


ECAS
в грузовых автомобилях
Описание системы и инструкции по установке

 2. Издание
2. Издание
Данное издание не подлежит изменению.
Новые версии можно найти в системе INFORM по адресу www.wabco-auto.com
© 2007 WABCO
Возможны изменения Версия 002/04.07(ru)
815 080 027 3
Оглавление
Оглавление
1. Важные указания и пояснения |
3 |
|
6.2.9 |
ECAS 4x2/6x2 24V CAN |
32 |
||
|
1.1 |
Инструкции по безопасности и меры |
|
|
6.2.10 |
ECAS/ESAC |
35 |
|
|
предосторожности |
3 |
|
6.3 |
Магнитный клапан ECAS |
37 |
|
1.2 |
Область использования |
3 |
|
6.3.1 |
Клапан с пружинным отводом |
38 |
|
1.3 |
Пояснение символов |
3 |
|
6.3.2 |
Золотник с импульсным управлением |
38 |
2. |
Введение |
4 |
|
6.3.3 |
Различие между магнитными клапанами ECAS |
39 |
|
3. |
Функции системы |
5 |
|
6.3.4 |
Возможность замены магнитных клапанов ECAS |
41 |
|
|
6.4 |
Пульт управления |
51 |
||||
|
3.1 |
Порядок работы основной системы ECAS |
5 |
|
|||
|
|
6.4.1 |
Пульт управления ТС |
54 |
|||
|
3.2 |
Основные понятия |
5 |
|
|||
|
|
|
|
|
|||
|
3.2.1 |
Типы осей в грузовых автомобилях |
5 |
7. |
Краткое описание отдельных систем |
55 |
|
|
3.2.2 |
Пневмобаллоны в системе управления |
|
|
7.1 |
ECAS 1-го поколения без датчика давления |
55 |
|
|
пневмоподвесками |
5 |
|
7.2 |
ECAS 1-го поколения с датчиком давления |
56 |
|
3.3 |
Регулировка заданного (номинального) уровня |
6 |
|
7.3 |
ECAS 4x2A |
57 |
|
3.3.1 |
Нормальный уровень I |
7 |
|
|||
|
|
7.4 |
ECAS 6x2A |
61 |
|||
|
3.3.2 |
Нормальные уровни II и III |
7 |
|
|||
|
|
7.5 |
ECAS 4x2 Ratio |
65 |
|||
|
3.3.3 |
Уровень памяти |
7 |
|
|||
|
|
7.6 |
ECAS 4x2 KWP 2000 |
67 |
|||
|
3.4 |
Ограничение в высоте |
7 |
|
|||
|
|
7.7 |
ECAS 6x2 Ratio |
69 |
|||
|
3.5 |
Поперечная стабилизация |
8 |
|
|||
|
|
7.8 |
ECAS 6x2 DV |
71 |
|||
|
3.6 |
Управление подъемной осью |
8 |
|
|||
|
|
7.9 |
ECAS 4x2 / 6x2 CAN |
76 |
|||
|
3.7 |
Смещение на нулевую точку |
8 |
|
|||
|
8. |
Ввод в эксплуатацию и диагностика |
81 |
||||
|
3.8 |
Вспомогательная сила при трогании |
|
||||
|
|
|
8.1 |
Общие сведения |
81 |
||
|
|
транспортного средства ( ТС) |
8 |
|
|||
|
3.9 |
Защита от перегрузки |
9 |
|
8.2 |
Обозрение диагностической карты |
82 |
|
3.10 |
Система компенсации давления в шинах |
9 |
|
8.3 |
Диагностическое программное обеспечение |
82 |
|
3.11 |
Управление регулятором тормозных сил (РТС) |
10 |
|
8.3.1 |
Диагностика с помощью диагностического |
82 |
|
3.12 |
Эксплуатация крана |
11 |
|
|
контроллера ( Diagnostic Controller ) |
|
|
|
8.3.2 |
Диагностика с помощью ПК |
83 |
|||
|
3.13 |
Регулировка давления в ТС с подъёмной и |
|
|
|||
|
|
|
|
|
|
||
|
|
ведомой осямиПод.ось/доп.мост |
11 |
9. |
Параметризация |
84 |
|
|
3.14 |
Определение нагрузки на ось с помощью |
|
|
9.1 |
Опциональный параметр |
84 |
|
|
электронной системы CAN II |
12 |
|
|||
|
|
|
9.2 |
Параметр значений |
84 |
||
4. |
Алгоритм управления |
13 |
|
||||
|
9.2.1 |
Отсчёт (Counts) |
85 |
||||
|
4.1 |
Алгоритм управления при регулировке уровня |
13 |
|
9.2.2 |
Timer Ticks |
85 |
|
4.2 |
Алгоритм управления при регулировке |
16 |
|
9.3 |
Разъяснение параметров |
85 |
|
|
подъемной оси |
|
9.3.1 |
Адресный параметр устройств |
85 |
|
|
4.2.1 |
Описание функций подъёмной оси в ТС |
|
|
|||
|
|
|
9.3.2 |
Опциональный параметр |
86 |
||
|
|
обладающих системой регулирования давления |
17 |
|
|||
|
|
|
9.3.3 |
Параметр значений |
96 |
||
|
4.2.2 |
Регулировка вспомогательной силы при трогании |
|
|
|||
|
|
|
|
|
|
||
|
|
ТС |
19 |
10. |
Калибровка |
106 |
|
5. |
Конфигурация системы |
21 |
|
10.1 |
Калибровка датчиков хода |
106 |
|
6. |
Компоненты |
23 |
|
10.1.1 |
Калибровка датчиков хода с помощью ПК |
106 |
|
|
10.2 |
Калибровка датчиков давления |
108 |
||||
|
6.1 |
Датчики |
23 |
|
|||
|
|
10.2.1 |
... по сравнению с атмосферным давлением |
108 |
|||
|
6.1.1 |
Датчик хода |
23 |
|
|||
|
|
10.2.2 |
...для установления допустимого |
|
|||
|
6.1.2 |
Переключатель давления |
25 |
|
|
||
|
|
|
давления в сильфоне во время обычной |
|
|||
|
6.1.3 |
Датчик давления |
26 |
|
|
|
|
|
|
|
эксплуатации |
108 |
|||
|
6.2 |
Электронный блок (ECU) 446 055 ... 0 |
27 |
|
10.2.3 |
...для установления допустимого |
|
|
6.2.1 |
ECAS 1-го поколения без датчика давления |
28 |
|
|
давления в сильфоне при активированной |
|
|
6.2.2 |
ECAS 1-го поколения с датчиком давления |
28 |
|
|
функции " Вспомогательная сила при трогании |
108 |
|
6.2.3 |
ECAS 4x2 A |
28 |
|
|
ТС" |
|
|
|
|
|
|
|||
|
6.2.4 |
ECAS 6x2 A |
29 |
11. |
Концепция безопасности |
109 |
|
|
6.2.5 |
ECAS 4x2 Ratio |
30 |
|
11.1 |
Незначительные ошибки |
109 |
|
6.2.6 |
ECAS 4x2 (Ratio) KWP 2000 |
30 |
|
11.2 |
Нарушения достоверности |
109 |
|
6.2.7 |
ECAS 6x2 Ratio |
31 |
|
11.3 |
Серьезные погрешности |
110 |
|
6.2.8 |
ECAS 6x2 DV |
31 |
|
11.4 |
Поиск ошибок |
111 |
2
Важные указания и пояснения ECAS 1.
1.Важные указания и пояснения
1.1Инструкции по безопасности и меры предосторожности
ECAS - это система безопасности автомобиля. Изменения в настройке системы должны производиться только лицами, обладающими необходимой компетенцией.
При включении зажигания или начале диагностики могут иметь место непредвиденные движения ТС или резкий спуск/подъем подъемной оси.
При выполнении работ с пневматической подвеской дайте знать об этом остальным, закрепив на руле автомобиля предупредительную табличку.
В грузовом автомобиле может быть установлена только одна система ECAS. Сочетание с другими системами управления пневмоподвески недопустимо, так как не исключено опасное взаимодействие.
При провождении сварочных работ на ТС, необходимо выполнять следующие требования:
•Электронные блоки нужно отсоединить от источников электропитания (отсоединить клеммы 31, 15 и 30). Как минимум, нужно отключить электропитание между автомобилем и прицепом.
•Сварочные и боковые электроды не должны касаться компонентов системы (ECU, датчиков, приводов, проводов и проч.).
Нивкоемслучаенеприводитеавтомобильвдвижениепри опущенной на амортизаторы конструкции, т.к. сам автомобиль и нагрузка могут быть сильно повреждены.
1.2режим эксплуатации
!Система ECAS предусмотрена только для управления пневматической подвеской ТС.
Для исключения опасного взаимодействия комбинирование с другими системами управления пневматическими подвесками запрещено.
Основные важные условия эксплуатации ECAS:
•Нужно обеспечить достаточное снабжение сжатым воздухом.
•Необходимо обеспечить надежное электроснабжение.
•Штекер ABS или EBS должен быть подсоединен.
Используйте данные из проверенных схем подключения, в которых приведен десятизначный идентификационный номер WABCO, при работах с системой ECAS.
Схемы подключения без номеров WABCO могут быть ошибочными. Они представляют собой только эскизы, не утвержденные компанией WABCO.
На системы, устанавливаемые способом, отличным от описанного в данном документе, компания WABCO не предоставляет никакой гарантии.
Они должны быть согласованы с WABCO в случаях:
•Использование компонентов, не приведенных в схемах подключения (кабелей, клапанов, датчиков, устройств управления)
•Подсоединение к системе устройств сторонних производителей или
•Настройка других функций помимо описанных выше системных функций.
!Структура системы ECAS наглядно показана в главе 9 " Краткое описание системы" на примере нескольких схем.
1.3 Пояснения к символам
Возможная опасность: Травмы или повреждения
!Дополнительные указания, сведения и советы
&WABCO - опытные данные и рекомендация
•Перечень
–Выполняемое действие
↑см. (предыдущий раздел, главу, рисунок/ таблицу)
см. (следующий раздел, главу, рисунок/таблицу)
3

2. ECAS |
Вступление |
|
|
2.Вступление
Пневматическая подвеска применяется в автомобилестроении, особенновпассажирскихавтобусах, еще с начала 50-х г.г. Она значительно повышает комфортность.
Если говорить о грузовиках и прицепах, пневматическая подвеска, прежде всего, проходит в верхнем тоннажном сегменте для перевозки грузов. Решающее значение при этом имеют критерии построения конструкции ходовой части. Существуют сравнительно большие статические различия при нагрузке на заднюю ось ТС в порожнем и нагруженном состоянии. В порожнем и частично нагруженном состоянии это вызывает проблемы при конструкциях с пружинными подвесками. Свойства пружин ухудшаются. Не последнюю роль при этом играют критерии комфортности, например, в автобусах.
Преимущества пневматических подвесок перед пружинными/рессорными
•Общий ход подвески полностью компенсирует изменение динамической нагрузки на ось. Изменение статической нагрузки компенсируется изменением давления. Тем самым достигается нужная для конструкции высота.
•Оптимальная работа подвесок, не зависимая от состояние дорог и нагрузки, повышает комфортность при езде и позволяет бережно перевозить груз. Шум колес автомобиля не передается.
•Колеса одинаково плотно прижимаются к поверхности дороги, что улучшает силу торможения и управляемость, а также значительно увеличивает срок службы шин.
•точное, зависящее от груза, управление пневматической тормозной системой с помощью использованиядавлениявпневмоподвескевследствии установления давления в регуляторе тормозного усилия.
•Постоянная высота автомобиля не зависит от статической нагрузки.
•Для погрузочных платформ и эксплуатации контейнеров предусмотрены операции подъема и спуска конструкции.
•Возможно управление подъемными осями.
•Возможно индивидуальное управление пневморессорами для компенсации поперечных сил (например, при прохождении поворотов).
•Хорошо сохраняется поверхность проезжей части.
Неблагоприятные свойства пневматических подвесок
всравнении с пружинными/рессорными
•повышенные расходы на установку;
•более сложные системы осей благодаря использованию рычагов, действующих на ось и осевых стабилизаторов,
•высокие затраты на детали из-за множества пневматических компонентов;
•высокая нагрузка управляющих клапанов из-за постоянной вентиляции и прокачки; сокращение срока
эксплуатации при переменной нагрузке;
•преобладание кренов на поворотах.
Вскорепослетого, какбыларазработанасоответствующая система управления с клапанами пневмоподвески, работающими с чисто механическим приводом, была введена и схема с электромагнитным приводом. За счет этого была повышена легкость управления и упрощен процесс подъема/опускания корпуса.
ECAS представляет собой последнее достижение в области разработки подобных систем. За счет применения электронныхустройствуправлениятрадиционнуюсистему удалось значительно усовершенствовать.
ECAS - Electronically Controlled Air Suspension. (пневмоподвеска с электронным управлением)
ECAS представляет собой электронно-управляемую систему пневматической подвески для автотранспорта с множеством функций. С начала 80-ых годов она используется в автомобилях.
При наличии механической пневмоподвески в месте, где производится измерение уровня, также осуществляется управление пневмоподвеской. При наличии же ECAS регулировка осуществляется электроникой. Управление пневмоподвесками осуществляется через магнитные клапаны с помощью данных измерения, поступающих от датчиков.
Наравне с управлением нормальным уровнем электроника производит также управление различными функциями с помощью пульта управления.
При использовании обычных пневмоподвесок эти функции возможны только при большом числе компонентов. С помощьюECAS могутбытьреализованыфункции, которые неосуществимы при использовании традиционных средств.
В основном система ECAS работает только при включенном зажигании. Но в сочетании с аккумулятором можно включить режим ожидания.
ECAS с системой CANBus
Новое поколение систем ECASэто поколение CAN - bus. Электронные системы связаны при этом с системой CANbus и обмен информацией происходит с помомощью SAE- CAN-Identifier CCVS или TCO1.
CAN-Bus ("сеть зоны контроля") - это система последовательной передачи данных, которая была разработана для того, чтобы соединить устройства электронного управления в автомобиле с целью уменьшения проводов электропроводки и, следовательно, веса. Вместо использования электрической схемы с учетом передаваемого сигнала "шина" основывается на целой коммуникационной платформе, которая обеспечивает передачу сообщений между отдельными устройствами.
4

Функции системы ECAS 3.
3.Функции системы
Основное назначение ECAS - компенсация отклонений в регулировке. Отклонения в регулировке возникают вследствие возмущающих воздействий (напр., изменения загруженности) или изменений в заданных значениях (напр., с помощью блока управления). Это приводит к изменению расстояния между осью автомобиля и его конструкцией. ECAS выравнивает отклонения в регулировке, корректируя уровень.
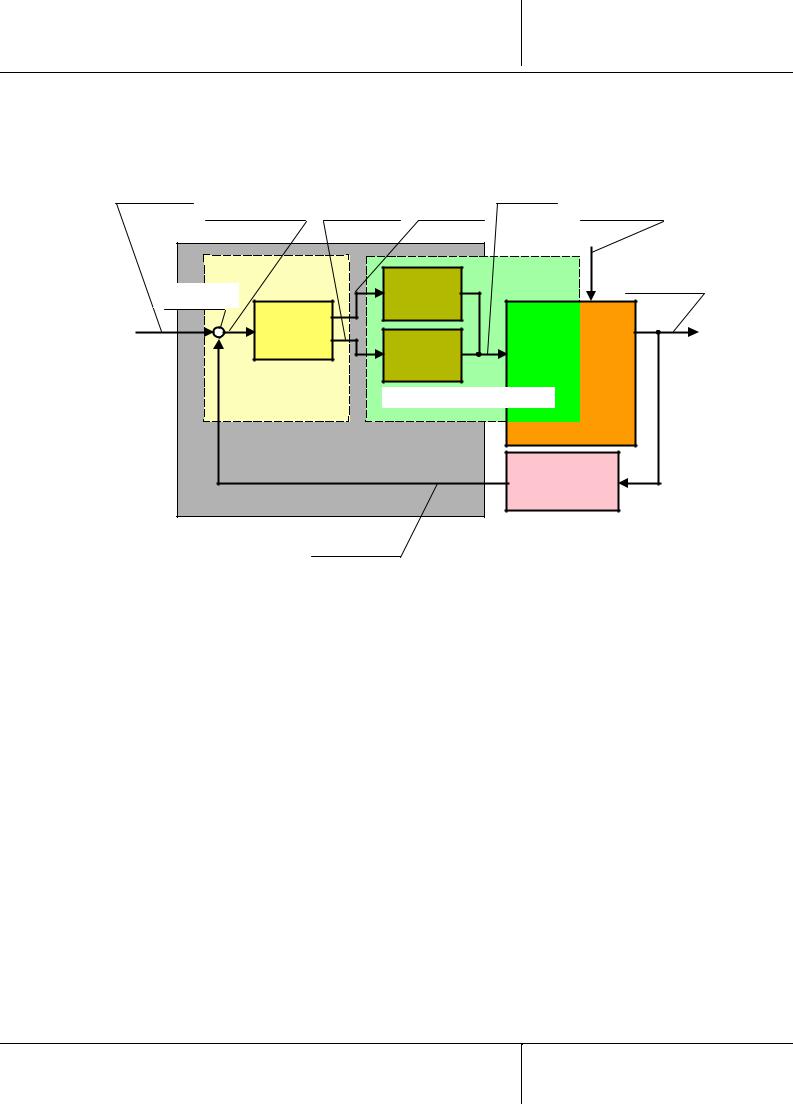
3.1 Порядок работы основной системы ECAS
(Рис. 1)
1.Датчик хода (1) закреплен в конструкции автомобиля и связан через систему рычагов с его осью. С определенными промежутками времени он определяет расстояние между осью и конструкцией. Интервалы времени зависят от времени эксплуатации (режима движения или погрузки) ТС.
2.Полученное при измерении значение является фактическим и оно передается далее в ECU (2).
3.ВблокеECU такоефактическоезначениесравнивается с заданным в ECU нормативным значением.
4.При недопустимой разнице между фактическим и заданным значением (отклонение в регулировке) магнитному клапану 3 системы ECAS передается управляющий сигнал.
5.В зависимости от такого управляющего сигнала магнитный клапан ECAS управляет пневмобаллоном (4), подавая в него воздух или прокачивая его. За счет изменения давления в пневмобаллоне изменяется расстояние между осью и конструкцией автомобиля.
6.Расстояние вновь определяется датчиком хода и этот цикл повторяется сначала.
Блок управления (5) больше не относится к основной системе ECAS. Он упомянут, потому что с его помощью пользователь может непосредственно повлиять на заданный уровень. Для влияния на заданный уровень в ТС используются зачастую переключатели и кнопки.
Расстояние |
3 |
|
конструкция/ |
||
4 |
||
ось |
||
|
Рис. 1 Основные функции системы ECAS
3.2Основные понятия
3.2.1Типы осей в ТС
Основная ось (также ведущая ось)
Ведущей осью является ось, которая всегда расположена на днище и не может быть управляемой. Все ТС обладают ведущей осью, в основном это задняя ось. Если пневмоподвеска в TC установлена только на ведущую ось, то оно считается ТС с частичной пневматической (ЧП) подвеской.
Передняя ось (управляемая ось)
Передняя ось - это, как правило, управляемая ось в ТС. Если ТС обладает пневмоподвеской на передней и задней осях, то речь идёт о ТС с полной пневматической подвеской (ПП).
Подъемная ось
Подъёмная ось составляет, в основном, одно целое с ведущей осью. При превышении нагрузки на ведущую ось подъёмная ось опускается, а при снижении нагрузки она снова может быть поднята.
Поддерживающая ось
Ведомая ось - это ось, которая также, как правило, соединена с ведущей осью. Обе оси составляют один агрегат. Типичнымипредставителямиявляютсяведомыеи управляемые оси. По сравнению с подъёмной осью они не могут быть приподняты, только разгружены. Преимущество ведомой оси, в отличие от подъёмной заключается в следующем: масса оси не прибавляется ко всему весу конструкции. Недостатком является повышенный износ шин.
3.2.2Пневмобаллоны в системе пневмоподвесок
Пневмоподушки
Пневмоподушки - это общеизвестные пневмобаллоны на осях. Они выполняют функцию подрессоривания автомобиля. На пневмоподушки расположенных в днище осей во время эксплуатации автомобиля постоянно подается давление пневморессоры пропорционально нагрузке соответствующих колес. Пневмоподушки приподнятых осей не находятся под давлением или, во
1 |
|
Основная система |
|
|
1 |
датчик хода |
|
2 |
|
2 |
ECU (электронный блок |
|
|
управления) |
|
|
|
3 |
магнитный клапан ECAS |
|
5 |
||
|
4 |
пневмобаллон |
|
|
|
||
|
|
5 |
блок управления (доп.) |
5

3. ECAS Функции системы
избежании повреждений сильфона, под очень низким давлением. Пневмоподушки присутствуют на всех вышеописанных типах осей.
Подъемные сильфоны
Подъемные сильфоны жестко привязаны к системе рычагов подъемной оси. Они поднимают или опускают подъемную ось при завышении или занижении заданного предела давления в пневмоподушках главного моста осевого агрегата. Помимо этого существуют,например, гидравлические системы , которые берут на себя решение данной задачи.
ECAS - это система регулировки, которая, как минимум, состоит из одной цепи регулировки. В цепи регулировки предварительно указывается заданное значение.. Датчик, подстраивающийся в процессе калибровки при вводе системы в эксплуатацию под систему, получает данные фактического значения системы и передает их далее в электронный блок управления (ECU).
ECU сравнивает заданное значение с фактическим. Во время такого сравнения могут возникать отклонения в регулировке.
Под этим понимается выход фактического значения за пределы установленного диапазона заданных значений.
При возникновении отклонения в регулировке ECU производит выравнивание через пускатель для заданного значения в пневмобаллоне.
Заданные (номинальные) значения:
•определенные промежутки (уровни) конструкции ТС в его осях,
•состояния ТС в зависимости от нагрузки на оси (напр., увеличение сцепления колес, пределы давления для управления подъемной осью).
Два варианта передачи номинального значения в ECU:
•Ввод фиксированных значений производителем автомобиля при вводе в эксплуатацию путем параметризации и калибровки.
•Указание значений пользователем системы с пульта управления.
Обратите внимание на то, что описанные здесь функции в зависимости от исполнения системы не должны задаваться принудительно. Тип системы (количество подъемных осей, наличие/отсутствие пневмоподвески на передней оси) определяет возможности реализации функций.
ECAS легко подстраивается под любой тип ТС. Благодаря модульной конструкции можно обеспечить самые разные варианты использования системы с учетом потребностей заказчика.
3.3Поддержание целевого уровня пола
Целевой уровень пола - это расстояние от конструкции ТС до оси. Он задается калибровкой, параметризацией или блоком управления. Поддержание целевого уровня пола - основная функция ECAS.
На электромагнитный клапан, выполняющий роль исполнительного звена, подаётся управляющий импульс и через выпуск/впуск воздуха в пневмоподушке фактический уровень уравнивается с номинальным. Это происходит при:
•отклонениях в регулировании вне пределов допустимого диапазона,
•изменении значения, заданного для номинального уровня.
Вотличие от традиционной системы пневмоподвескок, в данном случае регулируется не только нормальный уровень, но и каждый заданный уровень. Так, например, уровень, который был установлен при погрузке или разгрузке, считается заданным уровнем и регулируется далее как таковой.
Разница между статическим и динамическим изменением нагрузки на колесо
В отличие от традиционных систем пневмоподвесок ECAS различает статическое и динамическое изменение нагрузки на колесо. Данный процесс происходит с помощью использования сигнала скорости. Благодаря такому различению возможен оптимальный отклик с учетом возникающего изменения нагрузки на колесо.
Статическое изменение нагрузки на колесо
Статическоеизменениенагрузкинаколесопроисходитпри изменении нагрузки на транспортное средствов состоянии покоя или при низких скоростях. Для этого необходимо перепроверить заданное значение и при необходимости исправитьегоспомощьювпуска/выпускавоздухавданном пневмобаллоне в течение коротких промежутков времени. ECAS выполняет такую проверку ежесекундно. Данный интервал проверки может быть задан через параметры.
Динамическое изменение нагрузки на колесо
Динамическое изменение нагрузки на колесо может быть вызвано в основном из-за неровностей дорожной поверхности, при езде на поворотах, при торможении и набирании скорости и особенно усиливается при езде на высоких скоростях. Динамические изменение нагрузки на колесо компенсируются за счёт амортизационных свойств пневмподушек. В этом случае не рекомендуется производить впуск/выпуск воздуха в пневмоподушке, так как только изолированная пневмоподушка обладает стабильными амортизационными свойствами. По этой причине на высоких скоростях производится регулирование только через большие интервалы времени, как правило через каждые 60 секунд. Номинальная и фактическая величины сравниваются при этом непрерывно.
Нежелательное урегулирование динамических изменений нагрузки на колесо при торможении можно исключить путем впуска или выпуска воздуха в пневмоподушке. Данная операция возможна при получении системой ECU "стоп-сигнала".
6

Функции системы ECAS 3.
Трансп. уровень
Нормальный уровень (или уровень движения) устанавливается во время движения ТС на высокой скорости. Для ECAS могут быть установлены максимум 3 нормальных уровня.
3.3.1Норм. уровень I
Под определением " нормальный уровень I" подразумевается заданный уровень, установленный производителемТСдляегооптимальнойэксплуатации. На основе этого уровня можно рассчитать размеры общей высоты транспортного средства и теоретическую высоту его центра тяжести. Нормальный уровеньI имеет особое значение по сравнению с другими уровнями. Он характеризуется как расчётная величина для транспортного средства.
!При расчёте общей высоты соблюдайте соответствующие предписания в отношении допустимой максимальной величины.
Высота центра тяжести ТС - это заданное значение для расчета торможения ТС.
–Значение нормального уровня I необходимо сообщить системе только путем калибровки.
–Регулируйте нормальным уровнем I во время эксплуатации спомощьюскорости движенияТСи/илис помощью блока управления.
–При параметризации установите скорость для точки переключения в процессе регулировки.
3.3.2Нормальный уровень II и III
Данные уровни отличаются от нормального уровня 1. Это может оказаться необходимым:
•для спуска конструкции в целях экономии топлива,
•для установления высоты всего ТС,
•для лучшего уравновешивания поперечных сил на повышенных скоростях.
Функция зависимого от скорости опускания кузова применяется в том случае, если при движении с более высокими скоростями на качественных дорогах нет необходимости использовать весь ход пневмоподушки.
–Укажитесистемезначениедлянормальныхуровнейкак разницу по отношению к нормальному уровню 1 с помощью процесса параметризации.
Регулировку нормального уровня возможно производить выборочно с помощью:
•выключатель;
•пульт управления;
•Скорость движения ( в электронике только нормальный уровень II, включая CAN I).
Выбранный нормальный уровень является актуальным до выбора другого уровня.
–Для ввода актуального нормального уровня необходимо нажать кнопку " Нормальный уровень".
–Установите значения для вида и точек переключения в процессе регулировки путем параметризации.
–Нормальный уровень III необходимо определять как высший нормальный уровень.
Особенности электроники CAN II
•В электронике CAN II нормальный уровень 3 определяется как уровень, зависимый от скорости.
•Customer Level (уровень покупателя): Уровень задней оси может быть параметризован слева и справа ( обе стороны независимы друг от друга).
•Все уровни можно найти в CANIdentifier ASC2_…
3.3.3Уровень памяти
Для каждой системы можно использовать 2 различных уровня памяти. Уровень памяти применим для всего ТС. Для использования функции памяти нужен блок управления.
Возможности подключения уровня памяти:
•врежимепогрузки/ разгрузкивнеподвижномсостоянии
•при низких скоростях.
Этот уровень позволяет установить оптимальную для погрузки и разгрузки высоту кузова транспортного средства.
В отличие от разгрузочного уровня, прописанного в ECU, уровень памяти может быть задан самим пользователем и в любое время изменён. Заданный уровень памяти сохранен в системе до тех пор, пока его не изменит пользователь (даже при выключении ТС).
3.4Ограничение высоты корпуса автобуса
Изменение уровня автоматически прекращается электроникой по достижении заданных в процессе калибровки значений верхнего и нижнего пределов высоты. При этом эти заданные значения свободно выбираются. Темсамым, резиновыеамортизаторыитакие ограничители высоты, как сильфоны или тросы не перегружены сверх меры.
Процесс разгрузки регистрируется; первоначальный заданный уровень регулируется и, таким образом, не происходит перегрузка ТС на стыках.
7
3. ECAS Функции системы
3.5Поперечная стабилизация
Для ТС с неравномерным распределением груза на ось (например , односторонняя погрузка) можно настроить подачу давления с левой и с правой стороны на пневмоподушки одной оси с помощью двух контуров регулирования.
Для ТС с равномерной нагрузкой (напр. , автомобилейцистерн) это не обязательно.
3.6Управление подъемной осью
Подъемная ось при неподвижном автомобиле автоматически опускается или нагружает дополнительный мост, если при нагрузке на автомобиль превышается допустимая нагрузка на главный мост. Необходимый для этого сигнал электроника получает от датчика давления (6.1.3 Датчик давления), другими словами, от переключателя давления, находящемся на одной из пневмоподушек главной оси. Автоматический спуск подъемной оси во время пиковых значений давления при движении исключен.
При остановке ТС и его отключении положение подъёмной оси остаётся неизменимым. Так например, приподнятая подъёмная ось остаётся приподнятой.
Система с датчиком давления
Помимо спуска также возможен автоматический подъем подъемной оси после разгрузки автомобиля. Здесь речь идет о полностью автоматизированном управлении подъемной осью.
Система с пневматическим выключателем/кнопкой.
Спуск производится автоматически. Приподнятие подъёмной оси может быть осуществлено вручную с помощью блока управления ECAS или отдельным переключателем/кнопкой.
Функцию вспомогательной силы при трогании ТС можно использовать только при активированном автоматическом управлении подъемной осью.
3.7Смещение на нулевую точку
С помощью приподнятия подъемной оси автоматически возможно повышение нормального уровня. За счет этого улучшается ход колес подъемной оси. Это применимо ко всему транспортному средству.
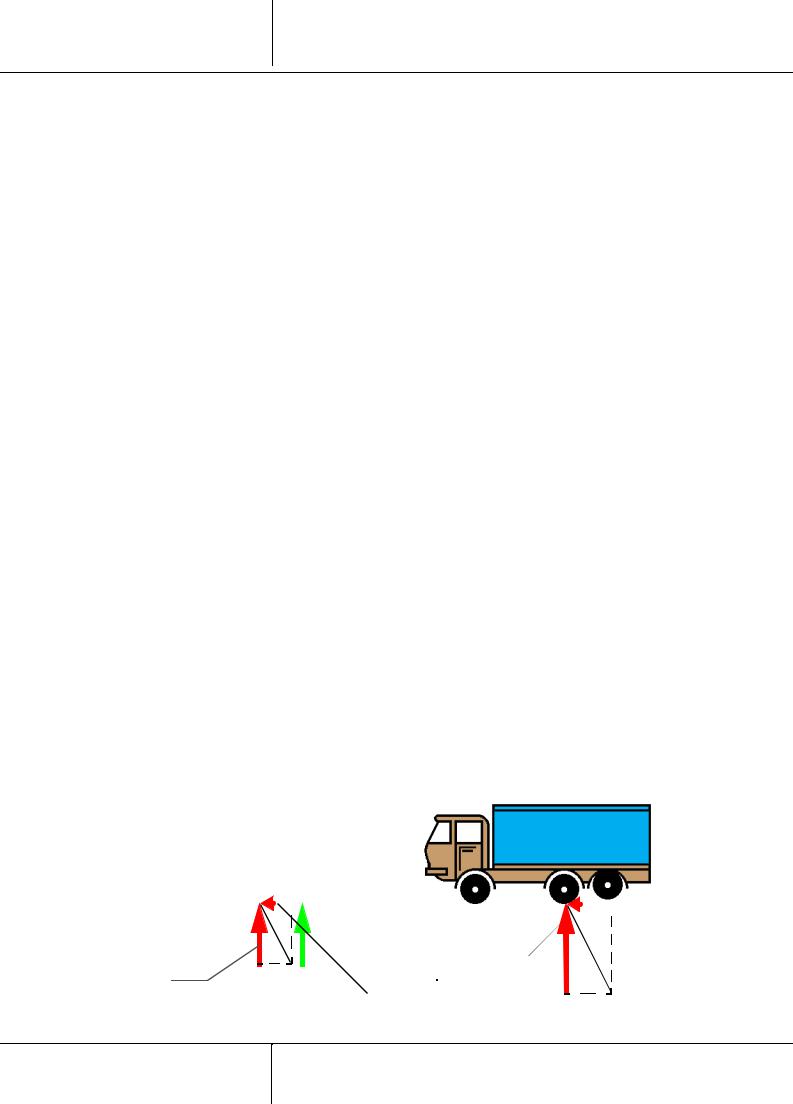
3.8Помощь при трогании
В ТС класса 6х2 возможно реализовать функцию " Вспомогательная сила при трогании ТС", если груз достигает достаточной высоты. С уменьшением давления на пневмоподушки подъёмной оси или, иначе говоря, с помощью приподнятия подъёмной оси происходит увеличение нагрузки на ведущую ось ТС с целью повышения силы тяги. (Рис. 2)
–Функцию " Вспомогательная сила при трогании ТС" можно активировать с помощью переключателя.
–Возможна активизация с помощью сигнала CAN, она зависит от параметризации P3.1: Управление с помощью переключателя или послания системы CAN (ASC2).
Модуль вспомогательной силы при трогании ТС можно разделить на 5 групп: при этом учитываются соответствующие национальные правила путём соответственной параметризации (с ограничением времени, скоростиинагрузкиилибезданногоограничения, с обязательной паузой или без неё).
С вступлением в силу директивы 97/27/EG были установленыизменения, которыенеобходимособлюдатьв процессе параметризации.
•Тип „Deutschland“ (Германия)
Функцию " Вспомогательная сила при трогании ТС" можно активировать с помощью нажатия клавиши максимум на 90 сек.. По истечению 90 сек. данная функция блокируется на мин. 50 сек. При превышении заданной скорости (мах. 30 км/ч) функция "Вспомогательная сила при трогании ТС" автоматически выключается. Увеличение силы тяги задано, но оно может быть превышено мах. на 30 % допустимой нагрузки на ведущую ось.
Нормальное движение ТС |
Помощь при трогании |
Зад. осьпод. ось |
Зад. |
под. |
|||||
ось |
ось |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Движущая сила функции |
|
"Вспомогательная сила при |
|
трогании ТС" |
Нагрузка на ось |
повышенная нагрузка на ось |
Нормальная движущая сила |
|
Рис. 2 Нагрузка на ось и изменение движущей силы при использовании функции " Вспомогательная сила при трогании ТС"
8
Функции системы ECAS 3.
•Тип „ЕУ99“
Функцию " Вспомогательная сила при трогании ТС" можно активировать с помощью клавиши и использовать неограниченно по времени. После проведения данной функции её можно сразу же повторить. При превышении заданной скорости (мах. 30 км/ч) функция "Вспомогательная сила при трогании ТС" автоматическивыключается. Увеличениесилытяги задано, но оно может быть превышено мах. на 30 % допустимой нагрузки на ведущую ось.
•Тип „За пределами Германии“
Функция "Вспомогательная сила при трогании ТС" типа " За пределами Германии" является аналогом данной функции типа "Германия". Между ними существует толькоодноразличие. Функция" Вспомогательнаясила при трогании ТС" может быть повторно активирована без вынужденной паузы.
•Тип " Северная страна" (с помощью двухпозиционного переключателя)
Функция " Вспомогательная сила при трогании ТС" не ограничена во времени и её можно активировать с помощью переключателя. После завершения использования данной функции, возможен её моментальный повтор. Функция " Вспомогательная функция при трогании ТС" деактивируется, если переключатель приводится в своё первоначальное положение (исключение: ТС 6x2 с системой ECAS-CAN
– см. 7.9 „Краткое описание системы ECAS 4x2/6x2 CAN“). Повышение силы тяги установлено.
•Тип " Проведение функции "Вспомогательная сила при трогании ТС" вручную" или, другими словами, тип " Северная страна" (с помощью трёхпозиционного переключателя/клавиши)
Функция " Вспомогательная сила при трогании ТС" не ограничена во времени и её можно активировать с помощью трёхпозиционного переключателя/ клавиши. Вданномтипетягаможетбытьбеспрерывноповышена и понижена. Если переключатель находится в центральном положении, то установленная сила тяги остаётся неизменной. Функция " Вспомогательная сила при трогании ТС" деактивируется, если происходит полная отмена повышения силы тяги.
3.9Защита от перегрузки
Путем указания максимально допустимого давления в пневмоподушках активируется функция защиты от перегрузки.
Эта защита приводит к снижению конструкции автомобиля на резиновые амортизаторы, если превышено давление в пневмоподушках вследствие перегрузки.
–НеобходиморазгрузитьТСдотакойстепени, что, таким образом, оставшаяся статическая нагрузка на ось действует на давление в пневмоподушках, которое находится на пределе к максимально допустимому. После повторного включения зажигания система ECAS пытается наполнить сильфоны и привести конструкцию на нормальный уровень.
Ни в коем случае не приводите автомобиль в движение при опущенной конструкции, т.к. сам автомобиль и нагрузка могут быть сильно повреждены.
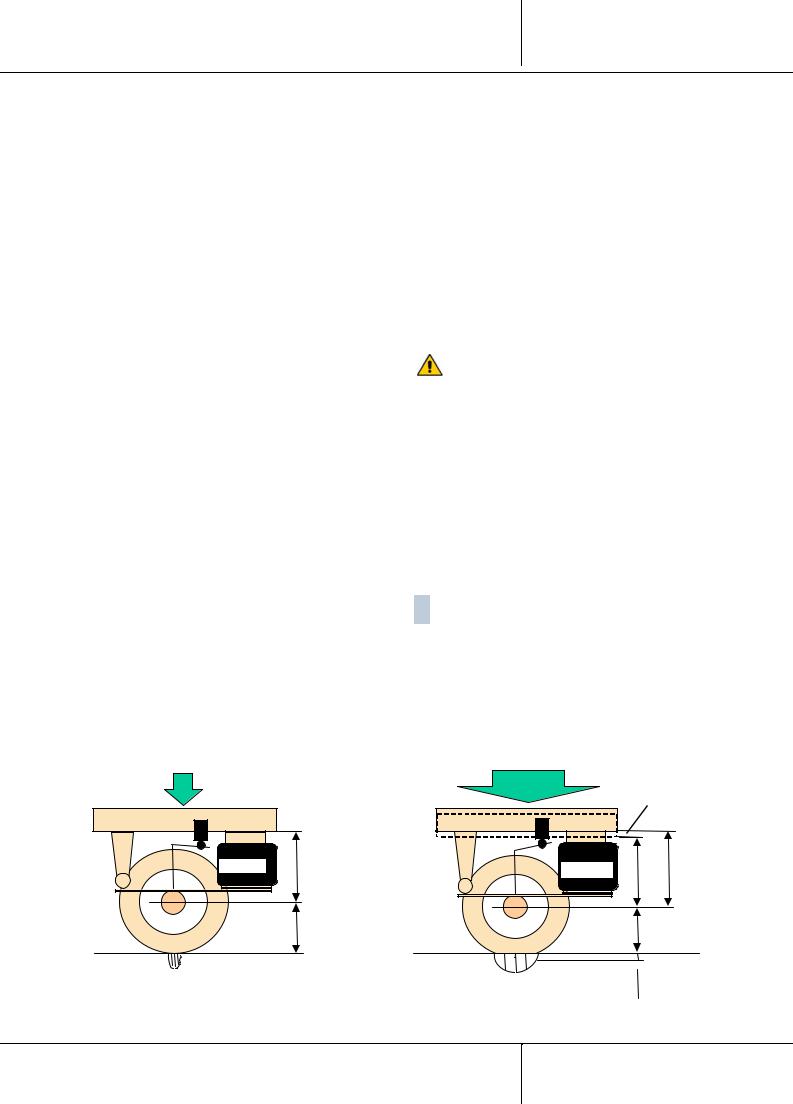
3.10Компенсация давления в шинах
Для ТС с особенно большой высотой всей конструкции наряду с небольшими колёсами используется также процесс подрессоривания автомобиля в порожнем состоянии.
С возрастанием нагрузки нарастает и потребность в ходе пневмоподвески. Но есть возможность задать возможный ходпневмоподвескинарастающемудавлениювшинахпри возрастающей нагрузке, при неизменной общей высоте автомобиля. (Рис. 3)
!Необходимо соблюдать предписанную правовыми нормами высоту автомобиля.
Данное регулирование необходимо, если общая высота прицепа находится за пределами высоты, предписанной законодателем.
Эта регулировка осуществима в любых системах ECAS. Она является дополнением. Условием является наличие датчика хода и минимум одного датчика давления.
Происходит повышение заданного уровня. Изменения в нагрузке приводят к изменению заданного значения.
мпорожний
p порожний
| <![if ! IE]> <![endif]>s |
мнагруженный |
|
| <![if ! IE]> <![endif]>Заданный уровень |
||
|
Расстояние между осью
и дорожной поверхностью h порожний
Компенсация продавливания с помощью Повышения заданного
уровня при h (быстроте реакции)
p нагруженный
| <![if ! IE]> <![endif]>Заданный уровеньs |
<![if ! IE]> <![endif]>компенсированный целевогоуровня h |
|
<![if ! IE]> <![endif]>h |
|
<![if ! IE]> <![endif]>=s+ |
|
<![if ! IE]> <![endif]>комп. |
Расстояние между осью и дорожной поверхностью
h нагруженный
 продавливание шин h
продавливание шин h
Рис. 3 Влияние процесса компенсации продавливания шин на заданный уровень при различных состояниях нагрузки ТС
9

3. ECAS Функции системы
Для осуществления этой регулировки нужно изначально узнать или определить различия в компенсации давления в шинах между порожним и загруженным состояниями для используемых шин. В процентном отношении, в ТС в порожнем состоянии с давлением в пневмоподушке p ПОРОЖНИЙ происходит минимальное продавливание шин h, точнее говоря0 % , а в максимально нагруженном ТС с давлением в пневмоподушке р100% - h100%.
Различие между состояниями рНагруженный и рПорожний определяет макс. диапазон, в котором происходит
регулировка нормального уровня в зависимости от состояния погрузки ТС со значением h100% - h0%.
–Нормативные значения данной регулировки необходимо задать электронике в процессе параметризации.
С их помощью система ECU определяет повышение заданного значения для нормального уровня.
!Если нормативные значения не соответствуют параметрам использования шин, могут возникнуть непредвиденные сдвиги на нормальном уровне в нагруженном состоянии ТС.
Регулировку можно представить следующим образом. При вводе заданного значения "нормальный уровень" определяетсядавлениевпневморессорах главнойоси. На основеполученногодавлениярблокомECU определяется номинальное значение для нормального уровня с помощью заданных значений, полученных в процессе компенсации шин. Данное номинальное значение сообщается системе в качестве нового значения для нормального уровня.
В данном случае происходит то же самое, как и описано в главе 3.1 " Принцип действия основной системы ECAS":
1.Датчик хода определяет фактическое значение расстояниямежду конструкцией автомобиля и егоосью и сравнивает его с только что определенным заданным значением.
2.При появлении отклонения в регулировке исполнительному механизму (магнитному клапану) передается сигнал подстройки.
3.Пневморессора главной оси соответственно наполняется воздухом или прокачивается.
4.Расстояниемеждуосьюавтомобиляиегоконструкцией при этом изменяется.
Итог
Повышение нормального уровня, зависящее от состояния груза, можно настроить следующим образом:
•Давление в пневмоподушке pпорожний при порожнем состоянии ТС
•Давление в пневмоподушке p100%при максимально нагруженном состоянии ТС
•Разница в процессе продавливания шин h100% -
h0%между порожним и максимально нагруженном состояниями ТС.
Компенсациядавлениявшинахнедействуетприактивном увеличении сцепления колес.
Чтобы определить точное значение, необходимое для процесса компенсации продавливания шин, лучше всего проводить испытания на ТС, используемом в данном случае. Наряду с продавливанием шин в процессе компенсации ( продавливания шин) определённую роль играет также механическое строение оси. Для этого мы рекомендуем следующий образ действий:
–ТС в порожнем состоянии с незадействованным стояночным тормозом установить на плоской поверхности.
–Определение точки начала отсчета на ТС над осью и измерение расстояния между данной точкой и поверхностью.
–провести максимально допустимую нагрузку/ нагрузку на ось ТС.
–Подключить инструмент диагноза и определить фактическое значение (WSW1) датчика хода на оси.
–Поднятие конструкции ТС до достижения расстояния, соответствующего порожнему состоянию ТС, а именно от точки начала отсчета до поверхности земли.
–определить новое фактическое значение (WSW2) датчика хода на оси и вычислить разницу WSW2-WSW1.
–разница датчика хода WSW2-WSW1 соответствует разнице процесса продавливания шин h100% - h0%.
3.11Управление регулятором тормозных сил (РТС)
Тягачи с пневмоподвесками и традиционной тормозной системой снабжены регулятором тормозных сил (РТС), зависящим от нагрузки. Управление данным регулятором происходит с помощью использования давления в сильфоне.
В случае падения давления в сильфоне (напр., значительно нарушена герметичность сильфона или разрушена его конструкция) регулятор тормозных сил, несмотря на максимальную нагрузку автомобиля, сигнализирует о его порожнем состоянии. Вследствие этого создается недостаточное торможение и удлинение пути торможения. Система ECAS обладает возможностью распознать такой случай и при его возникновении подать запасное давление, находящееся в системе пневмоподвески, управляющему выводу РТС 41/42. Таким образом, происходит симуляция максимально нагруженного состояния ТС.
1 |
|
|
2 |
|
pЗапас-ПП |
2 |
4241 |
|
|
|
PTC
Электромагнитный клапан Под.сильф.
Рис. 4 Включение функции РТС
10
Функции системы ECAS 3.
3.12Эксплуатация крана
В таких ТС, как тягачи со встроенным краном, большую эффективность имеет функция " Эксплуатация крана". Основой данной функции является следующий процесс: для эксплуатaции кранa необходимо выдвинуть опорные стойки, которые приподнимают ТС таким образом, что колёса не касаются поверхности земли. Вследствие этого необходимо прекратить поток поступающих сил, возникающих при нагрузке на кран на подвесках ТС. При поднятии колёс увеличивается расстояние между осью и конструкцией ТС. Вследствие этого система ECAS попытаетсяудалитьвоздухизсильфона, чтобыуменьшить данное расстояние. Таким образом, происходит бесполезная вентиляция пневмоподушeк. При опускании ТСэтоможетпривестикихнадлому. СистемаECAS может распознать данную ситуацию и вовремя прекратить вентиляцию сильфона, прежде чем произойдет его полная деаэризация.
3.13Регулировка давления в ТС - х с подъёмной и ведомой осями
В ТС 6х2 с подъёмной или ведомой осью можно осуществить всевозможные теории (в зависимости от оснащения системы ECAS), касающиеся давления в пневмоподушках.Это относится к агрегату задней оси между ведущей и подъёмной осъю.
Уравнивание давления
Отличительной чертой данного процесса является следуюещее: после опускания подъёмной оси/ нагрузки на ведомую ось на все пневмоподушки агрегата задней оси поступает одинаковое давление. Пневмоподушки ведущей, подъёмной и ведомой осей соединены между собой с боковых сторон.
Процесс уравнивания давления происходит при наличии малого количества компонентов. Установление значений давления происходит с помощью пневматического переключателя или датчика давления. (Рис. 5)
Непрерывное оптимальное регулирование силы тяги
В ТС 6х2 системы ECAS существует возможность регулировать распределение нагрузки на ось в агрегате заднейоси таким образом, что на ведущую осьпроисходит 100% - я нагрузка, а на подъёмную/ведомую оси - оставшаяся часть. В данном случае говорят о системе ECAS 6х2 РСД (регулирование соотношения давления).
Данный способ регулирования является преимуществом при эксплуатации ТС на скользких поверхностях. Движущие силы ведущей оси находятся всегда в верхней части и обеспечивают, таким образом, оптимальную силу тяги. Для подъёмной/ведомой оси такое распределение нагрузки на ось обозначает пониженный износ шин при езде на поворотах.
Недостатком такой конфигурации является то, что применимые тормозные усилия, касающиеся ведущей и подъёмной оси очень сильно отличаются друг от друга. Исходя из того, что обе оси обладают одинаковыми тормозными цилиндрами и в процессе торможения находятся под равным давлением, то речь идёт об отличиях в нагрузке на тормозное устройство.
Число компонентов, необходимых для оптимального регулирования силы тяги, выше, чем при процессе уравниваниядавления. Определениезначенийдавленияв сильфонах происходит с помощью датчиков давления. Число используемых датчиков давления зависит от производителя ТС. Например, ТС компании SCANIA обладают двумя датчиками (один - на ведущей оси, второй - наподъёмной/ведомойоси). КомпанияIVECO использует до 5-ти датчиков (на движущей оси по два с каждой стороны и один датчик давления, расположенный на подъёмном сильфоне подъёмной/ведомой оси). (Рис.6)
Управление соотношением давлений
Наряду с оптимальным регулированием силы тяги существуеттакжеирегулированиесоотношениядавления. Эти два процесса тесно связаны дру с другом. В ТС, обладающихсистемойECAS 6x2 РСД, можновыбратьодин из двух перечисленных выше способов регулировки.
Процесс движения |
Процесс торможения |
Зад. |
под. |
Зад. |
под. |
|
ось |
ось |
|||
ось |
ось |
|||
|
|
Движущая сила |
Тормозное усилие |
|
(частичная погрузка) |
||
(полная погрузка) |
||
|
||
Движущая сила (полная погрузка) |
Тормозное усилие |
|
|
(частичная погрузка) |
|
Нагрузка на ось (частичная погрузка) |
Нагрузка на ось с грузом |
|
Нагрузка на ось с грузом |
||
Нагрузка на ось (частичная погрузка) |
||
|
Рис. 5 Нагрузка на ось и изменение движущей силы в процессе уравнивания давления
11

3. ECAS Функции системы
Процесс движения |
Процесс торможения |
Зад. ось |
под. ось |
Зад. ось под. ось |
|
|
Движущая сила |
ЗО - тормозное усилие |
|
ЗО - нагрузка на ось |
||
ПО - тормозное усилие (полная погрузка) |
||
ПО - нагрузка на ось |
||
ПО - тормозное усилие (частичная погрузка) |
||
(частичная погрузка) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ПО - нагрузка на ось |
ЗО - нагрузка на ось |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
(полная погрузка) |
ПО - нагрузка на ось (частичная погрузка) |
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
ПО - нагрузка на ось (полная погрузка)
Рис. 6 Нагрузка на ось и изменение движущей силы в процессе уравнивания давления
В процессе регулирования соотношения давления происходит упорядочивание давления в пневмоподушках, находящихся на движущей, подъёмной и ведомой оси. Движущая сила остаётся при этом неизменной, в отличие от тормозной системы. Процесс износа тормозного устройстванаходитсянаобеихосяхнаодинаковомуровне. Этот способ регулирования является недорогим при провождении дальних перевозок или в транспортном распределителе.
Число компонентов, необходимых для регулирования соотношения давления соответствует числу компонентов, необходимых для оптимального регулирования силы тяги. При установке параметров можно выбрать желаемый способ регулировки. (Рис. 7)
Какой способ из выше названных будет в итоге выбран, зависит от различных условий.
3.14Определение нагрузки на ось в электроникe CAN II
С помощью встроенных датчиков давления система ECAS может определить давление, действующее на ось и предоставить его банку данных ТС в качестве CAN - послания. Данную информацию, касающуюся осевой нагрузки, водительТСможетувидетьнадисплееи/илиона может быть использована другими электронными системами управления.
Система ECU может сохранить информацию, касающуюся максимально 4-х расчётных кривых (макс. 4 оси). Каждая кривая определяется с помощью 3-х (вес/давление) точек.
Информация о нагрузке на ось (средняя величина, полученная из определённого интервала времени) сообщается системе CAN-Bus каждые 100 мс согласно протоколу SAE J1939.
Процесс движения |
Процесс торможения |
Зад. ось |
под. ось |
Зад. ось под. ось |
|
|
Движущая сила (частичная погрузка)
Движущая сила (полная погрузка)
Нагрузка на ось (частичная погрузка)
РСД |
Тормозное усилие |
|
(полная погрузка) |
РСД |
|
|
Тормозное усилие |
|
|
(частичная погрузка) |
|
Нагрузка на ось с грузом |
Нагрузка на ось с грузом |
|
|
|
|
|
|
|
Нагрузка на ось (частичная погрузка) |
||||||
Рис. 7 Нагрузка на ось и изменение движущей силы в процессе регулирования соотношения давления
12
|
|
|
|
Алгоритм управления |
|
ECAS |
4. |
||||
4. |
Алгоритм управления |
|
|
|
|
|
|||||
|
Целевой уровень пола |
|
|
|
Частота пульса |
электрический ток |
Пневматическая система |
|
|||
|
отклонение от |
(Исходная |
|
(Исходная |
(Управляющее воздействие y) |
|
|||||
|
(Ведущая величина w) |
Целевой уровень пола |
величина |
|
величина |
|
|
Изменение нагрузки на ось (колесо) |
|||
|
|
(разница в управлении e) |
регулятора yR2) |
регулятора yR1) |
|
|
(возмущающее воздействие z) |
|
|||
|
|
|
|
|
|
|
|
|
|
Расстояние |
|
|
|
|
|
|
|
клапан- |
|
|
конструкция/ось |
|
|
|
сравнительный |
|
|
|
|
(регулируемая величина x) |
|||||
|
|
|
вентилятор |
|
|
||||||
|
|
|
|
|
|
|
|||||
|
элемент |
|
|
|
|
|
|
исполнительный орган |
|
||
|
|
|
|
программа |
положение I |
|
|
||||
|
+ |
|
|
|
|
|
|
|
|||
|
- |
орган |
|
2/2 ходовой |
|
пневматическая |
|
||||
|
регулирования |
клапан(ы) |
|
|
|||||||
|
|
|
|
часть |
|
|
|||||
|
|
|
|
|
положение II |
|
пневмо- |
|
|
||
|
|
|
|
Электроника |
|
Магнитный клапан, ECAS |
подушка |
|
|||
|
|
|
|
|
|
|
|||||
|
|
|
|
регулятор |
|
исполнительный механизм |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
объект регулирования |
|
|
|
|
|
|
|
|
|
|
|
Датчик хода |
|
|
|
|
|
|
|
|
|
|
|
измерительное |
|
|
|
регулирующее устройство |
|
|
|
|
устройство |
|
|
|||
|
|
|
|
|
|
|
|
||||
фактический уровень
(возвратная величина r)
Рис. 8 План действия обычного контура регулирования системы ECAS
4.1Алгоритм управления при регулировке уровня Если регулировка протекает быстро, то, таким образом,
Прирегулировкеуровнякорректируетсярасстояниемежду конструкцией ТС и его осью. Регулировка уровня - основная функция ECAS.
Дополнительная регулировка расстояния может быть необходима при возмущающем воздействии или изменении заданного значения.
Для более четкого представления управляющих функций ECAS при регулировке уровня необходимо провести небольшой экскурс в физику пневматических подвесок.
Общие сведения по физике пневматических подвесок
Основная проблема любой регулировки при возникновении отклонения заключается в определении оптимального переходного периода. Это промежуток времени от начала изменения заданного значения до тех пор, пока фактическое значение не выйдет за установленные пределы допусков заданного значения (рис. 9). До тех пор система осуществляет регулировку, и при этом ей нужен воздух.
Большие периоды времени регулировки возникают при медленной подрегулировке фактического значения по новому заданному значению. При этом обеспечивается высокое качество регулирования, которое требует больших затрат времени.
происходит быстрое достижение нового заданного значения. Но при этом повышается склонность системы к колебаниям.
Большие номинальные значения магнитных клапанов ECAS, что является преимуществом для корректировки в случае небольших различий в заданных значениях, негативносказываютсяприбольшихразличияхвзаданных значениях. В последнем случае усиливается склонность к повышенным колебаниям.
Для правильного проектирования пневмосистемы должен быть создан перепад давления в электромагнитном клапане при любом режиме его эксплуатации. Это значит, что давление ресивера должно быть больше, чем давление на выходе в пневмобаллоны.
Гашение колебаний и амортизационное усилие
Во время регулировки нужно учитывать и роль демпфера. Традиционные демпферы рассчитаны только на одну рабочую точку. Амортизационное усилие создается в ТС в верхней области нагрузки. В ТС в частично нагруженном или порожнем состоянии доля амортизационного усилия, которое при изменении заданного значения должно преодолеваться, непропорционально высока. Исправление этого достигнуто за счет изменчивости регулировки амортизации. WABCO предлагает это путем
13

4. ECAS Алгоритм управления
установки системы ECAS. Однако в данном случае ECAS рассматриваться не будет.
Чем больше отличается показатель состояния нагруженности ТС от показателя параметризации демпфера, тем больше усиливается влияние амортизационного усилия.
Эти проблемы становятся ясны при работе демпфера. В демпфере жидкость должна перетекать из одной полости через дроссельное отверстие в другую полость.
Возникающая при этом сила сопротивления обозначается как амортизационное усилие. При быстром изменении расстояния между конструкцией и осью амортизационное усилие также резко нарастает.
Поэтомузасозданиеамортизационногоусилиявосновном отвечает изменение расстояния.
При изменении расстояния между конструкцией и осью ТС одновременно с созданием амортизационного усилия начинается его уменьшение за счет перетекания амортизационной жидкости через компенсирующий дроссель. Время такого уменьшения определено конструкцией демпфера (напр., диаметром дросселя, вязкостью жидкости).
Амортизационное усилие - это такое усилие, которое противодействует движению конструкции, препятствуя возникновению раскачивания корпуса или отскоку колеса от поверхности дороги. При этом оказывается противодействие и изменению уровня.
Амортизационное усилие, величина которого в течение времени меняется, является проблемой в процессе регулировки.
Ход регулировки при изменении заданного значения
Если ECAS находится в равновесии сил, то на пневмобаллон оси воздействует колесная нагрузка. При этом необходимо учитывать передаточное отношение несущих рычагов.
Давление в пневмоподушке, умноженное на площадь сечения сильфона, противодействует колесной нагрузке. Данную площадьнельзя непосредственно выссчитать из диаметра пневмобаллона. Давление в пневмобаллоне зависит только он колесной нагрузки, а не от высоты уровня.
В процессе регулировки уровня, происходящего вследствие изменения заданного значения (напр. с помощью блока управления) давление в сильфоне повышается или понижается до тех пор, пока фактическое значение расстояния между конструкцией и осью не будет соответствовать новому заданному значению. Это динамический процесс. Чем больше необходимое изменение заданного значения, тем больше происходят ускорения в изменении положения конструкции во время регулировки. Системапроявляетсклонностькколебаниям. Она может управлять, выходя за пределы нормы.
Такая тенденция встречается особенно в ТС в порожнем состоянии. При этом, с одной стороны, вследствие большого перепада давления между ресивером и пневмобаллоном в магнитном клапане ECAS возникают
большие ускорения при перетекании жидкости в ходе наполнения баллона.
С другой стороны, преодолеваемое амортизационное усилие максимально. При этом велика опасность колебания в регулировочном контуре. Это приводит к излишнему множеству циклов регулировки в магнитном клапане ECAS, что сокращает срок его службы.
Существует возможность, предотвратить ненужные колебанияспомощьюувеличениядиапазонадопущенного заданного значения. Но это сказывается на точности повторной регулировки при одинаковых заданных значениях.
Если же все–таки требуется соблюдения таких четких параметров, процесс управления должен быть усовершенствовать таким образом. чтобы объем подаваемого сжатого воздуха снижался незадолго до достижения целевого уровня. При это скорость перемещения конструкции уменьшается и предотвращается вероятность повышенных колебаний.
Поскольку магнитный клапан ECAS только включает или выключает подачу воздуха, но не осуществляет дросселирование, его магнитный ток находится в пульсирующем режиме. За счет пульсации поток воздуха кратковременно прерывается. При этом создается дроссельный эффект, препятствующий усилению колебаний.
Длительность импульсного режима и продолжительность импульсов
Для импульсов клапанов важны следующие понятия:
Длительность импульсного режима
Длительность импульсного режима - фиксированное значение, передаваемое при параметризации ECU. Началом такой длительности считается импульс включения для клапанных магнитов. Длительность импульсного режима является, таким образом, промежутком времени до момента получения клапанным магнитом следующего импульса включения (Рис. 9).
Продолжительность импульса
Продолжительностью импульса описывается промежуток времени, за который клапанный магнит получает импульс включения. Этозначениепеременноирассчитываетсядля каждой длительности импульсного режима вновь. Расчет продолжительности импульса производится блоком ECU и зависит от отклонения в регулировке, т. е. от расстоянием между заданным и фактическим уровнями.
При этом речь идет о пропорциональнодифференциальной регулировке (PD). Регулировка осуществляется в зависимости от отклонения в регулировке и скорости изменения отклонений в регулировке.
Большие отклонения в регулировке приводят к большой продолжительности импульса. Если установленная продолжительность импульса больше введенной длительности импульсного режима, то ток на клапанный магнит подается непрерывно. При этом изменение в регулировочных отклонениях максимальны.
14

Алгоритм управления ECAS 4.
Для замедления дополнительной регулировки при подъеме незадолго до установления нового заданного значения, по причине большого поперечного сечения тока, скорость изменения отклонения в регулировке анализируется и учитывается при регулировке. Увеличениескоростиизмененияотклоненийврегулировке приводит к уменьшению продолжительности импульса.
Уравнение для определения продолжительности импульса при подъеме конструкции в неподвижном состоянии
Продолжительность импульса вычисляется заново для каждого периода пульсации. Продолжительность импульса, которая больше длительности импульсного режима, приводит к непрерывной подаче тока на магниты (длительный импульс). Самая короткая выводимая продолжительность импульса составляет 75 мс (0,075 с).
Более короткие промежутки времени пульсации при температуре -40° C не гарантируют надежное переключение магнитного клапана.
Продолж. импульса = (| отклонение в рег. x KP | - | скорость изменения отклон. в рег. x KD |)
Определение пропорционального и дифференциального коэффициента для настройки регулятора пульсации.
Функции "Спуск конструкции в порожнем состоянии" и "Подъём/спуск во время движения"
Продолж. импульса = (| отклонение в рег. x KP |
Данные значения должны определяться опытным путем для конкретного автобуса. Это, как и определение других параметров, проводится производителем автобуса.
KP (пропорц. коэффициент) и KD (диффер. коэффициент) важны для описания цикла регулировки и передаются блоку ECU при параметризации.
Исходя из этого, приведённый ниже раздел является информацией, необходимой при перепроверке качества регулирования:
ТС устанавливается на уровень, который находится
Управление показывает:
•Для KP большие отклонения в регулировке или большие значения при одинаковом отклонении в регулировке приводят к увеличению продолжительности импульсов.
•И наоборот, для KD большие значения скорости отклонения в регулировке или большие значения при одинаковой скорости отклонения в регулировке сокращают продолжительность импульсов.
непосредственно на границе к допустимому заданному значению. Если нормальный уровень достигается без превышения колебаний или многократных импульсов магнитных клапанов, то это обозначает, что настройка значений допустимого заданного уровня и пропорционального коэффициента находится в порядке. Чем больше КÐ - значение, тем быстрее происходит регулировка, проводимая пневматическойчастьюсистемы в пределах гидродинамических возможностей.
<![endif]>Магнитный клапан, ECAS
Характер регулировки при отсутствии импульсов в ECAS Диапазон допусков заданного значения Магнитный клапан (повышенные колебания)
Заданный уровень В
| <![if ! IE]> <![endif]>Расстояние Конструкцияось ТС |
<![if ! IE]> <![endif]>Отклонение1. регулировкев |
<![if ! IE]> <![endif]>Отклонение2. регулировкев |
<![if ! IE]> <![endif]>Отклонение3. регулировкев |
<![if ! IE]> <![endif]>- |
Отклонение от заданного5.Регулировкаотклонение |
|
| <![if ! IE]> <![endif]>4. Регулировка отклонение |
значения |
|||||
|
|
|
|
|
|
Характер регулировки при импульсах |
|
|
|
|
|
|
Магнитный клапан, ECAS |
|
|
|
|
|
|
Заданный уровень А |
Вкл. |
|
|
|
|
|
|
Выкл. |
|
|
|
|
|
|
|
|
|
|
|
|
Время в сек. |
|
|
|
|
|
|
.......импульсы, период |
Длительность импульсного режима
Рис. 9 Пример процесса регулировки при изменении заданного значения
15

4. ECAS Алгоритм управления
Незначительно высокие КÐ - значения приводят к увеличению вероятности превышенных колебаний. Для установления дифференциального воздействия происходит проверка регулировки с помощью существенного изменения заданного значения (напр., с
помощью установки ТС на самый нижний уровень). Данное изменение необходимо уравнить посредством поднятия конструкции. При нажатии кнопки "нормальный уровень",
конструкцией и осью автомобиля следующими настройками:
•Длительность периода пульсации T
• Допуск заданного значения s,
•Пропорциональный коэффициент KP,
•Дифференциальный коэффициент KD,.
находящейся на блоке управления, должен происходить переход конструкции на нормальный уровень. По возможности без превышения колебаний или увеличения периода пульсации. Повышение колебаний конструкции с последующим переходом в заданный уровень в порожнем состоянии ТС допустимо в том случае, если данный процесс происходит однократно. При хорошо рассчитанном дифференциальном воздействии можно понизить склонность к повышенным колебаниям. Пульсация электромагнитного клапана ECAS повышается с увеличением KD-значения, вследствие этого происходит замедление поднятия конструкции.
Существует необходимость воздействия на систему для улучшения характера регулировки, так как, установление КÐ- и КD -значения не принесло желаемого результата, то можно уменьшить гидродинамический профиль в пневматической части. Как правило, достаточно установить дроссель в пневматический трубопровод
Самообучающийся регулятор
Существует вид регуляторов, которые работают на основе самообучения. В данном случае не происходит пульсация электромагнитных клапанов ECAS , что приводит к увеличению их срока службы. Такой способ регулировки используется при эксплуатации всех электроник CAN, а
также в 4x2/6x2 MAN, 4x2 RVI и DAF. На основе провождения первичной регулировки система ECAS осваивает образ действий при повышенных колебаниях. При последующих регулировках происходит отключение при достижении заданного уровня. В итоге конструкция переходит на заданный уровень. (Рис. 10)
В электрониках, не относящихся к CAN, определение продолжительности импульсов происходит на основе заданных коэффициентов. В электрониках CAN продолжительность импульсов зависит от механических изменений ТС (определение времени простоя).
между магнитным клапаном, пневмобаллоном (пневмобаллонами) соответствующей оси.
Итог
Можно повлиять на установку расстояния между
4.2Алгоритм управления при регулировке подъемной оси
Автомобили с одной подъемной осью могут оснащаться механизмом регулировки подъемной оси. Такая регулировка необязательна и ее не нужно устанавливать в каждой системе.
<![endif]>Магнитный клапан, ECAS
|
|
|
|
|
|
Характер регулировки при отсутствии импульсов в ECAS |
||
|
|
|
Диапазон допусков заданного значения |
Магнитный клапан (повышенные колебания) |
||||
|
|
|
|
|
|
|||
|
|
|
|
<![if ! IE]> <![endif]>- |
|
|
|
Заданный уровень В |
|
|
|
|
|
|
|
|
|
| <![if ! IE]> <![endif]>Расстояние Конструкция - ось ТС |
|
|
|
<![if ! IE]> <![endif]>4. Регулировка отклонение |
|
<![if ! IE]> <![endif]>- |
|
Характер регулировки для само- |
| <![if ! IE]> <![endif]>1. Отклонение в регулировке |
<![if ! IE]> <![endif]>2. Отклонение в регулировке |
<![if ! IE]> <![endif]>3. Отклонение в регулировке |
|
<![if ! IE]> <![endif]>5. Регулировка |
<![if ! IE]> <![endif]>отклонение |
обучающихся регуляторов (CAN II) |
||
|
|
|||||||
Отклонение от заданного значения |
||||||||
|
Заданный уровень А |
Вкл. |
Smooth Level Controller |
|
|
Выкл. |
|
|
Время в сек. |
|
.......импульсы, период |
Длительность импульсного режима
Рис. 10 Пример процесса регулировки при изменении заданного значения для самообучающегося регулятора
16

Алгоритм управления ECAS 4.
Положение подъёмной оси (в процессе её регулировки) зависит от осевой нагрузки движущей оси. При этом система ECAS определяет позицию подъёмной оси: расположение на днище или её поднятие. Регулирование положения подъёмной оси необходимо проводить под влиянием возмущающего воздействия, как правило, при изменении нагрузки. Пользователь не может вносить изменения, касающиеся заданного значения.
Приподнятую подъёмную ось можно всегда опустить вручную. В частично нагруженном состоянии ТС приподнятие подъёмной оси возможно в том случае, если не превышается макс. допущенное давление в пневмоподушке движущей оси.
В последующих высказываниях речь будет идти только о подъёмной оси. Но в основном данные содержания касаются также регулировки ведомой оси.
Общие сведения по управлению подъемной осью
К теме "Управление подъёмной осью" относятся также и такие темы, как: " Вспомогательная сила при трогании ТС" и "Предотвращение перегрузки". В этой связи они должны вместе учитываться.
Регулировка положения подъемной оси осуществляется в зависимости от давления в пневмобаллоне движущей оси, которое регистрируется с помощью переключателя или датчика давления ( в зависимости от конструкции). В системах, обладающих переключателями давления,
данные значения (давления) заданы. Коэффициент давления, полученный с помощью датчиков давления сравнивается в ECU с различными заданными значениями. Эти заданные значения уже заданы в ECU при вводе системы в эксплуатацию. На основе полученных значений устанавливаются следующие ограничения:
•давление переключения для спуска или подъема подъемной оси
•максимально допустимое давление при исполнении функции "Вспомогательная сила при трогании ТС"
•максимально допустимая величина погрузки
Каждому значению давления таким образом приписывается определенное состояние осевого агрегата.
4.2.1Описание функций подъёмной оси в ТС, обладающих системой регулирования
давления
(Напр., ТС с цистерной)
На рис. 11 показан процесс прохождения давления в пневмоподушке движущей оси (жирная линия) в зависимости от состояния нагрузки в агрегате задней оси для ТС, обладающего системой регулирования давления. При этом на ТС не установлено ни регулирование соотношения давления, ни регулировка силы тяги. Это значит, что на пневмоподушки подъёмной оси вопущенном состоянии действует такое же давление как и на пневмоподушки ведущей оси.
|
pперегрузка |
Предел "перегрузка" |
|
|
|
|
|
|
|
p130% |
Предел "вспомогательная сила при трогании ТС" |
|
|
||||
| <![if ! IE]> <![endif]>оси |
pспуск под. оси |
Предел "полная нагрузка" |
|
|
|
|
|
|
= p100% |
|
|
|
|
|
|
|
|
| <![if ! IE]> <![endif]>ведущей |
|
|
|
|
|
|
|
|
p*подъем под. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| <![if ! IE]> <![endif]>пневмоподушке |
оси |
|
|
|
|
|
|
|
p*спуск под. оси |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
p подъем под. |
|
|
|
|
Масс. дола подъем. оси mпод. ось |
|
|
|
оси |
|
|
|
|
Предел пор. ве- |
|
|
|
|
|
|
|
|
|
|
|
| <![if ! IE]> <![endif]>в |
p порожний |
|
|
|
|
|
с в пневморесс. |
|
|
<![if ! IE]> <![endif]>подподъем. оси |
<![if ! IE]> <![endif]>подподъем. оси |
|
|
|
|
||
| <![if ! IE]> <![endif]>Давление |
|
<![if ! IE]> <![endif]>порожний |
<![if ! IE]> <![endif]>.макс1 |
<![if ! IE]> <![endif]>.макс1 |
<![if ! IE]> <![endif]>.макс2 |
<![if ! IE]> <![endif]>перегрузка |
||
|
|
|
<![if ! IE]> <![endif]>) |
<![if ! IE]> <![endif]>) |
<![if ! IE]> <![endif]>) |
<![if ! IE]> <![endif]>) |
<![if ! IE]> <![endif]>100% |
<![if ! IE]> <![endif]>) |
|
|
|
|
|
<![if ! IE]> <![endif]>100% |
<![if ! IE]> <![endif]>100% |
|
|
|
|
|
|
|
|
|
<![if ! IE]> <![endif]>) |
|
|
|
<![if ! IE]> <![endif]>m |
|
|
<![if ! IE]> <![endif]>(p |
<![if ! IE]> <![endif]>(p |
<![if ! IE]> <![endif]>(p |
<![if ! IE]> <![endif]>m(p |
|
|
<![if ! IE]> <![endif]>m(p |
<![if ! IE]> <![endif]>m*(p |
<![if ! IE]> <![endif]>m* |
<![if ! IE]> <![endif]>m |
<![if ! IE]> <![endif]>m |
||
Рис. 11 Описание функций подъёмной оси в ТС, обладающих системой регулирования давления
Осевая нагрузка Агрегат задней оси
17

4. ECAS Алгоритм управления
При загрузке или разгрузке на этой линии происходит прохождение различных характерных точек. Значения давления в пневмоподушке движущей оси (указанные с помощью кружков на рис.)необходимо сообщить системе ECAS в процессе параметризации. В результате реакций подъёмной оси возникают частично давления ( на рис.
выделены звёздочкой *), на которые нельзя оказать влияние.
!Условием нормальной регулировки подъемной оси является достаточное обеспечение сжатым воздухом и электроэнергией.
Следующие высказывания играют роль в том случае, если ТС с цистерной непрерывно наполняется жидкостью или происходит его опорожнение (Рис. 11).
1.Процесс наполнения начинается при . Движущая ось ТС не находится под нагрузкой (порожний вес)
mпорожний. Эта порожняя масса получается из следующего:
•масса конструкции и
•массовая доля подъемной оси мпод. ось.
Значение давления в пневмоподушке pпорожний можно,например , узнать из таблички РТС.
2.В процессе наполнения увеличивается нагрузка ТС до достижения . В этой точке подъемная ось опускается. Соответствующее давление в пневмоподушке должно быть обозначено как давление, возникшее при спускe
подъемной оси pспускпод. оси. Егозначениедолжнобыть сообщено электронике в процессе параметризации. Ориентировочное значение такого давления - это
допустимое номинальное значение p100% давления в пневмоподушке при полной загрузке ТС. Это значение также можно узнать из таблички ALB.
3.После спуска подъемной оси происходит изменение в нагрузке агрегата задней оси (ЗО). Нагрузка снижается
на массовую долю подъемной оси mпод. ось. Давление в пневмоподушке движущей оси также снижается, поскольку осевая нагрузка распределяется по пневмоподушкам как движущей, так и подъемной оси. Кривая, касающаяся давления в сильфоне, после спускаподъёмнойосипроходитотдо. Пользовательне может повлиять на устанавливающееся само по себе
давление в пневмоподушке p* ПО спуск. Для расчёта параметров, касательно управления подъёмной осью, необходимо определить значение данного давления.
4.При дальнейшем наполнении цистерны давление в пневмоподушке движущей оси достигает своё максимально допустимое значение в .
5.Происходит регулировка максимально допустимого давления в пневмоподушке движущей оси при задействованной функции " Вспомогательная сила при трогании ТС" p130% .
6.В итоге достигается давление p перегрузка, в итоге этого срабатывает функция " Предотвращение перегрузки".
7.Функцию " предотвращение перегрузки" можно использовать только в системах, обладающих датчиками давления ( а не переключателями
давления). Смысл данной функции заключается в том,
что при достижении этого давления pперегрузка происходит вентиляция пневмоподушек всех осей,
находящихся на днище. Активизация функции "Предотвращение перегрузки" может привести к тому, что конструкция ТС опустится до предела. Это должно препятствовать движению с сильном перегруженной
конструкцией. Сведения о давлении pперегрузка должны быть переданы блоку ECU. При этом нужно учитывать
данные завода-изготовителя осей и нормативноправовые предписания касательно нагрузки на автомобили.
8.Пневмобаллоныопятьзаполняютсяприсниженииниже минимума при опорожнении или выпуске соответствующей осевой нагрузки, соответствующей
pперегрузка. То есть, когда давление в пневморессорах снижается при рассмотрении от точки . Достаточно выключить и повторно включить зажигание для того, чтобы провести регулировку последнего заданного уровня.
9.При дальнейшем спуске жидкости из цистерны, чтобы не изменять выбранный вначале процесс, понижается
давление в пневмоподушках ниже до 3a . В этой точке давление в пневмобаллонах главной оси настолько мало, что целесообразен подъем подъемной оси. Оно должно быть обозначено как давление, возникающее
при поднятииподъёмной оси pподнятиепод. оси. Данные о нем должны быть переданы в ECU путем
параметризации.
Для обеспечения нормальной работы учитывайте следующие правила:
•Значение давления p поднятие подъемной оси < давление в пневмоподушке p*спуск подъемной оси
•Давление при поднятии pподнятие подъемной оси >
давление pпорожний
(учитывая порожний вес ТС)
При несоблюдении правил могут возникнуть неисправности функций подъемной оси, напр. непрерывное поднятие и спуск, если значение давления является больше чем давление в пневмоподушке p*спуск подъемной оси.
10.В системах с полуавтоматической подъемной осью можно провести её поднятие вручную, если превышено допущенное давление p*спуск подъемной оси.
11.В системах, обладающих полностью автоматической подъёмной осью происходит следующий процесс: после установления давления при подъёме приподнимается подъёмная ось,а пневмоподушки ведущей оси берут на себя всю осевую нагрузку.
Массовая доля подъемной оси mпод. ось теперь опять относится к нагрузке. Кривая давления в пневмоподушках проходит от 3a до 2a , при этом
установленное давление в пневмоподушках p*поднятие подъемной оси нельзя изменить.
12.По завершении всего процесса опорожнения кривая
давления в пневмобаллонах опять оказывается у .
18

Алгоритм управления ECAS 4.
Итог
Регулировку подъёмной оси, включая функцию предотвращения перегрузки можно настроить следующим образом:
•Давление спуска подъемной оси pспуск под. оси
•Давление защиты от перегрузки pперегрузка
•Давление подъема подъемной оси pподъем под. оси
Кроме того, названные выше условия необходимо соблюдать во время определения давления при спуске и поднятии подъёмной оси для достижения успеха в процессе её регулировки.
4.2.2Регулировка функции " Вспомогательная сила при трогании ТС"
Функция " Вспомогательная сила при трогании ТС" возможна только в том случае, если давление в пневмоподушке (Рис. 12) можно определить между 3a и . Это означает, что подъемные оси должны находиться на днище. Описание регламентируется требованиями директивы ЕС 97/27/EG (EG 97/27).
На рис. 12 показано 2 примера, начиная с A1 и B1 , как увеличение сцепления колес действует после активации различных состояний загрузки.
Пример 1
В точке A1 происходит выкачивание воздуха из пневмоподушкиподъёмнойоси. Нарядусэтимсуществуют пневматические системы, в которых не проводится полное выкачивание воздуха, остаточное давление
предотвращает в данном случае возможный надлом сильфона. Подъемная ось поднимается. На движущей оси устанавливается давление в пневмоподушке, которое находится на удлинении линии между и и которое с A2 помечено. После отключения функции " Вспомогательная сила при трогании ТС" вновь устанавливается давление в пневмоподушке главной оси согласно точке A1 .
Существуют нормы согласно EG 97/27, касающиеся нагрузки на движущую ось с помощью функции вспомогательной тяги при трогании ТС. Нагрузка на движущую ось может быть превышена на макс. 30 % (в Германии определено StVZO §34), если заводизготовитель данных осей не установил меньшие значения.
Максимально допустимое давление (соответствующее данным требованиям) в пневмоподушках движущей оси при активированной функции "Вспомогательная сила при трогании ТС" p130% необходимо сообщить электронике ECAS в процессе параметризации. Для изменения такого состояния нужно установить диапазон заданного значения p130% в электронике , в пределах которого происходит регулирование давления при активированной функции " Вспомогательная сила при трогании ТС" К процессу регулировки относится:
Диапазон регулирования = p130% - p130%
В процессе регулировки не должно быть превышено предельное давление при активированной функции "Вспомогательная сила при трогании ТС". Если для
<![endif]>Давление в пневмоподушке ведущей оси
p130%
Предел "вспомогательная сила при трогании ТС"
pA2 < p130%
pспуск под. оси Предел "полная нагрузка" = p100%
p порожний
<![if ! IE]><![endif]>mпорожний
pB2 = p130%
mпод. ось
Предел "давление в сильфоне при порожнем весе"
Осевая нагрузка Агрегат задней оси
Рис. 12 Описание функции "Вспомогательная сила при трогании" в ТС, обладающих системой регулирования давления
19

4. ECAS Алгоритм управления
системы ECAS предусмотрены функции " Вспомогательная сила при трогании ТС" и "Предотвращение перегрузки", то предельное давление вспомогательной силы p130% ни в коем случае не должно превышать давление при перегрузке pперегрузка.
!Законодатель предписывает возможность использования такого увеличения сцепления колес только при скорости до 30 км/ч.
Пример 2
Особенности работы при установлении давления при увеличении сцепления колес p130% отображается. Исходя из B1 при этом также начинается прокачка пневмобаллона подъемной оси. При установлении давления увеличения сцепления колес настраивается прокачка подъемных сильфонов, а давление в пневморессорах главной оси большене растет B2 . Вэтом случае подъемная ось остается на днище. Излишняя доля нагрузки принимается пневморессорами подъемной оси. После отключения функции "Вспомогательная сила при трогании ТС" снова устанавливается давление в пневмоподушках движущей оси соответственно B1 .
В целом также для увеличения сцепления колес применимо правило, согласно которому блоку ECU нужно передать следующие значения:
•максимально допустимое давление в пневмоподушках движущей оси при активированной функции "Вспомогательная сила при трогании ТС" p130% (предельное давление при активированной функции "Вспомогательная сила при трогании ТС")
• диапазон заданного значения p130%
•Скоростное ограничение при использовании функции "Вспомогательная сила при трогании ТС".
Определение промежутков времени в период активизации и пауз, а также различные виды вспомогательной силы при трогании ТС могут быть заданы системе ECAS с помощью запуска определённых Pin или, в другом случае, они могут быть выбраны в процессе параметризации.
В общей сложности могут быть параметризированы 5 различных видов вспомогательной силы при трогании ТС (см. раздел 3.8 "Вспомогательная сила при трогании ТС").
В какой мере данные виды могут быть задействованы, зависит от типа системы ECAS.
20
Конфигурация системы ECAS 5.
5.Конфигурация системы
ECAS - это очень вариабельная система, которая может быть оптимально приспособлена под различные требования, касательно ТС. Так, например, на одном ТС могут быть установлены 3 основных системы управления ECAS. Наряду с этим возможно управление подъёмной осью. Выбор необходимых компонентов производится изготовителем ТC благодаря требованиям, предъявляемым системе.
Нарасположенныхнижеиллюстрацияхуказаныразличные варианты регулирования всех ТС.
В отличие от ABS или EBS, конфигурация которых определяется с помощью встроенных в систему датчиков частоты оборотов/модуляторов (напр. 4S/3M), определение конфигурации в системе ECAS производится благодарячислуосновныхконтуроврегулированияуровня. Данное число соответсвует числу, имеющихся в наличии датчиковхода. Так, например, система, обладающаядвумя датчикамиходаназываетсядвухстороннеерегулирование.
При этом сведения о типе управления касаются всего ТС (как указано на рис.) или отдельных частей оси. Полностью пневматическое ТСстрехстороннимуправлением состоит, к примеру, из подвижной оси с односторонним управлением и движущей оси с двухсторонним управлением.
Для ТС существуют в общей сложности следующие виды управления:
•одностороннее регулирование
•Регулировка по 2 точкам
•трехстороннее регулирование
Одностороннее регулирование типично для подвижных передних и задних осей (рассматривая данный процесс на основе осей). В ТС, обладающих частично пневматической подвеской, дляпроведенияодностороннегорегулирования устанавливаются датчики хода на движущую ось.
Двухстороннее регулирование находит применение на задних осях с значительной шириной колеи, если уже заранее известно, что ТС будет наравномерно нагружено или в ТС с относительно высоким центром тяжести. При рассмотрении ТС в целом выясняется, что ТС с полностью пневматической подвеской, на передней и задней оси которых находятся датчики хода, обладают двухсторонним регулированием.
Трехстороннее регулирование типично только для ТС с полностью пневматической подвеской. Оно состоит из одностороннего регулирования, касательно подвижной передней оси и двухстороннего регулирования задней оси.
одностороннее регулирование |
Регулировка по 2 точкам |
ECU |
ECU |
Электро- |
Электро- |
магнитный |
магнитный |
клапан |
клапан |
Ведущая ось |
Ведущая ось |
Зад. ось
Справа
Зад. ось |
Зад. ось |
Зад. ось |
слева |
Справа |
слева |
Датчик хода |
Датчик хода |
Датчик хода |
Рис. 13 Порядок регулирования для ТС с частично пневматической подвеской
21

5. ECAS Конфигурация системы
Соответствующую конфигурацию датчиков хода можно расширитьзасчётпереключателейдавленияилидатчиков давления с условием наличия подъёмной оси.
Для автоматического спуска подъёмной оси, по достижении определённых значений давления в пневмоподушках движущей оси, достаточно установить переключатели давления для определения давления в сильфоне. С помощью переключателей давления можно привести в действие функцию вспомогательной силы при трогании ТС.
Датчики давления находят применение на движущей оси, если есть необходимость использования полностью автоматизированной подъёмной оси, функции компенсации продавливания шин или функции предотвращения перегрузки. Существует запрос, касающийся процесса регулирования соотношения давления или оптимального регулирования силы тяги, то необходимо дополнительно установить датчики давления на пневмоподушки подъёмной оси.
Регулировка по 2 точкам |
трехстороннее регулирование |
ECU |
ECU |
|
|
|
ПО |
Датчик хода |
ПО |
|
|
|
|
||
|
|
|
слева |
|
Справа |
|
Электр- |
Электро- |
|
Электрома- |
|
Зад. ось |
омагн- |
магнитный |
|
гнитный клапан |
|
итный |
Клапаны : |
ПО |
Перед.ось |
|
|
|
Клапаны : |
управл- |
|
||
|
движущая |
яемая |
|
|
|
|
ось |
ось |
|
|
|
|
слева |
|
слева |
Электрома- |
|
|
|
|
|
|
|
|
|
|
|
гнитный клапан |
|
Справа |
|
|
Справа |
Ведущая ось |
|
|
|
|
|
|
|
|
|
|
Зад. ось |
Зад. ось |
|
|
|
|
слева |
||
|
|
|
|
Справа |
|
Датчик хода |
|
Датчик хода |
|
|
|
|
|
|
Датчик хода |
|
Датчик хода |
Рис. 14 Порядок регулирования для ТС с полностью пневматической подвеской |
|
|
|||
22
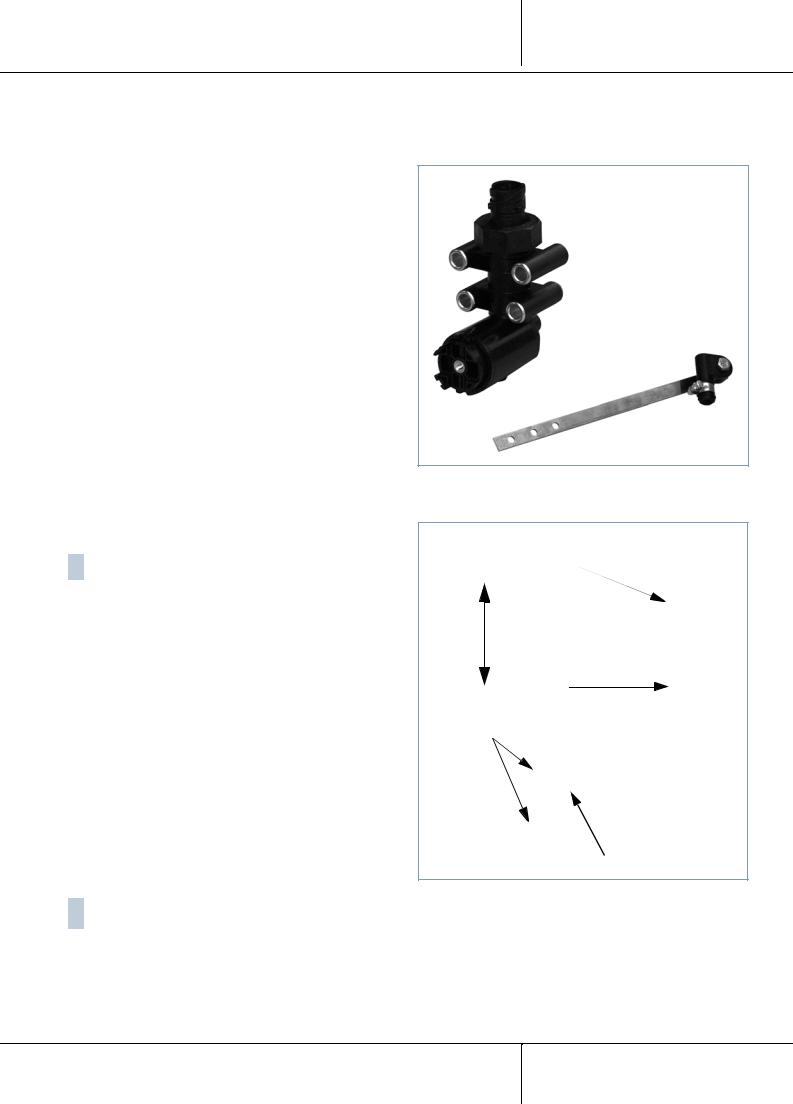
Компоненты ECAS 6.
6.Компоненты
Компоненты установки ECAS
•датчик(и) хода;
•Манометрический переключатель
•датчик(и) хода (выборочно: использование переключателей давления
или датчика(ов) давления зависит от выбора варианта системы)
•Устройство управления (ECU)
•Магнитный клапан(ы) ECAS
•блок управления (выборочно)
•пневматические компоненты (пневмобаллоны; возм. подъемный сильфон; клапаны ограничения давления; трубопроводы, пневматические контейнеры).
Вданном случае пневматические компоненты не будут рассмотрены, т.к. они соответствуют пневматическим компонентам общепринятой пневматической системы и не требуют особого разъяснения в ECAS. При описании электроники ECAS особенное внимание будет уделено электроснабжению.
6.1 Датчики
Вначале регулировки находятся датчики. Они измеряют регулируемые параметры и передают данные о них ECU с помощью кабелей датчиков.
!В системе ECAS необходимо установить минимум один датчик хода.
Для управления дополнительными функциями используются переключатели или датчик(и) давления.
6.1.1Датчик хода
датчик хода 441 050 0.. 0 является датчиком фактического значениядляпостояннойрегистрацииизмененийввысоте. Принцип измерения - индуктивный.
Вращательное движение передается рычагом во внутреннюю часть датчика. Это движение преобразуется по принципу работы без зазора кривошипного механизма в линейное движение сердечника в катушке. При "движении погружения" ферромагнитного сердечника в неподвижную катушку происходит сдвиг фаз между током и напряжением. ECU получает эти сигналы и преобразует их в значения "count".
Для датчика угла вращения 441 050 1.. 0 достигает индуктивного изменения с помощью вращательного движения сенсорной волны.
! Работу датчика хода нельзя проверить вольтметром.
Сенсорная волна Сенсорный рычаг

 Управление рычагом
Управление рычагом 
 Сенсорная волна
Сенсорная волна
 Сенсорный рычаг
Сенсорный рычаг
Рис. 15 Датчик хода 441 050 0 0 и рычаг 441 050 718 2
Подъем Цилиндрическая + катушка
Сердечник
-
Спуск
Управление рычагом
Сенсорная волна
Рис. 16 Изображение датчика хода 441 050 0.. в разрезе 0
23

6. ECAS Компоненты
Рис. 17 Датчик угла вращения 441 050 1.. 0
 пластмассовая ось
пластмассовая ось
ферромагнитное ядро
ферромагнитный листовой металл
 катушка
катушка
Рис. 18 Изображение датчика угла вращения 441 050 1.. 0
При необходимости проверки датчика хода можно провести измерение сопротивления для перепроверки катушки. Сопротивление должно составлять при этом примерно 120 Ом. Замер индуктивности катушки производитсяспециальным контуромвECU более50 разв секунду. Работоспособность датчика также производится
ECU.
Датчик хода находится на раме автомобиля рядом с осью, пневмоподвески которой нужно регулировать.
На управляемой оси над её центром находится, как правило, датчик хода (одностороннее регулирование). Движущие оси могут обладать не только одним, но а также двумя датчиками хода.
–Установите оба датчика таким образом, чтобы они были расположены, по возможности, на большом расстоянии друг от друга. Это необходимо для эффективного процесса регулирования датчиков хода по отдельности (двухстороннее регулирование на одной оси).
Датчик хода прочно соединен с регулируемой осью благодаря рычажной системе. На его конце находятся наконечники из резины для амортизации и компенсации.
Тип встроенного датчика нужно установить в параметрах (опциональный параметр 2.5).
ECAS ECU производит рассчёт данного сенсорного значения с помощью counts, а именно байтового значения между 4 и 255 counts. В новых версиях ECAS ECU была проведена переработка на 16 байт. Сенсорное значение сообщается с помощью Timer Ticks (диапазон от 256 до
65.536).
Инструкции по установке
Исходя из того, что рычаг находится в горизонтальном положении(исходноеположение90°), диапазонизмерения датчика хода составляет следующее: от + 43° до - 40°. На рис. 16 показано расположение плюсовой и минусовой зоны.
Оптимальным является использование всего диапазона управления, если сенсорный рычаг находится на нормальном уровне в горизонтальном положении.
!Не следует превышать максимальный диапазон управления рычагом (+/- 50°).
Длина рычага датчика выбирается. С другой стороны, она должна быть одинакова для датчиков хода одной и той же оси.
Короткий рычаг датчика
Короткий рычаг датчика сам обеспечивает при небольшом изменении положения подачу сигнала датчика и поддерживаетвысокуюточностьизмеряемыхзначений. Но он охватывает небольшой диапазон регулировки.
Длинный рычаг датчика
Длинный рычаг датчика охватывает большой диапазон регулировки за счет раздельного различения измеряемых значений. Это нужно для оптимальной нагрузки углов отклонения.
!Следует избегать кручения рычага, т.к. в таком случае на оси датчика могут возникать недопустимые опрокидывающие моменты. Все поворотные оси по этой причине должны быть установлены параллельно.
Датчик хода существует только в одном варианте для установки с левой и с правой стороны.
Но рычаг датчика можно устанавливать на оси датчика, который вращается без упирания в корпусе датчика, с шагом в 90°. Для нормальной работы и точности определения измеряемых значений нужно точно выровнять ось датчика.
24

Компоненты ECAS 6.
В качестве вспомогательного средства предусмотрены 2 выступа (↑ рис. 16) на сенсорной волне, которые выполняют функцию направления рычага.
Они расположены под прямым углом в направлении движения сердечника направо (как на рис.) или налево для оптимального использования диапазона измерений датчика хода.
!Обратите внимание на то, что датчик хода должен иметь полную свободу движения за счёт его исполнительного диапазона, а его рычаг не должен быть повернут.
При установке датчика хода на конструкции ТС необходимо учитывать его реакцию в процессе подъёма и спуска.
•Погружение цилиндрической катушки в сторону ПОДЪЕМ повышает индукцию.
•ВыдвижениецилиндрическойкатушкивсторонуСПУСК понижает индукцию.
Полученные при измерении значения могут отображаться средством диагностики (ПК).
•Подъем конструкции приводит к повышению отображаемых значений при измерении.
•Спуск конструкции приводит к уменьшению отображаемых значений при измерении.
Датчик хода в случае необходимости сервисного обслуживания
Номер заказа |
Исполнение |
|
|
441 050 006 0 |
Байонет; без рычага; использование в MAN, |
|
DAF и замена |
441 050 007 0 |
тонкий корпус; резьба M24x1; использование в |
|
Renault (автомобиль); |
|
|
441 050 008 0 |
M24x1; без рычага ; использование в DC, DAF, |
|
MAN, RVI, Scania, другие производители |
|
(замена для 441 050 003 0) |
|
|
441 050 010 0 |
M27x1; без рычага; использование в RVI, |
|
Neoplan и в прицепах |
|
|
441 050 011 0 |
Байонет DIN 72585-A1-2.1-Sn/K2; без рычага; |
|
использование в MAN, IVECO, Scania, DAF и в |
|
прицепах |
|
|
441 050 012 0 |
Байонет DIN 72585-A1-2.1-Sn/K2; без рычага; |
|
без температурной компенсации; |
|
использование в MAN TGA, DC Actros und Atego |
|
|
441 050 013 0 |
как 441 050 012 0, однако с цветной кодировкой |
|
насоединенииэлектропитания; использование |
|
в RVI |
|
|
Номер заказа |
Исполнение |
|
|
441 050 100 0 |
Датчик угла вращения; байонет DIN 72585-A1- |
|
2.1-Sn/K2; без температурной компенсации; |
|
прямой рычаг; использование в DAF |
|
|
441 050 101 0 |
Датчик угла вращения; байонет DIN 72585-A1- |
|
2.1-Sn/K2; без температурной компенсации; |
|
прямой рычаг; использование в SCANIA Truck |
|
|
441 050 120 0 |
Датчик угла вращения; байонет DIN 72585-A1- |
|
2.1-Sn/K2; без температурной компенсации; |
|
крестообразный рычаг; использование в IVECO |
|
|
441 050 121 0 |
Датчик угла вращения; байонет DIN 72585-A1- |
|
2.1-Sn/K2; без температурной компенсации; |
|
крестообразный рычаг; использование в DC |
|
|
441 050 122 0 |
Датчик угла вращения; байонет DIN 72585-A1- |
|
2.1-Sn/K2; без температурной компенсации; |
|
крестообразный рычаг; использование в |
|
SCANIA Bus |
|
|
441 050 123 0 |
Датчик угла вращения; байонет DIN 72585-A1- |
|
2.1-Sn/K2; без температурной компенсации; |
|
крестообразный рычаг; использование в MAN |
|
|
6.1.2Манометрический переключатель
Рис. 19 Переключатель давления 441 014 … 0
В системах, работающих по принципу выравнивания давления, использование простых функций ECAS (таких, как управление подъёмной осью, вспомогательная сила при трогании ТС) происходит с помощью переключателей давления.
Два переключателя давления на движущей оси, находящиеся в открытом состоянии, регистрируют давление в пневмоподушках. В порожнем состоянии эти переключатели давления включены на клемме 15 благодаря двум соответствующим пинам электроники
ECAS.
Переключатель давления (точка переключения: напр. , 11 … 11,5 т) подаёт сигнал ECU о превышении/понижении предельно допущенной нагрузки на ось. Соответственно затем начинается управление подъёмной или ведомой осью в процессе движения. Таким образом, исключено динамическое влияние осевой нагрузки за счёт выбора определённого промежутка времени (напр., 2 или более сек.). В данный период времени необходимо изменить положение управления для того, чтобы привести в действие реакцию оси.
25

6. ECAS Компоненты
Второй переключатель давления (пункт управления: напр. , 13 t) подаёт сигнал ECU о превышении допущенной нагрузки на ось при использовании функции вспомогательной силы при трогании ТС. Соответственно после этого происходит перемещение осевой нагрузки при активированной функции "Вспомогательная сила при трогании ТС".
Преимуществом "открытого" состояния переключателя передач является то, что при отсутствии напряжения (а именно , при выключенном зажигании) подъемная ось всегда опущена, иначе говоря, ведомая ось находится под давлением и, таким образом, исключена возможность перегрузки.
6.1.3Датчик давления
Для использования дополнительных функций ECAS необходимо применение датчиков давления. В простом случае датчик давления регистрирует давление в сильфоне движущей оси.
Данный случай находит использование в процессе решения простых регулярных задач.
•управление подъемной осью,
•управление увеличением сцепления колес или
•в процессе компенсации продавливания шин
При наличии более сложных процессов управления, как например , регулирование соотношения давления, на каждую пневмоподушку (также и на подъёмной оси) устанавливается датчик.
Измерение давления производится тензорезистором. При подачедавленияпроисходитизменениесопротивленияна мосту Уитстона, за счет чего создается напряжение, пропорциональное давлению. Датчик давления находится под напряжением от 8 … 32 В в зависимости от конструкции. Через сигнальный провод (кабель датчика) пропорциональное давлению напряжение выдается в электронную часть.
При отсутствии давления (смещение датчика давления) выходной сигнал составляет 0,5 В.
Передаваемое напряжение предельно измеряемых значений при давлении 10 бар, в зависимости от конструкции датчика давления, составляет 4,5 В (конструкция датчика давления с байонетным подсоединением согласно DIN 72 585-A1-3.1 - иными словами: байонетный тип по DIN) или 5,5 В (конструкция датчика давления с байонетом Schlemmer - более старый вариант).
!Максимально допустимое давление 16 бар, касающееся датчиков давления не должно быть превышено.
Подача измеренных значений производится в цифровом виде, т. е. ступенчато. Полученные при измерении значения могут отображаться средством диагностики (ПК).
Датчик давления находится на отдельном сильфонном соединении пневмоподушки или на тройнике ввода сильфона.
Не устанавливайте датчик давления в пневматический трубопровод между сильфоном и магнитным клапаном ECAS. Иначе в связи с большой динамикой при протекающих процессах подачивоздухаипрокачки возможныпогрешностив измерении.
Рис. 20 Датчик давления 441 040 003 0
Датчик давления с байонетным соединением Schlemmer для сенсорного кабеля. Минимальные цифровые интервалы в процессе измерения составляют 1/20 бар. 1 1 бар соответствует 20-ти измеряемым величинам. Данный вариант датчика давления всё чаще заменяется вариантом, описанным ниже.
.
Рис. 21 Датчик давления 441 040 0 0
Датчик давления с байонетным соединением по DIN для сенсорного кабеля. Минимальные цифровые интервалы при измерении равны 1/16 бар. 1 бар соответствует 16 измеренным величинам. Данный вариант датчиков давления всё чаще находит применение в системах ТС (также и в EBS) в связи с использованием соединений по DIN и заменяет, таким образом, выше названный вариант.
Данное касается также и байонетного соединения Schlemmer, которое заменяет датчик давления.
Заменаобоихвариантовдатчиковдавлениянеможетбыть проведена одновременно. При возникновении необходимости данной замены нужно изменить ответственные за регулировку давления параметры в электронике.
Датчик давления в случае необходимости сервисного обслуживания
Номер заказа |
Исполнение |
|
|
441 040 003 0 |
Пневм. соединение M16x1,5; электр. |
|
байонетное соединение; 500мВ/бар; замена |
|
только DAF и прицеп |
|
|
441 040 004 0 |
Пневм. соединение M16x1,5; электр. |
|
соединение M 27x1; 500мВ/бар; замена |
|
только DAF |
|
|
441 040 005 0 |
Пневм. соединение M16x1,5; прокладка с |
|
уплотнительным кольцом; электр. |
|
соединение M 27x1; 500мВ/бар; замена |
|
только RVI |
|
|
26

Компоненты ECAS 6.
Номер заказа |
Исполнение |
|
|
441 040 013 0 |
Пневм. соединение M16x1,5; байонет по |
|
DIN 72585-A1-3.1-Sn/K2; 400мВ/бар; Ratio- |
|
исполнение; использование в DC, MAN, DAF, |
|
IVECO и в прицепах; замена для модиф. 007 |
|
|
441 040 014 0 |
Пневм. соединение M16x1,5; байонет по |
|
DIN 72585-A1-3.1-Sn/K2; 333мВ/ |
|
бар;диапазон измерений 12 бар; |
|
использование в IVECO-S2000 |
|
|
441 040 015 0 |
Пневм. соединение M16x1,5; прокладка с |
|
уплотнительным кольцом Raufoss; байонет |
|
по DIN 72585-A1-3.1-Sn/K2; 400мВ/бар; |
|
использование IVECO (с декабря 2000) |
|
|
441 040 017 0 |
Пневм. соединение M16x1,5; байонет |
|
DIN 72585-A1-3.1-Sn/K2; 400мВ/бар; с |
|
фильтром Gore; использование Scania (с |
|
января 2001) будет заменен номером |
|
441 044 105 0 |
|
|
441 040 018 0 |
Пневм. соединение M16x1,5; прокладка с |
|
уплотнительным кольцом; байонет по DIN |
|
72585-A1-3.1-Sn/K2; 400мВ/бар; |
|
использование RVI |
|
|
441 044 001 0 |
Пневм. соединение M16x1,5; байонет по |
|
DIN 72585-A1-3.1-Sn/K2; 400мВ/бар; |
|
использование DAF, DC, MAN |
|
|
441 044 002 0 |
Пневм. соединение M16x1,5; прокладка с |
|
уплотнительным кольцом Raufoss; байонет |
|
по DIN 72585-A1-3.1-Sn/K2; 400мВ/бар; |
|
использование IVECO |
|
|
441 044 003 0 |
Пневм. соединение M16x1,5; байонет по |
|
DIN 72585-A1-3.1-Sn/K2; 333мВ/бар; |
|
использование Scania Bus |
|
|
441 044 105 0 |
Пневм. соединение M16x1,5; байонет по |
|
DIN 72585-A1-3.1-Sn/K2; 400мВ/бар; |
|
использование Scania |
|
|
6.2Электронный блок (ECU) 446 055 ... 0
ECU - это основа системы. Обеспечение напряжением электроники ECAS происходит за счёт клеммы 15 (зажигание). Существует возможность дополнительного снабжения через клемму 30 (длительный плюс). Здесь важно, какая система используется в данный момент.
В электронной части ECAS координируется регулировка системы пневматического подрессоривания. Это означает:
•Поступающие от датчика хода сигналы постоянно контролируются, преобразуются в понятные для компьютера сигналы (counts или Timer Ticks) и анализируются.
•В системах, обладающих встроенными переключателями давления, управление подъёмной осью зависит от положения данного переключателя давления.
•Если датчик давления является часть конфигурации системы, то такие поступающие сигналы постоянно контролируются, преобразуются в единицы counts и оцениваются.
•В соответствии с настройкой параметров или составом системы сигналы выдаются на магнитные клапаны ECAS для "отрегулирования" заданных значений в пневмоподвесках.
•Параметризованные, откалиброванные и в дальнейшем установленные данные (например уровень согласно данным памяти) сохраняются и подвергаются управлению.
•Поступающие сообщения регистрируются, сохраняются и при необходимости указываются с помощью соответствющей сигнальной лампочки, находящейся на приборной панели. Они могут быть считаны при помощи соответствующей программы.
•В электронике сохранены параметры, которые определяют принцип действия конкретной системы. ИзготовительТСпроизводитустановкупараметровпри первой эксплуатации; изменение данных параметров возможно только при согласии изготовителя и по окончанию соответствующего обучения.
•Обеспечивается обмен данными с блоком управления и выполняются различные функции контроля.
Микропроцессор выполняет одну программу в цикле доли секунды (25 мс), чтобы обеспечить быструю реакцию при регулировании в случае изменений фактического значения. При выполнении программы выполняются все упомянутые задания. Эта программа жестко записана в постоянной памяти (ROM) и не может быть изменена. Однакоонаиспользуетданные(параметры), хранящиесяв оперативной (произвольно изменяемой) памяти. Эти параметры влияют на вычислительные операции и тем самым на то, как реагирует механизм регулировки блока ECU. При их помощи программе передаются данные системы и преднастройки, касающиеся автомобиля и функций.
Электроника может находиться как в, так и на различных частях ТС. Подавляющее большинство изготовителей ТС предпочитают расположение электроники в области бардачка, некоторые находятся под сиденьем (DAF) или в двери со стороны водителя (SCANIA).
!Для провождения диагностики, особенно в более старых моделях, должно быть известно месторасположение электроники для ввождения дианостического интерфейса между ей и штепселем соединения (25или 35-контактный).
Вболее современных системах электронику можно задействовать через центральный диагностический интерфейс.
БольшинстворазличныхпоколенийECAS, атакжесистема пневмоподвесок и степени рационализации (Ratio) являются причиной многочисленности электроник ECAS в области грузовых автомобилей.
Ниже указано распределение электронных систем ECAS:
-ECAS 1-го поколения без датчика давления
-ECAS 1-го поколения с датчиком давления
-ECAS 4x2 A
27

6. ECAS Компоненты
-ECAS 6x2 A
-ECAS 4x2 (Ratio)
-ECAS 4x2 (Ratio) KWP 2000
-ECAS 6x2 (Ratio)
-ECAS 6x2 DV (= регулирование соотношения давления)
-ECAS 4x2 / 6x2 CAN 1
-ECAS 4x2 / 6x2 CAN 2
-ECAS + ESAC (с и без CAN)
6.2.1ECAS 1-го поколения без датчика давления
С помощью системы ECU, которая представляет собой первое поколение ECAS, происходит регулирование транспортными средствами (4x2 или 6x2) с частичной или полностью пневматической подвеской. Функцией подьёмной или ведомой оси в ТС 6х2 можно управлять за счёт переключателя давления.
Рис. 22 ECU 446 055 003 0
Для электронных систем данного вида типичен алюминиевый корпус, в заднюю часть которого вставляется и загибается платина с 35-контактной штепсельной панелью.
Для этой группы характерна только модификация 003 в случае возникновения необходимости в запчастях (в скобках изготовитель ТС, использующий данную систему
ECU):
- 446 055 003 0 (DAF, Leyland DAF)
Диагностика данной электроники может быть проведена с помощью диагностической карточки WABCO 446 300 524 0 (8. диагноз).
6.2.2ECAS 1-го поколения с датчиком давления
Здесь речь идёт об электронных системах, которые также преданазначены для подсоединения 35-контактного штепселя. С помощью данной ECU происходит регулировка ТС 6x2 с частичной или полностью пневматической подвеской. Каждая пневмоподушка ведущей, подъёмной или ведомой оси, а также подъёмный сильфонобладаютдатчикомдавления(касательноданной модели). Системе ECU непрерывно сообщаются данные о давлении, касающиеся каждого сильфона. Таким образом, управление подъёмной или ведомой осью реализуется как регулирование силы тяги (↑ 3. Функции системы).
Характерно как и для электронных систем без датчика давления.
Вэтой группе существуют следующие вариации:
-446 055 005 0 (DAF, RVI)
-446 055 009 0 (DAF)
Диагностика данной электроники может быть проведена с помощью диагностической карточки WABCO 446 300 532 0 (8. диагноз).
!Только в качестве информации, изготовление прекращено с начала 2004 года.
6.2.3ECAS 4x2 A
Данная система ECU специально предназначена для ТС 4x2. Она представляет собой дальнейшее развитие в отличие от поколения ECU без датчика давления. Система ECU стала более компактной, она предназначена для 25контактногоштепселя. СпомощьюданнойECU происходит регулировка ТС 4x2 с частичной или полностью пневматической подвеской.
Для электронных систем данного вида типичен алюминиевый корпус, в заднюю часть которого вставляется и загибается платина с 25-контактной штепсельной панелью.
Рис. 23 ECAS 4x2A
Вэтой группе существуют следующие вариации:
-446 055 020 0 (RVI, Scania)
-446 055 021 0 (MAN)
-446 055 022 0 (DaimlerChrysler)
-446 055 023 0 (DaimlerChrysler)
-446 055 024 0 (DaimlerChrysler)
-446 055 025 0 (MAN)
-446 055 026 0 (MAN)
-446 055 027 0 (RVI, IVECO)
-446 055 028 0 (Scania)
-446 055 029 0 (DAF)
-446 055 030 0 (Nissan Diesel)
Диагностика данной электроники может быть проведена с помощью диагностической карточки WABCO
446 300 520 0 и компьютерной диагностики
446 301 529 0 ( 8. Диагностика).
28

Компоненты ECAS 6.
|
1 |
14 |
|
|
||
1 |
клемма 15 (предохранитель 5A) |
14 клемма 31 / RCU |
||||
|
|
|||||
2 |
CLOCK-Ltg. RCU |
|
|
15 |
|
|
3 |
Диагностика L-провода |
|
|
16 |
|
|
4 |
Диагностика K-провода |
|
|
17 |
|
|
5 |
Датчик хода спереди |
|
|
18 Датчик хода масса |
||
6 |
|
|
19 Датчик хода сзади с левой стороны |
|||
7 |
Датчик хода сзади с правой стороны |
|
|
20 |
2-ход. 2-поз. клапан ЗО справа |
|
8 |
2-ход. 2-поз. клапан ЗО слева |
|
|
21 |
клапан-вентилятор |
|
9 |
|
|
|
22 Электромагнитный клапан функция |
||
10 |
2-ход. 2-поз. клапан ПО |
|
|
РТС |
||
11 DATA-Ltg. RCU |
|
|
23 НУ I/II-переключатель (для RCU) |
|||
|
или |
|
|
|
или |
|
|
ТС переключатель "Поднятие" |
|
|
|
||
12 C3/D3-сигнал (спидометр) |
|
|
|
ТС переключатель "Опускание" |
||
13 |
Аварийная лампа макс. 2В |
|
|
24 |
Переключатель стоп-сигнала |
|
|
|
|
25 |
25 Сигнальная лампа уровень |
||
|
13 |
|
"вспомогательная сила при трогании |
|||
|
|
|
|
ТС" |
||
Рис. 24 расположение контактов 25-контактной ECU для ТС 4x2
ECU 446 055 … 0 в случае необходимости сервисного обслуживания
Номер заказа |
Исполнение |
|
|
446 055 020 0 |
заменен номером 446 055 027 |
|
|
446 055 021 0 |
в зависимости от системного оснащения и |
|
изготовителя ТС заменен номером 446 055 |
|
028; 446 055 026 и 446 055 025 |
|
|
446 055 022 0 |
заменен номером 446 055 024 |
|
|
446 055 023 0 |
заменен номером 446 055 024 |
|
|
446 055 024 0 |
Последователь: 446 055 046 |
446 055 025 0 |
заменен номером 446 055 301 |
|
|
446 055 026 0 |
заменен номером 446 055 302 |
|
|
446 055 027 0 |
заменен номером 446 055 307; будет |
|
заменен (только для RVI!) номером 446 055 |
|
303. |
|
|
446 055 028 0 |
заменен номером 446 055 025 |
|
|
446 055 029 0 |
Последователь: 446 055 311 |
|
|
446 055 030 0 |
Последователь: 446 055 407 |
|
|
!При замене ECU в процессе диагностики нужно учитывать, что может возникнуть необходимость использования другой диагностической карточки.
системы данного типа для ТС 4x2 и 6x2 во избежании дополнительных расходов на детали.
Необычным в ТС, обладающих электронной системой данного типа, является то, что они оснащены множеством различных переключателей, которые, в свою очередь, подключены к ECU рядом с пультом системного управления. Так, например, управление подъёмной осью происходит в основном за счет переключателя давления. Переключатель давления для автоматического управления подъемной осью и переключатель давления для активации функции "Вспомогательная сила при трогании ТС" на ведущей оси; благодаря этому осуществляется управление подьёмной или ведомой осью в процессе уравнивания давления.
Для электронных систем данного вида типичен пластмассовый корпус, в переднюю часть которого вставляется и соединяется крестообразными болтами платина с 35-контактной штепсельной панелью.
6.2.4ECAS 6x2 A
Что касается этого поколения, то здесь речь идет о переработке электронных систем с помощью 35контактного штепселя соединения. С помощью данной ECU происходит регулировка ТС 6x2 с частичной или полностью пневматической подвеской. Наряду с этим возможна, конечно, также и регулировка ТС 4х2 с частичной или полностью пневматической подвеской. Таким образом, изготовители ТС используют электронные
Рис. 25 ECAS 6x2A
Вэтой группе существуют следующие вариации:
-446 055 040 0 (DaimlerChrysler)
-446 055 041 0 (MAN, Scania)
-446 055 042 0 (DaimlerChrysler)
-446 055 044 0 (DAF, RVI)
-446 055 046 0 (DaimlerChrysler)
-446 055 047 0 (MAN)
-446 055 048 0 (Scania)
29
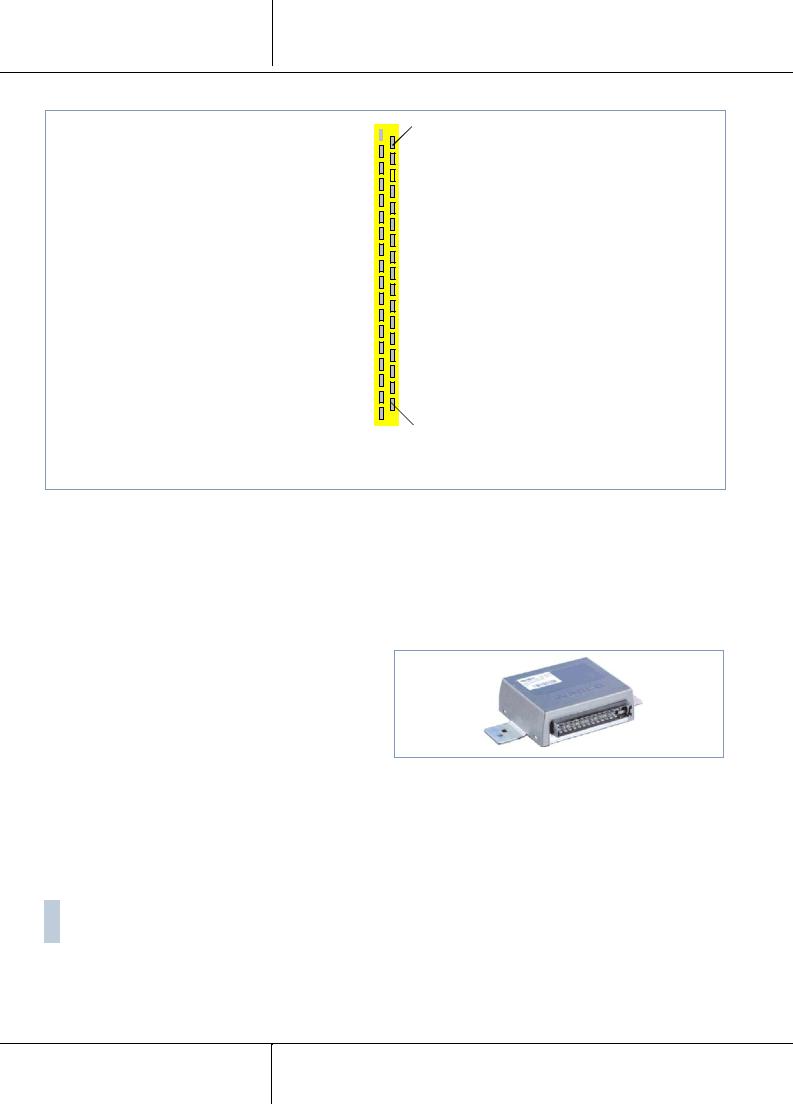
6. ECAS Компоненты
1 |
клемма 30 (предохранитель 8A) |
1 |
|
|
|
|
|
|
19 19 |
Кодировка PIN вспомогательная сила |
||
|
|
|
|
|
|
|||||||
2 |
Диагностика L-провода |
|
|
|
|
|
|
|
при трогании ТС |
|||
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
20 CLOCK-Ltg. RCU |
||||
3 |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
21 DATA-Ltg. RCU |
|||
4 |
Диагностика K-провода |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
22 C3/D3-сигнал (спидометр) |
||||
5 Переключатель давления ЗО 11т сигнал |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
23 |
НУ I/II-переключатель (с лампой) |
|||
|
Датчик давления пневмоподушка справа |
|
|
|
|
|
|
|
|
|||
6 |
Переключатель давления ЗО 13т сигнал |
|
|
|
|
|
|
|
|
24 |
Переключатель подъемной оси/ |
|
|
Датчик давления пневмоподушка слева |
|
|
|
|
|
|
|
|
переключатель порожнего пробега |
||
7 |
Переключатель стоп-сигнала |
|
|
|
|
|
|
|
|
25 |
Датчик хода сзади с левой стороны |
|
8 Датчик хода сзади с правой стороны |
|
|
|
|
|
|
|
|
26 |
Датчик хода спереди |
||
9 клемма 15 / RCU |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
27 Датчик хода масса + Кл. 31 |
||||
10 |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
28 |
|
||
11 |
2-ход. 2-поз. клапан ПО |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
29 Электромагнитный клапан функция РТС |
||||
12 |
Под.ось-спуск / вед.ось-разгрузка |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
30 |
Под.ось-поднятие/ вед.ось-разгрузка |
|||
13 |
2-ход. 2-поз. клапан ЗО слева |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
31 |
2-ход. 2-поз. клапан ЗО справа |
|||
14 |
отдельный вентиляторный клапан для под.оси |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
32 Массовое соединение - ДАТЧИК ХОДА и |
||||||
15 |
клапан-вентилятор |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
ДАТЧИК ДАВЛЕНИЯ |
|||
16 Кодировка PIN вспомогательная сила при |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
33 |
Аварийная лампа макс. 10В |
|||
трогании ТС |
|
|
|
|
|
|
|
|
34 |
Сигнальная лампа уровень |
||
17 переключатель вспомогательной силы при |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
"вспомогательная сила при трогании ТС" |
||||
трогании ТС |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
35 |
Позиционная лампа под.оси |
|||
18 |
Вспомогательная сила при трогании ТС / |
18 |
35 |
|||||||||
(отд. клапан-вентилятордля под.оси) |
||||||||||||
позиционная лампа под.оси |
|
|
|
|
|
|
|
|
|
|
||
Рис. 26 расположение контактов 35-контактной ECU для ТС 6x2
Диагностика данной электроники может быть проведена с помощью диагностической карточки WABCO 446 300 526 0 и компьютерной диагностики 446 301 529 0 (8. Диагностика).
ECU 446 055 … 0 в случае необходимости сервисного обслуживания
Номер заказа |
Исполнение |
|
|
446 055 040 0 |
заменен номером 446 055 042, с |
|
другой стороны будет заменен |
|
номером 446 055 046. |
446 055 041 0 |
заменен номером 446 055 047 (MAN) |
|
заменен номером 446 055 048 (Scania) |
446 055 042 0 |
заменен номером 446 055 046 |
|
|
446 055 044 0 |
в зависимости от системного |
|
оснащения и изготовителя ТС будет |
|
заменен на 446 055 403 (RVI) или |
|
446 055 405 (DAF). |
|
|
446 055 046 0 |
35-контактный 2-3 датчика хода, |
|
датчик давления |
|
|
446 055 047 0 |
заменен номером 446 055 404 / |
|
409 (MAN) |
|
|
446 055 048 0 |
|
|
|
!При замене ECU в процессе диагностики нужно учитывать, что может возникнуть необходимость использования другой диагностической карточки.
6.2.5ECAS 4x2 Ratio
Данная система приспособлена к потребностям ТС 4х2 и превосходит в развитии поколение 4x2 A. С помощью
данной ECU происходит регулировка ТС 4x2 с частичной или полностью пневматической подвеской.
Установление контактов PIN соответствует указанному пинингу системы ECAS-ECU 4x2 A (↑ рис. 24).
Для данной ECU характерно, что платина с 25-контактной штепсельной панелью находится на алюминиевой пластине. Верхняя часть корпуса состоит из пластмассы и соединена с нижней частью.
Рис. 27 ECAS 4x2 Ratio
Вэтой группе существуют следующие вариации:
-446 055 301 0 (MAN)
-446 055 302 0 (MAN)
-446 055 307 0 (IVECO)
Диагностика данной электроники может быть проведена с помощью диагностической карточки WABCO 446 300 881 0 ( 8. диагноз).
6.2.6ECAS 4x2 (Ratio) KWP 2000
Является усовершенствованием по сравнению с поколением 4x2 A. Система ECU и в дальнейшем продолжает быть предназначена для соединения 25контактногоштепселя. СпомощьюданнойECU происходит регулировка ТС 4x2 с частичной или полностью пневматической подвеской. Она очень схожа с ECAS-ECU
30
 Loading...
Loading...