

ECAS
в грузовых
автомобилях
Описание системы и инструкции
по установке
2. Издание
Данное издание не подлежит изменению.
Новые версии можно найти в системе INFORM по адресу
www.wabco-auto.com
© 2007 WABCO
Возможны изменения
Версия 0
02/04.07(ru)
815 080 027 3
Оглавление
Оглавление
1. Важные указания и пояснения 3
1.1 Инструкции по безопасности и меры
предосторожности 3
1.2 Область использования 3
1.3 Пояснение символов 3
2. Введение 4
3. Функции системы 5
3.1
3.2 Основные понятия 5
3.2.1 Типы осей в грузовых автомобилях 5
3.2.2 Пневмобаллоны в системе управления
3.3 Регулировка заданного (номинального) уровня 6
3.3.1 Нормальный уровень I7
3.3.2 Нормальные уровни II и III 7
3.3.3 Уровень памяти 7
3.4 Ограничение в высоте 7
3.5 Поперечная стабилизация 8
3.6 Управление подъемной осью 8
3.7 Смещение на нулевую точку 8
3.8 Вспомогательная сила при трогании
3.9 Защита от
3.10 Система компенсации давления в шинах 9
3.11 Управление регулятором тормозных сил (РТС)10
3.12 Эксплуатация крана 11
3.13 Регулировка давления в ТС с подъёмной и
3.14 Определение нагрузки на ось с помощью
4. Алгоритм управления 13
4.1 Алгоритм управления при регулировке уровня 13
4.2 Алгоритм управления при регулировке
4.2.1 Описание функций подъёмной оси в ТС
4.2.2 Регулировка вспомогательной силы при трогании
5. Конфигурация системы 21
6. Компоненты 23
6.1 Датчики 23
6.1.1 Датчик хода 23
6.1.2 Переключатель давления 25
6.1.3 Датчик давления 26
6.2 Электронный блок (ECU) 446 055 ... 0 27
6.2.1 ECAS 1-го поколения без датчика давления 28
6.2.2 ECAS 1-го поколения с датчиком давления 28
6.2.3 ECAS 4x2 A 28
6.2.4 ECAS 6x2 A 29
6.2.5 ECAS 4x2 Ratio 30
6.2.6 ECAS 4x2 (Ratio) KWP 2000 30
6.2.7 ECAS 6x2 Ratio 31
6.2.8 ECAS 6x2 DV 31
Порядок работы основной системы ECAS
пневмоподвесками 5
транспортного средства ( ТС)8
перегрузки 9
ведомой осямиПод.ось/доп.мост 11
электронной системы CAN II 12
подъемной оси 16
обладающих системой регулирования давления 17
ТС 19
5
6.2.9 ECAS 4x2/6x2 24V CAN 32
6.2.10 ECAS/ESAC 35
6.3 Магнитный клапан ECAS 37
6.3.1 Клапан с пружинным
6.3.2 Золотник с импульсным управлением 38
6.3.3 Различие между магнитными клапанами ECAS 39
6.3.4 Возможность замены магнитных клапанов ECAS 41
6.4 Пульт управления 51
6.4.1 Пульт управления ТС 54
7. Краткое описание отдельных систем 55
7.1 ECAS 1-го поколения без датчика давления 55
7.2 ECAS 1-го поколения с датчиком давления 56
7.3 ECAS 4x2A 57
7.4 ECAS 6x2A 61
7.5 ECAS 4x2 Ratio 65
7.6 ECAS 4x2 KWP 2000 67
7.7 ECAS 6x2 Ratio 69
7.8 ECAS 6x2 DV 71
7.9 ECAS 4x2 / 6x2 CAN 76
8. Ввод в эксплуатацию и диагностика 81
8.1 Общие сведения 81
8.2 Обозрение диагностической карты
8.3 Диагностическое программное обеспечение 82
8.3.1 Диагностика с помощью диагностического
контроллера ( Diagnostic Controller ) 82
8.3.2 Диагностика с помощью ПК 83
9. Параметризация 84
9.1 Опциональный параметр 84
9.2 Параметр значений 84
9.2.1 Отсчёт (Counts) 85
9.2.2 Timer Ticks 85
9.3 Разъяснение параметров 85
9.3.1 Адресный параметр устройств 85
9.3.2 Опциональный параметр 86
9.3.3 Параметр значений 96
10. Калибровка 106
10.1 Калибровка датчиков хода 106
10.1.1 Калибровка датчиков хода с помощью ПК 106
10.2 Калибровка датчиков давления 108
10.2.1 ... по сравнению
10.2.2 ...для установления допустимого
давления в сильфоне во время обычной
эксплуатации 108
10.2.3 ...для установления допустимого
давления в сильфоне при активированной
функции " Вспомогательная сила при трогании
ТС" 108
11. Концепция безопасности 109
11.1 Незначительные ошибки 109
11.2 Нарушения достоверности 109
11.3 Серьезные погрешности 110
11.4 Поиск ошибок 111
отводом 38
82
с атмосферным давлением 108
2
Важные указания и пояснения
1. Важные указания и пояснения
ECAS
1.
1.1 Инструкции по безопасности и меры
предосторожности
ECAS - это система безопасности автомобиля. Изменения
в настройке системы должны производиться только
лицами, обладающими необходимой компетенцией.
При включении зажигания или начале диагностики могут
иметь место непредвиденные движения ТС или резкий
спуск/подъем подъемной оси.
При выполнении работ с пневматической подвеской дайте
знать об этом остальным,
предупредительную табличку.
В грузовом автомобиле может быть установлена только
одна система ECAS. Сочетание с другими системами
управления пневмоподвески недопустимо, так как не
исключено опасное взаимодействие.
При провождении сварочных работ на ТС, необходимо
выполнять следующие требования:
• Электронные блоки нужно отсоединить от источников
электропитания (отсоединить клеммы 31, 15 и 30). Как
минимум, нужно отключить электропитание между
автомобилем и прицепом.
• Сварочные и боковые электроды не должны касаться
компонентов системы (ECU, датчиков, приводов,
проводов и проч.).
закрепив на руле автомобиля
Используйте данные из проверенных схем
подключения, в которых приведен десятизначный
идентификационный номер WABCO, при
системой ECAS.
Схемы подключения без номеров WABCO могут
быть ошибочными. Они представляют собой только
эскизы, не утвержденные компанией WABCO.
На системы, устанавливаемые способом, отличным
от описанного в данном документе, компания
WABCO не предоставляет никакой гарантии.
Они должны быть согласованы с WABCO в случаях:
• Использование компонентов, не приведенных в схемах
подключения (кабелей, клапанов, датчиков
управления)
• Подсоединение к системе устройств сторонних
производителей или
• Настройка других функций помимо описанных выше
системных функций.
Структура системы ECAS наглядно показана в главе 9
" Краткое описание системы" на примере нескольких
!
схем.
1.3 Пояснения к символам
Возможная опасность:
Травмы или повреждения
работах с
, устройств
Ни в коем случае не приводите автомобиль в движение при
опущенной на амортизаторы конструкции, т.к. сам
автомобиль и нагрузка могут быть сильно повреждены.
1.2 режим эксплуатации
Система ECAS предусмотрена только
пневматической подвеской ТС.
!
Для исключения опасного взаимодействия
комбинирование с другими системами управления
пневматическими подвесками запрещено.
Основные важные условия эксплуатации ECAS:
• Нужно обеспечить достаточное снабжение сжатым
воздухом.
• Необходимо обеспечить надежное электроснабжение.
• Штекер ABS или EBS должен быть подсоединен.
для управления
Дополнительные указания, сведения и
!
советы
& WABCO - опытные данные и рекомендация
• Перечень
– Выполняемое действие
↑ см. (предыдущий раздел, главу, рисунок/
таблицу)
см. (следующий раздел, главу, рисунок/таблицу)
3

2.
ECAS
2. Вступление
Вступление
Пневматическая подвеска применяется в
автомобилестроении, особенно в пассажирских автобусах,
еще с начала 50-х г.г. Она значительно повышает
комфортность.
Если говорить о грузовиках и прицепах, пневматическая
подвеска, прежде всего, проходит в верхнем тоннажном
сегменте для перевозки грузов. Решающее значение при
этом имеют критерии построения конструкции ходовой
части. Существуют сравнительно большие статические
различия при нагрузке на заднюю ось ТС в порожнем и
нагруженном состоянии. В порожнем и частично
нагруженном состоянии это вызывает проблемы при
конструкциях с пружинными подвесками. Свойства пружин
ухудшаются. Не последнюю роль при этом играют
критерии комфортности, например, в автобусах.
Преимущества пневматических подвесок перед
пружинными/рессорными
• Общий ход подвески полностью
изменение динамической нагрузки на ось. Изменение
статической нагрузки компенсируется изменением
давления. Тем самым достигается нужная для
конструкции высота.
• Оптимальная работа подвесок, не зависимая от
состояние дорог и нагрузки, повышает комфортность
при езде и позволяет бережно перевозить груз. Шум
колес автомобиля не передается.
• Колеса одинаково плотно прижимаются к поверхности
, что улучшает силу торможения и
дороги
управляемость, а также значительно увеличивает срок
службы шин.
• точное, зависящее от груза, управление
пневматической тормозной системой с помощью
использования давления в пневмоподвеске вследствии
установления давления в регуляторе тормозного
усилия.
• Постоянная высота автомобиля не зависит от
статической нагрузки.
• Для погрузочных платформ и эксплуатации
контейнеров предусмотрены
спуска конструкции.
• Возможно управление подъемными осями.
• Возможно индивидуальное управление
пневморессорами для компенсации поперечных сил
(например, при прохождении поворотов).
• Хорошо сохраняется поверхность проезжей части.
Неблагоприятные свойства пневматических подвесок
в сравнении с пружинными/рессорными
• повышенные расходы на установку;
• более сложные системы осей благодаря
использованию рычагов, действующих на
стабилизаторов,
• высокие затраты на детали из-за множества
пневматических компонентов;
• высокая нагрузка управляющих клапанов из-за
постоянной вентиляции и прокачки; сокращение срока
компенсирует
операции подъема и
ось и осевых
эксплуатации при переменной нагрузке;
• преобладание кренов на поворотах.
Вскоре после того, как была разработана соответствующая
система управления с клапанами пневмоподвески,
работающими с чисто механическим
введена и схема с электромагнитным приводом. За счет
этого была повышена легкость управления и упрощен
процесс подъема/опускания корпуса.
ECAS представляет собой последнее достижение в
области разработки подобных систем. За счет применения
электронных устройств управления традиционную систему
удалось значительно усовершенствовать.
ECAS - Electronically Controlled Air Suspension.
(пневмоподвеска с электронным управлением)
ECAS представляет собой электронно
систему пневматической подвески для автотранспорта с
множеством функций. С начала 80-ых годов она
используется в автомобилях.
При наличии механической пневмоподвески в месте, где
производится измерение уровня, также осуществляется
управление пневмоподвеской. При наличии же ECAS
регулировка осуществляется электроникой. Управление
пневмоподвесками осуществляется через магнитные
клапаны с помощью данных измерения, поступающих от
датчиков.
Наравне с управлением нормальным уровнем
электроника производит также управление различными
функциями с помощью пульта управления.
При использовании обычных пневмоподвесок эти функции
возможны только при большом числе компонентов. С
помощью ECAS могут быть реализованы функции, которые
неосуществимы при использовании традиционных
средств.
В основном система ECAS работает только при
включенном зажигании. Но в сочетании с
можно включить режим ожидания.
ECAS с системой CAN- Bus
Новое поколение систем ECAS- это поколение CAN - bus.
Электронные системы связаны при этом с системой CAN-
bus и обмен информацией происходит с помомощью SAECAN-Identifier CCVS или TCO1.
CAN-Bus ("сеть зоны контроля") - это система
последовательной передачи данных, которая была
разработана для того, чтобы соединить устройства
электронного управления в автомобиле с целью
уменьшения проводов электропроводки и, следовательно,
веса. Вместо использования электрической схемы с
учетом передаваемого сигнала "шина" основывается на
целой коммуникационной платформе, которая
обеспечивает передачу сообщений между отдельными
устройствами.
приводом, была
-управляемую
аккумулятором
4
Функции системы
3. Функции системы
ECAS
3.
Основное назначение ECAS - компенсация отклонений в
регулировке. Отклонения в регулировке возникают
вследствие возмущающих воздействий (напр., изменения
загруженности) или изменений в заданных значениях
(напр., с помощью блока управления). Это приводит к
изменению расстояния между осью автомобиля и его
конструкцией. ECAS выравнивает отклонения в
регулировке, корректируя уровень.
3.1 Порядок работы основной системы ECAS
(Рис. 1)
1. Датчик
2. Полученное при измерении значение является
3. В блоке ECU такое
4. При недопустимой разнице между фактическим и
5. В зависимости от такого управляющего сигнала
6. Расстояние вновь определяется датчиком хода и этот
Блок управления (5) больше не относится к основной
системе ECAS. Он упомянут, потому что с его помощью
пользователь может непосредственно повлиять на
заданный уровень. Для влияния на заданный уровень в ТС
используются зачастую переключатели и кнопки.
хода (1) закреплен в конструкции автомобиля и
связан через систему рычагов с его осью. С
определенными промежутками времени он определяет
расстояние между осью и конструкцией. Интервалы
времени зависят от времени эксплуатации (режима
движения или погрузки) ТС.
фактическим и оно передается далее в ECU (2).
фактическое значение сравнивается
с заданным в ECU нормативным значением.
заданным значением (отклонение в регулировке)
магнитному клапану 3 системы ECAS передается
управляющий сигнал.
магнитный клапан ECAS управляет пневмобаллоном
(4), подавая в него воздух или прокачивая его. За счет
изменения давления в пневмобаллоне изменяется
расстояние между осью и конструкцией автомобиля.
цикл повторяется сначала.
3.2 Основные понятия
3.2.1 Типы осей в ТС
Основная ось (также ведущая ось)
Ведущей осью является ось, которая всегда расположена
на днище и не может быть управляемой. Все ТС обладают
ведущей осью, в основном это задняя ось. Если
пневмоподвеска в TC установлена только на ведущую ось,
то оно считается ТС с частичной пневматической (
подвеской.
Передняя ось (управляемая ось)
Передняя ось - это, как правило, управляемая ось в ТС.
Если ТС обладает пневмоподвеской на передней и задней
осях, то речь идёт о ТС с полной пневматической
подвеской (ПП).
Подъемная ось
Подъёмная ось составляет, в основном, одно целое с
ведущей осью. При превышении нагрузки на
подъёмная ось опускается, а при снижении нагрузки она
снова может быть поднята.
Поддерживающая ось
Ведомая ось - это ось, которая также, как правило,
соединена с ведущей осью. Обе оси составляют один
агрегат. Типичными представителями являются ведомые и
управляемые оси. По сравнению с подъёмной осью они не
могут быть приподняты, только
Преимущество ведомой оси, в отличие от подъёмной
заключается в следующем: масса оси не прибавляется ко
всему весу конструкции. Недостатком является
повышенный износ шин.
3.2.2 Пневмобаллоны в системе пневмоподвесок
Пневмоподушки
Пневмоподушки - это общеизвестные пневмобаллоны на
осях. Они выполняют функцию подрессоривания
автомобиля. На пневмоподушки расположенных в днище
осей во время эксплуатации автомобиля постоянно
подается давление пневморессоры пропорционально
нагрузке соответствующих колес. Пневмоподушки
приподнятых осей не находятся под давлением или, во
разгружены.
ЧП)
ведущую ось
Расстояние
конструкция/
ось
3
4
Рис. 1 Основные функции системы ECAS
Основная система
1
2
5
1 датчик хода
2 ECU (электронный блок
управления)
3 магнитный клапан ECAS
4 пневмобаллон
5 блок управления (доп.)
5

3.
ECAS
Функции системы
избежании повреждений сильфона, под очень низким
давлением. Пневмоподушки присутствуют на всех
вышеописанных типах осей.
Подъемные сильфоны
Подъемные сильфоны жестко привязаны к системе
рычагов подъемной оси. Они поднимают или опускают
подъемную ось при завышении или занижении заданного
предела давления в пневмоподушках главного моста
осевого агрегата. Помимо этого существуют,например,
гидравлические системы , которые
данной задачи.
ECAS - это система регулировки, которая, как минимум,
состоит из одной цепи регулировки. В цепи регулировки
предварительно указывается заданное значение.. Датчик,
подстраивающийся в процессе калибровки при вводе
системы в эксплуатацию под систему, получает данные
фактического значения системы и передает их далее в
электронный блок управления (ECU).
ECU сравнивает
время такого сравнения могут возникать отклонения в
регулировке.
Под этим понимается выход фактического значения за
пределы установленного диапазона заданных значений.
При возникновении отклонения в регулировке ECU
производит выравнивание через пускатель для заданного
значения в пневмобаллоне.
Заданные (номинальные) значения:
• определенные промежутки (уровни) конструкции ТС в
его осях
• состояния ТС в зависимости от нагрузки на оси (напр.,
увеличение сцепления колес, пределы давления для
управления подъемной осью).
Два варианта передачи номинального значения в ECU:
• Ввод фиксированных значений производителем
автомобиля при вводе в эксплуатацию путем
параметризации и калибровки.
• Указание значений пользователем системы с пульта
управления.
Обратите внимание на то, что
зависимости от исполнения системы не должны
задаваться принудительно. Тип системы (количество
подъемных осей, наличие/отсутствие пневмоподвески на
передней оси) определяет возможности реализации
функций.
ECAS легко подстраивается под любой тип ТС. Благодаря
модульной конструкции можно обеспечить самые разные
варианты использования системы с учетом потребностей
заказчика.
заданное значение с фактическим. Во
,
берут на себя решение
описанные здесь функции в
3.3 Поддержание целевого
Целевой уровень пола - это расстояние от конструкции ТС
до оси. Он задается калибровкой, параметризацией или
блоком управления. Поддержание целевого уровня пола основная функция ECAS.
На электромагнитный клапан, выполняющий роль
исполнительного звена, подаётся управляющий импульс и
через выпуск/впуск воздуха в пневмоподушке фактический
уровень уравнивается с номинальным. Это происходит
при:
• отклонениях
допустимого диапазона,
• изменении значения, заданного для номинального
уровня.
В отличие от традиционной системы пневмоподвескок, в
данном случае регулируется не только нормальный
уровень, но и каждый заданный уровень. Так, например,
уровень, который был установлен при погрузке или
разгрузке, считается заданным уровнем и регулируется
далее как таковой.
Разница
изменением нагрузки на колесо
В отличие от традиционных систем пневмоподвесок ECAS
различает статическое и динамическое изменение
нагрузки на колесо. Данный процесс происходит с
помощью использования сигнала скорости. Благодаря
такому различению возможен оптимальный отклик с
учетом возникающего изменения нагрузки на колесо.
Статическое изменение нагрузки на колесо
Статическое изменение нагрузки
изменении нагрузки на транспортное средство в состоянии
покоя или при низких скоростях. Для этого необходимо
перепроверить заданное значение и при необходимости
исправить его с помощью впуска/выпуска воздуха в данном
пневмобаллоне в течение коротких промежутков времени.
ECAS выполняет такую проверку ежесекундно. Данный
интервал проверки может быть задан
Динамическое изменение нагрузки на колесо
Динамическое изменение нагрузки на колесо может быть
вызвано в основном из-за неровностей дорожной
поверхности, при езде на поворотах, при торможении и
набирании скорости и особенно усиливается при езде на
высоких скоростях. Динамические изменение нагрузки на
колесо компенсируются за счёт амортизационных свойств
пневмподушек. В
производить впуск/выпуск воздуха в пневмоподушке, так
как только изолированная пневмоподушка обладает
стабильными амортизационными свойствами. По этой
причине на высоких скоростях производится
регулирование только через большие интервалы времени,
как правило через каждые 60 секунд. Номинальная и
фактическая величины сравниваются при этом
непрерывно.
Нежелательное урегулирование динамических изменений
нагрузки
путем впуска или выпуска воздуха в пневмоподушке.
Данная операция возможна при получении системой ECU
"стоп-сигнала".
в регулировании вне пределов
между статическим и динамическим
этом случае не рекомендуется
на колесо при торможении можно исключить
уровня пола
на колесо происходит при
через параметры.
6
Функции системы
ECAS
3.
Трансп. уровень
Нормальный уровень (или уровень движения)
устанавливается во время движения ТС на высокой
скорости. Для ECAS могут быть установлены максимум 3
нормальных уровня.
3.3.1 Норм. уровень I
Под определением " нормальный уровень I"
подразумевается заданный уровень, установленный
производителем ТС для его оптимальной эксплуатации. На
основе этого уровня можно рассчитать размеры общей
высоты транспортного средства и
его центра тяжести. Нормальный уровеньI имеет особое
значение по сравнению с другими уровнями. Он
характеризуется как расчётная величина для
транспортного средства.
При расчёте общей высоты соблюдайте
соответствующие предписания в отношении
!
допустимой максимальной величины.
Высота центра тяжести ТС - это заданное значение для
расчета торможения ТС.
– Значение нормального уровня I необходимо
системе только путем калибровки.
– Регулируйте нормальным уровнем I во время
эксплуатации с помощью скорости движения ТС и/или с
помощью блока управления.
– При параметризации установите скорость для точки
переключения в процессе регулировки.
3.3.2 Нормальный уровень II и III
Данные уровни отличаются от нормального уровня 1. Это
может оказаться необходимым:
• для спуска конструкции в
• для установления высоты всего ТС,
• для лучшего уравновешивания поперечных сил на
повышенных скоростях.
Функция зависимого от скорости опускания кузова
применяется в том случае, если при движении с более
высокими скоростями на качественных дорогах нет
необходимости использовать весь ход пневмоподушки.
– Укажите системе значение для нормальных уровней как
разницу по отношению к нормальному уровню 1 с
помощью процесса параметризации.
Регулировку нормального уровня возможно производить
выборочно с помощью:
• выключатель;
• пульт управления;
теоретическую высоту
сообщить
целях экономии топлива,
• Скорость движения ( в электронике только нормальный
уровень II, включая CAN I).
Выбранный нормальный уровень является актуальным до
выбора другого уровня.
– Для ввода актуального нормального уровня
необходимо нажать кнопку " Нормальный уровень".
– Установите значения для вида и точек переключения в
процессе регулировки путем параметризации.
– Нормальный уровень III необходимо определять как
высший нормальный уровень.
Особенности электроники CAN II
• В электронике CAN II нормальный уровень 3
определяется как уровень, зависимый от скорости.
• Customer Level (уровень покупателя): Уровень задней
оси может быть параметризован слева и справа ( обе
стороны независимы друг от
• Все уровни можно найти в CAN- Identifier ASC2_…
3.3.3 Уровень памяти
Для каждой системы можно использовать 2 различных
уровня памяти. Уровень памяти применим для всего
ТС. Для использования функции памяти нужен блок
управления.
Возможности подключения уровня памяти:
• в режиме погрузки / разгрузки в неподвижном состоянии
• при низких скоростях.
Этот уровень позволяет установить оптимальную для
погрузки и разгрузки высоту кузова транспортного
средства.
В отличие от разгрузочного уровня, прописанного в ECU,
уровень памяти может быть задан самим пользователем и
в любое время изменён. Заданный уровень памяти
сохранен в системе до тех пор, пока его не изменит
пользователь (даже при выключении ТС).
3.4 Ограничение высоты корпуса автобуса
Изменение уровня
электроникой по достижении заданных в процессе
калибровки значений верхнего и нижнего пределов
высоты. При этом эти заданные значения свободно
выбираются. Тем самым, резиновые амортизаторы и такие
ограничители высоты, как сильфоны или тросы не
перегружены сверх меры.
Процесс разгрузки регистрируется; первоначальный
заданный уровень регулируется и, таким образом, не
происходит перегрузка
автоматически прекращается
ТС на стыках.
друга).
7
3.
ECAS
Функции системы
3.5 Поперечная стабилизация
Для ТС с неравномерным распределением груза на ось
(например , односторонняя погрузка) можно настроить
подачу давления с левой и с правой стороны на
пневмоподушки одной оси с помощью двух контуров
регулирования.
Для ТС с равномерной нагрузкой (напр., автомобилейцистерн) это не обязательно.
3.6 Управление подъемной осью
Подъемная ось при неподвижном
автоматически опускается или нагружает дополнительный
мост, если при нагрузке на автомобиль превышается
допустимая нагрузка на главный мост. Необходимый для
этого сигнал электроника получает от датчика давления
(6.1.3 Датчик давления), другими словами, от
переключателя давления, находящемся на одной из
пневмоподушек главной оси. Автоматический спуск
подъемной оси во время пиковых значений давления
движении исключен.
При остановке ТС и его отключении положение подъёмной
оси остаётся неизменимым. Так например, приподнятая
подъёмная ось остаётся приподнятой.
Система с датчиком давления
Помимо спуска также возможен автоматический подъем
подъемной оси после разгрузки автомобиля. Здесь речь
идет о полностью автоматизированном управлении
подъемной осью.
Система с пневматическим выключателем/кнопкой.
производится автоматически. Приподнятие
Спуск
подъёмной оси может быть осуществлено вручную с
помощью блока управления ECAS или отдельным
переключателем/кнопкой.
Функцию вспомогательной силы при трогании ТС можно
использовать только при активированном автоматическом
управлении подъемной осью.
автомобиле
при
3.7 Смещение на нулевую точку
С помощью приподнятия подъемной оси автоматически
возможно повышение нормального уровня. За счет этого
улучшается
всему транспортному средству.
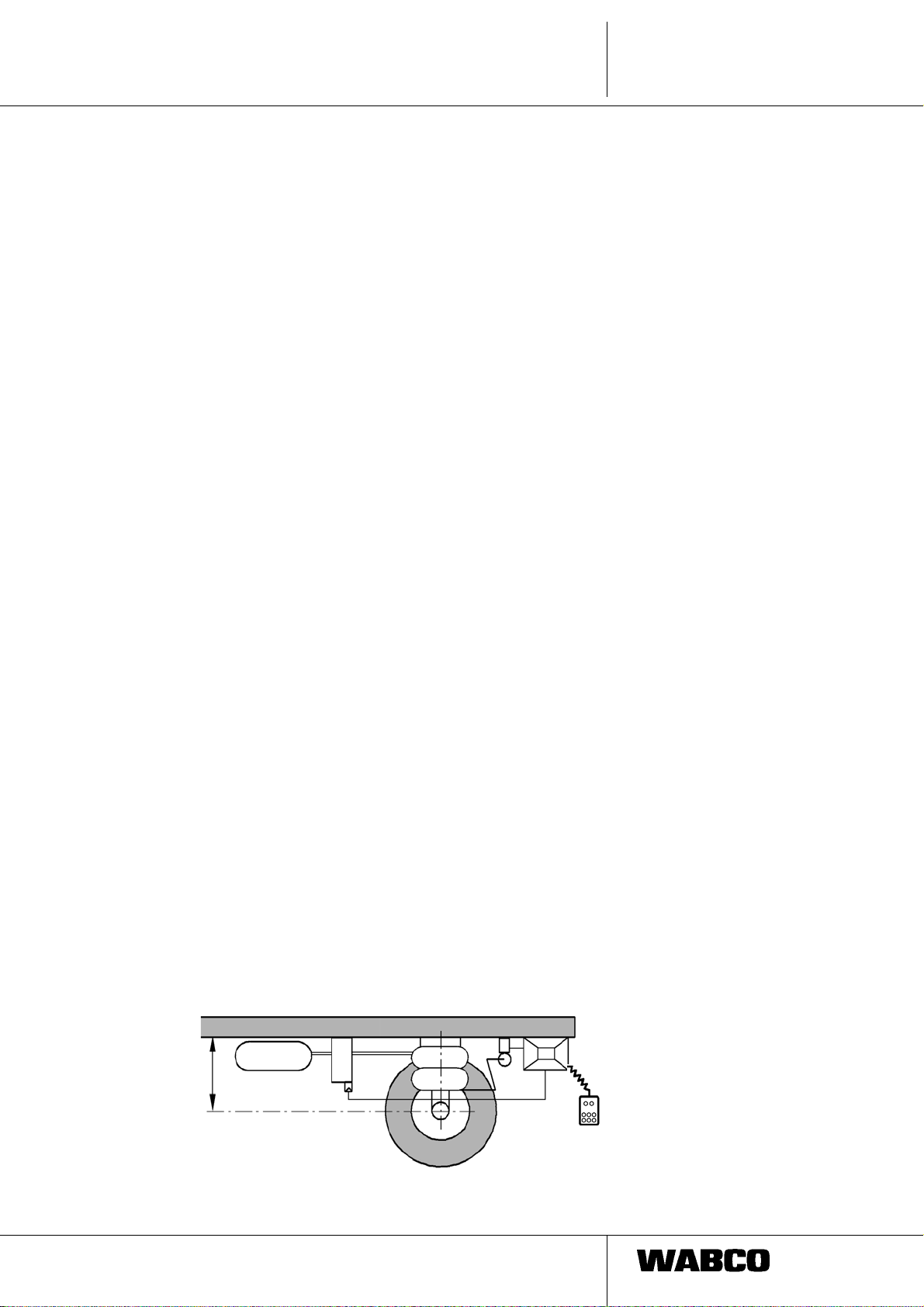
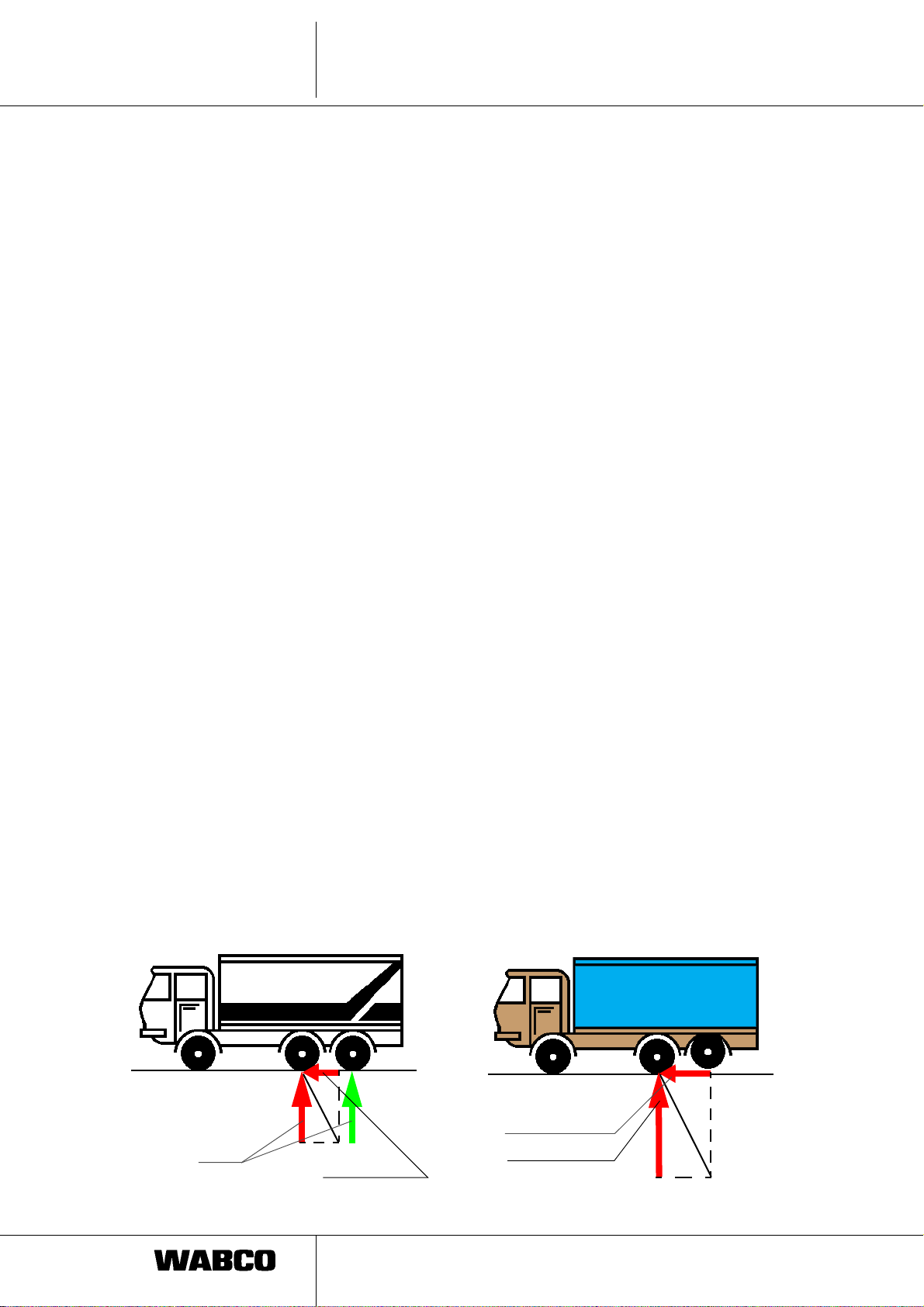
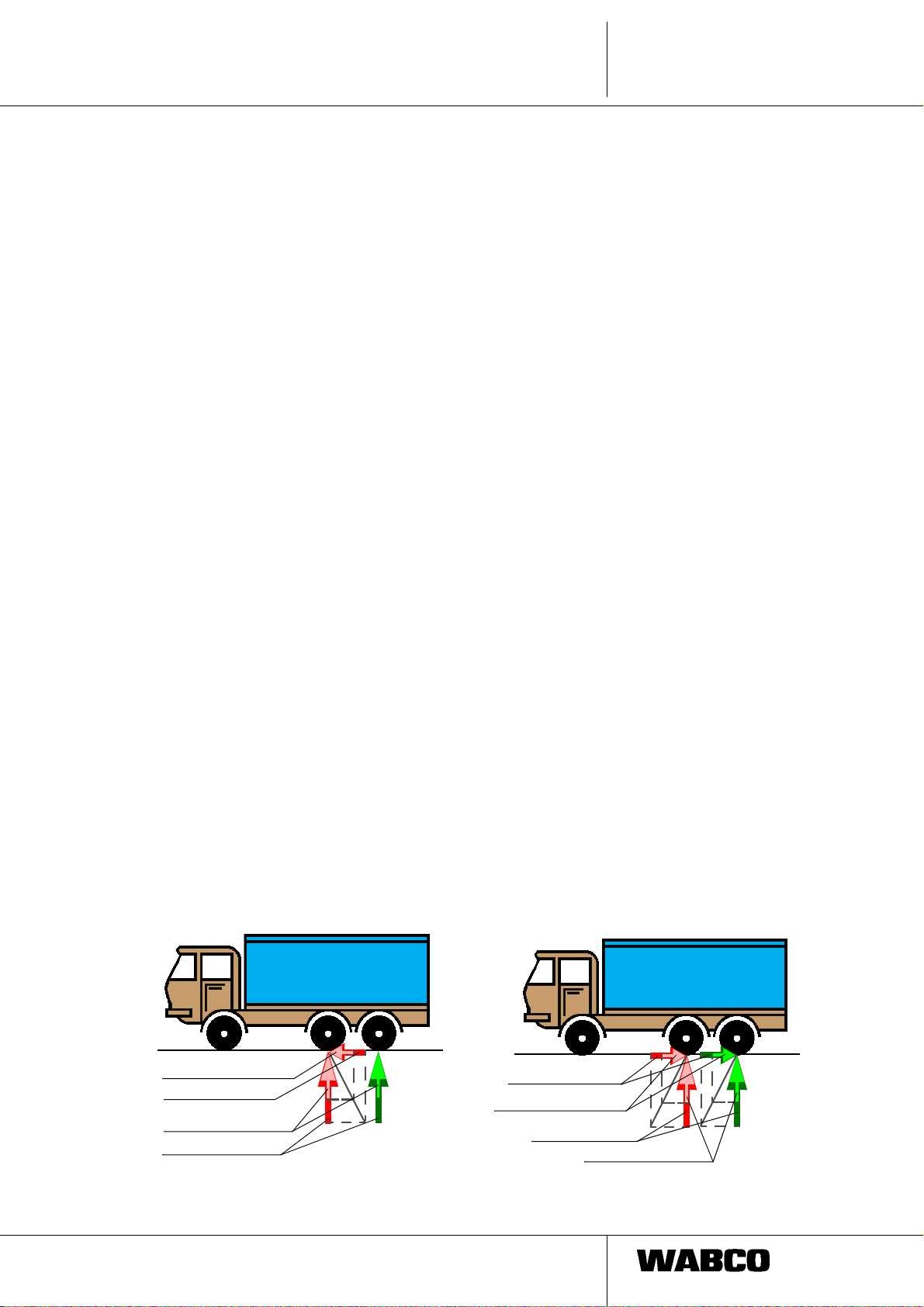
3.8 Помощь при трогании
В ТС класса 6х2 возможно реализовать функцию "
Вспомогательная сила при трогании ТС", если груз
достигает достаточной высоты. С уменьшением давления
на пневмоподушки подъёмной оси или, иначе говоря, с
помощью приподнятия подъёмной оси происходит
увеличение нагрузки на ведущую ось
повышения силы тяги. (Рис. 2)
– Функцию " Вспомогательная сила при трогании ТС"
можно активировать с помощью переключателя.
– Возможна активизация с помощью сигнала CAN, она
зависит от параметризации P3.1: Управление с
помощью переключателя или послания системы CAN
(ASC2).
Модуль вспомогательной силы при трогании ТС можно
разделить на 5 групп: при этом учитываются
соответствующие национальные
соответственной параметризации (с ограничением
времени, скорости и нагрузки или без данного ограничения,
с обязательной паузой или без неё).
С вступлением в силу директивы 97/27/EG были
установлены изменения, которые необходимо соблюдать в
процессе параметризации.
• Тип „Deutschland“ (Германия)
Функцию " Вспомогательная сила при трогании ТС"
можно активировать с помощью нажатия клавиши
максимум на
функция блокируется на мин. 50 сек. При превышении
заданной скорости (мах. 30 км/ч) функция
"Вспомогательная сила при трогании ТС"
автоматически выключается. Увеличение силы тяги
задано, но оно может быть превышено мах. на 30 %
допустимой нагрузки на ведущую ось.
ход колес подъемной оси. Это применимо ко
ТС с целью
правила путём
90 сек.. По истечению 90 сек. данная
Нормальное движение ТС
Çàä. îñü
Нагрузка на ось
Нормальная движущая сила
Рис. 2 Нагрузка на ось и изменение движущей силы при использовании функции " Вспомогательная сила при трогании
ТС"
ïîä. îñü
Движущая сила функции
"Вспомогательная сила при
трогании ТС"
повышенная нагрузка на ось
Помощь при трогании
Зад.
под.
осьось
8
Функции системы
ECAS
3.
• Тип „ЕУ99“
Функцию " Вспомогательная сила при трогании ТС"
можно активировать с помощью клавиши и
использовать неограниченно по времени. После
проведения данной функции её можно сразу же
повторить. При превышении заданной скорости (мах.
30 км/ч) функция "Вспомогательная сила при трогании
ТС" автоматически выключается. Увеличение силы тяги
задано, но оно может быть
допустимой нагрузки на ведущую ось.
• Тип „За пределами Германии“
Функция "Вспомогательная сила при трогании ТС" типа
" За пределами Германии" является аналогом данной
функции типа "Германия". Между ними существует
только одно различие. Функция " Вспомогательная сила
при трогании ТС" может быть повторно активирована
без вынужденной паузы.
• Тип " Северная
двухпозиционного переключателя)
Функция " Вспомогательная сила при трогании ТС" не
ограничена во времени и её можно активировать с
помощью переключателя. После завершения
использования данной функции, возможен её
моментальный повтор. Функция " Вспомогательная
функция при трогании ТС" деактивируется, если
переключатель приводится в своё первоначальное
положение (исключение: ТС 6x2 с системой ECAS-CAN
. 7.9 „Краткое описание системы ECAS 4x2/6x2
– см
CAN“). Повышение силы тяги установлено.
• Тип " Проведение функции "Вспомогательная сила
при трогании ТС" вручную" или, другими словами,
тип " Северная страна" (с помощью
трёхпозиционного переключателя/клавиши)
Функция " Вспомогательная сила при трогании ТС" не
ограничена во времени и её можно активировать с
помощью трёхпозиционного переключателя/ клавиши.
В данном типе
и понижена. Если переключатель находится в
центральном положении, то установленная сила тяги
остаётся неизменной. Функция " Вспомогательная сила
при трогании ТС" деактивируется, если происходит
полная отмена повышения силы тяги.
страна" (с помощью
тяга может быть беспрерывно повышена
превышено мах. на 30 %
м
порожний
3.9 Защита от перегрузки
Путем указания максимально допустимого давления в
пневмоподушках активируется функция защиты от
перегрузки.
Эта защита
на резиновые амортизаторы, если превышено давление в
пневмоподушках вследствие перегрузки.
– Необходимо разгрузить ТС до такой степени, что, таким
образом, оставшаяся статическая нагрузка на ось
действует на давление в пневмоподушках, которое
находится на пределе к максимально допустимому.
После повторного включения зажигания система ECAS
пытается наполнить сильфоны и
на нормальный уровень.
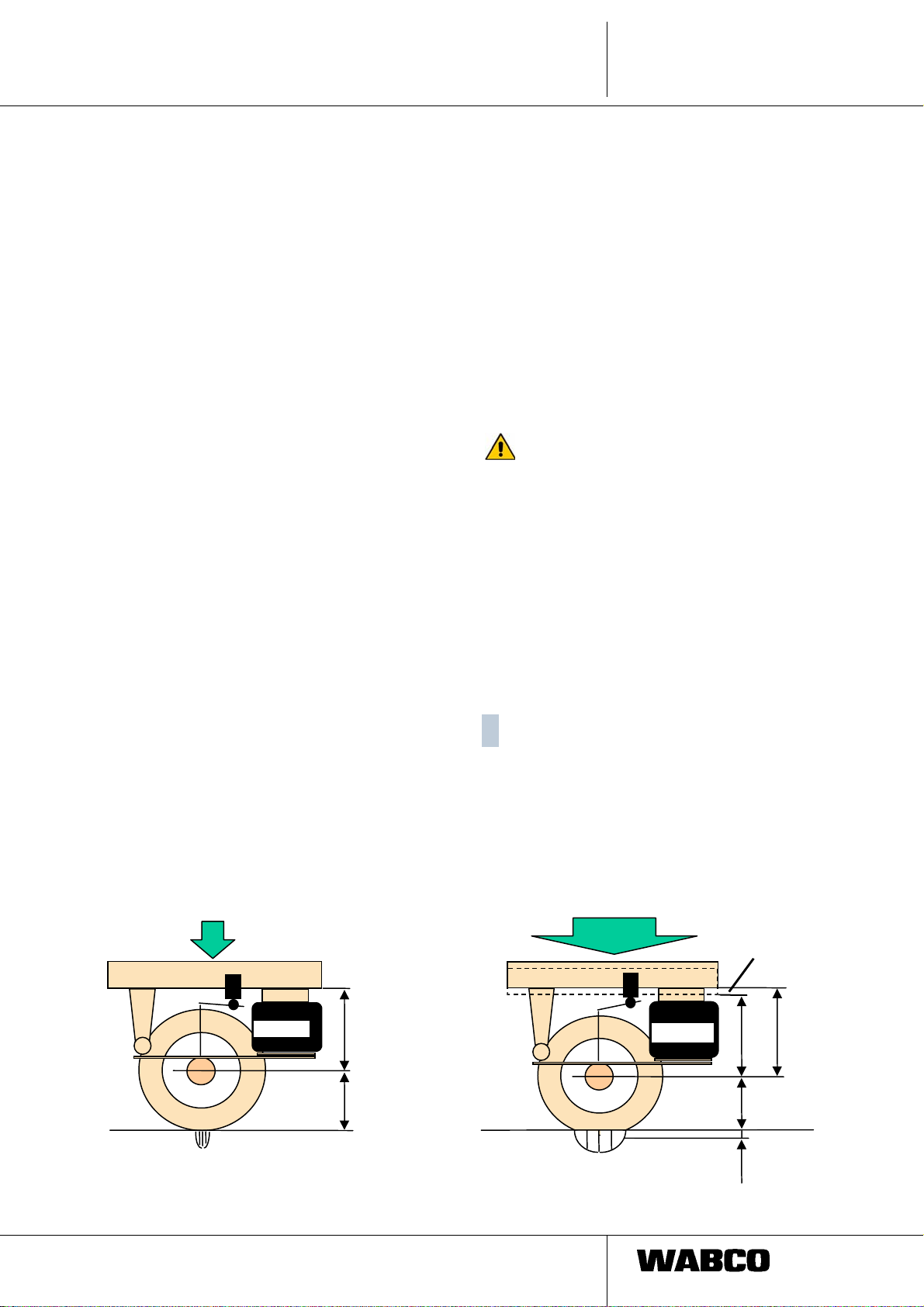
3.10 Компенсация давления в шинах
Для ТС с особенно большой высотой всей конструкции
наряду с небольшими колёсами используется также
процесс подрессоривания автомобиля в порожнем
состоянии
С возрастанием нагрузки нарастает и потребность в ходе
пневмоподвески. Но есть возможность задать возможный
ход пневмоподвески нарастающему давлению в шинах при
возрастающей нагрузке, при неизменной общей высоте
автомобиля. (Рис. 3)
Необходимо соблюдать предписанную правовыми
нормами высоту автомобиля.
!
Данное регулирование необходимо, если общая высота
прицепа находится за пределами высоты, предписанной
законодателем.
регулировка осуществима в любых системах ECAS.
Эта
Она является дополнением. Условием является наличие
датчика хода и минимум одного датчика давления.
Происходит повышение заданного уровня. Изменения в
нагрузке приводят к изменению заданного значения.
м
нагруженный
приводит к снижению конструкции автомобиля
привести конструкцию
Ни в коем случае не приводите автомобиль в
движение при опущенной конструкции, т.к. сам
автомобиль и нагрузка могут быть сильно
повреждены.
.
Компенсация продавливания
с помощью Повышения заданного
уровня при Δh (быстроте реакции)
p
порожний
Заданный уровень s
Расстояние между осью
и дорожной поверхностью h
Рис. 3 Влияние процесса компенсации продавливания шин на заданный уровень при различных
состояниях нагрузки ТС
порожний
p
нагруженный
=s+ Δh
Заданный
уровень s
Расстояние между осью
и дорожной поверхностью
h
нагруженный
продавливание шинΔh
комп.
компенсированный
целевого уровня
h
9
3.
ECAS
Функции системы
Для осуществления этой регулировки нужно изначально
узнать или определить различия в компенсации давления
в шинах между порожним и загруженным состояниями для
используемых шин. В процентном отношении, в ТС в
порожнем состоянии с давлением в пневмоподушке p
ПОРОЖНИЙ
шинΔh, точнее говоря
ТС с давлением в пневмоподушке р
Различие между состояниями р
определяет макс. диапазон, в котором происходит
регулировка нормального уровня в зависимости от
состояния погрузки ТС со значением Δh
– Нормативные значения данной регулировки
необходимо задать электронике в процессе
параметризации.
С их помощью система ECU определяет повышение
заданного значения для нормального уровня.
!
Регулировку можно представить следующим образом. При
вводе заданного значения "нормальный
определяется давление в пневморессорах главной оси. На
основе полученного давления р блоком ECU определяется
номинальное значение для нормального уровня с
помощью заданных значений, полученных в процессе
компенсации шин. Данное номинальное значение
сообщается системе в качестве нового значения для
нормального уровня.
В данном случае происходит то же самое, как и описано
главе 3.1 " Принцип действия основной системы ECAS":
1. Датчик хода определяет фактическое значение
расстояния между конструкцией автомобиля и его осью
и сравнивает его с только что определенным заданным
значением.
2. При появлении отклонения в регулировке
исполнительному механизму (магнитному клапану)
передается сигнал подстройки.
3. Пневморессора главной оси соответственно
наполняется воздухом или прокачивается.
4. Расстояние между
при этом изменяется.
происходит минимальное продавливание
, а в максимально нагруженном
0 %
Нагруженный
Если нормативные значения не соответствуют
параметрам использования шин, могут возникнуть
непредвиденные сдвиги на нормальном уровне в
нагруженном состоянии ТС.
осью автомобиля и его конструкцией
100%
100%
- Δh
100%
и р
Порожний
- Δh0%.
уровень"
.
в
Компенсация давления в шинах не действует при активном
увеличении сцепления колес.
Чтобы определить точное значение, необходимое для
процесса компенсации продавливания шин, лучше всего
проводить испытания на ТС, используемом в данном
случае. Наряду
компенсации ( продавливания шин) определённую роль
играет также механическое строение оси. Для этого мы
рекомендуем следующий образ действий:
– ТС в порожнем состоянии с незадействованным
стояночным тормозом установить на плоской
поверхности.
– Определение точки начала отсчета на ТС над осью и
измерение расстояния между данной точкой и
поверхностью.
– провести максимально допустимую нагрузку/ нагрузку
на ось ТС.
– Подключить инструмент диагноза и определить
фактическое значение (WSW
– Поднятие конструкции ТС до достижения расстояния,
соответствующего порожнему состоянию ТС, а именно
от точки начала отсчета до поверхности земли.
– определить новое фактическое значение (WSW
датчика хода на оси и вычислить разницу WSW2-WSW1.
– разница датчика хода WSW2-WSW1 соответствует
разнице процесса продавливания шин Δh
3.11 Управление регулятором тормозных сил (РТС)
Тягачи с пневмоподвесками и традиционной тормозной
системой снабжены регулятором тормозных сил (РТС),
зависящим от нагрузки. Управление данным регулятором
происходит с помощью использования давления в
сильфоне.
В случае падения давления в сильфоне (напр.,
значительно нарушена герметичность сильфона или
разрушена его конструкция) регулятор тормозных сил,
несмотря на
сигнализирует о его порожнем состоянии. Вследствие
этого создается недостаточное торможение и удлинение
пути торможения. Система ECAS обладает возможностью
распознать такой случай и при его возникновении подать
запасное давление, находящееся в системе
пневмоподвески, управляющему выводу РТС 41/42. Таким
образом, происходит симуляция максимально
нагруженного состояния ТС.
с продавливанием шин в процессе
) датчика хода на оси.
1
100%
максимальную нагрузку автомобиля,
)
2
-Δh0%.
Итог
Повышение нормального уровня, зависящее от состояния
груза, можно настроить следующим образом:
• Давление в пневмоподушке p
состоянии ТС
• Давление в пневмоподушке p
нагруженном состоянии ТС
• Разница в процессе продавливания шин Δh100% Δh0%между порожним и максимально нагруженном
состояниями ТС.
порожний
100%
при порожнем
при максимально
10
1
1
1
2
2
2
2
2
2
PTC
Электромагнитный клапан
Рис. 4 Включение функции РТС
4142
4142
4142
p
Запас-ПП
Под.сильф.
Функции системы
ECAS
3.
3.12 Эксплуатация крана
В таких ТС, как тягачи со встроенным краном, большую
эффективность имеет функция " Эксплуатация крана".
Основой данной функции является следующий процесс:
для эксплуатaции кранa необходимо выдвинуть опорные
стойки, которые приподнимают ТС таким образом, что
колёса не касаются поверхности земли. Вследствие этого
необходимо прекратить поток поступающих сил,
возникающих при нагрузке
поднятии колёс увеличивается расстояние между осью и
конструкцией ТС. Вследствие этого система ECAS
попытается удалить воздух из сильфона, чтобы уменьшить
данное расстояние. Таким образом, происходит
бесполезная вентиляция пневмоподушeк. При опускании
ТС это может привести к их надлому. Система ECAS может
распознать данную ситуацию и вовремя
вентиляцию сильфона, прежде чем произойдет его полная
деаэризация.
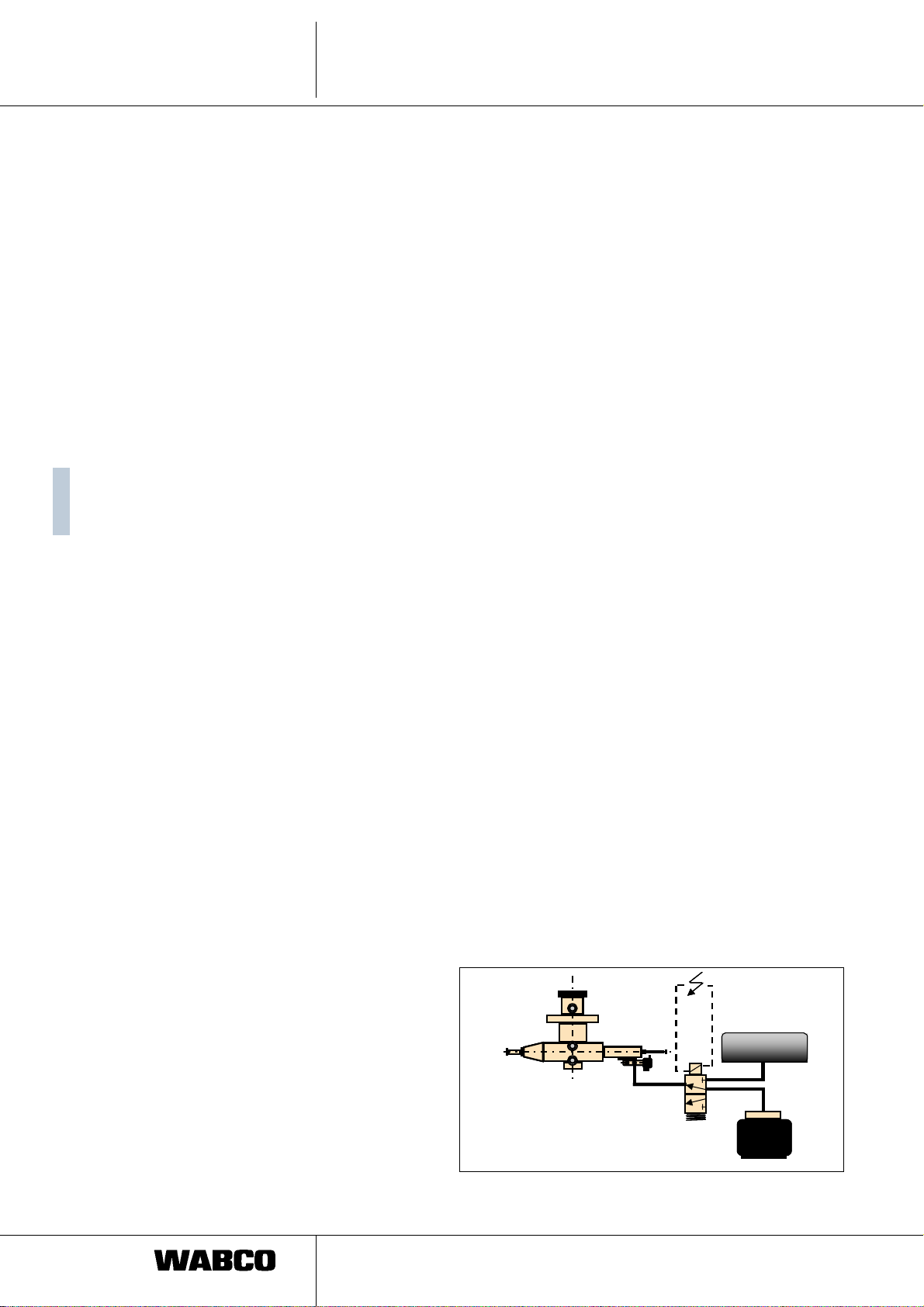
3.13 Регулировка давления в ТС - х с подъёмной и
ведомой осями
В ТС 6х2 с подъёмной или ведомой осью можно
осуществить всевозможные теории (в зависимости от
оснащения системы ECAS), касающиеся давления в
пневмоподушках.Это относится к агрегату задней оси
между ведущей и подъёмной осъю
Уравнивание давления
Отличительной чертой данного процесса является
следуюещее: после опускания подъёмной оси/ нагрузки на
ведомую ось на все пневмоподушки агрегата задней оси
поступает одинаковое давление. Пневмоподушки
ведущей, подъёмной и ведомой осей соединены между
собой с боковых сторон.
Процесс уравнивания давления происходит при наличии
малого количества компонентов. Установление значений
давления происходит с
переключателя или датчика давления. (Рис. 5)
на кран на подвесках ТС. При
прекратить
.
помощью пневматического
Непрерывное оптимальное регулирование силы тяги
В ТС 6х2 системы ECAS существует возможность
регулировать распределение нагрузки на ось в агрегате
задней оси таким образом, что на ведущую ось происходит
100% - я нагрузка, а на подъёмную/ведомую оси оставшаяся часть. В данном случае говорят о системе
ECAS 6
Данный способ регулирования является преимуществом
при эксплуатации ТС на скользких поверхностях.
Движущие силы ведущей оси находятся всегда в верхней
части и обеспечивают, таким образом, оптимальную силу
тяги. Для подъёмной/ведомой оси такое распределение
нагрузки на ось обозначает пониженный износ шин при
езде на поворотах.
Недостатком такой
применимые тормозные усилия, касающиеся ведущей и
подъёмной оси очень сильно отличаются друг от друга.
Исходя из того, что обе оси обладают одинаковыми
тормозными цилиндрами и в процессе торможения
находятся под равным давлением, то речь идёт об
отличиях в нагрузке на тормозное устройство.
Число компонентов, необходимых для
регулирования силы тяги, выше, чем при процессе
уравнивания давления. Определение значений давления в
сильфонах происходит с помощью датчиков давления.
Число используемых датчиков давления зависит от
производителя ТС. Например, ТС компании SCANIA
обладают двумя датчиками (один - на ведущей оси, второй
- на подъёмной/ведомой оси). Компания IVECO использует
до 5-ти датчиков (на движущей
стороны и один датчик давления, расположенный на
подъёмном сильфоне подъёмной/ведомой оси). (Рис.6)
Управление соотношением давлений
Наряду с оптимальным регулированием силы тяги
существует также и регулирование соотношения давления.
Эти два процесса тесно связаны дру с другом. В ТС,
обладающих системой ECAS 6x2 РСД, можно выбрать один
из двух
х2 РСД (регулирование соотношения давления).
конфигурации является то, что
оптимального
оси по два с каждой
перечисленных выше способов регулировки.
Процесс движения
Зад.
ось
Движущая сила
(частичная погрузка)
Движущая сила (полная погрузка)
Нагрузка на ось (частичная погрузка)
Нагрузка на ось с грузом
Рис. 5 Нагрузка на ось и изменение движущей силы в процессе уравнивания давления
под.
ось
Процесс торможения
Тормозное усилие
(полная погрузка)
Тормоз ное усил ие
(частичная погрузка)
Нагрузка на ось с грузом
Нагрузка на ось (частичная погрузка)
Зад.
ось
под.
ось
11

3.
ECAS
Функции системы
Процесс движения
Зад. ось
Движущая сила
ЗО - нагрузка на ось
ПО - нагрузка на ось
(частичная погрузка)
ПО - нагрузка на ось
(полная погрузка)
Рис. 6 Нагрузка на ось и изменение движущей силы в процессе уравнивания давления
В процессе регулирования соотношения давления
происходит упорядочивание давления в пневмоподушках,
находящихся на движущей, подъёмной и ведомой оси.
Движущая сила остаётся при этом неизменной, в отличие
от тормозной системы. Процесс износа тормозного
устройства находится на обеих осях на одинаковом уровне.
Этот способ регулирования является недорогим при
провождении дальних перевозок или в транспортном
распределителе.
Число компонентов, необходимых для регулирования
соотношения давления соответствует числу компонентов,
необходимых для оптимального регулирования силы тяги.
При установке параметров можно выбрать желаемый
способ регулировки. (Рис. 7)
Какой способ из выше названных будет в итоге выбран,
зависит от различных условий.
под. ось
ЗО - тормозное усилие
ПО - тормозное усилие (полная погрузка)
ПО - тормозное усил ие (частичная погрузка)
ПО - нагрузка на ось (частичная погрузка)
3.14 Определение нагрузки на ось в электроникe
С помощью встроенных датчиков
может определить давление, действующее на ось и
предоставить его банку данных ТС в качестве CAN послания. Данную информацию, касающуюся осевой
нагрузки, водитель ТС может увидеть на дисплее и/или она
может быть использована другими электронными
системами управления.
Система ECU может сохранить информацию, касающуюся
максимально 4-х расчётных кривых (макс. 4 оси). Каждая
кривая
Информация о нагрузке на ось (средняя величина,
полученная из определённого интервала времени)
сообщается системе CAN-Bus каждые 100 мс согласно
протоколу SAE J1939.
Процесс торможения
ЗО - нагрузка на ось
CAN II
определяется с помощью 3-х (вес/давление) точек.
Зад. ось
под. ось
ПО - нагрузка на ось
(полная погрузка)
давления система ECAS
Процесс движения
Зад. ось
Движущая сила (частичная погрузка)
Движущая сила (полная погрузка)
Нагрузка на ось (частичная погрузка)
Нагрузка на ось с грузом
Рис. 7 Нагрузка на ось и изменение движущей силы в процессе регулирования соотношения давления
под. ось
РСД
Процесс торможения
Зад. ось
Тормозное усилие
(полная погрузка)
Тормоз но е усил ие
(частичная погрузка)
Нагрузка на ось с грузом
Нагрузка на ось (частичная погрузка)
под. ось
12
РСД
Алгоритм управления
ECAS
4.
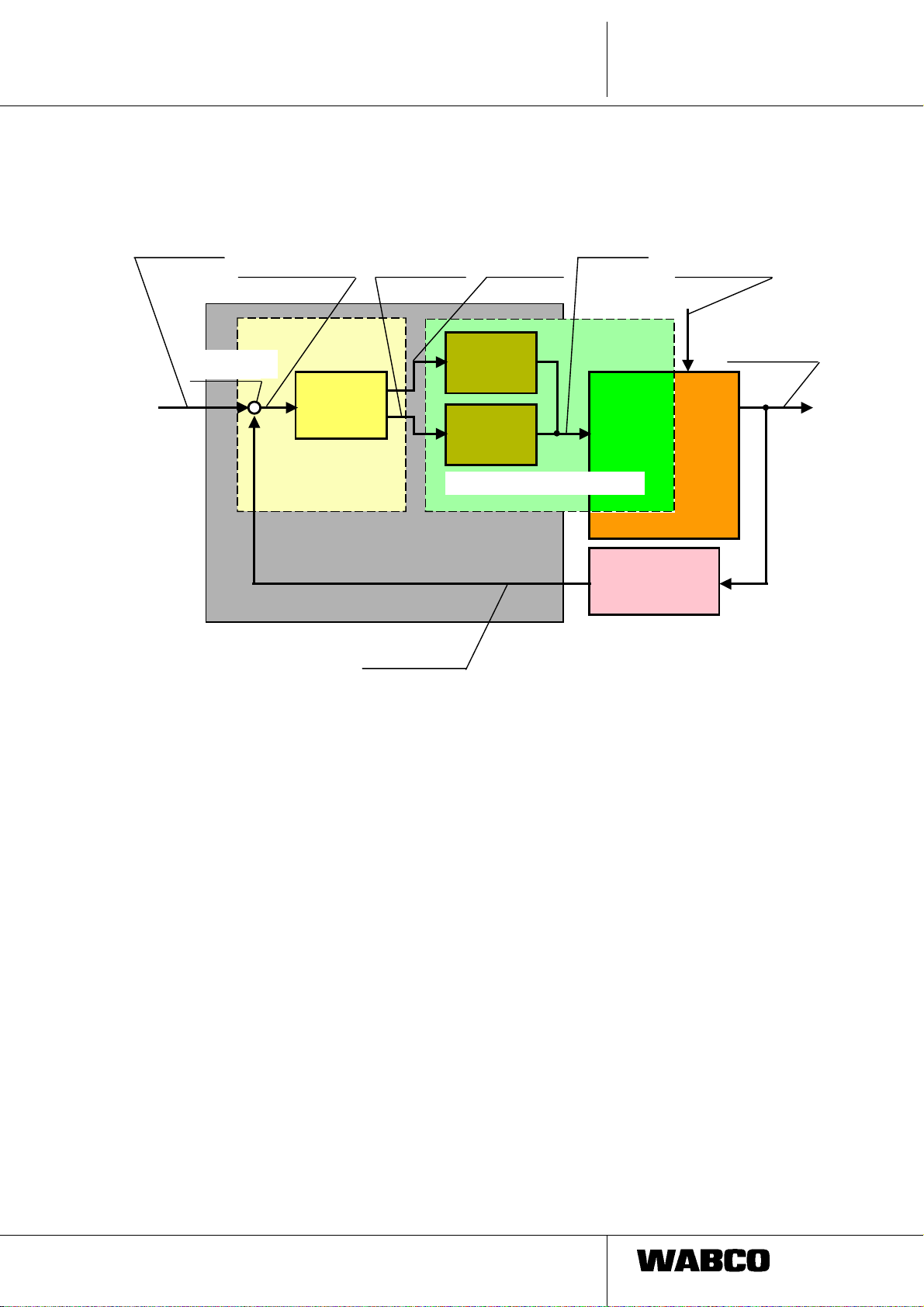
4. Алгоритм управления
Целевой уровень пола
(Ведущая величина w)
сравнительный
элемен т
+
+
регулирующее устройство
отклонение от
Целевой уровень пола
(разница в управлении e)
программа
орган
регулирования
-
-
Электроника
регулятор
Частота пульса
(Исходная
величина
регулятора y
(Исходная
величина
)
регулятора y
R2
клапанвентилятор
положение I
2/2 ходовой
клапан(ы)
положение II
Магнитный клапан, ECAS
исполнительный механизм
)
R1
Пневматическая система электрический ток
(Управляющее воздействие y)
исполнительный орган
пневматическая
часть
пневмо-
Изменение нагрузки на ось (колесо)
(возмущающее воздействие z)
Расстояние
конструкция/ось
(регулируемая величина x)
подушка
объект регулирования
Датчик хода
измерительное
устройство
фактический уровень
(возвратная величина r)
Рис. 8 План действия обычного контура регулирования системы ECAS
4.1 Алгоритм управления при регулировке уровня
При регулировке уровня корректируется расстояние между
конструкцией ТС и его осью. Регулировка уровня основная функция ECAS.
Дополнительная регулировка расстояния может быть
необходима при возмущающем воздействии или
изменении заданного значения.
Для более четкого представления управляющих функций
ECAS при регулировке уровня необходимо провести
небольшой экскурс в физику пневматических подвесок.
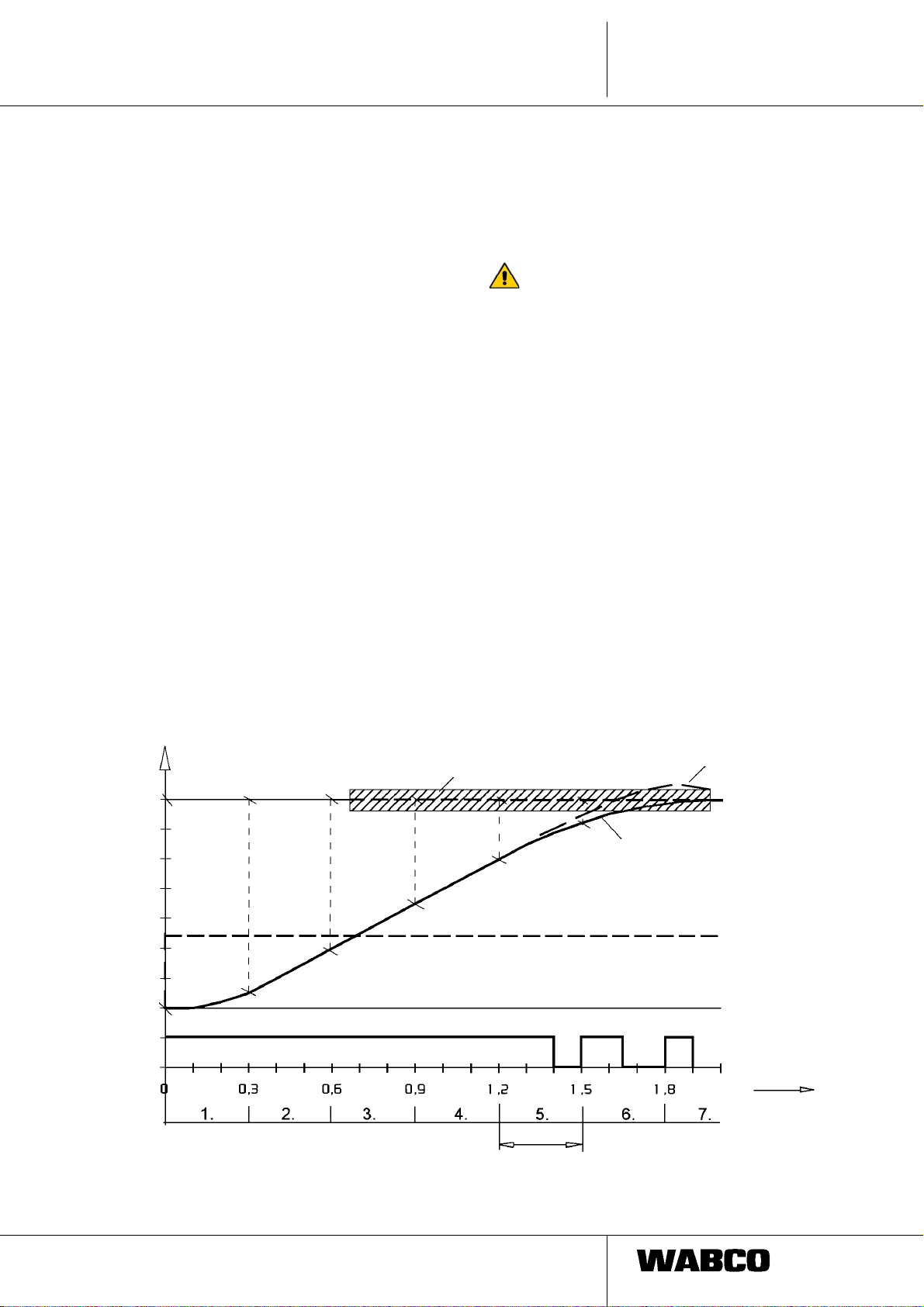
Общие сведения по физике пневматических подвесок
Основная проблема любой регулировки при
возникновении отклонения заключается в определении
оптимального переходного периода. Это промежуток
времени от начала изменения заданного значения до тех
пор, пока фактическое значение не выйдет за
установленные пределы допусков заданного значения
(рис. 9). До тех пор система осуществляет регулировку, и
при этом
Большие периоды времени регулировки возникают при
медленной подрегулировке фактического значения по
новому заданному значению. При этом обеспечивается
высокое качество регулирования, которое требует
больших затрат времени.
ей нужен воздух.
Если регулировка протекает быстро, то, таким образом,
происходит быстрое достижение нового заданного
значения. Но при этом повышается склонность системы к
колебаниям.
Большие
ECAS, что является преимуществом для корректировки в
случае небольших различий в заданных значениях,
негативно сказываются при больших различиях в заданных
значениях. В последнем случае усиливается склонность к
повышенным колебаниям.
Для правильного проектирования пневмосистемы должен
быть создан перепад давления в электромагнитном
клапане при любом режиме его эксплуатации. Это
что давление ресивера должно быть больше, чем
давление на выходе в пневмобаллоны.
Гашение колебаний и амортизационное усилие
Во время регулировки нужно учитывать и роль демпфера.
Традиционные демпферы рассчитаны только на одну
рабочую точку. Амортизационное усилие создается в ТС в
верхней области нагрузки. В ТС в частично нагруженном
или порожнем состоянии
которое при изменении заданного значения должно
преодолеваться, непропорционально высока.
Исправление этого достигнуто за счет изменчивости
регулировки амортизации. WABCO предлагает это путем
номинальные значения магнитных клапанов
значит,
доля амортизационного усилия,
13

4.
ECAS
Алгоритм управления
установки системы ECAS. Однако в данном случае ECAS
рассматриваться не будет.
Чем больше отличается показатель состояния
нагруженности ТС от показателя параметризации
демпфера, тем больше усиливается влияние
амортизационного усилия.
Эти проблемы становятся ясны при работе демпфера. В
демпфере жидкость должна перетекать из одной полости
через дроссельное отверстие в другую полость.
Возникающая при этом сила
как амортизационное усилие. При быстром изменении
расстояния между конструкцией и осью амортизационное
усилие также резко нарастает.
Поэтому за создание амортизационного усилия в основном
отвечает изменение расстояния.
При изменении расстояния между конструкцией и осью ТС
одновременно с созданием амортизационного усилия
начинается его уменьшение за счет перетекания
амортизационной жидкости через
дроссель. Время такого уменьшения определено
конструкцией демпфера (напр., диаметром дросселя,
вязкостью жидкости).
Амортизационное усилие - это такое усилие, которое
противодействует движению конструкции, препятствуя
возникновению раскачивания корпуса или отскоку колеса
от поверхности дороги. При этом оказывается
противодействие и изменению уровня.
Амортизационное усилие, величина которого в течение
времени меняется, является проблемой в процессе
регулировки.
Ход регулировки при изменении заданного значения
Если ECAS находится в равновесии сил, то на
пневмобаллон оси воздействует колесная нагрузка. При
этом необходимо учитывать передаточное отношение
несущих рычагов.
Давление в пневмоподушке, умноженное на площадь
сечения сильфона, противодействует колесной нагрузке.
Данную площадьнельзя непосредственно выссчитать из
диаметра пневмобаллона. Давление в пневмобаллоне
зависит только он
уровня.
В процессе регулировки уровня, происходящего
вследствие изменения заданного значения (напр. с
помощью блока управления) давление в сильфоне
повышается или понижается до тех пор, пока фактическое
значение расстояния между конструкцией и осью не будет
соответствовать новому заданному значению. Это
динамический процесс. Чем больше необходимое
изменение заданного значения, тем больше происходят
ускорения в изменении положения конструкции во время
регулировки. Система проявляет склонность к колебаниям.
Она может управлять, выходя за пределы нормы.
Такая тенденция встречается особенно в ТС в порожнем
состоянии. При этом, с одной стороны, вследствие
большого перепада давления между ресивером и
пневмобаллоном в магнитном клапане
колесной нагрузки, а не от высоты
сопротивления обозначается
компенсирующий
ECAS возникают
большие ускорения при перетекании жидкости в ходе
наполнения баллона.
С другой стороны, преодолеваемое амортизационное
усилие максимально. При этом велика опасность
колебания в регулировочном контуре. Это приводит к
излишнему множеству циклов регулировки в магнитном
клапане ECAS, что сокращает срок его службы.
Существует возможность, предотвратить ненужные
колебания с помощью увеличения диапазона допущенного
заданного значения. Но это сказывается на точности
повторной регулировки при одинаковых заданных
значениях.
Если же все–таки требуется соблюдения таких четких
параметров, процесс управления должен быть
усовершенствовать таким образом. чтобы объем
подаваемого сжатого воздуха снижался незадолго до
достижения целевого уровня. При это скорость
перемещения конструкции уменьшается и
предотвращается вероятность повышенных колебаний
Поскольку магнитный клапан ECAS только включает или
выключает подачу воздуха, но не осуществляет
дросселирование, его магнитный ток находится в
пульсирующем режиме. За счет пульсации поток воздуха
кратковременно прерывается. При этом создается
дроссельный эффект, препятствующий усилению
колебаний.
Длительность импульсного режима и
продолжительность импульсов
Для импульсов клапанов важны следующие понятия:
Длительность импульсного режима
Длительность
значение, передаваемое при параметризации ECU.
Началом такой длительности считается импульс
включения для клапанных магнитов. Длительность
импульсного режима является, таким образом,
промежутком времени до момента получения клапанным
магнитом следующего импульса включения (Рис. 9).
Продолжительность импульса
Продолжительностью импульса описывается промежуток
времени, за который клапанный магнит получает импульс
включения. Это значение переменно и
каждой длительности импульсного режима вновь. Расчет
продолжительности импульса производится блоком ECU и
зависит от отклонения в регулировке, т. е. от расстоянием
между заданным и фактическим уровнями.
При этом речь идет о пропорциональнодифференциальной регулировке (PD). Регулировка
осуществляется в зависимости от отклонения в
регулировке и скорости изменения отклонений в
регулировке.
Большие отклонения в регулировке приводят к большой
продолжительности импульса. Если установленная
продолжительность импульса больше введенной
длительности импульсного режима, то ток на клапанный
магнит подается непрерывно. При этом изменение в
регулировочных отклонениях максимальны.
импульсного режима - фиксированное
рассчитывается для
.
14
Алгоритм управления
ECAS
4.
Для замедления дополнительной регулировки при
подъеме незадолго до установления нового заданного
значения, по причине большого поперечного сечения тока,
скорость изменения отклонения в регулировке
анализируется и учитывается при регулировке.
Увеличение скорости изменения отклонений в регулировке
приводит к уменьшению продолжительности импульса.
Уравнение для определения продолжительности
импульса при подъеме конструкции в неподвижном
состоянии
Продолж.
изменения отклон. в рег. x KD |)
Функции "Спуск конструкции в порожнем состоянии" и
"Подъём/спуск во время движения"
Продолж. импульса = (| отклонение в рег. x K
(пропорц. коэффициент) и KD (диффер. коэффициент)
K
P
важны для описания цикла регулировки и передаются
блоку ECU при параметризации.
Управление показывает:
• Для K
• И наоборот, для KD большие значения скорости
импульса = (| отклонение в рег. x KP | - | скорость
|
P
большие отклонения в регулировке или
P
большие значения при одинаковом отклонении в
регулировке приводят к увеличению
продолжительности импульсов.
отклонения в регулировке или большие значения при
одинаковой скорости отклонения в регулировке
сокращают продолжительность импульсов.
Продолжительность импульса вычисляется заново для
каждого периода пульсации. Продолжительность
импульса, которая больше длительности импульсного
режима, приводит к непрерывной подаче тока на магниты
(длительный импульс). Самая короткая выводимая
продолжительность импульса составляет 75 мс (0,075 с
Более короткие промежутки времени пульсации при
температуре -40° C не гарантируют надежное
переключение магнитного клапана.
Определение пропорционального и
дифференциального коэффициента для настройки
регулятора пульсации.
Данные значения должны определяться опытным путем
для конкретного автобуса. Это, как и определение других
параметров, проводится производителем автобуса.
Исходя из этого, приведённый ниже раздел является
информацией, необходимой при
регулирования:
ТС устанавливается на уровень, который находится
непосредственно на границе к допустимому заданному
значению. Если нормальный уровень достигается без
превышения колебаний или многократных импульсов
магнитных клапанов, то это обозначает, что настройка
значений
пропорци
Чем больше К
регулировка, проводимая пневматической частью системы
в пределах гидродинамических возможностей.
допустимого заданного уровня и
онального коэффициента находится в порядке.
- значение, тем быстрее происходит
Ð
перепроверке качества
).
Расстояние
Вкл.
Выкл.
Магнитный клапан, ECAS
Характер регулировки при отсутствии импульсов в ECAS
Диапазон допусков заданного значения
4. Регулировка -
отклонение
1. Отклонение
в регулировке
в регулировке
2. Отклонение
Конструкция - ось ТС
в регулировке
3. Отклонение
Отклонение от заданного значения
Длительность импульсного режима
Магнитный клапан (повышенные колебания)
Заданный уровень В
Характер регулировки при импульсах
Магнитный клапан, ECAS
отклонение
5. Регулировка -
Заданный уровень А
Время в сек.
.......импульсы, период
Рис. 9 Пример процесса регулировки при изменении заданного значения
15
4.
ECAS
Алгоритм управления
Незначительно высокие КÐ - значения приводят к
увеличению вероятности превышенных колебаний.
Для установления дифференциального воздействия
происходит проверка регулировки с помощью
существенного изменения заданного значения (напр., с
помощью установки ТС на самый нижний уровень). Данное
изменение необходимо уравнить посредством поднятия
конструкции. При нажатии кнопки "нормальный уровень",
находящейся на блоке управления, должен происходить
переход конструкции на
возможности без превышения колебаний или увеличения
периода пульсации. Повышение колебаний конструкции с
последующим переходом в заданный уровень в порожнем
состоянии ТС допустимо в том случае, если данный
процесс происходит однократно. При хорошо
рассчитанном дифференциальном воздействии можно
понизить склонность к повышенным колебаниям.
Пульсация электромагнитного клапана ECAS повышается
с увеличением K
замедление поднятия конструкции.
Существует необходимость воздействия на систему для
улучшения характера регулировки, так как, установление
К
- и КD -значения не принесло желаемого результата, то
Ð
можно уменьшить гидродинамический профиль в
пневматической части. Как правило, достаточно
установить дроссель в пневматический трубопровод
между магнитным клапаном, пневмобаллоном
(пневмобаллонами) соответствующей оси.
Итог
Можно повлиять на установку расстояния между
D
нормальный уровень. По
-значения, вследствие этого происходит
конструкцией и осью автомобиля следующими
настройками:
• Длительность периода пульсации T
• Допуск заданного значения Δs,
• Пропорциональный
• Дифференциальный коэффициент KD,
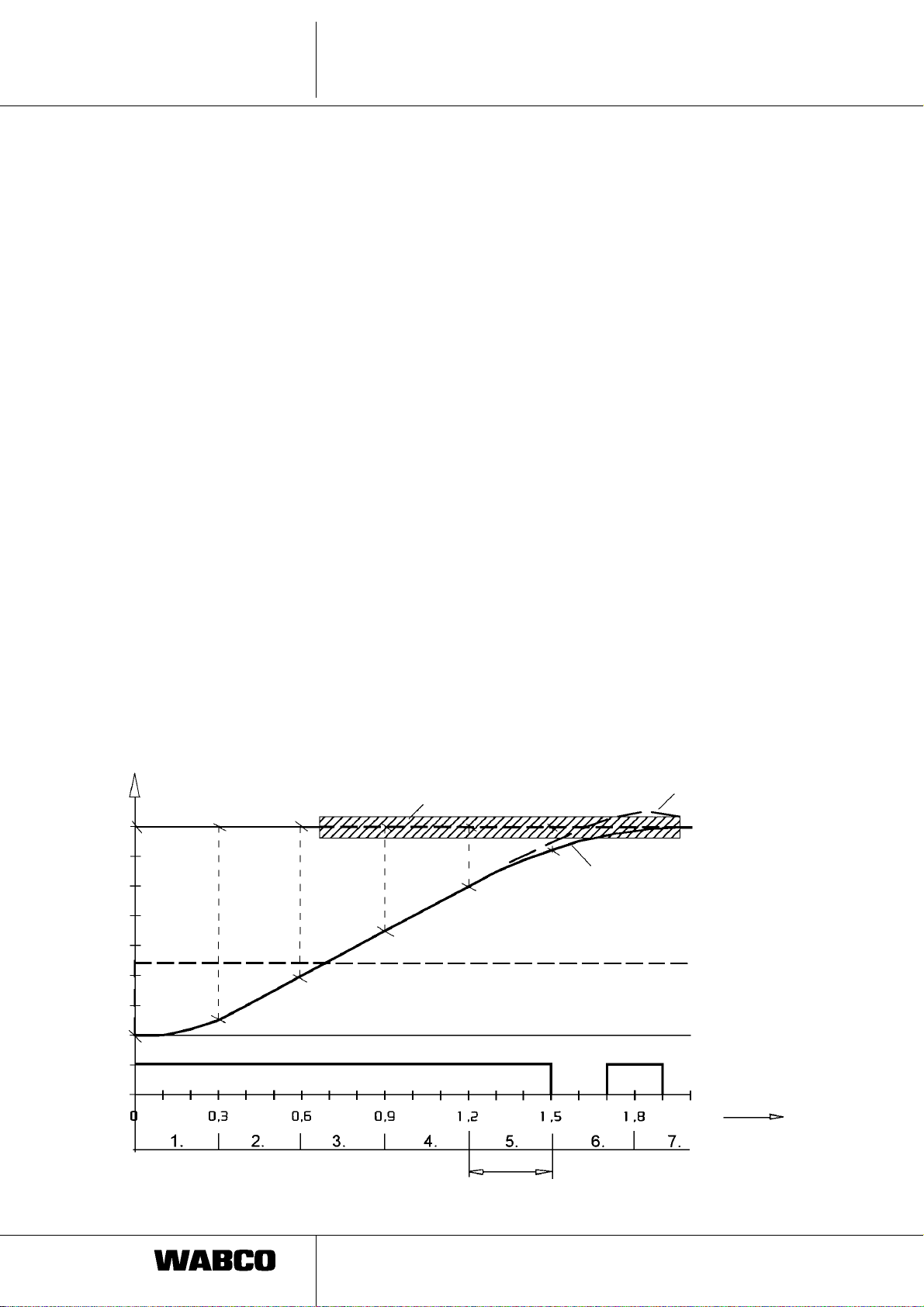
Самообучающийся регулятор
Существует вид регуляторов, которые работают на основе
самообучения. В данном случае не происходит пульсация
электромагнитных клапанов ECAS , что приводит к
увеличению их срока службы. Такой способ регулировки
используется при эксплуатации всех электроник CAN, а
также в 4x2/6x2 MAN, 4x2 RVI и DAF. На основе
провождения первичной регулировки система ECAS
осваивает образ действий при повышенных колебаниях.
При последующих
при достижении заданного уровня. В итоге конструкция
переходит на заданный уровень. (Рис. 10)
В электрониках, не относящихся к CAN, определение
продолжительности импульсов происходит на основе
заданных коэффициентов. В электрониках CAN
продолжительность импульсов зависит от механических
изменений ТС (определение времени простоя).
4.2 Алгоритм управления при регулировке
подъемной оси
Автомобили с одной подъемной осью
механизмом регулировки подъемной оси. Такая
регулировка необязательна и ее не нужно устанавливать в
каждой системе.
коэффициент KP,
.
регулировках происходит отключение
могут оснащаться
Характер регулировки при отсутствии импульсов в ECAS
Диапазон допусков заданного значения
отклонение
4. Регулировка -
Расстояние
в регулировке
2. Отклонение
1. Отклонение
в регулировке
Конструкция - ось ТС
Вкл.
Выкл.
Магнитный клапан, ECAS
в регулировке
3. Отклонение
Отклонение от заданного значения
Магнитный клапан (повышенные колебания)
Характер регулировки для само-
обучающихся регуляторов (CAN II)
отклонение
5. Регулировка -
Длительность импульсного режима
Заданный уровень В
Заданный уровень А
Smooth Level Controller
Время в сек.
.......импульсы, период
Рис. 10 Пример процесса регулировки при изменении заданного значения для самообучающегося регулятора
16
Алгоритм управления
ECAS
4.
Положение подъёмной оси (в процессе её регулировки)
зависит от осевой нагрузки движущей оси. При этом
система ECAS определяет позицию подъёмной оси:
расположение на днище или её поднятие. Регулирование
положения подъёмной оси необходимо проводить под
влиянием возмущающего воздействия, как правило, при
изменении нагрузки. Пользователь не может вносить
изменения, касающиеся заданного значения.
Приподнятую подъёмную
ось можно всегда опустить
вручную. В частично нагруженном состоянии ТС
приподнятие подъёмной оси возможно в том случае, если
не превышается макс. допущенное давление в
пневмоподушке движущей оси.
В последующих высказываниях речь будет идти только о
подъёмной оси. Но в основном данные содержания
касаются также регулировки ведомой оси.
Общие сведения по
управлению подъемной осью
К теме "Управление подъёмной осью" относятся также и
такие темы, как: " Вспомогательная сила при трогании ТС"
и "Предотвращение перегрузки". В этой связи они должны
вместе учитываться.
Регулировка положения подъемной оси осуществляется в
зависимости от давления в пневмобаллоне движущей оси,
которое регистрируется с помощью переключателя или
датчика давления ( в
зависимости от конструкции). В
системах, обладающих переключателями давления,
данные значения (давления) заданы. Коэффициент
давления, полученный с помощью датчиков давления
сравнивается в ECU с различными заданными значениями.
Эти заданные значения уже заданы в ECU при вводе
системы в эксплуатацию. На основе полученных значений
устанавливаются следующие ограничения:
• давление переключения для спуска или подъема
подъемной
оси
• максимально допустимое давление при исполнении
фу
нкции "Вспомогательная сила при трогании ТС"
• максимально допустимая величина погрузки
Каждому значению давления таким образом
приписывается определенное состояние осевого агрегата.
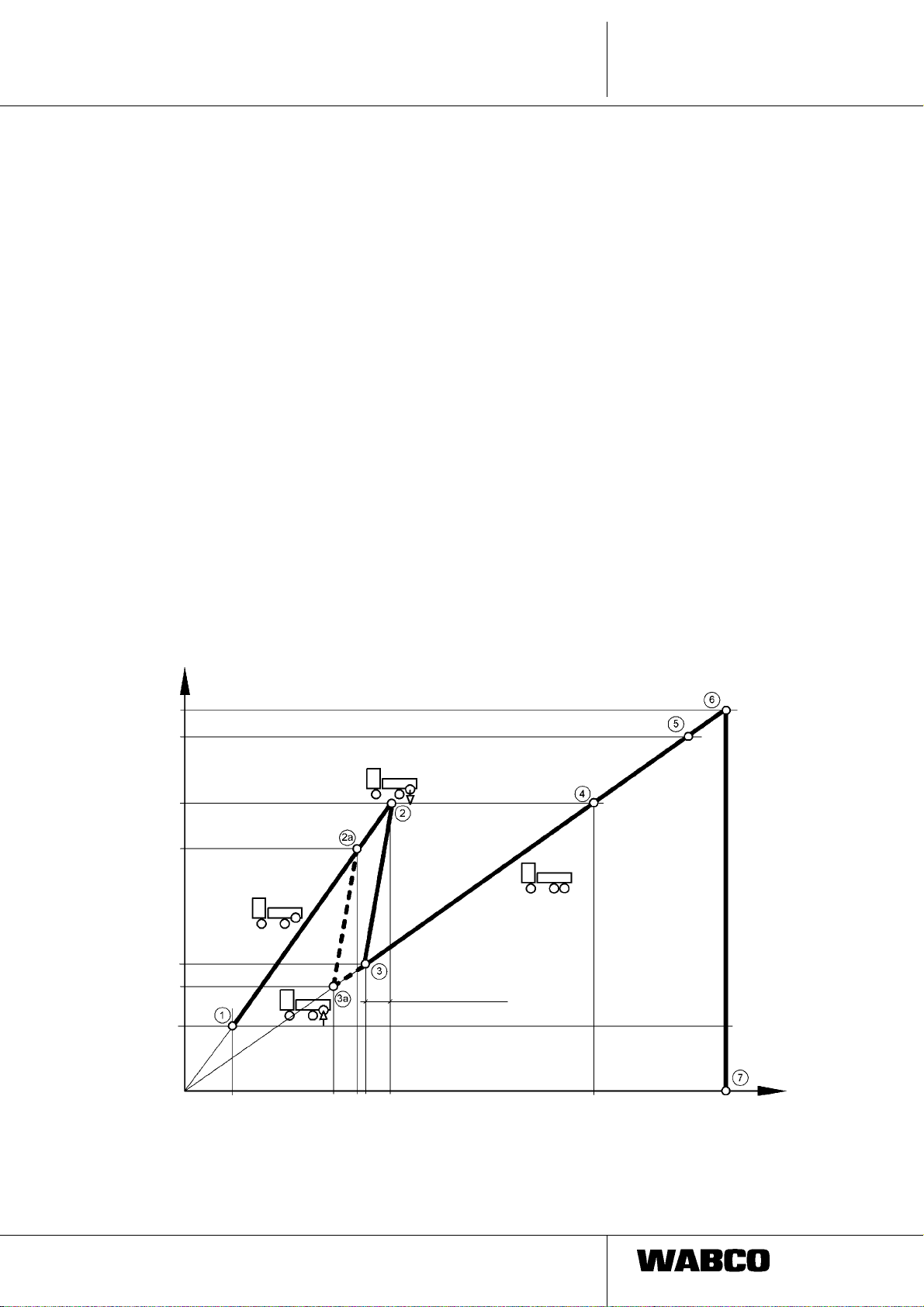
4.2.1 Описание функций подъёмной оси в ТС,
обладающих системой регулирования
давления
(Напр., ТС с цистерной)
На рис. 11 показан процесс прохождения давления в
пневмоподушке движущей оси (жирная линия) в
зависимости от состояния нагрузки в агрегате задней оси
для ТС, обладающего системой регулирования давления.
При этом на ТС не установлено ни регулирование
соотношения давления, ни регулировка силы тяги. Это
значит, что на пневмоподушки
состоянии действует такое же давление как и на
пневмоподушки ведущей оси.
подъёмной оси в опущенном
p
p
спуск под. оси
= p
100%
p*
подъем под.
оси
p*
спуск под. оси
p
подъем под.
оси
p
Давление в пневмоподушке ведущей оси
перегрузка
p
130%
порожний
Предел "перегрузка"
Предел "вспомогательная сила при трогании ТС"
Предел "полная нагрузка"
Масс. дола подъем. оси m
)
)
порожний
m
подъем под. оси
m(p
подъем под. оси
m*(p
)
100%
(p
1макс.
m*
)
(p
m
100%
1макс.
под. ось
Предел пор. ве-
с в пневморесс.
)
100%
(p
2макс.
m
Рис. 11 Описание функций подъёмной оси в ТС, обладающих системой регулирования давления
)
Осевая нагрузка
Агрегат задней оси
перегрузка
m(p
17
4.
ECAS
Алгоритм управления
При загрузке или разгрузке на этой линии происходит
прохождение различных характерных точек. Значения
давления в пневмоподушке движущей оси (указанные с
помощью кружков на рис.)необходимо сообщить системе
ECAS в процессе параметризации. В результате реакций
подъёмной оси возникают частично давления ( на рис.
выделены звёздочкой *), на которые нельзя оказать
влияние.
Условием нормальной регулировки
является достаточное обеспечение сжатым воздухом
!
и электроэнергией.
Следующие высказывания играют роль в том случае, если
ТС с цистерной непрерывно наполняется жидкостью или
происходит его опорожнение (Рис. 11).
1. Процесс наполнения начинается при . Движущая ось
ТС не находится под нагрузкой (порожний вес)
m
порожний
следующего:
• масса конструкции и
• массовая доля подъемной оси м
2. В процессе наполнения увеличивается нагрузка ТС до
достижения . В этой точке подъемная ось опускается.
Соответствующее давление в пневмоподушке должно
быть обозначено как давление, возникшее при спускe
подъемной оси p
сообщено электронике в процессе параметризации.
Ориентировочное значение такого давления - это
допустимое номинальное значение p
пневмоподушке при полной загрузке ТС. Это значение
также можно узнать из таблички ALB.
3. После спуска подъемной оси происходит изменение в
нагрузке агрегата задней оси (ЗО). Нагрузка снижается
на массовую долю подъемной оси m
пневмоподушке движущей оси также снижается,
поскольку осевая нагрузка распределяется по
пневмоподушкам как движущей, так и подъемной оси.
Кривая, касающаяся давления в сильфоне, после
спуска подъёмной оси проходит от до . Пользователь не
может повлиять на устанавливающееся само по себе
давление в пневмоподушке p*
параметров, касательно управления подъёмной осью,
необходимо определить значение данного давления.
4. При дальнейшем наполнении цистерны давление в
пневмоподушке движущей оси достигает своё
максимально допустимое значение в .
5. Происходит регулировка максимально допустимого
давления в пневмоподушке движущей оси при
задействованной функции " Вспомогательная сила при
трогании ТС" p
6. В итоге достигается давление p
срабатывает функция " Предотвращение перегрузки".
7. Функцию " предотвращение перегрузки" можно
использовать только в системах, обладающих
датчиками давления ( а не переключателями
. Эта порожняя масса получается из
Значение давления в пневмоподушке p
можно,например , узнать из таблички РТС.
спуск под. оси
.
130%
. Его значение должно быть
подъемной оси
под. ось
100%
под. ось
ПО спуск
. Для расчёта
перегрузка
.
порожний
давления в
. Давление в
, в итоге этого
давления). Смысл данной функции заключается в том,
что при достижении этого давления p
происходит вентиляция пневмоподушек всех осей,
находящихся на днище. Активизация функции
"Предотвращение перегрузки" может привести к тому,
что конструкция ТС опустится до предела. Это должно
препятствовать движению с сильном перегруженной
конструкцией. Сведения о давлении p
быть переданы блоку ECU. При этом нужно учитывать
данные завода-изготовителя осей и нормативноправовые предписания касательно нагрузки на
автомобили.
8. Пневмобаллоны опять заполняются при снижении ниже
минимума при опорожнении или выпуске
соответствующей осевой нагрузки, соответствующей
p
перегрузка
снижается при рассмотрении от точки . Достаточно
выключить и повторно включить зажигание для того,
чтобы провести регулировку последнего заданного
уровня.
9. При дальнейшем спуске жидкости из цистерны, чтобы
не изменять выбранный вначале процесс, понижается
давление в пневмоподушках ниже до . В этой точке
давление в пневмобаллонах главной
мало, что целесообразен подъем подъемной оси. Оно
должно быть обозначено как давление, возникающее
при поднятии подъёмной оси p
нем должны быть переданы в ECU путем
параметризации.
Для обеспечения нормальной работы учитывайте
следующие правила:
• Значение давления p
в пневмоподушке p*
• Давление при поднятии p
давление p
(учитывая порожний вес ТС)
10. В системах с полуавтоматической подъемной осью
можно провести её поднятие вручную, если превышено
допущенное давление p*
11. В системах, обладающих полностью автоматической
подъёмной осью происходит следующий процесс:
после установления давления при подъёме
приподнимается подъёмная ось,а пневмоподушки
ведущей оси берут на себя всю осевую нагрузку.
Массовая доля подъемной оси m
относится к нагрузке. Кривая давления в
пневмоподушках проходит от до , при этом
установленное давление в пневмоподушках p*
подъемной оси
12. По завершении всего процесса опорожнения кривая
давления в пневмобаллонах опять оказывается у .
. То есть, когда давление в пневморессорах
поднятие подъемной оси
спуск подъемной оси
поднятие подъемной оси
порожний
При несоблюдении правил могут возникнуть
неисправности функций подъемной оси, напр.
непрерывное поднятие и спуск, если значение
давления является больше чем давление в
пневмоподушке p*
нельзя изменить.
спуск подъемной оси
спуск подъемной оси
перегрузка
перегрузка
оси настолько
поднятие под. оси
.
под. ось
3a 2a
должны
3a
. Данные о
< давление
>
.
теперь опять
поднятие
18
Алгоритм управления
ECAS
4.
Итог
Регулировку подъёмной оси, включая функцию
предотвращения перегрузки можно настроить следующим
образом:
• Давление спуска подъемной оси p
• Давление защиты от перегрузки p
• Давление подъема подъемной оси p
спуск под. оси
перегрузка
подъем под. оси
Кроме того, названные выше условия необходимо
соблюдать во время определения давления при спуске и
поднятии подъёмной оси для достижения успеха в
процессе её регулировки.
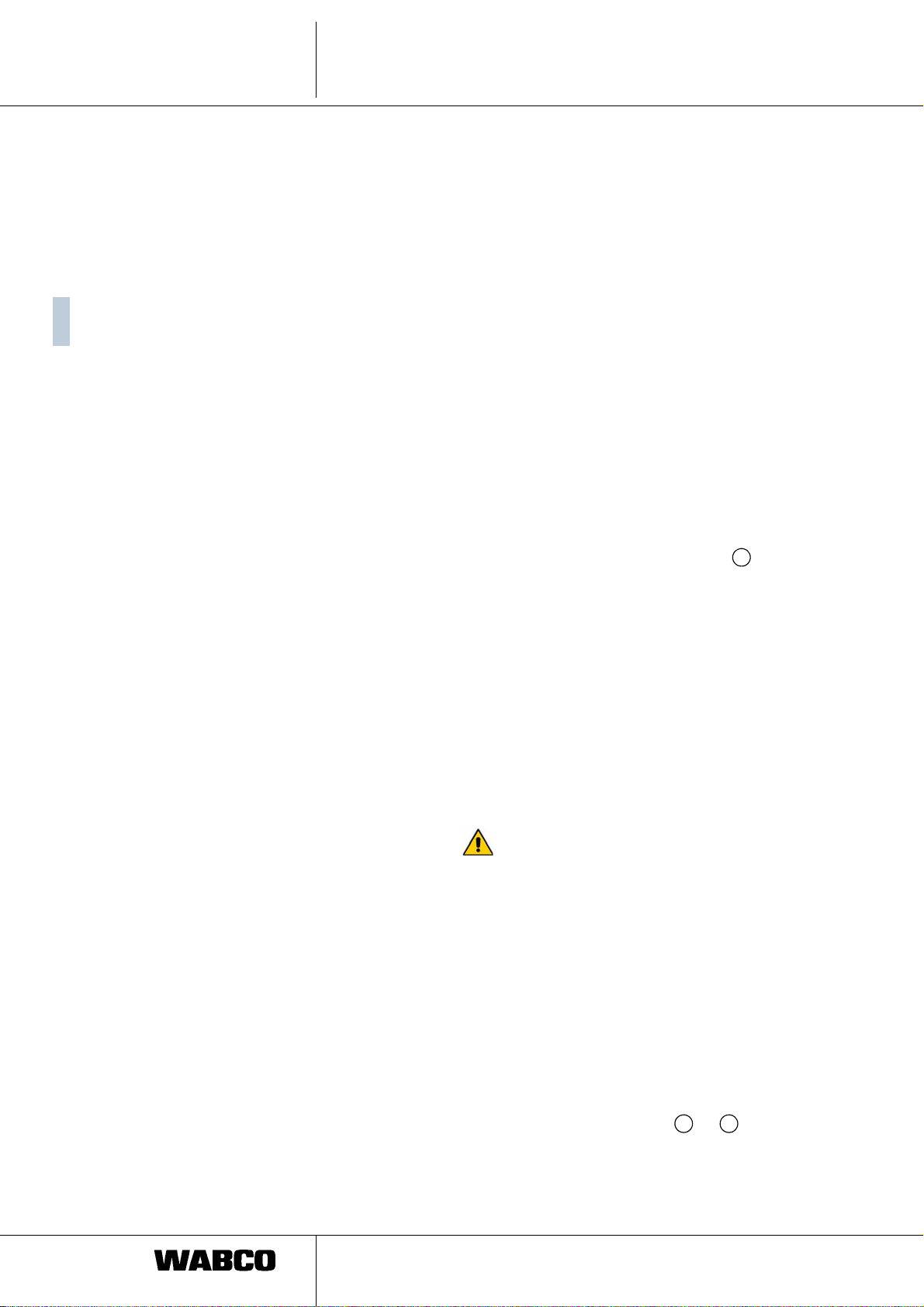
4.2.2 Регулировка функции " Вспомогательная сила
при трогании ТС"
Функция " Вспомогательная сила при трогании ТС"
возможна только в том случае, если давление в
3a
пневмоподушке (Рис. 12) можно определить между
и .
Это означает, что подъемные оси должны находиться на
днище. Описание регламентируется требованиями
директивы ЕС 97/27/EG (EG 97/27).
На рис. 12 показано 2 примера, начиная с и , как
A1 B1
увеличение сцепления колес действует после активации
различных состояний загрузки.
Пример 1
В точке происходит выкачивание воздуха из
A1
пневмоподушки подъёмной оси. Наряду с этим существуют
пневматические системы, в которых не
проводится полное
выкачивание воздуха, остаточное давление
предотвращает в данном случае возможный надлом
сильфона. Подъемная ось поднимается. На движущей оси
устанавливается давление в пневмоподушке, которое
находится на удлинении линии между и и которое с
A2
помечено. После отключения функции " Вспомогательная
сила при трогании ТС" вновь устанавливается давление в
A1
пневмоподушке главной оси согласно
точке .
Существуют нормы согласно EG 97/27, касающиеся
нагрузки на движущую ось с помощью функции
вспомогательной тяги при трогании ТС. Нагрузка на
движущую ось может быть превышена на макс. 30 % (в
Германии определено StVZO §34), если заводизготовитель данных осей не установил меньшие
значения.
Максимально допустимое давление (соответствующее
данным требованиям) в пневмоподушках движущей оси
при активированной функции
трогании ТС" p
необходимо сообщить электронике
130%
"Вспомогательная сила при
ECAS в процессе параметризации. Для изменения такого
состояния нужно установить диапазон заданного значения
в электронике , в пределах которого происходит
Δp
130%
регулирование давления при активированной функции "
Вспомогательная сила при трогании ТС" К процессу
регулировки относится:
Диапазон регулирования = p
130%
- Δp
130%
В процессе регулировки не должно быть превышено
предельное давление при активированной функции
"Вспомогательная сила при трогании ТС". Если для
p
130%
p
спуск под. оси
= p
100%
Предел "вспомогательная
сила при трогании ТС"
p
< p
A2
Предел "полная нагрузка"
130%
= p
p
m
под. ось
B2
130%
Давление в пневмоподушке ведущей оси
p
порожний
Предел "давление в сильфоне при порожнем весе"
Осевая нагрузка
порожний
m
Рис. 12 Описание функции "Вспомогательная сила при трогании" в ТС, обладающих системой регулирования давления
Агрегат задней оси
19
4.
ECAS
Алгоритм управления
системы ECAS предусмотрены функции "
Вспомогательная сила при трогании ТС" и
"Предотвращение перегрузки", то предельное давление
вспомогательной силы p
превышать давление при перегрузке p
Законодатель предписывает возможность
использования такого увеличения сцепления колес
!
только при скорости до 30 км/ч.
Пример 2
Особенности работы при установлении давления при
увеличении сцепления колес p
B1
из при этом также начинается прокачка
пневмобаллона подъемной оси. При установлении
давления увеличения сцепления колес настраивается
прокачка подъемных сильфонов, а давление в
пневморессорах главной оси больше не растет . В этом
случае подъемная ось остается на днище. Излишняя доля
нагрузки принимается пневморессорами подъемной оси.
После отключения функции "Вспомогательная сила
трогании ТС" снова устанавливается давление в
пневмоподушках движущей оси соответственно .
ни в коем случае не должно
130%
перегрузка
отображается. Исходя
130%
.
B2
при
B1
В целом также для увеличения сцепления колес
применимо правило, согласно которому блоку ECU нужно
передать следующие значения:
• максимально допустимое давление в пневмоподушках
движущей оси при активированной функции
"Вспомогательная сила при трогании ТС" p130%
(предельное давление при активированной функции
"Вспомогательная сила
• диапазон заданного значения Δp130%
• Скоростное ограничение при использовании функции
"Вспомогательная сила при трогании ТС".
Определение промежутков времени в период активизации
и пауз, а также различные виды вспомогательной силы при
трогании ТС могут быть заданы системе ECAS с помощью
запуска определённых Pin или, в другом случае, они могут
быть выбраны в процессе параметризации.
В общей сложности могут быть параметризированы 5
различных видов вспомогательной силы при трогании ТС
(см. раздел 3.8 "Вспомогательная сила при трогании ТС").
В какой мере данные виды могут быть задействованы,
зависит от типа системы ECAS.
при трогании ТС")
20
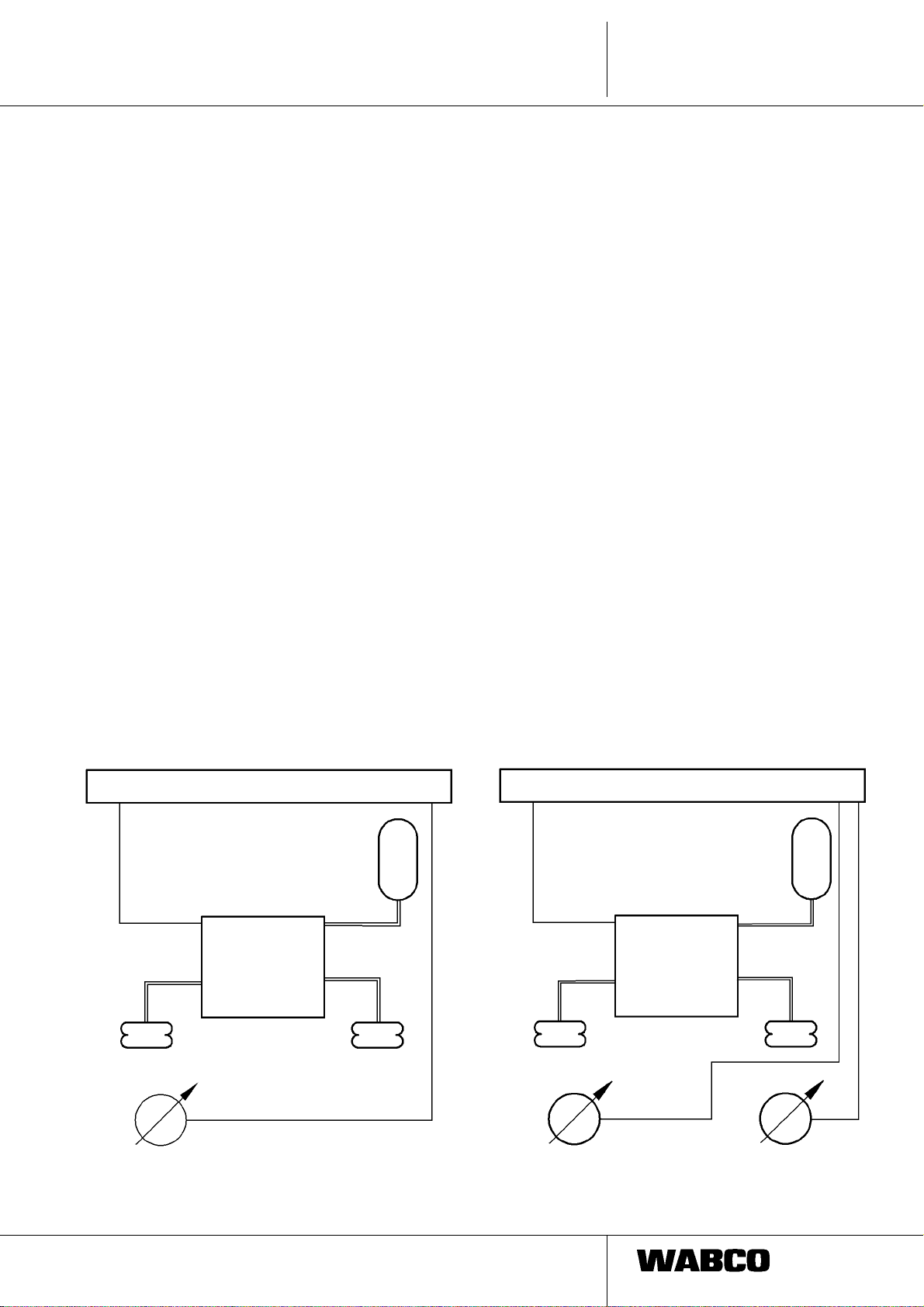
Конфигурация системы
5. Конфигурация системы
ECAS 5.
ECAS - это очень вариабельная система, которая может
быть оптимально приспособлена под различные
требования, касательно ТС. Так, например, на одном ТС
могут быть установлены 3 основных системы управления
ECAS. Наряду с этим возможно управление подъёмной
осью. Выбор необходимых компонентов производится
изготовителем ТC благодаря требованиям,
предъявляемым системе.
На расположенных ниже иллюстрациях указаны различные
варианты регулирования
В отличие от ABS или EBS, конфигурация которых
определяется с помощью встроенных в систему датчиков
частоты оборотов/модуляторов (напр.4S/3M),
определение конфигурации в системе ECAS производится
благодаря числу основных контуров регулирования уровня.
Данное число соответсвует числу, имеющихся в наличии
датчиков хода. Так, например, система, обладающая двумя
датчиками хода называется двухстороннее регулирование.
этом сведения о типе управления касаются всего ТС
При
(как указано на рис.) или отдельных частей оси. Полностью
пневматическое ТС с трехсторонним управлением состоит,
к примеру, из подвижной оси с односторонним
управлением и движущей оси с двухсторонним
управлением.
всех ТС.
Для ТС существуют в общей сложности следующие виды
управления:
• одностороннее регулирование
• Регулировка
• трехстороннее регулирование
Одностороннее регулирование типично для подвижных
передних и задних осей (рассматривая данный процесс на
основе осей). В ТС, обладающих частично пневматической
подвеской, для проведения одностороннего регулирования
устанавливаются датчики хода на движущую ось.
Двухстороннее регулирование находит применение на
задних осях с значительной шириной колеи, если уже
заранее известно, что
или в ТС с относительно высоким центром тяжести. При
рассмотрении ТС в целом выясняется, что ТС с полностью
пневматической подвеской, на передней и задней оси
которых находятся датчики хода, обладают двухсторонним
регулированием.
Трехстороннее регулирование типично только для ТС с
полностью пневматической подвеской. Оно состоит из
одностороннего регулирования
передней оси и двухстороннего регулирования задней оси.
по 2 точкам
ТС будет наравномерно нагружено
, касательно подвижной
одностороннее регулирование
Регулировка по 2 точкам
ECU
Электромагнитный
клапан
Ведущая ось
Зад. ось
слева
Датчик хода
Рис. 13 Порядок регулирования для ТС с частично пневматической подвеской
Зад. ось
Справа
Зад. ось
слева
Датчик хода
ECU
Электромагнитный
клапан
Ведущая ось
Зад. ось
Справа
Датчик хода
21
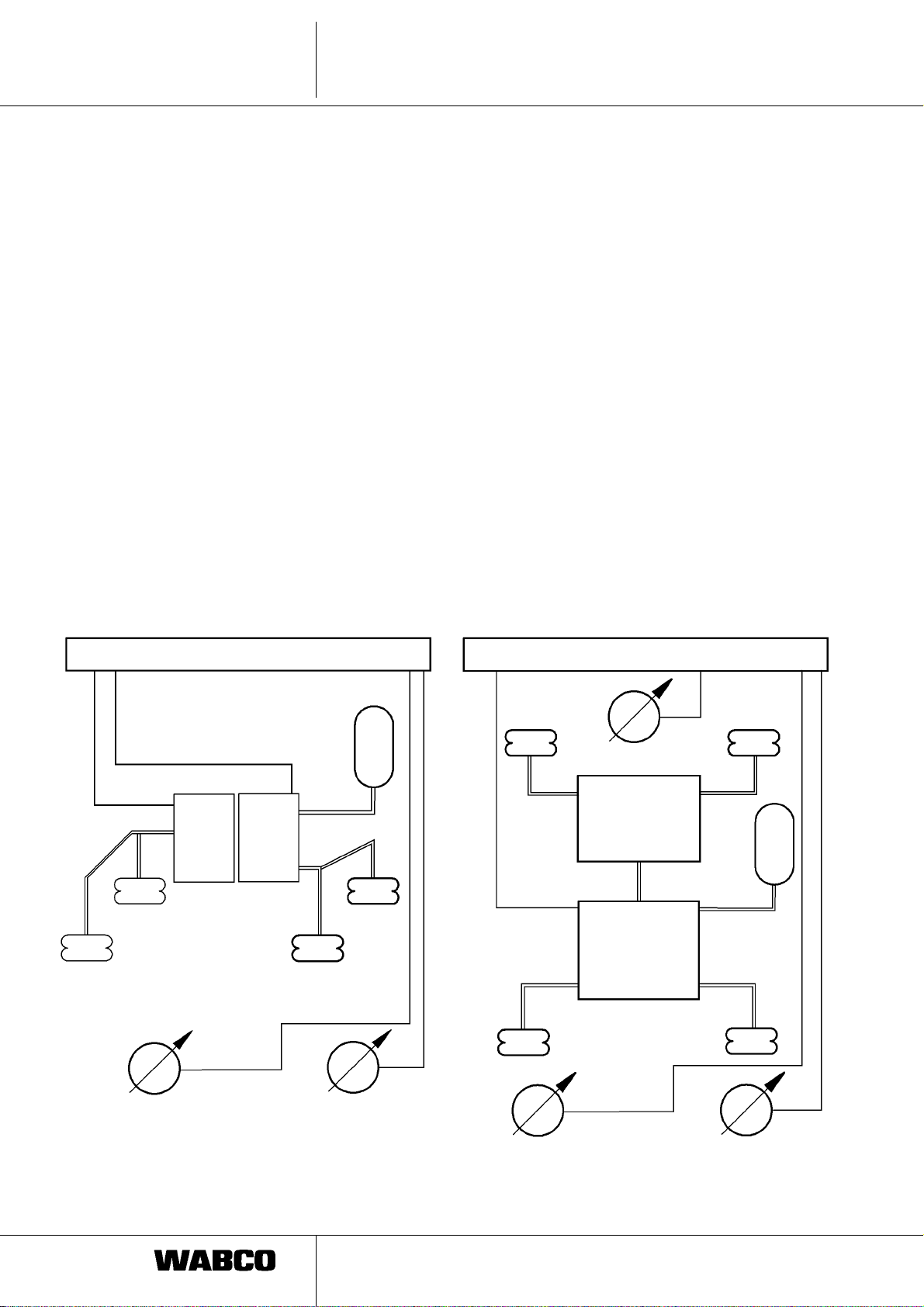
5. ECAS
Конфигурация системы
Соответствующую конфигурацию датчиков хода можно
расширить за счёт переключателей давления или датчиков
давления с условием наличия подъёмной оси.
Для автоматического спуска подъёмной оси, по
достижении определённых значений давления в
пневмоподушках движущей оси, достаточно установить
переключатели давления для определения давления в
сильфоне. С помощью переключателей давления можно
привести в действие функцию вспомогательной
силы при
трогании ТС.
Датчики давления находят применение на движущей оси,
если есть необходимость использования полностью
автоматизированной подъёмной оси, функции
компенсации продавливания шин или функции
предотвращения перегрузки. Существует запрос,
касающийся процесса регулирования соотношения
давления или оптимального регулирования силы тяги, то
необходимо дополнительно установить датчики давления
на пневмоподушки подъёмной оси.
Регулировка по 2 точкам
ECU
Электромагнитный
Клапаны :
управляемая
Зад. ось
Справа
слева
Электр-
омагн-
итный
Клапаны :
движущая
ось
ось
ПО
Справа
слева
трехстороннее регулирование
ECU
ПО
слева
Зад. ось
слева
Датчик хода
Электромагнитный клапан
Перед.ось
Электромагнитный клапан
Ведущая ось
Зад. ось
Справа
ПО
Справа
Датчик хода
Датчик хода
Датчик хода
Рис. 14 Порядок регулирования для ТС с полностью пневматической подвеской
22
Датчик хода
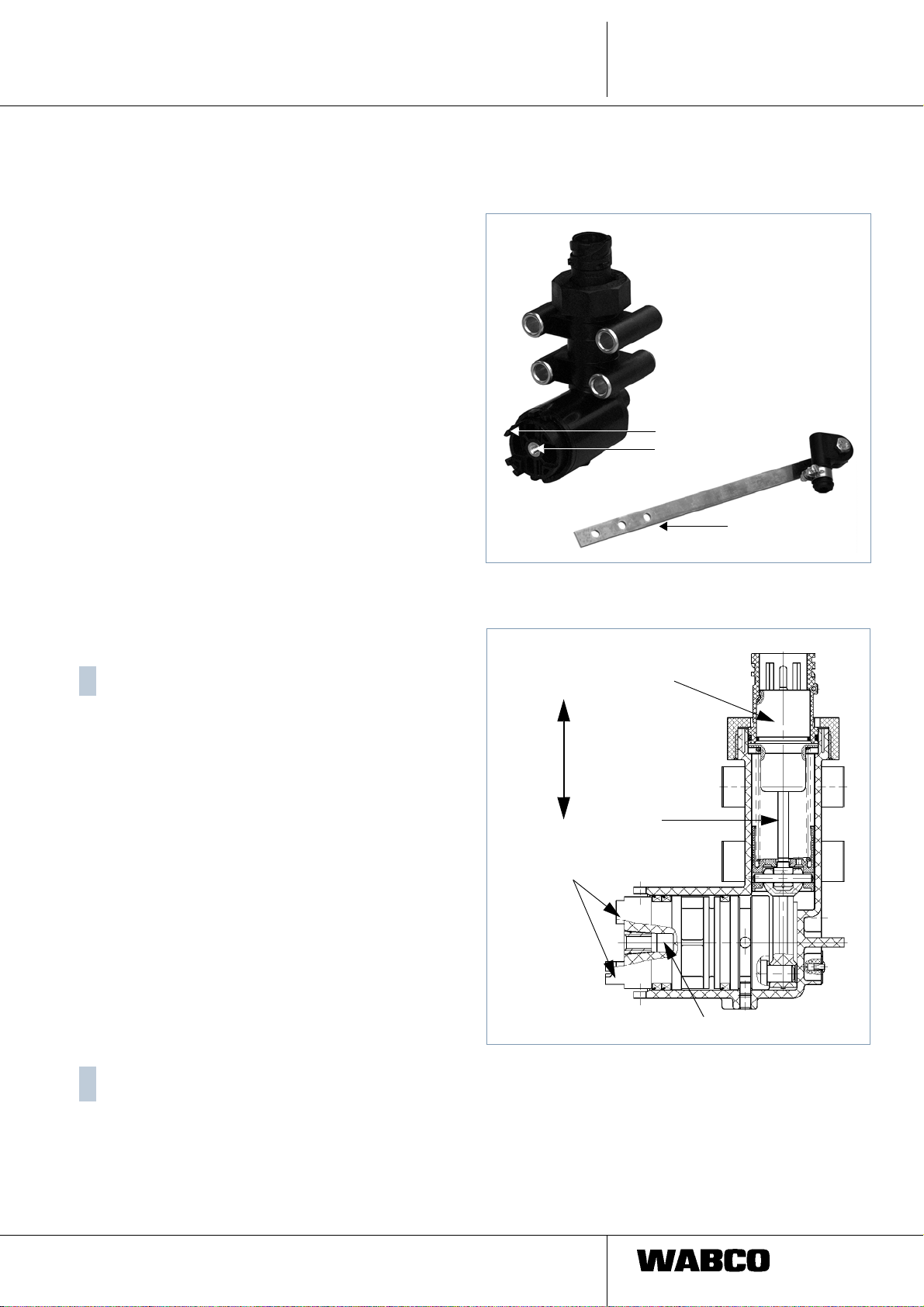
Компоненты
!
6. Компоненты
Компоненты установки ECAS
• датчик(и) хода;
• Манометрический переключатель
• датчик(и) хода
(выборочно: использование переключателей давления
или датчика(ов) давления зависит от выбора варианта
системы)
• Устройство управления (ECU)
• Магнитный клапан(ы) ECAS
• блок управления (выборочно)
• пневматические компоненты (пневмобаллоны; возм.
подъемный сильфон; клапаны ограничения давления;
трубопроводы, пневматические контейнеры).
В данном случае пневматические компоненты
рассмотрены, т.к. они соответствуют пневматическим
компонентам общепринятой пневматической системы и не
требуют особого разъяснения в ECAS. При описании
электроники ECAS особенное внимание будет уделено
электроснабжению.
не будут
ECAS 6.
Сенсорная волна
Сенсорный рычаг
Управление рычагом
Сенсорная волна
Сенсорный рычаг
6.1 Датчики
В начале регулировки находятся датчики. Они измеряют
регулируемые параметры и передают данные о них ECU с
помощью кабелей датчиков.
В системе ECAS необходимо установить минимум
один датчик хода.
Для управления дополнительными функциями
используются переключатели или датчик(и) давления.
6.1.1 Датчик хода
датчик хода 441 050 0.. 0 является датчиком фактического
значения для постоянной регистрации изменений в высоте.
Принцип измерения - индуктивный.
Вращательное движение передается рычагом во
внутреннюю часть датчика. Это движение преобразуется
по принципу работы без зазора кривошипного механизма в
линейное движение
погружения" ферромагнитного сердечника в неподвижную
катушку происходит сдвиг фаз между током и
напряжением. ECU получает эти сигналы и преобразует их
в значения "count".
Для датчика угла вращения 441 050 1.. 0 достигает
индуктивного изменения с помощью вращательного
движения сенсорной волны.
сердечника в катушке. При "движении
Рис. 15 Датчик хода 441 050 0 0 и рычаг 441 050 718 2
Подъем
+
-
Спуск
Управление рычагом
Цилиндрическая
катушка
Сердечник
Сенсорная волна
Работу датчика хода нельзя проверить вольтметром.
Рис. 16 Изображение датчика хода 441 050 0.. в разрезе 0
!
23

6. ECAS
Рис. 17 Датчик угла вращения 441 050 1.. 0
пластмассовая ось
ферромагнитное ядро
Компоненты
Датчик хода прочно соединен с регулируемой осью
благодаря рычажной системе. На его конце находятся
наконечники из резины для амортизации и компенсации.
Тип встроенного датчика нужно установить в параметрах
(опциональный параметр 2.5).
ECAS ECU производит рассчёт данного сенсорного
значения с
между 4 и 255 counts. В новых версиях ECAS ECU была
проведена переработка на 16 байт. Сенсорное значение
сообщается с помощью Timer Ticks (диапазон от 256 до
65.536).
Инструкции по установке
Исходя из того, что рычаг находится в горизонтальном
положении (исходное положение 90°), диапазон измерения
датчика хода составляет следующее: от + 43° до - 40°. На
рис. 16 показано расположение плюсовой
зоны.
Оптимальным является использование всего диапазона
управления, если сенсорный рычаг находится на
нормальном уровне в горизонтальном положении.
помощью counts, а именно байтового значения
и минусовой
ферромагнитный
листовой металл
катушка
Рис. 18 Изображение датчика угла вращения 441 050 1.. 0
При необходимости проверки датчика хода можно
провести измерение сопротивления для перепроверки
катушки. Сопротивление должно составлять при этом
примерно 120 Ом. Замер индуктивности катушки
производится специальным контуром в ECU более 50 раз в
секунду. Работоспособность датчика также производится
ECU.
Датчик хода находится на раме автомобиля рядом
пневмоподвески которой нужно регулировать.
На управляемой оси над её центром находится, как
правило, датчик хода (одностороннее регулирование).
Движущие оси могут обладать не только одним, но а также
двумя датчиками хода.
– Установите оба датчика таким образом, чтобы они
были расположены, по возможности, на большом
расстоянии друг от друга. Это
эффективного процесса регулирования датчиков хода
по отдельности (двухстороннее регулирование на
одной оси).
необходимо для
с осью,
Не следует превышать максимальный диапазон
управления рычагом (+/- 50°).
!
Длина рычага датчика выбирается. С другой стороны, она
должна быть одинакова для датчиков хода одной и той же
оси.
Короткий рычаг датчика
Короткий рычаг датчика
изменении положения подачу сигнала датчика и
поддерживает высокую точность измеряемых значений. Но
он охватывает небольшой диапазон регулировки.
Длинный рычаг датчика
Длинный рычаг датчика охватывает большой диапазон
регулировки за счет раздельного различения измеряемых
значений. Это нужно для оптимальной нагрузки углов
отклонения.
Следует избегать кручения рычага, т.к. в
на оси датчика могут возникать недопустимые
!
опрокидывающие моменты. Все поворотные оси по
этой причине должны быть установлены параллельно.
Датчик хода существует только в одном варианте для
установки с левой и с правой стороны.
Но рычаг датчика можно устанавливать на оси датчика,
который вращается без упирания в корпусе датчика, с
шагом в 90°. Для нормальной работы и точности
определения измеряемых значений нужно точно
выровнять ось датчика.
сам обеспечивает при небольшом
таком случае
24
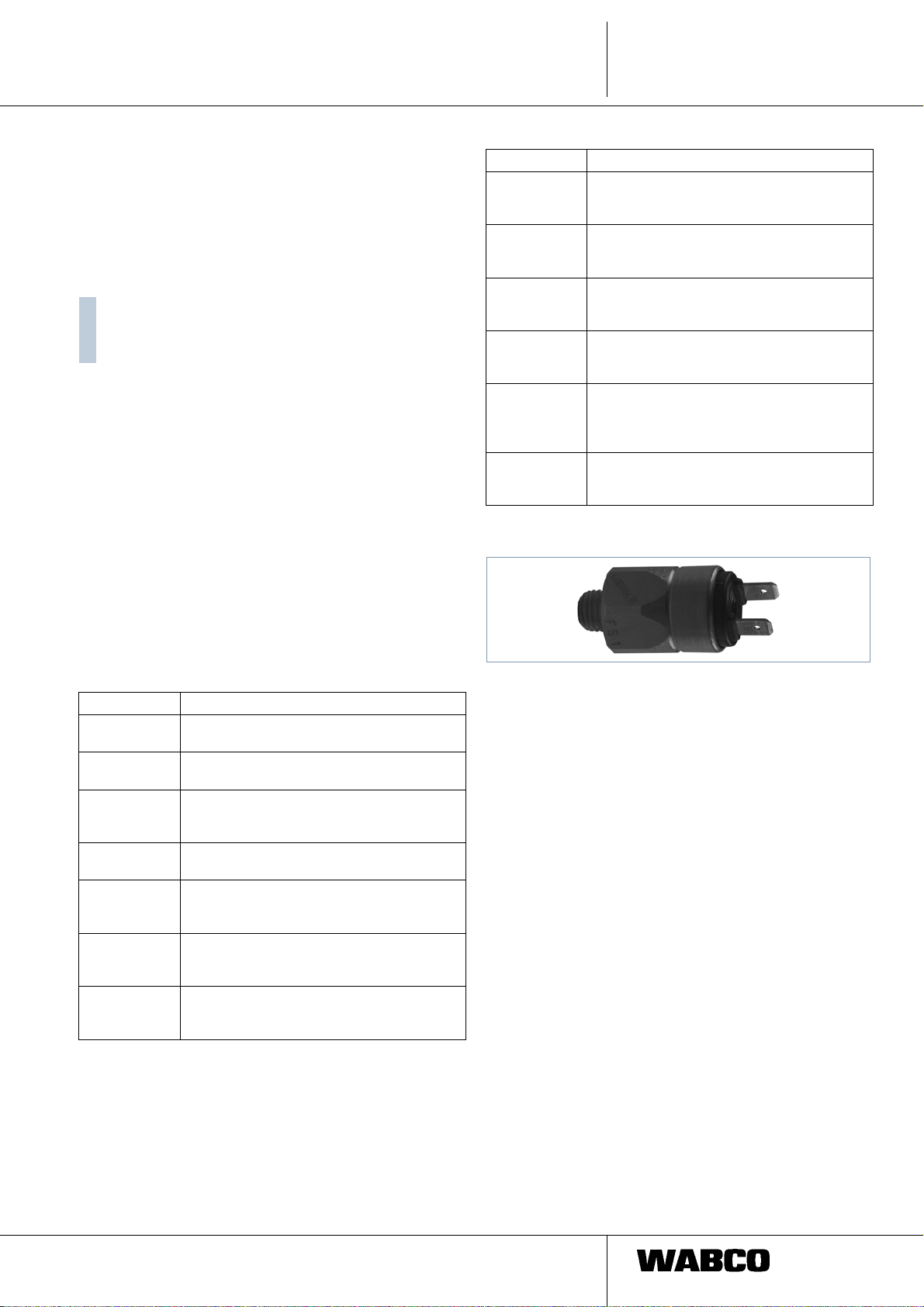
Компоненты
6.ECAS
В качестве вспомогательного средства предусмотрены 2
выступа (↑ рис. 16) на сенсорной волне, которые
выполняют функцию направления рычага.
Они расположены под прямым углом в направлении
движения сердечника направо (как на рис.) или налево для
оптимального использования диапазона измерений
датчика хода.
Обратите внимание на то, что датчик хода должен
иметь полную свободу движения за
!
исполнительного диапазона, а его рычаг не должен
быть повернут.
При установке датчика хода на конструкции ТС
необходимо учитывать его реакцию в процессе подъёма и
спуска.
• Погружение цилиндрической катушки в сторону
ПОДЪЕМ повышает индукцию.
• Выдвижение цилиндрической катушки в сторону СПУСК
понижает индукцию.
Полученные при измерении значения могут отображаться
средством диагностики (ПК).
• Подъем конструкции приводит к повышению
отображаемых значений при измерении.
• Спуск конструкции приводит к уменьшению
отображаемых значений при измерении.
счёт его
Номер заказа Исполнение
441 050 100 0 Датчик угла вращения; байонет DIN 72585-A1-
2.1-Sn/K2; без температурной компенсации;
прямой рычаг; использование в DAF
441 050 101 0 Датчик угла вращения; байонет DIN 72585-A1-
2.1-Sn/K2; без температурной компенсации;
прямой рычаг; использование в SCANIA Truck
441 050 120 0 Датчик угла вращения; байонет DIN 72585-A1-
2.1-Sn/K2; без температурной компенсации;
крестообразный рычаг; использование в IVECO
441 050 121 0 Датчик угла вращения; байонет DIN 72585-A1-
2.1-Sn/K2; без температурной компенсации;
крестообразный рычаг; использование в DC
441 050 122 0 Датчик угла вращения; байонет DIN 72585-A1-
2.1-Sn/K2; без температурной компенсации;
крестообразный рычаг; использование в
SCANIA Bus
441 050 123 0 Датчик угла вращения; байонет DIN 72585-A1-
2.1-Sn/K2; без температурной компенсации;
крестообразный рычаг; использование в MAN
6.1.2 Манометрический переключатель
Датчик хода в случае необходимости сервисного
обслуживания
Номер заказа Исполнение
441 050 006 0 Байонет; без рычага; использование в MAN,
DAF и замена
441 050 007 0 тонкий корпус; резьба M24x1; использование в
Renault (автомобиль);
441 050 008 0 M24x1; без рычага ; использование в DC, DAF,
MAN, RVI, Scania, другие производители
(замена для 441 050 003 0)
441 050 010 0 M27x1; без рычага; использование в RVI,
Neoplan и в прицепах
441 050 011 0 Байонет DIN 72585-A1-2.1-Sn/K2; без рычага;
использование в MAN, IVECO, Scania, DAF и в
прицепах
441 050 012 0 Байонет DIN 72585-A1-2.1-Sn/K2; без рычага;
без температурной компенсации;
использование в MAN TGA, DC Actros und Atego
441 050 013 0 как 441 050 012 0, однако с цветной кодировкой
на соединении электропитания; использование
в RVI
Рис. 19 Переключатель давления 441 014 … 0
В системах, работающих по принципу выравнивания
давления, использование простых функций ECAS (таких,
как управление подъёмной осью, вспомогательная сила
при трогании ТС) происходит с помощью переключателей
давления.
Два переключателя давления на движущей оси,
находящиеся в открытом состоянии, регистрируют
давление в пневмоподушках. В порожнем состоянии эти
переключатели давления включены на клемме 15
благодаря двум соответствующим пинам электроники
ECAS.
Переключатель давления (точка переключения: напр.,
11 … 11,5 т) подаёт сигнал ECU о превышении/понижении
предельно допущенной нагрузки
затем начинается управление подъёмной или ведомой
осью в процессе движения. Таким образом, исключено
динамическое влияние осевой нагрузки за счёт выбора
определённого промежутка времени (напр., 2 или более
сек.). В данный период времени необходимо изменить
положение управления для того, чтобы привести в
действие реакцию оси.
на ось. Соответственно
25
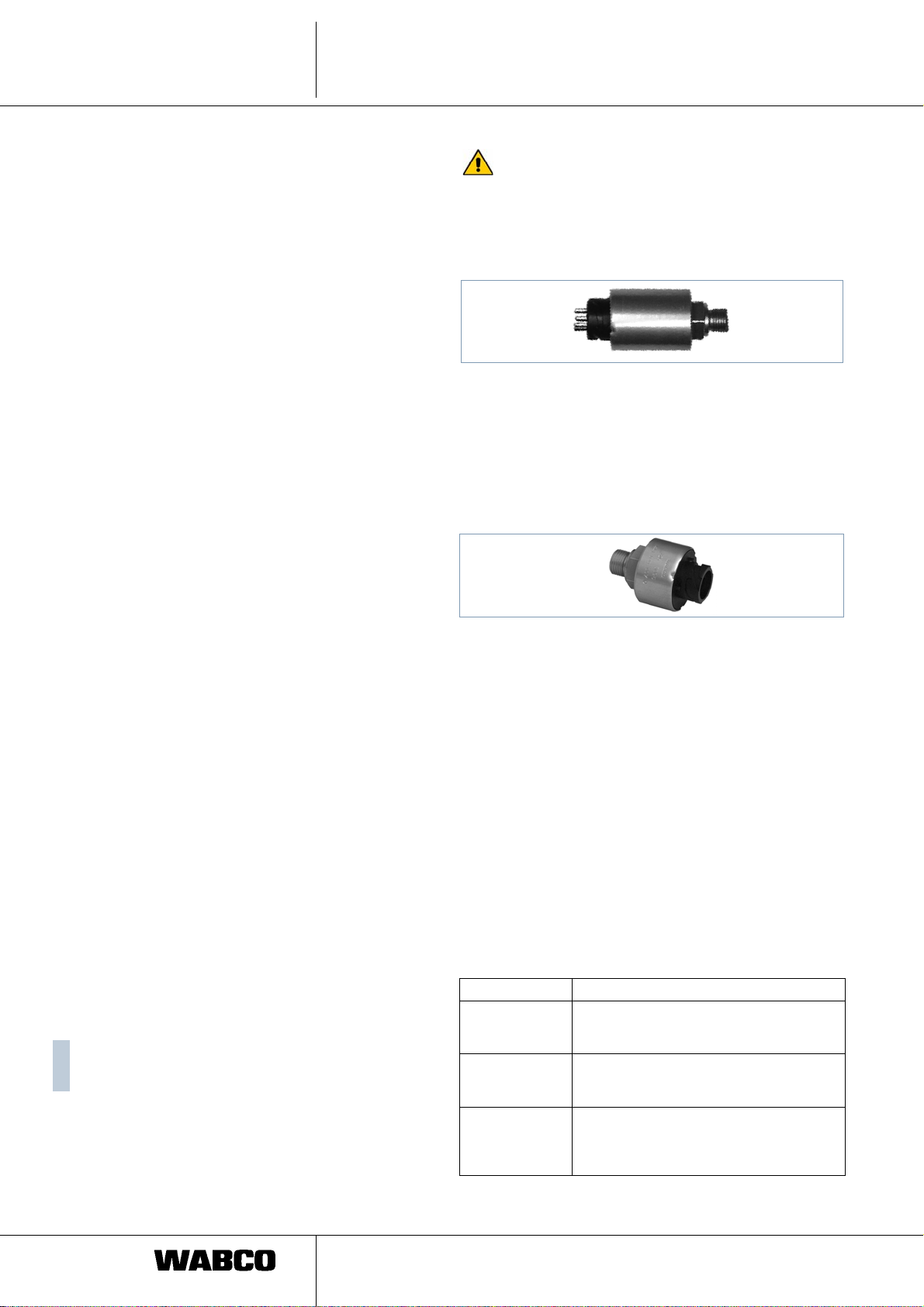
ECAS6.
Компоненты
Второй переключатель давления (пункт управления:
напр., 13t) подаёт сигнал ECU о превышении допущенной
нагрузки на ось при использовании функции
вспомогательной силы при трогании ТС. Соответственно
после этого происходит перемещение осевой нагрузки при
активированной функции "Вспомогательная сила при
трогании ТС".
Преимуществом "открытого" состояния переключателя
передач является то, что при отсутствии напряжения (а
именно , при
всегда опущена, иначе говоря, ведомая ось находится под
давлением и, таким образом, исключена возможность
перегрузки.
6.1.3 Датчик давления
Для использования дополнительных функций ECAS
необходимо применение датчиков давления. В простом
случае датчик давления регистрирует давление в
сильфоне движущей оси.
Данный случай находит использование в процессе
решения простых регулярных задач
• управление подъемной осью,
• управление увеличением сцепления колес или
• в процессе компенсации продавливания шин
При наличии более сложных процессов управления, как
например , регулирование соотношения давления, на
каждую пневмоподушку (также и на подъёмной оси)
устанавливается датчик.
Измерение давления производится тензорезистором. При
подаче давления происходит изменение сопротивления на
мосту Уитстона, за счет
пропорциональное давлению. Датчик давления находится
под напряжением от 8…32В в зависимости от
конструкции. Через сигнальный провод (кабель датчика)
пропорциональное давлению напряжение выдается в
электронную часть.
выключенном зажигании) подъемная ось
.
чего создается напряжение,
Не устанавливайте датчик давления в
пневматический трубопровод между сильфоном и
магнитным клапаном ECAS. Иначе в связи с
большой динамикой при протекающих процессах
подачи воздуха и прокачки возможны погрешности в
измерении.
Рис. 20 Датчик давления 441 040 003 0
Датчик давления с байонетным соединением Schlemmer
для сенсорного кабеля. Минимальные цифровые
интервалы в процессе измерения составляют 1/20 бар. 1 1
бар соответствует 20-ти измеряемым величинам. Данный
вариант датчика давления всё чаще заменяется
вариантом, описанным ниже.
.
Рис. 21 Датчик давления 441 040 0 0
Датчик давления с байонетным соединением по DIN для
сенсорного кабеля. Минимальные цифровые интервалы
при измерении равны 1/16 бар. 1
измеренным величинам. Данный вариант датчиков
давления всё чаще находит применение в системах ТС
(также и в EBS) в связи с использованием соединений по
DIN и заменяет, таким образом, выше названный вариант.
Данное касается также и байонетного соединения
Schlemmer, которое заменяет датчик давления.
бар соответствует 16
При отсутствии давления (смещение датчика давления)
выходной сигнал составляет 0,5 В.
Передаваемое напряжение предельно измеряемых
значений при давлении 10 бар, в зависимости от
конструкции датчика
(конструкция датчика давления с байонетным
подсоединением согласно DIN 72 585-A1-3.1 - иными
словами: байонетный тип по DIN) или 5,5 В (конструкция
датчика давления с байонетом Schlemmer - более старый
вариант).
Максимально допустимое давление 16 бар,
касающееся датчиков давления не должно быть
!
превышено.
Подача измеренных значений производится в цифровом
виде, т. е. ступенчато. Полученные при измерении
значения
Датчик давления находится на отдельном сильфонном
соединении пневмоподушки или на тройнике ввода
сильфона.
могут отображаться средством диагностики (ПК).
давления, составляет 4,5 В
26
Замена обоих вариантов датчиков давления не может быть
проведена одновременно. При возникновении
необходимости данной замены нужно изменить
ответственные за регулировку давления параметры в
электронике.
Датчик давления в случае необходимости сервисного
обслуживания
Номер заказа Исполнение
441 040 003 0 Пневм. соединение M16x1,5; электр.
байонетное соединение; 500мВ/бар; замена
только DAF и прицеп
441 040 004 0 Пневм. соединение M16x1,5; электр.
соединение M 27x1; 500мВ/бар; замена
только DAF
441 040 005 0 Пневм. соединение M16x1,5; прокладка с
уплотнительным кольцом; электр.
соединение M 27x1; 500мВ/бар; замена
только RVI
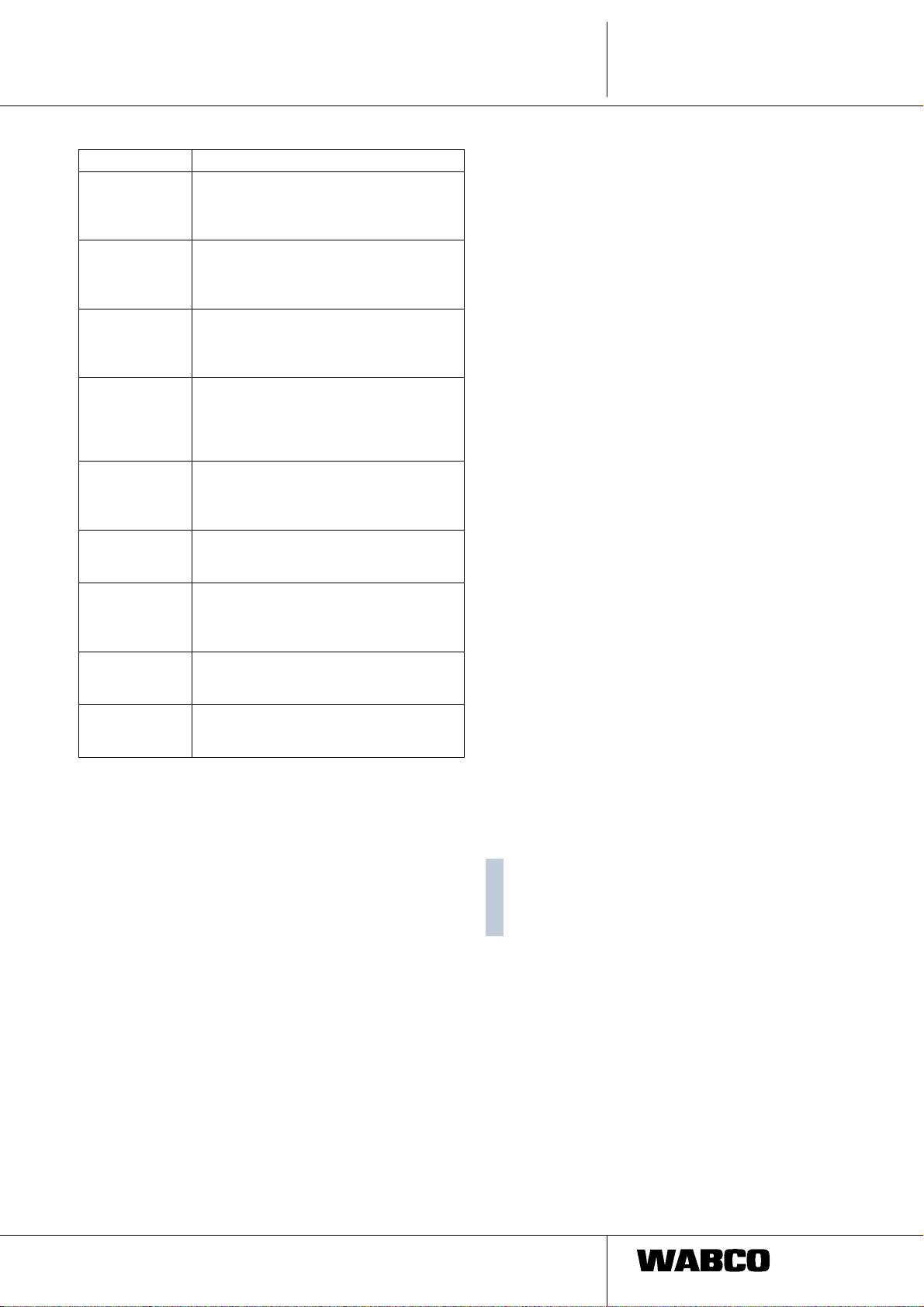
Компоненты
ECAS 6.
Номер заказа Исполнение
441 040 013 0 Пневм. соединение M16x1,5; байонет по
DIN 72585-A1-3.1-Sn/K2; 400мВ/бар; Ratioисполнение; использование в DC, MAN, DAF,
IVECO и в прицепах; замена для модиф. 007
441 040 014 0 Пневм. соединение M16x1,5; байонет по
DIN 72585-A1-3.1-Sn/K2; 333мВ/
бар;диапазон измерений 12 бар;
использование в IVECO-S2000
441 040 015 0 Пневм. соединение M16x1,5; прокладка с
441 040 017 0 Пневм. соединение M16x1,5; байонет
441 040 018 0 Пневм. соединение M16x1,5; прокладка с
441 044 001 0 Пневм. соединение M16x1,5; байонет по
441 044 002 0 Пневм. соединение M16x1,5; прокладка с
441 044 003 0 Пневм. соединение M16x1,5; байонет по
441 044 105 0 Пневм. соединение M16x1,5; байонет по
6.2 Электронный блок (ECU) 446 055 ... 0
ECU - это основа системы. Обеспечение напряжением
электроники ECAS происходит за счёт клеммы 15
(зажигание). Существует возможность дополнительного
снабжения через клемму 30 (длительный плюс). Здесь
важно, какая система используется в данный момент.
В электронной части ECAS координируется регулировка
системы пневматического подрессоривания. Это означает:
• Поступающие от датчика хода сигналы постоянно
контролируются, преобразуются в понятные
компьютера сигналы (counts или Timer Ticks) и
анализируются.
• В системах, обладающих встроенными
переключателями давления, управление подъёмной
осью зависит от положения данного переключателя
давления.
• Если датчик давления является часть конфигурации
системы, то такие поступающие сигналы постоянно
контролируются, преобразуются в единицы counts и
оцениваются.
уплотнительным кольцом Raufoss; байонет
по DIN 72585-A1-3.1-Sn/K2; 400мВ/бар;
использование IVECO (с декабря 2000)
DIN 72585-A1-3.1-Sn/K2; 400мВ/бар; с
фильтром Gore; использование Scania (с
января 2001) будет заменен номером
441 044 105 0
уплотнительным кольцом; байонет по DIN
72585-A1-3.1-Sn/K2; 400мВ/бар;
использование RVI
DIN 72585-A1-3.1-Sn/K2; 400мВ/бар;
использование DAF, DC, MAN
уплотнительным кольцом Raufoss; байонет
по DIN 72585-A1-3.1-Sn/K2; 400мВ/бар;
использование IVECO
DIN 72585-A1-3.1-Sn/K2; 333мВ/бар;
использование Scania Bus
DIN 72585-A1-3.1-Sn/K2; 400мВ/бар;
использование Scania
для
• В соответствии с настройкой параметров или составом
системы сигналы выдаются
ECAS для "отрегулирования" заданных значений в
пневмоподвесках.
• Параметризованные, откалиброванные и в
дальнейшем установленные данные (например
уровень согласно данным памяти) сохраняются и
подвергаются управлению.
• Поступающие сообщения регистрируются,
сохраняются и при необходимости указываются с
помощью соответствющей сигнальной лампочки,
находящейся на приборной панели. Они могут быть
считаны при помощи соответствующей
• В электронике сохранены параметры, которые
определяют принцип действия конкретной системы.
Изготовитель ТС производит установку параметров при
первой эксплуатации; изменение данных параметров
возможно только при согласии изготовителя и по
окончанию соответствующего обучения.
• Обеспечивается обмен данными с блоком управления
и выполняются различные функции контроля.
Микропроцессор выполняет одну программу в цикле
секунды (25 мс), чтобы обеспечить быструю реакцию при
регулировании в случае изменений фактического
значения. При выполнении программы выполняются все
упомянутые задания. Эта программа жестко записана в
постоянной памяти (ROM) и не может быть изменена.
Однако она использует данные (параметры), хранящиеся в
оперативной (произвольно изменяемой) памяти. Эти
параметры влияют на вычислительные операции и
самым на то, как реагирует механизм регулировки блока
ECU. При их помощи программе передаются данные
системы и преднастройки, касающиеся автомобиля и
функций.
Электроника может находиться как в, так и на различных
частях ТС. Подавляющее большинство изготовителей ТС
предпочитают расположение электроники в области
бардачка, некоторые находятся под сиденьем (DAF) или в
со стороны водителя (SCANIA).
двери
Для провождения диагностики, особенно в более
старых моделях, должно быть известно
!
месторасположение электроники для ввождения
дианостического интерфейса между ей и штепселем
соединения (25- или 35-контактный).
В более современных системах электронику можно
задействовать через центральный диагностический
интерфейс.
Большинство различных поколений ECAS, а также система
пневмоподвесок и степени рационализации (Ratio)
являются причиной
области грузовых автомобилей.
Ниже указано распределение электронных систем ECAS:
- ECAS 1-го поколения без датчика давления
- ECAS 1-го поколения с датчиком давления
- ECAS 4x2 A
многочисленности электроник ECAS в
на магнитные клапаны
программы.
доли
тем
27

ECAS6.
Компоненты
- ECAS 6x2 A
- ECAS 4x2 (Ratio)
- ECAS 4x2 (Ratio) KWP 2000
- ECAS 6x2 (Ratio)
- ECAS 6x2 DV (= регулирование соотношения
давления)
- ECAS 4x2 / 6x2 CAN 1
- ECAS 4x2 / 6x2 CAN 2
- ECAS + ESAC (с и без CAN)
6.2.1 ECAS 1-го поколения без датчика давления
С помощью системы ECU, которая представляет собой
первое поколение ECAS, происходит регулирование
транспортными средствами (4x2 или 6x2) с частичной или
полностью пневматической подвеской. Функцией
подьёмной или ведомой оси в ТС 6х2 можно управлять за
счёт переключателя давления.
Характерно как и для электронных систем без датчика
давления.
В этой группе существуют следующие вариации:
- 446 055 005 0 (DAF, RVI)
- 446 055 009 0 (DAF)
Диагностика данной электроники может быть проведена с
помощью диагностической карточки WABCO 446 300 532 0
(8. диагноз).
Только в качестве информации
прекращено с начала 2004 года.
!
6.2.3 ECAS 4x2 A
Данная система ECU специально предназначена для ТС
4x2. Она представляет собой дальнейшее развитие в
отличие от поколения ECU без датчика давления. Система
ECU стала более компактной, она предназначена для 25-
контактного штепселя. С помощью данной ECU происходит
регулировка ТС 4x2 с частичной или полностью
пневматической подвеской.
Для электронных систем данного вида
алюминиевый корпус, в заднюю часть которого
вставляется и загибается платина с 25-контактной
штепсельной панелью.
, изготовление
типичен
Рис. 22 ECU 446 055 003 0
Для электронных систем
алюминиевый корпус, в заднюю часть которого
вставляется и загибается платина с 35-контактной
штепсельной панелью.
Для этой группы характерна только модификация 003 в
случае возникновения необходимости в запчастях (в
скобках изготовитель ТС, использующий данную систему
ECU):
- 446 055 003 0 (DAF, Leyland DAF)
Диагностика данной электроники может быть проведена с
помощью диагностической карточки WABCO 446 300 524 0
(8. диагноз).
6.2.2 ECAS 1-го
Здесь речь идёт об электронных системах, которые также
преданазначены для подсоединения 35-контактного
штепселя. С помощью данной ECU происходит
регулировка ТС 6x2 с частичной или полностью
пневматической подвеской. Каждая пневмоподушка
ведущей, подъёмной или ведомой оси, а также подъёмный
сильфон обладают датчиком давления (касательно данной
модели). Системе ECU непрерывно сообщаются данные о
давлении, касающиеся каждого сильфона. Таким образом,
управление подъёмной или ведомой осью реализуется как
регулирование силы тяги (↑ 3. Функции системы).
данного вида типичен
поколения с датчиком давления
Рис. 23 ECAS 4x2A
В этой группе существуют следующие вариации:
- 446 055 020 0 (RVI, Scania)
- 446 055 021 0 (MAN)
- 446 055 022 0 (DaimlerChrysler)
- 446 055 023 0 (DaimlerChrysler)
- 446 055 024 0 (DaimlerChrysler)
- 446 055 025 0 (MAN)
- 446 055 026 0 (MAN)
- 446 055 027 0 (RVI, IVECO)
- 446 055 028 0 (Scania)
- 446 055 029 0 (DAF)
- 446 055 030 0 (Nissan Diesel)
Диагностика данной электроники может быть проведена с
помощью диагностической карточки WABCO
446 300 520 0 и компьютерной диагностики
446 301 529 0 ( 8. Диагностика).
28
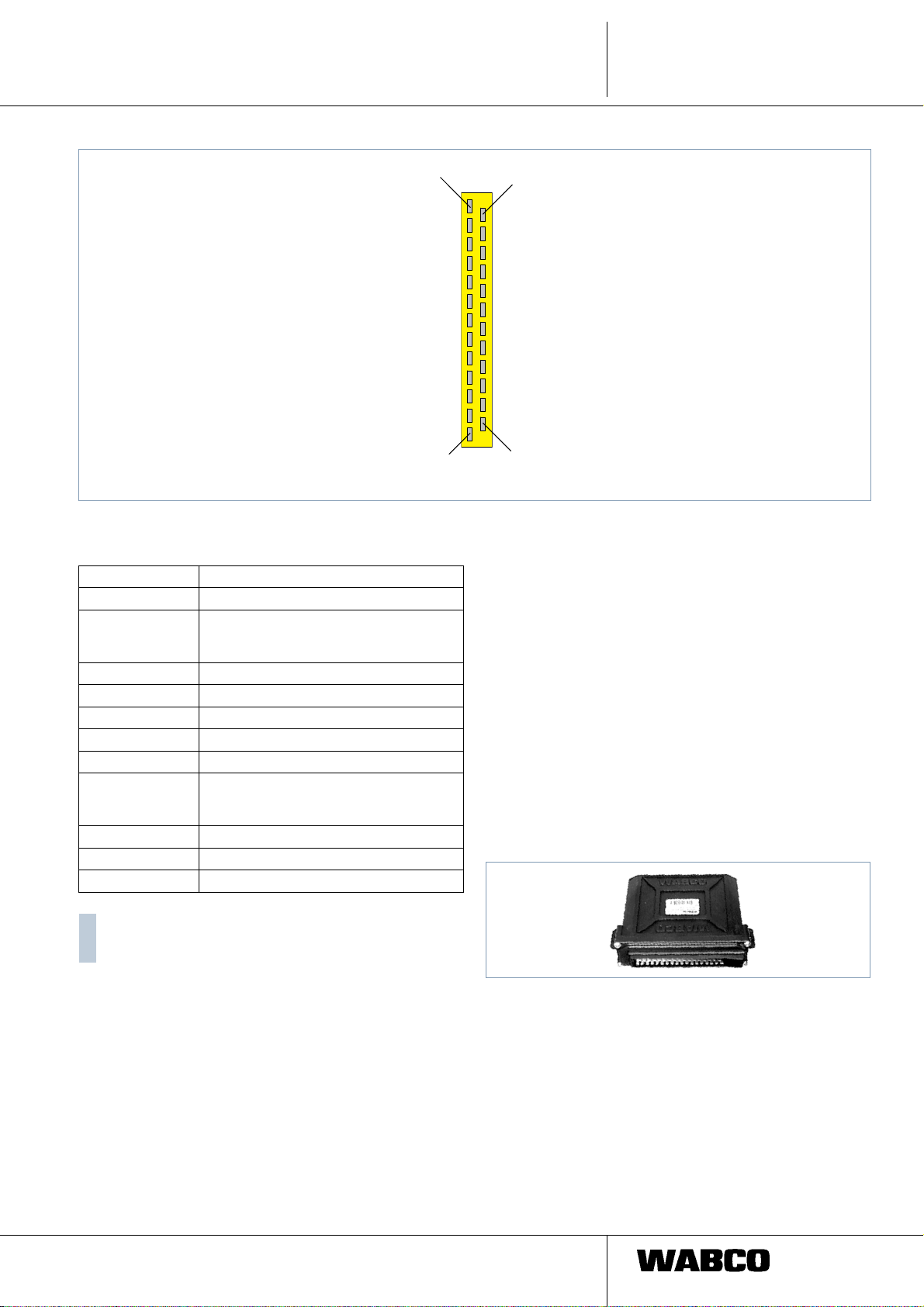
Компоненты
6.ECAS
1
1 клемма 15 (предохранитель 5A)
2 CLOCK-Ltg. RCU
3 Диагностика L-провода
4 Диагностика K-провода
5
6 Датчик хода спереди
7 Датчик хода сзади с правой стороны
8 2-ход. 2-поз. клапан ЗО слева
9
10 2-ход. 2-поз. клапан ПО
11 DATA-Ltg. RCU
или
ТС переключатель "Поднятие"
12 C3/D3-сигнал (спидометр)
13 Аварийная лампа макс. 2В
13
Рис. 24 расположение контактов 25-контактной ECU для ТС 4x2
ECU 446 055 … 0 в случае необходимости
сервисного обслуживания
Номер заказа Исполнение
446 055 020 0 заменен номером 446 055 027
446 055 021 0 в зависимости от системного оснащения и
изготовителя ТС заменен номером 446 055
028; 446 055 026 и 446 055 025
446 055 022 0 заменен номером 446 055 024
446 055 023 0 заменен номером 446 055 024
446 055 024 0 Последователь: 446 055 046
446 055 025 0 заменен номером 446 055 301
446 055 026 0 заменен номером 446 055 302
446 055 027 0 заменен номером 446 055 307; будет
заменен (только для RVI!) номером 446 055
303.
446 055 028 0 заменен номером 446 055 025
446 055 029 0 Последователь: 446 055 311
446 055 030 0 Последователь: 446 055 407
14
14 клемма 31 / RCU
15
16
17
18 Датчик хода масса
19 Датчик хода сзади с левой стороны
20 2-ход. 2-поз. клапан ЗО справа
21 клапан-вентилятор
22 Электромагнитный клапан функция
РТС
23 НУ I/II-переключатель (для RCU)
или
ТС переключатель "Опускание"
24 Переключатель стоп-сигнала
25
системы данного типа для ТС 4x2 и 6x2 во избежании
дополнительных расходов на детали.
Необычным в ТС, обладающих электронной системой
данного типа, является то, что они оснащены множеством
различных переключателей, которые, в свою очередь,
подключены к ECU
управления. Так, например, управление подъёмной осью
происходит в основном за счет переключателя давления.
Переключатель давления для автоматического
управления подъемной осью и переключатель давления
для активации функции "Вспомогательная сила при
трогании ТС" на ведущей оси; благодаря этому
осуществляется управление подьёмной или ведомой осью
в процессе уравнивания давления.
электронных систем данного вида типичен
Для
пластмассовый корпус, в переднюю часть которого
вставляется и соединяется крестообразными болтами
платин
25 Сигнальная лампа уровень
"вспомогательная сила при трогании
ТС"
рядом с пультом системного
а с 35-контактной штепсельной панелью.
При замене ECU в процессе диагностики нужно
учитывать, что может возникнуть необходимость
!
использования другой диагностической карточки.
6.2.4 ECAS 6x2 A
Что касается этого поколения, то здесь речь идет о
переработке электронных систем с помощью 35контактного штепселя соединения. С помощью данной
ECU происходит регулировка ТС 6x2 с частичной или
полностью пневматической подвеской. Наряду с этим
возможна, конечно, также
частичной или полностью пневматической подвеской.
Таким образом, изготовители ТС используют электронные
и регулировка ТС 4х2 с
Рис. 25 ECAS 6x2A
В этой группе существуют следующие вариации:
- 446 055 040 0 (DaimlerChrysler)
- 446 055 041 0 (MAN, Scania)
- 446 055 042 0 (DaimlerChrysler)
- 446 055 044 0 (DAF, RVI)
- 446 055 046 0 (DaimlerChrysler)
- 446 055 047 0 (MAN)
- 446 055 048 0 (Scania)
29
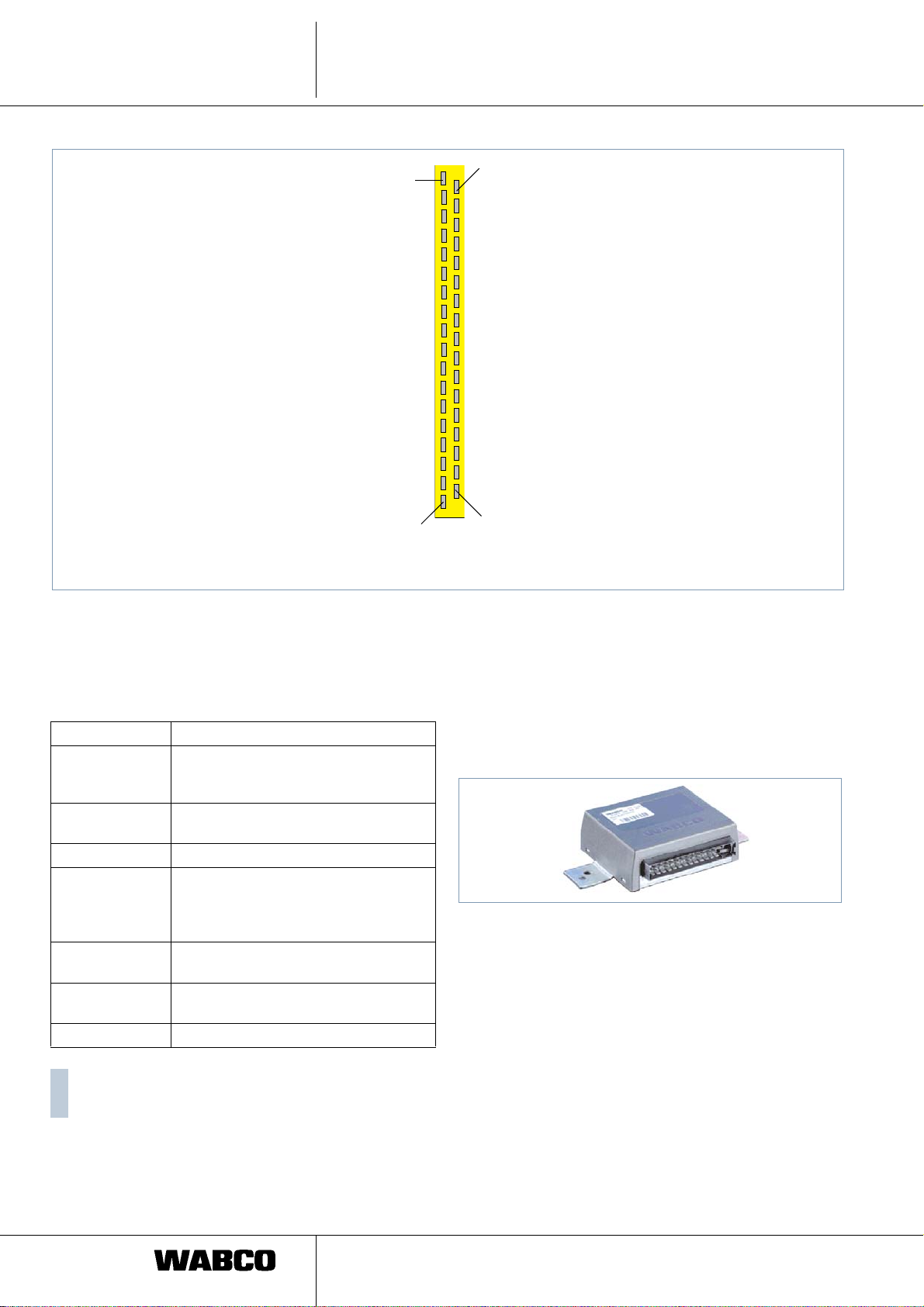
6. ECAS
1 клемма 30 (предохранитель 8A)
2 Диагностика L-провода
3
4 Диагностика K-провода
5 Переключатель давления ЗО 11т сигнал
Датчик давления пневмоподушка справа
6 Переключатель давления ЗО 13т сигнал
Датчик давления пневмоподушка слева
7 Переключатель стоп-сигнала
8 Датчик хода сзади с правой стороны
9 клемма 15 / RCU
10
11 2-ход. 2-поз. клапан ПО
12 Под.ось-спуск / вед.ось-разгрузка
13 2-ход. 2-поз. клапан ЗО слева
14 отдельный вентиляторный клапан для под.оси
15 клапан-вентилятор
16 Кодировка PIN вспомогательная сила при
трогании ТС
17 переключатель вспомогательной силы при
трогании ТС
18 Вспомогательная сила при трогании ТС /
позиционная лампа под.оси
Компоненты
1
18
19
19 Кодировка PIN вспомогательная сила
при трогании ТС
20 CLOCK-Ltg. RCU
21 DATA-Ltg. RCU
22 C3/D3-сигнал (спидометр)
23 НУ I/II24 Переключатель подъемной оси/
переключатель порожнего пробега
25 Датчик хода сзади с левой стороны
26 Датчик хода спереди
27 Датчик хода масса + Кл. 31
28
29 Электромагнитный клапан функция РТС
30 Под.ось-поднятие/ вед.ось-разгрузка
31 2-ход. 2-поз. клапан ЗО справа
32 Массовое соединение - ДАТЧИК ХОДА и
33 Аварийная лампа макс. 10В
34 Сигнальная лампа уровень
"вспомогательная сила при трогании ТС"
35 Позиционная лампа под.оси
35
(отд. клапан-вентилятор
переключатель (с лампой)
ДАТЧИК ДАВЛЕНИЯ
для под.оси)
Рис. 26 расположение контактов 35-контактной ECU для ТС 6x2
Диагностика данной электроники может быть проведена с
помощью диагностической карточки WABCO 446 300 526 0
и компьютерной диагностики 446 301 529 0
(8. Диагностика).
ECU 446 055 … 0 в случае необходимости сервисного
обслуживания
Номер заказа Исполнение
446 055 040 0 заменен номером 446 055 042, с
другой стороны будет заменен
номером 446 055 046.
446 055 041 0 заменен номером 446 055 047 (MAN)
заменен номером 446 055 048 (Scania)
446 055 042 0 заменен номером 446 055 046
446 055 044 0 в зависимости от системного
оснащения и изготовителя ТС будет
заменен на 446 055 403 (RVI) или
446 055 405 (DAF).
446 055 046 0 35-контактный 2-3 датчика хода,
датчик давления
446 055 047 0 заменен номером 446 055 404 /
409 (MAN)
446 055 048 0
При замене ECU в процессе диагностики нужно
учитывать, что может возникнуть необходимость
!
использования другой диагностической карточки.
6.2.5 ECAS 4x2 Ratio
Данная система приспособлена к потребностям ТС 4х2 и
превосходит в развитии поколение 4x2 A. С помощью
данной ECU происходит
или полностью пневматической подвеской.
Установление контактов PIN соответствует указанному
пинингу системы ECAS-ECU 4x2 A (↑ рис. 24).
Для данной ECU характерно, что платина с 25-контактной
штепсельной панелью находится на алюминиевой
пластине. Верхняя часть корпуса состоит из пластмассы и
соединена с нижней частью.
Рис. 27 ECAS 4x2 Ratio
В этой группе существуют следующие вариации:
- 446 055 301 0 (MAN)
- 446 055 302 0 (MAN)
- 446 055 307 0 (IVECO)
Диагностика данной
помощью диагностической карточки WABCO 446 300 881 0
( 8. диагноз).
6.2.6 ECAS 4x2 (Ratio) KWP 2000
Является усовершенствованием по сравнению с
поколением 4x2 A. Система ECU и в дальнейшем
продолжает быть предназначена для соединения 25контактного штепселя. С помощью данной ECU происходит
регулировка ТС 4x2 с частичной или полностью
пневматической подвеской. Она очень схожа с ECAS-ECU
регулировка ТС 4x2 с частичной
электроники может быть проведена с
30

Компоненты
ECAS
6.
4x2 Ratio, значительным отличием является диагностика,
которая проводится по принципу ”Key Word Protocol 2000“
(KWP 2000). Дальнейшим отличием является то, что здесь
датчики хода могут быть подключены без температурной
компенсации.
Установление контактов (PIN) соответствует указанному
пинингу системы ECAS-ECU 4x2 Ratio (↑ рис. 24).
Существуют следующие незначительные отличия по
сравнению с 4x2 Ratio:
– PIN 5 может быть дополнительно подключен к
отдельному аккумулятору с помощью плюсовой
клеммы (прежде
– PIN 22 не используется (раньше исполнял функцию
безопасности РТС - типичная функция MAN).
– PIN 3- это лампа, активирующая мигающий световой
сигнал для определения дефектов и для удаления
памяти ошибок без Diagnostic Controller (прежде: Lпровод, который больше не используется KWP 2000).
Внешне эта электроника схожа с ECU для ECAS 4x2 (Ratio).
В этой группе существует следующая вариация:
- 446 055 303 0 (RVI)
- 446 055 304 0 (RVI)
- 446 055 311 0 (DAF)
- 446 055 312 0 (Leyland)
Диагностика данной электроники
помощью диагностической карточки WABCO 446 300 880 0
и компьютерной диагностики 446 301 524 0
(8. Диагностика).
не использовался).
может быть проведена с
все пневмоподушки задействованной подьемной или
ведомой оси находятся под одним и тем же давлением).
Установление контактов (PIN) соответствует указанному
пинингу системы
следующие незначительные отличия по сравнению с 6x2
A:
– PIN 3 обладает кодировкой подьемной/ведомой оси
(прежде не обладал)
– PIN 14 не используется (раньше обладал соединением
для отдельного клапана-вентилятора подьемной оси,
т.к. данная функция исполняется электромагнитным
клапаном ECAS).
– PIN 32 не используется (прежде был массовым
соединением для датчика хода или давления).
Для электронных систем данного вида типичен
пластмассовый корпус, в переднюю часть которого
вставляется и соединяется крестообразными болтами
платина с 35-контактной штепсельной панелью.
В этой группе существуют следующие вариации:
- 446 055 403 0 (RVI)
- 446 055 404 0 (MAN)
- 446 055 405 0 (DAF)
- 446 055 409 0 (MAN)
Диагностика вариантов 403/405 может быть проведена с
помощью диагностической карточки WABCO 446 300 526 0
и компьютерной диагностики 446 301 529 0, вариант
404/409 - с помощью диагностической карточки WABCO
446 300 881 0 ( 8. Диагноз).
ECAS-ECU 6x2 A (↑ рис. 26). Существуют
ECU 446 055 … 0 в случае необходимости сервисного
обслуживания
Номер заказа Исполнение
446 055 303 0 заменен номером 446 055 027 (только
для RVI) с другой стороны будет
заменен номером 446 055 311
446 055 304 0 не обладает закрепляющей корпус
накладкой; будет заменен номером
446 055 312
446 055 311 0 Последователь 446 055 029 (DAF)
446 055 312 0 25-контактный, 1-3 датчика хода
6.2.7 ECAS 6x2 Ratio
В данном поколении ECU речь идет о переработке
электронных систем, которые предназначены для
соединения 35-контактного штепселя.
ТС, управляемые с помощью этой ECU, соответствуют тем
ТС, которые были уже упомянуты в ECAS 6x2 A.
Сенсоризирование осевой нагрузки осуществляется
только
давления (MAN) или датчиков давления (RVI, DAF) в
зависимости от производителя ТС. Управление подъёмной
или ведомой осью проводится, таким образом, как
регулирование силы тяги в ECAS 6x2 A (это означает, что
на движущей оси с помощью переключателя
6.2.8 ECAS 6x2 DV
В этом поколении ECU речь идет о новой разработке. В
соответствии с системным оснащением благодаря этой
ECU можно проводить регулирование соотношение
давления или беспрерывное регулирование силы тяги ( ↑3.
Функции системы). С помощью ECU происходит
регулирование транспортными средствами 6x2 с
частичной или полностью пневматической подвеской,
обладающими подъемной или ведомой осью.
Необычным в ТС с данной ECU
множеством переключателей, которые подключены к ECU
паралелльно с блоком управления. Сенсоризирование
осевой нагрузки происходит с помощью датчиков
давления, находящихся на пневмоподушках ведущей и
подъемной оси. Существуют системы, в которых
происходит сенсоризирование даже подъемного
сильфона.
Распределение PIN в электронике отличается от такого же
распределения для других ТС 6x2 и будет еще раз
представлено
Для электронных систем данного вида типичен
пластмассовый корпус, в переднюю часть которого
вставляется и соединяется крестообразными болтами
платина с 35-контактной штепсельной панелью.
(рис. 28).
является обладание
31

6. ECAS
Компоненты
1 клемма 30 (предохранитель 8A)
2 Диагностика L-провода
3 ПО переключатель "Поднятие/Спуск"
4 Диагностика K-провода
5 Сигнал датчик давления
Под.ось - пневмоподушка справа
6 Сигнал датчик давления
Под.ось - пневмоподушка слева
7 Сигнал датчик давления
ЗО - пневмоподушка слева
8 Датчик хода сзади с правой стороны
9 клемма 15 / RCU
10 DV-/переключатель силы тяги
11 2-ход. 2-поз. клапан ПО
12 2-ход. 2-поз. клапан под. ось пневмоподушка слева
13 2-ход. 2-поз. клапан ЗО слева
14 2-ход. 2-поз. подъемный сильфон
15 клапан-вентилятор
16 Переключатель стоп-сигнала
17 переключатель вспомогательной силы при
трогании ТС
18 Вспомогательная сила при трогании
ТС - лампа
Рис. 28 расположение PIN 35-контактной ECU для ТС 6x2 с регулированием соотношения давления (6x2 DV)
1
18
19
19 НУ I/II-переключатель
20 CLOCK-Ltg. RCU
21 DATA-Ltg. RCU
22 C3/D3-сигнал (спидометр)
23 Сигнал датчик давления ЗО пневмоподушка
справа
24 Деблокирование вспомогательной силы
при трогании ТС или
Сигнал датчик давления подъемный сильфон
25 Датчик хода сзади с левой стороны
26 Датчик хода спереди
27 Датчик хода масса + Кл. 31
28 Переключение осевой нагрузки
29 Электромагнитный клапан функция РТС
30 2-ход. 2-поз. клапан под. ось -
пневмоподушка справа
31 2-ход. 2-поз. клапан ЗО справа
32
33 аварийная лампа
34 Сигнальная лампа уровень
"вспомогательная сила при трогании ТС"
35
35 Под.ось-позиционная лампа
ECU 446 055 … 0 в случае необходимости сервисного
обслуживания
Рис 29 ECAS 6x2 DV
В этой группе существуют следующие вариации:
- 446 055 043 0 (Scania)
- 446 055 049 0 (IVECO)
- 446 055 401 0 (Scania)
- 446 055 402 0 (IVECO)
- 446 055 406 0 (Scania)
- 446 055 407 0 (Nissan Diesel)
- 446 055 408 0 (Mitsubishi)
Диагностика данной электроники может быть проведена с
помощью диагностической карточки WABCO 446 300 623 0
и компьютерной диагностики 446 301 529 0 (8.
Диагностика).
В случае необходимости сервисного обслуживания может
возникнуть проблема, что та или иная система ECU не
доступна, т.к. она была заменена более лучшим
вариантом.
Номер заказа Исполнение
446 055 043 0 будет заменен номером 446 055 401
446 055 049 0 будет заменен номером 446 055 402
446 055 401 0 заменяет 446 055 043, с другой
стороны будет заменен номером 446
055 406
446 055 402 0 35-контактный, 2-3 датчика хода, макс.
5 датчика давления
446 055 406 0 35-контактный, 1-2 датчика хода, макс.
3 датчика давления
446 055 407 0
446 055 408 0
6.2.9 ECAS 4x2/6x2 24В CAN 1
В этом поколении ECU речь идет о новейшем развитии в
области электроники, предназначенном для ТС с CAN-Bus.
Электроника ECAS использует систему Bus и сообщает
полученную информацию комплексу электронных систем
ТС.
Полученная из других электронных систем ТС информация
(напр., скорость, стоп-сигнал или давление в сильфоне/
осевая нагрузка - только в MAN) используется в процессе
управления.
Диагностика данных электроник проводится с помощью Кпровода, относящегося к ECU (MAN) или с помощью
центрального К-провода, хотя ECAS-ECU обладает только
одним интерфейсом CAN (DaimlerChrysler).
32

Компоненты
ECAS
6.
С помощью данной ECU происходит регулировка ТС 6x2 с
частичной или полностью пневматической подвеской.
Наряду с этим возможна, конечно, также и регулировка ТС
4х2 с частичной или полностью пневматической подвеской.
Количество и разработка переключателей, которые могут
быть подключены к ECU, понижается; здесь допустимы
только кнопки. Постоянная кодировка всевозможных
функций, напр., кодировка вспомогательной силы
при
трогании ТС с помощью распределения PIN больше не
планируется. Вход использователя в систему возможен, в
основном, с помощью блока управления.
Сенсоризация осевой нагрузки происходит по-разному.
Информация об осевой нагрузке может быть
предоставлена электронной системе благодаря CAN-Bus
X1
(Кодировка AC)
7
4
1
5
2
6
3
10
13
8
11
14
9
12
15
или к данной электронике могут быть подсоединены
датчики давления, информация о сильфонном давлении
которых сообщается
электронным системам ТС. Таким
образом, передняя ось может быть обеспечена датчиками
давления, что до этого было невозможно.
Пининг электронных систем полностью изменяется. См. (↑
рис. 30).
Для электронных систем данного вида типично
электрическое подсоединение с двумя 15-контактными или
с одним 15-контактным и с одним 18-контактным
компактным штепселем (в отличие от выше
упомянутой 25-
ти или 35-контактной штепсельной панели).
X2
(Кодировка BC)
7
4
1
5
2
6
3
10
13
8
11
14
9
12
15
+НА (Кл.15)
+НА (Кл.30)
Масса (Кл.31)
CAN - низк.
HF-GND CAN
CAN - выс.
Контрольная схема диагностики
Подъемная ось
подъем/спуск
Норм. уровень I/II
Помощь при трогании
БЛОК УПРАВЛЕНИЯ
- не используется -
+НА
Масса
Такт
Данные
Электропитание
Датчики давления /
Пульт ДУ
X1 X2
10
10
11
7
12
12
13
1
14
2
15
3
4
9
5
4
8
5
9
6
7
14
13
15
8
11
- не
1
используется -
2
3
6
U
U
U
ЭЛЕКТРОМАГНИТНЫЕ КЛАПАНЫ
Ведущая ось слева
Накачать
Подъем подъемной оси
Ведущая ось справа
Спуск подъемной оси
Передняя ось
Снабжение электромагнитных клапанов
ДАТЧИКИ ХОДА
Ведущая ось слева
Ведущая ось справа
Передняя ось
Сенсорная масса
ДАТЧИКИ ДАВЛЕНИЯ
Ведущая ось справа
P
Передняя ось
P
Ведущая ось слева
P
Рис. 30 расположение PIN системы ECU 24В CAN 1
33

ECAS6.
Компоненты
Платина вставлена в алюминиевый корпус со стороны
штепселя. Бросаются в глаза холодильные ламели в
задней части корпуса. Более новые корпуса сделаны из
пластмассы и обладают 15/18-контактными штекерами.
.
Рис. 31 ECAS 4x2 CAN и ECAS 6x2 CAN
В этой группе существуют следующие вариации:
- 446 170 001 0 (DaimlerChrysler)
- 446 170 002 0 (DaimlerChrysler)
- 446 170 003 0 (MAN TGA)
- 446 170 004 0 (DaimlerChrysler)
- 446 170 005 0 (DaimlerChrysler)
- 446 170 006 0 (MAN)
- 446 170 021 0 (DaimlerChrysler)
- 446 170 022 0 (DaimlerChrysler)
- 446 170 023 0 (DaimlerChrysler)
- 446 170 024 0 (DaimlerChrysler)
- 446 170 025 0 (DC ACTROS / ATEGO)
- 446 170 026 0 (DC ACTROS / ATEGO)
- 446 170 051 0 (DaimlerChrysler)
- 446 170 052 0 (DaimlerChrysler)
- 446 170 053 0 (MAN TG-A)
- 446 170 054 0 (DaimlerChrysler)
- 446 170 055 0 (DC ACTROS)
Различные вариации электронной системы DaimlerChrysler
могут быть диагностицированы с помощью
диагностической карточки WABCO 446 300 635 0, вариации
электронной системы MAN - с помощью диагностической
карточки WABCO 446 300 893 0 и компьютерной
диагностики 446 301 524 0 ( 8. Диагностика).
Номер заказа Исполнение
446 170 022 0 будет заменен номером 446 170 024
446 170 023 0 будет заменен номером 446 170 025
446 170 024 0 будет заменен номером 446 170 026
446 170 025 0 18/15-контактный, 3 датчика хода
446 170 026 0 18/15-контактный, 2 датчика хода
446 170 051 0 будет заменен номером 446 170 052
446 170 052 0 будет заменен номером 446 170 054
446 170 053 0 18/15-контактный, 1-3 датчика хода,
макс. 3 датчика давления
446 170 054 0 будет заменен номером 446 170 055
446 170 055 0 18/15-контактный, 1-3 датчика хода,
макс. 3 датчика давления
При замене ECU в процессе диагностики нужно
учитывать, что может
!
использования другой диагностической карточки.
Между тем, представителем этой группы на рынке сбыта
является 2-ое поколение, а именно CAN 2. Его используют
и другие изготовители ТС. В частности, в этой группе
существуют следующие вариации:
- 446 170 201 0 (IVECO)
- 446 170 202 0 (IVECO)
- 446 170 206 0 (Scania)
- 446 170 207 0 (MAN TG-A/TG-1(B)
- 446 170 208 0 (MAN TG-A/TG-1(B)
- 446 170 209 0 (MAN TG-A/TG-1(B)
- 446 170 211 0 (IVECO)
- 446 170 212 0 (IVECO)
- 446 170 213 0 (DAF)
- 446 170 214 0 (DAF)
- 446 170 215 0 (Scania)
- 446 170 216 0 (Scania)
возникнуть необходимость
В случае необходимости сервисного обслуживания может
возникнуть проблема, что та или иная система ECU не
доступна, т.к. она была заменена более лучшим
вариантом.
ECU 446 170 … 0 в случае необходимости сервисного
обслуживания
Номер заказа Исполнение
446 170 001 0 будет заменен номером 446 170 004
446 170 002 0 будет заменен номером 446 170 005
446 170 003 0 18/15-контактный, 1-3 датчика хода
446 170 004 0 будет заменен номером 446 170 023
446 170 005 0 будет заменен номером 446 170 024
446 170 006 0
446 170 021 0 будет заменен номером 446 170 023
34
Рис. 32 ECAS 4x2 CAN 2
ECU 446 170 … 0 в случае необходимости сервисного
обслуживания
Номер заказа Исполнение
446 170 201 0
446 170 202 0
446 170 205 0 заменен номером 446 170 215
446 170 206 0 будет заменен номером 446 170 216

Компоненты
т
6.ECAS
1 клемма 30 (предохранитель 8A)
2 Диагностика L-провода
3 Датчик двигательной педали
4 Диагностика K-провода
5 Сигнал датчик давления ЗО справа
6 Сигнал датчик давления ЗО слева
7 Сигнал торможения
8 Датчик хода сзади с правой стороны
9 Клемма 15
10 Переключатель тормозного давления ESAC
11 2-ход. 2-поз. клапан ПО
12 3-ход. 3-поз. клапан под.ось-спуск
13 2-ход. 2-поз. клапан ЗО слева
14 ESAC мягкий
15 клапан-вентилятор
16 Кодировка PIN вспомогательная сила при
трогании ТС
17 переключатель вспомогательной силы
при трогании ТС
18 Вспомогательная сила при трогании ТС - лампа
Рис. 33 расположение PIN 35-контактной ECU для ECAS/ESAC (446 155 … 0)
По причине возрастания числа функций и чрезмерной
перегрузки электронной системы, включая новую структуру
параметров, провождение диагностики данных электроник
возможно только с помощью ПК. В данном случае
используется компьютерная программа 446 301 524 0.
Диагностическая Controller-карта здесь не находит
применение.
6.2.10 ECAS/ESAC
В этом поколении ECU речь идет об электронных системах
со встроенной функцией ESAC. В основном различают 2
группы ECU:
- 446 155 … 0
(MAN - 3-ступенчатое демпфирование)
- 446 171 … 0
(DaimlerChrysler;
(MAN - плавное демпфирование)
Сенсоризирование осевой нагрузки в ТС 4х2 происходит с
помощью датчиков давления на всех пневмоподушках
ведущей оси, а также за счет передней оси. Амортизаторы
можно установить 3-ступенчато (а именно, мягкий,
средний, твердый) или безступенчато. Настройка
амортизатора зависит от используемого поколения ECU.
Функции ESAC данной электронной системы не будут
здесь подробно рассмотрены, т.к. они не являются
непосредственной темой этой брошюры.
ECU 446 155 … 0
С помощью данных электронных систем может быть
произведена 3-ступенчатая установка амортизатора. Она
предназначена для подсоединения 35-контактного
штекера. Для электронных систем данного типа - как и для
1
18
электроник ТС 6х2 - типичен пластмассовый корпус, в
переднюю часть которого вставляется и соединяется
крестообразными болтами платина с 35-контактной
штепсельной панелью.
В этой группе до настоящего момента существуют
следующие вариации (в скобках тип ТС, в котором
используется данная ECU):
Основное различие между обеими электронными
системами состоит в параметрах вспомогательной силы
при трогании ТС, а также здесь номер 446 155 000 был
заменен на 446 155 001.
Диагностика данных электроник может
помощью диагностической карточки WABCO 446 300 569 0
( 8. диагноз).
ECU 446 171 … 0
Электронные системы данной группы используются в ТС с
сетью CAN (это значит, DaimlerChrysler ACTROS или MAN
TGA). Они интегрированы в CAN-систему Bus ТС и
предназначены для подсоединения 15-контактного и 18контактного штекера. С помощью данной ECU можно
управлять ТС 4x2 и 6x2 с полностью пневматической
подвеской и с одной подъемной осью.
в алюминиевый корпус со стороны штепселя. Бросаются в
глаза холодильные ламели в задней части корпуса.
В этой группе существуют следующие вариации:
19 Кодировка PIN вспомогательная сила при
20 CLOCK-Ltg. RCU
19
21 DATA-Ltg. RCU
22 C3/D3-сигнал (спидометр)
23 НУ I/II
24 Переключатель под.оси
25 Датчик хода сзади с левой стороны
26 Датчик хода спереди
27 Датчик хода масса + Кл. 31
28 Наружное реле клапана
29 Электромагнитный клапан функция РТС
30 3-ход. 3-поз. клапан под.ось-поднятие
31 2-ход. 2-поз. клапан ЗО справа
32 ESAC средний
33 аварийная лампа
34 Сигнальная лампа вспомогательная
сила при трогании ТС
35
35 Под.ось-позиционная лампа
- 446 155 000 0 (MAN F2000)
- 446 155 001 0 (MAN F2000)
- 446 171 001 0 (DaimlerChrysler ACTROS)
- 446 171 002 0 (MAN TGA)
быть проведена с
Платина вставлена
35

6.
ECAS
Сигнал торможения ECAS
Компоненты
- не используется -
- не используется -
.
.
.
.
- не используется -
- не используется -
Снабжение амортизаторных магнитов
АМОРТИЗАТОРНЫЕ
МАГНИТЫ
Передняя ось
Ведущая ось
Подъемная ось
+НА (Кл.15)
+НА (Кл.30)
Масса (Кл.31)
CAN - низк.
HF-GND CAN
CAN - выс.
ДИАГНОСТИКА
К-линия
БЛОК УПРАВЛЕНИЯ
+НА
Масса
Такт
Данные
Подъем/спуск подъемной оси
Норм. уровень I/II
+НА
Помощь при трогании
ЭЛЕКТРОМАГНИТНЫЕ
КЛАПАНЫ
Ведущая ось слева
Накачать
Подъем подъемной оси
Ведущая ось справа
Спуск подъемной оси
Передняя ось
Снабжение электромагнитных
клапанов
ДАТЧИКИ ХОДА
Ведущая ось слева
Ведущая ось справа
Передняя ось
Сенсорная масса
ДАТЧИКИ ДАВЛЕНИЯ
Ведущая ось справа
зарезервировано для LWS-1
зарезервировано для LWS-2
- не используется -
- не используется -
Рис. 34 расположение PIN в ECU ECAS/ESAC CAN 446 171 … 0
36
Передняя ось
Ведущая ось слева
+НА датчики давления

Компоненты
6.ECAS
- 446 171 003 0 (DaimlerChrysler ACTROS)
- 446 171 004 0 (DaimlerChrysler AXOR)
Диагностика электронной системы 446 171 002
производится с помощью диагностической карточки
WABCO 446 300 893 0 и компьютерной диагностики
446 301 524 0. Диагностика остальных систем ECU может
производиться за счет диагностической карточки WABCO
446 300 635 0 и компьютерной диагностики.
6.3 Магнитный клапан, ECAS
Магнитный клапан ECAS для регулировки системы
представляет собой интерфейс между выходными
электронными сигналами электроники и пневматическими
исполнительными сигналами для пневмобаллонов.
Электромагнитный клапан ECAS состоит из
отдельных электромагнитных клапанов, находящихся в
блоке, так как отдельные электромагнитные клапаны не
создают частичное давление при нагрузке на
пневмобаллоны.
3 функции:
• Повышение давления
• Поддержание давления
• Понижение давления
возникают только в случае комбинирования отдельных
функций клапана. Каждый электромагнитный клапан в
отдельности представляет собой блок, состоящий из
отдельного магнита с одним или
клапанами или распределительными золотниками.
Рис. 35 Электромагнитный клапан ECAS для провождения
одностороннего управления на движущей оси
(магнитный блок - ECAS - II - электромагнитный
клапан)
Через электрические штекеры на отдельных магнитах или
блоках магнитных клапанов электрический управляющий
сигнал поступает из электронной части в отдельные
управляемые магниты. Сигнал управления определяет
только 2 состояния напряжения:
• HIGH (данное означает
находится под напряжением и открывает
пневматическое седло клапана против силы действия
пружины).
двумя релейными
, как правило, 24 В; магнит
нескольких
• LOW (данное означает 0 В; магнит не находится под
напряжением и магнитная пружина открывает
пневматическое седло клапана).
Сочетание сигналов управления на отдельных магнитах
обеспечивает открытие/закрытие соответствующих
пневматических клапанов или сдвиг соответствующих
золотников.
В электромагнитном
различных вида отдельных электромагнитных клапанов:
•3-ход. 2-поз. клапан (т. е. 3 пневматических
соединения: ресивер, приемное устройство, канал
выпуска воздуха и 2 переключающих положения, здесь:
включение или выключение с учетом подачи тока на
магнит). Он используется в качестве вентиляционного
клапана. В магнитах, не находящихся под
напряжением, запасные пневматические подвески
являются заблокированными
потребители соединяются с атмосферой. В магнитах,
находящихся под давлением, запасные
пневматические подвески соединяются с
последующими потребителями.
•2-ход. 2-поз. клапан (т. е. 2 пневматических
соединения: Ресивер и приемное устройство и 2
переключающих положения, здесь: включение или
выключение с учетом подачи тока на магнит). Он
используется в качестве распределительного клапана с
сильфонным
под напряжением, подсоединенный пневмобаллон
является заблокированным. В магнитах, находящихся
под напряжением, подсоединение к пневмобаллону
происходит со стороны выхода в 3-ход. 2-поз. клапане с
помощью запасных пневмоподвесок или за счет
атмосферного давления.
•3-ход. 3-поз. клапан (т. е. 3 пневматических
соединения: ресивер, приемное устройство, канал
выпуска воздуха и 3
ВЕРХ, СЕРЕДИНА И НИЗ с учетом положения
распределительного золотника в клапане). Он
используется для управления соединением между
пневмоподушками ведомой или подъемной оси и
пневмоподушками движущей оси в ТС, обладающих
процессом уравнивания давления. В ТС с подъемной
осью наряду с управлением сильфонным соединением
происходит одновременное управление давлением в
сильфоне
В 3-ход. 3-поз. клапане используются 2 магнита,
которые обеспечивают подачу давления на один или
более распределительный золотник с двух сторон.
Таким образом, распределительный золотник
приводится в 3 положения: ВЕРХ, НИЗ и СЕРЕДИНА.
Магниты данного клапана находятся под напряжением
только примерно 5 с. Необходима возможность
холостого хода в процессе зажигания ВЫКЛ. для
подъемной оси/снятия нагрузки с ведомой оси. В связи
с этим, распределительный золотник находится под
давлением в определенном месте только в процессе
подачи тока. По истечению этого токового импульса
происходит вентиляция в месте управления
распределительного золотника; золотник находится на
своей позиции только за счет давления со стороны
уплотнительных колец.
подъемной оси.
клапане ECAS существует 3
и последующие
давлением. В магнитах, не находящихся
переключающих положения, здесь:
спуска
37

ECAS6.
Компоненты
Учитывая магнитное управление пневмоклапанов,
различаются два варианта клапанов:
6.3.1 Клапан пружинно-возвратного типа
Управление пневматикой - это непрямое управление ( рис.
36), т.к. оно состоит из двух этапов: начальная стадия и
основной процесс управления. Магнит, управляемый
системой ECU открывает относительно небольшое седло
клапана, благодаря которому создается давление
(начальная стадия управления).
• С помощью этого
клапанах ECAS с управляющим поршнем открывается
пластинное седло клапана с большим поперечным
сечением, через которое поступает воздух.
• В электромагнитных клапанах ECAS с
распределительным золотником происходит сдвиг
золотникового поршня на желаемую позицию за счет
давления. Благодаря этому, происходит соединение
или рассоединение пневматических соединений между
собой в электромагнитных клапанах ECAS.
3-ходовой 2-
позиционный клапан
давления в электромагнитных
2-ходовой 2-
позиционный клапан
Благодаря этому существует возможность вентиляции
канала (5) и подключения потребителя (основной процесс
управления).
При прекращении подачи ток на магниты:
3. Седло клапана (1) закрывается, а верхняя сторона
управляющего поршня (3) прокачивается за счет
удаления воздуха из магнитов.
4. Клапанная пружина закрывает седло клапана (6) и
приводит
возвратной пружины поршня в исходное положение.
5. Через полый управляющий поршень (3) производится
вентиляция канала 5 и последующего потребителя.
2-ходовые 2-позиционные клапана работают по тому же
принципу.
управляющий поршень (3) при поддержке
2-ходовой 2-позиционный клапан 3-ходовой
2-позиционный
клапан
Рис. 36 Изображение
клапана ECAS с седельным клапаном пружинновозвратного типа для движущей оси (магнитный
блок-ECAS-II-электромагнитный клапан).
Принцип действия 3-ход. 2-поз. клапана, исполняющего
функцию седельного клапана, является таковым:
1. Магнит 6.1, постоянно находящийся под напряжением,
открывает седло клапана (1) и пропускает запасное
давление из канала 4 через канал 2 в верхнюю часть
управляющего поршня 3 (начальная
управления).
2. Поршень (3) открывает седло клапана (6) против
возвратной пружины.
в разрезе электромагнитного
стадия
Рис. 37 Изображение в разрезе магнитного клапана ECAS
с золотниковыми клапанами пружинновозвратного типа для главной оси или части
главной оси (магнитный блок)
В магнитных клапанах ECAS нового поколения все больше
начинают использоваться золотниковые клапана вместо
пневмоклапанов. Золотниковый клапан пружинновозвратного типа (↑ рис. 37) работает похожим образом.
Принципиальное различие заключается в том, что
пневмоклапана заменены заслонками, которые все так же
управляются возвратными пружинами.
6.3.2 Золотниковый клапан с импульсным
управлением
Золотниковый клапан с импульсным управлением
встречается в
магнитном клапане ECAS. Он преимущественно
используется для управления пневморессорами
подъемной оси в сочетании с пневмоподвесками
подъемной оси. С клапанами с импульсным управлением
реализуется автоматика подъемных осей. Как правило,
блок магнитных клапанов для управления подъемным
сильфоном прифланцован в блоке магнитных клапанов
для управления главной осью.
виде 3-ходового 3-позиционного клапана в
38

Компоненты
62.3
11
9
7
8
Рис. 38 Изображение в разрезе магнитного клапана ECAS
с золотниковыми клапанами с импульсным
управлением для части подъемной оси в
положении "сохранение давления"
Порядок работы 3-ходовых 3-позиционных клапанов (↑
рис. 38) таков:
1. В кольцевой камере (1) давление в ресивере через
канал (2) нагнетается в управляющие магниты (62.3
Подъем подъемной оси) и (62.1 Спуск подъемной оси).
2. Для подъема на
подается токовый импульс и открывается клапанное
седло (импульсное управление).
3. Через систему каналов подается воздух в
управляющий поршень (4) кольцевой камеры (3).
4. При этом управляющий поршень сдвигается вверх, а
кольцевая камера (1) связывается с кольцевой
камерой (6), к которой подсоединяется выход
подъемного сильфона.
5. После этого подъемный сильфон заполняется.
6. Одновременно в
поршней (5) нагнетается давление путем подачи
воздуха из камер (11), и управляющие поршни
передвигаются вниз.
7. Кольцевые камеры (8), к которым подсоединены
пневмоподушки подъемной оси, связываются с
каналом (12), и из них удаляется воздух через канал
(32).
8. Вследствие этого осуществляется подъем подъемной
оси.
магнит (62.3) через несколько секунд
верхних сторонах обоих управляющих
11 10
9
7
8
12
5
62.1
2
3
1
6
12
4
6.ECAS
По окончании подачи токового импульса на магниты
камеры
прокачки магнитов.
Заслонки остаются в выбранном положении в магнитном
клапане ECAS до тех пор, пока такое положение не
изменит новый импульс тока.
1. Для спуска подъемной оси на магнит (62.1) подается
2. Через систему каналов подается воздух в
3. При
4. После этого подъемный сильфон прокачивается.
5. Одновременно кольцевые камеры (7), в которых
6. При этом в пневмоподушках главной и подъемной оси
7. Вследствие этого осуществляется спуск подъемной
8. По окончании подачи токового импульса на магниты
Положение клапана (↑ рис. 38) - это особый случай, он
приводит к поддержанию давления во всех
пневмоподушках. Это происходит, к примеру, тогда, когда
в пневмоподушках главной и подъемной
различные давления при использовании функции
вспомогательной силы при трогании ТС. То есть, давление
в пневморессорах главной оси максимально, а в
подъемной оси соответственно ниже. При установлении
такого состояния управляющие магниты (62.1) и (62.3)
одновременно включаются без прерывания.
6.3.3 Отличие электромагнитных клапанов ECAS
В основном различают 3 группы электромагнитных
клапанов в зависимости от их
• Клапан передней оси (клапан ПО)
• Клапан задней оси (клапан ЗО)
• Клапан задней/подъемной оси (клапан ЗО/ПО)
Отходящие от сильфона провода должны располагаться
симметрично, а именно, чтобы у них была одинаковая
длина и поперечное сечение. При этом необходимо
соблюдать правильное расположение пневматических и
электрических соединений в соответствии с
Клапан передней оси (клапан ПО)
Клапан ПО находится рядом с передней осью и управляет
работой пневмоподушек передней оси. Он оснащен, как
правило, 2-ход. 2-позиц. клапаном для передней оси
(управляемая ось) и может, таким образом, осуществлять
только функцию открывания/перекрывания.
(3) и (11) освобождаются от воздуха через канал
токовый импульс, открывая седло клапана.
управляющий поршень (4) камеры (10).
этом поршень сдвигается вверх, а кольцевая
камера (6), с которой связан выход подъемного
сильфона, связывается с каналом (12).
создается давление пневмоподушек, связываются с
кольцевыми камерами (8), к которым подсоединены
пневмоподушки подъемной оси.
устанавливается одинаковое
оси.
камеры (9) и (10) освобождаются от воздуха через
канал прокачки магнитов.
давление.
оси возникают
использования:
нумерацией.
39

6. ECAS
Компоненты
Подкачка и стравливание выполняется 3-ходовым 2позиционным клапаном клапана заднего моста.
Рис. 39 Клапан ПО с байонетом по DIN 472 900 058 0
Клапан задней оси (клапан ЗО)
Клапан зад.оси - это центральный клапан системы ECAS
без автоматической подъемной оси, он находится в
области задней оси. Он управляет пневмоподушками
движущей оси в ТС с частичной или полностью
пневматической подвеской
помощью пневматического отвода, который закрыт в ТС с
частично пневматической подвеской, производится
вентиляция клапана передней оси в ТС с полностью
пневматической подвеской.
В зависимости от исполнения регулировки системы ECAS
клапан ЗО для управления пневмоподушками обладает:
• оси с управлением 1-мя датчиками хода 2-ходовой 2-
поз. клапан
• оси с
управлением 2-мя датчиками хода два 2-ходовых
2-поз. клапана
без подъемной/ведомой оси. С
пневмоподушками подъемной оси. В системах,
обладающих регулированием соотношения давления /
оптимальным регулированием силы тяги, за счет
электромагнитного клапана ECAS можно привести в
действие ТС с полностью пневматической подвеской (т. е.
также и пневмоподушки передней оси).
Рис. 41 Клапан зад./под. оси с байонетом по DIN
472 905 114 0
клапан состоит из блока задней оси и блока
Этот
подъемной оси. Его функция соответствует функции
клапана ЗМ. С помощью следующего пневматического
отвода в блоке задней оси можно осуществить вентиляцию
клапана передней оси. Оснащение клапана в блоке
подъемной оси зависит от того, о какой системе ECAS идет
речь: о системе с процессом уравнивания давления
регулированием соотношения давления / оптимальным
регулированием силы тяги.
или с
Рис. 40 Клапан ЗО с байонетом по DIN 472 900 055 0
Клапан задней/подъемной оси (клапан ЗО/под.оси)
Клапан зад./под.оси - это центральный клапан системы с
автоматической подъемной осью, он находится в области
задней оси. Он управляет пневмоподушками движущей
оси в ТС с частично и
подвеской, а также подъемным сильфоном и
полностью пневматической
40
В блоке клапана подъемной оси системы ECAS с
процессом уравнивания давления находятся 3-ход. 3-поз.
клапана, которые управляются двумя клапанными
магнитами и которые ответственны за управление
подъемного сильфона и за пневмоподушки подъемной оси.
В блоке клапана подъемной оси системы ECAS с
регулированием соотношения давления /
регулированием силы тяги находятся до трех 2-ход. 2-поз.
клапана, которые отвечают за управление подъемным
сильфоном и пневмоподушки подъемной оси.
Однозначно идентифицировать электрические
соединения Вы можете только с помощью схемы (7.
!
Краткое описание системы).
Если распределение электрических соединений не
является единообразным, то для распределения
пневматических соединений системы ECAS для грузовых
автомобилей применима следующая
Вывод 1
Только при клапанах ЗО/ПО: Запасное давление ресивера
для последующих потребителей.
оптимальным
директива:

Компоненты
6.ECAS
Вывод 11
Только при клапанах ПО и ЗМ: Запасное давление
ресивера для последующих потребителей.
Вывод 12
Только при клапанах ПО и ЗМ: Давление в ресивере для
регулирования элементов управления в магнитном
клапане ECAS.
Вывод 13
Не имеет практического значения.
Вывод 14
Только при клапанах ПО: Штуцер ресивера, идущий от
клапана ЗМ.
Вывод 21
• Только при клапанах
клапана передней оси.
• При клапанах ЗМ/под. оси: Вывод к (левой)
пневмоподушке, находящейся на днище оси(ей) (только
в процессе уравнивания давления).
Вывод 22
Вывод к (правой) пневморессоре находящейся на днище
оси(ей).
Вывод 23
• Только при клапанах передней оси или заднего моста:
Вывод к (левой) пневморессоре находящейся
оси(ей).
• При клапанах ЗМ/под. оси: Вывод к (левой)
пневморессоре подъемной оси (полностью
автоматическое упр.).
Вывод 24
Вывод к (правой) пневмоподушке подъемной оси с
полностью автоматическим управлением.
Вывод 25
Вывод к подъемному сильфону подъемной оси - полностью
автоматическое упр.
Вывод 26
• При клапанах ЗМ/под. оси: Вывод к соединению 14
клапана
давления).
• в автобусе также вывод к пневморессоре передней оси
при наклоне.
Вывод 27
• Не имеет практического значения.
• в автобусе также вывод к пневморессоре передней оси
при наклоне.
Вывод 3
Только при клапанах ЗМ: Прокачка для следующих
приемных устройств.
Вывод 31
Только при клапанах ЗМ/под. оси:
следующих приемных устройств в блоке заднего моста.
Вывод 32
Только при клапанах ЗМ/под. оси: Прокачка для
следующих приемных устройств в блоке подъемной оси.
передней оси (только в процессе уравнивания
ЗМ: Вывод к соединению 14
на днище
Прокачка для
6.3.4 Заменимость электромагнитных клапанов
ECAS
Отличие различных поколений электромагнитных
клапанов ECAS заключается в конструкции клапанных
магнитов. Электромагниные клапаны ECAS существуют в
более 60 различных вариациях. Группа продуктов под
номером 472 900 … 0 включает
оси, клапаны зад./под. оси для систем с базовым
регулированием и с регулированием соотношения
давления /силы тяги. Группа продуктов под номером
472 905 … 0 включает в себя клапаны зад./под. оси для
систем с процессом уравнивания давления.
В 2000-м году было введено новое поколение
электромагнитных клапанов ECAS (ECAS III). Это
поколение электромагнитных клапанов объединено в
группу продуктов под номером 472 880 … 0 и заменит в
будущем группу электромагнитных клапанов ECAS
472 900 … 0.
Рис. 41 Клапан ЗО с байонетом по DIN 472 880 030 0
В основном существуют различные вариации в группах со
схожей функцией. Основными различиями в устройствах
одной группы являются электрические и пневматические
интерфейсы.
Устройства, имеющие по причине специальных
соединений трубопровода
резьбу, можно без проблем обеспечить в случае
необходимости ремонта резьбовым соединением труб по
DIN (если нет под рукой соответствующего варианта).
С другой стороны, значительные проблемы могут
возникнуть при использовании электрических соединений к
клапанным магнитам с различной конструкцией. Так,
например, возможно выполнение регулировки магнитов в
качестве отдельного устройства управления с
в качестве управления электромагнитным клапаном с
байонетным соединением. Присоединительный штык
(байонет) различается по типам (байонет KOSTAL или
DIN). Даже в одном и том же байонетном типе существуют
различные электроконтакты, мешающие при замене - в
данном случае необходимо провести одновременную
замену всех относящихся кабелей.
В последующих таблицах приведено краткое описание
самых
функции и некоторые указания, касающиеся замены.
важных электромагнитных клапанов ECAS, их
в себя клапаны пер. и зад.
специально сформованную
резьбой или
41

ECAS6.
Компоненты
Для электрического соединения (Э-соединения) в качестве
байонета DIN существенно:
JED-388 = винтовые отверстия для системы штекерных
разъемов VOSS (возможно использование для резьбового
соединения труб по DIN).
Штекерное соединениеDIN 72 585-A1-4.1-Sn/K1
(Пример)
A1= устойчивое штекерное соединение (А) с
расположением кодированной панели 1 в штекере
(возможны 4 различных расположения).
4.1 = Кодирование контактного оснащения по DIN (здесь:
4 контакта оснащены на основе варианта 1).
Sn = лужение контактов.
K1 = класс требования (к К2 требования выше чем к К1).
Для
пневматических соединений (П-соединение)
существенно:
JED-152 = винтовое отверстие для метрической винтовой
резьбы по DIN.
В таблице указаны сначала пиктограммы, а затем и краткое
описание для различных групп. Отличие тех или иных
вариаций заключается в наличии/отсутствии глушителя.
и в последующих группах будут рассмотрены
Здесь
электромагнитные клапаны, которые находят
использование на задней (или движущей) оси в процессе
базового регулирования ECAS.
В первой группе в таблице показаны клапаны ЗО для
одностороннего регулирования (1 датчик хода). Данные
клапаны обладают дросселью (диаметр: 0,6 мм) между
пневматическими отводами с левой и правой стороны
сильфона.
Таблица1: Магнитные клапаны
Пиктограмма Номер заказа Е-соединение П-соединение Примечание
42
12
21
23
21
23
22
6.3
41
24
11
6.2
6.16.4
1122
472 900 030 0 2 отдельных магнита
M27x1
472 900 032 0 2 отдельных магнита
M27x1
3
472 900 033 0 2 отдельных магнита
472 900 034 0 2 отдельных магнита
472 900 055 0 2 магнита
472 900 061 0 2 магнита
3
472 900 065 0 2 магнита
472 880 030 0 2 магнита
472 880 031 0 2 магнита
M27x1
M27x1
1 байонет DIN 72585A1-4,2-Sn/K1
1 байонет DIN 72585A1-3,1-Sn/K1
1 байонет DIN 72585A1-4,2-Sn/K1
1 байонет
A1-4,2-Sn/K1
1 байонет DIN 72585A1-3,2-Sn/K2
DIN 72585-
Соединение
VOSS M22x1,5
M22x1,5 Штепсельные оси соединений
M22x1,5
(JED-388)
соединения,
выходящие
наверх
M22x1,5
(JED-388)
M22x1,5
(JED-388)
M22x1,5
(JED-388)
M22x1,5
(JED-152)
M22x1,5
(JED-388)
M22x1,5
(JED-388)
Штепсельные оси соединений
отдельных магнитов,
повернутые друг к другу на 90°;
с глушителем
отдельных магнитов,
повернутые друг к другу на 90°;
без глушителя
Штепсельные оси соединений
отдельных магнитов,
повернутые друг к
с глушителем
Штепсельные оси соединений
отдельных магнитов,
направленные в одну и ту же
сторону; без глушителя
специальная прокладка для
магнита для SCANIA ; с
глушителем
(6.3 не используется)
IVECO; с глушителем
ECAS III
с глушителем; заменяет
472 900 055 0
ECAS III
специальная прокладка для
магнита для SCANIA; с
глушителем заменяет 472 900
061 0 (6.3 не используется)
другу на 90°;
42

Компоненты
Клапаны задней оси для двухстороннего регулирования (2 датчика хода)
С помощью этих клапанов могут отдельно управляться пневматические отводы к
пневмобаллонам.
Вариации:
Пиктограмма Номер заказа Е-соединение П-соединение Примечание
43
21
23
6.3
21
23
42
12
22
6.2
22
41
24
11
6.1
6.4
11
472 900 000 0 3 отдельных магнита
M27x1
472 900 001 0 3 отдельных магнита
472 900 002 0 3
3
472 900 006 0 3 отдельных магнита
472 900 008 0 3 отдельных магнита
472 900 009 0 3 отдельных магнита
472 900 012 0 3 отдельных магнита
472 900 014 0 3 отдельных магнита
472 900 053 0 1 байонет DIN 72585-
472 900 060 0 1 байонет DIN 72585-
472 900 062 0 1 байонет DIN 72585-
3
472 900 063 0 1 байонет DIN 72585-
472 900 073 0 1 байонет DIN 72585-
472 880 000 0 1 байонет DIN 72585-
472 880 001 0 1 байонет DIN 72585-
472 880 002 0 1 байонет DIN 72585-
472 880 070 0 1 байонет DIN 72585-
M27x1
отдельных магнита
M27x1
M27x1
M27x1
M27x1
M27x1
M27x1
A1-4.1-Sn/K1
A1-4.1-Sn/K2
A1-4.1-Sn/K1
A1-4.1-Sn/K1
A1-4.1-Sn/K1
A1-4.1-Sn/K2
A1-4.1-Sn/K2
A1-4.1-Sn/K2
A1-4.1-Sn/K2
Соединение VOSS
M22x1,5
Соединение VOSS
M22x1,5
M22x1,5
(резьба по DIN)
M22x1,5
(резьба по DIN)
M22x1,5
(JED-388)
M22x1,5
(JED-388)
M22x1,5
(резьба по DIN)
M22x1,5
(JED-388)
M22x1,5
(JED-388)
M22x1,5
(JED-388)
M22x1,5
(JED-388)
M22x1,5
(JED-152)
M22x1,5
(JED-388)
M22x1,5
(JED-388)
M22x1,5
(JED-388)
M22x1,5
(JED-388)
M22x1,5
(JED-388)
заменен вариантом 001;
с глушителем
Штепсельные оси соединений
отдельных магнитов слева,
спереди и справа; замена
варианта 000; с глушителем
соединения отдельных
магнитов как вариант 001; с
глушителем
Штепсельные оси соединений
отдельных магнитов 2 спереди
и справа; замена вариантом
012; без глушителя
соединения отдельных
магнитов как вариант 001; Псоединения выходят наверх; с
глушителем
Штепсельные
отдельных магнитов 2 сзади и
справа; без глушителя
соединения отдельных
магнитов как вариант 006;
замена варианта 006; без
глушителя
соединения отдельных
магнитов как вариант 001; Псоединения выходят наверх;
без глушителя
с глушителем
соединение 21 открыто; с
глушителем
специальная прокладка для
магнита для SCANIA ; без
глушителя
с глушителем
Питающее напряжение 12 В; с
глушителем
ECAS III
соединение 21 открыто; с
глушителемзаменяет
472 880 060 0
ECAS III
с глушителем;заменяет
472 880 053 0
ECAS III
специальная прокладка для
магнита для SCANIA с
глушителем;
ECAS III
Питающее напряжение 12 В; с
глушителем;заменяет
472 880 073 0
6.ECAS
оси соединений
43

6. ECAS
Пиктограмма Номер заказа Е-соединение П-соединение Примечание
42
6.1
12
22
12
14
23
6.2
14
25
Компоненты
Электромагнитные клапаны ECAS для базового управления на передней оси.
Группа 1: Клапаны задней оси для одностороннего регулирования (1 датчик хода)
Данные клапаны обладают дросселью (диаметр: 0,6 мм) между пневматическими
отводами с левой и правой стороны сильфона. Вентиляция данных клапанов происходит
за счет подсоединенного клапана задней оси, таким образом, для провождения начальной
стадии управления необходимо соединение
(с ECAS III соединение 11).
Вариации:
472 900 020 0 1 отдельный
магнит M27x1
472 900 021 0 1 отдельный
магнит M27x1
472 900 022 0 1 отдельный
магнит M27x1
472 900 054 0 1 байонет DIN
72585-A1-3,6-Sn/
K1
472 900 064 0 1 байонет DIN
72585-A1-3,6-Sn/
K1
472 900 074 0 1 байонет DIN
72585-A1-3,6-Sn/
K1
472 900 058 0 1 байонет DIN
72585-A1-2,1-Sn/
K2
отдельного запасного провода, соединение 12
Соединение VOSS
3x M22x1,5
1x M16x1,5
Соединение VOSS
3x M22x1,5
1x M16x1,5
3x M22x1,5
1x M16x1,5
(резьба по DIN)
3x M22x1,5
1x M16x1,5
(JED-388)
3x M22x1,5
1x M16x1,5
(JED-152)
3x M22x1,5
1x M16x1,5
(JED-388)
3x M22x1,5
1x M16x1,5
(JED-388)
дополнительное соединение
13 рядом с 14 (замкнуто)
Магнит по сравнению с 054
повернут на 90°
Специальное исполнение: в
случае необходимости
замены должен быть заменен
номером 472 880 021 0, хотя
соединение 25 может быть
определено по соединению
22 (T-образный фитинг);
необходимо соблюдать
изменение величины
винтовой резьбы!
44
22
6.1
21
22
6.2
23
472 880 020 0 1 байонет DIN
6.4
472 880 021 0 1 байонет DIN
472 880 024 0 1 байонет DIN
11
23
72585-A1-3,6-Sn/
K2
72585-A1-2,1-Sn/
K2
72585-A1-3,6-Sn/
K2
M22x1,5
(JED-388)
M22x1,5
(JED-388)
M22x1,5
(JED-388)
ECAS III
заменяет 472 900 054 0
ECAS III
заменяет 472 900 058 0
(6.4 не используется)
ECAS III

Пиктограмма
61.1
61.4
62.1
62.2
62.4
61.3
Компоненты
61.2
12
14
ECAS
Электромагнитные клапаны ECAS для базового
управления на передней оси.
Группа 2: Клапаны передней оси,
используемые в автобусе.
Данные клапаны обладают (дополнительно к
описанным выше группам клапанов задней оси)
2-ход. 2-поз. клапаном для наклона (книлинга).
Вариации:
6.
26
Номер заказа Е-соединение П-соединение Примечание
472 900 066 0
472 900 076 0
472 880 061 0
472 880 071 0
Пиктограмма
1 байонет DIN 72585-A1-3,6-Sn/K1
1 байонет DIN 72585-A1-4,1-Sn/K1
1 байонет DIN 72585-A1-3,2-Sn/K1
1 байонет DIN 72585-A1-4,1-Sn/K1
1 байонет DIN 72585-A1-3,6-Sn/K2
1 байонет DIN 72585-A1-4.2-Sn/K2
1 байонет DIN 72585-A1-3,6-Sn/K2
1 байонет DIN 72585-A1-4.2-Sn/K2
61.3
62.1
62.2
62.4
61.2
61.1
27
3x M22x1,5
1x M16x1,5
(JED-388)
3x M22x1,5
1x M16x1,5
(JED-388)
4x M22x1,5
(JED-388)
4x M22x1,5
(JED-388)
61.4
заменен на 472 880 061 0
Питающее
472 880 071 0
ECAS III
заменяет 472 900 066 0; обратите внимание на
измененные пневматические соединения; с
глушителем
ECAS III
питающее напряжение 12В;
заменяет 472 900 066 0; обратите внимание
на измененные пневматические соединения
клапан задней оси для использования в
автобусе. Этот клапан - дополнительно к 2-ход.
2-поз. клапану для наклона (книлинга) обладает также и отдельным вентиляционным
клапаном.
напряжение 12В; заменен номером
3
21
23
Номер заказа Е-соединение П-соединение Примечание
472 880 062 0
472 880 064 0
1 байонет DIN 72585-A1-3,6-Sn/K2
1 байонет DIN 72585-A1-4,1-Sn/K2
1 байонет DIN 72585-A1-3,6-Sn/K2
1 байонет DIN 72585-A1-4,1-Sn/K2
22
11
4x M22x1,5
(JED-388)
4x M22x1,5
(JED-388)
ECAS III
исполнение SCANIA; в клапане интегрирована
функция вентиляции; с глушителем
ECAS III
в клапане интегрирована функция вентиляции; с
глушителем
45

Пиктограмма
62.1
ECAS6.
Компоненты
электромагнитные клапаны, используемые для регулирования силы тяги/соотношения
давления относительно всего ТС или осевых агрегатов.
клапаны передней/задней оси для
62.2
62.4
61.3
61.2
61.1
61.4
одностороннего/двухстороннего
регулирования (3 датчика хода).
Данные клапаны обладают дросселью
(диаметр: 0,6 мм) между пневматическими
отводами с левой и правой стороны сильфона
передней оси. Они используются в ТС 4х2.
Преимуществом является то
3
одного клапана можно управлять сильфоном в
, что с помощью
ТС с полностью пневматической подвеской.
26
27
22
21
1123
Вариации:
Номер заказа Е-соединение П-соединение Примечание
472 900 052 0
4 отдельных магнита M27x1
472 900 057 0 1 байонет DIN 72585-A1-3,6-Sn/K1
1 байонет DIN 72585-A1-4,1-Sn/K1
472 900 067 0 1 байонет DIN 72585-A1-3,6-Sn/K1
1 байонет DIN 72585-A1-4,1-Sn/K1
472 880 050 0 1 байонет DIN 72585-A1-3,6-Sn/K2
1 байонет DIN 72585-A1-4,1-Sn/K2
472 880 051 0 1 байонет DIN 72585-A1-3,6-Sn/K2
1 байонет DIN 72585-A1-4,1-Sn/K2
472 880 052 0 1 байонет DIN 72585-A1-3,6-Sn/K2
1 байонет DIN 72585-A1-4,1-Sn/K2
5x M22x1,5
(JED-388)
5x M22x1,5
(JED-388)
5x 1/2-14 NPTF
DRYSEAL
5x M22x1,5
(JED-388)
5x 1/2-14 NPTF
DRYSEAL
5x 1/2-14 NPTF
DRYSEAL
только в качестве информации, больше не
поставляется
заменен номером 472 880 050 0; с глушителем
заменен номером 472 880 051 0; с глушителем
ECAS III
заменяет 472 900 057 0; с глушителем
ECAS III
заменяет 472 900 067 0; с глушителем
ECAS III
исполнение SCANIA ; ЗО + пер./под.ось; с
глушителем
Пиктограмма
62.2
62.1
62.4
61.2
61.1
61.4
Клапан зад./под.оси (а соответственно зад./
ведом.оси) для одностороннего
регулирования (1 датчик хода).
В блоке подъемной оси находится один выход
для подъемного сильфона и один - для
пневмоподушек подъемной
оси.
3
22
23
22
21
1123
Номер заказа Е-соединение П-соединение Примечание
472 900 113 0
2 байонета DIN 72585-A1-4.1-Sn/K1 5x M22x1,5
Клапан ЗО/ВО (клапан задней/ведомой оси)
(JED-388)
46

Пиктограмма
62.3
62.4
62.1
62.2
61.3
61.2
Компоненты
61.4
61.1
ECAS 6.
клапаны зад./под.оси (а соответственно зад./
ведом.оси) для двухстороннего
регулирования (2 датчикa хода).
В блоке электромагнитного клапана находятся 2
пневматических отвода для пневмоподушек
подъемной/ведомой оси.
3
22
27
26
21
1123
Вариации:
Номер заказа Е-соединение П-соединение Примечание
472 900 102 0 5 отдельных магнита M27x1
соединение VOSS
заменен на 472 900 105 0
5x M22x1,5
472 900 103 0 5 отдельных магнита M27x1
472 900 105 0 5 отдельных магнита M27x1
5x M22x1,5
(резьба по DIN)
5x M22x1,5
(JED-388)
электр. соединения 41 до 43 (см. также стр. 43);
с
глушителем
замена для 472 900 102 0; электр. соединения
41 до 43; П-соединения выходят наверх; с
глушителем
472 900 110 0 1 байонет DIN 72585-A1-4.1-Sn/K1
1 байонет DIN 72585-A1-4.2-Sn/K1
472 900 112 0 1 байонет DIN 72585-A1-4.1-Sn/K1
1 байонет DIN 72585-A1-3,1-Sn/K1
5x M22x1,5
(JED-388)
5x M22x1,5
(JED-388)
клапан ЗО/ВО;
замена для 472 900 105 0; с глушителем
клапан зад./под. оси; с глушителем
Кодировка штекера на электр. соединении 62.3
изменена
472 880 100 0 1 байонет DIN 72585-A2-4.1-Sn/K2
1 байонет DIN 72585-A1-4.2-Sn/K2
5x M22x1,5
(JED-388)
ECAS III
клапан зад./ведом.
но изменена кодировка штекера на электр.
соединениях; с глушителем
472 880 101 0 1 байонет DIN 72585-A1-4.1-Sn/K1
1 байонет DIN 72585-A1-3,1-Sn/K1
5x M22x1,5
(JED-388)
ECAS III
клапан зад./под. оси; заменяет 472 900 112 0; без
глушителя
оси; заменяет 472 900 110 0,
Пиктограмма
62.1
25
Номер заказа Е-соединение П
62.2
61.4
62.3
26
62.4
61.3
27
61.2
23
61.1
3
22
21
11
-соединение Примечание
472 900 101 0 6 отдельных магнита M27x1 Соединение VOSS
6x M22x1,5
472 900 104 0 6 отдельных магнита M27x1 6x M22x1,5
(JED-388)
472 900 111 0 1 байонет DIN 72585-A1-4.1-Sn/K1
1 байонет DIN 72585-A1-4.2-Sn/K1
6x M22x1,5
(JED-152)
клапаны зад./под. оси для двухстороннего
регулирования
(2 датчика хода).
В блоке подъемной оси находятся один выход
для подъемного сильфона и два - для
пневмоподушек подъемной оси.
Вариации:
заменен на 472 900 111 0
электр. соединения 41 до 43 (см. также стр. 43);
П-соединения выходят наверх; с глушителем
замена для 472 900 101 0
47

ECAS6.
Компоненты
Номер заказа Е-соединение П-соединение Примечание
472 900 114 0 2 байонета DIN 72585-A1-4.1-Sn/K1 6x M22x1,5
замена для 472 900 104 0; с глушителем
(JED-388)
472 880 103 0 1 байонет DIN 72585-A2-4.1-Sn/K2
1 байонет DIN 72585-A1-4,1-Sn/K2
472 880 104 0 1 байонет DIN 72585-A2-4.1-Sn/K2
1 байонет DIN 72585-A1-4,1-Sn/K2
6x M22x1,5
(JED-388)
6x M22x1,5
(JED-388)
ECAS III
заменяет 472 900 114 0; с глушителем
ECAS III
с глушителем
Пиктограмма
клапаны пер./зад. оси для трехстороннего
регулирования
62.1
62.4
63.1
63.2
63.4
62.3
62.2
61.3
61.2
61.1
61.4
(3 датчика хода).
Специальная форма для автобусов - данные
клапаны обладают дросселью для передней
оси (диаметр: 1 мм) между пневматическими
отводами с
3
Особенность: магнит клапана в части передней
оси, используемый для реализации функции
наклона (книлинга).
левой и правой стороны сильфона.
27
26
23
22
21
11
Вариации:
Номер заказа Е-соединение П-соединение Примечание
472 900 050 0 6 отдельных магнита M27x1
472 900 051 0 6 отдельных магнита M27x1
M22x1,5
(резьба по DIN)
M22x1,5
(резьба по DIN)
электр. соединения 41 до 43 (см. также стр. 43);
с глушителем
только в качестве информации, больше не
поставляется; электр. соединения
также стр. 43); П-соединения выходят наверх; с
глушителем
472 900 056 0 1 байонет DIN 72585-A1-4.1-Sn/K2
1 байонет DIN 72585-A1-4.2-Sn/K2
M22x1,5
(JED-388)
с глушителем
1 байонет DIN 72585-A1-3,6-Sn/K2
472 900 059 0 6 отдельных магнита M27x1
472 900 068 0 1 байонет DIN 72585-A1-4.1-Sn/K2
1 байонет DIN 72585-A1-4.2-Sn/K2
M22x1,5
(JED-388)
M22x1,5
(JED-388)
электр. соединения 41 до 43 (см. также стр. 43);
П-соединения выходят наверх; без глушителя
исполнение 12 В; с глушителем
1 байонет DIN 72585-A1-3,6-Sn/K2
472 880 060 0 1 байонет DIN 72585-A1-4.1-Sn/K2
1 байонет DIN 72585-A1-4.2-Sn/K2
M22x1,5
(JED-388)
ECAS III
заменяет
1 байонет DIN 72585-A1-3,6-Sn/K2
Пиктограмма
12
41
42
43
электромагнитные клапаны ECAS,
требующие принятия специального решения.
Особенность: 2-ход. 2-поз. клапан перед
соединением 21/14, являющийся открытым в
обесточенном состоянии.
3
21/14
41 до 43 (см.
472 900 056 0; с глушителем
23
11/25
22
Номер заказа Е-соединение П-соединение Примечание
472 900 013 0
3 отдельных магнита M27x1 M22x1,5/M16x1,5
без глушителя
(резьба по DIN)
48

Компоненты
Пиктограмма
12
42
43
21/14
23
22
3
11/25
24
41
Номер заказа Е-соединение П-соединение Примечание
472 900 005 0
3 отдельных магнита M27x1 M22x1,5/M16x1,5
(резьба по DIN)
472 900 007 0
3 отдельных магнита M27x1 M22x1,5/M16x1,5
(резьба по DIN)
Электромагнитные клапаны, используемые в процессе уравнивания давления.
Пиктограмма
21
32
25
1
23
26
31
группа электромагнитных клапанов ECAS
для расширения соединения 24/13. Они не
играют никакой роли при использовании в ТС,
но зато выступают в качестве пневматического
исполнительного органа в пределах CTU
(измерительный прибор конформности для
ECE-R13).
Вариации:
заменен номером 472 900 007 0; без глушителя
замена
для 472 900 005 0; может также
заменить 472 900 013 0; без глушителя
клапаны зад./под.оси (а соответственно зад./
ведом.оси) для двухстороннего
регулирования (2 датчикa хода).
Давлением в сильфоне с левой и с правой
стороны ТС можно регулировать по
отдельности.
Вариации:
ECAS 6.
42
44
42
43
24
43
44
22
41
Номер заказа Е-соединение П-соединение Примечание
472 905 105 0
472 905 107 0
2 байонета KOSTAL M22x1,5
(JED-388)
2 байонета KOSTAL M22x1,5
(JED-388)
заменен номером 472 905 107 0; с
глушителем (старая версия)
замена для 472 905 105 0; заменен на
472 905 111 0; с одним глушителем (старая
версия)
472 905 111 0
472 905 112 0
472 905 118 0
1 байонет DIN 72585-A1-4.1-Sn/K2
1 байонет DIN 72585-A1-4.2-Sn/K2
2 байонета KOSTAL M22x1,5
1 байонет DIN 72585-A1-4.1-Sn/K2
1 байонет DIN 72585-A1-4.2-Sn/K2
M22x1,5
(JED-388)
(JED-152)
M22x1,5
(JED-388)
замена для 472 905 107 0; с одним глушителем
замена для 472 905 108 0; с одним глушителем;
водонепроницаемый
версия SCANIA; автобус, 6х2; с двумя
глушителями
одним
49

ECAS6.
Компоненты
Пиктограмма
32
21
23
1
клапаны зад./под.оси (а соответственно зад./
ведом.оси) для двухстороннего
регулирования (2 датчикa хода).
Давлением в сильфоне с левой и с правой
26
стороны ТС можно регулировать по
отдельности.
25
31
Особенность: поднятие/спуск подъемной оси
происходит инверсно (а именно
противоположно). Замена следующих клапанов
выше названными не допустима.
62.4
62.1
62.2
62.3
62.4
24
22
62.1
62.3
62.2
Вариации:
Номер заказа Е-соединение П-соединение Примечание
472 905 110 0
2 магнитных блока M27x1
M22x1,5
(JED-152)
заменен номером 472 905 116 0; для данного
устройства характерна точка голубого цвета,
расположенная на крышке; с одним глушителем
472 905 116 0 1 байонет DIN 72585-A1-4.1-Sn/K2
1 байонет DIN 72585-A1-4.2-Sn/K2
M22x1,5
(JED-388)
замена для 472 905 110 0; для данного
устройства характерна точка голубого цвета,
расположенная на крышке; с одним глушителем
Пиктограмма
1
21
23
32
клапаны зад./под.оси (а соответственно зад./
ведом.оси) для одностороннего
регулирования (1
Данные клапаны обладают дросселью
26
25
31
(диаметр: 0,6 мм) между пневматическими
отводами с левой и правой стороны сильфона.
Давлением в сильфоне с левой и с правой
стороны ТС невозможно регулировать по
отдельности.
датчик хода).
62.3
62.4
62.1
24
22
61.4
61.1
61.3
Номер заказа Е-соединение П-соединение Примечание
Вариации:
472 905 109 0 2 байонета KOSTAL M22x1,5
(JED-388)
472 905 114 0 1 байонет DIN 72585-A1-4.1-Sn/K2
1 байонет DIN 72585-A1-4.2-Sn/K2
M22x1,5
(JED-388)
заменен номером 472 905 114 0; с двумя
глушителями
замена для 472 905 109 0; с
Электромагнитные клапаны с особыми заданиями для определенных пользователей.
Пиктограмма
32
24
22
клапаны передней/задней/подъемной осей
для одностороннего/одностороннего
регулирования с интегрированной функцией
управления подъемным сильфоном (2
26
31
датчика хода)
За счет такого клапана можно всецело
выполнить функцию ECAS для ТС 6х2 с
полностью пневматической подвеской и
подъемной осью. Для каждой пневмоподушки
передней, задней и
предназначен один выход. Подъемный сильфон
62.4
62.2
62.3
62.1
1
25
21
61.3
61.1
61.2
61.4
обладает одним отдельным выходом и его
управление протекает непринужденно.
Номер заказа Е-соединение П-соединение Примечание
472 905 070 0 2 магнитных блока M27x1 M22x1,5 (JED-388)
без глушителя
1X (JED-152)
двумя глушителями
подъемной осей
50

Компоненты
Клапан задней оси для одностороннего регулирования (1 датчик
хода)
Пиктограмма Номер заказа Е-соединение П-соединение Примечание
6.4
6.3
6.2
472 905 010 0 1 байонет
KOSTAL
1/2-14 DRYSEAL
NPTF
ECAS 6.
исполнение 12 В; с
глушителем
1
Пиктограмма Номер заказа Е-соединение П-соединение Примечание
6.4
6.3
6.2
6.1
26
22
6.4 Блок управления
22
31
Клапан задней/ведомой оси для одностороннего регулирования
(1 датчик хода)
472 905 060 0 1 байонет
KOSTAL
1
31
1/2-14 DRYSEAL
NPTF
исполнение 12 В; с
глушителем
• спуск и поднятие конструкции с помощью всех осей
одновременно, передней или задней осью или осевым
Блок управления дает следующие возможности:
• изменять заданный уровень;
• манипулировать положением подъемной оси;
• включать увеличение сцепления колес;
• предварительно выбирать желаемый нормальный
уровень.
агрегатом отдельно и при соответствующем
управлении системой отдельно с правой и левой
стороны.
• Спуск и подъем подъемной оси с выключением или
включением имеющейся автоматической части
подъемной оси или разгрузкой и нагрузкой на
дополнительном мосту.
На уровень движения можно влиять при стоянке или
установлении определенной скорости v
эксплуат
.
– Укажите такую скорость блоку ECU при
параметризации.
Блок управления желательно разместить в автомобиле в
корпусе. Контакт к системе ECU устанавливается с
помощью 4-жильного винтового кабеля и рoзетки на ТС.
• Сохранение максимум двух преимущественных уровней
(в памяти) и настройка уровня кратковременным
нажатием соответствующей клавиши.
• установление ТС на режим ожидания,
электроснабжение системы ECAS может
осуществляться здесь с помощью клеммы
• за счет клавиши "СТОП" можно сразу же прекратить все
процессы поднятия и спуска.
4-сосудистый кабель содержит (как указано ниже):
• клемму 15 для снабжения напряжением
• Клемма 31
• проводку CLOCK (также: проводку генератора)
• проводку DATA (также: провода для передачи
данных)
В системах с более низкой конфигурацией, не происходит
никакой реакции на нажатие кнопок, не соответствующих
системе. Например, выбор передней оси в ТС с частично
пневматической подвеской, так как они таковой не
обладают. С помощью блока управления для
полностью пневматической подвеской можно также
управлять ТС с частично пневматической подвеской.
На рис. 42 показан блок управления 446 056 117 0 для ТС с
полностью пневматической подвеской и подъемной осью.
Функции данного блока управления:
• запуск нормального уровня.
Конструкция блока управления
В верхнем ряду панели управления находятся 3
контрольные сигнальные лампочки. Они указывают на то,
какие оси предварительно выбраны для изменения.
30.
ТС с
51

ECAS6.
Компоненты
лавиша предварительного
выбора перед.оси или
левая сторона ТС при
наличии регулировки
"справа/слева"
Клавиша уровня памяти 2
M 2
Клавиша уровня памяти 1
M 1
Кнопка "поднятие"
Кнопка "спуск"
Индикаторная лампа
Рис. 42 Блок управления 446 056 117 0 и его компоненты
Во втором ряду панели управления находятся 3 клавиши
предварительного выбора, передняя ось (левая сторона
ТС), задняя ось (правая сторона ТС), подъемная ось.
Каждая из этих клавиш находится под соответствующей ей
контр.сигн. лампочкой.
– Нажмите нужную клавишу предварительного выбора.
Соответствующая контрольная лампа загорится и будет
сигнализировать о том, что для предварительно выбранной
оси можно выполнить операцию.
– Еще раз нажмите до этого выбранную клавишу
предварительного выбора.
Соответствующая контрольная лампа погаснет и эти
сообщит о том, что режим ввода в блоке управления
прерван.
Изменение блоком управления больше не возможно.
!
Желательны изменения заданного уровня во всем
автомобиле:
– держите клавиши предварительного выбора "передняя
ось" и "задняя
После этого обе соответствующие индикаторные лампы
загораются в подтверждение готовности к операции.
ось" нажатыми.
Передняя ось
Индикаторная лампа
Задняя ось
Индикаторная лампа
подъем.ось
клавиша
предварительного выбора
ЗО или правая сторона ТС
при наличии регулировки
"справа/слева"
Клавиша
предварительного выбора
подъемной оси
Кнопка "нормальный
уровень"
клавиша "стоп"
Подъем и спуск конструкции
– Держите клавишу "поднятие" или "спуск" нажатой.
Блок ECU задаст измененный заданный уровень для
конструкции
выбранных осей. Конструкция автомобиля теперь без
задержи будет менять расстояние до оси автомобиля до
тех пор, пока прижата соответствующая клавиша.
– Отпустите кнопку или нажмите на "СТОП" .
Изменение заданного значения завершится. Последнее
заданное значение, в процессе отпускания кнопки,
устанавливается в качестве нового заданного значения и в
соответствии
Подъем и опускание подъемной оси
– Нажмите на клавишу предварительного выбора
"подъемная ось" и в итоге коротко нажмите на кнопку
"поднятие" или "спуск".
Подъемная ось поднимется или опустится либо будет
нагружен или разгружен дополнительный мост. Поднятие
или нагрузка допустимы только в том случае, если не
превышается максимально допустимое
пневмоподушках главной оси. Спуск подъемной или
разгрузка ведомой оси приводит к тому, что выключается
автоматика подъемной/ведомой осей.
автомобиля с помощью предварительно
с этим регулируется.
давление в
В целом ввод параметров в блоке управления нужно
начинать с предварительного выбора нужных осей,
!
завершая процедуру отменой режима ввода.
52
Выключение автоматики подъемной/ведомой оси
Автоматическая часть подъемной оси/доп. моста может
выключаться тогда, когда минимум одна подъемная ось/
дополнительный мост был автоматически поднят/

Компоненты
ECAS 6.
разгружен в связи с небольшой нагрузкой.
– Нажмите на кнопку "спуск"
Отключение автоматики подъемной оси означает, что до
этого автоматически поднятая подъемная ось будет
опущена и, соответственно, разгруженная ведомая ось
будет нагружена.
Включение автоматической системы подъемной оси/
доп. моста
– Нажмите на клавишу предварительного выбора
"подъемная ось" и в итоге на кнопку
– с помощью включения и выключения зажигания.
Нормальные уровни
Для запуска актуального нормального уровня достаточно
слегка дотронуться до кнопки "нормальный уровень". В
некоторых системах не существует необходимости
отключения функции предварительного выбора оси, так
как данный процесс происходит автоматически.
Уровни в памяти
Определенный уровень автомобиля должен чаще
настраиваться в режиме загрузки/разгрузки
Есть возможность такой уровень сохранить в памяти и по
своему усмотрению часто устанавливать нажатием
клавиши.
– Нажмите одновременно кнопку СТОП и одну из клавиш
- М 1 или М 2.
В результате в памяти будет сохранен существующий
заданный уровень (предпочтительный уровень).
Сохраненные значения при выключении зажигания не
теряются. Они применяются для всего автомобиля,
вызове настройки нужно будет только выбрать нужную ось.
– Нажмите соответствующую кнопку М1 или М2.
Конструкция автомобиля при этом без задержки
переведется на соответствующий сохраненный уровень.
Стоп
– Нажмите клавишу СТОП.
Все процессы регулировки для установки уровня будут без
задержки завершены, а текущий уровень будет установлен
как заданный.
помощью функции "Стоп" можно, прежде всего,
С
прекратить протекающие автоматически изменения
уровня (уровень памяти, движения), если, по
Вашему мнению, существует какая-либо угроза при
дальнейшем провождении регулировки.
Существуют системы, в которых необходимо нажатие
клавиши "Стоп" для окончания функции "Поднятие" или
"Спуск".
"поднятие"
.
т.е. при
– При нажатой кнопке СТОП выключите зажигание.
ТС находится в режиме
Зависимость от скорости
Функции подъема и спуска конструкции и "запоминания"
уровней возможны только при остановке, а также в
пределах до предварительно задаваемой скорости
движения v
до такой скорости, также завершаются при ее превышении.
Одновременное нажатие нескольких клавиш
При одновременном нажатии нескольких клавиш, что не
представляет собой приемлемой комбинации, при запуске
заданного изменения уровня никакая команда не
принимается. Выполняется функция останова.
Отключение блока управления
– Вытащите блок управления.
Сразу сработает функция останова.
Использование нескольких
Для регулирования системой ECAS может быть
предусмотрен второй блок управления (например , на
платформе или на внешней стороне).
Для того, чтобы убедиться, что электроника связана только
с одним блоком управления, необходимо наличие
функционального переключателя между блоками
управления в проводке DATA к ECU. Это же правило
применимо и к более чем 2 блокам управления.
Приоритет
У блока управления высокий приоритет в системе. Если
функция разгрузочного уровня активна и блоком
управления дополнительно подается команда ПОДЪЕМА/
СПУСКА, то такая команда блока управления
выполняется.
При сбое в регулировке с помощью функции ПОДЪЕМА
СПУСКА можно перевести конструкцию автомобиля на
допустимый уровень для дальнейшего движения с учетом
команды.
– Чтобы система ECAS зарегистрировала присутствие
блока управления, нужно убедиться в том, что он
подсоединен к блоку ECU при вводе в эксплуатацию.
Блоки управления в сервисном обслуживании
В соответствии с разработкой системы существует
примерно 60 вариантов различных блоков управления,
отличие
развития, объеме функций, конструкции соединительного
штекера, а также в логотипе изоготовителя ТС. В случае
необходимости замены все это разноообразие можно
сократить до наименьшего количества основных
ЭКСПЛУАТ
блоку ECU не подсоединяйте сразу параллельно
К
два блока управления. Это недопустимо и приводит
к сбоям в работе.
друг от друга которых заключается в уровне
ожидания.
. Регулировки, начавшиеся в пределах
блоков управления
/
53

ECAS6.
Компоненты
вариантов, за счет чего данный процесс (замены)
протекает без каких-либо проблем.
Пульт ДУ Замена
446 056 000 0, 446 056 007 0,
446 056 011 0, 446 056 014 0,
446 056 016 0, 446 056 017 0,
446 056 018 0, 446 056 021 0,
446 056 024 0, 446 056 027 0,
446 056 028 0, 446 056 029 0,
446 056 032 0, 446 056 035 0,
446 056 116 0, 446 056 124 0,
446 056 127 0, 446 056 128 0,
446 056 129 0, 446 056 132 0,
446 056 135 0, 446 056 136 0,
446 056 137 0, 446 056 140 0,
446 056 141 0, 446 056 142 0,
446 056 143 0
446 056 002 0, 446 056 005 0,
446 056 009 0
446 056 012 0, 446 056 013 0 446 056 113 0
446 056 015 0 446 056 115 0
446 056 019 0, 446 056 020 0,
446 056 119 0
446 056 008 0, 446 056 025 0 446 056 125 0
446 056 030 0 446 056 130 0
446 056 033 0, 446 056 034 0,
446 056 133 0
446 056 138 0 446 056 139 0
446 056 026 0, 446 056 031 0,
446 056 126 0, 446 056 131 0
446 056 117 0
446 056 202 0
446 056 102 0
446 056 120 0
446 056 134 0
446 056 146 0
6.4.1 Блок управления для управления тягачом
446 056 25 . 0
Блок управления, служащий для координации тягачами,
способствует контролированию уровня вручную, а также
регулированию подъемной осью в ТС, обладающих
системой ECAS. Сюда относятся также системы ECU с
интегрированными функциями ECAS, как, например, TCE.
• Данное устройство обеспечивает управление уровнем
конструкции ТС в грузовых автомобилях и прицепах,
если данная функциональность поддерживается
системой ECAS.
• Любой тип транспортного средства. Поддержку находят
как транспортные средства с дышлом, так и седельные
тягачи/полуприцепы.
• Можно одинаково использовать наряду с системой
ECAS для прицепов и/или грузовых автомобилей.
Таким образом, пользователь получает возможность,
полностью контролировать уровень
удобного и прочного устройства управления.
Отдельные клавиши предварительного выбора оси
предусмотрены для целенаправленного выбора всех осей
ТС или, соответственно, групп осей в различных
комбинациях. Выбранные оси указываются с помощью
соотносящейся контр. сигн. лампочки. Понятная символика
и цветовое подчеркивание особых клавиш приводят к тому,
что обслуживание производится интуитивно.
с ECU происходит за счет прочного, 4-жильного
Связь
винтового кабеля, приделанного к устройству. В качестве
дополнительного оснащения под номером WABCO 446 056
010 4 Вы найдете соответствующее крепление.
Рекомендуется убирать устройство в крепление в случае
его неиспользования.
ТС с помощью
2
1
16
15
14
13
Рис. 43 Блок управления 446 056 250 0
3
12
11
10
9
Расположение клавиш (функции см. в 6.4)
1 Контр. сигн. лампочка передняя ось грузовой
автомобиль
2 Контр. сигн. лампочка задняя ось грузовой
автомобиль
3 Контр. сигн. лампочка передняя ось прицеп
4 Контр. сигн. лампочка задняя ось прицеп
5 Клавиша предварительного выбора подъемная ось
прицеп
4
5
6
7
8
6 Клавиша предварительного выбора подъемная ось
грузовой автомобиль
Кнопка "нормальный уровень"
7
8 Кнопка "стоп“
9 Кнопка "спуск"
10 Уровень памяти 2 - кнопка М 2
11 Клавиша предварительного выбора задняя ось
грузовой автомобиль
12 Клавиша предварительного выбора задняя ось
прицеп
13 Кнопка "поднятие"
14 Уровень памяти 1 - кнопка М 1
15 Клавиша предварительного выбора передняя ось
грузовой автомобиль
16 Клавиша предварительного выбора передняя ось
прицеп
54

Краткое описание системы
7. Краткое описание отдельных систем
ECAS 7.
7.1 ECAS 1-го поколения без датчика давления
Схема в качестве примера: 841 801 208 0
Данная система служит для автоматического
регулирования уровней в ТС 4x2 и 6х2, обладающих осями
с пневмоподвесками. Максимум 3 датчика хода
непрерывно регистрируют фактический уровень, т. е.
расстояние между конструкцией и осью. Отклонения к
заданному уровню будут отрегулированы при превышении
допустимых границ.
Возможно подключение
переключателя управления. Благодаря клапану
ограничения давления можно избежать полное удаление
воздуха из сильфона. С помощью кнопок и
переключателей можно реализовать следующие функции:
• Свободный спуск подъемной оси с помощью
переключателя
• Активизация функции "вспомогательная сила при
трогании ТС" с помощью клавиш
• Выбор нормального уровня посредством
переключателя между двумя параметрированными
нормальными уровнями.
блока управления или
Для процесса контролирования системы существуют 2
лампочки, расположенные на приборной панели.
1. Аварийная лампочка указывает на наличие
неисправностей в системе.
2. Аварийная лампочка показывает такие ситуации, в
которых система ECAS находится не в обычном режиме
(напр., нахождение конструкции вне нормального
уровня или активированная функция "вспомогательной
силы при трогании ТС"), но которая,
безотказно работает. В электронике сохраняются
параметры ТС, фактические значения, ошибки и другая
информация.
Процесс регулировки прекращается на некоторое время,
после того, как будет отпущена тормозная педаль; система
ECAS узнает об этом с помощью переключателя стопсигнала. При этом учитываются динамичные изменения
нагрузки на ось в процессе торможения и,
можно избежать излишнее регулирование.
Расположенный на ECU "выход РТС", который при
обычной эксплуатации находится под напряжением,
тем не менее,
таким образом,
Рис. 44 ECAS 1-го поколения без датчика давления
55

7. ECAS
Краткое описание системы
управляет электромагнитным клапаном. Данный процесс
происходит после того, как система ECU распознает спуск
конструкции на уровень, ниже заданного, как прекращение
получения данных о давлении в сильфоне, посылаемых
регулятору тормозных сил (соединение 41/42). Таким
образом, вместо сильфонного давления происходит
поступление запасного давления пневмоподвески в
качестве сигнала управления на выходы 41/42 регулятора
тормозных сил. Регулятору внушается
полностью нагруженным, что должно привести к
избежанию затормаживания ТС.
Контролирование сильфонного давления в ТС 6х2
происходит, если необходимо, с помощью двух
переключателей давления (ступень переключения:
например, 13т или 11т). Подъемную ось можно поднять
только в том случае, если переключатель 11т является
закрытым. Она снова опустится, если данный
переключатель откроется в процессе поднятия.
Активизация функции вспомогательной силы при трогании
ТС приводит к непрерывному поднятию подъемной оси,
если не откроется переключатель 13т. При поднятой
подъемной оси или для активированной функции
вспомогательной силы при трогании ТС может быть
параметризовано повышение заданного уровня.
Включение и автоматическое завершение функции
вспомогательной силы при трогании
, что ТС является
ТС ограничено за счет
параметрированной скорости. Продолжительность
функции вспомогательной силы при трогании ТС, а также
перерыв между ее активизациями могут быть
параметризованы соответственно необходимым
предписаниям.
С помощью двустороннего серийного интерфейса
возможны следующие действия: диагностика,
тестирование функций, калибровка оборудования,
параметризация, а также считывание диагностической
памяти.
7.2 ECAS 1-го поколения с датчиком давления
Схема
Данная система служит, в основном, для автоматического
регулирования ТС 6х2 с осями, обладающими
пневмоподвесками, а также она может быть использована
в ТС 4х2. Макс. 3 датчика хода непрерывно регистрируют
фактический уровень. Отклонения к заданному уровню
будут отрегулированы при превышении допустимых
границ.
Возможно подключение блока управления. С помощью
клавиши или
вспомогательной силы при трогании ТС.
Для процесса контролирования системы существуют 2
лампочки, расположенные на приборной панели. (¦ 7.1
в качестве примера: 841 801 242 0
переключателя можно реализовать функцию
Рис. 45: ECAS 1-го поколения с регулятором давления
56

Краткое описание системы
7.ECAS
поколение без датчика давления)
Система работает, используя различные стратегии
регулирования, в зависимости от скорости:
• При v > 0 км/ч система ECAS классифицирует
изменения уровня в качестве динамических (режим
движения) и исправляет заданное значение только в
том случае, если определяемые в период 60 сек.
значения датчика хода постоянно находятся вне
допущенных значений.
• При v = 0 км/ч
изменения уровня в качестве статических (режим
стоянки) и исправляет заданное значение только в том
случае, если определяемые значения датчика хода - в
параметрированном, очень коротком периоде времени
(например, 1сек.) - постоянно находятся вне
допущенных значений.
• Макс. 3 сек. после изменения v > 0 км/ч на v = 0 км/ч
(завершение движения), система ECAS все так
продолжает классифицировать изменения уровня в
качестве динамических (динамическое движение по
инерции).
• 7 сек. после начала движения система ECAS
проверяет, была ли превышена параметризуемая
разница заданного значения по отношению к заданному
уровню при начале движения и регулирует при
необходимости заданный уровень.
Что касается этой группы, то в некоторых системах (с
электроникой 446 055 009 0)
"исходный уровень". Он является основой для всех
параметрированных уровней и находится ниже
калиброванного нормального уровня I. Значение исходного
уровня электронная система определяет после
калибровки. Он должен превышать 5 отсчетов (counts) во
избежании неисправностей.
Для избежания полного удаления воздуха из
пневмоподушек при спуске конструкции вводится
параметризуемый уровень, называемый "уровень
застрахован благодаря
представляет собой наименее возможную разницу в
расстоянии по отношению к исходному уровню, которая
должна находиться над нижними упорами и которую можно
запустить с помощью блока управления.
Электромагнитный клапан ECAS прерывает процесс
вентиляции в случае установления электронной системой
при спуске конструкции следующего признака: при
нахождении конструкции ниже этого уровня невозможно
определить изменение расстояния на датчике хода в
пределах 6-кратной длительности импульсного режима (в
некоторых системах также "время измерения").
Высший уровень параметризуется в качестве разницы по
отношению к исходному уровню. Общая сумма обоих
значений не должна превышать 254.
В некоторых версиях возможен обмен между двумя
нормальными уровнями в зависимости от
параметризуемой ступени
уровня параметризуются в качестве различия по
отношению к исходному уровню. Нормальный уровень II
система ECAS классифицирует
же
вводится, так называемый,
буферу". Данный уровень
скорости. Оба нормальных
регулируется над нормальным уровнем I ниже
параметрированной ступени скорости.
После того, как отпускается тормозная педаль, на
некоторое время прекращается процесс регулировки. При
этом учитываются динамичные изменения нагрузки на ось
в процессе торможения и, таким образом, можно избежать
излишнее регулирование.
В ТС 6х2 происходит регулировка давления между
движущей и неведомой осью (напр ., подъемная ось) в
зависимости от исполнения системы при оптимальной тяге
(ECU 446 055 005) или при параметрированном
соотношении давления (ECU 446 055 009). Для этого
необходимо установление датчиков давления на
пневмоподушках ведущей оси, а не на пневмоподушках
неведомой задней оси.
Существует возможность, активировать функцию
вспомогательной силы при трогании ТС. По причине
установления датчиков давления на пневмоподушках,
проводится процесс вспомогательной силы при трогании
ТС в качестве плавного перераспределения нагрузки с
неведомой задней оси на ведущую ось (до тех пор, пока
нажата кнопка "вспомогательная сила при трогании ТС").
Вид вспомогательной силы, а также ее основные признаки
(напр., макс. допущенная нагрузка ведущей оси;
предельная скорость, до достижения которой действует
функция вспомогательной силы при трогании ТС и т.д.)
являются параметризованными.
Возможен процесс компенсации продавливания шин при
наличии датчиков давления (ECU 446 055 009).
С помощью двустороннего серийного интерфейса
возможны следующие действия: диагностика,
тестирование функций, калибровка оборудования,
параметризация, а также считывание диагностической
памяти. Электронная система должна находиться под
напряжением дольше 6,6 сек. после выключения
зажигания для надлежащего сохранения заданного
уровня. Если данное невозможно, то после включения
зажигания фактические уровни, установленные до
прерывания подачи питающего напряжения, становятся
новыми заданными уровнями.
7.3 ECAS 4x2A
Схемы в качестве примера: 841 801 390 0 /
841 801 214 0 / 841 801 490 0
Данная система служит для автоматического
регулирования уровнями в ТС 4x2, обладающих
пневмоподвесками. Макс. 3 датчика хода непрерывно
регистрируют фактический уровень. Отклонения к
заданному уровню будут отрегулированы при превышении
допустимых границ.
Характеристика регулятора заданного уровня должна быть
параметрирована. Для этого электронной системе
сообщается в процессе параметризации
пропорциональный и дифференциальный коэффициент
для передней и задней оси, за счет которого определяется
характер регулировки
заданным уровнем.
Возможно подключение блока управления или
переключателя управления.
системы в процессе регулирования
осями с
57

7. ECAS
Краткое описание системы
Для процесса контролирования системы существуют 2
лампочки, расположенные на приборной панели.
1. Аварийная лампочка указывает на наличие
неисправностей в системе. При этом несерьезные
неисправности, нарушения достоверности или
пониженное напряжение 7,5 … 18 В указываются за
счет непрерывного светового сигнала, а более
серьезные погрешности, как "Система в режиме
диагностики" с помощью мигания лампочки (частота
мигания: прим. 1
2. Аварийная лампочка указывает на такие ситуации, в
которых система ECAS находится не в обычном режиме
(напр., нахождение конструкции вне нормального
уровня, небольшие нарушения в достоверности или
провождение ручной калибровки), но которая, тем не
менее, безотказно работает. В электронике
сохраняются параметры ТС, фактические значения,
ошибки и другая информация.
Гц).
Система работает в зависимости от
параметрируемой предельной скорости, используя
различные стратегии регулирования:
• Сверх этих параметров скорости: система ECAS
классифицирует изменения уровня в качестве
динамических (режим движения) и исправляет
заданное значение только в том случае, если
определяемые в период 60 сек. значения датчика хода
постоянно
об
ласти заданных значений.
• Ниже данной предельной скорости: система ECAS
классифицирует изменения уровня в качестве
статических (режим стоянки) и исправляет заданное
значение только в том случае, если определяемые
значения датчика хода - в параметрированном, очень
коротком периоде времени (например, 1сек.) постоянно находятся вне допущенных значений.
• Макс. 3 сек. после изменения v > 0 км/ч на v = 0 км
(завершение движения), система ECAS все так же
продолжает классифицировать изменения уровня в
качестве динамических (динамическое движение по
инерции).
• 7 сек. после начала движения система ECAS
проверяет, была ли превышена параметризуемая
разница заданного значения по отношению к заданному
уровню при начале движения и регулирует при
необходимости заданный уровень.
С помощью определенного процесса
(только ECU 446 055 027; т. е. RVI, IVECO, DAF)
регулировку можно установить таким образом, что в ТС с 2мя датчиками хода на движущей оси допустим
определенный перекос корпуса над осью в пользу
равномерного распределения давления в
пневмоподушках. После повторного безуспешного
находятся вне параметрируемой
/ч
параметризации
Рис. 46: ECAS 4x2A; схема 841 801 390 0
58

Краткое описание системы
7.ECAS
регулирования заданным уровнем в пределах
допустимого, система ECAS распознает поднятие
конструкции на уровень неравномерной погрузки и
устанавливает левую сторону ТС на заданный уровень.
Она коротко проводит вентиляцию пневмоподушки
вышестойщей стороны ТС (300 мс), чтобы уравнить
давления в пневмоподушках движущей оси.
После нажатия на тормоз, ECAS узнает об этом за счет
присоединения U
приостанавливается процесс регулировки. При этом
учитываются динамичные изменения нагрузки на ось в
процессе торможения и, таким образом, можно избежать
излишнее регулирование.
Существует возможность провести аварийное управление
сигналом РТС с помощью электромагнитного клапана в
соответствующем процессе параметризации. (невозможно в
ECU 446 055 024 и 446 055 027)
Существует возможность изменения высоты между
обоими нормальными уровнями (НУ
изменения на любой уровень между верхним и нижним
уровнями. НУ I сообщается электронике при вводе
системы в эксплуатацию; НУ II можно параметрировать, он
сообщается нижнему уровню в качестве
дифференциального значения. Они могут быть
(напряж.) к Pin 24,
АККУМ
I и НУ II), а также
установлены следующим образом:
• с помощью приведения в действие переключателя
нормального уровня (НУ) I/II происходят изменения
между обоими уровнями. Для установления НУ II, ECUPin 23 подключается на минус, а для возврата на НУ I
необходимо прервать данную связь. При нажатии на
кнопку "НУ" на пульте управления устанавливается
нормальный уровень, соответствующий позиции
переключателя НУ I/II.
• при превышении параметрированной допущенной
скорости, конструкция переходит на нормальный
уровень (если она там еще не находится); при
дальнейшем превышении допущенной скорости и при
последующем понижении дополнительной, заниженной
предельной скорости, возможно изменение с
настроенного НУ I на НУ II в соответственном процессе
параметризации.
• с помощью нажатия кнопки "поднятие" или "спуск",
находящейся на блоке управления, можно установить
любой уровень. От системы зависит, будет ли
активирована функция поднятия/спуска за счет
короткого
на блоке управления и отключение этой функции
благодаря нажатию на кнопку "стоп" (ECU 446 055 024;
т. е. ТС DC ); или от нее также зависит, останется ли
функция "подъема/спуска" активированной до тех пор,
нажатия соответствующего переключателя
Рис. 47: ECAS 4x2A схема 841 801 214 0
59

ECAS7.
Краткое описание системы
пока нажата соответствующая кнопка на блоке
управления.
• при нажатии на кодированный переключатель
управления, используемый системой вместо блока
управления, можно также провести функции "поднятия"
и "спуска".
При отсутствии в системе как блока управления, так и
переключателя управления, можно достичь того, что ECAS
устанавливает нормальный уровень сразу же после
включения зажигания за счет
Pin 2 и 11.
С помощью двустороннего серийного интерфейса
возможны следующие действия: диагностика,
тестирование функций, калибровка оборудования,
параметризация, а также считывание диагностической
памяти.
С помощью соответствующей параметризации можно
обеспечить подачу измеряемых значений во время
обычного режима работы ECAS. (не касается ECU 446 055
024).
Производственные значения в отдельности:
перемыкания электронных
1. фактический уровень слева на задней оси
2. фактический
3. фактический уровень на передней оси
4. заданный уровень слева на задней оси
5. заданный уровень на передней оси
6. Скорость
7. статус регулятора (только версия ECU 027) для других
не имеет значения
8. статус "блок управления / переключатель управления":
128 = спуск
Данный способ выдачи измеряемых значений допустим
только в случае сервисного обслуживания, по прошествии
выдачи измеряемых значений необходимо снова
установить нормальный модус.
уровень справа на задней оси
1= предварительный выбор передняя ось
2= предварительный выбор задняя ось
4= СТОП
8= нормальный уровень
16 = память I
32 = память II
64 =
поднятие
Рис. 48: ECAS 4x2A; схема 841 801 490 0
60

Краткое описание системы
ECAS 7.
7.4 ECAS 6x2A
Схемы в качестве примера: 841 801 353 0 /
841 801 268 0 / 841 801 379 0
Данная система служит, в основном, для автоматического
регулирования уровней в ТС 6х2 (возможно также и в ТС
4x2), обладающих осями с пневмоподвесками. Макс. 3
датчика хода непрерывно регистрируют фактический
уровень. Отклонения к заданному уровню будут
отрегулированы при превышении допустимых границ.
Электронной системе сообщается макс. допустимое
давление в
положения переключателей давления. При превышении
этого допустимого давления происходит спуск подъемной
оси или нагружение ведомой оси.
Характеристика регулятора заданного уровня должна быть
параметрирована. Для этого электронной системе
сообщается в процессе параметризации
пропорциональный и дифференциальный коэффициент
для передней и задней оси, за счет которого определяется
характер регулировки
заданным уровнем.
Возможно подключение блока управления.
пневмоподушках движущей оси за счет
системы в процессе регулирования
Для процесса контролирования системы существуют макс.
5 лампочек, расположенных на приборной панели.
• аварийная лампочка указывает на наличие
неисправностей в системе. При этом несерьезные
неисправности, нарушения достоверности или
пониженное напряжение 7,5 … 18 В указываются за
счет непрерывного светового сигнала, а более
серьезные погрешности,
диагностики" с помощью мигания лампочки (частота
мигания: прим. 1 Гц).
• аварийная уровневая лампочка указывает на такие
ситуации, в которых система ECAS находится не в
обычном режиме (напр., нахождение конструкции вне
нормального уровня, небольшие нарушения в
достоверности или провождение ручной калибровки),
но которая, тем не менее, безотказно работает.
• показатель
трогании ТС указывает на ее запуск.
• позиционная лампочка подъемной оси (также лампочка
холостого пробега/подъемной оси) загорается, если
поднимается подъемная или разгружается ведомая
ось.
функции вспомогательной силы при
как "Система в режиме
Рис. 49: ECAS 6x2A; схема 841 801 353 0
61

ECAS7.
Краткое описание системы
• лампочка нормального уровня указывает на то, был ли
выбран для ТС нормальный уровень II.
В электронике сохраняются параметры ТС, фактические
значения, ошибки и другая информация.
Система работает, используя различные стратегии
регулирования, в зависимости от скорости:
• Если происходит превышение скорости вне
допущенных пределов, то система классифицирует
изменения уровня как динамические (режим движения
и исправляет заданное значение только в том случае,
если определяемые в период 60 сек. значения датчика
хода постоянно находятся вне параметрированной
области заданных значений.
• Если уровень скорости находится ниже допущенных
пределов, то система ECAS классифицирует изменения
уровня в качестве статических (режим стоянки) и
исправляет заданное значение только в том случае,
если определяемые
параметрированном, очень коротком периоде времени
(например, 1сек.) - постоянно находятся вне
допущенных значений.
• В периоде времени до 3-х секунд после понижения
предельного значения скорости, система ECAS все так
же продолжает классифицировать изменения уровня в
качестве динамических (динамическое движение по
инерции).
значения датчика хода - в
• 7 сек. после начала движения система ECAS проверяет,
была ли превышена параметризуемая разница
заданного значения по отношению к заданному уровню
при начале движения и регулирует при необходимости
заданный уровень.
После нажатия на тормоз, ECAS узнает об этом за счет
присоединения U
системы, приостанавливается процесс регулировки. При
этом учитываются динамичные изменения нагрузки на ось
в процессе торможения и, таким образом, можно избежать
)
излишнее регулирование.
Существует возможность провести аварийное управление
сигналом РТС с помощью электромагнитного клапана в
соответствующем процессе параметризации.
Существует возможность изменения высоты между обоими
нормальными уровнями (НУ I и
любой уровень между верхним и нижним уровнями. Они
могут быть установлены следующим образом:
• с помощью приведения в действие переключателя НУ I/
II происходят изменения между обоими уровнями. Для
установления НУ II, ECU-Pin 23 подключается на минус,
а для возврата на НУ I необходимо прервать данную
связь. При нажатии на кнопку "НУ
устанавливается нормальный уровень,
соответствующий позиции переключателя НУ I/II. При
этом не должна быть активирована функция
(напряж.) к Pin 7 электронной
АККУМ
НУ II), а также изменения на
" на пульте управления
Рис. 50: ECAS 6x2A; схема 841 801 268 0
62

Краткое описание системы
7.ECAS
вспомогательной силы при трогании ТС.
• при превышении параметрированной допущенной
скорости конструкция переходит на нормальный
уровень (если она там еще не находится); при
дальнейшем превышении допущенной скорости и при
последующем понижении дополнительной, заниженной
предельной скорости, возможно изменение с
настроенного НУ I на НУ II в соответственном процессе
параметризации.
• с помощью нажатия кнопки "поднятие
находящейся на блоке управления, можно установить
любой уровень.
При отсутствии в системе блока управления можно
достичь того, что ECAS устанавливает нормальный
уровень сразу же после включения зажигания за счет
перемыкания электронных Pin 20 и 21.
Наряду с основной функцией ECAS (регулировка
расстояния между конструкцией и осью), особую роль
играет также функция регулирования нагрузки/
подъемной/ведомой оси с помощью ECAS. При этом
можно вручную управлять подъемной/ведомой осью или
провести полностью автоматическую регулировку данных
осей. Хотя в последующих главах речь будет идти о
"подъемной оси", данная информация касается также и
функций ведомой оси (насколько это возможно).
Определение точки переключения подъемной оси на
движущей оси
переключателей/датчиков давления. На переключателе
давления или датчике давления на движущей оси
определяется повышенное давление в пневмоподушках с
помощью 2-ход. 2-поз. клапана. Два переключателя
давления на движущей оси подключены последовательно;
таким образом, переключатель, который открывается
первым, подает сигнал ECU. На движущей оси с двумя
датчиками давления определяются
измеренные значения давления. Так как только движущая
ось обеспечена датчиками, то существует всего лишь одна
возможность проведения регулировки, а именно по
принципу "процесса уравнивания давления".
Выключатель давления:
Точка переключения подъемной/ведомой оси находится
обычно в пределах 11 т …11,5т. Она определяется с
помощью переключателя давления, подсоединенного к
Pin 5. В случае неисправности переключателя давления,
подъемная/ведомая ось опускается/разгружается.
Датчик давления:
Точка переключения подъемной/ведомой оси будет
параметрирована. Она определяется с помощью датчика
давления, подсоединенного к Pin 5/6. В случае
неисправности датчика давления, подъемная/ведомая ось
опускается/разгружается.
Для управления подъемной осью могут быть использованы
отдельные переключатели, находящиеся на приборной
панели.
найти 3 различных варианта переключателей для
управления подъемной осью:
1. Переключатель, отвечающий за подъемную ось
или холостой пробег:
подключение минуса к Pin 24 системы ECU.
открытый переключатель = подъемная ось "СПУСК"
можно провести с помощью макс. 2
Согласно параметризации, применение могут
" или "спуск",
разгрузки
(в ECU) слева и справа
закрытый переключатель = подъемная ось
"ПОДНЯТИЕ".
2. Кнопка подъемной оси или холостого пробега:
подключена к Pin 24 системы ECU.
кнопка открыта = нет управления
кнопка переключена
оси
кнопка переключена на U
3. Комбинированный переключатель для управления
подъемной осью и функцией вспомогательной
силы при трогании ТС.Управление подъемной осью
подключено к Pin24 / функция вспомогательной силы
при трогании ТС - к Pin17 системы ECU.
Pin 24 и Pin 17- открыты = подъемная ось "СПУСК"
Pin 24 - закрыт, a Pin 17- открыт = подъемная ось
"ПОДНЯТИЕ".
Переключателей касается следующее:ECAS реагирует
на процессы переключения, проводимые при
зажигании.
Управление пневмоподушкой, как таковой, происходит, в
основном, вынужденно. Т.е. электромагнитный клапан
ECAS выполняет одновременное провождение функций
"под.ось ПОДНЯТИЕ" (подача воздуха в пневмоподушку,
ECU-Pin 30= U
из пневмоподушки, ECU-Pin 12 = U
внутренних пневматических связей.
В ТС с ECU 446 055 048 (Scania) возможно отдельное
управление пневмоподушкой в соответственном процессе
параметризации. Необходимым условием для этого
является наличие соответственного электромагнитного
клапана ECAS с третьим управляющим магнитом для
пневмоподушки, который при необходимости может быть
подключен через ECU-Pin 14 к U
подачи тока на электромагнитный клапан зависит от
используемой конструкции подъемной оси.
Важным пунктом в этом отношении является
конструктивное исполнение вспомогательной силы при
трогании ТС. Желаемый тип вспомогательной силы при
трогании ТС можно выбрать, с одной стороны, с помощью
аппаратуры за счет процесса подключения к Pin-ам 16 и 19
системы ECU (т.
минус), с другой стороны, с помощью программного
обеспечения за счет процесса параметризации. Если тип
вспомогательной силы при трогании ТС должен быть
параметризирован, то Pin 16 и 19 должны прилегать к
минусу. Даже вспомогательная сила при трогании ТС
активируется с помощью переключения с ECU-Pin 17 на
минус.
Определение границ вспомогательной помощи на
движущей
переключателям/датчикам давления. Выяснение сигнала
проводится также, как и для точки переключения
подъемной оси.
Выключатель давления:
Ограничение, касающееся вспомогательной силы
находится, как правило, примерно около 13 т. Оно
определяется за счет переключателя давления,
подключенного к Pin 6. За счет постепенного снижения
нагрузки на подъемную ось, происходит повышение
нагрузки на движущую ось до тех пор, пока эта
АККУМ
е. Pin переключен/непереключен на
оси можно произвести благодаря макс. двум
на минус = поднятие подъемной
= спуск подъемной оси.
АККУМ
включенном
) или "под.ось "СПУСК" (сброс воздуха
) с помощью
АККУМ
. Период времени
АККУМ
63

7. ECAS
Краткое описание системы
информация не достигает переключателя давления для
вспомогательной силы; сильфонное давление держится
затем в пневмоподушках.
Датчик давления:
Ограничение, касающееся вспомогательной силы, будет
параметризовано. Оно определяется с помощью датчика
давления, подсоединенного к Pin 5/6. В случае
неисправности датчика давления, подъемная/ведомая ось
опускается/разгружается.
За счет использования датчиков давления может быть
проведена функция "вспомогательной силы
ТС в случае перегрузки". Данное означает: если нагрузка
на движущую ось находится, с одной стороны, ниже
допустимых пределов, а с другой стороны, уже превысила
точку переключения для управления подъемной осью
(напр., точка переключения для управления подъемной
осью = 75 % допустимой нагрузки на ось), то значение
ограничения вспомогательной силы повышается на
полученное значение разницы давления.
При запуске функции вспомогательной силы - независимо
от существующего заданного уровня - всегда происходит
повышение заданного уровня на параметрированное
значение "повышение заданного уровня при
активированной вспомогательной силе при трогании ТС".
при трогании
С помощью двустороннего серийного интерфейса
возможны следующие действия: диагностика,
тестирование функций, калибровка оборудования,
параметризация, а также считывание диагностической
памяти.
С помощью соответствующей параметризации можно
обеспечить подачу измеряемых значений во время
обычного режима работы ECAS.
Производственные значения в отдельности:
1. фактический уровень слева на задней оси
2. фактический уровень справа на задней оси
3. фактический уровень на передней оси
4. заданный уровень слева на задней оси
5. заданный уровень на передней оси
6. статус: переключатель 13 т
на движущей оси
7. скорость или смещение процесса компенсации
продавливания шин
8. статус блок управления: / или скорость:
1= предварительный выбор: передняя ось
2= предварительный выбор: задняя ось
4= СТОП
8= нормальный уровень
или усредненное давление
Рис. 51: ECAS 6x2A; схема 841 801 379 0
64

Краткое описание системы
ECAS
7.
16 = память I
32 = память II
64 = поднятие
128 = спуск
Исходные значения полученных измерений на отдельных
каналах зависят от используемой электроники.
Данный способ выдачи измеряемых значений допустим
только в случае сервисного обслуживания, по прошествии
выдачи измеряемых значений необходимо снова
установить нормальный модус.
7.5 ECAS 4x2 Ratio
Схемы в качестве примера: 841 801 641 0 /
841 801 635 0
Данная система служит для автоматического
регулирования уровнями в
пневмоподвесками. Макс. 3 датчика хода непрерывно
регистрируют фактический уровень. Отклонения к
заданному уровню будут отрегулированы при превышении
допустимых границ. Пининг является практически
идентичным версии ECAS 4x2A, если сравнивать, данный
Ratio-вариант более усовершенствован.
Характеристика регулятора заданного уровня больше не
должна быть параметрирована. Система является
самообучающейся, т. е. не существует необходимости
ТС 4x2, обладающих осями с
ввода пропорционального и дифференциального
коэффициента.
Возможно подключение блока управления или
переключателя управления.
Для процесса контролирования системы существуют 2
лампочки, расположенные на приборной панели.
1. аварийная лампочка указывает на наличие
неисправностей в системе. При этом несерьезные
неисправности, нарушения достоверности или
пониженное напряжение 7,5 … 18В указываются за счет
непрерывного светового сигнала, а более серьезные
погрешности,
помощью мигания лампочки (частота мигания: прим.
1 Гц).
2. Аварийная лампочка указывает на такие ситуации, в
которых система ECAS находится не в обычном режиме
(напр., нахождение конструкции вне нормального
уровня, небольшие нарушения в достоверности или
провождение ручной калибровки), но которая, тем не
менее, безотказно работает. В
сохраняются параметры ТС, фактические значения,
ошибки и другая информация.
как "Система в режиме диагностики" с
электронике
Рис. 52: ECAS 4x2 Ratio; схема 841 801 641 0
65

7. ECAS
Краткое описание системы
Также и здесь, система работает, используя различные
стратегии регулирования, в зависимости от скорости:
(¦ 7.4 ECAS 6x2A)
После нажатия на тормоз, ECAS узнает об этом за счет
присоединения U
системы, приостанавливается процесс регулировки. При
этом учитываются динамичные изменения нагрузки на ось
в процессе торможения и, таким образом, можно избежать
излишнее регулирование.
Существует возможность провести аварийное управление
сигналом РТС с помощью электромагнитного клапана в
соответствующем процессе параметризации.
Существует возможность изменения высоты между
обоими нормальными уровнями (НУ I и
изменения на любой уровень между верхним и нижним
уровнями. Они могут быть установлены следующим
образом:
• с помощью приведения в действие переключателя НУ
I/II происходят изменения между обоими уровнями. Для
установления НУ II, ECU-Pin 23 подключается на минус,
а для возврата на НУ I необходимо прервать данную
связь. При нажатии на кнопку "НУ
управления устанавливается нормальный уровень,
соответствующий позиции переключателя НУI/II.
(напряж.) к Pin 24 электронной
АККУМ
НУ II), а также
" на пульте
• при превышении параметрированной допущенной
скорости, конструкция переходит на нормальный
уровень (если она там еще не находится); при
дальнейшем превышении допущенной скорости и при
последующем понижении дополнительной, заниженной
предельной скорости, возможно изменение с
настроенного НУ I на НУ II в соответственном процессе
параметризации
• с помощью нажатия кнопки "поднятие" или "спуск",
находящейся на блоке управления, можно установить
любой уровень.
• при нажатии на кодированный переключатель
управления, используемый системой вместо блока
управления, можно также провести функции "поднятия"
и "спуска".
При отсутствии в системе как блока управления, так и
переключателя управления, можно достичь того, что ECAS
устанавливает
включения зажигания за счет перемыкания электронных
Pin 2 и 11.
В данных электронных системах параметрируется особая
функция "Эксплуатация крана".
С помощью двустороннего серийного интерфейса
возможны следующие действия: диагностика,
тестирование функций, калибровка оборудования,
.
нормальный уровень сразу же после
Рис. 53: ECAS 4x2 Ratio; схема 841 801 635 0
66

Краткое описание системы
ECAS
7.
параметризация, а также считывание диагностической
памяти.
С помощью соответствующей параметризации можно
обеспечить подачу измеряемых значений во время
обычного режима работы ECAS. Производственные
значения в отдельности:
1 фактический уровень на передней оси
2 фактический уровень слева на задней оси
3 фактический уровень справа на задней оси
4 заданный уровень на передней оси
5 заданный уровень слева
6 статус регулятора спереди
7 статус регулятора сзади с левой стороны
8 статус регулятора сзади с правой стороны
Данный способ выдачи измеряемых значений допустим
только в случае сервисного обслуживания, по прошествии
выдачи измеряемых значений необходимо снова
установить нормальный модус.
7.6 ECAS 4x2 KWP 2000
Схемы в качестве примера: 841 801 647 0 /
841 801 663 0
Данная система служит для автоматического
регулирования уровнями
на задней оси
в ТС 4x2, обладающих осями с
пневмоподвесками. Макс. 3 датчика хода непрерывно
регистрируют фактический уровень. Отклонения к
заданному уровню будут отрегулированы при превышении
допустимых границ. Пининг базируется на версии 4х2А
системы ECAS. Данный вариант является, по сравнению с
этим, более усовершенствованным.
Электронная система обладает диагностическим
интерфейсом по ISO/WD 14 230 (“Keyword Protocol 2000”) и,
таким образом, отличается этим
электроник 4х2, обладающих диагностическим
интерфейсом по DIN ISO 9141. За счет этого
необязательно использовать L-провод, кроме того,
повышается темп передачи данных.
Характеристика регулятора заданного уровня больше не
должна быть параметрирована. Система является
самообучающейся, т. е. не существует необходимости
ввода пропорционального и дифференциального
коэффициента. Процесс обучения, протекающий только
при определенных условиях и в
предписанный теоретический ход регулировки, базируется
на скорости поднятия и спуска конструкции; эта скорость
определяется отдельно на каждом датчике хода.
Полученные в процессе обучения характеристики,
сохраняются в ECU при выключенном зажигании.
от предшествующих
котором оптимизируется
Рис. 54: ECAS 4x2 KWP 2000; схема 841 801 647 0
67

ECAS7.
Краткое описание системы
Возможно подключение блока управления или
переключателя управления.
Для процесса контролирования системы существуют 2
лампочки, расположенные на приборной панели. (¦ 7.5
ECAS 4x2 Ratio)
Система работает в зависимости от параметризуемой
предельной скорости, используя различные стратегии
регулирования:
• Сверх параметров скорости: система ECAS
классифицирует изменения уровня в качестве
динамических (режим движения) и исправляет
заданное значение только в том случае, если
определяемые в период 60 сек. значения датчика хода
постоянно находятся вне параметрированной области
заданных значений.
• Ниже предельной скорости: система ECAS
классифицирует изменения уровня в качестве
статических (режим стоянки) и исправляет заданное
значение только в том случае, если определяемые
значения датчика хода - в параметрированном, очень
коротком периоде времени (например, 1сек.) постоянно находятся вне
• Макс. 3 сек. после изменения v > 0 км/ч на v = 0 км/ч
(завершение движения), система ECAS все так же
продолжает классифицировать изменения уровня в
качестве динамических (динамическое движение по
инерции).
допущенных значений.
• 7 сек. после начала движения система ECAS
проверяет, была ли превышена параметризуемая
разница заданного значения по отношению к заданному
уровню при начале
необходимости заданный уровень.
• С помощью определенного процесса параметризации
можно установить регулировку таким образом, что в ТС
с 2-мя датчиками хода на движущей оси допустим
определенный перекос корпуса над осью в пользу
равномерного распределения давления в
пневмоподушках. После повторного безуспешного
регулирования заданным уровнем в пределах
допустимого, система ECAS
конструкции на уровень неравномерной погрузки.
Таким образом, ECAS устанавливает левую сторону ТС
на заданный уровень и проводит вентиляцию
пневмоподушки вышестойщей стороны ТС (300 мс),
чтобы уравнить давления в пневмоподушках движущей
оси.
• После нажатия на тормоз, ECAS узнает об этом за счет
присоединения U
системы, приостанавливается процесс регулировки.
При этом учитываются динамичные изменения
нагрузки на ось в процессе торможения и, таким
образом, можно избежать излишнее регулирование.
• Существует возможность провести аварийное
управление сигналом РТС с помощью
электромагнитного клапана в соответствующем
движения и регулирует при
распознает поднятие
(напряж.) к Pin 24 электронной
АККУМ
Рис. 55: ECAS 4x2 KWP 2000; схема 841 801 663 0
68

Краткое описание системы
7.ECAS
процессе параметризации.
Изменение высоты между НУ I и НУ II, а также изменение
на любой уровень между верхним и нижним уровнями,
проводится в точности также, как и описано в 4x3 Ratio (¦
7.5).
При отсутствии в системе как блока управления, так и
переключателя управления, можно достичь того, что ECAS
устанавливает нормальный уровень сразу же после
включения зажигания
Pin 2 и 11.
В данных электронных системах параметрируется особая
функция "Эксплуатация крана".
В качестве ресивера полученных измерений, касательно
расстояния между осью и конструкцией, можно
использовать 3 вида датчиков хода:
• датчики хода без температурной компенсации.
• датчики хода с температурной компенсацией.
• датчики угла вращения.
На ТС можно установить только один
типов, т. е. нельзя комбинировать. Необходимо учитывать,
что устанавливаемый тип датчика хода должен
соответствовать параметризации.
С помощью двустороннего серийного интерфейса
возможны следующие действия: диагностика,
тестирование функций, калибровка оборудования,
параметризация, а также считывание диагностической
памяти.
С помощью соответствующей параметризации можно
обеспечить подачу измеряемых значений во время
обычного режима работы ECAS.
значения в отдельности:
1. фактический уровень на передней оси.
2. фактический уровень слева на задней оси.
3. фактический уровень справа на задней оси.
4. заданный уровень на передней оси.
5. заданный уровень слева на задней оси.
6. отклонение справа-слева.
7. статус клапана.
8. Скорость движения.
Данный способ выдачи измеряемых значений допустим
только в
выдачи измеряемых значений необходимо снова
установить нормальный модус.
7.7 ECAS 6x2 Ratio
Данная система служит, в основном, для автоматического
регулирования уровней в ТС 6х2 (возможно также и в ТС
4x2), обладающих осями с пневмоподвесками. Макс. 3
датчика хода непрерывно регистрируют фактический
уровень. Отклонения к заданному уровню будут
отрегулированы при превышении допустимых границ.
Электронной системе ECU сообщается макс. допустимое
давление в пневмоподушках движущей оси за счет
случае сервисного обслуживания, по прошествии
Схема в качестве примера: 841 801 681 0
за счет перемыкания электронных
из перечисленных
Производственные
положения переключателей давления. При превышении
этого допустимого давления происходит спуск подъемной
оси или нагружение ведомой оси.
Характеристика регулятора заданного уровня больше не
должна быть параметрирована. Система является
самообучающейся, т.е. не существует необходимости
ввода пропорционального и дифференциального
коэффициента. Процесс обучения, протекающий только
при определенных условиях и в котором оптимизируется
предписанный теоретический ход регулировки, базируется
на скорости поднятия и спуска конструкции; эта скорость
определяется отдельно на каждом датчике хода.
Полученные в процессе обучения характеристики,
сохраняются в ECU при выключенном зажигании.
Возможно подключение блока управления.
Для процесса контролирования системы существуют
макс. 5 лампочек, расположенных на приборной
панели. По
гореть в качестве контроля. Затем они работают в
нормальном режиме, а это означает:
• аварийная лампочка указывает на наличие
неисправностей в системе. При этом несерьезные
неисправности, нарушения достоверности или
пониженное напряжение 7,5 … 18 В указываются за
счет непрерывного светового сигнала, а более
серьезные погрешности, как "Система в
диагностики" с помощью мигания лампочки (частота
мигания: прим. 1 Гц).
• аварийная уровневая лампочка указывает на такие
ситуации, в которых система ECAS находится не в
обычном режиме (напр., нахождение конструкции вне
нормального уровня, небольшие нарушения в
достоверности или провождение ручной калибровки),
но которая, тем не менее, безотказно работает.
• показатель функции вспомогательной силы
трогании ТС указывает на ее запуск.
• позиционная лампочка подъемной оси (также лампочка
холостого пробега/подъемной оси) загорается, если
поднимается подъемная или разгружается ведомая
ось.
• лампочка нормального уровня указывает на то, был ли
выбран для ТС нормальный уровень (НУ) II.
В электронике сохраняются параметры ТС, фактические
значения, ошибки и другая
Система работает в зависимости от параметризуемой
предельной скорости, используя различные стратегии
регулирования:
• Сверх параметров скорости: система ECAS
классифицирует изменения уровня в качестве
динамических (режим движения) и исправляет
заданное значение только в том случае, если
определяемые в период 60сек. значения датчика хода
постоянно находятся вне параметрированной области
заданных значений.
• Ниже предельной
классифицирует изменения уровня в качестве
статических (режим стоянки) и исправляет заданное
сле включения зажигания они должны 2 сек.
режиме
при
информация.
скорости: система ECAS
69

7.
ECAS
Краткое описание системы
значение только в том случае, если определяемые
значения датчика хода - в параметрированном, очень
коротком периоде времени (например, 1сек.) постоянно находятся вне допущенных значений.
• Макс. 3 сек. после изменения v > 0 км/ч на v = 0 км/ч
(завершение движения), система ECAS все так же
продолжает классифицировать изменения уровня в
качестве динамических (динамическое движение по
инерции).
7 сек. после начала движения, система ECAS
•
проверяет, была ли превышена параметризуемая
разница заданного значения по отношению к заданному
уровню при начале движения и регулирует при
необходимости заданный уровень.
• После нажатия на тормоз, ECAS узнает об этом за счет
присоединения U
системы, приостанавливается процесс регулировки.
При этом учитываются динамичные изменения
нагрузки на ось в процессе торможения и, таким
образом, можно избежать излишнее регулирование.
Существует возможность провести аварийное управление
сигналом РТС с помощью электромагнитного клапана в
соответствующем процессе параметризации.
(напряж.) к Pin 7 электронной
АККУМ
Определение изменения высоты между НУ I и НУ II, а
также точки
производится в точности также, как и описано в ECAS
6x2A (¦ 7.4).
Управление пневмоподушкой, как таковой, происходит, в
основном, вынужденно. Т.е. электромагнитный клапан
ECAS выполняет одновременное провождение функций
"под.ось ПОДНЯТИЕ" (подача воздуха в пневмоподушку,
ECU-Pin 30= U
из пневмоподушки, ECU-Pin 12 = U
внутренних пневматических связей.
Важным пунктом в этом отношении является
конструктивное исполнение вспомогательной силы при
трогании ТС. Желаемый тип вспомогательной силы при
трогании ТС можно выбрать, с одной стороны, с помощью
аппаратуры за счет процесса подключения к Pin-ам 16 и 19
системы ECU (т. е. Pin переключен/непереключен на
минус), а с другой
обеспечения за счет процесса параметризации. Если тип
вспомогательной силы при трогании ТС должен быть
параметризирован, то Pin 16 и 19 должны прилегать к
минусу. Даже вспомогательная сила при трогании ТС
активируется с помощью переключения с ECU-Pin 17 на
минус.
переключения подъемной оси
) или "под.ось "СПУСК" (сброс воздуха
АККУМ
стороны, с помощью программного
АККУМ
) с помощью
Рис. 56: ECAS 6x2 Ratio; схема 841 801 681 0
70

Краткое описание системы
7.ECAS
Определение границ вспомогательной помощи на
движущей оси можно произвести благодаря макс. двум
переключателям/датчикам давления. Выяснение сигнала
проводится также, как и для точки переключения
подъемной оси.
Выключатель давления:
Ограничение, касающееся вспомогательной силы
находится, как правило, примерно около 13т. Оно
определяется с помощью переключателя давления,
подсоединенного к Pin 6. За счет постепенного снижения
нагрузки
нагрузки на движущую ось до тех пор, пока эта информация
не достигает переключателя давления для
вспомогательной силы; сильфонное давление держится
затем в пневмоподушках.
Датчик давления:
Ограничение, касающееся вспомогательной силы, будет
параметризовано. Оно определяется с помощью датчика
давления, подсоединенного к Pin 5/6. В случае
неисправности датчика давления подъемная
опускается / происходит нагрузка на ведомую ось. За счет
использования датчиков давления может быть обеспечена
"Вспомогательная сила при трогании ТС при перегрузке"
(напр., 446 055 405 для DAF). Данное означает: если
нагрузка на движущую ось находится, с одной стороны,
ниже допустимых пределов, а с другой стороны, уже
превысила точку переключения для управления подъемной
осью
подъемной осью = 75 % допустимой нагрузки на ось), то
значение ограничения вспомогательной силы повышается
на полученное значение разницы давления.
Повышение заданного уровня при активированной функции
вспомогательной силы.
При запуске вспомогательной силы всегда происходит
повышение заданного уровня на параметрированное
значение, независимо от существующего заданного
уровня.
С помощью двустороннего
возможны следующие действия: диагностика,
тестирование функций, калибровка оборудования,
параметризация, а также считывание диагностической
памяти.
С помощью соответствующей параметризации можно
обеспечить подачу измеряемых значений во время
обычного режима работы ECAS. Существует возможность,
рассмотреть отдельные производственные значения.
Для варианта ECU 404 и 409 это:
1. фактический уровень на передней оси.
2. фактический уровень слева на задней
3. фактический уровень справа на задней оси.
4. заданный уровень на передней оси.
5. заданный уровень слева на задней оси.
6. статус регулятора спереди.
7. статус регулятора сзади слева.
8. статус регулятора сзади справа.
на подъемную ось, происходит повышение
ось
(напр., точка переключения для управления
серийного интерфейса
оси.
Для варианта ECU 405 это:
1. фактический уровень слева на задней оси.
2. фактический уровень справа на задней оси.
3. фактический уровень
4. заданный уровень слева на задней оси.
5. заданный уровень на передней оси.
6. усредненное давление на движущей оси.
7. смещение процесса компенсации продавливания шин
сзади.
8. скорость.
Данный способ выдачи измеряемых значений допустим
только в случае сервисного обслуживания. По прошествии
выдачи измеряемых значений необходимо снова
установить нормальный модус.
7.8 ECAS 6x2DV
Схемы в качестве примера: 841 800 423 0 /
841 801 487 0 / 841 801 295 0
Данная система служит, в основном, для автоматического
регулирования уровней в ТС 6х2 (возможно также и в ТС
4x2), обладающих осями с пневмоподвесками. Макс. 3
датчика хода непрерывно регистрируют фактический
уровень, т. е. расстояние между конструкцией и осью.
Отклонения к заданному уровню будут отрегулированы при
превышении допустимых границ. Электронной
сообщается макс. допустимое давление в пневмоподушках
движущей оси за счет положения переключателей
давления. При превышении этого допустимого давления
происходит спуск подъемной оси или нагружение ведомой
оси. Фактическое давление в пневмоподушках постоянно
контролируется датчиками давления. Для реализации
регулирования соотношения давления/силы тяги, все
пневмоподушки ТС обеспечены датчиками давления, в
некоторых
Характеристика регулятора заданного уровня должна быть
параметрирована. Для этого электронной системе
сообщается в процессе параметризации
пропорциональный и дифференциальный коэффициент
для передней и задней оси, за счет которого определяется
характер регулировки системы в процессе регулирования
заданным уровнем.
Возможно подключение блока управления.
Для процесса контролирования системы существуют макс
4 лампочки, расположенные на приборной панели.
• аварийная лампочка указывает на наличие
неисправностей в системе. При этом несерьезные
неисправности, нарушения достоверности или
пониженное напряжение 7,5 … 18 В указываются за
счет непрерывного светового сигнала, а более
серьезные погрешности, как "Система в режиме
диагностики" с помощью мигания лампочки (частота
мигания: прим. 1 Гц).
• аварийная уровневая лампочка
ситуации, в которых система ECAS находится не в
обычном режиме, но тем не менее, безотказно
работает. Например, нахождение конструкции вне
нормального уровня, несерьезные ошибки или
случаях даже и подъемный сильфон.
на передней оси.
системе
указывает на такие
.
71

ECAS7.
Краткое описание системы
нарушения достоверности, а также провождение
ручной калибровки.
• показатель функции вспомогательной силы при
трогании ТС указывает на ее запуск.
• позиционная лампочка подъемной оси (лампочка
холостого пробега/подъемной оси) указывает на то,
поднимается ли подъемная или разгружается ли
ведомая ось.
В электронике сохраняются параметры ТС, фактические
значения, ошибки и другая информация.
Система работает в зависимости от
параметрируемой предельной скорости, используя
различные стратегии регулирования уровнем:
• Сверх предельной скорости, система ECAS
классифицирует изменения уровня в качестве
динамических (режим движения). Она исправляет
заданное значение только в том случае, если
определяемые в период 60 сек. значения датчика хода
постоянно находятся вне параметрированной области
заданных значений.
• Ниже предельной скорости: система ECAS
классифицирует изменения уровня в качестве
статических (режим стоянки). Она исправляет заданное
значение, если определяемые значения датчика хода в параметрированном, очень коротком периоде
времени (например , 1 сек.) - постоянно находятся вне
допущенных значений.
• До 3 сек. после завершения движения, система ECAS
все так же продолжает классифицировать изменения
уровня в качестве динамических (динамическое
движение по инерции).
• 7 сек. после начала движения, система ECAS
проверяет, была ли превышена параметризуемая
разница заданного значения по отношению к заданному
уровню при начале движения и регулирует при
необходимости заданный уровень.
• После нажатия на тормоз, ECAS узнает об этом за счет
присоединения U
приостанавливается процесс регулировки. При этом
учитываются динамичные изменения нагрузки на ось в
процессе торможения и, таким образом, можно
избежать излишнее регулирование.
Существует возможность провести аварийное управление
сигналом РТС с помощью электромагнитного клапана в
соответствующем процессе параметризации.
Наряду с этим возможна параметризация особой функции
"Отцепление стояночного тормоза на передней
Причиной является то, что ТС, в которых стояночный
тормоз действует на передней оси, могут быть расчалены
при различных действиях ECAS. На основе этого, подается
сигнал переключения U
системы в ходе процессов "ПОДНЯТИЯ" и "СПУСКА"
к Pin 16 системы ECU,
АККУМ
на Pin 29 электронной
АККУМ
оси".
Рис. 57: ECAS 6x2 DV; схема 841 800 423 0
72

Краткое описание системы
7.ECAS
вручную в состоянии покоя, с помощью данного сигнала
можно реверсировать электромагнитный клапан,
находящийся в трубопроводе по направлению к
стояночному тормозу передней оси; это может привести к
отцеплению тормоза.
Изменения высоты можно параметрировать между
(макс.3) нормальными уровнями (НУ). НУ I сообщается при
вводе системы в эксплуатацию, НУ II и НУ III
параметризуемы и вводятся
дифференциального значения по отношению к НУ I. Но
возможен также и любой другой уровень между верхним и
нижним уровнями. Они могут быть установлены
следующим образом:
• с помощью приведения в действие переключателя НУ I/
III изменяется предварительный выбор между
уровнями. Для установления НУ III, ECU-Pin 19
подключается на минус, а для возврата на НУ I
необходимо
кнопку "НУ" на пульте управления устанавливается
нормальный уровень, соответствующий позиции
переключателя НУ I/III. Вместо блока управления
можно достичь установки выбранного нормального
уровня также и с помощью переключателя управления
"Нормальный" на Pin 21 за счет переключения на
минус. Необходимо параметризовать, что было
использовано: блок управления или переключатель
прервать данную связь. При нажатии на
в качестве
управления
должна быть активирована функция вспомогательной
силы при трогании ТС.
• при превышении параметризуемой предельной
скорости, конструкция перемещается на выбранный
нормальный уровень I или III (если она там еще не
находится). При превышении предельной скорости и
при последующем понижении дополнительной,
заниженной предельной скорости, возможно изменение
с настроенного НУ I на
процессе параметризации. Параметрировано, какая
замена имеет преимущество: зависимая от скорости
между НУ I и НУ II или зависимая от выключателя между НУ I и НУ III.
• с помощью нажатия кнопки "поднятие" или "спуск",
находящейся на блоке управления, можно установить
любой уровень.
• при использовании переключателя управления
"Нормальный" запускается функция "ПОДНЯТИЕ" (за
счет открытого Pin 21 и Pin 10 на минус) и функция
"СПУСК" (за счет Pin 21 и Pin 10 на минус).
При отсутствии в системе блока управления можно
достичь того, что ECAS устанавливает нормальный
уровень сразу же после включения зажигания за счет
перемыкания электронных Pin 20 и 21.
. – При установке нормального уровня не
НУ II в соответственном
Рис. 58: ECAS 6x2 DV; схема 841 801 487 0
73

7. ECAS
Краткое описание системы
Наряду с основной функцией ECAS (регулировка
расстояния между конструкцией и осью), система ECAS
берет на себя также и регулировку НАГРУЗКИ и
РАЗГРУЗКИ подъемной/ведомой оси. При этом можно
вручную управлять подъемной/ведомой осью или провести
полностью автоматическую регулировку данных осей.
С помощью подключенного на минус переключателя
нагрузки на ось (к Pin 28 системы ECU), можно выбрать,
какой из двух данных модусов является действительным:
модус "нормальная нагрузка на ось" (переключатель
открыт) или "повышенная нагрузка на ось" (переключатель
закрыт). За счет этого можно изменить распределение
нагрузки на движущей и подъемной оси (при
ограничененной нагрузке на ось со стороны проезжей
части за счет открытия переключателя) в модусе
"оптимальное регулирование
ведущая ось находится максимально нагруженной.
Изменения производятся таким образом, что они при этом
соответствуют ограниченным требованиям, касательно
нагрузки на ось.
Определение точки переключения подъемной оси может
быть проведено с помощью макс. 2 датчиков давления,
находящихся на пневмоподушках движущей оси. Это
зависит от того, каким образом происходит регулировка
пневмоподушек: совместно с помощью одного или по
силы тяги", в котором
отдельности с помощью 2-х выходов электромагнитных
клапанов ECAS. Сверх этого пневмоподушки подъемных
осей являются сенсоризированными. Существуют также
системы, в которых подъемный сильфон оснащен
датчиком давления.
За счет того, что наряду с пневмоподушками движущей оси
сенсоризированными являются также и пневмоподушки
подъемной оси, возможна регулировка по принципу
"регулирование соотношения давления" (РСД) или
"оптимальное регулирование силы тяги". Какой из этих
двух принципов войдет в действие, зависит от
параметризации. Что касается параметрированного
принципа регулировки, то также от положения
функционального переключателя "РСД/регулирование
силы тяги", с помощью которого к электронике
подключается Pin 10 на минус. При этом действует
следущее: при открытом
применяется параметрированный принцип регулировки,
при закрытом - противоположный.
Точка переключения подъемной/ведомой оси будет
параметрирована. Она измеряется в системах с датчиком
давления на движущей оси, подключенному к Pin 7 ECU. В
системах с двумя датчиками давления, подключенными к
Pin 7 и Pin 23, она рассчитывается с помощью
формирования среднего значения. При полном выходе из
функциональном переключателе
Рис. 59: ECAS 6x2 DV с гидравлическим механизмом подъемной оси; схема 841 801 295 0
74

Краткое описание системы
7.ECAS
строя датчика давления, подъемная/ведомая ось
опускается/разгружается.
Для управления подъемной осью могут быть использованы
отдельные переключатели, находящиеся на приборной
панели. Согласно параметризации, применение могут
найти следующие виды переключателей, необходимые для
управления подъемной осью:
1. двуступенчатый переключатель "подъемная ось":
подключение минуса к Pin 3 системы ECU.
открытый переключатель = "спуск подъемной оси"
закрытый переключатель = "поднятие подъемной оси"
ECAS реагирует на процессы переключения,
проводимые при включенном зажигании.
2. (трехступенчатая) клавиша "подъемная ось":
подключение к Pin 3 системы ECU.
кнопка открыта = "нет управления"
кнопка переключена на минус = "поднятие подъемной
оси"
кнопка переключена на U
Время закрытия клавиши должно составлять мин. 0,1
сек..
Подъемный сильфон управляется отдельно, т.е. магнит
подъемного сильфона электромагнитного клапана ECAS
подключается к электронной системе за счет Pin 14.
Процедуры ПОДНЯТИЯ и СПУСКА подъемной оси
отличаются друг от друга тем, является ли подъемный
сильфон сензированным или нет. Особенно перед
провождением процесса ПОДНЯТИЯ,
провести расчет давления, результат которого считается
критерием правильного исполнения. Необходимые для
этого условия должны быть параметрированы, также как и
тип конструкции подъемной оси.
Наряду с регулировкой подъемной оси с одним подъемным
сильфоном, в некоторых системах могут быть
использованы также и гидравлические конструкции
подъемной оси; сигнал управления подается на электрон
Pin 14 и 32.
– поднятъ подъемную ось = Pin 14 открыт/Pin 32 на
U
– опустить подъемную ось = Pin 32 открыт/Pin 14 на
U
АККУМ
АККУМ
.
= "спуск подъемной оси"
АККУМ
электроника должна
.
соответствует определению сигнала для точки
переключения подъемной оси. Ограничение, касающееся
вспомогательной силы, будет параметризовано. Оно
определяется с помощью датчика давления,
подсоединенного к Pin 7. Наряду с уже известными типами
вспомогательной силы:
• Германия
• ЕС
• Nordland (северная страна) …
...в ТС с
вспомогательной силы вручную. При этом водитель может
вручную самостоятельно повышать или понижать
давление (до заданного макс. допустимого давления) в
сильфонах ведущей оси. Повышение происходит с
помощью клавиши вспомогательной силы и длится до тех
пор, пока клавиша электрон. Pin 17 переключена на минус.
Понижение производится за счет переключателя
подъемной
электрон. Pin 3 является открытым. В соответственном
процессе параметризации может быть произведен запрос
впоследствии установленной вспомогательной силы
(функция памяти) с помощью нажатия на кнопку
вспомогательной силы по прохождению макс. 2 сек.
При запуске функции вспомогательной силы - независимо
от существующего заданного уровня - всегда происходит
повышение заданного уровня
значение "повышение заданного уровня при
активированной вспомогательной силе при трогании ТС".
Возможна параметризация режима ожидания, который
запускается при выключеном зажигании, если нажата
кнопка СТОП на блоке управления и который ведет к
регулировке последнего уровня перед выключением
зажигания (условием является достаточное количество
запасного давления и напряжения).
С помощью двустороннего серийного
возможны следующие действия: диагностика,
тестирование функций, калибровка оборудования,
параметризация, а также считывание диагностической
памяти.
За счет изменения параметров можно обеспечить подачу
измеряемых значений во время обычного режима работы
ECAS. Существует возможность, рассмотреть отдельные
производственные значения:
ECAS 6x2DV может быть проведена функция
оси до тех пор, пока переключатель на
на параметрированное
интерфейса
Важным пунктом в этом отношении является
конструктивное исполнение вспомогательной силы при
трогании ТС. Желаемый тип вспомогательной силы может
быть установлен только с помощью программного
обеспечения в процессе параметризации. Запуск
вспомогательной силы достигается благодаря
переключению с ECU-Pin 17 на минус. В некоторых
системах может быть дополнительно установлена функция
деблокирования вспомогательной силы при трогании
Здесь идет речь о контакте, который переключает Pin 24
электроники на U
возможен только при закрытом контакте.
Определение сигнала для вспомогательной силы
. Запуск вспомогательной силы
АККУМ
ТС.
1. фактический уровень (слева - только версия ECU 402)
на задней оси.
2. не имеет значения, иными словами, фактический
уровень справа на задней оси (только версия ECU 402).
3. фактический уровень на передней оси.
4. заданный уровень (слева - только версия ECU 402) на
задней оси.
5. заданный уровень на передней оси.
6. давление движущей оси.
7. давление подъемной оси.
8. скорость.
75

ECAS7.
Краткое описание системы
Исходные значения полученных измерений на отдельных
каналах зависят от используемой электроники.
Данный способ выдачи измеряемых значений допустим
только в случае сервисного обслуживания, по прошествии
выдачи измеряемых значений необходимо снова
установить нормальный модус.
7.9 ECAS 4x2/6x2 CAN (первое и второе поколение
Схемы в качестве примера: 841 801 694 0,
841 801 545 0 (CAN I) / 841 801 909 0 (CAN II)
Данная система служит для автоматического
регулирования уровней в ТС 6x2 и
с пневмоподвесками. Макс. 3 датчика хода непрерывно
регистрируют фактический уровень. Отклонения к
заданному уровню будут отрегулированы при превышении
допустимых границ. ECU сообщается макс. допустимое
давление в пневмоподушках движущей оси, при
превышении которого происходит спуск подъемной или
нагружение ведомой оси. Фактическое давление в
пневмоподушках постоянно контролируется датчиками
давления. Электроника ECAS интегрирована
систему электроник в ТС с помощью CAN-Bus, а это
значит, она принимает и использует, с одной стороны,
известия CAN, чтобы обеспечить безопасность
4х2, обладающих осями
в общую
функционирования, а с другой стороны, сама посылает
известия CAN, которые могут быть важными для других
электроник или которые просто сообщаются. Основной
контур регулирования "датчик хода-электроникаэлектромагнитный клапан" остался таким
касается известных до этого подсоединенных
переключателей и ламп, появились достаточно большие
упрощения - вся необходимая информация показывается
теперь на дисплее.
Характеристика регулятора заданного уровня больше не
должна быть параметрирована. Система является
самообучающейся, т. е. не существует необходимости
ввода пропорционального и дифференциального
коэффициента. Процесс обучения, протекающий только
при определенных
предписанный теоретический ход регулировки, базируется
на скорости поднятия и спуска конструкции; эта скорость
определяется отдельно на каждом датчике хода.
Полученные в процессе обучения характеристики,
сохраняются в ECU при выключенном зажигании.
Возможно подключение блока управления.
Контролирование системы происходит не за счет лампочек,
а за счет известий CAN, посылающих необходимые
предупреждения.
условиях и в котором оптимизируется
же, но что
Рис. 60: ECAS 6x2 CAN (диагностика KWP2000); схема 841 801 694 0
76

Краткое описание системы
ECAS 7.
Сообщения о повреждениях поылаются в качестве
известий CAN при возникновении неисправностей в
системе. Сообщения о повреждениях содержат в себе
информацию о(б):
...неисправных компонентах
...виде неисправностей, местонахождении и числе
...серъезности неисправностей (нормальная или
легкая)
...необходимой аварийной лампочке ("КРАСНАЯ" или
"ЖЕЛТАЯ")
Дисплей или лампочка нормального уровня указывают на
то, на каком
ТС.
В электронике сохраняются параметры ТС, фактические
значения, ошибки и другая информация.
нормальном уровне - НУ I или НУ II- находится
Система работает в зависимости от
параметрируемой предельной скорости, используя
различные стратегии регулирования уровнем:
• Сверх предельной скорости: система ECAS
классифицирует изменения уровня в качестве
динамических (режим движения) и исправляет заданное
значение только в том случае, если находящиеся в
параметрированном отрезке времени ( например ,
60 сек.) значения датчика хода постоянно находятся вне
параметрированной области заданных значений.
• Ниже предельной скорости: система ECAS
классифицирует изменения уровня в качестве
статических (режим
значение только в том случае, если определяемые
значения датчика хода - в параметрированном, очень
коротком периоде времени (например, 1сек.) постоянно находятся вне допущенных значений.
• 7 сек. после начала движения система ECAS проверяет,
была ли превышена параметризуемая разница
заданного значения по отношению к заданному уровню
при начале движения и регулирует
заданный уровень.
• При нажатии на тормоз, ECAS узнает об этом за счет
получения соответствующих известий CAN,
приостанавливается процесс управления. При этом
учитывается динамичное перемещение нагрузки на ось
в процессе торможения и, таким образом, можно
избежать излишнее регулирование.
Существует возможность изменения высоты между обоими
нормальными уровнями (НУ), а также изменения на
уровень между верхним и нижним уровнями. НУ I
сообщается системе ECU при вводе системы в
стоянки) и исправляет заданное
при необходимости
любой
Рис. 61: ECAS 6x2 CAN (диагностика с помощью CAN); схема 841 801 545 0
77

ECAS7.
Краткое описание системы
эксплуатацию, НУ II параметризуем и может быть задан в
качестве дифференциального значения на нижний уровень
или на НУ I (по выбору; вводное значние = НУ II - НУ I или
нижний уровень + 125). Изменения высоты могут быть
произведены следующим образом:
• с помощью приведения в действие переключателя НУ I/
II происходят изменения между обоими уровнями. Для
установления НУ II, ECU-Pin X1/5 подключается на
минус, а для возврата на НУ I необходимо прервать
данную связь.
• при превышении параметрированной допущенной
скорости конструкция переходит на нормальный
уровень (если она там еще не находится); при
дальнейшем превышении допущенной скорости и при
последующем понижении дополнительной, заниженной
предельной скорости, возможно изменение с
настроенного НУ I на НУ II в соответственном процессе
параметризации
• с помощью нажатия кнопки "поднятие" или "спуск",
находящейся на блоке управления, можно установить
любой уровень.
• за счет запроса известия CAN, касающегося изменения
высоты. Запросы об изменении высоты с помощью
.
известия CAN имеют большое преимущество по
отношению к блоку управления.
Если в системе не встроен блок управления, то ECAS
устанавливает сразу же после
нормальный уровень.
В неподвижном состоянии может быть установлен уровень
разгрузки (УР). Данный уровень разгрузки сообщается
электронике в качестве отличия к НУ I в процессе
параметризации.
(вводное значние = УР - НУ I + 125)
ECAS посылает информацию о выбранном НУ с помощью
известия CAN.
В данных электронных системах параметрируется особая
функция "Эксплуатация крана".
В качестве ресивера
расстояния между осью и конструкцией, возможно
использование 3-х видов различных ресиверов:
– датчики хода без температурной компенсации.
– датчики хода с температурной компенсацией.
полученных измерений, касательно
включения зажигания
Рис. 62: ECAS 6x2 CAN II (диагностика с помощью CAN); схема 841 801 909 0
78

Краткое описание системы
ECAS 7.
– датчики угла вращения.
На ТС можно установить только один из перечисленных
типов, т. е. нельзя комбинировать. Необходимо учитывать,
что устанавливаемый тип датчика хода должен
соответствовать параметризации.
Наряду с основной функцией ECAS (регулировка
расстояния между конструкцией и осью), система ECAS
берет на себя также и регулировку НАГРУЗКИ и
РАЗГРУЗКИ подъемной/ведомой оси. При
вручную управлять подъемной/ведомой осью или провести
полностью автоматическую регулировку данных осей.
Точка переключения подъемной/ведомой оси будет
параметрирована. Определение точки переключения
подьемной оси можно произвести с помощью макс. 2
датчиков давления, находящихся на пневмоподушках
движущей оси или, если электроника ECAS использует
информацию о нагрузке движущей оси, полученную от
EBS, которую
известия CAN. Параметризуется, какой принцип должен
быть использован.
Подъемная ось регулируется по принципу "процесса
уравнивания давления".
При использовании датчиков давления измеряется точка
переключения на движущей оси с помощью датчика
давления, подсоединенного к Pin X2/6 и Pin X2/2. В случае
неисправности датчика давления, подъемная/ведомая ось
опускается/разгружается.
Согласно параметризации
следующие варианты запуска, необходимые для
управления подъемной осью:
• с помощью известия CAN
• кнопкой
Если соответственное известие CAN с запросом на
управление подъемной осью посылается электронной
системе, то может быть изменена позиция подъемной оси.
Для управления подъемной осью может быть
использована отдельная кнопка, находящаяся на
приборной панели. В данном случае
подъемной оси, за счет которой происходит переключение
с минуса на Pin X1/4 системы ECU. При нажатии на кнопку
происходит подача импульса переключения в ECU, что
ведет к изменению позиции подъемной оси (при
соблюдении допустимых условий). Управление подъемной
осью происходит только в процессах переключения,
проводимых при включенном зажигании.
Управление подъемным сильфоном,
происходит вынужденно. Т. е. электромагнитный клапан
ECAS выполняет одновременное провождение функций
"поднятие подъемной оси/подача воздуха в подъемный
сильфон" (ECU-Pin X2/12 = GND) или спуск подъемной оси/
сброс воздуха из подъемного сильфона" (ECU-Pin X2/14 =
GND) с помощью внутренних пневматических связей.
та, в свою очередь, получает за счет
, применение могут найти
этом можно
речь идет о кнопке
как таковым,
Важным пунктом в этом отношении является
конструктивное исполнение вспомогательной силы при
трогании ТС. Желаемый тип
определяется с помощью программного обеспечения в
процессе параметризации. Запуск вспомогательной силы
достигается благодаря переключению с ECU-Pin X1/6 на
минус.
Выяснение сигнала проводится также, как и для точки
переключения подъемной оси. Ограничение, касающееся
вспомогательной силы, будет параметризовано. Оно
определяется с помощью датчиков давления,
присоединенных к Pin-ам X2/2 и X2/6.
В электронных системах CAN-II параметризуются, во
первых, время (продолжительность и вынужденная пауза),
а во-вторых, элемент управления (переключатель или
кнопки); исходя из этого, ECU генерирует соответствующий
тип вспомогательной силы. Возможно образование 5-ти
различных типов вспомогательной силы при трогании ТС:
• Германия
• EU99
• Auerhalb Deutschlands (вне Германии)
• Север
• Увел. сцеп. колес - ручной режим
При параметрированной вспомогательной силе
NORDLAND водитель может вручную
повышать или понижать давление (до заданного макс.
допустимого давления) в сильфонах ведущей оси.
Повышение происходит с помощью трехпозиционного
переключателя.
Запуск вспомогательной силы может быть проведен
следующим образом:
• за счет нажатия кнопки в типе "Deutschland“ (StVZO -
закон о дорожном движении), "Auerhalb Deutschland" и
"EU ‘99" (опциональный параметр 3.1 = 1 и 7.1 = 0)
• за счет ввода в действие двухпозиционного
переключателя
параметр 3.1 = 1 и 7.1 = 0).
• за счет ввода в действие трехпозиционного
переключателя в типе "Deutschland“ (StVZO), "Auerhalb
Deutschland", "EU ‘99" и "Плавное перемещение груза"
(опциональный параметр 3.1 = 1 и 7.1 = 1).
• с помощью запроса "Traction help (load transfer)" за счет
SAE-CAN Identifier ASC2_…, байт 3, байт 1...4,
(опциональный параметр 3.1 = 0).
Если функция вспомогательной силы функционирует, то
электронная система посылает соответствующую
информацию ("Traction help – load transfer“, „Traction help –
load reduce“, „Load fixing“) в SAE-CAN-Identifier ASC1_…,
байт 4, байт 5...8.
При запуске функции
от существующего заданного уровня - всегда происходит
повышение заданного уровня на параметрированное
значение "повышение заданного уровня при
активированной вспомогательной силе при трогании ТС".
в типе "Nordland" (опциональный
вспомогательной силы - независимо
вспомогательной силы
-
самостоятельно
79

ECAS7.
Краткое описание системы
Возможна параметризация функции "эксплуатация крана".
При спуске конструкции на амортизатор во время движения
регулятор тормозных сил (РТС) больше не может
правильно работать, т.к. отсутствует информация о
нагрузке. Электроника распознает данную ситуацию и
подает сигнал CAN для того, чтобы тормозная система
могла среагировать.
Может быть параметризован режим ожидания. Он
запускается при выключенном
электроники обесточен) и нажатой кнопке СТОП на блоке
управления. Он ведет к регулировке последнего уровня
перед выключением зажигания, при условии, что
существует наличие запасного давления и напряжения.
Существуют электронные системы, которые обладают
диагностическим интерфейсом по ISO/WD 14 230 (Keyword
Protocol 2000). Другие электронные системы могут
"общаться" друг другом только с помощью IES-CAN-Bus,
диагностика проводится на
Благодаря К-проводу или CAN-Datenbus в процессе
параметризации с помощью известий CAN могут быть
переданы и показаны - за счет соответствующего
диагностического устройства - следующие информации:
зажигании (PIN X1/10
центральном интерфейсе.
"выдача измеряемых значений..."
...фактический и заданный уровни всех датчиков хода
... положения электромагнитного клапана
... показатели для регулировки уровнем
... скорость движения
... статус блока управления
... значения, полученные датчиком давления
... зажигание (ВКЛ./ВЫКЛ.)
... включенный режим ожидания
... обнаруженная неисправность
С помощью двустороннего серийного интерфейса
возможны следующие действия: диагностика,
тестирование функций, калибровка оборудования,
параметризация, а также считывание диагностической
памяти. По окончанию диагностики необходимо
ВЫКЛючить и снова ВКЛючить зажигание.
Описание системы ECAS/ESAC отсутствует, так как ECAS
этой системы не обладает новыми функциями. При
возникновении проблем
помощью к изготовителю транспортного средства или
компании WABCO.
необходимо обратиться за
80

Ввод в эксплуатацию и диагностика
8. Ввод в эксплуатацию и диагностика
ECAS 8.
8.1 Введение
Находящиеся в электронике значения установки - так
называемые параметры - приспособлены к транспортному
средству. В случае необходимости сервисного
обслуживания, иногда желательно или даже необходимо
изменить определенные параметры.
Однако производить параметризацию имеет право
только обученный персонал. Если параметризация
должна производиться посредством средств для
тестирования компании WABCO, то данное возможно
только с помощью секретного номера
личный идентификационный номер). Обученный
персонал может производить изменения в параметрах,
так как он имеет доступ к соответствующим
программам диагностических средств (за счет
обладания PIN).
После замены электроники ECAS, необходимо ввести
систему в эксплуатацию с помощью калибровки. В
процессе калибровки датчиков, данные датчики будут
представлены электронике. Это необходимо для
осуществления
полученных при измерении значений с помощью датчиков.
Если существует необходимость наличия блока
управления в устройстве ECAS, то он должен быть
присоединен к данному устройству в процессе калибровки.
Калибровка датчиков должна проводиться в новых
агрегатах, после замены датчиков или после замены
электроники. Калибровка датчиков осуществляется
диагностическими средствами.
передачи и последующей переработки
(также ”PIN“, т. е.
об измерениях. При неполадках происходит описание
неисправности.
Для связи с диагностическим ПК необходим
диагностический интерфейс, причем возможно
использование как серийного интерфейса, так и версии
USB.
Диагностический Интерфейс
446 301 022 0 (USB) 446 301 021 0
(серийный)
. 63
Рис
Ввод в эксплуатацию ECAS 1-го поколения можно провести
с помощью диагностического контроллера (ДК) компании
WABCO с соответственной аппаратурой и программным
обеспечением. В качестве принадлежностей для этого
необходимы:
Соединительный адаптер
Диагностические средства
ECAS в эксплуатацию. Здесь необходимо указать, что
участие со стороны производителя ТС, касательно
процессов параметризации и калибровки, является
непостоянным. Так, например, существуют прозводители
ТС, которые при возникновении необходимости в
параметризации, ссылаются на наши диагностические
средства, другие производители с самого начала не
допускают вмешательства в изменение значений,
полученных
Диагностика производится с помощью ПК или ноутбука,
подключенного к электронике ТС. На ноутбуке должно быть
установлено диагностическое программное обеспечение
компании WABCO. Диагностическое программное
обеспечение представлено на различных языках и для
различных версий системы ECAS. Новейшую версию Вы
найдете в интернете (www.wabco-auto.com) с помощью
меню "Download" (загрузка). На страницах
диагностического программного обеспечения указаны все
существующие языковые версии диагностической
программы WABCO.
За счет диагностической программы можно сделать
запрос, касательно диагност. памяти и актуальных данных
в процессе параметризации и калибровки.
необходимы при вводе систем
абонемента
35-контактный 446 300 327 0 25-контактный
446 300 317 0
только для ТС 4х2
Рис. 63
Диагностический кабель, мультиметровый кабель,
измерительный адаптер
диагностический
кабель
894 604 303 2
Рис. 63
мультиметровый
кабель
894 604 30. 2
измерительный
адаптер
446 300 31. 0
81

ECAS8.
Ввод в эксплуатацию и диагностика
соответствующая программная карточка. (↑ брошюра
„Обзор средств тестирования“ 815 080 037 3)
С помощью названных диагностических средств, наряду с
вводом в эксплуатацию, возможно также проводить: поиск
неисправностей, управление магнитными клапанами,
тестирование лампочек, контроль тестовых и измеряемых
значений, обработку данных, полученных регулятором и
тестирование функций.
Программное обеспечение установлено в форме меню для
диагностической Controller-карточки и
весьма схожим образом. Компьютерная программа, наряду
с существующими функциями, обладает также и другими,
комфортными функциями как например, цветное
изображение системы, файл помощи, информация,
касающаяся диагностической программы, системы ECAS,
параметризации и калибровки, а также поиска
неисправностей.
Таблица3: Диагностические карточки
Система для ECU диагност.
без датчика давления 446 055 00 . 0 / 446 055 01 . 0 446 300 524 0
4 x 2 A 446 055 02 . 0 446 300 520 0
4 x 2 Ratio 446 055 301 0 / 446 055 302 0 446 300 881 0
4 x 2 KMP 446 055 303 0 / 446 055 304 0 / 446 055 311 0 / 446 055 312 0 446 300 880 0
с датчиком давления 446 055 00 . 0 446 300 532 0
6 x 2 A 446 055 04 . 0 446 300 526 0
6 x 2 Ratio 446 055 403 0 / 446 055 405 0
6 x 2 DV 446 055 043 0 / 446 055 049 0 446 300 623 0
6 x 2 DV Ratio 446 055 401 0/ 446 055 402 0 / 446 055 406 0 / 446 055 407 0
4 x 2 / 6 x 2 24В CAN (для DC ACTROS) 446 170 001 0 / 446 170 002 0 / 446 170 004 0 / 446 170 005 0
4 x 2 / 6 x 2 24В CAN (для MAN NFG) 446 170 003 0 / 446 170 006 0 / 446 170 053 0 446 300 893 0
для программы ПК-а
446 055 404 0
446 055 408 0
446 170 021 0 / 446 170 022 0 / 446 170 023 0 / 446 170 024 0
446 170 051 0 / 446 170 054 0
8.2 Обзор диагностических карточек
Наряду с диагностическими системами, выпущенными
изготовителем, существуют также (для всех
серии систем ECAS для ТС) диагностические карточки или
компьютерная диагностика, которые во взаимодействии с
названной диагностической аппаратурой могут быть
использованы для выявления неисправностей, для
считывания электроники, для параметризации электроники
и для калибровки датчиков хода и давления.
Следует заметить, что диагностическая карточка все
меньше находит использование. С одной стороны,
большее
другой стороны, в новых системах ECAS все труднее
становится разместить необходимые данные на чипе
диагностической карточки. Таблица 3 служит только в
качестве информации.
внимание уделяется диагностике с помощью ПК, с
находящихся в
карточка
446 300 526 0
446 300 881 0
446 300 623 0
446 300 635 0
8.3 Диагностическое программное обеспечение
Система ECAS не требует обслуживания. При помощи
интегрированных в программу ECU средств выявления и
обработки ошибок, система контролирует себя
самостоятельно. Посторонний контроль системы
необязателен, за исключением проверки узлов, которые
система не в состоянии проверить самостоятельно (щупы/
рычаги датчиков, сигнальные лампы и т.д.).
Если ECU распознает наличие неисправности, то мигает
сигнальная лампа, и только тогда возникает необходимость
проверки системы в ремонтной мастерской.
Самым известным диагностическим средством является
диагностика с помощью ПК
комфортабельных функций, начиная с лучшей наглядности
и подготовки программы и кончая возможностью
постоянного доступа к новейшему диагностическому
программному обеспечению в интернете, она заменила
. За счет наличия более
82
диагностического контроллера (Diagnostic Controller).
Возникшие неисправности, частота их появления и
актуальность наглядно показаны в обоих вспомогательных
средствах по диагностике. Компьютерное программное
обеспечение предлагает помимо этого
вспомогательные функции для устранения неисправностей
и для общего описания системы и ее компонентов.
Необходимые конфигурации были уже представлены в
разделе 8.1 " Основное".
8.3.1 Диагностика с помощью диагностического
контроллера (Diagnostic Controller)
Диагностика с помощью диагностического контроллера
была заменена компьютерной диагностикой; она должна
использоваться в ECAS в качестве вторичной возможности
(исключение - ECAS 1-го поколения) проведения
диагностики
производится за счет меню, т.е. не существует
. Управление диагностическим контроллером
также и

Ввод в эксплуатацию и диагностика
ECAS 8.
необходимости дополнительных знаний. Для поиска
неисправностей необходимо использовать находящуюся в
меню функцию "поиск неисправностей", причем некоторые
пункты в меню могут быть активированы только в том
случае, если до этого в меню 4 "Особые функции" был
задан код (PIN). Неисправности наглядно представлены,
для документации можно напечатать содержание
сохранненых неисправностей с помощью подключенного
принтера.
8.3.2
Диагностика с помощью компьютера является более
комфортабельной возможностью и поэтому она заменила
диагностику с помощью ДК (диагност. карточка). Все
неисправности наглядо показаны; предлагаются
информации, касающиеся этих неисправностей и системы
в целом. Для сохранения в документации можно
напечатать содержание диагностики и протокол данных ТС
с помощью подключенного принтера. Управление
диагностической
или клавиш управления.
Программное устройство является опорой программного
устройства программной карточки для облегчения работы с
диагностической программой. Для поиска неисправностей
необходимо использовать функцию "Поиск
неисправностей", находящуюся в меню.
Компьютерные программы находятся на дискетах или их
можно скачать из интернета. Преимуществом
диагностической программы, скачанной из интернета, по
сравнению с дискетой заключается в том, что не
существует необходимости проводить модернизацию - как,
например, для дискет и программных карточек.
В течение годового абонемента все существующие в
WABCO диагностические программы для ПК могут быть
скачаны из интернета в самой актуальной версии. В
настоящий момент для ECAS существуют следующие
программы:
ECAS- Bus A 246 301 851 0
ECAS- 4 x 2 S2000 246 301 860 0
ECAS- CAN 2 246 301 866 0
ECAS- (ENR) Actros 246 301 521 0
ECAS- Bus Citaro 246 301 523 0
ECAS- Truck KWP K 246 301 524 0
ECAS- Truck JED 677 246 301 529 0
ECAS- Bus 246 301 558 0
Компьютерная диагностика
программой происходит за счет панели
2. После прохождения информационного курса ECAS (1
день) или после соответствующего инструктажа,
проведенного человеком, уполномоченным или
признанным бюро обслуживания
(тренером, сотрудником, ответственным за выездные
работы и т.д. - в бюро обслуживания WABCO
существует соответственный список) можно получить
права на провождение калибровки. После сообщения
бюро обслуживания WABCO данных о лице,
прошедшем обучение, данный человек может
получить PIN (личный идентификационный номер) для
своей программы, с помощью которого он может
проводить калибровку датчика хода
(наряду с возможностями использования,
упомянутыми выше под пунктом 1).
3. По прохождению курса ECAS (мин. 2 дня) или после
соответствующего инструктажа, проведенного
человеком, уполномоченным или признанным бюро
обслуживания фирмы WABCO (он может быть
проведен также и другим производителем ТС) можно
получить права на провождение параметризации.
После сообщения бюро обслуживания WABCO данных
о лице,
получить PIN для своей программы, с помощью
которого он может проводить изменения параметров в
электронике (наряду с возможностями использования,
упомянутыми выше под пунктом 2).
С середины 2005-го года фирма WABCO производит
предоставление PIN через интернет. После прохождения
системного учебного курса Вы можете зарегистрироваться
в интернете и сделать запрос PIN-а с
при обучении лицензии.
При запросе PIN-a в интернете от вас потребуется
абонементный Login (вход). Login указывает WABCO на
законное приобретение программного обеспечения и
распознает, относится ли личность, подающая запрос, к
фирме (за счет введения данных из лицензионного
свидетельства) и является ли она действительным
обладателем абонемента.
прошедшем обучение, данный человек может
фирмы WABCO
и давления
помощью полученной
диагностической программе существует возможность
В
входа на 3 программных уровня, которые при
необходимости могут быть актуализированы с помощью
PIN (т. е. личный идентификационный номер).
1. За счет данной программы можно сразу же проводить
диагностику и считывать параметры.
Рис. 63 Запрос PIN-a в интернете
83

ECAS9.
9. Параметризация
Параметризация
Электронные системы поставляются в параметрированном
состоянии. Для ввода системы в эксплуатaцию необходим
лишь один процесс калибровки электроники. Для
наглядности ECAS важно знать различные виды
параметров и уметь их оценивать.
9.1 Альтернативные опции
Опциональные параметры - это параметры, в каждом из
которых могут быть установлены - или не установлены - 8
бит (т. е. также "опциональный бит
определение которых происходит с помощью ДА или НЕТ,
или на языке программирования 1 или 0. Альтернативные
опции безразмерны.
В одном байте объединены 8 бит, таким образом, 8
опциональных параметров. Они однозначно показаны в
качестве числа от 0 до 255, основой этого является
бинарная цифровая система.
При этом речь идет о данных для оборудования
необходимом порядке работы системы. Это, помимо
прочего:
• Конфигурация датчиков хода в системе, опознавание
конфигурации
• проводимая процедура калибровки, процедура
проверки на достоверность, конфигурация
переключателей
• наличие подъемной оси, вид управления подъемной
осью
• наличие датчика давления, конфигурация
вспомогательной силы при трогании ТС
• наличие электромагнитного клапана РТС, вид выбора
нормального уровня и
9.2 Параметры значений
Параметры значений - это числовые значения: заданные
значения, пределы и допуски в системе. Эти значения
находятся в пределах от 0 до 255. Они пропорциональны
настоящим физическим размерам: путь, давление, время,
скорость.
8 опциональных параметра составляют один параметр
значений
т.д.
"). Это опции, точное
и о
012345
0
2
+ 21 + 22 + 23 + 24 + 25 + 26 + 2
1 + 2 + 4 + 8 + 16 + 32 + 64 + 128 = 255
012345
20 + 0 + 22 + 0 + 0 + 25 + 0 + 2
1 + 0 + 4 + 0 + 0 + 32 + 0 + 128 = 165
Рис. 63 Модельное изображение числ 255 и 165 в
цифровом виде (пример)
Байт можно представить следующим
На панели с количеством гнезд от 0 до 7 имеется 8 ламп,
которые символизируют 8 бит. Если горит одна лампочка,
то это соответствует числу "2 в степени, равной номеру ее
гнезда"
Пример:
Горит лампочка в гнезде 3. Это соответствует 2
Если лампочка погасла, то это соответствует числу 0.
Существует 256 различных возможностей, с помощью
которых лампочки могут светиться.
Поскольку опциональный бит должен быть описан только с
помощью ДА или НЕТ (лампочка ВКЛ. или ВЫКЛ.), то 8
опциональных бит могут быть объединены в один
опциональный параметр. Из суммы значений данных 8-ми
опциональных бит получается
с помощью которого происходит однозначное описание
параметра.
С помощью соответствующей программы можно выполнить
параметризацию.
Наборы параметров, помимо прочего, можно:
• записать из электронного блока в компьютер, там же их
отобразить и сохранить.
• записать из ПК в электронный блок.
• установить вручную в ПК, изменить и сохранить,
передать в электронную систему.
образом:
в итоге число между 0 и 255,
6
7
7
=
6
7
7
3
= 8.
т.е.
84
– Прежде чем Вы начнете процесс параметризации,
сохраните серию параметров, находящуюся в
электронике, в ПК.
Таким образом, существует копия, с помощью которой
последняя серия параметров может быть повторно
введена в электронную систему. Это особенно важно, если
нужно изменить существующий набор параметров.
Изменение параметров можно проводить
согласии производителя ТС.
только при

Параметризация
ECAS 9.
9.2.1 Counts
Импульсы (counts) являются единицами измерения в
электронной системе. За основу берутся двоичные числа.
Ваш диапазон значений - от 0 до 255.
В процессе параметризации параметры, заданные
значения для регулировки, указываются в counts. Чтобы в
электронной части осуществилось сравнение заданных
значений с фактическими, фактические значения также
должны быть установлены в единицах "counts".
Полученные с помощью датчиков значения,
расстоянии или давлении. Они передаются блоку ECU в
виде значений напряжения или токовых импульсов. Блок
ECU преобразует такие сигналы в "counts"
(оцифровывание сигналов).
Ширина полосы находящихся в диапазоне измерений
показателей напряжения или длительности импульсов для
этого разделяется на равные доли.
Максимально возможный диапазон измерений разделен на
256 уровня.
Чем меньше ступени,
• точнее измеряемые значения для расчета.
• меньше охватываемая ширина полосы измерения.
Чем больше ступени, тем:
• менее точны измеряемые значения для расчета.
• больше охватываемая ширина полосы измерения.
Выше названную информацию необходимо
учитывать, например, при выборе рычага датчика хода.
(¦ 6.1.1 Датчик хода - указание по установке)
9.2.2 Отсчеты
В новых электронных системах ECAS 8-битовая
была переведена на 16-битовую обработку. За счет этого
увеличивается диапазон обработки данных и, таким
образом, возможен более точный расчет данных
измерений.
Электрический сигнал, переданный датчиками хода,
пересчитывает ECU в Timer Ticks. Диапазон значений
лежит от 256 до 65.536.
тем:
основаны на
обработка
серий параметров, которые к тому же различно
структурированы, практически невозможно объяснить
каждый параметр в отделъности. Многие параметры,
особенно опциональные параметры, не требуют
подробного объяснения. Это зачастую простые опросы
"ДА/НЕТ", которые определяют системную структуру.
Названные здесь параметры не относятся к диапазону
специальной
!
является скорее неточным обзором всех параметров,
встречающихся в элекрониках ECAS.
В зависимости от используемой электроники может
произойти то, что похожие по смыслу параметры обладают
другим номером, точнее говоря номером бита. По этой
причине здесь не производится нумерация параметров, а
только текстовое направление по теме. В случае наличия
конкретной электронной системы, нумерацию параметров
необходимо взять из диагностического средства или
документов, или сделать запрос у производителя ТС,
другими словами в WABCO.
Помимо этого, похожие по смыслу параметры возможно
представить таким образом, что они незначительно
отличаются друг от друга (касательно текста). Ссылка на
это последует при разъяснении параметров.
Основой следующих параметров служат
параметров, как:
Здесь появляется преобладающая часть параметров,
требующих пояснения (которые можно найти также и в
других электронных системах).
Пояснение можно разделить на 3 раздела:
9.3.1 Адресный параметр устройств
Параметр 0 определяет адрес прибора, с которым
электронный блок диагностического средства (ПК)
устанавливает связь.
электронной системы, данное толкование
такие серии
446 055 046 0 (6x2 A - MB)
446 055 405 0 (6x2 Ratio - DAF)
446 055 406 0 (6x2 DV - Scania)
446 170 053 0 (4x2/6x2 CAN I - MAN)
1. Адресный параметр устройств
2. Опциональный параметр
3. Параметр значений
Отличие между counts прежних электронных систем ECAS
и Timer Ticks необходимо учитывать при калибровке.
9.3 Разъяснения параметров
В данном разделе более подробно
параметров. По причине большого количества различных
объясняется значение
Для ТС с электронной системой нормирован адрес 16.
Исключения допустимы только в том случае, если,
например , в ТС установлено несколько систем ECU и все
они обладают общим диагностическим интерфейсом. Так,
отдельная электронная система ECAS в сочлененном
автобусе может обладать ISO-адресом 17, если
85

ECAS9.
Параметризация
электронная система ECAS его основной части уже
обладает адресом 16.
ТС первого поколения ECAS (т. е. ECAS с/без датчиком
давления) могут иметь различные адреса (ECU 446 005 003
0 для DAF = адрес 85). Если у вас имеются какие-либо
сомнения, обратитесь к производителю ТС или в
сервисную службу фирмы WABCO.
ТС с электроникой CAN не обладают приборным адресом,
так как здесь доступ
происходит другим образом.
9.3.2 Альтернативные опции
Опциональный параметр состоит, как указано выше, из
макс. 8 опциональных бит. Опция, названная в первую
очередь, соответствует статусу бита 0, а опция, названная
во вторую очередь - статусу бита 1.
Опциональные биты 4x2 (также 6x2)
Блок управления или переключатель управления
В электронную систему задается, каким образом
происходит доступ к
ПОДНЯТИЕ или СПУСК): с помощью переключателя или
блока управления. При диагностике " управление - значения
тестов и измерений - блок управления" проверяются
функции блока или переключателя управления (в
зависимости от выбора).
Бит = 0: устройство ECAS с блоком управления
Бит = 1: устройство ECAS с переключателем
управления
Пульт ДУ
Электронике задается, подключен ли блок управления или
нет, так
Бит = 0: устройство ECAS с блоком управления
Бит = 1: устройство ECAS без блока управления
Принудительное или отдельное управление
подъемным сильфоном
В большей части устройств ECAS, обладающих подъемной
осью, управление подъемным сильфоном происходит
вынужденно. Вынужденное управление встречается в
элктромагнитных клапанах ECAS с импульсным
управлением (¦ 8.3). Электромагнитный клапан ECAS
устроен таким образом, что следующие функции
друг с другом: "подача воздуха в сильфон подъемной оси/
выпуск воздуха из пневмоподушек подъемной оси"
(поднятие подъемной оси) или "выпуск воздуха из
сильфона подъемной оси/подача воздуха в пневмоподушки
подъемной оси" (спуск подъемной оси).
Существуют системы ECAS, в которых управление
пневмоподушками подъемной оси и подъемным
сильфоном происходит за счет различных
электромагнитных клапанов. В данном случае электронной
системе предоставлено отдельное управление клапаном
подъемного сильфона.
как она не может определить это самостоятельно:
к диагностической информации
системе вручную (команда
связаны
Бит = 0: вынужденное управление
Бит = 1: отдельное управление
Пневмоподвески только на задней оси или
пневмоподвески на задней и передней оси
В ТС с полностью пневматической подвеской можно
управлять задней осью(ми), передней осью (ми) и
отдельной функцией подъемной оси независимо друг
друга. В ТС с частичной пневматической подвеской
возможно управление задней осью (осями) и отдельной
функцией подъемной оси, компоненты передней оси не
принимаются и поэтому поступает сообщение о возникшей
неисправности.
Бит = 0: транспортное средство с полностью
пневматической подвеской
Бит = 1: транспортное средство с частичной
пневматической подвеской
ТС 6х2 или ТС 4х2
Данный параметр служит в
конфигурации ТС особенно для электронных систем,
используемых в ТС 4х2 и 6х2.
Бит = 0: ТС 6х2
Бит = 1: ТС 4х2
ТС с подъемной/ведомой осью или ТС без подъемной/
ведомой оси (ТС 6х2 или 6х4)
Электронные системы в ТС с формулой приводного
механизма 6xn могут быть использованы как в ТС с
подъемной/ведомой осью (6х2), так и в ТС без подъемной/
ведомой оси (6х4).
Соответственная системная конфигурация должна быть
сообщена электронной системе для того, чтобы она могла
отличить, являются ли специфические для подъемной или
ведомой оси компоненты неприсоединенными или
неисправными.
Что касается ТС 4х2, то здесь означает: всегда без
подъемной/ведомой оси
Бит = 0: ТС с подъемной или ведомой осью
Бит = 1: ТС без подъемной/ведомой оси
В соответствии с выше названным опциональным
битом (если бит = 0) ТС с подъемной осью или ТС с
ведомой осью
Различие между подъемной и ведомой осью заключается в
том, что ведомая ось может быть только разгружена, а
подъемная ось может быть
опущена. (¦ 3.2 „Основные определения“).
Соответственная системная конфигурация должна быть
сообщена электронной системе для того, чтобы она могла
отличить, являются ли специфические для подъемной оси
компоненты (напр., электромагнитный клапан ECAS с
качестве определения
.
помимо этого поднята или
от
86

Параметризация
ECAS 9.
функцией подъемной оси) неприсоединенными или
неисправными (напр., прерывание провода).
Бит = 0: ТС с подъемной осью
Бит = 1: ТС с ведомой осью или ТС без
дополнительных осей (т.е. ТС 4х2)
2 датчика хода на задней оси или 1 датчик хода на
задней оси
В этом параметре электронике сообщается, каким образом
происходит управление конструкцией: с помощью задней
оси сбоку или со стороны оси.
При управлении, протекающим сбоку, регулировка
устройством на задней оси - для регулировки расстояния происходит за счет двустороннего регулирования (2
контура регулирования). С двумя
магнитным клапаном, обладающим двумя 2-ход. 2-позиц.
клапанами, уровень можно поддерживать параллельно,
несмотря на неравномерность нагрузки сбоку. Обратите
внимание на то, что в данном случае нагрузка на колеса (на
оси) может быть различной и это может привести к
расчаливанию оси.
При управлении, проходящим со стороны оси, регулировка
устройством на задней оси происходит за счет
одностороннего регулирования (1 контур регулирования).
При наличии датчика хода, зачастую установленном
посередине оси, пневмоподушки задней оси управляются
за счет электромагнитного клапана ECAS с одним 2-ход. 2позиц. клапаном. Поперечная дроссель между обоими
пневматическими отводами 2-ход. 2-позиц. клапана
допускает медленное уравнивание давления между
пневмоподушками с обеих сторон ТС
избежать расчаливание оси. Односторонняя нагрузка
может привести к нежелательному наклону конструкции.
Бит = 0: 2 датчика хода на задней оси
Бит = 1: 1 датчик хода на задней оси
датчиками хода и одним
. Тем самым можно
Бит = 1: действует контур регулирования для правой
стороны ТС
Без выдачи данных измерений или с выдачей данных
измерений
В процессе активированной выдачи данных измерений,
система ECU без CAN постоянно посылает восемь данных
измерений, полученных с помощью датчиков, в
регулярного режима работы. Высланные значения
измерений могут быть представлены в процессе
диагностики ПК. Идентифицирование места измерения
зависит от используемой электронной системы. Так, в
процессе выдачи значений измерения показываются
фактические и заданные значения, полученные датчиками
хода: актуальная информация о скорости, значения,
полученные датчиками давления, значения смещения в
процессе компенсации продавливания
регулятора и т.д. Какие данные измерений будут выданы в
существующей электронике, необходимо запросить у
производителя ТС или фирмы WABCO.
Значения измерений выдаются в counts. При отсутствии
пунктов измерения, выдается значение от 0 до 255.
Выдача значений измерений должна проводиться только в
целях диагностики. Поскольку электронная часть
постоянно передает данные, без PIN-кода диагностический
режим неосуществим. В диагностическом контролере
(Diagnostic Controller) в процессе инициализации с
помощью сервисной карточки появляется сообщение
"данные получены на К-проводе, инициализировать еще
раз".
Бит = 0: нормальный режим работы
Бит = 1: режим диагностики
ВНИМАНИЕ! Для завершения параметризации
нужно установить бит 7 : 0, иначе без PIN
!
невозможно осуществить поиск неисправностей.
шин, статус
ходе
В соответствии с вышеназванным опциональным
битом
(бит =1) датчик хода сзади слева или сзади справа
В ТС, в которых на движущей оси посередине находится
только один
подсоединить данный датчик к электронике. Его можно
причислить электронному гнезду "датчик хода на задней
оси слева" или "датчик хода на задней оси справа" (по
выбору). Обратите внимание на то, что 2-ход. 2-позиц.
клапан принадлежащего к нему электромагнитного клапана
должен быть расположен на соответствующей ему стороне
ТС. Установленный
должен быть сообщен электронной системе.
Бит = 0: действует контур регулирования для левой
датчик хода, существует 2 возможности,
таким образом контур регулирования
стороны ТС
Три уровня калибровки или
калибровка нормального уровня
В качестве
в процессе калибровки запуск трех уровней. Исходя из
нормального уровня I, верхний и нижний уровни должны
быть запущены и откалиброваны.
При известном верхнем/нижнем уровне и в
исключительных случаях можно установить бит 1. Перед
процессом калибровки электронной системе ECAS
необходимо сообщить верхний/нижний уровень в качестве
чисел "count". В
калибруется только нормальный уровень I.
Бит = 0: необходима калибровка нормального уровня,
Бит = 1: необходима калибровка нормального уровня
нормы должен быть задан НОЛЬ. ECU ожидает
процессе калибровки запускается и
верхнего и нижнего уровня (стандарт)
87

ECAS9.
Параметризация
Уст ановка в соответствии с предусмотренными
альтернативными опциями автоматического
распознавания периферии
При установлении бит = 0 необходимо полностью сообщить
электронике системную конфигурацию в опциональных
параметрах.
При установлении бит = 1 ECU проверяет электрические
соединения перед процессом калибровки и делает вывод о
выполненной системной конфигурации. В соответствии с
этим параметры описания системной конфигурации
автоматически устанавливаются при изменении одного
параметра и/или при повторной калибровке.
Преимуществом является то, что не стоит задумываться о
конфигурации. Недостатком в данном случае является то,
что выход из строя компонентов не всегда распознается как
таковой, так как каждый раз при включении зажигания ВКЛ
следует конфигурация из существующих в наличии
датчиков.
Установка бита на 1 не освобождает
проведения параметризации. ECU не может, например,
распознать, подсоединен ли переключатель давления, как
должна работать функция вспомогательной силы при
трогании ТС и т.д.
Без клапана РТС или с клапаном РТС
С помощью этого устанавливается, существует ли в
системе 3-ход. 2-позиц. клапан для запуска управления
сильфоном РТС. Если этот бит = 0, то
функции безопасности для РТС не предусмотрены. Если
бит установлен на 1, то на отдельный 3-ход. 2-позиц.
электромагнитный клапан поступает ток до тех пор, пока
система функционирует надлежащим образом и уровень
находится над амортизатором. В случае нарушения
конструкция опускается ниже значения датчика хода. Если
электроника распознает данный образ действий,
происходит обесточивание электромагнитного клапана и
все его запасное давление поступает при этом на
соединения 41 или 42 регулятора тормозных сил (РТС).
от необходимости
в данном случае
то
ситуацию как нарушение достоверности. Нарушение
достоверности, с точки зрения электронной системы,
происходит также тогда, если в течение определенного
времени после подачи
понижение значений count. Вследствие данной
неприемлемой реакции включается сигнальная лампочка,
за счет этого водитель ТС получает сигнал о нарушении
достоверности, т. е. произошло нарушение
достоверности.
Нормой для этого бита является значение 0. Нарушения
достоверности распознаются сразу же после их появления,
заносятся в диагностическую программу памяти системы
ECU, затем включается
отключаются электромагнитные клапаны ECAS.
Существующие на этот момент фактические уровни
принимаются и регулируются в качестве новых заданных
уровней.
Пример: Конструкция ТС должна быть перемещена с 60
counts в сектор нормального уровня (учитывая допуск) на
75 до 85 counts. По истечению лимита времени после
подачи команды система ECU все также распознает
заданный уровень с 60 counts.
представляют собой новый заданный уровень и
регулируются в качестве таковых. Последующие
изменения расстояния между конструкцией и осью за счет
изменения нагрузки тоже были бы отрегулированы на 60
counts.
Если происходит установка бит на 1, то при возникновении
нарушения достоверности они заносятся в
диагностическую программу памяти, включается
сигнальная лампочка и в отличие
электромагнитные клапаны ECAS находятся под
напряжением, чтобы поднять конструкцию на желаемый
заданный уровень. Здесь необходимо учитывать
продолжительность включения клапана.
Без режима эксплуатации крана или с режимом
эксплуатации крана
Бит = 0: это стандартная установка.
команды "СПУСК" не происходит
сигнальная лампочка и
Таким образом, 60 counts
от варианта бит = 0,
Предупреждение о нарушении достоверности
указывается за счет сигнальной лампочки, клапаны
выключаются или они так и остаются запущенными.
Нарушения достоверности - это реакции датчиков хода,
которые в определенном периоде времени не
соответствуют ожиданиям
прохождению определенного времени электроника
проверяет системные реакции ECAS, которые должны
исполняться согласно заданной команде. Так, например,
после того, как электронная система дала команду
ПОДНЯТИЕ, должно возрасти count-число значений
датчиков хода.
Команду "ПОДНЯТИЕ" необязательно давать с помощью
блока управления, ее можно также провести
автоматически, например , как следствие превышения
скорости
находящегося уровня на нормальный уровень.
Для системы ECU является неприемлемым, если значения
датчиков хода остаются неизменными или если происходит
их понижение, таким образом, она оценивает данную
для перемещения конструкции из ниже
электронной системы. По
88
Бит = 1: используется преимущественно в ТС с краном
для того, чтобы избежать полного спуска воздуха
из пневмоподушек во
(¦ 3.12 "Режим эксплуатации крана"). Данная
функция возможна только при v = 0 км/ч.
При переходе в режим эксплуатации крана подпорки ТС
поднимают конструкцию, оси висят при этом в воздухе. В
данном случае увеличивается расстояние между
конструкцией ТС и его осями. ECAS тщетно старается
установить последний заданный уровень за счет спуска
воздуха
использовании этого бита система ECAS распознает режим
эксплуатации крана по истечению определенного
заданного времени и прерывает процесс спуска воздуха из
сильфона.
Эту функцию можно, например, также использовать при
необходимости поднятия ТС на паром. В данном случае
желательно провести неполный спуск воздуха из
пневмоподушек, чтобы избежать сгиб сильфонов
спуске ТС.
из пневмоподушек (команда СПУСКа). При
время эксплуатации крана
при

Параметризация
ECAS 9.
Допустимо или недопустимо состояние наклона ТС для
уменьшения отличия сильфонного давления.
При запуске заданного уровня система ECAS стремится
проводить его регулировку до тех пор, пока все датчики
хода не пошлют сигналы о расстоянии в пределе
допущенного положения заданного уровня. В ТС с двумя
датчиками хода на движущей оси наравномерная нагрузка
на данную
вследствие этой регулировки пневмоподушки находятся
под различным давлением. Результатом может быть
недостаточное использование трансмиссии ТС
(вмешательство ASR).
Для полного использования движущей силы допускается
больший наклон ТС над движущей осью в сторону
проезжей части при одновременном увеличении
трансмиссии. После повторной попытки установить оба
датчика хода
учитывается состояние наклона ТС и регулировка
прерывается. Данное возможно, если датчик хода с левой
стороны ТС не превышает допущенного заданного
значения (независимо от того, где находится правый датчик
хода). Затем для дальнейшего уменьшения разницы в
давлении между правой и левой пневмоподушкой
происходит дополнительная подача воздуха
находящуюся выше - сторона с более низким давлением в
пневмоподушке - на 0,3 сек.
Регулировка возможна только в том случае, если ТС
находится в режиме движения. Данная регулировка не
оказывает влияния на первоначальные значения
калибровки, полученные датчиками хода, т. е. при
последующей регулировке система ECAS снова
попытается установить конструкцию в горизонтальное
положение.
бит
бит = 1: не допускает большой наклон ТС.
Без клеммы 30-снабжение на PIN 5 или с клеммой 30снабжение на PIN 5
На этом бите определяется электроснабжение для
электронной системы. В обычном случае система ECAS
функционирует только при ВКЛюченном зажигании
(клемма 15). Однако существует возможность установить
режим ожидания, в котором ECAS проводит регулировку
заданного уровня несмотря
Для этого электронная система (здесь через PIN 5) должна
быть снабжена электричеством с помощью клеммы 30
(длительный плюс). Данный случай должен быть сообщен
электронной системе. Если PIN не снабжен
электроэнергией за счет клеммы 30 (даже несмотря на
установку), то данная ситуация сообщается водителю
посредством длительного светового сигнала, исходящего
от аварийной лампочки. Основные
же продоставлены, только невозможно использование
режима ожидания.
Бит = 0: без электроснабжения ECU за счет клеммы 30.
движущую ось может привести к тому, что
в допустимой области заданного значения,
на сторону,
= 0: допускает большой наклон ТС.
на выключенное зажигание.
функции ECAS все так
Бит = 1: возможно электроснабжение ECU с помощью
клеммы 30, можно обеспечить режим ожидания.
Выбор датчиков хода
В некоторых электронных системах можно установить
различные виды датчиков хода (¦ также 6.1.1 "Датчик хода"):
• датчик хода без температурной компенсации
• датчик хода с
• датчик угла вращения
В ECU должны быть подсоединены датчики хода только
одного типа.
При выборе датчиков хода электронной системе
сообщается - за счет установления/неустановления бита какой тип датчиков хода существует в системе.
Используемый вид датчика хода известен ECU за счет
установленной кодировки битов.
С функцией контролирования неисправностей
подключенного вида датчика
Данный опциональный бит находится в тесной связи с
выше описанным битом. Здесь принимается решение о
том, необходима ли проверка (проводимая ECU)
подсоединненого датчика хода на его отношение к
определенному типу. Требуется в этом бите провождение
контролирования неисправностей, то в случае нарушения
электроника указывает на датчик хода, не
соответствующий кодировке
серъезную ошибку.
9.3.2.1 Опциональный бит 6х2 (дополнительно)
Для ТС 6х2 могут быть использованы опциональные биты,
встречающиеся в ТС 4х2. В данном разделе они не будут
еще раз истолкованы, так как подробное объяснение Вы
найдете в главе 8.5.2.1 "Опциональные биты 4x2".
Типичные опциональные биты, встречающиеся
исключительно в ТС 6х2, затрагивают
управление подъемной/ведомой осью, вспомогательная
сила при трогании ТС, компенсация продавливания шин и
т.д.
Несущественно или управление подъемной/ведомой
осью с помощью переключателей давления
Если бит = 0, то возможно осуществление полностью
автоматической регулировки подъемной осью. Благодаря
данной установке возможен автоматический спуск
подъемной/нагрузка ведомой оси после превышения макс.
заданного давления в пневмоподушках, а также возможно
поднятие подъемной/разгрузка ведомой оси при понижении
мин. заданного давления в пневмоподушках. Здесь в
любом случае необходим датчик давления для управления
подъемной осью. В ТС без подъемной оси бит нужно
установить на 0.
При бит = 1: необходима связь переключателей давления
внутренней температурной компенсацией
или без неё
и распознает, таким образом,
такие темы, как
с управлением подъемной осью.
89

ECAS9.
Параметризация
Вспомогательная сила при трогании ТС "Deutschland"
(Германия) или вспомогательная сила при трогании ТС
"auerhalb Deutschland" (за пределами Германии)
(также: вспомогательная сила при трогании ТС в
пределах страны или за пределами страны)
Наряду с определением типа вспомогательной силы при
трогании ТС с помощью пининга системы ECU, его можно
также определить за счет процесса параметризации.
опциональных битах устанавливается при этом только тип
вспомогательной силы, точное определение параметров
вспомогательной силы при трогании ТС следует в
дальнейшем отрезке серии параметров.
Бит = 0: устанавливает вспомогательную силу при
трогании ТС по критериям государственной
транспортной техкомиссии Германии (StVZO).
Данное означает, что наряду с требованиями,
касающимися допустимой нагрузки и предельной
скорости, после периода
сек.) должна автоматически наступить пауза
(минимальное значение: 50 секунд).
Бит = 1: устанавливает тип вспомогательной силы при
трогании ТС, в котором возможно (а больше не
требуется) временное ограничение. Функция
вспомогательной силы ограничена, в основном,
только за счет нагрузки и скорости.
Активизация описанных здесь типов вспомогательной силы
происходит, как правило, с помощью
В транспортных средствах, относящихся к группе 6х2 DV,
подъемная ось которых не обладает датчиком давления,
для функции вспомогательной силы предусмотрен второй
вход соединений - так называемое деблокирование
вспомогательной силы. Данный переключатель
необходимо привести в действие при активизации
вспомогательной силы.
Вспомогательная сила при трогании ТС "Nordland"
(северная страна)
Этот опциональный бит тесно связан
опциональным битом.
Бит = 0: активирует вспомогательную силу как указано в
описании выше названного опционального бита.
Бит = 1: активирует тип вспомогательной силы,
работающий без параметризуемых границ.
Процесс активизации/отклучения проводится
водителем с помощью переключателя.
Конструкция подъемной оси с импульсным
управлением или конструкция подъемной оси, на
которую происходит постоянная подача тока
некоторых электронных системах существует отдельный
В
Pin, необходимый для поднятия подъемной оси. В данном
опциональном бите определяется выходной сигнал.
Бит = 0: устройство подъемной оси получает в течение
5 сек. импульс управления (напр.
электромагнитный клапан ECAS с частью
подъемной оси, управляемой за счет заслонки).
активизации (макс. 90
кнопок.
с выше описанным
В
Бит = 1: на устройство подъемной оси постоянно
поступает ток (напр., отдельный клапан
конструкции подъемной оси).
Управление подъемной/ведомой осью вручную с
помощью переключателя или трехпозиционной
клавиши.
В системах ECAS для грузовых автомобилей системное
вмешательство в управление подъемной/ведомой осью
происходит, в основном, посредством переключателя. Для
управления подъемной/ведомой осью вручную существуют
различные варианты активизации.
Бит = 0: управление подъемной осью происходит за счет
двухпозиционного переключателя, который
зависимости от положения переключателя ECU дает команду для поднятия или спуска подъемной
оси. Электронная система реагирует при этом
только на изменение положения переключателя, а
не на изменение нагрузки или состояние
зажигания: ВКЛ/ВЫКЛ.
Бит = 1: подъемная ось управляется с помощью
трехпозиционной клавиши пружинно-возвратного
типа, которая является незадействованной и
находится в
зависимости от положения клавиши в ECU
поступает импульс для поднятия или спуска
подъемной оси. Затем клавиша самостоятельно
переходит на нейтральный уровень.
Комбинированный переключатель для упр. подъем.
осью/доп. мостом и ув. сцеп. колес
Этот опциональный бит тесно связан с выше описанным
опциональным битом.
Бит = 0: активирует управление подъемной/ведомой осью
вручную, которое было описано в пояснении выше
названного опционального бита.
Бит = 1: управление подъемной осью происходит
посредством комбинированного переключателя.
Данный переключатель сочетает в себе функции
переключателя для управления подъемной/
ведомой осью вручную (¦ опциональный бит, бит =
0) и клавиши вспомогательной силы при трогании
ТС пружинно-возвратного типа.
2. Нормальный уровень за счет переключателя/
клавиши
предельной скорости
Нормальным уровнем II можно управлять с помощью
переключателя/клавиши или с помощью скорости (по
выбору).
Бит = 0: управление нормальным уровнем возможно за
Бит = 1: здесь исходят из того, что нормальный уровень I
или второй нормальный уровень за счет
счет переключателя/клавиши.
регулируется в качестве заданного значения.
После превышения заданной скорости ECU
проводит регулировку нормального уровня
нейтральном положении. В
- в
II в
90

Параметризация
ECAS 9.
режиме движения в качестве нового заданного
уровня. При понижении следующей заданной
скорости, которая должна быть ниже выше
упомянутой, нормальный уровень I снова
допускается и регулируется в качестве заданного
уровня.
2. Нормальный уровень посредством переключателя
или второй нормальный уровень посредством
трехпозиционной клавиши
Данный опциональный бит тесно связан с описанным выше
опциональным битом и вступает
случае, если выше описанный бит = 0.
Бит = 0: здесь принимается в рассчет то, что
переключатель подсоединен, причем регулировка
нормального уровня происходит в соответствии с
позицией переключателя.
Бит = 1: здесь принимается в рассчет то, что подсоединена
трехпозиционная клавиша, причем регулировка
нормального уровня происходит в соответствии с
выбранным в последний
уровнем. В состоянии покоя трехпозиционная
клавиша находится в нейтральном положении.
При наличии несерьезных неисправностей постоянное
или кратковременное использование аварийной
лампочки
На несущественные неисправности (неисправности, при
наличии которых возможен ограниченный режим
эксплуатации ECAS и которые не ведут к отключению
системы) ECAS реагирует с помощью постоянного горения
аварийной лампочки.
Бит = 0: при возникновении несущественных
неисправностей постоянно горит аварийная
лампочка.
Бит = 1: при возникновении несущественных
неисправностей аварийная лампочка загорается
на несколько секунд и снова погасает. Данная
функция выбирается для того, чтобы водитель не
был сбит с толку из-за постоянного горения
аварийной лампочки.
Управление подъемной/ведомой осью вручную или
полностью автоматизированная подъемная/ведомая
ось
При бит = 0: может
осью вручную (также полуавтоматически). ECAS может
быть оснащена при этом переключателями или датчиками
давления для учета нагрузки на ось. В системе
устанавливается предельное давление, (т. е. точка
переключения переключателя давления или предельные
параметры для датчика давления) ниже которого возможно
поднятие и спуск подъемной оси или нагрузка и разгрузка
ведомой оси в пределах заданной скорости. Данный
процесс производится водителем с помощью
переключателя или блока управления. При превышении
установленного давления в пневмоподушках движущей оси
происходит автоматический спуск подъемной оси, точнее
быть проведено управление подъемной
в силу только в том
раз нормальным
говоря происходит нагрузка на ведомую ось. В данном
модусе невозможно использование функции
вспомогательной силы при трогании ТС.
При установлении бит = 1
автоматическое управление подъемной осью. Благодаря
данной установке, возможен автоматический спуск
подъемной/нагрузка ведомой оси после превышения макс.
заданного давления в пневмоподушках движущей оси, а
также возможно поднятие подъемной/разгрузка ведомой
оси при понижении мин. заданного давления в
пневмоподушках. В любом случае необходимо наличие
датчика давления в системе. Использование
вспомогательной
выбрано полностъю автоматическое управление
подъемной осью. Полную автоматизацию можно
ВЫКЛючить с помощью команды "спуск подъемной оси/
нагрузка ведомой оси" и снова ВКЛючить с помощью
команды "поднятие подъемной оси/разгрузка ведомой оси".
Условием для этого является то, что макс. давление в
пневмоподушках не было
автоматически опускается подъемная ось или нагружается
ведомая ось.
Кнопка "СТОП", не оказывающая влияние на движение
подъемной оси или кнопка "СТОП", реверсирующая
движение подъемной/ведомой оси.
Бит = 0: кнопка "СТОП" на блоке управления прерывает
все процессы регулировки, необходимые для
установления уровня. На постоянные процессы
регулировки подъемной/ведомой осью кнопка
"СТОП" не оказывает обычно никакого влияния.
Бит = 1: этим можно воздействовать на текущую
регулировку подъемной/ведомой оси, если не
была установлена скорость и если эта функция не
ведет к перенагрузке. За счет нажатия на кнопку
"СТОП" в течение 5 сек. после начала движения
подъемной/ведомой оси можно прекратить данное
движение.
Датчики
бар или датчики давления с исходным напряжением
5,5 В с 10 бар
Существуют различные поколения датчиков давления,
основным отличием которых являются различные
цифровые измерения (¦ 6.1.3 "Датчик давления"). Хотя
параметры давления при необходимости заносятся в
следующие параметры в качестве count-значений,
достигается данное различие. Причиной этого является то,
что
средствах (ПК или Diagnostic Controller) происходит в
качестве подлинных значений давления. Fr die Umrechnung
der count-Werte fr die auszugebenden Drcke in Echtdruckwerte
ist die Angabe der ECU-Auflsung erforderlich.
Бит = 0: для датчиков давления, распределяющих
давления с исходным напряжением 4,5 В с 10
выдача значений давления в диагностических
напряжение 5,5 В на сигнальном проводе при
10 бар. 1 count составляет 1/20 бар (=0,05 бар).
Датчики давления с данным исполнением
обладают байонетным соединением Schlemmer
(KOSTAL).
силы возможно в том случае, если было
выбирается полностью
превышено; при его превышении
91

ECAS9.
Параметризация
Бит = 1: для датчиков давления, распределяющих
напряжение 4,5 В на сигнальном проводе при
10 бар. 1 count составляет 1/16 бар (=0,0625 бар).
Датчики давления с таким исполнением обладают
байонетным соединением по DIN и представляют
собой актуальную стандартную версию,
используемую также и в системах EBS.
ТС 4х2 без датчиков давления или
ТС 4х2 с датчиками давления (компенсация
продавливания шин)
без подъемной оси может быть необходимо
В ТС
использование компенсации продавливания шин. В данном
случае датчики давления подсоединяются к электронике.
Соединения ECU для регулировки подъемной/ведомой
осью в данном случае не используются. С помощью
данного параметра можно избежать ненужного
обнаружения неисправностей (напр., перебой 3-ход. 2-поз.
клапана для подъемной оси).
Бит = 0: означает, что для
необходимости использования компенсации
продавливания шин.
Бит = 1: означает, что возможно использование
компенсации продавливания шин, необходимые
признаки параметрируются позже.
9.3.2.2 Опциональный бит 6х2 DV (дополнительно)
Для ТС 6х2 DV (регулирование соотношения давления)
используются, помимо прочего, опциональные биты,
специфичные для регулирования соотношения давления /
силы тяги. Наряду с этим существуют также опциональные
биты, встречающиеся
еще раз объяснены. Типичные опциональные биты,
встречающиеся исключительно в ТС 6х2 DV, затрагивают,
помимо прочего, такие темы, как регулирование
соотношения давления, регулирование силы тяги,
обеспечение сильфона датчиками и т.д.
Подъемная ось без датчиков давления в
пневмобаллоне. Гидравлическое подъемное
устройство. Ведомая или подъемная ось
давления в пневмобаллоне
Здесь системе сообщается, какая из осей относится к
системе: ведомая или подъемная ось. Помимо этого в
ECAS поступает информация, каким образом происходит
поднятие/спуск подъемной оси. В зависимости от этого
определения ECAS активирует один из трех способов
поднятия и спуска подъемной оси:
• Подъемная ось с датчиками давления
сильфоне
• Подъемная ось без датчиков давления в подъемном
сильфоне
• гидравлическое устройство подъемной оси
За счет указанных здесь и в последующих опционалъных
битах утверждений, можно сделать вывод об однозначном
соотношении.
ТС не существует
в ТС 4х2 и 6х2; здесь они не будут
с датчиками
в подъемном
Бит = 0: означает, что данная система обладает
подъемной осью без датчика давления или
подъемной осью с гидравлическим устройством
подъемной оси или
Бит = 1: означает, что данная система обладает
подъёмным сильфоном с датчиком давления.
Подъемная ось с датчиками давления в
пневмобаллоне.
Подъемная ось без датчиков давления в
пневмобаллоне. Ведомая ось или гидравлическое
подъемное устройство
Данный опциональный бит находится в тесной связи с
предыдущим и последующим опциональным битом.
Бит = 0: означает, что данная система
осью или подъемной осью с датчиком давления
или без него.
Бит = 1: означает, что данная система обладает
гидравлическим подъемным устройством.
Подъемная ось с датчиками давления в
пневмобаллоне.
Гидравлическое подъемное устройство. Ведомая или
подъемная ось без датчиков давления в
пневмобаллоне
Данный опциональный бит находится в тесной связи с
обоими предыдущими опциональными
Бит = 0: означает, что данная система обладает
подъемной осью с датчиком давления или
подъемной осью с гидравлическим устройством
подъемной оси или ведомой осью.
Bit = 1: bedeutet, dieses System besitzt einen Liftbalg ohne
Drucksensor.
Вспомогательная сила при трогании ТС, производимая
вручную
Данный опциональный бит тесно связан с опциональными
битами для определения вспомогательной силы,
описанными в разделе 8.5.2.2 "Опциональные биты 6х2
(дополнительно
Вспомогательная сила при трогании ТС, производимая
вручную - это особый тип, реализируемый только в ТС 6х2
DV, так как здесь пневмоподушки движущей и подъемной
оси обладают датчиками давления. В то время как, в выше
описанных типах вспомогательной силы установлено
постоянно заданное макс. допустимое давление в
движущей оси (если подъемная ось не полностью
разгружена/поднята) и остальная нагрузка лежит на
подъемной оси, давление в пневмоподушке на движущей
оси может быть беспрерывно варьировано. Для
проведения управления вспомогательной силой вручную
необходимы кнопка вспомогательной силы и
переключатель подъемной оси (ПОДНЯТИЕ/СПУСК
подъемной оси). Активирование вспомогательной силы
происходит с помощью соответственной клавиши.
)".
ведомой осью.
обладает ведомой
битами.
92

Параметризация
ECAS 9.
Повышение нагрузки на движущую ось проводится путем
повторного нажатия кнопки вспомогательной силы.
Понижение происходит за счет установления
переключателя подъемной оси в положение "СПУСК
подъемной оси". Для окончания переноса нагрузки
необходимо выключить кнопку вспомогательной силы и
установитъ переключатель подъемной оси в нейтральное
положение.
С помощью следующего параметра можно определить,
должны ли быть
следующем процессе вспомогательной силы значения,
установленного вручую давления для вспомогательной
силы.
Бит = 0: активирует вспомогательную силу как указано в
описании предыдущего опционального бита. Тип
вспомогательной силы Deutschland (Германия),
auerhalb Deutschland (за пределами Германии )
или Nordland (северная страна).
Бит = 1: активирует вспомогательную силу при трогании
ТС, производимую вручную.
Поднятие или неподнятие
вспомогательной силы
В нормальном случае ECAS стремится поднять подъемную
ось при активизации вспомогательной силы, при условии,
что не будет превышена предельная нагрузка на движущую
ось. Так, например, при активированной вспомогательной
силе (для улучшения силы тяги) в ТС, используемых при
строительстве, имеет смысл всегда оставлять подъемную
ось на днище
Бит = 0: подъемная ось поднимается при активированной
вспомогательной силе при соблюдении
предельной нагрузки (стандарт).
Бит = 1: при активированной вспомогательной силе
подъемная ось остается на днище.
3. третий нормальный уровень, установленный с
помощью переключателя имеет приоритет по
сравнению со вторым нормальным уровнем,
установленным за счет предельной скорости.
второй нормальный уровень, установленный с
помощью предельной скорости имеет приоритет по
сравнению с третьим нормальным уровнем,
установленным с помощью переключателя.
Следующими нормальными уровнями можно управлять за
счет скорости (нормальный уровень II) или переключателя
(нормальный уровень III).
В данной ситуации управление нормальным уровнем II
происходит только за счет скорости, а нормальным
уровнем III (чередование с нормальным уровнем I) за счет
переключателя. При
являющейся ниже заданного предела, происходит
регулировка нормального уровня I. После превышения
данной заданной скорости электроника проводит
регулировку нормального уровня II в режиме движения в
качестве нового заданного уровня. При понижении
следующей заданной скорости, которая должна быть ниже
сохранены и, таким образом, вызваны при
подъемной оси в процессе
(лучшая устойчивость ТС).
этом исходят из того, что на скорости,
выше упомянутой, нормальный уровень I снова
допускается и регулируется
помощью переключателя можно, например, установить,
какой из нормальных уровней, I или III, будет принят и
отрегулирован в качестве заданного уровня. Обе эти
функции могут привести к следующим конфликтным
ситуациям:
– переключатель находится в положении "отрегулировать
нормальный уровень III" и ТС превышает предельную
скорость, при которой ECAS должна регулировать
нормальный уровень II.
– ТС передвигается со скоростью, на которой система
ECAS регулирует нормальный уровень II в качестве
заданного уровня и водитель устанавливает
переключатель в положение "отрегулировать
нормальный уровень III"
Для решения данного конфликта электронной системе
сообщается, какая из регулировок заданного уровня имеет
преимущество.
Бит = 0: если переключатель находится в положении
"отрегулировать нормальный уровень III" или если
будет установлен в данное положение, то
он
всегда происходит регулировка нормального
уровня III независимо от скорости. Находится этот
переключатель в положении "отрегулировать
нормальный уровень I", то регулируется
нормальный уровень I или II в зависимости от
скорости.
Бит = 1: если ТС превышает скорость, при которой должна
проводиться регулировка нормального уровня II,
то всегда будет регулироваться нормальный
уровень II независимо от
переключателя. При понижении ТС заданной
скорости, при которой снова должна проводитъся
регулировка нормального уровня I, регулируется
нормальный уровень I или III в зависимости от
положения переключателя.
Запуск вспомогательной силы с помощью
приведенного в действие переключателя на минус и
приведенного в действие переключателя на +U
В нормальном случае вспомогательная сила при трогании
ТС активируется за счет связи переключателя /кнопки и
минуса. Исключением являются ТС 6х2 DV, не
обладающие датчиками на пневмоподушке (ТС с ведомой
осью, без датчиков на пневмоподушках или с
гидравлическим устройством подъемного сильфона). В
данных ТС на Pin-е ECU для сигнального провода датчика
давления на подъемном
подсоединен к +U
вспомогательной силы), который должен быть выключен
наряду с кнопкой вспомогательной силы; данное
необходимо для активизации вспомогательной силы.
Бит = 0: активирует процесс вспомогательной силы только
за счет кнопки/переключателя вспомогательной
силы (обычный случай).
Бит = 1: для активизации вспомогательной силы с
помощью кнопки/переключателя нужно привести в
действие переключатель деблокирования
вспомогательной силы.
(переключатель деблокирования
B
в качестве заданного уровня. С
положения
B
сильфоне переключатель
93

ECAS9.
Параметризация
Деблокирование вспомогательной силы без второго
релейного входа или с помощью второго релейного
входа
В некоторых системах существует дополнительная
функция деблокирования вспомогательной силы,
подключенная к Pin 24 системы ECU. (¦описание системы
6x2 DV)
Бит = 0: функция деблокирования вспомогательной силы
отсутствует
Бит = 1: существует переключаемая функция
деблокирования вспомогательной силы на
U
АККУМ
Регулирование силы тяги или регулирование
соотношения давления
В ТС 6x2 DV регулирование давления в сильфоне на
движущей оси возможно в качестве регулирования силы
тяги или регулирования соотношения давления. С
помощью переключателя соотношения давления/силы
тяги, находящегося на минусе, можно выбрать один из двух
вариантов регулирования. В данном опциональном бите
определяется, какой из двух
действует в открытом состоянии переключателя. Если
переключатель является закрытым, то используется
другой вариант регулирования.
Бит = 0: означает, что в открытом состоянии
переключателя соотношения давления/силы тяги
действует регулирование силы тяги.
Бит = 1: означает, что в открытом состоянии
переключателя соотношения давления/силы тяги
действует регулирование соотношения давления.
Без клапана "РТС", точнее говоря
"отпустить стояночный тормоз передней оси при
поднятии/спуске" или при наличии соответствующих
клапанов.
Данный параметр определяет, существует ли
необходимость подачи сигнала переключения при
определенных обстоятельствах на Pin 29 системы ECU, с
помощью которого происходит управление
электромагнитным клапаном. Pin 29 системы ECU
обладает здесь двойной функцией. С одной стороны, это
функция "отцепления стояночного тормоза передней
при поднятии/спуске", с другой стороны, функция "с РТС".
Бит = 0: означает, что на Pin 29 электронной системы не
подается сигнал переключения U
Бит = 1: означает, что на Pin 29 электронной системы
подается сигнал переключения U
Клапан с мультифункцией "отцепление стояночного
тормоза передней оси при поднятии/спуске" или
клапан с мультифункцией "РТС"
Этот параметр находится в тесной связи с предыдущим
параметром.
вариантов регулирования
, без клапана
оси
.
АККУМ
.
АККУМ
Данный параметр определяет наделение Pina 29 системы
ECU двойной функцией. В зависимости от того, какой из
битов был установлен, описанная функция проводится с
помощью Pinа, подключенного к U
системы ECAS 6x2 DV“)
Функция "отпустить стояночный тормоз передней оси при
поднятии/спуске" приходит в действие при нажатии на
кнопку "поднятие" или "спуск", находящуюся на блоке
управления. Данная функция играет особую роль в таких
ТС, в которых стояночный тормоз оказывает действие на
переднюю ось. При этом намеченной целью является
электромагнитный клапан, находящийся
стояночного тормоза передней оси; с его помощью можно
отпустить стояночный тормоз передней оси. Благодаря
этому можно избежать возникший в процессе поднятия или
спуска перекос рамы и, таким образом, неправильное
выполнение функции поднятия или спуска.
Указанная выше функция "с электромагнитным клапаном
РТС" ведет к тому, что целью управления является
электромагнитный
установления информации "нагружен" на регуляторе
тормозных сил.
Бит = 0: означает - обеспечение функции "отпустить
стояночный тормоз передней оси при поднятии/
спуске".
Бит = 1: означает - обеспечение функции "с
электромагнитным клапаном РТС".
Выключить клапан с функцией "отпустить стояночный
тормоз передней оси при поднятии/спуске" по
прохождению процесса поднятия/спуска или
выключить кнопку "СТОП", клапан с функцией
"отпустить стояночный тормоз передней оси при
поднятии/спуске"
Данный параметр тесно связан с предыдущим параметром,
он описывает, каким образом нужно деактивировать
функцию "отпустить стояночный тормоз".
Бит = 0: означает, что данная функция ("отпустить тормоз")
будет автоматически выключена после окончания
процесса поднятия или спуска.
Бит = 1: означает, что
тормоз" должна быть нажата кнопка "СТОП" на
блоке управления - только после этого будет
приторможена передняя ось.
Вспомогательная сила, производимая вручную, без
функции памяти - касательно нагрузки на ось - или с
функцией памяти
Данный опциональный бит тесно связан с предыдущими
опциональными битами для вспомогательной силы при
трогании ТС, производимой
При использовании вспомогательной силы, производимой
вручную, устанавливается индивидуальное соотношение
давления между пневмоподушками ведущей и подъемной
клапан, данное необходимо для точного
для завершения функции "отпустить
вручную.
. (¦ 7.8 „Описание
АККУМ
в области
94

Параметризация
9.ECAS
оси с помощью клавиши вспомогательной силы и
переключателя подъемной оси "ПОДНЯТИЕ/СПУСК
подъемной оси". В данном опциональном бите можно
установить, возможно ли то и дело делать запрос этого
соотношения давления при активизации вспомогательной
силы с помощью кнопки вспомогательной силы (нажатие на
кнопку в течение <2сек.)
Бит = 0: желательна возможность запроса последнего
индивидуального
пневмоподушками движущей и подъемной оси при
активированной функции вспомогательной силы,
производимой вручную.
Бит = 1: не существует необходимости запроса последнего
индивидуального соотношения давления между
пневмоподушками движущей и подъемной оси при
активированной функции вспомогательной силы,
производимой вручную.
Автоматический, зависимый от нагрузки спуск
подъемной оси или отсутствие автоматического,
зависимого от нагрузки
Бит = 0: возможно осуществление полностью
автоматической регулировки подъемной осью.
Благодаря данной установке возможен
автоматический спуск подъемной/нагрузка
ведомой оси после превышения макс. заданного
давления в пневмоподушках, а также возможно
поднятие подъемной/разгрузка ведомой оси при
понижении мин. заданного давления в
пневмоподушках.
Бит = 1: деактивирует полностью автоматическую
регулировку подъемной оси и
один способ управления подъемной осью с
помощью переключателя или блока управления.
9.3.2.3 Опциональный бит 4x2/6x2 CAN
(дополнительно)
В ТС 4x2/6x2 CAN (т. е. в ТС с управлением за счет CANBus) используются, помимо прочего, опциональные биты,
специфичные для систем с соединением CAN-Bus. Наряду
с этим существуют также опциональные биты,
встречающиеся в ТС 4x2-/6x2, а также 6x2 DV; здесь
будут еще раз объяснены. Типичные опциональные биты,
встречающиеся только в ТС 4x2/6x2 CAN, затрагивают,
помимо прочего, таки темы, как: воздействие с помощью
известий CAN, информация о нагрузке за счет датчика
давления или в качестве известия CAN, различные
способы выдачи значений измерений и неисправностей за
счет данных CAN-Bus и т.д.
Функции в соответствии с
или функции только с помощью кнопок/
переключателя/блока управления
Определяется, до какой степени допущено вмешательство
в систему со стороны пользователя. FFR_1 является при
этом названием послания CAN, в котором находятся
команды необходимых действий для ECAS (например,
поднятие, спуск и т.д.)
соотношения давления между
спуска подъемной оси
допускает только
они не
FFR_1 и блоком управления
Бит = 0: означает, что пользователь имеет возможность
доступа в систему с
блока управления.
Бит = 1: означает, пользователь имеет возможность
доступа в систему, как и в предыдущих системах, с
помощью кнопок, переключателя или блока
управления. Доступ за счет известия CAN FFR_1
не допустим.
ТС 4x2/6x4 без спуска при перегрузке или
со спуском при перегрузке
В данном случае определяется, существует ли
необходимость установления перенагрузки в
(ТС без подъемной или ведомой оси) и, таким образом,
спуска конструкции ТС на амортизатор.
Бит = 0: означает, что при установлении перенагрузки не
происходит спуск на амортизатор.
Бит = 1: означает, что при установлении перенагрузки
происходит спуск на амортизатор. Для
использования данной функции необходимо
наличие датчиков давления на движущей оси.
Информацию о состоянии
система ECAS может получить с помощью данных
CAN-Bus или с помощью датчика давления,
непосредственно связанного с ECU.
Передняя ось с датчиком давления или без датчика
давления
Оснащение передней оси датчиками необходимо, если
определение нагрузки на ось для всего ТС происходит за
счет датчиков давления. За счет данной установки ECAS
учитывает нагрузку на соединении
для передней оси.
Бит = 0: означает, что передняя ось оснащена датчиком
давления.
Бит = 1: означает, что передняя ось не оснащена датчиком
давления.
Ось, движимая по инерции или ось с предварительным
спуском
Данный бит находится в тесной связи с опциональным
битом подъемной/ведомой оси и подробно описывает
положение оси. Данное существенно
Бит = 0: означает, что подъемная/ведомая ось находится
за движущей осью.
Бит = 1: означает, что подъемная/ведомая ось находится
перед движущей осью.
Исходный уровень для нормального уровня II нормальный уровень I или исходный уровень для
нормального уровня II - нижнее положение калибровки
Нормальный уровень II (НУ II) всегда сообщается в
качестве дифференциального значения. Здесь
определяется
разница по отношению к нормальному уровню I или к
, каким образом должен быть задан НУ II: как
помощью известия CAN или
ТС 4x2/6x4
нагрузки электронная
с датчиком давления
только для ТС 6х2.
95

ECAS9.
Параметризация
нижнему положению калибровки (также: нижний уровень
или самый нижний уровень).
Бит = 0: означает, нормальный уровень II будет задан в
качестве разницы по отношению к нормальному
уровню I.
Бит = 1: означает, нормальный уровень II будет задан в
качестве разницы по отношению к самому
нижнему уровню I.
ECAS с датчиками давления или информация о
нагрузке от EBS
Здесь устанавливается происхождение
нагрузке. Здесь определяется, каким образом информация
попадает в электронную систему: с помощью аппаратуры
(датчики давления, подключенные к электронной системе)
или с помощью программного обеспечения (известие CAN
от электронной системы EBS).
Бит = 0: означает, что электронная система получает
информацию от датчиков давления.
Бит = 1: означает, что информация о нагрузке поступает от
EBS-ECU на ECAS-ECU.
выдачи измеряемых значений за счет ID 889/890/
Без
891
или с выдачей измеряемых значений
В идентификаторах (известие CAN) в ходе нормального
режима эксплуатации ECAS могут быть выданы и показаны
(при наличии соответствующего диагностического
устройства) данные измерений. В статусе выдачи значений
измерений не может быть выслано однако известие CAN
DM4, которое, помимо прочего, содержит информацию об
актуальных и o
Модус выдачи значений измерений нужно установить в его
первоначальное положение, если больше не существует
необходимости его использования.
Бит = 0: означает нормальный модус
Бит = 1: означает, что установлен модус выдачи значений
С получением Identifier ECAM1
или без получения
Identifier (идентификатор) ECAM1 сообщает информацию
ECAS-ECU о запасном давлении в системе
пневмоподвесок. С помощью информации о числе
оборотов
может распознать наличие утечек ( в определенной области
запасного давления системы пневмоподвесок), если в
течение заданного времени не был окончен процесс
регулировки поднятия.
Бит = 0: означает, что возможно обнаружение утечек
Бит = 1: означает, что невозможно обнаружение утечек
неактуальных неисправностях.
измерений
двигателя (Identifier EEC1) электронная система
информации о
Предупреждение о нарушениях достоверности в DM1
или без предупреждения о нарушениях
Нарушения достоверности - это неисправности,
определяемые
соответствуют поданным командам. Так, по прохождению
заданного времени, электронная система контролирует,
происходит ли повышение входящих значений count
датчика давления после, например, подачи команды
"поднять конструкцию". Если они остаются одинаковыми
(напр., недостаточное количество запасного давления в
системе) или полностью отсутствуют (напр., поворот
рычага датчика хода), то
электронной системы.
Данная неисправность будет показана, если это возможно
в данном опциональном бите, в Identifier DM1. Возникшая
неисправность будет также сохранена в диагностической
памяти.
Бит = 0: означает, что существует возможность
Бит = 1: означает, что не существует возможность
Таким образом, здесь были описаны самые важные
опциональные параметры. Точное описание параметров
возможно только в том случае, если электронной системе
известен номер детали. Только в данном случае возможно
подробное описание действия параметров в конкретной
системе.
9.3.3 Параметры значений
В следующем разделе будут описаны самые важные
параметры значений. В то время, как
параметры описывают состояние качества, описывают
параметры значений количественное значение установки.
Так, например, тип вспомогательной силы при трогании ТС
определяется в качестве опционального параметра,
установка данного типа происходит однако в параметрах
значений.
Формулировка однозначных параметров в разнообразных
электронных системах может быть различной. Данное
обстоятельство учитывается тем, что дополнительно
возникшие формулировки при
приводятся в скобках.
Параметры, установка которых производится отдельно на
передней и задней оси, будут объяснены в одном разделе.
Разница между нормальным уровнем I и нормальнам
уровнем II спереди или сзади
Данный параметр описывает уровень, который приходит в
действие при нажатии на переключатель НУ II или, иначе
говоря, кнопки нормального уровня на
при НУ II, выбранном с помощью переключателя НУ II, на
передней, вернее движущей оси.
ECAS-ECU, если реакции датчиков хода не
это является неприемлемым для
предупреждения о нарушении достоверности.
предупреждения о нарушении достоверности,
неисправности не сохраняются в диагностической
.
памяти
опциональные
названии параметров
блоке управления
96

Параметризация
ECAS 9.
Если уровень должен находиться выше нормального
уровня I, то вносится значение между 0 и 99 counts. Данное
значение прибавляется к значению нормального уровня I.
Если уровень должен быть ниже НУ I, то необходимо
установить параметр выше 100. Значение, превышающее
число 100, при этом вычитается из нормального уровня I
для составления нового заданного значения. Ввод
осуществляется в counts.
Разница между нормальным уровнем
125) нормальным уровнем I / нижнее положение
калибровки спереди или сзади (для ТС с ECAS 4x2/6x2
CAN первого поколения)
В ТС с ECAS 4x2/6x2 CAN первого поколения необходимо
учитывать некоторые особенности.
Ввод происходит с учитыванием смещения в размере 125
counts. За счет этого значительно изменяется идеология
задаваемых значений. Вводное значение (ВЗ)
представляет собой разницу между нормальным уровнем II
НУ II) и исходным уровнем (ИУ, т. е. нормальный уровень I
(
или нижний уровень), увеличенную на значение смещения
125:
вводное значение = НУ II - ИУ + 125
Если НУ II должен находиться над исходным уровнем, то
должно быть задано значение <125. Если НУ II должен
находиться ниже исходного уровня, то заданное значение
должно составлять >125.
Пример 1: НУ II должен находиться 10 counts над НУ I:
ИУ = НУ I = 100 cts.
НУ II = 100 - 10 = 90 cts.
ВЗ = 90 - 100 + 125 = 115 cts.
вводный параметр: 115 "counts"
Пример 2: НУ II должен находиться 10 counts ниже НУ I:
II и (смещение =-
Для обеспечения устойчивого положения ТС может быть в
любом случае желательной возможность спуска
конструкции на резиновые амортизаторы. Исходя из того,
что процесс калибровки
уровня) производится при порожнем состоянии ТС, то
необходимо убедиться в том, что также и полностью
нагруженное ТС может быть опущено, при возможности, на
уровень амортизаторов. Из-за собственного тяжелого веса
этот, низко расположенный, уровень, необходимый при
нагруженном состоянии ТС находится ниже уровня,
калибрированного в порожнем
Вводимое параметральное значение является больше 100.
Die Elektronik erkennt durch den Eingabewert grer 100 den Fall
A ”Gummipuffer“. Из вводного значения она рассчитывает
предельное значение (вводное значение минус 100),
которое прибавляется к калибрированному нижнему
уровню. Если конструкция находится в пределах
определяемой сферы, то будет приостановлен процесс
обнаружения нарушения достоверности.
Основной критерий прекращения спуска воздуха из
сильфона заключается в том, если электронная система не
может больше определить изменение хода в
параметрированном периоде времени. Благодаря этому
существует возможность привести также в действие
уровни, находящиеся ниже калибрированных нижних
уровней.
Достигнутый уровень принимается как новый заданный
уровень.
Рекомендации: Если калибровка проводится при
отсутствии нагрузки, то должно быть параметрировано
значение между 110 и 125, для того, чтобы также и в
накрененном состоянии ТС, спущенном на амортизатор
только одной стороной, не произошло обнаружения
нарушения достоверности. Если калибровка проводится в
нагруженном состоянии ТС, то имеет смысл, установить
значение между 120 и 135.
(помимо прочего также и нижнего
состоянии.
ИУ = НУ I = 100 cts.
НУ II = 100 + 10 = 110 cts.
ВЗ = 110 - 100 + 125 = 135 cts.
вводный параметр: 135 "counts"
Следствием ввода НУЛЯ был бы НУ II 125 cts. ниже
исходного уровня.
Предел опознания нарушения достоверности на
передней или задней оси
Данный параметр устанавливает предельное значение
датчика хода, при превышении которого - при спуске
конструкции ТС - электронная
нарушения достоверности. В зависимости от определения
самого низкого допустимого уровня параметр оказывает
различное действие:
Случай А: Ограничением снизу(самый нижний уровень)
должен быть резиновый амортизатор
система не обнаруживает
Случай Б: Предельная высота снизу находится над
резиновым амортизатором.
Во избежании износа резинового амортизатора (который
может перейти и на пневмопровод), находящегося в
пневмоподушке
конструкция не спускается на резиновые амортизаторы.
Вводимое параметральное значение является меньше 100.
Die Elektronik erkennt durch den Eingabewert kleiner 100 den
Fall B ”Begrenzung ber dem Gummipuffer“. Вводное значение
представляет собой предельное значение, которое
прибавляется к значению калибрированного нижнего
уровня. Если конструкция находится в пределах
определяемой сферы, то здесь - также как и в случае А будет приостановлен процесс обнаружения нарушения
достоверности.
, преимуществом может быть то, что
97

ECAS9.
Параметризация
Основным критерием для прекращения спуска воздуха из
сильфона является достижение нижнего уровня
конструкцией.
Достигнутый уровень принимается как новый заданный
уровень.
Допустимые возможности заданного уровня на
передней или задней оси
Вводное допустимое значение описывает возможное
превышение и понижение каждого регулируемого
заданного уровня на передней или задней оси. Ширина
диапазона существующих возможностей, в
которой, заданное значение является установленным,
представляет собой, таким образом, следующую формулу:
заданное значение х 2.
Установка данного параметра определяет также качество
регулирования системы на задней оси наряду с
пропорциональным и дифференциальным
коэффициентом, иначе говоря с приобретенной
характеристикой регулирования. (¦ 4.1 Алгоритм
управления при регулировке уровня)
Ввод осуществляется в counts. Вводное значение должно
быть больше
Допустимые отклонения справа/слева заданного
уровня
Этот параметр действует только в системах с двумя
датчиками хода на заднем мосту. Он определяет
допустимый перекос корпуса при неравномерной нагрузке
на правую и левую стороны. Ввод осуществляется в counts.
Допустимое отклонение справа/слева при поднятии/
спуске
Этот параметр касается только мостов с
хода. Здесь, иначе чем в предыдущем параметре, процесс
регулировки специфицируется в ходе значительных
изменений уровня (поднятие/спуск). В ТС, нагруженном с
одной стороны, менее нагруженная сторона поднимается
быстрее (таким образом, более нагруженная сторона
опускается быстрее) и за счет этого возможно
предотвратить опасный наклон ТС при изменении уровня.
Путем незначительного
давление) менее нагруженного сильфона достигается
равномерное поднятие. Равномерное опускание
(импульсное давление) достигается за счет
незначительного выпуска воздуха из более нагруженного
сильфона.
Допустимое отклонение спереди/сзади при поднятии/
спуске
При изменении уровня в ТС с полностью пневматической
подвеской конструкция должна достичь новый заданный
уровень одновременно спереди и сзади. Часть
2 … 3 counts (зависит от системы).
наполнения (импульсное
пределах
двумя датчиками
конструкции
над осью, имеющая самый короткий отрезок пути для
достижения нового регулируемого заданного уровня будет,
соответственно, медленнее поднята/опущена.
Данный параметр определяет допустимую разницу хода
между передним и задним датчиком хода, при учитывании
которой протекает процесс регулировки.
Постоянная пульсация электромагнитных клапанов в
процессе регулировки является следствием небольших
отклонений, которые не следует
осуществляется в counts.
Допустимое повышение уровня 7 сек. после начала
движения или при активированной функции
"разгрузочный уровень"
При необходимости, во время движения можно провести
регулировку заданного уровня в определенном отрезке
времени (долгота интервала = задержка регулировки при
стоянке, стандартная установка: 60 сек. или свободная
параметризация). При запуске может произойти то, что
разгрузка
увеличивается расстояние между конструкцией и осью и
ТС находится, таким образом, над заданным уровнем.
Поправка возможна, в худшем случае, только через 60 сек.
Данный параметр содержит в себе информацию о
допустимом превышении (заданный уровень) расстояния
конструкции над осью. 7 сек. после начала движения ECAS
контролирует, было ли
уровень + допустимое превышение заданного уровня" на
всех датчиках хода системы. При установлении данного
состояния происходит немедленная регулировка заданного
уровня.
Параметр не должен быть равен НУЛЮ, так как каждый раз
будет проводиться регулировка при малейшем
превышении значения 7 сек. после начала движения. Ввод
осуществляется в counts.
Скорость движения, до которой возможно
изменение уровня пола
Параметр описывает предельную скорость, до достижения
которой блоком управления принимаются команды
"поднятие/спуск" или "М1/М2". При превышении данной
скорости, сохраняется установленный с помощью блока
управления заданный уровень; его последующее
изменение за счет блока управления невозможно.
Отрегулировать нормальный уровень, выбранный в
последнюю очередь, возможно благодаря параметру
"Скорость движения, при превышении которой происходит
автоматическая активизация нормального уровня".
Параметр "скорость движения, до достижения которой
возможно целенаправленное изменение высоты" должен
быть меньше параметра "скорость движения, при
превышении которой происходит автоматическая
активизация нормального уровня".
ТС еще не закончена, вследствие этого
превышено расстояние "заданный
учитывать. Ввод
точное
98

Параметризация
ECAS 9.
Задержка регулирования в неподвижном состоянии
Параметр задает период времени, в котором сигналы
датчика хода стоячего ТС должны безостановочно
подаваться из допустимого диапазона заданного уровня
для запуска процесса продолжения регулировки.
Длительность периода импульса Т
Данный параметр устанавливает продолжительность
импульсного периода для регулировки заданного уровня в
системах, в которых должна быть указана характеристика
регулирования.
Стандартной установкой является продолжительность
импульсного периода, составляющая 12 counts (= 300 мс).
Вводное значение составляет 25 мс в count. Ввод
осуществляется в counts.
Длительность импульсного режима - это интервал между 2мя импульсами включения, подаваемыми на 2-ходовые 2позиционные клапана в магнитном клапане ECAS. ECU
определяет продолжительность включения 2-ход. 2-поз.
клапанов в зависимости от отклонения регулируемой
величины и быстроты изменения данного отклонения
рассчитанная продолжительность включения равна или
больше заданной продолжительности импульсного
периода, то на 2-ход. 2-поз. клапаны постоянно поступает
ток. Подробное описание Вы найдете в разделе 5.1.
Время распознавания амортизатора
Этот параметр находится в тесной связи с параметром
"проверка на достоверность при спуске спереди или сзади".
Он определяет период времени, за который ECU
установить упор снизу (резиновый амортизатор).
Если в течение данного периода при подаче команды
"спуск конструкции" не происходят изменения хода, а
расстояние конструкции над осью находится на уровне,
соответствующем установке параметра "проверка на
достоверность при спуске спереди или сзади", то
прекращается подача импульсов электромагнитным
клапаном ECAS.
Делитель импульсов
Наряду с параметрами "допустимое
слева вне заданных уровней" и "допустимое отклонение
спереди/сзади вне заданных уровней", данный параметр
устанавливает период времени, в течение которого
отключается или, по крайней мере, находится под
импульсным давлением более подвижная при поднятии/
спуске сторона конструкции.
При продолжительности менее 75 мс, импульсы не
производятся.
При вводе значения "255" электромагнитный клапан
более быстро двужущейся стороне остается закрытым до
тех пор, пока конструкция не перейдет в прежнее
допустимое положение.
отклонение справа/
. Если
должна
на
Пропорциональный коэффициент KPV или KPH для
регулировки заданного уровня на передней или задней
оси
Пропорциональный коэффициент K
значение для регулировки заданного значения системой
ECAS и оно служит для расчета продолжительности
импульса при регулировке уровней. Рассчитываемая
продолжительность импульса пропорциональна
существующему отклонению заданного уровня. Для
расчета продолжительности импульса в электронной
системе нужно установить фактор пропорциональности,
пропорциональный коэффициент K
Пропорциональный коэффициент KP зависит от системной
конфигурации, его необходимо определить путем попытки
и в дальнейшем уточнить. Это задача изготовителя
автомобиля и при необходимости сервисного
обслуживания ее, как правило, не требуется решать.
Определение происходит так:
1. установить параметры "допустимое отклонение
справа/слева в заданных уровнях", "допустимое
отклонение справа/слева вне заданных уровней" и
"допустимое
уровней" на "255"
установить параметр "продолжительность
импульсного периода T" на C 12
установить параметр "допуск для заданного уровня
спереди или сзади" на C 3 … 5 возм. до 7
2. Определение (начального) значения для K
следующей формуле:
KP = (параметр "продолжительность импульсного
периода" - 2) / (параметр ”допуск для заданного
уровня спереди" или "...сзади“ - 1)
3. Определение вводимого параметра по формуле:
вводимый параметр = K
округлить до полного числа
(Примечание: При данном значении - при
минимальной скорости подъема и минимальном
регулируемом отклонении от заданного уровня - на
электромагнитный клапан ECAS постоянно бы
поступал ток.)
4. калибровка ТС
5. установить ТС на уровень ниже допустимого
заданного значения актуального нормального уровня
и дать команду "нормальный уровень" (с помощью
блока управления).
Проверка: запуск нормального уровня без
повышенных колебаний и без клапанных импульсов
6. результат проверки:
ДА; K
P
раскачивание конструкции; сократить значение K
(при необходимости повысить допустимый заданный
уровнень)
отклонение спереди/сзади вне заданных
находится в порядке, изменения не требуются
- это основное
P
.
P
по
P
x 3 - результат следует
P
P
99

ECAS9.
Параметризация
пульсация электромагнитных клапанов; повысить
значение KP
7. при необходимости проведения поправок,
действовать как указано в абзаце 5.
При отсутствии компромисса в регулировке, т. е. если
невозможно устранить склонность конструкции к
раскачиванию с помощью установления значения K
пределе допустимого заданного значения, то
рекомендуется оптимизация поперечного сечения (напр.,
его уменьшение) пневмопроводки между
электромагнитным клапаном ECAS и пневмоподушкой
(небольшое поперечное сечение в проводке или дроссель).
ВНИМАНИЕ: Ввод значения происходит в трети counts.
В ТС с самообучающейся регулировкой больше не
существует необходимости определять и вводить этот и
следующий параметры.
Пропорциональный коэффициент
регулировки заданного уровня на передней оси
или на задней оси)
Дифференциальный коэффициент KD - это базисное
значение для регулировки заданного уровня системой
ECAS. Промежуток времени, за который на
электромагнитный клапан ECAS подается ток при подъеме
конструкции, можно сократить в зависимости от скорости
изменения отклонений в регулировке. Тем самым, в случае
больших отклонений от заданного уровня, должны быть
приостановлены процессы поднятия во избежании
раскачивания конструкции. Для сокращения
продолжительности импульса в электронной системе
нужно установить следующий фактор - пропорциональный
коэффициент K
Пропорциональный коэффициент K
конфигурации, его необходимо определить путем попытки
и в дальнейшем уточнить. Это задача изготовителя
автомобиля и при необходимости сервисного
обслуживания ее, как правило, не требуется решать.
Определение происходит так:
1. Определение начального значения по следующей
формуле:
= пропорциональный коэффициент KP x 2
K
D
2. установить в ТС большое отклонение от заданного
значения ниже нормального уровня и дать команду
"нормальный уровень" (с помощью блока управления).
Проверка: запуск нормального уровня без
повышенных колебаний и без клапанных импульсов
3. результат проверки:
ДА; K
раскачивание конструкции; сократить значение K
(причём KD должно быть макс. 4 x KP)
.
D
находится в порядке, изменения не требуются
D
KPV или KPH для
зависит от системной
D
в
D
4. при необходимости проведения поправок,
действовать как указано в абзаце 2.
Ввод значения происходит в течение продолжительности
импульсного периода за треть counts.
Нормальный уровень III по отношению к нормальному
уровню I на передней или задней оси
Данный параметр находит применение в ТС, обладающих
третьим уровнем движения (напр. , 6x2 DV), параметр 24
описывает нормальный уровень III на передней или задней
оси. Ввод осуществляется в counts.
Если нормальный уровень III должен находиться выше
нормального уровня I, то вносится значение между 0 и 99
counts. Вводное значение прибавляется при этом к
значению уровня движения I.
Если нормальный уровень III должен находиться ниже
нормального уровня I, то параметр 24 должен быть больше
100. Нормальный уровень III вытекает из: нормальный
уровень I - параметр + 100.
Скорость движения, при превышении
регулируется режим норм. уровня II
Этот и следующий параметры тесно связаны друг с другом
и устанавливаются в ТС, обладающих зависимой от
скорости регулировкой с нормального уровня I на
нормальный уровень II и наоборот. Данная функция
должна быть активирована в соответственном
опциональном параметре.
После превышения здесь параметрированной скорости,
электронная система автоматически регулирует
нормальный уровень II в качестве заданного значения в
режиме движения. Ввод осуществляется в км/ч.
Скорость движения, при превышении которой автом.
регулируется режим норм. уровня I
Данный параметр находится в тесной связи с
вышеописанным, он устанавливает скорость, при
понижении которой начинается регулировка нормального
уровня I.
Данная функция должна быть активирована в
соответственном опциональном параметре
параметр - это обратная функция, вытекающая из выше
описанного параметра и которая должна быть меньше его.
Ввод осуществляется в км/ч.
Задержка регулирования во время движения
Данный параметр встречается в ТС с ECAS 4x2/6x2 CAN. С
его помощью можно установить интервал времени, в
котором производится регулировка заданного уровня во
время движения. В электронных системах
D
данное значение не может быть параметрировано, оно
которой автом.
. Данный
, в которых
100
 Loading...
Loading...