

Page 1

VC-C50i
COMMUNICATION CAMERA
PROGRAMMER'S MANUAL
Page 2

Contents
1. Getting Started...................................................................................................................................... 6
2. Connection with your Computer .......................................................................................................... 6
2.1 Connection .................................................................................................................................. 6
2.2 Connector & Pin Assignment...................................................................................................... 7
3. Communication Format........................................................................................................................ 7
3. Communication Format........................................................................................................................ 8
3.1 Signal Format .............................................................................................................................. 8
3.2 Understanding ............................................................................................................................. 8
3.3 Communication Timing Diagram ...............................................................................................9
4. Control Command Format ................................................................................................................. 11
5. Answer Format................................................................................................................................... 11
5.1 Answer Format.......................................................................................................................... 11
5.2 Error Code ................................................................................................................................. 11
5.3 Status ......................................................................................................................................... 12
6. Function of Command Termination Notification............................................................................... 13
6.1 Function In General................................................................................................................... 13
6.2 Format of Command Termination Notification ........................................................................ 13
7. Cascade Global Notification .............................................................................................................. 13
7.1 In General.................................................................................................................................. 13
7.2 Format of Cascade Global Notification Data............................................................................ 14
7.3 Notification Code ...................................................................................................................... 14
8. Event Generation Notification Function ............................................................................................ 15
8.1 Overview of Event Generation Notification Function .............................................................. 15
8.2 Event Generation Notification Data Format ............................................................................. 15
8.3 Event Generation Factor Codes................................................................................................. 15
9. Function of Remote Control............................................................................................................... 16
9.1 In General.................................................................................................................................. 16
9.2 Data Format of Remote Control Through................................................................................. 16
9.3 Table of Remote Control Code ................................................................................................. 17
10. Classification of Command.............................................................................................................. 18
10.1 Classification by Operation..................................................................................................... 18
10.2 Classification by Executive Format ........................................................................................18
11. Control Command Table.................................................................................................................. 20
11.1 Pedestal Control Command Table........................................................................................... 20
11.2 Camera Control Command Table ........................................................................................... 21
11.3 System Control Command Table ............................................................................................ 23
12. Details of Pedestal Control Commands ........................................................................................... 25
12.1 Pan Speed Assignment Pedestal Control Command Type 1........................................... 25
12.2 Tilt Speed Assignment Pedestal Control Command Type 1........................................... 26
12.3 Pan Speed Request Pedestal Control Command Type 1................................................. 27
12.4 Tilt Speed Request Pedestal Control Command Type 1................................................. 28
12.5 Pan Tilt Stop Pedestal control Command Type 1 ......................................................... 29
12.6 Pan Right Start Pedestal Control Command Type 2 ..................................................... 30
12.7 Pan Left Start Pedestal Control Command Type 2 ....................................................... 31
1
Page 3

12.8 Tilt Up Start Pedestal Control Command Type 2 ......................................................... 32
12.9 Tilt Down Start Pedestal Control Command Type 2 .................................................... 33
12.10 Home Position Pedestal Control Command Type 2.................................................... 34
12.11 Pedestal Initialize 1 Pedestal Control Command Type 2.............................................. 35
12.12 Pedestal Initialize 2 Pedestal Control Command Type 2.............................................. 36
12.13 Pan Slowest Speed Request Pedestal Control Command Type 1 ................................... 37
12.14 Pan Fastest Speed Request Pedestal Control Command Type 1..................................... 38
12.15 Tilt Slowest Speed Request Pedestal Control Command Type 1 ................................... 39
12.16 Tilt Fastest Speed Request Pedestal Control Command Type 1..................................... 40
12.17 Pan Angle Pulse Ratio Request Pedestal Control Command Type 1 ............................. 41
12.18 Tilt Angle Pulse Ratio Request Pedestal Control Command Type 1.............................. 42
12.19 Pan Minimum Angle Request Pedestal Control Command Type 1................................ 43
12.20 Pan Maximum Angle Request Pedestal Control Command Type 1 ............................... 44
12.21 Tilt Minimum Angle Request Pedestal Control Command Type 1................................ 45
12.22 Tilt Maximum Angle Request Pedestal Control Command Type 1 ............................... 46
12.23 Pan/Tilt Stop Pedestal Control Command Type 1 ...................................................... 47
12.24 Pan/Tilt Start Stop Pedestal Control Command Type 2................................................ 48
12.25 Pan/Tilt Angle Assignment Pedestal Control Command Type 2.................................... 50
12.26 Pan/Tilt Angle Request Pedestal Control Command Type 1........................................ 52
12.27 Pan Movable Range Assignment Pedestal Control Command Type 1........................... 54
12.28 Tilt Movable Range Assignment Pedestal Control Command Type 1 ........................... 56
12.29 Pan Movable Range Request Pedestal Control Command Type 1 ................................. 58
12.30 Tilt Movable Range Request Pedestal Control Command Type 1 ................................. 59
13. Details of Camera Control Commands ............................................................................................ 60
13.1 Camera OFF Camera Control Command Type 2.......................................................... 60
13.2 Camera ON Camera Control Command Type 2 ........................................................... 61
13.3 Focus Automatic Camera Control Command Type 1................................................... 62
13.4 Focus Manual Camera Control Command Type 1........................................................ 63
13.5 Focus Near Camera Control Command Type 2 ............................................................ 64
13.6 Focus Far Camera Control Command Type 2 ............................................................ 65
13.7 Focus Position Assignment Camera Control Command Type 2....................................... 66
13.8 Focus Position Request Camera Control Command Type 1........................................... 67
13.9 One Push AF Camera Control Command Type 2......................................................... 68
13.10 Focus Range Request Camera Control Command Type 1............................................ 69
13.11 Zoom Stop Camera Control Command Type 1 ........................................................ 70
13.12 Zoom Wide Camera Control Command Type 2 ......................................................... 71
13.13 Zoom Tele Camera Control Command Type 2........................................................... 72
13.14 Zoom Hi Wide Camera Control Command Type 2 .................................................... 73
13.15 Zoom Hi Tele Camera Control Command Type 2...................................................... 74
13.16 Zoom Position 1 Assignment Camera Control Command Type 2.................................. 75
13.17 Zoom Position 1 Request Camera Control Command Type 1...................................... 76
13.18 Zoom Position 2 Assignment Camera Control Command Type 2.......................... 77
13.19 Zoom Position 2 Request Camera Control Command Type 1...................................... 78
13.20 Zoom Speed Assignment Camera Control Command Type 1...................................... 79
13.21 Zoom Speed Request Camera Control Command Type 1 ............................................ 80
13.22 Zoom Position Maximum Request Camera Control Command Type 1 ........................... 81
2
Page 4

13.23 Backlight Compensation OFF Camera Control Command Type 2 ................................ 82
13.24 Backlight Compensation ON Camera Control Command Type 2.................................. 83
13.25 Exposure Automatic Camera Control Command Type 1 ............................................. 84
13.26 Exposure Manual Camera Control Command Type 1.................................................. 85
13.27 AE Lock OFF Camera Control Command Type 1 ..................................................... 86
13.28 AE Lock ON Camera Control Command Type 1 ....................................................... 87
13.29 Shutter Speed Program Camera Control Command Type 1 ....................................... 88
13.30 Shutter Speed 1/60 (PAL:1/50) Camera Control Command Type 2 .............................. 89
13.31 Shutter Speed 1/100 (PAL:1/120) Camera Control Command Type 2 .......................... 90
13.32 Shutter Speed Assignment Camera Control Command Type 2...................................... 91
13.33 Shutter Speed Request Camera Control Command Type 1 .......................................... 93
13.34 AGC Gain Assignment Camera Control Command Type 1......................................... 95
13.35 AGC Gain Request Camera Control Command Type 1 ............................................... 96
13.36 Iris Assignment Camera Control Command Type 2................................................... 97
13.37 Iris Request Camera Control Command Type 1 ......................................................... 98
13.38 AE Target Value Assignment Camera Control Command Type 2............................... 100
13.39 AE Target Value Request Camera Control Command Type 1 ..................................... 101
13.40 Auto White Balance Normal Camera Control Command Type 1 ................................ 102
13.41 Auto White Balance Lock Camera Control Command Type 1 .................................... 103
13.42 White Balance Manual Mode Camera Control Command Type 2 ............................... 104
13.43 White Balance Value Assignment Camera Control Command Type 1........................ 105
13.44 White Balance Value Request Camera Control Command Type 1 .............................. 106
13.45 Fade Normal Camera Control Command Type 2 ..................................................... 107
13.46 Fade White Camera Control Command Type 2........................................................ 108
13.47 Fade Hi Speed White Camera Control Command Type 2.......................................... 109
13.48 Fade Hi Speed Black Camera Control Command Type 2 .......................................... 110
13.49 Camera Reset Camera Control Command Type 2.................................................... 111
13.50 Zoom Ratio Request Camera Control Command Type 1 ........................................... 112
13.51 Pixel Size Request Camera Control Command Type 1 .............................................. 113
13.52 Setting Insertion of Infrared Cut Filter Camera Control Command Type 2 ................... 114
13.53 Settings when Infrared Cut Filter Not Inserted Camera Control Command Type 2......... 115
13.54 Infrared Cut Filter Status Request Camera Control Command Type 1 .......................... 116
13.55 Electronic Zoom Setting Camera Control Command Type 2..................................... 117
13.56 Electronic Zoom Setting Verification Camera Control Command Type 2..................... 118
13.57 Noise Reduction OFF Camera Control Command Type 2 ......................................... 119
13.58 Noise Reduction Low Level ON Camera Control Command Type 2 .......................... 120
13.59 Noise Reduction High Level ON Camera Control Command Type 2.......................... 121
13.60 Noise Reduction Setting Verification Camera Control Command Type 1..................... 122
13.61 Dome Mode Setting Camera Control Command Type 2............................................ 123
13.62 Dome Mode Setting Verification Camera Control Command Type 1.......................... 124
13.63 Product Version Request Camera Control Command Type 1 .................................... 125
13.64 EEPROM Version Request Camera Control Command Type 1................................... 126
14. Details of System Control Commands ........................................................................................... 127
14.1 Alarm Output OFF System Control Command Type 1 ................................................ 127
14.2 Alarm Output ON System Control Command Type 1.............. 128
14.3 Alarm Output Status Request System Control Command Type 1.......... 129
3
Page 5

14.4 External Sensor Input Detection Setting System Control Command Type 1 ....... 130
14.5 External Sensor Input Detection Status Request System Control Command Type 1......... 131
14.6 External Sensor Input Detection Setting Information Request System Control Command Type 1... 132
14.7 Internal Infrared Light ON/OFF Control System Control Command Type1.................. 133
14.8 Internal Infrared Light Status Request System Control Command Type 1 ........ 134
14.9 External Light Output OFF System Control Command Type 1 ............. 135
14.10 External Light Output ON System Control Command Type 1......................... 136
14.11 External Light Output Status Request System Control Command Type 1..................... 137
14.12 Remote Control ON System Control Command Type 1............................................. 138
14.13 Remote Control OFF System Control Command Type 1........................................... 139
14.14 Operation Status Request System Control Command Type 1 ...................................... 140
14.15 Extended Operation Status Request System Control Command Type 1 ........................ 141
14.16 Operation Status 3 Request System Control Command Type 1 ..................... 143
14.17 Operation Status 4 Request System Control Command Type 1 ................................. 145
14.18 Product Name Request System Control Command Type 1 ...................................... 147
14.19 ROM Version Request System Control Command Type 1 ........................................ 148
14.20 Preset Set System Control Command Type 1 ........................................................... 149
14.21 Preset Move System Control Command Type 2..................................................... 150
14.22 Preset Status Request System Control Command Type 1........................................... 152
14.23 Extended Preset Status Request System Control Command Type 1 ............................ 153
14.24 Remote Controller Through Setting System Control Command Type 1........................ 155
14.25 LED Normal Display System Control Command Type 1........................................... 156
14.26 LED Forced Control System Control Command Type 1............................................ 157
14.27 Cascade OFF System Control Command Type 1 ..................................................... 158
14.28 Cascade ON System Control Command Type 2....................................................... 159
14.29 Host Control Mode System Control Command Type 1.............................................. 160
14.30 Local Control Mode System Control Command Type 1 ............................................ 161
14.31 Screen Control System Control Command Type 1................................................... 162
14.32 Display Character Data Assignment System Control Command Type 1 ....................... 164
14.33 Display Character Data Request System Control Command Type 1.......................... 166
14.34 Display Date Assignment System Control Command Type 1.................................... 168
14.35 Display Date Request System Control Command Type 1 .......................................... 169
14.36 Display Time Setting System Control Command Type 1........................................... 170
14.37 Display Time Request System Control Command Type 1 ......................................... 171
14.38 Turning ON Time Request System Control Command Type 1.................................. 172
14.39 Default Setting System Control Command Type 1................................................. 173
14.40 Command Termination Notification Setting System Control Command Type 1............. 174
14.41 Global Notification Setting System Control Command Type 1 ................................... 175
14.42 Pedestal Model Request System Control Command Type 1 ...................................... 176
14.43 Camera Model Request System Control Command Type 1 ....................................... 177
15. Connection Cable ........................................................................................................................... 178
15.1 Example 1 Connection with PC-AT...................................................................................... 178
15.2 Example 2 Connection with PC-AT...................................................................................... 179
15.3 Example Connection with Macintosh ................................................................................... 180
15.4 Example of Connection Cables for Computer Side of VC-C50i .......................................... 181
15.5 Example of Connection Cables for Next Camera Side of VC-C50i ..................................... 182
4
Page 6

15.6 Example of Connection Cables from VC-C50i to VC-C50i................................................. 183
16. Example of Host Control Sequence ............................................................................................... 184
16.1 Assignment of Host Control Mode ....................................................................................... 184
16.2 Initial Setting ......................................................................................................................... 185
16.3 Command Termination Notification ..................................................................................... 186
16.4 Remote Controller Through .................................................................................................. 187
16.5 Cascade ON Assignment....................................................................................................... 188
16.6 Cascade Individual Assignment ............................................................................................ 189
16.7 Cascade Global Assignment.................................................................................................. 190
5
Page 7
1. Getting Started
This manual describes commands which control communication camera VC-C50i through
RS-232C interface from host computer.
Before reading this manual, it is recommended to read operation manual of VC-C50i.
CAUTION:
VC-C50i/VC-C50iR Pan/Tilt operational durability is guaranteed for 100K cycles.
In case of the continuous operation by the program such as Auto Pan Tilt system, & etc.,
it is important not to overdrive the said value (100K).
2. Connection with your Computer
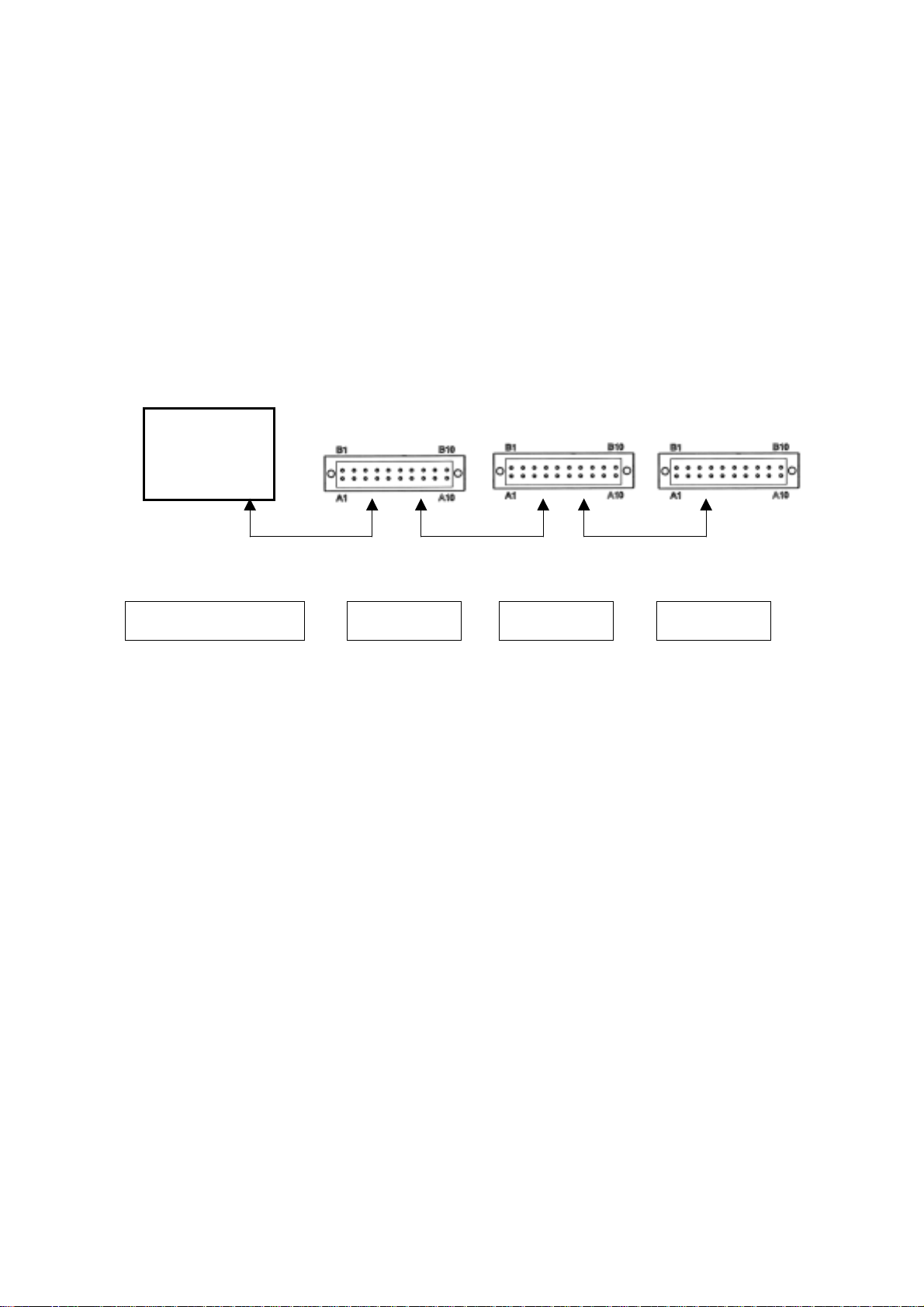
2.1 Connection
HOST PC
COM Port
RS-232C cable (dedicated)
RS-232C cable (dedicated) RS-232C cable (dedicated)
1st Unit 2nd Unit 3rd Unit
Host Computer
VC-C50i
VC-C50i VC-C50i
Use the supplied connector to connect the COM port on the host computer with the RS-232C
terminal on the VC-C50i host side using a RS-232C dedicated cable.
For operation of multiple connected VC-C50i units, connect a RS-232C dedicated cable to the
OUT side (next camera side) of the first VC-C50i unit's RS-232C terminal and to the IN side
(host side) of the second VC-C50i unit's RS-232C terminal. Three or more units are connected in
the same way, and up to nine VC-C50i units can be connected.
If a Cascade ON command is issued when multiple VC-C50i units are connected, the device
numbers of the connected VC-C50i units are set as 1, 2, 3, and so on, starting from the host
computer side.
If the VC-C50i is used as a single unit, there is no need for connections of a second or more units.
6
Page 8
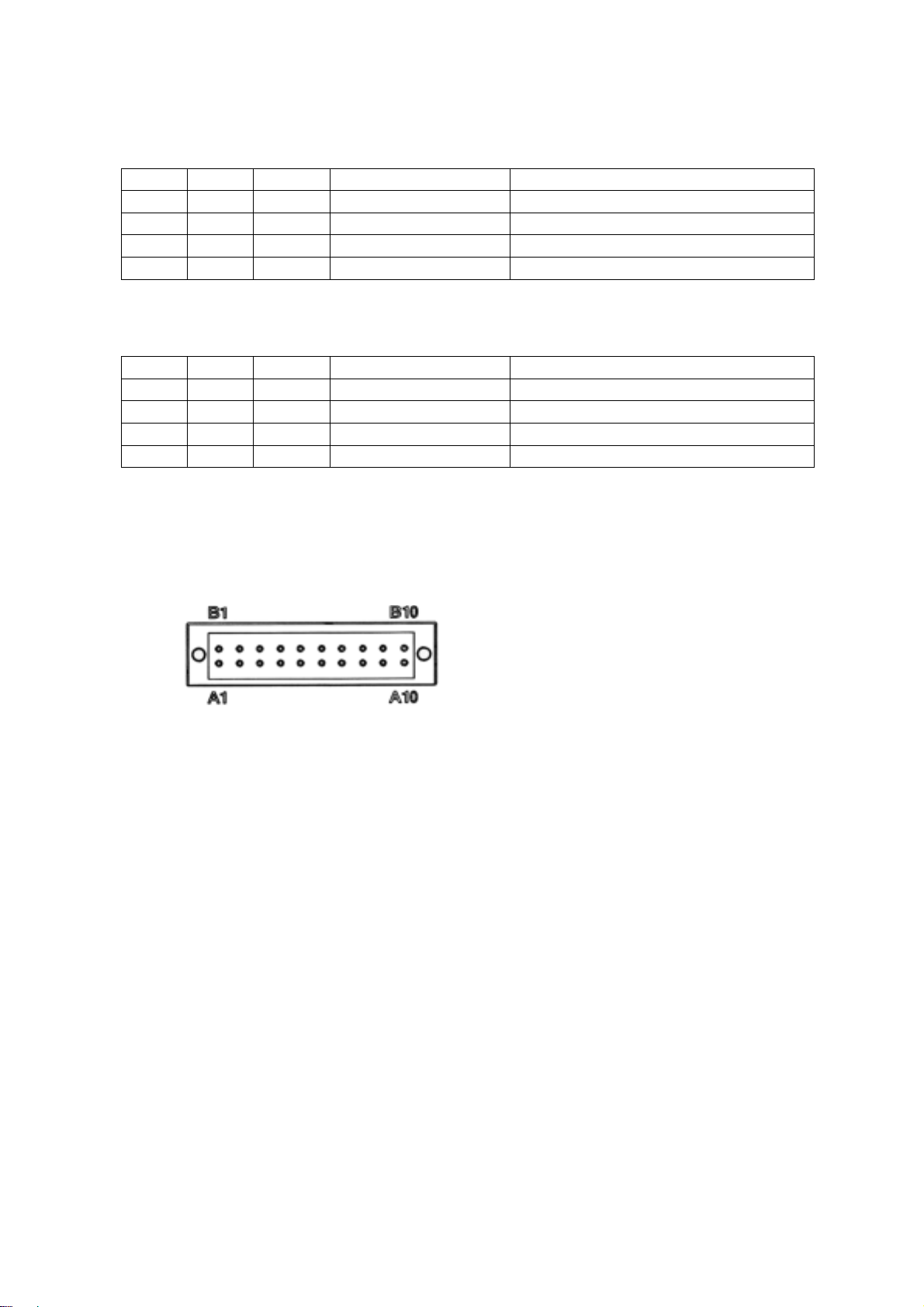
2.2 Connector & Pin Assignment
RS-232C OUT
(Connection to Next Camera Side in Cascade Connection)
A3 RTS Output → NEXT CAMERA RS-232C cascade output send request
B3 CTS Input NEXT CAMERA → RS-232C cascade output send permit
A4 TXD Output → NEXT CAMERA RS-232C cascade output send data
B4 RXD Input NEXT CAMERA → RS-232C cascade output receive data
A5 GND RS-232C cascade output GND
RS-232C IN
(Connection to Host Side in Cascade Connection)
B5 GND RS-232C input GND
A6 RTS Output → Host PC RS-232C input send request
B6 CTS Input Host PC → RS-232C input send permit
A7 TXD Output → Host PC RS-232C input send data
B7 RXD Input Host PC → RS-232C input receive data
Connector model: B2L 3.5/20 LH SN OR
Manufacturer: Weidmuller (supplied with product)
Camera side connector diagram
7
Page 9

3. Communication Format
3.1 Signal Format
RS-232C Conformity Connector & Pin assignment of connector are referred to 2.2
Transmission Mode : Half Duplex (Full duplex for notification)
Transfer Speed : 4800, 9600, 14400, 19200bps. (selected through menu window)
Data Bit : 8 bit
Parity : None
Stop Bit : 1 bit or 2 bit (selected through menu window)
Handshake : RTS/CTS Control
Others : One Acknowledge per command
RS-232C level Definitions
ON : +5V to +15V
OFF : –5V to –15V
3.2 Understanding
The followings are described based on the signal from the computer terminal (RS-232C).
• The flow is controlled by RTS/CTS terminal control.
• When the VC-C50i is ready to receive control commands, the CTS line of the computer is ON.
And as long as VC-C50i is turned on, the CTS line is always ON because VC-C50i is ready to
receive the control commands.
• In case of starting the communication from the computer, the RTS line of computer must be
ON.
• After receiving the answer corresponding to the control command, the next control commands
will be ready to transmit.
Before transmitting the answer corresponding to the control command, VC-C50i cancels the
received code, in case of receiving the next control commands.
• In case of not receiving the answer to the computer, the RTS line of the computer must be OFF.
In this case, VC-C50i will suspend to issue the answer. If VC-C50i, however, suspends more than
one second, the issue of the answer will be forced to stop and VC-C50i returns to the receiving
status.
• In case of using the notification functions, the communication format must correspond to full
duplex. There are some cases for VC-C50i to issue the notification data, while the computer
issues the commands.
• The standard waiting time of the answer is 300ms. If VC-C50i does not return the answer more
than 300ms, there must be some errors.
• Note that VC-C50i is unable to execute remote control and communication control at a one time.
After turn on, VC-C50i is under the condition of remote control. If the communication control is
required, Host Control Mode command or Cascade ON command must be issued. Note that
the VC-C50i can not shift the remote control status to the host communication control mode
during menu processing.
8
Page 10
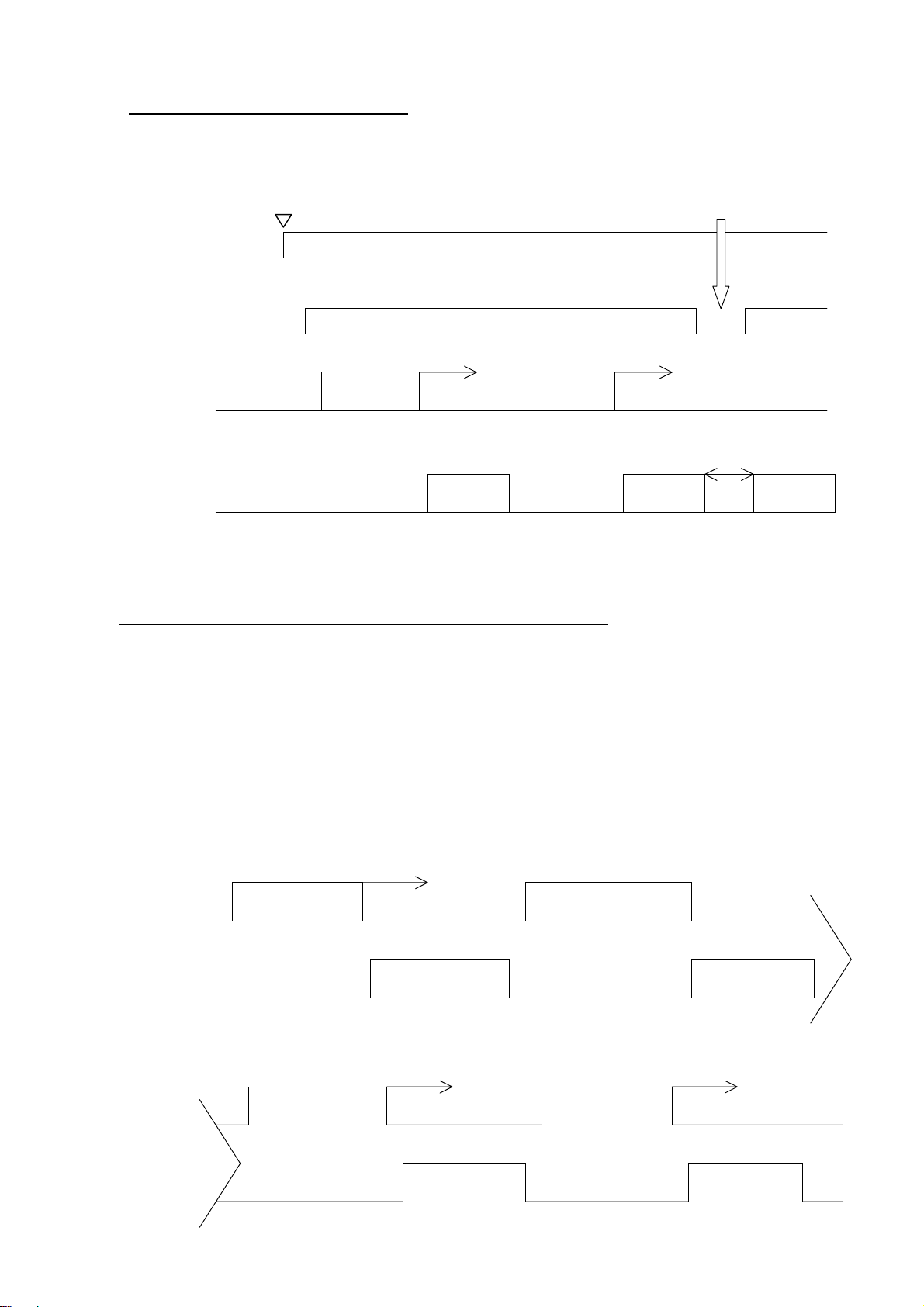
3.3 Communication Timing Diagram
N
N
Example 1: Basic communication
Computer Side
In case unable to receive the answer to the computer
Power turned on
CTS
Always ON
RTS
Command 1
execute
Command 2
execute
TXD
(Control Command)
Answer 1
Answer 2 Answer 2
RXD
(Answer)
Suspend
Example 2: Unable to execute the commands due to error
The details are referring to 12.1 Pan Speed Assignment command.
The followings shows the case which causes the error by Pan Speed Assignment command,
when the communication mode isn’t host mode. Pan Speed Assignment commands will cause
the error mode under the condition that the communication mode is not host mode.
After the error generated by Pan Speed Assignment command, the Operation Status Request
command is issued and confirms that the error source isn’t host mode, then the Host Control
command is issued and Pan Speed Assignment command is again executed.
Computer Side
Pan Speed Setting
Fail to execute
Operation Status Request
TXD
(Control Command)
Busy + Mode Error
Operation Status
RXD
(Answer)
Host Control Mode
Execute Execute
Pan Speed Setting
TXD
o error (ACK)
o error (ACK)
RXD
9
Page 11
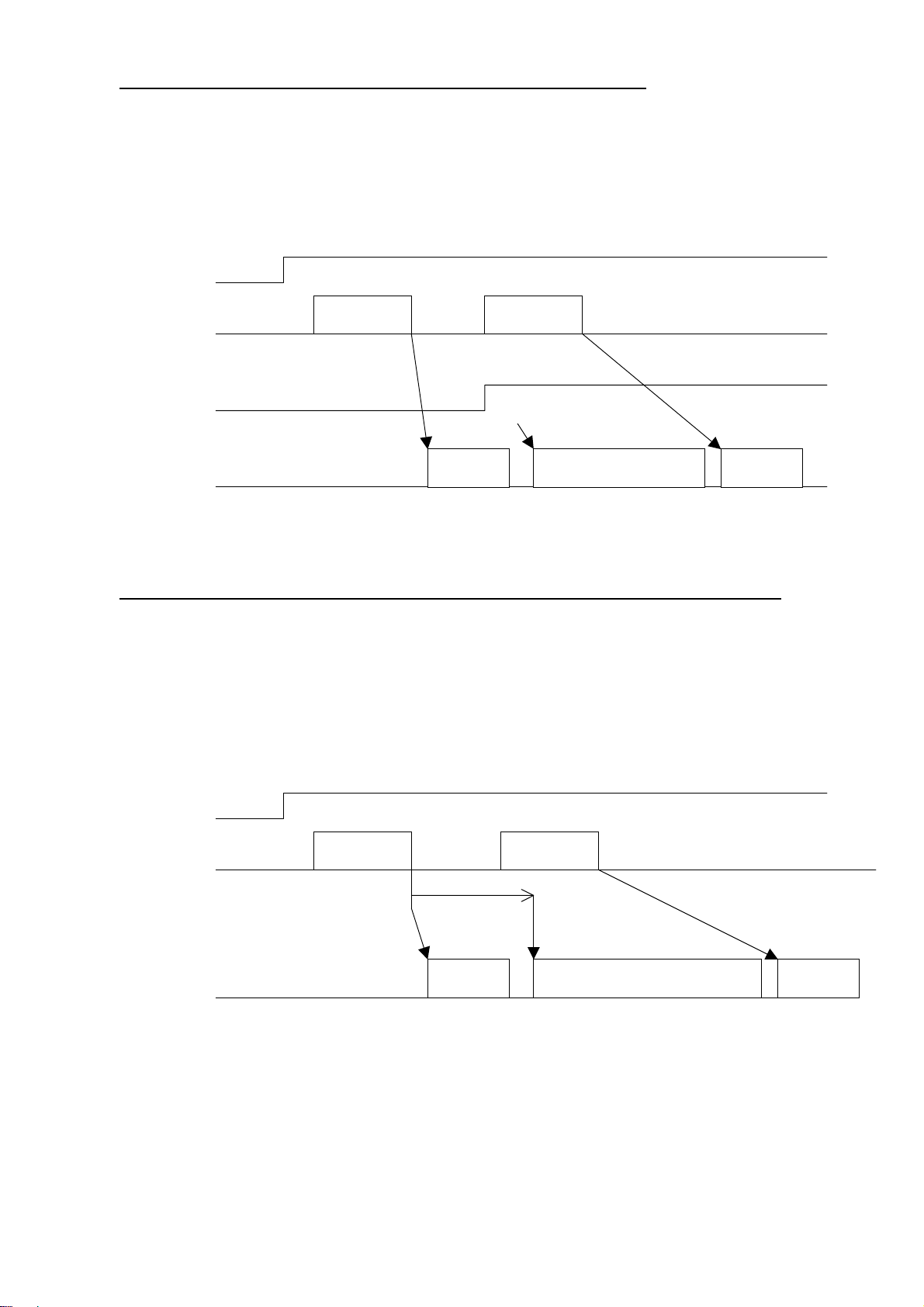
Example 3: The case using Remote Control Through Function
The details are referring to 9. Function of Remote Control.
As shown below, there are some cases that the commands and remote control through
data are generated at the same time, while remote control through function turns on the
RTS line of computer. In this case, the software of computer must correspond to full duplex.
Computer Side
RTS
Command 1
Command 2
TXD
(Control Command)
Remote
ON
Answer 1
Remote Control ON Data Answer 2
RXD
(Answer)
Example 4: The case using the Function of Command Termination Notification
The details are referring to 6. Function of Command Termination Notification.
As shown below, there are some cases that the commands and remote control through
data are generated at the same time, while the function of command termination notification
turns on the RTS line of computer. In this case, the software of computer must correspond to
full duplex.
Computer Side
RTS
Command 1
Command 2
TXD
(Control Command)
Execute
Answer 1
Command Termination Notification Answer 2
RXD
(Answer)
10
Page 12
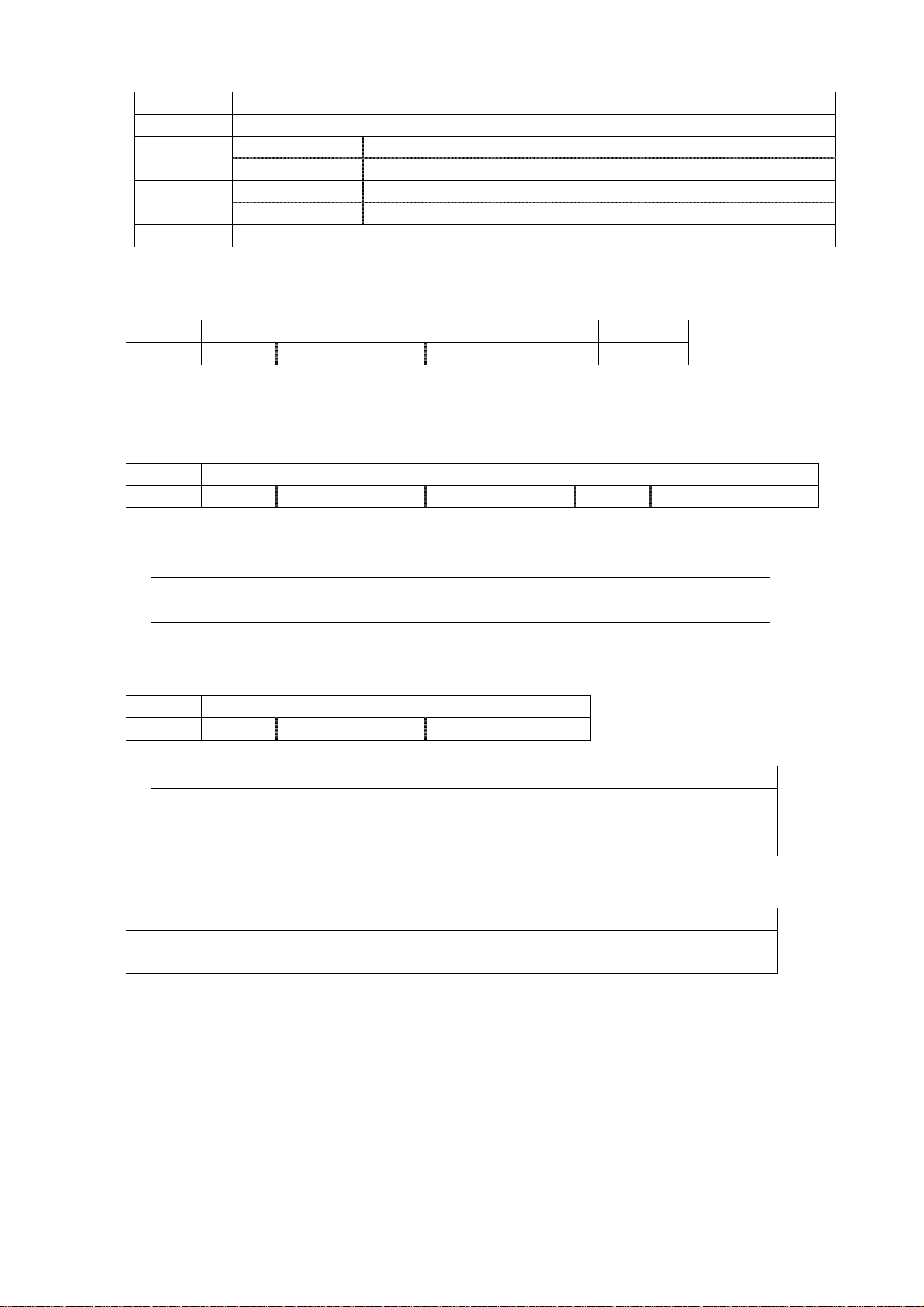
4. Control Command Format
This format is to transmit from the computer to VC-C50i.
Header Device Num Command Parameter End mark
Header : 1 byte FFh
Device Num : 2 byte 3030h~3039h (Device number in cascade connection)
Command : 2 byte (refer to 12. Details of Pedestal Control Commands
~ 14. Details of System Control Commands)
Parameter : Variable length If not specified, parameter manifests hexadecimal, transmits
its ASCII code.
End mark : 1 byte EFh
Just after power on, device number is 3030 and each device number is determined by Cascade
ON control command.
The control command (Global Command) of device number 3030 became valid to all VC-C50i
connected in Cascade ON status.
5. Answer Format
5.1 Answer Format
This answer format corresponds to the control command transmitted from the computer to
VC-C50i.
Header Device Num Error Code Status End mark
Header : 1 byte FEh
Device Num : 2 byte 3030h~3039h (Device number in cascade connection)
Error Code : 2 byte manifested error flag In hexadecimal and return it's ASCII code.
Status : Variable length If not specified, status manifests hexadecimal, transmits
its ASCII code.
End mark : 1 byte EFh
Under the condition in Cascade Connection ON, the answer corresponding to control
command of device number 3030, is returned only to the last device connected in cascade.
5.2 Error Code
Error code manifests error flag in hexadecimal and returns it’s ASCII code. If not exists error,
all bits of error flags are cleared and becomes zero.
• The bit assignment of error flag.
b7(MSB) b6 b5 b4 b3 b2 b1 b0(LSB)
Mode error Parameter error Command error Busy
System
reservation
System
reservation
System
reservation
System error
1st byte b7: Mode Error In case of wrong mode
b6: Parameter Error In case of receiving wrong parameter
b5: Command Error In case of receiving wrong command
b4: Busy In case of unable to execute by error
11
Page 13
2nd byte b3: System Reservation Always zero
b2: System Reservation Always zero
b1: System Reservation Always zero
b0: System Error In case of the fatal error to the system
The details of error flags are described as below.
Busy : VC-C50i is unable to execute the commands in process to execute the former
command.
: In case of generating Command Error, Parameter Error, Mode Error or
System Error.
Command Error : In case of receiving the wrong commands (not prepared commands).
Parameter Error : In case of over value of parameter or wrong parameter length.
Mode Error : In case of receiving the command unable to execute under VC-C50i during
the receiving status.
System Error : In case that the fatal accidents occur for some reason.
CAUTION
• If the device number is wrong, its control command code will be ignored.
• By Operation Status Request, the cause of error can be found.
• The error check will be executed by the following priority order.
(1) Mode Error
(2) Command Error
(3) Parameter Error, Busy
VC-C50i sets the error flag corresponding to any, after the detection of error, and returns
the answer, then multiple error flags can’t be set. Busy, however, is exceptional and set,
whenever any of Command Error, Parameter Error, Mode Error or System Error occurs.
Example: Wrong command to be transmitted.
1st byte
b7 = 0, b6 = 0, b5 = 1, b4 = 1 b3 = 0, b2 = 0, b1 = 0, b0 = 0
3h → 33h 0h → 30h
(Hexadecimal indication → ASCII code conversion)
Note: When the command errors occur and unable to execute, busy flag and command error flag
will be set at the 1.
5.3 Status
In case of having received status request command, this status adds status value to the
answer. The details of Operation Status Request command and status value are described
later. (Refer to 14. Details of System Control Commands)
The Operation Status Request will accept the command, if not host control mode.
2nd byte
12
Page 14
6. Function of Command Termination Notification
6.1 Function In General
Among the control commands of VC-C50i, the executive format type 2 has the function of
the termination notification at the time terminated to executed. (the details of executive format
refers to 10. Classification of Command) The termination notification to be admitted or
forbidden will be executed by the ON/OFF command of the termination notification.
Note 1 : After just turn on, the function of command termination notification is set under
the condition of forbidden status.
Note 2 : In case of using this function, the software of computer must correspond to full duplex,
in order to be able to receive the termination notification data, even if the computer
issues the commands.
Note 3 : The RTS line must be always ON, in order not to forbid the transmission of notification
data during the flow control.
Note 4 : The details of the communication timing are referring to 3.3 Communication Timing
Diagram.
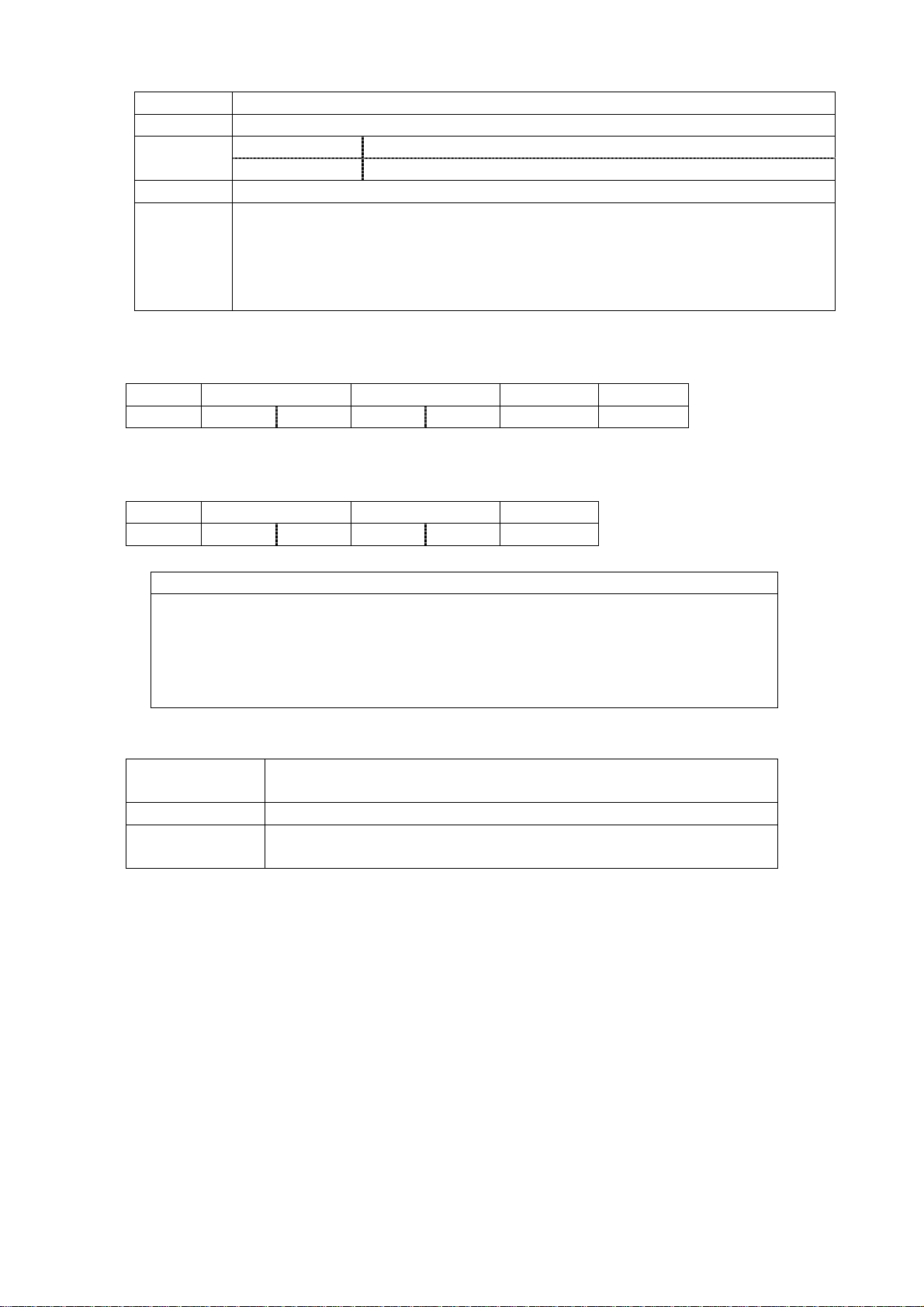
6.2 Format of Command Termination Notification
Before the time to terminate the execution, the data format from VC-C50i to the computer is
configured as shown below.
Header Device Num Command Parameter End mark
Header : 1 byte FAh
Device Num : 2 byte 3030h~3039h (Device number in cascade connection.)
Command : 2 byte Command at the time of the operation terminated.
Parameter : Variable length Parameter at the time of the operation terminated.
End mark : 1 byte EFh
Under the status of Cascade ON, the command termination notification will be returned
from each device, corresponding to the control command of Device Num. 3030. (device number
3031~3039)
7. Cascade Global Notification
7.1 In General
In case of using VC-C50i connected in cascade, the global commands (Device number 3030h)
can execute the identical operation to all VC-C50i connected in cascade. But the only last device
will return the answer to the computer. In case of the cascade global notification function
admitted and global command issued, the only error information integrated among the answer
information of VC-C50i is notified to the computer.
Note 1 : After just turn on, the function of command termination notification is of setting the
forbidden status.
Note 2 : In case of using this function, the software of computer must correspond to full duplex,
in order to be able to receive the termination notification data, even if the computer
issues the commands.
Note 3 : The RTS line must be always ON, in order not to forbid the transmission of notification
data during the flow control.
13
Page 15
Note 4 : The details of the communication timing are referring to 3.3 Communication Timing
Diagram.
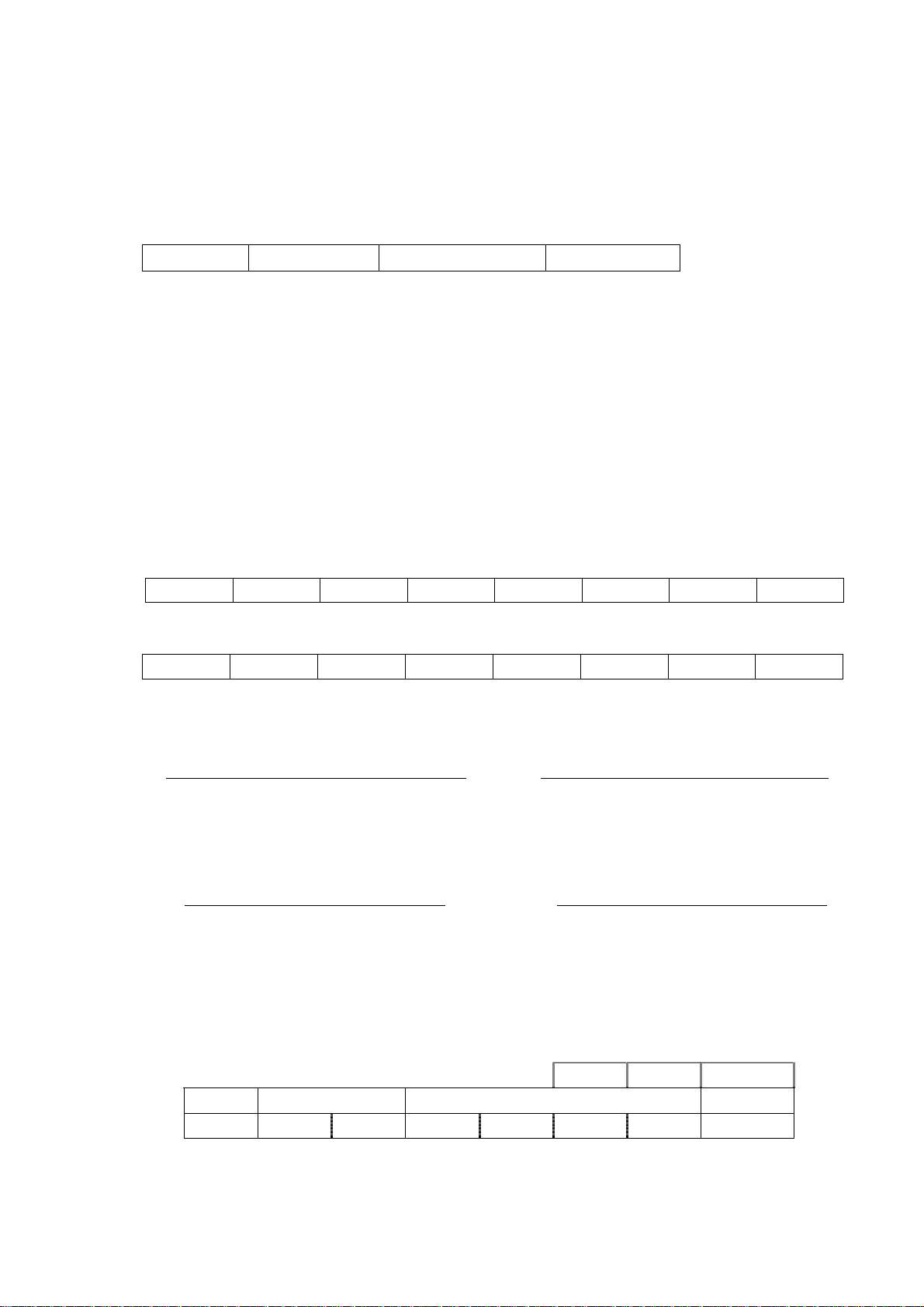
7.2 Format of Cascade Global Notification Data
Before the time to terminate the execution, the data format from VC-C50i to the computer is
configured as shown below.
Header Device Num Notification Code End mark
Header : 1 byte F8h
Device Num : 2 byte 3031h~3039h (Last device number connected in cascade.)
Notification Code : 4 byte Present information of VC-C50i connected.
End mark : 1 byte EFh
7.3 Notification Code
The error information of VC-C50i connected in cascade indicates in hexadecimal, returns its
ASCII code. If the error does not exists, all bits of notification flags will be cleared and become
zero.
• Bit Assignment of Error Flags.
b15(MSB) b14 b13 b12 b11 b10 b9 b8
System Resv.(0) System Resv.(0) System Resv.(0) System Resv.(0) System Resv.(0) System Resv.(0) System Resv.(0) Cascade 9th
b7 b6 b5 b4 b3 b2 b1 b0(LSB)
Cascade 8th Cascade 7th Cascade 6th Cascade 5th Cascade 4th Cascade 3rd Cascade 2nd Cascade 1st
Example: 6 units are connected in cascade, and the errors occur in 1st unit and 5th unit.
1st byte
2nd byte
b15 = 0, b14 = 0, b13 = 0, b12 = 0 b11 = 0, b10 = 0, b9 = 0, b8 = 0
0h → 30h 0h → 30h
(Hexadecimal indication → ASCII code conversion)
3
rd
byte 4th byte
b7 = 0, b6 = 0, b5 = 0, b4 = 1 b3 = 0, b2 = 0, b1 = 0, b0 = 1
1h → 31h 1h → 31h
(Hexadecimal indication → ASCII code conversion)
Example of Notification data
d0 d1 d2 d3 d4 d5 d6 d7
Header Device Num Notification Code End mark
F8h 30h 36h 30h 30h 31h 31h EFh
14
Page 16

8. Event Generation Notification Function
8.1 Overview of Event Generation Notification Function
This function notifies the computer side about event information generated in the VC-C50i.
The types of notification events can be set by selecting the commands for the event generation
notification function.
8.2 Event Generation Notification Data Format
When an event is generated, the data sent from the VC-C50i to the computer has the following
format.
Header Device Num Notification Code Parameter
Header : 1 byte FBh
Device Num : 2 byte 3031h~3039h (Device number in cascade connection.)
Notification Code : 2 byte Event generation factor code.
Parameter : 2 byte Event generation factor parameter.
End mark : 1 byte EFh
8.3 Event Generation Factor Codes
Commands related to the generated event are set.
Example: When the detection conditions are found with the external sensor input detection set
(74h command) .
d0 d1 d2 d3 d4 d5 d6 d7
Header Device Num Notification Code Parameter End mark
FBh 30h 3Xh 00h 74h 30h 30h EFh
⇑
The external sensor input detection setting command is set.
End mark
15
Page 17
9. Function of Remote Control
9.1 In General
The ON/OFF status of remote control can be monitored by the computer.
By Remote Control Through command ON, VC-C50i is in the status of through mode and
notify the status of ON/OFF to the computer.
If the control mode is set to remote through ON by host control, the VC-C50i sends the status
corresponding to the pressed key directly to the computer side without performing any operation
for any received remote control code. If the control mode is set to remote through ON by
remote control, the VC-C50i performs the operation corresponding to the received remote control
code, and then sends the status to the computer side.
Note 1 : After just turn on, the function of remote control is of setting the status OFF.
Note 2 : In case of using this function, the software of computer must correspond to full duplex,
in order to be able to receive the remote control through data, even if the computer issues
the commands.
Note 3 : The RTS line must be always ON, in order not to forbid the remote control through data
during the flow control.
Note 4 : The details of the communication timing are referring to 3.3 Communication Timing
Diagram.
9.2 Data Format of Remote Control Through
At the time to receive remote control data, the data format from VC-C50i to the computer is
configured as shown below.
Header Device Num Status End mark
Header : 1 byte FDh Remote Button ON (Pushed)
FCh Remote Button OFF (Released)
Device Num : 2 byte 3030h~3039h (Device number in cascade connection.)
Status : 2 byte Remote control code indicates hexadecimal, returns its ASCII code.
(refer to 9.3. Table of Remote Control Code)
End mark : 1 byte EFh
Each device return the data of remote control in the status of cascade connection (3031~3039).
Example: Remote Control Button [1] ON
d0 d1 d2 d3 d4 d7
Header Device Num Remote control Code End mark
FDh 30h 3Xh 30h 31h EFh
Example: Remote Control Button [1] OFF
d0 d1 d2 d3 d4 d7
Header Device Num Remote control Code End mark
FCh 30h 3Xh 30h 31h EFh
16
Page 18
9.3 Table of Remote Control Code
At the remote control through mode, the code corresponding to the key transmitted by VC-C50i,
is described below.
Command of remote control
(Remote Key)
MF 00h 30 30h
1 01h 30 31h
2 02h 30 32h
3 03h 30 33h
4 04h 30 34h
5 05h 30 35h
6 06h 30 36h
AF 07h 30 37h
NEAR 08h 30 38h
FAR 09h 30 39h
Code Status Value
WIDE 0Ah 30 41h
TELE 0Bh 30 42h
UP 0Ch 30 43h
DOWN 0Dh 30 44h
LEFT 0Eh 30 45h
RIGHT 0Fh 30 46h
HOME 10h 31 30h
ID 11h 31 31h
BRIGHT- 12h 31 32h
ON SCREEN 13h 31 33h
CAMERA 14h 31 34h
SET/OK 15h 31 35h
CANCEL 16h 31 36h
* 17h 31 37h
# 18h 31 38h
BRIGHT+ 19h 31 39h
Fn 1Ah 31 41h
MENU 1Bh 31 42h
7 1Ch 31 43h
8 1Dh 31 44h
9 1Eh 31 45h
0 1Fh 31 46h
17
Page 19
10. Classification of Command
10.1 Classification by Operation
VC-C50i consists of pedestal and camera sections, and command consists of Pedestal Control,
Camera Control and System Control. This manual describes according to this classification.
(1) Pedestal Control
This control is to set each parameter, to inquire and to indicate operation for pedestal.
Pan Speed Assignment, Pan Speed Request, Pan Angle Request, etc. are counted
among this classification. See the table 11.1 Pedestal Control Command Table,
and 12. Details of Pedestal Control Commands.
(2) Camera Control
This control is to set each parameter, to inquire and to indicate operation for camera.
Zoom Position Request, Parameter Setting, etc.. are counted among this classification.
See the Table 11.2 Camera Control Command Table, and 13. Details of Camera
Control Commands.
(3) System Control
This control is to control the operation by remote control, to control LED display, operation
of both camera and pedestal, to inquire the inside status and etc.
Remote ON/OFF, LED Forced Control, Preset Setting, Status Request of Operation are
counted among this classification.
See the table 11.3 System Control Command Table, and 14. Details of System Control
Commands.
10.2 Classification by Executive Format
Each command classify as one of Synchronous Execution (type 1) and other of Non-Synchronous
Execution A (type 2).
(1) Synchronous Execution (type 1)
This command executes immediately at the time of command receipt, and complete the
execution at the time of the answer completed.
The command among this classification enable to accept the next command at the moment of
answer transmission. This classified commands describe as type 1 in 12. Detail of Pedestal
Control Commands ~ 14. Details of System Control Commands.
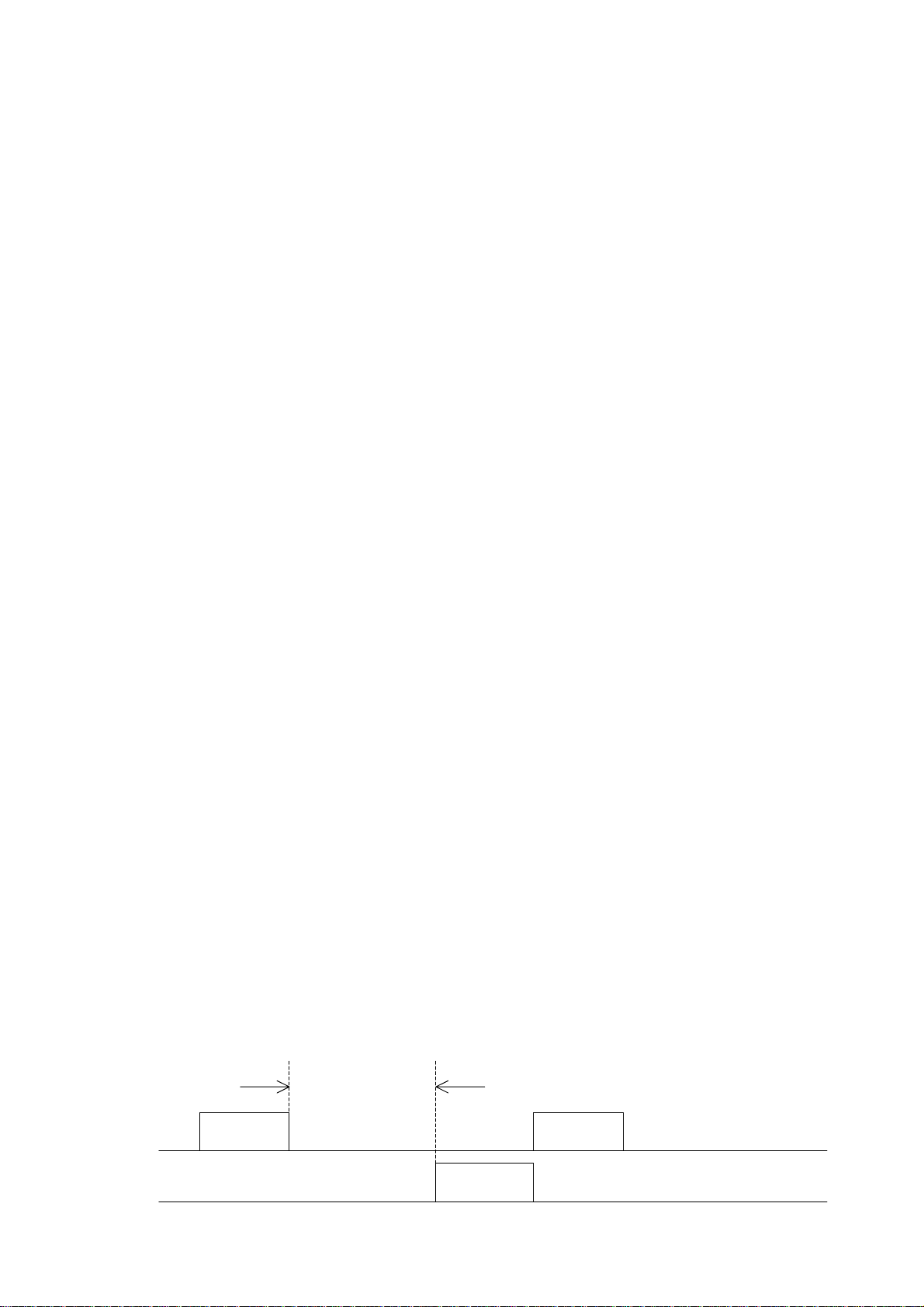
Timing diagram describes below.
The answering time after receipt of the command code is 10 ms in standard, and 30 ms Max.
And the execution completes at the beginning of transmission.
Command 1
Execution completed
T1(TYPE): 10ms
T1(MAX): 30ms
Command 2
Answer 1
18
Page 20
N
(2) Non-Synchronous Execution A (type 2)
On receipt of the command code, this command transmits the command without waiting of
the completion to execute. The completion of operation can be found by the status of flag
among the operation status, or by the Termination Notification of Command Termination
Notification.
The commands classified in this, describe in 12. Details of Pedestal Control Command ~
14. Details of System Control Commands as type 2.
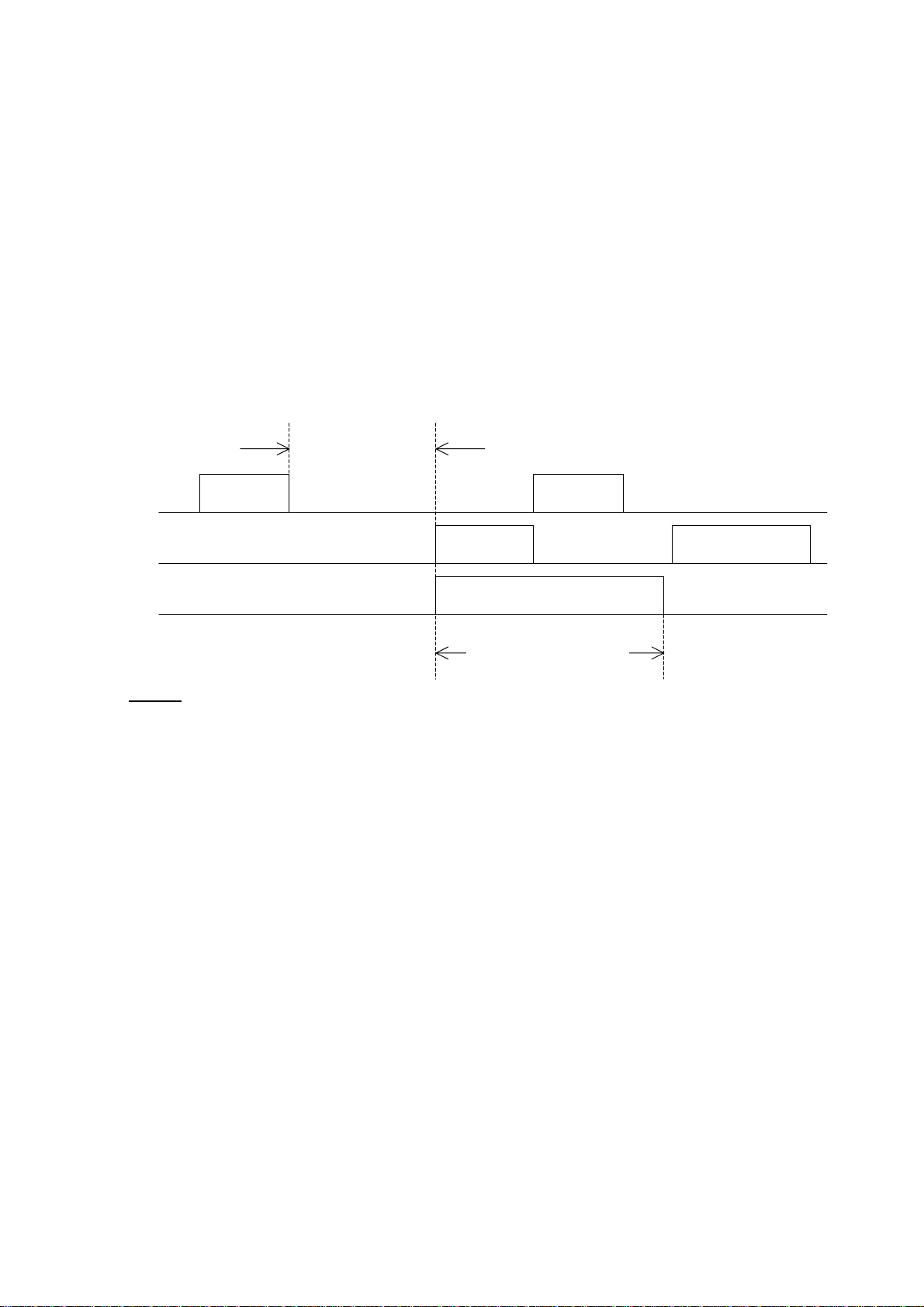
Timing diagram of the operation describes below.
The answering time after receipt of the command code, is 10 ms standard, 30 ms Max.
The time between start and stop, is depend on the class of commands and condition to be
executed.
Command 1
Operation start
T1(TYPE): 10ms
T1(MAX): 30ms
Command 2
Answer 1
Operation status
Command completed
(Command Termination
otification ON)
Completion of Execution
NOTE
The time shown above indicates the case of single VC-C50i to be connected with the host
computer.
In case of multiple connection in cascade, the time delay (30 ms Max.) will occur according
to the number of VC-C50i.
19
Page 21
11. Control Command Table
11.1 Pedestal Control Command Table
Function Meaning Command Parameter Status Ref
Pan Speed Assignment To set running speed for Pan 0050h 008h~320h None P 25
Tilt Speed Assignment To set running speed for Tilt 0051h 008h~26Eh None P 26
Pan Speed Request To return present running speed for Pan 0052h 0h 008h~320h P 27
Tilt Speed Request To return present running speed for Tilt 0052h 1h 008h~26Eh P 28
Pan Tilt Stop To stop running of Pan/Tilt 0053h 0h None P 29
Pan Right Start To start Pan running to right 0053h 1h None P 30
Pan Left Start To start Pan running to left 0053h 2h None P 31
Tilt Up Start To start Tilt running to up 0053h 3h None P 32
Tilt Down Start To start Tilt running to down 0053h 4h None P 33
Home Position To move Home position 0057h None None P 34
Pedestal Initialize 1 After Initialization, to move home position 0058h 0h None P 35
Pedestal Initialize 2 After Initialized, to move the origin position 0058h 1h None P 36
Pan Slowest Speed Request To return the slowest speed of Pan 0059h 0h 008h P 37
Pan Fastest Speed Request To return the fastest speed of Pan 0059h 1h 320h P 38
Tilt Slowest Speed request To return the slowest speed for Tilt 0059h 2h 008h P 39
Tilt Fastest Speed request To return the fastest speed for Tilt 0059h 3h 26Eh P 40
Pan Angle Pulse Ratio Request To return coefficient of Pan angle conversion 005Bh 0h 2BF2h P 41
Tilt Angle Pulse Ratio Request To return coefficient of Tilt angle conversion 005Bh 1h 2BF2h P 42
Pan Minimum Angle Request To return minimum angle of Pan 005Ch 0h 7C87h (7A19h) P 43
Pan Maximum Angle Request To return maximum angle of Pan 005Ch 1h 8379h (85E7h) P 44
Tilt Minimum Angle Request To return minimum angle of Tilt 005Ch 2h 7EF5h (7CE0h) P 45
Tilt Maximum Angle Request To return maximum angle of Tilt 005Ch 3h 8320h (8059h) P 46
Pan/Tilt Stop To stop Pan/tilt running 0060h 00h None P 47
Pan/Tilt Start Stop To start and stop Pan/tilt running 0060h 01h~22h None P 48
Pan/Tilt Angle Assignment To move assign position of Pan/Tilt 0062h XXXX, YYYYh None P 50
Pan/Tilt Angle Request To return present position of Pan/Tilt 0063h None XXXX, YYYYh P 52
Pan Movable Range Assignment To assign movable limit for Pan 0064h 0h, PMIN, PMAX None P 54
Tilt Movable Range Assignment To assign movable limit for Tilt 0064h 1h, TMIN, TMAX None P 56
Pan Movable Range Request To return present position of Pan 0065h 0h PMIN, PMAX P 58
Tilt Movable Range Request To return present position of Tilt 0065h 1h TMIN, TMAX P 59
Note: XXXX, YYYY means Pan angel, Tilt angle in hexadecimal.
PMIN, PMAX means Pan min. movable range, max. movable range in hexadecimal.
TMIN, TMAX means Tilt mini. movable range, max. movable range in hexadecimal.
The value inside ( ) means status value in the inverse mount type.
20
Page 22
11.2 Camera Control Command Table
Function Meaning Command Parameter Status Ref
Camera OFF To turn OFF power for Camera section 00A0h 0h None P 60
Camera ON To turn ON power for Camera section 00A0h 1h None P 61
Focus Auto To change mode of focus to AF 00A1h 0h None P 62
Focus Manual To stop and change of focus to Manual 00A1h 1h None P 63
Focus Near To move to near focus 00A1h 2h None P 64
Focus Far To move to far focus 00A1h 3h None P 65
Focus Position Assignment To move to focus position assigned 00B0h XXXXh *1 None P 66
Focus Position Request To return present focus position 00B1h 0h XXXXh *1 P 67
One Push AF After adjustment of focus, change to MF 00B1h 1h None P 68
Focus Range Request To return movable range of focus 00B1h 2h XXXXXXXXh *2 P 69
Zoom Stop To stop zoom operation 00A2h 0h None P 70
Zoom Wide To zooming to wide 00A2h 1h None P 71
Zoom Tele To zooming to tele 00A2h 2h None P 72
Zoom Hi Wide To zooming to wide high speed 00A2h 3h None P 73
Zoom Hi Tele To zooming to tele high speed 00A2h 4h None P 74
Zoom Position 1 Assignment To move to zoom position assigned 00A3h 00h~80h None P 75
Zoom Position 1 Request To return present zoom position 00A4h None 00h~80h P 76
Zoom Position 2 Assignment To move to zoom position assigned 00B3h 0000h~07A8h None P 77
Zoom Position 2 Request To return present zoom position 00B4h 0h 0000h~07A8h P 78
Zoom Speed Assignment To assign running speed of zoom 00B4h “31h”, 0h~7h None P 79
Zoom Speed Request To return present running speed 00B4h 2h 0h~7h P 80
Zoom Maximum Request To return maximum movable position 00B4h 3h 07A8h P 81
Backlight Compensation OFF To eliminate compensation of backlight 00A5h 0h None P 82
Backlight Compensation ON To compensate backlight 00A5h 1h None P 83
Exposure Auto To control exposure automatically 00A5h 2h None P 84
Exposure Manual To control exposure manually 00A5h 3h None P 85
AE Lock OFF To cancel AE lock ON 00A5h 40h None P 86
AE Lock ON To lock the exposure of AE mode 00A5h 41h None P 87
Shutter Speed Program To change shutter speed to program mode 00A8h 0h None P 88
Shutter Speed 1/60 (PAL: 1/50) To change shutter speed to 1/60 (PAL: 1/50) 00A8h 1h None P 89
Shutter Speed1/100 (PAL: 1/120) To change shutter speed to 1/100 (0PAL: 1/120) 00A8h 2h None P 90
Shutter Speed Assignment To assign shutter speed 00A5h
Shutter Speed Request To return present shutter speed 00A5h 6h
AGC Gain Assignment To assign AGC Gain 00A5h “37h”, 00h~FFh None P 94
AGC Gain Request To return present AGC gain 00A5h 8h 00h~FFh P 95
Iris Assignment To assign iris 00A5h “39h”, 02h~11h None P 96
Iris Request To return iris value 00A5h “3Ah” 00h~12h P 97
AE Target Value Assignment To assign target value of AE brightness 00A5h “3Bh”, 10h~FFh None P 99
AE Target Value Request To return target value of AE brightness 00A5h “3Ch” 10h~FFh P 100
Auto White Balance Normal To adjust white balance automatically 00A7h 0h None P 101
Auto White Balance Lock To stop white balance control 00A7h 1h None P 102
White Balance Manual Mode To set white balance manually 00A7h 2h None P 103
White Balance Value Assignment To assign white balance manually 00A7h “34h”, 00h~FFh None P 104
White Balance Value Request To return present white balance manually 00A7h 5h 00h~FFh P 105
Fade Normal To fade out normal image slowly 00A9h 0h None P 106
Fade White To fade in white image slowly 00A9h 1h None P 107
Fade Hi Speed White To change to white image high speed 00A9h 2h None P 108
Fade Hi Speed Black To change to black image high speed 00A9h 3h None P 109
Camera Reset To reset Camera section 00AAh None None P 110
Zoom Ratio request To return zoom ratio of camera 00ABh None 10h P 111
Pixel Size Request To return CCD pixel size 00ACh None 14h P 112
Insertion of Infrared Cut Filter
Settings when Infrared Cut Filter
Not Inserted
Infrared Cut Filter Status Request
Electronic Zoom Setting
Electronic Zoom Setting
Verification
Sets the status when infrared cut filter is
inserted
Sets the status when infrared cut filter is not
inserted.
Returns the setting status of the infrared cut
filter.
Sets the electronic zoom to the designated
magnification.
Returns the electronic zoom magnification that
was set.
00B5h 1h None P 113
00B5h 0h None P 114
00B6h None 0h or 1h P 115
00B7h
00B8h None 00h~10h P 117
“35h”, 00h~1Bh
80h~83h
2 byte
(magnification)
None P 91
00h~1Bh
80h~83h
None P 116
P 92
21
Page 23
Noise Reduction OFF Sets the noise reduction to OFF. 00b9h 0h None P 118
Noise Reduction Low Level ON Sets the noise reduction to low level ON. 00B9h 1h None P 119
Noise Reduction High Level ON Sets the noise reduction to high level ON. 00B9h 2h None P 120
Noise Reduction Setting
Verification
Dome Mode Setting Sets the Dome mode to the designated value. 00BDh
Dome Mode Setting Verification Returns the Dome mode setting value. 00BDh 01h 0h~03h P 123
Product Version Request To return version value of camera section 00BEh 0h 00h~FFh P 124
EEPROM Version Request to return version of camera EEPROM 00BEh 1h 00h~FFh P 125
*1 4 figures hexadecimal value within the request of focus limit.
*2 The focus range changes according to the zoom position. The value indicates Max/Min 4 figures in hexadecimal.
Returns the noise reduction setting value. 00BAh None 0h~2h P 121
“30 30h”,
0h~03h
None P 122
22
Page 24
11.3 System Control Command Table
Function Meaning Command Parameter Status Ref
Alarm Output OFF Sets the alarm output (+/- terminal) to Open. 0072h 0h None P 126
Alarm Output ON Sets the alarm output (+/- terminal) to Closed. 0072h 1h None P 127
Alarm Output Status Request Returns the alarm output setting status. 0073h None 0h or 1h P 128
External Sensor Input Detection
Setting
External Sensor Input Detection
Setting
External Sensor Input Detection
Setting
External Sensor Input Detection
Setting
External Sensor Input Detection
Status Request
External Sensor Input Detection
Setting Information Request
Internal Infrared Light ON/OFF
Control
Internal Infrared Light Status
Request
External Light Output OFF
External Light Output ON
External Light Output Status
Request
Remote Control ON To available remote controller 0080h 0h None P 137
External sensor input detection disabled 0074h 00h None P 129
External sensor input detection enabled with
notification of changes from Closed to Open
External sensor input detection enabled with
notification of changes from Open to Closed
External sensor input detection enabled with
notification of changes from Closed to Open and
notification of changes from Open to Closed
Returns external sensor input detection status. 0075h None 0h or 1h P 130
Returns the external sensor input detection
setting status.
Sets the internal infrared light ON/OFF control. 0076h 0h~6h None P 132
Returns the internal infrared light ON/OFF
setting status.
Sets the external light output (+/- terminal) to
Open.
Sets the external light output (+/- terminal) to
Closed.
Returns the setting status of the external light
output terminal.
0074h 01h None P 129
0074h 10h None P 129
0074h 11h None P 129
0075h 0h
0077h None 1 byte P 133
0078h 0h None P 134
0078h 1h None P 135
0079h None 1 byte P 136
00h or 01h or
10h or 11h
P 131
Remote Control OFF To inhibited remote controller 0080h 1h None P 138
Operation Status Request To return information of operate status 0086h None 3 byte P 139
Extended Operation Status Request To return extended information of operate status 0086h 0h 5 byte P 140
Operation Status 3 Request To return information of operate status 3 0086h 1h 4 byte P 142
Operation Status 4 Request To return information of operate status 4 0086h 2h 2 byte P 144
Product Name Request To return product name 0087h None
ROM Version Request To return ROM version of VC-C4 0088h None "V1-01" P 147
Preset Set To memory preset position 0089h 1h~9h None P 148
Preset Move To move preset position 008Ah 1h~9h None P 149
Preset Status Request To request preset status 008Bh None 2 byte P 151
Extended Preset Status Request To request extended preset status 008Bh 0h 3 byte P 152
Remote Controller Through Setting To set ON/OFF of remote controller through 008Dh 0h~1h None P 154
LED Normal Display To set normal display of LED 008Eh 0h None P 155
LED Forced Control To set forced ON/OFF of LED 008Eh 1h~4h None P 156
Cascade OFF To release cascade connection OFF 008Fh 0h None P 157
Cascade ON To connect cascade connection ON 008Fh 1h None P 158
"C50i" or
"C50iR"
P 146
Host Control Mode To control by host computer 0090h 0h None P 159
Local Control Mode To control by remote controller 0090h 1h None P 160
Screen Control To set screen display of date, time, characters 0091h 00h~09h None P 161
Display Character Data Assignment To assign character data of display 0091h 1h XX,Y,DD None P 163
Display Character Data Request To request character data of display 0091h 2h XX,Y 2 byte P 165
Display Date Setting To set display date (yy/mm/dd) 0091h 3h YY,MM,DD None P 167
23
Page 25
Display Date Request To request display date (yy/mm/dd) 0091h 4h YY,MM,DD P 168
Display Time Setting To set display time (hh/mm/ss) 0091h 5h,HH,MM,SS None P 169
Display Time Request To request display time (hh/mm/ss) 0091h 6h HH,MM,SS P 170
Turning On Time Request To request total accumulated turn on time 0092h 0h~1h 0000h~FFFFh P 171
Default Setting To initialize in status of factory setting 0093h None None P 172
Command Termination Notification
Setting
Global Notification Setting To set global notification ON/OFF 0095h 0h~1h None P 174
Pedestal Model Request To return pedestal model (normal/inverse) 009Ah 0h 0h or 1h P 175
Camera Model Request To return camera model (NTSC/PAL) 009Ah 1h 0h or 1h P 176
To set termination notification ON/OFF 0094h 0h~1h None P 173
Note: XX, Y, DD indicate X address, Y address, character data of display in hexadecimal
YY, MM, DD indicate year, month, day in hexadecimal.
HH, MM, SS indicate hour, minute, second in hexadecimal.
24
Page 26
12. Details of Pedestal Control Commands
12.1 Pan Speed Assignment Pedestal Control Command Type 1
Function To set running speed of Pan direction.
Command 0050h
Parameter
Status None
Reference •1LSB of parameter value is equal to 0.1125 degree/s
Format of Control Code
d0 d1 d2 d3 d4 d5 d6 d7 d8
Header Device Num Command Parameter End mark
FFh 30h 3Xh 00h 50h p0 p1 p2 EFh
⇓
The running speed indicates in 3 figures hexadecimal, and its ASCII code treats as
parameter.
Example: p0 p1 p2
150 ⇒ 096h ⇒ 30h 39h 36h
Answer Format
d0 d1 d2 d3 d4 d5
Header Device Num Error Code End mark
FFh 30h 3Xh e0 e1 EFh
⇓
Error Flag indicates in 2 figures hexadecimal and returns ASCII code value.
Example: e0 e1
In case of No Error : 00000000B ⇒ 00h ⇒ 30h 30h
In case of Parameter Error : 01010000B ⇒ 50h ⇒ 35h 30h
In case of Mode Error : 10010000B ⇒ 90h ⇒ 39h 30h
Condition of Error flag to be set
Parameter Error •Assigned parameter comes out less than minimum value.
Mode Error •Not in status of Camera ON.
Length 3 byte
Range 8~800PPS (008h~320h)
Default Value 800PPS (320h)
•The running time of Pan can calculate as under
(Pan position after run) – (Pan position before run)
(Pan running speed)
(refer to 12.27, 12.29 concerning Pan position of pedestal)
Example set Pan running speed 800. In this case, the running time is
approx. 2 seconds from +800 position to –800 position of pedestal.
800{position +90 degree} – (–800){position –90 degree}
800{Pan running speed}
•The command unable to set speed, is Home Position, Pedestal Initialize 1
and Pedestal Initialize 2, total 3 commands.
•Pan running speed can modify by this command during even running Pan.
•Assigned parameter comes out more than maximum value.
•Not in status of Host Control Mode.
25
Page 27
12.2 Tilt Speed Assignment Pedestal Control Command Type 1
Function To set the running speed of Tilt direction.
Command 0051h
Parameter
Status None
Reference •1LSB of parameter value is equal to 0.1125 degree/s
Format of Control Code
d0 d1 d2 d3 d4 d5 d6 d7 d8
Header Device Num Command Parameter End mark
FFh 30h 3Xh 00h 51h p0 p1 p2 EFh
⇓
The running speed indicates in 3 figures hexadecimal, and its ASCII code treats
as parameter.
Example: p0 p1 p2
350 ⇒ 15Eh ⇒ 31h 35h 45h
Answer Format
d0 d1 d2 d3 d4 d5
Header Device Num Error Code End mark
FFh 30h 3Xh e0 e1 EFh
⇓
Error Flag indicates in 2 figures hexadecimal and returns ASCII code value.
Example: e0 e1
In case of No Error : 00000000B ⇒ 00h ⇒ 30h 30h
In case of Parameter Error : 01010000B ⇒ 50h ⇒ 35h 30h
In case of Mode Error : 10010000B ⇒ 90h ⇒ 39h 30h
Condition of Error flag to be set
Parameter Error •Assigned parameter comes out less than minimum value.
Mode Error •Not in status of Camera ON.
Length 3 byte
Range 8~6222PPS (008h~26Eh)
Default Value 622PPS (26Eh)
•The running time of Tile can calculate as under
(Tilt position after run) – (Tilt position before run)
(Tilt running speed)
(refer to 12.28, 12.30 concerning Tilt position of pedestal)
Example set Tilt running speed 600. In this case, the running time is
approx. 0.9 seconds from +267 position to –267 position of pedestal.
267{position +30 degree} – (–267){position –30 degree}
600{Tilt running speed}
•The command unable to set speed, is Home Position, Pedestal Initialize 1
and Pedestal Initialize 2, total 3 commands.
•Tilt running speed can modify by this command during even Tilt running.
•Assigned parameter comes out more than maximum value.
•Not in status of Host Control Mode.
26
Page 28
12.3 Pan Speed Request Pedestal Control Command Type 1
Function To request the running speed of Pan direction.
Command 0052h
Length 1 byte Parameter
Value 0h
Length 3 byte Status
Range 8~800 (008h~320h)
Reference •1 LSB of status value is equal to 0.1125 degree/s.
Format of Control Code
d0 d1 d2 d3 d4 d5 d6
Header Device Num Command Parameter End mark
FFh 30h 3Xh 00h 52h 30h EFh
Answer Format
In case of No Error
d0 d1 d2 d3 d4 d5 d6 d7 d8
Header Device Num Error Code Status End mark
FEh 30h 3Xh 30h 30h s0 s1 s2 EFh
⇓
The running speed indicates in 3 figures hexadecimal, and its ASCII code treats
as status.
Example: s0 s1 s2
150 ⇒ 096h ⇒ 30h 39h 36h
In case of Error
d0 d1 d2 d3 d4 d5
Header Device Num Error Code End mark
FEh 30h 3Xh e0 e1 EFh
⇓
Error Flag indicates in 2 figures hexadecimal and returns ASCII code value.
Example: e0 e1
In case of Parameter Error : 01010000B ⇒ 50h ⇒ 35h 30h
In case of Mode Error : 10010000B ⇒ 90h ⇒ 39h 30h
Condition of Error flag to be set
Parameter Error •Assign illegal parameters.
Mode Error •Not in status of Camera ON.
•Not in status of Host Control Mode.
27
Page 29
12.4 Tilt Speed Request Pedestal Control Command Type 1
Function To request the running speed of Tilt direction.
Command 0052h
Length 1 byte Parameter
Value 1h
Length 3 byte Status
Range 8~622 (008h~26Eh)
Reference •1 LSB of status value is equal to 0.1125 degree/s.
Format of Control Code
d0 d1 d2 d3 d4 d5 d6
Header Device Num Command Parameter End mark
FFh 30h 3Xh 00h 52h 31h EFh
Answer Format
In case of No Error
d0 d1 d2 d3 d4 d5 d6 d7 d8
Header Device Num Error Code Status End mark
FEh 30h 3Xh 30h 30h s0 s1 s2 EFh
⇓
The running speed indicates in 3 figures hexadecimal, and its ASCII code treats
as status.
Example: s0 s1 s2
350 ⇒ 15Eh ⇒ 31h 35h 45h
In case of Error
d0 d1 d2 d3 d4 d5
Header Device Num Error Code End mark
FEh 30h 3Xh e0 e1 EFh
⇓
Error Flag indicates in 2 figures hexadecimal and returns ASCII code value.
Example: e0 e1
In case of Parameter Error : 01010000B ⇒ 50h ⇒ 35h 30h
In case of Mode Error : 10010000B ⇒ 90h ⇒ 39h 30h
Condition of Error flag to be set
Parameter Error •Assign illegal parameters.
Mode Error •Not in status of Camera ON.
•Not in status of Host Control Mode.
28
Page 30
12.5 Pan Tilt Stop Pedestal control Command Type 1
Function To stop the running of Pan/Tilt.
Command 0053h
Length 1 byte Parameter
Value 0h
Status None
Reference •To stop the running of Pan/Tilt except the running by Pedestal Initialize 1
and Pedestal Initialize 2 commands.
•By issuing this command, the Panning flag and Tilting flag to clear.
•By issuing this command, the Command Termination Notification flag to
clear.
Format of Control Code
d0 d1 d2 d3 d4 d5 d6
Header Device Num Command Parameter End mark
FFh 30h 3Xh 00h 53h 30h EFh
Answer Format
d0 d1 d2 d3 d4 d5
Header Device Num Error Code End mark
EFh 30h 3Xh e0 e1 EFh
⇓
Error Flag indicates in 2 figures hexadecimal and returns ASCII code value.
Example: e0 e1
In case of No Error : 00000000B ⇒ 00h ⇒ 30h 30h
In case of Busy : 00010000B ⇒ 10h ⇒ 31h 30h
In case of Parameter Error : 01010000B ⇒ 50h ⇒ 35h 30h
In case of Mode Error : 10010000B ⇒ 90h ⇒ 39h 30h
Condition of Error flag to be set
Busy •In case of executing Pedestal Initialize 1 and Pedestal Initialize
2 commands.
Parameter Error •Assign illegal parameters.
Mode Error •Not in status of Camera ON.
•Not in status of Host Control Mode.
29
Page 31

12.6 Pan Right Start Pedestal Control Command Type 2
Function To start Pan running to the right.
Command 0053h
Length 1 byte Parameter
Value 1h
Status None
Reference •Until Pan Tilt Stop command issues, or right limit position, continue to run.
•The running speed is able to set by Pan Speed Assignment command.
•By issuing this command, 1 is set in Panning flag among the operating
status.
The setting flag will be done, just before running pedestal. When pedestal
reaches to the right limit, Pan running will stop and clear Panning flag
and 1 of Pan Limit Position flag will be set.
Note: After power ON, at the moment of receipt of this command without
executing Pedestal Initialize 1 or Pedestal Initialize 2, returns mode
error and executes Pedestal Initialize 2.
Format of Control Code
d0 d1 d2 d3 d4 d5 d6
Header Device Num Command Parameter End mark
FFh 30h 3Xh 00h 53h 31h EFh
Answer Format
d0 d1 d2 d3 d4 d5
Header Device Num Error Code End mark
EFh 30h 3Xh e0 e1 EFh
⇓
Error Flag indicates in 2 figures hexadecimal and returns ASCII code value.
Example: e0 e1
In case of No Error : 00000000B ⇒ 00h ⇒ 30h 30h
In case of Busy : 00010000B ⇒ 10h ⇒ 31h 30h
In case of Parameter Error : 01010000B ⇒ 50h ⇒ 35h 30h
In case of Mode Error : 10010000B ⇒ 90h ⇒ 39h 30h
Condition of Error flag to be set
Busy •In case of executing Home Position, Pedestal Initialize 1 and
Pedestal Initialize 2 commands.
•In case of executing Pan/Tilt Angle Assignment and Preset
Move commands.
•Executing Pan running by Pedestal Control command.
Parameter Error •Assign illegal parameters.
Mode Error •After power ON, not executed pedestal initialize.
•Not in status of Camera ON.
•Not in status of Host Control Mode.
Normal Mounting: Right direction Inverse Mounting: Right direction
30
Page 32

12.7 Pan Left Start Pedestal Control Command Type 2
Function To start Pan running to the left.
Command 0053h
Length 1 byte Parameter
Value 2h
Status None
Reference •Until Pan/Tilt Stop command issues, or reaches to the left limit, continue to
run.
•The running speed is able to set by Pan Speed Assignment command.
•By issuing this command, 1 is set in Pan running flag among the running
status.
The setting flag will be done, just before running pedestal. When pedestal
reaches to the left limit, Pan running will stop and clear Pan running flag
and 1 of Pan Limit Position will be set.
Note: After power ON, at the moment of receipt of this command without
executing Pedestal Initialize 1 or Pedestal Initialize 2, returns mode
error and executes Pedestal Initialize 2.
Format of Control Code
d0 d1 d2 d3 d4 d5 d6
Header Device Num Command Parameter End mark
FFh 30h 3Xh 00h 53h 32h EFh
Answer Format
d0 d1 d2 d3 d4 d5
Header Device Num Error Code End mark
EFh 30h 3Xh e0 e1 EFh
⇓
Error Flag indicates in 2 figures hexadecimal and returns ASCII code value.
Example: e0 e1
In case of No Error : 00000000B ⇒ 00h ⇒ 30h 30h
In case of Busy : 00010000B ⇒ 10h ⇒ 31h 30h
In case of Parameter Error : 01010000B ⇒ 50h ⇒ 35h 30h
In case of Mode Error : 10010000B ⇒ 90h ⇒ 39h 30h
Condition of Error flag to be set
Busy •In case of executing Home Position, Pedestal Initialize 1 and
Pedestal Initialize 2 commands.
•In case of executing Pan/Tilt Angle Assignment and Preset
Move commands.
•Executing Pan running by Pedestal Control command.
Parameter Error •Assign illegal parameters.
Mode Error •After turn ON, pedestal initialize has never been done.
•Not in status of Camera ON.
•Not in status of Host Control Mode.
Normal Mounting: Left direction Inverse Mounting: Left direction
31
Page 33

12.8 Tilt Up Start Pedestal Control Command Type 2
Function To start Tilt running to the up.
Command 0053h
Length 1 byte Parameter
Value 3h
Status None
Reference •Until Pan/Tilt Stop command issues, or reaches to the upper limit, continue
to run.
•The running speed is able to set by Tilt Speed Assignment command.
•By issuing this command, 1 is set in Tilt running flag among the running
status.
The setting flag will be done, just before running pedestal. When pedestal
reaches to the upper limit, Tilt running will stop and clear Tilt Running flag
and 1 of Tilt Limit Position will be set.
Note: After power ON, at the moment of receipt of this command without
executing Pedestal Initialize 1 or Pedestal Initialize 2, returns mode
error and executes Pedestal Initialize 2.
Format of Control Code
d0 d1 d2 d3 d4 d5 d6
Header Device Num Command Parameter End mark
FFh 30h 3Xh 00h 53h 33h EFh
Answer Format
d0 d1 d2 d3 d4 d5
Header Device Num Error Code End mark
EFh 30h 3Xh e0 e1 EFh
⇓
Error Flag indicates in 2 figures hexadecimal and returns ASCII code value.
Example: e0 e1
In case of No Error : 00000000B ⇒ 00h ⇒ 30h 30h
In case of Busy : 00010000B ⇒ 10h ⇒ 31h 30h
In case of Parameter Error : 01010000B ⇒ 50h ⇒ 35h 30h
In case of Mode Error : 10010000B ⇒ 90h ⇒ 39h 30h
Condition of Error flag to be set
Busy •In case of executing Home Position, Pedestal Initialize 1 and
Pedestal Initialize 2 commands.
•In case of executing Pan/Tilt Angle Assignment and Preset
Move commands.
•Executing Tilt running by Pedestal Control command.
Parameter Error •Assign illegal parameters.
Mode Error •After turn ON, Pedestal Initialize has never been done.
•Not in status of Camera ON.
•Not in status of Host Control Mode.
Normal Mounting: Up direction Inverse Mounting: Up direction
32
Page 34

12.9 Tilt Down Start Pedestal Control Command Type 2
Function To start Tilt running to the down.
Command 0053h
Length 1 byte Parameter
Value 4h
Status None
Reference •Until Pan/Tilt Stop command issues, or reaches to the lower limit, continue
to run.
•The running speed is able to set by Tilt Speed Assignment command.
•By issuing this command, 1 is set in Tilt Running flag among the running
status.
The setting flag will be done, just before running pedestal. When pedestal
reaches to the low limit, Tilt running will stop and clear Tilt Running flag
and 1 of Tilt Limit Position will be set.
Note: After power ON, at the moment of receipt of this command without
executing Pedestal Initialize 1 or Pedestal Initialize 2, returns mode
error and executes Pedestal Initialize 2.
Format of Control Code
d0 d1 d2 d3 d4 d5 d6
Header Device Num Command Parameter End mark
FFh 30h 3Xh 00h 53h 33h EFh
Answer Format
d0 d1 d2 d3 d4 d5
Header Device Num Error Code End mark
EFh 30h 3Xh e0 e1 EFh
⇓
Error Flag indicates in 2 figures hexadecimal and returns ASCII code value.
Example: e0 e1
In case of No Error : 00000000B ⇒ 00h ⇒ 30h 30h
In case of Busy : 00010000B ⇒ 10h ⇒ 31h 30h
In case of Parameter Error : 01010000B ⇒ 50h ⇒ 35h 30h
In case of Mode Error : 10010000B ⇒ 90h ⇒ 39h 30h
Condition of Error flag to be set
Busy •In case of executing Home Position, Pedestal Initialize 1 and
Pedestal Initialize 2 commands.
•In case of executing Pan/Tilt Angle Assignment and Preset
Move commands.
•Executing Tilt running by Pedestal Control command.
Parameter Error •Assign illegal parameters.
Mode Error •After turn ON, pedestal initialize has never been done.
•Not in status of Camera ON.
•Not in status of Host Control Mode.
Normal Mounting: Down direction Inverse mounting: Down direction
33
Page 35

12.10 Home Position Pedestal Control Command Type 2
Function To move home position (front).
Command 0057h
Parameter None
Status None
Reference •Home position (front) is originally set at the following position.
Angle of Pan direction (position) 0 (8000h)
Angle of Tilt direction (position) 0 (8000h)
•Regardless of the running speed setting of Pan/Tilt direction, Pan/Tilt will
return to home position with the fastest speed.
•After power ON, at the moment of receipt of this command without
executing Pedestal Initialize 1 or Pedestal Initialize 2, execute Pedestal
Initialize 1.
•In process of home position running, Pan/Tilt Stop command is effective.
•By issuing this command, Pan & Tilt run simultaneously and flags of Pan &
Tilt Running among of running status, come out 1. When Pan running stops
flag of Pan running comes out 0, then Tilt will stop and the flag of Tilt comes
out zero.
Note:
In case that Pan & Tilt are in home position, Pan & Tilt do not run.
Format of Control Code
d0 d1 d2 d3 d4 d5
Header Device Num Command End mark
FFh 30h 3Xh 00h 57h EFh
Answer Format
d0 d1 d2 d3 d4 d5
Header Device Num Error Code End mark
FEh 30h 3Xh e0 e1 EFh
⇓d
Error Flag indicates in 2 figures hexadecimal and returns ASCII code value.
Example: e0 e1
In case of No Error : 00000000B ⇒ 00h ⇒ 30h 30h
In case of Busy : 00010000B ⇒ 10h ⇒ 31h 30h
In case of Mode Error : 10010000B ⇒ 90h ⇒ 39h 30h
Condition of Error flag to be set
Busy •In case of executing Pedestal Initialize 1 and Pedestal
Initialize 2 commands.
•In case of executing Pan/Tilt Angle Assignment and Preset
Move commands.
•Executing Pan/Tilt running by Pedestal Control command.
Mode Error •Not in status of Camera ON.
•Not in status of Host Control Mode.
34
Page 36

12.11 Pedestal Initialize 1 Pedestal Control Command Type 2
Function After initialize pedestal, to run to home position.
Command 0058h
Length 1 byte Parameter
Value 0h
Status None
Reference •After initialization, run to home position.
•Home Position (Front) is originally set at the following position.
Angle of Pan direction (position) 0 (8000h)
Angle of Tilt direction (position) 0 (8000h)
•By issuing this command, at first to centralize with high speed, then
approach to the right central position with low speed and determine the
central position. This central position will be home position.
The flag of Pan & Tilt running during Pan & Tilt Running come out 1 and
when every operation stops, it comes out zero.
Format of Control Code
d0 d1 d2 d3 d4 d5 d6
Header Device Num Command Parameter End mark
FFh 30h 3Xh 00h 58h 30h EFh
Answer Format
d0 d1 d2 d3 d4 d5
Header Device Num Error Code End mark
FEh 30h 3Xh e0 e1 EFh
⇓
Error Flag indicates in 2 figures hexadecimal and returns ASCII code value.
Example: e0 e1
In case of No Error : 00000000B ⇒ 00h ⇒ 30h 30h
In case of Busy : 00010000B ⇒ 10h ⇒ 31h 30h
In case of Parameter Error : 01010000B ⇒ 50h ⇒ 35h 30h
In case of Mode Error : 10010000B ⇒ 90h ⇒ 39h 30h
Condition of Error flag to be set
Busy •In case of executing Pan running by Pedestal Control command.
•In case of executing Tilt running by Pedestal Control command.
•In case of executing Preset Move command.
Parameter Error •Assign illegal parameters.
Mode Error •Not in status of Camera ON.
•Not in status of Host Control Mode.
35
Page 37

12.12 Pedestal Initialize 2 Pedestal Control Command Type 2
Function After initialize pedestal, to run to original position.
Command 0058h
Length 1 byte Parameter
Value 1h
Status None
Reference •After initialization, runs to former position.
•By issuing this command, at first to centralize in Pan with high speed, then
approaches to Pan central position with low speed and determine Pan central
position and secondly to try to centralize in Tilt with high speed, then
approach to Tilt central position with low speed and determines Pan & Tilt
central position. This Pan & Tilt central position will be home position and
returns to the position, when this command issued.
The flag of Pan & Tilt Running during Pan & Tilt Running comes out 1
and when every operation stops, it comes out zero.
Format of Control Code
d0 d1 d2 d3 d4 d5 d6
Header Device Num Command Parameter End mark
FFh 30h 3Xh 00h 58h 31h EFh
Answer Format
d0 d1 d2 d3 d4 d5
Header Device Num Error Code End mark
FEh 30h 3Xh e0 e1 EFh
⇓
Error Flag indicates in 2 figures hexadecimal and returns ASCII code value.
Example: e0 e1
In case of No Error : 00000000B ⇒ 00h ⇒ 30h 30h
In case of Busy : 00010000B ⇒ 10h ⇒ 31h 30h
In case of Parameter Error : 01010000B ⇒ 50h ⇒ 35h 30h
In case of Mode Error : 10010000B ⇒ 90h ⇒ 39h 30h
Condition of Error flag to be set
Busy •In case of executing Pan running by Pedestal Control command.
•In case of executing Tilt running by Pedestal Control command.
•In case of executing Preset Move command.
Parameter Error •Assign illegal parameters.
Mode Error •Not in status of Camera ON.
•Not in status of Host Control Mode.
36
Page 38

12.13 Pan Slowest Speed Request Pedestal Control Command Type 1
Function To return the slowest running speed in Pan direction.
Command 0059h
Length 1 byte Parameter
Value 0h
Length 3 byte Status
Value 8 (008h)
Reference •To return the slowest speed enable to set the running speed of Pan direction.
•The status value 8 is equal to approx. 0.9 degree/s.
Format of Control Code
d0 d1 d2 d3 d4 d5 d6
Header Device Num Command Parameter End mark
FFh 30h 3Xh 00h 59h 30h EFh
Answer Format
In case of No Error
d0 d1 d2 d3 d4 d5 d6 d7 d8
Header Device Num Error Code Status End mark
FEh 30h 3Xh 30h 30h 30h 30h 38h EFh
In case of Error
d0 d1 d2 d3 d4 d5
Header Device Num Error Code End mark
FEh 30h 3Xh e0 e1 EFh
⇓
Error Flag indicates in 2 figures hexadecimal and returns ASCII code value.
Example: e0 e1
In case of Parameter Error : 01010000B ⇒ 50h ⇒ 35h 30h
In case of Mode Error : 10010000B ⇒ 90h ⇒ 39h 30h
Condition of Error flag to be set
Parameter Error •Assign illegal parameters.
Mode Error •Not in status of Camera ON..
•Not in status of Host Control Mode.
37
Page 39

12.14 Pan Fastest Speed Request Pedestal Control Command Type 1
Function To return the fastest running speed in Pan direction.
Command 0059h
Length 1 byte Parameter
Value 1h
Length 3 byte Status
Value 800 (320h)
Reference •To return the fastest speed enable to set the running speed of Pan direction.
•The status value 800 is equal to approx. 90 degrees/s.
Format of Control Code
d0 d1 d2 d3 d4 d5 d6
Header Device Num Command Parameter End mark
FFh 30h 3Xh 00h 59h 31h EFh
Answer Format
In case of No Error
d0 d1 d2 d3 d4 d5 d6 d7 d8
Header Device Num Error Code Status End mark
FEh 30h 3Xh 30h 30h 33h 32h 30h EFh
In case of Error
d0 d1 d2 d3 d4 d5
Header Device Num Error Code End mark
FEh 30h 3Xh e0 e1 EFh
⇓
Error Flag indicates in 2 figures hexadecimal and returns ASCII code value.
Example: e0 e1
In case of Parameter Error : 01010000B ⇒ 50h ⇒ 35h 30h
In case of Mode Error : 10010000B ⇒ 90h ⇒ 39h 30h
Condition of Error flag to be set
Parameter Error •Assign illegal parameters.
Mode Error •Not in status of Camera ON.
•Not in status of Host Control Mode.
38
Page 40

12.15 Tilt Slowest Speed Request Pedestal Control Command Type 1
Function To return the slowest running speed in Tilt direction.
Command 0059h
Length 1 byte Parameter
Value 2h
Length 3 byte Status
Value 8 (008h)
Reference •To return the slowest speed enable to set the running speed of Tilt direction.
•The status value 8 is equal to approx. 0.9 degree/s.
Format of Control Code
d0 d1 d2 d3 d4 d5 d6
Header Device Num Command Parameter End mark
FFh 30h 3Xh 00h 59h 32h EFh
Answer Format
In case of No Error
d0 d1 d2 d3 d4 d5 d6 d7 d8
Header Device Num Error Code Status End mark
FEh 30h 3Xh 30h 30h 30h 30h 38h EFh
In case of Error
d0 d1 d2 d3 d4 d5
Header Device Num Error Code End mark
FEh 30h 3Xh e0 e1 EFh
⇓
Error Flag indicates in 2 figures hexadecimal and returns ASCII code value.
Example: e0 e1
In case of Parameter Error : 01010000B ⇒ 50h ⇒ 35h 30h
In case of Mode Error : 10010000B ⇒ 90h ⇒ 39h 30h
Condition of Error flag to be set
Parameter Error •Assign illegal parameters.
Mode Error •Not in status of Camera ON.
•Not in status of Host Control Mode.
39
Page 41

12.16 Tilt Fastest Speed Request Pedestal Control Command Type 1
Function To return the fastest running speed in Tilt direction.
Command 0059h
Length 1 byte Parameter
Value 3h
Length 3 byte Status
Value 622 (26Eh)
Reference •To return the fastest speed enable to set the running speed of Tilt direction.
•The status value 622 is equal to approx. 70 degrees/s.
Format of Control Code
d0 d1 d2 d3 d4 d5 d6
Header Device Num Command Parameter End mark
FFh 30h 3Xh 00h 59h 33h EFh
Answer Format
In case of No Error
d0 d1 d2 d3 d4 d5 d6 d7 d8
Header Device Num Error Code Status End mark
FEh 30h 3Xh 30h 30h 32h 36h 45h EFh
In case of Error
d0 d1 d2 d3 d4 d5
Header Device Num Error Code End mark
FEh 30h 3Xh e0 e1 EFh
⇓
Error Flag indicates in 2 figures hexadecimal and returns ASCII code value.
Example: e0 e1
In case of Parameter Error : 01010000B ⇒ 50h ⇒ 35h 30h
In case of Mode Error : 10010000B ⇒ 90h ⇒ 39h 30h
Condition of Error flag to be set
Parameter Error •Assign illegal parameters.
Mode Error •Not in status of Camera ON.
•Not in status of Host Control Mode.
40
Page 42

12.17 Pan Angle Pulse Ratio Request Pedestal Control Command Type 1
Function To return the coefficient to convert parameter value using Pan angle (position)
and Pan speed commands to angle unit.
Command 005Bh
Length 1 byte Parameter
Value 0h
Length 4 byte Status
Value 11250 (2BF2h)
Reference •To return integral value multiplied 100000 to the conversion coefficient of
true Pan angle. In case of angle conversion, divide it by 100000.
Example below,
Status value /100000 = 11250 /100000 = 0.1125
Note: The parameter of 12.1 Pan Speed Assignment command can be
converted as under.
Pan speed = 800PPS = 800 × 0.1125 = 90 degrees/s
Format of Control Code
d0 d1 d2 d3 d4 d5 d6
Header Device Num Command Parameter End mark
FFh 30h 3Xh 00h 5Bh 30h EFh
Answer Format
In case of No Error
d0 d1 d2 d3 d4 d5 d6 d7 d8 d9
Header Device Num Error Code Status End mark
FEh 30h 3Xh 30h 30h 32h 42h 46h 32h EFh
In case of Error
d0 d1 d2 d3 d4 d5
Header Device Num Error Code End mark
FEh 30h 3Xh e0 e1 EFh
⇓
Error Flag indicates in 2 figures hexadecimal and returns ASCII code value.
Example: e0 e1
In case of Parameter Error : 01010000B ⇒ 50h ⇒ 35h 30h
In case of Mode Error : 10010000B ⇒ 90h ⇒ 39h 30h
Condition of Error flag to be set
Parameter Error •Assign illegal parameters.
Mode Error •Not in status of Camera ON.
•Not in status of Host Control Mode.
41
Page 43

12.18 Tilt Angle Pulse Ratio Request Pedestal Control Command Type 1
Function To return the coefficient to convert parameter value using Tilt angle (position)
and Tilt speed commands to angle unit.
Command 005Bh
Length 1 byte Parameter
Value 1h
Length 4 byte Status
Value 11250 (2BF2h)
Reference •To return integral value multiplied 100000 to the conversion coefficient of
true Tilt angle. In case of angle conversion, divide it by 100000.
Example below,
Status value /100000 = 11250 /100000 = 0.1125
Note: The parameter of 12.2 Tilt Speed Assignment command can be
converted as under.
Tilt speed = 622 PPS = 622 × 0.1125 ≠ 70 degrees/s
Format of Control Code
d0 d1 d2 d3 d4 d5 d6
Header Device Num Command Parameter End mark
FFh 30h 3Xh 00h 5Bh 31h EFh
Answer Format
In case of No Error
d0 d1 d2 d3 d4 d5 d6 d7 d8 d9
Header Device Num Error Code Status End mark
FEh 30h 3Xh 30h 30h 32h 42h 46h 32h EFh
In case of Error
d0 d1 d2 d3 d4 d5
Header Device Num Error Code End mark
FEh 30h 3Xh e0 e1 EFh
⇓
Error Flag indicates in 2 figures hexadecimal and returns ASCII code value.
Example: e0 e1
In case of Parameter Error : 01010000B ⇒ 50h ⇒ 35h 30h
In case of Mode Error : 10010000B ⇒ 90h ⇒ 39h 30h
Condition of Error flag to be set
Parameter Error •Assign illegal parameters.
Mode Error •Not in status of Camera ON.
•Not in status of Host Control Mode.
42
Page 44

12.19 Pan Minimum Angle Request Pedestal Control Command Type 1
Function To return the minimum value (left) in Pan direction.
Command 005Ch
Length 1 byte Parameter
Value 0h
Status
Reference •Status Value (–889) in normal mounting is the position rotated approx.
Format of Control Code
d0 d1 d2 d3 d4 d5 d6
Header Device Num Command Parameter End mark
FFh 30h 3Xh 00h 5Ch 30h EFh
Answer Format
In case of No Error
d0 d1 d2 d3 d4 d5 d6 d7 d8 d9
Header Device Num Error Code Status End mark
FEh 30h 3Xh 30h 30h 37h 43h 38h 37h EFh
or
d0 d1 d2 d3 d4 d5 d6 d7 d8 d9
Header Device Num Error Code Status End mark
FEh 30h 3Xh 30h 30h 37h 41h 31h 39h EFh
In case of Error
d0 d1 d2 d3 d4 d5
Header Device Num Error Code End mark
FEh 30h 3Xh e0 e1 EFh
⇓
Error Flag indicates in 2 figures hexadecimal and returns ASCII code value.
Example: e0 e1
In case of Parameter Error : 01010000B ⇒ 50h ⇒ 35h 30h
In case of Mode Error : 10010000B ⇒ 90h ⇒ 39h 30h
Condition of Error flag to be set
Parameter Error •Assign illegal parameters.
Mode Error •Not in status of Camera ON.
Length 4 byte
Value
100 degree to left as zero degree for front.
•Status Value (–1511) in inverse mounting is the position rotated approx.
170 degrees to left as zero degree for front.
•Not in status of Host Control Mode.
Normal Mounting: –889 (7C87h)
Inverse Mounting: –1511 (7A19h)
43
Page 45

12.20 Pan Maximum Angle Request Pedestal Control Command Type 1
Function To return the maximum value (right) in Pan direction.
Command 005Ch
Length 1 byte Parameter
Value 1h
Status
Length 4 byte
Value
Reference •Status Value (+889) in normal mounting is the position rotated approx.
100 degree to right as zero degree for front.
•Status Value (+1511) in inverse mounting is the position rotated approx.
170 degrees to right as zero degree for front.
Format of Control Code
d0 d1 d2 d3 d4 d5 d6
Header Device Num Command Parameter End mark
FFh 30h 3Xh 00h 5Ch 31h EFh
Answer Format
In case of No Error
d0 d1 d2 d3 d4 d5 d6 d7 d8 d9
Header Device Num Error Code Status End mark
FEh 30h 3Xh 30h 30h 38h 33h 37h 39h EFh
or
d0 d1 d2 d3 d4 d5 d6 d7 d8 d9
Header Device Num Error Code Status End mark
FEh 30h 3Xh 30h 30h 38h 35h 46h 37h EFh
In case of Error
d0 d1 d2 d3 d4 d5
Header Device Num Error Code End mark
FEh 30h 3Xh e0 e1 EFh
⇓
Error Flag indicates in 2 figures hexadecimal and returns ASCII code value.
Example: e0 e1
In case of Parameter Error : 01010000B ⇒ 50h ⇒ 35h 30h
In case of Mode Error : 10010000B ⇒ 90h ⇒ 39h 30h
Condition of Error flag to be set
Parameter Error •Assign illegal parameters.
Mode Error •Not in status of Camera ON.
•Not in status of Host Control Mode.
Normal Mounting: +889 (8379h)
Inverse Mounting: +1511 (85E7h)
44
Page 46

12.21 Tilt Minimum Angle Request Pedestal Control Command Type 1
Function To return the minimum value (down) in Tilt direction.
Command 005Ch
Length 1 byte Parameter
Value 2h
Status
Length 4 byte
Value
Reference •Status Value (-267) in normal mounting is the position rotated approx.
30 degree to down as zero degree for horizontal.
•Status Value (-800) in inverse mounting is the position rotated approx.
90 degrees to down as zero degree for horizontal.
Format of Control Code
d0 d1 d2 d3 d4 d5 d6
Header Device Num Command Parameter End mark
FFh 30h 3Xh 00h 5Ch 32h EFh
Answer Format
In case of No Error
d0 d1 d2 d3 d4 d5 d6 d7 d8 d9
Header Device Num Error Code Status End mark
FEh 30h 3Xh 30h 30h 37h 45h 46h 35h EFh
or
d0 d1 d2 d3 d4 d5 d6 d7 d8 d9
Header Device Num Error Code Status End mark
FEh 30h 3Xh 30h 30h 37h 43h 45h 30h EFh
Normal Mounting: –267 (7EF5h)
Inverse Mounting: –800 (7CE0h)
In case of Error
d0 d1 d2 d3 d4 d5
Header Device Num Error Code End mark
FEh 30h 3Xh e0 e1 EFh
⇓
Error Flag indicates in 2 figures hexadecimal and returns ASCII code value.
Example: e0 e1
In case of Parameter Error : 01010000B ⇒ 50h ⇒ 35h 30h
In case of Mode Error : 10010000B ⇒ 90h ⇒ 39h 30h
Condition of Error flag to be set
Parameter Error •Assign illegal parameters.
Mode Error •Not in status of Camera ON.
•Not in status of Host Control Mode.
45
Page 47

12.22 Tilt Maximum Angle Request Pedestal Control Command Type 1
Function To return the maximum value (up) in Tilt direction.
Command 005Ch
Length 1 byte Parameter
Value 3h
Status
Length 4 byte
Value
Reference •Status Value (+800) in normal mounting is the position rotated approx.
90 degrees to upper as zero degree for horizontal.
•Status Value (+89) in inverse mounting is the position rotated approx.
10 degrees to upper as zero degree for horizontal.
Format of Control Code
d0 d1 d2 d3 d4 d5 d6
Header Device Num Command Parameter End mark
FFh 30h 3Xh 00h 5Ch 33h EFh
Answer Format
In case of No Error
d0 d1 d2 d3 d4 d5 d6 d7 d8 d9
Header Device Num Error Code Status End mark
FEh 30h 3Xh 30h 30h 38h 33h 32h 30h EFh
or
d0 d1 d2 d3 d4 d5 d6 d7 d8 d9
Header Device Num Error Code Status End mark
FEh 30h 3Xh 30h 30h 38h 30h 35h 39h EFh
In case of Error
d0 d1 d2 d3 d4 d5
Header Device Num Error Code End mark
FEh 30h 3Xh e0 e1 EFh
⇓
Error Flag indicates in 2 figures hexadecimal and returns ASCII code value.
Example: e0 e1
In case of Parameter Error : 01010000B ⇒ 50h ⇒ 35h 30h
In case of Mode Error : 10010000B ⇒ 90h ⇒ 39h 30h
Condition of Error flag to be set
Parameter Error •Assign illegal parameters.
Mode Error •Not in status of Camera ON.
•Not in status of Host Control Mode.
Normal Mounting: +800 (8320h)
Inverse Mounting: +89 (8059h)
46
Page 48

12.23 Pan/Tilt Stop Pedestal Control Command Type 1
Function To stop motion of Pan & Tilt.
Command 0060h
Length 2 byte Parameter
Value 00h
Status None
Reference •To stop the motion of Pan/Tilt excluding the motion by Pedestal Initialize 1
& Pedestal Initialize 2.
•By issuing this command, flag in Pan/Tilt motion among of the executing
status comes out zero.
•By issuing this command, the requested flag of Command Termination
Notification to Pan/Tilt motion comes out zero.
The format of Control Code
d0 d1 d2 d3 d4 d5 d6 d7
Header Device Num Command Parameter End mark
FFh 30h 3Xh 00h 60h 30h 30h EFh
Answer Format
d0 d1 d2 d3 d4 d5
Header Device Num Error Code End mark
FEh 30h 3Xh e0 e1 EFh
⇓
Error Flag indicates in 2 figures hexadecimal and returns ASCII code value.
Example: e0 e1
In case of No Error : 00000000B ⇒ 00h ⇒ 30h 30h
In case of Busy : 00010000B ⇒ 10h ⇒ 31h 30h
In case of Parameter Error : 01010000B ⇒ 50h ⇒ 35h 30h
In case of Mode Error : 10010000B ⇒ 90h ⇒ 39h 30h
Condition of Error flag to be set
Busy •In case of executing Pedestal Initialize 1 and Pedestal
Initialize 2 commands.
Parameter Error •Assign illegal parameters.
Mode Error •Not in status of Camera ON.
•Not in status of Host Control Mode.
47
Page 49

12.24 Pan/Tilt Start Stop Pedestal Control Command Type 2
Function To start or stop the motion of Pan/Tilt.
Command 0060h
Parameter
Status None
Reference •First parameter assigns Pan motion, and second parameter assigns Tilt
Length 2 byte
First Value 0h~2h
Second Value 0h~2h
motion.
Depend on the combination of first and second parameter, the following nine
(9) kind of motion can be assigned.
First Parameter Second Parameter Pan/Tilt Motion
0h 0h : Pan Stop, Tilt Stop
0h 1h : Pan Stop, Tilt Up Start
0h 2h : Pan Stop, Tilt Down Start
1h 0h : Pan Right Start, Tilt Stop
1h 1h : Pan Right Start, Tilt Up Start
1h 2h : Pan Right Start, Tilt Down Start
2h 0h : Pan Left Start, Tilt Stop
2h 1h : Pan Left Start, Tilt Up Start
2h 2h : Pan Left Start, Tilt Down Start
•The stop motion of Pan (0h) is different from the one of Tilt (0).
See 12.23 Pan/Tilt Stop.
•In case of changing motion status of Pan/Tilt by this command, not necessary
to issue Pan/Tilt Stop command. For example, the status in Pan right start
and Tilt up start can be changed to the status in Pan left start and Tilt down
start.
•Pan/Tilt Speed Assignment command is able to set Pan/Tilt Running
Speed.
•By issuing this command, Pan/Tilt will be simultaneously in action, and flag
of Pan/Tilt in action, is to set 1. When Pan motion stops, flag of Pan in action
clears it zero and When Tilt motion stops, flag of Tilt in action clear it zero.
Note:
After power on, in case of receipt of this command without executing
Pedestal Initialize 1 and Pedestal Initialize 2, mode error is returned and
Pedestal Initialize 2 will be executed.
48
Page 50

Format of Control Code (Example: Pan Right Start, Tilt Down Start)
d0 d1 d2 d3 d4 d5 d6 d7
Header Device Num Command Parameter End mark
FFh 30h 3Xh 00h 60h 31h 32h EFh
Answer Format
d0 d1 d2 d3 d4 d5
Header Device Num Error Code End mark
FEh 30h 3Xh e0 e1 EFh
⇓
Error Flag indicates in 2 figures hexadecimal and returns ASCII code value.
Example: e0 e1
In case of No Error : 00000000B ⇒ 00h ⇒ 30h 30h
In case of Busy : 00010000B ⇒ 10h ⇒ 31h 30h
In case of Parameter Error : 01010000B ⇒ 50h ⇒ 35h 30h
In case of Mode Error : 10010000B ⇒ 90h ⇒ 39h 30h
Condition of Error flag to be set
Busy •In case of executing Home Position, Pedestal Initialize 1 and
Pedestal Initialize 2 commands.
•In case of executing Pan/Tilt Angle Assignment and Preset
Move commands.
•Executing Pan/Tilt running by Pedestal Control command.
Parameter Error •Assign illegal parameters.
Mode Error •After Power ON, Not executed Pedestal Initialize.
•Not in status of Camera ON.
•Not in status of Host Control Mode.
49
Page 51

12.25 Pan/Tilt Angle Assignment Pedestal Control Command Type 2
Function To assign angle (position) in Pan/Tilt direction
Command 0062h
Parameter
Status None
Reference •Parameter value (1LSB) of both Pan/Tilt is equal to approx. 0.1125 by
Length 8 byte
Range Within range of Pan and Tilt movable range
Pan : –889~ +889 (7C87h~8379h) Default Range
(normal mounting)
Default Range
(inverse mounting)
converting to angle. (see 12.17 and 12.18)
•Parameter section (8 byte) splits p0~p3 as Pan (position) section, and p4~p7
as Tilt (position) section.
•The range of each parameter is effective within the range set by Pan
Movable Range Assignment (12.27) and Tilt Movable Range Assignment
(12.28).
•The right direction of Pan angle (position) is positive at the home position
and the left one is passive. The upper direction of Tilt angle (position) is
positive at the home position and the lower one is passive.
•Assign each parameter with the angle (position) at home position. (home
position is 8000h)
Assigned sample of Pan/tilt angle(position) as below
Pan right 90 degrees ⇒ +90/0.1125 ⇒ +800 ⇒ +320h
⇒ 8000h+320h = 8320h
Tilt lower 30 degrees ⇒ –30/0.1125 ⇒ –267 ⇒ –10Bh
⇒ 8000h–10Bh = 7EF5h
•Pan/Tilt Stop command can stop motion by force.
The running speed can be set by Pan/Tilt Speed Assignment command.
•By issuing this command, Pan/tilt will be in action simultaneously and Pan
and Tilt flag in action among the running status, set 1 and when Pan/Tilt
motion stop, Pan/Tilt flags in action clear to zero.
Note: After power ON, in case of receipt of this command without executing
Pedestal Initialize 1 & 2, return mode error and execute Pedestal
Initialize2.
Left
Tilt : –267~ +267 (7EF5h~810Bh)
Pan : –1511~ +1511 (7A19h~85E7h)
Tilt : –800~ +89 (7CE0h~8059h)
Upper
Home position
(800h, 800h)
(7EF5h)
Lower
Pan Right 90 degrees,
Tilt Low 30 degrees
(+800, –267)
(8320h)
Right
50
Page 52

Format of Control Code
d0 d1 d2 d3 d4
Header Device Num Command
FFh 30h 3Xh 00h 62h
d5 d6 d7 d8 d9 d10 d11 d12 d13
Pan Angle Parameter Tilt Angle Parameter End mark
p0 p1 p2 p3 p4 p5 p6 p7 EFh
⇓
Running speed indicates hexadecimal 8 figures and returns ASCII as parameter value.
Example: Pan right 90 degrees Tilt lower 30 degrees
Pan p0 p1 p2 p3
+800 ⇒ 8320h ⇒ 38h 33h 32h 30h
Tilt p4 p5 p6 p7
–267 ⇒ 7EF5h ⇒ 37h 45h 46h 35h
Answer Format
d0 d1 d2 d3 d4 d5
Header Device Num Error Code End mark
FEh 30h 3Xh e0 e1 EFh
⇓
Error Flag indicates in 2 figures hexadecimal and returns ASCII code value.
Example: e0 e1
In case of No Error : 00000000B ⇒ 00h ⇒ 30h 30h
In case of Busy : 00010000B ⇒ 10h ⇒ 31h 30h
In case of Parameter Error : 01010000B ⇒ 50h ⇒ 35h 30h
In case of Mode Error : 10010000B ⇒ 90h ⇒ 39h 30h
Condition of Error flag to be set
Busy •In case of executing Home Position, Pedestal Initialize 1 and
Pedestal Initialize 2 commands.
•In case of executing Pan/Tilt Angle Assignment and Preset
Move commands.
•In case of Panning by Pedestal Control command.
•In case of Tilting by Pedestal Control command.
Parameter Error •Assign illegal parameters.
•In case that Pan/Tilt angle(position) is out-of-range Pan/Tilt
Movable Range.
Mode Error •After power ON, not executed pedestal initialize.
•Not in status of Camera ON.
•Not in status of Host Control Mode.
51
Page 53

12.26 Pan/Tilt Angle Request Pedestal Control Command Type 1
Function To request angle (position) in Pan/Tilt direction.
Command 0063h
Parameter None
Length 8 byte (Pan angle: 4 bytes, tilt angle: 4 bytes) Status
Range Within range of Pan and Tilt Movable Range
Reference •Parameter value (1LSB) of both Pan/Tilt is equal to approx. 0.1125 by
converting to angle. (see 12.17 and 12.18)
•Status section (8 byte) splits s0~s3 as Pan (position) section, and s4~s7
as Tilt (position) section.
•The value of each status is indicated as angle at Home Position (8000h)
(See 12.25 Pan/Tilt Angle Assignment.)
•This command returns the angle (position), at the moment of receipt of
Command even though Pan/Tilt is in action except executing Pedestal
Initialize 1 & 2.
Note : After power ON, in case of receipt of this command without executing
Pedestal Initialize 1 & 2, return mode error.
Format of Control Code
d0 d1 d2 d3 d4 d5
Header Device Num Command End mark
FFh 30h 3Xh 00h 63h EFh
Answer Format
In case of No Error
d0 d1 d2 d3 d4
Header Device Num Error Code
EFh 30h 3Xh 30h 30h
d5 d6 d7 d8 d9 d10 d11 d12 d13
Pan Angel Status Tilt Angle Status End mark
s0 s1 s2 s3 s4 s5 s6 s7 EFh
⇓
The present position indicates in hexadecimal 8 figures and its ASCII is as parameter
value.
Example: Pan right 90 degrees Tilt lower 30 degrees
Pan s0 s1 s2 s3
+800 ⇒ 8320h ⇒ 38h 33h 32h 30h
Tilt s4 s5 s6 s7
–267 ⇒ 7EF5h ⇒ 37h 45h 46h 35h
52
Page 54

In case of Error
d0 d1 d2 d3 d4 d5
Header Device Num Error Code End mark
FEh 30h 3Xh e0 e1 EFh
⇓
Error Flag indicates in 2 figures hexadecimal and returns ASCII code value.
Example: e0 e1
In case of Busy : 00010000B ⇒ 10h ⇒ 31h 30h
In case of Mode Error : 10010000B ⇒ 90h ⇒ 39h 30h
Condition of Error flag to be set
Busy •In case of executing Pedestal Initialize 1 and Pedestal
Initialize 2 commands.
Mode Error •After Power ON, not executed pedestal initialize.
•Not in status of Camera ON.
•Not in status of Host Control Mode.
53
Page 55

12.27 Pan Movable Range Assignment Pedestal Control Command Type 1
Function To assign movable range in Pan direction.
Command 0064h
Parameter
Status None
Reference •Maximum & minimum (position) movable angle can be set, when Pan motion
Format of Control Code
d0 d1 d2 d3 d4
Header Device Num Command
FFh 30h 3Xh 00h 64h
d5 d6 d7 d8 d9 d10 d11 d12 d13 d14
Fixed Minimum Angle Parameter Maximum Angle Parameter End mark
30h p1 p2 p3 p4 p5 p6 p7 p8 EFh
⇓
Running speed indicates in hexadecimal 8 figures and returns ASCII as parameter value.
Example: Min Value (left) 90 degrees, Max Value (right) 45 degrees
p1 p2 p3 p4
Left –800 ⇒ 7CE0h ⇒ 37h 43h 45h 30h
p5 p6 p7 p8
Right +400 ⇒ 8190h ⇒ 38h 31h 39h 30h
Length 9 byte
Range
command is set by Pan Right Start and Pan Left Start are executed.
•To set Pan maximum & minimum angle (position) which can be set by
Pan/Tilt Angle Assignment command.
•Parameter value (1LSB) of Pan is equal to approx. 0.1125 by converting to
angle. (see 12.17)
•Minimum parameter value can be obtained by Pan Minimum Angle
Request command (12.19) and maximum value can be obtained by Pan
Maximum Angle Request (12.20).
•Parameter section (9byte) splits minimum angle (position) as p1~p4 and
maximum angle (position) as p5~p8.
•Minimum & maximum Pan parameter value is to set at angle of Home
Position (8000h). See 12.25 Pan/Tilt Angle Assignment
•Not necessary to include Home Position between minimum and maximum
angle (position). But minimum angle value must set equal or less value of
maximum value.
•When Pedestal Initialize 1 command executes, move to Home Position, even
though out of range.
•In case that Pan position is out of range before executing Pedestal Initialize 2
command, it return to minimum or maximum position within motion range
by the return motion.
Normal Mounting: –889~+889 (7C87h~8379h)
Inverse Mounting: –1511~+1511 (7A19h~85E7h)
54
Page 56

Example: Minimum (Left) 90 degrees, Maximum (Right) 45 degrees
Central value (Home position)
–800 (90degrees) +400 (45degrees)
Left Right
Pan movable range
Minimum Maximum
7CE0h 8000h 8190h
Answer Format
d0 d1 d2 d3 d4 d5
Header Device Num Error Code End mark
FEh 30h 3Xh e0 e1 EFh
⇓
Error Flag indicates in 2 figures hexadecimal and returns ASCII code value
Example: e0 e1
In case of No Error : 00000000B ⇒ 00h ⇒ 30h 30h
In case of Busy : 00010000B ⇒ 10h ⇒ 31h 30h
In case of Parameter Error : 01010000B ⇒ 50h ⇒ 35h 30h
In case of Mode Error : 10010000B ⇒ 90h ⇒ 39h 30h
Condition of Error flag to be set
Busy •In case of executing Home Position, Pedestal Initialize 1 and
Pedestal Initialize 2 commands.
•In case of executing Preset Move commands.
•Executing Pan/Tilt running by Pedestal Control command.
Parameter Error •In case of assigned parameter over value to the Max. & Min
parameter range.
•In case of assigned minimum value over maximum value.
Mode Error •Not in status of Camera ON.
•Not in status of Host Control Mode.
55
Page 57

12.28 Tilt Movable Range Assignment Pedestal Control Command Type 1
Function To assign movable range in Tilt direction.
Command 0064h
Parameter
Status None
Reference •Maximum & minimum (position) movable angle can be set, when Tilt motion
Format of Control Code
d0 d1 d2 d3 d4
Header Device Num Command
FFh 30h 3Xh 00h 64h
d5 d6 d7 d8 d9 d10 d11 d12 d13 d14
Fixed Minimum Angle Parameter Maximum Angle parameter End mark
31h p1 p2 p3 p4 p5 p6 p7 p8 EFh
⇓
Running speed indicates in hexadecimal 8 figures and returns ASCII as parameter value.
Example: Min Value (lower) 30 degrees, Max Value (upper) 10 degrees
p1 p2 p3 p4
Lower –267 ⇒ 7EF5h ⇒ 37h 45h 46h 35h
p5 p6 p7 p8
Upper +89 ⇒ 8059h ⇒ 38h 30h 35h 39h
Example: Minimum (Lower) 30 degrees, Maximum (Upper) 10 degrees
Central value (Home position)
–267 (30degrees) +89 (10degrees)
Lower Upper
Tilt movable range
Minimum Maximum
7EF5h 8000h 8059h
Length 9 byte
Range
command is set by Tilt Up and Down Start Tilt motion setting command and
etc. and set Tilt maximum & minimum angle (position) which can be set by
Pan/Tilt Angle Assignment command.
•Parameter value (1LSB) of Pan is equal to approx. 0.1125 by converting to
angle (see 12.18).
•Minimum parameter value can be obtained by Tilt Minimum Angle
Request command (12.21) and maximum value can be obtained by Tilt
Maximum Angle Request (12.22).
•Parameter section (9byte) splits fixed value as p0, minimum angle (position)
as p1~p4 and maximum angle (position) as p5~p8.
•Minimum & maximum Tilt parameter value is to set at angle of Home
Position (8000h). See 12.25 Pan/Tilt Angle Assignment.
•Not necessary to include Home Position between minimum and maximum
angle (position). But minimum angle value must set equal or less value of
maximum value.
•When Pedestal Initialize 1 command executes, moves to Home Position,
even though out of range.
•In case that Tilt position is out of range before executing Pedestal Initialize 2
command, it returns to minimum or maximum position within motion range
by the return motion.
Normal Mounting: –267~+800 (7EF5h~8320h)
Inverse Mounting: –800~+89 (7CE0h~8059h)
56
Page 58

Answer Format
d0 d1 d2 d3 d4 d5
Header Device Num Error Code End mark
FEh 30h 3Xh e0 e1 EFh
⇓
Error Flag indicates in 2 figures hexadecimal and returns ASCII code value.
Example: e0 e1
In case of No Error : 00000000B ⇒ 00h ⇒ 30h 30h
In case of Busy : 00010000B ⇒ 10h ⇒ 31h 30h
In case of Parameter Error : 01010000B ⇒ 50h ⇒ 35h 30h
In case of Mode Error : 10010000B ⇒ 90h ⇒ 39h 30h
Condition of Error flag to be set
Busy •In case of executing Home Position, Pedestal Initialize 1 and
Pedestal Initialize 2 commands.
•In case of executing Preset Move commands.
•Executing Pan/Tilt running by Pedestal Control command.
Parameter Error •In case of assigned parameter over value to the Max & Min
parameter range.
•In case of assigned minimum value over maximum value.
Mode Error •Not in status of Camera ON.
•Not in status of Host Control Mode.
57
Page 59

12.29 Pan Movable Range Request Pedestal Control Command Type 1
Function To request movable range in Pan direction.
Command 0065h
Length 1 byte Parameter
Value 0h
Status
Reference •Parameter value (1LSB) of Pan is equal to approx. 0.1125 by converting to
Format of Control Code
d0 d1 d2 d3 d4 d5 d6
Header Device Num Command Parameter End mark
FFh 30h 3Xh 00h 65h 30h EFh
Answer Format
In case of No Error
d0 d1 d2 d3 d4
Header Device Num Error Code
FEh 30h 3Xh 30h 30h
d5 d6 d7 d8 d9 d10 d11 d12 d13
Minimum Angle Status Maximum Angle Status End mark
s0 s1 s2 s3 s4 s5 s6 s7 EFh
⇓
Running speed indicates in hexadecimal 8 figures and returns ASCII as parameter value.
Example: Min Value (lower) 90 degrees, Max Value (upper) 45 degrees
s0 s1 s2 s3
Right –889 ⇒ 7C87h ⇒ 37h 43h 38h 37h
s4 s5 s6 s7
Left +267 ⇒ 810Bh ⇒ 38h 31h 30h 42h
In case of Error
d0 d1 d2 d3 d4 d5
Header Device Num Error Code End mark
FEh 30h 3Xh e0 e1 EFh
⇓
Error Flag indicates in 2 figures hexadecimal and returns ASCII code value.
Example: e0 e1
In case of Parameter Error : 01010000B ⇒ 50h ⇒ 35h 30h
In case of Mode Error : 10010000B ⇒ 90h ⇒ 39h 30h
Condition of Error flag to be set
Parameter Error •Assign illegal parameters.
Mode Error •Not in status of Camera ON.
Length 8 byte
Range
angle (see 12.17).
•Parameter section (8byte) splits minimum angle (position) as s0~s3 and
maximum angle (position) as s4~s7.
•Minimum & maximum parameter value is to set at angle of Home Position
(8000h). See 12.27 Pan Movable Range Assignment.
•Not in status of Host Control Mode.
Normal Mounting: –889 ~ +889 (7C87h~8379h)
Inverse Mounting: –1511 ~ +1511 (7A19h~85E7h)
58
Page 60

12.30 Tilt Movable Range Request Pedestal Control Command Type 1
Function To request movable range in Tilt direction.
Command 0065h
Length 1 byte Parameter
Value 1h
Status
Reference •Parameter value (1LSB) of Tilt is equal to approx. 0.1125 by converting to
Format of Control Code
d0 d1 d2 d3 d4 d5 d6
Header Device Num Command Parameter End mark
FFh 30h 3Xh 00h 65h 31h EFh
Answer Format
In case of No Error
d0 d1 d2 d3 d4
Header Device Num Error Code
FEh 30h 3Xh 30h 30h
d5 d6 d7 d8 d9 d10 d11 d12 d13
Minimum Angle Status Maximum Angle Status End mark
s0 s1 s2 s3 s4 s5 s6 s7 EFh
⇓
Running speed indicates in hexadecimal 8 figures and returns ASCII as parameter value.
Example: Min Value (lower) 30 degrees, Max Value (upper) 10 degrees
s0 s1 s2 s3
Lower –267 ⇒ 7EF5h ⇒ 37h 45h 46h 35h
s4 s5 s6 s7
Upper +89 ⇒ 8059h ⇒ 38h 30h 35h 39h
In case of Error
d0 d1 d2 d3 d4 d5
Header Device Num Error Code End mark
FEh 30h 3Xh e0 e1 EFh
⇓
Error Flag indicates in 2 figures hexadecimal and returns ASCII code value.
Example: e0 e1
In case of Parameter Error : 01010000B ⇒ 50h ⇒ 35h 30h
In case of Mode Error : 10010000B ⇒ 90h ⇒ 39h 30h
Condition of Error flag to be set
Parameter Error •Assign illegal parameters.
Mode Error •Not in status of Camera ON.
Length 8 byte
Range
angle (see 12.18).
•Parameter section (8byte) splits minimum angle (position) as s0~s3 and
maximum angle (position) as s4~s7.
•Minimum & maximum parameter value is to set at angle of Home Position
(8000h). See 12.28 Tilt Movable Range Assignment.
•Not in status of Host Control Mode.
Normal Mounting: –267 ~ +800 (7EF5h~8320h)
Inverse Mounting: –800 ~ +89 (7CE0h~8059h)
59
Page 61

13. Details of Camera Control Commands
13.1 Camera OFF Camera Control Command Type 2
Function To stop operation of camera and pedestal, and camera section power OFF.
Command 00A0h
Length 1 byte Parameter
Value 0h
Status None
Reference •To power camera section OFF (Picture signal of camera comes out OFF).
•If this command issues, this command is waiting status until initialize
operation finish, when Pedestal Initialize 1 & 2 are in process.
(Pan/Tilt motion operation besides the above, will be forced to stop.)
•During this process of camera OFF by this command, Busy error will occur,
when Camera ON or Camera OFF command is issued.
•By issuing this command, flag of Camera Power OFF command is set as 1.
•After this setting, the command except the following command will come out
mode error.
•Operation Status Request, Extended Operation Status Request
command.
•Camera ON, Camera OFF command.
•LED Normal Display, LED Forced Control command.
•Cascade ON, Cascade OFF command.
•Host Control Mode, Local Control Mode command.
•Global Notification Setting command.
Format of Control Code
d0 d1 d2 d3 d4 d5 d6
Header Device Num Command Parameter End mark
FFh 30h 3Xh 00h A0h 30h EFh
Answer Format
d0 d1 d2 d3 d4 d5
Header Device Num Error Code End mark
FEh 30h 3Xh e0 e1 EFh
⇓
Error Flag indicates in 2 figures hexadecimal and returns ASCII code value.
Example: e0 e1
In case of No Error : 00000000B ⇒ 00h ⇒ 30h 30h
In case of Busy : 00010000B ⇒ 10h ⇒ 31h 30h
In case of Parameter Error : 01010000B ⇒ 50h ⇒ 35h 30h
In case of Mode Error : 10010000B ⇒ 90h ⇒ 39h 30h
Condition of Error flag to be set
Busy •In case of executing Camera ON command.
•In case of executing Camera OFF command.
Parameter Error •Assign illegal parameters.
Mode Error •Not in status of Host Control Mode.
60
Page 62

13.2 Camera ON Camera Control Command Type 2
Function To camera section power ON, and start operation of camera and pedestal.
Command 00A0h
Length 1 byte Parameter
Value 1h
Status None
Reference •To power camera section power ON (Picture signal of camera turns out).
•Zoom position, AE target value (Back light compensation status, BRIGHT),
Shutter speed 1/100 (flicker less AE) will return to the setting condition prior
to executing Camera OFF command and another set values come out
default value.
•During this process of camera ON by this command, Busy error will occur,
when Camera ON or Camera OFF command is issued.
•After camera ON process finished, flag of Camera Power OFF among
operating status comes out zero.
•In order to confirm power ON by this command, necessary to confirm Power
OFF flag of camera section in operated status or answer of termination
notification at Camera ON command after finishing command termination
notification.
Format of Control Code
d0 d1 d2 d3 d4 d5 d6
Header Device Num Command Parameter End mark
FFh 30h 3Xh 00h A0h 31h EFh
Answer Format
d0 d1 d2 d3 d4 d5
Header Device Num Error Code End mark
FEh 30h 3Xh e0 e1 EFh
⇓
Error Flag indicates in 2 figures hexadecimal and returns ASCII code value.
Example: e0 e1
In case of No Error : 00000000B ⇒ 00h ⇒ 30h 30h
In case of Busy : 00010000B ⇒ 10h ⇒ 31h 30h
In case of Parameter Error : 01010000B ⇒ 50h ⇒ 35h 30h
In case of Mode Error : 10010000B ⇒ 90h ⇒ 39h 30h
Condition of Error flag to be set
Busy •In case of executing Camera ON command.
•In case of executing Camera OFF command.
Parameter Error •Assign illegal parameters.
Mode Error •Not in status of Host Control Mode.
61
Page 63

13.3 Focus Automatic Camera Control Command Type 1
Function To set auto focus mode.
Command 00A1h
Length 1 byte Parameter
Value 0h
Status None
Reference •Flags in Focusing of Operation Status Request and Manual Focus come
out 0 at AF mode.
•AF mode sets default value at the time of executing Camera Reset, Camera
ON command during power ON.
Format of Control Code
d0 d1 d2 d3 d4 d5 d6
Header Device Num Command Parameter End mark
FFh 30h 3Xh 00h A1h 30h EFh
Answer Format
d0 d1 d2 d3 d4 d5
Header Device Num Error Code End mark
FEh 30h 3Xh e0 e1 EFh
⇓
Error Flag indicates in 2 figures hexadecimal and returns ASCII code value.
Example: e0 e1
In case of No Error : 00000000B ⇒ 00h ⇒ 30h 30h
In case of Busy : 00010000B ⇒ 10h ⇒ 31h 30h
In case of Mode Error : 10010000B ⇒ 90h ⇒ 39h 30h
Condition of Error flag to be set
Busy •In process of camera initializing operation by Camera Reset
command, etc.
•In process of focus operation by manual.
•In process of One Push AF operation.
•In case of executing Preset Move command.
Mode Error •Not in status of Camera ON.
•Not in status of Host Control Mode.
62
Page 64

13.4 Focus Manual Camera Control Command Type 1
Function To stop focus operation and set manual mode.
Command 00A1h
Length 1 byte Parameter
Value 1h
Status None
Reference •In case of auto focus mode, cancels AF mode and set manual mode.
•To stop focus operation under focusing by manual mode.
•Flags in Focusing of Operation Status Request comes out zero and
Manual Focus comes out 1.
Format of Control Code
d0 d1 d2 d3 d4 d5 d6
Header Device Num Command Parameter End mark
FFh 30h 3Xh 00h A1h 31h EFh
Answer Format
d0 d1 d2 d3 d4 d5
Header Device Num Error Code End mark
FEh 30h 3Xh e0 e1 EFh
⇓
Error Flag indicates in 2 figures hexadecimal and returns ASCII code value.
Example: e0 e1
In case of No Error : 00000000B ⇒ 00h ⇒ 30h 30h
In case of Busy : 00010000B ⇒ 10h ⇒ 31h 30h
In case of Mode Error : 10010000B ⇒ 90h ⇒ 39h 30h
Condition of Error flag to be set
Busy •In process of camera initializing operation by Camera Reset
command, etc.
•In process of One Push AF operation.
•In case of executing Preset Move command.
Mode Error •Not in status of Camera ON.
•Not in status of Host Control Mode.
63
Page 65

13.5 Focus Near Camera Control Command Type 2
Function To move focus point near.
Command 00A1h
Length 1 byte Parameter
Value 2h
Status None
Reference •In case of auto focus mode, cancels AF mode and set manual mode.
•Flags in Focusing of Operation Status Request comes out zero and
Manual Focus comes out 1.
•By Focus Manual command, possible to stop running.
•To stop running at focus limit point (Near point) and flag in focusing comes
out zero.
•To return notification at the moment of reaching to focus operation limit
(Near point), when command termination notification ON is to be set.
Note:
In case that focus is already in focus operation limit (Near point), flag in
focusing doesn't set 1 because of focus not operating.
Format of Control Code
d0 d1 d2 d3 d4 d5 d6
Header Device Num Command Parameter End mark
FFh 30h 3Xh 00h A1h 32h EFh
Answer Format
d0 d1 d2 d3 d4 d5
Header Device Num Error Code End mark
FEh 30h 3Xh e0 e1 EFh
⇓
Error Flag indicates in 2 figures hexadecimal and returns ASCII code value.
Example: e0 e1
In case of No Error : 00000000B ⇒ 00h ⇒ 30h 30h
In case of Busy : 00010000B ⇒ 10h ⇒ 31h 30h
In case of Mode Error : 10010000B ⇒ 90h ⇒ 39h 30h
Condition of Error flag to be set
Busy •In process of camera initializing operation by Camera Reset
command, etc.
•In process of focus operation by manual.
•In process of One Push AF operation.
•In process of zooming operation.
•In case of executing Preset Move command.
Mode Error •Not in status of Camera ON.
•Not in status of Host Control Mode.
64
Page 66

13.6 Focus Far Camera Control Command Type 2
Function To move focus point far.
Command 00A1h
Length 1 byte Parameter
Range 3h
Status None
Reference •In case of Auto Focus mode, cancel AF mode and set manual mode.
•Flags in Focusing of Operation Status Request comes out zero and
Manual Focus comes out 1.
•By Focus Manual command, possible to stop running.
•To stop running at Focus Limit point (Far point) and flag in focusing comes
out zero.
•To return notification at the moment of reaching to focus operation limit
(Far point), when command termination notification ON is to be set.
Note:
In case that focus is already in focus operation limit (Far point), flag in
focusing doesn't set 1 because of focus not operating.
Format of Control Code
d0 d1 d2 d3 d4 d5 d6
Header Device Num Command Parameter End mark
FFh 30h 3Xh 00h A1h 33h EFh
Answer Format
d0 d1 d2 d3 d4 d5
Header Device Num Error Code End mark
FEh 30h 3Xh e0 e1 EFh
⇓
Error Flag indicates in 2 figures hexadecimal and returns ASCII code value.
Example: e0 e1
In case of No Error : 00000000B ⇒ 00h ⇒ 30h 30h
In case of Busy : 00010000B ⇒ 10h ⇒ 31h 30h
In case of Mode Error : 10010000B ⇒ 90h ⇒ 39h 30h
Condition of Error flag to be set
Busy •In process of camera initializing operation by Camera Reset
command, etc.
•In process of focus operation by manual.
•In process of One Push AF operation.
•In process of zooming operation.
•In case of executing Preset Move command.
Mode Error •Not in status of Camera ON.
•Not in status of Host Control Mode.
65
Page 67

13.7 Focus Position Assignment Camera Control Command Type 2
Function To move focus position assigned.
Command 00B0h
Length 4 byte Parameter
Range Within the range to be returned by Focus Range Request
Status None
Reference •In case of Auto Focus mode, cancel AF mode and set manual mode.
•Flags in Focusing of Operation Status Request and Manual Focus come
out 1 and when focus stops after moving assigned point, flag in focusing
comes out zero.
•By Focus Manual command, stop focusing, and flag in focusing comes out
zero.
•Return notification at the moment of reaching to assigned point, when
command termination notification ON is to be set. But not return
notification, in case of stopping Focus by Manual command before
reaching assigned point.
Format of Control Code
d0 d1 d2 d3 d4 d5 d6 d7 d8 d9
Header Device Num Command Parameter End mark
FFh 30h 3Xh 00h B0h p0 p1 p2 p3 EFh
⇓
Focus position indicates in 4 figures hexadecimal and its ASCII code is
Parameter value.
Example: p0 p1 p2 p3
256 ⇒ 0100h ⇒ 30h 31h 30h 30h
Answer Format
d0 d1 d2 d3 d4 d5
Header Device Num Error Code End mark
FEh 30h 3Xh e0 e1 EFh
⇓
Error Flag indicates in 2 figures hexadecimal and returns ASCII code value.
Example: e0 e1
In case of No Error : 00000000B ⇒ 00h ⇒ 30h 30h
In case of Busy : 00010000B ⇒ 10h ⇒ 31h 30h
In case of Parameter Error : 01010000B ⇒ 50h ⇒ 35h 30h
In case of Mode Error : 10010000B ⇒ 90h ⇒ 39h 30h
Condition of Error flag to be set
Busy •In process of camera initializing operation by Camera Reset
command, etc.
•In process of focus operation by manual.
•In process of One Push AF operation.
•In process of zooming operation.
•In case of executing Preset Move command.
Parameter Error •In case of assigned parameter over value to upper and lower.
Mode Error •Not in status of Camera ON.
•Not in status of Host Control Mode.
66
Page 68

13.8 Focus Position Request Camera Control Command Type 1
Function To return present focus position.
Command 00B1h
Length 1 byte Parameter
Value 0h
Length 4 byte Status
Range Within range to be return by Focus Range Request
Reference
Format of Control Code
d0 d1 d2 d3 d4 d5 d6
Header Device Num Command Parameter End mark
FFh 30h 3Xh 00h B1h 30h EFh
Answer Format
In case of No Error
d0 d1 d2 d3 d4 d5 d6 d7 d8 d9
Header Device Num Error Code Focus Position End mark
FEh 30h 3Xh 30h 30h s0 s1 s2 s3 EFh
⇓
Present position indicates in hexadecimal 4 figures and its ASCII code is Status
value.
Example: s0 s1 s2 s3
256 ⇒ 0100h ⇒ 30h 31h 30h 30h
In case of Error
d0 d1 d2 d3 d4 d5
Header Device Num Error Code End mark
FEh 30h 3Xh e0 e1 EFh
⇓
Error Flag indicates in 2 figures hexadecimal and returns ASCII code value.
Example: e0 e1
In case of Busy : 00010000B ⇒ 10h ⇒ 31h 30h
In case of Mode Error : 10010000B ⇒ 90h ⇒ 39h 30h
Condition of Error flag to be set
Busy •In process of camera initializing operation by Camera Reset
command, etc.
•In case of executing Preset Move command.
Mode Error •Not in status of Camera ON.
•Not in status of Host Control Mode.
67
Page 69

13.9 One Push AF Camera Control Command Type 2
Function To set manual mode after changing Mode to AF and getting focus.
Command 00B1h
Length 1 byte Parameter
Value 1h
Status None
Reference •Flags in Focusing of Operation Status Request in AF mode comes out
zero and Manual Focus come out 1 after getting in focus.
•To return notification at the moment of setting command termination
notification ON
Format of Control Code
d0 d1 d2 d3 d4 d5 d6
Header Device Num Command Parameter End mark
FFh 30h 3Xh 00h B1h 31h EFh
Answer Format
d0 d1 d2 d3 d4 d5
Header Device Num Error Code End mark
FEh 30h 3Xh e0 e1 EFh
⇓
Error Flag indicates in 2 figures hexadecimal and returns ASCII code value.
Example: e0 e1
In case of No Error : 00000000B ⇒ 00h ⇒ 30h 30h
In case of Busy : 00010000B ⇒ 10h ⇒ 31h 30h
In case of Mode Error : 10010000B ⇒ 90h ⇒ 39h 30h
Condition of Error flag to be set
Busy •In process of camera initializing operation by Camera Reset
command, etc.
•In process of focus operation by manual.
•In process of One Push AF operation.
•In case of executing Preset Move command.
Mode Error •Not in status of Camera ON.
•Not in status of Host Control Mode.
68
Page 70

13.10 Focus Range Request Camera Control Command Type 1
Function To return movable range of focus.
Command 00B1h
Length 1 byte Parameter
Value 2h
Length 8 byte Status
Range Change according to zoom position.
Reference
Format of Control Code
d0 d1 d2 d3 d4 d5 d6
Header Device Num Command Parameter End mark
FFh 30h 3Xh 00h B1h 32h EFh
Answer Format
In case of No Error
d0 d1 d2 d3 d4
Header Device Num Error Code
FEh 30h 3Xh 30h 30h
d5 d6 d7 d8 d9 d10 d11 d12 d13
Minimum Movable value Maximum Movable value End mark
s0 s1 s2 s3 s4 s5 s6 s7 EFh
⇓
Movable Range indicates in hexadecimal 8 figures and its ASCII is status value.
Example:
Movable Min. Value s0 s1 s2 s3
256 ⇒ 0100h ⇒ 30h 31h 30h 30h
Movable Max. Value s4 s5 s6 s7
512 ⇒ 0200h ⇒ 30h 32h 30h 30h
In case of Error
d0 d1 d2 d3 d4 d5
Header Device Num Error Code End mark
FEh 30h 3Xh e0 e1 EFh
⇓
Error Flag indicates in 2 figures hexadecimal and returns ASCII code value.
Example: e0 e1
In case of Busy : 00010000B ⇒ 10h ⇒ 31h 30h
In case of Mode Error : 10010000B ⇒ 90h ⇒ 39h 30h
Condition of Error flag to be set
Busy •In process of camera initializing operation by Camera Reset
command, etc.
•In case of executing Preset Move command.
Mode Error •Not in status of Camera ON.
•Not in status of Host Control Mode.
69
Page 71

13.11 Zoom Stop Camera Control Command Type 1
Function To stop zoom operation.
Command 00A2h
Length 1 byte Parameter
Value 0h
Status None
Reference •Flags in Zooming of Operation Status Request comes out zero.
•To set Zoom Stop by default at the moment of setting Camera Reset,
Camera ON command during power ON.
Format of Control Code
d0 d1 d2 d3 d4 d5 d6
Header Device Num Command Parameter End mark
FFh 30h 3Xh 00h A2h 30h EFh
Answer Format
d0 d1 d2 d3 d4 d5
Header Device Num Error Code End mark
FEh 30h 3Xh e0 e1 EFh
⇓
Error Flag indicates in 2 figures hexadecimal and returns ASCII code value.
Example: e0 e1
In case of No Error : 00000000B ⇒ 00h ⇒ 30h 30h
In case of Busy : 00010000B ⇒ 10h ⇒ 31h 30h
In case of Mode Error : 10010000B ⇒ 90h ⇒ 39h 30h
Condition of Error flag to be set
Busy •In process of camera initializing operation by Camera Reset
command, etc.
•In case of executing Preset Move command.
Mode Error •Not in status of Camera ON.
•Not in status of Host Control Mode.
70
Page 72

13.12 Zoom Wide Camera Control Command Type 2
Function Move the zoom to WIDE side at the selected zoom speed (0-7).
Command 00A2h
Length 1 byte Parameter
Value 1h
Status None
Reference •Flags in Zooming of Operation Status Request comes out 1.
•Possible to stop running by Zoom Stop command.
•To stop running at the zoom operation limit point (Wide), and Flag in
Zooming comes out zero.
•To return notification at the moment of reaching to zoom operation limit
point (Wide).
Note:
When zoom position reached to the zoom operation limit position of wide
end, Flag in Zooming doesn't come out 1 because of not zoom running.
Format of Control Code
d0 d1 d2 d3 d4 d5 d6
Header Device Num Command Parameter End mark
FFh 30h 3Xh 00h A2h 31h EFh
Answer Format
d0 d1 d2 d3 d4 d5
Header Device Num Error Code End mark
FEh 30h 3Xh e0 e1 EFh
⇓
Error Flag indicates in 2 figures hexadecimal and returns ASCII code value.
Example: e0 e1
In case of No Error : 00000000B ⇒ 00h ⇒ 30h 30h
In case of Busy : 00010000B ⇒ 10h ⇒ 31h 30h
In case of Mode Error : 10010000B ⇒ 90h ⇒ 39h 30h
Condition of Error flag to be set
Busy •In process of camera initializing operation by Camera Reset
command, etc.
•In process of zooming operation.
•In process of focus operation by manual.
•In case of executing Preset Move command.
Mode Error •Not in status of Camera ON.
•Not in status of Host Control Mode.
71
Page 73

13.13 Zoom Tele Camera Control Command Type 2
Function Move the zoom to TELE side at the selected zoom speed (0-7).
Command 00A2h
Length 1 byte Parameter
Value 2h
Status None
Reference •Flags in Zooming of Operation Status Request comes out 1.
•Possible to stop running by Zoom Stop command.
•To stop running at the zoom operation limit point (Tele), and Flag in
Zooming comes out zero.
•To return notification at the moment of reaching to zoom operation limit
point (Tele).
Note:
When zoom position reached to the zoom operation limit position of tele
end, Flag in Zooming doesn't come out 1 because of not zoom running.
Format of Control Code
d0 d1 d2 d3 d4 d5 d6
Header Device Num Command Parameter End mark
FFh 30h 3Xh 00h A2h 32h EFh
Answer Format
d0 d1 d2 d3 d4 d5
Header Device Num Error Code End mark
FEh 30h 3Xh e0 e1 EFh
⇓
Error Flag indicates in 2 figures hexadecimal and returns ASCII code value.
Example: e0 e1
In case of No Error : 00000000B ⇒ 00h ⇒ 30h 30h
In case of Busy : 00010000B ⇒ 10h ⇒ 31h 30h
In case of Mode Error : 10010000B ⇒ 90h ⇒ 39h 30h
Condition of Error flag to be set
Busy •In process of camera initializing operation by Camera Reset
command, etc.
•In process of zooming operation.
•In process of focus operation by manual
•In case of executing Preset Move command.
Mode Error •Not in status of Camera ON.
•Not in status of Host Control Mode.
72
Page 74

13.14 Zoom Hi Wide Camera Control Command Type 2
Function Move the zoom to WIDE side at the zoom speed 7 (the maximum high speed).
Command 00A2h
Length 1 byte Parameter
Value 3h
Status None
Reference •Flags in Zooming of Operation Status Request comes out 1.
•Possible to stop running by Zoom Stop command.
•To stop running at the zoom operation limit point (Wide), and Flag in
Zooming comes out zero.
•To return notification at the moment of reaching to zoom operation limit
point (Wide).
Note:
When zoom position reached to the zoom operation limit position of wide
end, Flag in Zooming doesn't come out 1 because of not zoom running.
Format of Control Code
d0 d1 d2 d3 d4 d5 d6
Header Device Num Command Parameter End mark
FFh 30h 3Xh 00h A2h 33h EFh
Answer Format
d0 d1 d2 d3 d4 d5
Header Device Num Error Code End mark
FEh 30h 3Xh e0 e1 EFh
⇓
Error Flag indicates in 2 figures hexadecimal and returns ASCII code value.
Example: e0 e1
In case of No Error : 00000000B ⇒ 00h ⇒ 30h 30h
In case of Busy : 00010000B ⇒ 10h ⇒ 31h 30h
In case of Mode Error : 10010000B ⇒ 90h ⇒ 39h 30h
Condition of Error flag to be set
Busy •In process of camera initializing operation by Camera Reset
command, etc.
•In process of zooming operation.
•In process of focus operation by manual.
•In case of executing Preset Move command.
Mode Error •Not in status of Camera ON.
•Not in status of Host Control Mode.
73
Page 75

13.15 Zoom Hi Tele Camera Control Command Type 2
Function Move the zoom to TELE side at the zoom speed 7 (the maximum high speed).
Command 00A2h
Length 1 byte Parameter
Value 4h
Status None
Reference •Flags in Zooming of Operation Status Request comes out 1.
•Possible to stop running by Zoom Stop command
•To stop running at the zoom operation limit point (Tele), and Flag in
Zooming comes out zero.
•To return notification at the moment of reaching to zoom operation limit
point (Tele).
Note:
When zoom position reached to the zoom operation limit position of tele
end, Flag in Zooming doesn't come out 1 because of not zoom running.
Format of Control Code
d0 d1 d2 d3 d4 d5 d6
Header Device Num Command Parameter End mark
FFh 30h 3Xh 00h A2h 34h EFh
Answer Format
d0 d1 d2 d3 d4 d5
Header Device Num Error Code End mark
FEh 30h 3Xh e0 e1 EFh
⇓
Error Flag indicates in 2 figures hexadecimal and returns ASCII code value.
Example: e0 e1
In case of No Error : 00000000B ⇒ 00h ⇒ 30h 30h
In case of Busy : 00010000B ⇒ 10h ⇒ 31h 30h
In case of Mode Error : 10010000B ⇒ 90h ⇒ 39h 30h
Condition of Error flag to be set
Busy •In process of camera initializing operation by Camera Reset
command, etc.
•In process of zooming operation.
•In process of focus operation by manual.
•In case of executing Preset Move command.
Mode Error •Not in status of Camera ON.
•Not in status of Host Control Mode.
74
Page 76

13.16 Zoom Position 1 Assignment Camera Control Command Type 2
Function To move to zoom position assigned.
Command 00A3h
Length 2 byte Parameter
Range 00h (Wide End)~80h (Tele End)
Status None
Reference •To assign zoom position by pre-assigned step value, within movable range.
•Flags in Zooming of Operation Status Request comes out 1. Zooming will
stop after moving assigned position and Flag in Zooming comes 0.
•To stop zooming by Zoom Stop command and flag in zooming comes out
zero.
•To return notification at the moment of setting command termination
notification after reaching to assigned position. But not to return
notification, when zooming stops by Zoom Stop command before reaching
assigned position.
Format of Control Code
d0 d1 d2 d3 d4 d5 d6 d7
Header Device Num Command Parameter End mark
FFh 30h 3Xh 00h A3h p0 p1 EFh
⇓
Zoom position indicates in hexadecimal 2 figures and parameter value is its ASCII code.
Example: p0 p1
64 ⇒ 40h ⇒ 34h 30h
Answer Format
d0 d1 d2 d3 d4 d5
Header Device Num Error Code End mark
FEh 30h 3Xh e0 e1 EFh
⇓
Error Flag indicates in 2 figures hexadecimal and returns ASCII code value.
Example: e0 e1
In case of No Error : 00000000B ⇒ 00h ⇒ 30h 30h
In case of Busy : 00010000B ⇒ 10h ⇒ 31h 30h
In case of Parameter Error : 01010000B ⇒ 50h ⇒ 35h 30h
In case of Mode Error : 10010000B ⇒ 90h ⇒ 39h 30h
Condition of Error flag to be set
Busy •In process of camera initializing operation by Camera Reset
command, etc.
•In process of zooming operation.
•In process of focus operation by manual.
•In case of executing Preset Move command.
Parameter Error •In case of assigned parameter over value to upper and lower.
Mode Error •Not in status of Camera ON.
•Not in status of Host Control Mode.
75
Page 77

13.17 Zoom Position 1 Request Camera Control Command Type 1
Function To return present zoom position.
Command 00A4h
Parameter None
Length 2 byte Status
Range 00h (Wide End) ~ 80h (Tele End)
Reference •To assign zoom position by pre-assigned step value, within movable range.
•Possibly error will be within ±1% before executing Camera Reset command
and Camera ON command or after returning camera.
Format of Control Code
d0 d1 d2 d3 d4 d5
Header Device Num Command End mark
FFh 30h 3Xh 00h A4h EFh
Answer Format
In case of No Error
d0 d1 d2 d3 d4 d5 d6 d7
Header Device Num Error Code Zoom Position End mark
FEh 30h 3Xh 30h 30h s0 s1 EFh
⇓
Present position indicates in hexadecimal 2 figures and its ASCII code is status value.
Example: s0 s1
64 ⇒ 40h ⇒ 34h 30h
In case of Error
d0 d1 d2 d3 d4 d5
Header Device Num Error Code End mark
FEh 30h 3Xh e0 e1 EFh
⇓
Error Flag indicates in hexadecimal 2 figures and returns ASCII value.
Example: e0 e1
In case of Busy : 00010000B ⇒ 10h ⇒ 31h 30h
In case of Mode Error : 10010000B ⇒ 90h ⇒ 39h 30h
Condition of Error flag to be set
Busy •In process of camera initializing operation by Camera Reset
command, etc.
•In case of executing Preset Move command
Mode Error •Not in status of Camera ON.
•Not in status of Host Control Mode.
76
Page 78

13.18 Zoom Position 2 Assignment Camera Control Command Type 2
Function To move to zoom position assigned.
Command 00B3h
Parameter
Status None
Reference •To assign zoom position in effective value.
Format of Control Code
d0 d1 d2 d3 d4 d5 d6 d7 d8 d9
Header Device Num Command Parameter End mark
FFh 30h 3Xh 00h B3h p0 p1 p2 p3 EFh
Length 4 byte
Range
•Flags in Zooming of Operation Status Request comes out 1. Zooming
will stop after moving assigned position and Flag in Zooming comes 0.
•To stop zooming by Zoom Stop command and Flag in Zooming comes
out zero.
•To return notification at the moment of setting command termination
notification after reaching to assigned position. But not to return
notification, when zooming stops by Zoom Stop command before
reaching assigned position.
Min. Value: 0000h (Wide End)
Max. Value: 07A8h (Tele End)
⇓
Zoom position indicates in hexadecimal 4 figures and its ASCII code is
parameter value.
Example: p0 p1 p2 p3
256 ⇒ 0100h ⇒ 30h 31h 30h 30h
Answer Format
d0 d1 d2 d3 d4 d5
Header Device Num Error Code End mark
FEh 30h 3Xh e0 e1 EFh
⇓
Error Flag indicates in 2 figures hexadecimal and returns ASCII code value.
Example: e0 e1
In case of No Error : 00000000B ⇒ 00h ⇒ 30h 30h
In case of Busy : 00010000B ⇒ 10h ⇒ 31h 30h
In case of Parameter Error : 01010000B ⇒ 50h ⇒ 35h 30h
In case of Mode Error : 10010000B ⇒ 90h ⇒ 39h 30h
Condition of Error flag to be set
Busy •In process of camera initializing operation by Camera Reset
command, etc.
•In process of zooming operation.
•In process of focus operation by manual.
•In case of executing Preset Move command.
Parameter Error •In case of assigned parameter over value to upper.
Mode Error •Not in status of Camera ON.
•Not in status of Host Control Mode.
77
Page 79

13.19 Zoom Position 2 Request Camera Control Command Type 1
Function To return present zoom position.
Command 00B4h
Length 1 byte Parameter
Value 0h
Status
Reference •To assign zoom position in effective value.
Format of Control Code
d0 d1 d2 d3 d4 d5 d6
Header Device Num Command Parameter End mark
FFh 30h 3Xh 00h B4h 30h EFh
Answer Format
In case of No Error
d0 d1 d2 d3 d4 d5 d6 d7 d8 d9
Header Device Num Error Code Zoom Position End mark
FEh 30h 3Xh 30h 30h s0 s1 s2 s3 EFh
⇓
Present position indicates in hexadecimal 4 figures and its ASCII code is Status value.
Example: s0 s1 s2 s3
256 ⇒ 0100h ⇒ 30h 31h 30h 30h
In case of Error
d0 d1 d2 d3 d4 d5
Header Device Num Error Code End mark
FEh 30h 3Xh e0 e1 EFh
⇓
Error Flag indicates in 2 figures hexadecimal and returns ASCII code value.
Example: e0 e1
In case of Busy : 00010000B ⇒ 10h ⇒ 31h 30h
In case of Mode Error : 10010000B ⇒ 90h ⇒ 39h 30h
Condition of Error flag to be set
Busy •In process of camera initializing operation by Camera Reset
Mode Error •Not in status of Camera ON.
Length 4 byte
Range
•Possibly error will be within ±5% before executing Camera Reset
command and Camera ON command or after returning camera.
command, etc.
•In case of executing Preset Move command.
•Not in status of Host Control Mode.
Min. Value: 0000h (Wide End)
Max.Value: 07A8h (Tele End)
78
Page 80

13.20 Zoom Speed Assignment Camera Control Command Type 1
Function To assign zooming speed.
Command 00B4h
Length 2 byte, including "31h" (fixed value) Parameter
Range 0~7
Status None
Reference •Speed set by this command is reflected in Zoom Wide, Zoom Tele, Zoom
Position Assignment and Preset Move.
•Default value is 7.
Format of Control Code
d0 d1 d2 d3 d4 d5 d6 d7
Header Device Num Command Parameter End mark
FFh 30h 3Xh 00h B4h 31h p1 EFh
⇓
Zoom speed indicates in hexadecimal 1 figure and parameter value is its ASCII code.
Example: p0
4 ⇒ 4h ⇒ 34h
Answer Format
d0 d1 d2 d3 d4 d5
Header Device Num Error Code End mark
FEh 30h 3Xh e0 e1 EFh
⇓
Error Flag indicates in 2 figures hexadecimal and returns ASCII code value.
Example: e0 e1
In case of No Error : 00000000B ⇒ 00h ⇒ 30h 30h
In case of Busy : 00010000B ⇒ 10h ⇒ 31h 30h
In case of Parameter Error : 01010000B ⇒ 50h ⇒ 35h 30h
In case of Mode Error : 10010000B ⇒ 90h ⇒ 39h 30h
Condition of Error flag to be set
Busy •In process of camera initializing operation by Camera Reset
command, etc.
•In case of executing Preset Move command.
Parameter Error •In case of out of range of assigned parameter.
Mode Error •Not in status of Camera ON.
•Not in status of Host Control Mode.
79
Page 81

13.21 Zoom Speed Request Camera Control Command Type 1
Function To return present zooming speed.
Command 00B4h
Length 1 byte Parameter
Value 2h
Length 1 byte Status
Range 0~7
Reference •Default value is 7.
Format of Control Code
d0 d1 d2 d3 d4 d5 d6
Header Device Num Command Parameter End mark
FFh 30h 3Xh 00h B4h 32h EFh
Answer Format
In case of No Error
d0 d1 d2 d3 d4 d5 d6
Header Device Num Error Code Speed End mark
FEh 30h 3Xh 30h 30h s0 EFh
⇓
Zoom speed indicates in hexadecimal 1 figure and status value is its ASCII code.
Example: s0
4 ⇒ 4h ⇒ 34h
In case of Error
d0 d1 d2 d3 d4 d5
Header Device Num Error Code End mark
FEh 30h 3Xh e0 e1 EFh
⇓
Error Flag indicates in 2 figures hexadecimal and returns ASCII code value.
Example: e0 e1
In case of Busy : 00010000B ⇒ 10h ⇒ 31h 30h
In case of Mode Error : 10010000B ⇒ 90h ⇒ 39h 30h
Condition of Error flag to be set
Busy •In process of camera initializing operation by Camera Reset
command, etc.
•In case of executing Preset Move command.
Mode Error •Not in status of Camera ON.
•Not in status of Host Control Mode.
80
Page 82

13.22 Zoom Position Maximum Request Camera Control Command Type 1
Function To return maximum value of zoom position.
Command 00B4h
Length 1 byte Parameter
Value 3h
Length 4 byte Status
Value 0000h~07A8h
Reference •To return movable max. value of zoom position.
Format of Control Code
d0 d1 d2 d3 d4 d5 d6
Header Device Num Command Parameter End mark
FFh 30h 3Xh 00h B4h 33h EFh
Answer Format
In case of No Error
d0 d1 d2 d3 d4 d5 d6 d7 d8 d9
Header Device Num Error Code Zoom Movable Max. Value End mark
FEh 30h 3Xh 30h 30h s0 s1 s2 s3 EFh
⇓
Zoom maximum value indicates in hexadecimal 4 figures and its ASCII code is status
value.
Example: s0 s1 s2 s3
2142 ⇒ 085Eh ⇒ 30h 38h 35h 45h
In case of Error
d0 d1 d2 d3 d4 d5
Header Device Num Error Code End mark
FEh 30h 3Xh e0 e1 EFh
⇓
Error Flag indicates in 2 figures hexadecimal and returns ASCII code value.
Example: e0 e1
In case of Busy : 00010000B ⇒ 10h ⇒ 31h 30h
In case of Mode Error : 10010000B ⇒ 90h ⇒ 39h 30h
Condition of Error flag to be set
Busy •In process of camera initializing operation by Camera Reset
command, etc.
•In case of executing Preset Move command.
Mode Error •Not in status of Camera ON.
•Not in status of Host Control Mode.
81
Page 83

13.23 Backlight Compensation OFF Camera Control Command Type 2
Function To change to backlight non-compensation mode.
Command 00A5h
Length 1 byte Parameter
Value 0h
Status None
Reference •To receive command at Auto exposure mode.
•To operate identical operation as to assign 48h by AE Target Value
Assignment command.
•To be set by default at the moment of executing Camera Reset command
•At the moment of command termination notification ON setting, to return
notification, when operation finished. But when Backlight Compensation
ON, AE Target Value Assignment command are executing, not to return
notification of Backlight Compensation OFF.
Format of Control Code
d0 d1 d2 d3 d4 d5 d6
Header Device Num Command Parameter End mark
FFh 30h 3Xh 00h A5h 30h EFh
Answer Format
d0 d1 d2 d3 d4 d5
Header Device Num Error Code End mark
FEh 30h 3Xh e0 e1 EFh
⇓
Error Flag indicates in 2 figures hexadecimal and returns ASCII code value.
Example: e0 e1
In case of No Error : 00000000B ⇒ 00h ⇒ 30h 30h
In case of Busy : 00010000B ⇒ 10h ⇒ 31h 30h
In case of Mode Error : 10010000B ⇒ 90h ⇒ 39h 30h
Condition of Error flag to be set
Busy •In process of camera initializing operation by Camera Reset
command, etc.
•In case of exposure manual mode.
•In status of AE Lock ON.
•In case of executing Preset Move command.
Mode Error •Not in status of Camera ON
•Not in status of Host Control Mode
82
Page 84

13.24 Backlight Compensation ON Camera Control Command Type 2
Function To change to backlight compensation mode.
Command 00A5h
Length 1 byte Parameter
Value 1h
Status None
Reference •To receive command at auto exposure mode.
•The same operation is performed as when 90h (1.5 aperture open) is
designated by the AE Target Value Assignment command. For the other
correction values, refer to the description of AE Target Value Assignment.
•At the moment of command termination notification ON setting, to return
notification, when operation finished. But when Backlight Compensation
OFF, AE Target Value Assignment command are executing, not to return
notification of Backlight Compensation ON.
Format of Control Code
d0 d1 d2 d3 d4 d5 d6
Header Device Num Command Parameter End mark
FFh 30h 3Xh 00h A5h 31h EFh
Answer Format
d0 d1 d2 d3 d4 d5
Header Device Num Error Code End mark
FEh 30h 3Xh e0 e1 EFh
⇓
Error Flag indicates in 2 figures hexadecimal and returns ASCII code value.
Example: e0 e1
In case of No Error : 00000000B ⇒ 00h ⇒ 30h 30h
In case of Busy : 00010000B ⇒ 10h ⇒ 31h 30h
In case of Mode Error : 10010000B ⇒ 90h ⇒ 39h 30h
Condition of Error flag to be set
Busy •In process of camera initializing operation by Camera Reset
command, etc.
•In case of exposure manual mode.
•In status of AE Lock ON.
•In case of executing Preset Move command.
Mode Error •Not in status of Camera ON.
•Not in status of Host Control Mode.
83
Page 85

13.25 Exposure Automatic Camera Control Command Type 1
Function To change to exposure auto mode.
Command 00A5h
Length 1 byte Parameter
Value 2h
Status None
Reference •The related exposure commands which enable to set in auto exposure
mode, are Backlight Compensation ON/OFF, Shutter Speed Program,
Shutter Speed 1/60, 1/100 and AE Target Value Assignment.
•Default value is set at the moment of executing Camera Reset and Camera
ON command during power ON.
Format of Control Code
d0 d1 d2 d3 d4 d5 d6
Header Device Num Command Parameter End mark
FFh 30h 3Xh 00h A5h 32h EFh
Answer Format
d0 d1 d2 d3 d4 d5
Header Device Num Error Code End mark
FEh 30h 3Xh e0 e1 EFh
⇓
Error Flag indicates in 2 figures hexadecimal and returns ASCII code value.
Example: e0 e1
In case of No Error : 00000000B ⇒ 00h ⇒ 30h 30h
In case of Busy : 00010000B ⇒ 10h ⇒ 31h 30h
In case of Mode Error : 10010000B ⇒ 90h ⇒ 39h 30h
Condition of Error flag to be set
Busy •In process of camera initializing operation by Camera Reset
command, etc.
•In case of executing Preset Move command.
Mode Error •Not in status of Camera ON.
•Not in status of Host Control Mode.
84
Page 86

13.26 Exposure Manual Camera Control Command Type 1
Function To change to exposure manual mode.
Command 00A5h
Length 1 byte Parameter
Value 3h
Status None
Reference •The related exposure commands which enable to set in manual exposure
mode, are Shutter Speed Assignment, AGC Gain Assignment and Iris
Assignment.
Format of Control Code
d0 d1 d2 d3 d4 d5 d6
Header Device Num Command Parameter End mark
FFh 30h 3Xh 00h A5h 33h EFh
Answer Format
d0 d1 d2 d3 d4 d5
Header Device Num Error Code End mark
FEh 30h 3Xh e0 e1 EFh
⇓
Error Flag indicates in 2 figures hexadecimal and returns ASCII code value
Example: e0 e1
In case of No Error : 00000000B ⇒ 00h ⇒ 30h 30h
In case of Busy : 00010000B ⇒ 10h ⇒ 31h 30h
In case of Mode Error : 10010000B ⇒ 90h ⇒ 39h 30h
Condition of Error flag to be set
Busy •In process of camera initializing operation by Camera Reset
command, etc.
•In status of AE Lock ON.
•In case of executing Preset Move command.
Mode Error •Not in status of Camera ON.
•Not in status of Host Control Mode.
85
Page 87

13.27 AE Lock OFF Camera Control Command Type 1
Function To cancel AE Lock ON status.
Command 00A5h
Length 2 byte Parameter
Value 40h
Status None
Reference •To set auto exposure mode ON.
•Default value is set at the moment of executing Camera Reset and Camera
ON command during power ON.
Format of Control Code
d0 d1 d2 d3 d4 d5 d6 d7
Header Device Num Command Parameter End mark
FFh 30h 3Xh 00h A5h 34h 30h EFh
Answer Format
d0 d1 d2 d3 d4 d5
Header Device Num Error Code End mark
FEh 30h 3Xh e0 e1 EFh
⇓
Error Flag indicates in 2 figures hexadecimal and returns ASCII code value.
Example: e0 e1
In case of No Error : 00000000B ⇒ 00h ⇒ 30h 30h
In case of Busy : 00010000B ⇒ 10h ⇒ 31h 30h
In case of Mode Error : 10010000B ⇒ 90h ⇒ 39h 30h
Condition of Error flag to be set
Busy •In process of camera initializing operation by Camera Reset
command, etc.
•In status of exposure mode manual.
•In case of executing Preset Move command.
Mode Error •Not in status of Camera ON.
•Not in status of Host Control Mode.
86
Page 88

13.28 AE Lock ON Camera Control Command Type 1
Function To lock the exposure of AE mode.
Command 00A5h
Length 2 byte Parameter
Value 41h
Status None
Reference •To set in status to disapprove exposure setting value.
Format of Control Code
d0 d1 d2 d3 d4 d5 d6 d7
Header Device Num Command Parameter End mark
FFh 30h 3Xh 00h A5h 34h 31h EFh
Answer Format
d0 d1 d2 d3 d4 d5
Header Device Num Error Code End mark
FEh 30h 3Xh e0 e1 EFh
⇓
Error Flag indicates in 2 figures hexadecimal and returns ASCII code value.
Example: e0 e1
In case of No Error : 00000000B ⇒ 00h ⇒ 30h 30h
In case of Busy : 00010000B ⇒ 10h ⇒ 31h 30h
In case of Mode Error : 10010000B ⇒ 90h ⇒ 39h 30h
Condition of Error flag to be set
Busy •In process of camera initializing operation by Camera Reset
command, etc.
•In status of exposure mode manual.
•In case of executing Preset Move command.
Mode Error •Not in status of Camera ON.
•Not in status of Host Control Mode.
In status of Exposure Mode Changeable
AUTO
Lock
Manual
87
Page 89

13.29 Shutter Speed Program Camera Control Command Type 1
Function To change shutter speed to program mode.
Command 00A8h
Length 1 byte Parameter
Value 0h
Status None
Reference •To change shutter speed automatically at the moment of Hi luminance
shot and prevent resolution from lowering by small iris diffraction
•To receive command at auto exposure mode.
•To be set by default at the moment of executing Camera Reset command.
Format of Control Code
d0 d1 d2 d3 d4 d5 d6
Header Device Num Command Parameter End mark
FFh 30h 3Xh 00h A8h 30h EFh
Answer Format
d0 d1 d2 d3 d4 d5
Header Device Num Error Code End mark
FEh 30h 3Xh e0 e1 EFh
⇓
Error Flag indicates in 2 figures hexadecimal and returns ASCII code value.
Example: e0 e1
In case of No Error : 00000000B ⇒ 00h ⇒ 30h 30h
In case of Busy : 00010000B ⇒ 10h ⇒ 31h 30h
In case of Mode Error : 10010000B ⇒ 90h ⇒ 39h 30h
Condition of Error flag to be set
Busy •In process of camera initializing operation by Camera Reset
command, etc.
•In status of exposure mode manual.
•In status of AE Lock ON.
•In case of executing Preset Move command.
Mode Error •Not in status of Camera ON.
•Not in status of Host Control Mode.
88
Page 90

13.30 Shutter Speed 1/60 (PAL:1/50) Camera Control Command Type 2
Function To change shutter speed to 1/60 (PAL: 1/50) mode.
Command 00A8h
Length 1 byte Parameter
Value 1h
Status None
Reference •To receive command at the moment of exposure mode auto.
•To return notification at the moment of setting command termination
notification ON, when operation terminates. But not return notification of
Shutter Speed 1/60 command, in case of executing Shutter Speed
Program, Shutter Speed 1/100 during operation.
Format of Control Code
d0 d1 d2 d3 d4 d5 d6
Header Device Num Command Parameter End mark
FFh 30h 3Xh 00h A8h 31h EFh
Answer Format
d0 d1 d2 d3 d4 d5
Header Device Num Error Code End mark
FEh 30h 3Xh e0 e1 EFh
⇓
Error Flag indicates in 2 figures hexadecimal and returns ASCII code value.
Example: e0 e1
In case of No Error : 00000000B ⇒ 00h ⇒ 30h 30h
In case of Busy : 00010000B ⇒ 10h ⇒ 31h 30h
In case of Mode Error : 10010000B ⇒ 90h ⇒ 39h 30h
Condition of Error flag to be set
Busy •In process of camera initializing operation by Camera Reset
command, etc.
•In status of exposure mode manual.
•In status of AE Lock ON.
•In case of executing Preset Move command.
Mode Error •Not in status of Camera ON.
•Not in status of Host Control Mode.
89
Page 91

13.31 Shutter Speed 1/100 (PAL:1/120) Camera Control Command Type 2
Function To change shutter speed to 1/100 (PAL: 1/120) mode.
Command 00A8h
Length 1 byte Parameter
Value 2h
Status None
Reference •To be able to lower flicker.
•To receive command at the moment of exposure mode auto.
•To return notification at the moment of setting command termination
notification ON, when operation terminates. But not return notification of
Shutter Speed 1/100 command, in case of executing Shutter Speed
Program, Shutter Speed 1/60 during operation.
Format of Control Code
d0 d1 d2 d3 d4 d5 d6
Header Device Num Command Parameter End mark
FFh 30h 3Xh 00h A8h 32h EFh
Answer Format
d0 d1 d2 d3 d4 d5
Header Device Num Error Code End mark
FEh 30h 3Xh e0 e1 EFh
⇓
Error Flag indicates in 2 figures hexadecimal and returns ASCII code value.
Example: e0 e1
In case of No Error : 00000000B ⇒ 00h ⇒ 30h 30h
In case of Busy : 00010000B ⇒ 10h ⇒ 31h 30h
In case of Mode Error : 10010000B ⇒ 90h ⇒ 39h 30h
Condition of Error flag to be set
Busy •In process of camera initializing operation by Camera Reset
command, etc.
•In status of exposure mode manual.
•In status of AE Lock ON.
•In case of executing Preset Move command.
Mode Error •Not in status of Camera ON.
•Not in status of Host Control Mode.
90
Page 92

13.32 Shutter Speed Assignment Camera Control Command Type 2
Function To assign shutter speed.
Command 00A5h
Length 3 byte, including fixed value (35h). Parameter
Range 00h~1Bh or 80h~83h
Status None
Reference • Specify with the phase value assigned in [1/80000seconds -
1/60seconds( PAL:one/50seconds) - 1seconds].
See Shutter Speed Corresponding Table.
•To receive command at the moment of exposure mode manual.
•To return notification at the moment of setting command termination
notification ON, when operation terminates. But not return notification in
case of changing exposure mode to auto during operation.
•When the low-speed shutter is specified,the noise reduction is automatically
canceled, and select the focus automatically to the manual focus
(NTSC:1/30, and PAL:1/25 exclude), and it selects the white balance
automatically to the manual white balance.
Thereafter, when returning to the high-speed shutter, it returns to the set of
the origin of the before the shift.
•At the low-speed shutter time (80h-83h) , can be changed only to
high-speed shutter (00h – 1Bh).
Format of Control Code
d0 d1 d2 d3 d4 d5 d6 d7 d8
Header Device Num Command Parameter End mark
FFh 30h 3Xh 00h A5h 35h p1 p2 EFh
⇓
Shutter Speed Parameter indicates in hexadecimal 2 figures and parameter value is its
ASCII code.
Example: p1 p2
10 ⇒ 0Ah ⇒ 30h 41h
Answer Format
d0 d1 d2 d3 d4 d5
Header Device Num Error Code End mark
FEh 30h 3Xh e0 e1 EFh
⇓
Error Flag indicates in 2 figures hexadecimal and returns ASCII code value.
Example: e0 e1
In case of No Error : 00000000B ⇒ 00h ⇒ 30h 30h
In case of Busy : 00010000B ⇒ 10h ⇒ 31h 30h
In case of Parameter Error : 01010000B ⇒ 50h ⇒ 35h 30h
In case of Mode Error : 10010000B ⇒ 90h ⇒ 39h 30h
91
Page 93

Condition of Error flag to be set
Busy •In process of camera initializing operation by Camera Reset
command, etc.
•In status of exposure mode auto.
•In status of AE Lock ON.
•In case of executing Preset Move command.
Parameter Error •In case of assigned parameter out of range.
•When the low-speed is set out at the low speed.
Mode Error •Not in status of Camera ON.
•Not in status of Host Control Mode.
• When the low-speed shutter is specified at the time of the Digital
zoom mode.
92
Page 94

13.33 Shutter Speed Request Camera Control Command Type 1
Function To return present shutter speed.
Command 00A5h
Length 1 byte Parameter
Value 6h
Length 2 byte Status
Range 00h~1Bh or 80h~83h
Reference • To return the phase value assigned in [1/80000seconds -
1/60seconds( PAL:one/50seconds) - 1seconds].
See Shutter Speed Corresponding Table.
Format of Control Code
d0 d1 d2 d3 d4 d5 d6
Header Device Num Command Parameter End mark
FFh 30h 3Xh 00h A5h 36h EFh
Answer Format
In case of No Error
d0 d1 d2 d3 d4 d5 d6 d7
Header Device Num Error Code Shutter Speed End mark
FEh 30h 3Xh 30h 30h s0 s1 EFh
⇓
Shutter Speed Parameter indicates in hexadecimal 2 figures and its ASCII Code is status
value.
Example: s0 s1
10 ⇒ 0Ah ⇒ 30h 41h
In case of Error
d0 d1 d2 d3 d4 d5
Header Device Num Error Code End mark
FEh 30h 3Xh e0 e1 EFh
⇓
Error Flag indicates in 2 figures hexadecimal and returns ASCII code value.
Example: e0 e1
In case of Busy : 00010000B ⇒ 10h ⇒ 31h 30h
In case of Mode Error : 10010000B ⇒ 90h ⇒ 39h 30h
Condition of Error flag to be set
Busy •In process of camera initializing operation by Camera Reset
command, etc.
•In case of executing Preset Move command.
Mode Error •Not in status of Camera ON.
•Not in status of Host Control Mode.
93
Page 95

•Shutter Speed Corresponding Table
High-speed shutter
NTSC PAL NTSC PAL
Parameter
00h 1/60 1/50 80h 1/30 2 1/25 2
01h 1/75 1/60 81h 1/8 7.5 1/6 8.3
02h 1/90 1/90 82h 1/2 30 1/2 25
03h 1/100 1/100 83h 1 60 1 50
04h 1/125 1/120
05h 1/150 1/150
06h 1/180 1/180
07h 1/215 1/215
08h 1/250 1/250
09h 1/300 1/300
0Ah 1/350 1/350
0Bh 1/425 1/425
0Ch 1/500 1/500
0Dh 1/600 1/600
0Eh 1/725 1/725
0Fh 1/850 1/850
10h 1/1000 1/1000
11h 1/1250 1/1250
12h 1/1500 1/1500
13h 1/1750 1/1750
14h 1/2000 1/2000
15h 1/2500 1/2500
16h 1/3000 1/3000
17h 1/4000 1/4000
18h 1/6000 1/6000
19h 1/10000 1/10000
Shutter
Speed
Shutter
Speed
Parameter
Shutter
Speed
Low-speed shutter
Accumulated
no. of fields
Shutter
Speed
Accumulated
no. of fields
1Ah 1/20000 1/20000
1Bh 1/80000 1/80000
94
Page 96

13.34 AGC Gain Assignment Camera Control Command Type 1
Function To assign AGC gain.
Command 00A5h
Length 3 byte, including fixed value (37h). Parameter
Range 00h~FFh
Status None
Reference •To change AGC magnification.
•To receive command at the moment of exposure mode manual.
Format of Control Code
d0 d1 d2 d3 d4 d5 d6 d7 d8
Header Device Num Command Parameter End mark
FFh 30h 3Xh 00h A5h 37h p1 p2 EFh
⇓
AGC Gain value indicates in hexadecimal 2 figures and parameter value is its ASCII code.
Example: p1 p2
10 ⇒ 0Ah ⇒ 30h 41h
Answer Format
d0 d1 d2 d3 d4 d5
Header Device Num Error Code End mark
FEh 30h 3Xh e0 e1 EFh
⇓
Error Flag indicates in 2 figures hexadecimal and returns ASCII code value.
Example: e0 e1
In case of No Error : 00000000B ⇒ 00h ⇒ 30h 30h
In case of Busy : 00010000B ⇒ 10h ⇒ 31h 30h
In case of Parameter Error : 01010000B ⇒ 50h ⇒ 35h 30h
In case of Mode Error : 10010000B ⇒ 90h ⇒ 39h 30h
Condition of Error flag to be set
Busy •In process of camera initializing operation by Camera Reset
command, etc.
•In status of exposure mode auto.
•In status of AE Lock ON.
•In case of executing Preset Move command.
Parameter Error •In case of assigned parameter out of range.
Mode Error •Not in status of Camera ON.
•Not in status of Host Control Mode.
95
Page 97

13.35 AGC Gain Request Camera Control Command Type 1
Function To return present AGC gain.
Command 00A5h
Length 1 byte Parameter
Value 8h
Length 2 byte Status
Range 00h~FFh
Reference
Format of Control Code
d0 d1 d2 d3 d4 d5 d6
Header Device Num Command Parameter End mark
FFh 30h 3Xh 00h A5h 38h EFh
Answer Format
In case of No Error
d0 d1 d2 d3 d4 d5 d6 d7
Header Device Num Error Code AGC Gain Value End mark
FEh 30h 3Xh 30h 30h s0 s1 EFh
⇓
AGC gain value indicates in hexadecimal 2 figures and its ASCII code is Status value.
Example: s0 s1
10 ⇒ 0Ah ⇒ 30h 41h
In case of Error
d0 d1 d2 d3 d4 d5
Header Device Num Error Code End mark
FEh 30h 3Xh e0 e1 EFh
⇓
Error Flag indicates in 2 figures hexadecimal and returns ASCII code value.
Example: e0 e1
In case of Busy : 00010000B ⇒ 10h ⇒ 31h 30h
In case of Mode Error : 10010000B ⇒ 90h ⇒ 39h 30h
Condition of Error flag to be set
Busy •In process of camera initializing operation by Camera Reset
command, etc.
•In case of executing Preset Move command.
Mode Error •Not in status of Camera ON.
•Not in status of Host Control Mode.
96
Page 98

13.36 Iris Assignment Camera Control Command Type 2
Function To assign iris.
Command 00A5h
Length 3 byte, including fixed value (39h). Parameter
Range 02h~11h
Status None
Reference •In case of decreasing a value to close iris and comes to darken.
•In case of increasing a value to open iris and comes to brighten.
•The assignable range is less narrow than the value returned by Iris Request
command.
•To receive a command, when exposure mode is manual mode.
•When command termination notification is assigned ON, notification will
be returned at the moment of the operation terminated during operation,
exposure mode is changed to auto, notification will not be returned.
Format of Control Code
d0 d1 d2 d3 d4 d5 d6 d7 d8
Header Device Num Command Parameter End mark
FFh 30h 3Xh 00h A5h 39h p1 p2 EFh
⇓
Iris value indicates in hexadecimal 2 figures and parameter value is its ASCII code.
Example: p1 p2
10 ⇒ 0Ah ⇒ 30h 41h
Answer Format
d0 d1 d2 d3 d4 d5
Header Device Num Error Code End mark
FEh 30h 3Xh e0 e1 EFh
⇓
Error Flag indicates in 2 figures hexadecimal and returns ASCII code value.
Example: e0 e1
In case of No Error : 00000000B ⇒ 00h ⇒ 30h 30h
In case of Busy : 00010000B ⇒ 10h ⇒ 31h 30h
In case of Parameter Error : 01010000B ⇒ 50h ⇒ 35h 30h
In case of Mode Error : 10010000B ⇒ 90h ⇒ 39h 30h
Condition of Error flag to be set
Busy •In process of camera initializing operation by Camera Reset
command, etc.
•In status of exposure mode auto.
•In status of AE Lock ON.
•In case of executing Preset Move command.
Parameter Error •In case of assigned parameter out of range.
Mode Error •Not in status of Camera ON.
•Not in status of Host Control Mode.
97
Page 99

13.37 Iris Request Camera Control Command Type 1
Function To return present iris value.
Command 00A5h
Length 1 byte Parameter
Value "3Ah" (Fixed value)
Length 2 byte Status
Range 00h~12h
Reference •Outside range value assigned by Iris Assignment command might be
returned, then status range is different from Iris Assignment command.
Format of Control Code
d0 d1 d2 d3 d4 d5 d6
Header Device Num Command Parameter End mark
FFh 30h 3Xh 00h A5h 3Ah EFh
Answer Format
In case of No Error
d0 d1 d2 d3 d4 d5 d6 d7
Header Device Num Error Code Iris Value End mark
FEh 30h 3Xh 30h 30h s0 s1 EFh
⇓
Iris value indicates in hexadecimal 2 figures and its ASCII code is Status value.
Example: s0 s1
10 ⇒ 0Ah ⇒ 30h 41h
In case of Error
d0 d1 d2 d3 d4 d5
Header Device Num Error Code End mark
FEh 30h 3Xh e0 e1 EFh
⇓
Error Flag indicates in 2 figures hexadecimal and returns ASCII code value.
Example: e0 e1
In case of Busy : 00010000B ⇒ 10h ⇒ 31h 30h
In case of Mode Error : 10010000B ⇒ 90h ⇒ 39h 30h
Condition of Error flag to be set
Busy •In process of camera initializing operation by Camera Reset
command, etc.
•In case of executing Preset Move command.
Mode Error •Not in status of Camera ON.
•Not in status of Host Control Mode.
98
Page 100

• Iris Value Table
00h Close mechanically
01h Close optically
02h F16.0
03h F13.3
04h F11.0
05h F9.4
06h F8.0
07h F6.7
08h F5.6
09h F4.7
0Ah F4.0
0Bh F3.3
0Ch F2.8
0Dh F2.4
0Eh F2.0
0Fh F1.9
10h F1.8
11h F1.6
12h open
99
 Loading...
Loading...