

Page 1

vacon
ac drives
opte9
dual port ethernet option board
installation manual
®
Page 2

Page 3

vacon • 1
TABLE OF CONTENTS
Document: DPD01583D
Release date : 6/10/16
1. Safety...............................................................................................................4
1.1 Danger................................................................................................................................4
1.2 Warnings ............................................................................................................................5
1.3 Earthing and earth fault protection ...................................................................................6
2. OPTE9 Dual Port Ethernet - General................................................................7
2.1 New features ......................................................................................................................8
3. OPTE9 Ethernet board technical data ..............................................................9
3.1 General...............................................................................................................................9
3.2 Cables.................................................................................................................................9
4. Layout and connections..................................................................................10
4.1 Layout and connections ...................................................................................................10
4.2 LED Indications ................................................................................................................11
4.2.1 Profinet IO ........................................................................................................................12
4.3 Ethernet devices ..............................................................................................................13
4.3.1 Human to machine...........................................................................................................13
4.3.2 machine to machine.........................................................................................................14
4.4 Connections and wiring....................................................................................................15
4.4.1 Topology: Star ..................................................................................................................15
4.4.2 Topology: Daisy Chain ......................................................................................................15
4.4.3 Topology: Ring..................................................................................................................16
4.5 ACD (Address Conflict Detection) ....................................................................................20
5. Installation.....................................................................................................21
5.1 Installation in VACON® NX..............................................................................................22
5.2 Installation in VACON® 20...............................................................................................24
5.2.1 Frames MI1, MI2, MI3 ......................................................................................................24
5.2.2 Frames MI4, MI5 ..............................................................................................................27
5.3 Installation in VACON® 20 X and 20 CP ..........................................................................31
5.4 Installation in VACON® 100.............................................................................................33
5.5 installation in VACON® 100 X..........................................................................................36
5.6 PC Tools ...........................................................................................................................39
5.6.1 PC tool support ................................................................................................................39
5.6.2 Updating the OPTE9 option board firmware with VACON® Loader ...............................40
5.6.3 PC Tools for NX / NCIPConfig ..........................................................................................43
5.6.4 PC Tools for NX / NCDrive ...............................................................................................45
5.6.5 PC Tools for VACON® 100 and VACON® 20 / VACON® Live..........................................48
6. Commissioning ..............................................................................................51
6.1 Option board menu...........................................................................................................51
6.1.1 Option board parameters.................................................................................................51
6.1.2 Option board monitoring values ......................................................................................53
6.1.3 Communication protocol .................................................................................................53
6.1.4 IP Mode.............................................................................................................................54
6.1.5 IP Address ........................................................................................................................54
6.1.6 Communication timeout ..................................................................................................54
6.1.7 Profinet IO - Name of Station ..........................................................................................54
6.1.8 EIP Input and Output instance .........................................................................................55
6.1.9 EIP Product code offset ...................................................................................................55
6.1.10 Mode.................................................................................................................................55
6.1.11 MAC Address....................................................................................................................55
6.1.12 Modbus Unit Identifier .....................................................................................................55
6.2 Communication mode......................................................................................................56
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 4

vacon • 2
7. Modbus TCP / Modbus UDP ............................................................................57
7.1 Modbus UDP vs TCP.........................................................................................................58
7.2 Modbus communications.................................................................................................60
7.3 Data addresses in Modbus messages .............................................................................61
7.3.1 Modbus memory map ......................................................................................................61
7.3.2 Modbus data mapping......................................................................................................62
7.4 Modbus communication and connection timeout ...........................................................73
7.5 Quick setup.......................................................................................................................74
7.6 Modbus - example messages ..........................................................................................75
7.6.1 Example 1 - Write process data.......................................................................................75
7.6.2 Example 2 - Read process data .......................................................................................76
7.6.3 Example 3 - Exception response .....................................................................................77
8. PROFINET IO ..................................................................................................78
8.1 PROFIdrive 4.1 profile ......................................................................................................78
8.2 PROFIdrive 4.1 state machine..........................................................................................78
8.3 PROFINET IO process communication ............................................................................79
8.3.1 Telegram types ................................................................................................................79
8.3.2 Telegram building blocks ................................................................................................84
8.3.3 Quick setup.......................................................................................................................89
8.4 PROFIdrive IO parameters...............................................................................................89
8.4.1 Parameters of the PROFIdrive.........................................................................................89
8.4.2 Vendor-specific PROFIdrive parameters.........................................................................91
8.4.3 PROFIdrive signal numbers.............................................................................................92
8.4.4 User specific record data.................................................................................................95
8.4.5 Base Mode Parameter Access Model..............................................................................96
8.4.6 Parameter responses ....................................................................................................100
8.4.7 Drive parameter access using application ID................................................................104
8.4.8 Parameter channel examples .......................................................................................104
8.5 PROFINET IO communications and connection timeout...............................................108
9. EtherNet/IP..................................................................................................109
9.1 General information.......................................................................................................109
9.1.1 Overview .........................................................................................................................109
9.1.2 AC/DC Drive Profile........................................................................................................109
9.1.3 EDS file ...........................................................................................................................109
9.1.4 LED functionality ............................................................................................................110
9.1.5 Explicit Messaging .........................................................................................................111
9.1.6 EtherNet/IP communication and connection timeout...................................................116
9.2 Common Industrial Objects implemented by OPTE9 ....................................................118
9.2.1 CIP Objects .....................................................................................................................118
9.2.2 Vendor Specific Objects .................................................................................................143
9.3 Assembly instances implemented by OPTE9 ................................................................151
9.3.1 CIP I/O Assembly instances for AC/DC Drive ................................................................151
9.3.2 Vendor-specific I/O Assembly Instances.......................................................................155
9.3.3 Mapping of Standard Output Assemblies onto VACON® data......................................165
9.3.4 Mapping of VACON® data onto Standard Input Assemblies ........................................166
9.4 EtherNet/IP connection example ..................................................................................168
10. Fault tracing.................................................................................................169
10.1 Typical fault conditions ..................................................................................................169
10.2 Other fault conditions ....................................................................................................170
11. APPENDIX 1 - PROCESS DATA......................................................................171
12. APPENDIX 2 - CONTROL AND STATUS WORD............................................... 172
12.1 Control Word bit description ...................................................................................172
12.2 Status Word Descriptions ........................................................................................174
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 5

vacon • 3
12.3 Control word bit support in drives...........................................................................175
12.4 Status word bit support in drives.............................................................................176
13. APPENDIX 3 - EXAMPLE WITH SIEMENS PLC .............................................. 177
14. APPENDIX 4 - EXAMPLE WITH SIEMENS SIMATIC PDM ...............................185
15. APPENDIX 5 - FIELDBUS PARAMETRISATION..............................................189
15.1 Fieldbus control and basic reference selection ............................................................189
15.2 Torque control parametrization ....................................................................................190
16. APPENDIX 6 - LWIP LICENCE .......................................................................191
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 6
vacon • 4 Safety
9000.emf
13006.emf
9001.emf
9000.emf
9000.emf
9000.emf
9000.emf
9000.emf
9000.emf
1. SAFETY
This manual contains clearly marked cautions and warnings that are intended for your personal
safety and to avoid any unintentional damage to the product or connected appliances.
Read the information included in cautions and warnings carefully.
The cautions and warnings are marked as follows:
Table 1. Warning signs
= DANGER! Dangerous voltage
= WARNING or CAUTION
= Caution! Hot surface
1.1 Danger
The components of the power unit are live when the drive is connected to mains
potential. Coming into contact with this voltage is extremely dangerous and may
cause death or severe injury.
The motor terminals U, V, W and the brake resistor terminals are live when the
AC drive is connected to mains, even if the motor is not running.
After disconnecting the AC drive from the mains, wait until the indicators on the
keypad go out (if no keypad is attached, see the indicators on the cover). Wait 5
more minutes before doing any work on the connections of the drive. Do not open
the cover before this time has expired. After expiration of this time, use a
measuring equipment to absolutely ensure that no
ensure absence of voltage before starting any electrical work!
The control I/O-terminals are isolated from the mains potential. However, the
relay outputs and other I/O-terminals may have a dangerous control voltage
present even when the AC drive is disconnected from mains.
voltage is present.
Always
Before connecting the AC drive to mains make sure that the front and cable
covers of the drive are closed.
During a ramp stop (see the Application Manual), the motor is still generating
voltage to the drive. Therefore, do not touch the components of the AC drive
before the motor has completely stopped. Wait until the indicators on the keypad
go out (if no keypad is attached, see the indicators on the cover). Wait additional 5
minutes before starting any work on the drive.
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
1
Page 7
Safety vacon • 5
13006.emf
13006.emf
13006.emf
13006.emf
13006.emf
13006.emf
13006.emf
13006.emf
13006.emf
13006.emf
1.2 Warnings
The AC drive is meant for fixed installations only.
Do not perform any measurements when the AC drive is connected to the mains.
The earth leakage current of the AC drives exceeds 3.5mA AC. According to
standard EN61800-5-1, a reinforced protective ground connection must be
ensured. See Chapter 1.3.
If the AC drive is used as a part of a machine, the machine manufacturer is
responsible for providing the machine with a supply disconnecting device (EN
60204-1).
Only spare parts delivered by VACON® can be used.
At power-up, power break or fault reset the motor will start immediately if the
start signal is active, unless the pulse control for
Furthermore, the I/O functionalities (including start inputs) may change if
parameters, applications or software are changed. Disconnect, therefore, the
motor if an unexpected start can cause danger.
Start/Stop logic has been selected
.
The motor starts automatically after automatic fault reset if the auto restart
function is activated. See the Application Manual for more detailed information.
Prior to measurements on the motor or the motor cable, disconnect the motor
cable from the AC drive.
Do not touch the components on the circuit boards. Static voltage discharge may
damage the components.
Check that the EMC level of the AC drive corresponds to the requirements of your
supply network.
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
1
Page 8
vacon • 6 Safety
13006.emf 13006.emf
1.3 Earthing and earth fault protection
CAUTION!
The AC drive must always be earthed with an earthing conductor connected to the earthing terminal
marked with .
The earth leakage current of the drive exceeds 3.5mA AC. According to EN61800-5-1, one or more
of the following conditions for the associated protective circuit must be satisfied:
a) The protective conductor must have a cross-sectional area of at least 10 mm2 Cu or 16
mm2 Al, through its total run.
b) Where the protective conductor has a cross-sectional area of less than 10 mm2 Cu or 16
mm2 Al, a second protective conductor of at least the same cross-sectional area must be
provided up to a point where the protective conductor has a cross-sectional area not less
than 10 mm2 Cu or 16 mm2 Al.
c) Automatic disconnection of the supply in case of loss of continuity of the protective
conductor.
The cross-sectional area of every protective earthing conductor which does not form part of the
supply cable or cable enclosure must, in any case, be not less than:
-2.5mm
-4mm
2
if mechanical protection is provided or
2
if mechanical protection is not provided.
The earth fault protection inside the AC drive protects only the drive itself against earth faults in the
motor or the motor cable. It is not intended for personal safety.
Due to the high capacitive currents present in the AC drive, fault current protective switches may
not function properly.
Do not perform any voltage withstand tests on any part of the AC drive. There is
a certain procedure according to which the tests must be performed. Ignoring
this procedure can cause damage to the product.
NOTE! You can download the English and French product manuals with applicable safety,
warning and caution information from
http://drives.danfoss.com/knowledge-center/technical-documentation/.
REMARQUE Vous pouvez télécharger les versions anglaise et française des manuels produit
contenant l’ensemble des informations de sécurité, avertissements et mises en garde
applicables sur le site http://drives.danfoss.com/knowledge-center/technical-documentation/
.
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
1
Page 9
OPTE9 Dual Port Ethernet - General vacon • 7
2. OPTE9 DUAL PORT ETHERNET - GENERAL
The VACON® AC drives can be connected to the Ethernet networks using the VACON® OPTE9 Dual
Port Ethernet fieldbus option board (OPTE9). The drives can be daisy chained by utilizing two
Ethernet ports of OPTE9. The option board supports PROFINET IO, Ethernet/IP, Modbus TCP and
Modbus UDP fieldbus protocols. “EtherNet/IP
topologies are supported. See details in Chapter 4.4 "Connections and wiring".
•Star
•Daisy chain
•Ring
Every appliance connected to an Ethernet network has two identifiers: a MAC address and an IP
address. The MAC address (Address format: xx:xx:xx:xx:xx:xx) is unique for each appliance and
cannot be changed.The Ethernet board’s MAC address can be found on the sticker attached to the
board.
In a local network, IP addresses can be defined by the user as long as all the units connected to the
network are given the same network portion of the address. Overlapping IP addresses cause
conflicts between appliances. For more information about setting IP addresses, see Chapter 6.
TM
is a trademark of ODVA, Inc. The following network
Table 2. List of abbreviations used in this document
Abbreviation Explanation
ACD Address Conflict Detection
CRC
DHCP
FB Fieldbus
GW Gateway
HI Upper 8/16 bits in a 16/32 bit value.
LO Lower 8/16 bits in a 16/32 bit value.
LWIP Light weight TCP/IP protocol stack for embedded systems.
Modbus TCP /
Modbus UDP
PDI Process data in (Profinet IO)
PDO Process data out (Profinet IO)
PHY(X)
PLC Programmable Logic Controller
Cyclic Redundancy Check is an error-detecting code commonly used in
fieldbusses to detect accidental changes to raw data.
Dynamic Host Configuration Protocol is used for dynamical resolving of network configuration parameters like an IP address.
Simple and vendor-neutral communication protocol intended for monitoring
and controlling of field devices.
Ethernet physical interface X, where X represents the number
of interface
PNU Parameter number (Profinet IO)
Profinet IO
RPM Revolutions per minute
RSTP Rapid Spanning Tree Protocol
TCP
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Profinet is a standard for industrial automation in Ethernet network. Profinet IO describes the exchange of data between controllers and field devices.
Transmission Control Layer provides reliable, ordered and error-checked
delivery of data streams between computers that are connected to a local
area network.
2
Page 10
vacon • 8 OPTE9 Dual Port Ethernet - General
Table 3. List of data types used in this document
Type name Bit size Explanation
INT8 8 Signed short integer
UINT8 8 Unsigned short integer
INT16 16 Signed integer
UINT16 16 Unsigned integer
INT32 32 Signed long integer
UINT32 32 Unsigned long integer
FLOAT32 32 32-bit floating point
STRING3 24 Three byte string
STRING5 40 Five byte string
2.1 New features
The following table shows the new features that are added in the OPTE9 Dual Port Ethernet's
firmware versions.
Table 4. New features
New feature Firmware version
EtherNet/IP protocol V004
Ethernet ring support (RSTP) V004
Address Conflict Detection (ACD) V004
Media Redundancy Protocol (MRP) V006
Simple Network Management Protocol (SNMP) V006
LLDP-MIB, LLDP-EXT-DOT3-MIB, LLDP-EXT-PNO-MIB V006
EDD files SIMATIC PDM V006
2
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 11
OPTE9 Ethernet board technical data vacon • 9
3. OPTE9 ETHERNET BOARD TECHNICAL DATA
3.1 General
Table 5. Technical da ta
General Board name OPTE9
Ethernet connections
Communications
Protocol Modbus TCP, Modbus UDP, Profinet I/O, EtherNet/IP
Environment
Interface Two RJ-45 connectors
Transfer cable Shielded Twisted Pair (STP) CAT5e
Speed 10 / 100 Mb
Duplex half / full
Default IP-address By default the board is in DHCP mode
Ambient operating temperature
Storing temperature -40°C…70°C
Humidity <95%, no condensation allowed
-10°C…50°C
Altitude Max. 1000 m
Vibration 0.5 G at 9...200 Hz
Safety Fulfills EN50178 standard
3.2 Cables
For connecting the OPTE9 devices, use only Ethernet cables that meet at least the requirements of
category 5 (CAT5) according to EN 50173 or ISO/IEC 11801.
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
3
Page 12
vacon • 10 Layout and connections
4. LAYOUT AND CONNECTIONS
The VACON® OPTE9 Dual Port Ethernet option board is connected to the Ethernet bus using the
standard RJ45 connectors (1 and 2). The communication between the control board and the AC drive
takes place through a standard VACON® Interface Board Connector.
4.1 Layout and connections
RN ER BS
A
1
B C
2
11592_00
A Ethernet connector C Interface Board connector
B Ethernet connector
Figure 1. The OPTE9 option board
Table 6. OPTE9 Ethernet ports
Ethernet port Description
1 Ethernet port 1 (PHY1)
2 Ethernet port 2 (PHY2)
4
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 13
Layout and connections vacon • 11
RN ER BS
A
1
2
11593_00
4.2 LED Indications
ALED indications
Figure 2. The OPTE9 option board LED indicators
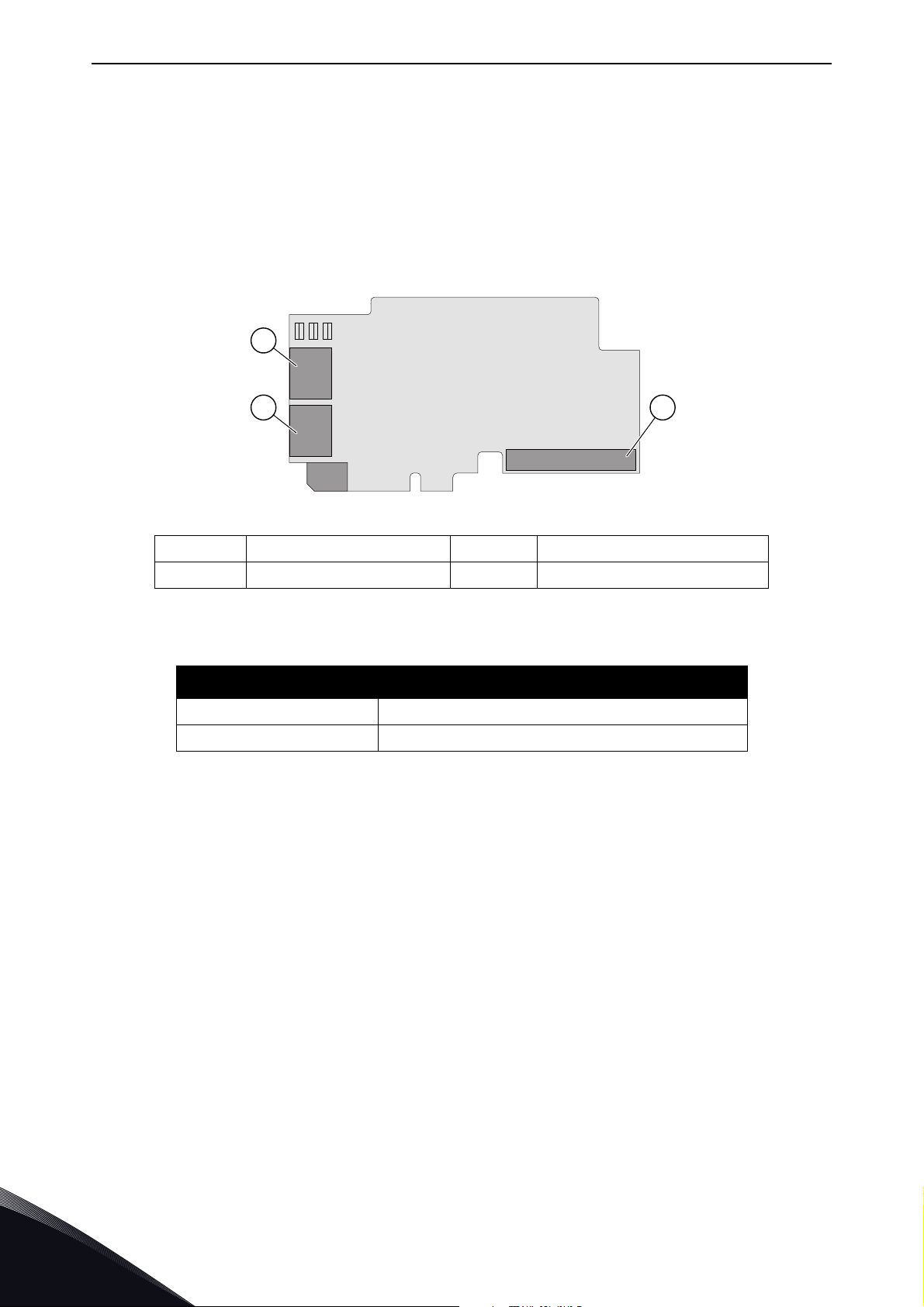
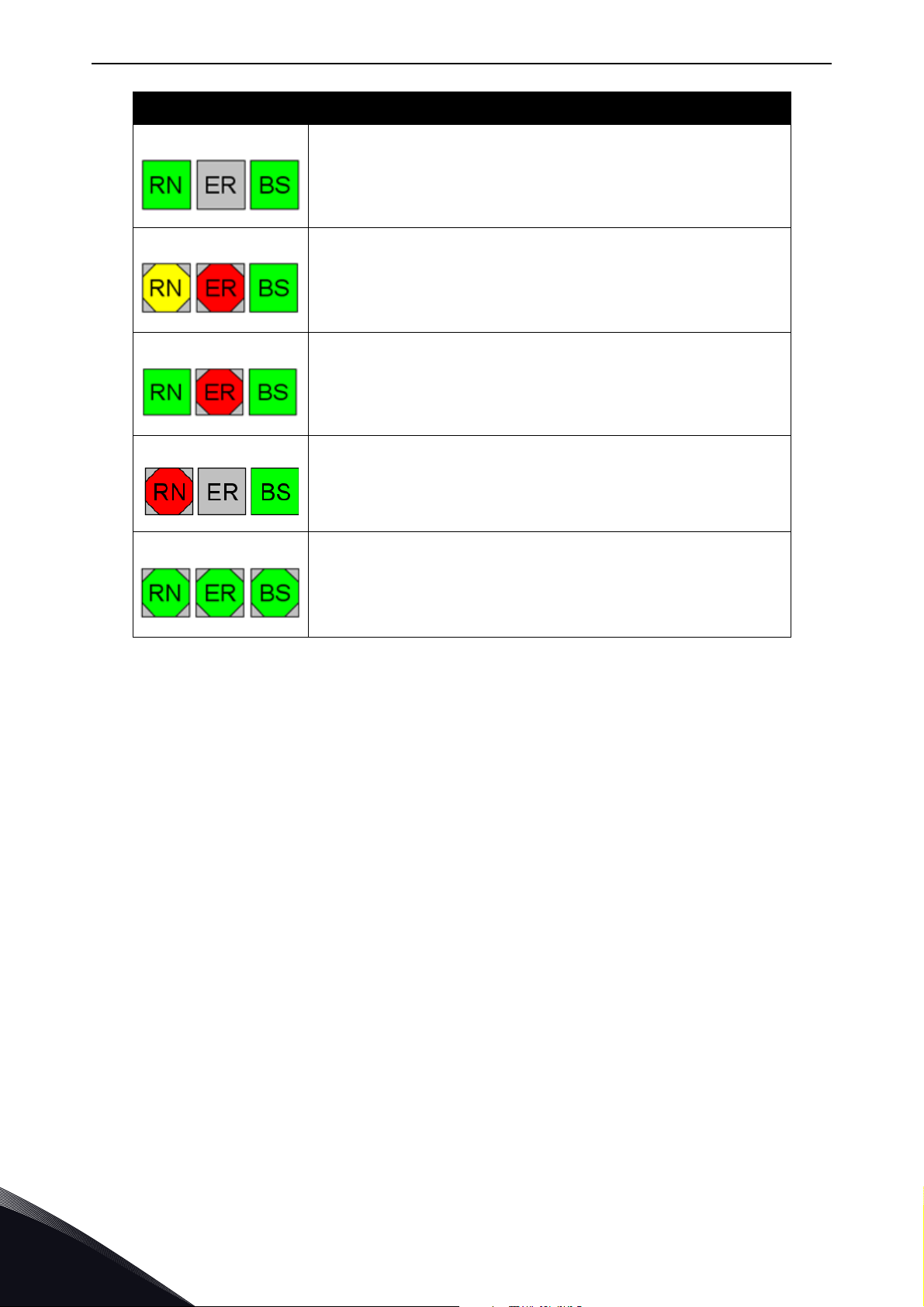
The table below lists possible LED combinations and their meanings. When the EtherNet/IP is
active, the option board follows CIP standard for LED indications. Therefore, the indications
described in Table 7 do not apply. See Chapter 9.1.4 "LED functionality".
Table 7. List of possible LED combinations
LED combinations Description
No power. All LEDs are OFF.
Option board firmware is corrupted or its software is missing.
ER is blinking (0.25s ON / 0.25s OFF)
Option board failure. Option board is not operational. BS and
possibly ER are blinking (2.5s ON / 2.5s OFF)
Option board is operational.
Protocol is ready for communications. RN is blinking (2.5s ON /
2.5s OFF).
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
4
Page 14
vacon • 12 Layout and connections
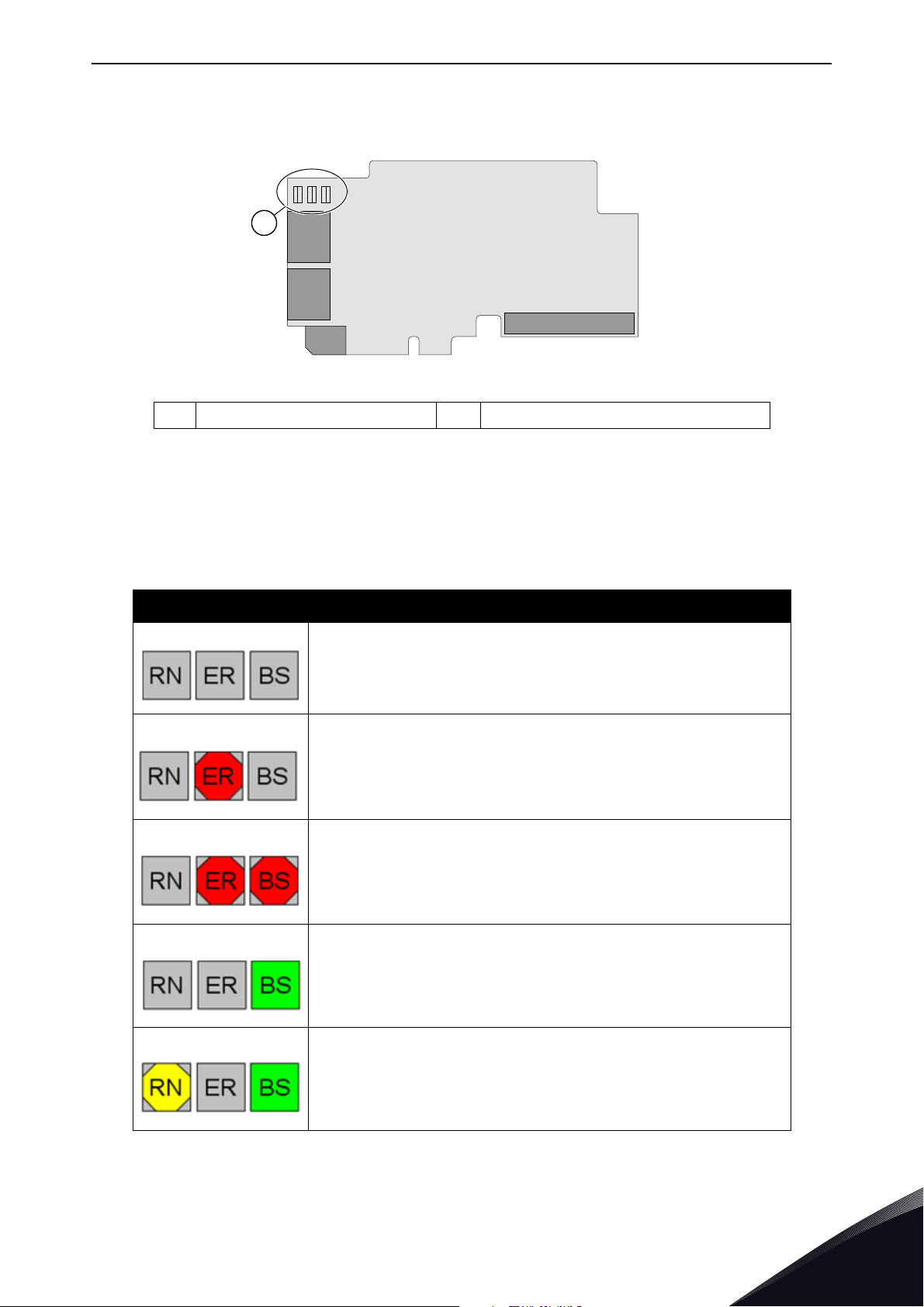
LED combinations Description
Protocol is communicating.
Protocol communication fault. ER is blinking to indicate a fault.
RN is blinking to indicate that protocol is again ready for
communications.
Protocol is communicating with an active fault. ER is blinking.
Duplicate IP address detected. RN is blinking.
Profinet IO only! In node flashing test all three LEDs are
blinking.
4.2.1 Profinet IO
When using the "Node Flashing Test" function, you can determine to which device you are directly
connected. For example, in Siemens S7, by using the menu command "PLC > Diagnostics/Setting >
Node Flashing Test..." you can identify the station directly connected to the PG/PC if all three LEDs
are flashing green.
4
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 15
Layout and connections vacon • 13
Power
12345678
11594_uk
Vacon PC tools interface
- Parameters
- Slow rate actual
Values:
- Trends
- Fault history
Ethernet switch
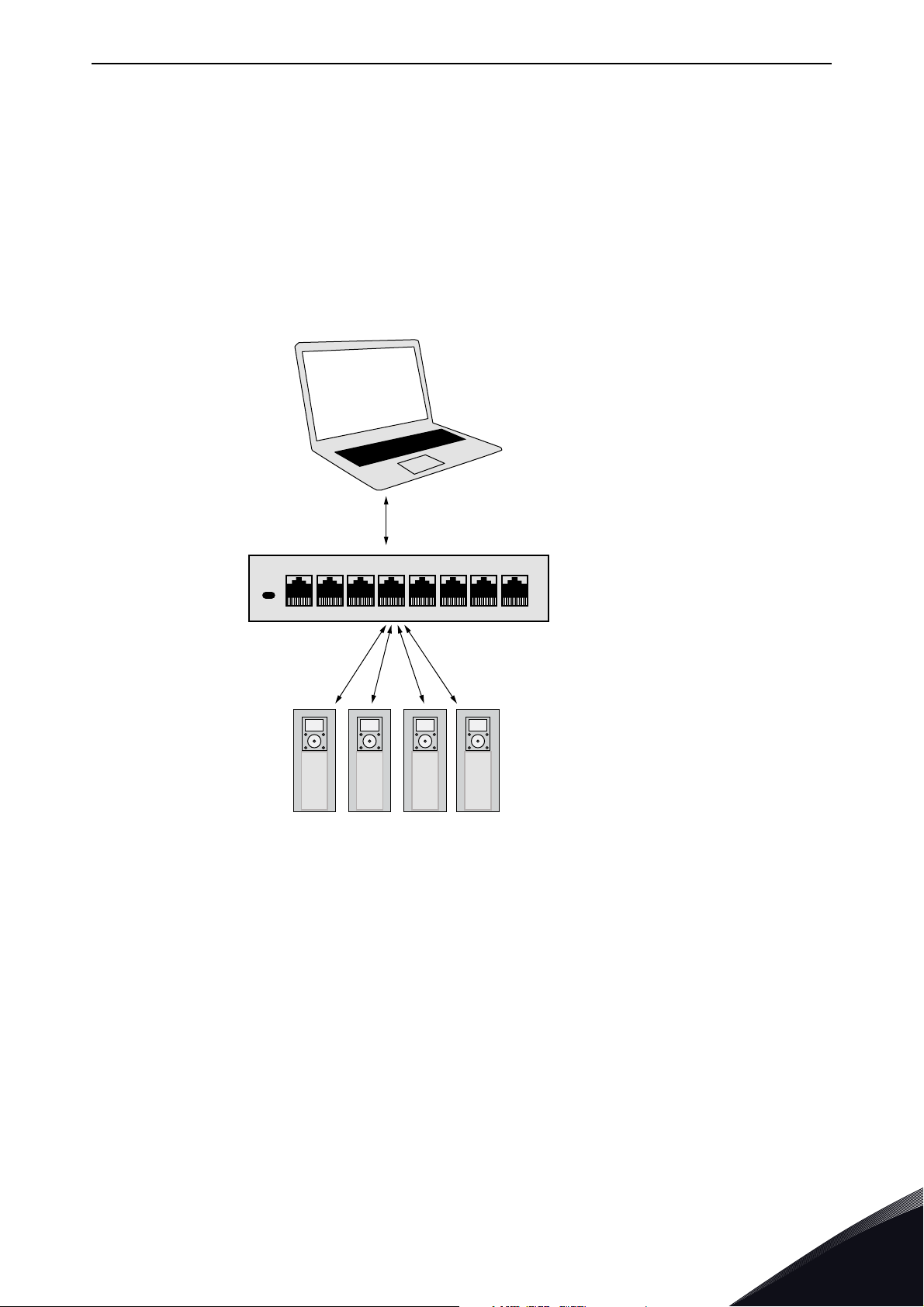
4.3 Ethernet devices
The common-use cases of Ethernet devices are 'human to machine' and 'machine to machine'. The
basic features of these two cases are presented in the pictures below.
4.3.1 Human to machine
Requirements:
- Graphical User Interface
- Relatively slow communication in use
NOTE! NCDrive can be used in NXS and NXP drives via Ethernet. VACON® Live can be used with
VACON® 100.
NOTE! The Ethernet connection to VACON® 20, VACON® 20 X and VACON® 20 CP via the OPTE9
Dual Port Ethernet is not yet supported.
Figure 3. Ethernet , Human to Machine
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
4
Page 16
vacon • 14 Layout and connections
Power
12345678
11595_uk
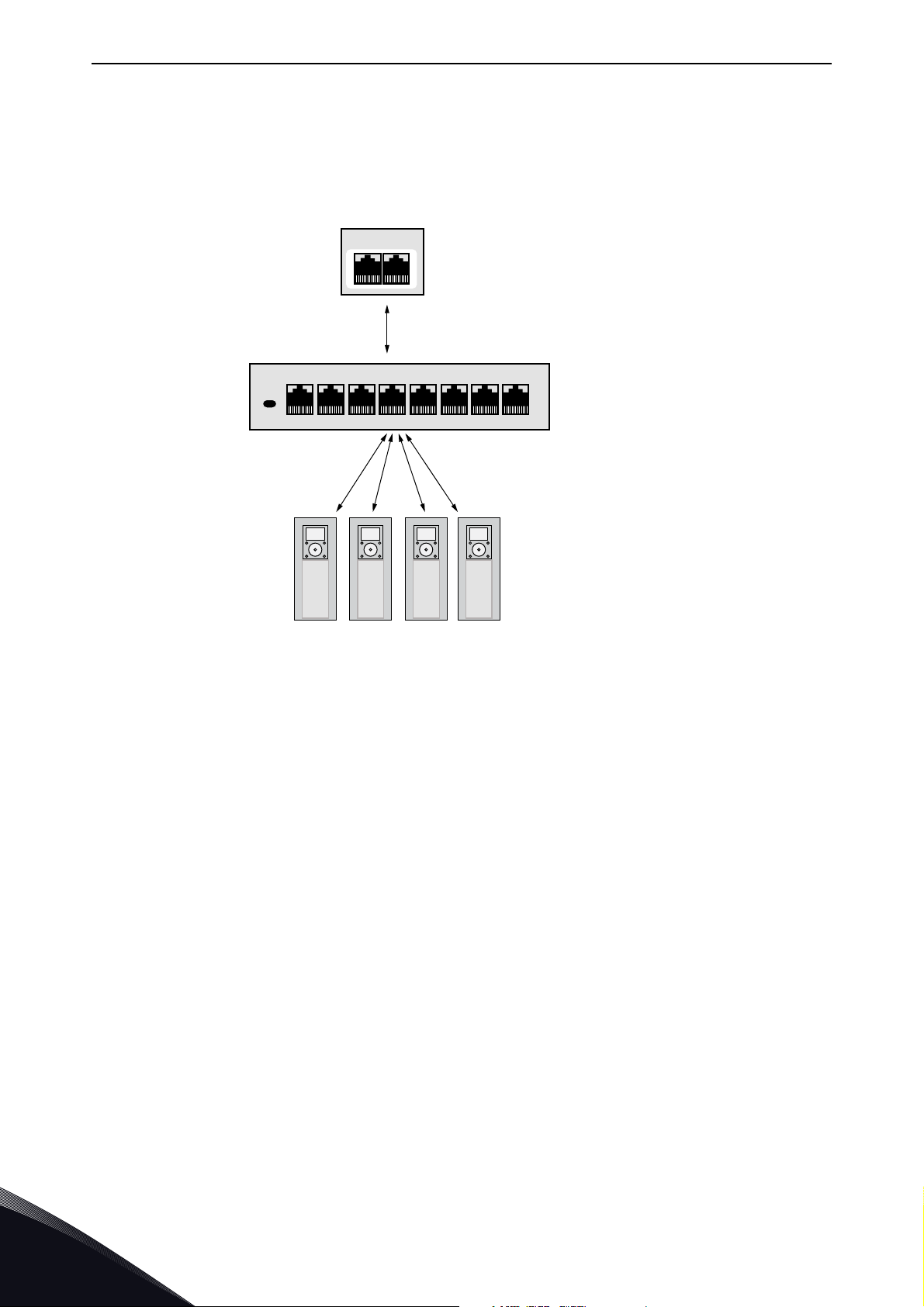
MASTER
Real-Time Control
- Start/Stop, Direction,...
- Reference
- Feedback
Ethernet switch
4.3.2 machine to machine
Requirements:
- Industrial environment
- Fast communication in use
Figure 4. Ethernet, Machine to Machine
4
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 17

Layout and connections vacon • 15
k
4.4 Connections and wiring
The OPTE9 has two Ethernet ports and an embedded switch. The option board is seen in network as
a single device as it has only one MAC and IP address. This configuration enables three different
topologies:
• Star (see Chapter 4.4.1)
• Daisy chain (see Chapter 4.4.2)
• Ring (see Chapter 4.4.3)
Each of these topologies has their own advantages and disadvantages. When designing the network
you must carefully consider the risks and benefits against the cost of the selected topology.
The OPTE9 supports 10/100Mb speeds in both Full- and Half-duplex modes. However, real-time
process control requires the Full-duplex mode and the 100-megabit speed. The boards must be
connected to the Ethernet network with a Shielded Twisted Pair (STP) CAT-5e cable (or better).
Use only industrial standard components in the network and avoid complex structures to minimize
the length of response time and the amount of incorrect dispatches. Because of the internal switch
in OPTE9, it does not matter in what port of the option board the Ethernet cables are connected to.
4.4.1 Topology: Star
In star network, all the devices are connected to the same switch(es). This topology reduces the
damage caused by single cable failure. It would affect only to a single drive instead of them all. In
this setup, a drive will receive only broadcast/multicast messages and messages directed to this
drive.
Only one port from the OPTE9 can be connected to a switch in the star topology. Connecting both
ports to switch(es) will cause an involuntary Ethernet ring which, in this setup, will break the
network.
1PLC
2345678
Power
DRIVE
OPTE9-1
DRIVE
OPTE9-2
DRIVE
OPTE9-3
DRIVE
...
OPTE9-8
11660_u
Figure 5. Star Topology
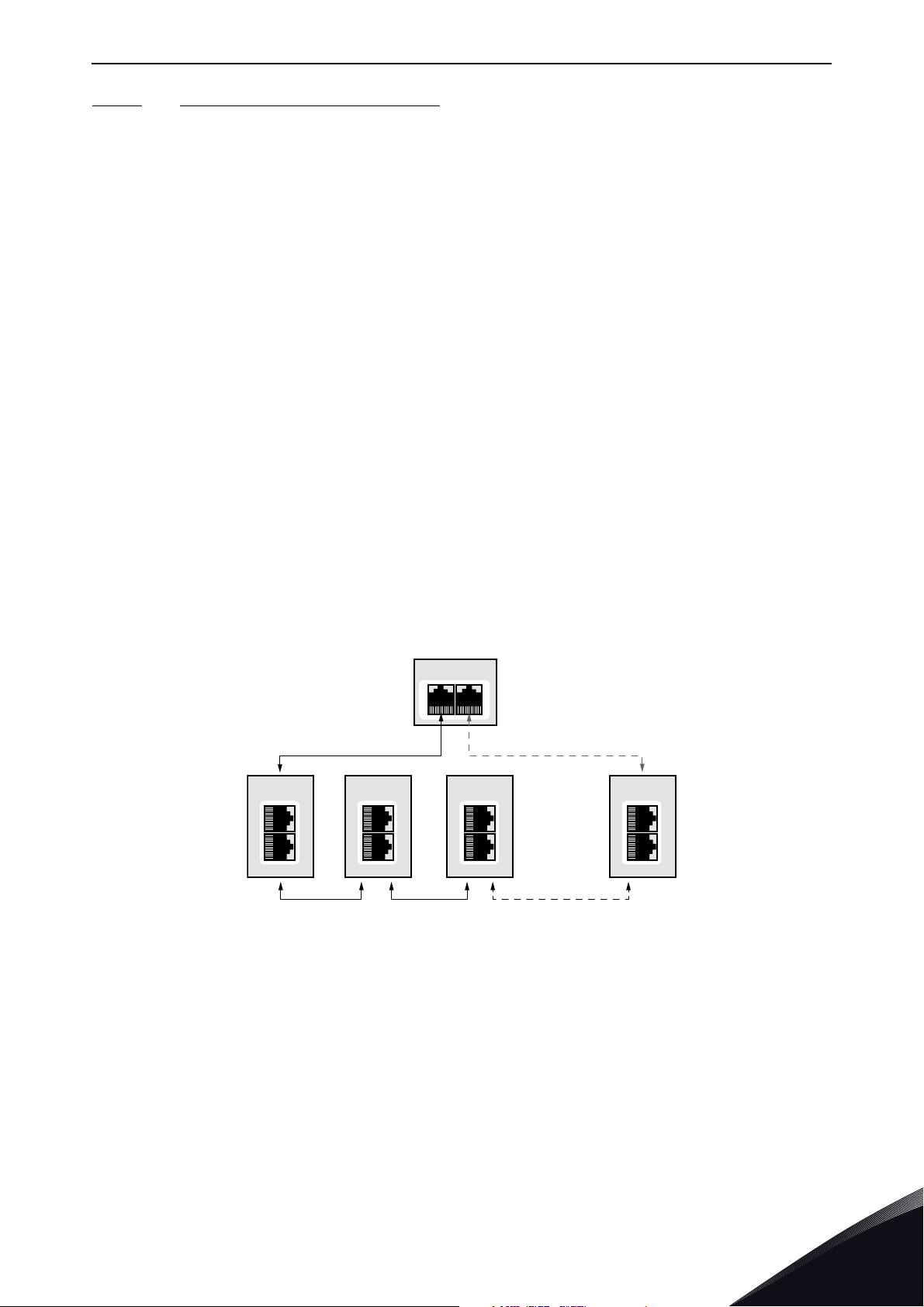
4.4.2 Topology: Daisy Chain
The daisy-chaining allows you to reduce the costs for cabling and networking equipment such as
switches. The maximum number of daisy-chained boards is 32. This restriction comes from the
average latency (20 to 40 microseconds) per Ethernet switch. The drawback in the daisy chain
topology is that it increases traffic in all except the last drive. The first drive in the daisy chain sees
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
4
Page 18

vacon • 16 Layout and connections
PLC
DRIVE
OPTE9-1
DRIVE
...
OPTE9-2
DRIVE
OPTE9-3
DRIVE
OPTE9-8
11597A_uk
all the traffic in the chain. Also damage to a single cable will drop all drives behind it from the
network.
Both in daisy chain topology and in star topology, the last drive's port must not be connected back
to the same line. This would cause an involuntary Ethernet ring which will break the network.
Figure 6. Daisy chain topology
4.4.3 Topology: Ring
In some cases it is possible to use OPTE9 in a ring topology. These cases are explained in
Chapter 4.4.3.1 and Chapter 4.4.3.2. The ring topology gains the same reduced cabling cost as the
daisy chain topology, but decreases the damage caused by a single cable failure.
4.4.3.1
Rapid Spanning Tree Protocol (RSTP)
To use the RSTP protocol, add a managed Ethernet switch that supports the RSTP protocol. If a
single link is broken, the RSTP switch will notice this and start sending data from the PLC to both
directions effectively creating two daisy chains. When the link has been repaired, the switch will
notice this too and reverts back to normal operating mode. Compared to the star topology, the ring
topology adds more network traffic to almost all drives. Damage to two cables will always create an
isolated subnetwork.
In the RSTP configuration, one of the ports in the switch is "Designated Port" (DP) and the other
"Alternative Port" (AP). When the network is functioning properly, the traffic flows through the
designated port. Only the BPDU (Bridge Protocol Data Unit) packets are transferred through the AP
port. The BPDU packets are used by the switch to determine if the network is working properly. If it
detects that the BPDU packets do not go through the ring, it will change the alternative port to a
second designated port. Now the switch will send packets to both directions in the broken ring (see
Figure 8).
4
Each designated port has a list of MAC addresses which are behind that port. Only frames directed
to the device in the MAC list are forwarded into that designated port. The broadcast and multicast
frames are sent to all designated ports.
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 19

Layout and connections vacon • 17
PLC
Managed switch with RSTP support
DRIVE
OPTE9-1
DRIVE
...
OPTE9-2
DRIVE
OPTE9-3
DRIVE
11661_uk
OPTE9-8
Power
12
DP AP
345678
PLC
Managed switch with RSTP support
DRIVE
OPTE9-1
DRIVE
...
OPTE9-2
DRIVE
OPTE9-3
DRIVE
11662_uk
OPTE9-8
Power
12
DP DP
345678
Figure 7. Ring topology
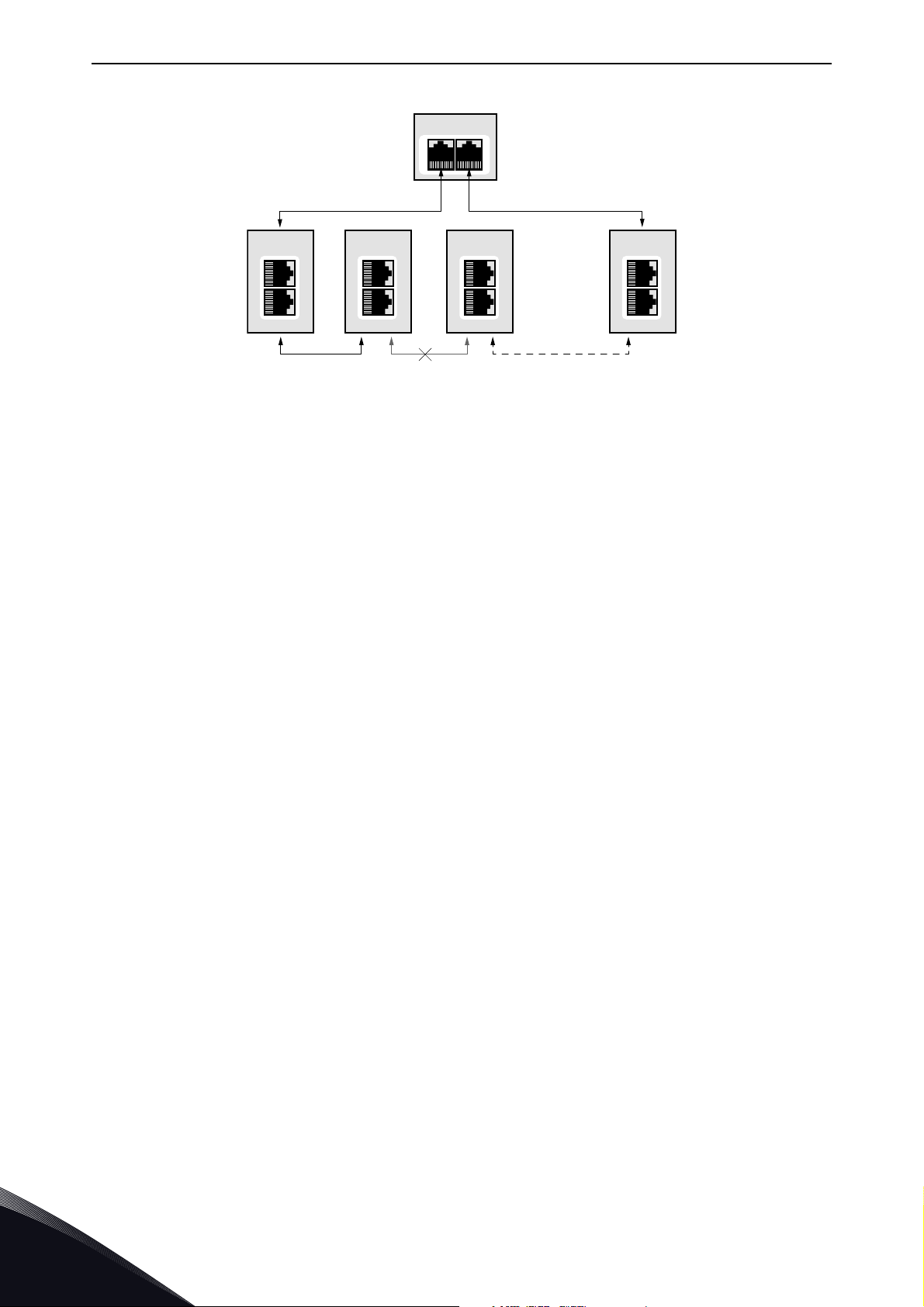
In the example below, the Ethernet communication will be interrupted to device number three and
other devices after that when the link is broken. The Fieldbus communication maybe faulted when
the link is broken, but when the switch enables the second designated port, the connections can be
reopened. In the RSTP protocol, it generally takes few seconds before the second designated port
will be activated. This depends on the BPDU exchange cycle, which is 2 seconds by default.
Figure 8. Ring topology: Error in network
NOTE! The OPTE9 switch itself does not implement the RSTP protocol, so the network will always
need a third party switch to support it.
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
4
Page 20
vacon • 18 Layout and connections
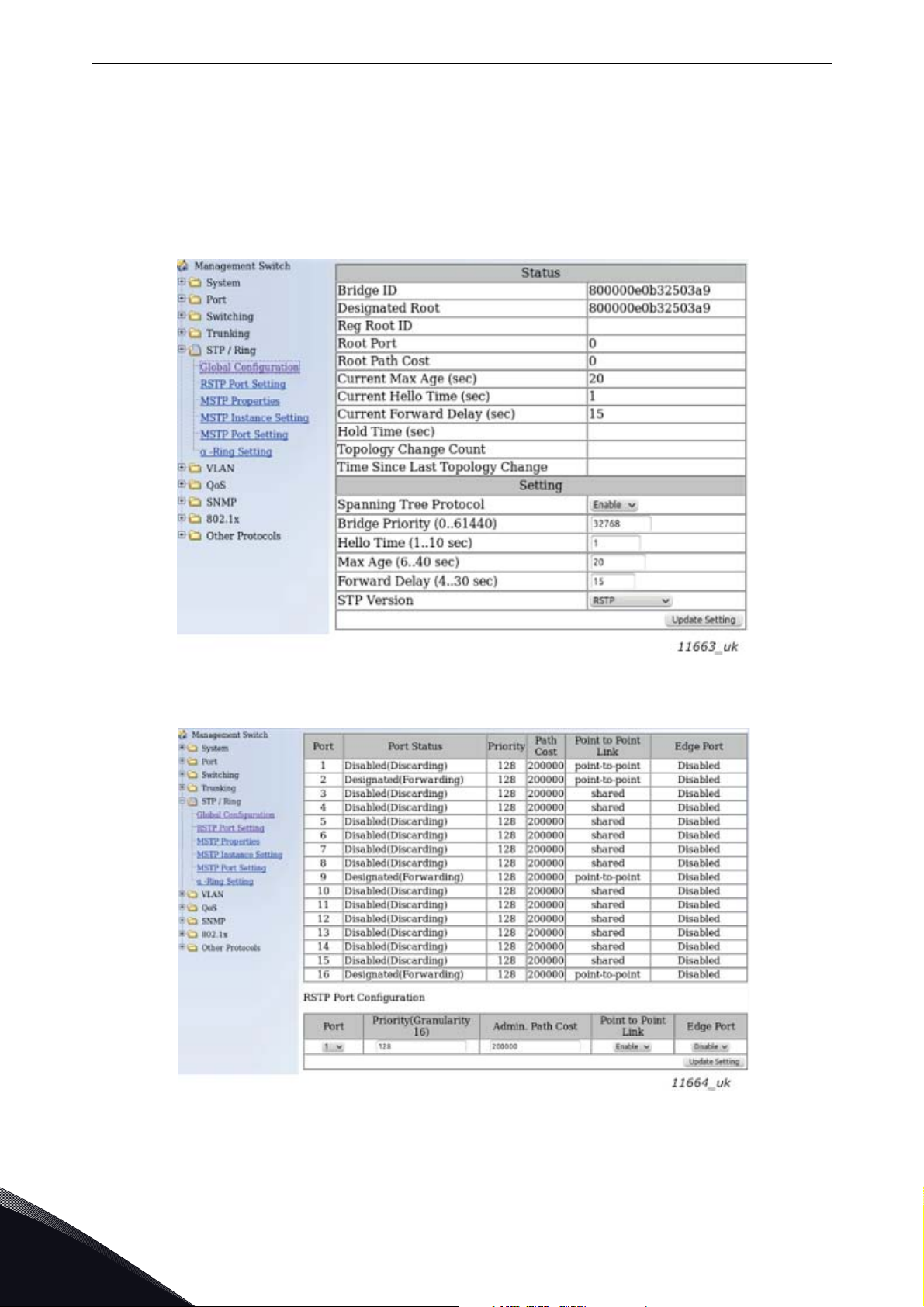
Configuration example
The screenshots below (Figure 9, Figure 10) show one example of configuring the RSTP in the switch
(in this case an EtherWAN switch). Port two is the designated port and port one is the alternative
port. The PLC was connected to port nine (the laptop taking the screenshots was in port 16). When
configuring your switch, refer to the switch manufacturer's manual.
Figure 9. EtherWAN Switch RSTP Configuration example
Figure 10. EtherWAN Switch RSTP Configuration example - Port Settings
4
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 21
Layout and connections vacon • 19
4.4.3.2 Media Redundancy Protocol (MRP)
The MRP is designed to react deterministically on a cable failure. This makes it suitable to be used
in process automation. One of the nodes in the network has the role of Media Redundancy Master
(MRM), which observes and controls the ring topology in order to react to network faults. Usually
this device is PLC or network switch.
The other nodes in the network are called Media Redundancy Clients (MRC), and they react on
received configuration frames from the MRM and can detect link changes on its ring ports. OPTE9
supports only MRC functionality.
The MRM and MRC have two ring ports, which take one of the following states:
•DISABLED
- All frames are dropped
•BLOCKING
- All frames are dropped, except the following frames:
a) MRP frames (e.g. MRP_test and MRP_TopologyChange)
b) Frames specified to pass ports in "Discarding" state, e.g. LLDP frames
•FORWARDING
- All frames are forwarded according to normal behaviour
The MRM sends MRP_Test frames in a configured time period to monitor the state of the ring
topology. If the MRM receives its own MRP_Test frames (network is closed), one of the ring ports is
set to FORWARDING state and the other to BLOCKED state (see Figure 11). If the MRP_Test frames
are not received by the MRM (network is open), it sets both of its ring ports to FORWARDING state
(see Figure 12).
The following figure shows an example of a MRP network, where the PLC acts as a MRM.
PLC
MRM
Forwarding Blocked
DRIVE
MRC
OPTE9-1
DRIVE
MRC
OPTE9-2 OPTE9-3
DRIVE
MRC
...
DRIVE
MRC
OPTE9-8
11713_uk
Figure 11. MRP ring: Closed network
In the example below, the Ethernet communication will be interrupted to device number three and
other devices after that when the link is broken. MRP can be configured to send test frames with
different time periods, depending on the maximum allowed recovery time for the network. When
using PROFINET IO, the recovery time is defined as 200 ms. Therefore, if the recovery time if less
than the watchdog time, the fieldbus connection is not interrupted by the cable failure.
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
4
Page 22
vacon • 20 Layout and connections
PLC
MRM
Forwarding Forwarding
DRIVE
MRC
OPTE9-1
DRIVE
MRC
OPTE9-2 OPTE9-3
DRIVE
MRC
...
DRIVE
MRC
OPTE9-8
11714_uk
Figure 12. MRP ring: Error in network
NOTE: The OPTE9 can use MRP (as MRC) only when PROFINET IO is the selected protocol. When
using MRP in a PROFINET IO network, it is suggested to set the watchdog time of each device in the
ring to 200ms, as this is the time that a network of 50 nodes is guaranteed to recover. MRP is
available in OPTE9 version V006 or later.
4.5 ACD (Address Conflict Detection)
The OPTE9 option board implements ACD algorithm (IETF RFC 5227). The implementation includes
requirements from the EtherNet/IP protocol.
The ACD algorithm tries to actively detect if the IP address configured to this device is been used by
another device in the same network. To accomplish this, ACD sends four ARP request packets when
the device's Ethernet interface goes up or when its IP address changes. ACD prevents the use of the
Ethernet interface until the ARP probing finishes. This delays the startup of fieldbus protocols about
one second. During the delay or after it, the ACD passively checks incoming ARP messages for use
of the device's IP address. If another device with the same IP address is detected, the ACD will try
to defend its IP address with a single ARP message. If the other device with the same IP address
also supports ACD, it should stop using the address. If not, the ACD will close the Ethernet
connection and indicate the situation with LEDs. This is done according the "DefendWithPolicyB".
Other policies are not supported. If the fieldbus protocol has been active, a fieldbus fault may be
activated (depends on the fieldbus and drive application configuration).
4
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 23
Installation vacon • 21
5. INSTALLATION
The VACON® OPTE9 Dual Port Ethernet option board can be used with the following VACON® AC
drives.
Table 8. Supported drives and slots
Drive Slots
VACON® NXP D, E NXP00002V188 V001
VACON® NXS D, E NXS00002V179 V001
VACON® 100 and 100 X D, E FW0072V018 V003
VACON® 100 FLOW D, E FW0159V012 V003
VACON® 20 - FW0107V011 V002
VACON® 20 X and CP - FW0117V007 V002
VACON® 100 Support
The VACON® 100 drives are supported from the OPTE9 firmware version V003. The process data in
VACON® 100 is 32 bit. The 32-bit process data support is planned for later firmware release. Only
16-bit process data is supported.
EtherNet/IP support
From drive SW
version on
From OPTE9 SW
version on
EtherNet/IP protocol was added to OPTE9 firmware version V004. The table below shows required
minimum drive firmware version .
Table 9. Required minimum drive firmware versions
Drive From drive SW version on
VACON® NXP NXP00002V191
VACON® NXS NXS00002V181
VACON® 100 and 100 X FW0072V018
VACON® 100 FLOW FW0159V012
VACON® 20 FW0107V012
VACON® 20 X and CP FW0117V009
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
5
Page 24
vacon • 22 Installation
13006.emf
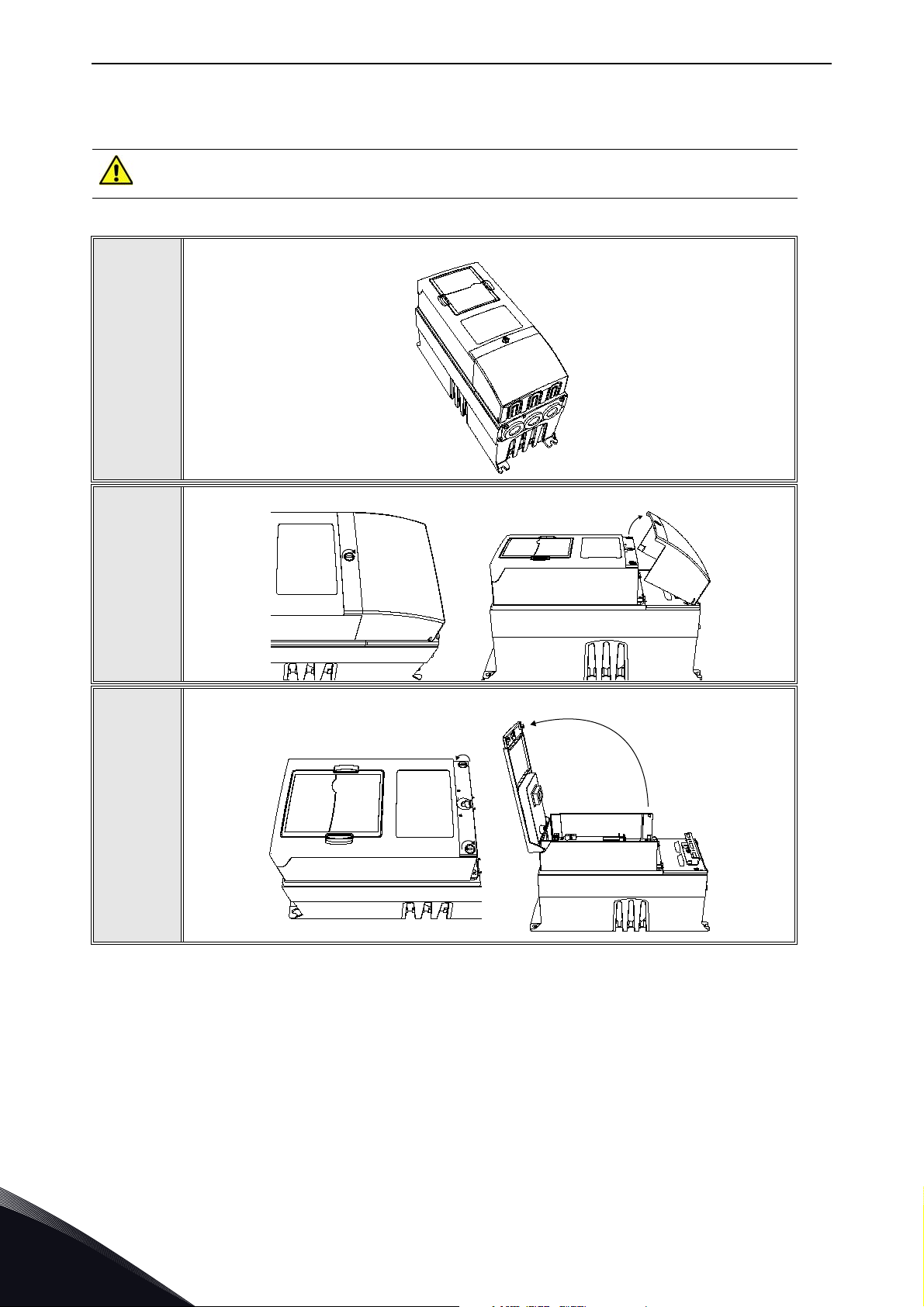
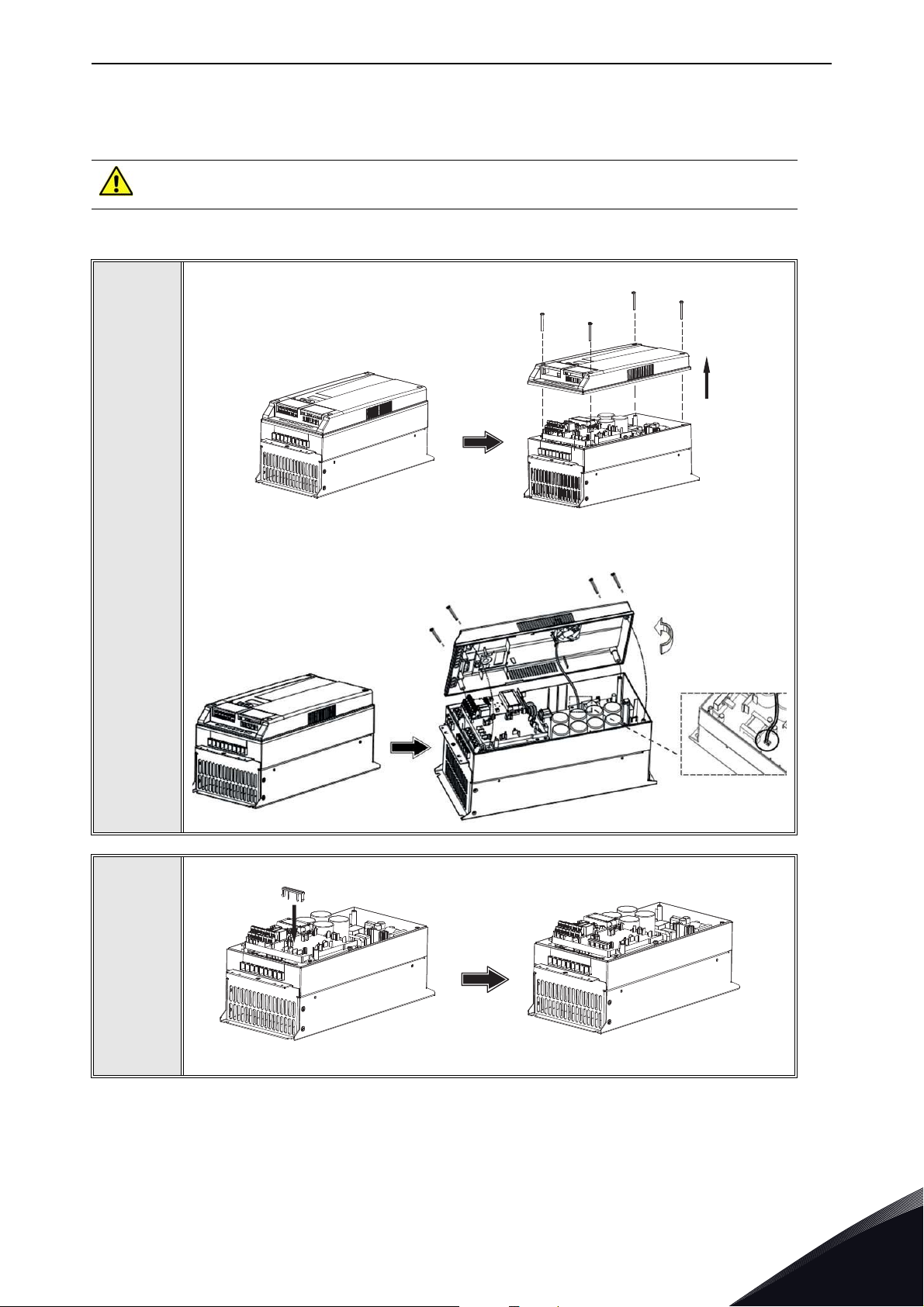
5.1 Installation in VACON® NX
Make sure that the AC drive is switched off before an option or fieldbus board is
changed or added!
VACON® NX AC drive.
1
Remove the cable cover.
2
3
Open the cover of the control unit.
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
5
Page 25
Installation vacon • 23
Install the OPTE9 Option Board in slot D or E on the control board of the AC drive.
Make sure that the grounding plate fits tightly in the clamp.
4
Make a sufficiently wide opening for your cable by cutting the grid as wide as
necessary.
5
6
Close the cover of the control unit and the cable cover.
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
5
Page 26

vacon • 24 Installation
11649_00
11556A_00
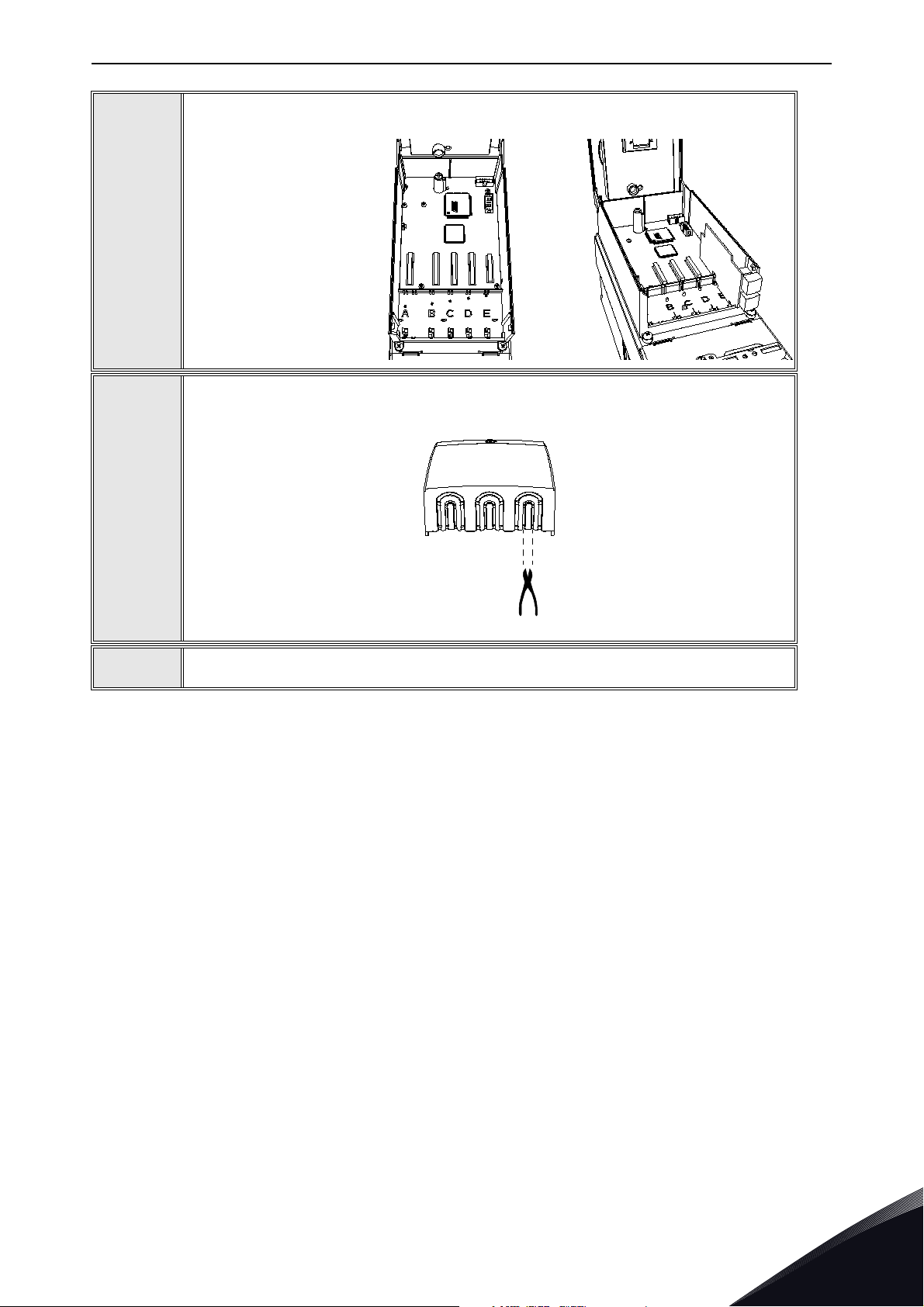
5.2 Installation in VACON® 20
5.2.1 Frames MI1, MI2, MI3
Remove the cable connector lid from the
AC drive.
1
2
11555A_00
Select a correct grounding plate and attach it to the
option board mounting frame. The grounding plate is
marked with the supported enclosure size.
Attach an option board mounting frame to
the AC drive.
5
3
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 27
Installation vacon • 25
Connect the flat cable from the option board mounting frame to V20.
4
11557A_00
If a cable strain relief is required, attach the parts as shown in the figure.
5
11558A_00
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
5
Page 28
vacon • 26 Installation
11559A_00
11560A_00
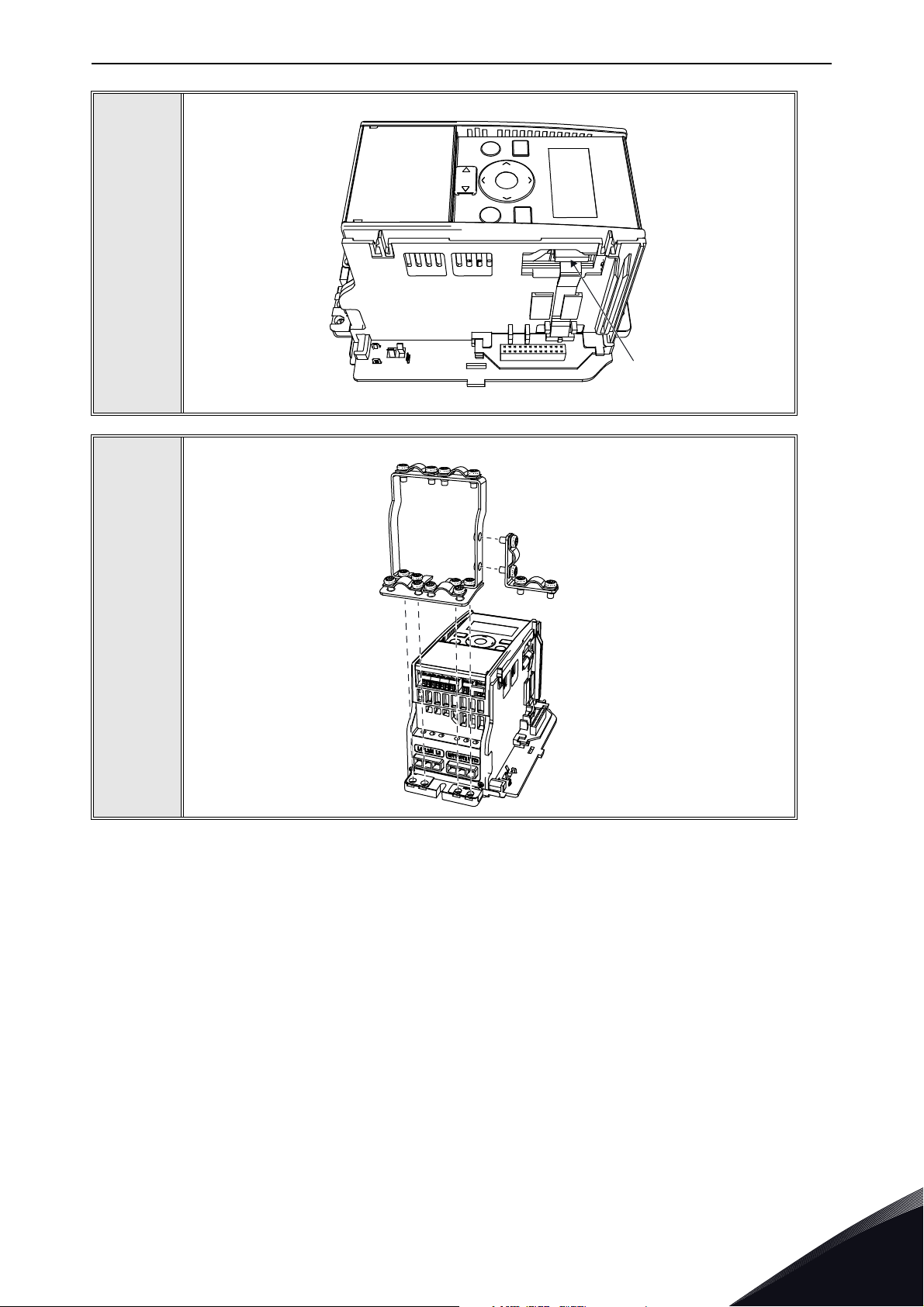
Install the option board to the option board
holder. Make sure that the option board is
securely fastened.
6
7
Cut free a sufficiently wide opening for the
option board connector.
11650_00
Attach the option board cover to V20. Attach
the strain relief cable clamp with screws if
needed.
5
8
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 29
Installation vacon • 27
13006.emf
11562_00
11563_00
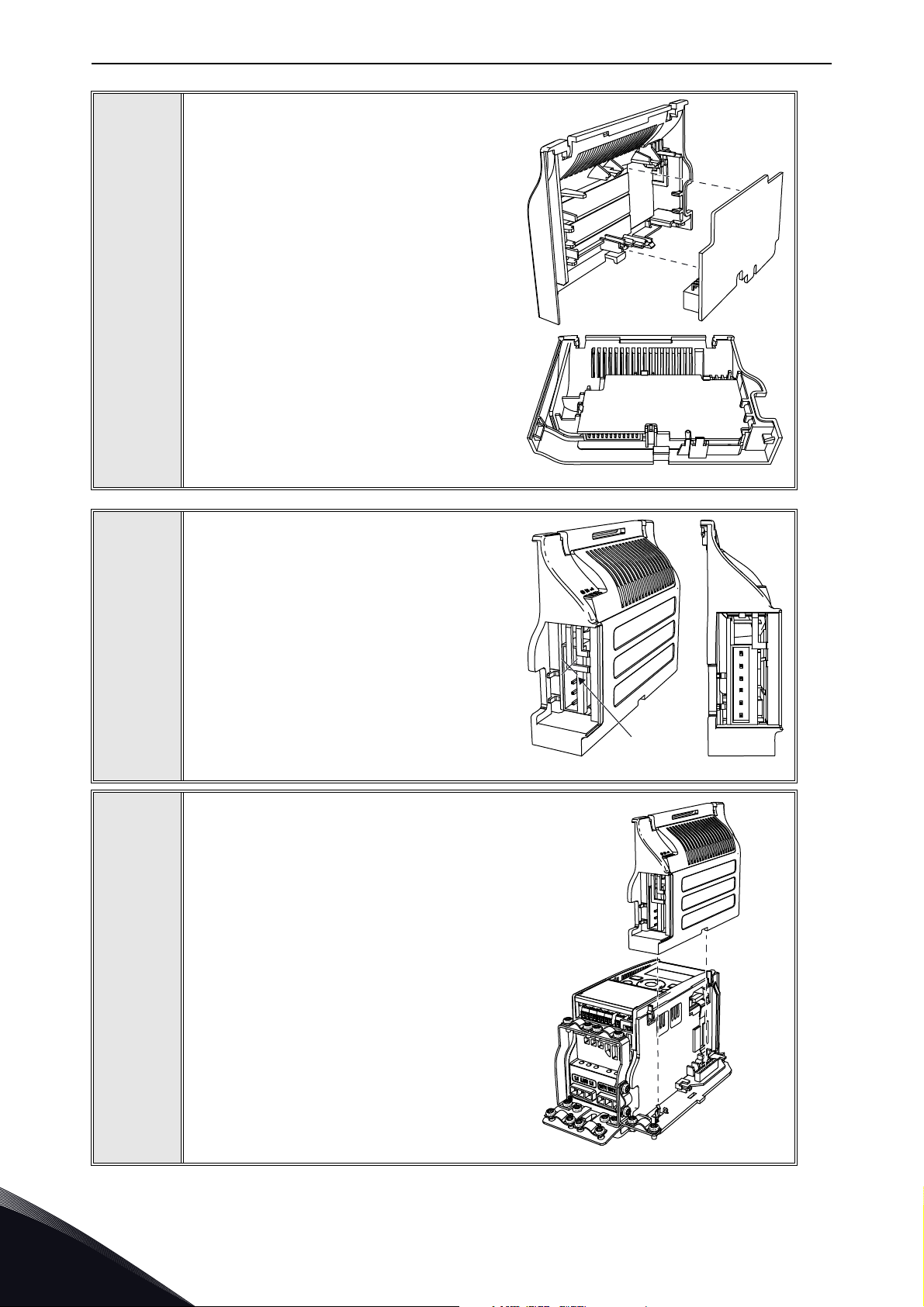
5.2.2 Frames MI4, MI5
Make sure power is disconnected before opening the V20 cover.
1a: For MI4: Open the cover.
1
2
11561_00
1b: For MI5: Open the cover and release the fan connector.
Attach the option board support.
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
5
Page 30

vacon • 28 Installation
11564_00
11565_00
Connect the flex cable to option board connector PCB.
3
Connect the option board to connector PCB.
4
5
Attach the option board with connector PCB to V20 and connect the flex cable.
11566_00
5
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 31

Installation vacon • 29
MI 04
MI 05
11567_00
11568_00
Attach a suitable grounding plate to V20. The grounding plate is marked with
supported enclosure size.
6
Assemble a clamp on top of the grounding plate on both sides of the option board.
7
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
5
Page 32

vacon • 30 Installation
11569_00
11570_00
8a: For MI4: Close the cover.
8
8b: For MI5: Remount the fan connector and close the cover.
5
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 33

Installation vacon • 31
13006.emf
11643_00
13006.emf
5.3 Installation in VACON® 20 X and 20 CP
Do not add or replace option boards or fieldbus boards on an AC
drive with the power switched on. This may damage the boards.
Open the cover of the drive.
1
MU3 example
The relay outputs and other I/O-terminals may have a dangerous control voltage
present even when the drive is disconnected from mains.
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
5
Page 34

vacon • 32 Installation
7089_00
7090_00
7091_007091_00
Remove the option slot cover.
2
Install the option board into the slot as shown in the figure.
3
4
Mount the option slot cover. Remove the plastic opening for the option board
terminals.
5
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 35

Installation vacon • 33
M4x55
9174.emf
DANGER
5.4 Installation in VACON® 100
Open the cover of the AC drive.
1
The relay outputs and other I/O-terminals may have a dangerous control voltage
present even when VACON® 100 is disconnected from mains.
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
5
Page 36

vacon • 34 Installation
3023.emf
DE
3024.emf
Open the inner cover to reveal the option board slots (C,D,E).
2
3
Install the fieldbus board into slot D or E.
NOTE: Incompatible boards cannot be installed on VACON® 100. Compatible
boards have a slot coding
that enable the placing of the board.
5
4
Then connect the cable to its appropriate OPTEC EtherCAT option board RJ-45
connector.
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 37

Installation vacon • 35
9202.emf
Fieldbus
cables
Unless already done for the other control cables,
cut free the opening on the AC drive cover for the
fieldbus cable (protection class IP21).
NOTE: Cut the opening on the same side you
have installed the board in!
5
Remount the AC drive cover and run the cable as
shown in picture.
NOTE: When planning the cable runs, remember
to keep the distance between the fieldbus cable
and the motor cable at a minimum of 30 cm. It is
recommended to route the option board cables
away from the power cables as shown in the picture.
6
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
5
Page 38

vacon • 36 Installation
11638_00
5.5 installation in VACON® 100 X
Open the cover of the AC drive.
1
5
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 39

Installation vacon • 37
11639_00
To get access to the option board slots, remove the screws and open the cover of
the control unit.
2
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
5
Page 40

vacon • 38 Installation
11641_00
Install the option board into the correct slot, D or E.
DE
3
4
5
6
11640_00
Close the option board cover.
Remove the cable entry plate. If you
installed the option board in the slot
D, use the cable entry plate on the
right side. If you installed the option
board in the slot E, use the cable
entry plate on the left side.
NOTE! The cable entry plate at the
bottom of the drive is used only for
mains and motor cables.
Open the necessary holes in the cable entry plate. Do not open the other holes.
See the VACON® 100X Installation Manual for the dimensions of the holes.
5
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 41

Installation vacon • 39
11642_00
Attach a cable gland on the hole in the
cable entry plate. Pull the Ethernet cable
through the hole.
NOTE! The Ethernet cable must go
through the correct cable entry plate to
avoid going near the motor cable.
7
8
9
5.6 PC Tools
Before connecting the OPTE9 option board to the network, its IP addresses must be set according
to the network. By default, the option board uses a DHCP server to get an IP address. If your network
does not have a DHCP server, you need to set an IP address manually. This can be accomplished
with the PC tools described in this chapter or with the drive's keypad (see Chapter 6).
For more information about IP addresses or a DHCP server, contact your network administrator.
5.6.1 PC tool support
This table describes what PC tools are supported in each drive type. The connection type “serial”
means a direct connection to the drive. The connection type “Ethernet” means a connection via the
OPTE9 Ethernet port.
Put the cable entry plate back.
Close the cover of the AC drive.
Table 10. The supported PC tools with different drives
V100 NX V20
Too l Serial Ethernet Serial Ethernet Serial Ethernet
VACON® Loaderxxx
VACON® Live x x x
NCIPConfigxxx
NCDrive x
NCLoad Not supported with OPTE9 Dual Port Ethernet
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
5
Page 42

vacon • 40 Installation
5.6.2 Updating the OPTE9 option board firmware with VACON® Loader
The VACON® Loader can be downloaded from http://drives.danfoss.com website. It has been
bundled with the VACON® Live software package.
To update the option board firmware, follow the steps below.
NOTE! With VACON® 20, the baud rate 9600 must be used. With VACON® 20 X and VACON® 20 CP,
the following baud rates are supported: 9600, 19200, 38400 or 57600.
Step 1. Connect your PC to the controller by using the USB/RS485 cable.
Then select the firmware file which you want to load to the option board and double click it. This will
start the VACON® Loader software. You can also start the program from the Windows Start menu.
In this case, select the firmware file using the "Browse"-button (see Figure 13).
5
Figure 13. VACON® Loader: File selection
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 43

Installation vacon • 41
Step 2. Press 'next' and wait for the loader to find the network drives.
Then select a drive from the list and press 'Connect to Selected'. See Figure 14.
Figure 14. VACON® Loader: Connecting to drive
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
5
Page 44

vacon • 42 Installation
Step 3. Select the modules to be updated, press 'next' and wait until the operation is finished. See
Figure 15 and Figure 16.
Figure 15. Option board slot selection
5
Figure 16. VACON® Loader: Firmware loading
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 45

Installation vacon • 43
Figure 17. VACON® Loader: Loading is finished
5.6.3 PC Tools for NX / NCIPConfig
The VACON® OPTE9 Dual Port Ethernet option board can be configured with the NCIPConfig tool.
Before the option board can be used, a valid IP address must be set. By default, the OPTE9 uses a
DHCP server. If your network does not have a DHCP server, you will need to set an IP address
manually and change the "IP Mode" to "static".
For more information about IP addresses or a DHCP server, contact your network administrator.
To install the NCIPConfig tool, start the installation program from the CD or download it from http:/
/drives.danfoss.com website. After starting the installation program, follow the on-screen
instructions.
Once the program is installed successfully, you can launch it by selecting it in the Windows Start
menu. Follow these instructions to set the IP addresses. Select Help --> Manual if you want more
information about the software features.
Step 1. Connect your PC to the Ethernet network with an Ethernet cable.
You can also connect the PC directly to the device using a crossover cable. This option may be
needed if your PC does not support the Automatic crossover function.
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
5
Page 46

vacon • 44 Installation
Step 2. Perform network nodes scanning.
Select Configuration --> Scan (Figure 18) and wait until the devices connected to the bus in the tree
structure are displayed on the left side of the screen.
Figure 18. Network nodes scanning
NOTE! The NCIPConfig uses broadcast messages for scanning devices. Some network switches
might block the broadcast messages. In this case, each network node must be scanned separately.
Step 3. Set the option board settings.
To change the board name, select the cell in the column 'Node' and enter the name of the node. To
change the node IP settings, select the cell in the right column and enter the value according to the
network IP settings. The program will report conflicts with a red color in table cells. To change the
IP Mode, click the cell and select the desired mode from the dropdown list (Figure 19).
To commit the changes, mark the checkbox and select Configuration->Configure- from the menu.
5
Figure 19. Change the option board settings
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 47

Installation vacon • 45
Step 4. Change the protocol settings.
To change the currently active protocol, select the setting from the tree structure. A dialog box
opens. Select the desired protocol from the dropdown list (Figure 20). After clicking "ok" the setting
will be activated.
The rest of the settings can be changed similarly, but values are edited in the tree (Figure 21). See
Chapter 6 for more information about the settings.
Figure 20. Change the currently active protocol value
Figure 21. Change the communication timeout value
5.6.4 PC Tools for NX / NCDrive
You can configure the drive parameters with the NCDrive. Some of the OPTE9 parameters can be
configured with the NCDrive. However, it is recommended to use the NCIPConfig tool for the OPTE9
Dual Port Ethernet configuration in the NX drives.
You need to have a PC with an Ethernet connection and the NCDrive tool installed. To install the
NCDrive, start the installation program from the CD or download it from http://drives.danfoss.com
website. After starting the installation program, follow the on-screen instructions.
Once the program is installed successfully, you can launch it by selecting it in the Windows Start
menu. Select Help --> Contents if you want more information about the software features.
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
5
Page 48

vacon • 46 Installation
Before using the NCDrive, you need to configure the option board IP settings with NCIPConfig. If the
option board does not have valid IP settings you will not be able to connect with the NCDrive.
Step 1. Connect your PC to the Ethernet network with an Ethernet cable.
You can also connect the PC directly to the device using a crossover cable. This option may be
needed if your PC does not support Automatic crossover function.
Step 2. In order to connect to the drive, you need to select the active drive first. Press the "Drive
Select" button (see Figure 22) to scan the network drives.
Figure 22. NC Drive: “Drive Select”
Step 3. In the "Select the active drive" dialog (see Figure 23), select the drive you want to connect to.
Then press the "Set Active Drive" button. Now you can close the dialog.
The IP information presented in the dialog comes from the option board, other information comes
from the drive.
5
Figure 23. NC Drive: Active drive selection
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 49

Installation vacon • 47
Step 4. Press the "ON-LINE" button. The NCDrive will connect to the drive and start loading
parameter information. This will take a few minutes. See Figure 24 and Figure 25.
Figure 24. NC Drive: Going online
Figure 25. Loading information from the drive
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
5
Page 50

vacon • 48 Installation
Step 5. To change the option board settings, navigate to the "M7Expander boards" menu and select
the slot that the OPTE9 is connected to. You can change the IP address, network mask and default
gate address in the menu item "G 7.x". After you have changed the IP settings, you need to change
"IP Mode" to "Fixed IP" in order to activate the settings.
For more information about these settings, see Chapter 6.1.
Figure 26. NC Drive: OPTE9 parameters
NOTE! The NCDrive software can be used with the Ethernet board in NXS, NXP and NXL drives.
NOTE! The NCDrive software is recommended to be used in LAN (Local Area Network) only.
NOTE! This feature does not work with VACON® 100 drives.
5.6.5 PC Tools for VACON
VACON® Live can be used to configure the IP settings of the OPTE9 option board. VACON® Live can
be downloaded from http://drives.danfoss.com website.
To configure the IP settings of the OPTE9 option board, follow the steps below:
NOTE! VACON
connection over the OPTE9 Ethernet port.
Step 1. Connect your PC to the Ethernet network with an Ethernet cable. You can also connect the
PC directly to the drive using a crossover cable. This option may be needed if your PC does not
support Automatic crossover function.
® 20, VACON® 20 X and VACON® 20 Cold Plate do not support VACON® Live
® 100 and VACON® 20 / VACON® Live
5
You can also connect to the VACON
same for both connections.
NOTE! You cannot use VACON
address. If you change the IP settings of the option board when connected through it, VACON® Live
connection will be lost.
® 100 drive by its serial port. In any case the steps below are the
® Live via the option board if the option board does not have a valid IP
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 51

Installation vacon • 49
Step 2. Start VACON® Live. When the program starts and it asks "Select startup mode", select
"Online". The program will scan your network for compatible drives. When found, they will be added
to the list. Select the drive that the OPTE9 option board is connected to and press "Connect to
select".
Figure 27. VACON® Live: The ”Startup mode” dialogue box
Figure 28. VACON® Live: The “Select devices” dialogue box
NOTE! The first column is the drive's name, but the information about IP and MAC addresses come
from the option board (if the device on the list is an option board).
NOTE! Some switches block broadcast messages. In this case, each network node must be scanned
separately.
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
5
Page 52

vacon • 50 Installation
Step 3. To change the IP settings, navigate to the "5. I/O and Hardware" menu and select the slot
that the OPTE9 is connected to. You can change the IP address, network mask and default gate
address in the menu item "5.x.3 Parameters". After you have changed the IP settings, you need to
change "IP Mode" to "Fixed IP" in order to activate the settings. For more information about these
settings, see Chapter 6.1.
Figure 29. VACON® Live: OPTE9 IP Address Mode
5
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 53

Commissioning vacon • 51
6. COMMISSIONING
The VACON® OPTE9 Dual Port Ethernet option board is commissioned with the control keypad by
giving values to appropriate parameters in the option board menu (or via PC tools, see Chapter 5.6
"PC Tools").
Keypad commissioning procedures and location of parameters differ a little with different drive
types:
• In the NXP/NXS option board, parameters are located under the menu M5 (Expander board
menu).
• In the VACON® 100 option board, parameters are located under the menu M7 (I/O and Hard-
ware).
6.1 Option board menu
The control keypad makes it possible for the user to see which expander boards are connected to
the control board and to reach and edit the parameters associated with the expander board.
6.1.1 Option board parameters
The OPTE9 board parameters are listed in the table below.
Table 11. Parameters menu structure
# Name Default Range Description
1
2IP Mode* DHCP
3 IP Part 1* 192 1…223 IP Address Part 1
4 IP Part 2* 168 0…255 IP Address Part 2
5 IP Part 3* 0 0…255 IP Address Part 3
6 IP Part 4* 10 0…255 IP Address Part 4
7 Subnet mask P1 255 0…255 Subnet Mask Part 1
8 Subnet mask P2 255 0…255 Subnet Mask Part 2
9 Subnet mask P3 255 0…255 Subnet Mask Part 3
10 Subnet mask P4 255 0…255 Subnet Mask Part 4
Comm.
Protocol*
Modbus
Modbus (1),
Profinet IO (2),
EtherNet/IP (3)
Fixed IP (1),
DHCP (2)
Active protocol
IP mode. When in DHCP
mode, the IP address cannot
be changed manually.
11 Default GW P1 192 0…255 Default Gateway Part 1
12 Default GW P2 168 0…255 Default Gateway Part 2
13 Default GW P3 0 0…255 Default Gateway Part 3
14 Default GW P4 1 0…255 Default Gateway Part 4
15 Comm. Timeout 10 s 0…65535 s
16
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
PNIO Name Of
Station
"" 1...240 char
Communication timeout in
seconds
For Profinet IO only. Only
visible in VACON® 100
drives.
6
Page 54

vacon • 52 Commissioning
# Name Default Range Description
"20" (1),
"21" (2),
17
18
EIP Output
Instance*
EIP Input
Instance*
21
71
"23" (3),
"25" (4),
"101" (5),
"111" (6),
"128" (7),
"131" (8)
"151" (9),
"161" (10)
"70" (1),
"71" (2),
"73" (3),
"75" (4),
"107" (5),
"117" (6),
"127" (7),
"137" (8)
"157" (9),
"167" (10)
EtherNet/IP output assembly instance.
Shows the active output
instance. The instance is
selected during the IO connection open request.
EtherNet/IP input assembly
instance.
Shows the active input
instance. The instance is
selected during the IO connection open request.
19
20 Mode* Normal
21
* These parameters are locked when either PROFINET IO connection, EtherNet/IP implicit connection or a
Modbus connection is established to write process data (i.e. when fieldbus can be used to control the process).
EIP Product
Code Offset
Modbus Unit
Identifier*
00…99
Normal (1),
NX Mode (2),
V100 Mode (3)
255 1…247, 255
Only in VACON® 100. After
this setting is changed,
drive must be restarted.
Modbus Unit Identifier. Used
only with Modbus UDP.
6
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 55

Commissioning vacon • 53
6.1.2 Option board monitoring values
The monitor menu shows the currently active IP settings. For example, these values will show '0'
when a DHCP server is trying to get an IP address. After the address is received, these values are
updated.
Table 12. Monitor menu structure
# Name Range Description
1IP Part 1
2 IP Part 2 0…255 Current IP Address Part 2
3 IP Part 3 0…255 Current IP Address Part 3
4 IP Part 2 0…255 Current IP Address Part 4
5 Subnet mask P1 0…255 Current Subnet Mask Part 1
6 Subnet mask P2 0…255 Current Subnet Mask Part 2
7 Subnet mask P3 0…255 Current Subnet Mask Part 3
8 Subnet mask P4 0…255 Current Subnet Mask Part 4
9 Default GW P1 0…223 Current Default Gateway Part 1
10 Default GW P2 0…255 Current Default Gateway Part 2
11 Default GW P1 0…255 Current Default Gateway Part 3
12 Default GW P4 0…255 Current Default Gateway Part 4
13 Fieldbus protocol status
14 Communication status 0.0…64.999
1…223
Initializing (1),
Stopped (2),
Operational (3),
Faulted (4)
Current IP Address Part 1
0-64 Number of messages with errors
0-999 Number of messages without
communication errors
15 Drive control word - Control word in drive format (hex)
16 Drive status word - Status word in drive format (hex)
17 Protocol control word - Control word in protocol format (hex)
18 Protocol status word - Status word in protocol format (hex)
19 EIP Product Code -
20 MAC Address -
6.1.3 Communication protocol
The OPTE9 option board comes with several fieldbus protocols. The user can select the one used in
their network from the list. Only one protocol can be active at a time.
Currently used EtherNet/IP Product
Code
Used device MAC address. Available in
NXP, NXS and VACON® 100 drives.
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
6
Page 56

vacon • 54 Commissioning
6.1.4 IP Mode
The IP mode determines how the option board IP settings are set. If a DHCP server is selected, then
the option board will try to retrieve its IP settings from the DHCP server connected to the local
network. If the option board is unable to retrieve its IP settings, it will set a link-local address as the
current IP address after about one minute (for example 169.x.x.x).
If "Fixed IP" is set as IP mode, the settings IP Part 1-4, Subnet Part 1-4 and Default gateway 1-4 are
used.
6.1.5 IP Address
IP is divided into 4 parts. (Part = Octet). Changing these values does not have any effect if the current
IP mode is "DHCP". The value will become active when the mode is changed to "fixed IP". When
these values are changed and the mode is "fixed IP", the changes are taken into use immediately.
6.1.6 Communication timeout
It defines how much time can pass from the last received message from the Master Device before
a fieldbus fault is generated. The functionality of this value is protocol-specific.
A fieldbus fault is also generated if the Ethernet link is down for over 60 seconds after the device
startup. The Ethernet link status is being checked until the fieldbus communication is activated.
After that the active fieldbus protocol controls the activation of the fieldbus fault.
The functionality of this value is protocol-specific.
6.1.6.1
For Modbus, this value defines a time in which a message must be received (from Client in Modbus
TCP/UDP) before a fieldbus fault is generated. If timeout is set to zero, no fault is created.
See Chapter 7.4.
6.1.6.2
For these protocols, this value is considered as an additional timeout which works on top the
timeout mechanism of the protocol. When a connection loss is noticed, a fault activation is started.
If communication timeout value is zero, the fault is activated immediately, otherwise the fault
activates after a specified time. If the connection is reopened before the specified time has elapsed,
no fault is created.
See Chapter 8.5 "PROFINET IO communications and connection timeout" for more details on how a
timeout is created in OPTE9 while using PROFINET IO protocol.
See Chapter 9.1.6 "EtherNet/IP communication and connection timeout" for more details for more
details on how a timeout is created in OPTE9 while using EtherNet/IP protocol.
6.1.7 Profinet IO - Name of Station
Modbus
Profinet IO and EtherNet/IP
6
The Profinet IO "Name of Station" parameter can be set via VACON® Live or NCIPConfig. Other
possibility is to set this name by writing it via Ethernet with the DCP protocol. In case of VACON®
100 drives, the last 18 characters of the Name of Station can be read but not written from the panel.
The name is empty if no name is set, or if name is set as "temporary" by network device.
NOTE! In case of VACON® 20, VACON® 20 X and VACON® 20 CP, the “Name of Station” must be
defined with NCIPConfig tool or by writing the name from the PLC.
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 57

Commissioning vacon • 55
6.1.8 EIP Input and Output instance
These parameters will show what instances are being used now. The instances actually used are
taken from the IO connection open request. So, although these values are parameters they act more
like monitoring values.
6.1.9 EIP Product code offset
This value can be used to differentiate drives for the PLC program. For example, if one drive is
running a different application (with different parameters) than other drives, this offset in the
product code will enable the PLC to use a different EDS file to read those parameters from this drive.
Remember that if you change this value, you need also to change the EDS file used or change the
product code value in your EDS file.
6.1.10 Mode
The "Mode"-parameter is available only when the OPTE9 has been installed to the VACON® 100
drive. When the mode is changed, the OPTE9 fieldbus protocols will emulate old C-series option
boards or VACON® 100 internal implementations.
Table 13. Mode values
Mode value Description
Normal Option board will identify itself as OPTE9 (depends on fieldbus protocol)
NX Mode
V100 Mode Option board will identify itself as VACON® 100 drive.
6.1.11 MAC Address
This value shows the OPTE9 device MAC address. The format differs between used VACON® AC
drive. In VACON® 100 the format is 00:11:22:33:44:55 and in VACON® NX 001122334455. This value
is not visible in VACON® 20 drives.
Example for VACON® 100: 00:21:99:1a:00:24
Example for VACON® NX: 0021991a0024
6.1.12 Modbus Unit Identifier
This value is used to select Modbus unit identifier / slave address. When using Modbus TCP the
value 255 must be used, and this field is ignored as the IP address is used to access the correct
device. When using Modbus UDP the values and their significance is explained in table below. Values
from 1 to 247 and 255 can be set to OPTE9.
Option board will identify itself as old C-series counterpart and will emu-
late selected features.
Table 14. Modbus Unit Identifier field description when using Modbus UDP
# Unit identifier Description
0 Broadcast Broadcast address, messages are accepted by all devices
1...247 Slave address Messages with this unit identifier and broadcast (0) are accepted
255 Non-significant Messages with all unit identifiers are accepted (setting is ignored)
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
6
Page 58

vacon • 56 Commissioning
The value 0 can be used to control several devices with a broadcast message, e.g. to command all
devices to stop at the same time. This feature will also work if all devices have the unit identifier
value 255.
6.2 Communication mode
The OPTE9 option board shall support multiple communication modes to AC drive in future release.
This will, among other features, enable transmitting and receiving 16 process data items at 1 ms
interval.
6
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 59

Modbus TCP / Modbus UDP vacon • 57
11608_uk
Master´s
message
Slave
response
Start
Address
Function
Data
CRC
End
Start
Address
Function
Data
CRC
End
7. M ODBUS TCP / MODBUS UDP
Modbus is a communication protocol developed by Modicon systems. In simple terms, it is a way of
sending information between electronic devices. The device requesting the information is called the
Modbus Master (or the Client in Modbus TCP/UDP) and the devices supplying information are
Modbus Slaves (in Modbus TCP/UDP servers). In a standard Modbus network, there is one Master
and up to 247 Slaves, each with a unique Slave Address from 1 to 247. The Master can also write
information to the Slaves. Modbus is typically used to transmit signals from instrumentation and
control devices back to the main controller or data gathering system.
The Modbus communication interface is built around messages. The format of these Modbus
messages is independent of the type of physical interface used. The same protocol can be used
regardless of the connection type. Because of this, Modbus gives the possibility to easily upgrade
the hardware structure of an industrial network, without the need for large changes in the software.
A device can also communicate with several Modbus nodes at once, even if they are connected with
different interface types, without the need to use a different protocol for every connection.
Figure 30. Basic structure of Modbus frame
On simple interfaces like RS485, the Modbus messages are sent in plain form over the network. In
this case, the network is dedicated to Modbus. When using more versatile network systems like
TCP/IP over Ethernet, the Modbus messages are embedded in packets with the format necessary
for the physical interface. In that case Modbus and other types of connections can co-exist at the
same physical interface at the same time. Although the main Modbus message structure is peerto-peer, Modbus is able to function on both point-to-point and multidrop networks.
Each Modbus message has the same structure. Four basic elements are present in each message.
The sequence of these elements is the same for all messages, to make it easy to parse the content
of the Modbus message. A conversation is always started by a master in the Modbus network. A
Modbus master sends a message and depending of the contents of the message a slave takes action
and responds to it. There can be more than one master in a Modbus network. Addressing in the
message header is used to define which device should respond to a message. All other nodes on the
Modbus network ignore the message if the address field does not match their own address.
If you need to contact VACON® service in problems related to Modbus TCP/UDP, send a description
of the problem together with the Drive Info File to tech.supportVDF@vacon.com. If possible, also
send a "Wireshark" log from the situation if applicable.
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
7
Page 60

vacon • 58 Modbus TCP / Modbus UDP
7.1 Modbus UDP vs TCP
In addition to TCP, the OPTE9 option board supports also UDP (from OPTE9 firmware version V006).
It is recommended that UDP is when reading and writing rapidly and repetitively (cyclically) same
data as in case of process data. TCP must be used for single operations, like service data (e.g.
reading or writing parameter values).
The key difference between UDP and TCP is that when using TCP each and every Modbus frame
needs to be acknowledged by the receiver (see the figure below). This adds extra traffic to the
network and more load to the system (PLC and drives) because software needs to keep track of sent
frames to make sure that they have reached their destination.
Modbus TCP Communication
PLC
TCP, SYN
TCP, SYN, ACK
Open
Connection
Modbus Response, TCP, ACK
Communicate
Close
Connection
TCP, ACK
Modbus Query
TCP, ACK
Modbus Query
TCP, ACK
TCP, ACK
TCP, FIN, ACK
TCP, ACK
Drive
Modbus UDP Communication
PLC Drive
Modbus Query
Modbus Response
Modbus Query
Communicate
11716_uk
7
Figure 31. Modbus TCP and UDP communication comparison
Another difference between TCP and UDP is that UDP is connectionless. TCP connections are
always opened with TCP SYN messages and closed with TCP FIN or TCP RST. With UDP, the first
packet is already a Modbus query. The OPTE9 treats IP address and port combination as a
connection. If port changes, it is considered as a new connection or as a second connection if both
stay active.
When using UDP, it is not guaranteed that the sent frame reaches is destination. PLC must keep
track of the Modbus requests by using the Modbus transaction id-field. It actually must do this also
when using TCP. If PLC does not receive response in time from drive in UDP connection, it needs to
send the query again. When using TCP, the TCP/IP stack will keep resending the request until it has
been acknowledged by the receiver (see Figure 32 ). If PLC sends new queries during this time,
some of those may not be sent to network (by TCP/IP stack) until previous sent package(s) has been
acknowledged. This can cause small packet storms when the connection is resumed between PLC
and drive (See Figure 33).
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 61

Modbus TCP / Modbus UDP vacon • 59
Modbus TCP Communication
PLC Drive
Modbus Query (1)
Modbus Response (1), TCP, ACK
TCP, ACK
Modbus Query (2)
Packet lost, no response
TCP retransmission, Modbus Query (2)
Packet lost, no response
TCP retransmission, Modbus Query (2)
Modbus Response (2), TCP, ACK
Normal communication continues
Modbus UDP Communication
PLC Drive
Modbus Query (1)
Modbus Response (1)
Modbus Query (2)
Packet lost, no response
Modbus Query (3)
Packet lost, no response
Modbus Query (4)
Modbus Response (4)
Normal communication continues
11717_uk
Figure 32. Modbus TCP and UDP communication errors comparison
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
7
Page 62

vacon • 60 Modbus TCP / Modbus UDP
Modbus TCP Communication
PLC Drive
Modbus Modbus
Modbus Query (1)
Modbus Query (2)
Modbus Query (3)
Modbus Query (4)
Modbus
Response (1,2,3)
Modbus
Response (4)
TCP
stack
TCP Modbus Query
Retransmission
Modbus Query (1)
Retransmission
Modbus Query (1,2)
Retransmission
Modbus Query (1,2,3)
Retransmission Modbus Query (1,2,3)
TCP, ACK
TCP, Modbus Query (4)
TCP, ACK
TCP, Modbus Response (1,2,3)
TCP, ACK
TCP, Modbus Response (4)
TCP, ACK
TCP
stack
Packet lost
Modbus Query
(1,2,3)
Modbus Response
(1,2,3)
Modbus Query (4)
Modbus Response
(4)
Normal communication continues
11718_uk
Figure 33. Modbus TCP retransmissions
Losing one packet is not a big issue because the same request can be sent again after timeout. In
TCP, the packages always reach their destination but if network congestion causes retransmissions,
those packages will most likely contain old data or instructions when they reach their destination.
7.2 Modbus communications
The Modbus-VACON® interface features are presented below:
• Direct control of VACON® drive (e.g. Run, Stop, Direction, Speed reference, Fault reset)
• Access to VACON® parameters
• VACON® status monitoring (e.g. Output frequency, Output current, Fault code)
7
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 63

Modbus TCP / Modbus UDP vacon • 61
7.3 Data addresses in Modbus messages
All data addresses in Modbus messages are referenced to zero. The first occurrence of a data item
is addressed as item number zero. For example:
• The coil known as 'Coil 1' in a programmable controller is addressed as 'Coil 0000' in the
data address field of a Modbus message.
• Coil 127 decimal is addressed as 'Coil 007E hex' (126 decimal).
• Holding register 40001 is addressed as register 0000 in the data address field of the message. The function code field already specifies a 'holding register' operation. Therefore the
'4XXXX' reference is implicit.
• Holding register 40108 is addressed as register 006B hex (107 decimal).
7.3.1 Modbus memory map
The VACON® variables and fault codes as well as the parameters can be read and written from
Modbus. The parameter addresses are determined in the application. Every parameter and actual
value has been given an ID number in the application. The ID numbering of the parameters as well
as the parameter ranges and steps can be found in the application manual in question. The
parameter value are given without decimals. If several parameters/actual values are read with one
message, the addresses of the parameters/actual values must be consecutive.
Table 15. Supported functions
Function
code
1 (0x01) Read coils Discrete 00000-0FFFF
2 (0x02) Read Input Discrete Discrete 10000-1FFFF
3 (0x03) Read holding registers 16bit 40000-4FFFF
4 (0x04) Read input registers 16bit 30000-3FFFF
5 (0x05) Force single coils Discrete 00000-0FFFF
6 (0x06) Write single register 16bit 40000-4FFFF
15 (0x0F) Force multiple coils Discrete 00001-0FFFF
16 (0x10) Write multiple registers 16bit 40000-4FFFF
23 (0x17) Read/Write multiple registers 16bit 40000-4FFFF
NOTE! Broadcasting is not supported in TCP.
Current terminology Access type
Address
range (hex)
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
7
Page 64

vacon • 62 Modbus TCP / Modbus UDP
7.3.2 Modbus data mapping
7.3.2.1 Coil registers
Coil registers contain binary data (Read/Write). See Table 16.
Table 16. Defined coil registers
Address Function Purpose
0001 RUN/STOP Control Word, bit 0
0002 Direction Control Word, bit 1
0003 Fault reset Control Word, bit 2
0017 Reset
0018 Reset Clears energy trip counter
Clears operation days trip
counter
7.3.2.2
The VACON® drives have trip counters for operation days and energy. These counters can be reset
to zero by writing value '1' to addresses defined in Table 17. Resetting the counters is not supported
in VACON® 20, VACON® 20 X or VACON® 20 CP.
For compatibility with OPT-CI, these registers can be cleared also by writing '1' to these coils.
Clearing resettable counters
Table 17. Clearing trip counters
Address Function Purpose
40101 Reset
40301 Reset Clears energy trip counter
Address Function Purpose
0017 Reset
0018 Reset Clears energy trip counter
Clears operation days trip
counter
Clears operation days trip
counter
7
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 65

Modbus TCP / Modbus UDP vacon • 63
7.3.2.3 Input Discrete registers
Input discrete registers contain binary data (Read). See Table 18.
Table 18. Defined Input Descrete registers
Address Function Purpose
10001 Ready Status Word, bit 0
10002 Run Status Word, bit 1
10003 Direction Status Word, bit 2
10004 Fault Status Word, bit 3
10005 Alarm Status Word, bit 4
10006 At reference Status Word, bit 5
10007 Zero speed Status Word, bit 6
10008 Flux ready Status Word, bit 7
7.3.2.4
The values can be read with function code 4. These are for compatibility with the OPT-CI option
board. They return the same values as holding register counterparts.
Address range Purpose Access type See R/W Max R/W size
101 - 105
201 - 203 Energy counter 16bit Table 31 RO 5/0
301 - 303
401 - 430 Fault history 16bit Table 34 RO 30/0
Input registers
Table 19.
1 - 5 Operation day counter 16bit Table 27 RO 5/0
Resettable operation
day counter
Resettable energy
counter
16bit Table 29
16bit Table 33
R, Write 1 to
first index to
reset
R, Write 1 to
first index to
reset
5/0
5/0
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
7
Page 66

vacon • 64 Modbus TCP / Modbus UDP
7.3.2.5 Holding registers
The values can be read with function code 3. Modbus registers are mapped to drive IDs as follows:
Table 20. Defined holding registers
Address range Purpose Access type See R/W Max R/W size
0001 - 2000
VACON® Application
ID’s
16bit Table 21 RW 30/30
2001 - 2019 FBProcessDataIN 16bit Table 22 RW 19/19
2051 - 2086 FBProcessDataIN
32bit
1)
Table 22 RW 36/36
2101 - 2119 FBProcessDataOUT 16bit Table 23 RO 19/0
2151 - 2186 FBProcessDataOUT
2200 - 10000
VACON® Application
ID’s
1)
32bit
16bit Table 21 RW 30/30
Table 23 RO 3 6/0
10501 - 10530 IDMap 16bit Figure 34 RW 30/30
10601 - 10630 IDMap Read/Write 16bit Table 24 RW
10701 - 10760 IDMap Read/Write
20001 - 40000
VACON® Application
ID's
32bit
32bit
1)
1)
Table 24 RW 30/30
Table 21 RW 30/30
30/30
40001 - 40005 Operation day counter 16bit Table 27 RO 5/0
40011 - 40012 Operation day counter
40101 - 40105
Resettable operation
day counter
1)
32bit
16bit Table 29
Table 26 RO 2/0
R, Write 1 to
first index to
5/0
reset
2)
40111 - 40112
Resettable operation
day counter
32bit Table 28 RO 2/0
40201 - 40203 Energy counter 16bit Table 31 RO 3/0
40211 - 40212 Energy counter 32bit Table 30 RO 2/0
R, Write 1 to
first index to
reset
3/0
40301 - 40303
40311 - 40312
Resettable energy
counter
Resettable energy
counter
16bit Table 33
32bit Table 32 RO 2/0
40401 - 40430 Fault history 16bit Table 34 RO 30/0
40501
40511-40568
1)
These items are supported only in VACON® 100. Not supported in current version. See chapter 5.
2)
In VACON® 20, VACON® 20 X and VACON® 20 CP, the maximum R/W size for IDmap operations is
12/30.
7.3.2.5.1. VACON® APPLICATION IDS
Communication timeout
Fault history with 16
bit fault codes
16bit Table 36 RW 1/1
16bit Table 35 RO 30/0
Application IDs are parameters that depend on the drive's application. These parameters can be
read and written by pointing the corresponding memory range directly or by using the so-called ID
map (more information below). The easiest way to read a single parameter value or parameters with
7
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 67

Modbus TCP / Modbus UDP vacon • 65
consecutive ID numbers is to use a straight address. It is possible to read 30 consecutive ID
addresses. Notice that the operation will fail if even one of the consecutive IDs do not exist.
Parameters which have 32 bit value can be read from their own range. For example, if you want to
read the value for ID 864 (FB Status Word), the address must be set to 21726. This address value
comes from values: 20000 + ((ID -1) * 2). The ID value is reduced with one because of zero-based
addressing and the result is multiplied with 2 because one 32 bit value will take two (16 bit)
addresses.
Table 21. Parameter IDs
Address range Purpose ID range
0001-2000 16 bit application parameters 1-2000
2200-10000 16 bit application parameters 2200-10000
20001-40000 32 bit application parameters 1-10000
7.3.2.5.2. FB PROCESS DATA IN
The process data fields are used to control the drive (e.g. Run, Stop, Reference, Fault Reset) and to
quickly read actual values (e.g. Output frequency, Output current, Fault code). The values in these
indexes can be read and written. The fields are structured as follows (continued on the next page):
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
7
Page 68

vacon • 66 Modbus TCP / Modbus UDP
Process Data Master -> Slave (max 22 bytes)
Table 22. Fieldbus Process Data IN
Address
Name Range/Type
16-bit 32-bit*
2001
2002 - FB General Control Word Binary coded
2003
2004
2005
2006
2007
2008
2009
2010
2011
2012*
2051 = High data
2052 = Low data
2053 = High data
2054 = Low data
2055 = High data
2056 = Low data
2057 = High data
2058 = Low data
2059 = High data
2060 = Low data
2061 = High data
2062 = Low data
2063 = High data
2064 = Low data
2065 = High data
2066 = Low data
2067 = High data
2068 = Low data
2069 = High data
2070 = Low data
2071 = High data
2072 = Low data
FB Control Word Binary coded
FB Speed Reference 0…10000 (100%)
FB Process Data In 1
FB Process Data In 2
FB Process Data In 3
FB Process Data In 4
FB Process Data In 5
FB Process Data In 6
FB Process Data In 7
FB Process Data In 8
See Chapter 11 "APPENDIX 1 -
PROCESS DATA"
FB Process Data In 9
2013*
2014*
2015*
2016*
2017*
2018*
2019*
* Available in future release
Control word bits
See Chapter 12 "APPENDIX 2 - CONTROL AND STATUS WORD" for control word bit descriptions.
2073 = High data
2074 = Low data
2075 = High data
2076 = Low data
2077 = High data
2078 = Low data
2079 = High data
2080 = Low data
2081 = High data
2082 = Low data
2083 = High data
2084 = Low data
2085 = High data
2086 = Low data
FB Process Data In 10
FB Process Data In 11
FB Process Data In 12
FB Process Data In 13
FB Process Data In 14
FB Process Data In 15
FB Process Data In 16
7
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 69

Modbus TCP / Modbus UDP vacon • 67
7.3.2.5.3. FB PROCESS DATA OUT
Values in these indexes can be only read, not written.
Table 23. Fieldbus Process Data OUT
Address
Name Range/Type
16-bit 32-bit*
2101
2102 -
2103
2104
2105
2106
2107
2108
2109
2110
2111
2112*
2151 = High data 2152
= Low data
2153 = High data
2154 = Low data
2155 = High data
2156 = Low data
2157 = High data
2158 = Low data
159 = High data
2160 = Low data
2161 = High data
2162 = Low data
2163 = High data
2164 = Low data
2165 = High data
2166 = Low data
2167 = High data
2168 = Low data
2169 = High data
2170 = Low data
2171 = High data
2172 = Low data
FB Status Word Binary coded
In case of 16-bit,
FB General Status Word
(High data)
FB Actual Speed 0…10000 (100.00%)
FB Process Data Out 1
FB Process Data Out 2
FB Process Data Out 3
FB Process Data Out 4
FB Process Data Out 5
FB Process Data Out 6
FB Process Data Out 7
FB Process Data Out 8
See Chapter 11 "APPENDIX 1 -
FB Process Data Out 9
Binary coded
PROCESS DATA"
2113*
2114*
2115*
2116*
2117*
2118*
2119*
* Available in future release
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
2173 = High data
2174 = Low data
2175 = High data
2176 = Low data
2177 = High data
2178 = Low data
2179 = High data
2180 = Low data
2181 = High data
2182 = Low data
2183 = High data
2184 = Low data
2185 = High data
2186 = Low data
FB Process Data Out 10
FB Process Data Out 11
FB Process Data Out 12
FB Process Data Out 13
FB Process Data Out 14
FB Process Data Out 15
FB Process Data Out 16
7
Page 70

vacon • 68 Modbus TCP / Modbus UDP
ID Value
699 123
700 321
701 456
702 654
703 1789
704 987
705 2741
706 1147
707 258
708 3852
Parameters
Address Data: ID
10501 700
10502 702
10503 707
10504 704
Address Data: ID
10601 321
10602 654
10603 258
10604 987
ID Map
11609_uk
Status Word bits
See Chapter 12 "APPENDIX 2 - CONTROL AND STATUS WORD" for status word bit descriptions.
The use of process data depends on the application. In a typical situation, the device is started and
stopped with the Control Word (CW) written by the Master and the Rotating speed is set with
Reference (REF). With PD1…PD16 the device can be given other reference values (e.g. Torque
reference).
With the Status Word (SW) read by the Master, the status of the device can be seen. Actual Value
(ACT) and PD1…PD16 show the other actual values.
7.3.2.5.4. ID MAP
Using the ID map, you can read consecutive memory blocks that contain parameters whose IDs are
not in a consecutive order. The address range 10501 - 10530 is called 'IDMap', and it includes an
address map in which you can write your parameter IDs in any order. The address range 10601 10630 is called 'IDMap Read/Write', and it includes values for parameters written in the IDMap. As
soon as one ID number has been written in the map cell 10501, the corresponding parameter value
can be read and written in the address 10601, and so on. The address range 10701 - 10760 contains
the ID Map for 32bit values. Maximum of 30 IDs and ID values can be written and read with single
request except in VACON® 20 and 20 X/CP it is possible to access only 12 ID value items at a time.
NOTE! 32 bit data not supported in the current version. See chapter 5.
Figure 34. ID Map initialization example
Once the ID Map address range has been initialized with the parameter IDs, the parameter values
can be read and written in the IDMap Read/Write address range address (IDMap address + 100).
7
Table 24. Parameter Values in 16-bit IDMap Read/Write registers
Address Data
10601 Data included in parameter ID700
10602 Data included in parameter ID702
10603 Data included in parameter ID707
10604 Data included in parameter ID704
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 71

Modbus TCP / Modbus UDP vacon • 69
If the ID Map table has not been initialized, all the fields show index as '0'. If it has been initialized,
the parameter IDs included in it are stored in the flash memory of the OPTE9 option board.
Table 25. Example of parameter values in 32-bit IDMap Read/Write registers
Address Data
10701 Data High, parameter ID700
10702 Data Low, parameter ID700
10703 Data High, parameter ID702
10704 Data Low, parameter ID702
7.3.2.5.5. OPERATION DAY COUNTER
Control unit operating time counter (total value). This counter cannot be reset. The values are read
only.
NOTE! The feature Operation day counter does not work with VACON® 20, VACON® 20 X or
VACON® 20 CP drives.
Operation day counter as seconds
This counter in registers 40011
d to 40012d holds the value of operation days as seconds in a 32-bit
unsigned integer.
Table 26. Operation days counter as seconds
Address Description
40011 High data
40012 Low data
Holds the counter value as seconds.
Operation day counter
This counter in registers 40001
d to 40005d holds the value of operation days counter. The values are
read only.
For compatibility with V100 internal Modbus TCP/UDP and the OPT-CI option board, this counter is
found from two different register areas: holding registers 40001
d.
5
d to 40005d and input registers 1d to
Table 27. Operation day counter
Holding register
addres
Input register
address
Purpose
40001 1 Years
40002 2 Days
40003 3 Hours
40004 4 Minutes
40005 5 Seconds
7.3.2.5.6. RESETTABLE OPERATION DAY COUNTER
This register holds the value for resettable control unit operating time counter (trip value). The
values are read only.
For resetting this counter see Chapter 7.3.2.2 "Clearing resettable counters".
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
7
Page 72

vacon • 70 Modbus TCP / Modbus UDP
NOTE! The feature Resettable operation day counter does not work with VACON® 20, VACON® 20
X or VACON® 20 CP drives.
Resettable operation day counter as seconds
This counter in registers 40111
d to 40112d holds the value of resettable operation days as seconds
in a 32-bit unsigned integer.
Table 28. Resettable operation days counter as seconds
Address Description
40111 High data
40112 Low data
Holds the counter value as seconds.
Resettable operation day counter
This counter in registers 40101
d to 40105d holds the value of operation days counter.
For compatibility with V100 internal Modbus TCP/UDP and the OPT-CI option board, this counter is
found from two different register areas: holding registers 40101
30101
d to 30105d.
d to 40105d and input registers
Table 29. Resettable operation day counter
Holding register
addres
Input register
address
Purpose
40101 101 Years
40102 102 Days
40103 103 Hours
40104 104 Minutes
40105 105 Seconds
7.3.2.5.7 ENERGY COUNTER
This counter holds the value of total amount of energy taken from a supply network. This counter
cannot be reset. The values are read only.
Energy counter as kWh
This counter is in registers 40211
d to 40212d and is a 32-bit floating point (IEEE 754) value containing
the number of kilowatt-hours (kWh) that is in the drive's energy counter. This value is read-only.
Table 30. Energy counter as kWh
Address Description
40211 High data
40212 Low data
Holds the value of energy counter in kWh. Datatype is 32 bit
float IEEE 754
Energy counter
7
These registers hold three values for the energy counter, amount of energy used, format of the
energy value and unit of the energy value.
For compatibility with V100 internal Modbus TCP/UDP and the OPT-CI option board, this counter is
found from two different register areas: holding registers 40201
to 203
d.
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
d to 40203d and input registers 201d
Page 73

Modbus TCP / Modbus UDP vacon • 71
Example: If energy = 1200, format = 52, unit = 1, then actual energy is 12.00 kWh.
Table 31 . Energy counter
Holding
register
address
40201 201 Energy Amount of energy taken from a supply network.
40202 202 Format
40203 203
7.3.2.5.8. RESETTABLE ENERGY COUNTER
This counter holds the value of total amount of energy taken from a supply network since the
counter was last reset. For resetting this counter see Chapter 7.3.2.2 "Clearing resettable
counters". The values are read only.
Resettable energy counter as kWh
Input
register
address
Purpose Description
The last number of the Format field indicates the decimal point place in the Energy field.
Example:
40 = 4 number of digits, 0 fractional digits
41 = 4 number of digits, 1 fractional digit
42 = 4 number of digits, 2 fractional digits
Unit
1 = kWh
2 = MWh
3 = GWh
4 = TWh
Unit of the value.
This counter is in registers 40311d to 40312d and is a 32-bit floating point (IEEE 754) value
containing the number of kilowatt-hours (kWh) that is in the drive's resettable energy counter.
Table 32. Resettable energy counter as kWh
Address Description
40311 High data
40312 Low data
Resettable energy counter
These registers hold three values for the energy counter, amount of energy used, format of the
energy value and unit of the energy value.
For compatibility with V100 internal Modbus TCP/UDP and the OPT-CI option board, this counter is
found from two different register areas: 40301
Holds the value of energy counter in kWh since last counter
reset. Datatype is 32 bit float IEEE 754
d to 40303d and 301d to 303d.
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
7
Page 74

vacon • 72 Modbus TCP / Modbus UDP
Example: If energy = 1200, format = 52, unit = 1, then actual energy is 12.00 kWh.
Table 33. Resettable energy counter
Holding
register
address
40301 301 Energy Amount of energy taken from a supply network.
40302 302 Format
40303 303
7.3.2.5.9. FAULT HISTORY
The fault history can be viewed by reading from address 40401 onward. The faults are listed in
chronological order so that the latest fault is mentioned first and the oldest last. The fault history
can contain 29 faults at the same time. (In VACON® 20, VACON® 20 X and VACON® 20 CP it is
possible to read nine faults). For compatibility with V100 internal Modbus TCP/UDP and the OPT-CI
option board, this counter is also found from input register area: 401
Input
register
address
Purpose Description
The last number of the Format field indicates the decimal point place in the Energy field.
Example:
40 = 4 number of digits, 0 fractional digits
41 = 4 number of digits, 1 fractional digit
42 = 4 number of digits, 2 fractional digits
Unit
1 = kWh
2 = MWh
3 = GWh
4 = TWh
Unit of the value.
d to 403d.
NOTE! Reading the fault history items is slow. Reading all 30 items at once might take up to three
seconds.
The fault history contents are represented as follows:
Table 34. Fault history
Holding register
address
40401 401 Upper byte is a fault code, lower byte is a sub code
40402 402
40403 403
... ...
40429 429
7.3.2.5.10. FAULT HISTORY WITH 16-BIT ERROR CODES
The fault history can be viewed by reading from address 40511 onward. The faults are listed in a
chronological order so that the latest fault is mentioned first and the oldest last. These addresses
contain the fault code and the subcode for the fault. Reading can be started from any address. (In
VACON® 20, VACON® 20 X and VACON® 20 CP it is possible to read nine faults).
Input register
address
Purpose
7
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 75

Modbus TCP / Modbus UDP vacon • 73
NOTE! Reading the fault history items is slow. Reading all 30 items at once might take up to three
seconds.
Table 35. Fault history with 16-bit error codes
Holding register
address
40511 Fault code 1 16-bit fault code in index 1.
40512 Sub code 1 16-bit sub code for the fault in index 1.
40513 Fault code 2 16-bit fault code in index 2.
40514 Sub code 2 16-bit sub code for the fault in index 2.
... ...
40567 Fault code 29
40568 Sub code 29
Purpose Description
7.4 Modbus communication and connection timeout
It is possible to open up to three connections to the OPTE9 option board. One of the connections
could be used for process data and other just for reading monitoring data. In most cases it is
desirable that if "monitor" connection gets disconnected, no fault is generated but when the
connection is handling the process data, a fault should be generated in the time specified.
This register address enables the user to give custom communication timeout for each connection.
If a custom timeout value is used, it must be given every time a connection is opened. Timeout can
be set only to the connection which is been used to access this register. By default the connection
uses the communication timeout value given via panel parameters.
If the cable is disconnected, a fieldbus fault is activated after the timeout period. When
communication timeout is zero, no fault is activated.
Table 36. Communication timeout register
Holding register
address
40501
Purpose Description
Communication
timeout
Connection timeout value for this connection in seconds.
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
7
Page 76

vacon • 74 Modbus TCP / Modbus UDP
Communicating
CheckYes
Communication timeout zero?
Connection closed or broken?
Broken
Has second connection with
communication timeout
other than zero?
Figure 35. The Modbus TCP/UDP function in case of timeout
7.5 Quick setup
Timeout
No
No
FAULT! No fault
No
Received packet during
communication
timout time?
Yes
Closed
Yes
7092_uk
Following these instructions, you can easily and fast set up your Modbus for use:
In the AC drive application: Choose Fieldbus as the active control place (see drives User's Manual).
In the Master software:
1. Set the settings in the master software.
2. Set the Control Word to '0' (2001).
3. Set the Control Word to '1' (2001).
4. Drive's status is RUN.
5. Set the Reference value to '5000' (50.00%) (2003).
6. Actual speed is 5000 (25.00 Hz if MinFreq is 0.00 Hz and MaxFreq is 50.00 Hz).
7. Set the Control Word to '0' (2001).
8. Drive's status is STOP.
7
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 77

Modbus TCP / Modbus UDP vacon • 75
7.6 Modbus - example messages
7.6.1 Example 1 - Write process data
Write the process data 42001…42003 with command 16 (Preset Multiple Registers).
Command Master - Slave:
ADDRESS 01 hex Slave address 1 hex (= 1)
FUNCTION 10 hex Function 10 hex (= 16)
Starting address HI 07 hex Starting address 07D0 hex (= 2000)
DATA Starting address LO D0 hex
No. of registers HI 00 hex Number of registers 0003 hex (= 3)
No. of registers LO 03 hex
Byte count 06 hex Byte count 06 hex (= 6)
Data HI 00 hex
Data LO 01 hex
Data HI 00 hex Data 2 = 0000 hex (= 0).
Data 1 = 0001 hex (= 1). Setting control
word run bit to 1.
Data LO 00 hex
Data HI 13 hex
Data LO 88 hex
ERROR CHECK CRC HI C8 hex
CRC LO CB hex CRC field C8CB hex (= 51403)
Message frame:
01 10 07 D0 00 03 06 00 01 00 00 13 88 C8 CB
The reply to Preset Multiple Registers message is the echo of 6 first bytes.
Answer Slave - Master:
ADDRESS 01 hex Slave address 1 hex (= 1)
FUNCTION 10 hex Function 10 hex (= 16)
Starting address HI 07 hex Starting address 07D0 hex (= 2000)
DATA Starting address LO D0 hex
No. of registers HI 00 hex Number of registers 0003 hex (= 3)
No. of registers LO 03 hex
ERROR CHECK CRC HI 80 hex
Data 3 = 1388 hex (= 5000), Speed Reference to 50.00%
CRC LO 85 hex CRC 8085 hex (= 32901)
Reply frame:
01 10 07 D0 00 03 80 85
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
7
Page 78

vacon • 76 Modbus TCP / Modbus UDP
7.6.2 Example 2 - Read process data
Read the Process Data 42103…42104 with command 4 (Read Input Registers).
Command Master - Slave:
ADDRESS 01 hex Slave address 1 hex (= 1)
FUNCTION 04 hex Function 4 hex (= 4)
Starting address HI 08 hex Starting address 0836 hex (= 2102)
DATA Starting address LO 36 hex
No. of registers HI 00 hex Number of registers 0002 hex (= 2)
No. of registers LO 02 hex
ERROR CHECK CRC HI 93 hex
CRC LO A5 hex CRC 93A5 hex (= 37797)
Message frame:
01 04 08 36 00 02 93 A5
The reply to the Read Input Registers message contains the values of the read registers.
Answer Slave - Master:
ADDRESS 01 hex Slave address 1 hex (= 1)
FUNCTION 04 hex Function 4 hex (= 4)
Byte count 04 hex Byte count 4 hex (= 4)
DATA Data HI 13 hex
Data LO 88 hex
Data HI 09 hex
Data LO C4 hex
ERROR CHECK CRC HI 78 hex
CRC LO E9 hex CRC 78E9 hex (= 30953)
Reply frame:
01 04 04 13 88 09 C4 78 E9
Speed reference = 1388 hex (=5000 =>
50.00%)
Output Frequency = 09C4 hex (=2500
=>25.00Hz)
7
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 79

Modbus TCP / Modbus UDP vacon • 77
7.6.3 Example 3 - Exception response
In an exception response, the Slave sets the most-significant bit (MSB) of the function code to 1. The
Slave returns an exception code in the data field.
Command Master - Slave:
ADDRESS 01 hex Slave address 1 hex (= 1)
FUNCTION 04 hex Function 4 hex (= 4)
Starting address HI 17 hex Starting address 1770 hex (= 6000)
DATA Starting address LO 70 hex
No. of registers HI 00 hex
No. of registers LO 05 hex
ERROR CHECK CRC HI 34 hex
CRC LO 66 hex CRC 3466 hex (= 13414)
Message frame:
Invalid number of registers 0005 hex (=
5)
01 04 17 70 00 05 34 55
Exception response
Answer Slave - Master:
ADDRESS 01 hex Slave address 1 hex (= 1)
FUNCTION 84 hex Most significant bit set to 1
DATA Error code 04 hex Error code 04 => Slave device failure
ERROR CHECK CRC HI 42 hex
CRC LO C3 hex CRC 42C3 hex (= 17091)
Reply frame:
01 84 04 42 C3
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
7
Page 80

vacon • 78 PROFINET IO
Highest priority transition
..
..
Lowest priority transition
Power ON
S1: Switching On Inhibited
ZSW1 bit 6 = True; 0,1,2 = False
General state diagram
11610_uk
OFF
AND No Coast Stop
AND No Quick Stop
STW1 bit0=False
AND bit1=True AND bit2=True
Coast Stop
OR Quick Stop
b
AND No Quick Stop
STW1 bit1=False
OR bit2=False
Coast Stop
SWT1 bit1=False
Standstill detected
OR
Disble operation
STW1 bit3=False
S2: Ready For Switching On
ZSW1 bit 0 = True; 1,2,6 = False
Ramp stop
Quick stop
ON
STW1 bit0=True
ON
STW1 bit0=True
OFF
STW1 bit0=False
OFF
STW1 bit0=False
Quick stop
STW1 bit2=False
Quick stop
STW1 bit2=False
Standstill detected
OR
Disable operation
STW1 bit3=False
S5: Switching Off
ZSW1 bit0,1 =True
bit 2,6=False
Coast stop
OR Quick stop
STW1 bit1=False
OR bit2=False
Coast stop
STW1 bit1=False
S3: Switched On
ZSW1 bit 0,1 = True; 2,6 = False
S4: Operation
ZSW1 bit 0,1,2”p.e” = True; 6=False
Enable operation
STW1 bit3=True
Disable operation
STW1 bit3=False
8. PROFINET IO
PROFINET is the Ethernet-based automation standard of PROFIBUS International for the
implementation of an integrated and consistent automation solution based on Industrial Ethernet.
PROFINET supports the integration of simple distributed field devices and time-critical applications
in (switched) Ethernet communication, as well as the integration of component-based distributed
automation systems for vertical and horizontal integration of networks.
OPTE9 implements PROFINET IO version 2.3 with conformance class B and the highest netload
class (class III), making it suitable for use in larger automation systems.
8.1 PROFIdrive 4.1 profile
To provide interoperability between devices from different manufacturers, a "standard" must be
defined so that:
• The devices behave in the same way.
• They produce and/or consume the same basic set of I/O data.
• They contain the same basic set of configurable attributes.
The formal definition of this information is known as a device profile.
8.2 PROFIdrive 4.1 state machine
STW1 (Control Word) and ZSW1 (Status Word) follow the state machine presented below:
8
Figure 36. General state diagram
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 81

PROFINET IO vacon • 79
8.3 PROFINET IO process communication
The PROFIdrive profile specifies telegrams used for process communication. The OPTE9 supports
4 type of different telegrams with and without extra process data items. These telegrams contain
either PROFIdrive or VACON® -specific signals or a combination of both.
It is also possible to use up to eight (8) Process Data fields, or sixteen (16) when using extended or
fast communication mode. If the normal communication mode is used, the upper 8 Process Data
items (9-16) are either zeroes (actual data) or not used (setpoint data). See chapter 6.2 for more
details. The following chapters describe the different types of telegrams and the signals that form
them.
8.3.1 Telegram types
8.3.1.1
Standard Telegram 1 types are used, when a standard VACON® application is used and PROFIdrive
functionality is required. These telegrams (Table 37) use PROFIdrive-defined control word, status
word, speed setpoint value and speed actual value. When using these telegrams, the process data
fields are communicated as 16-bit values.
Telegra m No. Tele gr am Abbreviation
Standard Telegram 1 and variants
Table 37. Standard Telegram 1 and variants
1
102 Standard Telegram 1 + 1 Process Data ST1 + 1 PD
103 Standard Telegram 1 + 2 Process Data ST1 + 2 PD
104 Standard Telegram 1 + 3 Process Data ST1 + 3 PD
100 Standard Telegram 1 + 4 Process Data ST1 + 4 PD
105 Standard Telegram 1 + 5 Process Data ST1 + 5 PD
106 Standard Telegram 1 + 6 Process Data ST1 + 6 PD
107 Standard Telegram 1 + 7 Process Data ST1 + 7 PD
101 Standard Telegram 1 + 8 Process Data ST1 + 8 PD
138 Standard Telegram 1 + 12 Process Data * ST1 + 12 PD
Standard Telegram 1 ST1
139 Standard Telegram 1 + 16 Process Data * ST1 + 16 PD
* 12 and 16 process data items will be available in future releases. At the moment, the incoming process data 9-
16 is not handled. Outgoing process data 9-16 is zero.
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
8
Page 82

vacon • 80 PROFINET IO
Table 38. Standard Telegram 1 setpoint and actual data
Bytes Setpoint Actual value
1...2 STW1 8.3.2.1 ZSW1 8.3.2.2
3...4 NSOLL_A 8.3.2.3 NIST_A 8.3.2.4
5...6 PDI1
7...8 PDI2 PDO2
... ... ...
19...20 PDI8 PDO8
21...22 PDI9* PDO9*
... ... ...
35...36 PDI16* PDO16*
* Not used / zero if not supported (see chapter 6.2)
8.3.1.2 VACON®-specific Telegram 1 and its variants
8.3.2.11
PDO1
8.3.2.11
These telegrams (Table 39) use VACON®-defined control word, status word, speed setpoint value
and speed actual value to directly access the AC drive application. When using these telegrams, the
process data fields are communicated as 16-bit values.
Table 39. Vendor telegram 1 and variants
Telegra m No. Tele gr am Abbreviation
108 Vendor Telegram 1 Vendor 1
109 Vendor Telegram 1 + 1 Process Data Vendor 1 + 1 PD
110 Vendor Telegram 1 + 2 Process Data Vendor 1 + 2 PD
111 Vendor Telegram 1 + 3 Process Data Vendor 1 + 3 PD
112 Vendor Telegram 1 + 4 Process Data Vendor 1 + 4 PD
113 Vendor Telegram 1 + 5 Process Data Vendor 1 + 5 PD
114 Vendor Telegram 1 + 6 Process Data Vendor 1 + 6 PD
115 Vendor Telegram 1 + 7 Process Data Vendor 1 + 7 PD
116 Vendor Telegram 1 + 8 Process Data Vendor 1 + 8 PD
140 Vendor Telegram 1 + 12 Process Data * Vendor 1 + 12 PD
141 Vendor Telegram 1 + 16 Process Data * Vendor 1 + 16 PD
* 12 and 16 process data items will be available in future releases. At the moment, the incoming process data 9-
16 is not handled. Outgoing process data 9-16 is zero.
8
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 83

PROFINET IO vacon • 81
Table 40. Vendor telegram 1 setpoint and actual data
Bytes Setpoint Actual value
1...2 FB FIXED CW 8.3.2.5 FB FIXED SW 8.3.2.6
3...4 FB SPEED REF 8.3.2.9 FB SPEED ACT 8.3.2.10
5...6 PDI1
7...8 PDI2 PDO2
... ... ....
19...20 PDI8 PDO8
21...22 PDI9* PDO9*
... ... ...
35...36 PDI16* PDO16*
* Not used / zero if not supported (see chapter 6.2)
8.3.1.3 VACON®-specific Telegram 2 and its variants
These telegrams (Table 41) use VACON®-defined control word, status word, speed setpoint value
and speed actual value to directly access the AC drive application. The difference to vendor telegram
1 types are the added general control and status words.
NOTE! This telegram type is not supported when using VACON® 100 AC drives. 32-bit process data
support for VACON® 100 AC drives is added in future release.
Table 41. Vendor telegram 2 and variants
Telegra m No. Tele gr am Abbreviation
8.3.2.11
PDO1
8.3.2.11
117 Vendor Telegram 2 Vendor 2
118 Vendor Telegram 2 + 1 Process Data Vendor 2 + 1 PD
119 Vendor Telegram 2 + 2 Process Data Vendor 2 + 2 PD
120 Vendor Telegram 2 + 3 Process Data Vendor 2 + 3 PD
121 Vendor Telegram 2 + 4 Process Data Vendor 2 + 4 PD
122 Vendor Telegram 2 + 5 Process Data Vendor 2 + 5 PD
123 Vendor Telegram 2 + 6 Process Data Vendor 2 + 6 PD
124 Vendor Telegram 2 + 7 Process Data Vendor 2 + 7 PD
125 Vendor Telegram 2 + 8 Process Data Vendor 2+ 8 PD
142 Vendor Telegram 2 + 12 Process Data * Vendor 2 + 12 PD
143 Vendor Telegram 2 + 16 Process Data * Vendor 2 + 16 PD
* 12 and 16 process data items will be available in future releases. At the moment, the incoming process data 9-
16 is not handled. Outgoing process data 9-16 is zero.
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
8
Page 84

vacon • 82 PROFINET IO
When using these telegrams, the process data fields are communicated as 32-bit values, but when
using VACON® NX or 20-series AC-drives, the data is actually 16-bits and transferred in the lower
bytes.
Table 42. Process data item definition when using Vendor telegram 2
Bytes VACON® NX VACON® 20 VACON® 100
1...2 16-bit Process data 16-bit Process data
3...4 Not used Not used
Table 43. Vendor telegram 2 setpoint and actual data
Bytes Setpoint Actual value
1...2 FB FIXED CW 8.3.2.5 FB FIXED SW 8.3.2.6
3...4 FB GENERAL CW 8.3.2.7 FB GENERAL SW 8.3.2.8
5...6 FB SPEED REF 8.3.2.9 FB SPEED ACT 8.3.2.10
7...10 PDI1*
11...14 PDI2* PDO2*
... ... ...
35...38 PDI8* PDO8*
39...42 PDI9** PDO9**
... ... ...
67...70 PDI16** PDO16**
* 32-bits. See Table 42
** See above Not used / zero if not supported (see chapter 6.2)
8.3.2.11
Future release: 32-bit process data
PDO1*
8.3.2.11
8.3.1.4 VACON®-specific Telegram 3 and its variants
These telegrams (Table 44) use PROFIdrive-defined control word, status word, speed setpoint value
and speed actual value with VACON® general control and status words for added functionality.
NOTE! This telegram type is not supported when using VACON® 100 AC drives. 32-bit process data
support for VACON® 100 AC drives is added in future release.
8
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 85

PROFINET IO vacon • 83
Table 44. Vendor telegram 3 and variants
Telegra m No. Tele gr am Abbreviation
126 Vendor Telegram 3 Vendor 3
127 Vendor Telegram 3 + 1 Process Data Vendor 3 + 1 PD
128 Vendor Telegram 3 + 2 Process Data Vendor 3 + 2 PD
129 Vendor Telegram 3 + 3 Process Data Vendor 3 + 3 PD
130 Vendor Telegram 3 + 4 Process Data Vendor 3 + 4 PD
131 Vendor Telegram 3 + 5 Process Data Vendor 3 + 5 PD
132 Vendor Telegram 3 + 6 Process Data Vendor 3 + 6 PD
133 Vendor Telegram 3 + 7 Process Data Vendor 3 + 7 PD
134 Vendor Telegram 3 + 8 Process Data Vendor 3 + 8 PD
144 Vendor Telegram 3 + 12 Process Data * Vendor 3 + 12 PD
145 Vendor Telegram 3 + 16 Process Data * Vendor 3 + 16 PD
* 12 and 16 process data items will be available in future releases. At the moment, the incoming process data 9-
16 is not handled. Outgoing process data 9-16 is zero.
When using these telegrams, the process data fields are communicated as 32-bit values, but when
using VACON® NX or 20-series AC-drives, the data is actually 16-bits and transferred in the lower
bytes.
Table 45. Process data item definition when using Vendor telegram 3
Bytes VACON® NX VACON® 20 / 20 X VACON® 100
1...2
3...4 Not used Not used
Bytes Setpoint Actual value
1...2 STW1 8.3.2.1 ZSW1 8.3.2.2
3...4 FB GENERAL CW 8.3.2.7 FB GENERAL SW 8.3.2.8
5...6 NSOLL_A 8.3.2.3 NIST_A 8.3.2.4
7...10 PDI1*
11...14 PDI2* PDO2*
... ... ...
35...38 PDI8* PDO8*
16-bit Process
data
Table 46. Vendor telegram 3 setpoint and actual data
16-bit Process data
Future release: 32-bit process data
8.3.2.11
PDO1*
8.3.2.11
39...42 PDI9** PDO9**
... ... ...
67...70 PDI16** PDO16**
* 32-bits. See Table 45
** See above Not used / zero if not supported (see chapter 6.2)
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
8
Page 86

vacon • 84 PROFINET IO
8.3.1.5 VACON®-specific Telegram 4 and its variants
Use these telegram types (Table 47) as a replacement for the OPT-CP option board, when using
"Bypass mode".
You can also use these telegram types when the PROFIdrive functionality is required and a VACON®
application with PROFIdrive state machine is activated (e.g. VACON® NX Advanced Application).
Table 47. Vendor telegram 4 and variants
Telegra m No. Tele gr am Abbreviation
135 Vendor Telegram 4 Vendor 4
136 Vendor Telegram 4 + 4 Process Data Vendor 4 + 4 PD
137 Vendor Telegram 4 + 8 Process Data Vendor 4 + 8 PD
146 Vendor Telegram 4 + 12 Process Data Vendor 4 + 12 PD
147 Vendor Telegram 4 + 16 Process Data Vendor 4 + 16 PD
Table 48. Vendor telegram 4 setpoint and actual data
Bytes Setpoint Actual value
1...2 FB FIXED CW 8.3.2.5 FB GENERAL SW 8.3.2.8
3...4 FB SPEED REF 8.3.2.9 FB SPEED ACT 8.3.2.10
5...6 PDI1
7...8 PDI2 PDO2
... ... ...
19...20 PDI8 PDO8
21...22 PDI9* PDO9*
... ... ...
35...36 PDI16* PDO16*
* Not used / zero if not supported (see chapter 6.2)
8.3.2 Telegram building blocks
8.3.2.1
The following table lists the assignments of bits in the control word 1.
PROFIdrive Control Word 1 (STW1)
8.3.2.11
PDO1
8.3.2.11
8
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 87

PROFINET IO vacon • 85
Table 49. Overview of the assignments of bits of the control word 1
Significance
Bit
Bit value is 1 Bit value is 0
0ON OFF
1 No Coast Stop (no OFF2 ) Coast Stop (OFF2)
2 No Quick Stop (no OFF3) Quick Stop (OFF3)
3 Enable Operation Disable Operation
4 Enable Ramp Generator Reset Ramp Generator
5 Unfreeze Ramp Generator Freeze Ramp Generator
6 Enable Setpoint Disable Set Point
7 Fault Acknowledge (0 -> 1)
8 Not used
9 Not used
10* Control by PLC No control by PLC
11 Device-specific Device-specific
12-15 Device-specific Device-specific
*Bits in a control word do not have any effect unless bit 10 is enabled.
Bit 0: Switching ON / OFF
This bit is used in combination with other bits to enable operation of the drive. When this bit is set
to 0 during operation, the drive performs a ramp stop.
Bit 1: Coast stop command
This bit is used to request a coast stop to be executed. When it is set to 0 during operation, the drive
performs a coast stop.
Bit 2: Quick stop command
This bit is used to request a quick stop to be executed. When it is set to 0 during operation, the drive
quickly ramps down to zero speed and stops.
Bit 3: Enabling of operation
This bit is used in combination with other bits to enable operation of the drive. When it is set to 0
during operation, the drive performs a coast stop.
Bit 4: Enabling of ramp generator
This bit is used in combination with other bits to enable operation of the drive. When it is set to 0
during operation, the drive quickly decelerates to zero speed.
Bit 5: Freezing of ramp generator
This bit can be used to freeze the setpoint value used by the drive. The value is frozen if this bit is
set to 0. If the bit is 1, the setpoint value provided by the master is continuously updated.
Bit 6: Enabling of setpoint value
This bit can be used to disable the fieldbus setpoint value. If this bit is set to 0, the option board
ignores the setpoint value by the master and instead uses a setpoint value of 0. During operation, if
this bit is set to 0, the drive decelerates to a standstill.
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
8
Page 88

vacon • 86 PROFINET IO
Bit 7: Fault acknowledge
This bit is used to acknowledge faults in the drive. When a rising edge (0 -> 1) is seen in this bit by
the option board, it requests the drive to acknowledge present faults. The functionality of this bit is
rising-edge sensitive only.
Bit 10: Control by PLC
This bit is used by the master to indicate that it is in control of the slave and that the commands sent
via fieldbus are valid.
During operation, this bit must be 1. If the drive is not operating and this bit is 0, the drive cannot be
started.
If the drive is operating, and this bit becomes 0, the option board freezes the process data provided
to the drive, and sets its state to FAULT. The drive reaction to this fieldbus fault depends on the drive
parameterization.
8.3.2.2
The table below lists the assignments of the status word 1.
PROFIdrive Status Word 1 (ZSW1)
Table 50. Overview of the assignments of bits of the status word 1
Significance
Bit
Bit value is 1 Bit value is 0
0 Ready to Switch On Not Ready To Switch On
1 Ready To Operate Not Ready To Operate
2
3 Fault Present No Fault
4 Coast Stop Not Activated (No OFF2) Coast Stop Activated (OFF2)
5 Quick Stop Not Activated (No OFF3) Quick Stop Activated (OFF3)
6 Switching On Inhibited Switching On Not Inhibited
7 Warning Present No Warning
8 Speed Error Within Tolerance Range Speed Error Out Of Tolerance Range
9 Control by PLC Requested No Control by PLC Requested
Operation Enabled (drive follows set-
point)
Operation Disabled
8
10 f Or n Reached Or Exceeded f Or n Not Reached
11 Device-specific Device-specific
12 Drive running Drive stopped
13 Drive is ready Drive is not ready
14-15 Device-specific Device-specific
Bit 0: Readiness to switch on
This bit indicates whether the drive is ready to switch on the power electronics. When the bit has the
value 0, the drive is not ready to switch on the power electronics. When the bit has the value 1, the
drive is ready to switch on the power electronics.
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 89

PROFINET IO vacon • 87
Bit 1: Readiness to operate
This bit indicates whether the drive is ready to begin operation. When the bit has the value 0, the
power electronics is switched off and the drive is unable to begin operation. When the bit has the
value 1, the power electronics is switched on and the drive can begin operation if requested by the
master.
Bit 2: State of operation
This bit indicates whether the drive is operating or not. When the bit has the value 0, the drive is not
operating. When the bit has the value 1, the drive is operating.
Bit 3: Presence of fault
This bit indicates the presence of unacknowledged faults in the drive. When the bit has the value 0,
no unacknowledged faults are present in the drive. When the bit has the value 1, at least one
unacknowledged fault is present in the drive.
Bit 4: Coast stop activated
This bit indicates whether a coast stop command is active or not. When the bit has the value 0, a
coast stop command is active. When the bit has the value 1, no coast stop command is active.
Bit 5: Quick stop activated
This bit indicates whether a quick stop command is active or not. When the bit has the value 0, a
quick stop command is active. When the bit has the value 1, no quick stop command is active.
Bit 6: Switching on inhibition
This bit indicates whether the power electronics may be switched on or not. When the bit has the
value 0, the power electronics may be switched on. When the bit has the value 1, the power
electronics are prevented from switching on.
Bit 7: Presence of warning
This bit indicates the presence of warning/alarm information in the drive. When the bit has the value
0, no warning is present. When the bit has the value 1, a warning is present.
Bit 8: Running at setpoint
This bit indicates whether the drive is operating and the actual speed value matches the setpoint
value. When the bit has the value 0, the actual speed value does not match the setpoint value. When
the bit has the value 1, the actual speed value matches the setpoint value.
Bit 9: Request control by master
This bit indicates whether the fieldbus master should take control of the drive. When this bit has the
value 0, the master does not take control of the drive. When this bit has the value 1, the master is
requested to take control of the drive.
In OPTE9, this bit depends on the configuration for the drive control place. If the control place is
assigned to fieldbus, the bit has the value 1. If the control place is elsewhere, the bit has the value 0.
Bit 10: Setpoint reached or exceeded
This bit indicates whether the setpoint value has been reached or exceeded. When this bit has the
value 0, the setpoint value has not been reached or exceeded. When this bit has the value 1, the
setpoint value has been reached or exceeded.
Bit 12: Drive running
This bit indicates drive state. If bit is 1, the motor is running. If bit is zero, the motor has been
stopped.
Bit 13: Drive ready
This bit indicates drive state. If bit is 1, the drive is ready for transition to running state.
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
8
Page 90

vacon • 88 PROFINET IO
8.3.2.3 PROFIdrive speed setpoint value NSOLL_A
Normalised 16-bit speed setpoint (containing a sign bit and a 15-bit integer).
• NSOLL_A = 0x4000 corresponds to 100% of the parameterized maximum motor speed.
• NSOLL_A = 0xC000 corresponds to -100% of the parameterized maximum motor speed.
8.3.2.4
Normalised 16-bit actual speed.
• NIST_A = 0x4000 corresponds to 100% of the parameterized maximum motor speed.
• NIST_A = 0xC000 corresponds to -100% of the parameterized maximum motor speed.
8.3.2.5
For details about vendor control word, see Chapter 12 "APPENDIX 2 - CONTROL AND STATUS
WORD"
8.3.2.6
For details about vendor status word, see Chapter 12 "APPENDIX 2 - CONTROL AND STATUS
WORD".
8.3.2.7
FB General Control Word is 16-bit in length and it is completely application-dependent.
8.3.2.8
PROFIdrive speed actual value NIST_A
VACON® FBFixedControlWord
VACON®FBFixedStatusWord
VACON® FBGeneralControlWord
VACON® FBGeneralStatusWord
FB General Status Word is 16-bit in length and it is completely application-dependent.
8.3.2.9
The FBSpeedReference value is unsigned in the range 0...10000d (0...2710h). The value 0
corresponds to MinimumFrequency and the value 10000d corresponds to MaximumFrequency.
Requested direction is indicated using bit 1 in the FBFixedControlWord.
8.3.2.10
The FBActualSpeed value is unsigned in the range 0...10000d (0...2710h). The value 0 corresponds
to MinimumFrequency and the value 10000d corresponds to MaximumFrequency. The direction is
indicated using bit 2 in the FBFixedStatusWord.
8.3.2.11
The Process Data variables are vendor-specific variables that can be communicated to and from the
drive. There can be up to eight Process Data variables communicated in a single telegram. Values
sent from the option board to the master are called ProcessDataOut variables, while the values sent
from the master to the option board are called ProcessDataIn variables. The contents of the
ProcessDataOut variables can be parameterised in the drive using a feature known as Fieldbus
Process Data mapping. See the drive's Application Manual for further details.
VACON® FBSpeedReference
VACON® FBSpeedActual
VACON® Process Data
8
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 91

PROFINET IO vacon • 89
8.3.3 Quick setup
By following these instructions, you can easily and fast set up your Profinet IO for use:
In the AC drive application: Choose Fieldbus as the active control place (see the drive's User's
Manual).
In the Master software:
1.Set the Control Word value to 0hex.
2.Set the Control Word value to 47Ehex.
3.Set the Control Word value to 47Fhex.
4.AC drive status is RUN.
5.Set the Reference value to '2000Hex' (=50.00%).
6.Actual speed is 2000Hex (25.00 Hz if MinFreq is 0.00 Hz and MaxFreq is 50.00 Hz)
7.Set the Control Word value to 47Ehex.
8.AC drive status is STOP.
8.4 PROFIdrive IO parameters
8.4.1 Parameters of the PROFIdrive
The table below lists the basic PROFIdrive parameters (continued on the next page).
Table 51. PROFIdrive basic parameters
PNU Significance Data type Explanation
Selection switch for DO IO
915
916
922 Telegram selection Unsigned16
923
930 Operating mode Unsigned16 1 = Speed control mode
Data in the setpoint tele-
gram
Selection switch for DO IO
Data in the actual value
telegram
List of all parameters for
signals
Array[n]
Unsigned16
Array[n]
Unsigned16
Array[n]
Unsigned16
Describes the data in the setpoint telegram. The parameter is an array of signals' numbers that creates the setpoint
telegram.
Describes the data in the actual value
telegram. The parameter is an array of
signals' numbers that creates the
actual value telegram.
Currently selected standard telegram is
read. It returns for example 1 for ST1.
See chapter 8.5.1.1., chapter ,
chapter 8.5.1.3, chapter 8.5.1.4 for possible values.
The parameter is an array. The index of
the array indicates for a signal number
and its value for corresponding parameter number.
Not supported standard signals, those
in range 1-99, have values set to 0. Gaps
between the device-specific signals are
also filled with 0.
Refer to Table 54.
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
8
Page 92

vacon • 90 PROFINET IO
Table 51. PROFIdrive basic parameters
PNU Significance Data type Explanation
The fault message counter is incremented each time that the fault buffer
changes. This means that it is guaran-
944 Fault message counter Unsigned16
947 Fault number
964 Drive Unit Identification
Array[n]
Unsigned16
Array[n]
Unsigned16
teed that the fault buffer is consistently
read-out. Without this parameter, it is
not guaranteed that the fault buffer
does not change while reading-out.
The parameter is an array of 8 elements. The first element indicates an
active unacknowledged fault. The following elements contain acknowledged
ones. The latest acknowledged fault
number is at index 1 and oldest one at
index 7.
An array is structured in the following
way (index meaning):
0 = Manufacturer code (0x01BA)
1 = Drive Unit Type (0x0002): 1 = VACON
NX series, 2 = VACON 100 series, 3 =
VACON 20 series
2 = Software version - XXYYd (XX - major
revision, YY - minor revision)
3 = Firmware date (year) - YYYYd
4 = Firmware date (day/month) DDMMd
5 = Number of Drive Objects (0x0001)
965
975 DO identification
Profile identification num-
ber
OctetString2
Array[n]
Unsigned16
Two bytes to identify the profile that is
used.
1st - profile number; PROFIdrive (3d)
2nd - profile version number; 4.1 (41d)
An array is structured in the following
way (index meaning):
0 = Manufacturer code (0x01BA)
1 = Drive Unit Type (0x0003)
2 = Software version - XXYYd (XX - major
revision, YY - minor revision)
3 = Firmware date (year) - YYYYd
4 = Firmware date (day/month) DDMMd
5 = Drive Object Type Class - Axis
(0x0001)
6 = Drive Object Sub-class 1 - Only
Application Class 1 (0x0001)
7 = Drive Object ID (value 1)
8
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 93

PROFINET IO vacon • 91
Table 51. PROFIdrive basic parameters
PNU Significance Data type Explanation
980:
This is a list of the parameter numbers
of all the implemented parameters. The
list does not contain the number 980-
980 - 989
Number list of defined pa-
rameter
Array[n]
Unsigned16
989. Parameters are listed in the
ascending (growing) order. The end-oflist is indicated by the value 0.
981-989:
Not used. Length of each is 1 and value
is 0, indicating an empty list.
8.4.1.1 PROFIdrive parameters for PROFINET IO communication interface
The table below lists the PROFINET IO communication interface parameters.
Table 52. PROFIdrive parameters
PNU Significance Data type Explanation
Octect-
61000 NameOfStation
String[240]
with-out null
termination
61001 IpOfStation
Unsigned32 IP Address of the Station for the PROFI-
61002 MacOfStation OctetString [6]
61003 DefaultGatewayOfStation Unsigned32
61004 SubnetMaskOfStation Unsigned32
Name of Station for the PROFINET IO
Network Interface, which is related to
this Drive Unit.
NET IO Network Interface.
MAC Address of the Station for the PRO-
FINET IO Network Interface
Default Gateway for the Station for the
PROFINET IO Network Interface.
Subnet Mask of the Station for the PRO-
FINET IO Network Interface.
8.4.2 Vendor-specific PROFIdrive parameters
The table below lists vendor-specific PROFIdrive parameters.
Table 53. PROFIdrive drive-specific parameters
PNU Significance Data type Explanation
9900 Test parameter (non-array) Unsigned16
Array[n]
9901 Test parameter (array)
10001 Drive parameter access
10100 Profile control word (STW1) Unsigned16 PROFIdrive 4.1 control word (STW1).
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Unsigned16
Array[n]
Special case, data
type depends
from the sub
index
For testing purposes. Does not affect the operation of the drive.
An array of 16 elements. Used only for testing
purposes. Does not affect the operation of the
drive.
A parameter used to access parameters from
the drive application. You can do this by putting
the desired drive parameter ID into the sub
index field of the parameter request. See
chapter 8.4.8
8
Page 94

vacon • 92 PROFINET IO
Table 53. PROFIdrive drive-specific parameters
PNU Significance Data type Explanation
10101
10102 Profile status word (ZSW1) Unsigned16 PROFIdrive 4.1 status word (ZSW1).
10103
10109
10110
10111
10112 VACON® Fixed Control Word Unsigned16 Fixed control word.
10113 VACON® Fixed Status Word Unsigned16 Fixed status word.
10114 VACON® Speed reference Unsigned16 Speed reference.
10115 VACON® Speed Actual value Unsigned16 Actual speed value.
10118 Clear VACON® fault history Unsigned16
10119 Read VACON® fault history
10120 VACON® General Control word Unsigned16 General control word.
10121 VACON® General Status word Unsigned16 General status word.
10122
10123
10124 Drive operation time counter Unsigned32
10125
10126 Drive energy counter Float32
10127 Drive energy trip counter Float32
Profile speed setpoint value
(NSOLL_A)
Profile speed actual value
(NIST_A)
VACON® 16-bit Process Data
In
VACON® 16-bit Process Data
Out
Speed physical reference
parameter
VACON® 32-bit Process Data
In
VACON® 32-bit Process Data
Out
Drive operation time trip coun-
ter
Integer16
Integer16 PROFIdrive 4.1 speed actual value (NIST_A).
Array[n]
Unsigned16
Array[n]
Unsigned16
Unsigned16
Array[n]
Unsigned16
Array[n]
Unsigned32
Array[n]
Unsigned32
Unsigned32
PROFIdrive 4.1 speed setpoint value
(NSOLL_A).
An array of 16 elements. From PDI1 (index 0) to
PDI16 (index 15).
An array of 16 elements. From PDO1 (index 0)
to PDO16 (index 15).
The parameter describes how many RPM is
meant by 100% in the PROFIdrive 4.1 speed
setpoint and actual value fields.
To clear the fault history, write a value to the
parameter.
An array of 40 elements consisting of VACON®
fault history fault codes.
An array of 16 elements. From PDI1 (index 0) to
PDI16 (index 15).
An array of 16 elements. From PDO1 (index 0)
to PDO16 (index 15).
Drive operation time in seconds as 32 bit
unsigned integer.
Drive operation time trip counter in seconds as
32 bit unsigned integer. Writing zero will reset
trip counter.
Drive energy counter in KWh as 32 bit float
(IEEE 754).
Drive energy trip counter in KWh as 32 bit float
(IEEE 754). Writing zero will reset trip counter.
8
8.4.3 PROFIdrive signal numbers
The table below lists the PROFIdrive signal numbers (continued on the next page).
Table 54. PROFIdrive signal numbers
Signal no. Signal name PNU PNU name
1 Control word 1 10100 PROFIdrive control word (STW1)
2 Status word 1
5 Speed setpoint A 10101
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
10102
PROFIdrive status word (ZSW1)
PROFIdrive speed setpoint value
(NSOLL_A)
Page 95

PROFINET IO vacon • 93
Table 54. PROFIdrive signal numbers
Signal no. Signal name PNU PNU name
6 Speed actual value A 10103 PROFIdrive speed actual value (NIST_A)
51 Output current 10104 Always returns zero.
52
54 Active power 10106 Always returns zero.
57 Speed actual value A 10107 Always returns zero.
58 Drive status/fault word 10108 Always returns zero.
100 VACON® PDO1 10110 VACON® 16-bit Process Data Out
101 VACON® PDO2 10110 VACON® 16-bit Process Data Out
102 VACON® PDO3 10110 VACON® 16-bit Process Data Out
103 VACON® PDO4 10110 VACON® 16-bit Process Data Out
104 VACON® PDO5 10110 VACON® 16-bit Process Data Out
105 VACON® PDO6 10110 VACON® 16-bit Process Data Out
106 VACON® PDO7 10110 VACON® 16-bit Process Data Out
107 VACON® PDO8 10110 VACON® 16-bit Process Data Out
Active current
(torque proportional)
10105 Always returns zero.
110 VACON® PDI1 10109 VACON® 16-bit Process Data In
111 VACON® PDI2 10109 VACON® 16-bit Process Data In
112 VACON® PDI3 10109 VACON® 16-bit Process Data In
113 VACON® PDI4 10109 VACON® 16-bit Process Data In
114 VACON® PDI5 10109 VACON® 16-bit Process Data In
115 VACON® PDI6 10109 VACON® 16-bit Process Data In
116 VACON® PDI7 10109 VACON® 16-bit Process Data In
117 VACON® PDI8 10109 VACON® 16-bit Process Data In
118 VACON® fixed control word 10112 VACON® Fixed Control Word
119 VACON® fixed status word 10113 VACON® Fixed Status Word
120
121 VACON® fixed actual value 10115 VACON® Speed Actual value
122*
123*
124* VACON® DW PDO1 10123 VACON® 32-bit Process Data Out
125* VACON® DW PDO2 10123 VACON® 32-bit Process Data Out
126* VACON® DW PDO3 10123 VACON® 32-bit Process Data Out
VACON® fixed reference
value
VACON® general control
word
VACON® general status
word
10114 VACON® Speed reference
10120 VACON® General Control word
10121 VACON® General Status word
127* VACON® DW PDO4 10123 VACON® 32-bit Process Data Out
128* VACON® DW PDO5 10123 VACON® 32-bit Process Data Out
129* VACON® DW PDO6 10123 VACON® 32-bit Process Data Out
130* VACON® DW PDO7 10123 VACON® 32-bit Process Data Out
131* VACON® DW PDO8 10123 VACON® 32-bit Process Data Out
132* VACON® DW PDI1 10123 VACON® 32-bit Process Data Out
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
8
Page 96

vacon • 94 PROFINET IO
Table 54. PROFIdrive signal numbers
Signal no. Signal name PNU PNU name
133* VACON® DW PDI2 10123 VACON® 32-bit Process Data Out
134* VACON® DW PDI3 10122 VACON® 32-bit Process Data In
135* VACON® DW PDI4 10122 VACON® 32-bit Process Data In
136* VACON® DW PDI5 10122 VACON® 32-bit Process Data In
137* VACON® DW PDI6 10122 VACON® 32-bit Process Data In
138* VACON® DW PDI7 10122 VACON® 32-bit Process Data In
139* VACON® DW PDI8 10122 VACON® 32-bit Process Data In
140 VACON® PDO9
141 VACON® PDO10
142 VACON® PDO11
143 VACON® PDO12
144 VACON® PDO13
145 VACON® PDO14
146 VACON® PDO15
147 VACON® PDO16
148 VACON® PDI9
149 VACON® PDI10
150 VACON® PDI11
151 VACON® PDI12
152 VACON® PDI13
153 VACON® PDI14
154 VACON® PDI15
155 VACON® PDI16
156 VACON® DW PDO9*
157 VACON® DW PDO10*
158 VACON® DW PDO11*
159 VACON® DW PDO12*
160 VACON® DW PDO13*
161 VACON® DW PDO14*
162 VACON® DW PDO15*
10110 VACON® 16-bit Process Data Out
10109 VACON® 16-bit Process Data In
10123 VACON® 32-bit Process Data Out
8
163 VACON® DW PDO16*
164 VACON® DW PDI9*
165 VACON® DW PDI10*
166 VACON® DW PDI11*
167 VACON® DW PDI12*
10122 VACON® 32-bit Process Data In
168 VACON® DW PDI13*
169 VACON® DW PDI14*
170 VACON® DW PDI15*
171 VACON® DW PDI16*
* 32 bit data not supported in current version. See chapter 5.
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 97

PROFINET IO vacon • 95
8.4.4 User specific record data
For easy access to drive parameters and monitoring values, the OPTE9 maps the PROFINET user
specific record indexes 0x0000 - 0x7FFF directly into the application IDs of the drive based on the
IEC61131 standard. Both read and write access is supported.
NOTE! The response data is in raw format. See application manual for available IDs, amount of
decimals and the unit used for the parameters.
IDs can be read/written as VACON® NX scaled values in all drives, or, in VACON® 100 series AC
drives, also as actual raw value.
Table 55. Application ID access settings
Slot Subslot Description Note
1 Access IDs as VACON® NX scaled values
1
2 Access IDs as VACON® 100 actual data type
Only available in VACON®
100
In the examples below, the following index values are used:
• 102 = Maximum frequency (Hz)
• 600 = Motor control mode
Table 56. Example 1: Reading values from different AC drives
Read command Response
AC drive
Slot Subslot Index Hex Dec Actual value
102 13 88 5000 50.00 Hz
Any 1 1
600 00 01 1 1 = OL Speed
102 00 07 A1 20 500000 50.0000 Hz
VACON® 100 1 2
600 00 00 00 01 1 1 = OL Speed
Table 57. Example 2: Writing values for different AC drives
Write command
AC drive
Slot Subslot Index Length Value (Hex)
102 2 11 94 45.00 Hz
Any 1 1
600 2 00 00 0 = OL Frequency
102 4 00 06 DD D0 45.0000 Hz
VACON® 100 1 2
600 4 00 00 00 00 0 = OL Frequency
Actual value
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
8
Page 98

vacon • 96 PROFINET IO
11611_uk
Contoller/Supervisor
(Client)
Communication system DU/DO Parameter
manager (Server)
Parameter
processing in the
Parameter Manager
Parameter
Request
Write Parameter response
from PAP
Parameter
Request
Error because
response
not yet available
Read Parameter response
from PAP
Error bacause
response
not yet available
Read Parameter response
from PAP
Parameter
response
Read Parameter response
from PAP
Parameter
response
Time line
8.4.5 Base Mode Parameter Access Model
The PROFIdrive parameters are accessed according to the model presented below:
Both indexes can be used to access PROFIdrive parameters. There is no difference in operation
between them with current implementation.
The structure of parameter requests is described in the table below:
Block definition Byte n+1 Byte n n
Request Header Request Reference Request ID 0
1st Parameter Address Attribute No. of Elements 4
nth Parameter Address ... 4 + 6 x (n - 1)
1st Parameter Value(s)
(only for request
"Change parameter")
nth Parameter Values ...
Figure 37. PROFIdrive parameter access model
Table 58. Parameter access services
Parameter access service Index
Base Mode Parameter - Local 0xB02E
Base Mode Parameter - Global 0xB02F
Table 59. Parameter request
Axis-No. / DO-ID No. of Parameters = n 2
Parameter Number (PNU)
Subindex
Format No. of Values 4 + 6 x n
Values
...
8
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
Page 99

PROFINET IO vacon • 97
Block definition Byte n+1 Byte n n
4 + 6 x n + ... +
(For-mat_n x
Qty_n)
The structure of parameter responses is described in the table below:
Table 60. Parameter response
Block definition Byte n+1 Byte n n
Response header Request Ref. mirrored Response ID 0
Axis-No. / DO-ID mirrored No. of Parameters = n 2
1st Parameter Value(s)
(only for request
"Request")
Values or Error Values
Format No. of Values 4
...
nth Parameter Values ...
The table below contains descriptions of parameters.
Table 61. Parameter description
Sub-
index
1 Identifier (ID) Unsigned16
2
3 Standardisation factor
4Variable attribute
5 Reserved
6Name
7Low limit
8 High limit
9 Reserved
10 ID extension Unsigned16 Not used, always 0.
Field name Data type Description
A bitmask with information about the
parameter characteristics.
Number of array ele-
ments
Unsigned16
FloatingPoint (IEEE
754)
Array of two
Unsigned8
Array of four
Unsigned8
ASCII string, 16 char-
acters
Array of four
Unsigned8
Array of four
Unsigned8
Array of two
Unsigned8
For array parameters, the number of
elements in the array.
If the information represented by the
parameter can be converted into a standardised form, this field contains a factor for this conversion.
Contains two index numbers for
describing the parameter information.
Reserved, always 0.
Symbolic name of the parameter.
Limit for valid values of the parameter.
Limit for valid values of the parameter.
Reserved, always 0.
4 + ... +
(Format_n x
Qty_n)
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
8
Page 100

vacon • 98 PROFINET IO
Sub-
index
11
12 Normalisation field Unsigned16
8.4.5.1 Parameter requests
There are two types of parameter requests in PROFIdrive:
• Read requests for reading parameters from the device
• Change requests for writing parameters to the device
Each parameter request consists of three elements:
• Request header
• Parameter address
• Parameter value (only in Change requests)
Request header
Field name Data type Description
Normalisation refer-
ence parameter
Parameter
address(es)
Unsigned16
Parameter value(s)
Parameter number, the value of which
is used as normalisation reference for
the parameter whose description this
is.
Contains information about normalisation of this parameter.
8.4.5.2
The request header consists of 4 fields, each one octet in size.
Octet
number
1
2 Request ID Defines the type of request.
3 Axis Number Not used, should be set to 1.
4
Request header
Table 62. Request header
Field name Description Allowed values
Unique number for each
request/response pair. This
Request Refer-
ence
Requested num-
ber of
parameters
value is changed by the
master for each new
request. It is mirrored by the
slave in the response.
The number of parameters
affected by the request.
A bitmask with information about the
parameter characteristics.
Use 0x01 for Read requests.
Use 0x02 for Change requests.
Other values are not allowed.
Use 1 for OPTE9 PROFINET IO.
Other values should not be used.
Values 1 to 39 are allowed.
The value 0 is not allowed.
Values 40 to 255 are not allowed.
8
Local contacts: http://drives.danfoss.com/danfoss-drives/local-contacts/
 Loading...
Loading...