

Page 1

vacon
ac drives
canopen option board opte6
user manual
®
Page 2

Page 3

vacon • 1
TABLE OF CONTENTS
Document: DPD01091B
Release date : 20042016
1. Safety...............................................................................................................3
1.1 Danger................................................................................................................................3
1.2 Warnings ............................................................................................................................4
1.3 Earthing and earth fault protection ...................................................................................5
2. CANopen option board OPTE6 - General ..........................................................6
2.1 Overview .............................................................................................................................6
2.2 Software .............................................................................................................................6
2.2.1 CAN.....................................................................................................................................6
2.2.2 CANopen.............................................................................................................................6
3. CANopen protocol description .........................................................................7
3.1 NMT ....................................................................................................................................7
3.2 Node control protocols ......................................................................................................8
3.3 Error control protocols ....................................................................................................10
3.3.1 Heartbeat protocol ...........................................................................................................10
3.3.2 Node guarding protocol ...................................................................................................10
3.3.3 EMCY object......................................................................................................................11
3.4 SDO protocol ....................................................................................................................13
3.5 PDO protocol ....................................................................................................................14
3.5.1 PDO communication parameter record ..........................................................................14
3.5.2 COB ID ..............................................................................................................................15
3.5.3 Transmission type............................................................................................................16
3.5.4 PDO parameter mapping record .....................................................................................17
3.6 SYNC protocol ..................................................................................................................18
3.6.1 SYNC with counter ...........................................................................................................18
3.7 Communication objects ...................................................................................................20
3.7.1 0X1000 - Device Type .......................................................................................................20
3.7.2 0X1001 - Error Register ...................................................................................................20
3.7.3 0X1003 - Pre-defined Error Field ....................................................................................21
3.7.4 0X1005 - COB ID SYNC .....................................................................................................21
3.7.5 0X100C - Guard Time .......................................................................................................21
3.7.6 0X100D - Life Time Factor ...............................................................................................21
3.7.7 0X1014 - COB ID EMCY.....................................................................................................22
3.7.8 0X1016 - Heartbeat Consumer Entries............................................................................22
3.7.9 0X1017 - Producer Heartbeat Time .................................................................................23
3.7.10 0X1018 - Identify Object ...................................................................................................23
3.7.11 0X1019 - Synchronous counter........................................................................................23
3.7.12 0X1029 - Error behaviour.................................................................................................24
3.8 Saving and restoring the object dictionary ......................................................................25
3.8.1 0X1010 Store parameter field ..........................................................................................25
3.8.2 0X1011 Restore default parameters................................................................................25
3.8.3 Bypass parameter set......................................................................................................25
4. CANopen option board OPTE6 - technical data...............................................30
4.1 General.............................................................................................................................30
4.2 CAN cable.........................................................................................................................30
4.2.1 Isolated ground connection .............................................................................................31
4.2.2 Recommended cable .......................................................................................................32
5. OPTE6 layout and connections .......................................................................33
5.1 Layout and connections ...................................................................................................33
5.2 LED Indications ................................................................................................................35
5.3 Jumpers ...........................................................................................................................36
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
Page 4
vacon • 2
6. Installation.....................................................................................................38
6.1 Installation in Vacon® 100...............................................................................................38
6.2 Prepare for use through fieldbus ....................................................................................40
6.3 Installation in Vacon® 20.................................................................................................43
6.3.1 Frames MI1, MI2, MI3 ......................................................................................................43
6.3.2 Frames MI4, MI5 ..............................................................................................................46
6.4 Installation in Vacon® 20 X and 20 CP ............................................................................49
6.5 Installation in Vacon® 100 X (Frames MM4-MM6) .........................................................51
7. Commissioning ..............................................................................................55
7.1 OPTE6 panel parameters.................................................................................................55
7.1.1 Parameter descriptions ...................................................................................................55
8. CANopen option board interface .................................................................... 57
8.1 Supported drive modes....................................................................................................57
8.2 Velocity mode ...................................................................................................................58
8.2.1 PDS State machine ..........................................................................................................58
8.2.2 0X6040 - Controlword ......................................................................................................61
8.2.3 0X6041 - Statusword ........................................................................................................61
8.2.4 0X6042 - vl Target Velocity...............................................................................................62
8.2.5 0X6043 - vl Velocity Demand............................................................................................62
8.2.6 0X6044 - vl Velocity Actual Value .....................................................................................62
8.2.7 0X6046 - vl Velocity Min Max Amount ..............................................................................62
8.2.8 0X6048 - vl Velocity Acceleration.....................................................................................63
8.2.9 0X6049 - vl Velocity Deceleration ....................................................................................63
8.3 Bypass mode ....................................................................................................................64
8.3.1 Exception when using bypass mode ................................................................................65
8.4 Default process data application mapping ......................................................................66
8.4.1 FB Control Word ..............................................................................................................66
8.4.2 FB Control Word Extension (general control word) ........................................................67
8.4.3 FB Speed Reference ........................................................................................................67
8.4.4 FB Process data Input 1...8..............................................................................................68
8.4.5 FB Processdata Input mapping in application ................................................................68
8.4.6 FB Status Word ................................................................................................................68
8.4.7 FB Status Word Extension (general status word) ...........................................................69
8.4.8 FB Actual Speed...............................................................................................................69
8.4.9 FB Processdata Output 1...8 ............................................................................................69
8.4.10 FB Processdata Output mapping in application..............................................................69
9. Appendix A: Object dictionary ........................................................................71
9.1 Communication segment.................................................................................................71
9.2 Manufacturer Segment....................................................................................................75
9.3 Device Profile Segment....................................................................................................76
Tel. +358 (0) 201 2121 • Fax +358 (0)201 212 205
Page 5
Safety vacon • 3
9000.emf
13006.emf
9001.emf
9000.emf
9000.emf
9000.emf
9000.emf
9000.emf
9000.emf
1. SAFETY
This manual contains clearly marked cautions and warnings that are intended for your personal
safety and to avoid any unintentional damage to the product or connected appliances.
Please read the information included in cautions and warnings carefully.
The cautions and warnings are marked as follows:
= DANGER! Dangerous voltage
= WARNING or CAUTION
= Caution! Hot surface
1.1 Danger
The components of the power unit are live when the drive is connected to mains
potential. Coming into contact with this voltage is extremely dangerous and may
cause death or severe injury.
The motor terminals U, V, W and the brake resistor terminals are live when the
AC drive is connected to mains, even if the motor is not running.
After disconnecting the AC drive from the mains, wait until the indicators on the
keypad go out (if no keypad is attached, see the indicators on the cover). Wait 5
more minutes before doing any work on the connections of the drive. Do not open
the cover before this time has expired. After expiration of this time, use a
measuring equipment to absolutely ensure that no
ensure absence of voltage before starting any electrical work!
The control I/O-terminals are isolated from the mains potential. However, the
relay outputs and other I/O-terminals may have a dangerous control voltage
present even when the AC drive is disconnected from mains.
Before connecting the AC drive to mains make sure that the front and cable
covers of the drive are closed.
During a ramp stop (see the Application Manual), the motor is still generating
voltage to the drive. Therefore, do not touch the components of the AC drive
before the motor has completely stopped. Wait until the indicators on the keypad
go out (if no keypad is attached, see the indicators on the cover). Wait additional 5
minutes before starting any work on the drive.
voltage is present.
Always
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
1
Page 6
vacon • 4 Safety
13006.emf
13006.emf
13006.emf
13006.emf
13006.emf
13006.emf
13006.emf
13006.emf
13006.emf
13006.emf
13006.emf
1.2 Warnings
The AC drive is meant for fixed installations only.
Do not perform any measurements when the AC drive is connected to the mains.
The earth leakage current of the AC drives exceeds 3.5mA AC. According to
standard EN61800-5-1, a reinforced protective ground connection must be
ensured. See Chapter 1.3.
If the AC drive is used as a part of a machine, the machine manufacturer is
responsible for providing the machine with a supply disconnecting device (EN
60204-1).
Only spare parts delivered by Vacon can be used.
At power-up, power brake or fault reset the motor will start immediately if the
start signal is active, unless the pulse control for
Start/Stop logic has been selected
Furthermore, the I/O functionalities (including start inputs) may change if
parameters, applications or software are changed. Disconnect, therefore, the
motor if an unexpected start can cause danger.
.
The motor starts automatically after automatic fault reset if the auto restart
function is activated. See the Application Manual for more detailed information.
Prior to measurements on the motor or the motor cable, disconnect the motor
cable from the AC drive.
Do not touch the components on the circuit boards. Static voltage discharge may
damage the components.
Check that the EMC level of the AC drive corresponds to the requirements of your
supply network.
Wear protective gloves when you do mounting, cabling or maintenance
operations. There can be sharp edges in the AC drive that can cause cuts.
Tel. +358 (0) 201 2121 • Fax +358 (0)201 212 205
1
Page 7
Safety vacon • 5
13006.emf 13006.emf
1.3 Earthing and earth fault protection
CAUTION!
The AC drive must always be earthed with an earthing conductor connected to the earthing terminal
marked with .
The earth leakage current of the drive exceeds 3.5mA AC. According to EN61800-5-1, one or more
of the following conditions for the associated protective circuit must be satisfied:
0) The protective conductor must have a cross-sectional area of at least 10 mm
Al, through its total run.
a) Where the protective conductor has a cross-sectional area of less than 10 mm
2
Al, a second protective conductor of at least the same cross-sectional area must be
mm
provided up to a point where the protective conductor has a cross-sectional area not less
than 10 mm
2
Cu or 16 mm2 Al.
b) Automatic disconnection of the supply in case of loss of continuity of the protective
conductor.
2
Cu or 1 6 mm2
2
Cu or 16
The cross-sectional area of every protective earthing conductor which does not form part of the
supply cable or cable enclosure must, in any case, be not less than:
-2.5mm
-4mm
2
if mechanical protection is provided or
2
if mechanical protection is not provided.
The earth fault protection inside the AC drive protects only the drive itself against earth faults in the
motor or the motor cable. It is not intended for personal safety.
Due to the high capacitive currents present in the AC drive, fault current protective switches may
not function properly.
Do not perform any voltage withstand tests on any part of the AC drive. There is
a certain procedure according to which the tests must be performed. Ignoring
this procedure can cause damage to the product.
NOTE! You can download the English and French product manuals with applicable safety,
warning and caution information from
http://drives.danfoss.com/knowledge-center/technical-documentation/.
REMARQUE Vous pouvez télécharger les versions anglaise et française des manuels produit
contenant l’ensemble des informations de sécurité, avertissements et mises en garde
applicables sur le site http://drives.danfoss.com/knowledge-center/technical-documentation/
.
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
1
Page 8

vacon • 6 CANopen option board OPTE6 - General
2. CANOPEN OPTION BOARD OPTE6 - GENERAL
2.1 Overview
OPTE6 is a CANopen adapter board for Vacon-manufactured AC drives. The board allows the AC
drive to be controlled by using the CANopen protocol. The board implements the AC drive profile
with the velocity mode.
The option board firmware implements the following protocol specifications:
• CiA-301 CANopen communication specification version 4.2
• CiA-402 CANopen Profile for Drives and Motion Controller version 3.2
Device: AC drive
Operation mode: velocity mode
• CiA-303-3 CANopen indicator specification, implemented by using 2 CANopen status led
indicators
2.2 Software
2.2.1 CAN
The CAN data link layer protocol is standardised in ISO 11898. The standard describes mainly the
data link layer composed of the logical link control (LLC) sub layer and the media access control
(MAC) sub layer, and some aspects of the physical layer of the OSI reference model.
2.2.2 CANopen
CANopen is an application layer protocol on top of the CAN bus.
The protocol specification describes:
• Set of bit rates to support
• Network Management (NMT)
• Service data transmission (SDO)
• Process data transmission (PDO)
• Error message transmission (EMCY)
• Node status monitoring (heartbeat and node guarding)
• Identity information
• Parameter saving and restoring
2
Tel. +358 (0) 201 2121 • Fax +358 (0)201 212 205
Page 9
CANopen protocol description vacon • 7
(1)
(2) (11)
(4) (5) (10)
(7)
(3)
(14)
(13)
(12) (8) (9)
Power on or hardware reset
Pre-operational
Initialisation
Operational
Stopped
11651_uk
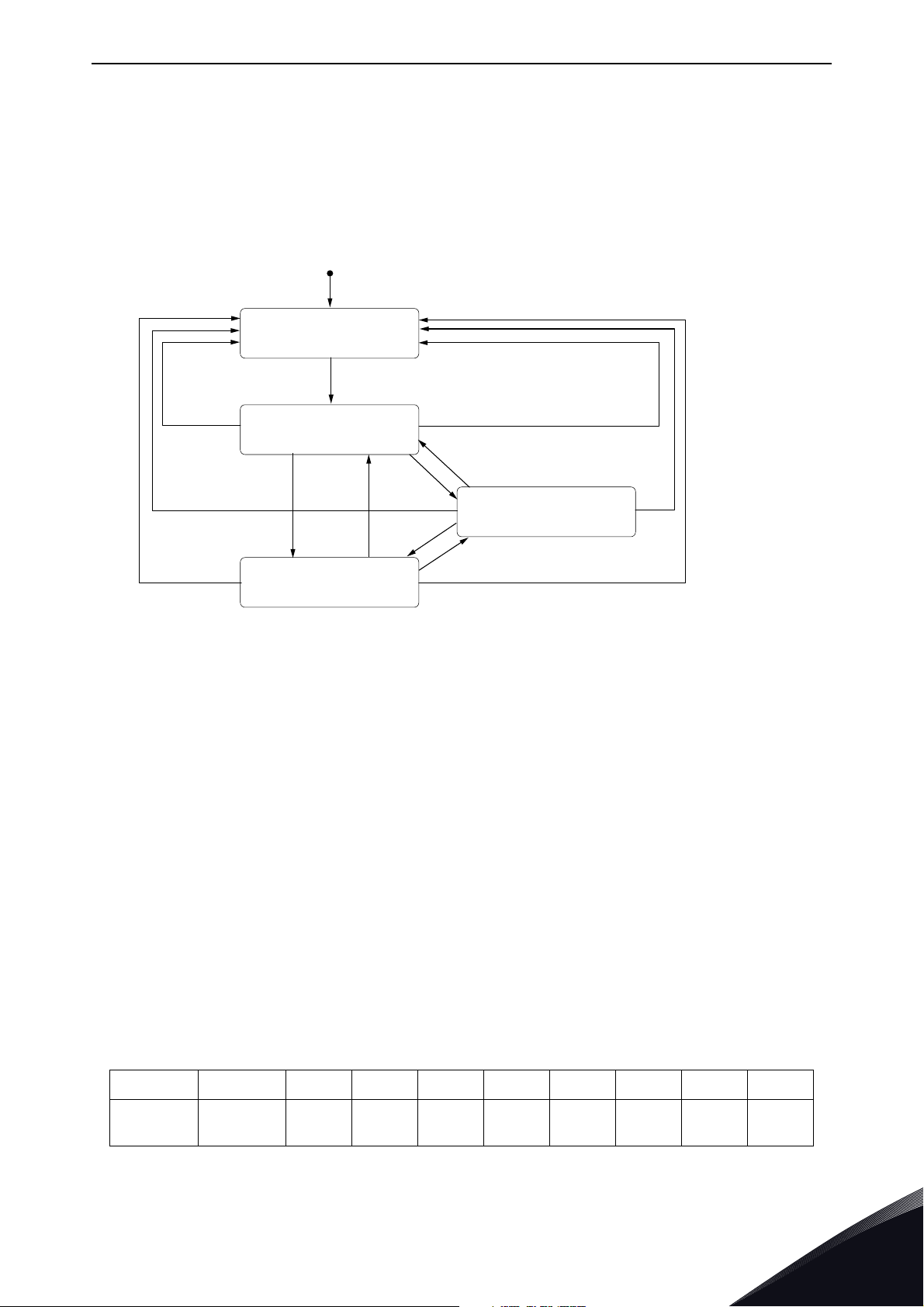
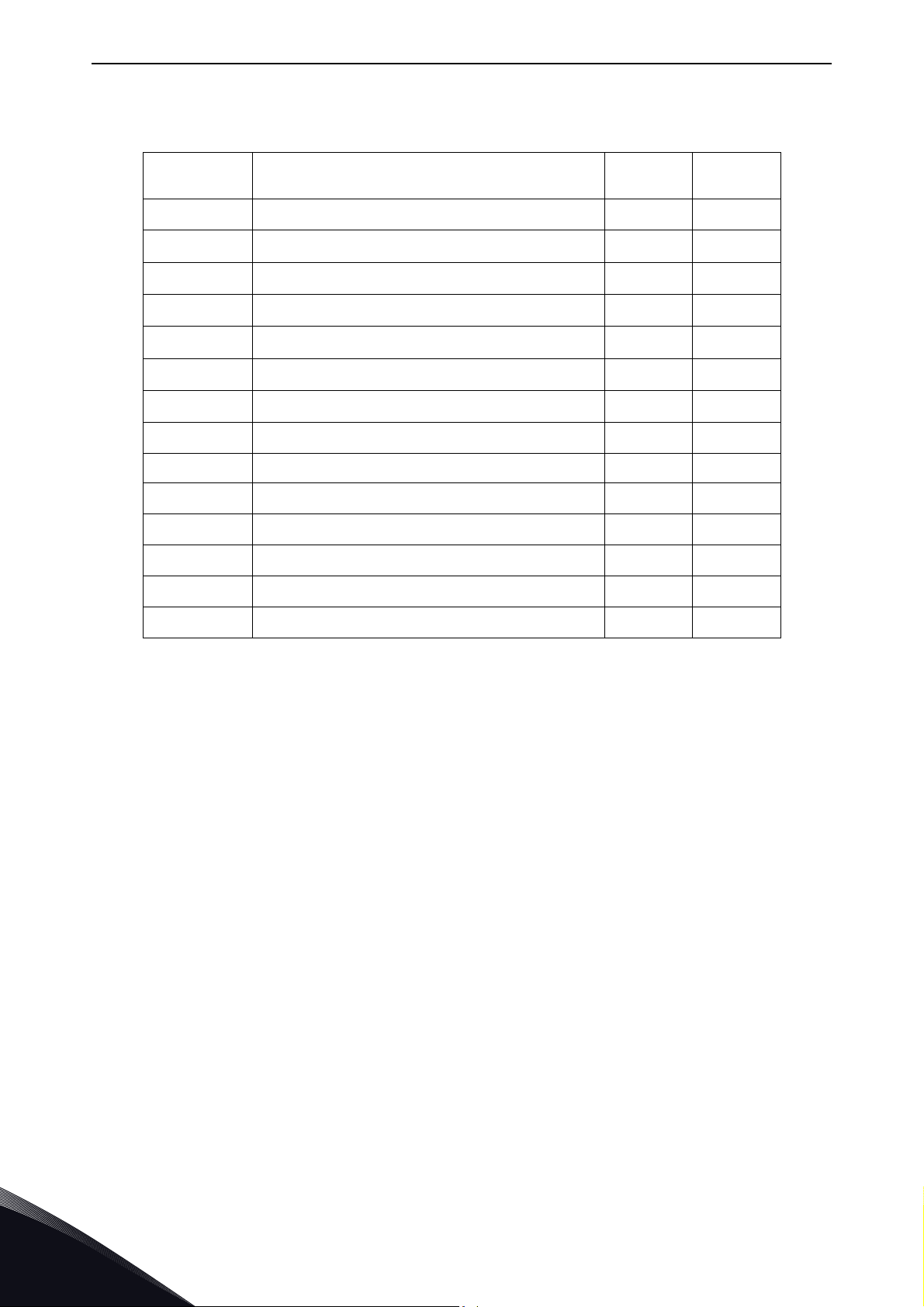
3. CANOPEN PROTOCOL DESCRIPTION
3.1 NMT
NMT network management manages CANopen, and is a mandatory, common feature for all
devices. The protocol describes several node control services and the state machine.
1 = When the power is on, the NMT state is entered autonomously
2= The NMT state initialisation is finished, the NMT pre-operational state is entered
automatically
3 = NMT service starts with remote node indication or by local control
4 and 7 = NMT service enters pre-operational indication
5 and 8 = NMT service stops remote node indication
6 = NMT service starts remote node indication
9, 10 and 11 = NMT resets node indication
12, 13 and 14 = Indication of NMT service reset communication
Boot-up protocol
After a node starts, it will enter automatically into the pre-operational state. Always when this
transition occurs, a boot-up message is sent into the bus.
Table 1: Boot-up message
CAN ID LENGTH DATA0 DATA1 DATA2 DATA3 DATA4 DATA 5 DATA 6 DATA7
Figure 1. NMT state machine
0x700 +
Node ID
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
10
3
Page 10
vacon • 8 CANopen protocol description
3.2 Node control protocols
Protocol start remote node
The start remote node message sets the node(s) into operational state. See Figure 1. NMT state
machine. If the node ID in the message is set to ‘0’, the message affects all nodes (broadcast).
Table 2: Start remote node message
CAN ID LENGTH DATA0 DATA1 DATA2 DATA3 DATA4 DATA5 DATA6 DATA7
0x0 0x2 0x1
NODE
ID
Protocol stop remote node
The stop remote node message sets the node(s) into stopped state. See Figure 1 NMT state
machine. If the node ID in the message is set to ‘0’, the message affects all nodes (broadcast). When
the node is in stopped state, it will not answer to SDO or PDO messages.
Table 3: Stop remote node message
CAN ID LENGTH DATA0 DATA1 DATA2 DATA3 DATA4 DATA5 DATA6 DATA7
0x0 0x2 0x2
NODE
ID
Protocol enter pre-operational
The enter pre-operational message sets the node(s) into pre-operational state. See Figure 1. NMT
state machine. If the node ID in the message is set to ‘0’, the message affects all nodes (broadcast).
When the node is in pre-operational state, it will not answer to PDO messages.
Table 4: Enter pre-operational message
CAN ID LENGTH DATA0 DATA1 DATA2 DATA3 DATA4 DATA5 DATA6 DATA7
0x0 0x2 0x80
NODE
ID
Protocol reset node
The reset node message makes the node(s) apply application reset. See Figure 1. NMT state
machine. Application reset sets the whole object dictionary back to the default or previously saved
values. If the node ID in the message is set to ‘0’, the message affects all nodes (broadcast). After
the node has made the application reset, it will enter the pre-operational state automatically from
the initialising state. This also creates a boot-up event and the boot-up message is sent after the
reset.
Table 5: Reset node message
CAN ID LENGTH DATA0 DATA1 DATA2 DATA3 DATA4 DATA5 DATA6 DATA7
0x0 0x2 0x81
NODE
ID
3
Tel. +358 (0) 201 2121 • Fax +358 (0)201 212 205
Page 11

CANopen protocol description vacon • 9
Protocol reset communication
The reset communication message makes the node(s) apply communication reset. See Figure 1.
NMT state machine. Communication reset does not affect the object dictionary values. If the node
ID in the message is set to ‘0’, the message affects all nodes (broadcast). After the node has made
the communication reset, it will enter the pre-operational state automatically from the initialising
state. This also creates a boot-up event and the boot-up message is sent after the reset.
Table 6: Reset communication message
CAN ID LENGTH DATA0 DATA1 DATA2 DATA3 DATA4 DATA5 DATA6 DATA7
0x0 0x2 0x82
NODE
ID
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
3
Page 12
vacon • 10 CANopen protocol description
3.3 Error control protocols
3.3.1 Heartbeat protocol
Heartbeat protocol defines the producer and consumer. The producer node sends its NMT status
that is then available for any consumer node. The consumer node is the receiver of heartbeat
messages. The producer node has a timing parameter that indicates how often the heartbeat
message should be sent. The consumer node has a relative parameter that indicates how often the
heartbeat message should be received. If the consumer does not receive the heartbeat message
within the time defined in the heartbeat object entry, an error event occurs.
Table 7: Node status description
Value Description
0x0 Boot-up
0x4 Stopped
0x5 Operational
0x7F Pre-operational
Table 8: Heartbeat message
CAN ID LENGTH DATA0 DATA 1 DATA2 DATA3 DATA4 DATA 5 DATA6 DATA7
0x700 +
Node ID
0x1 Status
Table 9: Heartbeat-related objects in OD
Index Description
0x1016 Consumer heartbeat time
0x1017 Producer heartbeat time
0x1029 Error behaviour
3.3.2 Node guarding protocol
Node guarding protocol is a NMT master driver protocol, where the master sends a remote
transmission request, which is answered by the slave. The slave response includes one data byte
that consists of a NMT slave state, and a toggle bit that toggles every response.
3
NOTE! The CiA application note 802 recommends that the node guarding protocol should not be
used, because of different handling of RTR frames in CAN controllers.
OPTE6 option board does not have a hardware-triggered automatic response to the RTR frame. RTR
information is handled by software, and the response data always consists of updated information.
Tel. +358 (0) 201 2121 • Fax +358 (0)201 212 205
Page 13
CANopen protocol description vacon • 11
Table 10: Node guarding RTR frame (remote request)
CAN ID LENGTH RTR DATA0 DATA1 DATA2 DATA3 D ATA4 DATA5 DATA6 DATA7
0x700 +
Node ID
Table 11: Node guarding response
CAN ID LENGTH DATA0 DATA1 DATA2 DATA3 DATA4 DATA5 DATA6 DATA7
0x700 +
Node ID
0x0 1
0x1 t Status
Table 12: Node guarding slave status
Status
Value Description
0x4 Stopped
0x5 Operational
0x7F Pre-operational
Table 13: Node guarding related objects in OD
Index Description
0x100C Guard time
0x100D Life time factor
3.3.3 EMCY object
Option board works as an EMCY producer. The EMCY object is transmitted when a fault occurs in
the drive or option board. To switch off the EMCY producer, disable the EMCY COB-id by writing MSB
bit to 1 (object 0x1014).
When an error occurs, the EMCY message is transmitted with the current value of the error
register and the error code is inserted into the pre-defined error field list. The newest error code is
always the first sub-index on the error field list. When all active errors are cleared, an empty EMCY
object is transmitted.
If a drive-internal fault occurs, the MSEF field contains the drive fault code. See the application and
user manual for possible fault codes. The ER field holds a bit coded value of the error type. See
object 0x1001 for more details.
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
3
Page 14
vacon • 12 CANopen protocol description
Table 14: EMCY message
CAN ID LENGTH DATA0 DATA1 DATA2 DATA3 DATA4 DATA5 DATA6 DATA7
0x80 +
Node ID
0x8 EEC ER MSEF
Table 15: EMCY message data fields
EEC Emergency error code
ER Error register value
MSEF
Manufacturer-specific
error code
Table 16: Used EMCY error codes and description MSEF fields
DATA0 DATA1 DATA2 DATA3 DATA4 DATA5 DATA6 DATA7
0x0000
0x1000 Drive fault codes
0x8110 -
0x8120 -
0x8130
ER
0x8140 -
3: N umb er of remai ning error s ource s
3: Heartbeat consumer subindex
4: Heartbeat consumer node-ID
0x8210 -
0x8220 -
0x8240 -
0x8250 -
Table 17: Description and behavior of different error situations
EEC Description Error behaviour Err LED
0x0000
0x1000
0x8120
Error Reset or No Error
Generic Error
CAN in Error Passive
Mode
Life Guard Error
0x8130
Heartbeat Error
0x8140 Recovered from Bus-Off
If MSEF field is empty all error sources are cleared and drive
fault is cleared.
Drive fault codes have changed. -
EMCY is sent after CAN driver goes back to active state. This
also clears the fault.
Error is reset when a RTR is received or either of the life
guard objects (0x100C, 0x100D) is written to zero.
Error is reset when a HB message is received by the HB consumer, or the consumer entry is changed (either Node-ID or
Heartbeat Time).
EMCY is sent after CAN driver goes back to active state. This
also clears the fault.
Single flash
-
Double
flash
On
3
0x8250
PDO timer expired
Error is cleared when a PDO is received (in expired PDO).
Tel. +358 (0) 201 2121 • Fax +358 (0)201 212 205
Quadruple
flash
Page 15
CANopen protocol description vacon • 13
All communication errors are reset if a reset command is given. This does not however reset drive
faults if there are active error sources.
EMCYs are also created in some cases, even though a fault is not created. These are for notification
only.
Table 18: Notification EMCY objects
EEC Description
0x8110 CAN overrun (objects lost)
0x8210 PDO not processed due to length error
0x8220 PDO length exceeded
0x8240 Unexpected SYNC data length
Table 19: EMCY-relate objects in OD
Index Description
0x1001 Error register
0x1003
0x1014 EMCY object COB-ID
Pre-defined error field
list
3.4 SDO protocol
The Option board contains one SDO server. The SDO protocol provides a direct access to the object
entries of the object dictionary of the CANopen device. Each message is acknowledged by the
server. The protocol is mostly used to set and read parameters from the object dictionary at the
pre-operational state. Some objects have limitations for SDO usage at the operational state.
Up to four bytes can be transferred by using the expedited transfer, where the data fits into one CAN
message. For bigger than 4-byte object sizes, segmented transfer must be used. Optionally, block
transfer is also possible with bigger data types. Block transfer is most efficient with big data sizes.
Table 20: SDO-related objects in OD
Index Description
0x1200
SDO server parameter
object
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
3
Page 16
vacon • 14 CANopen protocol description
3.5 PDO protocol
Process data objects PDOs are used to transmit real-time data with no protocol overhead. Each
PDO has its mapping and communication parameter record.
There are two different types of PDOs. Transmit PDOs for producing data into network and Receive
PDOs for consuming data from network. OPTE6 board consist totally 3 receive and 3 transmit PDOs.
Table 21: PDO-related objects in OD
Index Description
0x1400 1st rxPDO communication parameter record
0x1401 2nd rxPDO communication parameter record
0x1402 3rd rxPDO communication parameter record
0x1600 1st rxPDO mapping parameter record
0x1601 2nd rxPDO mapping parameter record
0x1602 3rd rxPDO mapping parameter record
0x1800 1st txPDO communication parameter record
0x1801 2nd txPDO communication parameter record
0x1802 3rd txPDO communication parameter record
0x1A00 1st txPDO mapping parameter record
0x1A01 2nd txPDO mapping parameter record
0x1A02 3rd txPDO mapping parameter record
3.5.1 PDO communication parameter record
PDO communication parameter record defines the COB-id, transmission type and how often the
PDO is transmitted. The fields can be modified during the pre-operational state.
Table 22: PDO communication parameter record
Indexes Sub-index Name Data type RX PDO TX PDO
0 Highest sub-index supported UNSIGNED8 ro ro
1 COB ID UNSIGNED32 r/w r/w
0x1400
0x1401
0x1402
0x1800
0x1801
0x1802
2 Transmission type UNSIGNED8 r/w r/w
3 Inhibit time UNSIGNED16 ro r/w
4 Reserved UNSIGNED8 ro ro
5 Event timer UNSIGNED16 r/w r/w
3
6 SYNC start value UNSIGNED8
Tel. +358 (0) 201 2121 • Fax +358 (0)201 212 205
Not
available
r/w
Page 17
CANopen protocol description vacon • 15
3.5.2 COB ID
COB ID determines whether the PDO is valid (active) and using 11-bit or 29-bit frames.
troller application and user manual for possible fault codes.
Table 23: COB ID
31 30 29 28 11 10 0
Valid Reserved Frame
Table 24: COB ID data fields
Bit(s) Value Description
Valid
Reserved x Not applicable
Frame
29-bit CAN-ID x
11-bit CAN-ID x
0x00000 11-bit CAN-ID
29-bit CAN-ID
0 PDO exists / enabled
1
0 11-bit CAN-ID valid
1 20-bit CAN-ID valid
PDO does not exist /
disabled
29-bit CAN-ID of the CAN
extended frame
11-bit CAN-ID of the CAN
base frame
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
3
Page 18
vacon • 16 CANopen protocol description
3.5.3 Transmission type
Table 25: PDO transmission types
Value Description
0x00
0x01
0x02
0x03
0x04
... ...
0xF0
0xF1
... ... - -
0xFB
0xFC
0xFD
0xFE
Synchronous (acyclic)
Synchronous (cyclic every sync)
Synchronous (cyclic every 2nd sync)
Synchronous (cyclic every 3rd sync)
Synchronous (cyclic every 4th sync)
Synchronous (cyclic every 240th sync)
Reserved
Reserved
RTR-only (synchronous)
RTR-only (Event-driven)
Event-driven (manufacturer-specific)
Receive
PDO
XX
X
1
X
1
X
1
X
1
X
1
X
1
--
--
-X
-X
XX
Transmit
PDO
X
X
X
X
X
X
0xFF
For receive PDO, each sync transmission mode equals the same. Each sync always activates the latest
1
Event-driven (device and application profile)
XX
received PDO value.
Synchronous means that the PDO is transmitted after the SYNC. The CANopen device starts
sampling the data with the reception of the SYNC. If the transmission mode of the PDO is acyclic,
the CANopen device gives an internal event, the sampling starts with the next SYNC and the PDO is
transmitted afterwards. If the transmission mode is cyclic, the sampling starts with the reception
of every SYNC, every second SYNC, every third SYNC etc. depending on the given value, and the PDO
is transmitted afterwards.
RTR-only means that the PDO is requested via RTR. If the transmission mode of the PDO is
synchronous, the CANopen device starts sampling with the reception of every SYNC and will buffer
the PDO. If the mode is event-driven, the CANopen device starts the sampling with the reception of
the RTR and transmits the PDO immediately.
Event-driven means that the PDO can be transmitted at any time based on the occurrence of the
internal event of the CANopen device. An event that triggers the OPTE6 transmission occurs when
the data mapped into the PDO is changed. Also, an event timer can be used to create transmit
events.
Inhibit time
For transmit PDOs, the inhibit time defines the minimum transmission interval, when 0xFE or 0xFF
transmission types are selected. For receive PDOs, the inhibit time is disabled. The inhibit time is
16bit unsigned value that is given as multiple of 100μs. Zero value means that the inhibit time is
disabled.
3
Tel. +358 (0) 201 2121 • Fax +358 (0)201 212 205
Page 19
CANopen protocol description vacon • 17
Event timer
For a transmit PDO event, the timer defines the maximum interval between the transmissions, if
the transmission type is set to 0xFE or 0xFF.
For a receive PDO event, the timer activates the deadline monitoring. The deadline monitoring is
activated at the first received PDO. If the time between the after the last PDO received is longer
than defined in the event timer, a fault will occur.
Event timer is 16bit unsigned value that is given as multiple of 1ms. Zero value means that the event
timer is disabled.
Sync start value
Sync start value gives the possibility to compensate network peak traffic in case of sync
transmission mode. If the sync start value is zero, the normal sync behaviour for the PDO is used.
If the sync start value is greater than zero, the PDO waits for the SYNC message that contains the
counter value. When the counter value of a SYNC message equals the SYNC start value, the first
SYNC message is regarded as received. The sync start value must not be changed while the PDO
exists. See the SYNC message format in Table 28.
3.5.4 PDO parameter mapping record
Each PDO consists of a maximum of 8 bytes of mapped data. To data map the PDO, use a
corresponding mapping record that consists of index, sub-index and the length of the mapped
object.
Table 26: PDO mapping structure
31 16 15 8 7 0
Index Sub-index Length
To data map the PDOs, first disable the related PDO COB ID in the pre-operational state. In the
mapping structure, write the sub-index 0 to zero (number of mapped objects). Then write the
mapping structures on the mapping parameter record, starting from the sub-index 1. When you
have written all the necessary structures, write the sub-index 0 to correspond to the mapped
objects.
Table 27: PDO mapping parameter record
Indexes Sub-index Name Data type Access
0x1600
0x1601
0x1602
0x1A00
0x1A01
0x1A02
0
1
2
3
Number of mapped objects in
PDO
1st object to be mapped UNSIGNED32 r/w
2nd object to be mapped UNSIGNED32 r/w
3rd object to be mapped UNSIGNED32 r/w
UNSIGNED8 r/w
4
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
4th object to be mapped UNSIGNED32 r/w
3
Page 20
vacon • 18 CANopen protocol description
3.6 SYNC protocol
Sync protocol is used by PDOs when the transmission is synchronous. The sync object that is
defined by COB ID in the object 0x1005 triggers the transmission of the txPDOs, or activates the
previously received data of the rxPDO. At the default sync message the CAN-ID is 0x80. The sync
message is a zero-length message but optionally it can consist of an 8bit counter.
Table 28: SYNC message
CAN ID LENGTH
0x80 0x0
Table 29: SYNC message with counter
CAN ID LENGTH DATA0
0x80 0x1 Counter
3.6.1 SYNC with counter
When a counter is used in a sync message, the PDOs that have a defined sync start value compare
the value against the sync message counter. The sync producer counter will overflow after it
reaches the value defined in its ‘synchronous counter overflow value’ at the object 0x1019. Also, the
sync consumer has the object 0x1019 even when the value itself is ignored. When the value of the
sync consumer is greater than zero, the sync counter handling and expecting of the sync messages
with counter are activated.
When the sync start value and the sync counter value match, the first sync message is regarded as
received.
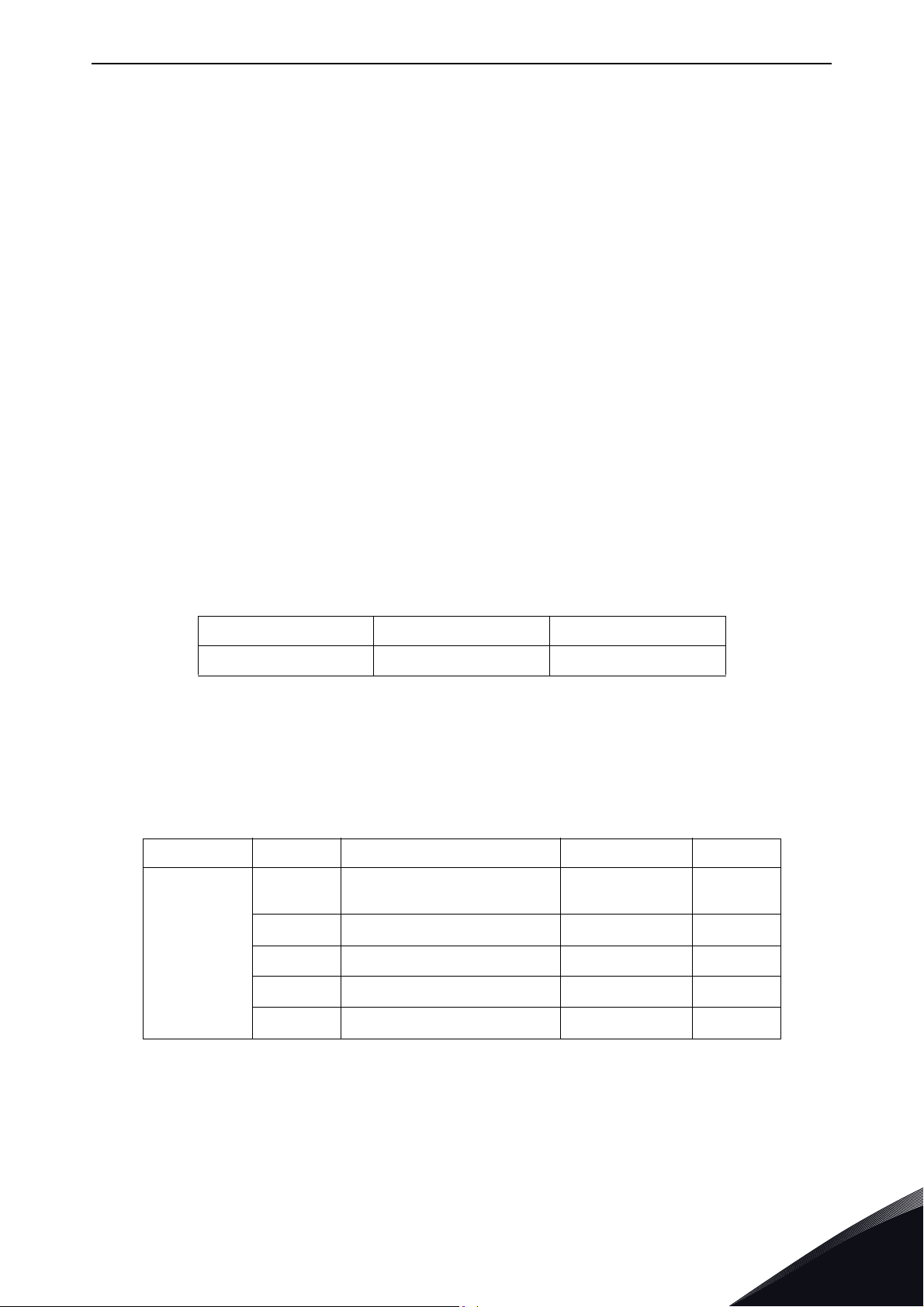
The following figure shows an example of SYNC messaging, when the slave is configured with:
• 0x1019 - Synchronous counter > 0
• 0x1800,2 - Transmission type = 2 (Cyclic, No. of SYNCs = 2)
• 0x1800,6 - Sync start value = 4
(1) (2) (3) (4) (5) (6) (7) (8)
SYNC
3
time
txPDO
Figure 2. txPDO responses to SYNC messages
Tel. +358 (0) 201 2121 • Fax +358 (0)201 212 205
Page 21
CANopen protocol description vacon • 19
Table 30: Sync-related object in OD
Index Description
0x1005 COB ID SYNC
0x1019 Synchronous counter
0x1014 EMCY object COB ID
0x1400 1st rxPDO communication parameter record
0x1401 2nd rxPDO communication parameter record
0x1402 3rd rxPDO communication parameter record
0x1800 1st txPDO mapping parameter record
0x1801 2nd txPDO mapping parameter record
0x1802 3rd txPDO mapping parameter record
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
3
Page 22
vacon • 20 CANopen protocol description
3.7 Communication objects
3.7.1 0X1000 - Device Type
The device type object indicates basic information about the device, including the supported device
profile and the profile settings.
Table 31: 0x1000 Device type
Index Sub-index Value Name Data type Access
0x1000 - 0x00010192 Device type UNSIGNED32 const
Value description:
0x0192 = 402 (Drive profile)
0x0001 = AC drive with PDO set for a generic drive device
3.7.2 0X1001 - Error Register
Error register indicates the active error code.
Table 32: 0x1001 Error register
Index Sub-index Value Name Data type Access
0x1001 - 0x0 Error register UNSIGNED8 const
Table 33: Error register bit descriptions
Bit Meaning
0 Generic error
1Current
2Voltage
3Temperature
4 Communication error (overrun, error state)
5 Device profile-specific*
6Reserved*
7 Manufacturer-specific*
3
* Not used/supported
Tel. +358 (0) 201 2121 • Fax +358 (0)201 212 205
Page 23
CANopen protocol description vacon • 21
3.7.3 0X1003 - Pre-defined Error Field
Pre-defined error field is a list of errors signaled with an EMCY object, listing the error history of
up to 9 error entries. Sub-index 1 contains the latest error.
Table 34: 0x1003 Pre-defined error field
Index Sub-index Value Name Data type Access
00x0
10x0
0x1003
.. .. .. .. ..
90x0
Number of
errors
Sta ndard error
field
Sta ndard error
field
UNSIGNED32 ro
UNSIGNED32
UNSIGNED32
ro
ro
3.7.4 0X1005 - COB ID SYNC
Defines the synchronisation message COB ID. Receiving the sync message causes actions in the
PDOs that have a synchronous transmission mode.
Table 35: 0x1005 COB ID sync
Index Sub-index Value Name Data type Access
0x1005 - 0x00000080 COB ID sync UNSIGNED32 r/w
3.7.5 0X100C - Guard Time
The object contains the guard time in milliseconds. As a default, guarding is disabled.
Table 36: 0x100C Guard time
Index Sub-index Value Name Data type Access
0x100C - 0x0000 Guard time UNSIGNED16 r/w
3.7.6 0X100D - Life Time Factor
Life time factor is used together with guard time, which is multiplied with the life time factor.
Table 37: 0x100D Guard time
Index Sub-index Value Name Data type Access
0x100D - 0x00 Guard time UNSIGNED8 r/w
Node life time = life time factor x guard time. If node life time is zero, guarding is disabled.
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
3
Page 24
vacon • 22 CANopen protocol description
3.7.7 0X1014 - COB ID EMCY
The object defines the emergency message COB ID.
Table 38: 0x1014 COB ID EMCY
Index Sub-index Value Name Data type Access
0x1014 -
0x00000080+
node id
COB ID EMCY UNSIGNED32 r/w
3.7.8 0X1016 - Heartbeat Consumer Entries
The device can act as the heartbeat consumer. Up to 8 devices can be monitored, as defined in the
table below. If the heartbeat transmission delay of a defined node ID exceeds the heartbeat time,
the error behaviour is activated according to the error behaviour object.
Table 39: 0x1016 Heartbeat consumer entries
Index Sub-index Value Name Data type Access
0 0x0000 0008 COB ID EMCY UNSIGNED32 ro
1 0x0000 0000
2 0x0000 0000
3 0x0000 0000
Consumer heart beat
time 1
Consumer heart beat
time 2
Consumer heart beat
time 3
UNSIGNED32 r/w
UNSIGNED32 r/w
UNSIGNED32 r/w
Consumer heart beat
time 4
Consumer heart beat
time 5
Consumer heart beat
time 6
Consumer heart beat
time 7
Consumer heart beat
time 8
UNSIGNED32 r/w
UNSIGNED32 r/w
UNSIGNED32 r/w
UNSIGNED32 r/w
UNSIGNED32 r/w
0x1016
4 0x0000 0000
5 0x0000 0000
6 0x0000 0000
7 0x0000 0000
8 0x0000 0000
Table 40: Consumer heartbeat time entry
31 24 23 16 15 0
Not used, must be
zeroes.
Node ID Heartbeat time
3
Tel. +358 (0) 201 2121 • Fax +358 (0)201 212 205
Page 25

CANopen protocol description vacon • 23
3.7.9 0X1017 - Producer Heartbeat Time
Heartbeat producer object consists of the time in milliseconds (ms) that it takes to transmit the
heartbeat message into the network. If the value is zero, the heartbeat is not used.
Table 41: 0x1017 Producer heartbeat time
Index Sub-index Value Name Data type Access
0x1017 - 0x0000
Table 42: Heartbeat message
CAN ID LENGTH DATA0
0x700 + node 0x1 Node state
Producer
heartbeat time
UNSIGNED16 r/w
3.7.10 0X1018 - Identify Object
The object gives information about the option board
Table 43: 0x1018 Identify object
Index Sub-index Value Name Data type Access
0 0x04 Number of entries UNSIGNED8 ro
1 0x90 Vendor ID UNSIGNED32 ro
0x1018
2 - Product code UNSIGNED32 ro
3 - Revision number UNSIGNED32 ro
4 - Serial number UNSIGNED32 ro
3.7.11 0X1019 - Synchronous counter
The synchronous counter defines whether a counter is mapped into the SYNC message, as well as
the highest value the counter can reach. 0 disables the sync counter.
Table 44: 0x1019 Synchronous counter
Index Sub-index Value Name Data type Access
0x1019 - 0x00
Synchronous
counter
UNSIGNED8 r/w
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
3
Page 26

vacon • 24 CANopen protocol description
3.7.12 0X1029 - Error behaviour
Error behaviour allows a change in the default error behaviour if there is a communication
error.
Table 45: 0x1029 Error behaviour
Index Sub-index Value Name Data type Access
0x1019
0 0x01 Number of entries UNSIGNED8 ro
1 0x00 Communication error UNSIGNED8 r/w
Table 46: Error behaviour
Value Description
0 Pre-operational
1 No change in state
2 Stopped
3..127 Reserved
3
Tel. +358 (0) 201 2121 • Fax +358 (0)201 212 205
Page 27

CANopen protocol description vacon • 25
3.8 Saving and restoring the object dictionary
CANopen defines a way of restoring the values in an object dictionary to the defaults and saving the
values if the modified values must be valid after the power cycle. The manufacturer-specific bypass
configuration can be restored to the object dictionary.
When the object dictionary is saved, the ID of the PDO, EMCY or SYNC COB ID does not change with
the node ID. When the default parameters are used, the COB IDs are always calculated according
to the node ID.
3.8.1 0X1010 Store parameter field
To save the object dictionary, use the object 0x1010 ‘Store Parameter Field’.
The option board only saves the parameters in the object dictionary with a command. Autonomous
saving is not supported. To save the parameters in the object dictionary, write the value 0x65766173
(ASCII “save”) into the sub-index by using the SDO protocol.
Table 47: 0x1010 Store parameter field
Index Sub-index Name Data type Access
0x1010
0
1 Save all parameters UNSIGNED32 r/w
Highest sub-index
supported
UNSIGNED8 ro
3.8.2 0X1011 Restore default parameters
The object values of the object dictionary are restored to defaults by using the object 0x1011. Option
board supports restoring only for All parameters (sub index 1) and for
manufacturer-specific Bypass mode defaults (sub index 4).
To restore parameters, write 0x64616F6C (ASCII "load") into the sub-index by using the SDO
protocol. Default object values are selected after reset.
Table 48: 0x1011 Restore default parameters
Index Sub-index Name Data type Access
0 Highest sub-index supported UNSIGNED8 ro
Restore all default
parameters
Restore bypass parameter
set*
UNSIGNED32 r/w
UNSIGNED32
r/w
0x1011
1
4
* Bypass parameter set is used with a drive that has special applications. The bypassed set disables the CIA-
402 drive profile and resets the PDO mapping to the vendor specific configuration. See chapter “Bypass
parameter set” for more information.
3.8.3 Bypass parameter set
Bypass parameter set can be restored to activate direct communication with the
application. The CIA-402 state machine and the related objects are bypassed. The bypass set is used
with special drive applications.
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
3
Page 28

vacon • 26 CANopen protocol description
NOTE! When the bypass parameter set is restored, the COB IDs are calculated according to the
table below. After the bypass parameter set is used, the node ID change does not affect the COB IDs.
Table 49: Overview of bypass RX PDO configuration
Object COB ID Size DATA0 DATA1 DATA2 DATA3 DATA4 DATA5 DATA6 DATA7
RPDO1
RPDO2
RPDO3
0x200
+node ID
0x300
+node ID
0x400
+node ID
6 FB PD in offset 0 FB PD in offset 1 FB PD in offset 2
8
8
FB PD in offset 3
FB PD in offset 7
FB PD in offset 4 FB PD in offset 5 FB PD in offset 6
FB PD in offset 8 FB PD in offset 9
FB PD in offset
10
Table 50: Overview of bypass TX PDO configuration
Object COB ID Size DATA0 DATA1 DATA2 DATA3 DATA4 DATA5 DATA6 DATA7
TPDO1
TPDO2
TPDO3
0x180
+node ID
0x280
+node ID
0x380
+node ID
6 FB PD in offset 0 FB PD in offset 1 FB PD in offset 2
8
8
FB PD in offset 3
FB PD in offset 7
FB PD in offset 4 FB PD in offset 5 FB PD in offset 6
FB PD in offset 8 FB PD in offset 9
FB PD in offset
10
Configuration of the receive PDO mapping, when the bypass parameter set is restored, is the following:
Table 51: Receive PDO 1
Index Sub-index Value Name Data type Access
0 3 Number of entries UNSIGNED8 r/w
0x1600
1 0x20000110 FB PD In Offset 0* UNSIGNED32 r/w
2 0x20000210 FB PD In Offset 1* UNSIGNED32 r/w
3 0x20000310 FB PD In Offset 2* UNSIGNED32 r/w
Table 52: Receive PDO 2
Index Sub-index Value Name Data type Access
0 4 Number of entries UNSIGNED8 r/w
1 0x20000410 FB PD In Offset 3* UNSIGNED32 r/w
0x1601
2 0x20000510 FB PD In Offset 4* UNSIGNED32 r/w
3 0x20000610 FB PD In Offset 5* UNSIGNED32 r/w
4 0x20000710 FB PD In Offset 6* UNSIGNED32 r/w
3
Tel. +358 (0) 201 2121 • Fax +358 (0)201 212 205
Page 29

CANopen protocol description vacon • 27
Table 53: Receive PDO 3
Index Sub-index Value Name Data type Access
0 4 Number of entries UNSIGNED8 r/w
1 0x20000810 FB PD In Offset 7* UNSIGNED32 r/w
0x1602
2 0x20000910 FB PD In Offset 8* UNSIGNED32 r/w
3 0x20000A10 FB PD In Offset 9* UNSIGNED32 r/w
4 0x20000B10 FB PD In Offset 10* UNSIGNED32 r/w
* Data inside ‘FB PD In’ vary according to the drive application. For further information, see Application
Manual.
Configuration of the receive PDO parameter, when the bypass parameter set is restored, is the following:
Table 54: Receive PDO 1 communication parameter record
Index Sub-index Value Name Data type Access
0 5 Highest sub-index UNSIGNED8 ro
1 0x00000200+id COB-ID UNSIGNED32 r/w
0x1400
2 0xFE Transmission type UNSIGNED8 r/w
3 0x03E8 Inhibit time UNSIGNED16 r/w
4 - Reserved UNSIGNED8 ro
5 0x0 Event timer UNSIGNED16 r/w
Table 55: Receive PDO 2 communication parameter record
Index Sub-index Value Name Data type Access
0 5 Highest sub-index UNSIGNED8 ro
1 0x00000300+id COB-ID UNSIGNED32 r/w
0x1401
2 0xFE Transmission type UNSIGNED8 r/w
3 0x03E8 Inhibit time UNSIGNED16 r/w
4 - Reserved UNSIGNED8 ro
5 0x0 Event timer UNSIGNED16 r/w
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
3
Page 30

vacon • 28 CANopen protocol description
Table 56: Receive PDO 3 communication parameter record
Index Sub-index Value Name Data type Access
0 5 Highest sub-index UNSIGNED8 ro
1 0x00000400+id COB-ID UNSIGNED32 r/w
0x1402
2 0xFE Transmission type UNSIGNED8 r/w
3 0x03E8 Inhibit time UNSIGNED16 r/w
4 - Reserved UNSIGNED8 ro
5 0x0 Event timer UNSIGNED16 r/w
Configuration of the transmit PDO mapping, when the bypass parameter set is restored, is the
following:
Table 57: Transmit PDO 1 mapping entry
Index Sub-index Value Name Data type Access
0 3 Number of entries UNSIGNED8 r/w
0x1A00
1 0x20010110 FB PD Out Offset 0* UNSIGNED32 r/w
2 0x20010210 FB PD Out Offset 1* UNSIGNED32 r/w
3 0x20010310 FB PD Out Offset 2* UNSIGNED32 r/w
Table 58: Transmit PDO 2 mapping entry
Index Sub-index Value Name Data type Access
0 4 Number of entries UNSIGNED8 r/w
1 0x20010410 FB PD Out Offset 3* UNSIGNED32 r/w
0x1A01
2 0x20010510 FB PD Out Offset 4* UNSIGNED32 r/w
3 0x20010610 FB PD Out Offset 5* UNSIGNED32 r/w
4
0x20010710
FB PD Out Offset 6* UNSIGNED32 r/w
Table 59: Transmit PDO 3 mapping entry
Index Sub-index Value Name Data type Access
0 4 Number of entries UNSIGNED8 r/w
1 0x20010810 FB PD Out Offset 7* UNSIGNED32 r/w
0x1A02
2
3
4
0x20010910
0x20010A10
0x20010B10
* Data inside ‘FB PD Out’ vary according to the drive application. For further information, see Application
Manual.
FB PD Out Offset 8* UNSIGNED32 r/w
FB PD Out Offset 9* UNSIGNED32 r/w
FB PD Out Offset 10* UNSIGNED32 r/w
3
Tel. +358 (0) 201 2121 • Fax +358 (0)201 212 205
Page 31

CANopen protocol description vacon • 29
Configuration of the transmit PDO parameter, when the bypass parameter set is restored, is the
following:
Table 60: Transmit PDO 1 communication parameter record
Index Sub-index Value Name Data type Access
0 6 Highest sub-index UNSIGNED8 ro
1 0x00000180+id COB-ID UNSIGNED32 r/w
2 0xFE Transmission type UNSIGNED8 r/w
0x1800
3 0x03E8 Inhibit time UNSIGNED16 r/w
4 - Reserved UNSIGNED8 ro
5 0x0 Event timer UNSIGNED16 r/w
6 0x0 Sync start value UNSIGNED8 w
Table 61: Transmit PDO 2 communication parameter record
Index Sub-index Value Name Data type Access
0 6 Highest sub-index UNSIGNED8 ro
1 0x00000280+id COB-ID UNSIGNED32 r/w
2 0xFE Transmission type UNSIGNED8 r/w
0x1801
3 0x03E8 Inhibit time UNSIGNED16 r/w
4 - Reserved UNSIGNED8 ro
5 0x0 Event timer UNSIGNED16 r/w
6 0x0 Sync start value UNSIGNED8 w
Table 62: Transmit PDO 3 communication parameter record
Index Sub-index Value Name Data type Access
0 5 Highest sub-index UNSIGNED8 ro
1 0x00000400+id COB-ID UNSIGNED32 r/w
2 0xFE Transmission type UNSIGNED8 r/w
0x1802
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
3 0x03E8 Inhibit time UNSIGNED16 r/w
4 - Reserved UNSIGNED8 ro
5 0x0 Event timer UNSIGNED16 r/w
6 Sync start value UNSIGNED8 w
3
Page 32

vacon • 30 CANopen option board OPTE6 - technical
4. CANOPEN OPTION BOARD OPTE6 - TECHNICAL DATA
4.1 General
Table 63. Technical data of CANopen opt ion board
CAN bus electrical
isolation
Ambient
temperature
Storing temperature As specified in drive specification (-40°C … 70°C)
Humidity 0-95%, non-condensing, corrosive
Vibration and
electrical safety
Emission C2 level, EN 61800-3 (2004)
Immunity C2 level, EN 61800-3 (2004)
CAN Interface
500 VDC
As specified in drive specification (-10°C … 40°C)
EN 61800-5-1 (2007)
5… 15.8 Hz 1mm (peak)
15.8 ...150 Hz 1 G
Isolation
Protection
2500 V rms isolation with a less than
10-ns propagation delay
±8kV ESD IEC 61000-4-2 Contact
Discharge
±80V Fault Protection
greater than ±12V common Mode Range
4.2 CAN cable
The recommended cables for installations are 4 wires twisted and a shielded cable with an
impedance of 120 Ohm. The network topology is a 2-wire bus line that is terminated at both ends by
resistors representing the characteristic impedance of the bus line. The typical CAN cable
impedance is 120 Ohm, and so for the termination resistors of ~120 Ohm must be used. For long
networks a higher resistor value must be used (150-300 Ohm).
Table 64. Bus parameter relation to cable length
Cable length Max bit rate [kbit/s]
0-40 m 1000 Max 70
100 m 500
500 m 100
1 km 50
Max cable resistance
[m
Ω/m]
<60
<40
<26
4
Tel. +358 (0) 201 2121 • Fax +358 (0)201 212 205
Page 33

CANopen option board OPTE6 - technical data vacon • 31
E6 Option Board E6 Option Board E6 Option Board
9384.emf
E6 Option Board E6 Option Board Non isolated node
9385.emf
4.2.1 Isolated ground connection
The OPTE6 option board is galvanically isolated. In CANopen networks that are completely galvanically isolated the CAN ground signal is carried in the cable line. It is connected at only one point
into common ground potential. If one CAN device with not galvanically isolated interface is connected to the network, the potential for isolated CAN ground is given. Therefore only one device with not
galvanically isolated interface may be connected to the network.
Figure 3. Completely isolated nodes
Figure 4. CAN network with one non-isolated node
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
4
Page 34

vacon • 32 CANopen option board OPTE6 - technical
4.2.2 Recommended cable
For all OPTE6 installations the use of 4-wire cable is recommended. 4 wires enable the connection
of isolated digital grounds with nodes.
Vacon recommends the following cable:
UNITRONIC® BUS CAN FD P
Colour-coded in accordance with DIN 47100
Figure 5. Recommended cable
Table 65. Cable thickness, length and baud rate relation
Bit rate Min cable thickness
1 Mbit/s 0.25
500 kbit/s 0.25 0.34
250 kbit/s 0.25 0.34 0.6
125 kbit/s 0.25 0.34 0.6
100 kbit/s 0.25 0.34 0.6 0.6
50 kbit/s 0.25 0.34 0.6 0.6
Cable
length
25 100 250 500
4
Tel. +358 (0) 201 2121 • Fax +358 (0)201 212 205
Page 35

OPTE6 layout and connections vacon • 33
M/N A N/M
1
2
3
4
5
6
7
product code
serial no.
9338A_00
Pin 1
Pin 5
9340.emf
5. OPTE6 LAYOUT AND CONNECTIONS
5.1 Layout and connections
OPTE6 has two different hardware revisions with slightly different layout. Layout is different in LED
arrangement and termination resistor orientation.
The two hardware revisions are marked with different product codes, and this product code can be
located from the sticker on the top side (location marked in Figure 6).
The two hardware revisions are named 70CVB01605 and 70CVB01124.
1 = CAN GND (isolated digital ground reference)
2 = CAN L
3 = SHIELD (shield connector)
4 = CAN H
5 = NC (No connection)
6 = Grounding option jumper
7= Bus termination resistor
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
Figure 6. OPTE6 board layout
Figure 7. CAN connector
5
Page 36

vacon • 34 OPTE6 layout and connections
CAN connector pinout
Pin out
1 CAN GND, isolated digital ground reference
2CAN LO
3 Shield connector
4CAN HI
5 No connection
5
Tel. +358 (0) 201 2121 • Fax +358 (0)201 212 205
Page 37

OPTE6 layout and connections vacon • 35
9339A_00
N A MM A N
70CVB01605 70CVB01124
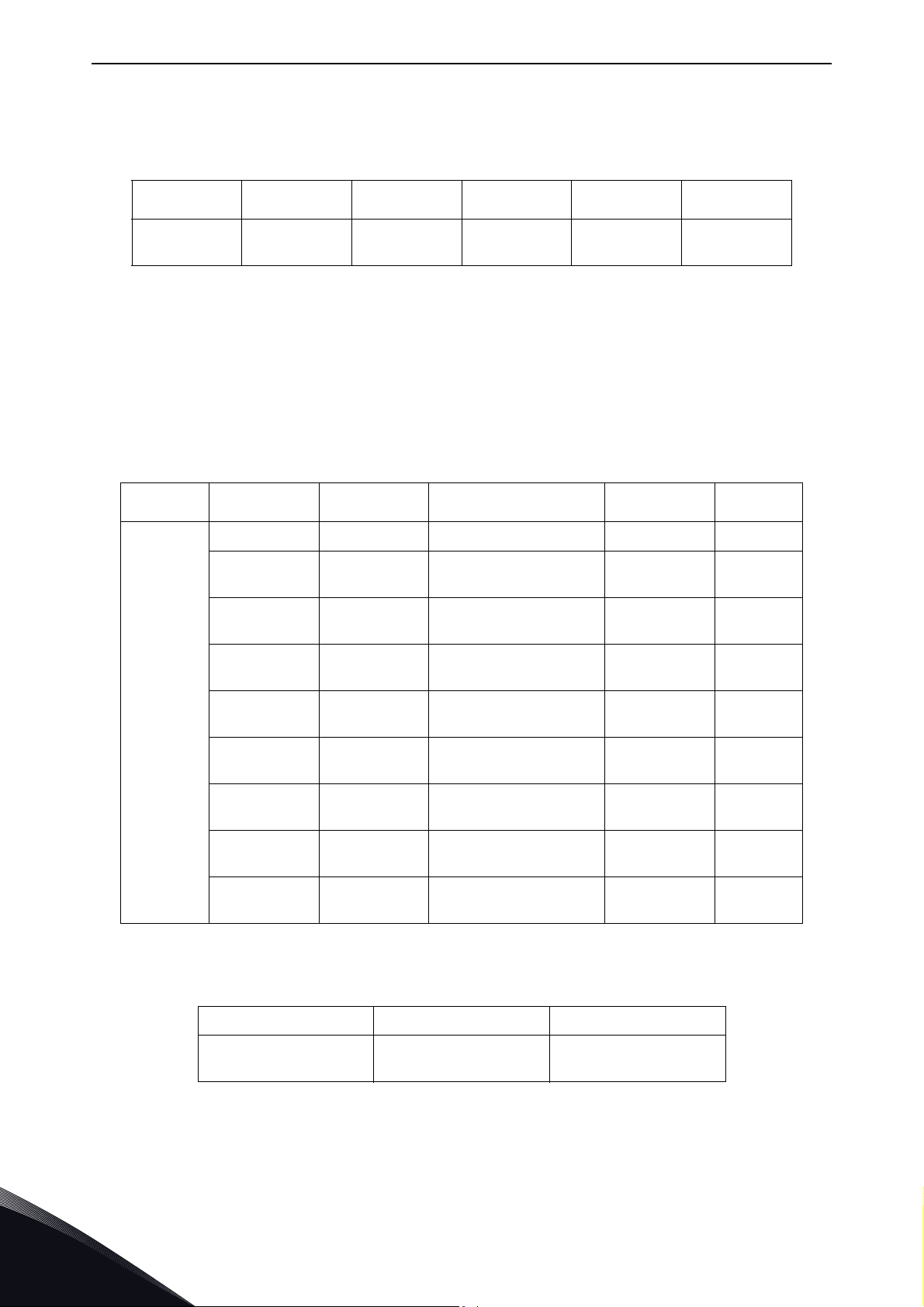
5.2 LED Indications
Figure 8. LED indicators
M = CANopen run led
A = CANopen err led
N = Board status
CANopen run led (green)
LED is Description
Blinking The CANopen device is in the pre-operational state.
Single flash The CANopen device is in the stopped state.
ON The CANopen device is in the operational state.
CANopen err led (red)
LED is Description
OFF No error
Blinking Invalid configuration
Single flash
Double flash
Quadruple flash
ON The CAN controller is bus-off.
Board status led (green)
LED is Description
At least one of the error counters of the CAN controller has
reached or exceeded the warning level (too many error frames).
A guard event (NMT slave or NMT master) or a heartbeat event
(heartbeat consumer) has occurred.
An expected PDO was not received before the event timer
elapsed.
OFF Option board is not activated.
ON
Blinking (once/
1s)
Option board is in initialization state, waiting activation com-
mand from the AC drive.
Option board is activated and in RUN state. Option board is
ready for external communication.
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
5
Page 38

vacon • 36 OPTE6 layout and connections
3
1
2
3
2
1
1
2
3
A
B
C
9341A_00
70CVB0112470CVB01605
3
1
2
3
2
1
1
2
3
A
B
C
5.3 Jumpers
The termination resistor jumper location differs on used hardware version. The jumper locations
can be seen from figure below.
3
4
5
3
4
7
5
7
6
70CVB01605 70CVB01124
Figure 9. LED indicators
The jumper settings for the CAN bus termination resistor are shown in the figure below.
6
11653_00
Figure 10. CAN bus termination jumper
A = Termination resistor 120 Ohm connected
B = Termination resistor is not connected to the CAN bus. (Factory default setting)
C = Termination resistor is not connected to the CAN bus
The jumper settings for the CAN cable shield grounding are shown in the figure below.
Tel. +358 (0) 201 2121 • Fax +358 (0)201 212 205
5
Page 39

OPTE6 layout and connections vacon • 37
3
1
2
3
2
1
1
2
3
A
B
C
9342.emf
Figure 11. CAN shield grounding option
A = CAN connector pin 3 (shield) connected to the drive chassis with a high-impedance RC circuit.
Recommended option when equipotential bonding is poor.
B = CAN connector pin 3 (shield) connected directly into the drive chassis. Recommended option
when equipotential bonding is good. (Factory default setting)
C = CAN connector pin 3 is not connected.
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
5
Page 40

vacon • 38 Installation
M4x55
9174.emf
DANGER
6. INSTALLATION
6.1 Installation in Vacon® 100
Open the cover of the AC drive.
1
The relay outputs and other I/O-terminals may have a dangerous control voltage
present even when AC drive is disconnected from mains.
Tel. +358 (0) 201 2121 • Fax +358 (0)201 212 205
6
Page 41

Installation vacon • 39
3023.emf
DE
3024.emf
Open the inner cover to reveal the option board slots (C,D,E). See Figure below.
2
3
Install the fieldbus board into slot D or E. See figure below.
NOTE: Incompatible boards cannot be installed on the AC drive. Compatible
boards have a slot coding
that enable the placing of the board.
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
6
Page 42

vacon • 40 Installation
10
5
6.2 Prepare for use through fieldbus
Strip about 15 mm of the fieldbus cable (see specification in ch. 3.2) and cut off
the grey cable shield. Remember to do this for both bus cables (except for the
last device).
Leave no more than 10 mm of the cable outside the terminal block and strip the
cables at about 5 mm to fit in the terminals. See picture below.
4
5
Also strip the cable now at such a distance from the terminal that you can fix it to
the frame with the grounding clamp. Strip the cable at a maximum length of 15
mm. Do not strip the aluminum cable shield!
Then connect the cable to its appropriate terminals on the OPTE6 CANopen
option board terminal block.
6
Tel. +358 (0) 201 2121 • Fax +358 (0)201 212 205
Page 43

Installation vacon • 41
Cable clamp
Using the cable clamp included in the delivery of the drive, ground the shield of
the CAN cable to the frame of the AC drive.
NOTE: This can be done in all drives if there is no difference in PE potential
between the drives. However, if there is PE potential difference then the shield
should be connected to PE only at one point in the system. The shields of the
cables shall be joint but not connected to several PE points with different potential.
6
7
8
If the AC drive is the last device on the bus, the bus termination must be set
with jumper X13 (see ch. 4.3.)
Unless already done for the other control cables,
cut free the opening on the AC drive cover for the
fieldbus cable (protection class IP21).
NOTE: Cut the opening on the same side you
have installed the board in!
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
6
Page 44

vacon • 42 Installation
9202.emf
Fieldbus
cables
Fieldbus cable
= Bus termination
Termination
activated
Ter min ation
activated with
jumper
Termination
deactivated
Vacon 100 Vacon 100 Vacon 100 Vacon 100 Vacon 100
3007.emf
Remount the AC drive cover and run the cable as
shown in picture.
NOTE: When planning the cable runs, remember
to keep the distance between the fieldbus cable
and the motor cable at a minimum of 30 cm. It is
recommended to route the option board cables
away from the power cables as shown in the picture.
9
The bus termination must be set for the first and the last device of the fieldbus
line. See picture below. See also step 7 on page 41. We recommend that the first
device on the bus and, thus, terminated was the Master device.
10
6
Tel. +358 (0) 201 2121 • Fax +358 (0)201 212 205
Page 45

Installation vacon • 43
11556A_0
6.3 Installation in Vacon® 20
6.3.1 Frames MI1, MI2, MI3
Remove the cable connector lid from the
AC drive.
1
11555A_00
2
3
Select a correct grounding plate and attach it to the
option board mounting frame. The grounding plate is
marked with the supported enclosure size.
11649_00
Attach an option board mounting frame to
the AC drive.
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
6
Page 46

vacon • 44 Installation
11559A_00
Connect the flat cable from the option board mounting frame to V20.
4
11557A_00
If a cable strain relief is required, attach the parts as shown in the figure.
5
6
11558A_00
Install the option board to the option board
holder. Make sure that the option board is
securely fastened.
6
Tel. +358 (0) 201 2121 • Fax +358 (0)201 212 205
Page 47

Installation vacon • 45
11560A_00
Cut free a sufficiently wide opening for the
option board connector.
7
11650_00
Attach the option board cover to V20. Attach
the strain relief cable clamp with screws if
needed.
8
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
6
Page 48

vacon • 46 Installation
13006.emf
11562_00
11563_00
6.3.2 Frames MI4, MI5
Make sure power is disconnected before opening the V20 cover.
1a: For MI4: Open the cover.
11561_00
1
2
1b: For MI5: Open the cover and release the fan connector.
Attach the option board support.
Tel. +358 (0) 201 2121 • Fax +358 (0)201 212 205
6
Page 49

Installation vacon • 47
11564_00
11565_00
MI 04
MI 05
11567_00
Connect the flex cable to option board connector PCB.
3
Connect the option board to connector PCB.
4
5
Attach the option board with connector PCB to V20 and connect the flex cable.
11566_00
Attach a suitable grounding plate to V20. The grounding plate is marked with supported enclosure size.
6
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
6
Page 50

vacon • 48 Installation
11568_00
11569_00
11570_00
Assemble a clamp on top of the grounding plate on both sides of the option board.
7
8a: For MI4: Close the cover.
8
8b: For MI5: Remount the fan connector and close the cover.
6
Tel. +358 (0) 201 2121 • Fax +358 (0)201 212 205
Page 51

Installation vacon • 49
13006.emf
13006.emf
6.4 Installation in Vacon® 20 X and 20 CP
Do not add or replace option boards or fieldbus boards on an AC
drive with the power switched on. This may damage the boards.
Open the cover of the drive.
1
11643_00
MU3 example
The relay outputs and other I/O-terminals may have a dangerous control voltage
present even when the drive is disconnected from mains.
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
6
Page 52

vacon • 50 Installation
7089_00
7090_00
7091_007091_00
Remove the option slot cover.
2
Install the option board into the slot as shown in the figure.
3
4
Mount the option slot cover. Remove the plastic opening for the option board terminals.
6
Tel. +358 (0) 201 2121 • Fax +358 (0)201 212 205
Page 53

Installation vacon • 51
11638_00
6.5 Installation in Vacon® 100 X (Frames MM4-MM6)
Open the cover of the AC drive.
1
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
6
Page 54

vacon • 52 Installation
11639_00
To get access to the option board slots, remove the screws and open the cover of
the control unit.
2
6
Tel. +358 (0) 201 2121 • Fax +358 (0)201 212 205
Page 55

Installation vacon • 53
11641_00
Install the option board into the correct slot, D or E.
DE
3
4
5
11640_00
Close the option board cover.
Remove the cable entry plate. If you
installed the option board in the slot
D, use the cable entry plate on the
right side. If you installed the option
board in the slot E, use the cable entry plate on the left side.
NOTE! The cable entry plate at the
bottom of the drive is used only for
mains and motor cables.
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
6
Page 56

vacon • 54 Installation
Open the necessary holes in the cable entry plate. Do not open the other holes.
6
See the Vacon 100 X Installation Manual for the dimensions of the holes.
Attach a cable gland on the hole in the cable entry plate. Pull the fieldbus cable
through the hole.
NOTE! The fieldbus cable must go through
the correct cable entry plate to avoid going
near the motor cable.
7
8
9
11642_00
Put the cable entry plate back.
Close the cover of the AC drive.
6
Tel. +358 (0) 201 2121 • Fax +358 (0)201 212 205
Page 57

Commissioning vacon • 55
7. COMMISSIONING
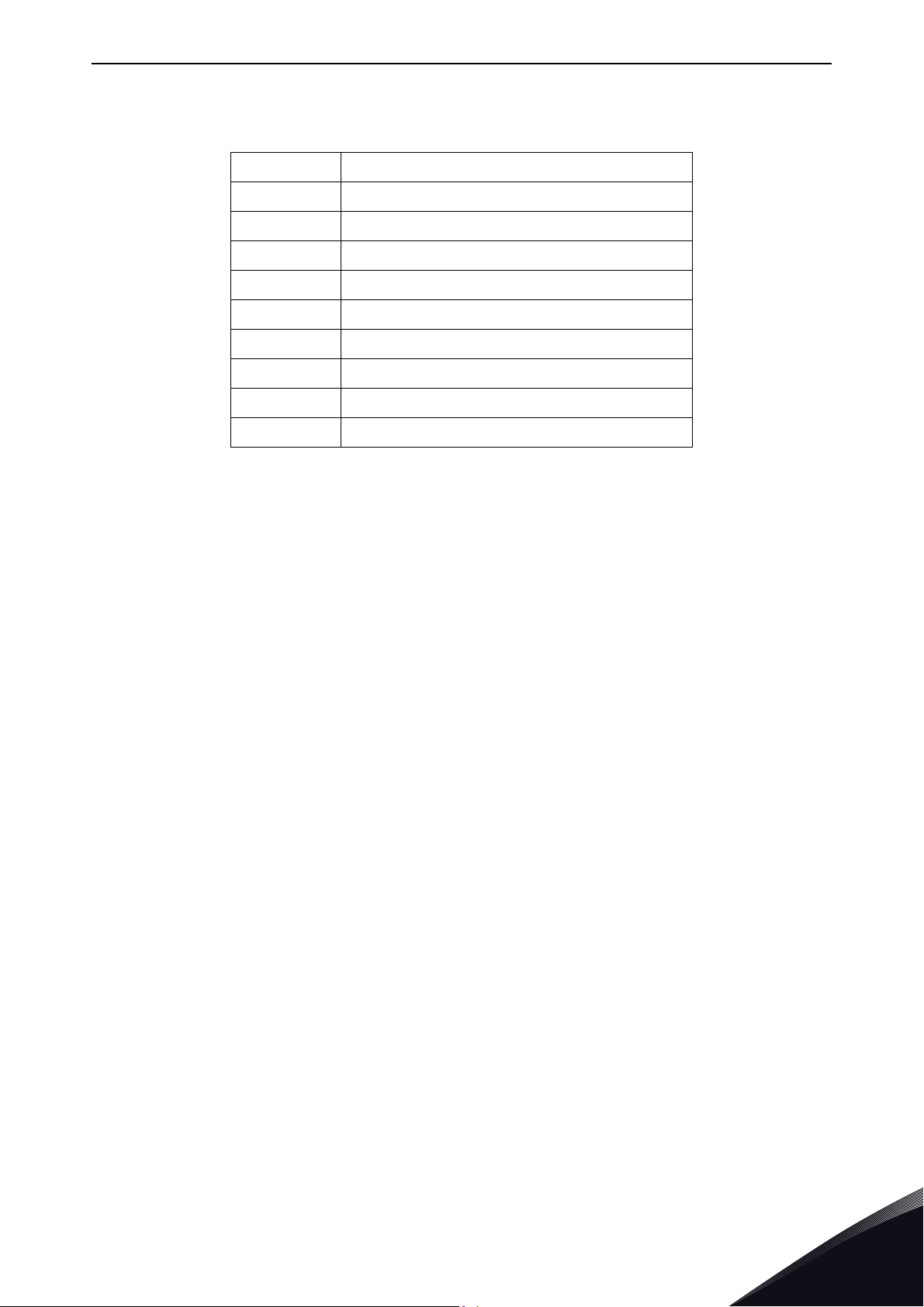
7.1 OPTE6 panel parameters
When OPTE6 board is attached to a drive, 3 basic communication parameters will appear on the
panel menu. The parameters are saved automatically when changed.
NOTE! Parameters 1-2 are saved into the memory of the AC drive. Remember this if the board is
moved into another drive. Parameter 3 - "Operate Mode" is read at startup from option board
memory.
Table 66. OPTE6 board parameters
Index Parameter Min Max Default Description
1 Node ID 1 127 1
2Baud rate385
3 Operate Mode 1 2 1
Table 67. OPTE6 board monitoring values
Index Monitoring value Description
Network-wide unique identifier for each CANopen
device
Data signalling rate. Should be the same on each
node in the same bus.
Selection between a CIA-402 drive profile and a
manufacturer-specific bypass mode.
1 CANopen Status
A running counter for incoming messages combined
with node CANopen status (see the description below)
7.1.1 Parameter descriptions
CANopen Status: indicates the NMT state of CANopen.
CANopen Status is in the following format:
NNNNN.S
where NNNNN is the counter for received messages and S is the CANopen status.
Table 68: CANopen status
Value Description
0 Initialising
4 Stopped
5Operational
6 Pre-operational
7 Reset application
8 Reset communication
Operate Mode: is used to change the modes of operation between the velocity mode of the CIA-402
drive profile and the manufacturer-specific bypass mode.
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
7
Page 58

vacon • 56 Commissioning
Index 0x6060 value is
changed into -1 (Bypass mode)
Drive Profile related objects are no more valid
Drive can be controlled only via Process data
in 0x2000 and Process data out 0x2001
9386.emf
Index 0x6060 value is changed
into 2 (CIA-402 Drive Profile,
Velocity mode)
Drive Profile related objects are updated
normally
9387.emf
Table 69: Operate mode
Value Name Description
1Drive Profile
2Bypass
Figure 12 and Figure 13 describe the outputs when you change the parameter.
Figure 12. Value changed from Drive Profile to Bypass mode
CIA-402 drive profile, velocity
mode active
Manufacturer-specific bypass
mode active
Figure 13. Value changed from Bypass mode into Drive profile
NOTE! Changing operate mode either via panel or object 0x6060 will cause receive and transmit
PDO mapping objects to revert back to mode specific default values! If custom mapping is used this
has to be taken into account!
Node ID: can be set to values 1-127.
Baud Rate:
timing is set as close
is used in CANopen communication. Regardless of the selected bitrate, the bit sample
as possible to 87.5 % according to the CANopen specification.
7
Table 70: The available bit rates
Value Bit rate
350 kbit/s
4100 kbit/s
5125 kbit/s
6250 kbit/s
7500 kbit/s
8 1000 kbit/s
Tel. +358 (0) 201 2121 • Fax +358 (0)201 212 205
Page 59

CANopen option board interface vacon • 57
8. CANOPEN OPTION BOARD INTERFACE
By default, the CANopen option board is configured to operate in Drive Profile mode. The drive profile implementation is ‘Velocity Mode’ which is defined in CiA 402 specification with PDO set for the
AC drive. The board can also be configured into Manufacturer specific mode.
8.1 Supported drive modes
Drive modes can be selected by writing the desired mode in Modes of Operation (0x6060) object or
by selecting the mode from panel. The active mode of operation can be read from object Modes of
Operation Display (0x6061).
The supported drive modes object will return value 0x80000002, which is described in table below.
Table 71. Supported drive modes
Bit(s) Description
31
30-2 Not supported
1Velocity mode
0 Not supported
Value Mode name Description
2Velocity Mode
-1 Bypass mode
Manufacturer specific Bypass
mode
Table 72. Drive modes
The CiA 402 Drive Profile mode where the control
of the drive is done using a control word and
speed reference value as specified in the drive
profile specification.
In this mode, the Drive control can be done using
raw process data which is exchanged with drive
application. The drive profile state machine and
the related objects become invalid.
Table 73. Operating mode related objects
Index Description
0x6060 Modes of Operation
0x6061 Modes of Operation Display
0x6502 Supported Drive Modes
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
8
Page 60

vacon • 58 CANopen option board interface
8.2 Velocity mode
The velocity mode is one of the specific modes that CIA-402 Drive Profile defines. Common behaviour in all modes are PDS state machine, some control and status bits and certain objects.
8.2.1 PDS State machine
The PDS state machine describes the generic start and stop sequence of the drive and the error behavior. The state machine is controlled by the Controlword object and internal events.The following
objects are usable in velocity mode:
Table 74. Velocity mode related objects in OD
Index Description
0x6040 Controlword
0x6041 Statusword
0x6042 Vl Target Velocity
0x6043 Vl Velocity Demand
0x6044 Vl Velocity Actual Value
0x6046 Vl Velocity Min Max Amount
0x6048 Vl Velocity Acceleration
0x6049 Vl Velocity Deceleration
The possible state machine transitions can be seen from Figure 15. The state of the AC drive can be
changed by writing the corresponding bits to Controlword data object. The needed bit values for
each command can be seen from Figure 14.
8
Tel. +358 (0) 201 2121 • Fax +358 (0)201 212 205
Page 61

CANopen option board interface vacon • 59
Power-off or reset
Fault reaction active
xxxx xxxx x0xx 1111
b
Quick stop active
xxxx xxxx x00x 0111
b
Ready to switch on
xxxx xxxx x01x 0001
b
Not ready to switch on
xxxx xxxx x0xx 0000
b
Start
0
1
2
3
45
6
7
89
10
11
12
13
14
15
Switch on disabled
xxxx xxxx x1xx 0000
b
Switched on
xxxx xxxx x01x 0011
b
Operation enabled
xxxx xxxx x01x 0111
b
Fault
xxxx xxxx x0xx 1000
b
9401.emf
Bits of the controlword
Command Transitions
Bit 7 Bit 3 Bit 2 Bit 1 Bit 0
Shutdown
Switch on
0 X 1 1 0 2.6.8
00111
3
Switch on + enable
operation
01111
3 + 4
(NOTE)
Disable voltage
Quick stop
Disable operation
Enable operation
Fault reset
0XX0X
0 X 0 1 X 7,10,11
00111
01111
XXX X
7,9,10,12
5
4,16
15
NOTE Automatic transition to Enable operation state after executing SWITCHED ON
state funtionality.
9422A_uk
Figure 14. Controlword commands
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
Figure 15. Power Drive System state machine
8
Page 62

vacon • 60 CANopen option board interface
The table below explains the actions taken in different state transitions and which event triggers
which state transition. If the used drive/application does not support different stop bits in Fixed
Control Word, the stop method will always be according to set stop function.
Table 75. State transition events and actions
Transition Event(s) Action(s)
0 Automatic transition after power-on or reset Self-initialization is performed
1 Automatic transition after drive status is 'ready' None
2, 6 Shutdown command None
3 Switch on command None
4 Enable operation command Drive function is enabled
5 Disable operation command Drive function is disabled
7 Disable voltage or quick stop command None
8 Shutdown command Stop by ramp /stop function
9 Disable voltage command Stop by coast / stop function
10, 12 Disable voltage command None
11 Quick stop command Quick stop / stop function
13 Fault signal
14 Automatic transition None
15 Fault reset command
Current state can be determined by reading the value of Statusword data object and comparing the
value of bits to the table below.
Table 76. Statusword bits
Bits of the statusword
PDS state
15-8 76543210
xx0 xx0000Not ready to switch on
xx1 xx0000Switch on disabled
Go to fault state and stop by stop
function
Reset fault if no fault currently
exists on drive
8
xx0 1x0001Ready to switch on
xx0 1x0011Switched on
xx0 1x0111Operation enabled
xx0 0x0111Quick stop active
xx0 xx1111Fault reaction active
xx0 xx1000Fault
x = Do not care
Tel. +358 (0) 201 2121 • Fax +358 (0)201 212 205
Page 63

CANopen option board interface vacon • 61
8.2.2 0X6040 - Controlword
Controlword is used to control the drive operation according to the PDS state machine. By default,
Controlword is mapped into the first two bytes of rxPDO1.
Table 77. 0x6040:Controlword
Bit Name Description
12-15 na Not used Bits 12 through 15 are not in use.
11 ar Alarm reset Rising edge resets alarm
10 r Reserved Bit 10 is not in use
9 oms Operation mode specific Bit 9 is not in use
8 h Halt Bit 8 is not in use
7 fr Fault reset Rising edge resets fault
4-6 na Not Used Bits 4 through 6 are not in use.
3 eo Enable operation Start drive
2qs
1 ev Enable voltage Enables/disables output voltage
0 so Switch on Enables possibility to start drive together with ev
Quick stop Stops the drive using the drive/application specific stop function
used as quick stop
8.2.3 0X6041 - Statusword
Statusword indicates whether the drive is in remote control and if the target velocity is reached. By
default, Statusword is mapped into the first two bytes of txPDO1.
Table 78. 0x6041:Statusword
Bit Name Description
15 na Not in use Bit 15 is not in use
14 idm Incorrect drive mode Indicates that the drive is in incorrect “Control mode” for the used
CiA-402 profile
12-13 oms Operation mode specific Bits 12 through 13 are not in use
10 tr Target reached Target velocity reached
9 rm Remote Indicates if the drive is controllable by Fieldbus
8 na Not in use Bit 8 not in use.
7 w Warning The AC drive has an active Alarm.
6 sod Switch on disabled PDS switch on disable
5 qs Quick stop PDS quick stop active
4 ve Voltage enabled Voltage is enabled
3 f Fault PDS Fault (indicates fault condition)
2 oe Operation enabled PDS operation enabled (drive is running)
1 so Switched on PDS switched on
0 rtso Ready to switch on PDS ready to switch on
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
8
Page 64

vacon • 62 CANopen option board interface
8.2.4 0X6042 - vl Target Velocity
The signed value of motor rpm speed request to drive. A negative value means that the motor is running clockwise. By default, the object is mapped into the last two bytes of rxPDO1.
Range: -32768...32767
0x6042:vl Target Velocity
15 0
Rpm request to drive
8.2.5 0X6043 - vl Velocity Demand
The signed read-only value of the ramp generator output scaled into rpm. A negative value means
that the motor is running clockwise. By default, the object is not mapped into any PDO.
Range: -32768...32767
0x6043:vl Velocity Demand
15 0
Drive ramp generator output scaled into rpm
8.2.6 0X6044 - vl Velocity Actual Value
The signed value of the motor actual rpm speed. A negative value means that the motor is running
clockwise. By default, the object is mapped into the last two bytes of txPDO1.
Range: -32678...32767
0x6044:vl Velocity Actual Value
15 0
Motor actual rpm speed
8.2.7 0X6046 - vl Velocity Min Max Amount
The minimum and maximum rpm speed of the AC drive's motor. The motor runs on minimum speed
defined here when the vl Target Velocity is set to 0.
0x6046.01: vl Velocity Min Amount
31 0
Motor minimum rpm speed
0x6046.02: vl Velocity Max Amount
31 0
8
Motor maximum rpm speed
Range: 0... 4294967296
Tel. +358 (0) 201 2121 • Fax +358 (0)201 212 205
Page 65

CANopen option board interface vacon • 63
8.2.8 0X6048 - vl Velocity Acceleration
This object indicates the configured delta speed and delta time of the slope of the acceleration
ramp.
0x6048.01: Delta speed
31 0
Maximum change of rpm the motor will accelerate during the time specified in Delta Time.
Range: 0... 4294967296
0x6048.02: Delta time
16 0
Time (in seconds) in which the rpm of the motor will accelerate the amount specified in Delta Speed.
Range: 0... 65536
8.2.9 0X6049 - vl Velocity Deceleration
This object indicates the configured delta speed and delta time of the slope of the deceleration
ramp.
0x6049.01: Delta speed
31 0
Maximum change of rpm the motor will accelerate during the time specified in Delta Time.
Range: 0... 4294967296
0x6049.02: Delta time
16 0
Time (in seconds) in which the rpm of the motor will accelerate the amount specified in Delta Speed.
Range: 0... 65536
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
8
Page 66

vacon • 64 CANopen option board interface
8.3 Bypass mode
In bypass mode, some data defined in the profile is invalid, and the drive control is done using raw
process data. The raw process data arrays are located in the manufacturer specific objects 0x2000
and 0x2001. There are two arrays: one for incoming data and one for outgoing data. The drive application defines which one is mapped into the process data.
Table 79. Process data in
Index Sub index Name Data type Access
0x2000 0 Number of entries UNSIGNED16 ro
1 PB PD In Offset 0 UNSIGNED16 r/w
2 PB PD In Offset 1 UNSIGNED16 r/w
3 PB PD In Offset 2 UNSIGNED16 r/w
4 PB PD In Offset 3 UNSIGNED16 r/w
5 PB PD In Offset 4 UNSIGNED16 r/w
6 PB PD In Offset 5 UNSIGNED16 r/w
7 PB PD In Offset 6 UNSIGNED16 r/w
8 PB PD In Offset 7 UNSIGNED16 r/w
9 PB PD In Offset 8 UNSIGNED16 r/w
10 PB PD In Offset 9 UNSIGNED16 r/w
11 PB PD In Offset 10 UNSIGNED16 r/w
Table 80. Process data out
Index Sub index Name Data type Access
0x2001 0 Number of entris UNSIGNED16 ro
1 FB PD Out Offset 0 UNSIGNED16 ro
2 FB PD Out Offset 1 UNSIGNED16 ro
3 FB PD Out Offset 2 UNSIGNED16 ro
4 FB PD Out Offset 3 UNSIGNED16 ro
5 FB PD Out Offset 4 UNSIGNED16 ro
6 FB PD Out Offset 5 UNSIGNED16 ro
7 FB PD Out Offset 6 UNSIGNED16 ro
8 FB PD Out Offset 7 UNSIGNED16 ro
9 FB PD Out Offset 8 UNSIGNED16 ro
10 FB PD Out Offset 9 UNSIGNED16 ro
11 FB PD Out Offset 10 UNSIGNED16 ro
8
Tel. +358 (0) 201 2121 • Fax +358 (0)201 212 205
Page 67

CANopen option board interface vacon • 65
8.3.1 Exception when using bypass mode
When using bypass mode, the profile objects listed in table Objects disabled at bypass mode are invalid and do not contain valid data.
Table 81. Objects disabled at bypass mode
Index Description
0x6040 Controlword
0x6041 Statusword
0x6042 VI Target Velocity
0x6043 VI Velocity Demand
0x6044 VI Velocity Actual Value
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
8
Page 68

vacon • 66 CANopen option board interface
8.4 Default process data application mapping
This chapter describes the default mapping of the OPTE6 process data variables to the application
data in the drive. It also provides a description of the application data in the drive. Supported control/status word bits might differ depending on used application. Please read also the corresponding section of the drive's application manual for additional information.
Table 82. Process data in
Sub-index Mapped Application data
In Offset0 FB Control word
In Offset 1 FB Control word Extension
In Offset 2 FB Speed reference
In Offset 3 FB Process data in 01
In Offset 4 FB Process data in 02
In Offset 5 FB Process data in 03
In Offset 6 FB Process data in 04
In Offset 7 FB Process data in 05
In Offset 8 FB Process data in 06
In Offset 9 FB Process data in 07
In Offset 10 FB Process data in 08
Table 83. Process data out
Sub-index Mapped Application data
Out Offset 0 FB Status Word
Out Offset 1 FB Status Word Extension
Out Offset 2 FB Actual Speed
Out Offset 3 FB Process data out 01
Out Offset 4 FB Process data out 02
Out Offset 5 FB Process data out 03
Out Offset 6 FB Process data out 04
Out Offset 7 FB Process data out 05
Out Offset 8 FB Process data out 06
Out Offset 9 FB Process data out 07
Out Offset 10 FB Process data out 08
8.4.1 FB Control Word
Mapped into FB PD in offset 0.
Table 84. FB Control Word
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
- - - ESTP JOG2 JOG1 BREF BCTRL ZREF FRMP ZRMP STPM2 STPM1 FRST DIR STRT
8
Tel. +358 (0) 201 2121 • Fax +358 (0)201 212 205
Page 69

CANopen option board interface vacon • 67
Table 85. FB Control Word description
Bit Name Description 0 1
12 ESTP Emergency Stop Request as fast stop as possible - Emergency stop
11 JOG2 Jogging request Select jogging with reference 2 - Select ref2 jogging
10 JOG1 Jogging request Select jogging with reference 1 - Select ref1 jogging
9 BREF Bus Reference Force Reference to fieldbus Selected reference
place
8 BCTRL Bus Control Force fieldbus control active Selected control place Force Fieldbus Control
7 ZREF Zero Ref Force reference to zero - Force reference to zero
6 FRMP Ramp Freeze Freeze ramp generator - Freeze ramp generator
5 QRMP Quick Ramp
Time
4 STPM2 Stop Mode2 Stop mode ramping - Stop By Ramp mode
3 STPM1 Stop Mode1 Stop mode coasting - Coasting Stop Mode
2 FRST Fault Reset Request fault reset from drive - Request reset from
1 DIR Direction Rotation direction Clockwise Counter clockwise
0 STRT Start / Stop Start / Stop request Stop Run
Use quick ramp time Normal ramp time Quick ramp time
Force Fieldbus refer-
ence
drive
8.4.2 FB Control Word Extension (general control word)
Mapped into FB PD in offset 1.
Table 86. FB Control Word Extension
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
BSTAT2BSTAT1BFLT-------------
Table 87. FB Control Word extension description
Bit Name Description 0 1
15 BSTAT2 Bus status Informs bus status into application Status of option board
14 BSTAT1 Bus status Informs bus status into application
13 BFLT Bus fault Request fieldbus fault - Generate field bus fault
8.4.3 FB Speed Reference
Mapped into FB PD in offset 2.
Table 88. FB Speed Reference
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
FB Speed Reference
Table 89. FB Speed reference description
Name Description Min Max
FB Speed Reference Frequency reference at percentage between
minimum and maximum frequency. Control
word DIR bit is used to select rotation direc-
tion.
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
0
(0%)
10000
(100.00%)
8
Page 70

vacon • 68 CANopen option board interface
8.4.4 FB Process data Input 1...8
Mapped into FB PD in offset 3...11.
Table 90. FB Process Data Input 1...8
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
FB Process data in
8.4.5 FB Processdata Input mapping in application
In addition to sending control commands and speed reference values to the application, 8 process
data items can be sent directly to the application to control other features via fieldbus. These can
be, for example, activating preset frequencies, activating or deactivating faults, selecting different
ramp times, controlling I/O's, and so on. Different applications support different features. For more
information, see the application manual. Also, always check the value of the sent data in the application manual to see in which format they are given (for example, % values, bit coded values, and
so on).
Table 91. FB Processdata application mapping
PD Mapped Application Data Unit
PD in 1 - -
PD in 2 - -
PD in 3 - -
PD in 4 - -
PD in 5 - -
PD in 6 - -
PD in 7 - -
PD in 8 - -
8.4.6 FB Status Word
Mapped into FB PD out offset 0.
Table 92. FB Status Word
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
- - - - - - - - FRDY ZSPD ATREF ALARM FLT DIR RUN RDY
Table 93. FB Status word description
Bit Name Description 0 1
7 FRDY Flux ready Motor magnetization is ready - Flux ready
6 ZSPD Zero speed Motor is running on zero speed - Zero speed condition
5 ATREF At reference Reference frequency is reached - Reference reached
4 ALARM Alarm Alarm indication - Drive is in Alarm
3 FLT Faulted Drive fault indicatioin - Drive is Faulted
2 DIR Direction Motor running direction Clockwise Counter clockwise
1 RUN Run Motor running information Stopped Running
0 RDY Ready Drive readiness information - Ready
8
Tel. +358 (0) 201 2121 • Fax +358 (0)201 212 205
Page 71

CANopen option board interface vacon • 69
8.4.7 FB Status Word Extension (general status word)
Mapped into FB PD out offset 1.
Table 94. FB Status word extension
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
CP3CP2CP1------- - - ----
Table 95. FB Status word extension description
Bit Name Description 0 1
15 CP3 Control Place Drive Control place information 0,0,1-(1) Fieldbus
14 CP2
13 CP1
0,1,0- (2) Panel
0,1,1 - (3) Tool
1,0,0 - (4) I/O
8.4.8 FB Actual Speed
Mapped into FB PD out offset 2.
Table 96. FB Actual Speed
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
FB Actual Speed
Table 97. FB Actual Speed description
Name Description Min Max
FB Actual Speed Actual output frequency at percentage
between minimum and maximum frequency.
Status word bit DIR is used to indicate actual
direction.
0
(0%)
10000
(100.00%)
8.4.9 FB Processdata Output 1...8
Mapped into FB PD out offset 3...11
Table 98. FB Process data output 1...8
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
FB Process data Out 1...8
8.4.10 FB Processdata Output mapping in application
Process data output mappings are selectable and also the default settings vary between drives. Refer to application manual for details. The following tables show the default values for Vacon 100 INDUSTRIAL application, Vacon 20 X Multipurpose Application and Vacon 20 Standard Application.
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
8
Page 72

vacon • 70 CANopen option board interface
Table 99. Process data output mapping defaults for V100 GP and V20X MP
PD Out Application Mapped Application Data Unit Scale
1 V100 GP Output Frequency Hz 0.01Hz
V20X MP Output Current A 0.1 A
2 V100 GP & V20X MP Motor Speed Rpm 1rpm
3 V100 GP & V20X MP Motor Current A 0.1A
4 V100 GP & V20X MP Motor Torque % 0.1%
5 V100 GP & V20X MP Motor Power % 0.1%
6 V100 GP & V20X MP Motor Voltage V 0.1V
7 V100 GP & V20X MP DC Link Voltage V 1V
8 V100 GP & V20X MP Last Active Fault Code - -
Table 100. Process data output mapping defaults for V20 Standard Application
PD Out Mapped Application Data Unit Scale
1 Frequency Reference Hz 0.01Hz
2 Output Reference Hz 0.01Hz
3 Motor Speed Rpm 1rpm
4 Motor Voltage V 0.1V
5 Motor Torque % 0.1%
6 Motor Current A 0.01A
7 Motor Power % 0.1%
8 DC Link Voltage V 1 V
8
Tel. +358 (0) 201 2121 • Fax +358 (0)201 212 205
Page 73

Appendix A: Object dictionary vacon • 71
9. APPENDIX A: OBJECT DICTIONARY
9.1 Communication segment
Index Sub-
index
1000 0 Device type Variable UNSIGNED32 CONST No 0x00010192
1001 0 Error Register Variable UNSIGNED8 RO No 0x00
1003 Pre-defined Error Field Array UNSIGNED32
000 Number of Errors RW No 0x00000000
001 Standard Error Field UNSIGNED32 RO No 0x0000000
002 Standard Error Field UNSIGNED32 RO No 0x0000000
003 Standard Error Field UNSIGNED32 RO No 0x0000000
004 Standard Error Field UNSIGNED32 RO No 0x0000000
005 Standard Error Field UNSIGNED32 RO No 0x0000000
006 Standard Error Field UNSIGNED32 RO No 0x0000000
007 Standard Error Field UNSIGNED32 RO No 0x0000000
008 Standard Error Field UNSIGNED32 RO No 0x0000000
009 Standard Error Field UNSIGNED32 RO No 0x0000000
Description Object
Code
Object 1000h: Device Type
Object 1001h: Error Register
Object 1003h: Pre-defined Error Field
Data Type Access PDO
Mapping
Default
value
Unit
Object 1005h: COB-ID SYNC
1005 0 COB-ID SYNC Variable UNSIGNED32 RW No 0x00000080
Object 100Ch: Guard Time
100C 0 Guard Time Variable UNSIGNED16 RW No 0x00000000 ms
Object 100Dh: Life Time Factor
100D 0 Life Time Factor Variable UNSIGNED8 RW No 0x00000000
Object 1010h: Store Parameter Field
1010 Store Parameter Field Array UNSIGNED32
000 Number of Entries RO No 0x2
001 Save all Parameters UNSIGNED32 RW No -
Object 1011h: Restore Default Parameters
1011 Restore Default Parameters Array UNSIGNED32
000 Number of Entries RO No 0x4
001 Restore all Default Parame-
ters
004 Restore Bypass parameter set UNSIGNED32 RW No -
Object 1014h: COB-ID EMCY
1014 0 COB-ID EMCY Variable UNSIGNED32 RW No 0x80
UNSIGNED32 RW No -
Object 1016h: Heartbeat Consumer Entries
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
9
Page 74

vacon • 72 Appendix A: Object dictionary
Index Sub-
index
1016 Heartbeat Consumer Entries Array UNSIGNED32
000 Number of Entries RO No 0x08
001 Consumer Heartbeat Time 1 UNSIGNED32 RW No 0x0000000
002 Consumer Heartbeat Time 2 UNSIGNED32 RW No 0x0000000
003 Consumer Heartbeat Time 3 UNSIGNED32 RW No 0x0000000
004 Consumer Heartbeat Time 4 UNSIGNED32 RW No 0x0000000
005 Consumer Heartbeat Time 5 UNSIGNED32 RW No 0x0000000
006 Consumer Heartbeat Time 6 UNSIGNED32 RW No 0x0000000
007 Consumer Heartbeat Time 7 UNSIGNED32 RW No 0x0000000
008 Consumer Heartbeat Time 8 UNSIGNED32 RW No 0x0000000
1017 0 Producer Heartbeat Time Variable UNSIGNED16 RW No 0x00000000
1018 Identity Object Record IDENTITY
000 number of entries RO No 0x4
001 Vendor Id UNSIGNED32 RO No 0x90
002 Product Code UNSIGNED32 RO No -
003 Revision number UNSIGNED32 RO No 0x01
004 Serial number UNSIGNED32 RO No -
Description Object
Code
Object 1017h: Producer Heartbeat Time
Object 1018h: Identity Object
Data Type Access PDO
Mapping
Default
value
Unit
Object 1019h: Synchronous counter
1019 0 Synchronous counter Variable UNSIGNED8 RW No 0x00000000
Object 1029h: Error Behaviour
1029 Error Behaviour Array UNSIGNED8
000 Number of Entries RO No 0x1
001 Communication Error UNSIGNED8 RW No 0x0
Object 1400h: Receive PDO Communication Parameter 1
1400 Receive PDO Communiction
Parameter 1
000 Number of Entries RO No 0x05
001 COB-ID UNSIGNED32 RW No 0x200
002 Transmission Type UNSIGNED8 RW No 0xFE
003 Inhibit Time UNSIGNED16 RW No 0x0 100 μs
005 Event Timer UNSIGNED16 RW No 0x0 ms
Object 1401h: Receive PDO Communication Parameter 2
1401 Receive PDO Communiction
Parameter 2
000 Number of Entries RO No 0x05
001 COB-ID UNSIGNED32 RW No 0x80000300
002 Transmission Type UNSIGNED8 RW No 0xFE
003 Inhibit Time UNSIGNED16 RW No 0x0 100 μs
005 Event Timer UNSIGNED16 RW No 0x0 ms
Record PDO_COMM_PAR
Record PDO_COMM_PAR
9
Tel. +358 (0) 201 2121 • Fax +358 (0)201 212 205
Page 75

Appendix A: Object dictionary vacon • 73
Index Sub-
index
1402 Receive PDO Communiction
000 Number of Entries RO No 0x05
001 COB-ID UNSIGNED32 RW No 0x80000400
002 Transmission Type UNSIGNED8 RW No 0xFE
003 Inhibit Time UNSIGNED16 RW No 0x0 100 μs
005 Event Timer UNSIGNED16 RW No 0x0 ms
1600 Receive PDO Mapping Param-
000 Number of Entries RW No 0x02
001 Mapping Entry 1 UNSIGNED32 RW No 0x60400010
002 Mapping Entry 2 UNSIGNED32 RW No 0x60420010
003 Mapping Entry 3 UNSIGNED32 RW No 0x00000000
004 Mapping Entry 4 UNSIGNED32 RW No 0x00000000
Description Object
Object 1402h: Receive PDO Communication Parameter 3
Parameter 3
Object 1600h: Receive PDO Mapping Parameter 1
eter 1
Data Type Access PDO
Code
Record PDO_COMM_PAR
Record PDO_MAPPING
Mapping
Default
value
Unit
Object 1601h: Receive PDO Mapping Parameter 2
1601 Receive PDO Mapping Param-
eter 2
000 Number of Entries RW No 0x04
001 Mapping Entry 1 UNSIGNED32 RW No 0x20000410
002 Mapping Entry 2 UNSIGNED32 RW No 0x20000510
003 Mapping Entry 3 UNSIGNED32 RW No 0x20000610
004 Mapping Entry 4 UNSIGNED32 RW No 0x20000710
Object 1602h: Receive PDO Mapping Parameter 3
1602 Receive PDO Mapping Param-
eter 3
000 Number of Entries RW No 0x04
001 Mapping Entry 1 UNSIGNED32 RW No 0x20000810
002 Mapping Entry 2 UNSIGNED32 RW No 0x20000910
003 Mapping Entry 3 UNSIGNED32 RW No 0x20000A10
004 Mapping Entry 4 UNSIGNED32 RW No 0x20000B10
Object 1800h: Transmit PDO Communication Parameter 1
1800 Transmit PDO Communiction
Parameter 1
000 Number of Entries RO No 0x06
001 COB-ID UNSIGNED32 RW No 0x180
002 Transmission Type UNSIGNED8 RW No 0xFE
003 Inhibit Time UNSIGNED16 RW No 0x64 100 μs
005 Event Timer UNSIGNED16 RW No 0x0 ms
006 Sync start value UNSIGNED8 RW No 0x0
Record PDO_MAPPING
Record PDO_MAPPING
Record PDO_COMM_PAR
Object 1801h: Transmit PDO Communication Parameter 2
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
9
Page 76

vacon • 74 Appendix A: Object dictionary
Index Sub-
index
1801 Transmit PDO Communiction
000 Number of Entries RO No 0x06
001 COB-ID UNSIGNED32 RW No 0x80000280
002 Transmission Type UNSIGNED8 RW No 0xFE
003 Inhibit Time UNSIGNED16 RW No 0x3E8 100 μs
005 Event Timer UNSIGNED16 RW No 0x0 ms
006 Sync start value UNSIGNED8 RW No 0x0
1802 Transmit PDO Communiction
000 Number of Entries RO No 0x06
001 COB-ID UNSIGNED32 RW No 0x80000380
002 Transmission Type UNSIGNED8 RW No 0xFE
003 Inhibit Time UNSIGNED16 RW No 0x3E8 100 μs
005 Event Timer UNSIGNED16 RW No 0x0 ms
006 Sync start value UNSIGNED8 RW No 0x0
Description Object
Parameter 2
Object 1802h: Transmit PDO Communication Parameter 3
Parameter 3
Data Type Access PDO
Code
Record PDO_COMM_PAR
Record PDO_COMM_PAR
Mapping
Default
value
Unit
Object 1A00h: Transmit PDO Mapping Parameter 1
1A00 Transmit PDO Mapping
Parameter 1
000 Number of Entries RW No 0x02
001 Mapping Entry 1 UNSIGNED32 RW No 0x60410010
002 Mapping Entry 2 UNSIGNED32 RW No 0x60440010
003 Mapping Entry 3 UNSIGNED32 RW No 0x00000000
004 Mapping Entry 4 UNSIGNED32 RW No 0x00000000
Object 1A01h: Transmit PDO Mapping Parameter 2
1A01 Transmit PDO Mapping
Parameter 2
000 Number of Entries RW No 0x04
001 Mapping Entry 1 UNSIGNED32 RW No 0x20010410
002 Mapping Entry 2 UNSIGNED32 RW No 0x20010510
003 Mapping Entry 3 UNSIGNED32 RW No 0x20010610
004 Mapping Entry 4 UNSIGNED32 RW No 0x20010710
Object 1A02h: Transmit PDO Mapping Parameter 3
1A02 Transmit PDO Mapping
Parameter 3
000 Number of Entries RW No 0x04
001 Mapping Entry 1 UNSIGNED32 RW No 0x20010810
002 Mapping Entry 2 UNSIGNED32 RW No 0x20010910
003 Mapping Entry 3 UNSIGNED32 RW No 0x20010A10
004 Mapping Entry 4 UNSIGNED32 RW No 0x20010B10
Record PDO_MAPPING
Record PDO_MAPPING
Record PDO_MAPPING
9
Tel. +358 (0) 201 2121 • Fax +358 (0)201 212 205
Page 77

Appendix A: Object dictionary vacon • 75
9.2 Manufacturer Segment
Index Sub-
index
2000 FB Processdata In Array UNSIGNED16
000 Number of Entries CONST No 0xB
001 FB PD In Offset 0 UNSIGNED16 RWW Yes 0x0
002 FB PD In Offset 1 UNSIGNED16 RWW Yes 0x0
003 FB PD In Offset 2 UNSIGNED16 RWW Yes 0x0
004 FB PD In Offset 3 UNSIGNED16 RWW Yes 0x0
005 FB PD In Offset 4 UNSIGNED16 RWW Yes 0x0
006 FB PD In Offset 5 UNSIGNED16 RWW Yes 0x0
007 FB PD In Offset 6 UNSIGNED16 RWW Yes 0x0
008 FB PD In Offset 7 UNSIGNED16 RWW Yes 0x0
009 FB PD In Offset 8 UNSIGNED16 RWW Yes 0x0
010 FB PD In Offset 9 UNSIGNED16 RWW Yes 0x0
011 FB PD In Offset 10 UNSIGNED16 RWW Yes 0x0
2001 FB Processdata Out Array UNSIGNED16
000 Number of Entries CONST No 0xB
001 FB PD Out Offset 0 UNSIGNED16 RO Yes 0x0
002 FB PD Out Offset 1 UNSIGNED16 RO Yes 0x0
003 FB PD Out Offset 2 UNSIGNED16 RO Yes 0x0
004 FB PD Out Offset 3 UNSIGNED16 RO Yes 0x0
005 FB PD Out Offset 4 UNSIGNED16 RO Yes 0x0
006 FB PD Out Offset 5 UNSIGNED16 RO Yes 0x0
007 FB PD Out Offset 6 UNSIGNED16 RO Yes 0x0
008 FB PD Out Offset 7 UNSIGNED16 RO Yes 0x0
009 FB PD Out Offset 8 UNSIGNED16 RO Yes 0x0
010 FB PD Out Offset 9 UNSIGNED16 RO Yes 0x0
011 FB PD Out Offset 10 UNSIGNED16 RO Yes 0x0
Description Object
Code
Object 2000h: FB Processdata In
Object 2001h: FB Processdata Out
Data Type Access PDO
Mapping
Default
value
Unit
The objects from 0x2100 to 0x5FFF contain the device-specific parameters and monitor valuesdefined in separate .EDS files. These files can be downloaded from http://drives.danfoss.com.
To access the application IDs in the drive, make the following calculation:
Index = ID number + 2100h
For example: Reading parameter acceleration time (ID 103d), has the index 2100h + 103d = 2167h.
Any application ID between 1 and 3EFFh (16127d) can be read/written using this method.
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
9
Page 78

vacon • 76 Appendix A: Object dictionary
9.3 Device Profile Segment
Index Sub-
index
6040 0 Controlword Variable UNSIGNED16 RWW Yes -
6041 0 Statusword Variable UNSIGNED16 RO Yes -
6042 0 vl Target Velocity Variable INTEGER16 RWW Yes 0x0000
6043 0 vl Velocity Demand Variable INTEGER16 RO Yes -
6044 0 vl Velocity Actual Value Variable INTEGER16 RO Yes -
6046 vl Velocity Min Max Amount Array UNSIGNED32
000 Number of Entries CONST No 0x00000002
001 vl_Velocity_Min_Amount UNSIGNED32 RW No 0x2
002 vl_Velocity_Max_Amount UNSIGNED32 RW No -
6048 vl Velocity Acceleration Record P402_VL_VEL_ACC_T
000 NumOfEntries CONST No 0x2
001 DeltaSpeed UNSIGNED32 RW No 0x0
002 DeltaTime UNSIGNED16 RW No 0x0
Description Object
Code
Object 6040h: Controword
Object 6041h: Statusword
Object 6042h: vl Target Velocity
Object 6043h: vl Velocity Demand
Object 6044h: vl Velocity Actual Value
Object 6046h: vl Velocity Min Max Amount
Object 6048h: vl Velocity Acceleration
Data Type Access PDO
Mapping
Default
Value
Object 6049h:vl Velocity Decelaration
6049 vl Velocity Deceleration Record P402_VL_VEL_ACC_T
000 NumOfEntries CONST No 0x2
001 DeltaSpeed UNSIGNED32 RW No 0x0
002 DeltaTime UNSIGNED16 RW No 0x0
Object 6060h: Modes of Operation
6060 0 Modes of Operation Variable INTEGER8 RW No -
Object 6061h: Modes of Operation Display
6061 0 Modes of Operation Display Variable INTEGER8 RO No -
Object 6502h: Supported Drive Modes
6502 0 Supported Drive Modes Variable UNSIGNED32 RO No -
9
Tel. +358 (0) 201 2121 • Fax +358 (0)201 212 205
Page 79

www.danfoss.com
Vacon Ltd
Member of the Danfoss Group
Runsorintie 7
65380 Vaasa
Finland
Document ID:
Rev. B
Sales code: DOC-OPTE6+DLUK
 Loading...
Loading...