

Vacon NXI FI9 series, NXI FI13 series, NXI FI14 series, NXI FI10 series, NXI FI12 series User Manual
Page 1

vacon® nxi
inverters
fi9-fi14
user manual
Page 2
AT LEAST THE 10 FOLLOWING STEPS OF THE
START-UP QUICK GUIDE
MUST BE PERFORMED
DURING THE INSTALLATION AND COMMISSIONING.
IF ANY PROBLEMS OCCUR, PLEASE CONTACT YOUR LOCAL DISTRIBUTOR.
Start-up Quick Guide
1. Check that the delivery corresponds to your order, see Chapter 3.
2. Before taking any commissioning actions, read carefully the safety instructions
in Chapter 1.
3. Before the mechanical installation, check the minimum clearances around the
unit and check the ambient conditions in Chapter 5.
4. Check the size of the motor cable, DC supply cable, and mains fuses, and check
the cable connections. Read Chapters 6.1.1.1 6.1.1.6.
5. Follow the installation instructions, see Chapter 6.1.1.8.
6. The sizes and grounding of control connections are explained in Chapter 6.2.2.
7. If the Start-Up wizard is active, select the language you want the keypad and the
application to use and confirm by pressing the enter button. If the Start-Up
wizard is not active, follow the instructions in 7a and 7b below.
8. 7a. Select the language of the keypad from Menu M6, page 6.1. Instructions on
using the keypad are given in Chapter 7.
9. 7b. Select the application you want to use from Menu M6, page 6.2. Instructions
on using the keypad are given in Chapter 7.
10. All parameters have factory default values. To ensure proper operation, check
the rating plate data for the values below and the corresponding parameters of
parameter group G2.1.
• nominal voltage of the motor
• nominal frequency of the motor
• nominal speed of the motor
• nominal current of the motor
• motor cos
All parameters are explained in the All in One Application Manual.
11. Follow the commissioning instructions, see Chapter 8.
12. The VACON
®
NX Inverter is now ready for use.
Vacon Ltd is not responsible for the use of the inverters against the
instructions.
Page 3
CONTENTS
VACON®
INDEX
1 SAFETY
2 EU DIRECTIVE
3 RECEIPT OF DELIVERY
4 TECHNICAL DATA
5 INSTALLATION
6 CABLING AND CONNECTIONS
7 CONTROL KEYPAD
8 COMMISSIONING
9 FAULT TRACING
Page 4

4 vacon
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
1
ABOUT THE VACON® NXI USER'S MANUAL
Congratulations for choosing VACON® NX Inverters!
The User's Manual will provide you with the necessary information about the installation,
commissioning and operation of VACON® NX Inverters. We recommend that you carefully study
these instructions before powering up the inverter for the first time.
In the All in One Application Manual you will find information about the different applications
included in the All in One Application Package. Should these applications not meet the requirements
of your process, please contact the manufacturer for information on special applications.
This manual is available in both paper and electronic editions. We recommend you to use the
electronic version if possible. If you have the electronic version at your disposal, you will be able to
benefit from the following features:
The manual contains several links and cross-references to other locations in the manual, which
makes it easier to move around in the manual. The reader can thus easily find and check things.
The manual also contains hyperlinks to web pages. To visit these web pages through the links, you
must have an internet browser installed on your computer.
Page 5

vacon 5
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
VACON® NXI User's Manual
Index
Document code: DPD00909D
Date: 30/01/2019
1. SAFETY .......................................................................................................................... 8
1.1 Warnings ...................................................................................................................................... 8
1.2 Safety instructions ....................................................................................................................... 8
1.3 Grounding and earth fault protection ........................................................................................ 9
1.4 Running the motor ...................................................................................................................... 9
2. EU DIRECTIVE .............................................................................................................. 10
2.1 CE marking ................................................................................................................................ 10
2.2 EMC directive ............................................................................................................................. 10
2.2.1 Introduction ....................................................................................................................... 10
2.2.2 Technical criteria .............................................................................................................. 10
2.2.3 VACON® inverter EMC classification ............................................................................... 10
2.2.4 Manufacturer's declaration of conformity ...................................................................... 10
3. RECEIPT OF DELIVERY ................................................................................................. 12
3.1 Type designation code. .............................................................................................................. 12
3.1.1 FI9 FI14 ........................................................................................................................... 12
3.2 Storage ....................................................................................................................................... 13
3.2.1 Capacitor reforming .......................................................................................................... 13
3.3 Maintenance .............................................................................................................................. 13
3.4 Disposal ...................................................................................................................................... 14
4. TECHNICAL DATA......................................................................................................... 15
4.1 Introduction................................................................................................................................ 15
4.2 NX Inverter drive Power ratings ............................................................................................... 17
4.2.1 Supply voltage 465-800 Vdc, Motor voltage 380 500 Vac ............................................. 17
4.2.2 Supply voltage 640-1100 Vdc, Motor voltage 525 690 Vac ........................................... 18
4.2.3 Overload capability ............................................................................................................ 18
4.3 Technical information ............................................................................................................... 20
4.4 Derating...................................................................................................................................... 23
4.4.1 Ambient temperature ....................................................................................................... 24
4.4.2 High altitude installation .................................................................................................. 24
5. INSTALLATION ............................................................................................................. 26
5.1 Mounting .................................................................................................................................... 26
5.2 Fan cooling ................................................................................................................................. 33
5.2.1 Enclosure sizes FI9 to FI14............................................................................................... 33
5.2.2 Arranging ventilation of the enclosure ............................................................................ 34
6. CABLING AND CONNECTIONS ...................................................................................... 37
6.1 Power unit .................................................................................................................................. 37
6.1.1 Power connections ............................................................................................................ 45
6.1.1.1 DC supply and motor cables .................................................................................... 45
6.1.1.2 Control cable ............................................................................................................. 45
6.1.1.3 Fuses, NXI_xxxx 5 ..................................................................................................... 45
Page 6

6 vacon
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
1
6.1.1.4 Fuses, NXI_xxxx 6 ..................................................................................................... 46
6.1.1.5 Inverter supply and motor cables , NXI_xxxx 5....................................................... 47
6.1.1.6 Terminal sizes, NXI_xxxx 5 ...................................................................................... 48
6.1.1.7 Inverter supply and motor cables, NXI_xxxx 6 ....................................................... 49
6.1.1.8 Terminal sizes, NXI_xxxx 6 ...................................................................................... 50
6.1.2 Installation instructions .................................................................................................... 51
6.1.2.1 VACON® NXI enclosures .......................................................................................... 53
6.1.3 Cable installation and the UL standards ......................................................................... 55
6.1.4 Cable and motor insulation checks ................................................................................. 55
6.2 Control unit ................................................................................................................................ 56
6.2.1 Control voltage (+24V/EXT +24V) ...................................................................................... 56
6.2.2 Control connections .......................................................................................................... 57
6.2.2.1 Control cables ........................................................................................................... 59
6.2.2.2 Galvanic isolation barriers ....................................................................................... 59
6.2.3 Control terminal signals ................................................................................................... 60
6.2.3.1 Digital input signal inversions ................................................................................. 61
6.2.3.2 Jumper selections on the OPT-A1 basic board ...................................................... 62
7. CONTROL KEYPAD ....................................................................................................... 64
7.1 Indicators on the keypad display .............................................................................................. 64
7.1.1 Drive status indications .................................................................................................... 64
7.1.2 Control place indications .................................................................................................. 65
7.1.3 Status LEDs (green green red) .................................................................................. 65
7.1.4 Text lines............................................................................................................................ 66
7.2 Keypad push-buttons ................................................................................................................ 67
7.2.1 Button descriptions ........................................................................................................... 67
7.3 Navigation on the control keypad ............................................................................................. 68
7.3.1 Monitoring menu (M1)....................................................................................................... 70
7.3.2 Parameter menu (M2) ....................................................................................................... 71
7.3.3 Keypad control menu (M3)................................................................................................ 73
7.3.3.1 Selection of control place......................................................................................... 73
7.3.3.2 Keypad reference ...................................................................................................... 73
7.3.3.3 Keypad direction ....................................................................................................... 73
7.3.3.4 Stop button activated ................................................................................................ 74
7.3.4 Active faults menu (M4) .................................................................................................... 75
7.3.4.1 Fault types ................................................................................................................. 75
7.3.4.2 Fault codes ................................................................................................................ 77
7.3.4.3 Fault time data record .............................................................................................. 83
7.3.5 Fault history menu (M5).................................................................................................... 84
7.3.6 System menu (M6) ............................................................................................................ 85
7.3.6.1 Selection of language ............................................................................................... 88
7.3.6.2 Application selection ................................................................................................ 88
7.3.6.3 Copy parameters ...................................................................................................... 89
7.3.6.4 Parameter comparison ............................................................................................ 91
7.3.6.5 Safety ......................................................................................................................... 92
7.3.6.6 Keypad settings ......................................................................................................... 94
7.3.6.7 Hardware settings .................................................................................................... 96
7.3.6.8 System info ................................................................................................................ 98
7.3.7 Expander board menu (M7) ............................................................................................ 102
7.4 Further keypad functions ........................................................................................................ 103
8. COMMISSIONING .........................................................................................................104
Page 7

vacon 7
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
8.1 Safety ........................................................................................................................................ 104
8.2 Commissioning the inverter ................................................................................................... 104
9. FAULT TRACING ..........................................................................................................107
Page 8
8 vacon SAFETY
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
1
1. SAFETY
1.1 Warnings
1
The components of the power unit of the inverter are live when the
VACON® NX is connected to DC supply. Coming into contact with this
voltage is extremely dangerous and may cause death or severe
injury. The control unit is isolated from mains potential.
2
The DC supply and motor terminals are live when the VACON® NX is
connected to DC supply, even if the motor is not running.
3
The control I/O-terminals are isolated from the mains potential.
However, the relay outputs and other I/O-terminals may have dangerous
control voltage present even when the VACON® NX is disconnected from
the DC supply.
4
The inverter has a large capacitive leakage current.
5
If the inverter is used as a part of a machine, the machine manufacturer
is responsible for providing the machine with a main switch (EN 60204-1).
6
Only spare parts delivered by manufacturer can be used.
1.2 Safety instructions
1
The VACON® NX inverter is meant for fixed installations only.
2
Do not perform any measurements when the inverter is connected to the
DC supply.
3
After having disconnected the inverter from the DC supply, wait until the
fan stops and the indicators on the keypad go out (if no keypad is
attached see the indicator through the keypad base). Wait 5 more
minutes before doing any work on VACON® NX connections. Do not even
open the cover before this time has expired.
4
Do not perform any voltage withstand tests on any part of VACON® NX.
There is a certain procedure according to which the tests shall be performed. Ignoring this procedure may result in damaged product.
5
Prior to measurements on the motor or the motor cable, disconnect the
motor cable from the inverter.
6
Do not touch the components on the circuit boards. Static voltage discharge may damage the components.
7
Before connecting the inverter to DC supply, make sure that the VACON®
NX front and cable covers are closed.
ONLY A COMPETENT ELECTRICIAN MAY CARRY OUT
THE ELECTRICAL INSTALLATION
WARNING
Page 9
SAFETY vacon 9
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
1
1.3 Grounding and earth fault protection
The VACON® NX inverter must always be earthed with an grounding conductor connected to the
grounding terminal.
The earth fault protection inside the inverter only protects the inverter against earth faults in the
motor or the motor cable.
Due to the high capacity currents present in the inverter, fault current protective switches may not
function properly. If fault current protective switches are used, they need to be tested with earth
fault currents present during possible fault situations.
1.4 Running the motor
Warning symbols
For your own safety, please pay special attention to the instructions marked with the following
symbols:
=
Dangerous voltage
WARNING
=
General warning
HOT SURFACE
=
Hot surface Risk of burn
MOTOR RUN CHECK LIST
1
Before starting the motor, check that the motor is mounted properly and
ensure that the machine connected to the motor allows the motor to be
started.
2
Set the maximum motor speed (frequency) according to the motor and
the machine connected to it.
3
Before reversing the motor, make sure that this can be done safely.
4
Make sure that no power correction capacitors are connected to the
motor cable.
5
Make sure that the motor terminals are not connected to mains
potential.
NOTE! You can download the English and French product manuals with applicable safety, warning
and caution information from https://www.danfoss.com/en/service-and-support/.
REMARQUE Vous pouvez télécharger les versions anglaise et française des manuels produit
sur le site https://www.danfoss.com/en/service-and-support/.
WARNING
Page 10
10 vacon receipt of delivery
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
2
2. EU DIRECTIVE
2.1 CE marking
The CE marking on the product guarantees the free movement of the product within the EEA
(European Economic Area). It also guarantees that the product complies with applicable directives
(for example, the EMC Directive and other possible so-called new method directives). VACON® NX
Inverters carries the CE label as a proof of compliance with the Low Voltage Directive (LVD), Electro
Magnetic Compatibility (EMC) Directive and RoHS Directive.
2.2 EMC directive
2.2.1
Introduction
The EMC Directive provides that the electrical apparatus must not excessively disturb the
environment it is used in, and, on the other hand, it shall have an adequate level of immunity toward
other disturbances from the same environment.
The compliance of VACON® NX Inverters with the EMC Directive is verified with Technical
Construction Files (TCF) and checked and approved by SGS FIMKO, which is a Notified Body. The
Technical Construction Files are used to authenticate the conformity of VACON® NX Inverters with
the Directive because it is impossible to test such a large product family in a laboratory environment
and because the combinations of installation vary greatly.
2.2.2
Technical criteria
Our basic idea was to develop a range of inverters offering the best possible usability and costefficiency. EMC compliance was a major consideration from the outset of the design.
2.2.3
VACON® inverter EMC classification
Factory delivered VACON® NX inverters are Class T equipment, which fulfil all EMC immunity
requirements (standard EN 61800-3) .
Class T:
Class T equipment have a small earth leakage current and can be used with floating DC input.
2.2.4
Manufacturer's declaration of conformity
The following page presents the photocopy of the Manufacturer's Declaration of Conformity assuring
the compliance of VACON® Inverters with the EMC-directives
Warning: This product is of the restricted sales distribution class according to IEC 61800-3. In
residential areas, this product may cause radio interference in which case the user may be required
to take adequate measures.
Page 11
receipt of delivery vacon 11
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
2
Page 12
12 vacon receipt of delivery
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
3
3. RECEIPT OF DELIVERY
VACON® NX inverters have undergone scrupulous tests and quality checks at the factory before they
are delivered to the customer. However, after unpacking the product, check that no signs of
transportation damage is to be found on the product and that the delivery is complete (compare the
type designation of the product to the code below, see the figure below.
Should the drive have been damaged during the shipping, please contact primarily the cargo
insurance company or the carrier.
If the delivery does not correspond to your order, contact the supplier immediately.
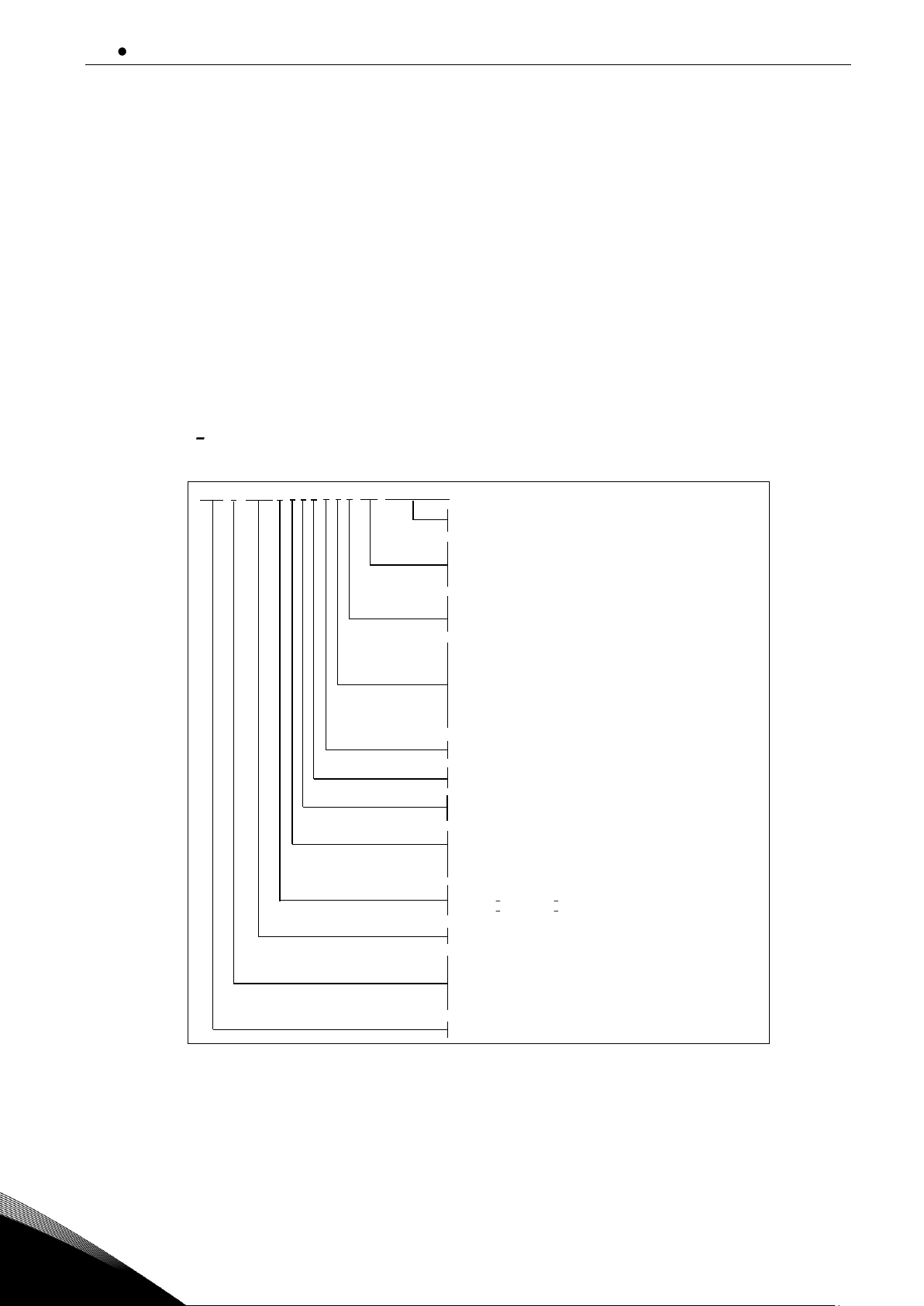
3.1 Type designation code.
3.1.1
FI9 FI14
Figure 3-1. VACON® NX type designation code, FI9 - FI14
NX
AAAA
T 0 C S S A1A2000000
V
2A
I
Nominal current (low overload)
0004 = 4A, 0520 = 520A, etc.
Nominal supply voltage (3-phase):
5 = 380 500Vac / 465 800Vdc
6 = 525 690Vac / 640 1100Vdc
Control keypad:
A = standard (alpha-numeric)
B = no local control keypad
F = dummy keypad
G = graphic display
Enclosure class:
2 = IP21, FR4...7
0 = IP00, FR8, FI9...14
EMC emission level:
T = fulfils standard EN61800-3 for IT networks
0 = N/A (no brake chopper)
Hardware modifications; Module type - S - Boards
S = Direct connection, standard boards, FR4...8
V = Direct connection, varnished boards, FR4...8
F= Fiber connection, standard boards
G = Fiber connection, varnished boards
Option boards; each slot is represented by two characters where:
A = basic I/O board, B = expander I/O board,
C = fieldbus board, D = special board
S = Standard air cooled drive
A =Standard air cooled power unit - transformer supply for main fan
U = Standard air cooled power unit - external supply for main fan
C = INU - with integrated charging circuit
I = INU - no charging circuit
N = Standard 6-pulse - no chokes
S = Standard 6-pulse connection with chokes
2 = AFE module
5 = AFE module + LCL filter
3 = FFE module
6 = FFE module + AC choke
8 = BCU Brake chopper unit
Module type:
A = AFE Active Front End
B = BCU Brake Chopper Unit
F = FFE Fundamental Front End
I = INU Inverter
N = Non regenerative Front End
Product generation
Page 13
receipt of delivery vacon 13
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
3
3.2 Storage
If VACON® NX Inverter is to be stored before use, make sure that the ambient conditions are
acceptable:
Storage temperature: -40...+158°F)
Relative humidity: 0 to 95%, no condensation
If you must keep the VACON® NX Active Front End in storage for a long time, you must connect the
power to the VACON® NX Active Front End each year. Keep the power on for a minimum of 2 hours.
We do not recommend a long storage time. If the storage time is more than 12 months, you must
charge the electrolytic DC capacitors with caution. To reform the capacitors, obey the instructions in
Chapter 3.2.1 Capacitor reforming.
3.2.1
Capacitor reforming
After a long storage time, it is necessary to reform the capacitors to prevent damage to the
capacitors. To make sure that the possible high leakage current through the capacitors stays in
minimum, use a DC-power supply with an adjustable current limit.
1. Set the current limit to 300-800mA to agree with the size of the drive.
2. Connect the DC-power supply to the B+/Bterminals (DC+ to B+, DC- to B-) of the DC-link or
directly to the capacitor terminals.
3. Set the DC-voltage to the nominal DC-voltage level of the Active Front End (1.35*Un AC) and
keep the power on for 1 hour, at minimum. If the Active Front End was in store for much longer
than 12 months and the capacitors were not charged, speak to the factory to get instructions
before you connect the power.
3.3 Maintenance
All technical devices, drives as well, need a certain amount of care-taking and failure preventive
maintenance. To maintain trouble-free operation of the drive, environmental conditions, as well as
load, line power, process control, etc. have to be within specifications, determined by manufacturer.
If all conditions are in accordance with the manufacturer's specifications, there are no other
concerns, but to provide a cooling capacity high enough for the power- and control circuits. This
requirement can be met by making sure, that the cooling system works properly. Operation of
cooling fans and cleanness of the heat sink should be verified regularly.
Regular maintenance is recommended to ensure trouble free operation and long lifetime of the
drive. At least the issues listed in the following table should be included in the regular maintenance.
Page 14
14 vacon receipt of delivery
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
3
TABLE 5. Maintenance interval
Interval
Maintenance
12 months (if unit stored)
Capacitor reforming, see Chapter
3.2.1
6 - 24 months (The interval is
different in different
environment.)
Check tightening torque of the
input and output terminals and
I/O terminals.
Clean the heat sink.
Clean the cooling tunnel.
Check operation of the cooling
fan, check for corrosion on
terminals, bus bars and other
surfaces.
Check the door filters.
5 - 7 years
Change the cooling fans.
• Main fan of the unit.
• Fan of the LCL filter.
• Internal IP54 (UL Type 12)
fan.
• Cabinet cooling fan/filter.
5 - 10 years
Change the DC bus capacitors if
DC voltage ripple is high.
It is also recommended to record all actions and counter values with dates and time for follow up of
maintenance.
3.4 Disposal
When the drive is at the end of its operation life, do not
discard it as a part of municipal waste. You can recycle
the primary components of the drive. You must
disassemble some components before you can remove
the different materials. Recycle the electrical and
electronic components as waste.
To make sure that the waste is recycled correctly, send
the waste to a recycling centre. You can also send the
waste back to the manufacturer. Obey the local and
other applicable regulations.
Page 15
technical data vacon 15
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
4
4. TECHNICAL DATA
4.1 Introduction
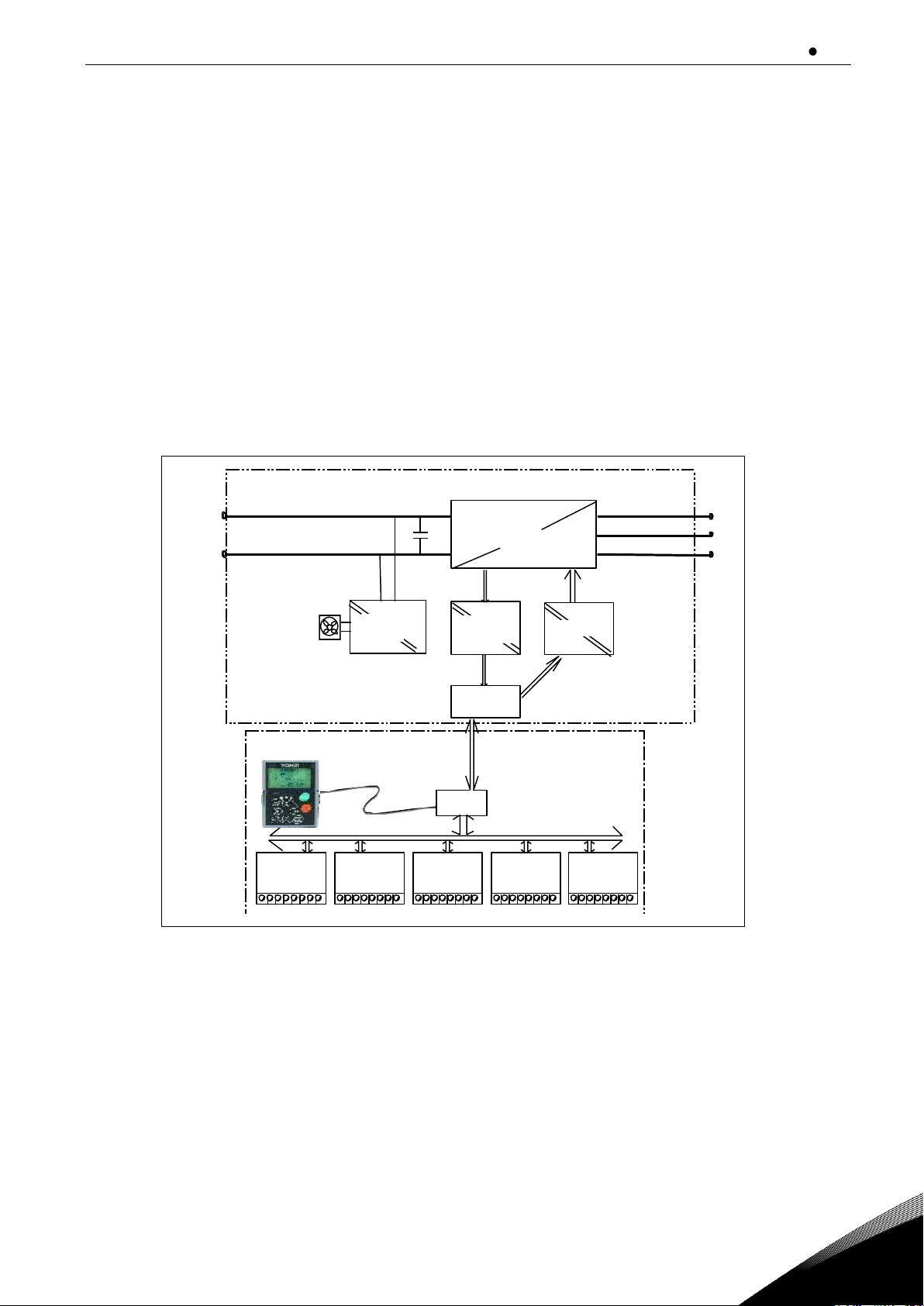
The figure below presents the block diagram of the VACON® NX inverter. The inverter mechanically
consists of two units, the Power Unit and the Control Unit.
The Power Unit contains an inverter bridge which consists of IGBT switches and produces a
symmetrical, 3-phase PWM-modulated AC voltage to the motor.
The Motor and Application Control Block is based on microprocessor software. The microprocessor
controls the motor based on the information it receives through measurements, parameter settings,
control I/O and control keypad. The motor and application control block controls the motor control
ASIC which, in turn, calculates the IGBT positions. Gate drivers amplify these signals for driving the
IGBT inverter bridge.
Figure 4-1. The block diagram of VACON® NXI inverter
U
V
W
RS 232
NK4_1
B+
B-
Measurements
Driver
ASIC
Control
Control
Keypad
Fan
IGBT
bridge
Power
Supply
I/O
Slot A
I/O
Slot B
Control
module
Power
module
I/O
Slot C
I/O
Slot D
I/O
Slot E
Page 16
16 vacon technical data
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
4
The control keypad constitutes a link between the user and the inverter. The control keypad is used
for parameter setting, reading status data and giving control commands. It is detachable and can be
operated externally and is connected via a cable to the inverter. Instead of the control keypad, a PC
can be used to control the inverter if connected through a similar cable (VACON RS232PC 1.5M).
The basic control interface and the parameters (the Basic Application) are easy to use. If a more
versatile interface or parameters are required, a more suitable application can be chosen from the
"All in One+" Application Package. See the "All in One+" Application Manual for more information on
the different applications.
Optional I/O expander boards that increase the number of inputs and outputs to be used are also
available. For more information, contact the Manufacturer or your local distributor (see back cover).
Page 17
technical data vacon 17
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
4
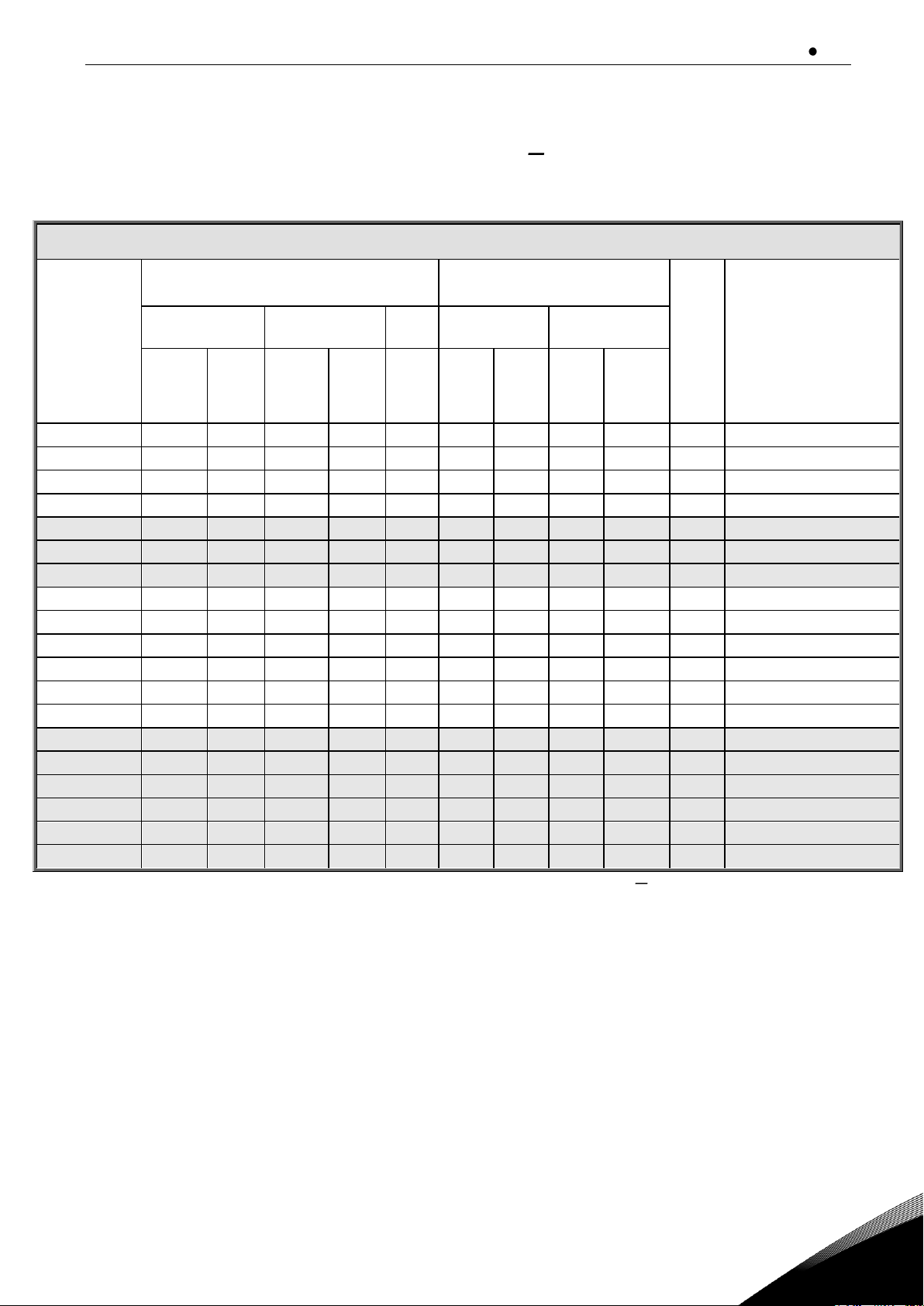
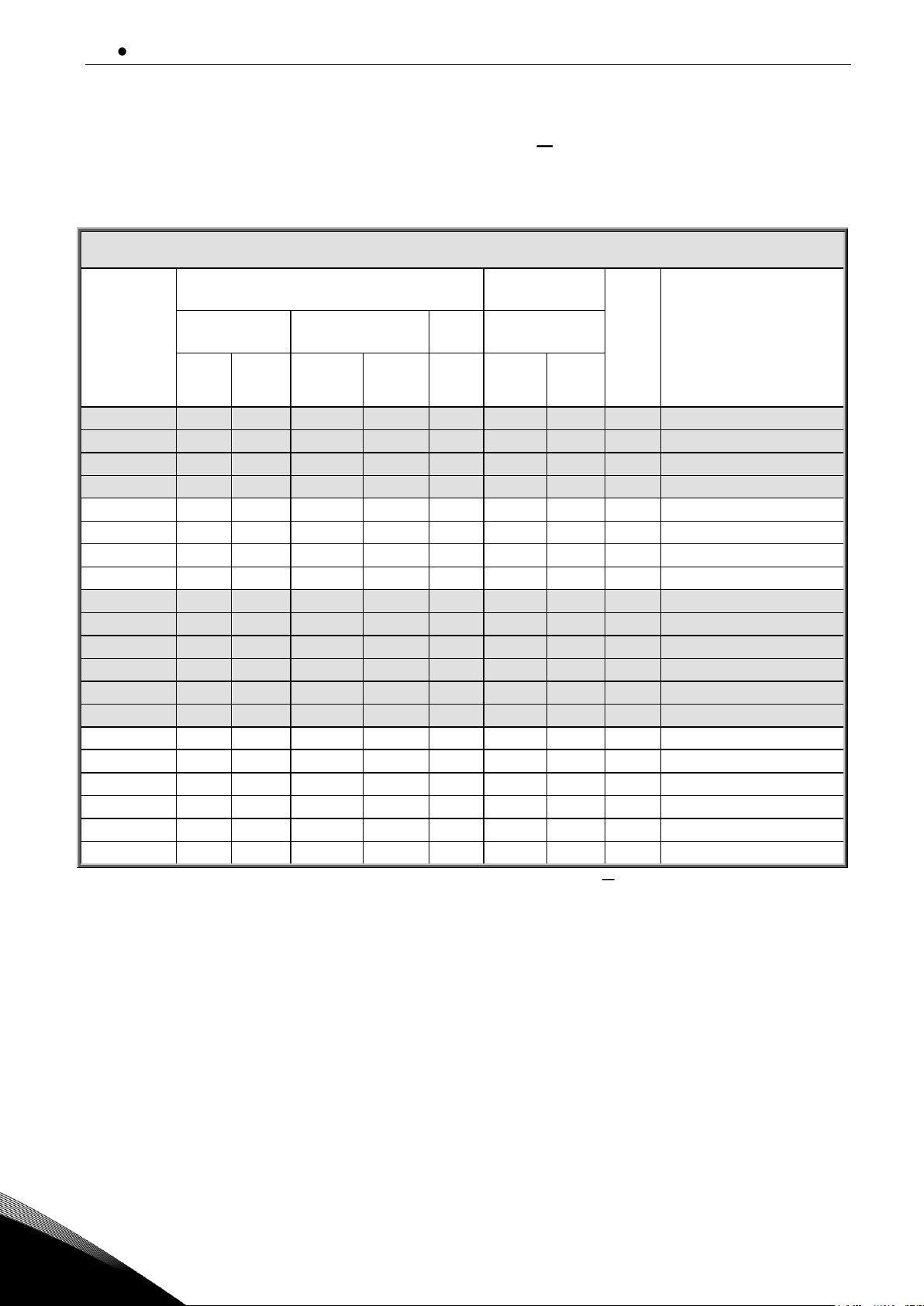
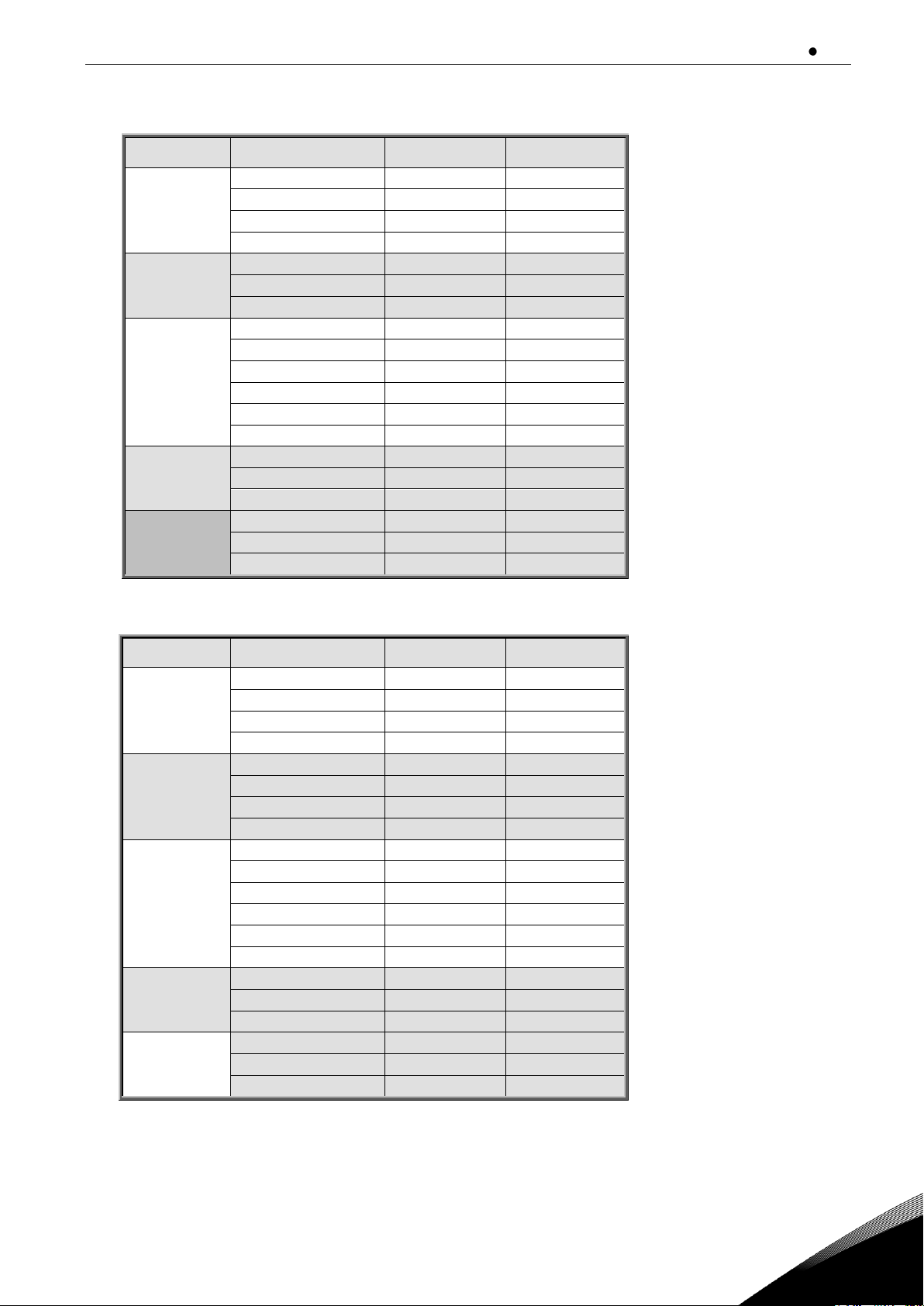
4.2 NX Inverter drive Power ratings
4.2.1
Supply voltage 465-800 Vdc, Motor voltage 380 500 Vac
Table 4-1. Power ratings and dimensions of VACON® NXI, supply voltage 465 800Vdc
Note: The rated currents in given ambient temperatures are achieved only when the switching
frequency is equal to or less than the factory default.
Motor voltage 380-500 Vac, 50/60 Hz, 3~
Inverter type
Loadability
@ 40 °C ambient temperature
Motor shaft power
Enclos
ure
size
Dimensions and weight
W×H×D/kg
Low
High
513Vdc
supply
675Vdc
supply
Rated
continuous
current IL
(A)
10%
overload
current
(A)
Rated
continuous
current
IH (A)
50%
overload
current
(A)
Max
current
I
S
10%
overload
40°C
P(kW)
50%
overload
40°C
P(kW)
10%
overload
40°C
P(kW)
50%
overload
40°C P(kW)
NXI_0168 5
170
187
140
210
238
90
75
110
90
FI9
239 × 1030 × 372/65
NXI_0205 5
205
226
170
255
285
110
90
132
110
FI9
239 × 1030 × 372/65
NXI_0261 5
261
287
205
308
349
132
110
160
132
FI9
239 × 1030 × 372/65
NXI_0300 5
300
330
245
368
444
160
132
200
160
FI9
239 × 1030 × 372/65
NXI_0385 5
385
424
300
450
540
200
160
250
200
FI10
239 × 1030 × 552/100
NXI_0460 5
460
506
385
578
693
250
200
315
250
FI10
239 × 1030 × 552/100
NXI_0520 5
520
572
460
690
828
250
250
355
315
FI10
239 × 1030 × 552/100
NXI_0590 5
590
649
520
780
936
315
250
400
355
FI12
2×239 × 1030 × 552/200
NXI_0650 5
650
715
590
885
1062
355
315
450
400
FI12
2×239 × 1030 × 552/200
NXI_0730 5
730
803
650
975
1170
400
355
500
450
FI12
2×239 × 1030 × 552/200
NXI_0820 5
820
902
730
1095
1314
450
400
560
500
FI12
2×239 × 1030 × 552/200
NXI_0920 5
920
1012
820
1230
1476
500
450
630
560
FI12
2×239 × 1030 × 552/200
NXI_1030 5
1030
1133
920
1380
1656
560
500
710
630
FI12
2×239 × 1030 × 552/200
NXI_1150 5
1150
1265
1030
1545
1854
630
560
800
710
FI13
708 × 1030 × 553/302
NXI_1300 5
1300
1430
1150
1725
2070
710
630
900
800
FI13
708 × 1030 × 553/302
NXI_1450 5
1450
1595
1300
1950
2340
800
710
1000
900
FI13
708 × 1030 × 553/302
NXI_1770 5
1770
1947
1600
2400
2880
1000 1200 FI14
2×708 × 1030 × 553/302
NXI_2150 5
2150
2365
1940
2910
3492
1200 1500
FI14
2×708 × 1030 × 553/302
NXI_2700 5
2700
2970
2300
3287
3933
1500 1800
FI14
2×708 × 1030 × 553/302
Page 18
18 vacon technical data
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
4
4.2.2
Supply voltage 640-1100 Vdc, Motor voltage 525 690 Vac
All enclosures are available as IP21 and IP54.
Motor voltage 525-690 Vac, 50/60 Hz, 3~
Inverter type
Loadability
@ 40 °C ambient temperature
Motor shaft
power
Enclos
ure
size
Dimensions and weight
W×H×D/kg
Low
High
930Vdc
supply
Rated
continuou
s current
IL (A)
10%
overload
current
(A)
Rated
continuous
current
IH (A)
50%
overload
current
(A)
Max
current
I
S
10%
overload
40°C P(kW)
50%
overload
40°C
P(kW)
NXI_0125 6
125
138
100
150
200
110
90
FI9
239 × 1030 × 372/65
NXI_0144 6
144
158
125
188
213
132
110
FI9
239 × 1030 × 372/65
NXI_0170 6
170
187
144
216
245
160
132
FI9
239 × 1030 × 372/65
NXI_0208 6
208
229
170
255
289
200
160
FI9
239 × 1030 × 372/65
NXI_0261 6
261
287
208
312
375
250
200
FI10
239 × 1030 × 552/100
NXI_0325 6
325
358
261
392
470
315
250
FI10
239 × 1030 × 552/100
NXI_0385 6
385
424
325
488
585
355
315
FI10
239 × 1030 × 552/100
NXI_0416 6
416
458
325
488
585
400
355
FI10
239 × 1030 × 552/100
NXI_0460 6
460
506
385
578
693
450
400
FI12
2×239 × 1030 × 552/200
NXI_0502 6
502
552
460
690
828
500
450
FI12
2×239 × 1030 × 552/200
NXI_0590 6
590
649
502
753
904
560
500
FI12
2×239 × 1030 × 552/200
NXI_0650 6
650
715
590
885
1062
630
560
FI12
2×239 × 1030 × 552/200
NXI_0750 6
750
825
650
975
1170
710
630
FI12
2×239 × 1030 × 552/200
NXI_0820 6
820
902
650
975
1170
800
710
FI12
2×239 × 1030 × 552/200
NXI_0920 6
920
1012
820
1230
1476
900
800
FI13
708 × 1030 × 553/302
NXI_1030 6
1030
1133
920
1380
1656
1000
900
FI13
708 × 1030 × 553/302
NXI_1180 6
1180
1298
1030
1464
1755
1200
1000
FI13
708 × 1030 × 553/302
NXI_1500 6
1500
1650
1300
1950
2340
1500
1300
FI14
2×708 × 1030 × 553/302
NXI_1900 6
1900
2090
1500
2250
2700
1800
1500
FI14
2×708 × 1030 × 553/302
NXI_2250 6
2250
2475
1900
2782
3335
2000
1800
FI14
2×708 × 1030 × 553/302
Table 4-2. Power ratings and dimensions of VACON® NXI, supply voltage 640 1100Vdc
Note: The rated currents in given ambient temperatures are achieved only when the switching
frequency is equal to or less than the factory default.
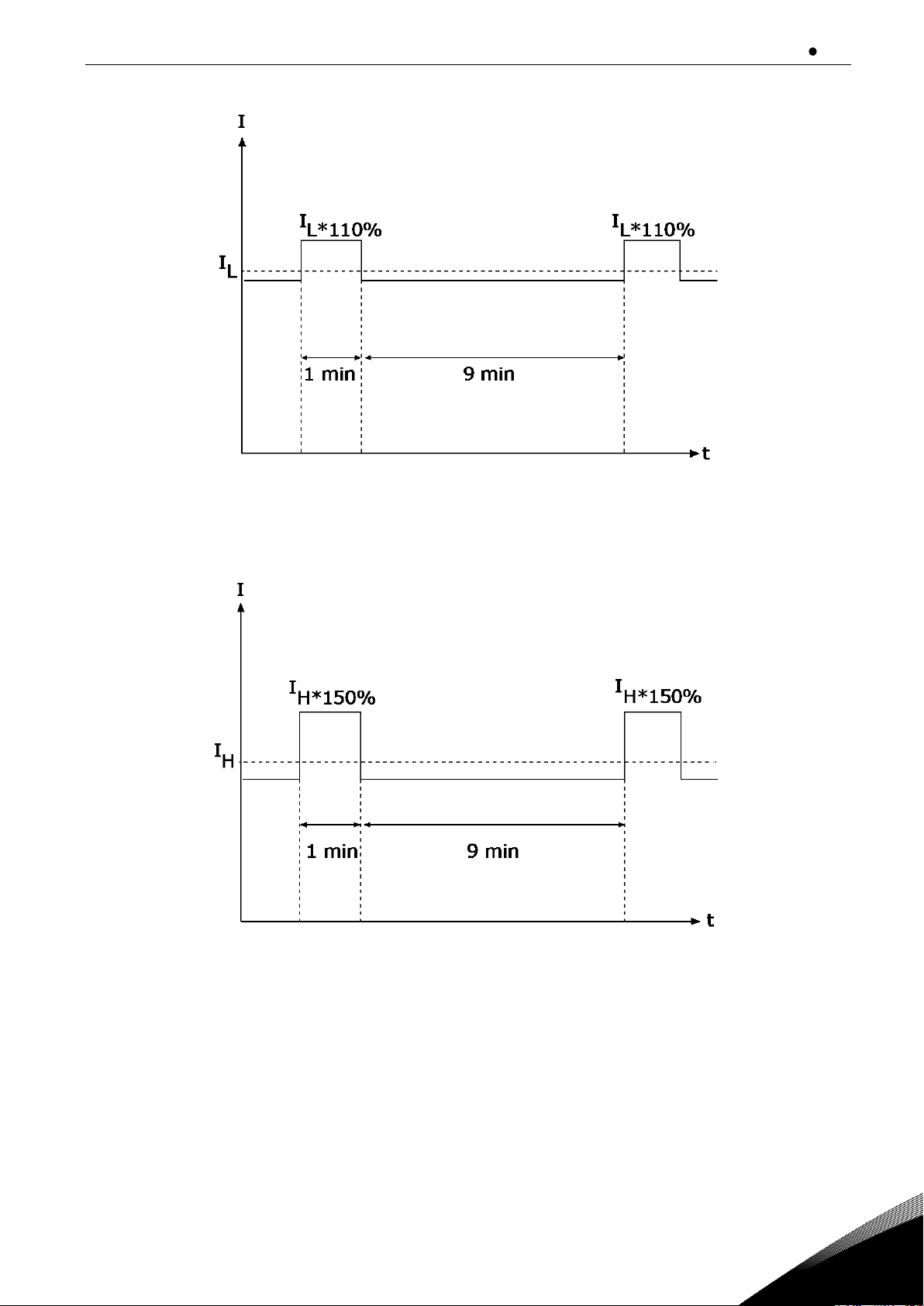
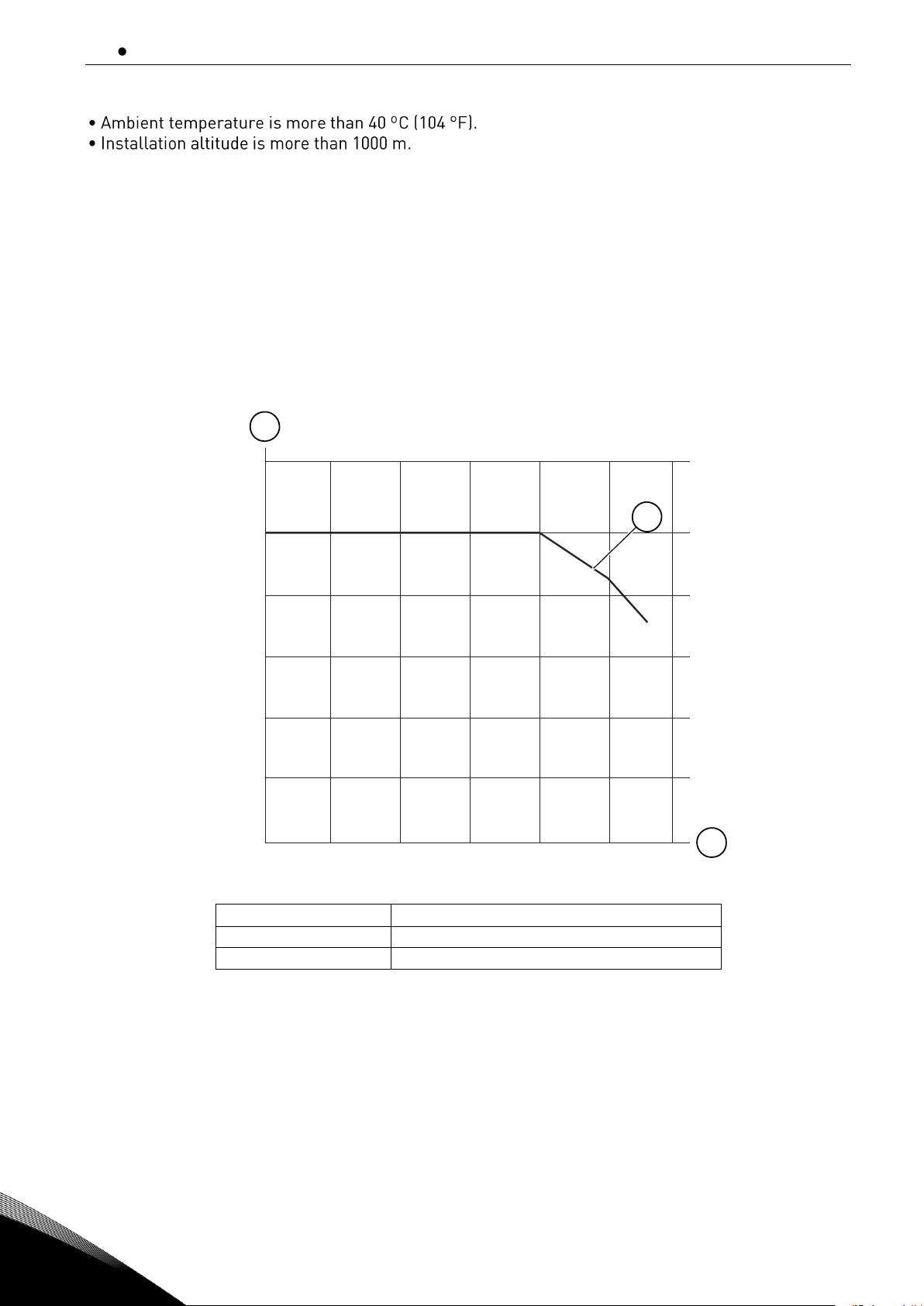
4.2.3
Overload capability
The low overload means that if 110% of the continuous current (IL) is required for 1 minute
every 10 minutes, the remaining 9 minutes must be approximately 98% of IL or less. This is to
make sure that the output current is not more than IL during the duty cycle.
Page 19
technical data vacon 19
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
4
Figure 4-2. Low overload
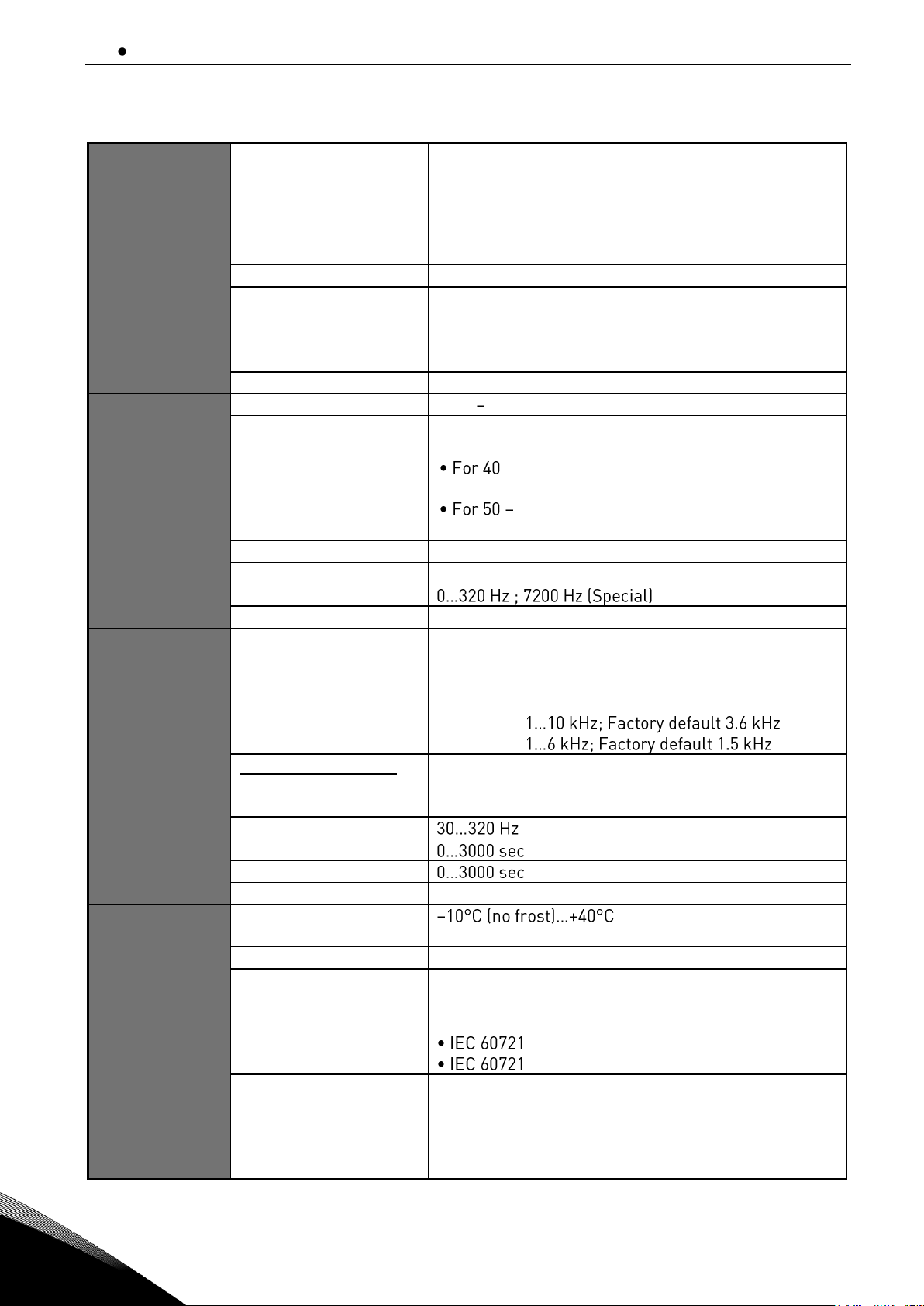
The high overload means that if 150% of the continuous current (IH) is required for 1 minute
every 10 minutes, the remaining 9 minutes must be approximately 92% of IH or less. This is
to make sure that the output current is not more than IH during the duty cycle.
Figure 4-3. High overload
Page 20
20 vacon technical data
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
4
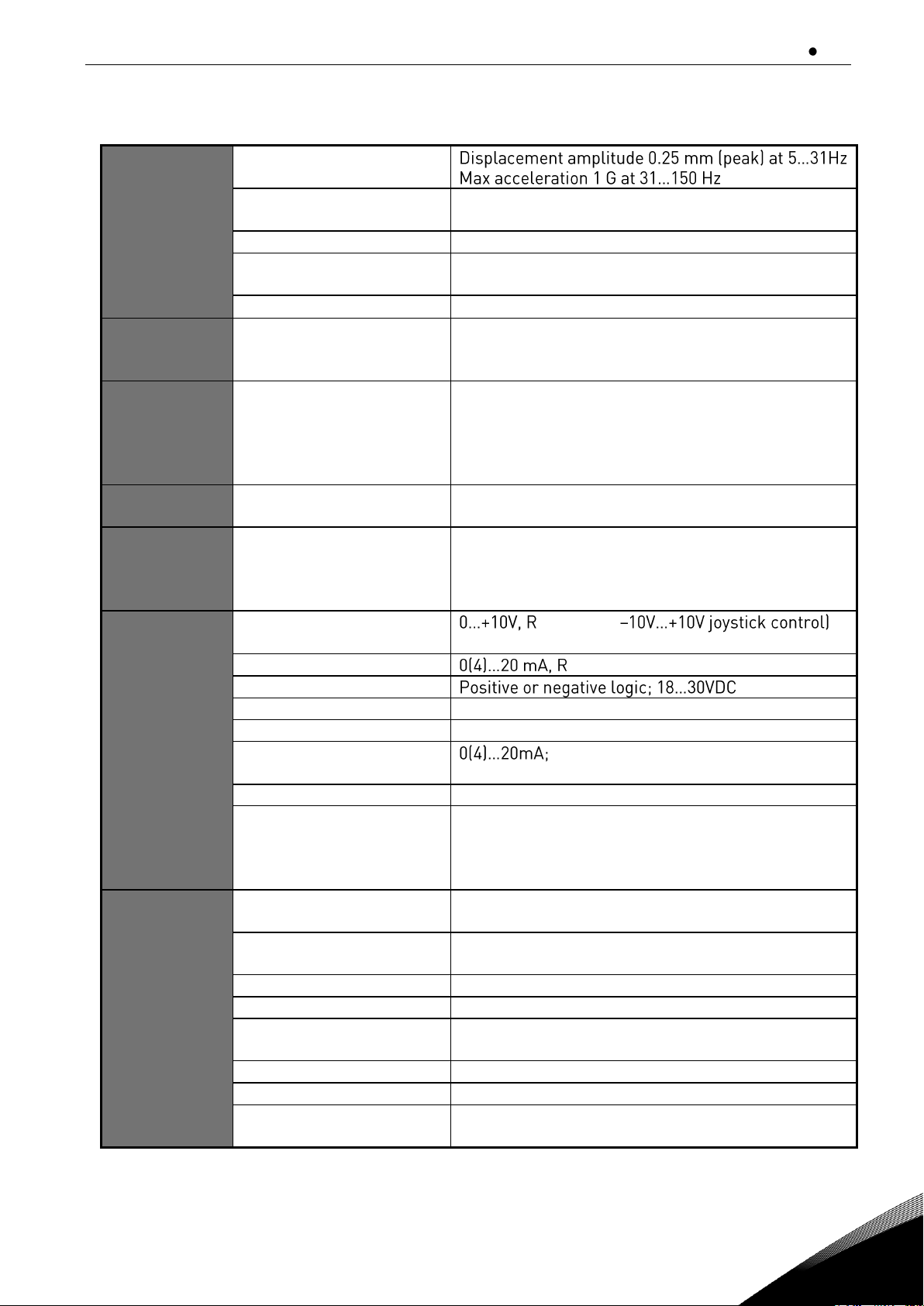
4.3 Technical information
Supply
connection
Input voltage Uin
465...800Vdc ( 380-500 Vac)
640...1100Vdc ( 525-690 Vac)
The waviness of the inverter supply voltage, which is
formed in rectification of the electric network's
alternating voltage in basic frequency, must be less
than 50V peak-to-peak.
Input current I
in
(sqrt3 × U
mot
× I
mot
× cos) / ( Uin × 0.98)
DC bank capacitance
FI9_5 : 4950F; FI9_6 : 3733F
FI10_5: 9900F; FI10_6: 7467F
FI12_5: 19800F; FI12_6: 14933F
FI13_5: 29700F; FI13_6: 22400F
Starting delay
5 s (FI9 and greater)
Motor
connection
Output voltage
3 ~ 0 Uin / 1.4
Continuous output
current
IH: Ambient temperature +40 °C (104 °F),
overloadability 1.5 x IH (1 min./10 min.).
- 50 °C (104 - 122°F), the ambient
temperatures use derating factor IH*1.5%/1 °C (°F).
55 °C (122 - 131°F), the ambient
temperatures use derating factor IH*2.5% /1 °C (°F).
Starting torque
IS for two seconds, torque motor dependent
Peak current
IS for 2 s every 20 s
Output frequency
Frequency resolution
Application dependent
Control
characteristics
Control method
Frequency control U/f
Open Loop Sensorless Vector Control
Closed Loop Frequency Control
Closed Loop Vector Control
Switching frequency
(see parameter 2.6.9)
NXI_5:
NXI_6:
Frequency reference
Analogue input
Panel reference
Resolution 0.1% (12-bit), accuracy ±1%
Resolution 0.01 Hz
Field weakening point
Acceleration time
Deceleration time
Braking torque
DC brake: 30% * TN (without brake)
Ambient
conditions
Ambient operating
temperature
Storage temperature
-40 °C (-40 °F)...+70 °C (158 °F)
Relative humidity
0 to 95% RH, non-condensing, non-corrosive,
no dripping water
Air quality:
- chemical fumes
- solid particles
Designed according to
-3-3, AC drive in operation, class 3C2
-3-3, AC drive in operation, class 3S2
Altitude
100% loadability (no derating) up to 1000 m.
Maximum elevation 2000 m (525-690 VAC) and 4000
m (380-500 VAC), Relay I/O: max. 240 V: 3000 m;
max. 120 V: 4000 m, see Power derating as a
function of installation altitude. See Chapter 4.4.
Page 21
technical data vacon 21
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
4
Vibration
EN50178/EN60068-2-6
Shock
EN50178, EN60068-2-27
UPS Drop Test (for applicable UPS weights)
Storage and shipping: max 15 G, 11 ms (in package)
Heat loss
P
loss
[kW] approx. P
mot
[kW] × 0.02
Cooling air required
FI9 1150 m3/h, FI10 1400 m3/h,
FI12 2800 m3/h, FI13 4200 m3/h, FI14 2×4200 m3/h
Unit enclosure class
IP00/Open type standard size in the kW/HP range
EMC
(at default
settings)
Immunity
IEC/EN 61800-3:2004+A1:2012, second
environment
Noise level
Average noise level
(cooling fan) in dB(A)
FI9: 76
FI10: 74
FI12: 76
FI13: 81
FI14: 2*81 (2*FI13)
Safety
standards
IEC/EN 61800-5-1, UL 508C, CSA C22.2 No.274
T-level, see chapter 2.2.3.
Approvals
CE, cULus, RCM, KC, EAC, UA. (See the nameplate
of the drive for more approvals.)
Marine approvals: LR, BV, DNV, GL, ABS, RMRS,
CCS,KR.
Control
connections
Analogue input voltage
i
= 200k, (
Resolution 0.1%, accuracy ±1%
Analogue input current
i
= 250 differential
Digital inputs (6)
Auxiliary voltage
+24V, ±15%, max. 250mA
Output reference voltage
+10V, +3%, max. load 10mA
Analogue output
RL max. 500; Resolution 10 bit;
Accuracy ±2%
Digital outputs
Open collector output, 50mA/48V
Relay outputs
2 programmable change-over relay outputs
Switching capacity: 24VDC/8A, 250VAC/8A,
125VDC/0.4A
Min.switching load: 5V/10mA
Protections
Overvoltage protection
Undervoltage protection
NX_5: 911VDC; NX_6: 1200VDC
NX_5: 333VDC; NX_6: 461 VDC
Earth fault protection
In case of earth fault in motor or motor cable, only
the inverter is protected
Motor phase supervision
Trips if any of the output phases is missing
Overcurrent protection
Yes
Unit overtemperature
protection
Yes
Motor overload protection
Yes
Motor stall protection
Yes
Motor underload
protection
Yes
Page 22

22 vacon technical data
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
4
Short-circuit protection of
+24V and +10V reference
voltages
Yes
Table 4-3. Technical information
Page 23
technical data vacon 23
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
4
Structure
IN (output)
Motor P.F.
IDC (input)
FI9
170
0.89
198
205
0.89
239
261
0.89
304
300
0.89
350
FI10
385
0.9
454
460
0.9
542
520
0.9
613
FI12
590
0.9
695
650
0.9
766
730
0.91
870
820
0.91
977
920
0.91
1096
1030
0.91
1227
FI13
1150
0.91
1370
1300
0.91
1549
1450
0.91
1727
FI14
1770
0.92
2132
2150
0.92
2590
2700
0.92
3252
Table 4- 4 DC currents and dimensions of VACON® NXI, supply voltage 465 - 800Vdc
Structure
IN (output)
Motor P.F.
IDC (input)
FI9
125
0.89
146
144
0.89
168
170
0.89
198
208
0.9
245
FI10
261
0.9
308
325
0.9
383
385
0.9
454
416
0.9
490
F12
460
0.91
548
502
0.91
598
590
0.91
703
650
0.91
774
750
0.91
894
820
0.91
977
FI13
920
0.91
1096
1030
0.91
1227
1180
0.92
1421
FI14
1500
0.92
1807
1900
0.93
2313
2250
0.93
2739
Table 4- 5. DC currents and dimensions of VACON® NXI, supply voltage 640 - 1100Vdc
4.4 Derating
The output power has to be derated if one of following cases:
Page 24
24 vacon technical data
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
4
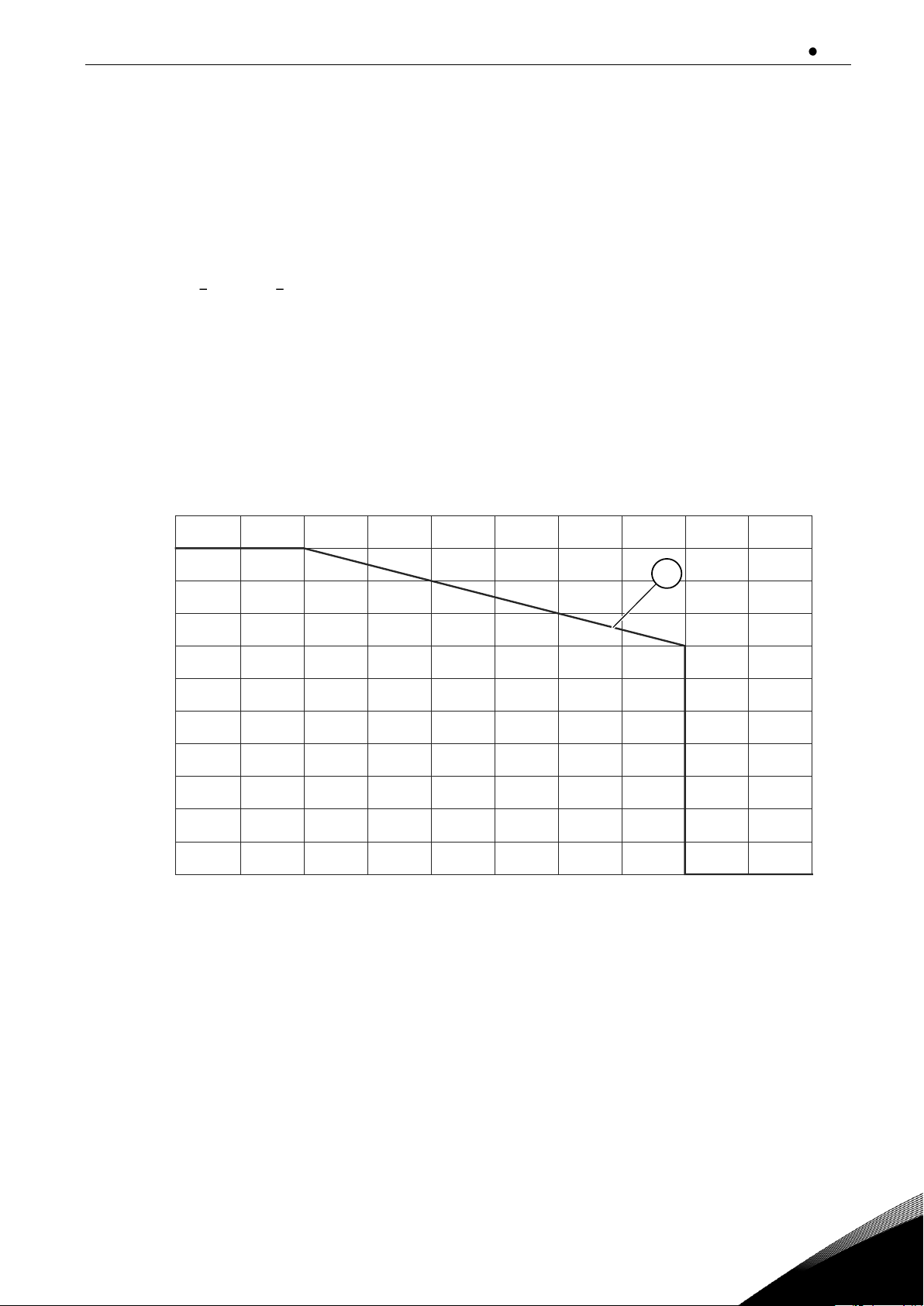
4.4.1
Ambient temperature
The power rating of the Active Front End unit is valid for an ambient temperature of 40 ºC (104 °F). If
the device is to be used in higher ambient temperatures, its power rating must be subjected to
derating. The derating coefficient from 40 °C to 50 °C, use derating factor 1.5 %/1 °C, and from 50 °C
to 55 °C, use derating factor 2.5 %/1 °C, for ambient temperatures not exceeding 55 °C (131 °F). The
reduced power is calculated using the formula:
Pde = Pn *((100% - (t - 40 ºC)*X)/100)
Pn = nominal power of the unit
t = ambient temperature
x = derating coefficient
C
11167A_00
0
10
20
30
40
50
60
0%
20%
40%
60%
80%
100%
120%
B
A
A
Ambient temperature, °C
B
Loadability, %
C
Loadability %
Figure 4-4. Derating as the ambient temperature
4.4.2
High altitude installation
The density of air decreases when the altitude increases and the pressure decreases. When the air
density decreases, the thermal capacity decreases (i.e. less air removes less heat) and the
resistance to electric field (breakdown voltage / distance) decreases.
Page 25
technical data vacon 25
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
4
The full thermal performance of VACON® NX AC drives is designed for installation up to 1000 m
altitude and the electric insulation is designed for installations up to 2000 m altitude. Higher
installation locations are possible, when you obey the derating guidelines in this chapter.
NOTE! 690V units maximum installation altitude is 2000m.
Above 1000 m, you must decrease the limited maximum load current by 1% for each 100 m. Thus, for
example, at 2500 m altitude, you must decrease the load current down to 85% of the rated output
current (100% (2500 m 1000 m) / 100 m x 1% = 85%).
When you use fuses at high altitudes, the cooling effect of the fuse decreases as the density of the
atmosphere decreases.
When you use fuses above 2000 meters, the continuous rating of the fuse:
I = In*(1- (h-2000)/100*0.5/100)
I = Current rating at high altitude
In = Rated current of a fuse
h = Altitude in meters
0
500
1000
1500
2000
2500
3000
3500
4000
4500
5000
0%
10%
30%
50%
70%
20%
40%
60%
80%
90%
100%
110%
A
Figure 4-5. Loadability in high altitudes
For permitted maximum altitudes, see Table 7.
For information on option boards and I/O signals and relay outputs, see VACON® NX I/O Boards
User Manual.
Page 26

26 vacon installation
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
5
5. INSTALLATION
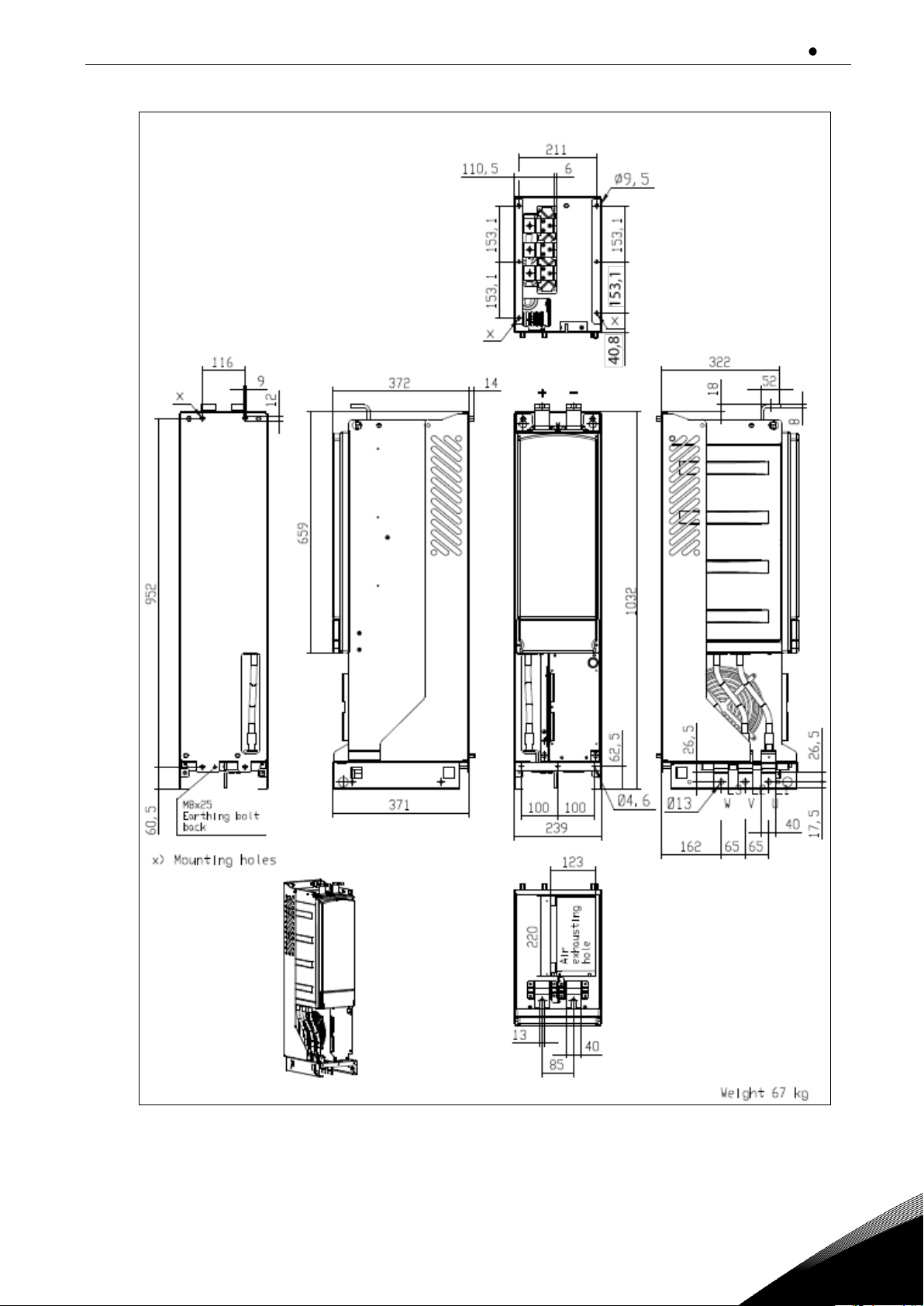
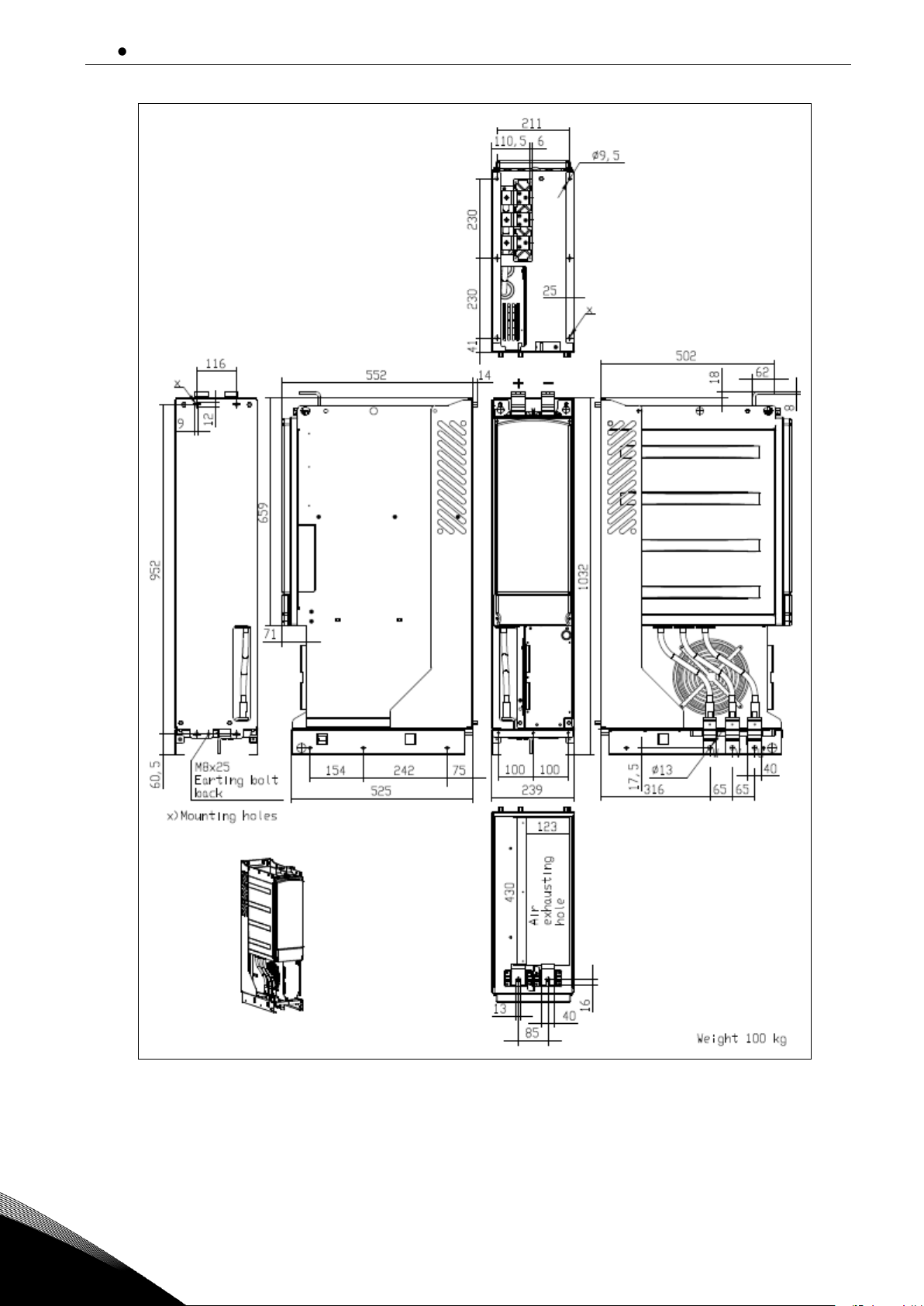
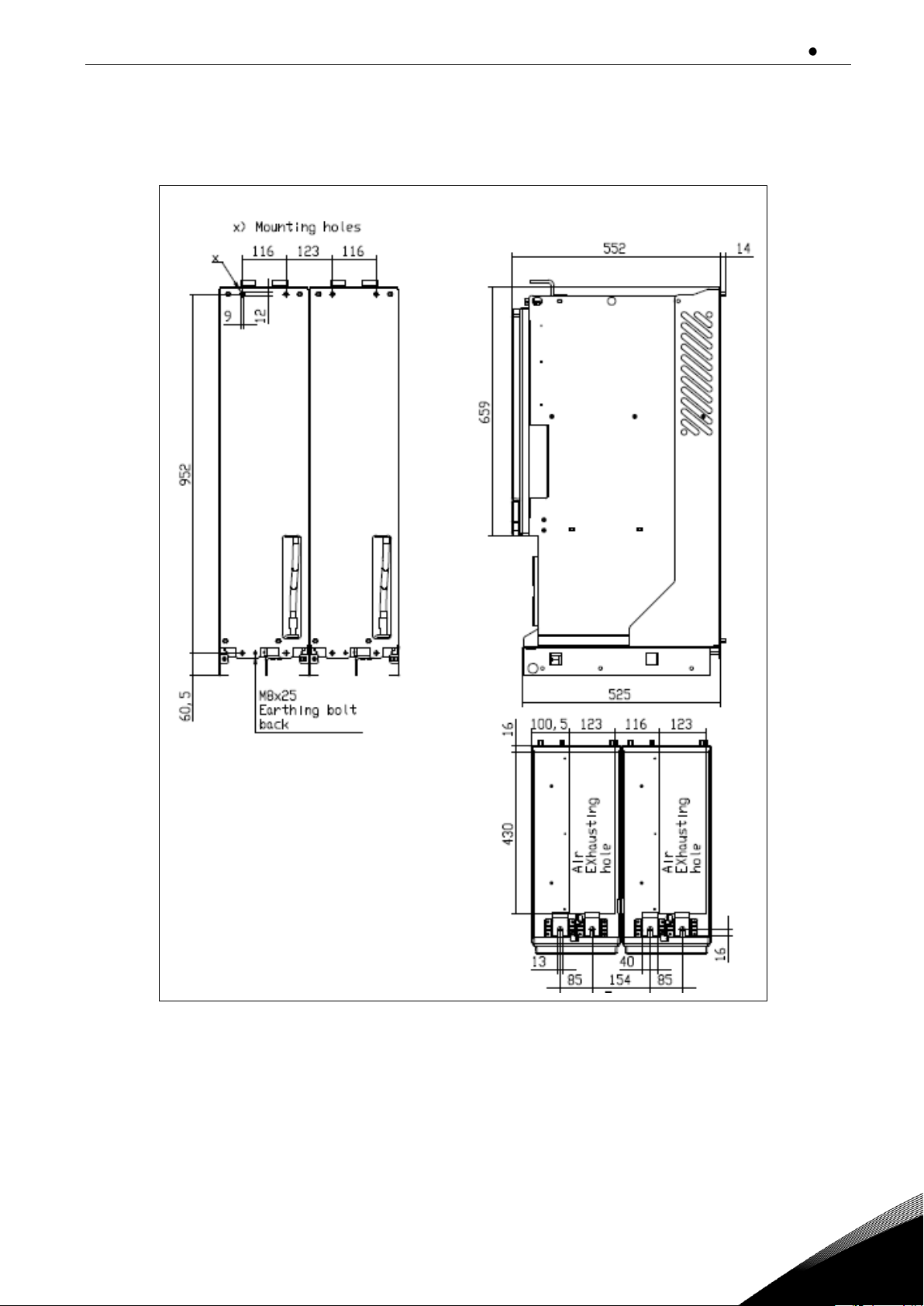
5.1 Mounting
The inverter can be mounted in a vertical position on the back plane of a cubicle. Enough space must
be reserved around the inverter to ensure sufficient cooling, see Figure 5-7. Follow the minimum
dimensions for installation, see Table 5-1 and Table 5-2. Also make sure that the mounting plane is
relatively even. The inverter is fixed with four screws (or bolts, depending on the unit size). The
dimensions for installation are presented in Figure 5-7 and Table 5-1.The following pages show the
dimensions for IP00 power module.
Page 27
installation vacon 27
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
5
Figure 5-1. The dimensions of VACON® NXI FI9
Page 28
28 vacon installation
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
5
Figure 5-2. VACON® NXI dimensions, FI10
Page 29
installation vacon 29
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
5
Figure 5-3. VACON® NXI dimensions, FI12 back view.
Page 30

30 vacon installation
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
5
Figure 5-4. VACON® NXI dimensions, FI12 front view
Page 31

installation vacon 31
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
5
Figure 5-5. VACON® NXI dimensions, FI13 back view. Note, FI14 is a douple FI13
Page 32

32 vacon installation
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
5
Figure 5-6. VACON® NXI dimensions, FI13 front view. Note, FI14 is a douple FI13
Page 33

installation vacon 33
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
5
5.2 Fan cooling
5.2.1
Enclosure sizes FI9 to FI14
Enough free space must be left around the inverter to ensure sufficient air circulation and cooling.
You will find the required dimensions for free space in the table below.
If several units are mounted on top of each other, the required free space equals 2 * C (see figure
below). Moreover, the outlet air used for cooling by the lower unit must be directed away from the air
intake of the upper unit. When planning the cooling for the space, take into consideration that the
Type
Dimensions [mm]
A
B
B
2
C
NXI_0168 0300 5
NXI_0125 0208 6
200
20 Min. 300
NXI_0385 0520 5
NXI_0261 0416 6
200
20 Min. 300
NXI_0590 1030 5
NXI_0460 0820 6
200
20 0 Min. 300
NXI_1150 1450 5
NXI_0920 1180 6
200
20 0 Min. 300
NXI_1770 2700 5
NXI_1500 2250 6
The dimensions as per FI13
module
Table 5-1. Mounting space dimensions
Figure 5-7. Installation space.
A = free space above the inverter
B = distance between inverter and cabinet wall
B2 = distance between two inverters
C = free space underneath of the inverter
Page 34

34 vacon installation
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
5
Type
Enclosure
size
Cooling air
required
(m3/h)
Minimum air holes on
switchgear (mm2)
NXI_0168 0300 5
NXI_0125 0208 6
FI9
1.150
Inlet: 55.000
Outlet: 30.000
NXI_0385 0520 5
NXI_0261 0416 6
FI10
1.400
Inlet: 65.000
Outlet: 40.000
NXI_0590 1030 5
NXI_0460 0820 6
FI12
2.800
Inlet: 130.000
Outlet: 70.000
NXI_1150 1450 5
NXI_0920 1180 6
FI13
4.200
Inlet: 195.000
Outlet: 105.000
NXI_1770 2700 5
NXI_1500 2250 6
FI14
2 × 4.200
Inlet: 2 × 195.000
Outlet: 2 × 105.000
Table 5-2. Required cooling air
5.2.2
Arranging ventilation of the enclosure
The enclosure door must be provided with air gaps for air intake. To achieve sufficient cooling inside
the cabinet, the dimensions for the total area of free openings for incoming air given in Table 5-2
must be followed. For instance, there could be two screened gaps as presented in Figure 5-7 (our
recommendation). This layout ensures a sufficient air flow to the module fans as well as cooling of
the additional components.
Air outlet gaps must be situated on top of the cabinet. The minimum effective air outlet area per
converter enclosure is given in Table 5-2. The cooling arrangements inside the cabinet must be such
that they prevent hot output air from mixing with the incoming fresh air (see page 32).
The ventilation gaps must fulfil the requirements set by the selected IP class. The examples in this
manual apply to protection class IP21.
During operation, air is sucked in and circulated by a fan blower at the bottom of the power unit. If
the power unit is placed in the upper part of the cabinet, the fan blower will be in the mid of the
cabinet, at the height of the upper ventilation grid.
See Figure 5-7 on page 33.
Page 35

cabling and connections vacon 35
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
5
Figure 5-8. Cabinet openings for cooling.
1. Cooling air inlets
2. Hot air exhaust
1 1 1 2 2
Page 36

36 vacon cabling and connections
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
5
STEERING AIR FLOW
Cooling air must be taken in through the ventilation gaps on the door and blown out at the top of the
enclosure. To steer the hot air from the power unit to the outlet at the top of the enclosure and
prevent it from circulating back to the fan blower, use either of the following arrangements:
A. Install a closed air duct from the power unit to the outlet on top of the enclosure (A in
figures below).
B. Install shields in the gaps between the power unit and the cabinet walls (B in figures
below). Place the shields above the air outlet gaps at the sides of the module.
Figure 5-9. Cabinet cooling airflow guides
Page 37

cabling and connections vacon 37
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6
6. CABLING AND CONNECTIONS
6.1 Power unit
The following wiring diagrams show the supply and motor connections.
Figure 6-1. FI9/10 basic wiring diagram without charging
Page 38

38 vacon cabling and connections
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6
Figure 6-2, FI9/10 basic wiring diagram with charging
Page 39

cabling and connections vacon 39
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6
Figure 6-3, FI12 basic wiring diagram without charging
Page 40

40 vacon cabling and connections
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6
Figure 6-4, FI12 basic wiring diagram with charging
Page 41

cabling and connections vacon 41
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6
Figure 6-5, FI13 basic wiring diagram without charging
Page 42

42 vacon cabling and connections
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6
Figure 6-6. FI13 basic wiring diagram with charging
Page 43

cabling and connections vacon 43
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6
Figure 6-7. FI14 basic wiring diagram without charging
Page 44

44 vacon cabling and connections
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6
Figure 6-8. FI14 basic wiring diagram with charging
Page 45

cabling and connections vacon 45
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6
6.1.1
Power connections
6.1.1.1 DC supply and motor cables
The power supply is connected to terminals B+ and B- and the motor cables to terminals U/T1, V/T2
and W/T3. A cable entry gland should be used at the motor cable end to reach the EMC levels, see
Table 6-1.
Use cables with a heat resistance of at least +70C. The cables and the fuses must be sized according
to the inverter nominal output current which can be found on the rating plate. Installation of cables
according to UL regulations is presented in Chapter 6.1.3 and aR fuse sizes in Tables 6-2 and 6-3.
If the motor temperature protection of the drive (see VACON® All in One Application Manual) is used
as an overload protection, the cable shall be chosen accordingly.
These instructions apply only to installations with one motor and one cable connection from the
inverter to the motor. In any other case, ask the factory for more information.
Cable type
EMC Level T
Power supply
Flexible conductor. Min. temperature endurance for isolation 70°C
Copper Busbar
Motor cable
Power cable equipped with concentric protection wire and intended
for the specific mains voltage. (PIRELLI/MCMK or similar
recommended).
Control cable
Screened cable equipped with compact low-impedance shield
(PIRELLI/jamak, SAB/ÖZCuY-O or similar).
Table 6-1. Cable types required to meet standards
6.1.1.2 Control cable
For information on control cables, see Chapter 6.2.2.1 and Table 6-1 above.
6.1.1.3 Fuses, NXI_xxxx 5
Type
Enclo
sure
size
I
L
[A]
Bussman aR
fuse type
Fuse
size
Fuse
U
n
[V]
Fuse
In
[A]
No. of fuses
NXI_0168 5
FI9
168
170M6808
DIN3
690
500
2
NXI_0205 5
205
170M6808
DIN3
690
500
2
NXI_0261 5
261
170M6812
DIN3
690
800
2
NXI_0300 5
300
170M6812
DIN3
690
800
2
NXI_0385 5
FI10
385
170M8547
3SHT
690
1250
2
NXI_0460 5
460
170M8547
3SHT
690
1250
2
NXI_0520 5
520
170M8547
3SHT
690
1250
2
NXI_0590 5
FI12
590
170M8547
3SHT
690
1250
2 × 2
NXI_0650 5
650
170M8547
3SHT
690
1250
2 × 2
NXI_0730 5
730
170M8547
3SHT
690
1250
2 × 2
NXI_0820 5
820
170M8547
3SHT
690
1250
2 × 2
NXI_0920 5
920
170M8547
3SHT
690
1250
2 × 2
NXI_1030 5
1030
170M8547
3SHT
690
1250
2 × 2
NXI_1150 5
FI13
1150
170M8547
3SHT
690
1250
6
Page 46

46 vacon cabling and connections
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6
NXI_1300 5
1300
170M8547
3SHT
690
1250
6
NXI_1450 5
1450
170M8547
3SHT
690
1250
6
NXI_1770 5
FI14
1770
170M8547
3SHT
690
1250
2 × 6
NXI_2150 5
2150
170M8547
3SHT
690
1250
2 × 6
NXI_2700 5
2700
170M8547
3SHT
690
1250
2 × 6
Table 6-2. Fuses used in VACON® NXI (465 - 800Vdc)
6.1.1.4 Fuses, NXI_xxxx 6
Type
Enclo
sure
size
IL
[A]
Bussman aR
fuse type
Fuse
size
Fuse
Un
[V]
Fuse
In
[A]
No. of fuses
NXI_0125 6
FI9
125
170M4199
1SHT
1250
400
2
NXI_0144 6
144
170M4199
1SHT
1250
400
2
NXI_0170 6
170
170M4199
1SHT
1250
400
2
NXI_0208 6
208
170M4199
1SHT
1250
400
2
NXI_0261 6
FI10
261
170M6305
3SHT
1250
700
2
NXI_0325 6
325
170M6305
3SHT
1250
700
2
NXI_0385 6
385
170M6277
3SHT
1100
1000
2
NXI_0416 6
416
170M6277
3SHT
1100
1000
2
NXI_0460 6
FI12
460
170M6305
3SHT
1250
700
4
NXI_0502 6
502
170M6305
3SHT
1250
700
4
NXI_0590 6
590
170M6305
3SHT
1250
700
4
NXI_0650 6
650
170M6277
3SHT
1100
1000
4
NXI_0750 6
750
170M6277
3SHT
1100
1000
4
NXI_0820 6
820
170M6277
3SHT
1100
1000
4
NXI_0920 6
FI13
920
170M6305
3SHT
1250
700
6
NXI_1030 6
1030
170M6277
3SHT
1100
1000
6
NXI_1180 6
1180
170M6277
3SHT
1100
1000
6
NXI_1500 6
FI14
1500
170M6305
3SHT
1250
700
2 × 6
NXI_1900 6
1900
170M6277
3SHT
1100
1000
2 × 6
NXI_2250 6
2250
170M6277
3SHT
1100
1000
2 × 6
Table 6-3. Fuses used in VACON® NX (640 - 1100V)
Information about fuses:
gR fuses are designed to protect the device against both overcurrent and short-circuits.
aR fuses protect the cables of the device against short-circuits.
gG fuses are generally used to protect cables against overcurrent and short-circuits.
Page 47

cabling and connections vacon 47
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6
6.1.1.5 Inverter supply and motor cables , NXI_xxxx 5
Type
Enclosure
size
IL
[A]
Module supply (DC)
(per terminal)
Cu [mm2]
Motor cable
[mm2]
NXI_0168 5
FI9
170 1) 2×(1×24)
Cu: 3×95+50
Al: 3×120+70
NXI_0205 5
205 1) 2×(1×24)
Cu: 3×150+70
Al: 3×240Al+72Cu
NXI_0261 5
261 1) 3×(1×24)
Cu: 3×185+95
Al: 2×(3×120+70)
NXI_0300 5
300 1) 6×(1×24)
Cu: 2×(3×120+70)
Al: 2×(3×185Al+57Cu)
NXI_0385 5
FI10
385 2) 5×40
Cu: 2×(3×120+70)
Al: 2×(3×185Al+57Cu)
NXI_0460 5
460 2) 5×40
Cu: 2×(3×150+70)
Al: 2×(3×240Al+72Cu)
NXI_0520 5
520 2) 6×40
Cu: 2×(3×185+95)
Al: 2×(3×300Al+88Cu)
NXI_0590 5
3
) FI12
590 2) 5×40
Cu: 2×(3×240+120)
Al: 4×(3×120Al+41Cu)
NXI_0650 5
650 2) 5×40
Cu: 4×(3×95+50)
Al: 4×(3×150Al+41Cu)
NXI_0730 5
730 2) 5×40
Cu: 4×(3×120+70)
Al: 4×(3×185Al+57Cu)
NXI_0820 5
820 2) 5×40
Cu: 4×(3×150+70)
Al: 4×(3×185Al+57Cu)
NXI_0920 5
920 2) 5×40
Cu: 4×(3×150+70)
Al: 4×(3×240Al+72Cu)
NXI_1030 5
1030 2) 6×40
Cu: 4×(3×185+95)
Al: 4×(3×300Al+88Cu)
NXI_1150 5
FI13
1150 2) 5×40
Cu: 4×(3×240+170)
Al: 6× (3×185Al+57Cu)
NXI_1300 5
1300 2) 5×40
Cu: 6×(3×150+70)
Al: 6× (3×240Al+72 Cu)
NXI_1450 5
1450 2) 6×40
Cu: 6×(3×185+95)
Al: 6× (3×240Al+72 Cu)
NXI_1770 5
3
) FI14
1770 2) 5×40
Cu: 2× 4×(3×240+170)
Al: 2× 6× (3×185Al+57Cu)
NXI_2150 5
2150 2) 5×40
Cu: 2× 6×(3×150+70)
Al: 2× 6× (3×240Al+72 Cu)
NXI_2700 5
2700 2) 6×40
Cu: 2× 6×(3×185+95)
Al: 2× 6× (3×240Al+72 Cu)
Note:
1
) Flexible conductor. Min. temperature endurance for isolation 70°C
2
) Copper Busbar
3
) The modules requires symmetrical parallel cable with min length 40m or dU/dt- or sinus filter.
Table valid for enclosure class IP20 cabinets
Motor cables:
EN 60204-1, IEC 60364-5-2/2001
- PVC insulation
- 40 °C ambient temperature
- 70 °C surface temperature
Table 6-4. Cable sizes for VACON® NX_5
Page 48

48 vacon cabling and connections
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6
6.1.1.6 Terminal sizes, NXI_xxxx 5
Type
Enclos
ure size
IL
[A]
DC supply terminal]
Motor cable terminal
NXI_0168 5
FI9
170
PE: M8 × 25
NXI_0205 5
205
NXI_0261 5
261
NXI_0300 5
300
NXI_0385 5
FI10
385
PE: M8 × 25
NXI_0460 5
460
NXI_0520 5
520
NXI_0590 5
FI12
590
PE: M8 × 25
NXI_0650 5
650
NXI_0730 5
730
NXI_0820 5
820
NXI_0920 5
920
NXI_1030 5
1030
NXI_1150 5
FI13
1150
PE: M8 × 25
NXI_1300 5
1300
NXI_1450 5
1450
Table 6-5. Terminal sizes for VACON® NX_5
8 x 40
13
35
16
38
17
6 x 40
13
38
17
6 x 40
13
8 x 40
13
50
16
38
17
6 x 40
13
8 x 40
13
50
16
Page 49

cabling and connections vacon 49
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6
6.1.1.7 Inverter supply and motor cables, NXI_xxxx 6
Type
Enclosure
size
IL
[A]
Module supply (DC)
Cu [mm2]
Motor cable
[mm2]
NXI_0125 6
FI9
125 1) 2×(1×24)
Cu: 3×95+50
Al: 3×120+70
NXI_0144 6
144 1) 2×(1×24)
Cu: 3×95+50
Al: 3×120+70
NXI_0170 6
170 1) 2×(1×24)
Cu: 3×95+50
Al: 3×120+70
NXI_0208 6
208 1) 2×(1×24)
Cu: 3×150+70
Al: 3×240Al+72Cu
NXI_0261 6
FI10
261 1) 3×(1×24)
Cu: 3×185+95
Al: 2×(3×95Al+29Cu)
NXI_0325 6
325 2) 5×40
Cu: 2×(3×95+50)
Al: 2×(3×150Al+41Cu)
NXI_0385 6
385 2) 5×40
Cu: 2×(3×120+70)
Al: 2×(3×185Al+57Cu)
NXI_0416 6
416 2) 5×40
Cu: 2×(3×150+70)
Al: 2×(3×185Al+57Cu)
NXI_0460 6
3
) FI12
460 2) 5×40
Cu: 2×(3×150+70)
Al: 2×(3×240Al+72Cu)
NXI_0502 6
502 2) 5×40
Cu: 2×(3×185+95)
Al: 2×(3×300Al+88 Cu)
NXI_0590 6
590 2) 5×40
Cu: 2×(3×240+120)
Al: 4×(3×120Al+41Cu)
NXI_0650 6
650 2) 5×40
Cu: 4×(3×95+50)
Al: 4×(3×150Al+41Cu)
NXI_0750 6
750 2) 5×40
Cu: 4×(3×120+70)
Al: 4×(3×150Al+41Cu)
NXI_0820 6
820 2) 5×40
Cu: 4×(3×150+70)
Al: 4×(3×185Al+57Cu)
NXI_0920 6
FI13
920 2) 5×40
Cu:4x(3x150+70)
Al:4x(3x240+72Cu)
NXI_1030 6
1030 2) 5×40
Cu:4x(3x185+95)
Al:5x(3x185+57Cu)
NXI_1180 6
1180 2) 5×40
Cu:5x(3x185+95)
Al:6x(3x185+72Cu)
NXI_1500 6
3
) FI14
1500
2
) 5×40
Cu: 2×4×(3×120+70)
Al: 2×4×(3×150Al+41Cu)
NXI_1900 6
1900
2
) 5×40
Cu: 2×4x(3x185+95)
Al: 2×5x(3x185+57Cu)
NXI_2250 6
2250
2
) 5×40
Cu: 2×5x(3x185+95)
Al: 2×6x(3x185+72Cu)
Note:
1
) Flexible conductor. Min. temperature endurance for isolation 70°C
2
) Copper Busbar
2) 3
) The modules requires symmetrical parallel cable with min length 40m or dU/dt- or sinus filter.
Table valid for enclosure class IP20 cabinets
Motor cables:
EN 60204-1, IEC 60364-5-2/2001
- PVC insulation
- 40 °C ambient temperature
- 70 °C surface temperature
Table 6-6. Cable sizes for VACON® NX_6
Page 50

50 vacon cabling and connections
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6
6.1.1.8 Terminal sizes, NXI_xxxx 6
Type
Enclosur
e size
IL
[A]
DC supply terminal
Motor cable Terminal
NXI_0125 6
FI9
125
PE: M8×25
NXI_0144 6
144
NXI_0170 6
170
NXI_0208 6
208
NXI_0261 6
FI10
261
PE: M8×25
NXI_0325 6
325
NXI_0385 6
385
NXI_0416 6
416
NXI_0460 6
FI12
460
PE: M8×25
NXI_0502 6
502
NXI_0590 6
590
NXI_0650 6
650
NXI_0750 6
750
NXI_0820 6
820
NXI_0920 6
FI13
920
PE: M8×25
NXI_1030 6
1030
NXI_1180 6
1180
Table 6-7. Terminal sizes for VACON® NX_5
40
13
35
16
6 x 40
13
38
17
40
13
50
16
40
13
50
16
40
13
50
16
6 x 40
13
38
17
6 x 40
13
38
17
6 x 40
13
38
17
Page 51

cabling and connections vacon 51
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6
6.1.2
Installation instructions
1
Before starting the installation, check that none of the components of the
inverter are live.
2
In accordance with protection class IP00 requirements. There is no need
to install the inverter cover if the inverter is installed in a cubicle,
separate cabinet or device space.
3
Place the motor cables sufficiently far from other cables:
▪ Avoid placing the motor cables in long parallel lines with other
cables
▪ If the motor cables runs in parallel with other cables, note the
minimum distances between the motor cables and other cables
given in the table below.
▪ The given distances also apply between the motor cables and
signal cables of other systems.
▪ The maximum length of the motor cables is 300 m.
If output du/dt filters (+DUT option) are used the cable length is
limited according to the table below:
▪ The motor cables should cross other cables at an angle of 90
degrees.
4
If cable insulation checks are needed, see Chapter .
Distance
between cables
[m]
Shielded
cable
[m]
0.3
50
1.0
200
Page 52

52 vacon cabling and connections
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6
5
Connect the cables:
▪ Remove the screws of the cable protection plate. Do not open the
cover of the power unit!
▪ Make holes into and pass the cables through the rubber
grommets on the bottom of the power unit. The rubber grommets
are delivered in a separate bag.
▪ Connect the DC supply, motor and control cables into their
respective terminals.
▪ For Information on cable installation according to UL
regulations, see Chapter 6.1.3.
▪ Cable installation according to EMC regulations:
The output cables to the motor must be 360o EMC earthed. The
EMC grounding clamps can, for instance, be installed on the
mounting plate. The EMC grounding clamps must be suited to the
output cable diameter to give a 360o contact with the cables.
▪ Make sure that the control cable wires do not come in contact with
the electronic components of the unit.
▪ Check the connection of the earth cable to the motor and the
inverter terminals marked with .
▪ Connect the separate shield of the power cable to the earth
terminals of the inverter, motor and the supply centre.
▪ Attach the cable protection plate with the screws.
▪ Ensure that the control cables or the cables of the unit are not
trapped between the enclosure and the protection plate.
Page 53

cabling and connections vacon 53
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6
6.1.2.1 VACON® NXI enclosures
Figure 6-9. VACON® NXI, FI9. Protection class IP00
Figure 6-10. VACON® NXI, FI10. Protection class IP00
Page 54

54 vacon cabling and connections
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6
Figure 6-11. VACON® NXI, F12. Protection class IP00
Figure 6-12. VACON® NXI, FI13. Protection class IP00
Page 55

cabling and connections vacon 55
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6
6.1.3
Cable installation and the UL standards
To meet the UL (Underwriters Laboratories) regulations, a UL-approved copper cable with a
minimum heat-resistance of +60/75C must be used.
Use Class 1 wire only.
The tightening torques of the terminals are given below in Table 6-8.
Type
Enclosu
re size
DC terminals
Tightening torque [Nm]
AC terminals
Tightening torque [Nm]
Bolt Ø
Min
Nom
Max
Bolt Ø
Min
Nom
Max
NXI_0168 - 0300 5
NXI_0125 –0208 6
FI9
M10
35
40
45
M10
35
40
45
NXI_0385 - 0520 5
NXI_0261 - 0416 6
FI10
M12
65
70
75
M10
35
40
45
NXI_0590 - 1030 5
NXI_0460 - 0820 6
FI12
M10
35
40
45
2 x M10
35
40
45
NXI_1150 - 1450 5
NXI_0920 - 1180 6
FI13
M12
65
70
75
3 x M12
65
70
75
NXI_1770 - 2700 5
NXI_1500 - 2250 6
FI14
M12
65
70
75
6 x M12
65
70
75
Table 6-8. Tightening torques of terminals
6.1.4
Cable and motor insulation checks
1. Motor cable insulation checks
Disconnect the motor cable from terminals U, V, and W of the inverter and from the motor.
Measure the insulation resistance of the motor cable between each phase conductor as well as
between each phase conductor and the protective ground conductor.
The insulation resistance must be >1M.
2. DC supply cable insulation checks
Disconnect the DC supply cable from terminals DC- and DC+ of the inverter and from DC supply.
Measure the insulation resistance between each conductor and ground.
The insulation resistance must be >1M.
3. Motor insulation checks
Disconnect the motor cable from the motor and open the bridging connections in the motor
connection box. Measure the insulation resistance of each motor winding. The measurement
voltage must equal at least the motor nominal voltage but not exceed 1,000 V.
The insulation resistance must be >1M.
Page 56

56 vacon cabling and connections
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6
6.2 Control unit
The control unit of the inverter consists of the control board and option boards (see Figure 6-13 and
Figure 6-20) connected to the five slot connectors (A to E) on the control board. The control board is
connected to the power unit through a D connector (1).
Figure 6-13. control board Figure 6-14. Basic and option board connections
on the control board
When the inverter is delivered from the factory, the control unit usually includes two basic boards
(I/O board and relay board), which are normally installed in slots A and B. On the next pages you will
find the arrangement of the control I/O and the relay terminals of the two basic boards, the general
wiring diagram and the control signal descriptions. The I/O boards mounted at the factory are
indicated in the type code. For more information on the option boards, see VACON® NX IO boards
User Manual.
6.2.1
Control voltage (+24V/EXT +24V)
It is possible to use the drive with an external power source with these properties: +24 VDC ±10%,
minimum 1000 mA. You can use it to externally power-up the control board, and the basic and
expander boards.
Connect the external power source to one of the 2 bidirectional terminals (#6 or #12), see Figure 48.
With this voltage, the control unit stays on and you can set the parameters. The measurements of
the main circuit (for example, the DC link voltage, and the unit temperature) are not available when
the drive is not connected to mains.
NOTE! If you supply the AC drive with external 24 V DC power, you must use a diode in terminal #6
(or #12) to prevent the current to flow in opposite direction. Put a 1 A fuse in 24 V DC line for each AC
drive. The maximum current consumption of each drive is 1 A from the external power supply.
A
B
C
D
E
Page 57

cabling and connections vacon 57
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6
Dotted line indicates the connection with
inverted signal levels
24 V
GND
24 V
GND
U<+48V
I<50mA
+
0(4)/20mA
RL<500
Basic I/O board
NXOPTA1
+10Vref
AIA1+
GND
AIA2+
AIA224Vout
GND
DIA1
DIA2
DIA3
CMA
24Vout
GND
DIB4
DIB5
DIB6
CMB
Iout+
Iout-
DO1
Reference
(voltage)
Reference
(current)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
PE/GND
-G1
Ext +24VDC
Power Supply
-F1
#6 #7 #6 #7 #6 #7 #6 #7 #6 #7 #6 #7
-F2
1A
gG/
Class CC
-Q1
3A
-Q2
3A
-Q3
3A
-Q4
3A
-Q5
3A
-Q6
3A
-F3
1A
gG/
Class CC
-F4
1A
gG/
Class CC
-F5
1A
gG/
Class CC
-F6
1A
gG/
Class CC
-F7
1A
gG/
Class CC
Figure 6-15. Parallel connection of 24 V inputs with many AC drives
NOTE! The control unit I/O ground is not isolated from the chassis ground / protective earth. In the
installation, take into account the potential differences between the grounding points. We
recommend that you use galvanic isolation in the I/O and 24V circuitry.
NOTE! Analogue outputs and inputs do not work with only +24V supplied to the control unit.
If there is a +24V/EXT+24V output on the board, it is locally short-circuit protected. If one of the +24V/
EXT+24V outputs short-circuits, the others remain powered because of the local protection.
6.2.2
Control connections
The basic control connections for boards A1 and A2/A3 are shown in Chapter 0.
The inverters are equipped with A1 and A2 boards as standard.
The signal descriptions for the standard application are presented in Chapter 2 of the All in One
Application Manual. You can find the signal descriptions for other applications in the VACON® NX
Application Manual.
Figure 6-16. The I/O terminals
of the two basic boards
OPT-A2 OPT-A3
Board OPT-A1
in slot A
Boards OPT-A2 and
OPT-A3 in slot B
Page 58

58 vacon cabling and connections
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6
Figure 6-17. General wiring diagram of the basic I/O board
(OPT-A1)
Figure 6-18. General wiring diagram of the basic relay boards (OPT-A2/OPT-A3)
RO1/1
1/2
RO1/3
RO2/1
2/2
RO2/3
ac/dc
21
22
23
24
25
26
NX6_6.fh8
21
22
23
25
26
RO1/1
1/2
RO1/3
2/1
RO2/2
ac/dc
28
29
TI1+
TI1-
+t
Switching:
<8A/24Vdc,
<0.4A/125Vdc,
<2kVA/250Vac
Continuously:
<2Arms
Basic relay board
OPT-A2
Switching:
<8A/24Vdc,
<0.4A/125Vdc,
<2kVA/250Vac
Continuously:
<2Arms
Basic relay board
OPT-A3
Page 59

cabling and connections vacon 59
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6
6.2.2.1 Control cables
The control cables shall be at least 0.5 mm2 screened multicore cables, see Table 6-9. The
maximum terminal wire size is 2.5 mm2 for the relay terminals and 1.5 mm2 for other terminals.
You can find the tightening torques of the option board terminals below.
Terminal screw
Tightening torque
Nm
lb-in.
Relay and
thermistor
terminals
(screw M3)
0.5
4.5
Other terminals
(screw M2.6)
0.2
1.8
Table 6-9. Tightening torques of terminals
6.2.2.2 Galvanic isolation barriers
The control connections are isolated from the mains potential and the GND terminals are
permanently connected to ground. See below.
The digital inputs are galvanically isolated from the I/O ground. The relay outputs are additionally
double-isolated from each other at 300VAC (EN-50178).
Figure 6-19. Galvanic isolation barriers.
B+ B-
U V W
RO1/1
RO1/2
RO1/3
RO2/3
RO2/2
RO2/1
10Vref
GND
GND
+24V
AI1
AI2+
AI2 DIN1...
DIN3
CMA
DIN4...
DIN6
CMB
AO1+
AO2 -
DO1
nk6_15
TI1+
TI1-
Control I/O
ground
Digital input
group A
Digital input
group B
Analogue
output
Digital
output
Control
board
Control
panel
Gate drivers
Power
board
Page 60

60 vacon cabling and connections
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6
6.2.3
Control terminal signals
Terminal
Signal
Technical information
1
+10 Vref
Reference voltage
Maximum current 10 mA
2
AI1+
Analogue input,
voltage or current
Selection V or mA with jumper block X1 (see page
63):
Default: 0 +10V (Ri = 200 k)
(- -stick control, selected with a jumper)
0 20mA (Ri = 250 )
3
GND/AI1
Analogue input common
Differential input if not connected to ground;
Allows 20V differential mode voltage to GND
4
AI2+
Analogue input,
voltage or current
Selection V or mA with jumper block X1 (see page
63):
Default: 0 20mA (Ri = 250 )
0 +10V (Ri = 200 k)
(- -stick control, selected with a jumper)
5
GND/AI2
Analogue input common
Differential input if not connected to ground;
Allows 20V differential mode voltage to GND
6
24 Vout
(bidirectional)
24V auxiliary voltage
15%; maximum current 250 mA all boards total; 150
mA from single board. Can also be used as external
power backup for the control unit (and fieldbus).
7
GND
I/O ground
Ground for reference and controls
8
DIN1
Digital input 1
Ri = min. 5k
9
DIN2
Digital input 2
10
DIN3
Digital input 3
11
CMA
Digital input common A for
DIN1, DIN2 and DIN3.
Must be connected to GND or 24V of I/O terminal or
to external 24V or GND
Selection with jumper block X3 (see page 63):
12
24 Vout
(bidirectional)
24V auxiliary voltage
Same as terminal #6
13
GND
I/O ground
Same as terminal #7
14
DIN4
Digital input 4
Ri = min. 5k
15
DIN5
Digital input 5
16
DIN6
Digital input 6
17
CMB
Digital input common B
for DIN4, DIN5 and DIN6
Must be connected to GND or 24V of I/O terminal or
to external 24V or GND
Selection with jumper block X3 (see page 63):
18
AO1+
Analogue signal (+output)
Output signal range:
Current 0(4) 20mA, RL max. 500 or
Voltage 0 10V, RL >1k
Selection with jumper block X3 (see page 63):
19
AO1
Analogue output common
20
DO1
Open collector output
Maximum Uin = 48VDC
Maximum current = 50 mA
Table 6-10. Control I/O terminal signals on basic I/O board OPT-A1
Page 61

cabling and connections vacon 61
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6
OPT-A2
21
RO1/1
Relay output
1
Switching capacity 24VDC/8A
250VAC/8A
125VDC/0.4A
Min.switching load 5V/10mA
22
RO1/2
23
RO1/3
24
RO2/1
Relay output
2
Switching capacity 24VDC/8A
250VAC/8A
125VDC/0.4A
Min.switching load 5V/10mA
25
RO2/2
26
RO2/3
Table 6-11. Control I/O terminal signals on basic relay board OPT-A2
OPT-A3
21
RO1/1
Relay output
1
Switching capacity 24VDC/8A
250VAC/8A
125VDC/0.4A
Min.switching load 5V/10mA
22
RO1/2
23
RO1/3
25
RO2/1
Relay output
2
Switching capacity 24VDC/8A
250VAC/8A
125VDC/0.4A
Min.switching load 5V/10mA
26
RO2/2
28
TI1+
Thermistor input
29
TI1
Table 6-12. Control I/O terminal signals on basic relay board OPT-A3
6.2.3.1 Digital input signal inversions
The active signal level depends on which potential the common inputs CMA and CMB (terminals 11
and 17) are connected to. The alternatives are either +24V or ground (0 V). See Figure 6-20.
We recommend the use of positive logic in all control connections of the inverter. If negative logic is
used, additional appropriate measures are needed to meet the safety regulation requirements.
The 24 volt control voltage and the ground for the digital inputs and the common inputs (CMA, CMB)
can be either internal or external.
Figure 6-20. Positive/Negative logic
+24V
+24V
DIN1
DIN2
DIN3
CMA
DIN1
DIN2
DIN3
CMA
nk6_16
Ground
Ground
Positive logic (+24V is the active signal) =
the input is active when the switch is closed
Negative logic (0V is the active signal) =
the input is active when the switch is closed.
Requires setting of jumper X3 to position
‘CMA/CMB isolated from ground’
Page 62

62 vacon cabling and connections
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6
6.2.3.2 Jumper selections on the OPT-A1 basic board
The user can customise the functions of the inverter to better suit his needs by selecting certain
positions for the jumpers on the OPT-A1 board. The positions of the jumpers determine the signal
type of analogue and digital inputs.
On the A1 basic board, there are four jumper blocks (X1, X2, X3 and X6) each containing eight pins
and two jumpers. The selection possibilities of the jumpers are shown on page 63 (Figure 6-22).
Figure 6-21. Jumper blocks on OPT-A1
Page 63

cabling and connections vacon 63
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
6
Figure 6-22. Jumper selection for OPT-A1
WARNING
Ensure that the jumper positions are correct. Running the
motor with signal settings that differ from the jumper positions
will not harm the inverter but may harm the motor.
Note: If you change the AI/AO signal content also remember to changer the corresponding board
parameter in menu M7.
A B C D
A B C D
A B C D
A B C D
A B C D
A B C D
A B C D
A B C D
A B C D
A B C D
AI1 mode: Voltage input; 0...10V
AI1 mode: Voltage input; 0...10V (differential)
AI1 mode: Voltage input; -10...10V
Jumper block X2:
AI2 mode
AI2 mode : 0...20mA; Current input
AI2 mode: Voltage input; 0...10V
AI2 mode: Voltage input; 0...10V (differential)
AI2 mode: Voltage input; -10...10V
Jumper block X3:
CMA and CMB grounding
CMB connected to GND
CMA connected to GND
CMB isolated from GND
CMA isolated from GND
CMB and CMA
internally connected together,
isolated from GND
= Factory default
Jumper block X6:
AO1 mode
AO1 mode: 0...20mA; Current output
AO1 mode: Voltage output; 0...10V
AI1 mode: 0...20mA; Current input
Jumper block X1:
AI1 mode
Page 64

64 vacon control keypad
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
7
7. CONTROL KEYPAD
The control keypad is the link between the VACON® inverter and the user. The VACON® NX control
keypad features an alphanumeric display with seven indicators for the Run status (RUN, ,
READY, STOP, ALARM, FAULT) and three indicators for the control place (I/O term/
Keypad/BusComm). There are also three Status Indicator LEDs (green green red), see section
7.1.3.
The control information, i.e. the menu number, description of the menu or the displayed value and
the numeric information are presented on three text lines.
The inverter is operable through the nine push-buttons of the control keypad. Furthermore, the
buttons can be used in setting parameters and monitoring values.
The keypad is detachable and isolated from the input line potential.
7.1 Indicators on the keypad display
Figure 7-1. VACON® control keypad and drive status indications
7.1.1
Drive status indications
The drive status symbols tell the user the status of the motor and the inverter. In addition, they tell
about possible irregularities detected by the motor control software in motor or inverter functions.
RUN = Motor is running; Blinks when the stop command has been given but the
frequency is still ramping down.
= Indicates the direction of motor rotation.
STOP = Indicates that the drive is not running.
READY
FAULTSTOP
RUN
Bus/Comm
Keypad
I/Oterm
ALARM
run
ready fault
I
II
II
12345
6
a
b
c
7045.jpg
1 2 3
Page 65

control keypad vacon 65
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
7
READY = Lights up when AC power is on. In case of a trip, the symbol will not light up.
ALARM = Indicates that the drive is running outside a certain limit and a warning is given.
FAULT = Indicates that unsafe operating conditions were encountered due to which the
drive was stopped.
7.1.2
Control place indications
The symbols
I/O term, Keypad
and
Bus/Comm
(see Error! Reference source not found.) indicate
the choice of control place made in the Keypad control menu (M3) (see Chapter 7.3.3).
I/O term
= I/O terminals are selected as the control place i.e. START/STOP
commands or reference values etc. are given through the I/O terminals.
Keypad
= Control keypad is selected as the control place i.e. the motor can be
started or stopped, or its reference values etc. altered from the keypad.
Bus/Comm
= The inverter is controlled through a fieldbus.
7.1.3
Status LEDs (green green red)
The status LEDs light up in connection with the READY, RUN and FAULT drive status indicators.
= lights up with the AC power connected to the drive. Simultaneously, the drive
status indicator READY is lit up.
= Lights up when the drive is running. Blinks when the STOP button has been
pushed and the drive is ramping down.
= Lights up when unsafe operating conditions were encountered due to which
the drive was stopped (Fault Trip). Simultaneously, the drive status indicator
FAULT blinks on the display and the fault description can be seen, see
Chapter 7.3.3.4, Active faults.
4
5
6
b c a I II
III
Page 66

66 vacon control keypad
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
7
7.1.4
Text lines
The three text lines (•, ••, •••) provide the users with information on their present location in the
keypad menu structure as well as with information related to the operation of the drive.
• = Location indicator; displays the symbol and number of the menu, parameter,
etc.
Example: M2 = Menu 2 (Parameters); P2.1.3 = Acceleration time
•• = Description line; Displays the description of the menu, value or fault.
••• = Value line; Displays the numerical and textual values of references,
parameters, etc. and the number of submenus available in each menu.
Page 67

control keypad vacon 67
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
7
7.2 Keypad push-buttons
The VACON® alphanumeric control keypad has 9 push-buttons that are used for controlling the
inverter (and motor), setting parameters, and monitoring values.
Figure 7-2. Keypad push-buttons
7.2.1
Button descriptions
reset = This button is used to reset active faults (see Chapter 7.3.3.4).
select = This button is used to switch between the two latest displays. This may be
useful when you want to see how the changed new value influences some
other value.
enter = The enter button is used for:
1) confirmation of selections
= Browser button up
Browse the main menu and the pages of different submenus.
Edit values.
= Browser button down
Browse the main menu and the pages of different submenus.
Edit values.
= Menu button left
Move backward in menu.
Move cursor left (in parameter menu).
Exit edit mode.
Press for 2 to 3 seconds to return to main menu.
Page 68

68 vacon control keypad
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
7
= Menu button right
Move forward in menu.
Move cursor right (in parameter menu).
Enter edit mode.
= Start button
Pressing this button starts the motor if the keypad is the active control
place. See Chapter 7.3.3.
= Stop button
Pressing this button stops the motor (unless disabled by parameter
R3.4/R3.6). See Chapter 7.3.3.
7.3 Navigation on the control keypad
The data on the control keypad is arranged in menus and submenus. The menus are used for the
display and editing of measurement and control signals, parameter settings (see Chapter 7.3.2) and
reference value and fault displays (see Chapter 7.3.3.4). Through the menus, you can also adjust the
contrast of the display (see Chapter 7.3.6.6).
The first menu level consists of menus M1 to M7 and is called the
Main menu
. The user can navigate
in the main menu with the
Browser buttons
up and down. The desired submenu can be entered from
the main menu with the
Menu buttons
. When there still are pages to enter under the currently
displayed menu or page, you can see an arrow ( ) in the lower right corner of the display and can
reach the next menu level by pressing
Menu button right
.
The control keypad navigation chart is shown on the next page. Please note that menu M1 is located
in the lower left corner. From there you will be able to navigate your way up to the desired menu
using the menu and browser buttons.
You will find more detailed descriptions of the menus later in this chapter.
Description
Number of items
available
V1èV14
READY
Local
RUN
Monitor
Page 69

control keypad vacon 69
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
7
Figure 7-3. Keypad navigation chart
F T1 èT7
STOP FAULT
I/Oterm
STOP
I/Oterm
FAULT
H1èH3
READY
I/Oterm
T1èT7
I/Oterm
READY
I/Oterm
READY
S1èS9
STOP READY
I/Oterm
STOP READY
I/Oterm
enter
G1èG5
READY
I/Oterm
A:NXOPTA1
READY
I/Oterm
G1èG1
READY
I/Oterm
V1èV15
READY
I/Oterm
RUN
13.95 Hz
READY
I/Oterm
RUN
G1èG9
READY
I/Oterm
P1èP15
READY
I/Oterm
13.95 Hz
READY
Loc al
P1èP3
READY
I/Oterm
STOP
READY
I/Oterm
STOP
enter
enter
F0
STOP FAULT
I/Oterm
Parameters Basic parameters Min Frequency
11 Output phase Operation days
17
Fault history 11 Output phase Operation days
System Menu Language
Change
value
Browse
Expander boards
Parameters
P1èP3
Monitor Output frequency
No editing!
Keypad control
Control Place
I/O Terminal
Change
value
Change
value
Browse
Browse
Active faults
17
English
or:
Page 70

70 vacon control keypad
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
7
7.3.1
Monitoring menu (M1)
You can enter the Monitoring menu from the Main menu by pressing
Menu button right
when the
location indication M1 is visible on the first line of the display. The figure below shows how to browse
through the monitored values.
The monitored signals carry the indication V#.# and they are listed in Table 7-1. The values are
updated once every 0.3 seconds.
This menu is meant only for signal checking. The values cannot be altered here. For changing values
of parameters, see Chapter 7.3.2.
Figure 7-4. Monitoring menu
Code
Signal name
Unit
Description
Output frequency
Hz
Frequency to the motor
Frequency reference
Hz
Motor speed
rpm
Calculated motor speed
Motor current
A
Measured motor current
Motor torque
%
Calculated actual torque/nominal torque of the
Motor power
%
Calculated actual power/nominal power of the
Motor voltage
V
Calculated motor voltage
DC-link voltage
V
Measured DC-link voltage
Unit temperature
ºC
Heat sink temperature
Motor temperature
%
Calculated motor temperature
Voltage input
V
AI1
Current input
mA
AI2 DIN1, DIN2, DIN3
Digital input statuses
DIN4, DIN5, DIN6
Digital input statuses
DO1, RO1, RO2
Digital and relay output statuses
Analogue output
mA
AO1
M1.17
Multimonitoring
items
Displays three selectable monitoring values. See
chapter 7.3.6.5.
Table 7-1. Monitored signals
Note! All in One applications may embody more monitoring values.
V1èV14
READY
Local
13.95 Hz
READY
Local
13.95 Hz
READY
Local
RUN RUN
RUN
Monitor Output frequency
FreqReference
Page 71

control keypad vacon 71
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
7
7.3.2
Parameter menu (M2)
Parameters are the way of conveying the commands of the user to the inverter. Parameter values
can be edited by entering the
Parameter Menu
from the
Main Menu
when the location indication M2
is visible on the first line of the display. The value editing procedure is presented in Figure 7-5.
Pressing
Menu button right
once takes you to the Parameter Group Menu
(G#)
. Locate the desired
parameter group by using the Browser buttons and press
Menu button right
again to see the group
and its parameters. Use the
Browser buttons
to find the parameter (P#) you want to edit. Pressing
Menu button right
takes you to the edit mode. As a sign of this, the parameter value starts to blink.
You can now change the value in two different ways:
▪ Set the desired value with the
Browser buttons
and confirm the change with the
enter
button.
Consequently, the blinking stops and the new value is visible in the value field.
▪ Press
Menu button right
once more. Now you will be able to edit the value digit by digit. This may
come in handy, when a relatively greater or smaller value than that on the display is desired.
Confirm the change with the
enter
button.
The value will not change unless the Enter button is pressed. Pressing
Menu button left
takes
you back to the previous menu.
Several parameters are locked, i.e. cannot be edited, when the drive is in RUN status. If you try to
change the value of such a parameter the text
*Locked*
will appear on the display. The inverter
must be stopped to edit these parameters.
The parameter values can also be locked using the function in menu M6 (see Chapter6.5.2)).
You can return to the Main menu any time by pressing
Menu button left
for 1 to 2 seconds.
The basic application package "All in One+" includes seven applications with different sets of
parameters. You will find the parameter lists in the Application Section of this manual.
Once in the last parameter of a parameter group, you can move directly to the first parameter of that
group by pressing
Browser button up
.
See the diagram for parameter value change procedure on page 72.
Note: You can connect power to the control board by connecting the external power source to the
bidirectional terminal #6 on the OPT-A1 board (see page 60). The external power source can also be
connected to the corresponding +24V terminal on any option board. This voltage is sufficient for
parameter setting and for keeping the fieldbus active.
Page 72

72 vacon control keypad
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
7
Figure 7-5. Parameter value change procedure
G1èG8
READY
Keypad
P1èP18
READY
Keypad
13.95 Hz
READY
Keypad
G1èG8
Keypad
READY
Keypad
13.95 Hz
enter
READY
Keypad
14.45 Hz
Parameters Basic parameters Min Frequency
Input signals
Min Frequency Min Frequency
Page 73

control keypad vacon 73
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
7
7.3.3
Keypad control menu (M3)
In the
Keypad Control Menu
, you can choose the control place, edit the frequency reference and
change the direction of the motor. You can enter the submenu level by pressing
Menu button right
.
7.3.3.1 Selection of control place
There are three different places (sources) where the inverter can be controlled from. For each
control place, a different symbol will appear on the alphanumeric display:
Control place
Symbol
I/O terminals
Keypad (panel)
Fieldbus
You can change the control place by entering the edit mode with
Menu button right
. The options can
then be browsed with the
Browser buttons
. Select the desired control place with the
enter
button.
See the diagram on the next page.
See also Chapter 7.3.3. above.
Figure 7-6. Selection of control place
7.3.3.2 Keypad reference
The keypad reference submenu (P3.2) displays and allows the operator to edit the frequency
reference. The changes will take place immediately. This reference value will not, however,
influence the rotation speed of the motor unless the keypad has been selected as the active
control place.
NOTE: The maximum difference in RUN mode between the output frequency and the keypad
reference is 6 Hz. The program automatically monitors the keypad reference value.
See also Chapter 7.3.3.
Figure 7-5 shows how to edit the reference value (pressing the
enter
button is not necessary).
7.3.3.3 Keypad direction
The keypad direction submenu (P3.3) displays and allows the operator to change the rotating
direction of the motor. This setting will not, however, influence the rotation direction of the
motor unless the keypad has been selected as the active control place.
I/O term
Keypad
Bus/Comm
P1èP4
READY
I/Oterm
READY
I/Oterm
READY
I/Oterm
READY
I/Oterm
enter
READY
Keypad
STOP
STOP
STOP
STOPSTOP
Keypad control
Control Place
I/O Remote
Control Place
I/O Remote
Control Place
Keypad
Control Place
Keypad
Page 74

74 vacon control keypad
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
7
See also Chapter 7.3.3.
7.3.3.4 Stop button activated
By default, pushing the STOP button will always stop the motor regardless of the selected control
place. You can disable this function by giving parameter 3.4 the value 0. If the value of this parameter
is 0, the STOP button will stop the motor only when the keypad has been selected as the active
control place.
Note: For additional information on controlling the motor with the keypad, see Chapters 7.2.1, 7.3.3
and 8.2.
NOTE!
There are some special functions that can be performed in menu M3:
Select the keypad as the active control place by pressing START for 3 seconds when
the motor is running. The keypad will become the active control place and the current
frequency reference and direction will be copied to the keypad.
Select the keypad as the active control place by pressing STOP for 3 seconds when
the motor is stopped. The keypad will become the active control place and the current
frequency reference and direction will be copied to the keypad.
Copy the frequency reference set elsewhere (I/O, fieldbus) to the panel by pressing
enter
for 3 seconds.
Note that if you are in any other than menu M3 these functions will not work.
If you are in some other than menu
M3
and try to start the motor by pressing the START
button when the keypad is not selected as the active control place, you will get an error
message:
Keypad Control NOT ACTIVE
.
Page 75

control keypad vacon 75
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
7
7.3.4
Active faults menu (M4)
You can enter the Active faults menu from the Main menu by pressing
Menu button right
when the
location indication M4 is visible on the first line of the keypad display.
When a fault brings the inverter to a stop, the location indication F1, the fault code, a short
description of the fault, and the fault type symbol (see Chapter 7.3.4.1) will appear on the display. In
addition, the indication FAULT or ALARM (see Figure 7-1 or Chapter 7.1.1) is displayed and, in case
of a FAULT, the red LED on the keypad starts to blink. If several faults occur simultaneously, the list
of active faults can be browsed with the
Browser buttons
.
The memory of active faults can store a maximum of 10 faults in the order of appearance. The
display can be cleared with the
reset
button and the read-out will return to the same state it was in
before the fault trip. The fault remains active until it is cleared with the
reset button
or with a reset
signal from the I/O terminal.
Note! Remove external Start signal before resetting the fault to prevent unintentional restart of the
drive.
Normal state,
no faults
7.3.4.1 Fault types
The NX inverter has four types of faults. These types differ from each other on the basis of the
subsequent behaviour of the drive. See Table 7-1.
Figure 7-7. Fault display
F0
READY
I/Oterm
Active faults
Fault type
symbol
F T1 èT13
STOP FAULT
I/Oterm
STOP
I/Oterm
FAULT
34:21:05
I/Oterm
17
11 Output phase Operations days
Operation hours
Page 76

76 vacon control keypad
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
7
Fault type symbol
Meaning
A
(Alarm)
This type of fault is a sign of an unusual operating
condition. It does not cause the drive to stop, nor does it
require any special actions. The 'A fault' remains in the
display for about 30 seconds.
F
(Fault)
An 'F fault' makes the drive stop. Actions need to be
taken to restart the drive.
AR
(Fault Autoreset)
If an 'AR fault' occurs the drive will stop immediately.
The fault is reset automatically and the drive tries to
restart the motor. Finally, if the restart is not successful,
a fault trip (FT, see below) occurs.
FT
(Fault Trip)
If the drive is unable to restart the motor after an AR
fault an FT fault occurs. The 'FT fault' has basically the
same effect as the F fault: the drive is stopped.
Table 7-1. Fault types
Page 77

control keypad vacon 77
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
7
7.3.4.2 Fault codes
The fault codes, their causes and correcting actions are presented in the table below. The shadowed
faults are A faults only. The items in white on black background are faults for which you can
program different responses in the application. See parameter group Protections.
Note! When contacting the distributor or factory because of a fault condition, always write down all
texts and codes visible on the keypad display.
Fault
code
Fault
Possible cause
Correcting measures
1
Overcurrent
S1 = Hardware
trip
S3 = Current
controller
supervision
S4 = User
configured
overcurrent
limit exceeded
Inverter has detected too high a
current (>4*In) in the motor cable:
sudden heavy load increase
short circuit in motor cables
unsuitable motor
Check loading.
Check motor.
Check cables.
Make an identification run.
2
Overvoltage
S1 = Hardware
trip
S2 =
Overvoltage
control
supervision
The DC-link voltage has exceeded the
limits defined in
too short a deceleration time
high overvoltage spikes in supply
Start/Stop sequence too fast
Set the deceleration time longer.
Add a brake chopper or a brake
resistor.
Activate the overvoltage controller.
Check the input voltage.
3
Earth fault
Current measurement has detected
that the sum of motor phase current
is not zero.
insulation failure in cables or motor
Check motor cable and motor.
5
Charging
switch
The charging switch is open, when the
START command has been given.
faulty operation
component failure
Reset the fault and restart.
Should the fault re-occur, contact
the distributor near to you.
For local contacts, go to:
http://drives.danfoss.com/danfossdrives/local-contacts/
6
Emergency
stop
Stop signal has been given from the
option board.
Check the emergency stop circuit.
7
Saturation trip
Various causes:
component failure
brake resistor short-circuit or
overload
Cannot be reset from the keypad.
Switch off power.
DO NOT RE-CONNECT POWER!
Contact factory.
If this fault appears simultaneously
with Fault 1, check motor cables and
motor
Page 78

78 vacon control keypad
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
7
Fault
code
Fault
Possible cause
Correcting measures
8
System fault
S7 = Charging
switch
S8 = No power
to driver card
S9 = Power unit
communication
(TX)
S10 = Power
unit
communication
(Trip)
S11 = Power
unit comm.
(Measurement)
component failure
faulty operation
Note the exceptional Fault data
record. See 7.3.4.3.
Reset the fault and restart.
Should the fault re-occur, contact
the distributor near to you.
For local contacts, go to:
http://drives.danfoss.com/danfossdrives/local-contacts/
9
Undervoltage
S1 = DClink too
low during run
S2 = No data
from power
unit
S3 =
Undervoltage
control
supervision
DC-link voltage is under the voltage
limits defined in
most probable cause: too low a supply
voltage
inverter internal fault
a defective input fuse
the external charge switch is not
closed
In case of temporary supply voltage
break, reset the fault and restart the
inverter. Check the supply voltage. If
it is adequate, an internal failure has
occurred.
Contact the nearest distributor.
For local contacts, go to:
http://drives.danfoss.com/danfossdrives/local-contacts/
10
Input line
supervision
The input line phase is missing.
Check the supply voltage, the fuses
and supply cable.
11
Output phase
supervision
Current measurement has detected
that there is no current in one motor
phase.
Check motor cable and motor.
12
Brake chopper
supervision
No brake resistor installed
brake resistor is broken
brake chopper failure
Check brake resistor.
If the resistor is ok, the chopper is
faulty. Contact the distributor near
to you.
For local contacts, go to:
http://drives.danfoss.com/danfossdrives/local-contacts/
13
Inverter
undertemperat
ure
Heatsink temperature is under 10C
14
Inverter
overtemperatu
re
Heatsink temperature is over 90C or
77ºC (NX_6, FR6).
Overtemperature warning is issued
when the heatsink temperature
exceeds 85C (72ºC).
Check the correct amount and flow
of cooling air.
Check the heatsink for dust.
Check the ambient temperature.
Make sure that the switching
frequency is not too high in relation
to ambient temperature and motor
load.
15
Motor stalled
Motor stall protection has tripped.
Check motor.
Page 79

control keypad vacon 79
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
7
Fault
code
Fault
Possible cause
Correcting measures
16
Motor overtemperature
Motor overheating has been detected
by inverter motor temperature model.
Motor is overloaded.
Decrease the motor load.
If no motor overload exists, check
the temperature model parameters.
17
Motor
underload
Motor underload protection has
tripped.
Check the load.
18
Unbalance
S1 = Current
unbalance
S2 = DC voltage
unbalance
Unbalance between power modules in
paralleled power units.
Should the fault re-occur, contact
the distributor near to you.
For local contacts, go to:
http://drives.danfoss.com/danfossdrives/local-contacts/
22
EEPROM
checksum fault
Parameter save fault
faulty operation
component failure
Should the fault re-occur, contact
the distributor near to you.
For local contacts, go to:
http://drives.danfoss.com/danfossdrives/local-contacts/
24
Counter fault
Values displayed on counters are
incorrect
25
Microprocessor
watchdog fault
faulty operation
component failure
Reset the fault and restart.
Should the fault re-occur, contact
the distributor near to you.
For local contacts, go to:
http://drives.danfoss.com/danfossdrives/local-contacts/
26
Start-up
prevented
Start-up of the drive has been
prevented. Run request in ON when
new application is downloaded to the
drive.
Cancel prevention of start-up.
Remove Run request.
29
Thermistor
fault
The thermistor input of option board
has detected increase of the motor
temperature
Check motor cooling and loading
Check thermistor connection
(If thermistor input of the option
board is not in use it has to be short
circuited)
30
Safe Torque Off
The input on OPTAF board has
opened.
Cancel Safe Torquee Off if this can
be done safely.
31
IGBT
temperature
(hardware)
IGBT Inverter Bridge overtemperature
protection has detected too high a
short term overload current
Check loading.
Check motor size.
32
Fan cooling
Cooling fan of the inverter does not
start, when ON command is given.
Contact the nearest distributor.
For local contacts, go to:
http://drives.danfoss.com/danfossdrives/local-contacts/
34
CAN bus
communication
Sent message not acknowledged.
Ensure that there is another device
on the bus with the same
configuration.
Page 80

80 vacon control keypad
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
7
Fault
code
Fault
Possible cause
Correcting measures
35
Application
Problem in application software.
Contact the nearest distributor.
For local contacts, go to:
http://drives.danfoss.com/danfossdrives/local-contacts/
If you are an application
programmer, check the application
program.
36
Control unit
Software function requires newer
control board.
Change control unit
37
Device changed
(same type)
Option board or control unit changed.
Same type of board or same power
rating of drive. The parameters are
available in the drive.
Reset. The device is ready for use.
The drive starts to use the old
parameter settings.
Note: No fault time data record!
38
Device added
(same type)
Option board or drive added.
Drive of same power rating or same
type of board added. The parameters
are available in the drive.
Reset The device is ready for use.
The drive starts to use the old
parameter settings.
Note: No fault time data record!
39
Device
removed
Option board removed.
Drive removed.
The device is not available. Reset
Note: No fault time data record!
40
Device
unknown
S1 = Unknown
device
S2 = Power1
not same type
as Power2
Unknown option board or drive.
Contact the nearest distributor.
For local contacts, go to:
http://drives.danfoss.com/danfossdrives/local-contacts/
41
IGBT
temperature
IGBT Inverter Bridge overtemperature
protection has detected too high a
short term overload current
Check loading.
Check motor size.
Make an identification run.
42
Internal brake
resistor
overtemperature
Internal brake resistor
overtemperature protection has
detected too heavy braking
Set the deceleration time longer.
Use external brake resistor.
43
Encoder fault
1 = Encoder 1
channel A is
missing
2 = Encoder 1
channel B is
missing
3 = Both
encoder 1
channels are
missing
4 = Encoder
reversed
5 = Encoder
board missing
Note the exceptional Fault data
record. See 7.3.4.3. Additional codes:
1 = Encoder 1 channel A is missing
2 = Encoder 1 channel B is missing
3 = Both encoder 1 channels are
missing
4 = Encoder reversed
Check encoder channel connections.
Check the encoder board.
Check the encoder frequency in the
open loop.
Page 81

control keypad vacon 81
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
7
Fault
code
Fault
Possible cause
Correcting measures
44
Device changed
(different type)
Option board or control unit changed.
Option board of different type or
different power rating of drive.
Reset
Set the option board parameters
again if option board was changed.
Note: No fault time data record!
Note: Application parameter values
restored to default.
45
Device added
(different type)
Option board or drive added.
Option board of different type or drive
of different power rating added.
Reset
Set the power unit parameters
again.
Note: No fault time data record!
Note: Application parameter values
restored to default.
49
Division by zero
in application
Division by zero has occurred in
application program.
Should the fault re-occur while the
AC drive is in run state, contact the
distributor near to you.
For local contacts, go to:
http://drives.danfoss.com/danfossdrives/local-contacts/
If you are an application
programmer, check the application
program.
50
Analogue input
(sel. signal
range 4 to 20
mA)
Current at the analogue input is <
4mA.
control cable is broken or loose
signal source has failed
Check the current loop circuitry.
51
External fault
Digital input fault.
Remove fautl situation on external
device.
52
Keypad
communication
fault
There is no connection between the
control keypad and the inverter.
Check keypad connection and
possible keypad cable.
53
Fieldbus fault
The data connection between the
fieldbus Master and the fieldbus
board is broken
Check installation.
If installation is correct contact the
nearest distributor.
For local contacts, go to:
http://drives.danfoss.com/danfossdrives/local-contacts/
54
Slot fault
Defective option board or slot
Check board and slot.
Contact the nearest distributor.
For local contacts, go to:
http://drives.danfoss.com/danfossdrives/local-contacts/
56
PT100 board
temp. fault
Temperature limit values set for the
PT100 board parameters have been
exceeded
Find the cause of temperature rise
57
Identification
Identification run has failed
Run command was removed before
completion of identification run.
The motor is not connected to the AC
drive.
There is load on motor shaft.
Page 82

82 vacon control keypad
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
7
Fault
code
Fault
Possible cause
Correcting measures
58
Brake
Actual status of the brake is different
from the control signal.
Check the mechanical brake state
and connections.
59
Follower
communication
SystemBus or CAN communication is
broken between Master and Follower.
Check the option board parameters.
Check the optical fibre cable or CAN
cable.
60
Cooling
Coolant circulation on liquid-cooled
drive has failed.
Check the reason for the failure on
the external system.
61
Speed error
Motor speed is unequal to reference.
Check of the encoder connection.
PMS motor has exceeded the pull
out torque.
62
Run disable
Run enable signal is low.
Check of the reason for the Run
enable signal.
63
Quick stop
Command for quick stop received
from digital input or fieldbus.
New run command is accepted after
reset.
64
Input switch
open
Drive input switch is open.
Check the main power switch of the
drive.
65
Over Temp.
Temperature exceeded set limit.
Sensor disconnected.
Short circuit.
Find the cause of temperature rise.
70
Active filter
fault
Fault triggered by dig. input (see
param. P2.2.7.33). Remove fault
situation on active filter
74
Follower fault
When using normal Master Follower
function this fault code is given if one
or more follower drives trip to fault.
Table 7-2. Fault codes
Page 83

control keypad vacon 83
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
7
7.3.4.3 Fault time data record
When a fault occurs, the information described in Chapter 7.3.3.4 is displayed. By pressing
Menu
button right,
you will enter the
Fault time data record menu
indicated by T.1→T.#. In this menu,
some selected important data valid at the time of the fault are recorded. This feature will help the
user or the service person in determining the cause of the fault.
The data available are:
T.1
Counted operation days
(Fault 43: Additional
code)
(d)
T.2
Counted operation hours
(Fault 43: Counted
operation days)
(hh:mm:
ss)
(d)
T.3
Output frequency
(Fault 43: Counted
operation hours)
Hz
(hh:mm:
ss)
T.4
Motor current
A
T.5
Motor voltage
V
T.6
Motor power
%
T.7
Motor torque
%
T.8
DC voltage
V
T.9
Unit temperature
C
T.10
Run status
T.11
Direction
T.12
Warnings
T.13
0-speed*
Table 7-3. Fault time recorded data
* Tells the user if the drive was at zero speed (< 0.01 Hz) when the fault occurred
Real time record
If real time is set to run on the inverter, the data items T1 and T2 will appear as follows:
T.1
Counted operation days
yyyy-mm-dd
T.2
Counted operation hours
hh:mm:ss,sss
Page 84

84 vacon control keypad
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
7
7.3.5
Fault history menu (M5)
You can enter the
Fault history menu
from the
Main menu
by pressing
Menu button right
when the
location indication M5 is visible on the first line of the keypad display.
All faults are stored in the
Fault history menu
where you can browse them with the
Browser buttons
.
Additionally, the
Fault time data record
pages (see Chapter 7.3.4.3) are accessible for each fault. You
can return to the previous menu any time by pressing
Menu button left
.
The memory of the inverter can store a maximum of 30 faults in order of appearance. The number of
faults currently in the fault history is shown on the value line of the main page (H1→H#). The order
of the faults is indicated by the location indication in the upper left corner of the display. The latest
fault is indicated by F5.1, the one before that by F5.2 and so on. If there are 30 uncleared faults in the
memory, the next fault will erase the oldest fault from the memory.
Pressing the
enter
button for about 2 to 3 seconds resets the whole fault history. The symbol H# will
change to 0.
Figure 7-8. Fault history menu
H1èH3
READY
I/Oterm
T1èT7
I/Oterm
READY
I/Oterm
I/Oterm
READY
13:25:43
I/Oterm
enter
17
Fault history 11 Output phase
5 ChargeSwitch
Operation days
Operation hours
PUSH to reset
Page 85

control keypad vacon 85
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
7
7.3.6
System menu (M6)
You can enter the
System menu
from the
Main menu
by pressing
Menu button right
when the
location indication M6 is visible on the first line of the keypad display
.
The controls associated with the general use of the inverter, such as application selection,
customised parameter sets or information about the hardware and software are located under the
System menu.
The number of submenus and subpages is shown with the symbol S (or P) on the
value line.
Page 86 has a table of the functions available in the System menu.
Page 86

86 vacon control keypad
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
7
System menu functions
Code
Function
Min
Max
Unit
Default
Cust
Selections
S6.1
Selection of
language
English
English
Deutsch
Suomi
Svenska
Italiano
S6.2
Application selection
Basic
Application
Basic Application
Standard Application
Local/Remote control Appl.
Multi-Step Application
PID Control Application
Multi-Purpose Control Appl.
Pump and Fan Control Appl.
S6.3
Copy parameters
S6.3.1
Parameter sets
Load factory defaults
Store set 1
Load set 1
Store set 2
Load set 2
S6.3.2
Load to keypad
All parameters
S6.3.3
Load from keypad
All parameters
All but motor parameters
Application parameters
P6.3.4
Parameter backup
Yes
No
Yes
S6.4
Parameter
comparison
S6.4.1
Set1
Not used
S6.4.2
Set2
Not used
S6.4.3
Factory settings
S6.4.4
Keypad set
S6.5
Safety
S6.5.1
Password
Not used
0=Not used
P6.5.2
Parameter locking
Change
Enabled
Change Enabled
Change Disabled
S6.5.3
Start-up wizard
No
Yes
S6.5.4
Multimonitoring
items
Change
Enabled
Change Enabled
Change Disabled
S6.6
Keypad settings
P6.6.1
Default page
P6.6.2
Default page/OM
P6.6.3
Timeout time
0
65535 s 30
P6.6.4
Contrast
0
31 18
P6.6.5
Backlight time
Always
65535
min
10
S6.7
Hardware settings
P6.7.1
Internal brake
resistor
Connected
Not connected
Connected
P6.7.2
Fan control function
Continuous
Continuous
Temperature
P6.7.3
HMI acknowledg.
200
5000
ms
200
P6.7.4
HMI: no. of retries
1
10 5
S6.8
System information
S6.8.1
Total counters
C6.8.1.1.
MWh counter
kWh
C6.8.1.2.
Operation day
counter
C6.8.1.3.
Operation hour
Page 87

control keypad vacon 87
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
7
counter
S6.8.2
Trip counters
T6.8.2.1
MWh counter
kWh
T6.8.2.2
Clear MWh counter
T6.8.2.3
Operation day
counter
T6.8.2.4
Operation hour
counter
T6.8.2.5
Clear operation hour
counter
S6.8.3
Software information
S6.8.3.1
Software package
S6.8.3.2
System software
version
S6.8.3.3
Firmware interface
S6.8.3.4
System load
S6.8.4
Applications
S6.8.4.#
Name of application
D6.8.4.#.1
Application ID
D6.8.4.#.2
Applications: version
D6.8.4.#.3
Applications:
firmware interface
S6.8.5
Hardware
I6.8.5.1
Unit power
I6.8.5.2
Unit voltage
E6.8.5.3
Brake chopper
E6.8.5.4
Brake resistor
S6.8.6
Expander boards
S6.8.7
Debug menu
For Application
programming only.
Contact the factory to
get instructions.
Table 7-4. System menu functions
Page 88

88 vacon control keypad
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
7
7.3.6.1 Selection of language
The VACON® control keypad offers you the possibility to control the inverter through the keypad in
the language of your choice.
Locate the language selection page under the
System menu
. Its location indication is S6.1. Press
Menu button right
once to enter the edit mode. As the name of the language starts to blink you can
select another language for the keypad texts. Confirm with the
enter
button. The blinking stops and
all text information on the keypad is presented in the selected language.
You can return to the previous menu any time by pressing
Menu button left
.
Figure 7-9. Selection of language
7.3.6.2 Application selection
The user can select the desired application on the
Application selection page (S6.2)
. To enter the
page, press
Menu button right
on the first page of the
System menu
. To change the application,
press
Menu button right
once more. The name of the application starts to blink. Now you can browse
the applications with the
Browser buttons
and select the desired application with the
enter
button.
After application change, you will be asked if you want the parameters of the new application to be
uploaded to the keypad. If you want to do this, press the
enter
button. Pressing any other button
leaves the parameters of the previously used application saved in the keypad. For more information,
see Chapter .
For more information about the Application Package, see VACON® NX Application Manual.
System Menu
S1èS11
READY
I/Oterm
Language
English
READY
I/Oterm
Language
English
READY
I/Oterm
enter
READY
I/Oterm
Francais
Langue
Page 89

control keypad vacon 89
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
7
Figure 7-10. Change of application
7.3.6.3 Copy parameters
The parameter copy function is used when the operator wants to copy one or all parameter groups
from one drive to another. All the parameter groups are first
uploaded
to the keypad, then the
keypad is connected to another drive and then the parameter groups are
downloaded
to it (or
possibly back to the same drive). For more information, see page 90.
Before any parameters can be successfully copied from one drive to another, the drive has to be
stopped when the parameters are downloaded to it:
The parameter copy menu (S6.3) contains four functions:
Parameter sets (S6.3.1)
The user can reload the factory default parameter values and store and load two customised
parameter sets (all parameters included in the application).
On the
Parameter sets
page (S6.3.1), press
Menu button right
to enter the
edit mode
. The text
LoadFactDef
begins to blink and you can confirm the loading of factory defaults by pressing the
enter
button. The drive resets automatically.
Alternatively, you can choose any other storing or loading functions with the
Browser buttons
.
Confirm with the
enter
button. Wait until 'OK' appears on the display.
S1èS11
STOP READY
I/Oterm
STOP READY
I/Oterm
STOP READY
I/Oterm
enter
STOP READY
I/Oterm
System Menu
Application
Standard
Application
Standard
Application
Multi-step
Page 90

90 vacon control keypad
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
7
Figure 7-11. Storing and loading of parameter sets
Upload parameters to keypad (To keypad, S6.3.2)
This function uploads all existing parameter groups to the keypad provided that the drive is stopped.
Enter the
To keypad
page (S6.3.2) from the
Parameter copy menu
. Pressing
Menu button right
takes
you to the edit mode. Use the
Browser buttons
to select the option
All parameters
and press the
enter
button. Wait until 'OK' appears on the display.
Figure 7-12. Parameter copy to keypad
Download parameters to drive (From keypad, S6.3.3)
This function downloads one or all parameter groups uploaded to the keypad to a drive provided
that the drive is in STOP status.
Enter the
To keypad
page (S6.3.2) from the
Parameter copy menu
. Pressing the
Menu button right
takes you to the edit mode. Use the
Browser buttons
to select either
All parameters, All but motor
parameters
or
Application parameters
and press the
Enter button
. Wait until 'OK' appears on the
display.
The procedure to download the parameters from keypad to drive is similar to that of from drive to
keypad. See Figure 7-12.
READY
READY
enter
READY READY
OK
Parameter sets
Select
Parameter sets
CANCEL
CONFIRM
Parameter sets
Wait...
Parameter sets
LoadFactDef
P1èP4
READY
READY READY
enter
READY READY
Copy Parameters
Up to keypad
Up to keypad
Select CANCEL
CONFIRM
Up to keypad
Wait...
Up to keypad
OK
All param.
CHANGE VALUE
Page 91

control keypad vacon 91
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
7
Automatic parameter backup (P6.3.4)
On this page you can activate or inactivate the parameter backup function. Enter the edit mode by
pressing
Menu button right.
Select
Yes
or
No
with the
Browser buttons
.
When the Parameter backup function is activated VACON® NX control keypad makes a copy of the
parameters of the presently used application. When applications are changed, you will be asked if
you wish the parameters of the new application to be uploaded to the keypad. If you want to do this,
press the
enter
button. If you wish to keep the copy of the parameters of the previously used
application saved in the keypad, press any other button. Now you will be able to download these
parameters to the drive following the instructions given in Chapter 7.3.6.3.
If you want the parameters of the new application to be automatically uploaded to the keypad you
have to do this for the parameters of the new application once on page 6.3.2 as instructed.
Otherwise the panel will always ask for the permission to upload the parameters.
Note: Parameters saved in the parameter settings on page S6.3.1 will be deleted when applications
are changed. If you want to transfer the parameters from one application to another, you have to
upload them first to the keypad.
7.3.6.4 Parameter comparison
In the
Parameter comparison
submenu (S6.4), you can compare the actual parameter values to the
values of your customised parameter sets and those loaded to the control keypad.
You can compare the parameter by pressing
Menu button right
in the
Compare parameters
submenu
. The actual parameter values are first compared to those of the customised parameter
Set1. If no differences are detected, '0' is displayed on the lowermost line. If any of the parameter
values differ from those of Set1, the number of the deviations is displayed together with symbol P
(for example, P1→P5 = five deviating values). By pressing
Menu button right
once more, you can
enter pages where you can see both the actual value and the value it was compared to. In this
display, the value on the description line (in the middle) is the default value and the one on the value
line (lowermost) is the edited value. Furthermore, you can also edit the actual value with the
Browser buttons
in the
edit mode
which you can enter by pressing
Menu button right
once.
Page 92

92 vacon control keypad
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
7
Figure 7-13. Parameter comparison
7.3.6.5 Safety
NOTE: The
Security submenu
is protected with a password. Store the password in a safe place!
Password (S6.5.1)
The application selection can be protected against unauthorised changes with the Password function
(S6.5.1).
By default, the password function is not in use. If you want to activate the function, enter the edit
mode by pressing
Menu button right
. A blinking zero appears in the display and you can set a
password with the
Browser buttons
. The password can be any number between 1 and 65535.
Note that you can also set the password by digits. In the edit mode, push
Menu button right
again
and another zero appears on the display. Set ones first. To set the tens, press
Menu button right
, and
so on. Confirm the password with the
enter
button. After this, you have to wait until the
Timeout time
(P6.6.3) (see page 95) has expired before the password function is activated.
If you try to change applications or the password itself, you will be prompted for the current
password. Enter the password with the
Browser buttons
.
You can deactivate the password function by entering the value 0.
Figure 7-14. Password setting
Note! Store the password in a safe place! No changes can be made unless a valid password is
entered.
Parameter lock (P6.5.2)
C1èC3
READY
READY
READY
0
enter
P1èP6
P2.1.2= 50.0
READY
20.0 Hz
P2.1.2= 50.0
READY
20.0 Hz
ParamComparison
Set1
Set1
CONFIRM CHANGE
EDIT VALUE
OR
READY
I/Oterm
0
READY
I/Oterm
enter
00
READY
I/Oterm
enter
Password
Not in use
Password Password
OR:
Page 93

control keypad vacon 93
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
7
This function allows the user to prohibit changes to the parameters.
If the parameter lock is activated, the text
*locked*
will appear on the display if you try to edit a
parameter value.
NOTE: This function does not prevent unauthorised editing of parameter values.
Enter the edit mode by pressing
Menu button right.
Use the
Browser buttons
to change the
parameter lock status. Confirm the change with the
enter
button or go back to the previous level by
pressing
Menu button left.
Figure 7-15. Parameter locking
Start-up wizard (P6.5.3)
The Start-up wizard facilitates the commissioning of the inverter. If active, the Start-up wizard
prompts the operator for the language and application of his/her choice and then displays the first
menu or page.
Activating the Start-up wizard: In the System Menu, find page P6.5.3. Press
Menu button right
once
to enter the edit mode. Use the
Browser buttons
to select
Yes
and confirm the selection with the
enter
button. If you want to deactivate the function, follow the same procedure and give the
parameter value No.
Figure 7-16. Activation of Start-up wizard
S1èS9
READY
I/Oterm
READY
I/Oterm
READY
I/Oterm
enter
READY
I/Oterm
READY
I/Oterm
P1èP4
System Menu
Security
Parameter Lock
ChangeEnable
Parameter Lock
ChangeDisabl
Parameter Lock
ChangeEnable
READY
I/Oterm
READY
I/Oterm
READY
I/Oterm
enter
Startup wizard Startup wizard
No No
Startup wizard
Yes
CANCEL
CONFIRM
Page 94

94 vacon control keypad
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
7
Multimonitoring items (P6.5.4)
VACON® alphanumeric keypad features a display where you can monitor up to three actual values at
the same time (see Chapter 7.3.1 and Chapter
Monitoring values
in the manual of the application you
are using). On page P6.5.4 of the System Menu, you can define whether the operator can replace the
values monitored with other values. See below.
Figure 7-17. Disabling the change of multimonitoring items
7.3.6.6 Keypad settings
In the Keypad settings submenu under the System menu, you can further customise your inverter
operator interface
.
Locate the Keypad setting submenu (S6.6). Under the submenu, there are four pages (P#)
associated with the keypad operation:
Figure 7-18. Keypad settings submenu
Default page (P6.6.1)
Here you can set the location (page) to which the display automatically moves when the
Timeout
time
(see below) has expired or the power is switched on to the keypad.
If the
Default page
is 0, the function is not activated i.e. the latest displayed page remains on the
keypad display. Pressing
Menu button right
takes you to the edit mode. Change the number of the
Main menu with the
Browser buttons
. To edit the number of the submenu/page, press
Menu button
right
. If the page you want to move to by default is at the third level, repeat the procedure. Confirm
the new default page with the
enter
button. You can return to the previous menu at any time by
pressing
Menu button left
.
Figure 7-19. Default page function
READY
I/Oterm
READY
I/Oterm
enter
READY
I/Oterm
Multimon. items
ChangeEnable
Multimon. items Multimon. items
ChangeEnable ChangeDisable
P1èP5
READY
I/Oterm
0.
READY
I/Oterm
Keypad settings
Default page
0.
READY
I/Oterm
READY
I/Oterm
READY
I/Oterm
0.
1.
enter
Default page
REPEAT TO SET
DEFAULT SUBMENU/PAGE
CANCEL
Default pageDefault page
CONFIRM CHANGE
Page 95

control keypad vacon 95
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
7
Default page in the operating menu (P6.6.2)
Here you can set the location (page) in the
Operating menu
(in special applications only) to which
the display automatically moves to when the set
Timeout time
(see below) has expired or the power
is switched on to the keypad.
See how to set the Default page in the above figure.
Timeout time (P6.6.3)
The Timeout time setting defines the time after which the keypad display returns to the Default page
(P6.6.1). (See previous page.)
Enter the edit mode by pressing
Menu button right
. Set the desired timeout time and confirm it with
the
enter
button. You can return to the previous menu at any time by pressing
Menu button left
.
Figure 7-20. Timeout time setting
Note: If the
Default page
value is 0 the
Timeout time
setting has no effect.
Contrast adjustment (P6.6.4)
In case the display is unclear, you can adjust its contrast through the same procedure as for the
timeout time setting (see above).
Backlight time (P6.6.5)
By giving a value for the
Backlight time
, you can determine how long the backlight stays on before
going out. You can select any time between 1 and 65535 minutes or 'Forever'. For the value setting
procedure, see Timeout time (P6.6.3).
90 s
READY
READY READY
90 s.
enter
60 s.
Timeout time
Timeout time Timeout time
CANCEL
CONFIRM CHANGE
Page 96

96 vacon control keypad
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
7
7.3.6.7 Hardware settings
NOTE:
The Hardware settings submenu
is protected with a password. Store the password in a safe
place!
In the
Hardware settings
submenu (S6.7) under the System menu, you can further control some
functions of the hardware in your inverter. The functions available in this menu are
Internal brake
resistor connection, Fan control, HMI acknowledge timeout and HMI retry.
Internal brake resistor connection (P6.7.1)
This function tells the inverter, whether the internal brake resistor is connected or not. If you have
ordered the inverter with an internal brake resistor, the default value of this parameter is
Connected
. However, if it is necessary to increase braking capacity by installing an external brake
resistor, or if the internal brake resistor is disconnected for another reason, it is advisable to change
the value of this function to
Not conn.
in order to avoid unnecessary fault trips.
Enter the edit mode by pressing
Menu button right
. You can change the brake resistor information
with the
Browser buttons
. Confirm the change with the
enter
button or return to the previous level
with
Menu button left
.
Note! The brake resistor is available as optional equipment for all classes. It can be installed
internally in classes FR4 to FR6.
Figure 7-21. Internal brake resistor connection
Fan control (P6.7.2)
This function allows you to control the cooling fan of the inverter. You can set the fan to run continuously when the power is switched on or depending on the temperature of the unit. If the latter
function has been selected, the fan is switched on automatically when the heatsink temperature
reaches 60C. The fan receives a stop command when the heatsink temperature falls to 55C. After
the command, the fan runs for approximately 1 minute before stopping. The same happens after
switching on the power and after changing the value from
Continuous
to
Temperature
.
Note! The fan runs always when the drive is in RUN state.
S1èS8
READY
I/Oterm
READY
I/Oterm
READY
I/Oterm
enter
READY
I/Oterm
READY
I/Oterm
P1èP4
System Menu
HW settings
InternBrakeRes
Connected
Not conn.
InternBrakeRes
Connected
InternBrakeRes
Page 97

control keypad vacon 97
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
7
To change the value: Enter the edit mode by pressing
Menu button right
. The value starts blinking.
Use the
Browser buttons
to change the fan mode and confirm the change with the
enter
button. If
you do not want to change the value, return to the previous level with
Menu button left
. See Figure
7.21 .
Figure 7-22. Fan control function
HMI acknowledge timeout (P6.7.3)
This function allows the user to change the timeout of the HMI acknowledgement time. The inverter
waits for the HMI acknowledgment in accordance with the value of this parameter.
Note! If the inverter has been connected to the PC with a normal cable, the default values of
parameters 6.7.3 and 6.7.4 (200 and 5) must not be changed.
If the inverter has been connected to the PC via a modem and there is a delay in transferring
messages, the value of parameter 6.7.3 must be set according to the delay as follows:
Example:
▪ Transfer delay between the inverter and the PC = 600 ms
▪ The value of par. 6.7.3 is set to 1200 ms (2 x 600, sending delay + receiving
delay)
▪ The corresponding setting shall be entered in the Misc part of the file
NCDrive.ini:
Retries = 5
AckTimeOut = 1200
TimeOut = 6000
▪ It must also be considered that intervals shorter than the AckTimeOut time
cannot be used in NC-Drive monitoring.
Enter the edit mode by pressing
Menu button right
. The current value starts to blink. Use the
Browser buttons
to change the acknowledgement time. Confirm the change with the
enter
button or
return to the previous level with Menu button left.
READY
I/Oterm
READY
I/Oterm
enter
READY
I/Oterm
Fan control
Continuous
Fan control Fan control
Continuous
Temperature
Page 98

98 vacon control keypad
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
7
Figure 7-23. HMI acknowledge timeout
Number of retries to receive HMI acknowledgement (P6.7.4)
With this parameter you can set the number of times the drive will try to receive acknowledgement if
it does not receive acknowledgement within the acknowledgement time (P6.7.3) or if the received
acknowledgement is faulty.
You can change value through the same procedure as for P6.7.3 (see above).
Note! Changes to P6.7.3 and P6.7.4 become effective after the next start-up.
7.3.6.8 System info In the System info submenu (S6.8) you can find inverter-related hardware and software information.
You can enter the
System info submenu
by pressing
Menu button right
. You can now browse the
submenu pages with the
Browser buttons
.
Total counters
The
Total counters menu
(S6.8.1) contains information on the inverter operation times i.e. the total
number of MWh, operation days and operation hours. Unlike the counters in the Trip counters menu,
these counters cannot be reset.
Note! The Power On time counter (days and hours) runs always when the power is on.
Page
Counter
C6.8.10.1
.
MWh counter
C6.8.10.2
.
Operation day counter
C6.8.1.3.
Operation hour counter
Table 7-5. Counter pages
READY
I/Oterm
200ms
READY
I/Oterm
enter
200ms
HMI ACK timeout
HMI ACK timeout
Page 99

control keypad vacon 99
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
7
Trip counters
Trip counters
(menu S6.8.2) are counters the values of which can be reset i.e. restored to zero. You
can use the following resettable counters:
Note! The trip counters run only when the motor is running.
Page
Counter
T6.8.2.1
MWh counter
T6.8.2.3
Operation day counter
T6.8.2.4
Operation hour counter
Table 7-6. Resettable counters
The counters can be reset on pages 6.8.2.2
(Clear MWh counter)
and 6.8.2.5
(Clear Operation time
counter)
.
Example: When you want to reset the operation counters you should do the following:
Figure 7-24. Counter reset
Software (S6.8.3)
The
Software
information page includes information on the following inverter software related
topics:
Page
Content
6.8.3.1
Software package
6.8.3.2
System software version
6.8.3.3
Firmware interface
6.8.3.4
System load
Table 7-7. Software information pages
Applications (S6.8.4)
At location S6.8.4, you can find the
Applications submenu
containing information on the application
currently in use and all other applications loaded into the inverter. The following information is
available:
Page
Content
6.8.4.#
Name of application
6.8.4.#.1
Application ID
6.8.4.#.2
Version
6.8.4.#.3
Firmware interface
Table 7-8. Applications information pages
T1èT5
READY
READY READY
enter
READY READY
STOP
STOP
STOP STOP
READYSTOP
Trip counters
Clr Optime cntr Clr Optime cntr
Not reset Not reset
Clr Optime cntr
Reset
Clr Optime cntr
Reset
Clr Optime cntr
Not reset
Page 100

100 vacon control keypad
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
7
In the Applications information page, press
Menu button right
to enter the Application pages of
which there are as many as there are applications loaded into the inverter. Locate the desired
application with the
Browser buttons
and then enter the Information pages with
Menu button right
.
Use the
Browser buttons
to see the different pages.
Figure 7-25. Applications info submenu
Hardware (S6.8.5)
The
Hardware
information page provides information on the following hardware-related topics:
Page
Content
6.8.5.1
Nominal power of the unit
6.8.5.2
Nominal voltage of the unit
6.8.5.3
Brake chopper
6.8.5.4
Brake resistor
Table 7-9. Hardware information pages
Expander boards (S6.8.6)
The
Expander boards submenu
contains information about the basic and option boards. (See
Chapter 6.2)
You can check the status of each board slot by entering the Expander boards page with
Menu button
right.
Use the
Browser buttons
to view the status of each board slot. The description line of the
keypad will display the type of the expansion board and the text
'Run'
is shown below it. If no board is
connected to the slot the text
'no board'
will be shown. If a board is connected to a slot but the
connection is lost for some reason, the text
'no conn.'
is displayed. For more information, see
Chapter 6.2, Figure 6-13.
For more information on expander board related parameters, see Chapter 7.3.7.
A1 èA7
I/Oterm I/Oterm
D1èD3
I/Ot erm
READY READY
D1 èD3
I/Oterm
READY
NXFIFF01
2.01
I/Oterm
Applications Basic
Standard
Application id
Version
 Loading...
Loading...