

Page 1
GLOBALSAT GPS Module
Hardware Data Sheet
Product No : EM-506
User Manual Version 1.7
Globalsat Technology Corporation
16F., No. 186, Jian-Yi Road, Chung-Ho City, Taipei
Hsien 235, Taiwan
Tel: 886-2-8226-3799 Fax: 886-2-8226-3899
E-mail : service@globalsat.com.tw
Website: www.globalsat.com.tw
Issue Date
2014/5/20
APPR
Ray
CHECK
- 1 -
PREPARE
Mason
Page 2

EM-506
High Performance GPS Module
Product Description
Product Description
EM-506 GPS module features high sensitivity, low power and ultra small form factor. This GPS
module is powered by SiRF Star IV, it can provide you with superior sensitivity and performance
even in urban canyon and dense foliage environment. With SiRF CGEE (Client Generated
Extended Ephemeris) technology, it predicts satellite positions for up to 3 days and delivers
CGEE-start time of less than 15 seconds under most conditions, without any network assistance.
Besides, MicroPower Mode allows GPS module to stay in a hot-start condition nearly continuously
while consuming very little power. EM-506 is suitable for the following applications:
Automotive navigation
Fleet management
Marine navigation
Product Features
SiRF Star IV high performance GPS Chipset
Very high sensitivity (Tracking Sensitivity: -163 dBm)
Extremely fast TTFF (Time To First Fix) at low signal level
Support UART interface.
Built-in LNA(with in CHIP)
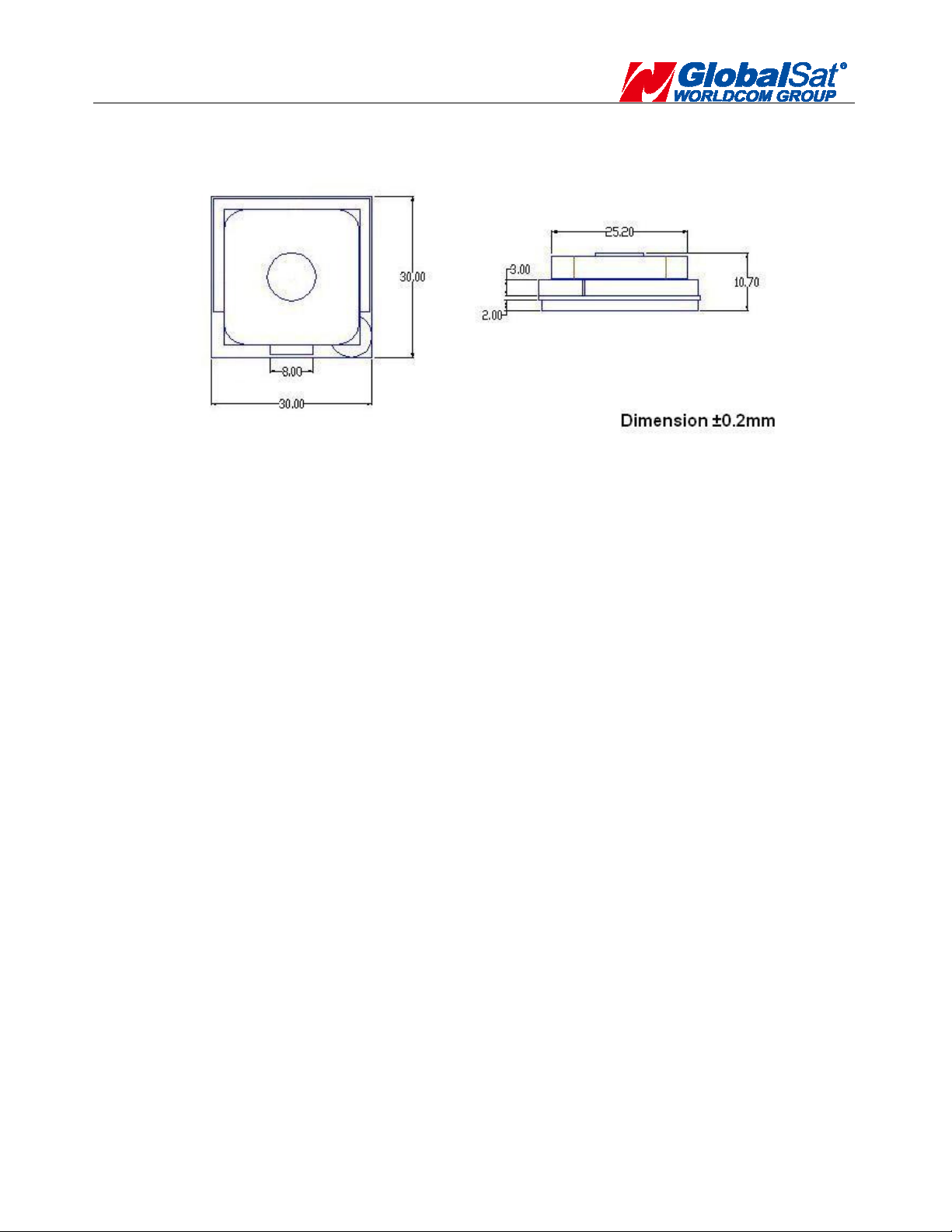
Compact size (30.0mm x 30.0 mm x 10.7mm) suitable for space-sensitive application
Support NMEA 0183 V3.0 (GGA, GSA, GSV, RMC, VTG, GLL, ZDA)
Support OSP protocol
Support SBAS (WASS, EGNOS, MSAS, GAGAN)
Note: Features mentioned above are available depending on firmware versions. Please contact us first to specify which features
you will require, before purchase.
- 2 -
Page 3
EM-506
High Performance GPS Module
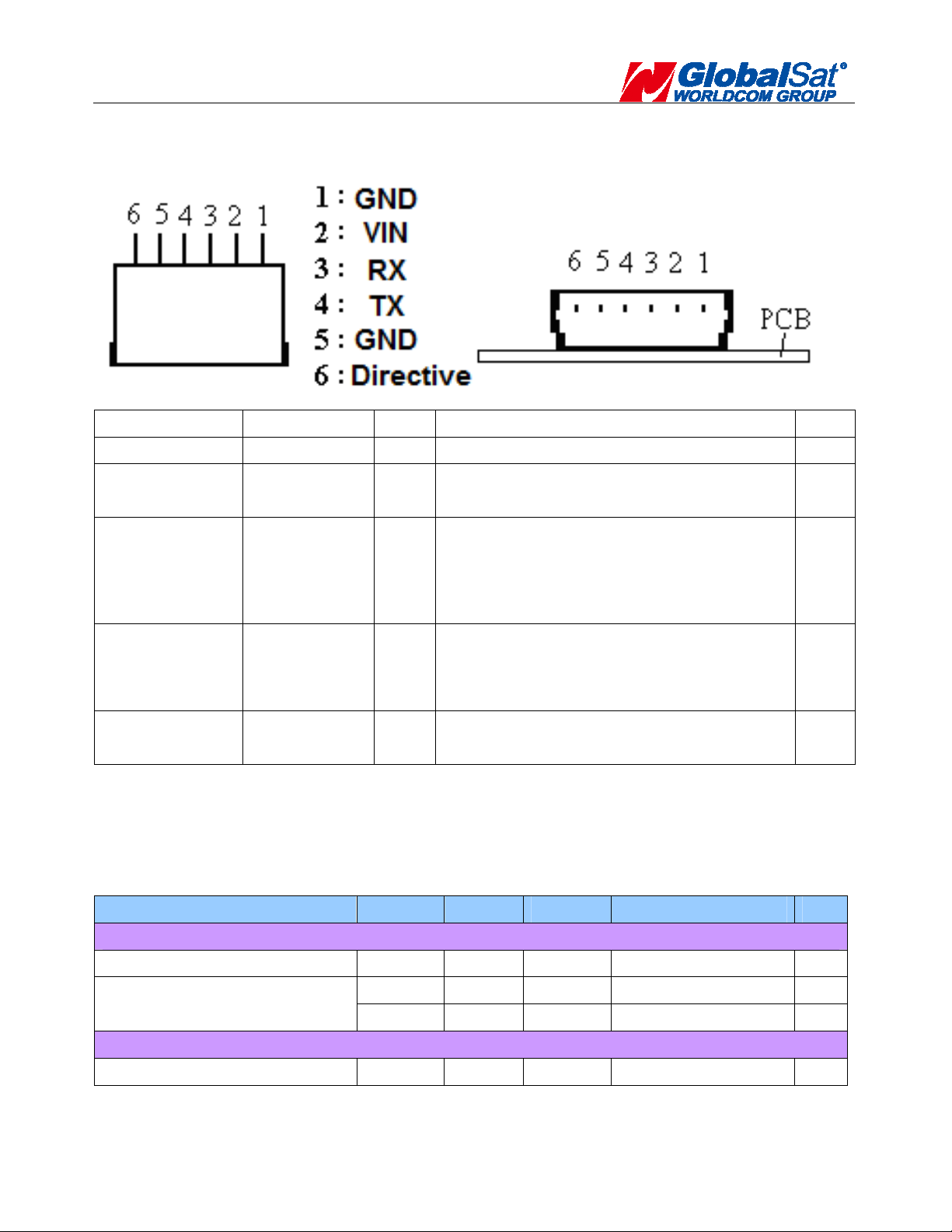
Product Pin Description
PIN Number(s)
Name Type
Description Note
1,5
GND P Ground.
This is the main power supply to the engine
2
VIN P
board. (4.5Vdc to 6.5Vdc)
This is the main receive channel for
receiving software commands to the engine
3 RXD I
board from SiRFdemo software or from user
written software. Baud rate based on flash
memory setting.
This is the main transmits channel for
4
TXD O
outputting navigation and measurement
data to user’s navigation software or user
written software. Output 3.3V level.
This pin output signal based on firmware
6
GPS Status O
setting.*1
*1.The EM-506 supports a 1PPS output, but will not have an LED. If you don't need a 1PPS output but require an LED, then please contact
our sales department for more information
Electrical Specification
Absolute Maximums Ratings
Parameter Min. Typ. Max. Conditions Unit
POWER Supply
Main power supply(VCC) 4.5 5.0 6.5 V
45 50 55 GPS is not 3D Fixed. mA
Main power supply Current
33 34 38 GPS is 3D Fixed. mA
RF
Operating Frequency 1.575 Ghz
- 3 -
Page 4
EM-506
High Performance GPS Module
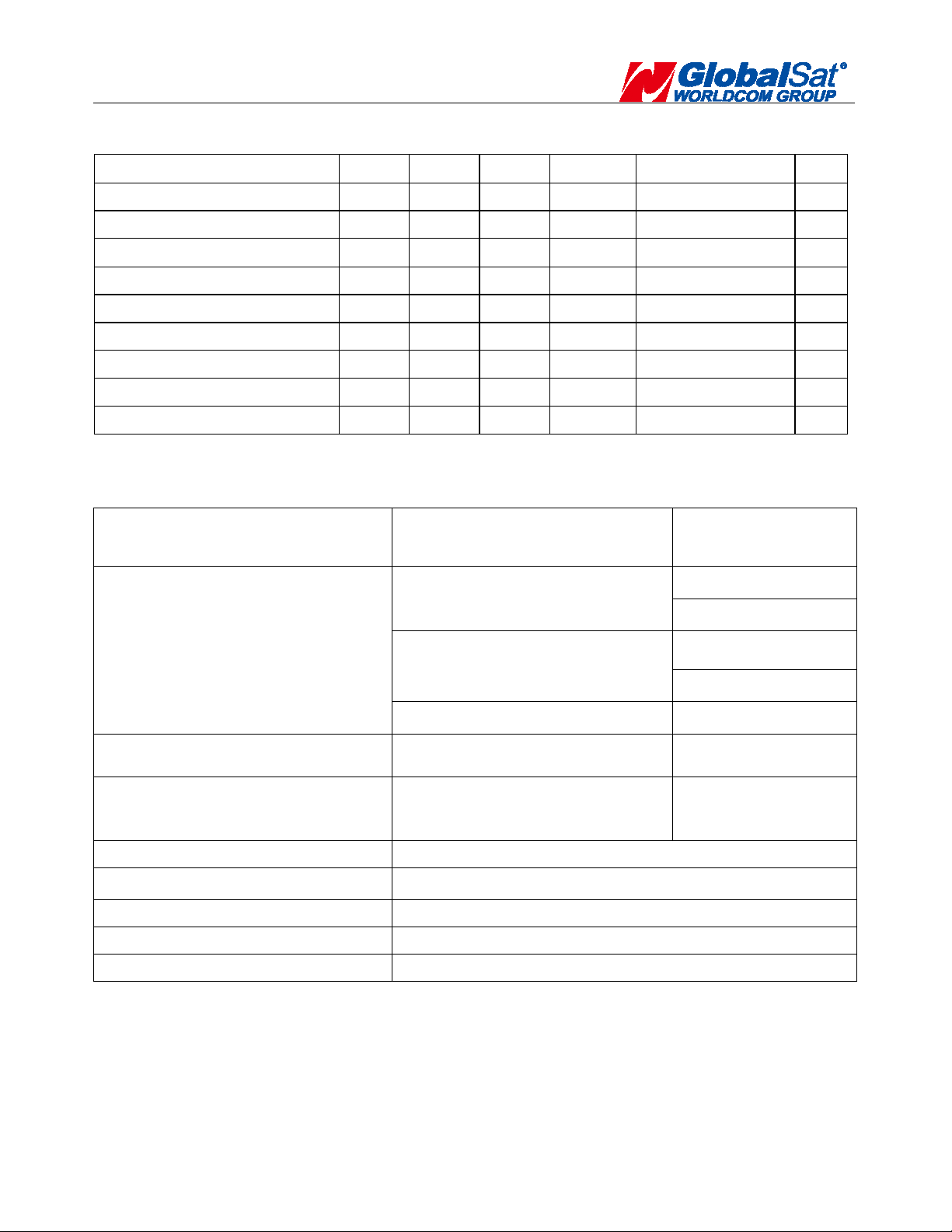
DC Electrical characteristics
Parameter Symbol Min. Typ. Max. Conditions Units
Low Level Output Voltage VOL 0.4 V
High Level Output Voltage
Low Level Input Voltage VI L -0.4 0.45 V
High Level Input Voltage VI H 1.26 3.6 V
Low Level Output Voltage VOL 0.4 Without LED V
Low Level Output Voltage VOL 0.8 With LED V
High Level Output Voltage VOH 3.3 V
Low Level Input Voltage VI L -0.4 0.45 V
High Level Input Voltage VI H 1.26 3.6 V
Receiver Performance
Sensitivity
Time-To-First-Fix
VOH 3.3 V
Tracking :
Autonomous acquisition :
Cold Start – Autonomous
1
Warm Start – Autonomous
Hot Start – Autonomous
2
3
-163dBm
-160 dBm
< 35s
<15s (with CGEE)
< 35s
< 15s(with CGEE)
< 1s
Horizontal Position Accuracy
Velocity Accuracy
Reacquisition 0.1 second, average
Update Rate 1 Sec / 5 Sec
Maximum Altitude < 18,000 meter
Maximum Velocity < 515 meter/ second
Maximum Acceleration < 4G
<Note>
1. 50% -130dBm Fu 0.5ppm Tu ±2s Pu 30Km
2. Commanded Warm START
3. Commanded Hot START
4. 50% 24hr static, -130dBm
5. 50% @ 30m/s
4
Autonomous < 2.5m
Speed
5
Heading
- 4 -
< 0.01 m/s
< 0.01 degrees
Page 5
EM-506
High Performance GPS Module
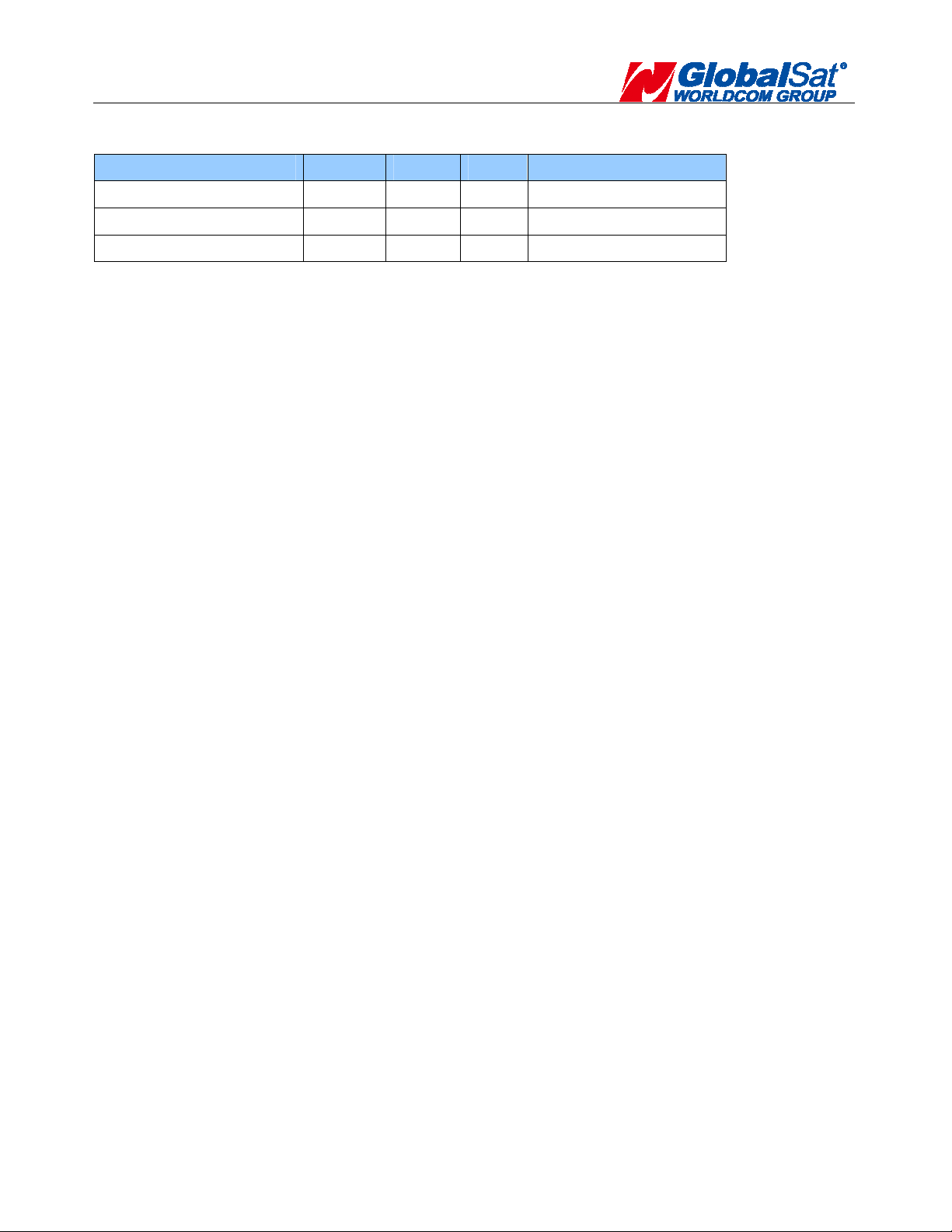
Environmental Characteristics
Parameter Min Typ Max Unit
Humidity Range 5 95 % non-condensing
Operation Temperature -40 25 85
Storage Temperature -40 85
℃
℃
- 5 -
Page 6
EM-506
High Performance GPS Module
Physical Characteristic
OPERATING Description
GND
This is Ground pin for the baseband circuit.
VIN
This is the main power supply to the engine board. (4.5Vdc to 6.5Vdc)
RXD
This is the main channel for receiving software commands from SiRFdemo software or from your
proprietary software.
TXD
This is the main transmits channel for outputting navigation and measurement data to user’s
navigation software or user written software. Output is TTL level, 0V ~ 3.3V.
GPS status
This pin exports signal to indicate the GPS status.
GPS unfix: always low level.
GPS fixed: one second high level, one second low level.
LED
LED indicator for GPS fix or not fix
LED OFF: Receiver switch off
LED ON: No fixed, Signal searching
LED Flashing: Position Fixed
- 6 -
Page 7

EM-506
High Performance GPS Module
SOFTWARE COMMAND
NMEA Output Command
GGA - Global Positioning System Fixed Data
Note – Fields marked in italic red apply only to NMEA version 2.3 (and later) in this NMEA
message description
Table B-2 contains the values for the following example:
$GPGGA,161229.487,3723.2475,N,12158.3416,W,1,07,1.0,9.0,M,-34.2,M,,0000*18
Table B-2 GGA Data Format
Name Example Units Description
Message ID $GPGGA GGA protocol header
UTC Time 161229.487 hhmmss.sss
Latitude 3723.2475 ddmm.mmmm
N/S Indicator N N=north or S=south
Longitude 12158.3416 dddmm.mmmm
E/W Indicator W E=east or W=west
Position Fix Indicator 1 See Table B-3
Satellites Used 07 Range 0 to 12
HDOP 1.0 Horizontal Dilution of Precision
MSL Altitude 9.0 meters
Units M meters
Geoid Separation1 -34.2 meters Geoid-to-ellipsoid separation.
Ellipsoid altitude=MSL Altitude + Geoid
Separation
Units M meters
Age of Diff. Corr. second Null fields when DGPS is not used
Diff. Ref. Station ID 0000
Checksum *18
<CR><LF> End of message termination
Table B-3 Position Fix Indicator
Value Description
0 Fix not available or invalid
1 GPS SPS Mode, fix valid
2 Differential GPS, SPS Mode , fix valid
3 Not supported
6 Dead Reckoning Mode, fix valid
Note:
A valid status is derived from all the parameters set in the software. This includes the minimum
- 7 -
Page 8

EM-506
High Performance GPS Module
number of satellites required, any DOP mask setting, presence of DGPS corrections, etc. If the
default or current software setting requires that a factor is met, then if that factor is not met the
solution will be marked as invalid.
GLL - Geographic Position-Latitude/Longitude
Note – Fields marked in italic red apply only to NMEA version 2.3 (and later) in this NMEA
message description
Table B-4 contains the values for the following example:
$GPGLL,3723.2475,N,12158.3416,W,161229.487,A,A*41
Table B-4 GLL Data Format
Name Example Units Description
Message ID $GPGLL GLL protocol header
Latitude 3723.2475 ddmm.mmmm
N/S Indicator n N=north or S=south
Longitude 12158.3416 dddmm.mmmm
E/W Indicator W E=east or W=west
UTC Position 161229.487 hhmmss.sss
Status A A=data valid or V=data not valid
Mode A A=Autonomous, D=DGPS,
E=DR
N=Output Data Not Valid
R= Coarse Position
1
S=Simulator
Checksum *41
<CR><LF> End of message termination
1. Position was calculated based on one or more of the SVs having their states derived from
almanac parameters, as opposed to ephemerides.
- 8 -
Page 9

EM-506
allowed to automatically switch 2D/3D
High Performance GPS Module
GSA - GNSS DOP and Active Satellites
Table B-5 contains the values for the following example:
$GPGSA,A,3,07,02,26,27,09,04,15,,,,,,1.8,1.0,1.5*33
Table B-5 GSA Data Format
Name Example Units Description
Message ID $GPGSA GSA protocol header
Mode 1 A See Table B-6
Mode 2 3 See Table B-7
Satellite Used1 07 Sv on Channel 1
Satellite Used1 02 Sv on Channel 2
…..
Satellite Used1 Sv on Channel 12
PDOP2 1.8 Position dilution of Precision
HDOP2 1.0 Horizontal dilution of Precision
VDOP2 1.5 Vertical dilution of Precision
Checksum *33
<CR><LF> End of message termination
1. Satellite used in solution.
2. Maximum DOP value reported is 50. When 50 is reported, the actual DOP may be much larger.
Table B-6 Mode1
Value Description
M Manual-forced to operate in 2D or 3D mode
A 2Dautomatic-
Table B-7 Mode 2
Value Description
1 Fix Not Available
2 2D (<4 SVs used)
3 3D (>3 SVs used)
- 9 -
Page 10

EM-506
High Performance GPS Module
GSV - GNSS Satellites in View
Table B-8 contains the values for the following example:
$GPGSV,2,1,07,07,79,048,42,02,51,062,43,26,36,256,42,27,27,138,42*71
$GPGSV,2,2,07,09,23,313,42,04,19,159,41,15,12,041,42*41
Table B-8 GSV Data Format
Name Example Units Description
Message ID $GPGSV GSV protocol header
Number of Messages
Message Number
Satellites in View
Satellite ID 07 Channel 1(Range 1 to 32)
Elevation 79 degrees Channel 1(Maximum90)
Azimuth 048 degrees Channel 1(True, Range 0 to 359)
SNR(C/No) 42 dBHz Range 0 to 99,null when not tracking
……. …….
1
2 Range 1 to 3
1
1
1 Range 1 to 3
07
Satellite ID 27 Channel 4 (Range 1 to 32)
Elevation 27 Degrees Channel 4(Maximum90)
Azimuth 138 Degrees Channel 4(True, Range 0 to 359)
SNR(C/No) 42 dBHz Range 0 to 99,null when not tracking
Checksum *71
<CR><LF> End of message termination
1. Depending on the number of satellites tracked, multiple messages of GSV data may be
required. In some software versions, the maximum number of satellites reported as visible is
limited to 12, even though more may be visible.
- 10 -
Page 11

EM-506
High Performance GPS Module
RMC - Recommended Minimum Specific GNSS Data
Note – Fields marked in italic red apply only to NMEA version 2.3 (and later) in this NMEA
message description
Table B-9 contains the values for the following example:
$GPRMC,161229.487,A,3723.2475,N,12158.3416,W,0.13,309.62,120598,,,A*10
Table B-9 RMC Data Format
Name Example Units Description
Message ID $GPRMC RMC protocol header
UTC Time 161229.487 hhmmss.sss
Status1 A A=data valid or V=data not valid
Latitude 3723.2475 ddmm.mmmm
N/S Indicator N N=north or S=south
Longitude 12158.3416 dddmm.mmmm
E/W Indicator W E=east or W=west
Speed Over Ground 0.13 knots
Course Over Ground 309.62 degrees True
Date 120598 ddmmyy
Magnetic Variation2 degrees E=east or W=west
East/West Indicator
2
E E=east
Mode A A=Autonomous, D=DGPS,
E=DR
N=Output Data Not Valid
R= Coarse Position
3
S=Simulator
Checksum *10
<CR><LF> End of message termination
1. A valid status is derived from all the parameters set in the software. This includes the
minimum number of satellites required, any DOP mask setting, presence of DGPS
corrections, etc. If the default or current software setting requires that a factor is met, then if
that factor is not met the solution will be marked as invalid.
2. SiRF Technology Inc. does not support magnetic declination. All “course over ground” data
are geodetic WGS84 directions relative to true North.
3. Position was calculated based on one or more of the SVs having their states derived from
almanac parameters, as opposed to ephemerides.
- 11 -
Page 12

EM-506
High Performance GPS Module
VTG - Course Over Ground and Ground Speed
Note – Fields marked in italic red apply only to NMEA version 2.3 (and later) in this NMEA
message description
Table B-10 contains the values for the following example:
$GPVTG,309.62,T,,M,0.13,N,0.2,K,A*23
Table B-10 VTG Data Format
Name Example Units Description
Message ID $GPVTG VTG protocol header
Course 309.62 degrees Measured heading
Reference T True
Course degrees Measured heading
Reference M Magnetic1
Speed 0.13 knots Measured horizontal speed
Units N Knots
Speed 0.2 Km/hr Measured horizontal speed
Units K Kilometers per hour
Mode A A=Autonomous, D=DGPS,
E=DR
N=Output Data Not Valid
R= Coarse Position
2
S=Simulator
Checksum *23
<CR><LF> End of message termination
1. SiRF Technology Inc. does not support magnetic declination. All “course over ground” data
are geodetic WGS84 directions.
2. Position was calculated based on one or more of the SVs having their states derived from
almanac parameters, as opposed to ephemerides.
- 12 -
Page 13

EM-506
hhmmss
High Performance GPS Module
ZDA - Time and Date
This message is included only with systems which support a time-mark output pulse identified as
"1PPS". Outputs the time associated with the current 1PPS pulse. Each message is output within
a few hundred ms after the 1PPS pulse is output and tells the time of the pulse that just occurred.
Table B-11 contains the values for the following example:
$GPZDA,181813,14,10,2003,,*4F<CR><LF>
Table B-11: ZDA Data Format
Name Example
Message ID $GPZDA
Unit Description
ZDA protocol header
The UTC time units are:
hh=UTC hours from 00 to 23 mm=UTC minutes
from 00 to 59 ss=UTC seconds from 00 to 59 Either
using valid IONO/UTC or estimated from default
UTC Time 181813
Day 14
Month 10
Year 2003
Local zone hour
1
Local zone minutes
1
Checksum *4F
hour Offset from UTC (set to 00)
minute Offset from UTC (set to 00)
leap seconds
Day of the month, range 1 to 31
Month of the year, range 1 to 12
Year
<CR><LF> End of message termination
1. Not supported by CSR, reported as 00.
- 13 -
Page 14

EM-506
<DataBits>
High Performance GPS Module
NMEA Input Command
A). Set Serial Port ID: 100 Set PORTA parameters and protocol
This command message is used to set the protocol (SiRF Binary, NMEA, or USER1) and/or the
communication parameters (baud, data bits, stop bits, parity). Generally, this command would be
used to switch the module back to SiRF Binary protocol mode where a more extensive command
message set is available. For example, to change navigation parameters. When a valid message
is received, the parameters will be stored in battery backed SRAM and then the receiver will
restart using the saved parameters.
Format:
$PSRF100,<protocol>,<baud>,<DataBits>,<StopBits>,<Parity>*CKSUM<CR><LF>
<protocol> 0=SiRF Binary, 1=NMEA, 4=USER1
<baud> 1200, 2400, 4800, 9600, 19200, 38400
8,7. Note that SiRF protocol is only valid f8 Data bits
<StopBits> 0,1
<Parity> 0=None, 1=Odd, 2=Even
Example 1: Switch to SiRF Binary protocol at 9600,8,N,1
$PSRF100,0,9600,8,1,0*0C<CR><LF>
Example 2: Switch to User1 protocol at 38400,8,N,1
$PSRF100,4,38400,8,1,0*38<CR><LF>
**Checksum Field: The absolute value calculated by exclusive-OR the 8 data bits of each
character in the Sentence, between, but excluding “$” and “*”. The hexadecimal value of the most
significant and least significant 4 bits of the result are convertted to two ASCII characters (0-9, A-F)
for transmission. The most significant character is transmitted first.
**<CR><LF> : Hex 0D 0A
B). Navigation lnitialization ID::::101 Parameters required for start
This command is used to initialize the module for a warm start, by providing current position (in X,
Y, Z coordinates),clock offset, and time. This enables the receiver to search for the correct
satellite signals at the correct signal parameters. Correct initialization parameters will enable the
receiver to acquire signals more quickly, and thus, produce a faster navigational solution.
When a valid Navigation Initialization command is received, the receiver will restart using the input
parameters as a basis for satellite selection and acquisition.
Format::::
- 14 -
Page 15

EM-506
Differential receivers may output corrections using different communication parameters.
High Performance GPS Module
$PSRF101,<X>,<Y>,<Z>,<ClkOffset>,<TimeOfWeek>,<WeekNo>,<chnlCount>,<ResetCfg>*CK
SUM<CR><LF>
<X> X coordinate position
INT32
<Y> Y coordinate position
INT32
<Z> Z coordinate position
INT32
<ClkOffset> Clock offset of the receiver in Hz, Use 0 for last saved value if available. If
this is unavailable, a default value of 75000 for GSP1, 95000 for GSP 1/LX
will be used.
INT32
<TimeOf Week> GPS Time Of Week
UINT32
<WeekNo> GPS Week Number
UINT16
( Week No and Time Of Week calculation from UTC time)
<chnlCount> Number of channels to use.1-12. If your CPU throughput is not high enough,
you could decrease needed throughput by reducing the number of active
channels
UBYTE
<ResetCfg> bit mask
0×01=Data Valid warm/hot start=1
0×02=clear ephemeris warm start=1
0×04=clear memory. Cold start=1
UBYTE
Example: Start using known position and time.
$PSRF101,-2686700,-4304200,3851624,96000,497260,921,12,3*7F
C). Set DGPS Port ID: 102 Set PORT B parameters for DGPS input
This command is used to control Serial Port B that is an input only serial port used to receive
RTCM differential corrections.
The default communication parameters for PORT B are 9600Baud, 8data bits, 0 stop bits, and no
parity. If a DGPS receiver is used which has different communication parameters, use this
command to allow the receiver to correctly decode the data. When a valid message is received,
the parameters will be stored in battery backed SRAM and then the receiver will restart using the
saved parameters.
- 15 -
Page 16

EM-506
High Performance GPS Module
Format:
$PSRF102,<Baud>,<DataBits>,<StopBits>,<Parity>*CKSUM<CR><LF>
<baud> 1200,2400,4800,9600,19200,38400
<DataBits> 8
<StopBits> 0,1
<Parity> 0=None, Odd=1,Even=2
Example: Set DGPS Port to be 9600,8,N,1
$PSRF102,9600,8,1.0*12
D). Query/Rate Control ID: 103 Query standard NMEA message and/or set output rate
This command is used to control the output of standard NMEA message GGA, GLL, GSA, GSV,
RMC, VTG. Using this command message, standard NMEA message may be polled once, or
setup for periodic output. Checksums may also be enabled or disabled depending on the needs of
the receiving program. NMEA message settings are saved in battery backed memory for each
entry when the message is accepted.
Format:
$PSRF103,<msg>,<mode>,<rate>,<cksumEnable>*CKSUM<CR><LF>
<msg> 0=GGA,
1=GLL,
2=GSA,
3=GSV,
4=RMC,
5=VTG
6=MSS(if internal beacon is supported)
7=Not defined
8=ZDA(if 1PPS output supported)
9=Not defined
<mode> 0=SetRate
1=Query
2=ABP On
3=ABP Off
<rate> Output every <rate>seconds, off=0,max=255
<cksumEnable> 0=disable Checksum,1=Enable checksum for specified message
Example 1: Query the GGA message with checksum enabled
$PSRF103,00,01,00,01*25
Example 2: Enable VTG message for a 1Hz constant output with checksum enabled
- 16 -
Page 17

EM-506
High Performance GPS Module
$PSRF103,05,00,01,01*20
Example 3: Disable VTG message
$PSRF103,05,00,00,01*21
E). LLA Navigation lnitialization ID: 104 Parameters required to start using Lat/Lon/Alt
This command is used to initialize the module for a warm start, by providing current position (in
Latitude, Longitude, Altitude coordinates), clock offset, and time. This enables the receiver to
search for the correct satellite signals at the correct signal parameters. Correct initialization
parameters will enable the receiver to acquire signals more quickly, and thus, will produce a faster
navigational soution.
When a valid LLA Navigation Initialization command is received, the receiver will restart using the
input parameters as a basis for satellite selection and acquisition.
Format:
$PSRF104,<Lat>,<Lon>,<Alt>,<ClkOffset>,<TimeOfWeek>,<WeekNo>,<ChannelCount>,
<ResetCfg>*CKSUM<CR><LF>
<Lat> Latitude position, assumed positive north of equator and negative south of
equator float, possibly signed
<Lon> Longitude position, it is assumed positive east of Greenwich and negative
west of Greenwich Float, possibly signed
<Alt> Altitude position float, possibly signed
<ClkOffset> Clock Offset of the receiver in Hz, use 0 for last saved value if available. If
this is unavailable, a default value of 75000 for GSP1, 95000 for GSP1/LX
will be used.
INT32
<TimeOfWeek> GPS Time Of Week
UINT32
<WeekNo> GPS Week Number
UINT16
<ChannelCount> Number of channels to use. 1-12 UBYTE
<ResetCfg> bit mask
0×01=Data Valid warm/hot starts=1
0×02=clear ephemeris warm start=1
0×04=clear memory. Cold start=1
UBYTE
Example: Start using known position and time.
$PSRF104,37.3875111,-121.97232,0,96000,237759,922,12,3*37
F). Development Data On/Off ID: 105 Switch Development Data Messages On/Off
- 17 -
Page 18

EM-506
High Performance GPS Module
Use this command to enable development debug information if you are having trouble getting
commands accepted. Invalid commands will generate debug information that should enable the
user to determine the source of the command rejection. Common reasons for input command
rejection are invalid checksum or parameter out of specified range. This setting is not preserved
across a module reset.
Format: $PSRF105,<debug>*CKSUM<CR><LF>
<debug> 0=Off, 1=On
Example: Debug On
Example: Debug Off
$PSRF105,1*3E
$PSRF105,0*3F
G). Select Datum ID: 106 Selection of datum to be used for coordinate Transformations
GPS receivers perform initial position and velocity calculations using an earth-centered earth-fixed
(ECEF) coordinate system. Results may be converted to an earth model (geoid) defined by the
selected datum. The default datum is WGS 84 (World Geodetic System 1984) which provides a
worldwide common grid system that may be translated into local coordinate systems or map
datums. (Local map datums are a best fit to the local shape of the earth and not valid worldwide.)
Examples:
Datum select TOKYO_MEAN
$PSRF106,178*32
Name Example Unit Description
Message ID $PSRF106 PSRF106 protocol
header
Datum 178 21=WGS84
178=TOKYO_MEAN
179=TOKYO_JAPAN
180=TOKYO_KOREA
181=TOKYO_OKINAWA
Debug
Checksum *32
<CR><LF> End of message
termination
- 18 -
Page 19

EM-506
High Performance GPS Module
RoHS / Lead Free Compliance
- 19 -
Page 20

EM-506
High Performance GPS Module
Reversion history
Reversion Date Name Status / Comments
V1.1 20120320 Luwalk Initial Version
V1.2 20130521 Mason Modify VCC range
V1.3 20130724 Mason 1.Modify Pin define
2.Modify DC electrical characteristics
V1.4 20131008 Mason Modify pin 1PPS to Directive
V1.5 20131112 Mason 1.Modify Pin define
2.Modify DC electrical characteristics
V1.6 20140226 Mason Modify Product Features
V1.7 20140520 Mason Modify Pin Define Note.
- 20 -
 Loading...
Loading...