

Page 1

Installation Manual
For
Sorcerer Autopilot
RV 10, AP 100 Autopilot
8300-010 Rev B
TRUTRAK FLIGHT SYSTEMS
1500 S. Old Missouri Road
Springdale, AR 72764
Ph. 479-751-0250 Fax 479-751-3397
www.trutrakflightsystems.com
Page 2
INSTALLATION MANUAL
Sorcerer, RV 10, AP 100 Autopilots
TABLE OF CONTENTS
Mechanical Considerations ........................................................1
Pitot and Static Connections....................................................... 2
RFI/EMI......................................................................................2
Connecting GPS Units
Definitions .................................................................................. 5
Initial Setup & Ground Checkout............................................... 7
Yaw Damper Ground Checkout.................................................9
First Flight ................................................................................10
Yaw Damper First Flight..........................................................12
GPSS / GPSV APPROACH PICTORIAL...............................12
Electrical Pin-out......................................................................13
Sorcerer Wiring Diagram.........................................................15
Sorcerer Wiring Diagram with Yaw Damper...........................16
Sorcerer Block Diagram...........................................................17
Sorcerer with all Options Block Diagram................................18
FOR
Revision Date Description Page #
A 1/1/2008 Initial Release
B 05/28/2009 Corrected auto trim information 18
Page 3
Mechanical Considerations
The installation information in this section is extremely important and must be clearly
understood by the installer. Improper servo installation or failure to observe and diagnose
installation problems prior to flight can result in extremely serious consequences, including
loss of ability to control the aircraft. If there are any questions on the part of the installer it
is mandatory to resolve these questions prior to flight of the aircraft.
Most modern experimental aircraft use push-pull tubes to drive the primary controls. These tubes generally have a total travel
of 3” or less; therefore, it is best to connect the autopilot servo to the primary control by the same method. This connection
consists of an arm on the servo connected by a push-pull rod to the primary control. Rod-end bearings are required on each
end of the push-pull rod.
The servo arm must not rotate even near to the point called OVER CENTER, the point at which the primary
aircraft control would lock up. Some aircrafts mechanical primary control installations will not allow this to
occur and do not need the servo stops.
This is a condition that would result from the servo being back driven when the pilot operates the controls, or
from the servo itself driving the controls to a stop. To protect against this mechanical stops are supplied with the
servos. These stops are drilled so that they can be mounted at different angles as required (18° intervals)
In addition to the proper use of the stop it is important to know the amount of travel on the primary control that
the servo can handle. With the push rod connected to the outermost hole (1 ½”) the travel on the primary cannot
exceed 2 ½”, the intermediate hole 2 1/16”, and the inner hole 1 5/8”.
It is important to note that at the neutral point of the control the SERVO ARM must be PERPENDICULAR to the
push rod, and that the stop must be mounted so as to limit travel as near as possible to equal amounts in both
directions. In certain factory-designed installations there may be well-proven exceptions.
There will be installations in which space does not permit the use of the stop. When this is done the aircraft’s primary control
stops must be positive and care must be taken to be sure that at the neutral point the servo arm is perpendicular to the push rod,
and that the travel limits of the servo arm are not exceeded.
There are installations in which the travel of the push-pull tube exceeds the allowable 2 ½”. For such installations, the drive
can be applied to a bell crank at a radius point that moves the desired 2 ½” of maximum allowed travel in the outermost hole of
the arm.
When there is no way to have a drive point of less than 2 ½” or when the primary control is cable-driven it is necessary to use
the capstan-cable servo drive. When this is done the servo should be mounted so that the 1/16” diameter cable which wraps
around the capstan when extended parallel to the primary cable is approximately 3/16” from the primary cable. If the primary
control travel does not exceed 5” the cable locking pin will be 180° away from the point at which the cable leaves the capstan.
When the primary control is at the neutral point this means the total cable wrap around the capstan is 360°. If the primary
control travel is greater than 5” the cable wrap is 720°and the pin is adjacent to the output point when the primary control is at
the neutral point.
The cable clamps when properly installed will not slip and thus get loose, but it is desirable to NICO press or swedge a fitting
on to the cable so as to provide added assurance that the cable will not become slack. If the bridle cable is not sufficiently tight
there will be lost motion in the autopilot drive. This will result in hunting (oscillation).
Sorcerer, RV 10, AP 100 Autopilot Installation Manual 1 TruTrak Flight Systems
May 2009
8300-010 Rev B
Page 4

PROGRAMMER INSTALLATION
Mounting Considerations
The Sorcerer programmer unit is designed to mount in the aircraft instrument panel within view and reach of the pilot.
Maximum recommended viewing angle should be no more than 20 deg. The maximum mounting angle the Sorcerer can
accommodate is 12 degrees longitudinal axis and 0 degrees lateral axis. The primary unit location should minimize pilot head
movement when transitioning between looking outside of the cockpit and viewing/operating the Sorcerer programmer unit.
The location should be such that the Sorcerer programmer unit is not blocked by the glare shield on top, or by the throttles,
control yoke, etc. on the bottom. Use aircraft installation standards for mounting and support of the Sorcerer programmer.
Wiring Considerations
Use AWG #24 or larger wire for all connections unless otherwise specified. The standard solder pin contacts supplied in the
connector kit are compatible with up to AWG #18 wire. In cases where some installations have more than one component
sharing a common circuit breaker, sizing and wire gauge is based on, length of wiring and current draw on units. In these cases,
a larger gauge wire such as AWG #20 may be needed for power connections. Do not attach any wires to the outside of the
programmer or route high current wires within six (6) inch of the programmer. Ensure that routing of the wiring is not exposed
to sources of heat, RF or EMI interference. Check that there is ample space for the cabling and mating connectors. Avoid
sharp bends in cabling and routing near aircraft control cables. Do not route the COM antenna coax near any autopilot
components.
Pitot and Static Connections
All multi-servo TruTrak autopilots require connections to the pitot and static lines. The preferred method of this connection
would be tee fittings near the aircraft’s airspeed indicator. The static line for the autopilot requires due care in its construction,
as excessive lag or insufficient static orifices can cause the autopilot to oscillate (hunt) in pitch. Although there is compensation
within the autopilot sufficient to handle moderate amounts of lag, the importance of a good static port and line cannot be
overstated. In some cases problems can be caused by having a large number of devices (including the autopilot) connected to a
single, insufficient, static port. In other cases, the static line itself is adequate but there are one or more devices connected to the
same line, one of which has a large static reservoir. A simple remedy for this problem if it occurs is a tee-fitting near the static
port, and a dedicated line to the autopilot only. Obviously, an insufficiently-large orifice coupled with large static reservoirs
can aggravate the problems associated with lag.
RFI/EMI considerations
The autopilot programmer is shielded and does not generate any appreciable level of electromagnetic interference. Moreover,
the servo lines (except for power and ground) are low-current and cannot contribute to RF interference. The servo power and
ground lines do have switching currents through them, but so long as th ere are no parallel runs of servo power and ground lines
with such things as poorly-shielded antenna lines or strobe light power lines, there is no need to shield the servo harnesses.
The autopilot itself has been internally protected from RF interference and has been tested under fairly extreme conditions,
such as close proximity to transmitting antennas. However, it is always good practice to insure that such antennas are properly
shielded and not routed directly over or under sensitive panel-mounted electronic equipment. Most problems in this area are
the result of improper RF shielding on transmitting antennas, microphone cables, and the like. The most sensitive inputs to the
autopilot are the CDI, Glide slope, and Control Wheel Switch inputs. These lines should not be routed in parallel with
transmitting antennas or other sources of known RF interference. If necessary, they can be shielded with the shield connection
to pin 19 of the autopilot connector.
Sorcerer, RV 10, AP 100 Autopilot Installation Manual 2 TruTrak Flight Systems
May 2009
8300-010 Rev B
Page 5
Specific connections for certain commonly-used in-panel GPS units
Note that the information in the tables is based upon the best information available from each manufacturer’s documentation at
the time of publication. Please consult the appropriate installation manual for confirmation of wiring information.
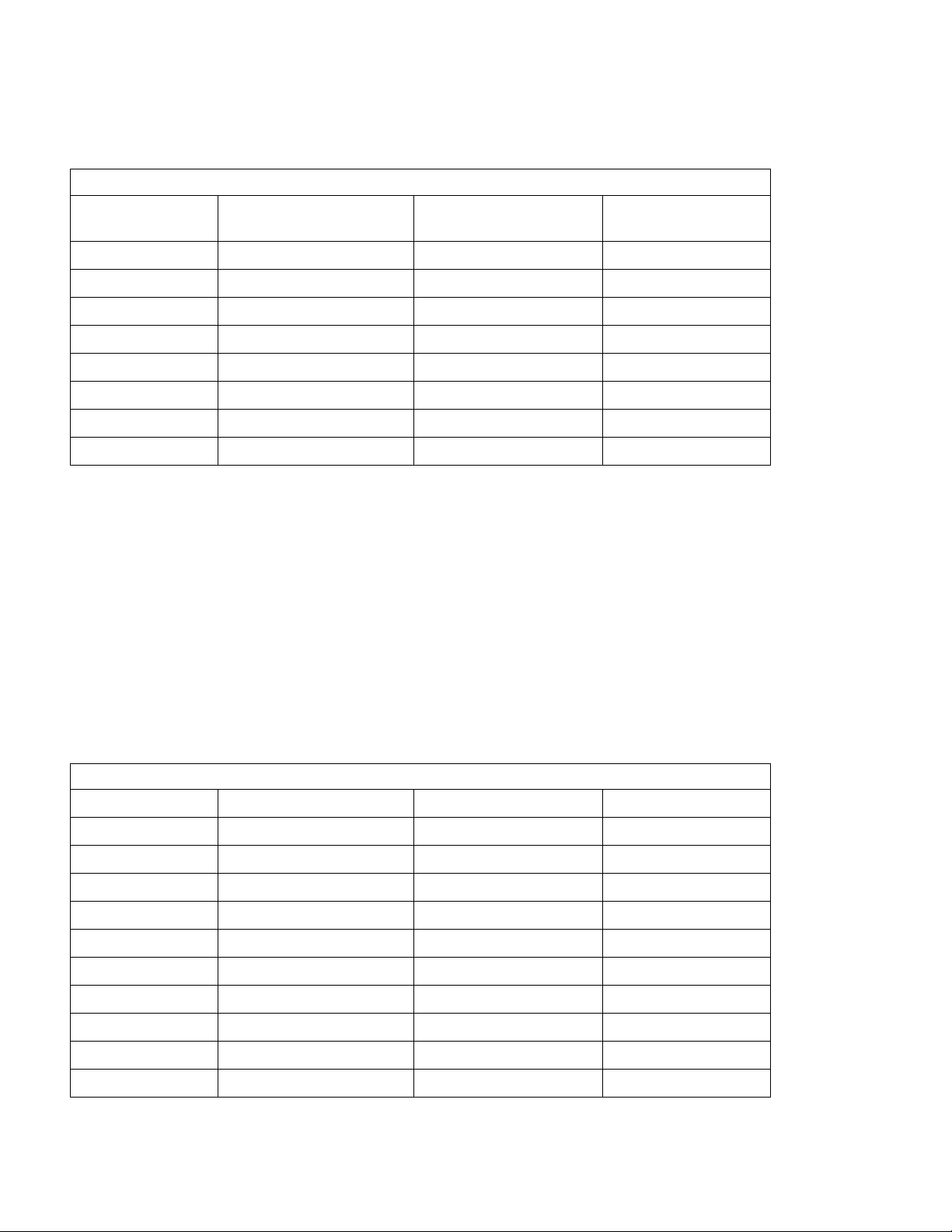
Garmin 430 and 530 connections to Sorcerer autopilot
P4001 [P5001] on
Garmin 430 [530]
21 MAIN +LEFT CDI LEFT 21
22 MAIN +RIGHT CDI RIGHT 22
27 MAIN +UP GS UP 24
28 MAIN +DOWN GS DOWN 23
56 GPS RS 232 O UT 1 Primary Serial Input 25
46 GPS ARINC 429 OUT A ARINC-A 26
47 GPS ARINC 429 OUT B ARINC-B 27
14 ILS / GPS APPROACH Localizer Mode 29
Garmin 430/530 setup instructions:
Power 430/530 up and turn it on while holding down the ENT key. Release the ENT key when the display activates. After the
data base pages, the first page displayed is the MAIN ARINC 429 CONFIG page. While in Configuration mode, pages can be
selected by ensuring the cursor is off and rotating the small right knob. To change data on the displayed Configuration Page,
press the small right knob (CRSR) to turn on the cursor. Turn the large right knob to change between data fields. Turn the
large or small right knob to change a field that the cursor is on. Once you have made the desired selection, press the ENT key
to accept the entry. The second startup page will test the RS 232 and ARINC inputs on the ground, a good RS 232 connection
will display GPS NAV and the asterisk, ARINC will display GPSS and move the stick right and left.
Signal Name
(Garmin)
Signal Name
(TruTrak)
P101 on
Sorcerer Autopilot
With the MAIN ARINC 429 CONFIG page display e d , on the row la bel ed OUT, select SPEED Î Low
and DATA ÎARINC 429 GAMA, turn labels ON.
Advance to the MAIN RS232 CONFIG page.
On the row labeled CHNL1, select OUTPUT Î Aviation.
Note that for the Garmin units, the autopilot will need to be set for 9600 baud.
Garmin 480 connections to Sorcerer autopilot
P1 on GNS 480 Signal Name (Garmin AT) Signal Name (TruTrak) P101 on Sorcerer
22 RS232 TxD2 Primary Serial Input 25
P5 on GNS 480 Signal Name (Garmin AT) Signal Name (TruTrak) P101 on Sorcerer
4 429 OUT 1A ARINC-A 26
24 429 OUT 1B ARINC-B 27
P7 on GNS 480 Signal Name (Garmin AT) Signal Name (TruTrak) P101 on Sorcerer
14 MAIN CDI + LEFT CDI LEFT 21
13 MAIN CDI + RIGHT CDI RIGHT 22
30 MAIN CDI + UP GS UP 24
31 MAIN CDI + DOWN GS DOWN 23
33 ILS Energize Localizer Mode 29
Sorcerer, RV 10, AP 100 Autopilot Installation Manual 3 TruTrak Flight Systems
May 2009
8300-010 Rev B
Page 6

The system setup and checkout functions are reached in the Ground Maintenance mode of the GNS 480. This mode should not
be accessed during flight. The Ground Maintenance mode is reached by pressing the line select keys 1,4, and MENU/ENTER
in sequence immediately after the GNS 480 initialization is complete and before any other bezel keys on the GNS 480 are
pressed. Line 1 select key is the top line select key, line select key 4 is the fourth key down, and MENU/ENTER is the lower
most key below the line select keys. After pressing the keys, wait for the GNS 480 to restart in Ground Maintenance mode.
Pressing the SETUP, TEST, or INPUT smart keys along the bottom allows selection of that function. Pressing the EXIT smart
key will return the GNS 480 to the Airborne mode.
While on the Ground Maintenance SETUP menu page, press the SERIAL PORTS line select key to change the serial port
settings. Push the small, inner knob in to enter the editing mode. The first editable item will be highlighted. Use the large,
outer knob to select the next or previous editable data field and turn the small, inner knob to ch ange the current setting. Set
serial port 2 to MAPCOM, and select a baud rate of 9600. Either press the small, inner knob in again or press the
MENU/ENTER key to save the settings. Press the SETUP or BACK smart key to return to the Ground Maintenance SETUP
menu.
While on the Ground Maintenance SETUP menu page, press the 429 PORTS line select key to configure the ARINC 429 ports.
Push the small, inner knob in to enter the editing mode. The first editable item will be highlighted. Use the large, outer knob
to select the next or previous editable data field and turn the small, inner knob to change the current setting. Set the ARINC
429 channel 1 out to Low Speed and ARINC 429. Either press the small, inner knob in again or press the MENU/ENTER key
to save the settings. Press the SETUP or BACK smart key to return to the Ground Maintenance SETUP menu.
Note that the baud rate on the Sorcerer should be set to 9600.
UPSAT GX-50/60/65 + SL30 connections to Sorcerer autopilot
GX
50/60/65
14 CDI +L CDI LEFT 21
13 CDI +R CDI RIGHT 22
30 GSI +UP GS UP 24
31 GSI +DOWN GS DOWN 23
33 ILS ENERGIZE Localizer Mode 29
5
or
22
GX-50/60/65 setup instructions:
Power the GX-50/60/65 up and turn it on while holding down the leftmost and rightmost “smart keys.”
Rotate the LARGE knob to the Serial Interface Configuration “CH RX TX” page. Press SEL (the selection fields will start
flashing), rotate the LARGE knob to select the port, rotate the SMALL knob to select the desired configurations, then press
ENT when complete.
SL30 Signal Name
(UPSAT)
Use pin 5 – TxD1 – if GX has no
GPSS
Use pin 22 – TxD2 – if GX has
GPSS
Signal Name
(TruTrak)
Primary Serial
Input
P101 on
Sorcerer Autopilot
25
If the GX unit has no GPSS capability, select “MOVING MAP” For CH 1, TX column and wire to pin 5 of the GX unit;
if the GX unit does have this feature, select “GPSS” for CH 2, TX colum n, an d wire t o pi n 2 2 inst ead.
To restore the GX-50/60/65 to normal operation, switch its power off, then back on.
Note that for the GX-50/60/65 units, the autopilot will need to be set for 9600 baud. The autopilot’s ARINC-A and ARINC-B
inputs should be left unconnected, as steering information in the case of UPSAT units is sent over the serial RS232 lin e along
with the ground track and ground speed information the autopilot needs.
Sorcerer, RV 10, AP 100 Autopilot Installation Manual 4 TruTrak Flight Systems
May 2009
8300-010 Rev B
Page 7

Definitions
Note: Not all settings appear in every autopilot.
ACTIVITY (Setting range 0 – 24) The velocity at which the servo moves the control surface.
The higher the number the more movement you will see in the control surface.
With a standard servo (DSB-X, DSP-X) you should start at 0 then work your way
up in flight to set the level for your aircraft. The High Torque Servo (DSB-HB,
DSB-HC) has a different gear ratio, so an Activity setting of 12 will be equal to
about 0. With too low a setting the aircraft will hunt slowly and appear to be lazy.
With too high a setting the aircraft will hunt rapidly, and appear nervous and jittery.
TORQUE (Setting range 0-12) The holding force that the servo has on the control surface.
This setting should not be too low; the reason is that the servo will not be able to
fly the aircraft in turbulence. The lower the setting the easier it is to override the
servo if you need to. It is recommended that the torque be set in moderate
turbulence, so that one can be certain that the level is not set too low.
BAUD RATE (Setting Range 600-9600) This is the communication speed that must match your
GPS serial output setting. Most handhelds are 4800 and most panel mounts are
9600.
STATIC LAG (Setting Range 0-2) This setting is used to compensate for lag in the aircraft static
system. This setting is usually not adjusted. This value is used to remove very
slow hunting, of more than 15 to 30 feet, in altitude hold when adjusting the
activity setting does not solve the problem. This is NOT the setting to adjust if
there is slight nose bobble in still air; the setting for that situation is HALF STEP.
We recommend factory assistance before adjusting this value.
MICROACTIVITY (Setting Range 0-32) This is used to remove the significant lost motion in the
control system, usually a cable control system. Most aircraft do not need this
changed from 0. An example of when one might need to adjust microactivity is: If
flying in still air, there is a very slight wing rock that can not be solved by adjusting
the ACTIVITY setting.
BANK ANGLE (Setting Range Low – High) This setting limits the maximum bank angle of the
aircraft to approximately 13 degrees at the low setting, 18 degrees at the medium
setting, and 24 degrees at the high setting.
GPSS GAIN (Setting Range 16-32) This setting should normally left at 16. It is used only in
GPS systems that are capable of GPS Steering, to increase the lateral authority of
the GPS Steering information from the GPS.
MIN AIRSPD (Setting Range 0-399) This setting is the minimum airspeed in knots that the
autopilot will fly the aircraft. Example: If the aircraft is climbing and the power
setting is not adequate to maintain selected vertical speed setting, the autopilot will
lower the nose until MIN AIRSPD setting is met.
Sorcerer, RV 10, AP 100 Autopilot Installation Manual 5 TruTrak Flight Systems
May 2009
8300-010 Rev B
Page 8

MAX AIRSPD (Setting Range 0-399) This setting is the maximum airspeed in knots that the
autopilot will fly the aircraft. Example: If the aircraft is in a decent and the power
is not reduced so as to keep the airspeed below the MAX AIRSPD setting, the
autopilot will raise the nose until MAX AIRSPD setting is met.
NORM CLIMB (Setting Range 0-399) This setting is the airspeed, in knots, that the autopilot will
start a climb when a preselected altitude is selected. This setting is only in the
Sorcerer autopilot.
AUDIO LEVEL (Setting Range 0-16) This setting controls the volume of the Speech output. This
setting is only in the Sorcerer, RV 10, and AP100 autopilots.
HALF-STEP? (Setting Range N or Y) This setting will cause the servo to take smaller steps, but
will also reduce the torque available. Normally this setting is “N”, if the aircraft
nose moves up and down very slightly in VERY calm air, and it can be verified that
the servo is only moving one step for each “bobble” of the nose, then select “Y”.
Only very light aircraft that are extremely pitch sensitive will need to adjust this
setting.
EXT DG/HSI? (Setting Range N or Y) This setting indicates if the aircraft has an input from an
HSI heading bug. TruTrak autopilots input rage is 0 to 5 volts.
YAW DAMPER? (Setting Range N or Y) This setting indicates if the aircraft has a Yaw Damper
system installed.
YAW LEVELING (Setting Range-8 -8) This setting is used to have the Yaw Damper keep the aircraft
slip/skid indicator centered when the Yaw system is engaged. Allow a few seconds
for the Yaw System to respond to the new setting.
YAW ACTIVITY (Setting Range0-12) The velocity at which the servo moves the control surface. The higher the
number the more movement you will see in the control surface.
Sorcerer, RV 10, AP 100 Autopilot Installation Manual 6 TruTrak Flight Systems
May 2009
8300-010 Rev B
Page 9

Initial Setup & Ground Checkout
Must be performed before first flight
Once wiring and servo installation are completed the autopilot should be tested in the aircraft while on the ground. The first
step is to enter the setup modes on the autopilot and set all parameters to their correct values. Apply power to the autopilot
programmer, this must be done with aircraft stationary. Its initial screen should be displayed, along with the words PWR UP in
the lower-right of the display. After approximately ten seconds, the autopilot is ready to be set up for operation, indicating AP
OFF on the display.
Press and hold TRK on the autopilot for about three seconds until the first setup screen, showing LAT ACTIVITY is displayed.
Rotate the encoder knob as necessary to set the lateral activity value to a value of 1 or 2. Press and release the UP control of
the VS rocker to enter that value and advance to the next setup screen.
Rotating the encoder knob, select a value for LAT TORQUE. Insure that the value displayed is somewhere close to the
maximum value of 12. Once that is done, press and release the UP control of the VS rocker to enter that value and advance to
the next screen. If at any time there is a need to go back to a previous setup screen, press and release the DN control of the VS
rocker.
Rotating the encoder knob, select the value for BAUD which is compatible with the panel-mount GPS receiver connected to
pin 25. The value of 9600 is the most commonly used rate. Once baud rate selection is done, press and release the UP control
of the VS rocker to enter that value and advance to the next screen.
Rotating the encoder knob, select a value for BANK ANGLE. The BANK ANGLE possibilities are LO, MED, HI. The LO
setting will give a maximum BANK ANGLE of approximately 13 degrees, where MED will have a maximum of
approximately 18 degrees, and HI has a maximum of approximately 24 degrees. Once BANK ANGLE selection is done, press
and release the UP control of the VS rocker to enter the value and advance to the next screen.
Rotating the encoder knob, select a value of 0 for MICROACTIVITY. This setting will be addressed in the first flight section
of this manual. Press and release the UP control of the VS rocker to enter the value and advance to the next screen.
Rotating the encoder knob, select ON or OFF for SPEECH. With the SPEECH control ON, Sorcerer will give a voice
enunciation of all important autopilot related information. With the SPEECH co ntrol OFF, Sorcerer will give a series of beeps
for the most important autopilot related information. Press and release the UP control of the VS rocker to enter the value and
advance to the next screen.
Rotating the encoder knob, select a value for AUDIO LEVEL (0 to 16) which results in a comfortable listening level. This
adjustment varies the audio level of the voice enunciation and alerter signal output on pin 13 of the programmer and wired into
an audio panel. Having selected a comfortable level, press and release the UP control of the VS rocker to enter the value and
advance to the next screen.
Rotating the encoder knob, select Y (yes) or N (no) to the EXT DG/HSI? question. If no external device is connected to pin 9
on the connecter, answer N. The EXT DG flight mode will be present or absent when operating the autopilot based on the
answer to this question. Having made this choice, press and release the UP control of the VS rocker to enter the value and
advance to the next screen.
Rotating the encoder knob, select Y (yes) or N (no) to the YAW DAMPER? question. If no YD-300 module is connected to
pins 5, 6 and 8 on the connector, answer N. If N is answered for the yaw damper, this will be the end of the lateral setup, push
and release the encoder knob to exit the lateral setup. If the answer is set to Y, push the UP control of the VS rocker to enter
the value and advance to the next setup screen.
Rotating the encoder knob, set YD LEVELING to 0. This setting will be addressed in the Yaw Damper Initial Checkout
portion of this manual. Press and release the UP control of the VS rocker to enter the value and advance to the next setup
screen.
Rotating the encoder knob, set YD ACTIVITY to a setting of 1 or 2. This setting will be addressed first in the Yaw Damper
Initial Checkout, and once more in the First Flight section of this manual. Press and release the encoder knob to exit the lateral
setup.
Once all the initial lateral setup of the autopilot is complete, the pitch axis initial setup should be done.
Press and hold ALT on the autopilot for about three seconds until the first pitch setup screen is displayed. Rotate the encoder
knob as necessary to set the VRT ACTIVITY to a value of 1 or 2. Press and release the UP control of the VS rocker to enter
that value and advance to the next setup screen.
Sorcerer, RV 10, AP 100 Autopilot Installation Manual 7 TruTrak Flight Systems
May 2009
8300-010 Rev B
Page 10

Rotating the encoder knob, select a value for VRT TORQUE. Insure that the value displayed is somewhere close to the
maximum value of 12. Once that is done, press and release the UP control of the VS rocker to enter that value and advance to
the next screen. If at any time there is a need to go back to a previous setup screen, press and release the DN control of the VS
rocker.
Using the encoder knob, set the MIN AIRSPD to the slowest airspeed the autopilot should ever fly the aircraft. This should be
safely above stall airspeed for the aircraft. This is also the speed at which the yaw damper will automatically disengage prior
to landing. If the system being set up includes a yaw damper, it is necessary to set minimum airspeed to 0 at this time, to allow
the yaw damper to be tested properly before the first flight. After selecting the appropriate value, press and release the UP
control of the VS rock er to enter that value and advance to the next screen.
Using the encoder knob, set the MAX AIRSPD to the fastest airspeed the autopilot should ever fly the aircraft. This should be
safely below the red line airspeed for the aircraft. After selecting the appropriate value, press and release the UP control of the
VS rocker to enter that value and advance to the next screen.
Rotating the encoder knob, set the NORM CLIMB airspeed. This will be the default selected airspeed when climbing to a
selected altitude. Press and release the UP control of the VS rocker to enter that value and advance to the next setup screen.
The STATIC LAG field is used to accommodate aircraft with delay in the static line. Start with a value of 0 until the first
flight test of the autopilot. Select 0, then press and release the UP control of the VS rocker to enter that value and advance to
the next screen.
Rotating the encoder knob, select a value of 0 for MICROACTIVITY. This setting will be addressed in the first flight section
of this manual. Press and release the UP control of the VS rocker to enter the value and advance to the next screen.
The final setup screen in the pitch setup is HALF-STEP. This setting should initially be set to N. This setting will be
addressed in the first flight section of this manual. Press and release the encoder knob to exit the vertical setup.
The next step in the check-out procedure is to verify that all servos run, and in the correct direction. Power up the autopilot and
wait approximately ten seconds for AP OFF to be displayed in the lower right portion of the screen. Then press and release the
AP button to engage the autopilot. At this point, the selected bank angle will be underlined on the bottom left of the display,
while the selected vertical speed (“SVS”) will be shown on the bottom right. Use the Vertical Speed rocker to set selected
vertical speed to zero. The pitch servo should stop, or move only very slowly. Then press the UP control on the VS rocker
repeatedly until several hundred feet per minute is showing on the lower right SVS field. Pressing and holding the VS rocker
will also slowly step the vertical speed in the desired direction. At this point the pitch servo should be moving the control yoke
or stick back, in an effort to raise the nose of the aircraft. Similarly, using the DN control of the VS rocker to select a negative
selected vertical speed, the pitch servo should be moving the controls in such a way as to lower the nose of the aircraft. If
direction is incorrect, install or remove the jumper between pins 1 and 2 of the autopilot connector.
The roll servo should also be responding at this time, moving the controls in such a way as to turn the aircraft from the current
selected bank angle. The initial value of the selected bank angle is the 0 degrees at the moment of engagement, but the encoder
knob can be used to modify the selected bank angle. When the bank angle is set to 0 the servo should stop or run only very
slowly. If the knob is rotated clockwise, to a selected bank to the right, the control yoke or stick should move in such a way as
to roll the aircraft to the right. Conversely, a select a bank to the right will move the controls in the opposite direction to
attempt a roll towards the left. If servo direction is not correct, the wires going to pins 4 and 5 of the roll servo (pins 32 and 33
on the main connector) must be reversed to achieve the correct response. If the servos do not move at all, double-check the
LAT TORQUE or VRT TORQUE setting as appropriate. If a servo jitters but does not actually rotate, check the wiring on the
four servo drive lines (pins 2, 3, 4, and 5 on the servo) to that servo for continuity and correctness. If the servo does not seem
to have any torque, check the relevant torque control line for continuity and correctness. With a torque setting of 12 the
voltage on pin 6 of the servo should be approximately 5 volts.
At this time, check that the servo arm or capstan is properly operating the controls. For servo installations using an arm, check
that as the controls go from limit to limit the arm of the servo remains in the operating range of the servo (a maximum of 100
degrees total rotation) and that when the controls are centered, the connecting pushrod is approx imately perpendicular to the
arm of the servo. For capstan systems, insure that the cabling remains at proper tension and is properly secured as the servo
moves the controls from stop to stop. Insure that the servo remains secure in its mounting and does not flex its mounting
bracket as it drives the control to its stops. For installations using an arm, insure that as the servo moves the control towards
the end of control travel it does not cause the main control’s torque tube to flex in any way that could cause control system
lockup at the extremes of servo travel. Insure that any “lost motion” in the linkages is eliminated or minimized, in order to
maximize the performance of the autopilot. Lost motion (dead zone) will result in wandering or slow “hunting” behavior in
flight.
Sorcerer, RV 10, AP 100 Autopilot Installation Manual 8 TruTrak Flight Systems
May 2009
8300-010 Rev B
Page 11

The next step in the check-out procedure is to verify that the serial input from the GPS receiver is being properly received and
interpreted. With the aircraft outside of any building, power up the GPS panel-mount recei ver an d the a uto pi l ot. Whi l e the
GPS is acquiring, the display will show NO FIX with a flashing “.” After the GPS receiver acquires its position, the autopilot
will begin to flash the “*” character once per message from the GPS unit showing that valid position data is available. The
display will now show GPS OK. If the display shows NO GPS, even after it is known that the GPS unit has a position fix, the
problem must be diagnosed. Possible reasons for such a problem are,
Pin 25 on the connector is not wired to a source of RS-232 serial data, check wiring.
The GPS receiver’s baud rate disagrees with that selected within the autopilot, match up Baud rates.
The GPS receiver’s serial output port has not been properly configured to provide the information, see GPS manual for
configuration setup.
Summary:
ENGAGE AUTOPILOT WITH FLIGHT CONTROL CENTERED,
ROTATE KNOB CLOCKWISE. FLIGHT CONTROL MUST MOVE
TOWARD RIGHT. ROTATE KNOB COUNTER CLOCKWISE,
FLIGHT CONTROL MUST MOVE BACK TOWARD LEFT.
TAP “UP” ROCKER SWITCH TO 1000’ UP. FLIGHT CONTROL
MUST MOVE BACK. TAP “DN” ROCKER SWITCH TO 1000’
DOWN. FLIGHT CONTROL MUST MOVE FORWARD.
Yaw Damper Ground Checkout
On the ground for Yaw setup reduce MIN Airspeed in the controller to “0”. The next step in the checkout procedure is to
verify operation of the yaw damper. Before this test, remove the yaw damper module from its mounting location (a vertical
bulkhead) so that it can be manually tilted. Verify the direction strap is correctly wired on pins 16 and 17 of J501, the 25-pin
yaw damper connector. If the unit is to be mounted on the rear side of a bulkhead, the strap between pins 16 and 17 of J501
must be absent; if the unit is to be mounted on the front side, the jumper must be present.
Having verified the strap, set the YD ACTIVITY in the controller to 15, manually center the rudder and then engage the yaw
damper by pressing the TRK key on the autopilot programmer. With the toggle switch on the controller away from “ON” for
centering, hold the yaw damper module in the same position it will occupy when mounted on the bulkhead in an approximately
level position that stops the servo rotation. Tilt the module to simulate the aircraft banking to the right. The yaw damper
should respond by commanding the rudder to move towards the right, and conversely a bank to the left should move the rudder
towards the left. If the servo moves in the wrong direction during this test, double-check the correct jumper setting on pins 16
and 17 and if found to be correct, interchange the wires on the yaw damper servo connector (pins 4 and 5 of J401) or at the
connector on the yaw damper module (pins 12 and 13 of J501). Re-check the direction after exchanging the wires.
Having verified the correct direction of response to the tilt sensor, secure the yaw damper module to the bulkhead. Re-engage
the yaw damper and adjust the leveling potentiometer (which protrudes from the face of the yaw damper module) to stop the
movement of the servo (rudder). The aircraft should be on a level surface (with its “ball” centered) for this adjustment. Once
the proper adjustment is done, switch the toggle switch toward “gyro on”, press the TRK key to disengage the yaw damper, reenter the lateral setup using the TRK button, repeatedly push and release the UP control of the VS rocker to advance to the and
set YD ACTIVITY value to zero. This insures that the yaw damper adjustments do not complicate the first test flight of the
autopilot. Holding down the ALT button to enter the setup mode, and repeatedly pressing the UP control on the VS rocker to
advance to the MIN AIRSPD field, set the minimum airspeed to the desired value for actual flight. This should be an indicated
airspeed (in knots) which is safely above the stall but below normal approach or climb out speeds. Make sure that the toggle
switch on the Yaw Damper controller is toggled toward “gyro on” for flight.
Tilt the module to simulate the aircraft banking to the right. The yaw damper
should respond by commanding the rudder to move towards the right, and
conversely a bank to the left should move the rudder towards the left.
Sorcerer, RV 10, AP 100 Autopilot Installation Manual 9 TruTrak Flight Systems
May 2009
8300-010 Rev B
Page 12

With autopilot and yaw engaged push on tail and rudder must move in
direction you have pushed.
First Flight
The first flight should be done after having completed all the setup and testing on the ground. For the first flight, it is important
that the GPS unit is properly functioning with the autopilot, so that the dynamics of flight can be set without consideration of
the calibration of the magnetic backup system. As discussed earlier, when there is proper connection to the serial input of the
autopilot, the display will show a flashing asterisk “*” in the display below the words GPS OK; once taxi speed exceeds 10
knots, the display will change from GPS OK to TRK if the GPS unit has achieved a position fix and sufficient groundspeed. If
this does not occur on fast taxi speeds, it is best to diagnose the problem prior to first flight of the autopilot.
The two activity adjustments (LAT ACTIVITY and VRT ACTIVITY) determine how briskly the autopilot responds to roll and
pitch disturbances. They can be adjusted, in flight, over a wide range; thus the autopilot can be tailored to adapt to any aircraft
installation.
Each of the two activity adjustments covers a numeric range of 0 to 24. Unless the value for a particular aircraft is provided by
TruTrak, it is advisable to start with a setting of zero and work up from there. Most installations would ultimately require
somewhat higher settings.
Prior to takeoff on the first flight, a barometer set will be required. (Not used in RV 10, AP 100 models) With the autopilot off
press and hold the SEL button for approximately three seconds, to show the BARO SET screen (take care not to accidentally
enter the ALT SELECT screen by mistake). The words BARO SET will appear immediately. Continue holding until
ALTITUDE appears below BARO SET. This will insure that the ALT SELECT screen will not be selected by mistake. Use
the encoder knob to adjust the setting of the barometer. The default value will always be 29.92. Having set the autopilot’s
barometer to agree with the current barometer setting, push and release the encoder to enter the barometer setting. If the
current altitude is incorrect, adjust the current altitude. Press and release the encoder to enter the current altitude and exit the
barometer setup screen.
On the first flight, manually fly the aircraft to a suitable area for testing. Engage the autopilot using the AP switch. Observe
that the SEL field now shows the captured present ground track (shown after TRK on the display) and the SVS (s
vertical speed) field shows the approximate present rate of climb or descent in feet per minute. Use the vertical speed rocker to
set the selected vertical speed to zero. Press and hold the TRK button for a few seconds until LAT ACTIVITY is shown on the
display, along with an underlined value. Rotate the knob to select the value zero (0), and observe the resulting control
movement. Increase the value one setting at a time, taking time to observe an increasing level of control response. At some
point, if too high a setting is chosen, the autopilot will be jittery and over-active. Back the setting down until the autopilot is
responsive but not over-active. It is best if these adjustments are made in conditions of moderate turbulence (the Sorcerer loves
turbulence) so as to make it easy to observe the response of the autopilot to disturbances. It will be noted that a fairly limited
range of activity setting will be acceptable; too low a value will result in sluggish response, while too high a value will result in
nervous, inappropriate response. Within this acceptable range there is room for individual preference; some people prefer a
more aggressive autopilot than others. It should be noted that any builder can accomplish this adjustment procedure and no
professional is required.
Once the desired LAT ACTIVITY level is established, press and release the UP control on the vertical speed rocker.
Next, the LAT TORQUE field is adjusted. Again, it is best that this be done in light to moderate turbulence. The reason is that
more torque is required of the autopilot in turbulence than is the case in still air, because the velocity of the servo is greater as
turbulence requires more rapid servo movement. This means that when activity is set to the high end of the acceptable range, a
higher torque setting will be required.
The reason for setting LAT TORQUE to a setting less than its maximum (12) is to reduce the current draw of the servo and to
make it easier to override the autopilot should the need arise. Manual override is not normally required, as using the controlwheel switch or the AP button will disengage the autopilot, but it is best to have a setting of torque which can be comfortably
overridden if necessary. Once the desired LAT TORQUE level is established, press and release the UP control on the vertical
speed rocker to advance to the next setup screen.
The next setup screen is the BANK ANGLE selection screen. Set the desired bank angle that is comfortable, options are LO,
MED, and HI. Once the BANK ANGLE has been selected, push and release the UP control on the vertical speed rocker to
advance to the next setup screen.
elected
Sorcerer, RV 10, AP 100 Autopilot Installation Manual 10 TruTrak Flight Systems
May 2009
8300-010 Rev B
Page 13

The next setup screen is MICROACTIVITY. The MICROACTIVITY setting in most aircraft will be left at zero (0). Micro
activity is used only in aircraft in which a slow wing rock has been observed in very still air. Sometimes there will be a small
amount of lost motion in an aircrafts control system, and the micro activity setting is a way to compensate for the lost motion.
Once the desired MICROACTIVITY has been selected, push and release the encoder knob to exit the lateral setup mode.
Having set the autopilot for its proper roll response, it is time to move to the pitch axis adjustments. Press and hold the ALT
button until VRT ACTIVITY is shown on the display, along with an underlined value. In the same manner as was done for the
roll axis, use the knob to find a setting which results in the appropriate response. Again, too high a value will be jittery or
oscillatory and too low a setting will be sluggish and unresponsive. Having found the desired VRT ACTIVITY setting, press
and release the UP control on the vertical speed rocker to advance to the next setup screen.
In a manner similar to the lateral axis, rotate the knob to choose a torque setting sufficient to fly the aircraft in light to moderate
turbulence without slipping the servo, yet not so high as to be difficult to override manually. Having selected this value, press
and release the UP control on the vertical speed rocker to advance to the next setup screen.
The next screen shows selections for MIN AIRSPD. The minimum airspeed value is the slowest indicated airspeed the
autopilot will fly, independent of what it is commanded to do. This airspeed value should be safely above stall speed (knots
IAS) yet slower than normal approach or climb out speeds. Select the value, and press the UP control on the vertical speed
rocker to advance to the next setup screen.
The next setup screen is the MAX AIRSPD screen. The maximum airspeed value is the fastest indicated airspeed the autopilot
will fly, independent of what it is commanded to do. This airspeed value should be safely below the red line speed (knots
IAS) yet above normal cruising speeds. Select the value, and press the UP control on the vertical speed rocker to advance to
the next setup screen.
The next setup screen is the NORM CLIMB field is the airspeed (knots IAS) which would be normally used in a climb,
typically the cruise climb airspeed for the aircraft. This value shows up as the default airspeed (which can be changed as
desired while climbing) in the altitude selector function. Select the normal climb airspeed, and press the UP control on the
vertical speed rocker to advance to the next setup screen.
The next screen is the STATIC LAG field. It is set to 0 at the factory but can vary between 0 and 2 to suit a particular static
system. The value 0 assumes a static system with very little “lag”; the value 2 assumes a fairly large amount of lag. To
diagnose the lag of a particular system, it is necessary to be in the altitude hold mode of the autopilot, so prior to setting this
field, push and release the encoder knob to exit the pitch setup screen. Click the ALT button to enter altitude hold. This puts
the autopilot into altitude hold mode at the current altitude.
Once the autopilot is in altitude hold mode, re-enter the vertical setup mode by holding the ALT k e y. Use the UP contro l on
the vertical speed rocker to cycle over the choices already made until the STATIC LAG display is again on the screen. In still
air, straight and level flight, in altitude hold mode, observe whether the altitude appears to oscillate, or “hunt” up and down. If
this is the case, it may be caused by several factors, one of which is the amount of lag in the static system. Increasing the
STATIC LAG value to a 1 or a 2 may cure the problem; however this should be set to the smallest value that satisfactorily flies
the aircraft in the pitch axis, as the larger the value the less responsive the autopilot will be to vertical commands or altitude
error. Other possible causes of hunting in altitude hold are “lost motion” in the aircraft controls or too low a level of vertical
activity setting. Excessive lag in the static system itself can be caused by undersized static ports, improperly placed ports, long
static lines, or especially by attached equipment with large static reservoirs. The autopilot can be adapted to cover a wide range
of static systems, but in truly extreme cases it may be necessary to provide a separate static line for the autopilot so that other
equipment attached to the port does not degrade the autopilot’s performance. Press and release the UP control on the vertical
speed rocker to advance to the next setup screen.
The next setup screen is MICROACTIVITY. The MICRO ACTIVITY setting in most aircraft will be left at zero (0). Micro
activity is used only in aircraft in which there is a slow pitch oscillation that is very small in magnitude. Sometimes there will
be a small amount of lost motion in an aircrafts control system, and the micro activity setting is a way to compensate for the
lost motion. Press and release the UP control on the vertical speed rocker to advance to the final pitch setup screen.
The HALF-STEP setting in most cases will not need to be changed. If the half step setting is set to Y (yes), then the pitch
servo will now have higher resolution, and take smaller steps. While this setting will make the servo take smaller steps, it will
decrease the amount of available torque. This setting should be left at N (No), unless it is observe that the nose moves up and
down very slightly while in altitude hold in very still air. Once this setting has been done, push and release the encoder knob to
exit the pitch setup.
Sorcerer, RV 10, AP 100 Autopilot Installation Manual 11 TruTrak Flight Systems
May 2009
8300-010 Rev B
Page 14

Yaw Damper First Flight
The Yaw Damper system requires adjustment of the yaw damper parameters. With the autopilot disengaged, level the
aircraft and hand-fly the aircraft in still air. Press TRK to engage the yaw damper (the lower-left part of the display will
indicate YD ON). Then press and hold TRK to enter the setup screen. Cycle through the settings already completed, until YD
LEVELING is shown on the display. Centering is adjustable from -8 to 8 and has enough authority to move the ball
approximately one and one half times the width of the ball in either direction. (Coarse adjustment was made using the
potentiometer in the yaw damper module during the earlier Initial Checkout Procedure.) Adjust the centering so that the ball is
centered. Once the YD LEVELING has been set, press and release the UP control on the VS rocker to advance to the next
setup screen. The next field, YD ACTIVITY, determines how aggressively the yaw damper responds to yaw disturbances.
Yaw damper activity can range from 0 (off) to 12 (extremely aggressive). For this purpose it is best to find light to moderate
turbulence so the effects can be properly observed. Having found suitable conditions, use the knob to gradu a lly increase the
value of YD ACTIVITY in order to obtain an appropriate level of response to yaw disturbances. Too high a value will result in
rapid oscillation, while too low a value will essentially disable the quick response of the yaw damper to turbulence. Within the
acceptable range of operation, there is still room to account for personal preferences. So long as the yaw damper’s YD
ACTIVITY value is not so high as to cause oscillation, the response is simply set according to preference and comfort. Once
the YD ACTIVITY has been set, press and release the encoder to exit the setup mode.
The normal operation of the autopilot will turn the yaw damper on any time the autopilot is engaged, and the yaw damper will
stay
on after the autopilot is disengaged. During final approach and the diminishing of the airspeed below the MIN AIRSPD
setting, the yaw damper will automatically disengage. To disengage the yaw damper prior to that point, simply use the TRK
button to toggle the yaw damper off. When the autopilot is in the Off mode, the TRK button acts as a yaw damper on/off
toggle function and the display will indicate YD ON or YD OFF.
GPSS / GPSV APPROACH PICTORIAL
Sorcerer, RV 10, AP 100 Autopilot Installation Manual 12 TruTrak Flight Systems
May 2009
8300-010 Rev B
Page 15

Electrical Pin-out
All TruTrak DFC and Sorcerer autopilots have consistent wiring requirements. The Sorcerer and Sorcerer with Yaw Damper
will be covered in this manual.
The table below provides a brief explanation of each pin function on the main 37-pin connector P101.
P101 Autopilot Rear Connector (Viewed from rear of autopilot) or wire side of connector.
P101
Pin
Function Notes
1 Dedicated ground connection for Pitch Reverse Jumper.
Pitch Reverse Jumper,
2
present or absent, as follows:
Pin 2 open (no connect): Servo CCW (counter-clockwise) Î UP
Pin 2 Jumper to pin 1: Servo CW (clockwise) Î UP
3 Auxiliary RS-232 Output. Presently unused, intended for futur e expansion.
4 No Connection. Reserved for future expansion.
5 Yaw Damper Activity. A signal from the autopilot which sets the amount of response the yaw
damper exhibits to azimuth disturbances and “ball” deflection.
6 Yaw Damper Leveling. A signal from the autopilot which is used for fine adjustment of the
“ball” in a yaw damper.
7 No Connection. Reserved for future expansion.
8 Yaw Damper Activate. A signal from the autopilot which turns on the yaw damper function. Sorcerer with Yaw
9 Analog DG/HSI Input. A zero to 5V DC signal centered at 2.5 volts from an external steering
device. An adapter specific to a given DG or HSI is required. Use 1 meg ohm resistor to reduce
voltage. Consult factory for details on this adapter.
10 Pitch Servo Torque Control. A signal from the autopilot to the pitch servo which sets the
amount of torque to be delivered by the servo.
11 Pitch Servo Trim Sensor. A signal from the pitch servo to the autopilot which indicates an
out-of-trim condition and its direction.
12 Autopilot Master (+12 to +28 V DC). The autopilot itself draws less than ½ ampere. Most of
the current required by the autopilot system is used by the servos (up to 1A per servo).
13 Audio alerter signal. This pin may be wired to an unswitched input of an audio panel. The
autopilot uses various voice or tones to denote specific events (loss of GPSS, capture
Glideslope, etc). Volume is adjustable within a setup screen of the autopilot.
14
Pitch Servo control lines. These lines cause the stepping motor in the pitch servo to run in the
appropriate direction at the desired velocity. They are small-signal lines and do not have any
15
substantial current-carrying capability or require any special shielding. Connect to pitch servo
16
as shown on wiring diagram.
17
18 No Connection. Reserved for future expansion.
19 Ground Connection. Provide #20 AWG to common grounding point.
20 Control Wheel Switch. Connect as shown in wiring diagram to a SPST momentary switch
located remotely to the autopilot for convenient engage/disengage function.
21
CDI LEFT
22
CDI RIGHT
Analog +/- 150 mV differential signals from Nav receiver. Pin 22 more
positive than pin 21 indicates CDI needle right-of-center.
Direction of servo arm / capstan rotation
(as viewed from face of the servo body)
for UP elevator
See note 4 on wiring
diagram
Sorcerer with Yaw
Damper only
Sorcerer with Yaw
Damper only
Damper only
Install 1 meg ohm
resistor in series for
Garmin 600 / 900
attempt to
Do not
reverse servo
direction by
swapping wires
Not used in RV 10
AP
Sorcerer, RV 10, AP 100 Autopilot Installation Manual 13 TruTrak Flight Systems
May 2009
8300-010 Rev B
Page 16

Autopilot Rear Connections to P101 (Continued)
P101
Pin
Function Notes
23
GS DOWN
24
GS UP
25 Primary Serial Input. Baud rate selectable 1200, 2400, 4800 or 9600 baud. Automatically
decodes NMEA-0183, Garmin Aviation Format, or Apollo/UPSAT Moving-Map or GPSS
format. Provides directional reference to the autopilot.
26
ARINC-A
27
ARINC-B
28 Roll Servo Torque Control. A signal from the autopilot to the roll (aileron) servo which sets
the amount of torque to be delivered by the servo.
29 Localizer mode signal. When floating or at power supply potential, the autopilot will assume
CDI signal represents a VOR deviation. When grounded, the autopilot will assume that CDI
represents a localizer signal with different flight dynamics, and in addition will allow coupling
to the Glideslope as well for an ILS approach. Some Nav receivers refer to this as the “ILS
Energize” function.
30 Auxiliary RS-232 Input. Presently unused, intended for future expansion.
31 No Connection. Reserved for future expansion.
Roll (aileron) Servo control lines. These lines cause the stepping motor in the roll servo to run
in the appropriate direction at the desired velocity. They are small-signal lines and do not have
any substantial current-carrying capability or require any special shield ing. Connect to roll
32
servo as shown on wiring diagram.
33
34
35
Wiring to roll servo J201
J101 Pin 32 Pin 33
Standard J201-4 J201-5 Servo CCW (counter-clockwise) Î RIGHT
Reversed J201-5 J201-4 Servo CW (clockwise) Î RIGHT
36 No Connection. Reserved for future expansion.
37 No Connection. Reserved for future expansion.
Analog +/- 150 mV differential signals from Glideslope receiver. Pin 24
more positive than pin 23 indicates GS needle above center.
Digital differential signals from Garmin, Sierra, or other panel-mount receiver
which provide directional steering commands (GPSS) to autopilot
Direction of servo arm / capstan rotation
(as viewed from face of the servo body)
for RIGHT aileron
Not used in RV 10
AP
Not used in RV 10
AP
Reverse servo
direction if necessary
by swapping wires on
pin 32 and 33. See
note 3 on wiring
diagram.
Sorcerer, RV 10, AP 100 Autopilot Installation Manual 14 TruTrak Flight Systems
May 2009
8300-010 Rev B
Page 17

Sorcerer Wiring Diagram
INSTALLATION NOTES:
1.
USE #20 AWG FOR POWER AND GROUND WIRES TO SERVOS
(PINS 1 AND 9 ON 9-PIN CONNECTORS J201, J301 AND J401)
AND WIRE TO AUTOPILOT MASTER AND SINGLE-POINT GROUND.
ALL OTHER WIRING #20 TO #24 AWG.
2.
ROLL SERVO ONLY:
REVERSAL OF SERVO DIRECTION CAN BE
ACCOMPLISHED IF NECESSARY BY SWAPPING
WIRESATPINS4AND5OFTHEROLL
SERVO CONNECTOR (J201).
3. PITCH SERVO ONLY:
REVERSAL OF SERVO DIRECTION CAN BE ACCOMPLISHED
AS NECESSARY BY INSTALLING OR REMOVING A JUMPER
BETWEEN PINS 1 AND 2 OF THE 37-PIN CONNECTOR
( CUSTOMER'S J101 MATING PROGRAMMER P10 1 ).
AIRCRAFT
ELECTRICAL
GROUND ( - )
AUDIO ALERTER OUTPUT
EXT DG/HSI INPUT
PITCH SERVO
J301 9-PIN FEM ALE
D-SUBMINIATURE
NOTE 3
12345678910111213141516171819
20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37
162738495
AUX RS-232
( FUTURE EXPANSION )
CONTROL WHEEL SWITCH
PROGRAMMER M ODULE
J101 37-PIN FEMALE
D-SUBMINIATU RE
FROM NAV RECEIVER
CDI LEFT
CDI RIGHT
LOC MODE
FROM GLIDESLOPE RECEIVER
GS DOWN
GS UP
FROM GPS RECEIVER
PRIMARY SERIAL INPUT
ARINC-A
ARINC-B
(View Facing Rear of unit)
NOTE
162738495
ROLL SERVO
J201 9-PIN FEMALE
D-SUBMINIATURE
2
SORCERER EXTERNAL W IRING DIAGRAM
( W ITHOUT YAW DAMPER )
Sorcerer, RV 10, AP 100 Autopilot Installation Manual 15 TruTrak Flight Systems
May 2009
8300-010 Rev B
Page 18

Sorcerer Wiring Diagram with Yaw Damper
INSTALLATION NOTES:
USE #20 AWG FOR POW ER AND GROUND WIRES TO SERVOS
1.
(PINS 1 AND 9 ON 9-PIN CONNECTORS J201, J301 AND J401)
AND WIRE TO AUTOPILOT MASTER AND SINGLE-POINT GROUND.
ALL OTHER WIRING #20 TO #24 AWG.
2.
ROLL AND YAW DAMPER SERVOS ONLY:
REVERSAL OF SERVO DIRECTION CAN BE
ACCOMPLISHED IFNECESSARY BY SWAPPING
WIRES AT PINS 4 AND 5 OF THE RESPECTIVE
SERVO CONNECTOR (J201 OR J401).
3.4.PITCH SERVO ONLY:
REVERSAL OF SERVO DIRECTION CAN BE AC COMPLISHED
AS NECESSARY BY INSTALLING OR REMOVING A JUMPER
BETWEEN PINS 1 AND 2 OF THE 37-PIN CONNECTOR
( CUSTOMER'S J101 MATING PR OGRAMMER P 101 ).
YAW DAMPER UNIT MUST BE MOUNTED ON A VERTICAL
TRANSVERSE BULKHEAD. JUMPERIS INSTALLED ONLY IF
MODULE IS MOUNTEDON BULKHEAD FRONT SIDE.
AIRCRAFT
ELECTRICAL
GROUND ( - )
AUDIO ALERTER OUTPUT
EXT DG/HSI INPUT
NOTE 2
162738495
YAW DAMPER SERVO
J401 9-PIN FEMALE
D-SUBMINIATURE
AUX RS-232
( FUTURE EXPANSION )
CONTROL WHEEL SW ITCH
1142153164
5 6 7 8 910111213
17 18 19 20 21 22 23 2 4 25
NOTE 4
YAW DAMPER MODULE
J501 25-PIN FEMALE
D-SUBMINIAT URE
PITCH SERVO
J301 9-PIN FEMALE
D-SUBMINIATURE
NOTE 3
1 2 3 4 5 6 7 8 910111213141516171819
20 21 22 23 24 25 26 2 7 28 29 30 31 32 33 34 35 3 6 37
162738495
PROGRAMMER MODULE
J101 37-PIN FEMALE
D-SUBMINIATURE
FROM NAV RECEIVER
CDI LEFT
CDI RIGHT
LOC MODE
FROM GLIDESLOPE RECEIVER
GS DOWN
GS UP
FROM GPS RECEIVER
PRIMARY SERIAL INPUT
ARINC-A
ARINC-B
(View Facing R ear of unit)
NOTE
2
162738495
ROLL SERVO
J201 9-PIN FEM ALE
D-SUBMINIATURE
SORCE RE R EXT E RN A L W IR IN G DIA GRAM
( W ITH YAW DAMPER )
Sorcerer, RV 10, AP 100 Autopilot Installation Manual 16 TruTrak Flight Systems
May 2009
8300-010 Rev B
Page 19

Sorcerer Block Diagram
Sorcerer, RV 10, AP 100 Autopilot Installation Manual 17 TruTrak Flight Systems
May 2009
8300-010 Rev B
Page 20

Sorcerer with all Options Block Diagram
Sorcerer, RV 10, AP 100 Autopilot Installation Manual 18 TruTrak Flight Systems
May 2009
8300-010 Rev B
Page 21

NOTES
Sorcerer, RV 10, AP 100 Autopilot Installation Manual 19 TruTrak Flight Systems
May 2009
8300-010 Rev B
Page 22

Sorcerer, RV 10, AP 100 Autopilot Installation Manual 20 TruTrak Flight Systems
May 2009
8300-010 Rev B
Page 23

RETURN MERCHANDISE POLICY AND PROCEDURE
Under no circumstances should products be returned to TruTrak without first obtaining a Return of
Merchandise Authorization number (RMA #) from TruTrak. An RMA# may be obtained by contacting us at
866-878-8725.
Products that do not have an RMA # will not be processed
Please include documentation stating the reason for the return and describing any symptoms, failure modes,
suspected causes of damage, diagnostics performed, data collected, etc.
Product(s) should be packaged in their original shipping containers. In lieu of this, they should be very
carefully packaged in containers suitable to protect them during transit. For your protection, items should be
insured for the full value. Note that damage caused during shipping will not be repaired under warranty.
The outside of the box must be clearly marked with the RMA # issued by TruTrak and the RMA # must also be
noted on the return documents.
Products will be returned to the customer at no charge via FedEx Ground or UPS Ground. If customer requests
expedited shipping (2
nd
Day or Overnight) they will be charged the shipping cost and must supply a credit card
number.
INTERNATIONAL SHIPMENTS:
Trutrak sends all International shipments with an insurance value on all products. Trutrak pays for shipping
only. The customer is responsible for any and all additional fees, duties, taxes associated with the shipment.
When sending products to Trutrak for repair or otherwise please be advised that the customer is responsible for
all charges and fees associated with shipment. For your protection, items should be insured for the full value.
Trutrak states on all product returns “WARRANTY REPAIR AT NO CHARGE TO CUSTOMER. A COMMERCIAL
INVOICE VALUE OF $___ GIVEN FOR INSURANCE PURPOSE S ONLY”
Please keep in mind that your government or another entity in your country may impose a charge for custom and/or
brokerage fees, duties and taxes on items received from the US. These charges do not originate from our company nor do
we benefit from them in any way. You are responsible for payment of all custom and brokerage fees, duties and taxes that
may be imposed when these goods are imported into your country.
Send ALL return shipments to:
Trutrak Flight Systems, Inc., 1500 South Old Missouri Road, Springdale, AR 72764 USA
Attention: Returns Dept. RMA# ______________
Warranty On TruTrak Flight Systems Products
We here at TruTrak Flight Systems know how important it is to feel as though the customer is purchasing a product
that the manufacturer is going to stand behind. For this reason we want offer more than the basic one year warranty
that is standard to this industry. The warranty on all TruTrak products will be three years from the date of
purchase. Abuse and misuse of a product are not covered under this warranty. Modification to a product may void
the warranty, as well as carry a penalty when upgrading to another product. This three year warranty will be for all
products except the Pictorial Turn & Bank, which will continue to have a warranty of one year from the date of
purchase.
.
Page 24

TruTrak Flight Systems, Inc.
1500 S. Old Missouri Rd.
Springdale AR 72764
(479) 751-0250
FAX (479) 751-3397
www.trutrakap.com
 Loading...
Loading...