

Page 1

Installation & User Guide
8300-011 Rev B
For
Pictorial Pilot
TRUTRAK FLIGHT SYSTEMS
1500 S. Old Missouri Road
Springdale, AR 72764
Ph. 479-751-0250 Fax 479-751-3397
www.trutrakflightsystems.com
Page 2
INSTALLATION MANUAL
for
Pictorial Pilot
TABLE OF CONTENTS
Power Up ......................................................................................................................................................................1
Basic Operation ............................................................................................................................................................1
Nav Mode Operation ....................................................................................................................................................1
Mechanical Considerations........................................................................................................................................... 2
Magnetic Considerations ..............................................................................................................................................2
RFI / EMI Considerations............................................................................................................................................. 3
Pictorial Pilot 2” cutout.................................................................................................................................................3
Pictorial Pilot 3” cutout.................................................................................................................................................4
GPS Setup Guide ..........................................................................................................................................................5
Portable GPS .............................................................................................................................................................................. 5
Panel mount GPS ....................................................................................................................................................................... 8
Definitions ..................................................................................................................................................................10
Pictorial Pilot Settings ................................................................................................................................................10
Ground Checkout........................................................................................................................................................11
First Flight ..................................................................................................................................................................13
Manual Gyro Set operation.........................................................................................................................................13
Magnetic Calibration ..................................................................................................................................................14
Electrical Pin-out ........................................................................................................................................................15
Pictorial Pilot Wiring Diagram ...................................................................................................................................16
Pictorial Pilot Block Diagram..................................................................................................................................... 16
Revision Date Description Page #
A 1/1/2008 Initial Release
B 12/07/2009 Updated Warranty information 17
Page 3
Power Up
NOTE: When powering up the autopilot ensure that the aircraft is as still as possible
for 10 seconds.
The power up of the autopilot takes approximately ten seconds. During the power cycle it is very important that the aircraft be
as still as possible for the initialization of the internal gyro. While the autopilot is in the power up the display will show three
flashing
valid GPS signal present the display will show three non-flashing
(“–”) characters. If there is a GPS signal present the display will now change to read (“OFF”). If there is not a
(“–”) characters.
Basic Operation
If a valid GPS signal is present, and the autopilot is not engaged the display of the autopilot is a digital DG displaying a
gyroscopically smoothened GPS track. Once the aircraft is off the ground and at a safe altitude, the autopilot can be engaged.
There are two ways to engage the autopilot. Clicking the knob will engage the autopilot and the “AP” light will light up. If a
GPS signal is present, the autopilot will display the ground track before being engaged and will now hold the track. If there is
no GPS signal the display will show
way to engage the autopilot is with the Control-Wheel Switch, pushing and holding the control wheel switch for approximately
1-1/2 seconds and releasing will engage the autopilot and the “AP” light will light up.
“–| – |–” and will be in “heading hold” mode instead of track hold mode. The second
Changing the selected track can be done two different ways. One way in which the track can be changed is to rotate the knob.
Each detent will be a one-degree change in selected track. If the knob is pushed in and rotated each detent will be a 5 degree
change in selected track. If there is no GPS signal present rotating the knob will change the heading by approximately onedegree per detent, pushing in and turning will result in approximately 5 degrees per detent. The other way to change the
selected track is with the Control-Wheel Switch. Pushing and holding the Control-Wheel Switch will disengage the servo and
the display on the autopilot will be a Digital DG .While holding the Control-Wheel Switch, fly the aircraft manually to the
desired track using the Digital DG display as a reference. Upon release of the Control-Wheel Switch, the servo will re-engage
and the autopilot will now fly the new selected track. If there is no GPS signal present the Digital DG will not be displayed.
Disengaging the autopilot can be done in two different ways. Pressing and holding the knob for approximately 1-1/2 seconds
will disengage the autopilot. The second way to disengage the autopilot is with the Control-Wheel Switch. Momentarily
pushing and releasing the Control-Wheel Switch will disengage the autopilot.
Nav Mode Operation
When there is a flight plan present in the GPS the autopilot can follow the programmed flight plan. To enter the Nav Mode,
click the knob and the “NAV” light will light up. (Take care not to hold the knob for more than 1-1/2 seconds or the autopilot
will disengage.) The autopilot display will now once again become a Digital DG, showing the current ground track. The
Pictorial Pilot will intercept the Nav track at about a 45 degree angle. Clicking or rotating the knob on the autopilot will exit
the Nav Mode. When on course, 1 or 2-degree excursions are normal. When the end of the flight plan is reached or the flight
plan is cancelled on the GPS unit, the autopilot will continue flying the track it was flying when the flight plan ended. If the
flight plan has multiple waypoints, the autopilot will make the necessary turn at each waypoint. Because, typically, the
information from the GPS to the autopilot does not change until the waypoint is crossed, the autopilot will over-fly the
waypoint, and then will fly back to intercept the new course line. Some GPS units have a “turn anticipation” feature, and if
this feature is enabled on the GPS the autopilot may turn prior to reaching a given waypoint.
TruTrak Flight Systems Pictorial Pilot Installation & User Guide
December 2009 1 8300-011 Rev B
Page 4
Mechanical Considerations
The installation information in this section is extremely important and must be clearly
understood by the installer. Improper servo installation or failure to observe and diagnose
installation problems prior to flight can result in extremely serious consequences, including
loss of ability to control the aircraft. If there are any questions on the part of the installer it
is mandatory to resolve these questions prior to flight of the aircraft.
Most modern experimental aircraft use push-pull tubes to drive the primary controls. These tubes generally have a total travel
of 3” or less; therefore, it is best to connect the autopilot servo to the primary control by the same method. This connection
consists of an arm on the servo connected by a push-pull rod to the primary control. Rod-end bearings are required on each
end of the push-pull rod.
The servo arm must not rotate even near to the point called OVER CENTER, the point at which the primary
aircraft control would lock up. Some aircrafts mechanical primary control installations will not allow this to
occur and do not need the servo stops.
This is a condition that would result from the servo being back driven when the pilot operates the controls, or
from the servo itself driving the controls to a stop. To protect against this mechanical stops are supplied with the
servos. These stops are drilled so that they can be mounted at different angles as required (18° intervals).
In addition to the proper use of the stop it is important to know the amount of travel on the primary control that
the servo can handle. With the push rod connected to the outermost hole (1 ½”) the travel on the primary cannot
exceed 2 ½”, the intermediate hole 2 1/16”, and the inner hole 1 5/8”.
It is important to note that the servo travel should be very nearly the same in both directions. In most cases this
means that the servo arm needs to be perpendicular to the push rod but there are exceptions such as the RV-4 and
RV-8 installations.
There will be installations in which space does not permit the use of the stop. When this is done the aircraft’s primary control
stops must be positive and care must be taken to be sure that the servo drives the push rod the same distance in both directions,
and that the travel limits of the servo arm are not exceeded.
There are installations in which the travel of the push-pull tube exceeds the allowable 2 ½”. For such installations, the drive
can be applied to a bell crank at a radius point that moves the desired 2 ½” of maximum allowed travel in the outermost hole of
the arm.
When there is no way to have a drive point of less than 2 ½” or when the primary control is cable-driven it is necessary to use
the capstan-cable servo drive. When this is done the servo should be mounted so that the 1/16” diameter cable which wraps
around the capstan when extended parallel to the primary cable is approximately 3/16” from the primary cable. If the primary
control travel does not exceed 5” the cable-locking pin will be 180° away from the point at which the cable leaves the capstan.
When the primary control is at the neutral point this means the total cable wrap around the capstan is 360°. If the primary
control travel is greater than 5” the cable wrap is 720°and the pin is adjacent to the output point when the primary control is at
the neutral point.
The cable clamps when properly installed will not slip and thus get loose, but it is desirable to nicopress or swedge a fitting on
to the cable so as to provide added assurance that the cable will not become slack. If the bridle cable is not sufficiently tight
there will be lost motion in the autopilot drive, this will result in hunting (oscillation).
Magnetic Considerations
Because the autopilot contains a built-in magnetometer for a backup source of heading in the event of GPS loss, it is important
to try to locate the programmer away from known sources of magnetic disturbance. The calibration procedure can account for a
moderate amount of fixed disturbance (for example, nearby iron objects) but it cannot adjust for changing magnetic fields such
as would be generated by aircraft compasses or certain electrical devices. One such source of such problems is the “Flag”
mechanism in some older DG or HSI devices. These units use a solenoid to hold the flag out of sight, and the magnetic field
will then change when the flags come and go. If at all possible, place the autopilot so as to be as far as possible from such
devices. A hand-held compass can be used to assist in finding fixed or variable disturbances prior to installation of the
Autopilot. Even a few inches can make an appreciable difference in the magnetic disturbance level. It should be noted also that
strobe light controls, landing lights, navigation lighting, pitot heat, generate very strong currents in their wiring, thus they will
TruTrak Flight Systems Pictorial Pilot Installation & User Guide
December 2009 2 8300-011 Rev B
Page 5
create a periodically pulsating magnetic field disturbance. Shielding has no effect on this problem; the only solution is to keep
strobe light wiring as far away as possible from any electronics which can be affected by pulsating magnetic fields.
RFI/EMI considerations
The autopilot programmer is shielded and does not generate any appreciable level of electromagnetic interference. Moreover,
the servo lines (except for power and ground) are low-current and cannot contribute to RF interference. The servo power and
ground lines do have switching currents through them, but so long as there are no parallel runs of servo power and ground lines
with such things as poorly-shielded antenna lines or strobe light power lines, there is no need to shield the servo harnesses.
The autopilot itself has been internally protected from RF interference and has been tested under fairly extreme conditions,
such as close proximity to transmitting antennas. However, it is always good practice to insure that such antennas are properly
shielded and not routed directly over or under sensitive panel-mounted electronic equipment. Most problems in this area are the
result of improper RF shielding on transmitting antennas, microphone cables, and the like. The most sensitive input to the
autopilot is the Control Wheel Switch input. This line should not be routed in parallel with transmitting antennas or other
sources of known RF interference. If necessary, it can be shielded with the shield connection to pin 8 of the autopilot
connector.
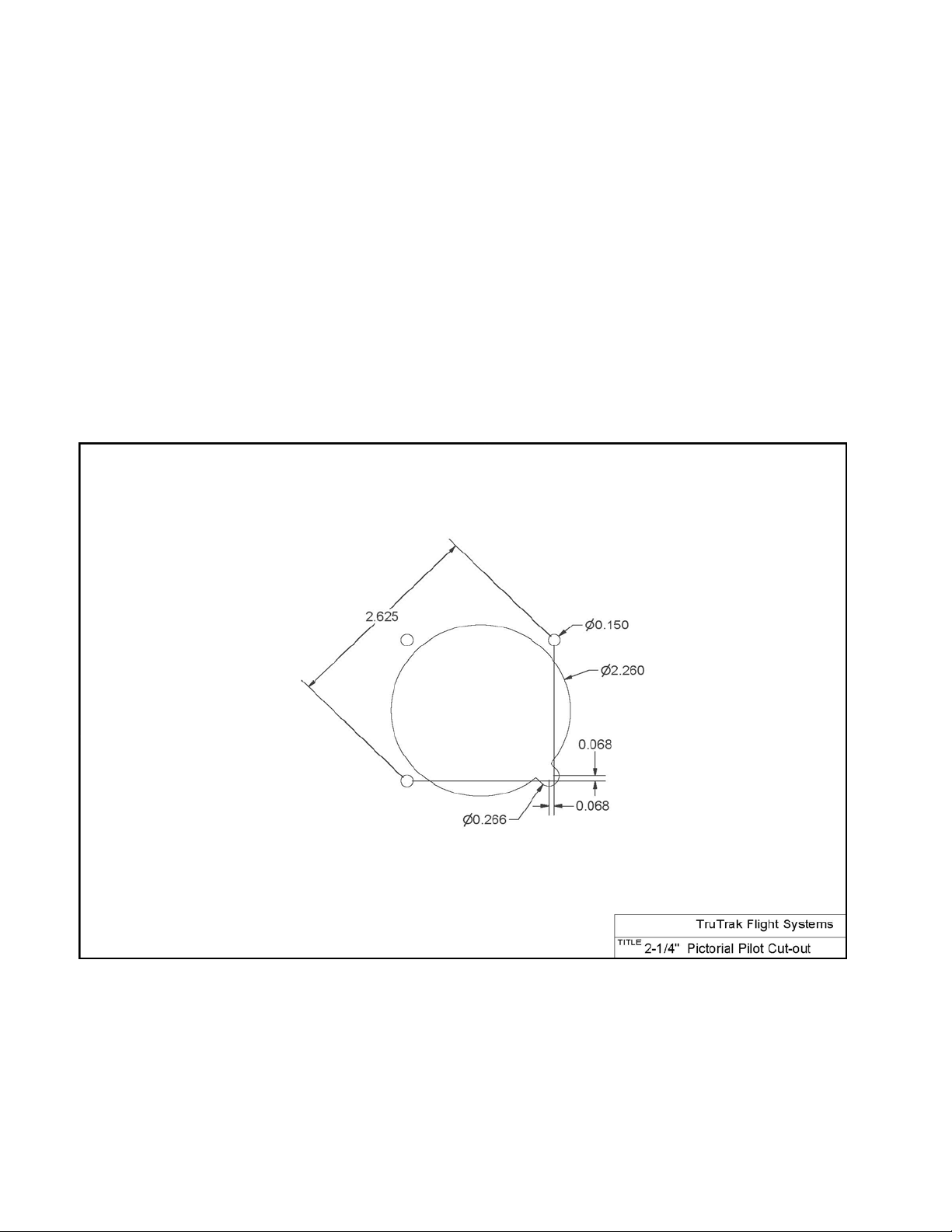
Pictorial Pilot 2” cutout
TruTrak Flight Systems Pictorial Pilot Installation & User Guide
December 2009 3 8300-011 Rev B
Page 6
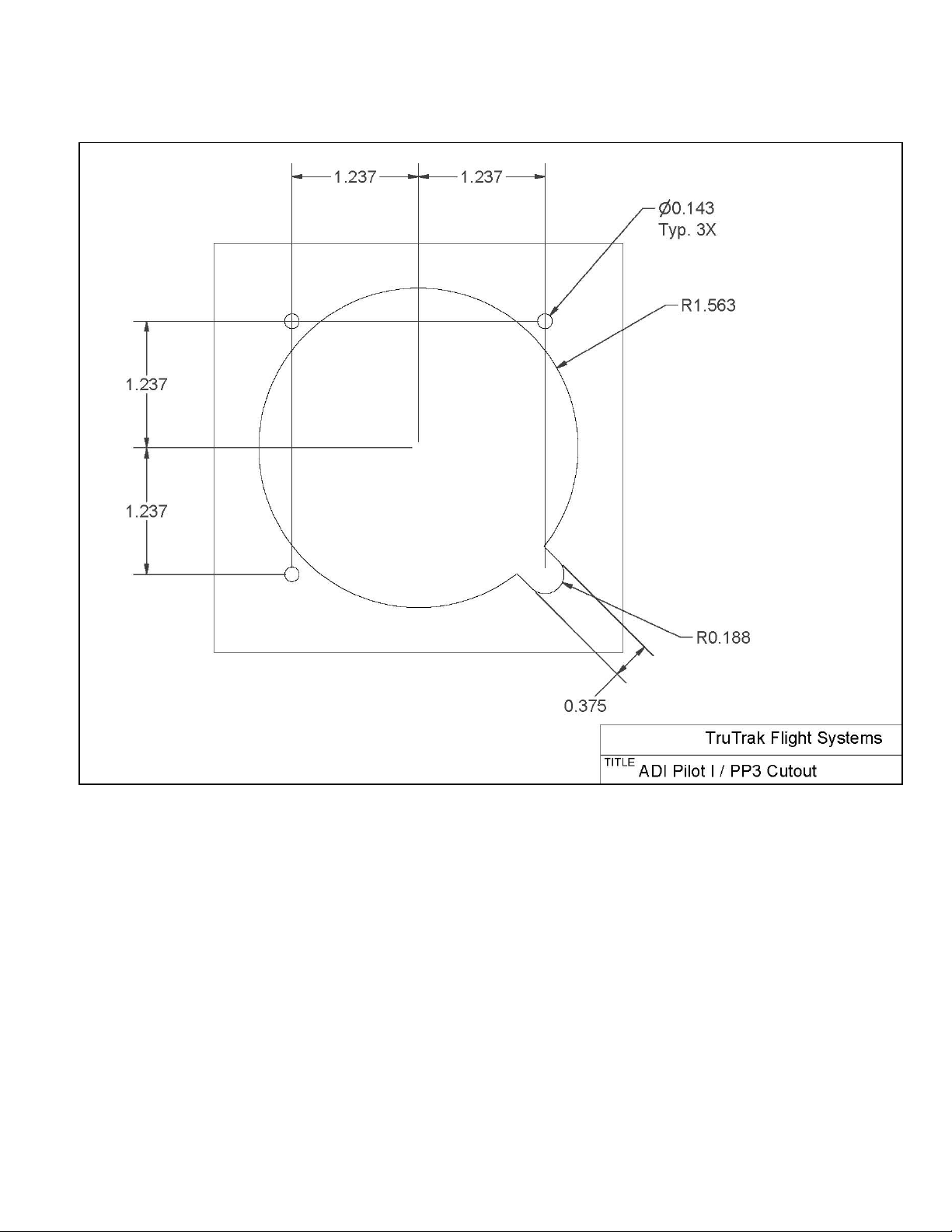
Pictorial Pilot 3” cutout
TruTrak Flight Systems Pictorial Pilot Installation & User Guide
December 2009 4 8300-011 Rev B
Page 7

GPS Setup Guide
Note that the information in the tables is based upon the best information available from each manufacturer’s documentation at
the time of publication. Please consult the appropriate installation manual for confirmation of wiring information.
Portable GPS
Many new handheld GPS’s have adequate output required to fly a TruTrak autopilot. Although most support data output not
all handhelds will provide consistent and reliable information required to fly all TruTrak autopilots. Therefore, some
handhelds will not fly the airplane well. Performance may decline by putting the processor in high-load situations.
We require a data output rate of once per second for best performance. Some handhelds output data at longer intervals
than once per second. These handhelds will cause the autopilot not to perform well in turns and it may cause overshooting and
hunting. If the baud rate is selectable the optimum setting is 4800. Most handhelds will require a data cable that plugs into the
handheld and provides a medium for data output. This is an accessory and is available from your GPS manufacturer. The
setup procedures are in your GPS manual. If your GPS is not listed here consult your GPS manual for NMEA output setup.
The autopilot must have a direct connection with the handheld GPS to provide the autopilot with RS-232. To allow the
handheld GPS to be removed easily you should add a connector in your panel. We recommend that you use a 9 pin D
subminature connector in your panel that will mate to the harness from the GPS. This will also allow you to wire power and
ground and use the aircraft electrical system to power your handheld GPS.
Magellan GPS 315 A
The Magellan GPS 315 A requires a Power/Data Cable (Magellan Product Number 730276) to provide data output.
The Magellan GPS 315 A must be configured to provide the correct output to the autopilot.
Press the MENU key then select “Setup. Press ENTER. Select “NMEA” and press ENTER. Select “V2.1 GSA”
then press ENTER. Next we must set the baud rate. Press MENU then select “SETUP” and press ENTER. Next
Select “BAUD RATE” and press enter. Select 4800 for the baud rate. Press ENTER.
Note that this is the baud rate that will entered into the autopilot in the setup mode.
Garmin GPS III
The Garmin III requires a Power/data cable (Garmin Part Number 010-10082-00) to provide data output.
The Garmin III must be configured to provide the correct output to the autopilot.
Press the MENU key twice. Select ‘Setup’. Press ENTER. Select the ‘Interface’ tab. Press ENTER. Select the
NMEA format.
Note: The default baud rate is 4800. This is the baud rate that will entered into the autopilot in the setup mode.
GPS 92
The Garmin 92 requires a Power/data cable (Garmin Part Number 010-10082-00) to provide data output. The Garmin 92 must
be configured to provide the correct output to the autopilot.
Press the PAGE key until the ‘Main Menu’ appears. Select ‘Setup Menu’ and press ENTER. Next select ‘Interface.’
Press ENTER. Select NONE/NMEA.
Note: The default baud rate is 4800. This is the baud rate that will entered into the autopilot in the setup mode.
Garmin GPS 195
The GPS 195 provides data output every two seconds and may be slow in recognizing turns and will overshoot the desired
track. This may cause the autopilot to wander and not perform well in turns.
The Garmin 195 requires a Power/data cable (Garmin Part Number 010-10135-00) to provide data output. The Garmin 195
must be configured to provide the correct output to the autopilot.
Press the MENU key twice. Select ‘Set-Up Menu’. Press ENTER. Select ‘Input/Output’. Press ENTER. The
input/output format is ‘No In/NMEA Out.’ Note that the baud rate is automatically set at 4800 bps.
Note: This is the baud rate that will need to be entered in the setup mode of the autopilot.
Now the Garmin 195 is correctly set up to provide the RS-232 serial output required by your TruTrak autopilot.
TruTrak Flight Systems Pictorial Pilot Installation & User Guide
December 2009 5 8300-011 Rev B
Page 8

Garmin GPS 196
The Garmin 196 requires a Power/data cable (Garmin Part Number 010-10082-00) to provide data output.
The Garmin 196 must be configured to provide the correct output to the autopilot.
Press the MENU key twice. Use the arrow keypad to select the ‘SETUP’ tab.
Within the Setup Menu select the ‘INTERFACE’ tab. Using the arrow keypad highlight the ‘Serial Data Format’
field. Use the arrow keypad to select ‘NMEA In/NMEA Out’ and press ENTER.
Set the baud rate to 4800.
Note: This is the baud rate that will need to be entered in the setup mode of the autopilot.
Press MENU to enter the Advanced NMEA page. Select ‘Advanced NMEA Setup’ and press ENTER.
Using the arrow keypad and the ENTER key to turn OFF ‘GPS Status (GSA, GSV)’, ‘Waypoint/Route (WPL, RTE)’,
and ‘GARMIN Proprietary’.
Now the Garmin 196 is correctly set up to provide the RS-232 serial output required by your TruTrak autopilot.
Garmin 295
The Garmin 295 requires a power/data cable (Garmin Part Number 010-10082-00) to provide data output. The Garmin 295
must be configured to provide the correct output to the autopilot.
Press the MENU key twice. Use the rocker keypad to select the ‘INTERFACE’ tab.
Press the down portion of the rocker keypad to select the ‘FORMAT’ field.
Press ENTER and a popup window will show the available settings.
Use the rocker keypad to select ‘NMEA OUT’ then press ENTER. Select 4800 for the baud rate.
Note: This is the baud rate that will need to be entered in the setup mode of the autopilot.
Now the Garmin 295 is correctly set up to provide the RS-232 serial output required by your TruTrak autopilot.
Garmin 296
The Garmin 296 must be configured to provide the correct output to the autopilot.
Press the MENU key twice. Use the rocker keypad to select the SETUP in the vertical tabs. Use the rocker keypad to
select the ‘COM 1’ tab.
Press the down portion of the rocker keypad to select the ‘FORMAT’ field.
Press ENTER and a popup window will show the available settings.
Use the rocker keypad to select ‘NMEA IN / NMEA OUT’ then press EN TER. Select 4800 for the baud rate. Note:
This is the baud rate that will need to be entered in the setup mode of the autopilot.
Press MENU to enter the Advanced NMEA page. Select ‘Advanced NMEA Setup’ and press ENTER.
Using the arrow keypad and the ENTER key to select “FAST OUTPUT” or turn OFF ‘GPS Status (GSA, GSV)’,
‘Waypoint/Route (WPL, RTE)’, and ‘GARMIN Proprietary’.
Now the Garmin 296 is correctly set up to provide the RS-232 serial output required by your TruTrak autopilot.
Garmin 396
The Garmin 396 must be configured to provide the correct output to the autopilot.
Press the MENU key twice. Use the rocker keypad to select the SETUP in the vertical tabs. Use the rocker keypad to
select the ‘Interface’ tab.
Press the down portion of the rocker keypad to select the ‘Serial Data Format’ field.
Press ENTER and a popup window will show the available settings.
Use the rocker keypad to select ‘NMEA IN / NMEA OUT’ then press EN TER. Select 4800 for the baud rate. Note:
This is the baud rate that will need to be entered in the setup mode of the autopilot.
Press MENU to enter the Advanced NMEA page. Select ‘Advanced NMEA Setup’ and press ENTER.
Using the arrow keypad and the ENTER key to select “FAST OUTPUT” or turn OFF ‘GPS Status (GSA, GSV)’,
‘Waypoint/Route (WPL, RTE)’, and ‘GARMIN Proprietary’.
Now the Garmin 396 is correctly set up to provide the RS-232 serial output required by your TruTrak autopilot.
Garmin 496
The Garmin 496 must be configured to provide the correct output to the autopilot.
Press the MENU key twice. Use the rocker keypad to select the SETUP in the vertical tabs. Use the rocker keypad to
select the ‘Interface’ tab.
TruTrak Flight Systems Pictorial Pilot Installation & User Guide
December 2009 6 8300-011 Rev B
Page 9

Press the down portion of the rocker keypad to select the ‘Serial Data Format’ field.
Press ENTER and a popup window will show the available settings.
Use the rocker keypad to select ‘NMEA IN / NMEA OUT’ then press EN TER. Select 4800 for the baud rate. Note:
This is the baud rate that will need to be entered in the setup mode of the autopilot.
Press MENU to enter the Advanced NMEA page. Select ‘Advanced NMEA Setup’ and press ENTER.
Using the arrow keypad and the ENTER key to select “FAST OUTPUT” or turn OFF ‘GPS Status (GSA, GSV)’,
‘Waypoint/Route (WPL, RTE)’, and ‘GARMIN Proprietary’.
Now the Garmin 496 is correctly set up to provide the RS-232 serial output required by your TruTrak autopilot.
Lowrance Airmap 100
The Lowrance Airmap 100 requires a NMEA/DGPS adapter cable to provide data output. The Lowrance Airmap 100 must be
configured to provide the correct output to the autopilot.
Press the MENU key then select “NMEA/DGPS CONFIG” from the “System Setup” menu. Highlight the “NMEA
OUT” menu then press the right arrow key.
Note: The default baud rate is 4800. This is the baud rate that will entered into the autopilot in the setup mode.
Now the Lowrance Airmap 100 is correctly set up to provide the RS-232 serial output required by your TruTrak autopilot.
Lowrance Airmap 1000/2000
The Lowrance Airmap 1000/2000 requires a NMEA/DGPS adapter cable to provide data output. The Lowrance Airmap
1000/2000 must be configured to provide the correct output to the autopilot. AirMap has one NMEA 0183 version 2.0
compatible communication port,
Press MENU|MENU|↓ to SYSTEM SETUP|ENT. Press ↓ to COMMUNICATIONS PORT|ENT. Select 9600
Baud. This is the baud rate that will entered into the autopilot in the setup mode. Select “NMEA OUT”
Now the Lowrance Airmap 1000/2000 is correctly set up to provide the RS-232 serial output required by your TruTrak
autopilot.
AvMap EKP IV
The AvMap EKP IV requires a NMEA/DGPS adapter cable to provide data output. The AvMap EKP IV must be configured
to provide the correct output to the autopilot.
MENU’ 1 sec. + “COMMUNICATIONS” + ‘ENTER’ + “NMEA OUTPUT” + ‘ENTER’.
The Output NMEA0183 messages are RMC, RMB that need to be selected.
Note: The default baud rate is 4800. This is the baud rate that will entered into the autopilot in the setup mode. The yellow
wire is the Data out TX wire.
Now the AvMap EKP IV is correctly set up to provide the RS-232 serial output required by your TruTrak autopilot.
TruTrak Flight Systems Pictorial Pilot Installation & User Guide
December 2009 7 8300-011 Rev B
Page 10

Panel mount GPS
Garmin 155XL/250XL/300XL
Garmin 155XL/250XL/300XL connections to TruTrak autopilot
J1 on
Garmin unit
Signal Name
(Garmin)
Signal Name
(TruTrak)
P101 on
TruTrak PP
19 GPS RS 232 OUT 2 Primary Serial Input 3
Press & hold MSG, rotate outer knob until I/O setup page is displayed. Press CRSR twice and rotate inner knob to select
“plotting” for output to autopilot. Rotate outer knob to advance cursor to the baud rate field, select 9600. Press CRSR to
finish.
Note that for the Garmin units, the autopilot will need to be set for 9600 baud.
Garmin 430 and 530
Garmin 430 and 530 connections to TruTrak autopilot
P4001 [P5001] on
Garmin 430 [530]
Signal Name
(Garmin)
Signal Name
(TruTrak)
P101 on
TruTrak PP
56 GPS RS 232 OUT 1 Primary Serial Input 3
Power 430/530 up and turn it on while holding down the ENT key. Release the ENT key when the display activates. After the
data base pages, the first page displayed is the MAIN ARINC 429 CONFIG page. While in Configuration mode, pages can be
selected by ensuring the cursor is off and rotating the small right knob. To change data on the displayed Configuration Page,
press the small right knob (CRSR) to turn on the cursor. Turn the large right knob to change between data fields. Turn the large
or small right knob to change a field that the cursor is on. Once you have made the desired selection, press the ENT key to
accept the entry.
Advance to the MAIN RS232 CONFIG page.
On the row labeled CHNL1, select OUTPUT Î Aviation.
Note that for the Garmin units, the autopilot will need to be set for 9600 baud.
UPSAT GX-50/60/65
UPSAT GX-50/60/65 connections to TruTrak autopilot
37-Pin Connector
on UPSAT
Signal Name
(UPSAT)
Signal Name
(TruTrak)
P101 on
TruTrak PP
GX-50/60/65
5 Use pin 5 – TxD1 Primary Serial Input 3
Power the GX-50/60/65 up and turn it on while holding down the leftmost and rightmost “smart keys.” Rotate the LARGE
knob to the Serial Interface Configuration “CH RX TX” page. Press SEL (the selection fields will start flashing), rotate the
LARGE knob to select the port, rotate the SMALL knob to select the desired configurations, and then press ENT when
complete.
If both the GX unit AND the DigiFlight unit have GPSS capability,
select “GPSS” for CH 2, TX column, and wire pin 17 on the DigiFlight IIVSG to pin 22 of the GX unit
Otherwise
select “MOVING MAP” For CH 1, TX column and wire pin 17 on the DigiFlight II / IIVS to pin 5 of the GX unit
To restore the GX-50/60/65 to normal operation, switch its power off, and then back on.
Note that for the GX-50/60/65 units, the autopilot will need to be set for 9600 baud.
TruTrak Flight Systems Pictorial Pilot Installation & User Guide
December 2009 8 8300-011 Rev B
Page 11

Garmin AT GNS480
Garmin AT GNS480 connections to TruTrak autopilot
P1 on GNS480 Signal Name (Garmin AT) Signal Name
(TruTrak)
22 RS232 TxD2 Primary Serial Input 3
P101 on TruTrak
DT/PP
Power 480 up and select the 1, 4, MENU/ ENTER keys immediately after the GNS 480 initialization is complete. After
restart, the first page displayed is the SETUP page. Select the SERIAL PORTS with the button next to it. Press the small knob
to enter the edit mode and move to the TX column for the channel that you have connected the serial wire to (channel 2).
Select MAPCOM and 9600. Press the small inner knob again to save. Then press the BACK to go back to the Setup page.
Serial output baud rate should be set to 9600 on the GNS480. Set the TruTrak baud rate to 9600.
KMD 150
Power the KMD 150 up and turn it full bright. Press the MENU button then the SETUP button then the INST & DIAGS
button then the DATA IN/OUT. Change the DATA OUT PUT to NEMA 0183 the manual states the Baud rate is 9600. The
output pin is pin 11 and connects to the Primary Serial input on the auto pilot controller.
You will need to match 9600 Baud rate in the auto pilot.
KMD 150 connections to TruTrak autopilot
37 Pin Connector
on KMD 150
Signal Name
Signal Name
(TruTrak)
P101 on
TruTrak PP / DT
11 (AV NAV) Primary Serial Input 3
TruTrak Flight Systems Pictorial Pilot Installation & User Guide
December 2009 9 8300-011 Rev B
Page 12

Definitions
ACTIVITY (Setting range 0 – 24) The velocity at which the servo moves the control surface. The higher the
number the more movement you will see in the control surface. With a standard servo (DSB-X,
DSP-X) you should start at 0 then work your way up in flight to set the level for your aircraft. The
High Torque Servo (DSB-HB, DSB-HC) has a different gear ratio, so an Activity setting of 12 will
be equal to about 0. With too low a setting the aircraft will hunt slowly and appear to be lazy. With
too high a setting the aircraft will hunt rapidly, and appear nervous and jittery.
TORQUE (Setting range 0-12) The holding force that the servo has on the control surface. This setting should
not be too low; the reason is that the servo will not be able to fly the aircraft in turbulence. The
lower the setting the easier it is to override the servo if you need to. It is recommended that the
torque be set in moderate turbulence, so that one can be certain that the level is not set too low.
BAUD RATE (Setting Range 600-9600) This is the communication speed that must match your GPS serial output
setting. Most handhelds are 4800 and most panel mounts are 9600.
MICROACTIVITY (Setting Range 0-32) This is used to remove the significant lost motion in the control system,
usually a cable control system. Most aircraft do not need this changed from 0. An example of when
one might need to adjust microactivity is: If flying in still air, there is a very slight wing rock that
can not be solved by adjusting the ACTIVITY setting.
Pictorial Pilot Settings
Engage the autopilot by pressing and releasing the lower right knob. Then press and hold the knob for approximately 5
seconds, until the first setup screen is displayed.
“1” LATERAL ACTIVITY
Rotate the lower right knob as necessary to adjust the lateral activity value to a value of 1 or 2. Press and release the lower
right knob to advance to next setup screen.
“2” LATERAL TORQUE
Rotate the lower right knob as necessary to adjust the torque value close to the maximum value of 12. Press and release the
lower right knob to advance to next setup screen.
“5” MICRO ACTIVITY
This setting should be left at zero unless advised by the factory. This setting is used to remove lost motion from the control
system. Press and release the lower right knob to advance to next setup screen.
“3” BAUD RATE
Select either 48 or 96. Where 48 is a baud rate of 4800 and 96 is a baud rate of 9600. Press and release the lower right knob to
advance to next setup screen.
“4” MAGNETIC CALIBRATION
This is the option for calibrating the internal backup magnetometer. To this question, leave the answer set to 0 (which means
“no”) at this time. This operation will be done at a later time during flight testing. Click the knob to leave the setup mode.
TruTrak Flight Systems Pictorial Pilot Installation & User Guide
December 2009 10 8300-011 Rev B
Page 13

Pictorial Pilot Ground Checkout
Must be performed before first flight
Once wiring is completed the autopilot should be tested in the aircraft while on the ground. The first step is to enter the setup
mode on the autopilot and set all parameters to their correct values. Apply power to the autopilot programmer.
When power is first applied to the unit, the display will show three flashing dash (“–”) characters. After approximately ten
seconds, the autopilot is ready to be set up for operation, indicating three non
happens to be connected to the autopilot, has a valid position fix, and is running at the correct baud rate, the autopilot will
indicate the word “OFF” instead of the three dashes.)
Engage the autopilot by clicking the knob. Then press and hold the knob for approximately 4 seconds, until the first setup
screen is displayed.
This display will show a flashing “1” and a two-digit number from 0 to 24, representing the autopilot activity level (default 6).
With the activity setup screen on the display, rotate the knob as necessary to adjust the lateral activity value to a value of 1 or 2.
Click the knob to enter the activity value and advance to the next screen.
The second setup screen, with a flashing “2” is used to set the torque of the autopilot servo (default 12). Rotate the knob as
necessary to adjust the torque value close to the maximum value of 12. Once that is done, click the knob to enter that value
and advance to the next screen.
The third setup screen, with a flashing “5” is used to set the micro activity of the autopilot servo (default 0). Rotate the knob as
necessary to adjust the activity value to the value of 0 to 32. This setting is used in aircraft, in which lost motion has been
observed in the control system, or when a slow wing rock persists and adjusting activity (setting 1) does not solve the problem.
Once that is done, click the knob to enter that value and advance to the next screen
-flashing dashes on the display. (If a GPS unit
The fourth setup screen, with a flashing “3” is used to set the baud rate (speed) of the serial interface to the GPS receiver
(default 96). Rotate the knob to select among five choices as shown in the table below.
Displayed value RS-232 serial rate
06 600 Baud
12 1200 Baud
24 2400 Baud
48 4800 Baud
96 9600 Baud
9600 and 4800 are the most common settings. Having chosen the desired baud rate, click the knob to enter that value and
advance to the next screen.
The fifth setup screen, with a flashing “4” provides the option for calibrating the internal backup magnetometer. To this
question, leave the answer set to 0 (which means “no”) at this time. This operation will be done at a later time during flight
testing.
Click the knob to leave the setup mode. The Pictorial Pilot display will now show “–| – |–” indicating the magnetic “headinghold” mode. (If the GPS were indicating sufficient ground-speed for flight, the display would be showing the current ground
track instead.)
Push and hold the knob for approximately 1-1/2 seconds. The Pictorial Pilot display will now return to its disengaged (off)
state, which is three “–” characters if no GPS fix has been obtained, or “OFF” if a GPS position fix has been obtained, and the
“AP” light will turn off as well.
While the autopilot is in its disengaged (off) mode, press and hold the knob. The display will now show “–| – |–” with the
center dash character blinking, indicating the Manual Gyro Set operation. Continue to hold the knob in for about 10 seconds
while the autopilot is not being moved about, to re-center the gyro manually.
The next step in the check-out procedure is to verify that the servo runs, and in the correct direction. Click the knob to again
engage the autopilot. The servo should be responding at this time, moving the controls only very slowly in attempt to hold
magnetic heading constant. Rotate the knob to right and select a heading approximately 20 degrees to the right. The autopilot
will now move the controls in an attempt to cause a turn towards the right. If servo direction is not correct, the wires going to
pins 4 and 5 of the roll servo (pins 11 and 12 on the main connector) must be reversed to achieve the correct response. If the
TruTrak Flight Systems Pictorial Pilot Installation & User Guide
December 2009 11 8300-011 Rev B
Page 14

servo does not move at all, double-check the torque setting (setup screen 2) to make sure it is at least 10. If a servo jitters but
does not actually rotate, check the wiring on the four servo drive lines to that servo for continuity and correctness. If the servo
does not seem to have any torque, check the roll torque control line for continuity and correctness. With a torque setting of 12,
and the autopilot engaged, the torque control line should measure approximately 4.9 volts DC.
Rotate the knob to the left and select a heading approximately 40 degrees to the left. The autopilot will now move the controls
in attempt to cause a turn to the left. Rotate the knob to the right and select a heading 20 degrees to the right to stop the servo.
While the servo is running, check that the servo arm or capstan is properly operating the controls. For servo installations using
an arm, check that as the controls go from limit to limit the arm of the servo remains in the operating range of the servo (a
maximum of 100 degrees total rotation) and that when the controls are centered, the connecting push rod is approximately
perpendicular to the arm of the servo. For capstan systems, insure that the cabling remains at proper tension and is properly
secured as the servo moves the controls from stop to stop. Insure that the servo remains secure in its mounting and does not
flex its mounting bracket as it drives the control to its stops. For installations using an arm, insure that as the servo moves the
control towards the end of control travel it does not cause the main control’s torque tube to flex in any way that could cause
control system lockup at the extremes of servo travel. Insure that any “lost motion” in the linkages is eliminated or minimized,
in order to maximize the performance of the autopilot. Lost motion (dead zone) will result in wandering or slow “hunting”
behavior in flight. Lost motion in the linkage can best be observed by temporarily clamping the servo arm and gently moving
an aileron back and forth, while observing how much aileron movement takes place against the clamped servo.
The next step in the check-out procedure is to verify that the serial input from the GPS receiver is being properly received and
interpreted. With the aircraft outside of any building, power up the GPS receiver and the autopilot. After the GPS receiver
acquires its position, the autopilot display will change from “ – – – ” to “OFF” indicating that valid position data is available.
If the word “OFF” is not displayed, even after it is known that the GPS unit has a position fix, the problem must be diagnosed.
Summary:
ENGAGE AUTOPILOT WITH FLIGHT CONTROL CENTERED,
ROTATE KNOB CLOCKWISE. FLIGHT CONTROL MUST MOVE
TOWARD RIGHT. ROTATE KNOB COUNTER CLOCKWISE,
FLIGHT CONTROL MUST MOVE BACK TOWARD LEFT.
TruTrak Flight Systems Pictorial Pilot Installation & User Guide
December 2009 12 8300-011 Rev B
Page 15

Pictorial Pilot First Flight
The first flight should be done after having completed all the setup and testing on the ground. For the first flight, it is important
that the GPS unit is properly functioning with the autopilot, so that the dynamics of flight can be set without consideration of
the calibration of the magnetic backup system. As discussed earlier, when there is proper connection to the serial input of the
autopilot, the display will show “OFF” when it is disengaged and valid GPS data is present. Once the GPS ground speed is
sufficient, the display will show switch to the digital DG and show the current gyroscopically smoothened ground track. If this
does not occur, it is best to diagnose and fix the problem prior to first flight of the autopilot.
The activity adjustment (setup screen 1) determines how briskly the autopilot responds to roll disturbances. The setting can be
adjusted, in flight, over a wide range; thus the autopilot can be tailored to adapt to any aircraft installation.
The activity adjustment covers a numeric range of 0 to 24. Unless the value for a particular aircraft is provided by TruTrak, it is
advisable to start with a setting of zero and work up from there. Most installations would ultimately require somewhat higher
settings.
On the first flight, manually fly the aircraft to a suitable area for testing. Engage the autopilot by clicking the knob. Observe
that the display now shows the captured GPS ground track as the selected direction of flight.
Press and hold the knob for approximately 4 seconds until the first setup screen is shown on the display. The digit “1” will be
flashing, followed by the activity value that was set earlier during pre-flight setup. Use the knob to select the value zero (0),
and observe the resulting control movement. Using the knob, increase the value one setting at a time, taking time to observe an
increasing level of control response. At some point, if too high a setting is chosen, the autopilot will be jittery and over-active.
Back the setting down using the knob until the autopilot is responsive but not over-active. It is best if these adjustments are
made in conditions of light to moderate turbulence (the TruTrak loves
of the autopilot to disturbances. It will be noted that a fairly limited range of activity setting will be acceptable; too low a value
will result in sluggish response, while too high a value will result in nervous, inappropriate response. Within this acceptable
range there is room for individual preference; some people prefer a more aggressive autopilot than others. It should be noted
that any builder can accomplish this adjustment procedure and no professional is required.
turbulence) so as to make it easy to observe the response
Once the desired activity level is established, click the knob to store the value and move to the second setup screen.
In the second setup screen, the digit “2” will be flashing, followed by the torque value that was set earlier during pre-flight
setup. Again, it is best that this be done in light to moderate turbulence. The reason is that more torque is required of the
autopilot in turbulence than is the case in still air, because the velocity of the servo is greater as turbulence requires more rapid
servo movement. This means that the higher the activity setting, the higher the required torque setting.
The reason for setting the torque to a setting less than its maximum (12) is to reduce the current draw of the servo and to make
it easier to override the autopilot should the need arise. Manual override is not normally required, as using the control-wheel
switch or the knob will disengage the autopilot, but it is best to have a setting of torque which can be comfortably overridden if
necessary. Starting with the maximum torque setting (12), gradually decrease the value using the knob, until it is observed that
the autopilot no longer has the necessary torque to respond to disturbances; then increase the setting somewhat from that level
using the knob until no more slippage of the servo is observed. The clearest evidence of servo slippage is that the autopilot is
no longer able to roll the aircraft back to a level attitude after a roll disturbance occurs.
Once the desired torque level is established, click the knob to store the value. Click the knob two more times to skip over setup
screens 3 and 4 and return to the primary flight display in which the selected GPS ground track appears on the display.
The setup procedure can be repeated whenever it is desired to modify the dynamic flight characteristics of the autopilot.
Manual Gyro Set operation
Occasionally the autopilot may not get a good gyro set when powering up. It is recommended that a gyro set be performed just
before takeoff as part of the final check list
While the autopilot is in its disengaged (off) mode, press and hold the knob. The display will now show “–| – |–” with the
center dash character blinking, indicating the Manual Gyro Set operation. Continue to hold the knob in for about 10 seconds
while the autopilot is not being moved about, to re-center the gyro manually.
TruTrak Flight Systems Pictorial Pilot Installation & User Guide
December 2009 13 8300-011 Rev B
Page 16

Magnetic Calibration
The Pictorial Pilot autopilot contains a built-in magnetometer which is used to maintain gyro centering and slaving for the
built-in Electronic DG of the autopilot in case of GPS loss. This magnetometer is calibrated at the factory in a disturbance-free
environment, but once installed in the aircraft it may be necessary to account for any fixed magnetic disturbances in the aircraft
itself.
For best results, this operation should be done on a day when the winds are relatively calm, so that air is still and heading and
ground track are approximately the same in all directions. The operation should be deferred until such flight conditions exist.
For this operation the autopilot will fly four legs of approximately half a minute each, first north, then east, then south, then
west. Prior to the calibration sequence, fly the aircraft to an area where this can suitably be done. Verify that the autopilot is
receiving GPS properly (note that the digital DG appears in the display when the autopilot is off, and the selected ground track
appears when the autopilot is on). Choose and hold an appropriate altitude and engage the autopilot using the knob or the
control stick switch. During the calibration sequence, it is important that aircraft pitch attitude remain as constant as possible.
Once the autopilot is engaged, press and hold the knob for approximately 4 seconds until the first setup screen appears. Click
the knob four times, to cycle through the activity, torque, micro activity, and baud rate setup screens until the fifth setup screen
shows on the display. This will be a flashing digit “4” followed by the digit “0”. Rotate the knob to select 1 (for “yes”) and
then click the knob. The autopilot screen will announce the beginning of the calibration sequence with the digits “000” flashing
as it turns the aircraft towards North. It will fly the aircraft to a ground track of 000 degrees, and once established on course the
digits will cease flashing as the autopilot gathers and averages magnetometer readings for this direction. This process requires
approximately ten to twenty seconds of steady flight on a ground track of 000 degrees. Having gathered the required data, the
autopilot will announce its turn towards East with a flashing “090” display. Again, the autopilot rolls out and gathers data. This
process is continued through South, and finally West. Having completed this operation, the display will change to “– C –”
indicating that calibration has been successful. (A display of “– F –” at any time during the magnetic calibration sequence
means that the GPS signal has been lost and the calibration cannot be completed. Repeat the calibration once reliable GPS
reception is again present.) Confirm the calibration sequence by clicking the knob. At this point, the autopilot will revert back
to its normal flight mode with a direction selector, but it now has a magnetic backup mode sufficient to fly the aircraft drift-free
in the event of GPS loss.
TruTrak Flight Systems Pictorial Pilot Installation & User Guide
December 2009 14 8300-011 Rev B
Page 17

Electrical Pin-out
The table below provides a brief explanation of each pin function on the main 15-pin connector P101.
345678
1
2
9 101112131415
P101
Function Notes
Pin
1 Autopilot Master (+12 to +14 V DC). The autopilot itself draws less than 0.3 ampere. Most of
the current required by the system is used by the servo (up to 1Amp depending on torque
setting)
2 Control Wheel Switch. Connect as shown in wiring diagram to a SPST momentary switch
located remotely to the autopilot for convenient engage/disengage function.
3 Primary Serial Input. Baud rate selectable, normally 4800 or 9600 baud. Automatically
decodes NMEA-0183, Garmin Aviation Format, or Apollo/UPSAT Moving-Map format.
Provides directional reference to the autopilot.
4,5,6 Reserved. Do not connect to these pins.
7 Roll Servo Torque Control. A signal from the autopilot to the roll (aileron) servo which sets
the amount of torque to be delivered by the servo.
8 Ground Connection. Provide #20 AWG to common grounding point.
9 Power Connection to Servo. Provide #20 AWG to Servo Pin 1.
10 Instrument Lamp Dimmer. A source of variable DC from external dimming control module.
Drives the LED brightness control. If left disconnected, the LED display will be full-on.
Roll (aileron) Servo control lines. These lines cause the stepping motor in the roll servo to run
in the appropriate direction at the desired velocity. They are small-signal lines and do not have
any substantial current-carrying capability or require any special shielding. Connect to roll
11
servo as shown on wiring diagram.
12
13
14
Wiring to roll servo J201
Direction of servo arm / capstan rotation
(as viewed from face of the servo body)
J101 Pin 11 Pin 12
for RIGHT aileron
Standard J201-4 J201-5 Servo CCW (counter-clockwise) Î RIGHT
Reversed J201-5 J201-4 Servo CW (clockwise) Î RIGHT
15 Ground Connection to Servo. Provide #20 AWG to Servo Pin 9.
Rear 15-Pin Connector P101
viewed from rear of unit
Reverse servo direction if
necessary by swapping
wires on pin 11 and 12.
See note 3 on wiring
diagram.
TruTrak Flight Systems Pictorial Pilot Installation & User Guide
December 2009 15 8300-011 Rev B
Page 18

PICTORIAL PILOT EXTERNAL BLOCK
DIAGRAM
TruTrak Flight Systems Pictorial Pilot Installation & User Guide
December 2009 16 8300-011 Rev B
Page 19

RETURN MERCHANDISE POLICY AND PROCEDURE
• Under no circumstances should products be returned to TruTrak without first obtaining a Return of Merchandise
Authorization number (RMA #) from TruTrak. An RMA # may be obtained by contacting us at 866-878-8725.
• Products that do not have an RMA # will not be processed.
• Please include some form of documentation stating the reason for the return and describing any symptoms, failure
modes, suspected causes of damage, diagnostics performed, data collected, etc.
• Product(s) should be packaged in their original shipping containers. In lieu of this, they should be very carefully
packaged in containers suitable to protect them during transit. Note that damage caused during shipping will not be
repaired under warranty.
• The outside of the box must be clearly marked with the RMA # issued by TruTrak and the RMA # must also be noted
on the return documents.
• Products will be returned to the customer at no charge via FedEx Ground or UPS Ground. If customer requests
expedited shipping (2
number.
• Send ALL return shipments to:
Trutrak Flight Systems, Inc.
1500 South Old Missouri Road
Springdale, AR 72764
USA
Attention: Returns Dept.
RMA# ______________
Warranty On TruTrak Flight Systems Products
We here at TruTrak Flight Systems know how important it is to feel as though the customer is purchasing a product
that the manufacturer is going to stand behind. For this reason we want offer more than the basic one year
warranty that is standard to this industry. The warranty on all TruTrak products will be three years from the date of
purchase. Abuse and misuse of a product are not covered under this warranty. Modification to a product may void
the warranty, as well as carry a penalty when upgrading to another product. This three year warranty will be for all
products except the Pictorial Turn & Bank, which will continue to have a warranty of one year from the date of
purchase.
TruTrak Flight Systems No Penalty Upgrade Policy
As the product line continues to grow, it becomes increasingly difficult to maintain a simple upgrade policy. We do
want to reward our repeat customers by allowing a lower cost upgrade from one system to another; however we
are not able to offer this across the board on all products. If you are considering an upgrade, please call and we
will give you a quote on what this would cost. Many products that we sell today are upgradeable for only the
difference in system price. Because we continually strive to have the most up to date products possible, we
occasionally have to discontinue products. We will continue to offer discounted upgrades even for our discontinued
products.
nd
Day or Overnight) they will be charged the shipping cost and must supply a credit card
TruTrak Flight Systems Pictorial Pilot Installation & User Guide
December 2009 17 8300-011 Rev B
Page 20

TRUTRAK FLIGHT SYSTEMS
1500 S. Old Missouri Road
Springdale, AR 72764
Ph: 479-751-0250 Fax: 479-751-3397
www.trutrakflightsystems.com
info@trutrakflightsystems.com
 Loading...
Loading...