

Page 1

Operating Handbook
For
DFC SERIES AUTOPILOTS
TRUTRAK FLIGHT SYSTEMS
1500 S. Old Missouri Road
Springdale, AR 72764
Ph. 479-751-0250 Fax 479-751-3397
www.trutrakflightsystems.com
Page 2
1
Table of Contents
Operating Instructions
General Introduction....................................................2
Mode and Data Display...............................................3
Controls.......................................................................4
Lateral Modes..............................................................4
Magnetic Back-Up Mode............................................6
Yaw Damper................................................................6
Vertical Modes............................................................6
Altitude Hold Mode.....................................................6
Altimeter Sync.............................................................7
Altitude Select Mode...................................................7
VNAV Mode...............................................................8
Stopping the Transition to a Selected Altitude............8
Additional Operating Instructions
Initializing the Autopilot.............................................9
GPS Acquisition..........................................................9
Altitude Select with AP Off ........................................9
Gyro Set.......................................................................9
Engaging the Autopilot................................................10
Setting Pitch Trim .......................................................10
Power Loss..................................................................10
DFC-250 Setup Procedure
Lateral Setup................................................................11
Pitch Setup...................................................................14
Page 3

General Introduction
The Trutrak autopilot can be defined as being an orthogonal rate system.
This means that gyroscopic rate sensors are installed so as to sense motion
about each of the major axes (roll, pitch and yaw). These sensors generate
the fast signal responses necessary to create an autopilot with the best
possible dynamic performance.
To fly an aircraft well about the axis controlled by the ailerons, velocity
of aileron movement must be directly proportional to the rate of roll for small
movement. This means that aileron position corrections do not lag behind
motion of the craft about the roll axis. Aileron control systems that use a
turn coordinator, which senses twice as much azimuth as roll rate, cannot do
this. Instead, in turbulence, yaw disturbances cause undesired aileron
movement. In some aircraft this effect is so severe that the controls may
even move momentarily in the wrong direction.
The challenge at Trutrak is to create, beyond question, systems with the
very best dynamic performance available—systems that need not be
disengaged in turbulence, but instead provide function when needed most.
The complete Trutrak flight control system combines within a single
panel-mounted programmer/computer package which includes all the
electronic and sensing elements needed for the roll and pitch functions as
well as a rate-gyro-controlled yaw damper.
Basic directional control is provided by digital selection of a GPS track
to be flown. This replaces heading selection on the DG, and eliminates drift
as well as crosswind correction. In the GPS steering mode of operation, the
system responds to digital guidance information so as to fly a complex
navigation program.
The vertical portion of the system contains a digital altimeter and
associated altitude selector capable of selection in increments as small as
fifty feet. Altitude transitions can be made by airspeed, vertical speed, or
horizontal distance (VNAV) selection. If and upward vertical speed is
selected which is beyond the capability of the aircraft, there will be no stall.
Instead, the autopilot will cause the aircraft to climb at a pre-set minimum
safe airspeed. This is the only known system to provide this safety feature.
For any set of features all Trutrak computers are identical. Servos
likewise are identical in velocity response. Servos do differ according to
total torque required. By providing setup functions in the programmer for
system activity and torque, one Trutrak programmer-servo combination can
fly any aircraft.
As a starting point in understanding how to operate the TruTrak system,
the following describes the presentation of data, the operating controls, and
the procedures for selecting modes of operation.
2
Page 4
POWER UP—AIRCRAFT STATIONARY
SEE INITIALIZING THE AUTOPILOT PAGE 9
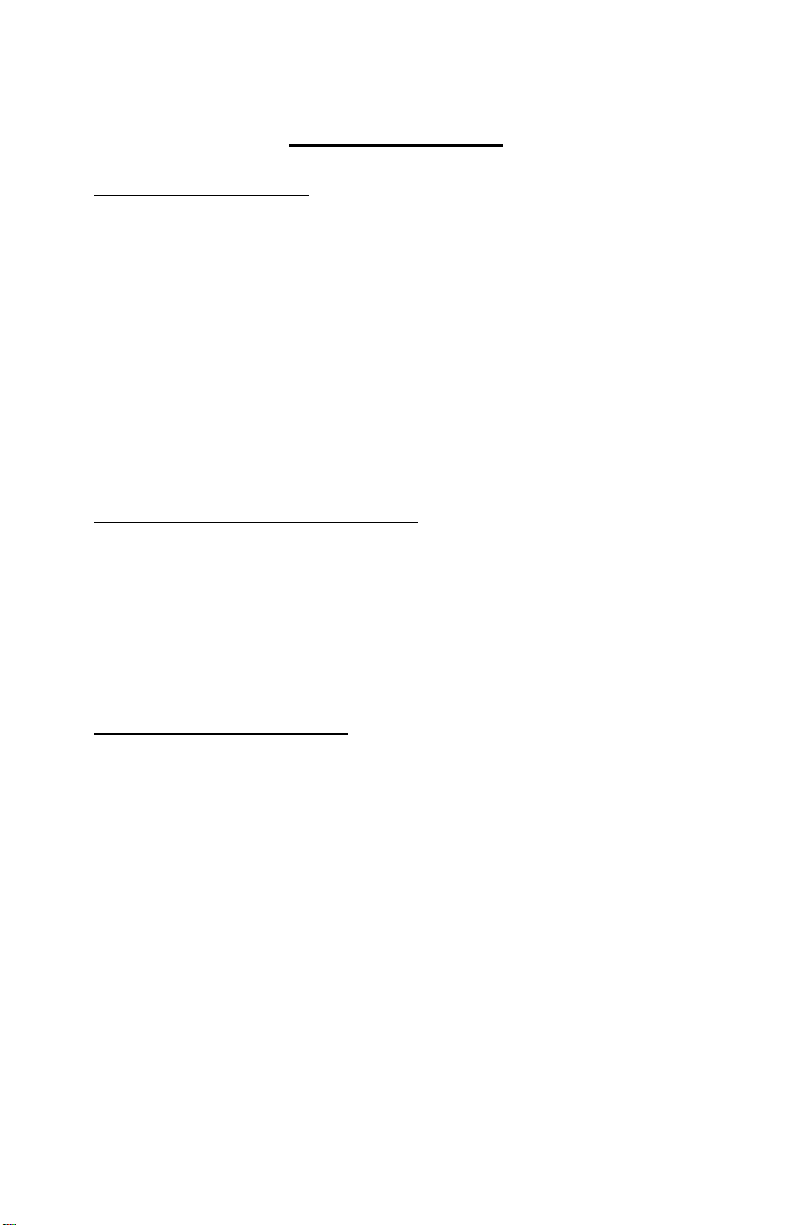
Mode and Data
Display
This display normally
shows operating modes and
associated numerical data. It is
also used to display setup mode
screens and the setting of
associated numerical data.
When displaying operating
modes, the left side shows
lateral data and the right side
shows vertical data. (See figure
below) The upper left display
labeled
electronic DG slaved to GPS
track. When the GPS track is
not available
replaced by
the autopilot now uses an
internal source of magnetic
information for direction. The
lower left display labeled
shows the selected direction of
flight. The upper right display
shows altitude or selected
altitude, and the lower right
display shows either selected
vertical speed or selected
airspeed.
the left and right hand display
DG SLAVED
→ ←
TO TRACK
SELECTED
→ ←
DIRECTION
TRK shows the
TRK will be
MAG, which means
SEL
The vertical space between
TRK*135 ALT 4500
SEL 135 ≡ SVS 500+
↑
area is used to show pitch trim.
This display consists of three
horizontal bars spaced
vertically as the rungs on a
ladder, and are made to move
up or down when the aircraft is
in need of being trimmed.
In the upper left where
direction is shown, a flashing
indicator is present between
TRK or MAG and the numerals
that follow. When there is no
GPS position input this will be
a flashing period. Once GPS
position data becomes valid this
will be a flashing asterisk. If
GPS flight plan information is
being received over the serial
channel or if the
GPSS option
has been added and GPS
steering information is being
received, a flashing plus sign
will indicate the presence of a
useable steering (
GPSS mode) or
waypoint to waypoint (
mode) signal.
A cursor in the form of an
underline is shown beneath the
SEL numerals. This is used to
indicate that an underlined
number will be set by rotation
of the encoder knob.
TRIM INDICATOR
VERTICAL SPEED
3
GPS NAV
INTERNAL
ALTIMETER
SELECTED
Page 5
Controls
Switches labeled [MODE]
and [ALT] when depressed
sequentially step through the
respective lateral and vertical
mode setup screens. When the
desired setup screen is
displayed, the numerical data to
be entered will be underlined.
The data is then set by rotating
the encoder knob and entered
by depressing and then quickly
releasing the knob. This will be
referred to hereafter as enter.
Another means of entering
numerical data is the sequential
pressing of a [VS] switch.
Each time a [VS] switch is
pressed, the vertical speed will
be changed in increments of
100 feet per minute. Still
another means of altering the
display presentation is engaging
or disengaging the autopilot.
This is accomplished by using
the [ON OFF] switch on the
programmer or the switch
located on the control wheel or
stick. The control stick switch
serves a dual purpose.
Momentary closure will
disengage the autopilot. If the
switch is held closed more than
two seconds, the autopilot will
engage upon release. This
means that in addition to
disengaging the autopilot, this
switch also provides the
function referred to as Control
Wheel Steering in that the
autopilot synchronizes to both
direction and vertical speed
upon being engaged.
4
Lateral Modes
Upon being engaged, the
autopilot will be in the basic
lateral mode, and it will be
synchronized to the direction
being flown at the time. (See
figure on page 3.) Note: The
number following
direction) is underlined,
meaning that rotation of the
encoder will select heading.
Rotation of the knob when it is
not depressed will cause 5°
steps of
depressed the steps will be 1°.
When an external heading
source (DG or HSI) is present,
depressing [MODE] one time
will select the
screen. If this is the desired
mode, pressing the encoder
knob makes it the active lateral
mode. When in this mode the
heading “bug” within the
external DG or HSI will be used
to control direction.
TRK 135 ALT 4500
EXT DG SVS 500+
The next sequential entry
screen will be either
GPSS depending on which, if
either, steering signal is
available to the autopilot.
In
autopilot follows a flight plan
programmed into the GPS. The
autopilot will however overfly
each waypoint prior to turning
and intercepting the course line
to the next waypoint.
TRK+135 ALT 4500
GPS NAV SVS 500+
SEL and when it is
GPS NAV mode the
SEL (Selected
EXT DG entry
GPS NAV or
Page 6
In the GPSS mode the
autopilot follows lateral
steering or bank commands
generated by a navigation
system (EFIS or GPS).
TRK+135 ALT 4500
GPSS SVS 500+
The next sequential entry
screen is
VOR NAV or LOC NAV,
depending on which is selected
by the navigation receiver. The
setup screen for this mode is
shown below.
LOC NAV CRS 183
INTRCPT ANGLE 30
The course numerals are
underlined. This means that the
VOR/LOC course is to be set by
rotating the encoder. As the
encoder is rotated, knob out
equals 5° steps while knob in
equals 1° steps. When course
has been set press enter. The
cursor (underline) has now
moved to intercept angle. The
default value will be 30°. The
intercept angle can be set from
15° to 45° by rotation of the
encoder knob. When the
desired intercept angle is set,
press enter.
LOC NAV CRS 183
INTRCPT ANGLE 30
The selected intercept
angle is now converted to an
intercept direction according to
5
which side of the course the
aircraft is on.
TRK 213 ALT 4500
INT 213 VS 500↑
Also, intercept direction is
underlined which means it can
be adjusted. With this feature
the system is in a selected
direction mode until the on
course turn (tracking phase) is
initiated. During the intercept
phase of the approach, the
lower left display will alternate
to show
of five. When the aircraft is
established on the inbound
portion of the approach, the
lower left display will indicate
the selected course.
glide slope is present (ILS),
flying below the glide slope in
ALT HOLD mode will arm the
glide slope coupler. When this
occurs, the display will be as
shown below
TRK 183 AH 4500
CRS 183 GS ARMED
When the Glide slope is
intercepted, the display will be
as shown below.
When glide slope coupling
is terminated, by entering either
the
CRS for one second out
TRK 213 ALT 4500
CRS 213 VS 500
If the above is LOC NAV and
TRK 183 ALT 2200
CRS 183 GS CPLD
ALT HOLD or VS mode, the
Page 7

lateral mode will switch from
LOC NAV to TRK mode. The
selected track will be the same
as the inbound course.
The next sequential mode
LOC/VOR REV. This refers to
is
flying the localizer or
the reverse direction. Operation
of this mode is the same as
NAV
except that there will be no
glideslope coupling.
VOR in
LOC
Magnetic Back-Up
Mode
The lateral modes
previously described are based
on GPS track being present.
When GPS is lost, the DG
display is slaved to a magnetic
heading source contained
within the programmer, and
TRK is replaced with MAG. This
magnetic mode is only a backup
and would seldom be needed;
however, it does provide a
means of selecting and
maintaining a drift-free
direction of flight. If an
external heading source (HSI or
DG) is present, the
mode remains functional, and if
GPSS signal source is
the
functional, the
also be functional. The
remaining modes,
navigation should not be used
GPS track is absent.
when
EXT HDG
GPSS mode will
VOR and LOC
Yaw Damper
(Option only)
6
The Yaw Damper can be
used whether or not the
autopilot is engaged. It
automatically comes on when
the autopilot is turned on.
When the autopilot is off, the
display is as shown below.
When the autopilot is not
engaged the Yaw Damper can
be toggled on or off by pressing
the [MODE] button.
TRK 000 ALT 5000
YD OFF AP OFF
Vertical Modes
When the autopilot is
engaged, it will synchronize to
the vertical speed being flown
at the time, and thus will be in
the basic vertical speedoperating mode (see figure on
page 3). While in this basic
mode, the upper right section of
the display shows altitude and
the lower right section shows
SVS (selected vertical speed).
This mode is also entered by
depressing a vertical speed
button [VS UP] or [VS DN].
If the system is in transition to a
selected altitude pressing [VS]
will switch from AIRSPEED to
VS. It will not cancel the
selected altitude
VS
Altitude Hold Mode
Press [ALT] once to select
ALT HOLD entry screen, and
then press enter to activate the
altitude hold mode. The
selected altitude will be to the
nearest 100 feet as viewed on
Page 8

the digital altimeter. For
example, pressing enter
between 4950 and 5050 will
select 5000.
CURRENT ALT 2200
ALTITUDE HOLD
-press enter-
TRK 183 AH 2200 SEL
183 ALT HOLD
Altimeter Sync
With the autopilot engaged,
the internal altimeter can only
be set when the aircraft is level
in the
accomplish this, press [ALT],
once in order to display the
current altimeter reading. Then
rotate the encoder to set the
internal altimeter to agree with
the primary altimeter. When
this is done press enter.
When the above altimeter
correction has been entered the
aircraft will climb or descend to
again be at the displayed
selected altitude.
When the autopilot is not
engaged, pressing [ALT] once
will bring up the
SYNC screen. Note: Be certain
the autopilot screen indicates
ALTIMETER SYNC and not SEL
ALT as the screens are similar
but have entirely different
meanings. The procedure is
then the same as with the
autopilot engaged. When
power to the autopilot is turned
on the altimeter will show the
same altitude as displayed at
power shut down, thus if this
ALT HOLD mode. To
ALTIMITER
7
was done at field elevation, it
should show field elevation.
CURRENT ALT 8000
ALTIMETER SYNC
Altitude Select Mode
Pressing [ALT] twice will
display the
screen.
SEL ALT 4500
SEL AS 165
At this screen SEL ALT
numerals are underlined so that
rotation of the encoder selects
the target altitude. When this is
done press enter.
If a higher altitude has been
selected, the pre-set (best-cruise
climb) air speed is now
displayed and underlined.
SEL ALT 4500
SEL IAS 165 KTS
This value can be modified by
rotating the encoder knob.
When the knob is out each step
is 5 Knots and when depressed
each step is 1 Knot. When air
speed has been set, press enter
and the altitude transition will
begin. The autopilot will then
revert to the normal flight
display.
TRK 183 SA 4500
SEL 183 SAS 165
Also, SEL direction will
again be underlined. Both
selected altitude and air speed
can be modified while in
transition. Press and release the
SEL ALT set up
Page 9

encoder knob once and the
underlined cursor moves to
selected altitude. Pressing a
second time moves it to air
speed and a third time returns it
to direction, or after 8 seconds
it will return automatically to
direction. It will be observed
that the airspeed will change at
a constant pre-set rate from the
initial value to the selected
value at which point it will
cease moving with no
overshoot. Finally, because
[VS] buttons are always active,
the climb to a new altitude can
be changed from airspeed to VS
and the rate adjusted, by
pressing the appropriate [VS]
button the required number of
times.
If a lower altitude is
selected, the set-up screen will
be as shown below in which a
default downward vertical
speed of 500 Fpm is shown
when the selected altitude
differs from the present by
more than 500 feet.
SEL ALT 3000 SEL VS
500-
When the new altitude has
been selected and entered the
downward transition will begin
at 500 fpm. Pressing the
appropriate [VS] button can
modify this value.
TRK 183 SA 3000 SEL
183 SVS 500-
VNAV Mode
8
Pressing [ALT] three times
will display the VNAV screen:
SEL ALT 4500
DIST 10 NM
At this screen the SEL
ALT numerals are under lined
so that rotation of the encoder
selects the target altitude.
When this is done press enter.
SEL ALT 10000
DIST 10 NM
Once the desired altitude
has been entered the DIST
numerals are underlined so that
rotation of the encoder now will
select the distance in which the
selected altitude will be
reached.
Stopping the
Transition to a
Selected Altitude
Once the aircraft is in
climb or descent to a selected
altitude, the process can only be
stopped by entering the
ALT HOLD mode. This is
accomplished by arriving at the
selected altitude or by selecting
ALT HOLD mode as per the
the
procedure previously outlined.
Page 10

9
Additional Operating Instructions
Initializing the
Autopilot
The autopilot master switch
should be in the off position
when the engine is started.
Aircraft electrical systems can
generate voltage transients
during an engine start, and like
other avionics systems, the
autopilot should not be
subjected unnecessarily to these
conditions. After start up, turn
on the autopilot master switch
and hold the aircraft
stationary as the internal gyros
are initialized. This takes
approximately ten seconds
during which time the display
will show the words
PWR UP in
the lower right.
MAG 160 ALT 1350
PWR UP
When initializing is
complete
AP OFF.
to
MAG 160 ALT 1350
AP OFF
PWR UP will change
GPS Acquisition
Between the word MAG and
the three digit numeric display,
a flashing period
appear each time the GPS sends
a message to the autopilot (once
per second). This indicates the
GPS is working but has not yet
obtained a position fix. As long
as the period is shown, the
MAG•155 will
heading display cannot
transition to the
TRK mode.
When the GPS does obtain a
fix, the period will be replaced
by an asterisk
MAG*155. This
means that when a certain
velocity is attained
replaced by
MAG will be
TRK. This happens
at approximately 10 Knots
groundspeed as detected by
GPS and will even occur at
rapid taxi speeds.
Altitude Select With
AP Off
If a target or assigned
altitude is known prior to takeoff, this altitude can be set while
on the ground. As with the AP
on, pressing [ALT] twice will
display the ALT SEL setup screen.
The procedure is to select the
desired altitude and then press
enter.
The display will show the
selected altitude even though the
autopilot is still off. This will
serve as a reminder that the
autopilot will climb to the
selected altitude when engaged.
Gyro Set
When the initializing has
been done correctly, the gyros
should already be centered at the
time of take off. If confirmation
of this is desired, with the
aircraft stationary on the
runway, pressing and holding the
encoder knob will put the gyros
in the fast centering mode. The
knob should be depressed for
approximately 10 seconds during
Page 11

which time the words GYRO SET
will be displayed.
MAG*180 ALT 1350
GYRO SET
Engaging the
Autopilot
Since the autopilot
synchronizes to
VS, the VS at
the time of engaging should be
a value that can be sustained.
Otherwise airspeed will
diminish as the aircraft attempts
to sustain VS. As
diminishes to the pre-set
minimum it will hold this value
and thus prevent a stall.
When aircraft vertical speed
is less than approximately 350
feet per minute, the autopilot will
initially select zero vertical speed.
The [VS UP] and [VS DN] keys
can be used to change the initial
value if desired.
airspeed then
Setting Pitch Trim
The pitch servo contains a
torque sensor that sends a signal
to the computer when the up or
down force greater than a
threshold value is required to fly
a selected flight condition. When
this signal indicates an out-oftrim condition that persists in one
direction for more than a few
seconds, the three moving
horizontal bars will come into
view and move according to the
direction in which trim is
required. The pilot is then
required to operate the trim
control (electric or manual) so as
to bring the system to neutral
trim. With mechanical trim this
10
is easily done, but with electric
systems it may be necessary to
develop a technique. If the trim
is slow enough, the pilot has
plenty of time to react when the
bars disappear before the trim
condition is reversed. With a fast
trim it will be necessary to tap or
pulse the trim button so that it
will be slow enough to turn it off
before going too far. When a
reversal takes place, a slight tap
in the reverse direction may be
required to get the bars to stay
off. Finally, when the bars have
been made to disappear and there
has been no speed change, the
bars can be ignored if they
reappear if it is known the aircraft
is close to being in trim.
Power Loss
If there is a momentary loss
of electrical power, the autopilot
will disengage. When this
happens it is necessary to do a
GYRO SET before re-engaging
the autopilot. To accomplish this,
the aircraft must be held very
straight during which time the
encoder knob is pressed to do
GYRO SET. After this, engage
the autopilot and note the extent
to which TRK differs from SEL.
If this is more than 15° repeat the
gyro set procedure. The
difference between TRK and SEL
will be reduced at the rate of 8°
per minute by the automatic gyro
centering system within.
Page 12

11
DFC Series Setup Procedure
Lateral Setup
The lateral setup consists of
setting activity, torque, serial
baud rate, and magnetometer
calibration and various
configuration parameters. To
enter the setup mode, press and
hold the [MODE] button for
two or more seconds, until the
first setup screen appears. This
screen shows current values for
the activity and torque of the
aileron servo, with an underline
under the present setting of
activity. A typical screen might
show:
LAT ACTIVITY 8
LAT TORQUE 200
The underlined number is
set by rotating the encoder
knob. Turn this knob to set the
activity level to the desired
value for the particular aircraft.
Any value between 0 and 12
may be chosen. In this example,
the value of 1 will be selected.
Activity should be set so as to
not be excessive in turbulence
and yet sufficient to fly without
hunting in still air. (Any lost
motion or play between the
servo and the control surface
can cause hunting in still air).
Once activity is set to the
desired value, press and quickly
release the knob to confirm and
enter the selected value into
storage. The underline (cursor)
will now move to the torque
setting:
LAT ACTIVITY 1
LAT TORQUE 200
In a manner similar to
activity, use the encoder knob to
select the desired value of roll
servo torque. This value should
be between 75 and 250. A
default value is set at the factory
but may need to be modified to
suit a particular aircraft. The
value chosen should be
sufficient to fly the aircraft, but
not so much that it is difficult to
override the autopilot if
necessary.
Having selected the desired
torque level, again press and
quickly release the encoder
knob to confirm and enter the
selected torque value into
storage. The unit will now show
the next screen:
BAUD RATE 4800
The value shown represents
the speed of the primary
interface to the external GPS
unit. By default at the factory it
is set to 9600 baud, as that is the
most commonly used value.
However, it may be set to any
of 600, 1200, 2400, 4800, or
9600 baud. Consult the manual
for the GPS unit and follow its
setup instructions to determine
RS-232
Page 13

its setting and set the baud rate
Y
Y
of the autopilot to the same
value. The autopilot will
recognize NMEA-0183
protocol, Garmin protocol, or
Apollo GX50/GX60 protocol
(moving map output).
Once the desired baud rate
has been selected, again press
and quickly release the encoder
knob to confirm and enter the
selected baud rate into storage.
The unit will now show the next
screen:
MICROACTIVITY 0
This setting is to be left at
zero unless advised by the
factory. Press the encoder
know and the unit will now
show the next screen:
AUDIO VOLUME 16
While this screen is
displayed, the autopilot will
send an audio tone to the audio
system. Adjust the value
between 0 and 16 for the
desired volume, then press the
knob to go to the next screen:
EXT DG/HSI? N
Use the encoder to select
either
Y (yes) or N (no)
depending on whether an
external DG or HSI is
connected to the system. Press
12
the knob to go to the next
screen:
NAV RCVR?
Again, select either
depending on whether a source
of CDI deflection is connected
to the autopilot. If the question
is answered
LOC/NAV REV modes will be
Y, the NAV and
available. Press the knob to go
to the next screen:
GS RCVR?
Again, select Y or N
depending on whether a source
of glideslope deflection is
connected to the autopilot. If
the question is answered
glideslope coupling will be
available (ILS) when
is in use and a valid deflection
appears on the input terminal.
Press enter to go to the next
screen.
YAW DAMPER? N
Answer
Y or N to indicate
whether or not a Yaw Damper
is present. Press the knob to go
to the next screen:
MAG CALIBRATE? N
This setup allows the
internal magnetometer in the
unit to be compensated for any
Y or N
Y,
LOC mode
Page 14

internal magnetic disturbances
within the aircraft, and should
be performed once the autopilot
is installed in the panel of the
aircraft. It may need to be
repeated if the autopilot is
moved within the panel, or if
new equipment is installed
nearby. In order to skip this
step, press and quickly release
the encoder knob while
N is
selected.
If a calibration is desired, it
may be done in either of two
ways: (1) With the autopilot
disengaged, either in the air or
on the ground, the operator will
turn the aircraft through a full
circle according to instructions,
or (2) With the autopilot
engaged, in flight, the autopilot
directs the aircraft in the
necessary flight path.
In either method of
calibration, the aircraft is
turned, first to North, then East,
then South, and finally West. At
each step, the heading is flown
for approximately 20 seconds
while the autopilot gathers and
averages the data from the
magnetometer.
The magnetometer is
initially calibrated at the factory
for operation in an environment
free of magnetic disturbances,
and should be functional,
though not accurate, when
mounted in the aircraft. The
first calibration of the
magnetometer in the actual
aircraft is probably best done on
the ground, on a level pavement
surface, as there are fewer
13
variables involved than would
be the case in flight. Assuming
that it is desired to perform this
calibration, do the following
steps:
(1) Rotate the encoder knob to
Y in the setup screen.
select
(2) Press and quickly release
the encoder knob to begin the
setup sequence. The screen will
now show:
CALIBRATING
TURN NORTH
Turn the aircraft to a
heading of North using a
reliable reference, either a
compass or magnetically slaved
DG or HSI. Once this is done,
press and quickly release the
encoder knob to confirm that
the heading is steady. The
screen will now show:
CALIBRATING
HOLD NORTH
After a period of approximately
20 seconds, the screen will
show:
CALIBRATING
TURN EAST
Again, turn the aircraft to a
heading of 090 magnetic and
then press and quickly release
the encoder knob. In the same
manner as before, the screen
will say
seconds. This process is
continued through South and
West. Once the westerly data
HOLD for twenty
Page 15

has been averaged for twenty
Y
8
seconds, the process is complete
and the screen will show:
CALIBRATION DONE
PRESS ENTER
At this time, press and
quickly release the encoder
knob to confirm the calibration
and enter the resulting data into
permanent memory.
If the “
question was answered “
MAG CALIBRATE?” question
the “
was answered “
YAW DAMPER?”
Y” and
N” the next
screen in the setup sequence
will allow adjustment controls
for the yaw damper:
YD LEVELING __0
YD ACTIVITY 6
The value for leveling is
adjustable from -8 to 8 and is
used as necessary to have the
yaw damper keep the aircraft
slip/skid indicator (ball)
centered when the yaw damper
is engaged and the autopilot is
flying the aircraft straight and
level. When adjusting this
value, allow a few seconds for
the yaw damper to respond to
each new value setting. Press
and release the encoder know
once the correct setting has
been determined.
YD LEVELING 0
YD ACTIVITY __7
14
Use the encoder knob to
determine the correct amount of
yaw damper response in
conditions of light to moderate
turbulence. Having found a
satisfactory value for flight in
turbulence, press and release the
encoder knob to enter the value
into storage.
This concludes the DFC250 lateral setup mode.
Pitch Setup
The pitch (vertical) setup
consists of setting activity and
torque in a manner similar to
that done for the aileron servo
in the lateral setup. To enter the
vertical setup mode, press and
hold the [ALT] button for two
or more seconds, until the first
setup screen appears. This
screen shows current values for
the activity and torque of the
aileron servo with an underline
under the present setting of
activity. A typical screen might
show
VRT ACTIVIT
VRT TORQUE 200
Turn the encoder knob to
set the activity level to the
desired value for the particular
aircraft. Any value between 0
and 12 may be chosen. In this
example, the value of 4 will be
selected.
Once activity is set to the
desired value, press and quickly
release the knob to confirm and
enter the selected value into
storage. The underline (cursor)
Page 16

will now move to the torque
setting:
VRT ACTIVITY 4
VRT TORQUE 200
In a manner similar to
activity, use the encoder knob to
select the desired value of pitch
servo torque. This value should
be between 75 and 250. A
default value is set at the factory
but may need to be modified to
suit a particular aircraft. The
value chosen should be
sufficient to fly the aircraft, but
not so much that it is difficult to
override the autopilot if
necessary.
Having selected the desired
torque level, again press and
quickly release the encoder
knob to confirm and enter the
selected torque value into
storage. The next screen will
show:
MIN AIRSPD 95KT
NORM CLIMB 120KT
Use the encoder knob to
select the minimum airspeed at
which the autopilot will fly the
aircraft. This speed should be a
safe margin above a stall. Press
the knob to enter the minimum
airspeed into storage, and the
cursor will move to the second
line, as shown below.
Select, using the encoder
knob, the default value most
commonly used for a climb to a
selected altitude. Press the
15
encoder knob to enter this value
into storage.
MIN AIRSPD 120KT
NORM CLIMB 170KT
The next screen in the pitch
setup sequence allows
adjustment to compensate for
the lag (delay) in the aircraft’s
static system.
STATIC LAG 0
Select the lowest value
over the range 0 to 2 which
results in the elimination of
“hunting” in the altitude hold
mode. This adjustment should
be done in still air at cruise
airspeed. Press the encoder
knob to enter this value into
storage.
This concludes the DFCseries autopilot pitch setup
procedure.
Page 17

(5-06)
Printed in U.S.A.
16
TruTrak Flight Systems, Inc.
 Loading...
Loading...