

TruTrak 380-385 Install manual

Vizion 380/385 Series Autopilots
Installation Manual
8300-086 Rev IR
TRUTRAK FLIGHT SYSTEMS
1500 S. Old Missouri Road
Springdale, AR 72764
POSTAL SERVICE ADDRESS
Springdale, AR 72765-0189
Ph: 479-751-0250 Fax: 479-751-3397
www.trutrakap.com
P.O. Box 189
INSTALLATION MANUAL
Revision
Date
Description
Page #
IR
12/18/2013
Initial Release
For
Vizion 380/385 Series Autopilots
TABLE OF CONTENTS
Mechanical Considerations ..................................................................................................................................................................... 1
Pitot / Static Connections ........................................................................................................................................................................ 2
RFI / EMI Considerations ........................................................................................................................................................................ 2
Vizion Series Ground Checkout ............................................................................................................................................................. 3
Electrical Pin-out ......................................................................................................................................................................................... 4
Vizion Wiring Diagram ............................................................................................................................................................................. 5
Controller Dimensions/Panel Cut-outs ............................................................................................................................................. 6
GPS Setup Guide........................................................................................................................................................................................ 91
Garmin 430W and 530W ........................................................................................................................................................................................ 113
Warranty Information/Upgrade Policy .......................................................................................................................................... 17
RETURN MERCHANDISE POLICY AND PROCEDURE ........................................................................................................... 18
Mechanical Considerations
The installation information in this section is extremely important and must be clearly
understood by the installer. Improper servo installation or failure to observe and
diagnose installation problems prior to flight can result in extremely serious
consequences, including loss of ability to control the aircraft. If there are any
questions on the part of the installer it is mandatory to resolve these questions prior to
flight of the aircraft.
Most modern experimental aircraft use push-pull tubes to drive the primary controls. These tubes generally have a
total travel of 3” or less; therefore, it is best to connect the autopilot servo to the primary control by the same method.
This connection consists of an arm on the servo connected by a push-pull rod to the primary control. Rod-end bearings
are required on each end of the push-pull rod.
The servo arm must not rotate even near to the point called OVER CENTER, the point at which the
primary aircraft control would lock up. Some aircrafts mechanical primary control installations will not
allow this to occur and do not need the servo stops.
This is a condition that would result from the servo being back driven when the pilot operates the controls,
or from the servo itself driving the controls to a stop. To protect against this mechanical stops are supplied
with the servos. These stops are drilled so that they can be mounted at different angles as required (18
intervals).
In addition to the proper use of the stop it is important to know the amount of travel on the primary
control that the servo can handle. With the push rod connected to the outermost hole (1 ½”) the travel on
the primary cannot exceed 2 ½”, the intermediate hole 2 1/16”, and the inner hole 1 5/8”.
It is important to note that at the neutral point of the control the SERVO ARM must be PERPENDICULAR to
the push rod, and that the stop must be mounted so as to limit travel as near as possible to equal amounts
in both directions. In certain factory-designed installations there may be well-proven exceptions.
There will be installations in which space does not permit the use of the stop. When this is done the aircraft’s primary
control stops must be positive and care must be taken to be sure that at the neutral point the servo arm is
perpendicular to the push rod, and that the travel limits of the servo arm are not exceeded.
There are installations in which the travel of the push-pull tube exceeds the allowable 2 ½”. For such installations, the
drive can be applied to a bell crank at a radius point that moves the desired 2 ½” of maximum allowed travel in the
outermost hole of the arm.
When there is no way to have a drive point of less than 2 ½” or when the primary control is cable-driven it is necessary
to use the capstan-cable servo drive. When this is done the servo should be mounted so that the 1/16” diameter cable
which wraps around the capstan when extended parallel to the primary cable is approximately 3/16” from the primary
cable. If the primary control travel does not exceed 5” the cable locking pin will be 180 away from the point at which
the cable leaves the capstan. When the primary control is at the neutral point this means the total cable wrap around
the capstan is 360 . If the primary control travel is greater than 5” the cable wrap is 720 and the pin is adjacent to the
output point when the primary control is at the neutral point.
The cable clamps when properly installed will not slip and thus get loose, but it is desirable to NICO press or swedge a
fitting on to the cable so as to provide added assurance that the cable will not become slack. If the bridle cable is not
sufficiently tight there will be lost motion in the autopilot drive. This will result in hunting (oscillation).
TruTrak Flight Systems 1 Vizion 380/385 Series Autopilot Installation Manual
December 2013 8300-086 Rev IR

Controller Installation
Mounting Considerations
The Vizion controller unit is designed to mount in the aircraft instrument panel within view and reach of the pilot.
Maximum recommended viewing angle should be no more than 20 deg. The maximum mounting angle the Vizion can
accommodate is 10 degrees longitudinal (pitch) axis and 0 degrees lateral (roll or yaw) axis. The location should be
such that the controller unit is not blocked by the glare shield on top, or by the throttles, control yoke, etc. on the
bottom. Use aircraft installation standards for mounting and support of the controller.
Wiring Considerations
Use AWG #24 or larger wire for all connections unless otherwise specified. The standard solder pin contacts supplied in
the connector kit are compatible with up to AWG #18 wire. In cases where some installations have more than one
component sharing a common circuit breaker, sizing and wire gauge is based on length of wiring and current draw on
units. In these cases, a larger gauge wire such as AWG #20 may be needed for power connections. Do not attach any
wires to the outside of the programmer or route high current wires within six (6) inch of the programmer. Ensure that
routing of the wiring is not exposed to sources of heat, RF or EMI interference. Check that there is ample space for the
cabling and mating connectors. Avoid sharp bends in cabling and routing near aircraft control cables. Do not route the
COM antenna coax near any autopilot components.
Pitot and Static Connections
All multi-servo TruTrak autopilots require connections to the pitot and static lines. The preferred method of this
connection would be tee fittings near the aircraft’s altimeter. The static line for the autopilot requires due care in its
construction, as excessive lag or insufficient static orifices can cause the autopilot to oscillate (hunt) in pitch. Although
there is compensation within the autopilot sufficient to handle moderate amounts of lag, the importance of a good static
port and line cannot be overstated. In some cases problems can be caused by having a large number of devices
(including the autopilot) connected to a single, insufficient, static port. In other cases, the static line itself is adequate
but there are one or more devices connected to the same line, one of which has a large static reservoir. A simple remedy
for this problem if it occurs is a tee-fitting near the static port, and a dedicated line to the autopilot only. Obviously, an
insufficiently-large orifice coupled with large static reservoirs can aggravate the problems associated with lag.
RFI/EMI considerations
The autopilot controller is shielded and does not generate any appreciable level of electromagnetic interference.
Moreover, the servo lines (except for power and ground) are low-current and cannot contribute to RF interference. The
servo power and ground lines do have switching currents through them, but so long as there are no parallel runs of
servo power and ground lines with such things as poorly-shielded antenna lines or strobe light power lines, there is no
need to shield the servo harnesses.
The autopilot itself has been internally protected from RF interference and has been tested under fairly extreme
conditions, such as close proximity to transmitting antennas. However, it is always good practice to insure that such
antennas are properly shielded and not routed directly over or under sensitive panel-mounted electronic equipment.
Most problems in this area are the result of improper RF shielding on transmitting antennas, microphone cables, and
the like. The most sensitive input to the autopilot is the Control Wheel Switch input. This line should not be routed in
parallel with transmitting antennas or other sources of known RF interference. If necessary, it can be shielded with the
shield connection to pin 13 of the autopilot connector.
TruTrak Flight Systems 2 Vizion 380/385 Series Autopilot Installation Manual
December 2013 8300-086 Rev IR
Vizion Ground Checkout
Once installation and setup of the autopilot are complete (see Operation Manual for setup and operation instructions), a
ground checkout is a good idea before the first flight of the system. This is a simple procedure to verify that the servos
move in the correct direction. Follow the steps below to verify this:
-1) Center both the aileron and elevator control surfaces.
-2) Engage the autopilot.
-3) Turn the knob clockwise, make sure the controls move to the right (stick) or clockwise (yoke).
-4) Turn the knob counter-clockwise. It must be turned enough to select a left bank angle. Make sure the controls move
to the left (stick) or counter-clockwise (yoke).
-5) Push the knob to move the cursor to SVS and turn the knob clockwise to select a climb rate. Make sure the controls
move aft. The cursor will return to the Bank selection after three seconds.
-6) Push the knob to move the cursor to SVS and turn the knob counter-clockwise. It must be turned enough to select a
rate of descent on the autopilot display. Make sure the controls move forward.
If steps 2-6 are all verified then the Vizion is ready to be engaged in flight.
*For instructions on accessing the setup menus and adjusting autopilot settings, please see section 5 of the
Vizion 380/385 Operating Manual.
*For recommended settings of common Experimental-Amateur Built aircraft, please see section 8 of the Vizion
380/385 Operating Manual.
TruTrak Flight Systems 3 Vizion 380/385 Series Autopilot Installation Manual
December 2013 8300-086 Rev IR
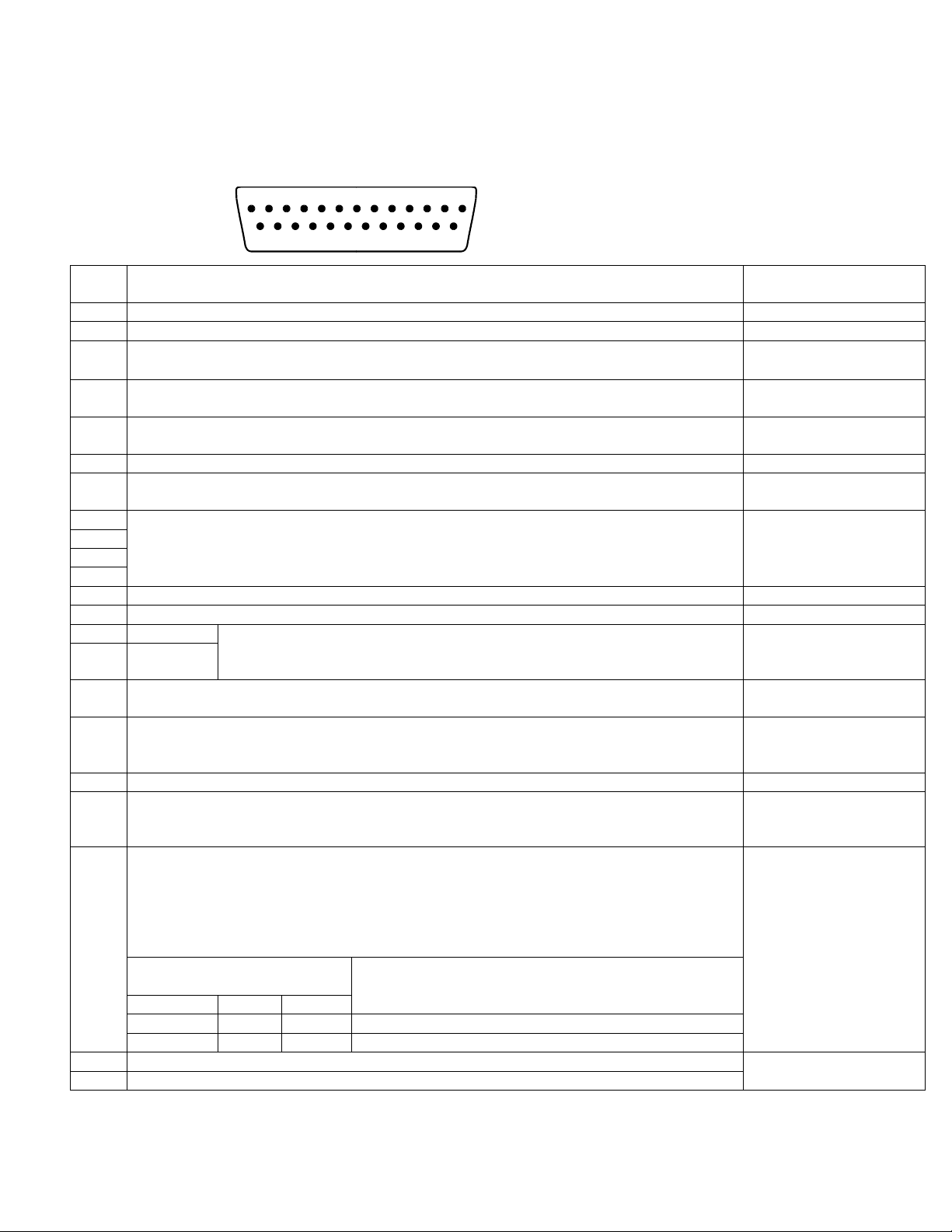
Electrical Pin-out
P101
Pin
Function
Notes
1
Used for external Emergency AP Level button connection.
2 Used for external Emergency AP Level button connection.
3
Control Wheel Switch. Connect as shown in wiring diagram to a SPST momentary switch
located remotely to the autopilot for convenient engage/disengage function.
4
Pitch Servo Torque Control. A signal from the autopilot to the pitch servo which sets the
amount of torque to be delivered by the servo.
5
Pitch Servo Trim Sensor. A signal from the pitch servo to the autopilot which indicates
an out-of-trim condition and its direction.
6
Unused.
7
RS-232 Output. Output to G3X/AFS-5000 series
Required for integrated
control mode.
8
Pitch Servo control lines. These lines cause the stepper motor in the pitch servo to run in
the appropriate direction at the desired velocity. They are small-signal lines and do not
have any substantial current-carrying capability or require any special shielding. Connect
to pitch servo as shown on wiring diagram.
9
10
11
12
Yaw Damper option.
13
Ground Connection. Provide #20 AWG to common grounding point.
14
ARINC-A
Digital differential signals from Garmin, Sierra, or other panel-mount
receiver which provide directional steering commands (GPSS, GPSV) to
autopilot
Vizion 385 Only
15
ARINC-B
16
Roll Servo Torque Control. A signal from the autopilot to the roll (aileron) servo which
sets the amount of torque to be delivered by the servo.
17
Primary Serial Input. Baud rate selectable 1200, 2400, 4800 or 9600 baud.
Automatically decodes NMEA-0183, Garmin Aviation Format, or Apollo/UPSAT MovingMap or GPSS format. Provides directional reference to the autopilot.
18
Auxiliary RS-232 Input. Presently unused.
19
Autopilot Master (+12 to +28 V DC). The autopilot itself draws less than 0.5 ampere.
Most of the current required by the autopilot system is used by the servos (up to 2A per
servo).
20
21
22
23
Roll (aileron) Servo control lines. These lines cause the stepping motor in the roll servo
to run in the appropriate direction at the desired velocity. They are small-signal lines and
do not have any substantial current-carrying capability or require any special shielding.
Connect to roll servo as shown on wiring diagram.
Reverse servo direction
if necessary by
swapping wires on pins
20 and 21. See note 2 on
wiring diagram.
Wiring to roll servo J201
Direction of servo arm / capstan rotation
(as viewed from face of the servo body)
for RIGHT aileron
J101
Pin 20
Pin 21
Standard
J201-4
J201-5
Servo CCW (counter-clockwise) RIGHT
Reversed
J201-5
J201-4
Servo CW (clockwise) RIGHT
24
TCB-A
Unused at this time, for
future expansion.
25
TCB-B
Rear 25-Pin Connector P101
viewed from rear of unit
1
20 21 22 23 24 25
2 3 4 5 6 7 8 9 10 11 12 13
14 15 16 17 18 19
All TruTrak Vizion 380 and 385 autopilots have consistent wiring requirements. Therefore, this manual covers all such
units, with special notations covering any differences between the units. The table below provides a brief explanation
of each pin function on the main 25-pin connector P101.
TruTrak Flight Systems 4 Vizion 380/385 Series Autopilot Installation Manual
December 2013 8300-086 Rev IR
 Loading...
Loading...