

Page 1

PANdrive™ for Stepper Motors
+6V..+28V DC
ARM
Cortex-M0+
TM
microcontroller
TMCL™
Memory
Step
Motor
CAN
Energy Efficient
Driver
TMC262
Stepper
motor
controller +
driver
TMCM-1270
I2C
SPI
Input
REFL/REFR
PD42-x-1270
ENC_A/ENC_B
/ENABLE
4
PANDRIVE™
PD42-1270 Hardware Manual
Hardware Version V1.00 | Document Revision V1.10 • 2017-Mar-02
PD42-1270 is an easy to use PANdrive™smart stepper motor. The module is controlled via a CAN bus interface and comes with two firmware options – TMCL and CANopen. PD42-1270 features stealthChop™for
absolute silent motor control, spreadCycle™for high speed stepper motor commutation, a fully integrated
hardware motion controller with sixPoint™ motion ramps, as well as stallGuard2™ and coolStep™.
Features
• PANdrive™ smart motor
• Supply Voltag +6 to +24V DC
• CAN bus interface
• TMCL or CANopen protocol
•
Integrated
controller
• stealthChop™ silent PWM mode
• spreadCycle™ smart mixed decay
• stallGuard2™ load detection
• coolStep™ autom. current scaling
sixPoint™
ramp motion
Applications
• Lab-Automation
• Manufacturing
Simplified Block Diagram
• Robotics
• Factory Automation
• CNC
• Laboratory Automation
©2017 TRINAMIC Motion Control GmbH & Co. KG, Hamburg, Germany
Terms of delivery and rights to technical change reserved.
Download newest version at: www.trinamic.com
Read entire documentation.
Page 2

PD42-1270 Hardware Manual • Hardware Version V1.00 | Document Revision V1.10 • 2017-Mar-02
2 / 24
Contents
1 Features 3
1.1 General Features . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.2 TRINAMIC’s Unique Features . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.2.1 stealthChop™ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.2.2 spreadCycle™ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.2.3 stallGuard2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.2.4 coolStep . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.2.5 sixPoint Motion Controller . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2 Order Codes 7
3 Mechanical and Electrical Interfacing 8
3.1 PD42-1270 Dimensions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
3.2 PD42-1270 Dimensions and Weight . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
3.3 PD42-1270 Motor Parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
3.4 PD42-1270 Torque Curves . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
4 Connectors and LEDs 13
4.1 Power supply and I/O Connector . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
4.2 CAN Connection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
4.3 Motor Connector . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
4.4 LEDs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
5 Functional Description 17
5.1 Typical Application Wiring . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
5.2 Inputs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
6 Operational Ratings and Characteristics 18
6.1 Absolute Maximum Ratings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
6.2 Electrical Characteristics (Ambient Temperature 25° C) . . . . . . . . . . . . . . . . . . . . . . . 18
6.3 I/O Ratings (Ambient Temperature 25° C) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
6.4 Functional Characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
6.5 Other Requirements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
7 Abbreviations used in this Manual 19
8 Figures Index 20
9 Tables Index 21
10 Supplemental Directives 22
10.1 Producer Information . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
10.2 Copyright . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
10.3 Trademark Designations and Symbols . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
10.4 Target User . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
10.5 Disclaimer: Life Support Systems . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
10.6 Disclaimer: Intended Use . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
10.7 Collateral Documents & Tools . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
11 Revision History 24
11.1 Hardware Revision . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
11.2 Document Revision . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
©2017 TRINAMIC Motion Control GmbH & Co. KG, Hamburg, Germany
Terms of delivery and rights to technical change reserved.
Download newest version at www.trinamic.com
Read entire documentation.
Page 3

PD42-1270 Hardware Manual • Hardware Version V1.00 | Document Revision V1.10 • 2017-Mar-02
3 / 24
1 Features
The PANdrive™PD42-1270 is a full mechatronic solution with state of the art feature set. It is highly
integrated and offers convenient handling via CAN interface. The PD42-1270 includes a stepper motor,
driver electronics, and a fully featured hardware motion controller. It can be used in many decentralized
applications and has been designed for 0.20...0.47 Nm maximum holding torque and 24V DC nominal
supply voltage. With stealthChop™, the PD42-1270 offers absolutely silent and smooth motor operation
for lower and medium velocities. With spreadCycle™, the PD42-1270 offers a high performance current
controlled chopper mode for highest velocities with perfect zero crossing performance. With stallGuard2™,
a sensorless load detection feature is provided for automatic end step detection and load monitoring.
stallGuard2 is also used for the automatic current scaling feature coolStep™. The PD42-1270 comes with a
CAN bus interface and four (4) digital IOs.
1.1 General Features
Main Characteristics
• Supply Voltage +24V nom. (+6V to +28V DC)
• 1.0A RMS phase current (ca. 1.4A peak phase current)
• Highest micro step resolution, up to 256 micro steps per full step
• Available with enclosure and mounted to NEMA17 / 42mm flange size motor
• Permanent onboard parameter storage
• Advanced sixPoint™ ramp hardware motion controller
• Noiseless stealthChop™ chopper mode for slow to medium velocities
• High performance spreadCycle™ chopper mode
• High-precision sensorless load measurement with stallGuard2™
• Automatic current scaling algorithm coolStep™ to save energy and keep your drive cool
I/Os
• Home and reference switch inputs
• Enable input to power-on/-off driver H-bridges
• Optionally configurable analog input
•
Optionally configurable incremental encoder inputs (quadrature channels A and B only, no N channel)
CAN Bus Interface
• Standard CAN Bus Interface for control and configuration
• CAN bit rate of 20. . . 1000kBit/s
• TMCL-based protocol with TMCL firmware option
• CANopen protocol with DS402 device profile with CANopen firmware option
©2017 TRINAMIC Motion Control GmbH & Co. KG, Hamburg, Germany
Terms of delivery and rights to technical change reserved.
Download newest version at www.trinamic.com
Read entire documentation.
Page 4

PD42-1270 Hardware Manual • Hardware Version V1.00 | Document Revision V1.10 • 2017-Mar-02
4 / 24
1.2 TRINAMIC’s Unique Features
1.2.1 stealthChop™
stealthChop is an extremely quiet mode of operation for low and medium velocities. It is based on a voltage
mode PWM. During standstill and at low velocities, the motor is absolutely noiseless. Thus, stealthChop
operated stepper motor applications are very suitable for indoor or home use. The motor operates
absolutely free of vibration at low velocities. With stealthChop, the motor current is applied by driving
a certain effective voltage into the coil, using a voltage mode PWM. There are no more configurations
required except for the regulation of the PWM voltage to yield the motor target current.
Figure 1: Motor coil sine wave current using stealthChop (measured with current probe)
1.2.2 spreadCycle™
The spreadCycle chopper is a high-precision, hysteresis-based, and simple to use chopper mode, which
automatically determines the optimum length for the fast-decay phase. Several parameters are available to
optimize the chopper to the application. spreadCycle offers optimal zero crossing performance compared
to other current controlled chopper algorithms and thereby allows for highest smoothness. The true target
current is powered into the motor coils.
Figure 2: spreadCycle principle
1.2.3 stallGuard2
stallGuard2 is a high-precision sensorless load measurement using the back EMF of the motor coils. It
can be used for stall detection as well as other uses at loads below those which stall the motor. The
©2017 TRINAMIC Motion Control GmbH & Co. KG, Hamburg, Germany
Terms of delivery and rights to technical change reserved.
Download newest version at www.trinamic.com
Read entire documentation.
Page 5

PD42-1270 Hardware Manual • Hardware Version V1.00 | Document Revision V1.10 • 2017-Mar-02
Load [Nm]
stallGuard2
Initial stallGuard2 (SG) value: 100%
stallGuard2 (SG) value: 0
Maximum load reached.
Motor close to stall.
Motor stalls
0
0,1
0,2
0,3
0,4
0,5
0,6
0,7
0,8
0,9
0 50 100 150 200 250 300 350
Velocity [RPM]
Efficiency with coolStep
Efficiency with 50% torque reserve
5 / 24
stallGuard2 measurement value changes linearly over a wide range of load, velocity, and current settings.
At maximum motor load, the value reaches zero or is near zero. This is the most energy-efficient point of
operation for the motor.
Figure 3: stallGuard2 Load Measurement as a Function of Load
1.2.4 coolStep
coolStep is a load-adaptive automatic current scaling based on the load measurement via stallGuard2.
coolStep adapts the required current to the load. Energy consumption can be reduced by as much as 75%.
coolStep allows substantial energy savings, especially for motors which see varying loads or operate at a
high duty cycle. Because a stepper motor application needs to work with a torque reserve of 30% to 50%,
even a constant-load application allows significant energy savings because coolStep automatically enables
torque reserve when required. Reducing power consumption keeps the system cooler, increases motor
life, and allows for cost reduction.
Figure 4: Energy Efficiency Example with coolStep
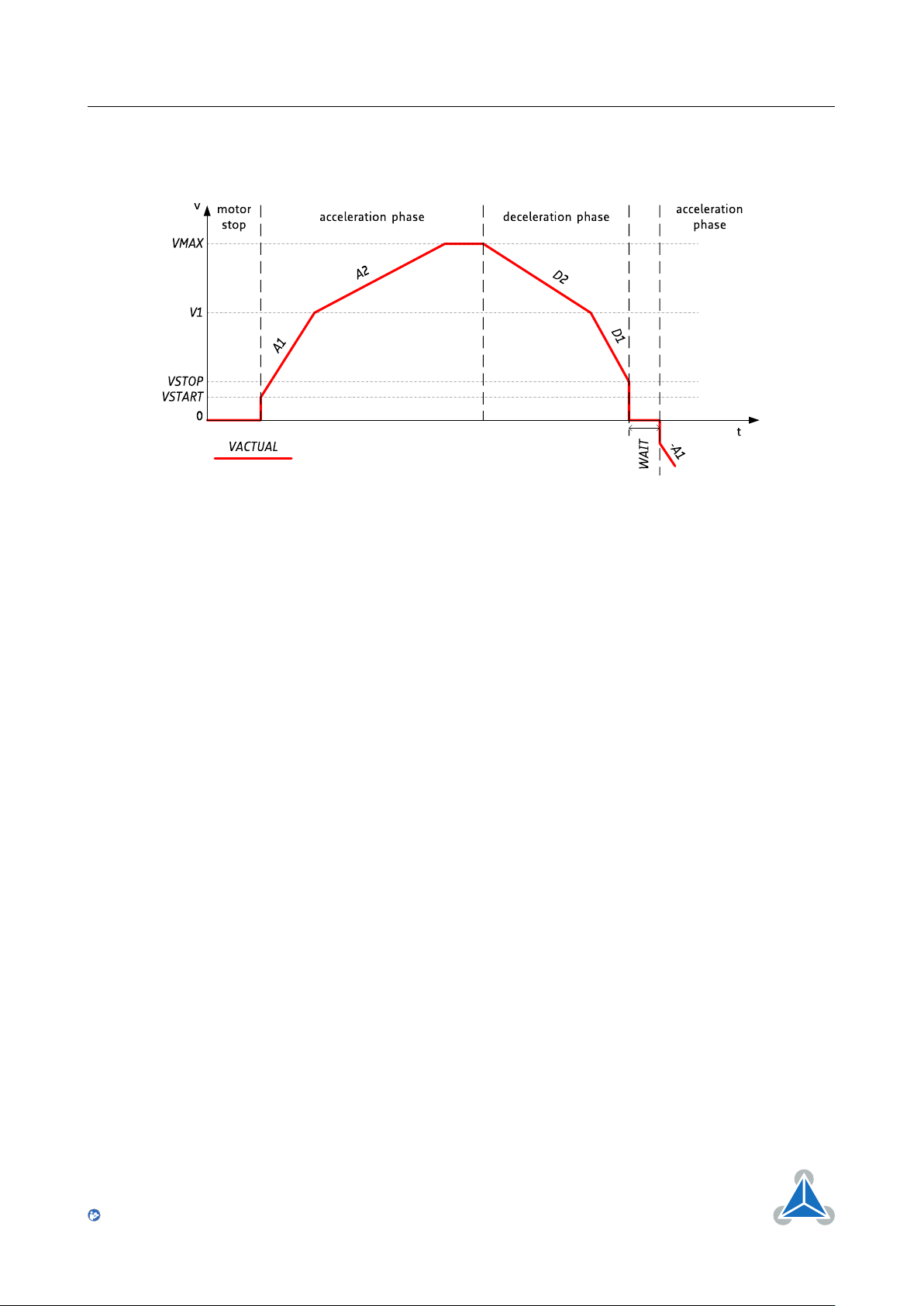
1.2.5 sixPoint Motion Controller
TRINAMIC’s sixPoint motion controller is a new type of ramp generator, which offers faster machine
operation compared to the classical linear acceleration ramps. The sixPoint ramp generator allows adapting
©2017 TRINAMIC Motion Control GmbH & Co. KG, Hamburg, Germany
Terms of delivery and rights to technical change reserved.
Download newest version at www.trinamic.com
Read entire documentation.
Page 6
PD42-1270 Hardware Manual • Hardware Version V1.00 | Document Revision V1.10 • 2017-Mar-02
6 / 24
the acceleration ramps to the torque curves of a stepper motor and uses two different acceleration settings
each for the acceleration phase and for the deceleration phase
Figure 5: Typical motion profile with TRINAMIC’s sixPoint motion controller
©2017 TRINAMIC Motion Control GmbH & Co. KG, Hamburg, Germany
Terms of delivery and rights to technical change reserved.
Download newest version at www.trinamic.com
Read entire documentation.
Page 7

PD42-1270 Hardware Manual • Hardware Version V1.00 | Document Revision V1.10 • 2017-Mar-02
2 Order Codes
Order Code Description Size (LxWxH)
7 / 24
PD42-1-1270-TMCL
PD42-2-1270-TMCL
PD42-3-1270-TMCL
PD42-1-1270-CANOpen
PD42-2-1270-CANOpen
PD42-3-1270-CANOpen
TMCM-1270-TMCL
TMCM-1270-CANOpen
Table 1: Order codes modules (electronics + enclosure) and PANdrives™
PANdrive, 0.27Nm, 1.0A RMS, +24V DC, CAN Bus
interface, TMCL firmware
PANdrive, 0.35Nm, 1.0A RMS, +24V DC, CAN Bus
interface, TMCL firmware
PANdrive, 0.49Nm, 1.0A RMS, +24V DC, CAN Bus
interface, TMCL firmware
PANdrive, 0.27Nm, 1.0A RMS, +24V DC, CAN Bus
interface, CANopen firmware
PANdrive, 0.35Nm, 1.0A RMS, +24V DC, CAN Bus
interface, CANopen firmware
PANdrive, 0.49Nm, 1.0A RMS, +24V DC, CAN Bus
interface, CANopen firmware
Controller/Driver Module without motor, +24V
DC, CAN Bus interface, TMCL firmware
Controller/Driver Module without motor, +24V
DC, CAN Bus interface, CANopen firmware
42mm x 42mm x 45,5mm
42mm x 42mm x 50mm
42mm x 42mm x 59mm
42mm x 42mm x 45,5mm
42mm x 42mm x 50mm
42mm x 42mm x 59mm
42mm x 42mm x 12mm
42mm x 42mm x 12mm
Order Code Description
TMCM-1270-CABLE Cable loom for TMCM-1270:
• 1x cable loom for motor connector with 4-pin JST PH series connector
•
1x cable loom for Power supply and I/O connector with 10-pin JST PH series
connector
PD42-1270-CABLE Cable loom for PD42-x-1270:
•
1x cable loom for Power supply and I/O connector with 10-pin JST PH series
connector
Table 2: Order codes cable loom
©2017 TRINAMIC Motion Control GmbH & Co. KG, Hamburg, Germany
Terms of delivery and rights to technical change reserved.
Download newest version at www.trinamic.com
Read entire documentation.
Page 8

PD42-1270 Hardware Manual • Hardware Version V1.00 | Document Revision V1.10 • 2017-Mar-02
8 / 24
3 Mechanical and Electrical Interfacing
3.1 PD42-1270 Dimensions
The PD42-1270 includes the TMCM-1270 stepper motor controller/driver module (electronics + encapsulating enclosure) and a NEMA17 / 42mm flange size bipolar stepper motor. Currently, there is a choice
between three NEMA17 / 42mm flange size stepper motors with different lengths and different holding
torques. All three stepper motors are rated for 1A RMS coil current - perfectly fitting to the TMCM-1270
electronics.
The dimensions of the controller/driver unit are approx. 42mm x 42mm x 12mm (TMCM-1270 electronics +
encapsulating enclosure). There are two mounting holes for M3 screws for mounting on the back bell of a
NEMA17 / 42mm flange size stepper motor (screw/thread length depends on motor size).
Figure 6: PD42-1270 top view mechanical dimensions
3.2 PD42-1270 Dimensions and Weight
When mounted to the stepper motor the overall size of the PANdrive is the housing height plus motor
body size.
Order Code L in mm Weight in g
TMCM-1270 12 ±0,2 ≈ 32
PD42-1-1270 45,5 ±1 ≈ 260
PD42-2-1270 50 ±1 ≈ 320
PD42-3-1270 59 ±1 ≈ 395
Table 3: Length and weight
©2017 TRINAMIC Motion Control GmbH & Co. KG, Hamburg, Germany
Terms of delivery and rights to technical change reserved.
Download newest version at www.trinamic.com
Read entire documentation.
Page 9

PD42-1270 Hardware Manual • Hardware Version V1.00 | Document Revision V1.10 • 2017-Mar-02
9 / 24
Figure 7: PD42-3-1270 mechanical dimensions with motor
©2017 TRINAMIC Motion Control GmbH & Co. KG, Hamburg, Germany
Terms of delivery and rights to technical change reserved.
Download newest version at www.trinamic.com
Read entire documentation.
Page 10

PD42-1270 Hardware Manual • Hardware Version V1.00 | Document Revision V1.10 • 2017-Mar-02
3.3 PD42-1270 Motor Parameters
Specifications Parameter Unit PD42-1-1270 PD42-2-1270 PD42-3-1270
Step angle
Step angle accuracy % ±5 ±5 ±5
Ambient temperature T
Max. motor temperature T
amb
motor
max
Shaft radial play (450g load) mm 0,02 0,02 0,02
Shaft axial play (450g load) mm 0,08 0,08 0,08
◦
◦
C -20...+50 -20...+50 -20...+50
◦
C 80 80 80
1.8 1.8 1.8
10 / 24
Max radial force (20mm from
N 28 28 28
front flange)
Max axial force N 10 10 10
Rated voltage V
Rated phase current I
Phase resistance at 20◦C R
Phase inductance (typ.) L
RAT ED
RMSRAT ED
COIL
COIL
V 2.0 2.4 2.4
A 1.0 1.0 1.0
Ω 1.0 1.2 1.4
mH 1.6 2.2 2.1
Holding torque Nm 0.22 0.36 0.44
Insulation class B B B
Rotor inertia g cm2 35 57 68
Weight M kg 0.22 0.24 0.35
Table 4: PD42-1270 Motor Parameters
©2017 TRINAMIC Motion Control GmbH & Co. KG, Hamburg, Germany
Terms of delivery and rights to technical change reserved.
Download newest version at www.trinamic.com
Read entire documentation.
Page 11

PD42-1270 Hardware Manual • Hardware Version V1.00 | Document Revision V1.10 • 2017-Mar-02
11 / 24
3.4 PD42-1270 Torque Curves
The following diagrams show the torque vs. speed curves for the PD42-1-1270, the PD42-2-1270, and
the PD42-3-1270 at three different typical conditions. All measurements have been done in spreadCycle
chopper mode. The measurement conditions are:
1. V DD =+24V, I
2. V DD =+24V, I
3. V DD =+12V, I
COILRM S
COILRM S
COILRM S
=1A, 1/256 microstepping
=1A, half stepping
=1A, half stepping
Figure 8: PD42-1-1270 torque vs. speed
©2017 TRINAMIC Motion Control GmbH & Co. KG, Hamburg, Germany
Terms of delivery and rights to technical change reserved.
Download newest version at www.trinamic.com
Read entire documentation.
Page 12

PD42-1270 Hardware Manual • Hardware Version V1.00 | Document Revision V1.10 • 2017-Mar-02
12 / 24
Figure 9: PD42-2-1270 torque vs. speed
Figure 10: PD42-3-1270 torque vs. speed
©2017 TRINAMIC Motion Control GmbH & Co. KG, Hamburg, Germany
Terms of delivery and rights to technical change reserved.
Download newest version at www.trinamic.com
Read entire documentation.
Page 13

PD42-1270 Hardware Manual • Hardware Version V1.00 | Document Revision V1.10 • 2017-Mar-02
10
1
1
4
Power Supply and I/O
connector
Motor connector
13 / 24
4 Connectors and LEDs
The PD42-1270 offers two connectors - one 10-pin connector for power supply, communication (CAN) and
four Inputs and one four pin connector for connecting the motor.
Figure 11: PD42-1270 connectors
Overview of connector and mating connector types:
Label Connector type Mating connector type
Power supply and I/O connector
Motor connector
JST B10B-PH-K-S (JST PH series,
10pins, 2mm pitch)
JST B4B-PH-K-S (JST PH series,
4pins, 2mm pitch)
Table 5: Connector and mating connectors
4.1 Power supply and I/O Connector
Pin no. Pin name Description
1 GND Supply and signal ground connection
2 +24V Supply voltage input (+6V to +28V DC)
Connector housing: JST PHR-10
Contacts: JST SPH-002T-P0.5S
Wire: 0.22mm2, AWG 24
Connector housing: JST PHR-4
Contacts: JST SPH-002T-P0.5S
Wire: 0.22mm2, AWG 24
3 CAN_H Differential CAN bus signal (non-inverting)
©2017 TRINAMIC Motion Control GmbH & Co. KG, Hamburg, Germany
Terms of delivery and rights to technical change reserved.
Download newest version at www.trinamic.com
Read entire documentation.
Page 14

PD42-1270 Hardware Manual • Hardware Version V1.00 | Document Revision V1.10 • 2017-Mar-02
Pin no. Pin name Description
4 CAN_L Differential CAN bus signal (inverting)
5 GND Signal ground connection
14 / 24
6 +5V
7 HOME (GPI0)
8 REFL (GPI1)
9 REFR (GPI2)
10 ENN (GPI3)
Table 6: PD42-1270 Power supply and I/O connector pin assignment
NOTICE
5V output, 100mA maximum load, e.g. for end / home switch circuit or
external encoder supply
General purpose input 0, can be used as HOME switch input, also. Configurable as analog input AIN0 via software (+5V compatible, internal 10k pull-up
to +5V)
General purpose input 1, can be used as left reference / stop switch input
REFL / STOP_L, also. Configurable as incremental encoder input channel A via
software (+5V TTL compatible, internal 10k pull-up to +5V)
General purpose input 2, can be used as right reference / stop switch input
REFR / STOP_R, also. Configurable as incremental encoder input channel B
via software (+5V TTL compatible, internal 10k pull-up to +5V)
ENABLE NOT input (active low) for driver stage, 0 = enabled, 1 = disabled (+5V
TTL compatible, internal 10k pull-up to +5V)
Always keep the power supply voltage below the upper limit of 28V!
Otherwise the driver electronics will be seriously damaged. Especially, when the
selected operating voltage is near the upper limit a regulated power supply is
highly recommended.
NOTICE
Add external power supply capacitors!
It is recommended to connect an electrolytic capacitor of significant size (e.g. 470µF/35V) to the power supply lines next
to the PD42-1270!
Rule of thumb for size of electrolytic capacitor: C =
1000µF
A
× I
SU P P LY
In addition to power stabilization (buffer) and filtering this added capacitor will
also reduce any voltage spikes which might otherwise occur from a combination
of high inductance power supply wires and the ceramic capacitors. In addition
it will limit slew-rate of power supply voltage at the module. The low ESR of
ceramic-only filter capacitors may cause stability problems with some switching
power supplies.
NOTICE
Tie ENN to GND in order to enable driver stage!
Please note that pin 10 of the
Power supply and I/O connector is a hardware driver stage enable input (active
low) with an internal pull-up resistor. In order to enable motor driver stage and
be able to move the motor using appropriate software commands it is necessary
to tie this input to GND.
4.2 CAN Connection
For remote control and communication with a host system the PD42-1270 provides a CAN bus interface.
For proper operation the following items should be taken into account when setting up a CAN network:
©2017 TRINAMIC Motion Control GmbH & Co. KG, Hamburg, Germany
Terms of delivery and rights to technical change reserved.
Download newest version at www.trinamic.com
Read entire documentation.
Page 15

PD42-1270 Hardware Manual • Hardware Version V1.00 | Document Revision V1.10 • 2017-Mar-02
15 / 24
Bus Structure
The network topology should follow a bus structure as closely as possible. That is, the
connection between each node and the bus itself should be as short as possible. Basically, it should be
short compared to the length of the bus.
Figure 12: CAN bus strcuture
Bus Termination
Especially for longer busses and/or multiple nodes connected to the bus and/or high
communication speeds, the bus should be properly terminated at both ends. The PD42-1270 does not
integrate any termination resistor. Therefore, 120 Ohm termination resistors at both ends of the bus have
to be added externally.
Number of Nodes
The bus transceiver used on the PD42-1270 (TJA1051) supports at least 100 nodes
under optimum conditions. Practically achievable number of nodes per CAN bus highly depend on bus
length (longer bus → less nodes) and communication speed (higher speed → less nodes).
CAN Bus Adapters
To quickly connect to the PD42-1270 a PC based intergated development environment TMCL-IDE is available. Latest release can be downloaded for free from our web site: www.trinamic.com
A number of common CAN interface adapters from different manufactures is supported from within this
software. Please make sure to check our web site from time to time for the latest version of the software!
4.3 Motor Connector
Pin no. Pin name Description
1 A1 Motor phase A pin 1
2 A2 Motor phase A pin 2
3 B1 Motor phase B pin 1
4 B2 Motor phase B pin 2
Table 7: Motor connector pinning
©2017 TRINAMIC Motion Control GmbH & Co. KG, Hamburg, Germany
Terms of delivery and rights to technical change reserved.
Download newest version at www.trinamic.com
Read entire documentation.
Page 16

PD42-1270 Hardware Manual • Hardware Version V1.00 | Document Revision V1.10 • 2017-Mar-02
Green LED
Red LED
16 / 24
NOTICE
Do not connect or disconnect motor during operation!
Motor cable and motor inductivity might lead to voltage spikes when the motor is connected / disconnected while energized. These voltage spikes might exceed voltage limits of the
driver MOSFETs and might permanently damage them. Therefore, always switch
off or disconnect power supply before connecting or disconnecting the motor.
4.4 LEDs
The PD42-1270 includes two LEDs: one green status LED and one red error LED. See figure 13 for LED
location.
Figure 13: PD42-1270 LED colors and loacation
Depending on the firmware option (TMCL or CANopen), these LEDs have different functionality. Main
states for TMCL:
State green LED State red LED Description TMCL Firmware
Flashing off Firmware running (normal operation mode)
Permanent on Permanent on Bootloader mode, firmware update supported
Table 8: LED functionality description
For CANopen firmware LED functionality has been implemented based on CANopen standard.
©2017 TRINAMIC Motion Control GmbH & Co. KG, Hamburg, Germany
Terms of delivery and rights to technical change reserved.
Download newest version at www.trinamic.com
Read entire documentation.
Page 17

PD42-1270 Hardware Manual • Hardware Version V1.00 | Document Revision V1.10 • 2017-Mar-02
Power supply
USB-CAN
c:>
Host
5 Functional Description
5.1 Typical Application Wiring
The PD42-1270 driver/controller’s wiring is straightforward as shown in the following figure.
• Power supply must be connected to V+ and GND.
• CAN - use appropriate CAN interface adapter
• ENN - connect ENN signal to GND in order to enable driver stage
17 / 24
Figure 14: Typical application scenario for remote control of PD42-1270
5.2 Inputs
The four inputs of the PD42-1270 are +5V TTL compatible with internal pull-ups (10k) to +5V and
optically isolated.
not
©2017 TRINAMIC Motion Control GmbH & Co. KG, Hamburg, Germany
Terms of delivery and rights to technical change reserved.
Download newest version at www.trinamic.com
Read entire documentation.
Page 18

PD42-1270 Hardware Manual • Hardware Version V1.00 | Document Revision V1.10 • 2017-Mar-02
6 Operational Ratings and Characteristics
6.1 Absolute Maximum Ratings
Parameter Min Max Unit
Supply voltage +6 +28 V
Working temperature -30 +40 ° C
Motor coil current / sine wave peak 1.4 A
Continuous motor current (RMS) 1.0 A
18 / 24
NOTICE
Stresses above those listed under "‘Absolute Maximum Ratings"’ may cause permanent damage to the device. This is a stress rating only and functional operation
of the device at those or any other conditions above those indicated in the operation listings of this specification is not implied. Exposure to maximum rating
conditions for extended periods may affect device reliability.
6.2 Electrical Characteristics (Ambient Temperature 25° C)
Parameter Symbol Min Typ Max Unit
Supply voltage V DD 6 24 28 V
Motor coil current / sine wave
peak
(chopper regu-
I
COILpeak
0 1.4 A
lated, adjustable via TTL UART interface)
Continuous motor current (RMS) I
Power supply current I
COILRM S
DD
0 1.0 A
I
COIL
1.4∗I
COIL
Table 10: Electrical Characteristics
6.3 I/O Ratings (Ambient Temperature 25° C)
A
Parameter Symbol Min Typ Max Unit
Input voltage V
Low level voltage V
High level voltage V
IN
L
H
0 1.75 V
3.25 5 V
5 5.5 V
Table 11: I/O ratings
©2017 TRINAMIC Motion Control GmbH & Co. KG, Hamburg, Germany
Terms of delivery and rights to technical change reserved.
Download newest version at www.trinamic.com
Read entire documentation.
Page 19

PD42-1270 Hardware Manual • Hardware Version V1.00 | Document Revision V1.10 • 2017-Mar-02
6.4 Functional Characteristics
Parameter Description / Value
19 / 24
Control
CAN bus interface and four digital inputs for referencing, incremental encoder,
and NOT_ENABLE
Communication CAN bus interface for control and configuration, 20. . . 1000kBit/s
Driving Mode
spreadCycle, stealthChop, and constant
T
chopper, adaptive current control
off
via stallGuard2 and coolstep
Stepping Resolution Full, 1/2, 1/4, 1/8, 1/16, 1/32, 1/64, 1/128, 1/256 step
Table 12: Functional Characteristics
6.5 Other Requirements
Specifications Description or Value
Cooling Free air
Working environment Avoid dust, water, oil mist and corrosive gases, no condensation, no frosting
Working temperature -30° C to +40° C
Table 13: Other Requirements and Characteristics
7 Abbreviations used in this Manual
Abbreviation Description
CAN Controller Area Network
IDE Integrated Development Environment
LED Light Emmitting Diode
RMS Root Mean Square value
TMCL TRINAMIC Motion Control Language
TTL Transistor Transistor Logic
UART Universal Asynchronous Receiver Transmitter
USB Universal Serial Bus
Table 14: Abbreviations used in this Manual
©2017 TRINAMIC Motion Control GmbH & Co. KG, Hamburg, Germany
Terms of delivery and rights to technical change reserved.
Download newest version at www.trinamic.com
Read entire documentation.
Page 20

PD42-1270 Hardware Manual • Hardware Version V1.00 | Document Revision V1.10 • 2017-Mar-02
8 Figures Index
1
Motor coil sine wave current using
stealthChop (measured with current
probe) . . . . . . . . . . . . . . . . . . . 4
2 spreadCycle principle . . . . . . . . . . 4
3
stallGuard2 Load Measurement as a
Function of Load . . . . . . . . . . . . 5
4
Energy Efficiency Example with coolStep
5
Typical motion profile with TRINAMIC’s
sixPoint motion controller . . . . . . . 6
6
PD42-1270 top view mechanical di-
mensions . . . . . . . . . . . . . . . . . 8
5
7
PD42-3-1270 mechanical dimensions
with motor . . . . . . . . . . . . . . . . 9
8 PD42-1-1270 torque vs. speed . . . . 11
9 PD42-2-1270 torque vs. speed . . . . 12
10 PD42-3-1270 torque vs. speed . . . . 12
11 PD42-1270 connectors . . . . . . . . . 13
12 CAN bus strcuture . . . . . . . . . . . 15
13 PD42-1270 LED colors and loacation . 16
14
Typical application scenario for re-
mote control of PD42-1270 . . . . . . 17
20 / 24
©2017 TRINAMIC Motion Control GmbH & Co. KG, Hamburg, Germany
Terms of delivery and rights to technical change reserved.
Download newest version at www.trinamic.com
Read entire documentation.
Page 21

PD42-1270 Hardware Manual • Hardware Version V1.00 | Document Revision V1.10 • 2017-Mar-02
9 Tables Index
1
Order codes modules (electronics +
enclosure) and PANdrives™ . . . . . . 7
2 Order codes cable loom . . . . . . . . 7
3 Length and weight . . . . . . . . . . . 8
4 PD42-1270 Motor Parameters . . . . 10
5 Connector and mating connectors . . 13
6
PD42-1270 Power supply and I/O con-
nector pin assignment . . . . . . . . . 14
7 Motor connector pinning . . . . . . . 15
8 LED functionality description . . . . . 16
10 Electrical Characteristics . . . . . . . . 18
11 I/O ratings . . . . . . . . . . . . . . . . 18
12 Functional Characteristics . . . . . . . 19
13
Other Requirements and Characteristics
14 Abbreviations used in this Manual . . 19
15 Hardware Revision . . . . . . . . . . . 24
16 Document Revision . . . . . . . . . . . 24
21 / 24
19
©2017 TRINAMIC Motion Control GmbH & Co. KG, Hamburg, Germany
Terms of delivery and rights to technical change reserved.
Download newest version at www.trinamic.com
Read entire documentation.
Page 22

PD42-1270 Hardware Manual • Hardware Version V1.00 | Document Revision V1.10 • 2017-Mar-02
22 / 24
10 Supplemental Directives
10.1 Producer Information
10.2 Copyright
TRINAMIC owns the content of this user manual in its entirety, including but not limited to pictures, logos,
trademarks, and resources.©Copyright 2017 TRINAMIC. All rights reserved. Electronically published by
TRINAMIC, Germany.
Redistributions of source or derived format (for example, Portable Document Format or Hypertext Markup
Language) must retain the above copyright notice, and the complete Datasheet User Manual documentation of this product including associated Application Notes; and a reference to other available
product-related documentation.
10.3 Trademark Designations and Symbols
Trademark designations and symbols used in this documentation indicate that a product or feature is
owned and registered as trademark and/or patent either by TRINAMIC or by other manufacturers, whose
products are used or referred to in combination with TRINAMIC’s products and TRINAMIC’s product documentation.
This Hardware Manual is a non-commercial publication that seeks to provide concise scientific and technical
user information to the target user. Thus, trademark designations and symbols are only entered in the
Short Spec of this document that introduces the product at a quick glance. The trademark designation
/symbol is also entered when the product or feature name occurs for the first time in the document. All
trademarks and brand names used are property of their respective owners.
10.4 Target User
The documentation provided here, is for programmers and engineers only, who are equipped with the
necessary skills and have been trained to work with this type of product.
The Target User knows how to responsibly make use of this product without causing harm to himself or
others, and without causing damage to systems or devices, in which the user incorporates the product.
10.5 Disclaimer: Life Support Systems
TRINAMIC Motion Control GmbH & Co. KG does not authorize or warrant any of its products for use in life
support systems, without the specific written consent of TRINAMIC Motion Control GmbH & Co. KG.
Life support systems are equipment intended to support or sustain life, and whose failure to perform,
when properly used in accordance with instructions provided, can be reasonably expected to result in
personal injury or death.
Information given in this document is believed to be accurate and reliable. However, no responsibility
is assumed for the consequences of its use nor for any infringement of patents or other rights of third
parties which may result from its use. Specifications are subject to change without notice.
10.6 Disclaimer: Intended Use
The data specified in this user manual is intended solely for the purpose of product description. No representations or warranties, either express or implied, of merchantability, fitness for a particular purpose
©2017 TRINAMIC Motion Control GmbH & Co. KG, Hamburg, Germany
Terms of delivery and rights to technical change reserved.
Download newest version at www.trinamic.com
Read entire documentation.
Page 23

PD42-1270 Hardware Manual • Hardware Version V1.00 | Document Revision V1.10 • 2017-Mar-02
23 / 24
or of any other nature are made hereunder with respect to information/specification or the products to
which information refers and no guarantee with respect to compliance to the intended use is given.
In particular, this also applies to the stated possible applications or areas of applications of the product.
TRINAMIC products are not designed for and must not be used in connection with any applications where
the failure of such products would reasonably be expected to result in significant personal injury or death
(safety-Critical Applications) without TRINAMIC’s specific written consent.
TRINAMIC products are not designed nor intended for use in military or aerospace applications or environments or in automotive applications unless specifically designated for such use by TRINAMIC. TRINAMIC
conveys no patent, copyright, mask work right or other trade mark right to this product. TRINAMIC assumes
no liability for any patent and/or other trade mark rights of a third party resulting from processing or
handling of the product and/or any other use of the product.
10.7 Collateral Documents & Tools
This product documentation is related and/or associated with additional tool kits, firmware and other
items, as provided on the product page at: www.trinamic.com.
©2017 TRINAMIC Motion Control GmbH & Co. KG, Hamburg, Germany
Terms of delivery and rights to technical change reserved.
Download newest version at www.trinamic.com
Read entire documentation.
Page 24

PD42-1270 Hardware Manual • Hardware Version V1.00 | Document Revision V1.10 • 2017-Mar-02
11 Revision History
11.1 Hardware Revision
Version Date Author Description
1.00 2016-09-27 TMC Series version.
Table 15: Hardware Revision
11.2 Document Revision
Version Date Author Description
1.00 2016-06-26 BS Initial release.
1.10 2016-02-20 GE Update for series version V1.0
Table 16: Document Revision
24 / 24
©2017 TRINAMIC Motion Control GmbH & Co. KG, Hamburg, Germany
Terms of delivery and rights to technical change reserved.
Download newest version at www.trinamic.com
Read entire documentation.
 Loading...
Loading...