

Page 1

Start in Trinamic´s Schrittmotorsysteme
Kursive und grüne Zeilen können beim PD-110 ignoriert werden.
Komponenten: Vorsicht:
• Ihr TMCM-110 Schrittmotor Steuer- und
Treibermodul.
• Ein Schrittmotor mit 1A RMS Spulenstrom.
• Interface (RS232, RS485, CAN oder IIC)
passend zu Ihrer TMCM-110 Version, mit
Anschlusskabeln und evtl. Konverter.
• Spannungsversorgung für 12V bis 30V
• TMCL IDE Programm und PC
• Passende Kabel zum Anschließen des
Motors und des TMCM-110.
Start:
• Der Motor darf niemals entfernt bzw. angeschlossen
werden, während das Modul bestromt ist.
• Verwechseln von Anschlüssen oder Kurzschlüsse
können zur Zerstörung des Moduls führen.
• Bündeln Sie keine Signalkabel mit Motor- und
Spannungsversorgungskabeln zur Vermeidung von
Kommunikationsfehlern.
• Überschreiten Sie nicht die max. Spannung von 30V.
• Wenn Sie das TMCM-110 auf einen Motor montieren,
lassen Sie 5mm Abstand zur Luftkühlung.
Beginnen Sie mit ausgeschalteter
Versorgungsspannung.
1. Verbinden Sie RS232 Pin 2 (PC-TxD) mit Pin 4 (110-RxD) und
Pin 3 (PC-RxD) mit Pin 5. Andere Interfaces Äquivalent.
2. Schließen Sie das ungekreuzte RS232-Kabel an den PC an.
3. Anschluss der Versorgungsspannung an das TMCM-110:
• Versorgungsspannung (+) an 2
• Erdung (GND) an Pin 1
4. Anschluss des Schrittmotors an die 4-pin-Buchse.
5. Versorgung EINschalten. Die LED auf dem Modul blinkt und
der Motor ist bestromt im Stillstand. Wenn dieses nicht
geschieht, schalten Sie die Versorgung AUS und überprüfen
Ihre Anschlüsse.
6. Starten Sie das TMCL IDE Programm (Siehe zweite Seite zur
Einstellung und Benutzung).
7. Schreiben Sie folgendes Programm in das offene Feld:
//Einfaches Beispiel zu TMCL und der TMCL-IDE
SAP 4, 0, 100 //Setzt maximale Geschw.
Loop: MVP ABS, 0, 15000 //Fahr zur Position 15000
WAIT POS, 0, 0
WAIT TICKS, 0, 200
MVP ABS, 0, 0 //Fahr zurück zu Position 0
WAIT POS, 0, 0
WAIT TICKS, 0, 100
JA Loop //Unendliche Schleife
Spannungs-
Versorgung
12..30V
3
6
Pin 1
+-
GNDVSGND
Nullmodemkabel,
sonst sind Pins 2
und 3 vertauscht
2
RS232
23 5
1
TxD
RxD
Pin 1
GND
8. Klicken Sie nacheinander “Assemble”, “Download” zum Laden
TMCM-110
des Codes zum TMCM-110 und “Run”. Das übertragene
Programm wird nun ausgeführt.
9. “Stop”-Knopf klicken, dann den “TMCL Direct Mode” starten
A1A2B1
und folgende Befehle eingeben und senden:
• ROR rotate right, Motor 0, value 500 →Execute klicken
Der Motor dreht sich jetzt..
B2
Pin 1
• MST motor stop, Motor 0 → Click Execute
Erste Schritte sind getan. Weitere Befehle finden Sie auf
4
Seite 2 und im TMCM-110 Manual.
Anschlussbemerkung: Das TMCM-110 wird mit einem 4 Pin, 5pin
Motor
and 8 Pin JST PHR-connector mit etwa 20cm Kabeln für jeden Pin
geliefert. Bei einem PANdrive PD-110 ist der Motor bereits an das
TMCM-110 angeschlossen.
8
9
Copyright © 2006, TRINAMIC Motion Control GmbH & Co. KG www.trinamic.com
Page 2
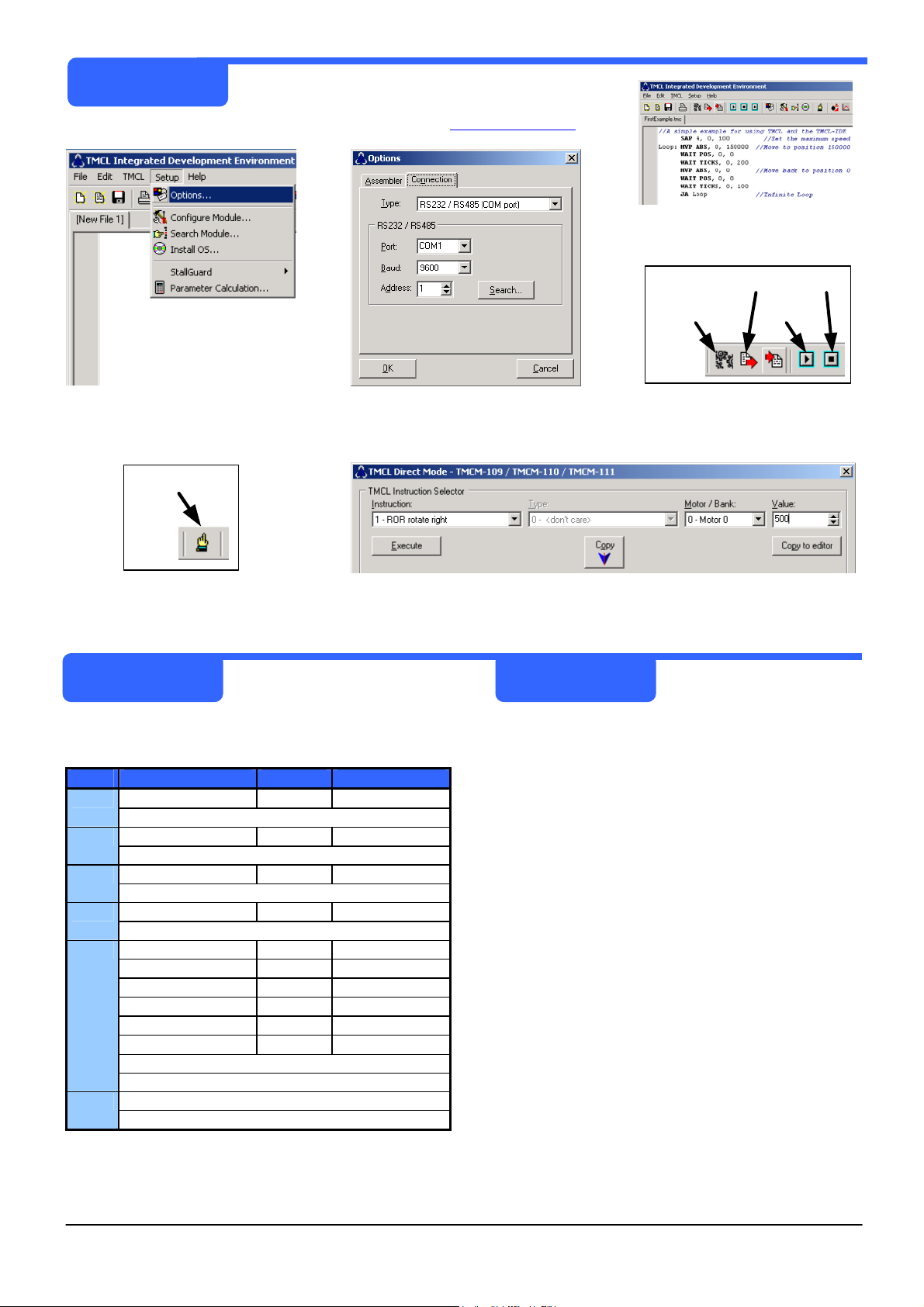
TMCL IDE:
1. Vergewissern Sie sich, dass kein anderes
Programm den COM-Port nutzt.
2. Öffnen Sie die TMCL IDE (auf der TechLibCD and www.trinamic.com)
by clicking TMCL.exe.
5. Schreiben Sie ins weiße Feld
einen Programmcode und
speichern ihn mit File/Save.
Download
Stop
3. Öffnen Sie Options.. und
klicken Sie den Reiter
Connection.
"Direct Mode"
7. Alle laufenden Programme
mit “Stop” anhalten und den
“Direct Mode” starten.
Befehle: Fehlersuche:
werden. Es gibt Bewegungs- (ROR, ROL, MST, MVP)
and Steuerungs- (SAP - Set Axis Parameter) Befehle.
GAP liefert die entsprechende SAP-Einstellung.
Instr. Type Value Beschreibung
(don´t care) 0..2047 Dreht rechts ROR
ROR <motor no.>, <Value>
(don´t care) 0..2047 Dreht links ROL
ROL <motor no.>, <Value>
(don´t care) Motor stoppt MST
MST <motor no.>, <Value>
ABS|REL|COORD 23 bit Fahr zu Pos. MVP
MVP <type>, <motor no.>, <Value>
SAP
SAP <type no.>,<motor no.>,<Value>
Bewegungs- und Steuerungsparameter
GAP
Liefert den aktuellen SAP Parameter
Für die vollständige Befehlsliste und weitere Details
siehe das TMCL-Reference and Programming
Manual auf TechLibCD oder www.trinamic.com.
2 23 bit Aktuelle Pos.
4 0..2047 Max Geschw.
5 0..2047 Max Beschl.
6 0..1500 Max Strom
7 0..1500 Standbystrom
140 0..6 Mikroschrittres.
GAP <type no.>, <motor no.>
Folgende Befehle können in
einem Programm oder im
“Direct Mode” benutzt
4. Wählen Sie den COM-Port
und Einstellungen wie oben
(baudrate 9600). OK klicken.
8. Das TMCM-110 wird automatisch erkannt, wenn die Kommunikation
funktioniert. Erteilen Sie einen Befehl mit Instruction, Type, Motor,
Value und drücken Sie Execute, um ihn zum TMCM-110 zu senden.
Wenn die Kommunikation nicht hergestellt wird:
• Blinkt die LED des TMCM-110 ?. Wenn nicht,
prüfen Sie die Spannungsversorgung.
• Starten Sie “Direct Mode”. Wird das TMCM-110
automatisch erkannt? Wenn nicht: schließen.
• Benutzen Sie den richtigen COM-Port und ist er
nicht blockiert durch ein anderes Programm?
• Überprüfen Sie die Anschlusseinstellungen,
Standard: 9600 Baud und Adresse 1.
• Überprüfen Sie den Interface-Anschluss ans
TMCM-110.
• Nutzen Sie das TMCM-110 Manual zur weiteren
Fehlersuche.
Der Motor reagiert nicht:
• Wenn er nach dem Einschalten bestromt wird
(Spannung korrekt?), ist es normalerweise ein
Kommunikationsproblem (siehe oben).
• Wenn Sie ein TMCL Programm benutzten,
versuchen Sie einen Befehl im “Direct Mode“, um
einen Fehler in Ihrem Programm auszuschließen.
• Überprüfen Sie den Motoranschluss und ob die
LED auf dem Modul blinkt.
• Stellen Sie mit dem Befehl „137 - restore factory
settings“ im „Direct Mode“ die Standardeinstellungen wieder her.
Assemble
Run
6. Nacheinander “Assemble”-,
“Download”- und “Run”Knopf drücken.
Copyright © 2006, TRINAMIC Motion Control GmbH & Co. KG www.trinamic.com
 Loading...
Loading...