

Page 1

BACnet® Option Module
Instruction Manual
TR200
November 2009
BAS-SVX24B-EN
Page 2
Table of Contents
Safety
Copyright, limitation of liability and revision rights
High Voltage Warning
Before Commencing Repair Work
Special Conditions
Introduction
Introduction
How to Install
The BACnet Option
System Specifications
How to Configure the System
Configuring BACnet
1-1
1-1
1-3
1-8
1-8
2-1
2-1
3-1
3-1
3-5
4-1
4-1
BIBBs
Example of a simple set-up of BACnet
How to Control the Adjustable Frequency Drive
Network Adjustable Frequency Drive Control Inputs and Outputs
Adjustable Frequency Drive Feedback to Network
Parameters
Parameter Overview
Parameter Description
Troubleshooting
Alarm, Warning and Extended Status Word
Alarm Words
4-2
4-3
5-1
5-2
5-15
6-1
6-1
6-2
7-1
7-1
7-2
Warning Words
TR200 BACnet -1
7-3
Page 3

LED Status
7-4
-2 TR200 BACnet
Page 4

Safety
Copyright, limitation of liability and revision rights
This publication contains information proprietary to Trane. By accepting and using this manual, the user agrees
that the information contained herein will be used solely for operating equipment from Trane or equipment
from other vendors provided that such equipment is intended for communication with Trane equipment over
a serial communication link. This publication is protected under the copyright laws of most countries.
Trane does not warrant that a software program produced according to the guidelines provided in this manual
will function properly in every physical, hardware or software environment.
Although Trane has tested and reviewed the documentation within this manual, Trane makes no warranty or
representation, neither expressed nor implied, with respect to this documentation, including its quality, performance, or fitness for a particular purpose.
In no event shall Trane be liable for direct, indirect, special, incidental, or consequential damages arising out of
the use, or the inability to use information contained in this manual, even if advised of the possibility of such
damages. In particular, Trane is not responsible for any costs, including but not limited to those incurred as a
result of lost profits or revenue, loss or damage of equipment, loss of computer programs, loss of data, the costs
to substitute these, or any claims by third parties.
Trane reserves the right to revise this publication at any time and to make changes to its contents without prior
notice or any obligation to notify former or present users of such revisions or changes.
TR200 BACnet 1-1
Page 5
Safety
Warnings, Cautions and Notices
Note that warnings, cautions and notices appear at appropriate intervals throughout this manual. Warnings are
provided to alert installing contractors to potential hazards that could result in personal injury or death. Cautions
are designed to alert personnel to hazardous situations that could result in personal injury, while notices indicate
a situation that could result in equipment or property damage-only accidents.
Your personal safety and the proper operation of this machine depend upon the strict observance of these
precautions.
Warnings, Cautions and Notices appear at appropriate sections throughout this literature. Read these carefully.
WARNING
Indicates a potentially hazardous situation which, if not avoided, could result in death or serious injury.
CAUTION
Indicates a potentially hazardous situation which, if not avoided, could result in minor or moderate injury. It could also
be used to alert against unsafe practices.
NOTE
Indicates a situation that could result in equipment or property damage-only accidents.
Note
Indicates something important to be noted by the reader.
✮
Indicates default setting
1-2 TR200 BACnet
Page 6
Safety
High Voltage Warning
WARNING
The voltage of the adjustable frequency drive is dangerous whenever it is connected to line power. Incorrect installation
of the motor or adjustable frequency drive could result indeath, serious injury or damage to the equipment. Consequently, it is essential to comply with the instructions in this manual as well as local and national rules and safety
regulations.
Safety Note
WARNING
The voltage of the adjustable frequency drive is dangerous whenever connected to line power. Incorrect installation of
the motor, adjustable frequency drive or serial communication bus could result in death, serious personal injury or
damage to the equipment. Consequently, the instructions in this manual, as well as national and local rules and safety
regulations, must be complied with.
WARNING
Failure to follow instructions below could result in death or serious injury.
Safety Regulations
1. The adjustable frequency drive must be disconnected from line power if repair work is to be carried out.
Make sure that the line power supply has been disconnected and that the necessary time has passed before
removing motor and line power plugs.
2. The [STOP/RESET] key on the keypad of the adjustable frequency drive does not disconnect the equipment
from line power and is thus not to be used as a safety switch.
3. Correct protective grounding of the equipment must be established, the user must be protected against
supply voltage, and the motor must be protected against overload in accordance with applicable national
and local regulations.
4. The ground leakage currents are higher than 3.5 mA.
5. Protection against motor overload is set by par.1-90
set par.1-90
Note: The function is initialized at 1.16 x rated motor current and rated motor frequency. For the North
American market: The ETR functions provide class 20 motor overload protection in accordance with NEC.
6. Do not remove the plugs for the motor and line power supply while the adjustable frequency drive is connected to line power. Make sure that the line power supply has been disconnected and that the necessary
time has passed before removing motor and line power plugs.
7. Please note that the adjustable frequency drive has more voltage inputs than L1, L2 and L3, when load
sharing (linking of DC intermediate circuit) and external 24 Vdc have been installed. Make sure that all
voltage inputs have been disconnected and that the necessary time has passed before commencing repair
work.
Motor Thermal Protection to data value [ETR trip] (default value) or data value [ETR warning].
Motor Thermal Protection. If this function is desired,
TR200 BACnet 1-3
Page 7
Safety
Installation at high altitudes
WARNING
Installation at high altitude:
380–500 V, enclosure A, B and C: At altitudes above 6,561 ft [2 km], please contact Trane regarding PELV/Class II.
380–500 V, enclosure D, E and F: At altitudes above 9,842 ft [3 km], please contact Trane regarding PELV/Class II.
If the drive is to be installed over 6,561 ft [2 km] altitude, then the PELV specifications are not fulfilled anymore, i.e.,
the distances between components and critical parts become too small. To maintain the clearance for functional insulation anyway, the risk for overvoltage must be reduced by means of external protective devices or some kind of galvanic
isolation. De-rating should also be taken into consideration, since cooling the drive is more difficult at high altitude.
Please contact Trane in such cases.
Failure to follow recommendations could result in death or serious injury.
WARNING
Warning against Unintended Start
1.
The motor can be brought to a stop by means of digital commands, bus commands, references or a local stop,
while the adjustable frequency drive is connected to line power. If personal safety considerations make it necessary
to ensure that no unintended start occurs, these stop functions are not sufficient.
2.
While parameters are being changed, the motor may start. Consequently, the stop key [STOP/RESET] must always
be activated, following which data can be modified.
3.
A motor that has been stopped may start if faults occur in the electronics of the adjustable frequency drive, or if a
temporary overload or a fault in the supply line power or the motor connection ceases.
Consequently, disconnect all electric power, including remote disconnects before servicing. Follow proper lockout/
tagout procedures to ensure the power cannot be inadvertently energized. Failure to follow recommendations could
result in death or serious injury.
WARNING
Touching the electrical parts could result in death or serious injury - even after the equipment has been disconnected
from line power.
Also make sure that other voltage inputs have been disconnected, such as external 24 VDC, load sharing (linkage
of DC intermediate circuit), as well as the motor connection for kinetic backup. Refer to the Instruction Manual
for further safety guidelines.
Failure to follow recommendations could result in death or serious injury.
WARNING
The adjustable frequency drive DC link capacitors remain charged after power has been disconnected. To avoid an
electrical shock hazard, disconnect the adjustable frequency drive from line power before carrying out maintenance.
Wait at least as follows before doing service on the adjustable frequency drive:
Failure to follow recommendations could result in death or serious injury.
1-4 TR200 BACnet
Page 8
Voltage (V) Min. Waiting Time (Minutes)
4 15 20 30 40
200 - 240 1.5–5 hp
[1.1–3.7 kW]
380 - 480 1.5–10 hp
[1.1–7.5 kW]
525-600 1.5–10 hp
[1.1–7.5 kW]
525-690 15–125 hp
Be aware that there may be high voltage on the DC link even when the LEDs are turned off.
7.5–60 hp
[5.5 –45 kW]
15–125 hp
[11–90 kW]
15–125 hp
[11–90 kW]
[11–90 kW]
150–350 hp
[110–250 kW]
60–550 hp
[45–400 kW]
450–1350 hp
600–1875 hp
[450–1400 kW]
Safety
[315–1000 kW]
TR200 BACnet 1-5
Page 9
Safety
Safety Precautions
WARNING
The voltage of the adjustable frequency drive is dangerous whenever connected to line power. Incorrect installation of
the motor, adjustable frequency drive or serial communication bus could cause death, serious personal injury or damage
to the equipment. Consequently, the instructions in this manual, as well as national and local rules and safety regulations, must be complied with.
WARNING
Safety Regulations
1.
The line power supply to the adjustable frequency drive must be disconnected whenever repair work is to be
carried out. Make sure that the line power supply has been disconnected and that the necessary time has elapsed
before removing motor and line power supply plugs.
2.
The [OFF] button on the control panel of the adjustable frequency driver does not disconnect the line power supply
and consequently it must not be used as a safety switch.
3. The equipment must be properly grounded, the user must be protected against supply voltage and the motor must
be protected against overload in accordance with applicable national and local regulations.
4.
The ground leakage current exceeds 3.5 mA.
5.
Protection against motor overload is not included in the factory setting. If this function is desired, set par.
1-90
Motor Thermal Protection to data value ETR trip 1 [4] or data value ETR warning 1 [3].
6.
Do not remove the plugs for the motor and line power supply while the adjustable frequency drive is connected
to line power. Make sure that the line power supply has been disconnected and that the necessary time has elapsed
before removing motor and line power plugs.
7.
Please note that the adjustable frequency drive has more voltage sources than L1, L2 and L3, when load sharing
(linking of DC intermediate circuit) or external 24 V DC are installed. Make sure that all voltage sources have been
disconnected and that the necessary time has elapsed before commencing repair work.
Failure to follow recommendations could result in death or serious injury.
WARNING
Warning against unintended start
1.
The motor can be brought to a stop by means of digital commands, bus commands, references or a local stop,
while the adjustable frequency drive is connected to line power. If personal safety considerations (e.g., risk of
personal injury caused by contact with moving machine parts following an unintentional start) make it necessary
to ensure that no unintended start occurs, these stop functions are not sufficient. In such cases, the line power
supply must be disconnected or the
2.
The motor may start while setting the parameters. If this means that personal safety may be compromised (e.g.,
personal injury caused by contact with moving machine parts), motor starting must be prevented, for instance by
use of the
3.
A motor that has been stopped with the line power supply connected, may start if faults occur in the electronics
of the adjustable frequency drive, through temporary overload or if a fault in the power supply grid or motor connection is remedied. If unintended start must be prevented for personal safety reasons (e.g., risk of injury caused
by contact with moving machine parts), the normal stop functions of the adjustable frequency drive are not sufficient. In such cases, the line power supply must be disconnected or the
Consequently, disconnect all electric power, including remote disconnects before servicing. Follow proper lockout/
tagout procedures to ensure the power cannot be inadvertently energized. Failure to follow recommendations could
result in death or serious injury.
Safe Stop
function or secure disconnection of the motor connection.
Safe Stop
function must be activated.
Safe Stop
function must be activated.
1-6 TR200 BACnet
Page 10
Safety
Disconnect all electric power, including remote disconnects before servicing. Follow proper lockout/tagout procedures to ensure the power cannot be inadvertently energized. Failure to follow recommendations could result
in death or serious injury.
1. Control signals from, or internally within, the adjustable frequency drive may in rare cases be activated in
error, be delayed or fail to occur entirely. When used in situations where safety is critical, e.g., when controlling the electromagnetic brake function of a hoist application, these control signals must not be relied
on exclusively.
Note
When using the
Safe Stop
function, always follow the instructions in the
Safe Stop
section of the Design Guide.
WARNING
Disconnect all electric power, including remote disconnects. Follow proper lockout/tagout procedures to ensure the
power cannot be inadvertently energized. Use an appropriate voltmeter to verify that the unit is discharged. Failure to
disconnect power and ensure unit is discharged before servicing could result in death or serious injury.
Also make sure that other voltage inputs have been disconnected, such as external 24 V DC, load sharing (linkage of
DC intermediate circuit), as well as the motor connection for kinetic backup.
Systems where adjustable frequency drives are installed must, if necessary, be equipped with additional monitoring
and protective devices according to the valid safety regulations, e.g., law on mechanical tools, regulations for the
prevention of accidents, etc. Modifications on the adjustable frequency drives by means of the operating software are
allowed.
Failure to follow recommendations could result in death or serious injury.
Hoisting applications:
The adjustable frequency drive functions for controlling mechanical brakes cannot be considered as a primary
safety circuit. There must always be a redundancy for controlling external brakes.
Protection Mode
Once a hardware limit on motor current or DC link voltage is exceeded, the drive will enter “Protection mode”.
“Protection mode” means a change of the PWM modulation strategy and a low switching frequency to minimize
losses. This continues 10 sec after the last fault and increases the reliability and the robustness of the drive while
re-establishing full control of the motor.
In hoist applications, “Protection mode” is not usable because the drive will usually not be able to leave this
mode again, and therefore it will extend the time before activating the brake – which is not recommended.
"Protection mode” can be disabled by setting par.14-26
the drive will trip immediately if one of the hardware limits is exceeded.
Note
It is recommended to disable protection mode in hoisting applications (par.14-26
0).
Trip Delay at Inverter Fault to zero, which means that
Trip Delay at Inverter Fault =
TR200 BACnet 1-7
Page 11

Safety
Before Commencing Repair Work
WARNING
Hazardous Voltage!
1.
Disconnect the adjustable frequency drive from line power.
2. Disconnect DC bus terminals 88 and 89
3.
Wait at least the time mentioned above in the section General Warning.
4.
Remove motor cable
Failure to follow recommendations could result in death or serious injury.
Special Conditions
Electrical ratings:
The rating indicated on the nameplate of the adjustable frequency drive is based on a typical 3-phase line power
supply within the specified voltage, current and temperature ranges, which are expected to be used in most
applications.
The adjustable frequency drives also support other special applications, which affect the electrical ratings of the
adjustable frequency drive.
Special conditions that affect the electrical ratings might be:
• Single phase applications.
• High temperature applications that require derating of the electrical ratings.
• Marine applications with more severe environmental conditions.
Other applications might also affect the electrical ratings.
Consult the relevant sections in this manual and in the for information about the electrical ratings.
Installation requirements:
The overall electrical safety of the adjustable frequency drive requires special installation considerations regarding:
• Fuses and circuit breakers for overcurrent and short-circuit protection
• Selection of power cables (line power, motor, brake, load sharing and relay)
• Grid configuration (grounded delta transformer leg, IT,TN, etc.)
• Safety of low-voltage ports (PELV conditions).
Consult the relevant clauses in these instructions and in the for information about the installation requirements.
1-8 TR200 BACnet
Page 12

Introduction
Introduction
About this Manual
First time users can obtain the most essential information for quick installation and set-up in these chapters:
Introduction
How to Install
How to Configure the System
Application Example
For more detailed information including the full range of set-up options and diagnosis tools, refer to the chapters:
How to Control the TR200
How to Access TR200 Parameters
Parameters
Troubleshooting
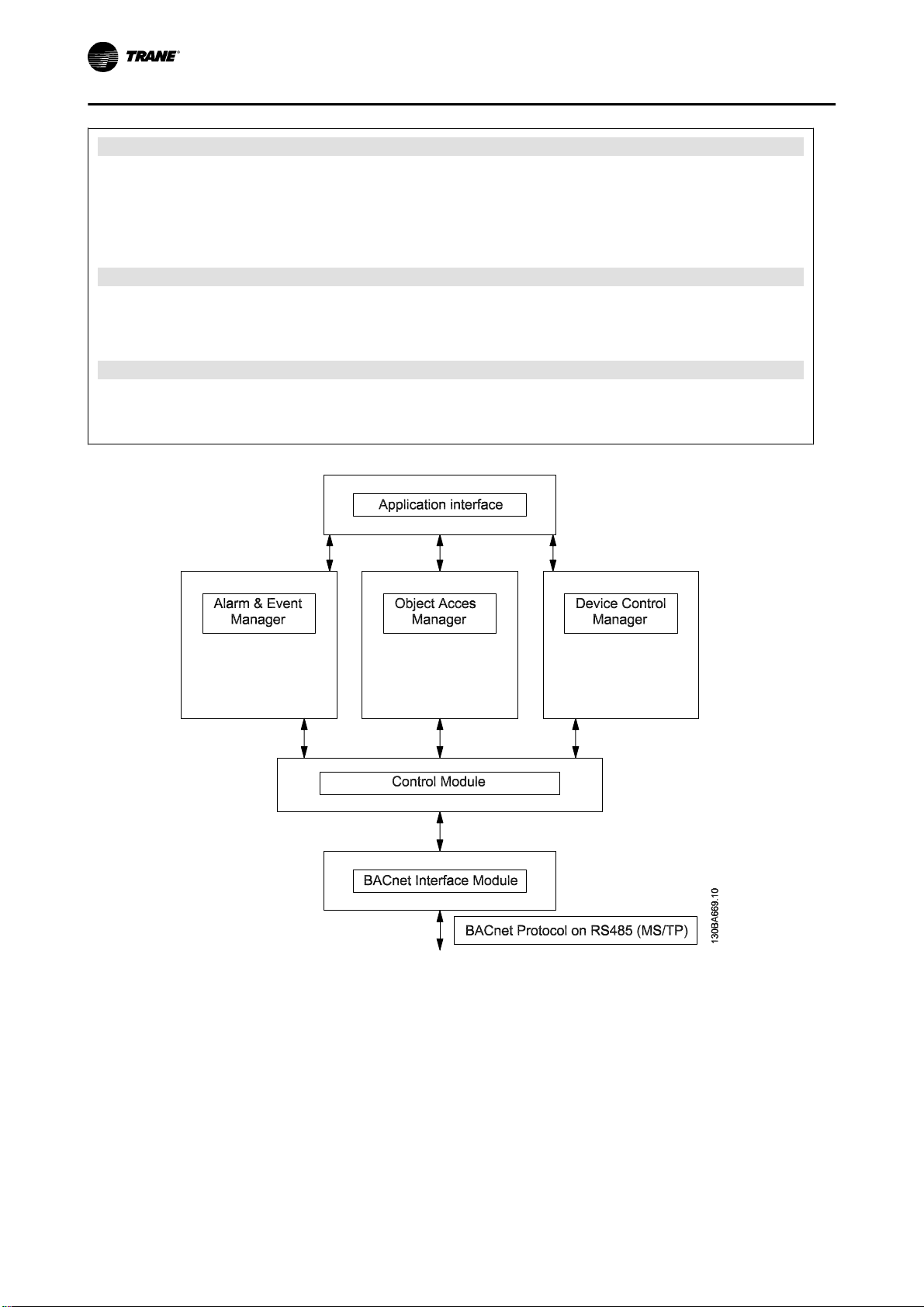
Technical Overview
BACnet (Building Automation and Control Network) is an open data communications protocol, American National Standard (ANSI/ASHRAE 135-1995). BACnet provides a means by which computer-based control equipment from different manufacturers can work together. BACnet is designed to handle many types of building
controls, including HVAC, lighting, security, fire, access control, maintenance and waste management. BACnet
permits flexibility for expansion and different equipment combinations.
Conformance Classes, Function Groups and the PICS: Evaluating the capabilities of a BACnet device is potentially a formidable task, given the great choice of objects, properties and services, which can be implemented,
as well as the fact that it is not necessary for every BACnet device to have a full BACnet implementation in order
to carry out its task. ASHRAE's BACnet Committee recognized this problem and responded with aids to evaluation in the form of "Conformance Classes", "Function Groups" and the "Protocol Implementation Conformance
Statement" (PICS).
The BACnet protocol defines six levels of conformance classes, each of which specifies the minimum subset of
services implemented on the device. The lowest level, Conformance Class 1, requires only that the BACnet
device contain a device object and that it be able to execute (respond to) a ReadProperty service request. Each
successive conformance class level adds service requests that must be executable by the device, as well as the
service requests it must be able to initiate. Conformance Class 6 requires 21 types of service requests (of the 32
overall) to be implemented, of which 20 must be initiable and 17 executable. Conformance class thus provides
a measure of the device's ability to communicate.
Function groups specify a combination of objects and services necessary to carry out certain building automation functions. They are specified independently of conformance class, though the implementation of some of
the function groups automatically confers some conformance class higher than 1.
TR200 BACnet 2-1
Page 13
Introduction
Background information
Protocol name: BACnet
Technology developer: ASHRAE
Year introduced: 1995
Governing standards: ANSI/ASHRAE Standard 135-2004, ISO 16484-5
Openness: Open specification
Physical characteristics
Network topology: Bus
Physical media: Shielded twisted pair
Max. Distance at low speed: 3937 ft [1200 m]
Transport mechanism
Communication methods: Master/slave
Baud Rates Supported: 9600, 19200, 38400, 76800
Termination: 120 ohm
2-2 TR200 BACnet
Page 14
Introduction
Assumptions
This manual assumes you are using a Trane BACnet Option Card in conjunction with a Trane TR200 series
adjustable frequency drive. It is also assumed that your master is a BMS or PC equipped with a serial communication card supporting all the BACnet communication services required by your application, and that all
requirements stipulated in the BACnet standard, as well as those pertaining to the Variable Frequency Drive are
strictly observed as well as all limitations therein fully respected.
Background Knowledge
The Trane BACnet Option Card is designed to communicate with any master complying with the BACnet standard. Familiarity with the PC or PLC used as a master in the system is assumed. Issues regarding hardware or
software produced by other manufacturers are beyond the scope of this manual and are not the responsibility
of Trane.
If you have questions regarding set-up of master-to-master communication or communication to a non-Trane
slave, consult the appropriate manuals.
Available Literature for TR200
- The Instruction Manual provides the necessary information for getting the drive up and running.
- Instruction Manual TR200 High Power
- The Design Guide contains all the technical information about the drive and customer design and applications.
- The Programming Guide provides information on how to program and includes complete parameter descriptions.
x = Revision number
yy = Language code
Trane technical literature is available in print from your local Trane Sales Office or online at:
www.trane.com/vfd
TR200 BACnet 2-3
Page 15
Introduction
Abbreviations
ACI Acyclical Control Interval PCD Process Data
AOC Application Orientated Controller PCA Parameter Characteristics
AV Analog Variable PCV Parameter-Characteristics-Value
BMS Building Management System PDU Protocol Data Unit
BV Binary Variable PELV Protected Extra Low Voltage
CAN Controller Area Network PLC Programmable Logic Control
CTW Control Word PNU Parameter Number
EEPROM
EIA Electronic Industries Association: Specifies of the
EMC Electromagnetic Compatibility STW Status Word
FDL Serial Communication Bus Data link Layer
FDT Field Device Tool
IND Sub index
I/O Input/Output
ISO International Standards Organization
LCD Liquid Crystal Display
keypad Local Control Panel
LED Light Emitting Diode
MAV Main Actual Value
MOC Motion Orientated Controller
MRV Main Reference Value
PC Personal Computer
Electrical Erasable Programmable Read Only
Memory
EIA Standard RS 485-A
PVA Parameter Value
RC Request/Response Characteristics
2-4 TR200 BACnet
Page 16
How to Install
The BACnet Option
Installation of the Option
Items required to install a serial communication bus option in the adjustable frequency drive:
- The serial communication bus option
- Serial communication bus option adaptor frame for the adjustable frequency drive. This frame is deeper
than the standard frame, to allow space for the serial communication bus option beneath.
- Cable holders
TR200 BACnet 3-1
Page 17
How to Install
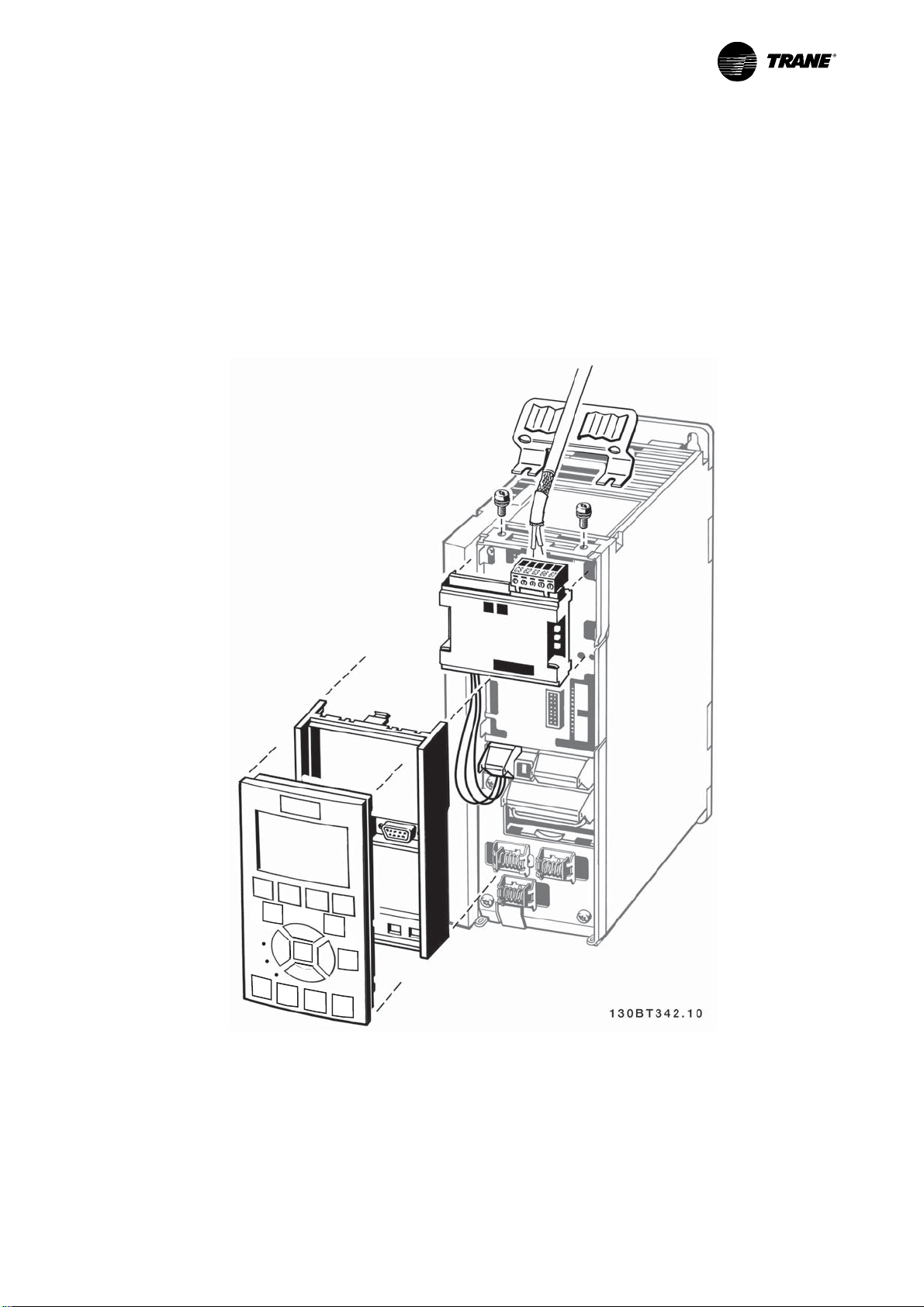
Instructions:
- Remove the keypad panel from the adjustable frequency drive.
- Remove the frame located beneath and discard.
- Push the option into place. Two positions are possible, with cable terminal facing either up or down. The
cable up position is often most suitable when several adjustable frequency drives are installed side by side
in a rack, as this position permits shorter cable lengths.
- Push the serial communication bus option adaptor frame for the adjustable frequency drive into place.
- Remove the plug for the Drive port and connect the plug that is connected to the BACnet option
- Replace the keypad panel.
- Attach cable.
- Fasten the cable in place using cable holders. The adjustable frequency drive top surface has pre-drilled
threaded holes for attaching the cable holders to the unit.
130BT341.10
Cabling
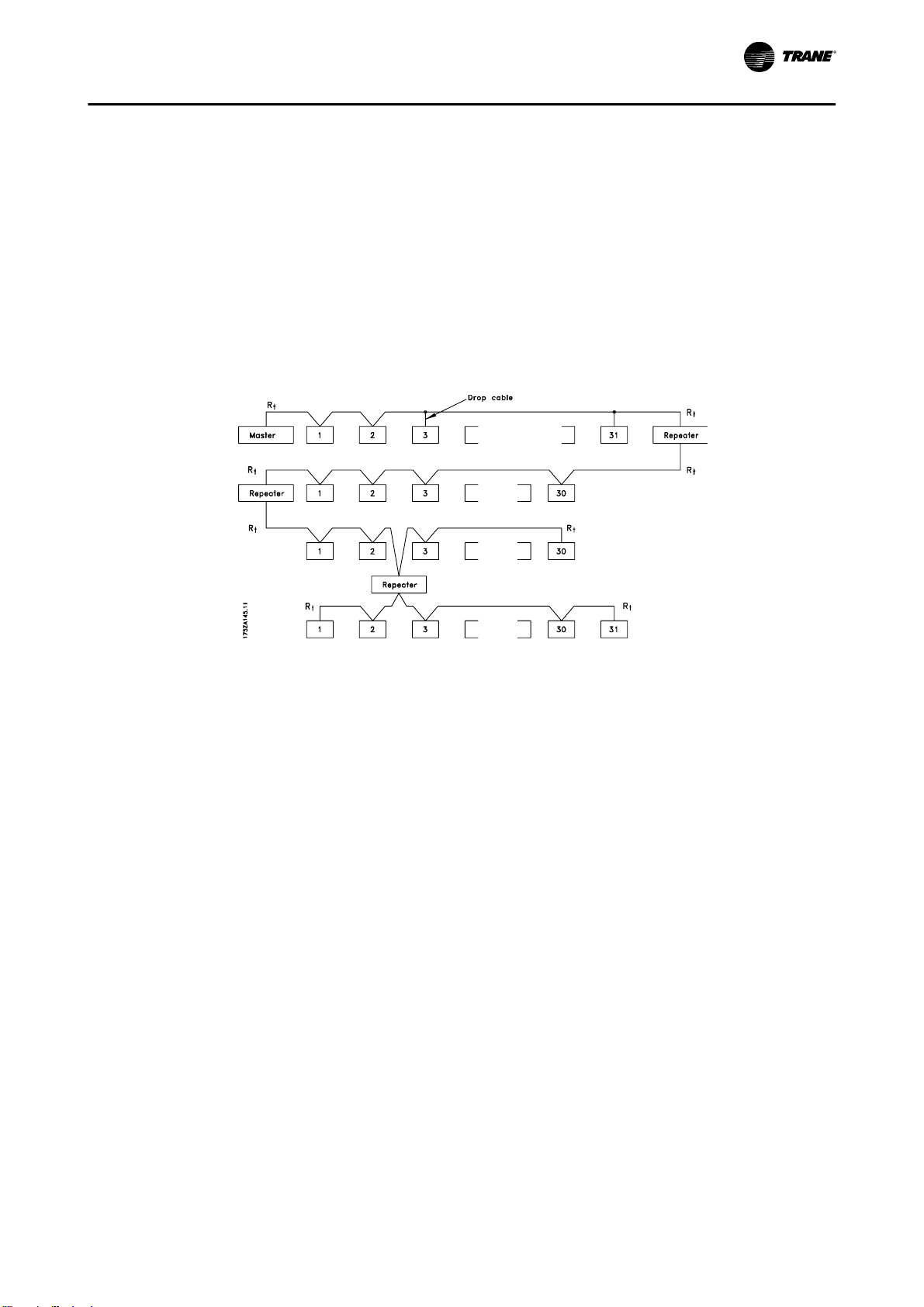
Cable lengths and number of nodes
The maximum cable length allowable in one segment is dependent on the transmission speed. The total cable
length includes drop cables if any. A drop cable is the connection from the main bus cable to each node. If a Tconnection is used, permissible cable length and maximum number of nodes/drives are 1, 2, 3 and 4 bus
segments.
Drop cable connection (i.e., T-connection) beyond the cable lengths indicated is not recommended, due to the
increased risk of reflection occurring. Instead, Trane recommends direct connection of the adjustable frequency
drive.
Note that a repeater is a node in both of the two segments it connects. The number of adjustable frequency
drives is based on a single master system. If there are two or more masters (e.g., PC tools, routers), the number
of adjustable frequency drives must be reduced correspondingly.
Network topology Maximum cable length
Free topology without repeater 1640 ft [500 m]
Free topology with one repeater 3280 ft [1000 m]
Free topology maximum device-to-device 1640 ft [500 m]
Bus topology single terminated 1640 ft [500 m]
Bus topology double terminated without repeater 8858 ft [2700 m]
Bus topology double terminated with one repeater 17716 ft [5400 m]
Bus topology maximum stub length 9.8 ft [3 m]
3-2 TR200 BACnet
Page 18
How to Install
The length statements in the tables above are valid for bus cable with the following properties:
- Impedance: 135 to 165 Ohm at a measuring frequency from 3 to 20 MHz
- Resistance: <110 Ohm/km
- Capacitance: <30 pF/m
- Damping: max. 9 dB over the whole wire length
-
Cross section: max. 0.00053 in2 [0.34 mm2], corresponding to AWG 22
- Cable type: twisted in pairs, 1 x 2, or 2 x 2, or 1 x 4 wires
- Shielding: Copper-braided shield or braided shield and foil shield
Use of the same cable type throughout the entire segment is recommended to avoid impedance mismatch.
TR200 BACnet 3-3
Page 19

How to Install
Network Termination
Connecting the Bus Line
Connect the BACnet Option Card to the bus line via terminals 62, 63 and 66. Terminal 62 is marked red and
Terminal 63 is marked green. These two are the RS485 lines. Terminal 66 the signal ground for the RS485
transmitter.
Maximum Cable Lengths
Maximum total bus cable length: 4000 ft [1200 m]
3-4 TR200 BACnet
Page 20

How to Install
Cable Routing
The BACnet communication cable must be kept away from motor and brake resistor cables to avoid coupling
of high frequency noise from one cable to the other. Normally a distance of 7.9 in (200 mm) is sufficient, but
maintaining the greatest possible distance between cables is generally recommended, especially where cables
run in parallel over long distances.
When crossing is unavoidable, the BACnet cable must cross motor and brake resistor cables at an angle of 90
degrees.
System Specifications
EMC Precautions
The following EMC precautions are recommended to achieve interference-free operation of the BACnet network.
Additional EMC information is available in the
for further installation guidelines.
NOTE
Ensure compliance with relevant national and local regulations, for example in protective ground connection.
Connection of the Cable Shield
It is recommended to connect the shield to ground at both ends of the bus cable. This ensures the optimum
resistance towards EMC noise. The shield of the BACnet cable must always be connected to ground at both
ends, meaning the shield must be connected to ground in all stations connected to the BACnet network. It is
very important to have a low impedance ground connection of the shield, also at high frequencies. This can be
obtained by connecting the surface of the shield to ground, for example by means of a cable clamp or a conductive cable connector. The TR200 Series has various clamps and brackets to enable a proper ground
connection of the BACnet cable shield.
TR200 Drive Design Guide
. Also consult the BACnet master manual
TR200 BACnet 3-5
Page 21

How to Install
Ground Connection
It is important that all stations connected to the BACnet network are connected to the same ground potential.
The ground connection must have low HF (high frequency) impedance. This can be achieved by connecting a
large surface area of the cabinet to ground, for example by mounting the TR200 series on a conductive rear
plate. Particularly when there are long distances between the stations in a BACnet network, it may be necessary
to use additional potential equalizing cables, connecting the individual stations to the same ground potential.
The use of repeaters with galvanic isolation or fiber optic can improve the EMC performance and reduce ground
loop current.
3-6 TR200 BACnet
Page 22

How to Configure the System
Configuring BACnet
Initialization Procedure
The Initialization Procedure is explained by the flow chart given below:
Initialization Parameter
General Settings
Name
Control Site 8-01 Digital and control word Digital and control word
Control word source 8-02 Drive RS-485 Drive RS-485
ControlWord Timeout time 8-03 1.0 sec 1.0 sec
ControlWord Timeout Function 8-04 Off Off
End of Timeout Function 8-05 Resume set-up Resume set-up
Reset ControlWord Timeout 8-06 Do not reset Do not reset
Diagnosis 8-07 Set-up Don’t care
ControlWord Profile 8-10 Drive Profile Drive Profile
Drive Port Settings
Name Par. Number Default Value Setting for BACnet
Protocol 8-30 Drive Drive Option
Address 8-31 1 1
Baud Rate 8-32 9600 baud 9600 baud
Minimum Response Delay 8-35 10 ms 10 ms
Max Response Delay 8-36 5000 ms 5000 ms
Table 4. 1: 1) Please see also section: Parameter Overview >Parameter List.
Par. Number Default Value Setting for BACnet
TR200 BACnet 4-1
Page 23

How to Configure the System
Digital/Bus settings
Name Par. Number Default Value Setting for BACnet
Coasting Select 8-50 Logic-or Logic-or
Quick Stop Select 8-51 Logic-or Logic-or
DC Brake Select 8-52 Logic-or Logic-or
Start Select 8-53 Logic-or Logic-or
Reversing Select 8-54 Logic-or Logic-or
Set-up Select 8-55 Logic-or Logic-or
Preset reference Select 8-56 Logic-or Logic-or
BACnet settings
Name Par. Number Default Value Setting for BACnet
BACnet device instance 8-71 1 1
MS/TP Max Masters 8-73 127
“I am” Service 8-74 At power-up At power-up
Initialization Password 8-75 “admin” “admin”
Depent on the Number of
Masters in the system
Control Word Timeout Function
par.8-03 Control Timeout Time and par.8-04 Control Timeout Function are not enabled in this version of the
BACnet option.
BIBBs
Bibb's
ReadProperty Service
ReadPropertyMultiple Service
WriteProperty Service
WritePropertyMultiple Service
ConfirmedEventNotification Service
UnconfirmedEventNotification Service
GetEventInformation Service
AcknowledgeAlarm Service
ReinitializeDevice Service
DeviceCommunicationControl Service
I-Have Service
Who-Has Service
Who-Is Service
I-am Service
TimeSynchronization
4-2 TR200 BACnet
Page 24

How to Configure the System
Example of a simple set-up of BACnet
This example shows the necessary steps to set up the TR200 BACnet interface with the following system requirements:
• MS/TP running at 38,400 baud
• MAC address 20 for the TR200
• BACnet Device Instance 0 1025
• Highest number of a master stack is 35
• Start/stop of drive from BACnet only
• Reference from BACnet
• Read status of drive (actual speed)
Set the following parameters:
Name Par. number Value
Protocol 8-30 Drive option [9]
Address 8-31 20
Drive Port Baud Rate 8-32 38,400 Baud [4]
Coasting Select 8-50 Bus [1]
BACnet device instance 8-70 1025
MS/TP Max Masters 8-72 35
After the parameters have been set according to the table above, the drive has to be unpowered and repowered
before the changes take effect. When the adjustable frequency drive is detected by the BMS, the drive can be
controlled by BV:1, which will start the motor if set to [1]. Setting AV:0 will set the speed reference of the drive.
The actual speed can be monitored via AV:1. See also
Analog Input and Output Objects
section.
TR200 BACnet 4-3
Page 25

How to Configure the System
4-4 TR200 BACnet
Page 26
How to Control the Adjustable Frequency Drive
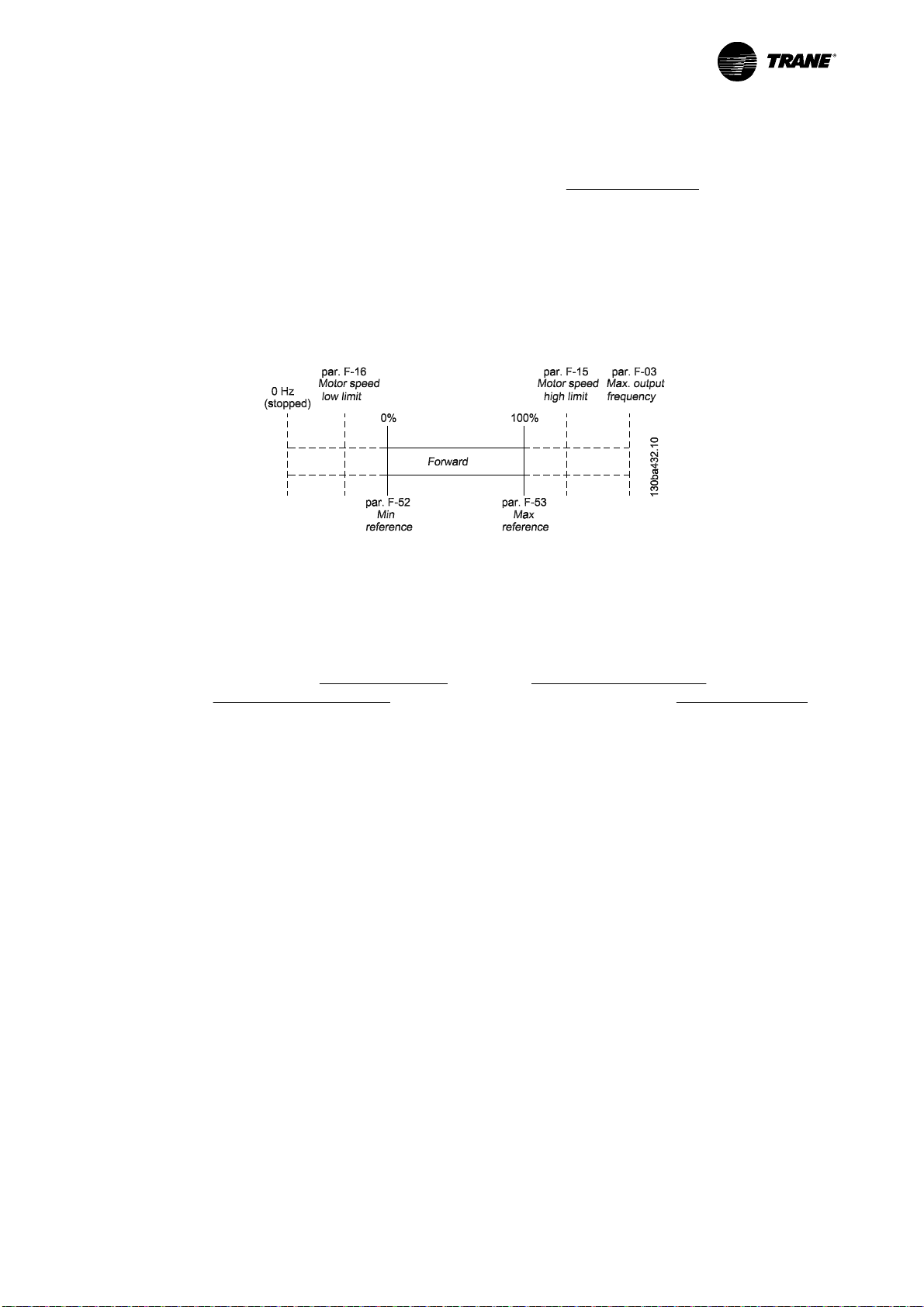
Reference Handling
Select the adjustable frequency drive configuration mode in par.1-00 Configuration Mode.
[0] Open-loop
[3] Closed-loop
Open-loop
For open-loop operation, the reference represents the desired output speed of the adjustable frequency drive.
The speed reference value:
Closed-loop
For closed-loop operation, the reference represents the setpoint.
NOTE
In closed-loop operation, par.3-02 Minimum Reference and par.4-12 Motor Speed Low Limit [Hz] must be set to 0 Hz.
Set the par.4-14
Motor Speed High Limit [Hz] to a value greater than the setting in par.3-03 Maximum Reference.
TR200 BACnet 5-1
Page 27

How to Control the Adjustable Frequency
Drive
Network Adjustable Frequency Drive Control Inputs and Outputs
Analog Input and Output Objects
Control the adjustable frequency drive from the BACnet network using 'objects'. The various types of 'objects'
and their descriptions are shown in the following tables.
Object
ID
AI:0
AI:1
AI:2
AI:3
AI:4
AI:5
AI:6
Table 5. 1: Analog inputs
Object
ID
AO:0
AO:1
AO:2
AO:3
AO:4
AO:5
AO:6
Object Name
Analog
Input 53
Analog
Input 54
Analog
In X30/11
Analog
In X30/12
Analog
Input X42/1
Analog
Input X42/3
Analog
Input X42/5
Object Name
Terminal
42 Output Bus
Control
Pulse out
#27 Bus
Control
Pulse out
#29 Bus
Control
Analog
Out X30/8 [mA]
Analog
Output
X42/7[V]
Analog
Output
X42/9[V]
Analog
Output
X42/11[V]
Read/
Write
R Yes No 16-62 Yes NO
R Yes No 16-64 Yes NO
R Yes No 16-75 Yes NO
R Yes No 16-76 Yes NO
R Yes No 18-30 Yes NO
R Yes No 18-31 Yes NO
R Yes No 18-32 Yes NO
Read/
Write
W/R Yes No 6-53 No Yes
W/R Yes No 5-93 No Yes
W/R Yes No 5-95 No Yes
W/R Yes No 6-63 No Yes
W/R Yes No 26-43 No Yes
W/R Yes No 26-53 No Yes
W/R Yes No 26-63 No Yes
Changeable De-
scription
Changeable De-
scription
Non-vola-
tile RAM
Store
Non-vola-
tile RAM
Store
Drive Par.
Linked to
TR200Pa-
rameter
Alarm
notification
Alarm
notification
Triggers bus
timeout
Triggers
Bus Time-
out
Table 5. 2: Analog outputs
5-2 TR200 BACnet
Page 28

How to Control the Adjustable Frequency
Drive
Object
ID
AV:0 Reference W/R Yes No MRV No Yes
AV:1 Speed Act. Value W/R Yes No MAV Yes Yes
AV:2 Bus Feedback1 W/R Yes No 8-94 No Yes
AV:3 Bus Feedback2 W/R Yes No 8-95 No Yes
AV:4 Bus Feedback3 W/R Yes No 8-96 No Yes
AV:5 Motor Voltage Read Yes No 16-12 Yes No
AV:6 Motor Current Read Yes No 16-14 Yes No
AV:7 Motor Torque % Read Yes No 16-22 Yes No
AV:8 DC Link Voltage Read Yes No 16-30 Yes No
AV:9 Motor Thermal Read Yes No 16-18 Yes No
AV:10
AV:11 Inverter Thermal Read Yes No 16-35 Yes No
AV:12 Operating Hours Read No No 15-00 No No
AV:13 Running Hours Read No No 15-01 No No
AV:14 KWh Counter Read No No 15-02 No No
AV:15 Power [KW] Read No No 16-10 No No
AV:16
AV:17
AV:18
AV:19
AV:20 PID Dif. Gain Limit W/R No TR200 20-96 No No
AV:21
AV:22 Ext. 1 Setpoint W/R No TR200 21-15 No No
AV:23
AV:24
AV:25
AV:26 Reserved W/R No Na
AV:27
AV:28
AV:29
AV:30 Reserved W/R No Na
Object Name
Heatsink Temper-
ature
PID Start Speed
[Hz]
PID Proportional
Gain
PID Integral Time
(Sec)
PID Differential
Time (Sec)
On Reference
Bandwith
Ext. 1 Reference
[Unit]
Ext. 1 Feedback
[Unit]
Ext. 1 Proportion-
al Gain
Ext. 1 Integral
Time (Sec)
Ext. 1 Differential
Time (Sec)
Ext. 1 Dif. Gain
Limit
Read/
Write
Read Yes No 16-34 Yes No
W/R No TR200 20-83 No No
W/R No TR200 20-93 No No
W/R No TR200 20-94 No No
W/R No TR200 20-95 No No
W/R No TR200 20-84 No No
W/R No TR200 21-17 No No
W/R No TR200 21-18 No No
W/R No TR200 21-21 No No
W/R No TR200 21-22 No No
W/R No TR200 21-23 No No
W/R No TR200 21-24 No No
Changeable De-
scription
Non-vola-
tile RAM
Store
TR200Pa-
rameter
Alarm
notification
Triggers Bus
Timeout
Table 5. 3: Analog values
TR200 BACnet 5-3
Page 29

How to Control the Adjustable Frequency
Drive
Object
ID
AV:31 Ext. 2 Setpoint W/R No TR200 21-35 No No
AV:32
AV:33
AV:34
AV:35
AV:36
AV:37 Ext. 2 Dif. Gain W/R No TR200 21-44 No No
AV:38 Ext. 3 Setpoint W/R No TR200 21-55 No No
AV:39
AV:40
AV:41
AV:42
AV:43
AV:44
AV:45 Running Bypass Read No No 31-11 No No
Object Name
Ext. 2 Reference
[Unit]
Ext. 2 Feedback
[Unit]
Ext. 2 Proportion-
al Gain
Ext. 2 Integral
Time (Sec)
Ext. 2 Differential
Time
Ext. 3 Reference
[Unit]
Ext. 3 Feedback
[Unit]
Ext. 3 Proportion-
al Gain
Ext. 3 Integral
Time (Sec)
Ext. 3 Differential
Time (Sec)
Ext. 3 Dif. Gain
Limit
Read/
Write
W/R No TR200 21-37 No No
W/R No TR200 21-38 No No
W/R No TR200 21-41 No No
W/R No TR200 21-42 No No
W/R No TR200 21-43 No No
W/R No TR200 21-57 No No
W/R No TR200 21-58 No No
W/R No TR200 21-61 No No
W/R No TR200 21-62 No No
W/R No TR200 21-63 No No
W/R No TR200 21-64 No No
Changeable Description
Non-vola-
tile RAM
Store
TR200 Pa-
rameter
Alarm
notification
Triggers Bus
Timeout
Table 5. 4: Analog values cont.
5-4 TR200 BACnet
Page 30

Binary Input and Output Objects
How to Control the Adjustable Frequency
Drive
Object
ID
BI:0 Digital Input 33 Read No No 16-60/00 No No
BI:1 Digital Input 32 Read No No 16-60/01 No No
BI:2 Digital Input 29 Read No No 16-60/02 No No
BI:3 Digital Input 27 Read No No 16-60/03 No No
BI:4 Digital Input 19 Read No No 16-60/04 No No
BI:5 Digital Input 18 Read No No 16-60/05 No No
BI:6 Digital Input 37 Read No No 16-60/06 No No
BI:7
BI:8
BI:9
BI:10
BI:11
BI:12
BI:13
BI:14
BI:15
Object Name
Digital Input
X30/2
Digital Input
X30/3
Digital Input
X30/4
Digital Input P
1660/10*
Digital Input P
1660/11*
Digital Input P
1660/12*
Digital Input P
1660/13*
Digital Input P
1660/14*
Digital Input P
1660/15*
Read/
Write
Read No No 16-60/07 No No
Read No No 16-60/08 No No
Read No No 16-60/09 No No
Read No No 16-60/10 No No
Read No No 16-60/11 No No
Read No No 16-60/12 No No
Read No No 16-60/13 No No
Read No No 16-60/14 No No
Read No No 16-60/15 No No
Changeable De-
scription
Non-vola-
tile RAM
Store
Drive Par.
Alarm
notification
Triggers
Timeout
Bus
Table 5. 5: Binary inputs
Bl:7 - Bl:19 values are only available if the option is installed.
*) Reserved for future options!
TR200 BACnet 5-5
Page 31
How to Control the Adjustable Frequency
Drive
Object
ID
BO:0 Digital Output 27 W/R No No 5-90/00 No Yes
BO:1 Digital Output 29 W/R No No 5-90/01 No Yes
BO:2
BO:3
BO:4 Relay 1 Output W/R No No 5-90/04 No Yes
BO:5 Relay 2 Output W/R No No 5-90/05 No Yes
BO:6
BO:7
BO:8
BO:9
BO:10
BO:11
BO:12
BO:13
BO:14
BO:15
BO:16
BO:17
BO:18
BO:19
BO:20
BO:21
BO:22
BO:23
BO:24
BO:25
Object Name
GPIO Output
Term X30/6
GPIO Output
Term X30/7
Option B Relay 1
Output
Option B Relay 2
Output
Option B Relay 3
Output
Reserved Output
P 590/9
Reserved Output
P 590/10*
Reserved Output
P 590/11*
Reserved Output
P 590/12*
Reserved output
P 590/13*
Reserved Output
P 590/14*
Reserved Output
P 590/15*
Option C Relay 1
Output
Option C Relay 2
Output
Option C Relay 3
Output
Option C Relay 4
Output
Option C Relay 5
Output
Option C Relay 6
Output
Option C Relay 7
Output
Option C Relay 8
Output
Reserved Output
P 590/24*
Reserved Output
P 590/25*
Read/
Write
W/R No No 5-90/02 No Yes
W/R No No 5-90/03 No Yes
W/R No No 5-90/06 No Yes
W/R No No 5-90/07 No Yes
W/R No No 5-90/08 No Yes
W/R No No 5-90/09 No Yes
W/R No No 5-90/10 No Yes
W/R No No 5-90/11 No Yes
W/R No No 5-90/12 No Yes
W/R No No 5-90/13 No Yes
W/R No No 5-90/14 No Yes
W/R No No 5-90/15 No Yes
W/R No No 5-90/16 No Yes
W/R No No 5-90/17 No Yes
W/R No No 5-90/18 No Yes
W/R No No 5-90/19 No Yes
W/R No No 5-90/20 No Yes
W/R No No 5-90/21 No Yes
W/R No No 5-90/22 No Yes
W/R No No 5-90/23 No Yes
W/R No No 5-90/24 No Yes
W/R No No 5-90/25 No Yes
Changeable De-
scription
Non-vola-
tile RAM
Store
Drive Par.
Alarm
notification
Triggers Bus
Timeout
Table 5. 6: Binary outputs
5-6 TR200 BACnet
Page 32

*) Reserved for future options!
How to Control the Adjustable Frequency
Drive
Object
ID
BO:30
BO:31
BO:36
BO:37
BO:38
BO:39
Table 5. 7: Binay outputs cont.
*) Reserved for future options!
Object Name
Reserved Output
P 590/30*
Reserved Output
P 590/31*
Reserved Output
P 590/26*
Reserved Output
P 590/27*
Reserved Output
P 590/28*
Reserved Output
P 590/29*
Read/
Write
W/R No No 5-90/30 No Yes
W/R No No 5-90/31 No Yes
W/R No No 5-90/26 No Yes
W/R No No 5-90/27 No Yes
W/R No No 5-90/28 No Yes
W/R No No 5-90/29 No Yes
Changeable Description
Non-vola-
tile RAM
Store
Drive Par.
Alarm
notification
Triggers Bus
Timeout
TR200 BACnet 5-7
Page 33

How to Control the Adjustable Frequency
Drive
Object
ID
BV:0 Com. Fault R No NA
BV:1 Start W/R No No CTW No Yes
BV:2 Coasting W/R No No
BV:3 CW/CCW W/R No No
BV:4 Jog W/R No No
BV:5 Reset W No No
BV:6
BV:7
BV:10 Drive Ready R No NA STW Bit 01 No No
BV:11 Reverse R No NA STW Bit 15 No No
BV:12
BV:13 Bus Control R No NA STW Bit 09 No No
BV:14 Tripped R No NA STW Bit 03 Yes No
BV:15 Triplock R No NA STW Bit 06 Yes No
BV:16 -20 Reserved R No
BV:21 ECB Test Mode R No NA 31-10/00 No No
BV:22 ECB Drive mode R No NA 31-10/01 No No
BV:23
BV:24
BV:25 ECB State R No NA 31-10/05 Yes No
BV:26
BV:27 M2 Fault R No NA 31-10/07 Yes No
BV:28 M3 Fault R No NA 31-10/08 Yes No
BV:29
BV:30
BV:31 Reserved R No
Object Name
Reset Kwh Coun-
ter
Reset Running
Hours Counter
Speed = Refer-
ence
ECB Aut. Bypass
Enable
ECB Bypass
Mode
ECB Overload
Trip
ECB External In-
terlock
ECB Manual
Override
Read /
Write
W No No P15-06 No NO
W No No P15-07 No NO
R No NA STW Bit 08 No No
R No NA 31-10/02 No No
R No NA 31-10/03 No No
R No NA 31-10/06 Yes No
R No NA 31-10/09 Yes No
R No NA 31-10/10 No No
Changeable De-
scription
Non-vola-
tile RAM
Store
Drive Par.
BACnet op-
tion
CTW, Bit 3
=0
CTW bit
15=1
CTW bit 0
=1
CTW bit 07
= 1
Alarm
notification
Yes No
No Yes
No Yes
No Yes
No Yes
Triggers Bus
Timeout
Table 5. 8: Binary values
5-8 TR200 BACnet
Page 34

How to Control the Adjustable Frequency
Drive
Object
ID
BV:40 Brake Check R No NA 16-90/00 Yes
BV:41 Pwr. Card Temp R No NA 16-90/01 Yes
BV:42 Ground Fault R No NA 16-90/02 Yes
BV:43 Ctrl.Card Temp R No NA 16-90/03 Yes
BV:44 Ctrl. Word TO R No NA 16-90/04 Yes
BV:45 Overcurrent R No NA 16-90/05 Yes
BV:46 Torque Limit R No NA 16-90/06 Yes
BV:47 Motor TH Over R No NA 16-90/07 Yes
BV:48 Motor TH Over R No NA 16-90/08 Yes
BV:49 Inverter Overld. R No NA 16-90/09 Yes
BV:50 DC undervolt R No NA 16-90/10 Yes
BV:51 DC overvolt R No NA 16-90/11 Yes
BV:52 Short Circuit R No NA 16-90/12 Yes
BV:53 Soft-charge fault R No NA 16-90/13 Yes
BV:54 Line Power Fault R No NA 16-90/14 Yes
BV:55 AMA Not OK R No NA 16-90/15 Yes
BV:56 Live Zero Error R No NA 16-90/16 Yes
BV:57 Internal Fault R No NA 16-90/17 Yes
BV:58 Brake Overload R No NA 16-90/18 Yes
BV:59 U Phase Loss R No NA 16-90/19 Yes
BV:60 V Phase Loss R No NA 16-90/20 Yes
BV:61 W Phase Loss R No NA 16-90/21 Yes
BV:62
BV:63 24 V Supply Low R No NA 16-90/23 Yes
BV:64 Line Power Fault R No NA 16-90/24 Yes
BV:65 1.8 V Supply Low R No NA 16-90/25 Yes
BV:66 Brake Failure R No NA 16-90/26 Yes
BV:67 Brake IGBT R No NA 16-90/27 Yes
BV:68 Option Changed R No NA 16-90/28 Yes
BV:69 Drive Initialized R No NA 16-90/29 Yes
BV:70 Safe Stop R No NA 16-90/30 Yes
BV:71 Brake Low R No NA 16-90/31 Yes
BV:72
BV:73
BV:74
BV:75
BV:76
BV:77 No Flow R No NA 16-91/05 Yes
BV:78 Dry Pump R No NA 16-91/06 Yes
BV:79 Curve End R No NA 16-91/07 Yes
Object Name
Serial Communi-
cation Bus Fault
Service Trip P
1691/0
Service Trip P
1691/1
Service Trip P
1691/2
Service Trip P
1691/3
Service Trip P
1691/4
Read /
Write
R No NA 16-90/22 Yes
R No NA 16-91/00 Yes
R No NA 16-91/01 Yes
R No NA 16-91/02 Yes
R No NA 16-91/03 Yes
R No NA 16-91/04 Yes
Changeable Description
Non-vola-
tile RAM
Store
Drive Par.
Alarm
notification
Triggers Bus
Timeout
Table 5. 9: Binary values cont.
TR200 BACnet 5-9
Page 35

How to Control the Adjustable Frequency
Drive
Object
ID
BV:80 Broken Belt R No NA 16-91/08 Yes
BV:81 Discharge High R No NA 16-91/08 Yes
BV:82 Start Fault R No NA 16-91/10 Yes
BV:83 Speed Limit R No NA 16-91/11 Yes
BV:84
BV:85
BV:86
BV:87
BV:88
BV:89 Drive Fan Error R No NA 16-91/17 Yes
BV:90 ECB Error R No NA 16-91/18 Yes
BV:91 Alarm 1692/19 R No NA 16-91/19 Yes
BV:92 Alarm 1692/20 R No NA 16-91/20 Yes
BV:93 Alarm 1692/21 R No NA 16-91/21 Yes
BV:94 Alarm 1692/22 R No NA 16-91/22 Yes
BV:95 Alarm 1692/23 R No NA 16-91/23 Yes
BV:96 Alarm 1692/24 R No NA 16-91/24 Yes
BV:97 Alarm 1692/25 R No NA 16-91/25 Yes
BV:98 Alarm 1692/26 R No NA 16-91/26 Yes
BV:99 Alarm 1692/27 R No NA 16-91/27 Yes
BV:100 Alarm 1692/28 R No NA 16-91/28 Yes
BV:101 Alarm 1692/29 R No NA 16-91/29 Yes
BV:102 Alarm 1692/30 R No NA 16-91/30 Yes
BV:103 Alarm 1692/31 R No NA 16-91/31 Yes
BV:104 Brake Check R No NA 16-92/00 Yes
BV:105 Pwr. Card Temp R No NA 16-92/01 Yes
BV:106 Ground Fault R No NA 16-92/02 Yes
BV:107 Ctrl. Card Temp R No NA 16-92/03 Yes
BV:108 Crtl. Word TO R No NA 16-92/04 Yes
BV:109 Overcurrent R No NA 16-92/05 Yes
BV:110 Torque Limit R No NA 16-92/06 Yes
BV:111 Motor Th Over R No NA 16-92/07 Yes
BV:112 Motor ETR Over R No NA 16-92/08 Yes
BV:113 Inverter Overld. R No NA 16-92/09 Yes
BV:114 DC undervolt R No NA 16-92/10 Yes
BV:115 DC overvolt R No NA 16-92/11 Yes
BV:116 DC Voltage Low R No NA 16-92/12 Yes
BV:117 DC Voltage high R No NA 16-92/13 Yes
BV:118 Line ph. loss R No NA 16-92/14 Yes
BV:119 No Motor R No NA 16-92/15 Yes
BV:120 Live Zero Error R No NA 16-92/16 Yes
Object Name
State Fault P
1691/12
State Fault P
1691/13
State Fault P
1691/14
State Fault P
1691/15
KTY Temperature
Error
Read /
Write
R No NA 16-91/12 Yes
R No NA 16-91/13 Yes
R No NA 16-91/14 Yes
R No NA 16-91/15 Yes
R No NA 16-91/16 Yes
Changeable De-
scription
Non-vola-
tile RAM
Store
Drive Par.
Alarm
notification
Triggers Bus
Timeout
Table 5. 10: Binary values cont.
5-10 TR200 BACnet
Page 36

How to Control the Adjustable Frequency
Drive
Object
ID
BV:121 10V low R No NA 16-92/17 Yes
BV:122 Brake Overload R No NA 16-92/18 Yes
BV:123 Brake Resistor R No NA 16-92/19 Yes
BV:124 Brake IGBT R No NA 16-92/20 Yes
BV:125 Speed Limit R No NA 16-92/21 Yes
BV:126
BV:127 24V Supply Low R No NA 16-92/23 Yes
BV:128 Line failure R No NA 16-92/24 Yes
BV:129 Current Limit R No NA 16-92/25 Yes
BV:130 Low Temp R No NA 16-92/26 Yes
BV:131 Voltage Limit R No NA 16-92/27 Yes
BV:132 Encoder loss R No NA 16-92/28 Yes
BV:133
BV:134 Safe Stop R No NA 16-92/30 Yes
BV:135 Ext. Status R No NA 16-92/31 Yes
BV:136 Start Delayed R No NA 16-93/00 Yes
BV:137 Stop Delayed R No NA 16-93/01 Yes
BV:138 Clock Failure R No NA 16-93/02 Yes
BV:139
BV:140
BV:141 No Flow R No NA 16-93/05 Yes
BV:142 Dry Pump R No NA 16-93/06 Yes
BV:143 End of Curve R No NA 16-93/07 Yes
BV:144 Belt Broken R No NA 16-93/08 Yes
BV:145 Discharge High R No NA 16-93/09 Yes
BV:146
BV:147
BV:148
BV:149
BV:150
BV:151
BV:152
BV:153 KTY Temperature R No NA 16-93/17 Yes
BV:154 Drive Fan Failure R No NA 16-93/18 Yes
BV:155 ECB Failure R No NA 16-93/19 Yes
Object Name
Serial Communi-
cation Bus Fault
Output Freq. Lim-
it
Fire Mode was
Active
Reserved,
P1693/04
Reserved, P
1693/10
Reserved, P
1693/11
Reserved, P
1693/12
Reserved, P
1693/13
Reserved, P
1693/14
Reserved, P
1693/15
Reserved, P
1693/16
Read /
Write
R No NA 16-92/22 Yes
R No NA 16-92/29 Yes
R No NA 16-93/03 Yes
R No NA 16-93/04 Yes
R No NA 16-93/10 Yes
R No NA 16-93/11 Yes
R No NA 16-93/12 Yes
R No NA 16-93/13 Yes
R No NA 16-93/14 Yes
R No NA 16-93/15 Yes
R No NA 16-93/16 Yes
Changeable Description
Non-vola-
tile RAM
Store
Drive Par.
Alarm
notification
Triggers Bus
Timeout
Table 5. 11: Binary values cont.
TR200 BACnet 5-11
Page 37

How to Control the Adjustable Frequency
Drive
Object
ID
BV:156
BV:157
BV:158
BV:159
BV:160
BV:161
BV:162
BV:163
BV:164
BV:165
BV:166 PTC Temperature R No NA 16-93/30 Yes
BV:167
BV:168 Ramping Active R No NA 16-94/00 No
BV:169 AMA Running R No NA 16-94/01 No
BV:170 Start CW/CCW R No NA 16-94/02 No
BV:171 Slowdown R No NA 16-94/03 No
BV:172 Catch Up R No NA 16-94/04 No
BV:173 Feedback High R No NA 16-94/05 No
BV:174 Feedback Low R No NA 16-94/06 No
BV:175
BV:176
BV:177 Output Freq High R No NA 16-94/09 No
BV:178 Output Freq Low R No NA 16-94/10 No
BV:178 Brake Check OK R No NA 16-94/11 No
BV:180 Brake Max R No NA 16-94/12 No
Object Name
Reserved, P
1693/20
Reserved, P
1693/21
Reserved, P
1693/22
Reserved, P
1693/23
Reserved, P
1693/24
Reserved, P
1693/25
Reserved, P
1693/26
Reserved, P
1693/27
Reserved, P
1693/28
Reserved, P
1693/29
Reserved, P
1693/31
Output Current
High
Output Current
Low
Read /
Write
R No NA 16-93/20 Yes
R No NA 16-93/21 Yes
R No NA 16-93/22 Yes
R No NA 16-93/23 Yes
R No NA 16-93/24 Yes
R No NA 16-93/25 Yes
R No NA 16-93/26 Yes
R No NA 16-93/27 Yes
R No NA 16-93/28 Yes
R No NA 16-93/29 Yes
R No NA 16-93/31 Yes
R No NA 16-94/07 No
R No NA 16-94/08 No
Changeable De-
scription
Non-vola-
tile RAM
Store
Drive Par.
Alarm
notification
Triggers Bus
Timeout
Table 5. 12: Binary values cont.
5-12 TR200 BACnet
Page 38

How to Control the Adjustable Frequency
Drive
Object
ID
BV:181 Braking R No NA 16-94/13 No
BV:182
BV:183 OVC Active R No NA 16-94/15 No
BV:184 AC Brake R No NA 16-94/16 No
BV:185
BV:186 Password Status R No NA 16-94/18 No
BV:187 Reference High R No NA 16-94/19 No
BV:188 Reference Low R No NA 16-94/20 No
BV:189 Reference Site R No NA 16-94/21 No
BV:190
BV:191
BV:192
BV:193
BV:194
BV:195
BV:196
BV:197
BV:198
BV:199
Object Name
Out of Speed
range
Password Time-
lock
Reserved,
16-94/22
Reserved,
16-94/23
Reserved,
16-94/24
Reserved,
16-94/25
Reserved,
16-94/26
Reserved,
16-94/27
Reserved,
16-94/28
Reserved,
16-94/29
Reserved,
16-94/30
Reserved,
16-94/31
Read /
Write
R No NA 16-94/14 No
R No NA 16-94/17 No
R No NA 16-94/22 No
R No NA 16-94/23 No
R No NA 16-94/24 No
R No NA 16-94/25 No
R No NA 16-94/26 No
R No NA 16-94/27 No
R No NA 16-94/28 No
R No NA 16-94/29 No
R No NA 16-94/30 No
R No NA 16-94/31 No
Changeable Description
Non-vola-
tile RAM
Store
Drive Par.
Alarm
notification
Triggers Bus
Timeout
Table 5. 13: Binary values cont.
Multi-state Input and Output Objects
Multi-state Variable
Object
ID
MSV:0
MSV:1 Set-up selection W/R No Non
TR200 BACnet 5-13
Object Name
SL LC Controller
State
Read/
Write
R No Non 16-38 No No
Changeable De-
scription
Non-vola-
tile RAM
Store
Drive Par.
Bit 13 & 14
in CTW
Alarm notifi-
cation
No No
Triggers Bus
Timeout
Page 39
How to Control the Adjustable Frequency
Drive
Mailbox variable
Object
ID
MBV:0 Mailbox Write W/R No Non
MBV:1 Mailbox Read R No Non
Object Name
Read/
Write
Changeable Description
Non-vola-
tile RAM
Store
Drive Par.
PCV part of
the send
drive mes-
sage
PCV part of
the receive
drive mes-
sage
Alarm notifi-
cation
No No
No No
Triggers Bus
Timeout
Real Time Clock Variable
The adjustable frequency drive has a built-in real-time clock. The standard real-time clock has no battery backup
function (for real-time clock battery backup, selected TR200 option modules are available), which will lead to a
time stop if the drive is unpowered. Some BACnet Masters can be programmed to send out the date and time
as a broadcast message on a regular basis. The BACnet will update the real-time clock of the drive if it receives
this type of message: “Message”.
5-14 TR200 BACnet
Page 40

How to Control the Adjustable Frequency
Drive
Adjustable Frequency Drive Feedback to Network
The BACnet option provides several output variables (NVOs) to the network, containing important adjustable
frequency drive, motor and I/O feedback data. The BACnet option transmits bound network variables only and
sends feedback data when there is a change in value.
Influence of the digital input terminals upon the drive control mode, par.8-50
Reference Select
The influence of the digital input terminals upon control of the adjustable frequency drive can be programmed
in par.8-50
Coasting Select to par.8-56 Preset Reference Select.
Coasting Select to par.8-56 Preset
NOTE
par.8-01 Control Site overrules the settings in
parameter.
Each of the digital input signals can be programmed to logic AND, logic OR, or to have no relation to the corresponding bit in the control word. In this way, a specific control command, i.e., stop / coast, can be initiated by
the serial communication bus only, serial communication bus AND Digital Input, or serial communication bus
OR digital input terminal.
parameters 8-50 to 8-56
and Terminal 37, Safe Stop overrules any
CAUTION
In order to control the adjustable frequency drive via BACnet, par.8-50 Coasting Select must be set to either Bus [1],
or to Logic AND [2] and par.8-01
More detailed information and examples of logical relationship options are provided in the
chapter.
Control Site must be set to Digital and ctrl. word [0] or Controlword only [2].
Troubleshooting
TR200 BACnet 5-15
Page 41
How to Control the Adjustable Frequency
Drive
Object / Property Support Matrix
The following table summarizes the object types and properties supported:
Property Device
Object
identifier
Object
Name
Object
Type
System
Status
Vendor
Name
Vendor
Identifier
Model
Name
Firmware
Revision
Appl. Software Revision
Location X
Description
Protocol
Version
Protocol
Revision
Services
Supported
Object
Types Supported
Object List X
Max. APDU Length
Segmentation Support
Local Time X
Local Date X
APDU
Timeout
Number
APDU Retries
Max Master
Max Info
Frames
Device Address Binding
Database
Revision
Binary
input
XX XXXXXXXX
X X X X X X X X X X
XX XXXXXXXX
X
X
X
X
X
X
XX XXXXXXXX
X
X
X
X
X
X
X
X
X
X
X
X
Binary
output
Binary
value
Analog
input
Analog
output
Analog
value
Multi-
stage
value
File
Event
notification
class
5-16 TR200 BACnet
Page 42

How to Control the Adjustable Frequency
Drive
Object / Property Support Matrix, continued..
Property Device
Present Value X X X X X X
Status Flags X X X X X X
Event State X X X X X X
Reliability X X X X X X
Out-of-Service
Number of
States
State Text X
Units X X X
Time Delay X X
Notification
Class
High Limit X X
Low Limit X X
Deadband X X
Limit Enable X X
Event Enable X X
Acked Transitions
Notify Type X X
Event Time
Stamp
Priority Array X X* X ?? X
Priority X
ACk Required X
Recipient List X
# of Notification Class
Relinquish Default
Polarity X X
Active Text X X X
Inactive Text X X X
File type X
File size X
Modification
Date
Archive X
Read Only X
File Access
Method
*For commandable values only
Binary
input
XXXX X X
X
X X
X X
X X
X
X X* X ?? X
X
X
Binary
output
Binary
value
Analog
input
Analog
output
Analog
value
Multi-
stage
value
File
Event
notification
class
TR200 BACnet 5-17
Page 43

How to Control the Adjustable Frequency
Drive
5-18 TR200 BACnet
Page 44

Parameters
Parameter Overview
Parameter List
Nr. Title Default value Range
8-01 Control Site Dig. and ctrl. word [0] [0 - 2] - 5
8-02 Control Source Drive RS485 [0] [0 - 4] - 5
8-03 Control Timeout Time 1 s 0.1–18000 - 1 7
8-04 Control Timeout Function Off [0] [0 - 10] - 5
8-05 End-of-timeout Function Hold set-up [0] [0 - 1] - 5
8-06 Reset Control Timeout Do not reset [0] [0 - 1] - 5
8-07 Diagnosis Trigger Disable [0] [0 - 3] - 5
8-10 Control Profile Drive profile [0] [0 - x] - 5
8-30 Protocol Drive
8-31 Address 1 [0 – 255]
8-32 Baudrate 38,400 [0 – 7]
8-33 Parity/Stop Bits No Parity, 1 Stop Bit
8-35 Minimum Response Delay 10mS
8-36 Max Response Delay 5000mS
8-37 Max Inter-Char Delay 25.00mS
8-50 Coasting Select Logic OR [3] [0 - 3] - 5
8-52 DC Brake Select Logic OR [3] [0 - 3] - 5
8-53 Start Select Logic OR [3] [0 - 3] - 5
8-54 Reversing Select Logic OR [3] [0 - 3] - 5
8-55 Set-up Select Logic OR [3] [0 - 3] - 5
8-56 Preset Reference Select Logic OR [3] [0 - 3] - 5
8-70 BACnet Device Instance 1 [1-4194304] -
8-72 MS/TP Max Masters 127 [1-127] -
8-73 MS/TP Max Info Frames
8-74 “I am” Service Once at power-up [0] [0-1] -
8-75 Initialization Password “admin” String[19]
Conver-
sion index
Data
type
Table 6. 1: BACnet specific parameter list
Please refer to the
TR200 Drive Programming Guide, MG.12.JX.YY
TR200 BACnet 6-1
TR200 Drive Instruct ion Manual, MG.12.HX.YY
for detailed descriptions of parameters.
for a comprehensive parameter list or to the
Page 45

Parameters
Parameter Description
8-** Comm. and Options
Parameter group for configuring communications and options.
8-01 Control Site
Option: Function:
The setting in this parameter overrides the settings in par.8-50
Select to par.8-56 Preset Reference Select.
[0] * Digital and ctrl. word Control by using both digital input and control word.
[1] Digital only Control by using digital inputs only.
[2] Control word only Control by using control word only.
8-02 Control Source
Option: Function:
Select the source of the control word: one of two serial interfaces or four
installed options. During initial power-up, the adjustable frequency drive
automatically sets this parameter to
communication bus option installed in slot A. If the option is removed,
the adjustable frequency drive detects a change in the configuration, sets
par.8-02
Drive Port
installed after initial power-up, the setting of par.8-02
not change but the adjustable frequency drive will trip and display: Alarm
67
Control Source back to default setting
, and the adjustable frequency drive then trips. If an option is
Option Changed
.
Option A
[3] if it detects a valid serial
Adjustable Frequency
Coasting
Control Source will
[0] None
[1] FC RS-485
[2] FC USB
[3] * Option A
[4] Option B
[5] Option C0
[6] Option C1
[30] External Can
NOTE: This parameter cannot be adjusted while the motor is running.
8-03 Control Timeout Time
Range: Function:
60.0 s* [1.0 - 18000.0 s] Enter the maximum time expected to pass between the reception of two
consecutive messages. If this time is exceeded, it indicates that the serial
communication has stopped. The function selected in par.8-04
Timeout Function
In LonWorks, the following variables will trigger the Control Word Time
parameter:
nviStartStop
nviReset Fault
Control Timeout Function
will then be carried out.
Control
6-2 TR200 BACnet
Page 46

nviControlWord
nviDrvSpeedStpt
nviRefPcnt
nviRefHz
8-04 Control Timeout Function
Option: Function:
Select the timeout function. The timeout function is activated when the
control word fails to be updated within the time period specified in par.
8-03
Control Timeout Time. Choice [20] only appears after setting the
Metasys N2 protocol.
[0] * Off
[1] Freeze output
[2] Stop
[3] Jogging
[4] Max. speed
[5] Stop and trip
[7] Select setup 1
[8] Select setup 2
[9] Select setup 3
[10] Select setup 4
[20] N2 Override Release
Parameters
In LonWorks, the timeout function is also activated when the following SNVTs fail to be updated within the time
period specified in par.8-03
nviStartStop
nviReset Fault
nviControlWord
Control Timeout Time:
nviDrvSpeedStpt
nviRefPcnt
nviRefHz
8-05 End-of-Timeout Function
Option: Function:
Select the action after receiving a valid control word following a timeout.
This parameter is active only when par.8-04
set to [Set-up 1-4].
[0] Hold set-up Retains the set-up selected in par.8-04
displays a warning, until par.8-06
the adjustable frequency drive resumes its original set-up.
[1] * Resume set-up Resumes the set-up active prior to the timeout.
Reset Control Timeout toggles. Then
Control Timeout Function is
Control Timeout Function and
TR200 BACnet 6-3
Page 47

Parameters
8-06 Reset Control Timeout
Option: Function:
This parameter is active only when the choice
selected in par.8-05
End-of-Timeout Function.
Hold set-up
[0] has been
[0] * Do not reset Retains the set-up specified in par.8-04
set-up 1-4] following a control timeout.
[1] Do reset Returns the adjustable frequency drive to the original set-up following a
control word timeout. When the value is set to
frequency drive performs the reset and then immediately reverts to the
Do not reset
[0] setting.
Control Timeout Function, [Select
Do reset
[1], the adjustable
8-07 Diagnosis Trigger
Option: Function:
This parameter has no function for LonWorks.
[0] * Disable
[1] Trigger on alarms
[2] Trigger alarm/warn.
8-10 Control Profile
Option: Function:
Select the interpretation of the control and status words corresponding
to the installed serial communication bus. Only the selections valid for
the serial communication bus installed in slot A will be visible in the
keypad display.
[0] * FC profile
[1] PROFIdrive profile
[5] ODVA
[7] CANopen DSP 402
8-30 Protocol
Option: Function:
Protocol selection for the integrated FC (standard) Port (RS485) on the
control card.
Parameter group 8-7* is only visible when Adjustable Frequency Drive
Option [9] is chosen.
[0] * FC
[1] FC MC
[2] Modbus RTU Communication according to the Modbus RTU protocol as described in
[3] Metasys N2 Communication protocol. The N2 software protocol is designed to be
6-4 TR200 BACnet
Communication according to the FC protocol as described in the TR200
Design Guide, RS 485 Installation and Set-up
FC
Same as
frequency drive or uploading dll file (covering information regarding parameters available in the adjustable frequency drive and their interdependencies) to Trane Drive Utility, TDU.
the TR200
general in nature in order to accommodate the unique properties each
[0] but to be used when downloading SW to the adjustable
Design Guide, RS 485 Installation and Set-up
.
.
Page 48

Parameters
device may have. Please see separate manual
12.NX.YY
[4]
[9] FC Option To be used when a gateway is connected to the integrated RS 485 port,
e.g., the BACnet gateway.
The following changes will take place:
-The address for the adjustable frequency drive port will be set to 1 and
par.8-31
network, e.g., BACnet.
-Baud rate for the Drive port will be set to a fixed value (115,200 Baud)
and par.8-32
port (e.g., BACnet) on the gateway.
[20]
NOTE: Further details can be found in the Metasys manual.
.
Address, is now used to set the address for the gateway on the
Baud Rate is now used to set the baud rate for the network
TR200 MetasysMG.
8-31 Address
Range: Function:
1. N/A* [1. - 126. N/A] Enter the address for the adjustable frequency drive (standard) port.
Valid range: 1–126.
8-32 Baud Rate
Option: Function:
Baud rate selection depends on Protocol selection in par.8-30
[0] 2400 Baud
[1] 4800 Baud
[2] 9600 Baud
[3] 19200 Baud
[4] * 38400 Baud
[5] 57600 Baud
[6] 76800 Baud
[7] 115200 Baud
Protocol.
Default refers to the FC Protocol.
8-33 Parity / Stop Bits
Option: Function:
Parity and Stop Bits for the protocol par.8-30
able Frequency Drive Port. For some of the protocols, not all options will
be visible. Default depends on the protocol selected.
[0] * Even Parity, 1 Stop Bit
[1] Odd Parity, 1 Stop Bit
[2] No Parity, 1 Stop Bit
[3] No Parity, 2 Stop Bits
TR200 BACnet 6-5
Protocol using the Adjust-
Page 49

Parameters
8-35 Minimum Response Delay
Range: Function:
10. ms* [5. - 10000. ms] Specify the minimum delay time between receiving a request and transmitting a response. This is used for overcoming modem turnaround
delays.
8-36 Max Response Delay
Range: Function:
10001.
ms*
8-37 Max Inter-Char Delay
Range: Function:
25.00
ms*
8-50 Coasting Select
Option: Function:
[11. - 10001. ms] Specify the maximum permissible delay time between transmitting a re-
quest and receiving a response. Exceeding this delay time will cause
control word timeout.
[0.00 - 35.00 ms] Specify the maximum permissible time interval between receiving two
bytes. This parameter activates timeout if transmission is interrupted.
Select control of the coasting function via the terminals (digital input)
and/or via the bus.
[0] Digital input Activates Start command via a digital input.
[1] Bus Activates Start command via the serial communication port or serial
communication option.
[2] Logic AND Activates Start command via the serial communication bus/serial com-
munication port, AND additionally via one of the digital inputs.
[3] * Logic OR Activates Start command via the serial communication bus/serial com-
munication port OR via one of the digital inputs.
NOTE: This parameter is active only when par.8-01
Control Site is set to [0]
Digital and control word
.
8-52 DC Brake Select
Option: Function:
Select control of the DC brake via the terminals (digital input) and/or via
the serial communication bus.
[0] Digital input Activates Start command via a digital input.
[1] Bus Activates Start command via the serial communication port or serial
communication option.
[2] Logic AND Activates Start command via the serial communication bus/serial com-
munication port, AND additionally via one of the digital inputs.
[3] * Logic OR Activates Start command via the serial communication bus/serial com-
munication port OR via one of the digital inputs.
NOTE: This parameter is active only when par.8-01
6-6 TR200 BACnet
Control Site is set to [0]
Digital and control word
.
Page 50

Parameters
8-53 Start Select
Option: Function:
Select control of the adjustable frequency drive start function via the terminals (digital input) and/or via the serial communication bus.
[0] Digital input Activates Start command via a digital input.
[1] Bus Activates Start command via the serial communication port or serial
communication option.
[2] Logic AND Activates Start command via the serial communication bus/serial com-
munication port, AND additionally via one of the digital inputs.
[3] * Logic OR Activates Start command via the serial communication bus/serial com-
munication port OR via one of the digital inputs.
NOTE: This parameter is active only when par.8-01
Control Site is set to [0]
Digital and control word
.
8-54 Reverse Select
Option: Function:
Select control of the adjustable frequency drive reverse function via the
terminals (digital input) and/or via the serial communication bus.
[0] * Digital input Activates Reverse command via a digital input.
[1] Bus Activates Reverse command via the serial communication port or serial
communication option.
[2] Logic AND Activates Reverse command via the serial communication bus/serial
communication port, AND additionally via one of the digital inputs.
[3] Logic OR Activates Reverse command via the serial communication bus/serial
communication port OR via one of the digital inputs.
NOTE: This parameter is active only when par.8-01
Control Site is set to [0]
Digital and control word
.
8-55 Set-up Select
Option: Function:
Select control of the adjustable frequency drive set-up selection via the
terminals (digital input) and/or via the serial communication bus.
[0] Digital input Activates the set-up selection via a digital input.
[1] Bus Activates the set-up selection via the serial communication port or serial
communication option.
[2] Logic AND Activates the set-up selection via the serial communication bus/serial
communication port, AND additionally via one of the digital inputs.
[3] * Logic OR Activate the set-up selection via the serial communication bus/serial
communication port OR via one of the digital inputs.
NOTE: This parameter is active only when par.8-01
TR200 BACnet 6-7
Control Site is set to [0]
Digital and control word
.
Page 51

Parameters
8-56 Preset Reference Select
Option: Function:
Select control of the adjustable frequency drive Preset Reference selection via the terminals (digital input) and/or via the serial communication
bus.
[0] Digital input Activates Preset Reference selection via a digital input.
[1] Bus Activates Preset Reference selection via the serial communication port
or serial communication option.
[2] Logic AND Activates Preset Reference selection via the serial communication bus/
serial communication port, AND additionally via one of the digital inputs.
[3] * Logic OR Activates the Preset Reference selection via the serial communication
bus/serial communication port OR via one of the digital inputs.
NOTE: This parameter is active only when par.8-01
Control Site is set to [0]
Digital and control word
.
8-70 BACnet Device Instance
Range: Function:
1 N/A* [0 - 4194304 N/A] Enter a unique ID number for the BACnet device.
NOTE: This parameter is active only when par.8-30
Protocol is set to [9]
Drive Option
.
8-72 MS/TP Max Masters
Range: Function:
127 N/A*[0 - 127 N/A] Define the address of the master which holds the highest address in this
network. Decreasing this value optimizes polling for the token.
NOTE: This parameter is active only when par.8-30
Protocol is set to [9]
Option
.
8-73 MS/TP Max Info Frames
Range: Function:
1 N/A* [1 - 65534 N/A] Define how many info/data frames the device is allowed to send while
holding the token.
NOTE: This parameter is active only when par.8-30
Protocol is set to [9]
Option
.
8-74 "Startup I am"
Option: Function:
[0] *
[1] Choose whether the device should send the "I-Am" service message only
at power-up or continuously with an interval of approx. 1 min.
NOTE: This parameter is active only when par.8-30
Protocol is set to [9]
Option
.
8-75 Initialization Password
Range: Function:
0 N/A* [0 - 0 N/A] Enter the password needed for execution of Drive Re-initialization from
BACnet.
NOTE: This parameter is active only when par.8-30
6-8 TR200 BACnet
Protocol is set to [9]
Drive Option
.
Page 52

Troubleshooting
Alarm, Warning and Extended Status Word
Alarm and Warning Messages
General
There is a clear distinction between alarms and warnings. In the event of an alarm, the adjustable frequency
drive will enter a fault condition. After the cause for the alarm has been cleared, the master must acknowledge
the alarm message in order to start operation of the adjustable frequency drive again. A warning, on the other
hand, may appear when a warning condition arises, then disappear when conditions return to normal without
interfering with the process.
Alarm Word and Warning Word are shown on the display in Hex format. If there is more than one warning or
alarm, a sum of all warnings or alarms will be shown. Warning Word and Alarm Word are displayed in par.
16-90 to 16-95. For more information on the individual alarms and warnings, please refer to: TR200
Guide
.
Warnings
All warnings within the adjustable frequency drive are represented by a single bit within a warning word. A
warning word is always an action parameter. Bit status FALSE [0] means no warning, while bit status TRUE [1]
means warning. Each bit status has a corresponding text string message. In addition to the Warning Word
message, the master will also be notified via a change to bit 7 in the status word.
Design
Alarms
Following an alarm message the adjustable frequency drive will enter a fault condition. Only after the fault has
been rectified and the master has acknowledged the alarm message by setting bit 3 in the Control Word, can
the adjustable frequency drive resume operation. All alarms within the TR200 are represented by a single bit
within an alarm word. An alarm word is always an action parameter. Bit status FALSE [0] means no alarm, while
bit status TRUE [1] means alarm.
TR200 BACnet 7-1
Page 53
Troubleshooting
Alarm Words
Alarm word, par.16-90 Alarm Word
Bit
(Hex)
00000001 Brake check
00000002 Power card overtemperature
00000004 Ground fault
00000008 Ctrl. card overtemperature
00000010 Control word timeout
00000020 Overcurrent
00000040 Torque limit
00000080 Motor thermistor overtemp.
00000100 Motor ETR overtemperature
00000200 Inverter overloaded
00000400 DC link undervoltage
00000800 DC link overvoltage
00001000 Short circuit
00002000 Soft-charge fault
00004000 Line phase loss
00008000 AMA not OK
00010000 Live zero error
00020000 Internal fault
00040000 Brake overload
00080000 Motor phase U is missing
00100000 Motor phase V is missing
00200000 Motor phase W is missing
00400000
00800000 24 V supply fault
01000000 Line failure
02000000 1.8 V supply fault
04000000 Brake resistor short circuit
08000000 Brake chopper fault
10000000 Option change
20000000 Drive initialized
40000000 Safe Stop
80000000 Not used
Alarm Word
(par.16-90
Serial communication bus
fault
Alarm Word)
Alarm word 2, par.16-91 Alarm word 2
Bit
(Hex)
00000001 Service Trip, read / Write
00000002 Reserved
00000004
00000008 Reserved
00000010 Reserved
00000020 No Flow
00000040 Dry Pump
00000080 End of Curve
00000100 Broken Belt
00000200 Not used
00000400 Not used
00000800 Reserved
00001000 Reserved
00002000 Reserved
00004000 Reserved
00008000 Reserved
00010000 Reserved
00020000 Not used
00040000 Fans error
00080000 ECB error
00100000 Reserved
00200000 Reserved
00400000 Reserved
00800000 Reserved
01000000 Reserved
02000000 Reserved
04000000 Reserved
08000000 Reserved
10000000 Reserved
20000000 Reserved
40000000 Reserved
80000000 Reserved
Alarm Word 2
(par.16-91
Service Trip, Typecode /
Spare part
Alarm word 2)
7-2 TR200 BACnet
Page 54

Warning Words
Troubleshooting
Warning word , par.16-92 Warning Word
Bit
(Hex)
00000001 Brake check
00000002 Power card overtemperature
00000004 Ground fault
00000008 Ctrl. card overtemperature
00000010 Control word timeout
00000020 Overcurrent
00000040 Torque limit
00000080 Motor thermistor overtemp.
00000100 Motor ETR overtemperature
00000200 Inverter overloaded
00000400 DC link undervoltage
00000800 DC link overvoltage
00001000 DC link voltage low
00002000 DC link voltage high
00004000 Line phase loss
00008000 No motor
00010000 Live zero error
00020000 10 V low
00040000 Brake resistor power limit
00080000 Brake resistor short circuit
00100000 Brake chopper fault
00200000 Speed limit
00400000
00800000 24 V supply fault
01000000 Line failure
02000000 Current limit
04000000 Low temperature
08000000 Voltage limit
10000000 Encoder loss
20000000 Output frequency limit
40000000 Not used
80000000 Not used
Warning Word
(par.16-92
Serial Communication Bus
comm. fault
Warning Word)
Warning word 2, par.16-93 Warning word 2
Bit
(Hex)
00000001 Start Delayed
00000002 Stop Delayed
00000004 Clock Failure
00000008 Reserved
00000010 Reserved
00000020 No Flow
00000040 Dry Pump
00000080 End of Curve
00000100 Broken Belt
00000200 Not used
00000400 Reserved
00000800 Reserved
00001000 Reserved
00002000 Reserved
00004000 Reserved
00008000 Reserved
00010000 Reserved
00020000 Not used
00040000 Fans warning
00080000 ECB warning
00100000 Reserved
00200000 Reserved
00400000 Reserved
00800000 Reserved
01000000 Reserved
02000000 Reserved
04000000 Reserved
08000000 Reserved
10000000 Reserved
20000000 Reserved
40000000 Reserved
80000000 Reserved
Warning Word 2
(par.16-93
2)
Warning word
TR200 BACnet 7-3
Page 55
▂█▂█▂█▂█▂█
██████████
▂█▂█▂█▂█▂█
██████████
Troubleshooting
LED Status
Check the LEDs. The two bi-color LEDs on the BACnet card indicate the status of BACnet communication.
LED 1: Net Status
Phases Status Bi-color LED
Power On. Hardware Not OK Red
Self test Gree
n
Running Module OK Gree
n
Recoverable fault Red
Data exchange
Device communicating. Gree
n
LED 2: Module Status
Phases Status Bi-color LED
Power
On.
Running Module OK Gree
Recoverable fault
Unrecoverable fault drive is not responding on internal bus
Self test configuration takes place Gree
• Configuration not OK, e.g, P830
• Drive tripped
Red
n
n
Red
7-4 TR200 BACnet
Page 56

Rev. 2009-06-18130R0451 MG12L122
*MG12L122*
www.trane.com
Literature Order Number BAS-SVX24B-EN
Date November 2009
Supersedes BAS-SVX24A
For more information, contact your local Trane
office or e-mail us at comfort@trane.com
Trane has a policy of continous product and product data improvement and reserves the right to
change design and specifications without notice.
 Loading...
Loading...