

Toshiba TXZ Reference Manual
1 / 107
© 2017-2021
TXZ/TXZ+ Family
Advanced Vector Engine Plus
32-bit RISC Microcontroller
TXZ/TXZ+ Family
Reference Manual
Advanced Vector Engine Plus
(A-VE+-B)
Revision 3.1
2021-02
Toshiba Electronic Devices & Storage Corporation
2021-02-24
Rev. 3.1

TXZ/TXZ+ Family
2 / 107
Advanced Vector Engine Plus
Contents
Preface ................................................................................................................................................................. 7
Related document ..................................................................................................................................................... 7
Conventions .............................................................................................................................................................. 8
Terms and Abbreviation .......................................................................................................................................... 10
1. Outlines ....................................................................................................................................................... 11
2. Configuration ............................................................................................................................................... 12
2.1. Configuration of the VE .................................................................................................................................... 12
2.2. Interaction between the VE, PMD, and ADC ................................................................................................... 14
3. Description of Operations ........................................................................................................................... 15
3.1. Clock Supply .................................................................................................................................................... 15
3.2. Schedule Management .................................................................................................................................... 15
3.2.1. Schedule Control ........................................................................................................................................................ 17
3.2.2. Start Control ............................................................................................................................................................... 19
3.2.3. Interrupt Control .......................................................................................................................................................... 20
3.3. Description of Tasks ........................................................................................................................................ 21
3.3.1. Current Control (Task 5) ............................................................................................................................................. 23
3.3.2. SIN/COS calculation (Task 6) ..................................................................................................................................... 29
3.3.3. Output Voltage Transformation (Coordinate Axis Transformation/Phase Transformation) ......................................... 31
3.3.3.1. Output coordinate axis transformation (Task 7) ............................................................................................................. 31
3.3.3.2. Output phase transformation 1 (Space vector transformation) (Task 8) ........................................................................ 32
3.3.3.3. Output phase transformation 2 (Inverse Clarke transformation) (Task 11) .................................................................... 34
3.3.4. Output Control ............................................................................................................................................................ 36
3.3.4.1. Output control 1 (Task 0) ............................................................................................................................................... 36
3.3.4.2. Output control 2 (Task 9) ............................................................................................................................................... 42
3.3.5. Trigger Generation (Task 1) ....................................................................................................................................... 47
3.3.6. Input Process.............................................................................................................................................................. 49
3.3.6.1. Input process 1 (Task 2) ................................................................................................................................................ 49
3.3.6.2. Input process 2 (Task 10) .............................................................................................................................................. 52
3.3.7. Input Current Transformation (Phase Transformation/Coordinate Axis Transformation) ............................................ 56
3.3.7.1. Input phase transformation (Task 3) .............................................................................................................................. 56
3.3.7.2. Input coordinate axis transformation (Task 4)................................................................................................................ 57
3.3.8. Other Tasks ................................................................................................................................................................ 58
3.3.8.1. ATAN2 (Arctangent function 2) (Task 12) ...................................................................................................................... 58
3.3.8.2. SQRT (Square root function) (Task 13) ......................................................................................................................... 59
4. Registers ..................................................................................................................................................... 60
4.1. List of Registers ............................................................................................................................................... 60
4.2. Details of VE Control Registers ....................................................................................................................... 63
4.2.1. [VExEN] (VE Operation Enable/Disable Register) ...................................................................................................... 63
4.2.2. [VExCPURUNTRG] (CPU Start Trigger Selection Register) ...................................................................................... 63
4.2.3. [VExTASKAPP] (Task Selection Register) ................................................................................................................. 64
4.2.4. [VExACTSCH] (Operation Schedule Selection Register) ........................................................................................... 65
2021-02-24
Rev. 3.1

TXZ/TXZ+ Family
3 / 107
Advanced Vector Engine Plus
4.2.5. [VExREPTIME] (Operation Schedule Repeat Number Selection Register) ................................................................ 65
4.2.6. [VExTRGMODE] (Start Trigger Mode Setting Register) ............................................................................................. 65
4.2.7. [VExERRINTEN] (Error Interrupt Enable/Disable Setting Register) ............................................................................ 66
4.2.8. [VExCOMPEND] (VE Forcible Termination Register) ................................................................................................. 66
4.2.9. [VExERRDET] (Error Detection Register) .................................................................................................................. 66
4.2.10. [VExSCHTASKRUN] (Schedule Operation Status/Ongoing Task Number Register) ............................................... 67
4.2.11. [VExTMPREG0] (Temporary Registers 0) ................................................................................................................ 67
4.3. Details of Dedicated Registers ........................................................................................................................ 68
4.3.1. [VExMCTLF] (Status Register) ................................................................................................................................... 68
4.3.2. [VExMODE] (Task Control Mode Register) ................................................................................................................ 69
4.3.3. [VExFMODE] (Flow Control Register) ........................................................................................................................ 71
4.3.4. [VExTPWM] (PWM Period Rate setting Register) ...................................................................................................... 72
4.3.5. [VExOMEGA] (Rotational Speed setting Register) ..................................................................................................... 72
4.3.6. [VExTHETA] (Motor Phase setting Register) .............................................................................................................. 73
4.3.7. d-axis/q-axis Current Reference setting Registers ..................................................................................................... 73
4.3.7.1. [VExIDREF] (d-axis Current Reference setting Register) .............................................................................................. 73
4.3.7.2. [VExIQREF] (q-axis Current Reference setting Register) .............................................................................................. 73
4.3.8. d-axis/q-axis Voltage setting Registers ....................................................................................................................... 74
4.3.8.1. [VExVD] (d-axis Voltage setting Register) ..................................................................................................................... 74
4.3.8.2. [VExVQ] (q-axis Voltage setting Register) ..................................................................................................................... 74
4.3.8.3. [VExVDQ] (Voltage Scalar Register) ............................................................................................................................. 74
4.3.8.4. [VExVSLIM] (Voltage Scalar Limitation Register) .......................................................................................................... 75
4.3.9. Coefficient Registers for PI control ............................................................................................................................. 76
4.3.9.1. [VExCIDKI] (d-axis Current Integral Coefficient setting Register for PI control) ............................................................. 76
4.3.9.2. [VExCIDKP] (d-axis Current Proportional Coefficient setting Register for PI control) .................................................... 76
4.3.9.3. [VExCIDKG] (d-axis Coefficient Range setting Register for PI control) .......................................................................... 76
4.3.9.4. [VExCIQKI] (q-axis Current Integral Coefficient setting Register for PI control) ............................................................. 77
4.3.9.5. [VExCIQKP] (q-axis Current Proportional Coefficient setting Register for PI control) .................................................... 77
4.3.9.6. [VExCIQKG] (q-axis Coefficient Range setting Register for PI control) ......................................................................... 77
4.3.9.7. [VExVDIH] (d-axis Voltage Integral component Store Register for PI control (Upper)) .................................................. 78
4.3.9.8. [VExVDILH] (d-axis Voltage Integral component Store Register for PI control (Lower)) ................................................ 78
4.3.9.9. [VExVQIH] (q-axis Voltage Integral component Store Register for PI control (Upper)) .................................................. 78
4.3.9.10. [VExVQILH] (q-axis Voltage Integral component Store Register for PI control (Lower)) .............................................. 78
4.3.10. [VExPIOLIM] (Output Limitation Register for PI control) ........................................................................................... 78
4.3.11. [VExFPWMCHG] (PWM Switching Speed setting Register) .................................................................................... 79
4.3.12. [VExPWMOFS] (PWM Shift 2 Offset Register) ......................................................................................................... 79
4.3.13. SIN/COS Registers ................................................................................................................................................... 80
4.3.13.1. [VExCOS] (Cosine value Register of θ) ....................................................................................................................... 80
4.3.13.2. [VExSIN] (Sine value Register of θ)............................................................................................................................. 80
4.3.13.3. [VExCOSM] (Previous Cosine value Register) ............................................................................................................ 80
4.3.13.4. [VExSINM] (Previous Sine value Register) .................................................................................................................. 80
4.3.14. Sector Information Registers .................................................................................................................................... 81
4.3.14.1. [VExSECTOR] (Sector Information Register) .............................................................................................................. 81
4.3.14.2. [VExSECTORM] (Previous Sector Information Register) ............................................................................................ 81
4.3.15. 3-phase Current Registers ....................................................................................................................................... 82
2021-02-24
Rev. 3.1

TXZ/TXZ+ Family
4 / 107
Advanced Vector Engine Plus
4.3.15.1. [VExIAO] (a-phase Zero-Current Register) .................................................................................................................. 82
4.3.15.2. [VExIBO] (b-phase Zero-Current Register) .................................................................................................................. 82
4.3.15.3. [VExICO] (c-phase Zero-Current Register) .................................................................................................................. 82
4.3.15.4. [VExIAADC] (ADC Conversion Result Register for a-phase Current) .......................................................................... 83
4.3.15.5. [VExIBADC] (ADC Conversion Result Register for b-phase Current) .......................................................................... 83
4.3.15.6. [VExICADC] (ADC Conversion Result Register for c-phase Current) .......................................................................... 83
4.3.15.7. [VExIA] (a-phase Current Register) ............................................................................................................................. 83
4.3.15.8. [VExIB] (b-phase Current Register) ............................................................................................................................. 84
4.3.15.9. [VExIC] (c-phase Current Register) ............................................................................................................................. 84
4.3.16. DC Supply Voltage Registers ................................................................................................................................... 85
4.3.16.1. [VExVDC] (DC Supply Voltage Register) .................................................................................................................... 85
4.3.16.2. [VExVDCL] (DC2 Supply Voltage Register)................................................................................................................. 85
4.3.17. d-axis/q-axis Current Registers ................................................................................................................................ 86
4.3.17.1. [VExID] (d-axis Current Register) ................................................................................................................................ 86
4.3.17.2. [VExIQ] (q-axis Current Register) ................................................................................................................................ 86
4.3.18. [VExTADC] (ADC Conversion Time setting Register) .............................................................................................. 87
4.3.19. 3-phase PWM Duty Registers .................................................................................................................................. 88
4.3.19.1. [VExCMPU] (U-phase PWM Duty Register) ................................................................................................................ 88
4.3.19.2. [VExCMPV] (V-phase PWM Duty Register)................................................................................................................. 88
4.3.19.3. [VExCMPW] (W-phase PWM Duty Register) ............................................................................................................... 88
4.3.19.4. [VExMINPLS] (Minimum Pulse Width setting Register) ............................................................................................... 89
4.3.20. PWM Output Limitation Registers ............................................................................................................................. 90
4.3.20.1. [VExPWMMAX] (PWM Upper-Limit setting Register) .................................................................................................. 90
4.3.20.2. [VExPWMMIN] (PWM Lower-Limit setting Register) ................................................................................................... 90
4.3.21. [VExOUTCR] (PMD Output Control Register) .......................................................................................................... 91
4.3.22. Trigger Generation Registers ................................................................................................................................... 93
4.3.22.1. [VExTRGCRC] (Synchronous Trigger Correction setting Register) ............................................................................. 93
4.3.22.2. [VExTRGCMP0] (PMD Trigger 0 Timing setting Register) .......................................................................................... 93
4.3.22.3. [VExTRGCMP1] (PMD Trigger 1 Timing setting Register) .......................................................................................... 93
4.3.22.4. [VExTRGSEL] (Synchronous Trigger Selection setting Register) ................................................................................ 94
4.3.23. [VExEMGRS] (EMG release Register) ..................................................................................................................... 94
4.3.24. [VExDELTA] (Current Declination Angle Register) ................................................................................................... 94
4.3.25. Motor Constant Registers ......................................................................................................................................... 95
4.3.25.1. [VExCPHI] (Motor Interlinkage Magnetic Flux Register) .............................................................................................. 95
4.3.25.2. [VExCLD] (Motor d-axis Inductance Register) ............................................................................................................. 95
4.3.25.3. [VExCLQ] (Motor q-axis Inductance Register) ............................................................................................................. 95
4.3.25.4. [VExCR] (Motor Resistance Register) ......................................................................................................................... 95
4.3.25.5. [VExCPHIG] (Motor Magnetic Flux Range setting Register) ........................................................................................ 96
4.3.25.6. [VExCLG] (Motor Inductance Range setting Register) ................................................................................................ 96
4.3.25.7. [VExCRG] (Motor Resistance Range setting Register) ................................................................................................ 96
4.3.26. [VExVDE] (d-axis Voltage Register for Non-interference Control) ............................................................................ 97
4.3.27. [VExVQE] (q-axis Voltage Register for Non-interference Control) ............................................................................ 97
4.3.28. [VExDTC] (Dead Time Compensation Register) ...................................................................................................... 97
4.3.29. [VExHYS] (Hysteresis Width Register for Current Polarity Determination) ............................................................... 97
4.3.30. [VExHYS2] (Hysteresis Width Register 2 for Current Polarity Determination) .......................................................... 98
4.3.31. [VExDTCS] (Dead Time Compensation Control/Status Register) ............................................................................ 98
2021-02-24
Rev. 3.1

TXZ/TXZ+ Family
5 / 107
Advanced Vector Engine Plus
4.3.32. [VExTHTCLP] (Clipped Phase value setting Register) ............................................................................................. 99
4.3.33. 2-phase Voltage Registers ....................................................................................................................................... 99
4.3.33.1. [VExVALPHA] (α-phase Voltage Register) .................................................................................................................. 99
4.3.33.2. [VExVBETA] (β-phase Voltage Register) .................................................................................................................... 99
4.3.34. 3-phase Voltage Duty Registers ............................................................................................................................. 100
4.3.34.1. [VExVDUTYA] (a-phase Voltage Duty Register) ....................................................................................................... 100
4.3.34.2. [VExVDUTYB] (b-phase Voltage Duty Register) ....................................................................................................... 100
4.3.34.3. [VExVDUTYC] (c-phase Voltage Duty Register) ....................................................................................................... 100
4.3.35. 2-phase Current Registers ..................................................................................................................................... 101
4.3.35.1. [VExIALPHA] (α-phase Current Register) .................................................................................................................. 101
4.3.35.2. [VExIBETA] (β-phase Current Register) .................................................................................................................... 101
4.3.36. [VExVDELTA] (Voltage Declination Angle Register) .............................................................................................. 101
4.3.37. [VExVDCRC] (d-axis Voltage Correction Register) ................................................................................................ 101
4.3.38. [VExVQCRC] (q-axis Voltage Correction Register) ................................................................................................ 102
5. Precautions ............................................................................................................................................... 103
6. Revision History ........................................................................................................................................ 104
RESTRICTIONS ON PRODUCT USE ............................................................................................................. 107
2021-02-24
Rev. 3.1

TXZ/TXZ+ Family
6 / 107
Advanced Vector Engine Plus
List of Figures
Figure 2.1 Block diagram of VE ............................................................................................................... 12
Figure 2.2 Connection diagram of VE and peripherals ............................................................................ 14
Figure 3.1 Example of Motor Control Operation Status Flowchart .......................................................... 15
Figure 3.2 Operation schedule flowchart ................................................................................................. 18
Figure 3.3 Relationship diagram of tasks ................................................................................................. 22
Figure 4.1 [VExVDC]/[VExVDCL] store register ...................................................................................... 70
Figure 4.2 ADC conversion time .............................................................................................................. 87
List of Tables
Table 2.1 List of signals ........................................................................................................................... 13
Table 3.1 Execution task in each schedule.............................................................................................. 17
Table 3.2 Example of setting for typical operation flow ........................................................................... 18
Table 3.3 Schedule-related tasks ............................................................................................................ 19
Table 3.4 List of tasks .............................................................................................................................. 21
Table 4.1 <UPWM>, <UOC[1:0]> PMD setting: Output control of U-phase(UOx, XOx) ......................... 92
Table 4.2 <VPWM>, <VOC[1:0]> PMD setting: Output control of V-phase(VOx, YOx) .......................... 92
Table 4.3 <WPWM>, <WOC[1:0]> PMD setting: Output control of W-phase(WOx, ZOx) ...................... 92
Table 6.1 Revision history ...................................................................................................................... 104
2021-02-24
Rev. 3.1
7 / 107
Preface
Related document
Document name
Advanced Programmable Motor Control Circuit
12-bit Analog to Digital Converter
Exception
Clock Control and Operation Mode
Product Information
TXZ/TXZ+ Family
Advanced Vector Engine Plus
2021-02-24
Rev. 3.1

TXZ/TXZ+ Family
8 / 107
Advanced Vector Engine Plus
Conventions
● Numeric formats follow the rules as shown below:
Hexadecimal: 0xABC
Decimal: 123 or 0d123 – Only when it needs to be explicitly shown that they are decimal numbers.
Binary: 0b111 – It is possible to omit the "0b" when the number of bit can be distinctly understood from a
sentence.
● "_N" is added to the end of signal names to indicate low active signals.
● It is called "assert" that a signal moves to its active level, "deassert" to its inactive level.
● When two or more signal names are referred, they are described like as [m: n].
Example: S[3: 0] shows four signal names S3, S2, S1 and S0 together.
● The characters surrounded by [ ] defines the register.
Example: [ABCD]
● "n" substitutes suffix number of two or more same kind of registers, fields, and bit names.
Example: [XYZ1], [XYZ2], [XYZ3] [XYZn]
● "x" substitutes suffix number or character of units and channels in the Register List.
In case of unit, "x" means A, B, and C ...
Example: [ADACR0], [ADBCR0], [ADCCR0] [ADxCR0]
In case of channel, "x" means 0, 1, and 2 ...
Example: [T32A0RUNA], [T32A1RUNA], [T32A2RUNA] [T32AxRUNA]
● The bit range of a register is written like as [m: n].
Example: Bit[3: 0] expresses the range of bit 3 to 0.
● The configuration value of a register is expressed by either the hexadecimal number or the binary number.
Example: [ABCD]<EFG> = 0x01 (hexadecimal), [XYZn]<VW> = 1 (binary)
● Word and Byte represent the following bit length.
Byte: 8 bits
Half word: 16 bits
Word: 32 bits
Double word: 64 bits
● Properties of each bit in a register are expressed as follows:
R: Read only
W: Write only
R/W: Read and Write are possible
● Unless otherwise specified, register access supports only word access.
● The register defined as reserved must not be rewritten. Moreover, do not use the read value.
● The value read from the bit having default value of "—" is unknown.
● When a register containing both of writable bits and read-only bits is written, read-only bits should be written
with their default value, in the cases that default is "—", follow the definition of each register.
● Reserved bits of the Write-only register should be written with their default value.
In the cases that default is "—", follow the definition of each register.
● Do not use read-modified-write processing to the register of a definition which is different by writing and
read out.
2021-02-24
Rev. 3.1

TXZ/TXZ+ Family
9 / 107
Advanced Vector Engine Plus
All other company names, product names, and service names mentioned herein may be trademarks of their
respective companies.
2021-02-24
Rev. 3.1

10 / 107
Terms and Abbreviation
Some of abbreviations used in this document are as follows:
ADC Analog to Digital Converter
A-PMD Advanced Programmable Motor Control Circuit
A-VE+ Advanced Vector Engine Plus
PMD Programmable Motor Control Circuit
VE Vector Engine
TXZ/TXZ+ Family
Advanced Vector Engine Plus
2021-02-24
Rev. 3.1
TXZ/TXZ+ Family
11 / 107
Function
Classification
Calculate with fixed point number.
Interface task for PMD(Note1) and ADC(Note2)
d axis PI control, q axis PI control.
- Output limit by voltage scalar value
SIN/COS
Calculate sine and cosine values at phase θ
- Phase interpolation and phase clipping possible
- Coordinate transformation(Inverse park transformation)
Clarke transformation)
Convert 3-phase voltage to PWM output setting of PMD(Note1) (2 types)
- Compensation control of dead time
Trigger generation
task
Calculate AD conversion sampling timing set value of PMD from 3-phase
duty.
Read the ADC(Note2) conversion results and convert it to fixed point
- Current polarity determination (hysteresis/reverse hysteresis)
- Phase transformation (Clarke transformation)
- Axis transformation (park transformation)
- Arctangent (ATAN) calculation task
- Square root calculation task
Execute tasks sequentially
- 15 types of schedule
- Command start
process task by the ADC conversion end interrupt
Schedule end
interrupt
Interrupt that occurs when PWM interrupt is input from PMD(Note1) during
output schedule execution
Task end interrupt
Interrupt that occurs when the specified task completion.
Outputs a signal at task transition timing during schedule operation.
It can be monitored by PMD's(Note1) debug output function.
Advanced Vector Engine Plus
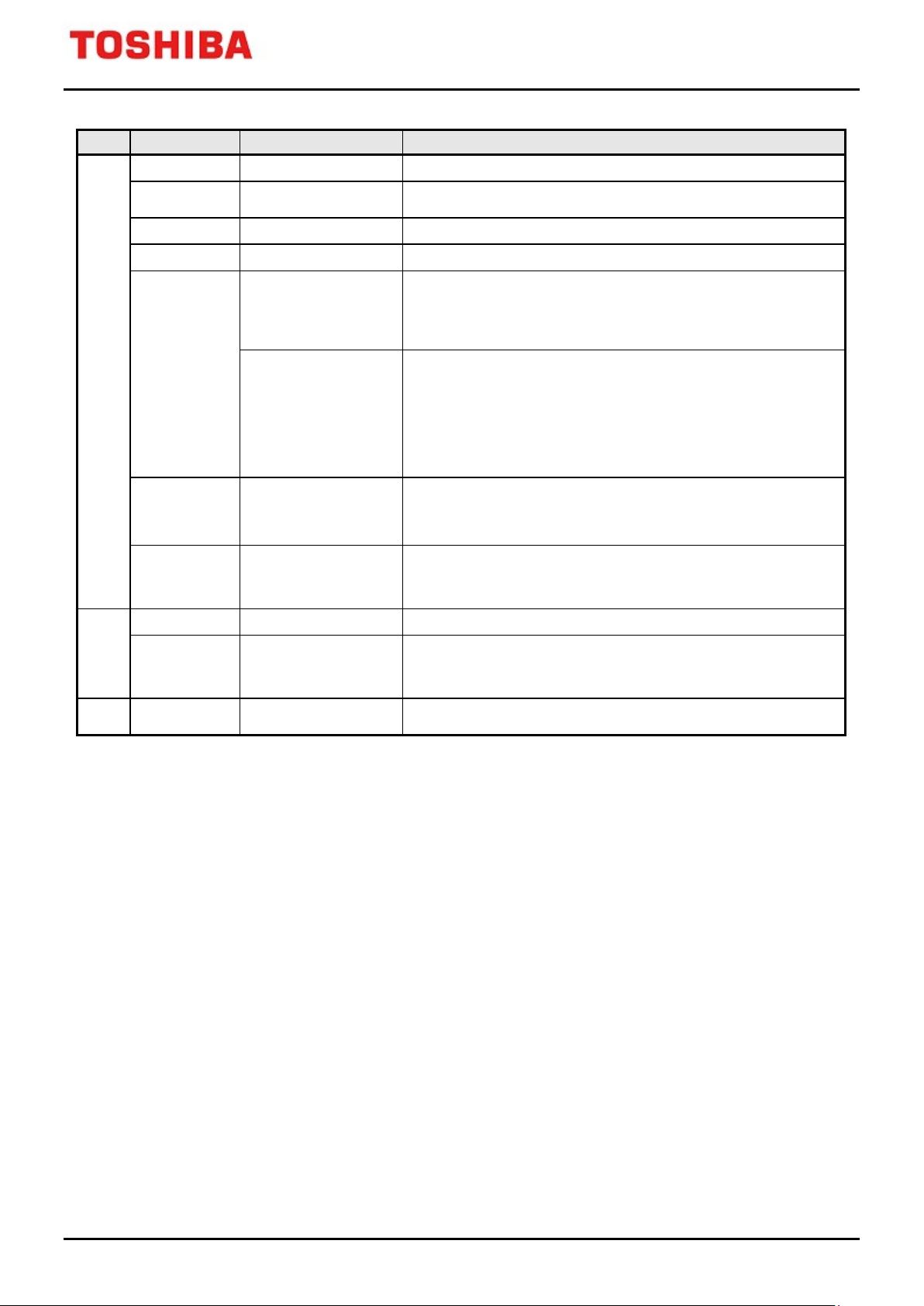
1. Outlines
The advanced vector engine plus (hereafter referred to as VE) can support vector control of 1 channel motor in 1
unit. The following is a list of functions.
Function Operation
Calculation
function
Basic function
Current control task
calculation task
Output voltage
transformation task
Output control task
Input process task
Input current
transformation task
Individual function
Scheduling control
Computation task for vector control
- Non-interference control
- Phase transformation: 2 types(Space vector transformation, Inverse
- Output limit possibility
number (2 types).
Schedule
manager
Interrupt control
Other function
Start control
Error interrupt
Output for
debugging
- Repeat start
- Start input schedule by end of AD conversion.
Start from the standby state after the output schedule ends from the input
Interrupt that occurs at the completion of schedule
Note1: For details of the PMD, refer to the reference manual "Advanced Programmable Motor Control
Circuit".
Note2: For details of the ADC, refer to the reference manual "12-bit Analog to Digital Converter".
2021-02-24
Rev. 3.1
12 / 107
Ta sk s
Current Control
Output voltage
transformation
Output control
Trigger generation
Input process
Input current
transformation
Scheduler
Schedule 0
Schedule
management
Start co
ntrol
Schedule
control
Interrupt control
Registers
Computation
Unit
INTPWMx
INTVCNx
Decoder
Error detection
ADC
INTADxPDA
INTADxPDB
INTVCTx
VExDBGO
Schedule 1
Schedule 15
PMD
ADxREG0 to 3
VExCMPU to W
VExTRGCMP0,1
VExTRGSEL
VExEMGRS
VExOUTCR
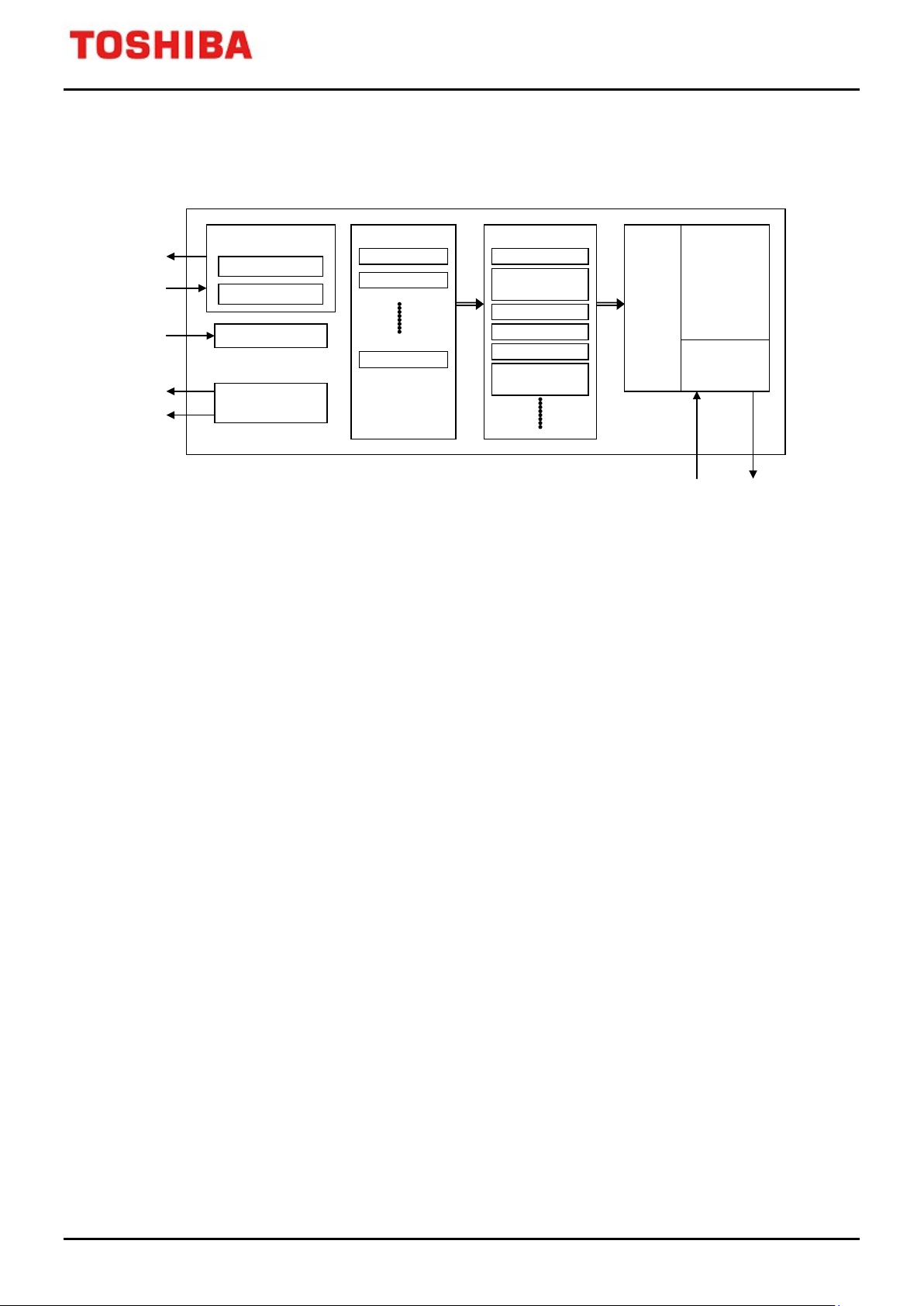
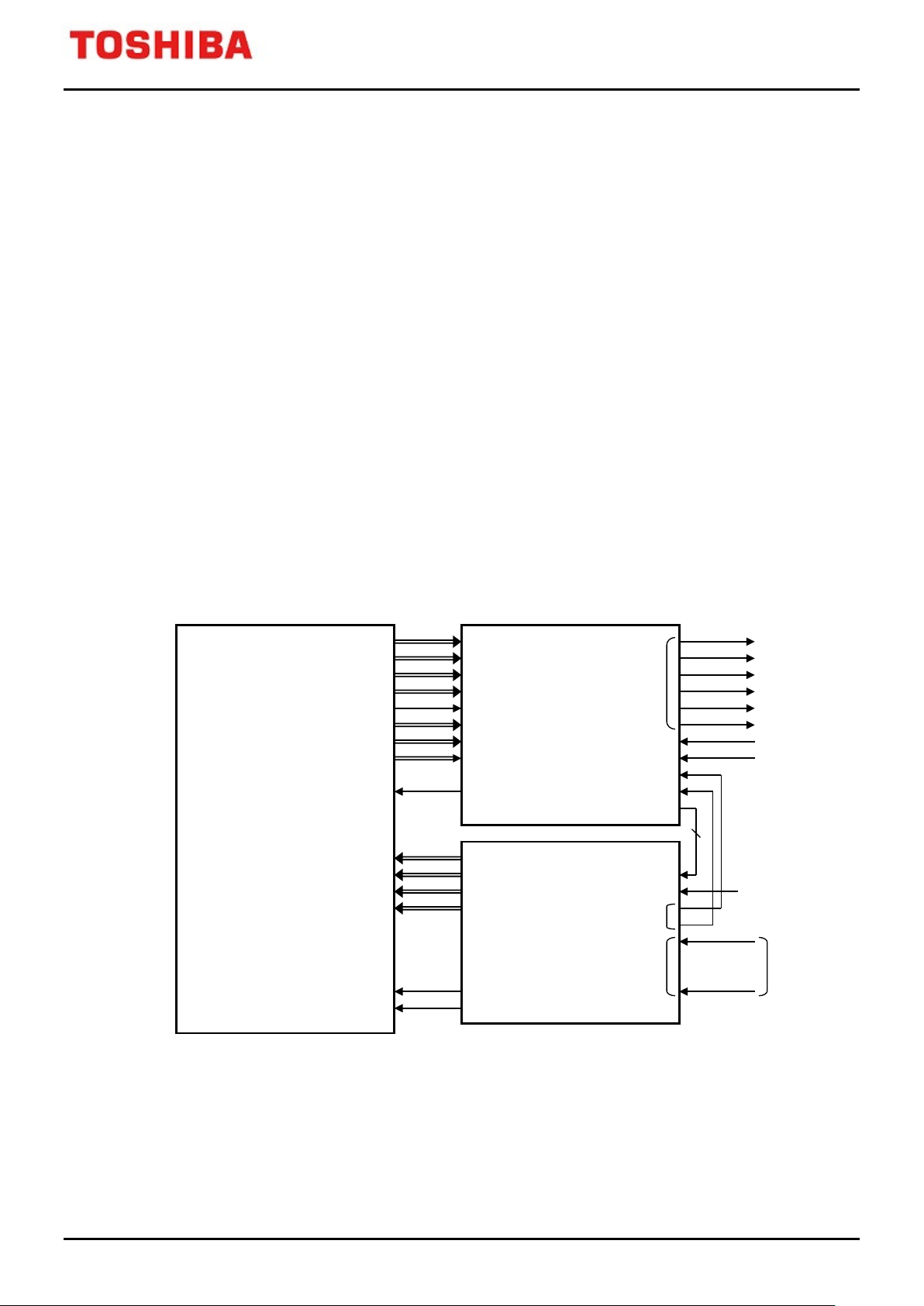
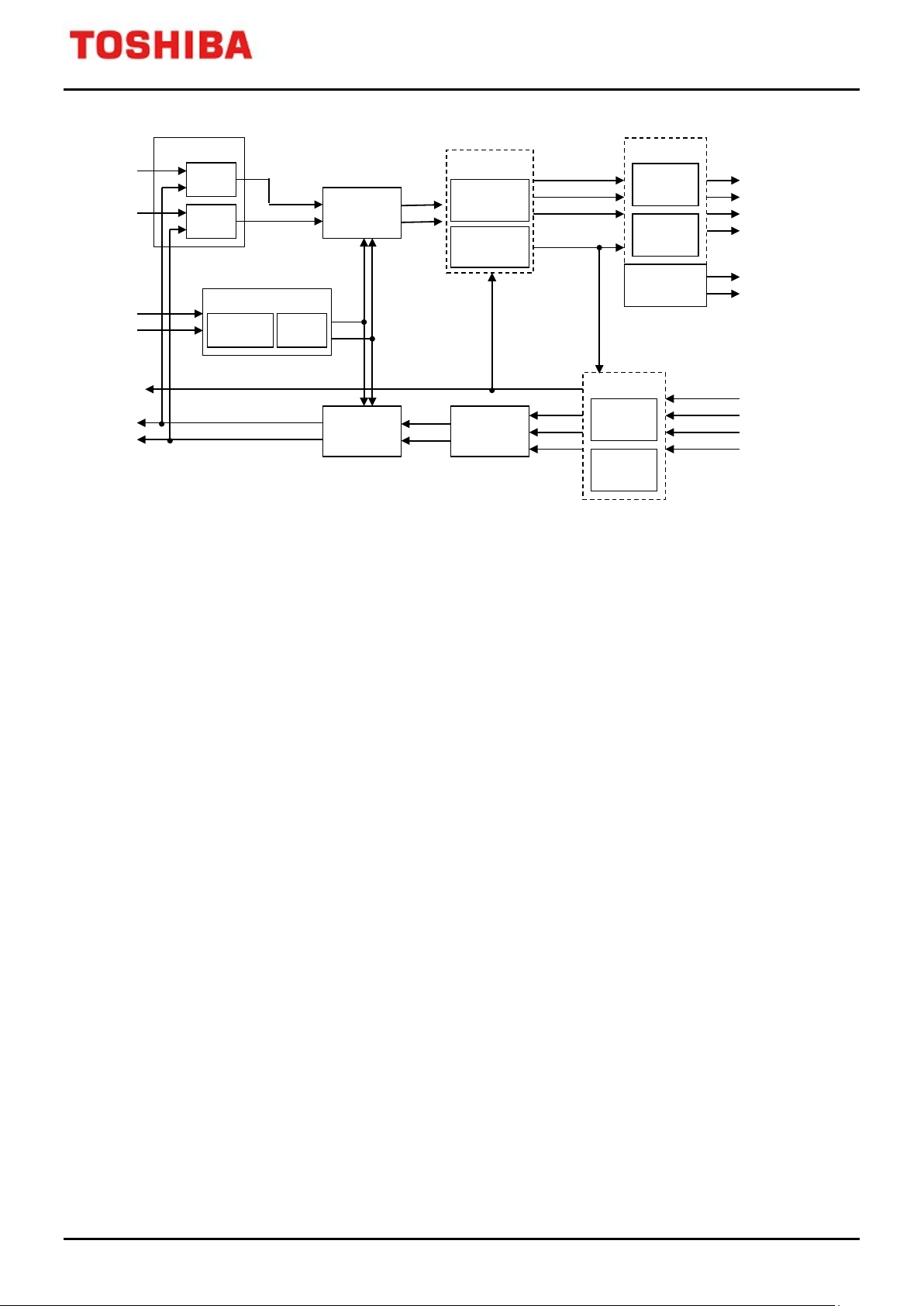
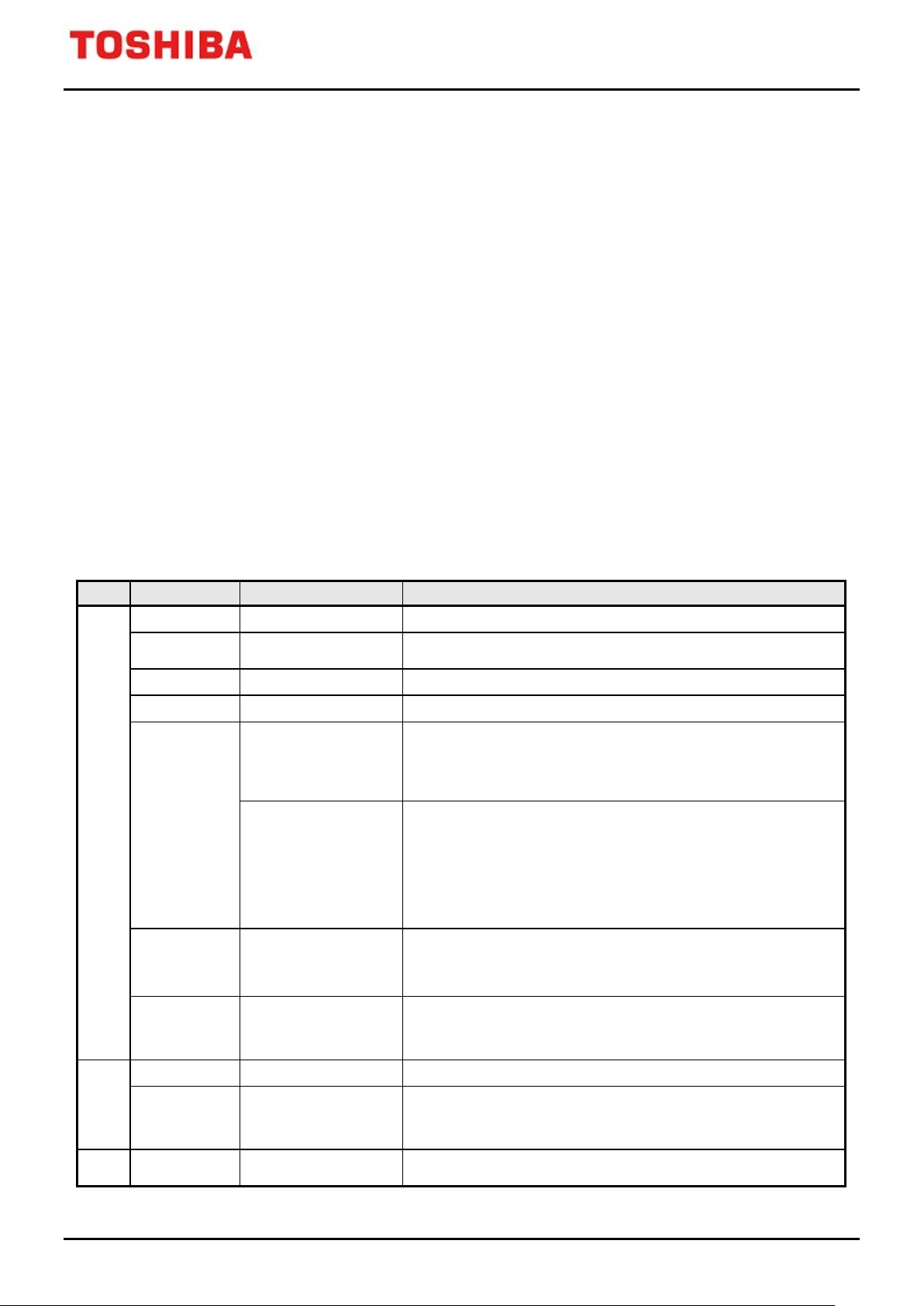
2. Configuration
2.1. Configuration of the VE
TXZ/TXZ+ Family
Advanced Vector Engine Plus
Figure 2.1 Block diagram of VE
2021-02-24
Rev. 3.1
TXZ/TXZ+ Family
13 / 107
U-phase PWM duty
([VExCMPU] register output to PMD)
V-phase PWM duty
([VExCMPV] register output to PMD)
W-phase PWM duty
([VExCMPW] register output to PMD)
Trigger compare 0
([VExTRGCMP0] register output to PMD)
([VExTRGCMP1] register output to PMD)
Synchronous trigger output selection
([VExTRGSEL] register output to PMD)
Conduction control / output control
([VExOUTCR] register output to PMD)
EMG release
[VExEMGRS]
9
INTPW Mx
PWM interrupt (from PMD)
Input
Product Information
ADC conversion result 0
(Current 1 data from ADC)
ADC conversion result 1
(Current 2 data from ADC)
ADC conversion result 2
(Current 3 data from ADC)
ADC conversion result 3
(DC voltage data from ADC)
ADC conversion end interrupt A
(Trigger from ADC)
ADC conversion end interrupt B
(Trigger from ADC)
16
INTVCNx
Schedule end interrupt
Output
Exception, Product Information
17
INTVCTx
Task end interrupt
Output
Exception, Product Information
18
VExDBGO
Task transition signal (debug output)
Output
Product Information
Advanced Vector Engine Plus
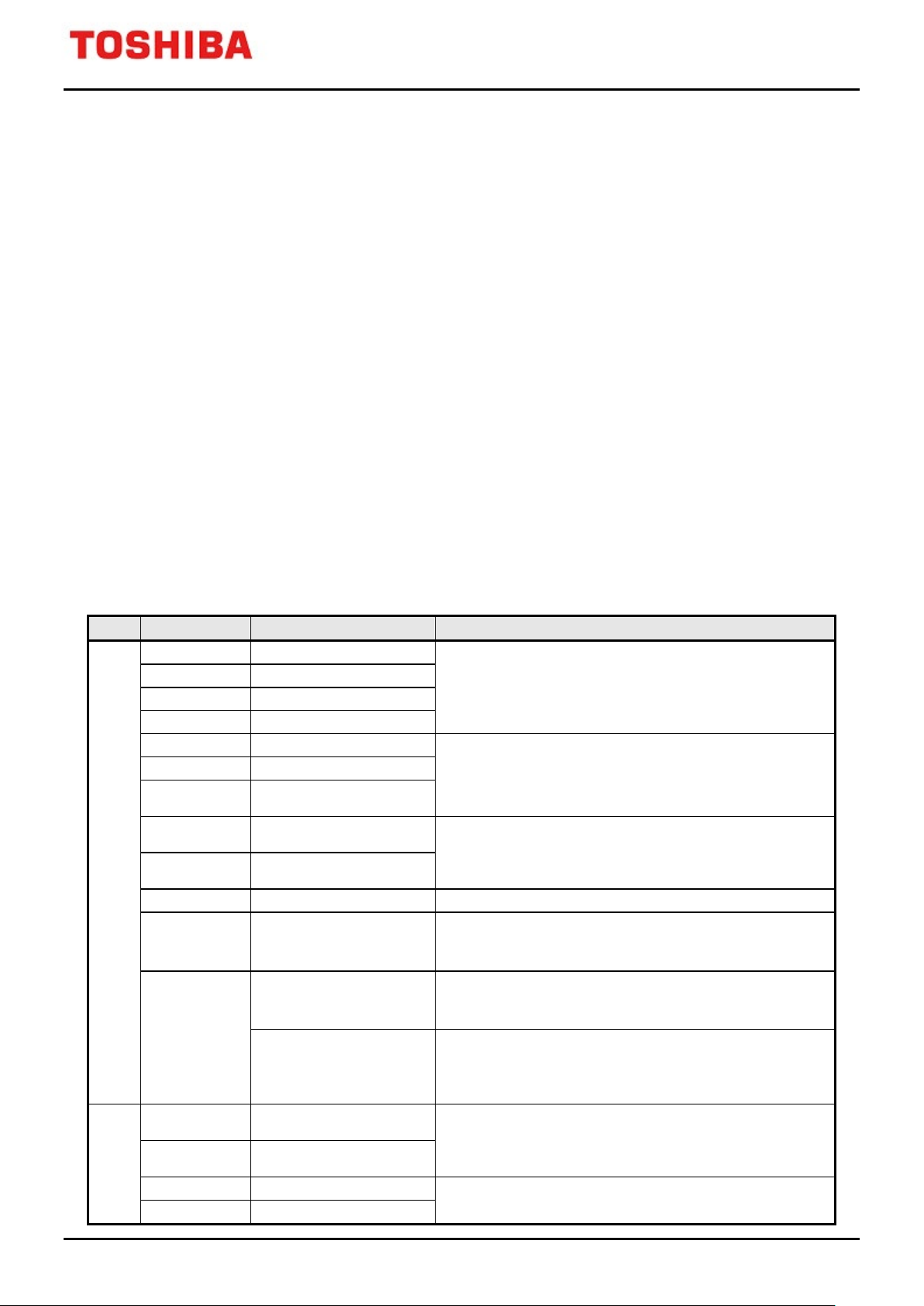
Table 2.1 List of signals
No Signal name Signal name I/O Related Reference manual
1 VExCMPU
2 VExCMPV
3 VExCMPW
4 VExTRGCMP0
5 VExTRGCMP1
6 VExTRGSEL
7 VExOUTCR
8 VExEMGRS
10 ADxREG0
11 ADxREG1
12 ADxREG2
13 ADxREG3
Trigger compare 1
(
register output to PMD)
Output Product Information
Output Product Information
Output Product Information
Output Product Information
Output Product Information
Output Product Information
Output Product Information
Output Product Information
Input Product Information
Input Product Information
Input Product Information
Input Product Information
14 INTADxPDA
15 INTADxPDB
Input Product Information
Input Product Information
2021-02-24
Rev. 3.1
TXZ/TXZ+ Family
14 / 107
VE ch0
PMD ch0
ADC unit A
Trigger output
Port
UO0
VO0
WO0
XO0
YO0
ZO0
・
・
・
Port
AINAx
ADAREG0
ADAREG1
ADAREG2
ADAREG3
VE0CMPU
VE0CMPV
VE0
CMPW
VE0OUTCR
VE0EMGRS
VE0TRGCMP0
VE0TRGCMP1
VE0TRGSEL
INTPW M0
INTPW M0
PMD0CMPU
PMD0CMPV
PMD0CMPW
PMD0OUTCR
PMD0EMGRS
PMD0TRGCMP0
PMD0TRGCMP1
PMD0TRGSEL
PWM output
Protect signal
(Internal)
EMG0
OVV0
Protect signal
(External)
General purpose trigger
PMD trigger 0 to 5
Monitor function output
from timer
Analog input
INTADAPDA
INTADAPDA
INTADAPDB
INTADAPDB
Current 1 input
Current 2 input
Current 3 input
DC voltage input
ADAREG0
ADAREG1
ADAREG2
ADAREG3
Advanced Vector Engine Plus
2.2. Interaction between the VE, PMD, and ADC
As shown in Figure 2.2, the VE allows to swap data between the PMD and ADC directly.
When the [PMDxCMPU], [PMDxCMPV], [PMDxCMPW], [PMDxMDOUT], [PMDxTRGCMP0],
[PMDxTRGCMP1] and [PMDxTRGSEL] registers of the PMD is set to the VE mode with the
[PMDxMODESEL] register, these registers are switched to [VExCMPU], [VExCMPV], [VExCMPW],
[VExOUTCR], [VExTRGCMP0], [VExTRGCMP1] and [VExTRGSEL] of the VE registers(Note). In this case,
these VE registers cannot be controlled via the corresponding registers of the PMD by the CPU. These registers
can be written by the VE. There are no read/write restrictions for other PMD registers.
The VE can read the value of the conversion result storage registers ([ADxREG0], [ADxREG1], [ADxREG2],
[ADxREG3]) of the ADC in the input process task. When reading the conversion result, phase information set in
the conversion program for each synchronous trigger from the PMD is also read from the ADC.
Note: Even if PMD register is switched to VE register, double buffer / triple buffer function of PMD is
valid. Refer to "Advanced Programmable Motor Control Circuit" in the reference manual for details
of buffer function.
When executing double buffers / triple buffers with PMD, while executing the task of operating
these registers with VE (output control 1 task/output control 2 task/trigger generation task, refer to
"3.3 Description of Tasks".) Even if the double buffer / triple buffer execution stage update timing is
reached, the execution stage is not updated.
Figure 2.2 Connection diagram of VE and peripherals
2021-02-24
Rev. 3.1

TXZ/TXZ+ Family
15 / 107
RESET
Initial input
Stop
Positioning
Forced
commutation
Speed control by
current feedback
Brake
Initial setting
EMG release
:
Executed by the VE
:
Software control
Change
[VExACTSCH]
Enable VE
Change
[VExMODE]
Change [VExACTSCH
]
Change [VExMODE
]
Change [VExACTSCH]
Change [VExMODE]
Change [VExACTSCH]
Change [VExMODE]
Change [VExACTSCH]
Change [VExMODE]
Change
[VEx
ACTSCH]
Change[VExMODE]
Advanced Vector Engine Plus
3. Description of Operations
3.1. Clock Supply
When you use VE, please set an applicable clock enable bit to "1" (clock supply) in Clock supply and stop register
A for fsys ([CGFSYSENA], [CGFSYSMENA]), Clock supply and stop register B for fsys ([CGFSYSENB],
[CGFSYSMENB]), and Clock supply and stop register for fc ([CGFCEN]).
An applicable register and the bit position vary according to a product. Therefore, the register may not exist with
the product. Please refer to "Clock Control and Operation Mode" of the reference manual for the details.
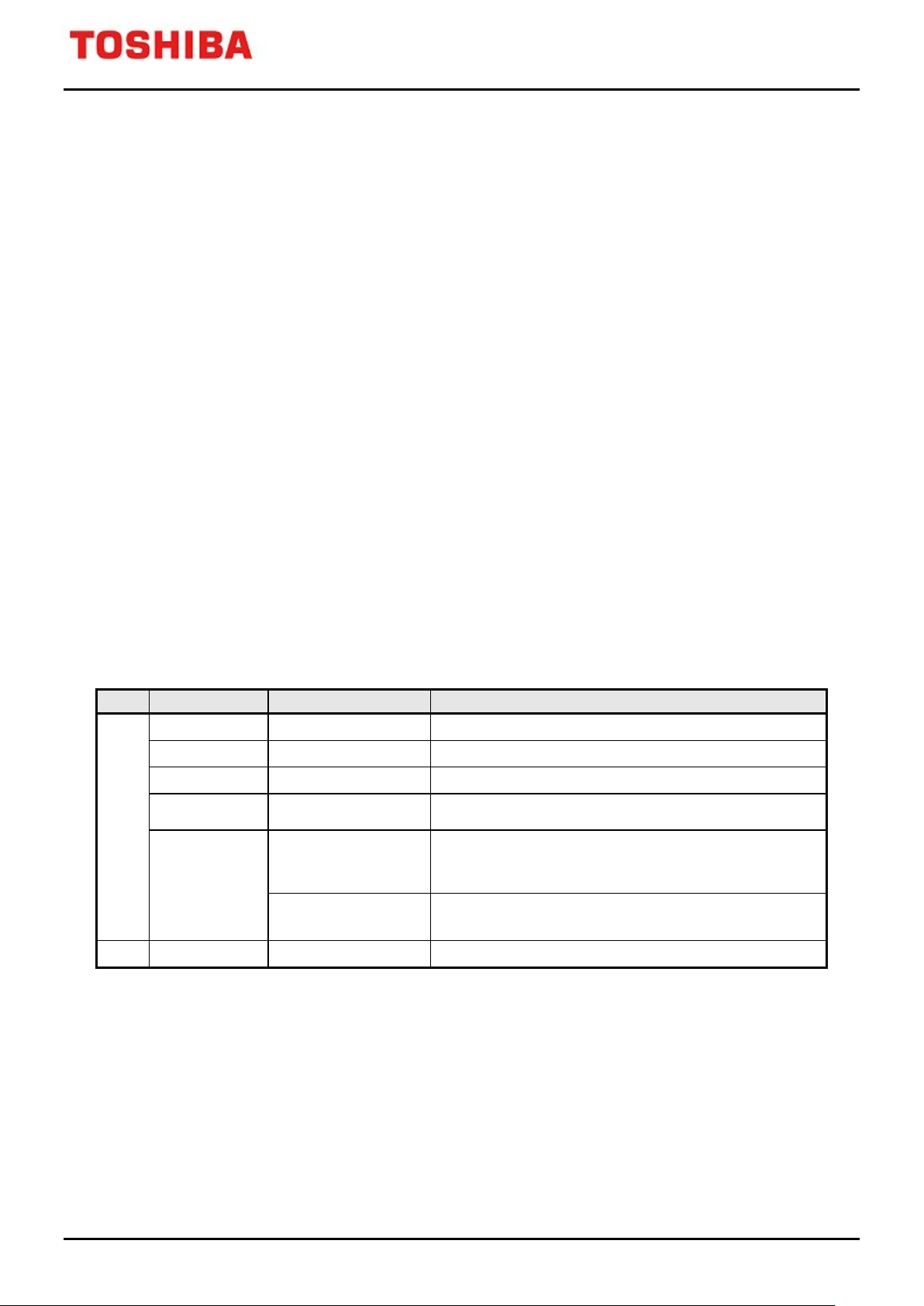
3.2. Schedule Management
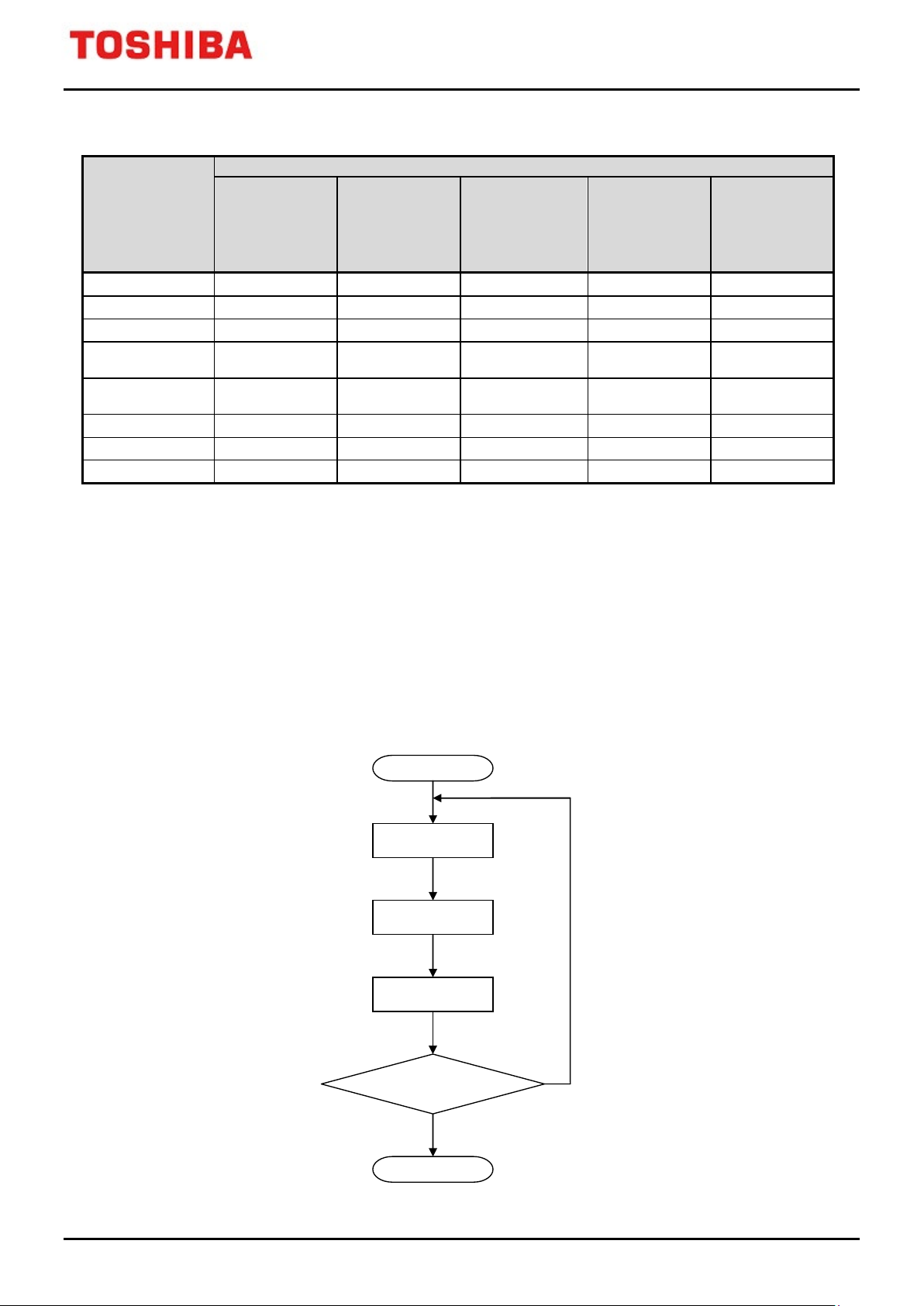
Figure 3.1 shows a flowchart of motor control. The VE changes operation status according to the schedule setting
([VExACTSCH]) and mode setting ([VExMODE]).
Figure 3.1 Example of Motor Control Operation Status Flowchart
2021-02-24
Rev. 3.1
Advanced Vector Engine Plus
16 / 107
Item
Function
RESET Resets the MCU.
Initial setting Specifies the initial setting by software.
Stop Stops the motor.
Initial input Samples and stores zero-current data when the motor is at stop.
Positioning Controls the motor initial position.
TXZ/TXZ+ Family
Forced commutation
Speed control by current feedback Control motor rotation speed by current feedback.
Brake Deceleration control
EMG release Release the EMG protection state.
Rotates the motor. The motor is rotated without current feedback control at
a specified speed in a motor activation period.
2021-02-24
Rev. 3.1
TXZ/TXZ+ Family
17 / 107
Provided by
execution
SIN/COS
Output
formation
for
for
mation
Input
formation
Task 5
Task 6
Task 7
Task 8
Task 11
Task 0
Task 9
Task 1
Task 2
Task 10
Task 3
Task 4
Task 12
Task 13
0:Individual
task execution
(Note 1)
(Note 1)
(Note 1)
(Note 1)
(Note 1)
(Note 1)
(Note 1)
(Note 1)
(Note 1)
(Note 1)
10: Schedule 10
11: Schedule 11
12: Schedule 12
13: Schedule 13
14: Schedule 14
Advanced Vector Engine Plus
3.2.1. Schedule Control
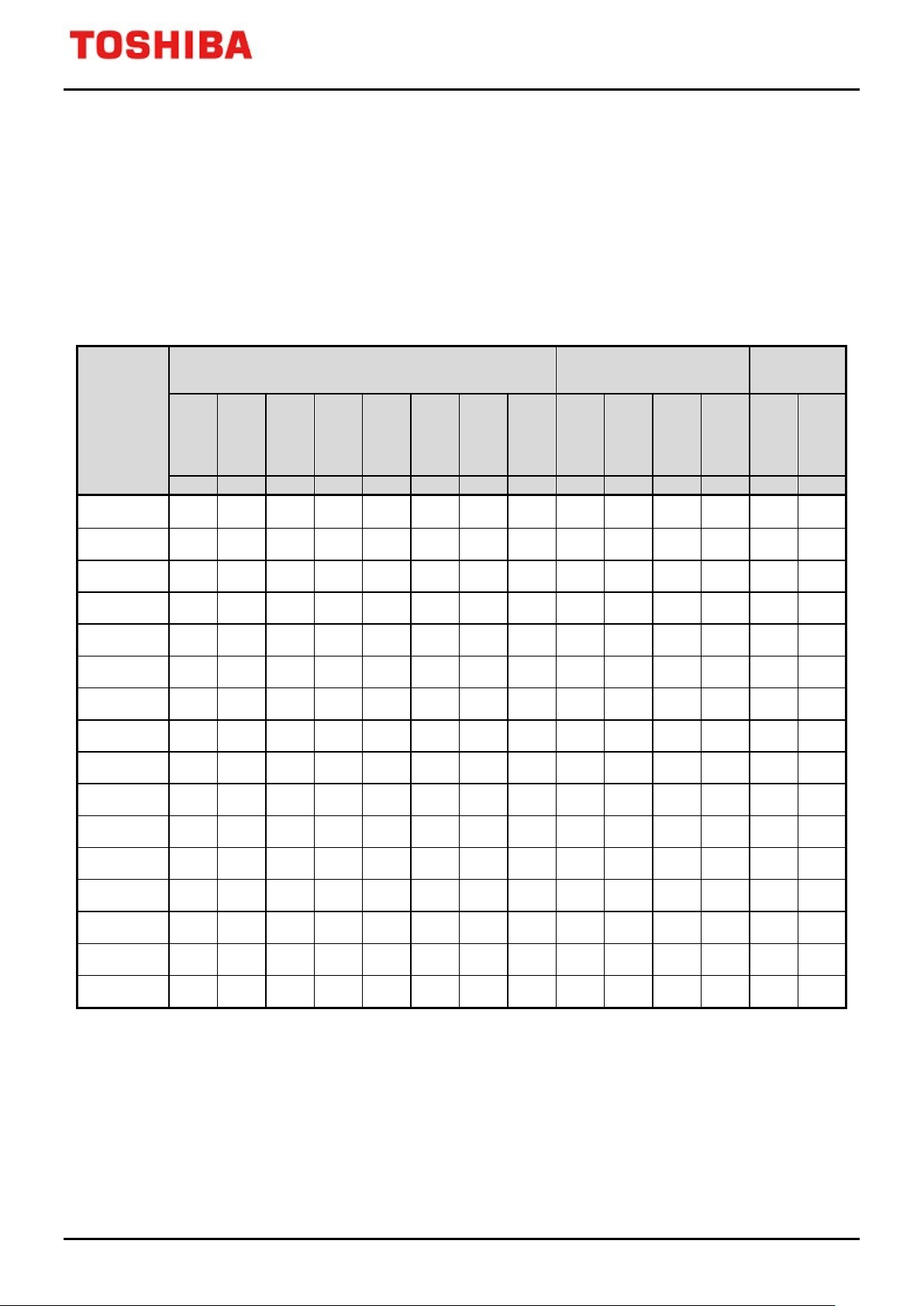
An operation schedule is selected with the [VExACTSCH] register.
The schedule is comprised of the output schedule handling output process tasks and the input schedule handling
input process tasks. Table 3.1 shows the relationship between the schedules and operation tasks.
A task operation is specified with the dedicated register according to the motor control method.
Table 3.1 Execution task in each schedule
Output schedule
execution tasks
Input schedule
execution tasks
only individual
Schedule
Selection
[VExACTSCH]
<VACT>
1: Schedule 1
Current
control
calcula-
coordi-
tion
(Note 1)
nate
axis
trans-
Output
phase
trans-
mation
1
Output
phase
trans-
mation
2
-
Output
control
1
Output
control
2
-
Trigger
genera-
tion
(Note 1)
Input
process
1
Input
process
2
-
Input
phase
trans-
for
coordi-
nate
axis
trans-
ATAN2
calcula-
tion
(Note 1) (Note 1)
- -
Square
root
calcula-
tion
2: Schedule 2 - - - - -
3: Schedule 3 - - - - -
4: Schedule 4 -
-
-
-
- -
5: Schedule 5 - - - - - -
6: Schedule 6 - - - - - -
7: Schedule 7 -
-
-
-
- -
8: Schedule 8 - - - - -
9: Schedule 9 - - - - - - - - - - -
15:Schedule 15 - - - - - - - - - -
-
- - - - - - - -
- - - - - - - - -
- - - - - - - - -
-
- - - - - - - -
- - - - - - - - - -
Note 1: Only the tasks that are specified with [VExTASKAPP] are executed.
Note 2: : Execution task, -: Non execution task
2021-02-24
Rev. 3.1
18 / 107
Setting
Phase
<PVIEN>
Forced
commutation
Current feedback
speed control
×
Start command
Execute
output schedule
Execute
input schedule
Wait for
start trigger
Schedule end
Yes
No
Start trigger
Repeated specified
number of times?
TXZ/TXZ+ Family
Advanced Vector Engine Plus
Table 3.2 Example of setting for typical operation flow
Motor control
flow
Stop 9 0
Initial input 9 0
Positioning 1 5 0 01 0
Brake 4 6 0 01 0
EMG release 9 0
Short circuit brake 4 6
Schedule
setting
[VExACTSCH]
<VACT>
1 5 1 01 0
1 5 1 01 0
Task selection
[VExTASKAPP]
<VTASK>
interpolation
enable
[VExMODE]
×
×
×
Output control
operation
[VExMODE]
<OCRMD>
00 0
00 1
11 0
10 0
Zero-current
detection
[VExMODE]
<ZIEN>
×: don’t care
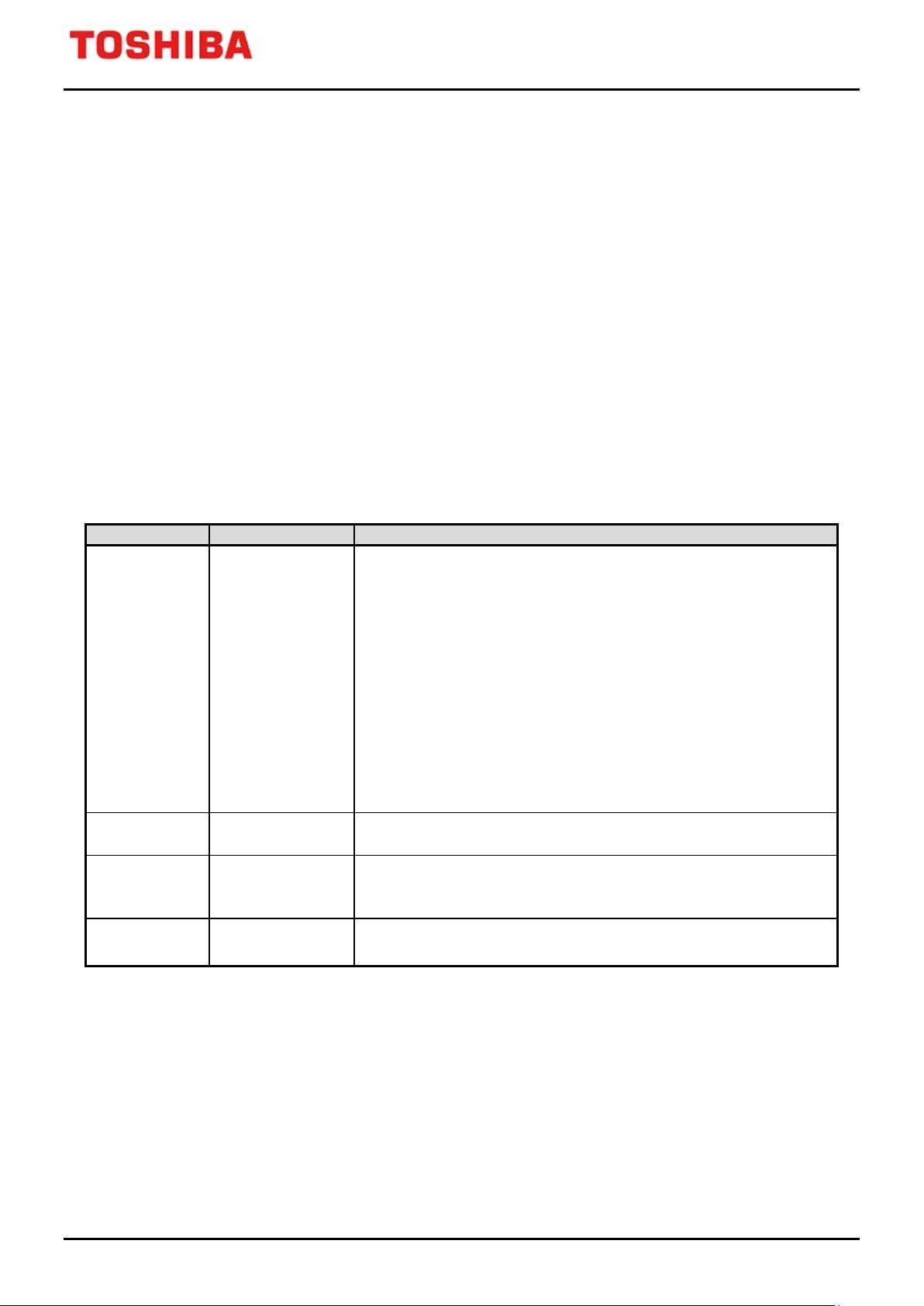
An output schedule starts operation with the command ([VExCPURUNTRG]). When all output-related tasks are
completed, the VE enters standby state and waits for a start trigger ([VExTRGMODE] setting).
An input schedule starts operation by a start trigger. When all input-related tasks are completed, the VE generates
an interrupt to the CPU and enters halt state. However, if the number of repeating of the schedule
([VExREPTIME]) is set to "2" or more, the output schedules continue execution. An interrupt does not occur
until the schedules have been executed for the specified number of times.
Note: Repeat setting is not available in Schedule 10 to Schedule 15. (The schedule ends once even if the
condition is [VExREPTIME] ≥ 2.)
Figure 3.2 Operation schedule flowchart
2021-02-24
Rev. 3.1
TXZ/TXZ+ Family
19 / 107
Register name
Function
Advanced Vector Engine Plus
3.2.2. Start Control
Before the schedule is started, set the VE to enable ([VExEN]<VEEN> = 1), and then set the operation schedule
selection register ([VExACTSCH]), task selection register ([VExTASKAPP]) and operation schedule repeat
specify register ([VExREPTIME]). After that, the schedule can be executed as follows:
A schedule of the VE is comprised of output schedules and input schedules. Typically, the VE enters wait state
after an output schedule is complete. At this time, if a startup trigger occurs, an input schedule is executed.
The output schedule and the input schedule are started on different conditions below:
● Start conditions for the output schedule
‒ Starting by the command. A task ([VExTASKAPP]) is specified with [VExCPURUNTRG].
‒ Repeat setting. Starting after the input schedules have been executed for the number of times
([VExREPTIME] ≥ 1).
● Start conditions for the input schedule
‒ Starting an input process task that is started from wait state by a trigger (specified with
[VExTRGMODE]). In this case, the VE is in wait state after the output schedule is complete.
‒ Starting by the command. A task ([VExTASKAPP]) is specified with [VExCPURUNTRG].
[VExACTSCH]
[VExTASKAPP]
[VExREPTIME]
[VExTRGMODE]
Operation
schedule selection
Starting
task designation
The number of
repeating of
the schedule
Start trigger mode
selection
Table 3.3 Schedule-related tasks
0x0: Only the task specified with [VExTASKAPP] is executed.
0x1: Schedule 1 is executed.
0x2: Schedule 2 is executed.
0x3: Schedule 3 is executed.
0x4: Schedule 4 is executed.
0x5: Schedule 5 is executed.
0x6: Schedule 6 is executed.
0x7: Schedule 7 is executed.
0x8: Schedule 8 is executed.
0x9: Schedule 9 is executed.
0xA: Schedule 10 is executed.
0xB: Schedule 11 is executed.
0xC: Schedule 12 is executed.
0xD: Schedule 13 is executed.
0xE: Schedule 14 is executed.
0xF: Schedule 15 is executed.
Specifies the task number that can be executed among the selected
operation schedule.
Sets the number from "1" to "15".
Note: When one-time execution is specified, set "1".If "0" is set, the
schedule is not executed.
Selects the input schedule trigger.
Sets INTADxPDA or INTADxPDB.
2021-02-24
Rev. 3.1

Advanced Vector Engine Plus
20 / 107
3.2.3. Interrupt Control
The VE has a schedule end interrupt (INTVCNx) that occurs at the completion of the schedule, and a task
completion interrupt (INTVCTx) that occurs at the completion of specified task.
● Schedule end interrupt
(1) Specifies the schedule with the operation schedule selection register ([VExACTSCH]). Sets the
command ([VExCPURUNTRG] = 1).
(2) When the schedules have been executed for the specified times ([VExREPTIME]), an INTVCNx
interrupt occurs.
(3) If the error detection interrupt control is enabled ([VExERRINTEN]<VERREN> = 1), a PWM
interrupt of the PMD circuit occurs while output schedule is being executed. Then an INTVCNx
interrupt occurs and an error flag ([VExERRDET]<VERRD>) is set to "1".
● Task end interrupt
(1) Specifies a task triggered of a task end interrupt ([VExTASKAPP]<VITASK>). Sets task end interrupt
control to enable ([VExERRINTEN]<INTTEN> = 1).
(2) Starts the schedule by the command ([VExCPURUNTRG] = 1). Sets a INTVCTx interrupt to occur at
the completion of the task specified with <VITASK>
TXZ/TXZ+ Family
2021-02-24
Rev. 3.1
Advanced Vector Engine Plus
21 / 107
Task
number
Output coordinate
transformation
Output phase
transformation 1
Input phase
transformation
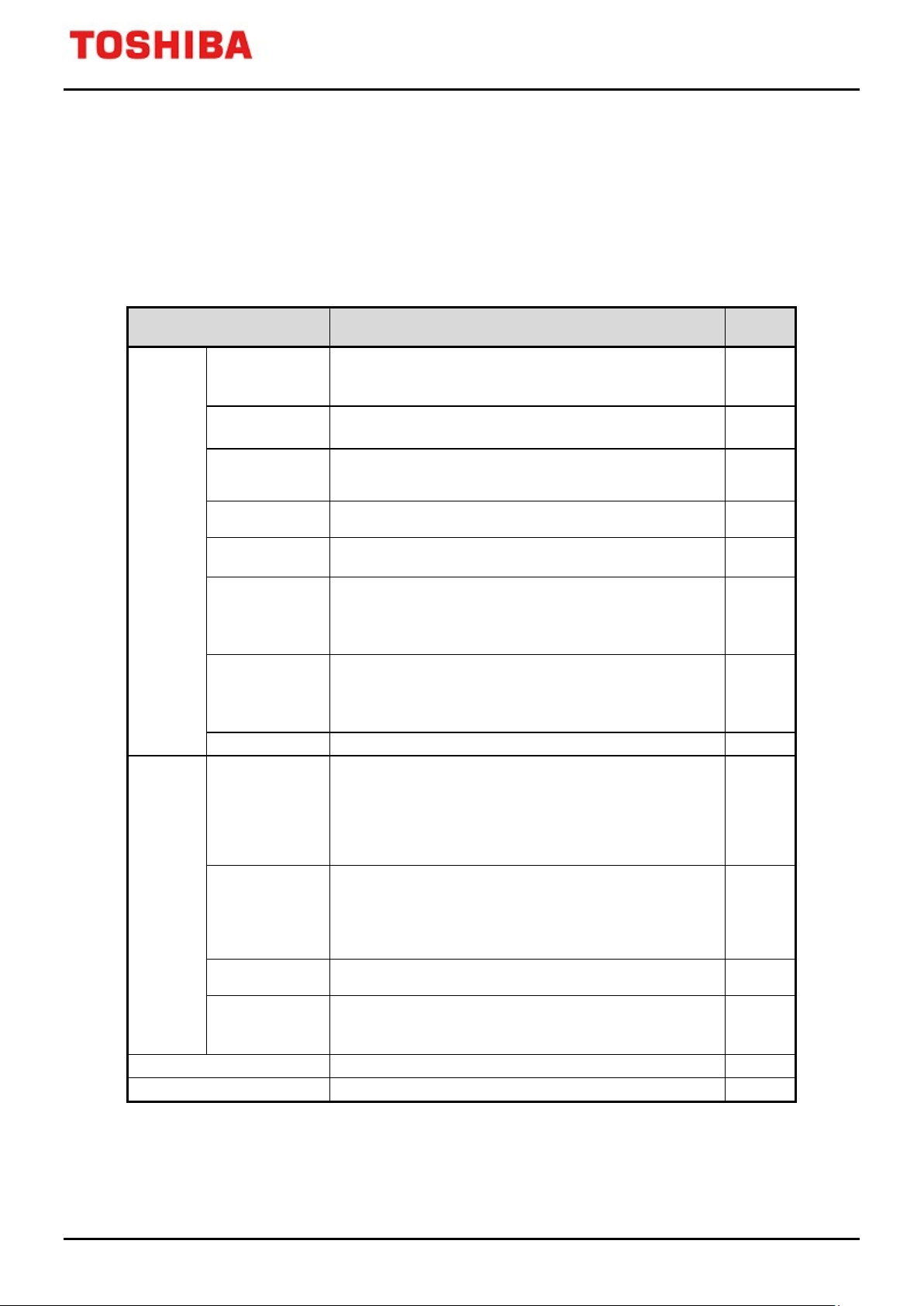
3.3. Description of Tasks
This subsection describes the outline of each task operation in the schedule.
Table 3.4 shows the task numbers that are used to specify the execution task and the start task.
Table 3.4 List of tasks
Task Task function
PI control for d-axis/q-axis (PI control output limit enable)
Current control
SIN/COS
calculation
Non-interference control for d-axis and q-axis, voltage scalar
limitation
Sine/cosine calculation
Phase interpolation (with clipping function)
TXZ/TXZ+ Family
5
6
Output
schedule
Input
schedule
axis
Output phase
transformation 2
Output control 1
Output control 2
Trigger generation
Input process 1
Input process 2
Inverse Park transformation
Transforms from 2-phase to 3-phase [SVM] 8
Transforms from 2-phase to 3-phase [Inverse Clarke
transformation]
Converts the data to PMD setting format. Switches PWM Shift
1.
Limits the PWM output.
Sets the dead time compensation control.
Converts the data to PMD setting format. Switches PWM Shift
2.
Limits the PWM output.
Sets the dead time compensation control.
Generates the synchronous trigger timing for ADC.
Corresponds to sensor, 3-shunt and 1-shunt current
detection.1-shunt is corresponded in the case of PWM Shift
prohibited or PWM Shift 1.
Captures the result of AD conversion and converts them into
fixed-point format.
Specifies the hysteresis width to determine the current polarity.
Corresponds to sensor, 3-shunt and 1-shunt current
detection.1-shunt is corresponded in the case of PWM Shift 2.
Captures the result of AD conversion and converts them into
fixed-point format.
Specifies the hysteresis width to determine the current polarity.
11
10
7
0
9
1
2
Transforms from 3-phase to 2-phase.
Input coordinate
axis
transformation
ATAN2 calculation Calculates the arctangent. 12
SQRT calculation Calculates the square root. 13
Performs Park transformation
Calculates the declination angle of the current vector or the
induced voltage vector on the d-q coordinate.
3
4
2021-02-24
Rev. 3.1
22 / 107
Input process
Output control
Phase
transformation
Current control
SIN/COS
calculation
Phase
interpolation
PI
control
PI
control
Cordinate axis
transformation
[I-Park]
Phase
transformation 1
[SVM]
Output
control 1
sin,cos
VD
VQ
Valpha
Vbeta
DUTYA
DUTYB
DUTYC
SECTOR
θ
ω
Trigger
generation
Phase
transformation
[Clark]
Input
process1
Ialpha
Ibeta
VDC,VDCL
ID
IQ
PWM output
setting (PMD)
Synchronous
trigger t setting
(PMD)
Current/Voltage
detection value
(ADC)
SIN
COS
IDREF
ID
IQ
IQREF
VDC
IA
IB
IC
Phase
transformation 2
[I-Clark]
Output
control 2
Input
process2
VDC
Cordinate axis
transformation
[Park]
TXZ/TXZ+ Family
Advanced Vector Engine Plus
Figure 3.3 Relationship diagram of tasks
2021-02-24
Rev. 3.1

TXZ/TXZ+ Family
23 / 107
Advanced Vector Engine Plus
3.3.1. Current Control (Task 5)
The current control task is comprised of a PI control unit for d-axis current and a PI control unit for q-axis current,
and calculates the d-axis and q-axis voltages respectively.
The expansion control enables the non-interference control and the voltage scalar limitation that controls d-axis
and q-axis together.
a. d-axis current PI control
<Equation>
[PI control]
Δid = [VExIDREF] - [VExID] ; Calculates between the current reference value
and the current feedback
kpg = ([VExCIDKG]<CIDKPG> setting) ; Range of proportional coefficient
kig = ([VExCIDKG]<CIDKIG> setting) ; Range of Integral coefficient
limit = [VExPIOLIM]
if (kpg ≥ 2) n = kpg ; Selected range is more than twice
Save Range of proportional coefficient
limit = limit / kpg ; Limit correction
kig = kig / kpg ; Range correction of integral
kpg = 1 ; Range correction of proportional
else n = 1
cidkp = [VExCIDKP] × kpg ; Proportional coefficient
cidki = [VExCIDKI] × kig ; Integral coefficient
vdi0 = cidki × Δid + VDI ; Calculates the integral components.
vd0 = cidkp × Δid + vdi0 ; Calculates the voltage by adding the
proportional components.
[PI control output limitation]
if (vd0 > limit) ; The upper-limit value
vd = limit
[VExMCTLF]<PIDOVF> = 1
else if (vd0 < -limit) ; The lower-limit value
vd = -limit
[VExMCTLF]<PIDOVF> = 1
else
[VExVD] = vd × n ; Save more than a double proportional range
to be compensated.
[Anti-windup]
Δvd = vd - vd0 ; Calculates the difference between the d-axis
voltage and the limit.
VDI = vdi0 + Δvd × ([VExMODE]<AWUMD> setting) ; Reflects the above difference
to the integral component.
vd = vd0
2021-02-24
Rev. 3.1
24 / 107
Register name
Function
Detail
d-axis current reference
value
Integral component
of d-axis voltage
TXZ/TXZ+ Family
Advanced Vector Engine Plus
Input
[VExID]
[VExIDREF]
[VExCIDKP]
[VExCIDKI]
[VExCIDKG]
[VExPIOLIM]
[VExMODE]
d-axis current
Proportional coefficient
Integral coefficient
[3:0] Sets a range of
d-axis PI control integral
coefficient
[11:8] Sets a range of
d-axis PI control
proportional coefficient
PI control output
limitation
[9:8] Anti-windup ratio
setting when output is
limited.
32-bit fixed-point data (31 fractional bits)
16-bit fixed-point data(15 fractional bits)
16-bit data
16-bit data
<CIDKIG> Range of Integral coefficient
0000: 1 / 1 0001: 1 / 2
0011: 1 / 2
0101 to 1111: Reserved
<CIDKPG> Range of proportional coefficient
0000: 1 / 1 0001: 1 / 2
0011: 1 / 2
0101 to 1000: Reserved
1001: 2 1010: 2
1100: 2
1101 to 1111: Reserved
16-bit fixed-point data (15 fractional bits)
Valid range: 0x0000 to 0x7FFF
Output limitation is disabled when [VExPIOLIM] = 0x0000.
<AWUMD>
00: Disabled 01: 1 / 4 10: 1 / 2
11: 1 / 1
12
12
4
0100: 1 / 2
0100: 1 / 2
4
16
4
16
2
0010: 1 / 2
0010: 1 / 2
1011: 2
8
8
3
Output
Internal
Note: The VDI is comprised of 64 bits. The upper is used for the [VExVDIH] register and the lower is used for
b. q-axis current PI control
<Equation>
[PI control]
Δiq = [VExIQREF] - [VExIQ] ; Calculates between the current reference value
and the current feedback
kpg = ([VExCIQKG]<CIQKPG> setting) ; Range of proportional coefficient
kig = ([VExCIQKG]<CIQKIG> setting) ; Range of Integral coefficient
limit = [VExPIOLIM]
if (kpg ≥ 2) n = kpg ; Selected range is more than twice,
Save Range of proportional coefficient
limit = limit / kpg ; Limit correction
kig = kig / kpg ; Range correction of integral
kpg = 1 ; Range correction of proportional
else n = 1
ciqkp = [VExCIQKP] × kpg ; Proportional coefficient
ciqki = [VExCIQKI] × kig ; Integral coefficient
vqi0 = ciqki × Δiq + VQI ; Calculates the integral components.
[VExVD]
[VExMCTLF]
VDI
d-axis voltage
[8] Flag for d-axis output
limitation on PI control
the [VExVDILH] register
32-bit fixed-point data (31 fractional bits)
<PIDOVF>
0: |d-axis output on PI control | ≤ [VExPIOLIM]
1: |d-axis output on PI control | > [VExPIOLIM]
64-bit fixed-point data (63 fractional bits)
2021-02-24
Rev. 3.1
TXZ/TXZ+ Family
25 / 107
Register name
Function
Detail
q-axis current reference
value
Integral component
of q-axis voltage
Advanced Vector Engine Plus
vq0 = ciqkp × Δiq + vqi0 ; Calculates the voltage by adding the
proportional components.
[PI control output limitation]
if (vq0 > limit) ; The upper-limit value
vq = limit
[VExMCTLF]<PIQOVF> = 1
else if (vq0 < -limit) ; The lower-limit value
vq = -limit
[VExMCTLF]<PIQOVF> = 1
else vq = vq0
[VExVQ] = vq × n ; Save more than a doubled proportional range
to be compensated.
[Anti-windup]
Δvq = vq - vq0 ; Calculates the difference between the q-axis
voltage and the limit.
VQI = vqi0 + Δvq × ([VExMODE]<AWUMD> setting) ; Reflects the above difference to the
integral component.
Input
[VExIQ]
[VExIQREF]
[VExCIQKP]
[VExCIQKI]
[VExCIQKG]
[VExPIOLIM]
[VExMODE]
q-axis current
Proportional coefficient
Integral coefficient 16-bit data
[3:0] Sets a range of
q-axis PI control integral
coefficient
[11:8] Sets a range of
q-axis PI control
proportional coefficient
PI control output
limitation
[9:8] Anti-windup ratio
setting when output is
limited.
32-bit fixed-point data (31 fractional bits)
16-bit fixed-point data(15 fractional bits)
16-bit data
<CIQKIG> Range of Integral coefficient
0000: 1 / 1 0001: 1 / 2
0011: 1 / 2
0101 to 1111: Reserved
<CIQKPG> Range of proportional coefficient
0000: 1 / 1 0001: 1 / 2
0011: 1 / 212 0100: 1 / 216
0101 to 1000: Reserved
1001: 2 1010: 2
1100: 24
1101 to 1111: Reserved
16-bit fixed-point data (15 fractional bits)
Valid range: 0x0000 to 0x7FFF
Output limitation is disabled when [VExPIOLIM] = 0x0000.
<AWUMD>
00: Disabled 01: 1 / 4 10: 1 / 2
11: 1
12
4
0100: 1 / 216
4
2
1011: 2
0010: 1 / 2
0010: 1 / 2
3
8
8
Output
Internal
Note: The VQI is comprised of 64 bits. The upper is used for the [VExVQIH] register and the lower is used for
[VExVQ]
[VExMCTLF]
VQI
q-axis voltage
[9] Flag for q-axis output
limitation on PI control
32-bit fixed-point data (31 fractional bits)
<PIQOVF>
0: |q-axis output on PI control | ≤ [VExPIOLIM]
1: |q-axis output on PI control | > [VExPIOLIM]
64-bit fixed-point data (63 fractional bits)
the [VExVQILH] register
2021-02-24
Rev. 3.1
TXZ/TXZ+ Family
26 / 107
Register name
Function
Detail
[VExVD]
d-axis voltage
[VExID]
d-axis current
[VExIQ]
[VExCLD]
[VExCLQ]
Motor Interlinkage magnetic
flux
Motor Inductance range
setting
Motor Interlinkage magnetic
flux range setting
[VExIDREF], [VExIQREF]
1: Expansion control is enabled.
Non-interference correction
voltage for d-axis
Non-interference correction
voltage for q-axis
[VExVD]
[VExVQ]
Advanced Vector Engine Plus
c. Non-interference control
The result of PI control is corrected using the results of the interference to d-axis and q-axis based on motor
voltage equation.
<Equation>
if ([VExMODE]<T5ECEN> = 1) ; Expansion control is enabled
ld = [VExCLD] × ([VExCLG] setting) ; d-axis inductance
lq = [VExCLQ] × ([VExCLG] setting) ; q-axis inductance
phi = [VExCPHI] × ([VExCPHIG] setting) ; Interlinkage magnetic flux
id = [VExID] ; Feedback current
iq = [VExIQ]
if ([VExFMODE]<IDQSEL> = 1) id = [VExIDREF] ; Inputs a command value
iq = [VExIQREF]
[VExVDE] = - [VExOMEGA] × iq × lq ; Calculates the interference to d-axis
[VExVQE] = [VExOMEGA] × id × ld + [VExOMEGA] × phi ; Calculates the interference to q-axis
if ([VExMODE]<NICEN> = 1) ; Non-interference control is enabled
[VExVD] = [VExVD] + [VExVDE]
[VExVQ] = [VExVQ] + [VExVQE]
Input
Output
[VExVQ]
[VExCPHI]
[VExCLG]
[VExCPHIG]
[VExOMEGA]
[VExFMODE]
[VExMODE]
[VExVDE]
[VExVQE]
q-axis voltage
q-axis current
Motor d-axis inductance
Motor q-axis inductance
Rotational speed 16-bit fixed-point data (15 fractional bits)
[4] Selects Non-interference
control input
[11] Non-interference control
enable
[10] Expansion control
enable
d-axis voltage
q-axis voltage
32-bit fixed-point data (31 fractional bits)
16-bit fixed-point data (11 fractional bits)
000: 1 / 1 001: 1 / 24 010: 1 / 28
011: 1 / 2
101 to 111: Reserved
<IDQSEL>
0: Use [VExID], [VExIQ]
1: Use
<NICEN>
0: Non-interference control is disabled.
1: Non-interference control is enabled.
<T5ECEN>
0: Expansion control is disabled.
(Non-interference control is disabled.)
16-bit fixed-point data (15 fractional bits)
32-bit fixed-point data (31 fractional bits)
12
100: 1 / 216
2021-02-24
Rev. 3.1

TXZ/TXZ+ Family
27 / 107
Advanced Vector Engine Plus
d. Voltage scalar limitation
The voltage scalar limitation controls d-axis voltage and q-axis voltage, so as to be lower the composite value (the
2
square root of VD
+ VQ2) that is comprised of d-axis voltage and q-axis voltage than the limit value.
<Equation>
if ([VExMODE]<T5ECEN> = 1) ; Expansion control is enabled.
[VDQ calculation]
if (([VExVD]
2
+ [VExVQ]2)> [VExVSLIM]2) ; Confirm the excess
if ([VExFMODE]<VSLIMMD> = 00) ; Voltage scalar limitation is disabled
[VExVDQ] = SQRT([VExVD]
2
+ [VExVQ]2)
else if ([VExFMODE]<VSLIMMD> = 01) ; Scalar limitation on the d-axis direction
2
[VExVDQ] = SQRT([VExVSLIM]
+ [VExVQ]2)
else if ([VExFMODE]<VSLIMMD> = 10) ; Scalar limitation on the q-axis direction
[VExVDQ] = SQRT([VExVSLIM]
2
+ [VExVD]2)
else if ([VExFMODE]<VSLIMMD> = 11) ; dq proportional scalar limitation
[VExVDQ] = SQRT([VExVD]
else [VExVDQ] = SQRT([VExVD]
2
+ [VExVQ]2)
2
+ [VExVQ]2) ; Calculation of voltage scalar value
Note: SQRT is the square root calculation
[Calculation for the declination angle]
x = |[VExVQ]|
y = |[VExVD]|
[VExVDELTA] = ATAN(x, y)
Note: ATAN is arctangent calculation
[Limitation calculation for each axis]
if ([VExFMODE]<VSLIMMD> = 00) ; Voltage scalar limitation is disabled
vdlim = [VExVSLIM]
vqlim = [VExVSLIM]
else if ([VExFMODE]<VSLIMMD> = 01) ; Scalar limitation on the d-axis direction
vdlim = [VExVDQ]
vqlim = [VExVSLIM]
else if ([VExFMODE]<VSLIMMD> = 10) ; Scalar limitation on the q-axis direction
vdlim = [VExVSLIM]
vqlim = [VExVDQ]
else if ([VExFMODE]<VSLIMMD> = 11) ; dq proportional scalar limitation
vdlim = [VExVSLIM] × SIN([VExVDELTA])
vqlim = [VExVSLIM] × COS([VExVDELTA])
[Limitation process]
if ([VExVD] > vdlim)
[VExVD] = vdlim ; Process for the upper-limit of d-axis
[VExMCTLF]<VSOVF> = 1
else if ([VExVD] < -vdlim)
[VExVD] = -vdlim ; Process for the lower-limit of d-axis
2021-02-24
Rev. 3.1

TXZ/TXZ+ Family
28 / 107
Register name
Function
Detail
The value of d-axis
voltage correction
The value of q-axis
voltage correction
The value of voltage
axis direction limitation.
[10] Indicates the
scalar limitation.
Advanced Vector Engine Plus
[VExMCTLF]<VSOVF> = 1
if ([VExVQ] > vqlim)
[VExVQ] = vqlim ; Process for the upper-limit of q-axis
[VExMCTLF]<VSOVF> = 1
else if ([VExVQ] < -vqlim)
[VExVQ] = -vqlim ; Process for the lower-limit of q-axis
[VExMCTLF]<VSOVF> = 1
[Correction process]
[VExVD] = [VExVD] + [VExVDCRC] ; d-axis correction
[VExVQ] = [VExVQ] + [VExVQCRC] ; q-axis correction
Input
[VExVD]
[VExVQ]
[VExVSLIM]
[VExVDCRC]
[VExVQCRC]
[VExMODE]
[VExFMODE]
[VExVDQ]
d-axis voltage
q-axis voltage
The limit value of
voltage scalar
[10] Expansion control
enable
[11:10] Limitation mode
setting
scalar or the value of
32-bit fixed-point data (31 fractional bits)
16-bit fixed-point data (15 fractional bits)
0x0000 to 0x7FFF
Limitation is disabled when [VExVSLIM] = 0x0000
16-bit fixed-point data (15 fractional bits)
<T5ECEN>
0: Expansion control is disabled.(Scalar limitation is
disabled.)
1: Expansion control is enabled.
<VSLIMMD>
00: Scalar limitation is disabled.
(Limitation in each axis is enabled.)
01: Scalar limitation is enabled.
(Limitation on the d-axis direction.)
10: Scalar limitation is enabled.
(Limitation on the q-axis direction.)
11: Scalar limitation is enabled.
(dq proportional limitation.)
16-bit fixed-point data (15 fractional bits)
Output
[VExVDELTA]
[VExVD]
[VExVQ]
[VExMCTLF]
The voltage declination
angle
d-axis voltage
q-axis voltage
excess flag for voltage
16-bit data
0x0000 to 0x4000 (0-degree to 90-degree)
32-bit fixed-point data (31 fractional bits)
<VSOVF>
0:non excess 1:excess
2021-02-24
Rev. 3.1
TXZ/TXZ+ Family
29 / 107
Register name
Function
Detail
The value of clipped
phase
Advanced Vector Engine Plus
3.3.2. SIN/COS calculation (Task 6)
The SIN/COS calculation task executes phase interpolation calculation and SIN/COS calculation.
Phase interpolation calculates the rotation speed by integrating with the PWM period. It is executed only when
phase interpolation is enabled ([VExMODE]<PVIEN> = 1).
a. Phase interpolation
<Equation>
theta0 = [VExOMEGA] × [VExTPWM] + [VExTHETA] ; Calculates the value of
phase interpolation
theta0 = theta0 & 0x0000FFFF
if ([VExMODE]<CLPEN> = 1) ; Enables the clipping
if ([VExOMEGA] ≥ 0) ; On positive rotation
if ([VExTHETA] ≤ [VExTHTCLP] ≤ theta0) theta0 = [VExTHTCLP]
else if (theta0 ≤ [VExTHETA] ≤ [VExTHTCLP]) theta0 = [VExTHTCLP]
else if ([VExTHTCLP] ≤ theta0 ≤ [VExTHETA]) theta0 = [VExTHTCLP]
else if ([VExOMEGA] < 0) ; On inverse rotation
if (theta0 ≤ [VExTHTCLP] ≤ [VExTHETA]) theta0 = [VExTHTCLP]
else if ([VExTHTCLP] ≤ [VExTHETA] ≤ theta0) theta0 = [VExTHTCLP]
else if ([VExTHETA] ≤ theta0 ≤ [VExTHTCLP]) theta0 = [VExTHTCLP]
if ([VExMODE]<PVIEN> = 1) [VExTHETA] = theta0 ; Updates the [VExTHETA] value when
phase interpolation is enabled
Input
Output
[VExTHETA]
[VExOMEGA]
[VExTPWM]
[VExTHTCLP]
[VExMODE]
[VExTHETA]
Phase θ 16-bit fixed-point data (0.0 to 1.0, 16 fractional bits)
Rotational speed
PWM period rate
[0] Phase interpolation
enable
[7] Phase clipping
control
Phase θ
16-bit fixed-point data (-1.0 to 1.0, 15 fractional bits)
16-bit data
16-bit fixed-point data (0.0 to 1.0, 16 fractional bits)
<PVIEN>
0: Phase interpolation is disabled
1: Phase interpolation is enabled
<CLPEN>
0: Clipping is disabled 1: Clipping is enabled
16-bit fixed-point data (0.0 to 1.0, 16 fractional bits)
2021-02-24
Rev. 3.1
TXZ/TXZ+ Family
30 / 107
Register name
Function
Detail
Advanced Vector Engine Plus
b. SIN/COS calculation
<Equation>
[VExSINM] = [VExSIN] ; Stores the previous value (for input process)
[VExCOSM] = [VExCOS]
[VExSIN] = SIN ([VExTHETA]) ; Calculates the SIN and COS values
[VExCOS] = SIN ([VExTHETA] + 1 / 4)
if ([VExFMODE]<MREGDIS> = 1) ; Confirms that the previous value is not maintained
[VExSINM] = [VExSIN]
[VExCOSM] = [VExCOS]
Note: SIN: Sine calculation
Input
Output
[VExTHETA]
[VExFMODE]
[VExSIN]
[VExCOS]
[VExSINM]
[VExCOSM]
Phase θ
[9] Selects to store the
previous value of SIN
and COS
The sine value of θ
The cosine value of θ
Previous sine value
Previous cosine value
16-bit fixed-point data (0.0 to 1.0, 16 fractional bits)
<MREGDIS>
0: Previous value is maintained.
1: Previous value is not maintained.
16-bit fixed-point data (-1.0 to 1.0, 15 fractional bits)
2021-02-24
Rev. 3.1
 Loading...
Loading...