

東芝Bi-CMOS集積回路 シリコン モノリシック
TB6585FG
正弦波 PWM 制御 3 相ブラシレスモータドライバ
特 長
• 正弦波 PWM 駆動方式
• 三角波生成回路内蔵
• ホールアンプ内蔵 (ホール素子に対応)
• 進み角制御機能
• 電流制限入力端子 (V
• 回転パルス出力 (3 pulse/電気角 360°C)
• 動作電源電圧範囲: V
• 基準電源出力: V
• 出力電流: I
• 出力 R
TB6585FG は、鉛フリー製品です。
はんだ付け性については、以下の条件で確認しております。
on
(1) はんだ槽 (Sn-37Pb 半田槽) の場合
はんだ温度 230°C、浸漬時間 5 秒間 1 回、R タイプフラックス使用
(2) はんだ槽 (Sn-3.0Ag-0.5Cu 半田槽) の場合
はんだ温度 245°C、浸漬時間 5 秒間 1 回、R タイプフラックス使用
refout
= 1.8 A (最大)、1.2 A (標準)
OUT
(Pch + Nch) = 0.7 Ω (標準)
= 0.5 V (標準))
RS
= 4.5~42 V
M
= 4.4 V (標準)、20 mA (最大)
質量: 0.79 g (標準)
TB6585FG
1
2008-03-04
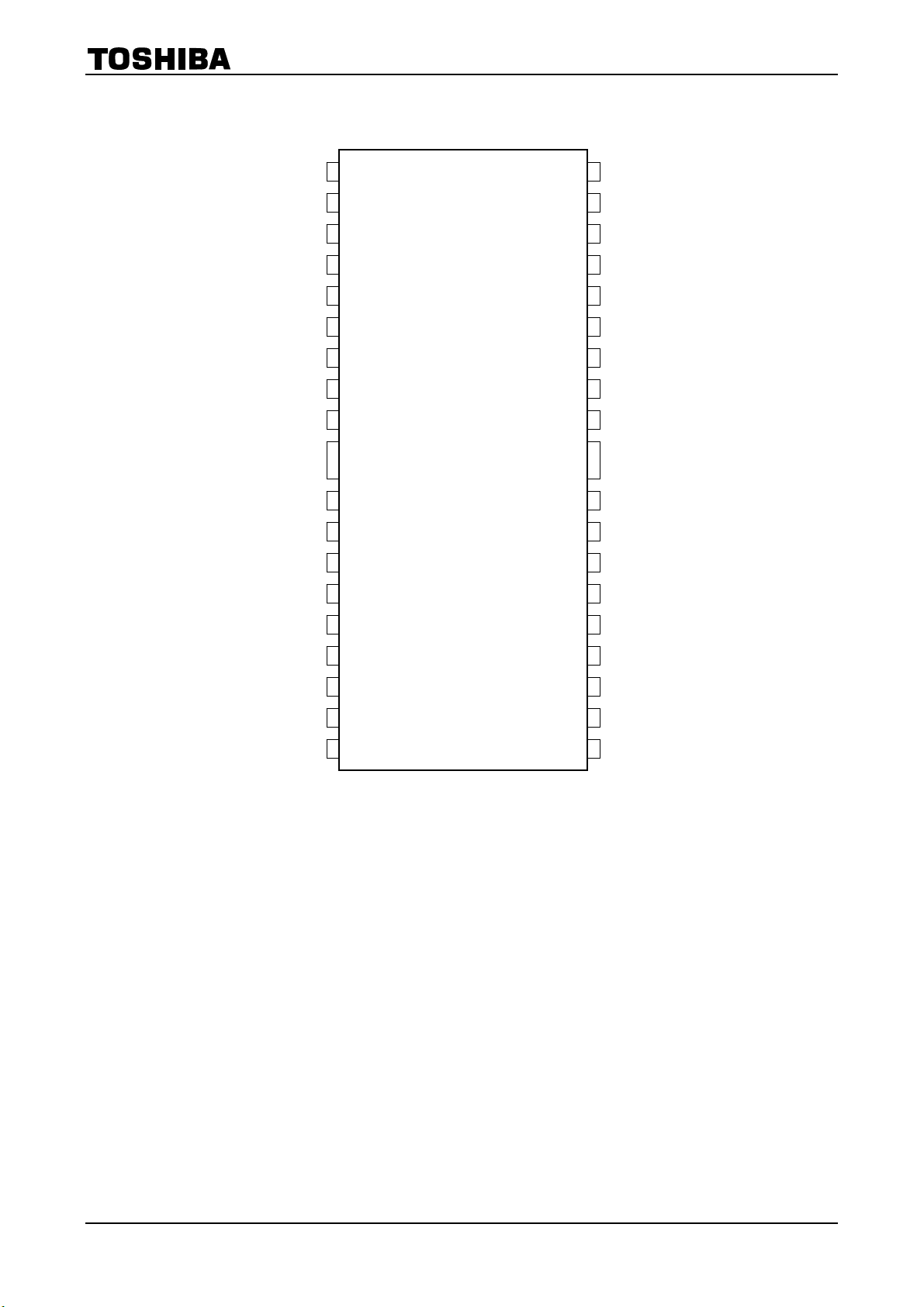
ピン配置図
VM
TB6585FG
V
1
36
M
FG
HWM
HWP
S-GND
N.C
OSC/C
OSC/R
VSP
TR
N.C
CW/CCW
RESET
HVM
2
3
4
5
6
7
8
9
Fin
10
11
12
13
14
35
34
33
32
31
30
29
28
Fin
27
26
25
24
23
U
V
W
IR
P-GND
RS
G
+
in
G
−
in
G
OUT
PH
LPF
IV
LA
HVP
HUM
HUP
V
refout
15
16
17
18
22
21
20
19
UL
LL
ML
V
refout
注: 1 ピンと 36 ピン、18 ピンと 19 ピンは IC 内部のフレームで接続されています。
NC ピンはジャンパーとして使用可能です。Fin 部は、IC 裏面と接続されておりますので、チップを安定化
させるため、S-GND 端子、P-GND 端子と IC 直近で接続してください。
2
2008-03-04

端子説明
端子番号 名称 端子説明
1, 36 VM モータ用電源 (VM = 4.5~42 V)
2 FG 回転数パルス出力 (3 パルス/電気角)
3 HWM W 相ホール入力−
4 HWP W 相ホール入力+
5 S-GND シグナルグランド
6 N.C ノンコネクション
7 OSC/C PWM 発振用のコンデンサ接続
8 OSC/R PWM 発振用の抵抗接続
9 VSP 速度制御入力
10 TR ロック保護時間設定
11 N.C ノンコネクション
12 CW/CCW 回転方向切り替え
13 RESET リセット、出力をオフ
14 HVM V 相ホール入力−
15 HVP V 相ホール入力+
16 HUM U 相ホール入力−
17 HUP U 相ホール入力+
18, 19 V
20 ML ロック保護復帰方法切り替え端子
21 LL 進角下側リミット
22 UL 進角上側リミット
23 LA 進角制御端子 (自動進角時は、レベル確認端子)
24 IV 出力電流の電圧変換出力
25 LPF フィルタ用コンデンサ接続
26 PH ピークホールド用コンデンサ抵抗接続
27 Gout シャント電圧増幅結果
28 Gin− 増幅抵抗接続
29 Gin+ シャント電圧入力
30 RS 過電流保護入力 (0.5 V 以上で出力オフ)
31 P-GND パワーグランド
32 IR 出力シャント抵抗接続
33 W W 相出力
34 V V 相出力
35 U U 相出力
refout
基準電源出力 (V
内部発振止めコンデンサ接続端子
= 4.4 V (標準), I
refout
= 20 mA (最大)),
refout
TB6585FG
3
2008-03-04
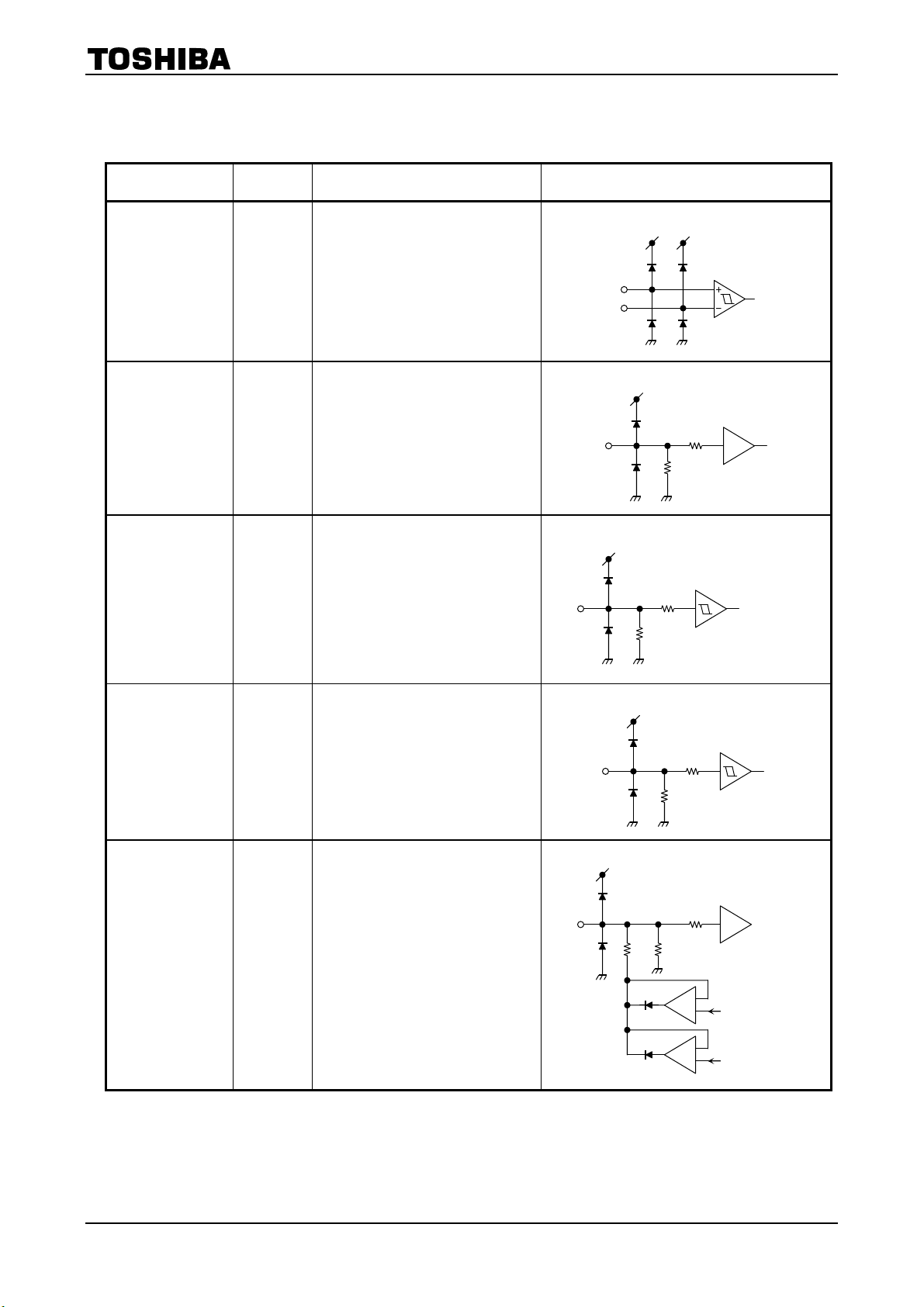
入出力等価回路
等価回路は、回路を説明するため、一部省略・簡略化している場合があります。
端子説明 名称 入出力信号 入出力内部回路
HUP
HUM
位置信号入力
速度制御入力 V
HVP
HVM
HWP
HWM
アナログ
ヒステリシス ± 8 mV (標準)
アナログ
SP
入力範囲 0~V
refout
V
V
refout
refout
V
refout
100 Ω
150 kΩ
TB6585FG
回転方向切り替え
入力
L: 正転 (CW)
H: 逆転 (CCW)
リセット入力
L: モータ駆動
H: Reset
進み角設定入力
0 V: 0°
3.0 V: 28°
(5 bit AD)
CW/CCW
RESET
LA
デジタル
L : 0.8 V (最大)
H: 2.0 V (最小)
ヒステリシス 200 mV (標準)
デジタル
L : 0.8 V (最大)
H: 2.0 V (最小)
ヒステリシス 200 mV (標準)
Reset 時: 出力オフ。
内部カウンタは動作。
外部より進角固定する場合 LL = GND,
UL = V
位を入力
入力範囲 0~4.4 V (V
3.0 V 以上の入力電圧は、28°でクリップ
されます。
自動進角設定時は、LA 端子をオープン
としてください。この時 LA 端子は、進
角幅の確認用となります。
に接続し、LA 端子に設定電
refout
)
refout
LA
V
V
refout
refout
V
100 kΩ
refout
100 Ω
100 kΩ
100 Ω
100 Ω
100 Ω
200 kΩ
CW/CCW
Reset
下限リミット
上限リミット
& 自動進角信号
4
2008-03-04

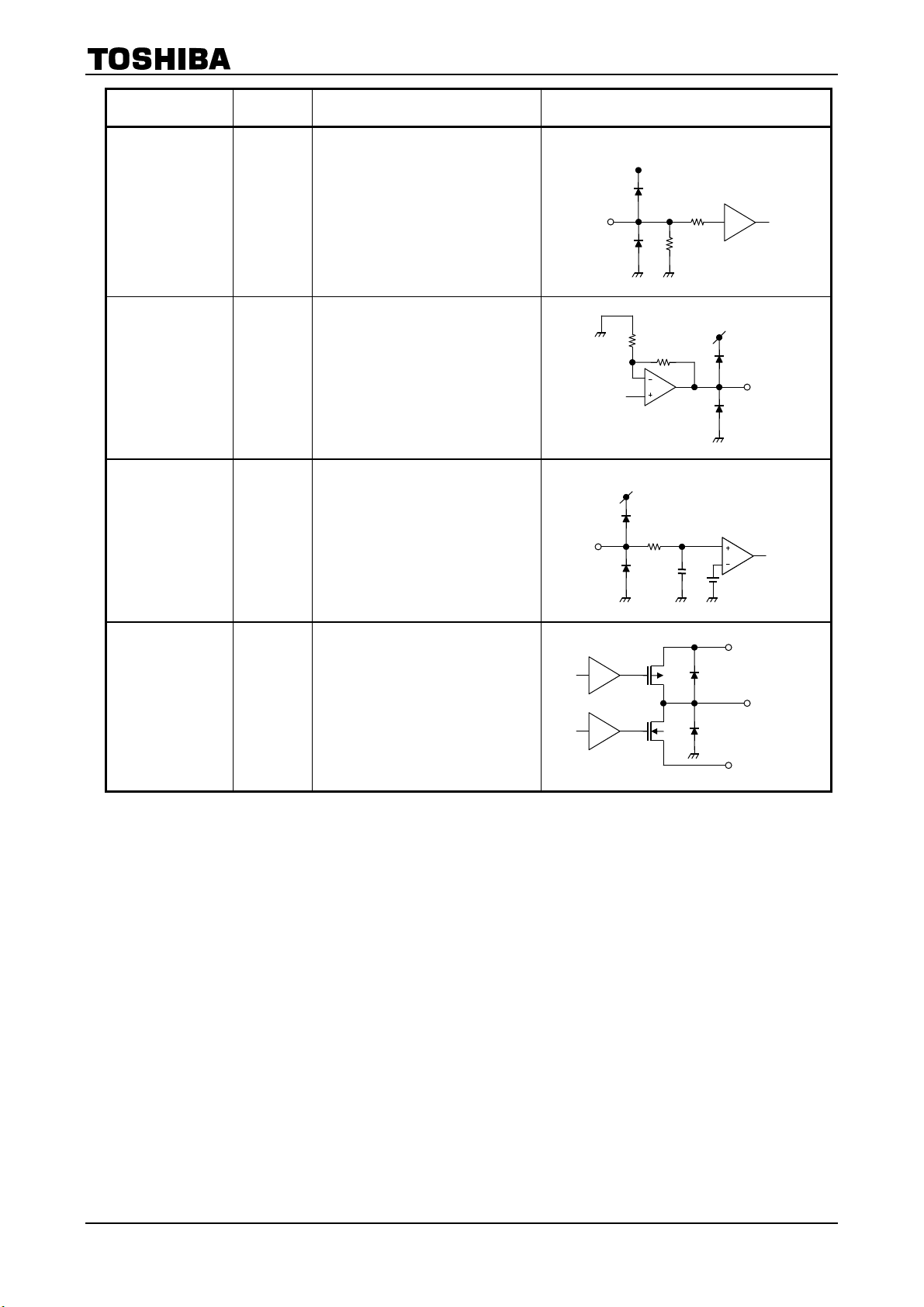
端子説明 名称 入出力信号 入出力内部回路
ピ
V
refout
TB6585FG
増幅率設定入力
(進み角設定部)
ピークホールド
(進み角設定部)
ローパスフィルタ
(進み角設定部)
G
in
G
in
G
out
PH
LPF
非反転増幅アンプ
−
25dB max
+
出力電圧
G
out
Low: GND
High: V
refout
− 0.4 V
ピークホールド用コンデンサと放電用
抵抗を接続
100 kΩ/0.1 μF
RC ローパスフィルタ用コンデンサを接
続
抵抗は内蔵 R = 100 kΩ (標準)
0.1 μF
Gin−
Gin+
V
refout
PH
LPF
100 Ω
100 Ω
V
refout
V
refout
V
refout
ーク
ホールド
回路へ
100 Ω
100 Ω
100 Ω
100 Ω
100 Ω
G
out
進み角の下限をクリップ
進み角下限リミット LL
LL = 0 V~4.4 V (V
LL > UL の場合、LL 値で進角 LA が固定
となります
進み角の上限をクリップ
進み上限リミット UL
UL = 0 V~4.4 V (V
LL > UL の場合、LL 値で進角 LA が固定
となります
refout
refout
V
refout
)
LL
)
UL
V
refout
100 Ω
100 Ω
5
2008-03-04
端子説明 名称 入出力信号 入出力内部回路
V
refout
ロック保護復帰方法
切り替え端子
L: 電源 Reset 復帰
H: 自動復帰
ML
デジタル
L : 0.8 V (最大)
H: 2.0 V (最小)
100 Ω
100 kΩ
V
TB6585FG
refout
アナログ
出力電流電圧変換
出力
電流制限入力 RS
U, V, W 相出力
IV
U
V
W
IV = 0.5 V~3.5 V (±2 mA (最大))
Gain = 1.2 (標準)
アナログ
デジタルフィルタ 1 μs (標準)
0.5 V 以上でゲートブロック保護
(キャリヤ周期で解除)
モータ駆動出力
= 1.2 A (標準)
I
OUT
1.8 A (最大)
RS
V
60 kΩ
refout
10 kΩ
200 kΩ
5 pF
IV
コンパレータ
0.5 V
VM
U, V, W
IR
6
2008-03-04
絶対最大定格 (Ta = 25°C)
項目 記号 定格 単位
電源電圧 VM 45 V
入力電圧 VIN 4.7 V
出力電流 I
消費電力 PD
動作温度 T
保存温度 T
注 1: 出力電流は周囲温度、ヒートシンクにより制限される場合があります。
接合部温度 (T
= 150°C) を超えないように設計を行ってください。
jmax
注 2: IC 単体 (Ta = 25°C)
注 3: 基板実装時 (100 mm × 200 mm × 1.6 mm, Cu: 50%)
1.8 (注 1) A
OUT
1.3 (注 2)
3.2 (注 3)
−30~85
opr
−55~150
stg
W
°C
TB6585FG
動作範囲 (T
電源電圧 VM 4.5 24 42 V
周波数帯域幅 F
= 25°C)
a
項目 記号 最小 標準 最大 単位
4 5 6 MHz
OSC
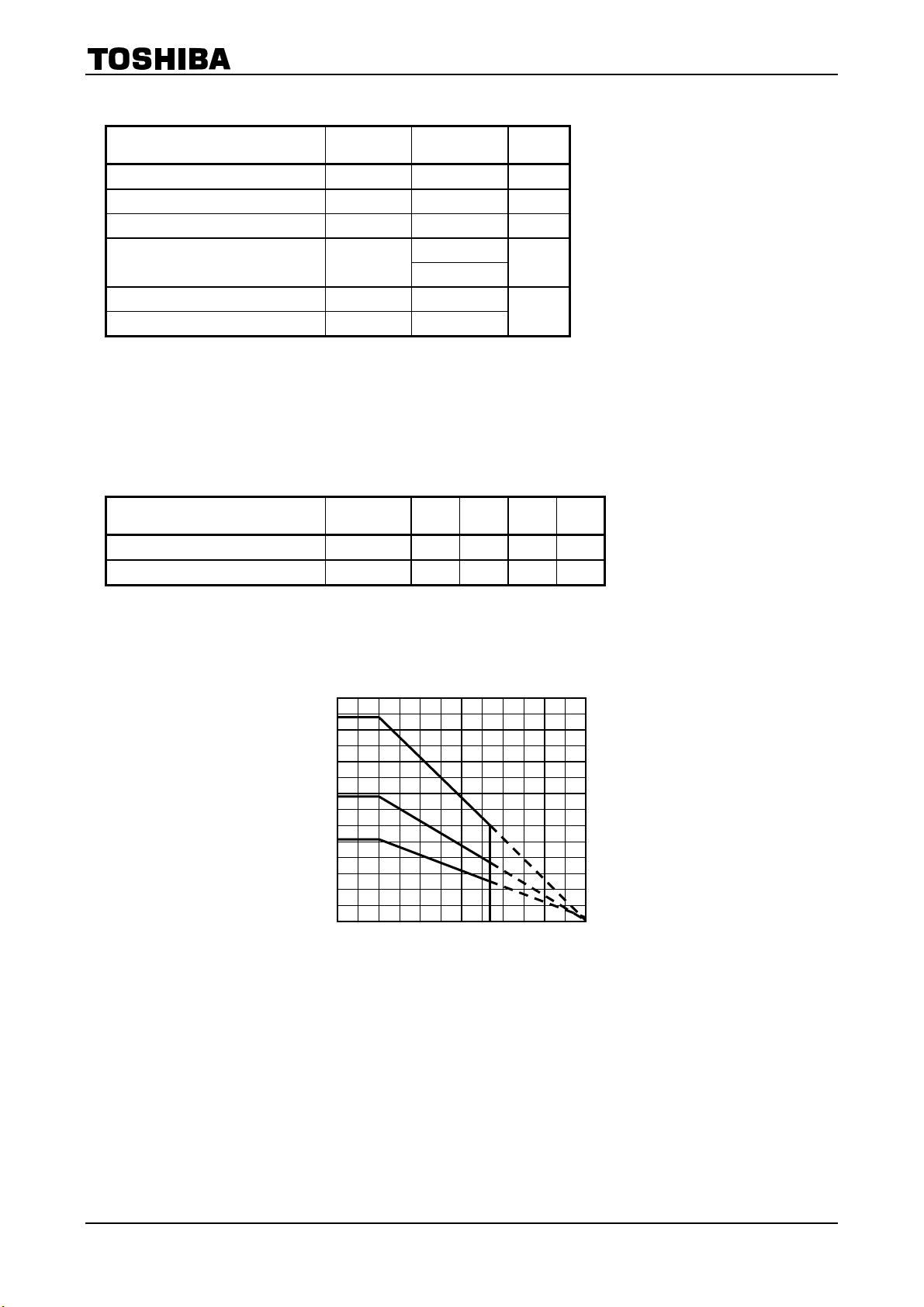
パッケージの許容損失
P
– Ta
3.5
(3)
3
2.5
(W)
D
2
1.5
0.5
(2)
(1)
1
0
0
25 50 75 100 125 150
許容損失 P
D
周囲温度 Ta (°C)
(1) 単体 R
(2) 基板実装時 (114 mm × 75 mm × 1.6 mm, Cu: 20%) R
(3) 基板実装時 (140 mm × 70 mm × 1.6 mm, Cu: 50%) R
th (j-a)
: 96°C/W
th (j-a)
th (j-a)
: 65°C/W
: 39°C/W
7
2008-03-04

TB6585FG
電気的特性 (Ta = 25°C, V
項目
電源電流 IM
入力電流
ホールアンプ
同相入力電圧範囲 V
= 24 V)
M
記号 測定条件 最小 標準 最大 単位
プリドライブ電流 + 制御電流、
= 0 mA
I
refout
I
Vin = 4.4 V LA ⎯ 22 40
in (1)
I
Vin = 4.4 V Vsp ⎯ 30 60
in (2)
I
Vin = 4.4 V RESET, ML, CW/CCW ⎯ 44 80
in (3)
1.5 ⎯ 3.5 V
CMRH
⎯ 7 14 mA
入力振幅範囲 VH 50 ⎯ ⎯ mVpp
入力ヒステリシス V
入力電流 I
入力電圧
出力オン抵抗 R
V
出力電圧 V
refout
FG 出力電圧
出力リーク電流
(注) ±4 ±8 ±12 mV
hysH
V
inH
High 2.0 ⎯
Vin
Low
= 2.5 V, 1 相 −1 ⎯ 1 μA
CMRH
CW/CCW, RESET, ML
0 ⎯ 0.8
V
+ 0.2
refout
Vin Hys CW/CCW, RESET, ML ⎯ 0.2 ⎯
V
Vsp (4.4) 変調波 max
V
(0.5) 通電 OFF → モータ動作開始 0.3 0.5 0.7
sp
I
= 1.2 A U, V, W ⎯ 0.7 1.0
OUT
ON (H+L)
refout
V
FG (H)
V
FG (L)
I
L (H)
I
L (L)
I
I
I
V
V
= 1.6 A U, V, W ⎯ 0.7 1.0
I
OUT
= 20 mA V
refout
= 1 mA FG
OUT
= −1 mA FG ⎯ 0.2 1.0
OUT
= 0 V ⎯ 0 1
OUT
= 24 V ⎯ 0 1
OUT
4.0 4.4 4.8 V
refout
refout
− 0.2
V
refout
− 1.0
V
⎯
refout
− 0.2
V
+ 0.2
refout
⎯
電流検出 VRS RS 0.46 0.5 0.54 V
入力遅延 TRS RS → 出力オフ ⎯ 2.0 ⎯ μs
進角部ゲイン設定アンプ
AMP
AMP
OUT
GIN, G
OFS
G
G
OUT
IN
出力電流、I
−, G
: Gain = 12 (11 kΩ/1 kΩ)
OUT
11 k Ω/1 kΩ ⎯ −40 ⎯ mV
OUT
= 5 mA, GIN+ = 0.2 V
OUT
2.25 2.3 ⎯ V
ΔL LL = 0.7 V −20 ⎯ 20
進角部リミット設定誤差
進角部 PH 出力電流
進角補正
モータロック自動復帰
ΔU UL = 2.0 V −30 ⎯ 30
PH
(0 mA) PH 出力電流、I
OUT
(5 mA) PH 出力電流、I
PH
OUT
T
LA = 0 V or Open, Hall IN = 100 Hz ⎯ 0 ⎯
LA (0)
T
LA = 2.5 V, Hall IN = 100 Hz ⎯ 15 ⎯
LA (1.5)
T
LA = 5 V, Hall IN = 100 Hz ⎯ 29 ⎯
LA (3)
ロック検知時間 TR = 180 pF ⎯ 500 ⎯
TML(ON)
TML
出力オフ期間 ML = High TR = 180 pF ⎯ 500 ⎯
(OFF)
F
発振周波数 TR = 180 pF 1.5 2.0 2.5 kHz
TR
= 0 mA, G
OUT
= 5 mA, G
OUT
= 2.4 V 2.35 2.4 2.45
OUT
= 2.4 V ⎯ 1.9 ⎯
OUT
VM (H) 出力動作開始点 3.8 4.0 4.2
V
電源監視
M
VM (L) 出力非動作点 3.3 3.5 3.7
V
入力ヒステリシス幅 ⎯ 0.5 ⎯
H
PWM 発振周波数 FC (5M) OSC/C = 150 pF OSC/R = 16 kΩ 18 20 22 kHz
過熱保護
TSD (注) 150 165 180
TSDhys 復帰ヒステリシス ⎯ 15 ⎯
注: 出荷テストは実施しておりません。
μA
V
Ω
V
μA
mV
V
°
ms
V
°C
8
2008-03-04

動作説明
1. 基本動作
始動時は、位置検出信号から矩形波駆動の通電信号にて駆動します。位置検出信号が f = 2.5 Hz 以上の回転数に
達すると、位置検出信号からロータ位置を推定して変調波を発生し、この変調波と三角波を比較して正弦波 PWM
信号を生成し駆動します。
始動~2.5 Hz: 矩形波駆動 (120°通電) f = fosc/(2
2.5 Hz~ : 正弦波 PWM 駆動 (180°通電) f
2. Vsp 電圧指令入力
(1) 電圧指令入力: 0 V < V
駆動出力をオフします。(モータ停止)
(2) 電圧指令入力: V
fosc = 5 MHz の場合、ホール信号が 2.5 Hz までは矩形波駆動し、2.5 Hz 以上で正弦波駆動します。
変調波
100%
sp
> 0.5 V 時
sp
<
0.5 V 時
TB6585FG
12
× 32 × 6)
= 5 MHz の場合、約 2.5 Hz となります。
osc
注: 変調波形が最大となる V
3. キャリヤ周波数設定
PWM 信号生成に必要な三角波の周期 (キャリヤ周期) を設定します。
キャリヤ周期: f
例: f
osc
= f
c
= 5 MHz の場合 fc = 19.8 kHz
4. 進み角補正機能
誘導電圧 (ホール信号) に対するモータ駆動出力を 0~30°の範囲で進み角を補正します。
進み角設定は、LA 端子に直接電位を印可し補正する方法とモータ電流を利用して補正することが可能です。
<LA端子ブロック図>
(1) (2)
0.5 V 0 V
refout
/252 (Hz) f
osc
LA
V
refout
V
sp
電圧を 100%としております。
= 基準クロック (CR 発振周波数)
osc
三角波 (キャリア)
5 bit AD 変調波生成
V
refout
変調波形
GND
自動進角設定部
LA = 0 V
LA = 90 mV (標準)
Gin+
進角 0.94°
進角 0°
9
2008-03-04

<LA-進角の標準特性イメージ>
段数 LA (V) 進角 (°) 段数 LA (V) 進角 (°)
1 0.00 0.00 17 1.50 15
2 0.09 0.94 18 1.59 15.94
3 0.19 1.88 19 1.69 16.88
4 0.28 2.81 20 1.78 17.81
5 0.38 3.75 21 1.88 18.75
6 0.47 4.69 22 1.97 19.69
7 0.56 5.63 23 2.06 20.63
8 0.66 6.56 24 2.16 21.56
9 0.75 7.5 25 2.25 22.50
10 0.84 8.44 26 2.34 23.44
11 0.94 9.38 27 2.44 24.38
12 1.03 10.31 28 2.53 25.31
13 1.13 11.25 29 2.63 26.25
14 1.22 12.19 30 2.72 27.19
15 1.31 13.13 31 2.81 28.13
16 1.41 14.06 32 2.91 29.06
TB6585FG
30
25
20
15
進 角 (°)
10
5
0
0 0.35 0.7 1.05 1.4 1.75 2.1 2.45 2.8 3.15
LA (V) – 進角 (°) 特性
LA (V)
10
2008-03-04

<自動進み角補正動作回路イメージ>
モータ電流
RF
Amp.
R
2
R1
*: Gain = (R
RF
+ R2) /R1, R3 = 100 kΩ, C1 = 0.1 μF
1
V [v]
V
Gain × V
LA 端子 IV 端子
Peak
hold
LA 値
RF
3
R
Gain × V
1
C
(peak)
RF
TB6585FG
5 bit
A/D 変換
V
RF
Gain × VRF
Gain × VRF
(peak)
LA 値
T [s]
5. 位置検出 (ホール入力)
同相電圧範囲は、V
HUM
*: 50mVpp 以上あれば、ホールアンプは動作しますが、各相間の 60°時間幅を安定させるため、出来る限り振幅
を広げてください。(推奨;200mVpp 以上)
= 1.5~3.5 V となります。また、入力ヒステリシスは、VH = 8 mV (標準) です。
CMRH
V
= 8 mV (標準)
V
S
VS = 50 mV 以上
VH
H
V
H
HUP
6. 回転パルス出力 (FG 出力)
ホール信号に基づいた回転パルス (3 パルス/電気角) を出力します。
例: 8 極モータの場合の FG パルス数は、12 パルス/回転 (12ppr) となります。
7. 逆回転検出機能
モータの回転方向を検出し、120°通電、180°通電を制御します。
電気角 360°ごとの検出となります。
CW/CCW 端子 実際のモータ回転方向 通電方式
Low (CW 時)
High (CCW 時)
注: 180°通電の場合も、ホール信号が 2.5 Hz 以下では 120°通電となります。
CW (正転) 180°通電
CCW (逆転) 120°通電
CW (正転) 120°通電
CCW (逆転) 180°通電
11
2008-03-04

8. 各種保護機能
(1)電流制限保護 (RS 端子)
直流リンク電流が内部の基準電圧を超えた場合に、出力をオフします。電流制限保護の解除はキャリヤ周波数
ごとに解除されます。基準電圧 = 0.5 V (標準)
(2)外部 RESET 保護 (RESET 端子)
入力信号レベルが、High で出力をオフし、Low または Open で再始動します。
外部より異常を検出し、RES 端子に入力します。
(3)内蔵保護
・位置検出信号異常保護
位置検出信号が H・H・H または、L・L・L になった場合は、出力をオフし、それ以外でキャリヤ周期で再始動し
ます。
・モータロック検出保護
180°通電に切り替わる設定において、始動時の 120°通電から 180°通電に切り替わらない場合、モータがロッ
クしたと判断して出力をオフします。復帰は、自動復帰と電源の ON/OFF による復帰が選択できます。
TB6585FG
Hall U
Hall V
Hall W
ML
モータロック検出
(Hall < 2.5 Hz が継続)
復帰方式設定
ML = High
ML = Low
パルスカウンタ
(10 ビット)
自動復帰動作
⇒パルスカウンタに
より保護自動解除
電源再投入復帰
電源あるいは
⇒V
M
の再投入によ
V
SP
り解除
TR
駆動出力制御
1
C
<検出、停止期間の設定について>
検知する期間および出力を停止する期間は外付けのコンデンサ (C
) で設定することが可能です
1
(検知期間と停止期間は同時間となります)。
×
V C
設定時間
例: C
= 180 pF 時
1
∼
−
= s1024
T 500 ms (標準) となります。
th1
T
I
I = 0.72 μA, Vth = 2 V
)(×
<自動復帰 (ML = High)>
ホール信号が、2.5 Hz 以下で 500 ms (標準) 継続した場合、500 ms (標準) の駆動期間と 500 ms (標
準) の停止期間の間欠動作を繰り返します。ホール信号が 2.5 Hz 以上となり 180°通電に切り替わ
ると解除します。
<電源再投入復帰 (ML = Open or low) >
ホール信号が、2.5 Hz 以下で 500 ms (標準) 継続した場合、出力を停止します。復帰は電源の再投入
で復帰します。その際、V
= 3.5 V (標準) 以下まで下げてください。また、Vsp の再投入でも復帰し
M
ます。その際、Vsp を 1 V(標準)以下まで下げてください。
12
2008-03-04

• 低電源電圧保護 (VM電源監視)
V
電源 ON/OFF 時における、動作電圧範囲外においては、通電信号出力をオフとします。
M
電源電圧
通電信号
4.0 V (標準) 3.5 V (標準)
V
M
GND
V
M
TB6585FG
動作フロー
位置信号
(ホール素子)
電圧指令
(V
)
sp
CR 発振
システム
クロック生成
出力オフ
位置推定 カウンタ
位相合わせ
U 相
V 相
W 相
正弦波パターン
(キャリヤ周波数)
(変調信号)
三角波
出力オフ 出力動作
コンパレータ
出力
P
w
Pch+
Nch
. Tr.
U 相出力
V 相出力
W 相出力
13
2008-03-04

TB6585FG
<正弦波パターン生成方法>
ホール信号から変調波形を作り、この変調波形を三角波と比較して正弦波 PWM 信号を生成します。
3 つのホール信号のアップエッジ (ダウンエッジ) から次のダウンエッジ (アップエッジ) までの時間 (電気角:
60°) をカウントし、この時間を変調波形の次の 60°位相分のデータとして使用しています。
変調波形の 60°位相分は 32 データからなっており、その 1 データ分の時間幅は、1 つ前の 60°位相分の時間幅の
1/32 であり、この幅で変調波形は進みます。(CW/CCW = Low 時の動作イメージ)
HUP
HVP
HWP
S
U
S
V
Sw
⑥ ① ③
⑤ ②
⑥’ ①’ ②’ ③’
* HUP, HVP, HWP はホール素子
入力となりますが、動作イメー
ジのため、方形波に変換して記
載しております。
上図において、
HW:
から
HU:
HV:
から
HW:
までの時間②の
までの時間①の
の時間幅で、②’ のデータは進みます。
1/32
の時間幅で、変調波形の①’ データは進み、同じく、
1/32
32 データが終了しても次のエッジが来ない場合には、次の 32 データは次のエッジが来るまで同じ時間幅で進み
ます。
*t
*t
32
31
30
6
5
4
3
2
1
S
V
* t = t① × 1/32
①’
32 データ
また、位置検出信号のゼロクロスごとに変調波形との位相合わせを行います。
電気角 60°ごとに位置検出信号のアップエッジおよびダウンエッジと同期し変調波形はリセットされます。
従いまして、ホール信号の位置ずれおよび、加減速時はリセットごとに変調波形が不連続となります。
14
2008-03-04

TB6585FG
また、上記と併せて、位置検出信号のゼロクロスごとに変調波形との位相合わせを行います。
電気角 60°ごとに位置検出信号 (ホールアンプ出力信号) のアップエッジ、およびダウンエッジと同期し変調波
形はリセットされます。
従いまして、位置検出信号のゼロクロスずれにより、60°位相分の 32 データが終了する前に次のゼロクロスが来
た場合、データはリセットされ、次の 60°位相分のデータが開始されます。
この場合、リセットごとに変調波形が不連続となります。
HA
HB
HC
31
3
2
1
SB
①
②
30
29
28
4
3
2
1
リセット
①’
15
2008-03-04

<正弦波PWM駆動の出力動作波形>
相
U
(IC
内部)
出力波形
U 相
変調信号 キャリヤ周波数
TB6585FG
V
refout
(
標準)
GND
V
M
GND
相
V
相
W
線間電圧
VUV
(VU − VV)
<矩形波駆動の出力動作波形>
V
SP
PWM
成生
(IC
内部)
出力波形
U 相
入力電圧 キャリア周波数
VM
GND
VM
GND
V
V
GND
M
M
2
V 相
W
相
注: 出力を抵抗で中点を出した場合の波形イメージとなります。
ます。
16
V
M
は出力ハイインピーダンスの状態を意味し
2
2008-03-04
V
M
V
M
2
GND
V
M
V
M
2
GND

正転動作タイミングチャート (CW/CCW = Low, LA = GND)
(正ホール入力)
HUM
HUP
HVM
HVP
HWP
HWM
0 < ホール < 2.5 Hz
(120°通電)
UH
VH
TB6585FG
WH
UL
VL
WL
FG
2.5 Hz < ホール
(180°
通電: IC 内部の変調波)
S
u
S
v
S
w
FG
*: ホール信号が 2.5 Hz 以上では、LA 端子に従い進角補正機能が動作します。
タイミングチャートは機能・動作を説明するため、単純化しております。
17
2008-03-04

正転動作タイミングチャート (CW/CCW = Low, LA = GND)
逆ホール入力)
(
HUM
HUP
HVM
HVP
HWP
HWM
逆転検知
(120°通電)
UH
VH
TB6585FG
WH
UL
VL
WL
FG
*: CW/CCW = Low で逆ホール信号が入力された場合は、進角 0°の 120°通電で駆動します。(逆風動作)
タイミングチャートは機能・動作を説明するため、単純化しております。
18
2008-03-04

逆転動作タイミングチャート (CW/CCW = High, LA = GND)
(逆ホール入力)
HUM
HUP
HVM
HVP
HWP
HWM
0 < ホール < 5 Hz
(120°通電)
UH
VH
TB6585FG
WH
UL
VL
WL
FG
5 Hz < ホール
通電: IC 内部の変調波)
(180°
Su
S
v
S
w
FG
*: ホール信号が 2.5 Hz 以上では、LA 端子に従い進角補正機能が動作します。
タイミングチャートは機能・動作を説明するため、単純化しております。
19
2008-03-04

逆転動作タイミングチャート (CW/CCW = High, LA = GND)
(正ホール入力)
HUM
HUP
HVM
HVP
HWP
HWM
逆転検知
(120°通電)
UH
VH
TB6585FG
WH
UL
VL
WL
FG
*: CW/CCW = High で正ホール信号が入力された場合は、進角 0°の 120°通電で駆動します。(逆風動作)
タイミングチャートは機能・動作を説明するため、単純化しております。
20
2008-03-04

(
)
μ
μ
6
ブロック図
TB6585FG
0.47
150 pF
refout
V
(注 1)
M
C
U
(注 1)V
μF
S-GND
kΩ
1
CW/CCW
refout
18, 19
OSC/C
OSC/R
HUP
HUM
HVP
HVM
HWP
HWM
VSP
RESET
FG
29
G
+ Gin− G
in
7
システムクロック
8
17
16
15
14
4
3
9
12
13
3 ppr
2
F
F
10 kΩ
(100 kΩ)
28 27 26 23 22 21
生成回路
PH LPF IV LA UL LL
out
4.4 V 電源回路
正弦波生成回路ブロック
0.1
100 kΩ
25
PH LPF
0.1
24
V
refout
上限 limit
下限 limit
V
refout
VM (注 2)
1, 36
22 μF
35
U
34
V
33
W
IR
32
30
RS
= 4.5~42 V
0.001μF
M
V
チャージ
TR
注 1: V
端子の直近に発振防止用のコンデンサを接続してください。
refout
また、パッケージの放熱特性が厳しい場合は、V
ださい。
ポンプ
10
180 pF
ロック保護
設定回数
20
ML
refout
TSD (165°C)
5, Fin
S-GND P-GND
31
出力に負荷を接続せず、外部電源より 4.4 V を供給してく
(注 3)
29 Pin
注 2: VM端子の直近に発振防止用のコンデンサを接続してください。
注 3: ノイズの影響が大きい場合は、C, R の L.P.F.を接続してください。
注 4: 出力間のショートおよび出力の天絡、地絡時に IC の破壊および周辺部に過電流、過電圧が加わる恐れがありま
すので、出力ライン
場合も同様に破壊の恐れがありますので注意してください。
VM, IR, GND ラインの設計には十分注意してください。また、IC を回転差し (逆差し)した
注 5: 応用回路上の外付け定数は、動作確認のためのイニシャル値となる場合がありますので、必要に応じて変更を
お願いします。特に
VM, V
ホール素子±間のコンデンサは実験の上、決定してください。
refout,
21
2008-03-04

外形図
TB6585FG
: 0.79 g (標準)
質量
22
2008-03-04

記載内容の留意点
1. ブロック図
ブロック図内の機能ブロック/回路/定数などは、機能を説明するため、一部省略・簡略化している場合があります。
2. 等価回路
等価回路は、回路を説明するため、一部省略・簡略化している場合があります。
3. タイミングチャート
タイミングチャートは機能・動作を説明するため、単純化している場合があります。
4. 応用回路例
応用回路例は、参考例であり、量産設計に際しては、十分な評価を行ってください。
また、工業所有権の使用の許諾を行うものではありません。
5. 測定回路図
測定回路内の部品は、特性確認のために使用しているものであり、応用機器の誤動作や故障が発生しないことを
保証するものではありません。
TB6585FG
使用上のご注意およびお願い事項
使用上の注意事項
(1)絶対最大定格は複数の定格の、どの一つの値も瞬時たりとも超えてはならない規格です。
複数の定格のいずれに対しても超えることができません。
絶対最大定格を超えると破壊、損傷および劣化の原因となり、破裂・燃焼による傷害を負うことがあります。
(2)過電流の発生や IC の故障の場合に大電流が流れ続けないように、適切な電源ヒューズを使用してください。IC は絶対
最大定格を超えた使い方、誤った配線、および配線や負荷から誘起される異常パルスノイズなどが原因で破壊すること
があり、この結果、IC に大電流が流れ続けることで、発煙・発火に至ることがあります。破壊における大電流の流出入を
想定し、影響を最小限にするため、ヒューズの容量や溶断時間、挿入回路位置などの適切な設定が必要となります。
(3)モータの駆動など、コイルのような誘導性負荷がある場合、ON 時の突入電流や OFF 時の逆起電力による負極性の電流
に起因するデバイスの誤動作あるいは破壊を防止するための保護回路を接続してください。IC が破壊した場合、傷害を
負ったり発煙・発火に至ることがあります。
保護機能が内蔵されている IC には、安定した電源を使用してください。電源が不安定な場合、保護機能が動作せず、IC
が破壊することがあります。IC の破壊により、傷害を負ったり発煙・発火に至ることがあります。
(4)デバイスの逆差し、差し違い、または電源のプラスとマイナスの逆接続はしないでください。電流や消費電力が絶対最
大定格を超え、破壊、損傷および劣化の原因になるだけでなく、破裂・燃焼により傷害を負うことがあります。なお、逆
差しおよび差し違いのままで通電したデバイスは使用しないでください。
23
2008-03-04

TB6585FG
使用上の留意点
(1)過電流保護回路
過電流制限回路 (通常: カレントリミッタ回路) はどのような場合でも IC を保護するわけではありません。動作後
は、速やかに過電流状態を解除するようお願いします。
絶対最大定格を超えた場合など、ご使用方法や状況により、過電流制限回路が正常に動作しなかったり、動作する前
に IC が破壊したりすることがあります。また、動作後、長時間過電流が流れ続けた場合、ご使用方法や状況によって
は、IC が発熱などにより破壊することがあります。
(2)熱遮断回路
熱遮断回路 (通常: サーマルシャットダウン回路) は、どのような場合でも IC を保護するわけではありません。動
作後は、速やかに発熱状態を解除するようお願いします。
絶対最大定格を超えて使用した場合など、ご使用法や状況により、熱遮断回路が正常に動作しなかったり、動作する
前に IC が破壊したりすることがあります。
(3)放熱設計
パワーアンプ、レギュレータ、ドライバなどの、大電流が流出入する IC の使用に際しては、適切な放熱を行い、規定
接合温度 (Tj) 以下になるように設計してください。これらの IC は通常使用時においても、自己発熱をします。IC
放熱設計が不十分な場合、IC の寿命の低下・特性劣化・破壊が発生することがあります。
また、IC の発熱に伴い、周辺に使用されている部品への影響も考慮して設計してください。
(4)逆起電力
モータを逆転やストップ、急減速を行った場合に、モータの逆起電力の影響でモータからモータ側電源へ電流が流
れ込みますので、電源の Sink 能力が小さい場合、IC のモータ側電源端子、出力端子が定格以上に上昇する恐れがあ
ります。
逆起電力によりモータ側電源端子、出力端子が定格電圧を超えないように設計してください。
24
2008-03-04

TB6585FG
当社半導体製品取り扱い上のお願い
060919TBA_R6
• 当社は品質、信頼性の向上に努めておりますが、一般に半導体製品は誤作動したり故障することがあります。当社
半導体製品をご使用いただく場合は、半導体製品の誤作動や故障により、生命・身体・財産が侵害されることのない
ように、購入者側の責任において、機器の安全設計を行うことをお願いします。
なお、設計に際しては、最新の製品仕様をご確認の上、製品保証範囲内でご使用いただくと共に、考慮されるべき注
意事項や条件について「東芝半導体製品の取り扱い上のご注意とお願い」、「半導体信頼性ハンドブック」などでご
確認ください。
021023_A
• 本資料に掲載されている製品は、一般的電子機器 (コンピュータ、パーソナル機器、事務機器、計測機器、産業用ロボ
ット、家電機器など
が直接人命を脅かしたり人体に危害を及ぼす恐れのある機器
機器、燃焼制御、医療機器、各種安全装置など
) に使用されることを意図しています。特別に高い品質・信頼性が要求され、その故障や誤作動
(原子力制御機器、航空宇宙機器、輸送機器、交通信号
) にこれらの製品を使用すること (以下 “特定用途” という) は意図
もされていませんし、また保証もされていません。本資料に掲載されている製品を当該特定用途に使用すること
は、お客様の責任でなされることとなります。
021023_B
• 本資料に掲載されている製品を、国内外の法令、規則及び命令により製造、使用、販売を禁止されている応用製品に
使用することはできません。
060106_Q
• 本資料に掲載してある技術情報は、製品の代表的動作・応用を説明するためのもので、その使用に際して当社及び
第三者の知的財産権その他の権利に対する保証または実施権の許諾を行うものではありません。
021023_C
• 本製品のご使用に際しては、特定の物質の含有・使用を規制する RoHS 指令などの法令を十分調査の上、かかる法
令に適合するようご使用ください。
お客様が適用される法令を遵守しないことにより生じた損害に関して、当社は一切の責任を負いかねます。
060919_AF
• 本資料に掲載されている製品は、外国為替及び外国貿易法により、輸出または海外への提供が規制されているもの
です。
021023_E
• 本資料の掲載内容は、技術の進歩などにより予告なしに変更されることがあります。 021023_D
25
2008-03-04
 Loading...
Loading...