

TB6575FNG 使用上の注意点
TB6575FNG 使用上の注意点
TB6575FNG は、三相 DC ブラシレスモータをセンサレスにて制御を可能とするコントローラ IC です。ファンモータ
用に開発した製品となります。動作中に正転、逆転をするアプリケーションには使用できません。また、センサレス駆動
となり、負荷変動に対して弱いため、使用できるかをセットで充分に確認してください。始動に関しても、100%確実に
始動できるものではありませんので、FGパルスとV
テムを検討してください。
の関係等により、モータ異常を検知して再始動できるようにシス
SP
1. 電源電圧
動作電源電圧範囲
項目 記号 動作電源電圧範囲 単位
制御電源電圧 V
4.5~5.5 V
DD
2. 制御入力 (LA, CW/CCW, SEL_LAP, Fmax, Fst, OS, VSP)
(1) 入力方法
VDD電源が投入する前は、LA 端子、CW/CCW 端子、SEL_LAP 端子、Fmax 端子、Fst 端子、OS 端子、
V
端子は、オープンまたは GND としてください。
SP
3. 発振回路
(1) 動作範囲
(2) 推奨発振子
セラミック発振子: 4.19 MHz
• FCR4.19MC5 (TDK 製)
• CSTLS4M19G56-B0 (村田製作所製)
※ セラミック発振子については、製造メーカにお問い合わせください。
(3) 接続
IC 端子の近接に接続してください。発振子の GND は、TB6575FNG の GND へ最短距離で接続をお願いし
ます。
項目 記号 動作範囲 単位
発振周波数 fosc 2~8 MHz
1
2010-04-08
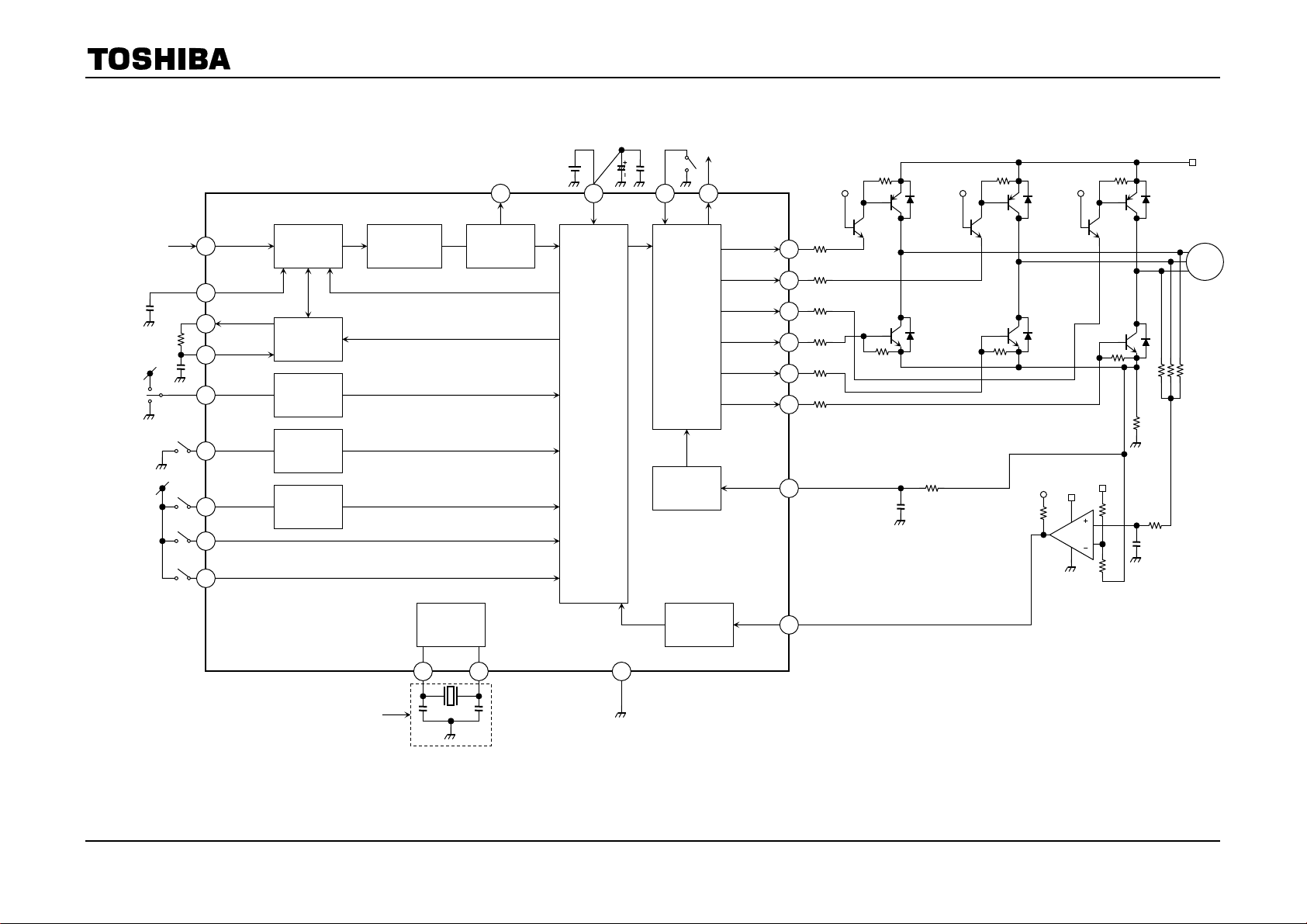
4. 応用回路 (モータ電圧 30 V 以下)
V
速度指令
(リニア電圧)
0.47 μF
VDD
220 kΩ
SP
5
SC
2
START
8
IP
9
1μF
F
ST
24
F
MAX
5
LA
12
CW_CCW
6
SEL_LAP
20
起動時間
設定
一相励磁
制御回路
始動転流
周波数設定
最大転流
周波数設定
進み角
設定
6 ビット AD
コンバータ
Duty
19
PWM
制御
クロック
生成
X
Tout
10 11 1
X
Tin
5 V
21 24 7
DD
タイミング
制御
GND
MCU
通電信号
形成回路
過電流
保護回路
位置検出
回路
FG_OUT OS V
OUT_UP
OUT_VP
OUT_WP
OUT_UN
OUT_VN
OUT_WN
OC
WAVE
13
15
17
14
16
18
22
23
5 V
TB6575FNG 使用上の注意点
V
M
M
100 kΩ × 3
1 Ω 22 pF
V
M
10 kΩ
TA75393P
1 kΩ
100 kΩ 100 kΩ
セラミック発振子使用
4.19 MHz
2
2010-04-08
(1) 電源コンデンサ
VDD – GND 間は IC のできるだけ近くに接続してください。
VM – GND 間はパワーIC のできるだけ近くに接続してください。
推奨値
(2) 始動設定
モータにより動作設定は異なりますので、評価により決定してください。
弊社評価時
この設定にて、弊社評価用ファンモータは動作いたします。
TB6575FNG 使用上の注意点
項目 推奨値 備考
VCC – GND 10 μF~33 μF 電解コンデンサ
VM – GND 0.001 μF~0.22 μF セラミックコンデンサ
項目 推奨値 備考
SC:C1 0.47 μF セラミックコンデンサ
START – IP: R1 220 kΩ 抵抗
IP:C2 1 μF セラミックコンデンサ
3
2010-04-08
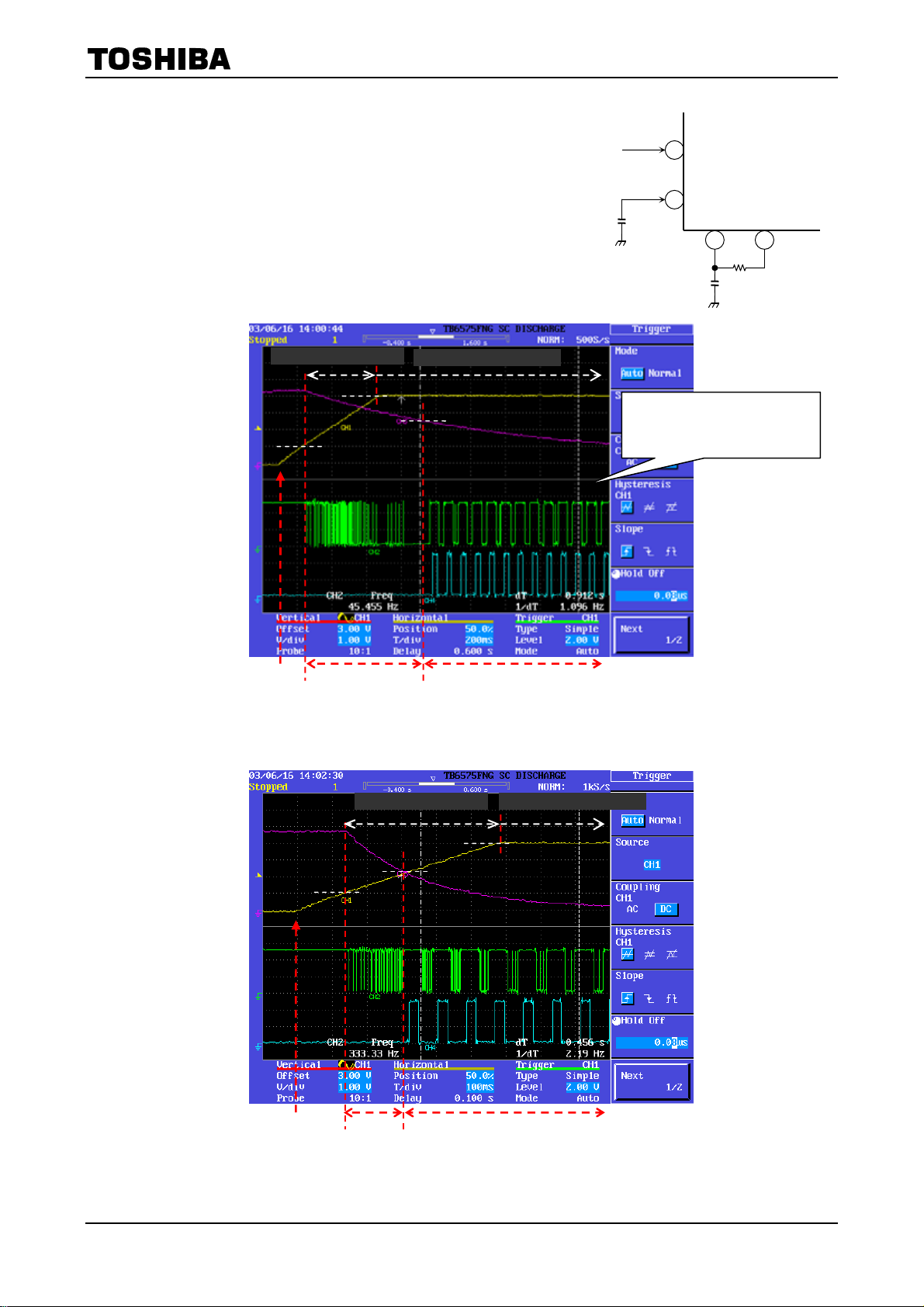
TB6575FNG 始動時出力動作波形 (参考データ)
コンデンサ: C2 を 4.7 μF と 1 μF を接続して直流励磁期間の変化
を比較評価した結果となります。直流励磁期間で確実にロータをロ
ックさせることが重要です。また、SC端子の電位によって、全ての
モードの出力 PWM の ON Duty が決定されます。SC 端子の傾斜は
コンデンサ: C1 で決定され、最大電位は V
C1, C2, R1, Fst, V
実験により見つけだす必要があります。
1. 測定条件: VDD = 5.0 V, VSP = 4.0 V, FST = “L”, R1/C2 = 220 KΩ/4.7 μF
の設定を変更して、モータが始動し易い設定を
SP
でクランプされます。
SP
TB6575FNG 使用上の注意点
V
SP
C
1
5
TB6575FNG
2
SC
9
IP START
R1
C2
8
IP (9 pin) 端子電圧
1 V/div (Red)
SC (2 pin) 端子電圧
1 V/div (Yellow)
OUT_UP (13 pin)
端子電圧
2 V/div (Green)
OUT_UN (14pin)
端子電圧
2 V/div (Blue)
200 ms/div
VSP = 4 V 印加
出力 ONduty_RampUP
SC = 4 V
IP = 2.5 V
SC = 1 V
直流励磁期間:T
(typ.) = 0.69 × C2 × R1 (s) = 0.69 × 4.7 μF × 220 K = 0.71 (s)
*: T
FIX
出力 ONduty_MAX (63/64)
Fst = L → 2.6 Hz
(*) 強制転流
FIX
2. 測定条件: VDD = 5.0 V, VSP = 4.0 V, FST = “L”, R1/C2 = 220 KΩ/1.0 μF
出力 ONduty_MAX (63/64)出力 ONduty_RampUP
IP (9 pin) 端子電圧
1 V/div (Red)
IP = 2.5 V
SC = 1 V
SC (2 pin) 端子電圧
1 V/div (Yellow)
OUT_UP (13 pin)
端子電圧
2 V/div (Green)
SC = 4 V
Fst = L → 2.6 Hz
WAVE 端子から入力されるモータ
周波数 (誘起電圧の変化) が、Fst
周波数より速くなると、センサレ
ス制御モードに切り替わります。
OUT_UN (14pin)
端子電圧
2 V/div (Blue)
100 ms/div
VSP = 4 V 印加
*: T
直流励磁期間:T
(typ.) = 0.69 × C2 × R1 (s) = 0.69 × 1.0 μF × 220 K = 0.15 (s)
FIX
FIX
強制転流
(*)
4
2010-04-08

(3) 入力保護フィルタ
過電流保護回路入力端子、および位置検出回路上のコンパレータ入力端子は、イ ンピー ダンス が高く、ノイ
ズの影響を受けやすいため、誤動作を引き起こす恐れがあります。
誤動作防止のため、CR フィルタを接続してください。ノイズ周波数によりフィルタ値を決定してください。
コンデンサ容量は、0.001 μF~0.1 μF を推奨いたします。
(4) コンパレータ
反転端子の基準電圧は、VMと過電流検知抵抗 (出力Tr-GND 間) の前との中間電位を基本とします。
OFF 相の誘起電圧を検知する仕様ですので、ノイズやモータにより微調整が必要となります。
V
はこのコンパレータの耐圧により制限されますので VM > 30V でご使用になられる場合は、後述の「7. レ
M
ベルシフト」をご参照ください。
TB6575FNG + MP6404 駆動波形 (参考データ)
OUT-U
20 V/div
OUT-V
20 V/div
TB6575FNG 使用上の注意点
120 度通電
V
= 20 V
M
OUT-W
20 V/div
10 V/div
三相合成電圧
コンパレータ非反転端子
10 V/div
OUT-U
20 V/div
OUT-V
20 V/div
三相合成電圧
コンパレータ非反転端子
10V/div
WAVE
コンパレータ出力
5V/div
コンパレータ反転端子
入力 (基準電圧)
OFF ON
コンパレータ出力 (WAVE端子) の OFF と ON の比が概ね 50%デュティになるように、コンパレータの反転
端子 (基準電圧) を調整してください。
5
2010-04-08

5. 進み角制御機能について
TB6575FNG は、誘起電圧に対する駆動信号を 7.5°, 15°の範囲で、電気的に進ませることが可能です。ただし、
起動直後の、直流励磁、強制転流励磁のモードでは、進み角 0°で動作します。
モータの誘起電圧を検出し、センサレスモードに移行後、LA 端子に従う進み角で駆動します。
LA 進み角 (°)
LOW or OPEN 7.5
HIGH 15
進み角の設定は、モータおよび回転数により異なりますので、実験により効率の良い方を選択してください。
TB6575FNG + MP6404 駆動波形 (参考データ)
OUT-U
20 V/div
OUT-V
20 V/div
TB6575FNG 使用上の注意点
進み角: 7.5 度
120 度通電
= 24 V
V
M
V
= 2 V
SP
OUT-W
20 V/div
10 V/div
FG
5 V/div
OUT-U
20 V/div
OUT-V
20 V/div
OUT-W
20 V/div
10 V/div
FG
5 V/div
進み角: 15 度
120 度通電
= 24 V
V
M
V
= 2 V
SP
6
2010-04-08

TB6575FNG 使用上の注意点
6. ラップ通電について
ラップ通電時は、ゼロクロスより通電を開始することにより、他相とオーバラップさせ、120°通電で発生する励
磁切り替わり時に発生する電磁ノイズ (騒音) を低減する効果があります。オーバラップする期間は、進み角設定
により変化し、進み角 7.5°のとき 22.5°オーバラップし、進み角 15°の時 15°オーバラップします。
SEL_LAP 通電方式
HIGH or OPEN 120°
LOW ラップ
TB6575FNG + MP6404 駆動波形 (参考データ)
U 相モータ電流
0.1 A/div
OUT-U
20 V/div
OUT-V
20 V/div
OUT-W
20 V/div
10 V/div
U 相モータ電流
0.1 A/div
OUT-U
20 V/div
OUT-V
20 V/div
進み角: 7.5 度
120 度通電
= 24 V
V
M
V
= 2 V
SP
ラップ通電
= 24 V
V
M
V
= 2 V
SP
OUT-W
20 V/div
10 V/div
7
2010-04-08

TB6575FNG 使用上の注意点
7. モータ電圧をコンパレータ耐圧以上でご使用になられる場合 (レベルシフト)
モータ電圧 30 V (推奨コンパレータの場合) 以上でご使用になられる場合は、以下の方法によりコンパレータ入
力電圧のレベルシフトを行ってください。
(1) 基準電位の GND 側基準は、低抵抗 R12 の上とする。
始動時の電流により、過電流検出用抵抗 R12 の電圧降下は無視できないものとなるため、その電圧降下分を
相殺するため、位置検出用コンパレータの入力は共に R12 の上を基準としてください。
GND としますと、誤差のためセンサレスモードへの移行が行われない可能性があります。
(2) 計算時は V
V
とモータにかかる電圧は異なります。
M
の値ではなく、モータに接続された各相の電圧を用いる。
M
V
M
VOH (OUT-U)
位置検出用
コンパレータ
RA
RB
I4
V2
R2
R1
I1
I3
R1
VRF (OUT-W)
R1
I2
V1 (OUT-V)
レベルシフト用抵抗
R12 (RF)
注: 計算用の回路図となっております。
実際と異なりますので、ご注意ください。
また、実際の回路を 8 項に付属します。
I1 = (V
− V2)/R1 式 (1)
OH
I2 = (V1 − V2)/R1 式 (2)
I3 = (V2 − V
I4 = (V2 − V
)/R1 式 (3)
RF
)/R2 式 (4)
RF
I1 + I2 = I3 + I4 式 (5)
式 (5) に式 (1), (2), (3), (4) を代入すると
(V
− V2)/R1 + (V1 − V2)/R1 = (V2 − VRF)/R1+ (V2 − VRF)/R2
OH
これの式より
V2 = (V
+ VRF + V1)/(3 + R1/R2) 式 (6)
OH
となります。
V1 を中点 ((V
V2 (中点) =
− VRF)/2 + VRF)とすると、式 (6)は
OH
)V(VR23
+××
RFOH
R1)R232
+×(×
となります。
コンパレータの基準電圧 VAは
V
= (VM − VRF) ×
A
RBRARB+
+ VRF
となります。
8
2010-04-08

TB6575FNG 使用上の注意点
V2 (中点) = V
(V
A
− VRF) ×
M
となります。
例) V
= 40 V, VRF = 0.5 V, VOH = 37 V, R1 = 100 kΩ, R2 = 30 kΩとすると
M
RB/ (RA + RB) = 0.2070
となります。
つまり、
RA: RB = 7930:2070
となります。
例えば、RB = 10 kΩの場合、RA = 38.3 kΩとなります。
※ 計算値は、実機評価される際のイニシャル値とお考えください。起動不良がないように、実験により最適
値を決定する必要があります。RA, RB を可変抵抗等にて、起動が確実となる様に合わせ込む必要があり
ます。
8. その他の注意点
位置検出について
とすると
=
RBRARB+
)V(VR23
+××
RFOH
+ VRF =
RBRARB+
⎧
×
VV1+
RF
Μ
⎨
⎩
+×(×
+××
RFOH
R1)R232
+×(×
R1)R232
)V(VR23
⎫
V
RF
⎬
⎭
−
出力 OFF 相の誘起電圧の変化と基準値 (仮想中点) と比較し、位置検出を行っております。
IC 内部で位置検出信号を認識するに際に、逆起電圧 (ダイオード ON 期間) をマスクしており、そのマスクして
いる期間は、進み角によって以下の通り変化します。
転流オン後のマスク期間と考えた場合 (ダイオードの逆起の期間)、以下の期間がマスクされます。
進み角 (°) マスク期間 (°)
ダイオード ON 時間が上記マスク時間を超えるアプリケーションでは、誤動作してしまい、モータが正常に回転
できなくなります。
その場合の対策としては、進み角の設定変更、出力ダイオードのスピードの改善、使用条件の変更、もしくはモ
ータの変更が必要となります。
最大転流周波数について
FMAX 端子で設定した、転流周波数を超えると、モータの異常状態と判断し、出力をオフします。
ただし、始動転流周波数 (Fst 端子) の設定により、最大転流周波数が変化しますので、注意が必要です。
転流周波数は、モータ電流周波数 (1 電気角) を意味しております。復帰動作については、仕様書 P6.保護動作を
ご参照ください。
•
Fst = ow の場合
F
MAX
F
MAX
•
Fst = High or Middle の場合
F
MX
F
MX
注: FST = Low, F
例: fxt = 4.19 MHz, 4 極モータ使用の場合
f
MX
モータ回転数= (170.5 Hz/2) *60 (s) = 5115 rpm
従いまして、モータ回転数が、5115 rpm になりますと、保護動作モードに入ります。
= High or Open: 最大転流周波数fMX = fXT/ (6 × 211)
= Low: 最大転流周波数fMX = fXT/ (6 × 212 )
= High or Open: 最大転流周波数 fMX = fXT/ (6 × 28)
= Low: 最大転流周波数fMX fXT/ (6 × 29)
= Low の場合に、保護動作の働く回転数が低くなりますので、注意が必要です。
MAX
= fXT/(6 × 212) = 4.19 MHz/(6 × 212) = 170.5 Hz
7.5 22.5
15 30
9
2010-04-08

TB6575FNG 使用上の注意点
過電流保護動作について
OC 端子に、0.5 V (typ.) 以上を印加しますと、出力の上相制御 (OUT_UP, OUT_VP, OUT_WP) の出力を停止
します。
となります。ただし、起動含め本動作を常用しないようお願いします。実動作では流れない電流値に設定して戴き、
異常時に破壊から保護する目的で使用ください。復帰は次の
状態の時は、過電流が断続的
の間、出力の上相を停止させます。過電流が予測される場合は、本システム以外で異常を検知して破壊から保護す
るようお願いします。
電流保護が動作した際、出力
タが脱調する恐れがありますので、過電流保護機能は、異常時の破壊防止の一案の位置づけで設定ご検討をお願い
します。
始動時の VSP端子制御方法について
モータの状態をマイコンで確認し、始動に失敗した場合は再始動するようお願いします。また、VSPの電圧により
始動し易い電圧を実験にて見つけ出し、その
してマイコンにて判断してください。始動の VSP電圧に対する回転数が得られたら、目的の回転数になるように、
V
SP
異常がある場合は V
使用をストップしてください。
パワー段のモータ電流検出抵抗より、電流電圧変換値を印加することで、過電流による素子破壊を防止する動作
PWM 周期で復帰しますので、パワー段が制御可能な
(PWM ごと) に流れることになります。OC 端子に 0.5 V 以上が継続した場合は、こ
また、本 IC のセンサレスシステムは、出力の誘起電圧 (PWM) を検知して位置推定を行っておりますので、過
(PWM) を停止しますので位置検知ができなくなります。この結果、制御できずモー
直流励磁時間や強制転流を実験により合せても、負荷を含めたあらゆる条件で 100%始動させる事は困難です。
V
電圧で始動させます。始動が完了したかは、FG パルスを使用
SP
電圧を可変してください。また、定期的に FG 信号を利用して、VSP−FG の関係をマイコンでチェックし
0 V にして、再起動してください。繰り返し回転数異常となる場合は、NG ですので、
SP =
Step1:
Step2: Step1 の V
始動しやすい VSP電圧を印加
電圧に相応する回転数でモータが駆動したら目的の回転数に VSPを変更
SP
※ Step1 の VSP電圧に相応する回転が得られない場合は、VSPを 1 V 以下に下げ、再始動してください。
Main Board
MCU
MCU からの制御信号
Vsp 入力信号
回転数情報
A
B
FG
Speed Control
A
回転数をマイコンで確認する。
Motor Board
Vsp
TB6575FNG
B
1.7 V など始動しやすい電圧を実験に
より決定してください
To target speed
FG
TB6575FNG 始動方法
10
2010-04-08

レベルシフト時の実際の回路図
外付け回路とパワー素子との接続は、以下のようになります。
VM
TB6575FNG 使用上の注意点
ON
OFF
OFF
OFF
OFF
ON
レベルシフト用抵抗
RA
RB
I4
V2
VOH (OUT-U)
I3
R2
VRF (OUT-W)
R1
I1
R1
R1
I2
V1 (OUT-V)
(注1)
R12 (RF)
OUT-W 端子は Low 側がオン、OUT-U 端子は、High 側がオン、OUT-V はハイインピーダンスでモータの誘起
電圧が発生していると仮定し、
V
OUT-W
= V
と近似 (出力ロスを無視) して計算を行っております。
RF
(注1)
モータの始動時等に、大電流が流れますと、電流検出抵抗の電位が振られます。この影響で、三相合成の電位も
振られますので、コンパレータの入力が同期して動作することを意図して、反転端子と非反転端子のGND側を電
流検出抵抗に接続することを推奨します。
・9. よくあるご質問(ご参考)
(1)直流励磁期間(TFIX)の意味と適切な時間はどのように決めますか?
ロータを初期位置に固定します。(CW 時:U 相→V 相の電流方向)
期間内に、ロータが固定する時間が必要となります。
長い時間設定で、確実に固定することを確認し、必要に応じて短くしてください。
固定する前に強制転流に移行しますと起動不良を起こす可能性があります。
(2)強制転流の意味と適切な時間はどのように決めますか?
ロータを強制的に動作させ、誘起電圧を発生させるモードです。
ロータ回転が、Fst で決めた速度を超えますと、ノーマルモード
に切り替わります。従いまして、時間の設定はできません。
(3)Start 時、VSPの入れ方はどうするのが良いでしょうか?
10page
その後、FG パルスが規定内(実験で確認した: V
所望の回転数になるように、VSP電位を変更してください
で記したように、始動し易い電圧を見つけ、固定電圧を印加してください。
-回転数)の速度になった事を確認し、
SP
11
2010-04-08

TB6575FNG 使用上の注意点
(4)起動時に、モータが振動後に、正常回転に移行しています。
スムーズに動作するにはどうすれば良いでしょうか?
システム的に、直流励磁、強制転流で始動しますので、多少なりガタつきはありますが、
V
の印加上げ方を緩斜にすれば、少し緩和する可能性がありますので、VSPで調整を試みてください。
SP
(5)Over Current 検出機能を使うために、使用する抵抗値の計算方法をしりたい?
VOCスペック = 0.46 V〜0.54 V ですので、
R = 0.54 V/1 A = 0.54 Ωとなります。
実使用上では、0.54Ωを使用しますと、
V
Iout(limit) = 0.5 V/0.54 Ω = 0.93 A でリミット動作することになります。
本機能は、異常時に停止させるために設定をお願いします。モータ始動時等の突入電流には動作させないよう抵抗設
定をしてください。
検出抵抗 R(Ω) = Voc(0.5 (V))/ Iout (A)で決定されます。
例)1 A で電流リミットする場合。
typ = 0.5 V となりますので、標準動作としては、
OC
12
2010-04-08

TB6575FNG 使用上の注意点
製品取り扱い上のお願い
•
本資料に掲載されているハードウェア、ソフトウェアおよびシステム(以下、本製品という)に関する情報等、本
資料の掲載内容は、技術の進歩などにより予告なしに変更されることがあります。
•文書による当社の事前の承諾なしに本資料の転載複製を禁じます。また、文書による当社の事前の承諾を得て本資
料を転載複製する場合でも、記載内容に一切変更を加えたり、削除したりしないでください。
•当社は品質、信頼性の向上に努めていますが、半導体製品は一般に誤作動または故障する場合があります。本製品
をご使用頂く場合は、本製品の誤作動や故障により生命・身体・財産が侵害されることのないように、お客様の責
任において、お客様のハードウェア・ソフトウェア・システムに必要な安全設計を行うことをお願いします。なお、
設計および使用に際しては、本製品に関する最新の情報(本資料、仕様書、データシート、アプリケーションノー
ト、半導体信頼性ハンドブックなど)および本製品が使用される機器の取扱説明書、操作説明書などをご確認の上、
これに従ってください。また、上記資料などに記載の製品データ、図、表などに示す技術的な内容、プログラム、
アルゴリズムその他応用回路例などの情報を使用する場合は、お客様の製品単独およびシステム全体で十分に評価
し、お客様の責任において適用可否を判断してください。
•本製品は、一般的電子機器(コンピュータ、パーソナル機器、事務機器、計測機器、産業用ロボット、家電機器な
ど)または本資料に個別に記載されている用途に使用されることが意図されています。本製品は、特別に高い品質・
信頼性が要求され、またはその故障や誤作動が生命・身体に危害を及ぼす恐れ、膨大な財産損害を引き起こす恐れ、
もしくは社会に深刻な影響を及ぼす恐れのある機器(以下“特定用途”という)に使用されることは意図されてい
ませんし、保証もされていません。特定用途には原子力関連機器、航空・宇宙機器、医療機器、車載・輸送機器、
列車・船舶機器、交通信号機器、燃焼・爆発制御機器、各種安全関連機器、昇降機器、電力機器、金融関連機器な
どが含まれます。本資料に個別に記載されている場合を除き、本製品を特定用途に使用しないでください。
•本製品を分解、解析、リバースエンジニアリング、改造、改変、翻案、複製等しないでください。
•本製品を、国内外の法令、規則及び命令により、製造、使用、販売を禁止されている製品に使用することはできま
せん。
•本資料に掲載してある技術情報は、製品の代表的動作・応用を説明するためのもので、その使用に際して当社及び
第三者の知的財産権その他の権利に対する保証または実施権の許諾を行うものではありません。
•別途、書面による契約またはお客様と当社が合意した仕様書がない限り、当社は、本製品および技術情報に関して、
明示的にも黙示的にも一切の保証(機能動作の保証、商品性の保証、特定目的への合致の保証、情報の正確性の保
証、第三者の権利の非侵害保証を含むがこれに限らない。)をしておりません。
•本製品、または本資料に掲載されている技術情報を、大量破壊兵器の開発等の目的、軍事利用の目的、あるいはそ
の他軍事用途の目的で使用しないでください。また、輸出に際しては、「外国為替及び外国貿易法」、「米国輸出管
理規則」等、適用ある輸出関連法令を遵守し、それらの定めるところにより必要な手続を行ってください。
•本製品の RoHS 適合性など、詳細につきましては製品個別に必ず弊社営業窓口までお問合せください。本製品のご
使用に際しては、特定の物質の含有・使用を規制するRoHS 指令等、適用ある環境関連法令を十分調査の上、かか
る法令に適合するようご使用ください。お客様がかかる法令を遵守しないことにより生じた損害に関して、当社は
一切の責任を負いかねます。
13
2010-04-08
 Loading...
Loading...