

Page 1
TOSHIBA CMOS Integrated Circuit Silicon Monolithic
T B 6 5 4 8 F
3-Phase Full-Wave PWM Sensorless Controller for Brushless DC Motors
TB6548F is a 3-phase full-wave sensorless controller for
brushless DC motors. It is capable of controlling voltage by PWM
signal input. It is capable of PWM type sensorless driving when
used conjunction with TA84005F
Features
• 3-phase full-wave sensorless drive
• PWM control (PWM signal is supplied from external sources.)
• Turn-on signal output current: 20 mA
• Built-in protection against overcurrent
• Forward/reverse modes
• Built-in lead angle control function (0, 7.5, 15 and 30 degrees)
• Built-in lap turn-on function
Weight: 0.32 g (typ.)
TB6548F
1
2001-08-28
Page 2
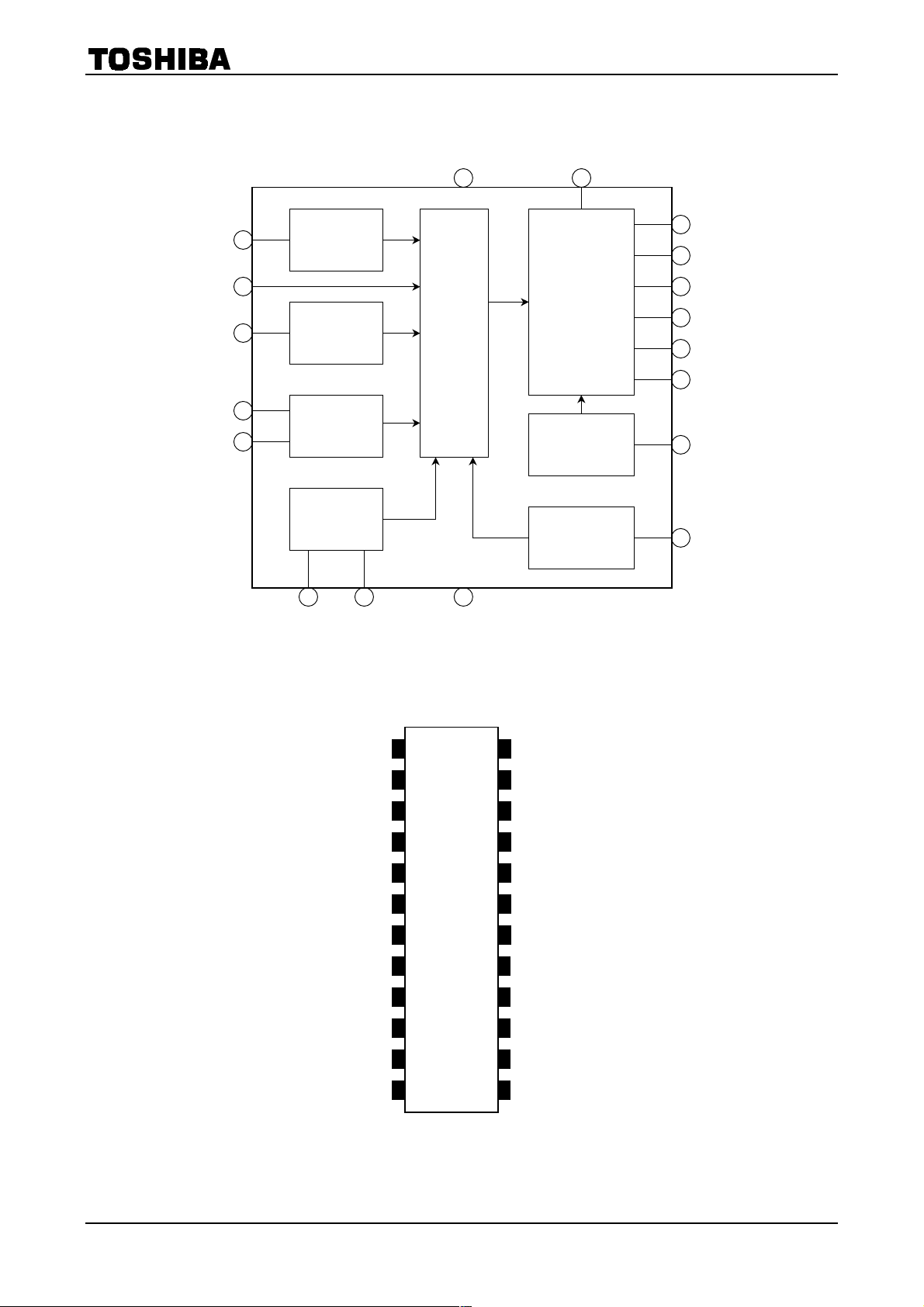
Block Diagram
TB6548F
V
13
DD
FG_OUT
6
PWM
SEL_LAP
CW_CCW
LA0
LA1
Pin Assignment
3
8
4
1
2
PWM Control
Rotation
Instruction
Circuit
Lead Angle
Setting Circuit
Clock
Generator
Circuit
10
11
Tin
XT
Timing
Control
12
GND X
Turn-on Signal
Forming Circuit
Overcurrent
Protection
Circuit
Position
Detection
Circuit
14
17
21
15
19
22
23
24
OUT_UP
OUT_VP
OUT_WP
OUT_UN
OUT_VN
OUT_WN
OC
WAVE
NC
NC
NC
X
Tin
1
2
3
4
5
6
7
8
9
10
T
11
12
24
23
22
21
20
19
18
17
16
15
14
13
WAVE
OC
OUT_WN
OUT_WP
NC
OUT_VN
NC
OUT_VP
NC
OUT_UN
OUT_UP
V
DD
LA0
LA1
PWM
CW_CCW
FG_OUT
SEL_LAP
X
GND
2
2001-08-28
Page 3
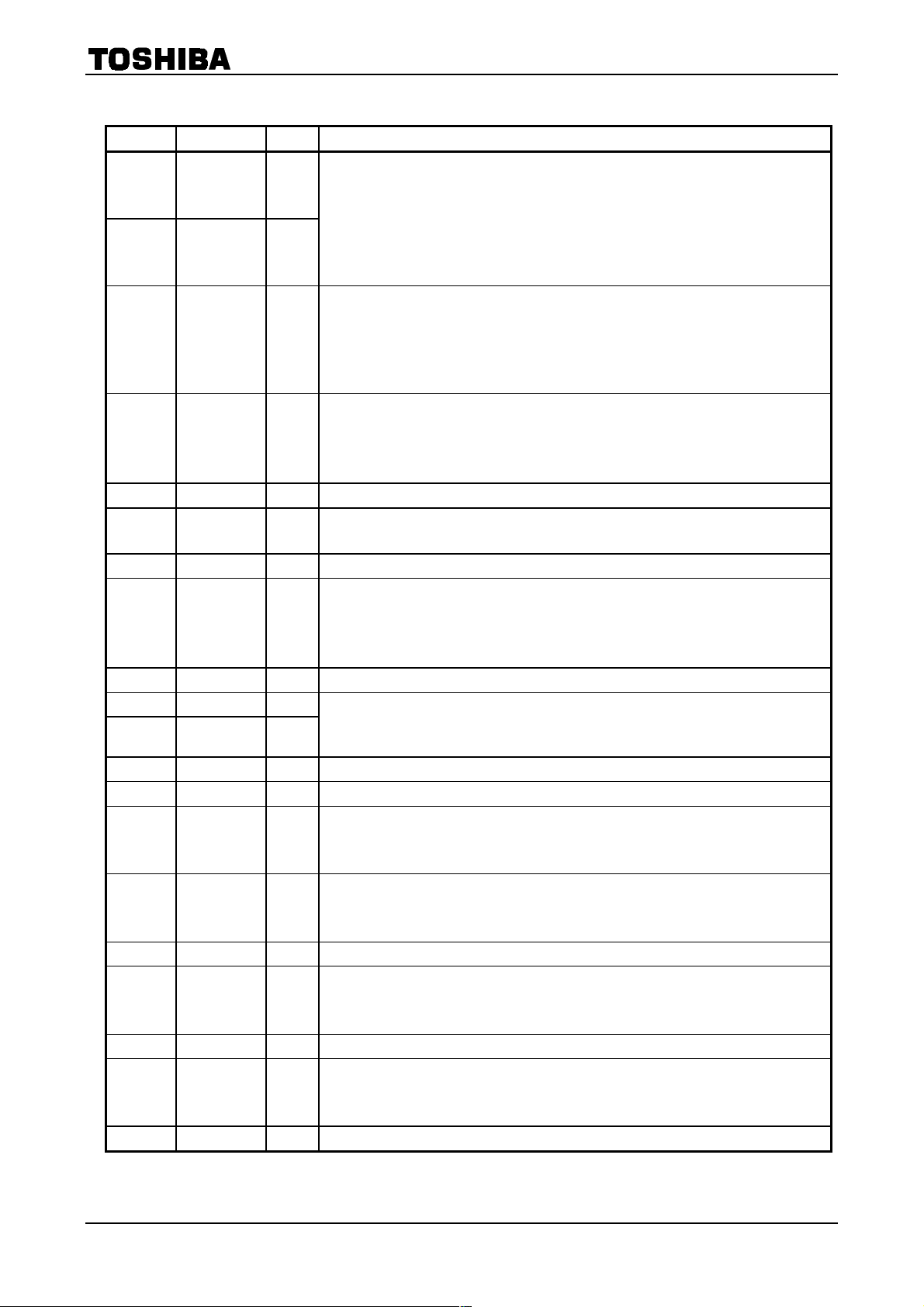
Pin Description
Pin No. Symbol I/O Description
Lead angle setting signal input pin
1 LA0 I
2 LA1 I
3 PWM I
4 CW_CCW I
5 NC Not connected
6 FG_OUT O
7 NC Not connected
8 SEL_LAP I
9 NC Not connected
10 X
11 X
12 GND Connected to GND.
13 V
14 OUT_UP O
15 OUT_UN O
16 NC Not connected
17 OUT_VP O
18 NC Not connected
19 OUT_VN O
20 NC Not connected
Tin
DD
T
• LA0 = Low, LA1 = Low: Lead angle 0 degree
• LA0 = High, LA1 = Low: Lead angle 7.5 degree
• LA0 = Low, LA1 = High: Lead angle 15 degree
• LA0 = High, LA1 = High: Lead angle 30 degree
• Built-in pull-down resistor
PWM signal input pin
• Inputs Low-active PWM signal
• Built-in pull-up resistor
• Disables input of duty-100% (Low) signal
High for 250 ns or longer is required.
Rotation direction signal input pin
• High: Reverse (U → W → V)
• Low, Open: Forward (U → V → W)
• Built-in pull-down resistor
Number of ratation detection signal output pin
• Equiralent to U-phase signal (except PWM)
Lap turn-on select pin
• Low: Lap turn-on
• High: 120 degrees turn-on
• Built-in pull-up resistor
Resonator connecting pin
• Selects starting commutation frequency.
Connected to 5-V power supply.
Starting commutation frequency f
U-phase upper turn-on signal output pin
• U-phase winding wire positive ON/OFF switching pin
• ON: Low, OFF: High
U-phase lower turn-on signal output pin
• U-phase winding wire negative ON/OFF switching pin
• ON: High, OFF: Low
V-phase upper turn-on signal output pin
• V-phase winding wire positive ON/OFF switching pin
• ON: Low, OFF: High
V-phase lower turn-on signal output pin
• V-phase winding wire negative ON/OFF switching pin
• ON: High, OFF: Low
st
TB6548F
= Resonator frequency fxt/(6 × 217)
3
2001-08-28
Page 4
Pin No. Symbol I/O Description
W-phase upper turn-on signal output pin
21 OUT_WP O
22 OUT_WN O
23 OC I
24 WAVE I
• W-phase winding wire positive ON/OFF switching
• ON: Low, OFF: High
W-phase lower turn-on signal output pin
• W-phase winding wire negative ON/OFF switching pin
• ON: High, OFF: Low
Overcurrent signal input pin
• High on this pin can put constraints on the turn-on signal which is performing PWM
control.
• Built-in pull-up resistor
Positional signal input pin
• Inputs majority logic synthesis signal of three-phase pin voltage.
• Built-in pull-up resistor
Functional Description
1. Sensorless Drive
On receipt of PWM signal start instruction turn-in signal for forcible commutation (commutation
irrespective of the motor’s rotor position) is output and the motor starts to rotate. The motor’s rotation
causes induced voltage on winding wire pin for each phase.
When signals indicating positive or negative for pin voltage (including induced voltage) for each phase
are input on respective positional signal input pin, the turn-on signal for forcible commutation is
automatically switched to turn-on signal for positional signal (induced voltage).
Thereafter turn-on signal is formed according to the induced voltage contained in the pin voltage so as to
drive the brushless DC motor.
2. Starting commutation frequency
The forcible commutation frequency at the time of start is determined by the resonator’s frequency and
the number of counter bit (within the IC).
Starting commutation frequency f
The forcible commutation frequency at the time of start can be adjusted using inertia of the motor and
load.
• The forcible commutation frequency should be set higher as the number of magnetic poles increases.
• The forcible commutation frequency should be set lower as the inertia of the load increases.
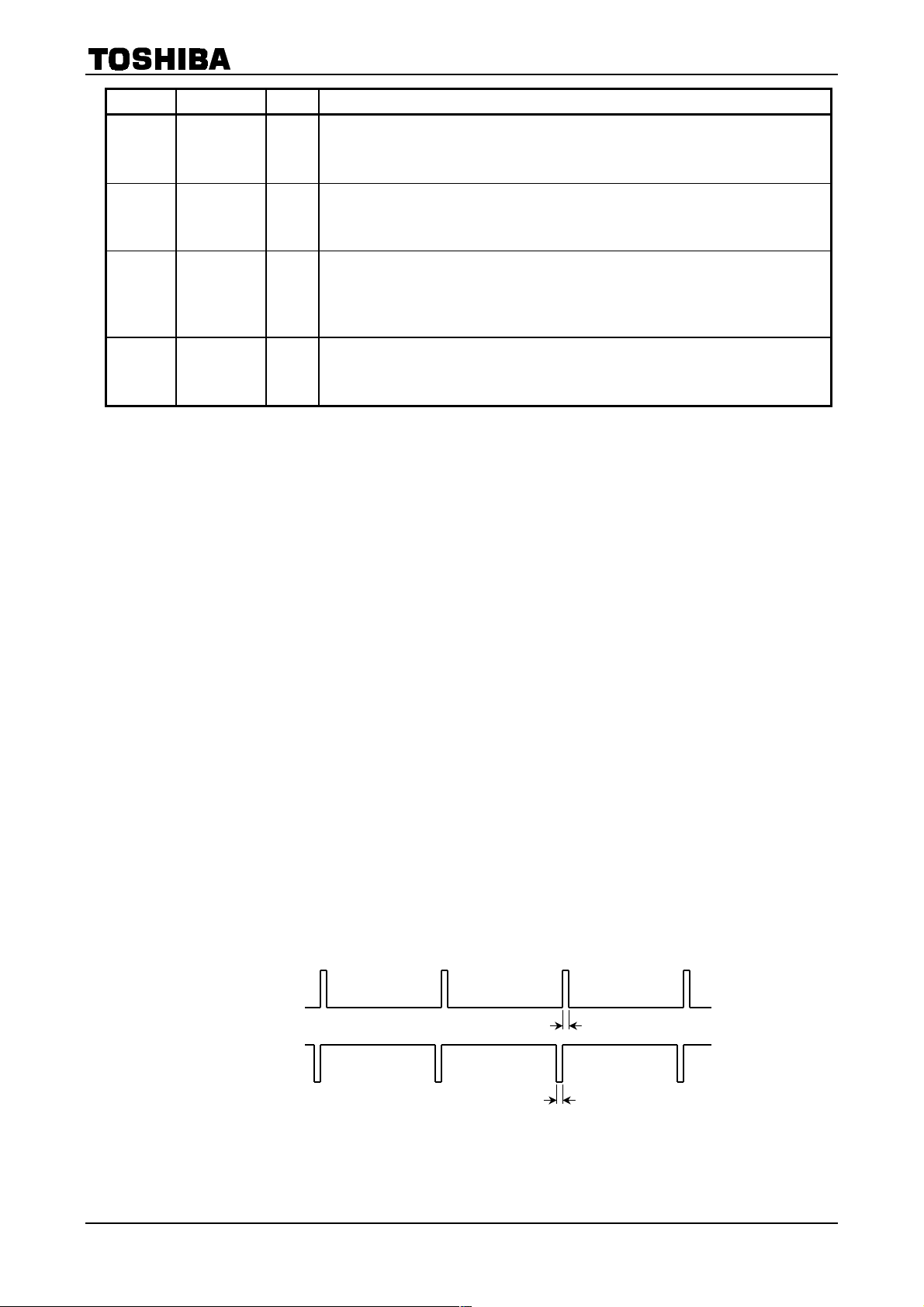
3. PWM Control
PWM signal can be reflected in turn-on signal by supplying PWM signal from external sources.
The frequency of the PWM signal shoud be set adequately high with regard to the electrical frequency of
the motor and in accordance to the switching characteristics of the drive circuit.
Because positional detection is performed in synchronization with the falling edges of PWM signal,
positional detection cannot be performed with 0% duty or 100% duty.
(resonator pin and counter bit select pin)
= Resonator frequency fxt/(6 × 2
st
pin
(bit + 3)
TB6548F
) bit = 14
Duty (max)
250 ns
Duty (min)
250 ns
The voltage applied to the motor is duty 100% because of the storage time of the drive circuit even if the
duty is 99%.
4
2001-08-28
Page 5

4. PWM Control
Upper turn-on
signal (OUT-P)
Lower turn-on
signal (OUT-N)
Output
voltage
of TA84005F
TB6548F
5
2001-08-28
Page 6

5. Positional Variation
Since positional detection is performed in synchronization with PWM signal, positional variation occurs
in connection with the frequency of PWM signal. Be especially careful when the IC is used for high-speed
motors.
PWM signal
Output voltage
of TA84005F
TB6548F
Reference voltage
Pin voltage
Positional signal
Ideal detection timing Actual detection timing
Variation is calculated by detecting at two consecutive rising edges of PWM signal.
1/f
< Detection time variation < 2/f
p
p
fp: PWM frequency
6
2001-08-28
Page 7

6. Lead Angle Control
The lead angle is 0 degree during the starting forcible commutation and when normal commutation is
started, automatically changes to the lead angle which has been set using LA0 and LA1. However, if both
LA0 and LA1 are set for High, the lead angle is 30 degrees in the starting forcible commutation as well as
in normal commutation.
TB6548F
Induced voltage
Turn-on signal
(1) Lead angle: 0 degree
OUT_UP
OUT_UN
OUT_VP
OUT_VN
OUT_WP
OUT_WN
(2) Lead angle: 7.5 degrees
(3) Lead angle: 15 degree
(4) Lead angle: 30 degree
OUT_UP
OUT_UN
OUT_VP
OUT_VN
OUT_WP
OUT_WN
OUT_UP
OUT_UN
OUT_VP
OUT_VN
OUT_WP
OUT_WN
OUT_UP
OUT_UN
OUT_VP
OUT_VN
OUT_WP
OUT_WN
7. Lap Turn-on Control
When SEL_LAP = High, the turn-on degree is 120 degrees. When SEL_LAP = Low, Lap Turn-on Mode
starts.
In Lap Turn-on Mode, the time between zero-cross point and the 120 degrees turn-on timing becomes
longer (shaded area in the below chart) so as to create some overlap when switching turn on signals. The
lap time differs depending ong the lead angle setting.
30 degrees
22.5 degrees
15 degrees
PWM control
PWM control
U V
PWM control
PWM control
PWM control
PWM control
PWM control
PWM control
PWM control
W
PWM control
PWM control
Induced voltage
Turn-on signal
(1) Lead angle: 0 degree
OUT_UP
OUT_UN
OUT_VP
OUT_VN
OUT_WP
OUT_WN
(2) Lead angle: 7.5 degrees
(3) Lead angle: 15 degree
(4) Lead angle: 30 degree
OUT_UP
OUT_UN
OUT_VP
OUT_VN
OUT_WP
OUT_WN
OUT_UP
OUT_UN
OUT_VP
OUT_VN
OUT_WP
OUT_WN
OUT_UP
OUT_UN
OUT_VP
OUT_VN
OUT_WP
OUT_WN
PWM control
PWM control
U V
PWM control
PWM control
PWM control
PWM control
PWM control
PWM control
PWM control
7
W
PWM control
PWM control
2001-08-28
Page 8

8. Start/Stop Control
Start/Stop is controlled using PWM signal input pin.
A stop is acknowledged when PWM signal duty is 0, and a start is acknowledged when ON-signal of a
frequency 4 times higher than the resonator frequency or even higher is input continuously.
Timing chart
PWM signal
Detection
timing
Start
TB6548F
512 periods at the resonator frequency
PWM signal
Detection
timing
Stop
512 periods at the resonator frequency
Note: Take sufficient care for noise on PWM signal input pin.
First detection
First detection
Second detection Start
Second detection
and stop
8
2001-08-28
Page 9

TB6548F
Maximum Ratings
Characteristics Symbol Rating Unit
Power supply voltage V
Input voltage V
Turn-on signal output current I
Power dissipation PD 590 mW
Operating temperature T
Storage temperature T
(Ta ==== 25°C)
DD
in
OUT
opr
stg
5.5 V
−0.3 to V
+ 0.3 V
DD
20 mA
−30 to 85 °C
−55 to 150 °C
Recommended Operating Conditions
Characteristics
Power supply voltage V
Input voltage V
PWM frequency f
Oscillation frequency f
Symbol Test Condition Min Typ. Max Unit
DD
in
PWM
osc
(Ta ==== −−−−30 to 85°C)
4.5 5.0 5.5 V
−0.3
16 kHz
1.0 10 MHz
V
DD
+ 0.3
V
9
2001-08-28
Page 10

TB6548F
Electrical Characteristics
Characteristics
Static power supply current I
Dynamic power supply current I
Input current
Input voltage
Input hysteresis voltage V
Output voltage
Output leak current
Output delay time
(Ta ==== 25°C, VDD ==== 5 V)
Symbol
DD
DD (opr)
I
(H)
IN-1
I
(L)
IN-1
I
(H) VIN = 5 V, CW_CCW, LA0, LA1 50 75
IN-2
(L) VIN = 0 V, CW_CCW, LA0, LA1 −1 0
I
IN-2
VIN (H)
(L)
V
IN
H
V
(H)
O-1
V
(L)
O-1
V
(H)
O-2
V
(L)
O-2
V
(H)
O-3
V
(L)
O-3
IL (H)
Test
Circuit
PWM = H, X
PWM = 50% Duty, X
= 5 V, PWM, OC, WAVE_U,
V
IN
SEL_LAP
= 0 V, PWM, OC, WAVE_U,
V
IN
SEL_LAP
PWM, OC, SEL_LAP, CW_CCW
WAVE_U, LA0, LA1
PWM, OC, SEL_LAP, CW_CCW
WAVE_U, LA0, LA1
PWM, OC, SEL_LAP, CW_CCW
WAVE_U, LA0, LA1
I
= −1 mA
OH
OUT_UP, OUT_VP, OUT_WP
I
= 20 mA
OL
OUT_UP, OUT_VP, OUT_WP
I
= −20 mA
OH
OUT_UN, OUT_VN, OUT_WN
I
= 1 mA
OL
OUT_UN, OUT_VN, OUT_WN
I
= −0.5 mA
OH
FG_OUT
I
= 0.5 mA
OL
FG_OUT
= 5.5 V, V
V
DD
OUT_UP, OUT_VP, OUT_WP
OUT_UN, OUT_VN, OUT_WN
Test Condition Min Typ. Max Unit
= H 0.1 0.3 mA
Tin
= 4 MHz 1 3 mA
Tin
0 1
−75 −50
3.5 5
GND 1.5
0.6 V
4.3 V
GND 0.5
4.0 V
GND 0.5
4.0 V
GND 0.5
= 0 V
OUT
0 10
FG_OUT
(L)
I
L
= 5.5 V, V
V
DD
OUT_UP, OUT_VP, OUT_WP
OUT_UN, OUT_VN, OUT_WN
OUT
= 5.5 V
0 10
FG_OUT
t
pLH
t
pHL
PWM-Output
0.5 1
0.5 1
DD
DD
DD
µA
V
V
µA
µs
10
2001-08-28
Page 11

Application Circuit Example
VDD = 5 V
V
DD
PWM signal
PWM
WAVE
TB6548F
VM = 20 V
Positional detection signal
COMP
FG signal
OUT_UP
OUT_UN
OUT_VP
GND
OUT_VN
OUT_WP
OUT_WN
OC
Over current detection
signal
FG_OUT
<TB6548F> <TA84005F>
IN_UP
IN_UN
IN_VP
IN_VN
IN_WP
IN_WN
ISD
GND
OUT_U
OUT_V
OUT_W
RF
VISD1
VISD2
M
1 Ω
0.01 µF
Note 1: Take enough care in designing output V
line and GND line to avoid short circuit between outputs, VDD
DD
fault or GND fault which may cause the IC to break down.
Note 2: The above application circuit and values mentioned are just an example for reference. Since the values may
vary depending on the motor to be used, appropriate values must be determined through experiments before
using the device.
11
2001-08-28
Page 12

Package Dimensions
TB6548F
Weight: 0.32 g (typ.)
12
2001-08-28
Page 13

TB6548F
RESTRICTIONS ON PRODUCT USE
• TOSHIBA is continually working to improve the quality and reliability of its products. Nevertheless, semiconductor
devices in general can malfunction or fail due to their inherent electrical sensitivity and vulnerability to physical
stress. It is the responsibility of the buyer, when utilizing TOSHIBA products, to comply with the standards of
safety in making a safe design for the entire system, and to avoid situations in which a malfunction or failure of
such TOSHIBA products could cause loss of human life, bodily injury or damage to property.
In developing your designs, please ensure that TOSHIBA products are used within specified operating ranges as
set forth in the most recent TOSHIBA products specifications. Also, please keep in mind the precautions and
conditions set forth in the “Handling Guide for Semiconductor Devices,” or “TOSHIBA Semiconductor Reliability
Handbook” etc..
• The TOSHIBA products listed in this document are intended for usage in general electronics applications
(computer, personal equipment, office equipment, measuring equipment, industrial robotics, domestic appliances,
etc.). These TOSHIBA products are neither intended nor warranted for usage in equipment that requires
extraordinarily high quality and/or reliability or a malfunction or failure of which may cause loss of human life or
bodily injury (“Unintended Usage”). Unintended Usage include atomic energy control instruments, airplane or
spaceship instruments, transportation instruments, traffic signal instruments, combustion control instruments,
medical instruments, all types of safety devices, etc.. Unintended Usage of TOSHIBA products listed in this
document shall be made at the customer’s own risk.
• The products described in this document are subject to the foreign exchange and foreign trade laws.
• The information contained herein is presented only as a guide for the applications of our products. No
responsibility is assumed by TOSHIBA CORPORATION for any infringements of intellectual property or other
rights of the third parties which may result from its use. No license is granted by implication or otherwise under
any intellectual property or other rights of TOSHIBA CORPORATION or others.
000707EBA
• The information contained herein is subject to change without notice.
13
2001-08-28
 Loading...
Loading...