

TOSHIBA 1550 Service Manual
SERVICE MANUAL
SORTER
Click the Page Only button to close the overview area of the window.
Click the Bookmarks and Page button to open the Contents and
display bookmarks created for the document. Click a bookmark’s name
to go to the Page marked by that bookmark.
MG-1003
Click the Thumbnails and Page button to open the overview area and
display thumbnail images of each document page. Click a thumbnail to
go to the page marked by that thumbnail.
Copyright TOSHIBA CORPORATION 1995
ALL RIGHTS RESERVED
General Precautions for Installation/Servicing/Maintenance
1. When installing the Sorter MG-1003 to the Plain Paper Copier, be sure to follow the instructions
described in the “Unpacking/Set-Up Procedure for the MG-1003” booklet which comes with each
unit of the MG-1003.
2. The MG-1003 should be installed by an authorized/qualified person.
3. Before starting installation, servicing or maintenance work, be sure to unplug the copier first.
4. The MG-1003 is supplied with power from the copier.
5. Use suitable measuring instruments and tools.
6. When servicing or maintaining the MG-1003, be careful about the rotating or operating sections
such as gears, pulleys, sprockets, cams belts, etc.
7. When parts are disassembled, reassembly is basically the reverse of disassembly unless otherwise
noted in this manual or other related materials. Be careful not to assemble small parts such as
screws, washers, pins, E-rings, toothed washers to the wrong places.
8. Basically, the machine should not be operated with any parts removed or disassembled.
9. Delicate parts for preventing safety hazard problems (such as thermofuses, door switches, sensors,
etc. if any) should be handled/installed /adjusted correctly.
10. During servicing or maintenance work, be sure to check the serial No. plate and other cautionary
labels (if any) to see if they are clean and firmly fixed. If not, take appropriate actions.
11. For the recovery and disposal of used MG-1003s, consumable parts and packing materials, it is
recommended that the relevant regulations/rules should be followed.
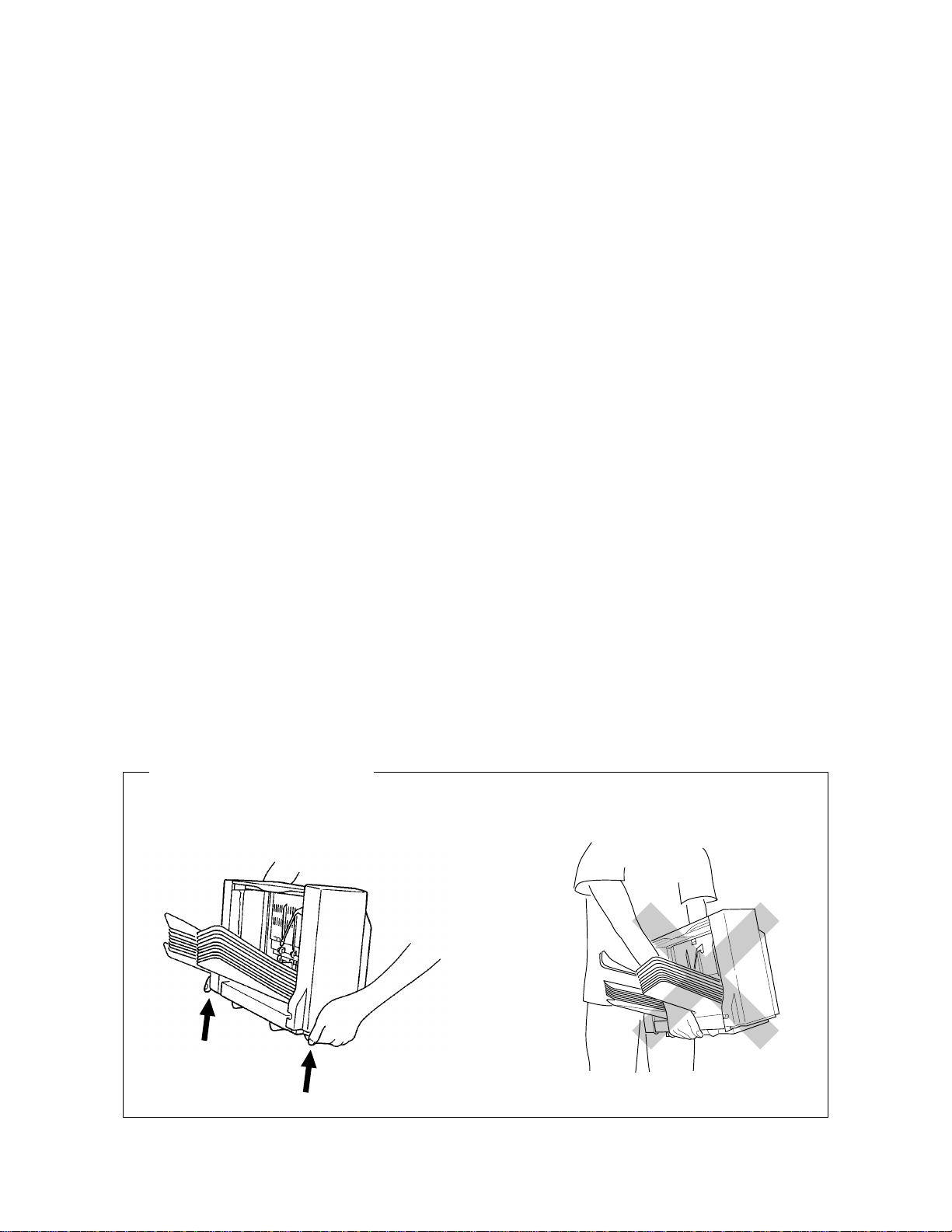
How to lift the Sorter MG-1003
Be sure to hold the sorter in the positions as indicated in Fig. A.
Do NOT hold as in Fig. B.
Fig. A.
Fig. B.
c Copyright 1995 TOSHIBA CORPRATION
1. PRODUCT SPECIFICATIONS
Model name .................................... MG-1003
Type ................................................ Suspended type
Paper transport method................... Roller transporting
Paper sorting method ...................... Bin moving method
Acceptable paper
Mode
Non-Sort
Sort
Group
Sort
Group
Number of sets
1
1
10
10
10
10
Number of Sheets
60
100
15/bin
15/bin
30/bin
20/bin
A3, LD, B4, LG, FOLIO, COMP
50~127g/m
A4, LG, ST-R, A5-R, LT, B5, A4-R, LT-R,
B5-R 50~127g/m
A3, B4, LD, LG 50~127g/m
A4, A4R, B5, B5R, A5R, LT, LTR, FLO,
STR 50~127g/m
Acceptable size of paper
2
2
2
2
Note: Special paper such as OHP, drawing paper, labels, etc. can be used only in the non-sort
mode.
Number of bins........................... 1~10 (bin 1 doubles the non-sort bin)
Power source used .................... DC24V±10% (supplied from the copier)
Power consumption.................... 30W or less (average, in-rush current not included)
Use environment
Temperature........................... 10~30°C
Humidity ................................. 20~85%RH
Weight ........................................ 6.8 kg aprox.
Dimension .................................. 335(W) x 483(D) x 315(H) mm
SEP. 1995 C TOSHIBA CORP. 1 - 1 MG-1003 PRODUCT SPECIFICATIONS
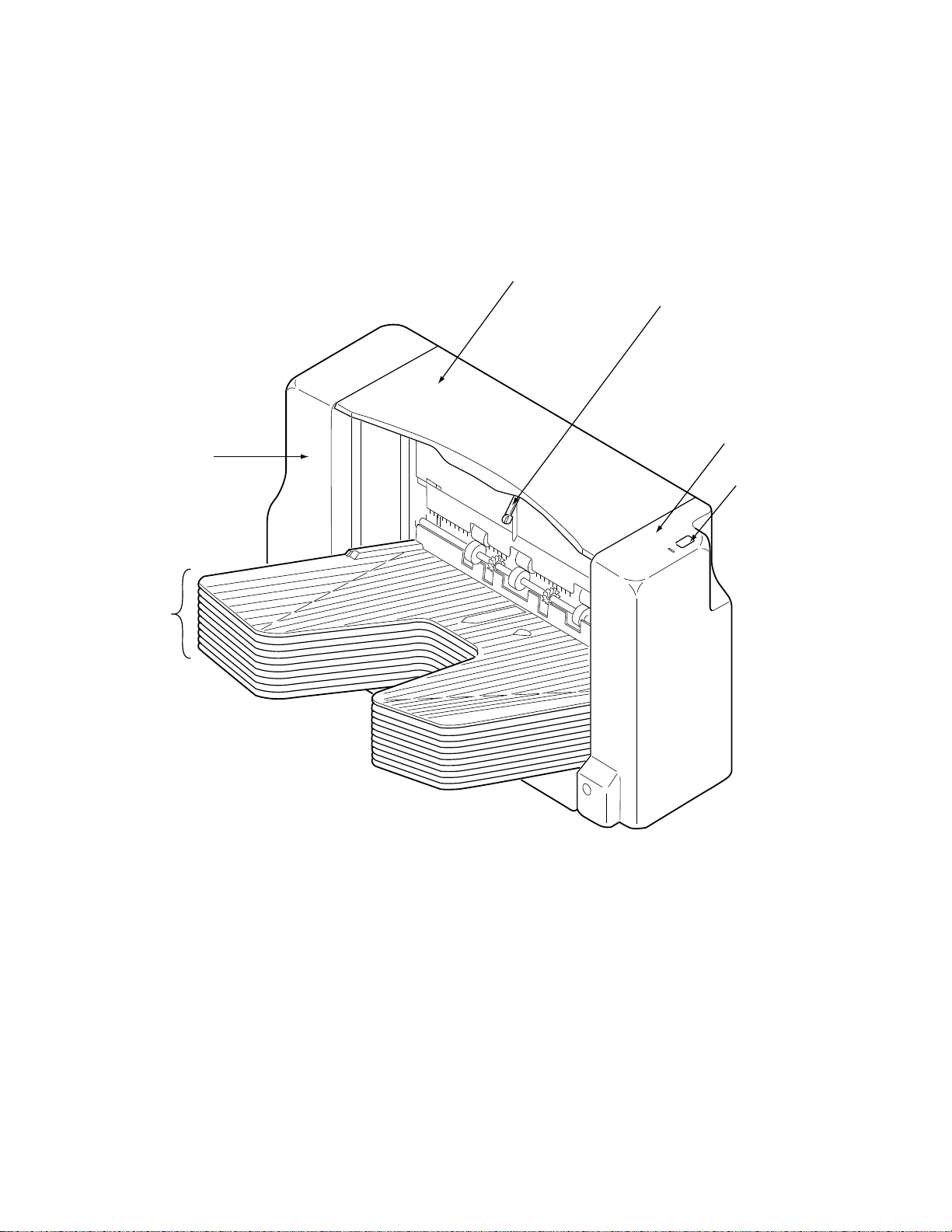
2. NAMES OF MAIN COMPONENTS
2.1 Front Side View
Top cover
Copy-removal
position sensor
Rear cover
Bins
1~10
Front cover
Copy removal
key
SEP. 1995 C TOSHIBA CORP. 2 - 1 MG-1003 NAMES OF MAIN COMPONENTS
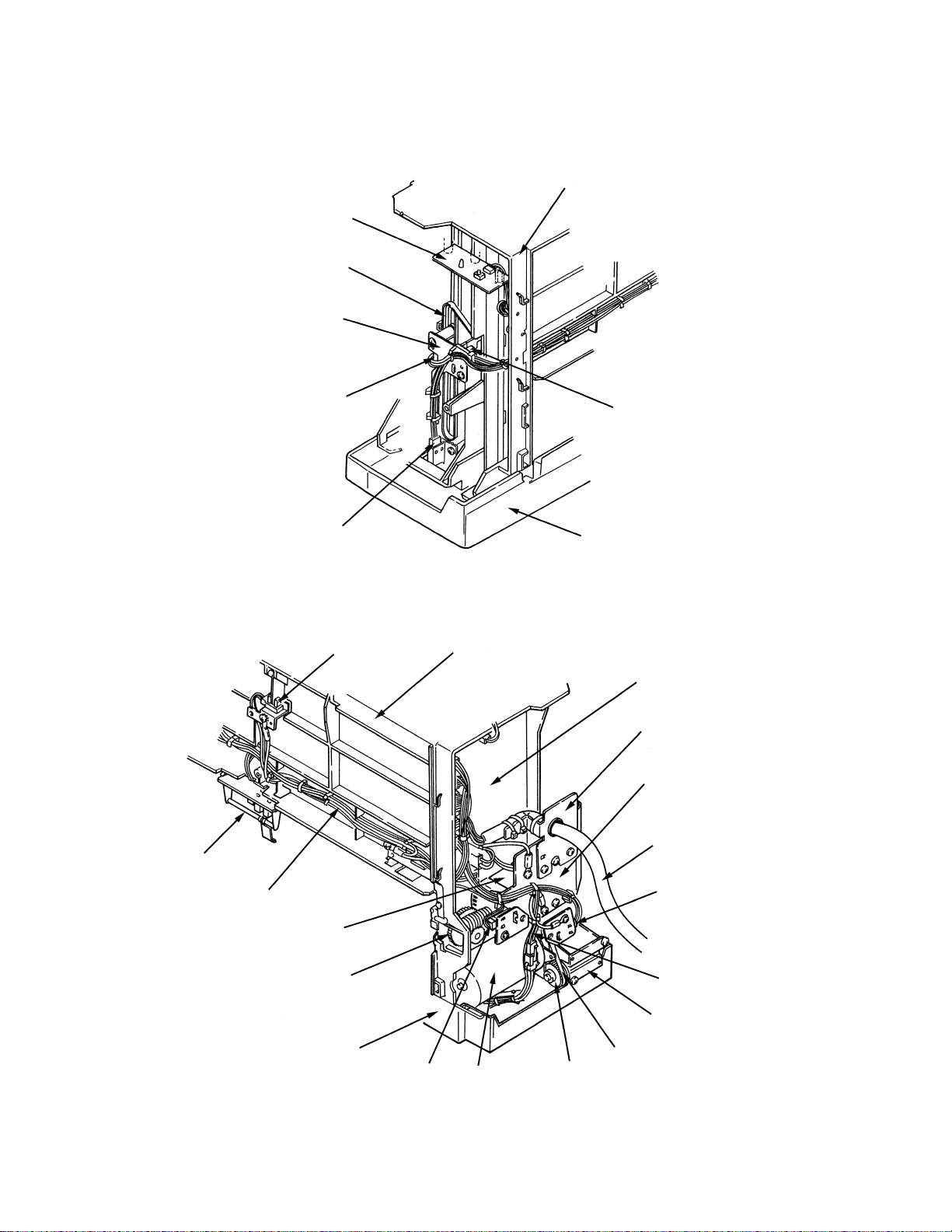
2.2 Front Side View (with Covers Removed)
Display PC board
Bin home position
sensor lever
Bin home position
sensor bracket
Main frame
Upper/lower limit sensor
One-rotation detection sensor
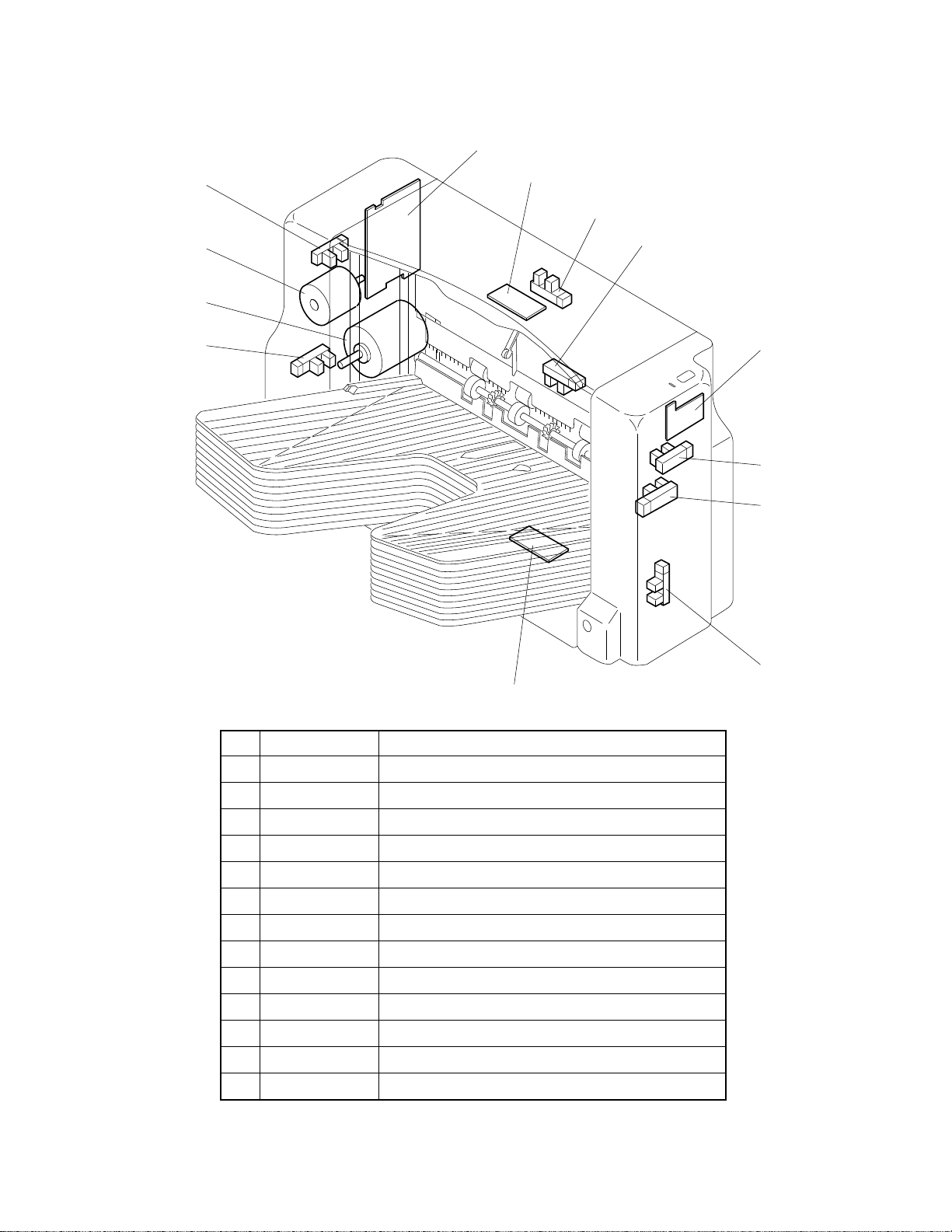
2.3 Rear Side View (with Covers Removed)
Copy-removal
position sensor
Paper path
sensor
Main harness
Paper transport
motor
Main frame
Bin home position sensor
Base cover
Control PC board
Harness sub-bracket
Harness bracket
Interface cable
Bin moving motor
sensor
Paper transport roller
assembly
Base cover
Paper transport
motor sensor
Bin moving
motor
Harness assembly
Worm reinforcement plate
Drive belt
Worm gear assembly
SEP. 1995 C TOSHIBA CORP.MG-1003 NAMES OF MAIN COMPONENTS 2 - 2
3. EXPLANATION OF OPERATION
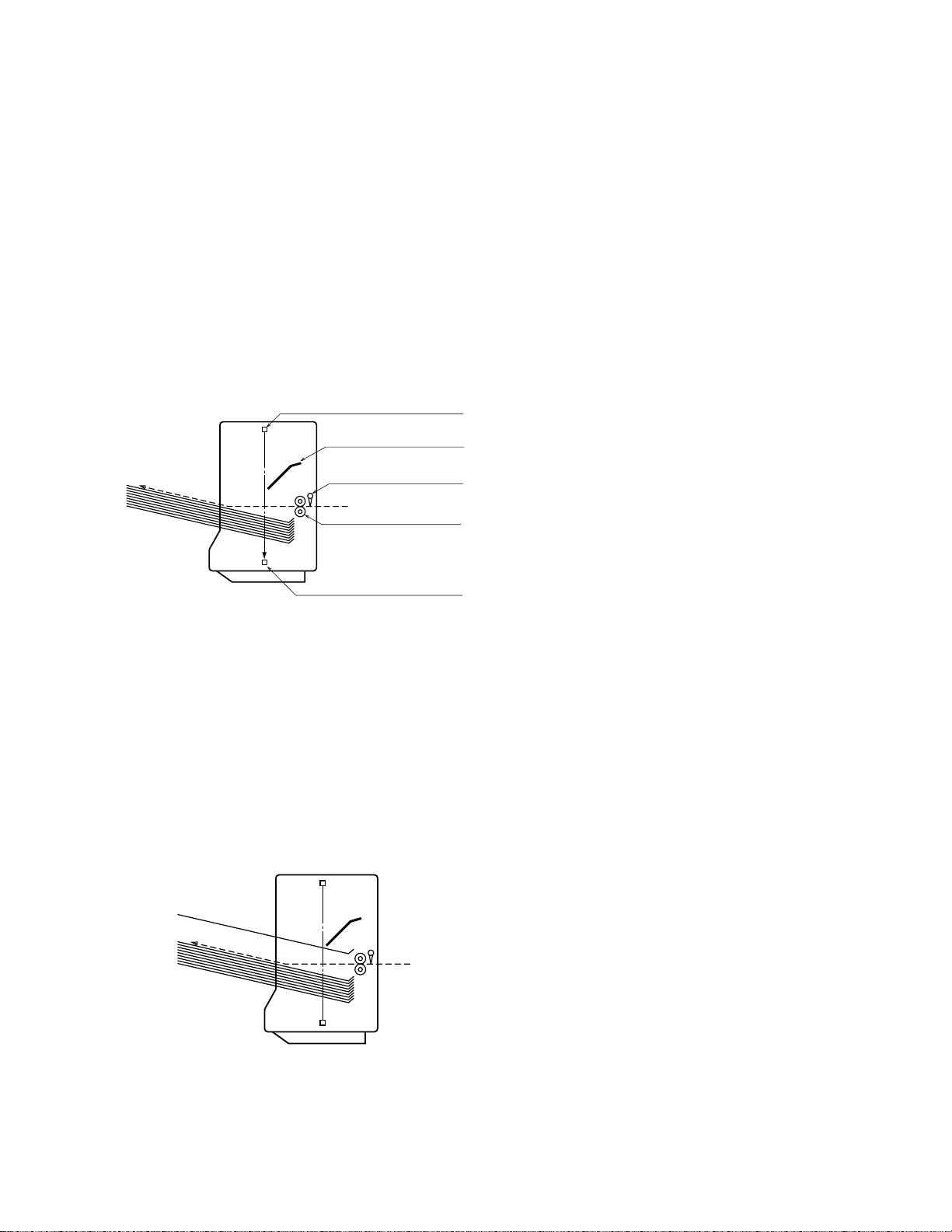
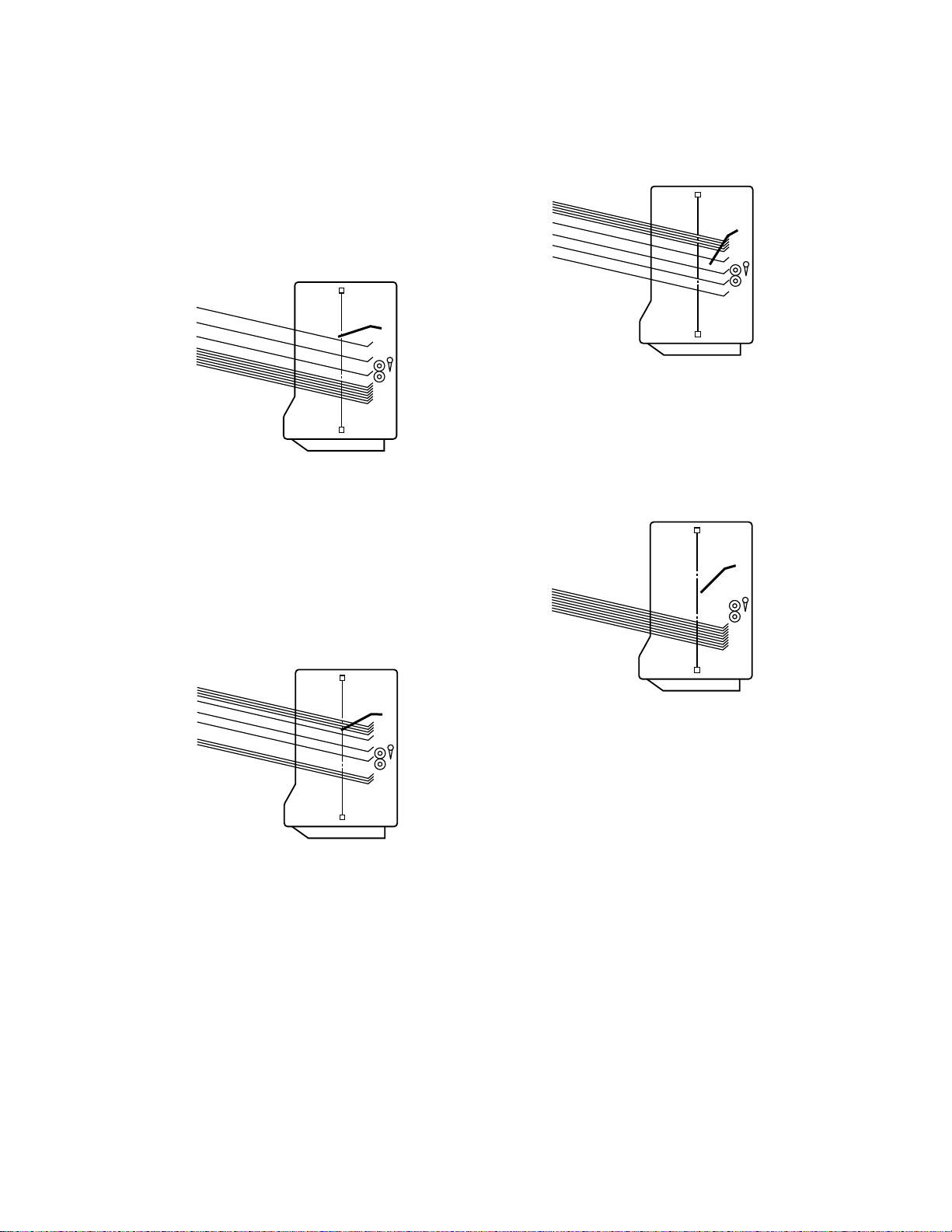
3.1 Non-sort Mode (Cascade Mode)
(1) When the sorter receives a paper exit signal
(EXIT) from the copier, the paper transport
motor starts rotating.
The copy exited from the copier is transported
and exited by the paper transport roller into the
top bin. (Fig. 1-1)
Paper sensor-U
(Light emitting side)
Copy removal
position sensor
Paper path sensor
Paper transport roller
Paper sensor-L
(Light receiving side)
Fig. 1-1
(3) When the limit number of sheets exit into each
bin, the bin moves up. This operation continues
until the last bin.
(4) The exiting of sheets into the last bin continues
until a signal indicating the last sheet is received
from the copier.
(5) When a signal to reset the copy run signal (C-
RUN) is received from the copier, the paper
transport motor stops rotating.
(2) When the preset number of copies exiting from
the copier exceeds the limit number of the top
bin, the sorter goes into the cascade mode; a
fixed time after the last sheet of the limit number
passes the paper path sensor, the top bin (bin
1) moves up. (Fig. 1-2)
Fig. 1-2
SEP. 1995 C TOSHIBA CORP. 3 - 1 MG-1003 EXPLANATION OF OPERATION
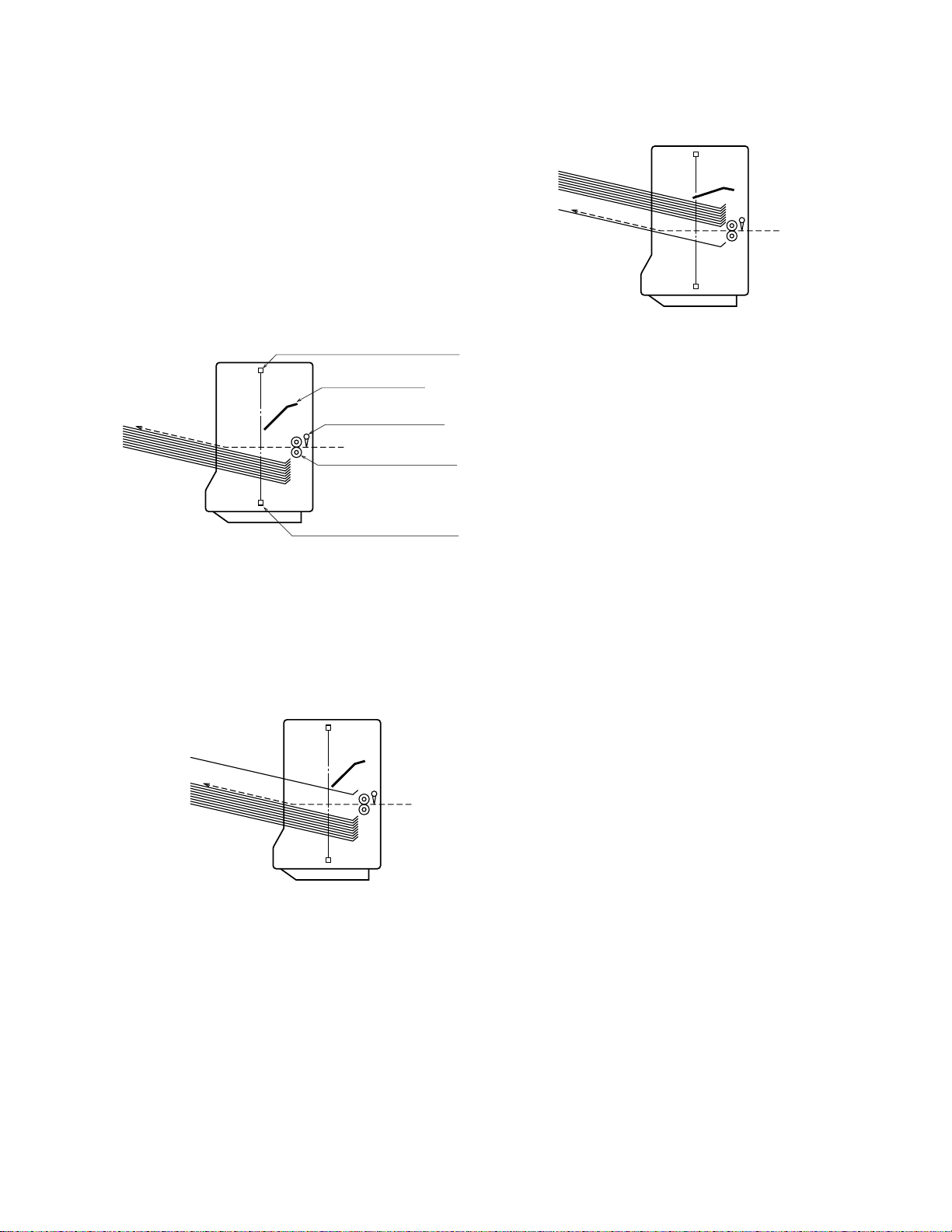
3.2 Sort Mode
(1) When the sorter receives a paper exit signal
(EXIT) from the copier, the paper transport
motor starts rotating.
The copy exited from the copier is transported
and exited by the paper transport roller into the
top bin. (Fig. 2-1)
Paper sensor-U
(Light emitting side)
Copy removal
position sensor
Paper path sensor
Paper transport roller
Paper sensor-L
(Light receiving side)
Fig. 2-1
(2) A fixed timer after the sheet passes the paper
path sensor, the bin moves up (or down). (Fig.
2-2 and Fig. 2-3)
Fig. 2-3
(3) After that, operation in step (2) is repeated until
a signal indicating the last sheet (C-END) is
received from the copier.
(4) For the sheet for which the sorter has received
the last sheet signal (C-END), the sorter does
not move the bin when its passage over the
paper path sensor is detected; a fixed time after
passage of the next sheet is detected, the sorter
changes its moving direction to continue
sorting.
(5) After that, operation in steps (2), (3) and (4) is
repeated.
Fig. 2-2
(6) When the sorter receives a signal to reset the
copy run signal (C-RUN), the paper transport
motor stops rotating.
SEP. 1995 C TOSHIBA CORP.3 - 2MG-1003 EXPLANATION OF OPERATION
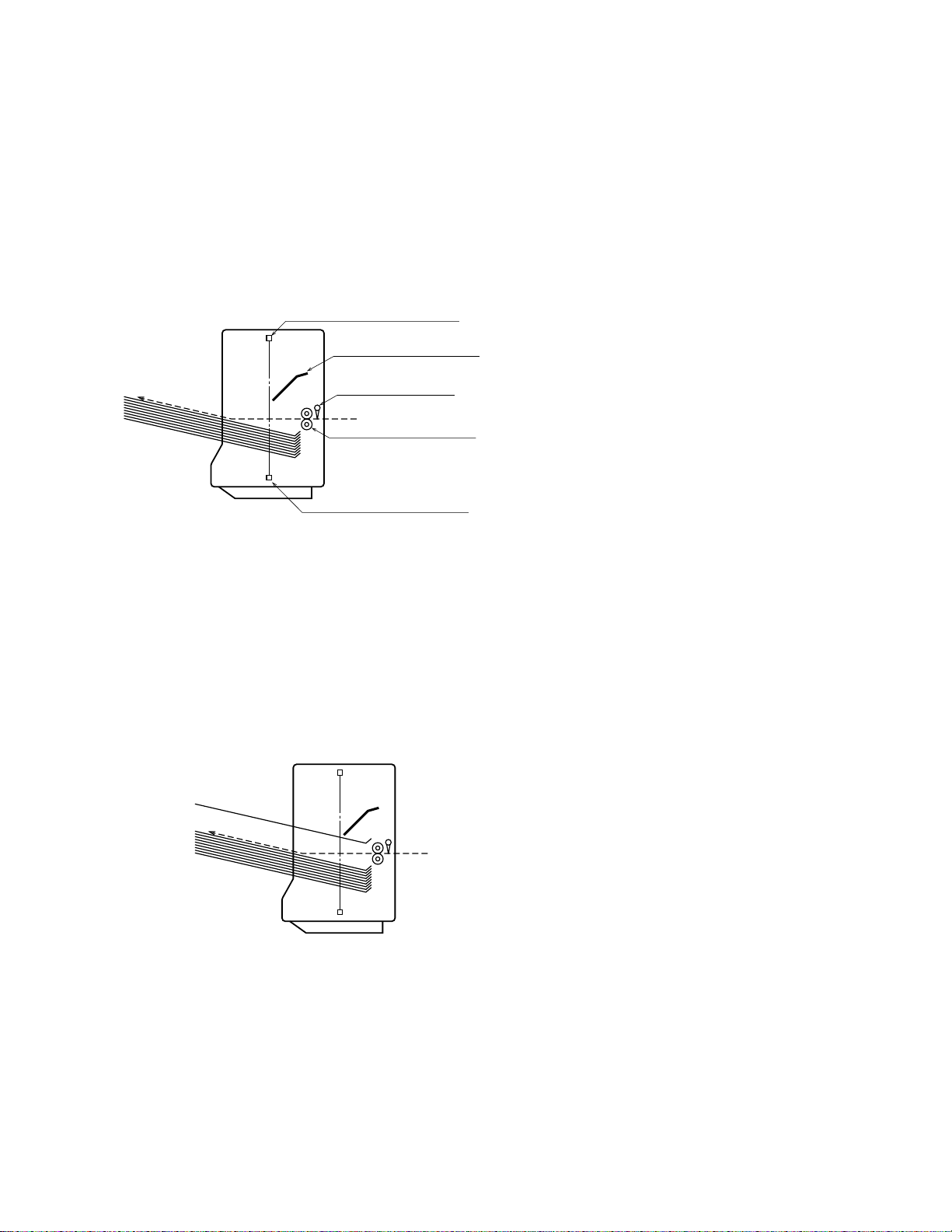
3.3 Group Mode
(1) When the sorter receives a paper exit signal
(EXIT) from the copier, the paper transport
motor starts rotating. The sheet exited from
the copier is transported and exited by the paper
transport roller into the top bin. (Fig. 3-1)
Paper sensor-U
(Light emitting side)
Copy removal position
paper sensor
Paper path sensor
Paper transport roller
Paper sensor-L
(Light receiving side)
Fig. 3-1
(2) Sheets continue exiting into the same bin until
(3) After that, the procedure in step (2) is continued
until a reset signal for the copy run signal (CRUN) is received from the copier.
(4) When a signal to reset the copy run signal (C-
RUN) is received from the copier, the paper
transport motor stops rotating.
the sorter receives a last-sheet signal(C-END)
from the copier.
A fixed time after the sheet for which the lastsheet signal was received passes the paper
path sensor, the bin is moved up. (Fig. 3-2)
Fig. 3-2
SEP. 1995 C TOSHIBA CORP. 3 - 3 MG-1003 EXPLANATION OF OPERATION
3.4 Copy Removal Mode
(1) When a copy removal signal (AUT-REM) is
received from the copier or when the copy
removal key is pressed, the bins move to the
copy removal position. (Fig. 4-1)
Fig. 4-3
(3) When all sheets on the bins are removed, the
Fig. 4-1
(2) When copies are removed from the bins, the
sorter moves up other bins until the copy
removal position sensor detects the presence
of paper.
(Fig. 4-2 and Fig. 4-3)
Fig. 4-2
bins are initialized. (Fig. 4-4)
Fig. 4-4
* When ADF is used, the copy removal signal
is automatically sent from the copier.
SEP. 1995 C TOSHIBA CORP.3 - 4MG-1003 EXPLANATION OF OPERATION
4. MECHANICAL EXPLANATION
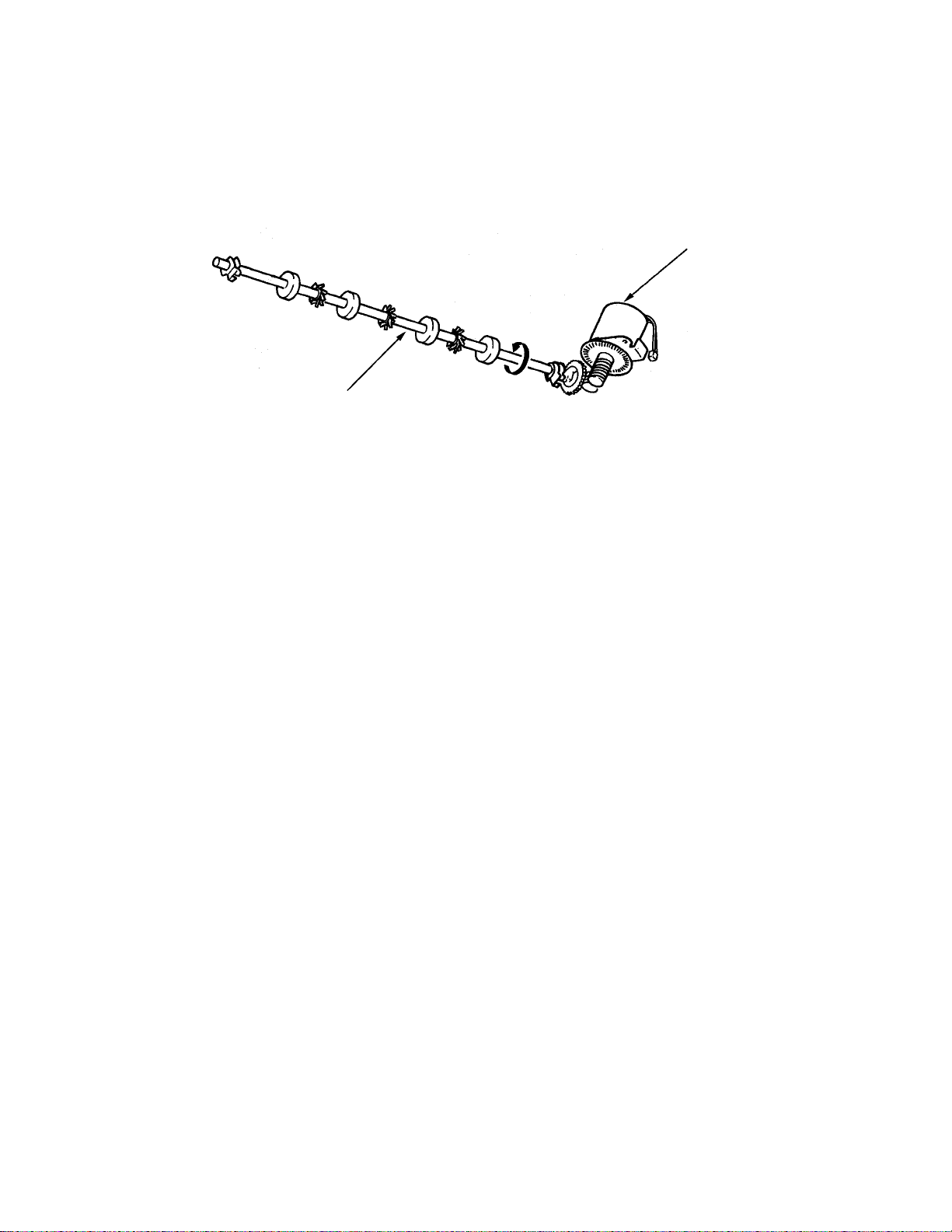
4.1 Paper Transport Mechanism
The drive force of the paper transport motor is transmitted to the paper transport roller through
gears.
Paper transport
motor
Paper transport roller
SEP. 1995 C TOSHIBA CORP. 4 - 1 MG-1003 MECHANICAL EXPLANATION
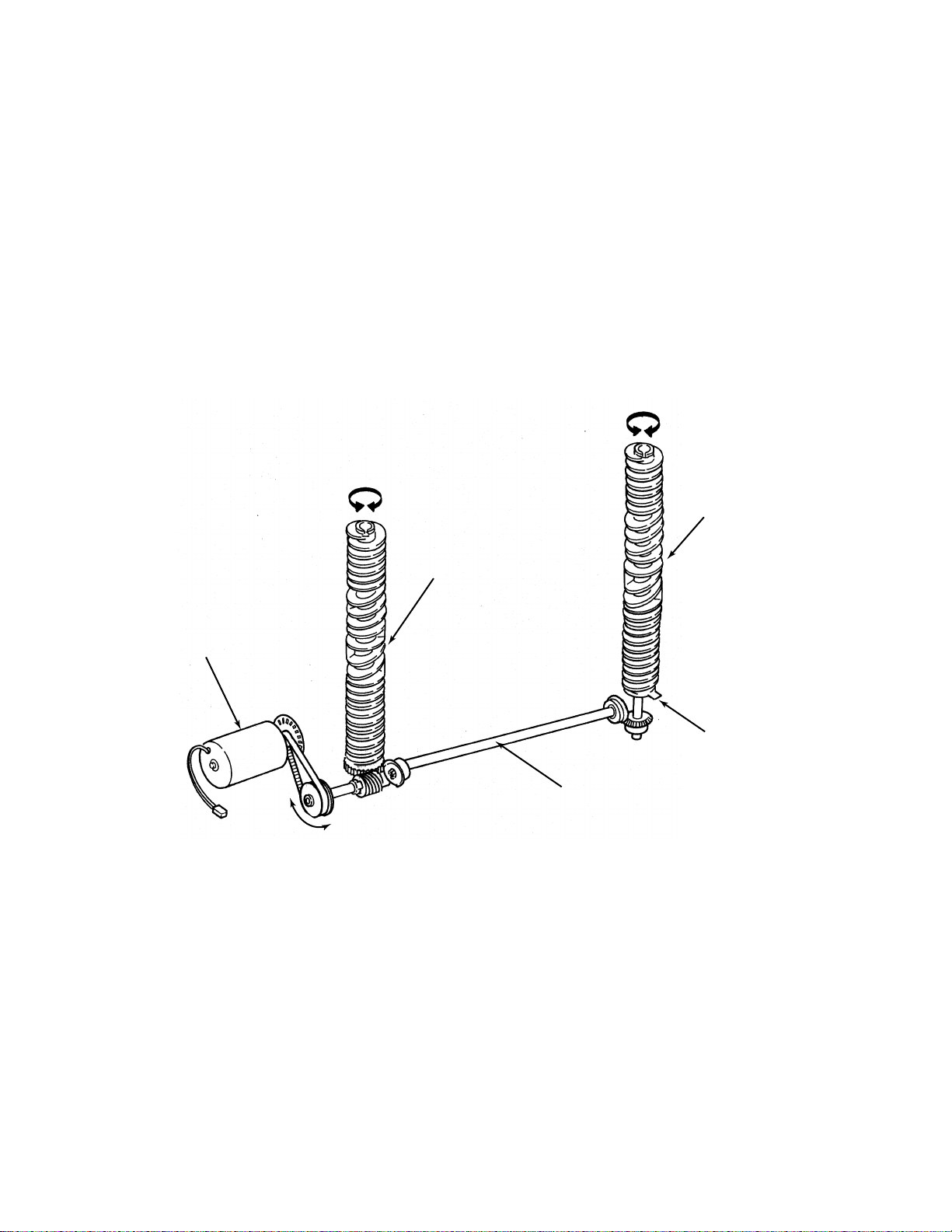
4.2 Bin Up/Down Moving Mechanism
Since this sorter is of a bin moving type, a bin designated moves to the paper transport position
and copy sheets exit into the designated bin.
The drive force of the bin moving motor is transmitted through a timing belt and gears to the spiral
cam 1. At the same time, it is also transmitted through a drive shaft to the spiral cam 2.
The bins are moved up or down by changing the rotation direction of the motor.
The bins are stopped at the preset position by one-rotation detection sensor tab attached to the
spiral cam 2.
Spiral cam 2
Bin moving motor
Spiral cam 1
One-rotation
detection sensor tab
Drive shaft
Down
Up
SEP. 1995 C TOSHIBA CORP.4 - 2MG-1003 MECHANICAL EXPLANATION
5. NAMES AND FUNCTIONS OF MAIN ELECTRICAL PARTS
5.1 Sensors and Switches
Symbol
SEN1
SEN2
SEN3
SEN4
SEN5
SEN6
SEN7
SEN8
Paper path sensor
Bin home position sensor
One-rotation detection sensor
Copy removal position sensor
Paper sensor-L and -U
Bin moving motor sensor
Paper transport motor sensor
Upper/lower limit sensor
5.2 Motors
Symbol
M1
M2
Paper transport motor
Bin moving motor
Name
Name
Function
Detects paper when its lead edge is sent to the
paper transport roller.
Detects the bin home position.
Detects the bin stop position.
Detects the paper removal position.
Detects the paper presence on the tray.
Detects bin moving motor rotation.
Detects paper transport motor rotation.
Detects the bin limit positions.
Operation and function
Drives the paper transport roller.
Drives the spiral cams that move up and down the bins.
Remarks
Photo-interrupter
Photo-interrupter
Photo-interrupter
Photo-interrupter
Transmission type
Photo-interrupter
Photo-interrupter
Photo-interrupter
Remarks
DC brush motor
DC brush motor
SEP. 1995 C TOSHIBA CORP. 5 - 1 MG-1003 MAIN ELECTRICAL PARTS
5.3 Electrical Parts Location
!™
8
0
!£
7
6
4
1
!¡
2
9
NO
SEN1
1
SEN2
2
SEN3
3
SEN4
4
SEN5
5
SEN5LD
6
SEN6
7
SEN7
8
SEN8
9
M1
!º
PBA-OPPANEL-T
!¡
PBA-CONTROL-T
!™
M2
!£
Symbol
3
5
Description
Paper path sensor
Home position sensor
One-rotation detection sensor
Copy-removal position sensor
Paper sensor-L (Print wiring board assembly)
Paper sensor-U (LED)
Bin moving motor sensor
Paper transport motor sensor
Upper/Lower limit sensor
Paper transport motor
Print wiring board assembly for display
Print wiring board assembly for control
Bin moving motor
SEP. 1995 C TOSHIBA CORP.5 - 2MG-1003 MAIN ELECTRICAL PARTS
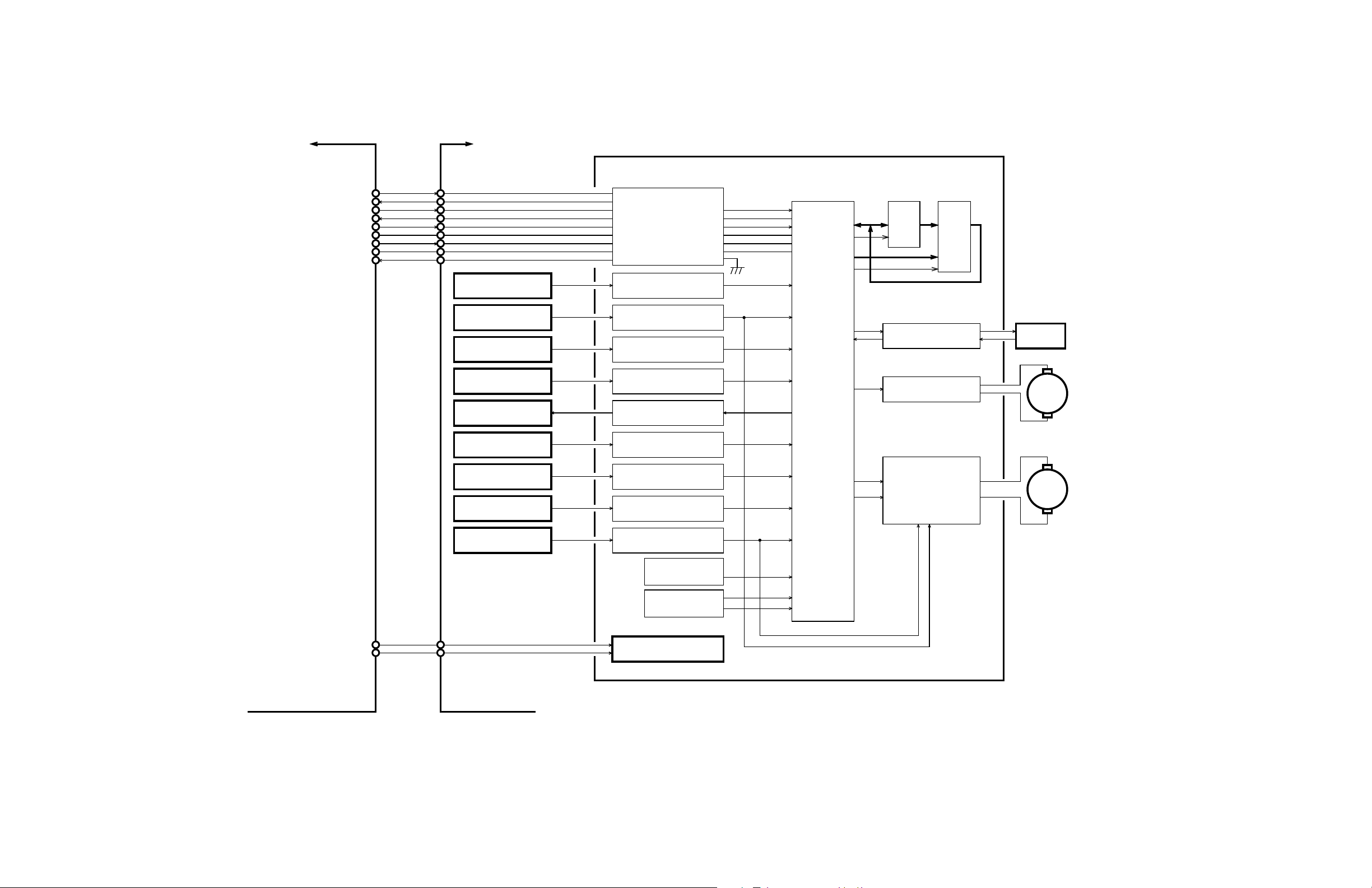
6. BLOCK DIAGRAM FOR TRANSMISSION/RECEPTION OF SIGNALS
Copier side
REQ-S
S-ACK
ACKB-S
S-REQ
TXD
SGND
RXD
SGND
CNT
Sorter side
Paper path sensor
Bin home position
sensor
One-rotation detection
sensor
Copy removal position
sensor
Paper presence LED
Paper presence
sensor
Bin moving motor
rotation detection
Paper transport motor
rotation detection
Upper/Lower limit
sensor
SEN1
SEN2
SEN3
SEN4
SEN5CLK
SEN5
SEN6
SEN7
SEN8
Control PC board
Serial interface
Paper path sensor input
section
Bin home position sensor
input section
One-rotation detection
sensor input section
Copy removal position
sensor input section
Paper presence LED
CLK output section
Paper presence sensor
input section
Bin moving motor rotation
detection CLK input
section
Paper transport motor
rotation detection CLK
input section
Upper/Lower limit sensor
input section
SEN1
SEN2
SEN3
SEN4
SEN5CLK
SEN5
SEN6
SEN7
SEN8
CPU
LATCH
ROM
256K
Display section logic
Paper transport motor
(M1) control section
Bin moving motor (M2)
control section
Display
PC board
M1
Paper transport motor
(M1)
M2
Bin moving motor (M2)
System
reset section
System
clock section
DC24V
Power input section
SEP. 1995 © TOSHIBA CORP. MG-1003 TRANSMISSION/RECEPTION OF SIGNALS6 - 1
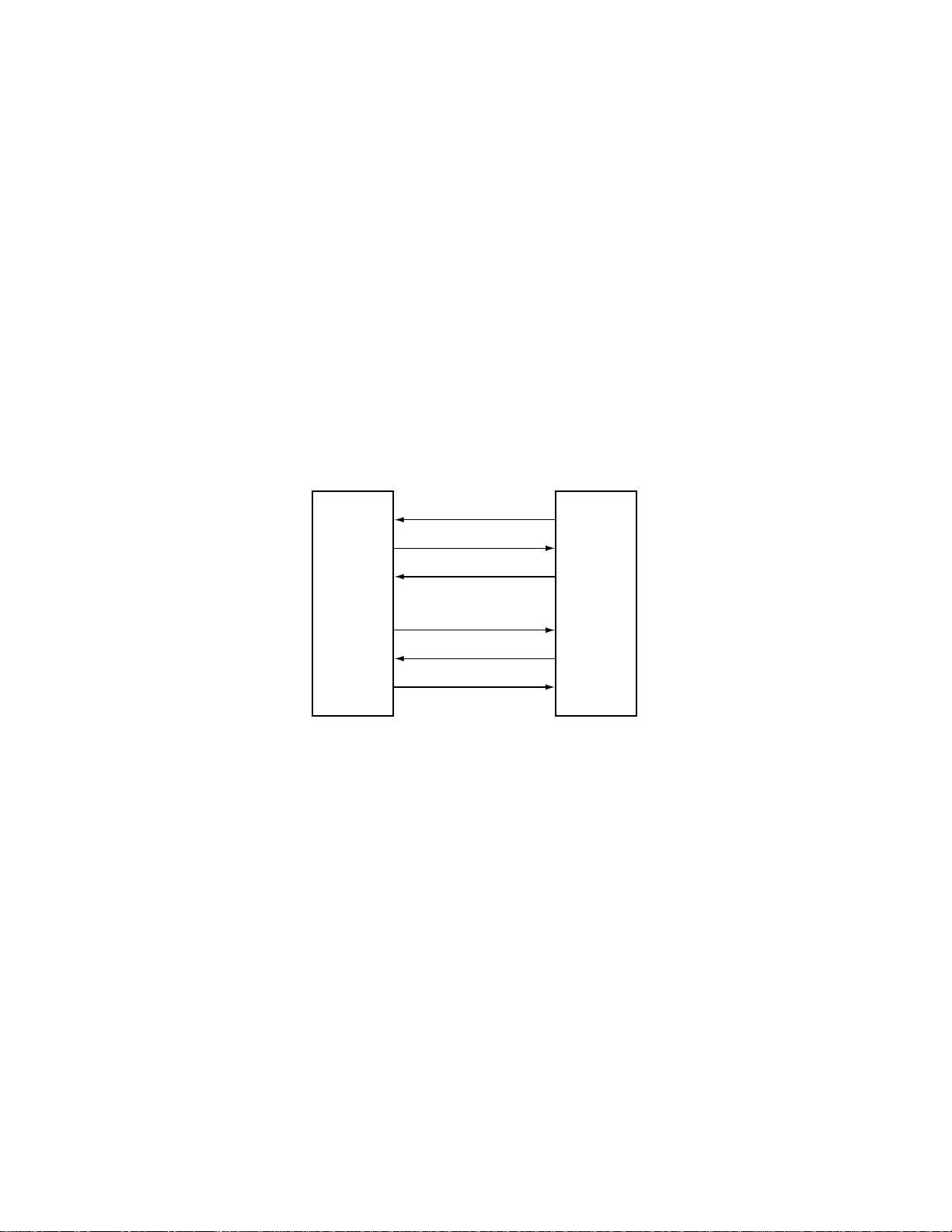
7. INTERFACE SIGNALS
The sending and receiving of signals between the copier and the sorter is conducted by using the
six lines as show below:
REQ1 ..................... Communication request signal (form the copier to the sorter)
REQ2 ..................... Communication request signal (from the sorter to the copier)
ACK1...................... Communication request response signal (from the sorter to the copier)
ACK2...................... Communication request response signal (from the copier to the sorter)
S-TXD .................... Data sent from the copier to the sorter
S-RXD .................... Data sent from the sorter to the copier
Since data transmission between the copier and the sorter (S-TXD and S-RXD) is conducted by
means of serial transmission, it is not possible to check for the correct data transmission in the field.
CopierSorter
REQ1
ACK1
S-TXD
REQ2
ACK2
S-RXD
7 - 1SEP. 1995 C TOSHIBA CORP. MG-1003 INTERFACE SIGNALS
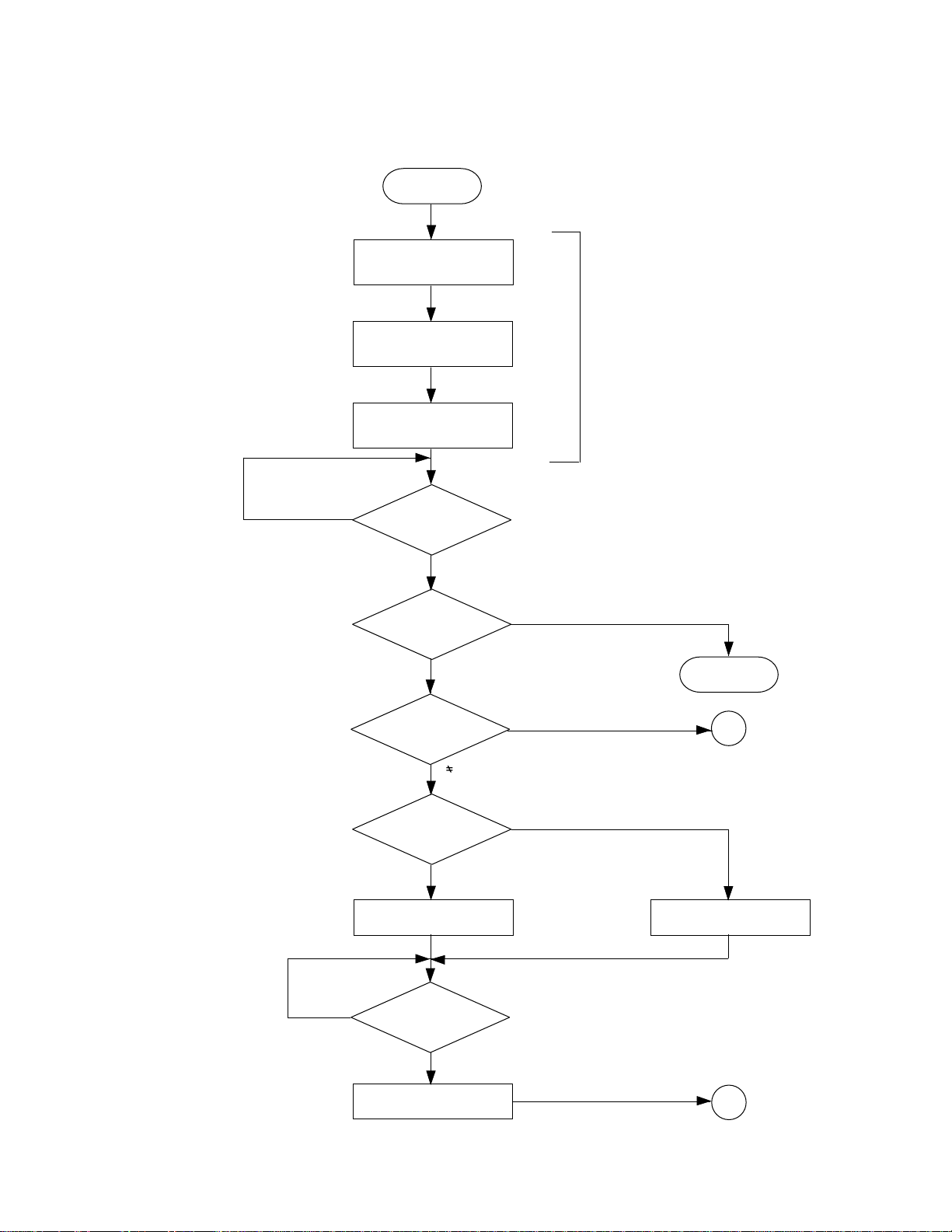
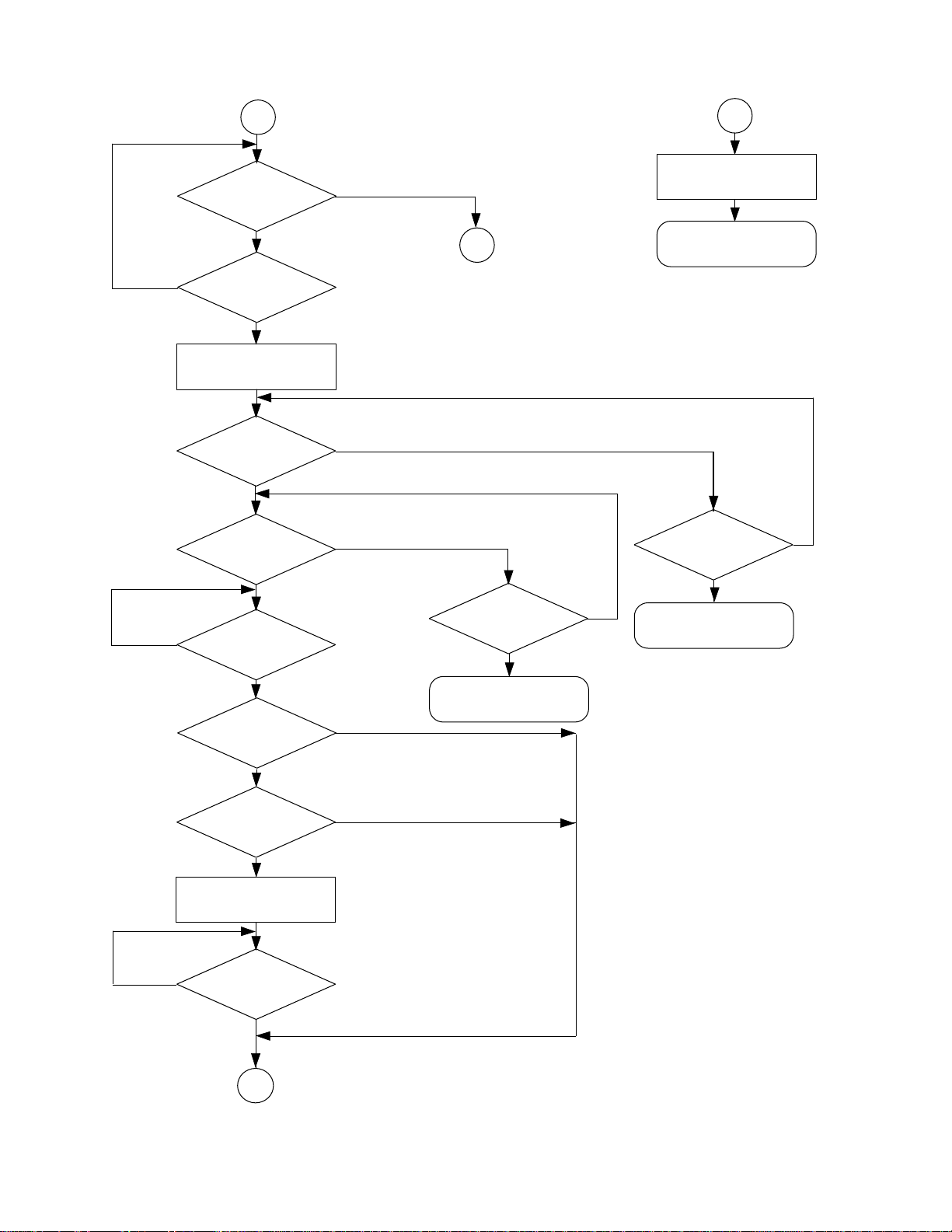
8. OPERATION FLOW CHART
8.1 Non-Sort/Cascade Mode
Stand by
Confirms that the non-sort
mode is selected.
Copy quantity is set at the
copier.
PRINT key is pressed.
NO
Operation
start signal
received?
Paper path
sensor ON?
Target bin?
YES
NO
Present position
User's operation
YES
Sorter jam
=Present position
1
Target bin?
< Present bin
> Present bin
Bin starts moving up.
NO
SEP. 1995 C TOSHIBA CORP. 8 - 1 MG-1003 OPERATION FLOW CHART
Target bin has
arrived?
YES
Bin stops moving.
Bin starts moving down.
1
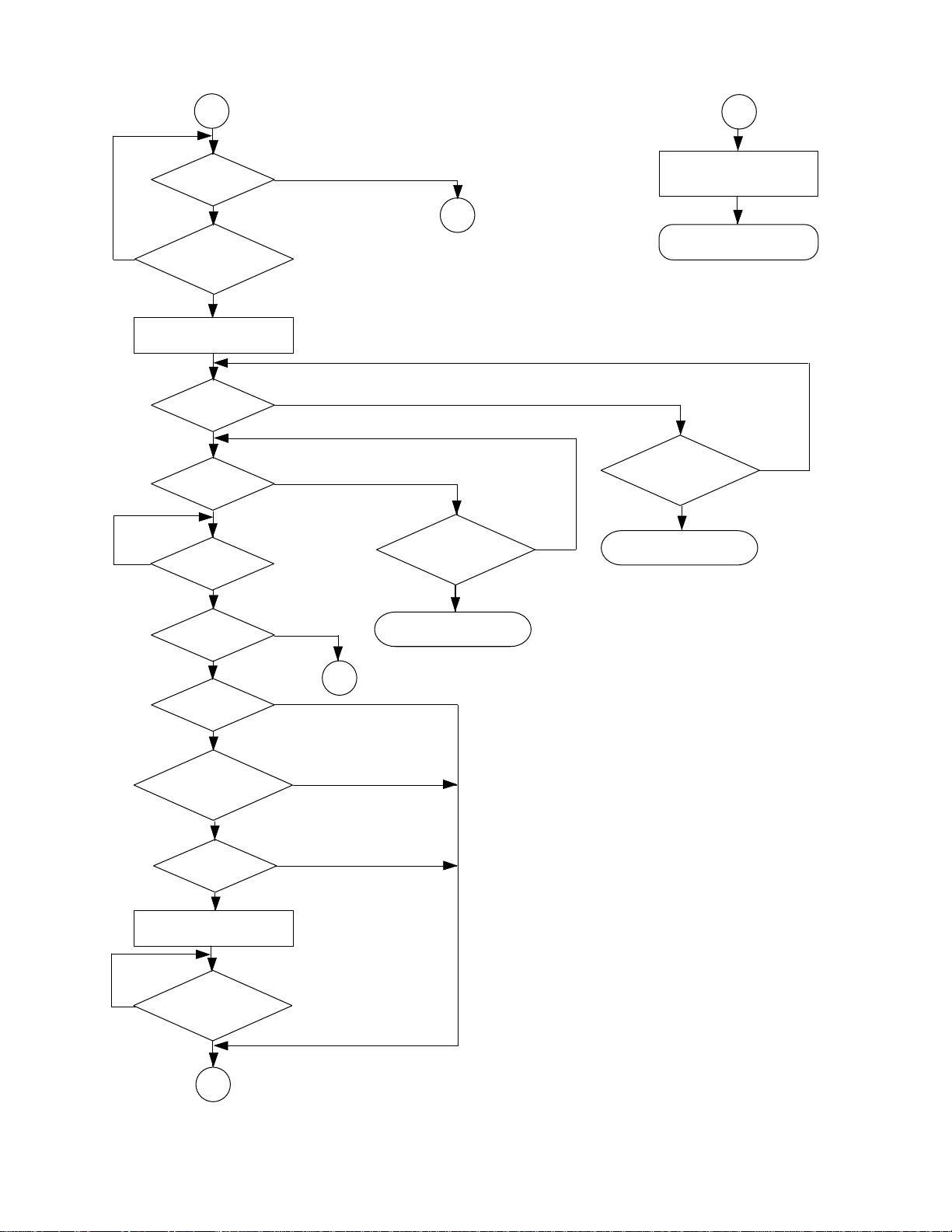
1
2
NO
NO
Copying?
YES
Paper exit
command
received?
YES
Paper transport
motor starts.
Paper path
sensor ON?
YES
Paper path
sensor OFF?
YES
50msec
has elapsed?
YES
NO
NO
NO
2
Jam timer
has timed out?
YES
NO
Paper transport motor
stops moving.
Jam timer
has timed out?
YES
Sorter jam
Complete
NO
Cascade mode?
Received number
Present position?
Bin starts moving up.
NO
finished moving?
YES
Last sheet?
NO
YES
of copies?
> Max. No. of copies
< Bin 10
Bin has
YES
1
NO
< Max. No. of copies
> Bin 10
Sorter jam
1
MG-1003 OPERATION FLOW CHART
8 - 2
SEP. 1995 C TOSHIBA CORP.
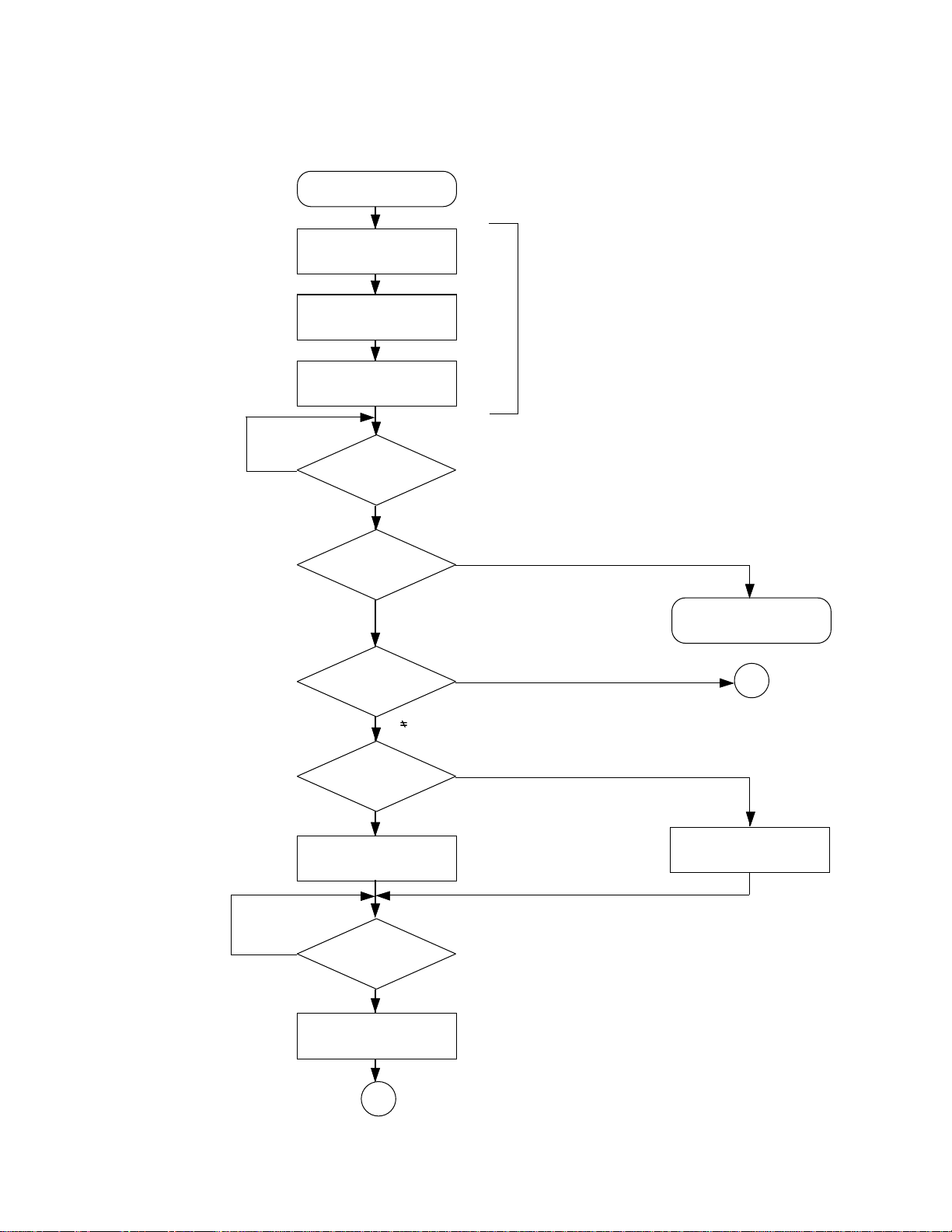
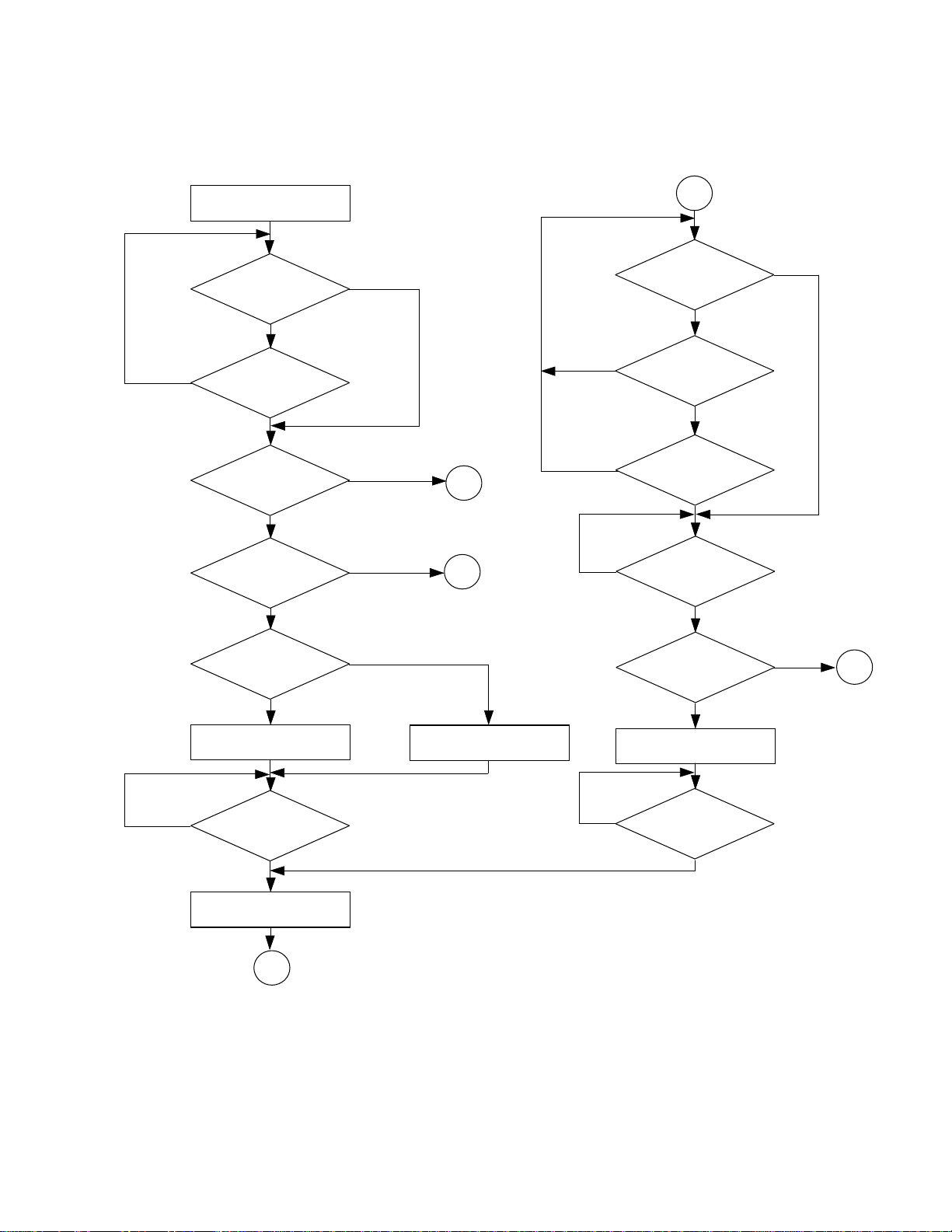
8.2 Sort Mode
Stand by
Confirms that the sort
mode is selected.
Copy quantity set at the
PRINT key is pressed.
NO
Operation
start signal received?
Paper path
sensor ON?
Target bin?
copier.
YES
NO
User's operation
YES
Sorter jam
= Present position
1
Present position
< Present bin
Bin starts moving down.
NO
Target bin?
> Present bin
Bin starts moving up.
Target bin
has arrived?
YES
Bin stops moving
1
SEP. 1995 C TOSHIBA CORP. 8 - 3 MG-1003 OPERATION FLOW CHART
1 2
Paper transport motor
Copying?
NO
stops moving.
NO
NO
YES
Paper exit command
received?
YES
Paper transport motor
starts.
Paper path
sensor ON?
YES
Paper path
sensor OFF?
YES
50msec has elapsed?
NO
NO
2
Jam timer has
timed out?
YES
NO
Complete
Jam timer has
timed out?
YES
Sorter jam
NO
YES
Last sheet?
YES
Present moving
direction?
Up
Bin changes to
downward direction.
1
MG-1003 OPERATION FLOW CHART
NO
Down
Sorter jam
Bin changes to upward
direction.
8 - 4
NO
Bin starts moving.
Bin has
finished moving?
YES
SEP. 1995 C TOSHIBA CORP.
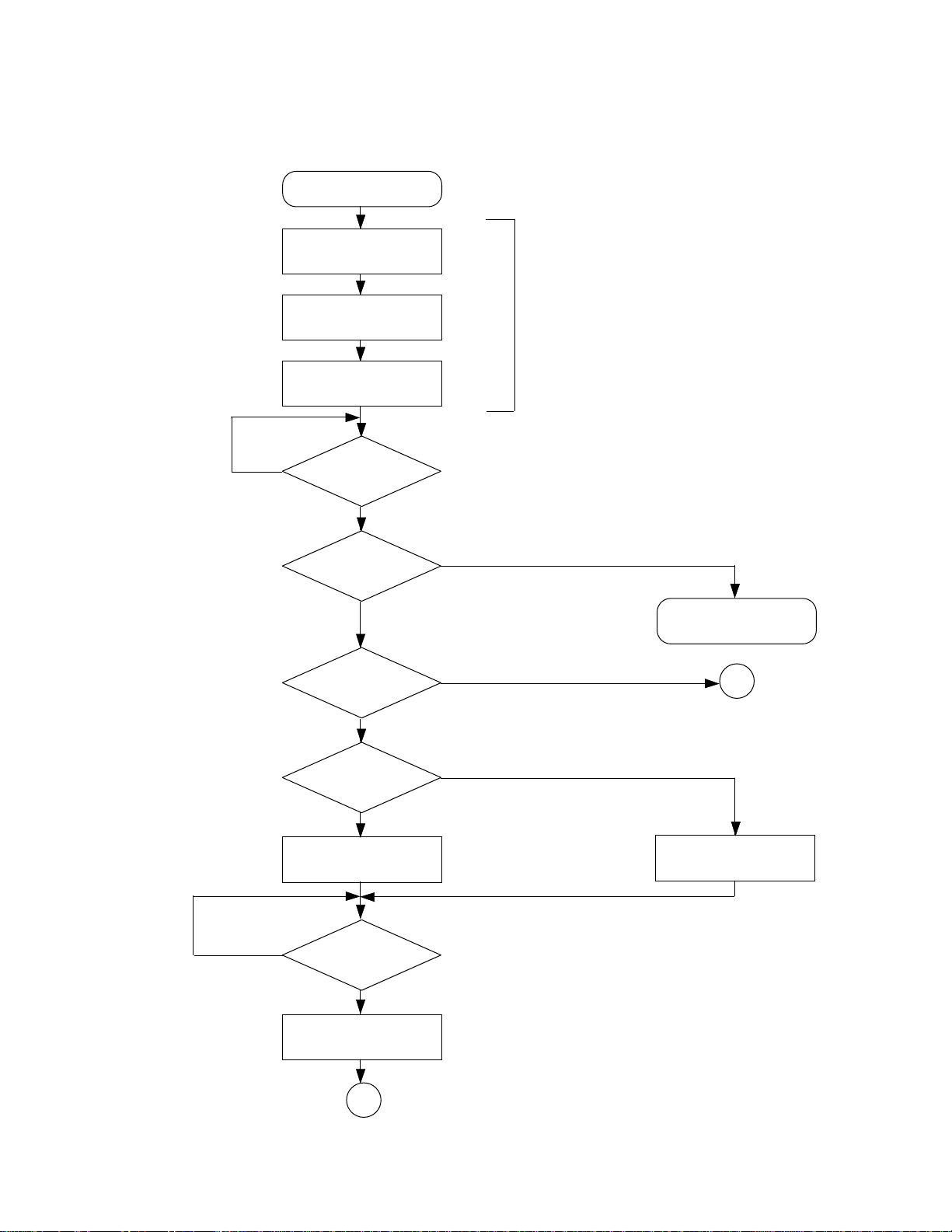
8.3 Group Mode
Stand by
Confirms that the group
mode is selected.
NO
Copy quantity is set at
the copier.
PRINT key is pressed.
Operation start
signal received?
YES
Paper path
sensor ON?
NO
Target bin?
≠ Present position
User's operation
YES
Sorter jam
= Present position
1
< Present bin
Bin starts moving down.
NO
Target bin?
> Present bin
Bin starts moving up.
Target bin
has arrived?
YES
Bin stops moving.
1
SEP. 1995 C TOSHIBA CORP. 8 - 5 MG-1003 OPERATION FLOW CHART
1
Copying
NO
2
Paper transport motor
stops moving.
NO
NO
YES
Paper exit command
received?
YES
Paper transport motor
starts.
Paper path
sensor ON?
YES
Paper path
sensor OFF?
YES
50msec has elapsed?
NO
NO
2
Jam timer has
timed out?
YES
NO
Complete
Jam timer has
timed out?
YES
Sorter jam
NO
NO
YES
Last sheet?
YES
Present position?
< Bin 10
Bin Starts moving up.
Bin has
finished moving?
YES
1
Sorter jam
NO
> Bin 10
MG-1003 OPERATION FLOW CHART
8 - 6
SEP. 1995 C TOSHIBA CORP.
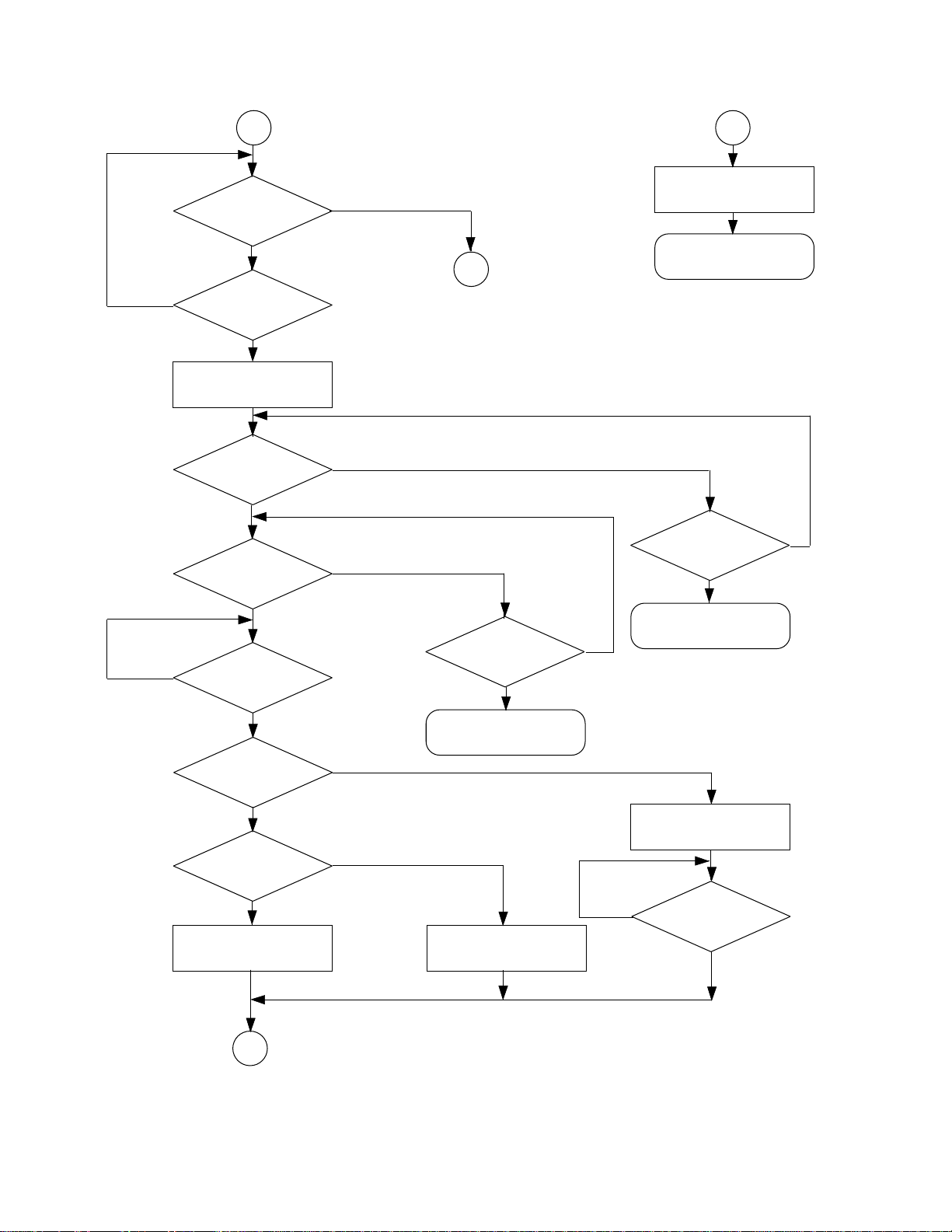
8.4 Copy Removal Mode
NO
Stand by
Copy removal
command received?
NO
Copy removal
key OFF?
YES
Possible to move
to the copy removal
position?
YES
Paper on bin?
YES
YES
NO
NO
3
2
YES
> Bin 10
NO
1
Paper on bin?
YES
Copy removal
position sensor ON?
NO
Present bin position?
< Bin 10
1.5 sec has elapsed?
YES
NO
NO
Present bin position?
< Bin 4
Bin starts moving up.
Copy removal position?
YES
Bin stops moving
1
> Bin 4
Bin starts moving down.
NO
Paper on bin?
YES
Bin starts moving up.
Copy removal
position sensor ON?
YES
NO
3
SEP. 1995 C TOSHIBA CORP. 8 - 7 MG-1003 OPERATION FLOW CHART
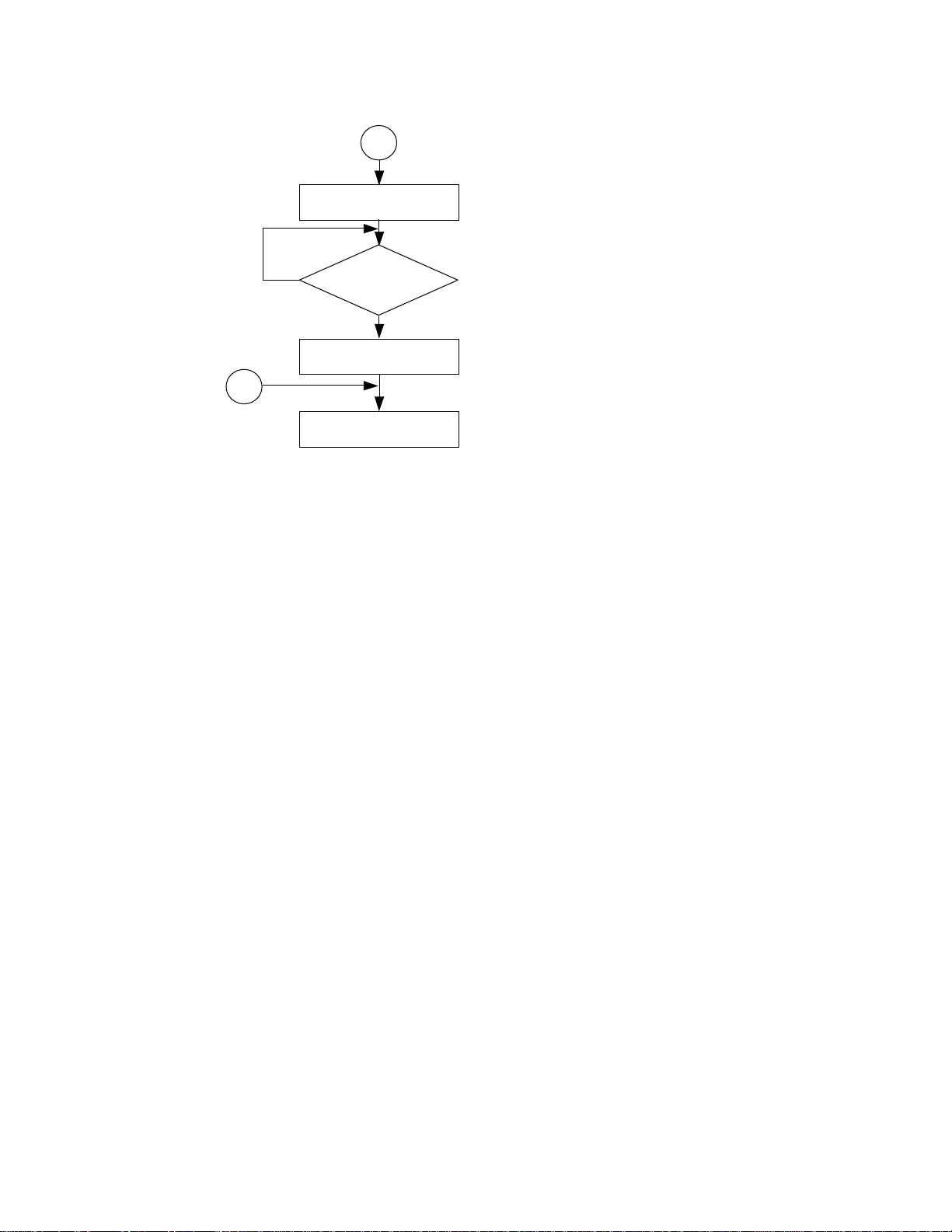
3
Bin starts moving down.
2
NO
Bin home position
sensor ON?
YES
Bin stops moving.
Complete.
MG-1003 OPERATION FLOW CHART
8 - 8
SEP. 1995 C TOSHIBA CORP.
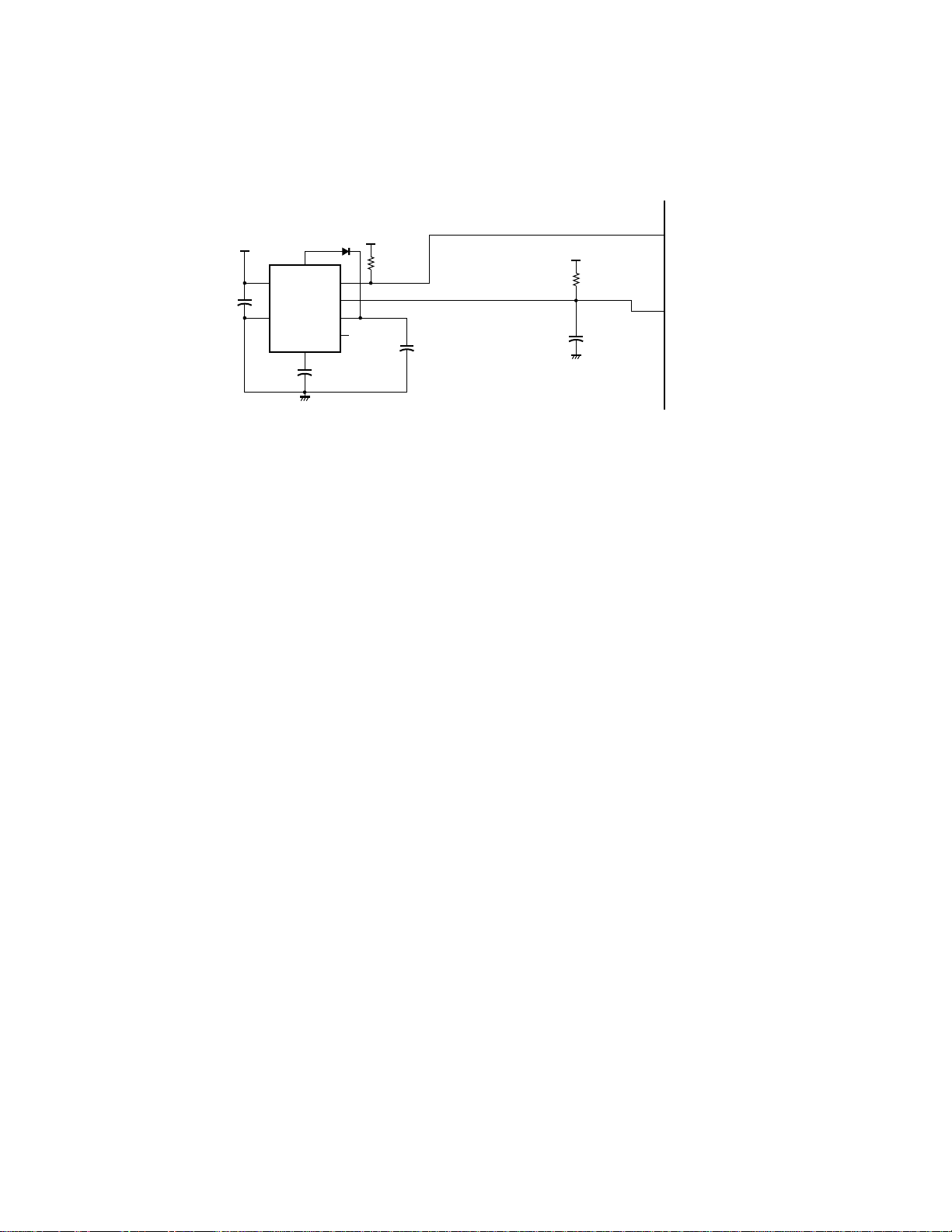
9. EXPLANATION OF CIRCUIT OPERATION
9.1 Reset Circuit
This is a reset circuit.
6
CPU
IC11
7
C17
+5V
+5V
D5
2
1
1
A
*RESIC5
VREF
C22
K
R72
2
3
CK
8
1
CT
6
C18
1
2
2
RES
5
VCC
1
42
GND
VS
7
1
2
SGND
C11
R33
+5V
SGND
1
2
1
2
It is a circuit for generating reset signals for CPU and consists for IC5 and its peripheral circuits.
IC5 has all reset functions concentrated on it and performs such functions as power-on resetting at
the time of power on, resetting when +5V drops abnormally as well as watch-dog timer function.
After the power is turned on, when the power line (+5V line) becomes approx. 0.8V, IC5 starts
functioning, making its pin 8 L level to reset CPU. This reset state is maintained until a fixed time after the
power line has reached approx. 4.3V. The reset hold time is determined by the capacitance of C18,
approx. 100msec in this circuit. After the reset hold time expires, pin 8 of IC5 becomes H level, clearing
the reset state. This causes CPU to start its operation.
Furthermore, when the power line voltage drops to approx. 4.2V, pin 8 of IC5 also becomes L level
and maintains the reset state as long as the power supply voltage is below 4.3V. The reset state is
cleared approx. 100 msec after the power supply voltage has recovered to 4.3V.
Pin 3 of IC5 provides a clock signal input terminal for a watch dog timer and uses the signal output
from pin 6 of CPU. While CPU is functioning normally, this clock signal is a regular pulse signal of a 5msec period with a duty of 50%. But when an abnormal condition such as a CPU runaway occurs, the
clock signal ceases to be output. IC5 always monitors this clock signal and when it stops being generated,
a fixed time later IC5 makes pin 8 L level to produce a reset signal. The clock monitoring time is also
determined by the capacitance of C18 and the same length of 100 msec as the hold time for power-on
resetting.
SEP. 1995 C TOSHIBA CORP. 9 - 1 MG-1003 CIRCUIT OPERATION
 Loading...
Loading...