

Page 1

www.topconpositioning.com
X30 • X25
Console
Athene Spreader Control
Operator’s Manual
Page 2

Page 3
Athene Spreader Controller
Operator Manual
Part Number: 1014197-01
Rev Number: 1.0
For use with Software Version 3.22
© Copyright Topcon Precision Agriculture
June 2016
All contents in this manual are copyrighted by Topcon. All rights reserved. The information
contained herein may not be used, accessed, copied, stored, displayed, sold, modified, published or
distributed, or otherwise reproduced without express written consent from Topcon.
www.topconpa.com
Page 4

Page 5

i
Preface
This manual provides information about operating and maintaining this Topcon
Precision Agriculture product. Correct use and servicing is important for safe and
reliable operation of the product.
It is very important that you take the time to read this manual before using the
product.
Information in this manual is current at the time of publication. A system may vary
slightly. The manufacturer reserves the right to redesign and change the system as
necessary without notification.
Terms and Conditions
Note:Please read these Terms and Conditions carefully.
General
APPLICATION - You accept these Terms and Conditions by purchasing the product from
Topcon Precision Agriculture (TPA) or from one of TPA’s product dealers.
COPYRIGHT - All information contained in this manual is the intellectual property of, and
copyrighted material of TPA. All rights are reserved. You may not use, access, copy, store,
display, create derivative works of, sell, modify, publish, distribute, or allow any third parties
access to, any graphics, content, information or data in this manual without TPA’s express written
consent and may only use such information for the care and operation of your product. The
information and data in this manual are a valuable asset of TPA and are developed by the
expenditure of considerable work, time and money, and are the result of original selection,
coordination and arrangement by TPA.
TRADEMARKS – ZYNX, PROSTEER, EAGLE, KEE Technologies, Topcon, Topcon
Positioning Systems and Topcon Precision Agriculture are trademarks or registered trademarks of
the Topcon Group of companies. Microsoft and Windows are trademarks or registered trademarks
in the United States and/or other countries of Microsoft Corporation. Product and company names
mentioned herein may be trademarks of their respective owners.
WEBSITE AND OTHER STATEMENTS - No statement contained at the website of TPA or
any other Topcon Group company or in any other advertisements or TPA literature or made by an
employee or independent contractor of TPA modifies these Terms and Conditions.
IMPORTANT: SAFETY - Improper use of the product can lead to death or injury to persons,
damage to property and/or malfunction of the product. The product should only be repaired by
authorized TPA service centers. You should closely review the safety warnings and directions as
to the proper use of the product in this manual and at all times comply with the same.
Limited Warranty
ELECTRONIC AND MECHANICAL COMPONENTS -TPA warrants that the electronic
components manufactured by TPA shall be free of defects in materials and workmanship for a
period of one year from the original date of shipment to the dealer. TPA warrants that all valves,
hoses, cables and mechanical parts manufactured by TPA shall be free of defects in materials and
workmanship for a period of 90 days from the date of purchase.
Page 6

ii
RETURN AND REPAIR - During the respective warranty periods, any of the above items
found defective may be shipped to TPA for repair. TPA will promptly repair or replace the
defective item at no charge, and ship it back to you. You must pay the shipping and handling
charges in respect of the same. Calibration of components, labor and travel expenses incurred
for in-field removal and replacement of components are not covered in this warranty policy. The
foregoing warranty shall NOT apply to damage or defects resulting from:
(i) disaster, accident or abuse
(ii) normal wear and tear
(iii) improper use and/or maintenance
(iv) unauthorized modifications of the product; and/or
(v) use of the product in combination with other products not supplied or specified by TPA.
Software accompanying any product is licensed for use in connection with the product and not
sold. Use of software that is provided with a separate end user license agreement (“EULA”)
will be subject to the terms and conditions, including those relating to limited warranty, of the
applicable EULA, notwithstanding anything in these Terms and Conditions to the contrary.
WARRANTY DISCLAIMER -OTHER THAN FOR THE ABOVE WARRANTIES,
WARRANTIES PROVIDED IN AN APPLICABLE WARRANTY CARD,
APPENDIX OR END USER LICENSE AGREEMENT, THIS MANUAL, THE
PRODUCT AND RELATED SOFTWARE ARE PROVIDE ‘AS-IS’. THERE ARE
NO OTHER WARRANTIES AND TO THE EXTENT ALLOWED BY LAW TPA
EXCLUDES ALL IMPLIED TERMS, CONDITIONS AND WARRANTIES IN
RESPECT OF THE MANUAL AND THE PRODUCT (INCLUDING ANY IMPLIED
WARRANTY OR MERCHANTABILITY OR FITNESS FOR ANY PARTICULAR
USE OR PURPOSE). TPA IS NOT RESPONSIBLE FOR THE OPERATION OF
GNSS SATELLITES AND/OR AVAILABILITY, CONTINUITY, ACCURACY, OR
INTEGRITY OF GNSS SATELLITE SIGNALS.
LIABILITY LIMIT AND INDEMNITY - TPA and its dealers, agents and representatives
shall not be liable for technical or editorial errors or omissions contained herein or for special,
indirect, economic, incidental or consequential damages resulting from the furnishing,
performance or use of this material, the product or its accompanying software (including where
TPA has been advised of the possibility of such damage). Such disclaimed damages include but
are not limited to loss of time, loss or destruction of data, loss of profit, savings or revenue or
loss of or damage to the product. You shall defend, indemnify and hold TPA harmless from and
against any claims, actions, suits, damages, losses, liabilities and costs (including attorneys’ fees)
arising from, or relating to (a) your operation use, or maintenance of the product and/or software
other than as provided for in this manual or the applicable end user license agreement; and (b)
your negligence or wrongful act or omission in respect of the product.
In any event, TPA’s liability to you or any other person for any claim, loss or damage (in
contract, tort or on any other basis) will be limited (in TPA’s option) to either (a) the
replacement or repair of the product, or (b) payment of the cost of replacing or repairing the
product.
Page 7
iii
Other
These Terms and Conditions may be amended, modified, superseded or cancelled, at any time by
TPA. These Terms and Conditions will be governed by, and construed in accordance with:
n the laws of South Australia if the product is sold and supplied to you in Australia (in which
case the courts of South Australia or the Federal Court of Australia (Adelaide Registry) have
exclusive jurisdiction in respect of any claim or dispute) or
n the laws of the State of California if the product is sold and supplied to you outside of Australia
n the provisions of the United Nations Convention on Contracts for the International Sale of
Goods shall not apply to these Terms and Conditions.
All information, illustrations, and applications contained herein are based on the latest available
information at the time of publication. TPA reserves the right to make product changes at any time
without notice.
If any part of these Terms and Conditions would be unenforceable, the provision must be read
down to the extent necessary to avoid that result, and if the provision cannot be read down to that
extent, it must be severed without affecting the validity and enforceability of the remainder of these
Terms and Conditions.
Service Information
Service assistance can be provided by contacting your local TPA Authorized Dealer.
Communications Regulation Information
FCC Compliance Statement (USA)
This equipment has been tested and found to comply with the limits for a
Class ‘A’ digital device, pursuant to Part 15 of the FCC Rules. Operation
of this equipment in a residential area is likely to cause harmful
interference in which case the user will be required to correct the
interference at the user's expense.
FCC Compliance Statement (Canada)
This Class A digital apparatus meets all requirements of the Canadian
Interference-Causing Equipment Regulation.
CE EMC Statement (European Community)
Warning:This is a class ‘A’ product. In a domestic environment this
product may cause radio interference in which case the user may be
required to take adequate measures.
‘C’ Tick EMC Statement (Australia & New Zealand)
This product meets the applicable requirements of the Australia and New
Zealand EMC Framework.
Page 8

iv
Type Approval and Safety Regulations
Type approval may be required in some countries to license the use of transmitters
on certain band frequencies. Check with local authorities and your dealer.
Unauthorized modification of the equipment may void that approval, the warranty
and the license to use the equipment.
The receiver contains an internal radio-modem. This can potentially send signals.
Regulations vary between countries, so check with the dealer and local regulators
for information on licensed and unlicensed frequencies. Some may involve
subscriptions.
Radio and Television Interference
This computer equipment generates, uses, and can radiate radio-frequency energy.
If it is not installed and used correctly in strict accordance with TOPCON
Precision Agriculture instructions, it may cause interference with radio
communication.
You can check if interference is being caused by this equipment by turning the
Topcon equipment off to see if the interference stops. If the equipment is causing
interference to a radio or other electronic device, try:
l Turning the radio antenna until the interference stops
l Moving the equipment to either side of the radio or other electronic device
l Moving the equipment farther away from the radio or other electronic device
l Connecting the equipment to another circuit that is not linked to the radio.
To reduce potential interference operate the equipment at the lowest gain level that
will allow successful communication.
If necessary contact your nearest Topcon Precision Agriculture dealer for
assistance.
Note:Changes or modifications to this product not authorized by TOPCON
Precision Agriculture could void the EMC compliance and negate authority to
operate the product.
This product was tested for EMC compliance using Topcon Precision Agriculture
peripheral devices, shielded cables and connectors. It is important to use Topcon
Precision Agriculture devices between system components to reduce the possibility
of interference with other devices
General Safety
DANGER: It is essential that the following information and the
product specific safety information is read and understood.
Most incidents arising during operation, maintenance and repair are caused by a
failure to observe basic safety rules or precautions. Always be alert to potential
hazards and hazardous situations.
Page 9
v
Always follow the instructions that accompany a Warning or Caution. The
information these provide aims to minimize risk of injury and/or damage to property.
In particular follow instructions presented as Safety Messages.
Safety Messages and Warnings
The safety symbol is used with the relevant word: DANGER, WARNING or
CAUTION.
Messages marked in this way recommend safety precautions and practices. LEARN
and apply them.
DANGER: Indicates an imminently hazardous situation that, if not
avoided, could result in DEATH OR VERY SERIOUS INJURY.
WARNING: Indicates a potentially hazardous situation that, if not
avoided, could result in DEATH OR SERIOUS INJURY.
CAUTION: Indicates a potentially hazardous situation that, if not
avoided, may result in MINOR INJURY.
Safety Signs
WARNING: DO NOT remove or obscure safety signs. Replace any
safety signs that are not readable or are missing. Replacement signs are
available from your dealer in the event of loss or damage.
If a used vehicle has been purchased, make sure all safety signs are in the correct
location and can be read. Replace any safety signs that cannot be read or are missing.
Replacement safety signs are available from your dealer.
Operator Safety
WARNING: It is YOUR responsibility to read and understand the safety
sections in this book before operating this vehicle. Remember that YOU
are the key to safety.
Good safety practices not only protect you, but also the people around you. Study
this manual as part of your safety program. This safety information only relates to
Topcon equipment and does not replace other usual safe work practices.
WARNING: Ensure power is removed from the Topcon equipment prior
to maintenance or repair of the vehicle or implements.
WARNING: Ensure appropriate precautions are taken prior to handling any hazardous substances. Always read the Material Safety Data
Sheet prior to commencing work.
Page 10
vi
WARNING: In some of the illustrations or photos used in this manual,
panels or guards may have been removed for demonstration purposes.
Never operate the vehicle with any panels or guards removed. If the
removal of panels or guards is necessary to make a repair, these
MUST be replaced before operation.
WARNING: Always check that any suspended vehicle attachments are
lowered to the ground before beginning repair or maintenance work
on a vehicle.
WARNING: Vehicle and implement parts can become hot during operation and may be under pressure. Refer to vehicle manuals.
WARNING: Wear appropriate protective clothing for the task being
undertaken and conditions.
WARNING: Do not operate equipment around explosive equipment or
supplies.
WARNING: Topcon is committed to good environmental performance
and minimizes the use of any potentially harmful substances in its
products. However, it is always advisable not to handle damaged electronic equipment. This Topcon product may contain a sealed lithium
battery. Always dispose of any electronic equipment thoughtfully and
responsibly.
Exposure to Radio Frequency
Exposure to energy from radio frequencies is an important safety issue. Keep a
distance of at least 20 cm (7.8 inches) between people and any radiating antenna.
Keep a distance of at least 20 cm between transmitting antennas.
WARNING: Products using cellular modem or an RTK base station
can transmit radio frequency energy. Check with your dealer.
This device is designed to operate with TPA approved antennas. Discuss with your
dealer.
Preparation for Operation
l Read and understand this manual and learn all of the controls before you use
the equipment.
l Keep the manual with the equipment.
l If the equipment is moved to another vehicle, move the manual as well.
l Read the manual for the vehicle with which the equipment will be used and
check that the vehicle has the correct equipment required by local regulations.
Page 11
vii
l Make sure you understand the speed, brakes, steering, stability, and load
characteristics of the vehicle before you start.
l Check all controls in an area clear of people and obstacles before starting work.
l Identify possible hazards.
WARNING: Topcon equipment must not be used by an operator
affected by alcohol or drugs. Seek medical advice if using prescription or
over-the-counter medication.
Disclaimer
Topcon accepts no responsibility or liability for damages to property, personal
injuries, or death resulting from the misuse or abuse of any of its products.
Further, Topcon accepts no responsibility for the use of Topcon equipment or the
GNSS signal for any purpose other than the intended purpose.
Topcon cannot guarantee the accuracy, integrity, continuity, or availability of the
GNSS signal.
The operator must ensure that the equipment is correctly turned off when not in use.
Before operating any vehicle equipped with Topcon products, read and understand
the following product specific safety precautions.
Important Safety Information
Operator Alertness and Responsibility
The console helps the operator to steer the vehicle, but the operator remains in charge
and must be alert and in complete control of the vehicle at all times. The operator is
ultimately responsible for safe operation of this equipment.
It is essential that safety requirements are met when operating the console and any of
its components. All operators and other relevant personnel must be advised of safety
requirements.
Electrical Safety
WARNING: Incorrectly connected power can cause severe injury and
damage to people or the equipment.
When working with electrical components, you must do the following:
l Make sure the negative terminal of the battery is disconnected before doing any
welding on the vehicle.
l Check that all power cables to system components are connected to the correct
polarity as marked. Please refer to the vehicle manual for safety information.
l Check that equipment is grounded in accordance with installation instructions.
Page 12

viii
Operation and Risk of Obstacles
The following list is not exhaustive or limited. To use the console for assisted
steering along a defined wayline, the operator must ensure that it is used:
l Away from people and obstacles
l Away from high voltage power lines or other overhead obstructions (identify
any clearance problems before activating the console)
l On private property without public access
l Within cleared fields
l Off public roads or access ways.
Note that:
l The operator needs to know the vehicle’s position and the field conditions at
all times.
l The operator will need to respond if the GNSS satellite or differential
correction signal is lost momentarily.
l The console cannot detect obstacles (people, livestock or other).
l Only use the console in areas that are clear of obstacles and keep a proper
distance.
l Steering needs to be disengaged for manual control if an obstacle appears in
the path or the vehicle moves away from the wayline.
On/Off and Manual Control
WARNING: Ensure the steering switch is Off to prevent unintentional
engagement of the assisted steering. When repairing or maintaining
the vehicle/implement, ensure the vehicle CANNOT be moved. Disengage steering, apply brakes and remove keys.
The operator must ensure that the steering switch is Off (all LED indicators are
off) when assisted steering is not being used.
The operator must disengage assisted steering and use manual control if an
obstacle is in the line of travel or moves into the line of travel, or if the vehicle
steers away from the desired wayline.
To disengage assisted steering:
l Turn the steering wheel a few degrees OR
l Select the Disengage Auto Steering button on the console AND/OR
l If using an external steering switch, disengage using the switch if the above
actions do not disengage assisted steering.
Vehicle Shut Down Safety
Before leaving the vehicle, disengage assisted steering, disengage external steering
switch if this is being used, and remove the key from the key switch.
Page 13
ix
Using a Reference (Base) Station
WARNING: Do not move a reference station while in operation. Moving
an operating reference station can interfere with the controlled steering
of a system using the reference station. This could result in personal
injury or damage to property.
Operators and other affected personnel must be advised of the following safety
precautions.
l Do not erect the reference station under or within the vicinity of high voltage
power lines.
l When using the portable reference station, make sure that the tripod is securely
mounted.
To Get the Best Out of the Product
Back up data regularly. The console has large, but limited storage capacity. Use the
Diagnostics Mini-view to view capacity available. A warning screen displays if
storage is reaching its limit.
Be aware of file format compatibility. Discuss compatible formats with the dealer.
Topcon Agricultural Products are hardy and designed to work in tough conditions.
However, if equipment is unused for a length of time, store away from water and
direct heat sources.
Alert Symbols
In this manual two alert symbols are used:
Note:This offers additional information.
WARNING: A warning signal appears on safety signs and in this
manual to show that this information is very important to your safety.
LEARN these and APPLY them.
Page 14

x
Table of contents
Chapter 1 – Introduction 1
Chapter 2 – Implement Setup 3
2.1. Enabling ISOBUS 4
2.2. Setting up a new implement 7
2.3. Setting implement geometry 9
2.4. Setting up section control 11
2.4.1. Enabling section control 11
2.4.2. Setting timing 11
2.4.3. Setting up the section switch 12
2.5. Setting up master switch and speed 13
Chapter 3 – Athene Setup 15
3.1. Switching between setup and operation screen 15
3.2. Opening the Athene UT window 16
3.3. Athene primary screens 18
3.3.1. Main screen 18
3.3.1. Spreader settings screen 23
3.3.1. Totals screen 27
3.4. Setting up units 28
3.5. Load cell configuration 29
3.5.1. Load cell calibration 31
3.6. Setting up working width 32
3.7. Setting up pre-start 33
3.7.1. Operating pre-start 34
3.8. Setting up boundary reduction 35
3.8.1. Operating boundary reduction 36
3.9. Setting up products 37
3.10. Setting up alarms 39
3.11. Setting up forward speed 40
3.11.1. SSF Autocal 40
3.11.2. Simulated speed 41
3.12. Adding product / tare 42
3.12.1. With load cells 42
3.12.2. Without load cells 42
Page 15
xi
Chapter 4 – Calibration 45
4.1. Product calibration modes 45
4.1.1. Dynamic mode 45
4.2. Performing calibration (with or without load cells) 47
4.2.1. Product flow factor – check calibration routine 49
4.3. Nudge calibration 52
4.4. Static mode calibration 53
4.5. Valve calibration 54
Chapter 5 – Operation 57
5.1. Opening auto section control 57
5.2. Using the master switch 59
5.3. Variable rate control 60
5.3.1. If using VRC maps 60
Chapter 6 – Updating Athene Software 65
Chapter 7 – Index 67
Page 16

xii
Page 17
1
Chapter 1 – Introduction
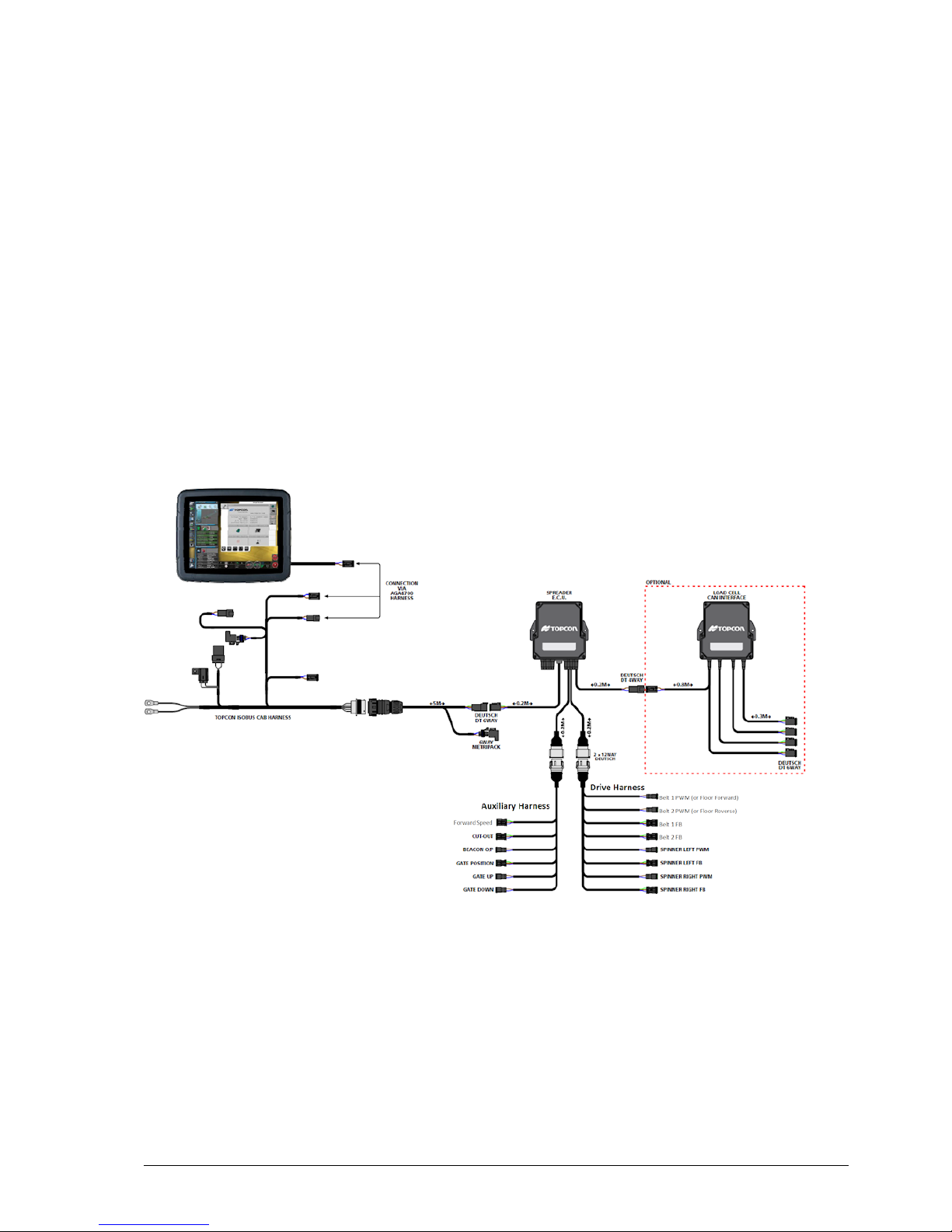
The Athene spreader controller is an ISOBUS UT-compliant
monitoring and application control system for self-propelled / trailed
belt spreaders spreading lime / granular materials. Forward speed
measurement and cutout sensing enables full proportional control, to
maintain (within limits) a set application irrespective of changes in
forward speed.
Shown is a typical retrofitted system (that is independent from the
tractor ISOBUS). Some installations will have minor variations, but
the key components are the Console, Spreader ECU, Loadcell ECU
and load cells.
Forward speed sensing may be performed via a GPS VTG message,
or optionally by a magnetic sensor measuring wheel or propshaft
rotation (fitted to the tractor / self-propelled spreader or trailed
spreader). There is no physical master cutout switch. The master
on/off switch is ‘virtual’ (a softkey on the Athene operation screen).
The system may be fitted with or without load cells.
Page 18

2
Machines without load cells: The system relies on volumetric
calculation from the known gate height and width, and a known
product density (or selecting the product from a pre-defined list). It
works best for relatively free-flowing material of consistent density.
Machines with load cells: Load cells enable fully-automatic,
continuous calibration. They are advantageous for controlling the rate
of material with more variable density. By constantly measuring the
weight of product in the spreader, the floor (belt) speed is
continuously adjusted to achieve the correct target application rate.
The system quickly reacts to changes in product characteristics or
spreading conditions without having to adjust or re-calibrate the
machine.
Other spreader functions, such as spinner speed, can also be
monitored, with warnings being triggered if they are not operating
correctly.
Page 19

3
Chapter 2 – Implement Setup
This chapter explains how to setup and configure the console for use
with the Spreader Controller features.
Note: When the system is new, the following Setup screen displays.
Page 20

2.1. Enabling ISOBUS
4
2.1. Enabling ISOBUS
Enables the ISOBUS Universal Terminal server that allows interaction
with the Athene ISOBUS compliant ECU.
To enable ISOBUS / Universal Terminal:
1.
Select System / Features / Console .
2. Select FILE SERVER and select Enabled.
3. Select UNIVERSAL TERMINAL and select Enabled.
4.
Select System / ISOBUS / UT .
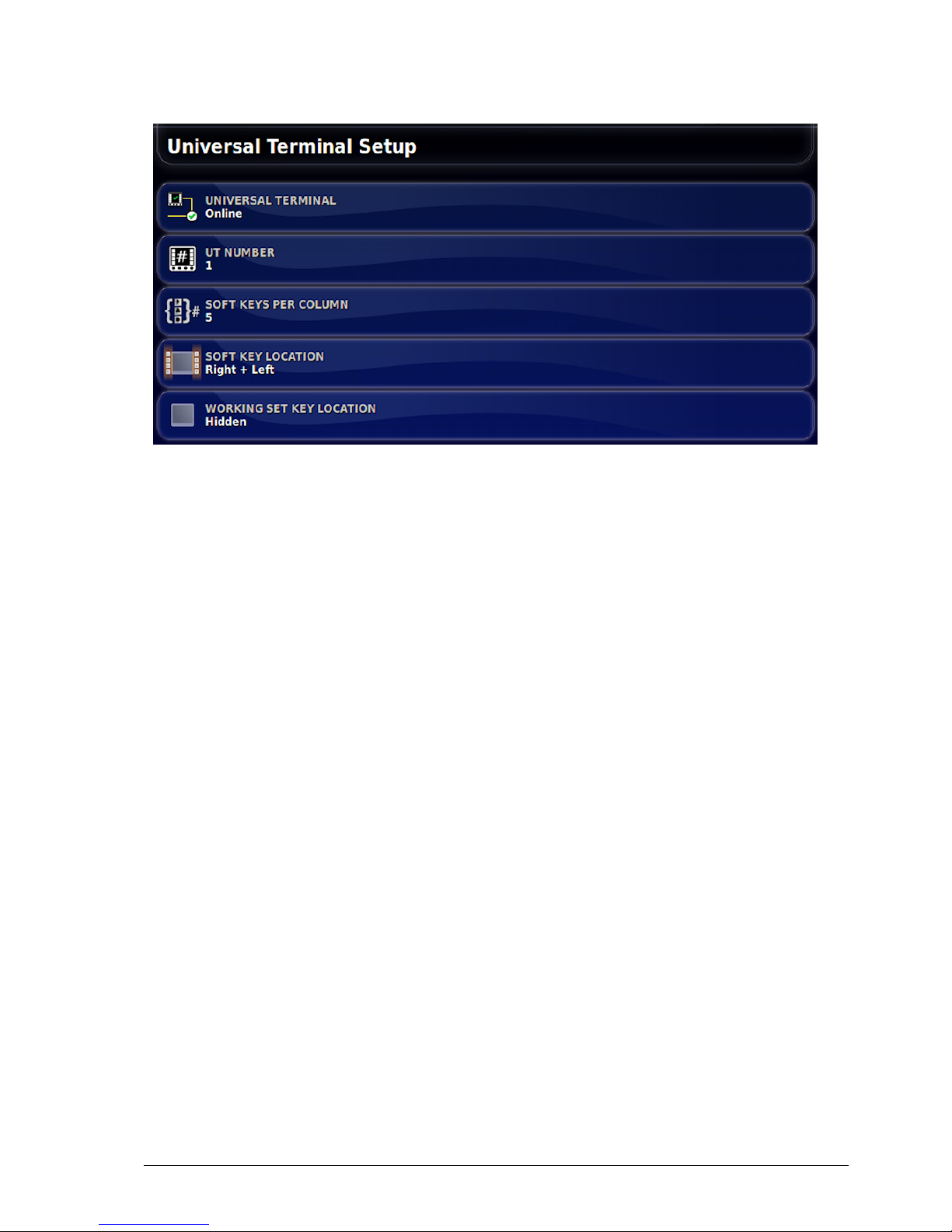
The Universal Terminal setup page is displayed.
Page 21
Chapter 2 – Implement Setup
5
l Universal terminal: Controls whether the UT server is actively
receiving connections from other devices.
This may be useful if there are multiple UTs on the bus and
multiple UTs claim to be the primary UT (in which case the UT
will go offline automatically and require the UT Number to be
changed before it will go online again), or to temporarily deactivate
the UT on the console.
l UT number: Sets the UT number for the console. If there are
multiple UTs on the bus, use this setting to assign a unique number
to this UT to avoid conflicts. The UT with number 1 will be the
default UT. If the UT client doesn’t appear on the correct UT you
may need to reconfigure its UT number appropriately. If there is a
conflict, the following message will appear:
'The UT Number of this UT conflicts with another UT on the bus,
and this UT has been disabled. Please make sure that this UT has a
unique UT Number.'
l Soft keys per column: Sets the number of available softkeys on the
UT interface on the Operation screen. Note: This should be set to 5
(or 6 if the option to select 5 is not available).
l Soft key location: Sets the location of the softkeys on the UT
interface and the number of columns (1 or 2). Note: Right + Left
should be selected.
Page 22

2.1. Enabling ISOBUS
6
l Working set key location: Sets the visibility and location of the
keys that switch the interface between ECUs (if more than one
ISOBUS compliant ECU is connected). Note: This should be set
to Hidden.
Page 23

Chapter 2 – Implement Setup
7
2.2. Setting up a new implement
Creates a new implement profile for the attached implement.
Note: Existing implement files can be imported from a USB. Refer to
the Guidance and Auto Steering manual.
To create a new implement:
1.
On the Setup screen, select Implement / New .
l Custom: Create a new implement profile.
l Factory: Select an implement template from a pre-defined list.
2. If the required implement is not available in the Factory templates,
select Custom.
3. Use the arrows to select the implement Type and confirm.
rigid
pivoted (tow behind)
Page 24

2.2. Setting up a new implement
8
front mount
double pivoted (tow between)
A message displays stating that the console will restart once the
implement has been created.
A default name for the implement is displayed.
Note: It is highly recommended that items are named in a
thoughtful and structured way to allow easy use in future seasons.
4. To change the default name, select IMPLEMENT NAME and
enter the new name, then confirm.
The New Implement Setup wizard displays.
5. Select IMPLEMENT CONTROL, select Section Control and
Rate Control, confirm and select next..
6. Select ECU TYPE, select ISOBUS, confirm and select next.
7. Select IMPLEMENT FUNCTION, select Spreader, confirm and
select next.
8. Select ECUASSIGNMENT, select SM-1 and select next, then
to confirm.
The ECUSetup screen is displayed.
9. The ECU name SM-1 should be displayed in the table. If not,
press REFRESH ECU SETTINGS to trigger the ECU to
communicate with the console.
Page 25
Chapter 2 – Implement Setup
9
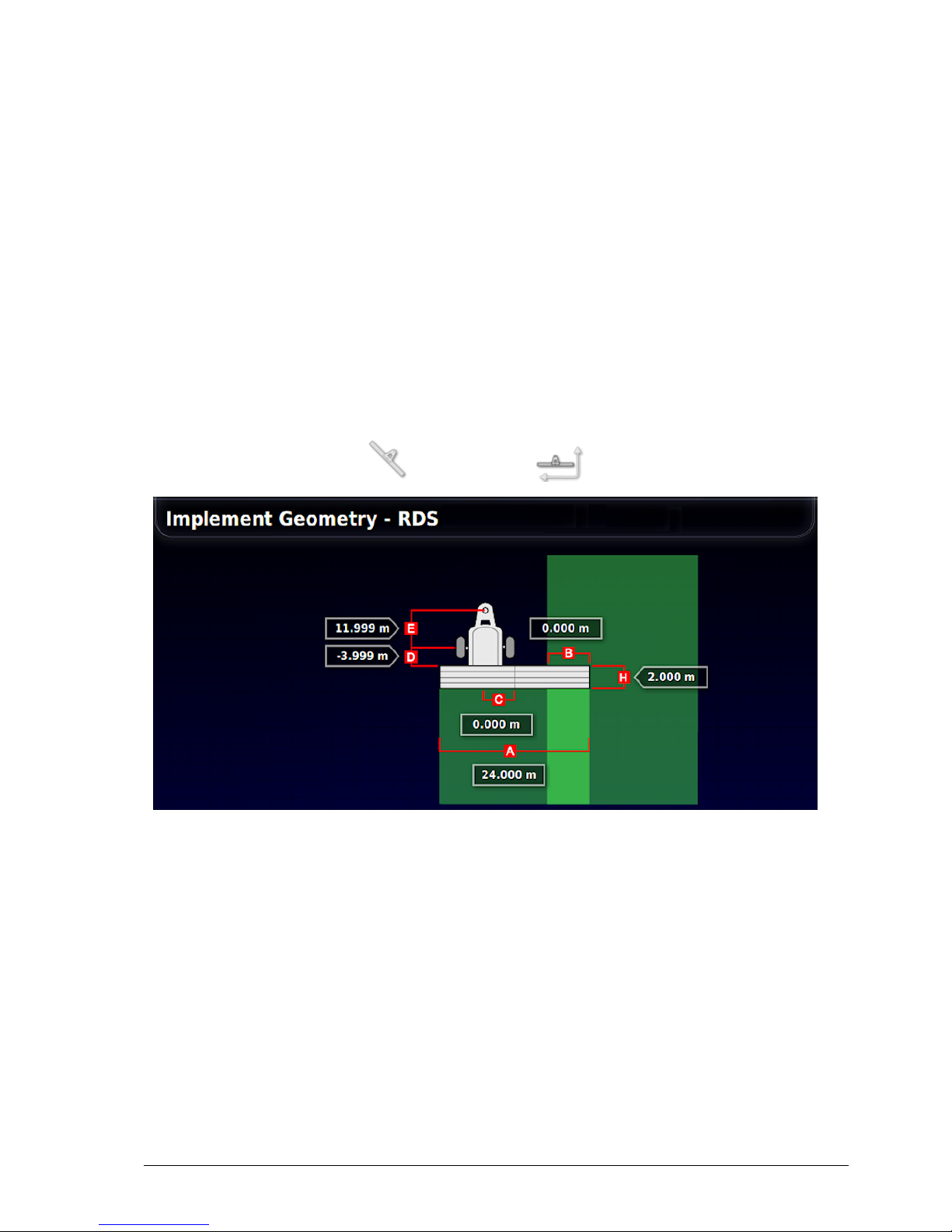
2.3. Setting implement geometry
Sets the implement measurements so that guidance can work accurately.
Note: Measure the implement dimensions as accurately as possible.
The recommended tolerance is +/- 5 cm.
When an ISOBUS implement is connected, some of the geometry items
are provided by the implement and cannot be altered in the console user
interface. Any changes to these must be made in the Athene ISOBUS
UT control screen (see Setting up working width, page 32).
To set the implement geometry:
1.
Select Implement / Geometry .
2. Select an implement dimension. The name of the dimension
appears in the title bar.
Dimensions requested vary according to the type of implement
selected.
3. Add or adjust dimensions where needed and confirm.
Measurements used are as follows:
l Swath Width: Measures the working width of the implement (that
is, the width of the area that is treated during one pass of the
implement).
Page 26

2.3. Setting implement geometry
10
l Working Length: Length from the start to the finish of the
working area of the boom. Together with swath width, it defines
the ‘Working Area’, which is the region that product is applied
over for that boom.
l Overlap: Measures the width of the overlap between two adjacent
passes.
l Implement Offset: Measures the distance between the hitch point
and the wheels of the implement.
l Implement Wheels Offset: Measures the distance between the
wheels and the working area of the implement.
l Inline Offset: Measures the off-center offset of the implement
relative to the hitch point. Enter a positive number if the
implement is shifted to the right and a negative number if it is
shifted to the left.
l Trailer Offset: Measures the distance between the trailer hitch
point and the trailer wheels.
l Trailer Wheels Offset: Measures the distance between the
implement hitch point and the trailer wheels.
Page 27

Chapter 2 – Implement Setup
11
2.4. Setting up section control
Follow these steps to set up section control for the implement.
2.4.1. Enabling section control
To use Auto Section Control, this must be enabled.
1.
Select System / Features / Implement and set
AUTO SECTION CONTROL to Enabled.
2. If using VRC prescription maps, select VARIABLE RATE
CONTROL, choose Enabled and confirm.
3. Repeat for each feature you wish to enable or disable.
2.4.2. Setting timing
These settings set the response times for the sections when switched on
or off. It is important to accurately calculate the response times to avoid
overlaps or gaps in product application.
To calculate the response times:
1. Ensure the implement is ready to begin product application and that
the product calibration has been performed (refer to Calibration,
page 45).
Page 28

2.4. Setting up section control
12
2. Use a stop watch to time the delay between switching a section on
and the application of product. This is the ONTIME.
3. When the section is switched off, time the delay between
switching it off and the product ceasing to flow. This is the OFF
TIME.
To set the response times:
1.
Select Implement / Section Control / Timing .
2. Select ON TIME to set how many seconds delay there is between
switching a section on and the application of product, then
confirm.
3. Repeat for OFF TIME and confirm. This will set how many
seconds delay there is between switching a section off and
stopping product flow.
2.4.3. Setting up the section switch
The section switch option is not functional when using spreader
implements.
Page 29

Chapter 2 – Implement Setup
13
2.5. Setting up master switch and speed
1.
Select Implement / Master Switch .
2. Set MASTER SWITCH to Virtual.
3.
Select Implement / Speed .
4. Set ISO GROUND SPEED to Disabled.
5. Set GPS NMEA2000 to Enabled.
Page 30

2.5. Setting up master switch and speed
14
Page 31

15
Chapter 3 – Athene Setup
3.1. Switching between setup and operation
screen
The console has two main screens; the Setup screen and the Operation
screen.
Use the highlighted buttons to switch between the screens.
Page 32

3.2. Opening the Athene UT window
16
3.2. Opening the Athene UT window
To view the Athene UT window:
1. Select the Athene UT icon on the left of the operation screen.
2. Expand the mini-view by selecting the arrow in the top right
corner, or by swiping left to right across the mini-view (ending
the swipe to the right of the mini-view screen).
3. To open the Athene UT window in full screen, select the UT
maximise button.
Page 33

Chapter 3 – Athene Setup
17
Page 34

3.3. Athene primary screens
18
3.3. Athene primary screens
Athene has three primary screens: Main, Totals and Spreader Settings.
1.
Press to cycle between the primary screens.
Note: The appearance of the screens will vary depending on the
selections made on the ISOBUS UT setup screen. Refer to Enabling
ISOBUS, page 4.
3.3.1. Main screen
The main screen displays job information. The buttons and
information displayed varies depending which settings are selected /
enabled.
Main screen buttons
Pre-start. Starts the floor (belt) moving when there is no
forward speed to ensure good coverage at the beginning of a
run (see Setting up pre-start, page 33).
Master on / off. Note: This does not simultaneously activate /
deactivate coverage as indicated on the guidance screen.
Coverage is independently activated / deactivated using the
console master switch / .
Rate control mode.
Full automatic mode proportional to forward speed. The
Page 35

Chapter 3 – Athene Setup
19
target rate is entered on the main screen. The floor (belt) speed
is automatically adjusted to maintain the correct rate based on
the forward speed and working width.
The floor speed is manually controlled using and
. This mode is commonly used to run the floor belt while
the spreader is stationary (for example; to empty remaining
contents).
Set the target application rate. Vary application
rate (± % increments).
Boundary reduction. The left-hand spinner RPM can be
slowed down to reduce the spread width when traversing the
field boundary (see Setting up boundary reduction, page 35).
Page 36

3.3. Athene primary screens
20
Main screen fields
1
Forward speed.
2
Calibration mode (see Product calibration modes, page 45).
3
Product remaining (actual weight measurement from load
cells for dynamic calibration, a theoretical calculation
otherwise).
4
Live, current application rate.
5
Target application rate.
6
Working width (see Setting up working width, page 32).
7
Job information. Touch to toggle between job information
and spinner speed control (see Variable screen display, page
21).
8
Spinner speed.
9
Work status. Red crosses are shown when the spreader is not
operating.
10
Touch to toggle the bottom left of the display between gate
height and auxiliary function. This button is only present if
additional hydraulic functions have been enabled via Factory
menu / Machine Options / Gate Control and Aux
Page 37

Chapter 3 – Athene Setup
21
Function. Default is OFF (see Variable screen display, page
21).
11
Gate height.
12
Belt speed (% of max).
Variable screen display
The bottom left area of the screen can toggle between job information
and spinner speed by pressing the right button, and gate height and
auxiliary function by pressing the left button.
Job information
Displays the area, weight and time for the current job.
Spinner speed
Page 38

3.3. Athene primary screens
22
Manual / auto spinner speed control. Press to toggle between
AUTO and MAN mode. In AUTO mode, press to set the spinner
speed. Spinners will automatically run at the set speed. In manual
mode, they can be adjusted on-the-go. Note: Please refer to the
machinery manufacturer's manual to establish the correct spinner
RPM for the product / desired spread width.
Gate height
Displays the gate height control option. Use the plus and minus
buttons to adjust the height.
Auxiliary function
Displays the auxiliary hydraulic function. Use the arrow buttons to
activate the function.
Page 39

Chapter 3 – Athene Setup
23
3.3.1. Spreader settings screen
Technician, factory and diagnostics menu should not need to be used
during normal use.
Technician menu. Requires a password for access. See below for
details.
Factory menu. Requires a password for access.
Diagnostics menu. Requires a password for access. See below for
details.
Return to main menu.
Product setup. See Setting up products, page 37.
Alarm setup. See Setting up alarms, page 39.
Cycle between primary screens.
Page 40

3.3. Athene primary screens
24
Select calibration mode (see page 45), add weight / tare
(see page 42).
Set full working width. See Setting up working width,
page 32.
Used to test the machine in the factory or if there is a
problem with the normal forward speed signal. See
Simulated speed, page 41.
Start floor moving while spreader is stationary. See
Setting up pre-start, page 33.
Configure units (see page 28) and forward speed
options (see page 40).
Reduce spinner RPM on boundary. See Setting up
boundary reduction, page 35.
Press to return to the previous screen or to confirm an
entry.
Technician menu
The Technician menu provides the following settings.
Display options:
l Speed smoothing:Damping of forward speed displayed. Higher
number gives more damping.
l Rate lock on %: If the actual rate is within this % of the target,
then the target rate will be displayed on the main screen.
l Rate smoothing: Damping of application rate display. Higher
number gives more damping.
l Off target alarm: If the actual rate is outside this % of the target
then the 'Over/Under Application' alarm is shown.
Page 41

Chapter 3 – Athene Setup
25
l Average weight: Sets whether the average weight is visible on the
INFO screen.
l Info weight: Selects whether the INFO page is based on theorical
weight (rotations of floor) or the weight reduction from the load
cells.
Loadcell correction:
l Correction span: Amount the calibration factor can change by after
each dynamic calibration.
l Min static weight: Weight of product that must be spread during a
static test.
l Dynamic time: How often a dynamic calibration is made.
l Dynamic weight: Weight of product that must be spread during
each dynamic calibration.
l Start delay: Delay at the start of each new load before dynamic
corrections are made.
l Steady weight: % change that is allowed each second before weight
reading is considered unstable.
l Headland delay: Delay when the machine is switched in to work
before dynamic corrections are made.
l Cal factor delay: Pause time between the previous dynamic
correction being made and the new correction starting.
l Dynamic fill weight: When the hopper weight increases by this
value it is considered re-filled.
l Correction span fast: Amount the calibration factor can change by
if weight is below 'Fast empty point'.
Overload log: A list showing each time the weight in the spreader went
over the maximum permissible load.
Diagnostics menu
The Diagnostics menu provides a method to view the following:
l Channels: Shows the current forward speed, target floor speed and
current floor speed.
Page 42

3.3. Athene primary screens
26
l LCI diagnostics: Voltage and weight from the load cell interface.
l Angle sensor: View the current machine angle.
l Dynamic calibration: View the actual weight vs. theory weight
during each dynamic calibration.
l Machine: View other miscellaneous input status.
There are no user settable options.
Page 43

Chapter 3 – Athene Setup
27
3.3.1. Totals screen
Records the grand total and part totals 1 and 2 of area, weight and the
number of loads.
Note: The Reset button is used to reset the selected total.
Page 44

3.4. Setting up units
28
3.4. Setting up units
The measurement system is set from the console setup menu,
however the units (e.g. kg/ha, tonnes/ha) are set from the Athene
setup menu.
1.
Select User / Region / Units .
2. Select the required UNITS (metric or imperial).
3. Exit the console setup menu and start the Athene application.
4.
From the Spreader Settings screen, select General Setup /
Sub Units.
5.
Select the required units and press to confirm.
Page 45

Chapter 3 – Athene Setup
29
3.5. Load cell configuration
1. To ensure the software is set to communicate with the load cell
interface, from the Spreader Settings screen select Factory /
Loadcell Interfaces.
2. If the machine is not fitted with load cells, set Function to NOT
USED.
3. If the machine is fitted with load cells, set Function to CAN
module 1.
To calculate the correct weight, the load cell interface contains an angle
sensor. The orientation of the load cell interface must be entered.
4.
Select Factory / Loadcell Interfaces / Angle Sensor.
5. Press the cycle button to rotate the icon of the ECU around the
spreader until it matches the orientation on which it is mounted.
Page 46

3.5. Load cell configuration
30
6. With the spreader parked on flat ground, press the TARE button
and this will zero the angle sensor.
7. To set the zero point for the load cell, with the spreader empty
select Factory / Loadcell Interfaces / Loadcell
Calibration.
8. When prompted ‘Is spreader empty?’ select YES and then select
again to confirm the spreader is empty. This sets the zero
point.
The load cell gain value must be set. This tells the software that a
load of xx kg causes an increase of 1 volt from the load cell interface.
9.
Place a known weight of product in the spreader. Note: This
process is more accurate if using a bigger known weight.
Page 47

Chapter 3 – Athene Setup
31
10.
Select Factory / Loadcell Interfaces / Loadcell Calibration.
11. When prompted ‘Is spreader empty?’ select NO and enter the actual
weight in the spreader.
3.5.1. Load cell calibration
Load cells may drift out of calibration after an initial period of 'bedding
in' on a new machine.
To recalibrate, repeat the procedure detailed above from step 6.
Page 48

3.6. Setting up working width
32
3.6. Setting up working width
This sets the full working width of the spreader.
Note: Please refer to the machinery operators manual to establish the
correct spinner RPM for the product / desired spread width.
1.
From the Spreader Settings screen, select Width .
2. Enter the implement working width. (The width of the area that is
treated during one pass of the implement.)
The Offsets are the dimensions from the GPS receiver location to
where the product is applied, as part of guidance setup. They do not
normally need to be changed.
Page 49

Chapter 3 – Athene Setup
33
3.7. Setting up pre-start
Pre-start is used to start the floor moving when there is no forward
speed. This ensures that there is good coverage at the start of each run,
and that irrespective of how the product has been loaded, the spreader
does not have to start moving until a suitable amount of product has
reached the spinners.
1.
From the Spreader Settings screen, select Pre-Start .
Pre-start mode
AUTO mode: Pre-start is automatically triggered when the spreader is
switched into work. This removes the need to push the button at the
start of each load.
MAN mode: Pre-start is activated manually by pressing on the
main screen.
Default = MAN
Pre-start time
The duration pre-start will run before stopping the floor if there is no
forward speed movement. This should be long enough to ensure that
product is being spread but also so that there is a smooth transition
between pre-start and starting to move forward. An average pre-start
time is 8-10 seconds.
Page 50

3.7. Setting up pre-start
34
Default = 8 sec
3.7.1. Operating pre-start
1.
Engage hydraulics and/or press on the main screen.
Product automatically moves towards spinners.
2. Once the spread pattern is observed, start to drive forward.
Page 51

Chapter 3 – Athene Setup
35
3.8. Setting up boundary reduction
The RPM of a selected spinner can be slowed down (using a hydraulic
diverter valve) to reduce the spread width when traversing the field
boundary.
Note: The boundary should be driven clockwise if the left spinner is
selected and anticlockwise if right spinner is selected.
1. From the Spreader Settings screen, select Spinner Reduction
.
The reduced speed is set as a proportion of the spinner speed. The
reduction must be established by trial and error to establish the desired
spread pattern.
If the Spinner Reduction option is not visible, enable spinner reduction
as follows:
1.
From the Main Menu select Factory / Machine Options.
2. Change Channel Selected to 2 and In Use to ON.
Page 52

3.8. Setting up boundary reduction
36
3.8.1. Operating boundary reduction
1.
Select the boundary reduction icon to activate.
The boundary reduction indicator displays in red below the
spreader image when operating.
The instrument will beep every 15 seconds to remind the operator
that this function is enabled.
Page 53

Chapter 3 – Athene Setup
37
3.9. Setting up products
The system can store 10 different products with customizable names.
1.
From the Spreader Settings screen, select Products .
2. Select the Product button and the left / right arrows to change the
selected product.
3. Select the product name to edit the name.
l Rate: The rate at which the product is applied.
l D Factor: The product density. Take note of the units when
entering this figure.
l Gate Height:The height of the opening that the product passes
through from the belt. The gate height and maximum forward speed
Page 54

3.9. Setting up products
38
are theoretically calculated as a result of the volumetric calibration
routine (see Calibration, page 45), or an approximate gate height
can be entered here if known.
l Flow Factor: This accounts for any product flow inconsistencies
that may come from pelletized (prilled) or low friction products.
It can be established either by carrying out a calibration nudge
after spreading a certain amount of product (see Nudge
calibration, page 52) or by following the check calibration routine
(see Product flow factor – check calibration routine, page 49).
Page 55

Chapter 3 – Athene Setup
39
3.10. Setting up alarms
1.
From the Spreader Settings screen, select Alarms .
2. Select the alarm field to enter the value beyond which the alarm
should sound.
The system can be set to show an alarm in the following conditions:
l RPM Lo / High:Spinners 1 and 2 RPM too slow / too fast.
l Low Level: Hopper level low.
l Beacon Weight: Hopper maximum load (activates a warning
beacon output if maximum weight exceeded). Only applicable if
load cells are fitted.
Note: Alarms are disabled when set to zero.
Page 56

3.11. Setting up forward speed
40
3.11. Setting up forward speed
1.
From the Spreader Settings screen, select General Setup /
Speed Factor.
There are four preset options for the forward speed signal:
l (0): Magnetic sensor (1 pulse per rev)
l (1): Magnetic sensor (2 pulses per rev)
l (2): Radar sensor (0.00778 metres per pulse)
l (3): GPS (NMEA VTG message)
With the exception of option (3), the factors can be manually edited if
required. However if options (0), (1) or (2) are selected, it is
recommended to perform an ‘Autocal’ routine.
3.11.1. SSF Autocal
The Speed Sensor Factor (SSF) is the distance traveled forward in the
time between two pulses from the forward speed sensor. In the case of
magnetic sensor options (1) and (2), this could be calculated based on
the nominal tire diameter or rolling distance and then entered
manually. However this does not take into account wheel slip,
compaction, or tire deformation under practical operating conditions.
1. Mark a set distance of 100 metres by suitable means. The surface
should be representative of the average field conditions (i.e. not a
paved surface).
2. Position the vehicle with the first marker level with a suitable
reference point on the vehicle.
3.
From the Spreader Settings screen, select General Setup /
SSF Auto Cal and then follow the screen instructions.
4. Stop the vehicle when the second marker lines up with the predetermined reference point on the vehicle and press to end the
Auto Cal procedure. The Speed Sensor Factor is automatically recalculated and stored in memory.
Page 57

Chapter 3 – Athene Setup
41
Note: If you overrun the marker, do not reverse - repeat the Auto Cal
procedure from the beginning.
3.11.2. Simulated speed
If the speed sensor is not providing a signal, a simulated speed can be
set to continue operation.
1.
From the Spreader Settings screen, select Simulation Speed
/ Speed Factor.
2. Enter the desired speed and switch the simulation ON.
3.
Press to start the simulation.
Note: Actual forward speed must be matched to the simulated speed as
closely as possible. Otherwise the system will under-apply if you travel
too quickly, or over-apply if you travel too slowly.
Page 58

3.12. Adding product / tare
42
3.12. Adding product / tare
The main screen displays the current weight remaining in the hopper
(a theoretical calculation if volumetric calibration is in effect, or the
actual weight measurement from load cells for dynamic calibration).
The weight setup screen varies, depending on whether the system has
load cells fitted or not (see Load cell configuration, page 29).
3.12.1. With load cells
The hopper contents display refreshes automatically to show the
current weight as product is loaded.
The weight can be tared either when the hopper is empty, or if it
contains a known weight. To maintain correct angle compensation,
only perform the tare with the spreader on level ground.
1.
From the Spreader Settings screen, select Weight Setup /
Tare Calibration.
2. Follow the screen prompts.
3.12.2. Without load cells
1. Refill the hopper with the desired load.
2.
From the Spreader Settings screen, select Weight Setup /
Add Weight / Tare.
l Max: The full hopper weight. Confirm that MAX corresponds to
the hopper maximum capacity, and adjust if necessary. If loading
Page 59

Chapter 3 – Athene Setup
43
the hopper to capacity, then press OK to reset to full.
l Now: The current (theoretical) weight remaining in the hopper.
l To add: The weight required to replenish the hopper (MAX –
NOW). When this weight has been added to the hopper, press OK
to confirm it has been loaded. The TO ADD value is added to the
NOW total, and TO ADD is recalculated.
Page 60

3.12. Adding product / tare
44
Page 61

45
Chapter 4 – Calibration
4.1. Product calibration modes
If using load cells, there are two calibration modes:
l Dynamic: Constant, automatic re-calibration on-the-move.
l Static: Calibration over a set distance. This mode may be useful if
spreading at low application rates or if the product is not flowing
freely. See Static mode calibration, page 53.
To select the calibration mode:
1.
From the Spreader Settings screen, select Weight Setup /
Mode and use the left / right arrows to select the mode.
If the required mode is not available, ensure the software has been
configured for load cells (see Load cell configuration, page 29).
Note: Selecting MAN here is the equivalent to selecting MAN on
the main screen . The floor speed is then manually controlled
using + and – arrows and is not proportional to forward speed.
MAN mode is normally only used for emptying the spreader or
for checking that the valve and encoder are working correctly.
If not using load cells, during operation the product weight shown is
theoretical based on the floor (belt) speed and gate height. To perform
a calibration without load cells, see Performing calibration (with or
without load cells), page 47.
4.1.1. Dynamic mode
The system will normally be operated in Dynamic (DYN) calibration
mode. This method of calibration is particularly suited for products
with more variable density.
The weight of the product is constantly measured by the load cells.
The amount the actual weight has decreased is compared to the
theoretical weight decrease. The calibration factor is then adjusted to
speed up or slow down the floor (belt) speed accordingly. The
Page 62

4.1. Product calibration modes
46
operator should only have to enter the target rate and working width
and all other factors are adjusted in the background to ensure the
correct rate is applied.
As dynamic calibration is constantly self-correcting, the calibration
routine is there to assist in determining the appropriate gate height
and to calculate the forward speed range for applying a new product.
To perform a calibration in Dynamic mode, see Performing
calibration (with or without load cells), page 47.
Page 63

Chapter 4 – Calibration
47
4.2. Performing calibration (with or without
load cells)
This procedure is applicable if not using load cells and to Dynamic
mode if using load cells. See Static mode calibration, page 53 for
calibration in Static mode.
The calibration factor is called the ‘T’ factor. It is the volume of
product dispensed per revolution of the floor belt roller. It is calculated
as: gate height (mm) x gate width (mm) x belt travel per revolution of
the belt roller (mm).
The product density is then used to convert the volume to weight.
1. Select the required product (see Setting up products, page 37).
2.
From the Spreader Settings screen, select Weight Setup /
Calibration.
3. Follow the screen prompts to enter the:
l Required application rate
l Working width
l Density
l Average working speed
Based on the information entered, the software recommends a gate
height setting. This takes account of the minimum and maximum
RPM of the belt roller. The recommended gate height is based on
the roller rotating in the middle of its RPM range, so that it allows
maximum flexibility to forward speed.
Page 64

4.2. Performing calibration (with or without load cells)
48
4. Confirm the recommended gate height or enter a different gate
height if desired.
The operating speed range is displayed based on the above
calculations.
5. If you have not previously done so, select Check Calibration to
determine the 'flow factor' for the product (continue to the next
section). Note: This procedure is only applicable if load cells are
fitted.
Page 65

Chapter 4 – Calibration
49
6. Otherwise select Start Spreading to end the calibration sequence
and return to the main operating screen.
4.2.1. Product flow factor – check calibration routine
The flow factor accounts for any product flow inconsistencies that may
come from pelletized (prilled) or low friction products. To achieve
accuracy across a complete product range, each product should be tested
to enable the system to learn the flow characteristics of that material.
Note: This procedure is applicable if load cells are fitted, in Dynamic
or Static mode.
The flow factor can be established by:
l Following this routine, which involves running the floor for a set
time period, catching and then weighing the product that is
dispensed from the spreader, or
l Carrying out a calibration nudge after spreading a certain amount of
product (see Nudge calibration, page 52).
1.
From the Spreader Settings screen, select Weight Setup /
Calibration.
2. Follow the product calibration procedure through and then select
Check Calibration.
3. Enter the weight of product to be caught and weighed for the test.
Note: If catching the product to be weighed, it is advisable to select
enough product for a minimum of 5 Ha depending upon target rate.
Page 66

4.2. Performing calibration (with or without load cells)
50
The system will run the belt for that much product and can then
be calibrated once this has been weighed. The greater the volume
of product dispensed for calibration, the greater the accuracy.
4.
Press to switch the spreader on.
5.
Press to start the calibration. The belt will start running,
based on the Average Working Speed entered during the
calibration procedure.
The display then counts up the theory weight (the weight the
Athene has calculated based on the calibration factors entered in
step 3), and the live weight (the weight as measured by the load
cells).
The belt will automatically stop when the theory weight is
reached.
6.
Press to switch the spreader off.
7.
Press to continue.
8. If metering out a smaller weight that can be lifted by scales, enter
the weight that has been measured into the weight entry page. For
smaller weights, such as 40 kg, it is advised not to use the live
load cell weight for this calibration.
Page 67

Chapter 4 – Calibration
51
9. If dispensing a large volume of product (1000 kg) back in to a bulk
store, then enter the Live Kg that is shown from the load cells.
Note: To check application rate accuracy, dispense the TOTAL
amount of product that is shown in the hopper.
10.
Press to continue.
The flow factor is recalculated and displayed.
Note: Increasing the flow factor has the effect of slowing the belt
speed compared to the programmed density. Decreasing the flow
factor has the effect of increasing the belt speed compared to the
programmed density.
'Dispensed weight' = 'Theory weight'.
11.
Press to finish the calibration routine.
Page 68

4.3. Nudge calibration
52
4.3. Nudge calibration
Some discrepancy between the target weight and the actual weight
can occur, often due to variations in the actual density of the product
from the theoretical density programmed. The calibration factor can
be fine tuned to account for any discrepancy.
1.
From the Spreader Setting screen, select Weight Setup /
Nudge Calibration.
2.
Enter the Target Weight then press enter .
3.
Enter the Actual Weight applied and press enter again. The
% error is calculated and displayed.
4.
Press enter to make the correction.
Page 69

Chapter 4 – Calibration
53
4.4. Static mode calibration
The calibration factor is calculated by doing a 'Static Test' routine. This
factor remains the same throughout subsequent spreading until either
manually adjusted, or another static test is done. Static calibration
assumes that the product density will be consistent, therefore results
may not be as accurate as with dynamic calibration.
To perform a calibration in Static mode:
1.
From the Spreader Settings screen, select Weight Setup /
Static Test.
2.
While stationary, press enter to start the test.
The weight in the hopper is measured. The system then calculates
the distance that must be driven, based on application rate and
spread width set, until the hopper weight decreases to a pre-set
threshold.
3. Start spreading until prompted to stop.
4.
Press enter to measure the weight and calculate the new
calibration factor, which is then displayed.
5.
Press enter to confirm, and then ESC to return to the Main
menu.
Page 70

4.5. Valve calibration
54
4.5. Valve calibration
This procedure sets the minimum and maximum PWMto move the
spreader belt.
1.
From the Main Menu select Factory / Channels / Valve
Setup. The Belt Valve Setup screen summarizes the current valve
settings.
2. Select Valve Auto Cal, set the engine to normal operating rpm
and press to start the calibration procedure.
3. With Min Duty selected, by observing the Live Feedback rpm
value, adjust the belt until it is on the threshold of moving.
4.
Press to set the minimum PWM output.
Page 71

Chapter 4 – Calibration
55
5. With Max Duty selected, increase the belt speed to the maximum it
can go.
6.
Press to set the maximum PWM output.
The Belt Valve Setup screen displays a summary of the new
settings.
Page 72

4.5. Valve calibration
56
Page 73

57
Chapter 5 – Operation
5.1. Opening auto section control
Auto section control is available when an implement and ECU have
been set up and Auto Section Control has been enabled in the Setup
screen (System / Features / Implement ).
1.
Select Auto Section Control . The Auto Section Control
mini-view opens.
l Control mode: Use the slider or number keypad to set to avoid
overlap (0) or avoid gaps (100). If avoid overlap is chosen, there
may be some spaces where product is not applied. If avoid gaps is
Page 74

5.1. Opening auto section control
58
chosen, some overlap of application is likely near boundaries. The
default (50) is a compromise.
l Boundary limit: Sets which type of boundary limit will turn off
spraying when using auto section control.
Field Boundary and Headland are defined using the Field menu
on the Operation screen. Refer to the Guidance and Auto Steering
Operator Manual for more information on these.
Safety Zone reduces width of spreading by half a swath width
from the boundary to prevent over application.
l ASC on/off: Turn auto section control on/off.
Page 75

Chapter 5 – Operation
59
5.2. Using the master switch
When Virtual has been selected in the Setup screen (Implement /
Master Switch), the Spreader Master Switch on the Operation screen
turns the spreader system on. This switch does not work if External
ECU Sense is selected as the Master Switch.
The switch also indicates the readiness of the system:
Green
Spreader Controller is on and working. Select the master
switch to turn the spreader off.
White
Spreader Controller is ready to use. Select the master switch
to turn the spreader on.
Red
Spreader Controller is off and cannot be used. Select the
Master Switch to see possible causes of the problem. See the
example below.
Green indicates that the system is ready. Red indicates that the system is
not ready.Select to return to the main screen and complete the
necessary action.
The alarm bell button shows the number of active alarms.
Page 76

5.3. Variable rate control
60
5.3. Variable rate control
Before use, Variable Rate Control (VRC) must be set up with a
controller and must be enabled on the Setup screen (System /
Features / Implement ).
Select to enable or disable the VRC Map display on the
guidance screen.
5.3.1. If using VRC maps
There are three ways to perform VRC:
l Importing prescription maps (shapefiles and ISO XML files) into
created jobs using the VRC import wizard.
l Using real-time sensor data from nitrogen sensors mounted on the
tractor (for example: Topcon CropSpec).
l Using Task Data based prescription maps.
The following instructions describe the first two methods. If using
task data, refer to AGA4084 Guidance Manual.
Both shapefiles (.shp) and ISO XML files (.xml) may be imported
into created jobs. Note that only the prescription map portion of the
data is used if .xml files are imported.
1. Select a client / farm / field.
2. Create a new job.
3.
Select Job Menu / Configure Variable Rate Control
.
4. Select next at step 1 of the VRC Configuration wizard.
5. Select the rate source(s) for the VRC and select next. The possible
options are:
Page 77

Chapter 5 – Operation
61
l Shapefiles
l ISOXML
l CropSpec (if enabled)
Note that shapefiles and ISO XML cannot be used at the same time.
However CropSpec can be used in conjunction with shapefiles or
ISO XML
If Shapefiles or ISO XML are selected at step 2, all maps
previously imported to the current field are displayed so that
previously used maps can be recalled.
l If the desired maps are not already on the console, insert a USB
with prescription maps.
l
Select the USB icon at base of the screen . The window
background turns blue to indicate you are viewing the USB file
list.
l
Select the USB home icon to view the root of the USB file
structure. Files and folders on the USB root are displayed.
l Select a folder to open it. Find the required file and select it. It
will display as white and next is now enabled. Note that multiple
files may be selected.
Page 78

5.3. Variable rate control
62
l Select next.
6. If ISOXML was selected in step 2, select the task that you wish
to run. The file may have several tasks listed. Select the task that
matches the implement that is hooked up.
7. Select next.
Source and Attributes must now be assigned to channels.
l Channel: The tank or bin that is being controlled.
l Source: The source of the prescription map for that channel.
The list of files that were selected earlier on will appear here or
you can also select a live source like CropSpec or Yara.
l Attribute: One of the properties in the shape file or ISOXML
file or the sensor output from CropSpec. The same shape file
may have multiple attributes to define the rates for more than
one tank so this allows the operator to map the prescription to
the appropriate tank.
l Rescale: This column defaults to 1, which means that the
prescription defined in the source will be used directly.
However, depending on weather conditions, the operator may
choose to increase or decrease the rate of application. This
allows a uniform increase for all defined rates. For example, a
Page 79

Chapter 5 – Operation
63
rescale of 1.1 will apply 110 percent of the rate defined in the
source.
l Default: Defines the rate to use if the source doesn’t specify a rate
for that region of the paddock.
8. Select next.
9. On the final step, you must confirm the setup. This cannot be
changed for the job, so ensure it is correct before continuing. Select
Back to change the configuration or OK to confirm.
The map is displayed. If it does not display, ensure you are in close
proximity geographically to the map’s location.
Page 80

5.3. Variable rate control
64
Page 81

65
Chapter 6 – Updating Athene Software
1. Copy the folder named 'Apollo' onto the root directory of a USB
memory stick, and insert at the rear of the console.
2.
From the Main Menu select Factory / Software Info &
Reset and confirm.
ECU Object Pool and ECU Program Code show the version of
software that is currently installed. The new software number that
is found on the USB stick is shown at the top of the screen. In
this case CMS600-000rev83.
3. Press the top part of the display to display a drop-down menu
showing a list of software versions found on the USB. Ordinarily
there will only be one valid software version –
CMS600000revxx.
4.
Press to select.
5. Press the Update Software button to save the current settings to
the USB.
Once this has finished it will move onto ‘Loading Software',
followed by 'Loading Object Pool'.
6. Once this process has finished, the screen will appear white.
Without removing the USB, switch the console off and back on
Page 82

66
to trigger the new software to be reset.
7. When the console has restarted and the Athene UT screen is
available, select the Load Factors button to restore the previous
settings from the USB.
8. When ‘Loading Factors’ is complete, switch the console off and
back on for the restored settings to take effect.
Page 83

67
Chapter 7 – Index
alarms 39
angle sensor 29
ASC 57
auto section control 57
boundary reduction 35
calibration
check 49
modes 45
nudge 52
performing 47
valve 54
diagnostics menu 25
dynamic mode 45
forward speed 40
geometry 9
ground speed 13
implement
new 7
implement geometry 9
load cell
calibration 30
configure 29
main screen 18
master switch 13
using 59
nudge 52
operation screen 15
pre-start 33
product
adding 42
calibration 45
setup 37
section control 11
settings screen 23
setup screen 15
simulated speed 41
software update 65
speed factor 40
spinner reduction 35
SSF Autocal 40
static mode 53
tare 42
technician menu 24
totals screen 27
units setup 28
update software 65
valve calibration 54
variable rate control 60
VRC 60
working width 32
Page 84

68
Page 85

Page 86

Topcon Precision Agriculture
16900 West 118th Terrace
Olathe, KS 66061 USA
Phone: 866-486-7266
Topcon Positioning Systems, Inc.
7400 National Drive
Livermore CA 94551 USA
Phone: 925-245-8300
Fax: 925-245-8599
Topcon Precision Agriculture
14 Park Way
Mawson Lakes SA 5095 Australia
Phone: +61-8-8203-3300
Fax : +61-8-8203-3399
Topcon Precision Agriculture Europe
Avenida de la Industria 35
Tres Cantos 28760, Spain
Phone: +34-91-804-92-31
Fax: +34-91-803-14-15
Topcon Corporation
75-1 Hasunuma-cho, Itabashi-ku
Tokyo 174-8580 Japan
Phone: +81-3-5994-0671
Fax: +81-3-5994-0672
© 2016 Topcon Precision Agriculture All rights reserved
Specifications subject to change without notice
 Loading...
Loading...