

Page 1

Page 2
ВВЕДЕНИЕ
Поздравляем Вас с приобретением модели радиоуправляемого вертолета Thunder Tiger серии
Raptor E. Raptor Е разработан на базе известных и проверенных временем моделей вертолетов
с двигателями внутреннего сгорания (ДВС) Thunder Tiger Raptor 30/50 V2. Новая серия Raptor E
оборудована теми же самыми головкой ротора и системой привода хвоста, что и Raptor 30/50
V2, но здесь для управления автоматом перекоса используется система управления E-CCPM
90° и 140° (опционно). Эти модели вертолетов объединяют элементы предыдущего успешного
дизайна с популярной на данный момент системой E-CCPM. Все тяги типа "тяни-толкай"
делают отклик управления значительно более быстрым и точным. Чтобы получить наилучшее
соотношение мощности к весу, используется алюминий и углеволокно в конструкции нижней
части рамы, что повышает жесткость и позволет выполнять экстремальные 3D-полеты плавно и
четко. Если Вы желаете летать без шума и грязи, серия Raptor E, без сомнения, лучший выбор.
Новички и 3D-пилоты будут поражены новой серией Raptor E.
СОДЕРЖАНИЕ
Введение......................................................стр.1
Содержание.................................................стр.1
Предупреждения. Гарантия........................стр.2
Безопасность полетов.................................стр.3
Требуется дополнительно..........................стр.4
Раздел по сборке.....................................стр.5
Предисловие к E-CCPM...........................стр.23
Настройка тяг............................................стр.31
Поиск неисправностей.............................стр.36
Список деталей........................................стр.37
1
Page 3
ПРЕДУПРЕЖДЕНИЯ
Этот радиоуправляемый вертолет - не игрушка. Это технически сложное изделие,
использующее передовые достижения высокоточной механики и электроники разработано
исключительно для хоббийного/спортивного использования. В случае неправильной сборки
и/или использования, модель вертолета способна причинить ущерб имуществу и травмы, как
пилоту, так и зрителям. Thunder Tiger и его авторизованные дистрибьюторы не берут на себя
никакой ответственности за ущерб, который может произойти в результате сборки или
использования этого изделия.
Использование модели вертолета требует высокой степени ответственности и навыков. Если
Вы новичок в радиоуправляемых моделях, лучше обратиться за помощью и руководством к
опытным пилотам моделей вертолетов или в клуб моделистов. Мы также настоятельно
рекомендуем Вам приобрести компьютерный симулятор (например, Aerofly Professional Deluxe
или easyFly2) для отработки навыков пилотирования. Это существенно ускорит процесс
обучения и в разумных пределах времени позволит Вам успешно пилотировать.
ГАРАНТИЯ
Корпорация Thunder Tiger гарантирует, что данное изделие/комплект не содержит брака в
материалах и в заводской сборке. В случае гарантийного ремонта/замены/возврата полная
стоимость возмещения не будет ни в каком случае превышать стоимость первоначально
купленного изделия. Гарантия не покрывает стоимость деталей, поврежденных во время
использования изделия или при его модификации. По всем вопросам гарантийного ремонта
необходимо обращаться к официальным дилерам Thunder Tiger по месту покупки. Если Вы
обнаружили бракованную или недостающую деталь, свяжитесь с дилером компании по месту
покупки в течении 60 дней со дня покупки. Наличие гарантийного талона на изделие и
документа об оплате в таком случае обязательно. Если Вы уже начали сборку/эксплуатацию
изделия, то Вы не можете вернуть изделие обратно по месту покупки.
Официальным поставщиком продукции Thunder Tiger в России является ООО «Планета Хобби» http://www.planetahobby.ru.
Свежую информацию о продукции Thunder Tiger Вы можете найти на сайте http://www.thundertiger.ru
2
Page 4

КОНТРОЛЬНЫЙ СПИСОК БЕЗОПАСНОСТИ ПОЛЕТОВ
1. Перед полетом удостоверьтесь, что батареи передатчика и приёмника полностью заряжены.
2. Перед полетом удостоверьтесь, что все управляющие поверхности работают правильно.
3. Перед первым полетом проведите проверку дальности работы радиоуправления.
Электронное оборудование должно корректно работать даже со сложенной антенной
передатчика на расстоянии как минимум 15 метров (50 футов).
4. Перед полетом удостоверьтесь, что на вашей частоте нет радиопомех.
5. Мы настоятельно рекомендуем подключить между электронным регулятором скорости и
приемником колечко против радиопомех.
6. Обязательно включайте сначала передатчик, а ручка газа должна быть в положении
холостого хода, а затем последним включайте приёмник и подключайте аккумуляторную
батарею.
7. Основной ротор и хвостовой ротор вращаются при очень высоких оборотах в минуту.
Удостоверьтесь, что ничто не сможет попасть под лопасти роторов во время полета.
8. Во время полета всегда сохраняйте безопасное расстояние до вертолета.
9. Никогда не запускайте вертолет в дождь или в условиях сильного ветра.
10. Всегда используйте и запускайте вертолет безопасным и надежным образом.
11. Никогда не запускайте вертолет над другими пилотами, зрителями, автомобилями или чем-
нибудь ещё, что может привести к травмам или повреждению собственности.
ПОСЛЕПОЛЁТНЫЙ ОСМОТР
1. Полностью осмотрите модель, чтобы проверить, что никакие детали не ослабли или не
повредились во время полета и приземления. Замените поврежденные части и затяните
ослабшие винты перед новым полетом.
2. Очистите корпус вертолета.
3. Смажьте все движущиеся части, чтобы обеспечить их плавную работу при следующем
полёте.
4. Замените все изношенные шаровые тяги и поврежденные подшипники.
5. Храните модель в прохладном, сухом месте. Избегайте расположения её под прямым
солнечным светом или около источника тепла.
Следование этим простым правилам позволит Вам наслаждаться острыми ощущениями от
полета модели вертолета многие годы.
ПРЕДОСТЕРЕЖЕНИЕ: В случае, если модель потерпела аварию, осмотрите стабилизатор,
вал ротора и шпиндель лопастей, чтобы удостовериться, что они не согнуты. Если какая-либо
деталь повреждена, её необходимо заменить новой, чтобы гарантировать безопасную работу.
Не склеивайте никаких сломанных или поврежденных пластмассовых частей. Не ремонтируйте
сломанные лопасти ротора. Очень важно осмотреть двигатель, регулятор скорости и
аккумуляторную батарею.
Всегда осматривайте следующие детали:
Шестерни, Шаровые тяги, Тяги, Подшипники, Основной вал, Стабилизатор, Шпиндель,
Хвостовую балку и привод, Плоскости, Вал хвостового ротора, Ремень, Основные лопасти и
хвостовые лопасти, Двигатель, Регулятор скорости и Аккумуляторную батарею.
3
Page 5

ТРЕБУЕТСЯ ПРИОБРЕСТИ ДОПОЛНИТЕЛЬНО
Е-ССРМ 90° или 140°)
выключатель
плоскогубцы
плоскогубцы
нож
клей
фиксатор
клей
ключ
g НАБОР РАДИОУПРАВЛЕНИЯ
Приемник
Бортовой
Аккумуляторная
Передатчик (с системой
Серво х4 (одна специально
для руля направления)
g НАБОР ЭЛЕКТРОПИТАНИЯ
Li-Po
Бесколлекторный мотор
g ДРУГОЕ
Гироскоп
(рекомендуется гироскоп
Удержания направления)
Зарядное устройство
Регулятор скорости
Стяжки Резиновая лента Пеноматериал
Отвертка
Хоббийный
ТРЕБУЕМЫЕ ДЛЯ СБОРКИ ИНСТРУМЕНТЫ
Узконосые
Моментальный
5,5 мм
Синий
Смазка
Ключ
Круглоносые
7 мм
Паяльник
4
Клещи Ножницы Припой
Эпоксидный
Шестигранный
5,5 мм
7 мм
8 мм
10 мм
Торцевые отвертки
Page 6

РАЗДЕЛ ПО СБОРКЕ
аны согласно шагам сборки. Номер детали и
количество указываются в каждом шаге и всегда выделены в рамку на каждой странице. Не
открывайте все пакеты сразу. Открывайте только тот пакет, который необходим для текущего шага
Большинство деталей в наборе Raptor E серии упаков
сборки.
5
Page 7

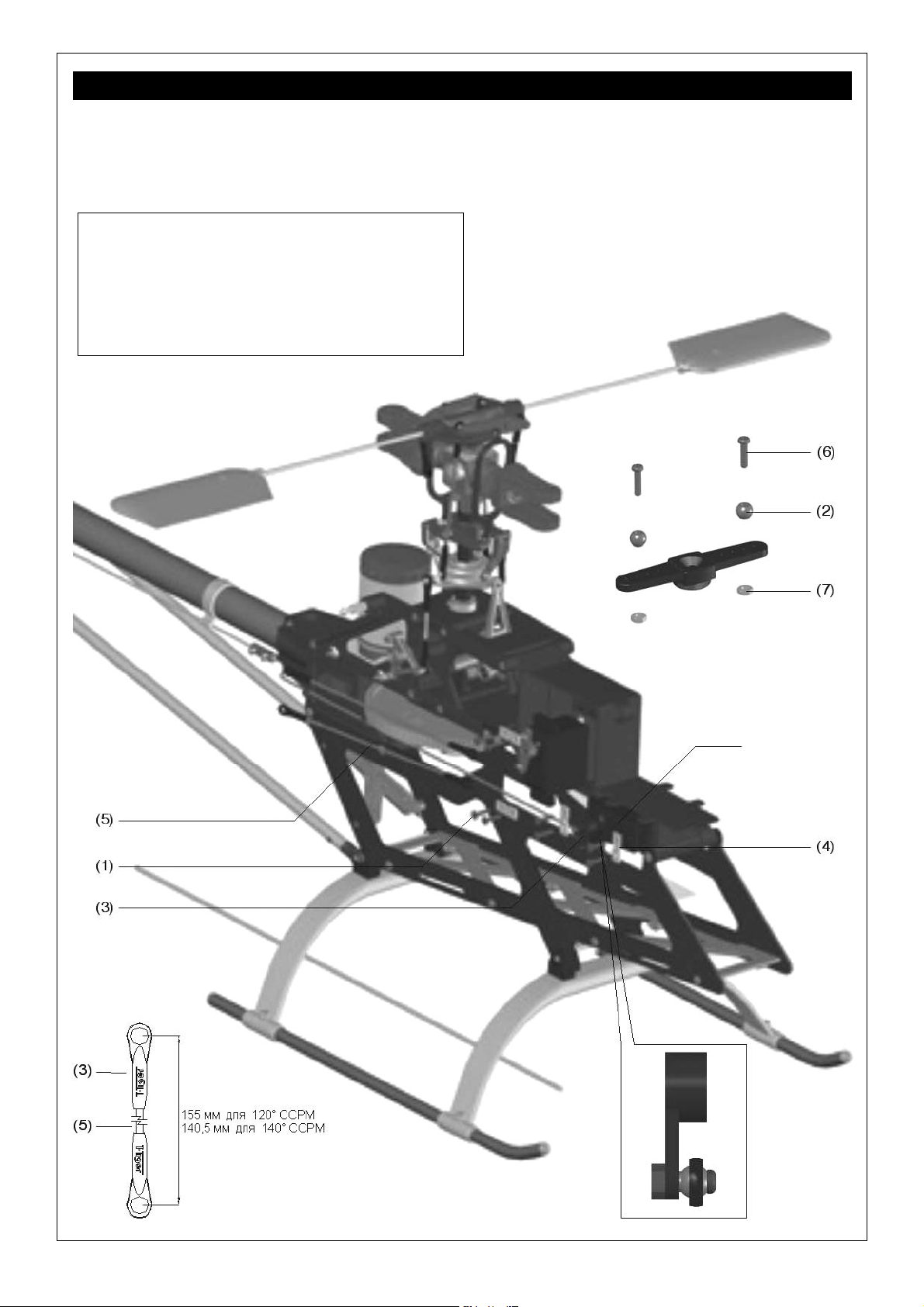
b Сборка главной рамы -Часть 1
для 140° E
-
CCPM
для 90° E
-
CCPM
1. Сперва соберите подсистему.
2. Пожалуйста установите распорки рамы, подшипники, шкивы и рычаг управления рулем высоты между
рамами как показано на рисунке ниже.
3. Прикрепите рычаг управления элеронами к боковой раме. При различных крепежных положениях
рычага элеронов на боковой раме, Вы можете использовать 90° или 140° E-CCPM. Если Вы хотите
использовать 90° E-CCPM, пожалуйста установите рычаг элеронов в заднее положение. Если Вы
желаете настроить 140° E-CCPM, пожалуйста установите рычаг элеронов в переднее положение.
(Если Вы хотите применить 140° E-CCPM, то необходимо использовать дополнительный аппарат
перекоса PV0566).
4. Не перетягивайте саморезы, что может повредить пластмассу.
(1) BK1106 Крепление серво .................................. 1
(2) BK1104 Боковая рама (Левая) .......................... 1
(3) BK1105 Боковая рама (Правая) ....................... 1
(4) BK1111 Распорка рамы (44 мм) ....................... 9
(5) BK0036 Муфта шкива ......................................... 4
(6) BK0081 Штырек ................................................... 2
(7) BV0035 Ведущий шкив ....................................... 2
(8) HMV6800ZZY Подшипник (d10xD19xW5) ....... 2
ОБРАТИТЕ ВНИМАНИЕ: За подробным описанием системы 90°/140° E-CCPM, пожалуйста
ознакомьтесь с "Предисловием к системе управления E-CCPM" (стр. 22).
(9) BK0076 Муфта (04x03x10) ..................................................... 2
(10) BK0088 Шайба (d3xd5x0.5) .................................................. 2
(11) HSE3-12B Саморез (M3x12) .............................................. 12
(12) HMJ3-22B Саморез (M3x22) ................................................ 2
(13) 1-1 Подсистема рычага управления рулем высоты ....... 1
(14) 1-2 Подсистема рычага управления элероном (Прав) ... 1
(15) 1-2 Подсистема рычага управления элероном (Лев) ..... 1
Передняя позиция
6
Задняя позиция
Page 8

1-1 Подсистема рычага управления рулем высоты
ПРАВЫЙ
(1) BK1101 А-тяга руля высоты ....................................... 1
(2) BK1102 Управляющая качалка руля высоты ......... 1
(3) HMV740ZZY Подшипник (d4xD7xW2.5) ................... 2
(4) BK1116 Муфта (04x « i3x2.5) ...................................... 2
(5) HSE3-10B Саморез (M3x10) ....................................... 2
(6) HMJ2-10N Саморез (M2x10) ...................................... 2
(7) BK0075 Шар тяги .......................................................... 2
(8) HMV1280ZZY Подшипник (d8xD12x\M3.5) .............. 2
1-2 Подсистема рычага управления элероном
ЛЕВЫЙ
(1) BK1103 Рычаг управления элероном ................... 1
(2) HMJ2-10N Саморез (M2x10) ................................... 3
(3) BK0075 Шар тяги ....................................................... 3
(4) HMV740ZZY Подшипник (d4xD7xW2.5) ................ 2
(1) BK1103 Рычаг управления элероном ................... 1
(2) HMJ2-10N Саморез (M2x10) ................................... 3
(3) BK0075 Шар тяги ....................................................... 3
(4) HMV740ZZY Подшипник (d4xD7xW2.5) ................ 2
7
Page 9

c Сборка главной рамы -Часть 2
(2) Для
E550
1. Вместо алюминиевой рамы как у E550, E620 SE получил нижнюю боковую раму из карбона.
2. Временно подсоедините крепление задней стойки посадочных салазок к раме, её необходимо будет
собрать позже, со стержнями поддержки хвоста.
(1) BK1107 Нижняя боковая рама из карбона (E620 SE) .... 2
(2) BK1122 Нижняя боковая рама из алюминия (E550) ...... 2
(3) BK1108 Основание ............................................................... 1
(4) BK1109 Задняя пластина .................................................... 1
(5) BK1110 Крепление посадочных салазок .......................... 4
(6) BK1111 Распорка рамы (44 мм) ......................................... 2
(7) HSE3-12B Саморез (M3x12) ............................................. 16
(8) HMJ3-22B Саморез (M3x22) ................................. 2
(9) BK0064T Трубка салазок ...................................... 2
(10) BK0065 Заглушка трубки салазок ..................... 4
(11) BK0066 Стойка салазок ...................................... 2
(12) HME4-5B Фиксирующий винт (M4x5) ............... 4
(13) HSE3-18B Саморез (M3x18) ............................... 6
(1) Для E650 SE
8
Page 10
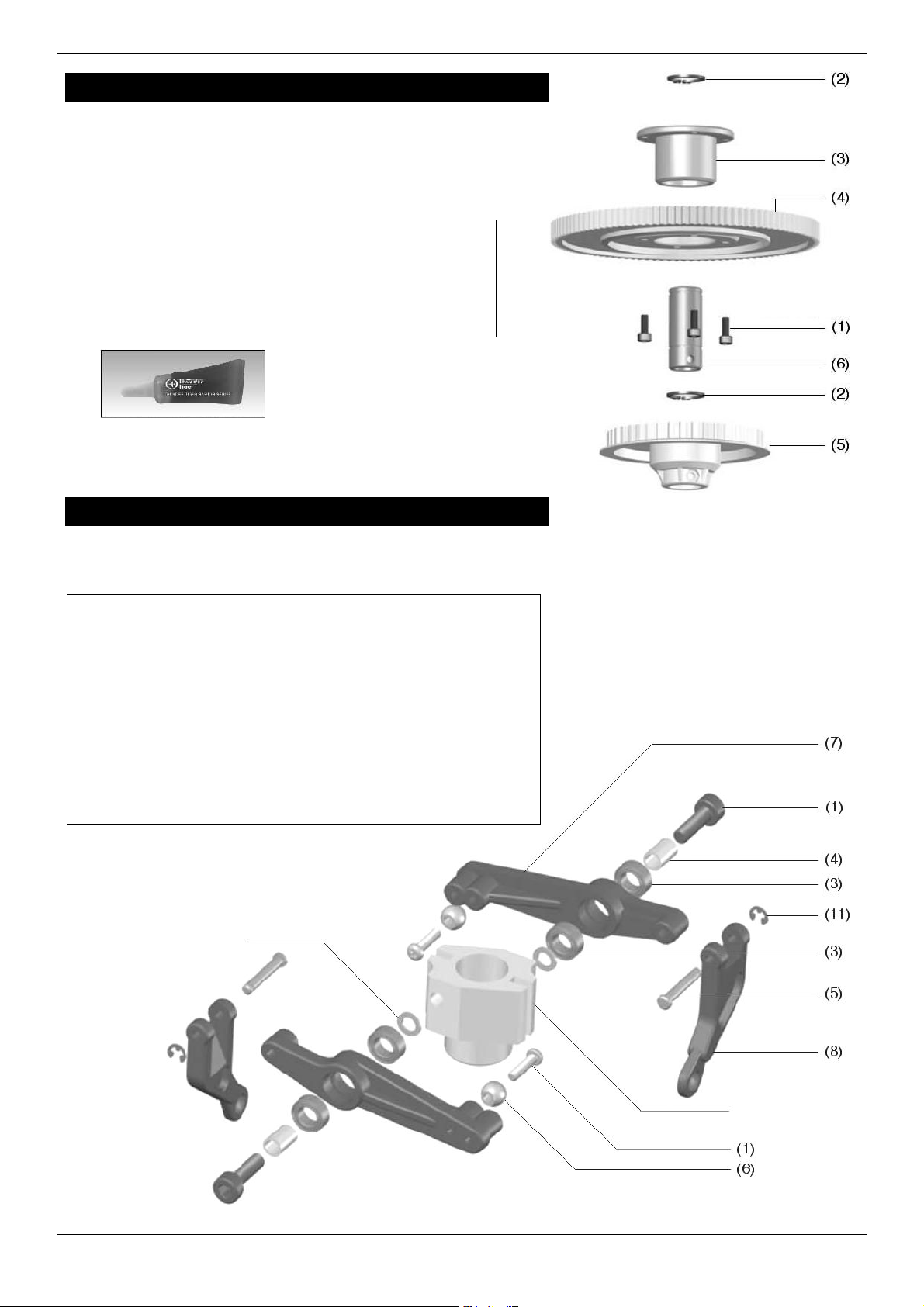
D Сборка главной шестерни привода
фиксатор
При использовании (10)
Перед вашим первым полётом необходимо добавить смазку
внутрь одностороннего сцепления. Одностороннее сцепление
сможет блокироваться, как только смазка уйдёт. Для смазывания
рекомендуется смазка сцепления (PV0517) или смазка шарового
дифференциала.
(1) HMC3-8B Вставной винт (M3x8) ............................................ 4
(2) HMQ14 Защелкивающееся кольцо ...................................... 2
(3) BV0033 Корпус одностороннего сцепления ....................... 1
(4) BK1112 Главная приводная шестерня 111T ...................... 1
(5) BK0610 Шкив привода автовращения хвоста .................... 1
(6) BK0034 Вал одностороннего сцепления ............................. 1
Нанести
PV0517 СМАЗКА ОДНОСТОРОННЕГО
ПОДШИПНИКА
e Сборка тяг аппарата перекоса
Вы можете выбрать положение шара тяги. Внешнее отверстие
сделает отклик более быстрым, внутреннее отверстие - более
плавным.
(1) HMJ2-10N Саморез (M2x10) .............................................................. 2
(2) HMC3-10B Вставной винт (M3x10) ................................................... 2
(3) HMV740ZZY Подшипник (d4xD7xW2.5) ........................................... 4
(4) BK0077 Муфта (O4x O3x6) ................................................................. 2
(5) BK0171 Штырек .................................................................................... 2
(6) BK0075 Шар тяги .................................................................................. 2
(7) BK0015 Рычаг управления стабилизатора ..................................... 2
(8) BK0016 Тяга аппарата перекоса ....................................................... 2
(9) BK0014 Основание аппарата перекоса (E550) .............................. 1
(10) BK0126 Металл-е основание аппарата перекоса (E620 SE) .... 1
(11) HMS15 E Кольцо ................................................................................ 2
(12) BK0088 Шайба (E620 SE) ................................................................. 2
ВК0126 нанести фиксатор
(12) Только для E620 SE
(9) Для E550
(10) Для E620 SE
9
Page 11

f Сборка главной рамы -Часть 3
(9) Для
E550
фиксатор
1. Вставьте главный вал через подшипники вала. Удостоверьтесь, что отверстие расположено к концу,
направленному вниз.
2. Вставьте сборку главной шестерни в раму и совместите отверстие в главной раме с отверстием вала
одностороннего сцепления.
3. Вставьте вставной винт и закрепите его блокирующей гайкой. Вы не должны затягивать этот винт,
иначе одностороннее сцепление будет легко блокироваться.
4. Наденьте блокирующее кольцо главного вала, потяните главный вал вверх и нажмите кольцо вниз,
затем закрепите кольцо двумя фиксирующими винтами.
5. Наденьте аппарат перекоса и подсоедините тяги к шарам внешнего аппарата перекоса.
6. Наденьте сборку тяг аппарата перекоса и подсоедините тяги к шарам внутреннего аппарата перекоса.
(1) BK0616 Вставной винт (M3x20) ............................................ 1
(2) HMM3Z Блокирующая гайка (M3) ......................................... 1
(3) HME4-5B Фиксирующий винт (M4x5) ................................... 2
(4) BK0086 Шаровая тяга ............................................................. 4
(5) BK0839 Прочный стержень тяги ........................................... 2
(6) BKOOSO Блокирующее кольцо главного вала ................. 1
(7) BK0702 Прочный главный вал .............................................. 1
(8) BV0092 Сборка метал-го аппарата перекоса (E620SE) ....1
(9) BV0601 Сборка аппарата перекоса (E550) ......................... 1
(10) Сборка тяг аппарата перекоса ............................................ 1
(11) Сборка главной шестерни .................................................... 1
(8) Для E620 SE
Нанести
10
Page 12

g Сборка главной рамы -Часть 4
1. Прикрепите шестерню к валу электромотора двумя фиксирующими винтами.
2. Установите двигатель на мотораме.
3. Приложите двигатель и мотораму к верхней части рамы, отрегулируйте работу шестерен и закрепите
мотораму на шасси.
4. Для E550/E620 SE с аккумуляторной батареей 6S рекомендуются электромотор TT OBL 43/11-30H
(No.2379) и шестерня 10T.
5. Для E620 SE с аккумуляторной батареей 10S рекомендуются электромотор TT OBL 49/08-50H
(No.2380) и шестерня 9T.
(1) BK1114 Моторама .......................................................................... 1
(2) BK1117 Ведущая шестерня (Шестерня 10T для E550) .......... 1
(3) BK1124 Ведущая шестерня (Шестерня 9T для E620 SE) ...... 1
(4) HMC3-6B Вставной винт (M3x6) .................................................. 4
(5) HMC3-10B Вставной винт (M3x10) ............................................. 4
(6) BK0087 Плоская шайба ................................................................ 4
(7) HME4-5B Фиксирующий винт (M4x5) ......................................... 3
ОБРАТИТЕ ВНИМАНИЕ: Для установки бесколлекторного
двигателя TT OBL используйте только два (4) HMC3-6B.
Фиксатор
Фиксатор
(2) Для E550
(3) Для E630SE
11
Page 13

h Сборка головы основного ротора
(6)
HMX0612
1. Закрепите шары тяг на корпусе шага основного ротора.
2. В узел основного ротора вставьте амортизирующую прокладку.
3. Чтобы продеть вал оперения сквозь прокладки, нанесите немного силиконовой смазки или вазелина.
4. Обязательно нанесите на вставной винт (16) M4x8 фиксатор.
5. Для E620 SE, на данном этапе, не затягивайте (20) HMC2610B.
(1) BK0012 Штырек (E550) .................................................... 2
(2) HMY2-26 Штырек (E620SE) ............................................ 2
(3) BK0435 Шайба (d4xD11xW1.7) ...................................... 2
(4) HMV1360ZZY (d6xD13xW5) ............................................ 4
(5) BK0584 Упорная шайба .................................................. 2
(6) HMX0612 Упорный подшипник ...................................... 2
(7) BK0596 Корпус шага основного ротора ....................... 2
(8) BK0583 Вал оперения ..................................................... 1
(9) BK0581 Амортизирующая муфта .................................. 2
(10) BK0586 Амортизирующая прокладка (70º) (E550) ... 2
(12) BK0007 Тяга управления стабилизатором ......... 2
(13) BK0587 Штырек узла основного ротора .............. 1
(14) BK0595 Узел основного ротора (E550) ................ 1
(15) BK0554 Мет. узел основного ротора (E620 SE) ..... 1
(16) HMC4-8B Вставной винт (M4x8) ........................... 2
(17) BK0075 Шар тяги ..................................................... 2
(18) HMJ2-10N Саморез (M2x10) .................................. 2
(19) BK0555 Кольцо регулировки фазы (E620 SE) ... 1
(20) HMC2610B Вставной винт (M2.6x10) (E620 SE) .... 1
(21) HMV6800ZZY Подшипник (d10xD19xW5) (E620SE) ..2
(11) BK0585 Амортизирующая прокладка (80º) (E620SE) .. 2
ОБРАТИТЕ ВНИМАНИЕ: Для 3D-полета, мы настоятельно рекомендуем жесткий амортизатор
(PV0382), а также металлический узел основного ротора (PV0338 или PV0484).
Больший внутренний
диаметр всегда направлен в
сторону узла основного
ротора
Меньший внутренний
диаметр всегда обращен к
лопастям
Диаграмма для сборки упорного подшипника
Нанести смазку
Нанести фиксатор
Нанести фиксатор
Без фиксатора (20)
Нанести фиксатор
12
Page 14

i Сборка стабилизатора
(6) Для
E620 SE
1. Прикрепите 6 шаров тяг к качалкам управления стабилизатором и микширующим рычагам с помощью
саморезов (17) HMJ2-10N (M2x10).
2. Соберите узел качели, стабилизатор, втулку качалки стабилизатора и качалку управления
стабилизатором, как показано на рисунке. Удостоверитесь, что стабилизатор имеет одинаковую длину
с каждой стороны от узла качели, затем затяните фиксирующий винт (16) и закрепите фиксатором.
3. Установите с каждой стороны лопатки, на одинаковом расстоянии от лопатки до узла качели.
Поставьте параллельно лопатки и качалки управления стабилизатором, затем закрепите лопатки
фиксирующими финтами (15).
4. Прикрепите микширующие качалки к узлу качели, с использованием фиксатора. Не дайте фиксатору
просочиться в подшипники.
5. Посредством двойной тяги подсоедините микширующий рычаг (короткая сторона) к главному приводу.
(1) BK0002 Качалка управления стабилизатором............ 2
(2) BV0004 Узел качели стабилизатора.............................. 1
(3) BK0005 Втулка качалки стабилизатора........................ 2
(4) BK0006 Микширующий рычаг ........................................ 2
(5) BK0067 Лопатка стабилизатора (E550) ....................... 2
(6) BK0067G Ультра легкая лопатка (E620SE) ................ 2
(7) BK0075 Шар тяги .............................................................. 6
(8) BK0076 Муфта (d3xD4x10) ............................................. 2
(9) BK0078 Муфта (d3xD4x4) ............................................... 2
(10) BK0088 Шайба (d3xD5x0.5) .......................................... 2
ОБРАТИТЕ ВНИМАНИЕ: 1. Черная лопатка (PV0036) хороша для устойчивого полета.
2. Легкая лопатка (PV0481/25g или PV0482/20g) рекомендуется для 3D.
(16) Нанести фиксатор
(11) BK0631 Прочный стабилизатор ............................ 1
(12) BV0085 Двойная тяга .............................................. 2
(13) HMC3-14B Вставной винт (M3x14) ....................... 2
(14) HMC3-8B Вставной винт (M3x8) ........................... 2
(15) HME3-10B Фиксирующий винт (M3x10) ............... 2
(16) HME4-5B Фиксирующий винт (M4x5) ................... 2
(17) HMJ2-10N Саморез (M2x10) .................................. 6
(18) HMV740ZZY Подшипник (d4xD7x2.5) .................. 4
(19) HMV840ZZY Подшипник (d4xD8x3) ..................... 2
(20) Сборка головы основного ротора ......................... 1
(5) Для E550
Нанести фиксатор
(14) Нанести фиксатор
13
Page 15

j Сборка главной рамы -Часть 5
1. Наденьте сборку основного ротора на главный вал и совместите два штырька, чтобы надеть сборку тяг
аппарата перекоса.
2. Вставьте винт M3x20 и закрепите его блокирующей гайкой.
3. Установите стержни длинным концом к микширующему рычагу и шарами к внутреннему аппарату
перекоса.
(1) BK0616 Вставной винт (M3x20) ........................................ 1
(2) HMM3Z Блокирующая гайка (M3) .................................... 1
(3) HME3-18.5B Фиксирующий винт (M3x18.5) .................... 2
(4) BK0842 Прочный стержень тяги (M2.3X76) .................... 2
(5) BK0086 Шаровая тяга ......................................................... 4
(6) BK0626 Стойка крепления кабины ................................... 2
(7) Сборка головы основного ротора .................................... 1
Нанести фиксатор
14
Page 16
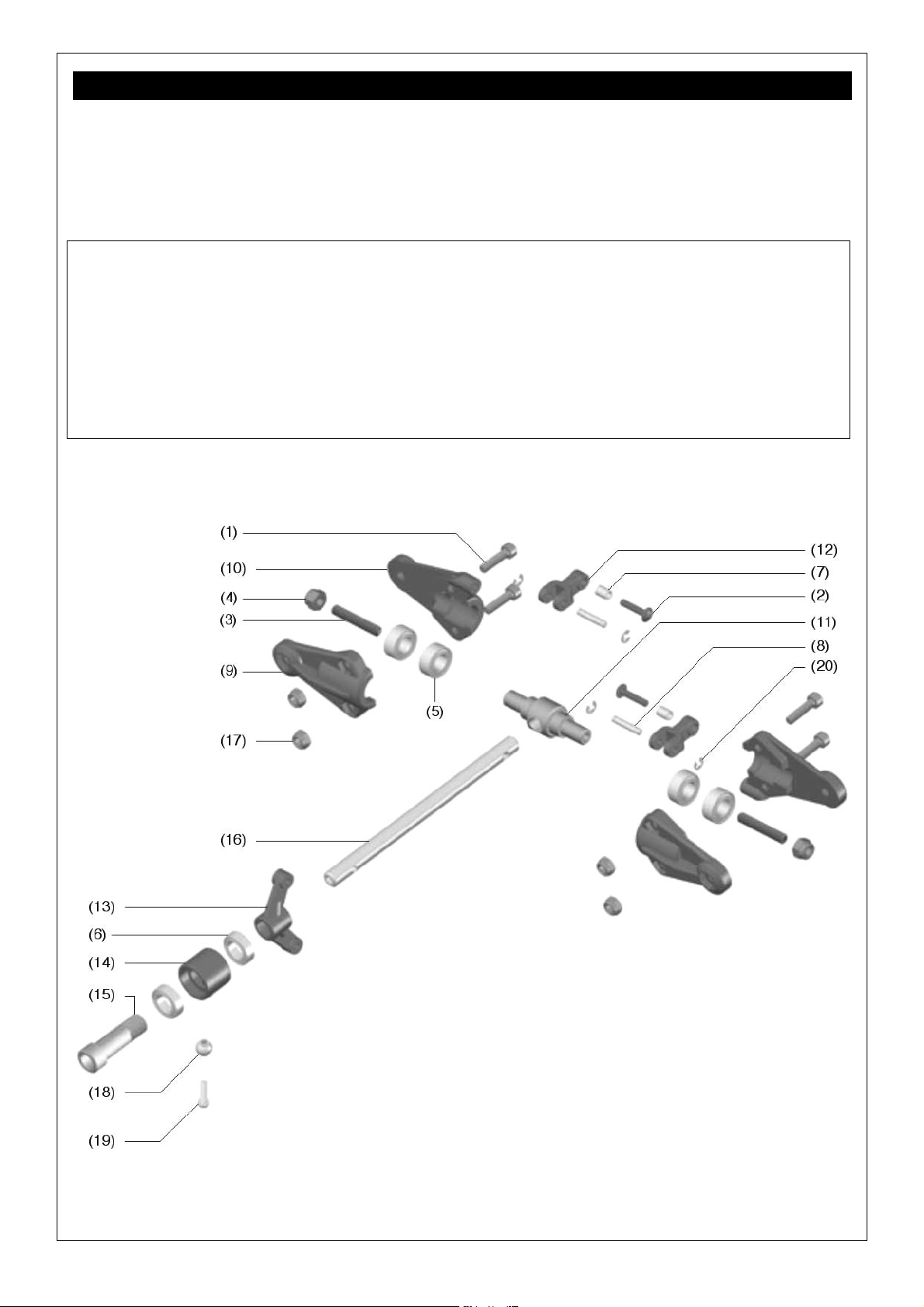
1) Сборка хвостовой части -Часть 1
1. Закрепите узел хвостового ротора на валу хвостового ротора. Фиксирующие винты должны быть
установлены точно по точке на валу.
2. Нанесите фиксатор на фиксирующие винты (3).
3. Не перетягивайте блокирующую гайку (4).
4. Не перетягивайте саморез (2) .Тяга управления шагом хвоста должна вращаться свободно.
5. Не перетягивайте вилку и втулку, они должны вращаться свободно и двигаться на валу плавно.
(1) HMC2510B Вставной винт (M2.5x10) ...................... 4
(2) HSE2-10B Саморез (M2x10) ..................................... 2
(3) HME3-18.5B Фиксирующий винт (M3X18.5) .......... 2
(4) HMM3Z Блокирующая гайка (M3) ........................... 2
(5) HMV1050ZZ Подшипник (d5xD10xW4) ................... 4
(6) HMV1060ZZY Подшипник (d6xD10xW5) ................ 2
(7) BK0082 Муфта (d2xD3xW4.3) .................................. 2
(8) BK0546 Штырек (2 мм) .............................................. 2
(9) BK0302-1 Корпус шага хвоста (A) ........................... 2
(10) BK0303-1 Корпус шага хвоста (B) ......................... 2
Нанести фиксатор
(11) BK0307 Узел хвостового ротора ..................................... 1
(12) BK0026 Тяга управления шагом хвоста ........................ 2
(13) BK0025 Вилка шага хвоста .............................................. 1
(14) BK0027 Ползунок управления шагом хвоста ............... 1
(15) BK0028 Втулка ползунка управления шагом хвоста ...1
(16) BK0053 Вал хвостового ротора........................................ 1
(17) HMM25 Блокирующая гайка (M2.5) ................................ 4
(18) BK0075 Шар тяги ................................................................ 1
(19) HMF2-8N Винт (M2x8) ....................................................... 1
(20) HMS15 E Кольцо ................................................................ 4
15
Page 17

1! Сборка хвостовой части -Часть 2
1. Закрепите шкив, вставив штырек в хвостовой вал.
2. Нанесите фиксатор на фиксирующий винт и надежно закрепите штырек.
3. Не затягивайте рычаг управления шагом хвоста. Он должен вращаться свободно, иначе хвостом будет
трудно управлять при полете.
(1) HMV1150X Подшипник (d5xD11xW5) ..................... 1
(2) HMY2-12 Штырек (2x12) ............................................ 1
(3) HSE3-18B Саморез (M3x18) ..................................... 1
(4) HMF2-8N Винт (M2x8) ................................................ 1
(5) BK0076 Муфта (d3xD4xW10) ................................... 1
(6) BK0075 Шар тяги ........................................................ 1
(7) HMV740ZZY Подшипник (d4xD7xW2.5) ................. 2
(8) BK0024 Рычаг управления шагом хвоста ....................... 1
(9) BK0088 Плоская шайба ...................................................... 1
(10) HME3-4B Фиксирующий винт (M3x4) ............................. 1
(11) BK0050 Хвостовой шкив ................................................... 1
(12) BK0051 Фланец хвостового шкива ................................. 1
(13) BK0047 Корпус хвостового блока (R) ............................. 1
(14) Сборка хвостового блока ................................................. 1
Нанести
фиксатор
16
Page 18

1@ Сборка хвостовой балки
1. Наденьте 3 направляющих тяги на балку и равномерно их распределите.
2. Проденьте в направляющие стержень хвостовой тяги.
3. Вставьте в балку приводной ремень хвоста так, чтобы он выходил с обоих концов.
4. Поместите приводной ремень на шкив привода хвоста и завершите остальную сборку хвостовой балки.
5. При установке концов стержней поддержки хвоста нанесите густой циакриновый или эпоксидный клей.
(1) HMC3-20B Вставной винт (M3x20) ...................................... 4
(2) HMC3-25B Вставной винт (M3x25) ...................................... 2
(3) HSE3-12B Саморез ................................................................. 4
(4) HMM3Z Блокирующая гайка (M3) ....................................... 6
(5) HMV1150X Подшипник (d5xD11xW5) ................................ 1
(6) BK0046 Корпус хвостового блока (L) .................................. 1
(7) BK0071 Вертикальное оперение (E550) ............................ 1
(8) BK0069 Оперение стабилизатора (E550) ......................... 1
(9) BK0801 Карбоновое вертикальное оперение (E620SE) 1
(10) BK0121 Карбоновое оперение стабилиз-ра (E620SE). 1
(11) BK0809 POM Шайба (d3xD10x3) (E620 SE) ................... 2
(12) BK0070 Скоба оперения стабилизатора ........................ 1
(13) BK0540-T Стержень поддержки хвоста (E550) ............. 2
(8) Для E550
(15) Для E550
(16) Для E620 SE
(14) BK0524T Стержень поддержки хвоста (E620 SE) ............... 2
(15) BK0060-T Хвостовая балка (E550) .......................................... 1
(16) BK0859 Хвостовая балка (E620 SE) ....................................... 1
(17) BK0091 Направляющая стержня ............................................ 3
(18) BK0089 Приводной ремень хвостового ротора (E550) ...... 1
(19) BK0858 Приводной ремень хвостового ротора (E620SE) 1
(20) BK0100-2 Стержень поддержки хвоста (E550) .................... 1
(21) BK0861 Стержень поддержки хвоста (E620SE) .................. 1
(22) BK0447 Конец стержня поддержки хвоста ............................ 4
(23) HMJ2-8N Саморез (M2x8) .......................................................... 4
(24) BK0086 Шаровая тяга ................................................................. 1
(25) BV0052 Шкив холостого хода хвоста ...................................... 1
(26) Хвостовой блок ............................................................................. 1
(20) Для E550
(21) Для E620 SE
(18) Для E550
(19) Для E620 SE
Нанести циакрин
Для E620 SE
Для E620 SE
Для E550
E620 SE
(13) Для E550
(14) Для E620 SE
17
Page 19

1# Сборка главной рамы -Часть 6
хвостового ротора
шкив
шестерня
против часовой стрелки
основного ротора
Сове т:
При настройке
1. Вставьте винты M3x20 в основание хвоста на главной раме и закрепите их блокирующими гайками, но
пока не затягивайте их.
2. Ремень должен вращаться как показано ниже. Протяните ремень через основание хвоста, сохраняя
правильное положение ремня. Полностью до упора протолкните хвостовую балку в основание хвоста.
Поместите приводной ремень на ведущую шестерню хвостового привода. Затем, осторожно потяните
хвостовую балку назад, пока натяжение на ремне не будет допускать его прогиб не более 5 мм (3/16").
Затяните блокирующие гайки, и завершите остальную часть сборки.
3. Соберите хвостовую тягу А и B. Пожалуйста прочтите стр.34, чтобы отрегулировать длину.
4. Для E620 SE, пожалуйста следуйте совету по настройке, чтобы настроить фазирование.
(1) BK0068 Лопасть хвостового ротора ................ 2
(2) HMJ3-22B Саморез (M3x22) .............................. 2
(3) HMC3-14B Вставной винт (M3x14) ................... 2
(4) HMC3-20B Вставной винт (M3x20) ................... 2
(5) HMM3Z Блокирующая гайка (M3) .................... 4
(6) HME4-5B Фиксирующий винт ............................ 2
(7) BK0105 Соединитель хвостовой тяги ............. 1
(8) Bk1123 Прочная тяга А. ...................................... 1
Направление вращения
УСТАНОВКА РЕМНЯ
Шкив холостого хода хвоста
Ремень
Направляющий
Главная
Поверните ремень на 90º
Направление вращения
ТОЛЬКО E620 SE
А качалка
Аппарат
перекоса
Кольцо
настройки
фазирования
Стабилизатор
Балка
Стабилизатор должен
быть выровнен по
центру балки
кольца регулировки фазы,
стабилизатор и хвостовая
балка могут выступать как
контроль. Когда стабилизатор и хвостовая балка
отцентрированы, внутренние
шаровые аппарата перекоса
должны быть выровнены с
внешними шаровыми. В этот
момент затяните вставной
винт на кольце фазирования.
ОБРАТИТЕ ВНИМАНИЕ:
Неправильное выравнивание повлечет неправильное микширование.
18
Page 20
1$ Установка серво -Часть 1
1. Перед подсоединением стальных шаров тяг, снимите ве качалки с серво.
2. Установите шары тяг на расстоянии 13,5 мм от центра качалки серво.
3. Для серво руля направления, пожалуйста ознакомьтесь с руководством вашего гироскопа, чтобы
подобрать длину качалки.
4. Удостоверьтесь, что длины тяг правильны.
(1) HSE2612N Саморез (M2.6x12) .................................... 8
(2) BK0075 Шар тяги ........................................................... 3
(3) BK0086 Шаровая тяга ................................................... 5
(4) BK0104 Пластина крепления серво ........................... 4
(5) BK1120 Прочная тяга (M2.3x130) ............................... 2
(6) HMF2-8N Винт (M2x8) ................................................... 3
(7) HML2 Гайка (M2) ............................................................ 3
Нанести фиксатор
Серво руля
направления
19
Page 21

1% Установка серво -Часть 2
1. Перед подсоединением стальных шаров тяг, снимите ве качалки с серво.
2. Установите шары тяг на расстоянии 13,5 мм от центра качалки серво.
3. Удостоверьтесь, что длины тяг правильны.
(1) HSE2612N Саморез (M2.6X12) ................................... 8
(2) BK0075 Шар тяги ........................................................... 4
(3) BK0086 Шаровая тяга ................................................... 8
(4) BK0104 Пластина крепления серво ........................... 4
(5) BK1121 Прочная тяга (M2.3X107) .............................. 2
(6) BK0840 Прочная тяга (M2.3x46) ................................. 2
(7) HMF2-8N Винт (M2x8) ................................................... 4
(8) HML2 Гайка (M2) ............................................................ 4
Нанести фиксатор
20
Page 22

1^ Установка Приемника / Гироскопа
Рекомендуется гироскоп
скорости
Thunder Tiger признает, что для выбора существует множество производителей радиоуправления и
гироскопов. При принятии решения, Вы можете спросить совета у опытных пилотов вертолетов.
(1) BE1052 Трубка антенны ................................ 1
(2) BK0106 Двусторонний скотч ......................... 2
Обратите внимание:
1. Настоятельно рекомендуется подключить противопомеховое кольцо между
регулятором скорости и
приемником.
2. Не устанавливайте антенну
на одной стороне вертолета
вместе с регулятором
скорости и проводами
батареи.
удержания направления
Усилитель гироскопа
Приемник
Аккумул
Регулятор
Li-Po
Стяжка
1& Сборка Корпуса / Кабины
1. Срежьте облой с корпуса. Оставьте в отверстии корпуса некоторый запас, чтобы Вы смогли
привинтить к нему кабину.
2. Срежьте фланец в задней части корпуса, чтобы избежать царапанья по нему главной шестерни.
3. Если во время полета корпус спадает, установите на защелке А саморез.
(1) HMJ2-6B Саморез (M2x6) ...................................... 7
(2) HSE3-12B Саморез (M3x12) .................................. 2
(3) BK0611 Корпус ......................................................... 1
(4) BK0102 Резиновое кольцо ..................................... 2
(5) BK0098 Защелка корпуса -А .................................. 1
(6) BK0099 Защелка корпуса -В .................................. 1
(7) BK0612 Кабина ......................................................... 1
Корпус
Срезать
фланец
Кольцо
Проделайте отверстия и
установите резиновые
кольца как показано на
рисунке.
Если во время обратного 3Dполета корпус будет спадать,
мы предлагаем установить
саморез (#1) на защелке
корпуса -А (#5).
21
Page 23

1* Сборка основного ротора
Для безопасности и высоких летных характеристик
мы настоятельно рекомендуем использовать
стекловолоконные или карбоновые лопасти ротора.
(1) HMC4-27B Вставной винт (M4x7) .......................... 2
(2) HMM4Z блокирующая гайка (M4) .......................... 2
Обратите внимание: Поскольку скорость
вращения головы электрического р/у
вертолета очень высока, мы настоятельно
рекомендуем использовать стекловолоконные
или углеволоконные основные лопасти.
Стекловолоконные
или карбоновые
основные лопасти
22
Page 24

ПРЕДИСЛОВИЕ К СИСТЕМЕ УПРАВЛЕНИЯ E-CCPM
Электронное микширование циклического/общего
ия, которая может выполнять то же
Механическое микширование циклического/общего шага), но с простой механизацией. Система
вного управления элеронами, рулем высоты и
CCPM системе работают независимо от друг друга, но они
CCPM системе. Например,
рво работают вместе, чтобы перемещать аппарат
перекоса вверх и вниз. Если дается команда элеронам, одновременно работают 2 серво, наклоняя
либо отданной команды вместе, создают
CCPM выполняет данные команды
управления посредством менее сложных механических систем микширования и требует меньшего
E-CCPM (Electric Cyclic/Collective Pitch Mixing -
шага) система предоставляет пользователям систему управлен
управление, что и традиционная система М-CCPM (Mechanical Cyclic/Collective Pitch Mixing -
90°/140° E-CCPM использует 3 серво для осно
общим шагом. Эти 3 серво в Мработают слаженно, чтобы достигнуть такого же управления, что в Eесли дана команда общего шага, все 3 се
аппарат перекоса. Серво, работающие в течение какоймаксимальный вращающий момент. Кроме того, система E-
количества управляющих тяг и деталей.
23
Page 25

РАБОТА СИСТЕМЫ 90°/140° E-CCPM
Мы применили на этом вертолёте систему 90°/140° E-CCPM. Вы можете выбрать, которую Вам
понравится, в зависимости от вашего предпочтения и вашего передатчика. Главное различие в том, что
при использовании 90° E-CCPM во время команды руля высоты работает только 1 серво. А в системе
140° E-CCPM при данной ситуации работают все 3 серво.
В сегодняшних современных компьютерных системах радиоуправления, система E-CCPM заложена в
программе. Поскольку функция 90°/140° E-CCPM уже запрограммирована, нет больше сложных
установок/микширований как в системе М-CCPM. Среди типов радиоуправления и марок пожалуйста
выберите то, которое имеет функцию 90°/140° E-CCPM. Пожалуйста имейте в виду, что для управления
E-CCPM невозможно использовать не-E-CCPM систему.
Отданные команды выполняются совместной работой трёх серво через микширующую программу
радиоуправления. Далее приведены примеры, показывающие как выполняются эти движения.
< ОБЩИЙ ШАГ
Когда даётся команда общего шага, все 3 серво движутся в одном направлении с одинаковой скоростью
и на одинаковый угол. Это движение поднимает или опускает аппарат перекоса и сохраняет уровень
аппарата перекоса. Таким образом, требуемый общий шаг может быть достигнут без ввода циклического.
< ЭЛЕРОН
Элерон управляется двумя серво спереди. Когда отдаётся команда элерона, одна серво будет тянуть
аппарат перекоса вниз, а другая будет толкать аппарат перекоса вверх, тем самым выполняя команду
крена. Они движутся в разные стороны с одинаковыми скоростью и отклонением, а третья серво сзади
остается в том же положении.
24
Page 26

РАБОТА СИСТЕМЫ 90°/140° E-CCPM
< РУЛЬ ВЫСОТЫ
1. Для 90° E-CCPM:
Руль высоты управляется только одной серво. Когда отдается команда руля высоты, серво,
подключенная в канал руля высоты, будет тянуть/толкать аппарат перекоса, наклоняя его. 2 другие
серво остаются неподвижны. То есть, при использовании системы 90° E-CCPM, за руль высоты
отвечает только 1 серво.
2. Для 140° E-CCPM:
Руль высоты управляется всеми 3 серво с 140 ° E-CCPM установка. Когда команда руль высот
дается, эти 2 серво перед ходом подноса серво в том же самом руководстве(направлении) и
третьем перемещают обратное. Например, когда вниз руль высот com mand дается, 2 передних
серво выдвигают(подталкивают) аппарат перекоса вверх, и третий тянет аппарат перекоса вниз
так, чтобы вниз команды руль высот был выполнен. Эти 3 серво тянут/выдвигать аппарат перекоса
в то же самое время с той же самой скоростью и расстоянием путешествия, чтобы выполнить
данную команду. С 140 ° E-CCPM, это минимизирует взаимодействие между коллективным и
циклическим контролем(управлением), что точность может быть лучше.
25
Page 27

ПОДКЛЮЧЕНИЕ СЕРВО
Система E-CCPM требует 3 канала для элеронов, руля высоты и дополнительный (AUX) для шага. Но
люди могут запутаться, поскольку эти 3 канала не говорят ни о каком независимом движении. Они
используются вместе, чтобы выполнять вращение, переворот и общее управление. Как следствие,
рекомендуется следующий способ подключения.
1. Тыловая серво, расположенная в задней части аппарата перекоса ДОЛЖНА быть включена в канал
руля высоты.
2. Допустим, 1-я серво спереди подключена в канал элеронов.
3. 2-я серво подключена в дополнительный канал (AUX).
В качестве справки для Вас - следующая диаграмма E-CCPM подключения. Пожалуйста также
обратитесь к инструкции Вашего радиоуправления.
Газ
Элерон
Приемник
Высота
Руль
5 канал
AUX
Аккумуля
Выключатель
Аккумуляторная батарея
Гиро
Направление
Li-Po
Магнитное кольцо
Элероны
Бесколлекторный
электромотор
Дополнит.
Высота
Регулятор
скорости
26
Page 28

ОСНОВНОЙ ПРИНЦИП РЕГУЛИРОВКИ
Поскольку людей может смутить способ работы системы E-CCPM, мы хотим объяснить основной принцип
того, как центрировать и триммировать серво при настройке полного отклонения.
Прежде всего, мы должны выяснить, что Вы хотите отрегулировать. Вы желаете регулировать
непосредственно серво или рулевую поверхность? Например, если Вы хотите настроить серво,
подключенную в канал элерона, будет регулироваться только эта серво. Но если Вы хотите настроить
(кренящие) плоскости элеронов, то будут регулироваться две серво, подключенные в каналы элерона и
AUX. Разъяснение этой основной концепции упростит процесс регулировки.
Кроме того, Вы должны изучить функции передатчика - "Реверс", " Саб-триммер", "Триммер",
"Регулировка отклонения", "Двойные расходы, Экспонента" и "Микширование аппарата перекоса".
Разными производителями радиоуправления даются различные названия этим функциям, но их
установки в основном идентичны. Следующая таблица показывает на что влияют эти функции:
Пункты
Реверс
Саб-триммер
Регулировка отклонения
Регулировать
непосредственно серво
«
«
«
Триммер
Д/Р и Экспонента
Микшер
аппарата
перекоса
Поэтому, если Вы желаете регулировать сами серво, пожалуйста используйте "Реверс", "Саб-триммер", и
"Регулировку отклонения". Если Вы хотите отрегулировать рулевые поверхности, пожалуйста
используйте "Триммер", "Двойные расходы, Экспоненту" и "Микшер аппарата перекоса".
Например, чтобы получить желаемое положение качалки серво, необходимо сделать незначительную
центровку с помощью функции "Саб-триммера". При таком обстоятельстве, Вы должны регулировать
саму серво, а не управляющую поверхность.
± Элерон
± Руль высоты
± Шаг
Регулировать
движение управления
«
«
«
«
«
27
Page 29

ОСНОВНОЙ ПРИНЦИП УСТАНОВКИ И РЕГУЛИРОВКИ
Перед стартом обязательно выполните следующую подготовку.
1. Установите все триммеры, кнопки и переключатели в нейтральное и нулевое положение.
2. Сбросьте установки радиоуправления в их фабричные установки.
3. Выберите режим управления аппаратом перекоса 90°/140° E-CCPM.
< Микширование Реверса/Аппарата перекоса
Направления работы серво необходимо подтвердить. Вы можете временно прикрепить качалки к серво,
чтобы было легче наблюдать направление перемещения серво. При подаче команды положительного
общего шага, все 3 серво должны перемещаться в одном направлении, поднимая аппарат перекоса.
Если эти 3 серво перемещаются в одном направлении, но опускают аппарат перекоса, Вам необходимо
использовать функцию "микширования аппарата перекоса", чтобы заставить его подниматься. Если
какая-либо серво перемещается в обратном направлении, Вам необходимо настроить её посредством
функции "реверса". Поскольку вышеописанный способ перемещения определен, функция "реверса" для
Элерона/Высоты/AUX выполнена.
Далее, Вам необходимо проверить рулевые поверхности. При подаче команды управления циклическим
шагом, аппарат перекоса должен отклоняться в правильном направлении. В ином случае, Вам следует
отрегулировать его функцией "микширования аппарата перекоса". Например, если дана команда руля
высоты вниз, аппарат перекоса должен отклониться вперед. Если аппарат перекоса наклонен назад, Вы
должны изменить +/- управляющей плоскости руля высоты посредством функции "микширования
аппарата перекоса". Таким же образом с рулевой поверхностью элерона. Подводя итог, функция
"реверса" должна регулировать непосредственно серво, а +/- функции "микширования аппарата
перекоса" призвана настраивать управляющие поверхности.
< Качалки серво
После того как были определены направления работы серво, пожалуйста центрируйте ручку управления
общим шагом. С ручкой общего управления по центру, установите качалки на 3 серво. Они должны быть
вертикальны. Если качалки серво отклоняются на небольшой градус, используйте функцию "сабтриммера", чтобы независимо их отрегулировать. Таким образом, процедура центровки завершена.
28
Page 30
ОСНОВНОЙ ПРИНЦИП УСТАНОВКИ И РЕГУЛИРОВКИ
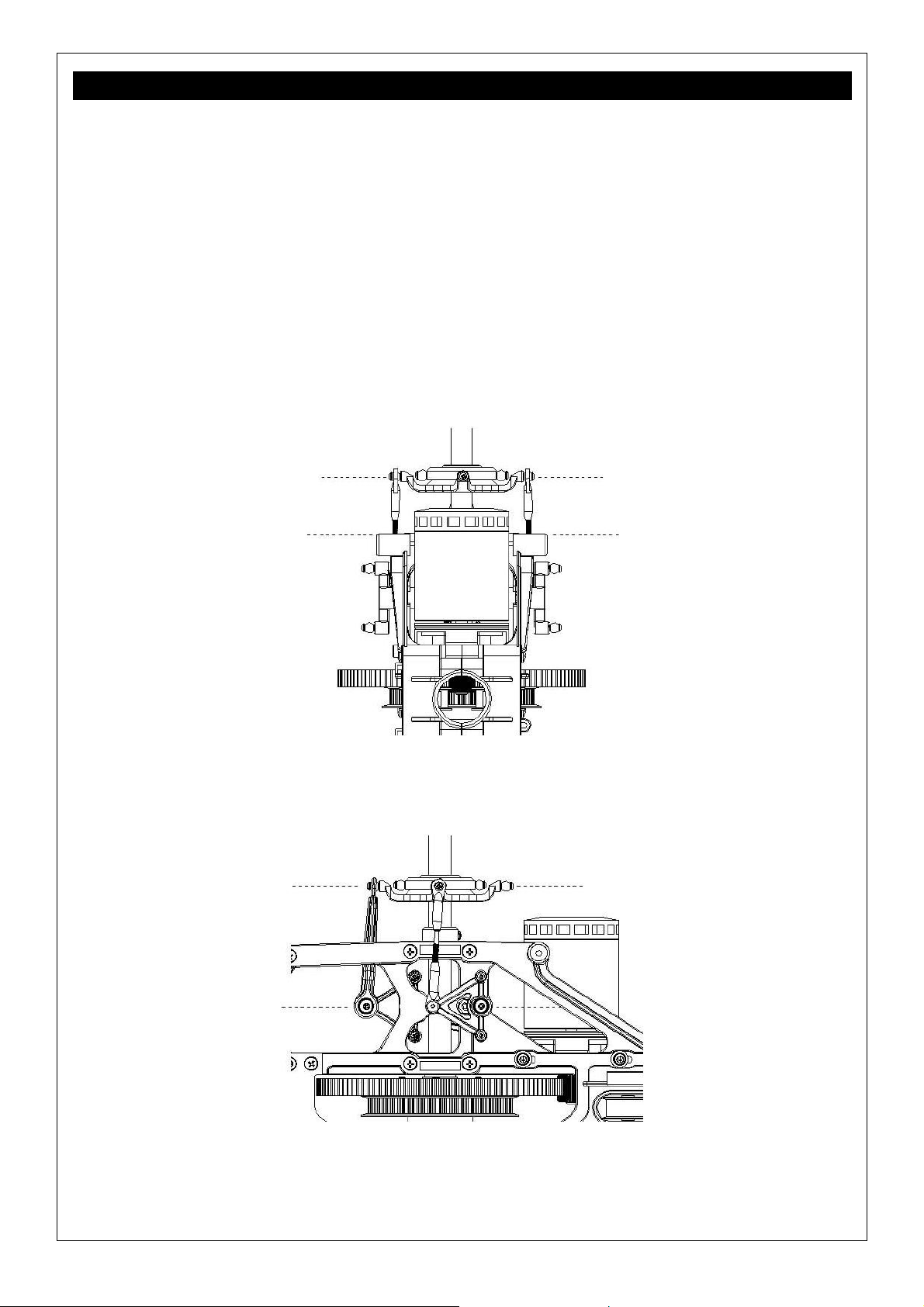
< Уровень аппарата перекоса
После центровки серво, настройки длины управляющих тяг и подсоединения их к шарам тяг, важно
проконтролировать, чтобы аппарат перекоса стоял ровно. Включите передатчик и приемник и
центрируйте ручку общего шага. Все триммеры и кнопки должны быть обязательно центрированы, а
кривая шага в данный момент должна быть 0% в нижней точке и 100% в верхней. Качалки серво должны
быть вертикальны. Если ручка общего шага центрирована, а качалки серво вертикальны, аппарат
перекоса должен стоять ровно. Сперва проверьте аппарат перекоса с тыла модели, чтобы проверить его
выравнивание слева направо. Если аппарат перекоса стоит неровно относительно рамы модели,
отрегулируйте левые или правые тяги управления серво. Затем, проверьте аппарат перекоса с бока
модели, чтобы просмотреть его ровность вперед-назад. Если аппарат перекоса стоит неровно, советуем
одновременно отрегулировать обе управляющие тяги, левую и правую.
Уровень
Уровень
29
Page 31
РЕГУЛИРОВКА МИКШИРОВАНИЯ ОБЩЕГО К ЦИКЛИЧЕСКОМУ
Это всегда случается, что отклонение каждой серво слегка различается. Если это так, то аппарат
перекоса будет отклоняться, когда дается команда полного общего шага. Эти различия могут быть
откорректированы небольшим изменением значения отклонения каждой серво, посредством функции
"регулировки отклонения".
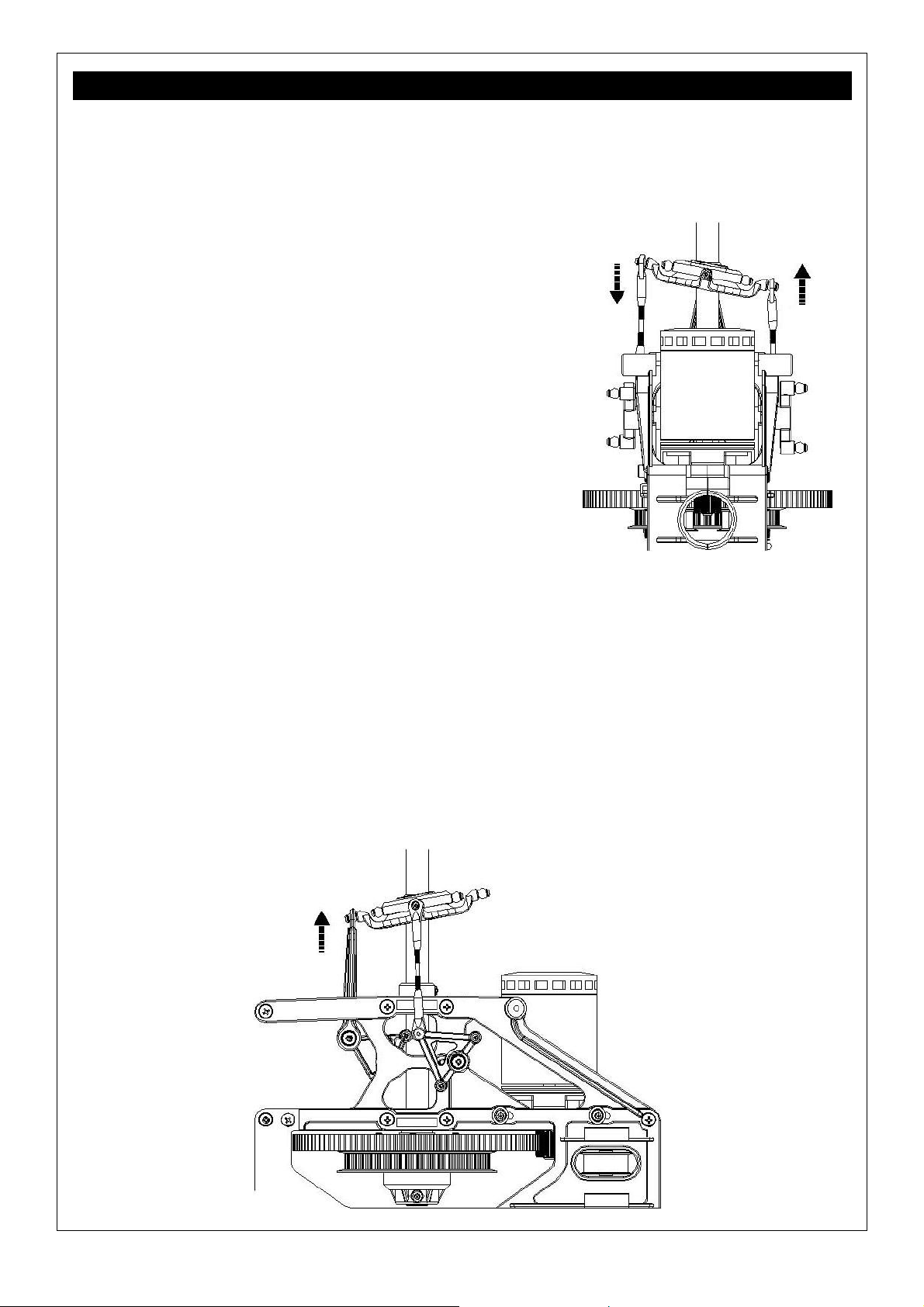
< Микширование Шаг к Элерону
Установите ручку общего шага в положение полного
положительного шага. Проверьте аппарат перекоса с тыла
модели, чтобы он стоял ровно слева направо. Если аппарат
перекоса расположен неровно по отношению к раме модели,
настройте какие-либо серво посредством функции
"регулировки отклонения".
Например, аппарат перекоса при команде полного
положительного общего шага отклоняется в правую сторону.
Это означает, что отклонение левой серво больше, чем
отклонение правой серво. Вы можете либо уменьшить
отклонение левой серво, либо увеличить отклонение правой.
Снова проверьте аппарат перекоса, чтобы стоял ровно.
Необходимо повторить процедуру для полного
отрицательного общего шага. Проверьте, ровно ли стоит
аппарат перекоса и при необходимости отрегулируйте серво,
во время команды полного отрицательный общего шага.
Уменьшить Увеличить
< Микширование Шаг к Рулю высоты
В предыдущем шаге мы затронули микширование шаг к элерону. Это также важно для рассмотрения
микширования шаг к рулю высоты. Поместите ручку общего шага в позицию полного положительного
шага. Проверьте с бока модели аппарат перекоса, чтобы он стоял ровно спереди к заду. Если аппарат
перекоса расположен неровно, отрегулируйте серво руля высоты с помощью функции "регулировки
отклонения".
Например, аппарат перекоса во время команды полного положительного общего шага наклонился
вперед. Это указывает, что отклонение серво руля высоты меньше чем отклонение двух других.
Пожалуйста увеличьте отклонение серво руля высоты. Снова проверьте аппарат перекоса, чтобы он
стоял ровно.
Необходимо повторить процедуру для команды полного отрицательного общего шага. Проверьте,
расположен ли аппарат перекоса ровно, и при необходимости отрегулируйте в момент команды полного
отрицательного общего шага.
Увеличить
30
Page 32

Рекомендуются следующие длины тяг:
Длины измеряются от
центра шара тяги до
НАСТРОЙКА ТЯГ
центра другого шара тяги
Указанная выше длина тяги подходит для новичков и 3D-полётов. Вы можете использовать эти длины как
начальные установки и регулировать длины под ваш стиль полета. Длины тяг измеряются от центра
шара тяги до центра другого.
31
Page 33

УСТАНОВКА УГЛА ШАГА ЛОПАСТЕЙ ОСНОВНОГО РОТОРА
После установки длины тяг, как упоминалось ранее, тяги должны быть центрированы, как описано ниже.
< Центровка
1. При центровке ручки общего шага, рычаги управления рулем высоты и элеронами должны быть как на
рисунке ниже.
2. Сделайте стабилизатор параллельно, лопасти основного ротора должны быть 0 градусов, а аппарат
перекоса должен стоять ровно.
< Максимум
1. Установите ручку общего шага в крайнее верхнее положение.
2. Лопасти основного ротора должны повернуться на 10 градусов, а аппарат перекоса должен
располагаться ровно.
< Минимум
1. Поместите ручку общего шага в нижнее положение.
2. Основные лопасти должны быть повернуты на 10 градусов, а аппарат перекоса должен стоять ровно.
ПРИМЕЧАНИЕ 1: Действия выше определяют предельные установки общего шага.
ПРИМЕЧАНИЕ 2: Установка максимального общего шага зависит от лично вашего навыка полетов и
стиля. Слишком большой общий шаг может перегрузить электронный регулятор
скорости, электромотор и аккумуляторную батарею. А также это уменьшит время
полёта.
32
Page 34
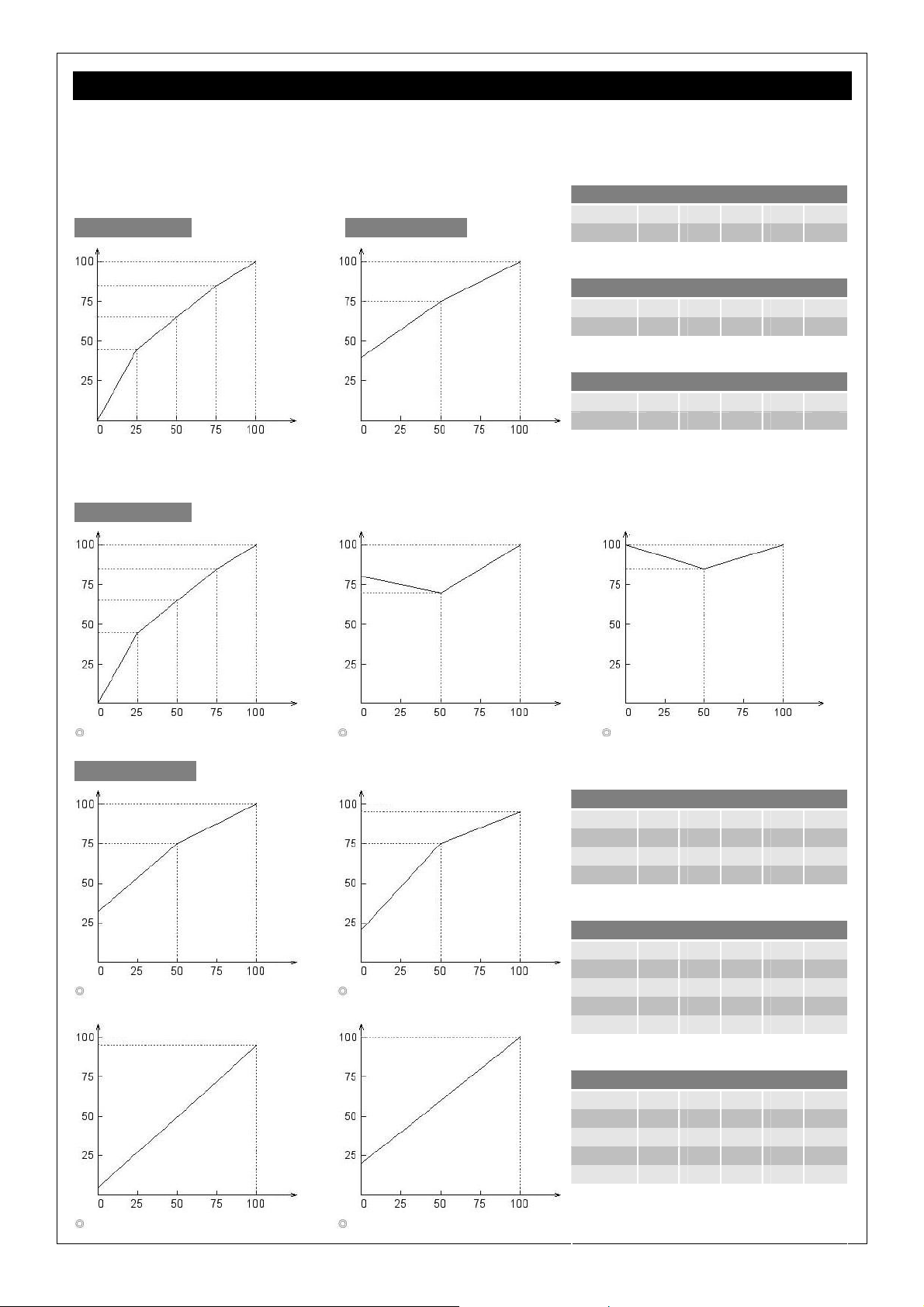
РЕКОМЕНДУЕМЫЕ ДАННЫЕ ДЛЯ УСТАНОВКИ
Следующие установочные параметры кривой шага и кривой газа приводятся только для вашей справки.
Пожалуйста, если Вы никогда не делали этого ранее, попросите опытного пилота помочь Вам.
< Новичок
..Кривая Газа.. ..Кривая Шага..
Ручка Ручка
< F3C
..Кривая Газа..
Газ Газ Газ
Кривая Газа
0 25 50 75 100
Норм. 0 45 65 85 100
Кривая Шага
0 25 50 75 100
Норм. 40 - 75 - 100
Угол Шага
0 25 50 75 100
Норм. -2º - +5º - +10º
Ручка Ручка Ручка
Нормальный Холостой 1 Холостой 2
..Кривая Шага..
Шаг Шаг
Ручка Ручка
Нормальный Холостой 1
Шаг Шаг
Кривая Газа
0 25 50 75 100
Норм. 0 45 65 85 100
Хол. 1 80 - 70 - 100
Хол.2 100 - 85 - 100
Кривая Шага
0 25 50 75 100
Норм. 30 - 75 - 100
Хол. 1 20 - 75 - 95
Хол.2 5 - - - 95
Удерж 20 - - - 100
Угол Шага
0 25 50 75 100
Норм. -4º - +5º - +10º
Хол. 1 -6º - +5º - +9º
Хол.2 -9º - - - +9º
Удерж -6º - - - +10º
Ручка Ручка
Холостой 2 Удержание
33
Page 35

РЕКОМЕНДУЕМЫЕ ДАННЫЕ ДЛЯ УСТАНОВКИ
< 3D
..Кривая Газа..
Газ Газ
Ручка Ручка
Нормальный Холостой 1
..Кривая Шага..
Шаг Шаг
Кривая Газа
0 25 50 75 100
Норм. 0 45 65 85 100
Хол. 1 100 - 85 - 100
Кривая Шага
0 25 50 75 100
Норм. 30 - 75 - 100
Хол. 1 5 - - - 95
Удерж 0 - - - 100
Угол Шага
0 25 50 75 100
Норм. -4º - +5º - +10º
Хол. 1 -9º - - - +9º
Удерж -10º - - - +10º
Ручка Ручка
Нормальный Холостой 1
Шаг
Ручка
Удержание
ПРЕДУПРЕЖДЕНИЕ
1. Слишком большой шаг вызовет слишком сильный ток на
электромоторе и регуляторе скорости.
2. Слишком высокие обороты ротора могут привести к разрыву лопастей
(креплений).
3. Очень опасно устанавливать скорость вращения, превышающую
предел лопастей (креплений).
34
Page 36
УПРАВЛЕНИЕ ХВОСТОМ И УСТАНОВКА ГИРОСКОПА
Рекомендуется использовать гироскоп с удержанием направления (Heading Hold). С гироскопом,
удерживающим направление, Вы можете не использовать триммер и функцию микширования вращения
хвостового управления.
Сперва, согласно инструкции к гироскопу, установите длину качалки хвостовой серво. В качестве
начальной установки, Вы можете попробовать 13,5 мм. Затем временно закрепите качалку серво и
проверьте движение хвостовой серво:
1. При подаче команды управления руля направления вправо, качалка серво должна отклоняться
вперед.
2. Вращайте вертолет рукой против часовой стрелки, качалка серво должна двигаться вперед.
Серво руля направления
Удостоверившись в направлении движения хвостовой серво, Вам необходимо установить качалку серво
в правильное положение. Пожалуйста повторно подключите питание приемника и не двигайте вертолет.
При положении ручки управления хвостом и триммере по центру, установите качалку серво вертикально.
Если Вы не можете прикрепить качалку серво вертикально, используйте функцию "саб-триммера", чтобы
откорректировать качалку. После использования функции "саб-триммера" повторно подключите питание,
поскольку гироскоп может сбросить нейтральное положение. Затем, могут возникнуть два варианта:
1. Отклонение хвостовой серво не может выйти за пределы механического движения.
2. Когда шаг хвостового ротора равен 0, качалка хвостовой серво должна быть вертикально или с
небольшим смещением вправо. (Согласно фото ниже)
Серво руля направления
Примечание 1: Чтобы определить предел отклонения, Вы должны настроить гироскоп согласно его
инструкции.
Примечание 2: Чтобы регулировать скорость вращения вертолета, пожалуйста используйте функцию
"регулировки отклонения" или "Д/Р и Экспоненты".
35
Page 37

ПОИСК НЕИСПРАВНОСТЕЙ
Вертолеты
Q: Что бы Вы проверили, если вертолет трясётся во время полета?
A: а. Лопасти главного ротора трассированы?
b. Лопатки стабилизатора трассированы?
c. Лопасти главного ротора хорошо сбалансированы?
d. Лопатки хорошо закреплены на одинаковом расстоянии от вала ротора?
e. Шпиндель или стабилизатор не согнут?
f. Главный вал не согнут?
g. Узел главного ротора не поврежден?
h. Электродвигатель хорошо установлен и вал двигателя не погнут?
i. Вал хвостового ротора не согнут?
j. Узел хвостового ротора не поврежден?
k. Все шарикоподшипники работают хорошо?
Q: Что бы Вы сделали, если вертолет во время полёта издает слишком много шума?
A: а. Пожалуйста проверьте работу редуктора между главной шестерней и шестерней мотора. Если
слишком большое сцепление шестерен, оно будет создавать сильный шум редуктора во время
полета.
b. Если приводной ремень хвоста слишком ослаб, он будет вызывать некоторый шум и может
повлечь отказ хвостового управления.
c. Проверьте тяги и систему управления основным и хвостовым ротором, чтобы удостовериться, что
каждая тяга работает правильно и не соприкасается с чем-либо еще.
d. Проверьте, не разбалансировался ли мотор.
Электродвигатель, Аккумуляторы и Регулятор скорости
Q: Как выбрать электромотор и шестерню?
A: Это зависит от батареи и двигателя. Вот формула того, как вычислить требуемую скорость вращения
головы.
Об./мин двигателя = KV электродвигателя х Вольт (3,7В) х Серия х константа (0,9)
Скорость головы = Об./мин двигателя / Коэффициент редукции
Коэффициент редукции = 111T / Шестерня двигателя
Пример: установка с Li-Pol 6S
Мы выбираем бесколлекторный электромотор
TT OBL 43/11-30H, обороты двигателя должны
быть
1050KV x 3,7В x 6S x 0,9 = 20979 об./мин.
И мы ожидаем получить скорость вращения
головы 1900 об./мин.
20979 / Коэффициент редукции = 1900
Коэффициент редукции = 11,04
Значит, шестерня должна быть
111T / 11,04 = 10Т
Q: Какой регулятор скорости рекомендуется?
A: Для установки 6S рекомендуется ACE BLC-75 No.8043. Для установки 10S рекомендуется ACE BLC-65
No.8042.
Пример: установка с Li-Pol 10S
Мы выбираем бесколлекторный электромотор
TT OBL 49/08-50H, обороты двигателя должны
быть
770KV x 3,7В x 10S x 0,9 = 25641 об./мин.
И мы ожидаем получить скорость вращения
головы 2100 об./мин.
25641 / Коэффициент редукции = 2100
Коэффициент редукции = 12,21
Значит, шестерня должна быть
111T / 12,21 = 9Т
36
Page 38

РАЗДЕЛ СПИСКА ДЕТАЛЕЙ
37
Page 39

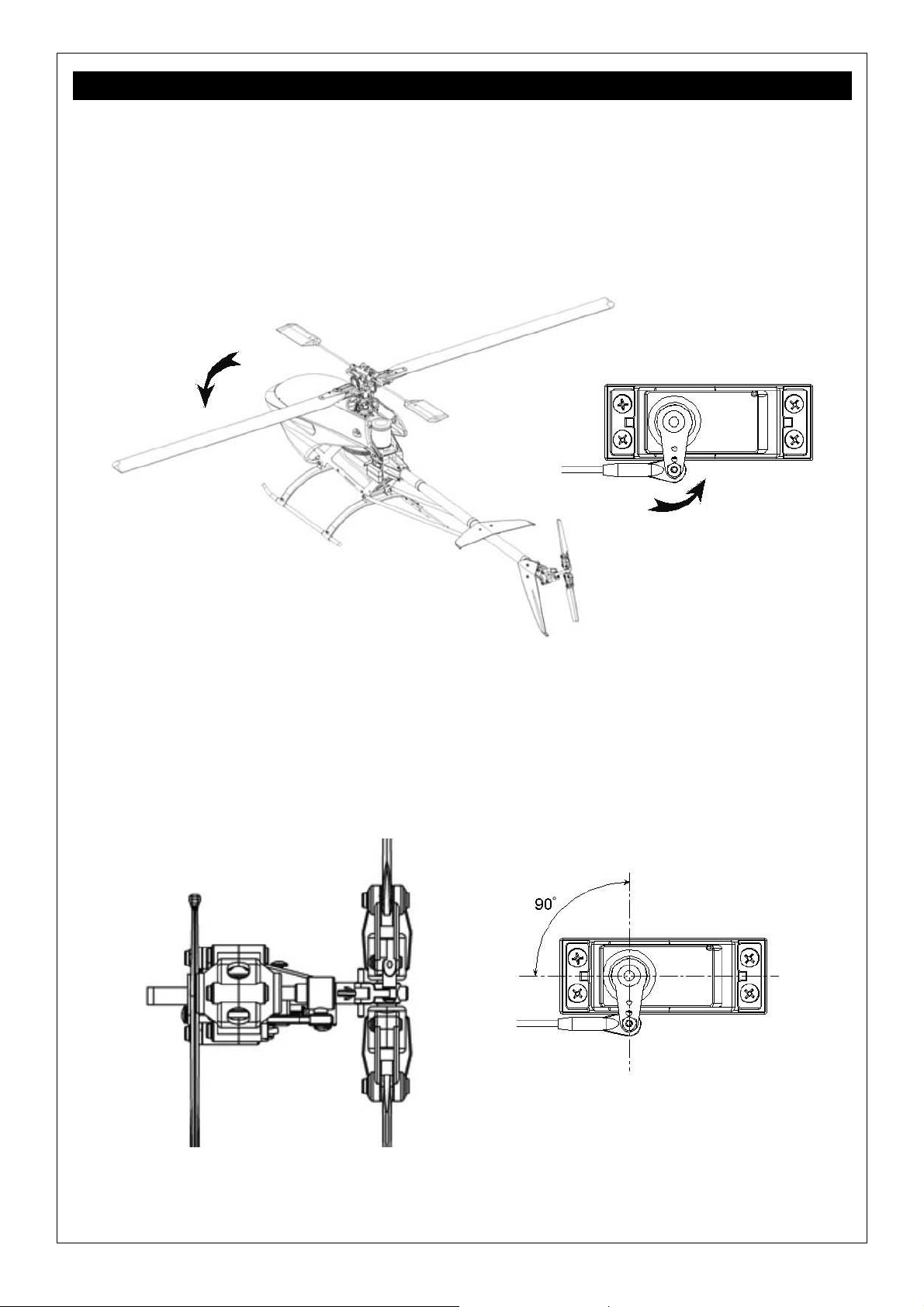
AK0060-T Хвостовая балка,
AV0052 Шкив холостого хода
Блокирующее кольцо
R30/E550
AK0089 Приводной ремень
хвоста, 630XL R30/E550
хвоста
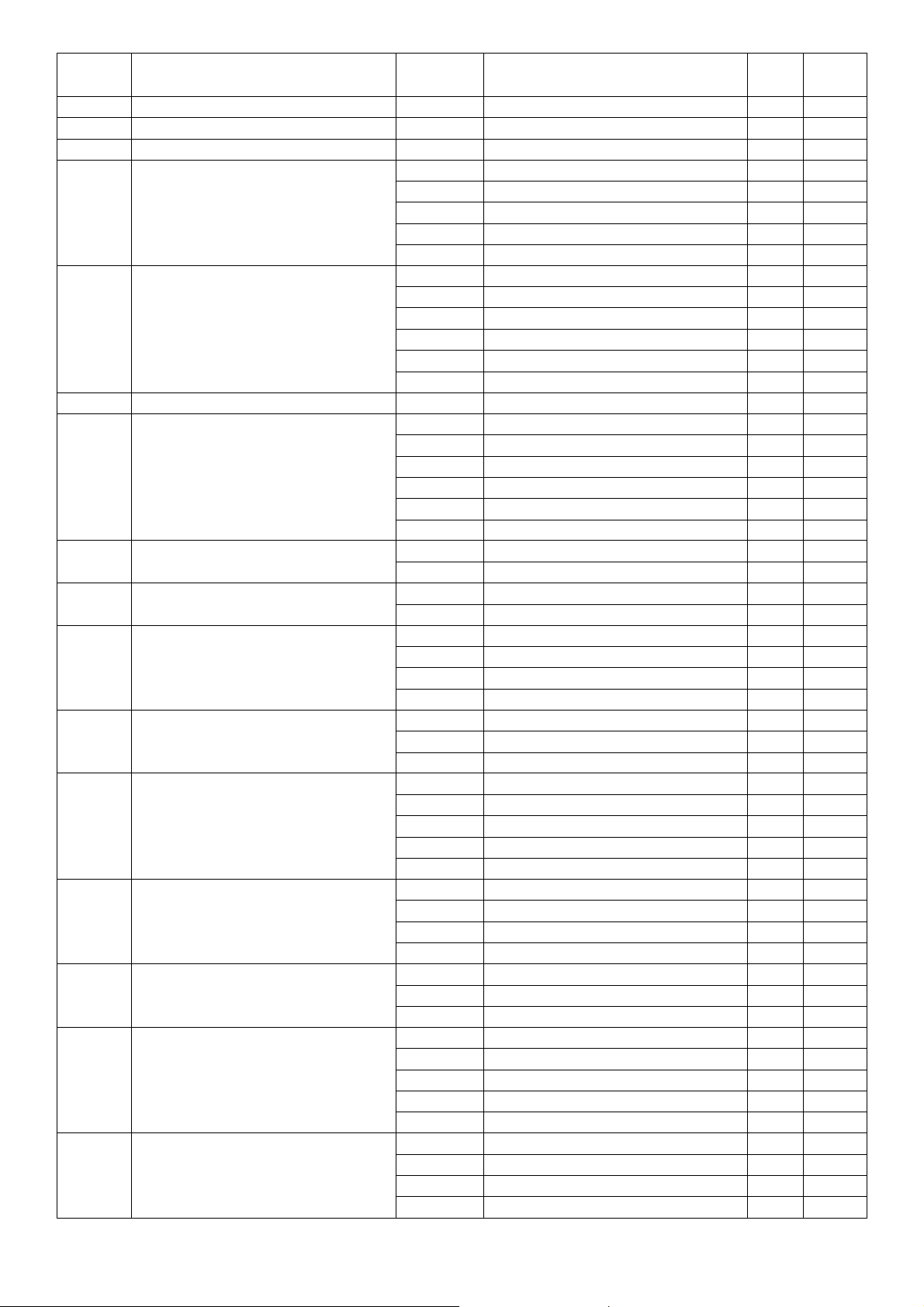
PV0002 Качалка управления
стабилизатора
PV0004 Рычаг микширования PV0005 Тяга управления
стабилизатором
PV0019 Односторонне
сцепление
PV0020 Вал одностороннего
сцепления
PV0016 Рычаг управления
шагом хвоста, R30
PV0021 Сборка ведущего
шкива
PV0018
главного вала
PV0027 Хвостовой корпус
PV0029 Хвостовой шкив
PV0037 Лопасть хвостового
ротора
PV0030 Вал хвостового
ротора
PV0038 Хвостовое оперение PV0040 Двойная тяга
PV0035 Посадочные салазки
PV0035-T Посадочные салазки
38
PV0036 Лопатка
стабилизатора
PV0041 Шаровая тяга
Page 40

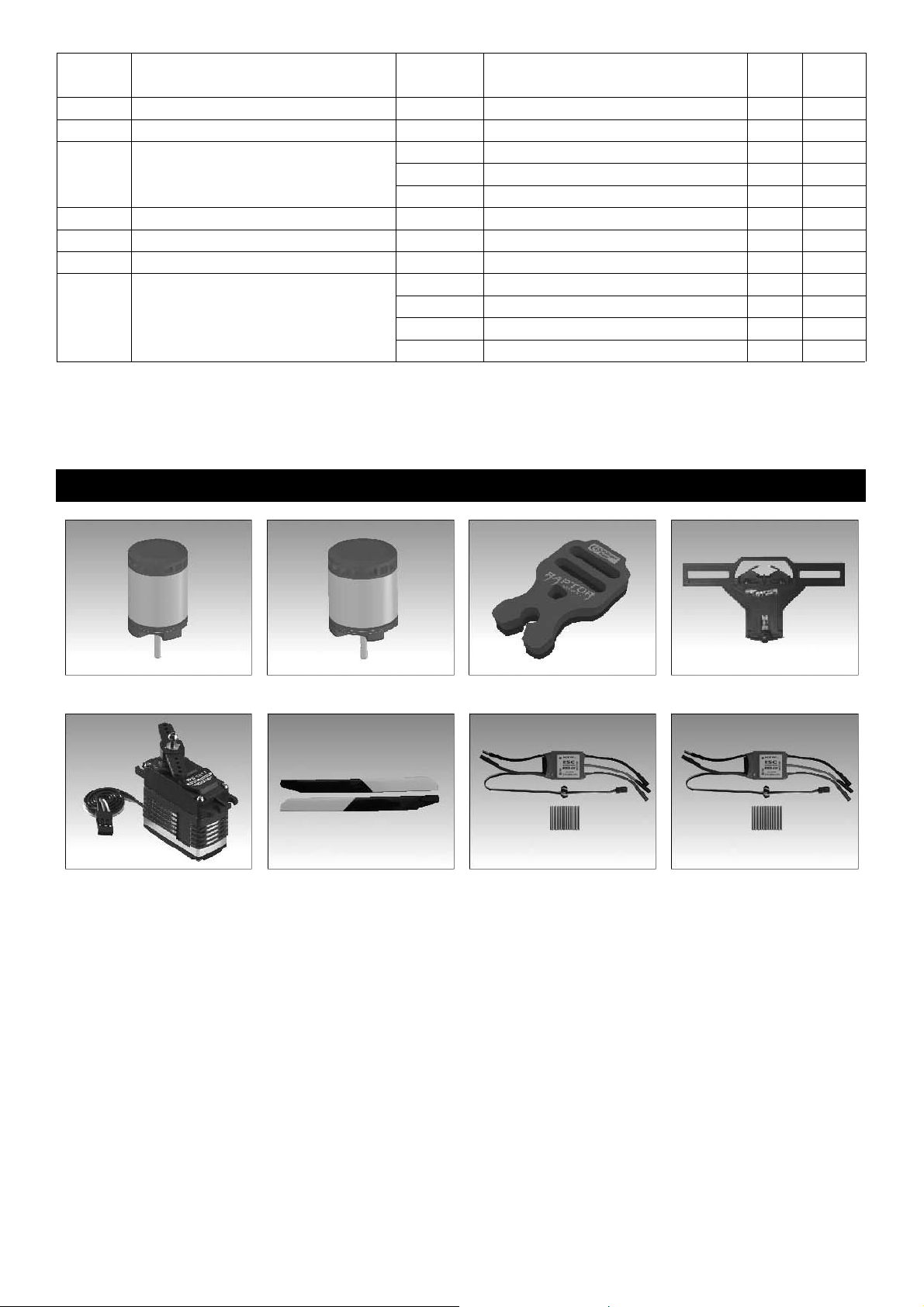
PV0048 Шарикоподшипник
d4xD8xW3
PV0049 Шарикоподшипник
d3xD8xW4
PV0051 Шарикоподшипник
d4xD7xW2.5
PV0052 Шарикоподшипник
d6xD10xW3
PV0053 Болт ротора
PV0060 Установочный набор
PV0054 Пластина крепления
серво
PV0062 Резиновое кольцо
крепления корпуса
PV0058 Шар тяги
PV0092 Металлический
аппарат перекоса
PV0059 Шарикоподшипник
d5xD11xW5
PV0148 Сцепление
хвостового ротора
PV0151 Узел хвостового
ротора
PV0244 Шарикоподшипник
PV0209 Шайба d4xD11x1.7 PV0210 Шайба d3xD8x1.4
ФИКСАТОР ФИКСАТОР СМАЗКА
PV0267 Фиксатор #242 PV0268 Фиксатор #262
39
PV0239 Защелка корпуса
PV0270 Смазка упорного
подшипника
Page 41

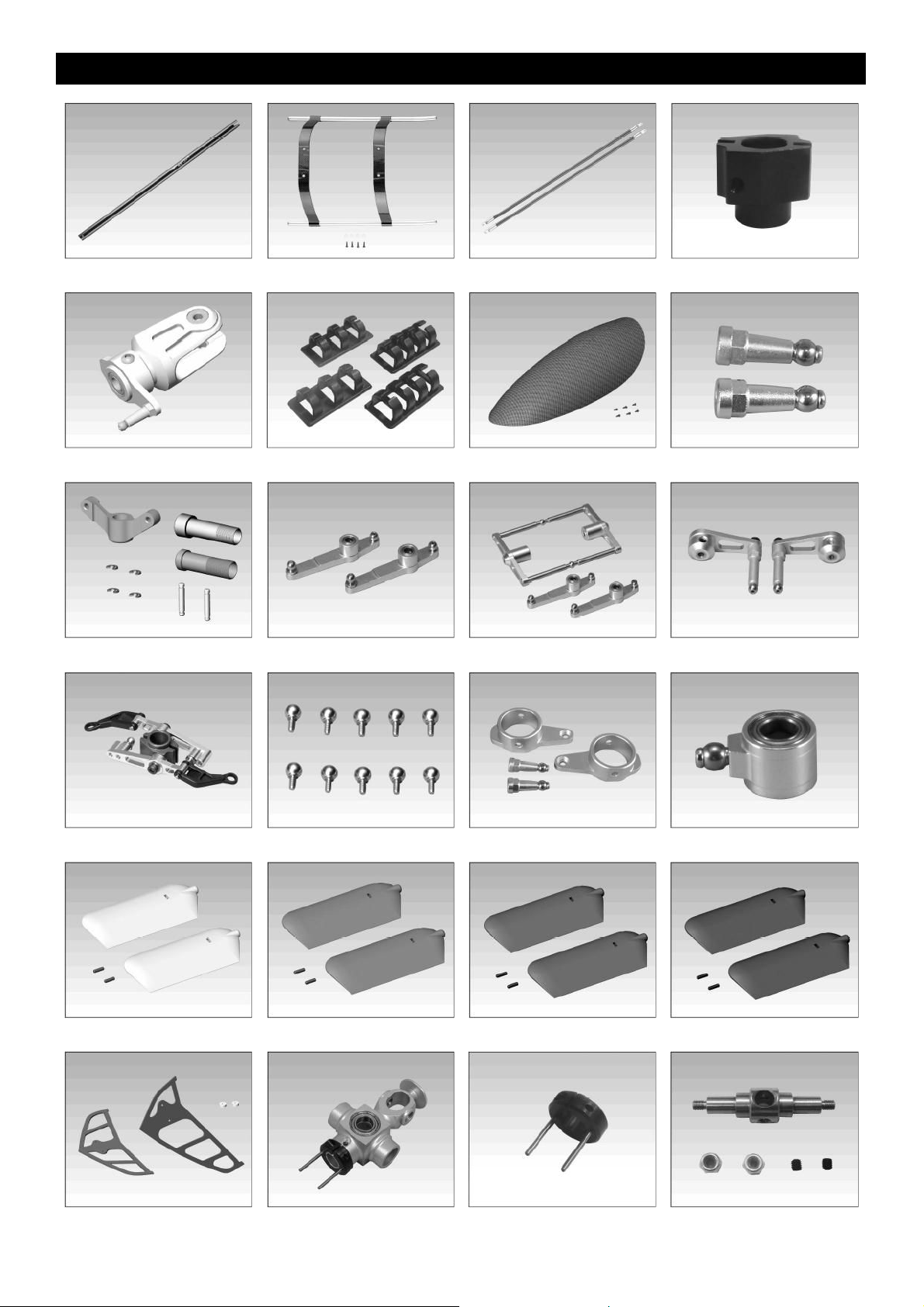
PV0279 Направляющая
хвостовой тяги
PV0328-T Опора R30/E550,
PV0329-T Опора R50T/E620
PV0338 Металлический узел
основного ротора
PV0353 Крепление лопастей
основного ротора
PV0354 Узел основного
ротора
PV0365 Упорный подшипник PV0369 Только кабина PV0370 Только корпус PV0372 Упорная муфта
PV0355 Шпиндель PV0357 Аппарат перекоса PV0364 Корпус
PV0374 Шарикоподшипник
d6xD13xW5
PV0382 Амортизирующая
прокладка
PV0375 Набор крепления
корпуса
PV0450 Прочная тяга
стабилизатора
PV0379 Шкив автовращения
хвоста
PV0451 Прочный главный вал PV0454 Заглушка трубки
PV0381 Амортизирующая
прокладка
салазок
40
Page 42

PV0486 Качель
PV0545 Шестерня двигателя,
PV0546 Шестерня двигателя,
стабилизатора
PV0503 Набор тяг аппарата
перекоса
PV0504 Ползунок шага хвоста PV0517 Смазка
одностороннего подшипника
PV0520 Приводной ремень
хвоста, 686XL, R50T/E620
PV0543 Стойка салазок PV0544 Главная шестерня
PV0521 Хвостовая балка,
R50T/E620
111T, Е550/E620
PV0526 Шарикоподшипник
d5xD10xW4
9T
PV0542 Вилка управления
шагом хвоста
10T
PV0550 Тяга хвоста, E550
PV0551 Тяга хвоста, E620
PV0555 Качалка -А- руля
высоты, E550/E620
PV0552 Стержень тяги,
E550/E620
PV0556 Рычаг элеронов,
E550VE620
PV0553 Распорка рамы,
E550/E620
PV0557 Крепление серво,
E550/E620
41
PV0554 Рычаг качалки руля
высоты, E550/E620
PV0558 Главная рама,
E550/E620
Page 43

PV0559 Алюминиевая нижняя
рама, E550
PV0560 Карбоновая нижняя
рама, E620
PVO561 Нижняя рама,
E550/E620
PV0562 Скоба батареи,
E550/E620
PV0563 Крепление салазок,
E550/E620
PV0574 Моторама,
E550/E620
PV0564 Наклейка, E550 PV0565 Наклейка, E620 PV0572 Стяжка
HMF2-6N M2x6
HMF2-8N M2x8
HMC3-10B M3x10
HMC3-12B M3x12
HMC3-14B M3x14
HMC3-20B M3x20
....
HMJ2-10N M2x10
HMJ2-14N M2x14
HMJ2-6B M2x6
HMJ3-22B M3x22
HMC3-25B M3x0,5L25
HMC3-8B M3x8
BK0616 M3x20
HSE2-10B M2x10
HSE2612N M2,6x12
HSE3-12B M3x12
HSE3-18B M3x18
HME3-10B M3x10
HME3-18B M3x18
HME3-5B M4x5
HSE3-5B M3x5
PV0088 Пакет винтов (по 6 шт.) PV0089 Пакет винтов (по 6 шт.)
42
Page 44
№ части
AK0060-T Хвостовая балка, E550 BK0060-T Хвостовая балка, E550 1 16
AK0089 Приводной ремень хвоста, 630XL BK0089 Приводной ремень хвоста, 630XL 1 16
AV0052 Шкив холостого хода хвоста BV0052 Хвостовой приводной шкив 1 16
PV0002 Качалка управления стабилизатора
PV0004 Рычаг микширования
PV0005 Стержень управл-я стабилизатором BK0007 Стержень управл-я стабилизатором 2 11
PV0016 Рычаг управления шагом хвоста, R30
PV0020 Вал одностороннего сцепления
PV0021 Сборка ведущего шкива.
PV0027 Хвостовой корпус
PV0029 Набор хвостового шкива
PV0030 Вал хвостового ротора
PV0035 Набор посадочных салазок
PV0035-T Набор посадочных салазок
Описание № детали Описание
BK0002 Качалка управления стабилизатором 2 12
BK0005 Втулка качалки стабилизатора 2 12
BK0075 Шар тяги 2 12
HME4-5B Фиксирующий винт, M4x5 2 12
HMJ2-10N Саморез, M2x10 2 12
BK0006 Рычаг микширования 2 12
BK0075 Шар тяги 4 12
BK0076 Муфта (d4xD4x10) 2 12
BK0088 Плоская шайба 2 12
HMC3-14B Вставной винт, M3x14 2 12
HMJ2-10N Саморез, M2x10 4 12
BK0024 Рычаг управления шагом хвоста 1 15
BK0075 Шар тяги 1 15
BK0076 Муфта (d4xD4x10) 1 15
BK0088 Плоская шайба 1 15
HMJ2-8N Саморез, M2x8 1 15
HSE3-18B Саморез, M3x18 1 15
BK0030 Блокирующее кольцо главного вала 1 9PV0018 Блокирующее кольцо главного вала
HME4-5B Фиксирующий винт, M4x5 2 9
BV0033 Набор корпуса одност-го сцепления 1 8PV0019 Односторонне сцепление
HMC3-12B Вставной винт, M3x1 2 4 8
BK0034 Вал одностороннего сцепления 1 8
HMC3-20B Вставной винт, M3x20 1 8
HMM3Z Блокирующая гайка, M3 1 8
HMQ14 Удерживающее кольцо, 14 2 8
BV0035 Ведущий шкив 1 5
BK0036 Муфта шкива 2 5
BK0081 Штырек, D13x18 1 5
BK0046 Корпус хвостового блока (Л) 1 15, 16
BK0047 Корпус хвостового блока (П) 1 15, 16
HMC3-20B Вставной винт, M3x20 4 15, 16
HMC3-25B Вставной винт, M3x25 2 15, 16
HMM3Z Блокирующая гайка, M3 6 15, 16
BK0050 Набор хвостового шкива 1 15
BK0051 Фланец хвостового шкива 1 15
BK0414 Штырек, D2x12 1 15
HME3-4B Фиксирующий винт, M3x4 1 15
BK0053 Вал хвостового ротора 1 14
BK0414 Штырек, D2x12 1 14
HME3-4B Фиксирующий винт, M3x4 1 14
BK0064 Салазки 2 7
BK0065 Заглушка салазок 4 7
BK0066 Стойка салазок 2 7
HMJ3-18B Саморез, M3x18 4 7
HME4-5B Фиксирующий винт, M4x5 4 7
BK0064T Салазки 2 7
BK0065 Заглушка салазок 4 7
BK0066 Стойка салазок 2 7
HMJ3-18B Саморез, M3x18 4 7
Кол-воШаг
сборки
43
Page 45

№ части
PV0037 Лопасть хвостового ротора BK0068 Лопасть хвостового ротора 2 17
PV0038 Хвостовое оперение
PV0040 Двойная тяга BV0085 Двойная тяга 2 12
PV0041 Шаровая тяга BK0086 Шаровая тяга 12 -
PV0048 Шарикоподшипник HMV840ZZY Подшипник, d4xD8xW3 2 12
PV0049 Шарикоподшипник HMV830ZZ Подшипник, d3xD8xW4 2 12
PV0051 Шарикоподшипник HMV740ZZY Подшипник, d4xD7xW2. 5 4 12, 15
PV0052 Шарикоподшипник HMV1060 Подшипник, d6xD10xW3 2 14
PV0053 Болт ротора HMC4-27B Вставной винт, M4x27 2 21
PV0054 Пластина крепления серво BK0104 Пластина крепления серво 10 18, 19
PV0058 Шар тяги BK0075 Шар тяги 12 -
PV0059 Шарикоподшипник HMV1150X Подшипник, d5xD11xW5 2 15
PV0060 Установочный набор
PV0062 Резиновое кольцо крепления корпуса BK0102 Резинка крепления корпуса 5 20
PV0092 Металлический аппарат перекоса BV0092 Металлический аппарат перекоса 1 9
PV0148 Сцепление хвостового ротора
PV0151 Узел хвостового ротора
PV0209 Шайба BK0435 Шайба, d4xD11x1.7 4 11
PV0210 Шайба BK0087 Шайба, d3xD8x1.4 16 10
PV0239 Защелка корпуса
PV0244 Шарикоподшипник HMV6800ZZY Шарикоподшипник, d10xD19xW5 2 5
PV0267 Фиксатор #242 1 PV0268 Фиксатор #262 1 PV0270 Смазка упорного подшипника 1 -
PV0279 Направляющая хвостовой тяги BK0091 Направляющая тяги 3 16
PV0328-T Поддержка хвоста
PV0329-T Поддержка хвоста, R50T
Описание № детали Описание
HME4-5B Фиксирующий винт, M4x5 4 7
BK0067 Лопатка стабилизатора 2 12PV0036 Лопатка стабилизатора
HME3-10B Фиксирующий винт, M3x10 2 12
BK0069 Оперение стабилизатора 1 16
BK0070 Скоба оперения стабилизатора 1 16
BK0071 Вертикальное оперение 1 16
HSE3-12B Саморез, M3x12 2 16
BE1052 Трубка антенны 1 -
BK0106 Двусторонний скотч 2 -
BK0109 Резиновая лента 2 -
HNI15 Шестигранный ключ, 1.5 мм 1 -
HNI2 Шестигранный ключ, 2.0 мм 1 -
HNI25 Шестигранный ключ, 2.5 мм 1 -
HNI3 Шестигранный ключ, 3.0 мм 1 -
HNJ-1 Стяжка 3 -
BK0302-1 Корпус шага хвоста (A) 2 14
BK0303-1 Корпус шага хвоста (B) 2 14
HMC2610B Вставной винт, M2.6x10 4 14
HMM26B Блокирующая гайка, M2.6 4 14
HMC3-14B Вставной винт, M3x14 2 14
HMM3Z Блокирующая гайка, М3 2 14
BK0307 Узел хвостового ротора 1 14
HME3-18B Фиксирующий винт, M3x18 2 14
HMM3B Блокирующая гайка, M3 2 14
BK0098 Защелка корпуса A 1 20
BK0099 Защелка корпуса B 1 20
HSE3-12B Саморез, M3x12 2 20
BK0447 Конец стержня поддержки хвоста 4 16
BK0540-T Стержень поддержки хвоста, E550 2 16
HMJ2-8N Саморез, M2x8 4 16
BK0447 Конец стержня поддержки хвоста 4 16
BK0524 Стержень поддержки хвоста 2 16
HMJ2-8N Саморез, M2x8 4 16
Кол-воШаг
сборки
44
Page 46

№ части
PV0353 Крепление лопастей основного ротора
PV0354 Узел основного ротора
PV0355 Шпиндель, R30V2
PV0357 Аппарат перекоса BV0601 Аппарат перекоса 1 9
PV0364 Корпус
PV0365 Упорный подшипник HMX0612 Упорный подшипник 2 11
PV0370 Только корпус
PV0372 Тяговая муфта BK0584 Упорная муфта 2 11
PV0374 Шарикоподшипник HMV1360Z Подшипник, d6xD13xW5 2 11
PV0381 70° амортизирующая прокладка BK0586 70° амортизирующая прокладка 2 11
PV0382 80° амортизирующая прокладка BK0585 80° амортизирующая прокладка 2 11
PV0450 Прочная тяга стабилизатора BK0631 Прочный стабилизатор 1 12
PV0451 Прочный главный вал BK0702 Прочный главный вал 1 9
PV0454 Заглушка трубки салазок BK0065 Заглушка трубки салазок 8 7
PV0503 Набор тяг аппарата перекоса
PV0504 Ползунок шага хвоста
Описание № детали Описание
BV05S4 Металлический узел основного ротора 1 11PV0338 Металлический узел основного ротора
BK0585 Амортизирующая прокладка (80°) 2 11
BK0075 Шар тяги 2 11
BK0596 Корпус шага основного ротора 2 11
HMJ2-10N Саморез, M2x10 2 11
BK0587 Штырек основного ротора 1 11
BK0616 Вставной винт, M3x20 1 11
BK0595 Узел основного ротора 1 11
HMM3Z HMM3Z 1 11
BK0581 Амортизирующая муфта 2 11
BK0583 Вал оперения 1 11
BK0435 Шайба, d4xD11x1.7 2 11
HMC4-8B Вставной винт, M4x8 2 11
BK0098 Защелка корпуса A 1 20
BK0099 Защелка корпуса B 1 20
BK0102 Резиновое кольцо 2 20
BK0611 Корпус 1 20
BK0612 Кабина 1 20
HSE3-12B Саморез, M3x12 2 20
BK0612 Кабина 1 20PV0369 Только защита от ветра
HMJ2-6B Саморез, M2x6 6 20
BK0098 Защелка корпуса A 1 20
BK0099 Защелка корпуса B 1 20
BK0102 Резиновое кольцо 2 20
BK0611 Корпус 1 20
HSE3-12B Саморез, M3x12 2 20
BK0626 Гайка крепления корпуса 2 13PV0375 Набор крепления корпуса
HME3-18B Фиксирующий винт, M3x 18 2 13
BK0610 Шкив автовращения 1 8PV0379 Шкив автовращения
HMC3-8B Вставной винт, M3x8 4 8
BK0004 Качель 1 12PV0486 Качель стабилизатора
HMV830ZZ Подшипник, d3xD8xW4 2 12
BK0014 Основа тяг аппарата перекоса 1 8
BK0015 Рычаг управления стабилизатором 1 8
BK0016 Тяги аппарата перекоса 2 8
BK0075 Шар тяги 2 8
BK0077 Муфта (d3xD4x6) 2 8
BK0171 Штырек 2 8
HMC3-10B Вставной винт, M3x10 2 8
HMJ2-10N Саморез, M2x10 2 8
HMS15 E Кольцо 2 8
BK0025 Вилка управления шагом хвоста 1 14
BK0026 Тяга управления шагом хвоста 2 14
BK0027 Ползунок управления шагом хвоста 1 14
Кол-воШаг
сборки
45
Page 47

№ части
PV0517 Смазка одностороннего подшипника BV0857 Смазка одностороннего подшипника 1 8
PV0520 Приводной ремень хвоста, 686XL BK0858 Ремень, 686XL 1 16
PV0521 Алюминиевая хвостовая балка BK0859 Хвостовая балка 1 16
PV0526 Шарикоподшипник HMV1050ZZ Подшипник, d5xD10xW4 4 14
R30750
PV0543 Стойка салазок BK0066 Стойка салазок 2 7
PV0544 Главная шестерня 111T BK1112 Главная шестерня 111T 1 8
PV0545 Шестерня двигателя, 9T BK1124 Шестерня двигателя, 9T 1 10
PV0546 Шестерня двигателя, 10T BK1117 Шестерня двигателя, 10T 1 10
PV0550 Стержень управления хвостом, E550
PV0551 Стержень управления хвостом, E620
SE
PV0552 Стержень тяги, E550/E620 SE
PV0553 Распорка рамы, E550/E620 SE BK1111 Распорка рамы (44 мм) 11 5
PV0554 Рычаг качалки руля высоты,
E550/E620 SE
PV0555 Качалка руля высоты, E550/E620SE BK1101 Качалка руля высоты, E550/E620SE 1 6
PV0556 Рычаг элеронов, E550VE620 SE
PV0557 Крепление серво, E550/E620 SE
PV0558 Главная рама, E550/E620 SE
PV0559 Алюминиевая нижняя рама, E550 BK1122 Алюминиевая нижняя рама, E550 2 7
PV0560 Карбоновая нижняя рама, E620 SE BK1107 Карбоновая нижняя рама, E620 SE 2 7
Описание № детали Описание
BK0028 Втулка ползунка упр-я шагом хвоста 1 14
BK0075 Шар тяги 1 14
BK0082 Муфта (d2xD3x4) 2 14
BK0546 Штырек (2 мм) 2 14
HMF2-8N Винт, M2x8 1 14
HSE2-10B Саморез, M2x10 2 14
HMS15 E Кольцо 4 14
BK0025 Вилка управления шагом хвоста 1 14PV0542 Вилка управления шагом хвоста,
BK0026 Тяга управления шагом хвоста 2 14
BK1123 Прочная тяга А 1 16, 17
BK1133 Прочная тяга В 1 16, 17
BK0086 Шаровая тяга 1 16, 17
BK0105 Соединитель тяги управления хвоста 1 16, 17
HME4-5B Фиксирующий винт, M4x5 2 16, 17
BK1123 Прочная тяга А 1 16, 17
BK0861 Прочная тяга Б 1 16, 17
BK0086 Шаровая тяга 1 16, 17
BK0105 Соединитель тяги управления хвоста 1 16, 17
HME4-5B Фиксирующий винт, M4x5 2 16, 17
BK0839 Прочная тяга, M2.3x30 2 9
BK0840 Прочная тяга, M2.3x46 2 19
BK0842 Прочная тяга, M2.3x76 2 13
BK1120 Прочная тяга, M2. 3x130 2 18
BK1121 Прочная тяга, M2.3x107 2 19
BK1102 Рычаг ка-ки руля высоты, E550/E620SE 1 6
BK0075 Шар тяги 2 6
HMJ2-10N Саморез, M2x10 2 6
BK1103 Рычаг элерона, E550/E620 SE 2 6
BK0075 Шар тяги 6 6
BK0076 Муфта (d4xD4x10) 2 6
HMJ2-10N Саморез, M2x10 6 6
HSE3-18B Саморез, M3x18 2 6
BK1106 Крепление серво, E550/E620 SE 1 5
HSE3-12B Саморез, M3x12 4 5
HSE3-18B Саморез, M3x18 2 5
BK1104 Главная рама, E550/E620 SE (Лев) 1 5
BK1105 Главная рама, E550/E620 SE (Прав) 1 5
BK1111 Распорка рамы (44 мм) 9 5
HSE3-12B Саморез, M3x12 18 5
HMC3-20B Вставной винт, M3x20 2 5
HMM3Z Блокирующая гайка, M3 2 5
Кол-воШаг
сборки
46
Page 48
№ части
Описание № детали Описание
Кол-воШаг
сборки
PVOS61 Нижняя рама, E550/E620 SE BK1108 Нижняя рама, E550/E620 SE 1 7
PV0562 Скоба батареи, E550/E620 SE BK1109 Скоба батареи, E550/E620 SE 1 7
PV0563 Крепление салазок, E550/E620 SE
BK1110 Крепление салазок, E550/E620 SE 4 7
HMJ3-22B Саморез, M3x22 4 7
HSE3-18B Саморез, M3x18 4 7
PV0564 Наклейка, E550 JV0179 Наклейка, E550 1 -
PV0565 Наклейка, E620 SE JV0180 Наклейка, E620 SE 1 -
PV0572 Стяжка BK1125 Стяжка 2 20
PV0574 Моторама, E550/E620 SE
BK1114 Моторама 1 10
HMC3-6B Вставной винт, M3x6 4 10
HMC3-10B Вставной винт, M3x10 4 10
BK0087 Плоская шайба 4 10
ВЕРТОЛЕТНЫЕ ПРИНАДЛЕЖНОСТИ
2379 Бесколлекторный мотор,
OBL 43/11-30H
8126 Цифровая серво, DS1213
2380 Бесколлекторный мотор,
OBL 49/08-50H
3827/3829 Углеволоконные
лопасти ротора 600мм/620мм
3800 Поддержка лопастей 3802 Точный измеритель шага
8042 Регулятор скорости,
BLC-65 2-10 элементов
8043 Регулятор скорости,
BLC-75 2-6 элементов
47
Page 49
ДОПОЛНИТЕЛЬНЫЕ ЧАСТИ
Поддержка хвостовой
Набор металлических
PV0099
PV0523
крепление лопастей ротора
PV0439
Уг. хвост. балка, R30
Уг. хвост. балка, R50T
PV0339
Металлическое
Алюминиевая вилка
хвостового шага
PV0101
PV0384
PV0442
Карбоновые салазки
Фиксатор проводов,
вертолетный
рычагов микширования
PV0103
балки из карбона
PV0394
PV0443
стабилизатором
Кабина из угле-
волокна
Набор управления
PV0114
аппарата перекоса E550/E620
управления стабилизатором
Мет-е основание тяг
PV0399
Стойка крепления
основного ротора
PV0444
Набор качалок
PV0445
PV0483
Сборка металл-го
аппарата перекоса
PV0481
Легкая лопатка
Набор карбонового
хвостового оперения
PV0448
PV0482
PV0484
Вставной винт
шара тяги
Ультра легкая
лопатка
Металлический узел
ротора
PV0492
48
PV0449
PV0482
Набор плашек
крепления ротора
-R Ультра легкая
лопатка (красная)
Ползунковое кольцо
узла ротора
PV0457
PV0482
лопатка (синяя)
PV0499
Хвостовой ползунок
-L Ультра легкая
Прочный хвостовой
узел
Page 50
ДОПОЛНИТЕЛЬНЫЕ ЧАСТИ
PV0512-Y
PV0548
PV0568
руля высоты, Е550/Е620
Амортизатор
салазок (желтый)
Шестерня мотора,
12Т
Алюминиевый рычаг
PV0512-L
салазок (синий)
PV0549
PV0569
Шестерня мотора,
Тяга руля высоты,
Е550/Е620
Амортизатор
13Т
PV0512-W
PV0566
PV0570
хвостовое оперение
Амортизатор
салазок (белый)
Аппарат перекоса
140º, Е550/Е620
Карбоновое гориз.
PV0547
PV0571
Шестерня мотора,
11Т
PV0567
распорка рамы, 44 мм
Металлическая
Карбоновое вертик.
хвостовое оперение
Официальным поставщиком продукции Thunder Tiger в России является ООО «Планета Хобби» http://www.planetahobby.ru.
Свежую информацию о продукции Thunder Tiger Вы можете найти на сайте http://www.thundertiger.ru
49
Page 51
EE555500EE662200SSE
E
Полная длина фюзеляжа
Полная ширина фюзеляжа
Полная высота
Диаметр основного ротора
Диаметр хвостового ротора
Отношение редукции
Полный полётный вес
1150 мм (45,27")
140 мм (5,51")
390 мм (15,35")
1245 мм (49")
237 мм (9,33")
1:8,54~12,33:4,56
3300 гр (7,3 унц)
50
Полная длина фюзеляжа
Полная ширина фюзеляжа
Полная высота
Диаметр основного ротора
Диаметр хвостового ротора
Отношение редукции
Полный полётный вес
1220 мм (48,03")
140 мм (5,51")
390 мм (15,35")
1345~1385мм (52,95"~54,53")
237 мм (9,33")
1:8,54~12,33:4,56
3500 гр (7,7 унц) .
 Loading...
Loading...