

Product
Folder
Order
Now
Technical
Documents
Tools &
Software
Support &
Community
Reference
Design
TRF7960, TRF7961 Multiple-Standard Fully Integrated 13.56-MHz RFID
Analog Front End and Data-Framing Reader System
1 Device Overview
1.1 Features
1
• Completely Integrated Protocol Handling
• Separate Internal High-PSRR Power Supplies for
Analog, Digital, and PA Sections Provide Noise
Isolation for Superior Read Range and Reliability
• Dual Receiver Inputs With AM and PM
Demodulation to Minimize Communication Holes
• Receiver AM and PM RSSI
• Reader-to-Reader Anticollision
• High Integration Reduces Total BOM and Board
Area
– Single External 13.56-MHz Crystal Oscillator
– MCU-Selectable Clock-Frequency Output of RF,
RF/2, or RF/4
– Adjustable 20-mA High-PSRR LDO for
Powering External MCU
• Easy to Use With High Flexibility
– Automatically Configured Default Modes for
Each Supported ISO Protocol
– 12 User-Programmable Registers
TRF7960, TRF7961
SLOU186G –AUGUST 2006–REVISED MAY 2017
– Selectable Receiver Gain
– Programmable Output Power (100 mW or
200 mW)
– Adjustable ASK Modulation Range (8% to 30%)
– Built-In Receiver Band-Pass Filter With User-
Selectable Corner Frequencies
• Wide Operating Voltage Range of 2.7 V to 5.5 V
• Ultra-Low-Power Modes
– Power Down: <1 µA
– Standby: 120 µA
– Active (RX Only): 10 mA
• Parallel 8-Bit or Serial 4-Pin Serial Peripheral
Interface (SPI) With MCU Using 12-Byte FIFO
• Ultra-Small 32-Pin QFN Package (5 mm × 5 mm)
• Available Tools (Also See Tools and Software)
– Reference Design and EVM With Development
Software
– Source Code Available for MSP430™ MCU
1.2 Applications
• Secure Access Control
• Product Authentication
1.3 Description
The TRF7960 and TRF7961 devices are integrated analog front end and data-framing systems for a
13.56-MHz RFID reader system that supports multiple protocols including ISO/IEC 14443 A and B,
FeliCa™, and ISO/IEC 15693. Built-in programming options make it suitable for a wide range of
applications for proximity and vicinity identification systems.
The reader is configured by selecting the desired protocol in the control registers. Direct access to all
control registers allows fine-tuning of various reader parameters as needed.
The device supports data rates up to 848 kbps with all framing and synchronization tasks for the ISO
protocols onboard. Other standards and even custom protocols can be implemented by using one of the
direct modes that the device offers. These direct modes let the application fully control the AFE and also
gain access to the raw subcarrier data or the unframed, but already ISO-formatted, data and the
associated (extracted) clock signal.
The receiver system has a dual-input receiver architecture to maximize communication robustness. The
receivers also include various automatic and manual gain control options. The received signal strength
from transponders, ambient sources, or internal levels is available in the RSSI register.
A SPI or parallel interface can be used for the communication between the MCU and the TRF796x reader.
When the built-in hardware encoders and decoders are used, transmit and receive functions use a 12-byte
FIFO register. For direct transmit or receive functions, the encoders or decoders can be bypassed so the
MCU can process the data in real time.
1
• Medical Systems
• Public Transport or Event Ticketing
An IMPORTANT NOTICE at the end of this data sheet addresses availability, warranty, changes, use in safety-critical applications,
intellectual property matters and other important disclaimers. PRODUCTION DATA.
3 (SPI) or 8 (Parallel)
Impedance
Matching
Circuit
TX_OUT
RX_IN1
RX_IN2
VDD_X
VDD_I/O
SYS_CLK
DATA_CLK
VCC
TRF796x
MSP430 MCU
Crystal
13.56 MHz
IRQ
OSC_IN
OSC_OUT
Copyright © 2017, Texas Instruments Incorporated
TRF7960, TRF7961
SLOU186G –AUGUST 2006–REVISED MAY 2017
The TRF7960 and TRF7961 devices support a wide supply voltage range of 2.7 V to 5.5 V and data
communication levels from 1.8 V to 5.5 V for the MCU I/O interface.
The transmitter has selectable output power levels of 100 mW (+20 dBm) or 200 mW (+23 dBm)
equivalent into a 50-Ω load when using a 5-V supply and supports OOK and ASK modulation with
selectable modulation depth.
Built-in programmable auxiliary voltage regulator delivers up to 20 mA to supply an MCU and additional
external circuits within the reader system.
Start evaluating the TRF7960 multiprotocol transceiver IC with the TRF7960AEVM or the TRF7960ATB.
Documentation, Tools, Reference Designs, and Software, Samples
www.ti.com
(1) For more information, see Section 9, Mechanical, Packaging, and
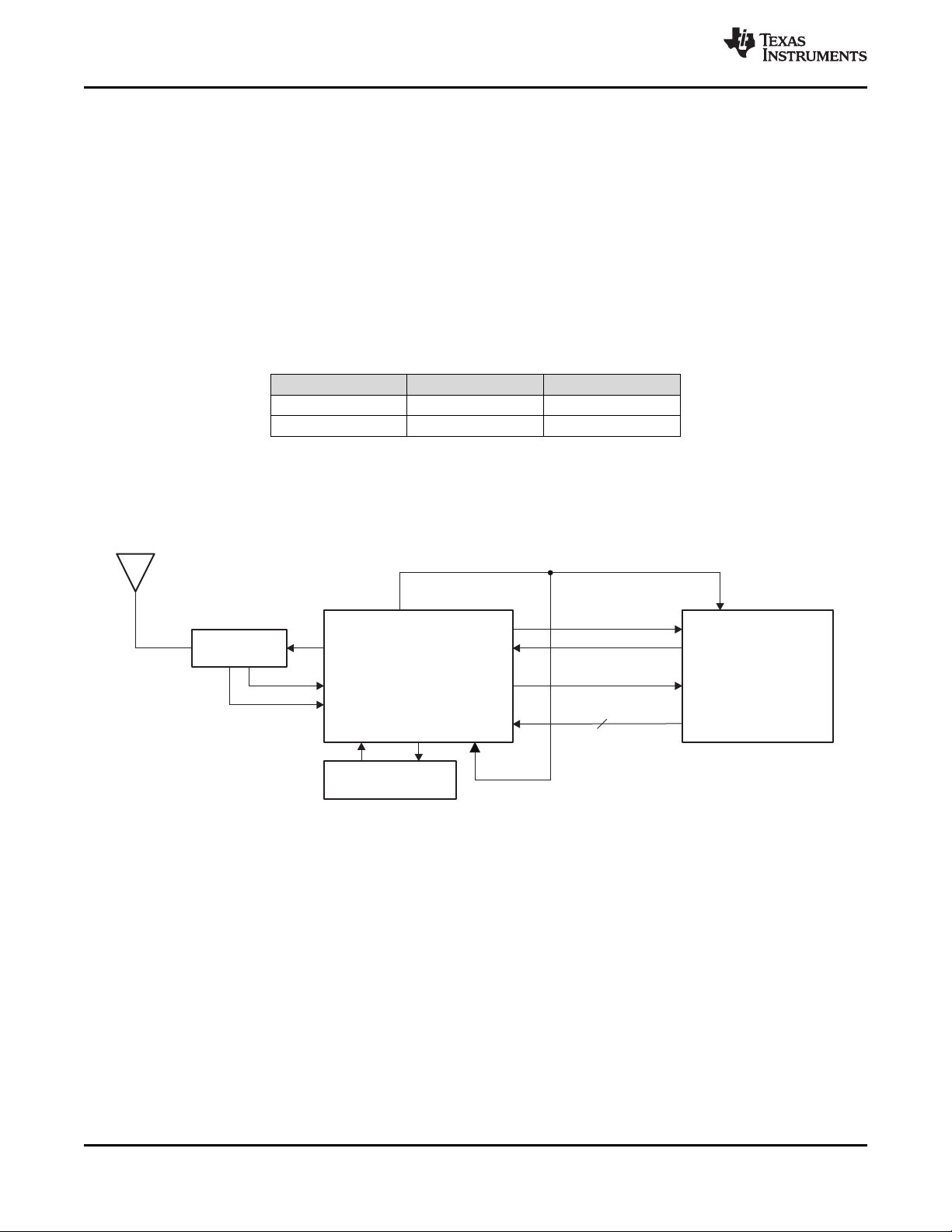
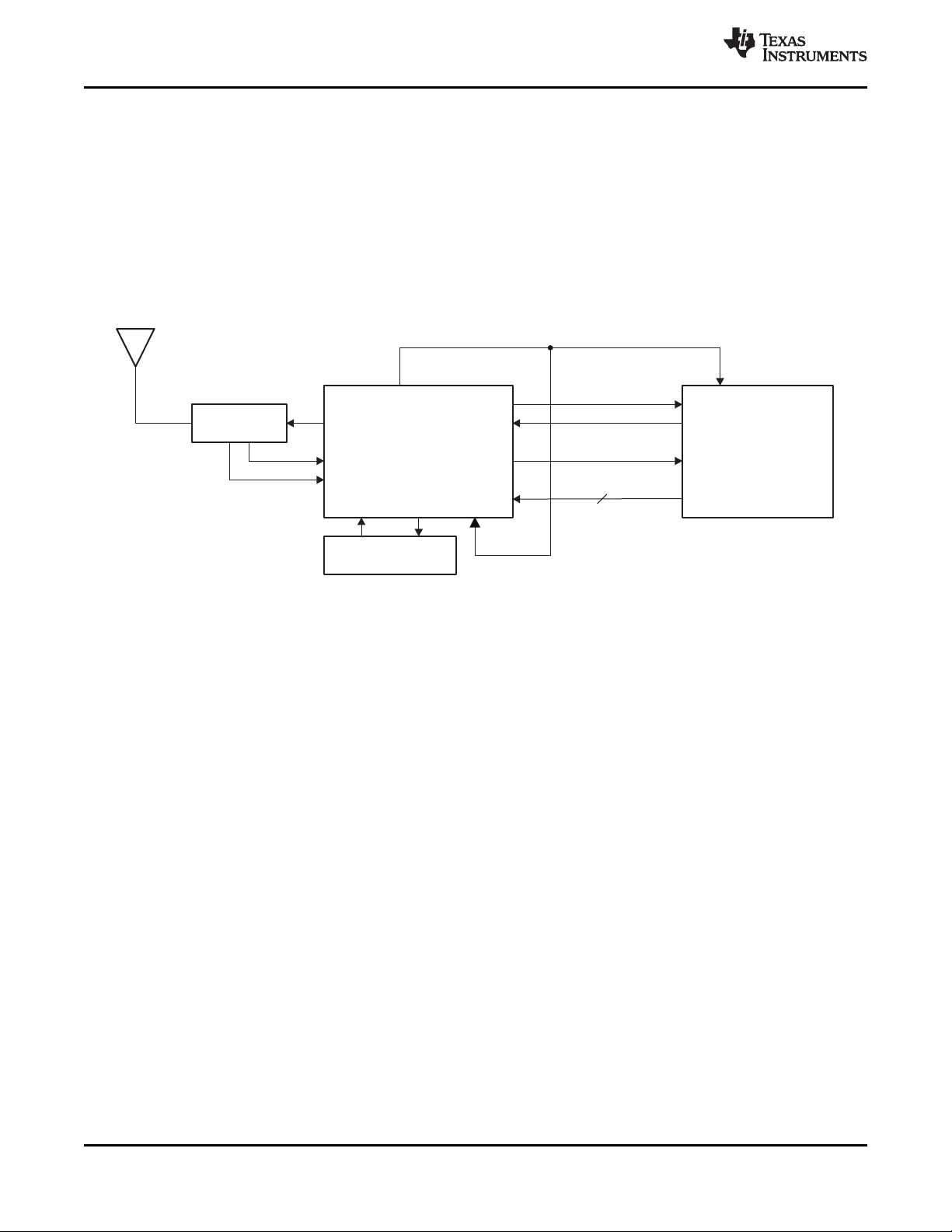
1.4 Typical Application
Figure 1-1 shows a typical application block diagram.
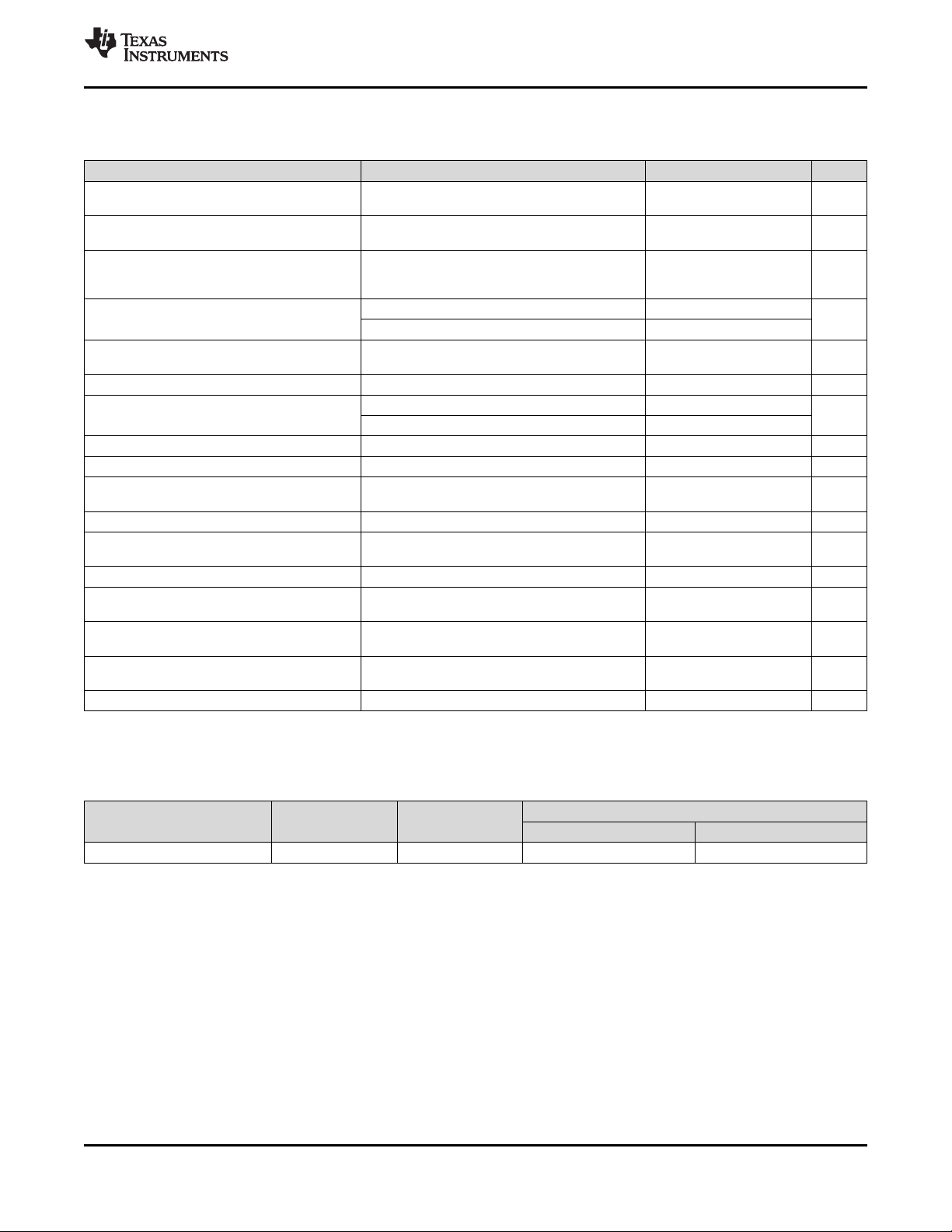
Device Information
PART NUMBER PACKAGE BODY SIZE
TRF7960RHB VQFN (32) 5 mm × 5 mm
TRF7961RHB VQFN (32) 5 mm × 5 mm
Orderable Information.
(1)
2
Figure 1-1. Application Block Diagram
Device Overview Copyright © 2006–2017, Texas Instruments Incorporated
Submit Documentation Feedback
Product Folder Links: TRF7960 TRF7961
www.ti.com
TRF7960, TRF7961
SLOU186G –AUGUST 2006–REVISED MAY 2017
Table of Contents
1 Device Overview ......................................... 1
1.1 Features .............................................. 1
1.2 Applications........................................... 1
1.3 Description............................................ 1
1.4 Typical Application ................................... 2
2 Revision History ......................................... 4
3 Device Comparison ..................................... 5
3.1 Related Products ..................................... 5
4 Terminal Configuration and Functions.............. 6
4.1 Pin Diagram .......................................... 6
4.2 Signal Descriptions ................................... 6
5 Specifications ............................................ 8
5.1 Absolute Maximum Ratings .......................... 8
5.2 ESD Ratings.......................................... 8
5.3 Recommended Operating Conditions ................ 8
5.4 Electrical Characteristics ............................. 8
5.5 Thermal Resistance Characteristics.................. 9
6 Detailed Description ................................... 10
6.1 Overview ............................................ 10
6.2 Power Supplies...................................... 10
6.3 Receiver – Analog Section.......................... 16
6.4 Register Descriptions................................ 22
6.5 Direct Commands From MCU to Reader ........... 31
6.6 Reader Communication Interface................... 33
6.7 Parallel Interface Communication................... 34
6.8 Serial Interface Communication..................... 36
7 Applications, Implementation, and Layout........ 41
7.1 Application Schematics ............................. 41
8 Device and Documentation Support ............... 43
8.1 Getting Started and Next Steps..................... 43
8.2 Device Nomenclature ............................... 43
8.3 Tools and Software ................................. 44
8.4 Documentation Support ............................. 44
8.5 Related Links........................................ 45
8.6 Community Resources .............................. 45
8.7 Trademarks.......................................... 45
8.8 Electrostatic Discharge Caution..................... 45
8.9 Export Control Notice ............................... 45
8.10 Glossary............................................. 45
9 Mechanical, Packaging, and Orderable
Information .............................................. 46
Submit Documentation Feedback
Product Folder Links: TRF7960 TRF7961
Table of ContentsCopyright © 2006–2017, Texas Instruments Incorporated
3
TRF7960, TRF7961
SLOU186G –AUGUST 2006–REVISED MAY 2017
www.ti.com
2 Revision History
NOTE: Page numbers for previous revisions may differ from page numbers in the current version.
Changes from August 12, 2010 to May 18, 2017 Page
• Removed "and AGC" from "Selectable Receiver Gain" in Section 1.1, Features ........................................... 1
• Updated list of applications.......................................................................................................... 1
• Changed contents of Section 1.3, Description.................................................................................... 1
• Added Device Information table .................................................................................................... 2
• Added Section 1.4, Typical Application............................................................................................ 2
• Added Section 3, Device Comparison, and moved Table 3-1 to it............................................................. 5
• Added Section 3.1, Related Products ............................................................................................. 5
• Changed the title of Section 4 from Physical Characteristics to Terminal Configuration and Functions.................. 6
• Removed former Section 3.2, Packaging and Ordering Information (see Section 9, Mechanical, Packaging, and
Orderable Information) ............................................................................................................... 7
• Updated note (1) on Section 5.1, Absolute Maximum Ratings, to standard wording........................................ 8
• Moved ESD ratings from Absolute Maximum Ratings to Section 5.2, ESD Ratings; changed ratings from positive
voltages only to positive and negative; added notes for HBM and CDM...................................................... 8
• Changed format of MIN, TYP, and MAX columns in Section 5.4, Electrical Characteristics ............................... 8
• Added the f
D_CLKmax
• Changed title of and moved Section 5.5, Thermal Resistance Characteristics .............................................. 9
• Moved contents of Section 6.1, Overview from former Section 2............................................................. 10
• Removed a paragraph that began "The second receiver gain stage and digitizer stage..." in Section 6.3,
Receiver – Analog Section......................................................................................................... 17
• Added the last sentence to the paragraph that begins "The start of the receive operation (successfully received
SOF)..." in Section 6.3.2, Receiver – Digital Section .......................................................................... 18
• Added "and ISO/IEC 15693" to the first sentence of the paragraph that begins "The framing section also
supports bit-collision detection..." in Section 6.3.2, Receiver – Digital Section ............................................. 18
• Changed B2 to Reserved in Table 6-11, Chip Status Control Register (Address = 00h) ................................. 23
• Changed B1 and B0 to Reserved in Table 6-22, RX Special Setting Register (Address = 0Ah) ........................ 28
• Corrected the name of the Reset FIFO command in Table 6-31, Command Codes, and Section 6.5.2, Reset FIFO 31
• Added the last sentence to the paragraph that begins "The serial communications work in the same manner..."
in Section 6.8, Serial Interface Communication................................................................................. 36
• Removed former section External Power Amplifier Application............................................................... 40
• Added Section 7, Applications, Implementation, and Layout, and moved the application schematics to it ............. 41
• Added Section 8, Device and Documentation Support......................................................................... 43
• Added Section 9, Mechanical, Packaging, and Orderable Information ...................................................... 46
parameter in Section 5.4, Electrical Characteristics ..................................................... 9
4
Revision History Copyright © 2006–2017, Texas Instruments Incorporated
Submit Documentation Feedback
Product Folder Links: TRF7960 TRF7961
TRF7960, TRF7961
www.ti.com
SLOU186G –AUGUST 2006–REVISED MAY 2017
3 Device Comparison
Table 3-1 summarizes the device characteristics.
Table 3-1. Device Comparison
PROTOCOLS
DEVICE
106 kbps 212 kbps 424 kbps 848 kbps
TRF7960 ✓ ✓ ✓ ✓ ✓ ✓
TRF7961 ✓ ✓
3.1 Related Products
For information about other devices in this family of products or related products, see the following links.
Products for TI Wireless Connectivity Connect more with the broadest wireless connectivity portfolio in
the industry.
Products for NFC / RFID TI provides one of the most differentiated NFC and RFID product portfolios in
the industry and is your solution to meet a broad range of NFC connectivity and RFID
identification needs.
Companion Products for TRF7960 Review products that are frequently purchased or used with this
product.
Reference Designs for TRF7960 The TI Designs Reference Design Library is a robust reference design
library that spans analog, embedded processor, and connectivity. Created by TI experts to
help you jump start your system design, all TI Designs include schematic or block diagrams,
BOMs, and design files to speed your time to market. Search and download designs at
ti.com/tidesigns.
ISO/IEC 14443 A AND B
ISO/IEC 15693,
ISO/IEC 18000-3
Tag-it™
Submit Documentation Feedback
Product Folder Links: TRF7960 TRF7961
Device ComparisonCopyright © 2006–2017, Texas Instruments Incorporated
5
Exposed Thermal Pad
1
8
7
6
5
4
3
2
24
17
18
19
20
21
22
23
VDD_A
RX_IN1
VSS_RX
VSS_RF
TX_OUT
VDD_PA
VDD_RF
VIN
I/O_7
I/O_0
I/O_1
I/O_2
I/O_3
I/O_4
I/O_5
I/O_6
RX_IN2
VDD_I/O
VSS_A
MOD
IRQ
ASK/OOK
VSS
VDD_X
EN2
DATA_CLK
SYS_CLK
EN
VSS_D
OSC_OUT
OSC_IN
32 31 30 29 28 27 26 25
9
10 11 12 13 14 15 16
TRF7960, TRF7961
SLOU186G –AUGUST 2006–REVISED MAY 2017
4 Terminal Configuration and Functions
4.1 Pin Diagram
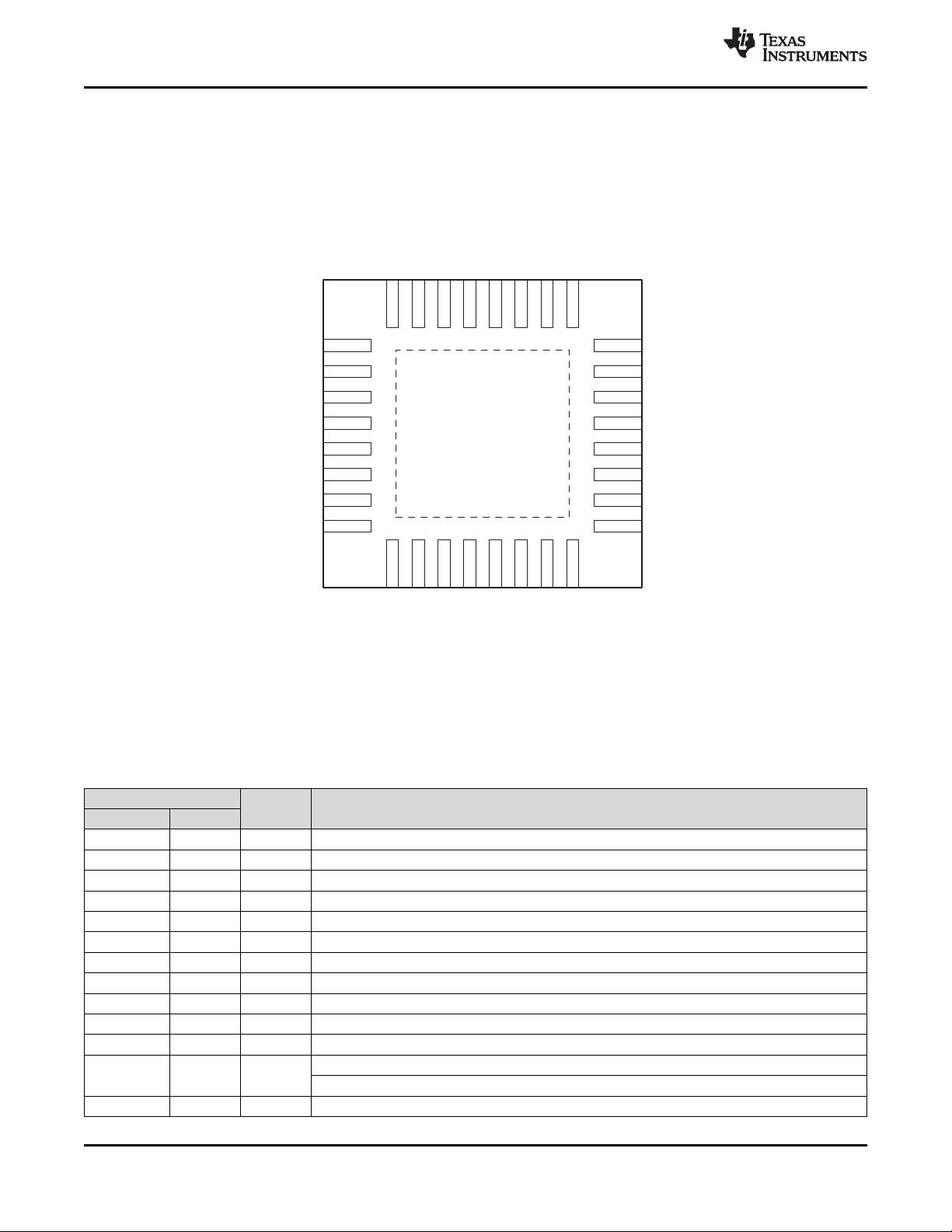
Figure 4-1 shows the pinout of the 32-pin RHB package.
www.ti.com
Figure 4-1. 32-Pin RHB Package (Top View)
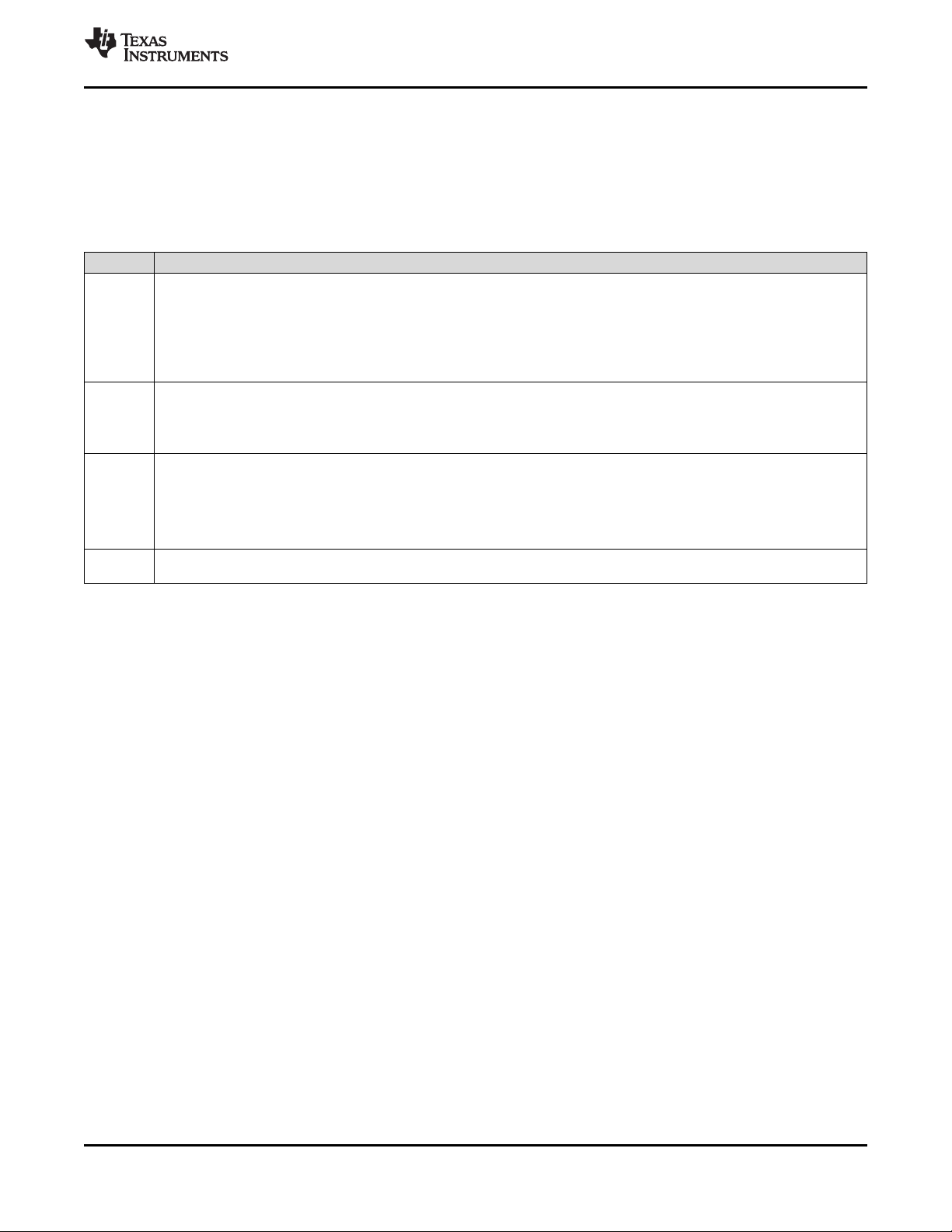
4.2 Signal Descriptions
Table 4-1 describes the device signals.
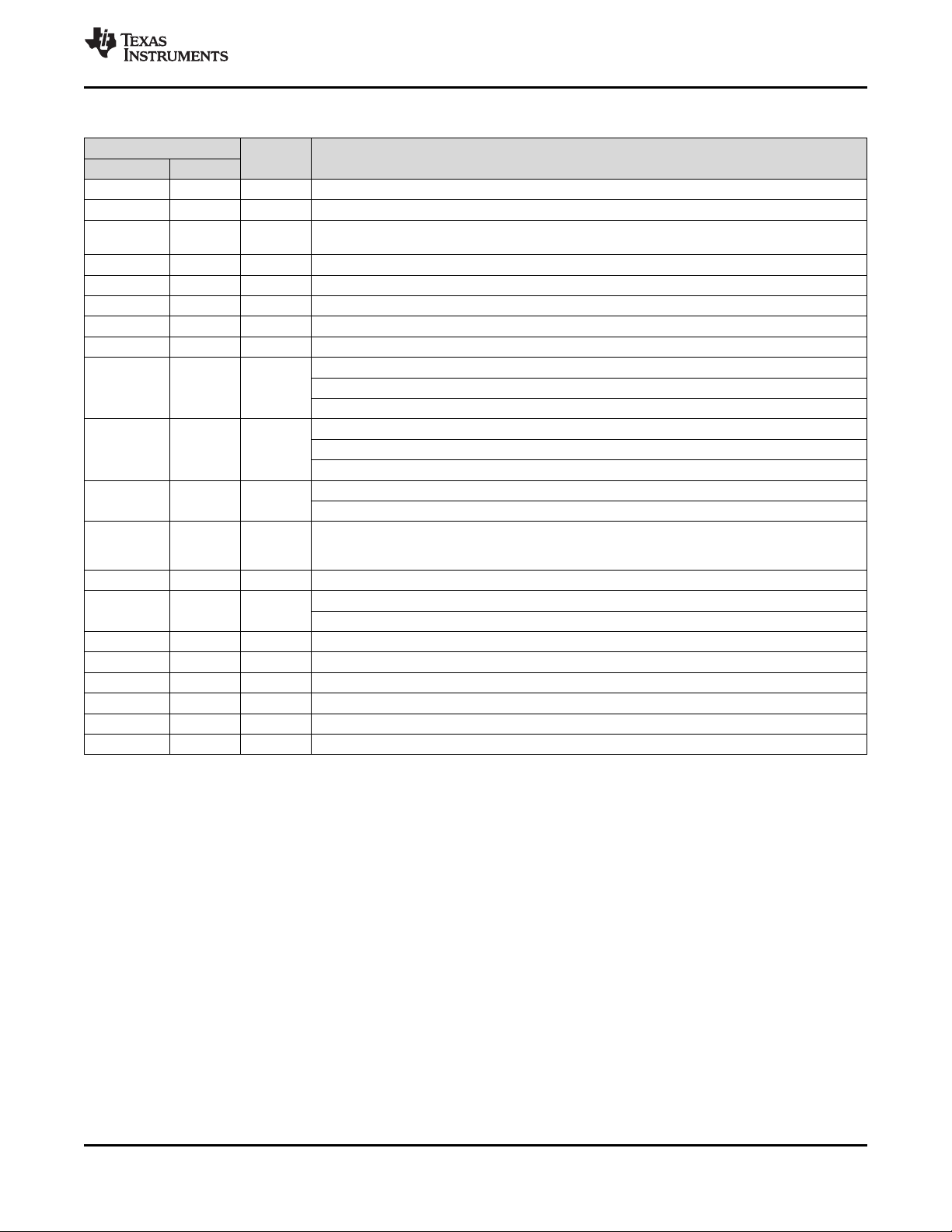
Table 4-1. Signal Descriptions
TERMINAL
NAME NO.
VDD_A 1 OUT Internal regulated supply (2.7 V to 3.4 V) for analog circuitry
VIN 2 SUP External supply input to chip (2.7 V to 5.5 V)
VDD_RF 3 OUT Internal regulated supply (2.7 V to 5 V), normally connected to VDD_PA (pin 4)
VDD_PA 4 INP Supply for PA; normally connected externally to VDD_RF (pin 3)
TX_OUT 5 OUT RF output (selectable output power, 100 mW at 8 Ω or 200 mW at 4 Ω, with VDD= 5 V)
VSS_RF 6 SUP Negative supply for PA; normally connected to circuit ground
VSS_RX 7 SUP Negative supply for RX inputs; normally connected to circuit ground
RX_IN1 8 INP RX input, used for AM reception
RX_IN2 9 INP RX input, used for PM reception
VSS 10 SUP Chip substrate ground
BAND_GAP 11 OUT Band-gap voltage (1.6 V); internal analog voltage reference; must be AC-bypassed to ground
ASK/OOK 12 BID
IRQ 13 OUT Interrupt request
(1)
TYPE
DESCRIPTION
Also can be configured to provide the received analog signal output (ANA_OUT)
Direct mode, selects either ASK or OOK modulation (0 = ASK, 1 = OOK)
(1) SUP = Supply, INP = Input, BID = Bidirectional, OUT = Output
6
Terminal Configuration and Functions Copyright © 2006–2017, Texas Instruments Incorporated
Submit Documentation Feedback
Product Folder Links: TRF7960 TRF7961
TRF7960, TRF7961
www.ti.com
SLOU186G –AUGUST 2006–REVISED MAY 2017
Table 4-1. Signal Descriptions (continued)
TERMINAL
NAME NO.
MOD 14 INP Direct mode, external modulation input
VSS_A 15 SUP Negative supply for internal analog circuits; normally connected to circuit ground
VDD_I/O 16 SUP
I/O_0 17 BID I/O pin for parallel communication
I/O_1 18 BID I/O pin for parallel communication
I/O_2 19 BID I/O pin for parallel communication
I/O_3 20 BID I/O pin for parallel communication
I/O_4 21 BID I/O pin for parallel communication
I/O_5 22 BID
I/O_6 23 BID
I/O_7 24 BID
EN2 25 INP
DATA_CLK 26 INP Clock input for MCU communication (parallel and serial)
SYS_CLK 27 OUT
EN 28 INP Chip enable input (If EN = 0, then chip is in power-down mode.)
VSS_D 29 SUP Negative supply for internal digital circuits; normally connected to circuit ground
OSC_OUT 30 OUT Crystal oscillator output
OSC_IN 31 INP Crystal oscillator input
VDD_X 32 OUT Internally regulated supply (2.7 V to 3.4 V) for external circuitry (MCU)
Thermal Pad Connected to circuit ground
TYPE
(1)
Supply for I/O communications (1.8 V to 5.5 V). Should be connected to VIN for 5-V
communication, VDD_X for 3.3-V communication, or any other voltage from 1.8 V to 5.5 V.
I/O pin for parallel communication
Strobe out clock for serial communication
Data clock output in direct mode
I/O pin for parallel communication
MISO for serial communication (SPI)
Serial bit data output in direct mode 1 or subcarrier signal in direct mode 0
I/O pin for parallel communication.
MOSI for serial communication (SPI)
Pulse enable and selection of power-down mode. If EN2 is connected to VIN, then VDD_X is
active during power down to support the MCU. Pin can also be used for pulse wake up from
power-down mode.
Clock for MCU (3.39 / 6.78 / 13.56 MHz) at EN = 1 and EN2 = don't care
If EN = 0 and EN2 = 1, then system clock is set to 60 kHz
DESCRIPTION
Submit Documentation Feedback
Product Folder Links: TRF7960 TRF7961
Terminal Configuration and FunctionsCopyright © 2006–2017, Texas Instruments Incorporated
7
TRF7960, TRF7961
SLOU186G –AUGUST 2006–REVISED MAY 2017
www.ti.com
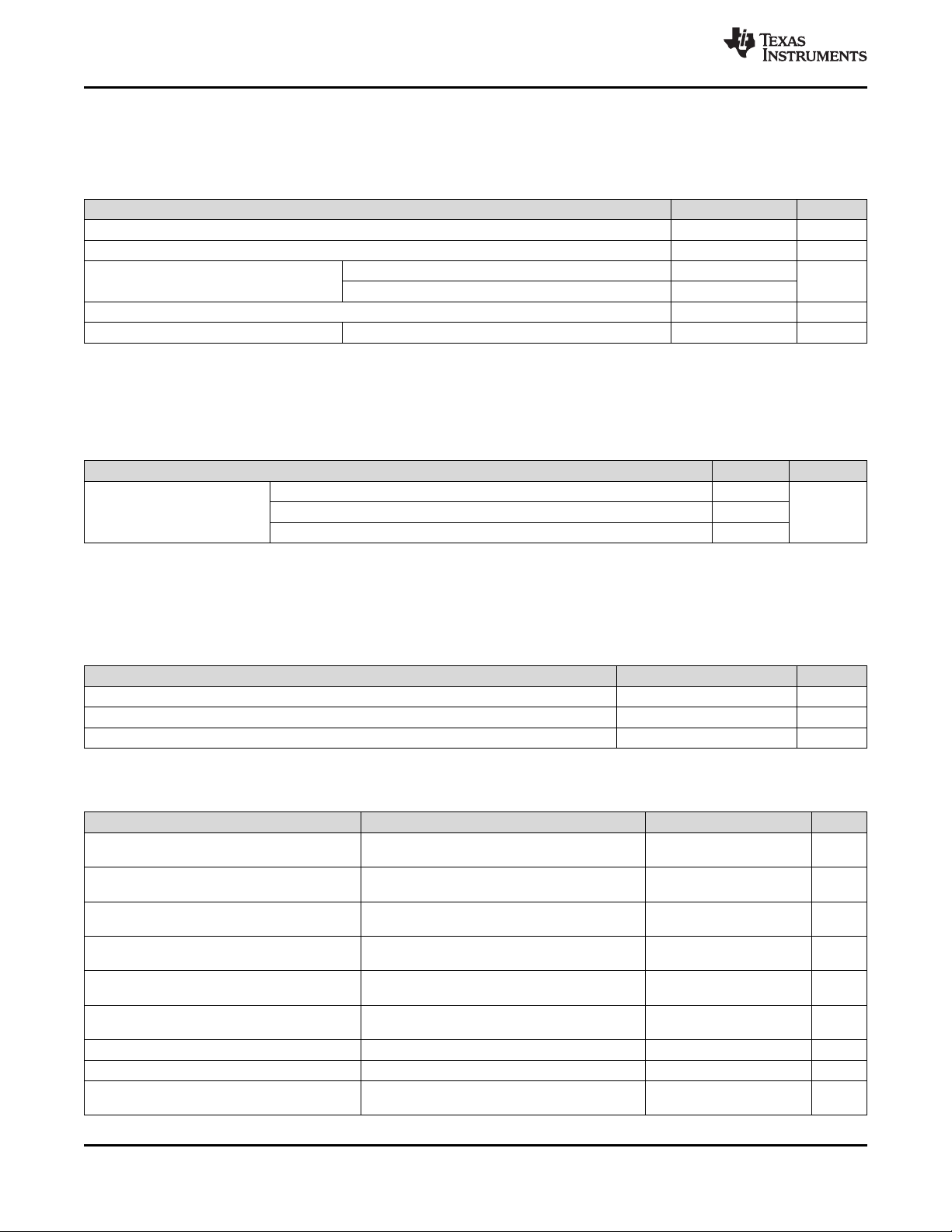
5 Specifications
5.1 Absolute Maximum Ratings
over operating free-air temperature range (unless otherwise noted)
VINSupply voltage 6 V
I
Output current 150 mA
O
T
Maximum junction temperature
J
T
Storage temperature range –55 150 °C
stg
Any condition 140
Continuous operation, long-term reliability
Lead temperature 1,6 mm (1/16 inch) from case for 10 seconds 300 °C
(1) Stresses beyond those listed under Absolute Maximum Ratings may cause permanent damage to the device. These are stress ratings
only, and functional operation of the device at these or any other conditions beyond those indicated under recommended operating
conditions is not implied. Exposure to absolute-maximum-rated conditions for extended periods may affect device reliability.
(2) The maximum junction temperature for continuous operation is limited by package constraints. Operation above this temperature may
result in reduced reliability or lifetime of the device.
5.2 ESD Ratings
Human-body model (HBM), per ANSI/ESDA/JEDEC JS-001
V
Electrostatic discharge
(ESD)
Machine model (MM) ±200
(1) JEDEC document JEP155 states that 500-V HBM allows safe manufacturing with a standard ESD control process. Pins listed as
±2000 V may actually have higher performance.
(2) JEDEC document JEP157 states that 250-V CDM allows safe manufacturing with a standard ESD control process. Pins listed as ±500 V
may actually have higher performance.
(1)
MIN MAX UNIT
(2)
125
°C
VALUE UNIT
(1)
(2)
±2000
±500
VCharged-device model (CDM), per JEDEC specification JESD22-C101
5.3 Recommended Operating Conditions
over operating free-air temperature range (unless otherwise noted)
MIN TYP MAX UNIT
VINSupply voltage 2.7 5 5.5 V
T
Operating virtual junction temperature –40 125 °C
J
T
Operating ambient temperature –40 25 110 °C
A
5.4 Electrical Characteristics
TYP values at 25°C, MIN and MAX values over operating ambient temperature range, VS= 5 V (unless otherwise noted)
PARAMETER TEST CONDITIONS MIN TYP MAX UNIT
I
PD
I
PD2
I
STBY
I
ON1
I
ON2
I
ON3
Supply current in power-down
mode
Supply current in power-down
mode 2
Supply current in standby mode
Supply current without antenna
driver current
Supply current with antenna
driver current
Supply current with antenna
driver current
BG Band-gap voltage Internal analog reference voltage 1.4 1.6 1.7 V
V
V
POR
DD_A
Power-on-reset (POR) voltage 1.4 2 2.5 V
Regulated supply for analog
circuitry
All systems disabled, including supply voltage
regulators
The reference voltage generator and VDD_X
remain active to support external circuitry.
Oscillator running, supply voltage regulators in
low-consumption mode
Oscillator, regulators, RX, and AGC are active,
TX is off
Oscillator, regulators, RX, AGC, and TX are
active, P
= 100 mW
out
Oscillator, regulators, RX, AGC, and TX are all
active, P
= 200 mW
out
1 10 µA
120 300 µA
1.5 4 mA
10 16 mA
70 mA
120 mA
3.1 3.5 3.8 V
8
Specifications Copyright © 2006–2017, Texas Instruments Incorporated
Submit Documentation Feedback
Product Folder Links: TRF7960 TRF7961
TRF7960, TRF7961
www.ti.com
SLOU186G –AUGUST 2006–REVISED MAY 2017
Electrical Characteristics (continued)
TYP values at 25°C, MIN and MAX values over operating ambient temperature range, VS= 5 V (unless otherwise noted)
PARAMETER TEST CONDITIONS MIN TYP MAX UNIT
V
DD_RF
V
DD_X
P
PSRR
R
RFOUT
R
RFIN
V
RFIN
V
SENS
t
SET_PD
t
SET_STBY
t
REC
f
SYS_CLK
f
D_CLKmax
CLK
MAX
V
IL
V
IH
R
OUT
R
SYS_CLK
Regulated supply for RF circuitry
Regulated supply for external
circuitry
Rejection of external supply noise
on the supply VDD_RF regulator
PA driver output resistance
RX_IN1 and RX_IN2 input
resistance
Maximum input voltage At RX_IN1 and RX_IN2 inputs 3.5 V
Input sensitivity
Setup time after power down 10 20 ms
Setup time after standby mode 30 100 µs
Recovery time after modulation
(ISO/IEC 14443)
SYS_CLK frequency In PD2 mode EN = 0 and EN2 = 1 30 60 120 kHz
Maximum DATA_CLK frequency
Maximum CLK frequency 2 MHz
Input logic low
Input logic high
Output resistance of I/O_0 to
I/O_7
Output resistance of SYS_CLK low_io = H for V
(1) Recommended DATA_CLK speed is 2 MHz; higher data clock depends on the capacitive load. Maximum SPI clock speed should not
exceed 10 MHz. This clock speed is acceptable only when external capacitive load is less than 30 pF. The MISO driver has a typical
output resistance of 400 Ω (12-ns time constant when 30-pF load is used).
Regulator set for 5-V system with 250-mV
difference
4 4.6 5.2 V
3.1 3.4 3.8 V
The difference between the external supply and
the regulated voltage is higher than 250 mV,
20 26 dB
measured at 212 kHz
Half-power mode 8 12
Full-power mode 4 6
5 10 20 kΩ
f
SUBCARRIER
f
SUBCARRIER
= 424 kHz 1.2 2.5
= 848 kHz 1.2 3
mV
Modulation signal: sine, 424 kHz, 10 mVpp 60 µs
Depends on capacitive load on the I/O lines, TI
recommends 2 MHz
(1)
2 4 8 MHz
V
DD_I/O
0.2 ×
V
DD_I/O
0.2 ×
0.8 ×
V
DD_I/O
low_io = H for V
< 2.7 V 400 800 Ω
DD_I/O
< 2.7 V 200 400 Ω
DD_I/O
Ω
V
V
PP
PP
5.5 Thermal Resistance Characteristics
PACKAGE
Rθ
JC
(°C/W)
Rθ
JA
(°C/W)
(1)
TA≤ 25°C TA= 85°C
POWER RATING
RHB (32) 31 36.4 2.7 W 1.1 W
(1) This data was taken using the JEDEC standard high-K test PCB.
(2) Power rating is determined with a junction temperature of 125°C. This is the temperature at which distortion starts to increase
substantially. Thermal management of the final PCB should strive to keep the junction temperature at or below 125°C for best
performance and long-term reliability.
Submit Documentation Feedback
Product Folder Links: TRF7960 TRF7961
(2)
SpecificationsCopyright © 2006–2017, Texas Instruments Incorporated
9
3 (SPI) or 8 (Parallel)
Impedance
Matching
Circuit
TX_OUT
RX_IN1
RX_IN2
VDD_X
VDD_I/O
SYS_CLK
DATA_CLK
VCC
TRF796x
MSP430 MCU
Crystal
13.56 MHz
IRQ
OSC_IN
OSC_OUT
Copyright © 2017, Texas Instruments Incorporated
TRF7960, TRF7961
SLOU186G –AUGUST 2006–REVISED MAY 2017
6 Detailed Description
6.1 Overview
Figure 6-1 shows a typical application diagram for the TRF796x devices. A parallel or serial interface can
be implemented for communication between the MCU and reader. Transmit and receive functions use
internal encoders and decoders with a 12-byte FIFO register. For direct transmit or receive functions, the
encoders and decoders can be bypassed so the MCU can process the data in real time. The transmitter
has selectable output power levels of 100 mW (20 dBm) or 200 mW (23 dBm) into a 50-Ω load (5-V
supply) and supports ASK or OOK modulation. Integrated voltage regulators ensure power-supply noise
rejection for the complete reader system.
www.ti.com
Data transmission supports low-level encoding for ISO/IEC 15693, modified Miller for ISO/IEC 14443 A,
high-bit-rate systems for ISO/IEC 14443, and Tag-it coding systems. Included with the data encoding is
automatic generation of SOF, EOF, CRC, and parity bits.
The receiver system enables AM and PM demodulation using a dual-input architecture. The receiver also
includes an automatic gain control option and selectable gain. Also included is a selectable bandwidth to
cover a broad range of input subcarrier signal options. The received signal strength for AM and PM
modulation is accessible through the RSSI register. The receiver output is a digitized subcarrier signal
among a selectable protocol and bit rate as outlined in Table 6-13. A selected decoder delivers bit stream
and a data clock as outputs.
The receiver system also includes a framing system. This system performs a CRC or parity check,
removes the EOF and SOF settings, and organizes the data in bytes. Framed data is then accessible to
the MCU through a 12-byte FIFO register and MCU interface. The framing supports ISO/IEC 14443 and
ISO/IEC 15693 protocols.
The TRF796x supports data communication levels from 1.8 V to 5.5 V for the MCU I/O interface, while
also providing a data synchronization clock. An auxiliary 20-mA regulator (pin 32) is available for
additional system circuits.
6.2 Power Supplies
The positive supply pin, VIN (pin 2), has an input voltage range of 2.7 V to 5.5 V. The positive supply input
sources three internal regulators with output voltages V
capacitors for supply noise filtering. These regulators provide enhanced PSRR for the RFID reader
system. Table 6-1 describes the power supplies.
10
Detailed Description Copyright © 2006–2017, Texas Instruments Incorporated
Figure 6-1. Typical Application Diagram
DD_RF
Submit Documentation Feedback
Product Folder Links: TRF7960 TRF7961
, V
DD_A
, and V
that use external bypass
DD_X
www.ti.com
The regulators are not independent and have common control bits for output voltage setting. The
regulators can be configured to operate in either automatic or manual mode. The automatic regulator
mode setting ensures an optimal compromise between regulator PSRR and highest possible supply
voltage for RF output power. The manual mode allows the application to manually configure the regulator
settings.
Table 6-1. Power Supplies
SUPPLY DESCRIPTION
V
DD_RF
V
V
V
DD_PA
DD_A
DD_X
The regulator V
operation.
When configured for 5-V operation, the output voltage can be set from 4.3 V to 5 V in 100-mV steps. The current sourcing
capability for 5-V operation is 150 mA maximum over the adjusted output voltage range.
When configured for 3-V operation, the output voltage can be set from 2.7 V to 3.4 V, also in 100-mV steps. The current
sourcing capability for 3-V operation is 100 mA maximum over the adjusted output voltage range.
Regulator V
When configured for 5-V operation, the output voltage is fixed at 3.5 V. When configured for 3-V operation, the output voltage
can be set from 2.7 V to 3.4 V in 100-mV steps.
NOTE: The V
Regulator V
components. When configured for 5-V operation, the output voltage is fixed at 3.4 V. When configured for 3-V operation, the
output voltage can be set from 2.7 to 3.4 V in 100-mV steps.
The total current sourcing capability of the V
NOTE: The V
The V
V
DD_RF
DD_A
DD_X
pin (pin 4) is the positive supply pin for the RF output stage and is externally connected to the regulator output
DD_PA
(pin 3).
(pin 3) is used to source the RF output stage. The voltage regulator can be set for either 5-V or 3-V
DD_RF
(pin 1) supplies voltage to analog circuits within the reader chip. The voltage setting is divided in two ranges.
and V
DD_A
(pin 32) can be used to source the digital I/O of the reader chip together with other external system
and V
DD_A
regulators are configured together (their settings are not independent).
DD_X
regulator is 20 mA (maximum) over the adjusted output range.
DD_X
regulators are configured together (their settings are not independent).
DD_X
TRF7960, TRF7961
SLOU186G –AUGUST 2006–REVISED MAY 2017
6.2.1 Negative Supply Connections
The negative supply connections are all externally connected together (to GND). The substrate connection
is VSS(pin 10), the analog negative supply is V
the RF output stage negative supply is V
V
SS_RX
(pin 7).
6.2.2 Digital I/O Interface
To allow compatible I/O signal levels, the TRF796x has a separate supply input V
input voltage range of 1.8 V to 5.5 V. This pin supplies the I/O interface (I/O_0 to I/O_7), IRQ, SYS_CLK,
and DATA_CLK pins of the reader. In typical applications, V
that the I/O signal levels of the MCU are the same as the internal logic levels of the reader.
6.2.3 Supply Regulator Configuration
The supply regulators can be automatically or manually configured by the control bits. Table 6-2 lists the
manual regulator settings for a 5-V system. Table 6-3 lists the manual regulator settings for a 3-V system.
Table 6-4 and Table 6-5 list the automatic mode gain settings for 5-V and 3-V systems, respectively.
The automatic mode is the default configuration. In automatic mode, the regulators are automatically set
every time the system is activated by asserting the EN input high. The internal regulators are also
automatically reconfigured every time the automatic regulator selection bit is set high (on the rising edge).
(pin 15), the logic negative supply is V
SS_A
(pin 6), and the negative supply for the RF receiver input is
SS_TX
DD_I/O
is connected directly to V
DD_I/O
SS_D
(pin 16), with an
DD_X
(pin 29),
to ensure
Submit Documentation Feedback
Product Folder Links: TRF7960 TRF7961
Detailed DescriptionCopyright © 2006–2017, Texas Instruments Incorporated
11
TRF7960, TRF7961
SLOU186G –AUGUST 2006–REVISED MAY 2017
The application can reset the automatic mode setting from a state in which the automatic setting bit is
already high by changing the automatic setting bit from high to low to high. The regulator-configuration
algorithm adjusts the regulator outputs 250 mV below the VINlevel, but not higher than 5 V for V
V for V
, and 3.4 V for V
DD_A
output stage while maintaining an adequate PSRR (power supply rejection ratio). As an example, the
application can improve the PSRR if there is a noisy supply voltage from V
voltage difference across the V
Table 6-5.
Table 6-2. Supply-Regulator Setting – Manual – 5-V System
. This algorithm ensures the highest possible supply voltage for the RF
DD_X
by increasing the target
DD_X
regulator as listed for automatic regulator settings in Table 6-4 and
DD_X
www.ti.com
, 3.5
DD_RF
BYTE
ADDRESS
OPTION BITS SETTING IN CONTROL REGISTER
B7 B6 B5 B4 B3 B2 B1 B0
0x00 1 5-V system
0x0B 0 Manual regulator setting
0x0B 0 1 1 1 V
0x0B 0 1 1 0 V
0x0B 0 1 0 1 V
0x0B 0 1 0 0 V
0x0B 0 0 1 1 V
0x0B 0 0 1 0 V
0x0B 0 0 0 1 V
0x0B 0 0 0 0 V
DD_RF
DD_RF
DD_RF
DD_RF
DD_RF
DD_RF
DD_RF
DD_RF
= 5 V, V
= 4.9 V, V
= 4.8 V, V
= 4.7 V, V
= 4.6 V, V
= 4.5 V, V
= 4.4 V, V
= 4.3 V, V
Table 6-3. Supply-Regulator Setting – Manual – 3-V System
BYTE
ADDRESS
0x00 0 3-V system
0x0B 0 Manual regulator setting
0x0B 0 1 1 1 V
0x0B 0 1 1 0 V
0x0B 0 1 0 1 V
0x0B 0 1 0 0 V
0x0B 0 0 1 1 V
0x0B 0 0 1 0 V
0x0B 0 0 0 1 V
0x0B 0 0 0 0 V
OPTION BITS SETTING IN CONTROL REGISTER
B7 B6 B5 B4 B3 B2 B1 B0
DD_RF
DD_RF
DD_RF
DD_RF
DD_RF
DD_RF
DD_RF
DD_RF
= 3.4 V, V
= 3.3 V, V
= 3.2 V, V
= 3.1 V, V
= 3.0 V, V
= 2.9 V, V
= 2.8 V, V
= 2.7 V, V
DD_A
DD_A
DD_A
DD_A
DD_A
DD_A
DD_A
DD_A
DD_A
DD_A
DD_A
DD_A
DD_A
DD_A
DD_A
DD_A
ACTION
= 3.5 V, V
= 3.5 V, V
= 3.5 V, V
= 3.5 V, V
= 3.5 V, V
= 3.5 V, V
= 3.5 V, V
= 3.5 V, V
ACTION
, V
DD_X
, V
DD_X
, V
DD_X
, V
DD_X
, V
DD_X
, V
DD_X
, V
DD_X
, V
DD_X
DD_X
DD_X
DD_X
DD_X
DD_X
DD_X
DD_X
DD_X
= 3.4 V
= 3.3 V
= 3.2 V
= 3.1 V
= 3.0 V
= 2.9 V
= 2.8 V
= 2.7 V
= 3.4 V
= 3.4 V
= 3.4 V
= 3.4 V
= 3.4 V
= 3.4 V
= 3.4 V
= 3.4 V
Table 6-4. Supply-Regulator Setting – Automatic – 5-V System
BYTE
ADDRESS
0x00 1 5-V system
0x0B 1 x 1 1 Automatic regulator setting; approximately 250-mV difference
0x0B 1 x 1 0 Automatic regulator setting; approximately 350-mV difference
0x0B 1 x 0 0 Automatic regulator setting; approximately 400-mV difference
(1) x = Don't care
12
Detailed Description Copyright © 2006–2017, Texas Instruments Incorporated
OPTION BITS SETTING IN CONTROL REGISTER
B7 B6 B5 B4 B3 B2
(1)
B1 B0
Submit Documentation Feedback
Product Folder Links: TRF7960 TRF7961
ACTION
www.ti.com
TRF7960, TRF7961
SLOU186G –AUGUST 2006–REVISED MAY 2017
Table 6-5. Supply-Regulator Setting – Automatic – 3-V System
BYTE
ADDRESS
0x00 0 3-V system
0x0B 1 x 1 1 Automatic regulator setting; approximately 250-mV difference
0x0B 1 x 1 0 Automatic regulator setting; approximately 350-mV difference
0x0B 1 x 0 0 Automatic regulator setting; approximately 400-mV difference
(1) x = Don't care
OPTION BITS SETTING IN CONTROL REGISTER
B7 B6 B5 B4 B3 B2
(1)
B1 B0
ACTION
6.2.4 Power Modes
The chip has seven power states, which are controlled by two input pins (EN and EN2) and three bits in
the Chip Status Control register (00h).
The main reader enable input is EN (which has a threshold level of 1 V [minimum]). Any input signal level
from 1.8 V to VINcan be used. When EN is set high, all of the reader regulators are enabled, together with
the 13.56-MHz oscillator, and the SYS_CLK output clock for an external MCU.
The auxiliary enable input EN2 has two functions:
• A direct connection from EN2 to VINensures availability of the regulated supply (V
auxiliary clock signal (60 kHz) on the SYS_CLK output (same for the case EN = 0). This mode is
intended for systems in which the MCU controlling the reader is also being supplied by the reader
supply regulator (V
the MCU supply and clock be available during power down.
• EN2 enables start-up of the reader system from complete power down (EN = 0, EN2 = 0). In this case,
the EN input is controlled by the MCU or other system device that is without supply voltage during
complete power down (thus unable to control the EN input). A rising edge applied to the EN2 input
(which has a 1-V threshold level) starts the reader supply system and 13.56-MHz oscillator (identical to
condition EN = 1). This start-up mode lasts until all of the regulators have settled and the 13.56-MHz
oscillator has stabilized. If the EN input is set high by the MCU (or other system device), the reader
stays active. If the EN input is not set high within 100 µs after the SYS_CLK output is switched from
auxiliary clock (60 kHz) to high-frequency clock (derived from the crystal oscillator), the reader system
returns to a complete power-down mode. This option can be used to wake the reader system from
complete power down by using a push-button switch or by sending a single pulse.
) and the MCU clock is supplied by the SYS_CLK output of the reader. This lets
DD_X
DD_X
) and an
After the reader EN line is high, the other power modes are selected by control bits. Table 6-6 lists the
power mode options and functions.
Detailed DescriptionCopyright © 2006–2017, Texas Instruments Incorporated
Submit Documentation Feedback
Product Folder Links: TRF7960 TRF7961
13
TRF7960, TRF7961
SLOU186G –AUGUST 2006–REVISED MAY 2017
www.ti.com
Table 6-6. Power Modes
OPTION BITS SETTING IN CHIP STATUS CONTROL
BYTE
ADDRESS
0x00 0 0 Complete power down <1 µA
0x00 0 1
0x00 1 x x x 1 x
0x00 0 0 x 0 1 x
0x00 0 0 x 1 1 x
0x00 0 1 1 x 1 x
0x00 0 1 0 x 1 x
B7
stby
B6
B5
rfon
REGISTER
B4
rf_pwr
B3
B2
B1
rec_on
EN EN2 FUNCTIONALITY CURRENT
B0
VDD_X available,
SYS_CLK auxiliary frequency
60 kHz is ON
All supply regulators active and in
low power mode,
13.56-MHz oscillator on,
SYS_CLK clock available
All supply regulators active,
13.56-MHz oscillator on,
SYS_CLK clock available
All supply regulators active,
13.56-MHz oscillator on,
SYS_CLK clock available,
Receiver active
All supply regulators active,
13.56-MHz oscillator on,
SYS_CLK clock available,
Receiver active,
Transmitter active in half-power
mode
All supply regulators active,
13.56-MHz oscillator running,
SYS_CLK clock available,
Receiver active,
Transmitter active in full-power
mode
120 µA
1.5 mA
3.5 mA
10 mA
70 mA
(at 5 V)
120 mA
(at 5 V)
During reader inactivity, the TRF796x can be placed in power-down mode (EN = 0). The power down can
be complete (EN = 0, EN2 = 0) with no function running, or partial (EN = 0, EN2 = 1) with the regulated
supply (V
) and 60-kHz auxiliary clock (SYS_CLK) available to the MCU or other system device.
DD_X
When EN is set high (or on rising edge of EN2 and then confirmed by EN = 1), the supply regulators are
activated and the 13.56-MHz oscillator is started. When the supplies are settled and the oscillator
frequency is stable, the SYS_CLK output is switched from the auxiliary frequency of 60 kHz to the
selected frequency derived from the crystal oscillator. At this time, the reader is ready to communicate and
perform the required tasks. The control system (MCU) can then write appropriate bits to the Chip Status
Control register (address 0x00) and select the operation mode.
The standby mode (bit 7 = 1 in register 0x00) is the active mode with the lowest current consumption. The
reader can recover from this mode to full operation in 100 µs.
The active mode with RF section disabled (bit 5 = 0 and bit 1 = 0 in register 0x00) is the next active mode
with low power consumption. The reader is capable of recovering from this mode to full operation in 25 µs.
The active mode with only the RF receiver section active (bit 1 = 1 in register 0x00) can be used to
measure the external RF field (see Section 6.3.1) if reader-to-reader anticollision is implemented.
The active mode with the entire RF section active (bit 5 = 1 in register 0x00) is the normal mode used for
transmit and receive operations.
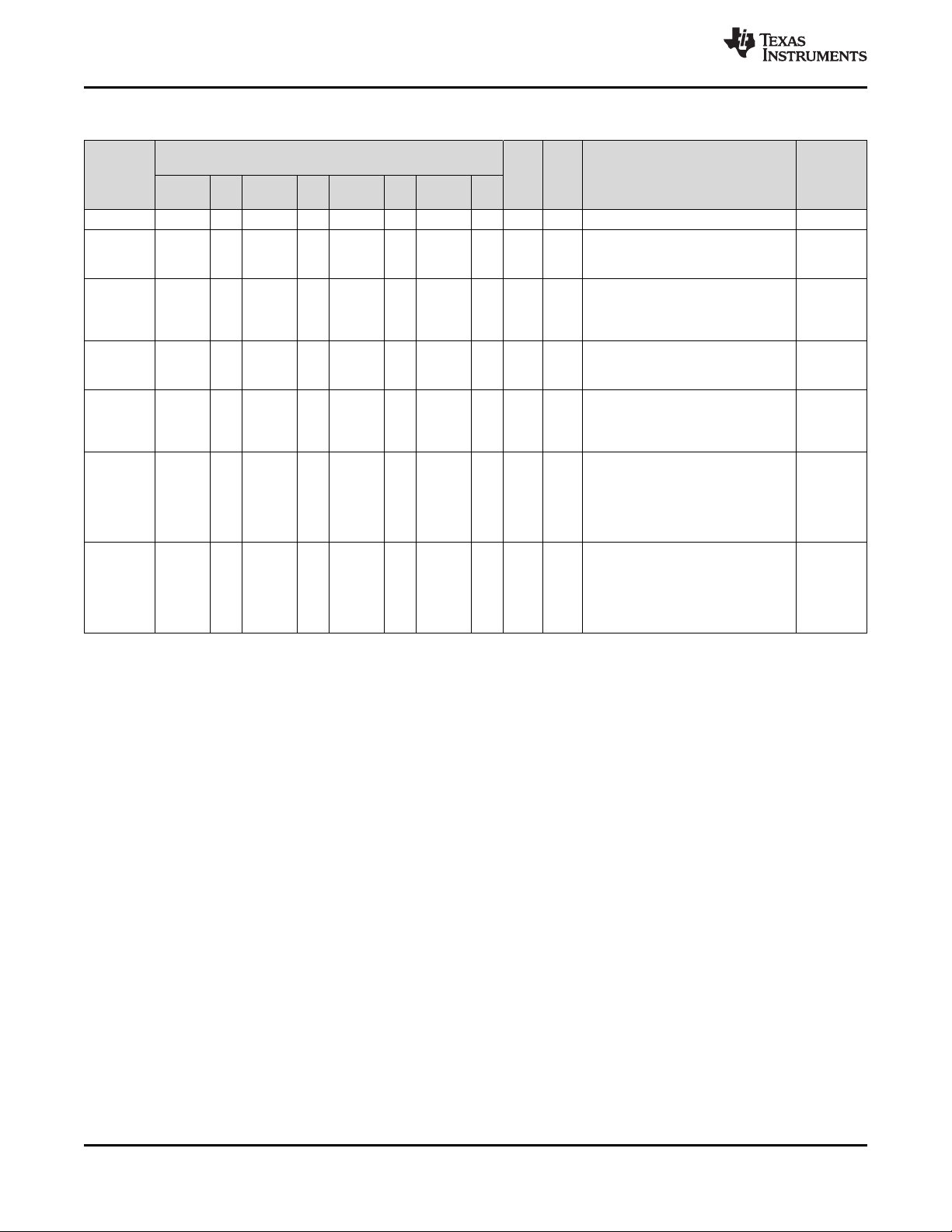
6.2.5 Timing Diagrams
Figure 6-2 shows an oscilloscope trace of chip power up.
Figure 6-3 shows an oscilloscope trace of chip enable to clock start with EN2 low and EN high.
14
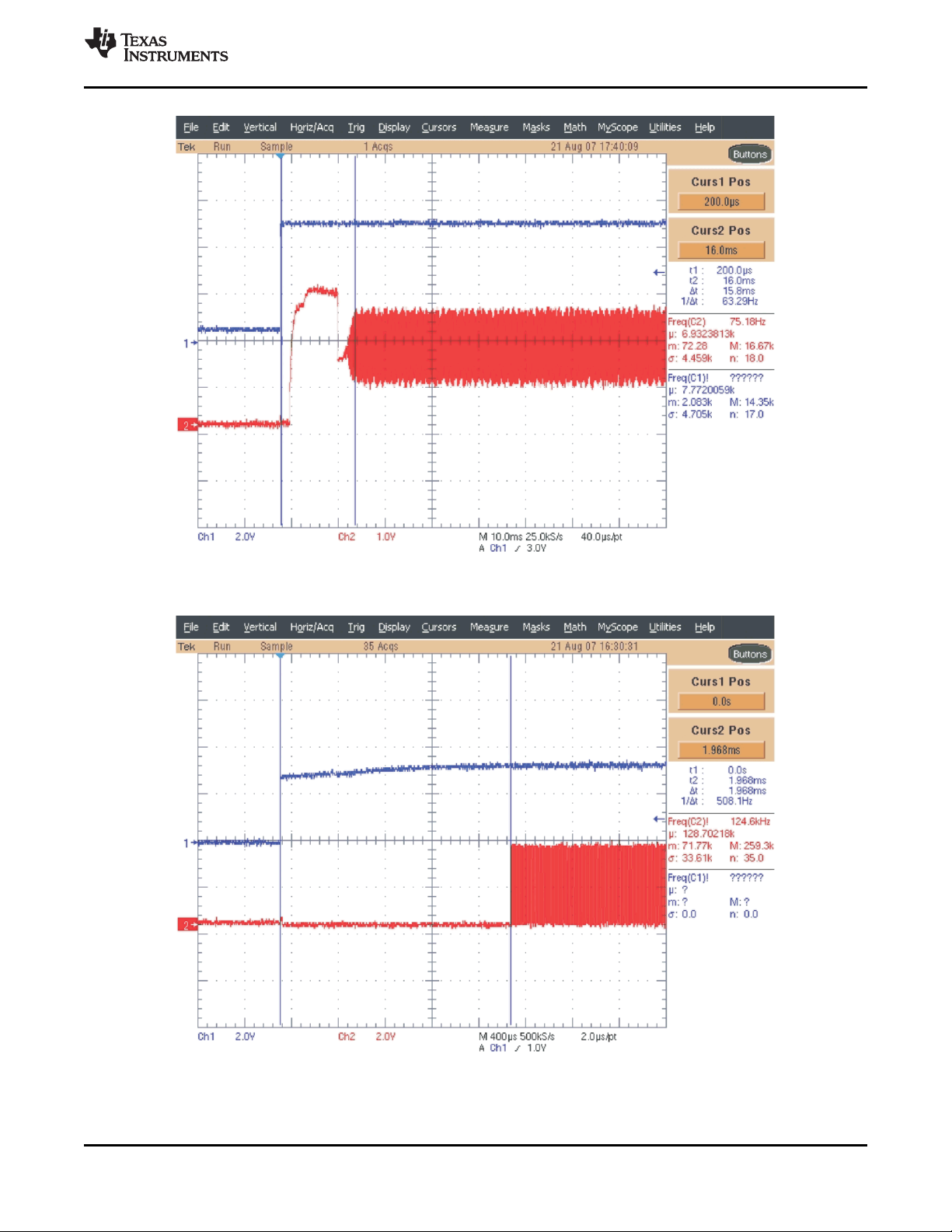
Figure 6-4 shows an oscilloscope trace of chip enable to clock start with EN2 high and EN low.
Detailed Description Copyright © 2006–2017, Texas Instruments Incorporated
Submit Documentation Feedback
Product Folder Links: TRF7960 TRF7961
www.ti.com
TRF7960, TRF7961
SLOU186G –AUGUST 2006–REVISED MAY 2017
Figure 6-2. Chip Power Up [VIN(Blue) to Crystal Start (Red)]
Figure 6-3. Chip Enable to Clock Start, EN2 Low and EN High (Blue) to Start of System Clock (Red)
Detailed DescriptionCopyright © 2006–2017, Texas Instruments Incorporated
Submit Documentation Feedback
Product Folder Links: TRF7960 TRF7961
15
TRF7960, TRF7961
SLOU186G –AUGUST 2006–REVISED MAY 2017
www.ti.com
Figure 6-4. Chip Enable to Clock Start, EN2 High and EN Low (Blue) to Start of System Clock (Red)
6.3 Receiver – Analog Section
The TRF796x has two receiver inputs, RX_IN1 (pin 8) and RX_IN2 (pin 9). The two inputs are connected
to an external filter to ensure that AM modulation from the tag is available on at least one of the two
inputs. The external filter provides a 45° phase shift for the RX_IN2 input to allow further processing of a
received PM-modulated signal (if it appears) from the tag. This architecture eliminates any possible
communication holes that may occur from the tag to the reader.
The two RX inputs are multiplexed to two receiver channels: the main receiver and the auxiliary receiver.
Receiver input multiplexing is controlled by control bit B3 (pm_on) in the Chip Status Control register
(address 0x00). The main receiver is composed of an RF-detection stage, gain, filtering with AGC, and a
digitizing stage whose output is connected to the digital processing block. The main receiver also has an
RSSI measuring stage, which measures the strength of the demodulated signal.
The primary function of the auxiliary receiver is to measure the RSSI of the modulation signal. It also has
similar RF-detection, gain, filtering with AGC, and RSSI blocks.
The default setting is RX_IN1 connected to the main receiver and RX_IN2 connected to the auxiliary
receiver (bit pm_on = 0). When a response from the tag is detected by the RSSI, values on both inputs
are measured and stored in the RSSI Level register (address 0x0F). The control system reads the RSSI
values and switches to the stronger receiver input (RX_IN1 or RX_IN2 by setting pm_on = 1).
The receiver input stage is an RF level detector. The RF amplitude level on RX_IN1 and RX_IN2 inputs
should be approximately 3 VPPfor a VINsupply level greater than 3.3 V. If the VINlevel is lower, the RF
input peak-to-peak voltage level should not exceed the VINlevel. VINis the main supply voltage to the
device at pin 2.
16
The first gain and filtering stage following the RF-envelope detector has a nominal gain of 15 dB with an
adjustable band-pass filter. The band-pass filter has adjustable 3-dB frequency steps (100 kHz to 400 kHz
for high pass and 600 kHz to 1500 kHz for low pass). Following the band-pass filter is another gain-andfiltering stage with a nominal gain of 8 dB and with frequency characteristics identical to the first stage.
Detailed Description Copyright © 2006–2017, Texas Instruments Incorporated
Submit Documentation Feedback
Product Folder Links: TRF7960 TRF7961
TRF7960, TRF7961
www.ti.com
SLOU186G –AUGUST 2006–REVISED MAY 2017
The internal filters are configured automatically, with internal presets for each new selection of a
communication standard in the ISO Control register (address 0x01). If required, additional fine-tuning can
be accomplished by writing directly to the RX Special Setting register (address 0x0A). Table 6-22 lists the
bits of the RX Special Settings register (address 0x0A) that control the receiver analog section.
6.3.1 Received Signal Strength Indicator (RSSI)
The RSSI measurement block measures the demodulated signal (except in the case of a direct command
for RF-amplitude measurement; see Section 6.5). The measuring system latches the peak value, so the
RSSI level can be read after the end of the receive packet. The RSSI register values reset with every
transmission by the reader. This allows an updated RSSI measurement for each new tag response.
Table 6-7 and Table 6-8 list the correlation between the RF input level and RSSI designation levels on
RX_IN1 and RX_IN2.
Table 6-7 compares the RSSI level and the RSSI bit value. The RSSI has seven levels (3 bits each) with
4-dB increments. The input level is the peak-to-peak modulation level of the RF signal as measured on
one side envelope (positive or negative).
Table 6-7. RSSI Level Versus Register Bit Value
RSSI 1 2 3 4 5 6 7
Input level 2 mVpp 3.2 mVpp 5 mVpp 8 mVpp 13 mVpp 20 mVpp 32 mVpp
As an example, from Table 6-8, let B2 = 1, B1 = 1, B0 = 0. This yields an RSSI value of 6. From Table 6-7
a bit value of 6 indicates an RSSI level of 20 mVpp.
Table 6-8. RSSI Bit Value and Oscillator Status Register (0x0F)
BIT SIGNAL FUNCTION COMMENTS
B7 Unused
B6 osc_ok Crystal oscillator stable
B5 rssi_x2 Most significant bit (MSB) of auxiliary receiver RSSI
4 dB per stepB4 rssi_x1 Auxiliary receiver RSSI
B3 rssi_x1 Least significant bit (LSB) of auxiliary receiver RSSI
B2 rssi_2 MSB of main receiver RSSI
4 dB per stepB1 rssi_1 Main receiver RSSI
B0 rssi_0 LSB of main receiver RSSI
6.3.2 Receiver – Digital Section
The received subcarrier is digitized to form a digital representation of the modulated RF envelope. This
digitized signal is applied to digital decoders and framing circuits for further processing.
The digital part of the receiver consists of two sections, which partly overlap. The first section consists of
the bit decoders for the various protocols, and the second section consists of the framing logic. The bit
decoders convert the subcarrier coded signal to a bit stream and also to the data clock. Thus, the
subcarrier-coded signal is transformed to serial data, and the data clock is extracted. The decoder logic is
designed for maximum error tolerance. This enables the decoders to successfully decode even partly
corrupted (due to noise or interference) subcarrier signals.
In the framing section, the serial bit stream data is formatted in bytes. In this process, special signals like
the start of frame (SOF), end of frame (EOF), start of communication, and end of communication are
automatically removed. The parity bits and CRC bytes are checked and also removed. The end result is
clean or raw data, which is sent to the 12-byte FIFO register where it can be read by the external
microcontroller system.
Detailed DescriptionCopyright © 2006–2017, Texas Instruments Incorporated
Submit Documentation Feedback
Product Folder Links: TRF7960 TRF7961
17

TRF7960, TRF7961
SLOU186G –AUGUST 2006–REVISED MAY 2017
The start of the receive operation (successfully received SOF) sets the flags in the IRQ Status register.
The end of the receive operation is indicated to the external system (MCU) by sending an interrupt request
(pin 13, IRQ). If the receive data packet is longer than 8 bytes, an interrupt is sent to the MCU when the
received data occupies 75% of the FIFO capacity to signal that the data should be removed from the
FIFO. Use the FIFO Status register (0x1C) to provide the number of bytes that should be clocked out
during the actual FIFO read.
If any error in data format, parity, or CRC is detected, the external system is notified of the error by an
interrupt-request pulse. The source condition of the interrupt-request pulse is available in the IRQ Status
register (address 0x0C) (see Table 6-24).
The ISO Control register (address 0x01) is the primary control for the digital part of the receiver. By writing
to this register, the application selects the protocol to be used. With each new write in this register, the
default presets are loaded in all related registers, so no further adjustments in other registers are typically
needed for proper operation.
Table 6-12 describes the coding of the ISO Control register. The TRF7961 does not include the
ISO/IEC 14443 functionality; therefore, the features and commands for this protocol are not functional for
the TRF7961.
The framing section also supports bit-collision detection as specified in ISO/IEC 14443 A and
ISO/IEC 15693. When a bit collision is detected, an interrupt request is sent and a flag is set in the IRQ
Status register. For ISO/IEC 14443 A specifically, the position of the bit collision is written in two registers:
partly in the Collision Position register (0x0E) and partly in the Collision Position and Interrupt Mask
register (0x0D) (bits B6 and B7). The collision position is presented as a sequential bit number, where the
count starts immediately after the start bit. For example, the collision in the first bit of the UID would give
the value 00 0001 0000 in the collision position registers. The count starts with 0, and the first 16 bits are
the command code and the NVB byte (the NVB byte is the number of valid bits).
www.ti.com
The receive section also has two timers. The RX wait time timer is controlled by the value in the RX Wait
Time register (address 0x08). This timer defines the time after the end of the transmit operation in which
the receive decoders are not active (held in reset state). This prevents incorrect detections resulting from
transients following the transmit operation. The value of the RX Wait Time register defines this time in
increments of 9.44 µs. This register is preset at every write to ISO Control register (address 0x01)
according to the minimum tag-response time defined by each standard.
The RX no response timer is controlled by the RX No Response Wait Time register (address 0x07). This
timer measures the time from the start of slot in the anticollision sequence until the start of tag response. If
there is no tag response in the defined time, an interrupt request is sent and a flag is set in IRQ Status
Control register. This enables the external controller to be relieved of the task of detecting empty slots.
The wait time is stored in the register in increments of 37.76 µs. This register is also preset, automatically,
for every new protocol selection.
6.3.3 Transmitter
The transmitter section consists of the 13.56-MHz oscillator, digital protocol processing, and RF output
stage.
6.3.3.1 Transmitter – Analog Section
The 13.56-MHz crystal oscillator (connected to pins 31 and 32) directly generates the RF for the RF output
stage. It also generates the clock signal for the digital section and the clock signal output on SYS_CLK
(pin 27), which can be used by an external MCU system.
During partial power-down mode (EN = 0, EN2 = 1), the frequency of SYS_CLK is 60 kHz. During normal
reader operation, SYS_CLK can be programmed by bits B4 and B5 in the Modulator and SYS_CLK
Control register (address 0x09); available clock frequencies are 13.56 MHz, 6.78 MHz, or 3.39 MHz.
18
Table 6-9 lists the recommendations for the reference crystal (HC49U).
Detailed Description Copyright © 2006–2017, Texas Instruments Incorporated
Submit Documentation Feedback
Product Folder Links: TRF7960 TRF7961

www.ti.com
TRF7960, TRF7961
SLOU186G –AUGUST 2006–REVISED MAY 2017
Table 6-9. Crystal Recommendations
PARAMETER SPECIFICATION
Frequency 13.560000 MHz
Mode of operation Fundamental
Type of resonance Parallel
Frequency tolerance ±20 ppm
Aging <5 ppm/year
Operation temperature range –40°C to 85°C
Equivalent series resistance 50 Ω, minimum
NOTE
The value of the two external shunt capacitors on the crystal oscillator is calculated based on
the specified load capacitance of the crystal. The external capacitors (connected to the OSC
pins 30 and 31), are calculated as two capacitors in series plus CS(the internal I/O
capacitance of the oscillator gate plus PCB stray capacitance). The stray capacitance (CS)
can be estimated at 5 ±2 pF (typical).
As an example, given a crystal with a required load capacitance (CL) of 18 pF,
CL= ((C1× C2) / (C1+ C2)) + C
18 pF = ((27 pF × 27 pF) / (27 pF + 27 pF)) + 4.5 pF
From this example, 18-pF capacitors would be placed on pins 30 and 31 to ensure proper
crystal oscillator operation.
S
The transmit power level is selectable as either half power of 100 mW (20 dBm) or full power of 200 mW
(23 dBm) when configured for 5-V automatic operation. The transmit output impedance is 8 Ω when
configured for half power and 4 Ω when configured for full power. Selection of the transmit power level is
set by bit B4 (rf_pwr) in the Chip Status Control register (see Table 6-11). When configured for 3-V
automatic operation, the transmit power level is typically selectable as either 33 mW (15 dBm) in halfpower mode or 70 mW (18 dBm) in full-power mode (VDD_RF at 3.3 V). Lower operating voltages result
in reduced transmit power levels.
In typical operation, the transmit modulation is configured by the selected ISO Control register (address
0x01). External control of the transmit modulation is possible by setting the ISO Control register (address
0x01) to direct mode. While in direct mode, the transmit modulation is set by the ASK/OOK pin (pin 12).
External control of the modulation type is enabled by setting B6 = 1 (en_ook_p) in the Modulator and
SYS_CLK Control register (address 0x09). ASK modulation depth is controlled by bits B0, B1, and B2 in
the Modulator and SYS_CLK Control register (address 0x09). The range of the ASK modulation is 7% to
30%, or 100% (OOK).
Table 6-21 describes the coding of the Modulator and SYS_CLK Control register.
The length of the modulation pulse is defined by the protocol selected in the ISO Control register. With a
high-Q antenna, the modulation pulse is typically prolonged, and the tag detects a longer pulse than
intended. For such cases, the modulation pulse length can be corrected by using the TX Pulse Length
register. If the register contains all zeros, then the pulse length is governed by the protocol selection. If the
register contains a value other than 00h, the pulse length is equal to the value of the register in 73.7-ns
increments. This means the range of adjustment is 73.7 ns to 18.8 µs.
Submit Documentation Feedback
Product Folder Links: TRF7960 TRF7961
Detailed DescriptionCopyright © 2006–2017, Texas Instruments Incorporated
19

TRF7960, TRF7961
SLOU186G –AUGUST 2006–REVISED MAY 2017
6.3.3.2 Transmitter – Digital Section
The digital portion of the transmitter is very similar to that of the receiver. Before beginning data
transmission, the FIFO should be cleared with a Reset command (0x0F). Data transmission is initiated
with a selected command (see Table 6-31). The MCU then commands the reader to do a continuous Write
command (3Dh, see Table 6-33) starting from register 1Dh. Data written into register 1Dh is the TX Length
Byte1 (upper and middle nibbles), while the following byte in register 1Eh is the TX Length Byte2 (lower
nibble and broken byte length). The TX byte length determines when the reader sends the EOF byte. After
the TX length bytes, FIFO data is loaded in register 1Fh with byte storage locations 0 to 11. Data
transmission begins automatically after the first byte is written into the FIFO. The TX Length bytes and
FIFO can be loaded with a continuous-write command because the addresses are sequential.
If the data length is longer than the allowable size of the FIFO, the external system (MCU) is warned when
the majority of data from the FIFO has already been transmitted by sending an interrupt request with a
flag in the IRQ register signaling FIFO low or high status. The external system should respond by loading
the next data packet into the FIFO.
At the end of the transmit operation, the external system is notified by another interrupt request with a flag
in the IRQ register that signals the end of TX.
The TX Length register also supports incomplete bytes transmitted. The high 2 nibbles in register 0x1D
and the nibble composed of bits B4 to B7 in register 0x1E store the number of complete bytes to be
transmitted. Bit 0 (in register 0x1E) is a flag that signals the presence of additional bits to be transmitted
that do not form a complete byte. The number of bits are stored in bits B1 to B3 of the same register
(0x1E).
www.ti.com
The protocol is selected by the ISO Control register (address 0x01), which also selects the receiver
protocol. As defined by the selected protocol, the reader automatically adds all the special signals, like
start of communication, end of communication, SOF, EOF, parity bits, and CRC bytes. The data is then
coded to the modulation pulse level and sent to the modulation control of the RF output stage. This means
that the external system is only required to load the FIFO with data, and all the low-level coding is done
automatically. Also, all registers used in transmission are automatically preset to the optimum value when
a new selection is entered into the ISO Control register.
Some protocols have options, and two registers are provided to select the TX protocol options. The first
register is ISO14443B TX Options (address 0x02). This register controls the SOF and EOF selection and
EGT (extra guard time) selection for the ISO/IEC 14443 B protocol (see Table 6-14)
The second register controls the ISO/IEC 14443 high-bit-rate options. This register enables the use of
different bit rates for RX and TX operations in the ISO/IEC 14443 high bit-rate protocol. Additionally, it also
selects the parity system for the ISO/IEC 14443 A high-bit-rate selection (see Table 6-15).
The transmit section also has a timer that can be used to start the transmit operation at a precise time
interval from a selected event. This is necessary if the tag requires a reply in an exact window of time
following the tag response. The TX timer uses two registers (addresses 0x04 and 0x05). In first register
(address 0x04), two bits (B7 and B6) define the trigger conditions. The remaining 6 bits are the upper bits
and the 8 bits in register address 0x05 are lower bits, which are preset to the counter. The increment is
590 ns and the range of this counter is from 590 ns to 9.7 ms. See Table 6-16 for the bit definitions
(trigger conditions).
6.3.4 Direct Mode
Direct mode supports two configurations:
20
Direct mode 0 (bit 6 = 0 in the ISO Control register) enables use of only the front-end functions of the
reader, bypassing the protocol implementation in the reader. For transmit functions, the application has
direct access to the transmit modulator through the MOD pin (pin 14). On the receive side, the application
has direct access to the subcarrier signal (digitized RF envelope signal) on I/O_6 (pin 23).
Detailed Description Copyright © 2006–2017, Texas Instruments Incorporated
Submit Documentation Feedback
Product Folder Links: TRF7960 TRF7961

Analog Front End (AFE)
Packetization and Framing
14443A 14443B 15693
Tag-it
ISO Encoders and Decoders
Mode 0:
Raw subcarrier data
Mode 1:
Unframed raw ISO
formatted data
www.ti.com
Direct mode 1 (bit 6 = 1 in the ISO Control register) uses the subcarrier signal decoder of the selected
protocol (as defined in the ISO Control register). This means that the receive output is not the subcarrier
signal but the decoded serial bit stream and bit clock signals. The serial data is available on I/O_6 (pin 23)
and the bit clock is available on I/O_5 (pin 22). The transmit side is identical; the application has direct
control over the RF modulation through the MOD input. This mode is provided so that the application can
implement a protocol that has the same bit coding as one of the protocols implemented in the reader, but
needs a different framing format.
To use direct mode, first select the direct mode to enter by writing B6 in the ISO Control register. This bit
determines if the receive output is the direct subcarrier signal (B6 = 0) or the serial data of the selected
decoder. If B6 = 1, also define which protocol should be used for bit decoding by writing the appropriate
setting in the ISO Control register.
The reader actually enters the direct mode when B6 (direct) is set to 1 in the Chip Status Control register.
Direct mode starts immediately. The write command should not be terminated with a stop condition (see
communication protocol), because the stop condition terminates the direct mode and clears B6. This is
necessary as the direct mode uses one or two I/O pins (I/O_6, I/O_5). Standard parallel communication is
not possible in direct mode. Sending a stop condition terminates direct mode.
Figure 6-5 shows mode 0 and mode 1 in direct mode.
• In mode 0, the reader is used as an AFE only, and protocol handling is bypassed.
• In mode 1, framing is not done, but SOF and EOF are present. This allows for a user-selectable
TRF7960, TRF7961
SLOU186G –AUGUST 2006–REVISED MAY 2017
framing level based on an existing ISO standard.
In mode 2 (standard mode), data is ISO-standard formatted. SOF, EOF, and error checking are removed,
so the microprocessor receives only bytes of raw data through a 12-byte FIFO.
Figure 6-5. User-Configurable Modes
Submit Documentation Feedback
Product Folder Links: TRF7960 TRF7961
Detailed DescriptionCopyright © 2006–2017, Texas Instruments Incorporated
21

TRF7960, TRF7961
SLOU186G –AUGUST 2006–REVISED MAY 2017
6.3.5 Register Preset
After power up and the EN pin low-to-high transition, the reader is in the default mode. The default
configuration is ISO/IEC 15693, single subcarrier, high data rate, 1-out-of-4 operation. The low-level option
registers (0x02 to 0x0B) are automatically set to adapt the circuitry optimally to the appropriate protocol
parameters.
When entering another protocol (writing to the ISO Control register [0x01]), the low-level option registers
(0x02 to 0x0B) are automatically configured to the new protocol parameters.
After selecting the protocol, it is possible to change some low-level register contents if needed. However,
changing to another protocol and then back, reloads the default settings, and the application must reload
the custom settings.
The Clo1 and Clo0 bits in register 0x09, which define the microcontroller frequency available on the
SYS_CLK pin, are the only two bits in the configuration registers that are not cleared during protocol
selection.
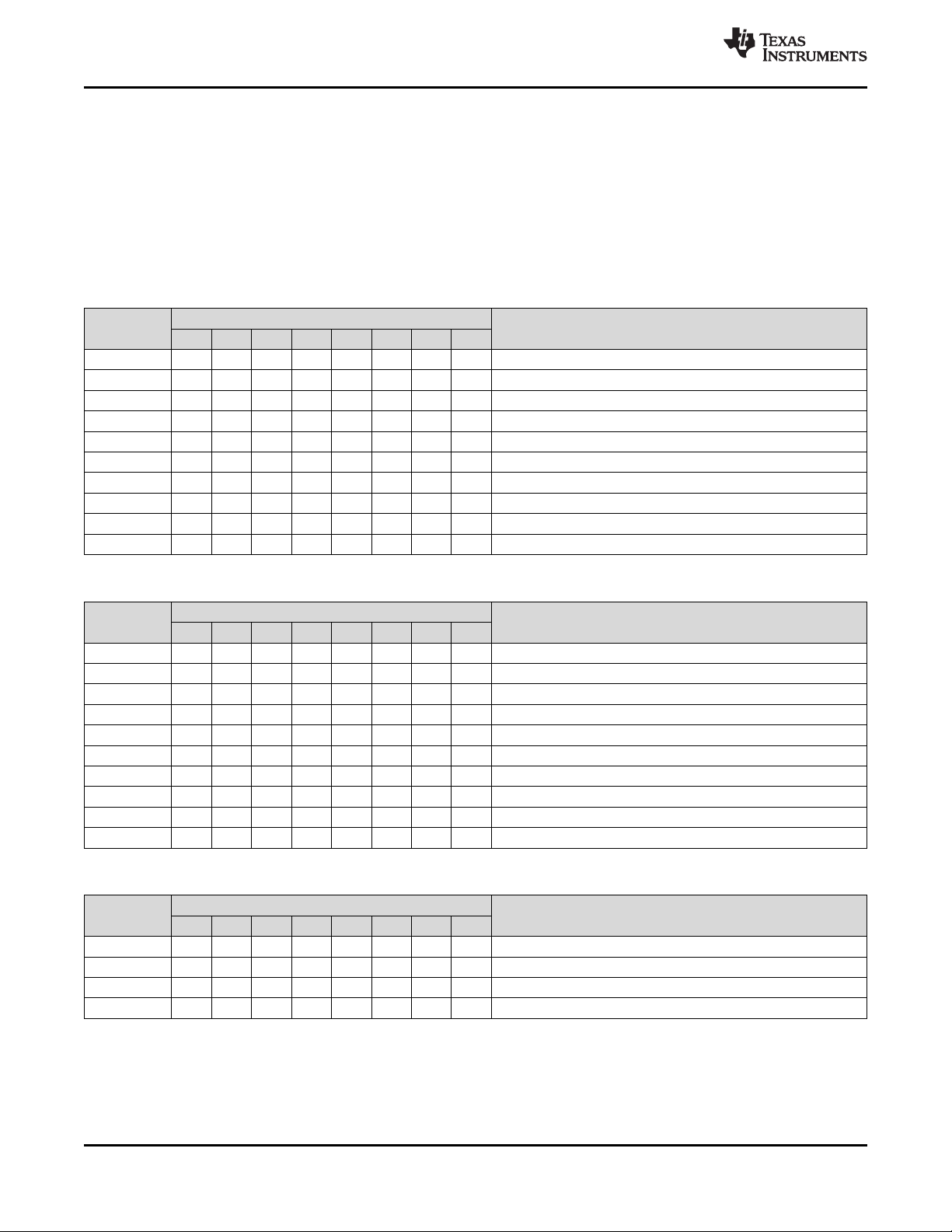
6.4 Register Descriptions
Table 6-10 lists the registers by address.
Table 6-10. Register Address Space
ADDRESS REGISTER READ/WRITE DETAILS
Main Control Registers
0x00 Chip status control R/W Table 6-11
0x01 ISO control R/W Table 6-12
Protocol Subsetting Registers
0x02 ISO14443B TX options R/W Table 6-14
0x03 ISO14443A high bit rate options R/W Table 6-15
0x04 TX timer setting, H-byte R/W Table 6-16
0x05 TX timer setting, L-byte R/W Table 6-17
0x06 TX pulse-length control R/W Table 6-18
0x07 RX no response wait R/W Table 6-19
0x08 RX wait time R/W Table 6-20
0x09 Modulator and SYS_CLK control R/W Table 6-21
0x0A RX special setting R/W Table 6-22
0x0B Regulator and I/O control R/W Table 6-23
0x16 Unused NA
0x17 Unused NA
0x18 Unused NA
0x19 Unused NA
Status Registers
0x0C IRQ status R Table 6-24
0x0D Collision position and interrupt mask register R/W Table 6-25
0x0E Collision position R Table 6-26
0x0F RSSI levels and oscillator status R Table 6-27
FIFO Registers
0x1C FIFO status R Table 6-28
0x1D TX length byte1 R/W Table 6-29
0x1E TX length byte2 R/W Table 6-30
0x1F FIFO I/O register R/W
www.ti.com
22
Detailed Description Copyright © 2006–2017, Texas Instruments Incorporated
Submit Documentation Feedback
Product Folder Links: TRF7960 TRF7961

www.ti.com
6.4.1 Control Registers – Main Configuration Registers
Table 6-11 describes the Chip Status Control register. This register controls the power mode, RF on or off,
and AM or PM. The register default is 0x01 and is reset at EN = L or POR = H.
Table 6-11. Chip Status Control Register (Address = 00h)
BIT BIT NAME FUNCTION COMMENTS
B7 stby
B6 direct
B5 rf_on
B4 rf_pwr
B3 pm_on
B2 Reserved
B1 rec_on
B0 vrs5_3
1 = Standby mode
0 = Active mode
1 = Received subcarrier signal (decoders
bypassed)
0 = Received decoded signal from selected
decoder
1 = RF output active
0 = RF output not active
1 = Half output power
0 = Full output power
1 = RX_IN2
0 = RX_IN1
1 = Receiver enable for external field
measurement
1 = 5-V operation (VIN)
0 = 3-V operation (VIN)
Standby mode keeps regulators and oscillator running when
en_rec = L and en_tx = L.
The modulation control is direct through MOD input. The receiver
subcarrier signal is on I/0_6.
When B5 = 1, the RF field is active.
1 = RF driver at 8 Ω
0 = RF driver at 4 Ω
1 = Selects PM signal input
0 = Selects AM signal input
Receiver and oscillator are enabled; intended for external field
measurement.
Selects the V
3.4 V)
TRF7960, TRF7961
SLOU186G –AUGUST 2006–REVISED MAY 2017
range: 5 V (4.3 V to 5 V) or 3 V (2.7 V to
DD_RF
Submit Documentation Feedback
Product Folder Links: TRF7960 TRF7961
Detailed DescriptionCopyright © 2006–2017, Texas Instruments Incorporated
23

TRF7960, TRF7961
SLOU186G –AUGUST 2006–REVISED MAY 2017
Table 6-12 describes the ISO Control register. This register controls the ISO selection. The register default
is 0x02, which is ISO/IEC 15693 high bit rate, one subcarrier, 1 out of 4. The default is reset at EN = L or
POR = H.
Table 6-12. ISO Control Register (Address = 01h)
BIT BIT NAME FUNCTION COMMENTS
B7 rx_crc_n Receiving without CRC
B6 dir_mode Direct mode type
B5 rfid RFID mode Always set to 0.
B4 iso_4
B3 iso_3
B2 iso_2
B1 iso_1
B0 iso_0
RFID mode See Table 6-13.
1 = No RX CRC
0 = RX CRC
0 = Output is subcarrier data.
1 = Output is bit stream (I/O_6) and bit clock (I/O_5) from decoder selected by ISO bits
Table 6-13. RFID Mode Selections
Iso_4 Iso_3 Iso_2 Iso_1 Iso_0 PROTOCOL REMARKS
0 0 0 0 0
0 0 0 0 1
0 0 0 1 0
0 0 0 1 1
0 0 1 0 0
0 0 1 0 1
0 0 1 1 0
0 0 1 1 1
0 1 0 0 0 ISO/IEC 14443 A bit rate, 106 kbps
0 1 0 0 1 ISO/IEC 14443 A high bit rate, 212 kbps
0 1 0 1 0 ISO/IEC 14443 A high bit rate, 424 kbps
0 1 0 1 1 ISO/IEC 14443 A high bit rate, 848 kbps
0 1 1 0 0 ISO/IEC 14443 B bit rate, 106 kbps
0 1 1 0 1 ISO/IEC 14443 B high bit rate, 212 kbps
0 1 1 1 0 ISO/IEC 14443 B high bit rate, 424 kbps
0 1 1 1 1 ISO/IEC 14443 B high bit rate, 848 kbps
1 0 0 1 1 Tag-it
ISO/IEC 15693 low bit rate, 6.62 kbps, one subcarrier,
1 out of 4
ISO/IEC 15693 low bit rate, 6.62 kbps, one subcarrier,
1 out of 256
ISO/IEC 15693 high bit rate, 26.48 kbps, one subcarrier,
1 out of 4
ISO/IEC 15693 high bit rate, 26.48 kbps, one subcarrier,
1 out of 256
ISO/IEC 15693 low bit rate, 6.67 kbps, double subcarrier,
1 out of 4
ISO/IEC 15693 low bit rate, 6.67 kbps, double subcarrier,
1 out of 256
ISO/IEC 15693 high bit rate, 26.69 kbps, double subcarrier,
1 out of 4
ISO/IEC 15693 high bit rate, 26.69 kbps, double subcarrier,
1 out of 256
Default for reader
RX bit rate when TX bit
rate is different from RX
(see Table 6-15)
RX bit rate when TX bit
rate is different from RX
(see Table 6-15)
www.ti.com
24
Detailed Description Copyright © 2006–2017, Texas Instruments Incorporated
Submit Documentation Feedback
Product Folder Links: TRF7960 TRF7961

www.ti.com
6.4.2 Control Registers – Sublevel Configuration Registers
Table 6-14 describes the ISO14443B TX Options register. This register selects the ISO subsets for
ISO/IEC 14443 B transmit. The register default is 0x00 and is reset at POR = H or EN = L.
Table 6-14. ISO14443B TX Options Register (Address = 02h)
BIT BIT NAME FUNCTION COMMENTS
B7 egt2 TX EGT time select MSB
B6 egt1 TX EGT time select
B5 egt0 TX EGT time select LSB
B4 eof_l0
B3 sof_l1
B2 sof _l0
B1 l_egt
B0 Unused
1 = EOF, 0 length 11 etu
0 = EOF, 0 length 10 etu
1 = SOF, 1 length 03 etu
0 = SOF, 1 length 02 etu
1 = SOF, 0 length 11 etu
0 = SOF, 0 length 10 etu
1 = EGT after each byte
0 = EGT after last byte is omitted
This 3-bit code defines the number of etu (0 to 7) that
separate two characters. ISO/IEC 14443 B TX only.
ISO/IEC 14443 B TX only
TRF7960, TRF7961
SLOU186G –AUGUST 2006–REVISED MAY 2017
Table 6-15 describes the ISO14443A High-Bit-Rate Options register. The register default is 0x00 and is
rest at POR = H or EN = L and at each write to the ISO Control register.
Table 6-15. ISO14443A High-Bit-Rate Options Register (Address = 03h)
BIT BIT NAME FUNCTION COMMENTS
B7 dif_tx_br TX bit rate different from RX bit rate enable Valid for ISO/IEC 14443 A or B high bit rate
B6 tx_br1
B5 tx_br0
B4 parity-2tx 1 = Parity odd except last byte, which is even for TX
B3 parity-2rx 1 = Parity odd except last byte, which is even for RX
B2 Unused
B1 Unused
B0 Unused
TX bit rate
tx_br1 = 0, tx_br = 0: 106 kbps
tx_br1 = 0, tx_br = 1: 212 kbps
tx_br1 = 1, tx_br = 0: 424 kbps
tx_br1 = 1, tx_br = 1: 848 kbps
For ISO/IEC 14443 A high bit rate, coding and decoding
Table 6-16 describes the TX Timer H-Byte register. The register default is 0xC2 and is reset at POR = H
or EN = L and at each write to the ISO Control register.
Table 6-16. TX Timer H-Byte Register (Address = 04h)
BIT BIT NAME FUNCTION COMMENTS
B7 Tm_st1
B6 Tm_st0
B5 Tm_lengthD
B4 Tm_lengthC
B3 Tm_lengthB
B2 Tm_lengthA
B1 Tm_length9
B0 Tm_length8
Timer start condition
Timer length. MSB is B5.
tm_st1 = 0, tm_st0 = 0: Beginning of TX SOF
tm_st1 = 0, tm_st0 = 1: End of TX SOF
tm_st1 = 1, tm_st0 = 0: Beginning of RX SOF
tm_st1 = 1, tm_st0 = 1: End of RX SOF
Submit Documentation Feedback
Product Folder Links: TRF7960 TRF7961
Detailed DescriptionCopyright © 2006–2017, Texas Instruments Incorporated
25

TRF7960, TRF7961
SLOU186G –AUGUST 2006–REVISED MAY 2017
Table 6-17 describes the TX Timer L-Byte register. The register default is 0x00 and is reset at POR = H or
EN = L and at each write to the ISO Control register.
Table 6-17. TX Timer L-Byte Register (Address = 05h)
BIT BIT NAME FUNCTION COMMENTS
B7 Tm_length7
B6 Tm_length6
B5 Tm_length5
B4 Tm_length4
B3 Tm_length3
B2 Tm_length2
B1 Tm_length1
B0 Tm_length0
Timer length. MSB is B7.
Defines the time when delayed transmission is started. RX wait range is
590 ns to 9.76 ms (1 to 16383), and the step size is 590 ns.
All bits low (00) = Timer is disabled (preset for all protocols)
Table 6-18 describes the TX Pulse Length Control register. This register controls the length of TX pulse.
The register default is 0x00 and is reset at POR = H or EN = L and at each write to the ISO Control
register.
Table 6-18. TX Pulse Length Control Register (Address = 06h)
BIT BIT NAME FUNCTION COMMENTS
B7 Pul_p2
B6 Pul_p1
B5 Pul_p0
B4 Pul_c4
B3 Pul_c3
B2 Pul_c2
B1 Pul_c1
B0 Pul_c0
Pulse length. MSB is B7.
The pulse range is 73.7 ns to 18.8 µs (1 to 255), and the step size is 73.7 ns.
All bits low (00) = Pulse length control is disabled
Presets are:
9.44 µs for ISO/IEC 15693
11 µs for Tag-it
2.36 µs for ISO/IEC 14443 A at 106 kbps
1.4 µs for ISO/IEC 14443 A at 212 kbps
737 ns for ISO/IEC 14443 A at 424 kbps
442 ns for ISO/IEC 14443 A at 848 kbps
www.ti.com
Table 6-19 describes the RX No Response Wait Time register. This register defines the time when a no
response interrupt is sent. The default is 0x0E and is reset at POR = H or EN = L and at each write to the
ISO Control register.
Table 6-19. RX No Response Wait Time Register (Address = 07h)
BIT BIT NAME FUNCTION COMMENTS
B7 NoResp7
B6 NoResp6
B5 NoResp5
B4 NoResp4
B3 NoResp3
B2 NoResp2
B1 NoResp1
B0 NoResp0
26
Detailed Description Copyright © 2006–2017, Texas Instruments Incorporated
No response. MSB is B7.
Defines the time when the no response interrupt is sent. Time starts from the end of TX
EOF. RX no response wait range is 37.76 µs to 9628 µs (1 to 255), and step size is
37.76 µs.
Presets are:
755 µs for ISO/IEC 15693
1812 µs for ISO/IEC 15693 low data rate
604 µs for Tag-it
529 µs for all other protocols
Submit Documentation Feedback
Product Folder Links: TRF7960 TRF7961

www.ti.com
Table 6-20 describes the RX Wait Time register. This register defines the time after TX EOF when the RX
input is disregarded. The default is 0x1F and is reset at POR = H or EN = L and at each write to the ISO
Control register.
Table 6-20. RX Wait Time Register (Address = 08h)
BIT BIT NAME FUNCTION COMMENTS
B7 Rxw7
B6 Rxw6
B5 Rxw5
B4 Rxw4
B3 Rxw3
B2 Rxw2
B1 Rxw1
RX wait
Defines the time during which the RX input is ignored. Starts from the end of TX EOF.
RX wait range is 9.44 µs to 2407 µs (1 to 255), and step size is 9.44 µs.
Presets are:
293 µs for ISO/IEC 15693
66 µs for ISO/IEC 14443 A and B
180 µs for Tag-it
Table 6-21 describes the Modulator and SYS_CLK Control register. This register controls the modulation
depth, modulation input, and ASK/OOK pin control. The default is 0x11 and is reset at POR = H or EN = L
and at each write to the ISO Control register, except for the Clo1 and Clo0 bits.
Table 6-21. Modulator and SYS_CLK Control Register (Address = 09h)
BIT BIT NAME FUNCTION COMMENTS
B7 Unused
B6 en_ook_p
B5 Clo1
B4 Clo0
B3 en_ana
B2 Pm2
B1 Pm1
B0 Pm0
1 = Enables external selection of ASK or OOK
modulation
SYS_CLK output frequency. MSB is B5.
1 = Enables analog output on the ASK/OOK pin
(pin 12)
Modulation depth. MSB is B2.
Valid only when ISO control register (0x01) is configured to direct
mode
Clo1 Clo0 SYS_CLK Output
0 0 Disabled
0 1 3.3 MHz
1 0 6.78 MHz
1 1 13.56 MHz
For test and measurement
Pm2 Pm1 Pm0 Modulation Type and Percentage
0 0 0 ASK 10%
0 0 1 OOK (100%)
0 1 0 ASK 7%
0 1 1 ASK 8.5%
1 0 0 ASK 13%
1 0 1 ASK 16%
1 1 0 ASK 22%
1 1 1 ASK 30%
TRF7960, TRF7961
SLOU186G –AUGUST 2006–REVISED MAY 2017
Submit Documentation Feedback
Product Folder Links: TRF7960 TRF7961
Detailed DescriptionCopyright © 2006–2017, Texas Instruments Incorporated
27

TRF7960, TRF7961
SLOU186G –AUGUST 2006–REVISED MAY 2017
www.ti.com
Table 6-22 describes the RX Special Setting register. This register sets the gains and filters directly. The
default is 0x40 and is reset at POR = H or EN = L and at each write to the ISO Control register.
Table 6-22. RX Special Setting Register (Address = 0Ah)
BIT BIT NAME FUNCTION COMMENTS
B7 C212 Band-pass filter of 110 kHz to 570 kHz Appropriate for 212-kHz subcarrier system
B6 C424 Band-pass filter of 200 kHz to 900 kHz Appropriate for 424-kHz subcarrier used in ISO/IEC 15693 and Tag-it
B5 M848 Band-pass filter of 450 kHz to 1.5 MHz
B4 hbt
B3 gd1 01 = Gain reduction for 5 dB
B2 gd2
B1 Reserved
B0 Reserved
Band-pass filter of 100 kHz to 1.5 MHz
Gain reduced for 7 dB
10 = Gain reduction for 10 dB
11 = Gain reduction for 15 dB
Appropriate for Manchester-coded 848-kHz subcarrier used in
ISO/IEC 14443 A
Appropriate for highest bit rate (848 kbps) used in high-bit-rate
ISO/IEC 14443
Sets the RX gain reduction
Table 6-23 describes the Regulator and I/O Control register. This register controls the three voltage
regulators. The default is 0x87 and is reset at POR = H or EN = L.
Table 6-23. Regulator and I/O Control Register (Address = 0Bh)
BIT BIT NAME FUNCTION COMMENTS
B7 auto_reg
B6 en_ext_pa Support for external power amplifier
B5 io_low
B4 Unused Default is low.
B3 Unused Default is low.
B2 vrs2
B0 vrs0
0 = Setting regulator by option bits
(vrs3_5 and vrs2, vrs1, and vrs0)
1 = Automatic setting
1 = Enable low peripheral
communication voltage
Voltage set. MSB is B2. vrs3_5 = L: VDD_RF, VDD_A, VDD_X range 2.7 V to 3.4 VB1 vrs1
Automatic system sets VDD_RF = (VIN– 250 mV) and sets
VDD_A = VDD_X = (VIN– 250 mV) but not higher than 3.4 V.
Receiver inputs accept externally demodulated subcarrier, OOK pin
becomes modulation output for external amplifier.
When high, the output resistance of logic outputs is decreased. Should be
set high when VDD_I/O voltage is below 2.7 V.
28
Detailed Description Copyright © 2006–2017, Texas Instruments Incorporated
Submit Documentation Feedback
Product Folder Links: TRF7960 TRF7961

TRF7960, TRF7961
www.ti.com
SLOU186G –AUGUST 2006–REVISED MAY 2017
6.4.3 Status Registers
Table 6-24 describes the IRQ Status register. This register displays the cause of IRQ and TX and RX
status. The default is 0x00 and is reset at POR = H or EN = L and at each write to the ISO Control
register. The register is also automatically set to default at the end of a read phase. This reset also
removes the IRQ flag.
Table 6-24. IRQ Status Register (Address = 0Ch)
BIT BIT NAME FUNCTION COMMENTS
B7 Irq_tx IRQ set due to end of TX
B6 Irg_srx IRQ set due to RX start
B5 Irq_fifo
B4 Irq_err1 CRC error Indicates receive CRC error
B3 Irq_err2 Parity error Indicates parity error
B2 Irq_err3 Byte framing or EOF error Indicates framing error
B1 Irq_col Collision error For ISO/IEC 14443 A and ISO/IEC 15693 single subcarrier
B0 Irq_noresp No response interrupt Signal to MCU that next slot command can be sent
Signals the FIFO is 1/3 > FIFO >
2/3
Table 6-25 describes the Collision Position and Interrupt Mask register. The default is 0x3E and is reset at
POR = H and EN = L. Collision bits are reset automatically after a read operation.
Signals that TX is in progress. The flag is set at the start of TX but the
interrupt request is sent when TX is finished.
Signals that RX SOF was received and RX is in progress. The flag is set at
the start of RX but the interrupt request is sent when RX is finished.
Signals FIFO high or low (less than 4 or more than 8)
Table 6-25. Collision Position and Interrupt Mask Register (Address = 0Dh)
BIT BIT NAME FUNCTION COMMENTS
B7 Col9 Bit position of collision MSB
B6 Col8 Bit position of collision
B5 En_irq_fifo Interrupt enable for FIFO
B4 En_irq_err1 Interrupt enable for CRC
B3 En_irq_err2 Interrupt enable for Parity
B2 En_irq_err3
B1 En_irq_col
B0 En_irq_noresp Enables no-response interrupt
Interrupt enable for Framing
error or EOF
Interrupt enable for collision
error
Supported: ISO/IEC 15693, single subcarrier, and ISO/IEC 14443 A
Table 6-26 describes the Collision Position register. This register displays the bit position of collision or
error. The default is 0x00 and is reset at POR = H and EN = L. Collision bits are reset automatically after a
read operation.
Table 6-26. Collision Position Register (Address = 0Eh)
BIT BIT NAME FUNCTION COMMENTS
B7 Col7
B6 Col6
B5 Col5
B4 Col4
B3 Col3
B2 Col2
B1 Col1
B0 Col0
Bit position of collision. MSB is B7.
Supports ISO/IEC 15693 single subcarrier and ISO/IEC 14443 A. In other
protocols, it shows the bit position of error, either frame, SOF-EOF, parity, or
CRC error.
Submit Documentation Feedback
Product Folder Links: TRF7960 TRF7961
Detailed DescriptionCopyright © 2006–2017, Texas Instruments Incorporated
29

TRF7960, TRF7961
SLOU186G –AUGUST 2006–REVISED MAY 2017
Table 6-27 describes the RSSI Levels and Oscillator Status register. This register reports the signal
strength on both reception channels and RF amplitude during RF-off state. The RSSI values are valid from
reception start until the start of the next transmission.
Table 6-27. RSSI Levels and Oscillator Status Register (Address = 0Fh)
BIT BIT NAME FUNCTION COMMENTS
B7 Unused
B6 Oscok Crystal oscillator stable indicator
B5 rssi_x2
B4 rssi_x1
B3 rssi_x0
B2 rssi_2
B1 rssi_1
B0 rssi_0
RSSI value of auxiliary channel (4 dB
per step). MSB is B5.
RSSI value of active channel (4 dB
per step). MSB is B2.
Auxiliary channel is PM by default. It can be set to AM with option bit B3 of
the Chip State Control register (00h).
Active channel is AM by default. It can be set to PM with option bit B3 of the
Chip State Control register (00h).
6.4.4 FIFO Control Registers
Table 6-28 describes the FIFO Status register. This register reports the low nibbles of complete bytes to
be transferred through FIFO, information about a broken byte, and the number of bits to be transferred
from it.
www.ti.com
Table 6-28. FIFO Status Register (Address = 1Ch)
BIT BIT NAME FUNCTION COMMENTS
B7 RFU Set to low Reserved for future use
B6 Fhil FIFO level high Indicates that 9 bytes are in the FIFO (for RX)
B5 Flol FIFO level low Indicates that 3 bytes are in the FIFO (for TX)
B4 Fove FIFO overflow error Too much data was written to the FIFO
B3 Fb3 FIFO bytes fb[3]
B2 Fb2 FIFO bytes fb[2]
B1 Fb1 FIFO bytes fb[1]
B0 Fb0 FIFO bytes fb[0]
Bits B0:B3 indicate how many bytes that are loaded in FIFO were not read
out yet. Reports (N – 1) number of bytes; for example, if 8 bytes are in the
FIFO, this number is 7.
Table 6-29 describes the TX Length Byte1 register. This register reports the high 2 nibbles of complete
bytes to be transferred through the FIFO. The default is 0x00 and is reset at POR and EN = 0. It is also
automatically reset at TX EOF.
Table 6-29. TX Length Byte1 Register (Address = 1Dh)
BIT BIT NAME FUNCTION COMMENTS
B7 Txl11 Number of complete byte bn[11]
B6 Txl10 Number of complete byte bn[10]
B5 Txl9 Number of complete byte bn[9]
B4 Txl8 Number of complete byte bn[8]
B3 Txl7 Number of complete byte bn[7]
B2 Txl6 Number of complete byte bn[6]
B1 Txl5 Number of complete byte bn[5]
B0 Txl4 Number of complete byte bn[4]
High nibble of complete bytes to be transmitted
Middle nibble of complete bytes to be transmitted
30
Detailed Description Copyright © 2006–2017, Texas Instruments Incorporated
Submit Documentation Feedback
Product Folder Links: TRF7960 TRF7961

TRF7960, TRF7961
www.ti.com
SLOU186G –AUGUST 2006–REVISED MAY 2017
Table 6-30 describes the TX Length Byte2 register. This register reports the low nibble of complete bytes
to be transferred through the FIFO, information about a broken byte, and the number of bits to be
transferred from it. The default is 0x00 and is reset at POR and EN = 0. It is also automatically reset at TX
EOF.
Table 6-30. TX Length Byte2 Register (Address = 1Eh)
BIT BIT NAME FUNCTION COMMENTS
B7 Txl3 Number of complete byte bn[3]
B6 Txl2 Number of complete byte bn[2]
B5 Txl1 Number of complete byte bn[1]
B4 Txl0 Number of complete byte bn[0]
B3 Bb2 Broken byte number of bits bb[2]
B2 Bb1 Broken byte number of bits bb[1]
B1 Bb0 Broken byte number of bits bb[0]
B0 Bbf Broken byte flag If 1, the last byte is not complete and is less than 8 bits wide.
Low nibble of complete bytes to be transmitted
Number of bits in the last broken byte to be transmitted. This bit is taken
into account only when the broken byte flag is set.
6.5 Direct Commands From MCU to Reader
6.5.1 Command Codes
Table 6-31 describes the command codes.
Table 6-31. Command Codes
COMMAND CODE COMMAND COMMENTS
0x00 Idle
0x03 Software Initialization Software initialization, same as power-on reset
0x0F Reset FIFO
0x10 Transmission Without CRC
0x11 Transmission With CRC
0x12 Delayed Transmission Without CRC
0x13 Delayed Transmission With CRC
0x14 Transmit Next Time Slot Used for ISO/IEC 15693 only
0x16 Block Receiver
0x17 Enable Receiver
0x18 Test Internal RF RSSI at RX input with TX on
0x19 Test External RF RSSI at RX input with TX off
0x1A Receiver Gain Adjust
NOTE
The command code values in Table 6-31 are substituted in Table 6-33, bit 0 to bit 4. The
MSB in Table 6-33 must be set to 1.
6.5.2 Reset FIFO
The Reset FIFO command clears the FIFO contents and FIFO Status register (1Ch) and the Collision
Position register (0Eh).
6.5.3 Transmission With CRC
The transmission command must be sent first, followed by transmission length bytes, and then the FIFO
data. The reader starts transmitting after the first byte is loaded into the FIFO. The CRC byte is included in
the transmitted sequence.
Submit Documentation Feedback
Product Folder Links: TRF7960 TRF7961
Detailed DescriptionCopyright © 2006–2017, Texas Instruments Incorporated
31

TRF7960, TRF7961
SLOU186G –AUGUST 2006–REVISED MAY 2017
6.5.4 Transmission Without CRC
Same as Section 6.5.3 with CRC excluded.
6.5.5 Delayed Transmission With CRC
The transmission command must be sent first, followed by the transmission length bytes, and then the
FIFO data. The reader transmission is triggered by the TX timer.
6.5.6 Delayed Transmission Without CRC
Same as Section 6.5.5 with CRC excluded.
6.5.7 Transmit Next Time Slot
When this command is received, the reader transmits the next slot command. The next slot sign is defined
by the protocol selection. This command is used for ISO/IEC 15693 only.
6.5.8 Receiver Gain Adjust
This command should be executed when the MCU determines that no tag response is coming and when
the RF and receivers are on. When this command is received, the reader reads the digitized receiver
output. If more than two edges are observed in 100 µs, the window comparator voltage is increased. The
procedure is repeated until the number of edges (changes of logical state) of the digitized reception signal
is less than 2 (in 100 µs). The command can reduce the input sensitivity in 5-dB increments up to 15 dB.
This command ensures better operation in a noisy environment.
www.ti.com
The gain setting is reset to maximum gain at EN = 0, POR = 1.
6.5.9 Test External RF (RSSI at RX Input With TX Off)
This command can be used in active mode when the RF receiver is on, and the RF output is off (rec-on,
bit B1 = 1 in the Chip Status Control register [see Table 6-11]). The level of the RF signal received on the
antenna is measured and reported in the RSSI Levels register. The relation between the 3-bit code and
the external RF field strength (in A/m) must be determined by calculation or by experiments for each
antenna design. The antenna Q and connection to the RF input influence the result. The nominal
relationship between the RF peak-to-peak voltage at the receiver inputs and the corresponding RSSI level
is as follows.
Receiver Input (mVPP): 40 60 80 100 140 180 300
RSSI Level: 1 2 3 4 5 6 7
If the direct command Test RF Internal or Test RF External is used immediately after activation, the
command should be preceded by the Enable RX command to activate the RX section. For proper
execution of the test RF commands, the RX section must be enabled. This section is enabled
automatically when a data exchange between the reader and the tag is done, or by sending the Enable
RX direct command.
6.5.10 Test Internal RF (RSSI at RX Input With TX On)
This command measures the level of the RF carrier at the receive inputs. Its operating range is 300 mVp
to 2.1 Vp with a step size of 300 mV. The two values are displayed in the RSSI Levels register. The
command is intended for diagnostic purposes to set the correct RX_IN levels. The optimum RX_IN input
level is approximately 1.6 Vp, or an RSSI level of 5 or 6. The nominal relationship between the input RF
peak level and the corresponding RSSI code is as follows.
Receiver Input (mVPP): 300 600 900 1200 1500 1800 2100
RSSI Level: 1 2 3 4 5 6 7
32
Detailed Description Copyright © 2006–2017, Texas Instruments Incorporated
Submit Documentation Feedback
Product Folder Links: TRF7960 TRF7961

www.ti.com
6.5.11 Block Receiver
The Block Receiver command puts the digital part of receiver (bit decoder and framer) in reset mode. This
is useful in an extremely noisy environment, where the noise level could otherwise cause a constant
switching of the subcarrier input of the digital part of the receiver. The receiver (if not in reset) would try to
catch an SOF signal, and if the noise pattern matched the SOF pattern, an interrupt would be generated,
falsely signaling the start of an RX operation. A constant flow of interrupt requests can be a problem for
the external system (MCU), so the external system can stop this by putting the receive decoders in reset
mode. The reset mode can be terminated in two ways. The external system can send the Enable Receiver
command. The reset mode is also automatically terminated at the end of a TX operation. The receiver can
stay in reset after end of TX if the RX Wait Time register (address 0x08) is set. In this case, the receiver is
enabled at the end of the wait time following the transmit operation.
6.5.12 Enable Receiver
This command clears the reset mode in the digital part of the receiver if the reset mode was entered by
the Block Receiver command.
6.6 Reader Communication Interface
6.6.1 Introduction
The communication interface to the reader can be configured as a parallel 8-pin interface with a data clock
or as a serial peripheral interface (SPI). These modes are mutually exclusive; only one mode can be used
at a time in the application.
TRF7960, TRF7961
SLOU186G –AUGUST 2006–REVISED MAY 2017
When the SPI is selected, the unused I/O_2, I/O_1, and I/O_0 pins must be hardwired according to
Table 6-32. At power up, the TRF7960 IC samples the status of these three pins and then enters one of
the possible SPI modes (see Table 6-32).
The reader always acts as the slave while the microcontroller (MCU) acts as the master device. The MCU
initiates all communications with the reader and is also used to communicate with the higher levels
(application layer). The reader has an IRQ pin to prompt the MCU for attention if the reader detects a
response from a proximity integrated circuit card (PICC) or a vicinity integrated circuit card (VICC).
Communication is initialized by a start condition, which is expected to be followed by an
Address/Command (Adr/Cmd) word. The Adr/Cmd word is 8 bits long (see Table 6-33).
Table 6-32. Pin Assignment in Parallel and Serial Interface Connection or Direct Mode
PIN PARALLEL PARALLEL DIRECT SPI WITH SS SPI WITHOUT SS
DATA_CLK DATA_CLK DATA_CLK DATA_CLK from master DATA_CLK from master
MISO
(1)
= data in (reader in) MOSI
(2)
= data out (MCU out)
(3)
(4)
DD
DD
SS
I/O_7 A/D[7] MOSI
I/O_6 A/D[6]
I/O_5 A/D[5] Direct mode, strobe – bit clock out See
I/O_4 A/D[4] SS – slave select
I/O_3 A/D[3] – – –
I/O_2 A/D[2] – At V
I/O_1 A/D[1] – At V
I/O_0 A/D[0] – At V
IRQ IRQ interrupt IRQ interrupt IRQ interrupt IRQ interrupt
(1) MOSI = master out, slave in
(2) MISO = master in, slave out
(3) IO_5 pin is used only when data is output from the chip (for example, reading 1 byte from the chip). The master must first write the
address of the register (8 clocks) and then generate another 8 clocks to read the data. The IO_5 pin goes high during this second 8
clocks. For normal SPI operation, this pin is not used.
(4) The slave-select pin is active low.
Direct mode, data out (subcarrier or bit
stream)
MISO
out)
See
–
At V
At V
At V
(1)
= data in (reader in)
(2)
= data out (MCU
(3)
DD
SS
SS
Submit Documentation Feedback
Product Folder Links: TRF7960 TRF7961
Detailed DescriptionCopyright © 2006–2017, Texas Instruments Incorporated
33

TRF7960, TRF7961
SLOU186G –AUGUST 2006–REVISED MAY 2017
Table 6-33. Address/Command Word Bit Distribution
BIT DESCRIPTION BIT FUNCTION ADDRESS COMMAND
Bit 7 Command control bit 1 = Command, 0 = Address 0 1
Bit 6 Read/write 1 = Read, 0 = Write R/W 0
Bit 5 Continuous address mode 1 = Continuous mode R/W 0
Bit 4 Address/command bit 4 Adr 4 Cmd 4
Bit 3 Address/command bit 3 Adr 3 Cmd 3
Bit 2 Address/command bit 2 Adr 2 Cmd 2
Bit 1 Address/command bit 1 Adr 1 Cmd 1
Bit 0 Address/command bit 0 Adr 0 Cmd 0
The MSB (bit 7) determines if the word is to be used as a command or as an address. The ADDRESS
and COMMAND columns of Table 6-33 list the function of the separate bits if either address or command
is written. Data is expected when the address word is sent. In continuous-address mode (B5 = 1), the first
data that follows the address is written to or read from the given address. For each additional data, the
address is incremented by 1. Continuous mode can be used to write to a block of control registers in a
single stream without changing the address; for example, setup of the predefined standard control
registers from the nonvolatile memory of the MCU to the reader. In noncontinuous address mode (simple
addressed mode), only one data word is expected after the address.
Address mode is used to write or read the configuration registers or the FIFO. When writing more than 12
bytes to the FIFO, the continuous address mode should be set to 1.
www.ti.com
The command mode is used to enter a command resulting in reader action (for example, initialize
transmission, enable reader, or turn reader on or off).
The following examples show the expected communication between the MCU and reader.
Continuous address mode
Start Adr x Data(x) Data(x+1) Data(x+2) Data(x+3) Data(x+4) ... Data(x+n) StopCont
Noncontinuous address mode (single address mode)
Start Adr x Data(x) Adr y Data(y) ... Adr z Data(z) StopSgl
Command mode
Start Cmd x (Optional data or command) Stop
6.7 Parallel Interface Communication
In parallel mode, the start condition is generated on the rising edge of the I/O_7 pin while the CLK is high.
This condition resets the interface logic. Figure 6-6 shows the sequence of the data, with an 8-bit address
word followed by data and ending with the StopSmpl condition. Figure 6-7 shows a similar sequence,
except that it ends with the StopCont condition.
Communication is ended by:
• The StopSmpl condition, which is indicated when the falling edge on the I/O_7 pin is detected while
CLK is high
• The StopCont condition, which is indicated when the I/O_7 pin has successive rising and falling edges
while CLK is low. This condition resets the parallel interface, and the device is ready for a new
communication sequence.
34
The StopSmpl condition also terminates the direct mode.
Detailed Description Copyright © 2006–2017, Texas Instruments Incorporated
Submit Documentation Feedback
Product Folder Links: TRF7960 TRF7961

a0 [7] d0 [7]
Start
Condition
CLK
I/O_7
a0 [6:0] d0 [6:0]xx d1 [6:0] d2 [6:0]
d2 [7]
dN [6:0]d3 [6:0]
dN [7]
xx
StopCont
Condition
d1 [7] d3 [7]
50 ns
a1 [7] d1 [7] a2 [7] d2 [7] aN [7] dN [7]
Start
Condition
StopSmpl
Condition
CLK
I/O_7
a1 [6:0] a2 [6:0]d1 [6:0] d2 [6:0] aN [6:0] dN [6:0]
50 ns
www.ti.com
TRF7960, TRF7961
SLOU186G –AUGUST 2006–REVISED MAY 2017
Figure 6-6. Parallel Interface Communication With Simple Stop Condition StopSmpl
Figure 6-7. Parallel Interface Communication With Continuous Stop Condition StopCont
6.7.1 Receive
At the start of a receive operation (when SOF is successfully detected), B6 is set in the IRQ Status
register. An interrupt request is sent to the MCU at the end of the receive operation if the receive data
string was shorter than or equal to 8 bytes. The MCU receives the interrupt request, then checks to
determine the reason for the interrupt by reading the IRQ Status register (address 0Ch), after which the
MCU reads the data from the FIFO.
If the received packet is longer than 8 bytes, the interrupt is sent before the end of the receive operation
when the ninth byte is loaded into the FIFO (75% full). The MCU should again read the content of the IRQ
Status register to determine the cause of the interrupt request. If the FIFO is 75% full (as marked with flag
B5 in the IRQ Status register and by reading the FIFO Status register), the MCU should respond by
reading the data from the FIFO to make room for new incoming receive data. When the receive operation
is finished, the interrupt is sent and the MCU must check how many words are still present in the FIFO
before it finishes reading.
If the reader detects a receive error, the corresponding error flag is set (for example, framing error or CRC
error) in the IRQ Status register, which indicates that the MCU reception was completed incorrectly.
6.7.2 Transmit
Before beginning data transmission (see Figure 6-8), the FIFO should be cleared with a reset command
(0x0F). Data transmission is initiated with a selected command (see Table 6-31). The MCU then
commands the reader to do a continuous write command (3Dh, see Table 6-33) starting from register
1Dh. Data written into register 1Dh is the TX Length Byte1 (upper and middle nibbles), while the next byte
in register 1Eh is the TX Length Byte2 (lower nibble and broken byte length). The TX byte length
determines when the reader sends the EOF byte. After the TX Length Bytes are written, FIFO data is
loaded in register 1Fh with byte storage locations 0 to 11. Data transmission begins automatically after the
first byte is written into the FIFO. The loading of TX Length Bytes and the FIFO can be done with a
continuous-write command, because the addresses are sequential.
Product Folder Links: TRF7960 TRF7961
Submit Documentation Feedback
Detailed DescriptionCopyright © 2006–2017, Texas Instruments Incorporated
35

Start
Condition
CLK
I/O_[7]
I/O_[6:0]
a0 [6:0]
d0 [6:0]xxd1 [6:0]
d2 [6:0]
dN [6:0]
d3 [6:0]
xx
StopCont
Valid Ouput Data
a0 [7]
d0 [7]
d2 [7]
dN [7]
d1 [7]
d3 [7]
Internal OE
50 ns
TRF7960, TRF7961
SLOU186G –AUGUST 2006–REVISED MAY 2017
At the start of transmission, the Irq_tx flag (B7) is set in the IRQ Status register. If the transmit data is
shorter than or equal to 4 bytes, the interrupt is sent only at the end of the transmit operation. If the
number of bytes to be transmitted is greater than or equal to 5, the interrupt is generated. The interrupt is
also generated when the number of bytes in the FIFO reaches 3. The MCU should check the IRQ Status
register and the FIFO Status register and then load additional data to the FIFO, if needed. At the end of
the transmit operation, an interrupt is sent to notify the MCU that the task is complete.
www.ti.com
Figure 6-8. Data Output Only When CLK Is High
6.8 Serial Interface Communication
When a SPI is required, parallel I/O pins I/O_2, I/O_1, and I/O_0, must be hardwired according to Table 6-
32. On power up, the reader detects the status of these pins; if they are not the same (not all high, or not
all low), the reader enters into one of two possible SPI modes.
The serial communications work in the same manner as the parallel communications with respect to the
FIFO, except for the following condition. On receiving an IRQ from the reader, the MCU reads the IRQ
Status register of the reader to determine how to service the reader. After this, the MCU must do a dummy
read to clear the IRQ Status register of the reader. The dummy read is required in SPI mode, because the
IRQ Status register of the reader needs an additional clock cycle to clear the register. This is not required
in parallel mode, because the additional clock cycle is included in the stop condition. The recommended
clock frequency on the DATA_CLK line is 2 MHz.
A procedure for a dummy read follows:
1. Start the dummy read:
(a) When using slave select (SS), set the SS bit low.
(b) When not using SS, the start condition occurs when SCLK is high (see Figure 6-9).
2. Send the address word to the IRQ Status register (0Ch) with read and continuous address mode bits
set to 1 (see Table 6-33).
3. Read 1 byte (8 bits) from the IRQ Status register (0Ch).
4. Dummy read 1 byte from register 0Dh (collision position and interrupt mask).
5. Stop the dummy read:
(a) When using slave select (SS), set the SS bit high.
(b) When not using SS, the stop condition occurs when SCLK is high (see Figure 6-9).
36
Detailed Description Copyright © 2006–2017, Texas Instruments Incorporated
Submit Documentation Feedback
Product Folder Links: TRF7960 TRF7961

MOSI
SS*
B7 B6 B5 B4 B3 B2 B1 B0
b7 b6 b5 b4 b3 b2 b1 b0
Start
Condition
Stop
Condition
SCLK
Data IN
50 ns
www.ti.com
6.8.1 SPI Without SS* (Slave Select) Pin
The serial interface without the slave select pin must use delimiters for the start and stop conditions.
Between these delimiters, the address, data, and command words can be transferred. All words must be
8 bits long with MSB transmitted first.
Figure 6-9. Serial – SPI Communication (No SS* Pin)
In this mode, a rising edge on Data IN (I/O_7, pin 24) while SCLK is high resets the serial interface and
prepares it to receive data. Data IN can change only when SCLK is low and is taken by the reader on the
rising edge of SCLK. Communication is terminated by the stop condition when the falling edge of Data IN
occurs during a high SCLK period.
6.8.2 SPI With SS* (Slave Select) Pin
TRF7960, TRF7961
SLOU186G –AUGUST 2006–REVISED MAY 2017
The serial interface is in reset while the SS* signal is high. Serial data-in (MOSI) changes on the falling
edge, and is validated in the reader on the rising edge, as shown in Figure 6-10. Communication is
terminated when the SS* signal goes high.
All words must be 8 bits long with the MSB transmitted first.
Figure 6-10. Serial – SPI Communication (Write Mode)
Figure 6-11 shows the SPI read operation.
Submit Documentation Feedback
Product Folder Links: TRF7960 TRF7961
Detailed DescriptionCopyright © 2006–2017, Texas Instruments Incorporated
37

Write Mode
CKPH – 1, CKPL – 0 (MSP430)
Data Transition – SCLK Falling Edge
MOSI Valid – SCLK Rising Edge
Switch
SCLK
Polarity
Read Mode
CKPH – 0, CKPL – 0 (MSP430)
Data Transition – SCLK Rising Edge
MISO Valid – SCLK Falling Edge
MOSI
MISO
SS*
Write Address Byte Read Data Byte
B7B7B6B6B5B5B4B4B3B3B2B2B1B1B0
B0
Don't Care
No Data Transitions (All High or Low)
TRF7960, TRF7961
SLOU186G –AUGUST 2006–REVISED MAY 2017
Figure 6-11. Serial – SPI Communication (Read Mode)
www.ti.com
The read command is sent out on the MOSI pin, MSB first, in the first eight clock cycles. MOSI data
changes on the falling edge, and is validated in the reader on the rising edge (see Figure 6-11). During the
write cycle, the serial data out (MISO) is not valid. After the last read command bit (B0) is validated at the
eighth rising edge of SCLK, after half a clock cycle, valid data can be read on the MISO pin at the falling
edge of SCLK. It takes eight clock edges to read out the full byte (MSB first).
NOTE
When using the hardware SPI (for example, an MSP430 hardware SPI) to implement this
feature, take care to switch the SCLK polarity after the write phase for proper read operation.
Figure 6-11 shows the example clock polarity for the MSP430-specific environment in the
Write Mode and Read Mode sections. See the SPI chapter of the family user's guide for any
specific microcontroller family for further information on the setting the appropriate clock
polarity.
This clock polarity switch must be done for all read operations (single or continuous).
The MOSI (serial data out) should not have any transitions (all high or all low) during the read cycle. Also,
the SS* signal should be low during the whole write and read operation.
Figure 6-12 shows the continuous read operation.
38
Detailed Description Copyright © 2006–2017, Texas Instruments Incorporated
Submit Documentation Feedback
Product Folder Links: TRF7960 TRF7961

MOSI
MISO
SS*
B0
B0
B7
B7
B6
B6
B5
B5
B4
B4
B3
B3
B2B2B1
B1
No Data Transitions (All High/Low)
No Data Transitions (All High/Low)
Don’t Care
Ignore
Dummy Read
Read Data in
IRQ Status Register
Write Address
Byte (0x6C)
MOSI
MISO
SS*
B0
B0 B0
B7
B7 B7
B6
B6 B6
B5
B5 B5
B4
B4 B4
B3
B3 B3
B2
B2 B2
B1
B1 B1
No Data Transitions (All High or Low) No Data Transitions (All High or Low)
Don’t Care
Write Address Byte
Read Data Byte 1
Read Data Byte n
www.ti.com
TRF7960, TRF7961
SLOU186G –AUGUST 2006–REVISED MAY 2017
Figure 6-12. SPI Communication (Continuous Read Mode)
NOTE
Special steps are needed to read the TRF796x IRQ Status register (register address 0x0C)
in SPI mode. The status of the bits in this register are cleared after a dummy read. The
following steps must be followed when reading the IRQ Status register.
1. Write command 0x6C: read the IRQ Status register in continuous mode (eight clocks).
2. Read the data in register 0x0C (eight clocks).
3. Generate another eight clocks (as if reading the data in register 0x0D) but ignore the
MISO data line.
See Figure 6-13 for an example of this process.
6.8.2.1 FIFO Operation
The FIFO is a 12-byte register at address 0x1F with byte storage locations 0 to 11. FIFO data is loaded in
a cyclical manner and can be cleared by a Reset command (0x0F).
Two counters and three FIFO status flags are associated with the FIFO. The first counter is a 4-bit FIFO
byte counter (bits B0 to B3 in register 0x1C) that keeps track of the number of bytes loaded into the FIFO.
If the number of bytes in the FIFO is n, the register value is (n – 1) number of bytes in FIFO register. For
example, if 8 bytes are in the FIFO, the FIFO counter (bits B0 to B3 in register 0x1C) has the value 7.
Figure 6-13. SPI Communication (IRQ Status Register Read)
Submit Documentation Feedback
Product Folder Links: TRF7960 TRF7961
Detailed DescriptionCopyright © 2006–2017, Texas Instruments Incorporated
39

TRF7960, TRF7961
SLOU186G –AUGUST 2006–REVISED MAY 2017
A second counter (12 bits wide) indicates the number of bytes being transmitted (registers 1Dh and 1Eh)
in a data frame. An extension to the transmission-byte counter is a 4-bit broken-byte counter also provided
in register 1Eh (bits B0:B3). Together, these counters make up the TX length value that determines when
the reader generates the EOF byte.
FIFO status flags are as follows:
1. FIFO overflow (bit B4 of register 0x1C) – indicates that the FIFO was loaded too soon
2. FIFO level too low (bit B5 of register 0x1C) – indicates that only 3 bytes are left to be transmitted
(Can be used during transmission.)
3. FIFO level high (bit B6 of register 0x1C) – indicates that 9 bytes are already loaded into the FIFO
(Can be used during reception to generate a FIFO reception IRQ. This is to notify the MCU to service
the reader in time to ensure a continuous data stream.)
During transmission, the FIFO is checked for an almost-empty condition, and during reception, the FIFO is
checked for an almost-full condition. The maximum number of bytes that can be loaded into the FIFO in
one sequence is 12 bytes. The number of bytes in a frame, transmitted or received, can be greater than
12 bytes.
During transmission, the MCU loads the reader FIFO (or during reception, the MCU removes data from
the FIFO), and the FIFO counter counts the number of bytes being loaded into the FIFO. Meanwhile, the
byte counter keeps track of the number of bytes being transmitted. An interrupt request is generated if the
number of bytes in the FIFO is less than 3 or greater than 9, so that the MCU can send new data or
remove the data as necessary. The MCU also checks the number of data bytes to be sent, so as to not
surpass the value defined in TX Length Bytes. The MCU also signals the transmit logic when the last byte
of data is sent or was removed from the FIFO during reception. Transmission starts automatically after the
first byte is written into the FIFO.
www.ti.com
40
Detailed Description Copyright © 2006–2017, Texas Instruments Incorporated
Submit Documentation Feedback
Product Folder Links: TRF7960 TRF7961

Test Port
or
Ext Ant Port
1
TRF796x
234
5
6
7
8
9 10 11 12 13 14 15 16
32
31
30
29 28
27
26
25
17
18
19
20
21
22
23
24
33
Thermal Pad
VDD_X
OSC_IN
OSC_OUT
VSS_D
EN
SYS_CLK
DATA_CLK
EN2
VDD_I/ O
VSS_A
MOD
IRQ
ASK / OOK
BAND GAP
VSS
RX2_PM
RX1_AM
VDD_A
VSS_RX
VSS_RF
TX_OUT
VDD_PA
VDD_RF
VIN
I / O_0
I / O_1
I / O_2
I / O_3
I / O_4
I / O_5
I / O_6
I / O_7
1000 pF
1000 pF
1500 pF
1500 pF
680 pF
680 pF
220 pF
VSWR
Adj
Phase
Adj
330 nH
150 nH
Freq
Adj
100 pF
27 pF
2.2 uF
10 nF
10 nF
10 nF
10 nF
2.2 uF
2.2 uF
2.2 uF
0 Ohms
0 Ohms
27 pF
27 pF
13.56 MHz
VSWR
Adj
DVCC
DVSS, AVSS
XIN
1 K
1 K
Reader Pwr Enable (GPIO)
Interrupt Capable GPIO
MSP430 MCU
4.7 uF
10V
0.1 uF
1 K
CLK (GPIO)
PX.7
PX.6
PX.5
PX.4
PX.3
PX.2
PX.1
PX.0
Vcc
100
0.1 uF
2.2 uF
10 nF
10K
10 pF
Harmonic
Suppression
Antenna
Circuit
Ant Q
Adj
R cal
open, short, load
C1 × C2
Crystal C =
L
C1 + C2
+ C
S
Copyright © 2017, Texas Instruments Incorporated
www.ti.com
7 Applications, Implementation, and Layout
Information in the following Applications section is not part of the TI component specification,
and TI does not warrant its accuracy or completeness. TI's customers are responsible for
determining suitability of components for their purposes. Customers should validate and test
their design implementation to confirm system functionality.
7.1 Application Schematics
Figure 7-1 shows a schematic for parallel communication.
TRF7960, TRF7961
SLOU186G –AUGUST 2006–REVISED MAY 2017
NOTE
Figure 7-1. Application Schematic for the TRF796x EVM (Parallel Mode)
Applications, Implementation, and LayoutCopyright © 2006–2017, Texas Instruments Incorporated
41
Submit Documentation Feedback
Product Folder Links: TRF7960 TRF7961

Test Port
or
Ext Ant Port
1
TRF796x
234
5
6
7
8
9 10 11 12 13 14 15 16
32 31 30 29 28 27 26 25
17
18
19
20
21
22
23
24
33
Thermal Pad
VDD_X
OSC_IN
OSC_OUT
VSS_D
EN
SYS_CL
DATA_CLK
EN2
VDD_I/ O
VSS_A
MOD
IRQ
ASK /
BAND GAP
VSS
RX2_PM
RX1_AM
VDD_A
VSS_RX
VSS_RF
TX_OUT
VDD_PA
VDD_RF
VIN
I / O_0
I / O_1
I / O_2
I / O_3
I / O_4
I / O_5
I / O_6
I / O_7
1000 pF
1000 pF
1500 pF
1500 pF
680 pF
680 pF
220 pF
VSWR
Adj
Phase Adj
330 nH
150 nH
Freq
Adj
100 pF
27 pF
2.2
Fµ
10 nF
10 nF
10 nF
10 nF
2.2
Fµ
2.2
Fµ
2.2
Fµ
0 Ohms
0 Ohms
27 pF
27 pF
13.56 MHz
VSWR
Adj
Vcc
DVCC
DVSS, AVSS
MISO
MOSI
XIN
10 K
10 K
1 K
1 K
CLK (GPIO)
Slave Select (GPIO)
Reader Pwr Enable (GPIO)
Interrupt Capable GPIO
MSP430 MCU
4.7 F
10 V
µ
0.1
Fµ
1 K
100
0.1
Fµ
2.2
Fµ
10 nF
10 pF
Harmonic
Suppression
10 K
C1 × C2
Crystal C =
L
C1 + C2
+ C
S
Antenna
Circuit
Ant Q
Adj
R cal
open, short, load
Copyright © 2017, Texas Instruments Incorporated
TRF7960, TRF7961
SLOU186G –AUGUST 2006–REVISED MAY 2017
Figure 7-2 shows a schematic for SPI communication.
www.ti.com
Figure 7-2. Application Schematic for the TRF796x EVM (SPI Mode)
42
Applications, Implementation, and Layout Copyright© 2006–2017, Texas Instruments Incorporated
Submit Documentation Feedback
Product Folder Links: TRF7960 TRF7961

Device Family
TRF79 = NFC/RFID Transceiver
Revision A = Silicon revision
Package
See
or www.ti.com/package
Packaging Information
Distribution R = Large reel
T = Small reel
Feature Set 60 = Feature set
TRF79
60
A RHB R
Device Family
Feature Set
Revision
Package
Distribution
www.ti.com
8 Device and Documentation Support
8.1 Getting Started and Next Steps
For more information on the TI NFC/RFID devices and the tools and software that are available to help
with your development, visit Overview for NFC / RFID.
8.2 Device Nomenclature
To designate the stages in the product development cycle, TI assigns prefixes to the part numbers of
devices. Each commercial family member has one of three prefixes: x, p, or no prefix. These prefixes
represent evolutionary stages of product development from engineering prototypes (with prefix x) through
fully qualified production devices (with no prefix).
Device development evolutionary flow:
xTRF... – Experimental device that is not necessarily representative of the electrical specifications of the
final device
pTRF... – Final device that conforms to the electrical specifications of the final product but has not
completed quality and reliability verification
TRF... – Fully qualified production device
Devices with a prefix of x or p are shipped against the following disclaimer:
TRF7960, TRF7961
SLOU186G –AUGUST 2006–REVISED MAY 2017
"Developmental product is intended for internal evaluation purposes."
Production devices have been characterized fully, and the quality and reliability of the device have been
demonstrated fully. TI's standard warranty applies.
Predictions show that prototype devices have a greater failure rate than the standard production devices.
TI recommends that these devices not be used in any production system because their expected end-use
failure rate still is undefined. Only qualified production devices are to be used.
TI device nomenclature also includes a suffix with the device family name. This suffix indicates the
package type and, optionally, the temperature range. Figure 8-1 provides a legend for reading the
complete device name.
Figure 8-1. Device Nomenclature
Submit Documentation Feedback
Product Folder Links: TRF7960 TRF7961
Device and Documentation SupportCopyright © 2006–2017, Texas Instruments Incorporated
43

TRF7960, TRF7961
SLOU186G –AUGUST 2006–REVISED MAY 2017
8.3 Tools and Software
Design Kits and Evaluation Modules
TRF7960A Evaluation Module The TRF7960EVM let the software application developer experiment with
the functions of the TRF796x multiple-standard fully integrated 13.56-MHz RFID analog front
end and data framing reader system.
TRF7960A Target Board The TRF7960ATB EVM lets the software application developer experiment with
the functions of the TRF796x multiple-standard fully integrated 13.56-MHz RFID
writer/reader IC on the Texas Instruments embedded microcontroller platform of choice
without having to worry about the RF section.
Software
TRF7960 Firmware Source Code for CCS Sample source code for direct register control of the device
functions.
TRF7960EVM GUI Source Code Source code for the GUI that is included in the TRF7960A evaluation
module.
TRF7960EVM GUI Software The GUI that runs on the host PC for use with the TRF7960A evaluation
module.
8.4 Documentation Support
The following documents describe the TRF7960 and TRF7961 devices. Copies of these documents are
available on the Internet at www.ti.com.
www.ti.com
Receiving Notification of Document Updates
To receive notification of documentation updates—including silicon errata—go to the product folder for
your device on ti.com (for links to the product folders, see Section 8.5). In the upper-right corner, click the
"Alert me" button. This registers you to receive a weekly digest of product information that has changed (if
any). For change details, check the revision history of any revised document.
Application Notes
TRF79xxA HF-RFID Reader Layout Design Guide Describes suggested guidelines for laying out the
TRF79xxA family of HF RFID readers.
Antenna Matching for the TRF7960 RFID ReaderDescribes the design method for determining an
antenna matching circuit.
TRF796x Software Design Hints This application report provides guidance on designing software that
works around certain device and protocol limitations.
Management of the TRF7960 and TRF7960A Start-up Sequence System developers concerned about
minimizing the current draw of TRF7960, TRF7960A, and their variants systems at start-up
time need guidance about handling the Regulator Control register (0x0B) value. Valid
application use case for this guidance is battery-powered RFID applications in which
controlling the entire system current draw over time is of the utmost concern.
TRF7960A RFID Multiplexer Example System This application report describes the 16-channel high-
frequency (HF) (13.56 MHz) RFID reader system (based on the TRF7960A IC) designed by
TI for customer use. The system firmware resides on an MSP430F2370 MCU and supports
the ISO/IEC 15693 protocol in addition to communication with a host.
Firmware Description of the TI TRF796x Evaluation Module (EVM) This application note discusses the
firmware implemented in the MSP430F2370 (a 16-bit ultra-low power microcontroller from
the TI MSP430 family) used with the TRF796x devices.
Comparison of TRF7960 and TRF7960AThis application report helps current and new users of the
TRF7960 high-frequency RFID/NFC reader understand the differences between the
TRF7960 and the TRF7960A devices. Understanding these differences in detail and
applying this knowledge to application-specific requirements helps designers make informed
decisions about whether or not a bill of materials change is needed.
44
Device and Documentation Support Copyright © 2006–2017, Texas Instruments Incorporated
Submit Documentation Feedback
Product Folder Links: TRF7960 TRF7961

www.ti.com
8.5 Related Links
Table 8-1 lists quick access links. Categories include technical documents, support and community
resources, tools and software, and quick access to sample or buy.
TRF7960, TRF7961
SLOU186G –AUGUST 2006–REVISED MAY 2017
Table 8-1. Related Links
PARTS PRODUCT FOLDER ORDER NOW
TRF7960 Click here Click here Click here Click here Click here
TRF7961 Click here Click here Click here Click here Click here
TECHNICAL
DOCUMENTS
TOOLS &
SOFTWARE
8.6 Community Resources
The following link connects to TI community resources. Linked contents are provided "AS IS" by the
respective contributors. They do not constitute TI specifications and do not necessarily reflect TI's views;
see TI's Terms of Use.
TI E2E™ Community
TI's Engineer-to-Engineer (E2E) Community. Created to foster collaboration among engineers. At
e2e.ti.com, you can ask questions, share knowledge, explore ideas, and help solve problems with fellow
engineers.
8.7 Trademarks
MSP430, Tag-it, E2E are trademarks of Texas Instruments.
FeliCa is a trademark of Sony Corporation.
8.8 Electrostatic Discharge Caution
This integrated circuit can be damaged by ESD. Texas Instruments recommends that all integrated circuits be handled with
appropriate precautions. Failure to observe proper handling and installation procedures can cause damage.
ESD damage can range from subtle performance degradation to complete device failure. Precision integrated circuits may be more
susceptible to damage because very small parametric changes could cause the device not to meet its published specifications.
SUPPORT &
COMMUNITY
8.9 Export Control Notice
Recipient agrees to not knowingly export or re-export, directly or indirectly, any product or technical data
(as defined by the U.S., EU, and other Export Administration Regulations) including software, or any
controlled product restricted by other applicable national regulations, received from disclosing party under
nondisclosure obligations (if any), or any direct product of such technology, to any destination to which
such export or re-export is restricted or prohibited by U.S. or other applicable laws, without obtaining prior
authorization from U.S. Department of Commerce and other competent Government authorities to the
extent required by those laws.
8.10 Glossary
TI Glossary This glossary lists and explains terms, acronyms, and definitions.
Submit Documentation Feedback
Product Folder Links: TRF7960 TRF7961
Device and Documentation SupportCopyright © 2006–2017, Texas Instruments Incorporated
45

TRF7960, TRF7961
SLOU186G –AUGUST 2006–REVISED MAY 2017
9 Mechanical, Packaging, and Orderable Information
The following pages include mechanical, packaging, and orderable information. This information is the
most current data available for the designated devices. This data is subject to change without notice and
revision of this document. For browser-based versions of this data sheet, refer to the left-hand navigation.
www.ti.com
46
Mechanical, Packaging, and Orderable Information Copyright © 2006–2017, Texas Instruments Incorporated
Submit Documentation Feedback
Product Folder Links: TRF7960 TRF7961

PACKAGE OPTION ADDENDUM
www.ti.com
10-Dec-2020
PACKAGING INFORMATION
Orderable Device Status
TRF7960RHBR ACTIVE VQFN RHB 32 3000 RoHS & Green NIPDAU Level-2-260C-1 YEAR -40 to 110 TRF
TRF7960RHBT ACTIVE VQFN RHB 32 250 RoHS & Green NIPDAU Level-2-260C-1 YEAR -40 to 110 TRF
TRF7961RHBR ACTIVE VQFN RHB 32 3000 RoHS & Green NIPDAU Level-2-260C-1 YEAR -40 to 110 TRF
TRF7961RHBRG4 ACTIVE VQFN RHB 32 3000 RoHS & Green NIPDAU Level-2-260C-1 YEAR -40 to 110 TRF
TRF7961RHBT ACTIVE VQFN RHB 32 250 RoHS & Green NIPDAU Level-2-260C-1 YEAR -40 to 110 TRF
TRF7961RHBTG4 ACTIVE VQFN RHB 32 250 RoHS & Green NIPDAU Level-2-260C-1 YEAR -40 to 110 TRF
(1)
The marketing status values are defined as follows:
ACTIVE: Product device recommended for new designs.
LIFEBUY: TI has announced that the device will be discontinued, and a lifetime-buy period is in effect.
NRND: Not recommended for new designs. Device is in production to support existing customers, but TI does not recommend using this part in a new design.
PREVIEW: Device has been announced but is not in production. Samples may or may not be available.
OBSOLETE: TI has discontinued the production of the device.
Package Type Package
(1)
Drawing
Pins Package
Qty
Eco Plan
(2)
Lead finish/
Ball material
(6)
MSL Peak Temp
(3)
Op Temp (°C) Device Marking
(4/5)
7960
7960
7961
7961
7961
7961
(2)
RoHS: TI defines "RoHS" to mean semiconductor products that are compliant with the current EU RoHS requirements for all 10 RoHS substances, including the requirement that RoHS substance
do not exceed 0.1% by weight in homogeneous materials. Where designed to be soldered at high temperatures, "RoHS" products are suitable for use in specified lead-free processes. TI may
reference these types of products as "Pb-Free".
RoHS Exempt: TI defines "RoHS Exempt" to mean products that contain lead but are compliant with EU RoHS pursuant to a specific EU RoHS exemption.
Green: TI defines "Green" to mean the content of Chlorine (Cl) and Bromine (Br) based flame retardants meet JS709B low halogen requirements of <=1000ppm threshold. Antimony trioxide based
flame retardants must also meet the <=1000ppm threshold requirement.
(3)
MSL, Peak Temp. - The Moisture Sensitivity Level rating according to the JEDEC industry standard classifications, and peak solder temperature.
(4)
There may be additional marking, which relates to the logo, the lot trace code information, or the environmental category on the device.
(5)
Multiple Device Markings will be inside parentheses. Only one Device Marking contained in parentheses and separated by a "~" will appear on a device. If a line is indented then it is a continuation
of the previous line and the two combined represent the entire Device Marking for that device.
Samples
Addendum-Page 1

PACKAGE OPTION ADDENDUM
www.ti.com
(6)
Lead finish/Ball material - Orderable Devices may have multiple material finish options. Finish options are separated by a vertical ruled line. Lead finish/Ball material values may wrap to two
lines if the finish value exceeds the maximum column width.
10-Dec-2020
Important Information and Disclaimer:The information provided on this page represents TI's knowledge and belief as of the date that it is provided. TI bases its knowledge and belief on information
provided by third parties, and makes no representation or warranty as to the accuracy of such information. Efforts are underway to better integrate information from third parties. TI has taken and
continues to take reasonable steps to provide representative and accurate information but may not have conducted destructive testing or chemical analysis on incoming materials and chemicals.
TI and TI suppliers consider certain information to be proprietary, and thus CAS numbers and other limited information may not be available for release.
In no event shall TI's liability arising out of such information exceed the total purchase price of the TI part(s) at issue in this document sold by TI to Customer on an annual basis.
Addendum-Page 2

PACKAGE MATERIALS INFORMATION
www.ti.com 19-Oct-2020
TAPE AND REEL INFORMATION
*All dimensions are nominal
Device Package
Type
TRF7960RHBR VQFN RHB 32 3000 330.0 12.4 5.3 5.3 1.5 8.0 12.0 Q2
TRF7960RHBT VQFN RHB 32 250 180.0 12.4 5.3 5.3 1.5 8.0 12.0 Q2
TRF7961RHBR VQFN RHB 32 3000 330.0 12.4 5.3 5.3 1.5 8.0 12.0 Q2
TRF7961RHBT VQFN RHB 32 250 180.0 12.4 5.3 5.3 1.5 8.0 12.0 Q2
Package
Drawing
Pins SPQ Reel
Diameter
(mm)
Reel
Width
W1 (mm)
A0
(mm)B0(mm)K0(mm)P1(mm)W(mm)
Pin1
Quadrant
Pack Materials-Page 1

PACKAGE MATERIALS INFORMATION
www.ti.com 19-Oct-2020
*All dimensions are nominal
Device Package Type Package Drawing Pins SPQ Length (mm) Width (mm) Height (mm)
TRF7960RHBR VQFN RHB 32 3000 853.0 449.0 35.0
TRF7960RHBT VQFN RHB 32 250 210.0 185.0 35.0
TRF7961RHBR VQFN RHB 32 3000 853.0 449.0 35.0
TRF7961RHBT VQFN RHB 32 250 210.0 185.0 35.0
Pack Materials-Page 2

GENERIC PACKAGE VIEW
VQFN - 1 mm max heightRHB 32
5 x 5, 0.5 mm pitch
PLASTIC QUAD FLATPACK - NO LEAD
Images above are just a representation of the package family, actual package may vary.
Refer to the product data sheet for package details.
www.ti.com
4224745/A

PACKAGE OUTLINE
PIN 1 INDEX AREA
1 MAX
0.05
0.00
28X 0.5
SCALE 3.000
VQFN - 1 mm max heightRHB0032E
PLASTIC QUAD FLATPACK - NO LEAD
A
9
8
5.1
4.9
2X 3.5
3.45 0.1
16
B
5.1
4.9
EXPOSED
THERMAL PAD
17
OPTIONAL METAL THICKNESS
C
SEATING PLANE
0.08 C
SEE SIDE WALL
DETAIL
(0.1)
SIDE WALL DETAIL
20.000
(0.2) TYP
2X
3.5
PIN 1 ID
(OPTIONAL)
33
1
32
SYMM
32X
25
0.5
0.3
SYMM
24
0.3
32X
0.2
0.1 C A B
0.05
C
4223442/B 08/2019
NOTES:
1. All linear dimensions are in millimeters. Any dimensions in parenthesis are for reference only. Dimensioning and tolerancing
per ASME Y14.5M.
2. This drawing is subject to change without notice.
3. The package thermal pad must be soldered to the printed circuit board for thermal and mechanical performance.
www.ti.com

32X (0.6)
32
EXAMPLE BOARD LAYOUT
VQFN - 1 mm max heightRHB0032E
PLASTIC QUAD FLATPACK - NO LEAD
( 3.45)
SYMM
25
32X (0.25)
28X (0.5)
( 0.2) TYP
(R0.05)
TYP
VIA
1
33
8
9
(4.8)
(1.475)
16
24
(1.475)
SYMM
(4.8)
17
LAND PATTERN EXAMPLE
SCALE:18X
0.07 MAX
ALL AROUND
METAL
SOLDER MASK
OPENING
NON SOLDER MASK
DEFINED
(PREFERRED)
0.07 MIN
ALL AROUND
SOLDER MASK
OPENING
METAL UNDER
SOLDER MASK
SOLDER MASK
DEFINED
SOLDER MASK DETAILS
4223442/B 08/2019
NOTES: (continued)
4. This package is designed to be soldered to a thermal pad on the board. For more information, see Texas Instruments literature
number SLUA271 (www.ti.com/lit/slua271).
5. Vias are optional depending on application, refer to device data sheet. If any vias are implemented, refer to their locations shown
on this view. It is recommended that vias under paste be filled, plugged or tented.
www.ti.com

(R0.05) TYP
32X (0.6)
32
EXAMPLE STENCIL DESIGN
VQFN - 1 mm max heightRHB0032E
PLASTIC QUAD FLATPACK - NO LEAD
4X ( 1.49)
(0.845)
25
32X (0.25)
28X (0.5)
METAL
TYP
1
33
8
9
SYMM
16
24
(0.845)
SYMM
(4.8)
17
(4.8)
SOLDER PASTE EXAMPLE
BASED ON 0.125 mm THICK STENCIL
EXPOSED PAD 33:
75% PRINTED SOLDER COVERAGE BY AREA UNDER PACKAGE
NOTES: (continued)
6. Laser cutting apertures with trapezoidal walls and rounded corners may offer better paste release. IPC-7525 may have alternate
design recommendations.
SCALE:20X
4223442/B 08/2019
www.ti.com

IMPORTANT NOTICE AND DISCLAIMER
TI PROVIDES TECHNICAL AND RELIABILITY DATA (INCLUDING DATASHEETS), DESIGN RESOURCES (INCLUDING REFERENCE
DESIGNS), APPLICATION OR OTHER DESIGN ADVICE, WEB TOOLS, SAFETY INFORMATION, AND OTHER RESOURCES “AS IS”
AND WITH ALL FAULTS, AND DISCLAIMS ALL WARRANTIES, EXPRESS AND IMPLIED, INCLUDING WITHOUT LIMITATION ANY
IMPLIED WARRANTIES OF MERCHANTABILITY, FITNESS FOR A PARTICULAR PURPOSE OR NON-INFRINGEMENT OF THIRD
PARTY INTELLECTUAL PROPERTY RIGHTS.
These resources are intended for skilled developers designing with TI products. You are solely responsible for (1) selecting the appropriate
TI products for your application, (2) designing, validating and testing your application, and (3) ensuring your application meets applicable
standards, and any other safety, security, or other requirements. These resources are subject to change without notice. TI grants you
permission to use these resources only for development of an application that uses the TI products described in the resource. Other
reproduction and display of these resources is prohibited. No license is granted to any other TI intellectual property right or to any third
party intellectual property right. TI disclaims responsibility for, and you will fully indemnify TI and its representatives against, any claims,
damages, costs, losses, and liabilities arising out of your use of these resources.
TI’s products are provided subject to TI’s Terms of Sale (www.ti.com/legal/termsofsale.html) or other applicable terms available either on
ti.com or provided in conjunction with such TI products. TI’s provision of these resources does not expand or otherwise alter TI’s applicable
warranties or warranty disclaimers for TI products.
Mailing Address: Texas Instruments, Post Office Box 655303, Dallas, Texas 75265
Copyright © 2020, Texas Instruments Incorporated
 Loading...
Loading...