

Page 1
TMS380C26
NETWORK COMMPROCESSOR
SPWS010A–APRIL 1992–REVISED MARCH 1993
• IEEE 802.5 and IBM Token-Ring Network
Compatible
• IEEE 802.3 and Blue Book Ethernet
Network Compatible
• Pin and Software Compatible With the
TMS380C16
• Configurable Network Type and Speed:
– Selectable by Host Software Control
(Adapter Control Register)
– Selectable by Network Front-End
– Readable from Host (Adapter Control
Register)
• Token-Ring Features
– 16- or 4-Megabit-per-Second Data Rates
– Supports up to 18K-Byte Frame Size
(16 Mbps Operation Only)
– Supports Universal and Local Network
Addressing
– Early Token Release Option (16 Mbps
Operation Only)
– Compatible With the TMS38054
• Ethernet Features
– 10-Megabit-per-Second Data Rate
– Compatible With Most Ethernet Serial
Network Interface Devices
– Full Duplex Ethernet Operation Allows
Network Speed Self-test
• Expandable Local LAN Subsystem Memory
Space up to 2 Megabytes
• Supports Multicast Addressing of Network
Group Addresses Through Hashing
• Glueless Interface to DRAMs
• High-Performance 16-Bit CPU for
Communications Protocol Processing
• Up to 8 Megabyte-per-Second High-Speed
Bus Master DMA Interface
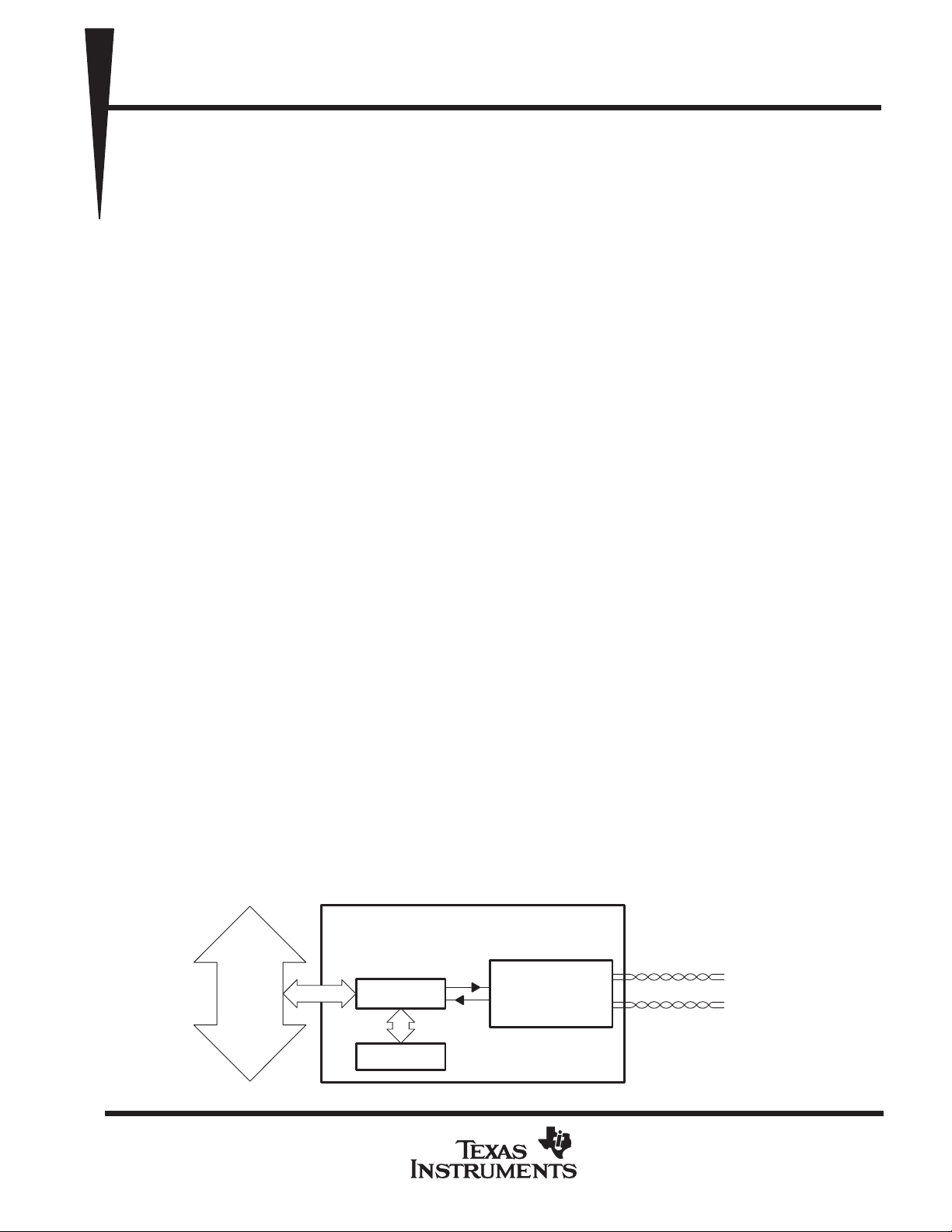
network commprocessor applications diagram
• Low-Cost Host-Slave I/O Interface Option
• Up to 32-Bit Host Address Bus
• Selectable Host System Bus Options
• 80x8x or 68xxx-Type Bus and Memory
Organization
– 8- or 16-Bit Data Bus on 80x8x Buses
– Optional Parity Checking
• Dual-Port DMA and Direct I/O Transfers to
Host Bus
• Specification for External Adapter-Bus
Devices (SEADs) Supports External
Hardware Interface for User-Defined
External Logic
• Enhanced Address Copy Option (EACO)
Interface Supports External Address
Checking Logic for Bridging or External
Custom Applications
• Support for Module High-Impedance
In-Circuit Testing
• Built-in Real-Time Error Detection
• Bring-Up and Self-Test Diagnostics With
Loopback
• Automatic Frame Buffer Management
• Slow-Clock Low-Power Mode
• Single 5-V Supply
• 1-µm CMOS Technology
• 250 mA Typical Latch-Up Immunity at 25°C
• ESD Protection Exceeds 2,000 V
• 132-Pin JEDEC Plastic Quad Flat Package
(PQ Suffix)
• Operating Temperature Range
0°C to 70 °C
Attached
System
Bus
PRODUCTION DATA information is current as of publication date.
Products conform to specifications per the terms of Texas Instruments
standard warranty. Production processing does not necessarily include
testing of all parameters.
LAN Subsystem
Token Ring or
TMS380C26
Memory
POST OFFICE BOX 1443 • HOUSTON, TEXAS
Ethernet Physical
Layer Circuitry
77251–1443
Transmit
To
Network
Receive
Copyright 1993, Texas Instruments Incorporated
1
Page 2
TMS380C26
NETWORK COMMPROCESSOR
SPWS010A–APRIL 1992–REVISED MARCH 1993
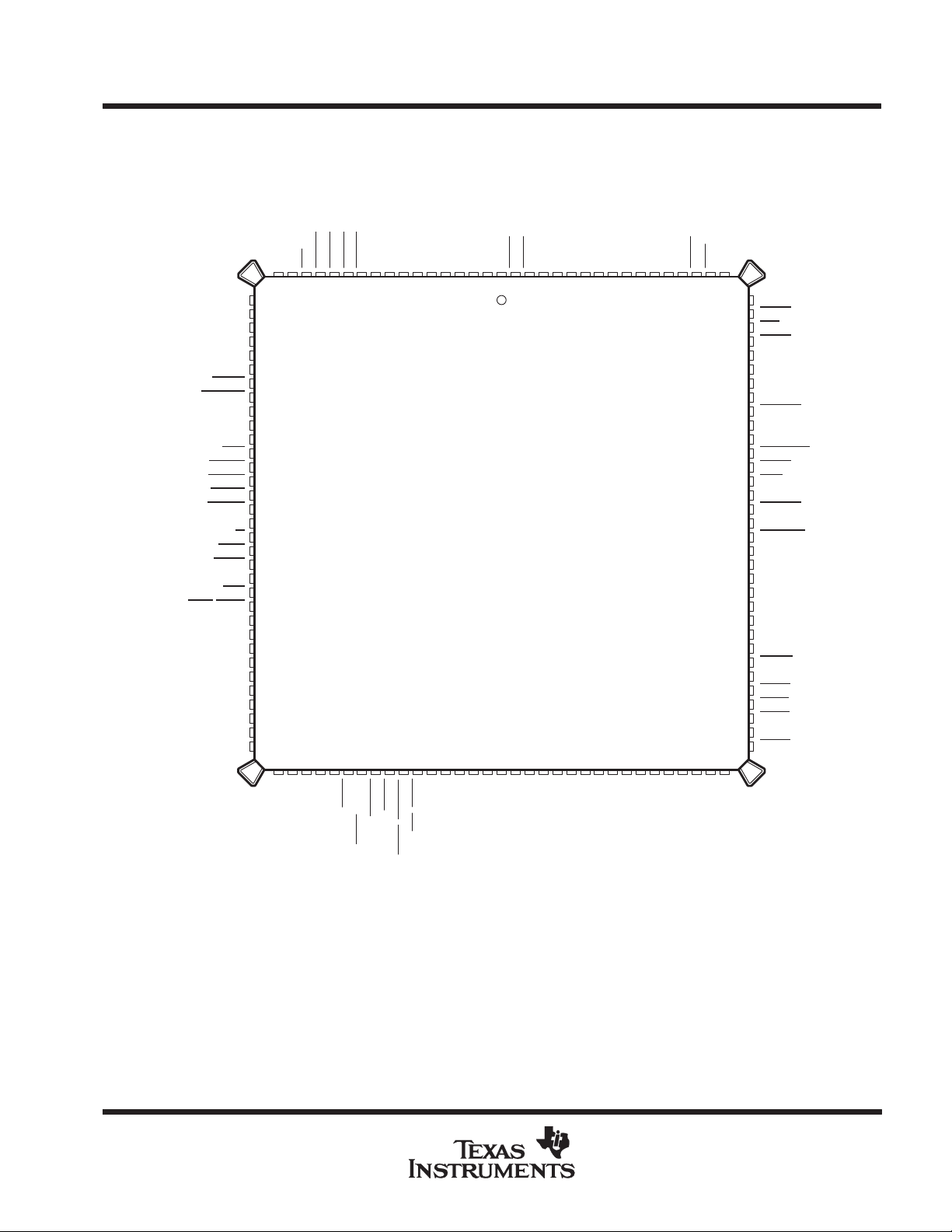
pinout
The pin assignments for TMS380C26 (132-pin quad flat-pack) are shown in Figure 1.
132-PIN QUAD FLAT PACK
(TOP VIEW)
SSL
V
DDL
CLKDIV
V
SSC
NSELOUT0
PRTYEN
BTSTRP
SIACK
SRESET
SRS1
SRS0
SRSX
SCS
SBRLS
SBBSY
S8/SHALT
SRS2/SBERR
V
DDL
SI/M
SINTR/SIRQ
SHLDA/SBGR
SDDIR
SRAS/SAS
SWR/SLDS
V
SSI
SXAL
SALE
SBCLK
SADL7
SADL6
SADL5
SADL4
SADL3
V
DD5
DD4
V
V
NMI
EXTINT014EXTINT113EXTINT2
EXTINT3
MADL010MADL19MADL28MADL37MADL46MADL55MADL64MADL73MAXPL
17
16
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
15
515253545556575859696162636465666768697071727374757677787980818283
11
12
SS4
V
MBGR
MBGQ
MAXPH
MADH0
2
1
132
131
130
129
MADH1
MADH2
128
127
SS3
V
MADH3
126
125
DD3
V
124
MADH4
MADH5
123
122
MADH6
MADH7
121
120
MBEN
MOE
119
118
SS1
V
117
116
115
114
113
112
111
110
109
108
107
106
105
104
103
102
101
100
99
98
97
96
95
94
93
92
91
80
89
88
87
86
85
84
V
SSC
MRAS
MW
MCAS
MAX2
MAX0
MDDIR
V
DD2
SYNCIN
OSCIN
V
SS2
MROMEN
MACS
MAL
MREF
MBIAEN
V
DDL
MRESET
MBCLK2
MBCLK1
OSCOUT
RCVR/RXD
RCLK/RXC
NSETOUT1
PXTALIN/TXC
V
SS1
WRAP
/TXEN
DRVR
DRVR
WFLT/COLL
/LPBK
NSRT
FRAQ/TXD
REDY
/CRS
SS5
V
SADL2
SADL1
SPL
SADL0
SOWN
SDBEN
SHRQ/SBRQ
SBHE/SRNW
SPH
SRD/SUDS
SRDY/SDTACK
SADH7
SADH6
SSC
V
DD6
V
SS6
V
SADH5
SADH4
SADH3
SADH2
SADH1
SADH0
TEST5
TEST4
TEST3
TEST2
TEST1
TEST0
XFAIL
XMATCH
DD1
V
SSL
V
Figure 1. TMS380C26 Pinout
2
POST OFFICE BOX 1443 • HOUSTON, TEXAS
77251–1443
Page 3

TMS380C26
NETWORK COMMPROCESSOR
SPWS010A–APRIL 1992–REVISED MARCH 1993
description
The TMS380C26 is a single-chip network communications processor (commprocessor) that supports token
ring, or Ethernet Local Area Networks (LANs). Either token ring at data rates of 16 Mbps or 4 Mbps, or Ethernet
at a data rate of 10 Mbps, can be selected. A flexible configuration scheme allows network type and speed to
be configured by hardware or software. This allows the design of LAN subsystems which support both token
ring and Ethernet networks, by electrically or physically switched network front-end circuits.
The TMS380C26 conforms to IEEE 802.5–1989 standards and has been verified to be completely IBM
Token-Ring compatible. By integrating the essential control building blocks needed on a LAN subsystem card
into one device, the TMS380C26 can ensure that this IBM compatability is maintained in silicon.
The TMS380C26 conforms to ISO/IEC 8802–3 (ANSI/IEEE Std 802.3) CSMA/CD standards, and the Ethernet
”Blue Book” standard.
The high degree of integration of the TMS380C26 makes it a virtual LAN subsystem on a single chip. Protocol
handling, host system interfacing, memory interfacing, and communications processing are all provided through
the TMS380C26. T o complete LAN subsystem design, only the network interface hardware, local memory , and
minimal additional components such as PALs and crystal oscillators need to be added.
The TMS380C26 provides a 32-bit system memory address reach with a high-speed bus-master DMA interface
that supports rapid communications with the host system. In addition, the TMS380C26 supports direct I/O and
a low-cost 8-bit pseudo-DMA interface that requires only a chip select to work directly on an 80x8x 8-bit slave
I/O interface. Finally , selectable 80x8x or 68xxx-type host system bus and memory organization add to design
flexibility .
The TMS380C26 supports addressing for up to two Megabytes of local memory. This expanded memory
capacity can improve LAN subsystem performance by minimizing the frequency of host LAN subsystem
communications by allowing larger blocks of information to be transferred at one time. The support of large local
memory is important in applications that require large data transfers (such as graphics or data base transfers)
and in heavily loaded networks where the extra memory can provide data buffers to store data until it can be
processed by the host.
The proprietary CPU used in the TMS380C26 allows protocol software to be downloaded into RAM or stored
in ROM in the local memory space. By moving protocols (such as LLC) to the LAN subsystem, overall system
performance is increased. This is accomplished due to the the offloading of processing from the host system
to the TMS380C26, which may also reduce LAN subsystem-to-host communications. As other protocol
software is developed, greater differentiation of end products with enhanced system performance will be
possible.
In addition, the TMS380C26 includes hardware counters that provide realtime error detection and automatic
frame buffer management. These counters control system bus retries, burst size, and track host and LAN
subsystem buffer status. Previously , these counters needed to be maintained in software. By integrating them
into hardware, software overhead is removed and LAN subsystem performance is improved.
The TMS380C26 implements a TI-patented Enhanced Address Copy Option (EACO) interface. This interface
supports external address checking devices, such as the TMS380SRA Source Routing Accelerator. The
TMS380C26 has a 128-word external I/O space in its memory map to support external address-checker devices
and other hardware extensions to the TMS380 architecture. Hardware designed in conformance with TI’s
Specification for External Adapter-bus Devices (SEADs) can map registers into this external I/O space and post
interrupts to the TMS380C26.
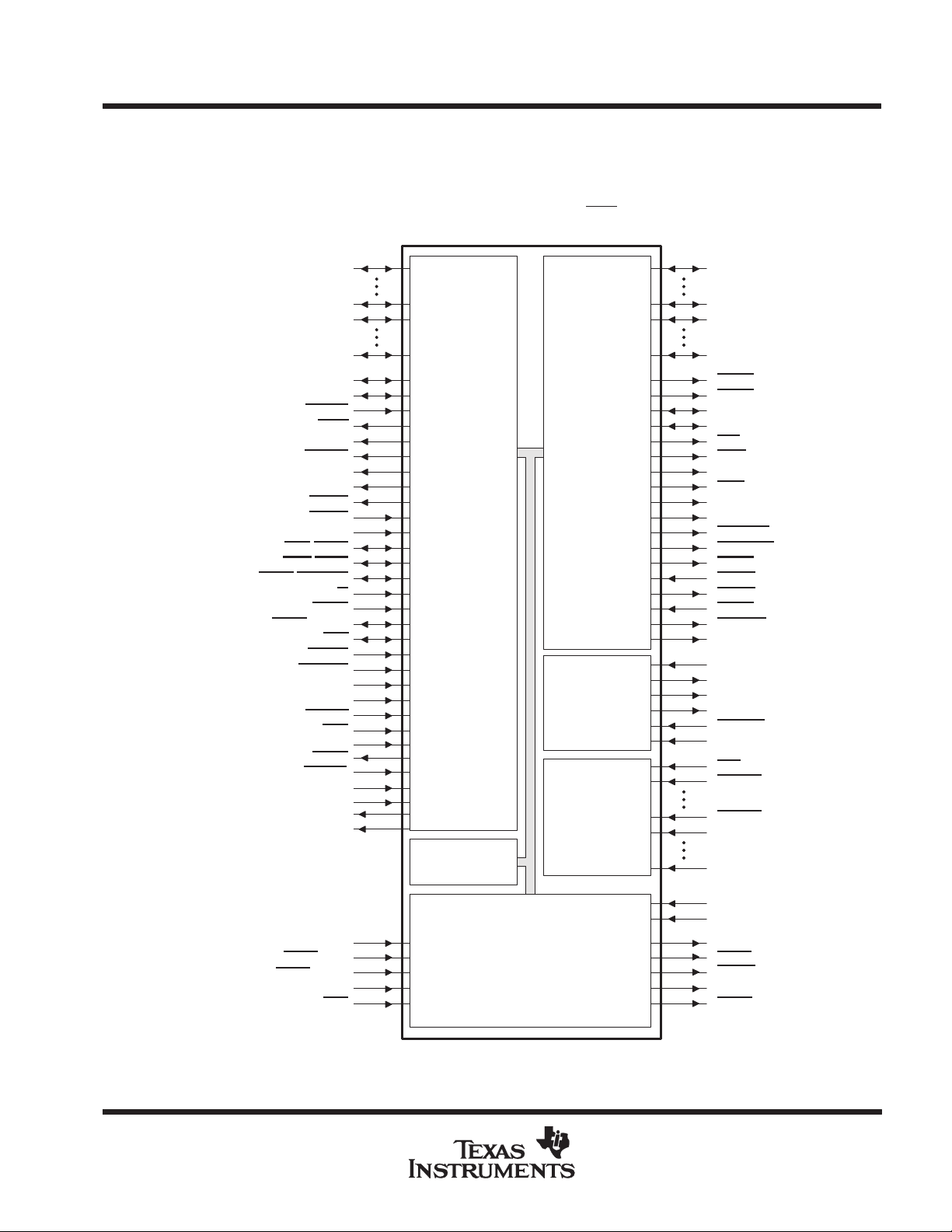
The major blocks of the TMS380C26 include the Communications Processor (CP), System Interface (SIF),
Memory Interface (MIF), Protocol Handler (PH), Clock Generator (CG), and the Adapter Support Function (ASF)
as shown in Figure 2.
The TMS380C26 is available in a 132-pin JEDEC plastic quad flat pack and is rated from 0°C to 70°C.
IBM is a registered trademark of International Business Machines Corporation.
POST OFFICE BOX 1443 • HOUSTON, TEXAS
77251–1443
3
Page 4
TMS380C26
NETWORK COMMPROCESSOR
SPWS010A–APRIL 1992–REVISED MARCH 1993
block diagram and signal descriptions
TMS380C26 has a bus interface to the host system, a bus interface to local memory, and an interface to the
physical layer circuitry. As a rule of thumb in the pin nomenclature and descriptions that follow, pin names
starting with the letter S attach to the host system bus and pin names starting with the letter M attach to the local
memory bus. Active-low signals have names with overbars, e.g., SCS
.
SADH0
SADH7
SADL0
SADL7
SPH
SPL
SBRLS
SINTR/SIRQ
SDDIR
SDBEN
SALE
SXAL
SOWN
SIACK
SBCLK
/SUDS
SRD
SWR/SLDS
SRDY/SDTACK
SHLDA/SBGR
SBHE/SRNW
SRS2/SBERR
SHRQ/SBRQ
SI/M
SRAS/SAS
S8/SHALT
SRESET
SRS0
SRS1
SCS
SRSX
SBBSY
BTSTRP
PRTYEN
NSELOUT0
NSELOUT1
System
Interface
(SIF)
• DIO Control
• Bus Control
• DMA Control
Communications
Processor
Memory
Interface
(MIF)
• DRAM Refresh
• Local Bus
Arbitrator
• Local Bus
Control
• Local
Parity Check/
Generator
Clock
Generator
(CG)
Adapter
Support
Function
(ASF)
• Interrupts
• Test Function
MADH0
MADH7
MADL0
MADL7
MRAS
MCAS
MAXPH
MAXPL
MW
MOE
MDDIR
MAL
MAX0
MAX2
MRESET
MROMEN
MBEN
MBRQ
MBGR
MACS
MBIAEN
MREF
OSCIN
OSCOUT
MBCLK1
MBCLK2
SYNCIN
CLKDIV
NMI
EXTINT0
EXTINT
3
TEST0
TEST5
XMATCH
XFAIL
RCLK/RXC
/CRS
REDY
WFLT
/COLL
RCVR/RXD
PXTALIN/TXC
Protocol Handler (PH):
for Token Ring and
Ethernet Interface
FRAQ/TXD
/LPBK
NSRT
WRAP
/TXEN
DRVR
DRVR
Figure 2. TMS380C26 COMMprocessor Block Diagram
4
POST OFFICE BOX 1443 • HOUSTON, TEXAS
77251–1443
Page 5
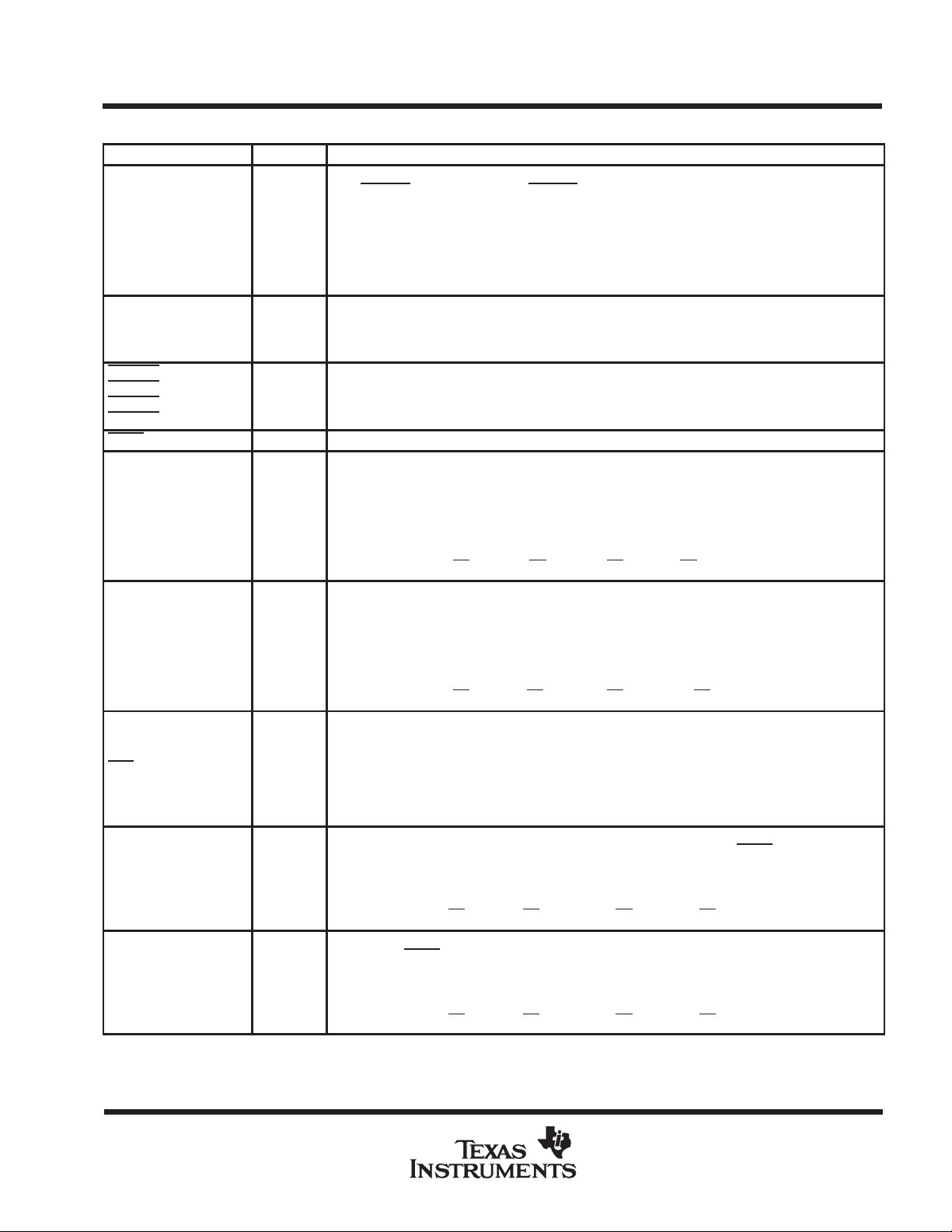
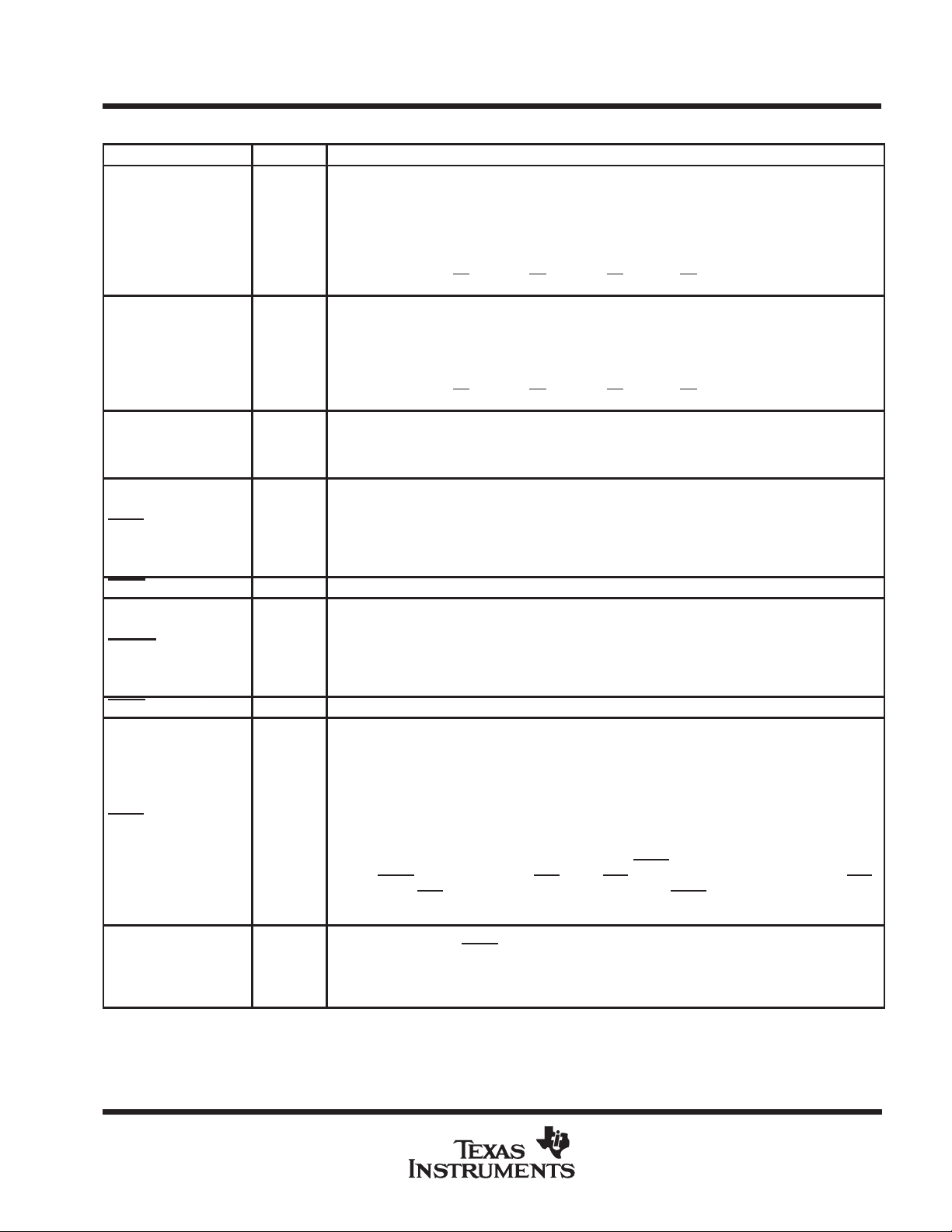
Terminal Functions
PIN NAME NO. I/O DESCRIPTION
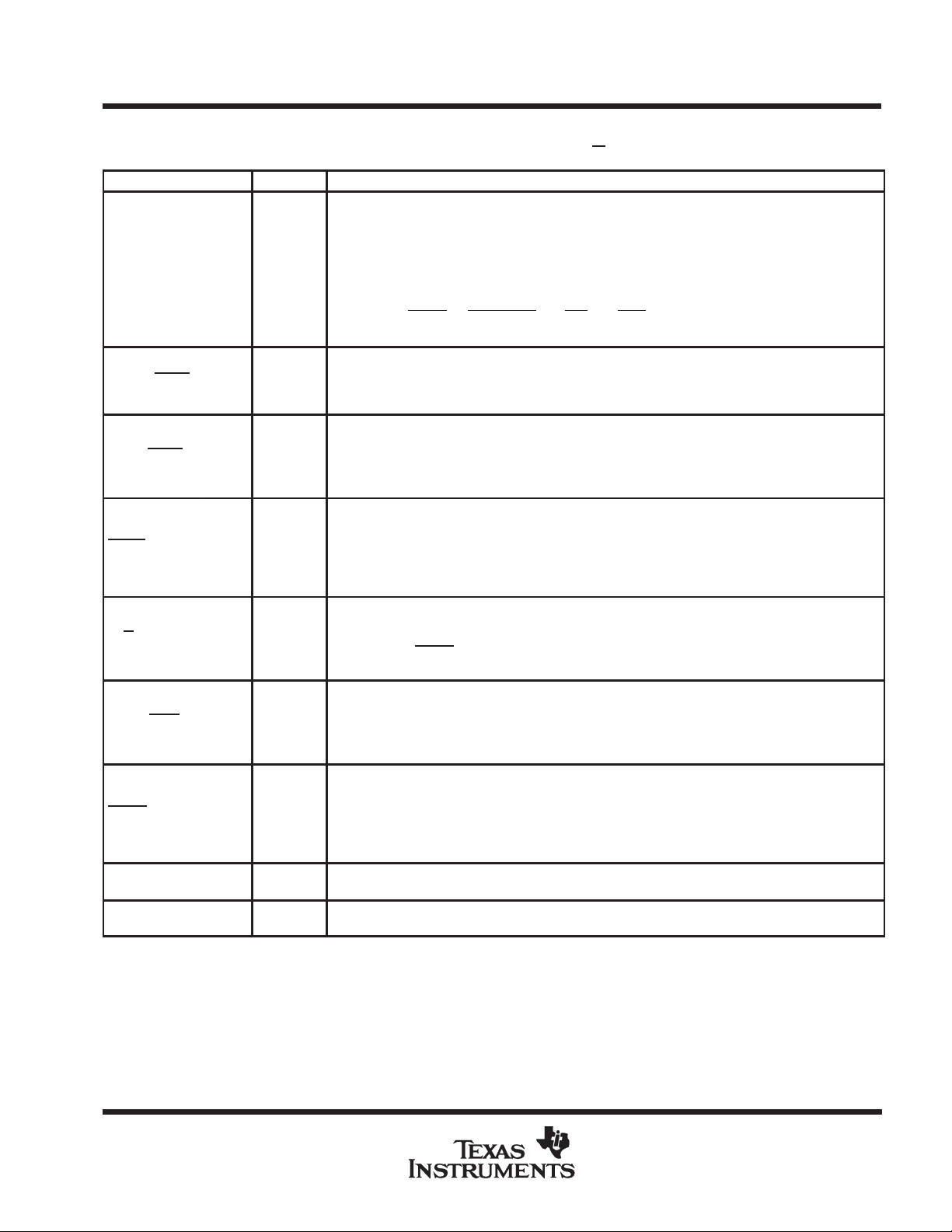
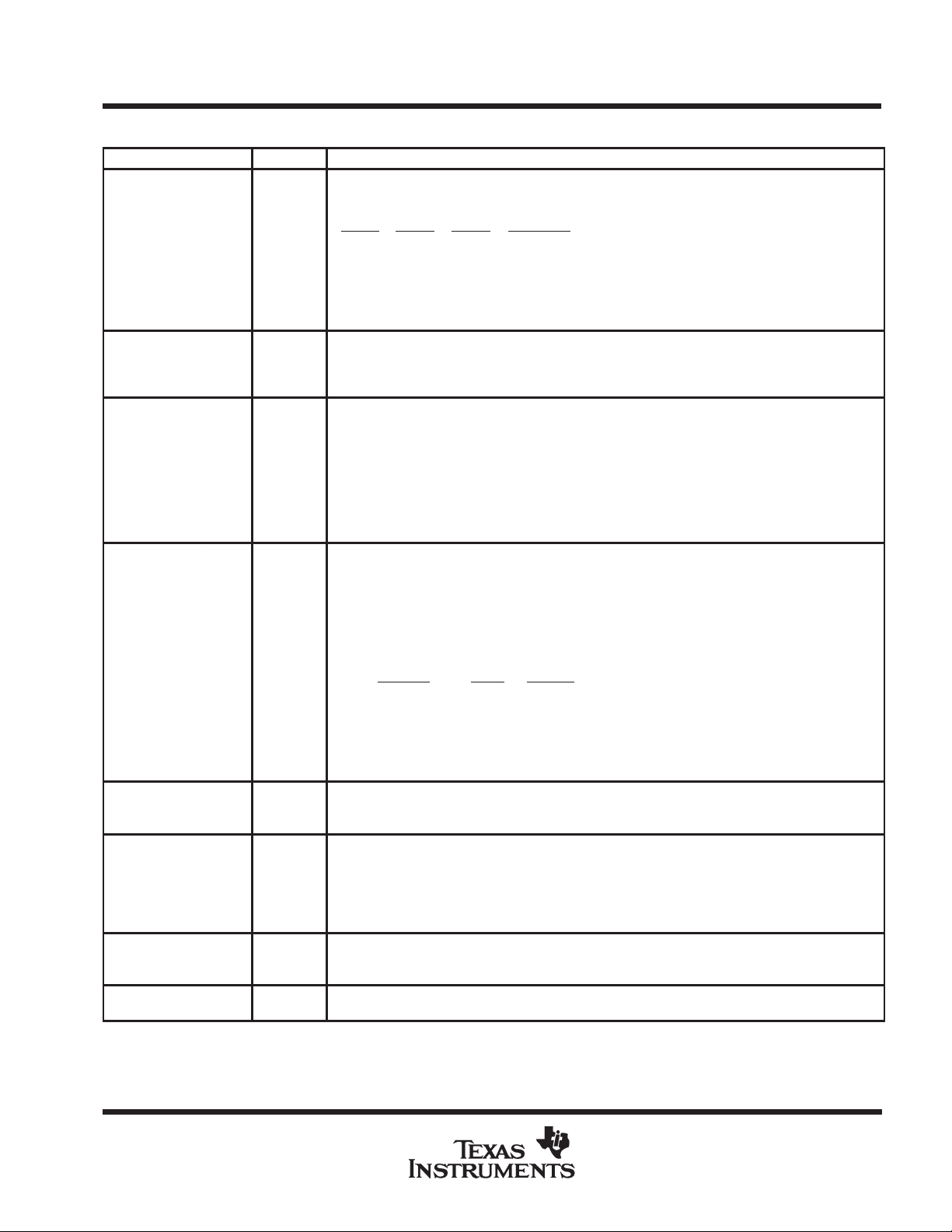
Bootstrap. The value on this pin is loaded into the BOOT bit of the SIFACL register at reset (i.e., when
the SRESET
This bit indicates whether chapters 0 and 31 of the memory map are RAM or ROM. If these chapters
BTSTRP 23 IN
CLKDIV 19 IN
EXTINT0
EXTINT1
EXTINT2
EXTINT3
MACS 104 IN Reserved. Must be tied low (see Note 2).
MADH0
MADH1
MADH2
MADH3
MADH4
MADH5
MADH6
MADH7
MADL0
MADL1
MADL2
MADL3
MADL4
MADL5
MADL6
MADL7
MAL 103 OUT
14
13
12
11
129
128
127
126
123
122
121
120
10
9
8
7
6
5
4
3
IN Reserved; must be pulled high (see Note 4).
I/O
I/O
are RAM then the TMS380C26 is denied access to the local memory bus until the CPHALT bit in the
SIFACL register is cleared.
H = Chapters 0 and 31 of local memory are RAM-based (see Note 1).
L = Chapters 0 and 31 of local memory are ROM-based.
Clock Divider Select. This pin must be pulled high
H = Indicates 64-MHz OSCIN (see Note 3).
L = Reserved.
Local memory Address, Data and Status Bus – high byte. For the first quarter of the local memory
cycle these bus lines carry address bits AX4 and A0 to A6; for the second quarter, they carry status
bits; and for the third and fourth quarters, they carry data bits 0 to 7. The most significant bit is MADH0
and the least significant bit is MADH7.
Signal AX4,A0–A6 Status D0–D7 D0–D7
Local Memory Address, Data and Status Bus – low byte. For the first quarter of the local memory
cycle, these bus lines carry address bits A7 to A14; for the second quarter, they carry address bits
AX4 and A0 to A6; and for the third and fourth quarters, they carry data bits 8 to 15. The most
significant bit is MADL0 and the least significant bit is MADL7.
Signal A7–A14 AX4,A0–A6 D8–D15 D8–D15
Memory Address Latch. This is a strobe signal for sampling the address at the start of the memory
cycle; it is used by SRAMs and EPROMs. The full 20-bit word address is valid on MAX0, MAXPH,
MAX2, MAXPL, MADH0-MADH7, and MADL0-MADL7. Three 8-bit transparent latches can therefore
be used to retain a 20-bit static address throughout the cycle.
pin is asserted or the ARESET bit in the SIFACL register is set) to form a default value.
1Q
1Q
Memory Cycle
2Q 3Q 4Q
Memory Cycle
2Q 3Q 4Q
TMS380C26
NETWORK COMMPROCESSOR
SPWS010A–APRIL 1992–REVISED MARCH 1993
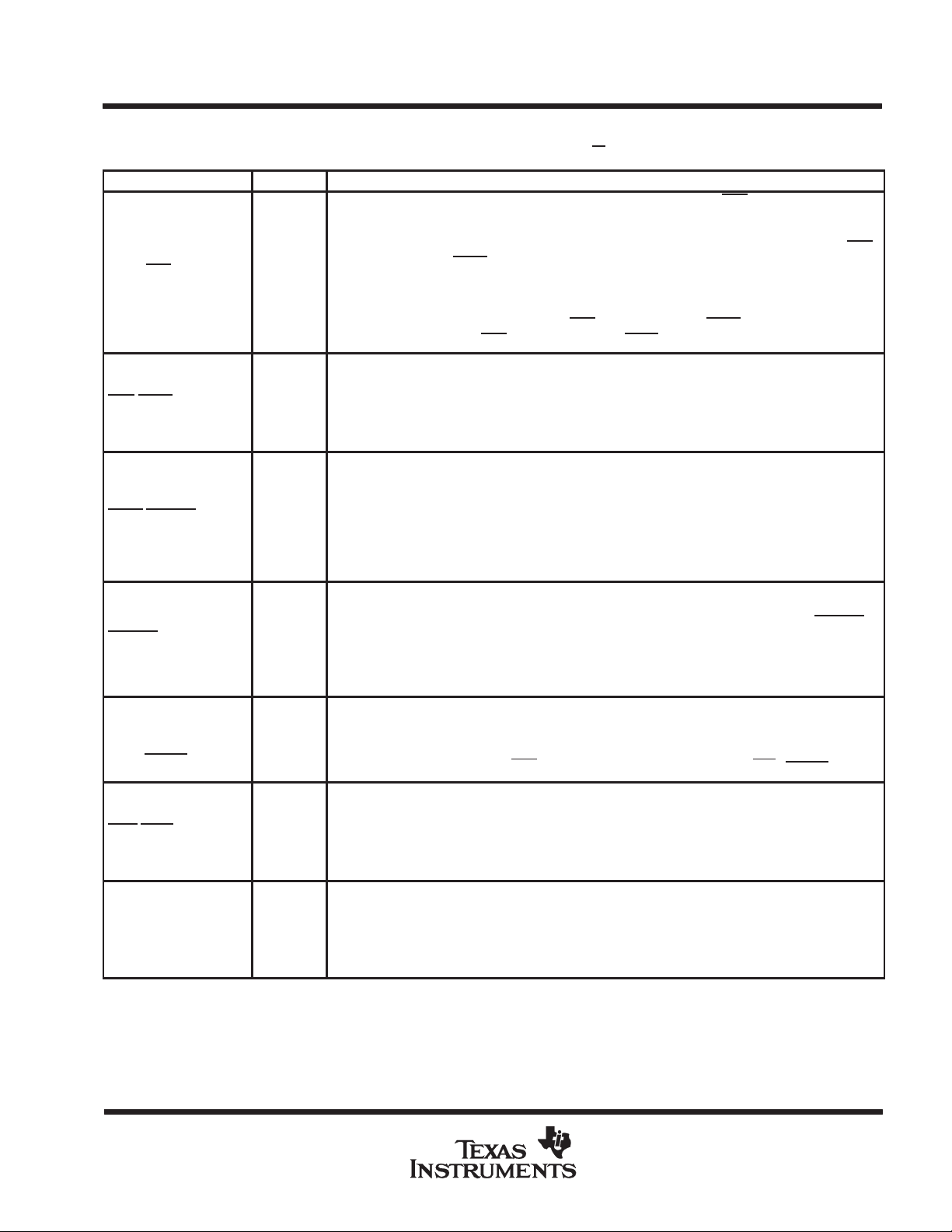
Rising edge = No signal latching.
Falling edge = Allows the above address signals to be latched.
Local Memory Extended Address Bit. This signal drives AX0 at ROW address time and it drives A12
at COL address and DAT A time for all cycles. This signal can be latched by MRAS
MAX0 111 OUT
MAX2 112 OUT
NOTES: 1. Pin has an internal pullup device to maintain a high voltage level when left unconnected (no etch or loads).
2. Pin should be connected to ground.
3. Pin should be tied to VCC with a 4.7-kΩ pullup resistor.
4. Each pin must be individually tied to VCC with a 1.0-kΩ pullup resistor.
interfacing to a BIA ROM.
Signal AX0 A12 A12 A12
Local Memory Extended Address Bit. This signal drives AX2 at ROW address time, which can be
latched by MRAS
interfacing to a BIA ROM.
Signal AX2 A14 A14 A14
POST OFFICE BOX 1443 • HOUSTON, TEXAS
1Q
, and A14 at COL address, and DATA time for all cycles. Driving A14 eases
1Q
77251–1443
Memory Cycle
2Q 3Q 4Q
Memory Cycle
2Q 3Q 4Q
. Driving A12 eases
5
Page 6
TMS380C26
NETWORK COMMPROCESSOR
SPWS010A–APRIL 1992–REVISED MARCH 1993
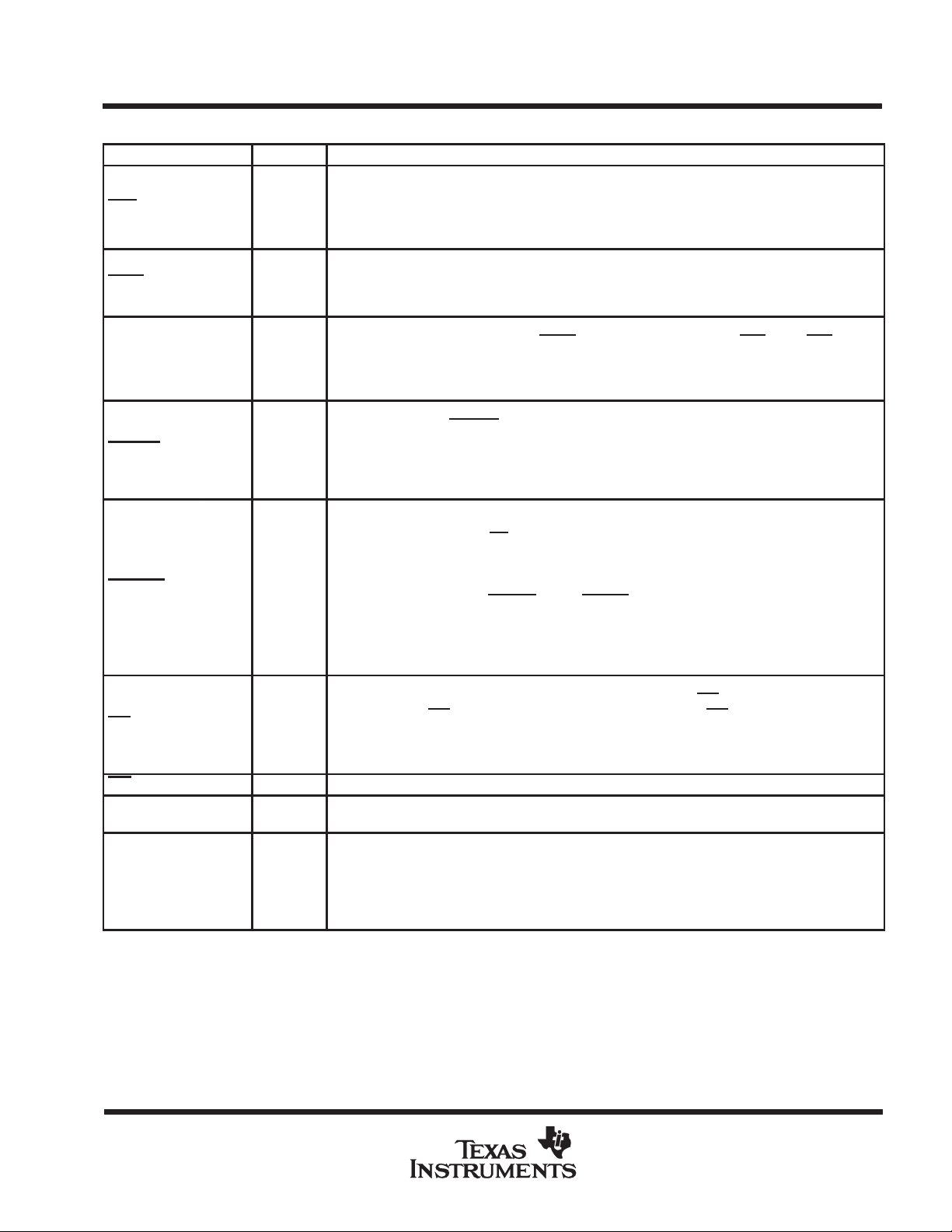
Terminal Functions (continued)
PIN NAME NO. I/O DESCRIPTION
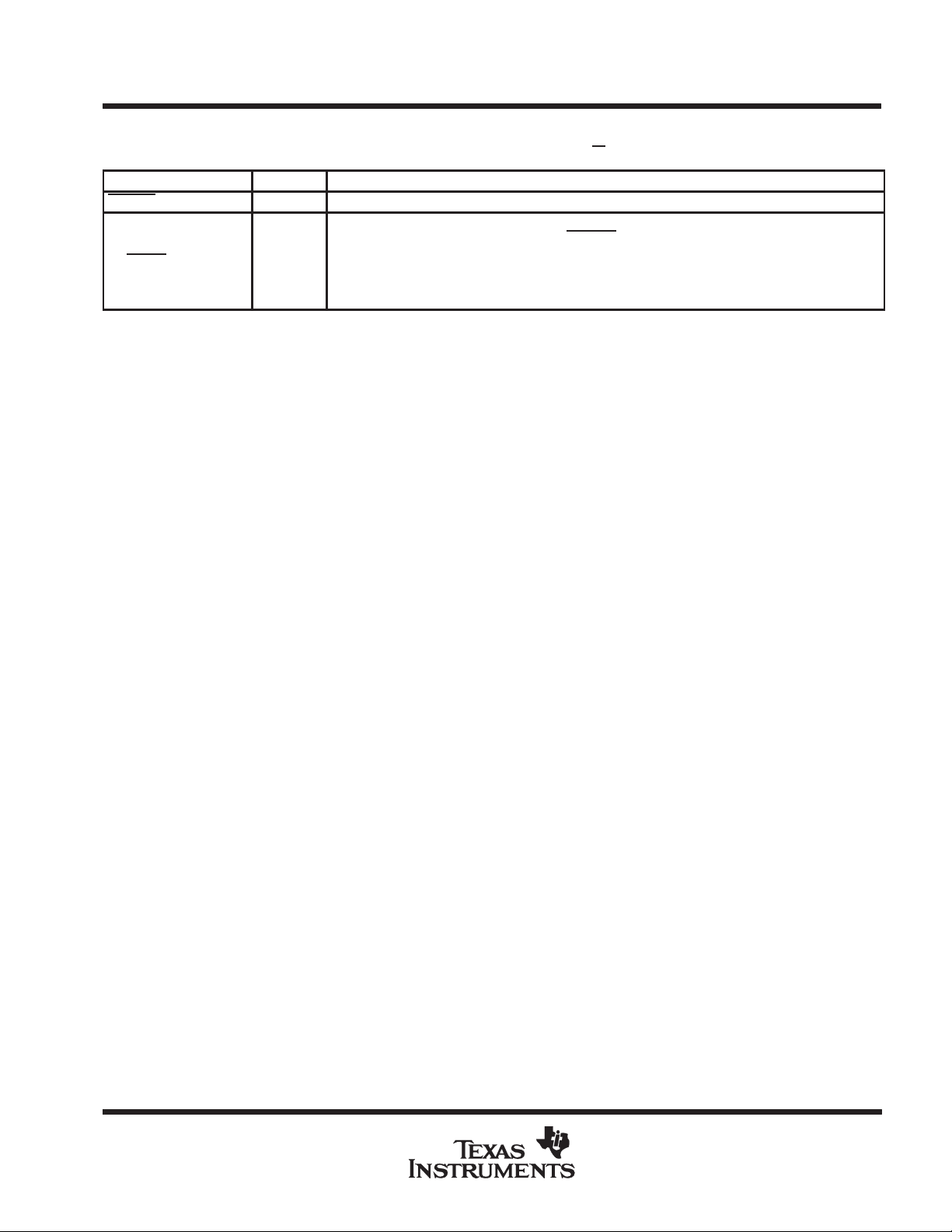
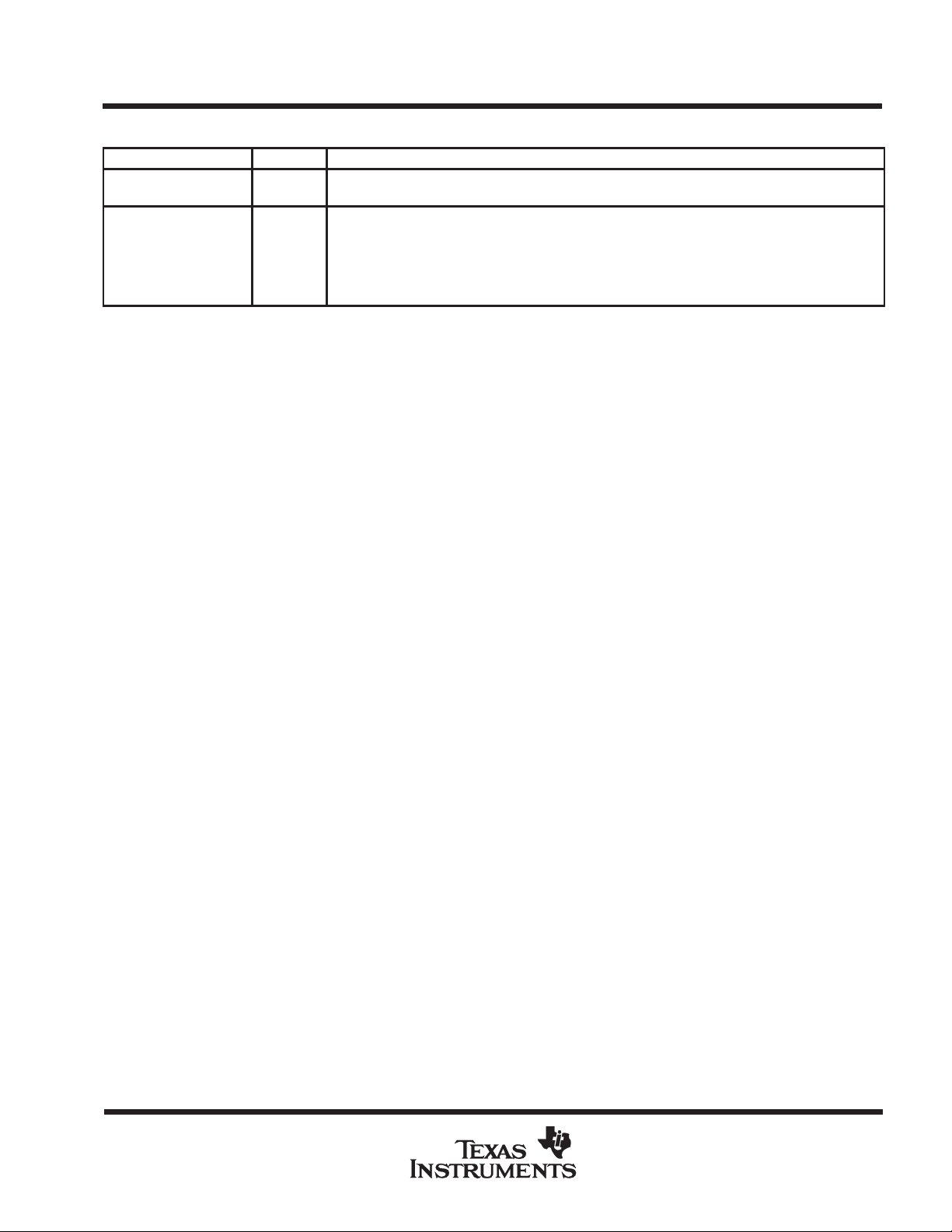
Local Memory Extended Address and Parity High Byte. For the first quarter of a memory cycle this
signal carries the extended address bit (AX1); for the second quarter of a memory cycle this signal
carries the extended address bit (AX0); and for the last half of the memory cyle this signal carries the
MAXPH 130 I/O
MAXPL 2 I/O
MBCLK1
MBCLK2
MBEN 119 OUT
MBGR 132 OUT Reserved. Must be left unconnected.
MBIAEN 101 OUT
MBRQ 131 IN Reserved. Must be pulled high (see Note 4).
97
98
OUT
parity bit for the high data byte.
Signal AX1 AX0 Parity Parity
1Q
Local Memory Extended Address and Parity Low Byte. For the first quarter of a memory cycle this
signal carries the extended address bit (AX3), for the second quarter of a memory cycle this signal
carries extended address bit (AX2); and for the last half of the memory cycle this signal carries the
parity bit for the low data byte.
1Q
Signal AX3 AX2 Parity Parity
Local Bus Clock1 and local Bus Clock 2. These signals are referenced for all local bus transfers.
MBCLK2 lags MBCLK1 by a quarter of a cycle. These clocks operate at 8 MHz for a 64-MHz OSCIN
and 6 MHz for a 48-MHz OSCIN, which is twice the memory cycle rate. The MBCLK signals are
always a divide-by-8 of the OSCIN frequency.
Buffer Enable. This signal enables the bidirectional buf fer outputs on the MADH, MAXPH, MAXPL,
and MADL buses during the data phase. This signal is used in conjunction with MDDIR which selects
the buffer output direction.
H = Buffer output disabled.
L = Buffer output enabled.
Burned-In Address Enable. This is an output signal used to provide an output enable for the ROM
containing the adapter’s Burned-In Address (BIA).
H = This signal is driven high for any WRITE accesses to the addresses between >00.0000 and
>00.000F, or any accesses (Read/Write) to any other address.
L = This signal is driven low for any READ from addresses between >00.0000 and >00.000F .
Column Address Strobe for DRAMs. The column address is valid for the 3/16 of the memory cycle
following the row address portion of the cycle. This signal is driven low every memory cycle while the
column address is valid on MADL0-MADL7, MAXPH, and MAXPL, except when one of the following
conditions occurs:
Memory Cycle
2Q 3Q 4Q
Memory Cycle
2Q 3Q 4Q
1) When the address accessed is in the BIA ROM (>00.0000 – >00.000F).
MCAS 113 OUT
MDDIR 110 OUT
NOTE 4: Each pin must be individually tied to VCC with a 1.0-kΩ pullup resistor.
6
2) When the address accessed is in the EPROM memory map (i.e., when the BOOT bit in
the SIFACL register is zero and an access is made between >00.0010 – >00.FFFF)
or >1F.0000 – >1F.FFFF).
3) When the cycle is a refresh cycle, in which case MCAS
MRAS
(for DRAMs that have CAS-before-RAS refresh). For DRAMs that do not support CASbefore-RAS
cycle.
Data Direction. This signal is used as a direction control for bidirectional bus drivers. The signal
becomes valid before MBEN
H = TMS380C26 memory bus write.
L = TMS380C26 memory bus read.
POST OFFICE BOX 1443 • HOUSTON, TEXAS
refresh, it may be necessary to disable MCAS with MREF during the refresh
active.
77251–1443
is driven at the start of the cycle before
Page 7
Terminal Functions (continued)
PIN NAME NO. I/O DESCRIPTION
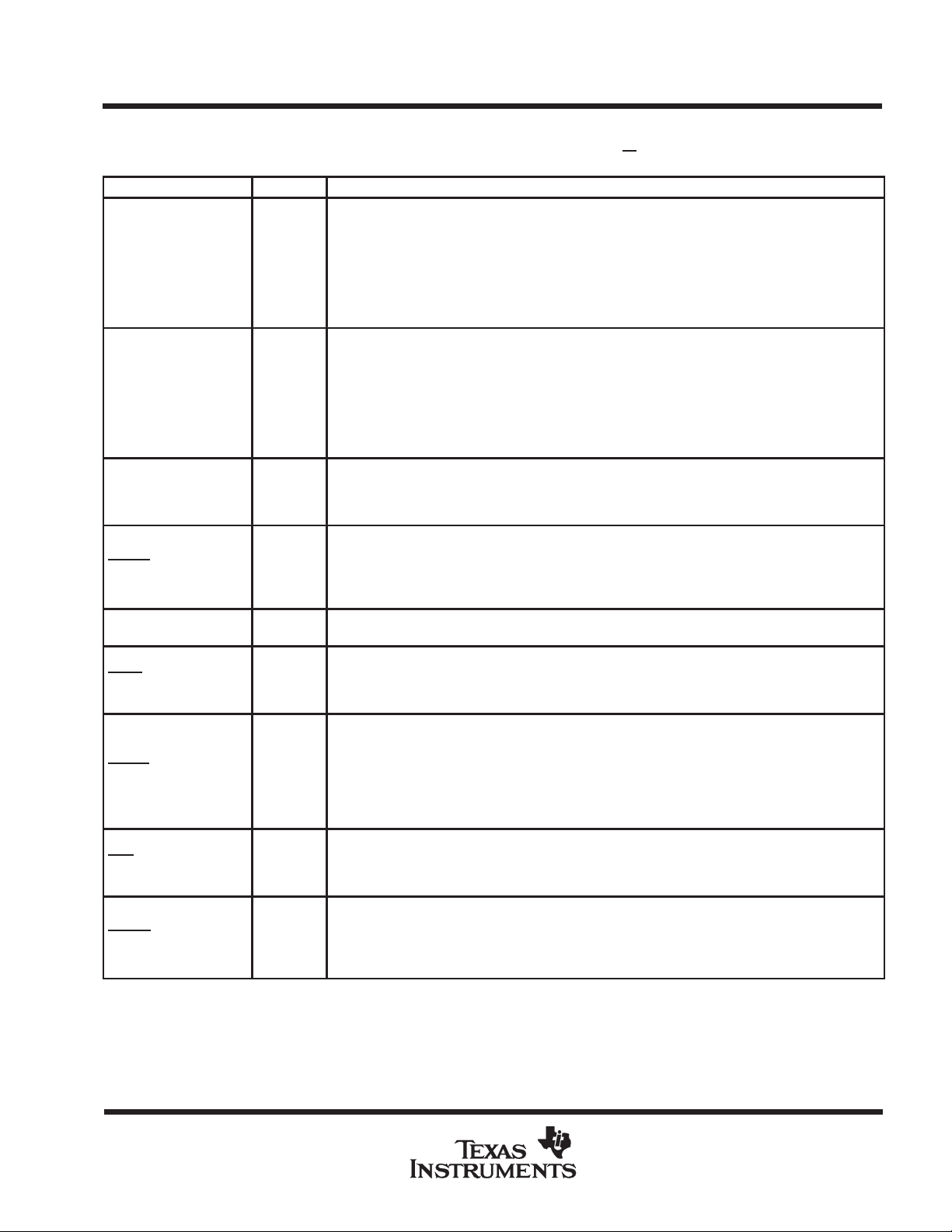
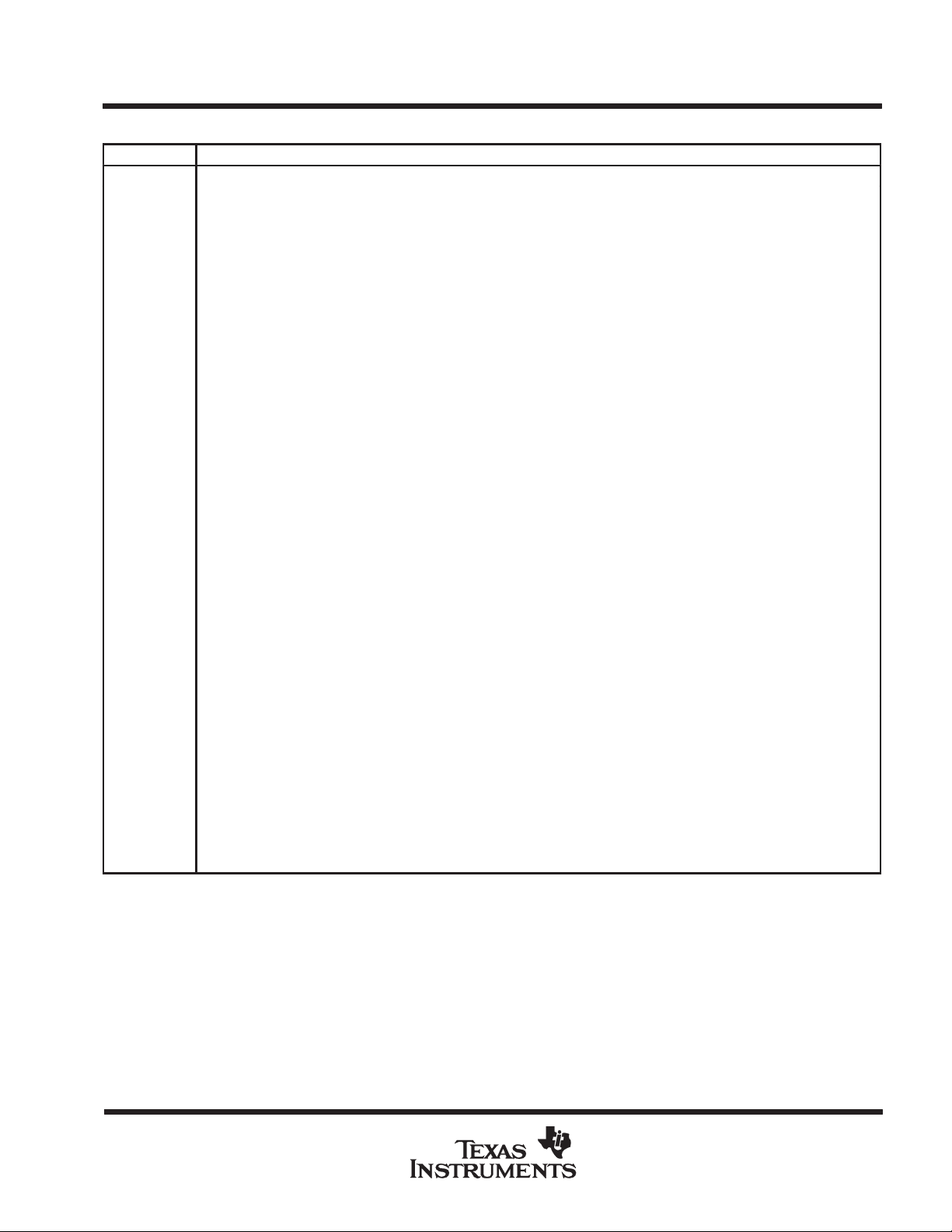
Memory Output Enable. This signal is used to enable the outputs of the DRAM memory during a read
cycle. This signal is high for EPROM or BIA ROM read cycles.
MOE 118 OUT
MRAS 115 OUT
MREF 102 OUT
MRESET 99 OUT
MROMEN 105 OUT
H = Disable DRAM outputs.
L = Enable DRAM outputs.
Row Address Strobe for DRAMs. The row address lasts for the first 5/16 of the memory cycle. This
signal is driven low every memory cycle while the row address is valid on MADL0-MADL7, MAXPH,
and MAXPL for both RAM and ROM cycles. It is also driven low during refresh cycles when the refresh
address is valid on MADL0-MADL7.
DRAM Refresh Cycle in Progress. This signal is used to indicate that a DRAM refresh cycle is
occurring. It is also used for disabling MCAS
H = DRAM refresh cycle in process.
L = Not a DRAM refresh cycle.
Memory Bus Reset. This is a reset signal generated when either the ARESET bit in the SIFACL
register is set or the SRESET
logic.
H = External logic not reset.
L = External logic reset.
ROM Enable. During the first 5/16 of the memory cycle, this signal is used to provide a chip select
for ROMs when the BOOT bit of the SIFACL register is zero (i.e., when code is resident in ROM, not
RAM). It can be latched by MA
>1F .0000 – >1F .FFFF when the Boot bit in the SIFACL register is zero. It stays high for writes to these
addresses, accesses of other addresses, or accesses of any address when the BOOT bit is one.
During the final three quarters of the memory cycle, it outputs the A13 address signal for interfacing
to a BIA ROM. This means MBIAEN
for the BIA ROM.
pin is asserted. This signal is used for resetting external local bus glue
L. It goes low for any read from addresses >00.0010 – >00.FFFF or
to all DRAMs that do not use a CAS before-RAS refresh.
, MAX0, ROMEN, and MAX2 together form a glueless interface
TMS380C26
NETWORK COMMPROCESSOR
SPWS010A–APRIL 1992–REVISED MARCH 1993
H = ROM disabled.
L = ROM enabled.
Local Memory Write. This signal is used to specify a write cycle on the local memory bus. The data
on the MADH0-MADH7 and MADL0-MADL7 buses is valid while MW
MW 114 OUT
NMI 15 IN Non-Maskable Interrupt Request. This pin must be left unconnected.
OSCIN 107 IN
OSCOUT 96 OUT
NOTE 5: Pin has an expanded input voltage specification.
the falling edge MW
H = Not a local memory write cycle.
L = Local memory write cycle.
External Oscillator Input. This line provides the clock frequency to the TMS380C26 for a 4-MHz
internal bus. OSCIN should be 64 a MHz signal (see Note 5).
Oscillator Output. With OSCIN at 64 MHz and CLKDIV pulled high, this pin provides an 8 MHz output
which can be used by TMS3054 for 4 Mbps operation without the need for an additional crystal.
CLKDIV OSCOUT
L Reserved (Reserved)
H OSCIN/8 (if OSCIN = 64 MHz, then OSCOUT = 8 MHz).
, while SRAMs latch data on the rising edge of MW.
is low. DRAMs latch data on
POST OFFICE BOX 1443 • HOUSTON, TEXAS
77251–1443
7
Page 8
TMS380C26
NETWORK COMMPROCESSOR
SPWS010A–APRIL 1992–REVISED MARCH 1993
Terminal Functions (continued)
PIN NAME NO. I/O DESCRIPTION
Parity Enable. The value on this pin is loaded into the PEN bit of the SIFACL register at reset (i.e.,
when the SRESET
PRTYEN 22 IN
NSELOUT0
NSELOUT1
NOTE 1: Pin has an internal pullup device to maintain a high voltage level when left unconnected (no etch or loads).
21
93
OUT
OUT
value. This bit enables parity checking for the local memory.
H = Local memory data bus checked for parity (see Note 1).
L = Local memory data bus
Network Selection Outputs. These output signals are controlled by the host through the
corresponding bits of the SIFACTL register. The value of these bits/signals can only be changed while
the TMS380C26 is reset.
pin is asserted or the ARESET bit in the SIFACL register is set) to form a default
NOT
checked for parity.
NSELOUT0 NSELOUT1 Description
L L Reserved
L H 16 Mbps token ring
H L Ethernet (802.3/Blue Book)
H H 4 Mbps token ring
8
POST OFFICE BOX 1443 • HOUSTON, TEXAS
77251–1443
Page 9
NETWORK COMMPROCESSOR
SPWS010A–APRIL 1992–REVISED MARCH 1993
Terminal Functions (continued)
System Interface – Intel Mode (SI/M =H)
PIN NAME NO. I/O DESCRIPTION
SADH0
SADH1
SADH2
SADH3
SADH4
SADH5
SADH6
SADH7
SADL0
SADL1
SADL2
SADL3
SADL4
SADL5
SADL6
SADL7
SALE 43 OUT
SBBSY 31 IN
SBCLK 44 IN
SBHE/SRNW 57 I/O
SBRLS
SCS 29 IN
SDBEN 58 OUT
†
Typical bit ordering for Intel and Motorola processor buses.
NOTE 1: Pin has an internal pullup device to maintain a high voltage level when left unconnected (no etch or loads).
73
72
71
70
69
68
64
63
54
53
52
49
48
47
46
45
30 IN
I/O
I/O
System Address/Data Bus—high byte (see Note 1).These lines make up the most significant byte
of each address word (32-bit address bus) and data word (16-bit data bus). The most significant bit
is SADH0, and the least significant bit is SADH7.
Address Multiplexing†: Bits 31 – 24 and bits 15 – 8.
Data Multiplexing†: Bits 15 – 8.
System Address/Data Bus—low byte (see Note 1). These lines make up the least significant byte of
each address word (32-bit address bus) and data word (16-bit data bus). The most significant bit is
SADL0, and the least significant bit is SADL7.
Address Multiplexing†: Bits 23 – 16 and bits 7 – 0.
Data Multiplexing†: Bits 7 – 0.
System Address Latch Enable. This is the enable pulse used to externally latch the 16 LSBs of the
address from the SADH0 – SADH7 and SADL0 – SADL7 buses at the start of the DMA cycle.
Systems that implement address parity can also externally latch the parity bits (SPH and SPL) for
the latched address.
System Bus Busy. The TMS380C26 samples the value on this pin during arbitration. The sample has
one of (2) two values (see Note 1):
H = Not busy. The TMS380C26 may become Bus Master if the grant condition is met.
L = Busy. The TMS380C26 cannot become Bus Master.
System Bus Clock. The TMS380C26 requires the external clock to synchronize its bus timings for
all DMA transfers.
System Byte High Enable. This pin is a three-state output that is driven during DMA and an input at
all other times.
H = System Byte High not enabled (see Note 1).
L = System Byte High enabled.
System Bus Release. This pin indicates to the TMS380C26 that a higher-priority device requires the
system bus. The value on this pin is ignored when the TMS380C26 is
signal is internally synchronized to SBCLK.
H = The TMS380C26 can hold onto the system bus (see Note 1).
L = The TMS380C26 should release the system bus upon completion of current DMA cycle. If the
DMA transfer is not yet complete, the SIF will rearbitrate for the system bus.
System Chip Select. Activates the system interface of the TMS380C26 for a DIO read or write.
H = Not selected (see Note 1).
L = Selected.
System Data Bus Enable. This output signals to the external data buffers to begin driving data. This
output is activated during both DIO and DMA.
H = Keep external data buffers in high-impedance state.
L = Cause external data buffers to begin driving data.
NOT
TMS380C26
perfoming DMA. This
POST OFFICE BOX 1443 • HOUSTON, TEXAS
77251–1443
9
Page 10
TMS380C26
NETWORK COMMPROCESSOR
SPWS010A–APRIL 1992–REVISED MARCH 1993
Terminal Functions (continued)
System Interface – Intel Mode (SI/M =H)
PIN NAME NO. I/O DESCRIPTION
System Data Direction. This output provides to the external data buffers a signal indicating the direction
in which the data is moving. During DIO writes and DMA reads, SDDIR is low (data direction input to
the TMS380C26). During DIO reads and DMA writes, SDDIR is high (data direction output from the
SDDIR 38 OUT
SHLDA/SBGR 37 IN
SHRQ/SBRQ 56 OUT
SIACK 24 IN
TMS380C26). When the system interface is
high by default.
DATA
SDDIR
System Hold Acknowledge. This pin indicates that the system DMA hold request has been
acknowledged. It is internally synchronized to SBCLK (see Note 1).
H = Hold request acknowledged.
L = Hold request not acknowledged.
System Hold Request. This pin is used to request control of the system bus in preparation for a DMA
transfer. This pin is internally synchronized to SBCLK.
H = System bus requested.
L = System bus not requested.
System Interrupt Acknowledge. This signal is from the host processor to acknowledge the interrupt
request from the TMS380C26.
H = System interrupt not acknowledged (see Note 1).
L = System interrupt acknowledged: the TMS380C26 places its interrupt vector onto the system
bus.
System Intel/Motorola Mode Select. The value on this pin specifies the system interface mode.
DIRECTION DIO DMA
H output read write
L input write read
NOT
involved in a DIO or DMA operation, then SDDIR is
SI/M 35 IN
SINTR/SIRQ 36 OUT
SOWN 59 OUT
SPH 62 I/O
SPL 55 I/O
NOTE 1: Pin has an internal pullup device to maintain a high voltage level when left unconnected (no etch or loads).
H = Intel-compatible interface mode selected. Intel interface can be 8-bit or 16-bit mode
(see S8/SHALT
L = Motorola-compatible interface mode selected.
System Interrupt Request. TMS380C26 activates this output to signal an interrupt request to the host
processor.
H = Interrupt request by TMS380C26.
L = No interrupt request.
System Bus Owned. This signal indicates to external devices that TMS380C26 has control of the
system bus. This signal drives the enable signal of the bus transceiver chips, which drive the address
and bus control signals.
H = TMS380C26 does not have control of the system bus.
L = TMS380C26 has control of the system bus.
System Parity High. The optional odd-parity bit for each address or data byte transmitted over
SADH0-SADH7 (see Note 1).
System Parity Low. The optional odd-parity bit for each address or data byte transmitted over
SADL0-SADL7 (see Note 1).
pin description and Note 1.)
10
POST OFFICE BOX 1443 • HOUSTON, TEXAS
77251–1443
Page 11
Terminal Functions (continued)
System Interface – Intel Mode (SI/M =H)
PIN NAME NO. I/O DESCRIPTION
System Memory Address Strobe (see Note 3). This pin used to latch the SCS, SRSX – SRS2 register
input signals. In a minimum-chip system, SRAS is tied to the SALE output of the System Bus. The
latching capability can be defeated since the internal latch for these inputs remains transparent as
long as SRAS remains high. This permits SRAS to be pulled high and the signals at the SCS
SRAS/SAS 39 I/O
SRSX – SRS2, and SBHE
During DMA this pin remains an input.
to be applied independently of the SALE strobe from the system bus.
TMS380C26
NETWORK COMMPROCESSOR
SPWS010A–APRIL 1992–REVISED MARCH 1993
,
High = transparent mode
Low = Holds latched values of SCS
Falling edge = latches SCS, SRSX – SRS2, and SBHE
System Read Strobe (see Note 3). Active-low strobe indicating that a read cycle is performed on the
system bus. This pin is an input during DIO and an output during DMA.
SRD/SUDS 61 I/O
SRDY/SDTACK 60 I/O
SRESET 25 IN
SRSX
SRS0
SRS1
SRS2/SBERR
SWR/SLDS 40 I/O
SXAL 42 OUT
NOTES: 1. Pin has an internal pullup device to maintain a high voltage level when left unconnected (no etch or loads).
3. Pin should be tied to VCC with a 4.7-kΩ pullup resistor.
28
27
26
33
IN
H = Read cyle is not occurring.
L = If DMA: host provides data to system bus.
If DIO: SIF provides data to system bus.
System Bus Ready (see Note 3).The purpose of this signal is to indicate to the bus master that a data
transfer is complete. This signal is asynchonous, but during DMA and pseudo-DMA cycles it is
internally synchronized to SBCLK. During DMA cycles, it must be asserted before the falling edge
of SBCLK in state T2 in order to prevent a wait state. This signal is an output when the TMS380C26
is selected for DIO, and an input otherwise.
H = System bus NOT ready.
L = Data transfer is complete; system bus is ready.
System Reset. This input signal is activated to place the TMS380C26 into a known initial state.
Hardware reset will put most of the TMS380C26 output pins into a high-impedance state and place
all blocks into the reset state. DMA bus width selection is latched on the rising edge of SRESET
H = No system reset.
L = System reset.
Rising edge = Latch bus width for DMA operation.
System Register Select. These inputs select the word or byte to be transferred during a system DIO
access. The most significant bit is SRSX and the least significant bit is SRS2 (see Note 1).
MSb
Registered selected = SRSX SRS0 SRS1 SRS2/SBERR
System Write Strobe (see Note 3). This pin serves as an active-low write strobe. This pin is an input
during DIO and an output during DMA.
H = Write cycle is not occurring.
L = If DMA: data to be drivien from SIF to host bus.
If DIO: on the rising edge, the data is latched and written to the selected register.
System Extended Address Latch. This output provides the enable pulse used to externally latch the
most significant 16 bits of the 32-bit system address during DMA. SXAL is activated prior to the first
cycle of each block DMA transfer, and thereafter as necessary (whenever an increment of the DMA
address counter causes a carry-out of the lower 16 bits). Systems that implement parity on addresses
can use SXAL to externally latch the parity bits (available on SPL and SPH) for the DMA address
extension.
, SRSX–SRS2, and SBHE
LSb
.
POST OFFICE BOX 1443 • HOUSTON, TEXAS
77251–1443
11
Page 12
TMS380C26
NETWORK COMMPROCESSOR
SPWS010A–APRIL 1992–REVISED MARCH 1993
Terminal Functions (continued)
System Interface – Intel Mode (SI/M =H)
PIN NAME NO. I/O DESCRIPTION
SYNCIN 108 IN Reserved. This signal must be left unconnected (see Note 1).
System 8/16-bit bus select. This pin selects the bus width used for communications through the
system interface. On the rising edge of SRESET
S8/SHALT 32 IN
NOTE 1: Pin has an internal pullup device to maintain a high voltage level when left unconnected (no etch or loads).
otherwise the value on this pin dynamically selects the DIO bus width.
H = Selects 8-bit mode (see Note 1).
L = Selects 16-bit mode.
, the TMS380C26 latches the DMA bus width;
12
POST OFFICE BOX 1443 • HOUSTON, TEXAS
77251–1443
Page 13
Terminal Functions (continued)
TMS380C26
NETWORK COMMPROCESSOR
SPWS010A–APRIL 1992–REVISED MARCH 1993
System Interface – Motorola Mode (SI/M
PIN NAME NO. I/O DESCRIPTION
SADH0
SADH1
SADH2
SADH3
SADH4
SADH5
SADH6
SADH7
SADL0
SADL1
SADL2
SADL3
SADL4
SADL5
SADL6
SADL7
SALE 43 OUT
SBBSY 31 IN
SBCLK 44 IN
SBHE/SRNW 57 I/O
SBRLS
SCS 29 IN
SDBEN 58 OUT
†
Typical bit ordering for Intel and Motorola processor buses.
NOTE 1: Pin has an internal pullup device to maintain a high voltage level when left unconnected (no etch or loads).
73
72
71
70
69
68
64
63
54
53
52
49
48
47
46
45
30 IN
I/O
I/O
System Address/Data Bus—high byte (see Note 1).These lines make up the most significant byte
of each address word (32-bit address bus) and data word (16-bit data bus). The most significant bit
is SADH0, and the least significant bit is SADH7.
Address Multiplexing†: Bits 31 – 24 and bits 15 – 8.
Data Multiplexing†: Bits 15 – 8.
System Address/Data Bus—low byte (see Note 1). These lines make up the least significant byte of
each address word (32-bit address bus) and data word (16-bit data bus). The most significant bit is
SADL0, and the least significant bit is SADL7.
Address Multiplexing†: Bits 23 – 16 and bits 7 – 0.
Data Multiplexing†: Bits 7 – 0.
System Address Latch Enable. This is the enable pulse used to externally latch the 16 LSBs of the
address from the SADH0 – SADH7 and SADL0 – SADL7 buses at the start of the DMA cycle.
Systems that implement address parity can also externally latch the parity bits (SPH and SPL) for
the latched address.
System Bus Busy. The TMS380C26 samples the value on this pin during arbitration. The sample has
one of (2) two values (see Note 1):
H = Not busy. The TMS380C26 may become Bus Master if the grant condition is met.
L = Busy. The TMS380C26 cannot become Bus Master.
System Bus Clock. The TMS380C26 requires the external clock to synchronize its bus timings for
all DMA transfers.
System Read Not Write. This pin serves as a control signal to indicate a read or write cycle.
H = Read Cycle (see Note 1).
L = Write Cycle
System Bus Release. This pin indicates to the TMS380C26 that a higher-priority device requires the
system bus. The value on this pin is ignored when the TMS380C26 is
signal is internally synchronized to SBCLK.
H = The TMS380C26 can hold onto the system bus (see Note 1).
L = The TMS380C26 should release the system bus upon completion of current DMA cycle. If the
DMA transfer is not yet complete, the SIF will rearbitrate for the system bus.
System Chip Select. Activates the system interface of TMS380C26 for a DIO read or write.
H = Not selected (see Note 1).
L = Selected.
System Data Bus Enable. This output signals to the external data buffers to begin driving data. This
output is activated during both DIO and DMA.
H = Keep external data buffers in high-impedance state.
L = Cause external data buffers to begin driving data.
=L)
NOT
perfoming DMA. This
POST OFFICE BOX 1443 • HOUSTON, TEXAS
77251–1443
13
Page 14
TMS380C26
NETWORK COMMPROCESSOR
SPWS010A–APRIL 1992–REVISED MARCH 1993
Terminal Functions (continued)
System Interface – Motorola Mode (SI/M
PIN NAME NO. I/O DESCRIPTION
System Data Direction. This output provides to the external data buffers a signal indicating the
direction in which the data is moving. During DIO writes and DMA reads, SDDIR is low (data direction
input to the TMS380C26). During DIO reads and DMA writes, SDDIR is high (data direction output
from the TMS380C26). When the system interface is
SDDIR 38 OUT
SHLDA/SBGR 37 IN
SHRQ/SBRQ 56 OUT
SIACK 24 IN
SI/M 35 IN
SINTR/SIRQ 36 OUT
SOWN 59 OUT
SPH 62 I/O
SPL 55 I/O
SRAS/SAS 39 I/O
NOTES: 1. Pin has an internal pullup device to maintain a high voltage level when left unconnected (no etch or loads).
3. Pin should be tied to VCC with a 4.7-kΩ pullup resistor.
SDDIR is high by default.
SDDIR
H output read write
L input write read
System Bus Grant. This pin serves as an active-low bus grant, as defined in the standard 68000
interface, and is internally synchronized to SBCLK (see Note 1).
H = System bus not granted,
L = System bus granted.
System Bus Request. This pin is used to request control of the system bus in preparation for a DMA
transfer. This pin is internally synchronized to SBCLK.
H = System bus not requested.
L = System bus requested.
System Interrupt Acknowledge. This signal is from the host processor to acknowledge the interrupt
request from the TMS380C26.
H = System interrupt not acknowledged (see Note 1).
L = System interrupt acknowledged: the TMS380C26 places its interrupt vector onto the system
bus.
System Intel/Motorola Mode Select. The value on this pin specifies the system interface mode.
H = Intel-compatible interface mode selected.
L = Motorola-compatible interface mode selected. Motorola interface mode is always 16 bits.
System Interrupt Request. TMS380C26 activates this output to signal an interrupt request to the host
processor.
H = No interrupt request.
L = Interrupt request by TMS380C26.
System Bus Owned. This signal indicates to external devices that TMS380C26 has control of the
system bus. This signal drives the enable signal of the bus transceiver chips, which drive the address
and bus control signals.
H = TMS380C26 does not have control of the system bus.
L = TMS380C26 has control of the system bus.
System Parity High. The optional odd-parity bit for each address or data byte transmitted over
SADH0-SADH7 (see Note 1).
System Parity Low. The optional odd-parity bit for each address or data byte transmitted over
SADL0-SADL7 (see Note 1).
Sytem Memory Address Strobe (see Note 3). This pin is an active-low address strobe that is an input
during DIO (although ignored as an address strobe) and an output during DMA.
H = Address not valid
L = Address is valid and a transfer operation is in progress.
DATA
DIRECTION DIO DMA
=L)
NOT
involved in a DIO or DMA operation, then
14
POST OFFICE BOX 1443 • HOUSTON, TEXAS
77251–1443
Page 15
Terminal Functions (continued)
TMS380C26
NETWORK COMMPROCESSOR
SPWS010A–APRIL 1992–REVISED MARCH 1993
System Interface – Motorola Mode (SI/M
PIN NAME NO. I/O DESCRIPTION
Upper Data Strobe (see Note 3). This pin serves as the active-low upper data strobe.
This pin is an input during DIO and an output during DMA.
SRD/SUDS 61 I/O
SRDY/SDTACK 60 I/O
SRESET 25 IN
SRSX
SRS0
SRS1
SRS2/SBERR 33 IN
SWR/SLDS 40 I/O
SXAL 42 OUT
SYNCIN 108 IN Reserved. This signal must be left unconnected (see Note 1).
S8/SHALT 32 IN
NOTES: 1. Pin has an internal pullup device to maintain a high voltage level when left unconnected (no etch or loads).
3. Pin should be tied to VCC with a 4.7-kΩ pullup resistor.
28
27
26
IN
H = Not valid data on SADH0-SADH7 lines.
L = Valid data on SADH0-SADH7 lines.
System Data Transfer Acknowledge (see Note 3). The purpopse of this signal is to indicate to the bus
master that a data transfer is complete. This signal is internally synchronized to SBCLK. During DMA
cycles, it must be asserted before the falling edge of SBCLK in state T2 in order to prevent a wait state.
This signal is an output when the TMS380C26 is selected for DIO, and an input otherwise.
H = System bus NOT ready.
L = Data transfer is complete; system bus is ready.
System Reset. This input is activated to place the adapter into a known initial state. Hardware reset
will put most of the TMS380C26 output pins into a high-impedance state and place all blocks into the
reset state.
H = No system reset.
L = System reset.
System Register Select. These inputs select the word or byte to be transferred during a system DIO
access. The most significant bit is SRSX and the least significant bit is SRS1 (see Note 1).
Register Selected = SRSX SRS0 SRS1
Bus Error. Corresponds to the bus error signal of the 68000 microprocessor. It is internally
synchronized to SBCLK. This input is driven low during a DMA cycle to indicate to the TMS380C26
that the cycle must be terminated. See Section 3.4.5.3 of the
Ring User’s Guide
Lower Data Strobe (see Note 3). This pin is an input during DIO and an output during DMA. This pin
serves as the active-low lower data strobe.
H = Not valid data on SADL0-SADL7 lines.
L = Valid data on SADL0-SADL7 lines.
System Extended Address Latch. This output provides the enable pulse used to externally latch the
most significant 16 bits of the 32-bit system address during DMA. SXAL is activated prior to the first
cycle of each block DMA transfer, and thereafter as necessary (whenever an increment of the DMA
address counter causes a carry-out of the lower 16-bits). Systems that implement parity on
addresses can use SXAL to externally latch the parity bits (available on SPL and SPH) for the DMA
address extension.
System Halt/Bus Error Retry. If this signal is asserted along with bus errror (SBERR), the adapter will
retry the last DMA cycle. This is the re-run operation as defined in the 68000 specification. The
BERETRY counter is not decremented by SBERR
the
TMS380 Second-Generation T oken Ring User’s Guide
MSb
(SPWU005) for more information (see Note 1).
=L)
LSb
TMS380 Second-Generation Token
when SHALT is asserted. See Section 3.4.5.3 of
(SPWU005) for more information.
POST OFFICE BOX 1443 • HOUSTON, TEXAS
77251–1443
15
Page 16
TMS380C26
NETWORK COMMPROCESSOR
SPWS010A–APRIL 1992–REVISED MARCH 1993
Terminal Functions (continued)
Network Media Interface – Token-Ring Mode (TEST1 = H, TEST2 = H)
PIN NAME NO. I/O DESCRIPTION
DRVR
DRVR
FRAQ/TXD 85 OUT
NSRT/LPBK 86 OUT
PXTALIN/TXC 92 IN
RCLK/RXC 94 IN
RCVR/RXD 95 IN
REDY/CRS 84 IN
WFLT/COLL 87 IN
WRAP/TXEN 90 OUT
89
88
OUT
Differential Driver Data Output. These pins are the differential outputs that send the TMS380C16
transmit data to the TMS38054 for driving onto the ring transmit signal pair.
Frequency Acquisition Control. This TTL output determines the use of frequency or phase acquisition
mode in the TMS38054.
H = Wide range. Frequency centering to PXTALIN by TMS38054.
L = Narrow range. Phase-lock onto the incoming data (RCVINA and RCVINB) by the
TMS38054.
Insert Control Signal to the TMS38054. This TTL output signal enables the phantom driver outputs
(PHOUTA and PHOUTB) of the TMS38054, through the watchdog timer, for insertion onto the
Token-Ring.
Static High = Inactive, phantom current removed (due to watchdog timer)
Static Low = Inactive, phantom current removed (due to watchdog timer)
NSRT
Low and Pulsed High = Active, current output on PHOUTA and PHOUTB
Ring Interface Clock Frequency Control (see Note 5). At 16-Mbps ring speed, this input must be
supplied a 32-MHz signal. At 4-Mbps ring speed, the input signal must be 8-MHz and may be the
output from the OSCOUT pin.
Ring Interface Recovered Clock (see Note 5). This input signal is the clock recovered by the
TMS38054 from the Token-Ring received data.
For 16-Mbps operation it is a 32-MHz clock.
For 4-Mbps operation it is an 8-MHz clock.
Ring Interface Received Data (see Note 5). This input signal contains the data received by the
TMS38054 from the token ring.
Ring Interface Ready. This input pin provides an indication of the presence of received data, as
monitored by the TMS38054 energy detect capacitor.
H = Not ready. Ignore received data.
L = Ready. Received data.
Wire Fault Detect. This signal is an input to the TMS380C16 driven by the TMS38054. It indicates
a current imbalance of the TMS38054 PHOUTA and PHOUTB pins.
H = No wire fault detected.
L = Wire fault detected.
Internal Wrap Select. This signal is an output from the TMS380C16 to the ring interface to activate
an internal attenuated feedback path from the transmitted data (DRVR) to receive data (RCVR)
signals for bring-up diagnostic testing. When active, the TMS38054 also cuts off the current drive to
the transmission pair.
H = Normal ring operation.
L = Transmit data drives receive data (loopback).
NOTE 5: Pin has an expanded input voltage specification.
16
POST OFFICE BOX 1443 • HOUSTON, TEXAS
77251–1443
Page 17
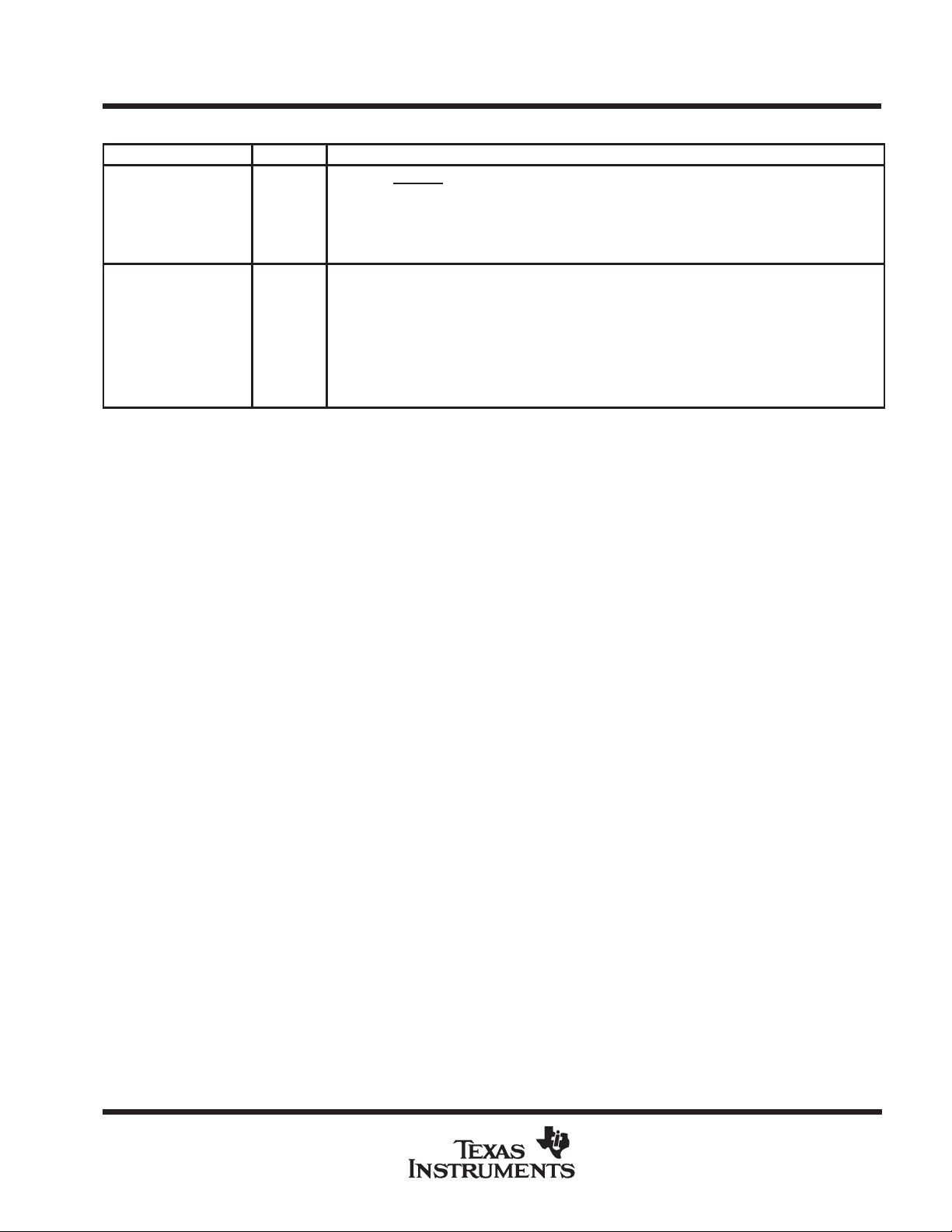
Terminal Functions (continued)
Network Media Interface – Ethernet Mode (TEST1 = L, TEST2 = H)
PIN NAME NO. I/O DESCRIPTION
DRVR
DRVR
FRAQ/TXD 85 OUT
NSRT/LPBK 86 OUT
PXTALIN/TXC 92 IN
RCLK/RXC 94 IN
RCVR/RXD 95 IN
REDY/CRS 84 IN
WFLT/COLL 87 IN
89
88
OUT
These pins have no Ethernet function. In Ethernet Mode these pins are placed in their token ring reset
state of DRVR = High, DRVR
Ethernet Transmit Data. This output signal provides the Ethernet physical layer circuitry with bit-rate
from the TMS380C26. Data on this pin is output synchronously to the transmit clock TXC
normally connected to the TXD pin of an Ethernet Serial Network Interface (SNI) chip.
Loopback. This enables loopback of Ethernet transmit data through the Ethernet (SNI) device to
recieve data.
H = Wrap through the front end device
L = Normal operation
Ethernet Transmit Clock. A 10 MHz clock input used to synchronize transmit data from the
TMS380C26 to the Ethernet physical layer circuitry . This is a continuously running clock. It is normally
connected to the TXC output pin of an Ethernet SNI chip (see Note 5).
Ethernet Receive Clock. A 10 MHz clock input used to synchronize received data from the Ethernet
physical layer circuitry to the TMS380C26. This clock must be present whenever the CRS signal is
active (although it can be held low for a maximum of 16 clock cycles after the rising edge of CRS).
When the CRS signal is inactive it is permissable to hold this clock in a low phase. It is normally
connected to the RXC output pin of an Ethernet Serial Network Interface (SNI) chip. The TMS380C26
requires this pin to be maintained in the low state when CRS
Ethernet Received Data. This input signal provides the TMS380C26 with bit rate network data from
the Ethernet front end device. Data on this pin must be synchronous with the receive clock RXC. It
is normally connected to the RXD pin of an Ethernet SNI chip (see Note 5).
Ethernet Carrier Sense. This input signal indicates to the TMS380C26 that the Ethernet physical layer
circuitry has network data present on the RXD pin. This signal is asserted high when the first bit of
the frame is received and is deasserted after the last bit of the frame is received.
H = Receiving data.
L = No data on network.
Ethernet Collision Detect. This input signal indicates to the TMS380C26 that the Ethernet physical
layer circuitry has detected a network collision. This signal must be present for at least two TXC clock
cycles to ensure it is accepted by the TMS380C26. It is normally connected to the COLL pin of an
Ethernet SNI chip. This signal can also be an indication of the SQE test signal.
= Low.
TMS380C26
NETWORK COMMPROCESSOR
SPWS010A–APRIL 1992–REVISED MARCH 1993
. It is
is not asserted (see Note 5).
H = COLL detected by the SNI device.
L = Normal operation.
Ethernet Transmit Enable. This output signal indicates to the Ethernet physical layer circuitry that
bit-rate data is present on the TXD pin. This signal is output synchronously to the transmit clock TXC
WRAP/TXEN 90 OUT
NOTE 5: Pin has an expanded input voltage specification.
It is normally connected to the TXE pin of an Ethernet SNI chip.
H = Data line currently contains data to be transmitted.
L = No valid data on TXEN.
POST OFFICE BOX 1443 • HOUSTON, TEXAS
77251–1443
.
17
Page 18
TMS380C26
NETWORK COMMPROCESSOR
SPWS010A–APRIL 1992–REVISED MARCH 1993
Terminal Functions (continued)
PIN NAME NO. I/O DESCRIPTION
Network Select inputs. These pins are used to select the network speed and type to be used by the
TMS380C26. These inputs should only be changed during adapter reset.
TEST 0
TEST 1
TEST 2
TEST3
TEST4
TEST5
XFAIL 80 IN
XMATCH 81 IN
79
78
77
76
75
74
IN
IN
IN
IN
IN
IN
TEST0
Test Pin Inputs. These pins should be left unconnected (see Note 1).
Module-in-Place test mode is achieved by tying TEST 3 and TEST 4 pins to ground. In this mode,
all TMS380C26 output pins are high impedance. Internal pullups on all TMS380C26 inputs will be
disabled (except TEST3-TEST5 pins).
External Fail-to-Match signal. An enhanced address copy option (EACO) device uses this signal to
indicate to the TMS380C26 that it should not copy the frame nor set the ARI/FCI in bits in a token
ring frame due to an external address match.The ARI/FCI bits in a token ring frame may be set due
to an internal address matched frame. If an enhanced address copy option (EACO) device is NOT
used, then this pin must be left unconnected. This pin is ignored when CAF mode is enabled.
See table given below in XMATCH pin description (see Note 1).
H = No address match by external address checker.
L = External address checker armed state.
External Match signal. An enhanced address copy option (EACO) device uses this signal to indicate
to the TMS380C26 to copy the frame and set the ARI/FCI bits in a token ring frame. If an enhanced
address copy option (EACO) device is NOT used, then this pin must be left unconnected. This pin
is ignored when CAF mode is enabled (see Note 1).
H = Address match recognized by external address checker.
L = External address checker armed state.
TEST1 TEST2 Description
L L H Reserved
L H H 16 Mbps token ring
H L H Ethernet (802.3/Blue Book)
H H H 4 Mbps token ring
X X 0 Reserved
XMATCH
XFAIL Function
0 0 Armed (Processing frame data).
0 1 Do NOT externally match the frame. (XFAIL takes precedence)
1 0 COPY the frame.
1 1 Do NOT externally match the frame. (XFAIL takes precedence)
HI-Z HI-Z Reset state (adapter not initialized).
18
V
DDL
V
DD1
V
DD2
V
DD3
V
DD4
V
DD5
V
DD6
V
SSC
V
SSI
NOTE 1: Pin has an internal pullup device to maintain a high voltage level when left unconnected (no etch or loads).
34
100
82
109
124
16
50
66
20
65
116
41
117
IN
IN
IN
IN
Positive supply voltage for digital logic. All VDD pins must be attached to the common system power
supply plane.
Positive supply voltage for output buffers. All VDD pins must be attached to the common system
power supply plane.
Ground reference for output buffers (clean ground). All VSS pins must be attached to the common
system ground plane.
Ground reference for input buffers. All VSS pins must be attached to the common system ground
plane.
18
POST OFFICE BOX 1443 • HOUSTON, TEXAS
77251–1443
Page 19
Terminal Functions (continued)
PIN NAME NO. I/O DESCRIPTION
V
V
V
V
V
V
V
SSL
SS1
SS2
SS3
SS4
SS5
SS6
17
83
91
106
125
1
51
67
IN Ground reference for digital logic. All VSS pins must be attached to the common system ground plane.
IN Ground connections for output buffers. All VSS pins must be attached to system ground plane.
TMS380C26
NETWORK COMMPROCESSOR
SPWS010A–APRIL 1992–REVISED MARCH 1993
POST OFFICE BOX 1443 • HOUSTON, TEXAS
77251–1443
19
Page 20

TMS380C26
NETWORK COMMPROCESSOR
SPWS010A–APRIL 1992–REVISED MARCH 1993
architecture
The major blocks of the TMS380C26 include the Communications Processor (CP), System Interface (SIF),
Memory Interface (MIF), Protocol Handler (PH), Clock Generator (CG), and the Adapter Support Function
(ASF). The functionality of each block is described in the following sections.
communications processor (CP)
The Communications Processor (CP) performs the control and monitoring of the other functional blocks in the
TMS380C26. The control and monitoring protocols are specified by the software (downloaded or ROM-based)
local memory . Available protocols include:
in
• Media Access Control (MAC) software,
• Logical Link Control (LLC) software, (token ring version only), and
• Copy All Frames (CAF) software.
The CP is a proprietary 16-bit central processing unit (CPU) with data cache and a single prefetch pipe for
pipelining of instructions. These features enhance the TMS380C26’s maximum performance capability to about
4 million instructions per second (MIPS), with an average of about 2.5 MIPS.
system interface (SIF)
The System Interface (SIF) performs the interfacing of the LAN subsystem to the host system. This interface
may require additional logic depending on the application. The system interface can transfer information/data
using any of these three methods:
• Direct Memory Access (DMA),
• Direct Input/Output (DIO), or
• Pseudo-Direct Memory Access (PDMA).
DMA (or PDMA) is used to transfer all data to/from host memory from/to local memory . DIO’s main uses are for
loading the software to local memory and for initializing the TMS380C26. DIO also allows command/status
interrupts to occur to and from the TMS380C26.
The system interface can be hardware selected for either of two modes by use of the SI/M
selected determines the memory organizations and control signals used. These modes are:
pin. The mode
• The Intel 80x8x families: 8-, 16-, and 32-bit bus members
• The Motorola 68000 microprocessor family: 16- and 32-bit bus members
The system interface supports host system memory addressing up to 32 bits (32-bit reach into the host system
memory). This allows greater flexibility in using/accessing host system memory.
System designers are allowed to customize the system interface to their particular bus by:
• Programmable burst transfers or cycle-steal DMA operations
• Optional parity protection
These features are implemented in hardware to reduce system overhead, facilitate automatic rearbitration of
the bus after a burst, or repeat a cycle when errors occur (parity or bus). Bus retries are also supported.
The system interface hardware also includes features to enhance the integrity of the TMS380C26 and the data.
These features do the following:
• Always internally maintain odd byte parity regardless if parity is disabled,
• Monitor for the presence of a clock failure.
20
POST OFFICE BOX 1443 • HOUSTON, TEXAS
77251–1443
Page 21

TMS380C26
NETWORK COMMPROCESSOR
SPWS010A–APRIL 1992–REVISED MARCH 1993
On every cycle the system interface compares all the system clocks to a reference clock. If any of the clocks
become invalid, the TMS380C26 enters the slow clock mode, which prevents latchup of the TMS380C26. If the
SBCLK is invalid, any DMA cycle is terminated immediately; otherwise, the DMA cycle is completed and then
the TMS380C26 is placed in slow clock mode.
When the TMS380C26 enters the slow clock mode, the clock that failed is replaced by a slow free-running clock
and the device is placed into a low-power reset state. When the failed clock(s) return to valid operation, the
TMS380C26 must be re-initialized.
Using DMA, a continuous transfer rate of 64 Mbits per second (Mbps), which is 8 MBytes per second (MBps),
can be obtained. For pseudo-DMA a continuous transfer rate of 48 Mbps (6 MBps) can be obtained when using
a 16-MHz clock. The DIO transfer rate is not a significant issue, since the main purpose of DIO is for downloading
and initialization. For comparison, the ISA bus continuous DMA transfer is rated for approximately 23 Mbps.
memory interface (MIF)
The Memory Interface (MIF) performs the memory management to allow the TMS380C26 to address 2 MBytes
in local memory. Hardware in the MIF allows the TMS380C26 to be directly connected to DRAMs without
additional circuitry. This glueless DRAM connection includes the DRAM refresh controller.
The MIF also handles all internal bus arbitration between these blocks. When required, the MIF then arbitrates
for the external bus.
The MIF is responsible for the memory mapping of the CPU of a task. The memory map of DRAMs, EPROMs,
Burned-in Addresses (BIA), and External Devices are appropriately addressed when required by the System
Interface (SIF), Protocol Handler (PH), or for a DMA transfer.
The memory interface is capable of a 64 Mbps continuous transfer rate when using a 4-MHz local bus (64-MHz
device crystal).
protocol handler (PH)
The Protocol Handler (PH) performs the hardware-based realtime protocol functions for a token ring or Ethernet
Local Area Network (LAN). Network type is determined by the test pins TEST0–2. Token ring network is
determined by software and can be either 16-Mbps or 4-Mbps. These speeds are not fixed by the hardware,
but by the software.
The (PH) converts the parallel transmit data to serial network data of the appropriate coding, and converts the
received serial data to parallel data. The PH data management state machines direct the transmission/reception
of data to/from local memory through the MIF. The PH’s buffer management state machines automatically
oversee this process, directly sending/receiving linked-lists of frames without CPU intervention.
POST OFFICE BOX 1443 • HOUSTON, TEXAS
77251–1443
21
Page 22
TMS380C26
NETWORK COMMPROCESSOR
SPWS010A–APRIL 1992–REVISED MARCH 1993
The Protocol Handler contains many state machines which provide the following features:
• Transmit and receive frames
• Capture tokens (token ring)
• Provide token-priority controls (token ring)
• Automatic retry of frame transmissions after collisions (Ethernet)
• Implement the Random Exponential Backoff algorithm (Ethernet)
• Manage the TMS380C26 buffer memory
• Provide frame address recognition (group, specific, functional, and multicast)
• Provide internal parity protection
• Control and verify the physical layer circuitry interface signals
Integrity of the transmitted and received data is assured by cyclic redundancy checks (CRC), detection of
network data violations, and parity on internal data paths. All data paths and registers are optionally
parity-protected to assure functional integrity.
adapter support function (ASF)
The Adapter Support Function (ASF) performs support functions not contained in the other blocks. The features
are:
• The TMS380C26 base timer,
• Identification, management, and service of internal and external interrupts,
• Test pin mode control, including the unit-in-place mode for board testing,
• Checks for illegal states, such as illegal opcodes and parity.
clock generator (CG)
The Clock Generator (CG) performs the generation of all the clocks required by the other functional blocks and
the local memory bus clocks. This block also generates the reference clock to be sampled by the SIF to
determine if the TMS380C26 needs to be placed into slow clock mode. This reference clock is free floating in
the range of 10 – 100 kHz.
user-accessible hardware registers and TMS380C26-internal pointers
The following tables show how to access internal data via pointers and how to address the registers in the host
interface. The SIFACL register, which directly controls device operation, is described in detail.
NOTE:
The Adapter-Internal Pointers Table is defined only after TMS380C26 initialization and until the OPEN
command is issued.
22
These pointers are defined by the TMS380C26 software (microcode), and this table describes the release
1.00 and 2.x software.
POST OFFICE BOX 1443 • HOUSTON, TEXAS
77251–1443
Page 23
TMS380C26
NETWORK COMMPROCESSOR
SPWS010A–APRIL 1992–REVISED MARCH 1993
Adapter-Internal Pointers for Token-Ring
ADDRESS DESCRIPTION
>00.FFF8
>00.FFFA
>01.0A00 Pointer to burned-in address in chapter 1.
>01.0A02 Pointer to software level in chapter 1.
>01.0A04 Pointer to TMS380C26 addresses in chapter 1:
>01.0A06 Pointer to TMS380C26 parameters in chapter 1:
>01.0A08 Pointer to MAC buffer (a special buffer used by the software to transmit adapter generated MAC frames) in chapter 1.
>01.0A0A Pointer to LLC counters in chapter 1:
>01.0A0C Pointer to 4-/16-Mbps word flag. If zero, then 4 Mbps. If nonzero, then the adapter is set to run at 16-Mbps data rate.
>01.0A0E Pointer to total TMS380C26 RAM found in Kbytes in RAM allocation test in chapter 1.
†
This table describes the pointers for release 1.00 and 2.x of the TMS380C26 software.
‡
This address valid only for microcode release 2.x.
‡
Pointer to software raw microcode level in chapter 0.
‡
Pointer to starting location of copyright notices. Copyright notices are separated by a >0A character and
terminated by a >00 character in chapter 0.
Pointer + 0 node address.
Pointer + 6 group address.
Pointer + 10 functional address.
Pointer + 0 physical drop number.
Pointer + 4 upstream neighbor address.
Pointer + 10 upstream physical drop number.
Pointer + 14 last ring poll address.
Pointer + 20 reserved.
Pointer + 22 transmit access priority.
Pointer + 24 source class authorization.
Pointer + 26 last attention code.
Pointer + 28 source address of the last received frame.
Pointer + 34 last beacon type.
Pointer + 36 last major vector.
Pointer + 38 ring status.
Pointer + 40 soft error timer value.
Pointer + 42 ring interface error counter.
Pointer + 44 local ring number.
Pointer + 46 monitor error code.
Pointer + 48 last beacon transmit type.
Pointer + 50 last beacon receive type.
Pointer + 52 last MAC frame correlator.
Pointer + 54 last beaconing station UNA.
Pointer + 60 reserved.
Pointer + 64 last beaconing station physical drop number.
Pointer + 0 MAX_SAPs.
Pointer + 1 open SAPs.
Pointer + 2 MAX_STATIONs.
Pointer + 3 open stations.
Pointer + 4 available stations.
Pointer + 5 reserved.
†
POST OFFICE BOX 1443 • HOUSTON, TEXAS
77251–1443
23
Page 24
TMS380C26
NETWORK COMMPROCESSOR
SPWS010A–APRIL 1992–REVISED MARCH 1993
Adapter-Internal Pointers for Ethernet
ADDRESS DESCRIPTION
>00.FFF8
>00.FFFA
>01.0A00 Pointer to burned-in address in chapter 1.
>01.0A02 Pointer to software level in chapter 1.
>01.0A04 Pointer to TMS380C26 addresses in chapter 1:
>01.0A08 Pointer to MAC buffer (a special buffer used by the software to transmit adapter generated MAC frames) in chapter 1.
>01.0A0A Pointer to LLC counters in chapter 1:
>01.0A0C Pointer to 4-/16-Mbps word flag. If zero, then 4 Mbps. If nonzero, then the adapter is set to run at 16-Mbps data rate.
>01.0A0E Pointer to total TMS380C26 RAM found in Kbytes in RAM allocation test in chapter 1.
†
This table describes the pointers for release 1.00 and 2.x of the TMS380C26 software.
‡
This address valid only for microcode release 2.x.
‡
Software raw microcode level in chapter 0.
‡
Pointer to starting location of copyright notices. Copyright notices are separated by a >0A character and
terminated by a >00 character in chapter 0.
Pointer + 0 node address.
Pointer + 6 group address.
Pointer + 10 functional address.
Pointer + 0 MAX_SAPs.
Pointer + 1 open SAPs.
Pointer + 2 MAX_STATIONs.
Pointer + 3 open stations.
Pointer + 4 available stations.
Pointer + 5 reserved.
†
24
POST OFFICE BOX 1443 • HOUSTON, TEXAS
77251–1443
Page 25
User-Access Hardware Registers
808x 16-Bit Mode: (SI/M = 1, S8/SHALT = 0)
Word Transfers
Byte Transfers
SRSX SRS0 SRS1
000
001
010
011
100
101
110
111
†
(SBHE = 1 and SRS2 = 1 is not defined)
808x 8-Bit Mode: (SI/M = 1, S8/SHALT = 1)
SRSX SRS0 SRS1 SRS2
00 0 0
00 0 1
00 1 0
00 1 1
01 0 0
01 0 1
01 1 0
01 1 1
10 0 0
10 0 1
10 1 0
10 1 1
11 0 0
11 0 1
11 1 0
11 1 1
SBHE = 0 SBHE = 1
SRS2 = 1 SRS2 = 0
SIFDAT MSB SIFDAT LSB
SIFDAT/INC MSB SIFDAT/INC LSB
SIFADR MSB SIFADR LSB
SIFCMD SIFSTS
SIFACL MSB SIFACL LSB
SIFADR MSB SIFADR LSB
SIFADX MSB SIFADX LSB
DMALEN MSB DMALEN LSB
†
Normal Mode
SBHE = 0
SRS2 = 0
Normal
SBHE = X
SIFDAT LSB
SIFDAT MSB
SIFDAT/INC LSB
SIFDAT/INC MSB
SIFADR LSB
SIFADR MSB
SIFSTS
SIFCMD
SIFACL LSB
SIFACL MSB
SIFADR LSB
SIFADR MSB
SIFADX LSB
SIFADX MSB
DMALEN LSB
DMALEN MSB
TMS380C26
NETWORK COMMPROCESSOR
SPWS010A–APRIL 1992–REVISED MARCH 1993
Pseudo-DMA Mode Active
SBHE = 0
SRS2 = 0
SBHE = 0 SBHE = 1
SRS2 = 1 SRS2 = 0
— SDMADAT
DMALEN MSB DMALEN LSB
SDMAADR MSB SDMAADR LSB
SDMAADX MSB SDMAADX LSB
SIFACL MSB SIFACL LSB
SIFADR MSB SIFADR LSB
SIFADX MSB SIFADX LSB
DMALEN MSB DMALEN LSB
Pseudo-DMA
SBHE = X
SDMADAT
—
DMALEN LSB
DMALEN MSB
SDMAADR LSB
SDMAADR MSB
SDMAADX LSB
SDMAADX MSB
SIFACL LSB
SIFACL MSB
SIFADR LSB
SIFADR MSB
SIFADX LSB
SIFADX MSB
DMALEN LSB
DMALEN MSB
68xxx Mode: (SI/M = 0)
‡
Word Transfers
Byte Transfers
SRSX SRS0 SRS1
000
001
010
011
100
101
110
111
‡
68xxx Mode is always 16-bit.
Normal Mode
SUDS = 0
= 0
SLDS
SUDS = 0 SUDS = 1
SLDS = 1 SLDS = 0
SIFDAT MSB SIFDAT LSB
SIFDAT/INC MSB SIFDAT/INC LSB
SIFADR MSB SIFADR LSB
SIFCMD SIFSTS
SIFACL MSB SIFACL LSB
SIFADR MSB SIFADR LSB
SIFADX MSB SIFADX LSB
DMALEN MSB DMALEN LSB
POST OFFICE BOX 1443 • HOUSTON, TEXAS
77251–1443
Pseudo-DMA Mode Active
SUDS = 0
= 0
SLDS
SUDS = 0 SUDS = 1
SLDS = 1 SLDS = 0
— SDMADAT
DMALEN MSB DMALEN LSB
SDMAADR MSB SDMAADR LSB
SDMAADX MSB SDMAADX LSB
SIFACL MSB SIFACL LSB
SIFADR MSB SIFADR LSB
SIFADX MSB SIFADX LSB
DMALEN MSB DMALEN LSB
25
Page 26
TMS380C26
NETWORK COMMPROCESSOR
SPWS010A–APRIL 1992–REVISED MARCH 1993
SIF Adapter Control Register (SIFACL)
The SIFACL register allows the host processor to control and to some extent reconfigure the
TMS380C26 under software control.
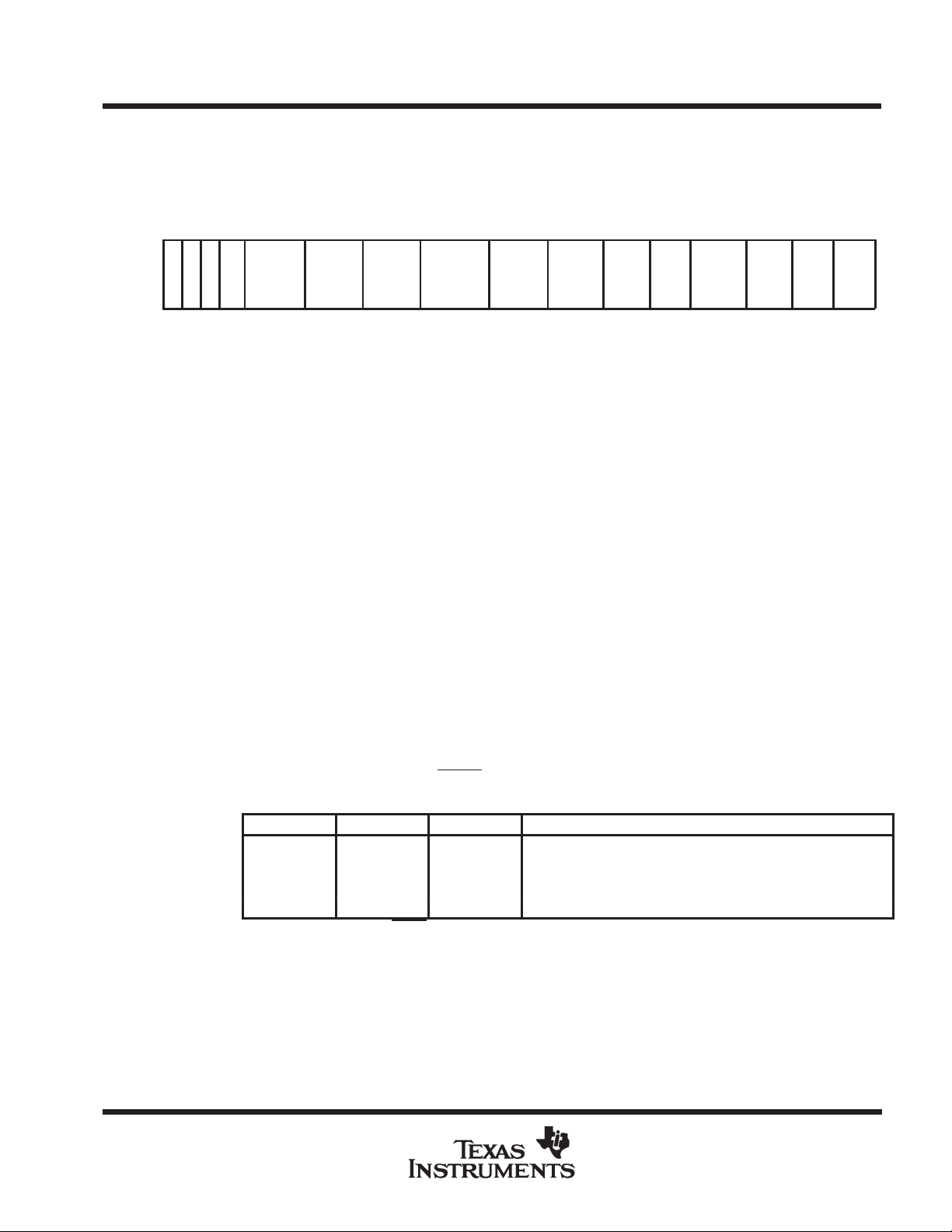
SIFACL Register
Bit # 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
T
T
T
E
E
E
S
S
S
T
0
R R R RP – 0 R –u R – 0 RS –0 RW – 0 RP –b RP –b R RW –1 RP –p RP-0 RP–1
— SWHLDA SWDDIR SWHRQ PSDMAEN ARESET CPHALT BOOT RES0 SINTEN PEN
T
T
1
2
R = Read, W = Write, P = Write during ARESET = 1 only, S = Set Only,
–n = Value after reset
(b = V alue on BTSTRP pin, p = Value on PRTYEN pin, u = Indeterminate)
Bits 0-2: TEST (0–2). Value on TEST (0–2) pins.
These bits are read only and always reflect the value on the corresponding device pins. This
allows the host S/W to determine the network type and speed configuration. If the network speed
and type are software configurable, these bits can be used to determine which configurations
are supported by the network hardware.
NSEL
OUT0
NSEL
OUT1
TEST0 TEST1 TEST2 Description
L L H Reserved
L H H 16 Mbps token ring
H L H Ethernet (802.3/Blue Book)
H H H 4 Mbps token ring
X X 0 Reserved
Bit 3: Reserved. Read data is indeterminate.
Bit 4: SWHLDA — Software Hold Acknowledge
This bit allows the SHLDA/SBGR pin’s function to be emulated from software control for
pseudo-DMA.
PSDMAEN SWHLDA SWHRQ RESULT
†
0
†
1
†
1
†
1
†
The value on the SHLDA/SBGR pin is ignored.
X X SWHLDA value in the SIFACL register cannot be set to a one.
0 0 No pseudo-DMA request pending.
0 1 Indicates a pseudo-DMA request interrupt.
1 X Pseudo-DMA process in progress.
Bit 5: SWDDIR — Current SDDIR Signal Value
This bit contains the current value of the pseudo-DMA direction. This enables the host to easily
determine the direction of DMA transfers, which allows system DMA to be controlled by system
software.
0 = Pseudo-DMA from host system to TMS380C26.
1 = Pseudo-DMA from TMS380C26 to host system.
26
POST OFFICE BOX 1443 • HOUSTON, TEXAS
77251–1443
Page 27
Bit 6: SWHRQ — Current SHRQ Signal Value
This bit contains the current value on the SHRQ/SBRQ pin when in Intel mode, and the inverse
of the SHRQ/SBRQ pin when in Motorola mode. This enables the host to easily determine if a
pseudo-DMA transfer is requested.
INTEL MODE (SI/M pin = H) MOTOROLA MODE (SI/M pin = L)
0 = System bus not requested System bus not requested
1 = System bus requested System bus requested
Bit 7: PSDMAEN — Pseudo-System-DMA Enable
This bit enables pseudo-DMA operation
0 = Normal bus master DMA operation possible.
1 = Pseudo-DMA operation selected. Operation dependent on the values of the SWHLDA
and SWHRQ bits in the SIFACL register.
Bit 8: ARESET — Adapter Reset
This bit is a hardware reset of the TMS380C26. This bit has the same effect as the SRESET pin,
except that the DIO interface to the SIFACL register is maintained. This bit will be set to one if
a clock failure is detected (OSCIN, PXTALIN, RCLK, or SBCLK not valid).
0 = The TMS380C26 operates normally.
1 = The TMS380C26 is held in the reset condition.
TMS380C26
NETWORK COMMPROCESSOR
SPWS010A–APRIL 1992–REVISED MARCH 1993
Bit 9: CPHALT — Communications Processor Halt
This bit prevents the TMS380C26’s processor from accessing the internal TMS380C26 buses.
This prevents the TMS380C26 from executing instructions before the microcode has been
downloaded.
0 = The TMS380C26’s processor can access the internal TMS380C26 buses.
1 = The TMS380C26’s processor is prevented from accessing the internal adapter buses.
Bit 10: BOOT — Bootstrap CP Code
This bit indicates whether the memory in chapters 0 and 31 of the local memory space is RAM
or ROM/PROM/EPROM. This bit then controls the operation of the MCAS
0 = ROM/PROM/EPROM memory in chapters 0 and 31.
1 = RAM memory in chapters 0 and 31.
Bit 11: RES0 — Reserved. This bit must be set to zero
and MROMEN pins.
POST OFFICE BOX 1443 • HOUSTON, TEXAS
77251–1443
27
Page 28
TMS380C26
NETWORK COMMPROCESSOR
SPWS010A–APRIL 1992–REVISED MARCH 1993
Bit 12: SINTEN — System-Interrupt Enable
This bit allows the host processor to enable or disable system interrupt requests from the
TMS380C26. The system interrupt request from the TMS380C26 is on the SINTR/SIRQ pin. The
following equation shows how the SINTR/SIRQ pin is driven. The table also explains the results
of the states.
SINTR/SIRQ = (PSDMAEN * SWHRQ * !SWHLDA) + (SINTEN * SYSTEM_INTERRUPT)
PSDMAEN SWHRQ SWHLDA SINTEN
†
1
†
1
†
1
X X X 1 1
0 X X 1 0
0 X X 0 X
†
The value on the SHLDA/SBGR pin is ignored.
1 1 X X Pseudo-DMA is active.
1 0 X X
0 0 X X Not a pseudo-DMA interrupt.
SYSTEM
INTERRUPT
(SIFSTS Reg.)
RESULT
The TMS380C26 generated a system
interrupt for a pseudo-DMA.
The TMS380C26 will generate a system
interrupt.
The TMS380C26 will not generate a system
interrupt.
The TMS380C26 can not generate a system
interrupt.
Bit 13: PEN — Adapter Parity Enable
This bit determines whether data transfers within the TMS380C26 are checked for parity.
0 = Data transfers are not checked for parity
1 = Data transfers are checked for correct odd parity.
Bit 14 — 15: NSELOUT (0–1) — Network selection outputs.
The values in these bits control the output pins NSELOUT0 and NSELOUT1. These bits can only
be modified while the ARESET bit is set.
These bits can be used to software configure a multi-protocol TMS380C26, as follows:
The NSELOUT0 and NSELOUT1 pins should be connected to TEST0 and TEST1 pins
respectively (TEST2 should be left unconnected or tied high). NSELOUT0 should be used to
select network speed and NSELOUT1 network type, as shown in the table below:
NSELOUT0 NSELOUT1
0 0 Reserved
0 1 16 Mbps token ring
1 0 Ethernet (802.3/Blue Book)
1 1 4 Mbps token ring
At power-up these bits are set NSELOUT1 = 1, NSELOUT0 = 0 corresponding to 16 Mbps token
ring.
28
POST OFFICE BOX 1443 • HOUSTON, TEXAS
77251–1443
Page 29

TMS380C26
NETWORK COMMPROCESSOR
SPWS010A–APRIL 1992–REVISED MARCH 1993
SIFACL Control for Pseudo-DMA Operation
Pseudo-DMA is software controlled by the use of five bits in the SIFACL register . The logic model for the SIF ACL
register control of pseudo-DMA operation is shown in Figure 3.
Internal
Signals
SYSTEM_INTERRUPT
(SIFSTS Register)
DMA
Request
DMA
Grant
DMADIR
Motorola Mode
M
U
X
M
U
X
M
U
X
SWHLDA
SWDDIR SWHRQ PSDMAEN SINTEN
SIFACL Register
Figure 3. Pseudo-DMA Logic Related to SIFACL Bits
Host
Interface
SINTR/SIRQ
SHRQ/SBRQ
SHLDA/SBGR
SDDIR
POST OFFICE BOX 1443 • HOUSTON, TEXAS
77251–1443
29
Page 30

TMS380C26
VILLow-level input voltage, TTL-level signal (see Note 8)
V
IOHigh-impedance output current
A
NETWORK COMMPROCESSOR
SPWS010A–APRIL 1992–REVISED MARCH 1993
absolute maximum ratings over operating free-air temperature range (unless otherwise noted)
Supply voltage range, V
Input voltage range (see Note 6) – 0.3 V to 20 V. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Output voltage range – 2 V to 7 V. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Power dissipation 1.0 W. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Operating free-air temperature range 0°C to 70°C. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Storage temperature range –65°C to 150°C. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
†
Stresses beyond those listed under “absolute maximum ratings” may cause permanent damage to the device. These are stress ratings only and
functional operation of the device at these or any other conditions beyond those indicated under “recommended operating conditions” is not
implied. Exposure to absolute-maximum-rated conditions for extended periods may affect device reliability.
NOTE 6: Voltage values are with respect to VSS.
(see Note 6) 7 V. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
DD
recommended operating conditions
MIN NOM MAX UNIT
V
Supply voltage 4.75 5 5.25 V
DD
V
Supply voltage (see Note 7) 0 0 0 V
SS
TTL-level signal 2.0 VDD+0.3
V
High-level input voltage
IH
p
I
High level output current –400 µA
OH
I
Low level output current (see Note 9) 2 mA
OL
T
Operating free-air temperature 0 70 °C
A
†
The minimum level specified is a result of the manufacturing test environment. This signal has been characterized to a minimum level of
2.4 V over the full temperature range.
‡
The maximum level specified is a result of the manufacturing test environment. This signal has been characterized to a maximum level of
0.8 V over the full temperature range.
NOTES: 7. All VSS pins should be routed to minimize inductance to system ground.
8. The algebraic convention, where the more negative (less positive) limit is designated as a minimum, is used in this data sheet for
logic voltage levels only.
9. Output current of 2 mA is sufficient to drive five low-power Schottky TTL loads or ten advanced low-power Schottky TTL loads (worst
case).
†
OSCIN
RCLK, PXTALIN, RCVR 2.6 VDD+0.3
‡
OSCIN
All other –0.3 0.8
2.6 VDD+0.3
–0.3 0.6
V
†
electrical characteristics over full ranges of recommended operating conditions (unless otherwise
noted)
PARAMETER
V
High-level output voltage, TTL-level signal (see Note 11) VDD = min, IOH = max 2.4 V
OH
V
Low-level output voltage, TTL-level signal VDD = min, IOL = max 0.6 V
OL
p
I
Input current, any input or input/output pin VI = VSS to V
I
I
Supply current VDD = max 220 mA
DD
C
Input capacitance, any input f = 1 MHz, other pins at 0 V 15 pF
i
C
Output capacitance, any output or input/output f = 1 MHz, other pins at 0 V 15 pF
o
NOTES: 10. For conditions shown as MIN or MAX, use the appropriate value specified under the recommended operating conditions.
30
11. The following signals require an external pullup resistor: SRAS/SAS
EXTINT0
p
–EXTINT3, and MBRQ.
TEST CONDITIONS
(see Note 10)
VDD = max, VO = 2.4 V 20
VDD = max, VO = 0.4 V – 20
POST OFFICE BOX 1443 • HOUSTON, TEXAS
77251–1443
MIN TYP MAX UNIT
DD
, SRDY/SDTACK, SRD/SUDS, SWR/SLDS,
± 20 µA
µ
Page 31

TMS380C26
NETWORK COMMPROCESSOR
SPWS010A–APRIL 1992–REVISED MARCH 1993
PARAMETER MEASUREMENT INFORMATION
Outputs are driven to a minimum high-logic level of 2.4 volts and to a maximum low-logic level of 0.6 volts. These
levels are compatible with TTL devices.
Output transition times are specified as follows: For a high-to-low transition on either an input or output signal,
the level at which the signal is said to be no longer high is 2 volts, and the level at which the signal is said to be
low is 0.8 volts. For a low-to-high transition, the level at which the signal is said to be no longer low is 0.8 volts,
and the level at which the signal is said to be high is 2 volts, as shown below.
The rise and fall times are not specified but are assumed to be those of standard TTL devices, which are typically
1.5 ns.
2 V (High)
0.8 V (Low)
test measurement
The test load circuit shown in Figure 4 represents the programmable load of the tester pin electronics which are
used to verify timing parameters of TMS380C26 output signals.
Tester Pin
Electronics
V
LOAD
I
I
OL
OH
Output
Under
Test
C
T
Where: IOL = 2.0 mA DC level verification (all outputs)
IOH = 400 µA (all outputs)
V
= 1.5 V typical DC level verification
LOAD
0.7 V typical timing verification
CT = 65 pF typical load circuit capacitance
Figure 4. Test Load Circuit
POST OFFICE BOX 1443 • HOUSTON, TEXAS
77251–1443
31
Page 32

TMS380C26
NETWORK COMMPROCESSOR
SPWS010A–APRIL 1992–REVISED MARCH 1993
PARAMETER MEASUREMENT INFORMATION
Reference
OSCIN
When
CLKDIV = 1
OSCOUT
MBCLK1
MBCLK2
†
The MBCLK1 and MBCLK2 signals have no timing relationship to the OSCOUT signal. The MBCLK1 and MBCLK2 signals can start on any
OSCIN rising edge, depending on when the memory cycle starts execution.
†
†
4 Periods 8 Periods 12 Periods 16 Periods 20 Periods
Figure 5. Clock Waveforms After Clock Stabilization
32
POST OFFICE BOX 1443 • HOUSTON, TEXAS
77251–1443
Page 33

TMS380C26
NETWORK COMMPROCESSOR
SPWS010A–APRIL 1992–REVISED MARCH 1993
PARAMETER MEASUREMENT INFORMATION
timing parameters
The timing parameters for all the pins of TMS380C26 are shown in the following tables and are illustrated in the
accompanying figures. The purpose of these figures and tables is to quantify the timing relationships among
the various signals. The parameters are numbered for convenience.
static signals
The following table lists signals that are not allowed to change dynamically and therefore have no timing
associated with them. They should be strapped high or low as required.
SIGNAL FUNCTION
SI/M Host processor select. (Intel/Motorola)
CLKDIV Reserved
BTSTRP Default bootstrap mode. (RAM/ROM)
PRTYEN Default parity select. (enabled/disabled)
TEST0 Test pin, indicates network type
TEST1 Test pin, indicates network type
TEST2 Test pin, indicates network type
TEST3 Test pin for TI manufacturing test.
TEST4 Test pin for TI manufacturing test.
TEST5 Test pin for TI manufacturing test.
†
For unit-in-place test.
†
†
†
timing parameter symbology
Timing parameter symbols have been created in accordance with JEDEC standard 100. In order to shorten the
symbols, some of the pin names and other related terminology have been abbreviated as shown below:
DR DRVR RS SRESET
DRN DRVR VDD V
OSC OSCIN
SCK SBCLK
Lower case subscripts are defined as follows:
c cycle time r rise time
d delay time sk skew
h hold time su setup time
w pulse duration (width) t transition time
The following additional letters and phrases are defined as follows:
H High Z High impedance
L Low Falling edge No longer high
V Valid Rising edge No longer low
DDL
, V
DDB
POST OFFICE BOX 1443 • HOUSTON, TEXAS
77251–1443
33
Page 34

TMS380C26
NETWORK COMMPROCESSOR
SPWS010A–APRIL 1992–REVISED MARCH 1993
PARAMETER MEASUREMENT INFORMATION
power up, SBCLK, OSCIN, MBCLK1, MBCLK2, SYNCIN
NO. PARAMETER MIN MAX UNIT
100†t
101†‡t
102†‡t
103 t
104 t
105 t
106†t
107 t
108 t
109 t
†
110
†
111
†
117
†
118
†
119
288†t
289†t
†
This specification is provided as an aid to board design.
‡
If parameter 101 or 102 cannot be met, parameter 117 must be extended by the larger dif ference: real value of parameter 101 or 102 minus the
max value listed.
NOTE 12: If OSCIN is used to generate PXTALIN, the specification for the tolerance of OSCIN is equal to ± 0.01%.
) Rise time from 1.2 V to VDD minimum high level 1 ms
r(VDD
d(VDDH-SCKV)
d(VDDH-OSCV)
c(SCK)
w(SCKH)
w(SCKL)
t(SCK)
c(OSC)
w(OSCH)
w(OSCL)
t
t(OSC)
t
d(OSCV-CKV)
t
h(VDDH-RSL)
t
w(RSH)
t
w(RSL)
su(RST)
h(RST)
t
M
Delay time from minimum VDD high level to first valid SBCLK no longer high 1 ms
Delay time from minimum VDD high level to first valid OSCIN high 1 ms
Cycle time of SBCLK 62.5 ns
Pulse duration of SBCLK high 26 ns
Pulse duration of SBCLK low 26 ns
Transition time of SBCLK 5 ns
Cycle time of OSCIN (see Note 12) 15.6 500 ns
Pulse duration of OSCIN high 5.5 ns
Pulse duration of OSCIN low 5.5 ns
Transition time of OSCIN 3 ns
Delay time from OSCIN valid to MBCLK1 and MBCLK2 valid 1 ms
Hold time of SRESET low after VDD reaches minimum high level 5 ms
Pulse duration of SRESET high 14 µs
Pulse duration of SRESET low 14 µs
Setup time of DMA size to SRESET high (Intel mode only) 15 ns
Hold time of DMA size from SRESET high (Intel mode only) 15 ns
One-eighth of an local memory cycle 2t
, and SRESET timing
c(OSC)
34
POST OFFICE BOX 1443 • HOUSTON, TEXAS
77251–1443
Page 35

V
DD
SBCLK
OSCIN
MBCLK1
MBCLK2
NETWORK COMMPROCESSOR
SPWS010A–APRIL 1992–REVISED MARCH 1993
PARAMETER MEASUREMENT INFORMATION
100
Minimun VDD High Level
103
111
106
104
108
105
110
109
102
101
107
TMS380C26
106
110
117
SRESET
288
S8/SHALT
NOTE A: In order to represent the information on one figure, non-actual phase and timebase characteristics are shown. Please refer to specified
parameters for precise information.
118
119
289
Figure 6. Power Up, SBCLK, OSCIN, MBCLK1, MBCLK2, SYNCIN, and SRESET Timing
POST OFFICE BOX 1443 • HOUSTON, TEXAS
77251–1443
35
Page 36

TMS380C26
NETWORK COMMPROCESSOR
SPWS010A–APRIL 1992–REVISED MARCH 1993
PARAMETER MEASUREMENT INFORMATION
memory bus timing: clocks, MAL
, MROMEN, MBIAEN, NMI, MRESET, and ADDRESS
tM is the cycle time of one-eighth of a local memory cycle (31.25 ns minimum)
NO. PARAMETER MIN MAX UNIT
1 Period of MBCLK1 and MBCLK2 4t
2 Pulse duration of clock high 2tM–9 ns
3 Pulse duration of clock low 2tM–9 ns
4 Hold time of MBCLK2 low after MBCLK1 high tM–9 ns
5 Hold time of MBCLK1 high after MBCLK2 high tM–9 ns
6 Hold time of MBCLK2 high after MBCLK1 low tM–9 ns
7 Hold time of MBCLK1 low after MBCLK2 low tM–9 ns
8 Setup time of address/enable on MAX0, MAX2, and MROMEN before MBCLK1 no longer high tM–9 ns
9 Setup time of row address on MADL0–MADL7, MAXPH, and MAXPL before MBCLK1 no longer high tM–14 ns
10 Setup time of address on MADH0–MADH7 before MBCLK1 no longer high tM–14 ns
11 Setup time of MAL high before MBCLK1 no longer high tM–13 ns
12 Setup time of address on MAX0, MAX2, and MROMEN before MBCLK1 no longer low 0.5tM–9 ns
Setup time of column address on MADL0–MADL7, MAXPH, and MAXPL before MBCLK1 no
13
longer low
14 Setup time of status on MADH0–MADH7 before MBCLK1 no longer low 0.5tM–9 ns
120 Setup time of NMI valid before MBCLK1 low 30 ns
121 Hold time of NMI valid after MBCLK1 low 0 ns
126 Delay time from MBCLK1 no longer low to MRESET valid 0 20 ns
129 Hold time of column address/status after MBCLK1 no longer low. tM–7 ns
M
0.5tM–9 ns
ns
36
POST OFFICE BOX 1443 • HOUSTON, TEXAS
77251–1443
Page 37

NETWORK COMMPROCESSOR
SPWS010A–APRIL 1992–REVISED MARCH 1993
PARAMETER MEASUREMENT INFORMATION
TMS380C26
MBCLK1
MBCLK2
MAX0,
MAX2,
MROMEN
MAXPH,
MAXPL,
MADL0–MADL7
MADH0–MADH7
MAL
M1 M2 M3M8
t
M
4
10
11
5
8
9
Address
6
12
129
M4 M5 M6 M7 M8 M1
1
3
7
AddressADD/EN
13
ColRow
14
Status
120
1
2
121
2
3
NMI
MRESET
Valid
126
Valid
Figure 7. Memory Bus Timing: Clocks, MAL, MROMEN, MBIAEN, NMI, MRESET, and ADDRESS
POST OFFICE BOX 1443 • HOUSTON, TEXAS
77251–1443
37
Page 38

TMS380C26
NETWORK COMMPROCESSOR
SPWS010A–APRIL 1992–REVISED MARCH 1993
PARAMETER MEASUREMENT INFORMATION
memory bus timing: clocks, MRAS
, MCAS, and MAL to ADDRESS
tM is the cycle time of one-eighth of a local memory cycle (31.25 ns minimum)
NO. PARAMETER MIN MAX UNIT
15
16 Hold time of row address on MADL0–MADL7, MAXPH, and MAXPL after MRAS no longer high tM–6.5 ns
17 Delay time from MRAS no longer high to MRAS no longer high in the next memory cycle 8t
18 Pulse duration of MRAS low 4.5tM–9 ns
19 Pulse duration of MRAS high 3.5tM–9 ns
20
21
22
23 Pulse duration of MCAS low 3tM–9 ns
24 Pulse duration of MCAS high, refresh cycle follows read or write cycle 2tM–9 ns
25 Hold time of row address on MAXL0–MAXL7, MAXPH, and MAXPL after MAL low 1.5tM–9 ns
26 Setup time of row address on MAXL0–MAXL7, MAXPH, and MAXPL before MAL no longer high tM–9 ns
27 Pulse duration of MAL high tM–9 ns
28 Setup time of address/enable on MAX0, MAX2, and MROMEN before MAL no longer high tM–9 ns
29 Hold time of address/enable of MAX0, MAX2, and MROMEN after MAL low 1.5tM–9 ns
30 Setup time of address on MADH0–MADH7 before MAL no longer high tM–9 ns
31 Hold time of address on MADH0–MADH7 after MAL low 1.5tM–9 ns
Setup time of row address on MADL0–MADL7, MAXPH, and MAXPL before MRAS no longer
high
Setup time of column address (MADL0–MADL7, MAXPH, and MAXPL) and status
(MADH0–MADH7) before MCAS
Hold time of column address (MADL0–MADL7, MAXPH, and MAXPL) and status
(MADH0–MADH7) after MCAS
Hold time of column address (MADL0–MADL7, MAXPH, and MAXPL) and status
(MADH0–MADH7) after MRAS
no longer high
low
no longer high
1.5tM – 11.5 ns
M
0.5tM–9 ns
tM–9 ns
2.5tM–6.5 ns
ns
38
POST OFFICE BOX 1443 • HOUSTON, TEXAS
77251–1443
Page 39

NETWORK COMMPROCESSOR
SPWS010A–APRIL 1992–REVISED MARCH 1993
PARAMETER MEASUREMENT INFORMATION
TMS380C26
MAXPH,
MAXPL,
MADL0–MADL7
MRAS
MCAS
MAL
MAX0,
MAX2,
MROMEN
MADH0–MADH7
28
30
15
16
20
29
25
22
18
20
Row ColumnColumnRow
17
19
21
23
AddressADD/EN
21
24
26
27
31
Address StatusStatusAddress
22
Figure 8. Memory Bus Timing: Clocks, MRAS, MCAS, and MAL to ADDRESS
POST OFFICE BOX 1443 • HOUSTON, TEXAS
77251–1443
39
Page 40

TMS380C26
NETWORK COMMPROCESSOR
SPWS010A–APRIL 1992–REVISED MARCH 1993
PARAMETER MEASUREMENT INFORMATION
memory bus timing: read cycle
tM is the cycle time of one-eighth of a local memory cycle (31.25 ns minimum)
NO. PARAMETER MIN MAX UNIT
32 Access time from address/enable valid on MAX0, MAX2, and MROMEN to valid data/parity
33
35 Access time from MRAS low to valid data/parity 4.5tM–21.5 ns
36 Hold time of valid data/parity after MRAS no longer low 0 ns
37
38 Access time from MCAS low to valid data/parity 3tM–23 ns
39 Hold time of valid data/parity after MCAS no longer low 0 ns
40
41 Delay time from MCAS no longer high to MOE low tM+13 ns
42
43 Access time from MOE low to valid data/parity 2tM–25 ns
44 Pulse duration MOE low 2tM–9 ns
45 Delay time from MCAS low to MOE no longer low 3tM–9 ns
46 Hold time of valid data/parity in after MOE no longer low 0 ns
47
48
48a
49 Access time from MBEN low to valid data/parity 2tM–25 ns
49a Access time from MBIAEN low to valid data/parity 2tM–25 ns
50 Pulse duration MBEN low 2tM–9 ns
50a Pulse duration MBIAEN low 2tM–9 ns
51 Hold time of valid data/parity after MBEN no longer low 0 ns
51a Hold time of valid data/parity after MBIAEN no longer low 0 ns
52
52a
53 Hold time of MDDIR high after MBEN high, read follows write cycle 1.5tM–12 ns
54 Setup time of MDDIR low before MBEN no longer high 3tM–9 ns
55 Hold time of MDDIR low after MBEN high, write follows read cycle 3tM–12 ns
†
This specification has been characterized to meet stated value.
NOTE 13: The data/parity that exists on the address lines will most likely achieve a high-impedance condition sometime later than the rising edge,
Access time from address valid on MAXPH, MAXPL, MADH0–MADH7, and MADL0–MADL7
to valid data/parity
Hold time of address high impedance on MAXPH, MAXPL, MADH0–MADH7 and
†
MADL0–MADL7 after MRAS
Hold time of address high impedance on MAXPH, MAXPL, MADH0–MADH7, and
†
MADL0–MADL7 after MCAS
Setup time of address/status high impedance on MAXPH, MAXPL, MADL0–MADL7, and
†
MADH0–MADH7 before MOE
Hold time of address high impedance on MAXPH, MAXPL, MADH0–MADH7, and
†
MADL0–MADL7 after MOE
Setup time of address/status high impedance on MAXPH, MAXPL, MADL0–MADL7, and
†
MADH0–MADH7, before MBEN
Setup time of address/status high impedance on MAXPH, MAXPL, MADL0–MADL7, and
†
MADH0–MADH7 and before MBIAEN
Hold time of address high impedance on MAXPH, MAXPL, MADH0–MADH7, and
†
MADL0–MADL7 after MBEN
Hold time of address high impedance on MAXPH, MAXPL, MADH0–MADH7, and
†
MADL0–MADL7 after MBIAEN
of MRAS
Hence, the MIN time given represents the time from the rising edge of MRAS
address, and does not represent the actual high-impedance period on the address bus.
, MCAS, MOE, or MBEN (between MIN and MAX of timing parameter 36) and will be a function of the memory being read.
high (see Note 13)
high (see Note 13)
no longer high
high (see Note 13)
no longer high
no longer high
high (see Note 13)
high
2tM–10.5
2tM–13
2tM–15
2tM–15
2tM–15
, MCAS, MOE, or MBEN to the beginning of the next
6tM – 23
6tM–23
0
0
0
ns
ns
ns
ns
ns
ns
ns
ns
ns
ns
40
POST OFFICE BOX 1443 • HOUSTON, TEXAS
77251–1443
Page 41

NETWORK COMMPROCESSOR
SPWS010A–APRIL 1992–REVISED MARCH 1993
PARAMETER MEASUREMENT INFORMATION
TMS380C26
MAX0,
MAX2,
MROMEN
MAXPH, MAXPL,
MADH0–MADH7,
MADL0–MADL7
MRAS
MCAS
MOE
Address/
Enable
Address
32
Address/
Status
33
42
35
41
Address
Data/Parity
Address
36
37
38
39
40
43
45
46
47
44
MBIAEN
MBEN
MDDIR
48a
50a
48
53
54
50
Figure 9. Memory Bus Timing: Read Cycle
49a
51a
52a
49
51
52
55
POST OFFICE BOX 1443 • HOUSTON, TEXAS
77251–1443
41
Page 42

TMS380C26
NETWORK COMMPROCESSOR
SPWS010A–APRIL 1992–REVISED MARCH 1993
PARAMETER MEASUREMENT INFORMATION
memory bus timing: write cycle
tM is the cycle time of one-eighth of a local memory cycle (31.25 ns minimum)
NO. PARAMETER MIN MAX UNIT
58 Setup time of MW low before MRAS no longer low 1.5tM – 9 ns
60 Setup time of MW low before MCAS no longer low 1.5tM–6.5 ns
63 Setup time of valid data/parity before MW no longer high 0.5tM–11.5 ns
64 Pulse duration of MW low 2.5tM–9 ns
65 Hold time of data/parity out valid after MW high 0.5tM–10.5 ns
66 Setup time of address valid on MAX0, MAX2, and MROMEN before MW no longer low 7tM–11.5 ns
67 Hold time from MRAS low to MW no longer low 5.5tM–9 ns
69 Hold time from MCAS low to MW no longer low 4tM–11.5 ns
70 Setup time of MBEN low before MW no longer high 1.5tM–13.5 ns
71 Hold time of MBEN low after MW high 0.5tM–6.5 ns
72 Setup time of MDDIR high before MBEN no longer high 2tM–9 ns
73 Hold time of MDDIR high after MBEN high 1.5tM–12 ns
42
POST OFFICE BOX 1443 • HOUSTON, TEXAS
77251–1443
Page 43

NETWORK COMMPROCESSOR
SPWS010A–APRIL 1992–REVISED MARCH 1993
PARAMETER MEASUREMENT INFORMATION
TMS380C26
MAX0,
MAX2,
MROMEN
MAXPH, MAXPL,
MADH0–MADH7,
MADL0–MADL7
MRAS
MCAS
MW
MBEN
Address/
Enable
66
63
67
Address
70
Data/Parity OutADD/STSAddress
58
60
65
64
69
71
MDDIR
72 73
Figure 10. Memory Bus Timing: Write Cycle
POST OFFICE BOX 1443 • HOUSTON, TEXAS
77251–1443
43
Page 44

TMS380C26
NETWORK COMMPROCESSOR
SPWS010A–APRIL 1992–REVISED MARCH 1993
PARAMETER MEASUREMENT INFORMATION
memory bus timing: TMS380C26 releases control of bus
tM is the cycle time of one-eighth of a local memory cycle (31.25 ns minimum)
NO. PARAMETER MIN MAX UNIT
74 Hold time of MIF output after MBCLK1 rising edge, bus release 0.5tM – 13 ns
74a Hold time of MBEN valid after MBCLK1 rising edge, bus release tM – 13 ns
75 Delay time from MBCLK1 high to MIF output high impedance, bus release 0.5t
75a Delay time from MBCLK1 high to MBEN output high impedance, bus release t
76 Setup time of MBRQ low before MBCLK1 falling edge, bus release 24 ns
77 Hold time of MBRQ low after MBCLK1 low, bus release 0 ns
78 Setup time of MBGR low before MBCLK1 rising edge, bus release 29 ns
MBCLK1
MAX0,
MAX2,
MROMEN
75
MAXPH,
MAXPL,
MADH0–MADH7,
MADL0–MADL7
74
75
74
M
M
ns
ns
MRAS
MCAS
MW
MOE
Figure 11. Memory Bus Timing: TMS380C26 Releases Control of Bus
75
74
75
74
75
74
75
74
44
POST OFFICE BOX 1443 • HOUSTON, TEXAS
77251–1443
Page 45

MBCLK1
MBCLK2
MBEN
MDDIR
MAL
TMS380C26
NETWORK COMMPROCESSOR
SPWS010A–APRIL 1992–REVISED MARCH 1993
PARAMETER MEASUREMENT INFORMATION
75a
74a
75
74
75
74
MBIAEN
MBRQ
MBGR
77
76
75
74
78
Figure 12. Memory Bus Timing: TMS380C26 Releases Control of Bus (continued)
POST OFFICE BOX 1443 • HOUSTON, TEXAS
77251–1443
45
Page 46

TMS380C26
NETWORK COMMPROCESSOR
SPWS010A–APRIL 1992–REVISED MARCH 1993
PARAMETER MEASUREMENT INFORMATION
memory bus timing: TMS380C26 resumes control of bus
tM is the cycle time of one-eighth of a local memory cycle (31.25 ns minimum)
NO. PARAMETER MIN MAX UNIT
79 Hold time of MIF output high impedance after MBCKL1 rising edge, bus resume tM – 13 ns
80 Delay time from MBCLK1 high to MIF output vallid, bus resume tM + 9 ns
91 Setup time of MBRQ valid before MBCLK1 falling edge, bus resume 24 ns
82 Hold time of MBRQ valid after MBCLK1 low, bus resume 0 ns
83 Setup time of MBGR high before MBCLK1 rising edge, bus resume 29 ns
46
POST OFFICE BOX 1443 • HOUSTON, TEXAS
77251–1443
Page 47

MBCLK1
MAX0,
MAX2,
MOROMEN
MAXPH,
MAXPL,
MADH0–MADH7,
MADL0–MADL7
MRAS
TMS380C26
NETWORK COMMPROCESSOR
SPWS010A–APRIL 1992–REVISED MARCH 1993
PARAMETER MEASUREMENT INFORMATION
80
79
80
79
80
79
MCAS
MW
MOE
Figure 13. Memory Bus Timing: TMS380C26 Resumes Control of Bus
80
79
80
79
80
79
POST OFFICE BOX 1443 • HOUSTON, TEXAS
77251–1443
47
Page 48

TMS380C26
NETWORK COMMPROCESSOR
SPWS010A–APRIL 1992–REVISED MARCH 1993
PARAMETER MEASUREMENT INFORMATION
MBCLK1
MBCLK2
MBEN
MDDIR
MAL
MBIAEN
81
82
MBRQ
83
MBGR
80
79
80
79
80
79
80
79
Figure 14. Memory Bus Timing: TMS380C26 Resumes Control of Bus (continued)
48
POST OFFICE BOX 1443 • HOUSTON, TEXAS
77251–1443
Page 49

TMS380C26
NETWORK COMMPROCESSOR
SPWS010A–APRIL 1992–REVISED MARCH 1993
PARAMETER MEASUREMENT INFORMATION
memory bus timing: external bus master read from TMS380C26
tM is the cycle time of one-eighth of a local memory cycle (31.25 ns minimum)
NO. PARAMETER MIN MAX UNIT
84 Setup time of address on MAX0 and MAX2 before MBCLK1 falling edge, external bus master access 21 ns
85 Hold time of address on MAX0 and MAX2 after MBCLK1 low, external bus master access 0 ns
86 Setup time of valid address before MBCLK1 falling edge, external bus master access 21 ns
87 Hold time of valid address after MBCLK1 low, external bus master access 0 ns
88 Setup time of address high impedance before MBCLK1 falling edge, external bus master read 0 ns
89 Setup time of data/parity valid before MBCLK2 falling edge, external bus master read 1.5tM – 17
90 Hold time of valid data/parity after MBCLK2 low, external bus master read tM – 13 ns
91 Setup time of data/parity high impedance before MBCLK2 rising edge, external bus master read tM – 9 ns
92 Setup time of MDDIR low before MBCLK2 falling edge, external bus master read 21 ns
93 Hold time of MDDIR low after MBCLK2 low, external bus master read 0 ns
94 Setup time of MACS low before MBCLK2 falling edge, external bus master read 21 ns
95 Hold time of MACS low after MBCLK2 low, external bus master read 0 ns
†
This specification has been characterized to meet stated value.
†
ns
POST OFFICE BOX 1443 • HOUSTON, TEXAS
77251–1443
49
Page 50

TMS380C26
NETWORK COMMPROCESSOR
SPWS010A–APRIL 1992–REVISED MARCH 1993
PARAMETER MEASUREMENT INFORMATION
MBCLK1
MBCLK2
84
85
MAX0,
MAX2
86
87
MAXPH,
MAXPL,
MADH0–MADH7,
MADL0–MADL7
Address In
92
93
Address In
88
Address In
89
91
90
Data/Parity
Address In
MDDIR
94
95
MACS
Figure 15. Memory Bus Timing: External Bus Master Read From TMS380C26
50
POST OFFICE BOX 1443 • HOUSTON, TEXAS
77251–1443
Page 51

TMS380C26
NETWORK COMMPROCESSOR
SPWS010A–APRIL 1992–REVISED MARCH 1993
PARAMETER MEASUREMENT INFORMATION
memory bus timing: external bus master write to TMS380C26
NO. PARAMETER MIN MAX UNIT
96 Setup time of valid data/parity before MBCLK2 falling edge, external bus master write 21 ns
97 Hold time of valid data/parity after MBCLK2 low, external bus master write 0 ns
98 Setup time of MDDIR high before MBCLK2 falling edge, external bus master write 21 ns
99 Hold time of MDDIR high after MBCLK2 low, external bus master write 0 ns
MBCLK1
Address In
Address In
MAX0, MAX2
MAXPH,
MAXPL,
MADH0–MADH7,
MADL0–MADL7
MDDIR
MACS
Address In
96
Data/Pty
Address In
98
99
94
95
Figure 16. Memory Bus Timing: External Bus Master Write To TMS380C26
97
POST OFFICE BOX 1443 • HOUSTON, TEXAS
77251–1443
51
Page 52

TMS380C26
NETWORK COMMPROCESSOR
SPWS010A–APRIL 1992–REVISED MARCH 1993
PARAMETER MEASUREMENT INFORMATION
memory bus timing: DRAM refresh timing
tM is the cycle time of one-eighth of a local memory cycle (31.25 ns minimum)
NO. PARAMETER MIN MAX UNIT
Setup time of row address on MADL0–MADL7, MAXPH, and MAXPL before MRAS no longer
15
high
16 Hold time of row address on MADL0–MADL7, MAXPH, and MAXPL after MRAS no longer high tM–6.5 ns
18 Pulse duration of MRAS low 4.5tM–9 ns
19 Pulse duration of MRAS high 3.5tM–9 ns
73a Setup time of MCAS low before MRAS no longer high 1.5tM–11.5 ns
73b Hold time of MCAS low after MRAS low 4.5tM– 6.5 ns
73c Setup time of MREF high before MCAS no longer high tM–14 ns
73d Hold time of MREF high after MCAS high tM–9 ns
1.5tM–11.5 ns
MADL0–MADL7
MRAS
MCAS
MREF
Refresh
Address
16
15
18
73a
73c
73b
Figure 17. Memory Bus Timing: DRAM Refresh Cycle
Address
19
73d
52
POST OFFICE BOX 1443 • HOUSTON, TEXAS
77251–1443
Page 53

TMS380C26
NETWORK COMMPROCESSOR
SPWS010A–APRIL 1992–REVISED MARCH 1993
PARAMETER MEASUREMENT INFORMATION
XMATCH and XFAIL timing
tM is the cycle time of one-eighth of a local memory cycle (31.25 ns minimum)
NO. PARAMETER MIN MAX UNIT
127 Delay from status bit 7 high to XMATCH and XFAIL recognized 7t
128 Pulse duration of XMATCH or XFAIL high 50 ns
M
ns
MADH7
XMATCH,
XFAIL
Status
Bit 7
127
Figure 18. XMATCH and XFAIL Timing
128
POST OFFICE BOX 1443 • HOUSTON, TEXAS
77251–1443
53
Page 54

TMS380C26
153
Period of RCLK (see Note 14)
154L
Pulse duration of RCLK lo
154H
Pulse duration of RCLK high
158L
Pulse duration of ring baud clock lo
158H
Pulse duration of ring baud clock high
165
Period of OSCOUT and PXTALIN (see Note 14)
NETWORK COMMPROCESSOR
SPWS010A–APRIL 1992–REVISED MARCH 1993
PARAMETER MEASUREMENT INFORMATION
token ring — ring interface timing
No. PARAMETER MIN TYP MAX UNIT
4Mbps 125 ns
16 Mbps 31.25 ns
w
155 Setup of RCVR valid before rising edge (1.8 V) of RCLK at 16 Mbps 10 ns
156 Hold of RCVR valid after rising edge (1.8 V) of RCLK at 16 Mbps 4 ns
w
166 Tolerance of PXTALIN input frequency (see Note 14) ± 0.01 %
NOTE 14: This parameter is not tested but is required by the IEEE 802.5 specification.
4 Mbps nominal: 62.5 ns 46 ns
16 Mbps nominal: 15.625 ns 15 ns
4 Mbps nominal: 62.5 ns 35 ns
16 Mbps nominal: 15.625 ns 8 ns
4 Mbps 40 ns
16 Mbps 15 ns
4 Mbps 40 ns
16 Mbps 8 ns
4 Mbps 125 ns
16 Mbps (for PXTALIN only) 31.25 ns
RCLK
RCVR
OSCOUT,
PXTALIN
153
154H
154L
155
Valid
158H
156
158L
165
Figure 19. Token Ring — Ring Interface Timing
54
POST OFFICE BOX 1443 • HOUSTON, TEXAS
77251–1443
Page 55

TMS380C26
NETWORK COMMPROCESSOR
SPWS010A–APRIL 1992–REVISED MARCH 1993
PARAMETER MEASUREMENT INFORMATION
token ring — transmitter timing (see Figure 20)
NO. PARAMETER MIN TYP MAX UNIT
Delay from DRVR rising edge (1.8 V) to DRVR falling edge (1.0 V) or DRVR falling edge (1.0 V) to
159
DRVR
rising edge (1.8 V)
160†Delay from RCLK (or PXTALIN) falling edge (1.0 V) to DRVR rising edge (1.8 V) (see Note 15)
161†Delay from RCLK (or PXTALIN) falling edge (1.0 V) to DR VR falling edge (1.0 V) (see Note 15)
162†Delay from RCLK (or PXTALIN) falling edge (1.0 V) to DRVR falling edge (1.0 V) (see Note 15)
163†Delay from RCLK (or PXTALIN) falling edge (1.0 V) to DRVR rising edge (1.8 V) (see Note 15)
)
t
DRVR/DRVR Asymmetry
164
†
When in active-monitor mode, the clock source is PXTALIN; otherwise, the clock-source is either RCLK or PXTALIN.
NOTE 15: This parameter is not tested to a minimum or a maximum but is measured and used as a component required for parameter 164.
RCLK or PXTALIN
d(DR)L
t
d(CRN)H
2
–
t
d(DR)H
)
2
t
d(DRN)L
2.60
1.50
0.60
±2 ns
±1.5 ns
DRVR
DRVR
162
160
159
161
159
163
2.40
1.50
0.60
2.40
1.50
0.60
Figure 20. Skew and Asymmetry from RCLK or PXTALIN to DRVR and DRVR
POST OFFICE BOX 1443 • HOUSTON, TEXAS
77251–1443
55
Page 56

TMS380C26
NETWORK COMMPROCESSOR
SPWS010A–APRIL 1992–REVISED MARCH 1993
PARAMETER MEASUREMENT INFORMATION
ethernet timing of clock signals
NO. PARAMETER MIN TYP MAX UNIT
300 CLKPHS Pulse duration of TXC 45 ns
301 CLKPER Cycle time of TXC 95 1000 ns
300
TXC
300
301
2.4 V
0.45 V
Figure 21. Ethernet Timing Of Clock Signals
ethernet timing of XMIT signals
NO. PARAMETER MIN TYP MAX UNIT
305 t
306 t
XDHLD
XDVLD
TXC
TXD
TXEN
Hold time of TXD after TXC high 5 ns
Delay time from TXC high to TXD valid and
Delay time from TXC high to TXEN high
305
306
306
40 ns
2.4 V
0.45 V
2.4 V
0.45 V
56
Figure 22. Ethernet Timing of XMIT Signals
POST OFFICE BOX 1443 • HOUSTON, TEXAS
77251–1443
Page 57

TMS380C26
NETWORK COMMPROCESSOR
SPWS010A–APRIL 1992–REVISED MARCH 1993
PARAMETER MEASUREMENT INFORMATION
ethernet timing of RCV signals — start of frame
NO. PARAMETER MIN TYP MAX UNIT
310 RXDSET Setup of RXD before RXC no longer low 20 ns
311 RXDHLD Hold of RXD after RXC high 5 ns
312 CRSSET Setup of CRS high before RXC no longer low for first valid data sample 20 ns
313 SAMDLY Delay of CRS internally recognized to first valid data sample (see Notes 16 and 17) nominal 3 clk cycles
314 RXCHI Pulse duration of RXC high 36 ns
315 RXCL0 Pulse duration of RXC low 36 ns
NOTES: 16. For valid frame synchronization one of the following data sequences must be received. Any other pattern will delay frame
synchronization until after the next CRS rising edge.
a) 0n(10) 11 where n is an integer and n is greater than or equal to 3
b) 10n(10) 11
17. If a previous frame or frame fragment completed without extra RXC clock cycles (XTRCVC = 0), then SAMDLY = 2 clock cycles.
312
CRS
RXC
RXD
313
310
314
315
311
Figure 23. Ethernet Timing of RCV Signals — Start Of Frame
POST OFFICE BOX 1443 • HOUSTON, TEXAS
77251–1443
57
Page 58

TMS380C26
NETWORK COMMPROCESSOR
SPWS010A–APRIL 1992–REVISED MARCH 1993
PARAMETER MEASUREMENT INFORMATION
ethernet timing of RCV signals — end of frame
NO. PARAMETER MIN TYP MAX UNIT
320 CRSSET
321 CRSHLD
322 XTRCYC Number of extra RXC clock cycles after last data bit (CRS pin is low) (see Note 18) 0 5 cycle
NOTE 18: TMS380C26 will operate correctly even with no extra RXC clock cycles, providing that CRS does not remain asserted longer than
2 µs (see timing spec, NDRXC). Providing no extra clocks affect receive startup timing, see timing spec, SAMDLY.
Setup time of CRS low before RXC no longer low to determine if last data bit ”seen” on
previous RXC no longer low (see Note 18)
Hold time of CRS low after RXC no longer low, to determine if last data bit ”seen” on
previous RXC no longer low
RXC
20 ns
0 ns
CRS
RXD
320
321
322
Last
Data Bit
Figure 24. Ethernet Timing of RCV Signals — End Of Frame
58
POST OFFICE BOX 1443 • HOUSTON, TEXAS
77251–1443
Page 59

TMS380C26
NETWORK COMMPROCESSOR
SPWS010A–APRIL 1992–REVISED MARCH 1993
PARAMETER MEASUREMENT INFORMATION
ethernet timing of RCV signals — no RXC
NO. PARAMETER MIN TYP MAX UNIT
330 NORXC Time with no clock pulse on RXC, when CRS is high (see Note 19) 2 µs
NOTE 19: If NORXC is exceeded local clock failure circuitry may become activated, resetting the device.
CRS ”1”
330
RXC
Figure 25. Ethernet Timing of RCV Signals — No RXC
ethernet timing of XMIT signals
NO. PARAMETER MIN TYP MAX UNIT
340 HBWIN
341 COLPUL Minimum pulse duration of COLL high for guaranteed sample 20 ns + 1 cycle ns
342 COLSET Setup of COLL high to TXC high 20 ns
Delay time from TXC high of the last transmitted data bit (TXEN is high) to COLL
sampled high, so not to generate a ”heart-beat” error
47 cycles
TXC
COLL
TXD
TXEN
340
341
342
Figure 26. Ethernet Timing of XMIT Signals
POST OFFICE BOX 1443 • HOUSTON, TEXAS
77251–1443
59
Page 60

TMS380C26
NETWORK COMMPROCESSOR
SPWS010A–APRIL 1992–REVISED MARCH 1993
PARAMETER MEASUREMENT INFORMATION
ethernet timing of XMIT signals
NO. PARAMETER MIN TYP MAX UNIT
350 JAMTIM
351 COLSET Setup of COLL high before TXC high 20 ns
352 COLPUL Minimum pulse duration of COLL high for guaranteed sample 20 ns + 1 cycle ns
NOTE 20: The JAM pattern is delayed until after the completion of the preamble pattern. The TMS380C26 transmits a JAM pattern of all ”1”s.
TXC
Time from COLL sampled high (TXC high) to first transmitted ”JAM” bit on TXD
(see Note 20)
350
4 cycles
TXD
COLL
Data Data Data JAM JAM JAM
351
352
Figure 27. Ethernet Timing of XMIT Signals
60
POST OFFICE BOX 1443 • HOUSTON, TEXAS
77251–1443
Page 61

TMS380C26
NETWORK COMMPROCESSOR
SPWS010A–APRIL 1992–REVISED MARCH 1993
PARAMETER MEASUREMENT INFORMATION
80x8x DIO read timing
NO. PARAMETER MIN MAX UNIT
255 Delay from SRDY low to either SCS or SRD high 15 ns
256 Pulse duration, SRAS high 30 ns
259†Hold of SAD high-impedance after SRD low (see Note 21) 0 ns
260 Setup of SADH0–SADH7, SADL0–SADL7, SPH and SPL valid before SRDY low 0 ns
261†Delay from SRD or SCS high to SAD high-impedance (see Note 21) 35 ns
261a Hold of output data valid after SRD or SCS high (see Note 21) 0 ns
264 Setup of SRSX, SRS0–SRS2, SCS, and SBHE valid to SRAS no longer high (see Note 22) 30 ns
265 Hold of SRSX, SRS0–SRS2, SCS, and SBHE valid after SRAS low 15 ns
266a Setup of SRAS high to SRD no longer high (see Note 22) 25 ns
267‡Setup of SRSX, SRS0–SRS2 valid before SRD no longer high (see Note 21) 15 ns
268 Hold of SRSX, SRS0–SRS2 valid after SRD no longer low (see Note 22) 0 ns
272a Setup time of SRD, SWR, and SIACK high from previous cycle to SRD no longer high 55 ns
273a Hold time of SRD, SWR, and SIACK high after SRD high 55 ns
275 Delay from SRD and SWR, or SCS high to SRDY high (see Note 21) 35 ns
279†Delay from SRD and SWR, high to SRDY high impedance 65 ns
282a Delay from SDBEN low to SRDY low in a read cycle 35 ns
282R
283R Delay from SRD high to SDBEN high (see Note 21) 35 ns
286 Pulse duration, SRD high between DIO accesses (see Note 21) 55 ns
†
This specification is provided as an aid to board design.
‡
It is the later of SRD
NOTES: 21. The “inactive” chip select is SIACK
Delay from SRD low to SDBEN low (see
SPWU005,
cycles.
22. In 80x8x mode, SRAS may be used to strobe the values of SBHE
must meet parameter 266a, and SBHE
parameters 266a and 264 are irrelevant, and parameter 268 must be met.
subsection 3.4.1.1.1), provided previous cycle completed.
and SWR or SCS low that indicates the start of the cycle.
TMS380 Second Generation Token-Ring User’s Guide,
in DIO read and DIO write cycles, and SCS is the “inactive” chip select in interrupt acknowledge
, SRSX, SRS0 – SRS2, and SCS. When used to do so, SRAS
, SRS0–SRS2, and SCS must meet parameter 264. If SRAS is strapped high, then
55 ns
POST OFFICE BOX 1443 • HOUSTON, TEXAS
77251–1443
61
Page 62

TMS380C26
NETWORK COMMPROCESSOR
SPWS010A–APRIL 1992–REVISED MARCH 1993
PARAMETER MEASUREMENT INFORMATION
, SRSX,
SCS
SRS0–SRS2,
SBHE
SRAS
256
264
Valid (see Note A)Valid
268265
266a
267
SIACK
SWR
SRD
(High)
SDDIR
SDBEN
†
SRDY
SADH0–SADH7,
SADL0–SADL7,
SPH, SPL
(see Note B)
†
When the TMS380C26 begins to drive SDBEN inactive, it has already latched the write data internally. Parameter 263 must be met to the input
of the data buffers.
NOTES: A. In 80x8x mode, SRAS may be used to strobe the values of SBHE
meet parameter 266a, and SBHE
266a and 264 are irrelevant, and parameter 268 must be met.
B. In 8-bit 80x8x mode DIO reads, the SADH0–SADH7 contain don’t care data.
HI-Z
272a
272a
272a
282R
282a
260
259
Output Data Valid
, SRS0–SRS2, and SCS must meet parameter 264. If SRAS is strapped high, then parameters
283R
275
255
, SRSX, SRS0–SRS2, and SCS. When used to do so, SRAS must
279
273a
273a
273a
286
HI-Z
261
261a
HI-ZHI-Z
62
Figure 28. 80x8x DIO Read Timing
POST OFFICE BOX 1443 • HOUSTON, TEXAS
77251–1443
Page 63

TMS380C26
282b
y(
g
ns
NETWORK COMMPROCESSOR
SPWS010A–APRIL 1992–REVISED MARCH 1993
PARAMETER MEASUREMENT INFORMATION
80x8x DIO write timing
NO. PARAMETER MIN MAX UNIT
255 Delay from SRDY low to either SCS or SWR high 15 ns
256 Pulse duration, SRAS high 30 ns
262 Setup of SADH0–SADH7, SADL0–SADL7, SPH, and SPL valid before SCS or SWR no longer low 25 ns
263 Hold of SADH0–SADH7, SADL0–SADL7, SPH, and SPL valid after SCS or SWR high 25 ns
264 Setup of SRSX, SRS0–SRS2, SCS, and SBHE to SRAS no longer high (see Note 21) 30 ns
265 Hold of SRSX, SRS0–SRS2, SCS, and SBHE after SRAS low 15 ns
266a Setup of SRAS high to SWR no longer high (see Note 22) 25 ns
267†Setup of SRSX, SRS0–SRS2 before SWR no longer high (see Note 21) 15 ns
268 Hold of SRSX, SRS0–SRS2 valid after SWR no longer low (see Note 22) 0 ns
272a Setup time of SRD, SWR, and SIACK high from previous cycle to SWR no longer high 55 ns
273a Hold time of SRD, SWR, and SIACK high after SWR high 55 ns
Delay from SRDY low in the first DIO access to the SIF register to SRDY low in the immediately following
‡
276
279§Delay from SWR high to SRDY high impedance 65 ns
281a Hold of SDDIR low after SWR no longer active (see Note 21) 0 ns
282W Delay from SDDIR low to SDBEN low 25 ns
283W Delay from SCS or SWR high to SDBEN no longer low 25 ns
†
It is the later of SRD and SWR or SCS low that indicates the start of the cycle.
‡
This specification has been characterized to meet stated value.
§
This specification is provided as an aid to board design.
NOTES: 21. The “inactive” chip select is SIACK
access to the SIF (see
3.4.1.1.1)
275 Delay from SWR or SCS high to SRDY high (see Note 21) 35 ns
280 Delay from SWR low to SDDIR low (see Note 21) 25 ns
281 Delay from SWR high to SDDIR high (see note 21) 55 ns
Delay from SDBEN low to SRDY low (see
User’s Guide,
286 Pulse duration SWR high between DIO accesses (see Note 21) 55 ns
cycles.
22. In 80x8x mode, SRAS may be used to strobe the values of SBHE
meet parameter 266a, and SBHE
266a and 264 are irrelevant, and parameter 268 must be met.
SPWU005, subsection 3.4.1.1.1)
TMS380 Second-Generation Token Ring User’s Guide
TMS380 Second Generation T oken-Ring
in DIO read and DIO write cycles, and SCS is the “inactive” chip select in interrupt acknowledge
, SRSX, SRS0–SRS2, and SCS. When used to do so, SRAS must
, SRS0–SRS2, and SCS must meet parameter 264. If SRAS is strapped high, then parameters
, SPWU005, subsection
If SIF register is
ready (no waiting
required)
If SIF register is
not ready (waiting
required)
0 35
0 4000
POST OFFICE BOX 1443 • HOUSTON, TEXAS
77251–1443
63
Page 64

TMS380C26
NETWORK COMMPROCESSOR
SPWS010A–APRIL 1992–REVISED MARCH 1993
PARAMETER MEASUREMENT INFORMATION
, SRSX,
SCS
SRS0–SRS2,
SBHE
SRAS
Valid
264
256
265
268
SIACK
SWR
SRD
SDDIR
SDBEN
SADH0–SADH7,
SADL0–SADL7,
SPH, SPL
(see Note A)
†
When the TMS380C26 begins to drive SDBEN
of the data buffers.
NOTE A: In 8-bit 80x8x mode DIO writes, the value placed on SADH0–SADH7 is a don’t care.
†
SRDY
(High)
266a
267
272a
272a
272a
280
281a
282W
276
282b
HI-Z HI-Z
HI-Z
inactive, it has already latched the write data internally. Parameter 263 must be met to the input
262
283W
255
275
Data
Data
273a
273a
286
273a
281
279
263
HI-Z
64
Figure 29. 80x8x DIO Write Timing
POST OFFICE BOX 1443 • HOUSTON, TEXAS
77251–1443
Page 65

NETWORK COMMPROCESSOR
SPWS010A–APRIL 1992–REVISED MARCH 1993
PARAMETER MEASUREMENT INFORMATION
TMS380C26
80x8x interrupt acknowledge timing – first SIACK
NO. PARAMETER MIN MAX UNIT
286 Pulse duration, SIACK high between DIO accesses (see Note 21) 55 ns
287 Pulse duration, SIACK low on first pulse of two pulses 62.5 ns
NOTE 21: The “inactive” chip select is SIACK in DIO read and DIO write cycles, and SCS is the “inactive” chip select in interrupt acknowledge
cycles.
SRD, SWR,
SCS
SIACK
287
First
pulse
286
Second
Figure 30. 80x8x Interrupt Acknowledge Timing – First SIACK Pulse
80x8x interrupt acknowledge timing – second SIACK pulse
NO. PARAMETER MIN MAX UNIT
255 Delay from SRDY low to SCS high 15 ns
259†Hold of SAD high-impedance after SIACK low (see Note 21) 0 ns
260 Setup of output data valid before SRDY low 0 ns
261†Delay from SIACK high to SAD high-impedance (see Note 21) 35 ns
261a Hold of output data valid after SIACK high (see Note 21) 0 ns
272a Setup of inactive data strobe high to SIACK no longer high 55 ns
273a Hold of inactive data strobe high after SIACK high 55 ns
275 Delay from SIACK high to SRDY high (see Note 21) 35 ns
Delay from SRDY low in the first DIO access to the SIF register to SRDY low in the immediately
‡
276
279†Delay from SIACK high to SRDY high impedance 65 ns
282a Delay from SDBEN low to SRDY low in a read cycle 35 ns
282R
283R Delay from SIACK high to SDBEN high (see Note 21) 35 ns
†
This specification is provided as an aid to board design.
‡
This specification has been characterized to meet stated value.
NOTE 21: The “inactive” chip select is SIACK
following access to the SIF
Delay from SIACK low to SDBEN low (see
User’s Guide,
cycles.
SPWU005, subsection 3.4.1.1.1), provided previous cycle completed
in DIO read and DIO write cycles, and SCS is the “inactive” chip select in interrupt acknowledge
TMS380 Second Generation Token-Ring
4000 ns
55 ns
POST OFFICE BOX 1443 • HOUSTON, TEXAS
77251–1443
65
Page 66

TMS380C26
NETWORK COMMPROCESSOR
SPWS010A–APRIL 1992–REVISED MARCH 1993
PARAMETER MEASUREMENT INFORMATION
SCS, SRSX,
SRS0–SRS2,
SBHE
SIACK
SWR
SRD
SDDIR
SDBEN
SRDY
Only SCS needs to be inactive.
All others are Don’t Care.
272a
272a
272a
(High)
282R
276
†
HI-Z
282a
283R
275
255
279
273a
273a
273a
HI-Z
259
SADH0–SADH7,
SADL0–SADL7,
SPH, SPL
(see Note A)
†
SRDY is an active-low bus ready signal. It must be asserted before data output.
NOTE A: In 8-bit 80x8x mode DIO writes, the value placed on SADH0–SADH7 is a don’t care.
HI-Z HI-Z
260
Output Data Valid
Figure 31. 80x8x Interrupt Acknowledge Timing – Second SIACK Pulse
261
261a
66
POST OFFICE BOX 1443 • HOUSTON, TEXAS
77251–1443
Page 67

TMS380C26
NETWORK COMMPROCESSOR
SPWS010A–APRIL 1992–REVISED MARCH 1993
PARAMETER MEASUREMENT INFORMATION
80x8x mode bus arbitration timing, SIF takes control
NO. PARAMETER MIN MAX UNIT
208a
208b
212 Delay from SBCLK low to SADH0–SADH7, SADL0–SADL7, SPH, and SPL valid 25 ns
224a Delay from SBCLK low in cycle I2 to SOWN low 25 ns
224c Delay from SBCLK low in cycle I2 to SDDIR low in DMA read 30 ns
230 Delay from SBCLK high to SHRQ high 25 ns
241 Delay from SBCLK high in TX cycle to SRD and SWR high, bus acquisition 25 ns
241a†Hold of SRD and SWR high-impedance after SOWN low, bus acquisition t
†
This specification has been characterized to meet stated value.
Setup of asynchronous signal SBBSY and SHLDA before SBCLK no longer high to guarantee
recognition on that cycle
Hold of asynchronous signal SBBSY and SHLDA after SBCLK low to guarantee recognition on
that cycle
15 ns
15 ns
c(SCK)–15
ns
POST OFFICE BOX 1443 • HOUSTON, TEXAS
77251–1443
67
Page 68

68
POST OFFICE BOX 1443 HOUSTON, TEXAS 77001
SIF Inputs:
SBCLK
SBBSY
SHLDA
SIF Outputs:
SHRQ
SRD, SWR
TMS380C26
NETWORK COMMPROCESSOR
SPWS010A–APRIL 1992–REVISED MARCH 1993
PARAMETER MEASUREMENT INFORMATION
SIF MasterBus ExchangeUser Master
T1TXI2I1(T4)
208a
,
230
208b
241
•
SBHE
SADH0–SADH7,
SADL0–SADL7,
SPH, SPL
SDDIR
SOWN
(see Note A)
NOTE A: While the system interface DMA controls are active (i.e., SOWN is asserted), the SCS input is disabled.
224c
224a
241a
212
Address Valid
Write
Read
212
Figure 32. 80x8x Mode Bus Arbitration Timing, SIF Takes Control
Page 69

TMS380C26
NETWORK COMMPROCESSOR
SPWS010A–APRIL 1992–REVISED MARCH 1993
PARAMETER MEASUREMENT INFORMATION
80x8x mode DMA read timing
NO. PARAMETER MIN MAX UNIT
205
206
207a Hold of SADL0–SADL7, SADH0–SADH7, SPH, and SPL valid after SRD high 0 ns
207b Hold of SADL0–SADL7, SADH0–SADH7, SPH, and SPL valid after SDBEN no longer low 0 ns
208a
208b Hold of asynchronous signal SRDY after SBCLK low to guarantee recognition on this cycle 15 ns
212 Delay from SBCLK low to address valid 25 ns
214
215 Pulse duration, SALE and SXAL high t
216 Delay from SBCLK high to SALE or SXAL high 25 ns
216a Hold of SALE or SXAL low after SRD high t
217 Delay from SBCLK high to SXAL low in the TX cycle or SALE low in the T1 cycle 25 ns
218 Hold of SADH0–SADH7, SADL0–SADL7, SPH, and SPL valid after SALE or SXAL low t
223R Delay from SBCLK low in T4 cycle to SRD high (see Note 23) 25 ns
225R Delay from SBCLK low in T4 cycle to SDBEN high 25 ns
226†Delay from SADH0–SADH7, SADL0–SADL7, SPH, and SPL high-impedance to SRD low 0 ns
227R Delay from SBCLK low in T2 cycle to SRD low 25 ns
229
231 Pulse duration, SRD low 2t
233
237R Delay from SBCLK high in the T2 cyle to SDBEN low 25 ns
247 Setup of data valid before SRDY low if parameter 208a not met 0 ns
†
This specification has been characterized to meet stated value.
NOTE 23: While the system interface DMA controls are active (i.e., SOWN
Setup of SADL0–SADL7, SADH0–SADH7, SPH, and SPL valid before SBCLK in T3 cycle no
longer high
Hold of SADL0–SADL7, SADH0–SADH7, SPH, and SPL valid after SBCLK low in T4 cycle if
parameters 207a and 207b not met
Setup of asynchronous signal SRDY before SBCLK no longer high to guarantee recognition on
this cycle
Delay from SBCLK low in T1 cycle to SADH0–SADH7, SADL0–SADL7, SPH, and SPL high-im-
†
pedance
Hold of SADH0–SADH7, SADL0–SADL7, SPH, and SPL high-impedance after SBCLK low in
†
T1 cycle
Setup of SADH0–SADH7, SADL0–SADL7, SPH, and SPL valid before SALE, SXAL no longer
high
is asserted), the SCS input is disabled.
c(SCK)
w(SCKL)
w(SCKH)
c(SCK)
t
w(SCKL)
15 ns
15 ns
15 ns
25 ns
–25 ns
–15 ns
–15 ns
0 ns
–30 ns
–15 ns
POST OFFICE BOX 1443 • HOUSTON, TEXAS
77251–1443
69
Page 70

70
SBCLK
PARAMETER MEASUREMENT INFORMATION
T2
TWAIT
V
TMS380C26
NETWORK COMMPROCESSOR
SPWS010A–APRIL 1992–REVISED MARCH 1993
T1T4T3T1TXT4
POST OFFICE BOX 1443 HOUSTON, TEXAS 77001
•
SRAS
SBHE
(see Note B)
SWR
SRD
(see Note A)
SXAL
SALE
SADH0–SADH7,
SADL0–SADL7,
SPH, SPL
(see Note C)
SRDY
216
212
Extended
Address
217
216
233
215
218
217
215
HI-Z
212
Valid
227R 223R
218
212
233
218
(High)
214
226
231
208a
247
205
†
207a
206
207b
216a
229
AddressDataAddress
SDBEN
(see Note A)
SDDIR
†
If parameter 208A is not met then valid data must be present before SRDY goes low.
NOTES: A. Motorola-style bus slaves hold SDTACK
B. In 8-bit 80x8x mode, SBHE
C. In 8-bit 80x8x mode, the most significant byte of the address is maintained on SADH for T2, T3, and T4. The address is maintained according to parameter 21; i.e., held
after T4 high.
/SRNW is a don’t care input during DIO and an inactive (high) output during DMA.
active until the bus master deasserts SAS.
Figure 33. 80x8x Mode DMA Read Timing
237R
Low
208b
225R
Page 71

TMS380C26
NETWORK COMMPROCESSOR
SPWS010A–APRIL 1992–REVISED MARCH 1993
PARAMETER MEASUREMENT INFORMATION
80x8x mode DMA write timing
NO. PARAMETER MIN MAX UNIT
208a
208b Hold of asynchronous signal SRDY after SBCLK low to guarantee recognition on that cycle 15 ns
212 Delay from SBCLK low to SADH0–SADH7, SADL0–SADL7, SPH, and SPL valid 25 ns
215 Pulse duration, SALE and SXAL high t
216 Delay from SBCLK high to SALE or SXAL high 25 ns
216a Hold of SALE or SXAL low after SWR high t
217 Delay from SBCLK high to SXAL low in the TX cycle or SALE low in the T1 cycle 25 ns
218 Hold of address valid after SALE, SXAL low t
219 Delay from SBCLK low in T2 cycle to output data and parity valid 39 ns
221 Hold of SADH0–SADH7, SADL0–SADL7, SPH, and SPL valid after SWR high t
223W Delay from SBCLK low to SWR high 25 ns
225W Delay from SBCLK high in T4 cycle to SDBEN high 25 ns
225WH Hold of SDBEN low after SWR, SUDS, and SLDS high t
227W Delay from SBCLK low in T2 cycle to SWR low 31 ns
232 Pulse duration, SWR low 2t
233
237W Delay from SBCLK high in T1 cycle to SDBEN low 25 ns
Setup of asynchronous signal SRDY before SBCLK no longer high to guarantee recognition
on that cycle
Setup of SADH0–SADH7, SADL0–SADL7, SPH, and SPL valid before SALE, SXAL
no longer high
c(SCK)
w(SCKL)
w(SCKH)
c(SCK)
w(SCKL)
c(SCK)
t
w(SCKL)
15 ns
–25 ns
–15 ns
–15 ns
–15 ns
–25 ns
–30 ns
–15 ns
POST OFFICE BOX 1443 • HOUSTON, TEXAS
77251–1443
71
Page 72

72
SBCLK
SBHE
(see Note A)
PARAMETER MEASUREMENT INFORMATION
TWAIT
V
212
Valid
TMS380C26
NETWORK COMMPROCESSOR
SPWS010A–APRIL 1992–REVISED MARCH 1993
T1T4T3T2T1TXT4
POST OFFICE BOX 1443 HOUSTON, TEXAS 77001
•
SRD
SWR
SXAL
SALE
SADL0–SADH7,
SADH0–SADL7,
SPH, SPL
(see Note B)
SRDY
SDBEN
216
212
217
215
216
233
218
Extended Address
215
233
237W
217
212
227W
(HIGH)
218
219
208b
223W
232
216a
221
Output DataAddress
208a
225W
225WH
SDDIR
NOTES: A. In 8-bit 80x8x mode, SBHE/SRNW is a don’t care input during DIO and an inactive (high) output during DMA.
B. In 8-bit 80x8x mode, the most significant byte of the address is maintained on SADH for T2, T3, and T4. The address is maintained according to parameter 21; i.e., held
after T4 high.
(HIGH)
Figure 34. 80x8x Mode DMA Write Timing
Page 73

TMS380C26
NETWORK COMMPROCESSOR
SPWS010A–APRIL 1992–REVISED MARCH 1993
PARAMETER MEASUREMENT INFORMATION
80x8x mode bus arbitration timing, SIF returns control
NO. PARAMETER MIN MAX UNIT
Delay from SBCLK low in I1 cycle to SADH0–SADH7, SADL0–SADL7, SPL, SPH, SRD, and SWR
†
220
223b†Delay from SBCLK low in I1 cycle to SBHE high-impedance 45 ns
224b Delay from SBCLK low in cycle I2 to SOWN high 25 ns
224d Delay from SBCLK low in cycle I2 to SDDIR high 30 ns
230 Delay from SBCLK high in cycle I1 to SHRQ low 25 ns
240†Setup of SRD, SWR, and SBHE high-impedance before SOWN no longer low 0 ns
†
This specification has been characterized to meet stated value.
high-impedance
User MasterBus ExchangeSIF Master
SBCLK
35 ns
(T2)(T1)I2I1T4T3
SHLDA
SIF Outputs:
SHRQ
(see Note A)
SRD, SWR
SBHE
SADH0–SADH7,
SADL0–SADL7,
SPH, SPL
SDDIR
SOWN
(see Note B)
NOTES: A. In 80x8x mode, the system interface deasserts SHRQ on the rising edge of SBCLK following the T4 state of the last system bus
transfer it controls. In 68xxx mode, the system interface deasserts SBRQ on the rising edge of SBCLK in state T2 of the first system
bus transfer it controls.
B. While the system interface DMA controls are active (i.e., SOWN
SIF
220
SIF
WRITE
READ
230
220
HI-Z
240
223b
HI-Z
240
HI-Z
224d
224b
is asserted), the SCS input is disabled.
Figure 35. 80x8x Mode Bus Arbitration Timing, SIF Returns Control
POST OFFICE BOX 1443 • HOUSTON, TEXAS
77251–1443
73
Page 74

TMS380C26
NETWORK COMMPROCESSOR
SPWS010A–APRIL 1992–REVISED MARCH 1993
PARAMETER MEASUREMENT INFORMATION
80x8x mode bus release timing
NO. PARAMETER MIN MAX UNIT
208a Setup of asynchronous input SBRLS low before SBCLK no longer high to guarantee recognition 15 ns
208b Hold of asynchronous input SBRLS low after SBCLK low to guarantee recognition 15 ns
208c Hold of SBRLS low after SOWN high 0 ns
T(W or 2) T3 T4 T1 T2
SBCLK
208a
SBRLS
(see Note A)
SOWN
208b
208c
NOTES: A. The System Interface ignores the assertion of SBRLS
the assertion of SBRLS
internally started, then the System Interface will release the bus before starting another.
B. If SBERR
of the value of SRDY
Interface will then release control of the system bus. The System Interface ignores the assertion of SBERR
a DMA bus cycle on the system bus. When SBERR
releases the bus upon completion of the current bus transfer and halts all further DMA on the system side. The error is synchronized
to the local bus and DMA stops on the local sides. The value of the SDMAADR, SDMADDRX, and SDMALEN registers in the System
Interface are not defined after a system bus error.
C. In cycle-steal mode, state TX is present on every system bus transfer. In burst mode, state TX is present on the first bus transfer
and whenever the increment of the DMA Address Register carries beyond the least significant 16 bits.
D. SDTACK
E. Unless otherwise specified, for all signals specified as a maximum delay from the end of an SBCLK transition to the signal valid,
the signal is also specified to hold its previous value (including high-impedance) until the start of that SBCLK transition.
is asserted when the System Interface controls the system bus, then the current bus transfer is completed, regardless
is not sampled to verify that it is deasserted.
, it will complete any internally started DMA cycle and relinquish control of the bus. If no DMA transfer has
. If the BERETRY register is non-zero, the cycle will be retried. If the BERETRY register is zero, the System
Figure 36. 80x8x Mode Bus Release Timing
if it does not own the system bus. If it does own the bus, then when it detects
if it is not performing
is properly asserted and BERETRY is zero, however, the System Interface
74
POST OFFICE BOX 1443 • HOUSTON, TEXAS
77251–1443
Page 75

TMS380C26
NETWORK COMMPROCESSOR
SPWS010A–APRIL 1992–REVISED MARCH 1993
PARAMETER MEASUREMENT INFORMATION
68xxx DIO read timing
NO. PARAMETER MIN MAX UNIT
255 Delay from SDTACK low to either SCS, SUDS, or SLDS high 15 ns
259†Hold of SAD high-impedance after SUDS or SLDS low (see Note 21) 0 ns
260 Setup of SADH0–SADH7, SADL0–SADL7, SPH, and SPL valid before SDTACK low 0 ns
Delay from SCS, SUDS, or SLDS high to SADH0–SADH7, SADL0–SADL7, SPH, and SPL
†
261
261a Hold of output data valid after SUDS or SLDS no longer low (see Note 21) 0 ns
267 Setup of register address before SUDS or SLDS no longer high (see Note 21) 15 ns
268 Hold of register address valid after SUDS or SLDS no longer low (see Note 22) 0 ns
272 Setup of SRNW before SUDS or SLDS no longer high (see Note 21) 15 ns
273 Hold of SRNW after SUDS or SLDS high 0 ns
273a Hold of SIACK high after SUDS or SLDS high 55 ns
275 Delay from SCS, SUDS, or SLDS high to SDTACK high (see Note 21) 35 ns
276
279†Delay from SUDS or SLDS high to SDTACK high impedance 65 ns
282a Delay from SDBEN low to SDTACK low 35 ns
282R
283R Delay from SUDS or SLDS high to SDBEN high (see Note 21) 35 ns
286 Pulse duration, SUDS or SLDS high between DIO accesses (see Note 21) 55 ns
†
This specification is provided as an aid to board design.
‡
This specification has been characterized to meet stated value.
NOTES: 21. The “inactive” chip select is SIACK
high-impedance (see Note 21)
Delay from SDTACK low in the first DIO access to the SIF register to SDTACK low in the immediately fol-
‡
lowing access to the SIF
Delay from SUDS or SLDS low to SDBEN low (see
Guide,
SPWU005, subsection 3.4.1.1.1) provided the previous cycle completed
cycles.
22. In 80x8x mode, SRAS may be used to strobe the values of SBHE
meet parameter 266a, and SBHE
266a and 264 are irrelevant, and parameter 268 must be met.
in DIO read and DIO write cycles, and SCS is the “inactive” chip select in interrupt acknowledge
, SRS0–SRS2, and SCS must meet parameter 264. If SRAS is strapped high, then parameters
TMS380 Second Generation Token-Ring User’s
, SRSX, SRS0–SRS2, and SCS. When used to do so, SRAS must
35 ns
4000 ns
55 ns
POST OFFICE BOX 1443 • HOUSTON, TEXAS
77251–1443
75
Page 76

TMS380C26
NETWORK COMMPROCESSOR
SPWS010A–APRIL 1992–REVISED MARCH 1993
PARAMETER MEASUREMENT INFORMATION
SCS, SRSX,
SRS0, SRS1
SIACK
SRNW
SUDS,
SLDS
SDDIR
SDBEN
SDTACK
SADH0–SADH7,
SADL0–SADL7,
SPH, SPL
Valid
267
272
(High)
282R
276
†
HI-Z
HI-Z HI-Z
282a
259
Output Data Valid
273
283R
275
255
260
268
273a
286
279
HI-Z
261
261a
†
SDTACK
76
is an active-low bus ready signal. It must be asserted before data output.
Figure 37. 68xxx DIO Read Timing
POST OFFICE BOX 1443 • HOUSTON, TEXAS
77251–1443
Page 77

TMS380C26
282b
y(
ns
NETWORK COMMPROCESSOR
SPWS010A–APRIL 1992–REVISED MARCH 1993
PARAMETER MEASUREMENT INFORMATION
68xxx DIO write timing
NO. PARAMETER MIN MAX UNIT
255 Delay from SDTACK low to either SCS, SUDS or SLDS high 15 ns
262 Setup of write data valid before SUDS or SLDS no longer low 25 ns
263 Hold of write data valid after SUDS or SLDS high 25 ns
267§Setup of register address before SUDS or SLDS no longer high (see Note 21) 15 ns
268 Hold of register address valid after SUDS or SLDS no longer low (see Note 22) 0 ns
272 Setup of SRNW before SUDS or SLDS no longer high (see Note 21) 15 ns
272a Setup of inactive SUDS or SLDS high to active data strobe no longer high 55 ns
273 Hold of SRNW after SUDS or SLDS high 0 ns
273a Hold of inactive SUDS or SLDS high after active data strobe high 55 ns
275 Delay from SCS, SUDS or SLDS high to SDTACK high (see Note 21) 35 ns
Delay from SDTACK low in the first DIO access to the SIF register to SDTACK low in the
‡
276
279†Delay from SUDS or SLDS high to SDTACK high impedance 65 ns
280 Delay from SUDS or SLDS low to SDDIR low (see Note 21) 25 ns
281 Delay from SUDS or SLDS high to SDDIR high (see Note 21) 55 ns
281a Hold of SDDIR low after SUDS or SLDS no longer active (see Note 21) 0 ns
282W Delay from SDDIR low to SDBEN low 25 ns
283W Delay from SUDS or SLDS high to SDBEN no longer low 25 ns
286 Pulse duration, SUDS or SLDS high between DIO accesses (see Note 21) 55 ns
†
This specification is provided as an aid to board design.
‡
This specification has been characterized to meet stated value.
§
It is the later of SRD
NOTES: 21. The “inactive” chip select is SIACK
immediately following access to the SIF
Delay from SDBEN low to SDTACK low (see
Ring User’s Guide,
and SWR or SCS low that indicates the start of the cycle.
cycles.
22. In 80x8x mode, SRAS may be used to strobe the values of SBHE
meet parameter 266a, and SBHE
266a and 264 are irrelevant, and parameter 268 must be met.
SPWU005, subsection 3.4.1.1.1)
, SRS0–SRS2, and SCS must meet parameter 264. If SRAS is strapped high, then parameters
TMS380 Second Generation T oken-
in DIO read and DIO write cycles, and SCS is the “inactive” chip select in interrupt acknowledge
If SIF register is
ready (no waiting
required)
If SIF register is
not ready (waiting
required)
, SRSX, SRS0–SRS2, and SCS. When used to do so, SRAS must
4000 ns
0 35
0 4000
POST OFFICE BOX 1443 • HOUSTON, TEXAS
77251–1443
77
Page 78

TMS380C26
NETWORK COMMPROCESSOR
SPWS010A–APRIL 1992–REVISED MARCH 1993
PARAMETER MEASUREMENT INFORMATION
SCS SRSX,
SRS0, SRS1
SIACK
SRNW
SUDS
SLDS
(see Note A)
SDDIR
SDBEN
SDTACK
Valid
267
272
,
(High)
‡
†
HI-Z
272a
280
282W
276
273
283W
275
255
268
273a
286
273a
281
281a
279
HI-Z
282b
SADH0–SADH7,
SADL0–SADL7,
SPH, SPL
†
SDTACK is an active-low bus ready signal. It must be asserted before data output.
‡
When the TMS380C16 begins to drive SDBEN
of the data buffers.
NOTE A: For 68xxx mode, skew between SLDS
to a data strobe edge use the later occurring edge. Events defined by two data strobes edges, such as parameter 286, are measured
between latest and earlier edges.
inactive, it has already latched the write date internally. Parameter 263 must be met to the input
and SUDS must not exceed 10 ns. Provided this limitation is observed, all events referenced
262
Figure 38. 68xxx DIO Write Timing
Data
263
(see Note 36)
HI-ZHI-Z
78
POST OFFICE BOX 1443 • HOUSTON, TEXAS
77251–1443
Page 79

TMS380C26
NETWORK COMMPROCESSOR
SPWS010A–APRIL 1992–REVISED MARCH 1993
PARAMETER MEASUREMENT INFORMATION
68xxx interrupt acknowledge cycle timing
NO. PARAMETER MIN MAX UNIT
255 Delay from SDTACK low to either SCS or SUDS, or SIACK high 15 ns
259†Hold of SAD high-impedance after SIACK no longer high (see Note 21) 0 ns
260 Setup of output data valid before SDTACK no longer high 0 ns
261†Delay from SIACK high to SAD high-impedance (see Note 21) 35 ns
261a Hold of output data valid after SCS or SIACK no longer low (see Note 21) 0 ns
267§Setup of register address before SIACK no longer high (see Note 21) 15 ns
272a Setup of inactive high SIACK to active data strobe no longer high 55 ns
273a Hold of inactive SRNW high after active data strobe high 55 ns
275 Delay from SCS or SRNW high to SDTACK high (see Note 21) 35 ns
Delay from SDTACK low in the first DIO access to the SIF register to SDTACK low in the immediately
‡
276
279†Delay from SIACK high to SDTACK high impedance 65 ns
282a Delay from SDBEN low to SDTACK low in a read cycle 35 ns
282R
283R Delay from SIACK high to SDBEN high (see Note 21) 35 ns
286 Pulse duration, SIACK high between DIO accesses (see Note 21) 55 ns
†
This specification is provided as an aid to board design.
‡
This specification has been characterized to meet stated value.
§
It is the later of SRD
NOTE 21: The “inactive” chip select is SIACK
following access to the SIF
Delay from SIACK low to SDBEN low (see
SPWU005, subsection 3.4.1.1.1) provided the previous cycle completed
and SRD or SCS low that indicates the start of the cycle.
in DIO read and DIO write cycles, and SCS is the “inactive” chip select in interrupt acknowledge
cycles.
TMS380 Second Generation Token-Ring User’s Guide,
4000 ns
55 ns
POST OFFICE BOX 1443 • HOUSTON, TEXAS
77251–1443
79
Page 80

TMS380C26
NETWORK COMMPROCESSOR
SPWS010A–APRIL 1992–REVISED MARCH 1993
PARAMETER MEASUREMENT INFORMATION
SCS, SRSX,
SRS0, SRS1,
SBHE
SIACK
Only SCS needs to be Inactive.
All Others are Don’t Care.
267
SRNW
SLDS
SDDIR
SDBEN
SDTACK
SADH0–SADH7,
SADL0–SADL7,
SPH, SPL
(see Note A)
†
SDTACK
NOTE A: Internal logic will drive SDTACK
is an active-low bus ready signal. It must be asserted before data output.
(High)
†
HI-Z
259
272a
282R
283R
276
282a
260
Output Data Valid
high and verify that it has reached a valid high level before three-stating the signal.
275
255
279
286
273a
286
261
261a
HI-Z
HI-ZHI-Z
80
Figure 39. 68xxx Interrupt Acknowledge Cycle Timing
POST OFFICE BOX 1443 • HOUSTON, TEXAS
77251–1443
Page 81

TMS380C26
NETWORK COMMPROCESSOR
SPWS010A–APRIL 1992–REVISED MARCH 1993
PARAMETER MEASUREMENT INFORMATION
68xxx mode bus arbitration timing, SIF takes control
NO. PARAMETER MIN MAX UNIT
208a
208b Hold of asynchronous input SBGR after SBCLK low to guarantee recognition on this cycle 15 ns
212 Delay from SBCLK low to address valid 25 ns
224a Delay from SBCLK low in cycle I2 to SOWN low (see Note 24) 25 ns
224c Delay from SBCLK low in cycle I2 to SDDIR low in DMA read 30 ns
230 Delay from SBCLK high to either SHRQ low or SBRQ high 25 ns
241 Delay from SBCLK high in TX cycle to SUDS and SLDS high 25 ns
241a†Hold of SUDS, SLDS, SRNW, and SAS high-impedance after SOWN low, bus acquisition t
†
This specification has been characterized to meet stated value.
NOTE 24: Motorola-style bus slaves hold SDTACK
Setup of asynchronous input SBGR before SBCLK no longer high to guarantee recognition on
this cycle
active until the bus master deasserts SAS.
15 ns
c(SCK)–15
ns
POST OFFICE BOX 1443 • HOUSTON, TEXAS
77251–1443
81
Page 82

82
POST OFFICE BOX 1443 HOUSTON, TEXAS 77001
SIF Inputs:
SBCLK
SBGR
SBERR,
SDTACK,
SBBSY
SIF Outputs:
SBRQ
(see Note A)
PARAMETER MEASUREMENT INFORMATION
208b
208a
230
TMS380C26
NETWORK COMMPROCESSOR
SPWS010A–APRIL 1992–REVISED MARCH 1993
SIF MasterBus ExchangeUser Master
T2T1TXI2I1(T4)
230
208a
SAS
, SLDS,
•
SADH0–SADH7,
SADL0–SADL7,
NOTES: A. In 80x8x mode, the system interface deasserts SHRQ on the rising edge of SBCLK following the T4 state of the last system bus transfer it controls. In 68xxx mode, the
SUDS
SRNW
SPH, SPL
SDDIR
SOWN
(see Note B)
system interface deasserts SBRQ
B. While the system interface DMA controls are active (i.e., SOWN
on the rising edge of SBCLK in state T2 of the first system bus transfer it controls.
(Input)
HI-Z
is asserted), the SCS input is disabled.
208b 241
Output
241
READ
WRITE
212
SIF
224c
WRITE
READ
224a
241a
Figure 40. 68xxx Mode Bus Arbitration Timing, SIF Takes Control
Page 83

TMS380C26
NETWORK COMMPROCESSOR
SPWS010A–APRIL 1992–REVISED MARCH 1993
PARAMETER MEASUREMENT INFORMATION
68xxx mode DMA read timing
NO. PARAMETER MIN MAX UNIT
205 Setup of input data valid before SBCLK in T3 cycle no longer high 15 ns
206 Hold of input data valid after SBCLK low in T4 cycle if parameters 207a and 207b not met 15 ns
207a Hold of input data valid after data strobe no longer low 0 ns
207b Hold of input data valid after SDBEN no longer low 0 ns
208a
208b Hold of asynchronous input SDTACK after SBCLK low to guarantee recognition on this cycle 15 ns
209 Pulse duration, SAS, SUDS, and SLDS high
210 Delay from SBCLK high in T2 cycle to SUDS and SLDS active 25 ns
212 Delay from SBCLK low to address valid 25 ns
214†Delay from SBCLK low in T2 cycle to SAD high-impedance 25 ns
215 Pulse duration, SALE and SXAL high t
216 Delay from SBCLK high to SALE or SXAL high 25 ns
216a Hold of SALE or SXAL low after SUDS and SAS high t
217 Delay from SBCLK high to SXAL low in the TX cycle or SALE low in the T1 cycle 25 ns
218 Hold of address valid after SALE, SXAL low t
222 Delay from SBCLK high to SAS low 25 ns
223R Delay from SBCLK low in T4 cycle to SUDS, SLDS, and SAS high (see Note 25) 25 ns
225R Delay from SBCLK low in T4 cycle to SDBEN high 25 ns
229†Hold of SAD high-impedance after SBCLK low in T4 cycle 0 ns
233 Setup of address valid before SALE or SXAL no longer high t
233a Setup of address valid before SAS no longer high t
237R Delay from SBCLK high in the T2 cycle to SDBEN low 25 ns
239 Pulse duration, SAS, SUDS, and SLDS
247 Setup of data valid before SDTACK low if parameter 208a not met 0 ns
†
This specification has been characterized to meet stated value.
NOTE 25: While the system interface DMA controls are active (i.e., SOWN
Setup of asynchronous input SDTACK before SBCLK no longer high to guarantee recognition
on this cycle
is asserted), the SCS input is disabled.
t
c(SCK)
t
w(SCKL)
c(SCK)
w(SCKL)
w(SCKH)
w(SCKL)
w(SCKL)
2t
c(SCK)
t
w(SCKH)
15 ns
+
–25
–25 ns
–15 ns
–15 ns
–15 ns
–15 ns
+
–30
ns
ns
POST OFFICE BOX 1443 • HOUSTON, TEXAS
77251–1443
83
Page 84

84
POST OFFICE BOX 1443 HOUSTON, TEXAS 77001
SBCLK
SAS
(see Note A)
SUDS,
SLDS
SRNW
SXAL
216
PARAMETER MEASUREMENT INFORMATION
TWAIT
V
222
210
218
(High)
217
215
217
239
239
223R
TMS380C26
NETWORK COMMPROCESSOR
SPWS010A–APRIL 1992–REVISED MARCH 1993
T1T4T3T2T1TXT4
S7S6S5S4S3S2S1
209
209
216
•
SADL0–SADH7,
SADH0–SADL7,
(see Notes B and C)
†
If parameter 208a is not met, then valid data must be present before SDTACK
NOTES: A. Motorola-style bus slaves hold SDTACK
B. All VSS pins should be routed to minimize inductance to system ground.
C. On read cycle, read strobe remains active until the internal sample of incoming data is completed. Input-data may be removed when either the read strobe or SDBEN
becomes no longer active.
SALE
SPH, SPL
SDTACK
SDDIR
SDBEN
(see Note A)
212
233
Extended Address
active until the bus master deasserts SAS.
215
goes low.
212
233
218
233a
237R
214
208b
247
†
208a
205
216a
229
206
207a
HI-ZData InAddress
207b
225R
Figure 41. 68xxx Mode DMA Read Timing
Page 85

TMS380C26
NETWORK COMMPROCESSOR
SPWS010A–APRIL 1992–REVISED MARCH 1993
PARAMETER MEASUREMENT INFORMATION
68xxx mode DMA write timing
NO. PARAMETER MIN MAX UNIT
208a
208b Hold of asynchronous input SDTACK after SBCLK low to guarantee recognition on this cycle 15 ns
209 Pulse duration, SAS, SUDS, and SLDS high
211 Delay from SBCLK high in T2 cycle to SUDS and SLDS active 25 ns
211a Delay of output data valid to SUDS and SLDS no longer high t
212 Delay from SBCLK low to address valid 25 ns
215 Pulse duration, SALE and SXAL high t
216 Delay from SBCLK high to SALE or SXAL high 25 ns
216a Hold of SALE or SXAL low after SUDS and SAS high t
217 Delay from SBCLK high to SXAL low in the TX cycle or SALE low in the T1 cycle 25 ns
218 Hold of address valid after SALE, SXAL low t
219 Delay from SBCLK low in T2 cycle to output data and parity valid 39 ns
221 Hold of output data, parity valid after SUDS and SLDS high t
222 Delay from SBCLK high to SAS low 25 ns
223W Delay from SBCLK low to SUDS, SLDS, and SAS high 25 ns
225W Delay from SBCLK high in T4 cycle to SDBEN high 25 ns
225WH Hold of SDBEN low after SUDS and SLDS high t
233 Setup of address valid before SALE or SXAL no longer high t
233a Setup of address valid before SAS no longer high t
237W Delay from SBCLK high in T1 cycle to SDBEN low 25 ns
239 SAS pulse duration
243 Pulse duration, SUDS and SLDS
Setup of asynchronous input SDTACK before SBCLK no longer high to guarantee recognition
on this cycle
t
c(SCK)
t
w(SCKL)
w(SCKL)
c(SCK)
w(SCKL)
w(SCKH)
c(SCK)
w(SCKL)
w(SCKL)
w(SCKL)
2t
c(SCK)
t
w(SCKH)
t
c(SCK)
t
w(SCKH)
15 ns
+
–25
–15 ns
–25 ns
–15 ns
–15 ns
–15 ns
–25 ns
–15 ns
–15 ns
+
–30
+
–25
ns
ns
ns
POST OFFICE BOX 1443 • HOUSTON, TEXAS
77251–1443
85
Page 86

86
POST OFFICE BOX 1443 HOUSTON, TEXAS 77001
•
SBCLK
SAS
SUDS,
SLDS
SRNW
SXAL
SALE
SADL0–SADH7,
SADH0–SADL7,
SPL, SPH
SDTACK
(see Notes A and B)
216
Low
212
PARAMETER MEASUREMENT INFORMATION
217
215
216
233
Extended Address
222
233a
218
215
212
233
211
211a
217
218
219
TWAIT
V
239
208a
243
Output DataAddress
223W
216a
209
221
TMS380C26
NETWORK COMMPROCESSOR
SPWS010A–APRIL 1992–REVISED MARCH 1993
T1T4T3T2T1TXT4
SDDIR
SDBEN
NOTES: A. All VSS pins should be routed to minimize inductance to system ground.
B. On read cycle, read strobe remains active until the internal sample of incoming data is completed. Input-data may be removed when either the read strobe or SDBEN
becomes no longer active.
237W
Figure 42. 68xxx Mode DMA Write Timing
208b
225W
225WH
Page 87

TMS380C26
NETWORK COMMPROCESSOR
SPWS010A–APRIL 1992–REVISED MARCH 1993
PARAMETER MEASUREMENT INFORMATION
68xxx mode bus arbitration timing, SIF returns control
NO. PARAMETER MIN MAX UNIT
220†Delay from SBCLK low in I1 cycle to SAD, SPL, SPH, SUDS, and SLDS high-impedance, bus release 35 ns
223b†Delay from SBCLK low in I1 cycle to SBHE/SRNW high-impedance 45 ns
224b Delay from SBCLK low in cycle I2 to SOWN high 25 ns
224d Delay from SBCLK low in cycle I2 to SDDIR high 30 ns
230 Delay from SBCLK high to either SHRQ low or SBRQ high 25 ns
240†Setup of SUDS, SLDS, SRNW, and SAS control signals high-impedance before SOWN no longer low 0 ns
†
This specification has been characterized to meet stated value.
POST OFFICE BOX 1443 • HOUSTON, TEXAS
77251–1443
87
Page 88

88
SIF Inputs:
SBCLK
SBGR
SDTACK
PARAMETER MEASUREMENT INFORMATION
TMS380C26
NETWORK COMMPROCESSOR
SPWS010A–APRIL 1992–REVISED MARCH 1993
UserBus ExchangeSIF Master
T1I2I1T4T3T2
POST OFFICE BOX 1443 HOUSTON, TEXAS 77001
•
SIF Outputs:
SBRQ
(see Note A)
SAS
, SUDS,
SLDS
SRNW
SADH0–SADH7,
SADL0–SADL7,
SPH, SPL
SDDIR
SOWN
230
READ
WRITE
SIF
WRITE
READ
220
240
240
223b
HI-Z
220
HI-Z
224d
224b
NOTE A: In 80x8x mode, the system interface deasserts SHRQ on the rising edge of SBCLK following the T4 state of the last system bus transfer it controls. In 68xxx mode, the system
interface deasserts SBRQ
on the rising edge of SBCLK in state T2 of the first system bus transfer it controls.
Figure 43. 68xxx Mode Bus Arbitration Timing, SIF Returns Control
Page 89

TMS380C26
NETWORK COMMPROCESSOR
SPWS010A–APRIL 1992–REVISED MARCH 1993
PARAMETER MEASUREMENT INFORMATION
68xxx mode bus release and error timing
NO. PARAMETER MIN MAX UNIT
208a Setup of asynchronous input before SBCLK no longer high to guarantee recognition 15 ns
208b Hold of asynchronous input SBRLS, SOWN, or SBERR after SBCLK low to guarantee recognition 15 ns
208c Hold of SBRLS low after SOWN high 0 ns
236 Setup of SBERR low before SDTACK no longer high if parameter 208a not met 30 ns
T(W or 2) T3 T4 T1 T2
SBCLK
208a
SBRLS
(see Note A)
SOWN
SBERR
(see Note B)
SDTACK
NOTES: A. The System Interface ignores the assertion of SBRLS
the assertion of SBRLS
internally started, then the System Interface will release the bus before starting another.
B. If SBERR
of the value of SDTACK
Interface will then release control of the system bus. The System Interface ignores the assertion of SBERR
a DMA bus cycle on the system bus. When SBERR
releases the bus upon completion of the current bus transfer and halts all further DMA on the system side. The error is synchronized
to the local bus and DMA stops on the local sides. The value of the SDMAADR, SDMADDRX, and SDMALEN registers in the System
Interface are not defined after a system bus error.
C. In cycle-steal mode, state TX is present on every system bus transfer. In burst mode, state TX is present on the first bus transfer
and whenever the increment of the DMA Address Register carries beyond the least significant 16 bits.
D. SDTACK
E. Unless otherwise specified, for all signals specified as a maximum delay from the end of an SBCLK transition to the signal valid,
the signal is also specified to hold its previous value (including high-impedance) until the start of that SBCLK transition.
is asserted when the System Interface controls the system bus, then the current bus transfer is completed, regardless
is not sampled to verify that it is deasserted.
, it will complete any internally started DMA cycle and relinquish control of the bus. If no DMA transfer has
. If the BERETRY register is non-zero, the cycle will be retried. If the BERETRY register is zero, the System
208b
208a
208b
208c
236
if it does not own the system bus. If it does own the bus, then when it detects
if it is not performing
is properly asserted and BERETRY is zero, however, the System Interface
Figure 44. 68xxx Mode Bus Release and Error Timing
POST OFFICE BOX 1443 • HOUSTON, TEXAS
77251–1443
89
Page 90

TMS380C26
NETWORK COMMPROCESSOR
SPWS010A–APRIL 1992–REVISED MARCH 1993
PARAMETER MEASUREMENT INFORMATION
normal completion with delayed start
T1 T(W or 2) T3 T4
SBCLK
SDTACK
SBERR
SHALT
rerun cycle with delayed start
T1 T2 T3 T4 TH
SBCLK
SDTACK
†
†
TH T1
B
TH
E
T1
SBERR
SHALT
SOWN
†
Only the relative placement of the edges to SBCLK falling edge is shown. Actual signal edge placement may vary from waveforms shown.
Figure 45. 68xxx Bus Halt and Retry Cycle Waveforms
90
POST OFFICE BOX 1443 • HOUSTON, TEXAS
77251–1443
Page 91

TMS380C26
NETWORK COMMPROCESSOR
SPWS010A–APRIL 1992–REVISED MARCH 1993
MECHANICAL DATA
JEDEC plastic leaded quad flat package (PQ suffix)
Each of these chip carrier packages consists of a circuit mounted on a lead frame and encapsulated within an
electrically nonconductive plastic compound. The compound withstands soldering temperatures with no
deformation, and circuit performance characteristics remain stable when the devices are operated in
high-humidity conditions. The packages are intended for surface mounting on solder lands on 0,635 (0.025)
centers. Leads require no additional cleaning or processing when used in soldered assembly.
0,635 (0.025) NOM
B
0,254 (0.010) NOM
4,57 (0.180)
4,06 (0.160)
0,76 (0.030) NOM
C
L
CA
C
L
B
A
JEDEC
OUTLINE
MO–069–AD
MO–069–AE
ALL LINEAR DIMENSIONS ARE IN MILLIMETERS AND PARENTHETICALLY IN INCHES
NO. OF
TERMINALS
100
132
POST OFFICE BOX 1443 • HOUSTON, TEXAS
A
MIN MAX
22,28
(0.877)
27,36
(1.077)
77251–1443
(0.883)
(1.083)
22,43
27,50
B
MIN MAX
18,97
(0.747)
24,05
(0.947)
(0.753)
(0.953)
19,13
24,21
C
MIN MAX
15,16
(0.597)
20,24
(0.797)
15,32
(0.603)
20,40
(0.803)
91
Page 92

IMPORTANT NOTICE
T exas Instruments and its subsidiaries (TI) reserve the right to make changes to their products or to discontinue
any product or service without notice, and advise customers to obtain the latest version of relevant information
to verify, before placing orders, that information being relied on is current and complete. All products are sold
subject to the terms and conditions of sale supplied at the time of order acknowledgement, including those
pertaining to warranty, patent infringement, and limitation of liability.
TI warrants performance of its semiconductor products to the specifications applicable at the time of sale in
accordance with TI’s standard warranty. Testing and other quality control techniques are utilized to the extent
TI deems necessary to support this warranty . Specific testing of all parameters of each device is not necessarily
performed, except those mandated by government requirements.
CERTAIN APPLICATIONS USING SEMICONDUCTOR PRODUCTS MAY INVOLVE POTENTIAL RISKS OF
DEATH, PERSONAL INJURY, OR SEVERE PROPERTY OR ENVIRONMENTAL DAMAGE (“CRITICAL
APPLICATIONS”). TI SEMICONDUCTOR PRODUCTS ARE NOT DESIGNED, AUTHORIZED, OR
WARRANTED TO BE SUITABLE FOR USE IN LIFE-SUPPORT DEVICES OR SYSTEMS OR OTHER
CRITICAL APPLICA TIONS. INCLUSION OF TI PRODUCTS IN SUCH APPLICATIONS IS UNDERST OOD TO
BE FULLY AT THE CUSTOMER’S RISK.
In order to minimize risks associated with the customer’s applications, adequate design and operating
safeguards must be provided by the customer to minimize inherent or procedural hazards.
TI assumes no liability for applications assistance or customer product design. TI does not warrant or represent
that any license, either express or implied, is granted under any patent right, copyright, mask work right, or other
intellectual property right of TI covering or relating to any combination, machine, or process in which such
semiconductor products or services might be or are used. TI’s publication of information regarding any third
party’s products or services does not constitute TI’s approval, warranty or endorsement thereof.
Copyright 1998, Texas Instruments Incorporated
 Loading...
Loading...