

Page 1

TMS320 x2833x, 2823x System Control and
Interrupts
Reference Guide
Literature Number: SPRUFB0C
September 2007 – Revised May 2009
Page 2

2 SPRUFB0C – September 2007 – Revised May 2009
Submit Documentation Feedback
Page 3

Contents
Preface .............................................................................................................................. 11
1 Flash and OTP Memory Blocks .................................................................................. 15
1.1 Flash and OTP Memory ................................................................................................... 16
1.1.1 Flash Memory ...................................................................................................... 16
1.1.2 OTP Memory ....................................................................................................... 16
1.2 Flash and OTP Power Modes ............................................................................................ 16
1.2.1 Flash and OTP Performance ................................................................................... 18
1.2.2 Flash Pipeline Mode .............................................................................................. 18
1.2.3 Reserved Locations Within Flash and OTP ................................................................... 19
1.2.4 Procedure to Change the Flash Configuration Registers .................................................... 20
1.3 Flash and OTP Registers ................................................................................................. 21
2 Code Security Module (CSM) ..................................................................................... 27
2.1 Functional Description ..................................................................................................... 28
2.2 CSM Impact on Other On-Chip Resources ............................................................................. 30
2.3 Incorporating Code Security in User Applications ..................................................................... 31
2.3.1 Environments That Require Security Unlocking .............................................................. 32
2.3.2 Password Match Flow ........................................................................................... 33
2.3.3 Unsecuring Considerations for Devices With/Without Code Security ...................................... 34
2.4 Do's and Don'ts to Protect Security Logic ............................................................................... 36
2.4.1 Do's ................................................................................................................. 36
2.4.2 Don'ts .............................................................................................................. 36
2.5 CSM Features - Summary ................................................................................................ 36
3 Clocking .................................................................................................................. 37
3.1 Clocking and System Control ............................................................................................. 38
3.2 OSC and PLL Block ........................................................................................................ 45
3.2.1 PLL-Based Clock Module ........................................................................................ 45
3.2.2 Main Oscillator Fail Detection.................................................................................... 46
3.2.3 XCLKOUT Generation ............................................................................................ 48
3.2.4 PLL Control (PLLCR) Register .................................................................................. 49
3.2.5 PLL Control, Status and XCLKOUT Register Descriptions .................................................. 51
3.2.6 External Reference Oscillator Clock Option ................................................................... 52
3.3 Low-Power Modes Block .................................................................................................. 53
3.4 Watchdog Block ............................................................................................................ 55
3.4.1 Servicing The Watchdog Timer .................................................................................. 56
3.4.2 Watchdog Reset or Watchdog Interrupt Mode ................................................................ 56
3.4.3 Watchdog Operation in Low Power Modes .................................................................... 57
3.4.4 Emulation Considerations ........................................................................................ 57
3.4.5 Watchdog Registers .............................................................................................. 58
3.5 32-Bit CPU Timers 0/1/2 .................................................................................................. 60
4 General-Purpose Input/Output (GPIO) ......................................................................... 65
SPRUFB0C – September 2007 – Revised May 2009 Contents 3
Submit Documentation Feedback
Page 4

www.ti.com
4.1 GPIO Module Overview ................................................................................................... 66
4.2 Configuration Overview .................................................................................................... 71
4.3 Digital General Purpose I/O Control ..................................................................................... 72
4.4 Input Qualification .......................................................................................................... 74
4.4.1 No Synchronization (asynchronous input) ..................................................................... 74
4.4.2 Synchronization to SYSCLKOUT Only ......................................................................... 74
4.4.3 Qualification Using a Sampling Window ....................................................................... 74
4.5 GPIO and Peripheral Multiplexing (MUX) ............................................................................... 78
4.6 Register Bit Definitions .................................................................................................... 83
5 Peripheral Frames ................................................................................................... 109
5.1 Peripheral Frame Registers ............................................................................................. 110
5.2 EALLOW-Protected Registers .......................................................................................... 112
5.3 Device Emulation Registers ............................................................................................. 116
5.4 Write-Followed-by-Read Protection .................................................................................... 118
6 Peripheral Interrupt Expansion (PIE) ......................................................................... 121
6.1 Overview of the PIE Controller .......................................................................................... 122
6.1.1 Interrupt Operation Sequence .................................................................................. 122
6.2 Vector Table Mapping .................................................................................................... 125
6.3 Interrupt Sources.......................................................................................................... 127
6.3.1 Procedure for Handling Multiplexed Interrupts ............................................................... 129
6.3.2 Procedures for Enabling And Disabling Multiplexed Peripheral Interrupts ............................... 130
6.3.3 Flow of a Multiplexed Interrupt Request From a Peripheral to the CPU ................................. 131
6.3.4 The PIE Vector Table ........................................................................................... 132
6.4 PIE Configuration Registers ............................................................................................. 139
6.5 PIE Interrupt Registers ................................................................................................... 140
6.5.1 PIE Interrupt Flag Registers .................................................................................... 141
6.5.2 PIE Interrupt Enable Registers ................................................................................. 141
6.5.3 CPU Interrupt Flag Register (IFR) ............................................................................. 142
6.5.4 Interrupt Enable Register (IER) and Debug Interrupt Enable Register (DBGIER) ...................... 144
6.6 External Interrupt Control Registers ................................................................................... 148
A Revision History ..................................................................................................... 151
Contents 4 SPRUFB0C – September 2007 – Revised May 2009
Submit Documentation Feedback
Page 5

www.ti.com
List of Figures
1-1 Flash Power Mode State Diagram ....................................................................................... 17
1-2 Flash Pipeline ............................................................................................................... 19
1-3 Flash Configuration Access Flow Diagram ............................................................................. 20
1-4 Flash Options Register (FOPT) .......................................................................................... 22
1-5 Flash Power Register (FPWR) ........................................................................................... 22
1-6 Flash Status Register (FSTATUS) ....................................................................................... 23
1-7 Flash Standby Wait Register (FSTDBYWAIT) ......................................................................... 24
1-8 Flash Standby to Active Wait Counter Register (FACTIVEWAIT) .................................................. 24
1-9 Flash Wait-State Register (FBANKWAIT) .............................................................................. 25
1-10 OTP Wait-State Register (FOTPWAIT) ................................................................................. 26
2-1 CSM Status and Control Register (CSMSCR) ......................................................................... 32
2-2 Password Match Flow (PMF) ............................................................................................ 33
3-1 Clock and Reset Domains ................................................................................................ 38
3-2 Peripheral Clock Control 0 Register (PCLKCR0) ...................................................................... 39
3-3 Peripheral Clock Control 1 Register (PCLKCR1) ..................................................................... 40
3-4 Peripheral Clock Control 3 Register (PCLKCR3) ...................................................................... 43
3-5 High-Speed Peripheral Clock Prescaler (HISPCP) Register ......................................................... 44
3-6 Low-Speed Peripheral Clock Prescaler Register (LOSPCP) ......................................................... 44
3-7 OSC and PLL Block ........................................................................................................ 45
3-8 Oscillator Fail-Detection Logic Diagram ................................................................................. 46
3-9 XCLKOUT Generation ..................................................................................................... 48
3-10 PLLCR Change Procedure Flow Chart .................................................................................. 50
3-11 PLLCR Register Layout ................................................................................................... 51
3-12 PLL Status Register (PLLSTS) ........................................................................................... 51
3-13 Low Power Mode Control 0 Register (LPMCR0) ....................................................................... 54
3-14 Watchdog Module .......................................................................................................... 55
3-15 System Control and Status Register (SCSR) .......................................................................... 58
3-16 Watchdog Counter Register (WDCNTR) ................................................................................ 59
3-17 Watchdog Reset Key Register (WDKEY) ............................................................................... 59
3-18 Watchdog Control Register (WDCR) .................................................................................... 59
3-19 CPU-Timers ................................................................................................................. 60
3-20 CPU-Timer Interrupts Signals and Output Signal ...................................................................... 61
3-21 TIMERxTIM Register (x = 0, 1, 2) ........................................................................................ 62
3-22 TIMERxTIMH Register (x = 0, 1, 2) ...................................................................................... 62
3-23 TIMERxPRD Register (x = 0, 1, 2) ....................................................................................... 62
3-24 TIMERxPRDH Register (x = 0, 1, 2) ..................................................................................... 62
3-25 TIMERxTCR Register (x = 0, 1, 2) ....................................................................................... 63
3-26 TIMERxTPR Register (x = 0, 1, 2) ....................................................................................... 64
3-27 TIMERxTPRH Register (x = 0, 1, 2) .................................................................................... 64
4-1 GPIO0 to GPIO27 Multiplexing Diagram ................................................................................ 66
4-2 GPIO28 to GPIO31 Multiplexing Diagram (Peripheral 2 and Peripheral 3 Outputs Merged) .................... 67
4-3 GPIO32, GPIO33 Multiplexing Diagram ................................................................................. 68
4-4 GPIO34 to GPIO63 Multiplexing Diagram (Peripheral 2 and Peripheral 3 Outputs Merged) .................... 69
4-5 GPIO64 to GPIO79 Multiplexing Diagram (Minimal GPIOs Without Qualification) ................................ 70
4-6 Input Qualification Using a Sampling Window .......................................................................... 74
4-7 Input Qualifier Clock Cycles .............................................................................................. 77
4-8 GPIO Port A MUX 1 (GPAMUX1) Register ............................................................................. 83
4-9 GPIO Port A MUX 2 (GPAMUX2) Register ............................................................................. 85
4-10 GPIO Port B MUX 1 (GPBMUX1) Register ............................................................................. 87
4-11 GPIO Port B MUX 2 (GPBMUX2) Register ............................................................................. 89
4-12 GPIO Port C MUX 1 (GPCMUX1) Register ............................................................................. 91
4-13 GPIO Port C MUX 2 (GPCMUX2) Register ............................................................................. 92
SPRUFB0C – September 2007 – Revised May 2009 List of Figures 5
Submit Documentation Feedback
Page 6
www.ti.com
4-14 GPIO Port A Qualification Control (GPACTRL) Register ............................................................ 94
4-15 GPIO Port B Qualification Control (GPBCTRL) Register ............................................................ 95
4-16 GPIO Port A Qualification Select 1 (GPAQSEL1) Register........................................................... 96
4-17 GPIO Port A Qualification Select 2 (GPAQSEL2) Register........................................................... 96
4-18 GPIO Port B Qualification Select 1 (GPBQSEL1) Register........................................................... 97
4-19 GPIO Port B Qualification Select 2 (GPBQSEL2) Register........................................................... 97
4-20 GPIO Port A Direction (GPADIR) Register ............................................................................. 98
4-21 GPIO Port B Direction (GPBDIR) Register ............................................................................. 98
4-22 GPIO Port C Direction (GPCDIR) Register ............................................................................ 99
4-23 GPIO Port A Pullup Disable (GPAPUD) Registers .................................................................. 100
4-24 GPIO Port B Pullup Disable (GPBPUD) Registers .................................................................. 100
4-25 GPIO Port C Pullup Disable (GPCPUD) Registers .................................................................. 101
4-26 GPIO Port A Data (GPADAT) Register ............................................................................... 101
4-27 GPIO Port B Data (GPBDAT) Register ............................................................................... 102
4-28 GPIO Port C Data (GPCDAT) Register ............................................................................... 103
4-29 GPIO Port A Set, Clear and Toggle (GPASET, GPACLEAR, GPATOGGLE) Registers ....................... 104
4-30 GPIO Port B Set, Clear and Toggle (GPBSET, GPBCLEAR, GPBTOGGLE) Registers ....................... 105
4-31 GPIO Port C Set, Clear and Toggle (GPCSET, GPCCLEAR, GPCTOGGLE) Registers ...................... 106
4-32 GPIO XINTn, XNMI Interrupt Select (GPIOXINTnSEL, GPIOXNMISEL) Registers ............................. 107
4-33 GPIO Low Power Mode Wakeup Select (GPIOLPMSEL) Register ................................................ 108
5-1 Device Configuration (DEVICECNF) Register ........................................................................ 116
5-2 Part ID Register ........................................................................................................... 117
5-3 CLASSID Register ........................................................................................................ 117
5-4 REVID Register ........................................................................................................... 117
6-1 Overview: Multiplexing of Interrupts Using the PIE Block ........................................................... 122
6-2 Typical PIE/CPU Interrupt Response - INTx.y ........................................................................ 124
6-3 Reset Flow Diagram ...................................................................................................... 126
6-4 PIE Interrupt Sources and External Interrupts XINT1/XINT2 ....................................................... 127
6-5 PIE Interrupt Sources and External Interrupts (XINT3 – XINT7) ................................................... 128
6-6 Multiplexed Interrupt Request Flow Diagram ......................................................................... 131
6-7 PIECTRL Register (Address CE0) ..................................................................................... 140
6-8 PIE Interrupt Acknowledge Register (PIEACK) Register (Address CE1) ......................................... 140
6-9 PIEIFRx Register (x = 1 to 12) .......................................................................................... 141
6-10 PIEIERx Register (x = 1 to 12) .......................................................................................... 141
6-11 Interrupt Flag Register (IFR) — CPU Register ....................................................................... 143
6-12 Interrupt Enable Register (IER) — CPU Register .................................................................... 145
6-13 Debug Interrupt Enable Register (DBGIER) — CPU Register ..................................................... 146
6-14 External Interrupt n Control Register (XINT nCR) .................................................................... 148
6-15 External NMI Interrupt Control Register (XNMICR) — Address 7077h ............................................ 148
6-16 External Interrupt 1 Counter (XINT1CTR) (Address 7078h) ........................................................ 149
6-17 External Interrupt 2 Counter (XINT2CTR) (Address 7079h) ........................................................ 149
6-18 External NMI Interrupt Counter (XNMICTR) (Address 707Fh) ..................................................... 150
List of Figures6 SPRUFB0C – September 2007 – Revised May 2009
Submit Documentation Feedback
Page 7

www.ti.com
List of Tables
1-1 Flash/OTP Configuration Registers ...................................................................................... 21
1-2 Flash Options Register (FOPT) Field Descriptions .................................................................... 22
1-3 Flash Power Register (FPWR) Field Descriptions ..................................................................... 22
1-4 Flash Status Register (FSTATUS) Field Descriptions ................................................................. 23
1-5 Flash Standby Wait Register (FSTDBYWAIT) Field Descriptions ................................................... 24
1-6 Flash Standby to Active Wait Counter Register (FACTIVEWAIT) Field Descriptions ............................. 24
1-7 Flash Wait-State Register (FBANKWAIT) Field Descriptions ........................................................ 25
1-8 OTP Wait-State Register (FOTPWAIT) Field Descriptions ........................................................... 26
2-1 Security Levels ............................................................................................................. 28
2-2 Resources Affected by the CSM ......................................................................................... 30
2-3 Resources Not Affected by the CSM .................................................................................... 30
2-4 Code Security Module (CSM) Registers ................................................................................ 31
2-5 CSM Status and Control Register (CSMSCR) Field Descriptions ................................................... 32
3-1 PLL, Clocking, Watchdog, and Low-Power Mode Registers ........................................................ 39
3-2 Peripheral Clock Control 0 Register (PCLKCR0) Field Descriptions ................................................ 39
3-3 Peripheral Clock Control 1 Register (PCLKCR1) Field Descriptions ............................................... 41
3-4 Peripheral Clock Control 3 Register (PCLKCR3) Field Descriptions ................................................ 43
3-5 High-Speed Peripheral Clock Prescaler (HISPCP) Field Descriptions .............................................. 44
3-6 Low-Speed Peripheral Clock Prescaler Register (LOSPCP) Field Descriptions ................................... 44
3-7 Possible PLL Configuration Modes ...................................................................................... 46
3-8 PLLCR Bit Descriptions ................................................................................................... 51
3-9 PLL Status Register (PLLSTS) Field Descriptions ..................................................................... 51
3-10 Low-Power Mode Summary .............................................................................................. 53
3-11 Low Power Modes ......................................................................................................... 53
3-12 Low Power Mode Control 0 Register (LPMCR0) Field Descriptions ................................................ 54
3-13 Example Watchdog Key Sequences ..................................................................................... 56
3-14 System Control and Status Register (SCSR) Field Descriptions .................................................... 58
3-15 Watchdog Counter Register (WDCNTR) Field Descriptions ......................................................... 59
3-16 Watchdog Reset Key Register (WDKEY) Field Descriptions ......................................................... 59
3-17 Watchdog Control Register (WDCR) Field Descriptions .............................................................. 59
3-18 CPU-Timers 0, 1, 2 Configuration and Control Registers ............................................................. 61
3-19 TIMERxTIM Register Field Descriptions ................................................................................ 62
3-20 TIMERxTIMH Register Field Descriptions .............................................................................. 62
3-21 TIMERxPRD Register Field Descriptions ............................................................................... 62
3-22 TIMERxPRDH Register Field Descriptions ............................................................................. 63
3-23 TIMERxTCR Register Field Descriptions ............................................................................... 63
3-24 TIMERxTPR Register Field Descriptions ............................................................................... 64
3-25 TIMERxTPRH Register Field Descriptions.............................................................................. 64
4-1 GPIO Control Registers ................................................................................................... 71
4-2 GPIO Interrupt and Low Power Mode Select Registers ............................................................... 71
4-3 GPIO Data Registers ...................................................................................................... 73
4-4 Sampling Period ............................................................................................................ 75
4-5 Sampling Frequency ....................................................................................................... 75
4-6 Case 1: Three-Sample Sampling Window Width ...................................................................... 76
4-7 Case 2: Six-Sample Sampling Window Width .......................................................................... 76
4-8 Default State of Peripheral Input ......................................................................................... 79
4-9 GPIOA MUX ................................................................................................................ 80
4-10 GPIOB MUX ................................................................................................................ 81
4-11 GPIOC MUX ................................................................................................................ 82
SPRUFB0C – September 2007 – Revised May 2009 List of Tables 7
Submit Documentation Feedback
Page 8

www.ti.com
4-12 GPIO Port A Multiplexing 1 (GPAMUX1) Register Field Descriptions .............................................. 83
4-13 GPIO Port A MUX 2 (GPAMUX2) Register Field Descriptions ....................................................... 85
4-14 GPIO Port B MUX 1 (GPBMUX1) Register Field Descriptions ....................................................... 87
4-15 GPIO Port B MUX 2 (GPBMUX2) Register Field Descriptions ....................................................... 89
4-16 GPIO Port C MUX 1 (GPCMUX1) Register Field Descriptions ...................................................... 91
4-17 GPIO Port C MUX 2 (GPCMUX2) Register Field Descriptions ...................................................... 92
4-18 GPIO Port A Qualification Control (GPACTRL) Register Field Descriptions ....................................... 94
4-19 GPIO Port B Qualification Control (GPBCTRL) Register Field Descriptions ....................................... 95
4-20 GPIO Port A Qualification Select 1 (GPAQSEL1) Register Field Descriptions .................................... 96
4-21 GPIO Port A Qualification Select 2 (GPAQSEL2) Register Field Descriptions .................................... 96
4-22 GPIO Port B Qualification Select 1 (GPBQSEL1) Register Field Descriptions .................................... 97
4-23 GPIO Port B Qualification Select 2 (GPBQSEL2) Register Field Descriptions .................................... 97
4-24 GPIO Port A Direction (GPADIR) Register Field Descriptions ....................................................... 98
4-25 GPIO Port B Direction (GPBDIR) Register Field Descriptions ....................................................... 99
4-26 GPIO Port C Direction (GPCDIR) Register Field Descriptions ....................................................... 99
4-27 GPIO Port A Internal Pullup Disable (GPAPUD) Register Field Descriptions .................................... 100
4-28 GPIO Port B Internal Pullup Disable (GPBPUD) Register Field Descriptions .................................... 100
4-29 GPIO Port C Internal Pullup Disable (GPCPUD) Register Field Descriptions .................................... 101
4-30 GPIO Port A Data (GPADAT) Register Field Descriptions .......................................................... 102
4-31 GPIO Port B Data (GPBDAT) Register Field Descriptions .......................................................... 102
4-32 GPIO Port C Data (GPCDAT) Register Field Descriptions ......................................................... 103
4-33 GPIO Port A Set (GPASET) Register Field Descriptions ............................................................ 104
4-34 GPIO Port A Clear (GPACLEAR) Register Field Descriptions ..................................................... 104
4-35 GPIO Port A Toggle (GPATOGGLE) Register Field Descriptions ................................................. 104
4-36 GPIO Port B Set (GPBSET) Register Field Descriptions ............................................................ 105
4-37 GPIO Port B Clear (GPBCLEAR) Register Field Descriptions ..................................................... 105
4-38 GPIO Port B Toggle (GPBTOGGLE) Register Field Descriptions ................................................. 105
4-39 GPIO Port C Set (GPCSET) Register Field Descriptions ........................................................... 106
4-40 GPIO Port C Clear (GPCCLEAR) Register Field Descriptions ..................................................... 106
4-41 GPIO Port C Toggle (GPCTOGGLE) Register Field Descriptions ................................................. 106
4-42 GPIO XINTn Interrupt Select (GPIOXINTnSEL) Register Field Descriptions ..................................... 107
4-43 XINT1/XINT2 Interrupt Select and Configuration Registers ......................................................... 107
4-44 GPIO XINT3 - XINT7 Interrupt Select (GPIOXINTnSEL) Register Field Descriptions .......................... 107
4-45 XINT3 - XINT7 Interrupt Select and Configuration Registers ....................................................... 107
4-46 GPIO XNMI Interrupt Select (GPIOXNMISEL) Register Field Descriptions ...................................... 108
4-47 GPIO Low Power Mode Wakeup Select (GPIOLPMSEL) Register Field Descriptions .......................... 108
5-1 Peripheral Frame 0 Registers .......................................................................................... 110
5-2 Peripheral Frame 1 Registers ........................................................................................... 110
5-3 Peripheral Frame 2 Registers ........................................................................................... 111
5-4 Peripheral Frame 3 Registers ........................................................................................... 111
5-5 Access to EALLOW-Protected Registers .............................................................................. 112
5-6 EALLOW-Protected Device Emulation Registers..................................................................... 112
5-7 EALLOW-Protected Flash/OTP Configuration Registers ............................................................ 112
5-8 EALLOW-Protected Code Security Module (CSM) Registers ...................................................... 113
5-9 EALLOW-Protected PIE Vector Table ................................................................................. 113
5-10 EALLOW-Protected PLL, Clocking, Watchdog, and Low-Power Mode Registers ............................... 114
5-11 EALLOW-Protected GPIO MUX Registers ........................................................................... 114
5-12 EALLOW-Protected eCAN Registers .................................................................................. 115
5-13 EALLOW-Protected ePWM1 - ePWM 6 Registers .................................................................... 115
5-14 XINTF Registers ......................................................................................................... 115
5-15 Device Emulation Registers ............................................................................................. 116
8 List of Tables SPRUFB0C – September 2007 – Revised May 2009
Submit Documentation Feedback
Page 9

www.ti.com
5-16 DEVICECNF Register Field Descriptions.............................................................................. 116
5-17 PARTID Register Field Descriptions ................................................................................... 117
5-18 CLASSID Register Description .......................................................................................... 117
5-19 REVID Register Field Descriptions ..................................................................................... 118
5-20 PROTSTART and PROTRANGE Registers........................................................................... 118
5-21 PROTSTART Valid Values ............................................................................................. 118
5-22 PROTRANGE Valid Values ............................................................................................. 119
6-1 Enabling Interrupt ......................................................................................................... 124
6-2 Interrupt Vector Table Mapping ........................................................................................ 125
6-3 Vector Table Mapping After Reset Operation ........................................................................ 125
6-4 PIE MUXed Peripheral Interrupt Vector Table ........................................................................ 133
6-5 PIE Vector Table .......................................................................................................... 134
6-6 PIE Configuration and Control Registers .............................................................................. 139
6-7 PIECTRL Register Address Field Descriptions ....................................................................... 140
6-8 PIE Interrupt Acknowledge Register (PIEACK) Field Descriptions ................................................. 140
6-9 PIEIFRx Register Field Descriptions ................................................................................... 141
6-10 PIEIERx Register (x = 1 to 12) Field Descriptions ................................................................... 142
6-11 Interrupt Flag Register (IFR) — CPU Register Field Descriptions ................................................. 143
6-12 Interrupt Enable Register (IER) — CPU Register Field Descriptions .............................................. 145
6-13 Debug Interrupt Enable Register (DBGIER) — CPU Register Field Descriptions ............................... 146
6-14 External Interrupt n Control Register (XINT nCR) Field Descriptions .............................................. 148
6-15 External NMI Interrupt Control Register (XNMICR) Field Descriptions ............................................ 148
6-16 XNMICR Register Settings and Interrupt Sources ................................................................... 149
6-17 External Interrupt 1 Counter (XINT1CTR) Field Descriptions ....................................................... 149
6-18 External Interrupt 2 Counter (XINT2CTR) Field Descriptions ....................................................... 150
6-19 External NMI Interrupt Counter (XNMICTR) Field Descriptions .................................................... 150
A-1 Changes Made in This Revision ........................................................................................ 151
SPRUFB0C – September 2007 – Revised May 2009 List of Tables 9
Submit Documentation Feedback
Page 10

List of Tables10 SPRUFB0C – September 2007 – Revised May 2009
Submit Documentation Feedback
Page 11
About This Manual
Notational Conventions
Preface
SPRUFB0C – September 2007 – Revised May 2009
Read This First
This reference guide is applicable for the systems control and interrupts found on the
TMS320F2833x/TMS320F2823x Delfino digital signal controllers (DSCs).
This guide describes how various 2833x/2823x DSC system controls and interrupts work. It includes
information on the:
• Flash and one-time programmable (OTP) memories
• Code security module (CSM), which is a security feature incorporated in TMS320C28x™ devices.
• Clocking mechanisms including the oscillator, PLL, XCLKOUT, watchdog module, and the low-power
modes. In addition, the 32-bit CPU-Timers are also described.
• GPIO multiplexing (MUX) registers used to select the operation of shared pins on the device.
• Accessing the peripheral frames to write to and read from various peripheral registers on the device.
• Interrupt sources both external and the peripheral interrupt expansion (PIE) block that multiplexes
numerous interrupt sources into a smaller set of interrupt inputs.
This document uses the following conventions.
• Hexadecimal numbers are shown with the suffix h or with a leading 0x. For example, the following
number is 40 hexadecimal (decimal 64): 40h or 0x40.
• Registers in this document are shown in figures and described in tables.
– Each register figure shows a rectangle divided into fields that represent the fields of the register.
Each field is labeled with its bit name, its beginning and ending bit numbers above, and its
read/write properties below. A legend explains the notation used for the properties.
– Reserved bits in a register figure designate a bit that is used for future device expansion.
Related Documentation From Texas Instruments
The following books describe the 2833x and related support tools that are available on the TI website:
Data Manual and Errata—
SPRS439— TMS320F28335, TMS320F28334, TMS320F28332, TMS320F28235, TMS320F28234,
TMS320F28232 Digital Signal Controllers (DSCs) Data Manual contains the pinout, signal
descriptions, as well as electrical and timing specifications for the F2833x/2823x devices.
SPRZ272— TMS320F28335, F28334, F28332, TMS320F28235, F28234, F28232 Digital Signal
Controllers (DSCs) Silicon Errata describes the advisories and usage notes for different versions of
silicon.
CPU User's Guides—
SPRU430 — TMS320C28x CPU and Instruction Set Reference Guide describes the central processing
unit (CPU) and the assembly language instructions of the TMS320C28x fixed-point digital signal
processors (DSPs). It also describes emulation features available on these DSPs.
SPRUEO2 — TMS320C28x Floating Point Unit and Instruction Set Reference Guide describes the
floating-point unit and includes the instructions for the FPU.
Peripheral Guides—
SPRUFB0C – September 2007 – Revised May 2009 Read This First 11
Submit Documentation Feedback
Page 12

Related Documentation From Texas Instruments
SPRU566 — TMS320x28xx, 28xxx DSP Peripheral Reference Guide describes the peripheral reference
guides of the 28x digital signal processors (DSPs).
SPRUFB0 — TMS320x2833x, 2823x System Control and Interrupts Reference Guide describes the
various interrupts and system control features of the 2833x and 2823x digital signal controllers
(DSCs).
SPRU812 — TMS320x2833x, 2823x Analog-to-Digital Converter (ADC) Reference Guide describes
how to configure and use the on-chip ADC module, which is a 12-bit pipelined ADC.
SPRU949 — TMS320x2833x, 2823x DSC External Interface (XINTF) Reference Guide describes the
XINTF, which is a nonmultiplexed asynchronous bus, as it is used on the 2833x and 2823x devices.
SPRU963 — TMS320x2833x, 2823x Boot ROM Reference Guide describes the purpose and features of
the bootloader (factory-programmed boot-loading software) and provides examples of code. It also
describes other contents of the device on-chip boot ROM and identifies where all of the information
is located within that memory.
SPRUFB7 — TMS320x2833x, 2823x Multichannel Buffered Serial Port (McBSP) Reference Guide
describes the McBSP available on the 2833x and 2823x devices. The McBSPs allow direct
interface between a DSP and other devices in a system.
SPRUFB8 — TMS320x2833x, 2823x Direct Memory Access (DMA) Module Reference Guide
describes the DMA on the 2833x and 2823x devices.
SPRUG04 — TMS320x2833x, 2823x Enhanced Pulse Width Modulator (ePWM) Module Reference
Guide describes the main areas of the enhanced pulse width modulator that include digital motor
control, switch mode power supply control, UPS (uninterruptible power supplies), and other forms of
power conversion.
www.ti.com
SPRUG02 — TMS320x2833x, 2823x High-Resolution Pulse Width Modulator (HRPWM) Reference
Guide describes the operation of the high-resolution extension to the pulse width modulator
(HRPWM).
SPRUFG4 — TMS320x2833x, 2823x Enhanced Capture (eCAP) Module Reference Guide describes
the enhanced capture module. It includes the module description and registers.
SPRUG05 — TMS320x2833x, 2823x Enhanced Quadrature Encoder Pulse (eQEP) Module Reference
Guide describes the eQEP module, which is used for interfacing with a linear or rotary incremental
encoder to get position, direction, and speed information from a rotating machine in
high-performance motion and position control systems. It includes the module description and
registers.
SPRUEU1 — TMS320x2833x, 2823x Enhanced Controller Area Network (eCAN) Reference Guide
describes the eCAN that uses established protocol to communicate serially with other controllers in
electrically noisy environments.
SPRUFZ5 — TMS320x2833x, 2823x Serial Communications Interface (SCI) Reference Guide
describes the SCI, which is a two-wire asynchronous serial port, commonly known as a UART. The
SCI modules support digital communications between the CPU and other asynchronous peripherals
that use the standard non-return-to-zero (NRZ) format.
SPRUEU3 — TMS320x2833x, 2823x DSC Serial Peripheral Interface (SPI) Reference Guide describes
the SPI - a high-speed synchronous serial input/output (I/O) port - that allows a serial bit stream of
programmed length (one to sixteen bits) to be shifted into and out of the device at a programmed
bit-transfer rate.
SPRUG03 — TMS320x2833x, 2823x Inter-Integrated Circuit (I2C) Module Reference Guide describes
the features and operation of the inter-integrated circuit (I2C) module.
Tools Guides—
12 Read This First SPRUFB0C – September 2007 – Revised May 2009
Submit Documentation Feedback
Page 13

www.ti.com
Related Documentation From Texas Instruments
SPRU513 — TMS320C28x Assembly Language Tools v5.0.0 User's Guide describes the assembly
language tools (assembler and other tools used to develop assembly language code), assembler
directives, macros, common object file format, and symbolic debugging directives for the
TMS320C28x device.
SPRU514 — TMS320C28x Optimizing C/C++ Compiler v5.0.0 User's Guide describes the
TMS320C28x™ C/C++ compiler. This compiler accepts ANSI standard C/C++ source code and
produces TMS320 DSP assembly language source code for the TMS320C28x device.
SPRU608 — TMS320C28x Instruction Set Simulator Technical Overview describes the simulator,
available within the Code Composer Studio for TMS320C2000 IDE, that simulates the instruction
set of the C28x™ core.
SPRU625 — TMS320C28x DSP/BIOS 5.32 Application Programming Interface (API) Reference Guide
describes development using DSP/BIOS.
Trademarks
TMS320C28x, C28x, Code Composer Studio are trademarks of Texas Instruments.
All other trademarks are the property of their respective owners.
SPRUFB0C – September 2007 – Revised May 2009 Read This First 13
Submit Documentation Feedback
Page 14

Read This First14 SPRUFB0C – September 2007 – Revised May 2009
Submit Documentation Feedback
Page 15

Chapter 1
SPRUFB0C – September 2007 – Revised May 2009
Flash and OTP Memory Blocks
This chapter describes the proper sequence to configure the wait states and operating mode of flash and
one-time programmable (OTP) memories. It also includes information on flash and OTP power modes and
how to improve flash performance by enabling the flash pipeline mode.
Topic .................................................................................................. Page
1.1 Flash and OTP Memory .............................................................. 16
1.2 Flash and OTP Power Modes ...................................................... 16
1.3 Flash and OTP Registers ........................................................... 21
SPRUFB0C – September 2007 – Revised May 2009 Flash and OTP Memory Blocks 15
Submit Documentation Feedback
Page 16

Flash and OTP Memory
1.1 Flash and OTP Memory
This section describes how to configure flash and one-time programmable (OTP) memory.
1.1.1 Flash Memory
The on-chip flash is uniformly mapped in both program and data memory space. This flash memory is
always enabled and features:
• Multiple sectors
The minimum amount of flash memory that can be erased is a sector. Having multiple sectors provides
the option of leaving some sectors programmed and only erasing specific sectors.
• Code security
The flash is protected by the Code Security Module (CSM). By programming a password into the flash,
the user can prevent access to the flash by unauthorized persons. See Chapter 2 for information in
using the Code Security Module.
• Low power modes
To save power when the flash is not in use, two levels of low power modes are available. See
Section 1.2 for more information on the available flash power modes.
• Configurable wait states
Configurable wait states can be adjusted based on CPU frequency to give the best performance for a
given execution speed.
• Enhanced performance
A flash pipeline mode is provided to improve performance of linear code execution.
www.ti.com
1.1.2 OTP Memory
The 1K x 16 block of one-time programmable (OTP) memory is uniformly mapped in both program and
data memory space. Thus, the OTP can be used to program data or code. This block, unlike flash, can be
programmed only one time and cannot be erased.
1.2 Flash and OTP Power Modes
The following operating states apply to the flash and OTP memory:
• Reset or Sleep State
This is the state after a device reset. In this state, the bank and pump are in a sleep state (lowest
power). When the flash is in the sleep state, a CPU data read or opcode fetch to the flash or OTP
memory map area will automatically initiate a change in power modes to the standby state and then to
the active state. During this transition time to the active state, the CPU will automatically be stalled.
Once the transition to the active state is completed, the CPU access will complete as normal.
• Standby State
In this state, the bank and pump are in standby power mode state. This state uses more power then
the sleep state, but takes a shorter time to transition to the active or read state. When the flash is in
the standby state, a CPU data read or opcode fetch to the flash or OTP memory map area will
automatically initiate a change in power modes to the active state. During this transition time to the
active state, the CPU will automatically be stalled. Once the flash/OTP has reached the active state,
the CPU access will complete as normal.
• Active or Read State
In this state, the bank and pump are in active power mode state (highest power). The CPU read or
fetch access wait states to the flash/OTP memory map area is controlled by the FBANKWAIT and
FOTPWAIT registers. A prefetch mechanism called flash pipeline can also be enabled to improve fetch
performance for linear code execution.
16 Flash and OTP Memory Blocks SPRUFB0C – September 2007 – Revised May 2009
Submit Documentation Feedback
Page 17

Active
state
state
Standby
state
Sleep
Delay
FACTIVEWAIT
cycles
Delay
FSTDBYWAIT
cycles
FSTDBYWAIT
cycles
FACTIVEWAIT
Delay
cycles
Delay
Highest
power
Lowest power
Longest
Wake up time
PWR=0,1
PWR=0,0
PWR=0,0
PWR=1,1
or access to
the Flash/OTP
PWR=0,1
PWR=1,1
or access to
the Flash/OTP
Reset
www.ti.com
Note: During the boot process, the Boot ROM performs a dummy read of the Code Security
Module (CSM) password locations located in the flash. This read is performed to unlock a
new or erased device that has no password stored in it so that flash programming or loading
of code into CSM protected SARAM can be performed. On devices with a password stored,
this read has no affect and the CSM remains locked (see Chapter 2 for information on the
CSM). One effect of this read is that the flash will transition from the sleep (reset) state to the
active state.
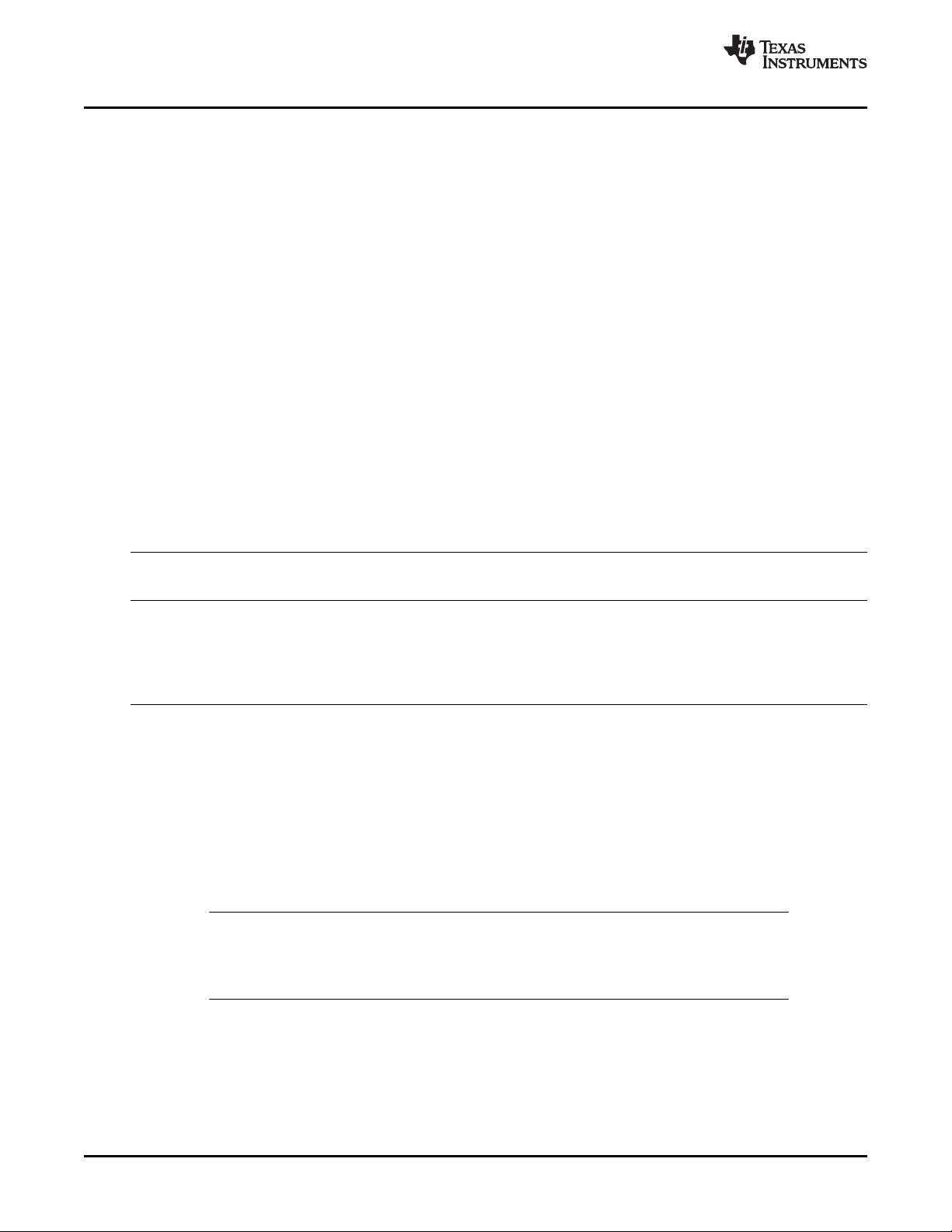
Flash and OTP Power Modes
The flash/OTP bank and pump are always in the same power mode. See Figure 1-1 for a graphic
depiction of the available power states. You can change the current flash/OTP memory power state as
follows:
• To move to a lower power state
Change the PWR mode bits from a higher power mode to a lower power mode. This change
instantaneously moves the flash/OTP bank to the lower power state. This register should be accessed
only by code running outside the flash/OTP memory.
• To move to a higher power state
To move from a lower power state to a higher power state, there are two options.
1. Change the FPWR register from a lower state to a higher state. This access brings the flash/OTP
memory to the higher state.
2. Access the flash or OTP memory by a read access or program opcode fetch access. This access
automatically brings the flash/OTP memory to the active state.
There is a delay when moving from a lower power state to a higher one. See Figure 1-1 . This delay is
required to allow the flash to stabilize at the higher power mode. If any access to the flash/OTP memory
occurs during this delay the CPU automatically stalls until the delay is complete.
Figure 1-1. Flash Power Mode State Diagram
SPRUFB0C – September 2007 – Revised May 2009 Flash and OTP Memory Blocks 17
Submit Documentation Feedback
Page 18
Flash and OTP Power Modes
The duration of the delay is determined by the FSTDBYWAIT and FACTIVEWAIT registers. Moving from
the sleep state to a standby state is delayed by a count determined by the FSTDBYWAIT register. Moving
from the standby state to the active state is delayed by a count determined by the FACTIVEWAIT register.
Moving from the sleep mode (lowest power) to the active mode (highest power) is delayed by
FSTDBYWAIT + FACTIVEWAIT. These registers should be left in their default state.
1.2.1 Flash and OTP Performance
CPU read or data fetch operations to the flash/OTP can take one of the following forms:
• 32-bit instruction fetch
• 16-bit or 32-bit data space read
• 16-bit program space read
Once flash is in the active power state, then a read or fetch access to the bank memory map area can be
classified as a flash access or an OTP access.
The main flash array is organized into rows and columns. The rows contain 2048 bits of information.
Accesses to flash and OTP are one of three types:
1. Flash Memory Random Access
The first access to a 2048 bit row is considered a random access.
2. Flash Memory Paged Access
While the first access to a row is considered a random access, subsequent accesses within the same
row are termed paged accesses.
The number of wait states for both a random and a paged access can be configured by programming
the FBANKWAIT register. The number of wait states used by a random access is controlled by the
RANDWAIT bits and the number of wait states used by a paged access is controlled by the
PAGEWAIT bits. The FBANKWAIT register defaults to a worst-case wait state count and, thus, needs
to be initialized for the appropriate number of wait states to improve performance based on the CPU
clock rate and the access time of the flash. The flash supports 0-wait accesses when the PAGEWAIT
bits are set to zero. This assumes that the CPU speed is low enough to accommodate the access
time. To determine the random and paged access time requirements, refer to the Data Manual for your
particular device.
3. OTP Access
Read or fetch accesses to the OTP are controlled by the OTPWAIT bits in the FOTPWAIT register.
Accesses to the OTP take longer than the flash and there is no paged mode. To determine OTP
access time requirements, see the data manual for your particular device.
Some other points to keep in mind when working with flash:
• CPU writes to the flash or OTP memory map area are ignored. They complete in a single cycle.
• When the Code Security Module (CSM) is secured, reads to the flash/OTP memory map area from
outside the secure zone take the same number of cycles as a normal access. However, the read
operation returns a zero.
• Reads of the CSM password locations are hardwired for 16 wait-states. The PAGEWAIT and
RANDOMWAIT bits have no effect on these locations. See Chapter 2 for more information on the
CSM.
www.ti.com
1.2.2 Flash Pipeline Mode
Flash memory is typically used to store application code. During code execution, instructions are fetched
from sequential memory addresses, except when a discontinuity occurs. Usually the portion of the code
that resides in sequential addresses makes up the majority of the application code and is referred to as
linear code. To improve the performance of linear code execution, a flash pipeline mode has been
implemented. The flash pipeline feature is disabled by default. Setting the ENPIPE bit in the FOPT register
enables this mode. The flash pipeline mode is independent of the CPU pipeline.
18 Flash and OTP Memory Blocks SPRUFB0C – September 2007 – Revised May 2009
Submit Documentation Feedback
Page 19

Flash Pipeline
CPU
32 bits
M
U
X
Data read from either program or data memory
Instruction Fetch (64 bits)
Flash or OTP
Read
16 bits
Flash and OTP
Instruction buffer
64-bit
Buffer
64-bit
Buffer
www.ti.com
Flash and OTP Power Modes
An instruction fetch from the flash or OTP reads out 64 bits per access. The starting address of the access
from flash is automatically aligned to a 64-bit boundary such that the instruction location is within the 64
bits to be fetched. With flash pipeline mode enabled (see Figure 1-2 ), the 64 bits read from the instruction
fetch are stored in a 64-bit wide by 2-level deep instruction pre-fetch buffer. The contents of this pre-fetch
buffer are then sent to the CPU for processing as required.
Up to two 32-bit instructions or up to four 16-bit instructions can reside within a single 64-bit access. The
majority of C28x instructions are 16 bits, so for every 64-bit instruction fetch from the flash bank it is likely
that there are up to four instructions in the pre-fetch buffer ready to process through the CPU. During the
time it takes to process these instructions, the flash pipeline automatically initiates another access to the
flash bank to pre-fetch the next 64 bits. In this manner, the flash pipeline mode works in the background to
keep the instruction pre-fetch buffers as full as possible. Using this technique, the overall efficiency of
sequential code execution from flash or OTP is improved significantly.
Figure 1-2. Flash Pipeline
The flash pipeline pre-fetch is aborted only on a PC discontinuity caused by executing an instruction such
as a branch, BANZ, call, or loop. When this occurs, the pre-fetch is aborted and the contents of the
pre-fetch buffer are flushed. There are two possible scenarios when this occurs:
1. If the destination address is within the flash or OTP, the pre-fetch aborts and then resumes at the
destination address.
2. If the destination address is outside of the flash and OTP, the pre-fetch is aborted and begins again
only when a branch is made back into the flash or OTP. The flash pipeline pre-fetch mechanism only
applies to instruction fetches from program space. Data reads from data memory and from program
memory do not utilize the pre-fetch buffer capability and thus bypass the pre-fetch buffer. For example,
instructions such as MAC, DMAC, and PREAD read a data value from program memory. When this
read happens, the pre-fetch buffer is bypassed but the buffer is not flushed. If an instruction pre-fetch
is already in progress when a data read operation is initiated, then the data read will be stalled until the
pre-fetch completes.
1.2.3 Reserved Locations Within Flash and OTP
When allocating code and data to flash and OTP memory, keep the following in mind:
1. Address locations 0x33 FFF6 and 0x33 FFF7 are reserved for an "entry into flash" branch instruction.
When the "boot to flash" boot option is used, the boot ROM will jump to address 0x33 FFF6. If you
program a branch instruction here that will then re-direct code execution to the entry point of the
application.
SPRUFB0C – September 2007 – Revised May 2009 Flash and OTP Memory Blocks 19
Submit Documentation Feedback
Page 20

Wait eight cycles to let the write instructions
propagate through the CPU pipeline. This
must be done before the return-from-function
call is made.
Write instructions to FOPT, FBANKWAIT,
etc.
The function that changes the configuration
cannot execute from the Flash or OTP.
Branch or call is required to properly flush the
CPU pipeline before the configuration
change.
Wait 8 cycles (8 NOPs)
Return to calling function
Continue execution
SARAM, Flash,
or OTP
Flash configuration
change
Do not execute from
Flash/OTP
SARAM
Begin Flash configuration
change
SARAM, Flash, OTP
Branch or call to
configuration code
Flash and OTP Power Modes
2. For code security operation, all addresses between 0x33 FF80 and 0x33 FFF5 cannot be used for
program code or data, but must be programmed to 0x0000 when the Code Security Password is
programmed. If security is not a concern, addresses 0x33 FF80 through 0x33 FFF5 may be used for
code or data. See Chapter 2 for information in using the Code Security Module.
3. Addresses from 0x33 FFF0 to 0x33 FFF5 are reserved for data variables and should not contain
program code.
1.2.4 Procedure to Change the Flash Configuration Registers
During flash configuration, no accesses to the flash or OTP can be in progress. This includes instructions
still in the CPU pipeline, data reads, and instruction pre-fetch operations. To be sure that no access takes
place during the configuration change, you should follow the procedure shown in Figure 1-3 for any code
that modifies the FOPT, FPWR, FBANKWAIT, or FOTPWAIT registers.
Figure 1-3. Flash Configuration Access Flow Diagram
www.ti.com
20 Flash and OTP Memory Blocks SPRUFB0C – September 2007 – Revised May 2009
Submit Documentation Feedback
Page 21
www.ti.com
1.3 Flash and OTP Registers
The flash and OTP memory can be configured by the registers shown in Table 1-1 . The configuration
registers are all EALLOW protected. The bit descriptions are in Figure 1-4 through Figure 1-10 .
Name
FOPT 0x0A80 1 Flash Option Register Figure 1-4
Reserved 0x0A81 1 Reserved
FPWR 0x0A82 1 Flash Power Modes Register Figure 1-5
FSTATUS 0x0A83 1 Status Register Figure 1-6
FSTDBYWAIT
FACTIVEWAIT
FBANKWAIT 0x0A86 1 Flash Read Access Wait State Register Figure 1-9
FOTPWAIT 0x0A87 1 OTP Read Access Wait State Register Figure 1-10
(1)
These registers are EALLOW protected. See Section 5.2 for information.
(2)
These registers are protected by the Code Security Module (CSM). See Chapter 2 for more information.
(3)
These registers should be left in their default state.
Note: The flash configuration registers should not be written to by code that is running from OTP or
Table 1-1. Flash/OTP Configuration Registers
(1) (2)
(3)
flash memory or while an access to flash or OTP may be in progress. All register accesses
to the flash registers should be made from code executing outside of flash/OTP memory and
an access should not be attempted until all activity on the flash/OTP has completed. No
hardware is included to protect against this.
To summarize, you can read the flash registers from code executing in flash/OTP; however,
do not write to the registers.
Address Size (x16) Description Bit Description
0x0A84 1 Flash Sleep To Standby Wait Register Figure 1-7
(3)
0x0A85 1 Flash Standby To Active Wait Register Figure 1-8
Flash and OTP Registers
CPU write access to the flash configuration registers can be enabled only by executing the EALLOW
instruction. Write access is disabled when the EDIS instruction is executed. This protects the registers
from spurious accesses. Read access is always available. The registers can be accessed through the
JTAG port without the need to execute EALLOW. See Section 5.2 for information on EALLOW protection.
These registers support both 16-bit and 32-bit accesses.
SPRUFB0C – September 2007 – Revised May 2009 Flash and OTP Memory Blocks 21
Submit Documentation Feedback
Page 22

Flash and OTP Registers
Figure 1-4. Flash Options Register (FOPT)
15 1 0
Reserved ENPIPE
R-0 R/W-0
LEGEND: R/W = Read/Write; R = Read only; - n = value after reset
Table 1-2. Flash Options Register (FOPT) Field Descriptions
Bit Field Value Description
15-1 Reserved
0 ENPIPE Enable Flash Pipeline Mode Bit. Flash pipeline mode is active when this bit is set. The pipeline
mode improves performance of instruction fetches by pre-fetching instructions. See Section 1.2.2
for more information.
When pipeline mode is enabled, the flash wait states (paged and random) must be greater than
zero.
On flash devices, ENPIPE affects fetches from flash and OTP.
0 Flash Pipeline mode is not active. (default)
1 Flash Pipeline mode is active.
(1)
This register is EALLOW protected. See Section 5.2 for more information.
(2)
This register is protected by the Code Security Module (CSM). See Chapter 2 for more information.
(3)
When writing to this register, follow the procedure described in Section 1.2.4 .
(1) (2) (3)
Figure 1-5. Flash Power Register (FPWR)
www.ti.com
15 2 1 0
Reserved PWR
R-0 R/W-0
LEGEND: R/W = Read/Write; R = Read only; - n = value after reset
Table 1-3. Flash Power Register (FPWR) Field Descriptions
Bit Field Value Description
15-2 Reserved
1-0 PWR Flash Power Mode Bits. Writing to these bits changes the current power mode of the flash bank
and pump. See section Section 1.2 for more information on changing the flash bank power mode.
00 Pump and bank sleep (lowest power)
01 Pump and bank standby
10 Reserved (no effect)
11 Pump and bank active (highest power)
(1)
This register is EALLOW protected. See Section 5.2 for more information.
(2)
This register is protected by the Code Security Module (CSM). See Chapter 2 for more information.
(1) (2)
Flash and OTP Memory Blocks22 SPRUFB0C – September 2007 – Revised May 2009
Submit Documentation Feedback
Page 23

www.ti.com
Flash and OTP Registers
Figure 1-6. Flash Status Register (FSTATUS)
15 9 8
Reserved 3VSTAT
R-0 R/W1C-0
7 4 3 2 1 0
Reserved ACTIVEWAITS STDBYWAITS PWRS
R-0 R-0 R-0 R-0
LEGEND: R/W = Read/Write; R = Read only; W1C = Write 1 to clear; - n = value after reset
Table 1-4. Flash Status Register (FSTATUS) Field Descriptions
Bit Field Value Description
15-9 Reserved Reserved
8 3VSTAT Flash Voltage (V
the pump module went to a high level. This signal indicates that the flash 3.3-V supply went out of
) Status Latch Bit. When set, this bit indicates that the 3VSTAT signal from
DD3VFL
the allowable range.
0 Writes of 0 are ignored.
1 When this bit reads 1, it indicates that the flash 3.3-V supply went out of the allowable range.
Clear this bit by writing a 1.
7-4 Reserved Reserved
3 ACTIVEWAITS Bank and Pump Standby To Active Wait Counter Status Bit. This bit indicates whether the
respective wait counter is timing out an access.
0 The counter is not counting.
1 The counter is counting.
2 STDBYWAITS Bank and Pump Sleep To Standby Wait Counter Status Bit. This bit indicates whether the
respective wait counter is timing out an access.
0 The counter is not counting.
1 The counter is counting.
1-0 PWRS Power Modes Status Bits. These bits indicate which power mode the flash/OTP is currently in.
The PWRS bits are set to the new power mode only after the appropriate timing delays have
expired.
00 Pump and bank in sleep mode (lowest power)
01 Pump and bank in standby mode
10 Reserved
11 Pump and bank active and in read mode (highest power)
(1)
This register is EALLOW protected. See Section 5.2 for more information.
(2)
This register is protected by the Code Security Module (CSM). See Chapter 2 for more information.
(1) (2)
SPRUFB0C – September 2007 – Revised May 2009 Flash and OTP Memory Blocks 23
Submit Documentation Feedback
Page 24

Flash and OTP Registers
Figure 1-7. Flash Standby Wait Register (FSTDBYWAIT)
15 9 8 0
Reserved STDBYWAIT
R-0 R/W-1
LEGEND: R/W = Read/Write; R = Read only; - n = value after reset
Table 1-5. Flash Standby Wait Register (FSTDBYWAIT) Field Descriptions
Bit Field Value Description
15-9 Reserved 0 Reserved
8-0 STDBYWAIT This register should be left in its default state.
Bank and Pump Sleep To Standby Wait Count.
111111111 511 SYSCLKOUT cycles (default)
(1)
This register is EALLOW protected. See Section 5.2 for more information.
(2)
This register is protected by the Code Security Module (CSM). See Chapter 2 for more information.
(1) (2)
Figure 1-8. Flash Standby to Active Wait Counter Register (FACTIVEWAIT)
7 9 8 0
Reserved ACTIVEWAIT
R-0 R/W-1
LEGEND: R/W = Read/Write; R = Read only; - n = value after reset
www.ti.com
Table 1-6. Flash Standby to Active Wait Counter Register (FACTIVEWAIT) Field Descriptions
Bits Field Value Description
15-9 Reserved 0 Reserved
8-0 ACTIVEWAIT This register should be left in its default state.
Bank and Pump Standby To Active Wait Count:
(1)
This register is EALLOW protected. See Section 5.2 for more information.
(2)
This register is protected by the Code Security Module (CSM). See Chapter 2 for more information.
111111111 511 SYSCLKOUT cycles (default)
(1) (2)
Flash and OTP Memory Blocks24 SPRUFB0C – September 2007 – Revised May 2009
Submit Documentation Feedback
Page 25

www.ti.com
Flash and OTP Registers
Figure 1-9. Flash Wait-State Register (FBANKWAIT)
15 12 11 8 7 4 3 0
Reserved PAGEWAIT Reserved RANDWAIT
R-0 R/W-1 R-0 R/W-1
LEGEND: R/W = Read/Write; R = Read only; - n = value after reset
Table 1-7. Flash Wait-State Register (FBANKWAIT) Field Descriptions
Bits Field Value Description
15-12 Reserved Reserved
11-8 PAGEWAIT Flash Paged Read Wait States. These register bits specify the number of wait states for a paged
read operation in CPU clock cycles (0..15 SYSCLKOUT cycles) to the flash bank. See Section 1.2.1
for more information.
See the device-specific data manual for the minimum time required for a PAGED flash access.
You must set RANDWAIT to a value greater than or equal to the PAGEWAIT setting. No hardware is
provided to detect a PAGEWAIT value that is greater then RANDWAIT.
0000 Illegal value. PAGEWAIT must be set greater then 0.
0001 One wait state per paged flash access or a total of two SYSCLKOUT cycles per access.
0010 Two wait states per paged flash access or a total of three SYSCLKOUT cycles per access.
0011 Three wait states per paged flash access or a total of four SYSCLKOUT cycles per access.
. . . . . .
1111 15 wait states per paged flash access or a total of 16 SYSCLKOUT cycles per access. (default)
7-4 Reserved Reserved
3-0 RANDWAIT Flash Random Read Wait States. These register bits specify the number of wait states for a random
read operation in CPU clock cycles (1..15 SYSCLKOUT cycles) to the flash bank. See Section 1.2.1
for more information.
See the device-specific data manual for the minimum time required for a RANDOM flash access.
RANDWAIT must be set greater than 0. That is, at least 1 random wait state must be used. In
addition, you must set RANDWAIT to a value greater than or equal to the PAGEWAIT setting. The
device will not detect and correct a PAGEWAIT value that is greater then RANDWAIT.
0000 Illegal value. RANDWAIT must be set greater then 0.
0001 One wait state per random flash access or a total of two SYSCLKOUT cycles per access.
0010 Two wait states per random flash access or a total of three SYSCLKOUT cycles per access.
0011 Three wait states per random flash access or a total of four SYSCLKOUT cycles per access.
. . . . . .
1111 15 wait states per random flash access or a total of 16 SYSCLKOUT cycles per access. (default)
(1)
This register is EALLOW protected. See Section 5.2 for more information.
(2)
This register is protected by the Code Security Module (CSM). See Chapter 2 for more information.
(3)
When writing to this register, follow the procedure described in Section 1.2.4 .
(1) (2) (3)
SPRUFB0C – September 2007 – Revised May 2009 Flash and OTP Memory Blocks 25
Submit Documentation Feedback
Page 26

Flash and OTP Registers
Figure 1-10. OTP Wait-State Register (FOTPWAIT)
15 5 4 0
Reserved OTPWAIT
R-0 R/W-1
LEGEND: R/W = Read/Write; R = Read only; - n = value after reset
Table 1-8. OTP Wait-State Register (FOTPWAIT) Field Descriptions
Bit(s) Field Value Description
15-5 Reserved 0 Reserved
4-0 OTPWAIT OTP Read Wait States. These register bits specify the number of wait states for a read operation in
CPU clock cycles (1..31 SYSCLKOUT cycles) to the OTP. See CPU Read Or Fetch Access From
flash/OTP section for details. There is no PAGE mode in the OTP.
OTPWAIT must be set greater than 0. That is, a minimum of 1 wait state must be used. See the
device-specific data manual for the minimum time required for an OTP access.
00000 Illegal value. OTPWAIT must be set to 1 or greater.
00001 One wait state will be used each OTP access for a total of two SYSCLKOUT cycles per access.
00010 Two wait states will be used for each OTP access for a total of three SYSCLKOUT cycles per access.
00011 Three wait states will be used for each OTP access for a total of four SYSCLKOUT cycles per access.
. . . . . .
11111 31 wait states will be used for an OTP access for a total of 32 SYSCLKOUT cycles per access.
(1)
This register is EALLOW protected. See Section 5.2 for more information.
(2)
This register is protected by the Code Security Module (CSM). See Chapter 2 for more information.
(3)
When writing to this register, follow the procedure described in Section 1.2.4 .
(1) (2) (3)
www.ti.com
26 Flash and OTP Memory Blocks SPRUFB0C – September 2007 – Revised May 2009
Submit Documentation Feedback
Page 27

Chapter 2
SPRUFB0C – September 2007 – Revised May 2009
Code Security Module (CSM)
The code security module (CSM) is a security feature incorporated in 28x devices. It prevents
access/visibility to on-chip memory to unauthorized persons—i.e., it prevents duplication/reverse
engineering of proprietary code.
The word secure means access to on-chip memory is protected. The word unsecure means access to
on-chip secure memory is not protected — i.e., the contents of the memory could be read by any means
(through a debugging tool such as Code Composer Studio™, for example).
Topic .................................................................................................. Page
2.1 Functional Description............................................................... 28
2.2 CSM Impact on Other On-Chip Resources ................................... 30
2.3 Incorporating Code Security in User Applications ......................... 31
2.4 Do's and Don'ts to Protect Security Logic .................................... 36
2.5 CSM Features - Summary ........................................................... 36
SPRUFB0C – September 2007 – Revised May 2009 Code Security Module (CSM) 27
Submit Documentation Feedback
Page 28
Functional Description
2.1 Functional Description
www.ti.com
The security module restricts the CPU access to certain on-chip memory without interrupting or stalling
CPU execution. When a read occurs to a protected memory location, the read returns a zero value and
CPU execution continues with the next instruction. This, in effect, blocks read and write access to various
memories through the JTAG port or external peripherals. Security is defined with respect to the access of
on-chip memory and prevents unauthorized copying of proprietary code or data.
The device is secure when CPU access to the on-chip secure memory locations is restricted. When
secure, two levels of protection are possible, depending on where the program counter is currently
pointing. If code is currently running from inside secure memory, only an access through JTAG is blocked
(i.e., through the emulator). This allows secure code to access secure data. Conversely, if code is running
from nonsecure memory, all accesses to secure memories are blocked. User code can dynamically jump
in and out of secure memory, thereby allowing secure function calls from nonsecure memory. Similarly,
interrupt service routines can be placed in secure memory, even if the main program loop is run from
nonsecure memory.
Security is protected by a password of 128-bits of data (eight 16-bit words) that is used to secure or
unsecure the device. This password is stored at the end of flash in 8 words referred to as the password
locations.
The device is unsecured by executing the password match flow (PMF), described Section 2.3.2 . Table 2-1
shows the levels of security.
Table 2-1. Security Levels
PMF Executed Operating Mode Program Fetch Security Description
With Correct Location
Password?
No Secure Outside secure memory Only instruction fetches by the CPU are allowed to secure
memory. In other words, code can still be executed, but not
read
No Secure Inside secure memory CPU has full access.
JTAG port cannot read the secured memory contents.
Yes Not Secure Anywhere Full access for CPU and JTAG port to secure memory
The password is stored in code security password locations (PWL) in flash memory (0x33 FFF8 0x33 FFFF). These locations store the password predetermined by the system designer.
If the password locations have all 128 bits as ones, the device is labeled unsecure. Since new flash
devices have erased flash (all ones), only a read of the password locations is required to bring the device
into unsecure mode. If the password locations have all 128 bits as zeros, the device is secure, regardless
of the contents of the KEY registers. Do not use all zeros as a password or reset the device during an
erase of the flash. Resetting the device during an erase routine can result in either an all zero or unknown
password. If a device is reset when the password locations are all zeros, the device cannot be unlocked
by the password match flow described in Section 2.3.2 . Using a password of all zeros will seriously limit
your ability to debug secure code or reprogram the flash.
Note: If a device is reset while the password locations are all zero or an unknown value, the device
will be permanently locked unless a method to run the flash erase routine from secure
SARAM is embedded into the flash or OTP. Care must be taken when implementing this
procedure to avoid introducing a security hole.
User accessible registers (eight 16-bit words) that are used to unsecure the device are referred to as key
registers. These registers are mapped in the memory space at addresses 0x00 0AE0 - 0x00 0AE7 and
are EALLOW protected.
28 Code Security Module (CSM) SPRUFB0C – September 2007 – Revised May 2009
Submit Documentation Feedback
Page 29

www.ti.com
Functional Description
In addition to the CSM, the emulation code security logic (ECSL) has been implemented to prevent
unauthorized users from stepping through secure code. Any code or data access to flash, user OTP, L0,
L1, L2 or L3 memory while the emulator is connected will trip the ECSL and break the emulation
connection. To allow emulation of secure code, while maintaining the CSM protection against secure
memory reads, you must write the correct value into the lower 64 bits of the KEY register, which matches
the value stored in the lower 64 bits of the password locations within the flash. Note that dummy reads of
all 128 bits of the password in the flash must still be performed. If the lower 64 bits of the password
locations are all ones (unprogrammed), then the KEY value does not need to match.
When initially debugging a device with the password locations in flash programmed (i.e., secured), the
emulator takes some time to take control of the CPU. During this time, the CPU will start running and may
execute an instruction that performs an access to a protected ECSL area. If this happens, the ECSL will
trip and cause the emulator connection to be cut. Two solutions to this problem exist:
1. The first is to use the Wait-In-Reset emulation mode, which will hold the device in reset until the
emulator takes control. The emulator must support this mode for this option.
2. The second option is to use the “Branch to check boot mode” boot option. This will sit in a loop and
continuously poll the boot mode select pins. You can select this boot mode and then exit this mode
once the emulator is connected by re-mapping the PC to another address or by changing the boot
mode selection pin to the desired boot mode.
Note: Reserved Flash Locations When Using Code Security
For code security operation, all addresses between 0x33 FF80 and 0x33 FFF5 cannot be
used as program code or data, but must be programmed to 0x0000 when the Code
Security Password is programmed. If security is not a concern, addresses 0x33 FF80
through 0x33 FFF5 may be used for code or data. The 128-bit password (at
0x33 FFF8 - 0x33 FFFF) must not be programmed to zeros. Doing so would permanently
lock the device.
Addresses 0x33 FFF0 through 0x33 FFF5 are reserved for data variables and should not
contain program code.
Disclaimer: Code Security Module Disclaimer
The Code Security Module ("CSM") included on this device was designed to password
protect the data stored in the associated memory and is warranted by Texas Instruments
(TI), in accordance with its standard terms and conditions, to conform to TI's published
specifications for the warranty period applicable for this device.
TI DOES NOT, HOWEVER, WARRANT OR REPRESENT THAT THE CSM CANNOT BE
COMPROMISED OR BREACHED OR THAT THE DATA STORED IN THE ASSOCIATED
MEMORY CANNOT BE ACCESSED THROUGH OTHER MEANS. MOREOVER, EXCEPT
AS SET FORTH ABOVE, TI MAKES NO WARRANTIES OR REPRESENTATIONS
CONCERNING THE CSM OR OPERATION OF THIS DEVICE, INCLUDING ANY IMPLIED
WARRANTIES OF MERCHANTABILITY OR FITNESS FOR A PARTICULAR PURPOSE.
IN NO EVENT SHALL TI BE LIABLE FOR ANY CONSEQUENTIAL, SPECIAL, INDIRECT,
INCIDENTAL, OR PUNITIVE DAMAGES, HOWEVER CAUSED, ARISING IN ANY WAY
OUT OF YOUR USE OF THE CSM OR THIS DEVICE, WHETHER OR NOT TI HAS BEEN
ADVISED OF THE POSSIBILITY OF SUCH DAMAGES. EXCLUDED DAMAGES INCLUDE,
BUT ARE NOT LIMITED TO LOSS OF DATA, LOSS OF GOODWILL, LOSS OF USE OR
INTERRUPTION OF BUSINESS OR OTHER ECONOMIC LOSS.
SPRUFB0C – September 2007 – Revised May 2009 Code Security Module (CSM) 29
Submit Documentation Feedback
Page 30

CSM Impact on Other On-Chip Resources
2.2 CSM Impact on Other On-Chip Resources
The CSM affects access to the on-chip resources listed in Table 2-2 :
Address Block
0x00 0A80 - 0x00 0A87 Flash Configuration Registers
0x00 8000 - 0x00 8FFF L0 SARAM (4K X 16)
0x00 9000 - 0x00 9FFF L1 SARAM (4K X 16)
0x00 A000 - 0x00 AFFF L2 SARAM (4K X 16)
0x00 B000 - 0x00 BFFF L3 SARAM (4K X 16)
0x30 0000 - 0x33 FFFF Flash (64K X 16, 32 X 16, or 16 X 16)
0x38 0000 - 0x38 03FF TI One-Time Programmable (OTP)
0x38 0400 - 0x38 07FF User One-Time Programmable (OTP) (1K X 16)
0x3F 8000 - 0x3F 8FFF L0 SARAM (4K X 16), mirror
0x3F 9000 - 0x3F 9FFF L1 SARAM (4K X 16), mirror
0x3F A000 - 0x3F AFFF L2 SARAM (4K X 16), mirror
0x3F B000 - 0x3F BFFF L3 SARAM (4K X 16), mirror
(1)
Not affected by ECSL
The Code Security Module has no impact whatsoever on the following on-chip resources:
• Single-access RAM (SARAM) blocks not designated as secure - These memory blocks can be freely
accessed and code run from them, whether the device is in secure or unsecure mode.
• Boot ROM contents - Visibility to the boot ROM contents is not impacted by the CSM.
• On-chip peripheral registers - The peripheral registers can be initialized by code running from on-chip
or off-chip memory, whether the device is in secure or unsecure mode.
• PIE Vector Table - Vector tables can be read and written regardless of whether the device is in secure
or unsecure mode. Table 2-2 and Table 2-3 show which on-chip resources are affected (or are not
affected) by the CSM.
Table 2-2. Resources Affected by the CSM
www.ti.com
(1)
(1K X 16)
Table 2-3. Resources Not Affected by the CSM
Address Block
0x00 0000 - 0x00 03FF M0 SARAM (1K X 16)
0x00 0400 - 0x00 07FF M1 SARAM (1K X16)
0x00 0800 - 0x00 0CFF Peripheral Frame 0 (2K X 16)
0x00 0D00 - 0x00 0FFF PIE Vector RAM (256 X 16)
0x00 6000 - 0x00 6FFF Peripheral Frame 1 (4K X 16)
0x00 7000 - 0x00 7FFF Peripheral Frame 2 (4K X 16)
0x00 C000 - 0x00 CFFF L4 SARAM (4K X 16)
0x00 D000 - 0x00 DFFF L5 SARAM (4K X 16)
0x00 E000 - 0x00 EFFF L6 SARAM (4K X 16)
0x00 F000 - 0x00 FFFF L7 SARAM (4K X 16)
0x3F F000 - 0x3F FFFF Boot ROM (4K X 16)
To summarize, it is possible to load code onto the unprotected on-chip program SARAM shown in
Table 2-3 via the JTAG connector without any impact from the Code Security Module. The code can be
debugged and the peripheral registers initialized, independent of whether the device is in secure or
unsecure mode.
Code Security Module (CSM)30 SPRUFB0C – September 2007 – Revised May 2009
Submit Documentation Feedback
Page 31

www.ti.com
2.3 Incorporating Code Security in User Applications
Code security is typically not required in the development phase of a project; however, security is needed
once a robust code is developed. Before such a code is programmed in the flash memory, a password
should be chosen to secure the device. Once a password is in place, the device is secured (i.e.,
programming a password at the appropriate locations and either performing a device reset or setting the
FORCESEC bit (CSMSCR.15) is the action that secures the device). From that time on, access to debug
the contents of secure memory by any means (via JTAG, code running off external/on-chip memory etc.)
requires the supply of a valid password. A password is not needed to run the code out of secure memory
(such as in a typical end-customer usage); however, access to secure memory contents for debug
purpose requires a password.
Memory
Address Register Name Reset Values Register Description
KEY Registers
0x00 - 0AE0 KEY0
0x00 - 0AE1 KEY1
0x00 - 0AE2 KEY2
0x00 - 0AE3 KEY3
0x00 - 0AE4 KEY4
0x00 - 0AE5 KEY5
0x00 - 0AE6 KEY6
0x00 - 0AE7 KEY7
0x00 - 0AEF CSMSCR
Password Locations (PWL) in Flash Memory - Reserved for the CSM password only
0x33 - FFF8 PWL0 User defined Low word of the 128-bit password
0x33 - FFF9 PWL1 User defined Second word of the 128-bit password
0x33 - FFFA PWL2 User defined Third word of the 128-bit password
0x33 - FFFB PWL3 User defined Fourth word of the 128-bit password
0x33 - FFFC PWL4 User defined Fifth word of the 128-bit password
0x33 - FFFD PWL5 User defined Sixth word of the 128-bit password
0x33 - FFFE PWL6 User defined Seventh word of the 128-bit password
0x33 - FFFF PWL7 User defined High word of the 128-bit password
(1)
(1)
(1)
(1)
(1)
(1)
(1)
(1)
Table 2-4. Code Security Module (CSM) Registers
0xFFFF Low word of the 128-bit KEY register
0xFFFF Second word of the 128-bit KEY register
0xFFFF Third word of the 128-bit KEY register
0xFFFF Fourth word of the 128-bit key
0xFFFF Fifth word of the 128-bit key
0xFFFF Sixth word of the 128-bit key
0xFFFF Seventh word of the 128-bit key
0xFFFF High word of the 128-bit KEY register
(1)
0x005F CSM status and control register
Incorporating Code Security in User Applications
(1)
These registers are EALLOW protected. Refer to Section 5.2 for more information.
SPRUFB0C – September 2007 – Revised May 2009 Code Security Module (CSM) 31
Submit Documentation Feedback
Page 32

Incorporating Code Security in User Applications
Figure 2-1. CSM Status and Control Register (CSMSCR)
15 14 7 6 1 0
FORCESEC Reserved Reserved SECURE
R/W-1 R-0 R-10111 R-1
LEGEND: R/W = Read/Write; R = Read only; - n = value after reset
Table 2-5. CSM Status and Control Register (CSMSCR) Field Descriptions
Bits Field Value Description
15 FORCESEC Writing a 1 clears the KEY registers and secures the device.
0 A read always returns a zero.
1 Clears the KEY registers and secures the device. The password match flow described in
Section 2.3.2 must be followed to unsecure the device again.
14-1 Reserved Reserved
0 SECURE Read-only bit that reflects the security state of the device.
0 Device is unsecure (CSM unlocked).
(1)
This register is EALLOW protected. Refer to Section 5.2 for more information.
1 Device is secure (CSM locked).
(1)
2.3.1 Environments That Require Security Unlocking
Following are the typical situations under which unsecuring can be required:
• Code development using debuggers (such as Code Composer Studio™).
This is the most common environment during the design phase of a product.
• Flash programming using TI's flash utilities such as Code Composer Studio™ F28xx On-Chip Flash
Programmer plug-in.
Flash programming is common during code development and testing. Once the user supplies the
necessary password, the flash utilities disable the security logic before attempting to program the flash.
The flash utilities can disable the code security logic in new devices without any authorization, since
new devices come with an erased flash. However, reprogramming devices (that already contain a
custom password) require the password to be supplied to the flash utilities in order to unlock the device
to enable programming. In custom programming solutions that use the flash API supplied by TI
unlocking the CSM can be avoided by executing the flash programming algorithms from secure
memory.
• Custom environment defined by the application
In addition to the above, access to secure memory contents can be required in situations such as:
• Using the on-chip bootloader to load code or data into secure SARAM or to erase/program the flash.
• Executing code from on-chip unsecure memory and requiring access to secure memory for lookup
table. This is not a suggested operating condition as supplying the password from external code could
compromise code security.
The unsecuring sequence is identical in all the above situations. This sequence is referred to as the
password match flow (PMF) for simplicity. Figure 2-2 explains the sequence of operation that is required
every time the user attempts to unsecure a device. A code example is listed for clarity.
www.ti.com
32 Code Security Module (CSM) SPRUFB0C – September 2007 – Revised May 2009
Submit Documentation Feedback
Page 33

Start
Yes
No
Yes
No
Deviceunsecure
Usercanaccess
on-chipsecure
memory
Devicepermanentlysecured
CPUaccessislimited.
Devicecannotbedebugged
orreprogrammed.
DodummyreadofPWL
0x33FFF8 − 0x33FFFF
KEYregisters=allones
Correct
password?
ArePWL=
allFs?
ArePWL=
allzeros?
Devicesecureafter
resetorruntime
No
Yes
Writethepasswordto
KEYregisters
0x000AE0 0x000AE7
(A)
−
www.ti.com
2.3.2 Password Match Flow
Password match flow (PMF) is essentially a sequence of eight dummy reads from password locations
(PWL) followed by eight writes to KEY registers.
Figure 2-2 shows how the PMF helps to initialize the security logic registers and disable security logic.
Incorporating Code Security in User Applications
Figure 2-2. Password Match Flow (PMF)
A The KEY registers are EALLOW protected.
SPRUFB0C – September 2007 – Revised May 2009 Code Security Module (CSM) 33
Submit Documentation Feedback
Page 34

Incorporating Code Security in User Applications
2.3.3 Unsecuring Considerations for Devices With/Without Code Security
Case 1 and Case 2 provide unsecuring considerations for devices with and without code security.
Case 1: Device With Code Security
A device with code security should have a predetermined password stored in the password locations
(0x33 FFF8 - 0x33 FFFF in memory). In addition, locations 0x33 FF80 - 0x33 FFF5 should be
programmed with all 0x0000 and not used for program and/or data storage. The following are steps to
unsecure this device:
1. Perform a dummy read of the password locations.
2. Write the password into the KEY registers (locations 0x00 0AE0 - 0x00 0AE7 in memory).
3. If the password is correct, the device becomes unsecure; otherwise, it stays secure.
Case 2: Device Without Code Security
A device without code security should have 0x FFFF FFFF FFFF FFFF FFFF FFFF FFFF FFFF (128 bits
of all ones) stored in the password locations. The following are steps to use this device:
1. At reset, the CSM will lock memory regions protected by the CSM.
2. Perform a dummy read of the password locations.
3. Since the password is all ones, this alone will unlock all memory regions. Secure memory is fully
accessible immediately after this operation is completed.
Note: Even if a device is not protected with a password (all password locations all ones), the CSM
will lock at reset. Thus, a dummy read operation must still be performed on these devices
prior to reading, writing, or programming secure memory if the code performing the access is
executing from outside of the CSM protected memory region. The Boot ROM code does this
dummy read for convenience.
www.ti.com
34 Code Security Module (CSM) SPRUFB0C – September 2007 – Revised May 2009
Submit Documentation Feedback
Page 35

www.ti.com
2.3.3.1 C Code Example to Unsecure
volatile int *CSM = (volatile int *)0x000AE0; //CSM register file
volatile int *PWL = (volatile int *)0x0033FFF8; //Password location
volatile int tmp;
int I;
// Read the 128-bits of the password locations (PWL)
// in flash at address 0x33 FFF8 - 0x33 FFFF
// If the device is secure, then the values read will
// not actually be loaded into the temp variable, so
// this is called a dummy read.
for (I=0; i < 8; I++) tmp = *PWL++;
// If the password locations (PWL) are all = ones (0xFFFF),
// then the device will now be unsecure. If the password
// is not all ones (0xFFFF), then the code below is required
// to unsecure the CSM.
// Write the 128-bit password to the KEY registers
// If this password matches that stored in the
// PWL then the CSM will become unsecure. If it does not
// match, then the device will remain secure.
// An example password of:
// 0x11112222333344445555666677778888 is used.
asm(" EALLOW"); // Key registers are EALLOW protected
*CSM++ = 0x1111; // Register KEY0 at 0xAE0
*CSM++ = 0x2222; // Register KEY1 at 0xAE1
*CSM++ = 0x3333; // Register KEY2 at 0xAE2
*CSM++ = 0x4444; // Register KEY3 at 0xAE3
*CSM++ = 0x5555; // Register KEY4 at 0xAE4
*CSM++ = 0x6666; // Register KEY5 at 0xAE5
*CSM++ = 0x7777; // Register KEY6 at 0xAE6
*CSM++ = 0x8888; // Register KEY7 at 0xAE7
asm(" EDIS");
Incorporating Code Security in User Applications
2.3.3.2 C Code Example to Resecure
volatile int *CSMSCR = 0x00AEF; //CSMSCR register
asm(" EALLOW"); //CSMSCR register is EALLOW protected.
*CSMSCR = 0x8000;
asm("EDIS");
//Set FORCESEC bit
SPRUFB0C – September 2007 – Revised May 2009 Code Security Module (CSM) 35
Submit Documentation Feedback
Page 36

Do's and Don'ts to Protect Security Logic
2.4 Do's and Don'ts to Protect Security Logic
2.4.1 Do's
• To keep the debug and code development phase simple, use the device in the unsecure mode; i.e.,
use all 128 bits as ones in the password locations (or use a password that is easy to remember). Use
a password after the development phase when the code is frozen.
• Recheck the password stored in the password locations before programming the COFF file using flash
utilities.
• The flow of code execution can freely toggle back and forth between secure memory and unsecure
memory without compromising security. To access data variables located in secure memory when the
device is secured, code execution must currently be running from secure memory.
• Program locations 0x33 FF80 - 0x33 FFF5 with 0x0000 when using the CSM.
2.4.2 Don'ts
• If code security is desired, do not embed the password in your application anywhere other than in the
password locations or security can be compromised.
• Do not use 128 bits of all zeros as the password. This automatically secures the device, regardless of
the contents of the KEY register. The device is not debuggable nor reprogrammable.
• Do not pull a reset during an erase operation on the flash array. This can leave either zeros or an
unknown value in the password locations. If the password locations are all zero during a reset, the
device will always be secure, regardless of the contents of the KEY register.
• Do not use locations 0x33 FF80 - 0x33 FFF5 to store program and/or data. These locations should be
programmed to 0x0000 when using the CSM.
www.ti.com
2.5 CSM Features - Summary
1. The flash is secured after a reset until the password match flow described in Section 2.3.2 is executed.
2. The standard way of running code out of the flash is to program the flash with the code and power up
the DSP. Since instruction fetches are always allowed from secure memory, regardless of the state of
the CSM, the code functions correctly even without executing the password match flow.
3. Secure memory cannot be modified by code executing from unsecure memory while the device is
secured.
4. Secure memory cannot be read from any code running from unsecure memory while the device is
secured.
5. Secure memory cannot be read or written to by the debugger (i.e., Code Composer Studio™) at any
time that the device is secured.
6. Complete access to secure memory from both the CPU code and the debugger is granted while the
device is unsecured.
Code Security Module (CSM)36 SPRUFB0C – September 2007 – Revised May 2009
Submit Documentation Feedback
Page 37

Chapter 3
SPRUFB0C – September 2007 – Revised May 2009
Clocking
This section describes the oscillator, PLL and clocking mechanisms, the watchdog function, and the
low-power modes.
Topic .................................................................................................. Page
3.1 Clocking and System Control ..................................................... 38
3.2 OSC and PLL Block ................................................................... 45
3.3 Low-Power Modes Block ............................................................ 53
3.4 Watchdog Block........................................................................ 55
3.5 32-Bit CPU Timers 0/1/2 ............................................................. 60
SPRUFB0C – September 2007 – Revised May 2009 Clocking 37
Submit Documentation Feedback
Page 38

ePWM1/../6,HRPWM1/../6,
eCAP1/../6,eQEP1/2
Peripheral
Registers
Bridge
ClockEnables
I/O
Peripheral
Registers
ClockEnables
I/O
eCAN-A/B
/2
Peripheral
Registers
ClockEnables
I/O
SPI-A,SCI-A/B/C
LOSPCP
LSPCLK
System
Control
Register
Bridge
SYSCLKOUT
MemoryBus
C28xCore
GPIO
Mux
ClockEnables
Peripheral
Registers
I/O
McBSP-A/B
LOSPCP
LSPCLK
ClockEnables
Bridge
HISPCP
HSPCLK
DMA
Bus
Result
Registers
Bridge
12-Bit ADC
ADC
Registers
16Channels
DMA
ClockEnables
PeripheralBus
CLKIN
I2C-A
ClockEnables
Clocking and System Control
3.1 Clocking and System Control
Figure 3-1 shows the various clock and reset domains.
The PLL, clocking, watchdog and low-power modes, are controlled by the registers listed in Table 3-1 .
www.ti.com
Figure 3-1. Clock and Reset Domains
A CLKIN is the clock into the CPU. It is passed out of the CPU as SYSCLKOUT (that is, CLKIN is the same frequency
as SYSCLKOUT).
Clocking38 SPRUFB0C – September 2007 – Revised May 2009
Submit Documentation Feedback
Page 39

www.ti.com
Clocking and System Control
Table 3-1. PLL, Clocking, Watchdog, and Low-Power Mode Registers
Name Address Size Description
(x16)
PLLSTS
(2)
0x7011 1 PLL Status Register Figure 3-12
HISPCP 0x701A 1 High-Speed Peripheral Clock (HSPCLK) Prescaler Register Figure 3-5
LOSPCP 0x701B 1 Low-Speed Peripheral Clock (LSPCLK) Prescaler Register Figure 3-6
PCLKCR0 0x701C 1 Peripheral Clock Control Register 0 Figure 3-2
PCLKCR1 0x701D 1 Peripheral Clock Control Register 1 Figure 3-3
LPMCR0 0x701E 1 Low Power Mode Control Register 0 Figure 3-6
PCLKCR3 0x7020 1 Peripheral Clock Control Register 3 Figure 3-4
(2)
PLLCR
0x7021 1 PLL Control Register Figure 3-11
SCSR 0x7022 1 System Control & Status Register Figure 3-15
WDCNTR 0x7023 1 Watchdog Counter Register. Figure 3-16
WDKEY 0x7025 1 Watchdog Reset Key Register Figure 3-17
WDCR 0x7029 1 Watchdog Control Register Figure 3-18
(1)
All of the registers in this table are EALLOW protected. See Section 5.2 for more information.
(2)
The PLL control register (PLLCR) and PLL Status Register (PLLSTS) are reset to a known state by the XRS signal or a
watchdog reset only. A reset issued by the debugger or the missing clock detect logic have no effect.
(1)
Bit Description
The PCLKCR0 /1/3 registers enable/disable clocks to the various peripheral modules. There is a
2-SYSCLKOUT cycle delay from when a write to the PCLKCR0 /1/3 registers occurs to when the action is
valid. This delay must be taken into account before attempting to access the peripheral configuration
registers. Due to the peripheral-GPIO MUXing, all peripherals cannot be used at the same time. While it is
possible to turn on the clocks to all the peripherals at the same time, such a configuration is not useful. If
this is done, the current drawn will be more than required. To avoid this, only enable the clocks required
by the application.
Figure 3-2. Peripheral Clock Control 0 Register (PCLKCR0)
15 14 13 12 11 10 9 8
ECANBENCLK ECANAENCLK MCBSPBENCLK MCBSPAENCLK SCIBENCLK SCIAENCLK Reserved SPIAENCLK
R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R-0 R/W-0
7 6 5 4 3 2 1 0
Reserved SCICENCLK I2CAENCLK ADCENCLK TBCLKSYNC Reserved
R-0 R/W-0 R/W-0 R/W-0 R/W-0 R-0
LEGEND: R/W = Read/Write; R = Read only; - n = value after reset
Table 3-2. Peripheral Clock Control 0 Register (PCLKCR0) Field Descriptions
Bit Field Valu Description
e
15 ECANBENCLK ECAN-B Clock enable
0 The eCAN-B module is not clocked. (default)
1 The eCAN-B module is clocked (SYSCLKOUT/2).
14 ECANAENCLK ECAN-A clock enable
0 The eCAN-A module is not clocked. (default)
1 The eCAN-A module is clocked (SYSCLKOUT/2).
13 MCBSPBENCLK McBSP-B Clock Enable. This bit is reserved on devices without the McBSP-B module.
0 The McBSP-B module is not clocked. (default)
1 The McBSP-B module is clocked by the low-speed clock (LSPCLK).
(1)
This register is EALLOW protected. See Section 5.2 for more information.
(2)
If a peripheral block is not used, the clock to that peripheral can be turned off to minimize power consumption.
(3)
On devices without a particular peripheral, the clock selection bit is reserved. On these devices, the bit should not be written to with a 1.
(1)
(2)
(2)
(3)
SPRUFB0C – September 2007 – Revised May 2009 Clocking 39
Submit Documentation Feedback
Page 40

Clocking and System Control
Table 3-2. Peripheral Clock Control 0 Register (PCLKCR0) Field Descriptions (continued)
Bit Field Valu Description
e
12 MCBSPAENCLK McBSP-A Clock Enable
0 The McBSP-A module is not clocked. (default)
1 The McBSP-A module is clocked by the low-speed clock (LSPCLK).
11 SCIBENCLK SCI-B clock enable
0 SCI-B module is not clocked. (default)
1 The SCI-B module is clocked by the low-speed clock (LSPCLK).
10 SCIAENCLK SCI-A clock enable
0 The SCI-A module is not clocked. (default)
1 The SCI-A module is clocked by the low-speed clock (LSPCLK).
9 Reserved 0 Reserved
8 SPIAENCLK SPI-A clock enable
0 The SPI-A module is not clocked. (default)
1 The SPI-A module is clocked by the low-speed clock (LSPCLK).
7:6 Reserved 0 Reserved
5 SCICENCLK SCI-C clock enable. This bit is reserved on devices without the SCI-C module.
0 The SCI-C module is not clocked. (default)
1 The SCI-C module is clocked by the low-speed clock (LSPCLK).
4 I2CAENCLK I2C clock enable
0 The I2C module is not clocked. (default)
1 The I2C module is clocked by SYSCLKOUT.
3 ADCENCLK ADC clock enable
0 The ADC is not clocked. (default)
1 The ADC module is clocked by the high-speed clock (HSPCLK)
2 TBCLKSYNC ePWM Module Time Base Clock (TBCLK) Sync: Allows the user to globally synchronize all enabled
ePWM modules to the time base clock (TBCLK):
0 The TBCLK (Time Base Clock) within each enabled ePWM module is stopped. (default). If, however,
the ePWM clock enable bit is set in the PCLKCR1 register, then the ePWM module will still be clocked
by SYSCLKOUT even if TBCLKSYNC is 0.
1 All enabled ePWM module clocks are started with the first rising edge of TBCLK aligned. For perfectly
synchronized TBCLKs, the prescaler bits in the TBCTL register of each ePWM module must be set
identically. The proper procedure for enabling ePWM clocks is as follows:
• Enable ePWM module clocks in the PCLKCR1 register.
• Set TBCLKSYNC to 0.
• Configure prescaler values and ePWM modes.
• Set TBCLKSYNC to 1.
1-0 Reserved Reserved
(1)
(2)
(2)
(2)
(2)
(2)
www.ti.com
(3)
Figure 3-3. Peripheral Clock Control 1 Register (PCLKCR1)
15 14 13 12 11 10 9 8
EQEP2ENCLK EQEP1ENCLK ECAP6ENCLK ECAP5ENCLK ECAP4ENCLK ECAP3ENCLK ECAP2ENCLK ECAP1ENCLK
R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0
7 6 5 4 3 2 1 0
Reserved EPWM6ENCLK EPWM5ENCLK EPWM4ENCLK EPWM3ENCLK EPWM2ENCLK EPWM1ENCLK
R-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0
LEGEND: R/W = Read/Write; R = Read only; - n = value after reset
Clocking40 SPRUFB0C – September 2007 – Revised May 2009
Submit Documentation Feedback
Page 41

www.ti.com
Table 3-3. Peripheral Clock Control 1 Register (PCLKCR1) Field Descriptions
Bits Field Value Description
15 EQEP2ENCLK eQEP2 clock enable
0 The eQEP2 module is not clocked. (default)
1 The eQEP2 module is clocked by the system clock (SYSCLKOUT).
14 EQEP1ENCLK eQEP1 clock enable
0 The eQEP1 module is not clocked. (default)
1 The eQEP1 module is clocked by the system clock (SYSCLKOUT).
14 EQEP1ENCLK eQEP1 clock enable
0 The eQEP1 module is not clocked. (default)
1 The eQEP1 module is clocked by the system clock (SYSCLKOUT).
13-9 Reserved
13 ECAP6ENCLK eCAP6 clock enable. This bit is reserved on devices without the eCAP6 module.
0 The eCAP6 module is not clocked. (default)
1 The eCAP6 module is clocked by the system clock (SYSCLKOUT).
12 ECAP5ENCLK eCAP5 clock enable. This bit is reserved on devices without the eCAP5 module.
0 The eCAP5 module is not clocked. (default)
1 The eCAP5 module is clocked by the system clock (SYSCLKOUT).
11 ECAP4ENCLK eCAP4 clock enable
0 The eCAP4 module is not clocked. (default)
1 The eCAP4 module is clocked by the system clock (SYSCLKOUT).
10 ECAP3ENCLK eCAP3 clock enable
0 The eCAP3 module is not clocked. (default)
1 The eCAP3 module is clocked by the system clock (SYSCLKOUT).
9 ECAP2ENCLK eCAP2 clock enable
0 The eCAP2 module is not clocked. (default)
1 The eCAP2 module is clocked by the system clock (SYSCLKOUT).
8 ECAP1ENCLK eCAP1 clock enable
0 The eCAP1 module is not clocked. (default)
1 The eCAP1 module is clocked by the system clock (SYSCLKOUT).
7:6 Reserved 0 Reserved
5 EPWM6ENCLK ePWM6 clock enable
(3)
0 The ePWM6 module is not clocked. (default)
1 The ePWM6 module is clocked by the system clock (SYSCLKOUT).
4 EPWM5ENCLK ePWM5 clock enable
(3)
0 The ePWM5 module is not clocked. (default)
1 The ePWM5 module is clocked by the system clock (SYSCLKOUT).
3 EPWM4ENCLK ePWM4 clock enable.
(3)
0 The ePWM4 module is not clocked. (default)
1 The ePWM4 module is clocked by the system clock (SYSCLKOUT).
2 EPWM3ENCLK ePWM3 clock enable.
(3)
0 The ePWM3 module is not clocked. (default)
1 The ePWM3 module is clocked by the system clock (SYSCLKOUT).
1 EPWM2ENCLK ePWM2 clock enable.
(3)
0 The ePWM2 module is not clocked. (default)
1 The ePWM2 module is clocked by the system clock (SYSCLKOUT).
(1)
(2)
(2)
(2)
(2)
(2)
(2)
(2)
(2)
(2)
(2)
(2)
(2)
Clocking and System Control
(1)
This register is EALLOW protected. See Section 5.2 for more information.
(2)
If a peripheral block is not used, the clock to that peripheral can be turned off to minimize power consumption.
(3)
To start the ePWM Time-base clock (TBCLK) within the ePWM modules, the TBCLKSYNC bit in PCLKCR0 must also be set.
SPRUFB0C – September 2007 – Revised May 2009 Clocking 41
Submit Documentation Feedback
Page 42

Clocking and System Control
Table 3-3. Peripheral Clock Control 1 Register (PCLKCR1) Field Descriptions (continued)
Bits Field Value Description
0 EPWM1ENCLK ePWM1 clock enable.
0 The ePWM1 module is not clocked. (default)
1 The ePWM1 module is clocked by the system clock (SYSCLKOUT).
www.ti.com
(1)
(3)
(2)
Clocking42 SPRUFB0C – September 2007 – Revised May 2009
Submit Documentation Feedback
Page 43

www.ti.com
Clocking and System Control
Figure 3-4. Peripheral Clock Control 3 Register (PCLKCR3)
15 14 13 12 11 10 9 8
Reserved GPIOINENCLK XINTFENCLK DMAENCLK CPUTIMER2ENCLK CPUTIMER1ENCLK CPUTIMER0ENCLK
R-0 R/W-1 R/W-0 R/W-0 R/W-1 R/W-1 R/W-1
7 0
Reserved
R-0
LEGEND: R/W = Read/Write; R = Read only; - n = value after reset
Table 3-4. Peripheral Clock Control 3 Register (PCLKCR3) Field Descriptions
Bit Field Value Description
15:`14 Reserved Reserved
13 GPIOINENCLK GPIO Input Clock Enable
0 The GPIO module is not clocked.
1 The GPIO module is clocked.
12 XINTFENCLK External Interface (XINTF) Clock Enable
0 The external memory interface is not clocked.
1 The external memory interface is clocked.
11 DMAENCLK DMA Clock Enable
0 The DMA module is not clocked.
1 The DMA module is clocked.
10 CPUTIMER2ENCLK CPU Timer 2 Clock Enable
0 The CPU Timer 2 is not clocked.
1 The CPU Timer 2 is clocked.
9 CPUTIMER1ENCLK CPU Timer 1 Clock Enable
0 The CPU Timer 1 is not clocked.
1 The CPU Timer 1 is clocked.
8 CPUTIMER0ENCLK CPU Timer 0 Clock Enable
0 The CPU Timer 0 is not clocked.
1 The CPU Timer 0 is clocked.
7:0 Reserved Reserved
The high speed peripheral and low speed peripheral clock prescale (HISPCP and LOSPCP) registers are
used to configure the high- and low-speed peripheral clocks, respectively. See Figure 3-5 for the HISPCP
bit layout and Figure 3-6 for the LOSPCP layout.
SPRUFB0C – September 2007 – Revised May 2009 Clocking 43
Submit Documentation Feedback
Page 44

Clocking and System Control
Figure 3-5. High-Speed Peripheral Clock Prescaler (HISPCP) Register
15 3 2 0
Reserved HSPCLK
R-0 R/W-001
LEGEND: R/W = Read/Write; R = Read only; - n = value after reset
Table 3-5. High-Speed Peripheral Clock Prescaler (HISPCP) Field Descriptions
Bits Field Value Description
15-3 Reserved Reserved
2-0 HSPCLK These bits configure the high-speed peripheral clock (HSPCLK) rate relative to SYSCLKOUT:
If HISPCP
(2)
≠ 0, HSPCLK = SYSCLKOUT/(HISPCP X 2)
If HISPCP = 0, HSPCLK = SYSCLKOUT
000 High speed clock = SYSCLKOUT/1
001 High speed clock = SYSCLKOUT/2 (reset default)
010 High speed clock = SYSCLKOUT/4
011 High speed clock = SYSCLKOUT/6
100 High speed clock = SYSCLKOUT/8
101 High speed clock = SYSCLKOUT/10
110 High speed clock = SYSCLKOUT/12
111 High speed clock = SYSCLKOUT/14
(1)
This register is EALLOW protected. See Section 5.2 for more information.
(2)
HISPCP in this equation denotes the value of bits 2:0 in the HISPCP register.
(1)
www.ti.com
Figure 3-6. Low-Speed Peripheral Clock Prescaler Register (LOSPCP)
15 3 2 0
Reserved LSPCLK
R-0 R/W-010
LEGEND: R/W = Read/Write; R = Read only; - n = value after reset
Table 3-6. Low-Speed Peripheral Clock Prescaler Register (LOSPCP) Field Descriptions
Bits Field Value Description
15-3 Reserved Reserved
2-0 LSPCLK These bits configure the low-speed peripheral clock (LSPCLK) rate relative to SYSCLKOUT:
If LOSPCP
(2)
≠ 0, then LSPCLK = SYSCLKOUT/(LOSPCP X 2)
If LOSPCP = 0, then LSPCLK = SYSCLKOUT
000 Low speed clock = SYSCLKOUT/1
001 Low speed clock= SYSCLKOUT/2
010 Low speed clock= SYSCLKOUT/4 (reset default)
011 Low speed clock= SYSCLKOUT/6
100 Low speed clock= SYSCLKOUT/8
101 Low speed clock= SYSCLKOUT/10
110 Low speed clock= SYSCLKOUT/12
111 Low speed clock= SYSCLKOUT/14
(1)
This register is EALLOW protected. See Section 5.2 for more information.
(2)
LOSPCP in this equation denotes the value of bits 2:0 in the LOSPCP register.
(1)
Clocking44 SPRUFB0C – September 2007 – Revised May 2009
Submit Documentation Feedback
Page 45

X1
XCLKIN
(3.3-Vclockinput
fromexternal
oscillator)
On-chip
oscillator
X2
PLLSTS[OSCOFF]
OSCCLK
PLL
VCOCLK
4-bitMultiplierPLLCR[DIV]
OSCCLKor
VCOCLK
CLKIN
OSCCLK
0
PLLSTS[PLLOFF]
n
n ≠ 0
PLLSTS[DIVSEL]
/1
/2
/4
External
Crystalor
Resonator
To
CPU
www.ti.com
3.2 OSC and PLL Block
The on-chip oscillator and phase-locked loop (PLL) block provides the clocking signals for the device, as
well as control for low-power mode (LPM) entry.
3.2.1 PLL-Based Clock Module
The 2833x, 2823x devices have an on-chip, PLL-based clock module. The PLL has a 4-bit ratio control to
select different CPU clock rates. Figure 3-7 shows the OSC and PLL block.
OSC and PLL Block
Figure 3-7. OSC and PLL Block
The PLL-based clock module provides two modes of operation:
• Crystal/Resonator Operation:
The on-chip oscillator enables the use of an external crystal/resonator to be attached to the device to
provide the time base to the device. The crystal/resonator is connected to the X1/X2 pins and XCLKIN
is tied low.
• External clock source operation:
If the on-chip oscillator is not used, this mode allows the internal oscillator to be bypassed. The device
clocks are generated from an external clock source input on either the X1 or the XCLKIN pin.
Option 1: External clock on the XCLKIN pin:
When using XCLKIN as the external clock source, you must tie X1 low and leave X2 disconnected. In
this case, an external oscillator clock is connected to the XCLKIN pin, which allows for a 3.3-V clock
source to be used.
Option 2: External clock on the X1 pin:
When using X1 as the clock source, you must tie XCLKIN low and leave X2 disconnected. In this case,
an external oscillator clock is connected to the X1 pin, which allows for a 1.8-V clock source to be
used.
The OSC circuit enables attachment of a crystal using the X1 and X2 pins. If a crystal is not used, then an
external oscillator can be directly connected to the XCLKIN pin, the X2 pin is left unconnected, and the X1
pin is tied low. See the TMS320F28335, TMS320F28334, TMS28332, TMS320F28235, TMS320F28234,
TMS28232 Digital Signal Controllers (DSCs) Data Manual (literature number SPRS439 ). The input clock
and PLLCR[DIV] bits should be chosen in such a way that the output frequency of the PLL (VCOCLK)
does not exceed 300 MHz.
SPRUFB0C – September 2007 – Revised May 2009 Clocking 45
Submit Documentation Feedback
Page 46

VCOCLK
counter
(13bits)
Clear ResClear
OSCCLK
Clear
(7bits)
counter
Res Clear
OvfClk
XRS
PLL
Clk Ovf
Off
Clear
OSCCLK
Clock
switch
logic
VCOCLK
C28x
CPU
Missing
clock
reset
PLLCLK
/1,
/2
or
/4
PLLSTS
reg
PLLCR
reg
C28x
CPU
OSC and PLL Block
PLL Mode Remarks PLLSTS[DIVSEL]
PLL Off Invoked by the user setting the PLLOFF bit in the PLLSTS register. The 0, 1 OSCCLK/4
PLL Bypass PLL Bypass is the default PLL configuration upon power-up or after an 0, 1 OSCCLK/4
PLL Enabled Achieved by writing a non-zero value n into the PLLCR register. Upon 0, 1 OSCCLK*n/4
(1)
PLLSTS[DIVSEL] must be 0 before writing to the PLLCR and should be changed only after PLLSTS[PLLLOCKS] = 1. See
Figure 3-10 .
3.2.2 Main Oscillator Fail Detection
Due to vibrations, it is possible for the external clock source to the DSP to become detached and fail to
clock the device. When the PLL is not disabled, the main oscillator fail logic allows the device to detect
this condition and default to a known state as described in this section.
Two counters are used to monitor the presence of the OSCCLK signal as shown in Figure 3-8 . The first
counter is incremented by the OSCCLK signal itself either from the X1/X2 or XCLKIN input. When the PLL
is not turned off, the second counter is incremented by the VCOCLK coming out of the PLL block. These
counters are configured such that when the 7-bit OSCCLK counter overflows, it clears the 13-bit VCOCLK
counter. In normal operating mode, as long as OSCCLK is present, the VCOCLK counter will never
overflow.
Table 3-7. Possible PLL Configuration Modes
PLL block is disabled in this mode. This can be useful to reduce system 2 OSCCLK/2
noise and for low power operation. The PLLCR register must first be set 3 OSCCLK/1
to 0x0000 (PLL Bypass) before entering this mode. The CPU clock
(CLKIN) is derived directly from the input clock on either X1/X2, X1 or
XCLKIN.
external reset ( XRS). This mode is selected when the PLLCR register is 2 OSCCLK/2
set to 0x0000 or while the PLL locks to a new frequency after the 3 OSCCLK/1
PLLCR register has been modified. In this mode, the PLL itself is
bypassed but the PLL is not turned off.
writing to the PLLCR, the device will switch to PLL Bypass mode until 2 OSCCLK*n/2
the PLL locks.
www.ti.com
(1)
SYSCLKOUT
Figure 3-8. Oscillator Fail-Detection Logic Diagram
46 Clocking SPRUFB0C – September 2007 – Revised May 2009
Submit Documentation Feedback
Page 47

www.ti.com
OSC and PLL Block
If the OSCCLK input signal is missing, then the PLL will output a default "limp mode" frequency and the
VCOCLK counter will continue to increment. Since the OSCCLK signal is missing, the OSCCLK counter
will not increment and, therefore, the VCOCLK counter is not periodically cleared. Eventually, the
VCOCLK counter overflows and, if required, the device switches the CLKIN input to the CPU to the limp
mode output frequency of the PLL.
When the VCOCLK counter overflows, the missing clock detection logic resets the CPU, peripherals, and
other device logic. The reset generated is known as a missing clock detect logic reset ( MCLKRES). The
MCLKRES is an internal reset only. The external XRS pin of the device is not pulled low by MCLKRES
and the PLLCR and PLLSTS registers are not reset.
In addition to resetting the device, the missing oscillator logic sets the PLLSTS[MCLKSTS] register bit.
When the MCLKCSTS bit is 1, this indicates that the missing oscillator detect logic reset the part and that
the CPU is now running either at or one-half of the limp mode frequency.
Software should check the PLLSTS[MCLKSTS] bit after a reset to determine if the device was reset by
MCLKRES due to a missing clock condition. If MCLKSTS is set, then the firmware should take the action
appropriate for the system such as a system shutdown. The missing clock status can be cleared by writing
a 1 to the PLLSTS[MCLKCLR] bit. This will reset the missing clock detection circuits and counters. If
OSCCLK is still missing after writing to the MCLKCLR bit, then the VCOCLK counter again overflows and
the process will repeat.
Note: Applications in which the correct CPU operating frequency is absolutely critical should
implement a mechanism by which the DSP will be held in reset should the input clocks ever
fail. For example, an R-C circuit may be used to trigger the XRS pin of the DSP should the
capacitor ever get fully charged. An I/O pin may be used to discharge the capacitor on a
periodic basis to prevent it from getting fully charged. Such a circuit would also help in
detecting failure of the flash memory and the V
rail.
DD3VFL
The following precautions and limitations should be kept in mind:
• Use the proper procedure when changing the PLL Control Register.
Always follow the procedure outlined in Figure 3-10 when modifying the PLLCR register.
• Do not write to the PLLCR register when the device is operating in limp mode.
When writing to the PLLCR register, the device switches to the CPU's CLKIN input to OSCCLK/2.
When operating after limp mode has been detected, OSCCLK may not be present and the clocks to
the system will stop. Always check that the PLLSTS[MCLKSTS] bit = 0 before writing to the PLLCR
register as described in Figure 3-10 .
• The watchdog is not functional without an external clock.
The watchdog is not functional and cannot generate a reset when OSCCLK is not present. No special
hardware has been added to switch the watchdog to the limp mode clock should OSCCLK become
missing.
• Limp mode may not work from power up.
The PLL may not generate a limp mode clock if OSCCLK is missing from power-up. Only if OSCCLK is
initially present will a limp mode clock be generated by the PLL.
• Do not enter HALT low power mode when the device is operating in limp mode.
If you try to enter HALT mode when the device is already operating in limp mode then the device may
not properly enter HALT. The device may instead enter STANDBY mode or may hang and you may
not be able to exit HALT mode. For this reason, always check that the PLLSTS[MCLKSTS] bit = 0
before entering HALT mode.
SPRUFB0C – September 2007 – Revised May 2009 Clocking 47
Submit Documentation Feedback
Page 48

1
0
XCLKOUT
/2
XTIMCLK
1
0
/2
C28x
CPU
XINTCNF2
(CLKMODE)
XINTCNF2(XTIMCLK)
DefaultValueafterreset
SYSCLKOUT
XINTCNF2
(CLKOFF)
OSC and PLL Block
www.ti.com
The following list describes the behavior of the missing clock detect logic in various operating modes:
• PLL by-pass mode
When the PLL control register is set to 0x0000, the PLL is by-passed. Depending on the state of the
PLLSTS[DIVSEL] bit, OSCCLK, OSCCLK/2, or OSCCLK/4 is connected directly to the CPU's input
clock, CLKIN. If the OSCCLK is detected as missing, the device will automatically switch to the PLL,
set the missing clock detect status bit, and generate a missing clock reset. The device will now run at
the PLL limp mode frequency or one-half of the PLL limp mode frequency.
• PLL enabled mode
When the PLL control register is non-zero (PLLCR = n, where n ≠ 0x0000), the PLL is enabled. In this
mode, OSCCLK*n, OSCCLK*n/2, or OSCCLK*n/4 is connected to CLKIN of the CPU. If OSCCLK is
detected as missing, the missing clock detect status bit will be set and the device will generate a
missing clock reset. The device will now run at one-half of the PLL limp mode frequency.
• STANDBY low power mode
In this mode, the CLKIN to the CPU is stopped. If a missing input clock is detected, the missing clock
status bit will be set and the device will generate a missing clock reset. If the PLL is in by-pass mode
when this occurs, then one-half of the PLL limp frequency will automatically be routed to the CPU. The
device will now run at the PLL limp mode frequency or at one-half or one-fourth of the PLL limp mode
frequency, depending on the state of the PLLSTS[DIVSEL] bit.
• HALT low power mode
In HALT low power mode, all of the clocks to the device are turned off. When the device comes out of
HALT mode, the oscillator and PLL will power up. The counters that are used to detect a missing input
clock (VCOCLK and OSCCLK) will be enabled only after this power-up has completed. If VCOCLK
counter overflows, the missing clock detect status bit will be set and the device will generate a missing
clock reset. If the PLL is in by-pass mode when the overflow occurs, then one-half of the PLL limp
frequency will automatically be routed to the CPU. The device will now run at the PLL limp mode
frequency or at one-half or one-fourth of the PLL limp mode frequency depending on the state of the
PLLSTS[DIVSEL] bit.
3.2.3 XCLKOUT Generation
The XCLKOUT signal is directly derived from the system clock SYSCLKOUT as shown in Figure 3-9 .
XCLKOUT can be either equal to, one-half, or one-fourth of SYSCLKOUT. By default, at power-up,
XCLKOUT = SYSCLKOUT/ 4 or XCLKOUT = OSCCLK/ 16.
The XCLKOUT signal is active when reset is active. Since XCLKOUT should reflect SYSCLKOUT/ 4 when
reset is low, you can monitor this signal to detect if the device is being properly clocked during debug.
There is no internal pullup or pulldown on the XCLKOUT pin.
If XCLKOUT is not being used, it can be turned off by setting the CLKOFF bit to 1 in the XINTCNF2
register.
Figure 3-9. XCLKOUT Generation
Clocking48 SPRUFB0C – September 2007 – Revised May 2009
Submit Documentation Feedback
Page 49

www.ti.com
3.2.4 PLL Control (PLLCR) Register
The PLLCR register is used to change the PLL multiplier of the device. Before writing to the PLLCR
register, the following requirement s must be met:
• The PLLSTS[DIVSEL] bit must be 0 (CLKIN divide by 4 enabled). Change PLLSTS[DIVSEL] to 1 only
after the PLL has completed locking, i.e., after PLLSTS[PLLLOCKS] = 1.
• The device must not be operating in "limp mode". That is, the PLLSTS[MCLKSTS] bit must be 0.
When the CPU writes to the PLLCR[DIV] bits, the PLL logic switches the CPU clock (CLKIN) to
OSCCLK/2. Once the PLL is stable and has locked at the new specified frequency, the PLL switches
CLKIN to the new value as shown in Table 3-8 . When this happens, the PLLLOCKS bit in the PLLSTS
register is set, indicating that the PLL has finished locking and the device is now running at the new
frequency. User software can monitor the PLLLOCKS bit to determine when the PLL has completed
locking. Once PLLSTS[PLLLOCKS] = 1, DIVSEL can be changed.
Follow the procedure in Figure 3-10 any time you are writing to the PLLCR register.
OSC and PLL Block
SPRUFB0C – September 2007 – Revised May 2009 Clocking 49
Submit Documentation Feedback
Page 50

Start
PLLSTS[MCLKSTS]
=1?
Yes
No
Deviceisoperatinginlimp
mode. Takeappropriate
actionforyoursystem.
DonotwritetoPLLCR.
SetPLL[MCLKOFF]=0
toenablefailedoscillator
detectlogic.
Ifrequired,
PLLSTS[DIVSEL]
cannowbechanged.
SetnewPLLCRvalue
Is
PLLSTS[PLLLOCKS]
=1?
ContinuetowaitforPLL
tolock. Thisisimportant
fortime-criticalsoftware.
SetPLLSTS[MCLKOFF]=1
todisablefailedoscillator
detectlogic
No
Yes
PLLSTS[DIVSEL]
=2or3?
No
SetPLLSTS[DIVSEL]=0
Yes
OSC and PLL Block
www.ti.com
Figure 3-10. PLLCR Change Procedure Flow Chart
50 Clocking SPRUFB0C – September 2007 – Revised May 2009
Submit Documentation Feedback
Page 51

www.ti.com
OSC and PLL Block
3.2.5 PLL Control, Status and XCLKOUT Register Descriptions
The DIV field in the PLLCR register controls whether the PLL is bypassed or not and sets the PLL
clocking ratio when it is not bypassed. PLL bypass is the default mode after reset. Do not write to the DIV
field if the PLLSTS[DIVSEL] bit is 10 or 01, or if the PLL is operating in limp mode as indicated by the
PLLSTS[MCLKSTS] bit being set. See the procedure for changing the PLLCR described in Figure 3-10 .
Figure 3-11. PLLCR Register Layout
15 4 3 0
Reserved DIV
R-0 R/W-0
LEGEND: R/W = Read/Write; R = Read only; - n = value after reset
Table 3-8. PLLCR Bit Descriptions
SYSCLKOUT (CLKIN)
PLLCR[DIV] Value
0000 (PLL bypass) OSCCLK/4 (Default) OSCCLK/2 OSCCLK
0001 (OSCCLK * 1)/4 (OSCCLK*1)/2 –
0010 (OSCCLK * 2)/4 (OSCCLK*2)/2 –
0011 (OSCCLK * 3)/4 (OSCCLK*3)/2 –
0100 (OSCCLK * 4)/4 (OSCCLK*4)/2 –
0101 (OSCCLK * 5)/4 (OSCCLK*5)/2 –
0110 (OSCCLK * 6)/4 (OSCCLK*6)/2 –
0111 (OSCCLK * 7)/4 (OSCCLK*7)/2 –
1000 (OSCCLK * 8)/4 (OSCCLK*8)/2 –
1001 (OSCCLK * 9)/4 (OSCCLK*9)/2 –
1010 (OSCCLK * 10)/4 (OSCCLK*10)/2 –
1011 - 1111 Reserved Reserved Reserved
(1)
This register is EALLOW protected. See Section 5.2 for more information.
(2)
PLLSTS[DIVSEL] must be 0 before writing to the PLLCR and should be changed only after PLLSTS[PLLLOCKS] = 1. See
Figure 3-10 .
(3)
The PLL control register (PLLCR) and PLL Status Register (PLLSTS) are reset to their default state by the XRS signal or a
watchdog reset only. A reset issued by the debugger or the missing clock detect logic have no effect.
(3)
PLLSTS[DIVSEL] = 0 or 1 PLLSTS[DIVSEL] = 2 PLLSTS[DIVSEL] = 3
(1)
(2)
Figure 3-12. PLL Status Register (PLLSTS)
15 9 8
Reserved DIVSEL
R-0 R/W-0
7 6 5 4 3 2 1 0
DIVSEL MCLKOFF OSCOFF MCLKCLR MCLKSTS PLLOFF Reserved PLLLOCKS
R/W-0 R/W-0 R/W-0 R/W-0 R-0 R/W-0 R-0 R-1
LEGEND: R/W = Read/Write; R = Read only; - n = value after reset
Table 3-9. PLL Status Register (PLLSTS) Field Descriptions
Bits Field Value Description
15-9 Reserved Reserved
8:7 DIVSEL Divide Select: This bit selects between /4, /2, and /1 for CLKIN to the CPU.
(1)
This register is reset to its default state only by the XRS signal or a watchdog reset. It is not reset by a missing clock or debugger reset.
(2)
This register is EALLOW protected. See Section 5.2 for more information.
SPRUFB0C – September 2007 – Revised May 2009 Clocking 51
Submit Documentation Feedback
The configuration of the DIVSEL bit is as follows:
(1) (2)
Page 52

OSC and PLL Block
Table 3-9. PLL Status Register (PLLSTS) Field Descriptions (continued)
Bits Field Value Description
00 Select Divide By 8 for CLKIN
00, 01 Select Divide By 4 for CLKIN
10 Select Divide By 2 for CLKIN
11 Select Divide By 1 for CLKIN . (This mode can be used only when PLL is off or bypassed.)
6 MCLKOFF Missing clock-detect off bit
0 Main oscillator fail-detect logic is enabled. (default)
1 Main oscillator fail-detect logic is disabled and the PLL will not issue a limp-mode clock. Use this
mode when code must not be affected by the detection circuit. For example, if external clocks are
turned off.
5 OSCOFF Oscillator Clock Off Bit
0 The OSCCLK signal from X1, X1/X2 or XCLKIN is fed to the PLL block. (default)
1 The OSCCLK signal from X1, X1/X2 or XCLKIN is not fed to the PLL block. This does not shut
down the internal oscillator. The OSCOFF bit is used for testing the missing clock detection logic.
When the OSCOFF bit is set, do not enter HALT or STANDBY modes or write to PLLCR as these
operations can result in unpredictable behavior.
When the OSCOFF bit is set, the behavior of the watchdog is different depending on which input
clock source (X1, X1/X2 or XCLKIN) is being used:
• X1 or X1/X2: The watchdog is not functional.
• XCLKIN: The watchdog is functional and should be disabled before setting OSCOFF.
4 MCLKCLR Missing Clock Clear Bit.
0 Writing a 0 has no effect. This bit always reads 0.
1 Forces the missing clock detection circuits to be cleared and reset. If OSCCLK is still missing, the
detection circuit will again generate a reset to the system, set the missing clock status bit
(MCLKSTS), and the CPU will be powered by the PLL operating at a "limp mode" frequency.
3 MCLKSTS Missing Clock Status Bit. Check the status of this bit after a reset to determine whether a missing
oscillator condition was detected. Under normal conditions, this bit should be 0. Writes to this bit
are ignored. This bit will be cleared by writing to the MCLKCLR bit or by forcing an external reset.
0 Indicates normal operation. A missing clock condition has not been detected.
1 Indicates that OSCCLK was detected as missing. The main oscillator fail detect logic has reset the
device and the CPU is now clocked by the PLL operating at the limp mode frequency.
2 PLLOFF PLL Off Bit. This bit turns off the PLL. This is useful for system noise testing. This mode must only
be used when the PLLCR register is set to 0x0000.
0 PLL On (default)
1 PLL Off. While the PLLOFF bit is set the PLL module will be kept powered down.
The device must be in PLL bypass mode (PLLCR = 0x0000) before writing a 1 to PLLOFF. While
the PLL is turned off (PLLOFF = 1), do not write a non-zero value to the PLLCR.
The STANDBY and HALT low power modes will work as expected when PLLOFF = 1. After waking
up from HALT or STANDBY the PLL module will remain powered down.
1 Reserved Reserved
0 PLLLOCKS PLL Lock Status Bit.
0 Indicates that the PLLCR register has been written to and the PLL is currently locking. The CPU is
clocked by OSCCLK/2 until the PLL locks.
1 Indicates that the PLL has finished locking and is now stable.
(1) (2)
www.ti.com
3.2.6 External Reference Oscillator Clock Option
TI recommends that customers have the resonator/crystal vendor characterize the operation of their
device with the DSP chip. The resonator/crystal vendor has the equipment and expertise to tune the tank
circuit. The vendor can also advise the customer regarding the proper tank component values to provide
proper start-up and stability over the entire operating range.
Clocking52 SPRUFB0C – September 2007 – Revised May 2009
Submit Documentation Feedback
Page 53

www.ti.com
3.3 Low-Power Modes Block
Table 3-10 summarizes the various modes.
The various low-power modes operate as shown in Table 3-11 .
See the TMS320F28335, TMS320F28334, TMS320F28332, TMS320F28235, TMS320F28234,
TMS320F28232 Digital Signal Controllers (DSCs) Data Manual (literature number SPRS439 ) for exact
timing for entering and exiting the low power modes.
Mode LPMCR0[1:0] OSCCLK CLKIN SYSCLKOUT Exit
IDLE 00 On On On
STANDBY 01 On Off Off XRS,
HALT 1X Off Off Off XRS,
(1)
The Exit column lists which signals or under what conditions the low power mode is exited. This signal must be kept low long
enough for an interrupt to be recognized by the device. Otherwise the IDLE mode is not exited and the device goes back into
the indicated low power mode.
(2)
The IDLE mode on the 28x behaves differently than on the 24x/240x. On the 28x, the clock output from the CPU
(SYSCLKOUT) is still functional while on the 24x/240x the clock is turned off.
(3)
On the 28x, the JTAG port can still function even if the clock to the CPU (CLKIN) is turned off.
Low-Power Modes Block
Table 3-10. Low-Power Mode Summary
(2)
(watchdog still running) Watchdog interrupt,
(oscillator and PLL turned off, GPIO Port A Signal,
watchdog not functional) Debugger
XRS,
Watchdog interrupt,
Any enabled interrupt
GPIO Port A signal,
Debugger
(1)
(3)
(3)
Table 3-11. Low Power Modes
Mode Description
IDLE This mode is exited by any enabled interrupt or an NMI. The LPM block itself performs no tasks during this
Mode: mode.
STANDBY If the LPM bits in the LPMCR0 register are set to 01, the device enters STANDBY mode when the IDLE
Mode: instruction is executed. In STANDBY mode the clock input to the CPU (CLKIN) is disabled, which disables all
clocks derived from SYSCLKOUT. The oscillator and PLL and watchdog will still function. Before entering the
STANDBY mode, you should perform the following tasks:
• Enable the WAKEINT interrupt in the PIE module. This interrupt is connected to both the watchdog and the
low power mode module interrupt.
• If desired, specify one of the GPIO port A signals to wake the device in the GPIOLPMSEL register. The
GPIOLPMSEL register is part of the GPIO module. In addition to the selected GPIO signal, the XRS input
and the watchdog interrupt, if enabled in the LPMCR0 register, can wake the device from the STANDBY
mode.
• Select the input qualification in the LPMCR0 register for the signal that will wake the device.
When the selected external signal goes low, it must remain low a number of OSCCLK cycles as specified by the
qualification period in the LPMCR0 register. If the signal should be sampled high during this time, the
qualification will restart. At the end of the qualification period, the PLL enables the CLKIN to the CPU and the
WAKEINT interrupt is latched in the PIE block. The CPU then responds to the WAKEINT interrupt if it is enabled.
SPRUFB0C – September 2007 – Revised May 2009 Clocking 53
Submit Documentation Feedback
Page 54

Low-Power Modes Block
HALT If the LPM bits in the LPMCR0 register are set to 1x, the device enters the HALT mode when the IDLE
Mode: instruction is executed. In HALT mode all of the device clocks, including the PLL and oscillator, are shut down.
www.ti.com
Table 3-11. Low Power Modes (continued)
Mode Description
Before entering the HALT mode, you should perform the following tasks:
• Enable the WAKEINT interrupt in the PIE module (PIEIER1.8 = 1). This interrupt is connected to both the
watchdog and the Low-Power-Mode module interrupt.
• Specify one of the GPIO port A signals to wake the device in the GPIOLPMSEL register. The
GPIOLPMSEL register is part of the GPIO module. In addition to the selected GPIO signal, the XRS input
can also wake the device from the HALT mode
• Disable all interrupts with the possible exception of the HALT mode wakeup interrupt. The interrupts can be
re-enabled after the device is brought out of HALT mode.
• For device to exit HALT mode properly, the following conditions must be met:
Bit 7 (INT1.8) of PIEIER1 register should be 1.
Bit 0 (INT1) of IER register must be 1.
• If the above conditions are met,
– WAKE_INT ISR will be executed first, followed by the instruction(s) after IDLE, if INTM = 0.
– WAKE_INT ISR will not be executed and instruction(s) after IDLE will be executed, if INTM = 1.
Do not enter HALT low power mode when the device is operating in limp mode (PLLSTS[MCLKSTS] = 1).
If you try to enter HALT mode when the device is already operating in limp mode then the device may not
properly enter HALT. The device may instead enter STANDBY mode or may hang and you may not be able to
exit HALT mode. For this reason, always check that the PLLSTS[MCLKSTS] bit = 0 before entering HALT mode.
When the selected external signal goes low, it is fed asynchronously to the LPM block. The oscillator is turned
on and begins to power up. You must hold the signal low long enough for the oscillator to complete power up.
Once the oscillator has stabilized, the PLL lock sequence is initiated. Once the PLL has locked, it feeds the
CLKIN to the CPU at which time the CPU responds to the WAKEINT interrupt if enabled.
The low-power modes are controlled by the LPMCR0 register (Figure 3-13 ).
Figure 3-13. Low Power Mode Control 0 Register (LPMCR0)
15 14 8 7 2 1 0
WDINTE Reserved QUALSTDBY LPM
R/W-0 R-0 R/W-1 R/W-0
LEGEND: R/W = Read/Write; R = Read only; - n = value after reset
Table 3-12. Low Power Mode Control 0 Register (LPMCR0) Field Descriptions
Bits Field Value Description
15 WDINTE Watchdog interrupt enable
0 The watchdog interrupt is not allowed to wake the device from STANDBY. (default)
The watchdog is allowed to wake the device from STANDBY. The watchdog interrupt must also
1
be enabled in the SCSR Register.
14-8 Reserved Reserved
7-2 QUALSTDBY Select number of OSCCLK clock cycles to qualify the selected GPIO inputs that wake the device
000000 2 OSCCLKs (default)
000001 3 OSCCLKs
. . . . . .
(1)
This register is EALLOW protected. See Section 5.2 for more information.
111111 65 OSCCLKs
from STANDBY mode. This qualification is only used when in STANDBY mode. The GPIO
signals that can wake the device from STANDBY are specified in the GPIOLPMSEL register.
(1)
Clocking54 SPRUFB0C – September 2007 – Revised May 2009
Submit Documentation Feedback
Page 55

/512
OSCCLK
WDCR (WDPS(2:0))
WDCLK
WDCNTR(7:0)
WDKEY(7:0)
Good Key
1 0 1
WDCR (WDCHK(2:0))
Bad
WDCHK
Key
WDCR (WDDIS)
Clear Counter
SCSR (WDENINT)
Watchdog
Prescaler
Generate
Output Pulse
(512 OSCCLKs)
8-Bit
Watchdog
Counter
CLR
WDRST
WDINT
Watchdog
55 + AA
Key Detector
XRS
Core-reset
WDRST
(A)
Internal
Pullup
www.ti.com
Table 3-12. Low Power Mode Control 0 Register (LPMCR0) Field Descriptions (continued)
Bits Field Value Description
1-0 LPM
(2)
The low power mode bits (LPM) only take effect when the IDLE instruction is executed. Therefore, you must set the LPM bits to the
appropriate mode before executing the IDLE instruction.
(3)
If you try to enter HALT mode when the device is already operating in limp mode then the device may not properly enter HALT. The
device may instead enter STANDBY mode or may hang and you may not be able to exit HALT mode. For this reason, always check that
the PLLSTS[MCLKSTS] bit = 0 before entering HALT mode.
(2)
These bits set the low power mode for the device.
00 Set the low power mode to IDLE (default)
01 Set the low power mode to STANDBY
10 Set the low power mode to HALT
11 Set the low power mode to HALT
(3)
(3)
(1)
3.4 Watchdog Block
The watchdog module generates an output pulse, 512 oscillator-clocks (OSCCLK) wide whenever the
8-bit watchdog up counter has reached its maximum value. To prevent this, the user can either disable the
counter or the software must periodically write a 0x55 + 0xAA sequence into the watchdog key register
which resets the watchdog counter. Figure 3-14 shows the various functional blocks within the watchdog
module.
Figure 3-14. Watchdog Module
Watchdog Block
A The WDRST and XRS signals are driven low for 512 OSCCLK cycles when a watchdog reset occurs. Likewise, if the
watchdog interrupt is enabled, the WDINT signal will be driven low for 512 OSCCLK cycles when an interrupt occurs.
Watchdog is not functional and cannot generate a reset when OSCCLK is not present.
SPRUFB0C – September 2007 – Revised May 2009 Clocking 55
Submit Documentation Feedback
Page 56

Watchdog Block
3.4.1 Servicing The Watchdog Timer
The WDCNTR is reset when the proper sequence is written to the WDKEY register before the 8-bit
watchdog counter (WDCNTR) overflows. The WDCNTR is reset-enabled when a value of 0x55 is written
to the WDKEY. When the next value written to the WDKEY register is 0xAA then the WDCNTR is reset.
Any value written to the WDKEY other than 0x55 or 0xAA causes no action. Any sequence of 0x55 and
0xAA values can be written to the WDKEY without causing a system reset; only a write of 0x55 followed
by a write of 0xAA to the WDKEY resets the WDCNTR.
Step Value Written to WDKEY Result
1 0xAA No action
2 0xAA No action
3 0x55 WDCNTR is enabled to be reset if next value is 0xAA.
4 0x55 WDCNTR is enabled to be reset if next value is 0xAA.
5 0x55 WDCNTR is enabled to be reset if next value is 0xAA.
6 0xAA WDCNTR is reset.
7 0xAA No action
8 0x55 WDCNTR is enabled to be reset if next value is 0xAA.
9 0xAA WDCNTR is reset.
10 0x55 WDCNTR is enabled to be reset if next value is 0xAA.
11 0x32 Improper value written to WDKEY.
12 0xAA No action due to previous invalid value.
13 0x55 WDCNTR is enabled to be reset if next value is 0xAA.
14 0xAA WDCNTR is reset.
www.ti.com
Table 3-13. Example Watchdog Key Sequences
No action, WDCNTR no longer enabled to be reset by next 0xAA.
Step 3 in Table 3-13 is the first action that enables the WDCNTR to be reset. The WDCNTR is not
actually reset until step 6. Step 8 again re-enables the WDCNTR to be reset and step 9 resets the
WDCNTR. Step 10 again re-enables the WDCNTR ro be reset. Writing the wrong key value to the
WDKEY in step 11 causes no action, however the WDCNTR is no longer enabled to be reset and the
0xAA in step 12 now has no effect.
If the watchdog is configured to reset the device, then a WDCR overflow or writing the incorrect value to
the WDCR[WDCHK] bits will reset the device and set the watchdog flag (WDFLAG) in the WDCR register.
After a reset, the program can read the state of this flag to determine the source of the reset. After reset,
the WDFLAG should be cleared by software to allow the source of subsequent resets to be determined.
Watchdog resets are not prevented when the flag is set.
3.4.2 Watchdog Reset or Watchdog Interrupt Mode
The watchdog can be configured in the SCSR register to either reset the device ( WDRST) or assert an
interrupt ( WDINT) if the watchdog counter reaches its maximum value. The behavior of each condition is
described below:
• Reset mode:
If the watchdog is configured to reset the device, then the WDRST signal will pull the device reset
( XRS) pin low for 512 OSCCLK cycles when the watchdog counter reaches its maximum value.
• Interrupt mode:
If the watchdog is configured to assert an interrupt, then the WDINT signal will be driven low for 512
OSCCLK cycles, causing the WAKEINT interrupt in the PIE to be taken if it is enabled in the PIE
module. The watchdog interrupt is edge triggered on the falling edge of WDINT. Thus, if the WAKEINT
interrupt is re-enabled before WDINT goes inactive, you will not immediately get another interrupt. The
next WAKEINT interrupt will occur at the next watchdog timeout.
If the watchdog is re-configured from interrupt mode to reset mode while WDINT is still active low, then
the device will reset immediately. The WDINTS bit in the SCSR register can be read to determine the
current state of the WDINT signal before reconfiguring the watchdog to reset mode.
Clocking56 SPRUFB0C – September 2007 – Revised May 2009
Submit Documentation Feedback
Page 57

www.ti.com
3.4.3 Watchdog Operation in Low Power Modes
In STANDBY mode, all of the clocks to the peripherals are turned off on the device. The only peripheral
that remains functional is the watchdog since the watchdog module runs off the oscillator clock
(OSCCLK). The WDINT signal is fed to the Low Power Modes (LPM) block so that it can be used to wake
the device from STANDBY low power mode (if enabled). See the Low Power Modes Block section of the
device data manual for details.
In IDLE mode, the watchdog interrupt ( WDINT) signal can generate an interrupt to the CPU to take the
CPU out of IDLE mode. The watchdog is connected to the WAKEINT interrupt in the PIE.
Note: If the watchdog interrupt is used to wake-up from an IDLE or STANDBY low power mode
condition, then make sure that the WDINT signal goes back high again before attempting to
go back into the IDLE or STANDBY mode. The WDINT signal will be held low for 512
OSCCLK cycles when the watchdog interrupt is generated. You can determine the current
state of WDINT by reading the watchdog interrupt status bit (WDINTS) bit in the SCSR
register. WDINTS follows the state of WDINT by two SYSCLKOUT cycles.
In HALT mode, this feature cannot be used because the oscillator (and PLL) are turned off and, therefore,
so is the watchdog.
3.4.4 Emulation Considerations
The watchdog module behaves as follows under various debug conditions:
CPU Suspended: When the CPU is suspended, the watchdog clock (WDCLK) is suspended
Run-Free Mode: When the CPU is placed in run-free mode, then the watchdog module
resumes operation as normal.
Real-Time Single-Step When the CPU is in real-time single-step mode, the watchdog clock
Mode: (WDCLK) is suspended. The watchdog remains suspended even within
real-time interrupts.
Real-Time Run-Free When the CPU is in real-time run-free mode, the watchdog operates as
Mode: normal.
Watchdog Block
SPRUFB0C – September 2007 – Revised May 2009 Clocking 57
Submit Documentation Feedback
Page 58

Watchdog Block
3.4.5 Watchdog Registers
The system control and status register (SCSR) contains the watchdog override bit and the watchdog
interrupt enable/disable bit. Figure 3-15 describes the bit functions of the SCSR register.
Figure 3-15. System Control and Status Register (SCSR)
15 8
Reserved
R-0
7 3 2 1 0
Reserved WDINTS WDENINT WDOVERRIDE
R-0 R-1 R/W-0 R/W1C-1
LEGEND: R/W = Read/Write; R = Read only; - n = value after reset
Table 3-14. System Control and Status Register (SCSR) Field Descriptions
Bit Field Value Description
15-3 Reserved
2 WDINTS Watchdog interrupt status bit. WDINTS reflects the current state of the WDINT signal from the
1 WDENINT Watchdog interrupt enable.
0 WDOVERRIDE Watchdog override
(1)
This register is EALLOW protected. See Section 5.2 for more information.
watchdog block. WDINTS follows the state of WDINT by two SYSCLKOUT cycles.
If the watchdog interrupt is used to wake the device from IDLE or STANDBY low power mode, use
this bit to make sure WDINT is not active before attempting to go back into IDLE or STANDBY
mode.
0 Watchdog interrupt signal ( WDINT) is active.
1 Watchdog interrupt signal ( WDINT) is not active.
0 The watchdog reset ( WDRST) output signal is enabled and the watchdog interrupt ( WDINT) output
signal is disabled. This is the default state on reset ( XRS). When the watchdog interrupt occurs the
WDRST signal will stay low for 512 OSCCLK cycles.
If the WDENINT bit is cleared while WDINT is low, a reset will immediately occur. The WDINTS bit
can be read to determine the state of the WDINT signal.
1 The WDRST output signal is disabled and the WDINT output signal is enabled. When the watchdog
interrupt occurs, the WDINTsignal will stay low for 512 OSCCLK cycles.
If the watchdog interrupt is used to wake the device from IDLE or STANDBY low power mode, use
the WDINTS bit to make sure WDINT is not active before attempting to go back into IDLE or
STANDBY mode.
0 Writing a 0 has no effect. If this bit is cleared, it remains in this state until a reset occurs. The
current state of this bit is readable by the user.
1 You can change the state of the watchdog disable (WDDIS) bit in the watchdog control (WDCR)
register. If the WDOVERRIDE bit is cleared by writing a 1, you cannot modify the WDDIS bit.
(1)
www.ti.com
Clocking58 SPRUFB0C – September 2007 – Revised May 2009
Submit Documentation Feedback
Page 59

www.ti.com
Watchdog Block
Figure 3-16. Watchdog Counter Register (WDCNTR)
15 8 7 0
Reserved WDCNTR
R-0 R-0
LEGEND: R/W = Read/Write; R = Read only; - n = value after reset
Table 3-15. Watchdog Counter Register (WDCNTR) Field Descriptions
Bits Field Description
15-8 Reserved Reserved
7-0 WDCNTR These bits contain the current value of the WD counter. The 8-bit counter continually increments at the
watchdog clock (WDCLK), rate. If the counter overflows, then the watchdog initiates a reset. If the WDKEY
register is written with a valid combination, then the counter is reset to zero. The watchdog clock rate is
configured in the WDCR register.
Figure 3-17. Watchdog Reset Key Register (WDKEY)
15 8 7 0
Reserved WDKEY
R-0 R/W-0
LEGEND: R/W = Read/Write; R = Read only; - n = value after reset
Table 3-16. Watchdog Reset Key Register (WDKEY) Field Descriptions
Bits Field Value Description
15-8 Reserved Reserved
7-0 WDKEY Refer to Table 3-13 for examples of different WDKEY write sequences.
0x55 + 0xAA Writing 0x55 followed by 0xAA to WDKEY causes the WDCNTR bits to be cleared.
Other value Writing any value other than 0x55 or 0xAA causes no action to be generated. If any value other than
(1)
This register is EALLOW protected. See Section 5.2 for more information.
0xAA is written after 0x55, then the sequence must restart with 0x55.
Reads from WDKEY return the value of the WDCR register.
(1)
Figure 3-18. Watchdog Control Register (WDCR)
15 8
Reserved
7 6 5 3 2 0
WDFLAG WDDIS WDCHK WDPS
R/W1C-0 R/W-0 R/W-0 R/W-0
LEGEND: R/W = Read/Write; R = Read only; - n = value after reset
Table 3-17. Watchdog Control Register (WDCR) Field Descriptions
Bits Field Value Description
15-8 Reserved Reserved
7 WDFLAG Watchdog reset status flag bit
0 The reset was caused either by the XRS pin or because of power-up. The bit remains latched
until you write a 1 to clear the condition. Writes of 0 are ignored.
1 Indicates a watchdog reset ( WDRST) generated the reset condition. .
(1)
(1)
This register is EALLOW protected. See Section 5.2 for more information.
SPRUFB0C – September 2007 – Revised May 2009 Clocking 59
Submit Documentation Feedback
Page 60

Borrow
Reset
Timer reload
SYSCLKOUT
TCR.4
(Timer start status)
TINT
16-bit timer divide-down
TDDRH:TDDR
32-bit timer period
PRDH:PRD
32-bit counter
TIMH:TIM
16-bit prescale counter
PSCH:PSC
Borrow
32-Bit CPU Timers 0/1/2
Table 3-17. Watchdog Control Register (WDCR) Field Descriptions (continued)
Bits Field Value Description
6 WDDIS Watchdog disable. On reset, the watchdog module is enabled.
0 Enables the watchdog module. WDDIS can be modified only if the WDOVERRIDE bit in the
SCSR register is set to 1. (default)
1 Disables the watchdog module.
5-3 WDCHK Watchdog check.
0,0,0 You must ALWAYS write 1,0,1 to these bits whenever a write to this register is performed
unless the intent is to reset the device via software.
other If the watchdog is enabled, then writing any other value causes an immediate device reset or
watchdog interrupt to be taken. These three bits always read back as zero (0, 0, 0). This
feature can be used to generate a software reset of the DSP.
2-0 WDPS Watchdog pre-scale. These bits configure the watchdog counter clock (WDCLK) rate relative
to OSCCLK/512:
000 WDCLK = OSCCLK/512/1 (default)
001 WDCLK = OSCCLK/512/1
010 WDCLK = OSCCLK/512/2
011 WDCLK = OSCCLK/512/4
100 WDCLK = OSCCLK/512/8
101 WDCLK = OSCCLK/512/16
110 WDCLK = OSCCLK/512/32
111 WDCLK = OSCCLK/512/64
(1)
www.ti.com
3.5 32-Bit CPU Timers 0/1/2
When the XRS line is low, the WDFLAG bit is forced low. The WDFLAG bit is only set if a rising edge on
WDRST signal is detected (after synch and an 8192 SYSCLKOUT cycle delay) and the XRS signal is
high. If the XRS signal is low when WDRST goes high, then the WDFLAG bit remains at 0. In a typical
application, the WDRST signal connects to the XRS input. Hence to distinguish between a watchdog reset
and an external device reset, an external reset must be longer in duration then the watchdog pulse.
This section describes the three 32-bit CPU-timers (Figure 3-19 ) (TIMER0/1/2).
CPU-Timer 0 and CPU-Timer 1 can be used in user applications. Timer 2 is reserved for DSP-BIOS. If the
application is not using DSP-BIOS, then Timer 2 can be used in the application.
The CPU-timer interrupt signals (TINT0, TINT1, TINT2) are connected as shown in Figure 3-20 .
Figure 3-19. CPU-Timers
60 Clocking SPRUFB0C – September 2007 – Revised May 2009
Submit Documentation Feedback
Page 61

INT1
to
INT12
INT14
28x
CPU
TINT2
TINT0
PIE
CPU-TIMER0
CPU-TIMER2
(ReservedforDSP/BIOS)
INT13
TINT1
CPU-TIMER1
XINT13
www.ti.com
Figure 3-20. CPU-Timer Interrupts Signals and Output Signal
A The timer registers are connected to the Memory Bus of the 28x processor.
B The timing of the timers is synchronized to SYSCLKOUT of the processor clock.
The general operation of the CPU-timer is as follows: The 32-bit counter register TIMH:TIM is loaded with
the value in the period register PRDH:PRD. The counter register decrements at the SYSCLKOUT rate of
the 28x. When the counter reaches 0, a timer interrupt output signal generates an interrupt pulse. The
registers listed in Table 3-18 are used to configure the timers.
32-Bit CPU Timers 0/1/2
Table 3-18. CPU-Timers 0, 1, 2 Configuration and Control Registers
Name Address Size (x16) Description Bit Description
TIMER0TIM 0x0C00 1 CPU-Timer 0, Counter Register Figure 3-21
TIMER0TIMH 0x0C01 1 CPU-Timer 0, Counter Register High Figure 3-22
TIMER0PRD 0x0C02 1 CPU-Timer 0, Period Register Figure 3-23
TIMER0PRDH 0x0C03 1 CPU-Timer 0, Period Register High Figure 3-24
TIMER0TCR 0x0C04 1 CPU-Timer 0, Control Register Figure 3-25
Reserved 0x0C05 1
TIMER0TPR 0x0C06 1 CPU-Timer 0, Prescale Register Figure 3-26
TIMER0TPRH 0x0C07 1 CPU-Timer 0, Prescale Register High Figure 3-27
TIMER1TIM 0x0C08 1 CPU-Timer 1, Counter Register Figure 3-21
TIMER1TIMH 0x0C09 1 CPU-Timer 1, Counter Register High Figure 3-22
TIMER1PRD 0x0C0A 1 CPU-Timer 1, Period Register Figure 3-23
TIMER1PRDH 0x0C0B 1 CPU-Timer 1, Period Register High Figure 3-24
TIMER1TCR 0x0C0C 1 CPU-Timer 1, Control Register Figure 3-25
Reserved 0x0C0D 1
TIMER1TPR 0x0C0E 1 CPU-Timer 1, Prescale Register Figure 3-26
TIMER1TPRH 0x0C0F 1 CPU-Timer 1, Prescale Register High Figure 3-27
TIMER2TIM 0x0C10 1 CPU-Timer 2, Counter Register Figure 3-21
TIMER2TIMH 0x0C11 1 CPU-Timer 2, Counter Register High Figure 3-22
TIMER2PRD 0x0C12 1 CPU-Timer 2, Period Register Figure 3-23
TIMER2PRDH 0x0C13 1 CPU-Timer 2, Period Register High Figure 3-24
TIMER2TCR 0x0C14 1 CPU-Timer 2, Control Register Figure 3-25
Reserved 0x0C15 1
TIMER2TPR 0x0C16 1 CPU-Timer 2, Prescale Register Figure 3-26
TIMER2TPRH 0x0C17 1 CPU-Timer 2, Prescale Register High Figure 3-27
SPRUFB0C – September 2007 – Revised May 2009 Clocking 61
Submit Documentation Feedback
Page 62

32-Bit CPU Timers 0/1/2
Figure 3-21. TIMERxTIM Register (x = 0, 1, 2)
15 0
TIM
R/W-0
LEGEND: R/W = Read/Write; R = Read only; - n = value after reset
Table 3-19. TIMERxTIM Register Field Descriptions
Bits Field Description
15-0 TIM CPU-Timer Counter Registers (TIMH:TIM): The TIM register holds the low 16 bits of the current 32-bit count
of the timer. The TIMH register holds the high 16 bits of the current 32-bit count of the timer. The TIMH:TIM
decrements by one every (TDDRH:TDDR+1) clock cycles, where TDDRH:TDDR is the timer prescale
divide-down value. When the TIMH:TIM decrements to zero, the TIMH:TIM register is reloaded with the
period value contained in the PRDH:PRD registers. The timer interrupt (TINT) signal is generated.
Figure 3-22. TIMERxTIMH Register (x = 0, 1, 2)
15 0
TIMH
R/W-0
LEGEND: R/W = Read/Write; R = Read only; - n = value after reset
www.ti.com
Table 3-20. TIMERxTIMH Register Field Descriptions
Bits Field Description
15-0 TIMH See description for TIMERxTIM.
Figure 3-23. TIMERxPRD Register (x = 0, 1, 2)
15 0
PRD
R/W-0xFFFF
LEGEND: R/W = Read/Write; R = Read only; - n = value after reset
Table 3-21. TIMERxPRD Register Field Descriptions
Bits Field Description
15-0 PRD CPU-Timer Period Registers (PRDH:PRD): The PRD register holds the low 16 bits of the 32-bit period. The
PRDH register holds the high 16 bits of the 32-bit period. When the TIMH:TIM decrements to zero, the
TIMH:TIM register is reloaded with the period value contained in the PRDH:PRD registers, at the start of
the next timer input clock cycle (the output of the prescaler). The PRDH:PRD contents are also loaded into
the TIMH:TIM when you set the timer reload bit (TRB) in the Timer Control Register (TCR).
Figure 3-24. TIMERxPRDH Register (x = 0, 1, 2)
15 0
PRDH
R/W-0
LEGEND: R/W = Read/Write; R = Read only; - n = value after reset
Clocking62 SPRUFB0C – September 2007 – Revised May 2009
Submit Documentation Feedback
Page 63

www.ti.com
32-Bit CPU Timers 0/1/2
Table 3-22. TIMERxPRDH Register Field Descriptions
Bits Field Description
15-0 PRDH See description for TIMERxPRD
Figure 3-25. TIMERxTCR Register (x = 0, 1, 2)
15 14 13 12 11 10 9 8
TIF TIE Reserved FREE SOFT Reserved
R/W-0 R/W-0 R-0 R/W-0 R/W-0 R-0
7 6 5 4 3 0
Reserved TRB TSS Reserved
R-0 R/W-0 R/W-0 R-0
LEGEND: R/W = Read/Write; R = Read only; - n = value after reset
Table 3-23. TIMERxTCR Register Field Descriptions
Bits Field Value Description
15 TIF CPU-Timer Interrupt Flag.
0 The CPU-Timer has not decremented to zero.
Writes of 0 are ignored.
1 This flag gets set when the CPU-timer decrements to zero.
Writing a 1 to this bit clears the flag.
14 TIE CPU-Timer Interrupt Enable.
0 The CPU-Timer interrupt is disabled.
1 The CPU-Timer interrupt is enabled. If the timer decrements to zero, and TIE is set, the
13-12 Reserved Reserved
11-10 FREE CPU-Timer Emulation Modes: These bits are special emulation bits that determine the
SOFT state of the timer when a breakpoint is encountered in the high-level language
FREE SOFT CPU-Timer Emulation Mode
0 0 Stop after the next decrement of the TIMH:TIM (hard stop)
0 1 Stop after the TIMH:TIM decrements to 0 (soft stop)
1 0 Free run
1 1 Free run
9-6 Reserved Reserved
5 TRB CPU-Timer Reload bit.
0 The TRB bit is always read as zero. Writes of 0 are ignored.
1 When you write a 1 to TRB, the TIMH:TIM is loaded with the value in the PRDH:PRD,
4 TSS CPU-Timer stop status bit. TSS is a 1-bit flag that stops or starts the CPU-timer.
0 Reads of 0 indicate the CPU-timer is running.
1 Reads of 1 indicate that the CPU-timer is stopped.
timer asserts its interrupt request.
debugger. If the FREE bit is set to 1, then, upon a software breakpoint, the timer
continues to run (that is, free runs). In this case, SOFT is a don't care. But if FREE is 0,
then SOFT takes effect. In this case, if SOFT = 0, the timer halts the next time the
TIMH:TIM decrements. If the SOFT bit is 1, then the timer halts when the TIMH:TIM
has decremented to zero.
In the SOFT STOP mode, the timer generates an interrupt before shutting down (since
reaching 0 is the interrupt causing condition).
and the prescaler counter (PSCH:PSC) is loaded with the value in the timer
divide-down register (TDDRH:TDDR).
To start or restart the CPU-timer, set TSS to 0. At reset, TSS is cleared to 0 and the
CPU-timer immediately starts.
To stop the CPU-timer, set TSS to 1.
SPRUFB0C – September 2007 – Revised May 2009 Clocking 63
Submit Documentation Feedback
Page 64

32-Bit CPU Timers 0/1/2
Table 3-23. TIMERxTCR Register Field Descriptions (continued)
Bits Field Value Description
3-0 Reserved Reserved
Figure 3-26. TIMERxTPR Register (x = 0, 1, 2)
15 8 7 0
PSC TDDR
R-0 R/W-0
LEGEND: R/W = Read/Write; R = Read only; - n = value after reset
Table 3-24. TIMERxTPR Register Field Descriptions
Bits Field Description
15-8 PSC CPU-Timer Prescale Counter. These bits hold the current prescale count for the timer. For every timer clock
source cycle that the PSCH:PSC value is greater than 0, the PSCH:PSC decrements by one. One timer clock
(output of the timer prescaler) cycle after the PSCH:PSC reaches 0, the PSCH:PSC is loaded with the contents
of the TDDRH:TDDR, and the timer counter register (TIMH:TIM) decrements by one. The PSCH:PSC is also
reloaded whenever the timer reload bit (TRB) is set by software. The PSCH:PSC can be checked by reading
the register, but it cannot be set directly. It must get its value from the timer divide-down register
(TDDRH:TDDR). At reset, the PSCH:PSC is set to 0.
7-0 TDDR CPU-Timer Divide-Down. Every (TDDRH:TDDR + 1) timer clock source cycles, the timer counter register
(TIMH:TIM) decrements by one. At reset, the TDDRH:TDDR bits are cleared to 0. To increase the overall timer
count by an integer factor, write this factor minus one to the TDDRH:TDDR bits. When the prescaler counter
(PSCH:PSC) value is 0, one timer clock source cycle later, the contents of the TDDRH:TDDR reload the
PSCH:PSC, and the TIMH:TIM decrements by one. TDDRH:TDDR also reloads the PSCH:PSC whenever the
timer reload bit (TRB) is set by software.
www.ti.com
Figure 3-27. TIMERxTPRH Register (x = 0, 1, 2)
15 8 7 0
PSCH TDDRH
R-0 R/W-0
LEGEND: R/W = Read/Write; R = Read only; - n = value after reset
Table 3-25. TIMERxTPRH Register Field Descriptions
Bits Field Description
15-8 PSCH See description of TIMERxTPR.
7-0 TDDRH See description of TIMERxTPR.
64 Clocking SPRUFB0C – September 2007 – Revised May 2009
Submit Documentation Feedback
Page 65

Chapter 4
SPRUFB0C – September 2007 – Revised May 2009
General-Purpose Input/Output (GPIO)
The GPIO multiplexing (MUX) registers are used to select the operation of shared pins. The pins are
named by their general purpose I/O name (i.e., GPIO0 - GPIO87). These pins can be individually selected
to operate as digital I/O, referred to as GPIO, or connected to one of up to three peripheral I/O signals (via
the GPxMUXn registers). If selected for digital I/O mode, registers are provided to configure the pin
direction (via the GPxDIR registers). You can also qualify the input signals to remove unwanted noise (via
the GPxQSELn, GPACTRL, and GPBCTRL registers).
Topic .................................................................................................. Page
4.1 GPIO Module Overview .............................................................. 66
4.2 Configuration Overview ............................................................. 71
4.3 Digital General Purpose I/O Control ............................................ 72
4.4 Input Qualification ..................................................................... 74
4.5 GPIO and Peripheral Multiplexing (MUX) ...................................... 78
4.6 Register Bit Definitions .............................................................. 83
SPRUFB0C – September 2007 – Revised May 2009 General-Purpose Input/Output (GPIO) 65
Submit Documentation Feedback
Page 66

GPADAT
(latch)
GPACLEAR,
GPATOGGLE
GPAQSEL1/2
Qual
GPAMUX1/2
SYSCLKOUT
High
impedance
output
control
GPIO0
to
GPIO27
Pins
PU
XRS
Sync
Lowpower
modesblock
GPIOx.async
GPADIR
(latch)
01
11
01
GPACTRL
2
2
10
Peripheral1input
N/C
(defaultonreset)
(defaultonreset)
GPIOx_OUT
GPIOx_DIR
GPAPUD
0 = enablePU
1 = disablePU
(disabledafterreset)
async
(asyncdisable
whenlow)
11
10
Peripheral2input
Peripheral3input
Peripheral1output
GPASET,
(default
onreset)
3samples
6samples
00
00
XRS
(defaultonreset)
01
11
10
00
01
11
10
00
0=input,1=output
GPIOXINT1SEL
GPIOXINT2SEL
GPIOXNMISEL
External
interrupt
MUX
PIE
GPADAT (read)
GPIOLPMSEL
LPMCR0
Peripheral2output
Peripheral3output
Peripheral1outputenable
Peripheral2outputenable
Peripheral3outputenable
GPIO Module Overview
4.1 GPIO Module Overview
Up to three independent peripheral signals are multiplexed on a single GPIO-enabled pin in addition to
individual pin bit-I/O capability. There are three 32-bit I/O ports. Port A consists of GPIO0-GPIO31, port B
consists of GPIO32-GPIO63, and port C consists of GPIO64-87. Figure 4-1 shows the basic modes of
operation for the GPIO module.
www.ti.com
Figure 4-1. GPIO0 to GPIO27 Multiplexing Diagram
A GPxDAT latch/read are accessed at the same memory location.
66 General-Purpose Input/Output (GPIO) SPRUFB0C – September 2007 – Revised May 2009
Submit Documentation Feedback
Page 67

GPADAT
(latch)
GPACLEAR
GPATOGGLE
GPAQSEL1/2
Qual
GPAMUX1/2
SYSCLKOUT
High-
Impedance
Output
Control
GPIO28,
GPIO29,
GPIO30,
GPIO31
Pins
PU
XRS
0 = Input , 1 = Output
Sync
LowPower
ModesBlock
GPIOx.async
GPADIR
(latch)
01
11
01
01
0x
1x
01
GPACTRL
2
2
10
Perpheral1input
N/C
(defaultonreset)
(defaultonreset)
GPIOx_OUT
GPIOx_DIR
GPAPUD
0 = enablePU
1 = disablePU
(disabledafterreset)
async
(asyncdisable
whenlow)
0x
1x
11
10
XINTFOutputSignals
XZCS6,XA19,XA18,XA17
1
N/C
N/C
Perpheral1output
Perpheral1ouputenable
GPASET
(defaultonreset)
3samples
6samples
LPMCR0
GPIOLPMSEL
00
00
00
00
XRS
DefaultatReset
External
interrupt
MUX
GPIOXINT2SEL
GPIOXNMISEL
GPIOXINT1SEL
PIE
GPADAT (read)
www.ti.com
Figure 4-2. GPIO28 to GPIO31 Multiplexing Diagram (Peripheral 2 and Peripheral 3 Outputs Merged)
GPIO Module Overview
A The shaded area is disabled in the above GPIOs when the GPIOINENCLK bit is cleared to 0 in the PCLKCR3
register and the respective pin is configured as an output. This is to reduce power consumption when a pin is
configured as an output. Clearing the GPIOINCLK bit will reset the sync and qualification logic so no residual value is
left.
B The input qualification circuit is not reset when modes are changed (such as changing from output to input mode).
Any state will get flushed by the circuit eventually.
SPRUFB0C – September 2007 – Revised May 2009 General-Purpose Input/Output (GPIO) 67
Submit Documentation Feedback
Page 68

GPBDAT
(latch)
GPBCLEAR
GPBTOGGLE
GPBSEL1
Qual
GPBMUX1
SYSCLKOUT
High
Impedance
Output
Control
GPIO32,
GPIO33
Pins
PU
XRS
0
=
Input
,
1
=
Output
Sync
GPBDIR
(latch)
01
11
01
GPBCTRL
2
2
10
Perpheral1input
N/C
(defaultonreset)
GPIO32/33_OUT
(defaultonreset)
GPBPUD
0 = enablePU
1 = disablePU
(disabledafterreset)
async
(asyncdisable
whenlow)
0x
1x
11
10
Peripheral2input
Peripheral3input
GPBSET
(defaultonreset)
3samples
6samples
00
00
XRS
DefaultatReset
External
interrupt
MUX
GPIOXINT6SEL
GPIOXINT7SEL
GPIOXINT5SEL
GPIOXINT4SEL
GPIOXINT3SEL
PIE
GPBDAT (read)
01
Perpheral1output
11
10
Peripheral2output
Peripheral3output
00
01
11
10 Peripheral2outputenable
Peripheral3outputenable
00
SDAA/SCLA (I2Coutputenable)
SDAA/SCLA (I2Cdataout)
GPIO32/33-DIR
GPIO Module Overview
www.ti.com
Figure 4-3. GPIO32, GPIO33 Multiplexing Diagram
A The GPIOINENCLK bit in the PCLKCR3 register does not affect the above GPIOs (I2C pins) since the pins are
bi-directional.
B The input qualification circuit is not reset when modes are changed (such as changing from output to input mode).
Any state will get flushed by the circuit eventually.
General-Purpose Input/Output (GPIO)68 SPRUFB0C – September 2007 – Revised May 2009
Submit Documentation Feedback
Page 69

GPBDAT
(latch)
GPBCLEAR
GPBTOGGLE
GPBQSEL1/2
Qual
GPBMUX1/2
SYSCLKOUT
GPIO34
to
GPIO63
Pins
PU
XRS
0 = Input , 1 = Output
Sync
XINT InputSignals
(XREADY,XD31:16_IN)
GPBDIR
(latch)
01
11
01
01
0x
1x
01
GPBCTRL
2
2
10
Perpheral1input
N/C
(defaultonreset)
(defaultonreset)
GPIOx_OUT
GPIOx_DIR
GPBPUD
0 = enablePU
1 = disablePU
(disabledafterreset)
async
(asyncdisable
whenlow)
0x
1x
11
10
XINTFOutputSignals
(XR/ , , ,
, /XA0,
XA7.1,XD31:16_OUT)
WXZCS0XZCS7
XWE0XWE1
N/C
N/C
Peripheral1output
Peripheral1outputenable
GPBSET
(defaultonreset)
3samples
6samples
00
00
00
00
XRS
DefaultatReset
XINTFOutputEnables
(XD_OEor1)
External
interrupt
MUX
GPIOXINT6SEL
GPIOXINT7SEL
GPIOXINT5SEL
GPIOXINT4SEL
GPIOXINT3SEL
PIE
GPBDAT (read)
High-
Impedance
Output
Control
www.ti.com
Figure 4-4. GPIO34 to GPIO63 Multiplexing Diagram (Peripheral 2 and Peripheral 3 Outputs Merged)
GPIO Module Overview
A The shaded area is disabled in the above GPIOs when the GPIOINENCLK bit is cleared to "0" in the PCLKCR3
register and the respective pin is configured as an output. This is to reduce power consumption when a pin is
configured as an output. Clearing the GPIOINCLK bit will reset the sync and qualification logic so no residual value is
left.
B The input qualification circuit is not reset when modes are changed (such as changing from output to input mode).
Any state will get flushed by the circuit eventually.
SPRUFB0C – September 2007 – Revised May 2009 General-Purpose Input/Output (GPIO) 69
Submit Documentation Feedback
Page 70

GPCDAT
(latch)
GPCSET,
GPCCLEAR,
GPCTOGGLE
GPCMUX1
SYSCLKOUT
Hi-Z
when
high
GPIO64
to
GPIO79
Pins
PU
XRS
Sync
GPCDIR
(latch)
XD0_IN/../XD15_IN
1
(defaultonreset)
(defaultonreset)
GPIOx_OUT
GPIOx_DIR
GPCPUD
0=enablePU
1=disablePU
(disabledafterreset)
async
(asyncdisable
whenlow)
XRS
GPCDAT (read)
GPIOx_IN
1
0
XD0_OUT/../XD15_OUT
XD_OE
0=input,1=output
1
0
GPIO Module Overview
www.ti.com
Figure 4-5. GPIO64 to GPIO79 Multiplexing Diagram (Minimal GPIOs Without Qualification)
70 General-Purpose Input/Output (GPIO) SPRUFB0C – September 2007 – Revised May 2009
Submit Documentation Feedback
Page 71

www.ti.com
4.2 Configuration Overview
The pin function assignments, input qualification, and the external interrupt (XINT1 – XINT7, XNMI)
sources are all controlled by the GPIO configuration control registers. In addition, you can assign pins to
wake the device from the HALT and STANDBY low power modes and enable/disable internal pullup
resistors. Table 4-1 and Table 4-2 list the registers that are used to configure the GPIO pins to match the
system requirements.
Name
GPACTRL 0x6F80 2 GPIO A Control Register (GPIO0-GPIO31) Figure 4-14
GPAQSEL1 0x6F82 2 GPIO A Qualifier Select 1 Register (GPIO0-GPIO15) Figure 4-16
GPAQSEL2 0x6F84 2 GPIO A Qualifier Select 2 Register (GPIO16-GPIO31) Figure 4-17
GPAMUX1 0x6F86 2 GPIO A MUX 1 Register (GPIO0-GPIO15) Figure 4-8
GPAMUX2 0x6F88 2 GPIO A MUX 2 Register (GPIO16-GPIO31) Figure 4-9
GPADIR 0x6F8A 2 GPIO A Direction Register (GPIO0-GPIO31) Figure 4-20
GPAPUD 0x6F8C 2 GPIO A Pull Up Disable Register (GPIO0-GPIO31) Figure 4-23
GPBCTRL 0x6F90 2 GPIO B Control Register (GPIO32-GPIO63) Figure 4-15
GPBQSEL1 0x6F92 2 GPIO B Qualifier Select 1 Register (GPIO32-GPIO47) Figure 4-18
GPBQSEL2 0x6F94 2 GPIO B Qualifier Select 2 Register (GPIO48 - GPIO63) Figure 4-19
GPBMUX1 0x6F96 2 GPIO B MUX 1 Register (GPIO32-GPIO47) Figure 4-10
GPBMUX2 0x6F98 2 GPIO B MUX 2 Register (GPIO48-GPIO63) Figure 4-11
GPBDIR 0x6F9A 2 GPIO B Direction Register (GPIO32-GPIO63) Figure 4-21
GPBPUD 0x6F9C 2 GPIO B Pull Up Disable Register (GPIO32-GPIO63) Figure 4-24
GPCMUX1 0x6FA6 2 GPIO C MUX 1 Register (GPIO64-GPIO79) Figure 4-12
GPCMUX2 0x6FA8 2 GPIO C MUX 2 Register (GPIO80-GPIO87) Figure 4-13
GPCDIR 0x6FAA 2 GPIO C Direction Register (GPIO64-GPIO87) Figure 4-22
GPCPUD 0x6FAC 2 GPIO C Pull Up Disable Register (GPIO64-GPIO87) Figure 4-25
Configuration Overview
Table 4-1. GPIO Control Registers
(1)
Address Size (x16) Register Description Bit Description
(1)
The registers in this table are EALLOW protected. See Section 5.2 for more information.
Table 4-2. GPIO Interrupt and Low Power Mode Select Registers
(1)
Name
GPIOXINT1SEL 0x6FE0 1 XINT1 Source Select Register (GPIO0-GPIO31) Figure 4-32
GPIOXINT2SEL 0x6FE1 1 XINT2 Source Select Register (GPIO0-GPIO31) Figure 4-32
GPIOXNMISEL 0x6FE2 1 XNMI Source Select Register (GPIO0-GPIO31) Figure 4-32
GPIOXINT3SEL 0x6FE3 1 XINT3 Source Select Register (GPIO32 - GPIO63) Table 4-44
GPIOXINT4SEL 0x6FE4 1 XINT4 Source Select Register (GPIO32 - GPIO63) Table 4-44
GPIOXINT5SEL 0x6FE5 1 XINT5 Source Select Register (GPIO32 - GPIO63) Table 4-44
GPIOXINT6SEL 0x6FE6 1 XINT6 Source Select Register (GPIO32 - GPIO63) Table 4-44
GPIOXINT7SEL 0x6FE7 1 XINT7 Source Select Register (GPIO32 - GPIO63) Table 4-44
GPIOLPMSEL 0x6FE8 1 LPM wakeup Source Select Register (GPIO0-GPIO31) Figure 4-33
(1)
The registers in this table are EALLOW protected. See Section 5.2 for more information.
Address Register Description Bit Description
Size
(x16)
SPRUFB0C – September 2007 – Revised May 2009 General-Purpose Input/Output (GPIO) 71
Submit Documentation Feedback
Page 72

Digital General Purpose I/O Control
To plan configuration of the GPIO module, consider the following steps:
Step 1. Plan the device pin-out:
Through a pin multiplexing scheme, a lot of flexibility is provided for assigning functionality to the
GPIO-capable pins. Before getting started, look at the peripheral options available for each pin, and
plan pin-out for your specific system. Will the pin be used as a general purpose input or output (GPIO)
or as one of up to three available peripheral functions? Knowing this information will help determine
how to further configure the pin.
Step 2. Enable or disable internal pullup resistors:
To enable or disable the internal pullup resistors, write to the respective bits in the GPIO pullup disable
(GPAPUD, GPBPUD, and GPCPUD) registers. For pins that can function as ePWM output pins
(GPIO0-GPIO11), the internal pullup resistors are disabled by default. All other GPIO-capable pins
have the pullup enabled by default.
Step 3. Select input qualification:
If the pin will be used as an input, specify the required input qualification, if any. The input qualification
is specified in the GPACTRL, GPBCTRL, GPAQSEL1, GPAQSEL2, GPBQSEL1, and GPBQSEL2
registers. By default, all of the input signals are synchronized to SYSCLKOUT only.
Step 4. Select the pin function:
Configure the GPxMUXn registers such that the pin is a GPIO or one of three available peripheral
functions. By default, all GPIO-capable pins are configured at reset as general purpose input pins.
Step 5. For digital general purpose I/O, select the direction of the pin:
If the pin is configured as an GPIO, specify the direction of the pin as either input or output in the
GPADIR, GPBDIR, and GPCDIR registers. By default, all GPIO pins are inputs. To change the pin
from input to output, first load the output latch with the value to be driven by writing the appropriate
value to the GPxCLEAR, GPxSET, or GPxTOGGLE registers. Once the output latch is loaded, change
the pin direction from input to output via the GPxDIR registers. The output latch for all pins is cleared at
reset.
Step 6. Select low power mode wake-up sources:
Specify which pins, if any, will be able to wake the device from HALT and STANDBY low power
modes. The pins are specified in the GPIOLPMSEL register.
Step 7. Select external interrupt sources:
Specify the source for the XINT1 - XINT7, and XNMI interrupts. For each interrupt you can specify one
of the port A signals (for XINT1/2/3) or port B signals (XINT4/5/6/7) as the source. This is done by
specifying the source in the GPIOXINTnSEL, and GPIOXNMISEL registers. The polarity of the
interrupts can be configured in the XINTnCR, and the XNMICR registers as described in Section 6.6 .
www.ti.com
Note: There is a 2-SYSCLKOUT cycle delay from when a write to configuration registers such as
GPxMUXn and GPxQSELn occurs to when the action is valid
4.3 Digital General Purpose I/O Control
For pins that are configured as GPIO you can change the values on the pins by using the registers in
Table 4-3 .
72 General-Purpose Input/Output (GPIO) SPRUFB0C – September 2007 – Revised May 2009
Submit Documentation Feedback
Page 73

www.ti.com
Digital General Purpose I/O Control
Table 4-3. GPIO Data Registers
Name Address Size (x16) Register Description Bit Description
GPADAT 0x6FC0 2 GPIO A Data Register (GPIO0-GPIO31) Figure 4-26
GPASET 0x6FC2 2 GPIO A Set Register (GPIO0-GPIO31) Figure 4-29
GPACLEAR 0x6FC4 2 GPIO A Clear Register (GPIO0-GPIO31) Figure 4-29
GPATOGGLE 0x6FC6 2 GPIO A Toggle Register (GPIO0-GPIO31) Figure 4-29
GPBDAT 0x6FC8 2 GPIO B Data Register (GPIO32-GPIO63) Figure 4-27
GPBSET 0x6FCA 2 GPIO B Set Register (GPIO32-GPIO63) Figure 4-30
GPBCLEAR 0x6FCC 2 GPIO B Clear Register (GPIO32-GPIO63) Figure 4-30
GPBTOGGLE 0x6FCE 2 GPIO B Toggle Register (GPIO32-GPIO63) Figure 4-30
GPCDAT 0x6FD0 2 GPIO C Data Register (GPIO64 - GPIO87) Figure 4-28
GPCSET 0x6FD2 2 GPIO C Set Register (GPIO64 - GPIO87) Figure 4-31
GPCCLEAR 0x6FD4 2 GPIO C Clear Register (GPIO64 - GPIO87) Figure 4-31
GPCTOGGLE 0x6FD6 2 GPIO C Toggle Register (GPIO64 - GPIO87) Figure 4-31
• GPxDAT Registers
Each I/O port has one data register. Each bit in the data register corresponds to one GPIO pin. No
matter how the pin is configured (GPIO or peripheral function), the corresponding bit in the data
register reflects the current state of the pin after qualification. Writing to the GPxDAT register clears or
sets the corresponding output latch and if the pin is enabled as a general purpose output (GPIO
output) the pin will also be driven either low or high. If the pin is not configured as a GPIO output then
the value will be latched, but the pin will not be driven. Only if the pin is later configured as a GPIO
output, will the latched value be driven onto the pin.
When using the GPxDAT register to change the level of an output pin, you should be cautious not to
accidentally change the level of another pin. For example, if you mean to change the output latch level
of GPIOA0 by writing to the GPADAT register bit 0, using a read-modify-write instruction. The problem
can occur if another I/O port A signal changes level between the read and the write stage of the
instruction. You can also change the state of that output latch. You can avoid this scenario by using
the GPxSET, GPxCLEAR, and GPxTOGGLE registers to load the output latch instead.
• GPxSET Registers
The set registers are used to drive specified GPIO pins high without disturbing other pins. Each I/O
port has one set register and each bit corresponds to one GPIO pin. The set registers always read
back 0. If the corresponding pin is configured as an output, then writing a 1 to that bit in the set register
will set the output latch high and the corresponding pin will be driven high. If the pin is not configured
as a GPIO output, then the value will be latched but the pin will not be driven. Only if the pin is later
configured as a GPIO output will the latched value will be driven onto the pin. Writing a 0 to any bit in
the set registers has no effect.
• GPxCLEAR Registers
The clear registers are used to drive specified GPIO pins low without disturbing other pins. Each I/O
port has one clear register. The clear registers always read back 0. If the corresponding pin is
configured as a general purpose output, then writing a 1 to the corresponding bit in the clear register
will clear the output latch and the pin will be driven low. If the pin is not configured as a GPIO output,
then the value will be latched but the pin will not be driven. Only if the pin is later configured as a GPIO
output will the latched value will be driven onto the pin. Writing a 0 to any bit in the clear registers has
no effect.
• GPxTOGGLE Registers
The toggle registers are used to drive specified GPIO pins to the opposite level without disturbing other
pins. Each I/O port has one toggle register. The toggle registers always read back 0. If the
corresponding pin is configured as an output, then writing a 1 to that bit in the toggle register flips the
output latch and pulls the corresponding pin in the opposite direction. That is, if the output pin is driven
low, then writing a 1 to the corresponding bit in the toggle register will pull the pin high. Likewise, if the
output pin is high, then writing a 1 to the corresponding bit in the toggle register will pull the pin low. If
the pin is not configured as a GPIO output, then the value will be latched but the pin will not be driven.
Only if the pin is later configured as a GPIO output will the latched value will be driven onto the pin.
SPRUFB0C – September 2007 – Revised May 2009 General-Purpose Input/Output (GPIO) 73
Submit Documentation Feedback
Page 74

GPxCTRL Reg
SYNC
SYSCLKOUT
Qualification
Input Signal
Qualified By 3
or 6 Samples
GPIOx
Time between samples
GPxQSEL1/2
Number of Samples
Input Qualification
Writing a 0 to any bit in the toggle registers has no effect.
4.4 Input Qualification
The input qualification scheme has been designed to be very flexible. You can select the type of input
qualification for each GPIO pin by configuring the GPAQSEL1, GPAQSEL2, GPBQSEL1 and GPBQSEL2
registers. In the case of a GPIO input pin, the qualification can be specified as only synchronize to
SYSCLKOUT or qualification by a sampling window. For pins that are configured as peripheral inputs, the
input can also be asynchronous in addition to synchronized to SYSCLKOUT or qualified by a sampling
window. The remainder of this section describes the options available.
4.4.1 No Synchronization (asynchronous input)
This mode is used for peripherals where input synchronization is not required or the peripheral itself
performs the synchronization. Examples include communication ports SCI, SPI, eCAN, and I2C. In
addition, it may be desirable to have the ePWM trip zone ( TZ1- TZ6) signals function independent of the
presence of SYSCLKOUT.
The asynchronous option is not valid if the pin is used as a general purpose digital input pin (GPIO). If the
pin is configured as a GPIO input and the asynchronous option is selected then the qualification defaults
to synchronization to SYSCLKOUT as described in Section 4.4.2 .
4.4.2 Synchronization to SYSCLKOUT Only
This is the default qualification mode of all the pins at reset. In this mode, the input signal is only
synchronized to the system clock (SYSCLKOUT). Because the incoming signal is asynchronous, it can
take up to a SYSCLKOUT period of delay in order for the input to the DSP to be changed. No further
qualification is performed on the signal.
www.ti.com
4.4.3 Qualification Using a Sampling Window
In this mode, the signal is first synchronized to the system clock (SYSCLKOUT) and then qualified by a
specified number of cycles before the input is allowed to change. Figure 4-6 and Figure 4-7 show how the
input qualification is performed to eliminate unwanted noise. Two parameters are specified by the user for
this type of qualification: 1) the sampling period, or how often the signal is sampled, and 2) the number of
samples to be taken.
Figure 4-6. Input Qualification Using a Sampling Window
74 General-Purpose Input/Output (GPIO) SPRUFB0C – September 2007 – Revised May 2009
Submit Documentation Feedback
Page 75

www.ti.com
Input Qualification
Time between samples (sampling period):
To qualify the signal, the input signal is sampled at a regular period. The sampling period is specified by
the user and determines the time duration between samples, or how often the signal will be sampled,
relative to the CPU clock (SYSCLKOUT).
The sampling period is specified by the qualification period (QUALPRDn) bits in the GPxCTRL register.
The sampling period is configurable in groups of 8 input signals. For example, GPIO0 to GPIO7 use
GPACTRL[QUALPRD0] setting and GPIO8 to GPIO15 use GPACTRL[QUALPRD1]. Table 4-4 and
Table 4-5 show the relationship between the sampling period or sampling frequency and the
GPxCTRL[QUALPRDn] setting.
Table 4-4. Sampling Period
Sampling Period
If GPxCTRL[QUALPRDn] = 0 1 × T
If GPxCTRL[QUALPRDn] ≠ 0 2 × GPxCTRL[QUALPRDn] × T
Where T
SYSCLKOUT
SYSCLKOUT
SYSCLKOUT
is the period in time of SYSCLKOUT
Table 4-5. Sampling Frequency
Sampling Frequency
If GPxCTRL[QUALPRDn] = 0 f
If GPxCTRL[QUALPRDn] ≠ 0 f
SYSCLKOUT
SYSCLKOUT
Where f
× 1 ÷ (2 × GPxCTRL[QUALPRDn])
SYSCLKOUT
is the frequency of SYSCLKOUT
From these equations, the minimum and maximum time between samples can be calculated for a given
SYSCLKOUT frequency:
Example: Maximum Sampling Frequency:
If GPxCTRL[QUALPRDn] = 0
then the sampling frequency is f
If, for example, f
then the signal will be sampled at 150 MHz or one sample every ns.
Example: Minimum Sampling Frequency:
If GPxCTRL[QUALPRDn] = 0xFF (i.e. 255)
then the sampling frequency is f
If, for example, f
then the signal will be sampled at 150 MHz × 1 ÷ (2 × 255) or one sample every 3.4 µ s.
SYSCLKOUT
SYSCLKOUT
SYSCLKOUT
= 150 MHz
SYSCLKOUT
= 150 MHz
× 1 ÷ (2 × GPxCTRL[QUALPRDn])
SPRUFB0C – September 2007 – Revised May 2009 General-Purpose Input/Output (GPIO) 75
Submit Documentation Feedback
Page 76

Input Qualification
www.ti.com
Number of samples:
The number of times the signal is sampled is either 3 samples or 6 samples as specified in the
qualification selection (GPAQSEL1, GPAQSEL2, GPBQSEL1, and GPBQSEL2) registers. When 3 or 6
consecutive cycles are the same, then the input change will be passed through to the DSP.
Total Sampling Window Width:
The sampling window is the time during which the input signal will be sampled as shown in Figure 4-7 . By
using the equation for the sampling period along with the number of samples to be taken, the total width of
the window can be determined.
For the input qualifier to detect a change in the input, the level of the signal must be stable for the duration
of the sampling window width or longer.
The number of sampling periods within the window is always one less then the number of samples taken.
For a thee-sample window, the sampling window width is 2 sampling periods wide where the sampling
period is defined in Table 4-4 . Likewise, for a six-sample window, the sampling window width is 5
sampling periods wide. Table 4-6 and Table 4-7 show the calculations that can be used to determine the
total sampling window width based on GPxCTRL[QUALPRDn] and the number of samples taken.
Table 4-6. Case 1: Three-Sample Sampling Window Width
Total Sampling Window Width
If GPxCTRL[QUALPRDn] = 0 2 × T
If GPxCTRL[QUALPRDn] ≠ 0 2 × 2 × GPxCTRL[QUALPRDn] × T
Where T
SYSCLKOUT
SYSCLKOUT
SYSCLKOUT
is the period in time of SYSCLKOUT
Table 4-7. Case 2: Six-Sample Sampling Window Width
Total Sampling Window Width
If GPxCTRL[QUALPRDn] = 0 5 × T
If GPxCTRL[QUALPRDn] ≠ 0 5 × 2 × GPxCTRL[QUALPRDn] × T
Note: The external signal change is asynchronous with respect to both the sampling period and
SYSCLKOUT. Due to the asynchronous nature of the external signal, the input should be
held stable for a time greater than the sampling window width to make sure the logic detects
a change in the signal. The extra time required can be up to an additional sampling period +
T
SYSCLKOUT
.
The required duration for an input signal to be stable for the qualification logic to detect a
change is described in the device specific data manual.
Where T
SYSCLKOUT
SYSCLKOUT
SYSCLKOUT
is the period in time of SYSCLKOUT
General-Purpose Input/Output (GPIO)76 SPRUFB0C – September 2007 – Revised May 2009
Submit Documentation Feedback
Page 77

GPIO Signal
1
Sampling Window
Output From
Qualifier
1 1 1 1 1 1 1 1 1 1 10 0 0 0 0 0 0 0 0 0
SYSCLKOUT
QUALPRD = 1
(SYSCLKOUT/2)
(SYSCLKOUT cycle * 2 * QUALPRD) * 5
(C)
)
(A)
GPxQSELn = 1,0 (6 samples)
Sampling Period determined
by GPxCTRL[QUALPRD]
(B)
A. This glitch will be ignored by the input qualifier. The QUALPRD bit field specifies the qualification sampling period. It can vary from 00 to
0xFF. If QUALPRD = 00, then the sampling period is 1 SYSCLKOUT cycle. For any other value “n”, the qualification sampling period in 2n
SYSCLKOUT cycles (i.e., at every 2n SYSCLKOUT cycles, the GPIO pin will be sampled).
B. The qualification period selected via the GPxCTRL register applies to groups of 8 GPIO pins.
C. The qualification block can take either three or six samples. The GPxQSELn Register selects which sample mode is used.
D. In the example shown, for the qualifier to detect the change, the input should be stable for 10 SYSCLKOUT cycles or greater. In other words,
the inputs should be stable for (5 x QUALPRD x 2) SYSCLKOUT cycles. That would ensure 5 sampling periods for detection to occur. Since
external signals are driven asynchronously, an 13-SYSCLKOUT -wide pulse ensures reliable recognition.
(D)
t
w(SP)
t
w(IQSW)
www.ti.com
Input Qualification
Example Qualification Window:
For the example shown in Figure 4-7 , the input qualification has been configured as follows:
• GPxQSEL1/2 = 1,0. This indicates a six-sample qualification.
• GPxCTRL[QUALPRDn] = 1. The sampling period is tw(SP) = 2 × GPxCTRL[QUALPRDn] × T
SYSCLKOUT
.
This configuration results in the following:
• The width of the sampling window is: .
tw(IQSW) = 5 × tw(SP) = 5 × 2 × GPxCTRL[QUALPRDn] × T
• If, for example, T
SYSCLKOUT
= 6.67 ns, then the duration of the sampling window is:
SYSCLKOUT
or 5 × 2 × T
SYSCLKOUT
tw(IQSW) = 5 × 2 × 6.67 ns = 67 ns.
• To account for the asynchronous nature of the input relative to the sampling period and SYSCLKOUT,
up to an additional sampling period, tw(SP), + T
SYSCLKOUT
may be required to detect a change in the
input signal. For this example:
tw(SP) + T
SYSCLKOUT
= 13.34 ns + 6.67 ns = 20 ns
• In Figure 4-7 , the glitch (A) is shorter then the qualification window and will be ignored by the input
qualifier.
Figure 4-7. Input Qualifier Clock Cycles
SPRUFB0C – September 2007 – Revised May 2009 General-Purpose Input/Output (GPIO) 77
Submit Documentation Feedback
Page 78

GPIO and Peripheral Multiplexing (MUX)
4.5 GPIO and Peripheral Multiplexing (MUX)
Up to three different peripheral functions are multiplexed along with a general input/output (GPIO) function
per pin. This allows you to pick and choose a peripheral mix that will work best for the particular
application.
Table 4-9 , Table 4-10 , and Table 4-11 show an overview of the possible multiplexing combinations sorted
by GPIO pin. The second column indicates the I/O name of the pin on the device. Since the I/O name is
unique, it is the best way to identify a particular pin. Therefore, the register descriptions in this section only
refer to the GPIO name of a particular pin. The MUX register and particular bits that control the selection
for each pin are indicated in the first column.
For example, the multiplexing for the GPIO7 pin is controlled by writing to GPAMUX[15:14]. By writing to
these bits, the pin is configured as either GPIO7, or one of up to three peripheral functions. The GPIO7
pin can be configured as follows:
GPAMUX1[15:14] Bit Setting Pin Functionality Selected
If GPAMUX1[15:14] = 0,0 Pin configured as GPIO7
If GPAMUX1[15:14] = 0,1 Pin configured as EPWM4B (O)
If GPAMUX1[15:14] = 1,0 Pin configured as MCLKRA (I/O)
If GPAMUX1[15:14] = 1,1 Pin configured as ECAP2 (I/O)
All devices in the 2833x, 2823x family have the same multiplexing scheme. The only difference is that if a
peripheral is not available on a particular device, that MUX selection is reserved on that device and should
not be used.
www.ti.com
Note: If you should select a reserved GPIO MUX configuration that is not mapped to a peripheral,
the state of the pin will be undefined and the pin may be driven. Reserved configurations are
for future expansion and should not be selected. In the device MUX tables (Table 4-9 ,
Table 4-10 , and Table 4-11 ) these options are indicated as "Reserved".
Some peripherals can be assigned to more than one pin via the MUX registers. For example, the CAP1
function can be assigned to either the GPIO5 or GPIO24 pin, depending on individual system
requirements as shown below:
Pin Assigned to CAP1 MUX Configuration
Choice 1 GPIO5 GPAMUX1[11:10] = 1,1
or Choice 2 GPIO24 GPAMUX2[17:16] = 0,1
If no pin is configured as an input to a peripheral, or if more than one pin is configured as an input for the
same peripheral, then the input to the peripheral will either default to a 0 or a 1 as shown in Table 4-8 . For
example, if ECAP1 were assigned to both GPIO5 and GPIO24, the input to the eCAP1 peripheral would
default to a high state as shown in Table 4-8 and the input would not be connected to GPIO5 or GPIO24.
78 General-Purpose Input/Output (GPIO) SPRUFB0C – September 2007 – Revised May 2009
Submit Documentation Feedback
Page 79

www.ti.com
GPIO and Peripheral Multiplexing (MUX)
Table 4-8. Default State of Peripheral Input
Peripheral Input Description Default Input
TZ1- TZ6 Trip zone 1-6 1
EPWMSYNCI ePWM Synch Input 0
ECAPn eCAP input 1
EQEPnA eQEP input 1
EQEPnI eQEP index 1
EQEPnS eQEP strobe 1
SPICLKx SPI clock 1
SPISTEx SPI transmit enable 0
SPISIMOx SPI Slave-in, master-out 1
SPISOMIx SPI Slave-out, master-in 1
SCIRXDx SCI receive 1
CANRXx CAN receive 1
SDAA I2C data 1
SCLA1 I2C clock 1
(1)
This value will be assigned to the peripheral input if more then one pin has been assigned to the peripheral function in the
GPxMUX1/2 registers or if no pin has been assigned.
(1)
SPRUFB0C – September 2007 – Revised May 2009 General-Purpose Input/Output (GPIO) 79
Submit Documentation Feedback
Page 80

GPIO and Peripheral Multiplexing (MUX)
GPAMUX1 Register
Bits
1-0 GPIO0 EPWM1A (O) Reserved
3-2 GPIO1 EPWM1B (O) ECAP6 (I/O) MFSRB (I/O)
5-4 GPIO2 EPWM2A (O) Reserved
7-6 GPIO3 EPWM2B (O) ECAP5 (I/O) MCLKRB (I/O)
9-8 GPIO4 EPWM3A (O) Reserved
11-10 GPIO5 EPWM3B (O) MFSRA (I/O) ECAP1 (I/O)
13-12 GPIO6 EPWM4A (O) EPWMSYNCI (I) EPWMSYNCO (O)
15-14 GPIO7 EPWM4B (O) MCLKRA (I/O) ECAP2 (I/O)
17-16 GPIO8 EPWM5A (O) CANTXB (O) ADCSOCAO (O)
19-18 GPIO9 EPWM5B (O) SCITXDB (O) ECAP3 (I/O)
21-20 GPIO10 EPWM6A (O) CANRXB (I) ADCSOCBO (O)
23-22 GPIO11 EPWM6B (O) SCIRXDB (I) ECAP4 (I/O)
25-24 GPIO12 TZ1 (I) CANTXB (O) MDXB (O)
27-26 GPIO13 TZ2 (I) CANRXB (I) MDRB (I)
29-28 GPIO14 TZ3/ XHOLD (I) SCITXDB (O) MCLKXB (I/O)
31-30 GPIO15 TZ4/ XHOLDA (O) SCIRXDB (I) MFSXB (I/O)
GPAMUX2 Register
Bits
1-0 GPIO16 SPISIMOA (I/O) CANTXB (O) TZ5 (I)
3-2 GPIO17 SPISOMIA (I/O) CANRXB (I) TZ6 (I)
5-4 GPIO18 SPICLKA (I/O) SCITXDB (O) CANRXA (I)
7-6 GPIO19 SPISTEA (I/O) SCIRXDB (I) CANTXA (O)
9-8 GPIO20 EQEP1A (I) MDXA (O) CANTXB (O)
11-10 GPIO21 EQEP1B (I) MDRA (I) CANRXB (I)
13-12 GPIO22 EQEP1S (I/O) MCLKXA (I/O) SCITXDB (O)
15-14 GPIO23 EQEP1I (I/O) MFSXA (I/O) SCIRXDB (I)
17-16 GPIO24 ECAP1 (I/O) EQEP2A (I) MDXB (O)
19-18 GPIO25 ECAP2 (I/O) EQEP2B (I) MDRB (I)
21-20 GPIO26 ECAP3 (I/O) EQEP2I (I/O) MCLKXB (I/O)
23-22 GPIO27 ECAP4 (I/O) EQEP2S (I/O) MFSXB (I/O)
25-24 GPIO28 SCIRXDA (I) XZCS6 (O) XZCS6 (O)
27-26 GPIO29 SCITXDA (O) XA19 (O) XA19 (O)
29-28 GPIO30 CANRXA (I) XA18 (O) XA18 (O)
(1)
31-30 GPIO31 CANTXA (O) XA17 (O) XA17 (O)
The word "Reserved" means that there is no peripheral assigned to this GPxMUX1/2 register setting. Should it be selected, the
state of the pin will be undefined and the pin may be driven. This selection is a reserved configuration for future expansion.
www.ti.com
Table 4-9. GPIOA MUX
Default at Reset
Primary I/O Function Peripheral Selection Peripheral Selection 2 Peripheral Selection 3
(GPAMUX1 bits = 00) (GPAMUX1 bits = 01) (GPAMUX1 bits = 10) (GPAMUX1 bits = 11)
(1)
(1)
(1)
Reserved
Reserved
Reserved
(GPAMUX2 bits = 00) (GPAMUX2 bits = 01) (GPAMUX2 bits = 10) (GPAMUX2 bits = 11)
(1)
(1)
(1)
(1)
(1)
General-Purpose Input/Output (GPIO)80 SPRUFB0C – September 2007 – Revised May 2009
Submit Documentation Feedback
Page 81

www.ti.com
GPIO and Peripheral Multiplexing (MUX)
Table 4-10. GPIOB MUX
Default at Reset
Primary I/O Function Peripheral Selection 1 Peripheral Selection 2 Peripheral Selection 3
GPBMUX1 Register
Bits
1,0 GPIO32 (I/O) SDAA (I/OC) EPWMSYNCI (I) ADCSOCAO (O)
3,2 GPIO33 (I/O) SCLA (I/OC) EPWMSYNCO (O) ADCSOCBO (O)
5,4 GPIO34 (I/O) ECAP1 (I/O) XREADY (I) XREADY (I)
7,6 GPIO35 (I/O) SCITXDA (O) XR/ W (O) XR/ W (O)
9,8 GPIO36 (I/O) SCIRXDA (I) XZCS0 (O) XZCS0 (O)
11,10 GPIO37 (I/O) ECAP2 (I/O) XZCS7 (O) XZCS7 (O)
13,12 GPIO38 (I/O) Reserved XWE0 (O) XWE0 (O)
15,14 GPIO39 (I/O) Reserved XA16 (O) XA16 (O)
17,16 GPIO40 (I/O) Reserved XA0/ XWE1 (O) XA0/ XWE1 (O)
19,18 GPIO41 (I/O) Reserved XA1 (O) XA1 (O)
21,20 GPIO42 (I/O) Reserved XA2 (O) XA2 (O)
23,22 GPIO43 (I/O) Reserved XA3 (O) XA3 (O)
25,24 GPIO44 (I/O) Reserved XA4 (O) XA4 (O)
27,26 GPIO45 (I/O) Reserved XA5 (O) XA5 (O)
29,28 GPIO46 (I/O) Reserved XA6 (O) XA6 (O)
31,30 GPIO47 (I/O) Reserved XA7 (O) XA7 (O)
GPBMUX2 Register (GPBMUX2 bits = 00) (GPBMUX2 bits = 01) (GPBMUX2 bits = 10 or 11)
Bits
1,0 GPIO48 (I/O) ECAP5 (I/O) XD31 (I/O)
3,2 GPIO49 (I/O) ECAP6 (I/O) XD30 (I/O)
5,4 GPIO50 (I/O) EQEP1A (I) XD29 (I/O)
7,6 GPIO51 (I/O) EQEP1B (I) XD28 (I/O)
9,8 GPIO52 (I/O) EQEP1S (I/O) XD27 (I/O)
11,10 GPIO53 (I/O) EQEP1I (I/O) XD26 (I/O)
13,12 GPIO54 (I/O) SPISIMOA (I/O) XD25 (I/O)
15,14 GPIO55 (I/O) SPISOMIA (I/O) XD24 (I/O)
17,16 GPIO56 (I/O) SPICLKA (I/O) XD23 (I/O)
19,18 GPIO57 (I/O) SPISTEA (I/O) XD22 (I/O)
21,20 GPIO58 (I/O) MCLKRA (I/O) XD21 (I/O)
23,22 GPIO59 (I/O) MFSRA (I/O) XD20 (I/O)
25,24 GPIO60 (I/O) MCLKRB (I/O) XD19 (I/O)
27,26 GPIO61 (I/O) MFSRB (I/O) XD18 (I/O)
29,28 GPIO62 (I/O) SCIRXDC (I) XD17 (I/O)
31,30 GPIO63 (I/O) SCITXDC (O) XD16 (I/O)
(GPBMUX1 bits = 00) (GPBMUX1 bits = 01) (GPBMUX1 bits = 10) (GPBMUX1 bits = 11)
SPRUFB0C – September 2007 – Revised May 2009 General-Purpose Input/Output (GPIO) 81
Submit Documentation Feedback
Page 82

GPIO and Peripheral Multiplexing (MUX)
GPCMUX1 Register Bits (GPCMUX1 bits = 00 or 01) (GPCMUX1 bits = 10 or 11)
GPCMUX2 Register Bits GPCMUX2 bits = 00 or 01 GPCMUX2 bits = 10 or 11
www.ti.com
Table 4-11. GPIOC MUX
Default at Reset
Primary I/O Function Peripheral Selection 2 or 3
1,0 GPIO64 (I/O) XD15 (I/O)
3,2 GPIO65 (I/O) XD14 (I/O)
5,4 GPIO66 (I/O) XD13 (I/O)
7,6 GPIO67 (I/O) XD12 (I/O)
9,8 GPIO68 (I/O) XD11 (I/O)
11,10 GPIO69 (I/O) XD10 (I/O)
13,12 GPIO70 (I/O) XD9 (I/O)
15,14 GPIO71 (I/O) XD8 (I/O)
17,16 GPIO72 (I/O) XD7 (I/O)
19,18 GPIO73 (I/O) XD6 (I/O)
21,20 GPIO74 (I/O) XD5 (I/O)
23,22 GPIO75 (I/O) XD4 (I/O)
25,24 GPIO76 (I/O) XD3 (I/O)
27,26 GPIO77 (I/O) XD2 (I/O)
29,28 GPIO78 (I/O) XD1 (I/O)
31,30 GPIO79 (I/O) XD0 (I/O)
1,0 GPIO80 (I/O) XA8 (O)
3,2 GPIO81 (I/O) XA9 (O)
5,4 GPIO82 (I/O) XA10 (O)
7,6 GPIO83 (I/O) XA11 (O)
9,8 GPIO84 (I/O) XA12 (O)
11,10 GPIO85 (I/O) XA13 (O)
13,12 GPIO86 (I/O) XA14 (O)
15,14 GPIO87 (I/O) XA15 (O)
16 – 31 Reserved Reserved
General-Purpose Input/Output (GPIO)82 SPRUFB0C – September 2007 – Revised May 2009
Submit Documentation Feedback
Page 83

www.ti.com
Register Bit Definitions
4.6 Register Bit Definitions
Figure 4-8. GPIO Port A MUX 1 (GPAMUX1) Register
31 30 29 28 27 26 25 24 23 22 21 20 19 18 17 16
GPIO15 GPIO14 GPIO13 GPIO12 GPIO11 GPIO10 GPIO9 GPIO8
R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
GPIO7 GPIO6 GPIO5 GPIO4 GPIO3 GPIO2 GPIO1 GPIO0
R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0
LEGEND- R/W = Read/Write; R = Read only; - n = value after reset
Table 4-12. GPIO Port A Multiplexing 1 (GPAMUX1) Register Field Descriptions
Bits Field Value Description
31-30 GPIO15 Configure the GPIO15 pin as:
00 GPIO15 - General purpose input/output 15 (default) (I/O)
01 TZ4 - Trip Zone 4 (I) or XHOLDA (O). The pin function for this option is based on the
direction chosen in the GPADIR register. If the pin is configured as an input, then TZ4
function is chosen. If the pin is configured as an output, then XHOLDA function is chosen.
XHOLDA is driven active (low) when the XINTF has granted an XHOLD request. All XINTF
buses and strobe signals will be in a high-impedance state. XHOLDA is released when the
XHOLD signal is released. External devices should only drive the external bus when
XHOLDA is active (low).
10 SCIRXDB - SCI-B receive. (I)
11 MFSXB - McBSP-B transmit frame synch (I/O)
This option is reserved on devices that do not have a McBSP-B port.
29-28 GPIO14 Configure the GPIO14 pin as:
00 GPIO14 - General purpose I/O 14 (default) (I/O)
01 TZ3 - Trip zone 3 or XHOLD (I). XHOLD, when active (low), requests the external memory
interface (XINTF) to release the external bus and place all buses and strobes into a
high-impedance state. To prevent this from happening when TZ3 signal goes active, disable
this function by writing XINTCNF2[HOLD] = 1. If this is not done, the XINTF bus will go into
high impedance anytime TZ3 goes low. On the ePWM side, TZn signals are ignored by
default, unless they are enabled by the code. The XINTF will release the bus when any
current access is complete and there are no pending accesses on the XINTF. (I)
10 SCITXDB - SCI-B transmit (O)
11 MCLKXB - McBSP-B transmit clock (I/O)
This option is reserved on devices that do not have a McBSP-B port.
27-26 GPIO13 Configure the GPIO13 pin as:
00 GPIO13 - General purpose I/O 13 (default) (I/O)
01 TZ2 - Trip zone 2 (I)
10 CANRXB - eCAN-B receive. (I)
11 MDRB - McBSP-B Data Receive (I)
This option is reserved on devices that do not have a McBSP-B port.
25-24 GPIO12 Configure the GPIO12 pin as:
00 GPIO12 - General purpose I/O 12 (default) (I/O)
01 TZ1 - Trip zone 1 (I)
10 CANTXB - eCAN-B transmit. (O)
11 MDXB - McBSP-B, Data transmit (O)
This option is reserved on devices that do not have a McBSP-B port.
(1)
(2)
(2)
(2)
(2)
(1)
This register is EALLOW protected. See Section 5.2 for more information.
(2)
If reserved configurations are selected, then the state of the pin will be undefined and the pin may be driven. These selections
are reserved for future expansion and should not be used.
SPRUFB0C – September 2007 – Revised May 2009 General-Purpose Input/Output (GPIO) 83
Submit Documentation Feedback
Page 84

Register Bit Definitions
www.ti.com
Table 4-12. GPIO Port A Multiplexing 1 (GPAMUX1) Register Field Descriptions (continued)
Bits Field Value Description
23-22 GPIO11 Configure the GPIO11 pin as:
00 GPIO11 - General purpose I/O 11 (default) (I/O)
01 EPWM6B - ePWM 6 output B (O)
10 SCIRXDB - SCI-B receive (I)
11 ECAP4 - eCAP4. (I/O)
21-20 GPIO10 Configure the GPIO10 pin as:
00 GPIO10 - General purpose I/O 10 (default) (I/O)
01 EPWM6A - ePWM6 output A (O)
10 CANRXB - eCAN-B receive (I)
11 ADCSOCBO - ADC Start of conversion B (O)
19-18 GPIO9 Configure the GPIO9 pin as:
00 GPIO9 - General purpose I/O 9 (default) (I/O)
01 EPWM5B - ePWM5 output B
10 SCITXDB - SCI-B transmit (O)
11 ECAP3 - eCAP3 (I/O)
17-16 GPIO8 Configure the GPIO8 pin as:
00 GPIO8 - General purpose I/O 8 (default) (I/O)
01 EPWM5A - ePWM5 output A (O)
10 CANTXB - eCAN-B transmit (O)
11 ADCSOCAO - ADC Start of conversion A
15-14 GPIO7 Configure the GPIO7 pin as:
00 GPIO7 - General purpose I/O 7 (default) (I/O)
01 EPWM4B - ePWM4 output B (O)
10 MCLKRA - McBSP-A Receive clock (I/O)
11 ECAP2 - eCAP2 (I/O)
13-12 GPIO6 Configure the GPIO6 pin as:
00 GPIO6 - General purpose I/O 6 (default)
01 EPWM4A - ePWM4 output A (O)
10 EPWMSYNCI - ePWM Synch-in (I)
11 EPWMSYNCO - ePWM Synch-out (O)
11-10 GPIO5 Configure the GPIO5 pin as:
00 GPIO5 - General purpose I/O 5 (default) (I/O)
01 EPWM3B - ePWM3 output B
10 MFSRA - McBSP-A Receive frame synch (I/O)
11 ECAP1 - eCAP1 (I/O)
9-8 GPIO4 Configure the GPIO4 pin as:
00 GPIO4 - General purpose I/O 4 (default) (I/O)
01 EPWM3A - ePWM3 output A (O)
10 Reserved.
11 Reserved.
7-6 GPIO3 Configure the GPIO3 pin as:
00 GPIO3 - General purpose I/O 3 (default) (I/O)
01 EPWM2B - ePWM2 output B (O)
10 ECAP5 - eCAP5 (I/O)
11 MCLKRB - McBSP-B receive clock (I/O)
(1)
(2)
(2)
84 General-Purpose Input/Output (GPIO) SPRUFB0C – September 2007 – Revised May 2009
Submit Documentation Feedback
Page 85

www.ti.com
Register Bit Definitions
Table 4-12. GPIO Port A Multiplexing 1 (GPAMUX1) Register Field Descriptions (continued)
Bits Field Value Description
5-4 GPIO2 Configure the GPIO2 pin as:
00 GPIO2 (I/O) General purpose I/O 2 (default) (I/O)
01 EPWM2A - ePWM2 output A (O)
10 Reserved.
11 Reserved.
3-2 GPIO1 Configure the GPIO1 pin as:
00 GPIO1 - General purpose I/O 1 (default) (I/O)
01 EPWM1B - ePWM1 output B (O)
10 ECAP6 - eCAP6 (I/O)
11 MFSRB - McBSP-B Receive Frame Synch (I/O)
1-0 GPIO0 Configure the GPIO0 pin as:
00 GPIO0 - General purpose I/O 0 (default) (I/O)
01 EPWM1A - ePWM1 output A (O)
10 Reserved.
11 Reserved.
(1)
(2)
(2)
(2)
(2)
Figure 4-9. GPIO Port A MUX 2 (GPAMUX2) Register
31 30 29 28 27 26 25 24 23 22 21 20 19 18 17 16
GPIO31 GPIO30 GPIO29 GPIO128 GPIO27 GPIO26 GPIO25 GPIO24
R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
GPIO23 GPIO22 GPIO21 GPIO20 GPIO19 GPIO18 GPIO17 GPIO16
R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0
LEGEND: R/W = Read/Write; R = Read only; - n = value after reset
Table 4-13. GPIO Port A MUX 2 (GPAMUX2) Register Field Descriptions
Bits Field Value Description
31-30 GPIO31 Configure the GPIO31 pin as:
00 GPIO31 - General purpose I/O 31 (default) (I/O)
01 CANTXA - eCAN-A transmit (O)
10 or 11 XA17 - External interface address line 17 (O)
29-28 GPIO30 Configure the GPIO30 pin as:
00 GPIO30 (I/O) General purpose I/O 30 (default) (I/O)
01 CANRXA - eCAN-A receive (I)
10 or 11 XA18 - External interface address line 18
27-26 GPIO29 Configure the GPIO29 pin as:
00 GPIO29 (I/O) General purpose I/O 29 (default) (I/O)
01 SCITXDA - SCI-A transmit. (O)
10 or 11 XA19 - External Interface address line 19 (O)
25-24 GPIO28 Configure the GPIO28 pin as:
00 GPIO28 (I/O) General purpose I/O 28 (default) (I/O)
01 SCIRXDA - SCI-A receive (I)
10 or 11 XZCS6 - External interface zone 6 chip select (O)
(1)
(1)
This register is EALLOW protected. See Section 5.2 for more information.
SPRUFB0C – September 2007 – Revised May 2009 General-Purpose Input/Output (GPIO) 85
Submit Documentation Feedback
Page 86

Register Bit Definitions
www.ti.com
Table 4-13. GPIO Port A MUX 2 (GPAMUX2) Register Field Descriptions (continued)
Bits Field Value Description
23-22 GPIO27 Configure the GPIO27 pin as:
00 GPIO27 - General purpose I/O 27 (default) (I/O)
01 ECAP4 - eCAP4. (I/O)
10 EQEP2S - eQEP2 strobe (I/O)
11 MFSXB - McBSP-B Transmit Frame Synch (I/O)
21-20 GPIO26 Configure the GPIO26 pin as:
00 GPIO26 - General purpose I/O 26 (default) (I/O)
01 ECAP3 - eCAP3. (I/O)
10 EQEP2I - eQEP2 index. (I/O)
11 MCLKXB - McBSP-B Transmit Clock (I/O)
19-18 GPIO25 Configure the GPIO25 pin as:
00 GPIO25 - General purpose I/O 25 (default) (I/O)
01 ECAP2 - eCAP2 (I/O)
10 EQEP2B - eQEP2 input B (I)
11 MDRB - McBSP-B data receive (O)
17-16 GPIO24 Configure the GPIO24 pin as:
00 GPIO24 - General purpose I/O 24 (default) (I/O)
01 ECAP1 - eCAP1 (I/O)
10 EQEP2A - eQEP2 input A. (I)
11 MDXB - McBSP-B data transmit (O)
15-14 GPIO23 Configure the GPIO23 pin as:
00 GPIO23 - General purpose I/O 23 (default) (I/O)
01 EQEP1I - eQEP1 index (I/O)
10 MFSXA - McBSP-A transmit frame synch (I/O)
11 SCIRXDB - SCI-B receive (I/O)
13-12 GPIO22 Configure the GPIO22 pin as:
00 GPIO22 - General purpose I/O 22 (default) (I/O)
01 EQEP1S - eQEP1 strobe (I/O)
10 MCLKXA - McBSP-A transmit clock (I/O)
11 SCITXDB - SCI-B transmit (O)
11-10 GPIO21 Configure the GPIO21 pin as:
00 GPIO21 - General purpose I/O 21 (default) (I/O)
01 EQEP1B - eQEP1 input B (I)
10 MDRA - McBSP-A data receive (I)
11 CANRXB - eCAN-B receive (I)
9-8 GPIO20 Configure the GPIO20 pin as:
00 GPIO20 - General purpose I/O 22 (default) (I/O)
01 EQEP1A - eQEP1 input A (I)
10 MDXA - McBSP-A data transmit (O)
11 CANTXB - eCAN-B transmit (O)
7-6 GPIO19 Configure the GPIO19 pin as:
00 GPIO19 - General purpose I/O 19 (default) (I/O)
01 SPISTEA - SPI-A slave transmit enable (I/O)
10 SCIRXDB - SCI-B receive (I)
11 CANTXA - eCAN-A Transmit (O)
(1)
86 General-Purpose Input/Output (GPIO) SPRUFB0C – September 2007 – Revised May 2009
Submit Documentation Feedback
Page 87

www.ti.com
Register Bit Definitions
Table 4-13. GPIO Port A MUX 2 (GPAMUX2) Register Field Descriptions (continued)
Bits Field Value Description
5-4 GPIO18 Configure the GPIO18 pin as:
00 GPIO18 - General purpose I/O 18 (default) (I/O)
01 SPICLKA - SPI-A clock (I/O)
10 SCITXDB - SCI-B transmit. (O)
11 CANRXA - eCAN-A Receive (I)
3-2 GPIO17 Configure the GPIO17 pin as:
00 GPIO17 - General purpose I/O 17 (default) (I/O)
01 SPISOMIA - SPI-A slave-out, master-in (I/O)
10 CANRXB eCAN-B receive (I)
11 TZ6 - Trip zone 6 (I)
1-0 GPIO16 Configure the GPIO16 pin as:
00 GPIO16 - General purpose I/O 16 (default) (I/O)
01 SPISIMOA - SPI-A slave-in, master-out (I/O),
10 CANTXB - eCAN-B transmit. (O)
11 TZ5 - Trip zone 5 (I)
(1)
Figure 4-10. GPIO Port B MUX 1 (GPBMUX1) Register
31 30 29 28 27 26 25 24 23 22 21 20 19 18 17 16
GPIO47 GPIO46 GPIO45 GPIO44 GPIO43 GPIO42 GPIO41 GPIO40
R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
GPIO39 GPIO38 GPIO37 GPIO36 GPIO35 GPIO34 GPIO33 GPIO32
R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0
LEGEND: R/W = Read/Write; R = Read only; - n = value after reset
Table 4-14. GPIO Port B MUX 1 (GPBMUX1) Register Field Descriptions
Bit Field Value Description
31:30 GPIO47 Configure this pin as:
00 GPIO 47 - general purpose I/O 47 (default)
01 Reserved
10 or XA7 - External interface (XINTF) address line 7 (O)
11
29:28 GPIO46 Configure this pin as:
00 GPIO 46 - general purpose I/O 46 (default)
01 Reserved
10 or XA6 - External interface (XINTF) address line 6 (O)
11
27:26 GPIO45 Configure this pin as:
00 GPIO 45 - general purpose I/O 45 (default)
01 Reserved
10 or XA5 - External interface (XINTF) address line 5 (O)
11
SPRUFB0C – September 2007 – Revised May 2009 General-Purpose Input/Output (GPIO) 87
Submit Documentation Feedback
Page 88

Register Bit Definitions
Table 4-14. GPIO Port B MUX 1 (GPBMUX1) Register Field Descriptions (continued)
Bit Field Value Description
25:24 GPIO44 Configure this pin:
00 GPIO 44 - general purpose I/O 44 (default)
01 Reserved
10 or XA4 - External interface (XINTF) address line 4 (O)
11
23:22 GPIO43 Configure this pin as:
00 GPIO 43 - general purpose I/O 43 (default)
01 Reserved
10 or XA3 - External interface (XINTF) address line 3 (O)
11
21:20 GPIO42 Configure this pin as:
00 GPIO 42 - general purpose I/O 42 (default)
01 Reserved
10 or XA2 - External interface (XINTF) address line 2 (O)
11
19:18 GPIO41 Configure this pin as:
00 GPIO 41 - general purpose I/O 41 (default)
01 Reserved
10 or XA1 - External interface (XINTF) address line 1 (O)
11
17:16 GPIO40 Configure this pin as:
00 GPIO 40 - general purpose I/O 40 (default)
01 Reserved
10 or XA0/ XWE1 - External interface (XINTF) address line 1 or external interface write enable strobe 1
11 (O)
15:14 GPIO39 Configure this pin as:
00 GPIO 39 - general purpose I/O 39 (default)
01 Reserved
10 or XA16 - External interface (XINTF) address line 16 (O)
11
13:12 GPIO38 Configure this pin as:
00 GPIO 38 - general purpose I/O 38 (default)
01 Reserved
10 or XWE0 - External interface write enable strobe 0
11
11:10 GPIO37 Configure this pin as:
00 GPIO 37 - general purpose I/O 37 (default)
01 ECAP2 - Enhanced capture input/output 2 (I/O)
10 or XZCS7 - External interface zone 7 chip select (O)
11
9:8 GPIO36 Configure this pin as:
00 GPIO 36 - general purpose I/O 36 (default)
01 SCIRXDA - SCI-A receive data (I)
10 or XZCS0 - External interface zone 0 chip select (O)
11
7:6 GPIO35 Configure this pin as:
00 GPIO 35 - general purpose I/O 35 (default)
01 SCITXDA - SCI-A transmit data (O)
10 or XR/ W - Read Not Write Strobe. Normally held high. When low, XR/ W indicates write cycle is active;
11 when high, XR/ W indicates read cycle is active.
www.ti.com
88 General-Purpose Input/Output (GPIO) SPRUFB0C – September 2007 – Revised May 2009
Submit Documentation Feedback
Page 89

www.ti.com
Register Bit Definitions
Table 4-14. GPIO Port B MUX 1 (GPBMUX1) Register Field Descriptions (continued)
Bit Field Value Description
5:4 GPIO34 Configure this pin as:
00 GPIO 34 - general purpose I/O 34 (default)
01 ECAPI - Enhanced capture input/output 1 (I/O)
10 or XREADY - External interface ready signal
11
3:2 GPIO33 Configure this pin as:
00 GPIO 33 - general purpose I/O 33 (default)
01 SCLA - I2C clock open drain bidirectional port (I/O)
10 EPWMSYNCO - External ePWM sync pulse output (O)
11 ADCSOCBO - ADC start-of-conversion B (O)
1:0 GPIO32 Configure this pin as:
00 GPIO 32 - general purpose I/O 32 (default)
01 SDAA - I2C data open drain bidirectional port (I/O)
10 EPWMSYNCI - External ePWM sync pulse input (I)
11 ADCSOCAO - ADC start-of-conversion A (O)
Figure 4-11. GPIO Port B MUX 2 (GPBMUX2) Register
31 30 29 28 27 26 25 24 23 22 21 20 19 18 17 16
GPIO63 GPIO62 GPIO61 GPIO60 GPIO59 GPIO58 GPIO57 GPIO56
R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
GPIO55 GPIO54 GPIO53 GPIO52 GPIO51 GPIO50 GPIO49 GPIO48
R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0
LEGEND: R/W = Read/Write; R = Read only; - n = value after reset
Table 4-15. GPIO Port B MUX 2 (GPBMUX2) Register Field Descriptions
Bit Field Value Description
31:30 GPIO63 Configure this pin as:
00 GPIO 63 - general purpose I/O 63 (default)
01 GPIO 63 - general purpose I/O 63 (default)
10 or XD16 - External interface data line 16 (I/O)
11
29:28 GPIO62 Configure this pin as:
00 GPIO 62 - general purpose I/O 62 (default)
01 SCIRXDC - SCI-C receive data (I)
10 or XD17 - External interface data line 17 (I/O)
11
27:26 GPIO61 Configure this pin as:
00 GPIO 61 - general purpose I/O 61 (default)
01 MFSRB - McBSP-B receive frame synch (I/O)
10 or XD18 - External interface data line 18 (I/O)
11
25:24 GPIO60 Configure this pin as:
00 GPIO 60 - general purpose I/O 60 (default)
01 MCLKRB - McBSP-B receive clock (I/O)
10 or XD19 - External interface data line 19 (I/O)
11
SPRUFB0C – September 2007 – Revised May 2009 General-Purpose Input/Output (GPIO) 89
Submit Documentation Feedback
Page 90

Register Bit Definitions
Table 4-15. GPIO Port B MUX 2 (GPBMUX2) Register Field Descriptions (continued)
Bit Field Value Description
23:22 GPIO59 Configure this pin as:
00 GPIO 59 - general purpose I/O 59 (default)
01 MFSRA - McBSP-A receive frame synch (I/O)
10 or XD20 - External interface data line 20 (I/O)
11
21:20 GPIO58 Configure this pin as:
00 GPIO 58 - general purpose I/O 58 (default)
01 MCLKRA - McBSP-A receive clock (I/O)
10 or XD21 - External interface data line 21 (I/O)
11
19:18 GPIO57 Configure this pin as:
00 GPIO 57 - general purpose I/O 57 (default)
01 SPISTEA - SPI-A slave transmit enable (I/O)
10 or XD22 - External interface data line 22 (I/O)
11
17:16 GPIO56 Configure this pin as:
00 GPIO 56 - general purpose I/O 56 (default)
01 SPICLKA - SPI-A clock input/output (I/O)
10 or XD23 - External interface data line 23 (I/O)
11
15:14 GPIO55 Configure this pin as:
00 GPIO 55 - general purpose I/O 55 (default)
01 SPISOMIA - SPI-A slave out, master in (I/O)
10 or XD24 - External interface data line 24 (I/O)
11
13:12 GPIO54 Configure this pin as:
00 GPIO 54 - general purpose I/O 54 (default)
01 SPISIMOA - SPI slave in, master out (I/O)
10 or XD25 - External interface data line 25 (I/O)
11
11:10 GPIO53 Configure this pin as:
00 GPIO 53 - general purpose I/O 53 (default)
01 EQEP1I - Enhanced QEP1 index (I/O)
10 or XD26 - External interface data line 26 (I/O)
11
9:8 GPIO52 Configure this pin as:
00 GPIO 52 - general purpose I/O 52 (default)
01 EQEP1S - Enhanced QEP1 strobe (I/O)
10 or XD27External interface data line 27 (I/O)
11
7:6 GPIO51 Configure this pin as:
00 GPIO 51 - general purpose I/O 51 (default)
01 EQEP1B - Enhanced QEP1 input B (I)
10 or XD28 - External interface data line 28 (I/O)
11
5:4 GPIO50 Configure this pin as:
00 GPIO 50 - general purpose I/O 50 (default)
01 EQEP1A - Enhanced QEP1 input A (I)
10 or XD29 - External interface data line 29 (I/O)
11
www.ti.com
90 General-Purpose Input/Output (GPIO) SPRUFB0C – September 2007 – Revised May 2009
Submit Documentation Feedback
Page 91

www.ti.com
Register Bit Definitions
Table 4-15. GPIO Port B MUX 2 (GPBMUX2) Register Field Descriptions (continued)
Bit Field Value Description
3:2 GPIO49 Configure this pin as:
00 GPIO 49 - general purpose I/O 49 (default)
01 ECAP6 - Enhanced Capture input/output 6 (I/O)
10 or XD30 - External interface data line 30 (I/O)
11
1:0 GPIO48 Configure this pin as:
00 GPIO 48 - general purpose I/O 48 (default)
01 ECAP5 - Enhanced Capture input/output 5 (I/O)
10 or XD31 - External interface data line 31 (I/O)
11
Figure 4-12. GPIO Port C MUX 1 (GPCMUX1) Register
31 30 29 28 27 26 25 24 23 22 21 20 19 18 17 16
GPIO79 GPIO78 GPIO77 GPIO76 GPIO75 GPIO74 GPIO73 GPIO72
R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
GPIO71 GPIO70 GPIO69 GPIO68 GPIO67 GPIO66 GPIO65 GPIO64
R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0
LEGEND: R/W = Read/Write; R = Read only; - n = value after reset
Table 4-16. GPIO Port C MUX 1 (GPCMUX1) Register Field Descriptions
Bit Field Value Description
31:30 GPIO79 Configure this pin as:
00 or 01 GPIO 79 - general purpose I/O 79 (default)
10 or 11 XD0 - External interface data line 0 (O)
29:28 GPIO78 Configure this pin as:
00 or 01 GPIO 78 - general purpose I/O 78 (default)
10 or 11 XD1 - External interface data line 1 (O)
27:26 GPIO77 Configure this pin as:
00 or 01 GPIO 77 - general purpose I/O 77 (default)
10 or 11 XD2 - External interface data line 2 (O)
25:24 GPIO76 Configure this pin as:
00 or 01 GPIO 76 - general purpose I/O 76 (default)
10 or 11 XD3 - External interface data line 3 (O)
23:22 GPIO75 Configure this pin as:
00 or 01 GPIO 75 - general purpose I/O 75 (default)
10 or 11 XD4 - External interface data line 4 (O)
21:20 GPIO74 Configure this pin as:
00 or 01 GPIO 74 - general purpose I/O 74 (default)
10 or 11 XD5 - External interface data line 5(O)
19:18 GPIO73 Configure this pin as:
00 or 01 GPIO 73 - general purpose I/O 73 (default)
10 or 11 XD6 - External interface data line 6 (O)
17:16 GPIO72 Configure this pin as:
00 or 01 GPIO 72 - general purpose I/O 72 (default)
10 or 11 XD7 - External interface data line 7 (O)
SPRUFB0C – September 2007 – Revised May 2009 General-Purpose Input/Output (GPIO) 91
Submit Documentation Feedback
Page 92

Register Bit Definitions
Table 4-16. GPIO Port C MUX 1 (GPCMUX1) Register Field Descriptions (continued)
Bit Field Value Description
15:14 GPIO71 Configure this pin as:
00 or 01 GPIO 71 - general purpose I/O 71 (default)
10 or 11 XD8 - External interface data line 8 (O)
13:12 GPIO70 Configure this pin as:
00 or 01 GPIO 70 - general purpose I/O 70 (default)
10 or 11 XD9 - External interface data line 9 (O)
11:10 GPIO69 Configure this pin as:
00 or 01 GPIO 69 - general purpose I/O 69 (default)
10 or 11 XD10 - External interface data line 10 (O)
9:8 GPIO68 Configure this pin as:
00 or 01 GPIO 68 - general purpose I/O 68 (default)
10 or 11 XD11 - External interface data line 11 (O)
7:6 GPIO67 Configure this pin as:
00 or 01 GPIO 67 - general purpose I/O 67 (default)
10 or 11 XD12 - External interface data line 12 (O)
5:4 GPIO66 Configure this pin as:
00 or 01 GPIO 66 - general purpose I/O 66 (default)
10 or 11 XD13 - External interface data line 13 (O)
3:2 GPIO65 Configure this pin as:
00 or 01 GPIO 65 - general purpose I/O 65 (default)
10 or 11 XD14 - External interface data line 14 (O)
1:0 GPIO64 Configure this pin as:
00 or 01 GPIO 64 - general purpose I/O 64 (default)
10 or 11 XD15 - External interface data line 15 (O)
www.ti.com
Figure 4-13. GPIO Port C MUX 2 (GPCMUX2) Register
31 16
Reserved
R-0
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
GPIO87 GPIO86 GPIO85 GPIO84 GPIO83 GPIO82 GPIO81 GPIO80
R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0
LEGEND: R/W = Read/Write; R = Read only; - n = value after reset
Table 4-17. GPIO Port C MUX 2 (GPCMUX2) Register Field Descriptions
Bit Field Value Description
31:16 Reserved
15:14 GPIO87 Configure this pin as:
00 or GPIO 87 - general purpose I/O 87 (default)
01
10 or XA15 - External interface address line 15 (O)
11
92 General-Purpose Input/Output (GPIO) SPRUFB0C – September 2007 – Revised May 2009
Submit Documentation Feedback
Page 93

www.ti.com
Table 4-17. GPIO Port C MUX 2 (GPCMUX2) Register Field Descriptions (continued)
Bit Field Value Description
13:12 GPIO86 Configure this pin as:
00 or GPIO 86 - general purpose I/O 86 (default)
01
10 or XA14 - External interface address line 14 (O)
11
11:10 GPIO85 Configure this pin as:
00 or GPIO 85 - general purpose I/O 85 (default)
01
10 or XA13 - External interface address line 13 (O)
11
9:8 GPIO84 Configure this pin as:
00 or GPIO 84 - general purpose I/O 84 (default)
01
10 or XA12 - External interface address line 12 (O)
11
7:6 GPIO83 Configure this pin as:
00 or GPIO 83 - general purpose I/O 83 (default)
01
10 or XA11 - External interface address line 11 (O)
11
5:4 GPIO82 Configure this pin as:
00 or GPIO 82 - general purpose I/O 82 (default)
01
10 or XA10 - External interface address line 10 (O)
11
3:2 GPIO81 Configure this pin as:
00 or GPIO 81 - general purpose I/O 81 (default)
01
10 or XA9 - External interface address line 9 (O)
11
1:0 GPIO80 Configure this pin as:
00 or GPIO 80 - general purpose I/O 80(default)
01
10 or XA8 - External interface address line 8 (O)
11
Register Bit Definitions
SPRUFB0C – September 2007 – Revised May 2009 General-Purpose Input/Output (GPIO) 93
Submit Documentation Feedback
Page 94

Register Bit Definitions
Figure 4-14. GPIO Port A Qualification Control (GPACTRL) Register
31 24 23 16
QUALPRD3 QUALPRD2
R/W-0 R/W-0
15 8 7 0
QUALPRD1 QUALPRD0
R/W-0 R/W-0
LEGEND: R/W = Read/Write; R = Read only; - n = value after reset
The GPxCTRL registers specify the sampling period for input pins when configured for input qualification
using a window of 3 or 6 samples. The sampling period is the amount of time between qualification
samples relative to the period of SYSCLKOUT. The number of samples is specified in the GPxQSELn
registers.
Table 4-18. GPIO Port A Qualification Control (GPACTRL) Register Field Descriptions
Bits Field Value Description
31-24 QUALPRD3 Specifies the sampling period for pins GPIO24 to GPIO31.
0x00 Sampling Period = T
0x01 Sampling Period = 2 × T
0x02 Sampling Period = 4 × T
SYSCLKOUT
SYSCLKOUT
SYSCLKOUT
. . . . . .
0xFF Sampling Period = 510 × T
SYSCLKOUT
23-16 QUALPRD2 Specifies the sampling period for pins GPIO16 to GPIO23.
0x00 Sampling Period = T
0x01 Sampling Period = 2 × T
0x02 Sampling Period = 4 × T
SYSCLKOUT
SYSCLKOUT
SYSCLKOUT
. . . . . .
0xFF Sampling Period = 510 × T
SYSCLKOUT
15-8 QUALPRD1 Specifies the sampling period for pins GPIO8 to GPIO15.
0x00 Sampling Period = T
0x01 Sampling Period = 2 × T
0x02 Sampling Period = 4 × T
SYSCLKOUT
SYSCLKOUT
SYSCLKOUT
. . . . . .
0xFF Sampling Period = 510 × T
SYSCLKOUT
7-0 QUALPRD0 Specifies the sampling period for pins GPIO0 to GPIO7.
0x00 Sampling Period = T
0x01 Sampling Period = 2 × T
0x02 Sampling Period = 4 × T
SYSCLKOUT
SYSCLKOUT
SYSCLKOUT
. . . . . .
(1)
0xFF Sampling Period = 510 × T
This register is EALLOW protected. See Section 5.2 for more information.
(2)
T
SYSCLKOUT
indicates the period of SYSCLKOUT.
SYSCLKOUT
(2)
(2)
(2)
(2)
(1)
www.ti.com
General-Purpose Input/Output (GPIO)94 SPRUFB0C – September 2007 – Revised May 2009
Submit Documentation Feedback
Page 95

www.ti.com
Figure 4-15. GPIO Port B Qualification Control (GPBCTRL) Register
31 24 23 16
QUALPRD3 QUALPRD2
R/W-0 R/W-0
15 8 7 0
QUALPRD1 QUALPRD0
R/W-0 R/W-0
LEGEND: R/W = Read/Write; R = Read only; - n = value after reset
Table 4-19. GPIO Port B Qualification Control (GPBCTRL) Register Field Descriptions
Bits Field Value Description
31-24 QUALPRD3 Specifies the sampling period for pins GPIO56 to GPIO63
0x00 Sampling Period = T
0x01 Sampling Period = 2 × T
0x02 Sampling Period = 4 × T
SYSCLKOUT
SYSCLKOUT
SYSCLKOUT
. . . . . .
0xFF Sampling Period = 510 × T
SYSCLKOUT
23-16 QUALPRD2 Specifies the sampling period for pins GPIO48 to GPIO55
0x00 Sampling Period = T
0x01 Sampling Period = 2 × T
0x02 Sampling Period = 4 × T
SYSCLKOUT
SYSCLKOUT
SYSCLKOUT
. . . . . .
0xFF Sampling Period = 510 × T
SYSCLKOUT
15-8 QUALPRD1 Specifies the sampling period for pins GPIO40 to GPIO47
0x00 Sampling Period = T
0x01 Sampling Period = 2 × T
0x02 Sampling Period = 4 × T
SYSCLKOUT
SYSCLKOUT
SYSCLKOUT
. . . . . .
0xFF Sampling Period = 510 × T
SYSCLKOUT
7-0 QUALPRD0 Specifies the sampling period for pins GPIO32 to GPIO39
0x00 Sampling Period = T
0x01 Sampling Period = 2 × T
0x02 Sampling Period = 4 × T
SYSCLKOUT
SYSCLKOUT
SYSCLKOUT
. . . . . .
(1)
0xFF Sampling Period = 510 × T
This register is EALLOW protected. See Section 5.2 for more information.
(2)
T
SYSCLKOUT
indicates the period of SYSCLKOUT.
SYSCLKOUT
(2)
(2)
(2)
(2)
(1)
Register Bit Definitions
SPRUFB0C – September 2007 – Revised May 2009 General-Purpose Input/Output (GPIO) 95
Submit Documentation Feedback
Page 96

Register Bit Definitions
Figure 4-16. GPIO Port A Qualification Select 1 (GPAQSEL1) Register
31 30 29 28 27 26 25 24 23 22 21 20 19 18 17 16
GPIO15 GPIO14 GPIO13 GPIO12 GPIO11 GPIO10 GPIO9 GPIO8
R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
GPIO7 GPIO6 GPIO5 GPIO4 GPIO3 GPIO2 GPIO1 GPIO0
R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0
LEGEND: R/W = Read/Write; R = Read only; - n = value after reset
Table 4-20. GPIO Port A Qualification Select 1 (GPAQSEL1) Register Field Descriptions
Bits Field Value Description
31-0 GPIO15-GPIO0 Select input qualification type for GPIO0 to GPIO15. The input qualification of each GPIO
(1)
This register is EALLOW protected. See Section 5.2 for more information.
input is controlled by two bits as shown in Figure 4-16 .
00 Synchronize to SYSCLKOUT only. Valid for both peripheral and GPIO pins.
01 Qualification using 3 samples. Valid for pins configured as GPIO or a peripheral function.
The time between samples is specified in the GPACTRL register.
10 Qualification using 6 samples. Valid for pins configured as GPIO or a peripheral function.
The time between samples is specified in the GPACTRL register.
11 Asynchronous. (no synchronization or qualification). This option applies to pins configured
as peripherals only. If the pin is configured as a GPIO input, then this option is the same as
0,0 or synchronize to SYSCLKOUT.
(1)
www.ti.com
Figure 4-17. GPIO Port A Qualification Select 2 (GPAQSEL2) Register
31 30 29 28 27 26 25 24 23 22 21 20 19 18 17 16
GPIO31 GPIO30 GPIO29 GPIO28 GPIO27 GPIO26 GPIO25 GPIO24
R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
GPIO23 GPIO22 GPIO21 GPIO20 GPIO19 GPIO18 GPIO17 GPIO16
R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0
LEGEND: R/W = Read/Write; R = Read only; - n = value after reset
Table 4-21. GPIO Port A Qualification Select 2 (GPAQSEL2) Register Field Descriptions
Bits Field Value Description
31-0 GPIO31-GPIO16 Select input qualification type for GPIO16 to GPIO31. The input qualification of each GPIO
(1)
This register is EALLOW protected. See Section 5.2 for more information.
input is controlled by two bits as shown in Figure 4-17 .
00 Synchronize to SYSCLKOUT only. Valid for both peripheral and GPIO pins.
01 Qualification using 3 samples. Valid for pins configured as GPIO or a peripheral function. The
time between samples is specified in the GPACTRL register.
10 Qualification using 6 samples. Valid for pins configured as GPIO or a peripheral function. The
time between samples is specified in the GPACTRL register.
11 Asynchronous. (no synchronization or qualification). This option applies to pins configured as
peripherals only. If the pin is configured as a GPIO input, then this option is the same as 0,0
or synchronize to SYSCLKOUT.
(1)
96 General-Purpose Input/Output (GPIO) SPRUFB0C – September 2007 – Revised May 2009
Submit Documentation Feedback
Page 97

www.ti.com
Register Bit Definitions
Figure 4-18. GPIO Port B Qualification Select 1 (GPBQSEL1) Register
31 30 29 28 27 26 25 24 23 22 21 20 19 18 17 16
GPIO47 GPIO46 GPIO45 GPIO44 GPIO43 GPIO42 GPIO41 GPIO40
R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
GPIO39 GPIO38 GPIO37 GPIO36 GPIO35 GPIO34 GPIO33 GPIO32
R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0
LEGEND: R/W = Read/Write; R = Read only; - n = value after reset
Table 4-22. GPIO Port B Qualification Select 1 (GPBQSEL1) Register Field Descriptions
Bits Field Value Description
31-0 GPIO47-GPIO32 Select input qualification type for GPIO32 to GPIO47. The input qualification of each GPIO
(1)
This register is EALLOW protected. See Section 5.2 for more information.
input is controlled by two bits as shown in Figure 4-16 .
00 Synchronize to SYSCLKOUT only. Valid for both peripheral and GPIO pins.
01 Qualification using 3 samples. Valid for pins configured as GPIO or a peripheral function.
The time between samples is specified in the GPACTRL register.
10 Qualification using 6 samples. Valid for pins configured as GPIO or a peripheral function.
The time between samples is specified in the GPACTRL register.
11 Asynchronous. (no synchronization or qualification). This option applies to pins configured
as peripherals only. If the pin is configured as a GPIO input, then this option is the same as
0,0 or synchronize to SYSCLKOUT.
(1)
Figure 4-19. GPIO Port B Qualification Select 2 (GPBQSEL2) Register
31 30 29 28 27 26 25 24 23 22 21 20 19 18 17 16
GPIO63 GPIO62 GPIO61 GPIO60 GPIO59 GPIO58 GPIO57 GPIO56
R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
GPIO55 GPIO54 GPIO53 GPIO52 GPIO51 GPIO50 GPIO49 GPIO48
R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0
LEGEND: R/W = Read/Write; R = Read only; - n = value after reset
Table 4-23. GPIO Port B Qualification Select 2 (GPBQSEL2) Register Field Descriptions
Bits Field Value Description
31-0 GPIO63-GPIO48 Select input qualification type for GPIO48 to GPIO63. The input qualification of each GPIO
(1)
This register is EALLOW protected. See Section 5.2 for more information.
input is controlled by two bits as shown in Figure 4-17 .
00 Synchronize to SYSCLKOUT only. Valid for both peripheral and GPIO pins.
01 Qualification using 3 samples. Valid for pins configured as GPIO or a peripheral function. The
time between samples is specified in the GPACTRL register.
10 Qualification using 6 samples. Valid for pins configured as GPIO or a peripheral function. The
time between samples is specified in the GPACTRL register.
11 Asynchronous. (no synchronization or qualification). This option applies to pins configured as
peripherals only. If the pin is configured as a GPIO input, then this option is the same as 0,0
or synchronize to SYSCLKOUT.
(1)
SPRUFB0C – September 2007 – Revised May 2009 General-Purpose Input/Output (GPIO) 97
Submit Documentation Feedback
Page 98

Register Bit Definitions
The GPADIR and GPBDIR registers control the direction of the pins when they are configured as a GPIO
in the appropriate MUX register. The direction register has no effect on pins configured as peripheral
functions.
Figure 4-20. GPIO Port A Direction (GPADIR) Register
31 30 29 28 27 26 25 24
GPIO31 GPIO30 GPIO29 GPIO28 GPIO27 GPIO26 GPIO25 GPIO24
R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0
23 22 21 20 19 18 17 16
GPIO23 GPIO22 GPIO21 GPIO20 GPIO19 GPIO18 GPIO17 GPIO16
R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0
15 14 13 12 11 10 9 8
GPIO15 GPIO14 GPIO13 GPIO12 GPIO11 GPIO10 GPIO9 GPIO8
R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0
7 6 5 4 3 2 1 0
GPIO7 GPIO6 GPIO5 GPIO4 GPIO3 GPIO2 GPIO1 GPIO0
R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0
LEGEND: R/W = Read/Write; R = Read only; - n = value after reset
Table 4-24. GPIO Port A Direction (GPADIR) Register Field Descriptions
Bits Field Value Description
31-0 GPIO31-GPIO0 Controls direction of GPIO Port A pins when the specified pin is configured as a GPIO in the
(1)
This register is EALLOW protected. See Section 5.2 for more information.
appropriate GPAMUX1 or GPAMUX2 register.
0 Configures the GPIO pin as an input. (default)
1 Configures the GPIO pin as an output
The value currently in the GPADAT output latch is driven on the pin. To initialize the GPADAT
latch prior to changing the pin from an input to an output, use the GPASET, GPACLEAR, and
GPATOGGLE registers.
(1)
www.ti.com
Figure 4-21. GPIO Port B Direction (GPBDIR) Register
31 30 29 28 27 26 25 24
GPIO63 GPIO62 GPIO61 GPIO60 GPIO59 GPIO58 GPIO57 GPIO56
R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0
23 22 21 20 19 18 17 16
GPIO55 GPIO54 GPIO53 GPIO52 GPIO51 GPIO50 GPIO49 GPIO48
R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0
15 14 13 12 11 10 9 8
GPIO47 GPIO46 GPIO45 GPIO44 GPIO43 GPIO42 GPIO41 GPIO40
R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0
7 6 5 4 3 2 1 0
GPIO39 GPIO38 GPIO37 GPIO36 GPIO35 GPIO34 GPIO33 GPIO32
R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0
LEGEND: R/W = Read/Write; R = Read only; - n = value after reset
General-Purpose Input/Output (GPIO)98 SPRUFB0C – September 2007 – Revised May 2009
Submit Documentation Feedback
Page 99

www.ti.com
Register Bit Definitions
Table 4-25. GPIO Port B Direction (GPBDIR) Register Field Descriptions
Bits Field Value Description
31-0 GPIO63-GPIO32 Controls direction of GPIO pin when GPIO mode is selected. Reading the register returns the
(1)
This register is EALLOW protected. See Section 5.2 for more information.
current value of the register setting
0 Configures the GPIO pin as an input. (default)
1 Configures the GPIO pin as an output
(1)
Figure 4-22. GPIO Port C Direction (GPCDIR) Register
31 24
Reserved
R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0
23 22 21 20 19 18 17 16
GPIO87 GPIO86 GPIO85 GPIO84 GPIO83 GPIO82 GPIO81 GPIO80
R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0
15 14 13 12 11 10 9 8
GPIO79 GPIO78 GPIO77 GPIO76 GPIO75 GPIO74 GPIO73 GPIO72
R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0
7 6 5 4 3 2 1 0
GPIO71 GPIO70 GPIO69 GPIO68 GPIO67 GPIO66 GPIO65 GPIO64
R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0
LEGEND: R/W = Read/Write; R = Read only; - n = value after reset
Table 4-26. GPIO Port C Direction (GPCDIR) Register Field Descriptions
Bits Field Value Description
31-0 GPIO87-GPIO64 Controls direction of GPIO pin when GPIO mode is selected. Reading the register returns the
(1)
This register is EALLOW protected. See Section 5.2 for more information.
current value of the register setting
0 Configures the GPIO pin as an input. (default)
1 Configures the GPIO pin as an output
(1)
The pullup disable (GPxPUD) registers allow you to specify which pins should have an internal pullup
resister enabled. The internal pullups on the pins that can be configured as ePWM
outputs(GPIO0-GPIO11) are all disabled asynchronously when the external reset signal ( XRS) is low. The
internal pullups on all other pins are enabled on reset. When coming out of reset, the pullups remain in
their default state until you enable or disable them selectively in software by writing to this register. The
pullup configuration applies both to pins configured as I/O and those configured as peripheral functions.
SPRUFB0C – September 2007 – Revised May 2009 General-Purpose Input/Output (GPIO) 99
Submit Documentation Feedback
Page 100

Register Bit Definitions
Figure 4-23. GPIO Port A Pullup Disable (GPAPUD) Registers
31 30 29 28 27 26 25 24
GPIO31 GPIO30 GPIO29 GPIO28 GPIO27 GPIO26 GPIO25 GPIO24
R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0
23 22 21 20 19 18 17 16
GPIO23 GPIO22 GPIO21 GPIO20 GPIO19 GPIO18 GPIO17 GPIO16
R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0
15 14 13 12 11 10 9 8
GPIO15 GPIO14 GPIO13 GPIO12 GPIO11 GPIO10 GPIO9 GPIO8
R/W-0 R/W-0 R/W-0 R/W-0 R/W-1 R/W-1 R/W-1 R/W-1
7 6 5 4 3 2 1 0
GPIO7 GPIO6 GPIO5 GPIO4 GPIO3 GPIO2 GPIO1 GPIO0
R/W-1 R/W-1 R/W-1 R/W-1 R/W-1 R/W-1 R/W-1 R/W-1
LEGEND: R/W = Read/Write; R = Read only; - n = value after reset
Table 4-27. GPIO Port A Internal Pullup Disable (GPAPUD) Register Field Descriptions
Bits Field Value Description
31-0 GPIO31-GPIO0 Configure the internal pullup resister on the selected GPIO Port A pin. Each GPIO pin
(1)
This register is EALLOW protected. See Section 5.2 for more information.
corresponds to one bit in this register.
0 Enable the internal pullup on the specified pin. (default for GPIO12-GPIO31)
1 Disable the internal pullup on the specified pin. (default for GPIO0-GPIO11)
(1)
www.ti.com
Figure 4-24. GPIO Port B Pullup Disable (GPBPUD) Registers
31 30 29 28 27 26 25 24
GPIO63 GPIO62 GPIO61 GPIO60 GPIO59 GPIO58 GPIO57 GPIO56
R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0
23 22 21 20 19 18 17 16
GPIO55 GPIO54 GPIO53 GPIO52 GPIO51 GPIO50 GPIO49 GPIO48
R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0
15 14 13 12 11 10 9 8
GPIO47 GPIO46 GPIO45 GPIO44 GPIO43 GPIO42 GPIO41 GPIO40
R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0
7 6 5 4 3 2 1 0
GPIO39 GPIO38 GPIO37 GPIO36 GPIO35 GPIO34 GPIO33 GPIO32
R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0
LEGEND: R/W = Read/Write; R = Read only; - n = value after reset
Table 4-28. GPIO Port B Internal Pullup Disable (GPBPUD) Register Field Descriptions
Bits Field Value Description
31-0 GPIO63- Configure the internal pullup resister on the selected GPIO Port B pin. Each GPIO pin
(1)
This register is EALLOW protected. See Section 5.2 for more information.
GPIO32 corresponds to one bit in this register.
0 Enable the internal pullup on the specified pin. (default)
1 Disable the internal pullup on the specified pin.
(1)
General-Purpose Input/Output (GPIO)100 SPRUFB0C – September 2007 – Revised May 2009
Submit Documentation Feedback
 Loading...
Loading...