

Page 1

TMS320C6672
Multicore Fixed and Floating-Point Digital Signal Processor
Data Manual
ADVANCE INFORMATION concerns new products in the sampling
or preproduction phase of development. Characteristic data and
other specifications are subject to change without notice.
Literature Number: SPRS708
November 2010
Page 2
TMS320C6672
Data Manual
SPRS708—November 2010
Release History
Release Date Chapter/Topic Description/Comments
1.0 November 2010 All Initial Release
www.ti.com
2 Release History Copyright 2010 Texas Instruments Incorporated
Page 3
TMS320C6672
Multicore Fixed and Floating-Point Digital Signal Processor
www.ti.com
SPRS708—November 2010
Contents
1 Features . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .11
1.1 KeyStone Architecture. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .12
1.2 Device Description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .12
1.3 Functional Block Diagram. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .14
2 Device Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .15
2.1 Device Characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .15
2.2 DSP Core Description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .16
2.3 Memory Map Summary. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .19
2.4 Boot Sequence . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .25
2.5 Boot Modes Supported and PLL Settings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .26
2.5.1 Boot Device Field . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .26
2.5.2 Device Configuration Field . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .27
2.5.3 PLL Boot Configuration Settings. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .31
2.6 Second-Level Bootloaders . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .31
2.7 Terminals . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .32
2.8 Terminal Functions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .32
2.9 Development . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .58
2.9.1 Development Support . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .58
2.9.2 Device Support . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .58
3 Device Configuration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .61
3.1 Device Configuration at Device Reset . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .61
3.2 Peripheral Selection After Device Reset. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .61
3.3 Device State Control Registers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .62
3.3.1 Device Status Register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .64
3.3.2 Device Configuration Register. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .65
3.3.3 JTAG ID (JTAGID) Register Description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .65
3.3.4 Kicker Mechanism (KICK0 and KICK1) Register. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .66
3.3.5 LRESETNMI PIN Status (LRSTNMIPINSTAT) Register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .66
3.3.6 LRESETNMI PIN Status Clear (LRSTNMIPINSTAT_CLR) Register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .67
3.3.7 Reset Status (RESET_STAT) Register. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .67
3.3.8 Reset Status Clear (RESET_STAT_CLR) Register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .68
3.3.9 Boot Complete (BOOTCOMPLETE) Register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .68
3.3.10 Power State Control (PWRSTATECTL) Register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .69
3.3.11 NMI Even Generation to CorePac (NMIGRx) Register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .70
3.3.12 IPC Generation (IPCGRx) Registers. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .70
3.3.13 IPC Acknowledgement (IPCARx) Registers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .71
3.3.14 IPC Generation Host (IPCGRH) Register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .71
3.3.15 IPC Acknowledgement Host (IPCARH) Register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .72
3.3.16 Timer Input Selection Register (TINPSEL) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .73
3.3.17 Timer Output Selection Register (TOUTPSEL) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .73
3.3.18 Reset Mux (RSTMUXx) Register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .74
3.4 Pullup/Pulldown Resistors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .76
4 System Interconnect. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .77
4.1 Internal Buses, Bridges, and Switch Fabrics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .77
4.2 Data Switch Fabric Connections. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .78
4.3 Configuration Switch Fabric . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .80
4.4 Bus Priorities . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .80
5 C66x CorePac . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .81
5.1 Memory Architecture . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .82
5.1.1 L1P Memory . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .82
5.1.2 L1D Memory. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .83
5.1.3 L2 Memory . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .83
5.1.4 MSMC SRAM. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .84
5.1.5 L3 Memory . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .85
5.2 Memory Protection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .85
Copyright 2010 Texas Instruments Incorporated Contents 3
Page 4

TMS320C6672
Multicore Fixed and Floating-Point Digital Signal Processor
SPRS708—November 2010
5.3 Bandwidth Management . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .86
5.4 Power-Down Control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .86
5.5 C66x CorePac Resets. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .86
5.6 C66x CorePac Revision. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .87
5.7 C66x CorePac Register Descriptions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .87
6 Device Operating Conditions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .89
6.1 Absolute Maximum Ratings. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .89
6.2 Recommended Operating Conditions. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .90
6.3 Electrical Characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .91
7 TMS320C6672 Peripheral Information and Electrical Specifications. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .93
7.1 Parameter Information . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .93
7.1.1 1.8-V Signal Transition Levels. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .93
7.1.2 Timing Parameters and Board Routing Analysis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .94
7.2 Recommended Clock and Control Signal Transition Behavior . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .96
7.3 Power Supplies. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .96
7.3.1 Power-Supply Sequencing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .96
7.3.2 Power-Down Sequence . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103
7.3.3 Power Supply Decoupling and Bulk Capacitors. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104
7.3.4 SmartReflex. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105
7.4 Enhanced Direct Memory Access (EDMA3) Controller . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108
7.4.1 EDMA3 Device-Specific Information . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109
7.4.2 EDMA3 Channel Synchronization Events. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109
7.4.3 EDMA3 Peripheral Register Description(s). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113
7.5 Interrupts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 165
7.5.1 Interrupt Sources and Interrupt Controller . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 165
7.5.2 INTC Registers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 178
7.5.3 Inter-Processor Register Map . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 184
7.5.4 External Interrupts Electrical Data/Timing. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 185
7.6 MPU . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 186
7.6.1 MPU Registers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 187
7.6.2 MPU Programmable Range Registers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 191
7.7 Reset Controller . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 200
7.7.1 Power-on Reset . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 200
7.7.2 Hard Reset. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 201
7.7.3 Soft Reset. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 202
7.7.4 Local Reset . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 203
7.7.5 Reset Priority . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 203
7.7.6 Reset Controller Register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 203
7.7.7 Reset Electrical Data / Timing. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 203
7.8 Main PLL and PLL Controller . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 207
7.8.1 Main PLL Controller Device-Specific Information . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 208
7.8.2 PLL Controller Memory Map. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 209
7.8.3 Main PLL Control Register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 216
7.8.4 Main PLL Controller/SRIO/HyperLink/PCIe Clock Input Electrical Data/Timing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 216
7.9 DD3 PLL. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 220
7.9.1 DDR3 PLL Control Register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 220
7.9.2 DDR3 PLL Device-Specific Information. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 221
7.9.3 DDR3 PLL Input Clock Electrical Data/Timing. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 221
7.10 PASS PLL. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 222
7.10.1 PASS PLL Control Register. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 222
7.10.2 PASS PLL Device-Specific Information . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 223
7.11 DDR3 Memory Controller. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 224
7.11.1 DDR3 Memory Controller Device-Specific Information . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 224
7.11.2 DDR3 Memory Controller Electrical Data/Timing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 225
2
7.12 I
C Peripheral . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 225
7.12.1 I2C Device-Specific Information . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 225
7.12.2 I
7.12.3 I
2
C Peripheral Register Description(s). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 226
2
C Electrical Data/Timing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 227
www.ti.com
4 Contents Copyright 2010 Texas Instruments Incorporated
Page 5

TMS320C6672
Multicore Fixed and Floating-Point Digital Signal Processor
www.ti.com
7.13 SPI Peripheral . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 230
7.13.1 SPI Electrical Data/Timing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 230
7.14 HyperLink Peripheral . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 233
7.15 UART Peripheral. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 235
7.16 PCIe Peripheral. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 236
7.17 TSIP Peripheral . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 236
7.18 EMIF16 Peripheral . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 236
7.19 Packet Accelerator . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 237
7.20 Security Accelerator . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 237
7.21 Ethernet MAC (EMAC) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 238
7.22 Management Data Input/Output (MDIO). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 239
7.23 Timers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 240
7.23.1 Timers Device-Specific Information. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 240
7.23.2 Timers Electrical Data/Timing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 240
7.24 Serial RapidIO (SRIO) Port. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 241
7.25 General-Purpose Input/Output (GPIO) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 242
7.25.1 GPIO Device-Specific Information . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 242
7.25.2 GPIO Electrical Data/Timing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 242
7.26 Semaphore2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 242
7.27 Emulation Features and Capability. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 243
7.27.1 Advanced Event Triggering (AET) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 243
7.27.2 Trace . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 243
7.27.3 IEEE 1149.1 JTAG . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 244
8 Mechanical Data . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 247
8.1 Thermal Data. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 247
8.2 Packaging Information . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 247
8.3 Package CYP . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 248
SPRS708—November 2010
Copyright 2010 Texas Instruments Incorporated Contents 5
Page 6
TMS320C6672
Multicore Fixed and Floating-Point Digital Signal Processor
SPRS708—November 2010
www.ti.com
List of Figures
Figure 1-1 Functional Block Diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .14
Figure 2-1 TMS320C6672 DSP Core Data Paths. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .18
Figure 2-2 Boot Mode Pin Decoding . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .26
Figure 2-3 Sleep / EMIF16 Configuration Bit Fields. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .27
Figure 2-4 Ethernet (SGMII) Device Configuration Bit Fields. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .27
Figure 2-5 Serial Rapid I/O Device Configuration Bit Fields. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .28
Figure 2-6 PCI Device Configuration Bit Fields. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .28
Figure 2-7 I
Figure 2-8 I
Figure 2-9 SPI Device Configuration Bit Fields . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .30
Figure 2-10 HyperLink Boot Device Configuration Fields. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .31
Figure 2-11 CYP 841-Pin BGA Package Bottom View . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .32
Figure 3-1 Device Status Register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .64
Figure 3-2 Device Configuration Register (DEVCFG) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .65
Figure 3-3 JTAG ID (JTAGID) Register. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .65
Figure 3-4 LRESETNMI PIN Status Register (LRSTNMIPINSTAT) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .66
Figure 3-5 LRESETNMI PIN Status Clear Register (LRSTNMIPINSTAT_CLR) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .67
Figure 3-6 Reset Status Register (RESET_STAT) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .67
Figure 3-7 Reset Status Clear Register (RESET_STAT_CLR). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .68
Figure 3-8 Boot Complete Register (BOOTCOMPLETE) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .68
Figure 3-9 Power State Control Register (PWRSTATECTL) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .69
Figure 3-10 NMI Generation Register (NMIGRx). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .70
Figure 3-11 IPC Generation Registers (IPCGRx) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .70
Figure 3-12 IPC Acknowledgement Registers (IPCARx). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .71
Figure 3-13 IPC Generation Registers (IPCGRH) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .72
Figure 3-14 IPC Acknowledgement Register (IPCARH) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .72
Figure 3-15 Timer Input Selection Register (TINPSEL) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .73
Figure 3-16 Timer Output Selection Register (TOUTPSEL) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .73
Figure 3-17 Reset Mux Register RSTMUXx . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .74
Figure 4-1 Packed DMA Priority Allocation Register (PKTDMA_PRI_ALLOC). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .80
Figure 5-1 C66x CorePac Block Diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .81
Figure 5-2 TMS320C6672 L1P Memory Configurations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .82
Figure 5-3 TMS320C6672 L1D Memory Configurations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .83
Figure 5-4 TMS320C6672 L2 Memory Configurations. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .84
Figure 7-1 Test Load Circuit for AC Timing Measurements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .93
Figure 7-2 Input and Output Voltage Reference Levels for AC Timing Measurements. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .93
Figure 7-3 Rise and Fall Transition Time Voltage Reference Levels. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .94
Figure 7-4 Board-Level Input/Output Timings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .95
Figure 7-5 POR
Figure 7-6 POR
Figure 7-7 RESETFULL
Figure 7-8 RESETFULL
Figure 7-9 SmartReflex 4-Pin VID Interface Timing. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .105
Figure 7-10 SmartReflex I
Figure 7-11 SmartReflex I
Figure 7-12 TMS320C6672 Interrupt Topology . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .166
Figure 7-13 NMI and Local Reset Timing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .185
Figure 7-14 Configuration Register (CONFIG). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .191
Figure 7-15 Programmable Range n Start Address Register (PROGn_MPSAR) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .192
Figure 7-16 Programmable Range n End Address Register (PROGn_MPEAR). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .194
Figure 7-17 Programmable Range n Memory Protection Page Attribute Register (PROGn_MPPA) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .197
2
C Master Mode Device Configuration Bit Fields . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .29
2
C Passive Mode Device Configuration Bit Fields . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .30
-Controlled Power Sequencing — Core Before IO. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .98
-Controlled Power Sequencing — IO Before Core. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .99
-Controlled Device Initialization — Core Before IO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .101
-Controlled Device Initialization — IO Before Core . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .102
2
C Interface Receive Timings. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .106
2
C Interface Transmit Timings. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .107
6 List of Figures Copyright 2010 Texas Instruments Incorporated
Page 7

TMS320C6672
Multicore Fixed and Floating-Point Digital Signal Processor
www.ti.com
Figure 7-18 Power-On Reset Timing. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .204
Figure 7-19 Full-Reset Timing. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .204
Figure 7-20 Hard-Reset Timing. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .205
Figure 7-21 Soft-Reset Timing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .205
Figure 7-22 Boot Configuration Timing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .205
Figure 7-23 Main PLL and PLL Controller . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .207
Figure 7-24 PLL Secondary Control Register (SECCTL)) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .211
Figure 7-25 PLL Controller Divider Register (PLLDIVn) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .211
Figure 7-26 PLL Controller Clock Align Control Register (ALNCTL) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .212
Figure 7-27 PLLDIV Divider Ratio Change Status Register (DCHANGE) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .212
Figure 7-28 SYSCLK Status Register (SYSTAT) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .213
Figure 7-29 Reset Type Status Register (RSTYPE). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .213
Figure 7-30 Reset Control Register (RSTCTRL) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .214
Figure 7-31 Reset Configuration Register (RSTCFG) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .215
Figure 7-32 Reset Isolation Register (RSISO) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .215
Figure 7-33 Main PLL Control Register (MAINPLLCTL). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .216
Figure 7-34 Main PLL Controller/SRIO/HyperLink/PCIe Clock Input Timing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .218
Figure 7-35 PLL Transition Time. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .219
Figure 7-36 DDR3 PLL Block Diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .220
Figure 7-37 DDR3 PLL Control Register (DDR3PLLCTL) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .220
Figure 7-38 DDR3 PLL DDRCLK Timing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .221
Figure 7-39 PASS PLL Block Diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .222
Figure 7-40 PASS PLL Control Register (PASSPLLCTL) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .222
Figure 7-41 PASS PLL Timing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .223
Figure 7-42 I
Figure 7-43 I
Figure 7-44 I
2
C Module Block Diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .226
2
C Receive Timings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .228
2
C Transmit Timings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .229
Figure 7-45 SPI Master Mode Timing Diagrams — Base Timings for 3 Pin Mode. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .232
Figure 7-46 SPI Additional Timings for 4 Pin Master Mode with Chip Select Option . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .232
Figure 7-47 HyperLink Station Management Clock Timing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .234
Figure 7-48 HyperLink Station Management Transmit Timing. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .234
Figure 7-49 HyperLink Station Management Receive Timing. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .234
Figure 7-50 UART Receive Timing Waveform . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .235
Figure 7-51 UART CTS (Clear-to-Send Input) — Autoflow Timing Waveform . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .235
Figure 7-52 UART Transmit Timing Waveform . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .236
Figure 7-53 UART RTS (Request-to-Send Output) — Autoflow Timing Waveform . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .236
Figure 7-54 MACID1 Register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .238
Figure 7-55 MACID2 Register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .238
Figure 7-56 MDIO Input Timing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .239
Figure 7-57 MDIO Output Timing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .239
Figure 7-58 Timer Timing. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .241
Figure 7-59 GPIO Timing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .242
Figure 7-60 Trace Timing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .244
Figure 7-61 JTAG Test-Port Timing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .245
Figure 7-62 HS-RTDX Timing. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .245
Figure 8-1 CYP (S–PBGA–N841) Pb-Free Plastic Ball Grid Array . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .248
SPRS708—November 2010
Copyright 2010 Texas Instruments Incorporated List of Figures 7
Page 8
TMS320C6672
Multicore Fixed and Floating-Point Digital Signal Processor
SPRS708—November 2010
www.ti.com
List of Tables
Table 2-1 Characteristics of the TMS320C6672 Processor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .15
Table 2-2 Memory Map Summary for TMS320C6672. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .19
Table 2-3 Boot Mode Pins: Boot Device Values . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .26
Table 2-4 Sleep / EMIF16 Configuration Bit Field Descriptions. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .27
Table 2-5 Ethernet (SGMII) Configuration Bit Field Descriptions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .27
Table 2-6 Serial Rapid I/O Configuration Bit Field Descriptions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .28
Table 2-7 PCI Device Configuration Bit Field Descriptions. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .28
Table 2-8 BAR Config / PCIe Window Sizes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .29
Table 2-9 I
Table 2-10 I
Table 2-11 SPI Device Configuration Field Descriptions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .30
Table 2-12 HyperLink Boot Device Configuration Field Descriptions. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .31
Table 2-13 C66x DSP System PLL Configuration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .31
Table 2-14 I/O Functional Symbol Definitions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .32
Table 2-15 Terminal Functions — Signals and Control by Function. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .33
Table 2-16 Terminal Functions — Power and Ground. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .45
Table 2-17 Terminal Functions — By Signal Name . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .46
Table 2-18 Terminal Functions
Table 3-1 TMS320C6672 Device Configuration Pins. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .61
Table 3-2 Device State Control Registers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .62
Table 3-3 Device Status Register Field Descriptions. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .64
Table 3-4 Device Configuration Register Field Descriptions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .65
Table 3-5 JTAG ID Register Field Descriptions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .66
Table 3-6 LRESETNMI PIN Status Register (LRSTNMIPINSTAT) Field Descriptions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .66
Table 3-7 LRESETNMI PIN Status Clear Register (LRSTNMIPINSTAT_CLR) Field Descriptions. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .67
Table 3-8 Reset Status Register (RESET_STAT) Field Descriptions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .67
Table 3-9 Reset Status Clear Register (RESET_STAT_CLR) Field Descriptions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .68
Table 3-10 Boot Complete Register (BOOTCOMPLETE) Field Descriptions. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .69
Table 3-11 Power State Control Register (PWRSTATECTL) Field Descriptions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .69
Table 3-12 NMI Generation Register (NMIGRx) Field Descriptions. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .70
Table 3-13 IPC Generation Registers (IPCGRx) Field Descriptions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .71
Table 3-14 IPC Acknowledgement Registers (IPCARx) Field Descriptions. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .71
Table 3-15 IPC Generation Registers (IPCGRH) Field Descriptions. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .72
Table 3-16 IPC Acknowledgement Register (IPCARH) Field Descriptions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .72
Table 3-17 Timer Input Selection Field Description (TINPSEL) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .73
Table 3-18 Timer Output Selection Field Description (TOUTPSEL) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .74
Table 3-19 Reset Mux Register Field Descriptions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .74
Table 4-1 DSP/2 Data SCR Connection Matrix . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .78
Table 4-2 DSP/3 Data SCR Connection Matrix . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .78
Table 4-3 Packed DMA Priority Allocation Register (PKTDMA_PRI_ALLOC) Field Descriptions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .80
Table 5-1 Available Memory Page Protection Schemes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .85
Table 5-2 C66x CorePac Reset (Global or Local). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .86
Table 5-3 CorePac Revision ID Register (MM_REVID) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .87
Table 5-4 CorePac Revision ID Register (MM_REVID) Field Descriptions. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .87
Table 6-1 Absolute Maximum Ratings. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .89
Table 6-2 Recommended Operating Conditions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .90
Table 6-3 Electrical Characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .91
Table 7-1 Board-Level Timing Example. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .94
Table 7-2 Power Supply Rails on TMS320C6672 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .96
Table 7-3 POR
2
C Master Mode Device Configuration Field Descriptions. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .29
2
C Passive Mode Device Configuration Field Descriptions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .30
— By Ball Number . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .51
-Controlled Power Sequencing — Core Before IO. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .98
8 List of Tables Copyright 2010 Texas Instruments Incorporated
Page 9

TMS320C6672
Multicore Fixed and Floating-Point Digital Signal Processor
www.ti.com
Table 7-4 POR-Controlled Power Sequencing — IO Before Core. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .100
Table 7-5 RESETFULL
Table 7-6 RESETFULL
-Controlled Device Initialization — Core Before IO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .101
-Controlled Device Initialization — IO Before Core . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .103
Table 7-7 Clock Sequencing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .104
Table 7-8 SmartReflex 4-Pin VID Interface Switching Characteristics. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .105
Table 7-9 SmartReflex I
Table 7-10 SmartReflex I
2
C Interface Timing Requirements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .105
2
C Interface Switching Characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .106
Table 7-11 EDMA3 Parameter RAM Contents . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .109
Table 7-12 TPCC0 Events for C6672 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .110
Table 7-13 TPCC1 Events for C6672 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .110
Table 7-14 TPCC3 Events for C6672 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .112
Table 7-15 EDMA3 Channel Controller 0 Registers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .113
Table 7-16 EDMA3 Channel Controller 1 Registers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .124
Table 7-17 EDMA3 Channel Controller 2 Registers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .137
Table 7-18 EDMA3 Channel Controller 0 Parameter RAM. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .150
Table 7-19 EDMA3 Channel Controller 1 Parameter RAM. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .150
Table 7-20 EDMA3 Channel Controller 2 Parameter RAM. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .151
Table 7-21 EDMA3 TPCC0 Transfer Controller 0 Registers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .151
Table 7-22 EDMA3 TPCC0 Transfer Controller 1 Registers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .153
Table 7-23 EDMA3 TPCC 1 Transfer Controller 0 Registers. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .154
Table 7-24 EDMA3 TPCC1 Transfer Controller 1 Registers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .155
Table 7-25 EDMA3 TPCC1 Transfer Controller 2 Registers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .157
Table 7-26 EDMA3 TPCC1 Transfer Controller 3 Registers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .158
Table 7-27 EDMA3 TPCC2 Transfer Controller 0 Registers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .160
Table 7-28 EDMA3 TPCC2 Transfer Controller 1 Registers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .161
Table 7-29 EDMA3 TPCC2 Transfer Controller 2 Registers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .162
Table 7-30 EDMA3 TPCC2 Transfer Controller 3 Registers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .164
Table 7-31 TMS320C6672 System Event Mapping — C66x CorePac Primary Interrupts. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .166
Table 7-32 INTC0 Event Inputs (Secondary Interrupts for C66x CorePacs) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .170
Table 7-33 INTC2 Event Inputs (Secondary Events for TPCC1 and TPCC2) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .173
Table 7-34 INTC3 Event Inputs (Secondary Events for TPCC0 and HyperLink) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .177
Table 7-35 INTC0/INTC1 Register. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .178
Table 7-36 INTC2 Register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .181
Table 7-37 INTC3 Register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .183
Table 7-38 IPC Generation Registers (IPCGRx) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .184
Table 7-39 NMI and Local Reset Timing Requirements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .185
Table 7-40 MPU Default Configuration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .186
Table 7-41 MPU Memory Regions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .186
Table 7-42 Device Master Settings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .186
Table 7-43 MPU0 Registers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .187
Table 7-44 MPU1 Registers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .188
Table 7-45 MPU2 Registers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .189
Table 7-46 MPU3 Registers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .190
Table 7-47 Configuration Register (CONFIG) Field Descriptions. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .191
Table 7-48 Programmable Range n Start Address Register (PROGn_MPSAR) Field Descriptions (MPU0). . . . . . . . . . . . . . . . . . . . . . . .192
Table 7-49 Programmable Range n Start Address Register (PROGn_MPSAR) Field Descriptions (MPU1) . . . . . . . . . . . . . . . . . . . . . . . .193
Table 7-50 Programmable Range n Start Address Register (PROGn_MPSAR) Field Descriptions (MPU2) . . . . . . . . . . . . . . . . . . . . . . . .193
Table 7-51 Programmable Range n Start Address Register (PROGn_MPSAR) Field Descriptions (MPU3). . . . . . . . . . . . . . . . . . . . . . . .194
Table 7-52 Programmable Range n End Address Register (PROGn_MPEAR) Field Descriptions (MPU0). . . . . . . . . . . . . . . . . . .
Table 7-53 Programmable Range n End Address Register (PROGn_MPEAR) Field Descriptions (MPU1) . . . . . . . . . . . . . . . . . . . . . . . .195
Table 7-54 Programmable Range n End Address Register (PROGn_MPEAR) Field Descriptions (MPU2). . . . . . . . . . . . . . . . . . . . . . . . .195
Table 7-55 Programmable Range n End Address Register (PROGn_MPEAR) Field Descriptions (MPU3) . . . . . . . . . . . . . . . . . . . . . . . .196
Table 7-56 Programmable Range n Memory Protection Page Attribute Register (PROGn_MPPA) Field Descriptions. . . . . . . . . . . .197
Table 7-57 Programmable Range n Memory Protection Page Attribute Register (PROGn_MPPA) Reset Values . . . . . . . . . . . . . . . . .199
SPRS708—November 2010
. . . . . .194
Copyright 2010 Texas Instruments Incorporated List of Tables 9
Page 10

TMS320C6672
Multicore Fixed and Floating-Point Digital Signal Processor
SPRS708—November 2010
Table 7-58 Reset Types . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .200
Table 7-59 Reset Timing Requirements. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .203
Table 7-60 Reset Switching Characteristics Over Recommended Operating Conditions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .204
Table 7-61 Boot Configuration Timing Requirements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .205
Table 7-62 Main PLL Stabilization, Lock, and Reset Times . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .209
Table 7-63 PLL Controller Registers (Including Reset Controller). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .210
Table 7-64 PLL Secondary Control Register (SECCTL) Field Descriptions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .211
Table 7-65 PLL Controller Divider Register (PLLDIVn) Field Descriptions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .211
Table 7-66 PLL Controller Clock Align Control Register (ALNCTL) Field Descriptions. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .212
Table 7-67 PLLDIV Divider Ratio Change Status Register (DCHANGE) Field Descriptions. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .213
Table 7-68 SYSCLK Status Register (SYSTAT) Field Descriptions. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .213
Table 7-69 Reset Type Status Register (RSTYPE) Field Descriptions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .214
Table 7-70 Reset Control Register (RSTCTRL) Field Descriptions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .214
Table 7-71 Reset Configuration Register (RSTCFG) Field Descriptions. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .215
Table 7-72 Reset Isolation Register (RSISO) Field Descriptions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .216
Table 7-73 Main PLL Control Register Field Descriptions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .216
Table 7-74 Main PLL Controller/SRIO/HyperLink/PCIe Clock Input Timing Requirements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .217
Table 7-75 DDR3 PLL Control Register Field Descriptions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .220
Table 7-76 DDR3 PLL DDRREFCLK(N|P) Timing Requirements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .221
Table 7-77 PASS PLL Control Register Field Descriptions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .222
Table 7-78 PASS PLL Timing Requirements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .223
Table 7-79 I
Table 7-80 I
Table 7-81 I
2
C Registers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .226
2
C Timing Requirements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .227
2
C Switching Characteristics. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .228
Table 7-82 SPI Timing Requirements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .230
Table 7-83 SPI Switching Characteristics. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .230
Table 7-84 HyperLink Peripheral Timing Requirements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .233
Table 7-85 HyperLink Peripheral Switching Characteristics. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .233
Table 7-86 UART Timing Requirements. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .235
Table 7-87 UART Switching Characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .236
Table 7-88 MACID1 Register Field Descriptions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .238
Table 7-89 MACID2 Register Field Descriptions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .238
Table 7-90 MDIO Timing Requirements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .239
Table 7-91 MDIO Switching Characteristics. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .239
Table 7-92 Timer Input Timing Requirements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .240
Table 7-93 Timer Output Switching Characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .240
Table 7-94 GPIO Input Timing Requirements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .242
Table 7-95 GPIO Output Switching Characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .242
Table 7-96 Trace Switching Characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .243
Table 7-97 JTAG Test Port Timing Requirements. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .244
Table 7-98 JTAG Test Port Switching Characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .244
Table 7-99 HS-RTDX Switching Characteristics. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .245
Table 8-1 Thermal Resistance Characteristics (PBGA Package) [CMH/GMH] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .247
www.ti.com
10 List of Tables Copyright 2010 Texas Instruments Incorporated
Page 11

www.ti.com
1Features
TMS320C6672
Multicore Fixed and Floating-Point Digital Signal Processor
SPRS708—November 2010
• Two TMS320C66x™ DSP Core Subsystems (C66x
CorePacs), Each with
– 1.25 GHz C66x Fixed/Floating-Point CPU Core
› 40 GMAC/Core for Fixed Point @ 1.25 GHz
› 20 GFLOP/Core for Floating Point @ 1.25 GHz
–Memory
› 32K Byte L1P Per Core
› 32K Byte L1D Per Core
› 512K Byte Local L2 Per Core
• Multicore Shared Memory Controller (MSMC)
– 4096 KB MSM SRAM Memory Shared by Two DSP
C66x CorePacs
– Memory Protection Unit for Both MSM SRAM and
DDR3_EMIF
• Multicore Navigator
– 8192 Multipurpose Hardware Queues with Queue
Manager
– Packet-Based DMA for Zero-Overhead Transfers
• Network Coprocessors
– Packet Accelerator Enables Support for
› Transport Plane IPsec, GTP-U, SCTP, PDCP
› L2 User Plane PDCP (RoHC, Air Ciphering)
› 1 Gbps Wire Speed Throughput at 1.5M Packets
Per Second
– Security Accelerator Engine Enables Support for
› IPSec, SRTP, 3GPP, WiMAX Air Interface, and
SSL/TLS Security
› ECB, CBC, CTR, F8, A5/3, CCM, GCM, HMAC,
CMAC, GMAC, AES, DES, 3DES, Kasumi, SNOW
3G, SHA-1, SHA-2 (256-bit Hash), MD5
› Up to 2.8 Gbps Encryption Speed
• Peripherals
– Four Lanes of SRIO 2.1
› 1.24/2.5/3.125/5 GBaud Operation Supported
Per Lane
› Supports Direct I/O, Message Passing
› Supports Four 1×, Two 2×, One 4×, and Two 1x +
One 2x Link Configurations
– Two Lanes PCIe Gen2
› Supports Up To 5 GBaud Per Lane
–HyperLink
› Supports Connections to Other KeyStone
Architecture Devices Providing Resource
Scalability
› Supports up to 50 Gbaud
– Ethernet MAC Subsystem (EMAC)
›Two SGMII Ports
› Supports 10/100/1000 Mbps operation
– 64-Bit DDR3 Interface (DDR3-1600)
› 8G Byte Addressable Memory Space
–16-Bit EMIF
› Support For Up To 256MB NAND Flash and
16MB NOR Flash
› Support For Asynchronous SRAM up to 1MB
– Two Telecom Serial Ports (TSIP)
› Supports 1024 DS0s Per TSIP
› Supports 2/4/8 Lanes at 32.768/16.384/8.192
Mbps Per Lane
–UART Interface
2
–I
C Interface
–16 GPIO Pins
–SPI Interface
– Semaphore Module
– Four 64-Bit Timers
– Three On-Chip PLLs
• Commercial Temperature:
– 0°C to 100°C
• Extended Temperature:
– - 40°C to 105°C
ADVANCE INFORMATION
Copyright 2010 Texas Instruments Incorporated
Page 12

TMS320C6672
Multicore Fixed and Floating-Point Digital Signal Processor
SPRS708—November 2010
1.1 KeyStone Architecture
TI’s KeyStone Multicore Architecture provides a high performance structure for integrating RISC and DSP cores
with application specific coprocessors and I/O. KeyStone is the first of its kind that provides adequate internal
bandwidth for nonblocking access to all processing cores, peripherals, coprocessors, and I/O. This is achieved with
four main hardware elements: Multicore Navigator, TeraNet, Multicore Shared Memory Controller, and
HyperLink.
Multicore Navigator is an innovative packet-based manager that controls 8192 queues. When tasks are allocated to
the queues, Multicore Navigator provides hardware-accelerated dispatch that directs tasks to the appropriate
available hardware. The packet-based system on a chip (SoC) uses the two Tbps capacity of the TeraNet switched
ADVANCE INFORMATION
central resource to move packets. The Multicore Shared Memory Controller enables processing cores to access
shared memory directly without drawing from TeraNet’s capacity, so packet movement cannot be blocked by
memory access.
HyperLink provides a 50-Gbps chip-level interconnect that allows SoCs to work in tandem. Its low-protocol
overhead and high throughput make Hyperlink an ideal interface for chip-to-chip interconnections. Working with
Multicore Navigator, HyperLink dispatches tasks to tandem devices transparently and executes tasks as if they are
running on local resources.
1.2 Device Description
www.ti.com
The TMS320C6672 DSP is a highest-performance fixed/floating-point DSP that is based on TI's KeyStone multicore
architecture. Integrated with the new and innovative C66x DSP core, this device can run at a core speed of up to 1.25
GHz. For developers of a broad range of applications, such as mission critical, medical imaging, test and automation
and other applications requiring high performance, TI's TMS320C6672 DSP offers 2.5 GHz cumulative DSP and
enables a platform that is power efficient and easy to use. In addition, it is fully backward compatible with all existing
C6000 family of fixed and floating point DSPs.
TI's Keystone architecture provides a programmable platform integrating various subsystems (C66x cores, Memory
subsystem, Peripherals and accelerators) and uses several innovative components and techniques to maximize intra
device and inter device communication that allows the various DSP resources to operate efficiently and seamlessly.
Central to this architecture are key components such as Multicore navigator that allow for efficient data
management between the various chip components, Teranet switch fabric that is a 2 TB non-blocking switch fabric
enabling fast and contention free internal data movement, as well as the Multicore shared memory controller that
allows access to shared and external memory directly without drawing from switch fabric capacity.
For fixed point use, the C66x core has 4X the multiply accumulate (MAC) capability of current generation C64x+
cores. In addition, the C66x core integrates floating point capability and the per core raw computational
performance is an industry-leading 32 MACS/cycle and 16 flops/cycle. It can execute 8 single precision floating
point MAC operations per cycle and can perform double and mixed precision operations and is IEEE754 compliant.
The C66x core incorporates 90 new instructions targeted for floating point and vector math oriented processing,
compared to the C64x+ core. These enhancements yield sizeable performance improvements in popular DSP
kernels used in signal processing, mathematical, and image acquisition functions. The C66x core is backwards code
compatible with TI's previous generation C6000 fixed and floating point DSP cores, ensuring software portability
and shortened software development cycles for applications migrating to faster hardware.
The C6672 DSP integrates a large amount of on-chip memory. In addition to 32KB of L1 program and data cache,
there is 512KB of dedicated memory per core that can be configured as mapped RAM or cache. The device also
integrates 4096KB of Multicore Shared Memory that can be used as a shared L2 SRAM and/or shared L3 SRAM. All
L2 memories incorporate error detection and error correction. For fast access to external memory this device
includes 64 bit DDR-3 running at 1600MHz and has ECC DRAM support.
12 Copyright 2010 Texas Instruments Incorporated
Page 13

TMS320C6672
Multicore Fixed and Floating-Point Digital Signal Processor
www.ti.com
This family supports a plethora of high speed standard interfaces including RapidIO ver 2, PCI Express Gen2 and
Gigabit Ethernet, as well as an integrated Ethernet switch. It also includes I
and a 16 bit EMIF interface, along with general purpose CMOS IO. For high throughput, low latency
communication between devices or with an FPGA, this device also sports a 50Gbps FD interface called Hyperlink.
Adding to the network awareness of this device is a network co-processor which includes both packet and optional
security acceleration. The packet accelerator can process up to 1.5 M packets/s and enables a single IP address to be
used for the entire multicore C6672 device. It also provides L2 to L4 classification, along with checksum and QoS
capabilities.
The C6672 device has a complete set of development tools, which includes: an enhanced C compiler, an assembly
optimizer to simplify programming and scheduling, and a Windows® debugger interface for visibility into source
code execution.
2
C, UART, Telecom Serial Port (TSIP)
SPRS708—November 2010
ADVANCE INFORMATION
Copyright 2010 Texas Instruments Incorporated 13
Page 14
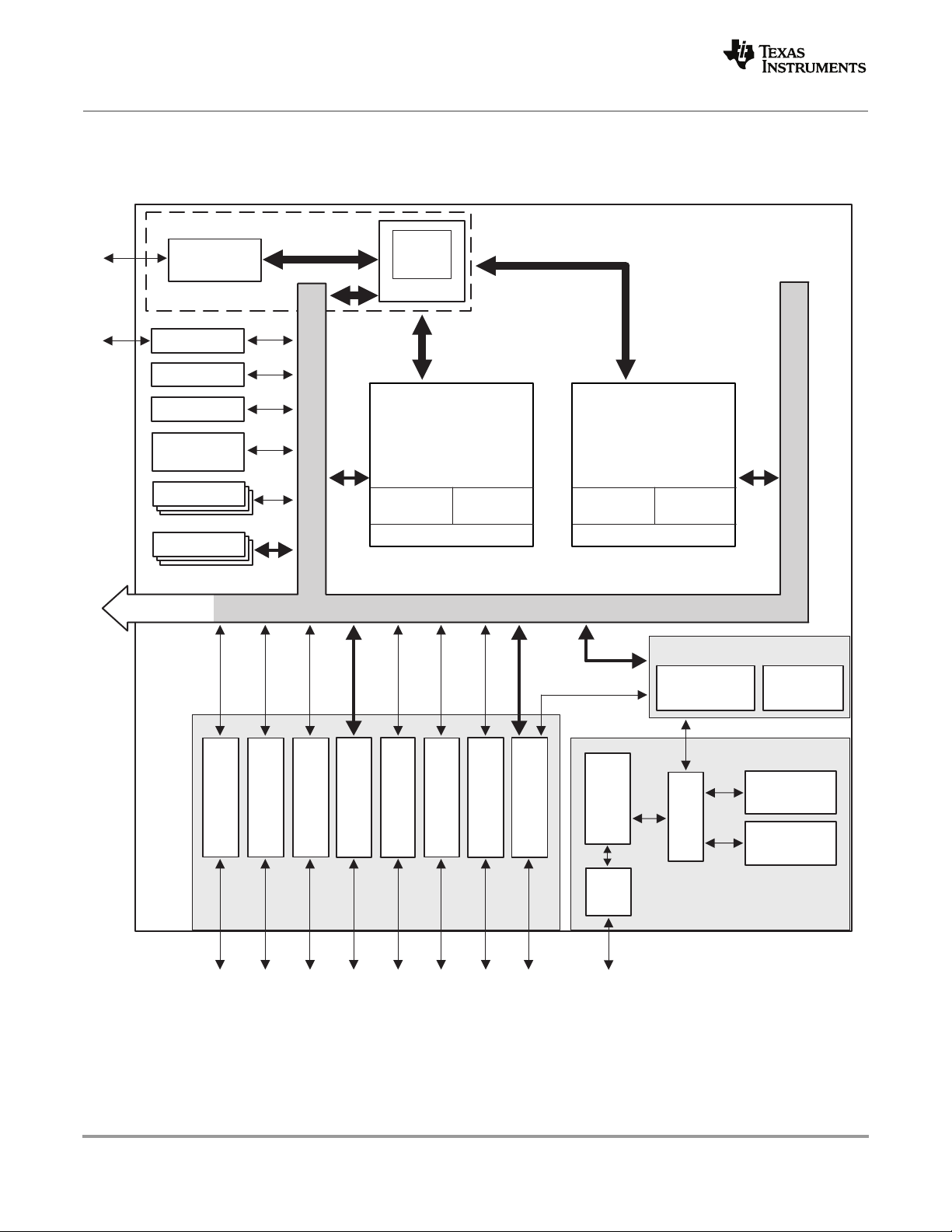
TMS320C6672
Multicore Fixed and Floating-Point Digital Signal Processor
SPRS708—November 2010
1.3 Functional Block Diagram
Figure 1-1 shows the functional block diagram of the TMS320C6672 device.
Figure 1-1 Functional Block Diagram
www.ti.com
Memory Subsystem
64-Bit
DDR3 EMIF
SRAM
MSMC
ADVANCE INFORMATION
Debug & Trace
Boot ROM
Semaphore
Power
Management
PLL
´3
EDMA
´3
HyperLink
32KB L1
P-Cache
512KB L2 Cache
4MB
MSM
C66x™
CorePac
32KB L1
D-Cache
2 Cores @ up to 1.25 GHz
TeraNet
TeraNet
C66x™
CorePac
32KB L1
P-Cache
512KB L2 Cache
C6672
32KB L1
D-Cache
Multicore Navigator
EMIF 16
GPIO
2
IC
Queue
Manager
2
´
SPI
UART
PCIe 2
´
TSIP
´
Switch
SRIO 4
Ethernet
2
´
SGMII
Network Coprocessor
Switch
Packet
DMA
Security
Accelerator
Packet
Accelerator
14 Copyright 2010 Texas Instruments Incorporated
Page 15
TMS320C6672
Multicore Fixed and Floating-Point Digital Signal Processor
www.ti.com
SPRS708—November 2010
2 Device Overview
2.1 Device Characteristics
Table 2-1 provides an overview of the TMS320C6672 DSP. The table shows significant features of the device,
including the capacity of on-chip RAM, the peripherals, the DSP frequency, and the package and pin count.
Table 2-1 Characteristics of the TMS320C6672 Processor
HARDWARE FEATURES TMS320C6672
DDR3 Memory Controller (64-bit bus width) [1.5 V I/O]
(clock source = DDRREFCLKN|P)
EDMA3 (16 independent channels) [DSP/2 clock rate] 1
EDMA3 (64 independent channels) [DSP/3 clock rate] 2
High-speed 1×/2x/4× Serial RapidIO Port (4 lanes) 1
PCIe (2 lanes) 1
10/100/1000 Ethernet MAC (EMAC) 2
Management Data Input/Output (MDIO) 1
Peripherals
Accelerators
On-Chip Memory
C66x CorePac
Revision ID
JTAG BSDL_ID JTAGID register (address location: 0262 0018h)
Frequency MHz
Cycle Time ns 1 ns
Voltage
Process Technology μm 0.040 μm
Product Status
End of Table 2-1
1 The Crypto Accelerator function is subject to export control and will be enabled only for approved device shipments.
2 PRODUCT PREVIEW information concerns experimental products (designated as TMX) that are in the formative or design phase of
development. Characteristic data and other specifications are design goals. Texas Instruments reserves the right to change or
discontinue these products without notice.
(2)
HyperLink 1
EMIF16 1
TSIP 2
SPI 1
UART 1
2
C1
I
64-Bit Timers (Configurable)
(internal clock source = DSP/6 clock frequency)
General-Purpose Input/Output Port (GPIO) 16
Packet Accelerator 1
Security Accelerator
Size (Bytes) 5376KB
Organization
CorePac Revision ID Register (address location: 0181 2000h) See Section 5.6 ‘‘C66x CorePac Revision’’ on page 87.
Core (V) SmartReflex variable supply
I/O (V) 1.0 V, 1.5 V, and 1.8 V
Product Preview (PP), Advance Information (AI),
or Production Data (PD)
(1)
1
4 64-bit (each configurable as 2 32-bit timers)
1
64KB L1 Program Memory [SRAM/Cache]
64KB L1 Data Memory [SRAM/Cache]
1024KB L2 Unified Memory/Cache
4096KB MSM SRAM
128KB L3 ROM
See Section 3.3.3 ‘‘JTAG ID (JTAGID) Register
Description’’ on page 65
1250 (1.25 GHz)
1000 (1.0 GHz)
PP
ADVANCE INFORMATION
Copyright 2010 Texas Instruments Incorporated Device Overview 15
Page 16

TMS320C6672
Multicore Fixed and Floating-Point Digital Signal Processor
SPRS708—November 2010
2.2 DSP Core Description
The C66x Digital Signal Processor (DSP) extends the performance of the C64x+ and C674x DSPs through
enhancements and new features. Many of the new features target increased performance for vector processing. The
C64x+ and C674x DSPs support 2-way SIMD operations for 16-bit data and 4-way SIMD operations for 8-bit data.
On the C66x DSP, the vector processing capability is improved by extending the width of the SIMD instructions.
C66x DSPs can execute instructions that operate on 128-bit vectors. For example the QMPY32 instruction is able to
perform the element-to-element multiplication between two vectors of four 32-bit data each. The C66x DSP also
supports SIMD for floating-point operations. Improved vector processing capability (each instruction can process
multiple data in parallel) combined with the natural instruction level parallelism of C6000 architecture (e.g
execution of up to 8 instructions per cycle) results in a very high level of parallelism that can be exploited by DSP
ADVANCE INFORMATION
programmers through the use of TI's optimized C/C++ compiler.
The C66x DSP consists of eight functional units, two register files, and two data paths as shown in Figure 2-1. The
two general-purpose register files (A and B) each contain 32 32-bit registers for a total of 64 registers. The
general-purpose registers can be used for data or can be data address pointers. The data types supported include
packed 8-bit data, packed 16-bit data, 32-bit data, 40-bit data, and 64-bit data. Multiplies also support 128-bit data.
40-bit-long or 64-bit-long values are stored in register pairs, with the 32 LSBs of data placed in an even register and
the remaining 8 or 32 MSBs in the next upper register (which is always an odd-numbered register). 128-bit data
values are stored in register quadruplets, with the 32 LSBs of data placed in a register that is a multiple of 4 and the
remaining 96 MSBs in the next 3 upper registers.
www.ti.com
The eight functional units (.M1, .L1, .D1, .S1, .M2, .L2, .D2, and .S2) are each capable of executing one instruction
every clock cycle. The .M functional units perform all multiply operations. The .S and .L units perform a general set
of arithmetic, logical, and branch functions. The .D units primarily load data from memory to the register file and
store results from the register file into memory.
Each C66x .M unit can perform one of the following fixed-point operations each clock cycle: four 32 × 32 bit
multiplies, sixteen 16 × 16 bit multiplies, four 16 × 32 bit multiplies, four 8 × 8 bit multiplies, four 8 × 8 bit multiplies
with add operations, and four 16 × 16 multiplies with add/subtract capabilities. There is also support for Galois field
multiplication for 8-bit and 32-bit data. Many communications algorithms such as FFTs and modems require
complex multiplication. Each C66x .M unit can perform one 16 × 16 bit complex multiply with or without rounding
capabilities, two 16 × 16 bit complex multiplies with rounding capability, and a 32 × 32 bit complex multiply with
rounding capability. The C66x can also perform two 16 × 16 bit and one 32 × 32 bit complex multiply instructions
that multiply a complex number with a complex conjugate of another number with rounding capability.
Communication signal processing also requires an extensive use of matrix operations. Each C66x .M unit is capable
of multiplying a [1 × 2] complex vector by a [2 × 2] complex matrix per cycle with or without rounding capability.
A version also exists allowing multiplication of the conjugate of a [1 × 2] vector with a [2 × 2] complex matrix.
Each C66x .M unit also includes IEEE floating-point multiplication operations from the C674x DSP, which includes
one single-precision multiply each cycle and one double-precision multiply every 4 cycles. There is also a
mixed-precision multiply that allows multiplication of a single-precision value by a double-precision value and an
operation allowing multiplication of two single-precision numbers resulting in a double-precision number. The
C66x DSP improves the performance over the C674x double-precision multiplies by adding a instruction allowing
one double-precision multiply per cycle and also reduces the number of delay slots from 10 down to 4. Each C66x
.M unit can also perform one the following floating-point operations each clock cycle: one, two, or four
single-precision multiplies or a complex single-precision multiply.
The .L and .S units can now support up to 64-bit operands. This allows for new versions of many of the arithmetic,
logical, and data packing instructions to allow for more parallel operations per cycle. Additional instructions were
added yielding performance enhancements of the floating point addition and subtraction instructions, including the
ability to perform one double precision addition or subtraction per cycle. Conversion to/from integer and
single-precision values can now be done on both .L and .S units on the C66x. Also, by taking advantage of the larger
16 Device Overview Copyright 2010 Texas Instruments Incorporated
Page 17

TMS320C6672
Multicore Fixed and Floating-Point Digital Signal Processor
www.ti.com
operands, instructions were also added to double the number of these conversions that can be done. The .L unit also
has additional instructions for logical AND and OR instructions, as well as, 90 degree or 270 degree rotation of
complex numbers (up to two per cycle). Instructions have also been added that allow for the computing the
conjugate of a complex number.
The MFENCE instruction is a new instruction introduced on the C66x DSP. This instruction will create a DSP stall
until the completion of all the DSP-triggered memory transactions, including:
• Cache line fills
• Writes from L1D to L2 or from the CorePac to MSMC and/or other system endpoints
• Victim write backs
• Block or global coherence operations
•Cache mode changes
• Outstanding XMC prefetch requests
This is useful as a simple mechanism for programs to wait for these requests to reach their endpoint. It also provides
ordering guarantees for writes arriving at a single endpoint via multiple paths, multiprocessor algorithms that
depend on ordering, and manual coherence operations.
For more details on the C66x DSP and its enhancements over the C64x+ and C674x architectures, see the following
documents:
• C66x CPU and Instruction Set Reference Guide (literature number SPRUGH7)
• C66x DSP Cache User Guide (literature number SPRUGY8)
• C66x CorePac User Guide (literature number SPRUGW0)
SPRS708—November 2010
ADVANCE INFORMATION
Copyright 2010 Texas Instruments Incorporated Device Overview 17
Page 18
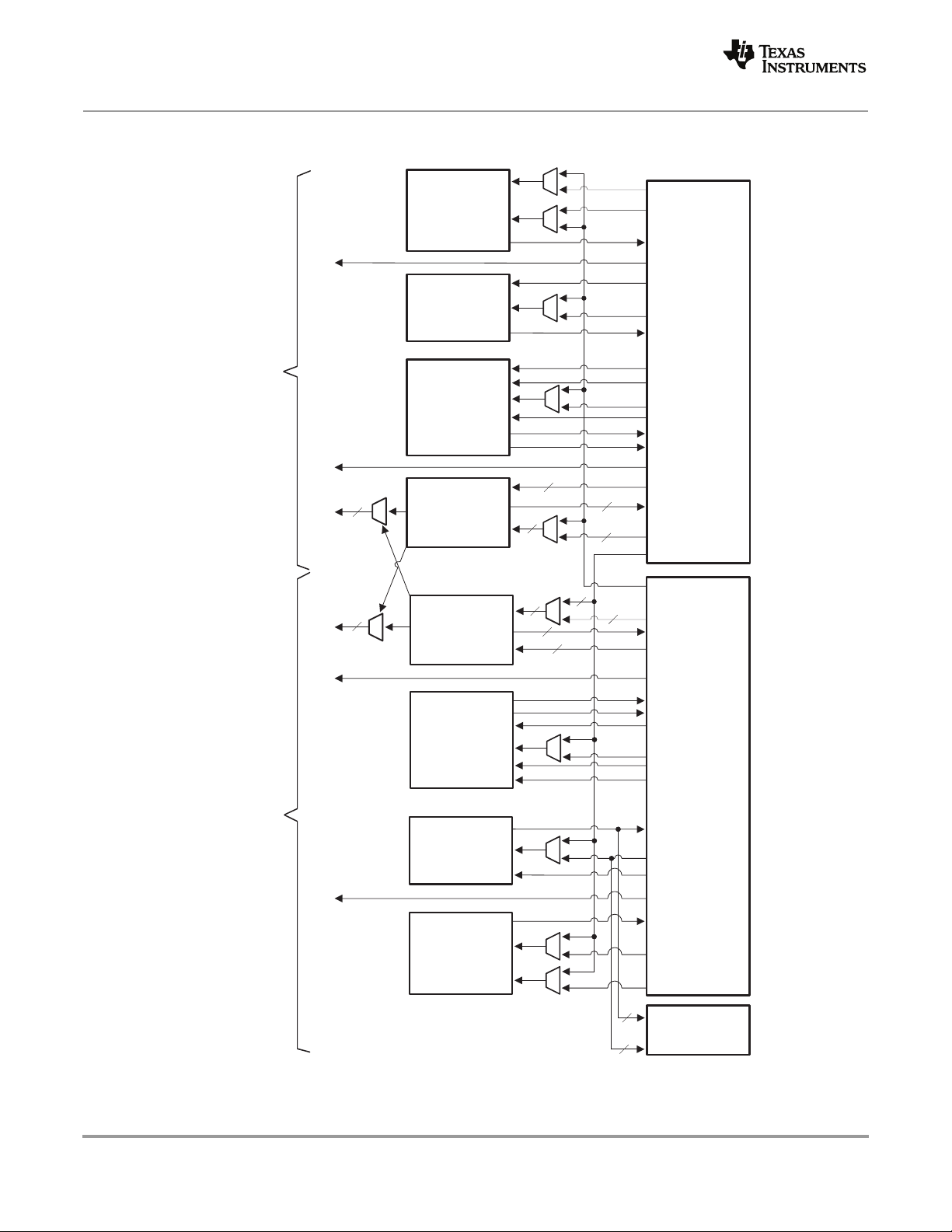
TMS320C6672
Multicore Fixed and Floating-Point Digital Signal Processor
SPRS708—November 2010
Figure 2-1 shows the DSP core functional units and data paths.
Figure 2-1 TMS320C6672 DSP Core Data Paths
Note:
Default bus width
is 64 bits
(i.e. a register pair)
ST1
ADVANCE INFORMATION
.L1
.S1
src1
src2
dst
src1
src2
dst
www.ti.com
Register
File A
(A0, A1, A2,
...A31)
Data Path A
Data Path B
LD1
DA1
DA2
LD2
ST2
src1
src1_hi
.M1
32
32
.D1
.D2
.M2
.S2
.L2
src2
src2_hi
dst2
dst1
src1
dst
src2
src2
src1
dst1
dst2
src2_hi
src2
src1_hi
src1
src2
src1
src2
dst
dst
dst
32
32
32
32
32
32
32
2
´
1
´
32
32
Register
File B
(B0, B1, B2,
...B31)
src1
32
Control
Register
32
18 Device Overview Copyright 2010 Texas Instruments Incorporated
Page 19
Multicore Fixed and Floating-Point Digital Signal Processor
www.ti.com
2.3 Memory Map Summary
Table 2-2 shows the memory map address ranges of the TMS320C6672 device.
Table 2-2 Memory Map Summary for TMS320C6672 (Part 1 of 7)
Address
Bytes DescriptionStart End
00000000 007FFFFF 8M Reserved
00800000 0087FFFF 512K Local L2 SRAM
00880000 00DFFFFF 5M+512K Reserved
00E00000 00E07FFF 32K Local L1P SRAM
00E08000 00EFFFFF 1M-32K Reserved
00F00000 00F07FFF 32K L1D SRAM
00F08000 017FFFFF 9M-32K Reserved
01800000 01BFFFFF 4M C66x CorePac Registers
01C00000 01CFFFFF 1M Reserved
01D00000 01D0007F 128 Tracer 0
01D00080 01D07FFF 32K-128 Reserved
01D08000 01D0807F 128 Tracer 1
01D08080 01D0FFFF 32K-128 Reserved
01D10000 01D1007F 128 Tracer 2
01D10080 01D17FFF 32K-128 Reserved
01D18000 01D1807F 128 Tracer3
01D18080 01D1FFFF 32K-128 Reserved
01D20000 01D2007F 128 Tracer 4
01D20080 01D27FFF 32K-128 Reserved
01D28000 01D2807F 128 Tracer 5
01D28080 01D2FFFF 32K-128 Reserved
01D30000 01D3007F 128 Tracer 6
01D30080 01D37FFF 32K-128 Reserved
01D38000 01D3807F 128 Tracer 7
01D38080 01D3FFFF 32K-128 Reserved
01D40000 01D4007F 128 Tracer 8
01D40080 01D47FFF 32K-128 Reserved
01D48000 01D4807F 128 Tracer 9
01D48080 01D4FFFF 32K-128 Reserved
01D50000 01D5007F 128 Tracer 10
01D50080 01D57FFF 32K-128 Reserved
01D58000 01D5807F 128 Tracer 11
01D58080 01D5FFFF 32K-128 Reserved
01D60000 01D6007F 128 Tracer 12
01D60080 01D67FFF 32K-128 Reserved
01D68000 01D6807F 128 Tracer 13
01D68080 01D6FFFF 32K-128 Reserved
01D70000 01D7007F 128 Tracer 14
01D70080 01D77FFF 32K-128 Reserved
01D78000 01D7807F 128 Tracer 15
TMS320C6672
SPRS708—November 2010
ADVANCE INFORMATION
Copyright 2010 Texas Instruments Incorporated Device Overview 19
Page 20
TMS320C6672
Multicore Fixed and Floating-Point Digital Signal Processor
SPRS708—November 2010
Table 2-2 Memory Map Summary for TMS320C6672 (Part 2 of 7)
Address
Bytes DescriptionStart End
01D78080 01D7FFFF 32K-128 Reserved
01D80000 01D8007F 128 Tracer 16
01D80080 01DFFFFF 512K-128 Reserved
01E00000 01E3FFFF 256K Telecom Serial Interface Port (TSIP) 0
01E40000 01E7FFFF 256K Reserved
01E80000 01EBFFFF 256K Telecom Serial Interface Port (TSIP) 1
ADVANCE INFORMATION
01EC0000 01FFFFFF 1M +256K Reserved
02000000 0209FFFF 640K Packet Accelerator Subsystem Configuration
020A0000 021FFFFF 1M + 384K Reserved
02200000 0220007F 128 Timer0
02200080 0220FFFF 64K-128 Reserved
02210000 0221007F 128 Timer1
02210080 0221FFFF 64K-128 Reserved
02220000 0222007F 128 Timer2
02220080 0222FFFF 64K-128 Reserved
02230000 0223007F 128 Timer3
02230080 0223FFFF 64K-128 Reserved
02240000 0224007F 128 Reserved
02240080 0224FFFF 64K-128 Reserved
02250000 0225007F 128 Reserved
02250080 0225FFFF 64K-128 Reserved
02260000 0226007F 128 Reserved
02260080 0226FFFF 64K-128 Reserved
02270000 0227007F 128 Reserved
02270080 0227FFFF 64K-128 Reserved
02280000 0228007F 128 Reserved
02280080 0228FFFF 64K-128 Reserved
02290000 0229007F 128 Reserved
02290080 0229FFFF 64K-128 Reserved
022A0000 022A007F 128 Reserved
022A0080 022AFFFF 64K-128 Reserved
022B0000 022B007F 128 Reserved
022B0080 022BFFFF 64K-128 Reserved
022C0000 022C007F 128 Reserved
022C0080 022CFFFF 64K-128 Reserved
022D0000 022D007F 128 Reserved
022D0080 022DFFFF 64K-128 Reserved
022E0000 022E007F 128 Reserved
022E0080 022EFFFF 64K-128 Reserved
022F0000 022F007F 128 Reserved
022F0080 022FFFFF 64K-128 Reserved
02300000 0230FFFF 64K Reserved
02310000 023101FF 512 PLL Controller
www.ti.com
20 Device Overview Copyright 2010 Texas Instruments Incorporated
Page 21
Multicore Fixed and Floating-Point Digital Signal Processor
www.ti.com
Table 2-2 Memory Map Summary for TMS320C6672 (Part 3 of 7)
Address
Bytes DescriptionStart End
02310200 0231FFFF 64K-512 Reserved
02320000 023200FF 256 GPIO
02320100 0232FFFF 64K-256 Reserved
02330000 023303FF 1K SmartRlex
02330400 0234FFFF 127K Reserved
02350000 02350FFF 4K Power Sleep Controller (PSC)
02351000 0235FFFF 64K-4K Reserved
02360000 023603FF 1K Memory Protection Unit (MPU) 0
02360400 02367FFF 31K Reserved
02368000 023683FF 1K Memory Protection Unit (MPU) 1
02368400 0236FFFF 31K Reserved
02370000 023703FF 1K Memory Protection Unit (MPU) 2
02370400 02377FFF 31K Reserved
02378000 023783FF 1K Memory Protection Unit (MPU) 3
02378400 0237FFFF 31K Reserved
02380000 0243FFFF 768K Reserved
02440000 02443FFF 16K DSP Trace Formatter 0
02444000 0244FFFF 48K Reserved
02450000 02453FFF 16K DSP Trace Formatter 1
02454000 0245FFFF 48K Reserved
02460000 02463FFF 16K Reserved
02464000 0246FFFF 48K Reserved
02470000 02473FFF 16K Reserved
02474000 0247FFFF 48K Reserved
02480000 02483FFF 16K Reserved
02484000 0248FFFF 48K Reserved
02490000 02493FFF 16K Reserved
02494000 0249FFFF 48K Reserved
024A0000 024A3FFF 16K Reserved
024A4000 024AFFFF 48K Reserved
024B0000 024B3FFF 16K Reserved
024B4000 024BFFFF 48K Reserved
024C0000 0252FFFF 448K Reserved
2
02530000 0253007F 128 I
02530080 0253FFFF 64K-128 Reserved
02540000 0254003F 64 UART
02540400 0254FFFF 64K-64 Reserved
02550000 025FFFFF 704K Reserved
02600000 02601FFF 8K Secondary Interrupt Controller (INTC) 0
02602000 02603FFF 8K Reserved
02604000 02605FFF 8K Reserved
02606000 02607FFF 8K Reserved
02608000 02609FFF 8K Secondary Interrupt Controller (INTC) 2
C Data & Control
TMS320C6672
SPRS708—November 2010
ADVANCE INFORMATION
Copyright 2010 Texas Instruments Incorporated Device Overview 21
Page 22

TMS320C6672
Multicore Fixed and Floating-Point Digital Signal Processor
SPRS708—November 2010
Table 2-2 Memory Map Summary for TMS320C6672 (Part 4 of 7)
Address
Bytes DescriptionStart End
0260A000 0260BFFF 8K Reserved
0260C000 0260DFFF 8K Secondary Interrupt Controller (INTC) 3
0260E000 0261FFFF 72K Reserved
02620000 026207FF 2K Chip-Level Registers (boot cfg)
02620800 0263FFFF 126K Reserved
02640000 026407FF 2K Semaphore
ADVANCE INFORMATION
02640800 0264FFFF 64K-2K Reserved
02650000 026FFFFF 704K Reserved
02700000 02707FFF 32K EDMA Channel Controller (TPCC) 0
02708000 0271FFFF 96K Reserved
02720000 02727FFF 32K EDMA Channel Controller (TPCC) 1
02728000 0273FFFF 96K Reserved
02740000 02747FFF 32K EDMA Channel Controller (TPCC) 2
02748000 0275FFFF 96K Reserved
02760000 027603FF 1K EDMA TPCC0 Transfer Controller (TPTC) 0
02760400 02767FFF 31K Reserved
02768000 027683FF 1K EDMA TPCC0 Transfer Controller (TPTC) 1
02768400 0276FFFF 31K Reserved
02770000 027703FF 1K EDMA TPCC1 Transfer Controller (TPTC) 0
02770400 02777FFF 31K Reserved
02778000 027783FF 1K EDMA TPCC1 Transfer Controller (TPTC) 1
02780400 0277FFFF 31K Reserved
02780000 027803FF 1K EDMA TPCC1 Transfer Controller (TPTC) 2
02780400 02787FFF 31K Reserved
02788000 027883FF 1K EDMA TPCC1Transfer Controller (TPTC) 3
02788400 0278FFFF 31K Reserved
02790000 027903FF 1K EDMA TPCC2 Transfer Controller (TPTC) 0
02790400 02797FFF 31K Reserved
02798000 027983FF 1K EDMA TPCC2 Transfer Controller (TPTC) 1
02798400 0279FFFF 31K Reserved
027A0000 027A03FF 1K EDMA TPCC2 Transfer Controller (TPTC) 2
027A0400 027A7FFF 31K Reserved
027A8000 027A83FF 1K EDMA TPCC2 Transfer Controller (TPTC) 3
027A8400 027AFFFF 31K Reserved
027B0000 027CFFFF 128K Reserved
027D0000 027D3FFF 16K TI Embedded Trace Buffer (TETB) core 0
027D4000 027DFFFF 48K Reserved
027E0000 027E3FFF 16K TI Embedded Trace Buffer (TETB) core 1
027E4000 027EFFFF 48K Reserved
027F0000 027F3FFF 16K Reserved
027F4000 027FFFFF 48K Reserved
02800000 02803FFF 16K Reserved
02804000 0280FFFF 48K Reserved
www.ti.com
22 Device Overview Copyright 2010 Texas Instruments Incorporated
Page 23
Multicore Fixed and Floating-Point Digital Signal Processor
www.ti.com
Table 2-2 Memory Map Summary for TMS320C6672 (Part 5 of 7)
Address
Bytes DescriptionStart End
02810000 02813FFF 16K Reserved
02814000 0281FFFF 48K Reserved
02820000 02823FFF 16K Reserved
02824000 0282FFFF 48K Reserved
02830000 02833FFF 16K Reserved
02834000 0283FFFF 48K Reserved
02840000 02843FFF 16K Reserved
02844000 0284FFFF 48K Reserved
02850000 02857FFF 32K TI Embedded Trace Buffer (TETB) — system
02858000 0285FFFF 32K Reserved
02860000 028FFFFF 640K Reserved
02900000 02907FFF 32K Serial RapidIO (SRIO) Configuration
02908000 029FFFFF 1M-32K Reserved
02A00000 02BFFFFF 2M Queue Manager Subsystem Configuration
02C00000 07FFFFFF 84M Reserved
08000000 0800FFFF 64K Extended Memory Controller (XMC) Configuration
08010000 0BBFFFFF 60M-64K Reserved
0BC00000 0BCFFFFF 1M Multicore Shared Memory Controller (MSMC) Config
0BD00000 0BFFFFFF 3M Reserved
0C000000 0C3FFFFF 4M Multicore Shared Memory
0C400000 107FFFFF 68 M Reserved
10800000 1087FFFF 512K Core0 L2 SRAM
10880000 108FFFFF 512K Reserved
10900000 10DFFFFF 5M Reserved
10E00000 10E07FFF 32K Core0 L1P SRAM
10E08000 10EFFFFF 1M-32K Reserved
10F00000 10F07FFF 32K Core0 L1D SRAM
10F08000 117FFFFF 9M-32K Reserved
11800000 1187FFFF 512K Core1 L2 SRAM
11880000 118FFFFF 512K Reserved
11900000 11DFFFFF 5M Reserved
11E00000 11E07FFF 32K Core1 L1P SRAM
11E08000 11EFFFFF 1M-32K Reserved
11F00000 11F07FFF 32K Core1 L1D SRAM
11F08000 127FFFFF 9M-32K Reserved
12800000 1287FFFF 512K Reserved
12880000 128FFFFF 512K Reserved
12900000 12DFFFFF 5M Reserved
12E00000 12E07FFF 32K Reserved
12E08000 12EFFFFF 1M-32K Reserved
12F00000 12F07FFF 32K Reserved
12F08000 137FFFFF 9M-32K Reserved
13800000 1387FFFF 512K Reserved
TMS320C6672
SPRS708—November 2010
ADVANCE INFORMATION
Copyright 2010 Texas Instruments Incorporated Device Overview 23
Page 24
TMS320C6672
Multicore Fixed and Floating-Point Digital Signal Processor
SPRS708—November 2010
Table 2-2 Memory Map Summary for TMS320C6672 (Part 6 of 7)
Address
Bytes DescriptionStart End
13880000 138FFFFF 512K Reserved
13900000 13DFFFFF 5M Reserved
13E00000 13E07FFF 32K Reserved
13E08000 13EFFFFF 1M-32K Reserved
13F00000 13F07FFF 32K Reserved
13F08000 147FFFFF 9M-32K Reserved
ADVANCE INFORMATION
14800000 1487FFFF 512K Reserved
14880000 148FFFFF 512K Reserved
14900000 14DFFFFF 5M Reserved
14E00000 14E07FFF 32K Reserved
14E08000 14EFFFFF 1M-32K Reserved
14F00000 14F07FFF 32K Reserved
14F08000 157FFFFF 9M-32K Reserved
15800000 1587FFFF 512K Reserved
15880000 158FFFFF 512K Reserved
15900000 15DFFFFF 5M Reserved
15E00000 15E07FFF 32K Reserved
15E08000 15EFFFFF 1M-32K Reserved
15F00000 15F07FFF 32K Reserved
15F08000 167FFFFF 9M-32K Reserved
16800000 1687FFFF 512K Reserved
16880000 168FFFFF 512K Reserved
16900000 16DFFFFF 5M Reserved
16E00000 16E07FFF 32K Reserved
16E08000 16EFFFFF 1M-32K Reserved
16F00000 16F07FFF 32K Reserved
16F08000 177FFFFF 9M-32K Reserved
17800000 1787FFFF 512K Reserved
17880000 178FFFFF 512K Reserved
17900000 17DFFFFF 5M Reserved
17E00000 17E07FFF 32K Reserved
17E08000 17EFFFFF 1M-32K Reserved
17F00000 17F07FFF 32K Reserved
17F08000 1FFFFFFF 129M-32K Reserved
20000000 200FFFFF 1M System Trace Manager (STM) Configuration
20100000 20AFFFFF 10M Reserved
20B00000 20B1FFFF 128K Boot ROM
20B20000 20BEFFFF 832K Reserved
20BF0000 20BF03FF 1K SPI
20BF0400 20BFFFFF 63K Reserved
20C00000 20C000FF 256 EMIF-16 Config
20C00100 20FFFFFF 12M - 256 Reserved
21000000 210000FF 256 DDR3 EMIF Configuration
www.ti.com
24 Device Overview Copyright 2010 Texas Instruments Incorporated
Page 25
Multicore Fixed and Floating-Point Digital Signal Processor
www.ti.com
Table 2-2 Memory Map Summary for TMS320C6672 (Part 7 of 7)
Address
Bytes DescriptionStart End
21000100 213FFFFF 4M-256 Reserved
21400000 214003FF 1K HyperLink Config
21400400 217FFFFF 4M-1K Reserved
21800000 21807FFF 32K PCIe Config
21808000 33FFFFFF 296M-32K Reserved
34000000 341FFFFF 2M Queue Manager Subsystem Data
34200000 3FFFFFFF 190M Reserved
40000000 4FFFFFFF 256M HyperLink data
50000000 5FFFFFFF 256M Reserved
60000000 6FFFFFFF 256M PCIe Data
70000000 73FFFFFF 64M EMIF16 CS2 Data NAND Memory
74000000 77FFFFFF 64M EMIF16 CS3 Data NAND Memory
78000000 7BFFFFFF 64M EMIF16 CS4 Data NOR Memory
7C000000 7FFFFFFF 64M EMIF16 CS5 Data SRAM Memory
80000000 8FFFFFFF 256M DDR3_ Data
90000000 9FFFFFFF 256M DDR3_ Data
A0000000 AFFFFFFF 256M DDR3_ Data
B0000000 BFFFFFFF 256M DDR3_ Data
C0000000 CFFFFFFF 256M DDR3_ Data
D0000000 DFFFFFFF 256M DDR3_ Data
E0000000 EFFFFFFF 256M DDR3_ Data
F0000000 FFFFFFFF 256M DDR3_ Data
End of Table 2-2
TMS320C6672
SPRS708—November 2010
ADVANCE INFORMATION
2.4 Boot Sequence
The boot sequence is a process by which the DSP's internal memory is loaded with program and data sections. The
DSP's internal registers are programmed with predetermined values. The boot sequence is started automatically
after each power-on reset, warm reset, and system reset. A local reset to an individual C66x CorePac should not affect
the state of the hardware boot controller on the device. For more details on the initiators of the resets, see section
‘‘Reset Controller’’.
The C6672 supports several boot processes that begins execution at the ROM base address, which contains the
bootloader code necessary to support various device boot modes. The boot processes are software-driven and use
the BOOTMODE[12:0] device configuration inputs to determine the software configuration that must be
completed. For more details on Boot Sequence see the Bootloader for the C66x DSP User Guide (literature number
SPRUGY5).
Copyright 2010 Texas Instruments Incorporated Device Overview 25
Page 26
TMS320C6672
Multicore Fixed and Floating-Point Digital Signal Processor
SPRS708—November 2010
2.5 Boot Modes Supported and PLL Settings
The device supports several boot processes, which leverage the internal boot ROM. Most boot processes are software
driven, using the BOOTMODE[3:0] device configuration inputs to determine the software configuration that must
be completed. From a hardware perspective, there are two possible boot modes:
• Public ROM Boot - C66x CorePac 0 is released from reset and begins executing from the L3 ROM base
address. After performing the boot process (e.g., from I
then begins execution from the provided boot entry point, other C66x CorePac’s are released from reset based
on interrupts generated by C66x CorePac 0, see the Bootloader for the C66x DSP User Guide (literature number
SPRUGY5) for more details.
ADVANCE INFORMATION
• Secure ROM Boot - On secure devices, the C66x CorePac 0 is released from reset and begin executing from
secure ROM. Software in the secure ROM will free up internal RAM pages, after which the C66x CorePac 0
initiates the boot process. The C66x CorePac 0 performs any authentication and decryption required on the
bootloaded image prior to beginning execution.
The boot process performed by the C66x CorePac 0 in public ROM boot and secure ROM boot are determined by
the BOOTMODE[12:0] value in the DEVSTAT register. The C66x CorePac 0 reads this value, and then executes the
associated boot process in software. Figure 2-2 shows the bits associated with BOOTMODE[12:0].
Figure 2-2 Boot Mode Pin Decoding
12 11 10 9 8 7 6 5 4 3 2 1 0
PLL Mult
2
I
C /SPI Ext Dev Cfg
2
C ROM, Ethernet, or RapidIO), the C66x CorePac 0
Boot Mode Pins
Device Configuration
www.ti.com
Boot Device
2.5.1 Boot Device Field
The Boot Device field BOOTMODE[2:0] defines the boot device that is chosen. Table 2-3 shows the supported boot
modes.
Table 2-3 Boot Mode Pins: Boot Device Values
Bit Field Value Description
2-0 Boot Device 0 Sleep / test modes / EMIF16
1Serial Rapid I/O
2 Ethernet (SGMII) (PA driven from core clk)
3 Ethernet (SGMII) (PA driver from PA clk)
4PCI
2
5I
6SPI
7HyperLink
C
26 Device Overview Copyright 2010 Texas Instruments Incorporated
Page 27
TMS320C6672
Multicore Fixed and Floating-Point Digital Signal Processor
www.ti.com
2.5.2 Device Configuration Field
The device configuration fields BOOTMODE[9:3] are used to configure the boot peripheral and, therefore, the bit
definitions depend on the boot mode
2.5.2.1 Sleep / EMIF16 Boot Device Configuration
Figure 2-3 Sleep / EMIF16 Configuration Bit Fields
9 8 7 6 5 4 3
Reserved Wait Enable Sub-Mode Reserved
Table 2-4 Sleep / EMIF16 Configuration Bit Field Descriptions
Bit Field Value Description
9-8 Reserved 0-3 Reserved
7 Wait Enable 0
1
6-5 Sub-Mode 0
1
4-3 Reserved 0-3 Reserved
Wait enable disabled (EMIF16 sub mode)
Wait enable enabled (EMIF16 sub mode)
Sleep boot
EMIF16 boot
SPRS708—November 2010
2.5.2.2 Ethernet (SGMII) Boot Device Configuration
Figure 2-4 Ethernet (SGMII) Device Configuration Bit Fields
9 8 7 6 5 4 3
SerDes Clock Mult Ext connection Device ID Reserved
Table 2-5 Ethernet (SGMII) Configuration Bit Field Descriptions
Bit Field Value Description
9-8 SerDes Clock Mult
7-6 Ext connection 0
5 Device ID 0-7 This value is used in the device ID field of the Ethernet-ready frame.
4-3 Reserved 0-3 Reserved
The output frequency of the PLL must be 1.25 GBs.
0
×8 for input clock of 156.25 MHz
1
×5 for input clock of 250 MHz
2
×4 for input clock of 312.5 MHz
3
Reserved
Mac to Mac connection, master with auto negotiation
1
Mac to Mac connection, slave, and Mac to Phy
2
Mac to Mac, forced link
3
Mac to fiber connection
ADVANCE INFORMATION
Copyright 2010 Texas Instruments Incorporated Device Overview 27
Page 28
TMS320C6672
Multicore Fixed and Floating-Point Digital Signal Processor
SPRS708—November 2010
2.5.2.3 Serial Rapid I/O Boot Device Configuration
The device ID is always set to 0xff (8-bit node IDs) or 0xffff (16 bit node IDs) at power-on reset.
Figure 2-5 Serial Rapid I/O Device Configuration Bit Fields
9 8 7 6 5 4 3
Lane Setup Data Rate Ref Clock Reserved
Table 2-6 Serial Rapid I/O Configuration Bit Field Descriptions
Bit Field Value Description
ADVANCE INFORMATION
9Lane Setup 01Port Configured as 4 ports each 1 lane wide (4 -1× ports)
Port Configured as 2 ports 2 lanes wide (2 – 2× ports)
8-7 Data Rate 0
1
2
3
6-5 Ref Clock 0
1
2
4-3 Reserved 0-3 Reserved
Data Rate = 1.25 GBs
Data Rate = 2.5 GBs
Data Rate = 3.125 GBs
Data Rate = 5.0 GBs
Reference Clock = 156.25 MHz
Reference Clock = 250 MHz
Reference Clock = 312.5 MHz
www.ti.com
In SRIO boot mode, the message mode will be enabled by default. If use of the memory reserved for received
messages is required and reception of messages cannot be prevented, the master can disable the message mode by
writing to the boot table and generating a boot restart.
2.5.2.4 PCI Boot Device Configuration
Extra device configuration is provided in the PCI bits in the DEVSTAT register.
Figure 2-6 PCI Device Configuration Bit Fields
9 8 7 6 5 4 3
Reserved BAR Config Reserved
Table 2-7 PCI Device Configuration Bit Field Descriptions
Bit Field Value Description
9 Reserved Reserved
8-5 Bar Config 0-0xf See Table 2-8.
4-3 Reserved 0-3 Reserved
28 Device Overview Copyright 2010 Texas Instruments Incorporated
Page 29
TMS320C6672
Multicore Fixed and Floating-Point Digital Signal Processor
www.ti.com
Table 2-8 BAR Config / PCIe Window Sizes
32-Bit Address Translation 64-Bit Address Translation
BAR cfg BAR0
0b0000PCIe MMRs32323232Clone of BAR4
0b0001 16163264
0b0010 16323264
0b0011 32323264
0b0100 16166464
0b0101 16326464
0b0110 32326464
0b0111 32 32 64 128
0b1000 64 64 128 256
0b1001 4 128 128 128
0b1010 4 128 128 256
0b1011 4 128 256 256
0b1100
0b1101 512 512
0b1110 1024 1024
0b1111 2048 2048
BAR1 BAR2 BAR3 BAR4 BAR5 BAR1/2 BAR3/4
SPRS708—November 2010
256 256
2.5.2.5 I2C Boot Device Configuration
2.5.2.5.1 I2C Master Mode
In master mode, the I2C device configuration uses ten bits of device configuration instead of seven as used in other
boot modes. In this mode, the device will make the initial read of the I
2
C EEPROM while the PLL is in bypass mode.
The initial read will contain the desired clock multiplier, which will be set up prior to any subsequent reads.
Figure 2-7 I2C Master Mode Device Configuration Bit Fields
12 11 10 9 8 7 6 5 4 3
Reserved Speed Address Mode
(0)
Table 2-9 I2C Master Mode Device Configuration Field Descriptions
Bit Field Value Description
12 Reserved Reserved
2
11 Speed 0
1
10 Address 0
1
9 Mode 0
1
8-3 Parameter Index 0-63 Identifies the index of the configuration table initially read from the I
4-3 Reserved 0-3 Reserved
C data rate set to approximately 20 kHz
I
2
C fast mode. Data rate set to approximately 400 kHz (will not exceed)
I
2
Boot from I
Boot from I
Master mode
Passive mode (see section I
C EEPROM at I2C bus address 0x50
2
C EEPROM at I2C bus address 0x51
2
C Passive Mode)
Parameter Index
2
C EEPROM
ADVANCE INFORMATION
Copyright 2010 Texas Instruments Incorporated Device Overview 29
Page 30
TMS320C6672
Multicore Fixed and Floating-Point Digital Signal Processor
SPRS708—November 2010
2.5.2.5.2 I2C Passive Mode
In passive mode, the device does not drive the clock, but simply acks data received on the specified address.
Figure 2-8 I2C Passive Mode Device Configuration Bit Fields
9 8 7 6 5 4 3
Mode (1) Receive I
Table 2-10 I2C Passive Mode Device Configuration Field Descriptions
Bit Field Value Description
ADVANCE INFORMATION
9Mode 01Master Mode (See ‘‘I2C Master Mode’’ on page 29)
Passive Mode
2
8-5 Receive I
4-3 Reserved 0-3 Reserved
C Address 0-15 The I2C Bus address the device will listen to for data
2.5.2.6 SPI Boot Device Configuration
In SPI boot mode, the SPI device configuration uses ten bits of device configuration instead of seven as used in other
boot modes.
2
C Address Reserved
www.ti.com
Figure 2-9 SPI Device Configuration Bit Fields
12 11 10 9 8 7 6 5 4 3
Mode 4, 5 Pin Addr Width Chip Select Parameter Table Index Reserved
Table 2-11 SPI Device Configuration Field Descriptions
Bit Field Value Description
12-11 Mode
10 4, 5 Pin 014-pin mode used
9 Addr Width 0116-bit address values are used
8-7 Chip Select 0-3 The chip select field value
6-5 Parameter Table Index 0-3 Specifies which parameter table is loaded
4-3 Reserved 0-3 Reserved
Clk Pol / Phase
0
Data is output on the rising edge of SPICLK. Input data is latched on the falling edge.
1
Data is output one half-cycle before the first rising edge of SPICLK and on subsequent falling edges.
Input data is latched on the rising edge of SPICLK.
2
Data is output on the falling edge of SPICLK. Input data is latched on the rising edge.
3
Data is output one half-cycle before the first falling edge of SPICLK and on subsequent rising edges.
Input data is latched on the falling edge of SPICLK.
5-pin mode used
24-bit address values are used
30 Device Overview Copyright 2010 Texas Instruments Incorporated
Page 31

Multicore Fixed and Floating-Point Digital Signal Processor
www.ti.com
2.5.2.7 HyperLink Boot Device Configuration
Figure 2-10 HyperLink Boot Device Configuration Fields
9 8 7 6 5 4 3
Reserved Data Rate Ref Clock Reserved
Table 2-12 HyperLink Boot Device Configuration Field Descriptions
Bit Field Value Description
9 Reserved Reserved
8-7 Data Rate 0
6-5 Ref Clocks 0
4-3 Reserved 0-3 Reserved
1
2
3
1
2
1.25 GBs
3.125 GBs
6.25 GBs
12.5 GBs
156.25 MHz
250 MHz
312.5 MHz
TMS320C6672
SPRS708—November 2010
2.5.3 PLL Boot Configuration Settings
The PLL default settings are determined by the BOOTMODE[12:10] bits. The Table 2-13 shows settings for various
input clock frequencies. This will set the PLL to the maximum clock setting for the device.
CLK = CLKIN × (PLLM+1) ÷ (2 × (PLLD+1))
The PA configuration is also shown. The PA is configured with these values only if the Ethernet boot mode is
selected with the input clock set to match the main PLL clock (not the PA SerDes clock). See Table 2-3 for details on
configuring Ethernet boot mode. See section 7.8 ‘‘Main PLL and PLL Controller’’ on page 207 for further details
Table 2-13 C66x DSP System PLL Configuration
BOOTMODE
[12:10]
0b000 50.00 0 31 800 0 39 1000 0 47 1200 0 41 1050
0b001 66.67 0 23 800.04 0 29 1000.05 0 35 1200.06 1 62 1050.053
0b010 80.00 0 19 800 0 24 1000 0 29 1200 3 104 1050
0b011 100.00 0 15 800 0 19 1000 0 23 1200 0 20 1050
0b100 156.25 24 255 800 4 63 1000 24 383 1200 24 335 1050
0b101 250.00 4 31 800 0 7 1000 4 47 1200 4 41 1050
0b110 312.50 24 127 800 4 31 1000 24 191 1200 24 167 1050
0b111 122.88 47 624 800 28 471 999.989 31 624 1200 11 204 1049.6
Input Clock
Freq (MHz)
800 MHz Device 1000 MHz Device 1200 MHz Device PA = 350 MHz
PLLD PLLM DSP ƒ PLLD PLLM DSP ƒ PLLD PLLM DSP ƒ PLLD PLLM DSP ƒ
ADVANCE INFORMATION
2.6 Second-Level Bootloaders
Any of the boot modes can be used to download a second-level bootloader. A second-level bootloader allows for any
level of customization to current boot methods as well as the definition of a completely customized boot.
Copyright 2010 Texas Instruments Incorporated Device Overview 31
Page 32

TMS320C6672
Multicore Fixed and Floating-Point Digital Signal Processor
SPRS708—November 2010
2.7 Terminals
Figure 2-11 Shows the TMS320C6672CYP ball grid area (BGA) package (bottom view)
Figure 2-11 CYP 841-Pin BGA Package Bottom View
AJ
AH
AG
AF
AE
AD
AC
AB
AA
Y
ADVANCE INFORMATION
W
V
U
T
R
P
N
M
L
K
J
H
G
F
E
D
C
B
A
3
5
1
2 4
6 810
www.ti.com
13
11
12 14
151719
16 18 20
9
7
21
22 24
23
252729
26 28
2.8 Terminal Functions
The terminal functions table (Table 2-15) identifies the external signal names, the associated pin (ball) numbers, the
pin type (I, O/Z, or I/O/Z), whether the pin has any internal pullup/pulldown resistors, and gives functional pin
descriptions. This table is arranged by function. The power terminal functions table (Table 2-16) lists the various
power supply pins and ground pins and gives functional pin descriptions. Table 2-17 shows all pins arranged by
signal name. Table 2-18 shows all pins arranged by ball number.
There are 17 pins that have a secondary function as well as a primary function. The secondary function is indicated
with a dagger (†).
For more detailed information on device configuration, peripheral selection, multiplexed/shared pins, and
pullup/pulldown resistors, see section 3.4 ‘‘Pullup/Pulldown Resistors’’ on page 76.
Use the symbol definitions in Table 2-14 when reading Table 2-15.
Table 2-14 I/O Functional Symbol Definitions
Functional
Symbol
Internal 100-μA pulldown or pullup is provided for this terminal. In most systems, a 1-kΩ resistor can
IPD or IPU
AAnalog signal Type
GND Ground Type
IInput terminal Type
OOutput terminal Type
S Supply voltage Type
Z Three-state terminal or high impedance Type
End of Table 2-14
be used to oppose the IPD/IPU. For more detailed information on pulldown/pullup resistors and
situations in which external pulldown/pullup resistors are required, see Hardware Design Guide for
KeyStone Devices (literature number SPRABI2).
Definition
Table 2-15
Column Heading
IPD/IPU
32 Device Overview Copyright 2010 Texas Instruments Incorporated
Page 33

TMS320C6672
Multicore Fixed and Floating-Point Digital Signal Processor
www.ti.com
Table 2-15 Terminal Functions — Signals and Control by Function (Part 1 of 13)
Signal Name Ball No. Type IPD/IPU Description
Boot Configuration Pins
LENDIAN † H25 IOZ UP Endian configuration pin (Pin shared with GPIO[0])
BOOTMODE00 † J28 IOZ Down
BOOTMODE01† J29 IOZ Down
BOOTMODE02 † J26 IOZ Down
BOOTMODE03 † J25 IOZ Down
BOOTMODE04 † J27 IOZ Down
BOOTMODE05 † J24 IOZ Down
BOOTMODE06 † K27 IOZ Down
BOOTMODE07 † K28 IOZ Down
BOOTMODE08 † K26 IOZ Down
BOOTMODE09 † K29 IOZ Down
BOOTMODE10 † L28 IOZ Down
BOOTMODE11 † L29 IOZ Down
BOOTMODE12 † K25 IOZ Down
PCIESSMODE0 † K24 IOZ Down
PCIESSMODE1 † L27 IOZ Down
PCIESSEN † L24 I Down PCIe module enable (Pin shared with TIMI0)
CORECLKP AG3 I
CORECLKN AG4 I
SRIOSGMIICLKP AG6 I
SRIOSGMIICLKN AJ6 I
DDRCLKP G29 I
DDRCLKN H29 I
PCIECLKP AG5 I
PCIECLKN AH5 I
MCMCLKP W2 I
MCMCLKN Y2 I
PASSCLKP AJ5 I
PASSCLKN AJ4 I
AVDDA1 H22 P SYS_CLK PLL Power Supply Pin
AVDDA2 AC6 P DDR_CLK PLL Power Supply Pin
AVDDA3 AD5 P PS_SS_CLK PLL Power Supply Pin
SYSCLKOUT AE3 OZ Down System Clock Output to be used as a general purpose output clock for debug purposes
PACLKSEL AE4 I Down PA clock select to choose between core clock and PASSCLK pins
HOUT AD20 OZ UP Interrupt output pulse created by IPCGRH
NMI
LRESET
LRESETNMIEN
M25 I UP Non-maskable Interrupt
N26 I UP Warm Reset
M27 I UP Enable for core selects
See Section 2.5 ‘‘Boot Modes Supported and PLL Settings’’ on page 26 for more details
(Pins shared with GPIO[1:13])
PCIe Mode selection pins (Pins shared with GPIO[14:15])
Clock / Reset
Core Clock Input to main PLL.
RapidIO/SGMII Reference Clock to drive the RapidIO and SGMII SerDes
DDR Reference Clock Input to DDR PLL (
PCIe Clock Input to drive PCIe SerDes
HyperLink Reference Clock to drive the HyperLink SerDes
Packet Sub-system Reference Clock
SPRS708—November 2010
ADVANCE INFORMATION
Copyright 2010 Texas Instruments Incorporated Device Overview 33
Page 34

TMS320C6672
Multicore Fixed and Floating-Point Digital Signal Processor
SPRS708—November 2010
Table 2-15 Terminal Functions — Signals and Control by Function (Part 2 of 13)
Signal Name Ball No. Type IPD/IPU Description
CORESEL0 AF2 I Down
CORESEL1 AD4 I Down
CORESEL2 AE6 I Down
CORESEL3 AE5 I Down
RESETFULL
RESET
POR
ADVANCE INFORMATION
RESETSTAT
BOOTCOMPLETE AE2 OZ Down Boot progress indication output
PTV15 G22 A PTV Compensation NMOS Reference Input
DDRDQM0 E29 OZ
DDRDQM1 C27 OZ
DDRDQM2 A25 OZ
DDRDQM3 A22 OZ
DDRDQM4 A10 OZ
DDRDQM5 A8 OZ
DDRDQM6 B5 OZ
DDRDQM7 B2 OZ
DDRDQM8 A20 OZ
DDRDQS0P C28 IOZ
DDRDQS0N C29 IOZ
DDRDQS1P A27 IOZ
DDRDQS1N B27 IOZ
DDRDQS2P A24 IOZ
DDRDQS2N B24 IOZ
DDRDQS3P A21 IOZ
DDRDQS3N B21 IOZ
DDRDQS4P A9 IOZ
DDRDQS4N B9 IOZ
DDRDQS5P B6 IOZ
DDRDQS5N A6 IOZ
DDRDQS6P B3 IOZ
DDRDQS6N A3 IOZ
DDRDQS7P D1 IOZ
DDRDQS7N C1 IOZ
DDRDQS8P A19 IOZ
DDRDQS8N B19 IOZ
N25 I UP Full Reset
M29 I UP Warm Reset of non isolated portion on the IC
AC20 I Power-on Reset
N27 O UP Reset Status Output
Select for the target core for LRESET and NMI. For more details see Table 7-39‘‘NMI and
Local Reset Timing Requirements’’ on page 185
DDR EMIF Data Masks
DDR EMIF Data Strobe
www.ti.com
DDR
34 Device Overview Copyright 2010 Texas Instruments Incorporated
Page 35

Multicore Fixed and Floating-Point Digital Signal Processor
www.ti.com
Table 2-15 Terminal Functions — Signals and Control by Function (Part 3 of 13)
Signal Name Ball No. Type IPD/IPU Description
DDRCB00 E19 IOZ
DDRCB01 C20 IOZ
DDRCB02 D19 IOZ
DDRCB03 B20 IOZ
DDRCB04 C19 IOZ
DDRCB05 C18 IOZ
DDRCB06 B18 IOZ
DDRCB07 A18 IOZ
DDR EMIF Check Bits
TMS320C6672
SPRS708—November 2010
ADVANCE INFORMATION
Copyright 2010 Texas Instruments Incorporated Device Overview 35
Page 36

TMS320C6672
Multicore Fixed and Floating-Point Digital Signal Processor
SPRS708—November 2010
Table 2-15 Terminal Functions — Signals and Control by Function (Part 4 of 13)
Signal Name Ball No. Type IPD/IPU Description
DDRD00 E28 IOZ
DDRD01 D29 IOZ
DDRD02 E27 IOZ
DDRD03 D28 IOZ
DDRD04 D27 IOZ
DDRD05 B28 IOZ
DDRD06 E26 IOZ
ADVANCE INFORMATION
DDRD07 F25 IOZ
DDRD08 F24 IOZ
DDRD09 E24 IOZ
DDRD10 E25 IOZ
DDRD11 D25 IOZ
DDRD12 D26 IOZ
DDRD13 C26 IOZ
DDRD14 B26 IOZ
DDRD15 A26 IOZ
DDRD16 F23 IOZ
DDRD17 F22 IOZ
DDRD18 D24 IOZ
DDRD19 E23 IOZ
DDRD20 A23 IOZ
DDRD21 B23 IOZ
DDRD22 C24 IOZ
DDRD23 E22 IOZ
DDRD24 D21 IOZ
DDRD25 F20 IOZ
DDRD26 E21 IOZ
DDRD27 F21 IOZ
DDRD28 D22 IOZ
DDRD29 C21 IOZ
DDRD30 B22 IOZ
DDRD31 C22 IOZ
DDRD32 E10 IOZ
DDRD33 D10 IOZ
DDRD34 B10 IOZ
DDRD35 D9 IOZ
DDRD36 E9 IOZ
DDRD37 C9 IOZ
DDRD38 B8 IOZ
DDRD39 E8 IOZ
DDRD40 A7 IOZ
DDRD41 D7 IOZ
DDR EMIF Data Bus
www.ti.com
36 Device Overview Copyright 2010 Texas Instruments Incorporated
Page 37

Multicore Fixed and Floating-Point Digital Signal Processor
www.ti.com
Table 2-15 Terminal Functions — Signals and Control by Function (Part 5 of 13)
Signal Name Ball No. Type IPD/IPU Description
DDRD42 E7 IOZ
DDRD43 C7 IOZ
DDRD44 B7 IOZ
DDRD45 E6 IOZ
DDRD46 D6 IOZ
DDRD47 C6 IOZ
DDRD48 C5 IOZ
DDRD49 A5 IOZ
DDRD50 B4 IOZ
DDRD51 A4 IOZ
DDRD52 D4 IOZ
DDRD53 E4 IOZ
DDRD54 C4 IOZ
DDRD55 C3 IOZ
DDRD56 F4 IOZ
DDRD57 D2 IOZ
DDRD58 E2 IOZ
DDRD59 C2 IOZ
DDRD60 F2 IOZ
DDRD61 F3 IOZ
DDRD62 E1 IOZ
DDRD63 F1 IOZ
DDRCE0
DDRCE1
DDRBA0 A13 OZ
DDRBA2 C13 OZ
DDRA00 A14 OZ
DDRA01 B14 OZ
DDRA02 F14 OZ
DDRA03 F13 OZ
DDRA04 A15 OZ
DDRA05 C15 OZ
DDRA06 B15 OZ
DDRA07 D15 OZ
DDRA08 F15 OZ
DDRA09 E15 OZ
DDRA10 E16 OZ
DDRA11 D16 OZ
DDRA12 E17 OZ
DDRA13 C16 OZ
DDRA14 D17 OZ
DDRA15 C17 OZ
DDRCAS
C11 OZ
C12 OZ
D12 OZ DDR EMIF Column Address Strobe
DDR EMIF Data Bus
DDR EMIF Chip Enables
DDR EMIF Bank AddressDDRBA1 B13 OZ
DDR EMIF Address Bus
TMS320C6672
SPRS708—November 2010
ADVANCE INFORMATION
Copyright 2010 Texas Instruments Incorporated Device Overview 37
Page 38

TMS320C6672
Multicore Fixed and Floating-Point Digital Signal Processor
SPRS708—November 2010
Table 2-15 Terminal Functions — Signals and Control by Function (Part 6 of 13)
Signal Name Ball No. Type IPD/IPU Description
DDRRAS C10 OZ DDR EMIF Row Address Strobe
DDRWE
DDRCKE0 D11 OZ DDR EMIF Clock Enable
DDRCKE1 E18 OZ DDR EMIF Clock Enable
DDRCLKOUTP0 A12 OZ
DDRCLKOUTN0 B12 OZ
DDRCLKOUTP1 A16 OZ
ADVANCE INFORMATION
DDRCLKOUTN1 B16 OZ
DDRODT0 D13 OZ DDR EMIF On Die Termination Outputs used to set termination on the SDRAMs
DDRODT1 E13 OZ DDR EMIF On Die Termination Outputs used to set termination on the SDRAMs
DDRRESET
DDRSLRATE0 G27 I Down
DDRSLRATE1 H27 I Down
VREFSSTL E14 P Reference Voltage Input for SSTL15 buffers used by DDR EMIF (VDDS15 ÷ 2)
EMIFRW
EMIFCE0
EMIFCE1
EMIFCE2
EMIFCE3
EMIFOE
EMIFWE
EMIFBE0
EMIFBE1
EMIFWAIT0 T29 I Down
EMIFWAIT1 T28 I Down
E12 OZ DDR EMIF Write Enable
DDR EMIF Output Clocks to drive SDRAMs (one clock pair per SDRAM)
E11 OZ DDR Reset signal
DDR Slew rate control
P26 O UP
P25 O UP
R27 O UP
R28 O UP
R25 O UP
R26 O UP
P24 O UP
R24 O UP
R23 O UP
EMIF16 Control Signals
www.ti.com
EMIF16
38 Device Overview Copyright 2010 Texas Instruments Incorporated
Page 39

Multicore Fixed and Floating-Point Digital Signal Processor
www.ti.com
Table 2-15 Terminal Functions — Signals and Control by Function (Part 7 of 13)
Signal Name Ball No. Type IPD/IPU Description
EMIFA00 T27 O Down
EMIFA01 T24 O Down
EMIFA02 U29 O Down
EMIFA03 T25 O Down
EMIFA04 U27 O Down
EMIFA05 U28 O Down
EMIFA06 U25 O Down
EMIFA07 U24 O Down
EMIFA08 V28 O Down
EMIFA09 V29 O Down
EMIFA10 V27 O Down
EMIFA11 V26 O Down
EMIFA12 V25 O Down
EMIFA13 V24 O Down
EMIFA14 W28 O Down
EMIFA15 W27 O Down
EMIFA16 W29 O Down
EMIFA17 W26 O Down
EMIFA18 W25 O Down
EMIFA19 W24 O Down
EMIFA20 W23 O Down
EMIFA21 Y29 O Down
EMIFA22 Y28 O Down
EMIFA23 U23 O Down
EMIFD00 Y27 IOZ Down
EMIFD01 AB29 IOZ Down
EMIFD02 AA29 IOZ Down
EMIFD03 Y26 IOZ Down
EMIFD04 AA27 IOZ Down
EMIFD05 AB27 IOZ Down
EMIFD06 AA26 IOZ Down
EMIFD07 AA25 IOZ Down
EMIFD08 Y25 IOZ Down
EMIFD09 AB25 IOZ Down
EMIFD10 AA24 IOZ Down
EMIFD11 Y24 IOZ Down
EMIFD12 AB23 IOZ Down
EMIFD13 AB24 IOZ Down
EMIFD14 AB26 IOZ Down
EMIFD15 AC25 IOZ Down
EMIF16 Address
EMIF16 Data
TMS320C6672
SPRS708—November 2010
ADVANCE INFORMATION
Copyright 2010 Texas Instruments Incorporated Device Overview 39
Page 40

TMS320C6672
Multicore Fixed and Floating-Point Digital Signal Processor
SPRS708—November 2010
Table 2-15 Terminal Functions — Signals and Control by Function (Part 8 of 13)
Signal Name Ball No. Type IPD/IPU Description
EMU00 AC29 IOZ UP
EMU01 AC28 IOZ UP
EMU02 AC27 IOZ UP
EMU03 AC26 IOZ UP
EMU04 AD29 IOZ UP
EMU05 AD28 IOZ UP
ADVANCE INFORMATION
EMU06 AD27 IOZ UP
EMU07 AE29 IOZ UP
EMU08 AE28 IOZ UP
EMU09 AF29 IOZ UP
EMU10 AE27 IOZ UP
EMU11 AF28 IOZ UP
EMU12 AG29 IOZ UP
EMU13 AD26 IOZ UP
EMU14 AG28 IOZ UP
EMU15 AG27 IOZ UP
EMU16 AJ27 IOZ UP
EMU17 AF27 IOZ UP
EMU18 AH27 IOZ UP
GPIO00 H25 IOZ UP
GPIO01 J28 IOZ Down
GPIO02 J29 IOZ Down
GPIO03 J26 IOZ Down
GPIO04 J25 IOZ Down
GPIO05 J27 IOZ Down
GPIO06 J24 IOZ Down
GPIO07 K27 IOZ Down
GPIO08 K28 IOZ Down
GPIO09 K26 IOZ Down
GPIO10 K29 IOZ Down
GPIO11 L28 IOZ Down
GPIO12 L29 IOZ Down
GPIO13 K25 IOZ Down
GPIO14 K24 IOZ Down
GPIO15 L27 IOZ Down
Emulation and Trace Port
General Purpose Input/Output (GPIO)
General Purpose Input/Output
These GPIO pins have secondary functions assigned to them as mentioned in the ‘‘Boot
Configuration Pins’’ on page 33.
www.ti.com
EMU
40 Device Overview Copyright 2010 Texas Instruments Incorporated
Page 41

Multicore Fixed and Floating-Point Digital Signal Processor
www.ti.com
Table 2-15 Terminal Functions — Signals and Control by Function (Part 9 of 13)
Signal Name Ball No. Type IPD/IPU Description
HyperLink
MCMRXN0 U2 I
MCMRXP0 T2 I
MCMRXN1 T1 I
MCMRXP1 R1 I
MCMRXN2 M1 I
MCMRXP2 N1 I
MCMRXN3 P2 I
MCMRXP3 N2 I
MCMTXN0 M5 O
MCMTXP0 N5 O
MCMTXN1 T4 O
MCMTXP1 U4 O
MCMTXN2 R5 O
MCMTXP2 T5 O
MCMTXN3 N4 O
MCMTXP3 P4 O
MCMRXFLCLK W3 O Down
MCMRXFLDAT W4 O Down
MCMTXFLCLK AA1 I Down
MCMTXFLDAT AA3 I Down
MCMRXPMCLK Y3 I Down
MCMRXPMDAT Y4 I Down
MCMTXPMCLK AA2 O Down
MCMTXPMDAT AA4 O Down
MCMREFCLKOUTP Y1 O
MCMREFCLKOUTN W1 O
SCL AD3 IOZ I
SDA AC4 IOZ I
TCK N29 I UP JTAG Clock Input
TDI P27 I UP JTAG Data Input
TDO R29 OZ UP JTAG Data Output
TMS P29 I UP JTAG Test Mode Input
TRST
MDIO G26 IOZ UP MDIO Data
MDCLK H26 O Down MDIO Clock
PCIERXN0 AH7 I
PCIERXP0 AH8 I
PCIERXN1 AJ9 I
PCIERXP1 AJ8 I
P28 I Down JTAG Reset
Serial HyperLink Receive Data
Serial HyperLink Transmit Data
Serial HyperLink Sideband Signals
HyperLink Reference clock output for daisy chain connection
2
C
2
C Clock
2
C Data
PCIexpress Receive Data (2 links)
I
JTAG
MDIO
PCIe
TMS320C6672
SPRS708—November 2010
ADVANCE INFORMATION
Copyright 2010 Texas Instruments Incorporated Device Overview 41
Page 42
TMS320C6672
Multicore Fixed and Floating-Point Digital Signal Processor
SPRS708—November 2010
Table 2-15 Terminal Functions — Signals and Control by Function (Part 10 of 13)
Signal Name Ball No. Type IPD/IPU Description
PCIETXN0 AF8 O
PCIETXP0 AF7 O
PCIETXN1 AG9 O
PCIETXP1 AG8 O
RIORXN0 AJ11 I
RIORXP0 AJ12 I
ADVANCE INFORMATION
RIORXN1 AH10 I
RIORXP1 AH11 I
RIORXN2 AH14 I
RIORXP2 AH13 I
RIORXN3 AJ15 I
RIORXP3 AJ14 I
RIOTXN0 AF10 O
RIOTXP0 AF11 O
RIOTXN1 AG11 O
RIOTXP1 AG12 O
RIOTXN2 AG15 O
RIOTXP2 AG14 O
RIOTXN3 AF14 O
RIOTXP3 AF13 O
SGMII0RXN AJ18 I
SGMII0RXP AJ17 I
SGMII0TXN AG18 O
SGMII0TXP AG17 O
SGMII1RXN AH17 I
SGMII1RXP AH16 I
SGMII1TXN AF17 O
SGMII1TXP AF16 O
VCL M24 IOZ Voltage Control I
VD M23 IOZ Voltage Control I
VCNTL0 L23 OZ
VCNTL1 K23 OZ
VCNTL2 J23 OZ
VCNTL3 H23 OZ
SPISCS0 AG1 OZ UP SPI Interface Enable 0
SPISCS1 AG2 OZ UP SPI Interface Enable 1
SPICLK AE1 OZ Down SPI Clock
SPIDIN AD2 I Down SPI Data In
SPIDOUT AB1 OZ Down SPI Data Out
PCIexpress Transmit Data (2 links)
Serial RapidIO Receive Data (2 links)
Serial RapidIO Receive Data (2 links)
Serial RapidIO Transmit Data (2 links)
Serial RapidIO Transmit Data (2 links)
Ethernet MAC SGMII Receive Data
Ethernet MAC SGMII Transmit Data
Ethernet MAC SGMII Receive Data
Ethernet MAC SGMII Transmit Data
Voltage Control Outputs to variable core power supply
Serial RapidIO
SGMII
SmartReflex
2
C Clock
2
C Data
SPI
www.ti.com
42 Device Overview Copyright 2010 Texas Instruments Incorporated
Page 43

Multicore Fixed and Floating-Point Digital Signal Processor
www.ti.com
Table 2-15 Terminal Functions — Signals and Control by Function (Part 11 of 13)
Signal Name Ball No. Type IPD/IPU Description
Timer
TIMI0 L24 I Down
TIMI1 L26 I Down
TIMO0 L25 OZ Down
TIMO1 M26 OZ Down
CLKA0 AF25 I Down
CLKB0 AG25 I Down
FSA0 AJ26 I Down
FSB0 AG26 I Down
TR00 AH26 I Down
TR01 AJ25 I Down
TR02 AD23 I Down
TR03 AD24 I Down
TR04 AC23 I Down
TR05 AH25 I Down
TR06 AC24 I Down
TR07 AE25 I Down
TX00 AE24 OZ Down
TX01 AD25 OZ Down
TX02 AJ24 OZ Down
TX03 AG24 OZ Down
TX04 AH24 OZ Down
TX05 AF24 OZ Down
TX06 AE23 OZ Down
TX07 AF23 OZ Down
Timer Inputs
Timer Outputs
TSIP
TSIP0
TMS320C6672
SPRS708—November 2010
ADVANCE INFORMATION
Copyright 2010 Texas Instruments Incorporated Device Overview 43
Page 44

TMS320C6672
Multicore Fixed and Floating-Point Digital Signal Processor
SPRS708—November 2010
Table 2-15 Terminal Functions — Signals and Control by Function (Part 12 of 13)
Signal Name Ball No. Type IPD/IPU Description
CLKA1 AJ23 I Down
CLKB1 AH23 I Down
FSA1 AG23 I Down
FSB1 AJ22 I Down
TR10 AE22 I Down
TR11 AD21 I Down
TR12 AC21 I Down
ADVANCE INFORMATION
TR13 AJ21 I Down
TR14 AH22 I Down
TR15 AJ20 I Down
TR16 AH21 I Down
TR17 AG21 I Down
TX10 AF21 OZ Down
TX11 AD22 OZ Down
TX12 AC22 OZ Down
TX13 AE21 OZ Down
TX14 AG20 OZ Down
TX15 AE20 OZ Down
TX16 AH20 OZ Down
TX17 AF20 OZ Down
UARTRXD AD1 I Down UART Serial Data In
UARTTXD AC1 OZ Down UART Serial Data Out
UARTCTS AB3 I Down UART Clear To Send
UARTRTS AB2 OZ Down UART Request To Send
RSV01 AH28 IOZ Down Reserved - leave unconnected
RSV02 N24 OZ Down Reserved - leave unconnected
RSV03 N23 OZ Down Reserved - leave unconnected
RSV04 AH2 O Reserved - leave unconnected
RSV05 AJ3 O Reserved - leave unconnected
RSV06 H28 O Reserved - leave unconnected
RSV07 G28 O Reserved - leave unconnected
RSV08 AH19 A Reserved - leave unconnected
RSV09 AF19 A Reserved - leave unconnected
RSV10 K22 A Reserved - leave unconnected
RSV11 J22 A Reserved - leave unconnected
RSV12 Y5 A Reserved - leave unconnected
RSV13 W5 A Reserved - leave unconnected
RSV14 W6 A Reserved - leave unconnected
RSV15 AE12 A Reserved - leave unconnected
RSV16 AC9 A Reserved - leave unconnected
RSV17 AD19 A Reserved - leave unconnected
RSV24 AH4 O Reserved - leave unconnected
TSIP1
www.ti.com
UART
Reserved
44 Device Overview Copyright 2010 Texas Instruments Incorporated
Page 45
TMS320C6672
Multicore Fixed and Floating-Point Digital Signal Processor
www.ti.com
Table 2-15 Terminal Functions — Signals and Control by Function (Part 13 of 13)
Signal Name Ball No. Type IPD/IPU Description
RSV25 AH3 O Reserved - leave unconnected
RSV20 AF3 OZ Down Reserved - leave unconnected
RSV21 G25 OZ Down Reserved - leave unconnected
RSV22 AF1 OZ Down Reserved - leave unconnected
End of Table 2-15
Table 2-16 Terminal Functions — Power and Ground
Supply Ball No. Volts Description
AVDDA1 H22 1.8 PLL Supply - CORE_PLL
AVDDA2 AC6 1.8 PLL Supply - DDR3_PLL
AVDDA3 AD5 1.8 PLL Supply - PASS_PLL
CVDD H7, H9, H11, H13, H15, H17, H19, H21, J10, J12, J16, J18, J20, K11, K17, K19, K21, L10, L12, L16,
L18, M11, M13, M15, M17, M19, N8, N10, N12, N14, N16, N18, P9, P11, P13, P15, P17, P19,
P21, R8, R10, R18, R20, R22, T9, T11, T13, T15, T17, T19, T21, U8, U10, U18, U20, U22, V9, V11,
V17, V19, V21, W8, W10, W18, W20, W22, Y9, Y11, Y13, Y15, Y17, Y19, Y21, AA8, AA10, AA12,
AA14, AA16, AA18, AA22
CVDD1 J8, J14, K7, K9, K13, K15, L8, L14, L20, L22, M9, M21, N20, N22, R12, R14, R16, U12, U14, U16,
V13, V15, W12, W14, W16
DVDD15 A2, A11, A17, A28, B1, B29, C14, C25, D5, D8, D20, D23, E3, F5, F7, F9, F11, F17, F19, F26, F28,
G2, G4, G8, G10, G12, G14, G16, G18, G20, G23
DVDD18 H24, N28, P23, T23, U26, V23, Y7, Y23, AA6, AB5, AB7, AB19, AB21, AB28, AC3, AF5, AF26,
AG22, AH1, AH29, AJ2, AJ28
VDDR1 V5 1.5 HyperLink SerDes regulator supply
VDDR2 AE10 1.5 PCIe SerDes regulator supply
VDDR3 AE16 1.5 SGMII SerDes regulator supply
VDDR4 AE14 1.5 SRIO SerDes regulator supply
VDDT1 M7, N6, P7, R6, T7, U6, V7 1.0 HyperLink SerDes termination
VDDT2 AB9, AB11, AB13, AB15, AB17, AC8, AC10, AC12, AC14, AC16, AC18, AD7, AD9, AD11, AD13,
AD15, AD17, AE18
VREFSSTL E14 0.75 DDR3 reference voltage
VSS A1, A29, B11, B17, B25, C8, C23, D3, D14, D18, E5, E20, F6, F8, F10, F12, F16, F18, F27, F29, G1,
G3, G5, G6, G7, G9, G11, G13, G15, G17, G19, G21, G24, H1, H2, H3, H4, H5, H6, H8, H10, H12,
H14, H16, H18, H20, J1, J2, J3, J4, J5, J6, J7, J9, J11, J13, J15, J17, J19, J21, K1, K2, K3, K4, K5, K6,
K8, K10, K12, K14, K16, K18, K20, L1, L2, L3, L4, L5, L6, L7, L9, L11, L13, L15, L17, L19, L21, M2,
M3, M4, M6, M8, M10, M12, M14, M16, M18, M20, M22, M28, N3, N7, N9, N11, N13, N15, N17,
N19, N21, P1, P3, P5, P6, P8, P10, P12, P14, P16, P18, P20, P22, R2, R3, R4, R7, R9, R11, R13,
R15, R17, R19, R21, T3, T6, T8, T10, T12, T14, T16, T18, T20, T22, T26, U1, U3, U5, U7, U9, U11,
U13, U15, U17, U19, U21, V1, V2, V3, V4, V6, V8, V10, V12, V14, V16, V18, V20, V22, W7, W9,
W11, W13, W15, W17, W19, W21, Y6, Y8, Y10, Y12, Y14, Y16, Y18, Y20, Y22, AA5, AA7, AA9,
AA11, AA13, AA15, AA17, AA19, AA23, AA28, AB4, AB6, AB8, AB10, AB12, AB14, AB16, AB18,
AB20, AB22, AC2, AC5, AC7, AC11, AC13, AC15, AC17, AC19, AD6, AD8, AD10, AD12, AD14,
AD16, AD18, AE7, AE8, AE9, AE11, AE13, AE15, AE17, AE19, AE26, AF4, AF6, AF9, AF12, AF15,
AF18, AF22, AG7, AG10, AG13, AG16, AG19, AH6, AH9, AH12, AH15, AH18, AJ1, AJ7, AJ10,
AJ13, AJ16, AJ19, AJ29
End of Table 2-16
0.9
to
1.1
1.0 Fixed core supply voltage
1.5 DDR IO supply
1.8 IO supply
1.0 SGMII/SRIO/PCIe SerDes
GND Ground
SPRS708—November 2010
SmartReflex core supply voltage
supply
termination supply
ADVANCE INFORMATION
Copyright 2010 Texas Instruments Incorporated Device Overview 45
Page 46

TMS320C6672
Multicore Fixed and Floating-Point Digital Signal Processor
SPRS708—November 2010
Table 2-17 Terminal Functions
— By Signal Name
(Part 1 of 13)
Signal Name Ball Number
AVDDA1 H22
AVDDA2 AC6
AVDDA3 AD5
BOOTCOMPLETE AE2
BOOTMODE00 † J28
ADVANCE INFORMATION
BOOTMODE01† J29
BOOTMODE02 † J26
BOOTMODE03 † J25
BOOTMODE04 † J27
BOOTMODE05 † J24
BOOTMODE06 † K27
BOOTMODE07 † K28
BOOTMODE08 † K26
BOOTMODE09 † K29
BOOTMODE10 † L28
BOOTMODE11 † L29
BOOTMODE12 † K25
CLKA0 AF25
CLKA1 AJ23
CLKB0 AG25
CLKB1 AH23
CORECLKN AG4
CORECLKP AG3
CORESEL0 AF2
CORESEL1 AD4
CORESEL2 AE6
CORESEL3 AE5
CVDD H7, H9, H11, H13,
H15, H17, H19, H21,
J10, J12, J16, J18,
J20, K11, K17, K19,
K21, L10, L12, L16,
L18, M11, M13,
M15, M17, M19, N8,
N10, N12, N14,
CVDD N16, N18, P9, P11,
P13, P15, P17, P19,
P21, R8, R10, R18,
R20, R22, T9, T11,
T13, T15, T17, T19,
T21, U8, U10, U18,
U20, U22, V9, V11,
V17, V19, V21, W8,
CVDD W10, W18, W20,
W22, Y9, Y11, Y13,
Y15, Y17, Y19, Y21,
AA8, AA10, AA12,
AA14, AA16, AA18,
AA22
Table 2-17 Terminal Functions
Signal Name Ball Number
CVDD1 J8, J14, K7, K9, K13,
DDRA00 A14
DDRA01 B14
DDRA02 F14
DDRA03 F13
DDRA04 A15
DDRA05 C15
DDRA06 B15
DDRA07 D15
DDRA08 F15
DDRA09 E15
DDRA10 E16
DDRA11 D16
DDRA12 E17
DDRA13 C16
DDRA14 D17
DDRA15 C17
DDRBA0 A13
DDRBA1 B13
DDRBA2 C13
DDRCAS
DDRCB00 E19
DDRCB01 C20
DDRCB02 D19
DDRCB03 B20
DDRCB04 C19
DDRCB05 C18
DDRCB06 B18
DDRCB07 A18
DDRCE0
DDRCE1
DDRCKE0 D11
DDRCKE1 E18
DDRCLKN H29
DDRCLKOUTN0 B12
DDRCLKOUTN1 B16
DDRCLKOUTP0 A12
DDRCLKOUTP1 A16
DDRCLKP G29
— By Signal Name
(Part 2 of 13)
K15, L8, L14, L20,
L22, M9, M21, N20,
N22, R12, R14, R16,
U12, U14, U16, V13,
V15, W12, W14,
W16
D12
C11
C12
www.ti.com
Table 2-17 Terminal Functions
—BySignalName
(Part 3 of 13)
Signal Name Ball Number
DDRD00 E28
DDRD01 D29
DDRD02 E27
DDRD03 D28
DDRD04 D27
DDRD05 B28
DDRD06 E26
DDRD07 F25
DDRD08 F24
DDRD09 E24
DDRD10 E25
DDRD11 D25
DDRD12 D26
DDRD13 C26
DDRD14 B26
DDRD15 A26
DDRD16 F23
DDRD17 F22
DDRD18 D24
DDRD19 E23
DDRD20 A23
DDRD21 B23
DDRD22 C24
DDRD23 E22
DDRD24 D21
DDRD25 F20
DDRD26 E21
DDRD27 F21
DDRD28 D22
DDRD29 C21
DDRD30 B22
DDRD31 C22
DDRD32 E10
DDRD33 D10
DDRD34 B10
DDRD35 D9
DDRD36 E9
DDRD37 C9
DDRD38 B8
DDRD39 E8
DDRD40 A7
DDRD41 D7
46 Device Overview Copyright 2010 Texas Instruments Incorporated
Page 47

www.ti.com
Table 2-17 Terminal Functions
— By Signal Name
(Part 4 of 13)
Signal Name Ball Number
DDRD42 E7
DDRD43 C7
DDRD44 B7
DDRD45 E6
DDRD46 D6
DDRD47 C6
DDRD48 C5
DDRD49 A5
DDRD50 B4
DDRD51 A4
DDRD52 D4
DDRD53 E4
DDRD54 C4
DDRD55 C3
DDRD56 F4
DDRD57 D2
DDRD58 E2
DDRD59 C2
DDRD60 F2
DDRD61 F3
DDRD62 E1
DDRD63 F1
DDRDQM0 E29
DDRDQM1 C27
DDRDQM2 A25
DDRDQM3 A22
DDRDQM4 A10
DDRDQM5 A8
DDRDQM6 B5
DDRDQM7 B2
DDRDQM8 A20
DDRDQS0N C29
DDRDQS0P C28
DDRDQS1N B27
DDRDQS1P A27
DDRDQS2N B24
DDRDQS2P A24
DDRDQS3N B21
DDRDQS3P A21
DDRDQS4N B9
DDRDQS4P A9
DDRDQS5N A6
TMS320C6672
Multicore Fixed and Floating-Point Digital Signal Processor
SPRS708—November 2010
Table 2-17 Terminal Functions
— By Signal Name
(Part 5 of 13)
Signal Name Ball Number
DDRDQS5P B6
DDRDQS6N A3
DDRDQS6P B3
DDRDQS7N C1
DDRDQS7P D1
DDRDQS8N B19
DDRDQS8P A19
DDRODT0 D13
DDRODT1 E13
DDRRAS
DDRRESET
DDRSLRATE0 G27
DDRSLRATE1 H27
DDRWE
DVDD15 A2, A11, A17, A28,
DVDD18 H24, N28, P23, T23,
EMIFA00 T27
EMIFA01 T24
EMIFA02 U29
EMIFA03 T25
EMIFA04 U27
EMIFA05 U28
EMIFA06 U25
EMIFA07 U24
EMIFA08 V28
EMIFA09 V29
EMIFA10 V27
EMIFA11 V26
EMIFA12 V25
EMIFA13 V24
EMIFA14 W28
EMIFA15 W27
EMIFA16 W29
EMIFA17 W26
C10
E11
E12
B1, B29, C14, C25,
D5, D8, D20, D23,
E3, F5, F7, F9, F11,
F17, F19, F26, F28,
G2, G4, G8, G10,
G12, G14, G16, G18,
G20, G23
U26, V23, Y7, Y23,
AA6, AB5, AB7,
AB19, AB21, AB28,
AC3, AF5, AF26,
AG22, AH1, AH29,
AJ2, AJ28
Table 2-17 Terminal Functions
—BySignalName
(Part 6 of 13)
Signal Name Ball Number
EMIFA18 W25
EMIFA19 W24
EMIFA20 W23
EMIFA21 Y29
EMIFA22 Y28
EMIFA23 U23
EMIFBE0
EMIFBE1
EMIFCE0
EMIFCE1
EMIFCE2
EMIFCE3
EMIFD00 Y27
EMIFD01 AB29
EMIFD02 AA29
EMIFD03 Y26
EMIFD04 AA27
EMIFD05 AB27
EMIFD06 AA26
EMIFD07 AA25
EMIFD08 Y25
EMIFD09 AB25
EMIFD10 AA24
EMIFD11 Y24
EMIFD12 AB23
EMIFD13 AB24
EMIFD14 AB26
EMIFD15 AC25
EMIFOE
EMIFRW
EMIFWAIT0 T29
EMIFWAIT1 T28
EMIFWE
EMU00 AC29
EMU01 AC28
EMU02 AC27
EMU03 AC26
EMU04 AD29
EMU05 AD28
EMU06 AD27
EMU07 AE29
EMU08 AE28
R24
R23
P25
R27
R28
R25
R26
P26
P24
ADVANCE INFORMATION
Copyright 2010 Texas Instruments Incorporated Device Overview 47
Page 48

TMS320C6672
Multicore Fixed and Floating-Point Digital Signal Processor
SPRS708—November 2010
Table 2-17 Terminal Functions
— By Signal Name
(Part 7 of 13)
Signal Name Ball Number
EMU09 AF29
EMU10 AE27
EMU11 AF28
EMU12 AG29
EMU13 AD26
ADVANCE INFORMATION
EMU14 AG28
EMU15 AG27
EMU16 AJ27
EMU17 AF27
EMU18 AH27
FSA0 AJ26
FSA1 AG23
FSB0 AG26
FSB1 AJ22
GPIO00 H25
GPIO01 J28
GPIO02 J29
GPIO03 J26
GPIO04 J25
GPIO05 J27
GPIO06 J24
GPIO07 K27
GPIO08 K28
GPIO09 K26
GPIO10 K29
GPIO11 L28
GPIO12 L29
GPIO13 K25
GPIO14 K24
GPIO15 L27
HOUT AD20
LENDIAN † H25
LRESETNMIEN
LRESET
MCMCLKN Y2
MCMCLKP W2
MCMREFCLKOUTN W1
MCMREFCLKOUTP Y1
MCMRXFLCLK W3
MCMRXFLDAT W4
MCMRXN0 U2
MCMRXN1 T1
M27
N26
Table 2-17 Terminal Functions
Signal Name Ball Number
MCMRXN2 M1
MCMRXN3 P2
MCMRXP0 T2
MCMRXP1 R1
MCMRXP2 N1
MCMRXP3 N2
MCMRXPMCLK Y3
MCMRXPMDAT Y4
MCMTXFLCLK AA1
MCMTXFLDAT AA3
MCMTXN0 M5
MCMTXN1 T4
MCMTXN2 R5
MCMTXN3 N4
MCMTXP0 N5
MCMTXP1 U4
MCMTXP2 T5
MCMTXP3 P4
MCMTXPMCLK AA2
MCMTXPMDAT AA4
MDCLK H26
MDIO G26
NMI
PACLKSEL AE4
PASSCLKN AJ4
PASSCLKP AJ5
PCIECLKN AH5
PCIECLKP AG5
PCIERXN0 AH7
PCIERXN1 AJ9
PCIERXP0 AH8
PCIERXP1 AJ8
PCIESSMODE0 † K24
PCIESSMODE1 † L27
PCIESSEN † L24
PCIETXN0 AF8
PCIETXN1 AG9
PCIETXP0 AF7
PCIETXP1 AG8
POR
PTV15 G22
RESETFULL
— By Signal Name
(Part 8 of 13)
M25
AC20
N25
www.ti.com
Table 2-17 Terminal Functions
—BySignalName
(Part 9 of 13)
Signal Name Ball Number
RESETSTAT N27
RESET
RIORXN0 AJ11
RIORXN1 AH10
RIORXN2 AH14
RIORXN3 AJ15
RIORXP0 AJ12
RIORXP1 AH11
RIORXP2 AH13
RIORXP3 AJ14
RIOTXN0 AF10
RIOTXN1 AG11
RIOTXN2 AG15
RIOTXN3 AF14
RIOTXP0 AF11
RIOTXP1 AG12
RIOTXP2 AG14
RIOTXP3 AF13
RSV01 AH28
RSV02 N24
RSV03 N23
RSV04 AH2
RSV05 AJ3
RSV06 H28
RSV07 G28
RSV08 AH19
RSV09 AF19
RSV0A AA21
RSV0B AA20
RSV10 K22
RSV11 J22
RSV12 Y5
RSV13 W5
RSV14 W6
RSV15 AE12
RSV16 AC9
RSV17 AD19
RSV20 AF3
RSV21 G25
RSV22 AF1
RSV24 AH4
RSV25 AH3
M29
48 Device Overview Copyright 2010 Texas Instruments Incorporated
Page 49

www.ti.com
Table 2-17 Terminal Functions
— By Signal Name
(Part 10 of 13)
Signal Name Ball Number
SCL AD3
SDA AC4
SGMII0RXN AJ18
SGMII0RXP AJ17
SGMII0TXN AG18
SGMII0TXP AG17
SGMII1RXN AH17
SGMII1RXP AH16
SGMII1TXN AF17
SGMII1TXP AF16
SPICLK AE1
SPIDIN AD2
SPIDOUT AB1
SPISCS0 AG1
SPISCS1 AG2
SRIOSGMIICLKN AJ6
SRIOSGMIICLKP AG6
SYSCLKOUT AE3
TCK N29
TDI P27
TDO R29
TIMI0 L24
TIMI1 L26
TIMO0 L25
TIMO1 M26
TMS P29
TR00 AH26
TR01 AJ25
TR02 AD23
TR03 AD24
TR04 AC23
TR05 AH25
TR06 AC24
TR07 AE25
TR10 AE22
TR11 AD21
TR12 AC21
TR13 AJ21
TR14 AH22
TR15 AJ20
TR16 AH21
TR17 AG21
TMS320C6672
Multicore Fixed and Floating-Point Digital Signal Processor
SPRS708—November 2010
Table 2-17 Terminal Functions
— By Signal Name
(Part 11 of 13)
Signal Name Ball Number
TRST P28
TX00 AE24
TX01 AD25
TX02 AJ24
TX03 AG24
TX04 AH24
TX05 AF24
TX06 AE23
TX07 AF23
TX10 AF21
TX11 AD22
TX12 AC22
TX13 AE21
TX14 AG20
TX15 AE20
TX16 AH20
TX17 AF20
UARTCTS AB3
UARTRTS AB2
UARTRXD AD1
UARTTXD AC1
VCL M24
VCNTL0 L23
VCNTL1 K23
VCNTL2 J23
VCNTL3 H23
VD M23
VDDR1 V5
VDDR2 AE10
VDDR3 AE16
VDDR4 AE14
VDDT1 M7, N6, P7, R6, T7,
U6, V7
VDDT2 AB9, AB11, AB13,
AB15, AB17, AC8,
AC10, AC12, AC14,
AC16, AC18, AD7,
AD9, AD11, AD13,
AD15, AD17, AE18
VREFSSTL E14
Table 2-17 Terminal Functions
—BySignalName
(Part 12 of 13)
Signal Name Ball Number
VSS A1, A29, B11, B17,
B25, C8, C23, D3,
D14, D18, E5, E20,
F6, F8, F10, F12,
F16, F18, F27, F29,
G1, G3, G5, G6, G7,
G9, G11, G13, G15,
G17, G19, G21, G24,
VSS H1, H2, H3, H4, H5,
H6, H8, H10, H12,
H14, H16, H18, H20,
J1, J2, J3, J4, J5, J6,
J7, J9, J11, J13, J15,
J17, J19, J21, K1, K2,
K3, K4, K5, K6, K8,
K10, K12, K14, K16,
VSS K18, K20, L1, L2, L3,
L4, L5, L6, L7, L9,
L11, L13, L15, L17,
L19, L21, M2, M3,
M4, M6, M8, M10,
M12, M14, M16,
M18, M20, M22,
M28, N3, N7, N9,
VSS N11, N13, N15, N17,
N19, N21, P1, P3,
P5, P6, P8, P10, P12,
P14, P16, P18, P20,
P22, R2, R3, R4, R7,
R9, R11, R13, R15,
R17, R19, R21, T3,
T6, T8, T10, T12,
VSS T14, T16, T18, T20,
T22, T26, U1, U3,
U5, U7, U9, U11,
U13, U15, U17, U19,
U21, V1, V2, V3, V4,
V6, V8, V10, V12,
V14, V16, V18, V20,
V22, W7, W9, W11,
VSS W13, W15, W17,
W19, W21, Y6, Y8,
Y10, Y12, Y14, Y16,
Y18, Y20, Y22, AA5,
AA7, AA9, AA11,
AA13, AA15, AA17,
AA19, AA23, AA28,
AB4, AB6, AB8,
VSS AB10, AB12, AB14,
AB16, AB18, AB20,
AB22, AC2, AC5,
AC7, AC11, AC13,
AC15, AC17, AC19,
AD6, AD8, AD10,
AD12, AD14, AD16,
AD18, AE7, AE8,
ADVANCE INFORMATION
Copyright 2010 Texas Instruments Incorporated Device Overview 49
Page 50

TMS320C6672
Multicore Fixed and Floating-Point Digital Signal Processor
SPRS708—November 2010
Table 2-17 Terminal Functions
— By Signal Name
(Part 13 of 13)
Signal Name Ball Number
VSS AE9, AE11, AE13,
ADVANCE INFORMATION
VSS AJ1, AJ7, AJ10,
End of Table 2-17
AE15, AE17, AE19,
AE26, AF4, AF6,
AF9, AF12, AF15,
AF18, AF22AG7,
AG10, AG13, AG16,
AG19, AH6, AH9,
AH12, AH15, AH18,
AJ13, AJ16, AJ19,
AJ29
www.ti.com
50 Device Overview Copyright 2010 Texas Instruments Incorporated
Page 51

www.ti.com
Table 2-18 Terminal Functions
— By Ball Number
(Part 1 of 21)
Ball Number Signal Name
A1 VSS
A2 DVDD15
A3 DDRDQS6N
A4 DDRD51
A5 DDRD49
A6 DDRDQS5N
A7 DDRD40
A8 DDRDQM5
A9 DDRDQS4P
A10 DDRDQM4
A11 DVDD15
A12 DDRCLKOUTP0
A13 DDRBA0
A14 DDRA00
A15 DDRA04
A16 DDRCLKOUTP1
A17 DVDD15
A18 DDRCB07
A19 DDRDQS8P
A20 DDRDQM8
A21 DDRDQS3P
A22 DDRDQM3
A23 DDRD20
A24 DDRDQS2P
A25 DDRDQM2
A26 DDRD15
A27 DDRDQS1P
A28 DVDD15
A29 VSS
B1 DVDD15
B2 DDRDQM7
B3 DDRDQS6P
B4 DDRD50
B5 DDRDQM6
B6 DDRDQS5P
B7 DDRD44
B8 DDRD38
B9 DDRDQS4N
B10 DDRD34
B11 VSS
B12 DDRCLKOUTN0
B13 DDRBA1
TMS320C6672
Multicore Fixed and Floating-Point Digital Signal Processor
SPRS708—November 2010
Table 2-18 Terminal Functions
— By Ball Number
(Part 2 of 21)
Ball Number Signal Name
B14 DDRA01
B15 DDRA06
B16 DDRCLKOUTN1
B17 VSS
B18 DDRCB06
B19 DDRDQS8N
B20 DDRCB03
B21 DDRDQS3N
B22 DDRD30
B23 DDRD21
B24 DDRDQS2N
B25 VSS
B26 DDRD14
B27 DDRDQS1N
B28 DDRD05
B29 DVDD15
C1 DDRDQS7N
C2 DDRD59
C3 DDRD55
C4 DDRD54
C5 DDRD48
C6 DDRD47
C7 DDRD43
C8 VSS
C9 DDRD37
C10 DDRRAS
C11 DDRCE0
C12 DDRCE1
C13 DDRBA2
C14 DVDD15
C15 DDRA05
C16 DDRA13
C17 DDRA15
C18 DDRCB05
C19 DDRCB04
C20 DDRCB01
C21 DDRD29
C22 DDRD31
C23 VSS
C24 DDRD22
C25 DVDD15
C26 DDRD13
Table 2-18 Terminal Functions
— By Ball Number
(Part 3 of 21)
Ball Number Signal Name
C27 DDRDQM1
C28 DDRDQS0P
C29 DDRDQS0N
D1 DDRDQS7P
D2 DDRD57
D3 VSS
D4 DDRD52
D5 DVDD15
D6 DDRD46
D7 DDRD41
D8 DVDD15
D9 DDRD35
D10 DDRD33
D11 DDRCKE0
D12 DDRCAS
D13 DDRODT0
D14 VSS
D15 DDRA07
D16 DDRA11
D17 DDRA14
D18 VSS
D19 DDRCB02
D20 DVDD15
D21 DDRD24
D22 DDRD28
D23 DVDD15
D24 DDRD18
D25 DDRD11
D26 DDRD12
D27 DDRD04
D28 DDRD03
D29 DDRD01
E1 DDRD62
E2 DDRD58
E3 DVDD15
E4 DDRD53
E5 VSS
E6 DDRD45
E7 DDRD42
E8 DDRD39
E9 DDRD36
E10 DDRD32
ADVANCE INFORMATION
Copyright 2010 Texas Instruments Incorporated Device Overview 51
Page 52

TMS320C6672
Multicore Fixed and Floating-Point Digital Signal Processor
SPRS708—November 2010
Table 2-18 Terminal Functions
— By Ball Number
(Part 4 of 21)
Ball Number Signal Name
E11 DDRRESET
E12 DDRWE
E13 DDRODT1
E14 VREFSSTL
E15 DDRA09
ADVANCE INFORMATION
E16 DDRA10
E17 DDRA12
E18 DDRCKE1
E19 DDRCB00
E20 VSS
E21 DDRD26
E22 DDRD23
E23 DDRD19
E24 DDRD09
E25 DDRD10
E26 DDRD06
E27 DDRD02
E28 DDRD00
E29 DDRDQM0
F1 DDRD63
F2 DDRD60
F3 DDRD61
F4 DDRD56
F5 DVDD15
F6 VSS
F7 DVDD15
F8 VSS
F9 DVDD15
F10 VSS
F11 DVDD15
F12 VSS
F13 DDRA03
F14 DDRA02
F15 DDRA08
F16 VSS
F17 DVDD15
F18 VSS
F19 DVDD15
F20 DDRD25
F21 DDRD27
F22 DDRD17
F23 DDRD16
Table 2-18 Terminal Functions
Ball Number Signal Name
F24 DDRD08
F25 DDRD07
F26 DVDD15
F27 VSS
F28 DVDD15
F29 VSS
G1 VSS
G2 DVDD15
G3 VSS
G4 DVDD15
G5 VSS
G6 VSS
G7 VSS
G8 DVDD15
G9 VSS
G10 DVDD15
G11 VSS
G12 DVDD15
G13 VSS
G14 DVDD15
G15 VSS
G16 DVDD15
G17 VSS
G18 DVDD15
G19 VSS
G20 DVDD15
G21 VSS
G22 PTV15
G23 DVDD15
G24 VSS
G25 RSV21
G26 MDIO
G27 DDRSLRATE0
G28 RSV07
G29 DDRCLKP
H1 VSS
H2 VSS
H3 VSS
H4 VSS
H5 VSS
H6 VSS
H7 CVDD
— By Ball Number
(Part 5 of 21)
www.ti.com
Table 2-18 Terminal Functions
— By Ball Number
(Part 6 of 21)
Ball Number Signal Name
H8 VSS
H9 CVDD
H10 VSS
H11 CVDD
H12 VSS
H13 CVDD
H14 VSS
H15 CVDD
H16 VSS
H17 CVDD
H18 VSS
H19 CVDD
H20 VSS
H21 CVDD
H22 AVDDA1
H23 VCNTL3
H24 DVDD18
H25 GPIO00
H25 LENDIAN †
H26 MDCLK
H27 DDRSLRATE1
H28 RSV06
H29 DDRCLKN
J1 VSS
J2 VSS
J3 VSS
J4 VSS
J5 VSS
J6 VSS
J7 VSS
J8 CVDD1
J9 VSS
J10 CVDD
J11 VSS
J12 CVDD
J13 VSS
J14 CVDD1
J15 VSS
J16 CVDD
J17 VSS
J18 CVDD
J19 VSS
52 Device Overview Copyright 2010 Texas Instruments Incorporated
Page 53

www.ti.com
Table 2-18 Terminal Functions
— By Ball Number
(Part 7 of 21)
Ball Number Signal Name
J20 CVDD
J21 VSS
J22 RSV11
J23 VCNTL2
J24 GPIO06
J24 BOOTMODE05 †
J25 GPIO04
J25 BOOTMODE03 †
J26 GPIO03
J26 BOOTMODE02 †
J27 GPIO05
J27 BOOTMODE04 †
J28 GPIO01
J28 BOOTMODE00 †
J29 GPIO02
J29 BOOTMODE01†
K1 VSS
K2 VSS
K3 VSS
K4 VSS
K5 VSS
K6 VSS
K7 CVDD1
K8 VSS
K9 CVDD1
K10 VSS
K11 CVDD
K12 VSS
K13 CVDD1
K14 VSS
K15 CVDD1
K16 VSS
K17 CVDD
K18 VSS
K19 CVDD
K20 VSS
K21 CVDD
K22 RSV10
K23 VCNTL1
K24 GPIO14
K24 PCIESSMODE0 †
K25 GPIO13
TMS320C6672
Multicore Fixed and Floating-Point Digital Signal Processor
SPRS708—November 2010
Table 2-18 Terminal Functions
— By Ball Number
(Part 8 of 21)
Ball Number Signal Name
K25 BOOTMODE12 †
K26 GPIO09
K26 BOOTMODE08 †
K27 GPIO07
K27 BOOTMODE06 †
K28 GPIO08
K28 BOOTMODE07 †
K29 GPIO10
K29 BOOTMODE09 †
L1 VSS
L2 VSS
L3 VSS
L4 VSS
L5 VSS
L6 VSS
L7 VSS
L8 CVDD1
L9 VSS
L10 CVDD
L11 VSS
L12 CVDD
L13 VSS
L14 CVDD1
L15 VSS
L16 CVDD
L17 VSS
L18 CVDD
L19 VSS
L20 CVDD1
L21 VSS
L22 CVDD1
L23 VCNTL0
L24 TIMI0
L24 PCIESSEN †
L25 TIMO0
L26 TIMI1
L27 GPIO15
L27 PCIESSMODE1 †
L28 GPIO11
L28 BOOTMODE10 †
L29 GPIO12
L29 BOOTMODE11 †
Table 2-18 Terminal Functions
— By Ball Number
(Part 9 of 21)
Ball Number Signal Name
M1 MCMRXN2
M2 VSS
M3 VSS
M4 VSS
M5 MCMTXN0
M6 VSS
M7 VDDT1
M8 VSS
M9 CVDD1
M10 VSS
M11 CVDD
M12 VSS
M13 CVDD
M14 VSS
M15 CVDD
M16 VSS
M17 CVDD
M18 VSS
M19 CVDD
M20 VSS
M21 CVDD1
M22 VSS
M23 VD
M24 VCL
M25 NMI
M26 TIMO1
M27 LRESETNMIEN
M28 VSS
M29 RESET
N1 MCMRXP2
N2 MCMRXP3
N3 VSS
N4 MCMTXN3
N5 MCMTXP0
N6 VDDT1
N7 VSS
N8 CVDD
N9 VSS
N10 CVDD
N11 VSS
N12 CVDD
N13 VSS
ADVANCE INFORMATION
Copyright 2010 Texas Instruments Incorporated Device Overview 53
Page 54

TMS320C6672
Multicore Fixed and Floating-Point Digital Signal Processor
SPRS708—November 2010
Table 2-18 Terminal Functions
— By Ball Number
(Part 10 of 21)
Ball Number Signal Name
N14 CVDD
N15 VSS
N16 CVDD
N17 VSS
N18 CVDD
ADVANCE INFORMATION
N19 VSS
N20 CVDD1
N21 VSS
N22 CVDD1
N23 RSV03
N24 RSV02
N25 RESETFULL
N26 LRESET
N27 RESETSTAT
N28 DVDD18
N29 TCK
P1 VSS
P2 MCMRXN3
P3 VSS
P4 MCMTXP3
P5 VSS
P6 VSS
P7 VDDT1
P8 VSS
P9 CVDD
P10 VSS
P11 CVDD
P12 VSS
P13 CVDD
P14 VSS
P15 CVDD
P16 VSS
P17 CVDD
P18 VSS
P19 CVDD
P20 VSS
P21 CVDD
P22 VSS
P23 DVDD18
P24 EMIFWE
P25 EMIFCE0
P26 EMIFRW
Table 2-18 Terminal Functions
Ball Number Signal Name
P27 TDI
P28 TRST
P29 TMS
R1 MCMRXP1
R2 VSS
R3 VSS
R4 VSS
R5 MCMTXN2
R6 VDDT1
R7 VSS
R8 CVDD
R9 VSS
R10 CVDD
R11 VSS
R12 CVDD1
R13 VSS
R14 CVDD1
R15 VSS
R16 CVDD1
R17 VSS
R18 CVDD
R19 VSS
R20 CVDD
R21 VSS
R22 CVDD
R23 EMIFBE1
R24 EMIFBE0
R25 EMIFCE3
R26 EMIFOE
R27 EMIFCE1
R28 EMIFCE2
R29 TDO
T1 MCMRXN1
T2 MCMRXP0
T3 VSS
T4 MCMTXN1
T5 MCMTXP2
T6 VSS
T7 VDDT1
T8 VSS
T9 CVDD
T10 VSS
— By Ball Number
(Part 11 of 21)
www.ti.com
Table 2-18 Terminal Functions
— By Ball Number
(Part 12 of 21)
Ball Number Signal Name
T11 CVDD
T12 VSS
T13 CVDD
T14 VSS
T15 CVDD
T16 VSS
T17 CVDD
T18 VSS
T19 CVDD
T20 VSS
T21 CVDD
T22 VSS
T23 DVDD18
T24 EMIFA01
T25 EMIFA03
T26 VSS
T27 EMIFA00
T28 EMIFWAIT1
T29 EMIFWAIT0
U1 VSS
U2 MCMRXN0
U3 VSS
U4 MCMTXP1
U5 VSS
U6 VDDT1
U7 VSS
U8 CVDD
U9 VSS
U10 CVDD
U11 VSS
U12 CVDD1
U13 VSS
U14 CVDD1
U15 VSS
U16 CVDD1
U17 VSS
U18 CVDD
U19 VSS
U20 CVDD
U21 VSS
U22 CVDD
U23 EMIFA23
54 Device Overview Copyright 2010 Texas Instruments Incorporated
Page 55

www.ti.com
Table 2-18 Terminal Functions
— By Ball Number
(Part 13 of 21)
Ball Number Signal Name
U24 EMIFA07
U25 EMIFA06
U26 DVDD18
U27 EMIFA04
U28 EMIFA05
U29 EMIFA02
V1 VSS
V2 VSS
V3 VSS
V4 VSS
V5 VDDR1
V6 VSS
V7 VDDT1
V8 VSS
V9 CVDD
V10 VSS
V11 CVDD
V12 VSS
V13 CVDD1
V14 VSS
V15 CVDD1
V16 VSS
V17 CVDD
V18 VSS
V19 CVDD
V20 VSS
V21 CVDD
V22 VSS
V23 DVDD18
V24 EMIFA13
V25 EMIFA12
V26 EMIFA11
V27 EMIFA10
V28 EMIFA08
V29 EMIFA09
W1 MCMREFCLKOUTN
W2 MCMCLKP
W3 MCMRXFLCLK
W4 MCMRXFLDAT
W5 RSV13
W6 RSV14
W7 VSS
TMS320C6672
Multicore Fixed and Floating-Point Digital Signal Processor
SPRS708—November 2010
Table 2-18 Terminal Functions
— By Ball Number
(Part 14 of 21)
Ball Number Signal Name
W8 CVDD
W9 VSS
W10 CVDD
W11 VSS
W12 CVDD1
W13 VSS
W14 CVDD1
W15 VSS
W16 CVDD1
W17 VSS
W18 CVDD
W19 VSS
W20 CVDD
W21 VSS
W22 CVDD
W23 EMIFA20
W24 EMIFA19
W25 EMIFA18
W26 EMIFA17
W27 EMIFA15
W28 EMIFA14
W29 EMIFA16
Y1 MCMREFCLKOUTP
Y2 MCMCLKN
Y3 MCMRXPMCLK
Y4 MCMRXPMDAT
Y5 RSV12
Y6 VSS
Y7 DVDD18
Y8 VSS
Y9 CVDD
Y10 VSS
Y11 CVDD
Y12 VSS
Y13 CVDD
Y14 VSS
Y15 CVDD
Y16 VSS
Y17 CVDD
Y18 VSS
Y19 CVDD
Y20 VSS
Table 2-18 Terminal Functions
— By Ball Number
(Part 15 of 21)
Ball Number Signal Name
Y21 CVDD
Y22 VSS
Y23 DVDD18
Y24 EMIFD11
Y25 EMIFD08
Y26 EMIFD03
Y27 EMIFD00
Y28 EMIFA22
Y29 EMIFA21
AA1 MCMTXFLCLK
AA2 MCMTXPMCLK
AA3 MCMTXFLDAT
AA4 MCMTXPMDAT
AA5 VSS
AA6 DVDD18
AA7 VSS
AA8 CVDD
AA9 VSS
AA10 CVDD
AA11 VSS
AA12 CVDD
AA13 VSS
AA14 CVDD
AA15 VSS
AA16 CVDD
AA17 VSS
AA18 CVDD
AA19 VSS
AA20 RSV0B
AA21 RSV0A
AA22 CVDD
AA23 VSS
AA24 EMIFD10
AA25 EMIFD07
AA26 EMIFD06
AA27 EMIFD04
AA28 VSS
AA29 EMIFD02
AB1 SPIDOUT
AB2 UARTRTS
AB3 UARTCTS
AB4 VSS
ADVANCE INFORMATION
Copyright 2010 Texas Instruments Incorporated Device Overview 55
Page 56

TMS320C6672
Multicore Fixed and Floating-Point Digital Signal Processor
SPRS708—November 2010
Table 2-18 Terminal Functions
— By Ball Number
(Part 16 of 21)
Ball Number Signal Name
AB5 DVDD18
AB6 VSS
AB7 DVDD18
AB8 VSS
AB9 VDDT2
ADVANCE INFORMATION
AB10 VSS
AB11 VDDT2
AB12 VSS
AB13 VDDT2
AB14 VSS
AB15 VDDT2
AB16 VSS
AB17 VDDT2
AB18 VSS
AB19 DVDD18
AB20 VSS
AB21 DVDD18
AB22 VSS
AB23 EMIFD12
AB24 EMIFD13
AB25 EMIFD09
AB26 EMIFD14
AB27 EMIFD05
AB28 DVDD18
AB29 EMIFD01
AC1 UARTTXD
AC2 VSS
AC3 DVDD18
AC4 SDA
AC5 VSS
AC6 AVDDA2
AC7 VSS
AC8 VDDT2
AC9 RSV16
AC10 VDDT2
AC11 VSS
AC12 VDDT2
AC13 VSS
AC14 VDDT2
AC15 VSS
AC16 VDDT2
AC17 VSS
Table 2-18 Terminal Functions
Ball Number Signal Name
AC18 VDDT2
AC19 VSS
AC20 POR
AC21 TR12
AC22 TX12
AC23 TR04
AC24 TR06
AC25 EMIFD15
AC26 EMU03
AC27 EMU02
AC28 EMU01
AC29 EMU00
AD1 UARTRXD
AD2 SPIDIN
AD3 SCL
AD4 CORESEL1
AD5 AVDDA3
AD6 VSS
AD7 VDDT2
AD8 VSS
AD9 VDDT2
AD10 VSS
AD11 VDDT2
AD12 VSS
AD13 VDDT2
AD14 VSS
AD15 VDDT2
AD16 VSS
AD17 VDDT2
AD18 VSS
AD19 RSV17
AD20 HOUT
AD21 TR11
AD22 TX11
AD23 TR02
AD24 TR03
AD25 TX01
AD26 EMU13
AD27 EMU06
AD28 EMU05
AD29 EMU04
AE1 SPICLK
— By Ball Number
(Part 17 of 21)
www.ti.com
Table 2-18 Terminal Functions
— By Ball Number
(Part 18 of 21)
Ball Number Signal Name
AE2 BOOTCOMPLETE
AE3 SYSCLKOUT
AE4 PACLKSEL
AE5 CORESEL3
AE6 CORESEL2
AE7 VSS
AE8 VSS
AE9 VSS
AE10 VDDR2
AE11 VSS
AE12 RSV15
AE13 VSS
AE14 VDDR4
AE15 VSS
AE16 VDDR3
AE17 VSS
AE18 VDDT2
AE19 VSS
AE20 TX15
AE21 TX13
AE22 TR10
AE23 TX06
AE24 TX00
AE25 TR07
AE26 VSS
AE27 EMU10
AE28 EMU08
AE29 EMU07
AF1 RSV22
AF2 CORESEL0
AF3 RSV20
AF4 VSS
AF5 DVDD18
AF6 VSS
AF7 PCIETXP0
AF8 PCIETXN0
AF9 VSS
AF10 RIOTXN0
AF11 RIOTXP0
AF12 VSS
AF13 RIOTXP3
AF14 RIOTXN3
56 Device Overview Copyright 2010 Texas Instruments Incorporated
Page 57

www.ti.com
Table 2-18 Terminal Functions
— By Ball Number
(Part 19 of 21)
Ball Number Signal Name
AF15 VSS
AF16 SGMII1TXP
AF17 SGMII1TXN
AF18 VSS
AF19 RSV09
AF20 TX17
AF21 TX10
AF22 VSS
AF23 TX07
AF24 TX05
AF25 CLKA0
AF26 DVDD18
AF27 EMU17
AF28 EMU11
AF29 EMU09
AG1 SPISCS0
AG2 SPISCS1
AG3 CORECLKP
AG4 CORECLKN
AG5 PCIECLKP
AG6 SRIOSGMIICLKP
AG7 VSS
AG8 PCIETXP1
AG9 PCIETXN1
AG10 VSS
AG11 RIOTXN1
AG12 RIOTXP1
AG13 VSS
AG14 RIOTXP2
AG15 RIOTXN2
AG16 VSS
AG17 SGMII0TXP
AG18 SGMII0TXN
AG19 VSS
AG20 TX14
AG21 TR17
AG22 DVDD18
AG23 FSA1
AG24 TX03
AG25 CLKB0
AG26 FSB0
AG27 EMU15
TMS320C6672
Multicore Fixed and Floating-Point Digital Signal Processor
SPRS708—November 2010
Table 2-18 Terminal Functions
— By Ball Number
(Part 20 of 21)
Ball Number Signal Name
AG28 EMU14
AG29 EMU12
AH1 DVDD18
AH2 RSV04
AH3 RSV25
AH4 RSV24
AH5 PCIECLKN
AH6 VSS
AH7 PCIERXN0
AH8 PCIERXP0
AH9 VSS
AH10 RIORXN1
AH11 RIORXP1
AH12 VSS
AH13 RIORXP2
AH14 RIORXN2
AH15 VSS
AH16 SGMII1RXP
AH17 SGMII1RXN
AH18 VSS
AH19 RSV08
AH20 TX16
AH21 TR16
AH22 TR14
AH23 CLKB1
AH24 TX04
AH25 TR05
AH26 TR00
AH27 EMU18
AH28 RSV01
AH29 DVDD18
AJ1 VSS
AJ2 DVDD18
AJ3 RSV05
AJ4 PASSCLKN
AJ5 PASSCLKP
AJ6 SRIOSGMIICLKN
AJ7 VSS
AJ8 PCIERXP1
AJ9 PCIERXN1
AJ10 VSS
AJ11 RIORXN0
Table 2-18 Terminal Functions
— By Ball Number
(Part 21 of 21)
Ball Number Signal Name
AJ12 RIORXP0
AJ13 VSS
AJ14 RIORXP3
AJ15 RIORXN3
AJ16 VSS
AJ17 SGMII0RXP
AJ18 SGMII0RXN
AJ19 VSS
AJ20 TR15
AJ21 TR13
AJ22 FSB1
AJ23 CLKA1
AJ24 TX02
AJ25 TR01
AJ26 FSA0
AJ27 EMU16
AJ28 DVDD18
AJ29 VSS
End of Table 2-18
ADVANCE INFORMATION
Copyright 2010 Texas Instruments Incorporated Device Overview 57
Page 58

TMS320C6672
Multicore Fixed and Floating-Point Digital Signal Processor
SPRS708—November 2010
2.9 Development
2.9.1 Development Support
In case the customer would like to develop their own features and software on the C6672 device, TI offers an
extensive line of development tools for the TMS320C6000™ DSP platform, including tools to evaluate the
performance of the processors, generate code, develop algorithm implementations, and fully integrate and debug
software and hardware modules. The tool's support documentation is electronically available within the Code
Composer Studio™ Integrated Development Environment (IDE).
The following products support development of C6000™ DSP-based applications:
ADVANCE INFORMATION
• Software Development Tools:
– Code Composer Studio™ Integrated Development Environment (IDE), including Editor C/C++/Assembly
Code Generation, and Debug plus additional development tools
– Scalable, Real-Time Foundation Software (DSP/BIOS™), which provides the basic run-time target software
needed to support any DSP application.
• Hardware Development Tools:
– Extended Development System (XDS™) Emulator (supports C6000™ DSP multiprocessor system debug)
– EVM (Evaluation Module)
www.ti.com
2.9.2 Device Support
2.9.2.1 Device and Development-Support Tool Nomenclature
To designate the stages in the product development cycle, TI assigns prefixes to the part numbers of all DSP devices
and support tools. Each DSP commercial family member has one of three prefixes: TMX, TMP, or TMS (e.g.,
TMX320CMH). Texas Instruments recommends two of three possible prefix designators for its support tools:
TMDX and TMDS. These prefixes represent evolutionary stages of product development from engineering
prototypes (TMX/TMDX) through fully qualified production devices/tools (TMS/TMDS).
Device development evolutionary flow:
• TMX: Experimental device that is not necessarily representative of the final device's electrical specifications
• TMP: Final silicon die that conforms to the device's electrical specifications but has not completed quality and
reliability verification
• TMS: Fully qualified production device
Support tool development evolutionary flow:
• TMDX: Development-support product that has not yet completed Texas Instruments internal qualification
testing.
• TMDS: Fully qualified development-support product
TMX and TMP devices and TMDX development-support tools are shipped with the following disclaimer:
"Developmental product is intended for internal evaluation purposes."
TMS devices and TMDS development-support tools have been characterized fully, and the quality and reliability of
the device have been demonstrated fully. TI's standard warranty applies.
Predictions show that prototype devices (TMX or TMP) have a greater failure rate than the standard production
devices. Texas Instruments recommends that these devices not be used in any production system because their
expected end-use failure rate still is undefined. Only qualified production devices are to be used.
58 Device Overview Copyright 2010 Texas Instruments Incorporated
Page 59

TMS320C6672
Multicore Fixed and Floating-Point Digital Signal Processor
www.ti.com
SPRS708—November 2010
Related Documentation from Texas Instruments
These documents describe the TMS320C6672 Multicore Fixed and Floating-Point Digital Signal Processor. Copies
of these documents are available on the Internet at www.ti.com
64-bit Timer (Timer 64) for KeyStone Devices User Guide SPRUGV5
Antenna Interface 2 (AIF2) for KeyStone Devices User Guide SPRUGV7
Bootloader for the C66x DSP User Guide SPRUGY5
C66x CorePac User Guide SPRUGW0
C66x CPU and Instruction Set Reference Guide SPRUGH7
C66x DSP Cache User Guide SPRUGY8
DDR3 Design Guide for KeyStone Devices SPRABI1
Emulation and Trace Headers Technical Reference SPRU655
Enhanced Direct Memory Access 3 (EDMA3) for KeyStone Devices User Guide SPRUGS5
Ethernet Media Access Control (EMAC) for KeyStone Devices User Guide SPRUGV9
External Memory Interface (EMIF16) for KeyStone Devices User Guide SPRUGZ3
Fast Fourier Transform Coprocessor (FFTC) for KeyStone Devices User Guide SPRUGS2
General Purpose Input/Output (GPIO) for KeyStone Devices User Guide SPRUGV1
Hardware Design Guide for KeyStone Devices SPRABI2
HyperLink for KeyStone Devices User Guide SPRUGW8
Inter Integrated Circuit (I
Interrupt Controller (INTC) for KeyStone Devices User Guide SPRUGW4
Memory Protection Unit (MPU) for KeyStone Devices User Guide SPRUGW5
Multicore Navigator for KeyStone Devices User Guide SPRUGR9
Multicore Shared Memory Controller (MSMC) for KeyStone Devices User Guide SPRUGW7
Packet Accelerator (PA) for KeyStone Devices User Guide SPRUGS4
Peripheral Component Interconnect Express (PCIe) for KeyStone Devices User Guide SPRUGS6
Phase Locked Loop (PLL) Controller for KeyStone Devices User Guide SPRUGV2
Power Management for KeyStone Devices SPRABH0
Power Sleep Controller (PSC) for KeyStone Devices User Guide SPRUGV4
Serial Peripheral Interface (SPI) for KeyStone Devices User Guide SPRUGP2
Serial RapidIO (SRIO) for KeyStone Devices User Guide SPRUGW1
Telecom Serial Interface Port (TSIP) for the C66x DSP User Guide SPRUGY4
Universal Asynchronous Receiver/Transmitter (UART) for KeyStone Devices User Guide SPRUGP1
Using Advanced Event Triggering to Debug Real-Time Problems in High Speed Embedded Microprocessor Systems SPRA387
Using Advanced Event Triggering to Find and Fix Intermittent Real-Time Bugs SPRA753
2
C) for KeyStone Devices User Guide SPRUGV3
ADVANCE INFORMATION
Copyright 2010 Texas Instruments Incorporated Device Overview 59
Page 60

TMS320C6672
Multicore Fixed and Floating-Point Digital Signal Processor
SPRS708—November 2010
ADVANCE INFORMATION
www.ti.com
60 Device Overview Copyright 2010 Texas Instruments Incorporated
Page 61
TMS320C6672
Multicore Fixed and Floating-Point Digital Signal Processor
www.ti.com
SPRS708—November 2010
3 Device Configuration
On the TMS320C6672 device, certain device configurations like boot mode and endianess, are selected at device
power-on reset. The status of the peripherals (enabled/disabled) is determined after device power-on reset. By
default, the peripherals on the device are disabled and need to be enabled by software before being used.
3.1 Device Configuration at Device Reset
Table 3-1 describes the device configuration pins. The logic level is latched at power-on reset to determine the device
configuration. The logic level on the device configuration pins can be set by using external pullup/pulldown resistors
or by using some control device (e.g., FPGA/CPLD) to intelligently drive these pins. When using a control device,
care should be taken to ensure there is no contention on the lines when the device is out of reset. The device
configuration pins are sampled during power-on reset and are driven after the reset is removed. To avoid
contention, the control device must stop driving the device configuration pins of the DSP.
Note—If a configuration pin must be routed out from the device and it is not driven (Hi-Z state), the internal
pullup/pulldown (IPU/IPD) resistor should not be relied upon. TI recommends the use of an external
pullup/pulldown resistor. For more detailed information on pullup/pulldown resistors and situations in
which external pullup/pulldown resistors are required, see Section 3.4 ‘‘Pullup/Pulldown Resistors’’ on
page 76.
Table 3-1 TMS320C6672 Device Configuration Pins
Configuration Pin Pin No. IPD/IPU
LENDIAN
BOOTMODE[12:0]
PCIESSMODE[1:0]
PCIESSEN
PACLKSEL
End of Table 3-1
1 Internal 100-μA pulldown or pullup is provided for this terminal. In most systems, a 1-kΩ resistor can be used to oppose the IPD/IPU. For more detailed information on
2 These signal names are the secondary functions of these pins.
(1) (2)
(1) (2)
(1) (2)
(1) (2)
(1)
pulldown/pullup resistors and situations in which external pulldown/pullup resistors are required, see Section 3.4 ‘‘Pullup/Pulldown Resistors’’ on page 76.
H25 IPU Device endian mode (LENDIAN).
J28, J29, J26, J25,
J27, J24, K27, K28,
K26, K29, L28, L29,
K25
L27, K24 IPD PCIe Subsystem mode selection.
L24 IPD PCIe subsystem enable/disable.
AE4 IPD Packet accelerator subsystem clock select.
(1)
Functional Description
0 = Device operates in big endian mode
1 = Device operates in little endian mode
IPD Method of boot.
Some pins may not be used by bootloader and can be used as general purpose config
pins. Refer to the Bootloader for the C66x DSP User Guide (literature number SPRUGY5) for
how to determine the device enumeration ID value.
00 = PCIe in end point mode
01 = PCIe legacy end point (no support for MSI)
10 = PCIe in root complex mode
11 = Reserved
0 = PCIE Subsystem is disabled
1 = PCIE Subsystem is enabled
0 = SYSCLK / ALTCORECLK (controlled by CORECLKSEL pin) is used as the input to PA_SS
PLL
1 = PASSCLK is used as the input to PASS PLL
ADVANCE INFORMATION
3.2 Peripheral Selection After Device Reset
Several of the peripherals on the TMS320C6672 are controlled by the Power Sleep Controller (PSC). By default, the
PCIe, SRIO, and HyperLink are held in reset and clock-gated. The memories in these modules are also in a
low-leakage sleep mode. Software is required to turn these memories on. Then, the software enables the modules
(turns on clocks and de-asserts reset) before these modules can be used.
Copyright 2010 Texas Instruments Incorporated Device Configuration 61
Page 62

TMS320C6672
Multicore Fixed and Floating-Point Digital Signal Processor
SPRS708—November 2010
If one of the above modules is used in the selected ROM boot mode, the ROM code will automatically enable the
module.
All other modules come up enabled by default and there is no special software sequence to enable. For more detailed
information on the PSC usage, see the Power Sleep Controller (PSC) for KeyStone Devices User Guide (literature
number SPRUGV4).
3.3 Device State Control Registers
The TMS320C6672 device has a set of registers that are used to control the status of its peripherals. These registers
are shown in Table 3-2.
ADVANCE INFORMATION
Table 3-2 Device State Control Registers (Part 1 of 3)
Address Start Address End Size Acronym Description
0x02620000 0x02620007 8B Reserved
0x02620008 0x02620017 16B Reserved
0x02620018 0x0262001B 4B JTAGID See section 3.3.3
0x0262001C 0x0262001F 4B Reserved
0x02620020 0x02620023 4B DEVSTAT See section 3.3.1
0x02620024 0x02620037 20B Reserved
0x02620038 0x0262003B 4B KICK0 See section 3.3.4
0x0262003C 0x0262003F 4B KICK1
0x02620040 0x02620043 4B DSP_BOOT_ADDR0 The boot address for C66x DSP CorePac 0
0x02620044 0x02620047 4B DSP_BOOT_ADDR1 The boot address for C66x DSP CorePac 1
0x02620048 0x0262004B 4B Reserved
0x0262004C 0x0262004F 4B Reserved
0x02620050 0x02620053 4B Reserved
0x02620054 0x02620057 4B Reserved
0x02620058 0x0262005B 4B Reserved
0x0262005C 0x0262005F 4B Reserved
0x02620060 0x026200DF 128B Reserved
0x026200E0 0x0262010F 48B Reserved
0x02620110 0x02620117 8B MACID See section 7.19 ‘‘Ethernet MAC (EMAC)’’ on page 190
0x02620118 0x0262012F 24B Reserved
0x02620130 0x02620133 4B LRSTNMIPIN See section 3.3.6
0x02620134 0x02620137 4B RESET_STAT_CLR See section 3.3.8
0x02620138 0x0262013B 4B Reserved
0x0262013C 0x0262013F 4B BOOTCOMPLETE See section 3.3.9
0x02620140 0x02620143 4B Reserved
0x02620144 0x02620147 4B RESET_STAT See section 3.3.7
0x02620148 0x0262014B 4B LRSTNMIPINSTAT See section 3.3.5
0x0262014C 0x0262014F 4B DEVCFG See section 3.3.2
0x02620150 0x02620153 4B PWRSTATECTL See section 3.3.10
0x02620154 0x0262017F 44B Reserved
0x02620180 0x02620183 4B Reserved
0x02620184 0x0262018F 12B Reserved
www.ti.com
62 Device Configuration Copyright 2010 Texas Instruments Incorporated
Page 63

Multicore Fixed and Floating-Point Digital Signal Processor
www.ti.com
Table 3-2 Device State Control Registers (Part 2 of 3)
Address Start Address End Size Acronym Description
0x02620190 0x02620193 4B Reserved
0x02620194 0x02620197 4B Reserved
0x02620198 0x0262019B 4B Reserved
0x0262019C 0x0262019F 4B Reserved
0x026201A0 0x026201A3 4B Reserved
0x026201A4 0x026201A7 4B Reserved
0x026201A8 0x026201AB 4B Reserved
0x026201AC 0x026201AF 4B Reserved
0x026201B0 0x026201B3 4B Reserved
0x026201B4 0x026201B7 4B Reserved
0x026201B8 0x026201BB 4B Reserved
0x026201BC 0x026201BF 4B Reserved
0x026201C0 0x026201C3 4B Reserved
0x026201C4 0x026201C7 4B Reserved
0x026201C8 0x026201CB 4B Reserved
0x026201CC 0x026201CF 4B Reserved
0x026201D0 0x026201FF 48B Reserved
0x02620200 0x02620203 4B NMIGR0 See section 3.3.11
0x02620204 0x02620207 4B NMIGR1
0x02620208 0x0262020B 4B NMIGR2
0x0262020C 0x0262020F 4B NMIGR3
0x02620210 0x02620213 4B NMIGR4
0x02620214 0x02620217 4B NMIGR5
0x02620218 0x0262021B 4B NMIGR6
0x0262021C 0x0262021F 4B NMIGR7
0x02620220 0x0262023F 32B Reserved
0x02620240 0x02620243 4B IPCGR0 See section 3.3.12
0x02620244 0x02620247 4B IPCGR1
0x02620248 0x0262024B 4B IPCGR2
0x0262024C 0x0262024F 4B IPCGR3
0x02620250 0x02620253 4B IPCGR4
0x02620254 0x02620257 4B IPCGR5
0x02620258 0x0262025B 4B IPCGR6
0x0262025C 0x0262025F 4B IPCGR7
0x02620260 0x0262027B 28B Reserved
0x0262027C 0x0262027F 4B IPCGRH See section 3.3.14
0x02620280 0x02620283 4B IPCAR0 See section 3.3.13
0x02620284 0x02620287 4B IPCAR1
0x02620288 0x0262028B 4B IPCAR2
0x0262028C 0x0262028F 4B IPCAR3
0x02620290 0x02620293 4B IPCAR4
0x02620294 0x02620297 4B IPCAR5
0x02620298 0x0262029B 4B IPCAR6
0x0262029C 0x0262029F 4B IPCAR7
TMS320C6672
SPRS708—November 2010
ADVANCE INFORMATION
Copyright 2010 Texas Instruments Incorporated Device Configuration 63
Page 64

TMS320C6672
Multicore Fixed and Floating-Point Digital Signal Processor
SPRS708—November 2010
Table 3-2 Device State Control Registers (Part 3 of 3)
Address Start Address End Size Acronym Description
0x026202A0 0x026202BB 28B Reserved
0x026202BC 0x026202BF 4B IPCARH See section 3.3.15
0x026202C0 0x026202FF 64B Reserved
0x02620300 0x02620303 4B TINPSEL See section 3.3.16
0x02620304 0x02620307 4B TOUTPSEL
0x02620308 0x0262030B 4B RSTMUX0 See section 3.3.18
0x0262030C 0x0262030F 4B RSTMUX1
ADVANCE INFORMATION
0x02620310 0x02620313 4B RSTMUX2
0x02620314 0x02620317 4B RSTMUX3
0x02620318 0x0262031B 4B RSTMUX4
0x0262031C 0x0262031F 4B RSTMUX5
0x02620320 0x02620323 4B RSTMUX6
0x02620324 0x02620327 4B RSTMUX7
0x02620328 0x0262032B 4B MAINPLLCTL0 See section 7.8 ‘‘Main PLL and PLL Controller’’ on page 207
0x0262032C 0x0262032F 4B Reserved
0x02620330 0x02620333 4B DDR3PLLCTL0 See section 7.9 ‘‘DD3 PLL’’ on page 220
0x02620334 0x02620337 4B Reserved
0x02620338 0x0262033B 4B PAPLLCTL0 See section 7.10 ‘‘PASS PLL’’ on page 222
0x0262033C 0x0262033F 4B Reserved
End of Table 3-2
www.ti.com
See section 3.3.17
3.3.1 Device Status Register
The Device Status Register depicts the device configuration selected upon a power-on reset by either the POR
RESETFULL
pin. Once set, these bits will remain set until a power-on reset. The Device Status Register is shown in
Figure 3-1 and described in Table 3-3.
Figure 3-1 Device Status Register
31 18 17 16 15 14 13 1 0
Reserved PACLKSEL PCIESSEN PCIESSMODE[1:0 BOOTMODE[12:0] LENDIAN
R-0 R-x R/W-xx R/W-xxxxxxxxxxxx R-x
Legend: R = Read only; RW = Read/Write; -n = value after reset
1 x indicates the bootstrap value latched via the external pin
Table 3-3 Device Status Register Field Descriptions (Part 1 of 2)
Bit Field Description
31-18 Reserved Reserved. Read only, writes have no effect.
17 PACLKSEL PA Clock select to select the reference clock for PA Sub-System PLL
0 = Selects PASSCLKP/N
1 = Selects output of Main PLL MUX (SYSCLK vs. ALTCORECLK - depending on CORECLKSEL pin)
16 PCIESSEN PCIe module enable
0 = PCIe module disabled
1 = PCIe module enabled
or
(1)
64 Device Configuration Copyright 2010 Texas Instruments Incorporated
Page 65

TMS320C6672
Multicore Fixed and Floating-Point Digital Signal Processor
www.ti.com
Table 3-3 Device Status Register Field Descriptions (Part 2 of 2)
Bit Field Description
15-14 PCIESSMODE[1:0] PCIe Mode selection pins
00b = PCIe in End-point mode
01b = PCIe in Legacy End-point mode (no support for MSI)
10b = PCIe in Root complex mode
11b = Reserved
13-1 BOOTMODE[12:0] Determines the bootmode configured for the device. For more information on bootmode, refer to Section 2.5 ‘‘Boot
Modes Supported and PLL Settings’’ on page 27 and see the Bootloader for the C66x DSP User Guide (literature number
SPRUGY5).
0 LENDIAN Device Endian mode (LENDIAN) — Shows the status of whether the system is operating in Big Endian mode or Little
Endian mode (default).
0 = System is operating in Big Endian mode
1 = System is operating in Little Endian mode (default)
End of Table 3-3
3.3.2 Device Configuration Register
The Device Configuration Register is one-time writeable through software. The register is reset on all hard resets
and is locked after the first write. The Device Configuration Register is shown in Figure 3-2 and described in
Table 3-4.
SPRS708—November 2010
Figure 3-2 Device Configuration Register (DEVCFG)
31 10
Reserved SYSCLKOUTEN
R-0 R/W-1
Legend: R = Read only; RW = Read/Write; -n = value after reset
Table 3-4 Device Configuration Register Field Descriptions
Bit Field Description
31:1 Reserved Reserved. Read only, writes have no effect.
0 SYSCLKOUTEN SYSCLKOUT Enable
0 = No clock output
1 = Clock output enabled (default)
End of Table 3-4
3.3.3 JTAG ID (JTAGID) Register Description
The JTAG ID register is a read-only register that identifies to the customer the JTAG/Device ID. For the device, the
JTAG ID register resides at address location 0x0262 0018. The JTAG ID Register is shown in Figure 3-3 and
described in Table 3-5.
Figure 3-3 JTAG ID (JTAGID) Register
31 28 27 12 11 1 0
VARIANT PART NUMBER MANUFACTURER LSB
R-0000 R-0000 0000 1001 1110b 0000 0010 111b R-1
Legend: RW = Read/Write; R = Read only; -n = value after reset
ADVANCE INFORMATION
Copyright 2010 Texas Instruments Incorporated Device Configuration 65
Page 66

TMS320C6672
Multicore Fixed and Floating-Point Digital Signal Processor
SPRS708—November 2010
Table 3-5 JTAG ID Register Field Descriptions
Bit Acronym Value Description
31-28 VARIANT 0000b Variant (4-Bit) value. The value of this field depends on the silicon revision being used.
27-12 PART NUMBER 0000 0000 1001 1110b Part Number for boundary scan
11-1 MANUFACTURER 0000 0010 111b Manufacturer
0 LSB 1b This bit is read as a 1 for TMS320C6672
End of Table 3-5
www.ti.com
ADVANCE INFORMATION
3.3.4 Kicker Mechanism (KICK0 and KICK1) Register
The Bootcfg module contains a kicker mechanism to prevent any spurious writes from changing any of the Bootcfg
MMR values. When the kicker is locked (which it is initially after power on reset) none of the Bootcfg MMRs are
writable (they are only readable). This mechanism requires two MMR writes to the KICK0 and KICK1 registers with
exact data values before the kicker lock mechanism is un-locked. See Table 3-2 ‘‘Device State Control Registers’’ on
page 62 for the address location. Once released then all the Bootcfg MMRs having “write” permissions are writable
(the read only MMRs are still read only). The first KICK0 data is 0x83e70b13. The second KICK1 data is 0x95a4f1e0.
Writing any other data value to either of these kick MMRs will lock the kicker mechanism and block any writes to
Bootcfg MMRs. In order to ensure protection to all Bootcfg MMRs, software must always re-lock the kicker
mechanism after completing the MMR writes.
3.3.5 LRESETNMI PIN Status (LRSTNMIPINSTAT) Register
The LRSTNMIPINSTAT Register is created in Boot Configuration to latch the status of LRESET
CORESEL. The LRESETNMI PIN Status Register is shown in Figure 3-4 and described in Table 3-6.
Figure 3-4 LRESETNMI PIN Status Register (LRSTNMIPINSTAT)
31 18 17 16 15 2 1 0
Reserved NMI1 NMI0 Reserved LR1 LR0
R, +0000 0000 R-0 R-0 R, +0000 0000 R-0 R-0
Legend: R = Read only; -n = value after reset;
Table 3-6 LRESETNMI PIN Status Register (LRSTNMIPINSTAT) Field Descriptions
Bit Field Description
31-18 Reserved Reserved
17 NMI1 CorePac 1 in NMI
16 NMI0 CorePac 0 in NMI
15-2 Reserved Reserved
1 LR1 CorePac 1 in Local Reset
0 LR0 CorePac 0 in Local Reset
End of Table 3-6
and NMI based on
66 Device Configuration Copyright 2010 Texas Instruments Incorporated
Page 67
Multicore Fixed and Floating-Point Digital Signal Processor
www.ti.com
3.3.6 LRESETNMI PIN Status Clear (LRSTNMIPINSTAT_CLR) Register
TMS320C6672
SPRS708—November 2010
The LRSTNMIPINSTAT_CLR Register is used to clear the status of LRESET
and NMI based on CORESEL. The
LRESETNMI PIN Status Clear Register is shown in Figure 3-5 and described in Table 3-7.
Figure 3-5 LRESETNMI PIN Status Clear Register (LRSTNMIPINSTAT_CLR)
31 18 17 16 15 2 1 0
Reserved NMI1 NMI0 Reserved LR1 LR0
R, +0000 0000 WC,+0 WC,+0 R, +0000 0000 WC,+0 WC,+0
Legend: R = Read only; -n = value after reset; WC = Write 1 to Clear
Table 3-7 LRESETNMI PIN Status Clear Register (LRSTNMIPINSTAT_CLR) Field Descriptions
Bit Field Description
31-18 Reserved Reserved
17 NMI1 CorePac 1 in NMI Clear
16 NMI0 CorePac 0 in NMI Clear
15-2 Reserved Reserved
1 LR1 CorePac 1 in Local Reset Clear
0 LR0 CorePac 0 in Local Reset Clear
End of Table 3-7
3.3.7 Reset Status (RESET_STAT) Register
The reset status register (RESET_STAT) captures the status of Local reset (LRx) for each of the cores and also the
global device reset (GR). Software can use this information to take different device initialization steps, if desired.
• In case of Local reset: The LRx bits are written as 1 and GR bit is written as 0 only when the CorePac receives
an local reset without receiving a global reset.
• In case of Global reset: The LRx bits are written as 0 and GR bit is written as 1 only when a global reset is
asserted.
ADVANCE INFORMATION
The Reset Status Register is shown in Figure 3-6 and described in Table 3-8.
Figure 3-6 Reset Status Register (RESET_STAT)
31 30 210
GR Reserved LR1 LR0
R, +1 R, + 000 0000 0000 0000 0000 0000 R,+0 R,+0
Legend: R = Read only; -n = value after reset
Table 3-8 Reset Status Register (RESET_STAT) Field Descriptions (Part 1 of 2)
Bit Field Description
31 GR Global reset status
0 = Device has not received a global reset.
1 = Device received a global reset.
30-2 Reserved Reserved.
Copyright 2010 Texas Instruments Incorporated Device Configuration 67
Page 68

TMS320C6672
Multicore Fixed and Floating-Point Digital Signal Processor
SPRS708—November 2010
Table 3-8 Reset Status Register (RESET_STAT) Field Descriptions (Part 2 of 2)
Bit Field Description
1 LR1 CorePac 1 reset status
0 = CorePac 1 has not received a local reset.
1 = CorePac 1 received a local reset.
0 LR0 CorePac 0 reset status
0 = CorePac 0 has not received a local reset.
1 = CorePac 0 received a local reset.
End of Table 3-8
www.ti.com
ADVANCE INFORMATION
3.3.8 Reset Status Clear (RESET_STAT_CLR) Register
The RESET_STAT bits can be cleared by writing 1 to the corresponding bit in the RESET_STAT_CLR register. The
Reset Status Clear Register is shown in Figure 3-7 and described in Table 3-9.
Figure 3-7 Reset Status Clear Register (RESET_STAT_CLR)
31 30 210
GR Reserved LR1 LR0
RW, +0 R, + 000 0000 0000 0000 0000 0000 RW,+0 RW,+0
Legend: R = Read only; RW = Read/Write; -n = value after reset
Table 3-9 Reset Status Clear Register (RESET_STAT_CLR) Field Descriptions
Bit Field Description
31 GR Global Reset Clear bit
30-2 Reserved Reserved.
1 LR1 CorePac 1 reset Clear bit
0 LR0 CorePac 0 reset Clear bit
End of Table 3-9
0 = Writing a 0 has no effect.
1 = Writing a 1 to the GR bit clears the corresponding bit in the RESET_STAT register.
0 = Writing a 0 has no effect.
1 = Writing a 1 to the LR1 bit clears the corresponding bit in the RESET_STAT register.
0 = Writing a 0 has no effect.
1 = Writing a 1 to the LR0 bit clears the corresponding bit in the RESET_STAT register.
3.3.9 Boot Complete (BOOTCOMPLETE) Register
The BOOTCOMPLETE register controls the BOOTCOMPLETE pin status. The purpose is to indicate the
completion of the ROM booting process. The Boot Complete Register is shown in Figure 3-8 and described in
Table 3-10.
Figure 3-8 Boot Complete Register (BOOTCOMPLETE)
31 210
Reserved BC1 BC0
R, + 0000 0000 0000 0000 0000 0000 RW,+0 RW,+0
Legend: R = Read only; RW = Read/Write; -n = value after reset
68 Device Configuration Copyright 2010 Texas Instruments Incorporated
Page 69

TMS320C6672
Multicore Fixed and Floating-Point Digital Signal Processor
www.ti.com
Table 3-10 Boot Complete Register (BOOTCOMPLETE) Field Descriptions
Bit Field Description
31-2 Reserved Reserved.
1 BC1 CorePac 1 boot status
0 = CorePac 1 boot NOT complete
1 = CorePac 1 boot complete
0 BC0 CorePac 0 boot status
0 = CorePac 0 boot NOT complete
1 = CorePac 0 boot complete
End of Table 3-10
The BCx bit indicates the boot complete status of the corresponding core. All BCx bits will be sticky bits — that is
they can be set only once by the software after device reset and they will be cleared to 0 on all device resets.
Boot ROM code will be implemented such that each core will set its corresponding BCx bit immediately before
branching to the predefined location in memory.
3.3.10 Power State Control (PWRSTATECTL) Register
The PWRSTATECTL register is controlled by the software to indicate the power-saving mode. ROM code reads this
register to differentiate between the various power saving modes. This register is cleared only by POR and will
survive all other device resets. See the Hardware Design Guide for KeyStone Devices in ‘‘Related Documentation from
Texas Instruments’’ on page 59 for more information. The Power State Control Register is shown in Figure 3-9 and
described in Table 3-11.
SPRS708—November 2010
Figure 3-9 Power State Control Register (PWRSTATECTL)
31 3 2 1 0
GENERAL_PURPOSE HIBERNATION_MODE HIBERNATION STANDBY
RW, +0000 0000 0000 0000 0000 0000 0000 0 RW,+0 RW,+0 RW,+0
Legend: RW = Read/Write; -n = value after reset
Table 3-11 Power State Control Register (PWRSTATECTL) Field Descriptions
Bit Field Description
31-3 GENERAL_PURPOSE Used to provide a start address for execution out of the hibernation modes. See the Bootloader for the C66x DSP User
Guide in ‘‘Related Documentation from Texas Instruments’’ on page 59.
2 HIBERNATION_MODE Indicates whether the device is in hibernation mode 1 or mode 2.
0 = Hibernation mode 1
1 = Hibernation mode 2
1 HIBERNATION Indicates whether the device is in hibernation mode or not.
0 = Not in hibernation mode
1 = Hibernation mode
0 STANDBY Indicates whether the device is in standby mode or not.
0 = Not in standby mode
1 = Standby mode
End of Table 3-11
ADVANCE INFORMATION
Copyright 2010 Texas Instruments Incorporated Device Configuration 69
Page 70

TMS320C6672
Multicore Fixed and Floating-Point Digital Signal Processor
SPRS708—November 2010
3.3.11 NMI Even Generation to CorePac (NMIGRx) Register
NMIGRx registers are used for generating NMI events to the corresponding CorePac. The C6672 has
two NMIGRx registers (NMIGR0 through NMIGR1). The NMIGR0 register generates an NMI event to CorePac0,
the NMIGR1 register generates an NMI event to CorePac1, and so on. Writing a 1 to the NMIG field generates a
NMI pulse. Writing a 0 has no effect and Reads return 0 and have no other effect. The NMI Even Generation to
CorePac Register is shown in Figure 3-10 and described in Table 3-12.
Figure 3-10 NMI Generation Register (NMIGRx)
31 10
GENERAL_PURPOSE NMIG
ADVANCE INFORMATION
Legend: RW = Read/Write; -n = value after reset
Table 3-12 NMI Generation Register (NMIGRx) Field Descriptions
Bit Field Description
31-1 Reserved Reserved
0NMIG Reads return 0
Writes:
0 = No effect
1 = Creates NMI pulse to the corresponding CorePac — CorePac0 for NMIGR0, etc.
End of Table 3-12
R, +0000 0000 0000 0000 0000 0000 0000 000 RW,+0
www.ti.com
3.3.12 IPC Generation (IPCGRx) Registers
IPCGRx are the IPC interrupt generation registers to facilitate inter CorePac interrupts.
The C6672 has two IPCGRx registers (IPCGR0 through IPCGR1) registers. This can be used by external hosts or
CorePacs to generate interrupts to other CorePacs. A write of 1 to IPCG field of IPCGRx register will generate an
interrupt pulse to CorePacx (0 <= x <= 1).
These registers also provide a Source ID facility by which up to 28 different sources of interrupts can be identified.
Al location of sou rce bits to source processor and meaning is entirely based on software convention. The register field
descriptions are given in the following tables. Virtually anything can be a source for these registers as this is
completely controlled by software. Any master that has access to BOOTCFG module space can write to these
registers. The IPC Generation Register is shown in Figure 3-11 and described in Table 3-13.
Figure 3-11 IPC Generation Registers (IPCGRx)
31 30 29 28 27 8 7 6 5 4 3 1 0
SRCS27 SRCS26 SRCS25 SRCS24 SRCS23 – SRCS4 SRCS3 SRCS2 RCS1 SRCS0 Reserved IPCG
RW +0 RW +0 RW +0 RW +0 RW +0 (per bit field) RW +0 RW +0 RW +0 RW +0 R, +000 RW +0
Legend: R = Read only; RW = Read/Write; -n = value after reset
70 Device Configuration Copyright 2010 Texas Instruments Incorporated
Page 71
TMS320C6672
Multicore Fixed and Floating-Point Digital Signal Processor
www.ti.com
Table 3-13 IPC Generation Registers (IPCGRx) Field Descriptions
Bit Field Description
31-4 SRCSx Reads return current value of internal register bit.
Writes:
0 = No effect
1 = Sets both SRCSx and the corresponding SRCCx.
3-1 Reserved Reserved
0IPCG Reads return 0.
Writes:
0 = No effect
1 = Creates an Inter-DSP interrupt.
End of Table 3-13
3.3.13 IPC Acknowledgement (IPCARx) Registers
IPCARx are the IPC interrupt-acknowledgement registers to facilitate inter-CorePac core interrupts.
The C6672 has two IPCARx (IPCAR0 through IPCAR1) registers. These registers also provide a Source ID facility
by which up to 28 different sources of interrupts can be identified. Allocation of source bits to source processor and
meaning is entirely based on software convention. The register field descriptions are given in the following tables.
Virtually anything can be a source for these registers as this is completely controlled by software. Any master that
has access to BOOTCFG module space can write to these registers. The IPC Acknowledgement Register is shown in
Figure 3-12 and described in Table 3-14.
SPRS708—November 2010
Figure 3-12 IPC Acknowledgement Registers (IPCARx)
31 30 29 28 27 8 7 6 5 4 3 0
SRCC27 SRCC26 SRCC25 SRCC24 SRCC23 – SRCC4 SRCC3 SRCC2 RCC1 SRCC0 Reserved
RW +0 RW +0 RW +0 RW +0 RW +0 (per bit field) RW +0 RW +0 RW +0 RW +0 R, +0000
Legend: R = Read only; RW = Read/Write; -n = value after reset
Table 3-14 IPC Acknowledgement Registers (IPCARx) Field Descriptions
Bit Field Description
31-4 SRCCx Reads return current value of internal register bit.
Writes:
0 = No effect
1 = Clears both SRCCx and the corresponding SRCSx
3-0 Reserved Reserved
End of Table 3-14
3.3.14 IPC Generation Host (IPCGRH) Register
IPCGRH register is provided to facilitate host DSP interrupt. Operation and use of IPCGRH is the same as other
IPCGR registers. Interrupt output pulse created by IPCGRH is driven on a device pin, host interrupt/event output
(HOUT).
ADVANCE INFORMATION
Copyright 2010 Texas Instruments Incorporated Device Configuration 71
Page 72
TMS320C6672
Multicore Fixed and Floating-Point Digital Signal Processor
SPRS708—November 2010
The host interrupt output pulse should be stretched. It should be asserted for 4 bootcfg clock cycles (DSP/6) followed
by a deassertion of 4 bootcfg clock cycles. Generating the pulse will result in 8 DSP/6 cycle pulse blocking window.
Write to IPCGRH with IPCG bit (bit 0) set will only generate a pulse if they are beyond 8 DSP/6 cycle period. The
IPC Generation Host Register is shown in Figure 3-13 and described in Table 3-15.
Figure 3-13 IPC Generation Registers (IPCGRH)
31 30 29 28 27 8 7 6 5 4 3 1 0
SRCS27 SRCS26 SRCS25 SRCS24 SRCS23 – SRCS4 SRCS3 SRCS2 RCS1 SRCS0 Reserved IPCG
RW +0 RW +0 RW +0 RW +0 RW +0 (per bit field) RW +0 RW +0 RW +0 RW +0 R, +000 RW +0
Legend: R = Read only; RW = Read/Write; -n = value after reset
ADVANCE INFORMATION
Table 3-15 IPC Generation Registers (IPCGRH) Field Descriptions
Bit Field Description
31-4 SRCSx Reads return current value of internal register bit.
Writes:
0 = No effect
1 = Sets both SRCSx and the corresponding SRCCx.
3-1 Reserved Reserved
0IPCG Reads return 0.
Writes:
0 = No effect
1 = Creates an interrupt pulse on device pin (host interrupt/event output in HOUT pin)
End of Table 3-15
www.ti.com
3.3.15 IPC Acknowledgement Host (IPCARH) Register
IPCARH registers are provided to facilitate host DSP interrupt. Operation and use of IPCARH is the same as
other IPCAR registers. The IPC Acknowledgement Host Register is shown in Figure 3-14 and described in
Table 3-16.
Figure 3-14 IPC Acknowledgement Register (IPCARH)
31 30 29 28 27 8 7 6 5 4 3 0
SRCC27 SRCC26 SRCC25 SRCC24 SRCC23 – SRCC4 SRCC3 SRCC2 RCC1 SRCC0 Reserved
RW +0 RW +0 RW +0 RW +0 RW +0 (per bit field) RW +0 RW +0 RW +0 RW +0 R, +0000
Legend: R = Read only; RW = Read/Write; -n = value after reset
Table 3-16 IPC Acknowledgement Register (IPCARH) Field Descriptions
Bit Field Description
31-4 SRCCx Reads return current value of internal register bit.
Writes:
0 = No effect
1 = Clears both SRCCx and the corresponding SRCSx
3-0 Reserved Reserved
End of Table 3-16
72 Device Configuration Copyright 2010 Texas Instruments Incorporated
Page 73

TMS320C6672
Multicore Fixed and Floating-Point Digital Signal Processor
www.ti.com
3.3.16 Timer Input Selection Register (TINPSEL)
Timer input selection is handled within the control register TINPSEL. The Timer Input Selection Register is shown
in Figure 3-15 and described in Table 3-17.
Figure 3-15 Timer Input Selection Register (TINPSEL)
31 876543210
Reserved TINPHSEL3 TINPLSEL3 TINPHSEL2 TINPLSEL2 TINPHSEL1 TINPLSEL1 TINPHSEL0 TINPLSEL0
RW, +1 RW, +0 RW, +1 RW, +0 RW, +1 RW, +1 RW, +1 RW, +0
R = Read only; RW = Read/Write; -n = value after reset
Table 3-17 Timer Input Selection Field Description (TINPSEL)
Bit Field Description
31-8 Reserved Reserved
7 TINPHSEL3 Input select for TIMER3 high.
0 = TIMI0
1 = TIMI1
6 TINPLSEL3 Input select for TIMER3 low.
0 = TIMI0
1 = TIMI1
5 TINPHSEL2 Input select for TIMER2 high.
0 = TIMI0
1 = TIMI1
4 TINPLSEL2 Input select for TIMER2 low.
0 = TIMI0
1 = TIMI1
3 TINPHSEL1 Input select for TIMER1 high.
0 = TIMI0
1 = TIMI1
2 TINPLSEL1 Input select for TIMER1 low.
0 = TIMI0
1 = TIMI1
1 TINPHSEL0 Input select for TIMER0 high.
0 = TIMI0
1 = TIMI1
0 TINPLSEL0 Input select for TIMER0 low.
0 = TIMI0
1 = TIMI1
End of Table 3-17
SPRS708—November 2010
ADVANCE INFORMATION
3.3.17 Timer Output Selection Register (TOUTPSEL)
The timer output selection is handled within the control register TOUTSEL. The Timer Output Selection Register
is shown in Figure 3-16 and described in Table 3-18.
Figure 3-16 Timer Output Selection Register (TOUTPSEL)
31 109540
Reserved TOUTPSEL1 TOUTPSEL0
R,+000000000000000000000000 RW,+00001 RW,+00000
Legend: R = Read only; RW = Read/Write; -n = value after reset
Copyright 2010 Texas Instruments Incorporated Device Configuration 73
Page 74

TMS320C6672
Multicore Fixed and Floating-Point Digital Signal Processor
SPRS708—November 2010
Table 3-18 Timer Output Selection Field Description (TOUTPSEL)
Bit Field Description
31-9 Reserved Reserved
9-5 TOUTPSEL1 Output select for TIMO1
00000: TOUTL0
00001: TOUTH0
00010: TOUTL1
00011: TOUTH1
4 Reserved Reserved
ADVANCE INFORMATION
4-0 TOUTPSEL0 Output select for TIMO0
00000: TOUTL0
00001: TOUTH0
00010: TOUTL1
00011: TOUTH1
End of Table 3-18
3.3.18 Reset Mux (RSTMUXx) Register
www.ti.com
00100: TOUTL2
00101: TOUTH2
00110: TOUTL3
00111: TOUTH3
01000 to 11111: Reserved
00100: TOUTL2
00101: TOUTH2
00110: TOUTL3
00111: TOUTH3
01000 to 11111: Reserved
The software controls the Reset Mux block through the reset multiplex registers using RSTMUX0 through
RSTMUX1 for each of the two CorePacs on the C6672. These registers are located in Bootcfg memory space. The
Timer Output Selection Register is shown in Figure 3-17 and described in Table 3-19.
Figure 3-17 Reset Mux Register RSTMUXx
31 109 8754310
Reserved EVTSTATCLR Reserved DELAY EVTSTAT OMODE LOCK
R, +0000 0000 0000 0000 0000 00 RC, +0 R, +0 RW, +100 R, +0 RW, +000 RW, +0
Legend: R = Read only; RW = Read/Write; -n = value after reset; RC
Table 3-19 Reset Mux Register Field Descriptions (Part 1 of 2)
Bit Field Description
31-10 Reserved Reserved
9 EVTSTATCLR 0 = Writing O had no effect
1 = Writing 1 to this bit clears the EVTSTAT bit
8 Reserved Reserved
7-5 DELAY 000b = 256 DSP/6 cycles delay between NMI & Local reset, when OMODE = 100b
001b = 512 DSP/6 cycles delay between NMI & Local reset, when OMODE=100b
010b = 1024 DSP/6 cycles delay between NMI & Local reset, when OMODE=100b
011b = 2048 DSP/6 cycles delay between NMI & Local reset, when OMODE=100b
100b = 4096 DSP/6 cycles delay between NMI & Local reset, when OMODE=100b (Default)
101b = 8192 DSP/6 cycles delay between NMI & Local reset, when OMODE=100b
110b = 16384 DSP/6 cycles delay between NMI & Local reset, when OMODE=100b
111b = 32768 DSP/6 cycles delay between NMI & Local reset, when OMODE=100b
4 EVTSTAT 0 = No event received (Default)
1 = WD timer event received by Reset Mux block
= Read only and write 1 to clear
74 Device Configuration Copyright 2010 Texas Instruments Incorporated
Page 75

Multicore Fixed and Floating-Point Digital Signal Processor
www.ti.com
Table 3-19 Reset Mux Register Field Descriptions (Part 2 of 2)
Bit Field Description
3-1 OMODE 000b = WD Timer Event input to the Reset Mux block does not cause any output event (Default)
001b = Reserved
010b = WD Timer Event input to the Reset Mux block causes local reset input to CorePac
011b = WD Timer Event input to the Reset Mux block causes NMI input to CorePac
100b = WD Timer Event input to the Reset Mux block causes NMI input followed by Local reset input to CorePac. Delay
between NMI and local reset is set in DELAY bit field.
101b = WD Timer Event input to the Reset Mux block causes Device Reset to C6672
110b = Reserved
111b = Reserved
0 LOCK 0 = Register fields are not locked (Default)
1 = Register fields are locked until the next timer reset
End of Table 3-19
TMS320C6672
SPRS708—November 2010
ADVANCE INFORMATION
Copyright 2010 Texas Instruments Incorporated Device Configuration 75
Page 76

TMS320C6672
Multicore Fixed and Floating-Point Digital Signal Processor
SPRS708—November 2010
3.4 Pullup/Pulldown Resistors
Proper board design should ensure that input pins to the device always be at a valid logic level and not floating. This
may be achieved via pullup/pulldown resistors. The device features internal pullup (IPU) and internal pulldown
(IPD) resistors on most pins to eliminate the need, unless otherwise noted, for external pullup/pulldown resistors.
An external pullup/pulldown resistor needs to be used in the following situations:
• Device Configuration Pins: If the pin is both routed out and are not driven (in Hi-Z state), an external
pullup/pulldown resistor must be used, even if the IPU/IPD matches the desired value/state.
• Other Input Pins: If the IPU/IPD does not match the desired value/state, use an external pullup/pulldown
resistor to pull the signal to the opposite rail.
ADVANCE INFORMATION
For the device configuration pins (listed in Table 3-1), if they are both routed out and are not driven (in Hi-Z state),
it is strongly recommended that an external pullup/pulldown resistor be implemented. Although, internal
pullup/pulldown resistors exist on these pins and they may match the desired configuration value, providing
external connectivity can help ensure that valid logic levels are latched on these device configuration pins. In
addition, applying external pullup/pulldown resistors on the device configuration pins adds convenience to the user
in debugging and flexibility in switching operating modes.
Tips for choosing an external pullup/pulldown resistor:
• Consider the total amount of current that may pass through the pullup or pulldown resistor. Make sure to
include the leakage currents of all the devices connected to the net, as well as any internal pullup or pulldown
resistors.
• Decide a target value for the net. For a pulldown resistor, this should be below the lowest V
connected to the net. For a pullup resistor, this should be above the highest V
A reasonable choice would be to target the V
by definition, have margin to the V
• Select a pullup/pulldown resistor with the largest possible value that can still ensure that the net will reach the
target pulled value when maximum current from all devices on the net is flowing through the resistor. The
current to be considered includes leakage current plus, any other internal and external pullup/pulldown
resistors on the net.
• For bidirectional nets, there is an additional consideration that sets a lower limit on the resistance value of the
external resistor. Verify that the resistance is small enough that the weakest output buffer can drive the net to
the opposite logic level (including margin).
• Remember to include tolerances when selecting the resistor value.
• For pullup resistors, also remember to include tolerances on the DV
and VIH levels.
IL
www.ti.com
level of all inputs
level of all inputs on the net.
or VOH levels for the logic family of the limiting device; which,
OL
DD
IH
rail.
IL
For most systems:
•A 1-kΩ resistor can be used to op pose th e IPU /IPD while meeting the above criteria. Users should confirm this
resistor value is correct for their specific application.
• A 20-kΩ resistor can be used to compliment the IPU/IPD on the device configuration pins while meeting the
above criteria. Users should confirm this resistor value is correct for their specific application.
For more detailed information on input current (I
), and the low-level/high-level input voltages (VIL and VIH) for
I
the TMS320C6672 device, see Section 6.3 ‘‘Electrical Characteristics’’ on page 91.
To determine which pins on the device include internal pullup/pulldown resistors, see Table 2-15 ‘‘Terminal
Functions — Signals and Control by Function’’ on page 33.
76 Device Configuration Copyright 2010 Texas Instruments Incorporated
Page 77

TMS320C6672
Multicore Fixed and Floating-Point Digital Signal Processor
www.ti.com
SPRS708—November 2010
4 System Interconnect
On the TMS320C6672 device, the C66x CorePac, the EDMA3 transfer controllers, and the system peripherals are
interconnected through two switch fabrics. The switch fabrics allow for low-latency, concurrent data transfers
between master peripherals and slave peripherals. The switch fabrics also allow for seamless arbitration between the
system masters when accessing system slaves.
4.1 Internal Buses, Bridges, and Switch Fabrics
Two types of buses exist in the device: data buses and configuration buses. Some peripherals have both a data bus
and a configuration bus interface, while others only have one type of interface. Furthermore, the bus interface width
and speed varies from peripheral to peripheral. Configuration buses are mainly used to access the register space of
a peripheral and the data buses are used mainly for data transfers. However, in some cases, the configuration bus is
also used to transfer data. Similarly, the data bus can also be used to access the register space of a peripheral. For
example, the DDR3 memory controller registers are accessed through their data bus interface.
The C66x CorePac, the EDMA3 traffic controllers, and the various system peripherals can be classified into two
categories: masters and slaves.
Masters are capable of initiating read and write transfers in the system and do not rely on the EDMA3 for their data
transfers. Slaves on the other hand rely on the EDMA3 to perform transfers to and from them. Examples of masters
include the EDMA3 traffic controllers, SRIO, and EMAC. Examples of slaves include the SPI, UART, and I
2
C.
The device contains two switch fabrics (the TeraNet) through which masters and slaves communicate. The data
switch fabric, known as the data switched central resource (SCR), is a high-throughput interconnect mainly used to
move data across the system (for more information, see Section 4.2 ‘‘Data Switch Fabric Connections’’). The data
SCR is further divided into two smaller SCRs. One connects very high speed masters to slaves via 256-bit data buses
running at a DSP/2 frequency. The other connects masters to slaves via 128-bit data buses running at a DSP/3
frequency. Peripherals that match the native bus width of the SCR it is connected to can connect directly to the data
SCR; other peripherals require a bridge.
The configuration switch fabric, also known as the configuration switch central resource (SCR), is mainly used to
access peripheral registers (for more information, see Section 4.3 ‘‘Configuration Switch Fabric’’). The
configuration SCR connects the C66x CorePac and masters on the data switch fabric to slaves via
32-bit configuration buses running at a DSP/3 frequency. As with the data SCR, some peripherals require the use of
a bridge to interface to the configuration SCR.
Bridges perform a variety of functions:
• Conversion between configuration bus and data bus.
• Width conversion between peripheral bus width and SCR bus width.
• Frequency conversion between peripheral bus frequency and SCR bus frequency.
ADVANCE INFORMATION
Copyright 2010 Texas Instruments Incorporated System Interconnect 77
Page 78

TMS320C6672
Multicore Fixed and Floating-Point Digital Signal Processor
SPRS708—November 2010
4.2 Data Switch Fabric Connections
A detailed figure will be added here for a future release. Connection information is shown in the tables below.
Table 4-1 DSP/2 Data SCR Connection Matrix
Masters
TPCC0 TC0_RD Y Y Y N Y N N
TPCC0 TC0_WR Y Y Y N Y N N
ADVANCE INFORMATION
TPCC0 TC1_RD Y Y Y N N Y N
TPCC0 TC1_WR Y Y Y N N Y N
HyperLink_Master N Y Y YNNN
MSMC_master Y N N NNNY
From DSP/3 Data SCR Br_5 Y Y Y NNNN
From DSP/3 Data SCR Br_6 Y Y Y NNNN
From DSP/3 Data SCR Br_7 Y Y Y NNNN
From DSP/3 Data SCR Br_8 Y Y Y NNNN
From DSP/3 Data SCR Br_9 Y Y Y NNNN
From DSP/3 Data SCR Br_10 Y Y Y NNNN
End of Table 4-1
HyperLink_Slave MSMC_SMS MSMC_SES
www.ti.com
Slave
To DSP/3 Data SCR
Br_1 Br_2 Br_3 Br_4
Table 4-2 DSP/3 Data SCR Connection Matrix (Part 1 of 2)
Slaves
CorePac0_SDMA
CorePac1_SDMA
SRIO_Data_Slave
Boot ROM
SPI
PCIe Slave
QM Slave
HyperLink Slave
EMIF16
Br_5 (to DSP/2 Data SCR)
Br_6 (to DSP/2 Data SCR)
Br_7 (to DSP/2 Data SCR)
Br_8 (to DSP/2 Data SCR)
Br_9 (to DSP/2 Data SCR)
Br_10 (to DSP/2 Data SCR)
Br_12 (to Config SCR)
Masters
HyperLink Data YYYYYYYNYNNNNNNYNN
TPCC0_TC0_RD YYYYYYNYYNNNNNNYNN
TPCC0_TC0_WR Y YY NY Y NY Y NNNNNNY NN
TPCC0_TC1_RD YYYYYYNYYNNNNNNYNN
TPCC0_TC1_WR Y YY NY Y NY Y NNNNNNY NN
TPCC1_TC0_RD YYYYYYNYYYNNNNNYNN
TPCC1_TC0_WR Y YY NY Y NY Y Y NNNNNY NN
TPCC1_TC1_RD YYYYYYYYYNYNNNNNYN
TPCC1_TC1_WR YYYNYYYYYNYNNNNNYN
TPCC1_TC2_RD YYYYYYNYYNNYNNNNNY
TPCC1_TC2_WR Y YY NY Y NY Y NNY NNNNNY
TPCC1_TC3_RD YYYYYYNYYNNNYNNYNN
TPCC1_TC3_WR YYYNYYNYYNNNYNNYNN
TPCC2_TC0_RD YYYYYYNYYNNNNYNYNN
Br_13 (to Config SCR)
Br_14 (to Config SCR)
78 System Interconnect Copyright 2010 Texas Instruments Incorporated
Page 79

TMS320C6672
Multicore Fixed and Floating-Point Digital Signal Processor
www.ti.com
Table 4-2 DSP/3 Data SCR Connection Matrix (Part 2 of 2)
Slaves
CorePac0_SDMA
CorePac1_SDMA
SRIO_Data_Slave
Boot ROM
SPI
PCIe Slave
QM Slave
HyperLink Slave
EMIF16
Br_5 (to DSP/2 Data SCR)
Br_6 (to DSP/2 Data SCR)
Masters
TPCC2_TC0_WR Y YY NY Y NY Y NNNNY NY NN
TPCC2_TC1_RD YYYYYYYYYNNNNNYNYN
TPCC2_TC1_WR YYYNYYYYYNNNNNYNYN
TPCC2_TC2_RD YYYYYYNYYYNNNNNYNN
TPCC2_TC2_WR Y YY NY Y NY Y Y NNNNNY NN
TPCC2_TC3_RD YYYYYYNYYNYNNNNNNY
TPCC2_TC3_WR YYYNYYNYYNYNNNNNNY
SRIO Messaging Y YNNNNY NYNNNNY NNNN
SRIO Data Master Y YNNY NYY YNNNNY NYNN
PCIe Master Y YNNY NYYY NNYNNNY NN
Packet Accelerator DataYY NNNNYNNNNNNNY NNN
MSMC Data (Br_4) YYYYYYYYYNNNNNNYNN
Queue Manager Y YNNNNY YNNNNY NNNNN
TSIP 0 Y YNNNNNNNY NNNNNNNN
TSIP 1 Y YNNNNNNNY NNNNNNNN
End of Table 4-2
Br_7 (to DSP/2 Data SCR)
SPRS708—November 2010
Br_8 (to DSP/2 Data SCR)
Br_9 (to DSP/2 Data SCR)
Br_10 (to DSP/2 Data SCR)
Br_12 (to Config SCR)
Br_13 (to Config SCR)
Br_14 (to Config SCR)
ADVANCE INFORMATION
Copyright 2010 Texas Instruments Incorporated System Interconnect 79
Page 80

TMS320C6672
Multicore Fixed and Floating-Point Digital Signal Processor
SPRS708—November 2010
www.ti.com
4.3 Configuration Switch Fabric
A detailed figure will be added here for a future release. All masters can talk to all slaves on the configuration switch
fabric.
4.4 Bus Priorities
The priority level of all master peripheral traffic is defined at the TeraNet boundary. User programmable priority
registers will be present to allow software configuration of the data traffic through the TeraNet. Note that a lower
number means higher priority - PRI = 000b = urgent, PRI = 111b = low.
ADVANCE INFORMATION
All other masters provide their priority directly and do not need a default priority setting. Examples include the
CorePacs, whose priorities are set through software in the UMC control registers. All the Packet DMA based
peripherals also have internal registers to define the priority level of their initiated transactions.
The Packet DMA secondary port is one master port that does not have priority allocation register inside the IP. The
priority level for transaction from this master port is described by PKTDMA_PRI_ALLOC register in Figure 4-1 and
Table 4-3.
Figure 4-1 Packed DMA Priority Allocation Register (PKTDMA_PRI_ALLOC)
31 16 15 10 9 8 7 4 3 2 0
R/W-00000000000000000000001000011 RW-000
Legend: R = Read only; R/W = Read/Write; -n = value after reset
Table 4-3 Packed DMA Priority Allocation Register (PKTDMA_PRI_ALLOC) Field Descriptions
Bit Acronym Description
31-10 Reserved Reserved.
2-0 PKDTDMA_PRI Control the priority level for the transactions from Packet DMA Master port, which access the external linking
RAM.
End of Table 4-3
Reserved PKTDMA_PRI
For all other modules, see the respective User Guides in “Related Documentation from Texas Instruments” on
page 59 for programmable priority registers.
80 System Interconnect Copyright 2010 Texas Instruments Incorporated
Page 81

TMS320C6672
Multicore Fixed and Floating-Point Digital Signal Processor
www.ti.com
SPRS708—November 2010
5 C66x CorePac
The C66x CorePac consists of several components:
• The C66x DSP and associated C66x CorePac core
• Level-one and level-two memories (L1P, L1D, L2)
• Data Trace Formatter (DTF)
• Embedded Trace Buffer (ETB)
• Interrupt controller
• Power-down controller
• External memory controller
• Extended memory controller
• A dedicated power/sleep controller (LPSC)
The C66x CorePac also provides support for memory protection, bandwidth management (for resources local to the
C66x CorePac) and address extension. Figure 5-1 shows a block diagram of the C66x CorePac.
Figure 5-1 C66x CorePac Block Diagram
32KB L1P
Boot
Controller
LPSCPLLC
GPSC
Program Memory Controller (PMC)With
Memory Protect/Bandwidth Mgmt
C66x DSP Core
Instruction Fetch
16-/32-bit Instruction Dispatch
Control
In-Circuit Emulation
Instruction Decode
Data Path A
A Register File
A31-A16
A15-A0
.M1
.L1 .S1
xxxx.D1 .D2
Data Memory Controller (DMC)With
Memory Protect/Bandwidth Mgmt
Registers
Data Path B
B Register File
B31-B16
B15-B0
.M2
xxxx.S2 .L2
ller
ion Contro
d Except
Interrupt an
ller (UMC)
UnifiedMemory
Contro
ller (XMC)
ExtendedMemory
Contro
lMemory
ller (EMC)
Contro
Externa
L2 Cache/
SRAM
512KB
ADVANCE INFORMATION
MSM
SRAM
4096KB
DDR3
SRAM
DMASwitch
Fabric
CFG Switch
Fabric
32KB L1D
For more detailed information on the TMS320C66x CorePac on the C6672 device, see the C66x CorePac User Guide
(literature number SPRUGW0).
Copyright 2010 Texas Instruments Incorporated C66x CorePac 81
Page 82

TMS320C6672
Multicore Fixed and Floating-Point Digital Signal Processor
SPRS708—November 2010
www.ti.com
5.1 Memory Architecture
Each C66x CorePac of the TMS320C6672 device contains a 512KB level-2 memory (L2), a 32KB level-1 program
memory (L1P), and a 32KB level-1 data memory (L1D). The device also contain a 4096KB multicore shared memory
(MSM). All memory on the C6672 has a unique location in the memory map (see Table 2-2 ‘‘Memory Map
Summary for TMS320C6672’’ on page 19.
The L1P and L1D cache can be reconfigured via software through the L1PMODE field of the L1P Configuration
Register (L1PCFG) and the L1DMODE field of the L1D Configuration Register (L1DCFG) of the C66x CorePac.
L1D is a two-way set-associative cache, while L1P is a direct-mapped cache.
ADVANCE INFORMATION
The on-chip bootloader changes the reset configuration for L1P and L1D. For more information, see the Bootloader
for the C66x DSP User Guide (literature number SPRUGY5).
For more information on the operation L1 and L2 caches, see the C66x DSP Cache User Guide (literature number
SPRUGY8).
5.1.1 L1P Memory
The L1P memory configuration for the C6672 device is as follows:
• Region 0 size is 0K bytes (disabled)
• Region 1 size is 32K bytes with no wait states
Figure 5-2 shows the available SRAM/cache configurations for L1P.
Figure 5-2 TMS320C6672 L1P Memory Configurations
L1P mode bits
000 001 010 011 100
SRAM
3/4
SRAM
mapped
direct
mapped
cache
All
SRAM
7/8
SRAM
dm
cache
1/2
direct
cache
direct
mapped
cache
L1P memory
16K bytes
8K bytes
4K bytes
4K bytes
Block base
address
00E0 0000h
00E0 4000h
00E0 6000h
00E0 7000h
00E0 8000h
82 C66x CorePac Copyright 2010 Texas Instruments Incorporated
Page 83

Multicore Fixed and Floating-Point Digital Signal Processor
www.ti.com
5.1.2 L1D Memory
The L1D memory configuration for the C6672 device is as follows:
• Region 0 size is 0K bytes (disabled)
• Region 1 size is 32K bytes with no wait states
Figure 5-3 shows the available SRAM/cache configurations for L1D.
Figure 5-3 TMS320C6672 L1D Memory Configurations
L1D mode bits
000 001 010 011 100
L1D memory
TMS320C6672
SPRS708—November 2010
Block base
address
00F0 0000h
1/2
SRAM
3/4
SRAM
2-way
cache
2-way
cache
2-way
cache
All
SRAM
7/8
SRAM
2-way
cache
5.1.3 L2 Memory
The L2 memory configuration for the C6672 device is as follows:
• Total memory size is 4096KB
• Each core contains 512KB of memory
• Local starting address for each core is 0080 0000h
16K bytes
00F0 4000h
8K bytes
00F0 6000h
4K bytes
00F0 7000h
4K bytes
00F0 8000h
ADVANCE INFORMATION
Copyright 2010 Texas Instruments Incorporated C66x CorePac 83
Page 84

TMS320C6672
Multicore Fixed and Floating-Point Digital Signal Processor
SPRS708—November 2010
L2 memory can be configured as all SRAM, all 4-way set-associative cache, or a mix of the two. The amount of L2
memory that is configured as cache is controlled through the L2MODE field of the L2 Configuration Register
(L2CFG) of the C66x CorePac. Figure 5-4 shows the available SRAM/cache configurations for L2. By default, L2 is
configured as all SRAM after device reset.
Figure 5-4 TMS320C6672 L2 Memory Configurations
L2 Mode Bits
000 001 010 011 100
ADVANCE INFORMATION
101
L2 Memory
www.ti.com
Block Base
Address
0080 0000h
ALL
SRAM
15/16
SRAM
4-Way
Cache
7/8
SRAM
4-Way
Cache
3/4
SRAM
4-Way
Cache
1/2
SRAM
4-Way
Cache
ALL
Cache
4-Way
Cache
256Kbytes
128Kbytes
64Kbytes
32Kbytes
32Kbytes
0084 0000h
0086 0000h
0087 0000h
0087 8000h
0087 FFFFh
Global addresses are accessible to all masters in the system. In addition, local memory can be accessed directly by
the associated processor through aliased addresses, where the eight MSBs are masked to zero. The aliasing is handled
within the C66x CorePac and allows for common code to be run unmodified on multiple cores. For example, address
location 0x10800000 is the global base address for C66x CorePac Core 0's L2 memory. C66x CorePac Core 0 can
access this location by either using 0x10800000 or 0x00800000. Any other master on the device must use 0x10800000
only. Conversely, 0x00800000 can by used by any of the cores as their own L2 base addresses.
For C66x CorePac Core 0, as mentioned, this is equivalent to 0x10800000 and for C66x CorePac Core 1 this is
equivalent to 0x11800000. Local addresses should be used only for shared code or data, allowing a single image to
be included in memory. Any code/data targeted to a specific core, or a memory region allocated during run-time by
a particular core should always use the global address only.
5.1.4 MSMC SRAM
The MSMC SRAM configuration for the C6672 device is as follows:
• Memory size is 4096KB
• The MSMC SRAM can be configured as shared L2 and/or shared L3 memory
• Allows extension of external addresses from 2GB to up to 8GB
• Has built in memory protection features
84 C66x CorePac Copyright 2010 Texas Instruments Incorporated
Page 85

TMS320C6672
Multicore Fixed and Floating-Point Digital Signal Processor
www.ti.com
The MSM SRAM is always configured as all SRAM. When configured as a shared L2, its contents can be cached in
L1P and L1D. When configured in shared L3 mode, it’s contents can be cached in L2 also. For more details on
external memory address extension and memory protection features, see the Multicore Shared Memory Controller
(MSMC) for KeyStone Devices User Guide (literature number SPRUGW7).
5.1.5 L3 Memory
The L3 ROM on the device is 128KB. The ROM contains software used to boot the device. There is no requirement
to block accesses from this portion to the ROM.
SPRS708—November 2010
5.2 Memory Protection
Memory protection allows an operating system to define who or what is authorized to access L1D, L1P, and L2
memory. To accomplish this, the L1D, L1P, and L2 memories are divided into pages. There are 16 pages of L1P (2KB
each), 16 pages of L1D (2KB each), and 32 pages of L2 (16KB each). The L1D, L1P, and L2 memory controllers in
the C66x CorePac are equipped with a set of registers that specify the permissions for each memory page.
Each page may be assigned with fully orthogonal user and supervisor read, write, and execute permissions. In
addition, a page may be marked as either (or both) locally accessible or globally accessible. A local access is a direct
DSP access to L1D, L1P, and L2, while a global access is initiated by a DMA (either IDMA or the EDMA3) or by
other system masters. Note that EDMA or IDMA transfers programmed by the DSP count as global accesses. On a
secure device, pages can be restricted to secure access only (default) or opened up for public, non-secure access.
The DSP and each of the system masters on the device are all assigned a privilege ID. It is possible to specify whether
memory pages are locally or globally accessible.
The AIDx and LOCAL bits of the memory protection page attribute registers specify the memory page protection
scheme, see Table 5-1.
Table 5-1 Available Memory Page Protection Schemes
AIDx Bit Local Bit Description
0 0 No access to memory page is permitted.
0 1 Only direct access by DSP is permitted.
1 0 Only accesses by system masters and IDMA are permitted (includes EDMA and IDMA accesses initiated by the DSP).
1 1 All accesses permitted.
End of Table 5-1
Faults are handled by software in an interrupt (or an exception, programmable within the C66x CorePac interrupt
controller) service routine. A DSP or DMA access to a page without the proper permissions will:
• Block the access — reads return zero, writes are ignored
• Capture the initiator in a status register — ID, address, and access type are stored
• Signal event to DSP interrupt controller
The software is responsible for taking corrective action to respond to the event and resetting the error status in the
memory controller. For more information on memory protection for L1D, L1P, and L2, see the C66x CorePac User
Guide (literature number SPRUGW0).
ADVANCE INFORMATION
Copyright 2010 Texas Instruments Incorporated C66x CorePac 85
Page 86

TMS320C6672
Multicore Fixed and Floating-Point Digital Signal Processor
SPRS708—November 2010
www.ti.com
5.3 Bandwidth Management
When multiple requestors contend for a single C66x CorePac resource, the conflict is resolved by granting access to
the highest priority requestor. The following four resources are managed by the Bandwidth Management control
hardware:
• Level 1 Program (L1P) SRAM/Cache
• Level 1 Data (L1D) SRAM/Cache
• Level 2 (L2) SRAM/Cache
• Memory-mapped registers configuration bus
ADVANCE INFORMATION
The priority level for operations initiated within the C66x CorePac are declared through registers in the C66x
CorePac. These operations are:
• DSP-initiated transfers
• User-programmed cache coherency operations
• IDMA-initiated transfers
The priority level for operations initiated outside the C66x CorePac by system peripherals is declared through the
Priority Allocation Register (PRI_ALLOC) System peripherals with no fields in PRI_ALLOC have their own
registers to program their priorities, see section 4.4 ‘‘Bus Priorities’’ on page 80 for more details.
More information on the bandwidth management features of the C66x CorePac can be found in the C66x CorePac
User Guide (literature number SPRUGW0.)
5.4 Power-Down Control
The C66x CorePac supports the ability to power-down various parts of the C66x CorePac. The power-down
controller (PDC) of the C66x CorePac can be used to power down L1P, the cache control hardware, the DSP, and
the entire C66x CorePac. These power-down features can be used to design systems for lower overall system power
requirements.
Note—The C6672 does not support power-down modes for the L2 memory at this time.
More information on the power-down features of the C66x CorePac can be found in the TMS320C66x CorePac
Reference Guide (literature number SPRUGW0).
5.5 C66x CorePac Resets
Table 5-2 shows the reset types supported on the C6672 device and how they affect the resetting of the CorePac,
either both globally or just locally.
Table 5-2 C66x CorePac Reset (Global or Local)
Reset Type Global C66x CorePac Reset Local C66x CorePac Reset
Power-On Reset Y Y
Warm Reset Y Y
System Reset Y Y
DSP Reset N Y
End of Table 5-2
For more detailed information on the global and local C66x CorePac resets, see the C66x CorePac Reference Guide
(literature number SPRUGW0). And for more detailed information on device resets, see section 7.7 ‘‘Reset
Controller’’ .
86 C66x CorePac Copyright 2010 Texas Instruments Incorporated
Page 87

TMS320C6672
Multicore Fixed and Floating-Point Digital Signal Processor
www.ti.com
SPRS708—November 2010
5.6 C66x CorePac Revision
The version and revision of the C66x CorePac can be read from the CorePac Revision ID Register (MM_REVID)
located at address 0181 2000h. The MM_REVID register is shown in Table 5-3 and described in Table 5-4. The C66x
CorePac revision is dependant on the silicon revision being used.
Table 5-3 CorePac Revision ID Register (MM_REVID)
Address - 0181 2000h
Bit 31 30 29 28 27 26 25 24 23 22 21 20 19 18 17 16
Acronym
(1)
Reset
Bit 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Acronym
(1)
Reset
1 R/W = Read/Write; R = Read only; -n = value after reset
Table 5-4 CorePac Revision ID Register (MM_REVID) Field Descriptions
Bit Acronym Value Description
31:16 VERSION - Version of the C66x CorePac implemented on the device.
15:0 REVISION - Revision of the C66x CorePac version implemented on the device.
End of Table 5-4
VERSION
R-h
REVISION
R-n
5.7 C66x CorePac Register Descriptions
See the C66x CorePac Reference Guide (literature number SPRUGW0) for register offsets and definitions.
ADVANCE INFORMATION
Copyright 2010 Texas Instruments Incorporated C66x CorePac 87
Page 88

TMS320C6672
Multicore Fixed and Floating-Point Digital Signal Processor
SPRS708—November 2010
ADVANCE INFORMATION
www.ti.com
88 C66x CorePac Copyright 2010 Texas Instruments Incorporated
Page 89

www.ti.com
6 Device Operating Conditions
6.1 Absolute Maximum Ratings
TMS320C6672
Multicore Fixed and Floating-Point Digital Signal Processor
SPRS708—November 2010
Table 6-1 Absolute Maximum Ratings
Over Operating Case Temperature Range (Unless Otherwise Noted)
) range:
I
) range:
O
(2)
:
:
C
(3)
: -65°C to 150°C
stg
Supply voltage range
Input voltage (V
Output voltage (V
Operating case temperature range, T
Overshoot/undershoot
Storage temperature range, T
End of Table 6-1
1 Stresses beyond those listed under "absolute maximum ratings" may cause permanent damage to the device. These are stress ratings only, and functional operation of the
device at these or any other conditions beyond those indicated under "recommended operating conditions" is not implied. Exposure to absolute-maximum-rated
conditions for extended periods may affect device reliability.
2 All voltage values are with respect to VSS.
3 Overshoot/Undershoot percentage relative to I/O operating values - for example the maximum overshoot value for 1.8-V LVCMOS signals is DVDD18 + 0.20 × DVDD18 and
maximum undershoot value would be VSS - 0.20 × DVDD18
(1)
CVDD -0.3 V to TBD V
CVDD1 -0.3 V to TBD V
DVDD15 -0.3 V to TBD V
DVDD18 -0.3 V to TBD V
VREFSSTL 0.49 × DVDD15 to 0.51 × DV
VDDT1, VDDT2, VDDT3
VDDT4, VDDT5, VDDT6
VDDR1, VDDR2, VDDR3 -0.3 V to TBD V
AVDDA1, AVDDA2, AVDDA3
VSS Ground 0 V
LVCMOS (1.8V) -0.3 V to TBD V
DDR3 -0.3 V to TBD V
2
C -0.3 V to TBD V
I
LVDS -0.3 V to TBD V
LJCB -0.3 V to TBD V
SERDES -0.3 V to TBD V
LVCMOS (1.8V) -0.3 V to TBD V
DDR3 -0.3 V to TBD V
2
C -0.3 V to TBD V
I
SERDES -0.3 V to TBD V
Commercial 0°C to 85°C
Extended -40°C to 100°C
LVCMOS (1.8V)
DDR3
2
C
I
20% Overshoot/Undershoot for 20% of
Signal Duty Cycle
DD15
-0.3 V to TBD V
-0.3 V to TBD V
ADVANCE INFORMATION
Copyright 2010 Texas Instruments Incorporated Device Operating Conditions 89
Page 90

TMS320C6672
Multicore Fixed and Floating-Point Digital Signal Processor
SPRS708—November 2010
6.2 Recommended Operating Conditions
www.ti.com
Table 6-2 Recommended Operating Conditions
CVDD Core Supply
CVDD1 SR Core Supply 0.95 1 1.05 V
DVDD18 1.8-V supply I/O voltage 1.71 1.8 1.89 V
DVDD15 1.5-V supply I/O voltage 1.425 1.5 1.575 V
ADVANCE INFORMATION
VREFSSTL DDR3 reference voltage 0.49 × DVDD15 0.5 × DVDD15 0.51 × DVDD15 V
(3)
V
DDRx
V
DDAx
V
DDTx
Ground 0 0 0 V
V
SS
V
IH
V
IL
Operating case temperature
T
C
End of Table 6-2
1 All differential clock inputs comply with the LVDS Electrical Specification, IEEE 1596.3-1996 and all SERDES I/Os comply with the XAUI Electrical Specification, IEEE
802.3ae-2002.
2 All SERDES I/Os comply with the XAUI Electrical Specification, IEEE 802.3ae-2002.
3 Where x = 1, 2, 3, 4... to indicate all supplies of the same kind.
SerDes regulator supply 1.425 1.5 1.575 V
PLL analog supply 1.71 1.8 1.89 V
SerDes termination supply 0.95 1 1.05 V
LVCMOS (1.8 V) 0.65 × DVDD18 V
2
C 0.7 × DVDD18 V
High-level input voltage
Low-level input voltage
I
DDR3 EMIF VREFSSTL + 0.1 V
LVCMOS (1.8 V) 0.35 × DVDD18 V
DDR3 EMIF -0.3 VREFSSTL - 0.1 V
2
I
C 0.3 × DVDD18 V
Commercial
Extended -40 100 °C
(1) (2)
Min Nom Max Unit
DSP at 1 GHz 0.95 1 1.05
DSP at 800 MHz 0.855 0.9 0.945
085°C
V
90 Device Operating Conditions Copyright 2010 Texas Instruments Incorporated
Page 91

TMS320C6672
Multicore Fixed and Floating-Point Digital Signal Processor
www.ti.com
SPRS708—November 2010
6.3 Electrical Characteristics
Table 6-3 Electrical Characteristics
Over Recommended Ranges of Supply Voltage and Operating Case Temperature (Unless Otherwise Noted)
Parameter Test Conditions
High-level output voltage
V
OH
LVCMOS (1.8 V) I
2C (2)
I
LVCMOS (1.8 V) I
= IOH DV
O
= IOL 0.45
O
VOLLow-level output voltage
2
CI
I
= 3 mA, pulled up to 1.8 V 0.4
O
No IPD/IPU -5 5 μA
(3)
I
Input current [DC]
I
LVCMOS (1.8 V)
2
I
C
Internal pullup 50 100 170
Internal pulldown -170 -100 -50
0.1 × DVDD18 V < V
DVDD18 V
TBD TBD
I
High-level output current [DC]
OH
TBD TBD
TBD TBD
TBD TBD
TBD TBD
TBD TBD
Low-level output current [DC]
I
OL
TBD TBD
TBD TBD
TBD TBD
(4)
Off-state output current [DC] LVCMOS (1.8 V) -2 2 μA
I
OZ
(1)
< 0.9 ×
I
Min Typ Max Unit
- 0.45
DD18
- 0.4
DD15
-10 10 μA
VDDR3 DV
VDDR3 0.4
mA
mA
ADVANCE INFORMATION
End of Table 6-3
1 For test conditions shown as MIN, MAX, or TYP, use the appropriate value specified in the recommended operating conditions table.
2
2 I
C uses open collector IOs and does not have a V
3II applies to input-only pins and bi-directional pins. For input-only pins, II indicates the input leakage current. For bi-directional pins, II includes input leakage current and
off-state (Hi-Z) output leakage current.
4IOZ applies to output-only pins, indicating off-state (Hi-Z) output leakage current.
Minimum.
OH
Copyright 2010 Texas Instruments Incorporated Device Operating Conditions 91
Page 92

TMS320C6672
Multicore Fixed and Floating-Point Digital Signal Processor
SPRS708—November 2010
ADVANCE INFORMATION
www.ti.com
92 Device Operating Conditions Copyright 2010 Texas Instruments Incorporated
Page 93

TMS320C6672
Multicore Fixed and Floating-Point Digital Signal Processor
www.ti.com
SPRS708—November 2010
7 TMS320C6672 Peripheral Information and Electrical Specifications
This chapter covers the various peripherals on the TMS320C6672 DSP. Peripheral-specific information, timing
diagrams, electrical specifications, and register memory maps are described in this chapter.
7.1 Parameter Information
This section describes the conditions used to capture the electrical data seen in this chapter.
The data manual provides timing at the device pin. For output analysis, the transmission line and associated
parasitics (vias, multiple nodes, etc.) must also be taken into account. The transmission line delay varies depending
on the trace length. An approximate range for output delays can vary from 176 ps to 2 ns depending on the end
product design. For recommended transmission line lengths, see the appropriate application notes, user guides, and
design guides. A transmission line delay of 2 ns was used for all output measurements, except the DDR3, which was
evaluated using a 528-ps delay.
2
Figure 7-1 represents all device outputs, except differential or I
Figure 7-1 Test Load Circuit for AC Timing Measurements
C.
Device
DDR3 Output Test Load
Transmission Line
Zo=50W
4pF
Data Manual Timing
Reference Point
(Device Terminal)
Device
Output Test Load Excluding DDR3
Transmission Line
Zo=50W
5pF
The load capacitance value stated is only for characterization and measurement of AC timing signals. This load
capacitance value does not indicate the maximum load the device is capable of driving.
7.1.1 1.8-V Signal Transition Levels
All input and output timing parameters are referenced to 0.9 V for both 0 and 1 logic levels.
Figure 7-2 Input and Output Voltage Reference Levels for AC Timing Measurements
ADVANCE INFORMATION
V = 0.9 V
ref
Copyright 2010 Texas Instruments Incorporated TMS320C6672 Peripheral Information and Electrical Specifications 93
Page 94

TMS320C6672
)
Multicore Fixed and Floating-Point Digital Signal Processor
SPRS708—November 2010
All rise and fall transition timing parameters are reference to VIL MAX and VIH MIN for input clocks.
Figure 7-3 Rise and Fall Transition Time Voltage Reference Levels
7.1.2 Timing Parameters and Board Routing Analysis
The timing parameter values specified in this data sheet do not include delays by board routings. As a good board
ADVANCE INFORMATION
design practice, such delays must always be taken into account. Timing values may be adjusted by
increasing/decreasing such delays. TI recommends using the available I/O buffer information specification (IBIS)
models to analyze the timing characteristics correctly. To properly use IBIS models to attain accurate timing analysis
for a given system, see the Using IBIS Models for Timing Analysis application report (literature number TBD). If
needed, external logic hardware such as buffers may be used to compensate any timing differences.
For inputs, timing is most impacted by the round-trip propagation delay from the DSP to the external device and
from the external device to the DSP. This round-trip delay tends to negatively impact the input setup time margin,
but also tends to improve the input hold time margins (see Table 7-1 and Figure 7-4).
Table 7-1 Board-Level Timing Example
(see Figure 7-4)
No. Description
1 Clock route delay
2 Minimum DSP hold time
3 Minimum DSP setup time
4 External device hold time requirement
5 External device setup time requirement
6 Control signal route delay
7 External device hold time
8 External device access time
9 DSP hold time requirement
10 DSP setup time requirement
11 Data route delay
End of Table 7-1
V = V MIN (or V MIN
ref IH OH
www.ti.com
94 TMS320C6672 Peripheral Information and Electrical Specifications Copyright 2010 Texas Instruments Incorporated
Page 95

TMS320C6672
Multicore Fixed and Floating-Point Digital Signal Processor
www.ti.com
Figure 7-4 shows a general transfer between the DSP and an external device. The figure also shows board route
delays and how they are perceived by the DSP and the external device
Figure 7-4 Board-Level Input/Output Timings
AECLKOUT
(Output from DSP)
AECLKOUT
(Input to External Device)
Control Signals
(Output from DSP)
Control Signals
(Input to External Device)
Data Signals
(Output from External Device)
Data Signals
(Input to DSP)
(A)
(B)
(B)
3
6
1
2
4
5
10
7
9
8
11
SPRS708—November 2010
(A) Control signals include data for writes.
(B) Data signals are generated during reads from an external device.
ADVANCE INFORMATION
Copyright 2010 Texas Instruments Incorporated TMS320C6672 Peripheral Information and Electrical Specifications 95
Page 96

TMS320C6672
Multicore Fixed and Floating-Point Digital Signal Processor
SPRS708—November 2010
7.2 Recommended Clock and Control Signal Transition Behavior
All clocks and control signals must transition between VIH and VIL (or between VIL and VIH) in a monotonic
manner.
7.3 Power Supplies
The following sections describe the proper power-supply sequencing and timing needed to properly power on the
C6672. The various power supply rails and their primary function is listed in Table 7-2 below.
Table 7-2 Power Supply Rails on TMS320C6672
ADVANCE INFORMATION
Name Primary Function Voltage Notes
CVDD SmartReflex core supply voltage 0.9 - 1.1 V Includes core voltage for DDR3 module
CVDD1 Core supply voltage for memory
array
VDDT1 HyperLink SerDes termination
supply
VDDT2 SGMII/SRIO/PCIE SerDes
termination supply
DVDD15 1.5-V DDR3 IO supply 1.5 V
VDDR1 HyperLink SerDes regulator supply 1.5 V Filtered version of DVDD15. Special considerations for noise. Filter is not needed if
VDDR2 PCIE SerDes regulator supply 1.5 V Filtered version of DVDD15. Special considerations for noise. Filter is not needed if PCIE
VDDR3 SGMII SerDes regulator supply 1.5 V Filtered version of DVDD15. Special considerations for noise. Filter is not needed if
VDDR4 SRIO SerDes regulator supply 1.5 V Filtered version of DVDD15. Special considerations for noise. Filter is not needed if SRIO
VDDR6
DVDD18 1.8-V IO supply 1.8V
AVDDA1 Main PLL supply 1.8 V Filtered version of DVDD18. Special considerations for noise.
AVDDA2 DDR3 PLL supply 1.8 V Filtered version of DVDD18. Special considerations for noise.
AVDDA3 PASS PLL supply 1.8 V Filtered version of DVDD18. Special considerations for noise.
VREFSSTL 0.75-V DDR3 reference voltage 0.75 V Should track the 1.5-V supply. Use 1.5 V as source.
VSS Ground GND
End of Table 7-2
1.0 V Fixed supply at 1.0 V
1.0 V Filtered version of CVDD1. Special considerations for noise. Filter is not needed if
1.0 V Filtered version of CVDD1. Special considerations for noise. Filter is not needed if
www.ti.com
HyperLink is not in use.
SGMII/SRIO/PCIE is not in use.
HyperLink is not in use.
is not in use.
SGMII is not in use.
is not in use.
7.3.1 Power-Supply Sequencing
This section defines the requirements for a power up sequencing from a Power-on reset condition. There are two
acceptable power sequences for the device. The first sequence stipulates the core voltages starting before the IO
voltages as shown below.
1. CVDD
2. CVDD1, VDDT1-3
3. DVDD18, AVDD1, AVDD2 (HHV)
4. DVDD15, VDDR1-6
The second sequence provides compatibility with other TI processors with the IO voltage starting before the core
voltages as shown below.
1. DVDD18, AVDD1, AVDD2 (HHV)
2. CVDD
96 TMS320C6672 Peripheral Information and Electrical Specifications Copyright 2010 Texas Instruments Incorporated
Page 97

TMS320C6672
Multicore Fixed and Floating-Point Digital Signal Processor
www.ti.com
3. CVDD1, VDDT1-3
4. DVDD15, VDDR1-6
The device initialization is broken into two phases. The first phase consists of the time period from the activation of
the first power supply until the point in which all supplies are active and at a valid voltage level. Either of the
sequencing scenarios described above can be implemented during this phase. The figures below show both the
core-before-IO voltage sequence and the IO-before-core voltage sequence. POR
must be held low for the entire
power stabilization phase.
SPRS708—November 2010
This is followed by the device initialization phase. Either POR
or RESETFULL may be used to trigger the end of the
initialization phase, but both must be inactive for the initialization to complete. The differences between
POR
-controlled initialization and RESETFULL initialization are described below. The following section has a
mention of REFCLK in many places. REFCLK here refers to the clock input that has been selected as the source for
the Main PLL. See Figure 7-23 for more details.
For more information on Power Supply sequencing see the Hardware Design Guide for KeyStone Devices (literature
number SPRABI2).
7.3.1.1 POR-Controlled Device Initialization
The timing diagrams in the figures below show the power sequencing and reset control of the device when
RESETFULL
is held high and POR is used to control the device initialization. In this mode, POR must be held low
until the power has been stable for the required 100 μsec and the device initialization requirements have been met.
On the rising edge of POR
and pulls. The POR
, the HHV signal will go inactive allowing the core to control the state of the output buffers
must be held for the 100 μsec after the power has stabilized plus the time period between that100
μsec and when the clock is active in addition to the 16 μsec following the active clock. If the clock becomes active
before the 100 μsec stabilization period has expired, only the additional 16 μsecs of POR
is required to complete
initialization.
Note—REFCLK must always be active before POR can be removed.
7.3.1.1.1 Core-Before-IO Power Sequencing
ADVANCE INFORMATION
Copyright 2010 Texas Instruments Incorporated TMS320C6672 Peripheral Information and Electrical Specifications 97
Page 98

TMS320C6672
Multicore Fixed and Floating-Point Digital Signal Processor
SPRS708—November 2010
The timing diagram for core-before-IO power sequencing is shown in Figure 7-5 and defined in Table 7-3.
Figure 7-5 POR-Controlled Power Sequencing — Core Before IO
Power Stabilization Phase C hip Initializ ation Phas e
PORz
RESETFULLz
ADVANCE INFORMATION
RESET z
t1
C VDD(core AVS)
CVDD1 (core constant)
DVDD18 (1.8V)
DVDD15 (1 .5V)
t2b
t4b
t2a
t5
t3
t4a
t2c
www.ti.com
t6
t7
REFC LKP&N
DDRCLKP&N
RES ETSTA Tz
PORz Controlled Reset Sequencing – Core before IO
Table 7-3 POR-Controlled Power Sequencing — Core Before IO (Part 1 of 2)
Time System State
t1 Begin Power Stabilization Phase
• CVDD (core AVS) ramps up.
•POR
must be held low through the power stabilization phase. Because POR is low, all the core logic that has async reset (created from
POR
) is put into the reset state.
t2a • CVDD1 (core constant) ramps at the same time or shortly following CVDD. Although ramping CVDD1 and CVDD simultaneously is
t2b • Once CVDD is valid, the clock drivers should be enabled. Although the clock inputs are not necessary at this time, they should either be
t2c • The DDRCLK and REFCLK may begin to toggle anytime between when CVDD is at a valid level and the setup time before POR
t3 • DVDD18 (1.8 V) supply is ramped up followed coincidentally by HHV (1.8 V).
t4a • DVDD15 (1.5 V) supply is ramped up following DVDD18. Although ramping DVDD18 and DVDD15 simultaneously is permitted, the
permitted, the voltage for CVDD1 must never exceed CVDD until after CVDD has reached a valid voltage.
• The purpose of ramping up the core supplies close to each other is to reduce crowbar current. CVDD1 (core constant) should trail CVDD
(core AVS) as this will ensure that the WLs in the memories are turned off and there is no current through the memory bit cells. If,
however, CVDD1 (core constant) ramps up before CVDD (core AVS), then the worst-case current could be on the order of twice the
specified draw of CVDD1.
driven with a valid clock or be held in a static state with one leg high and one leg low.
goes high
specified by t7.
• Filtered versions of 1.8 V can ramp simultaneously with DVDD18.
• RESETSTAT is driven low once the DVDD18 supply is available.
• All LVCMOS input and bidirectional pins must not be driven or pulled high until DVDD18 is present. Driving an input or bidirectional pin
before DVDD18 is valid could cause damage to the device.
voltage for DVDD15 must never exceed DVDD18.
98 TMS320C6672 Peripheral Information and Electrical Specifications Copyright 2010 Texas Instruments Incorporated
Page 99

TMS320C6672
Multicore Fixed and Floating-Point Digital Signal Processor
www.ti.com
Table 7-3 POR-Controlled Power Sequencing — Core Before IO (Part 2 of 2)
Time System State
t4b • RESETFULL and RESET may be driven high anytime after DVDD18 is at a valid level. In a POR controlled boot both RESETFULL and RESET
t5 • POR
must be high before POR
must continue to remain low for at least 100 μs after power has stabilized.
is driven high.
End Power Stabilization Phase
t6 • Device initialization requires 500 REFCLK periods after the Power Stabilization Phase. The maximum clock period is 33.33 nsec, so a delay
of an additional 16 μs is required before a rising edge of POR
t7 • The rising edge of POR
• Once device initialization and the efuse farm scan are complete, the RESETSTAT
will remove the reset to the efuse farm, allowing the scan to begin.
. The clock must be active during the entire 16 μs.
signal is driven high. This delay will be 10000 to 50000
clock cycles.
End Device Initialization Phase
End of Table 7-3
7.3.1.1.2 IO-Before-Core Power Sequencing
The timing diagram for IO-before-core power sequencing is shown in Figure 7-6 and defined in Table 7-4.
Figure 7-6 POR-Controlled Power Sequencing — IO Before Core
SPRS708—November 2010
PORz
RESETF ULLz
RESETz
CVDD(core AVS)
CVDD1 ( core constant)
DVDD18 (1.8V)
DVDD15 (1.5V)
REFCLKP&N
DDRCLKP&N
RESETSTATz
Power Stabilization Phase C hip Initialization Phase
t2a
t3a
t2b
t1
t4
t3b
t5
t3c
t6
t7
ADVANCE INFORMATION
PORz Controlled Reset Sequencing – IO before Core
Copyright 2010 Texas Instruments Incorporated TMS320C6672 Peripheral Information and Electrical Specifications 99
Page 100

TMS320C6672
Multicore Fixed and Floating-Point Digital Signal Processor
SPRS708—November 2010
www.ti.com
Table 7-4 POR
Time System State
t1 Begin Power Stabilization Phase
• DVDD18 (1.8 V) supply is ramped up followed coincidentally by HHV (1.8 V).
•Since POR
• Filtered versions of 1.8V can ramp simultaneously with DVDD18.
• RESETSTAT is driven low once the DVDD18 supply is available.
• All input and bidirectional pins must not be driven or pulled high until DVDD18 is present. Driving an input or bidirectional pin before
t2a • RESETFULL
ADVANCE INFORMATION
t2b • CVDD (core AVS) ramps up.
t3a • CVDD1 (core constant) ramps at the same time or following CVDD. Although ramping CVDD1 and CVDD simultaneously is permitted the
• The purpose of ramping up the core supplies close to each other is to reduce crowbar current. CVDD1 (core constant) should trail CVDD
t3b • Once CVDD is valid the clock drivers should be enabled. Although the clock inputs are not necessary at this time they should either be
t3c • The DDRCLK and REFCLK may begin to toggle anytime between when CVDD is at a valid level and the setup time before POR
t4 • DVDD15 (1.5 V) supply is ramped up following CVDD1.
t5 • POR must continue to remain low for at least 100 μs after power has stabilized.
End Power Stabilization Phase
t6 Begin Device Initialization
• Device initialization requires 500 REFCLK periods after the Power Stabilization Phase. The maximum clock period is 33.33 nsec so a delay
•POR
t7 • The rising edge of the POR
• Once device initialization and the efuse farm scan are complete, the RESETSTAT
End Device Initialization Phase
End of Table 7-4
-Controlled Power Sequencing — IO Before Core
is low all the core logic having async reset (created from POR) are put into reset state once the core supply ramps. POR must
remain low through Power Stabilization Phase.
DVDD18 could cause damage to the device.
and RESET may be driven high anytime after DVDD18 is at a valid level. In a POR-controlled boot both RESETFULL and RESET
must be high before POR
voltage for CVDD1 must never exceed CVDD until after CVDD has reached a valid voltage.
(core AVS) as this will ensure that the WLs in the memories are turned off and there is no current through the memory bit cells. If,
however, CVDD1 (core constant) ramps up before CVDD (core AVS) then the worst case current could be on the order of twice the
specified draw of CVDD1.
driven with a valid clock or held is a static state with one leg high and one leg low.
specified by t7.
of an additional 16 μs is required before a rising edge of POR
must remain low.
clock cycles.
is driven high.
will remove the reset to the efuse farm allowing the scan to begin.
goes high
. The clock must be active during the entire 16 μs.
signal is driven high. This delay will be 10000 to 50000
7.3.1.2 RESETFULL-Controlled Device Initialization
The timing diagrams in the figures below show the power sequencing and reset control of the device when
RESETFULL
stable for the required 100 μsec, but RESETFULL
been met. On the rising edge of POR
Note—REFCLK must always be active before POR can be removed.
7.3.1.2.1 Core-Before-IO Power Sequencing
100 TMS320C6672 Peripheral Information and Electrical Specifications Copyright 2010 Texas Instruments Incorporated
is used to extend device initialization. In this mode, POR may be removed after the power has been
may be held low until the device initialization requirements have
, the HHV signal will go inactive.
 Loading...
Loading...