

Page 1
D
Highest Performance Fixed-Point Digital
Signal Processor (DSP) TMS320C6202
– 4-ns Instruction Cycle Time
– 250-MHz Clock Rate
– Eight 32-Bit Instructions/Cycle
– 2000 MIPS
D
VelociTI Advanced Very Long Instruction
Word (VLIW) ’C6200 CPU Core
– Eight Highly Independent Functional
Units:
– Six ALUs (32-/40-Bit)
– Two 16-Bit Multipliers (32-Bit Result)
– Load-Store Architecture With 32 32-Bit
General-Purpose Registers
– Instruction Packing Reduces Code Size
– All Instructions Conditional
D
Instruction Set Features
– Byte-Addressable (8-, 16-, 32-Bit Data)
– 32-Bit Address Range
– 8-Bit Overflow Protection
– Saturation
– Bit-Field Extract, Set, Clear
– Bit-Counting
– Normalization
D
3M-Bit On-Chip SRAM
– 2M-Bit Internal Program/Cache
– Two 128K-Byte Blocks Offer Improved
Concurrency
Block 0: 128K Bytes Memory-Mapped
Block 1: 128K Bytes Direct-Mapped
Cache/Memory-Mapped
– 1M-Bit Dual-Access Internal Data
(128K Bytes)
– Two 64K-Byte Blocks Offer Improved
Concurrency
TMS320C6202
FIXED-POINT DIGITAL SIGNAL PROCESSOR
SPRS072B – AUGUST 1998 – REVISED AUGUST 1999
D
32-Bit External Memory Interface (EMIF)
– Glueless Interface to Synchronous
Memories: SDRAM or SBSRAM
– Glueless Interface to Asynchronous
Memories: SRAM and EPROM
D
Four-Channel Bootloading
Direct-Memory-Access (DMA) Controller
With an Auxiliary Channel
D
Flexible Phase-Locked-Loop (PLL) Clock
Generator
D
32-Bit Expansion Bus
– Glueless/Low-Glue Interface to Popular
PCI Bridge Chips
– Glueless/Low-Glue Interface to Popular
Synchronous or Asynchronous
Microprocessor Buses
– Master/Slave Functionality
– Glueless Interface to Synchronous FIFOs
and Asynchronous Peripherals
D
Three Multichannel Buffered Serial Ports
(McBSPs)
– Direct Interface to T1/E1, MVIP, SCSA
Framers
– ST-Bus-Switching Compatible
– Up to 256 Channels Each
– AC97-Compatible
– Serial-Peripheral-Interface (SPI)
Compatible (Motorola)
D
Two 32-Bit General-Purpose Timers
D
IEEE-1149.1 (JTAG†)
Boundary-Scan-Compatible
D
352-Pin BGA Package (GJL Suffix)
D
384-Pin BGA Package (GLS Suffix)
D
0.18-µm/5-Level Metal Process
– CMOS Technology
D
3.3-V I/Os, 1.8-V Internal
ADVANCE INFORMATION
Please be aware that an important notice concerning availability, standard warranty, and use in critical applications of
Texas Instruments semiconductor products and disclaimers thereto appears at the end of this data sheet.
VelociTI is a trademark of Texas Instruments Incorporated.
Motorola is a trademark of Motorola, Inc.
†
IEEE Standard 1149.1-1990 Standard-Test-Access Port and Boundary Scan Architecture.
ADVANCE INFORMATION concerns new products in the sampling or
preproduction phase of development. Characteristic data and other
specifications are subject to change without notice.
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
Copyright 1999, Texas Instruments Incorporated
1
Page 2
TMS320C6202
FIXED-POINT DIGITAL SIGNAL PROCESSOR
SPRS072B – AUGUST 1998 – REVISED AUGUST 1999
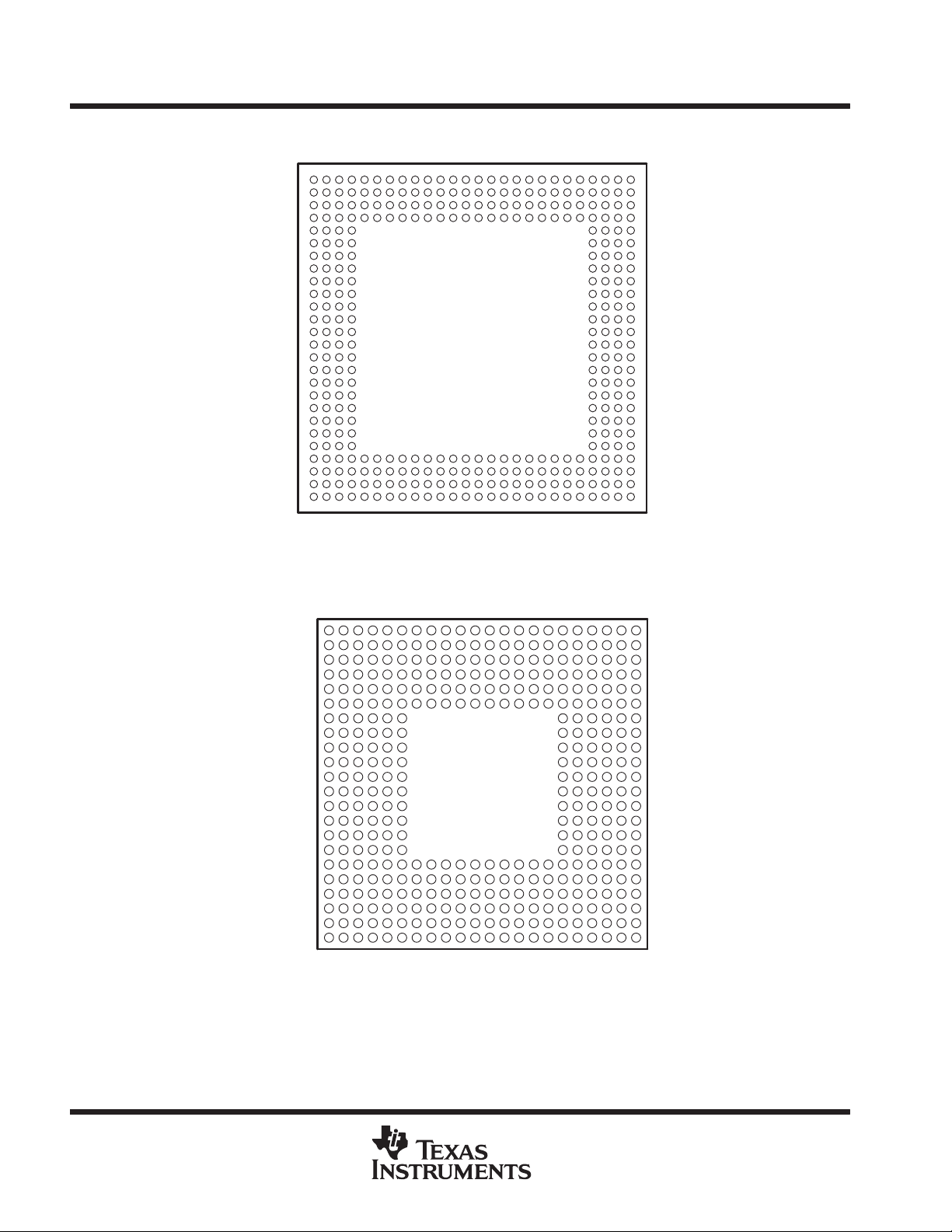
GJL 352-PIN BALL GRID ARRAY (BGA) PACKAGE
AF
AE
AD
AC
AB
AA
Y
W
V
U
T
R
P
N
M
L
K
J
H
G
F
E
D
C
B
A
3
111
2
GLS 384-PIN BALL GRID ARRAY (BGA) PACKAGE
(BOTTOM VIEW)
9
75
8
64
(BOTTOM VIEW)
16121314 1810
20
23
24
2622
19 211715
25
ADVANCE INFORMATION
AB
AA
Y
W
V
U
T
R
P
N
M
L
K
J
H
G
F
E
D
C
B
A
19
14
15
16 18
17
20
22
13
8
11
10 12
1
3 9 21
2
75
4 6
2
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
Page 3
TMS320C6202
FIXED-POINT DIGITAL SIGNAL PROCESSOR
SPRS072B – AUGUST 1998 – REVISED AUGUST 1999
description
The TMS320C62x DSPs (including the TMS320C6202 device) are the fixed-point DSP family in the
TMS320C6000 platform. The TMS320C6202 (’C6202) device is based on the high-performance, advanced
VelociTI very-long-instruction-word (VLIW) architecture developed by Texas Instruments (TI), making this
DSP an excellent choice for multichannel and multifunction applications.
With performance of up to 2000 million instructions per second (MIPS) at a clock rate of 250 MHz, the ’C6202
offers cost-effective solutions to high-performance DSP programming challenges. The ’C6202 DSP possesses
the operational flexibility of high-speed controllers and the numerical capability of array processors. This
processor has 32 general-purpose registers of 32–bit word length and eight highly independent functional units.
The eight functional units provide six arithmetic logic units (ALUs) for a high degree of parallelism and two 16-bit
multipliers for a 32-bit result. The ’C6202 can produce two multiply-accumulates (MACs) per cycle for a total
of 500 million MACs per second (MMACS). The ’C6202 DSP also has application-specific hardware logic,
on-chip memory, and additional on-chip peripherals.
The ’C6202 includes a large bank of on-chip memory and has a powerful and diverse set of peripherals.
Program memory consists of two 128K-byte blocks, with one block configured as memory-mapped program
space, and the other block user-configured as cache or memory-mapped program space. Data memory
consists of two 64K-byte blocks of RAM. The peripheral set includes three multichannel buffered serial ports
(McBSPs), two general-purpose timers, an expansion bus (XB) that offers ease of interface to synchronous or
asynchronous industry-standard host bus protocols, and a glueless external memory interface (EMIF) capable
of interfacing to SDRAM or SBSRAM and asynchronous peripherals.
The ’C6202 has a complete set of development tools which includes: a new C compiler, an assembly optimizer
to simplify programming and scheduling, and a Windows debugger interface for visibility into source code
execution.
device characteristics
T able 1 provides an overview of the ’C6202 DSP . The table shows significant features of each device, including
the capacity of on-chip RAM, the peripherals, the execution time, and the package type with pin count.
Table 1. Characteristics of the ’C6202 Processors
CHARACTERISTICS DESCRIPTION
Device Number TMS320C6202
2 Mbit Program Memory
On-Chip Memory
Peripherals
Cycle Time 4 ns
Package Type
Nominal Voltage
(organized as 2 blocks)
1 Mbit Data Memory
(organized as 2 blocks)
3 Multichannel Buffered Serial Ports (McBSP)
2 General-Purpose Timers
External Memory Interface (EMIF)
Expansion Bus (XB)
27 mm × 27 mm, 352-Pin BGA (GJL)
18 mm × 18 mm, 384-Pin BGA (GLS)
1.8 V Core
3.3 V I/O
ADVANCE INFORMATION
TI is a trademark of Texas Instruments Incorporated.
Windows is a registered trademark of the Microsoft Corporation.
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
3
Page 4
TMS320C6202
FIXED-POINT DIGITAL SIGNAL PROCESSOR
SPRS072B – AUGUST 1998 – REVISED AUGUST 1999
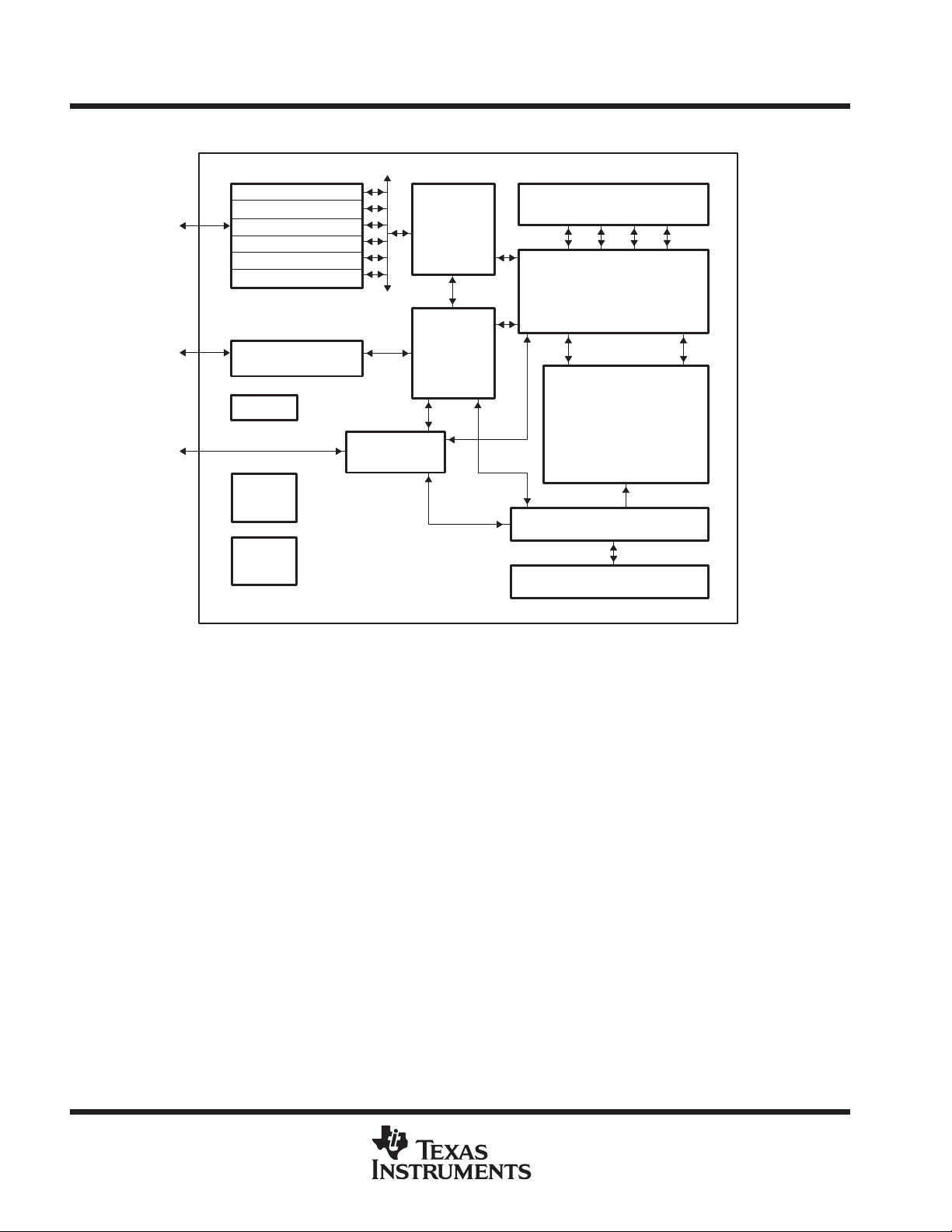
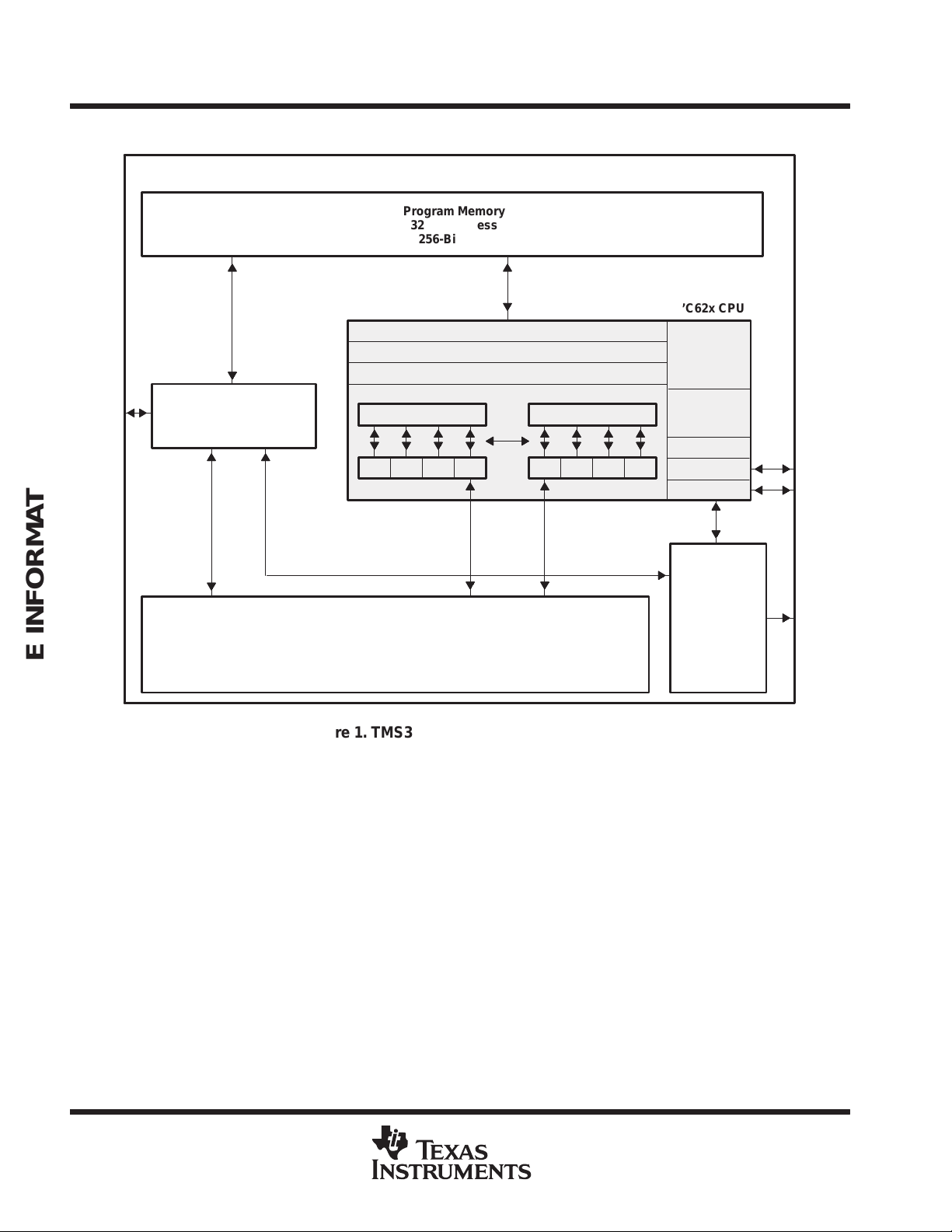
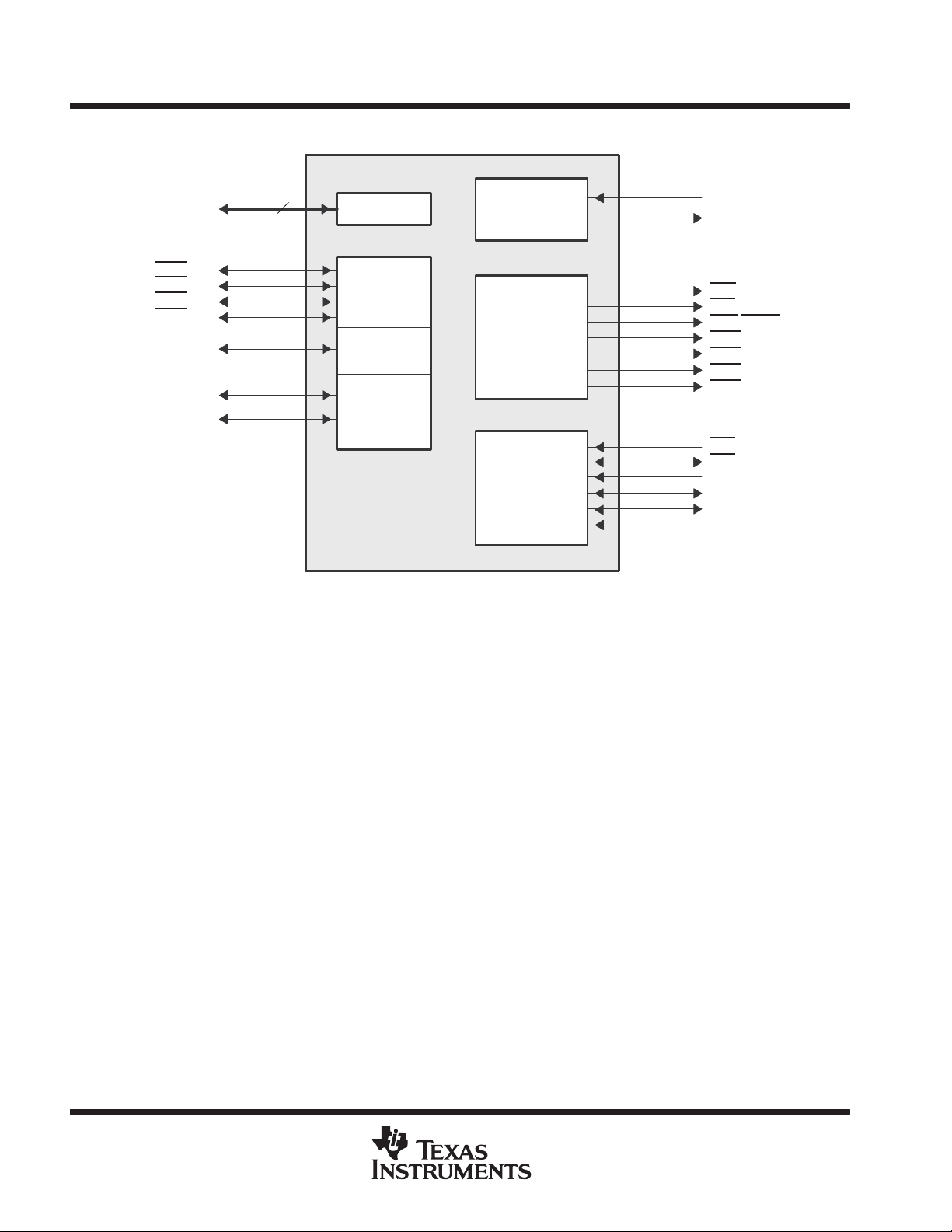
functional block diagram
Timers
Interrupt Selector
McBSPs
XB Control
DMA Control
EMIF Control
Expansion Bus (XB)
Interface
PLL
Power
Down
Boot-
Config.
EMIF
Peripheral
Bus
Controller
DMA
Controller
Data Memory
Data Memory
Controller
CPU
Program Memory Controller
Program Memory/Cache
ADVANCE INFORMATION
4
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
Page 5

TMS320C6202
FIXED-POINT DIGITAL SIGNAL PROCESSOR
SPRS072B – AUGUST 1998 – REVISED AUGUST 1999
CPU description
The CPU fetches VelociTI advanced very-long instruction words (VLIW) (256 bits wide) to supply up to eight
32-bit instructions to the eight functional units during every clock cycle. The VelociTI VLIW architecture features
controls by which all eight units do not have to be supplied with instructions if they are not ready to execute. The
first bit of every 32-bit instruction determines if the next instruction belongs to the same execute packet as the
previous instruction, or whether it should be executed in the following clock as a part of the next execute packet.
Fetch packets are always 256 bits wide; however, the execute packets can vary in size. The variable-length
execute packets are a key memory-saving feature, distinguishing the ’C6200 CPU from other VLIW
architectures.
The CPU features two sets of functional units. Each set contains four units and a register file. One set contains
functional units .L1, .S1, .M1, and .D1; the other set contains units .D2, .M2, .S2, and .L2. The two register files
each contain 16 32-bit registers for a total of 32 general-purpose registers. The two sets of functional units, along
with two register files, compose sides A and B of the CPU (see Figure 1 and Figure 2). The four functional units
on each side of the CPU can freely share the 16 registers belonging to that side. Additionally , each side features
a single data bus connected to all the registers on the other side, by which the two sets of functional units can
access data from the register files on the opposite side. While register access by functional units on the same
side of the CPU as the register file can service all the units in a single clock cycle, register access using the
register file across the CPU supports one read and one write per cycle.
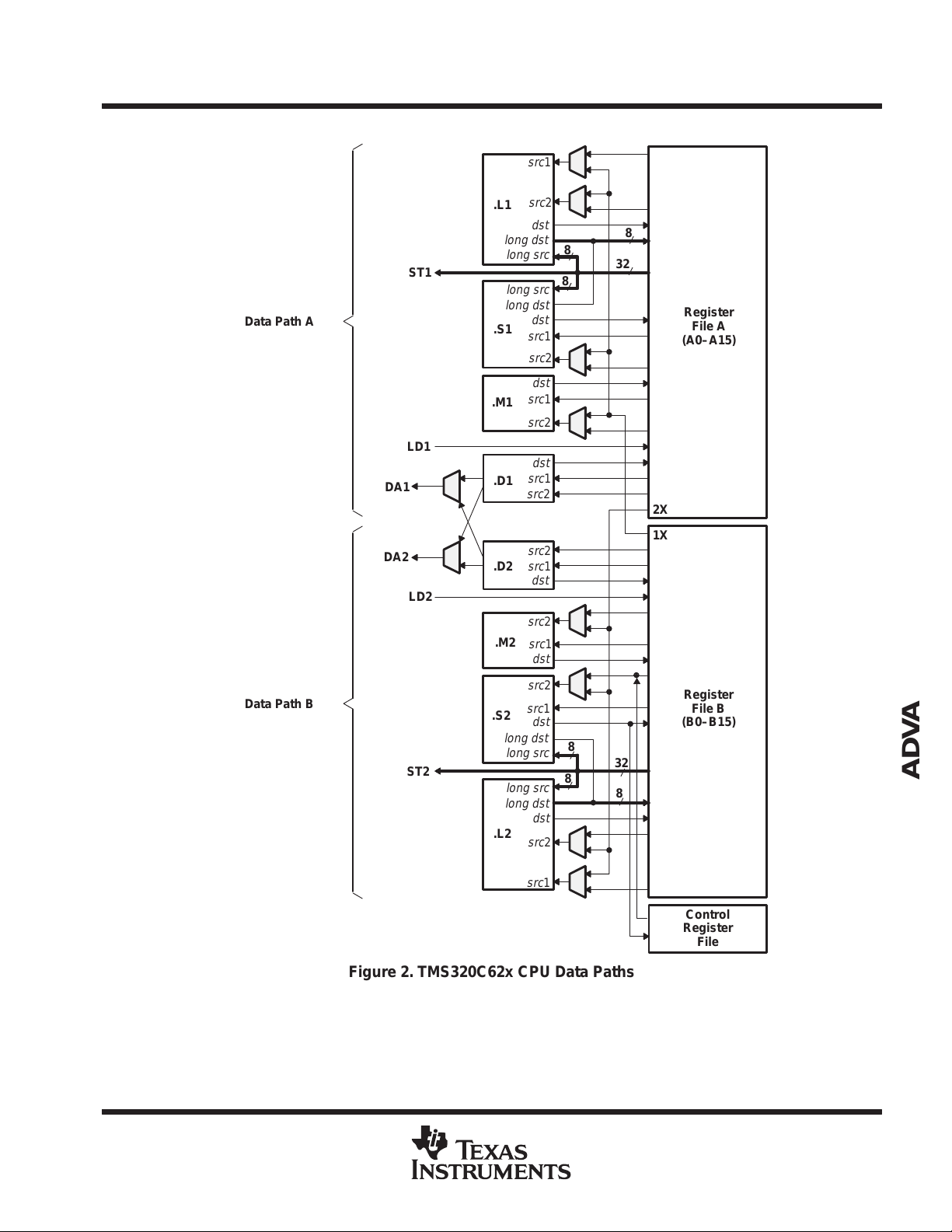
Another key feature of the ’C6200 CPU is the load/store architecture, where all instructions operate on registers
(as opposed to data in memory). Two sets of data-addressing units (.D1 and .D2) are responsible for all data
transfers between the register files and the memory. The data address driven by the .D units allows data
addresses generated from one register file to be used to load or store data to or from the other register file. The
’C6200 CPU supports a variety of indirect addressing modes using either linear- or circular-addressing modes
with 5- or 15-bit offsets. All instructions are conditional, and most can access any one of the 32 registers. Some
registers, however, are singled out to support specific addressing or to hold the condition for conditional
instructions (if the condition is not automatically “true”). The two .M functional units are dedicated for multiplies.
The two .S and .L functional units perform a general set of arithmetic, logical, and branch functions with results
available every clock cycle.
The processing flow begins when a 256-bit-wide instruction fetch packet is fetched from a program memory.
The 32-bit instructions destined for the individual functional units are “linked” together by “1” bits in the least
significant bit (LSB) position of the instructions. The instructions that are “chained” together for simultaneous
execution (up to eight in total) compose an execute packet. A “0” in the LSB of an instruction breaks the chain,
effectively placing the instructions that follow it in the next execute packet. If an execute packet crosses the
fetch-packet boundary (256 bits wide), the assembler places it in the next fetch packet, while the remainder of
the current fetch packet is padded with NOP instructions. The number of execute packets within a fetch packet
can vary from one to eight. Execute packets are dispatched to their respective functional units at the rate of one
per clock cycle and the next 256-bit fetch packet is not fetched until all the execute packets from the current fetch
packet have been dispatched. After decoding, the instructions simultaneously drive all active functional units
for a maximum execution rate of eight instructions every clock cycle. While most results are stored in 32-bit
registers, they can be subsequently moved to memory as bytes or half-words as well. All load and store
instructions are byte-, half-word, or word-addressable.
ADVANCE INFORMATION
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
5
Page 6
TMS320C6202
FIXED-POINT DIGITAL SIGNAL PROCESSOR
SPRS072B – AUGUST 1998 – REVISED AUGUST 1999
CPU description (continued)
Program Memory
32-Bit Address
256-Bit Data
External Memory
Interface
Data Path A Data Path B
Register File A Register File B
.S1
.L1
.M1 .D1 .D2
Program Fetch
Instruction Dispatch
Instruction Decode
.M2
.S2 .L2
’C62x CPU
Control
Registers
Control
Logic
Test
Emulation
Interrupts
ADVANCE INFORMATION
Data Memory
32-Bit Address
8-, 16-, 32-Bit Data
Figure 1. TMS320C62x CPU Block Diagram
Additional
Peripherals:
Timers,
Serial Ports,
etc.
6
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
Page 7
CPU description (continued)
Data Path A
DA1
DA2
ST1
LD1
LD2
TMS320C6202
FIXED-POINT DIGITAL SIGNAL PROCESSOR
SPRS072B – AUGUST 1998 – REVISED AUGUST 1999
src
1
src
dst
long dst
long src
long src
long dst
dst
src
src
dst
src
src
dst
src
src
src
src
dst
src
src
dst
2
8
8
8
1
2
1
2
1
2
2
1
2
1
32
Register
File A
(A0–A15)
2X
1X
.L1
.S1
.M1
.D1
.D2
.M2
Data Path B
src
2
src
dst
long dst
long src
long src
long dst
dst
src
src
1
8
32
8
8
2
1
.S2
ST2
.L2
Figure 2. TMS320C62x CPU Data Paths
Register
File B
(B0–B15)
ADVANCE INFORMATION
Control
Register
File
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
7
Page 8
TMS320C6202
FIXED-POINT DIGITAL SIGNAL PROCESSOR
SPRS072B – AUGUST 1998 – REVISED AUGUST 1999
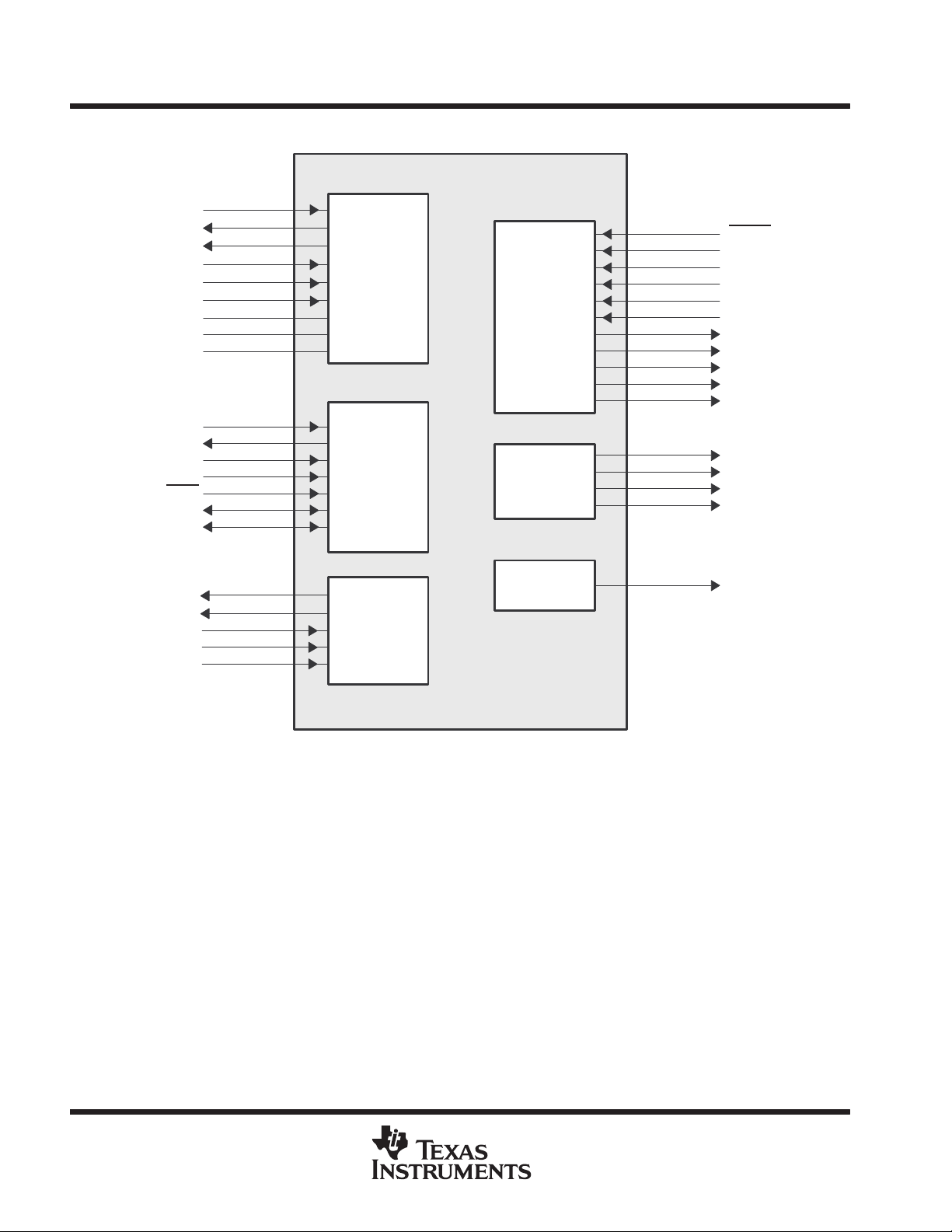
signal groups description
CLKIN
CLKOUT2
CLKOUT1
CLKMODE0
CLKMODE1
CLKMODE2
PLLV
PLLG
PLLF
TMS
TDO
TDI
TCK
TRST
EMU1
EMU0
†
†
Clock/PLL
IEEE Standard
1149.1
(JTAG)
Emulation
Reset and
Interrupts
DMA Status
RESET
NMI
EXT_INT7
EXT_INT6
EXT_INT5
EXT_INT4
IACK
INUM3
INUM2
INUM1
INUM0
DMAC3
DMAC2
DMAC1
DMAC0
ADVANCE INFORMATION
RSV4
RSV3
RSV2
RSV1
RSV0
†
For GLS devices only
Reserved
Figure 3. CPU Signals
Power-Down
Status
Control/Status
PD
8
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
Page 9
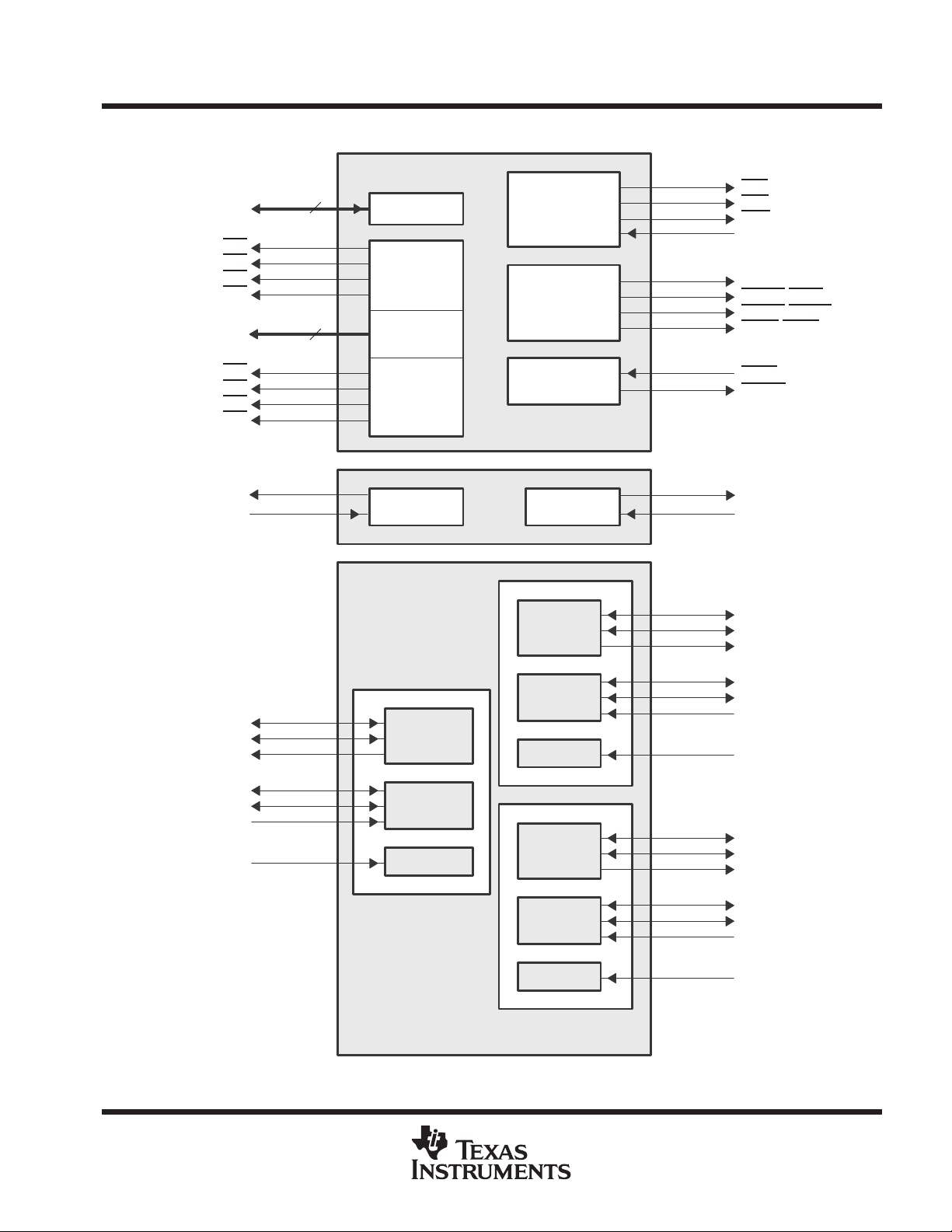
signal groups description (continued)
TMS320C6202
FIXED-POINT DIGITAL SIGNAL PROCESSOR
SPRS072B – AUGUST 1998 – REVISED AUGUST 1999
ED[31:0]
CE3
CE2
CE1
CE0
EA[21:2]
BE3
BE2
BE1
BE0
TOUT1
TINP1
32
20
Data
Memory Map
Space Select
Word Address
Byte Enables
Timer 1
Asynchronous
Memory
Control
Synchronous
Memory
Control
HOLD/
HOLDA
EMIF
(External Memory Interface)
Timer 0
Timers
McBSP0
Transmit
ARE
AOE
AWE
ARDY
SDA10
SDRAS
/SSOE
SDCAS/SSADS
SDWE/SSWE
HOLD
HOLDA
TOUT0
TINP0
CLKX0
FSX0
DX0
CLKX1
FSX1
DX1
CLKR1
FSR1
DR1
CLKS1
McBSP1
Transmit
Receive
Clock
McBSPs
(Multichannel Buffered Serial Ports)
Receive
Clock
McBSP2
Transmit
Receive
Clock
Figure 4. Peripheral Signals
CLKR0
FSR0
DR0
CLKS0
ADVANCE INFORMATION
CLKX2
FSX2
DX2
CLKR2
FSR2
DR2
CLKS2
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
9
Page 10
TMS320C6202
FIXED-POINT DIGITAL SIGNAL PROCESSOR
SPRS072B – AUGUST 1998 – REVISED AUGUST 1999
signal groups description (continued)
XD[31:0]
XBE3/XA5
/XA4
XBE2
/XA3
XBE1
XBE0
/XA2
XRDY
XHOLD
XHOLDA
32
Data
Byte-Enable
Control/
Address
Control
Arbitration
Interface
Expansion Bus
Figure 4. Peripheral Signals (Continued)
Clocks
I/O Port
Control
Host
Control
XCLKIN
XFCLK
XOE
XRE
XWE/XWAIT
XCE3
XCE2
XCE1
XCE0
XCS
XAS
XCNTL
XW/R
XBLAST
XBOFF
ADVANCE INFORMATION
10
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
Page 11
TYPE
†
DESCRIPTION
• Selects whether the CPU clock frequency = in ut clock frequency x4 or x1
I
O
lid duri
IACK f
l)
g
• Encoding order follows the interru t service fetch acket ordering
TMS320C6202
FIXED-POINT DIGITAL SIGNAL PROCESSOR
SPRS072B – AUGUST 1998 – REVISED AUGUST 1999
Signal Descriptions
SIGNAL
NAME
CLKIN C12 B10 I Clock Input
CLKOUT1 AD20 Y18 O Clock output at full device speed
CLKOUT2 AC19 AB19 O
CLKMODE0 B15 B12 I
CLKMODE1 – A9 I
CLKMODE2 – A14 I
‡
PLLV
‡
PLLG
PLLF C13 A11 A
TMS AD7 Y5 I JTAG test-port mode select (features an internal pullup)
TDO AE6 AA4 O/Z JTAG test-port data out
TDI AF5 Y4 I JTAG test-port data in (features an internal pullup)
TCK AE5 AB2 I JTAG test-port clock
TRST AC7 AA3 I JTAG test-port reset (features an internal pulldown)
EMU1 AF6 AA5 I/O/Z Emulation pin 1, pullup with a dedicated 20-kΩ resistor
EMU0 AC8 AB4 I/O/Z Emulation pin 0, pullup with a dedicated 20-kΩ resistor
RESET K2 J3 I Device reset
NMI L2 K2 I
EXT_INT7 V4 U2
EXT_INT6 Y2 U3
EXT_INT5 AA1 W1
EXT_INT4 W4 V2
IACK Y1 V1 O Interrupt acknowledge for all active interrupts serviced by the CPU
INUM3 V2 R3
INUM2 U4 T1
INUM1 V3 T2
INUM0 W2 T3
PD AB2 Y2 O Power-down modes 2 or 3 (active if high)
†
I = Input, O = Output, Z = High Impedance, S = Supply Voltage, GND = Ground
‡
PLLV and PLLG are not part of external voltage supply or ground. See the
§
A = Analog Signal (PLL Filter)
¶
For emulation and normal operation, pull up EMU1 and EMU0 with a dedicated 20-kΩ resistor. For boundary scan, pull down EMU1 and EMU0
with a dedicated 20-kΩ resistor.
PIN NO.
GJL GLS
D13 C11 A
D14 C12 A
CLOCK/PLL
Clock output at half of device speed
• Used for synchronous memory interface
Clock mode selects (Note: CLKMODE1 and CLKMODE2 selects are for GLS devices only)
§
PLL analog VCC connection for the low-pass filter
§
PLL analog GND connection for the low-pass filter
§
PLL low-pass filter connection to external components and a bypass capacitor
JTAG EMULATION
RESET AND INTERRUPTS
Nonmaskable interrupt
• Edge-driven (rising edge)
External interrupts
• Edge-driven (rising edge)
Active interrupt identification number
•Va
• Encoding order follows the interrupt-service fetch-packet orderin
ng
POWER-DOWN STATUS
or all active interrupts (not just externa
clock PLL
p
section for information on how to connect these pins.
p
¶
¶
ADVANCE INFORMATION
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
11
Page 12

TMS320C6202
TYPE
†
DESCRIPTION
Ex ansion bus data
,,
XCE[3:0] memory ty e
I/O/Z
y
– Arbitration mode (internal or external)
O/Z
bits 28, 29
Only
asserted du
access
• Only one asserted during any I/O ort data access
FIXED-POINT DIGITAL SIGNAL PROCESSOR
SPRS072B – AUGUST 1998 – REVISED AUGUST 1999
Signal Descriptions (Continued)
SIGNAL
NAME
XCLKIN A9 C8 I Expansion bus synchronous host interface clock input
XFCLK B9 A8 O Expansion bus FIFO interface clock output
XD31 D15 C13
XD30 B16 A13
XD29 A17 C14
XD28 B17 B14
XD27 D16 B15
XD26 A18 C15
XD25 B18 A15
XD24 D17 B16
XD23 C18 C16
XD22 A20 A17
XD21 D18 B17
XD20 C19 C17
XD19 A21 B18
XD18 D19 A19
XD17 C20 C18
XD16 B21 B19
XD15 A22 C19
XD14 D20 B20
XD13 B22 A21
XD12 E25 C21
XD11 F24 D20
XD10 E26 B22
XD9 F25 D21
XD8 G24 E20
XD7 H23 E21
ADVANCE INFORMATION
XD6 F26 D22
XD5 G25 F20
XD4 J23 F21
XD3 G26 E22
XD2 H25 G20
XD1 J24 G21
XD0 K23 G22
XCE3 F2 D2
XCE2 E1 B1
XCE1 F3 D3
XCE0 E2 C2
†
I = Input, O = Output, Z = High Impedance, S = Supply Voltage, GND = Ground
PIN NO.
GJL GLS
EXPANSION BUS
p
• Used for transfer of data, address, and control
• Also controls initialization of DSP modes and expansion bus at reset via pullup/pulldown
resistors
–
–
– XBLAST polarity
– XW/R polarity
– Asynchronous or synchronous host operation
–
– FIFO mode
– Little endian/big endian
–Boot mode
Expansion bus I/O port memory space enables
•Enabled by
one
•
p
, and 30 of the word address
ring any I/O port data
12
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
Page 13
TYPE
†
DESCRIPTION
I/O/Z
• Act as address for I/O ort o eration
O/Z
bits 24
Only
asserted du
access
• Only one asserted during any external data access
Byte-enable control
O/Z
TMS320C6202
FIXED-POINT DIGITAL SIGNAL PROCESSOR
SPRS072B – AUGUST 1998 – REVISED AUGUST 1999
Signal Descriptions (Continued)
SIGNAL
NAME
XBE3/XA5 C7 C5
XBE2/XA4 D8 A4
XBE1/XA3 A6 B5
XBE0/XA2 C8 C6
XOE A7 A6 O/Z Expansion bus I/O port output enable
XRE C9 C7 O/Z Expansion bus I/O port read enable
XWE/XWAIT D10 B7 O/Z Expansion bus I/O port write enable and host port wait signals
XCS A10 C9 I Expansion bus host port chip-select input
XAS D9 B6 I/O/Z Expansion bus host port address strobe
XCNTL B10 B9 I Expansion bus host control. XCNTL selects between expansion bus address or data register
XW/R D11 B8 I/O/Z Expansion bus host port write/read enable. XW/R polarity selected at reset
XRDY A5 C4 I/O/Z Expansion bus host port ready (active low) and I/O port ready (active high)
XBLAST B6 B4 I/O/Z Expansion bus host port burst last–polarity selected at reset
XBOFF B11 A10 I Expansion bus back off
XHOLD B5 A2 I/O/Z Expansion bus hold request
XHOLDA D7 B3 I/O/Z Expansion bus hold acknowledge
CE3 AB25 Y21
CE2 AA24 W20
CE1 AB26 AA22
CE0 AA25 W21
BE3 Y24 V20
BE2 W23 V21
BE1 AA26 W22
BE0 Y25 U20
EA21 J25 H20
EA20 J26 H21
EA19 L23 H22
EA18 K25 J20
EA17 L24 J21
EA16 L25 K21
EA15 M23 K20
EA14 M24 K22
EA13 M25 L21
EA12 N23 L20
EA11 P24 L22
†
I = Input, O = Output, Z = High Impedance, S = Supply Voltage, GND = Ground
PIN NO.
GJL GLS
EXPANSION BUS (CONTINUED)
Expansion bus multiplexed byte-enable control/address signals
•Act as byte enable for host port operation
• Act as address for I/O port operation
EMIF – CONTROL SIGNALS COMMON TO ALL TYPES OF MEMORY
Memory space enables
•Enabled by
one
•
• Decoded from the two lowest bits of the internal address
• Byte-write enables for most types of memory
• Can be directly connected to SDRAM read and write mask signal (SDQM)
EMIF – ADDRESS
O/Z External address (word address)
and 25 of the word address
p
p
ring any external data
ADVANCE INFORMATION
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
13
Page 14
TMS320C6202
TYPE
†
DESCRIPTION
I/O/Z
External data
FIXED-POINT DIGITAL SIGNAL PROCESSOR
SPRS072B – AUGUST 1998 – REVISED AUGUST 1999
Signal Descriptions (Continued)
SIGNAL
NAME
EA10 P23 M20
EA9 R25 M21
EA8 R24 N22
EA7 R23 N20
EA6 T25 N21
EA5 T24 P21
EA4 U25 P20
EA3 T23 R22
EA2 V26 R21
ED31 AD8 Y6
ED30 AC9 AA6
ED29 AF7 AB6
ED28 AD9 Y7
ED27 AC10 AA7
ED26 AE9 AB8
ED25 AF9 Y8
ED24 AC11 AA8
ED23 AE10 AA9
ED22 AD11 Y9
ED21 AE11 AB10
ED20 AC12 Y10
ED19 AD12 AA10
ED18 AE12 AA11
ED17 AC13 Y11
ED16 AD14 AB12
ED15 AC14 Y12
ADVANCE INFORMATION
ED14 AE15 AA12
ED13 AD15 AA13
ED12 AC15 Y13
ED11 AE16 AB13
ED10 AD16 Y14
ED9 AE17 AA14
ED8 AC16 AA15
ED7 AF18 Y15
ED6 AE18 AB15
ED5 AC17 AA16
ED4 AD18 Y16
ED3 AF20 AB17
ED2 AC18 AA17
ED1 AD19 Y17
ED0 AF21 AA18
†
I = Input, O = Output, Z = High Impedance, S = Supply Voltage, GND = Ground
PIN NO.
GJL GLS
EMIF – ADDRESS (CONTINUED)
O/Z External address (word address)
EMIF – DATA
14
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
Page 15
TYPE
†
DESCRIPTION
O
DMA action complete
FIXED-POINT DIGITAL SIGNAL PROCESSOR
SPRS072B – AUGUST 1998 – REVISED AUGUST 1999
Signal Descriptions (Continued)
SIGNAL
NAME
ARE V24 T21 O/Z Asynchronous memory read enable
AOE V25 R20 O/Z Asynchronous memory output enable
AWE U23 T22 O/Z Asynchronous memory write enable
ARDY W25 T20 I Asynchronous memory ready input
SDA10 AE21 AA19 O/Z SDRAM address 10 (separate for deactivate command)
SDCAS/SSADS AE22 AB21 O/Z SDRAM column-address strobe/SBSRAM address strobe
SDRAS/SSOE AF22 Y19 O/Z SDRAM row-address strobe/SBSRAM output enable
SDWE/SSWE AC20 AA20 O/Z SDRAM write enable/SBSRAM write enable
HOLD Y26 V22 I Hold request from the host
HOLDA V23 U21 O Hold-request-acknowledge to the host
TOUT1 J4 F2 O Timer 1 or general-purpose output
TINP1 G2 F3 I Timer 1 or general-purpose input
TOUT0 F1 D1 O Timer 0 or general-purpose output
TINP0 H4 E2 I Timer 0 or general-purpose input
DMAC3 Y3 V3
DMAC2 AA2 W2
DMAC1 AB1 AA1
DMAC0 AA3 W3
CLKS0 M4 K3 I External clock source (as opposed to internal)
CLKR0 M2 L2 I/O/Z Receive clock
CLKX0 M3 K1 I/O/Z Transmit clock
DR0 R2 M2 I Receive data
DX0 P4 M3 O/Z Transmit data
FSR0 N3 M1 I/O/Z Receive frame sync
FSX0 N4 L3 I/O/Z Transmit frame sync
CLKS1 G1 E1 I External clock source (as opposed to internal)
CLKR1 J3 G2 I/O/Z Receive clock
CLKX1 H2 G3 I/O/Z Transmit clock
DR1 L4 H1 I Receive data
DX1 J1 H2 O/Z Transmit data
FSR1 J2 H3 I/O/Z Receive frame sync
FSX1 K4 G1 I/O/Z Transmit frame sync
†
I = Input, O = Output, Z = High Impedance, S = Supply Voltage, GND = Ground
PIN NO.
GJL GLS
EMIF – ASYNCHRONOUS MEMORY CONTROL
EMIF – SYNCHRONOUS DRAM (SDRAM)/SYNCHRONOUS BURST SRAM (SBSRAM) CONTROL
EMIF – BUS ARBITRATION
TIMERS
DMA ACTION COMPLETE STATUS
p
MULTICHANNEL BUFFERED SERIAL PORT 0 (McBSP0)
MULTICHANNEL BUFFERED SERIAL PORT 1 (McBSP1)
TMS320C6202
ADVANCE INFORMATION
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
15
Page 16
TMS320C6202
TYPE
†
DESCRIPTION
FIXED-POINT DIGITAL SIGNAL PROCESSOR
SPRS072B – AUGUST 1998 – REVISED AUGUST 1999
Signal Descriptions (Continued)
SIGNAL
NAME
CLKS2 R3 N1 I External clock source (as opposed to internal)
CLKR2 T2 N2 I/O/Z Receive clock
CLKX2 R4 N3 I/O/Z Transmit clock
DR2 V1 R2 I Receive data
DX2 T4 R1 O/Z Transmit data
FSR2 U2 P3 I/O/Z Receive frame sync
FSX2 T3 P2 I/O/Z Transmit frame sync
RSV0 L3 J2 I Reserved for testing, pullup with a dedicated 20-kΩ resistor
RSV1 G3 E3 I Reserved for testing, pullup with a dedicated 20-kΩ resistor
RSV2 A12 B11 I Reserved for testing, pullup with a dedicated 20-kΩ resistor
RSV3 C15 B13 O Reserved (leave unconnected,
RSV4 D12 C10 O Reserved (leave unconnected,
DV
DD
ADVANCE INFORMATION
†
I = Input, O = Output, Z = High Impedance, S = Supply Voltage, GND = Ground
PIN NO.
GJL GLS
A11 A3
A16 A7
B7 A16
B8 A20
B19 D4
B20 D6
C6 D7
C10 D9
C14 D10
C17 D13
C21 D14
G4 D16
G23 D17
H3 D19
H24 F1
K3 F4
K24 F19
L1 F22
L26 G4
N24 G19
P3 J4
MULTICHANNEL BUFFERED SERIAL PORT 2 (McBSP2)
RESERVED FOR TEST
do not
connect to power or ground)
do not
connect to power or ground)
SUPPLY VOLTAGE PINS
S 3.3-V supply voltage
16
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
Page 17
TYPE
†
DESCRIPTION
FIXED-POINT DIGITAL SIGNAL PROCESSOR
Signal Descriptions (Continued)
SIGNAL
NAME
DV
DD
CV
DD
†
I = Input, O = Output, Z = High Impedance, S = Supply Voltage, GND = Ground
PIN NO.
GJL GLS
T1 J19
T26 K4
U3 K19
U24 L1
W3 M22
W24 N4
Y4 N19
Y23 P4
AD6 P19
AD10 T4
AD13 T19
AD17 U1
AD21 U4
AE7 U19
AE8 U22
AE19 W4
AE20 W6
AF11 W7
AF16 W9
– W10
– W13
– W14
– W16
– W17
– W19
– AB5
– AB9
– AB14
– AB18
A1 E7
A2 E8
A3 E10
A24 E11
A25 E12
A26 E13
B1 E15
B2 E16
B3 F7
B24 F8
B25 F9
B26 F11
C1 F12
SUPPLY VOLTAGE PINS (CONTINUED)
S 3.3-V supply voltage
S 1.8-V supply voltage
TMS320C6202
SPRS072B – AUGUST 1998 – REVISED AUGUST 1999
ADVANCE INFORMATION
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
17
Page 18
TMS320C6202
TYPE
†
DESCRIPTION
CV
S
1.8-V suppl
oltage
FIXED-POINT DIGITAL SIGNAL PROCESSOR
SPRS072B – AUGUST 1998 – REVISED AUGUST 1999
Signal Descriptions (Continued)
SIGNAL
NAME
DD
ADVANCE INFORMATION
†
I = Input, O = Output, Z = High Impedance, S = Supply Voltage, GND = Ground
PIN NO.
GJL GLS
C2 F14
C3 F15
C4 F16
C23 G5
C24 G6
C25 G17
C26 G18
D3 H5
D4 H6
D5 H17
D22 H18
D23 J6
D24 J17
E4 K5
E23 K18
AB4 L5
AB23 L6
AC3 L17
AC4 L18
AC5 M5
AC22 M6
AC23 M17
AC24 M18
AD1 N5
AD2 N18
AD3 P6
AD4 P17
AD23 R5
AD24 R6
AD25 R17
AD26 R18
AE1 T5
AE2 T6
AE3 T17
AE24 T18
AE25 U7
AE26 U8
AF1 U9
AF2 U11
AF3 U12
AF24 U14
AF25 U15
SUPPLY VOLTAGE PINS (CONTINUED)
pp
y v
18
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
Page 19
TYPE
†
DESCRIPTION
V
GND
Ground pins
FIXED-POINT DIGITAL SIGNAL PROCESSOR
Signal Descriptions (Continued)
SIGNAL
NAME
CV
DD
SS
†
I = Input, O = Output, Z = High Impedance, S = Supply Voltage, GND = Ground
PIN NO.
GJL GLS
AF26 U16
– V7
– V8
– V10
– V11
– V12
– V13
– V15
– V16
A4 A1
A8 A5
A13 A12
A14 A18
A15 A22
A19 B2
A23 B21
B4 C1
B12 C3
B13 C20
B14 C22
B23 D5
C5 D8
C11 D11
C16 D12
C22 D15
D1 D18
D2 E4
D6 E5
D21 E6
D25 E9
D26 E14
E3 E17
E24 E18
F4 E19
F23 F5
H1 F6
H26 F10
SUPPLY VOLTAGE PINS (CONTINUED)
S 1.8-V supply voltage
GROUND PINS
p
TMS320C6202
SPRS072B – AUGUST 1998 – REVISED AUGUST 1999
ADVANCE INFORMATION
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
19
Page 20
TMS320C6202
TYPE
†
DESCRIPTION
V
GND
Ground pins
FIXED-POINT DIGITAL SIGNAL PROCESSOR
SPRS072B – AUGUST 1998 – REVISED AUGUST 1999
Signal Descriptions (Continued)
SIGNAL
NAME
SS
ADVANCE INFORMATION
†
I = Input, O = Output, Z = High Impedance, S = Supply Voltage, GND = Ground
PIN NO.
GJL GLS
K1 F13
K26 F17
M1 F18
M26 H4
N1 H19
N2 J1
N25 J5
N26 J18
P1 J22
P2 K6
P25 K17
P26 L4
R1 L19
R26 M4
U1 M19
U26 N6
W1 N17
W26 P1
AA4 P5
AA23 P18
AB3 P22
AB24 R4
AC1 R19
AC2 U5
AC6 U6
AC21 U10
AC25 U13
AC26 U17
AD5 U18
AD22 V4
AE4 V5
AE13 V6
AE14 V9
AE23 V14
AF4 V17
AF8 V18
GROUND PINS (CONTINUED)
p
20
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
Page 21
TYPE
†
DESCRIPTION
V
GND
Ground pins
FIXED-POINT DIGITAL SIGNAL PROCESSOR
Signal Descriptions (Continued)
SIGNAL
NAME
SS
†
I = Input, O = Output, Z = High Impedance, S = Supply Voltage, GND = Ground
PIN NO.
GJL GLS
AF10 V19
AF12 W5
AF13 W8
AF14 W11
AF15 W12
AF17 W15
AF19 W18
AF23 Y1
– Y3
– Y20
– Y22
– AA2
– AA21
– AB1
– AB3
– AB7
– AB11
– AB16
– AB20
– AB22
GROUND PINS (CONTINUED)
p
TMS320C6202
SPRS072B – AUGUST 1998 – REVISED AUGUST 1999
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
ADVANCE INFORMATION
21
Page 22
TMS320C6202
FIXED-POINT DIGITAL SIGNAL PROCESSOR
SPRS072B – AUGUST 1998 – REVISED AUGUST 1999
development support
Texas Instruments offers an extensive line of development tools for the ’C6200 generation of DSPs, including
tools to evaluate the performance of the processors, generate code, develop algorithm implementations, and
fully integrate and debug software and hardware modules.
The following products support development of ’C6200-based applications:
Software Development Tools:
Assembly optimizer
Assembler/Linker
Simulator
Optimizing ANSI C compiler
Application algorithms
C/Assembly debugger and code profiler
Hardware Development Tools:
Extended development system (XDS) emulator (supports ’C6200 multiprocessor system debug)
EVM (Evaluation Module)
The
TMS320 DSP Development Support Reference Guide
development-support products for all TMS320 family member devices, including documentation. See this
document for further information on TMS320 documentation or any TMS320 support products from Texas
Instruments. An additional document, the
TMS320 Third-Party Support Reference Guide
information about TMS320-related products from other companies in the industry . T o receive TMS320 literature,
contact the Literature Response Center at 800/477-8924.
(SPRU011) contains information about
(SPRU052), contains
See Table 2 for a complete listing of development-support tools for the ’C6200. For information on pricing and
availability, contact the nearest TI field sales office or authorized distributor.
Table 2. TMS320C6xx Development-Support Tools
DEVELOPMENT TOOL PLATFORM PART NUMBER
Software
C Compiler/Assembler/Linker/Assembly Optimizer Win32 TMDX3246855-07
C Compiler/Assembler/Linker/Assembly Optimizer SPARCSolaris TMDX3246555-07
Simulator Win32 TMDS3246851-07
Simulator SPARCSolaris TMDS3246551-07
ADVANCE INFORMATION
XDS510 Debugger/Emulation Software Win32, Windows NT TMDX324016X-07
Hardware
XDS510 Emulator
XDS510WS Emulator
EVM Evaluation Kit PC/Win95/Windows NT TMDX3260A6201
EVM Evaluation Kit (including TMDX3246855–07) PC/Win95/Windows NT TMDX326006201
†
Includes XDS510 board and JTAG emulation cable. TMDX324016X-07 C-source Debugger/Emulation software is not included.
‡
Includes XDS510WS box, SCSI cable, power supply, and JTAG emulation cable.
†
‡
Software/Hardware
PC TMDS00510
SCSI TMDS00510WS
XDS, XDS510, and XDS510WS are trademarks of Texas Instruments Incorporated.
Win32 and Windows NT are trademarks of Microsoft Corporation.
SPARC is a trademark of SPARC International, Inc.
Solaris is a trademark of Sun Microsystems, Inc.
22
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
Page 23

TMS320C6202
FIXED-POINT DIGITAL SIGNAL PROCESSOR
SPRS072B – AUGUST 1998 – REVISED AUGUST 1999
device and development-support tool nomenclature
T o designate the stages in the product development cycle, TI assigns prefixes to the part numbers of all TMS320
devices and support tools. Each TMS320 member has one of three prefixes: TMX, TMP, or TMS. Texas
Instruments recommends two of three possible prefix designators for support tools: TMDX and TMDS. These
prefixes represent evolutionary stages of product development from engineering prototypes (TMX / TMDX)
through fully qualified production devices/tools (TMS/TMDS).
Device development evolutionary flow:
TMX Experimental device that is not necessarily representative of the final device’s electrical
specifications
TMP Final silicon die that conforms to the device’s electrical specifications but has not completed
quality and reliability verification
TMS Fully qualified production device
Support tool development evolutionary flow:
TMDX Development-support product that has not yet completed T exas Instruments internal qualification
testing.
TMDS Fully qualified development-support product
TMX and TMP devices and TMDX development-support tools are shipped against the following disclaimer:
“Developmental product is intended for internal evaluation purposes.”
TMS devices and TMDS development-support tools have been characterized fully , and the quality and reliability
of the device have been demonstrated fully. TI’s standard warranty applies.
Predictions show that prototype devices (TMX or TMP) have a greater failure rate than the standard production
devices. T exas Instruments recommends that these devices not be used in any production system because their
expected end-use failure rate still is undefined. Only qualified production devices are to be used.
TI device nomenclature also includes a suffix with the device family name. This suffix indicates the package type
(for example, GJL), the temperature range (for example, blank is the default commercial temperature range),
and the device speed range in megahertz (for example, -250 is 250 MHz). Figure 5 provides a legend for
reading the complete device name for any TMS320 family member.
ADVANCE INFORMATION
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
23
Page 24

TMS320C6202
FIXED-POINT DIGITAL SIGNAL PROCESSOR
SPRS072B – AUGUST 1998 – REVISED AUGUST 1999
device and development-support tool nomenclature (continued)
TMS 320 C 6202 GJL –250
PREFIX DEVICE SPEED RANGE
TMX= Experimental device
TMP= Prototype device
TMS= Qualified device
SMJ = MIL-STD-883C
SM = High Rel (non-883C)
DEVICE FAMILY
320 = TMS320 family
TECHNOLOGY
C = CMOS
E = CMOS EPROM
F = CMOS Flash EEPROM
(A)
DEVICE
ADVANCE INFORMATION
†
DIP = Dual-In-Line Package
PGA = Pin Grid Array
CC = Chip Carrier
QFP = Quad Flat Package
TQFP = Thin Quad Flat Package
BGA = Ball Grid Array
–100 MHz
–150 MHz
–167 MHz
–200 MHz
–233 MHz
–250 MHz
–300 MHz
TEMPERATURE RANGE (DEFAULT: 0°C TO 90°C)
Blank = 0°C to 90°C, commercial temperature
A = –40°C to 105°C, extended temperature
PACKAGE TYPE
N = Plastic DIP
J = Ceramic DIP
JD = Ceramic DIP side-brazed
GB = Ceramic PGA
FZ = Ceramic CC
FN = Plastic leaded CC
FD = Ceramic leadless CC
PJ = 100-pin plastic EIAJ QFP
PQ = 132-pin plastic bumpered QFP
PZ = 100-pin plastic TQFP
PBK = 128-pin plastic TQFP
PGE = 144-pin plastic TQFP
GFN = 256-pin plastic BGA
GGU = 144-pin plastic BGA
GGP = 352-pin plastic BGA
GJC = 352-pin plastic BGA
GJL = 352-pin plastic BGA
GLS = 384-pin plastic BGA
’1x DSP:
’2x DSP:
’2xx DSP:
’3x DSP:
’4x DSP:
’5x DSP:
’54x DSP:
’6x DSP:
10 16
14 17
15
25
26
203 206 240
204 209
30
31
32
40
44
50 53
51 56
52 57
541 545
542 546
543 548
6201
6201B
6202
6203
6211
6701
6711
†
24
Figure 5. TMS320 Device Nomenclature (Including TMS320C6202)
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
Page 25

TMS320C6202
FIXED-POINT DIGITAL SIGNAL PROCESSOR
SPRS072B – AUGUST 1998 – REVISED AUGUST 1999
documentation support
Extensive documentation supports all TMS320 family generations of devices from product announcement
through applications development. The types of documentation available include: data sheets, such as this
document, with design specifications; complete user’s reference guides for all devices; technical briefs;
development-support tools; and hardware and software applications. The following is a brief, descriptive list of
support documentation specific to the ’C6x devices:
The
TMS320C6000 CPU and Instruction Set Reference Guide
’C6000 CPU architecture, instruction set, pipeline, and associated interrupts.
The
TMS320C6000 Peripherals Reference Guide
the peripherals available on ’C6x devices, such as the external memory interface (EMIF), host-port interface
(HPI), multichannel buffered serial ports (McBSPs), direct-memory-access (DMA), enhanced
direct-memory-access (EDMA) controller, expansion bus (XB), clocking and phase-locked loop (PLL); and
power-down modes. This guide also includes information on internal data and program memories.
The
TMS320C6000 Programmer’s Guide
assembly code for ’C6x devices and includes application program examples.
The
TMS320C6x C Source Debugger User’s Guide
’C6x simulator and emulator versions of the C source debugger interface and discusses various aspects of the
debugger, including: command entry, code execution, data management, breakpoints, profiling, and analysis.
(literature number SPRU198) describes ways to optimize C and
(literature number SPRU190) describes the functionality of
(literature number SPRU188) describes how to invoke the
(literature number SPRU189) describes the
The
TMS320C6x Peripheral Support Library Programmer’s Reference
the contents of the ’C6x peripheral support library of functions and macros. It lists functions and macros both
by header file and alphabetically , provides a complete description of each, and gives code examples to show
how they are used.
TMS320C6000 Assembly Language T ools User’s Guide
language tools (assembler, linker, and other tools used to develop assembly language code), assembler
directives, macros, common object file format, and symbolic debugging directives for the ’C6000 generation of
devices.
The
TMS320C6x Evaluation Module Reference Guide
installing and operating the ’C6x evaluation module. It also includes support software documentation,
application programming interfaces, and technical reference material.
TMS320C62x Multichannel Evaluation Module User’s Guide
instructions for installing and operating the ’C62x multichannel evaluation module. It also includes support
software documentation, application programming interfaces, and technical reference material.
TMS320C62x Multichannel Evaluation Module Technical Reference
reference information for the ’C62x multichannel evaluation module (McEVM). It includes support software
documentation, application programming interface references, and hardware descriptions for the ’C62x
McEVM.
TMS320C6000 DSP/BIOS User’s Guide
and APIs to analyze embedded real-time DSP applications.
Code Composer User’s Guide
development environment to build and debug embedded real-time DSP applications.
(literature number SPRU296) explains how to use the Code Composer
(literature number SPRU303) describes how to use DSP/BIOS tools
(literature number SPRU186) describes the assembly
(literature number SPRU269) provides instructions for
(literature number SPRU273) describes
(literature number SPRU285) provides
(SPRU308) provides provides technical
ADVANCE INFORMATION
Code Composer Studio T utorial
development environment and software tools.
(literature number SPRU301) introduces the Code Composer Studio integrated
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
25
Page 26

TMS320C6202
FIXED-POINT DIGITAL SIGNAL PROCESSOR
SPRS072B – AUGUST 1998 – REVISED AUGUST 1999
documentation support (continued)
The
TMS320C6000 Technical Brief
devices, associated development tools, and third-party support.
A series of DSP textbooks is published by Prentice-Hall and John Wiley & Sons to support DSP research and
education. The TMS320 newsletter,
update TMS320 customers on product information. The TMS320 DSP bulletin board service (BBS) provides
access to information pertaining to the TMS320 family , including documentation, source code, and object code
for many DSP algorithms and utilities. The BBS can be reached at 281/274-2323.
Information regarding TI DSP products is also available on the Worldwide Web at http://www.ti.com uniform
resource locator (URL).
(literature number SPRU197) gives an introduction to the ’C62x/C67x
Details on Signal Processing
, is published quarterly and distributed to
ADVANCE INFORMATION
26
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
Page 27

TMS320C6202
FIXED-POINT DIGITAL SIGNAL PROCESSOR
SPRS072B – AUGUST 1998 – REVISED AUGUST 1999
clock PLL
All of the internal ’C6202 clocks are generated from a single source through the CLKIN pin. This source clock
either drives the PLL, which generates the internal CPU clock, or bypasses the PLL to become the CPU clock.
To use the PLL to generate the CPU clock, the filter circuit shown in Figure 6 must be properly designed.
To configure the ’C6202 PLL clock for proper operation, see Figure 6 and Table 3. To minimize the clock jitter,
a single clean power supply should power both the ’C6202 device and the external clock oscillator circuit. The
minimum CLKIN rise and fall times should also be observed. See the
clock timing requirements.
input and output clocks
section for input
3.3 V
1 IN
NOTES: A. The ’C6202 PLL can generate CPU clock frequencies in the range of 130 MHz to 250 MHz. For frequencies below 130 MHz, the
B. For the ’C6202, values for C1, C2, and R1 are fixed and apply to all valid frequency ranges of CLKIN and CPU clock frequency.
C. For CLKMODE x1, the PLL is bypassed and all six external PLL components can be removed. For this case, the PLLV terminal
D. The 3.3-V supply for the EMI filter (and PLLV) must be from the same 3.3-V power plane supplying the I/O voltage, DVDD.
E. EMI filter manufacturer TDK part number ACF451832-153-T
F. CLKMODE2 and CLKMODE1 exist only on the GLS device. There are no equivalent connections on the GJL device.
G. The reserved PLL clock modes (GLS devices only) may or may not be supported on future devices as additional PLL multiply factors.
3 OUT
R1
EMI Filter
2
GND
PLL should be configured to operate in bypass mode.
has to be connected to a clean 3.3-V supply and the PLLG and PLLF terminals should be tied together.
For future flexibility, a board can be designed so that these inputs are configurable (either through jumpers, switches, or 0-Ω
resistors).
10 µF 0.1 µF
(Bypass)
C1 C2
PLLV
PLLF
PLLG
CLKIN
All Other Modes
’320C6202
CPU Clock
CLKMODE2
CLKMODE1
0
0
0
0
CLKMODE0
0
– MULT×1
1
– MULT×4
– Reserved
CLKOUT1÷ 1
CLKOUT2÷ 2
f(CPU Clock)=f(CLKIN)
f(CPU Clock)=f(CLKIN)×4
Figure 6. PLL Block Diagram
ADVANCE INFORMATION
Table 3. TMS320C6202 PLL Component Selection Table
CLKIN
CLKMODE
x4 32.5–62.5 130–250 65–125 60.4 27 560 75
†
Under some operating conditions, the maximum PLL lock time may vary as much as 150% from the specified typical value. For example, if the
typical lock time is specified as 100 µs, the maximum value may be as long as 250 µs.
RANGE
(MHz)
CPU CLOCK
FREQUENCY
(CLKOUT1)
RANGE (MHz)
CLKOUT2
RANGE
(MHz)
R1
(Ω)
C1
(nF)
†
C2
(pF)
TYPICAL
LOCK TIME
(µs)
power-supply sequencing
The 1.8-V supply powers the core and the 3.3-V supply powers the I/O buffers. The core supply should be
powered up first, or at the same time as the I/O buffers supply . This is to ensure that the I/O buf fers have valid
inputs from the core before the output buffers are powered up, thus preventing bus contention with other chips
on the board.
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
27
Page 28

TMS320C6202
FIXED-POINT DIGITAL SIGNAL PROCESSOR
SPRS072B – AUGUST 1998 – REVISED AUGUST 1999
absolute maximum ratings over operating case temperature range (unless otherwise noted)
†
Supply voltage range, CVDD (see Note 1) – 0.3 V to 2.3 V. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Supply voltage range, DV
(see Note 1) –0.3 V to 4 V. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
DD
Input voltage range –0.3 V to 4 V. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Output voltage range –0.3 V to 4 V. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Operating case temperature range, T
Storage temperature range, T
†
Stresses beyond those listed under “absolute maximum ratings” may cause permanent damage to the device. These are stress ratings only, and
functional operation of the device at these or any other conditions beyond those indicated under “recommended operating conditions” is not
implied. Exposure to absolute-maximum-rated conditions for extended periods may affect device reliability.
NOTE 1: All voltage values are with respect to V
stg
SS
C
.
0_C to 90_C. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
–55_C to 150_C. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
recommended operating conditions
MIN NOM MAX UNIT
CV
DV
V
V
V
I
OH
I
OL
T
SS
IH
IL
C
Supply voltage 1.71 1.8 1.89 V
DD
Supply voltage 3.14 3.30 3.46 V
DD
Supply ground 0 0 0 V
High-level input voltage 2.0 V
Low-level input voltage 0.8 V
High-level output current –8 mA
Low-level output current 8 mA
Operating case temperature 0 90_C
electrical characteristics over recommended ranges of supply voltage and operating case
temperature (unless otherwise noted)
PARAMETER TEST CONDITIONS MIN TYP MAX UNIT
V
OH
V
OL
I
I
I
OZ
I
DD2V
I
DD2V
ADVANCE INFORMATION
I
DD3V
C
i
C
o
‡
TMS and TDI are not included due to internal pullups. TRST is not included due to internal pulldown.
§
Measured with average CPU activity:
50% of time: 8 instructions per cycle, 32-bit DMEM access per cycle
50% of time: 2 instructions per cycle, 16-bit DMEM access per cycle
¶
Measured with average peripheral activity:
50% of time: Timers at max rate
50% of time: Timers at max rate
#
Measured with average I/O activity (30-pF load, SDCLK on):
25% of time: Reads from external SDRAM
25% of time: Writes to external SDRAM
50% of time: No activity
High-level output voltage DV
Low-level output voltage DV
Input current
Off-state output current V
Supply current, CPU + CPU memory access§CV
Supply current, peripherals
Supply current, I/O pins
Input capacitance 10 pF
Output capacitance 10 pF
‡
¶
#
McBSPs at E1 rate
DMA burst transfer between DMEM and SDRAM
McBSPs at E1 rate
DMA servicing McBSPs
= MIN, I
DD
= MIN, I
DD
V
= V
to DV
I
SS
= DV
O
= NOM, CPU clock = 200 MHz TBD mA
DD
CV
= NOM, CPU clock = 200 MHz TBD mA
DD
DV
= NOM, CPU clock = 200 MHz TBD mA
DD
DD
or 0 V ±10 uA
DD
= MAX 2.4 V
OH
= MAX 0.6 V
OL
±10 uA
28
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
Page 29

TMS320C6202
FIXED-POINT DIGITAL SIGNAL PROCESSOR
SPRS072B – AUGUST 1998 – REVISED AUGUST 1999
PARAMETER MEASUREMENT INFORMATION
I
OL
Tester Pin
Electronics
Output
Under
Test
†
Typical distributed load circuit capacitance
V
ref
CT = 30 pF
I
OH
50 Ω
†
signal transition levels
All input and output timing parameters are referenced to 1.5 V for both “0” and “1” logic levels.
V
ref
Figure 7. Input and Output Voltage Reference Levels for ac Timing Measurements
= 1.5 V
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
ADVANCE INFORMATION
29
Page 30

TMS320C6202
FIXED-POINT DIGITAL SIGNAL PROCESSOR
SPRS072B – AUGUST 1998 – REVISED AUGUST 1999
INPUT AND OUTPUT CLOCKS
timing requirements for CLKIN
NO.
1 t
c(CLKIN)
2 t
w(CLKINH)
3 t
w(CLKINL)
4 t
t(CLKIN)
†
The reference points for the rise and fall transitions are measured at 20% and 80%, respectively, of VIH.
CLKIN
Cycle time,
CLKIN
Pulse duration,
CLKIN high
Pulse duration,
CLKIN low
Transition time,
CLKIN
†
(see Figure 8)
’C6202-200 ’C6202-233 ’C6202-250
CLKMODE
= x4
MIN MAX MIN MAX MIN MAX MIN MAX MIN MAX MIN MAX
20 5 17.2 4.3 16 4 ns
8 2.25 6.9 1.9 6.4 1.8 ns
8 2.25 6.9 1.9 6.4 1.8 ns
CLKMODE
= x1
5 0.6 5 0.6 5 0.6 ns
CLKMODE
= x4
1
2
CLKMODE
= x1
4
3
Figure 8. CLKIN Timings
CLKMODE
= x4
4
CLKMODE
= x1
UNIT
timing requirements for XCLKIN†‡ (see Figure 9)
NO.
1 t
c(XCLKIN)
2 t
ADVANCE INFORMATION
w(XCLKINH)
3 t
w(XCLKINL)
4 t
t(XCLKIN)
†
The reference points for the rise and fall transitions are measured at 20% and 80%, respectively, of VIH.
‡
P = 1/CPU clock frequency in nanoseconds (ns).
XCLKIN
Cycle time, XCLKIN 4P ns
Pulse duration, XCLKIN high 1.8P ns
Pulse duration, XCLKIN low 1.8P ns
Transition time, XCLKIN 0.6 ns
1
2
3
Figure 9. XCLKIN Timings
’C6202-200
’C6202-233
’C6202-250
MIN MAX
4
4
UNIT
30
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
Page 31

NO
PARAMETER
UNIT
TMS320C6202
FIXED-POINT DIGITAL SIGNAL PROCESSOR
SPRS072B – AUGUST 1998 – REVISED AUGUST 1999
INPUT AND OUTPUT CLOCKS (CONTINUED)
switching characteristics for CLKOUT1
.
1 t
c(CKO1)
2 t
w(CKO1H)
3 t
w(CKO1L)
4 t
†
‡
t(CKO1)
PH is the high period of CLKIN in ns and PL is the low period of CLKIN in ns.
P = 1/CPU clock frequency in nanoseconds (ns).
CLKOUT1
Cycle time, CLKOUT1 P – 0.7 P + 0.7 P – 0.7 P + 0.7 ns
Pulse duration, CLKOUT1 high (P/2) – 0.5 (P/2 ) + 0.5 PH – 0.5 PH + 0.5 ns
Pulse duration, CLKOUT1 low (P/2) – 0.5 (P/2 ) + 0.5 PL – 0.5 PL + 0.5 ns
Transition time, CLKOUT1 0.6 0.6 ns
†‡
(see Figure 10)
2
CLKMODE = x4 CLKMODE = x1
MIN MAX MIN MAX
1
Figure 10. CLKOUT1 Timings
switching characteristics for CLKOUT2‡ (see Figure 11)
NO. PARAMETER
1 t
c(CKO2)
2 t
w(CKO2H)
3 t
w(CKO2L)
4 t
‡
t(CKO2)
P = 1/CPU clock frequency in nanoseconds (ns).
Cycle time, CLKOUT2 2P – 0.7 2P + 0.7 ns
Pulse duration, CLKOUT2 high P – 0.7 P + 0.7 ns
Pulse duration, CLKOUT2 low P – 0.7 P + 0.7 ns
Transition time, CLKOUT2 0.6 ns
’C6202-200
’C6202-233
’C6202-250
4
3
4
’C6202-200
’C6202-233
’C6202-250
MIN MAX
UNIT
ADVANCE INFORMATION
CLKOUT2
1
2
3
Figure 11. CLKOUT2 Timings
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
4
4
31
Page 32

TMS320C6202
FIXED-POINT DIGITAL SIGNAL PROCESSOR
SPRS072B – AUGUST 1998 – REVISED AUGUST 1999
INPUT AND OUTPUT CLOCKS (CONTINUED)
switching characteristics for XFCLK
NO. PARAMETER
1 t
c(XFCK)
2 t
w(XFCKH)
3 t
w(XFCKL)
4 t
†
‡
t(XFCK)
P = 1/CPU clock frequency in ns.
D = 8, 6, 4, or 2; FIFO clock divide ratio, user-programmable
XFCLK
Cycle time, XFCLK D * P – 0.7 D * P + 0.7 ns
Pulse duration, XFCLK high (D/2) * P – 0.7 (D/2) * P + 0.7 ns
Pulse duration, XFCLK low (D/2) * P – 0.7 (D/2) * P + 0.7 ns
Transition time, XFCLK 0.6 ns
†‡
Figure 12. XFCLK Timings
(see Figure 12)
2
’C6202-200
’C6202-233
’C6202-250
MIN MAX
1
3
4
4
UNIT
ADVANCE INFORMATION
32
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
Page 33

TMS320C6202
FIXED-POINT DIGITAL SIGNAL PROCESSOR
SPRS072B – AUGUST 1998 – REVISED AUGUST 1999
ASYNCHRONOUS MEMORY TIMING
timing requirements for asynchronous memory cycles
NO.
6 t
su(EDV-CKO1H)
7 t
h(CKO1H-EDV)
10 t
su(ARDY-CKO1H)
11 t
†
h(CKO1H-ARDY)
To ensure data setup time, simply program the strobe width wide enough. ARDY is internally synchronized. If ARDY does meet setup or hold
time, it may be recognized in the current cycle or the next cycle. Thus, ARDY can be an asynchronous input.
Setup time, read EDx valid before CLKOUT1 high 4.0 ns
Hold time, read EDx valid after CLKOUT1 high 0 ns
Setup time, ARDY valid before CLKOUT1 high 4.0 ns
Hold time, ARDY valid after CLKOUT1 high 0 ns
†
(see Figure 13 – Figure 14)
’C6202-200
’C6202-233
’C6202-250
MIN MAX
UNIT
switching characteristics for asynchronous memory cycles‡ (see Figure 13 – Figure 14)
’C6202-200
NO. PARAMETER
1 t
d(CKO1H-CEV)
2 t
d(CKO1H-BEV)
3 t
d(CKO1H-BEIV)
4 t
d(CKO1H-EAV)
5 t
d(CKO1H-EAIV)
8 t
d(CKO1H-AOEV)
9 t
d(CKO1H-AREV)
12 t
d(CKO1H-EDV)
13 t
d(CKO1H-EDIV)
14 t
‡
d(CKO1H-AWEV)
The minimum delay is also the minimum output hold after CLKOUT1 high.
Delay time, CLKOUT1 high to CEx valid 0 4.0 ns
Delay time, CLKOUT1 high to BEx valid 0 4.0 ns
Delay time, CLKOUT1 high to BEx invalid 0 4.0 ns
Delay time, CLKOUT1 high to EAx valid 0 4.0 ns
Delay time, CLKOUT1 high to EAx invalid 0 4.0 ns
Delay time, CLKOUT1 high to AOE valid 0 4.0 ns
Delay time, CLKOUT1 high to ARE valid 0 4.0 ns
Delay time, CLKOUT1 high to EDx valid 4.0 ns
Delay time, CLKOUT1 high to EDx invalid 0 ns
Delay time, CLKOUT1 high to AWE valid 0 4.0 ns
’C6202-233
’C6202-250
MIN MAX
UNIT
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
ADVANCE INFORMATION
33
Page 34

TMS320C6202
FIXED-POINT DIGITAL SIGNAL PROCESSOR
SPRS072B – AUGUST 1998 – REVISED AUGUST 1999
ASYNCHRONOUS MEMORY TIMING (CONTINUED)
CLKOUT1
CEx
BE[3:0]
EA[21:2]
ED[31:0]
AOE
ARE
AWE
ARDY
Setup = 2 Strobe = 5
10
1111
10
Figure 13. Asynchronous Memory Read Timing
Not ready = 2
6
HOLD = 1
11
32
54
7
88
99
ADVANCE INFORMATION
CLKOUT1
CEx
BE[3:0]
EA[21:2]
ED[31:0]
AOE
ARE
AWE
ARDY
12
Setup = 2 Strobe = 5
10
11
10
11
Figure 14. Asynchronous Memory Write Timing
Not ready = 2
HOLD = 1
11
32
54
13
1414
34
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
Page 35

NO
UNIT
NO
PARAMETER
UNIT
FIXED-POINT DIGITAL SIGNAL PROCESSOR
SPRS072B – AUGUST 1998 – REVISED AUGUST 1999
SYNCHRONOUS-BURST MEMORY TIMING
timing requirements for synchronous-burst SRAM cycles (see Figure 15)
TMS320C6202
.
7 t
su(EDV-CKO2H)
8 t
h(CKO2H-EDV)
Setup time, read EDx valid before CLKOUT2
high
Hold time, read EDx valid after CLKOUT2 high 1.5 1.5 1.5 ns
switching characteristics for synchronous-burst SRAM cycles
.
1 t
osu(CEV-CKO2H)
2 t
oh(CKO2H-CEV)
3 t
osu(BEV-CKO2H)
4 t
oh(CKO2H-BEIV)
5 t
osu(EAV-CKO2H)
6 t
oh(CKO2H-EAIV)
9 t
osu(ADSV-CKO2H)
10 t
oh(CKO2H-ADSV)
11 t
osu(OEV-CKO2H)
12 t
oh(CKO2H-OEV)
13 t
osu(EDV-CKO2H)
14 t
oh(CKO2H-EDIV)
15 t
osu(WEV-CKO2H)
16 t
oh(CKO2H-WEV)
†
P = 1/CPU clock frequency in ns. For example, when running parts at 250 MHz, use P = 4 ns.
‡
SDCAS
§
/SSADS, SDRAS/SSOE, and SDWE/SSWE operate as SSADS, SSOE, and SSWE, respectively , during SBSRAM accesses.
For the first write in a series of one or more consecutive adjacent writes, the write data is generated one CLKOUT2 cycle early to accommodate
the ED enable time.
Output setup time, CEx valid
before CLKOUT2 high
Output hold time, CEx valid after
CLKOUT2 high
Output setup time, BEx valid
before CLKOUT2 high
Output hold time, BEx invalid
after CLKOUT2 high
Output setup time, EAx valid
before CLKOUT2 high
Output hold time, EAx invalid
after CLKOUT2 high
Output setup time,
SDCAS
/SSADS valid before
CLKOUT2 high
Output hold time,
SDCAS
/SSADS valid after
CLKOUT2 high
Output setup time,
SDRAS
/SSOE valid before
CLKOUT2 high
Output hold time, SDRAS/SSOE
valid after CLKOUT2 high
Output setup time, EDx valid
before CLKOUT2 high
Output hold time, EDx invalid
after CLKOUT2 high
Output setup time, SDWE/SSWE
valid before CLKOUT2 high
Output hold time, SDWE/SSWE
valid after CLKOUT2 high
§
’C6202-200 ’C6202-233 ’C6202-250
MIN MAX MIN MAX MIN MAX
2P – 5.5 2P – 4.4 2P – 3.8 ns
2P – 5.5 2P – 4.4 2P – 3.8 ns
2P – 5.5 2P – 4.4 2P – 3.8 ns
2P – 5.5 2P – 4.4 2P – 3.8 ns
2P – 5.5 2P – 4.4 2P – 3.8 ns
2P – 5.5 2P – 4.4 2P – 3.8 ns
2P – 5.5 2P – 4.4 2P – 3.8 ns
’C6202-200 ’C6202-233 ’C6202-250
MIN MAX MIN MAX MIN MAX
2.5 2.1 2 ns
†‡
(see Figure 15 and Figure 16)
1 1 1 ns
1 1 1 ns
1 1 1 ns
1 1 1 ns
1 1 1 ns
1 1 1 ns
1 1 1 ns
ADVANCE INFORMATION
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
35
Page 36

TMS320C6202
FIXED-POINT DIGITAL SIGNAL PROCESSOR
SPRS072B – AUGUST 1998 – REVISED AUGUST 1999
SYNCHRONOUS-BURST MEMORY TIMING (CONTINUED)
CLKOUT2
CEx
BE[3:0]
EA[21:2]
ED[31:0]
SDCAS/SSADS
SDRAS
/SSOE
/SSWE
SDWE
†
†
†
BE1 BE2 BE3 BE4
A1 A2 A3 A4
43
65
7
8
Q1 Q2 Q3 Q4
109
21
1211
†
SDCAS/SSADS, SDRAS/SSOE, and SDWE/SSWE operate as SSADS, SSOE, and SSWE, respectively , during SBSRAM accesses.
Figure 15. SBSRAM Read Timing
CLKOUT2
CEx
43
65
1413
109
1615
ADVANCE INFORMATION
†
SDCAS
BE[3:0]
EA[21:2]
ED[31:0]
/SSADS
/SSOE
/SSWE
†
†
†
SDCAS
SDRAS
SDWE
/SSADS, SDRAS/SSOE, and SDWE/SSWE operate as SSADS, SSOE, and SSWE, respectively, during SBSRAM accesses.
BE1 BE2 BE3 BE4
A1 A2 A3 A4
Q1 Q2 Q3 Q4
Figure 16. SBSRAM Write Timing
21
36
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
Page 37

NO
UNIT
NO
PARAMETER
UNIT
TMS320C6202
FIXED-POINT DIGITAL SIGNAL PROCESSOR
SPRS072B – AUGUST 1998 – REVISED AUGUST 1999
SYNCHRONOUS DRAM TIMING
timing requirements for synchronous DRAM cycles (see Figure 17)
.
7 t
su(EDV-CKO2H)
8 t
h(CKO2H-EDV)
Setup time, read EDx valid before CLKOUT2 high 1 1 0.5 ns
Hold time, read EDx valid after CLKOUT2 high 3 3 3 ns
switching characteristics for synchronous DRAM cycles†‡ (see Figure 17–Figure 22)
.
1 t
osu(CEV-CKO2H)
2 t
oh(CKO2H-CEV)
3 t
osu(BEV-CKO2H)
4 t
oh(CKO2H-BEIV)
5 t
osu(EAV-CKO2H)
6 t
oh(CKO2H-EAIV)
9 t
osu(CASV-CKO2H)
10 t
oh(CKO2H-CASV)
11 t
osu(EDV-CKO2H)
12 t
oh(CKO2H-EDIV)
13 t
osu(WEV-CKO2H)
14 t
oh(CKO2H-WEV)
15 t
osu(SDA10V-CKO2H)
16 t
oh(CKO2H-SDA10IV)
17 t
osu(RASV-CKO2H)
18 t
oh(CKO2H-RASV)
†
P = 1/CPU clock frequency in ns. For example, when running parts at 250 MHz, use P = 4 ns.
‡
SDCAS
§
/SSADS, SDRAS/SSOE, and SDWE/SSWE operate as SDCAS, SDRAS, and SDWE, respectively , during SDRAM accesses.
For the first write in a series of one or more consecutive adjacent writes, the write data is generated one CLKOUT2 cycle early to accommodate
the ED enable time.
Output setup time, CEx valid
before CLKOUT2 high
Output hold time, CEx valid after
CLKOUT2 high
Output setup time, BEx valid
before CLKOUT2 high
Output hold time, BEx invalid after
CLKOUT2 high
Output setup time, EAx valid
before CLKOUT2 high
Output hold time, EAx invalid after
CLKOUT2 high
Output setup time,
SDCAS
/SSADS valid before
CLKOUT2 high
Output hold time, SDCAS/SSADS
valid after CLKOUT2 high
Output setup time, EDx valid
before CLKOUT2 high
Output hold time, EDx invalid after
CLKOUT2 high
Output setup time, SDWE/SSWE
valid before CLKOUT2 high
Output hold time, SDWE/SSWE
valid after CLKOUT2 high
Output setup time, SDA10 valid
before CLKOUT2 high
Output hold time, SDA10 invalid
after CLKOUT2 high
Output setup time, SDRAS/SSOE
valid before CLKOUT2 high
Output hold time, SDRAS/SSOE
valid after CLKOUT2 high
§
’C6202-200 ’C6202-233 ’C6202-250
’C6202-200 ’C6202-233 ’C6202-250
MIN MAX MIN MAX MIN MAX
MIN MAX MIN MAX MIN MAX
2P – 6 2P – 4.6 2P – 4 ns
1.5 1.5 1.5 ns
2P – 6 2P – 4.6 2P – 4 ns
1.5 1.5 1.5 ns
2P – 6 2P – 4.6 2P – 4 ns
1.5 1.5 1.5 ns
2P – 6 2P – 4.6 2P – 4 ns
1.5 1.5 1.5 ns
2P – 6 2P – 4.6 2P – 4 ns
1.5 1.5 1.5 ns
2P – 6 2P – 4.6 2P – 4 ns
1.5 1.5 1.5 ns
2P – 6 2P – 4.6 2P – 4 ns
1.5 1.5 1.5 ns
2P – 6 2P – 4.6 2P – 4 ns
1.5 1.5 1.5 ns
ADVANCE INFORMATION
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
37
Page 38

TMS320C6202
FIXED-POINT DIGITAL SIGNAL PROCESSOR
SPRS072B – AUGUST 1998 – REVISED AUGUST 1999
SYNCHRONOUS DRAM TIMING (CONTINUED)
READ
CLKOUT2
CEx
BE[3:0]
5
EA[15:2]
ED[31:0]
SDA10
/SSADS
/SSWE
†
†
†
SDRAS/SSOE
SDCAS
SDWE
†
SDCAS/SSADS, SDRAS/SSOE, and SDWE/SSWE operate as SDCAS, SDRAS, and SDWE, respectively , during SDRAM accesses.
CA1 CA2 CA3
6
READ
3
BE1 BE2 BE3
4
READ
21
7
8
D1 D2 D3
1615
109
Figure 17. Three SDRAM READ Commands
WRITE
CLKOUT2
1
CEx
3
BE[3:0]
ADVANCE INFORMATION
EA[15:2]
ED[31:0]
SDA10
/SSADS
/SSWE
†
†
†
SDRAS/SSOE
SDCAS
SDWE
†
SDCAS/SSADS, SDRAS/SSOE, and SDWE/SSWE operate as SDCAS, SDRAS, and SDWE, respectively , during SDRAM accesses.
BE1 BE2 BE3
5
CA1 CA2 CA3
11
D1 D2 D3
4
6
12
WRITE
WRITE
2
1615
109
1413
Figure 18. Three SDRAM WRT Commands
38
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
Page 39

SDRAS
SDCAS
CLKOUT2
CEx
BE[3:0]
EA[15:2]
ED[31:0]
SDA10
/SSOE
/SSADS
TMS320C6202
FIXED-POINT DIGITAL SIGNAL PROCESSOR
SPRS072B – AUGUST 1998 – REVISED AUGUST 1999
SYNCHRONOUS DRAM TIMING (CONTINUED)
ACTV
1
5
Bank Activate/Row Address
15
17
†
†
2
Row Address
18
/SSWE
†
SDWE
†
SDCAS/SSADS, SDRAS/SSOE, and SDWE/SSWE operate as SDCAS, SDRAS, and SDWE, respectively , during SDRAM accesses.
Figure 19. SDRAM ACTV Command
DCAB
CLKOUT2
†
SDCAS
1
CEx
BE[3:0]
EA[15:2]
ED[31:0]
15
SDA10
17
†
/SSOE
SDRAS
/SSWE
†
13
†
SDCAS
/SSADS
SDWE
/SSADS, SDRAS/SSOE, and SDWE/SSWE operate as SDCAS, SDRAS, and SDWE, respectively, during SDRAM accesses.
2
16
18
14
ADVANCE INFORMATION
Figure 20. SDRAM DCAB Command
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
39
Page 40

TMS320C6202
FIXED-POINT DIGITAL SIGNAL PROCESSOR
SPRS072B – AUGUST 1998 – REVISED AUGUST 1999
SYNCHRONOUS DRAM TIMING (CONTINUED)
CLKOUT2
CEx
BE[3:0]
EA[15:2]
ED[31:0]
REFR
1
2
SDA10
†
/SSOE
SDRAS
†
/SSADS
SDCAS
/SSWE
†
SDWE
†
SDCAS/SSADS, SDRAS/SSOE, and SDWE/SSWE operate as SDCAS, SDRAS, and SDWE, respectively , during SDRAM accesses.
17
18
9
10
Figure 21. SDRAM REFR Command
MRS
CLKOUT2
ADVANCE INFORMATION
SDRAS
SDCAS
SDWE
CEx
BE[3:0]
EA[15:2]
ED[31:0]
SDA10
/SSOE
/SSADS
/SSWE
1
5
MRS Value
17
†
9
†
13
†
2
6
18
10
14
†
SDCAS/SSADS, SDRAS/SSOE, and SDWE/SSWE operate as SDCAS, SDRAS, and SDWE, respectively , during SDRAM accesses.
Figure 22. SDRAM MRS Command
40
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
Page 41

TMS320C6202
FIXED-POINT DIGITAL SIGNAL PROCESSOR
SPRS072B – AUGUST 1998 – REVISED AUGUST 1999
HOLD/HOLDA TIMING
timing requirements for the HOLD
NO.
3 t
†
oh(HOLDAL-HOLDL)
P = 1/CPU clock frequency in ns. For example, when running parts at 250 MHz, use P = 4 ns.
Hold time, HOLD low after HOLDA low P ns
/HOLDA cycles† (see Figure 23)
’C6202-200
’C6202-233
’C6202-250
MIN MAX
UNIT
switching characteristics for the HOLD/HOLDA cycles†‡ (see Figure 23)
’C6202-200
NO. PARAMETER
1 t
R(HOLDL-EMHZ)
2 t
d(EMHZ-HOLDAL)
4 t
R(HOLDH-EMLZ)
5 t
†
‡
§
d(EMLZ-HOLDAH)
P = 1/CPU clock frequency in ns. For example, when running parts at 250 MHz, use P = 4 ns.
EMIF Bus consists of CE[3:0]
All pending EMIF transactions are allowed to complete before HOLDA
external ARDY used or a minimum of eight consecutive SDRAM reads or writes when RBTR8 = 1. If no bus transactions are occurring, then the
minimum delay time can be achieved. Also, bus hold can be indefinitely delayed by setting NOHOLD = 1.
Response time, HOLD low to EMIF Bus high impedance 4P
Delay time, EMIF Bus high impedance to HOLDA low 0 2P ns
Response time, HOLD high to EMIF Bus low impedance 3P 7P ns
Delay time, EMIF Bus low impedance to HOLDA high 0 2P ns
, BE[3:0], ED[31:0], EA[21:2], ARE, AOE, AWE, SDCAS/SSADS, SDRAS/SSOE, SDWE/SSWE, and SDA10.
DSP Owns Bus
is asserted. The worst case for this is an asynchronous read or write with
External Requestor
Owns Bus
DSP Owns Bus
’C6202-233
’C6202-250
MIN MAX
UNIT
§
ns
3
HOLD
HOLDA
EMIF Bus
†
EMIF Bus consists of CE[3:0], BE[3:0], ED[31:0], EA[21:2], ARE, AOE, AWE, SDCAS/SSADS, SDRAS/SSOE, SDWE/SSWE, and SDA10.
†
C6202 C6202
25
1
4
Figure 23. HOLD/HOLDA Timing
ADVANCE INFORMATION
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
41
Page 42

TMS320C6202
w(RST)
FIXED-POINT DIGITAL SIGNAL PROCESSOR
SPRS072B – AUGUST 1998 – REVISED AUGUST 1999
RESET TIMING
timing requirements for reset (see Figure 24)
’C6202-200
NO.
1 t
11 t
su(XD)
12 t
h(XD)
†
This parameter applies to CLKMODE x1 when CLKIN is stable and applies to CLKMODE x4 when CLKIN and PLL are stable.
‡
This parameter only applies to CLKMODE x4. The RESET
need up to 250 µs to stabilize following device power up or after PLL configuration has been changed. During that time, RESET
to ensure proper device operation. See the
§
XD[31:0] are the boot configuration pins during device reset.
Width of the RESET pulse (PLL stable)
Width of the RESET pulse (PLL needs to sync up)
Setup time, XD configuration bits valid before RESET high
Hold time, XD configuration bits valid after RESET high
clock PLL
section for PLL lock times.
†
‡
§
§
signal is not connected internally to the clock PLL circuit. The PLL, however, may
’C6202-233
’C6202-250
MIN MAX
10
250 µs
5
5
UNIT
CLKOUT1
cycles
CLKOUT1
cycles
CLKOUT1
cycles
must be asserted
switching characteristics during reset¶ (see Figure 24)
NO. PARAMETER
2 t
R(RST)
3 t
d(CKO1H-CKO2IV)
4 t
d(CKO1H-CKO2V)
5 t
d(CKO1H-XFCKIV)
6 t
d(CKO1H-XFCKV)
7 t
d(CKO1H-LOWIV)
8 t
d(CKO1H-LOWV)
9 t
ADVANCE INFORMATION
¶
d(CKO1H-ZHZ)
10 t
d(CKO1H-ZV)
High group consists of: XFCLK
Low group consists of: IACK, INUM[3:0], DMAC[3:0], PD, TOUT0, and TOUT1
Z group consists of: EA[21:2], ED[31:0], CE[3:0]
Response time to change of value in RESET signal 2
Delay time, CLKOUT1 high to CLKOUT2 invalid –1 10 ns
Delay time, CLKOUT1 high to CLKOUT2 valid –1 10 ns
Delay time, CLKOUT1 high to high group invalid –1 10 ns
Delay time, CLKOUT1 high to high group valid –1 10 ns
Delay time, CLKOUT1 high to low group invalid –1 10 ns
Delay time, CLKOUT1 high to low group valid –1 10 ns
Delay time, CLKOUT1 high to Z group high impedance –1 10 ns
Delay time, CLKOUT1 high to Z group valid –1 10 ns
SDA10, CLKX0, CLKX1, CLKX2, FSX0, FSX1, FSX2, DX0, DX1, DX2, CLKR0, CLKR1, CLKR2, FSR0, FSR1,
FSR2, XCE[3:0]
and XHOLDA
, XBE[3:0]/XA[5:2], XOE, XRE, XWE/XWAIT, XAS, XW/R, XRDY, XBLAST, XHOLD,
, BE[3:0], ARE, AWE, AOE, SDCAS/SSADS, SDRAS/SSOE, SDWE/SSWE,
’C6202-200
’C6202-233
’C6202-250
MIN MAX
UNIT
CLKOUT1
cycles
42
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
Page 43

TMS320C6202
FIXED-POINT DIGITAL SIGNAL PROCESSOR
SPRS072B – AUGUST 1998 – REVISED AUGUST 1999
RESET TIMING (CONTINUED)
CLKOUT1
RESET
CLKOUT2
HIGH GROUP
LOW GROUP
Z GROUP
XD[31:0]
1
†
†
†
11
‡
22
43
65
87
109
12
†
High group consists of: XFCLK
Low group consists of: IACK, INUM[3:0], DMAC[3:0], PD, TOUT0, and TOUT1.
Z group consists of: EA[21:2], ED[31:0], CE[3:0], BE[3:0], ARE, AWE, AOE, SDCAS/SSADS, SDRAS/SSOE, SDWE/SSWE,
‡
XD[31:0] are the boot configuration pins during device reset.
SDA10, CLKX0, CLKX1, CLKX2, FSX0, FSX1, FSX2, DX0, DX1, DX2, CLKR0, CLKR1, CLKR2, FSR0, FSR1,
FSR2, XCE[3:0]
and XHOLDA.
, XBE[3:0]/XA[5:2], XOE, XRE, XWE/XWAIT, XAS, XW/R, XRDY, XBLAST, XHOLD,
Figure 24. Reset Timing
ADVANCE INFORMATION
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
43
Page 44

TMS320C6202
FIXED-POINT DIGITAL SIGNAL PROCESSOR
SPRS072B – AUGUST 1998 – REVISED AUGUST 1999
EXTERNAL INTERRUPT TIMING
timing requirements for interrupt response cycles
NO.
2 t
w(ILOW)
3 t
†
w(IHIGH)
P = 1/CPU clock frequency in ns. For example, when running parts at 250 MHz, use P = 4 ns.
Width of the interrupt pulse low 2P ns
Width of the interrupt pulse high 2P ns
†
(see Figure 25)
switching characteristics during interrupt response cycles† (see Figure 25)
NO. PARAMETER
1 t
R(EINTH – IACKH)
4 t
d(CKO2L-IACKV)
5 t
d(CKO2L-INUMV)
6 t
†
d(CKO2L-INUMIV)
P = 1/CPU clock frequency in ns. For example, when running parts at 250 MHz, use P = 4 ns.
CLKOUT2
2
EXT_INTx, NMI
Response time, EXT_INTx high to IACK high 9P ns
Delay time, CLKOUT2 low to IACK valid 0 10 ns
Delay time, CLKOUT2 low to INUMx valid 0 10 ns
Delay time, CLKOUT2 low to INUMx invalid 0 10 ns
1
3
’C6202-200
’C6202-233
’C6202-250
MIN MAX
’C6202-200
’C6202-233
’C6202-250
MIN MAX
UNIT
UNIT
ADVANCE INFORMATION
Intr Flag
IACK
INUMx
5
Figure 25. Interrupt Timing
4
Interrupt Number
4
6
44
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
Page 45

TMS320C6202
FIXED-POINT DIGITAL SIGNAL PROCESSOR
SPRS072B – AUGUST 1998 – REVISED AUGUST 1999
EXPANSION BUS SYNCHRONOUS FIFO TIMING
timing requirements for synchronous FIFO interface (see Figure 26, Figure 27, and Figure 28)
NO. MIN MAX UNIT
5 t
su(XDV-XFCKH)
6 t
h(XFCKH-XDV)
switching characteristics for synchronous FIFO interface (see Figure 26, Figure 27, and Figure 28)
NO. PARAMETER MIN MAX UNIT
1 t
d(XFCKH-XCEV)
2 t
d(XFCKH-XAV)
3 t
d(XFCKH-XOEV)
4 t
d(XFCKH-XREV)
7 t
d(XFCKH-XWEV)
8 t
d(XFCKH-XDV)
9 t
†
‡
d(XFCKH-XDIV)
XBE[3:0]/XA[5:2] operates as address signals XA[5:2] during synchronous FIFO accesses.
XWE
/XWAIT operates as the write enable signal XWE during synchronous FIFO accesses.
Setup time, read XDx valid before XFCLK high 2.5 ns
Hold time, read XDx valid after XFCLK high 2 ns
Delay time, XFCLK high to XCEx valid 1.5 5.2 ns
Delay time, XFCLK high to XBE[3:0]/XA[5:2] valid
Delay time, XFCLK high to XOE valid 1.5 5.2 ns
Delay time, XFCLK high to XRE valid 1.5 5.2 ns
Delay time, XFCLK high to XWE/XWAIT‡ valid 1.5 5.2 ns
Delay time, XFCLK high to XDx valid 5.2 ns
Delay time, XFCLK high to XDx invalid 1.5 ns
†
1.5 5.2 ns
XFCLK
†
XCE3
‡
XBE[3:0]
†
FIFO read (glueless) mode only available in XCE3.
‡
XBE[3:0]
§
XWE
/XA[5:2] operates as address signals XA[5:2] during synchronous FIFO accesses.
/XWAIT operates as the write enable signal XWE during synchronous FIFO accesses.
/XA[5:2]
XOE
XRE
XWE/XWAIT
XD[31:0]
§
XA1 XA2 XA3 XA4
5
D1 D2 D3 D4
Figure 26. FIFO Read Timing (Glueless Read Mode)
11
22
33
44
6
ADVANCE INFORMATION
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
45
Page 46

TMS320C6202
FIXED-POINT DIGITAL SIGNAL PROCESSOR
SPRS072B – AUGUST 1998 – REVISED AUGUST 1999
EXPANSION BUS SYNCHRONOUS FIFO TIMING (CONTINUED)
XFCLK
XCEx
XBE[3:0]/XA[5:2]
XOE
XRE
†
XA1 XA2 XA3 XA4
11
22
33
44
XD[31:0]
‡
5
D1 D2 D3 D4
XWE/XWAIT
†
XBE[3:0]/XA[5:2] operates as address signals XA[5:2] during synchronous FIFO accesses.
‡
XWE
/XWAIT operates as the write enable signal XWE during synchronous FIFO accesses.
Figure 27. FIFO Read Timing
XFCLK
XCEx
ADVANCE INFORMATION
†
XBE[3:0]
‡
XWE
XBE[3:0]/XA[5:2]
XWE/XWAIT
/XA[5:2] operates as address signals XA[5:2] during synchronous FIFO accesses.
/XWAIT operates as the write enable signal XWE during synchronous FIFO accesses.
†
XOE
XRE
‡
XD[31:0]
XA1 XA2 XA3 XA4
8
D1 D2 D3 D4
6
11
22
77
9
46
Figure 28. FIFO Write Timing
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
Page 47

TMS320C6202
FIXED-POINT DIGITAL SIGNAL PROCESSOR
SPRS072B – AUGUST 1998 – REVISED AUGUST 1999
EXPANSION BUS ASYNCHRONOUS PERIPHERAL TIMING
timing requirements for asynchronous peripheral cycles
NO.
4 t
su(XDV-CKO1H)
5 t
h(CKO1H-XDV)
8 t
su(XRY-CKO1H)
9 t
†
h(CKO1H-XRY)
To ensure data setup time, simply program the strobe width wide enough. XRDY is internally synchronized. If XRDY does meet setup or hold
time, it may be recognized in the current cycle or the next cycle. Thus, XRDY can be an asynchronous input.
Setup time, read XDx valid before CLKOUT1 high 4.0 ns
Hold time, read XDx valid after CLKOUT1 high 0 ns
Setup time, XRDY valid before CLKOUT1 high 4.0 ns
Hold time, XRDY valid after CLKOUT1 high 0 ns
switching characteristics for asynchronous peripheral cycles
NO. PARAMETER
1 t
d(CKO1H-XCEV)
2 t
d(CKO1H-XAV)
3 t
d(CKO1H-XAIV)
6 t
d(CKO1H-XOEV)
7 t
d(CKO1H-XREV)
10 t
d(CKO1H-XDV)
11 t
d(CKO1H-XDIV)
12 t
‡
§
¶
d(CKO1H-XWEV)
The minimum delay is also the minimum output hold after CLKOUT1 high.
XBE[3:0]
XWE
/XA[5:2] operates as address signals XA[5:2] during asynchronous peripheral accesses.
/XWAIT operates as the write enable signal XWE during asynchronous peripheral accesses.
Delay time, CLKOUT1 high to XCEx valid 0 4.0 ns
Delay time, CLKOUT1 high to XBE[3:0]/XA[5:2] valid 0 4.0 ns
Delay time, CLKOUT1 high to XBE[3:0]/XA[5:2] invalid 0 4.0 ns
Delay time, CLKOUT1 high to XOE valid 0 4.0 ns
Delay time, CLKOUT1 high to XRE valid 0 4.0 ns
Delay time, CLKOUT1 high to XDx valid 4.0 ns
Delay time, CLKOUT1 high to XDx invalid 0 ns
Delay time, CLKOUT1 high to XWE/XWAIT valid 0 4.0 ns
†
(see Figure 29–Figure 30)
’C6202-200
’C6202-233
’C6202-250
द
(see Figure 29–Figure 30)
’C6202-200
’C6202-233
’C6202-250
UNIT
MIN MAX
UNIT
MIN MAX
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
ADVANCE INFORMATION
47
Page 48

TMS320C6202
FIXED-POINT DIGITAL SIGNAL PROCESSOR
SPRS072B – AUGUST 1998 – REVISED AUGUST 1999
EXPANSION BUS ASYNCHRONOUS PERIPHERAL TIMING (CONTINUED)
Setup = 2 Strobe = 5
CLKOUT1
XCEx
Not ready = 2
HOLD = 2
11
XD[31:0]
XOE
XRE
XRDY
†
‡
§
8
99
8
XBE[3:0]/XA[5:2]
XWE/XWAIT
†
XBE[3:0]/XA[5:2] operates as address signals XA[5:2] during asynchronous peripheral accesses.
‡
XWE
/XWAIT operates as the write enable signal XWE during asynchronous peripheral accesses.
§
XRDY operates as active-high ready input during asynchronous peripheral accesses.
Figure 29. Expansion Bus Asynchronous Peripheral Read Timing
Setup = 2 Strobe = 5
CLKOUT1
XCEx
4
Not ready = 2
32
5
66
77
HOLD = 2
11
XD[31:0]
XOE
XRE
XRDY
†
10
‡
9
8
§
8
ADVANCE INFORMATION
XBE[3:0]/XA[5:2]
XWE/XWAIT
†
XBE[3:0]/XA[5:2] operates as address signals XA[5:2] during asynchronous peripheral accesses.
‡
XWE
/XWAIT operates as the write enable signal XWE during asynchronous peripheral accesses.
§
XRDY operates as active-high ready input during asynchronous peripheral accesses.
Figure 30. Expansion Bus Asynchronous Peripheral Write Timing
48
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
32
11
1212
9
Page 49

TMS320C6202
FIXED-POINT DIGITAL SIGNAL PROCESSOR
SPRS072B – AUGUST 1998 – REVISED AUGUST 1999
EXPANSION BUS SYNCHRONOUS HOST PORT TIMING
timing requirements with external device as bus master (see Figure 31 and Figure 32)
NO. MIN MAX UNIT
1 t
su(XCSV-XCKIH)
2 t
h(XCKIH-XCS)
3 t
su(XAS-XCKIH)
4 t
h(XCKIH-XAS)
5 t
su(XCTL-XCKIH)
6 t
h(XCKIH-XCTL)
7 t
su(XWR-XCKIH)
8 t
h(XCKIH-XWR)
9 t
su(XBLTV-XCKIH)
10 t
h(XCKIH-XBLTV)
16 t
su(XBEV-XCKIH)
17 t
h(XCKIH-XBEV)
18 t
su(XD-XCKIH)
19 t
†
‡
§
h(XCKIH-XD)
XW/R input/output polarity selected at boot.
XBLAST input polarity selected at boot.
XBE[3:0]
/XA[5:2] operates as byte enables XBE[3:0] during host-port accesses.
Setup time, XCS valid before XCLKIN high 4 ns
Hold time, XCS valid after XCLKIN high 2.3 ns
Setup time, XAS valid before XCLKIN high 4 ns
Hold time, XAS valid after XCLKIN high 2.3 ns
Setup time, XCNTL valid before XCLKIN high 4 ns
Hold time, XCNTL valid after XCLKIN high 2.3 ns
Setup time, XW/R valid before XCLKIN high
Hold time, XW/R valid after XCLKIN high
Setup time, XBLAST valid before XCLKIN high
Hold time, XBLAST valid after XCLKIN high
Setup time, XBE[3:0]/XA[5:2] valid before XCLKIN high
Hold time, XBE[3:0]/XA[5:2] valid after XCLKIN high
Setup time, XDx valid before XCLKIN high 4 ns
Hold time, XDx valid after XCLKIN high 2.3 ns
†
†
‡
‡
§
§
4 ns
2.3 ns
4 ns
2.3 ns
4 ns
2.3 ns
switching characteristics with external device as bus master¶ (see Figure 31 and Figure 32)
NO. PARAMETER MIN MAX UNIT
11 t
d(XCKIH-XDLZ)
12 t
d(XCKIH-XDV)
13 t
d(XCKIH-XDIV)
14 t
d(XCKIH-XDHZ)
15 t
d(XCKIH-XRY)
20 t
d(XCKIH-XRYLZ)
21 t
¶
#
d(XCKIH-XRYHZ)
P = 1/CPU clock frequency in ns. For example, when running parts at 250 MHz, use P = 4 ns.
XRDY operates as active-low ready input/output during host-port accesses.
Delay time, XCLKIN high to XDx low impedance 5 ns
Delay time, XCLKIN high to XDx valid 15.5 ns
Delay time, XCLKIN high to XDx invalid 5 ns
Delay time, XCLKIN high to XDx high impedance 18 ns
Delay time, XCLKIN high to XRDY valid
Delay time, XCLKIN high to XRDY low impedance 5 15.5 ns
Delay time, XCLKIN high to XRDY high impedance
#
#
5 15.5 ns
2P + 5 3P + 15.5 ns
ADVANCE INFORMATION
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
49
Page 50

TMS320C6202
FIXED-POINT DIGITAL SIGNAL PROCESSOR
SPRS072B – AUGUST 1998 – REVISED AUGUST 1999
EXPANSION BUS SYNCHRONOUS HOST PORT TIMING (CONTINUED)
XCLKIN
2
4
6
8
8
11
XBE[3:0]
XCS
XAS
XCNTL
XW/R
XW/R
/XA[5:2]
XBLAST
XBLAST
XD[31:0]
XRDY
1
3
5
7
†
7
†
‡
§
§
20
¶
9
9
12
D1 D2 D3 D4
15
15
10
10
13
14
21
†
XW/R input/output polarity selected at boot
‡
XBE[3:0]
§
XBLAST input polarity selected at boot
¶
XRDY operates as active-low ready input/output during host-port accesses.
/XA[5:2] operates as byte enables XBE[3:0] during host-port accesses.
Figure 31. External Host as Bus Master—Read
ADVANCE INFORMATION
50
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
Page 51

EXPANSION BUS SYNCHRONOUS HOST PORT TIMING (CONTINUED)
XCLKIN
1
XCS
3
XAS
5
XCNTL
†
XW/R
†
XW/R
XD[31:0]
XRDY
‡
§
§
¶
XBE[3:0]/XA[5:2]
XBLAST
XBLAST
†
XW/R input/output polarity selected at boot
‡
XBE[3:0]
§
XBLAST input polarity selected at boot
¶
XRDY operates as active-low ready input/output during host-port accesses.
/XA[5:2] operates as byte enables XBE[3:0] during host-port accesses.
7
7
20
2
4
6
8
8
TMS320C6202
FIXED-POINT DIGITAL SIGNAL PROCESSOR
SPRS072B – AUGUST 1998 – REVISED AUGUST 1999
19
17
15
10
10
21
9
9
16
XBE1 XBE2 XBE3 XBE4
18
D1 D2 D3 D4
15
Figure 32. External Host as Bus Master—Write
ADVANCE INFORMATION
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
51
Page 52

TMS320C6202
FIXED-POINT DIGITAL SIGNAL PROCESSOR
SPRS072B – AUGUST 1998 – REVISED AUGUST 1999
EXPANSION BUS SYNCHRONOUS HOST PORT TIMING (CONTINUED)
timing requirements with ’C6202 as bus master (see Figure 33, Figure 34, and Figure 35)
NO. MIN MAX UNIT
9 t
su(XDV-XCKIH)
10 t
h(XCKIH-XDV)
11 t
su(XRY-XCKIH)
12 t
h(XCKIH-XRY)
14 t
su(XBFF-XCKIH)
15 t
†
h(XCKIH-XBFF)
XRDY operates as active-low ready input/output during host-port accesses.
switching characteristics with ’C6202 as bus master (see Figure 33, Figure 34, and Figure 35)
NO. PARAMETER MIN MAX UNIT
1 t
d(XCKIH-XASV)
2 t
d(XCKIH-XWRV)
3 t
d(XCKIH-XBLTV)
4 t
d(XCKIH-XBEV)
5 t
d(XCKIH-XDLZ)
6 t
d(XCKIH-XDV)
7 t
d(XCKIH-XDIV)
8 t
d(XCKIH-XDHZ)
13 t
‡
§
¶
#
d(XCKIH-XWTV)
XW/R input/output polarity selected at boot.
XBLAST output polarity is always active low.
XBE[3:0]
XWE
/XA[5:2] operates as byte enables XBE[3:0] during host-port accesses.
/XWAIT operates as XWAIT output signal during host-port accesses.
Setup time, XDx valid before XCLKIN high 4 ns
Hold time, XDx valid after XCLKIN high 2.3 ns
Setup time, XRDY valid before XCLKIN high
Hold time, XRDY valid after XCLKIN high
Setup time, XBOFF valid before XCLKIN high 4 ns
Hold time, XBOFF valid after XCLKIN high 2.3 ns
Delay time, XCLKIN high to XAS valid 5 15.5 ns
Delay time, XCLKIN high to XW/R valid
Delay time, XCLKIN high to XBLAST valid
Delay time, XCLKIN high to XBE[3:0]/XA[5:2] valid
Delay time, XCLKIN high to XDx low impedance 5 ns
Delay time, XCLKIN high to XDx valid 15.5 ns
Delay time, XCLKIN high to XDx invalid 5 ns
Delay time, XCLKIN high to XDx high impedance 18 ns
Delay time, XCLKIN high to XWE/XWAIT valid
†
†
‡
§
¶
#
4 ns
2.3 ns
5 15.5 ns
5 15.5 ns
5 15.5 ns
5 15.5 ns
ADVANCE INFORMATION
52
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
Page 53

TMS320C6202
FIXED-POINT DIGITAL SIGNAL PROCESSOR
SPRS072B – AUGUST 1998 – REVISED AUGUST 1999
EXPANSION BUS SYNCHRONOUS HOST PORT TIMING (CONTINUED)
XCLKIN
1
22
3
3
44
BE
7
8
9
10
1211
13
13
XBE[3:0]
XWE
XAS
XW/R
XW/R
XBLAST
/XA[5:2]
XD[31:0]
XRDY
/XWAIT
1
†
†
‡
§
5
6
AD D1 D2 D3 D4
¶
†
XW/R input/output polarity selected at boot
‡
XBLAST output polarity is always active low.
§
XBE[3:0]
¶
XWE
/XA[5:2] operates as byte enables XBE[3:0] during host-port accesses.
/XWAIT operates as XWAIT output signal during host-port accesses.
Figure 33. ’C6202 as Bus Master—Read
XCLKIN
1
XAS
†
XW/R
†
XW/R
XD[31:0]
XRDY
/XWAIT
‡
§
5
¶
6
Addr D1 D2 D3 D4
XBLAST
XBE[3:0]
†
XW/R input/output polarity selected at boot
‡
XBLAST output polarity is always active low.
§
XBE[3:0]
¶
XWE
/XA[5:2] operates as byte enables XBE[3:0] during host-port accesses.
/XWAIT operates as XWAIT output signal during host-port accesses.
/XA[5:2]
XWE
1
22
13
3
13
3
44
7
8
1211
ADVANCE INFORMATION
Figure 34. ’C6202 as Bus Master—Write
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
53
Page 54

TMS320C6202
FIXED-POINT DIGITAL SIGNAL PROCESSOR
SPRS072B – AUGUST 1998 – REVISED AUGUST 1999
EXPANSION BUS SYNCHRONOUS HOST PORT TIMING (CONTINUED)
XCLKIN
11
XAS
†
XW/R
†
XW/R
XD[31:0]
XRDY
XBOFF
‡
§
6
5
Addr D1 D2
11
XBLAST
XBE[3:0]/XA[5:2]
22
44
7
8
12
15
14
¶
XHOLD
XHOLD
¶
#
#
XHOLDA
XHOLDA
†
XW/R input/output polarity selected at boot
‡
XBLAST output polarity is always active low.
§
XBE[3:0]
¶
Internal arbiter enabled
#
External arbiter enabled
||
This diagram illustrates XBOFF timing. Bus arbitration timing is shown in Figure 38 and Figure 39.
/XA[5:2] operates as byte enables XBE[3:0] during host-port accesses.
Figure 35. ’C6202 as Bus Master—BOFF Operation
ADVANCE INFORMATION
||
54
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
Page 55

TMS320C6202
FIXED-POINT DIGITAL SIGNAL PROCESSOR
SPRS072B – AUGUST 1998 – REVISED AUGUST 1999
EXPANSION BUS ASYNCHRONOUS HOST PORT TIMING
timing requirements with external device as asynchronous bus master
†
(see Figure 36 and
Figure 37)
NO. MIN MAX UNIT
1 t
w(XCSL)
2 t
w(XCSH)
3 t
su(XSEL-XCSL)
4 t
h(XCSL-XSEL)
10 t
h(XRYL-XCSL)
11 t
su(XBEV-XCSH)
12 t
h(XCSH-XBEV)
13 t
su(XDV-XCSH)
14 t
†
‡
§
h(XCSH-XDV)
P = 1/CPU clock frequency in ns. For example, when running parts at 250 MHz, use P = 4 ns.
Expansion bus select signals include XCNTL and XR/W.
XBE[3:0]
/XA[5:2] operates as byte enables XBE[3:0] during host-port accesses.
Pulse duration, XCS low 4P ns
Pulse duration, XCS high 4P ns
Setup time, expansion bus select signals‡ valid before XCS low 2 ns
Hold time, expansion bus select signals‡ valid after XCS low 2 ns
Hold time, XCS low after XRDY low P ns
Setup time, XBE[3:0]/XA[5:2] valid before XCS high
Hold time, XBE[3:0]/XA[5:2] valid after XCS high
Setup time, XDx valid before XCS high 2 ns
Hold time, XDx valid after XCS high 2 ns
§
§
2 ns
2 ns
switching characteristics with external device as asynchronous bus master (see Figure 36 and
Figure 37)
NO. PARAMETER MIN MAX UNIT
5 t
d(XCSL-XDLZ)
6 t
d(XCSH-XDIV)
7 t
d(XCSH-XDHZ)
8 t
d(XRYL-XDV)
9 t
d(XCSH-XRYH)
XCS
XCNTL
Delay time, XCS low to XDx low impedance 0 ns
Delay time, XCS high to XDx invalid 0 12 ns
Delay time, XCS high to XDx high impedance 12 ns
Delay time, XRDY low to XDx valid 0 4 ns
Delay time, XCS high to XRDY high 0 12 ns
1
10
3
4
2
3
1
10
4
XR/W
XR/W
XD[31:0]
XRDY
†
3
4
‡
3
4
‡
7
685
Word
XBE[3:0]
†
XBE[3:0]/XA[5:2] operates as byte enables XBE[3:0] during host-port accesses.
‡
XW/R input/output polarity selected at boot
/XA[5:2]
Figure 36. External Device as Asynchronous Master—Read
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
3
4
3
4
7
685
99
55
ADVANCE INFORMATION
Page 56

TMS320C6202
FIXED-POINT DIGITAL SIGNAL PROCESSOR
SPRS072B – AUGUST 1998 – REVISED AUGUST 1999
EXPANSION BUS ASYNCHRONOUS HOST PORT TIMING (CONTINUED)
10
XCS
XCNTL
XR/W
XR/W
XD[31:0]
XRDY
†
‡
‡
XBE[3:0]
†
XBE[3:0]/XA[5:2] operates as byte enables XBE[3:0] during host-port accesses.
‡
XW/R input/output polarity selected at boot
/XA[5:2]
1
3
4
11
3
4
3
4
13
word
Word
2
12
14
1
3
4
3
4
3
4
10
11
13
12
14
99
ADVANCE INFORMATION
Figure 37. External Device as Asynchronous Master—Write
56
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
Page 57

TMS320C6202
FIXED-POINT DIGITAL SIGNAL PROCESSOR
SPRS072B – AUGUST 1998 – REVISED AUGUST 1999
XHOLD/XHOLDA TIMING
timing requirements for expansion bus arbitration (internal arbiter enabled)
NO. MIN MAX UNIT
3 t
†
oh(XHDAH-XHDH)
P = 1/CPU clock frequency in ns. For example, when running parts at 250 MHz, use P = 4 ns.
Output hold time, XHOLD high after XHOLDA high P ns
†
(see Figure 38)
switching characteristics for expansion bus arbitration (internal arbiter enabled)†‡ (see Figure 38)
NO. PARAMETER MIN MAX UNIT
1 t
R(XHDH-XBHZ)
2 t
d(XBHZ-XHDAH)
4 t
R(XHDL-XHDAL)
5 t
†
‡
§
†
d(XHDAL-XBLZ)
P = 1/CPU clock frequency in ns. For example, when running parts at 250 MHz, use P = 4 ns.
XBus consists of XBE[3:0]
All pending XBus transactions are allowed to complete before XHOLDA is asserted.
XHOLD (input)
XHOLDA (output)
XBus
XBus consists of XBE[3:0]
Response time, XHOLD high to XBus high impedance 4P
Delay time, XBus high impedance to XHOLDA high 0 2P ns
Response time, XHOLD low to XHOLDA low 4P ns
Delay time, XHOLDA low to XBus low impedance 0 2P ns
/XA[5:2], XAS, XW/R, and XBLAST.
DSP Owns Bus
†
/XA[5:2], XAS, XW/R, and XBLAST.
C6202 C6202
External Requestor
Owns Bus
2
DSP Owns Bus
3
4
51
§
ns
Figure 38. Expansion Bus Arbitration—Internal Arbiter Enabled
ADVANCE INFORMATION
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
57
Page 58

TMS320C6202
FIXED-POINT DIGITAL SIGNAL PROCESSOR
SPRS072B – AUGUST 1998 – REVISED AUGUST 1999
XHOLD/XHOLDA TIMING (CONTINUED)
switching characteristics for expansion bus arbitration (internal arbiter disabled)
NO. PARAMETER MIN MAX UNIT
1 t
d(XHDAH-XBLZ)
2 t
†
‡
†
d(XBHZ-XHDL)
P = 1/CPU clock frequency in ns. For example, when running parts at 250 MHz, use P = 4 ns.
XBus consists of XBE[3:0]
XHOLD (output)
XHOLDA (input)
XBus
XBus consists of XBE[3:0]
Delay time, XHOLDA high to XBus low impedance
Delay time, XBus high impedance to XHOLD low
/XA[5:2], XAS, XW/R, and XBLAST.
†
/XA[5:2], XAS, XW/R, and XBLAST.
‡
‡
1
C6202
†
(see Figure 39)
2P 2P + 10 ns
0 2P ns
2
Figure 39. Expansion Bus Arbitration—Internal Arbiter Disabled
ADVANCE INFORMATION
58
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
Page 59

5
t
Setup time, external FSR high before CLKR lo
ns
6
t
Hold time, external FSR high after CLKR lo
ns
7
t
Setup time, DR valid before CLKR lo
ns
8
t
Hold time, DR valid after CLKR lo
ns
10
t
Setup time, external FSX high before CLKX lo
ns
11
t
Hold time, external FSX high after CLKX lo
ns
TMS320C6202
FIXED-POINT DIGITAL SIGNAL PROCESSOR
SPRS072B – AUGUST 1998 – REVISED AUGUST 1999
MULTICHANNEL BUFFERED SERIAL PORT TIMING
timing requirements for McBSP
NO.
2 t
c(CKRX)
3 t
w(CKRX)
su(FRH-CKRL)
h(CKRL-FRH)
su(DRV-CKRL)
h(CKRL-DRV)
su(FXH-CKXL)
h(CKXL-FXH)
†
CLKRP = CLKXP = FSRP = FSXP = 0. If polarity of any of the signals is inverted, then the timing references of that signal are also inverted.
‡
P = 1/CPU clock frequency in ns. For example, when running parts at 250 MHz, use P = 4 ns.
Cycle time, CLKR/X CLKR/X ext 2P ns
Pulse duration, CLKR/X high or CLKR/X low CLKR/X ext P–1 ns
p
p
p
†‡
(see Figure 40)
w
’C6202-200
’C6202-233
’C6202-250
MIN MAX
w
w
w
w
w
CLKR int 9
CLKR ext
CLKR int 6
CLKR ext
CLKR int 8
CLKR ext
CLKR int 3
CLKR ext
CLKX int 9
CLKX ext
CLKX int 6
CLKX ext 3
1
3
0
3
1
UNIT
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
ADVANCE INFORMATION
59
Page 60

TMS320C6202
9
t
Delay time, CLKX high to internal FSX valid
ns
12
t
,g g
ns
13
t
Delay time, CLKX high to DX valid
ns
14
t
ns
FIXED-POINT DIGITAL SIGNAL PROCESSOR
SPRS072B – AUGUST 1998 – REVISED AUGUST 1999
MULTICHANNEL BUFFERED SERIAL PORT TIMING (CONTINUED)
switching characteristics for McBSP
NO. PARAMETER
1 t
d(CKSH-CKRXH)
2 t
c(CKRX)
3 t
w(CKRX)
4 t
d(CKRH-FRV)
d(CKXH-FXV)
dis(CKXH-DXHZ)
d(CKXH-DXV)
d(FXH-DXV)
†
CLKRP = CLKXP = FSRP = FSXP = 0. If polarity of any of the signals is inverted, then the timing references of that signal are also inverted.
‡
Minimum delay times also represent minimum output hold times.
§
P = 1/CPU clock frequency in ns. For example, when running parts at 250 MHz, use P = 4 ns.
¶
C = H or L
S = sample rate generator input clock = P if CLKSM = 1 (P = 1/CPU clock frequency)
= sample rate generator input clock = P_clks if CLKSM = 0 (P_clks = CLKS period)
H = CLKX high pulse width = (CLKGDV/2 + 1) * S if CLKGDV is even
L = CLKX low pulse width = (CLKGDV/2) * S if CLKGDV is even
Delay time, CLKS high to CLKR/X high for internal
CLKR/X generated from CLKS input
Cycle time, CLKR/X CLKR/X int 2P
Pulse duration, CLKR/X high or CLKR/X low CLKR/X int C – 1¶C + 1
Delay time, CLKR high to internal FSR valid CLKR int –2 3 ns
Disable time, DX high impedance following last data bit
from CLKX high
Delay time, FSX high to DX valid
ONLY applies when in data delay 0 (XDATDLY = 00b)
mode.
= (CLKGDV + 1)/2 * S if CLKGDV is odd or zero
= (CLKGDV + 1)/2 * S if CLKGDV is odd or zero
†‡
(see Figure 40)
’C6202-200
’C6202-233
’C6202-250
MIN MAX
4 10 ns
§
CLKX int –2 3
CLKX ext 3 9
CLKX int –1 4
CLKX ext
CLKX int –1 4
CLKX ext 3 9
FSX int –1 3
FSX ext 3 9
3 9
UNIT
ns
¶
ns
ADVANCE INFORMATION
60
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
Page 61

TMS320C6202
FIXED-POINT DIGITAL SIGNAL PROCESSOR
SPRS072B – AUGUST 1998 – REVISED AUGUST 1999
MULTICHANNEL BUFFERED SERIAL PORT TIMING (CONTINUED)
CLKS
1
CLKR
4
FSR (int)
5
FSR (ext)
DR
CLKX
9
FSX (int)
10
FSX (ext)
2
3
3
4
6
7
Bit(n-1) (n-2) (n-3)
2
3
3
11
8
FSX (XDATDLY=00b)
DX
14
1312
Bit 0 Bit(n-1) (n-2) (n-3)
13
Figure 40. McBSP Timings
ADVANCE INFORMATION
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
61
Page 62

TMS320C6202
FIXED-POINT DIGITAL SIGNAL PROCESSOR
SPRS072B – AUGUST 1998 – REVISED AUGUST 1999
MULTICHANNEL BUFFERED SERIAL PORT TIMING (CONTINUED)
timing requirements for FSR when GSYNC = 1 (see Figure 41)
NO.
1 t
su(FRH-CKSH)
2 t
h(CKSH-FRH)
CLKR/X (no need to resync)
CLKR/X(needs resync)
Setup time, FSR high before CLKS high 4 ns
Hold time, FSR high after CLKS high 4 ns
CLKS
1
FSR external
2
Figure 41. FSR Timing When GSYNC = 1
’C6202-200
’C6202-233
’C6202-250
MIN MAX
UNIT
ADVANCE INFORMATION
62
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
Page 63

NO
UNIT
NO
PARAMETER
UNIT
TMS320C6202
FIXED-POINT DIGITAL SIGNAL PROCESSOR
SPRS072B – AUGUST 1998 – REVISED AUGUST 1999
MULTICHANNEL BUFFERED SERIAL PORT TIMING (CONTINUED)
timing requirements for McBSP as SPI master or slave: CLKSTP = 10b, CLKXP = 0
’C6202-200
’C6202-233
.
4 t
su(DRV-CKXL)
5 t
†
‡
h(CKXL-DRV)
P = 1/CPU clock frequency in ns. For example, when running parts at 250 MHz, use P = 4 ns.
For all SPI slave modes, CLKG is programmed as 1/2 of the CPU clock by setting CLKSM = CLKGDV = 1.
Setup time, DR valid before CLKX low 12 2 – 3P ns
Hold time, DR valid after CLKX low 4 5 + 6P ns
MASTER SLAVE
MIN MAX MIN MAX
’C6202-250
switching characteristics for McBSP as SPI master or slave: CLKSTP = 10b, CLKXP = 0
†‡
(see Figure 42)
†‡
(see Figure 42)
’C6202-200
’C6202-233
.
1 t
h(CKXL-FXL)
2 t
d(FXL-CKXH)
3 t
d(CKXH-DXV)
6 t
dis(CKXL-DXHZ)
7 t
dis(FXH-DXHZ)
8 t
†
‡
§
¶
#
d(FXL-DXV)
P = 1/CPU clock frequency in ns. For example, when running parts at 250 MHz, use P = 4 ns.
For all SPI slave modes, CLKG is programmed as 1/2 of the CPU clock by setting CLKSM = CLKGDV = 1.
S = sample rate generator input clock = P if CLKSM = 1 (P = 1/CPU clock frequency)
= sample rate generator input clock = P_clks if CLKSM = 0 (P_clks = CLKS period)
T = CLKX period = (1 + CLKGDV) * S
H = CLKX high pulse width = (CLKGDV/2 + 1) * S if CLKGDV is even
L = CLKX low pulse width = (CLKGDV/2) * S if CLKGDV is even
FSRP = FSXP = 1. As a SPI master, FSX is inverted to provide active-low slave-enable output. As a slave, the active-low signal input on FSX
and FSR is inverted before being used internally.
CLKXM = FSXM = 1, CLKRM = FSRM = 0 for master McBSP
CLKXM = CLKRM = FSXM = FSRM = 0 for slave McBSP
FSX should be low before the rising edge of clock to enable slave devices and then begin a SPI transfer at the rising edge of the master clock
(CLKX).
Hold time, FSX low after CLKX low
Delay time, FSX low to CLKX high
Delay time, CLKX high to DX valid –2 4 3P + 4 5P + 17 ns
Disable time, DX high impedance following last data bit from
CLKX low
Disable time, DX high impedance following last data bit from
FSX high
Delay time, FSX low to DX valid 2P + 2 4P + 17 ns
= (CLKGDV + 1)/2 * S if CLKGDV is odd or zero
= (CLKGDV + 1)/2 * S if CLKGDV is odd or zero
¶
#
MASTER
MIN MAX MIN MAX
T – 2 T + 3 ns
L – 2 L + 3 ns
L – 2 L + 3 ns
’C6202-250
§
SLAVE
P + 3 3P + 17 ns
ADVANCE INFORMATION
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
63
Page 64

TMS320C6202
FIXED-POINT DIGITAL SIGNAL PROCESSOR
SPRS072B – AUGUST 1998 – REVISED AUGUST 1999
MULTICHANNEL BUFFERED SERIAL PORT TIMING (CONTINUED)
CLKX
21
FSX
6
DX
DR
Bit 0 Bit(n-1) (n-2) (n-3) (n-4)
Bit 0 Bit(n-1) (n-2) (n-3) (n-4)
Figure 42. McBSP Timing as SPI Master or Slave: CLKSTP = 10b, CLKXP = 0
87
3
4
5
ADVANCE INFORMATION
64
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
Page 65

NO
UNIT
NO
PARAMETER
UNIT
TMS320C6202
FIXED-POINT DIGITAL SIGNAL PROCESSOR
SPRS072B – AUGUST 1998 – REVISED AUGUST 1999
MULTICHANNEL BUFFERED SERIAL PORT TIMING (CONTINUED)
timing requirements for McBSP as SPI master or slave: CLKSTP = 11b, CLKXP = 0
’C6202-200
’C6202-233
.
4 t
su(DRV-CKXH)
5 t
†
‡
h(CKXH-DRV)
P = 1/CPU clock frequency in ns. For example, when running parts at 250 MHz, use P = 4 ns.
For all SPI slave modes, CLKG is programmed as 1/2 of the CPU clock by setting CLKSM = CLKGDV = 1.
Setup time, DR valid before CLKX high 12 2 – 3P ns
Hold time, DR valid after CLKX high 4 5 + 6P ns
MASTER SLAVE
MIN MAX MIN MAX
’C6202-250
switching characteristics for McBSP as SPI master or slave: CLKSTP = 11b, CLKXP = 0
†‡
(see Figure 43)
†‡
(see Figure 43)
’C6202-200
’C6202-233
.
1 t
h(CKXL-FXL)
2 t
d(FXL-CKXH)
3 t
d(CKXL-DXV)
6 t
dis(CKXL-DXHZ)
7 t
†
‡
§
¶
#
d(FXL-DXV)
P = 1/CPU clock frequency in ns. For example, when running parts at 250 MHz, use P = 4 ns.
For all SPI slave modes, CLKG is programmed as 1/2 of the CPU clock by setting CLKSM = CLKGDV = 1.
S = sample rate generator input clock = P if CLKSM = 1 (P = 1/CPU clock frequency)
= sample rate generator input clock = P_clks if CLKSM = 0 (P_clks = CLKS period)
T = CLKX period = (1 + CLKGDV) * S
H = CLKX high pulse width = (CLKGDV/2 + 1) * S if CLKGDV is even
L = CLKX low pulse width = (CLKGDV/2) * S if CLKGDV is even
FSRP = FSXP = 1. As a SPI master, FSX is inverted to provide active-low slave-enable output. As a slave, the active-low signal input on FSX
and FSR is inverted before being used internally.
CLKXM = FSXM = 1, CLKRM = FSRM = 0 for master McBSP
CLKXM = CLKRM = FSXM = FSRM = 0 for slave McBSP
FSX should be low before the rising edge of clock to enable slave devices and then begin a SPI transfer at the rising edge of the master clock
(CLKX).
Hold time, FSX low after CLKX low
Delay time, FSX low to CLKX high
Delay time, CLKX low to DX valid –2 4 3P + 4 5P + 17 ns
Disable time, DX high impedance following last data bit from
CLKX low
Delay time, FSX low to DX valid H – 2 H + 4 2P + 2 4P + 17 ns
= (CLKGDV + 1)/2 * S if CLKGDV is odd or zero
= (CLKGDV + 1)/2 * S if CLKGDV is odd or zero
¶
#
MASTER
MIN MAX MIN MAX
L – 2 L + 3 ns
T – 2 T + 3 ns
’C6202-250
§
–2 4 3P + 3 5P + 17 ns
SLAVE
ADVANCE INFORMATION
CLKX
FSX
DX
DR
21
376
Bit 0 Bit(n-1) (n-2) (n-3) (n-4)
4
Bit 0 Bit(n-1) (n-2) (n-3) (n-4)
5
Figure 43. McBSP Timing as SPI Master or Slave: CLKSTP = 11b, CLKXP = 0
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
65
Page 66

TMS320C6202
NO
UNIT
NO
PARAMETER
UNIT
FIXED-POINT DIGITAL SIGNAL PROCESSOR
SPRS072B – AUGUST 1998 – REVISED AUGUST 1999
MULTICHANNEL BUFFERED SERIAL PORT TIMING (CONTINUED)
timing requirements for McBSP as SPI master or slave: CLKSTP = 10b, CLKXP = 1
’C6202-200
’C6202-233
.
4 t
su(DRV-CKXH)
5 t
†
‡
h(CKXH-DRV)
P = 1/CPU clock frequency in ns. For example, when running parts at 250 MHz, use P = 4 ns.
For all SPI slave modes, CLKG is programmed as 1/2 of the CPU clock by setting CLKSM = CLKGDV = 1.
Setup time, DR valid before CLKX high 12 2 – 3P ns
Hold time, DR valid after CLKX high 4 5 + 6P ns
MASTER SLAVE
MIN MAX MIN MAX
’C6202-250
†‡
(see Figure 44)
switching characteristics for McBSP as SPI master or slave: CLKSTP = 10b, CLKXP = 1
(see Figure 44)
’C6202-200
’C6202-233
.
1 t
h(CKXH-FXL)
2 t
d(FXL-CKXL)
3 t
d(CKXL-DXV)
6 t
dis(CKXH-DXHZ)
7 t
dis(FXH-DXHZ)
8 t
†
‡
§
ADVANCE INFORMATION
¶
#
d(FXL-DXV)
P = 1/CPU clock frequency in ns. For example, when running parts at 250 MHz, use P = 4 ns.
For all SPI slave modes, CLKG is programmed as 1/2 of the CPU clock by setting CLKSM = CLKGDV = 1.
S = sample rate generator input clock = P if CLKSM = 1 (P = 1/CPU clock frequency)
= sample rate generator input clock = P_clks if CLKSM = 0 (P_clks = CLKS period)
T = CLKX period = (1 + CLKGDV) * S
H = CLKX high pulse width = (CLKGDV/2 + 1) * S if CLKGDV is even
L = CLKX low pulse width = (CLKGDV/2) * S if CLKGDV is even
FSRP = FSXP = 1. As a SPI master, FSX is inverted to provide active-low slave-enable output. As a slave, the active-low signal input on FSX
and FSR is inverted before being used internally.
CLKXM = FSXM = 1, CLKRM = FSRM = 0 for master McBSP
CLKXM = CLKRM = FSXM = FSRM = 0 for slave McBSP
FSX should be low before the rising edge of clock to enable slave devices and then begin a SPI transfer at the rising edge of the master clock
(CLKX).
Hold time, FSX low after CLKX high
Delay time, FSX low to CLKX low
Delay time, CLKX low to DX valid –2 4 3P + 4 5P + 17 ns
Disable time, DX high impedance following last data bit from
CLKX high
Disable time, DX high impedance following last data bit from
FSX high
Delay time, FSX low to DX valid 2P + 2 4P + 17 ns
= (CLKGDV + 1)/2 * S if CLKGDV is odd or zero
= (CLKGDV + 1)/2 * S if CLKGDV is odd or zero
¶
#
MASTER
MIN MAX MIN MAX
T – 2 T + 3 ns
H – 2 H + 3 ns
H – 2 H + 3 ns
’C6202-250
§
SLAVE
P + 3 3P + 17 ns
†‡
66
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
Page 67

TMS320C6202
FIXED-POINT DIGITAL SIGNAL PROCESSOR
SPRS072B – AUGUST 1998 – REVISED AUGUST 1999
MULTICHANNEL BUFFERED SERIAL PORT TIMING (CONTINUED)
CLKX
21
FSX
7
4
DX
DR
6
Bit 0 Bit(n-1) (n-2) (n-3) (n-4)
Bit 0 Bit(n-1) (n-2) (n-3) (n-4)
Figure 44. McBSP Timing as SPI Master or Slave: CLKSTP = 10b, CLKXP = 1
38
5
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
ADVANCE INFORMATION
67
Page 68

TMS320C6202
NO
UNIT
NO
PARAMETER
UNIT
FIXED-POINT DIGITAL SIGNAL PROCESSOR
SPRS072B – AUGUST 1998 – REVISED AUGUST 1999
MULTICHANNEL BUFFERED SERIAL PORT TIMING (CONTINUED)
timing requirements for McBSP as SPI master or slave: CLKSTP = 11b, CLKXP = 1
’C6202-200
’C6202-233
.
4 t
su(DRV-CKXL)
5 t
†
‡
h(CKXL-DRV)
P = 1/CPU clock frequency in ns. For example, when running parts at 250 MHz, use P = 4 ns.
For all SPI slave modes, CLKG is programmed as 1/2 of the CPU clock by setting CLKSM = CLKGDV = 1.
Setup time, DR valid before CLKX low 12 2 – 3P ns
Hold time, DR valid after CLKX low 4 5 + 6P ns
MASTER SLAVE
MIN MAX MIN MAX
’C6202-250
†‡
(see Figure 45)
switching characteristics for McBSP as SPI master or slave: CLKSTP = 11b, CLKXP = 1
(see Figure 45)
’C6202-200
’C6202-233
.
1 t
h(CKXH-FXL)
2 t
d(FXL-CKXL)
3 t
d(CKXH-DXV)
6 t
dis(CKXH-DXHZ)
7 t
†
‡
§
ADVANCE INFORMATION
¶
#
d(FXL-DXV)
P = 1/CPU clock frequency in ns. For example, when running parts at 250 MHz, use P = 4 ns.
For all SPI slave modes, CLKG is programmed as 1/2 of the CPU clock by setting CLKSM = CLKGDV = 1.
S = sample rate generator input clock = P if CLKSM = 1 (P = 1/CPU clock frequency)
= sample rate generator input clock = P_clks if CLKSM = 0 (P_clks = CLKS period)
T = CLKX period = (1 + CLKGDV) * S
H = CLKX high pulse width = (CLKGDV/2 + 1) * S if CLKGDV is even
L = CLKX low pulse width = (CLKGDV/2) * S if CLKGDV is even
FSRP = FSXP = 1. As a SPI master, FSX is inverted to provide active-low slave-enable output. As a slave, the active-low signal input on FSX
and FSR is inverted before being used internally.
CLKXM = FSXM = 1, CLKRM = FSRM = 0 for master McBSP
CLKXM = CLKRM = FSXM = FSRM = 0 for slave McBSP
FSX should be low before the rising edge of clock to enable slave devices and then begin a SPI transfer at the rising edge of the master clock
(CLKX).
Hold time, FSX low after CLKX high
Delay time, FSX low to CLKX low
Delay time, CLKX high to DX valid –2 4 3P + 4 5P + 17 ns
Disable time, DX high impedance following last data bit from
CLKX high
Delay time, FSX low to DX valid L – 2 L + 4 2P + 2 4P + 17 ns
= (CLKGDV + 1)/2 * S if CLKGDV is odd or zero
= (CLKGDV + 1)/2 * S if CLKGDV is odd or zero
¶
#
MASTER
MIN MAX MIN MAX
H – 2 H + 3 ns
T – 2 T + 1 ns
’C6202-250
§
–2 4 3P + 3 5P + 17 ns
SLAVE
†‡
68
CLKX
21
FSX
DX
DR
6
Bit 0 Bit(n-1) (n-2) (n-3) (n-4)
Bit 0 Bit(n-1) (n-2) (n-3) (n-4)
7
4
3
5
Figure 45. McBSP Timing as SPI Master or Slave: CLKSTP = 11b, CLKXP = 1
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
Page 69

TMS320C6202
FIXED-POINT DIGITAL SIGNAL PROCESSOR
SPRS072B – AUGUST 1998 – REVISED AUGUST 1999
DMAC, TIMER, POWER-DOWN TIMING
switching characteristics for DMAC outputs
NO. PARAMETER
1 t
†
w(DMACH)
P = 1/CPU clock frequency in ns. For example, when running parts at 250 MHz, use P = 4 ns.
DMAC[3:0]
Pulse duration, DMAC high 2P–3 ns
†
(see Figure 46)
1
Figure 46. DMAC Timing
timing requirements for timer inputs† (see Figure 47)
NO.
1 t
w(TINPH)
2 t
†
w(TINPL)
P = 1/CPU clock frequency in ns. For example, when running parts at 250 MHz, use P = 4 ns.
Pulse duration, TINP high 2P ns
Pulse duration, TINP low 2P ns
switching characteristics for timer outputs† (see Figure 47)
NO. PARAMETER
3 t
w(TOUTH)
4 t
†
w(TOUTL)
P = 1/CPU clock frequency in ns. For example, when running parts at 250 MHz, use P = 4 ns.
TINPx
TOUTx
Pulse duration, TOUT high 2P–3 ns
Pulse duration, TOUT low 2P–3 ns
2
1
3
’C6202-200
’C6202-233
’C6202-250
MIN MAX
’C6202-200
’C6202-233
’C6202-250
MIN MAX
’C6202-200
’C6202-233
’C6202-250
MIN MAX
UNIT
UNIT
UNIT
ADVANCE INFORMATION
4
Figure 47. Timer Timing
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
69
Page 70

TMS320C6202
FIXED-POINT DIGITAL SIGNAL PROCESSOR
SPRS072B – AUGUST 1998 – REVISED AUGUST 1999
DMAC, TIMER, POWER-DOWN TIMING (CONTINUED)
switching characteristics for power-down outputs
NO. PARAMETER
1 t
†
w(PDH)
P = 1/CPU clock frequency in ns. For example, when running parts at 250 MHz, use P = 4 ns.
PD
Pulse duration, PD high 10P ns
†
(see Figure 48)
1
Figure 48. Power-Down Timing
’C6202-200
’C6202-233
’C6202-250
MIN MAX
UNIT
ADVANCE INFORMATION
70
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
Page 71

FIXED-POINT DIGITAL SIGNAL PROCESSOR
JTAG TEST-PORT TIMING
timing requirements for JTAG test port (see Figure 49)
NO.
1 t
c(TCK)
3 t
su(TDIV-TCKH)
4 t
h(TCKH-TDIV)
switching characteristics for JTAG test port (see Figure 49)
NO. PARAMETER
2 t
d(TCKL-TDOV)
Cycle time, TCK 50 ns
Setup time, TDI/TMS/TRST valid before TCK high 10 ns
Hold time, TDI/TMS/TRST valid after TCK high 5 ns
Delay time, TCK low to TDO valid 0 15 ns
TMS320C6202
SPRS072B – AUGUST 1998 – REVISED AUGUST 1999
’C6202-200
’C6202-233
’C6202-250
MIN MAX
’C6202-200
’C6202-233
’C6202-250
MIN MAX
UNIT
UNIT
TCK
TDO
TDI/TMS/TRST
1
2
3
Figure 49. JTAG Test-Port Timing
2
4
ADVANCE INFORMATION
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
71
Page 72

TMS320C6202
FIXED-POINT DIGITAL SIGNAL PROCESSOR
SPRS072B – AUGUST 1998 – REVISED AUGUST 1999
MECHANICAL DATA
GJL (S-PBGA-N352) PLASTIC BALL GRID ARRAY
27,20
SQ
26,80
25,20
16,30 NOM
Heat Slug
SQ
24,80
16,30 NOM
AF
AD
AB
Y
V
T
P
M
K
H
F
D
B
See Note E
AE
AC
AA
W
U
R
N
L
J
G
E
C
A
1 3 5 7 9 11131517192123
4
1,00
25,00 TYP
0,50
1,00
0,50
25
2622201612 14 1810862
24
3,50 MAX
1,00 NOM
Seating Plane
ADVANCE INFORMATION
NOTES: A. All linear dimensions are in millimeters.
B. This drawing is subject to change without notice.
C. Thermally enhanced plastic package with heat slug (HSL).
D. Flip chip application only
E. Possible protrusion in this area, but within 3,50 max package height specification
F. Falls within JEDEC MO-151/AAL-1
0,70
0,50
∅ 0,10
M
0,60
0,40
0,15
4173516-2/C 07/99
thermal resistance characteristics (S-PBGA package)
NO °C/W Air Flow LFPM
1 RΘ
2 RΘ
3 RΘ
4 RΘ
5 RΘ
†
LFPM = Linear Feet Per Minute
Junction-to-case 0.47 N/A
JC
Junction-to-free air 14.2 0
JA
Junction-to-free air 12.3 100
JA
Junction-to-free air 10.2 250
JA
Junction-to-free air 8.6 500
JA
†
72
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
Page 73

TMS320C6202
FIXED-POINT DIGITAL SIGNAL PROCESSOR
SPRS072B – AUGUST 1998 – REVISED AUGUST 1999
MECHANICAL DATA
GLS (S-PBGA-N384) PLASTIC BALL GRID ARRAY
18,10
17,90
Heat Slug
SQ
AB
AA
Y
W
V
U
T
R
P
N
M
L
K
J
H
G
F
E
D
C
B
A
5
3 9
1
4
2
0,80
6
7
8
16,80 TYP
13
11
10
12
14
0,40
15
16
17
18
19
20
0,80
0,40
21
22
1,00 NOM
0,55
0,45
NOTES: A. All linear dimensions are in millimeters.
B. This drawing is subject to change without notice.
C. Thermally enhanced plastic package with heat slug (HSL)
D. Flip chip application only
0,10
M
2,80 MAX
0,45
0,35
Seating Plane
0,15
4188959/B 12/98
thermal resistance characteristics (S-PBGA package)
NO °C/W Air Flow LFPM
1 RΘ
2 RΘ
3 RΘ
4 RΘ
5 RΘ
†
LFPM = Linear Feet Per Minute
Junction-to-case 0.85 N/A
JC
Junction-to-free air 21.6 0
JA
Junction-to-free air 17.9 100
JA
Junction-to-free air 14.2 250
JA
Junction-to-free air 11.8 500
JA
ADVANCE INFORMATION
†
POST OFFICE BOX 1443 • HOUSTON, TEXAS 77251–1443
73
Page 74

IMPORTANT NOTICE
T exas Instruments and its subsidiaries (TI) reserve the right to make changes to their products or to discontinue
any product or service without notice, and advise customers to obtain the latest version of relevant information
to verify, before placing orders, that information being relied on is current and complete. All products are sold
subject to the terms and conditions of sale supplied at the time of order acknowledgement, including those
pertaining to warranty, patent infringement, and limitation of liability.
TI warrants performance of its semiconductor products to the specifications applicable at the time of sale in
accordance with TI’s standard warranty. Testing and other quality control techniques are utilized to the extent
TI deems necessary to support this warranty . Specific testing of all parameters of each device is not necessarily
performed, except those mandated by government requirements.
CERTAIN APPLICA TIONS USING SEMICONDUCT OR PRODUCTS MAY INVOLVE POTENTIAL RISKS OF
DEATH, PERSONAL INJURY, OR SEVERE PROPERTY OR ENVIRONMENTAL DAMAGE (“CRITICAL
APPLICATIONS”). TI SEMICONDUCTOR PRODUCTS ARE NOT DESIGNED, AUTHORIZED, OR
WARRANTED TO BE SUITABLE FOR USE IN LIFE-SUPPORT DEVICES OR SYSTEMS OR OTHER
CRITICAL APPLICA TIONS. INCLUSION OF TI PRODUCTS IN SUCH APPLICATIONS IS UNDERST OOD TO
BE FULLY AT THE CUSTOMER’S RISK.
In order to minimize risks associated with the customer’s applications, adequate design and operating
safeguards must be provided by the customer to minimize inherent or procedural hazards.
TI assumes no liability for applications assistance or customer product design. TI does not warrant or represent
that any license, either express or implied, is granted under any patent right, copyright, mask work right, or other
intellectual property right of TI covering or relating to any combination, machine, or process in which such
semiconductor products or services might be or are used. TI’s publication of information regarding any third
party’s products or services does not constitute TI’s approval, warranty or endorsement thereof.
Copyright 1999, Texas Instruments Incorporated
 Loading...
Loading...