

Page 1
User's Guide
SLAU748B–October 2017–Revised September 2018
SimpleLink™ Ethernet MSP432E401Y Microcontroller
LaunchPad™ Development Kit (MSP-EXP432E401Y)
The SimpleLink™ Ethernet MSP432E401Y Microcontroller LaunchPad™ Development Kit is a low-cost
evaluation platform for SimpleLink Arm®Cortex®-M4F-based Ethernet microcontrollers. The Ethernet
LaunchPad development kit highlights the MSP432E401Y microcontroller with its on-chip 10/100 Ethernet
MAC and PHY, USB 2.0, hibernation module, motion control pulse-width modulation, and a multitude of
simultaneous serial connectivity.
Contents
1 Board Overview.............................................................................................................. 2
1.1 Kit Contents.......................................................................................................... 3
1.2 Using the Ethernet LaunchPad Development Kit............................................................... 3
1.3 Features.............................................................................................................. 3
1.4 BoosterPack Plug-in Modules..................................................................................... 4
1.5 Specifications........................................................................................................ 4
2 Hardware Description ....................................................................................................... 5
2.1 Functional Description.............................................................................................. 5
2.2 Power Management............................................................................................... 20
2.3 Debug Interface.................................................................................................... 21
3 Software Development .................................................................................................... 21
3.1 Software Description.............................................................................................. 21
3.2 Source Code....................................................................................................... 21
3.3 Tool Options ....................................................................................................... 21
3.4 Programming the Ethernet LaunchPad Development Kit.................................................... 22
4 PCB Schematics ........................................................................................................... 22
1 SimpleLink Ethernet MSP432E401Y LaunchPad Development Kit................................................... 2
2 SimpleLink Ethernet LaunchPad Development Kit Block Diagram ................................................... 5
3 Default Jumper Locations ................................................................................................. 18
4 BSL Header and Resistors................................................................................................ 19
5 Ethernet LaunchPad Development Kit Schematics (1 of 5) .......................................................... 23
6 Ethernet LaunchPad Development Kit Schematics (2 of 5) .......................................................... 24
7 Ethernet LaunchPad Development Kit Schematics (3 of 5) .......................................................... 25
8 Ethernet LaunchPad Development Kit Schematics (4 of 5) .......................................................... 26
9 Ethernet LaunchPad Development Kit Schematics (5 of 5) .......................................................... 27
1 MSP-EXP432E401Y Specifications ....................................................................................... 4
2 BoosterPack Plug-in Module Interface 1 GPIO and Signal Muxing................................................... 8
3 BoosterPack 2 GPIO and Signal Muxing ............................................................................... 11
4 X11 Breadboard Adapter Odd-Numbered Pad GPIO and Signal Muxing.......................................... 14
5 X11 Breadboard Adapter Even-Numbered Pad GPIO and Signal Muxing......................................... 15
6 Resistors for Serial Bootloader Protocols............................................................................... 19
SLAU748B–October 2017–Revised September 2018
Submit Documentation Feedback
List of Figures
List of Tables
SimpleLink™ Ethernet MSP432E401Y Microcontroller LaunchPad™
Copyright © 2017–2018, Texas Instruments Incorporated
Development Kit (MSP-EXP432E401Y)
1
Page 2
Board Overview
Trademarks
SimpleLink, LaunchPad, BoosterPack, Code Composer Studio are trademarks of Texas Instruments.
Arm, Cortex, Keil, RealView are registered trademarks of Arm Limited.
IAR Embedded Workbench is a registered trademark of IAR Systems.
All other trademarks are the property of their respective owners.
1 Board Overview
The SimpleLink Ethernet MSP432E401Y Microcontroller LaunchPad Development Kit is a low-cost
evaluation platform for SimpleLink Arm Cortex-M4F-based Ethernet microcontrollers. The Ethernet
LaunchPad development kit design highlights the MSP432E401Y microcontroller with its on-chip 10/100
Ethernet MAC and PHY, USB 2.0, hibernation module, motion control pulse-width modulation, and a
multitude of simultaneous serial connectivity. The Ethernet LaunchPad development kit also features two
user switches, four user LEDs, dedicated reset and wake switches, a breadboard expansion option and
two independent BoosterPack™ XL expansion connectors. The preprogrammed quick start application on
the Ethernet LaunchPad development kit also enables remote monitoring and control of the evaluation
board from an internet browser anywhere in the world. The web interface is provided by a third party,
Exosite. Each Ethernet LaunchPad development kit is enabled on the Exosite platform allowing users to
create and customize their own Internet-of-Things applications.
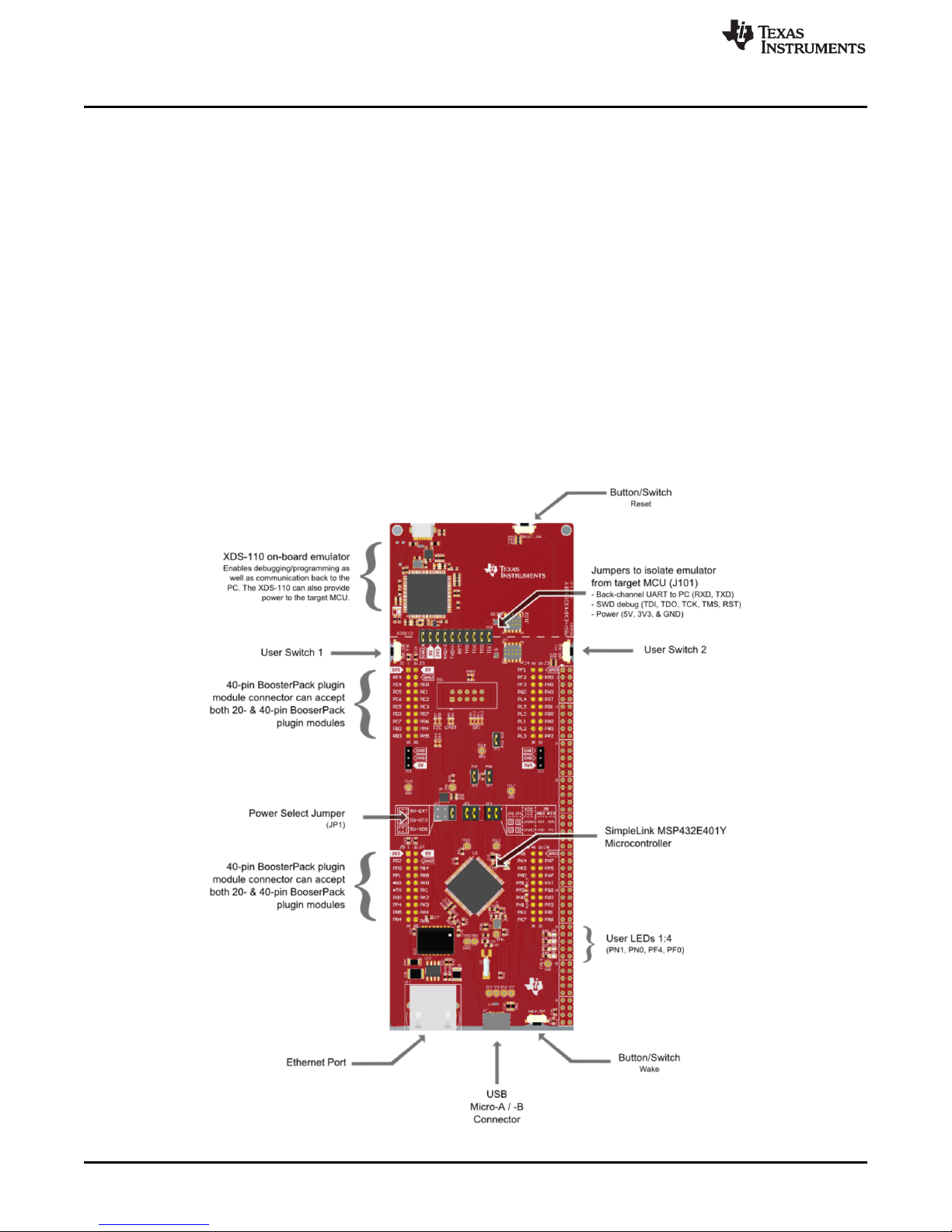
Figure 1 shows the Ethernet LaunchPad development kit with key features highlighted.
www.ti.com
Figure 1. SimpleLink Ethernet MSP432E401Y LaunchPad Development Kit
2
SimpleLink™ Ethernet MSP432E401Y Microcontroller LaunchPad™
Development Kit (MSP-EXP432E401Y)
SLAU748B–October 2017–Revised September 2018
Copyright © 2017–2018, Texas Instruments Incorporated
Submit Documentation Feedback
Page 3

www.ti.com
1.1 Kit Contents
The Ethernet LaunchPad development kit contains the following items:
• SimpleLink Ethernet MSP432E401Y LaunchPad Development Board (MSP-EXP432E401Y)
• USB Micro-B plug to USB-A plug cable
• Quick Start Guide
1.2 Using the Ethernet LaunchPad Development Kit
The recommended steps for using the Ethernet LaunchPad development kit are:
1. Run the Out of Box demo software. For detailed instruction on how to run the out of box demo, visit
this SimpleLink Academy tutorial.
2. Take the first step towards developing your own applications. The Ethernet LaunchPad development
kit is supported by the SimpleLink MSP432E4 SDK. After installing the SDK, look in the following
installation directories for bare metal and rtos based examples
a. examples\nortos\MSP_EXP432E401Y\
b. examples\rtos\MSP_EXP432E401Y\
See Section 3 for more details about software development.
3. Experiment with BoosterPack plug-in modules. This development kit conforms to the latest revision of
the BoosterPack plug-in module pinout standard. It has two independent BoosterPack plug-in module
connections to enable a multitude of expansion opportunities.
4. Customize and integrate the hardware to suit your end application. This development kit can be used
as a reference for building your own custom circuits based on SimpleLink microcontrollers or as a
foundation for expansion with your custom BoosterPack plug-in module or other circuit. This manual
can serve as a starting point for this endeavor.
5. More Resources. See the TI MCU LaunchPad web page for more information and available
BoosterPack modules.
Board Overview
1.3 Features
The Ethernet LaunchPad development kit includes the following features:
• SimpleLink MSP432E401Y microcontroller
• Ethernet connectivity with fully integrated 10/100 Ethernet MAC and PHY
• Motion Control PWM
• USB 2.0 Micro A/B connector
• 4 user LEDs
• 2 user switches
• 1 independent hibernate wake switch
• 1 independent microcontroller reset switch
• Jumper for selecting power source:
– XDS-110 USB
– USB Device
– BoosterPack
• Preloaded Internet-of-Things application
• I/O brought to board edge for breadboard expansion
• Two independent BoosterPack XL standard connectors featuring stackable headers to maximize
expansion through BoosterPack plug-in module ecosystem
SLAU748B–October 2017–Revised September 2018
Submit Documentation Feedback
SimpleLink™ Ethernet MSP432E401Y Microcontroller LaunchPad™
Copyright © 2017–2018, Texas Instruments Incorporated
Development Kit (MSP-EXP432E401Y)
3
Page 4
Board Overview
1.4 BoosterPack Plug-in Modules
The Ethernet LaunchPad development kit provides an easy and inexpensive way to develop applications
with the MSP432E401YPDT microcontroller. BoosterPack plug-in modules are add-on boards that follow a
pinout standard created by TI. The TI and third-party ecosystem of BoosterPack plug-in modules greatly
expands the peripherals and potential applications that you can easily explore with the Ethernet
LaunchPad development kit.
You can also build your own BoosterPack plug-in module by following the design guidelines on the TI
website. TI even helps you promote your BoosterPack plug-in module to other members of the
community. TI offers a variety of avenues for you to reach potential customers with your solutions.
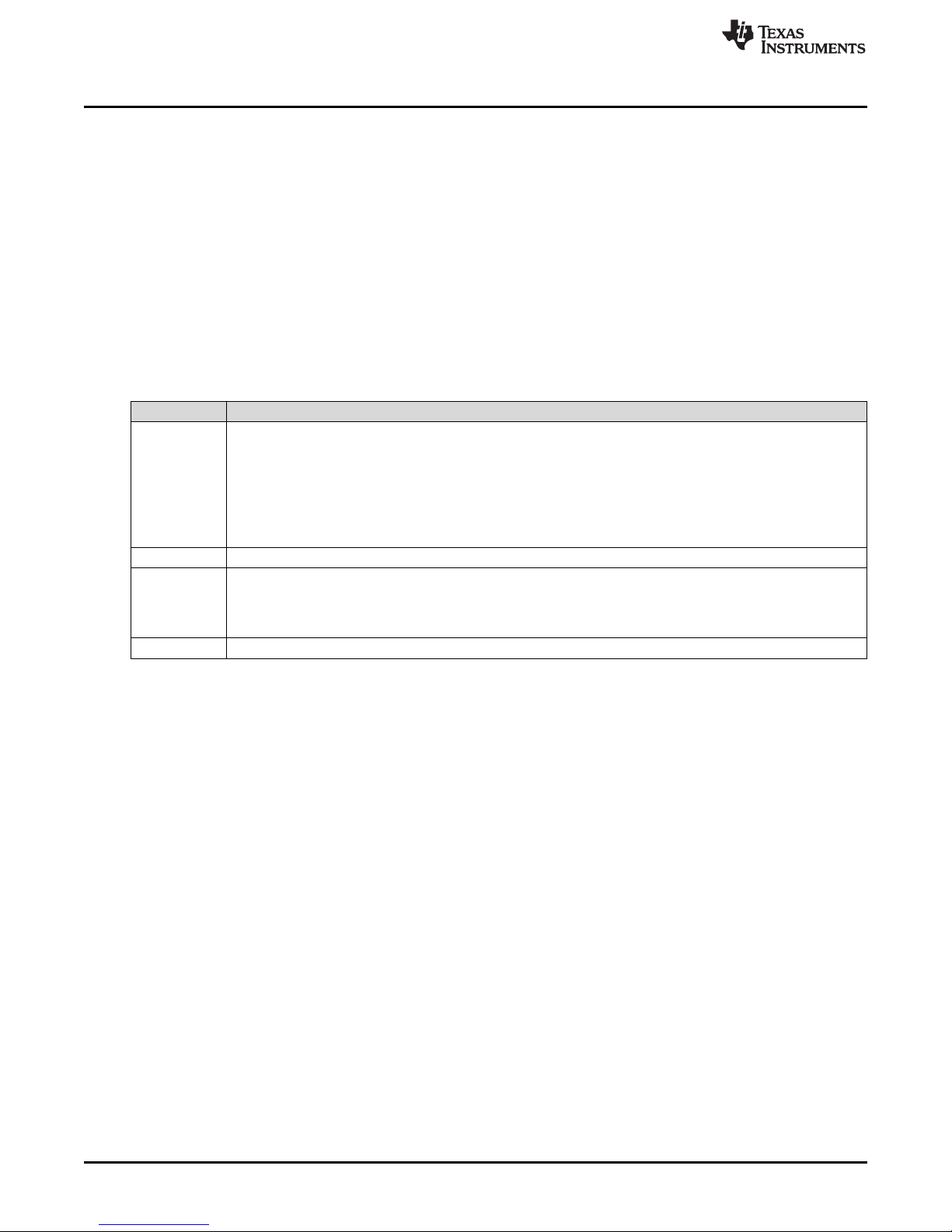
1.5 Specifications
Table 1 summarizes the specifications for the Ethernet LaunchPad.
Table 1. MSP-EXP432E401Y Specifications
Parameter Value
4.75 VDC to 5.25 VDC from one of the following sources:
• XDS-110 USB Micro-B cable connected to PC or other compatible power source
Board Supply
Voltage
Dimensions 6.85 in × 2.5 in × .425 in (17.4 cm × 6.35 cm × 10.8 mm) (L × W × H)
Break-out
Power Output
RoHS Status Compliant
• Target USB (U7) USB Micro-B cable connected to PC or other compatible power source
• BoosterPack 1 Interface (J3-21)
• BoosterPack 2 Interface (J7-21)
• 5-V Power header (J13-1)
• Breadboard expansion header (J10-2 or J10-97). See schematic symbol JP1 for power input selection.
• 5 VDC to BoosterPack modules, current limited by TPS2052B. Nominal rating is 1 A. Board input power
supply limitations may also apply.
• 3.3 VDC to BoosterPack modules, limited by output of TPS79601 LDO. This 3.3-V plane is shared with
onboard components. Total output power limit of TPS79601 is 1 A.
www.ti.com
4
SimpleLink™ Ethernet MSP432E401Y Microcontroller LaunchPad™
Development Kit (MSP-EXP432E401Y)
SLAU748B–October 2017–Revised September 2018
Copyright © 2017–2018, Texas Instruments Incorporated
Submit Documentation Feedback
Page 5

www.ti.com
2 Hardware Description
The Ethernet LaunchPad development kit includes an MSP432E401YPDT microcontroller with an
integrated 10/100 Ethernet MAC and PHY. This advanced Arm Cortex-M4F MCU has a wide range of
peripherals that are made available to users through the onboard accessories and the BoosterPack plugin module connectors. This chapter explains how those peripherals operate and interface to the
microcontroller.
Figure 2 shows a high-level block diagram of the Ethernet LaunchPad development kit.
Hardware Description
Figure 2. SimpleLink Ethernet LaunchPad Development Kit Block Diagram
2.1 Functional Description
2.1.1 Microcontroller
The MSP432E401Y is a 32-bit Arm Cortex-M4F based microcontroller with 1024KB of flash memory,
256KB of SRAM, 6KB of EEPROM, and 120-MHz operation, integrated 10/100 Ethernet MAC and PHY,
integrated USB 2.0 connectivity with external high-speed USB 3.0 PHY capability, a hibernation module, a
multitude of serial connectivity and motion control PWM, as well as a wide range of other peripherals. See
the MSP432E401Y microcontroller data sheet for more complete details.
Most of the microcontroller signals are routed to 0.1-in (2.54-mm) pitch headers or through-hole solder
pads. An internal multiplexor allows different peripheral functions to be assigned to each of these GPIO
pads. When adding external circuitry, consider the additional load on the evaluation board power rails.
The MSP432E401Y microcontroller is factory-programmed with a quick start demo program. The quick
start program resides in on-chip Flash memory and runs each time power is applied, unless the quick start
application has been replaced with a user program. The quick start application automatically connects to
http://ti.exosite.com when an internet connection is provided through the RJ45 Ethernet jack on the
evaluation board.
2.1.2 Ethernet Connectivity
The Ethernet LaunchPad development kit is designed to connect directly to an Ethernet network using
RJ45 style connectors. The microcontroller contains a fully integrated Ethernet MAC and PHY. This
integration creates a simple, elegant and cost-saving Ethernet circuit design. Example code is available for
LwIP TCP/IP protocol stack. The embedded Ethernet on this device can be programmed to act as an
HTTP server, client or both. The design and integration of the circuit and microcontroller also enable users
to synchronize events over the network using the IEEE1588 precision time protocol.
When configured for Ethernet operation, it is recommended that the user configure LED D3 and D4 to be
controlled by the Ethernet PHY to indicate connection and transmit or receive status.
SLAU748B–October 2017–Revised September 2018
Submit Documentation Feedback
SimpleLink™ Ethernet MSP432E401Y Microcontroller LaunchPad™
Copyright © 2017–2018, Texas Instruments Incorporated
Development Kit (MSP-EXP432E401Y)
5
Page 6

Hardware Description
2.1.2.1 RJ-45 Connections
To improve EMI performance, use a metal-shielded RJ-45 connector with the shield connected to chassis
ground.
Bob Smith termination to the RJ-45 connector involves 75-Ω termination resistors connected to the
unused differential pair connections on the RJ-45 connector. Bob Smith termination is used to reduce
noise that results from common-mode current flows and to reduce susceptibility to noise from unused wire
pairs on the RJ-45.
NOTE: Power Over Ethernet (PoE) applications require a modified Bob Smith termination, which
consists of DC-blocking capacitors in series with the 75-Ω termination resistors.
2.1.3 USB Connectivity
The Ethernet LaunchPad development kit is designed to be USB 2.0 ready. A TPS2052B load switch is
connected to and controlled by the microcontroller USB peripheral, which manages power to the USB
micro A/B connector when functioning in a USB host. When functioning as a USB device, the entire
Ethernet LaunchPad development kit can be powered directly from the USB micro A/B connector. Use
JP1 to select the desired power source.
USB 2.0 functionality is provided and supported directly out of the box with the target USB micro A/B
connector. High-speed USB 3.0 functionality can be enabled by adding an external USB PHY. The USB
external PHY control and data signals are provided on the breadboard expansion header J10.
www.ti.com
2.1.4 Motion Control
The Ethernet LaunchPad development kit includes motion control functionality through the use of a PWM
module capable of generating eight PWM outputs. The PWM module provides a great deal of flexibility
and can generate simple PWM signals – for example, those required by a simple charge pump – as well
as paired PWM signals with dead-band delays, such as those required by a half-H bridge driver. Three
generator blocks can also generate the full six channels of gate controls required by a 3-phase inverter
bridge.
A quadrature encoder interface (QEI) is also available to provide motion control feedback.
See Section 2.1.6 for details about the availability of these signals on the BoosterPack interfaces.
2.1.5 User Switches and LEDs
Two user switches are provided for input and control of the MSP432E401Y software. The switches are
connected to GPIO pins PJ0 and PJ1.
A reset switch and a wake switch are also provided. The reset switch initiates a system reset of the
microcontroller whenever it is pressed and released. Pressing the reset switch also asserts the reset
signal to the BoosterPack plug-in module and Breadboard headers. The wake switch is one way to bring
the device out of hibernate mode.
Four user LEDs are provided on the board. D1 and D2 are connected to GPIOs PN1 and PN0. These
LEDs are dedicated for use by the software application. D3 and D4 are connected to GPIOs PF4 and
PF0, which can be controlled by user’s software or the integrated Ethernet module of the microcontroller.
A power LED is also provided to indicate that 3.3-V power is present on the board.
6
SimpleLink™ Ethernet MSP432E401Y Microcontroller LaunchPad™
Development Kit (MSP-EXP432E401Y)
SLAU748B–October 2017–Revised September 2018
Copyright © 2017–2018, Texas Instruments Incorporated
Submit Documentation Feedback
Page 7

www.ti.com
2.1.6 BoosterPack Plug-in Modules and Headers
2.1.6.1 BoosterPack Plug-in Module Interface 1
The Ethernet LaunchPad development kit features two fully independent BoosterPack XL connectors.
BoosterPack Plug-in Module Interface 1, located near the XDS110 emulator, is fully compliant with the
BoosterPack plug-in module standard.
I2C is provided in both the original BoosterPack plug-in module standard configuration as well as the
updated standard location. Use of I2C on the bottom left of the BoosterPack plug-in module connections
per the updated standard is highly encouraged whenever possible.
Motion control advanced PWM connections are provided on the inner right connector for motion control
applications.
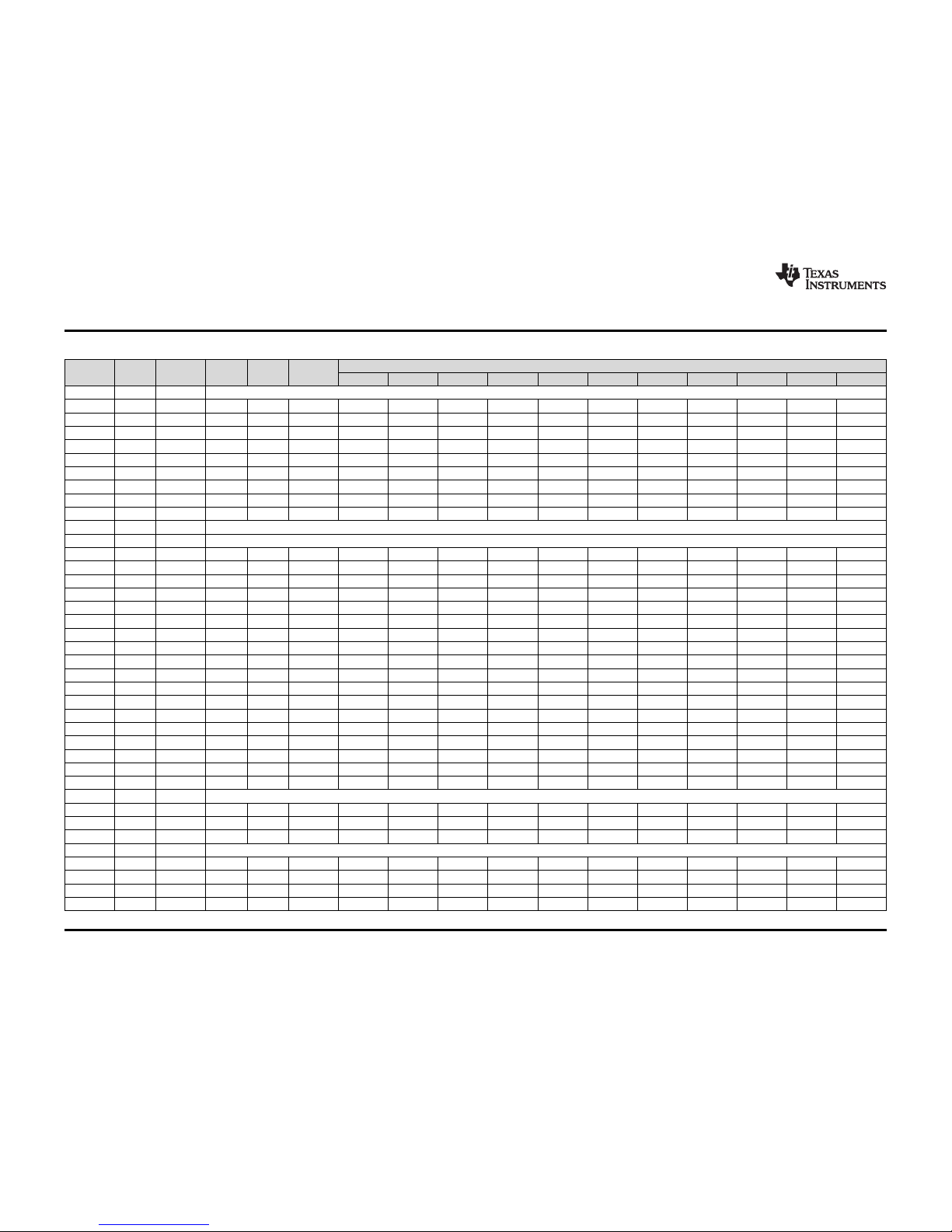
Table 2 lists the BoosterPack plug-in module pins and the GPIO alternate functions available on each pin.
The MSP432E401Y GPIO register GPIOPCTL values are shown for each configuration. The headers in
this table are labeled from left to right in ten pin columns. J1 and J2 make up the outer BoosterPack plugin module standard pins, and J3 and J4 make up the inner BoosterPack XL standard pins.
Hardware Description
SLAU748B–October 2017–Revised September 2018
Submit Documentation Feedback
SimpleLink™ Ethernet MSP432E401Y Microcontroller LaunchPad™
Copyright © 2017–2018, Texas Instruments Incorporated
Development Kit (MSP-EXP432E401Y)
7
Page 8
Hardware Description
www.ti.com
8
SLAU748B– October 2017–Revised September 2018
Submit Documentation Feedback
Copyright © 2017–2018, Texas Instruments Incorporated
SimpleLink™ Ethernet MSP432E401Y Microcontroller LaunchPad™
Development Kit (MSP-EXP432E401Y)
Table 2. BoosterPack Plug-in Module Interface 1 GPIO and Signal Muxing
Header Pin
Standard
Function
GPIO MCU Pin Analog
Digital Function (GPIOPCTL Bit Encoding)
1 2 3 5 6 7 8 11 13 14 15
J1 1 3.3 V 3.3 V
J1 2 Analog PE4 123 AIN9 U1RI – – – – – – – – – SSI1XDAT0
J1 3 UART RX PC4 25 C1- U7Rx – – – – – – – – – EPI0S7
J1 4 UART TX PC5 24 C1+ U7Tx – – – – RTCCLK – – – – EPI0S6
J1 5 GPIO PC6 23 C0+ U5Rx – – – – – – – – – EPI0S5
J1 6 Analog PE5 124 AIN8 – – – – – – – – – – SSIXDAT1
J1 7 SPI CLK PD3 4 AIN12 – I2C8SDA T1CCP1 – – – – – – – SSI2CLk
J1 8 GPIO PC7 22 C0- U5Tx – – – – – – – – – EPI0S4
J1 9 I2C SCL PB2 91 – – I2C0SCL T5CCP0 – – – – – – USB0STP EPI0S27
J1 10 I2C SDA PB3 92 – – I2C0SDA T5CCP1 – – – – – – USB0CLK EPI0S28
J3 21 5 V 5 V
J3 22 ground GND
J3 23 Analog PE0 15 AIN3 U1RTS – – – – – – – – – –
J3 24 Analog PE1 14 AIN2 U1DSR – – – – – – – – – –
J3 25 Analog PE2 13 AIN1 U1DCD – – – – – – – – – –
J3 26 Analog PE3 12 AIN0 U1DTR – – – – – – – – – –
J3 27 Analog PD7 128 AIN4 U2CTS – T4CCP1 USB0PFLT – – NMI – – – SSI2XDAT2
J3 28 Analog PD6 127 AIN5 U2RTS – T4CCP0 – USB0EPEN – – – – – SSI2XDAT3
J3 29 A out PM4 74 TMPR3 U0CTS – T4CCP0 – – – – – – – –
J3 30 A out PM5 73 TMPR2 U0DCD – T4CCP1 – – – – – – – –
J4 40 PWM PF1 43 – – – – EN0LED2 M0PWM1 – – – – SSI3XDAT0 TRD1
J4 39 PWM PF2 44 – – – – – M0PWM2 – – – – SSI3Fss TRD0
J4 38 PWM PF3 45 – – – – – M0PWM3 – – – – SSI3Clk TRCLK
J4 37 PWM PG0 49 – – I2C1SCL – EN0PPS M0PWM4 – – – – – EPI0S11
J4 36 Capture PL4 85 – – – T0CCP0 – – – – – – USB0D4 EPI0S26
J4 35 Capture PL5 86 – – – T0CCP1 – – – – – – USB0D5 EPI0S33
J4 34 GPIO PL0 81 – – I2C2SDA – – M0FAULT3 – – – – USB0D0 EPI0S16
J4 33 GPIO PL1 82 – – I2C2SCL – – PhA0 – – – – USB0D1 EPI0S17
J4 32 GPIO PL2 83 – – – – C0o PhB0 – – – – USB0D2 EPI0S18
J4 31 GPIO PL3 84 – – – – C1o IDX0 – – – – USB0D3 EPI0S19
J2 11 ground GND
J2 12 PWM PM3 75 – – – T3CCP1 – – – – – – – EPI0S12
J2 13 GPIO PH2 31 – U0DCD – – – – – – – – – EPI0S2
J2 14 GPIO PH3 32 – U0DSR – – – – – – – – – EPI0S3
J2 15 reset RESET
J2 16 SPI MOSI PD1 2 AIN14 – I2C7SDA T0CCP1 C1o – – – – – – SSI2XDAT0
J2 17 SPI MISO PD0 1 AIN15 – I2C7SCL T0CCP0 C0o – – – – – – SSI2XDAT1
J2 18 GPIO PN2 109 – U1DCD U2RTS – – – – – – – – EPI0S29
J2 19 GPIO PN3 110 – U1DSR U2CTS – – – – – – – – EPI0S30
Page 9

www.ti.com
Hardware Description
9
SLAU748B– October 2017–Revised September 2018
Submit Documentation Feedback
Copyright © 2017–2018, Texas Instruments Incorporated
SimpleLink™ Ethernet MSP432E401Y Microcontroller LaunchPad™
Development Kit (MSP-EXP432E401Y)
Table 2. BoosterPack Plug-in Module Interface 1 GPIO and Signal Muxing (continued)
Header Pin
Standard
Function
GPIO MCU Pin Analog
Digital Function (GPIOPCTL Bit Encoding)
1 2 3 5 6 7 8 11 13 14 15
J2 20 GPIO PP2 103 – U0DTR – – – – – – – – USB0NXT EPI0S29
Page 10

Hardware Description
2.1.6.2 BoosterPack Plug-in Module Interface 2
The second BoosterPack XL interface is located near the bottom of the board. This interface is fully
compliant with the BoosterPack plug-in module standard, and adds features not covered by the
BoosterPack plug-in module standard that enable operation with additional BoosterPack plug-in modules.
Using the jumpers JP4 and JP5, Controller Area Network (CAN) digital receive and transmit signals can
be optionally routed to the BoosterPack Plug-in Module Interface 2 connector. In the default configuration,
UART0 is used for the XDS-110 backchannel UART and CAN is not present on the BoosterPack plug-in
module headers. In this configuration, the ROM serial bootloader can be used over the XDS-110
backchannel UART. When the jumpers are configured for CAN on the BoosterPack plug-in module
interface, then UART2 must be used for the XDS-110 backchannel UART.
To comply with both the original and the new BoosterPack plug-in module standard, I2C is provided on
both sides of the BoosterPack plug-in module connection. Use of I2C on the bottom left of the BoosterPack
plug-in module connection is highly encouraged where possible, to be in compliance with the new
BoosterPack plug-in module standard. To provide I2C capability on the right side of the connector, per the
original standard, two 0-Ω resistors (R19 and R20) are used to combine the SPI and I2C signals. These
signals are not shared with any other pins on the LaunchPad development kit and therefore removal of
these zero-ohm resistors should not be required. Software should be certain that unused GPIO signals are
configured as inputs.
Table 3 lists the BoosterPack plug-in module pins and the GPIO alternate functions available at each pin.
The MSP432E401Y GPIO register GPIOPCTL values are shown for each configuration. The headers in
this table are labeled from left to right in ten pin columns. J5 and J6 make up the outer BoosterPack
standard pins, J7 and J8 make up the inner BoosterPack XL standard pins.
www.ti.com
10
SimpleLink™ Ethernet MSP432E401Y Microcontroller LaunchPad™
Development Kit (MSP-EXP432E401Y)
SLAU748B–October 2017–Revised September 2018
Copyright © 2017–2018, Texas Instruments Incorporated
Submit Documentation Feedback
Page 11

www.ti.com
Hardware Description
11
SLAU748B– October 2017–Revised September 2018
Submit Documentation Feedback
Copyright © 2017–2018, Texas Instruments Incorporated
SimpleLink™ Ethernet MSP432E401Y Microcontroller LaunchPad™
Development Kit (MSP-EXP432E401Y)
Table 3. BoosterPack 2 GPIO and Signal Muxing
Header Pin
Standard
Function
GPIO MCU Pin Analog
Digital Function (FPIOPCTL Bit Encoding)
1 2 3 5 6 7 8 11 13 14 15
J5 1 3.3 V
J5 2 Analog PD2 3 AIN13 – I2C8SCL T1CCP0 C2o – – – – – – SSI2Fss
J5 3 UART RX PP0 118 C2+ U6Rx – – – – – – – – – SSI3XDAT2
J5 4 UART TX PP1 119 C2- U6Tx – – – – – – – – – SSI3XDAT3
J5 5
GPIO (See
JP4)
PD4 125 AIN7 U2Rx – T3CCP0 – – – – – – – SSI1XDAT2
PA0 33 – U0Rx I2C9SCL T0CCP0 – – CANORx – – – – –
J5 6
Analog (See
JP5)
PD5 126 AIN6 U2Tx – T3CCP1 – – – – – – – SSI1XDAT3
PA1 34 – U0Tx I2C9SDA T0CCP1 – – CAN0Tx – – – – –
J5 7 SPI CLK PQ0 5 – – – – – – – – – – SSI3Clk EPI0S20
J5 8 GPIO PP4 105 – U3RTS U0DSR – – – – – – – USB0D7 –
J5 9 I2C SCL PN5 112 – U1RI U3CTS I2C2SCL – – – – – – – EPIO0S35
J5 10 I2C SDA PN4 111 – U1DTR U3RTS I2C2SDA – – – – – – – EPIO0S34
J7 21 5 V
J7 22 GND
J7 23 Analog PB4 121 AIN10 U0CTS I2C5SCL – – – – – – – – SSI1Fss
J7 24 Analog PB5 120 AIN11 U0RTS I2C5SDA – – – – – – – – SSI1Clk
J7 25 Analog PK0 18 AIN16 U4Rx – – – – – – – – – EPI0S0
J7 26 Analog PK1 19 AIN17 U4Tx – – – – – – – – – EPI0S1
J7 27 Analog PK2 20 AIN18 U4RTS – – – – – – – – – EPI0S2
J7 28 Analog PK3 21 AIN19 u4CTS – – – – – – – – – EPI0S3
J7 29 A out PA4 37 – U3Rx I2C7SCL T2CCP0 – – – – – – – SSI0XDAT0
J7 30 A out PA5 38 – U3Tx I2C7SDA T2CCP1 – – – – – – – SSI0XDAT1
J8 40 PWM PG1 50 – – I2C1SDA – – M0PWM5 – – – – – EPI0S10
J8 39 PWM PK4 63 – – I2C3SCL – EN0LED0 M0PWM6 – – – – – EPI0S32
J8 38 PWM PK5 62 – – I2C3SDA – EN0LED2 M0PWM7 – – – – – EPI0S31
J8 37 PWM PM0 78 – – – T2CCP0 – – – – – – – EPI0S15
J8 36 Capture PM1 77 – – – T2CCP1 – – – – – – – EPI0S14
J8 35 Capture PM2 76 – – – T3CCP0 – – – – – – – EPI0S13
J8 34 GPIO PH0 29 – U0RTS – – – – – – – – – EPI0S0
J8 33 GPIO PH1 30 – U0CTS – – – – – – – – – EPI0S1
J8 32 GPIO PK6 61 – – I2C4SCL – EN0LED1 M0FAULT1 – – – – – EPI0S25
J8 31 GPIO PK7 60 – U0RI I2C4SDA – RTCCLK M0FAULT2 – – – – – EPI0S24
J6 11 GND
J6 12 PWM PM7 71 TMPR0 U0RI – T5CCP1 – – – – – – – –
J6 13 GPIO PP5 106 – U3CTS I2C2SDL – – – – – – – USB0D6 –
J6 14 GPIO PA7 41 – U2Tx I2C6SDA T3CCP1 USB0PFLT – – – USB0EPEN SSI0XDAT3 – EPI0S9
J6 15 RESET
J6 16 SPI MOSI PQ2 11 – – – – – – – – – – SSI3XDAT0 EPI0S22
Page 12

Hardware Description
www.ti.com
12
SLAU748B– October 2017–Revised September 2018
Submit Documentation Feedback
Copyright © 2017–2018, Texas Instruments Incorporated
SimpleLink™ Ethernet MSP432E401Y Microcontroller LaunchPad™
Development Kit (MSP-EXP432E401Y)
Table 3. BoosterPack 2 GPIO and Signal Muxing (continued)
Header Pin
Standard
Function
GPIO MCU Pin Analog
Digital Function (FPIOPCTL Bit Encoding)
1 2 3 5 6 7 8 11 13 14 15
I2C PA3 36 – U4Tx I2C8SDA T1CCP1 – – – – – – – SSI0Fss
J6 17 SPI MISO PQ3 27 – – – – – – – – – – SSI3XDAT1 EPI0S23
I2C PA2 35 – U4Rx I2C8SCL T1CCP0 – – – – – – – SSI0Clk
J6 18 GPIO PP3 104 – U1CTS U0DCD – – – – – – – USB0DIR EPI0S30
J6 19 GPIO PQ1 6 – – – – – – – – – – SSI3Fss EPI0S21
J6 20 GPIO PM6 72 TMPR1 U0DSR – T5CCP0 – – – – – – – –
Page 13

www.ti.com
2.1.6.3 Breadboard Connection
The breadboard adapter section of the board is a set of 98 holes on a 0.1-inch grid. Properly combined
with a pair of right angle headers, the entire Ethernet LaunchPad development kit can be plugged directly
into a standard 300-mil (0.3-in) wide solderless breadboard. The right angle headers and breadboard are
not provided with this kit. Suggested part numbers are Samtec TSW-149-09-L-S-RE and TSW-149-08-LS-RA right angle pin headers and Twin industries TW-E40-1020 solderless breadboard. Samtec TSW149-09- F-S-RE and TSW-149-09-F-S-RA may be substituted.
Most microcontroller signals are made available at the breadboard adapter holes (J10). These signals are
grouped by function where possible. For example, all EPI signals are grouped on one side of the
connector. Many of the analog signals are grouped near VREF, and UART, SSI, and I2C signals are
grouped by peripheral to make expansion and customization simpler.
Table 4 and Table 5 list the GPIO pin and signal muxing for the X11 breadboard adapter pads.
Hardware Description
SLAU748B–October 2017–Revised September 2018
Submit Documentation Feedback
SimpleLink™ Ethernet MSP432E401Y Microcontroller LaunchPad™
Copyright © 2017–2018, Texas Instruments Incorporated
Development Kit (MSP-EXP432E401Y)
13
Page 14

Hardware Description
www.ti.com
14
SLAU748B– October 2017–Revised September 2018
Submit Documentation Feedback
Copyright © 2017–2018, Texas Instruments Incorporated
SimpleLink™ Ethernet MSP432E401Y Microcontroller LaunchPad™
Development Kit (MSP-EXP432E401Y)
Table 4. X11 Breadboard Adapter Odd-Numbered Pad GPIO and Signal Muxing
Pin Port MCU Pin Analog
Digital Function (GPIOPCTL Bit Encoding)
1 2 3 5 6 7 8 11 13 14 15
1 3V3
3 GND
5 PB4 121 AIN10 U0CTS I2C5SCL – – – – – – – – SSI1Fss
7 PB5 120 AIN11 U0RTS I2C5SDA – – – – – – – – SSI1Clk
9 PH0 29 – U0RTS – – – – – – – – – EPI0S0
11 PH1 30 – U0CTS – – – – – – – – – EPI0S1
13 PH2 31 – U0DCD – – – – – – – – – EPI0S2
15 PH3 32 – U0DSR – – – – – – – – – EPI0S3
17 PC7 22 C0- U5Tx – – – – – – – – – EPI0S4
19 PC6 23 C0+ U5Rx – – – – – – – – – EPI0S5
21 PC5 24 C1+ U7Tx – – – – RTCCLK – – – – EPI0S6
23 PC4 25 C1- U7Rx – – – – – – – – – EPI0S7
25 PA6 40 – U2Rx I2C6SCL T3CCP0 USB0EPEN – – – – SSI0XDAT2 – EPI0S8
27 PA7 41 – U2Tx I2C6SDA T3CCP1 USB0PFLT – – – USB0EPEN SSI0XDAT3 – EPI0S9
29 PG1 50 – – I2C1SDA – – M0PWM5 – – – – – EPI0S10
31 PG0 49 – – I2C1SCL – EN0PPS M0PWM4 – – – – – EPI0S11
33 PM3 75 – – – T3CCP1 – – – – – – – EPI0S12
35 GND
37 PM2 76 – – – T3CCP0 – – – – – – – EPI0S13
39 PM1 77 – – – T2CCP1 – – – – – – – EPI0S14
41 PM0 78 – – – T2CCP0 – – – – – – – EPI0S15
43 PL0 81 – – I2C2SDA – – M0FAULT3 – – – – USB0D0 EPI0S16
45 PL1 82 – – I2C2SCL – – PhA0 – – – – USB0D1 EPI0S17
47 PL2 83 – – – – C0o PhB0 – – – – USB0D2 EPI0S18
49 PL3 84 – – – – C1o IDX0 – – – – USB0D3 EPI0S19
51 PQ0 5 – – – – – – – – – – SSI3Clk EPI0S20
53 PQ1 6 – – – – – – – – – – SSI3Fss EPI0S21
55 PQ2 11 – – – – – – – – – – SSI3XDAT0 EPI0S22
57 PQ3 27 – – – – – – – – – – SSI3XDAT1 EPI0S23
59 PK7 60 – U0RI I2C4SDA – – – – – – EPI0S24
61 GND
63 PK6 61 – – I2C4SCL – EN0LED1 M0FAULT1 – – – – – EPI0S25
65 PL4 85 – – – T0CCP0 – – – – – – USB0D4 EPI0S26
67 PB2 91 – – I2C0SCL T5CCP0 – – – – – – USB0STP EPI0S27
69 PB3 92 – – I2C0SDA T5CCP1 – – – – – – USB0CLK EPI0S28
71 PP2 103 – U0DTR – – – – – – – – USB0NXT EPI0S29
73 PP3 104 – U1CTS U0DCD – – – RTCCLK – – – USB0DIR EPI0S30
75 PK5 62 – – I2C3SDA – EN0LED2 M0PWM7 – – – – – EPI0S31
77 PK4 63 – – I2C3SCL – EN0LED0 M0PWM6 – – – – – EPI0S32
Page 15

www.ti.com
Hardware Description
15
SLAU748B– October 2017–Revised September 2018
Submit Documentation Feedback
Copyright © 2017–2018, Texas Instruments Incorporated
SimpleLink™ Ethernet MSP432E401Y Microcontroller LaunchPad™
Development Kit (MSP-EXP432E401Y)
Table 4. X11 Breadboard Adapter Odd-Numbered Pad GPIO and Signal Muxing (continued)
Pin Port MCU Pin Analog
Digital Function (GPIOPCTL Bit Encoding)
1 2 3 5 6 7 8 11 13 14 15
79 PL5 86 – – – T0CCP1 – – – – – – USB0D5 EPI0S33
81 PN4 111 – U1DTR U3RTS I2C2SDA – – – – – – – EPI0S34
83 PN5 112 – U1RI U3CTS I2C2SCL – – – – – – – EPI0S35
85 PN0 107 – U1RTS – – – – – – – – – –
87 PN1 108 – U1CTS – – – – – – – – – –
89 PN2 109 – U1DCD U2RTS – – – – – – – – EPI0S29
91 PN3 110 – U1DSR U2CTS – – – – – – – – EPI0S30
93 PQ4 102 – U1Rx – – – – – DIVSCLK – – – –
95 WAKE
97 5V
Table 5. X11 Breadboard Adapter Even-Numbered Pad GPIO and Signal Muxing
Pin Port MCU Pin Analog
Digital Function (GPIOPCTL Bit Encoding)
1 2 3 5 6 7 8 11 13 14 15
2 5 V
4 GND
6 PA2 35 – U4Rx I2C8SCL T1CCP0 – – – – – – – SSI0Clk
8 PA3 36 – U4Tx I2C8SDA T1CCP1 – – – – – – – SSI0Fss
10 PA4 37 – U3Rx I2C7SCL T2CCP0 – – – – – – – SSI0XDAT0
12 PA5 38 – U3Tx I2C7SDA T2CCP1 – – – – – – – SSI0XDAT1
14 PE0 15 AIN3 U1RTS – – – – – – – – – –
16 PE1 14 AIN2 U1DSR – – – – – – – – – –
18 PE2 13 AIN1 U1DCD – – – – – – – – – –
20 PE3 12 AIN0 U1DTR – – – – – – – – – –
22 PE4 123 AIN9 U1RI – – – – – – – – – SSI1XDAT0
24 PE5 124 AIN8 – – – – – – – – – – SSI1XDAT1
26 PK0 18 AIN16 U4Rx – – – – – – – – – EPI0S0
28 PK1 19 AIN17 U4Tx – – – – – – – – – EPI0S1
30 PK2 20 AIN18 U4RTS – – – – – – – – – EPI0S2
32 PK3 21 AIN19 U4CTS – – – – – – – – – EPI0S3
34 VREF
36 GND
38 PD5 126 AIN6 U2Tx – T3CCP1 – – – – – – – SSI1XDAT3
40 PD4 125 AIN7 U2Rx – T3CCP0 – – – – – – – SSI1XDAT2
42 PD7 128 AIN4 U2CTS – T4CCP1 USB0PFLT – – NMI – – – SSI2XDAT2
44 PD6 127 AIN5 U2RTS – T4CCP0 USB0EPEN – – – – – – SSI2XDAT3
46 PD3 4 AIN12 – I2C8SDA T1CCP1 – – – – – – – SSI2Clk
48 PD1 2 AIN14 – I2C7SDA T0CCP1 C1o – – – – – – SSI2XDAT0
Page 16

Hardware Description
www.ti.com
16
SLAU748B– October 2017–Revised September 2018
Submit Documentation Feedback
Copyright © 2017–2018, Texas Instruments Incorporated
SimpleLink™ Ethernet MSP432E401Y Microcontroller LaunchPad™
Development Kit (MSP-EXP432E401Y)
Table 5. X11 Breadboard Adapter Even-Numbered Pad GPIO and Signal Muxing (continued)
Pin Port MCU Pin Analog
Digital Function (GPIOPCTL Bit Encoding)
1 2 3 5 6 7 8 11 13 14 15
50 PD0 1 AIN15 – I2C7SCL T0CCP0 C0o – – – – – – SSI2XDAT1
52 PD2 3 AIN13 – I2C8SCL T1CCP0 C2o – – – – – – SSI2Fss
54 PP0 118 C2+ U6Rx – – – – – – – – – SSI3XDAT2
56 PP1 119 C2- U6Tx – – – – – – – – – SSI3XDAT3
58 PB0 95 USB0ID U1Rx I2C5SCL T4CCP0 – – CAN1Rx – – – – –
60 PB1 96 USB0VBUS U1Tx I2C5SDA T4CCP1 – – CAN1Tx – – – – –
62 GND
64 PF4 46 – – – – EN0LED1 M0FAULT0 – – – – SSI3XDAT2 TRD3
66 PF0 42 – – – – EN0LED0 M0PWM0 – – – – SSI3XDAT1 TRD2
68 PF1 43 – – – – EN0LED2 M0PWM1 – – – – SSI3XDAT0 TRD1
70 PF2 44 – – – – – M0PWM2 – – – – SSI3Fss TRD0
72 PF3 45 – – – – – M0PWM3 – – – – SSI3Clk TRCLK
74 PA0 33 – U0Rx I2C9SCL T0CCP0 – – CAN0Rx – – – – –
76 PA1 34 – U0Tx I2C9SDA T0CCP1 – – CAN0Tx – – – – –
78 PP4 105 – U3RTS U0DSR – – – – – – – USB0D7 –
80 PP5 106 – U3CTS I2C2SCL – – – – – – – USB0D6 –
82 PJ0 116 – U3Rx – – – – – – – – –
84 PJ1 117 – U3Tx – – – – – – – – – –
86 PM7 71 TMPR0 U0RI – T5CCP1 – – – – – – – –
88 PM6 72 TMPR1 U0DSR – T5CCP0 – – – – – – – –
90 PM5 73 TMPR2 U0DCD – T4CCP1 – – – – – – – –
92 PM4 74 TMPR3 U0CTS – T4CCP0 – – – – – – – –
94 RESET
96 GND
98 3V3
Page 17

www.ti.com
2.1.6.4 Other Headers and Jumpers
JP1 is provided to select the 5-V power input source for the Ethernet LaunchPad development kit. The left
position is for BoosterPack plug-in module power; this position also disconnects both USB voltages from
the board’s primary 5-V input. In the left position, the TPS2052B does not limit current so additional care
should be exercised. The middle position draws power from the USB connector on the bottom of the board
near the Ethernet jack. The right position is the default, in which power is drawn from the XDS-110 USB
connection through J101. If JP1 is in the left or middle position, which selects the BoosterPack headers or
the USB OTG connector, respectively, externally provide 3.3 V to the board, and remove the 3V3 jumper
on J101.
JP2 separates the MCU 3.3-V power domain from the rest of the 3.3-V power on the board allowing an
ammeter to be used to obtain more accurate measurements of microcontroller power consumption. JP4
and JP5 are used to configure CAN signals to the BoosterPack Plug-in Module Interface 2 connector. In
the default vertical configuration, CAN is not present on the BoosterPack plug-in module connector.
UART2 goes to the BoosterPack plug-in module connector and UART 0 goes to the XDS-110
backchannel serial port and can also be used for the ROM serial bootloader. In the horizontal CANenabled configuration, UART2 goes to the XDS-110 backchannel serial port and CAN signals are
available on the BoosterPack Plug-in Module Interface 2 connector. The ROM serial bootloader is not
available to the XDS-110 backchannel serial port while the jumpers are in the CAN position.
Figure 3 shows the default configuration and relative location of the jumpers on the board.
Hardware Description
SLAU748B–October 2017–Revised September 2018
Submit Documentation Feedback
SimpleLink™ Ethernet MSP432E401Y Microcontroller LaunchPad™
Copyright © 2017–2018, Texas Instruments Incorporated
Development Kit (MSP-EXP432E401Y)
17
Page 18

Hardware Description
www.ti.com
18
SimpleLink™ Ethernet MSP432E401Y Microcontroller LaunchPad™
Development Kit (MSP-EXP432E401Y)
Figure 3. Default Jumper Locations
SLAU748B–October 2017–Revised September 2018
Copyright © 2017–2018, Texas Instruments Incorporated
Submit Documentation Feedback
Page 19

www.ti.com
2.1.7 Serial Bootloader
The Ethernet LaunchPad development kit enables the serial boot loader on the MSP432E401Y through
the BSL header for connecting to an external BSL host interface, such as the BSL Rocket. The BSL
header supports three communication protocols to the serial boot loader: SPI, UART, and I2C. To use the
serial bootloader, a shrouded 100mil header (such as the AWHW-10G-0202-T from Assman WSW)
should be soldered into the top side of the PCB, paying careful attention to make sure pin 1 of the
connector lines up to pin one of the PCB (denoted by a square pad).
Because several of the pins for different communication protocols are shared on the header, the Ethernet
LaunchPad development kit enables support for all three protocols by using 0-Ω resistor bridges for each
of the signals. See Figure 4 for the location of the header and resistors on the PCB. To connect a specific
protocol, populate the designated resistors with 0-Ω resistors and remove the resistors for the others
protocols (see Table 6). When using I2C, populate R13 and R14 with the pullup resistors if no I2C pullups
are on the external host. Typically the I2C pullup resistors should be 3.3 kΩ.
Hardware Description
Figure 4. BSL Header and Resistors
Table 6. Resistors for Serial Bootloader Protocols
Serial Bootloader
Protocol
I2C
UART
SPI
Resistors Populated
With 0-Ω Resistors
R7
R8
R5
R6
R9
R10
R11
R12
Resistors Left
Unpopulated
R5
R6
R9
R10
R11
R12
R7
R8
R9
R10
R11
R12
R5
R6
R7
R8
SLAU748B–October 2017–Revised September 2018
Submit Documentation Feedback
SimpleLink™ Ethernet MSP432E401Y Microcontroller LaunchPad™
Copyright © 2017–2018, Texas Instruments Incorporated
Development Kit (MSP-EXP432E401Y)
19
Page 20

Hardware Description
2.2 Power Management
2.2.1 Power Supplies
The Ethernet LaunchPad development kit can be powered from three different input options:
• Onboard XDS-110 USB cable (Debug, Default)
• Target USB cable
• BoosterPack plug-in module or Breadboard adapter connections
The JP1 power-select jumper is used to select one of the power sources.
In addition, the 3V3 Jumper on J101 power jumper can be used to isolate the 3.3-V output of the
TPS79601 in the XDS-110 emulator from the 3.3-V rail of the target side.
A TPS2052B load switch is used to regulate and control power to the Target USB connector when the
microcontroller is acting in USB host mode. This load switch also limits current to the BoosterPack plug-in
module and Breadboard adapter headers when the JP1 jumper is in the XDS-110 position.
2.2.2 Low Power Modes
The Ethernet LaunchPad development kit demonstrates several low power microcontroller modes. In run
mode, the microcontroller can be clocked from several sources such as the internal precision oscillator or
an external crystal oscillator. Either of these sources can then optionally drive an internal PLL to increase
the effective frequency of the system up to 120 MHz. In this way, the run mode clock speed can be used
to manage run mode current consumption.
The microcontroller also provides sleep and deep sleep modes and internal voltage adjustments to the
flash and SRAM to further refine power consumption when the processor is not in use but peripherals
must remain active. Each peripheral can be individually clock gated in these modes so that current
consumption by unused peripherals is minimized. A wide variety of conditions from internal and external
sources can trigger a return to run mode.
The lowest power setting of the microcontroller is hibernation, which requires a small amount of supporting
external circuitry available on the Ethernet LaunchPad development kit. The Ethernet LaunchPad
development kit can achieve microcontroller current consumption modes under 2 µA using hibernate
VDD3ON mode. Hibernation with VDD3ON mode is not supported on this board. The Ethernet LaunchPad
can be woken from hibernate by several triggers including the dedicated wake button, the reset button, an
internal RTC timer and a subset of the device GPIO pins. The hibernation module provides a small area of
internal battery backed register bank that can preserve data through a hibernate cycle.
www.ti.com
2.2.3 Clocking
The Ethernet LaunchPad uses a 25-MHz crystal (Y1) to drive the main MSP432E401Y internal clock
circuit. Most software examples use the internal PLL to multiply this clock to higher frequencies up to 120
MHz for core and peripheral timing. The 25-MHz crystal is required when using the integrated Ethernet
MAC and PHY.
The Hibernation module is clocked from an external 32.768-kHz crystal (Y3).
2.2.4 Reset
The RESET signal to the MSP432E401Y microcontroller connects to the RESET switch, BoosterPack
plug-in module connectors, breadboard adapter, and the XDS-110 target reset line.
External reset is asserted (active low) under the following conditions:
• Power-on reset (filtered by an RC network)
• RESET switch held down
• By the XDS-110 circuit when instructed by the debugger (this capability is optional, and may not be
supported by all debuggers)
• By an external circuit attached to the BoosterPack plug-in module or breadboard connectors
20
SimpleLink™ Ethernet MSP432E401Y Microcontroller LaunchPad™
Development Kit (MSP-EXP432E401Y)
SLAU748B–October 2017–Revised September 2018
Copyright © 2017–2018, Texas Instruments Incorporated
Submit Documentation Feedback
Page 21

www.ti.com
2.3 Debug Interface
2.3.1 XDS-110 Debug Interface
The Ethernet LaunchPad development kit comes with an onboard XDS-110. The XDS-110 allows for the
programming and debugging of the MSP432E401Y using Code Composer Studio™ IDE or any of the
supported tool chains. Note that XDS-110 only supports JTAG debugging at this time.
Debugging external boards using the XDS-110 is possible by removing the TDI, TDO, TCK, TMS, and
RST jumpers from JP101 on the Ethernet LaunchPad development kit and using the XDS-110 to drive
JTAG signals out on J102. To restore the connection to the onboard MSP432E401Y microcontroller,
reinstall the jumpers on JP101.
2.3.2 External Debugger
The connector J11 is provided for the attachment of an external debug adapter such as the IAR I-Jet,
Segger J-Link or Keil®ULINK. This connector follows the Arm 10-pin mini JTAG pinout. To use an
external debugger, make sure the TDI, TDO, TCK, TMS, RST, and 3V3 jumpers are disconnected from
J101. Many external debuggers do not provide a 3.3-V power rail through this adapter and require an
external 3.3-V source to power the LaunchPad development kit.
2.3.3 Virtual COM Port
When plugged into a USB host, the XDS-110 enumerates as both a debugger and a virtual COM port
referred to as the backchannel UART. JP4 and JP5 control the selection of which UART from the
MSP432E401Y is connected to the backchannel UART virtual COM port. In the default configuration,
UART0 maps to the backchannel UART of the XDS-110. In the CAN jumper configuration, UART2 maps
to the backchannel UART of the XDS-110.
Hardware Description
3 Software Development
This chapter provides general information on software development as well as instructions for flash
memory programming.
3.1 Software Description
The SimpleLink MSP432E4 Software Development Kit (SDK) provides drivers for all of the peripheral
devices supplied in the design. The Peripheral Driver Library is required to operate the on-chip peripherals
as part of SDK.
The SDK includes a set of example applications that use the Peripheral Driver Library. These applications
demonstrate the capabilities of the MSP432E401Y microcontroller, as well as provide a starting point for
the development of the final application for use on the Ethernet LaunchPad development kit.
3.2 Source Code
The source code is provided as part of the SimpleLink MSP432E4 SDK.
3.3 Tool Options
The source code installation includes directories containing projects, makefiles, and binaries for the
following tool-chains:
• Keil Arm RealView®Microcontroller Development System
• IAR Embedded Workbench®for Arm
• TI Code Composer Studio IDE for Arm and GCC compilers.
For detailed information on using the tools, see the documentation included in the tool chain installation or
visit the website of the tools supplier.
SLAU748B–October 2017–Revised September 2018
Submit Documentation Feedback
SimpleLink™ Ethernet MSP432E401Y Microcontroller LaunchPad™
Copyright © 2017–2018, Texas Instruments Incorporated
Development Kit (MSP-EXP432E401Y)
21
Page 22

Software Development
3.4 Programming the Ethernet LaunchPad Development Kit
The SimpleLink MSP432E4 SDK includes projects for each of the example applications for the different
supported tool chains. If you installed the SimpleLink MSP432E4 SDK to the default installation path of
C:\ti\, you can find the example applications in C:\ti\
simplelink_msp432e4_sdk_<version>\examples\. The onboard XDS-110 is used with the
supported toolchain to program applications on the MSP-EXP432E401Y LaunchPad development kit.
Follow these steps to program example applications into the Ethernet LaunchPad development kit using
the XDS-110:
1. Install a toolchain on a PC running Microsoft Windows.
2. Connect the USB-A cable plug in to an available USB port on the PC and plug the Micro-B plug to the
XDS-110 USB port at the top of the MSP-EXP432E401Y LaunchPad development kit.
3. Verify the RED LED on the left side of the XDS-110 is illuminated.
4. Run the toolchain and import the project. Build the project to generate the toolchain specific output file.
5. Press on the download and debug button for the toolchain to download the code.
6. After the code has been downloaded to the MSP-EXP432E401Y LaunchPad development kit, run the
code.
4 PCB Schematics
The following figures show the schematics of the Ethernet LaunchPad development kit.
www.ti.com
22
SimpleLink™ Ethernet MSP432E401Y Microcontroller LaunchPad™
Development Kit (MSP-EXP432E401Y)
SLAU748B–October 2017–Revised September 2018
Copyright © 2017–2018, Texas Instruments Incorporated
Submit Documentation Feedback
Page 23

1
1
2
2
3
3
4
4
5
5
6
6
D D
C C
B B
A A
1 6
10/12/2017
MCU023_MSP432E_GPIO_USB.SchDoc
Sheet Title:
Size:
Mod. Date:
File:
Sheet: of
B
http://www.ti.com
Contact:
http://www.ti.com/support
MSP-EXP432E401YProject Title:
Designed for:Public Release
AssemblyVariant: 001
©TexasInstruments 2017
Drawn By:
Engineer:
Mike Pridgen
Texas Instrumentsand/or its licensors do not warrant the accuracy or completeness of this specification or any information contained therein. TexasInst ruments and/or its licensors do not
warrant that this designwill meet the specificatio ns, will be suitable foryour application or fit fo r any particular purpose,or will operate in an imp lementation. Texas Instrumentsand/or its
licensors donot warrant that the design is product ion worthy.You should completely validate and testyour design implementation to confirm the system functionality for your application.
Version controldisabledSVN Rev:
MCU023Number: Rev: 1.1
TID #: N/A
Orderable: MSP-EXP432E401Y
PD0
1
PD1
2
PD2
3
PD3
4
PE3
12
PE2
13
PE1
14
PE0
15
PK0
18
PK1
19
PK2
20
PK3
21
PC7
22
PC6
23
PC5
24
PC4
25
PH0
29
PH1
30
PH2
31
PH3
32
PA0
33
PA1
34
PA2
35
PA3
36
PA4
37
PA5
38
PA6
40
PA7
41
PF0
42
PF1
43
PF2
44
PF3
45
PF4
46
PG0
49
PG1
50
PK7
60
PK6
61
PK5
62
PK4
63
PB2
91
PB3
92
PB0
95
PB1
96
PC3/TDO/SWO
97
PC2/TDI
98
PC1/TMS/SWDIO
99
PC0/TCK/SWCLK
100
PJ0
116
PJ1
117
PB5
120
PB4
121
PE4
123
PE5
124
PD4
125
PD5
126
PD6
127
PD7
128
U1A
MSP432E401YTPDTR
PQ0
5
PQ1
6
PQ2
11
PQ3
27
PM7
71
PM6
72
PM5
73
PM4
74
PM3
75
PM2
76
PM1
77
PM0
78
PL0
81
PL1
82
PL2
83
PL3
84
PL4
85
PL5
86
PL7
93
PL6
94
PQ4
102
PP2
103
PP3
104
PP4
105
PP5
106
PN0
107
PN1
108
PN2
109
PN3
110
PN4
111
PN5
112
PP0
118
PP1
119
U1B
MSP432E401YTPDTR
PA0
PA1
PA2
PA3
PA4
PA5
PA6
PA7
PB0
PB2
PB3
PB4
PB5
PC4
PC5
PC6
PC7
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PD7
PE0
PE1
PE2
PE3
PE4
PE5
PF1
PF2
PF3
PF4
PF0
PG0
PG1
PH0
PH1
PH2
PH3
PK0
PK1
PK2
PK3
PK4
PK5
PK6
PK7
PJ0
PJ1
PL0
PL1
PL2
PL3
PL4
PL5
USBD_P
USBD_N
PM0
PM1
PM2
PM3
PM4
PM5
PM6
PM7
PN0
PN1
PN2
PN3
PN4
PN5
PP0
PP1
PP2
PP3
PP4
PP5
PQ0
PQ1
PQ2
PQ3
PQ4
1.0M
R52
3300pF
C32
100
R18
D+
1
D-
2
ID
3
GND4NC
5
VBUS
6
U2
TPD4S012DRYR
34
12
USR_SW1
34
12
USR_SW2
Green
1
2
D1
Green
1
2
D2
390
R33
GND
GND
GND
USBD_N
USBD_P
TARGET_ID
TARGET_ID
PB0
USBD_N
USBD_P
GND
NOTE: TPD4S012 all protection circuits are identical
Connections chosenfor simple routing.
GND GND
PN0 PN1
See PF0 andPF4 for additional LED's used for
Ethernet anduser application
PJ0
PJ1
GND GND
GNDGND
+3.3V
1
Analog_In
2
LP_UART_RX
3
LP_UART_TX
4
GPIO!
5
AnalogIn
6
SPI_CLK
7
GPIO!
8
I2C_SCL
9
I2C_SDA
10
+5V
21
GND
22
Analog_In
23
Analog_In
24
Analog_In
25
Analog_In
26
Analog_In/I2S_WS
27
Analog_In/I2S_SCLK
28
Analog_Out/I2S_SDout
29
Analog_Out/I2S_SDin
30
J1/J3
+3.3V
1
Analog_In
2
LP_UART_RX
3
LP_UART_TX
4
GPIO!
5
AnalogIn
6
SPI_CLK
7
GPIO!
8
I2C_SCL
9
I2C_SDA
10
+5V
21
GND
22
Analog_In
23
Analog_In
24
Analog_In
25
Analog_In
26
Analog_In/I2S_WS
27
Analog_In/I2S_SCLK
28
Analog_Out/I2S_SDout
29
Analog_Out/I2S_SDin
30
J5/J7
GPIO!
31
GPIO!
32
GPIO!
33
GPIO!
34
Timer_Cap/GPIO!
35
Timer_Cap/GPIO!
36
PWM/GPIO!
37
PWM/GPIO!
38
PWM/GPIO!
39
PWM/GPIO!
40
GPIO!
11
SPI_CS/GPIO!
12
SPI_CS/GPIO!
13
SPI_MISO
14
SPI_MOSI
15
RST
16
GPIO
17
GPIO!
18
PWM/GPIO!
19
GND
20
J2/J4
GPIO!
31
GPIO!
32
GPIO!
33
GPIO!
34
Timer_Cap/GPIO!
35
Timer_Cap/GPIO!
36
PWM/GPIO!
37
PWM/GPIO!
38
PWM/GPIO!
39
PWM/GPIO!
40
GPIO!
11
SPI_CS/GPIO!
12
SPI_CS/GPIO!
13
SPI_MISO
14
SPI_MOSI
15
RST
16
GPIO
17
GPIO!
18
PWM/GPIO!
19
GND
20
J6/J8
GND
GND
GND
GND
+3V3
+3V3
+5V
+5V
BoosterPack1 Interface
BoosterPack2 Interface
PE4
PC4
PC5
PC6
PE5
PD3
PC7
PB2
PB3
PE0
PE1
PE2
PE3
PD7
PD6
PM4
PM5
PF1
PF2
PF3
PG0
PL4
PL5
PL0
PL1
PL2
PL3
PM3
PH2
PH3
TARGET_RESET
PD1
PD0
PN2
PN3
PP2
PD2
PP0
PP1
PQ0
PP4
PN5
PN4
PB4
PB5
PK0
PK1
PK2
PK3
PA4
PA5
PG1
PK4
PK5
PM0
PM1
PM2
PH0
PH1
PK6
PK7
PM7
PP5
PA7
PP3
PQ1
PM6
PQ2
PQ3
0
R19
DNP
0
R20
DNP
PA3
PA2
0.1µF
C23
0.1µF
C25
GND
GND
R19 and R20can be populated to enable I2c on
Right side of BP2 interface. This is for legacy
supportand the Sensor Hub BoosterPack
I2C and SSI areavailable on the corresponding
BoosterPack 1interface pins without modificaiton t o
the board.
PA6and PA7 are also used by the onboard radio.
Configure the radio to tri-state these GPIO beofre
using themon the boosterpack interface
1 2
3 4
JP4
1 2
3 4
JP5
TARGET_RXD
TARGET_TXD
PD4
PD5
PA0
PA1
BP2_5
BP2_6
BP2_5
BP2_6
JP4 andJP5 CAN and Backchannel UART Selection:
Populate Jumpersfrom 1-2 and 3-4 for default Mode
This enablesROM UART bootloader. UART0 toXDS
Populate from 1-3 and2-4 for controller area netwo rk
on the boosterpack. UART2 is then available to XDS
PF4
PF0
TARGET_VBUS TARGET_VBUS
TARGET_VBUS
TGT_RST
1
3
5
7
9
11
13
15
17
19
21
23
25
27
29
31
33
35
37
39
41
43
45
47
49
51
53
55
57
59
61
63
65
67
69
71
73
75
77
79
81
83
85
87
89
91
93
95
97
2
4
6
8
10
12
14
16
18
20
22
24
26
28
30
32
34
36
38
40
42
44
46
48
50
52
54
56
58
60
62
64
66
68
70
72
74
76
78
80
82
84
86
88
90
92
94
96
98
J10
DNP
PQ4
PD6
PB4
PB5
PH0
PH1
PH2
PH3
PC4
PC5
PC6
PC7
PA6
PA7
PG0
PG1
PM0
PM1
PM2
PM3
PL0
PL1
PL2
PL3
PQ0
PQ1
PQ2
PQ3
PK6
PK7
PL4
PB2
PB3
PP2
PK4
PK5
PP3
PL5
PN4
PN5
PN0
PN1
PN2
PN3
PQ4
PF0
PF1
PF2
PF3
PF4
PA0
PA1
PP4
PP5
PJ0
PJ1
PM4
PM5
PM6
PM7
TARGET_RESET
PB0
PD4
PD5
PD6
PD7
PD0
PD1
PD2
PD3
PP0
PP1
PA2
PA3
PA4
PA5
PE0
PE1
PE2
PE3
PE4
PE5
PK0
PK1
PK2
PK3
VREF+
VREF+
TARGET_VBUS
GND
GND GND
GND
GNDGND
0.1µF
C28
0.1µF
C27
+5V+3V3
GND
Wake
Wake
GND
0.1µF
C30
0.1µF
C29
+5V +3V3
GND
NOTE: PB0 and PB1 are used in some
configurationswith 5V signals especially in USB
Host or OTG mode. Be aware the 5V may be
present onthese pins depending on system jumper
configuration.
These pinsare only 5V tolerant when configured for
USB modeapplications
This isthe breadboard connection header.
SamtecTSW-149-08-F-S-RA and TSW-149-F-S-RE
can be usedtogether to create a breadboard
connector.
See the Users Manual for more information
TP14
DNP
TP15
DNP
TP16
DNP
TP17
DNP
GND
TP4
DNP
TP5
DNP
TP6
DNP
TP7
DNP
TARGET_RESET
390
R27
TDO_SWO
TDI
TARGET_RXD
TARGET_TXD
VBUS
1
D-
2
D+
3
ID
4
GND
5
6781110
9
U7
ZX62D-AB-5P8
TMS_SWDIO
10kR110k
R2
TCK_SWDCLK
TMS_SWDIO
MCU_3V3
1 2
3 4
5 6
7 8
9 10
BSL
DNP
BSL_P9 BSL_P10
BSL_P1
BSL_P3
DNP
R3
DNP
0
R4
DNP
R5
DNP
DNP
R6
DNP
DNP
R7
DNP
DNP
R8
DNP
DNP
R9
DNP
DNP
R10
DNP
DNP
R11
DNP
DNP
R12
DNP
GND
UARTI2C
SPI
BSL_P1BSL_P1
BSL_P1
PA1
PA0PB2
PB3
PA2
PA3
PA4
PA5
TX
RXSCL
MISO
MOSI
SCL
CS
BSL_P3
BSL_P3BSL_P9
BSL_P10
BSL_P9
TGT_RST
+3V3 +3V3
DNP
R14
DNP
DNP
R13
DNP
+3V3 +3V3
0.1µF
C26
0.1µF
C24
TCK_SWDCLK
TMS_SWDIO
SDA
TCK_SWDCLK
www.ti.com
PCB Schematics
23
SLAU748B– October 2017–Revised September 2018
Submit Documentation Feedback
Copyright © 2017–2018, Texas Instruments Incorporated
SimpleLink™ Ethernet MSP432E401Y Microcontroller LaunchPad™
Development Kit (MSP-EXP432E401Y)
Figure 5. Ethernet LaunchPad Development Kit Schematics (1 of 5)
Page 24

1
1
2
2
3
3
4
4
5
5
6
6
D D
C C
B B
A A
2 6
10/17/2017
MCU023_MSP432E_Ethernet_Power.SchDoc
Sheet Title:
Size:
Mod. Date:
File:
Sheet: of
B
http://www.ti.com
Contact:
http://www.ti.com/support
MSP-EXP432E401YProject Title:
Designed for:Public Release
AssemblyVariant: 001
©TexasInstruments 2017
Drawn By:
Engineer:
Mike Pridgen
Texas Instrumentsand/or its licensors do not warrant the accuracy or completeness of this specification or any information contained therein. TexasInst ruments and/or its licensors do not
warrant that this designwill meet the specificatio ns, will be suitable foryour application or fit fo r any particular purpose,or will operate in an imp lementation. Texas Instrumentsand/or its
licensors donot warrant that the design is product ion worthy.You should completely validate and testyour design implementation to confirm the system functionality for your application.
Version controldisabledSVN Rev:
MCU023Number: Rev: 1.1
TID #: N/A
Orderable: MSP-EXP432E401Y
0.1µF
C16
0.1µF
C17
49.9
R21
49.9
R22
49.9
R23
49.9
R24
75
R32
75
R43
75
R4575R46
2
1
3
5
6
4
7
8
2.8V
U13
SLVU2.8-4.TBT
2
3
4
1
5
6
7
8
9
10
11
12
U14
1-406541-1
EN0RXIN
53
EN0RXIP
54
EN0TXON
56
EN0TXOP
57
RBIAS
59
WAKE64HIB
65
XOSC0
66
XOSC1
67
RST
70
OSC0
88
OSC1
89
U1C
MSP432E401YTPDTR
Green
1
2
D4
Green
1
2
D3
390
R31
390
R30
GND GND
PF4 PF0
PF4 PF0
1000pF
C1
4700pF
C31
1.0M
R47
GND
0.1µF
C18
0.1µF
C22
MCU_3V3
MCU_3V3
GNDGND
MCU_3V3
Place pull up resistorsand C16, C17 near MCU
EN0TXO_N
EN0RXI_P
EN0RXI_N
EN0TXO_P
EN0TXO_N
EN0RXI_P
EN0RXI_N
341
2
RESET_SW1
100
R51
GND
10k
R44
MCU_3V3
EN0RXI_P
EN0RXI_N
EN0TXO_N
EN0TXO_P
VDD
7
VDDA
8
VREFA+
9
GNDA
10
VDD
16
GND
17
VDD
26
VDD
28
VDD
39
VDD
47
GND
48
VDD
51
VDD
52
GND
55
GND
58
VBAT
68
VDD
69
VDD
79
GND
80
VDDC
87
VDD
90
VDD
101
VDD
113
GND
114
VDDC
115
VDD
122
U1D
MSP432E401YTPDTR
341
2
Wake_SW4
GND
WAKE
1.0M
R42
0
R39
0.1µF
C3
51
R38
GND
0
R41
0.1µF
C43
0.1µF
C42
0.1µF
C41
0.1µF
C40
MCU_3V3
GND
0.1µF
C4
1µF
C14
2.2µF
C15
GND
GND
2.0k
R49
1
3 4
2
G
G
25 MHz
Y1
12pF
C44
12pF
C45
12pF
C47
12pF
C48
GND GND
GND
GND
4.87k
R25
GND
1
IN
2
EN1
3
EN2
4
OC2
5
OUT2
6
OUT1
7
OC1
8
PAD
9
U4
TPS2052BDRBR
10k
R35
100k
R36
VBUS
100k
R26
GND
JP6
PQ4
PQ4
+5V
TARGET_VBUS
GND
TPS2052B providescurrent limit for main 5V power
Also providespower switching for USB host/OTG mode s
For Host/OTG:
PD6 configuredas USB0EPEN peripheral function
PQ4 configureas individual pin interrupt. Indicates
power faulton the USB bus. USB0PFLT peripheral pin
not availabledue to pin mux and use on BoosterPack s
USB Hostmode does not supply power to devices
when powered from aBoosterPack
ForApplications that do not use USB:
Configure PD6 as inputwith internal pull-down
enabled. Turns of power to TARGET_VBUS
1 2
3 4
5 6
JP1
DEBUG_VBUS
TARGET_VBUS
VBUS
VREF+
Wake
Place C18 andC22 near pin 2 and pin 7 of U10
For Ethernetexample Applications:
LED4 is defaultconfigured as Ethernet Link OK
LED3 is defaultconfigured as Ethernet TX/RX activi ty
User may re-configure thesepins / LED's for any
applicationusage
Power Control Jumper:
1) To power from Debug install jumper on pins 5-6
2) To power fromTarget USB installjumper on pins 3-4
3) To powerfrom BoosterPack 5V install jumper on pins1-2
This is also theoff position if BoosterPack does n ot
supplypower
When poweredfrom BoosterPack TPS2052B does not
provide current limit protection
When poweredby BoosterPack, USB host mode does not
supplypower to connected devices
TP9
DNP
TP10
DNP
TP11
DNP
TP13
DNP
JP2 +3V3
TP8
DNP
JP7
10k
R50
PD6
PD6
GND
EN0TXO_P
1
2
GND
3
32.768 kHz
Y3
VDDC
TP12
DNP
0.1µF
C46
TARGET_RESET
TGT_RST
1
2
3
5.0V
GND
GND
J13
1
2
3
3.3V
GND
GND
J12
GND
GND
+3V3
+5V
EPHYRX_P
EPHYTX_P
EPHYTX_N
EPHYRX_N
1
2
3
4
5
6
7
8 9
10
11
12
13
14
15
16
U10
HX1198FNLT
GND
GND
GND
PCB Schematics
www.ti.com
24
SLAU748B– October 2017–Revised September 2018
Submit Documentation Feedback
Copyright © 2017–2018, Texas Instruments Incorporated
SimpleLink™ Ethernet MSP432E401Y Microcontroller LaunchPad™
Development Kit (MSP-EXP432E401Y)
Figure 6. Ethernet LaunchPad Development Kit Schematics (2 of 5)
Page 25

1
1
2
2
3
3
4
4
5
5
6
6
D D
C C
B B
A A
3 6
10/12/2017
MCU023_XDS110_USB_Power.SchDoc
Sheet Title:
Size:
Mod. Date:
File:
Sheet: of
B
http://www.ti.com
Contact:
http://www.ti.com/support
MSP-EXP432E401YProject Title:
Designed for:Public Release
AssemblyVariant: 001
©TexasInstruments 2017
Drawn By:
Engineer:
Mike Pridgen
Texas Instrumentsand/or its licensors do not warrant the accuracy or completeness of this specification or any information contained therein. TexasInst ruments and/or its licensors do not
warrant that this designwill meet the specificatio ns, will be suitable foryour application or fit fo r any particular purpose,or will operate in an imp lementation. Texas Instrumentsand/or its
licensors donot warrant that the design is product ion worthy.You should completely validate and testyour design implementation to confirm the system functionality for your application.
Version controldisabledSVN Rev:
MCU023Number: Rev: 1.1
TID #: N/A
Orderable: MSP-EXP432E401Y
IO1
1
IO2
2
GND
3
IO3
4
IO4
5
VCC
6
IC102
TPD4E004DRYR
VBUS
1
D-
2
D+
3
ID
4
GND
5
678
11
10
9
USB101
XDS_VCC
XDS_ID
XDS_DP
XDS_DM
XDS_VBUS
XDS_ID
XDS_VBUS
XDS_DP
XDS_DM
XDS_VBUS VBUS_DETECT
IN
1
IN
2
OUT
3
OUT
4
FB
5
6
NC
7
EN
8
9
GND
IC101
TPS79601DRBR
2.2µF
C148
2.2µF
C149
15pF
C147
220k
R124
51k
R133
30k
R134
1.00M
R132
3300pF
C102
XDS_GND
XDS_GND
XDS_GND XDS_GND
XDS_GND
XDS_GND
XDS_GND
XDS_GND
330k
R122
0
R101
0
R102
www.ti.com
PCB Schematics
25
SLAU748B– October 2017–Revised September 2018
Submit Documentation Feedback
Copyright © 2017–2018, Texas Instruments Incorporated
SimpleLink™ Ethernet MSP432E401Y Microcontroller LaunchPad™
Development Kit (MSP-EXP432E401Y)
Figure 7. Ethernet LaunchPad Development Kit Schematics (3 of 5)
Page 26

1
1
2
2
3
3
4
4
5
5
6
6
D D
C C
B B
A A
4 6
10/12/2017
MCU023_XDS110_Target_Interface.SchDoc
Sheet Title:
Size:
Mod. Date:
File:
Sheet: of
B
http://www.ti.com
Contact:
http://www.ti.com/support
MSP-EXP432E401YProject Title:
Designed for:Public Release
AssemblyVariant: 001
©TexasInstruments 2017
Drawn By:
Engineer:
Mike Pridgen
Texas Instrumentsand/or its licensors do not warrant the accuracy or completeness of this specification or any information contained therein. TexasInst ruments and/or its licensors do not
warrant that this designwill meet the specificatio ns, will be suitable foryour application or fit fo r any particular purpose,or will operate in an imp lementation. Texas Instrumentsand/or its
licensors donot warrant that the design is product ion worthy.You should completely validate and testyour design implementation to confirm the system functionality for your application.
Version controldisabledSVN Rev:
MCU023Number: Rev: 1.1
TID #: N/A
Orderable: MSP-EXP432E401Y
1 2
3 4
5 6
7 8
9 10
J102
1 2
3 4
5 6
7 8
9 10
J11
XDS_VBUS
XDS_VCC
XDS_TXD
XDS_RXD
XDS_TMS_SWDIO
XDS_RESET_OUT
XDS_TCK_SWDCLK
XDS_TDO_SWO
XDS_TDI
GND
DEBUG_VBUS +3V3
IO1
1
IO2
2
IO3
3
GND
4
IO4
5
IO5
6
IO6
7
VCC
8
U108
TPD6E004RSER
IO1
1
IO2
2
IO3
3
GND
4
IO4
5
IO5
6
IO6
7
VCC
8
U8
TPD6E004RSER
GND
GND
XDS_VCC
+3V3XDS_VCC
3.3k
R158
XDS_GND
XDS_GND
XDS_GND
RXD
TXD
TMS_SWDIO
TCK_SWDCLK
TDO_SWO
TDI
TMS_SWDIO
TCK_SWDCLK
TDO_SWO
TDI
TARGET_RXD
TARGET_TXD
TGT_RST
12
34
56
78
910
1112
1314
15
17
19
16
18
20
J101
PCB Schematics
www.ti.com
26
SLAU748B– October 2017–Revised September 2018
Submit Documentation Feedback
Copyright © 2017–2018, Texas Instruments Incorporated
SimpleLink™ Ethernet MSP432E401Y Microcontroller LaunchPad™
Development Kit (MSP-EXP432E401Y)
Figure 8. Ethernet LaunchPad Development Kit Schematics (4 of 5)
Page 27

1
1
2
2
3
3
4
4
5
5
6
6
D D
C C
B B
A A
5 6
10/17/2017
MCU023_XDS110_Debug_Probe.SchDoc
Sheet Title:
Size:
Mod. Date:
File:
Sheet: of
B
http://www.ti.com
Contact:
http://www.ti.com/support
MSP-EXP432E401YProject Title:
Designed for:Public Release
AssemblyVariant: 001
©TexasInstruments 2017
Drawn By:
Engineer:
Mike Pridgen
Texas Instrumentsand/or its licensors do not warrant the accuracy or completeness of this specification or any information contained therein. TexasInst ruments and/or its licensors do not
warrant that this designwill meet the specificatio ns, will be suitable foryour application or fit fo r any particular purpose,or will operate in an imp lementation. Texas Instrumentsand/or its
licensors donot warrant that the design is product ion worthy.You should completely validate and testyour design implementation to confirm the system functionality for your application.
Version controldisabledSVN Rev:
MCU023Number: Rev: 1.1
TID #: N/A
Orderable: MSP-EXP432E401Y
PD0
1
PD1
2
PD2
3
PD3
4
PE3
12
PE2
13
PE1
14
PE0
15
PK0
18
PK1
19
PK2
20
PK3
21
PC7
22
PC6
23
PC5
24
PC4
25
PH0
29
PH1
30
PH2
31
PH3
32
PA0
33
PA1
34
PA2
35
PA3
36
PA4
37
PA5
38
PA6
40
PA7
41
PF0
42
PF1
43
PF2
44
PF3
45
PF4
46
PG0
49
PG1
50
PK7
60
PK6
61
PK5
62
PK4
63
PB2
91
PB3
92
PB0
95
PB1
96
PC3/TDO/SWO
97
PC2/TDI
98
PC1/TMS/SWDIO
99
PC0/TCK/SWCLK
100
PJ0
116
PJ1
117
PB5
120
PB4
121
PE4
123
PE5
124
PD4
125
PD5
126
PD6
127
PD7
128
IC106A
TM4C129ENCPDTI3R
PQ0
5
PQ1
6
PQ2
11
PQ3
27
PM7
71
PM6
72
PM5
73
PM4
74
PM3
75
PM2
76
PM1
77
PM0
78
PL0
81
PL1
82
PL2
83
PL3
84
PL4
85
PL5
86
PL7
93
PL6
94
PQ4
102
PP2
103
PP3
104
PP4
105
PP5
106
PN0
107
PN1
108
PN2
109
PN3
110
PN4
111
PN5
112
PP0
118
PP1
119
IC106B
TM4C129ENCPDTI3R
EN0RXIN
53
EN0RXIP
54
EN0TXON
56
EN0TXOP
57
RBIAS
59
WAKE64HIB
65
XOSC0
66
XOSC1
67
RST
70
OSC0
88
OSC1
89
IC106C
TM4C129ENCPDTI3R
VDD
7
VDDA
8
VREFA+
9
GNDA
10
VDD
16
GND
17
VDD
26
VDD
28
VDD
39
VDD
47
GND
48
VDD
51
VDD
52
GND
55
GND
58
VBAT
68
VDD
69
VDD
79
GND
80
VDDC
87
VDD
90
VDD
101
VDD
113
GND
114
VDDC
115
VDD
122
IC106D
TM4C129ENCPDTI3R
XDS_RXD
XDS_TXD
XDS_TCK_SWDCLK
XDS_TMS_SWDIO
XDS_TDO_SWO
XDS_TDI
XDS_RESET_OUT
ITCK
ITMS
ITDI
ITDO
XDS_ID
XDS_VBUS
VBUS_DETECT
XDS_VCC
XDS_VCC
IC6A
2.5V
XDS_VCC
XDS_VCC
XDS_DP
XDS_DM
1
2
3
4
5 6
7
8
9
10
J108
TC2050-IDC-NL-FP
XDS_VCC
XDS_VCC
0.1µF
C139
0.1µF
C138
0.1µF
C132
0.1µF
C143
0.1µF
C146
12pF
C133
12pF
C134
1µF
C140
1µF
C142
1µF
C144
0.01µF
C135
0.01µF
C136
0.01µF
C137
0.01µF
C141
0.01µF
C150
0.01µF
C159
2.2µF
C145
10k
R117
DNP
R121
DNP
100
R120
100
R166
4.87k
R128
51
R131
470
R123
470
R125
XDS_GND
XDS_GND XDS_GND
XDS_GNDXDS_GND
XDS_GNDXDS_GND
XDS_GND
XDS_GND
XDS_GND
XDS_GND
XDS_GND
XDS_GND
XDS_GND
XDS_GND
XDS_GND
XDS_GND
Red
1
2
LED102
Green
1
2
LED101
1.0k
R118
1.0k
R108
1.0k
R109
1.0k
R110
1.0k
R111
XDS_VCC
1
3 4
2
G
G
16 MHz
Q101
XDS_GND
www.ti.com
PCB Schematics
27
SLAU748B– October 2017–Revised September 2018
Submit Documentation Feedback
Copyright © 2017–2018, Texas Instruments Incorporated
SimpleLink™ Ethernet MSP432E401Y Microcontroller LaunchPad™
Development Kit (MSP-EXP432E401Y)
Figure 9. Ethernet LaunchPad Development Kit Schematics (5 of 5)
Page 28

Revision History
www.ti.com
Revision History
NOTE: Page numbers for previous revisions may differ from page numbers in the current version.
Changes from July 20, 2018 to September 11, 2018 ...................................................................................................... Page
• Clarified function of JP1 in the first paragraph of Section 2.1.6.4, Other Headers and Jumpers ............................. 17
• Added the last sentence in Section 2.3.2, External Debugger .................................................................... 21
28
Revision History
SLAU748B–October 2017–Revised September 2018
Copyright © 2017–2018, Texas Instruments Incorporated
Submit Documentation Feedback
Page 29

STANDARD TERMS FOR EVALUATION MODULES
1. Delivery: TI delivers TI evaluation boards, kits, or modules, including any accompanying demonstration software, components, and/or
documentation which may be provided together or separately (collectively, an “EVM” or “EVMs”) to the User (“User”) in accordance
with the terms set forth herein. User's acceptance of the EVM is expressly subject to the following terms.
1.1 EVMs are intended solely for product or software developers for use in a research and development setting to facilitate feasibility
evaluation, experimentation, or scientific analysis of TI semiconductors products. EVMs have no direct function and are not
finished products. EVMs shall not be directly or indirectly assembled as a part or subassembly in any finished product. For
clarification, any software or software tools provided with the EVM (“Software”) shall not be subject to the terms and conditions
set forth herein but rather shall be subject to the applicable terms that accompany such Software
1.2 EVMs are not intended for consumer or household use. EVMs may not be sold, sublicensed, leased, rented, loaned, assigned,
or otherwise distributed for commercial purposes by Users, in whole or in part, or used in any finished product or production
system.
2 Limited Warranty and Related Remedies/Disclaimers:
2.1 These terms do not apply to Software. The warranty, if any, for Software is covered in the applicable Software License
Agreement.
2.2 TI warrants that the TI EVM will conform to TI's published specifications for ninety (90) days after the date TI delivers such EVM
to User. Notwithstanding the foregoing, TI shall not be liable for a nonconforming EVM if (a) the nonconformity was caused by
neglect, misuse or mistreatment by an entity other than TI, including improper installation or testing, or for any EVMs that have
been altered or modified in any way by an entity other than TI, (b) the nonconformity resulted from User's design, specifications
or instructions for such EVMs or improper system design, or (c) User has not paid on time. Testing and other quality control
techniques are used to the extent TI deems necessary. TI does not test all parameters of each EVM.
User's claims against TI under this Section 2 are void if User fails to notify TI of any apparent defects in the EVMs within ten (10)
business days after delivery, or of any hidden defects with ten (10) business days after the defect has been detected.
2.3 TI's sole liability shall be at its option to repair or replace EVMs that fail to conform to the warranty set forth above, or credit
User's account for such EVM. TI's liability under this warranty shall be limited to EVMs that are returned during the warranty
period to the address designated by TI and that are determined by TI not to conform to such warranty. If TI elects to repair or
replace such EVM, TI shall have a reasonable time to repair such EVM or provide replacements. Repaired EVMs shall be
warranted for the remainder of the original warranty period. Replaced EVMs shall be warranted for a new full ninety (90) day
warranty period.
3 Regulatory Notices:
3.1 United States
3.1.1 Notice applicable to EVMs not FCC-Approved:
FCC NOTICE: This kit is designed to allow product developers to evaluate electronic components, circuitry, or software
associated with the kit to determine whether to incorporate such items in a finished product and software developers to write
software applications for use with the end product. This kit is not a finished product and when assembled may not be resold or
otherwise marketed unless all required FCC equipment authorizations are first obtained. Operation is subject to the condition
that this product not cause harmful interference to licensed radio stations and that this product accept harmful interference.
Unless the assembled kit is designed to operate under part 15, part 18 or part 95 of this chapter, the operator of the kit must
operate under the authority of an FCC license holder or must secure an experimental authorization under part 5 of this chapter.
3.1.2 For EVMs annotated as FCC – FEDERAL COMMUNICATIONS COMMISSION Part 15 Compliant:
CAUTION
This device complies with part 15 of the FCC Rules. Operation is subject to the following two conditions: (1) This device may not
cause harmful interference, and (2) this device must accept any interference received, including interference that may cause
undesired operation.
Changes or modifications not expressly approved by the party responsible for compliance could void the user's authority to
operate the equipment.
FCC Interference Statement for Class A EVM devices
NOTE: This equipment has been tested and found to comply with the limits for a Class A digital device, pursuant to part 15 of
the FCC Rules. These limits are designed to provide reasonable protection against harmful interference when the equipment is
operated in a commercial environment. This equipment generates, uses, and can radiate radio frequency energy and, if not
installed and used in accordance with the instruction manual, may cause harmful interference to radio communications.
Operation of this equipment in a residential area is likely to cause harmful interference in which case the user will be required to
correct the interference at his own expense.
Page 30

FCC Interference Statement for Class B EVM devices
NOTE: This equipment has been tested and found to comply with the limits for a Class B digital device, pursuant to part 15 of
the FCC Rules. These limits are designed to provide reasonable protection against harmful interference in a residential
installation. This equipment generates, uses and can radiate radio frequency energy and, if not installed and used in accordance
with the instructions, may cause harmful interference to radio communications. However, there is no guarantee that interference
will not occur in a particular installation. If this equipment does cause harmful interference to radio or television reception, which
can be determined by turning the equipment off and on, the user is encouraged to try to correct the interference by one or more
of the following measures:
• Reorient or relocate the receiving antenna.
• Increase the separation between the equipment and receiver.
• Connect the equipment into an outlet on a circuit different from that to which the receiver is connected.
• Consult the dealer or an experienced radio/TV technician for help.
3.2 Canada
3.2.1 For EVMs issued with an Industry Canada Certificate of Conformance to RSS-210 or RSS-247
Concerning EVMs Including Radio Transmitters:
This device complies with Industry Canada license-exempt RSSs. Operation is subject to the following two conditions:
(1) this device may not cause interference, and (2) this device must accept any interference, including interference that may
cause undesired operation of the device.
Concernant les EVMs avec appareils radio:
Le présent appareil est conforme aux CNR d'Industrie Canada applicables aux appareils radio exempts de licence. L'exploitation
est autorisée aux deux conditions suivantes: (1) l'appareil ne doit pas produire de brouillage, et (2) l'utilisateur de l'appareil doit
accepter tout brouillage radioélectrique subi, même si le brouillage est susceptible d'en compromettre le fonctionnement.
Concerning EVMs Including Detachable Antennas:
Under Industry Canada regulations, this radio transmitter may only operate using an antenna of a type and maximum (or lesser)
gain approved for the transmitter by Industry Canada. To reduce potential radio interference to other users, the antenna type
and its gain should be so chosen that the equivalent isotropically radiated power (e.i.r.p.) is not more than that necessary for
successful communication. This radio transmitter has been approved by Industry Canada to operate with the antenna types
listed in the user guide with the maximum permissible gain and required antenna impedance for each antenna type indicated.
Antenna types not included in this list, having a gain greater than the maximum gain indicated for that type, are strictly prohibited
for use with this device.
Concernant les EVMs avec antennes détachables
Conformément à la réglementation d'Industrie Canada, le présent émetteur radio peut fonctionner avec une antenne d'un type et
d'un gain maximal (ou inférieur) approuvé pour l'émetteur par Industrie Canada. Dans le but de réduire les risques de brouillage
radioélectrique à l'intention des autres utilisateurs, il faut choisir le type d'antenne et son gain de sorte que la puissance isotrope
rayonnée équivalente (p.i.r.e.) ne dépasse pas l'intensité nécessaire à l'établissement d'une communication satisfaisante. Le
présent émetteur radio a été approuvé par Industrie Canada pour fonctionner avec les types d'antenne énumérés dans le
manuel d’usage et ayant un gain admissible maximal et l'impédance requise pour chaque type d'antenne. Les types d'antenne
non inclus dans cette liste, ou dont le gain est supérieur au gain maximal indiqué, sont strictement interdits pour l'exploitation de
l'émetteur
3.3 Japan
3.3.1 Notice for EVMs delivered in Japan: Please see http://www.tij.co.jp/lsds/ti_ja/general/eStore/notice_01.page 日本国内に
輸入される評価用キット、ボードについては、次のところをご覧ください。
http://www.tij.co.jp/lsds/ti_ja/general/eStore/notice_01.page
3.3.2 Notice for Users of EVMs Considered “Radio Frequency Products” in Japan: EVMs entering Japan may not be certified
by TI as conforming to Technical Regulations of Radio Law of Japan.
If User uses EVMs in Japan, not certified to Technical Regulations of Radio Law of Japan, User is required to follow the
instructions set forth by Radio Law of Japan, which includes, but is not limited to, the instructions below with respect to EVMs
(which for the avoidance of doubt are stated strictly for convenience and should be verified by User):
1. Use EVMs in a shielded room or any other test facility as defined in the notification #173 issued by Ministry of Internal
Affairs and Communications on March 28, 2006, based on Sub-section 1.1 of Article 6 of the Ministry’s Rule for
Enforcement of Radio Law of Japan,
2. Use EVMs only after User obtains the license of Test Radio Station as provided in Radio Law of Japan with respect to
EVMs, or
3. Use of EVMs only after User obtains the Technical Regulations Conformity Certification as provided in Radio Law of Japan
with respect to EVMs. Also, do not transfer EVMs, unless User gives the same notice above to the transferee. Please note
that if User does not follow the instructions above, User will be subject to penalties of Radio Law of Japan.
Page 31

【無線電波を送信する製品の開発キットをお使いになる際の注意事項】 開発キットの中には技術基準適合証明を受けて
いないものがあります。 技術適合証明を受けていないもののご使用に際しては、電波法遵守のため、以下のいずれかの
措置を取っていただく必要がありますのでご注意ください。
1. 電波法施行規則第6条第1項第1号に基づく平成18年3月28日総務省告示第173号で定められた電波暗室等の試験設備でご使用
いただく。
2. 実験局の免許を取得後ご使用いただく。
3. 技術基準適合証明を取得後ご使用いただく。
なお、本製品は、上記の「ご使用にあたっての注意」を譲渡先、移転先に通知しない限り、譲渡、移転できないものとします。
上記を遵守頂けない場合は、電波法の罰則が適用される可能性があることをご留意ください。 日本テキサス・イ
ンスツルメンツ株式会社
東京都新宿区西新宿6丁目24番1号
西新宿三井ビル
3.3.3 Notice for EVMs for Power Line Communication: Please see http://www.tij.co.jp/lsds/ti_ja/general/eStore/notice_02.page
電力線搬送波通信についての開発キットをお使いになる際の注意事項については、次のところをご覧ください。http:/
/www.tij.co.jp/lsds/ti_ja/general/eStore/notice_02.page
3.4 European Union
3.4.1 For EVMs subject to EU Directive 2014/30/EU (Electromagnetic Compatibility Directive):
This is a class A product intended for use in environments other than domestic environments that are connected to a
low-voltage power-supply network that supplies buildings used for domestic purposes. In a domestic environment this
product may cause radio interference in which case the user may be required to take adequate measures.
4 EVM Use Restrictions and Warnings:
4.1 EVMS ARE NOT FOR USE IN FUNCTIONAL SAFETY AND/OR SAFETY CRITICAL EVALUATIONS, INCLUDING BUT NOT
LIMITED TO EVALUATIONS OF LIFE SUPPORT APPLICATIONS.
4.2 User must read and apply the user guide and other available documentation provided by TI regarding the EVM prior to handling
or using the EVM, including without limitation any warning or restriction notices. The notices contain important safety information
related to, for example, temperatures and voltages.
4.3 Safety-Related Warnings and Restrictions:
4.3.1 User shall operate the EVM within TI’s recommended specifications and environmental considerations stated in the user
guide, other available documentation provided by TI, and any other applicable requirements and employ reasonable and
customary safeguards. Exceeding the specified performance ratings and specifications (including but not limited to input
and output voltage, current, power, and environmental ranges) for the EVM may cause personal injury or death, or
property damage. If there are questions concerning performance ratings and specifications, User should contact a TI
field representative prior to connecting interface electronics including input power and intended loads. Any loads applied
outside of the specified output range may also result in unintended and/or inaccurate operation and/or possible
permanent damage to the EVM and/or interface electronics. Please consult the EVM user guide prior to connecting any
load to the EVM output. If there is uncertainty as to the load specification, please contact a TI field representative.
During normal operation, even with the inputs and outputs kept within the specified allowable ranges, some circuit
components may have elevated case temperatures. These components include but are not limited to linear regulators,
switching transistors, pass transistors, current sense resistors, and heat sinks, which can be identified using the
information in the associated documentation. When working with the EVM, please be aware that the EVM may become
very warm.
4.3.2 EVMs are intended solely for use by technically qualified, professional electronics experts who are familiar with the
dangers and application risks associated with handling electrical mechanical components, systems, and subsystems.
User assumes all responsibility and liability for proper and safe handling and use of the EVM by User or its employees,
affiliates, contractors or designees. User assumes all responsibility and liability to ensure that any interfaces (electronic
and/or mechanical) between the EVM and any human body are designed with suitable isolation and means to safely
limit accessible leakage currents to minimize the risk of electrical shock hazard. User assumes all responsibility and
liability for any improper or unsafe handling or use of the EVM by User or its employees, affiliates, contractors or
designees.
4.4 User assumes all responsibility and liability to determine whether the EVM is subject to any applicable international, federal,
state, or local laws and regulations related to User’s handling and use of the EVM and, if applicable, User assumes all
responsibility and liability for compliance in all respects with such laws and regulations. User assumes all responsibility and
liability for proper disposal and recycling of the EVM consistent with all applicable international, federal, state, and local
requirements.
5. Accuracy of Information: To the extent TI provides information on the availability and function of EVMs, TI attempts to be as accurate
as possible. However, TI does not warrant the accuracy of EVM descriptions, EVM availability or other information on its websites as
accurate, complete, reliable, current, or error-free.
Page 32

6. Disclaimers:
6.1 EXCEPT AS SET FORTH ABOVE, EVMS AND ANY MATERIALS PROVIDED WITH THE EVM (INCLUDING, BUT NOT
LIMITED TO, REFERENCE DESIGNS AND THE DESIGN OF THE EVM ITSELF) ARE PROVIDED "AS IS" AND "WITH ALL
FAULTS." TI DISCLAIMS ALL OTHER WARRANTIES, EXPRESS OR IMPLIED, REGARDING SUCH ITEMS, INCLUDING BUT
NOT LIMITED TO ANY EPIDEMIC FAILURE WARRANTY OR IMPLIED WARRANTIES OF MERCHANTABILITY OR FITNESS
FOR A PARTICULAR PURPOSE OR NON-INFRINGEMENT OF ANY THIRD PARTY PATENTS, COPYRIGHTS, TRADE
SECRETS OR OTHER INTELLECTUAL PROPERTY RIGHTS.
6.2 EXCEPT FOR THE LIMITED RIGHT TO USE THE EVM SET FORTH HEREIN, NOTHING IN THESE TERMS SHALL BE
CONSTRUED AS GRANTING OR CONFERRING ANY RIGHTS BY LICENSE, PATENT, OR ANY OTHER INDUSTRIAL OR
INTELLECTUAL PROPERTY RIGHT OF TI, ITS SUPPLIERS/LICENSORS OR ANY OTHER THIRD PARTY, TO USE THE
EVM IN ANY FINISHED END-USER OR READY-TO-USE FINAL PRODUCT, OR FOR ANY INVENTION, DISCOVERY OR
IMPROVEMENT, REGARDLESS OF WHEN MADE, CONCEIVED OR ACQUIRED.
7. USER'S INDEMNITY OBLIGATIONS AND REPRESENTATIONS. USER WILL DEFEND, INDEMNIFY AND HOLD TI, ITS
LICENSORS AND THEIR REPRESENTATIVES HARMLESS FROM AND AGAINST ANY AND ALL CLAIMS, DAMAGES, LOSSES,
EXPENSES, COSTS AND LIABILITIES (COLLECTIVELY, "CLAIMS") ARISING OUT OF OR IN CONNECTION WITH ANY
HANDLING OR USE OF THE EVM THAT IS NOT IN ACCORDANCE WITH THESE TERMS. THIS OBLIGATION SHALL APPLY
WHETHER CLAIMS ARISE UNDER STATUTE, REGULATION, OR THE LAW OF TORT, CONTRACT OR ANY OTHER LEGAL
THEORY, AND EVEN IF THE EVM FAILS TO PERFORM AS DESCRIBED OR EXPECTED.
8. Limitations on Damages and Liability:
8.1 General Limitations. IN NO EVENT SHALL TI BE LIABLE FOR ANY SPECIAL, COLLATERAL, INDIRECT, PUNITIVE,
INCIDENTAL, CONSEQUENTIAL, OR EXEMPLARY DAMAGES IN CONNECTION WITH OR ARISING OUT OF THESE
TERMS OR THE USE OF THE EVMS , REGARDLESS OF WHETHER TI HAS BEEN ADVISED OF THE POSSIBILITY OF
SUCH DAMAGES. EXCLUDED DAMAGES INCLUDE, BUT ARE NOT LIMITED TO, COST OF REMOVAL OR
REINSTALLATION, ANCILLARY COSTS TO THE PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES, RETESTING,
OUTSIDE COMPUTER TIME, LABOR COSTS, LOSS OF GOODWILL, LOSS OF PROFITS, LOSS OF SAVINGS, LOSS OF
USE, LOSS OF DATA, OR BUSINESS INTERRUPTION. NO CLAIM, SUIT OR ACTION SHALL BE BROUGHT AGAINST TI
MORE THAN TWELVE (12) MONTHS AFTER THE EVENT THAT GAVE RISE TO THE CAUSE OF ACTION HAS
OCCURRED.
8.2 Specific Limitations. IN NO EVENT SHALL TI'S AGGREGATE LIABILITY FROM ANY USE OF AN EVM PROVIDED
HEREUNDER, INCLUDING FROM ANY WARRANTY, INDEMITY OR OTHER OBLIGATION ARISING OUT OF OR IN
CONNECTION WITH THESE TERMS, , EXCEED THE TOTAL AMOUNT PAID TO TI BY USER FOR THE PARTICULAR
EVM(S) AT ISSUE DURING THE PRIOR TWELVE (12) MONTHS WITH RESPECT TO WHICH LOSSES OR DAMAGES ARE
CLAIMED. THE EXISTENCE OF MORE THAN ONE CLAIM SHALL NOT ENLARGE OR EXTEND THIS LIMIT.
9. Return Policy. Except as otherwise provided, TI does not offer any refunds, returns, or exchanges. Furthermore, no return of EVM(s)
will be accepted if the package has been opened and no return of the EVM(s) will be accepted if they are damaged or otherwise not in
a resalable condition. If User feels it has been incorrectly charged for the EVM(s) it ordered or that delivery violates the applicable
order, User should contact TI. All refunds will be made in full within thirty (30) working days from the return of the components(s),
excluding any postage or packaging costs.
10. Governing Law: These terms and conditions shall be governed by and interpreted in accordance with the laws of the State of Texas,
without reference to conflict-of-laws principles. User agrees that non-exclusive jurisdiction for any dispute arising out of or relating to
these terms and conditions lies within courts located in the State of Texas and consents to venue in Dallas County, Texas.
Notwithstanding the foregoing, any judgment may be enforced in any United States or foreign court, and TI may seek injunctive relief
in any United States or foreign court.
Mailing Address: Texas Instruments, Post Office Box 655303, Dallas, Texas 75265
Copyright © 2018, Texas Instruments Incorporated
Page 33

IMPORTANT NOTICE AND DISCLAIMER
TI PROVIDES TECHNICAL AND RELIABILITY DATA (INCLUDING DATASHEETS), DESIGN RESOURCES (INCLUDING REFERENCE
DESIGNS), APPLICATION OR OTHER DESIGN ADVICE, WEB TOOLS, SAFETY INFORMATION, AND OTHER RESOURCES “AS IS”
AND WITH ALL FAULTS, AND DISCLAIMS ALL WARRANTIES, EXPRESS AND IMPLIED, INCLUDING WITHOUT LIMITATION ANY
IMPLIED WARRANTIES OF MERCHANTABILITY, FITNESS FOR A PARTICULAR PURPOSE OR NON-INFRINGEMENT OF THIRD
PARTY INTELLECTUAL PROPERTY RIGHTS.
These resources are intended for skilled developers designing with TI products. You are solely responsible for (1) selecting the appropriate
TI products for your application, (2) designing, validating and testing your application, and (3) ensuring your application meets applicable
standards, and any other safety, security, or other requirements. These resources are subject to change without notice. TI grants you
permission to use these resources only for development of an application that uses the TI products described in the resource. Other
reproduction and display of these resources is prohibited. No license is granted to any other TI intellectual property right or to any third
party intellectual property right. TI disclaims responsibility for, and you will fully indemnify TI and its representatives against, any claims,
damages, costs, losses, and liabilities arising out of your use of these resources.
TI’s products are provided subject to TI’s Terms of Sale (www.ti.com/legal/termsofsale.html) or other applicable terms available either on
ti.com or provided in conjunction with such TI products. TI’s provision of these resources does not expand or otherwise alter TI’s applicable
warranties or warranty disclaimers for TI products.
Mailing Address: Texas Instruments, Post Office Box 655303, Dallas, Texas 75265
Copyright © 2018, Texas Instruments Incorporated
 Loading...
Loading...