

Page 1

CC1000
CC1000
Single Chip Very Low Power RF Transceiver
Applications
• Very low power UHF wireless data
transmitters and receivers
• 315 / 433 / 868 and 915 MHz ISM/SRD
band systems
• RKE – Two-way Remote Keyless Entry
Product Description
CC1000
ceiver designed for very low power and
very low voltage wireless applications. The
circuit is mainly intended for the ISM
(Industrial, Scientific and Medical) and
SRD (Short Range Device) frequency
bands at 315, 433, 868 and 915 MHz, but
can easily be programmed for operation at
other frequencies in the 300-1000 MHz
range.
The main operating parameters of
can be programmed via a serial bus, thus
making
use transceiver. In a typical system
CC1000
microcontroller and a few external passive
components.
is a true single-chip UHF trans-
CC1000
CC1000
will be used together with a
a very flexible and easy to
• Home automation
• Wireless alarm and security systems
• AMR – Automatic Meter Reading
• Low power telemetry
• Game Controllers and advanced toys
CC1000
technology in 0.35 µm CMOS.
is based on Chipcon’s SmartRF®
Features
• True single chip UHF RF transceiver
• Very low current consumption
• Frequency range 300 – 1000 MHz
• Integrated bit synchroniser
• High sensitivity (typical -110 dBm at 2.4
kBaud)
• Programmable output power –20 to
10 dBm
• Small size (TSSOP-28 or UltraCSP™
package)
• Low supply voltage (2.1 V to 3.6 V)
• Very few external components required
• No external RF switch / IF filter
required
• RSSI output
• Single port antenna connection
• FSK data rate up to 76.8 kBaud
• Complies with EN 300 220 and FCC
CFR47 part 15
• Programmable frequency in 250 Hz
steps makes crystal temperature drift
compensation possible without TCXO
• Suitable for frequency hopping
protocols
• Development kit available
• Easy-to-use software for generating the
CC1000
SWRS048 Page 1 of 53
configuration data
Page 2

CC1000
Table of Contents
1. Absolute Maximum Ratings................................................................................... 4
2. Operating Conditions ............................................................................................. 4
3. Electrical Specifications......................................................................................... 4
4. Pin Assignment.......................................................................................................8
5. Circuit Description..................................................................................................9
6. Application Circuit ................................................................................................ 10
6.1 Input / output matching............................................................................................... 10
6.2 VCO inductor.............................................................................................................. 10
6.3 Additional filtering.......................................................................................................10
6.4 Power supply decoupling ........................................................................................... 10
7. Configuration Overview ....................................................................................... 12
8. Configuration Software ........................................................................................ 12
9. 3-wire Serial Configuration Interface ..................................................................13
10. Microcontroller Interface.................................................................................... 15
10.1 Connecting the microcontroller ................................................................................ 15
11. Signal interface ................................................................................................... 16
11.1 Manchester encoding and decoding ........................................................................ 16
12. Bit synchroniser and data decision ..................................................................19
13. Receiver sensitivity versus data rate and frequency separation.................... 22
14. Frequency programming.................................................................................... 23
15. Recommended RX settings for ISM frequencies .............................................24
16. VCO ...................................................................................................................... 25
17. VCO and PLL self-calibration............................................................................. 25
18. VCO and LNA current control ............................................................................ 28
19. Power management ............................................................................................ 28
20. Input / Output Matching...................................................................................... 31
21. Output power programming .............................................................................. 32
22. RSSI output ........................................................................................................33
SWRS048 Page 2 of 53
Page 3

CC1000
23. IF output ............................................................................................................. 34
24. Crystal oscillator.................................................................................................35
25. Optional LC Filter................................................................................................36
26. System Considerations and Guidelines............................................................ 37
26.1 SRD regulations ....................................................................................................... 37
26.2 Low cost systems..................................................................................................... 37
26.3 Battery operated systems......................................................................................... 37
26.4 Crystal drift compensation........................................................................................ 37
26.5 High reliability systems............................................................................................. 37
26.6 Frequency hopping spread spectrum systems......................................................... 37
27. PCB Layout Recommendations......................................................................... 38
28. Antenna Considerations..................................................................................... 38
29. Configuration registers ...................................................................................... 39
30. Package Description (TSSOP-28) ...................................................................... 48
31. Package Description (UltraCSP™) .................................................................... 49
32. Plastic Tube Specification ................................................................................. 51
33. Carrier Tape and Reel Specification.................................................................. 51
34. Ordering Information .......................................................................................... 52
35. General Information............................................................................................ 52
36. Address Information........................................................................................... 53
SWRS048 Page 3 of 53
Page 4

CC1000
1. Absolute Maximum Ratings
Parameter Min. Max. Units Condition
Supply voltage, VDD -0.3 5.0 V
Voltage on any pin -0.3 VDD+0.3,
Input RF level 10 dBm
Storage temperature range
(TSSOP)
Shelf life (UltraCSP™) 1 year Room temperature and oxygen
Reflow soldering temperature
(TSSOP)
Peak reflow soldering temperature
(UltraCSP™)
-50 150
260
251
Under no circumstances the absolute
maximum ratings given above should be
violated. Stress exceeding one or more of
max 5.0
the limiting values may cause permanent
damage to the device.
Caution! ESD sensitive device.
Precaution should be used when handling
the device in order to prevent permanent
damage.
2. Operating Conditions
Parameter
RF Frequency Range 300
Operating ambient temperature range -40 85
Min. Typ. Max. Unit Condition / Note
1000 MHz Programmable in steps of 250 Hz
V
°C
°C
°C
°C
IPC/JEDEC J-STD-020B
IPC/JEDEC J-STD-020A
free cabinet
Supply voltage
2.1 3.0 3.6 V
3. Electrical Specifications
Tc = 25°C, VDD = 3.0 V if nothing else stated
Parameter
Transmit Section
Transmit data rate
Binary FSK frequency separation
Min. Typ. Max. Unit Condition / Note
0.6 76.8 kBaud NRZ or Manchester encoding.
0 65 kHz
Note: The same supply voltage
should be used for digital (DVDD)
and analogue (AVDD) power.
76.8 kBaud equals 76.8 kbit/s
using NRZ coding. See page 16.
The frequency separation is
programmable in 250 Hz steps.
65 kHz is the maximum
guaranteed separation at 1 MHz
reference frequency. Larger
separations can be achieved at
higher reference frequencies.
SWRS048 Page 4 of 53
Page 5
CC1000
Parameter
Output power
433 MHz
868 MHz
RF output impedance
433/868 MHz
Harmonics
Receive Section
Receiver Sensitivity, 433 MHz
Optimum sensitivity (9.3 mA)
Low current consumption (7.4 mA)
Receiver Sensitivity, 868 MHz
Optimum sensitivity (11.8 mA)
Low current consumption (9.6 mA)
System noise bandwidth 30 kHz 2.4 kBaud, Manchester coded
Cascaded noise figure
433/868 MHz
Saturation
Input IP3
Blocking
LO leakage -57 dBm
Input impedance
Turn on time 11 128 Baud The turn-on time is determined by
IF Section
Intermediate frequency (IF)
IF bandwidth
RSSI dynamic range
RSSI accuracy
Min. Typ. Max. Unit Condition / Note
-20
-20
140 / 80
-20 dBc An external LC or SAW filter
12/13 dB
10 dBm 2.4 kBaud, Manchester coded
-18 dBm From LNA to IF output
40 dBc At +/- 1 MHz
150
175 kHz
-105 -50 dBm
-110
-109
-107
-105
88-j26
70-j26
52-j7
52-j4
± 6
10
5
10.7
dB See p.33 for details
dBm
dBm
Ω
dBm
dBm
dBm
dBm
Ω
Ω
Ω
Ω
kHz
MHz
Delivered to 50 Ω load.
The output power is
programmable.
Transmit mode. For matching
details see “Input/ output
matching” p.31.
should be used to reduce
harmonics emission to comply
with SRD requirements. See
p.36.
2.4 kBaud, Manchester coded
data, 64 kHz frequency
separation, BER = 10
See Table 6 and Table 7 page 22
for typical sensitivity figures at
other data rates.
data
data, BER = 10
Receive mode, series equivalent
at 315 MHz
at 433 MHz
at 868 MHz.
At 915 MHz
For matching details see “Input/
output matching” p. 31.
the demodulator settling time,
which is programmable. See p.
19
Internal IF filter
External IF filter
-3
-3
SWRS048 Page 5 of 53
Page 6
Parameter
RSSI linearity
Frequency Synthesiser
Section
Crystal Oscillator Frequency
Crystal frequency accuracy
requirement
Crystal operation
Crystal load capacitance
Crystal oscillator start-up time 5
Output signal phase noise
PLL lock time (RX / TX turn time)
PLL turn-on time, crystal oscillator
on in power down mode
Min. Typ. Max. Unit Condition / Note
3 16 MHz Crystal frequency can be 3-4, 6-8
Parallel C171 and C181 are loading
12
12
12
-85 dBc/Hz At 100 kHz offset from carrier
200
250
± 2
± 50
± 25
22
16
16
1.5
2
dB
ppm 433 MHz
30
30
16
ms
or 9-16 MHz. Recommended
frequencies are 3.6864, 7.3728,
11.0592 and 14.7456. See page
35 for details.
868 MHz
The crystal frequency accuracy
and drift (ageing and
temperature dependency) will
determine the frequency accuracy
of the transmitted signal.
capacitors, see page 35
pF
3-4 MHz, 22 pF recommended
pF
6-8 MHz, 16 pF recommended
pF
9-16 MHz, 16 pF recommended
3.6864 MHz, 16 pF load
ms
7.3728 MHz, 16 pF load
ms
16 MHz, 16 pF load
Up to 1 MHz frequency step
µs
Crystal oscillator running
µs
CC1000
Digital Inputs/Outputs
Logic “0” input voltage
Logic ”1” input voltage
Logic “0” output voltage
Logic “1” output voltage
Logic “0” input current
Logic “1” input current
DIO setup time
0 0.3*VDD V
0.7*VDD VDD V
0
2.5
NA -1
NA 1
20 ns TX mode, minimum time DIO
0.4 V Output current -2.5 mA,
VDD V Output current 2.5 mA,
SWRS048 Page 6 of 53
3.0 V supply voltage
3.0 V supply voltage
Input signal equals GND
µA
Input signal equals VDD
µA
must be ready before the positive
edge of DCLK
Page 7

Parameter
DIO hold time
Serial interface (PCLK, PDATA and
PALE) timing specification
Current Consumption
Power Down mode
Current Consumption,
receive mode 433/868 MHz
Current Consumption,
average in receive mode using
polling 433/868 MHz
Current Consumption,
transmit mode 433/868 MHz:
P=0.01mW (-20 dBm)
P=0.3 mW (-5 dBm)
P=1 mW (0 dBm)
P=3 mW (5 dBm)
P=10 mW (10 dBm)
Current Consumption, crystal osc.
Current Consumption, crystal osc.
And bias
Current Consumption, crystal osc.,
bias and synthesiser, RX/TX
Min. Typ. Max. Unit Condition / Note
10 ns TX mode, minimum time DIO
See Table 2 page 14
0.2 1
7.4/9.6 mA Current is programmable and can
74/96
5.3/8.6
8.9/13.8
10.4/16.5
14.8/25.4
26.7/NA
30
80
105
860
4/5
5/6
must be held after the positive
edge of DCLK
Oscillator core off
µA
be increased for improved
sensitivity
Polling controlled by micro-
µA
controller using 1:100 receive to
power down ratio
mA
The ouput power is delivered to a
50Ω load, see also p. 32
mA
mA
mA
mA
3-8 MHz, 16 pF load
µA
9-14 MHz, 12 pF load
µA
14-16 MHz, 16 pF load
µA
µA
< 500 MHz
mA
> 500 MHz
mA
CC1000
SWRS048 Page 7 of 53
Page 8
CC1000
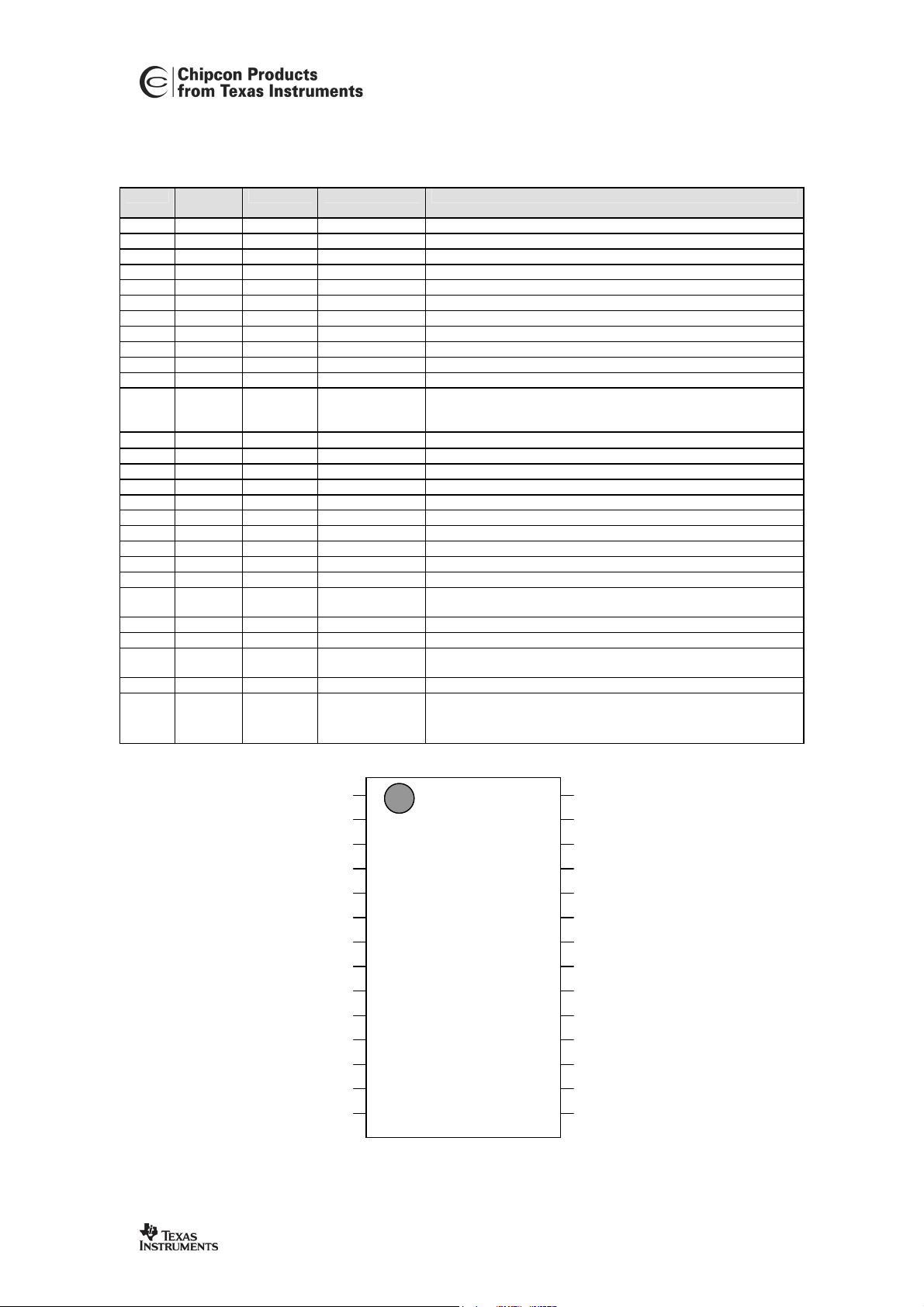
4. Pin Assignment
Pin no. UltraCSP
pin no.
1 G3 AVDD Power (A) Power supply (3 V) for analog modules (mixer and IF)
2 F2 AGND Ground (A) Ground connection (0 V) for analog modules (mixer and IF)
3 G2 RF_IN RF Input RF signal input from antenna
4 G1 RF_OUT RF output RF signal output to antenna
5 F1 AVDD Power (A) Power supply (3 V) for analog modules (LNA and PA)
6 E2 AGND Ground (A) Ground connection (0 V) for analog modules (LNA and PA)
7 E1 AGND Ground (A) Ground connection (0 V) for analog modules (PA)
8 D1 AGND Ground (A) Ground connection (0 V) for analog modules (VCO and prescaler)
9 C1 AVDD Power (A) Power supply (3 V) for analog modules (VCO and prescaler)
10 B1 L1 Analog input Connection no 1 for external VCO tank inductor
11 A1 L2 Analog input Connection no 2 for external VCO tank inductor
12 B2 CHP_OUT
13 C2 R_BIAS Analog output
14 F3 AGND Ground (A) Ground connection (0 V) for analog modules (backplane)
15 A2 AVDD Power (A) Power supply (3 V) for analog modules (general)
16 B3 AGND Ground (A) Ground connection (0 V) for analog modules (general)
17 A3 XOSC_Q2 Analog output Crystal, pin 2
18 A4 XOSC_Q1 Analog input Crystal, pin 1, or external clock input
19 B4 AGND Ground (A) Ground connection (0 V) for analog modules (guard)
20 C3 DGND Ground (D) Ground connection (0 V) for digital modules (substrate)
21 C4 DVDD Power (D) Power supply (3 V) for digital modules
22 D4 DGND Ground (D) Ground connection (0 V) for digital modules
23 E4 DIO Digital
24 F4 DCLK Digital output Data clock for data in both receive and transmit mode
25 G4 PCLK Digital input Programming clock for 3-wire bus
26 D3 PDATA Digital
27 D2 PALE Digital input Programming address latch enable for 3-wire bus. Internal pull-up.
28 E3 RSSI/IF Analog output The pin can be used as RSSI or 10.7 MHz IF output to optional
A=Analog, D=Digital
Pin name Pin type Description
Analog output Charge pump current output
(LOCK)
The pin can also be used as PLL Lock indicator. Output is high
when PLL is in lock.
Connection for external precision bias resistor (82 kΩ, ± 1%)
Data input/output. Data input in transmit mode. Data output in
input/output
receive mode
Programming data for 3-wire bus. Programming data input for
input/output
write operation, programming data output for read operation
external IF and demodulator. If not used, the pin should be left
open (not connected).
(Top View)
1
AVDD
AVDD
AGND
AGND
RF_IN
RF_IN
RF_OUT
RF_OUT
AVDD
AVDD
AGND
AGND
AGND
AGND
AGND
AGND
AVDD
AVDD
L1
L1
L2
L2
CHP_OUT
CHP_OUT
R_BIAS
R_BIAS
AGND
AGND
1
2
2
3
3
4
4
5
5
6
6
7
7
8
8
9
9
10
10
11
11
12
12
13
13
14 15
14 15
CC1000
CC1000
28
28
27
27
26
26
25
25
24
24
23
23
22
22
21
21
20
20
19
19
18
18
17
17
16
16
RSSI/IF
RSSI/IF
RSSI/IF
PALE
PALE
PALE
PDATA
PDATA
PDATA
PCLK
PCLK
PCLK
DCLK
DCLK
DCLK
DIO
DIO
DIO
DGND
DGND
DGND
DVDD
DVDD
DVDD
DGND
DGND
DGND
AGND
AGND
AGND
XOSC_Q1
XOSC_Q1
XOSC_Q1
XOSC_Q2
XOSC_Q2
XOSC_Q2
AGND
AGND
AGND
AVDD
AVDD
AVDD
SWRS048 Page 8 of 53
Page 9
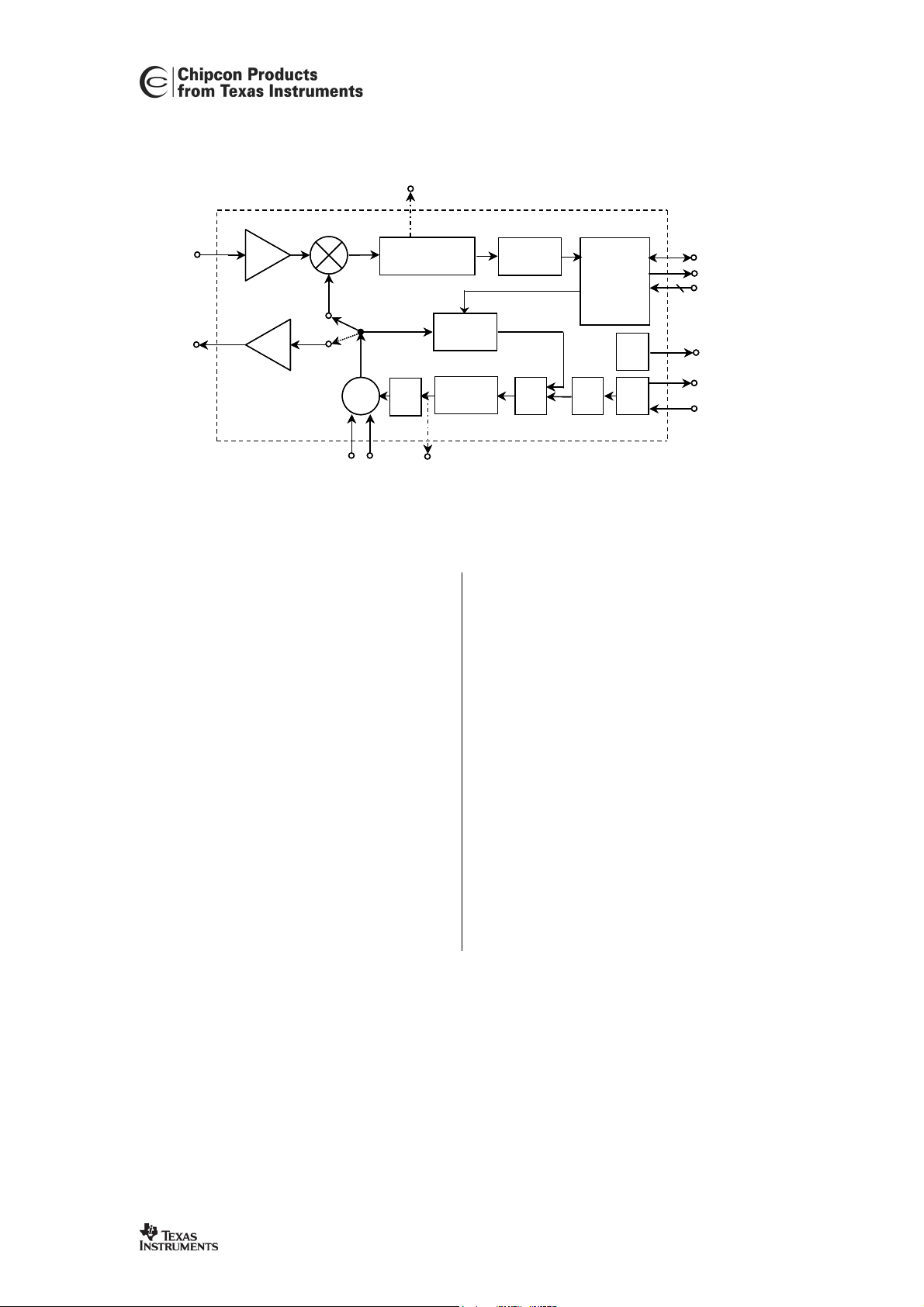
5. Circuit Description
MIXER
MIXER
RF_IN
RF_IN
RF_OUT
RF_OUT
LNA
LNA
PA
PA
VCO
VCO
RSSI/IF
RSSI/IF
DEMOD
/N
/N
DEMOD
~
~
L1
L1
L2
L2
IF STAGE
IF STAGE
LPF
LPF
CHP_OUT
CHP_OUT
CHARGE
CHARGE
PUMP
PUMP
CONTROL
CONTROL
BIAS
BIAS
PD OSC
PD OSC
/R
/R
CC1000
DIO
DIO
DCLK
DCLK
PDATA, PCLK, PALE
PDATA, PCLK, PALE
3
3
R_BIAS
R_BIAS
XOSC_Q2
XOSC_Q2
XOSC_Q1
XOSC_Q1
Figure 1. Simplified block diagram of the
A simplified block diagram of
CC1000
is
shown in Figure 1. Only signal pins are
shown.
In receive mode
CC1000
is configured as a
traditional superheterodyne receiver. The
RF input signal is amplified by the lownoise amplifier (LNA) and converted down
to the intermediate frequency (IF) by the
mixer (MIXER). In the intermediate
frequency stage (IF STAGE) this
downconverted signal is amplified and
filtered before being fed to the
demodulator (DEMOD). As an option a
RSSI signal, or the IF signal after the
mixer is available at the RSSI/IF pin. After
demodulation
CC1000
outputs the digital
demodulated data on the pin DIO.
Synchronisation is done on-chip providing
data clock at DCLK.
CC1000
In transmit mode the voltage controlled
oscillator (VCO) output signal is fed
directly to the power amplifier (PA). The
RF output is frequency shift keyed (FSK)
by the digital bit stream fed to the pin DIO.
The internal T/R switch circuitry makes the
antenna interface and matching very easy.
The frequency synthesiser generates the
local oscillator signal which is fed to the
MIXER in receive mode and to the PA in
transmit mode. The frequency synthesiser
consists of a crystal oscillator (XOSC),
phase detector (PD), charge pump
(CHARGE PUMP), VCO, and frequency
dividers (/R and /N). An external crystal
must be connected to XOSC, and only an
external inductor is required for the VCO.
The 3-wire digital serial interface
(CONTROL) is used for configuration.
SWRS048 Page 9 of 53
Page 10

6. Application Circuit
Very few external components are
required for the operation of
typical application circuit is shown in
Figure 2. Component values are shown in
Table 1.
6.1 Input / output matching
C31/L32 is the input match for the
receiver. L32 is also a DC choke for
biasing. C41, L41 and C42 are used to
match the transmitter to 50 Ω. An internal
T/R switch circuit makes it possible to
connect the input and output together and
match the
TX mode. See “Input/output matching”
p.31 for details.
6.2 VCO inductor
The VCO is completely integrated except
for the inductor L101.
CC1000
to 50 Ω in both RX and
CC1000
. A
CC1000
Component values for the matching
network and VCO inductor are easily
calculated using the SmartRF® Studio
software.
6.3 Additional filtering
Additional external components (e.g. RF
LC or SAW-filter) may be used in order to
improve the performance in specific
applications. See also “Optional LC filter”
p.36 for further information.
6.4 Power supply decoupling
Power supply decoupling and filtering
must be used (not shown in the
application circuit). The placement and
size of the decoupling capacitors and the
power supply filtering are very important to
achieve the optimum performance.
Chipcon provides reference designs
(CC1000PP and CC1000uCSP_EM) that
should be followed very closely.
Figure 2. Typical
CC1000
application circuit (power supply decoupling not shown)
SWRS048 Page 10 of 53
Page 11
CC1000
CC1000 TSSOP package
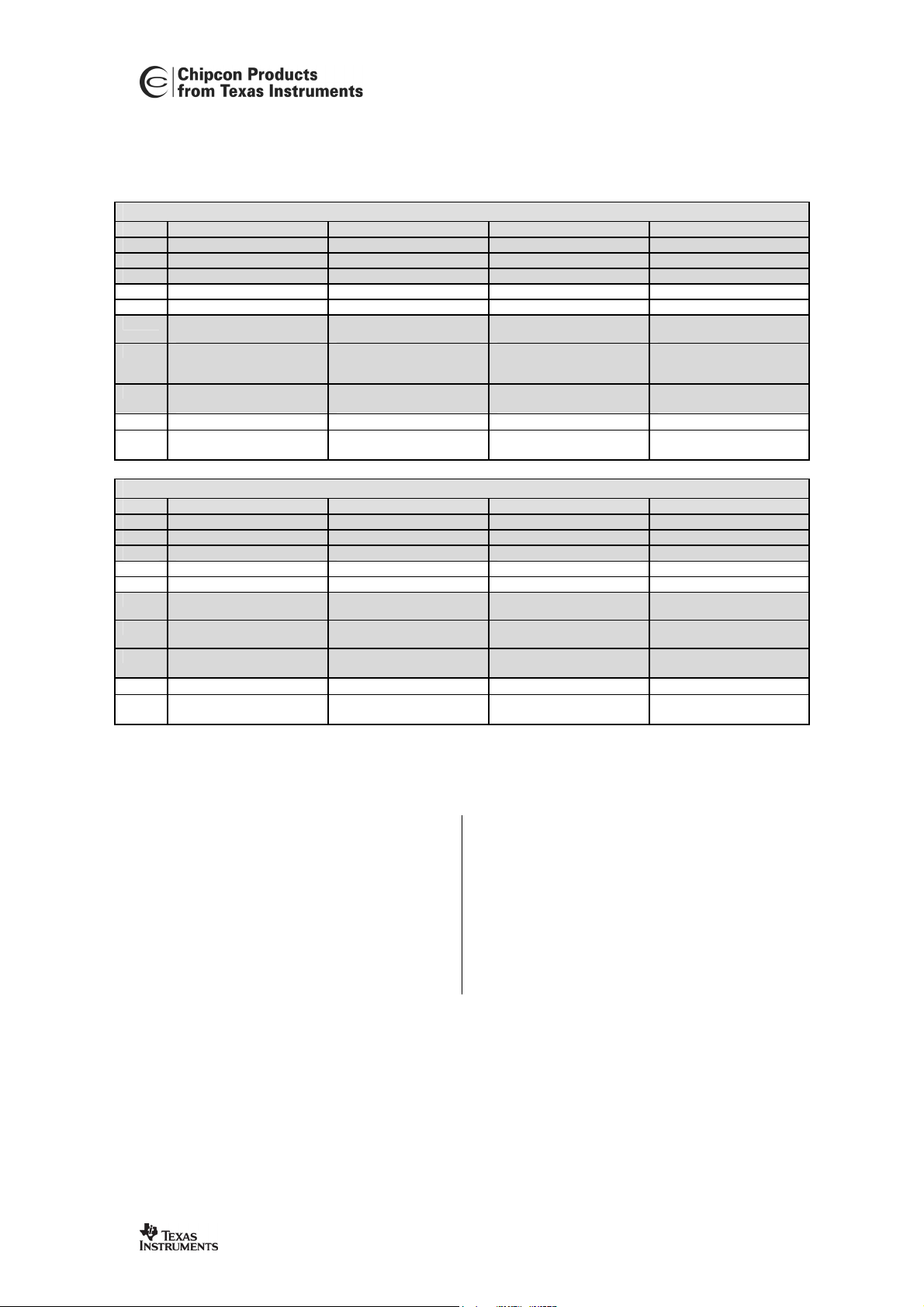
Item 315 MHz 433 MHz 868 MHz 915 MHz
C31 8.2 pF, 5%, C0G, 0603 15 pF, 5%, C0G, 0603 10 pF, 5%, C0G, 0603 10 pF, 5%, C0G, 0603
C41 2.2 pF, 5%, C0G, 0603 8.2 pF, 5%, C0G, 0603 Not used Not used
C42 5.6 pF, 5%, C0G, 0603 5.6 pF, 5%, C0G, 0603 4.7 pF, 5%, C0G, 0603 4.7 pF, 5%, C0G, 0603
C171 18 pF, 5%, C0G, 0603 18 pF, 5%, C0G, 0603 18 pF, 5%, C0G, 0603 18 pF, 5%, C0G, 0603
C181 18 pF, 5%, C0G, 0603 18 pF, 5%, C0G, 0603 18 pF, 5%, C0G, 0603 18 pF, 5%, C0G, 0603
L32 39 nH, 10%, 0805
L41 20 nH, 10%, 0805
L101 56 nH, 5%, 0805
R131
XTAL 14.7456 MHz crystal,
(Coilcraft 0805CS-390XKBC)
(Coilcraft 0805HQ20NXKBC)
(Koa KL732ATE56NJ)
82 kΩ, 1%, 0603 82 kΩ, 1%, 0603 82 kΩ, 1%, 0603 82 kΩ, 1%, 0603
16 pF load
Item 315 MHz 433 MHz 868 MHz 915 MHz
C31 8.2 pF, 5%, C0G, 0402 15 pF, 5%, C0G, 0402 10 pF, 5%, C0G, 0402 10 pF, 5%, C0G, 0402
C41 Not used Not used Not used Not used
C42 4.7 pF, 5%, C0G, 0402 4.7 pF, 5%, C0G, 0402 6.8 pF, 5%, C0G, 0402 6.8 pF, 5%, C0G, 0402
C171 18 pF, 5%, C0G, 0402 18 pF, 5%, C0G, 0402 18 pF, 5%, C0G, 0402 18 pF, 5%, C0G, 0402
C181 18 pF, 5%, C0G, 0402 18 pF, 5%, C0G, 0402 18 pF, 5%, C0G, 0402 18 pF, 5%, C0G, 0402
L32 39 nH, 5%, 0402
L41 22 nH, 5%, 0402
L101 56 nH, 5%, 0402
R131
XTAL 14.7456 MHz crystal,
(Ceramic multilayer)
(Ceramic multilayer)
(Thin film inductor)
82 kΩ, 1%, 0402 82 kΩ, 1%, 0402 82 kΩ, 1%, 0402 82 kΩ, 1%, 0402
16 pF load
Note: Items shaded are different for different frequencies
68 nH, 10%, 0805
(Coilcraft 0805CS-680XKBC)
6.2 nH, 10%, 0805
(Coilcraft 0805HQ6N2XKBC)
33 nH, 5%, 0805
(Koa KL732ATE33NJ)
14.7456 MHz crystal,
16 pF load
120 nH, 10%, 0805
(Coilcraft 0805CS-121XKBC)
2.5 nH, 10%, 0805
(Coilcraft 0805HQ2N5XKBC)
4.7 nH, 5%, 0805
(Koa KL732ATE4N7C)
14.7456 MHz crystal,
16 pF load
CC1000 UltraCSP™ package
68 nH, 5%, 0402
(Ceramic multilayer)
15 nH, 5%, 0402
(Ceramic multilayer)
33 nH, 5%, 0402
(Thin film inductor)
14.7456 MHz crystal,
16 pF load
120 nH, 5%, 0402
(Ceramic multilayer)
2.7 nH, 5%, 0402
(Ceramic multilayer)
7.5 nH, 5%, 0402
(Thin film inductor)
14.7456 MHz crystal,
16 pF load
120 nH, 10%, 0805
(Coilcraft 0805CS-121XKBC)
2.5 nH, 10%, 0805
(Coilcraft 0805HQ2N5XKBC)
4.7 nH, 5%, 0805
(Koa KL732ATE4N7C)
14.7456 MHz crystal,
16 pF load
120 nH, 5%, 0402
(Ceramic multilayer)
2.7 nH, 5%, 0402
(Ceramic multilayer)
7.5 nH, 5%, 0402
(Thin film inductor)
14.7456 MHz crystal,
16 pF load
Table 1. Bill of materials for the application circuit
Note that the component values for
868/915 MHz can be the same. However,
it is important the layout is optimised for
the selected VCO inductor in order to
centre the tuning range around the
operating frequency to account for
inductor tolerance. The VCO inductor
must be placed very close and
symmetrical with respect to the pins (L1
and L2).
Chipcon provide reference layouts that
should be followed very closely in order to
achieve the best performance. The
reference design can be downloaded from
the Chipcon website.
SWRS048 Page 11 of 53
Page 12
7. Configuration Overview
CC1000
best performance for different
applications. Through the programmable
configuration registers the following key
parameters can be programmed:
• Receive / transmit mode
• RF output power
• Frequency synthesiser key
8. Configuration Software
Chipcon provides users of
software program, SmartRF® Studio
(Windows interface) that generates all
necessary
based on the user’s selections of various
parameters. These hexadecimal numbers
will then be the necessary input to the
microcontroller for the configuration of
can be configured to achieve the
parameters: RF output frequency, FSK
CC1000
CC1000
configuration data
with a
CC1000
frequency separation (deviation),
crystal oscillator reference frequency
• Power-down / power-up mode
• Crystal oscillator power-up / power
down
• Data rate and data format (NRZ,
Manchester coded or UART interface)
• Synthesiser lock indicator mode
• Optional RSSI or external IF
CC1000
provide the user with the component
values needed for the input/output
matching circuit and the VCO inductor.
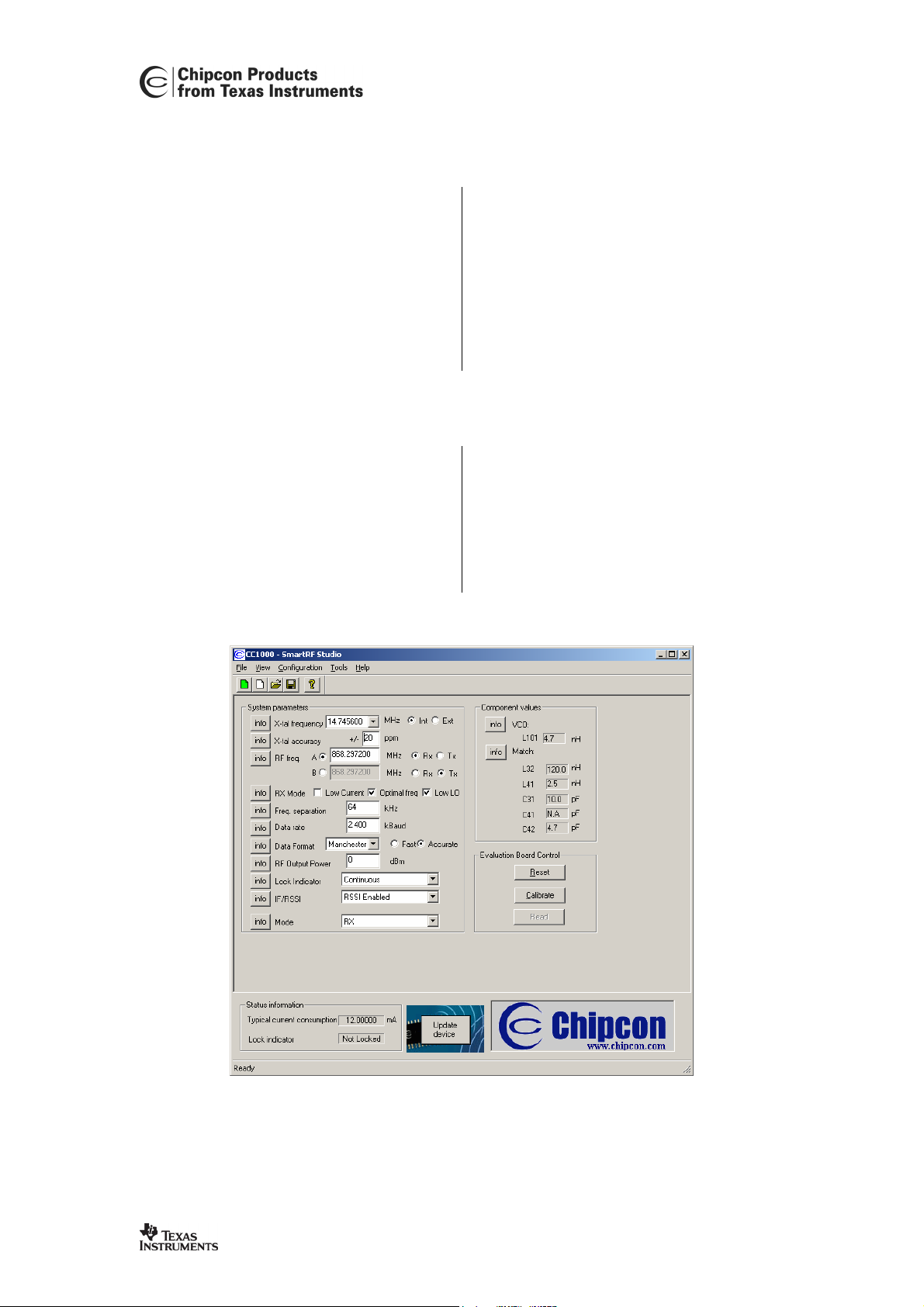
Figure 3 shows the user interface of the
CC1000
. In addition the program will
configuration software.
Figure 3. SmartRF® Studio user interface
SWRS048 Page 12 of 53
Page 13

9. 3-wire Serial Configuration Interface
CC1000
interface (PDATA, PCLK and PALE).
There are 28 8-bit configuration registers,
each addressed by a 7-bit address. A
Read/Write bit initiates a read or write
operation. A full configuration of
requires sending 22 data frames of 16 bits
each (7 address bits, R/W bit and 8 data
bits). The time needed for a full
configuration depend on the PCLK
frequency. With a PCLK frequency of 10
MHz the full configuration is done in less
than 46 µs. Setting the device in power
down mode requires sending one frame
only and will in this case take less than 2
µs. All registers are also readable.
In each write-cycle 16 bits are sent on the
PDATA-line. The seven most significant
bits of each data frame (A6:0) are the
address-bits. A6 is the MSB (Most
Significant Bit) of the address and is sent
as the first bit. The next bit is the R/W bit
(high for write, low for read). During
address and R/W bit transfer the PALE
(Program Address Latch Enable) must be
kept low. The 8 data-bits are then
transferred (D7:0). See Figure 4.
is configured via a simple 3-wire
CC1000
T
SA
CC1000
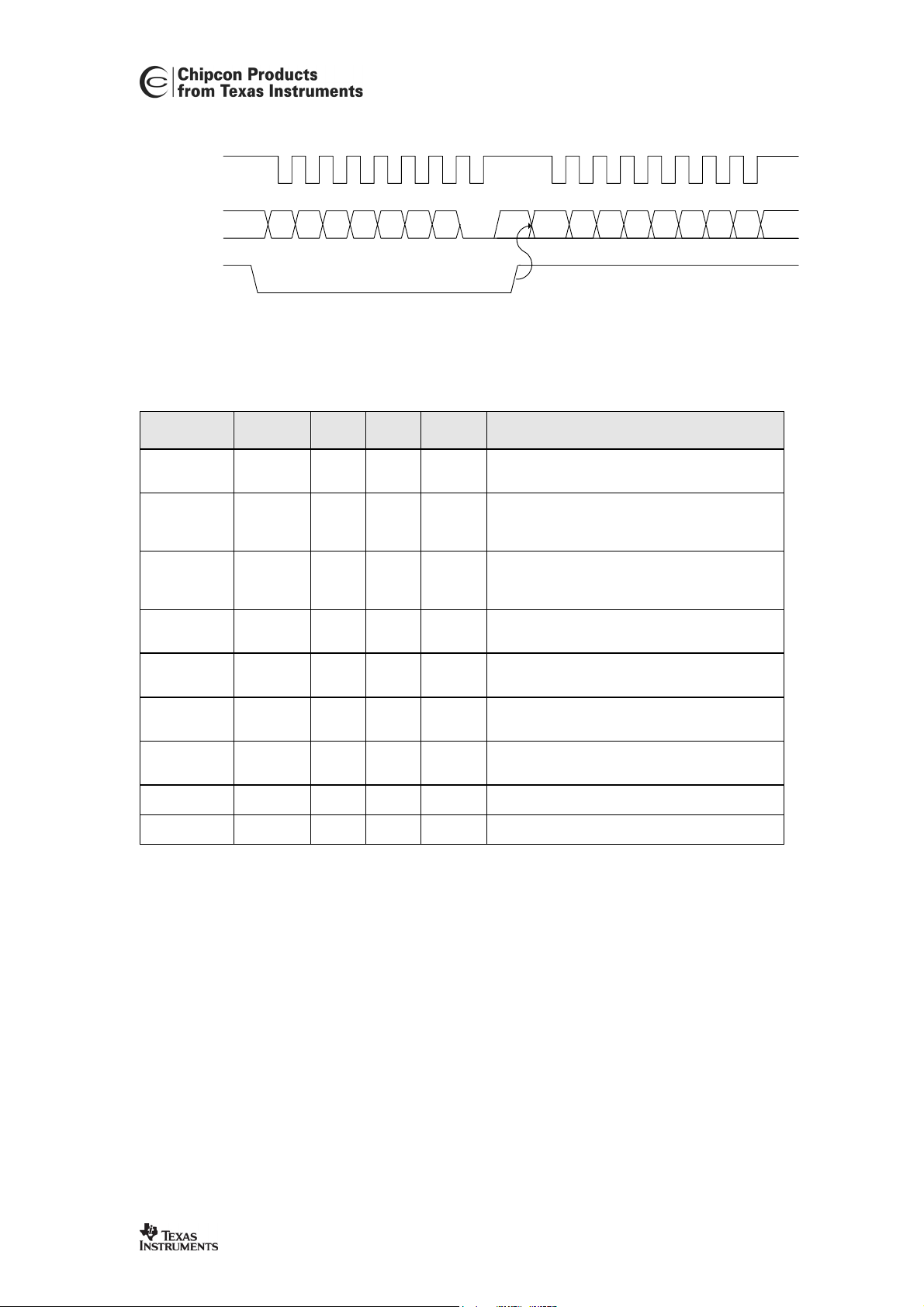
The timing for the programming is also
shown in Figure 4 with reference to Table
2. The clocking of the data on PDATA is
done on the negative edge of PCLK.
When the last bit, D0, of the 8 data-bits
has been loaded, the data word is loaded
in the internal configuration register.
The configuration data is stored in internal
RAM. The data is retained during powerdown mode, but not when the powersupply is turned off. The registers can be
programmed in any order.
The configuration registers can also be
read by the microcontroller via the same
configuration interface. The seven address
bits are sent first, then the R/W bit set low
to initiate the data read-back.
CC1000
returns the data from the addressed
register. PDATA is in this case used as an
output and must be tri-stated (or set high n
the case of an open collector pin) by the
microcontroller during the data read-back
(D7:0). The read operation is illustrated in
Figure 5.
T
HA
then
PCLK
PDATA
PALE
T
CH,min
Address Write mode
6543210
T
CL,min
Figure 4. Configuration registers write operation
T
SA
W
7 6 5 4 3 2 1 0
T
HD
Data byte
T
SD
SWRS048 Page 13 of 53
Page 14
CC1000
PCLK
Address Read mode
PDATA
6543210
R 7 6 5 4 3 2 1 0
PALE
Figure 5. Configuration registers read operation
Parameter Symbol Min Max Units Conditions
PCLK, clock
frequency
PCLK low
pulse
duration
PCLK high
pulse
duration
PALE setup
time
PALE hold
time
PDATA setup
time
PDATA hold
time
Rise time T
Fall time T
F
CLOCK
50 ns The minimum time PCLK must be low.
T
CL,min
50 ns The minimum time PCLK must be high.
T
CH,min
T
SA
THA 10 - ns The minimum time PALE must be held low after
T
SD
10 - ns The minimum time data must be held at PDATA,
T
HD
100 ns The maximum rise time for PCLK and PALE
rise
100 ns The maximum fall time for PCLK and PALE
fall
Note: The set-up- and hold-times refer to 50% of VDD.
- 10 MHz
10 - ns The minimum time PALE must be low before
negative edge of PCLK.
the positive edge of PCLK.
10 - ns The minimum time data on PDATA must be ready
before the negative edge of PCLK.
after the negative edge of PCLK.
Data byte
Table 2. Serial interface, timing specification
SWRS048 Page 14 of 53
Page 15
10. Microcontroller Interface
Used in a typical system,
interface to a microcontroller. This
microcontroller must be able to:
• Program
via the 3-wire serial configuration
interface (PDATA, PCLK and PALE).
• Interface to the bi-directional
synchronous data signal interface
(DIO and DCLK).
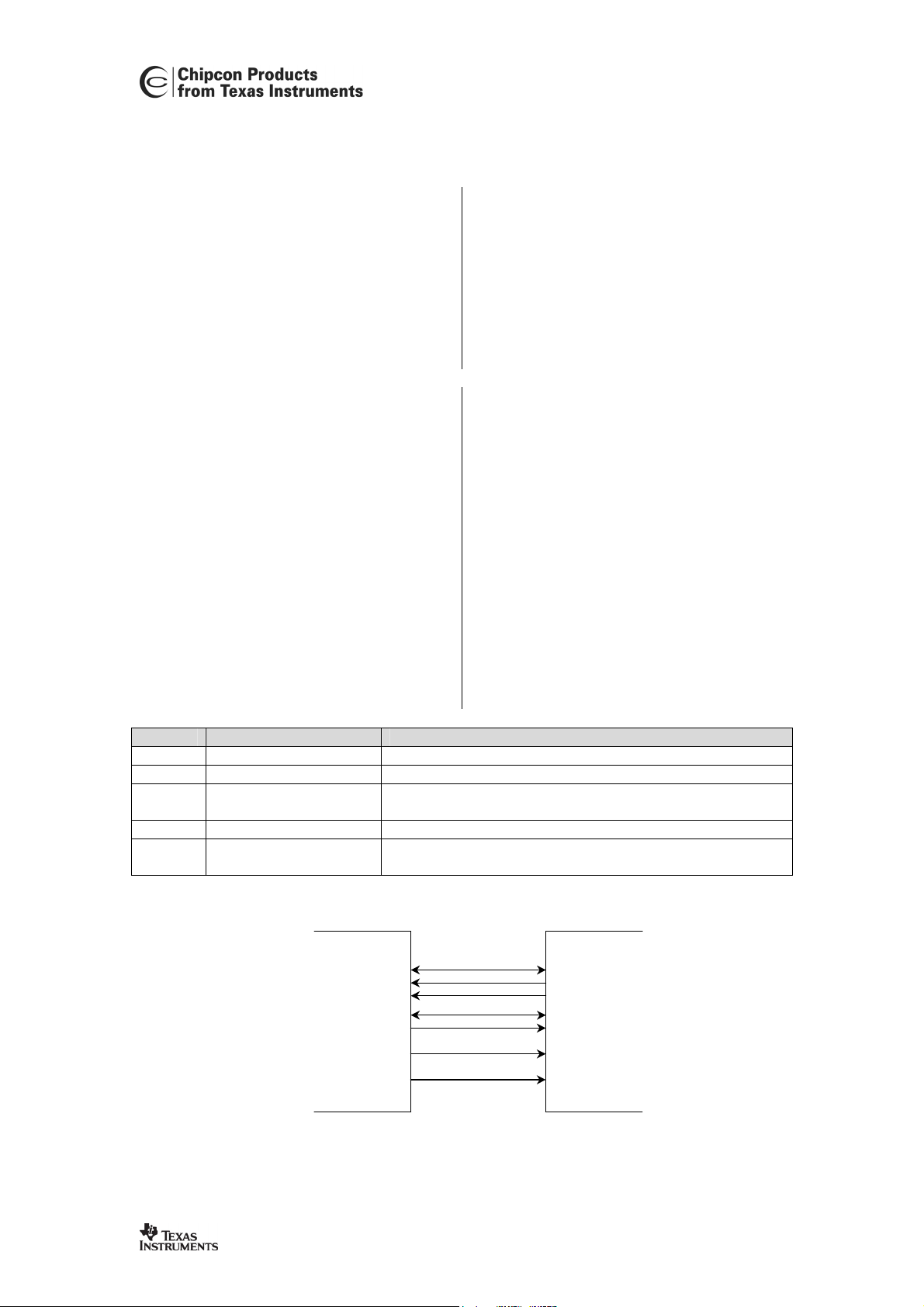
10.1 Connecting the microcontroller
The microcontroller uses 3 output pins for
the configuration interface (PDATA, PCLK
and PALE). PDATA should be a bidirectional pin for data read-back. A bidirectional pin is used for data (DIO) to be
transmitted and data received. DCLK
providing the data timing should be
connected to a microcontroller input.
Optionally another pin can be used to
monitor the LOCK signal (available at the
CHP_OUT pin). This signal is logic level
high when the PLL is in lock. See Figure
6.
Also the RSSI signal can be connected to
the microcontroller if it has an analogue
ADC input.
Pin Pin state Note
PDATA Input Should be driven high or low
PCLK Input Should be driven high or low
PALE Input with internal pull-
DIO Input Should be driven high or low
DCLK High-impedance
CC1000
up resistor
output
into different modes
CC1000
will
Should be driven high or high-impedance to minimize
power consumption
• Optionally the microcontroller can do
data encoding / decoding.
• Optionally the microcontroller can
monitor the frequency lock status from
pin CHP_OUT (LOCK).
• Optionally the microcontroller can
monitor the RSSI output for signal
strength acquisition.
The microcontroller pins connected to
PDATA and PCLK can be used for other
purposes when the configuration interface
is not used. PDATA and PCLK are high
impedance inputs as long as PALE is
high.
PALE has an internal pull-up resistor and
should be left open (tri-stated by the
microcontroller) or set to a high level
during power down mode in order to
prevent a trickle current flowing in the pullup. The pin state in power down mode is
summarized in Table 3.
CC1000
Table 3. CC1000 pins in power-down mode
PDATA
CC1000
PCLK
PALE
DIO
DCLK
CHP_OUT
(LOCK)
RSSI/IF
Figure 6. Microcontroller interface
(Optional)
(Optional)
SWRS048 Page 15 of 53
Microcontroller
ADC
Page 16
11. Signal interface
The signal interface consists of DIO and
DCLK and is used for the data to be
transmitted and data received. DIO is the
bi-directional data line and DCLK provides
a synchronous clock both during data
transmission and data reception.
CC1000
The
Return-to-Zero) data or Manchester (also
known as bi-phase-level) encoded data.
CC1000
the demodulator and provide the data
clock at DCLK.
CC1000
different data formats:
Synchronous NRZ mode
mode
DCLK, and DIO is used as data input.
Data is clocked into
edge of DCLK. The data is modulated at
RF without encoding.
configured for the data rates 0.6, 1.2, 2.4,
4.8, 9.6, 19.2, 38.4 or 76.8 kbit/s. For 38.4
and 76.8 kbit/s a crystal frequency of
14.7456 MHz must be used. In receive
mode
and provides received data clock at DCLK
and data at DIO. The data should be
clocked into the interfacing circuit at the
rising edge of DCLK. See Figure 7.
Synchronous Manchester encoded mode
In transmit mode
clock at DCLK, and DIO is used as data
input. Data is clocked into
rising edge of DCLK and should be in NRZ
format. The data is modulated at RF with
Manchester code. The encoding is done
CC1000
by
configured for the data rates 0.3, 0.6, 1.2,
2.4, 4.8, 9.6, 19.2 or 38.4 kbit/s. The 38.4
kbit/s rate corresponds to the maximum
76.8 kBaud due to the Manchester
encoding. For 38.4 and 76.8 kBaud a
crystal frequency of 14.7456 MHz must be
used. In receive mode
synchronisation and provides received
data clock at DCLK and data at DIO.
CC1000
can be used with NRZ (Non-
can also synchronise the data from
can be configured for three
. In transmit
CC1000
does the decoding and NRZ data
provides the data clock at
CC1000
CC1000
CC1000
does the synchronisation
CC1000
provides the data
CC1000
. In this mode
CC1000
CC1000
at the rising
can be
.
at the
can be
does the
CC1000
is presented at DIO. The data should be
clocked into the interfacing circuit at the
rising edge of DCLK. See Figure 8.
CC1000
.
Transparent Asynchronous UART mode
In transmit mode DIO is used as data
input. The data is modulated at RF without
synchronisation or encoding. In receive
mode the raw data signal from the
demodulator is sent to the output. No
synchronisation or decoding of the signal
is done in
the interfacing circuit. The DCLK pin is
used as data output in this mode. Data
rates in the range from 0.6 to 76.8 kBaud
can be used. For 38.4 and 76.8 kBaud a
crystal frequency of 14.7456 MHz must be
used. See Figure 9.
11.1 Manchester encoding and decoding
In the Synchronous Manchester encoded
mode
when modulating the data. The
also performs the data decoding and
synchronisation. The Manchester code is
based on transitions; a “0” is encoded as a
low-to-high transition, a “1” is encoded as
a high-to-low transition. See Figure 10.
The
decoding violation and will set a
Manchester Violation Flag when such a
violation is detected in the incoming
signal. The threshold limit for the
Manchester Violation can be set in the
MODEM1 register. The Manchester
Violation Flag can be monitored at the
CHP_OUT (LOCK) pin, configured in the
LOCK register.
The Manchester code ensures that the
signal has a constant DC component,
which is necessary in some FSK
demodulators. Using this mode also
ensures compatibility with CC400/CC900
designs.
CC1000
CC1000
CC1000
and should be done by
uses Manchester coding
can detect a Manchester
SWRS048 Page 16 of 53
Page 17
Transmitter side:
Transmitter side:
CC1000
DIO
DIO
DCLK
DCLK
“RF”
“RF”
Receiver side:
Receiver side:
“RF”
“RF”
DCLK
DCLK
DIO
DIO
Transmitter side:
Transmitter side:
Data provided by microcontroller
Data provided by microcontroller
Clock provided by CC1000
Clock provided by CC1000
FSK modulating signal (NRZ),
FSK modulating signal (NRZ),
internal in CC1000
internal in CC1000
Demodulated signal (NRZ),
Demodulated signal (NRZ),
internal in CC1000
internal in CC1000
Clock provided by CC1000
Clock provided by CC1000
Data provided by CC1000
Data provided by CC1000
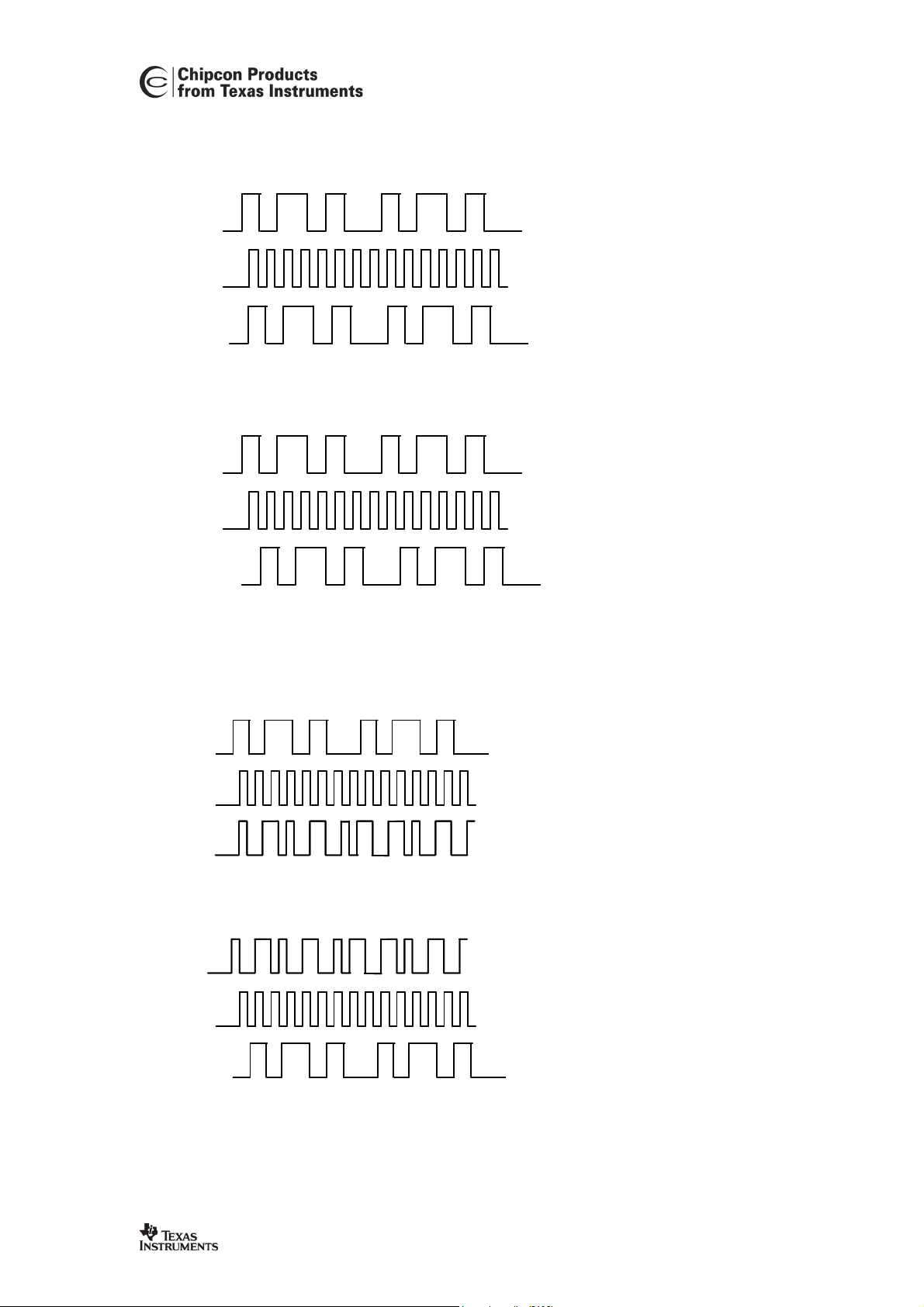
Figure 7. Synchronous NRZ mode
DIO
DIO
DCLK
DCLK
“RF”
“RF”
Receiver side:
Receiver side:
“RF”
“RF”
DCLK
DCLK
DIO
DIO
Figure 8. Synchronous Manchester encoded mode
Data provided by microcontroller (NRZ)
Data provided by microcontroller (NRZ)
Clock provided by CC1000
Clock provided by CC1000
FSK modulating signal (Manchester encoded),
FSK modulating signal (Manchester encoded),
internal in CC1000
internal in CC1000
Demodulated signal (Manchester encoded),
Demodulated signal (Manchester encoded),
internal in CC1000
internal in CC1000
Clock provided by CC1000
Clock provided by CC1000
Data provided by CC1000 (NRZ)
Data provided by CC1000 (NRZ)
SWRS048 Page 17 of 53
Page 18

Transmitter side:
Transmitter side:
CC1000
DIO
DIO
DCLK
DCLK
“RF”
“RF”
Receiver side:
Receiver side:
“RF”
“RF”
DIO
DIO
DCLK
DCLK
Data provided by UART (TXD)
Data provided by UART (TXD)
DCLK is not used in transmit mode.
DCLK is not used in transmit mode.
Used as data output in receive mode.
Used as data output in receive mode.
FSK modulating signal,
FSK modulating signal,
internal in CC1000
internal in CC1000
Demodulated signal,
Demodulated signal,
internal in CC1000
internal in CC1000
DIO is not used in receive mode. Used only
DIO is not used in receive mode. Used only
as data input in transmit mode.
as data input in transmit mode.
Data output provided by CC1000.
Data output provided by CC1000.
Connect to UART (RXD).
Connect to UART (RXD).
Figure 9. Transparent Asynchronous UART mode
1 0 1 1 0 0 0 1 1 0 1
1 0 1 1 0 0 0 1 1 0 1
TX
TX
data
data
Time
Time
Figure 10. Manchester encoding
SWRS048 Page 18 of 53
Page 19

12. Bit synchroniser and data decision
Average
filter
CC1000
Sampler
Frequency
detector
Decimator
Data
filter
Figure 11. Demodulator block diagram
A block diagram of the digital demodulator
is shown in Figure 11. The IF signal is
sampled and its instantaneous frequency
is detected. The result is decimated and
filtered. In the data slicer the data filter
output is compared to the average filter
output to generate the data output.
The averaging filter is used to find the
average value of the incoming data. While
the averaging filter is running and
acquiring samples, it is important that the
number of high and low bits received is
equal (e.g. Manchester code or a
balanced preamble).
Therefore all modes, also synchronous
NRZ mode, need a DC balanced
preamble for the internal data slicer to
acquire correct comparison level from the
averaging filter. The suggested preamble
is a ‘010101…’ bit pattern. The same bit
pattern should also be used in Manchester
mode, giving a ‘011001100110…chip
pattern. This is necessary for the bit
synchronizer to synchronize correctly.
The averaging filter must be locked before
any NRZ data can be received. If the
averaging filter is locked
(MODEM1.LOCK_AVG_MODE=’1’), the
Data slicer
comparator
acquired value will be kept also after
Power Down or Transmit mode. After a
modem reset
(MODEM1.MODEM_RESET_N), or a
main reset (using any of the standard
reset sources), the averaging filter is reset.
In a polled receiver system the automatic
locking can be used. This is illustrated in
Figure 12. If the receiver is operated
continuously and searching for a
preamble, the averaging filter should be
locked manually as soon as the preamble
is detected. This is shown in Figure 13. If
the data is Manchester coded there is no
need to lock the averaging filter
(MODEM1.LOCK_AVG_IN=’0’), as shown
in Figure 14.
The minimum length of the preamble
depends on the acquisition mode selected
and the settling time. Table 4 gives the
minimum recommended number of chips
for the preamble in NRZ and UART
modes. In this context ‘chips’ refer to the
data coding. Using Manchester coding
every bit consists of two ‘chips’. For
Manchester mode the minimum
recommended number of chips is shown
in Table 5.
SWRS048 Page 19 of 53
Page 20

CC1000
Manual Lock Automatic Lock Settling
MODEM1.
SETTLING
(1:0)
00 14 11 16 16
01 25 22 32 32
10 46 43 64 64
11 89 86 128 128
Notes:
** The averaging filter is locked when MODEM1.LOCK_AVG_IN is set to 1
*** X = Do not care. The timer for the automatic lock is started when RX mode is set in the
register
Also please note that in addition to the number of bits required to lock the filter, you need to add the
number of bits needed for the preamble detector. See the next section for more information.
Table 4. Minimum preamble bits for locking the averaging filter, NRZ and UART mode
NRZ mode
MODEM1.LOCK_
AVG_MODE=’1’
MODEM1.LOCK_
AVG_IN=’0’=→’1’**
UART mode
MODEM1.LOCK_
AVG_MODE=’1’
MODEM1.LOCK_
AVG_IN=’0’=→’1’**
Settling
MODEM1.
SETTLING
(1:0)
Free-running
Manchester mode
MODEM1.LOCK_
AVG_MODE=’1’
MODEM1.LOCK_
NRZ mode
MODEM1.LOCK_
AVG_MODE=’0’
MODEM1.LOCK_
AVG_IN=’X’***
AVG_IN=’0’
00 23
01 34
10 55
11 98
UART mode
MODEM1.LOCK_
AVG_MODE=’0’
MODEM1.LOCK_
AVG_IN=’X’***
RFMAIN
Table 5. Minimum number preamble chips for averaging filter, Manchester mode
SWRS048 Page 20 of 53
Page 21

CC1000
Data package to be received
Data package to be received
Averaging filter
Averaging filter
free-running / not used
free-running / not used
Noise
Noise
RX
PD
PD
Averaging filter free-running
Averaging filter free-running
RX
Noise
Noise
RX
RX
Automatically locked after a short period depending on “SETTLING”
Automatically locked after a short period depending on “SETTLING”
Preamble NRZ data
Preamble NRZ data
RXPD
RXPD
Averaging filter locked
Averaging filter locked
Figure 12. Automatic locking of the averaging filter
Data package to be received
Data package to be received
Preamble NRZ data
Preamble NRZ data
Averaging filter locked
Averaging filter locked
Noise
Noise
Noise
Noise
Noise
Noise
RX
PD
PD
Averaging filter always free-running
Averaging filter always free-running
RX
Manually locked after preamble is detected
Manually locked after preamble is detected
Figure 13. Manual locking of the averaging filter
Data package to be received
Data package to be received
Preamble Manchester encoded data
Figure 14. Free-running averaging filter
SWRS048 Page 21 of 53
NoisePreamble Manchester encoded data
Noise
Page 22

CC1000
13. Receiver sensitivity versus data rate and frequency separation
The receiver sensitivity depends on the
data rate, the data format, FSK frequency
separation and the RF frequency. Typical
figures for the receiver sensitivity (BER =
-3
10
) are shown in Table 6 for 64 kHz
frequency separations and Table 7 for 20
kHz separations. Optimised sensitivity
[kBaud]
0.6 64 -113 -114 -113 -110 -111 -110
1.2 64 -111 -112 -111 -108 -109 -108
2.4 64 -109 -110 -109 -106 -107 -106
4.8 64 -107 -108 -107 -104 -105 -104
9.6 64 -105 -106 -105 -102 -103 -102
19.2 64 -103 -104 -103 -100 -101 -100
38.4 64 -102 -103 -102 -98 -99 -98
76.8 64 -100 -101 -100 -97 -98 -97
Average current
Separation
[kHz]
consumption
NRZ
mode
433 MHz 868 MHz Data rate
Manchester
mode
9.3 mA
configurations are used. For best
performance the frequency separation
should be as high as possible especially at
high data rates. Table 8 shows the
sensitivity for low current settings. See
page 28 for how to program different
current consumption.
UART
mode
NRZ
mode
Manchester
mode
11.8 mA
UART mode
Table 6. Receiver sensitivity as a function of data rate at 433 and 868 MHz, BER = 10-3,
frequency separation 64 kHz, normal current settings
[kBaud]
0.6 20 -109 -111 -109 -106 -108 -106
1.2 20 -108 -110 -108 -104 -106 -104
2.4 20 -106 -108 -106 -103 -105 -103
4.8 20 -104 -106 -104 -101 -103 -101
9.6 20 -103 -104 -103 -100 -101 -100
19.2 20 -102 -103 -102 -99 -100 -99
38.4 20 -98 -100 -98 -98 -99 -98
76.8 20 -94 -98 -94 -94 -96 -94
Average current
Separation
[kHz]
consumption
NRZ
mode
433 MHz 868 MHz Data rate
Manchester
mode
9.3 mA
UART
mode
NRZ
mode
Manchester
mode
11.8 mA
UART mode
Table 7. Receiver sensitivity as a function of data rate at 433 and 868 MHz, BER = 10-3,
frequency separation 20 kHz, normal current settings
[kBaud]
0.6 64 -111 -113 -111 -107 -109 -107
1.2 64 -110 -111 -110 -106 -107 -106
2.4 64 -108 -109 -108 -104 -105 -104
4.8 64 -106 -107 -106 -102 -103 -102
9.6 64 -104 -105 -104 -100 -101 -100
19.2 64 -102 -103 -102 -98 -99 -98
38.4 64 -101 -102 -101 -96 -97 -96
76.8 64 -99 -100 -99 -95 -96 -95
Average current
Separation
[kHz]
consumption
NRZ
mode
433 MHz 868 MHz Data rate
Manchester
mode
7.4 mA
UART
mode
NRZ
mode
Manchester
mode
9.6 mA
UART mode
Table 8. Receiver sensitivity as a function of data rate at 433 and 868 MHz, BER = 10-3,
frequency separation 64 kHz , low current settings
SWRS048 Page 22 of 53
Page 23

R
V
14. Frequency programming
RX mode:
CC1000
f
(low-side) fLO (high-side)
f
LO
TX mode:
f
IF
f
0
(Lower FSK
frequency)
Figure 15. Relation between f
RF
(Receive frequency)
f
RF
(Center frequency)
f
sep
f
IF
f
(Upper FSK
frequency)
, fif, and LO frequency
vco
The frequency synthesiser (PLL) is
controlled by the frequency word in the
configuration registers. There are two
frequency words, A and B, which can be
programmed to two different frequencies.
The reference frequency f
oscillator clock divided by PLL.REFDIV, a
number between 2 and 14 that should be
chosen such that:
One of the frequency words can be used
for RX (local oscillator frequency) and the
other for TX (transmitting frequency, f
).
0
This makes it possible to switch very fast
Thus, the reference frequency f
between RX mode and TX mode. They
can also be used for RX (or TX) on two
different channels. The MAIN.F_REG
control bit performs selection of frequency
word A or B.
The frequency word, FREQ, is 24 bits (3
bytes) located in
FREQ_2A:FREQ_1A:FREQ_0A and
FREQ_2B:FREQ_1B:FREQ_0B for the A
and B word, respectively.
The frequency word FREQ can be
calculated from:
⋅=
ff
refVCO
TXDATAFSEPFREQ
16384
8192+⋅+
,
where TXDATA is 0 or 1 in transmit mode
depending on the data bit to be
f
is the Local Oscillator (LO) frequency
VCO
in receive mode, and the f
transmit mode (lower FSK frequency). The
LO frequency must be f
giving low-side or high side LO injection
respectively. Note that the data on DIO will
be inverted if high-side LO is used.
The upper FSK transmit frequency is
given by:
where the frequency separation f
by the 11 bit separation word
(FSEP1:FSEP0):
transmitted on DIO. In receive mode
TXDATA is always 0.
SWRS048 Page 23 of 53
1
1.0 MHz ≤ f
f
ref
=
f
= f0 + f
1
f
vco
f
vco
ref
≤ 2.46 MHz
ref
f
xosc
EFDI
– fIF or fRF + fIF
RF
,
sep
FSEP
⋅=
ff
refsep
16384
is the crystal
is:
ref
frequency in
0
is set
sep
Page 24

CC1000
Clearing PLL.ALARM_DISABLE will
enable generation of the frequency alarm
bits PLL.ALARM_H and PLL.ALARM_L.
These bits indicate that the frequency
synthesis PLL is near the limit of generate
the frequency requested, and the PLL
should be recalibrated.
15. Recommended RX settings for ISM frequencies
Shown in Table 9 are the recommended RX frequency synthesiser settings for a few
operating frequencies in the popular ISM bands. These settings ensure optimum
configuration of the synthesiser in receive mode for best sensitivity. For some settings of the
synthesiser (combinations of RF frequencies and reference frequency), the receiver
sensitivity is degraded. The FSK frequency separation is set to 64 kHz. The SmartRF®
Studio can be used to generate optimised configuration data as well. Also an application note
(AN011) and a spreadsheet are available from Chipcon generating configuration data for any
frequency giving optimum sensitivity.
ISM
Frequency
[MHz]
315 315.037200 3.6864 High-side 3 4194304 400000
7.3728 6 4194304 400000
11.0592 9 4194304 400000
14.7456 12 4194304 400000
433.3 433.302000 3.6864 Low-side 3 5775168 580000
7.3728 6 5775168 580000
11.0592 9 5775168 580000
14.7456 12 5775168 580000
433.9 433.916400 3.6864 Low-side 3 5775360 582000
7.3728 6 5775360 582000
11.0592 9 5775360 582000
14.7456 12 5775360 582000
434.5 434.530800 3.6864 Low-side 3 5783552 584000
7.3728 6 5783552 584000
11.0592 9 5783552 584000
14.7456 12 5783552 584000
868.3 868.297200 3.6864 Low-side 2 7708672 75A000
7.3728 4 7708672 75A000
11.0592 6 7708672 75A000
14.7456 8 7708672 75A000
868.95 868.918800 3.6864 High-side 2 7716864 75C000
7.3728 4 7716864 75C000
11.0592 6 7716864 75C000
14.7456 7716864 75C000
869.525 869.526000 3.6864 Low-side 3 11583488 B0C000
7.3728 6 11583488 B0C000
11.0592 9 11583488 B0C000
14.7456 12 11583488 B0C000
869.85 869.840400 3.6864 High-side 2 7725056 75E000
7.3728 4 7725056 75E000
11.0592 6 7725056 75E000
14.7456 8 7725056 75E000
915 914.998800 3.6864 High-side 2 8126464 7C0000
7.3728 4 8126464 7C0000
11.0592 6 8126464 7C0000
14.7456 8 8126464 7C0000
*Note: When using high-side LO injection the data at DIO will be inverted.
Actual
frequency
[MHz]
Crystal
frequency
[MHz]
Low-side /
high- side
LO*
It is recommended that the
LOCK_CONTINOUS bit in the LOCK
register is checked when changing
frequencies and when changing between
RX and TX mode. If lock is not achieved, a
calibration should be performed.
Reference
divider
REFDIV
(decimal)
Frequency word
RX mode
FREQ
(decimal)
Frequency word
RX mode
FREQ
(hex)
Table 9. Recommended settings for ISM frequencies
SWRS048 Page 24 of 53
Page 25

16. VCO
Only one external inductor (L101) is
required for the VCO. The inductor will
determine the operating frequency range
of the circuit. It is important to place the
inductor as close to the pins as possible in
order to reduce stray inductance. It is
recommended to use a high Q, low
tolerance inductor for best performance.
17. VCO and PLL self-calibration
To compensate for supply voltage,
temperature and process variations the
VCO and PLL must be calibrated. The
calibration is done automatically and sets
maximum VCO tuning range and optimum
charge pump current for PLL stability.
After setting up the device at the operating
frequency, the self-calibration can be
initiated by setting the CAL_START bit.
The calibration result is stored internally in
the chip, and is valid as long as power is
not turned off. If large supply voltage
variations (more than 0.5 V) or
temperature variations (more than 40
degrees) occur after calibration, a new
calibration should be performed.
The self-calibration is controlled through
the CAL register (see configuration
registers description p. 39). The
CAL_COMPLETE bit indicates complete
calibration. The user can poll this bit, or
simply wait for 34 ms (calibration wait time
when CAL_WAIT = 1). The wait time is
proportional to the internal PLL reference
frequency. The lowest permitted reference
frequency (1 MHz) gives 34 ms wait time,
which is therefore the worst case.
Reference
frequency [MHz]
2.4 14
2.0 17
1.5 23
1.0 34
The CAL_COMPLETE bit can also be
monitored at the CHP_OUT (LOCK) pin
(configured by LOCK_SELECT[3:0]) and
used as an interrupt input to the
microcontroller.
The CAL_START bit must be set to 0 by
the microcontroller after the calibration is
done.
Calibration time
[ms]
CC1000
Typical tuning range for the integrated
varactor is 20-25%.
Component values for various frequencies
are given in Table 1. Component values
for other frequencies can be found using
the SmartRF® Studio software.
There are separate calibration values for
the two frequency registers. If the two
frequencies, A and B, differ more than 1
MHz, or different VCO currents are used
(VCO_CURRENT[3:0] in the CURRENT
register) the calibration should be done
separately. When using a 10.7 MHz
external IF the LO is 10.7 MHz
below/above the transmit frequency,
hence separate calibration must be done.
The CAL_DUAL bit in the CAL register
controls dual or separate calibration.
The single calibration algorithm, using
separate calibration for RX and TX
frequency, is illustrated in Figure 16.
In Figure 17 the dual calibration algorithm
is shown for two RX frequencies. It could
also be used for two TX frequencies, or
even for one RX and one TX frequency if
the same VCO current is used.
In multi-channel and frequency hopping
applications the PLL calibration values
may be read and stored for later use. By
reading back calibration values and
frequency change can be done without
doing a re-calibration which could take up
to 34 ms. The calibration value is stored in
the TEST0 and TEST2 registers after a
calibration is completed. Note that when
using single calibration, calibration values
are stored separately for frequency
registers A and B. This means that the
TEST0 and TEST2 registers will contain
calibration settings for the currently
selected frequency register (selected by
F_REG in the MAIN register). The
calibration value can later be written into
TEST5 and TEST 6 to bypass the
calibration. Note that you must set
VCO_OVERRIDE=1 in TEST5 and
CHP_OVERRIDE=1 in the TEST6
register.
SWRS048 Page 25 of 53
Page 26

Start single calibration
Start single calibration
Write FREQ_A, FREQ_B
Write FREQ_A, FREQ_B
If DR>=9.6kBd then write TEST4: L2KIO=3Fh
If DR>=9.6kBd then write TEST4: L2KIO=3Fh
Write CAL: CAL_DUAL = 0
Write CAL: CAL_DUAL = 0
Write MAIN:
Write MAIN:
RXTX = 0; F_REG = 0
RXTX = 0; F_REG = 0
RX_PD = 0; TX_PD = 1; FS_PD = 0
RX_PD = 0; TX_PD = 1; FS_PD = 0
CORE_PD = 0; BIAS_PD = 0; RESET_N=1
CORE_PD = 0; BIAS_PD = 0; RESET_N=1
Write CURRENT = RX current
Write CURRENT = RX current
Write PLL = RX pll
Write PLL = RX pll
Write CAL:
Write CAL:
CAL_START=1
CAL_START=1
Frequency register A is used for
Frequency register A is used for
RX mode, register B for TX
RX mode, register B for TX
RX frequency register A is calibrated first
RX frequency register A is calibrated first
Update CURRENT and PLL for RX mode
Update CURRENT and PLL for RX mode
Calibration is performed in RX mode,
Calibration is performed in RX mode,
Result is stored in TEST0 and TEST2,
Result is stored in TEST0 and TEST2,
RX register
RX register
CC1000
Wait for maximum 34 ms, or
Wait for maximum 34 ms, or
Read CAL and wait until
Read CAL and wait until
CAL_COMPLETE=1
CAL_COMPLETE=1
Write CAL:
Write CAL:
CAL_START=0
CAL_START=0
Write MAIN:
Write MAIN:
RXTX = 1; F_REG = 1
RXTX = 1; F_REG = 1
RX_PD = 1; TX_PD = 0; FS_PD = 0
RX_PD = 1; TX_PD = 0; FS_PD = 0
CORE_PD = 0; BIAS_PD = 0; RESET_N=1
CORE_PD = 0; BIAS_PD = 0; RESET_N=1
Write CURRENT = TX current
Write CURRENT = TX current
Write PLL = TX pll
Write PLL = TX pll
Write PA_POW = 00h
Write PA_POW = 00h
Write CAL:
Write CAL:
CAL_START=1
CAL_START=1
Wait for 34 ms, or
Wait for 34 ms, or
Read CAL and wait until
Read CAL and wait until
CAL_COMPLETE=1
CAL_COMPLETE=1
Write CAL:
Write CAL:
CAL_START=0
CAL_START=0
Calibration time depend on the reference
Calibration time depend on the reference
frequency, see text.
frequency, see text.
TX frequency register B is calibrated second
TX frequency register B is calibrated second
Update CURRENT and PLL for TX mode
Update CURRENT and PLL for TX mode
PA is turned off to prevent spurious emission
PA is turned off to prevent spurious emission
Calibration is performed in TX mode,
Calibration is performed in TX mode,
Result is stored in TEST0 and TEST2,
Result is stored in TEST0 and TEST2,
TX registers
TX registers
End of calibration
End of calibration
Figure 16. Single calibration algorithm for RX and TX
SWRS048 Page 26 of 53
Page 27

Start dual calibration
Start dual calibration
Write FREQ_A, FREQ_B
Write FREQ_A, FREQ_B
If DR>=38kBd then write TEST4: L2KIO=3Fh
If DR>=38kBd then write TEST4: L2KIO=3Fh
Write CAL: CAL_DUAL = 1
Write CAL: CAL_DUAL = 1
Write MAIN:
Write MAIN:
RXTX = 0; F_REG = 0
RXTX = 0; F_REG = 0
RX_PD = 0; TX_PD = 1; FS_PD = 0
RX_PD = 0; TX_PD = 1; FS_PD = 0
CORE_PD = 0; BIAS_PD = 0; RESET_N=1
CORE_PD = 0; BIAS_PD = 0; RESET_N=1
Write CURRENT= RX current
Write CURRENT= RX current
Write PLL= RX pll
Write PLL= RX pll
CC1000
Frequency registers A and B are both used
Frequency registers A and B are both used
for RX mode
for RX mode
Either frequency register A or B is selected
Either frequency register A or B is selected
Update CURRENT and PLL for RX mode
Update CURRENT and PLL for RX mode
Dual calibration is performed.
Write CAL:
Write CAL:
CAL_START=1
CAL_START=1
Wait for maximum 34 ms, or
Wait for maximum 34 ms, or
Read CAL and wait until
Read CAL and wait until
CAL_COMPLETE=1
CAL_COMPLETE=1
Write CAL:
Write CAL:
CAL_START=0
CAL_START=0
End of calibration
End of calibration
Figure 17. Dual calibration algorithm for RX mode
Dual calibration is performed.
Result is stored in TEST0 and TEST2,
Result is stored in TEST0 and TEST2,
for both frequency A and B registers
for both frequency A and B registers
Calibration time depend on the reference
Calibration time depend on the reference
frequency, see text.
frequency, see text.
SWRS048 Page 27 of 53
Page 28

CC1000
18. VCO and LNA current control
The VCO current is programmable and
should be set according to operating
frequency RX/TX mode and output power.
Recommended settings for the
VCO_CURRENT bits in the CURRENT
register are shown in the tables on page
41.
uency
[MHz]
433 9.3 -110 0100 01 00 0 10
433 7.4 -109 0100 00 00 0 00
868 11.8 -107 1000 11 00 1 10
868 9.6 -105 1000 10 00 0 00
Note: Current consumption and sensitivity are typical figures at 2.4 kBaud Manchester encoded data, BER 10-3
Current
consumption
[mA]
Sensitivity
[dBm]
VCO_
CURRENT
[3:0]
Table 10. Receiver sensitivity as function of current consumption
The bias current for the LNA, and the LO
and PA buffers are also programmable.
Table 10 shows the current consumption
and receiver sensitivity for different
settings (2.4 kBaud Manchester encoded
data).
CURRENT register FRONT_END register RF freq-
LO_DRIVE
[1:0]
PA_DRIVE
[1:0]
BUF_CUR
RENT
LNA_CUR RENT[1:0]
19. Power management
CC1000
management in order to meet strict power
consumption requirements in battery
operated applications. Power Down mode
is controlled through the MAIN register.
There are separate bits to control the RX
part, the TX part, the frequency
synthesiser and the crystal oscillator (see
page 39). This individual control can be
used to optimise for lowest possible
current consumption in a certain
application.
offers great flexibility for power
A typical power-on and initialising
sequence for minimum power
consumption is shown in Figure 18 and
Figure 19.
PALE should be tri-stated or set to a high
level during power down mode in order to
prevent a trickle current from flowing in the
internal pull-up resistor.
PA_POW should be set to 00h before
power down mode to ensure lowest
possible leakage current.
SWRS048 Page 28 of 53
Page 29

CC1000
Power Off
Power Off
Power turned on
Power turned on
Initialise and reset CC1000
Initialise and reset CC1000
Reset and turning on the
MAIN:
MAIN:
RXTX = 0
RXTX = 0
F_REG = 0
F_REG = 0
RX_PD = 1
RX_PD = 1
TX_PD = 1
TX_PD = 1
FS_PD = 1
FS_PD = 1
CORE_PD = 0
CORE_PD = 0
BIAS_PD = 1
BIAS_PD = 1
RESET_N = 0
RESET_N = 0
MAIN: RESET_N = 1
MAIN: RESET_N = 1
Wait 2 ms*
Wait 2 ms*
Reset and turning on the
crystal oscillator core
crystal oscillator core
*Time to wait depends on the crystal frequency
*Time to wait depends on the crystal frequency
and the load capacitance
and the load capacitance
Program all registers except MAIN
Program all registers except MAIN
Calibrate VCO and PLL
Calibrate VCO and PLL
MAIN: RX_PD = 1, TX_PD = 1, FS_PD = 1,
MAIN: RX_PD = 1, TX_PD = 1, FS_PD = 1,
CORE_PD = 1, BIAS_PD = 1
CORE_PD = 1, BIAS_PD = 1
PA_POW = 00h
PA_POW = 00h
Power Down
Power Down
Figure 18. Initializing sequence
Frequency register A is used for
Frequency register A is used for
RX mode, register B for TX
RX mode, register B for TX
Calibration is performed according
Calibration is performed according
to single calibration algorithm for both
to single calibration algorithm for both
RX and TX mode
RX and TX mode
SWRS048 Page 29 of 53
Page 30

CC1000
Power Down
Turn on crystal oscillator core
MAIN: CORE_PD = 0
Wait 2 ms*
Turn on bias generator
BIAS_PD = 0
Wait 200 µs
RX TX
RX or TX?
*Time to wait depends on the crystal frequency
and the load capacitance
Turn on RX:
MAIN: RXTX = 0, F_REG = 0
RX_PD = 0, FS_PD = 0
CURRENT = ‘RX current’
PLL = ’RX pll’
Wait 250 µs
RX mode
Turn off RX:
MAIN: RX_PD = 1, FS_PD = 1,
CORE_PD=1, BIAS_PD=1
Power Down
Turn on TX:
PA_POW = 00h
MAIN: RXTX = 1, F_REG = 1
TX_PD = 0, FS_PD = 0
CURRENT = ‘TX current’
PLL = ’RX pll’
Wait 250 µs
PA_POW = ‘Output power’
Wait 20 µs
TX mode
Turn off TX:
MAIN: TX_PD = 1, FS_PD = 1,
CORE_PD=1, BIAS_PD=1
PA_POW = 00h
Power Down
Figure 19. Sequence for activating RX or TX mode
SWRS048 Page 30 of 53
Page 31

20. Input / Output Matching
A few passive external components
combined with the internal T/R switch
circuitry ensures match in both RX and TX
mode. The matching network is shown in
Figure 20.
C31
C31
C31
C31
TO ANTENNA
TO ANTENNA
TO ANTENNA
TO ANTENNA
C42
C42
C42
C42
CC1000
Component values for various frequencies
are given in Table 1. Component values
for other frequencies can be found using
the configuration software.
RF_IN
RF_IN
RF_IN
RF_IN
RF_OUT
RF_OUT
RF_OUT
RF_OUT
CC1000
CC1000
CC1000
CC1000
L41C41
L41C41
L41C41
L41C41
AVDD=3V
AVDD=3V
AVDD=3V
AVDD=3V
Figure 20. Input/output matching network
L32
L32
L32
L32
SWRS048 Page 31 of 53
Page 32

CC1000
21. Output power programming
The RF output power is programmable
and controlled by the PA_POW register.
Table 11 shows the closest programmable
value for output powers in steps of 1 dB.
The typical current consumption is also
shown.
[dBm]
-20 01 6.9 02 8.6
-19 01 6.9 02 8.8
-18 02 7.1 03 9.0
-17 02 7.1 03 9.0
-16 02 7.1 04 9.1
-15 03 7.4 05 9.3
-14 03 7.4 05 9.3
-13 03 7.4 06 9.5
-12 04 7.6 07 9.7
-11 04 7.6 08 9.9
-10 05 7.9 09 10.1
-9 05 7.9 0B 10.4
-8 06 8.2 0C 10.6
-7 07 8.4 0D 10.8
-6 08 8.7 0F 11.1
-5 09 8.9 40 13.8
-4 0A 9.6 50 14.5
-3 0B 9.4 50 14.5
-2 0C 9.7 60 15.1
-1 0E 10.2 70 15.8
0 0F 10.4 80 16.8
1 40 11.8 90 17.2
2 50 12.8 B0 18.5
3 50 12.8 C0 19.2
4 60 13.8 F0 21.3
5 70 14.8 FF 25.4
6 80 15.8
7 90 16.8
8 C0 20.0
9 E0 22.1
10 FF 26.7
RF frequency 433 MHz RF frequency 868 MHz Output power
PA_POW
[hex]
Current consumption,
typ. [mA]
In power down mode the PA_POW should
be set to 00h for minimum leakage
current.
PA_POW
[hex]
Current consumption,
typ. [mA]
Table 11. Output power settings and typical current consumption
SWRS048 Page 32 of 53
Page 33

22. RSSI output
CC1000
Signal Strength Indicator) giving an
analogue output signal at the RSSI/IF pin.
The IF_RSSI bits in the FRONT_END
register enable the RSSI. When the RSSI
function is enabled, the output current of
this pin is inversely
input signal level. The output should be
terminated in a resistor to convert the
current output into a voltage. A capacitor
is used in order to low-pass filter the
signal.
The RSSI voltage range from 0 – 1.2 V
when using a 27 kΩ terminating resistor,
giving approximately 50 dB/V. This RSSI
voltage can be measured by an A/D
converter. Note that a higher voltage
means a lower input signal.
has a built-in RSSI (Received
proportional to the
CC1000
The RSSI measures the power referred to
the RF_IN pin. The input power can be
calculated using the following equations:
P = -51.3 V
P = -50.0 V
The external network for RSSI operation is
shown in Figure 21. R281 = 27 kΩ, C281
= 1nF.
A typical plot of RSSI voltage as function
of input power is shown in Figure 22.
– 49.2 [dBm] at 433 MHz
RSSI
– 45.5 [dBm] at 868 MHz
RSSI
CC1000
CC1000
RSSI/IF
RSSI/IF
Figure 21. RSSI circuit
R281C281
R281C281
TO ADC
TO ADC
1.3
1.2
1.1
1
0.9
0.8
0.7
0.6
Voltage
0.5
0.4
0.3
0.2
0.1
0
-105 -100 -95 -90 -85 -80 -75 -70 -65 -60 -55 -50
dBm
433Mhz
868Mhz
Figure 22. RSSI voltage vs. input power
SWRS048 Page 33 of 53
Page 34

23. IF output
CC1000
buffer. This buffer could be applied in
narrowband applications with
requirements on mirror image filtering.
The system is then built with
10.7 MHz ceramic filter and an external
10.7 MHz demodulator. The external
network for IF output operation is shown in
Figure 23. R281 = 470 Ω, C281 = 3.3nF.
has a built-in 10.7 MHz IF output
CC1000
, a
CC1000
The external network provides 330 Ω
source impedance for the 10.7 MHz
ceramic filter.
RSSI/IF
RSSI/IF
CC1000
CC1000
C281
C281
R281
R281
Figure 23. IF output circuit
To 10.7MHz filter
To 10.7MHz filter
and demodulator
and demodulator
SWRS048 Page 34 of 53
Page 35

24. Crystal oscillator
CC1000
regulated crystal oscillator. A high current
is used to start up the oscillations. When
the amplitude builds up, the current is
reduced to what is necessary to maintain
a 600 mVpp amplitude. This ensures a
fast start-up, keeps the current
consumption as well as the drive level to a
minimum and makes the oscillator
insensitive to ESR variations.
An external clock signal or the internal
crystal oscillator can be used as main
frequency reference. An external clock
signal should be connected to XOSC_Q1,
while XOSC_Q2 should be left open. The
XOSC_BYPASS bit in the FRONT_END
register should be set when an external
clock signal is used.
The crystal frequency should be in the
range 3-4, 6-8 or 9-16 MHz. Because the
crystal frequency is used as reference for
the data rate (as well as other internal
functions), the following frequencies are
recommended: 3.6864, 7.3728, 11.0592
or 14.7456 MHz. These frequencies will
give accurate data rates. The crystal
frequency range is selected by
XOSC_FREQ1:0 in the MODEM0 register.
To operate in synchronous mode at data
rates different from the standards at 1.2,
2.4, 4.8 kBaud and so on, the crystal
frequency can be scaled. The data rate
(DR) will change proportionally to the new
crystal frequency (f). To calculate the new
crystal frequency:
has an advanced amplitude
DR
DR
new
XOSC_Q1 XOSC_Q2
XOSC_Q1 XOSC_Q2
Figure 24. Crystal oscillator circuit
ff
=
_
xtalnewxtal
CC1000
Using the internal crystal oscillator, the
crystal must be connected between
XOSC_Q1 and XOSC_Q2. The oscillator
is designed for parallel mode operation of
the crystal. In addition loading capacitors
(C171 and C181) for the crystal are
required. The loading capacitor values
depend on the total load capacitance, C
specified for the crystal. The total load
capacitance seen between the crystal
terminals should equal C
oscillate at the specified frequency.
C +
=
The parasitic capacitance is constituted by
pin input capacitance and PCB stray
capacitance. Typically the total parasitic
capacitance is 8 pF. A trimming capacitor
may be placed across C171 for initial
tuning if necessary.
The crystal oscillator circuit is shown in
Figure 24. Typical component values for
different values of C
12.
The initial tolerance, temperature drift,
ageing and load pulling should be carefully
specified in order to meet the required
frequency accuracy in a certain
application. By specifying the total
expected frequency accuracy in
SmartRF® Studio together with data rate
and frequency separation, the software
will calculate the total bandwidth and
compare to the available IF bandwidth.
XTAL
XTALXTA L
C171C181
C171C181
1
11
+
CC
181171
for the crystal to
L
C
are given in Table
L
parasiticL
,
L
Item CL= 12 pF CL= 16 pF CL= 22 pF
C171 6.8 pF 18 pF 33 pF
C181 6.8 pF 18 pF 33 pF
Table 12. Crystal oscillator component values
SWRS048 Page 35 of 53
Page 36

CC1000
25. Optional LC Filter
An optional LC filter may be added
between the antenna and the matching
network in certain applications. The filter
will reduce the emission of harmonics and
increase the receiver selectivity.
C71
C71
Figure 25. LC filter
Item 315 MHz 433 MHz 868 MHz 915 MHz
C71 30 pF 20 pF 10 pF 10 pF
C72 30 pF 20 pF 10 pF 10 pF
L71 15 nH 12 nH 5.6 nH 4.7 nH
The filter topology is shown in Figure 25.
Component values are given in Table 13.
The filter is designed for 50 Ω
terminations. The component values may
have to be tuned to compensate for layout
parasitics.
L71
L71
C72
C72
Table 13. LC filter component values
SWRS048 Page 36 of 53
Page 37

26. System Considerations and Guidelines
26.1 SRD regulations
International regulations and national laws
regulate the use of radio receivers and
transmitters. SRDs (Short Range Devices)
for licence free operation are allowed to
operate in the 433 and 868-870 MHz
bands in most European countries. In the
United States such devices operate in the
260–470 and 902-928 MHz bands.
is designed to meet the requirements for
operation in all these bands. A summary
of the most important aspects of these
regulations can be found in Application
Note AN001 SRD regulations for licence
free transceiver operation, available from
Chipcon’s web site.
26.2 Low cost systems
In systems where low cost is of great
importance the
Very few external components keep the
total cost at a minimum. The oscillator
crystal can then be a low cost crystal with
50 ppm frequency tolerance.
26.3 Battery operated systems
In low power applications the power down
mode should be used when not being
active. Depending on the start-up time
requirement, the oscillator core can be
powered during power down. See page 28
for information on how effective power
management can be implemented.
26.4 Crystal drift compensation
A unique feature in
frequency resolution of 250 Hz. This can
be used to do the temperature
compensation of the crystal if the
temperature drift curve is known and a
temperature sensor is included in the
system. Even initial adjustment can be
done using the frequency programmability.
This eliminates the need for an expensive
CC1000
is the ideal choice.
CC1000
is the very fine
CC1000
TCXO and trimming in some applications.
In less demanding applications a crystal
with low temperature drift and low ageing
could be used without further
compensation. A trimmer capacitor in the
crystal oscillator circuit (in parallel with
C171) could be used to set the initial
frequency accurately. The fine frequency
step programming cannot be used in RX
mode if optimised frequency settings are
required (see page 24).
26.5 High reliability systems
Using a SAW filter as a preselector will
improve the communication reliability in
harsh environments by reducing the
probability of blocking. The receiver
sensitivity and the output power will be
reduced due to the filter insertion loss. By
inserting the filter in the RX path only,
together with an external RX/TX switch,
only the receiver sensitivity is reduced,
and output power is remained. The
CHP_OUT (LOCK) pin can be configured
to control an external LNA, RX/TX switch
or power amplifier. This is controlled by
LOCK_SELECT in the LOCK register.
26.6 Frequency hopping spread spectrum systems
Due to the very fast frequency shift
properties of the PLL, the
suitable for frequency hopping systems.
Hop rates of 1-100 hops/s are usually
used depending on the bit rate and the
amount of data to be sent during each
transmission. The two frequency registers
(FREQ_A and FREQ_B) are designed
such that the ‘next’ frequency can be
programmed while the ‘present’ frequency
is used. The switching between the two
frequencies is done through the MAIN
register.
CC1000
CC1000
is also
SWRS048 Page 37 of 53
Page 38

27. PCB Layout Recommendations
Chipcon provide reference layouts that
should be followed in order to achieve the
best performance. The Chipcon reference
design (CC1000PP and
CC1000uCSP_EM) can be downloaded
from the Chipcon website.
A two layer PCB is highly recommended.
The bottom layer of the PCB should be the
“ground-layer”.
The top layer should be used for signal
routing, and the open areas should be
filled with etallization connected to
ground using several vias.
The ground pins should be connected to
ground as close as possible to the
package pin using individual vias. The decoupling capacitors should also be placed
as close as possible to the supply pins
and connected to the ground plane by
separate vias.
The external components should be as
small as possible and surface mount
28. Antenna Considerations
CC1000
types of antennas. The most common
antennas for short range communication
are monopole, helical and loop antennas.
Monopole antennas are resonant
antennas with a length corresponding to
one quarter of the electrical wavelength
(λ/4). They are very easy to design and
can be implemented simply as a “piece of
wire” or even integrated into the PCB.
Non-resonant monopole antennas shorter
than λ/4 can also be used, but at the
expense of range. In size and cost critical
applications such an antenna may very
well be integrated into the PCB.
Helical antennas can be thought of as a
combination of a monopole and a loop
antenna. They are a good compromise in
size critical applications. But helical
antennas tend to be more difficult to
optimise than the simple monopole.
Loop antennas are easy to integrate into
the PCB, but are less effective due to
can be used together with various
devices are required. The VCO inductor
must be placed as close as possible to the
chip and symmetrical with respect to the
input pins.
Precaution should be used when placing
the microcontroller in order to avoid
interference with the RF circuitry.
In certain applications where the ground
plane for the digital circuitry is expected to
be noisy, the ground plane may be split in
an analogue and a digital part. All AGND
pins and AVDD de-coupling capacitors
should be connected to the analogue
ground plane. All DGND pins and DVDD
de-coupling capacitors should be
connected to the digital ground. The
connection between the two ground
planes should be implemented as a star
connection with the power supply ground.
A development kit with a fully assembled
PCB is available, and can be used as a
guideline for layout.
difficult impedance matching because of
their very low radiation resistance.
For low power applications the λ/4-
monopole antenna is recommended giving
the best range and because of its
simplicity.
The length of the λ/4-monopole antenna is
given by:
where f is in MHz, giving the length in cm.
An antenna for 869 MHz should be 8.2
cm, and 16.4 cm for 434 MHz.
The antenna should be connected as
close as possible to the IC. If the antenna
is located away from the input pin the
antenna should be matched to the feeding
transmission line (50 Ω).
For a more thorough primer on antennas,
please refer to Application Note AN003
SRD Antennas available from Chipcon’s
web site.
SWRS048 Page 38 of 53
CC1000
L = 7125 / f
Page 39

CC1000
29. Configuration registers
The configuration of
programming 22 8-bit configuration
registers. The configuration data based on
selected system parameters are most
easily found by using the SmartRF®
REGISTER OVERVIEW
ADDRESS Byte Name Description
00h MAIN MAIN Register
01h FREQ_2A Frequency Register 2A
02h FREQ_1A Frequency Register 1A
03h FREQ_0A Frequency Register 0A
04h FREQ_2B Frequency Register 2B
05h FREQ_1B Frequency Register 1B
06h FREQ_0B Frequency Register 0B
07h FSEP1 Frequency Separation Register 1
08h FSEP0 Frequency Separation Register 0
09h CURRENT Current Consumption Control Register
0Ah FRONT_END Front End Control Register
0Bh PA_POW PA Output Power Control Register
0Ch PLL PLL Control Register
0Dh LOCK LOCK Status Register and signal select to CHP_OUT (LOCK) pin
0Eh CAL VCO Calibration Control and Status Register
0Fh MODEM2 Modem Control Register 2
10h MODEM1 Modem Control Register 1
11h MODEM0 Modem Control Register 0
12h MATCH Match Capacitor Array Control Register for RX and TX impedance matching
13h FSCTRL Frequency Synthesiser Control Register
14h Reserved
15h Reserved
16h Reserved
17h Reserved
18h Reserved
19h Reserved
1Ah Reserved
1Bh Reserved
1Ch PRESCALER Prescaler and IF-strip test control register
40h TEST6 Test register for PLL LOOP
41h TEST5 Test register for PLL LOOP
42h TEST4 Test register for PLL LOOP (must be updated as specified)
43h TEST3 Test register for VCO
44h TEST2 Test register for Calibration
45h TEST1 Test register for Calibration
46h TEST0 Test register for Calibration
CC1000
is done by
Studio software. A complete description of
the registers are given in the following
tables. After a RESET is programmed all
the registers have default values.
SWRS048 Page 39 of 53
Page 40

CC1000
MAIN Register (00h)
REGISTER NAME Default
value
MAIN[7] RXTX - - RX/TX switch, 0 : RX , 1 : TX
MAIN[6] F_REG - - Selection of Frequency Register, 0 : Register A, 1 :
MAIN[5] RX_PD - H Power Down of LNA, Mixer, IF, Demodulator, RX part of
MAIN[4] TX_PD - H Power Down of TX part of Signal Interface, PA
MAIN[3] FS_PD - H Power Down of Frequency Synthesiser
MAIN[2] CORE_PD - H Power Down of Crystal Oscillator Core
MAIN[1] BIAS_PD - H Power Down of BIAS (Global_Current_Generator)
MAIN[0] RESET_N - L Reset, active low. Writing RESET_N low will write default
FREQ_2A Register (01h)
REGISTER NAME Default
FREQ_2A[7:0] FREQ_A[23:16] 01110101 - 8 MSB of frequency control word A
FREQ_1A Register (02h)
REGISTER NAME Default
FREQ_1A[7:0] FREQ_A[15:8] 10100000 - Bit 15 to 8 of frequency control word A
FREQ_0A Register (03h)
REGISTER NAME Default
FREQ_0A[7:0] FREQ_A[7:0] 11001011 - 8 LSB of frequency control word A
FREQ_2B Register (04h)
REGISTER NAME Default
FREQ_2B[7:0] FREQ_B[23:16] 01110101 - 8 MSB of frequency control word B
FREQ_1B Register (05h)
REGISTER NAME Default
FREQ_1B[7:0] FREQ_B[15:8] 10100101 - Bit 15 to 8 of frequency control word B
FREQ_0B Register (06h)
REGISTER NAME Default
FREQ_0B[7:0] FREQ_B[7:0] 01001110 - 8 LSB of frequency control word B
FSEP1 Register (07h)
REGISTER NAME Default
FSEP1[7:3] - - - Not used
FSEP1[2:0] FSEP_MSB[2:0] 000 - 3 MSB of frequency separation control
Active Description
Register B
Signal Interface
and Crystal Oscillator Buffer
values to all other registers than MAIN. Bits in MAIN do
not have a default value, and will be written directly
through the configurations interface. Must be set high to
complete reset.
Active Description
value
Active Description
value
Active Description
value
Active Description
value
Active Description
value
Active Description
value
Active Description
value
SWRS048 Page 40 of 53
Page 41

CC1000
FSEP0 Register (08h)
REGISTER NAME Default
value
FSEP0[7:0] FSEP_LSB[7:0] 01011001 - 8 LSB of frequency separation control
CURRENT Register (09h)
REGISTER NAME Default
value
CURRENT[7:4] VCO_CURRENT[3:0] 1100 - Control of current in VCO core for TX and RX
CURRENT[3:2] LO_DRIVE[1:0] 10 Control of current in VCO buffer for LO drive
CURRENT[1:0] PA_DRIVE[1:0] 10 Control of current in VCO buffer for PA
Active Description
Active Description
0000 : 150µA
0001 : 250µA
0010 : 350µA
0011 : 450µA
0100 : 950µA, use for RX, f= 400 – 500 MHz
0101 : 1050µA
0110 : 1150µA
0111 : 1250µA
1000 : 1450µA, use for RX, f<400 MHz and f>500
MHz; and TX, f= 400 – 500 MHz
1001 : 1550µA, use for TX, f<400 MHz
1010 : 1650µA
1011 : 1750µA
1100 : 2250µA
1101 : 2350µA
1110 : 2450µA
1111 : 2550µA, use for TX, f>500 MHz
00 : 0.5mA, use for TX
01 : 1.0mA , use for RX, f<500 MHz*
10 : 1.5mA,
11 : 2.0mA, use for RX, f>500 MHz *
* LO_DRIVE can be reduced to save current in
RX mode. See
00 : 1mA, use for RX
01 : 2mA, use for TX, f<500 MHz
10 : 3mA
11 : 4mA, use for TX, f>500 MHz
Table 10 for details
SWRS048 Page 41 of 53
Page 42

CC1000
FRONT_END Register (0Ah)
REGISTER NAME Default
value
FRONT_END[7:6] - 00 - Not used
FRONT_END[5] BUF_CURRENT 0 - Control of current in the LNA_FOLLOWER
FRONT_END[4:3] LNA_CURRENT
[1:0]
FRONT_END[2:1] IF_RSSI[1:0] 00 - Control of IF_RSSI pin
FRONT_END[0] XOSC_BYPASS 0 - 0 : Internal XOSC enabled
PA_POW Register (0Bh)
REGISTER NAME Default
PA_POW[7:4] PA_HIGHPOWER[3:0] 0000 - Control of output power in high power array.
PA_POW[3:0] PA_LOWPOWER[3:0] 1111 - Control of output power in low power array
PLL Register (0Ch)
REGISTER NAME Default
PLL[7] EXT_FILTER 0 - 1 : External loop filter
PLL[6:3] REFDIV[3:0] 0010 - Reference divider
PLL[2] ALARM_DISABLE 0 h 0 : Alarm function enabled
PLL[1] ALARM_H - - Status bit for tuning voltage out of range
PLL[0] ALARM_L - - Status bit for tuning voltage out of range
01 - Control of current in LNA
Active Description
Active Description
value
Active Description
value
0 : 520uA, use for f<500 MHz
1 : 690uA, use for f>500 MHz *
*BUF_CURRENT can be reduced to save
current in RX mode. See
00 : 0.8mA, use for f<500 MHz *
01 : 1.4mA
10 : 1.8mA, use for f>500 MHz *
11 : 2.2mA
*LNA_CURRENT can be reduced to save
current in RX mode. See
00 : Internal IF and demodulator, RSSI inactive
01 : RSSI active, RSSI/IF is analog RSSI output
10 : External IF and demodulator, RSSI/IF is
mixer output. Internal IF in power down mode.
11 : Not used
1 : Power-Down of XOSC, external CLK used
Should be 0000 in PD mode . See Table 11
page 32 for details.
Should be 0000 in PD mode. See Table 11
page 32 for details.
0 : Internal loop filter
1-to-0 transition samples F_COMP
comparator when BREAK_LOOP=1
(TEST3)
0000 : Not allowed
0001 : Not allowed
0010 : Divide by 2
0011 : Divide by 3
…........
1111 : Divide by 15
1 : Alarm function disabled
(too close to VDD)
(too close to GND)
Table 10 for details.
Table 10 for details.
SWRS048 Page 42 of 53
Page 43

CC1000
LOCK Register (0Dh)
REGISTE
R
LOCK[7:4] LOCK_SELECT[3:0] 0000 - Selection of signals to CHP_OUT (LOCK) pin
LOCK[3] PLL_LOCK_
LOCK[2] PLL_LOCK_
LOCK[1] LOCK_INSTANT - - Status bit from Lock Detector
LOCK[0] LOCK_CONTINUOUS - - Status bit from Lock Detector
CAL Register (0Eh)
REGISTER NAME Default
CAL[7] CAL_START 0
CAL[6] CAL_DUAL 0 H 1 : Store calibration in both A and B
CAL[5] CAL_WAIT 0 H 1 : Normal Calibration Wait Time
CAL[4] CAL_CURRENT 0 H 1 : Calibration Current Doubled
CAL[3] CAL_COMPLETE 0 H Status bit defining that calibration is
CAL[2:0] CAL_ITERATE 101 H Iteration start value for calibration DAC
NAME Default
ACCURACY
LENGTH
Active Description
value
0000 : Normal, pin can be used as CHP_OUT
0001 : LOCK_CONTINUOUS (active high)
0010 : LOCK_INSTANT (active high)
0011 : ALARM_H (active high)
0100 : ALARM_L (active high)
0101 : CAL_COMPLETE (active high)
0110 : IF_OUT
0111 : REFERENCE_DIVIDER Output
1000 : TX_PDB (active high, activates external PA
when TX_PD=0)
1001 : Manchester Violation (active high)
1010 : RX_PDB (active high, activates external
LNA when RX_PD=0)
1011 : Not defined
1100 : Not defined
1101 : LOCK_AVG_FILTER
1110 : N_DIVIDER Output
1111 : F_COMP
0 - 0 : Sets Lock Threshold = 127, Reset Lock
Threshold = 111. Corresponds to a worst case
accuracy of 0.7%
1 : Sets Lock Threshold = 31, Reset Lock
Threshold =15. Corresponds to a worst case
accuracy of 2.8%
0 -
value
0 : Normal PLL lock window
1 : Not used
Active Description
↑ ↑ 1 : Calibration started
0 : Calibration inactive
CAL_START must be set to 0 after
calibration is done
0 : Store calibration in A or B defined by
MAIN[6]
0 : Half Calibration Wait Time
The calibration time is proportional to the
internal reference frequency. 2 MHz
reference frequency gives 14 ms wait time.
0 : Normal Calibration Current
complete
000 – 101: Not used
110 : Normal start value
111 : Not used
SWRS048 Page 43 of 53
Page 44

•
CC1000
MODEM2 Register (0Fh)
REGISTER NAME Default
value
MODEM2[7] PEAKDETECT 1 H Peak Detector and Remover disabled or
MODEM2[6:0] PEAK_LEVEL_OFFSET[6:0] 0010110 - Threshold level for Peak Remover in
Note: PEAK_LEVEL_OFFSET[6:0] =
and
low
•−=
accuracyXTALrffkHzIF
__2150
Fs
−
IF
low
IF
low
and ∆f is the separation
where
5
Fs
⋅
∆
f
8
+
2
MODEM1 Register (10h)
REGISTER NAME Default
Active Description
value
MODEM1[7:5] MLIMIT 011 - Sets the limit for the Manchester Violation Flag.
MODEM1[4] LOCK_AVG_IN 0 H Lock control bit of Average Filter
MODEM1[3] LOCK_AVG_MODE 0 - Automatic lock of Average Filter
MODEM1[2:1] SETTLING[1:0] 11 - Settling Time of Average Filter
MODEM1[0] MODEM_RESET_N 1 L Separate reset of MODEM
Active Description
enabled
0 : Peak detector and remover is
disabled
1 : Peak detector and remover is
enabled
Demodulator. Correlated to frequency
deviation, see note.
_
=
Fs
xoscf
1_
+
FREQXOSC
A Manchester Value = 14 is a perfect bit and a
Manchester Value = 0 is a constant level (an
unbalanced corrupted bit)
000 : No Violation Flag is set
001 : Violation Flag is set for Manchester Value < 1
010 : Violation Flag is set for Manchester Value < 2
011 : Violation Flag is set for Manchester Value < 3
100 : Violation Flag is set for Manchester Value < 4
101 : Violation Flag is set for Manchester Value < 5
110 : Violation Flag is set for Manchester Value < 6
111 : Violation Flag is set for Manchester Value < 7
0 : Average Filter is free-running
1 : Average Filter is locked
0 : Lock of Average Filter is controlled automatically
1 : Lock of Average Filter is controlled by
LOCK_AVG_IN
00 : 11 baud settling time, worst case 1.2dB loss in
sensitivity
01 : 22 baud settling time, worst case 0.6dB loss in
sensitivity
10 : 43 baud settling time, worst case 0.3dB loss in
sensitivity
11 : 86 baud settling time, worst case 0.15dB loss in
sensitivity
SWRS048 Page 44 of 53
Page 45

CC1000
MODEM0 Register (11h)
REGISTER NAME Default
value
MODEM0[7] - - - Not used
MODEM0[6:4] BAUDRATE[2:0] 010 - 000 : 0.6 kBaud
MODEM0[3:2] DATA_FORMAT[1:0] 01 - 00 : NRZ operation.
MODEM0[1:0] XOSC_FREQ[1:0] 00 - Selection of XTAL frequency range
MATCH Register (12h)
REGISTER NAME Default
MATCH[7:4] RX_MATCH[3:0] 0000 - Selects matching capacitor array value for
MATCH[3:0] TX_MATCH[3:0] 0000 - Selects matching capacitor array value for
FSCTRL Register (13h)
REGISTER NAME Default
value
FSCTRL[7:4] - - - Not used
FSCTRL[3:1] Reserved
FSCTRL[0] FS_RESET_N 1 L
Active Description
001 : 1.2 kBaud
010 : 2.4 kBaud
011 : 4.8 kBaud
100 : 9.6 kBaud
101 : 19.2, 38.4 and 76.8 kBaud
110 : Not used
111 : Not used
01 : Manchester operation
10 : Transparent Asyncronous UART operation
11 : Not used
00 : 3MHz – 4MHz crystal, 3.6864MHz
recommended
Also used for 76.8 kBaud, 14.7456MHz
01 : 6MHz – 8MHz crystal, 7.3728MHz
recommended
Also used for 38.4 kBaud, 14.7456MHz
10 : 9MHz – 12MHz crystal, 11.0592 MHz
recommended
11 : 12MHz – 16MHz crystal, 14.7456MHz
recommended
Active Description
value
RX, step size is 0.4 pF
0001: Use for RF frequency > 500 MHz
0111: Use for RF frequency < 500 MHz
TX, step size is 0.4 pF
Active Description
Separate reset of frequency synthesizer
SWRS048 Page 45 of 53
Page 46

CC1000
PRESCALER Register (1Ch)
REGISTER NAME Default
value
PRESCALER[7:6] PRE_SWING[1:0] 00 - Prescaler swing. Fractions for
PRESCALER[5:4] PRE_CURRENT
[1:0]
PRESCALER[3] IF_INPUT 0 - 0 : Nominal setting
PRESCALER[2] IF_FRONT 0 - 0 : Nominal setting
PRESCALER[1:0] - 00 - Not used
TEST6 Register (for test only, 40h)
REGISTER NAME Default
TEST6[7] LOOPFILTER_TP1 0 - 1 : Select testpoint 1 to CHP_OUT
TEST6 [6] LOOPFILTER_TP2 0 - 1 : Select testpoint 2 to CHP_OUT
TEST6 [5] CHP_OVERRIDE 0 - 1 : use CHP_CO[4:0] value
TEST6[4:0] CHP_CO[4:0] 10000 - Charge_Pump Current DAC override value
TEST5 Register (for test only, 41h)
REGISTER NAME Default
TEST5[7:6] - - - Not used
TEST5[5] CHP_DISABLE 0 - 1 : CHP up and down pulses disabled
TEST5[4] VCO_OVERRIDE 0 - 1 : use VCO_AO[2:0] value
TEST5[3:0] VCO_AO[3:0] 1000 - VCO_ARRAY override value
TEST4 Register (for test only, 42h)
REGISTER NAME Default
TEST4[7:6] - - - Not used
TEST4[5:0] L2KIO[5:0] 100101 h Constant setting charge pump current
00 - Prescaler current scaling
Active Description
PRE_CURRENT[1:0] = 00
00 : 1 * Nominal Swing
01 : 2/3 * Nominal Swing
10 : 7/3 * Nominal Swing
11 : 5/3 * Nominal Swing
00 : 1 * Nominal Current
01 : 2/3 * Nominal Current
10 : 1/2 * Nominal Current
11 : 2/5 * Nominal Current
1 : RSSI/IF pin is input to IF-strips
1 : Output of IF_Front_amp is switched to
RSSI/IF pin
Active Description
value
0 : CHP_OUT tied to GND
0 : CHP_OUT tied to GND
0 : use calibrated value
Active Description
value
0 : normal operation
0 : use calibrated value
Active Description
value
scaling/rounding factor. Sets Bandwidth of
PLL. Use 3Fh for 9.6 kBaud and higher
SWRS048 Page 46 of 53
Page 47

CC1000
TEST3 Register (for test only, 43h)
REGISTER NAME Default
value
TEST3[7:5] - - - Not used
TEST3[4] BREAK_LOOP 0 - 1 : PLL loop open
TEST3[3:0] CAL_DAC_OPEN 0100 - Calibration DAC override value, active when
TEST2 Register (for test only, 44h)
REGISTER NAME Default
value
TEST2[7:5] - - - Not used
TEST2[4:0] CHP_CURRENT
[4:0]
TEST1 Register (for test only, 45h)
REGISTER NAME Default
TEST1[7:4] - - - Not used
TEST1[3:0] CAL_DAC[3:0] - - Status vector defining applied Calibration
TEST0 Register (for test only, 46h)
REGISTER NAME Default
TEST0[7:4] - - - Not used
TEST0[3:0] VCO_ARRAY[3:0] - - Status vector defining applied VCO_ARRAY
- - Status vector defining applied
value
value
Active Description
0 : PLL loop closed
BREAK_LOOP =1
Active Description
CHP_CURRENT value
Active Description
DAC value
Active Description
value
SWRS048 Page 47 of 53
Page 48

30. Package Description (TSSOP-28)
CC1000
Note: The figure is an illustration only.
D E1 E A A1 e B L Copl.
TSSOP 28 Min
Max
All dimensions in mm
Thin Shrink Small Outline Package (TSSOP)
9.60
4.30
9.80
4.50
6.40
1.20
0.05
0.15
0.65
0.19
0.30
0.45
0.75
0.10
α
0°
8°
SWRS048 Page 48 of 53
Page 49

31. Package Description (UltraCSP™)
Top view
CC1000
A1
B1
C1
D1
E1
F1
A2
B2
2339um +/- 20um
C2
D2
4034um +/- 20um
E2
F2
A3
B3
C3
D3
E3
F3
A4
B4
C4
D4
E4
F4
500um
+/- 10um
G3
392um
+/-20um
292um
+/-20um
G1
G2
250um
+/- 10um
Bump pitch is 500um centre to centre in both directions.
SWRS048 Page 49 of 53
500um
+/- 10um
G4
535um
+/-20um
417um
+/-20um
Page 50

Vertical cross section (UltraCSP™)
CC1000
Before assembly on PCB:
A
h1
A
h2
Die thickness
(A)
432um 200um
Bump height
before
assembly (h1)
+/- 20um
Die
Solder bumps (Pb free)
After assembly on PCB:
Die
PCB mounting pads
Bump height
after assembly
(h2)
140um
+/- tbd um
Total height
before
assembly
632um
+/- 20um
Total
height after
assembly
572um
+/- tbd um
Table 14: Height budget
SWRS048 Page 50 of 53
Page 51

32. Plastic Tube Specification
TSSOP 4.4mm (.173”) antistatic tube.
Package Tube Width Tube Height Tube
TSSOP 28 268 mil 80 mil 20” 50
33. Carrier Tape and Reel Specification
Carrier tape and reel is in accordance with EIA Specification 481.
Package Tape Width Component
TSSOP 28 16 mm 8 mm 4 mm 13” 2500
UltraCSP™ 12 mm 8 mm 2500
Tube Specification
Length
Tape and Reel Specification
Pitch
Hole
Pitch
Reel
Diameter
CC1000
Units per Tube
Units per Reel
Note: UltraCSP™ Tape and reel illustration only
SWRS048 Page 51 of 53
Page 52

CC1000
34. Ordering Information
Ordering part number Description MOQ
CC1000 Single Chip RF Transceiver 50 (tube)
CC1000/T&R Single Chip RF Transceiver 2500 (tape and reel)
CC1000_uCSP/T&R Single Chip RF Transceiver UCSP™ 2500 (tape and reel)
CC1000DK-433 CC1000 Development Kit, 433 MHz 1
CC1000DK-868 CC1000 Development Kit, 868/915 MHz 1
CC1000SK CC1000 Sample Kit (5 pcs) 1
CC1000SK_uCSP CC1000 UCSP™ Sample Kit (5 pcs) 1
MOQ = Minimum Order Quantity
35. General Information
Document Revision History
Revision Date Description/Changes
2.2 April 2004 Shaping feature removed
2.3 August 2005 UltraCSP™ package included
Disclaimer
Chipcon AS believes the information contained herein is correct and accurate at the time of this printing. However,
Chipcon AS reserves the right to make changes to this product without notice. Chipcon AS does not assume any
responsibility for the use of the described product; neither does it convey any license under its patent rights, or the
rights of others. The latest updates are available at the Chipcon website or by contacting Chipcon directly.
As far as possible, major changes of product specifications and functionality, will be stated in product specific Errata
Notes published at the Chipcon website. Customers are encouraged to sign up to the Developers Newsletter for the
most recent updates on products and support tools.
When a product is discontinued this will be done according to Chipcon’s procedure for obsolete products as
described in Chipcon’s Quality Manual. This includes informing about last-time-buy options. The Quality Manual can
be downloaded from Chipcon’s website.
Compliance with regulations is dependent on complete system performance. It is the customer’s responsibility to
ensure that the system complies with regulations.
Trademarks
SmartRF
cells, modules and design expertise. Based on SmartRF
circuits as well as full custom ASICs based on customer requirements and this technology.
UltraCSP™ is a trademark registered to FlipChip International, LLC.
All other trademarks, registered trademarks and product names are the sole property of their respective owners.
®
is a registered trademark of Chipcon AS. SmartRF® is Chipcon's RF technology platform with RF library
Life Support Policy
This Chipcon product is not designed for use in life support appliances, devices, or other systems where malfunction
can reasonably be expected to result in significant personal injury to the user, or as a critical component in any life
support device or system whose failure to perform can be reasonably expected to cause the failure of the life support
device or system, or to affect its safety or effectiveness. Chipcon AS customers using or selling these products for
use in such applications do so at their own risk and agree to fully indemnify Chipcon AS for any damages resulting
from any improper use or sale.
Application circuit simplified
Additional information added for the demodulator
Additional information added for frequency calculation
Additional information added for calibration
Additional information added for crystal oscillator
Preliminary version removed
Narrow band information removed
REFDIV different in RX and TX
Minor corrections and editorial changes
Minor corrections and editorial changes
®
technology Chipcon develops standard component RF
SWRS048 Page 52 of 53
Page 53
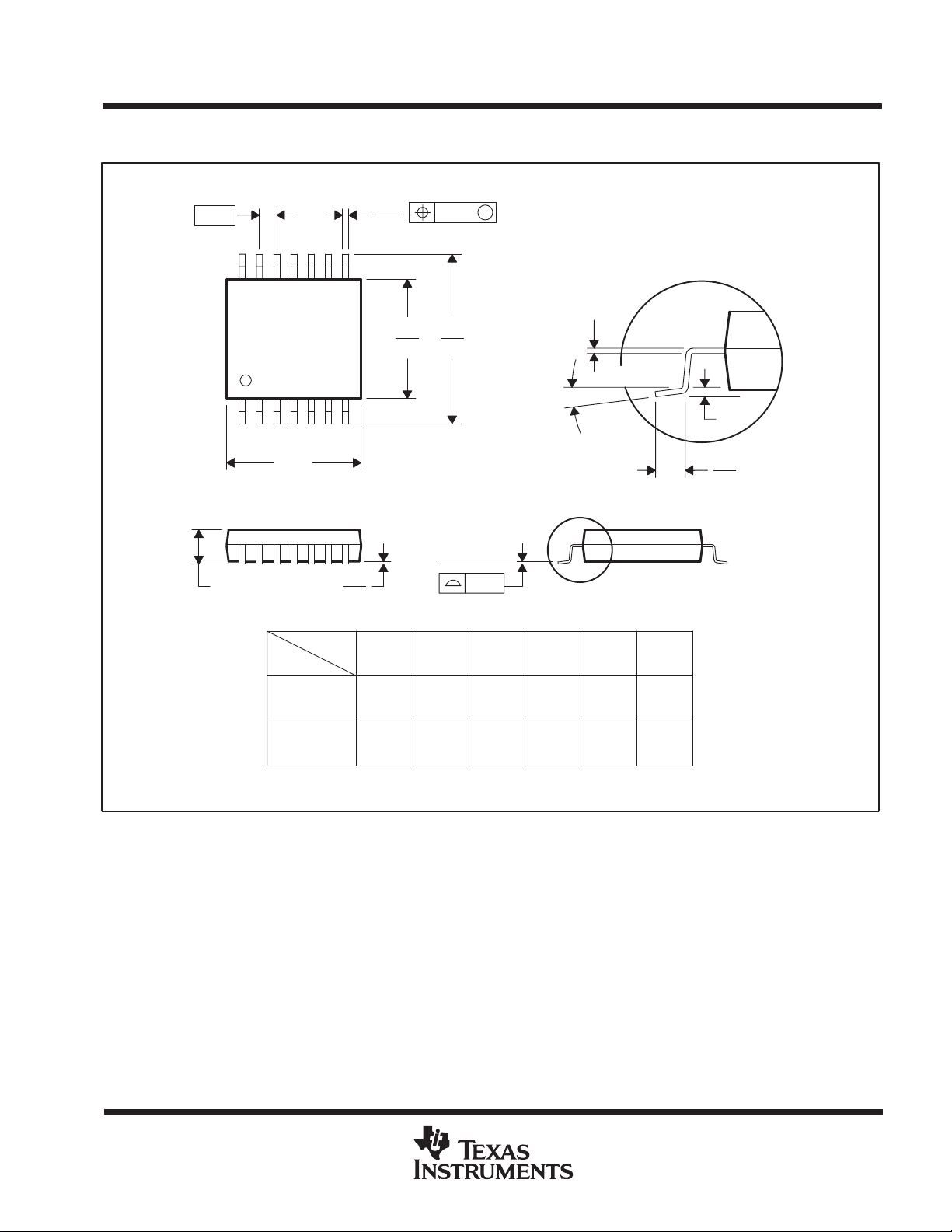
MECHANICAL DATA
MTSS001C – JANUARY 1995 – REVISED FEBRUARY 1999
PW (R-PDSO-G**) PLASTIC SMALL-OUTLINE PACKAGE
14 PINS SHOWN
0,65
1,20 MAX
14
0,30
0,19
8
4,50
4,30
PINS **
7
0,15
0,05
Seating Plane
8
14
1
A
DIM
0,10
6,60
6,20
0,10
M
0,15 NOM
Gage Plane
0,25
0°–8°
2016
24
28
0,75
0,50
A MAX
A MIN
NOTES: A. All linear dimensions are in millimeters.
B. This drawing is subject to change without notice.
C. Body dimensions do not include mold flash or protrusion not to exceed 0,15.
D. Falls within JEDEC MO-153
3,10
2,90
5,10
4,90
5,10
4,90
6,60
6,40
7,90
7,70
9,80
9,60
4040064/F 01/97
POST OFFICE BOX 655303 • DALLAS, TEXAS 75265
Page 54

IMPORTANT NOTICE
Texas Instruments Incorporated and its subsidiaries (TI) reserve the right to make corrections, modifications,
enhancements, improvements, and other changes to its products and services at any time and to discontinue
any product or service without notice. Customers should obtain the latest relevant information before placing
orders and should verify that such information is current and complete. All products are sold subject to TI’s terms
and conditions of sale supplied at the time of order acknowledgment.
TI warrants performance of its hardware products to the specifications applicable at the time of sale in
accordance with TI’s standard warranty. Testing and other quality control techniques are used to the extent TI
deems necessary to support this warranty . Except where mandated by government requirements, testing of all
parameters of each product is not necessarily performed.
TI assumes no liability for applications assistance or customer product design. Customers are responsible for
their products and applications using TI components. To minimize the risks associated with customer products
and applications, customers should provide adequate design and operating safeguards.
TI does not warrant or represent that any license, either express or implied, is granted under any TI patent right,
copyright, mask work right, or other TI intellectual property right relating to any combination, machine, or process
in which TI products or services are used. Information published by TI regarding third-party products or services
does not constitute a license from TI to use such products or services or a warranty or endorsement thereof.
Use of such information may require a license from a third party under the patents or other intellectual property
of the third party, or a license from TI under the patents or other intellectual property of TI.
Reproduction of information in TI data books or data sheets is permissible only if reproduction is without
alteration and is accompanied by all associated warranties, conditions, limitations, and notices. Reproduction
of this information with alteration is an unfair and deceptive business practice. TI is not responsible or liable for
such altered documentation.
Resale of TI products or services with statements different from or beyond the parameters stated by TI for that
product or service voids all express and any implied warranties for the associated TI product or service and
is an unfair and deceptive business practice. TI is not responsible or liable for any such statements.
Following are URLs where you can obtain information on other Texas Instruments products and application
solutions:
Products Applications
Amplifiers amplifier.ti.com Audio www.ti.com/audio
Data Converters dataconverter.ti.com Automotive www.ti.com/automotive
DSP dsp.ti.com Broadband www.ti.com/broadband
Interface interface.ti.com Digital Control www.ti.com/digitalcontrol
Logic logic.ti.com Military www.ti.com/military
Power Mgmt power.ti.com Optical Networking www.ti.com/opticalnetwork
Microcontrollers microcontroller.ti.com Security www.ti.com/security
Low Power Wireless www.ti.com/lpw Telephony www.ti.com/telephony
Video & Imaging www.ti.com/video
Wireless www.ti.com/wireless
Mailing Address: Texas Instruments
Post Office Box 655303 Dallas, Texas 75265
Copyright 2006, Texas Instruments Incorporated
 Loading...
Loading...