

Page 1
UM2133
User manual
Time-of-Flight long-distance ranging sensor with advanced multi-zone and multi-
object detection
Introduction
This user manual is applicable for VL53L1 devices. The VL53L1 is a long distance ranging sensor with multi-zone and multiobject detection (see VL53L1 Datasheet).
The purpose of this User Manual is to describe the possible integration models, and for each of them, the set of functions to call
to get ranging data using the VL53L1 bare driver.
Figure 1. VL53L1 ranging sensor module
References
• VL53L1 Datasheet (DS11786)
• VL53L1 Application Note to describe performances (AN5573)
UM2133 - Rev 6 - October 2020
For further information contact your local STMicroelectronics sales office.
www.st.com
Page 2
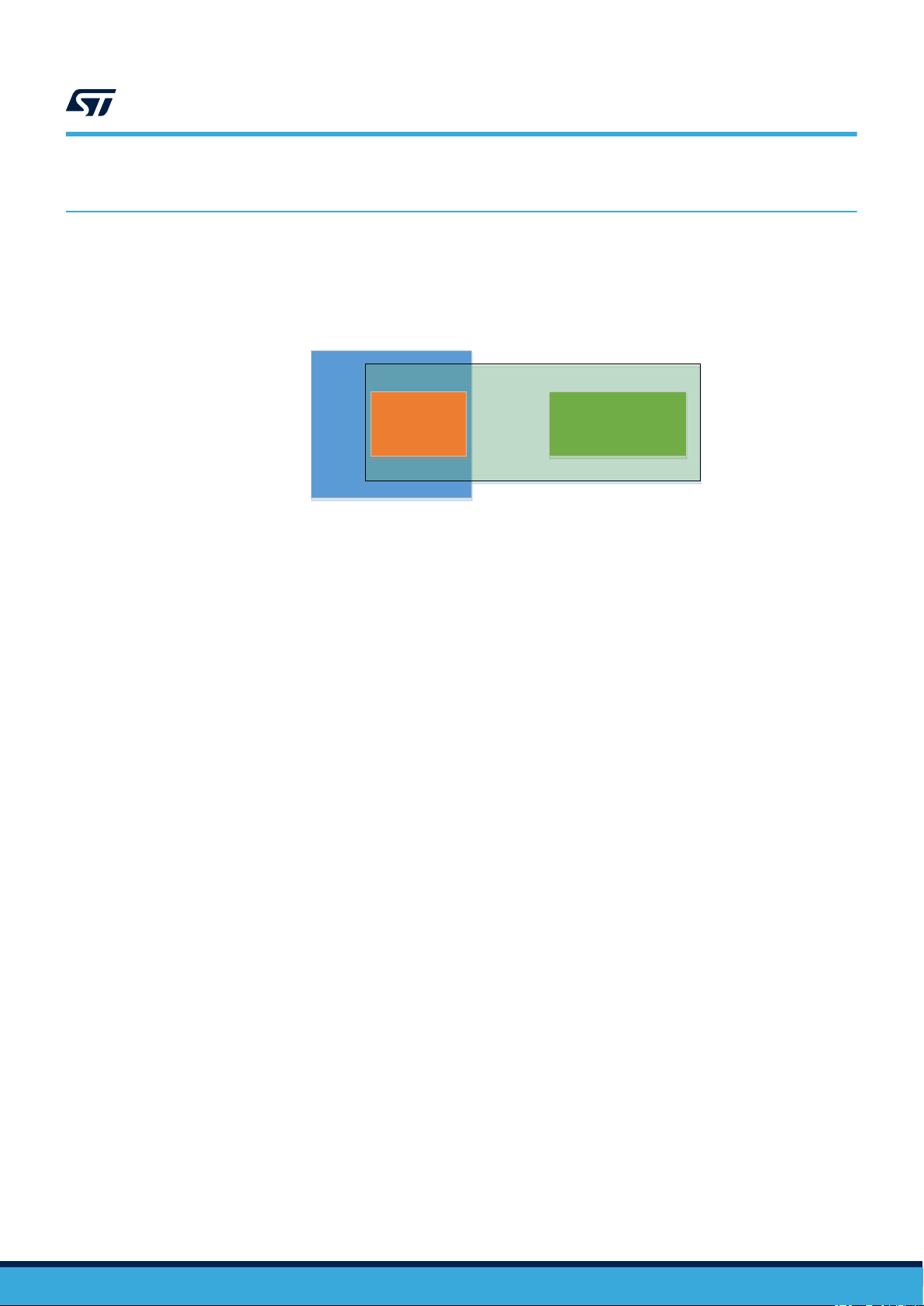
1 VL53L1 system overview
Host
VL53L1 System
VL53L1
module
VL53L1
Driver
I2C
The VL53L1 system is composed of the VL53L1 module and a driver running on a host.
UM2133
VL53L1 system overview
Figure 2. VL53L1 system
There are two possible integration models for VL53L1 devices, depending on whether the host is a Linux host or
not. ST delivers drivers for both of those integration models:
• For the non-Linux host, ST delivers a bare-metal driver, referred to as “bare driver” in this document.
• For the Linux host, ST delivers a Linux driver
Those drivers allow the user to control the device, to perform processing and output a data structure with ranging
values accessible to the host.
This document describes the driver functions accessible to the host, which are used to control the device and get
ranging data, for integration with non-Linux hosts.
A separate user manual (UM2326) describes the Linux host integration.
Note: The present document describes the implemented and validated functions.
Any other function available in the drivers should not be used if not described in this document.
The bare driver is provided to be integrated into non-Linux hosts, typically microcontrollers with:
• limited memory and computing resources
• without OS (bare metal)
• or with a small footprint real-time OS
The bare driver is an implementation of a set of functions which uses the VL53L1 device. It makes minimal
assumptions regarding OS integration and services. The sequencing of actions, execution/threading model,
platform adaptation, and device structure allocation are not part of the bare driver implementation but are left
open to the integrator.
The sequencing of bare driver calls must follow a set of rules, defined in this document.
UM2133 - Rev 6
page 2/37
Page 3
2 Ranging functional description
This section briefly describes the functional capabilities of the VL53L1 ranging device.
2.1 Ranging preset modes
Four ranging preset modes can be used with the VL53L1 bare driver:
1. Ranging mode: This mode aims to get single or multiple (up to 4) object ranging distances.
2. MultiZones scanning mode: This mode allows the multiple region-of-interest (16 maximum per default, and
up to 169) to be continuously scanned. It also allows each region-of-interest (ROI) ranging value to be
reported one by one. ROI number and sizes are defined by the user before ranging is started.
3. Autonomous mode: This mode allows a programmable inter-measurement period to be periodically
scanned. Ranging is done without involvement from the host, allowing the host to go into a low-power state.
The host only wakes up upon a measurement interrupt. Programming criteria (distance and/or signal
thresholds) allow the device to trigger an interrupt to the host only when the measurement is within the
programmed criteria.
4. Lite ranging mode: This mode is obsolete.
Selection of the ranging preset modes is made using the driver function described in Section 3.2.4 Preset mode.
Note: Ranging and MultiZones modes are based on histogram processing
UM2133
Ranging functional description
2.2 Ranging sequence
For all modes, except autonomous mode, the device runs with a handshake mechanism, based on a standard
interrupt management scheme.
After each ranging, the host retrieves the ranging data and enables the next ranging by clearing the interrupt. This
process is what is referred to as the handshake mechanism.
Next ranging is then triggered if the current one is finished and if the host has cleared the previous pending
interrupt.
The interrupt mechanism allows the faster data transfer, without loosing any ranging value due to communication
or asynchronism issues. During the handshake phase, the host performs some data processing.
The ranging sequence is functionally described in Figure 3. VL53L1 ranging sequence overview below.
UM2133 - Rev 6
page 3/37
Page 4
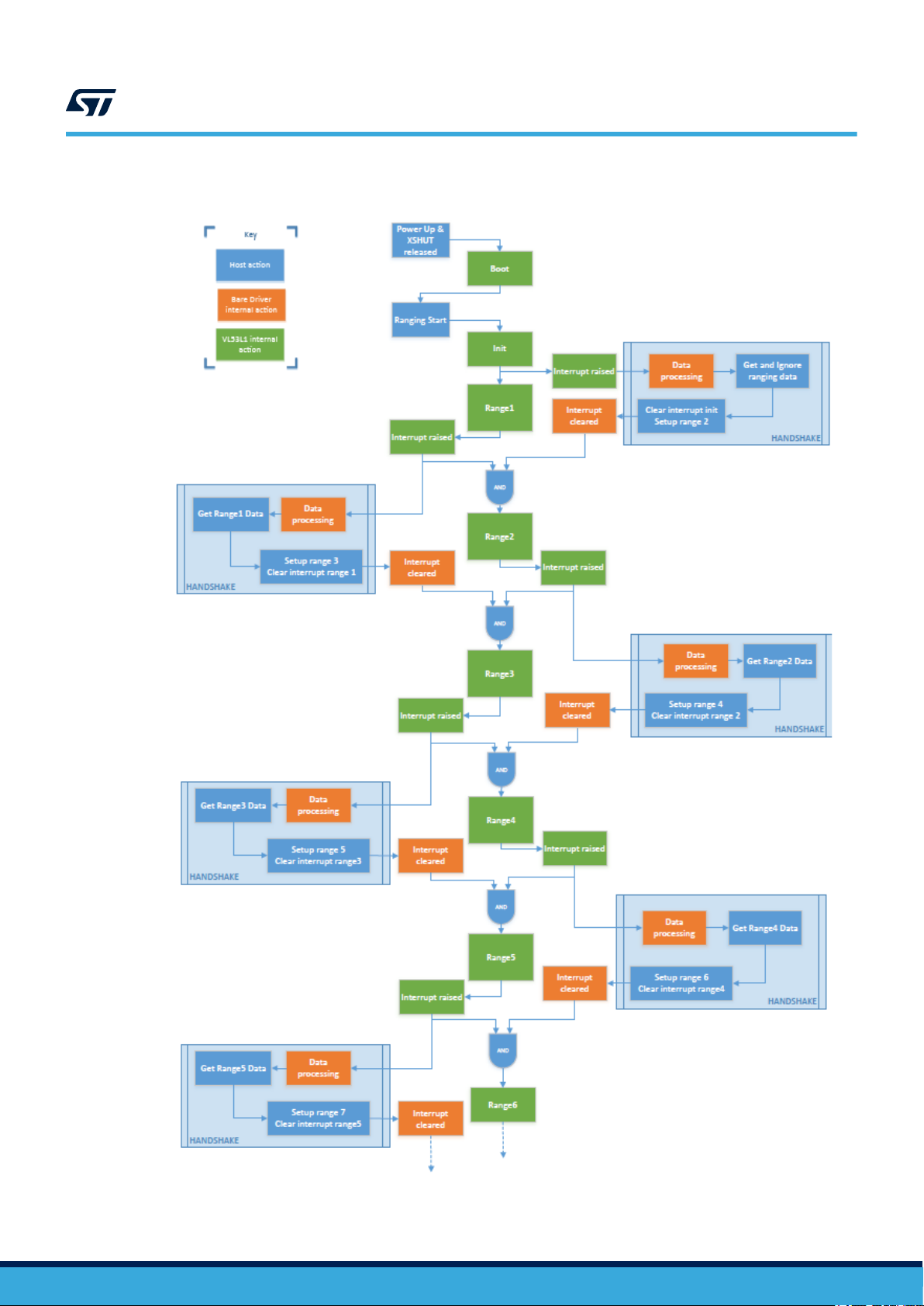
Figure 3. VL53L1 ranging sequence overview
UM2133
Ranging sequence
UM2133 - Rev 6
page 4/37
Page 5
UM2133
Timing considerations
The handshake sequence allows internal parameters to be computed and applied to the next range.
The handshake must be performed by the user of the bare driver. It is very important to keep the delay as low as
possible to enable ranging after a new measurement has been received by the host application. This maintains
the desired measurement rate.
Note: Autonomous mode does not require the host to perform any action to continue to range. If the host is too slow to
retrieve a measurement, the data are lost.
Note: In autonomous mode, there is no interrupt raised after init.
2.3 Timing considerations
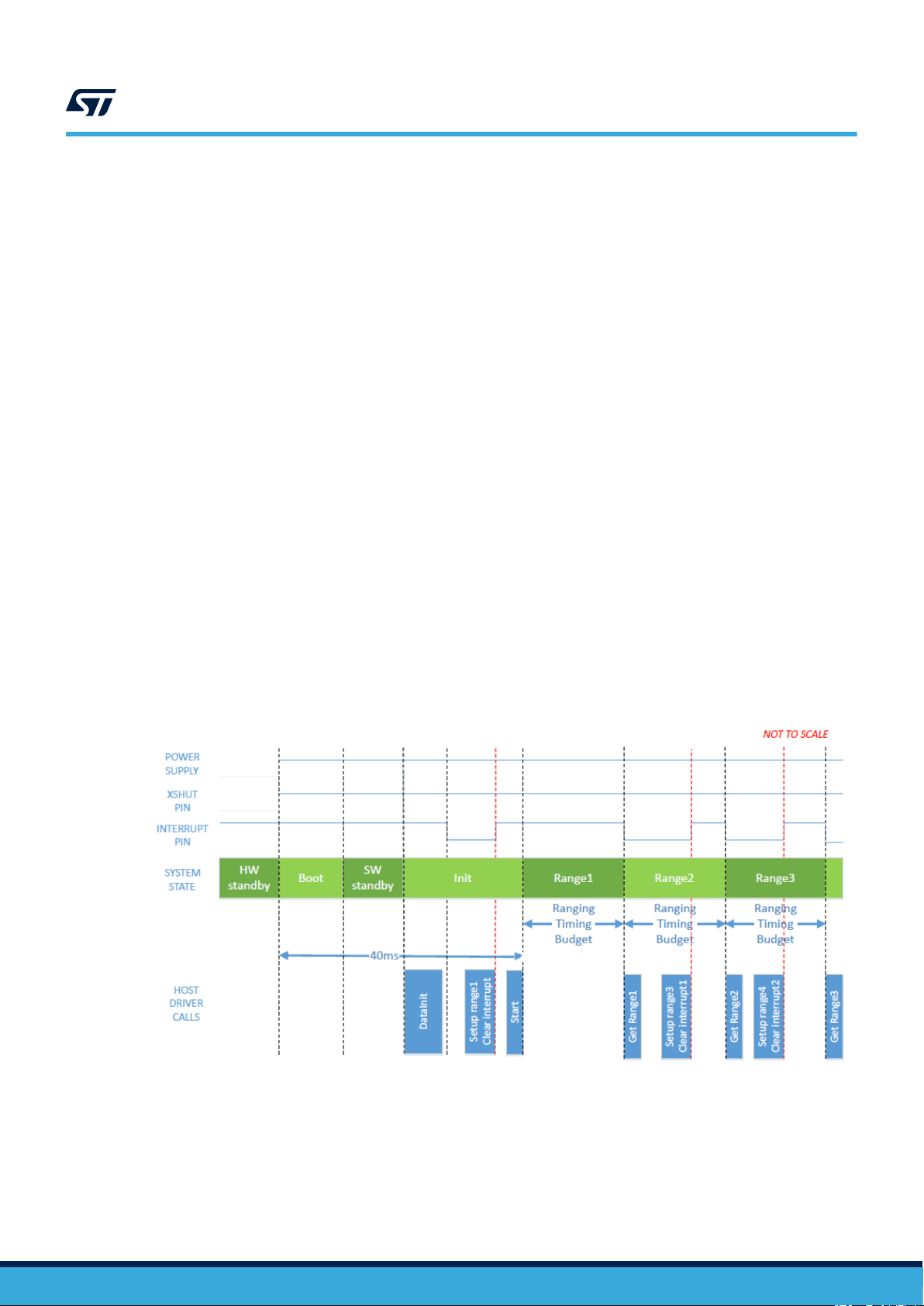
The timings are presented in Figure 4. VL53L1 Ranging sequence and timing targets.
The host can get the latest available ranging during the ranging timing budget of the current range.
In all modes except Autonomous mode, if a delay to clear the interrupt is introduced by the host, the next ranging
will be stopped until the pending interrupt is cleared.
Note: The timings in Figure 4. VL53L1 Ranging sequence and timing targets are example timings and can vary
depending on the user implementation.
The host can change the default timing budget by using a dedicated driver function described in
Section 5.4 Timing budget.
The host can decide to change the timing budget either to synchronize ranging with application, or to increase
ranging accuracy.
Note: If tuning parameter to improve accuracy (VL53L1_TUNINGPARM_PHASECAL_PATCH_POWER) is used, the
“init” time can go up to 300 ms.
In the Figure 4. VL53L1 Ranging sequence and timing targets, the “Boot”, “SW standby” and “Init” lasts 40 ms.
This time is needed to perform a correct initialization of the device, and it is independent of the platform or the
used timing budget. The first range, “Range1”, is not valid, since the wrap-around check is not possible. This
means that the first valid ranging value is “Range2”, available after 40 ms, plus twice the timing budget duration.
Figure 4. VL53L1 Ranging sequence and timing targets
2.4 Region-of-interest (ROI)
The user can get a ranging result on a specific part of the field of view (FoV), using ROIs.
A driver function is dedicated to this setup (see Section 5.1 Single ROI).
UM2133 - Rev 6
page 5/37
Page 6
3 Description of basic bare driver functions
This section describes the driver function call flows that should be followed to perform a ranging measurement
using the VL53L1.
The VL53L1 drivers are used in two classes of applications:
• Factory applications (factory flow): this flow is used for device calibration, typically when a product is tested
at the end of manufacturing.
• Field applications (ranging flow): this flow gathers all end user applications using the VL53L1 device.
UM2133
Description of basic bare driver functions
3.1
Bare driver
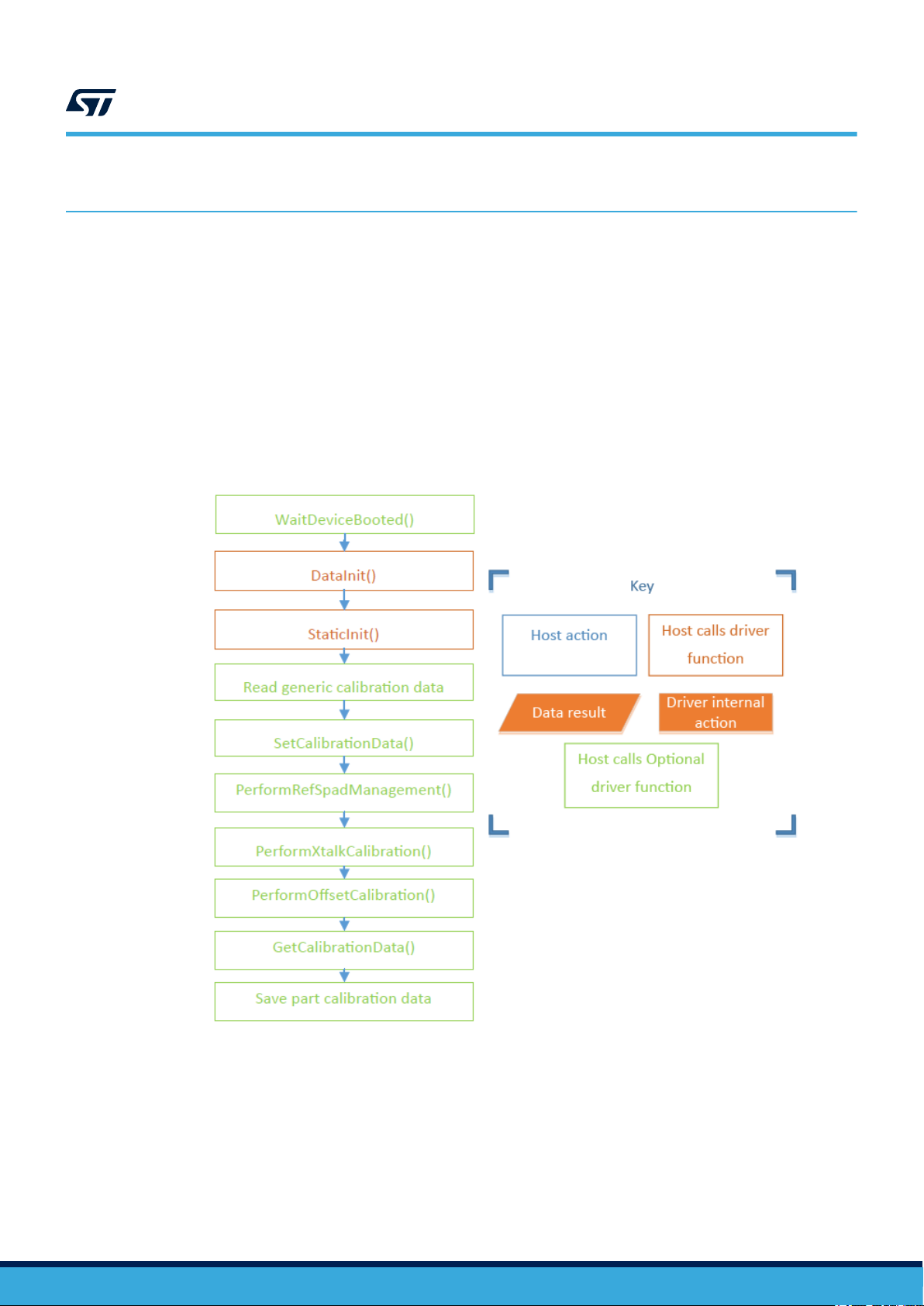
The bare driver factory flow is described in the following figure.
Figure 5. L53L1 API calibration flow (factory)
UM2133 - Rev 6
The bare driver ranging flow is described in Figure 6. VL53L1 API ranging flow (field). Please note that between
the SetCalibrationData() and StartMeasurement(), some important functions are shown as an example, but the list
is not complete. Parameters such as timing budget, offset correction mode, or smudge correction, can be set at
this time as well.
page 6/37
Page 7
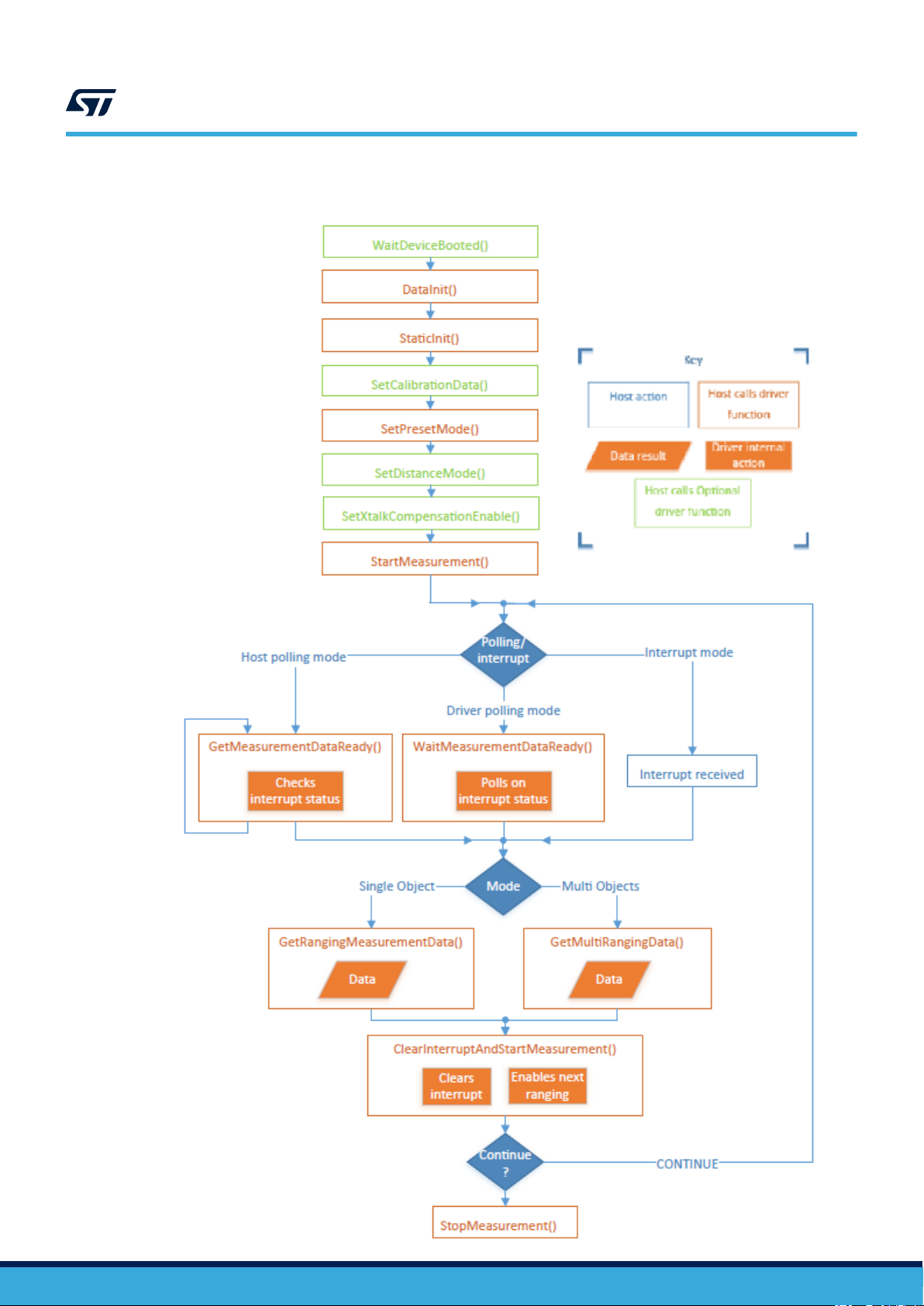
Figure 6. VL53L1 API ranging flow (field)
UM2133
Bare driver
UM2133 - Rev 6
page 7/37
Page 8

UM2133
System initialization
3.2 System initialization
The following sections show the API function calls required to perform the system initialization, before starting a
measurement.
3.2.1 Wait for boot
The VL53L1_WaitDeviceBooted() function ensures that the device is booted and ready.
It is not mandatory to call this function.
Note: This function blocks the host execution. This function should not block for more than 4 ms, assuming 400 kHz
I2C and 2 ms latency per transaction.
3.2.2 DataInit
The VL53L1_DataInit() function is called only once, to perform the device initialization after the device is reset.
After calling the VL53L1_DataInit() function, the calibration data must be loaded using the function
VL53L1_SetCalibrationData().
3.2.3 StaticInit
The VL53L1_StaticInit() function allows device settings, specific for a given use case, to be loaded.
3.2.4 Preset mode
The VL53L1_SetPresetMode() function allows one preset mode to be chosen.
The following preset modes are available using this driver revision:
• VL53L1_PRESETMODE_RANGING
• VL53L1_PRESETMODE_MULTIZONES_SCANNING
• VL53L1_PRESETMODE_LITE_RANGING (Obsolete)
• VL53L1_PRESETMODE_AUTONOMOUS
The default preset mode is VL53L1_PRESETMODE_RANGING.
UM2133 - Rev 6
page 8/37
Page 9
4 Ranging with the VL53L1
4.1 Starting a measurement
The VL53L1_StartMeasurement() function must be called to start a measurement.
4.2 Waiting for a result: polling or using an interrupt
To check if a measurement is available, the host can:
• Call a polling function
• Poll on a driver function
• Use a physical interrupt
4.2.1 Driver polling to get the result status
The function VL53L1_WaitMeasurementDataReady() polls on an internal status until a measurement is ready.
Note: This function is a blocking function since internal polling is performed.
4.2.2 Host polling to get the result status
The host can poll on the function VL53L1_GetMeasurementDataReady() to know when a new measurement is
ready.
Note: This function is not a blocking function.
UM2133
Ranging with the VL53L1
4.2.3 Using a physical interrupt
An alternative and preferred way to get the ranging status is to use the physical interrupt output. By default, the
GPIO1 goes low when a new measurement is ready.
This pin is an output pin only; there is no input interrupt pin on this device.
The interrupt must be cleared by calling the driver function: VL53L1_ClearInterruptAndStartMeasurement().
4.3 Getting a measurement
Depending on the selected mode, the hardware collects a single data measurement or a set of data
measurements per ranging loop:
• In autonomous mode, only a single measurement is reported per ranging.
• In ranging mode, multiple objects can be detected per ranging, and data measurements are reported per
object
• In multizone scanning mode, multiple zones of the FoV are scanned, and data measurements are reported
per zone.
The bare driver provides two functions to select whether single ranging data or multiple ranging data are returned:
• The “Get a single data” function is only available in autonomous mode. This function should not be used in
ranging and multizone scanning modes.
• The “Get multiple data” function is only available in ranging and multizone scanning modes. This function
should not be used in autonomous mode.
Note: Two consecutive calls to get a measurement function is not allowed if the interrupt is not cleared between the
two calls.
4.3.1 Getting a single ranging value
The VL53L1_GetRangingMeasurementData() can be used to get a single ranging data.
When calling this function to get the device ranging results, a structure called
VL53L1_RangingMeasurementData_t is returned.
This structure is described in Section 4.5 Single ranging measurement data structure.
UM2133 - Rev 6
page 9/37
Page 10

4.3.2 Getting multiple ranging values
The VL53L1_GetMultiRangingData() can be used to get multiple ranging data.
When calling this function to get the device multiple ranging results, a structure called
VL53L1_MultipleRangingData_t is returned.
This structure is described in Section 5 Description of additional driver functions.
4.4 Stopping a measurement
In continuous mode, the host can stop the measurement by calling the VL53L1_StopMeasurement() function.
If the stop request occurs during a range measurement, the measurement is aborted immediately.
4.5 Single ranging measurement data structure
The VL53L1_RangingMeasurementData_t structure is composed of:
• TimeStamp: not implemented
• StreamCount: this 8-bit integer gives a counter incremented at each range. The value first starts at 0,
incrementing to 255, and then incrementing from 128 to 255.
• RangingQualityLevel: not implemented
• SignalRateRtnMegaCps: this value is the return signal rate in MegaCountPer Second (MCPS). This is a
16.16 fixed point value.To obtain a real value, it should be divided by 65536.
• AmbientRateRtnMegaCps: this value is the return ambient rate (in MCPS). It is a 16.16 fixed point value,
which is effectively a measure of the infrared light. To obtain a real value, it should be divided by 65536.
• EffectiveSpadRtnCount: this is a16-bit integer that returns the effective SPAD count for the current ranging.
To obtain a real value, it should be divided by 256.
• SigmaMilliMeter: this 16.16 fixed point value is an estimation of the standard deviation of the current ranging,
expressed in millimeters. To obtain a real value, it should be divided by 65536.
• RangeMilliMeter: this is a 16-bit integer giving the range distance in millimeters.
• RangeFractionalPart: not implemented
• RangeStatus: this is an 8-bit integer giving the range status for the current measurement. Value = 0 means
the ranging is valid (refer to Table 1. Range status).
• ExtendedRange: this is a 8-bit integer indicating if the range has been unwrapped (only for long distances,
using Ranging Mode)
UM2133
Stopping a measurement
4.6 MultiRangingData structure
When using ranging or multizone scanning modes, the returned structure is called: VL53L1_MultiRangingData_t
and contains the following data:
• TimeStamp: not implemented
• StreamCount: this 8-bit integer gives a counter incremented at each range. The value first starts at 0,
incrementing to 255, and then incrementing from 128 to 255.
• RoiNumber: this is an 8-bit integer value that gives the ROI the range data is related to.
• NumberOfObjectsFound: this 8-bit integer value gives the number of objects found in the current ROI.
• RoiStatus: it gives the status of the current ROI. The value of this field can be 0, 1 or 2, for “invalid ROI”,
“valid ROI”, “valid and last ROI” respectively. This is mainly used to flag the last ROI for synchronization,
when the scanning mode is used.
• RangeData[VL53L1_MAX_RANGE_RESULTS]: this is a table structure of type
VL53L1_TargetRangeData_t, giving the results per ROI (see description below for more details). The
maximum number of objects is given by VL53L1_MAX_RANGE_RESULTS and, by default, is equal to four.
• HasXtalkValueChanged: this 8-bit integer value indicates if the crosstalk value has been changed.
• EffectiveSpadRtnCount: this is a16-bit integer that returns the effective SPAD count for the current ranging.
To obtain a real value, it should be divided by 256.
• DmaxMilliMeter: this is a 16-bit integer. When the target is not detected, and the ranging is valid (range
status 255 only), no object can be detected between zero and dmax. This value can help the host algorithm
when no valid ranging data is found.
UM2133 - Rev 6
page 10/37
Page 11
UM2133
MultiRangingData structure
• RecommendedDistanceMode: this is a value with VL53L1_DistanceModes type. It indicates the distance
mode that is recommended based on the ranging conditions, in order to get the best accuracy, focusing on
the detected objects.
The VL53L1_TargetRangeData_t structure is composed of:
• RangingQualityLevel: not implemented.
• RangeMaxMilliMeter: this a 16-bit integer, giving the larger detected distance.
• RangeMinMilliMeter: this is a 16-bit integer, giving the smaller detected distance.
• SignalRateRtnMegaCps: this value is the return signal rate in MegaCountPer Second (MCPS). This is a
16.16 fixed point value. To obtain a real value, it should be divided by 65536.
• AmbientRateRtnMegaCps: this value is the return ambient rate (in MCPS). It is a 16.16 fixed point value,
which is effectively a measure of the amount of light hitting the SPAD matrix. To obtain a real value, it should
be divided by 65536.
• SigmaMilliMeter: this 16.16 fixed point value is an estimation of the standard deviation of the current ranging,
expressed in millimeters. To obtain a real value, it should be divided by 65536.
• RangeMilliMeter: this is a 16-bit integer giving the range distance in millimeters.
• RangeFractionalPart: not implemented.
• RangeStatus: this is an 8-bit integer giving the range status for the current measurement. Value = 0 means
the ranging is valid (refer to Table 1. Range status).
For the multi ranging data structure only (ranging and multizones scanning modes), a particular behavior is
implemented when the target is not detected. If the target is not detected, and the measurement is valid, the
following values are reported into the VL53L1_TargetRangeData_t structure:
• RangeMaxMilliMeter: forced to 8191.
• RangeMinMilliMeter: forced to 8191.
• SignalRateRtnMegaCps: forced to 0.
• AmbientRateRtnMegaCps: the ambient rate value is normally computed.
• SigmaMilliMeter: forced to 0.
• RangeMilliMeter: forced to 8191.
• RangeStatus: forced to 255.
Table 1. Range status
Value
0 VL53L1_RANGESTATUS_RANGE_VALID Ranging measurement is valid
1 VL53L1_RANGESTATUS_SIGMA_FAIL
2 VL53L1_RANGESTATUS_SIGNAL_FAIL
VL53L1_RANGESTATUS_RANGE_VALID_MIN_RANG
3
4 VL53L1_RANGESTATUS_OUTOFBOUNDS_FAIL Raised when the range result is out of bounds.
5 VL53L1_RANGESTATUS_HARDWARE_FAIL Raised in case of HW or VCSEL failure
VL53L1_RANGESTATUS_RANGE_VALID_NO_WRAP
6
7 VL53L1_RANGESTATUS_WRAP_TARGET_FAIL Wrapped target not matching phases
8 VL53L1_RANGESTATUS_PROCESSING_FAIL
9 VL53L1_RANGESTATUS_XTALK_SIGNAL_FAIL
10 VL53L1_RANGESTATUS_SYNCRONISATION_INT Raised once after start, ranging value has to be ignored.
RangeStatus string Comment
Raised if sigma estimator check is above the internal
defined threshold. Sigma estimator gives qualitative
Raised in autonomous mode only if signal value is
Raised in autonomous mode only if ranging is below a
E_CLIPPED
_CHECK_FAIL
Internal algorithm underflow or overflow in autonomous
Raised in autonomous modes when signal is below the
information about the signal.
below the internally defined threshold.
threshold defined in the tuning parameter.
No wraparound check has been done
ranging.
crosstalk threshold.
UM2133 - Rev 6
page 11/37
Page 12

UM2133
MultiRangingData structure
Value RangeStatus string Comment
11
12
13 VL53L1_RANGESTATUS_MIN_RANGE_FAIL
14 VL53L1_RANGESTATUS_RANGE_INVALID The reported range is invalid, ignore it
255 VL53L1_RANGESTATUS_NONE
VL53L1_RANGESTATUS_RANGE_VALID_MERGED_
PULSE
VL53L1_RANGESTATUS_TARGET_PRESENT_LACK_
OF_SIGNAL
Note: The very first measurement does not include a wraparound check. This ranging measurement should be
discarded. When VL53L1_PRESETMODE_AUTONOMOUS is used, the driver deletes the first ranging value.
Note: Range status 1 is often caused by noisy measurements. sigma estimator is strongly impacted by the SNR of the
treated signals.
Note: Range status 4 is raised when some error on the measurement reference occurs. This can cause outliers as
negative measurements or extremely high ranging values.
Raised in ranging and multizone scanning modes only.
Range is OK, but the distance reported is the result of
multiple targets merged together.
Indicates that there is a target, but the signal is too low
to report ranging
Programmed ROI is not valid, selected ROI is out of the
SPAD array.
Single ranging value: ranging is not updated, ignore
reported value
Multiple ranging values: target not detected.
UM2133 - Rev 6
page 12/37
Page 13

5 Description of additional driver functions
5.1 Single ROI
To set an ROI, so that it is different from the default 16x16 one, the user can call the VL53L1_SetROI() function.
The ROI is a square or rectangular area defined by two corners: top left and bottom right.
Four coordinates are used to localize these two corners on the full SPAD array:
• TopLeftX
• TopLeftY
• BotRightX
• BotRightY
These coordinates are part of a structure of type named VL53L1_UserROI_t.
The user has to define the ROI coordinate values in the structure, and call the driver function to apply the ROI
change.
The minimum ROI size is 4x4.
An example of a ROI setting is given in the following figure.
UM2133
Description of additional driver functions
UserRois[1].TopLeftY=13
UserRois[1].BotRightY=10
UserRois[0].TopLeftX=5
UserRois[0].BotRightX=0
Figure 7. VL53L1 ROI setting example
Y AXIS
TopLeft
UserRois[1]
UserRois[0]
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
BottomRight
X AXIS
UM2133 - Rev 6
UserRois[0].TopLeftX=0
UserRois[0].BotRightX=5
UserRois[1].TopLeftX=9
UserRois[1].BotRightX=14
page 13/37
Page 14

5.2 SPAD array coordinates versus scene
The following figure shows the coordinates of an object in the SPAD array compared to the location in the FoV.
Figure 8. VL53L1 coordinates vs Scene
UM2133
SPAD array coordinates versus scene
5.3 Multiple ROIs for multizone scanning mode
When using multizone scanning mode, the user can set multiple ROIs. The VL53L1 manages this list as follows: it
starts ranging for the first ROI, raises an interrupt, moves to next ROI, and restarts the list until the user calls a
stop function. When the last ROI is activated, the flag ROIStatus is set to 2, then the next ROI is in the first
position of the array (see Section 4.6 MultiRangingData structure).
Note: Ranging data are available and have to be read by the user as soon as the interrupt is triggered.
The maximum number of ROIs is defined by the parameter VL53L1_MAX_USER_ZONES. Its default value is
16 (can be set up to 169).
Note: In order to save memory, the user can decrease the maximum number of ROIs to the actual maximum that is
programmed in the final application.
Note: The set of ROIs cannot be changed on the fly. The user has to stop ranging, change the ROIs and restart.
5.3.1 Bare driver structure
The structure VL53L1_RoiConfig_t is defined in the bare driver by:
• NumberOfRoi: an 8-bit integer which defines the number of ROIs
• UserRois[VL53L1_MAX_USER_ZONES]: a VL53L1_UserRoi_t table structure which contains the ROI
coordinates.
The VL53L1_UserRoi_t structure contains the coordinates of an ROI:
• TopLeftX: 8-bit integer that gives the top left x coordinate (0-15)
• TopLeftY: 8-bit integer that gives the top left y coordinate (0-15)
• BotRightX: 8-bit integer that gives the bottom right x coordinate (0-15)
• BotRightY: 8-bit integer that gives the bottom right y coordinate (0-15)
Example of VL53L1_UserRoi_t to set 2 ROIs (based on Figure 7. VL53L1 ROI setting example):
UM2133 - Rev 6
page 14/37
Page 15

VL53L1_RoiConfig_t roiConfig;
roiConfig.NumberOfRoi = 2;
roiConfig.UserRois[0].TopLeftX = 0;
roiConfig.UserRois[0].TopLeftY = 5;
roiConfig.UserRois[0].BotRightX = 5;
roiConfig.UserRois[0].BotRightY = 0;
roiConfig.UserRois[1].TopLeftX = 9;
roiConfig.UserRois[1].TopLeftY = 13;
roiConfig.UserRois[1].BotRightX = 14;
roiConfig.UserRois[1].BotRightY = 10;
status = VL53L1_SetROI(&VL53L1Dev, &roiConfig);
5.4 Timing budget
The timing budget is the time allocated by the user to perform one range measurement.
The VL53L1_SetMeasurementTimingBudgetMicroSeconds() is the function to use.
The typical, minimum and maximum timing budgets are described in Table 2. Timing budget values (in ms).
The following example sets the timing budget to 66ms:
status = VL53L1_SetMeasurementTimingBudgetMicroSeconds(&VL53L1Dev, 66000 )
The function VL53L1_GetMeasurementTimingBudgetMicroSeconds() allows the programmed timing budget to be
received.
UM2133
Timing budget
Table 2. Timing budget values (in ms)
PresetMode
Min.
(1)
Ranging 8 16 500
MultiZone scanning 8 16 500
Autonomous 20 40 1000
1. Warning: Ranging performances are not guaranteed at this timing budget. The device is functional but the detection rate,
maximum ranging distance, and accuracy are not in line with those of the datasheet.
2. The typical timing budget allows the performances mentioned in the datasheet to be reached.
Typ.
(2)
Max.
Default timing budget (after VL53L1_DataInit()) is 33 ms for the ranging preset mode.
When multiple ROIs are used, each zone ranging is an individual ranging operation and the timing budget applies
for each zone ranging.
UM2133 - Rev 6
page 15/37
Page 16

5.5 Distance mode
A function has been added to optimize the internal settings and tunings depending on the ranging distance
requested by the user.
The benefit of changing the distance mode is detailed in the following table.
Preset mode Possible distance mode Benefit/comments
Ranging
Scanning
Autonomous
UM2133
Distance mode
Table 3. Distance modes
Short Better ambient immunity
Medium (default) Maximum distance
Long Lower power consumption
Short Better ambient immunity
Medium (default)
Long Maximum distance
Short Better ambient immunity
Medium (default)
Long Maximum distance
The function to use is called VL53L1_SetDistanceMode().
Note: This function has to be called AFTER the VL53L1_SetPresetMode() function.
Note: In Autonomous mode, a ranging offset of 5 mm can be observed in short and medium modes compared to long
mode.
5.5.1 Recommended distance mode
In VL53L1_PRESETMODE_RANGING and VL53L1_PRESETMODE_MULTIZONES_SCANNING, the driver
monitors the ranging conditions and provides a recommendation of distance mode, in case it detects that a better
distance mode provides better accuracy covering the detected object range. This recommendation is provided
unconditionally, as part of the VL53L1_MultiRangingData_t structure. It is up to the application to monitor this
value, to check if it is different from the programmed distance mode, and decide whether to ignore or follow the
recommendation. If the application decides to follow the recommendation and change the distance mode, it has to
proceed as follows:
1. VL53L1_StopMeasurement()
2. VL53L1_SetDistanceMode(RecommendedDistanceMode)
3. VL53L1_StartMeasurement()
In VL53L1_PRESETMODE_AUTONOMOUS mode, the driver does not detect whether a better distance mode
exists and always reports the programmed mode as recommended distance mode.
5.6 Inter-measurement period
In autonomous mode, the device can be configured so that the ranging rate is reduced: the device ensures that
there is the programmed inter-measurement period between two consecutive ranging measurements. In the intermeasurement period, the device is in a low-power inter-measurement state.
It is recommended to set the inter-measurement period greater than timing budget.
This inter-measurement configuration is ignored in ranging, and multizone scanning modes.
By default, ranging data are reported to the host every ranging, so every inter-measurement period. The report
can be made using an interrupt.
VL53L1_SetInterMeasurementPeriodMilliSeconds() is the function to be used.
The following example sets the inter-measurement period to 1 second:
status = VL53L1_SetInterMeasurementPeriodMilliSeconds(&VL53L1Dev, 1000 )
UM2133 - Rev 6
page 16/37
Page 17

The function VL53L1_GetInterMeasurementPeriodMilliSeconds() allows reception of the programmed intermeasurement period.
The default value is 100 ms.
5.7 Autonomous mode thresholds
In autonomous mode, the device can be configured so that ranging is reported to the host only when the ranging
data match a configured set of criteria.
Detection mode
Whether reports to the host are filtered or not depends on the configuration of detection mode.
Report filtering conditions:
• 0: No filter (all ranging generate a report to the host)
• 1: Filter on distance criteria only
• 2: Filter on signal rate criteria only
• 3: Filter on a combination of two criteria
• 4: Filter on one or the other criteria
By default, the filter is disabled.
UM2133
Autonomous mode thresholds
Distance mode
Distance mode defines how the distance criteria is defined:
• 0: below a certain distance (if the object distance is greater than the configured distance or no object is
found, there is no report).
• 1: beyond a certain distance
• 2: within a distance range (min/max)
• 3: out of the distance range (min/max)
Distance low
The minimum distance in millimeters.
Distance high
The maximum distance in millimeters.
Signal rate mode
Similar to distance mode but for the signal rate.
Signal rate low
The minimum signal rate in MCPS
Signal rate high
The maximum signal rate in MCPS
UM2133 - Rev 6
No target
If no target is detected, no interrupt is generated if the “no target” criterion is not set (default). It is recommended
to set this value if the user wants to be notified that an object is beyond a maximum distance (for example, an
object that is too far to be detected does not otherwise generate an interrupt).
VL53L1_SetThresholdConfig() is the function to use.
Example, to program the device to report ranging only when an object is detected within 10 cm and 1 m:
page 17/37
Page 18

detectionConfig.DetectionMode = 1
detectionConfig.Distance.CrossMode = 2
detectionConfig.Rate.CrossMode = 0
detectionConfig.IntrNoTarget = 0
detectionConfig.Distance.High = 1000
detectionConfig.Distance.Low = 100
detectionConfig.Rate.High = 0
detectionConfig.Rate.Low = 0
status = VL53L1_SetThresholdConfig(&VL53L1Dev, &detectionConfig );
The function VL53L1_GetThresholdConfig() allows reception of the programmed report filtering/threshold
configuration.
5.8 Live crosstalk correction
Crosstalk (xtalk) is defined as the amount of signal received on the SPAD array which is due to VCSEL light
reflection inside the protective window (cover glass) added on top of the module.
The VL53L1 embeds a function able to measure the crosstalk value on the fly and apply a new crosstalk
correction value.
This functionality can be used to make sure the crosstalk value is always the right one. It is useful particularly
when smudge is added to the cover glass.
The user can enable/disable this function by calling: VL53L1_SmudgeCorrectionEnable().
Three options can be set with this function:
• VL53L1_SMUDGE_CORRECTION_NONE to disable the correction
• VL53L1_SMUDGE_CORRECTION_CONTINUOUS to enable a continuous correction
• VL53L1_SMUDGE_CORRECTION_SINGLE to enable a single correction after a start command is received.
Live crosstalk detection runs at each ranging. A new crosstalk value is computed if the following conditions are
met:
• no object below 80 cm
• ambient light level below a threshold
• crosstalk value above 1kcps
The threshold of ambient level is a tuning parameter (#32900). This parameter is a 16.16 format, the coded value
is by default 57671680 (Encoded Value = 880). If ambient rate is measured above this threshold, the smudge
correction will not be applied. This reduces noise on computed smudge value when high ambient signal is
present.
Setting this parameter to a higher value (for example 115343360) will allow to get smudge function reporting new
crosstalk values under stronger ambient light conditions. The possible drawback is an inaccuracy in the crosstalk
value.
Refer to Section 5.11 Tuning parameters to get more details on how to set a tuning parameter.
If the user sets the live crosstalk correction, the crosstalk value is corrected and the flag HasXtalkValueChanged
(described in Section 5 Description of additional driver functions) is set. This flag is cleared automatically at the
next range.
By default the smudge correction is disabled.
UM2133
Live crosstalk correction
5.9
UM2133 - Rev 6
Ranging gain
In order to reduce possible ranging errors, a ranging gain has to be applied to the device. This gain is a factor
directly applied to the final ranging.
Default values are proposed in Table 4. Ranging factor default values. These data are the ones used to get the
performances described in the datasheet.
The user can change these default values if needed. The customer can perform a full ranging sweep, monitor the
ranging data, and compute the ranging error. Based on the results, the customer decides if the default value has
to be changed or not.
This ranging gain factor is available through the set/get calibration data function
page 18/37
Page 19

The function VL53L1_GetCalibrationData() allows the reception of all calibration data. The returned structure
VL53L1_CalibrationData_t contains another structure called VL53L1_gain_calibration_data_t which contains the
two possible offset gain values:
• standard_ranging_gain_factor
• histogram_ranging_gain_factor
PresetMode standard_ranging_gain_factor histogram_ranging_gain_factor
Ranging, multizone scanning NA 0.971 (default)
Autonomous 0.982 (default) NA
The maximum gain value is 7. Setting a higher value generates incorrect ranging values.
If the user sets the gain at 0.5, the final ranging reported by the driver is multiplied by 0.5.
The user can set the ranging gain factors by calling VL53L1_SetCalibrationData().
5.10 Optical center coordinates
UM2133
Optical center coordinates
Table 4. Ranging factor default values
Due to assembly tolerances, the optical center of the device can vary. The optical center of the device is
measured for each part. The optical center coordinates are stored in the device NVM.
The user has access to the optical center coordinates by calling: VL53L1_GetCalibrationData(). The returned
structure VL53L1_CalibrationData_t contains another structure of type VL53L1_optical_centre_t which contains
the two coordinates:
• x_centre
• y_centre
The host can use these two coordinates to better align the ROIs to the optical center.
5.11
Note: Changing a tuning parameter can have strong effects on the device performances. ST recommends using the
5.12
Tuning parameters
An extra function exists to load tuning parameters. For specific use cases, ST can recommend the use of some
specific parameters composed of a key and value.
default values to benefit of optimal settings.
A dedicated function exists to load this tuning parameter: VL53L1_SetTuningParameter().
VDDIO configuration
As described in the VL53L1 Datasheet (DS11786), the user can select two modes for the VDDIO value: 1V8 or
2V8 modes.
The selection of the mode is made directly in the code though a compilation key called USE_I2C_2V8.
If this compilation key is defined, the system goes into 2V8 mode, otherwise, it is kept in the default 1V8 mode.
5.13 Dmax
Dmax is computed for each ranging value, and it represents an indication of the maximum distance at which a
target can be detected, in the current ambient conditions. This value depends mainly on the ambient light and on
the target reflectance. The latter value is indicated by the user, using the function VL53L1_SetDmaxReflectance().
The following example sets the reflectance as 50%:
status = VL53L1_SetDmaxReflectance(&VL53L1Dev, 50);
This means that the dmax indicates the max distance at which a 50% target can be detected.
Note: Dmax needs a calibration, to be operational. The dmax calibration is automatically performed during offset
calibration. Refer to Section 6.3 Offset calibration to learn more about dmax calibration.
UM2133 - Rev 6
page 19/37
Page 20

5.14 I2C address
The default I2C address of the VL53L1 is 0x52.
Some applications need to set a different I2C device address. This is the case, for example, when several
VL53L1 parts share the same I2C bus.
The customer should apply the following procedure:
1. The board mounting the VL53L1s has to be designed carefully. The Xshut and the GPIO1 (interrupt) pins
have to be controlled individually for each VL53L1.
2. The host has to:
– Put in Hw Standby, setting the Xshut pin low, all the VL53L1s
– Raise the Xshut pin of one of the VL53L1s
– Call the function VL53L1_SetDeviceAddress()
3. The host repeats the last three points until all the VL53L1s’ addresses are correctly set.
For example, to value of WantedAddress sets the new I2C address when calling the following function:
status = VL53L1_SetDeviceAddress(&VL53L1Dev, WantedAddress)
UM2133
I2C address
UM2133 - Rev 6
page 20/37
Page 21

6 Calibration functions
To benefit from device full performance, the VL53L1 driver includes calibration functions to be run once at the
customer production line.
Calibration procedures have to be run to compensate part-to-part parameters that may affect the device
performances.
Calibration data stored in the host have to be loaded in the VL53L1 at each startup using a dedicated driver
function.
Three calibrations are needed: refSPAD, crosstalk, and offset.
Offset calibration also allows calibration of the dmax value.
The order the calibration functions are called is important. They should be called in the following order:
1. refSPAD
2. crosstalk
3. offset
The three calibration functions can be made in sequential mode, or individually. When run individually, the data
from the previous step have to be loaded before running the calibration.
The crosstalk part-to-part calibration can be replaced by a live crosstalk calibration. This feature is described in
Section 7.1 Live crosstalk calibration.
UM2133
Calibration functions
6.1 RefSPAD calibration
The number of SPADs is calibrated during the final module test at ST. This part-to-part value is stored into the
NVM and automatically loaded into the device during bootup.
This calibration allows the number of SPADs to optimize the device dynamic to be adjusted.
However, adding a cover glass on top of the module may affect this calibration. ST recommends that the
customer performs this calibration again in the final product application.
The same algorithm running at FMT is applied when this function is called. The algorithm searches through three
possible types of SPAD:
• 1 (non attenuated SPAD)
• 2 (SPAD attenuated by a factor of five)
• 3 (SPAD attenuated by a factor of ten)
The number and type of SPAD is selected to avoid internal signal saturation.
6.1.1 RefSPAD calibration function
A dedicated function is available for this operation: VL53L1_PerformRefSpadManagement(VL53L1_DEV Dev)
Note: This function must be called first in the calibration procedure.
The function outputs the following three warning messages:
• VL53L1_WARNING_REF_SPAD_CHAR_NOT_ENOUGH_SPADS
Less than five good SPADs are available, output not valid
• VL53L1_WARNING_REF_SPAD_CHAR_RATE_TOO_HIGH
At the end of a search reference rate greater than 40.0 Mcps, the range stability may be degraded.
• VL53L1_WARNING_REF_SPAD_CHAR_RATE_TOO_LOW
At the end of a search reference rate less than 10.0 Mcps, the range stability may be degraded.
6.1.2 RefSPAD calibration procedure
No particular condition has to be followed for this calibration, except that no target should be placed on top of the
device.
The time to perform this calibration is a few milliseconds.
This function should be called after the VL53L1_DataInit() and VL53L1_StaticInit() functions are called.
UM2133 - Rev 6
page 21/37
Page 22

6.1.3 Getting refSPAD calibration results
The function VL53L1_GetCalibrationData() allows reception of all calibration data. The returned structure
VL53L1_CalibrationData_t contains another structure called VL53L1_customer_nvm_managed_t which contains
the following eight refSPAD calibration parameters:
• ref_spad_man__num_requested_ref_spads: this value is between 5 and 44. It gives the number of SPADs
selected.
• ref_spad_man__ref_location: this value can be 1, 2, or 3. It gives the type of SPAD area.
• Six additional parameters give the correct SPAD maps for the location selected.
– global_config__spad_enables_ref_0
– global_config__spad_enables_ref_1
– global_config__spad_enables_ref_2
– global_config__spad_enables_ref_3
– global_config__spad_enables_ref_4
– global_config__spad_enables_ref_5
6.1.4 Setting refSPAD calibration data
At each startup, after an initial boot, the customer field application can load the refSPAD calibration data after the
VL53L1_DataInit() and VL53L1_StaticInit() functions are called, by using VL53L1_SetCalibrationData().
It is better to get the entire calibration structure by:
1. Calling VL53L1_GetCalibrationData()
2. Modifying the eight parameters described in Section 6.1.3 Getting refSPAD calibration results
3. Calling VL53L1_SetCalibrationData()
UM2133
Crosstalk calibration
6.2
Crosstalk calibration
Crosstalk is defined as the amount of signal received on the return array which is due to VCSEL light reflection
inside the protective window (cover glass) on top of the module.
Depending on the cover glass quality, this signal affects the device performance. In the VL53L1, this phenomenon
is compensated for by a built-in correction function.
Depending on the PresetMode used and the object distance, the VL53L1 is immune to crosstalk. The following
table gives an overview of the device capabilities.
Table 5. Crosstalk vs Preset mode
Preset mode Distance Crosstalk correction
Ranging, MultiZone scanning
Autonomous All Correction needed
Crosstalk calibration is used to estimate the amount of correction needed to compensate the effect of a cover
glass added on top of the module.
The calibration procedure is unique and is applicable to all preset modes.
An important factor new to the VL53L1 is the inconsistent crosstalk due to the presence of a lens on top of the
SPAD array. This explaine why the plane fit model of crosstalk is required rather than the previous product
generation. Consequently, the output of the crosstalk contains many parameters that define the plane model,
while previous product generation had only one parameter.
Crosstalk is composed of several parameters:
• x gradient
• y gradient
• offset and crosstalk shape
< 80cm Correction needed
> 80cm Crosstalk immune, no correction needed
UM2133 - Rev 6
page 22/37
Page 23

UM2133
Crosstalk calibration
6.2.1 Crosstalk calibration function
A dedicated function is available for this operation: VL53L1_PerformXTalkCalibration(&VL53L1Dev,
CalibrationType);
Note: This function must be called in second position in the calibration procedure, after the refSPAD calibration is
made, and before the offset calibration.
Two calibration types are available:
• Standard crosstalk calibration. To select this calibration use CalibrationType =
VL53L1_XTALKCALIBRATIONMODE_NO_TARGET. This crosstalk calibration is optimized for high
crosstalk cover glasses (crosstalk above 5kcps).
• FullROI crosstalk calibration. To select this calibration use CalibrationType =
VL53L1_XTALKCALIBRATIONMODE_FULL_ROI. This crosstalk calibration is faster and optimized for low
crosstalk cover glasses (crosstalk below 5kcps).
6.2.2 Standard crosstalk calibration procedure
The customer has to ensure that no targets are within the device field of view (FoV) below 80 cm during the
crosstalk calibration.
Crosstalk calibration should be conducted in a dark environment with no IR contribution.
Note: If a target or an object is present in the FoV of the device below 80 cm, the calibration result will not be correct
and will affect the ranging performance.
Note: The crosstalk will fail if the closest target detected (the cover glass) is measured above 50 mm.
A dedicated calibration function has to be called after the VL53L1_StaticInit(), VL53L1_DataInit(), and
VL53L1_PerformRefSpadManagement() functions are called: VL53L1_PerformXTalkCalibration(&VL53L1Dev, 0);
When these functions are called, standard crosstalk calibration is performed and the crosstalk correction is
applied by default.
6.2.3 FullROI crosstalk calibration procedure
To perform the fullROI crosstalk calibration, a gray target (17% reflectance) has to be placed at a distance of
600 mm from the device.
Crosstalk calibration should be conducted in a dark environment with no IR contribution.
VL53L1_PerformXTalkCalibration(&VL53L1Dev, 2); is a dedicated calibration function which must be called after
the VL53L1_StaticInit(), VL53L1_DataInit(), and L53L1_PerformRefSpadManagement() functions are called.
When these functions are called, full ROI crosstalk calibration is performed and the crosstalk correction is applied
by default.
6.2.4 Generic shape crosstalk calibration
Generic shape crosstalk calibration is a way to get rid of part to part crosstalk calibration.
This option is only valid for ranging and multizone scanning modes.
The principle is as follows:
• The user characterizes the crosstalk in the final application, using a set of cover glasses. The chosen cover
glasses should represent the whole production spread, to include in the analysis all the possible crosstalk
values. The crosstalk data are sent to ST, and the generic shape is then computed and sent back to the
customer. To use the generic shape crosstalk calibration, the customer has to load it into the crosstalk fields
of the calibration structure, using the VL53L1_SetCalibrationData() function, as described in the
Section 6.2.6 Setting crosstalk calibration data.
• During part to part calibration, the user must:
– perform a refSPAD calibration
– load generic shape data
– perform offset calibration
• During standard operation, the user must:
– load calibration data, including the generic shape
– enable live crosstalk detection
– start ranging
Live crosstalk detection has the same limitations as described in Section 5.8 Live crosstalk correction.
UM2133 - Rev 6
page 23/37
Page 24

6.2.5 Getting crosstalk calibration results
Calibration results consist of a plan of values that are applied across the SPAD array. This plan is defined by an
offset and two coordinates, and a histogram structure.
The function VL53L1_GetCalibrationData() allows the reception of all calibration data. The returned structure
VL53L1_CalibrationData_t contains two other structures. The first one, called
VL53L1_customer_nvm_managed_t, contains the three crosstalk calibration results:
• algo_crosstalk_compensation_plane_offset_kcps is a fixed point 7.9 coded value. It has to be divided by 512
to get the actual number.
• algo_crosstalk_compensation_x_plane_gradient_kcps is a fixed point 5.11 coded value. It has to be divided
by 2048 to get the actual number.
• algo_crosstalk_compensation_y_plane_gradient_kcps is a fixed point 5.11 coded value. It has to be divided
by 2048 to get the actual number.
The other structure returned is called VL53L1_xtalk_histogram_data_t.
This structure contains important extra data like the shape phase position so the crosstalk correction can correctly
realign the shape for different phase calibration results.
This structure, combined with offset, x and y gradients, allows the generation of a crosstalk histogram for ranging
and multizone scanning modes.
6.2.6 Setting crosstalk calibration data
The customer can load the crosstalk calibration data after the VL53L1_DataInit() and VL53L1_StaticInit()
functions are called, by using: VL53L1_SetCalibrationData()
It is better to call VL53L1_GetCalibrationData() and then modify the following parameters:
• algo__crosstalk_compensation_plane_offset_kcps
• algo__crosstalk_compensation_x_plane_gradient_kcps
• algo__crosstalk_compensation_y_plane_gradient_kcps
• xtalkhisto.xtalk_shape.zone_id
• xtalkhisto.xtalk_shape.time_stamp
• xtalkhisto.xtalk_shape.first_bin
• xtalkhisto.xtalk_shape.buffer_size
• xtalkhisto.xtalk_shape.number_of_bins
• xtalkhisto.xtalk_shape.bin_data[0]
• xtalkhisto.xtalk_shape.bin_data[1]
• xtalkhisto.xtalk_shape.bin_data[2]
• xtalkhisto.xtalk_shape.bin_data[3]
• xtalkhisto.xtalk_shape.bin_data[4]
• xtalkhisto.xtalk_shape.bin_data[5]
• xtalkhisto.xtalk_shape.bin_data[6]
• xtalkhisto.xtalk_shape.bin_data[7]
• xtalkhisto.xtalk_shape.bin_data[8]
• xtalkhisto.xtalk_shape.bin_data[9]
• xtalkhisto.xtalk_shape.bin_data[10]
• xtalkhisto.xtalk_shape.bin_data[11]
• xtalkhisto.xtalk_shape.phasecal_result__reference_phase
• xtalkhisto.xtalk_shape.phasecal_result__vcsel_start
• xtalkhisto.xtalk_shape.cal_config__vcsel_start
• xtalkhisto.xtalk_shape.vcsel_width
• xtalkhisto.xtalk_shape.fast_osc__frequency
• xtalkhisto.xtalk_shape.zero_distance_phase
After the values of the structure have been modified, the user has to call VL53L1_SetCalibrationData().
UM2133
Crosstalk calibration
UM2133 - Rev 6
page 24/37
Page 25

UM2133
Offset calibration
6.2.7 Enable/disable crosstalk compensation
The function to enable or disable the crosstalk compensation is: VL53L1_SetXTalkCompensationEnable().
Calling VL53L1_SetXTalkCompensationEnable&VL53L1Dev, 0); disables the crosstalk compensation.
Calling V53L1_SetXTalkCompensationEnable&VL53L1Dev, 1); enables the crosstalk compensation.
Note: This function does not perform any calibration or crosstalk data loading, it enables the compensation.
Note: Calibration or loading of calibration data functions have to be called separately from the enable/disable function.
Note: Crosstalk compensation is disabled by default.
6.2.8 Crosstalk calibration error -22
An error -22 may be issued after calibration if the system failed to find a valid crosstalk value. This error is
typically raised when the standard crosstalk calibration is coupled with a low crosstalk (belove 5kcps) cover glass.
In this case it is strongly suggested to use fullROI crosstalk calibration.
If fullROI crosstalk calibration is not possible, then no crosstalk data should be applied.
In case of error, the crosstalk calibration data structure is not modified and can contain erroneous data.
It is recommended that the user sets the crosstalk calibration data to zero to ensure that spurious calibration data
does not affect ranging.
6.3 Offset calibration
Soldering the device onto the customer board or adding a cover glass can introduce an offset in the ranging
distance. This part-to-part offset has to be measured during the offset calibration.
During the offset calibration the dmax is also calibrated automatically. The calibration conditions suggested for the
offset calibration are optimal for the dmax calibration as well.
6.3.1 Offset calibration functions
Three functions are available for offset calibration:
• VL53L1_PerformOffsetCalibration(Dev,CalDistanceMilliMeter, CalReflectancePerCent)
Applicable to all preset modes
• VL53L1_PerformOffsetSimpleCalibration(Dev,CalDistanceMilliMeter)
Simplified offset calibration, more accurate but RANGING preset mode ONLY
• VL53L1_PerformOffsetPerVCSELCalibration(Dev,CalDistanceMilliMeter)
Gives the most accurate result, if several distance modes are used, but RANGING preset mode ONLY
The arguments of the functions are respectively the target distance in millimeters and its reflectance in percent
(only for the legacy one).
Note: Offset calibration has to be performed after crosstalk correction
6.3.2 Offset calibration procedure
The customer has to use a calibrated chart, placed at a given distance to allow offset calibration. Details of this
recommended setup are given in the following table.
Table 6. Offset calibration setup
Chart Distance Ambient conditions
Gray target (17% reflectance at visible light wavelength) 140 mm Dark (no IR contribution)
UM2133 - Rev 6
page 25/37
Page 26

6.3.3 Offset calibration options
The user can select the offset calibration options using the function: VL53L1_SetOffsetCalibrationMode().
This function has the following options:
• Standard calibration. This is the default setting.
• Pre-range only. This should be used if standard offset cannot be used (due to a target that is too reflective or
a short-distance target).
• Multizone calibration. This allows the ranging accuracy in multizones scanning mode to be increased.
Note that the ROIs must be set before calling the calibration function. A calibration is performed for a given ROI
configuration. The same configuration has to be used during ranging.
6.3.4 Offset correction options
In multizone scanning mode, the offset correction can be improved by using a per zone calibration.
If the calibration is made using this option, the user can apply a per zone calibration by calling:
VL53L1_SetOffsetCorrectionMode().
The two possible options are:
• VL53L1_OFFSETCORRECTIONMODE_STANDARD (default)
• VL53L1_OFFSETCORRECTIONMODE_PERZONE
6.3.5 Getting offset calibration results
The function VL53L1_GetCalibrationData() allows the reception of all calibration data. The returned structure
VL53L1_CalibrationData_t contains another structure called VL53L1_customer_nvm_managed_t which contains
the three offset calibration results:
• algo__part_to_part_range_offset_mm
• mm_config__inner_offset_mm
• mm_config__outer_offset_mm
UM2133
Offset calibration
6.3.6 Setting offset calibration data
Customer can load the offset calibration data after VL53L1_DataInit() and VL53L1_StaticInit() functions are
called, by using VL53L1_SetCalibrationData().
It is better is to
1. Call VL53L1_GetCalibrationData()
2. Modify the three parameters described in Section 6.3.4 Offset correction options and the parameters
described in Getting dmax calibration results
3. Call VL53L1_SetCalibrationData().
UM2133 - Rev 6
page 26/37
Page 27

Customer repair shop calibrations
7 Customer repair shop calibrations
If the calibration values are lost, due to component change in a repair shop, customers can apply a dedicated
procedure, where no specific setup (targets) are needed.
The calibration is composed of three steps: RefSpad, Xtalk and Offset calibrations.
RefSpad and Xtalk are the same as described in Section 6.1 RefSPAD calibration and Section 6.2 Crosstalk
calibration
Note: The customer only needs to check that no target is present below 80 cm during these calibrations.
A dedicated function is available to perform offset calibration: VL53L1_PerformOffsetZeroDistanceCalibration.
A target has to be set in front of the device, touching the cover glass. The target can be a simple sheet of paper.
There are no particular requirements for the paper reflectance.
The above function has to be called and the results can be retrieved similarly to the process described in the
previous chapters.
7.1 Live crosstalk calibration
Live crosstalk calibration is a way to get rid of part to part crosstalk calibration.
This option is only valid for Ranging and Scanning modes.
The principle is as follows:
• User performs a characterization of the crosstalk in the final application, using a typical cover glass. The
crosstalk data structure is recorded.
• During part to part calibration, the user must:
– perform RefSPadManagement calibration
– load crosstalk characterisation data
– perform offset calibration
• During standard operation, the user must:
– load crosstalk characterisation data
– enable live crosstalk detection
– start ranging
Live crosstalk detection has the same limitations as described in Section 5.8 Live crosstalk correction.
UM2133
UM2133 - Rev 6
page 27/37
Page 28

8 Bare driver errors and warnings
Driver error is reported when any driver function is called. Possible values for driver errors are described in the
following table.
Please note that warnings are given to inform the user that some parameters are not optimized. The warnings do
not block the host.
Table 7. Bare driver errors and warnings
UM2133
Bare driver errors and warnings
Error
value
0 VL53L1_ERROR_NONE No error
-1 VL53L1_ERROR_CALIBRATION_WARNING Invalid calibration data
-2 VL53L1_ERROR_MIN_CLIPPED
-3 VL53L1_ERROR_UNDEFINED Should not occur
-4 VL53L1_ERROR_INVALID_PARAMS Invalid parameter is set in a function
-5 VL53L1_ERROR_NOT_SUPPORTED
-6 VL53L1_ERROR_RANGE_ERROR Interrupt status is incorrect
-7 VL53L1_ERROR_TIME_OUT Ranging is aborted due to timeout
-8 VL53L1_ERROR_MODE_NOT_SUPPORTED Requested mode is not supported
-9 VL53L1_ERROR_BUFFER_TOO_SMALL Internal error, should not be raised
-10 VL53L1_ERROR_CALIBRATION_WARNING Supplied buffer is larger than I2C supports
-11 VL53L1_ERROR_GPIO_NOT_EXISTING
-12
-13 VL53L1_ERROR_CONTROL_INTERFACE Error reported from IO function
-14 VL53L1_ERROR_INVALID_COMMAND Command is invalid in current mode
-15 VL53L1_ERROR_DIVISION_BY_ZERO Should not be raised
-16 VL53L1_ERROR_REF_SPAD_INIT An error occurred during reference SPAD calibration
-17 VL53L1_ERROR_GPH_SYNC_CHECK_FAIL
-18 VL53L1_ERROR_STREAM_COUNT_CHECK_FAIL
-19 VL53L1_ERROR_GPH_ID_CHECK_FAIL
-20
-21 VL53L1_ERROR_ZONE_GPH_ID_CHECK_FAIL
-22 VL53L1_ERROR_XTALK_EXTRACTION_FAIL
VL53L1_ERROR_GPIO_FUNCTIONALITY_NOT_SUP
VL53L1_ERROR_ZONE_STREAM_COUNT_CHECK_
API error string Occurrence
Should not occur, unless using dedicated tuning
parameters
Requested parameter is not supported by the
programmed configuration
Should not be raised
PORTED
Driver out of sync with device. A stop/start or a reboot
may be needed.
FAIL
Thrown when run_xtalk_extraction function has 0
successful samples when using the full array to sample
the crosstalk. In this case, there is not enough
information to generate new crosstalk parameter
information. The function exits and leaves the current
crosstalk parameters unaltered.
UM2133 - Rev 6
page 28/37
Page 29

UM2133
Bare driver errors and warnings
Error
value
-23
-24 VL53L1_ERROR_OFFSET_CAL_NO_SAMPLE_FAIL
-25
-26 VL53L1_ERROR_ZONE_CAL_NO_SAMPLE_FAIL
-27 VL53L1_ERROR_TUNING_PARM_KEY_MISMATCH Tuning parameter key does not match
-28
-29
-30
-31
-32
-33 VL53L1_WARNING_OFFSET_CAL_RATE_TOO_HIGH
-34
-35 VL53L1_WARNING_ZONE_CAL_MISSING_SAMPLES
-36 VL53L1_WARNING_ZONE_CAL_SIGMA_TOO_HIGH
-37 VL53L1_WARNING_ZONE_CAL_RATE_TOO_HIGH
-38 VL53L1_WARNING_XTALK_MISSING_SAMPLES
VL53L1_WARNING_OFFSET_CAL_INSUFFICIENT_M
VL53L1_ERROR_OFFSET_CAL_NO_SPADS_ENABL
VL53L1_WARNING_REF_SPAD_CHAR_NOT_ENOUG
VL53L1_WARNING_REF_SPAD_CHAR_RATE_TOO_
VL53L1_WARNING_REF_SPAD_CHAR_RATE_TOO_L
VL53L1_WARNING_OFFSET_CAL_MISSING_SAMPL
VL53L1_WARNING_OFFSET_CAL_SIGMA_TOO_HIG
VL53L1_WARNING_OFFSET_CAL_SPAD_COUNT_T
API error string Occurrence
Thrown when xtalk_extraction function has found that
the average sigma estimate of the full array crosstalk
M1_SPADS
ED_FAIL
H_SPADS
HIGH
OW
ES
H
OO_LOW
sample is greater than the maximum limit allowed. In
this case the crosstalk sample is too noisy for
measurement. The function exits and leaves the current
crosstalk parameters unaltered.
Thrown if one of the stages has no valid offset
calibration samples. Fatal error calibration not valid.
Thrown if one of the stages has zero effective SPADs.
Traps the case when MM1 SPADs is zero. Fatal error
calibration not valid.
Thrown if some of the zones have no valid samples. A
fatal error calibration not valid
Thrown if less than five good SPADs are available.
Ensure setup is in line with ST recommendations.
Thrown if the final reference rate is greater than the
upper reference rate limit. Default is 40 Mcps. Implies a
minimum Q3 (x10) SPAD (5) selected. Ensure setup is
in line with ST recommendations.
Thrown if the final reference rate is less than the lower
reference rate limit. Default is 10 Mcps. Implies
maximum Q1 (x1) SPADs selected ensure setup is in
line with ST recommendations.
Thrown if there is less than the requested number of
valid samples. Ensure setup is in line with ST
recommendations.
Thrown if the offset calibration range sigma estimate is
greater than 8.0 mm. This is the recommended
minimum value to yield a stable offset measurement
Thrown when peak rate is greater than that 50.0Mcps.
This is the recommended maximum rate to avoid pile-up
influencing the offset measurement.
Thrown when one of stage’s range has less that 5.0
effective SPADs. This is the recommended minimum
value to yield a stable offset.
Thrown if one of more of the zones have less than the
requested number of valid samples.
Thrown if one or more zones have a sigma estimate
value greater than 8.0 mm. This is the recommended
minimum value to yield a stable offset measurement.
Thrown if one of more zones have a peak rate higher
than 50.0Mcps. This is the recommended maximum rate
to avoid pile-up influencing the offset measurement.
Thrown to notify that some of the crosstalk samples did
not yield valid ranging pulse data while attempting to
measure the crosstalk signal. This can signify any of the
zones are missing samples. This warning is for
notification only, the crosstalk pulse and shape have still
been generated.
UM2133 - Rev 6
page 29/37
Page 30

UM2133
Bare driver errors and warnings
Error
value
-39
-40
-41 VL53L1_ERROR_NOT_IMPLEMENTED Function called is not implemented.
VL53L1_WARNING_XTALK_NO_SAMPLES_FOR_GR
VL53L1_WARNING_XTALK_SIGMA_LIMIT_FOR_GRA
API error string Occurrence
Thrown to notify that some of the crosstalk samples
used for gradient generation did not yield valid ranging
pulse data while attempting to measure the crosstalk
ADIENT
DIENT
signal. This can signify that any one of the zones 0-3
yielded no successful samples. This warning is for
notification only, the crosstalk pulse and shape have still
been generated.
Thrown to notify that some of the crosstalk samples
used for gradient generation did not pass the sigma limit
check while attempting to measure the crosstalk signal.
This can signify that any one of the zones 0-3 yielded an
average sigma_mm value greater than the limit. This
warning is for notification only, the crosstalk pulse and
shape have still been generated.
UM2133 - Rev 6
page 30/37
Page 31

9 I2C utilization
This section lists the I2C bytes transactions for calls to the VL53L1 bare driver:
One time operations:
• initialization: 535 bytes
• offset calibration: 14512 bytes
• crosstalk calibration: 8423 bytes
• refSPAD calibration: 185 bytes
Frequent operations:
• each ranging mode operation: 155 bytes
• each autonomous ranging mode operation: 206 bytes
Class of functions Function call Total I2C bytes Comments
Initialization
System call
Interrupt (Autonomous
mode)
Interrupt (Autonomous
ranging mode)
Interrupt VL53L1_GetMeasurementDataReady() Writes 2 and Reads 1
Interrupt/Polling
(Ranging mode)
Polling loop VL53L1_WaitMeasurementDataReady() Writes 2 and Reads 1
System call VL53L1_StopMeasurement() Writes 7
System call VL53L1_PerformRefSpadManagement()
System call VL53L1_PerformXtalkCalibration()
System call VL53L1_PerformOffsetCalibration()
UM2133
I2C utilization
Table 8. I2C transactions size
VL53L1_WaitDeviceBooted()
VL53L1_DataInit()
VL53L1_SetXTalkCompensationEnable() Writes 25
VL53L1_StartMeasurement() Writes 137
VL53L1_GetMultiRangingData() Writes 2 and Reads 83
VL53L1_GetRangingMeasurementData()
VL53L1_ClearInterruptAndStartMeasurement () Writes 70 Start next ranging
Writes 2 bytes and
Reads 1 byte
Writes 363 and Reads
169
Writes 2 and Reads
134
Writes 134 and Reads
51
Writes 3875 and Reads
4548 bytes
Writes 9009 and Reads
5503
Called one time during
module load time
Called for every range
completion
Called for every range
completion
Checks range ready
status
Checks range ready
status
Called one time during
calibration
Called one time during
calibration
UM2133 - Rev 6
page 31/37
Page 32

10 Memory usage
The bare driver is compiled as a static library, on STM32F401RE, with gcc version 4.9.3, and no debug. It is
optimized for size (-Os) and takes 62 kB in flash.
The device structure contains most of the information required by the driver to control the device. The size of the
device structure is 8 kB - for the default number of zones (16) and results per zone (4).
UM2133
Memory usage
UM2133 - Rev 6
page 32/37
Page 33

Revision history
Table 9. Document revision history
Date Version Changes
24-Jan-2018 4 Initial corporate release
Maintenance 3 update.
2.2: re-phrased
3.2.1 re-phrased
4.3 typo correction
4.6: “target not detected” situation described
5.13: dmax user guide added. modification about dmax in paragraphs 4.3 and
6.3
08-Jan-2019 5
16-Oct-2020 6
Proximity and autonomous low power modes deleted from the whole
document
Figure 4 and Figure 6 modified
5.4: default timing budget 33ms instead of 80ms
Table 4: ranging gain modified to 0.971
5.8: live crosstalk correction limit 1kcps
6.2: FullROI crosstalk calibration added
6.3.2: gray17 chart suggested instead of black5
6.4: generic shape rewording
Removed references to Lite ranging mode as obsolete
Updated Introduction and added Section References
Added a Note regarding tuning timing accuracy in Section 2.3 Timing
considerations
Updated Section 3.2.2 DataInit and Section 3.2.4 Preset mode
Added info regarding ExtendedRange in Section 4.5 Single ranging
measurement data structure
Updated the Autonomous values in Table 2. Timing budget values (in ms)
Updated table Table 3. Distance modes
Added a note to Section 5.11 Tuning parameters
Updated Section 6.3.1 Offset calibration functions and Section 6.3.3 Offset
calibration options
Removed section regarding dmax calibration results
Added Section 7 Customer repair shop calibrations
UM2133
UM2133 - Rev 6
page 33/37
Page 34

UM2133
Contents
Contents
1 VL53L1 system overview ..........................................................2
2 Ranging functional description ....................................................3
2.1 Ranging preset modes ..........................................................3
2.2 Ranging sequence .............................................................3
2.3 Timing considerations...........................................................5
2.4 Region-of-interest (ROI) .........................................................5
3 Description of basic bare driver functions..........................................6
3.1 Bare driver ....................................................................6
3.2 System initialization ............................................................8
3.2.1 Wait for boot ............................................................8
3.2.2 DataInit ................................................................8
3.2.3 StaticInit ...............................................................8
3.2.4 Preset mode ............................................................8
4 Ranging with the VL53L1 ..........................................................9
4.1 Starting a measurement .........................................................9
4.2 Waiting for a result: polling or using an interrupt .....................................9
4.2.1 Driver polling to get the result status ..........................................9
4.2.2 Host polling to get the result status ...........................................9
4.2.3 Using a physical interrupt ..................................................9
4.3 Getting a measurement .........................................................9
4.3.1 Getting a single ranging value...............................................9
4.3.2 Getting multiple ranging values .............................................10
4.4 Stopping a measurement .......................................................10
4.5 Single ranging measurement data structure .......................................10
4.6 MultiRangingData structure .....................................................10
5 Description of additional driver functions .........................................13
5.1 Single ROI ...................................................................13
5.2 SPAD array coordinates versus scene ............................................14
5.3 Multiple ROIs for multizone scanning mode........................................14
UM2133 - Rev 6
page 34/37
Page 35

UM2133
Contents
5.3.1 Bare driver structure .....................................................14
5.4 Timing budget ................................................................15
5.5 Distance mode................................................................16
5.5.1 Recommended distance mode .............................................16
5.6 Inter-measurement period ......................................................16
5.7 Autonomous mode thresholds...................................................17
5.8 Live crosstalk correction........................................................18
5.9 Ranging gain .................................................................18
5.10 Optical center coordinates ......................................................19
5.11 Tuning parameters ............................................................19
5.12 VDDIO configuration ...........................................................19
5.13 Dmax .......................................................................19
5.14 I2C address ..................................................................20
6 Calibration functions .............................................................21
6.1 RefSPAD calibration ...........................................................21
6.1.1 RefSPAD calibration function ..............................................21
6.1.2 RefSPAD calibration procedure.............................................21
6.1.3 Getting refSPAD calibration results ..........................................22
6.1.4 Setting refSPAD calibration data ............................................22
6.2 Crosstalk calibration ...........................................................22
6.2.1 Crosstalk calibration function ..............................................23
6.2.2 Standard crosstalk calibration procedure .....................................23
6.2.3 FullROI crosstalk calibration procedure.......................................23
6.2.4 Generic shape crosstalk calibration..........................................23
6.2.5 Getting crosstalk calibration results..........................................24
6.2.6 Setting crosstalk calibration data............................................24
6.2.7 Enable/disable crosstalk compensation.......................................25
6.2.8 Crosstalk calibration error -22 ..............................................25
6.3 Offset calibration ..............................................................25
6.3.1 Offset calibration functions ................................................25
6.3.2 Offset calibration procedure ...............................................25
UM2133 - Rev 6
page 35/37
Page 36

UM2133
Contents
6.3.3 Offset calibration options..................................................26
6.3.4 Offset correction options ..................................................26
6.3.5 Getting offset calibration results ............................................26
6.3.6 Setting offset calibration data ..............................................26
7 Customer repair shop calibrations ................................................27
7.1 Live crosstalk calibration .......................................................27
8 Bare driver errors and warnings ..................................................28
9 I2C utilization .....................................................................31
10 Memory usage....................................................................32
Revision history .......................................................................33
Contents ..............................................................................34
UM2133 - Rev 6
page 36/37
Page 37

UM2133
IMPORTANT NOTICE – PLEASE READ CAREFULLY
STMicroelectronics NV and its subsidiaries (“ST”) reserve the right to make changes, corrections, enhancements, modifications, and improvements to ST
products and/or to this document at any time without notice. Purchasers should obtain the latest relevant information on ST products before placing orders. ST
products are sold pursuant to ST’s terms and conditions of sale in place at the time of order acknowledgement.
Purchasers are solely responsible for the choice, selection, and use of ST products and ST assumes no liability for application assistance or the design of
Purchasers’ products.
No license, express or implied, to any intellectual property right is granted by ST herein.
Resale of ST products with provisions different from the information set forth herein shall void any warranty granted by ST for such product.
ST and the ST logo are trademarks of ST. For additional information about ST trademarks, please refer to www.st.com/trademarks. All other product or service
names are the property of their respective owners.
Information in this document supersedes and replaces information previously supplied in any prior versions of this document.
© 2020 STMicroelectronics – All rights reserved
UM2133 - Rev 6
page 37/37
 Loading...
Loading...