

Page 1

STM32W108HB STM32W108CC
VFQFPN48
(7 x 7 mm)
VFQFPN40
(6 x 6 mm)
UFQFPN48
(7 x 7 mm)
STM32W108CB STM32W108CZ
High-performance, IEEE 802.15.4 wireless system-on-chip with up
to 256 Kbytes of embedded Flash memory
Datasheet − production data
Features
■ Complete system-on-chip
– 32-bit ARM® Cortex™-M3 processor
– 2.4 GHz IEEE 802.15.4 transceiver & lower
MAC
– 128/192/256-Kbyte Flash, 8/12/16-Kbyte
RAM memory
– AES128 encryption accelerator
2
– Flexible ADC, SPI/UART/I
communications, and general-purpose
timers
– 24 highly configurable GPIOs with Schmitt
trigger inputs
■ Industry-leading ARM® Cortex™-M3
processor
– Leading 32-bit processing performance
– Highly efficient Thumb®-2 instruction set
– Operation at 6, 12 or 24 MHz
– Flexible nested vectored interrupt controller
■ Low power consumption, advanced
management
– Receive current (w/ CPU): 27 mA
– Transmit current (w/ CPU, +3 dBm TX):
31 mA
– Low deep sleep current, with retained RAM
and GPIO: 400 nA/800 nA with/without
sleep timer
– Low-frequency internal RC oscillator for
low-power sleep timing
– High-frequency internal RC oscillator for
fast (100 µs) processor start-up from sleep
■ Exceptional RF performance
– Normal mode link budget up to 102 dB;
configurable up to 107 dB
– -99 dBm normal RX sensitivity;
configurable to -100 dBm (1% PER, 20
byte packet)
– +3 dB normal mode output power;
configurable up to +8 dBm
C serial
– Robust WiFi and Bluetooth coexistence
■ Innovative network and processor debug
– Non-intrusive hardware packet trace
– Serial wire/JTAG interface
– Standard ARM debug capabilities: Flash
patch & breakpoint; data watchpoint &
trace; instrumentation trace macrocell
■ Application flexibility
– Single voltage operation: 2.1-3.6 V with
internal 1.8 V and 1.25 V regulators
– Optional 32.768 kHz crystal for higher timer
accuracy
– Low external component count with single
24 MHz crystal
– Support for external power amplifier
– Small 7x7 mm 48-pin VFQFPN package or
6x6 mm 40-pin VFQFPN package
Applications
■ Smart energy
■ Building automation and control
■ Home automation and control
■ Security and monitoring
■ ZigBee® Pro wireless sensor networking
■ RF4CE products and remote controls
■ 6LoWPAN and custom protocols
March 2012 Doc ID 16252 Rev 13 1/232
This is information on a product in full production.
www.st.com
1
Page 2

Contents STM32W108HB STM32W108CC STM32W108CB STM32W108CZ
Contents
1 Description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
1.1 Development tools . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
1.2 Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
1.2.1 Functional description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
1.2.2 ARM® Cortex™-M3 core . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2 Documentation conventions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
3 Pinout and pin description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
4 Embedded memory . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
4.1 Flash memory . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
4.2 Random-access memory . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
4.2.1 Direct memory access (DMA) to RAM . . . . . . . . . . . . . . . . . . . . . . . . . . 30
4.2.2 RAM memory protection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
4.3 Memory protection unit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
5 Radio frequency module . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
5.1 Receive (Rx) path . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
5.1.1 Rx baseband . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
5.1.2 RSSI and CCA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
5.2 Transmit (Tx) path . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
5.2.1 Tx baseband . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
5.2.2 TX_ACTIVE and nTX_ACTIVE signals . . . . . . . . . . . . . . . . . . . . . . . . . 33
5.3 Calibration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
5.4 Integrated MAC module . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
5.5 Packet trace interface (PTI) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
5.6 Random number generator . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
6 System modules . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
6.1 Power domains . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
6.1.1 Internally regulated power . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
6.1.2 Externally regulated power . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
2/232 Doc ID 16252 Rev 13
Page 3

STM32W108HB STM32W108CC STM32W108CB STM32W108CZ Contents
6.2 Resets . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
6.2.1 Reset sources . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
6.2.2 Reset recording . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
6.2.3 Reset generation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
6.2.4 Reset register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
6.3 Clocks . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
6.3.1 High-frequency internal RC oscillator (OSCHF) . . . . . . . . . . . . . . . . . . 42
6.3.2 High-frequency crystal oscillator (OSC24M) . . . . . . . . . . . . . . . . . . . . . 42
6.3.3 Low-frequency internal RC oscillator (OSCRC) . . . . . . . . . . . . . . . . . . . 42
6.3.4 Low-frequency crystal oscillator (OSC32K) . . . . . . . . . . . . . . . . . . . . . . 42
6.3.5 Clock switching . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
6.3.6 Clock switching registers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
6.4 System timers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
6.4.1 Watchdog timer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
6.4.2 Sleep timer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
6.4.3 Event timer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
6.4.4 Slow timers (Watchdog and Sleeptimer) control and status registers . . 45
6.5 Power management . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
6.5.1 Wake sources . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
6.5.2 Basic sleep modes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
6.5.3 Further options for deep sleep . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
6.5.4 Use of debugger with sleep modes . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
6.6 Security accelerator . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
7 Integrated voltage regulator . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
8 General-purpose input/outputs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
8.1 Functional description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
8.1.1 GPIO ports . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
8.1.2 Configuration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
8.1.3 Forced functions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
8.1.4 Reset . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
8.1.5 nBOOTMODE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
8.1.6 GPIO modes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
8.1.7 Wake monitoring . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
8.2 External interrupts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
Doc ID 16252 Rev 13 3/232
Page 4

Contents STM32W108HB STM32W108CC STM32W108CB STM32W108CZ
8.3 Debug control and status . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
8.4 GPIO alternate functions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
8.5 General-purpose input / output (GPIO) registers . . . . . . . . . . . . . . . . . . . 67
8.5.1 Port x configuration register (Low) (GPIO_PxCFGL) . . . . . . . . . . . . . . . 67
8.5.2 Port x configuration register (High) (GPIO_PxCFGH) . . . . . . . . . . . . . . 67
8.5.3 Port x input data register (GPIO_PxIN) . . . . . . . . . . . . . . . . . . . . . . . . . 68
8.5.4 Port x output data register (GPIO_PxOUT) . . . . . . . . . . . . . . . . . . . . . . 69
8.5.5 Port x output clear register (GPIO_PxCLR) . . . . . . . . . . . . . . . . . . . . . . 69
8.5.6 Port x output set register (GPIO_PxSET) . . . . . . . . . . . . . . . . . . . . . . . 70
8.5.7 Port x wakeup monitor register (GPIO_PxWAKE) . . . . . . . . . . . . . . . . . 71
8.5.8 GPIO wakeup filtering register (GPIO_WAKEFILT) . . . . . . . . . . . . . . . . 71
8.5.9 Interrupt x select register (GPIO_IRQxSEL) . . . . . . . . . . . . . . . . . . . . . 72
8.5.10 GPIO interrupt x configuration register (GPIO_INTCFGx) . . . . . . . . . . . 73
8.5.11 GPIO interrupt flag register (INT_GPIOFLAG) . . . . . . . . . . . . . . . . . . . 73
8.5.12 GPIO debug configuration register (GPIO_DBGCFG) . . . . . . . . . . . . . . 74
8.5.13 GPIO debug status register (GPIO_DBGSTAT) . . . . . . . . . . . . . . . . . . . 75
9 Serial interfaces . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
9.1 Functional description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
9.2 Configuration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
9.3 SPI master mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
9.3.1 Setup and configuration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
9.3.2 Operation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
9.3.3 Interrupts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
9.4 SPI slave mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
9.4.1 Setup and configuration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
9.4.2 Operation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
9.4.3 DMA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
9.4.4 Interrupts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
9.5 Inter-integrated circuit interfaces (I2C) . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
9.5.1 Setup and configuration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
9.5.2 Constructing frames . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
9.5.3 Interrupts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
9.6 Universal asynchronous receiver / transmitter (UART) . . . . . . . . . . . . . . 89
9.6.1 Setup and configuration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
9.6.2 FIFOs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
4/232 Doc ID 16252 Rev 13
Page 5

STM32W108HB STM32W108CC STM32W108CB STM32W108CZ Contents
9.6.3 RTS/CTS flow control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
9.6.4 DMA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
9.6.5 Interrupts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
9.7 Direct memory access (DMA) channels . . . . . . . . . . . . . . . . . . . . . . . . . . 93
9.8 Serial controller registers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
9.8.1 Serial mode register (SCx_MODE) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
9.8.2 Serial controller interrupt flag register (INT_SCxFLAG) . . . . . . . . . . . . 95
9.8.3 Serial controller interrupt configuration register (INT_SCxCFG) . . . . . . 96
9.8.4 Serial controller interrupt mode register (SCx_INTMODE) . . . . . . . . . . 97
9.9 SPI master mode registers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
9.9.1 Serial data register (SCx_DATA) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
9.9.2 SPI configuration register (SCx_SPICFG) . . . . . . . . . . . . . . . . . . . . . . . 98
9.9.3 SPI status register (SCx_SPISTAT) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
9.9.4 Serial clock linear prescaler register (SCx_RATELIN) . . . . . . . . . . . . . . 99
9.9.5 Serial clock exponential prescaler register (SCx_RATEEXP) . . . . . . . 100
9.10 SPI slave mode registers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100
9.11 Inter-integrated circuit (I2C) interface registers . . . . . . . . . . . . . . . . . . . 100
9.11.1 I2C status register (SCx_TWISTAT) . . . . . . . . . . . . . . . . . . . . . . . . . . . 100
9.11.2 I2C control 1 register (SCx_TWICTRL1) . . . . . . . . . . . . . . . . . . . . . . . 101
9.11.3 I2C control 2 register (SCx_TWICTRL2) . . . . . . . . . . . . . . . . . . . . . . . 101
9.12 Universal asynchronous receiver / transmitter (UART) registers . . . . . . 102
9.12.1 UART status register (SC1_UARTSTAT) . . . . . . . . . . . . . . . . . . . . . . . 102
9.12.2 UART configuration register (SC1_UARTCFG) . . . . . . . . . . . . . . . . . . 103
9.12.3 UART baud rate period register (SC1_UARTPER) . . . . . . . . . . . . . . . 104
9.12.4 UART baud rate fractional period register (SC1_UARTFRAC) . . . . . . 104
9.13 DMA channel registers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105
9.13.1 Serial DMA control register (SCx_DMACTRL) . . . . . . . . . . . . . . . . . . 105
9.13.2 Serial DMA status register (SCx_DMASTAT) . . . . . . . . . . . . . . . . . . . 106
9.13.3 Transmit DMA begin address register A (SCx_TXBEGA) . . . . . . . . . . 107
9.13.4 Transmit DMA begin address register B (SCx_TXBEGB) . . . . . . . . . . 107
9.13.5 Transmit DMA end address register A (SCx_TXENDA) . . . . . . . . . . . 108
9.13.6 Transmit DMA end address register B (SCx_TXENDB) . . . . . . . . . . . 108
9.13.7 Transmit DMA count register (SCx_TXCNT) . . . . . . . . . . . . . . . . . . . . 109
9.13.8 Receive DMA begin address register A (SCx_RXBEGA) . . . . . . . . . . 110
9.13.9 Receive DMA begin address register B (SCx_RXBEGB) . . . . . . . . . . 110
9.13.10 Receive DMA end address register A (SCx_RXENDA) . . . . . . . . . . . . 111
Doc ID 16252 Rev 13 5/232
Page 6

Contents STM32W108HB STM32W108CC STM32W108CB STM32W108CZ
9.13.11 Receive DMA end address register B (SCx_RXENDB) . . . . . . . . . . . . 111
9.13.12 Receive DMA count register A (SCx_RXCNTA) . . . . . . . . . . . . . . . . . 112
9.13.13 Receive DMA count register B (SCx_RXCNTB) . . . . . . . . . . . . . . . . . 112
9.13.14 Saved receive DMA count register (SCx_RXCNTSAVED) . . . . . . . . . 113
9.13.15 DMA first receive error register A (SCx_RXERRA) . . . . . . . . . . . . . . . 114
9.13.16 DMA first receive error register B (SCx_RXERRB) . . . . . . . . . . . . . . . 114
10 General-purpose timers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 115
10.1 Functional description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 117
10.1.1 Time-base unit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 117
10.1.2 Counter modes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 119
10.1.3 Clock selection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
10.1.4 Capture/compare channels . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 128
10.1.5 Input capture mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 130
10.1.6 PWM input mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131
10.1.7 Forced output mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132
10.1.8 Output compare mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132
10.1.9 PWM mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 133
10.1.10 One-pulse mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 136
10.1.11 Encoder interface mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 138
10.1.12 Timer input XOR function . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 140
10.1.13 Timers and external trigger synchronization . . . . . . . . . . . . . . . . . . . . 141
10.1.14 Timer synchronization . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 145
10.1.15 Timer signal descriptions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 150
10.2 Interrupts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 151
10.3 General-purpose timer (1 and 2) registers . . . . . . . . . . . . . . . . . . . . . . . 151
10.3.1 Timer x control register 1 (TIMx_CR1) . . . . . . . . . . . . . . . . . . . . . . . . 151
10.3.2 Timer x control register 2 (TIMx_CR2) . . . . . . . . . . . . . . . . . . . . . . . . 153
10.3.3 Timer x slave mode control register (TIMx_SMCR) . . . . . . . . . . . . . . . 154
10.3.4 Timer x event generation register (TIMx_EGR) . . . . . . . . . . . . . . . . . . 156
10.3.5 Timer x capture/compare mode register 1 (TIMx_CCMR1) . . . . . . . . . 157
10.3.6 Timer x capture/compare mode register 2 (TIMx_CCMR2) . . . . . . . . . 160
10.3.7 Timer x capture/compare enable register (TIMx_CCER) . . . . . . . . . . . 163
10.3.8 Timer x counter register (TIMx_CNT) . . . . . . . . . . . . . . . . . . . . . . . . . 164
10.3.9 Timer x prescaler register (TIMx_PSC) . . . . . . . . . . . . . . . . . . . . . . . . 165
10.3.10 Timer x auto-reload register (TIMx_ARR) . . . . . . . . . . . . . . . . . . . . . . 165
10.3.11 Timer x capture/compare 1 register (TIMx_CCR1) . . . . . . . . . . . . . . . 166
6/232 Doc ID 16252 Rev 13
Page 7

STM32W108HB STM32W108CC STM32W108CB STM32W108CZ Contents
10.3.12 Timer x capture/compare 2 register (TIMx_CCR2) . . . . . . . . . . . . . . . 166
10.3.13 Timer x capture/compare 3 register (TIMx_CCR3) . . . . . . . . . . . . . . . 167
10.3.14 Timer x capture/compare 4 register (TIMx_CCR4) . . . . . . . . . . . . . . . 167
10.3.15 Timer 1 option register (TIM1_OR) . . . . . . . . . . . . . . . . . . . . . . . . . . . 168
10.3.16 Timer 2 option register (TIM2_OR) . . . . . . . . . . . . . . . . . . . . . . . . . . . 169
10.3.17 Timer x interrupt configuration register (INT_TIMxCFG) . . . . . . . . . . . 170
10.3.18 Timer x interrupt flag register (INT_TIMxFLAG) . . . . . . . . . . . . . . . . . 170
10.3.19 Timer x missed interrupt register (INT_TIMxMISS) . . . . . . . . . . . . . . . 171
11 Analog-to-digital converter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172
11.1 Functional description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 173
11.1.1 Setup and configuration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 173
11.1.2 GPIO usage . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 173
11.1.3 Voltage reference . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 173
11.1.4 Offset/gain correction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 174
11.1.5 DMA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 175
11.1.6 ADC configuration register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 175
11.1.7 Operation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 177
11.1.8 Calibration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 178
11.2 Interrupts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 179
11.3 Analog-to-digital converter (ADC) registers . . . . . . . . . . . . . . . . . . . . . . 180
11.3.1 ADC configuration register (ADC_CFG) . . . . . . . . . . . . . . . . . . . . . . . 180
11.3.2 ADC offset register (ADC_OFFSET) . . . . . . . . . . . . . . . . . . . . . . . . . . 181
11.3.3 ADC gain register (ADC_GAIN) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 181
11.3.4 ADC DMA configuration register (ADC_DMACFG) . . . . . . . . . . . . . . . 182
11.3.5 ADC DMA status register (ADC_DMASTAT) . . . . . . . . . . . . . . . . . . . . 182
11.3.6 ADC DMA begin address register (ADC_DMABEG) . . . . . . . . . . . . . . 183
11.3.7 ADC DMA buffer size register (ADC_DMASIZE) . . . . . . . . . . . . . . . . . 183
11.3.8 ADC DMA current address register (ADC_DMACUR) . . . . . . . . . . . . . 184
11.3.9 ADC DMA count register (ADC_DMACNT) . . . . . . . . . . . . . . . . . . . . . 184
11.3.10 ADC interrupt flag register (INT_ADCFLAG) . . . . . . . . . . . . . . . . . . . . 185
11.3.11 ADC interrupt configuration register (INT_ADCCFG) . . . . . . . . . . . . . 185
12 Interrupts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 186
12.1 Nested vectored interrupt controller (NVIC) . . . . . . . . . . . . . . . . . . . . . . 186
12.1.1 Non-maskable interrupt (NMI) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 189
12.1.2 Faults . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 189
Doc ID 16252 Rev 13 7/232
Page 8

Contents STM32W108HB STM32W108CC STM32W108CB STM32W108CZ
12.2 Event manager . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 189
12.3 Nested vectored interrupt controller (NVIC) interrupts . . . . . . . . . . . . . . 193
12.3.1 Top-level set interrupts configuration register (INT_CFGSET) . . . . . . 193
12.3.2 Top-level clear interrupts configuration register (INT_CFGCLR) . . . . . 194
12.3.3 Top-level set interrupts pending register (INT_PENDSET) . . . . . . . . . 195
12.3.4 Top-level clear interrupts pending register (INT_PENDCLR) . . . . . . . . 196
12.3.5 Top-level active interrupts register (INT_ACTIVE) . . . . . . . . . . . . . . . . 197
12.3.6 Top-level missed interrupts register (INT_MISS) . . . . . . . . . . . . . . . . . 198
12.3.7 Auxiliary fault status register (SCS_AFSR) . . . . . . . . . . . . . . . . . . . . . 199
13 Debug support . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 200
13.1 STM32W108 JTAG TAP connection . . . . . . . . . . . . . . . . . . . . . . . . . . . . 201
14 Electrical characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 202
14.1 Parameter conditions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 202
14.1.1 Minimum and maximum values . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 202
14.1.2 Typical values . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 202
14.1.3 Typical curves . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 202
14.1.4 Loading capacitor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 202
14.1.5 Pin input voltage . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 202
14.2 Absolute maximum ratings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 203
14.3 Operating conditions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 204
14.3.1 General operating conditions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 204
14.3.2 Operating conditions at power-up . . . . . . . . . . . . . . . . . . . . . . . . . . . . 204
14.3.3 Absolute maximum ratings (electrical sensitivity) . . . . . . . . . . . . . . . . 205
14.4 ADC characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 207
14.5 Clock frequencies . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 211
14.5.1 High frequency internal clock characteristics . . . . . . . . . . . . . . . . . . . . 211
14.5.2 High frequency external clock characteristics . . . . . . . . . . . . . . . . . . . 211
14.5.3 Low frequency internal clock characteristics . . . . . . . . . . . . . . . . . . . . 212
14.5.4 Low frequency external clock characteristics . . . . . . . . . . . . . . . . . . . . 212
14.6 DC electrical characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 213
14.7 Digital I/O specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 218
14.8 Non-RF system electrical characteristics . . . . . . . . . . . . . . . . . . . . . . . . 219
14.9 RF electrical characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 219
14.9.1 Receive . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 219
8/232 Doc ID 16252 Rev 13
Page 9

STM32W108HB STM32W108CC STM32W108CB STM32W108CZ Contents
14.9.2 Transmit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 220
14.9.3 Synthesizer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 221
15 Package characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 222
16 Ordering information scheme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 227
17 Revision history . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 228
Doc ID 16252 Rev 13 9/232
Page 10

Description STM32W108HB STM32W108CC STM32W108CB STM32W108CZ
Packet sniffer
ADC
RF_P,N
Program Flash
128 kBytes
192 kBytes
256 kBytes
Data SRAM
8 kBytes
12 kBytes
16 kBytes
HF crystal
OSC
LF crystal
OSC
General
Purpose
ADC
Serial
Wire and
JTAG
debug
Internal LF
RC-OSC
GPIO multiplexor swtich
Chip
manager
Regulator
Bias
2ndlevel
Interrupt
controller
RF_TX_ALT_P,N
OSCA
OSCB
PA[7:0], PB[7:0], PC[7:0]
Encryption
accl erator
IF
Always
Powered
Domain
ARM CORTEX-M3
®
CPU withNVIC
and MPU
VREG_OUT
Watchdog
PA select
LNA
PA
PA
DAC
MAC
+
Baseband
Sleep
timer
BIAS_R
POR
nRESET
General
purpose
timers
GPIO
regist ers
UART/
SPI/I
2
C
SYNTH
Inte rnal HF
RC-OSC
TX_ACTIVE
SWCLK,
JTCK
Calibrat ion
ADC
Packet Trace
CPU debug
TPIU/ITM/
FPB/DWT
!I
1 Description
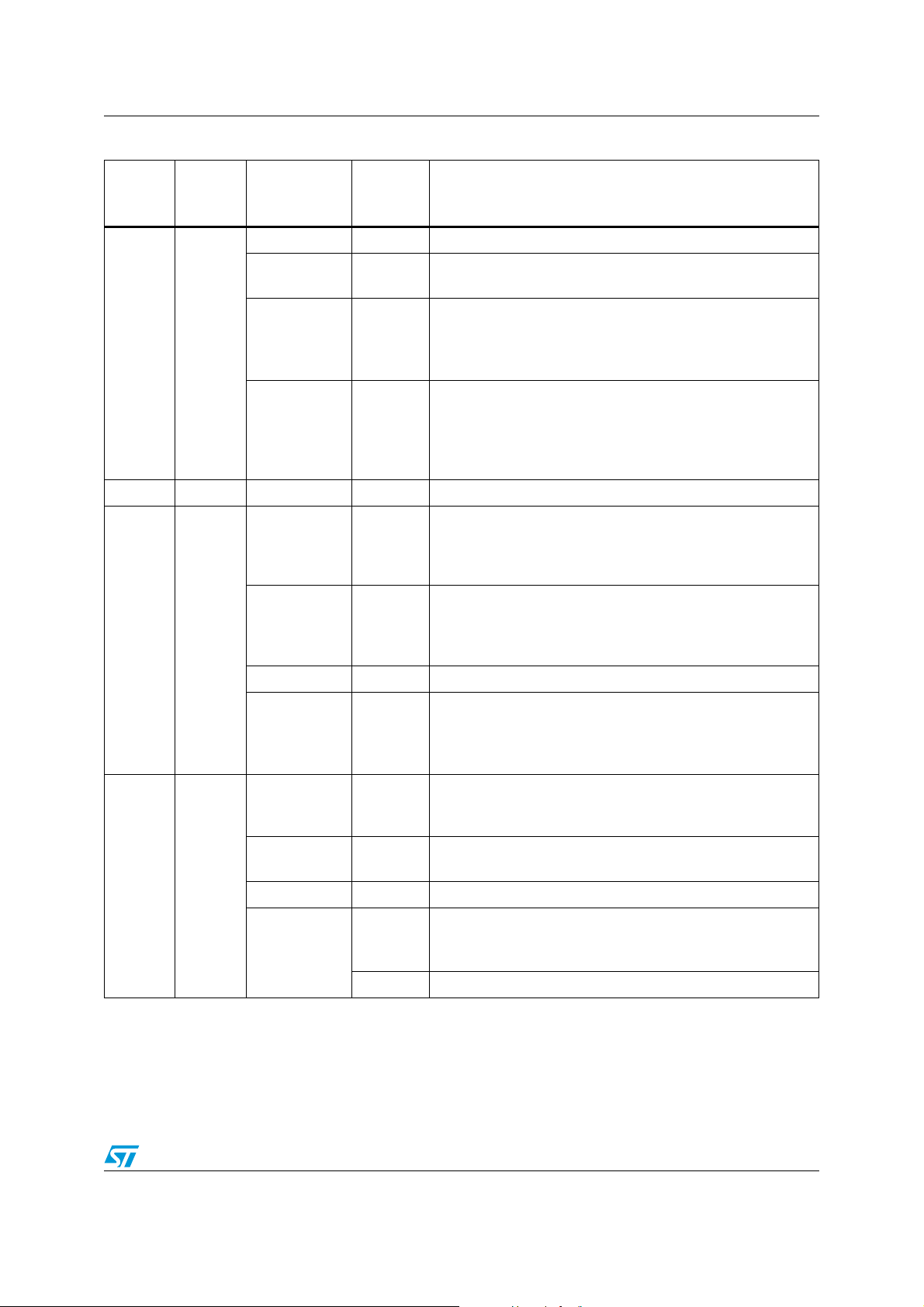
The STM32W108 is a fully integrated System-on-Chip that integrates a 2.4 GHz, IEEE
802.15.4-compliant transceiver, 32-bit ARM® Cortex™-M3 microprocessor, Flash and RAM
memory, and peripherals of use to designers of 802.15.4-based systems.
Figure 1. STM32W108 block diagram
The transceiver utilizes an efficient architecture that exceeds the dynamic range
requirements imposed by the IEEE 802.15.4-2003 standard by over 15 dB. The integrated
receive channel filtering allows for robust co-existence with other communication standards
in the 2.4 GHz spectrum, such as IEEE 802.11 and Bluetooth. The integrated regulator,
VCO, loop filter, and power amplifier keep the external component count low. An optional
high performance radio mode (boost mode) is software-selectable to boost dynamic range.
The integrated 32-bit ARM® Cortex™-M3 microprocessor is highly optimized for high
ormance, low power consumption, and efficient memory utilization. Including an
perf
integrated MPU, it supports two different modes of operation: Privileged mode and
Unprivileged mode. This architecture could be used to separate the networking stack from
imposed by the ZigBee and IEEE 802.15.4-2003
the application code and prevent unwanted modification of restricted areas of memory and
registers resulting in increased stability and reliability of deployed solutions.
The STM32W108 has 128/192/256 Kbytes of embedded Flash memory and 8/12/16 Kbytes
f integrated RAM for data and program storage. The STM32W108 HAL software employs
o
an effective wear-leveling algorithm that optimizes the lifetime of the embedded Flash.
To maintain the strict timing requirements
10/232 Doc ID 16252 Rev 13
standards, the STM32W108 integrates a number of MAC functions into the hardware. The
MAC hardware handles automatic ACK transmission and reception, automatic backoff
delay, and clear channel assessment for transmission, as well as automatic filtering of
Page 11

STM32W108HB STM32W108CC STM32W108CB STM32W108CZ Description
received packets. A packet trace interface is also integrated with the MAC, allowing
complete, non-intrusive capture of all packets to and from the STM32W108.
The STM32W108 offers a number of advanced power management features that enable
long battery life. A high-frequency internal RC oscillator allows the processor core to begin
code execution quickly upon waking. Various deep sleep modes are available with less than
1 µA power consumption while retaining RAM contents. To support user-defined
applications, on-chip peripherals include UART, SPI, I
as well as up to 24 GPIOs. Additionally, an integrated voltage regulator, power-on-reset
circuit, and sleep timer are available.
2
C, ADC and general-purpose timers,
1.1 Development tools
The STM32W108 implements both the ARM Serial Wire and JTAG debug interfaces. These
interfaces provide real time, non-intrusive programming and debugging capabilities. Serial
Wire and JTAG provide the same functionality, but are mutually exclusive. The Serial Wire
interface uses two pins; the JTAG interface uses five. Serial Wire is preferred, since it uses
fewer pins.
The STM32W108 also integrates the standard ARM system debug components: Flash
Patch and Breakpoint (FPB), Data Watchpoint and Trace (DWT), and Instrumentation Trace
Macrocell (DWT).
Doc ID 16252 Rev 13 11/232
Page 12

Description STM32W108HB STM32W108CC STM32W108CB STM32W108CZ
1.2 Overview
1.2.1 Functional description
The STM32W108 radio receiver is a low-IF, super-heterodyne receiver. The architecture has
been chosen to optimize co-existence with other devices in the 2.4 GHz band (namely, WIFI
and Bluetooth), and to minimize power consumption. The receiver uses differential signal
paths to reduce sensitivity to noise interference. Following RF amplification, the signal is
downconverted by an image-rejecting mixer, filtered, and then digitized by an ADC.
The radio transmitter uses an efficient architecture in which the data stream directly
modulates the VCO frequency. An integrated power amplifier (PA) provides the output
power. Digital logic controls Tx path and output power calibration. If the STM32W108 is to
be used with an external PA, use the TX_ACTIVE or nTX_ACTIVE signal to control the
timing of the external switching logic.
The integrated 4.8 GHz VCO and loop filter minimize off-chip circuitry. Only a 24 MHz
crystal with its loading capacitors is required to establish the PLL local oscillator signal.
The MAC interfaces the on-chip RAM to the Rx and Tx baseband modules. The MAC
provides hardware-based IEEE 802.15.4 packet-level filtering. It supplies an accurate
symbol time base that minimizes the synchronization effort of the software stack and meets
the protocol timing requirements. In addition, it provides timer and synchronization
assistance for the IEEE 802.15.4 CSMA-CA algorithm.
The STM32W108 integrates an ARM® Cortex-M3 microprocessor, revision r1p1. This
industry-leading core provides 32 bit performance and is very power efficient. It has
excellent code density using the ARM® Thumb 2 instruction set. The processor can be
operated at 12 MHz or 24 MHz when using the crystal oscillator, or at 6 MHz or 12 MHz
when using the integrated high frequency RC oscillator.
The STM32W108 has 128/192/256 Kbytes of Flash memory, 8/12/16 Kbytes of SRAM onchip, and the ARM configurable memory protection unit (MPU).
The STM32W108 contains 24 GPIO pins shared with other peripheral or alternate functions.
Because of flexible routing within the STM32W108, external devices can use the alternate
functions on a variety of different GPIOs. The integrated Serial Controller SC1 can be
configured for SPI (master or slave), I
Controller SC2 can be configured for SPI (master or slave) or I
The STM32W108 has a general purpose ADC which can sample analog signals from six
GPIO pins in single-ended or differential modes. It can also sample the regulated supply
VDD_PADSA, the voltage reference VREF, and GND. The ADC has two selectable voltage
ranges: 0 V to 1.2 V (normal) and 0.1 V to 0.1 V below the high voltage supply (high). The
ADC has a DMA mode to capture samples and automatically transfer them into RAM. The
integrated voltage reference for the ADC, VREF, can be made available to external circuitry.
An external voltage reference can also be driven into the ADC.
The STM32W108 contains four oscillators: a high frequency 24 MHz external crystal
oscillator, a high frequency 12 MHz internal RC oscillator, an optional low frequency 32.768
kHz external crystal oscillator, and a 10 kHz internal RC oscillator.
2
C (master-only), or UART operation, and the Serial
2
C (master-only) operation.
The STM32W108 has an ultra low power, deep sleep state with a choice of clocking modes.
The sleep timer can be clocked with either the external 32.768 kHz crystal oscillator or with
a 1 kHz clock derived from the internal 10 kHz RC oscillator. Alternatively, all clocks can be
disabled for the lowest power mode. In the lowest power mode, only external events on
12/232 Doc ID 16252 Rev 13
Page 13

STM32W108HB STM32W108CC STM32W108CB STM32W108CZ Description
GPIO pins will wake up the chip. The STM32W108 has a fast startup time (typically 100 µs)
from deep sleep to the execution of the first ARM® Cortex-M3 instruction.
The STM32W108 contains three power domains. The always-on high voltage supply powers
the GPIO pads and critical chip functions. Regulated low voltage supplies power the rest of
the chip. The low voltage supplies are be disabled during deep sleep to reduce power
consumption. Integrated voltage regulators generate regulated 1.25 V and 1.8 V voltages
from an unregulated supply voltage. The 1.8 V regulator output is decoupled and routed
externally to supply analog blocks, RAM, and Flash memories. The 1.25 V regulator output
is decoupled externally and supplies the core logic.
The digital section of the receiver uses a coherent demodulator to generate symbols for the
hardware-based MAC. The digital receiver also contains the analog radio calibration
routines and controls the gain within the receiver path.
In addition to 2 general-purpose timers, the STM32W108 also contains a watchdog timer to
ensure protection against software crashes and CPU lockup, a 32-bit sleep timer dedicated
to system timing and waking from sleep at specific times and an ARM® standard system
event timer in the NVIC.
The STM32W108 integrates hardware support for a Packet Trace module, which allows
robust packet-based debug.
Note: The STM32W108 is not pin-compatible with the previous generation chip, the SN250,
except for the RF section of the chip. Pins 1-11 and 45-48 are compatible, to ease migration
to the STM32W108.
1.2.2 ARM® Cortex™-M3 core
The STM32W108 integrates the ARM® Cortex™-M3 microprocessor, revision r1p1,
developed by ARM Ltd, making the STM32W108 a true system-on-a-chip solution. The
ARM® Cortex-M3 is an advanced 32-bit modified Harvard architecture processor that has
separate internal program and data buses, but presents a unified program and data address
space to software. The word width is 32 bits for both the program and data sides. The
ARM® Cortex-M3 allows unaligned word and half-word data accesses to support efficientlypacked data structures.
The ARM® Cortex-M3 clock speed is configurable to 6 MHz, 12 MHz, or 24 MHz. For
normal operation 12 MHz is preferred over 24 MHz due to its lower power consumption. The
6 MHz operation can only be used when radio operations are not required since the radio
requires an accurate 12 MHz clock.
The ARM® Cortex-M3 in the STM32W108 has also been enhanced to support two separate
memory protection levels. Basic protection is available without using the MPU, but the usual
operation uses the MPU. The MPU protects unimplemented areas of the memory map to
prevent common software bugs from interfering with software operation. The architecture
could also separate the networking stack from the application code using a fine granularity
RAM protection module. Errant writes are captured and details are reported to the developer
to assist in tracking down and fixing issues.
Doc ID 16252 Rev 13 13/232
Page 14

Documentation conventions STM32W108HB STM32W108CC STM32W108CB STM32W108CZ
2 Documentation conventions
Table 1. Description of abbreviations used for bitfield access
Abbreviation Description
(1)
Read/Write (rw)
Read-only (r)
Write only (w)
Read/Write in (MPU)
Privileged mode only (rws)
1. The conditions under which the hardware (core) sets or clears this field are explained in details in the
bitfield description, as well as the events that may be generated by writing to the bit.
Software can read and write to these bits.
Software can only read these bits.
Software can only write to this bit. Reading returns the reset value.
Software can read and write to these bits only in Privileged mode. For
re information, please refer to RAM memory protection on page 30
mo
and Memory protection unit on page 31.
14/232 Doc ID 16252 Rev 13
Page 15

STM32W108HB STM32W108CC STM32W108CB STM32W108CZ Pinout and pin description
Ai15261
Ground pad on back
VDD_24MHZ
RF_P
RF_N
VDD_RF
RF_TX_ALT_P
RF_TX_ALT_N
VDD_IF
BIAS_R
VDD_PADSA
PC5, TX_ACTIVE
VDD_PADS
PA1, TIM2C3, SC2SDA, SC2MISO
PA0, TIM2C1, SC2MOSI
PA7, TIM1C4, REG_EN
VDD_CORE
VREG_OUT
PC6, OSC32B, nTX_ACTIVE
VDD_PADS
PA2, TIM2C4, SC2SCL, SC2SCLK
PB0, VREF, IRQA, TRACECLK, TIM1CLK, TIM2MSK
PC4, JTMS, SWDIO
PC3, JTDI
PC2, JTDO, SWO
SWCLK, JTCK
VDD_PADS
PA5, ADC5, PTI_DATA, nBOOTMODE, TRACEDATA3
PA4, ADC4, PTI_EN, TRACEDATA2
PA 3, SC2nSSEL, TRACECLK, TIM2C2
PC1, ADC3, SWO, TRACEDATA0
VDD_MEM
PB7, ADC2, IRQC, TIM1C2
PB5, ADC0, TIM2CLK, TIM1MSK
VDD_CORE
VDD_PRE
OSCA
PC0, JRST, IRQDn, TRACEDATA1
OSCB
VDD_PADS
1
2
3
4
5
6
7
8
9
10
11
12
13 14 15 16 17 18 19 20 21 22
23 24
36
35
34
33
32
31
30
29
28
27
26
25
48 47 46 45 44 43 42 41 40 39
38 37
VDD_VCO
nRESET
PC7, OSC32A, OSC32_EXT
PB3, TIM2C3, SC1nCTS, SC1SCLK
PB4, TIM2C4, SC1nRTS, SC1nSSEL
PB1, SC1MISO, SC1MOSI, SC1SDA , SC1TXD, TIM2C1
PA6, TIM1C3
PB2, SC1MISO, SC1MOSI, SC1SCL, SC1RXD, TIM2C2
VDD_SYNTH
PB6, ADC1, IRQ6, TIM1C1
3 Pinout and pin description
Figure 2. 48-pin VFQFPN pinout
Doc ID 16252 Rev 13 15/232
Page 16

Pinout and pin description STM32W108HB STM32W108CC STM32W108CB STM32W108CZ
Figure 3. 40-pin VFQFPN pinout
PC0, JRST, IRQDn, TRACEDATA1
PC1, ADC3, SWO, TRACEDATA0
PB7, ADC2, IRQC, TIM1C2
PB6, ADC1, IRQ6, TIM1C1
VDD_VCO
RF_P
RF_N
VDD_RF
RF_TX_ALT_P
RF_TX_ALT_N
VDD_IF
BIAS_R
VDD_PADSA
PC5, TX_ACTIVE
VDD_24MHZ
OSCA
40 39 38 37 36 35 34 33 32 31
1
2
3
4
5
6
7
8
9
10
11 12 13 14 15 16 17 18 19 20
VREG_OUT
nRESET
VDD_PRE
OSCB
VDD_CORE
VDD_PADS
VDD_CORE
Ground pad on back
PB4, TIM2C4, SC1nRTS, SC1nSSEL
PB3, TIM2C3, SC1nCTS, SC1SCLK
PA0, TIM2C1, SC2MOSI
PA1, TIM2C3, SC2SDA, SC2MISO
VDD_MEM
PA2, TIM2C4, SC2SCL, SC2SCLK
VDD_PADS
30
PC4, JTMS, SWDIO
29
PC3, JTDI
28
PC2, JTDO, SWO
27
SWCLK, JTCK
26
PB2, SC1MISO, SC1MOSI, SC1SCL, SC1RXD, TIM2C2
25
PB1, SC1MISO, SC1MOSI, SC1SDA, SC1TXD, TIM2C1
24
VDD_PADS
23
PA5, ADC5, PTI_DATA, nBOOTMODE, TRACEDATA3
22
PA4, ADC4, PTI_EN, TRACEDATA2
21
PA 3, SC2nSSEL, TRACECLK, TIM2C2
Ai15260
Table 2. Pin descriptions
48-Pin
Package
Pin no.
140
40-Pin
Package
Pin no.
Signal Direction Description
VDD_24MHZ Power 1.8V high-frequency oscillator supply
21VDD_VCO Power 1.8V VCO supply
32RF_P I/O Differential (with RF_N) receiver input/transmitter output
43RF_N I/O Differential (with RF_P) receiver input/transmitter output
54VDD_RF Power 1.8V RF supply (LNA and PA)
65RF_TX_ALT_P O Differential (with RF_TX_ALT_N) transmitter output (optional)
76RF_TX_ALT_N O Differential (with RF_TX_ALT_P) transmitter output (optional)
87VDD_IF Power 1.8V IF supply (mixers and filters)
98BIAS_R I Bias setting resistor
16/232 Doc ID 16252 Rev 13
Page 17

STM32W108HB STM32W108CC STM32W108CB STM32W108CZ Pinout and pin description
Table 2. Pin descriptions (continued)
48-Pin
Package
Pin no.
10 9
11 10
12 11 nRESET I Active low chip reset (internal pull-up)
13
14
15 12 VREG_OUT Power Regulator output (1.8 V while awake, 0 V during deep sleep)
40-Pin
Package
Pin no.
Signal Direction Description
VDD_PADSA Power Analog pad supply (1.8V)
PC5 I/O Digital I/O
Logic-level control for external Rx/Tx switch. The
TX_ACTIVE O
PC6 I/O Digital I/O
OSC32B I/O
nTX_ACTIVE O
PC7 I/O Digital I/O
OSC32A I/O
OSC32_EXT I Digital 32 kHz clock input source
STM32W108 baseband controls TX_ACTIVE and drives it
high (VDD_PADS) when in Tx mode.
Select alternate output function with GPIO_PCCFGH[7:4]
32.768 kHz crystal oscillator
Select analog function with GPIO_PCCFGH[11:8]
Inverted TX_ACTIVE signal (see PC5)
Select alternate output function with GPIO_PCCFGH[11:8]
32.768 kHz crystal oscillator.
Select analog function with GPIO_PCCFGH[15:12]
16 13 VDD_PADS Power Pads supply (2.1-3.6 V)
17 14 VDD_CORE Power 1.25 V digital core supply decoupling
I/O
18
PA 7
TIM1_CH4
REG_EN O External regulator open drain output. (Enabled after reset.)
High
current
O
Digital I/O. Disable REG_EN with GPIO_DBGCFG[4]
Timer 1 Channel 4 output
Enable timer output with TIM1_CCER
Select alternate output function with GPIO_PACFGH[15:12]
Disable REG_EN with GPIO_DBGCFG[4]
I Timer 1 Channel 4 input. (Cannot be remapped.)
Doc ID 16252 Rev 13 17/232
Page 18

Pinout and pin description STM32W108HB STM32W108CC STM32W108CB STM32W108CZ
Table 2. Pin descriptions (continued)
48-Pin
Package
Pin no.
19 15
40-Pin
Package
Pin no.
Signal Direction Description
PB3 I/O Digital I/O
Timer 2 channel 3 output
TIM2_CH3
(see Pin 22)
UART_CTS I
SC1SCLK
PB4 I/O Digital I/O
TIM2_CH4
(see also
Pin 24)
O
O
O
Enable remap with TIM2_OR[6]
Enable timer output in TIM2_CCER
Select alternate output function with GPIO_PBCFGL[15:12]
I Timer 2 channel 3 input. Enable remap with TIM2_OR[6].
UART CTS handshake of Serial Controller 1
Enable with SC1_UARTCFG[5]
Select UART with SC1_MODE
SPI master clock of Serial Controller 1
Either disable timer output in TIM2_CCER or disable remap
with TIM2_OR[6]
Enable master with SC1_SPICFG[4]
Select SPI with SC1_MODE
Select alternate output function with GPIO_PBCFGL[15:12]
SPI slave clock of Serial Controller 1
I
Enable slave with SC1_SPICFG[4]
Select SPI with SC1_MODE
Timer 2 channel 4 output
Enable remap with TIM2_OR[7]
Enable timer output in TIM2_CCER
Select alternate output function with GPIO_PBCFGH[3:0]
I Timer 2 channel 4 input. Enable remap with TIM2_OR[7].
20 16
UART_RTS O
SC1nSSEL I
18/232 Doc ID 16252 Rev 13
UART RTS handshake of Serial Controller 1
Either disable timer output in TIM2_CCER or disable remap
with TIM2_OR[7]
Enable with SC1_UARTCFG[5]
Select UART with SC1_MODE
Select alternate output function with GPIO_PBCFGH[3:0]
SPI slave select of Serial Controller 1
Enable slave with SC1_SPICFG[4]
Select SPI with SC1_MODE
Page 19

STM32W108HB STM32W108CC STM32W108CB STM32W108CZ Pinout and pin description
Table 2. Pin descriptions (continued)
48-Pin
Package
Pin no.
21 17
22 18
23 19 VDD_PADS Power Pads supply (2.1-3.6V)
40-Pin
Package
Pin no.
Signal Direction Description
PA 0 I/O Digital I/O
Timer 2 channel 1 output
TIM2_CH1
(see also
30)
Pin
SC2MOSI
PA 1 I/O Digital I/O
TIM2_CH3
(see also
Pin 19)
SC2SDA I/O
SC2MISO
O
O
O
O
Disable remap with TIM2_OR[4]
Enable timer output in TIM2_CCER
Select alternate output function with GPIO_PACFGL[3:0]
I Timer 2 channel 1 input. Disable remap with TIM2_OR[4].
SPI master data out of Serial Controller 2
Either disable timer output in TIM2_CCER or enable remap
with TIM2_OR[4]
Enable master with SC2_SPICFG[4]
Select SPI with SC2_MODE
Select alternate output function with GPIO_PACFGL[3:0]
SPI slave data in of Serial Controller 2
I
Enable slave with SC2_SPICFG[4]
Select SPI with SC2_MODE
Timer 2 channel 3 output
Disable remap with TIM2_OR[6]
Enable timer output in TIM2_CCER
Select alternate output function with GPIO_PACFGL[7:4]
I Timer 2 channel 3 input. Disable remap with TIM2_OR[6].
I2C data of Serial Controller 2
Either disable timer output in TIM2_CCER or enable remap
with TIM2_OR[6]
Select I2C with SC2_MODE
Select alternate open-drain output function with
GPIO_PACFGL[7:4]
SPI slave data out of Serial Controller 2
Either disable timer output in TIM2_CCER or enable remap
with TIM2_OR[6]
Enable slave with SC2_SPICFG[4]
Select SPI with SC2_MODE
Select alternate output function with GPIO_PACFGL[7:4]
SPI master data in of Serial Controller 2
I
Enable slave with SC2_SPICFG[4]
Select SPI with SC2_MODE
Doc ID 16252 Rev 13 19/232
Page 20

Pinout and pin description STM32W108HB STM32W108CC STM32W108CB STM32W108CZ
Table 2. Pin descriptions (continued)
48-Pin
Package
Pin no.
24 20
40-Pin
Package
Pin no.
Signal Direction Description
PA 2 I/O Digital I/O
Timer 2 channel 4 output
TIM2_CH4
(see also
20)
Pin
SC2SCL I/O
SC2SCLK
PA 3 I/O Digital I/O
O
O
Disable remap with TIM2_OR[7]
Enable timer output in TIM2_CCER
Select alternate output function with GPIO_PACFGL[11:8]
I Timer 2 channel 4 input. Disable remap with TIM2_OR[7].
I2C clock of Serial Controller 2
Either disable timer output in TIM2_CCER or enable remap
with TIM2_OR[7]
Select I2C with SC2_MODE
Select alternate open-drain output function with
GPIO_PACFGL[11:8]
SPI master clock of Serial Controller 2
Either disable timer output in TIM2_CCER or enable remap
with TIM2_OR[7]
Enable master with SC2_SPICFG[4]
Select SPI with SC2_MODE
Select alternate output function with GPIO_PACFGL[11:8]
SPI slave clock of Serial Controller 2
I
Enable slave with SC2_SPICFG[4]
Select SPI with SC2_MODE
25 21
SC2nSSEL I
TRACECLK
(see also Pin
36)
TIM2_CH2
(see also Pin
31)
SPI slave select of Serial Controller 2
Enable slave with SC2_SPICFG[4]
Select SPI with SC2_MODE
Synchronous CPU trace clock
Either disable timer output in TIM2_CCER or enable remap
O
O
with TIM2_OR[5]
Enable trace interface in ARM core
Select alternate output function with GPIO_PACFGL[15:12]
Timer 2 channel 2 output
Disable remap with TIM2_OR[5]
Enable timer output in TIM2_CCER
Select alternate output function with GPIO_PACFGL[15:12]
I Timer 2 channel 2 input. Disable remap with TIM2_OR[5].
20/232 Doc ID 16252 Rev 13
Page 21

STM32W108HB STM32W108CC STM32W108CB STM32W108CZ Pinout and pin description
Table 2. Pin descriptions (continued)
48-Pin
Package
Pin no.
26 22
27 23
28 24 VDD_PADS Power Pads supply (2.1-3.6 V)
40-Pin
Package
Pin no.
Signal Direction Description
PA 4 I/O Digital I/O
ADC4 Analog
PTI_EN O
TRACEDATA2 O
PA 5 I/O Digital I/O
ADC5 Analog
PTI_DATA O
nBOOTMODE I
TRACEDATA3 O
ADC Input 4. Select analog function with
GPIO_PACFGH[3:0].
Frame signal of Packet Trace Interface (PTI).
Disable trace interface in ARM core.
Select alternate output function with GPIO_PACFGH[3:0].
Synchronous CPU trace data bit 2.
Select 4-wire synchronous trace interface in ARM core.
Enable trace interface in ARM core.
Select alternate output function with GPIO_PACFGH[3:0].
ADC Input 5. Select analog function with
GPIO_PACFGH[7:4].
Data signal of Packet Trace Interface (PTI).
Disable trace interface in ARM core.
Select alternate output function with GPIO_PACFGH[7:4].
Embedded serial bootloader activation out of reset.
Signal is active during and immediately after a reset on NRST.
Section 6.2: Resets on page 37 for details.
See
Synchronous CPU trace data bit 3.
Select 4-wire synchronous trace interface in ARM core.
Enable trace interface in ARM core.
Select alternate output function with GPIO_PACFGH[7:4]
29
PA 6
TIM1_CH3
I/O
High
current
O
Digital I/O
Timer 1 channel 3 output
Enable timer output in TIM1_CCER
Select alternate output function with GPIO_PACFGH[11:8]
I Timer 1 channel 3 input (Cannot be remapped.)
Doc ID 16252 Rev 13 21/232
Page 22

Pinout and pin description STM32W108HB STM32W108CC STM32W108CB STM32W108CZ
Table 2. Pin descriptions (continued)
48-Pin
Package
Pin no.
30 25
40-Pin
Package
Pin no.
Signal Direction Description
PB1 I/O Digital I/O
SPI slave data out of Serial Controller 1
Either disable timer output in TIM2_CCER or disable remap
SC1MISO O
SC1MOSI O
SC1SDA I/O
SC1TXD O
with TIM2_OR[4]
Select SPI with SC1_MODE
Select slave with SC1_SPICR
Select alternate output function with GPIO_PBCFGL[7:4]
SPI master data out of Serial Controller 1
Either disable timer output in TIM2_CCER or disable remap
with TIM2_OR[4]
Select SPI with SC1_MODE
Select master with SC1_SPICR
Select alternate output function with GPIO_PBCFGL[7:4]
I2C data of Serial Controller 1
Either disable timer output in TIM2_CCER,
or disable remap with TIM2_OR[4]
Select I2C with SC1_MODE
Select alternate open-drain output function with
GPIO_PBCFGL[7:4]
UART transmit data of Serial Controller 1
Either disable timer output in TIM2_CCER or disable remap
with TIM2_OR[4]
Select UART with SC1_MODE
Select alternate output function with GPIO_PBCFGL[7:4]
Timer 2 channel 1 output
TIM2_CH1
(see also
Pin
21)
22/232 Doc ID 16252 Rev 13
O
Enable remap with TIM2_OR[4]
Enable timer output in TIM2_CCER
Select alternate output function with GPIO_PACFGL[7:4]
I Timer 2 channel 1 input. Disable remap with TIM2_OR[4].
Page 23

STM32W108HB STM32W108CC STM32W108CB STM32W108CZ Pinout and pin description
Table 2. Pin descriptions (continued)
48-Pin
Package
Pin no.
31 26
32 27
40-Pin
Package
Pin no.
Signal Direction Description
PB2 I/O Digital I/O
SPI master data in of Serial Controller 1
SC1MISO I
SC1MOSI I
SC1SCL I/O
SC1RXD I
TIM2_CH2
(see also Pin
25)
SWCLK I/O
JTCK I
O
Select SPI with SC1_MODE
Select master with SC1_SPICR
SPI slave data in of Serial Controller 1
Select SPI with SC1_MODE
Select slave with SC1_SPICR
I2C clock of Serial Controller 1
Either disable timer output in TIM2_CCER,
or disable remap with TIM2_OR[5]
Select I2C with SC1_MODE
Select alternate open-drain output function with
GPIO_PBCFGL[11:8]
UART receive data of Serial Controller 1
Select UART with SC1_MODE
Timer 2 channel 2 output
Enable remap with TIM2_OR[5]
Enable timer output in TIM2_CCER
Select alternate output function with GPIO_PBCFGL[11:8]
I Timer 2 channel 2 input. Enable remap with TIM2_OR[5].
Serial Wire clock input/output with debugger
Selected when in Serial Wire mode (see JTMS description,
Pin 35)
JTAG clock input from debugger
Selected when in JTAG mode (default mode, see JTMS
description, Pin
Internal pull-down is enabled
35)
33 28
PC2 I/O
JTDO O
SWO O
Digital I/O
Enable with GPIO_DBGCFG[5]
JTAG data out to debugger
Selected when in JTAG mode (default mode, see JTMS
description, Pin
Serial Wire Output asynchronous trace output to debugger
Select asynchronous trace interface in ARM core
Enable trace interface in ARM core
Select alternate output function with GPIO_PCCFGL[11:8]
Enable Serial Wire mode (see JTMS description, Pin 35)
Internal pull-up is enabled
Doc ID 16252 Rev 13 23/232
35)
Page 24

Pinout and pin description STM32W108HB STM32W108CC STM32W108CB STM32W108CZ
Table 2. Pin descriptions (continued)
48-Pin
Package
Pin no.
34 29
35 30
40-Pin
Package
Pin no.
Signal Direction Description
Digital I/O
PC3 I/O
JTDI I
PC4 I/O
JTMS I
SWDIO I/O
PB0 I/O Digital I/O
Either Enable with GPIO_DBGCFG[5],
or enable Serial Wire mode (see JTMS description)
JTAG data in from debugger
Selected when in JTAG mode (default mode, see JTMS
description, Pin 35)
Internal pull-up is enabled
Digital I/O
Enable with GPIO_DBGCFG[5]
JTAG mode select from debugger
Selected when in JTAG mode (default mode)
JTAG mode is enabled after power-up or by forcing NRST low
Select Serial Wire mode using the ARM-defined protocol
through a debugger
Internal pull-up is enabled
Serial Wire bidirectional data to/from debugger
Enable Serial Wire mode (see JTMS description)
Select Serial Wire mode using the ARM-defined protocol
through a debugger
Internal pull-up is enabled
VREF Analog O
VREF Analog I
36
37 VDD_PADS Power Pads supply (2.1 to 3.6 V).
IRQA I External interrupt source A.
TRACECLK
(see also Pin
25)
TIM1CLK I Timer 1 external clock input.
TIM2MSK I Timer 2 external clock mask input.
O
ADC reference output.
Enable analog function with GPIO_PBCFGL[3:0].
ADC reference input.
Enable analog function with GPIO_PBCFGL[3:0].
Enable reference output with an ST system function.
Synchronous CPU trace clock.
Enable trace interface in ARM core.
Select alternate output function with GPIO_PBCFGL[3:0].
24/232 Doc ID 16252 Rev 13
Page 25
STM32W108HB STM32W108CC STM32W108CB STM32W108CZ Pinout and pin description
Table 2. Pin descriptions (continued)
48-Pin
Package
Pin no.
40-Pin
Package
Pin no.
Signal Direction Description
PC1 I/O Digital I/O
ADC Input 3
Enable analog function with GPIO_PCCFGL[7:4]
Serial Wire Output asynchronous trace output to debugger
Select asynchronous trace interface in ARM core
Enable trace interface in ARM core
Select alternate output function with GPIO_PCCFGL[7:4]
38 31
ADC3 Analog
SWO
(see also Pin
O
33)
Synchronous CPU trace data bit 0
Select 1-, 2- or 4-wire synchronous trace interface in ARM
TRACEDATA0 O
core
Enable trace interface in ARM core
Select alternate output function with GPIO_PCCFGL[7:4]
39 32 VDD_MEM Power 1.8 V supply (flash, RAM)
Digital I/O
Either enable with GPIO_DBGCFG[5],
or enable Serial Wire mode (see JTMS description, Pin 35)
and disable TRACEDATA1
PC0
I/O
High
current
JTAG reset input from debugger
40 33
JRST I
Selected when in JTAG mode (default mode, see JTMS
description) and TRACEDATA1 is disabled
Internal pull-up is enabled
(1)
IRQD
I Default external interrupt source D
Synchronous CPU trace data bit 1
TRACEDATA1 O
Select 2- or 4-wire synchronous trace interface in ARM core
Enable trace interface in ARM core
Select alternate output function with GPIO_PCCFGL[3:0]
41 34
I/O
PB7
High
current
ADC2 Analog
(1)
IRQC
I Default external interrupt source C
O
TIM1_CH2
I Timer 1 channel 2 input (Cannot be remapped)
Doc ID 16252 Rev 13 25/232
Digital I/O
ADC Input 2
Enable analog function with GPIO_PBCFGH[15:12]
Timer 1 channel 2 output
Enable timer output in TIM1_CCER
Select alternate output function with GPIO_PBCFGH[15:12]
Page 26

Pinout and pin description STM32W108HB STM32W108CC STM32W108CB STM32W108CZ
Table 2. Pin descriptions (continued)
48-Pin
Package
Pin no.
40-Pin
Package
Pin no.
Signal Direction Description
I/O
PB6
High
Digital I/O
current
ADC Input 1
Enable analog function with GPIO_PBCFGH[11:8]
42 35
ADC1 Analog
IRQB I External interrupt source B
Timer 1 channel 1 output
TIM1_CH1
O
Enable timer output in TIM1_CCER
Select alternate output function with GPIO_PBCFGH[11:8]
I Timer 1 channel 1 input (Cannot be remapped)
PB5 I/O Digital I/O
43
ADC0 Analog
ADC Input 0
Enable analog function with GPIO_PBCFGH[7:4]
TIM2CLK I Timer 2 external clock input
TIM1MSK I Timer 2 external clock mask input
44 36 VDD_CORE Power 1.25 V digital core supply decoupling
45 37 VDD_PRE Power 1.8 V prescaler supply
46 VDD_SYNTH Power 1.8 V synthesizer supply
47 38 OSCB I/O
24 MHz crystal oscillator or left open when using external
clock input on OSCA
48 39 OSCA I/O 24 MHz crystal oscillator or external clock input
49 41 GND Ground Ground supply pad in the bottom center of the package.
1. IRQC and IRQD external interrupts can be mapped to any digital I/O pin using the GPIO_IRQCSEL and GPIO_IRQDSEL
registers.
26/232 Doc ID 16252 Rev 13
Page 27

STM32W108HB STM32W108CC STM32W108CB STM32W108CZ Embedded memory
Main Flash Block (128kB)
Lower mapping
(Normal Mode)
07
0x00000000
0x0001FFFF
RAM (8kB)
mapped onto System
interface
0x20000000
0x20001FFF
RAM bit band
alias region
mapped onto System
interface
(not used)
0x22000000
0x22002000
Flash
RAM
Peripheral
Registers
mapped onto System
interface
Register bit band
alias region
mapped onto System
interface
(not used)
0x40000000
0x40000XXX
0x42000000
0x42002XXX
Not used
Private periph bus (internal)
Not used
Private periph bus (external)
Not used
Not used
Not used
0xE0000000
ITM
DWT
FPB
NVIC
TPIU
ROM table
0xE0001000
0xE0002000
0xE0003000
0xE000E000
0xE000F000
0xE003FFFF
0xE0040000
0xE0041000
0xE0042000
0xE00FF000
0xE00FFFFF
0xE0000000
0x00000000
0x20000000
0x40000000
0x60000000
0xA0000000
0xFFFFFFFF
0xDFFFFFFF
0x9FFFFFFF
0x5FFFFFFF
0x3FFFFFFF
0x1FFFFFFF
Fixed Info Block (2kB)
Customer Info Block (0.5kB)
0x08040000
0x080407FF
0x080409FF
0x08040800
Main Flash Block (128kB)
Upper mapping
(Boot mode)
0x08000000
0x0801FFFF
Fixed Info Block (2kB)
Optional boot mode
maps Fixed Info Block
to the start of memory
0x000007FF
Not used
Not used
Ai15259
4 Embedded memory
Figure 4. STM32W108xB memory mapping
Doc ID 16252 Rev 13 27/232
Page 28

Embedded memory STM32W108HB STM32W108CC STM32W108CB STM32W108CZ
Figure 5. STM32W108CC and STM32W108CZ memory mapping
X%&&&&&
X%&&
X%
X%
X%
X%&&&&
X%&
X%%
X%
X%
X%
X%
X888
X
X888
X
2/-TABLE
.OTUSED
.OTUSED
40)5
.OTUSED
.6)#
.OTUSED
&0"
$74
)4-
2EGISTERBITBAND
ALIASREGION
MAPPEDONTO3YSTEM
INTERFACE
NOTUSED
2EGISTERS
MAPPEDONTO3YSTEM
INTERFACE
.OTUSED
0RIVATEPERIPHBUSEXTERNAL
0RIVATEPERIPHBUSINTERNAL
.OTUSED
.OTUSED
X&&&&&&&&
X%
X$&&&&&&&
X!
X&&&&&&&
X
X
X&&&
X&&&
X
X&&&
X
X&&&
X
X&&
X
X&&&&
X&&&&
X
X&&&&
X&&&&
X&&
X
2!-BITBAND
ALIASREGION
MAPPEDONTO3YSTEM
INTERFACE
NOTUSED
2!-K"
MAPPEDONTO3YSTEM
INTERFACE
&IXED)NFO"LOCK%XTENSION
K"
#USTOMER)NFO"LOCKK"
&IXED)NFO"LOCKK"
-AIN&LASH"LOCK
K"
5PPERMAPPING
"OOTMODE
-AIN&LASH"LOCKK"
,OWERMAPPING
.ORMAL-ODE
0ERIPHERAL
2!-
&LASH
/PTIONALBOOT MODE
MAPS &IXED)NFO"LOCK
TO THESTARTOFMEMORY
&IXED)NFO"LOCKK"
X
X&&&&&&&
X
X&&&&&&&
X
X&&&&&&&
X
-36
28/232 Doc ID 16252 Rev 13
Page 29

STM32W108HB STM32W108CC STM32W108CB STM32W108CZ Embedded memory
4.1 Flash memory
The STM32W108 provides Flash memory in four separate blocks as follows:
● Main Flash Block (MFB)
● Fixed Information Block (FIB)
● Fixed Information Block Extension (FIB-EXT)
● Customer Information Block (CIB)
The size of these blocks and associated page size is described in Tab l e 3.
Table 3. Flash memory
STM32W108xB STM32W108CC STM32W108CZ
Unit
Size Page size Size Page size Size Page size
MFB 128 1 256 2 192 2 K Bytes
FIB 222222K Bytes
CIB 0.50.52222K Bytes
FIB-EXT 0N/A162162K Bytes
Total 130.5 276 212 K Bytes
The smallest erasable unit is one page and the smallest writable unit is an aligned 16-bit
half-word. The flash is guaranteed to have 10k write/erase cycles. The flash cell has been
qualified for a data retention time of >100 years at room temperature.
Flash may be programmed either through the Serial Wire/JTAG interface or through
bootloader software. Programming flash through Serial Wire/JTAG requires the assistance
of RAM-based utility code. Programming through a bootloader requires specific software for
over-the-air loading or serial link loading. A simplified, serial-link-only bootloader is also
available preprogrammed into the FIB.
4.2 Random-access memory
The STM32W108 has 8/12/16 Kbytes of static RAM on-chip. The start of RAM is mapped to
address 0x20000000. Although the ARM® Cortex-M3 allows bit band accesses to this
address region, the standard MPU configuration does not permit use of the bit-band feature.
The RAM is physically connected to the AHB System bus and is therefore accessible to both
the ARM® Cortex-M3 microprocessor and the debugger. The RAM can be accessed for
both instruction and data fetches as bytes, half words, or words. The standard MPU
configuration does not permit execution from the RAM, but for special purposes, such as
programming the main flash block, the MPU may be disabled. To the bus, the RAM appears
as 32-bit wide memory and in most situations has zero wait state read or write access. In
the higher CPU clock mode the RAM requires two wait states. This is handled by hardware
transparent to the user application with no configuration required.
Doc ID 16252 Rev 13 29/232
Page 30

Embedded memory STM32W108HB STM32W108CC STM32W108CB STM32W108CZ
4.2.1 Direct memory access (DMA) to RAM
Several of the peripherals are equipped with DMA controllers allowing them to transfer data
into and out of RAM autonomously. This applies to the radio (802.15.4 MAC), general
purpose ADC, and both serial controllers. In the case of the serial controllers, the DMA is full
duplex so that a read and a write to RAM may be requested at the same time. Thus there
are six DMA channels in total.
The STM32W108 integrates a DMA arbiter that ensures fair access to the microprocessor
as well as the peripherals through a fixed priority scheme appropriate to the memory
bandwidth requirements of each master. The priority scheme is as follows, with the top
peripheral being the highest priority:
1. General Purpose ADC
2. Serial Controller 2 Receive
3. Serial Controller 2 Transmit
4. MAC
5. Serial Controller 1 Receive
6. Serial Controller 1 Transmit
4.2.2 RAM memory protection
The STM32W108 integrates two memory protection mechanisms. The first memory
protection mechanism is through the ARM® Cortex-M3 Memory Protection Unit (MPU)
described in the Memory Protection Unit section. The MPU may be used to protect any area
of memory. MPU configuration is normally handled by software. The second memory
protection mechanism is through a fine granularity RAM protection module. This allows
segmentation of the RAM into blocks where any block can be marked as write protected. An
attempt to write to a protected RAM block using a user mode write results in a bus error
being signaled on the AHB System bus. A system mode write is allowed at any time and
reads are allowed in either mode. The main purpose of this fine granularity RAM protection
module is to notify the stack of erroneous writes to system areas of memory. RAM protection
is configured using a group of registers that provide a bit map. Each bit in the map
represents a 32-byte block of RAM for STM32W108xB and 64 bytes of RAM for
STM32W108CC and STM32W108CZ. When the bit is set the block is write protected.
The fine granularity RAM memory protection mechanism is also available to the peripheral
DMA controllers. A register bit is provided to enable the memory protection to include DMA
writes to protected memory. If a DMA write is made to a protected location in RAM, a
management interrupt is generated. At the same time the faulting address and the
identification of the peripheral is captured for later debugging. Note that only peripherals
capable of writing data to RAM, such as received packet data or a received serial port
character, can generate this interrupt.
30/232 Doc ID 16252 Rev 13
Page 31

STM32W108HB STM32W108CC STM32W108CB STM32W108CZ Embedded memory
4.3 Memory protection unit
The STM32W108 includes the ARM® Cortex-M3 Memory Protection Unit, or MPU. The
MPU controls access rights and characteristics of up to eight address regions, each of
which may be divided into eight equal sub-regions. Refer to the ARM® Cortex-M3 Technical
Reference Manual (DDI 0337A) for a detailed description of the MPU.
ST software configures the MPU in a standard configuration and application software should
not modify it. The configuration is designed for optimal detection of illegal instruction or data
accesses. If an illegal access is attempted, the MPU captures information about the access
type, the address being accessed, and the location of the offending software. This simplifies
software debugging and increases the reliability of deployed devices. As a consequence of
this MPU configuration, accessing RAM and register bit-band address alias regions is not
permitted, and generates a bus fault if attempted.
Doc ID 16252 Rev 13 31/232
Page 32

Radio frequency module STM32W108HB STM32W108CC STM32W108CB STM32W108CZ
5 Radio frequency module
The radio module consists of an analog front end and digital baseband as shown in
Figure 1: STM32W108 block diagram.
5.1 Receive (Rx) path
The Rx path uses a low-IF, super-heterodyne receiver that rejects the image frequency
using complex mixing and polyphase filtering. In the analog domain, the input RF signal
from the antenna is first amplified and mixed down to a 4 MHz IF frequency. The mixers'
output is filtered, combined, and amplified before being sampled by a 12 Msps ADC. The
digitized signal is then demodulated in the digital baseband. The filtering within the Rx path
improves the STM32W108's co-existence with other 2.4 GHz transceivers such as IEEE
802.15.4, IEEE 802.11g, and Bluetooth radios. The digital baseband also provides gain
control of the Rx path, both to enable the reception of small and large wanted signals and to
tolerate large interferers.
5.1.1 Rx baseband
The STM32W108 Rx digital baseband implements a coherent demodulator for optimal
performance. The baseband demodulates the O-QPSK signal at the chip level and
synchronizes with the IEEE 802.15.4-defined preamble. An automatic gain control (AGC)
module adjusts the analog gain continuously every ¼ symbol until the preamble is detected.
Once detected, the gain is fixed for the remainder of the packet. The baseband despreads
the demodulated data into 4-bit symbols. These symbols are buffered and passed to the
hardware-based MAC module for packet assembly and filtering.
In addition, the Rx baseband provides the calibration and control interface to the analog Rx
modules, including the LNA, Rx baseband filter, and modulation modules. The ST RF
software driver includes calibration algorithms that use this interface to reduce the effects of
silicon process and temperature variation.
5.1.2 RSSI and CCA
The STM32W108 calculates the RSSI over every 8-symbol period as well as at the end of a
received packet. The linear range of RSSI is specified to be at least 40 dB over temperature.
At room temperature, the linear range is approximately 60 dB (-90 dBm to -30 dBm input
signal).
The STM32W108 Rx baseband provides support for the IEEE 802.15.4-2003 RSSI CCA
method, Clear channel reports busy medium if RSSI exceeds its threshold.
5.2 Transmit (Tx) path
The STM32W108 Tx path produces an O-QPSK-modulated signal using the analog front
end and digital baseband. The area- and power-efficient Tx architecture uses a two-point
modulation scheme to modulate the RF signal generated by the synthesizer. The modulated
RF signal is fed to the integrated PA and then out of the STM32W108.
32/232 Doc ID 16252 Rev 13
Page 33

STM32W108HB STM32W108CC STM32W108CB STM32W108CZ Radio frequency module
5.2.1 Tx baseband
The STM32W108 Tx baseband in the digital domain spreads the 4-bit symbol into its IEEE
802.15.4-2003-defined 32-chip sequence. It also provides the interface for software to
calibrate the Tx module to reduce silicon process, temperature, and voltage variations.
5.2.2 TX_ACTIVE and nTX_ACTIVE signals
For applications requiring an external PA, two signals are provided called TX_ACTIVE and
nTX_ACTIVE. These signals are the inverse of each other. They can be used for external PA
power management and RF switching logic. In transmit mode the Tx baseband drives
TX_ACTIVE high, as described in
receive mode the TX_ACTIVE signal is low. TX_ACTIVE is the alternate function of PC5,
and nTX_ACTIVE is the alternate function of PC6. See
input/outputs on page 58 for details of the alternate GPIO functions.
Ta bl e 26: GPIO signal assignments on page 65. In
Section 8: General-purpose
5.3 Calibration
The ST RF software driver calibrates the radio using dedicated hardware resources.
5.4 Integrated MAC module
The STM32W108 integrates most of the IEEE 802.15.4 MAC requirements in hardware.
This allows the ARM® Cortex-M3 CPU to provide greater bandwidth to application and
network operations. In addition, the hardware acts as a first-line filter for unwanted packets.
The STM32W108 MAC uses a DMA interface to RAM to further reduce the overall ARM®
Cortex-M3 CPU interaction when transmitting or receiving packets.
When a packet is ready for transmission, the software configures the Tx MAC DMA by
indicating the packet buffer RAM location. The MAC waits for the backoff period, then
switches the baseband to Tx mode and performs channel assessment. When the channel is
clear the MAC reads data from the RAM buffer, calculates the CRC, and provides 4-bit
symbols to the baseband. When the final byte has been read and sent to the baseband, the
CRC remainder is read and transmitted.
The MAC is in Rx mode most of the time. In Rx mode various format and address filters
keep unwanted packets from using excessive RAM buffers, and prevent the CPU from being
unnecessarily interrupted. When the reception of a packet begins, the MAC reads 4-bit
symbols from the baseband and calculates the CRC. It then assembles the received data for
storage in a RAM buffer. Rx MAC DMA provides direct access to RAM. Once the packet has
been received additional data, which provides statistical information on the packet to the
software stack, is appended to the end of the packet in the RAM buffer space.
Doc ID 16252 Rev 13 33/232
Page 34

Radio frequency module STM32W108HB STM32W108CC STM32W108CB STM32W108CZ
The primary features of the MAC are:
● CRC generation, appending, and checking
● Hardware timers and interrupts to achieve the MAC symbol timing
● Automatic preamble and SFD pre-pending on Tx packets
● Address recognition and packet filtering on Rx packets
● Automatic acknowledgement transmission
● Automatic transmission of packets from memory
● Automatic transmission after backoff time if channel is clear (CCA)
● Automatic acknowledgement checking
● Time stamping received and transmitted messages
● Attaching packet information to received packets (LQI, RSSI, gain, time stamp, and
packet status)
● IEEE 802.15.4 timing and slotted/unslotted timing
5.5 Packet trace interface (PTI)
The STM32W108 integrates a true PHY-level PTI for effective network-level debugging. It
monitors all the PHY Tx and Rx packets between the MAC and baseband modules without
affecting their normal operation. It cannot be used to inject packets into the PHY/MAC
interface. This 500 kbps asynchronous interface comprises the frame signal (PTI_EN, PA4)
and the data signal (PTI_DATA, PA5).
5.6 Random number generator
Thermal noise in the analog circuitry is digitized to provide entropy for a true random
number generator (TRNG). The TRNG produces 16-bit uniformly distributed numbers. The
Software can use the TRNG to seed a pseudo random number generator (PNRG). The
TRNG is also used directly for cryptographic key generation.
34/232 Doc ID 16252 Rev 13
Page 35

STM32W108HB STM32W108CC STM32W108CB STM32W108CZ System modules
A
6 System modules
System modules encompass power, resets, clocks, system timers, power management, and
encryption.
Figure 6. System module block diagram
External
Regulator
Figure 6 shows these modules and how they interact.
GPIO w ake monito ring
PA2
PB2
IRQD
sleep timer compare b
WA KE_CO RE
CDB G PW RU P RE Q
CS YSP WR U PR EQ
sleep timer compare a
sleep timer wrap
recomended
connecti ons for
inter nal regul ator
optional
connecti ons for
external regulator
REG_EN
VDD_PAD S
VREG_ OUT
VDD_M EM
VDD_ COR E
nRESET
JRST
VREG _1V25
VREG _1V8
Reset Filter
SWJ
Wakeup Recording
Power Management
Watc hdogSleep T imer
always-on supply
POR H V
mem supply
POR LVm em
cor e supply
POR LVcor e
CDBGRSTREQ
deep sleep
wakeup
watc hdog
POR HV
POR LV
OSCRC
DIV10CLK1K
CLK32K
Reset Recording
Re set Gen er at ion
OSC32K
OSC32
OSC32B
AHB -AP
regi sters
HV
regi sters
LV
OSCHF
OSC24M
clock switch
alw ays-on dom ain
RAM
Flash
mem domain
cor e domain
FLITF
option byte error
Cortex-M3
Cortex-M3
Debug
Security Accelerator
CPU
SYSR ESETR EQ
PRESET
PRESET
PORES ET
SYSR ESET
DAPRESET
SCLK
Doc ID 16252 Rev 13 35/232
OSCA
OSCB
Page 36

System modules STM32W108HB STM32W108CC STM32W108CB STM32W108CZ
6.1 Power domains
The STM32W108 contains three power domains:
● An "always on domain" containing all logic and analog cells required to manage the
STM32W108's power modes, including the GPIO controller and sleep timer. This
domain must remain powered.
● A "core domain" containing the CPU, Nested Vectored Interrupt Controller (NVIC), and
peripherals. To save power, this domain can be powered down using a mode called
deep sleep.
● A "memory domain" containing the RAM and flash memories. This domain is managed
by the power management controller. When in deep sleep, the RAM portion of this
domain is powered from the always-on domain supply to retain the RAM contents while
the regulators are disabled. During deep sleep the flash portion is completely powered
down.
6.1.1 Internally regulated power
The preferred and recommended power configuration is to use the internal regulated power
supplies to provide power to the core and memory domains. The internal regulators
(VREG_1V25 and VREG_1V8) generate nominal 1.25 V and 1.8 V supplies. The 1.25 V
supply is internally routed to the core domain and to an external pin. The 1.8 V supply is
routed to an external pin where it can be externally routed back into the chip to supply the
memory domain. The internal regulators are described in
regulator on page 56.
Section 7: Integrated voltage
When using the internal regulators, the always-on domain must be powered between 2.1 V
and 3.6 V at all four VDD_PADS pins.
When using the internal regulators, the VREG_1V8 regulator output pin (VREG_OUT) must
be connected to the VDD_MEM, VDD_PADSA, VDD_VCO, VDD_RF, VDD_IF, VDD_PRE,
and VDD_SYNTH pins.
When using the internal regulators, the VREG_1V25 regulator output and supply requires a
connection between both VDD_CORE pins.
6.1.2 Externally regulated power
Optionally, the on-chip regulators may be left unused, and the core and memory domains
may instead be powered from external supplies. For simplicity, the voltage for the core
domain can be raised to nominal 1.8 V, requiring only one external regulator. Note that if the
core domain is powered at a higher voltage (1.8 V instead of 1.25 V) then power
consumption increases. A regulator enable signal, REG_EN, is provided for control of
external regulators. This is an open-drain signal that requires an external pull-up resistor. If
REG_EN is not required to control external regulators it can be disabled (see
Forced functions on page 60).
Using an external regulator requires the always-on domain to be powered between 1.8 V
and 3.6 V at all four VDD_PADS pins.
When using an external regulator, the VREG_1V8 regulator output pin (VREG_OUT) must
be left unconnected.
Section 8.1.3:
When using an external regulator, this external nominal 1.8 V supply has to be connected to
both VDD_CORE pins and to the VDD_MEM, VDD_PADSA, VDD_VCO, VDD_RF, VDD_IF,
VDD_PRE and VDD_SYNTH pins.
36/232 Doc ID 16252 Rev 13
Page 37

STM32W108HB STM32W108CC STM32W108CB STM32W108CZ System modules
6.2 Resets
The STM32W108 resets are generated from a number of sources. Each of these reset
sources feeds into central reset detection logic that causes various parts of the system to be
reset depending on the state of the system and the nature of the reset event.
6.2.1 Reset sources
For power-on reset (POR HV and POR LV) thresholds, see Section 14.3.2: Operating
conditions at power-up on page 204.
Watchdog reset
The STM32W108 contains a watchdog timer (see also the Watchdog Timer section) that is
clocked by the internal 1 kHz timing reference. When the timer expires it generates the reset
source WATCHDOG_RESET to the Reset Generation module.
Software reset
The ARM® Cortex-M3 CPU can initiate a reset under software control. This is indicated with
the reset source SYSRESETREQ to the Reset Generation module.
Note: When using certain external debuggers, the chip may lock up require a pin reset or power
cycle if the debugger asserts SYSRESETREQ. It is recommended not to write to the
SCS_AIRCR register directly from application code. The ST software provides a reset
function that should be used instead. This reset function ensures that the chip is in a safe
clock mode prior to triggering the reset.
Option byte error
The flash memory controller contains a state machine that reads configuration information
from the information blocks in the Flash at system start time. An error check is performed on
the option bytes that are read from Flash and, if the check fails, an error is signaled that
provides the reset source OPT_BYTE_ERROR to the Reset Generation module.
If an option byte error is detected, the system restarts and the read and check process is
repeated. If the error is detected again the process is repeated but stops on the 3rd failure.
The system is then placed into an emulated deep sleep where recovery is possible. In this
state, Flash memory readout protection is forced active to prevent secure applications from
being compromised.
Debug reset
The Serial Wire/JTAG Interface (SWJ) provides access to the SWJ Debug Port (SWJ-DP)
registers. By setting the register bit CDBGRSTREQ in the SWJ-DP, the reset source
CDBGRSTREQ is provided to the Reset Generation module.
JTAG reset
One of the STM32W108's pins can function as the JTAG reset, conforming to the
requirements of the JTAG standard. This input acts independently of all other reset sources
and, when asserted, does not reset any on-chip hardware except for the JTAG TAP. If the
STM32W108 is in the Serial Wire mode or if the SWJ is disabled, this input has no effect.
Doc ID 16252 Rev 13 37/232
Page 38

System modules STM32W108HB STM32W108CC STM32W108CB STM32W108CZ
Deep sleep reset
The Power Management module informs the Reset Generation module of entry into and exit
from the deep sleep states. The deep sleep reset is applied in the following states: before
entry into deep sleep, while removing power from the memory and core domain, while in
deep sleep, while waking from deep sleep, and while reapplying power until reliable power
levels have been detect by POR LV.
The Power Management module allows a special emulated deep sleep state that retains
memory and core domain power while in deep sleep.
6.2.2 Reset recording
The STM32W108 records the last reset condition that generated a restart to the system.
The reset conditions recorded are:
● POWER_HV Always-on domain power supply failure
● POWER_LV Core or memory domain power supply failure
● RSTB NRST pin asserted
● W_DOG Watchdog timer expired
● SW_RST Software reset by SYSERSETREQ from ARM® Cortex-M3
CPU
● WAKE_UP_DSLEEP Wake-up from deep sleep
● OPT_BYTE_FAIL Error check failed when reading option bytes from Flash
memory
The Reset event source register (RESET_EVENT) is used to read back the last reset event.
All bits are mutually exclusive except the OPT_BYTE_FAIL bit which preserves the original
reset event when set.
Note: While CPU Lockup is marked as a reset condition in software, CPU Lockup is not
specifically a reset event. CPU Lockup is set to indicate that the CPU entered an
unrecoverable exception. Execution stops but a reset is not applied. This is so that a
debugger can interpret the cause of the error. We recommend that in a live application (i.e.
no debugger attached) the watchdog be enabled by default so that the STM32W108 can be
restarted.
38/232 Doc ID 16252 Rev 13
Page 39

STM32W108HB STM32W108CC STM32W108CB STM32W108CZ System modules
6.2.3 Reset generation
The Reset Generation module responds to reset sources and generates the following reset
signals:
● PORESET Reset of the ARM® Cortex-M3 CPU and ARM® Cortex-M3
System Debug components (Flash Patch and Breakpoint,
Data Watchpoint and Trace, Instrumentation Trace Macrocell,
Nested Vectored Interrupt Controller). ARM defines
PORESET as the region that is reset when power is applied.
● SYSRESET Reset of the ARM® Cortex-M3 CPU without resetting the
Core Debug and System Debug components, so that a live
system can be reset without disturbing the debug
configuration.
● DAPRESET Reset to the SWJ's AHB Access Port (AHB-AP).
● PRESETHV Peripheral reset for always-on power domain, for peripherals
that are required to retain their configuration across a deep
sleep cycle.
● PRESETLV Peripheral reset for core power domain, for peripherals that
are not required to retain their configuration across a deep
sleep cycle.
Ta bl e 4 shows which reset sources generate certain resets.
Table 4. Generated resets
Reset source
POR HV
POR LV (in deep sleep)
POR LV (not in deep
)
sleep
RSTB
Watchdog reset
Software reset
Option byte error
Normal deep sleep
Emulated deep sleep
Debug reset
Reset generation
PORESET SYSRESET DAPRESET PRESETHV PRESETLV
XXXXX
XXX X
XXXXX
XX XX
XXX
XXX
XX X
XXX X
XX
X
Doc ID 16252 Rev 13 39/232
Page 40

System modules STM32W108HB STM32W108CC STM32W108CB STM32W108CZ
6.2.4 Reset register
Reset event source register (RESET_EVENT)
Address offset: 0x4000 002C
Reset value: 0x0000 0001
Table 5. Reset event source register (RESET_EVENT)
31 30 29 28 27 26 25 24 23 22 21 20 19 18 17 16
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Reserved
OPT_B
YTE_F
AIL
WAKE_
UP_DS
LEEP
CPU_L
Reserved
CPU_LOCKUP: When set to ‘1’, the reset is due to core lockup.
Bit 7
OPT_BYTE_FAIL: When set to ‘1’, the reset is due to an Option byte load failure (may be set
Bit 6
OCKU
P
rr rrrrrr
SW_
RST
W_
DOG
RSTB_
PIN
with other bits).
Bit 5
WAKE_UP_DSLEEP: When set to
Bit 4
SW_RST: When set to ‘1’, the reset is due to a software reset.
‘1’, the reset is due to a wake-up from Deep Sleep.
POWE
R_LV
POWE
R_HV
Bit 3
W_DOG: When set to ‘1’, the reset is due to watchdog expiration.
Bit 2
RSTB_PIN: When set to ‘1’, the reset is due
POWER_LV: When set to ‘1’, the reset is due to the app
Bit 1
to an external reset pin signal.
previously failed).
Bit 0
POWER_HV: Always set to ‘1’, Normal power applied
lication of a Core power supply (or
40/232 Doc ID 16252 Rev 13
Page 41

STM32W108HB STM32W108CC STM32W108CB STM32W108CZ System modules
6.3 Clocks
The STM32W108 integrates four oscillators:
● High frequency RC oscillator
● 24 MHz crystal oscillator
● 10 kHz RC oscillator
● 32.768 kHz crystal oscillator
Figure 7 shows a block diagram of the clocks in the STM32W108. This simplified view
shows all the clock sources and the general areas of the chip to which they are routed.
Figure 7. Clocks block diagram
OSC24M _CTRL[0]
12M Hz
RC
24M Hz
XTAL
10kHz
RC
Fail over m onitor
(sel ects R C when
XTAL fail s )
/N
(nom inal 10)
OSCHF
OSC 24M
oscillator
OSC24M _CTRL[1]
OSCRC CLK1K
SCLK
PCLK
/2
ADC
Sigm aDelt a
Produc es 6 MH z
or 1M Hz
ADC_C FG[ 2]
32kHz
digi tal in
32kHz
XTAL
Watc hdog
counter
Sleep T imer
counter
TIMx
counter
TIMx_SMCR[2:0]
TIMx_OR[1:0]
oscillator
SLEEPTMR _ CLKEN[ 0]
/(2^N)
SLEEPTMR _CF G[7:4]
OSC32K
SLEEPTMR _ CFG[0]
TIMxCLK
digi tal in
CPU_CLKSEL[0]
FCLK CPU
MAC Timer
RATEGEN
DEBUG_ EMC R[24]
AND
counter
SCx
FLITF
bus
Flash
bus
bus
bus
SysTi ck
counter
RAM
SCxSC LK
digi tal i /o
TRAC ECLK
digi tal out
RAM CTRL
ST _CSR[2 ]
/2
Doc ID 16252 Rev 13 41/232
Page 42

System modules STM32W108HB STM32W108CC STM32W108CB STM32W108CZ
6.3.1 High-frequency internal RC oscillator (OSCHF)
The high-frequency RC oscillator (OSCHF) is used as the default system clock source when
power is applied to the core domain. The nominal frequency coming out of reset is 12 MHz.
Most peripherals, excluding the radio peripheral, are fully functional using the OSCHF clock
source. Application software must be aware that peripherals are clocked at different speeds
depending on whether OSCHF or OSC24M is being used. Since the frequency step of
OSCHF is 0.5 MHz and the high-frequency crystal oscillator is used for calibration, the
calibrated accuracy of OSCHF is ±250 kHz ±40 ppm. The UART and ADC peripherals may
not be usable due to the lower accuracy of the OSCHF frequency.
See also Section 14.5.1: High frequency internal clock characteristics on page 211.
6.3.2 High-frequency crystal oscillator (OSC24M)
The high-frequency crystal oscillator (OSC24M) requires an external 24 MHz crystal with an
accuracy of ±40 ppm. Based upon the application's bill of materials and current
consumption requirements, the external crystal may cover a range of ESR requirements.
The crystal oscillator has a software-programmable bias circuit to minimize current
consumption. ST software configures the bias circuit for minimum current consumption.
All peripherals including the radio peripheral are fully functional using the OSC24M clock
source. Application software must be aware that peripherals are clocked at different speeds
depending on whether OSCHF or OSC24M is being used.
If the 24 MHz crystal fails, a hardware failover mechanism forces the system to switch back
to the high-frequency RC oscillator as the main clock source, and a non-maskable interrupt
(NMI) is signaled to the ARM® Cortex-M3 NVIC.
See also Section 14.5.2: High frequency external clock characteristics on page 211.
6.3.3 Low-frequency internal RC oscillator (OSCRC)
A low-frequency RC oscillator (OSCRC) is provided as an internal timing reference. The
nominal frequency coming out of reset is 10 kHz, and ST software calibrates this clock to
10
kHz. From the tuned 10 kHz oscillator (OSCRC) ST software calibrates a fractional-N
divider to produce a 1 kHz reference clock, CLK1K.
See also Section 14.5.3: Low frequency internal clock characteristics on page 212.
6.3.4 Low-frequency crystal oscillator (OSC32K)
A low-frequency 32.768 kHz crystal oscillator (OSC32K) is provided as an optional timing
reference for on-chip timers. This oscillator is designed for use with an external watch
crystal.
See also Section 14.5.4: Low frequency external clock characteristics on page 212.
42/232 Doc ID 16252 Rev 13
Page 43
STM32W108HB STM32W108CC STM32W108CB STM32W108CZ System modules
6.3.5 Clock switching
The STM32W108 has two switching mechanisms for the main system clock, providing four
clock modes.
The register bit OSC24M_SEL in the OSC24M_CTRL register switches between the highfrequency
the main system clock (SCLK). The peripheral clock (PCLK) is always half the frequency of
SCLK.
RC oscillator (OSCHF) and the high-frequency crystal oscillator (OSC24M) as
The register bit CPU_CLK_SEL in the CPU_CLKSEL register s
SCLK to produce the ARM® Cortex-M3 CPU clock (FCLK). The default and preferred mode
of operation is to run the CPU at the lower PCLK frequency, 12 MHz, but the higher SCLK
frequency, 24 MHz, can be selected to give higher processing performance at the expense
of an increase in power consumption.
In addition to these modes, further automatic control is invoked by hardware when flash
rogramming is enabled. To ensure accuracy of the flash controller's timers, the FCLK
p
frequency is forced to 12 MHz during flash programming and erase operations.
Table 6. System clock modes
OSC24M_SEL CPU_CLK_SEL SCLK PCLK
0 (OSCHF) 0 (Normal CPU) 12 MHz 6 MHz 6 MHz 12 MHz
0 (OSCHF) 1 (Fast CPU) 12 MHz 6 MHz 12 MHz 12 MHz
1 (OSC24M) 0 (Normal CPU) 24 MHz 12 MHz 12 MHz 12 MHz
1 (OSC24M) 1 (Fast CPU) 24 MHz 12 MHz 24 MHz 12 MHz
6.3.6 Clock switching registers
witches between PCLK and
f
CLK
Flash
Program/
Erase Inactive
Flash
Program/
Erase Active
XTAL or OSCHF main clock select register (OSC24M_CTRL)
Address offset: 0x4000 401C
Reset value: 0x0000 0000
Table 7. XTAL or OSCHF main clock select register (OSC24M_CTRL)
31 30 29 28 27 26 25 24 23 22 21 20 19 18 17 16
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Reserved
Reserved
OSC24M_EN: When set to ‘1’, 24 MHz crystal oscillator is main clock.
Bit 1
OSC24M_SEL: When set to ‘0’, OSCHF is selected. When set to ‘1’, XTAL is selected.
Bit 0
Doc ID 16252 Rev 13 43/232
OSC24
M_EN
rws rws
OSC24
M_SEL
Page 44

System modules STM32W108HB STM32W108CC STM32W108CB STM32W108CZ
CPU clock source select register (CPU_CLK_SEL)
Address offset: 0x4000 4020
Reset value: 0x0000 0000
Table 8. CPU clock source select register (CPU_CLK_SEL)
31 30 29 28 27 26 25 24 23 22 21 20 19 18 17 16
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Reserved
Rserved
CPU_CLK_SEL: When set to ‘0’, 12-MHz CPU clock is selected. When set to ‘1’, 24-MHz CPU
Bit 0
clock is selected. Note that the clock selection also determines if RAM controller is running at
the same speed as the HCLK (CPU_CLK_SEL = ‘1’) or double speed of HCLK (CPU_CLK_SEL
= ‘0’).
CPU_C
LK_SEL
rws
6.4 System timers
6.4.1 Watchdog timer
The STM32W108 integrates a watchdog timer which can be enabled to provide protection
against software crashes and ARM® Cortex-M3 CPU lockup. By default, it is disabled at
power up of the always-on power domain. The watchdog timer uses the calibrated 1 kHz
clock (CLK1K) as its reference and provides a nominal 2.048 s timeout. A low water mark
interrupt occurs at 1.792 s and triggers an NMI to the ARM® Cortex-M3 NVIC as an early
warning. When enabled, periodically reset the watchdog timer by writing to the
WDOG_RESTART register before it expires.
The watchdog timer can be paused when the debugger halts the ARM® Cortex-M3. To
able this functionality, set the bit DBG_PAUSE in the SLEEP_CONFIG register.
en
If the low-frequency internal RC oscillator (OSCR
stops. As a consequence the watchdog timer stops counting and is effectively paused
during deep sleep.
The watchdog enable/disable bits are protected fr
step process. To enable the watchdog timer the application must first write the enable code
0xEABE to the WDOG_CTRL register and then set the WDOG_EN register bit. To disable
the timer the application must write the disable code 0xDEAD to the WDOG_CTRL register
and then set the WDOG_DIS register bit.
C) is turned off during deep sleep, CLK1K
om accidental change by requiring a two
44/232 Doc ID 16252 Rev 13
Page 45

STM32W108HB STM32W108CC STM32W108CB STM32W108CZ System modules
6.4.2 Sleep timer
The STM32W108 integrates a 32-bit timer dedicated to system timing and waking from
sleep at specific times. The sleep timer can use either the calibrated 1 kHz
reference(CLK1K), or the 32 kHz crystal clock (CLK32K). The default clock source is the
internal 1 kHz clock. The sleep timer clock source is chosen with the SLEEPTMR_CLKSEL
register.
The sleep timer has a prescaler, a divider of the form 2^N, where N can be programmed
from 1 to 2^15. This divider allows for very long periods of sleep to be timed. The timer
provides two compare outputs and wrap detection, all of which can be used to generate an
interrupt or a wake up event.
The sleep timer is paused when the debugger halts the ARM® Cortex-M3. No additional
register bit must be set.
To save current during deep sleep, the low-frequency internal RC oscillator (OSCRC) can
be turned off. If OSCRC is turned off during deep sleep and a low-frequency 32.768 kHz
crystal oscillator is not being used, then the sleep timer will not operate during deep sleep
and sleep timer wake events cannot be used to wakeup the STM32W108.
6.4.3 Event timer
The SysTick timer is an ARM® standard system timer in the NVIC. The SysTick timer can
be clocked from either the FCLK (the clock going into the CPU) or the Sleep Timer clock.
FCLK is either the SCLK or PCLK as selected by CPU_CLK_SEL (see
switching on page 43).
Section 6.3.5: Clock
6.4.4 Slow timers (Watchdog and Sleeptimer) control and status registers
These registers are powered from the always-on power domain.
All registers are only writable when in System mode
Watchdog general control register (WDOG_CFG)
Register bits for general top level chip functions and protection.
Watchdog bits can only be written after first writing the appropriate code to the
WDOG_CTRL register.
Address: 0x4000 6000
Reset value: 0x0000 0002
Doc ID 16252 Rev 13 45/232
Page 46
System modules STM32W108HB STM32W108CC STM32W108CB STM32W108CZ
Table 9.
31 30 29 28 27 26 25 24 23 22 21 20 19 18 17 16
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Watchdog general control register (WDOG_CFG)
Reserved
Reserved
WDOG_DIS: Watchdog disable
Bit 1
WDOG_EN: Watchdog enable
Bit 0
WDOG
_DIS
rw rw
WDOG
_EN
Watchdog control register (WDOG_CTRL)
Requires magic number write to arm the watchdog enable or disable function.
Address: 0x4000 6004
Reset value: 0x0000 0000
Table 10. Watchdog control register (WDOG_CTRL)
31 30 29 28 27 26 25 24 23 22 21 20 19 18 17 16
Reserved
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
WDOG_CTRL
w
Bits [15:0]
WDOG_CTRL: Write 0xDEAD to disable or 0xEABE to enable.
Watchdog restart register (WDOG_RESTART)
Write any value to this register to kick-start the watchdog.
Address: 0x4000 6008
Reset value: 0x0000 0000
Sleep timer configuration register (SLEEPTMR_CFG)
This register sets the various options for the Sleep timer.
Address: 0x4000 600C
Reset value: 0x0000 0400
46/232 Doc ID 16252 Rev 13
Page 47

STM32W108HB STM32W108CC STM32W108CB STM32W108CZ System modules
Table 11. Sleep timer configuration register (SLEEPTMR_CFG)
31 30 29 28 27 26 25 24 23 22 21 20 19 18 17 16
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Reserved
SLEEP
Reserved
rrwrwrwr rw rrw
Bit 12
TMR_
REVER
SE
SLEEPTMR_REVERSE:
SLEEP
R_
TM
ENABL
E
SLEEP
TMR_
DBGPA
USE
Reserved SLEEPTMR_CLKDIV Reserved
0: count forward; 1: count backwards.
Only chang
Bit 11
SLEEPTMR_ENABLE:
es when ENABLE bit is set to ‘0’.
0: disable sleep timer; 1: enable sleep timer.
T
o change other register bits (REVERSE, CLK_DIV, CLK_SEL), this bit must be set to ‘0’.
Enabling/Disabling latency can be up 2 to 3 clock-periods of selected clock.
Bit 10
SLEEPTMR_DBGPAUSE: Debug Pause
0: The timer continues working in Debug mode.
1: The
timer is paused in Debug mode when the CPU is halted.
SLE
EPT
MR_
CLK
SEL
Bits [7:4]
SLEEPTMR_CLKDIV: Sleep timer prescaler setting
Divides clock by 2
N
where N = 0 to 15.
Can only be changed when the ENABLE bit is set to ‘0’.
Bit 0
SLEEPTMR_CLKSEL: Clock Select
0: Calibrated 1kHz RC clock (default); 1: 32kHz
Can
only be changed when the ENABLE bit is set to ‘0’.
Sleep timer count high register (SLEEPTMR_CNTH)
Address: 0x4000 6010
Reset value: 0x0000 0000
Table 12. Sleep timer count high register (SLEEPTMR_CNTH)
31 30 29 28 27 26 25 24 23 22 21 20 19 18 17 16
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Bits [15:0]
Reserved
SLEEPTMR_CNTH
r
SLEEPTMR_CNTH_FIELD:
Sleep timer counter high value [31:16].
ding this register updates the SLEEP_COUNT_L for subsequent reads.
Rea
Doc ID 16252 Rev 13 47/232
Page 48

System modules STM32W108HB STM32W108CC STM32W108CB STM32W108CZ
Sleep timer count low register (SLEEPTMR_CNTL)
Address: 0x4000 6014
Reset value: 0x0000 0000
Table 13. Sleep timer count low register (SLEEPTMR_CNTL)
31 30 29 28 27 26 25 24 23 22 21 20 19 18 17 16
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Bits [15:0]
Reserved
SLEEPTMR_CNTL
SLEEPTMR_CNTL_FIELD:
Sleep timer counter low value [15:16].
This register is
only valid following a read of the SLEEPTMR_CNTH register.
r
Sleep timer compare A high register (SLEEPTMR_CMPAH)
Address: 0x4000 6018
Reset value: 0x0000 FFFF
Table 14. Sleep timer compare A high register (SLEEPTMR_CMPAH)
31 30 29 28 27 26 25 24 23 22 21 20 19 18 17 16
Reserved
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
SLEEPTMR_CMPAH
rw
Bits [15:0]
SLEEPTMR_CMPAH_FIELD:
Sleep timer compare A high value [31:16].
p timer compare value, writing updates COMP_A_H (directly) and COMP_A_L (from
Slee
hold register).
Can only be changed when the ENABLE bit (bit 11 of SLEEP_CONFIG register) is set to ‘0’.
If changed when the ENABLE bit is set to ‘1’, a spurious interrupt may be generated.
Therefore it is recommended to disable interrupts before changing this register.
48/232 Doc ID 16252 Rev 13
Page 49

STM32W108HB STM32W108CC STM32W108CB STM32W108CZ System modules
Sleep timer compare A low register (SLEEPTMR_CMPAL)
Address: 0x4000 601C
Reset value: 0x0000 FFFF
Table 15. Sleep timer compare A low register (SLEEPTMR_CMPAL)
31 30 29 28 27 26 25 24 23 22 21 20 19 18 17 16
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Bits [15:0]
Reserved
SLEEPTMR_CMPAL
rw
SLEEPTMR_CMPAL_FIELD:
Sleep timer compare A low value [15:0].
iting to this register puts value in hold register until a write to the SLEEPTMR_CMPAH
Wr
register.
Can only be changed when the ENABLE bit (bit 11 of SLEEP_CONFIG register) is set to ‘0’.
If changed when the ENABLE bit is set to ‘1’, a spurious interrupt may be generated.
Therefore it is recommended to disable interrupts before changing this register.
Sleep timer compare B high register (SLEEPTMR_CMPBH)
Address: 0x4000 6020
Reset value: 0x0000 FFFF
Table 16. Sleep timer compare B high register (SLEEPTMR_CMPBH)
31 30 29 28 27 26 25 24 23 22 21 20 19 18 17 16
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Bits [15:0]
Reserved
SLEEPTMR_CMPBH
rw
SLEEPTMR_CMPBH_FIELD:
Sleep timer compare B high value [31:16].
p timer compare value, writing updates COMP_B_H (directly) and COMP_B_L (from
Slee
hold register).
Can only be changed when the ENABLE bit (bit 11 of SLEEP_CONFIG register) is set to ‘0’.
If changed when the ENABLE bit is set to ‘1’, a spurious interrupt may be generated.
Therefore it is recommended to disable interrupts before changing this register.
Doc ID 16252 Rev 13 49/232
Page 50

System modules STM32W108HB STM32W108CC STM32W108CB STM32W108CZ
Sleep timer compare B low register (SLEEPTMR_CMPBL)
Address: 0x4000 6024
Reset value: 0x0000 FFFF
Table 17. Sleep timer compare B low register (SLEEPTMR_CMPBL)
31 30 29 28 27 26 25 24 23 22 21 20 19 18 17 16
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Bits [15:0]
Reserved
SLEEPTMR_CMPBL
rw
SLEEPTMR_CMPBL_FIELD:
Sleep timer compare B low value [15:0].
iting to this register puts value in hold register until a write to the SLEEPTMR_CMPBH
Wr
register.
Can only be changed when the ENABLE bit (bit 11 of SLEEP_CONFIG register) is set to ‘0’.
If changed when the ENABLE bit is set to ‘1’, a spurious interrupt may be generated.
Therefore it is recommended to disable interrupts before changing this register.
Sleep timer interrupt source register (INT_SLEEPTMRFLAG)
Address: 0x4000 A014
Reset value: 0x0000 0000
Table 18. Sleep timer interrupt source register (INT_SLEEPTMRFLAG)
31 30 29 28 27 26 25 24 23 22 21 20 19 18 17 16
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Reserved
Reserved
rrwrwrw
INT_ SLEEPTMR CMPB: Sleep timer compare B
Bit 2
Note: Bits are cleared when set to ‘1’.
Bit 1
INT_SLEEPTMRCMPA: Sleep timer compare A
Note: Bits are cleared when set to ‘1’.
Bit 0
INT_SLEEPTMRWRAP: Sleep timer overflow
Note: Bits are cleared when set to ‘1’.
INT_
SLEEP
TMR
CMPB
INT_
SLEEP
TMR
CMPA
INT_
SLEEP
TMR
WRAP
50/232 Doc ID 16252 Rev 13
Page 51

STM32W108HB STM32W108CC STM32W108CB STM32W108CZ System modules
Sleep timer interrupt mask register (INT_SLEEPTMRCFG)
Address: 0x4000 A054
Reset value: 0x0000 0000
Table 19. Sleep timer interrupt mask register (INT_SLEEPTMRCFG)
31 30 29 28 27 26 25 24 23 22 21 20 19 18 17 16
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Reserved
Reserved
rrwrwrw
INT_ SLEEPTMR CMPB: Sleep timer compare B
Bit 2
INT_SLEEPTMRCMPA: Sleep timer compare A
Bit 1
INT_SLEEPTMRWRAP: Sleep timer overflow
Bit 0
INT_
SLEEP
TMR
CMPB
INT_
SLEEP
TMR
CMPA
INT_
SLEEP
TMR
WRAP
Sleep timer clock source enables (SLEEPTMR_CLKEN)
This timer controls the low power clock gated modes.
Clearing CLKRC_EN before executing W
control register causes DEEP_SLEEP2 to be entered. Setting this bit causes
DEEP_SLEEP1 to be entered.
Address: 0x4000 0008
Reset value: 0x0000 0002
Table 20. Sleep timer clock source enables (SLEEPTMR_CLKEN)
31 30 29 28 27 26 25 24 23 22 21 20 19 18 17 16
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Reserved
rrwrw
SLEEPTMR_CLK10KEN: Enables 10kHz internal RC during deep
Bit 1
Note: Bits are cleared when set to ‘1’.
SLEEPTMR_CLK32KEN: Enables 32kHz
Bit 0
Note: Bits are cleared when set to ‘1’.
FE with SLEEPDEEP bit set in the NVIC System
Reserved
SLEEP
TMR_
CLK10K
EN
external XTAL
SLEEP
TMR_
CLK32K
EN
Doc ID 16252 Rev 13 51/232
Page 52

System modules STM32W108HB STM32W108CC STM32W108CB STM32W108CZ
6.5 Power management
The STM32W108's power management system is designed to achieve the lowest deep
sleep current consumption possible while still providing flexible wakeup sources, timer
activity, and debugger operation. The STM32W108 has four main sleep modes:
● Idle Sleep: Puts the CPU into an idle state where execution is suspended until any
interrupt occurs. All power domains remain fully powered and nothing is reset.
● Deep Sleep 1: The primary deep sleep state. In this state, the core power domain is
fully powered down and the sleep timer is active
● Deep Sleep 2: The same as Deep Sleep 1 except that the sleep timer is inactive to
save power. In this mode the sleep timer cannot wakeup the STM32W108.
● Deep Sleep 0 (also known as Emulated Deep Sleep): The chip emulates a true deep
sleep without powering down the core domain. Instead, the core domain remains
powered and all peripherals except the system debug components (ITM, DWT, FPB,
NVIC) are held in reset. The purpose of this sleep state is to allow STM32W108
software to perform a deep sleep cycle while maintaining debug configuration such as
breakpoints.
6.5.1 Wake sources
When in deep sleep the STM32W108 can be returned to the running state in a number of
ways, and the wake sources are split depending on deep sleep 1 or deep sleep 2.
The following wake sources are available in both deep sleep 1 and 2.
● Wake on GPIO activity: Wake due to change of state on any GPIO.
● Wake on serial controller 1: Wake due to a change of state on GPIO Pin PB2.
● Wake on serial controller 2: Wake due to a change of state on GPIO Pin PA2.
● Wake on IRQD: Wake due to a change of state on IRQD. Since IRQD can be
configured to point to any GPIO, this wake source is another means of waking on any
GPIO activity.
● Wake on setting of CDBGPWRUPREQ: Wake due to setting the CDBGPWRUPREQ bit
in the debug port in the SWJ.
● Wake on setting of CSYSPWRUPREQ: Wake due to setting the CSYSPWRUPREQ bit
in the debug port in the SWJ.
The following sources are only available in deep sleep 1 since the sleep timer is not active in
deep sleep 2.
● Wake on sleep timer compare A.
● Wake on sleep timer compare B.
● Wake on sleep timer wrap.
The following source is only available in deep sleep 0 since the SWJ is required to write
memory to set this wake source and the SWJ only has access to some registers in deep
sleep 0.
● Wake on write to the WAKE_CORE register bit.
The Wakeup Recording module monitors all possible wakeup sources. More than one
wakeup source may be recorded because events are continually being recorded (not just in
deep-sleep), since another event may happen between the first wake event and when the
STM32W108 wakes up.
52/232 Doc ID 16252 Rev 13
Page 53

STM32W108HB STM32W108CC STM32W108CB STM32W108CZ System modules
6.5.2 Basic sleep modes
The power management state diagram in Figure 8 shows the basic operation of the power
management controller.
Figure 8. Power management state diagram
CDBGPWRU PREQ set
DEEP SLEEP
CDBGPWRUPREQ=0
& CSYSP WRUPREQ=0
PRE- DEEP
SLEEP
CSYSPWRUPR EQ & INHIBIT
CDBGPWRU PREQ cleare d
=
Q
E
R
Q
P
E
U
R
R
P
W
U
R
P
G
W
B
P
D
S
C
Y
S
C
&
(
r
e
Deep sleep requested
(WFI instru ction with SLEEP_DEEP= 1)
Sleep
uc
r
nst
i
I
WF
(
EMULAT ED
DEEP SLEEP
1
0
=
Wake up event
(resets the processor)
OR CSYSPWRUPREQ set
W
a
k
s
e
e
u
t
s
p
t
e
h
e
v
e
p
n
r
o
t
c
e
s
s
o
r
)
RUNNING
0)
P=
E
E
d
_D
e
t
P
s
E
LE
eque
S
r
ith
w
n
tio
t
p
Interru
IDLE SLEEP
Doc ID 16252 Rev 13 53/232
Page 54

System modules STM32W108HB STM32W108CC STM32W108CB STM32W108CZ
In normal operation an application may request one of two low power modes through
program execution:
● Idle Sleep is achieved by executing a WFI instruction whilst the SLEEPDEEP bit in the
Cortex System Control register (SCS_SCR) is clear. This puts the CPU into an idle
state where execution is suspended until an interrupt occurs. This is indicated by the
state at the bottom of the diagram. Power is maintained to the core logic of the
STM32W108 during the Idle Sleeping state.
● Deep sleep is achieved by executing a WFI instruction with the SLEEPDEEP bit in
SCS_SCR set. This triggers the state transitions around the main loop of the diagram,
resulting in powering down the STM32W108's core logic, and leaving only the alwayson domain powered. Wake up is triggered when one of the pre-determined events
occurs.
If a deep sleep is requested the STM32W108 first enters a pre-deep sleep state. This state
prevents any section of the chip from being powered off or reset until the SWJ goes idle (by
clearing CSYSPWRUPREQ). This pre-deep sleep state ensures debug operations are not
interrupted.
In the deep sleep state the STM32W108 waits for a wake up event which will return it to the
running state. In powering up the core logic the ARM® Cortex-M3 is put through a reset
cycle and ST software restores the stack and application state to the point where deep sleep
was invoked.
6.5.3 Further options for deep sleep
By default, the low-frequency internal RC oscillator (OSCRC) is running during deep sleep
(known as deep sleep 1).
To conserve power, OSCRC can be turned off during deep sleep. This mode is known as
deep sleep 2. Since the OSCRC is disabled, the sleep timer and watchdog timer do not
function and cannot wake the chip unless the low-frequency 32.768 kHz crystal oscillator is
used. Non-timer based wake sources continue to function. Once a wake event occurs, the
OSCRC restarts and becomes enabled.
6.5.4 Use of debugger with sleep modes
The debugger communicates with the STM32W108 using the SWJ.
When the debugger is connected, the CDBGPWRUPREQ bit in the debug port in the SWJ
is set, the STM32W108 will only enter deep sleep 0 (the Emulated Deep Sleep state). The
CDBGPWRUPREQ bit indicates that a debug tool is connected to the chip and therefore
there may be debug state in the system debug components. To maintain the state in the
system debug components only deep sleep 0 may be used, since deep sleep 0 will not
cause a power cycle or reset of the core domain. The CSYSPWRUPREQ bit in the debug
port in the SWJ indicates that a debugger wants to access memory actively in the
STM32W108. Therefore, whenever the CSYSPWRUPREQ bit is set while the STM32W108
is awake, the STM32W108 cannot enter deep sleep until this bit is cleared. This ensures the
STM32W108 does not disrupt debug communication into memory.
54/232 Doc ID 16252 Rev 13
Page 55

STM32W108HB STM32W108CC STM32W108CB STM32W108CZ System modules
Clearing both CSYSPWRUPREQ and CDBGPWRUPREQ allows the STM32W108 to
achieve a true deep sleep state (deep sleep 1 or 2). Both of these signals also operate as
wake sources, so that when a debugger connects to the STM32W108 and begins accessing
the chip, the STM32W108 automatically comes out of deep sleep. When the debugger
initiates access while the STM32W108 is in deep sleep, the SWJ intelligently holds off the
debugger for a brief period of time until the STM32W108 is properly powered and ready.
For more information regarding the SWJ and the interaction of debuggers with deep sleep,
contact ST support for Application Notes and ARM® CoreSight documentation.
6.6 Security accelerator
The STM32W108 contains a hardware AES encryption engine accessible from the ARM®
Cortex-M3. NIST-based CCM, CCM*, CBC-MAC, and CTR modes are implemented in
hardware. These modes are described in the IEEE 802.15.4-2003 specification, with the
exception of CCM*, which is described in the ZigBee Security Services Specification 1.0.
Doc ID 16252 Rev 13 55/232
Page 56

Integrated voltage regulator STM32W108HB STM32W108CC STM32W108CB STM32W108CZ
7 Integrated voltage regulator
The STM32W108 integrates two low dropout regulators to provide 1.8 V and 1.25 V power
supplies. The 1V8 regulator supplies the analog and memories, and the 1V25 regulator
supplies the digital core. In deep sleep the voltage regulators are disabled.
When enabled, the 1V8 regulator steps down the pads supply voltage (VDD_PADS) from a
nominal 3.0 V to 1.8 V. The regulator output pin (VREG_OUT) must be decoupled externally
with a suitable capacitor. VREG_OUT should be connected to the 1.8 V supply pins VDDA,
VDD_RF, VDD_VCO, VDD_SYNTH, VDD_IF, and VDD_MEM. The 1V8 regulator can
supply a maximum of 50 mA.
When enabled, the 1V25 regulator steps down VDD_PADS to 1.25 V. The regulator output
pin (VDD_CORE, (Pin 17) must be decoupled externally with a suitable capacitor. It should
connect to the other VDD_CORE pin (Pin 44). The 1V25 regulator can supply a maximum of
10 mA.
The regulators are controlled by the digital portion of the chip as described in Section 6:
System modules.
Table 21. 1.8 V integrated voltage regulator specifications
Parameter Min. Typ. Max. Units Comments
Supply range for regulator 2.1 3.6 V VDD_PADS
1V8 regulator output -5% 1.8 +5% V
1V8 regulator output after reset -5% 1.75 +5%
1V25 regulator output -5% 1.25 +5% V
1V25 regulator output after reset -5% 1.45 +5%
1V8 regulator capacitor 2.2 µF
1V25 regulator capacitor 1.0 µF Ceramic capacitor (0603)
1V8 regulator output current 050mARegulator output current
1V25 regulator output current 010mARegulator output current
No load current 600 µA
1V8 regulator current limit 200 mA Short circuit current limit
1V25 regulator current limit 25 mA Short circuit current limit
Regulator output after
initialization
Regulator output after
reset
Regulator output after
initialization
Regulator output after
reset
Low ESR tantalum
capacitor
ESR greater than 2 Ω
ESR less than 10 Ω
De-coupling less than100
nF ceramic
No load current
(bandgap and regulators)
56/232 Doc ID 16252 Rev 13
Page 57

STM32W108HB STM32W108CC STM32W108CB STM32W108CZ Integrated voltage regulator
Table 21. 1.8 V integrated voltage regulator specifications (continued)
Parameter Min. Typ. Max. Units Comments
1V8 regulator start-up time 50 µs
1V25 regulator start-up time 50 µs
0 V to POR threshold 2.2
µF capacitor
0 V to POR threshold 1.0
µF capacitor
An external 1.8 V regulator may replace both internal regulators. The STM32W108 can
control external regulators during deep sleep using open-drain GPIO PA7, as described in
Section 8: General-purpose input/outputs. The STM32W108 drives PA7 low during deep
sleep to disable the external regulator and an external pull-up is required to release this
signal to indicate that supply voltage should be provided. Current consumption increases
approximately 2 mA when using an external regulator. When using an external regulator the
internal regulators should be disabled through software.
Doc ID 16252 Rev 13 57/232
Page 58

General-purpose input/outputs STM32W108HB STM32W108CC STM32W108CB STM32W108CZ
8 General-purpose input/outputs
The STM32W108 has 24 multi-purpose GPIO pins that may be individually configured as:
● General purpose output
● General purpose open-drain output
● Alternate output controlled by a peripheral device
● Alternate open-drain output controlled by a peripheral device
● Analog
● General purpose input
● General purpose input with pull-up or pull-down resistor
The basic structure of a single GPIO is illustrated in Figure 9.
Figure 9. GPIO block diagram
GPIO_ PxCFGH/L
GPIO _PxSET
GPIO_PxC LR
GPIO_PxOU T
Alt ernat e output
Alt ernat e input
Wake detection
GPIO_PxIN
Output c ontrol
(pus h pull ,
open drai n , or
dis abled )
GPIO_PxW AKE
VDD _PADS
P-M OS
N-MOS
GND
Schmitt tr igger
VDD _PADS
GND
Analog
functi ons
VDD _PADS
Prot ection
Prot ection
GND
diode
PIN
diode
A Schmitt trigger converts the GPIO pin voltage to a digital input value. The digital input
signal is then always routed to the GPIO_PxIN register; to the alternate inputs of associated
peripheral devices; to wake detection logic if wake detection is enabled; and, for certain
pins, to interrupt generation logic. Configuring a pin in analog mode disconnects the digital
input from the pin and applies a high logic level to the input of the Schmitt trigger.
Only one device at a time can control a GPIO output. The output is controlled in normal
output mode by the GPIO_PxOUT register and in alternate output mode by a peripheral
device. When in input mode or analog mode, digital output is disabled.
58/232 Doc ID 16252 Rev 13
Page 59

STM32W108HB STM32W108CC STM32W108CB STM32W108CZ General-purpose input/outputs
8.1 Functional description
8.1.1 GPIO ports
The 24 GPIO pins are grouped into three ports: PA, PB, and PC. Individual GPIOs within a
port are numbered 0 to 7 according to their bit positions within the GPIO registers.
Note: Because GPIO port registers' functions are identical, the notation Px is used here to refer to
PA, PB, or PC. For example, GPIO_PxIN refers to the registers GPIO_PAIN, GPIO_PBIN,
and GPIO_PCIN.
Each of the three GPIO ports has the following registers whose low-order eight bits
correspond to the port's eight GPIO pins:
● GPIO_PxIN (input data register) returns the pin level (unless in analog mode).
● GPIO_PxOUT (output data register) controls the output level in normal output mode.
● GPIO_PxCLR (clear output data register) clears bits in GPIO_PxOUT.
● GPIO_PxSET (set output data register) sets bits in GPIO_PxOUT.
● GPIO_PxWAKE (wake monitor register) specifies the pins that can wake the
STM32W108.
In addition to these registers, each port has a pair of configuration registers,
GPIO_PxCFGH and GPIO_PxCFGL. These registers specify the basic operating mode for
the port's pins. GPIO_PxCFGL configures the pins Px[3:0] and GPIO_PxCFGH configures
the pins Px[7:4]. For brevity, the notation GPIO_PxCFGH/L refers to the pair of configuration
registers.
Five GPIO pins (PA6, PA7, PB6, PB7 and PC0) can sink and source higher current than
standard GPIO outputs. Refer to
information.
8.1.2 Configuration
Each pin has a 4-bit configuration value in the GPIO_PxCFGH/L register. The various GPIO
modes and their 4 bit configuration values are shown in
Table 22. GPIO configuration modes
GPIO mode GPIO_PxCFGH/L Description
Analog 0x0
Input (floating) 0x4
Input (pull-up or pull-down) 0x8
Output (push-pull) 0x1
Output (open-drain) 0x5
Ta bl e 151: Digital I/O characteristics on page 218 for more
Ta bl e 22.
Analog input or output. When in analog mode, the
digital input (GPIO_PxIN) always reads 1.
Digital input without an internal pull up or pull
down. Output is disabled.
Digital input with an internal pull up or pull down. A
set bit in GPIO_PxOUT selects pull up and a
cleared bit selects pull down. Output is disabled.
Push-pull output. GPIO_PxOUT controls the
output.
Open-drain output. GPIO_PxOUT controls the
output. If a pull up is required, it must be external.
Alternate Output (push-pull) 0x9
Doc ID 16252 Rev 13 59/232
Push-pull output. An onboard peripheral controls
the output.
Page 60

General-purpose input/outputs STM32W108HB STM32W108CC STM32W108CB STM32W108CZ
Table 22. GPIO configuration modes (continued)
GPIO mode GPIO_PxCFGH/L Description
Alternate Output (opendrain)
Alternate Output (push-pull)
SPI SCLK Mode
0xD
0xB
Open-drain output. An onboard peripheral controls
the output. If a pull up is required, it must be
external.
Push-pull output mode only for SPI master mode
SCLK pins.
If a GPIO has two peripherals that can be the source of alternate output mode data, then
other registers in addition to GPIO_PxCFGH/L determine which peripheral controls the
output.
Several GPIOs share an alternate output with Timer 2 and the Serial Controllers. Bits in
Timer 2's TIM2_OR register control routing Timer 2 outputs to different GPIOs. Bits in Timer
2's TIM2_CCER register enable Timer 2 outputs. When Timer 2 outputs are enabled they
override Serial Controller outputs.
Ta bl e 23 indicates the GPIO mapping for Timer 2 outputs
depending on the bits in the register TIM2_OR. Refer to Section 10: General-purpose timers
on page 115 for complete information on timer configuration.
Table 23. Timer 2 output configuration controls
GPIO mapping selected by TIM2_OR bit
Timer 2 output Option register bit
01
TIM2_CH1 TIM2_OR[4] PA0 PB1
TIM2_CH2 TIM2_OR[5] PA3 PB2
TIM2_CH3 TIM2_OR[6] PA1 PB3
TIM2_CH4 TIM2_OR[7] PA2 PB4
For outputs assigned to the serial controllers, the serial interface mode registers
(SCx_MODE) determine how the GPIO pins are used.
The alternate outputs of PA4 and PA5 can either provide packet trace data (PTI_EN and
PTI_DATA), or synchronous CPU trace data (TRACEDATA2 and TRACEDATA3).
If a GPIO does not have an associated peripheral in alternate output mode, its output is set
to 0.
8.1.3 Forced functions
For some GPIOs the GPIO_PxCFGH/L configuration may be overridden. Ta b le 24 shows
the GPIOs that can have different functions forced on them regardless of the
GPIO_PxCFGH/L registers.
Note: The DEBUG_DIS bit in the GPIO_DBGCFG register can disable the Serial Wire/JTAG
debugger interface. When this bit is set, all debugger-related pins (PC0, PC2, PC3, PC4)
behave as standard GPIO.
60/232 Doc ID 16252 Rev 13
Page 61

STM32W108HB STM32W108CC STM32W108CB STM32W108CZ General-purpose input/outputs
Table 24. GPIO forced functions
GPIO Override condition Forced function Forced signal
GPIO_EXTREGEN bit set in the
PA 7 REG_EN
GPIO_DBGCFG register
PC0 JRST
Debugger interface is active in JTAG mode Input with pull up
PC2 JTDO
Debugger interface is active in JTAG mode Push-pull output
PC3 JDTI
Debugger interface is active in JTAG mode Input with pull up
PC4 JTMS
Debugger interface is active in JTAG mode Input with pull up
Debugger interface is active in Serial Wire
PC4 SWDIO
mo
de
Open-drain output
Bidirectional (push-pull
output or floating input)
controlled by debugger
interface
8.1.4 Reset
A full chip reset is one due to power on (low or high voltage), the NRST pin, the watchdog, or
the SYSRESETREQ bit. A full chip reset affects the GPIO configuration as follows:
● The GPIO_PxCFGH/L configurations of all pins are configured as floating inputs.
● The GPIO_EXTREGEN bit is set in the GPIO_DBGCFG register, which overrides the
normal configuration for PA7.
● The GPIO_DEBUGDIS bit in the GPIO_DBGCFG register is cleared, allowing Serial
Wire/JTAG access to override the normal configuration of PC0, PC2, PC3, and PC4.
8.1.5 nBOOTMODE
nBOOTMODE is a special alternate function of PA5 that is active only during a pin reset
(NRST) or a power-on-reset of the always-powered domain (POR_HV). If nBOOTMODE is
asserted (pulled or driven low) when coming out of reset, the processor starts executing an
embedded serial boot loader instead of its normal program.
While in reset and during the subsequent power-on-reset startup delay (512 high-frequency
oscillator periods), PA5 is automatically configured as an input with a pull-up resistor. At
RC
the end of this time, the STM32W108 samples nBOOTMODE: a high level selects normal
startup, and a low level selects the boot loader. After nBOOTMODE has been sampled, PA5
is configured as a floating input. The GPIO_BOOTMODE bit in the GPIO_DBGSTAT register
captures the state of nBOOTMODE so that software may act on this signal if required.
Note: To avoid inadvertently asserting nBOOTMODE,
252 pF.
PA5's capacitive load should not exceed
Doc ID 16252 Rev 13 61/232
Page 62

General-purpose input/outputs STM32W108HB STM32W108CC STM32W108CB STM32W108CZ
8.1.6 GPIO modes
Analog mode
Analog mode enables analog functions, and disconnects a pin from the digital input and
output logic. Only the following GPIO pins have analog functions:
● PA4, PA5, PB5, PB6, PB7, and PC1 can be analog inputs to the ADC.
● PB0 can be an external analog voltage reference input to the ADC, or it can output the
internal analog voltage reference from the ADC.
● PC6 and PC7 can connect to an optional 32.768 kHz crystal.
Note: When an external timing source is required, a 32.768 kHz crystal is commonly connected to
PC6 and PC7. Alternatively, when PC7 is configured as a digital input, PC7 can accept a
digital external clock input.
When configured in analog mode:
● The output drivers are disabled.
● The internal pull-up and pull-down resistors are disabled.
● The Schmitt trigger input is connected to a high logic level.
● Reading GPIO_PxIN returns a constant 1.
Input mode
Input mode is used both for general purpose input and for on-chip peripheral inputs. Input
floating mode disables the internal pull-up and pull-down resistors, leaving the pin in a highimpedance state. Input pull-up or pull-down mode enables either an internal pull-up or pulldown resistor based on the GPIO_PxOUT register. Setting a bit to 0 in GPIO_PxOUT
enables the pull-down and setting a bit to 1 enables the pull up.
When configured in input mode:
● The output drivers are disabled.
● An internal pull-up or pull-down resistor may be activated depending on
GPIO_PxCFGH/L and GPIO_PxOUT.
● The Schmitt trigger input is connected to the pin.
● Reading GPIO_PxIN returns the input at the pin.
● The input is also available to on-chip peripherals.
Output mode
Output mode provides a general purpose output under direct software control. Regardless
of whether an output is configured as push-pull or open-drain, the GPIO's bit in the
GPIO_PxOUT register controls the output. The GPIO_PxSET and GPIO_PxCLR registers
can atomically set and clear bits within GPIO_PxOUT register. These set and clear registers
simplify software using the output port because they eliminate the need to disable interrupts
to perform an atomic read-modify-write operation of GPIO_PxOUT.
62/232 Doc ID 16252 Rev 13
Page 63
STM32W108HB STM32W108CC STM32W108CB STM32W108CZ General-purpose input/outputs
When configured in output mode:
● The output drivers are enabled and are controlled by the value written to
GPIO_PxOUT:
● In open-drain mode: 0 activates the N-MOS current sink; 1 tri-states the pin.
● In push-pull mode: 0 activates the N-MOS current sink; 1 activates the P-MOS current
source.
● The internal pull-up and pull-down resistors are disabled.
● The Schmitt trigger input is connected to the pin.
● Reading GPIO_PxIN returns the input at the pin.
● Reading GPIO_PxOUT returns the last value written to the register.
Note: Depending on configuration and usage, GPIO_PxOUT and GPIO_PxIN may not have the
same value.
Alternate output mode
In this mode, the output is controlled by an on-chip peripheral instead of GPIO_PxOUT and
may be configured as either push-pull or open-drain. Most peripherals require a particular
output type - I
does not by itself configure a pin, the GPIO_PxCFGH/L registers must be configured
properly for a peripheral's particular needs. As described in
page 59, when more than one peripheral can be the source of output data, registers in
addition to GPIO_PxCFGH/L determine which to use.
2
C requires an open-drain driver, for example - but since using a peripheral
Section 8.1.2: Configuration on
When configured in alternate output mode:
● The output drivers are enabled and are controlled by the output of an on-chip
peripheral:
● In open-drain mode: 0 activates the N-MOS current sink; 1 tri-states the pin.
● In push-pull mode: 0 activates the N-MOS current sink; 1 activates the P-MOS current
source.
● The internal pull-up and pull-down resistors are disabled.
● The Schmitt trigger input is connected to the pin.
● Reading GPIO_PxIN returns the input to the pin.
Note: Depending on configuration and usage, GPIO_PxOUT and GPIO_PxIN may not have the
same value.
Alternate output SPI SCLK mode
SPI master mode SCLK outputs, PB3 (SC1SCLK) or PA2 (SC2SCLK), use a special output
push-pull mode reserved for those signals. Otherwise this mode is identical to alternate
output mode.
Doc ID 16252 Rev 13 63/232
Page 64

General-purpose input/outputs STM32W108HB STM32W108CC STM32W108CB STM32W108CZ
8.1.7 Wake monitoring
The GPIO_PxWAKE registers specify which GPIOs are monitored to wake the processor. If
a GPIO's wake enable bit is set in GPIO_PxWAKE, then a change in the logic value of that
GPIO causes the STM32W108 to wake from deep sleep. The logic values of all GPIOs are
captured by hardware upon entering sleep. If any GPIO's logic value changes while in sleep
and that GPIO's GPIO_PxWAKE bit is set, then the STM32W108 will wake from deep sleep.
(There is no mechanism for selecting a specific rising-edge, falling-edge, or level on a GPIO:
any change in logic value triggers a wake event.) Hardware records the fact that GPIO
activity caused a wake event, but not which specific GPIO was responsible. Instead,
software should read the state of the GPIOs on waking to determine the cause of the event.
The register GPIO_WAKEFILT contains bits to enable digital filtering of the external wakeup
event sources: the GPIO pins, SC1 activity, SC2 activity, and IRQD. The digital filter
operates by taking samples based on the (nominal) 10 kHz RC oscillator. If three samples in
a row all have the same logic value, and this sampled logic value is different from the logic
value seen upon entering sleep, the filter outputs a wakeup event.
In order to use GPIO pins to wake the STM32W108 from deep sleep, the GPIO_WAKE bit in
the WAKE_SEL register must be set. Waking up from GPIO activity does not work with pins
configured for analog mode since the digital logic input is always set to 1 when in analog
mode. Refer to
power management and sleep modes.
Section 6: System modules on page 35 for information on the STM32W108's
8.2 External interrupts
The STM32W108 can use up to four external interrupt sources (IRQA, IRQB, IRQC, and
IRQD), each with its own top level NVIC interrupt vector. Since these external interrupt
sources connect to the standard GPIO input path, an external interrupt pin may
simultaneously be used by a peripheral device or even configured as an output. Analog
mode is the only GPIO configuration that is not compatible with using a pin as an external
interrupt.
External interrupts have individual triggering and filtering options selected using the
registers GPIO_INTCFGA, GPIO_INTCFGB, GPIO_INTCFGC, and GPIO_INTCFGD. The
bit field GPIO_INTMOD of the GPIO_INTCFGx register enables IRQx's second level
interrupt and selects the triggering mode: 0 is disabled; 1 for rising edge; 2 for falling edge; 3
for both edges; 4 for active high level; 5 for active low level. The minimum width needed to
latch an unfiltered external interrupt in both level- and edge-triggered mode is 80 ns. With
the digital filter enabled (the GPIO_INTFILT bit in the GPIO_INTCFGx register is set), the
minimum width needed is 450 ns.
The register INT_GPIOFLAG is the second-level interrupt flag register that indicates
pending external interrupts. Writing 1 to a bit in the INT_GPIOFLAG register clears the flag
while writing 0 has no effect. If the interrupt is level-triggered, the flag bit is set again
immediately after being cleared if its input is still in the active state.
Two of the four external interrupts, IRQA and IRQB, have fixed pin assignments. The other
two external interrupts, IRQC and IRQD, can use any GPIO pin. The GPIO_IRQCSEL and
GPIO_IRQDSEL registers specify the GPIO pins assigned to IRQC and IRQD, respectively.
Ta bl e 25 shows how the GPIO_IRQCSEL and GPIO_IRQDSEL register values select the
GPIO pin used for the external interrupt.
64/232 Doc ID 16252 Rev 13
Page 65

STM32W108HB STM32W108CC STM32W108CB STM32W108CZ General-purpose input/outputs
Table 25. IRQC/D GPIO selection
GPIO_IRQxSEL GPIO
GPIO_IRQxSE
0 PA0 8 PB0 16 PC0
1 PA1 9 PB1 17 PC1
2 PA2 10 PB2 18 PC2
3 PA3 11 PB3 19 PC3
4 PA4 12 PB4 20 PC4
5 PA5 13 PB5 21 PC5
6 PA6 14 PB6 22 PC6
7 PA7 15 PB7 23 PC7
In some cases, it may be useful to assign IRQC or IRQD to an input also in use by a
peripheral, for example to generate an interrupt from the slave select signal (nSSEL) in an
SPI slave mode interface.
Refer to Section 12: Interrupts on page 186 for further information regarding the
STM32W108 interrupt system.
8.3 Debug control and status
Two GPIO registers are largely concerned with debugger functions. GPIO_DBGCFG can
disable debugger operation, but has other miscellaneous control bits as well.
GPIO_DBGSTAT, a read-only register, returns status related to debugger activity
(GPIO_FORCEDBG and GPIO_SWEN), as well a flag (GPIO_BOOTMODE) indicating
whether nBOOTMODE was asserted at the last power-on or NRST-based reset.
L
GPIO
GPIO_IRQxSE
L
GPIO
8.4 GPIO alternate functions
Ta bl e 26 lists the GPIO alternate functions.
Table 26. GPIO signal assignments
GPIO Analog Alternate function Input
PA 0
PA 1
PA 2
PA 3
PA 4 A D C 4 PTI_EN, TRACEDATA2 Standard
TIM2_CH1
SC2MOSI
TIM2_CH3
SC2MISO, SC2SDA
TIM2_CH4
SC2SCLK, SC2SCL
TIM2_CH2
TRACECLK
Doc ID 16252 Rev 13 65/232
(1)
(1)
(1)
(1)
Output current
drive
,
TIM2_CH1
SC2MOSI
,
TIM2_CH3
SC2MISO, SC2SDA
,
TIM2_CH4
SC2SCLK
,
TIM2_CH2
SC2nSSEL
(1)
(1)
(1)
(1)
,
,
,
,
Standard
Standard
Standard
Standard
Page 66

General-purpose input/outputs STM32W108HB STM32W108CC STM32W108CB STM32W108CZ
Table 26. GPIO signal assignments (continued)
GPIO Analog Alternate function Input
PA 5 A D C 5
PTI_DATA,
TRACEDATA3
nBOOTMODE
(2)
Output current
drive
Standard
PA 6 TIM1_CH3 TIM1_CH3 High
PA 7
PB0 VREF
PB1
TIM1_CH4, REG_EN
(3)
TRACECLK
TIM2_CH1
(4)
, SC1TXD,
SC1MOSI, SC1MISO,
TIM1_CH4 High
TIM1CLK, TIM2MSK,
IRQA
TIM2_CH1
(4)
, SC1SDA Standard
Standard
SC1SDA
(4)
(4)
(4)
,
Standard
,
,
Standard
Standard
PB2
PB3
PB4
TIM2_CH2
SC1SCLK
TIM2_CH3
SC1SCLK
TIM2_CH4
UART_RTS
(4)
(4)
(4)
,
TIM2_CH2
SC1MISO, SC1MOSI,
SC1SCL, SC1RXD
,
TIM2_CH3
SC1SCLK, UART_CTS
,
TIM2_CH4
SC1nSSEL
PB5 ADC0 TIM2CLK, TIM1MSK Standard
PB6 ADC1
PB7 ADC2
PC0
PC1 ADC3
PC2
PC3
PC4
PC5
TIM1_CH1 TIM1_CH1, IRQB High
TIM1_CH2 TIM1_CH2 High
TRACEDATA1 JRST
(5)
High
TRACEDATA0, SWO Standard
(6)
JTDO
SWDIO
, SWO Standard
(5)
(7)
JTDI
SWDIO
(7)
, JTMS
(5)
Standard
Standard
TX_ACTIVE Standard
PC6 OSC32B
nTX_ACTIVE Standard
PC7 OSC32A
1. Default signal assignment (not remapped).
2. Overrides during reset as an input with pull up.
3. Overrides after reset as an open-drain output.
4. Alternate signal assignment (remapped).
5. Overrides in JTAG mode as an input with pull up.
6. Overrides in JTAG mode as a push-pull output.
7. Overrides in Serial Wire mode as either a push-pull output, or a floating input, controlled by the debugger.
66/232 Doc ID 16252 Rev 13
OSC32_EXT Standard
Page 67

STM32W108HB STM32W108CC STM32W108CB STM32W108CZ General-purpose input/outputs
8.5 General-purpose input / output (GPIO) registers
8.5.1 Port x configuration register (Low) (GPIO_PxCFGL)
Address offset: 0xB000 (GPIO_PACFGL), 0xB400 (GPIO_PBCFGL) and 0xB800
(GPIO_PCCFGL)
Reset value: 0x0000 4444
Table 27. Port x configuration register (Low) (GPIO_PxCFGL)
31 30 29 28 27 26 25 24 23 22 21 20 19 18 17 16
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Reserved
Px3_CFG Px2_CFG Px1_CFG Px0_CFG
rw rw rw rw
Bits [15:12]
Px3_CFG: GPIO configuration control.
0x0: Analog, input or output (GPIO_PxIN always reads 1).
0x1: Output, push-pull (GPIO_PxOUT controls the output).
0x4: Input, floating.
0x5: Output, open-drain (GPIO_PxOUT controls the output).
0x8: Input, pulled up or down (selected by GPIO_PxOUT: 0 = pull-down, 1 = pull-up).
0x9: Alternate output, push-pull (p
eripheral controls the output).
0xB: Alternate output SPI SCLK, push-pull (only for SPI master mode SCLK).
eripheral controls the output).
e Px3_CFG above.
Bits [11:8]
0xD: Alternate output, open-drain (p
Px2_CFG: GPIO configuration control: se
Bits [7:4]
Bits [3:0]
Px1_CFG: GPIO configuration control: se
Px0_CFG: GPIO configuration control: se
e Px3_CFG above.
e Px3_CFG above.
8.5.2 Port x configuration register (High) (GPIO_PxCFGH)
Address offset: 0xB004 (GPIO_PACFGH), 0xB404 (GPIO_PBCFGH) and 0xB804
(GPIO_PCCFGH)
Reset value: 0x0000 4444
Table 28. Port x configuration register (High) (GPIO_PxCFGH)
31 30 29 28 27 26 25 24 23 22 21 20 19 18 17 16
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Reserved
Px7_CFG Px6_CFG Px5_CFG Px4_CFG
rw rw rw rw
Doc ID 16252 Rev 13 67/232
Page 68

General-purpose input/outputs STM32W108HB STM32W108CC STM32W108CB STM32W108CZ
Bits [15:12]
Px7_CFG: GPIO configuration control.
0x0: Analog, input or output (GPIO_PxIN always reads 1).
0x1: Output, push-pull (GPIO_PxOUT controls the outpu
t).
0x4: Input, floating.
0x5: Output, open-drain (GPIO_PxOU
T controls the output).
0x8: Input, pulled up or down (selected by GPIO_PxOUT: 0 = pull-down, 1 = pull-up).
0x9: Alternate output, push-pull (peripheral controls the output).
0xB: Alternate output SPI SCLK, push-pull (only f
or SPI master mode SCLK).
0xD: Alternate output, open-drain (peripheral controls the output).
Bits [11:8]
Bits [7:4]
Bits [3:0]
Px6_CFG: GPIO configuration control: see Px7_CFG above.
Px5_CFG: GPIO configuration control: see Px7_CFG above.
Px4_CFG: GPIO configuration control: see Px7_CFG above.
8.5.3 Port x input data register (GPIO_PxIN)
Address offset: 0xB008 (GPIO_PAIN), 0xB408 (GPIO_PBIN) and 0xB808 (GPIO_PCIN)
Reset value: 0x0000 0000
Table 29. Port x input data register (GPIO_PxIN)
31 30 29 28 27 26 25 24 23 22 21 20 19 18 17 16
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Reserved
Px7: Input level at pin Px7.
Bit 7
Px6: Input level at pin Px6.
Bit 6
Px5: Input level at pin Px5.
Bit 5
Px4: Input level at pin Px4.
Bit 4
Px3: Input level at pin Px3.
Bit 3
Reserved
Px7 Px6 Px5 Px4 Px3 Px2 Px1 Px0
rw rw rw rw rw rw rw rw
Px2: Input level at pin Px2.
Bit 2
Px1: Input level at pin Px1.
Bit 1
Px0: Input level at pin Px0.
Bit 0
68/232 Doc ID 16252 Rev 13
Page 69

STM32W108HB STM32W108CC STM32W108CB STM32W108CZ General-purpose input/outputs
8.5.4 Port x output data register (GPIO_PxOUT)
Address offset: 0xB00C (GPIO_PAOUT), 0xB40C (GPIO_PBOUT)
and 0xB80C (GPIO_PCOUT)
Reset value: 0x0000 0000
Table 30. Port x output data register (GPIO_PxOUT)
31 30 29 28 27 26 25 24 23 22 21 20 19 18 17 16
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Reserved
Reserved
Px7: Output data for Px7.
Bit 7
Px6: Output data for Px6.
Bit 6
Px5: Output data for Px5.
Bit 5
Px4: Output data for Px4.
Bit 4
Px3: Output data for Px3.
Bit 3
Px2: Output data for Px2.
Bit 2
Px1: Output data for Px1.
Bit 1
Px0: Output data for Px0.
Bit 0
Px7 Px6 Px5 Px4 Px3 Px2 Px1 Px0
rw rw rw rw rw rw rw rw
8.5.5 Port x output clear register (GPIO_PxCLR)
Address offset: 0xB014 (GPIO_PACLR), 0xB414 (GPIO_PBCLR)
and 0xB814 (GPIO_PCCLR)
Reset value: 0x0000 0000
Table 31. Port x output clear register (GPIO_PxCLR)
31 30 29 28 27 26 25 24 23 22 21 20 19 18 17 16
Reserved
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Reserved
Px7 Px6 Px5 Px4 Px3 Px2 Px1 Px0
ww wwwwww
Bit 7 Px7: Write 1 to clear the output data bit for Px7 (writing 0 has no effect).
Bit 6 Px6: Write 1 to clear the output data bit f
Bit 5 Px5: Write 1 to clear the output data bit f
Bit 4 Px4: Write 1 to clear the output data bit f
Bit 3 Px3: Write 1 to clear the output data bit f
or Px6 (writing 0 has no effect).
or Px5 (writing 0 has no effect).
or Px4 (writing 0 has no effect).
or Px3 (writing 0 has no effect).
Doc ID 16252 Rev 13 69/232
Page 70

General-purpose input/outputs STM32W108HB STM32W108CC STM32W108CB STM32W108CZ
Bit 2 Px2: Write 1 to clear the output data bit f
Bit 1 Px1: Write 1 to clear the output data bit f
Bit 0 Px0: Write 1 to clear the output data bit f
or Px2 (writing 0 has no effect).
or Px1 (writing 0 has no effect).
or Px0 (writing 0 has no effect).
8.5.6 Port x output set register (GPIO_PxSET)
Address offset: 0xB010 (GPIO_PASET), 0xB410 (GPIO_PBSET)
and 0xB810 (GPIO_PCSET)
Reset value: 0x0000 0000
Table 32. Port x output set register (GPIO_PxSET)
31 30 29 28 27 26 25 24 23 22 21 20 19 18 17 16
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Bits [15:8]
Bit 7
Reserved
Reserved
Px7 Px6 Px5 Px4 Px3 Px2 Px1 Px0
rw rw rw rw rw rw rw rw
Reserved: these bits must be set to 0.
Px7: Write 1 to set the output data bit for Px7 (writing 0 has no effect).
Px6: Write 1 to set the output data bit for Px6 (writing 0 has no effect).
Bit 6
Px5: Write 1 to set the output data bit for Px5 (writing 0 has no effect).
Bit 5
Px4: Write 1 to set the output data bit for Px4 (writing 0 has no effect).
Bit 4
Px3: Write 1 to set the output data bit for Px3 (writing 0 has no effect).
Bit 3
Px2: Write 1 to set the output data bit for Px2 (writing 0 has no effect).
Bit 2
Px1: Write 1 to set the output data bit for Px1 (writing 0 has no effect).
Bit 1
Px0: Write 1 to set the output data bit for Px0 (writing 0 has no effect).
Bit 0
70/232 Doc ID 16252 Rev 13
Page 71

STM32W108HB STM32W108CC STM32W108CB STM32W108CZ General-purpose input/outputs
8.5.7 Port x wakeup monitor register (GPIO_PxWAKE)
Address offset: 0xBC08 (GPIO_PAWAKE), 0xBC0C (GPIO_PBWAKE)
and 0xBC10 (GPIO_PCWAKE)
Reset value: 0x0000 0000
Table 33. Port x wakeup monitor register (GPIO_PxWAKE)
31 30 29 28 27 26 25 24 23 22 21 20 19 18 17 16
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Reserved
Reserved
Px7: Write 1 to enable wakeup monitoring of Px7.
Bit 7
Px6: Write 1 to enable wakeup monitoring of Px6.
Bit 6
Px5: Write 1 to enable wakeup monitoring of Px5.
Bit 5
Px4: Write 1 to enable wakeup monitoring of Px4.
Bit 4
Px3: Write 1 to enable wakeup monitoring of Px3.
Bit 3
Px2: Write 1 to enable wakeup monitoring of Px2.
Bit 2
Px1: Write 1 to enable wakeup monitoring of Px1.
Bit 1
Px0: Write 1 to enable wakeup monitoring of Px0.
Bit 0
Px7 Px6 Px5 Px4 Px3 Px2 Px1 Px0
rw rw rw rw rw rw rw rw
8.5.8 GPIO wakeup filtering register (GPIO_WAKEFILT)
Address offset: 0xBC0C
Reset value: 0x0000 0000
Table 34. GPIO wakeup filtering register (GPIO_WAKEFILT)
31 30 29 28 27 26 25 24 23 22 21 20 19 18 17 16
Reserved
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Reserved
IRQD_WAKE_FILTER: Enable filter on GPIO wakeup source IRQD.
Bit 3
SC2_WAKE_FILTER: Enable filter on GPIO w
Bit 2
SC1_WAKE_FILTER: Enable filter on GPIO w
Bit 1
GPIO_WAKE_FILTER: Enable filter on GPIO wak
Bit 0
akeup source SC2 (PA2).
akeup source SC1 (PB2).
eup sources enabled by the GPIO_PnWAKE
IRQD_
WAKE
_FILTE
SC2_
WAKE
_FILTE
R
rw rw rw rw
SC1_
GPIO_
WAKE
WAKE
_FILTE
R
_FILTE
R
registers.
Doc ID 16252 Rev 13 71/232
R
Page 72

General-purpose input/outputs STM32W108HB STM32W108CC STM32W108CB STM32W108CZ
8.5.9 Interrupt x select register (GPIO_IRQxSEL)
Address offset: 0xBC14 (GPIO_IRQCSEL) and 0xBC18 (GPIO_IRQDSEL)
Reset value: 0x0000 000F (GPIO_IRQCSEL) and 0x0000 0010 (GPIO_IRQDSEL)
Table 35. Interrupt x select register (GPIO_IRQxSEL)
31 30 29 28 27 26 25 24 23 22 21 20 19 18 17 16
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Reserved
Bits [4:0]
Reserved
SEL_GPIO: Pin assigned to IRQx.
0x00: PA0. 0x0D: PB5.
0x01: PA1. 0x0E: PB6.
0x02: PA2. 0x0F: PB7.
0x03: PA3. 0x10: PC0.
0x04: PA4. 0x11: PC1.
0x05: PA5. 0x12: PC2.
0x06: PA6. 0x13: PC3.
0x07: PA7. 0x14: PC4.
0x08: PB0. 0x15: PC5.
0x09: PB1. 0x16: PC6.
0x0A: PB2. 0x17: PC7.
0x0B: PB3. 0x18 - 0x1F: Reserved.
0x0C: PB4.
SEL_GPIO
rw
72/232 Doc ID 16252 Rev 13
Page 73

STM32W108HB STM32W108CC STM32W108CB STM32W108CZ General-purpose input/outputs
8.5.10 GPIO interrupt x configuration register (GPIO_INTCFGx)
Address offset: 0xA860 (GPIO_INTCFGA), 0xA864 (GPIO_INTCFGB),
0xA868 (GPIO_INTCFGC) and 0xA86C (GPIO_INTCFGD)
Reset value: 0x0000 0000
Table 36. GPIO interrupt x configuration register (GPIO_INTCFGx)
31 30 29 28 27 26 25 24 23 22 21 20 19 18 17 16
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Reserved
GPIO_I
Reserved
GPIO_INTFILT: Set this bit to enable digital filtering on IRQx.
Bit [8]
NTFILT
rw rw
GPIO_INTMOD
Reserved
Bits [7:5]
GPIO_INTMOD: IRQx triggering mode.
0x0: Disabled.0x4: Active high level triggered.
0x1: Rising edge triggered.0x5: Active low level triggered.
0x2: Falling edge triggered.0x6, 0x7: Reserved.
0x3: Rising and falling edge triggered.
8.5.11 GPIO interrupt flag register (INT_GPIOFLAG)
Address offset: 0xA814
Reset value: 0x0000 0000
Table 37. GPIO interrupt flag register (INT_GPIOFLAG)
31 30 29 28 27 26 25 24 23 22 21 20 19 18 17 16
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Reserved
INT_IRQDFLAG: IRQD interrupt pending.
Bit 3
INT_IRQCFLAG: IRQC interr
Bit 2
INT_IRQBFLAG: IRQB interrupt pending.
Bit 1
Reserved
upt pending.
INT_IR
INT_IR
QDFLA
G
rw rw rw rw
QCFLA
G
INT_IR
QBFLA
G
INT_IR
QAFLA
G
INT_IRQAFLAG: IRQA interrupt pending.
Bit 0
Doc ID 16252 Rev 13 73/232
Page 74

General-purpose input/outputs STM32W108HB STM32W108CC STM32W108CB STM32W108CZ
8.5.12 GPIO debug configuration register (GPIO_DBGCFG)
Address offset: 0xBC00
Reset value: 0x0000 0010
Table 38. GPIO debug configuration register (GPIO_DBGCFG)
31 30 29 28 27 26 25 24 23 22 21 20 19 18 17 16
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Reserved
GPIO_
Reserved
GPIO_DEBUGDIS: Disable debug interface override of normal GPIO configuration.
Bit 5
DEBUG
GPIO
_EXT
REGE
DIS
rw rw
N
0: Permit debug interface to be active.
1: Disable debug interface (if it is not already active).
GPIO_EXTREGEN: : Disable REG_EN override o
Bit 4
f PA7's normal GPIO configuration.
0: Enable override.
1: Disable override.
Bit 3
Reserved: this bit can change during normal operati
on. When writing to GPIO_DBGCFG, the
value of this bit must be preserved.
Re-served
74/232 Doc ID 16252 Rev 13
Page 75

STM32W108HB STM32W108CC STM32W108CB STM32W108CZ General-purpose input/outputs
8.5.13 GPIO debug status register (GPIO_DBGSTAT)
Address offset: 0xBC04
Reset value: 0x0000 0000
Table 39. GPIO debug status register (GPIO_DBGSTAT)
31 30 29 28 27 26 25 24 23 22 21 20 19 18 17 16
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Reserved
GPIO_
Reserved
GPIO_BOOTMODE: The state of the nBOOTMODE signal sampled at the end of reset.
Bit 3
BOOT
MODE
rrr
0: nBOOTMODE was not asserted (it read high).
1: nBOOTMODE was asserted (it read low).
Bit 1
GPIO_FORCEDBG: Status of de
bugger interface.
0: Debugger interface not forced active.
1: Debugger interface forced active by debugger cable.
Bit 0
GPIO_SWEN: Status of Serial Wire interface.
0: Not enabled by SWJ-DP.
1: Enabled by SWJ-DP.
Reserv
ed
GPIO_
FORC
EDBG
GPIO_
SWEN
Doc ID 16252 Rev 13 75/232
Page 76

Serial interfaces STM32W108HB STM32W108CC STM32W108CB STM32W108CZ
9 Serial interfaces
9.1 Functional description
The STM32W108 has two serial controllers, SC1 and SC2, which provide several options
for full-duplex synchronous and asynchronous serial communications.
● SPI (Serial Peripheral Interface), master or slave
2
● I
C (Inter-Integrated Circuit), master only
● UART (Universal Asynchronous Receiver/Transmitter), SC1 only
● Receive and transmit FIFOs and DMA channels, SPI and UART modes
Receive and transmit FIFOs allow faster data speeds using byte-at-a-time interrupts. For the
highest SPI and UART speeds, dedicated receive and transmit DMA channels reduce CPU
loading and extend the allowable time to service a serial controller interrupt. Polled
operation is also possible using direct access to the serial data registers.
the components of the serial controllers.
Note: The notation SCx means that either SC1 or SC2 may be substituted to form the name of a
specific register or field within a register.
Figure 10 shows
76/232 Doc ID 16252 Rev 13
Page 77

STM32W108HB STM32W108CC STM32W108CB STM32W108CZ Serial interfaces
SC1_UARTSTAT
SCx_SPISTAT
SCx_SPICFG
SCx_I2CSTAT
SCx_I2CCTRL1
SCx_I2CCTRL2
SCx_RATELIN/EXP
SC1_UARTPER/FRAC Baud Generator
Clock Generator
UART
Controller
I2C Master
Controller
SCx_DATA
SPI Master
Controller
UART
SPI
I
2
C
OFF
SCx_MODE
0
1
2
3
nRTS
nCTS
SCLK
MOSI
MISO
SDA
TXD
RXD
RX-FIFO
TX-FIFO
SCx_TX/RXBEGA/B
SCx_RXCNTA/B SCx_TXCNT
SCx_DMASTAT
SCx_DMACTRL
SCx_RXERRA/B
DMA
Controller
SCL
INT_SCxFLAG
INT_SCxCFG
SC1_UARTCFG
SCx Interrupt
SCx TX DMA
channel
SCx RX DMA
channel
SCx_TX/RXENDA/B
SPI Slave
Controller
nSSEL
SCx_RXCNTSAVED
SC1
only
Figure 10. Serial controller block diagram
9.2 Configuration
Before using a serial controller, it should be configured and initialized as follows:
1. Set up the parameters specific to the operating mode (master/slave for SPI, baud rate
for UART, etc.).
2. Configure the GPIO pins used by the serial controller as shown in Ta bl e 40 and
Ta bl e 41. Section 8.1.2: Configuration on page 59 shows how to configure GPIO
pins."If using DMA, set up the DMA and buffers. This is described fully in Section 9.13:
DMA channel registers on page 105.
3. If using interrupts, select edge- or level-triggered interrupts with the SCx_INTMODE
register, enable the desired second-level interrupt sources in the INT_SCxCFG
register, and finally enable the top-level SCx interrupt in the NVIC.
4. Write the serial interface operating mode - SPI, I2C, or UART - to the SCx_MODE
register.
Doc ID 16252 Rev 13 77/232
Page 78

Serial interfaces STM32W108HB STM32W108CC STM32W108CB STM32W108CZ
Table 40. SC1 GPIO usage and configuration
Interface PB1 PB2 PB3 PB4
SPI - Master
SPI - Slave
I2C - Master
UART
1. used if RTS/CTS hardware flow control is enabled.
Table 41. SC2 GPIO usage and configuration
SC1MOSI alternate
utput (push-pull)
o
SC1MISO alternate
o
utput (push-pull)
SC1SDA alternate
utput (open-drain)
o
TXD alternate
utput (push-pull)
o
SC1MISO input
SC1MOSI input SC1SCLK input SC1nSSEL input
SC1SCL alternate
output (open-drain)
RXD input nCTS input
SC1SCLK alternate
utput (push-pull);
o
(not used)
special SCLK mode
(not used) (not used)
(1)
nRTS alternate
output (push-pull)
(1)
Interface PA0 PA1 PA2 PA3
SC2SCLK
nate Output
Alter
(push-pull), special
SCLK mode
(not used)
SPI - Master
SC2MOSI
Alternate Output
(push-pull)
SC2MISO Input
SC2MOSI
SPI - Slave
nate Output
Alter
SC2MISO Input SC2SCLK Input SC2nSSEL Input
(push-pull)
2
C - Master (not used)
I
SC2SDA Alternate
tput (open-drain)
Ou
SC2SCL Alternate
Output (open-drain)
(not used)
9.3 SPI master mode
The SPI master controller has the following features:
● Full duplex operation
● Programmable clock frequency (6 MHz max. for STM32W108xB and 12 MHz max for
STM32W108CC and STM32W108CZ)
● Programmable clock polarity and phase
● Selectable data shift direction (either LSB or MSB first)
● Receive and transmit FIFOs
● Receive and transmit DMA channels
The SPI master controller uses the three signals:
● MOSI (Master Out, Slave In) - outputs serial data from the master
● MISO (Master In, Slave Out) - inputs serial data from a slave
● SCLK (Serial Clock) - outputs the serial clock used by MOSI and MISO
The GPIO pins used for these signals are shown in Tab le 42. Additional outputs may be
needed to drive the nSSEL signals on
78/232 Doc ID 16252 Rev 13
slave devices.
Page 79

STM32W108HB STM32W108CC STM32W108CB STM32W108CZ Serial interfaces
Rate
12MHz
LIN 1+()x2
EXP
-----------------------------------------=
Table 42. SPI master GPIO usage
Parameter MOSI MISO SCLK
Direction
GPIO
configu
SC1 pin
SC2 pin
ration
Output Input Output
Alternate Output
(push-pull)
PB1 PB2 PB3
PA 0 PA 1 PA 2
9.3.1 Setup and configuration
Both serial controllers, SC1 and SC2, support SPI master mode. SPI master mode is
enabled by the following register settings:
● The serial controller mode register (SCx_MODE) is ‘2’.
● The SC_SPIMST bit in the SPI configuration register (SCx_SPICFG) is ‘1’.
● The SC_TWIACK bit in the I
The SPI serial clock (SCLK) is produced by a programmable clock generator. The serial
cloc
k is produced by dividing down 12 MHz according to this equation:
EXP is the value written to the SCx_RATEEXP register and LIN is the value written to the
SCx_RATELIN register. The SPI master mode clock may not exceed 6 Mbps, so EXP and
LIN cannot both be zero.
Input
2
C control register (SCx_TWICTRL2) is ‘1’.
Alternate Output (push-pull)
Special SCLK mode
The SPI master controller supports various frame formats depending upon the clock polarity
SC_SPIPOL), clock phase (SC_SPIPHA), and direction of data (SC_SPIORD) (see SPI
(
master mode formats on page 80). The bits SC_SPIPOL, SC_SPIP
HA, and SC_SPIORD
are defined within the SCx_SPICFG register.
Doc ID 16252 Rev 13 79/232
Page 80

Serial interfaces STM32W108HB STM32W108CC STM32W108CB STM32W108CZ
SCLK
out
MOSI
out
MISO
in
RX[7]
TX[7]
RX[6]
TX[6 ]
RX[5]
TX[ 5]
RX[4]
TX[4]
RX[3]
TX[3 ]
RX[2]
TX[2 ]
RX[1]
TX[ 1]
RX[0]
TX[0]
MOSI
out
MISO
in
RX[7]
TX[7]
RX[6]
TX[6 ]
RX[5]
TX[5]
RX[4]
TX[4]
RX[3]
TX[3 ]
RX[2]
TX[ 2]
RX[1]
TX[1]
RX[0]
TX[0 ]
SCLK
out
MOSI
out
MISO
in
RX[7]
TX[7 ]
RX[6]
TX[6]
RX[5]
TX[5]
RX[4]
TX[4 ]
RX[3]
TX[3]
RX[2]
TX[2]
RX[1]
TX[1 ]
RX[0]
TX [0]
SCL K
out
MOSI
out
MISO
in
RX[7]
TX[7]
RX[6]
TX[6 ]
RX[5]
TX[5]
RX[4]
TX[4]
RX[3]
TX [3]
RX[2]
TX[2]
RX[1]
TX[1]
RX[0]
TX[0 ]
SCLK
out
Table 43. SPI master mode formats
SCx_SPICFG
(1)
MST ORD PHA POL
1000
1001
1010
1011
Frame formatsSC_SPIxxx
11- -
Same as above except data is sent LSB first instead of MSB first.
1. The notation xxx means that the corresponding column header below is inserted to form the field name.
9.3.2 Operation
Characters transmitted and received by the SPI master controller are buffered in transmit
and receive FIFOs that are both 4 entries deep. When software writes a character to the
SCx_DATA register, the character is pushed onto the transmit FIFO. Similarly, when
software reads from the SCx_DATA register, the character returned is pulled from the
receive FIFO. If the transmit and receive DMA channels are used, they also write to and
read from the transmit and receive FIFOs.
When the transmit FIFO and the serializer are both empty, writing a character to the transmit
FO clears the SC_SPITXIDLE bit in the SCx_SPISTAT register. This indicates that some
FI
characters have not yet been transmitted. If characters are written to the transmit FIFO until
it is full, the SC_SPITXFREE bit in the SCx_SPISTAT register is cleared. Shifting out a
character to the MOSI pin sets the SC_SPITXFREE bit in the SCx_SPISTAT register. When
the transmit FIFO empties and the last character has been shifted out, the SC_SPITXIDLE
bit in the SCx_SPISTAT register is set.
80/232 Doc ID 16252 Rev 13
Page 81

STM32W108HB STM32W108CC STM32W108CB STM32W108CZ Serial interfaces
Characters received are stored in the receive FIFO. Receiving characters sets the
SC_SPIRXVAL bit in the SCx_SPISTAT register, indicating that characters can be read from
the receive FIFO. Characters received while the receive FIFO is full are dropped, and the
SC_SPIRXOVF bit in the SCx_SPISTAT register is set. The receive FIFO hardware
generates the INT_SCRXOVF interrupt, but the DMA register will not indicate the error
condition until the receive FIFO is drained. Once the DMA marks a receive error, two
conditions will clear the error indication: setting the appropriate SC_TX/RXDMARST bit in
the SCx_DMACTRL register, or loading the appropriate DMA buffer after it has unloaded.
To receive a character, you must transmit a character. If a long stream of receive characters
is expected, a long sequence of dummy transmit characters must be generated. To avoid
software or transmit DMA initiating these transfers and consuming unnecessary bandwidth,
the SPI serializer can be instructed to retransmit the last transmitted character or to transmit
a busy token (0xFF), which is determined by the SC_SPIRPT bit in the SCx_SPICFG
register. This functionality can only be enabled or disabled when the transmit FIFO is empty
and the transmit serializer is idle, indicated by a cleared SC_SPITXIDLE bit in the
SCx_SPISTAT register.
Every time an automatic character transmission starts, a transmit underrun is detected as
there is no data in transmit FIFO, and the INT_SCTXUND bit in the INT_SC2FLAG register
is set. After automatic character transmission is disabled, no more new characters are
received. The receive FIFO holds characters just received.
Note: The Receive DMA complete event does not always mean the receive FIFO is empty.
The DMA Channels section describes how to configure and use the serial receive and
transmit DMA channels.
9.3.3 Interrupts
SPI master controller second level interrupts are generated by the following events:
● Transmit FIFO empty and last character shifted out (depending on SCx_INTMODE,
either the 0 to 1 transition or the high level of SC_SPITXIDLE)
● Transmit FIFO changed from full to not full (depending on SCx_INTMODE, either the 0
to 1 transition or the high level of SC_SPITXFREE)
● Receive FIFO changed from empty to not empty (depending on SCx_INTMODE, either
the 0 to 1 transition or the high level of SC_SPIRXVAL)
● Transmit DMA buffer A/B complete (1 to 0 transition of SC_TXACTA/B)
● Receive DMA buffer A/B complete (1 to 0 transition of SC_RXACTA/B)
● Received and lost character while receive FIFO was full (receive overrun error)
● Transmitted character while transmit FIFO was empty (transmit underrun error)
To enable CPU interrupts, set the desired interrupt bits in the second level INT_SCxCFG
register, and enable the top level SCx interrupt in the NVIC by writing the INT_SCx bit in the
INT_CFGSET register.
Doc ID 16252 Rev 13 81/232
Page 82

Serial interfaces STM32W108HB STM32W108CC STM32W108CB STM32W108CZ
9.4 SPI slave mode
Both SC1 and SC2 SPI controllers include a SPI slave controller with these features:
● Full duplex operation
● Up to 5 Mbps data transfer rate
● Programmable clock polarity and clock phase
● Selectable data shift direction (either LSB or MSB first)
● Slave select input
The SPI slave controller uses four signals:
● MOSI (Master Out, Slave In) - inputs serial data from the master
● MISO (Master In, Slave Out) - outputs serial data to the master
● SCLK (Serial Clock) - clocks data transfers on MOSI and MISO
● nSSEL (Slave Select) - enables serial communication with the slave
The GPIO pins that can be assigned to these signals are shown in Ta bl e 44.
Table 44. SPI slave GPIO usage
Parameter MOSI MISO SCLK nSSEL
Direction
GPIO
configu
SC1 pin
SC2 pin
ration
Input Output Input Input
Input
PB2 PB1 PB3 PB4
PA 0 PA 1 PA 2 PA3
9.4.1 Setup and configuration
Both serial controllers, SC1 and SC2, support SPI slave mode. SPI slave mode is enabled
by the following register settings:
● The serial controller mode register, SCx_MODE, is ‘2’.
● The SC_SPIMST bit in the SPI configuration register, SCx_SPICFG, is ‘0’.
The SPI slave controller receives its clock from an external SPI master device and supports
r
ates up to 5 Mbps.
The SPI slave controller supports various frame formats depending upon the clock polarity
(
SC_SPIPOL), clock phase (SC_SPIPHA), and direction of data (SC_SPIORD) (see Table 8
6). The SC_SPIPOL, SC_SPIPHA, and SC_SPIORD bits are defined within the
SCx_SPICFG registers.
Alter
nate Output
(push-pull)
Input Input
82/232 Doc ID 16252 Rev 13
Page 83

STM32W108HB STM32W108CC STM32W108CB STM32W108CZ Serial interfaces
TX[7]
RX[7]
TX[6]
RX[6]
TX [5]
RX[5]
TX[4]
RX[4]
TX[3]
RX[3]
TX[2]
RX[2]
TX[1 ]
RX[1]
TX[ 0]
RX[0]
nSSEL
SCLK
in
MOSI
in
MISO
out
TX[7]
RX[7]
TX[6]
RX[6]
TX[5 ]
RX[5]
TX[4]
RX[4]
TX[3]
RX[3]
TX[2 ]
RX[2]
TX[ 1]
RX[1]
TX[0]
RX[0]
SCLK
in
MOSI
in
MISO
out
TX[7]
RX[7]
TX[6]
RX[6]
TX[5 ]
RX[5]
TX[4]
RX[4]
TX[3]
RX[3]
TX [2]
RX[2]
TX[1]
RX[1]
TX[0]
RX[0]
nSSE L
SCLK
in
MOSI
in
MISO
out
TX[ 7]
RX[7]
TX[6]
RX[6]
TX[5 ]
RX[5]
TX[4]
RX[4]
TX[3]
RX[3]
TX[2 ]
RX[2]
TX[ 1]
RX[1]
TX[0]
RX[0]
nSSEL
MOSI
in
MISO
out
SCLK
in
Table 45. SPI slave mode formats
SCx_SPICFG
(1)
MST ORD PHA POL
0000
0001
0010
Frame formatSC_SPIxxx
0011
01 - -
1. The notation xxx means that the corresponding column header below is inserted to form the field name.
Same as above except LSB first instead of MSB first.
9.4.2 Operation
When the slave select (nSSEL) signal is asserted by the master, SPI transmit data is driven
to the output pin MISO, and SPI data is received from the input pin MOSI. The nSSEL pin
has to be asserted to enable the transmit serializer to drive data to the output signal MISO.
A falling edge on nSSEL resets the SPI slave shift registers.
Characters transmitted and received by the SPI slave controller are buffered in the transmit
nd receive FIFOs that are both 4 entries deep. When software writes a character to the
a
SCx_DATA register, it is pushed onto the transmit FIFO. Similarly, when software reads from
the SCx_DATA register, the character returned is pulled from the receive FIFO. If the
transmit and receive DMA channels are used, the DMA channels also write to and read from
the transmit and receive FIFOs.
Doc ID 16252 Rev 13 83/232
Page 84

Serial interfaces STM32W108HB STM32W108CC STM32W108CB STM32W108CZ
Characters received are stored in the receive FIFO. Receiving characters sets the
SC_SPIRXVAL bit in the SCx_SPISTAT register, to indicate that characters can be read
from the receive FIFO. Characters received while the receive FIFO is full are dropped, and
the SC_SPIRXOVF bit in the SCx_SPISTAT register is set. The receive FIFO hardware
generates the INT_SCRXOVF interrupt, but the DMA register will not indicate the error
condition until the receive FIFO is drained. Once the DMA marks a receive error, two
conditions will clear the error indication: setting the appropriate SC_TX/RXDMARST bit in
the SCx_DMACTRL register, or loading the appropriate DMA buffer after it has unloaded.
Receiving a character causes the serial transmission of a character pulled from the transmit
FIFO. When the transmit FIFO is empty, a transmit underrun is detected (no data in transmit
FIFO) and the INT_SCTXUND bit in the INT_SCxFLAG register is set. Because no
character is available for serialization, the SPI serializer retransmits the last transmitted
character or a busy token (0xFF), determined by the SC_SPIRPT bit in the SCx_SPICFG
register.
When the transmit FIFO and the serializer are both empty, writing a character to the transmit
FIFO clears the SC_SPITXIDLE bit in the SCx_SPISTAT register. This indicates that not all
characters have been transmitted. If characters are written to the transmit FIFO until it is full,
the SC_SPITXFREE bit in the SCx_SPISTAT register is cleared. Shifting out a transmit
character to the MISO pin causes the SC_SPITXFREE bit in the SCx_SPISTAT register to
get set. When the transmit FIFO empties and the last character has been shifted out, the
SC_SPITXIDLE bit in the SCx_SPISTAT register is set.
The SPI slave controller must guarantee that there is time to move new transmit data from
the transmit FIFO into the hardware serializer. To provide sufficient time, the SPI slave
controller inserts a byte of padding at the start of every new string of transmit data. After
slave select asserts and the SC_SPIRXVAL bit in the SCx_SPISTAT register gets set at
least once, the following operation holds true until slave select deasserts. Whenever the
transmit FIFO is empty and data is placed into the transmit FIFO, either manually or through
DMA, the SPI hardware inserts a byte of padding onto the front of the transmission as if this
byte was placed there by software. The value of the byte of padding that is inserted is
selected by the SC_SPIRPT bit in the SCx_SPICFG register.
9.4.3 DMA
The DMA Channels section describes how to configure and use the serial receive and
transmit DMA channels.
When using the receive DMA channel and nSSEL transitions to the high (deasserted) state,
the active buffer's receive DMA count register (SCx_RXCNTA/B) is saved in the
SCx_RXCNTSAVED register. SCx_RXCNTSAVED is only written the first time nSSEL goes
high after a buffer has been loaded. Subsequent rising edges set a status bit but are
otherwise ignored. The 3-bit field SC_RXSSEL in the SCx_DMASTAT register records what,
if anything, was saved to the SCx_RXCNTSAVED register, and whether or not another
rising edge occurred on nSSEL.
84/232 Doc ID 16252 Rev 13
Page 85

STM32W108HB STM32W108CC STM32W108CB STM32W108CZ Serial interfaces
9.4.4 Interrupts
SPI slave controller second level interrupts are generated on the following events:
● Transmit FIFO empty and last character shifted out (depending on SCx_INTMODE,
either the 0 to 1 transition or the high level of SC_SPITXIDLE)
● Transmit FIFO changed from full to not full (depending on SCx_INTMODE, either the 0
to 1 transition or the high level of SC_SPITXFREE)
● Receive FIFO changed from empty to not empty (depending on SCx_INTMODE, either
the 0 to 1 transition or the high level of SC_SPIRXVAL)
● Transmit DMA buffer A/B complete (1 to 0 transition of SC_TXACTA/B)
● Receive DMA buffer A/B complete (1 to 0 transition of SC_RXACTA/B)
● Received and lost character while receive FIFO was full (receive overrun error)
● Transmitted character while transmit FIFO was empty (transmit underrun error)
To enable CPU interrupts, set desired interrupt bits in the second level INT_SCxCFG
r
egister, and also enable the top level SCx interrupt in the NVIC by writing the INT_SCx bit
in the INT_CFGSET register.
9.5 Inter-integrated circuit interfaces (I2C)
Both STM32W108 serial controllers SC1 and SC2 include an Inter-integrated circuit
2
interface (I
● Uses only two bidirectional GPIO pins
● Programmable clock frequency (up to 400 kHz)
● Supports both 7-bit and 10-bit addressing
● Compatible with Philips' I
The I
● SDA (Serial Data) - bidirectional serial data
● SCL (Serial Clock) - bidirectional serial clock
Ta bl e 46 lists the GPIO pins used by the SC1 and SC2 I
C) master controller with the following features:
2
C-bus slave devices
2
C master controller uses just two signals:
2
C master controllers. Because the
pins are configured as open-drain outputs, they require external pull-up resistors.
Table 46. I2C Master GPIO Usage
Parameter SDA SCL
Direction
GPIO configuration
SC1 pin
SC2 pin
Input / Output Input / Output
Alternate Output
(ope
n drain)
PB1 PB2
PA 1 PA 2
Alternate Output
(open drain)
Doc ID 16252 Rev 13 85/232
Page 86

Serial interfaces STM32W108HB STM32W108CC STM32W108CB STM32W108CZ
Rate
12MHz
LIN 1+()x2
EXP
-----------------------------------------=
9.5.1 Setup and configuration
The I2C controller is enabled by writing 3 to the SCx_MODE register. The I2C controller
operates only in master mode and supports both Standard (100 kbps) and Fast (400 kbps)
2
C modes. Address arbitration is not implemented, so multiple master applications are not
I
supported.
2
The I
C master controller's serial clock (SCL) is produced by a programmable clock
generator. SCL is produced by dividing down 12 MHz according to this equation:
EXP is the value written to the SCx_RATEEXP register and LIN is the value written to the
SCx_RATELIN register. I2C clock rate programming on page 86 shows the rate settings for
Standard-Mode I
Table 47. I2C clock rate programming
2
C (100 kbps) and Fast-Mode I2C (400 kbps) operation.
Clock rate SCx_RATELIN SCx_RATEEXP
100 kbps 14 3
375 kbps 15 1
400 kbps 14 1
Note: At 400 kbps, the Philips I2C Bus specification requires the minimum low period of SCL to be
1.3 µs, but on the STM32W108 it is 1.25 µs. If a slave device requires strict compliance with
SCL timing, the clock rate must be lowered to 375 kbps.
9.5.2 Constructing frames
The I2C master controller supports generating various frame segments by means of the
SC_TWISTART, SC_TWISTOP, SC_TWISEND, and SC_TWIRECV bits in the
SCx_TWICTRL1 registers. Figure 48 summarizes these frames.
86/232 Doc ID 16252 Rev 13
Page 87

STM32W108HB STM32W108CC STM32W108CB STM32W108CZ Serial interfaces
TWI re-s tart segment - after transmit or frame w ith NACK
SDA
out
SDA
outSLAVE
SCL
outSLAVE
SCL
out
TWI st art s egment
SDA
out
SDA
outSLAVE
SCL
outSLAVE
SCL
out
SCL
out
TX[7]TX[6]TX[5]TX[4]TX[3]TX[2]TX[1]TX[0]
SDA
out
SDA
outSLAVE
SCL
outSLAVE
(N)ACK
TWI transmit segment - after (re-)start frame
SCL
out
TX[7]TX[6]TX[5]TX[4]TX[3]TX[2]TX[1]TX[0]
SDA
out
SDA
outSLAVE
SCL
outSLAVE
(N)ACK
TWI transmit segment – after transmit with ACK
SCL
out
RX[7]RX[6]RX[5]RX[4]RX[3]RX[2]RX[1]RX[0]
SDA
out
SDA
outSLAVE
SCL
outSLAVE
(N)ACK
TWI receive segment – transmit with ACK
SCL
out
RX[7]RX[6]RX[5]RX[4]RX[3]RX[2]RX[1]RX[0]
SDA
out
SDA
outSLAVE
SCL
outSLAVE
(N)ACK
TWI rec eiv e segm ent - after rec eiv e with ACK
TWI stop segm ent - after f rame with NACK or st op
SDA
out
SDA
outSLAVE
SCL
outSLAVE
SCL
out
Table 48. I2C master frame segments
SCx_TWICTRL1
(1)
START SEND RECV STOP
1000
0100
Frame segmentsSC_TWIxxxx
0010
0001
0000
1
-
-
1
1. The notation xxx means that the corresponding column header below is inserted to form the field name.
1
1
-
-
1
1
-
No pending frame segment
-
Illegal
1
1
Doc ID 16252 Rev 13 87/232
Page 88

Serial interfaces STM32W108HB STM32W108CC STM32W108CB STM32W108CZ
RECEIVE Segment
with NACK
RECEIVE Segment
with ACK
IDLE
START Segment
STOP Segment TRANSMIT Segment
received ACK ?
NO
YES
Full I2C frames have to be constructed by software from individual I2C segments. All
necessary segment transitions are shown in
Figure 11. ACK or NACK generation of an I2C
receive frame segment is determined with the SC_TWIACK bit in the SCx_TWICTRL2
register.
Figure 11. I2C segment transitions
Generation of a 7-bit address is accomplished with one transmit segment. The upper 7 bits
of the transmitted character contain the 7-bit address. The remaining lower bit contains the
command type ("read" or "write").
Generation of a 10-bit address is accomplished with two transmit segments. The upper 5
bits of the first transmit character must be set to 0x1E. The next 2 bits are for the 2 most
significant bits of the 10-bit address. The remaining lower bit contains the command type
("read" or "write"). The second transmit segment is for the remaining 8 bits of the 10-bit
address.
Transmitted and received characters are accessed through the SCx_DATA register.
To initiate (re)start and stop segments, set the SC_TWISTART or SC_TWISTOP bit in the
SCx_TWICTRL1 register, then wait until the bit is clear. Alternatively, the SC_TWICMDFIN
bit in the SCx_TWISTAT can be used for waiting.
To initiate a transmit segment, write the data to the SCx_DATA data register, then set the
SC_TWISEND bit in the SCx_TWICTRL1 register, and finally wait until the bit is clear.
Alternatively the SC_TWITXFIN bit in the SCx_TWISTAT register can be used for waiting.
To initiate a receive segment, set the SC_TWIRECV bit in the SCx_TWICTRL1 register, wait
until it is clear, and then read from the SCx_DATA register. Alternatively, the SC_TWIRXFIN
bit in the SCx_TWISTAT register can be used for waiting. Now the SC_TWIRXNAK bit in the
SCx_TWISTAT register indicates if a NACK or ACK was received from an I
2
C slave device.
88/232 Doc ID 16252 Rev 13
Page 89

STM32W108HB STM32W108CC STM32W108CB STM32W108CZ Serial interfaces
9.5.3 Interrupts
I2C master controller interrupts are generated on the following events:
● Bus command (SC_TWISTART/SC_TWISTOP) completed (0 to 1 transition of
SC_TWICMDFIN)
● Character transmitted and slave device responded with NACK
● Character transmitted (0 to 1 transition of SC_TWITXFIN)
● Character received (0 to 1 transition of SC_TWIRXFIN)
● Received and lost character while receive FIFO was full (receive overrun error)
● Transmitted character while transmit FIFO was empty (transmit underrun error)
To enable CPU interrupts, set the desired interrupt bits in the second level INT_SCxCFG
r
egister, and enable the top level SCx interrupt in the NVIC by writing the INT_SCx bit in the
INT_CFGSET register.
9.6 Universal asynchronous receiver / transmitter (UART)
The SC1 UART is enabled by writing 1 to SC1_MODE. The SC2 serial controller does not
include UART functions.
The UART supports the following features:
● Flexible baud rate clock (300 bps to 921.6 bps)
● Data bits (7 or 8)
● Parity bits (none, odd, or even)
● Stop bits (1 or 2)
● False start bit and noise filtering
● Receive and transmit FIFOs
● Optional RTS/CTS flow control
● Receive and transmit DMA channels
The UART uses two signals to transmit and receive serial data:
● TXD (Transmitted Data) - serial data received by the STM32W108
● RXD (Received Data) - serial data sent by the STM32W108
If RTS/CTS flow control is enabled, these two signals are also used:
● nRTS (Request To Send) - indicates the STM32W108 is able to receive data RXD
● nCTS (Clear To Send) - inhibits sending data from the STM32W108 if not asserted
The GPIO pins assigned to these signals are shown in Ta bl e 49.
Table 49. UART GPIO usage
Parameter TXD RXD nCTS
Direction
GPIO configuration
SC1 pin
1. Only used if RTS/CTS hardware flow control is enabled.
Output Input Input Output
Alternate Output
ush-pull)
(p
Input Input
PB1 PB2 PB3 PB4
Doc ID 16252 Rev 13 89/232
(1)
Alternate Output
(1)
nRTS
(push-pull)
Page 90

Serial interfaces STM32W108HB STM32W108CC STM32W108CB STM32W108CZ
FN
MHz
baud+=
2
24
9.6.1 Setup and configuration
The UART baud rate clock is produced by a programmable baud generator starting from the
24 Hz clock:
The integer portion of the divisor, N, is written to the SC1_UARTPER register and the
fractional part, F, to the SC1_UARTFRAC register. Ta bl e 50 shows the values used to
generate some common baud rates and their associated clock frequency error. The UART
equires an internal clock that is at least eight times the baud rate clock, so the minimum
r
allowable setting for SC1_UARTPER is ‘8’.
Table 50. UART baud rate divisors for common baud rates
Baud rate (bits/sec) SC1_UARTPER SC1_UARTFRAC Baud rate error (%)
300 40000 0 0
2400 5000 0 0
4800 2500 0 0
9600 1250 0 0
19200 625 0 0
38400 312 1 0
57600 208 1 - 0.08
115200 104 0 + 0.16
230400 52 0 + 0.16
460800 26 0 + 0.16
921600 13 0 + 0.16
Note: The UART may receive corrupt bytes if the interbyte gap is long or there is a baud rate
mismatch between receive and transmit. The UART may detect a parity and/or framing error
on the corrupt byte, but there will not necessarily be any error detected. As a result, the
device should be operated in systems where the other side of the communication link also
uses a crystal as its timing reference, and baud rates should be selected to minimize the
baud rate mismatch to the crystal tolerance. UART protocols should contain some form of
error checking (e.g. CRC) at the packet level to detect, and retry in the event of errors.
The UART character frame format is determined by three bits in the SC1_UARTCFG
gister:
re
● SC1_UART2STP selects the number of stop bits in transmitted characters. (Only one
stop bit is ever required in received characters.) If this bit is clear, characters are
transmitted with one stop bit; if set, characters are transmitted with two stop bits.
● SC1_UARTPAR controls whether or not received and transmitted characters include a
parity bit. If SC1_UARTPAR is clear, characters do not contain a parity bit, otherwise,
characters do contain a parity bit.
● SC1_UARTODD specifies whether transmitted and received parity bits contain odd or
even parity. If this bit is clear, the parity bit is even, and if set, the parity bit is odd. Even
parity is the exclusive-or of all of the data bits, and odd parity is the inverse of the even
parity value. SC1_UARTODD has no effect if SC1_UARTPAR is clear.
90/232 Doc ID 16252 Rev 13
Page 91
STM32W108HB STM32W108CC STM32W108CB STM32W108CZ Serial interfaces
Idle tim e
Start
Bit
Data
Bit 0
Data
Bit 1
Data
Bit 2
Data
Bit 3
Data
Bit 4
Data
Bit 5
Data
Bit 6
Data
Bit 7
Pari ty
Bit
Stop
Bit
Stop
Bit
Next
Start Bi t
or
IdleTim e
UAR T Char acter Fram e Form at
(opt ional s ecti ons are i n ital ic s )
TXD
or
RXD
Receive Shift Register
SC1_DATA (read)
Transmit Shift Register
SC1_D ATA (wr ite)
RXD
TXD
Parity/Frame Errors
SC1_UARTSTAT
Rece ive FIF O
Transmit F IFO
CPU and DMA
Channel Access
A UART character frame contains, in sequence:
● The start bit
● The least significant data bit
● The remaining data bits
● If parity is enabled, the parity bit
● The stop bit, or bits, if 2 stop bits are selected.
Figure 12 shows the UART character frame format, with optional bits indicated. Depending
on the options chosen for the character frame, the length of a character frame ranges from 9
to 12 bit times.
Note that asynchronous serial data may have arbitrarily long idle periods between
characters. When idle, serial data (TXD or RXD) is held in the high state. Serial data
transitions to the low state in the start bit at the beginning of a character frame.
Figure 12. UART character frame format
9.6.2 FIFOs
Characters transmitted and received by the UART are buffered in the transmit and receive
FIFOs that are both 4 entries deep (see
SC1_DATA register, it is pushed onto the transmit FIFO. Similarly, when software reads from
the SC1_DATA register, the character returned is pulled from the receive FIFO. If the
transmit and receive DMA channels are used, the DMA channels also write to and read from
the transmit and receive FIFOs.
Figure 13. UART FIFOs
Figure 13). When software writes a character to the
Doc ID 16252 Rev 13 91/232
Page 92
Serial interfaces STM32W108HB STM32W108CC STM32W108CB STM32W108CZ
Other Device
UART Receiver
UART Transmitter
STM32W108
UART Transmitter
UART Receiver
RXD TXD
nRTS nCTS
TXD RXD
nCTS nRTS
9.6.3 RTS/CTS flow control
RTS/CTS flow control, also called hardware flow control, uses two signals (nRTS and nCTS)
in addition to received and transmitted data (see Figure 14). Flow control is used by a data
receiver to prevent buffer overflow, by signaling an external device when it is and is not
wed to transmit.
allo
Figure 14. RTS/CTS flow control connections
The UART RTS/CTS flow control options are selected by the SC1_UARTFLOW and
UARTAUTO bits in the SC1_UARTCFG register (see Tab l e 51). Whenever the
SC1_
SC1_UARTFLOW bit is set, the UART will not start transmitting a character unless nCTS is
w (asserted). If nCTS transitions to the high state (deasserts) while a character is being
lo
transmitted, transmission of that character continues until it is complete.
If the SC1_UARTAUTO bit is set, nRTS is controlled automatically by hardware: nRTS is put
to the low state (asserted) when the receive FIFO has room for at least two characters,
in
otherwise is it in the high state (unasserted). If SC1_UARTAUTO is clear, software controls
the nRTS output by setting or clearing the SC1_UARTRTS bit int the SC1_UARTCFG
register. Software control of nRTS is useful if the external serial device cannot stop
transmitting characters promptly when nRTS is set to the high state (deasserted).
Table 51. UART RTS/CTS flow control configurations
SC1_UARTCFG
FLOW AUTO RTS
0--TXD, RXD
100/1
11-
1. The notation xxx means that the corresponding column header below is inserted to form the field name.
(1)
Pins used Operating modeSC1_UARTxxx
TX D, RXD,
nCTS, nRTS
T
XD, R XD,
nCTS, nRTS
No RTS/CTS flow control
Flow control using RTS/CTS with software control of nRTS:
nRTS controlled by SC1_UARTRTS bit in SC1_UARTCFG register
Flow control using RTS/CTS with hardware control of nRTS:
nRTS is asserted if room for at least 2 characters in receive FIFO
92/232 Doc ID 16252 Rev 13
Page 93

STM32W108HB STM32W108CC STM32W108CB STM32W108CZ Serial interfaces
9.6.4 DMA
The DMA Channels section describes how to configure and use the serial receive and
transmit DMA channels.
The receive DMA channel has special provisions to record UART receive errors. When the
DMA channel transfers a character from the receive FIFO to a buffer in memory, it checks
the stored parity and frame error status flags. When an error is flagged, the
SC1_RXERRA/B register is updated, marking the offset to the first received character with a
parity or frame error. Similarly if a receive overrun error occurs, the SC1_RXERRA/B
registers mark the error offset. The receive FIFO hardware generates the INT_SCRXOVF
interrupt and DMA status register indicates the error immediately, but in this case the error
offset is 4 characters ahead of the actual overflow at the input to the receive FIFO. Two
conditions will clear the error indication: setting the appropriate SC_RXDMARST bit in the
SC1_DMACTRL register, or loading the appropriate DMA buffer after it has unloaded.
9.6.5 Interrupts
UART interrupts are generated on the following events:
● Transmit FIFO empty and last character shifted out (depending on SCx_INTMODE,
either the 0 to 1 transition or the high level of SC1_UARTTXIDLE)
● Transmit FIFO changed from full to not full (depending on SCx_INTMODE, either the 0
to 1 transition or the high level of SC1_UARTTXFREE)
● Receive FIFO changed from empty to not empty (depending on SCx_INTMODE, either
the 0 to 1 transition or the high level of SC1_UARTRXVAL)
● Transmit DMA buffer A/B complete (1 to 0 transition of SC_TXACTA/B)
● Receive DMA buffer A/B complete (1 to 0 transition of SC_RXACTA/B)
● Character received with parity error
● Character received with frame error
● Character received and lost when receive FIFO was full (receive overrun error)
To enable CPU interrupts, set the desired interrupt bits in the second level INT_SCxCFG
register, and enable the top level SCx interrupt in the NVIC by writing the INT_SCx bit in the
INT_CFGSET register.
9.7 Direct memory access (DMA) channels
The STM32W108 serial DMA channels enable efficient, high-speed operation of the SPI
and UART controllers by reducing the load on the CPU as well as decreasing the frequency
of interrupts that it must service. The transmit and receive DMA channels can transfer data
between the transmit and receive FIFOs and the DMA buffers in main memory as quickly as
it can be transmitted or received. Once software defines, configures, and activates the DMA,
it only needs to handle an interrupt when a transmit buffer has been emptied or a receive
buffer has been filled. The DMA channels each support two memory buffers, labeled A and
B, and can alternate ("ping-pong") between them automatically to allow continuous
communication without critical interrupt timing.
Doc ID 16252 Rev 13 93/232
Page 94

Serial interfaces STM32W108HB STM32W108CC STM32W108CB STM32W108CZ
Note: DMA memory buffer terminology:
● load - make a buffer available for the DMA channel to use
● pending - a buffer loaded but not yet active
● active - the buffer that will be used for the next DMA transfer
● unload - DMA channel action when it has finished with a buffer
● idle - a buffer that has not been loaded, or has been unloaded
To use a DMA channel, software should follow these steps:
● Reset the DMA channel by setting the SC_TXDMARST (or SC_RXDMARST) bit in the
SCx_DMACTRL register.
● Set up the DMA buffers. The two DMA buffers, A and B, are defined by writing the start
address to SCx_TXBEGA/B (or SCx_RXBEGA/B) and the (inclusive) end address to
SCx_TXENDA/B (or SCx_RXENDA/B). Note that DMA buffers must be in RAM.
● Configure and initialize SCx for the desired operating mode.
● Enable second level interrupts triggered when DMA buffers unload by setting the
INT_SCTXULDA/B (or INT_SCRXULDA/B) bits in the INT_SCxFLAG register.
● Enable top level NVIC interrupts by setting the INT_SCx bit in the INT_CFGSET
register.
● Start the DMA by loading the DMA buffers by setting the SC_TXLODA/B (or
SC_RXLODA/B) bits in the SCx_DMACTRL register.
A DMA buffer's end address, SCx_TXENDA/B (or SCx_RXENDA/B), can be written while
the buffer is loaded or active. This is useful for receiving messages that contain an initial
byte count, since it allows software to set the buffer end address at the last byte of the
message.
As the DMA channel transfers data between the transmit or receive FIFO and a memory
buffer, the DMA count register contains the byte offset from the start of the buffer to the
address of the next byte that will be written or read. A transmit DMA channel has a single
DMA count register (SCx_TXCNT) that applies to whichever transmit buffer is active, but a
receive DMA channel has two DMA count registers (SCx_RXCNTA/B), one for each receive
buffer. The DMA count register contents are preserved until the corresponding buffer, or
either buffer in the case of the transmit DMA count, is loaded, or until the DMA is reset.
The receive DMA count register may be written while the corresponding buffer is loaded. If
the buffer is not loaded, writing the DMA count register also loads the buffer while
preserving the count value written. This feature can simplify handling UART receive errors.
The DMA channel stops using a buffer and unloads it when the following is true:
(DMA buffer start address + DMA buffer count) > DMA buffer end address
Typically a transmit buffer is unloaded after all its data has been sent, and a receive buffer is
unloaded after it is filled with data, but writing to the buffer end address or buffer count
registers can also cause a buffer to unload early.
Serial controller DMA channels include additional features specific to the SPI and UART
operation and are described in those sections.
94/232 Doc ID 16252 Rev 13
Page 95

STM32W108HB STM32W108CC STM32W108CB STM32W108CZ Serial interfaces
9.8 Serial controller registers
9.8.1 Serial mode register (SCx_MODE)
Address offset: 0xC854 (SC1_MODE) and 0xC054 (SC2_MODE)
Reset value: 0x0000 0000
Table 52. Serial mode register (SCx_MODE)
31 30 29 28 27 26 25 24 23 22 21 20 19 18 17 16
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Reserved
SC_MODE
Bits [1:0]
Reserved
SC_MODE: Serial controller mode.
0: Disabled. 2: SPI mode.
2
1: UART mode (valid only for SC1). 3: I
C mode.
9.8.2 Serial controller interrupt flag register (INT_SCxFLAG)
Address offset: 0xA808 (INT_SC1FLAG) and 0xA80C (INT_SC2FLAG)
Reset value: 0x0000 0000
Table 53. Serial controller interrupt flag register (INT_SCxFLAG)
31 30 29 28 27 26 25 24 23 22 21 20 19 18 17 16
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Reser
ved
Reserved
INT_S
INT_S
INT_S
INT_S
INT_S
C1PA
C1FR
CTXU
RERR
MERR
rw rw rw rw rw rw rw rw rw rw rw rw rw rw rw
LDB
CTXU
LDA
CRXU
LDB
INT_S
CRXU
LDA
INT_S
CNAK
INT_S
CCMD
FIN
INT_S
CTXFI
N
INT_SC
RXFIN
INT_S
CTXU
ND
INT_S
CRXO
VF
INT_S
CTXID
LE
INT_S
CTXFR
EE
Bit 14 INT_SC1PARERR: Parity error received (UART) interrupt pending.
rw
INT_S
CRXVA
L
Bit 13 INT_SC1FRMERR: Frame error received (UART) interrupt pending.
Bit 12 INT_SCTXULDB: DMA transmit buffer B unloaded interrupt pending.
Bit 11 INT_SCTXULDA: DMA transmit buffer A unloaded interrupt pending.
Bit 10 INT_SCRXULDB: DMA receive buffer B unloaded interrupt pending.
Bit 9 INT_SCRXULDA: DMA receive buffer A unloaded interrupt pending.
2
Bit 8 INT_SCNAK: NACK received (I
Bit 7 INT_SCCMDFIN: START/STOP command complete (I
Bit 6 INT_SCTXFIN: Transmit operation complete (I
Bit 5 INT_SCRXFIN: Receive operation complete (I
C) interrupt pending.
2
C) interrupt pending.
2
C) interrupt pending.
2
C) interrupt pending.
Doc ID 16252 Rev 13 95/232
Page 96

Serial interfaces STM32W108HB STM32W108CC STM32W108CB STM32W108CZ
Bit 4 INT_SCTXUND: Transmit buffer underrun interrupt pending.
Bit 3 INT_SCRXOVF: Receive buffer overrun interrupt pending.
Bit 2 INT_SCTXIDLE: Transmitter idle interrupt pending.
Bit 1 INT_SCTXFREE: Transmit buffer free interrupt pending.
Bit 0 INT_SCRXVAL: Receive buffer has data interrupt pending.
9.8.3 Serial controller interrupt configuration register (INT_SCxCFG)
Address offset: 0xA848 (INT_SC1CFG) and 0xA84C (INT_SC2CFG)
Reset value: 0x0000 0000
Table 54. Serial controller interrupt configuration register (INT_SCxCFG)
31 30 29 28 27 26 25 24 23 22 21 20 19 18 17 16
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Reser
ved
Reserved
INT_S
INT_S
INT_S
INT_S
INT_S
C1PA
C1FR
CTXU
RERR
MERR
rw rw rw rw rw rw rw rw rw rw rw rw rw rw rw
INT_SC1PARERR: Parity error received (UART) interrupt enable.
Bit 14
INT_SC1FRMERR: Frame error received (UART) interrupt enable.
Bit 13
INT_SCTXULDB: DMA transmit buffer B unloaded interrupt enable.
Bit 12
LDB
CTXU
LDA
CRXU
LDB
INT_S
CRXU
LDA
INT_S
CNAK
INT_S
CCMD
FIN
INT_S
CTXFI
N
INT_SC
RXFIN
INT_S
CTXU
ND
INT_S
CRXO
VF
INT_S
CTXID
LE
INT_S
CTXFR
EE
INT_S
CRXVA
L
INT_SCTXULDA: DMA transmit buffer A unloaded interrupt enable.
Bit 11
INT_SCRXULDB: DMA receive buffer B unloaded interrupt enable.
Bit 10
INT_SCRXULDA: DMA receive buffer A unloaded interrupt enable.
Bit 9
2
INT_SCNAK: NACK received (I
Bit 8
INT_SCCMDFIN: START/STOP command complete (I
Bit 7
INT_SCTXFIN: Transmit operation complete (I
Bit 6
INT_SCRXFIN: Receive operation complete (I
Bit 5
INT_SCTXUND: Transmit buffer underrun interrupt enable.
Bit 4
INT_SCRXOVF: Receive buffer overrun interrupt enable.
Bit 3
INT_SCTXIDLE: Transmitter id
Bit 2
INT_SCTXFREE: Transmit buffer
Bit 1
INT_SCRXVAL: Receive buffer has data interrupt enable.
Bit 0
C) interrupt enable.
2
C) interrupt enable.
2
C) interrupt enable.
le interrupt enable.
free interrupt enable.
2
C) interrupt enable.
96/232 Doc ID 16252 Rev 13
Page 97

STM32W108HB STM32W108CC STM32W108CB STM32W108CZ Serial interfaces
9.8.4 Serial controller interrupt mode register (SCx_INTMODE)
Address offset: 0xA854 (SC1_INTMODE) and 0xA858 (SC2_INTMODE)
Reset value: 0x0000 0000
Table 55. Serial controller interrupt mode register (SCx_INTMODE)
31 30 29 28 27 26 25 24 23 22 21 20 19 18 17 16
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Reserved
Reserved
SC_TXIDLELEVEL: Transmitter idle interrupt mode
Bit 2
0: Edge triggered 1: Level triggered.
SC_TXFREELEVEL: Transmit buff
Bit 1
er free interrupt mode
0: Edge triggered 1: Level triggered.
Bit 0
SC_RXVALLEVEL: Receive buffer has data interr
0: Edge triggered 1: Level triggered.
upt mode
SC_TX
SC_TX
IDLEL
FREEL
EVEL
EVEL
rw rw rw
SC_RX
VALLE
VEL
9.9 SPI master mode registers
9.9.1 Serial data register (SCx_DATA)
Address offset: 0xC83C (SC1_DATA) and 0xC03C (SC2_DATA)
Reset value: 0x0000 0000
Table 56. Serial data register (SCx_DATA)
31 30 29 28 27 26 25 24 23 22 21 20 19 18 17 16
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Bits [7:0]
Reserved
Reserved
SC_DATA
rw
SC_DATA: Transmit and receive data register. Writing to this register adds a byte to the transmit
FIFO. Reading from this register takes the next byte from the receive FIFO and clears the
overrun error bit if it was set.
In UART mode (SC1 only), reading from this registe
r loads the UART status register with the
parity and frame error status of the next byte in the FIFO, and clears these bits if the FIFO is
now empty.
Doc ID 16252 Rev 13 97/232
Page 98

Serial interfaces STM32W108HB STM32W108CC STM32W108CB STM32W108CZ
9.9.2 SPI configuration register (SCx_SPICFG)
Address offset: 0xC858 (SC1_SPICFG) and 0xC058 (SC2_SPICFG)
Reset value: 0x0000 0000
Table 57. SPI configuration register (SCx_SPICFG)
31 30 29 28 27 26 25 24 23 22 21 20 19 18 17 16
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Reserved
SC_SPI
Reserved
SC_SPIRXDRV: Receiver-driven mode selection bit (SPI master mode only). Clear this bit to
Bit 5
RXDRV
SC_S
SC_SP
PIMS
T
rw rw rw rw rw rw
IRPT
SC_SP
IORD
initiate transactions when transmit data is available. Set this bit to initiate transactions when the
receive buffer (FIFO or DMA) has space.
SC_SPIMST: Set this bit to put the SPI in master m
Bit 4
ode, clear this bit to put the SPI in slave
mode.
Bit 3
SC_SPIRPT: This bit controls behavior on a transmit
buffer underrun condition in slave mode.
Clear this bit to send the BUSY token (0xFF) and set this bit to repeat the last byte. Changes to
this bit take effect when the transmit FIFO is empty and the transmit serializer is idle.
Bit 2
SC_SPIORD: This bit specifies the bit order in
which SPI data is transmitted and received.
0: Most significant bit first. 1: Least significant bit first.
Bit 1
SC_SPIPHA: Clock phase configuration: clear this
bit to sample on the leading (first edge) and
set this bit to sample on the second edge.
Bit 0
SC_SPIPOL: Clock polarity configuratio
n: clear this bit for a rising leading edge and set this bit
for a falling leading edge.
SC_SP
IPHA
SC_SP
IPOL
98/232 Doc ID 16252 Rev 13
Page 99

STM32W108HB STM32W108CC STM32W108CB STM32W108CZ Serial interfaces
9.9.3 SPI status register (SCx_SPISTAT)
Address offset: 0xC840 (SC1_SPISTAT) and 0xC040 (SC2_SPISTAT)
Reset value: 0x0000 0000
Table 58. SPI status register (SCx_SPISTAT)
31 30 29 28 27 26 25 24 23 22 21 20 19 18 17 16
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Reserved
SC_SPI
Reserved
SC_SPITXIDLE: This bit is set when both the transmit FIFO and the transmit serializer are
Bit 3
TXIDLE
SC_SPI
TXFREE
rrrr
empty.
Bit 2
SC_SPITXFREE: This bit is set when the transmit FIFO h
Bit 1
SC_SPIRXVAL: This bit is set when the receiv
SC_SPIRXOVF: This bit is set if a byte is received when
Bit 0
e FIFO contains at least one byte.
as space to accept at least one byte.
the receive FIFO is full. This bit is
cleared by reading the data register.
SC_SPI
RXVAL
SC_SPI
RXOVF
9.9.4 Serial clock linear prescaler register (SCx_RATELIN)
Address offset: 0xC860 (SC1_RATELIN) and 0xC060 (SC2_RATELIN)
Reset value: 0x0000 0000
Table 59. Serial clock linear prescaler register (SCx_RATELIN)
31 30 29 28 27 26 25 24 23 22 21 20 19 18 17 16
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Bits [3:0]
Reserved
Reserved
rw rw rw rw
SC_RATELIN: The linear component (LIN) of the clock rate in the equation:
Rate = 12 MHz / ( (LIN + 1) * (2^EXP) )
SC_RATELIN
Doc ID 16252 Rev 13 99/232
Page 100

Serial interfaces STM32W108HB STM32W108CC STM32W108CB STM32W108CZ
9.9.5 Serial clock exponential prescaler register (SCx_RATEEXP)
Address offset: 0xC864 (SC1_RATEEXP) and 0xC064 (SC2_RATEEXP)
Reset value: 0x0000 0000
Table 60. Serial clock exponential prescaler register (SCx_RATEEXP)
31 30 29 28 27 26 25 24 23 22 21 20 19 18 17 16
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Reserved
SC_RATEEXP
rw
Bits [3:0]
Reserved
SC_RATEEXP: The exponential component (EXP) of the clock rate in the equation:
Rate = 12 MHz / ( (LIN + 1) * (2^EXP) )
9.10 SPI slave mode registers
Refer to Section 9.9: SPI master mode registers on page 97 for a description of the
SCx_DATA, SCx_SPICFG, and SCx_SPISTAT registers.
9.11 Inter-integrated circuit (I2C) interface registers
9.11.1 I2C status register (SCx_TWISTAT)
Address offset: 0xC844 (SC1_TWISTAT) and 0xC044 (SC2_TWISTAT)
Reset value: 0x0000 0000
Table 61. I2C status register (SCx_TWISTAT)
31 30 29 28 27 26 25 24 23 22 21 20 19 18 17 16
Reserved
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
SC_T
SC_T
WICM
Reserved
SC_TWICMDFIN: This bit is set when a START or STOP command completes. It clears on the
Bit 3
WIRXF
DFIN
rrrr
SC_T
WITXF
IN
IN
next I2C bus activity.
SC_TWIRXFIN: This bit is set when a byte is receiv
Bit 2
Bit 1
SC_TWITXFIN: This bit is set when a byte
Bit 0
SC_TWIRXNAK: This bit is set when a NACK is received from the slave. It clears on the next
2
C bus activity.
I
is transmitted. It clears on the next I2C bus activity.
ed. It clears on the next I2C bus activity.
100/232 Doc ID 16252 Rev 13
SC_T
WIRXN
AK
 Loading...
Loading...