


查询L6911D供应商
5 BIT PROGRAMMABLE STEP DOWN CONTROLLER
■
OPERATING SUPPL Y IC VOLTAGE FROM 5V
TO 12V BUSES
■
UP TO 1.3A GATE CURRENT CAPABILITY
■
TTL-COMP A T I BLE 5 BIT P ROGR AMMABLE
OUTPUT CO MPLIANT WITH VRM 9.0 :
1.100V TO 1.850V WITH 0.025V BINARY
STEPS
■
VOLTAGE MODE PWM CONTROL
■
EXCELLENT OUTPUT ACCURACY: ±1%
OVER LINE AND TEMPERATURE
VARIATIONS
■
VERY FAST LOAD TRANSIENT RESPONSE:
FROM 0% TO 100% DUTY CYCLE
■
POWER GOOD OU T PUT VO LTA GE
■
OVERVOLTAGE PROTECTION AND
MONITOR
■
OVERCURRENT PROTECTION REALIZED
USING THE UPPER MOSFET'S R
■
200KHz INTERNAL OSCILLATOR
■
OSCILLATOR EXTERNALLY ADJUST ABLE
FROM 50KHz TO 1MHz
■
SOFT START AND INHIBIT FUNCTIONS
APPLICATIONS
■
POWER SUPPLY FOR ADVANCED
MICROPROCESSOR CORE
■
DISTRIBUTED PO WE R SUPP LY
■
HIGH POWER DC-DC REGULATORS
L6911D
WITH SYNCHRONOUS RECTIFICATION
SO-20
dsON
ORDERING NUMBERS: L6911D
DESCRIPTION
The device is a power supply controller specifically designed to provide a high performance DC/DC conversion for high current microprocessors. A precise 5-bit
digital to analog converter (DAC) allows adjusting the
output voltage from 1.30V to 2.05V with 50mV binary
steps and from 2.1 0V to 3.50V with 100 mV binary steps.
The high precision internal r eference ass ures the selected output voltage to be within ±1%. The high peak
current gate drive affords to have fast switching to the
external power mos providing low switching losses.
The device assures a fast protection against load
overcurrent and load overvoltage. An ex ternal SCR is
triggered to crowbar the input supply in case of hard
over-voltage. An internal crowbar is also provided
turning on the low side mosfet as long as the overvoltage is detected. In case of ove r-current detection,
the soft start capacitor is discharged and the system
works in HICCUP mode.
L6911DTR
(Tape and Reel)
BLOCK DIAGRAM
November 2001
PGOOD
OVP
VD0
VD1
VD2
VD3
VD4
D98IN957_2
Vcc 5 to 12V
VCC OCSET
SS
RT
D/A
MONITOR and
PROTECTION
OSC
+
E/A
COMP
+
PWM
BOOT
UGATE
PHASE
LGATE
PGND
GND
VSEN
VFB
Vin 5V to12V
1.100V to 1.850V
Vo
1/17

L6911D
ABSOLUTE MAXIMUM RATINGS
Symbol Parameter Value Unit
V
CC
V
BOOT-VPHASE
V
HGATE-VPHASE
VCC to GND, PGND 15 V
Boot Voltage 15 V
15 V
OCSET, LGATE, PHASE -0.3 to Vcc+0.3 V
RT, SS, FB, PGOOD, VSEN, VID0-4 7 V
OVP, COMP 6.5 V
THERMAL DATA
Symbol Parameter Value Unit
R
th j-amb
T
PIN CONNECTION
Thermal Resistance Junction to Ambient 110 °
T
Maximum junction temperature 150 °
j
Storage temperature range -40 to 150 °
stg
T
Junction temperature range 0 to 125 °
J
(Top view)
C/W
C
C
C
2/17
VSEN
OCSET
SS/INH
VID0
VID1
VID2
VID3
VID4
COMP PGOOD
FB GND
2
3
4
5
6
7
8
9
10
D98IN958
20
19
18
17
16
15
14
13
12
11
RT1
OVP
VCC
LGATE
PGND
BOOT
UGATE
PHASE

PIN FUNCTION
g
g
g
g
g
g
Pin
Num.
1 VSEN Connected to the output voltage is able to manage over-voltage conditions and the PGOOD
2 OCSET A resistor connected from this pin and the upper Mos Drain sets the current limit protection.
Name Description
signal.
The internal 200µA current
The Over-Current threshold is due to the followin
enerator sinks a current from the drain through the external resistor.
equation:
I
I
--------------------------------------------- -=
P
⋅
OCSETROCSET
R
DSon
L6911D
3 SS/INH
The soft start time is pro
internal current
enerator forces through the capacitor 10µA.
This pin can be used to disable the device forcin
rammed connecting an external capacitor from this pin and GND. The
a voltage lower than 0.4V
4 - 8 VID0 - 4 Voltage Identification Code pins. These input are internally pulled-up and TTL compatible. They
are used to program the output voltage as specified in Table 1 and to set the overvoltage and
power good thresholds.
Connect to GND to program a ‘0’ while leave floating to program a ‘1’.
9 COMP This pin is connected to the error amplifier output and is used to compensate the voltage control
feedback loop.
10 FB This pin is connected to the error amplifier inverting input and is used to compensate the voltage
control feedback loop.
11 GND All the internal references are referred to this pin. Connect it to the PCB signal ground.
12 PGOOD This pin is an open collector output and is pulled low if the output voltage is not within the above
specified thresholds.
If not used may be left floating.
13 PHASE This pin is connected to the source of the upper mosfet and provides the return path for the high
side driver. This pin monitors the drop across the upper mosfet for the current limit
14 UGATE High side gate driver output.
15 BOOT Bootstrap capacitor pin. Through this pin is supplied the high side driver and the upper mosfet.
Connect through a capacitor to the PHASE pin and through a diode to Vcc (cathode vs. boot).
16 PGND Power ground pin. This pin has to be connected closely to the low side mosfet source in order to
reduce the noise injection into the device
17 LGATE This pin is the lower mosfet gate driver output
18 VCC Device supply voltage. The operative nominal supply voltage ranges from 5 to 12V.
DO NOT CONNECT V
TO A VOLTAGE GREATER THAN VCC.
IN
19 OVP Over voltage protection. If the output voltage reaches the 17% above the programmed voltage
this pin is driven high and can be used to drive an external SCR that crowbar the supply voltage.
If not used, it may be left floating.
20 RT Oscillator switching frequency pin. Connecting an external resistor from this pin to GND, the
external frequency is increased according to the equation:
f
S
200kHz
4.94 10
-------------------------+=
R
⋅
kΩ()
T
6
Connecting a resistor from this pin to Vcc (12V), the switching frequency is reduced according to
the equation:
f
S
200kHz
4.306 10
---------------------------- -–=
R
⋅
kΩ()
T
7
If the pin is not connected, the switching frequency is 200KHz.
The volta
e at this pin is fixed at 1.23V (typ). Forcing a 50µA current into this pin, the built in
oscillator stops to switch.
3/17

L6911D
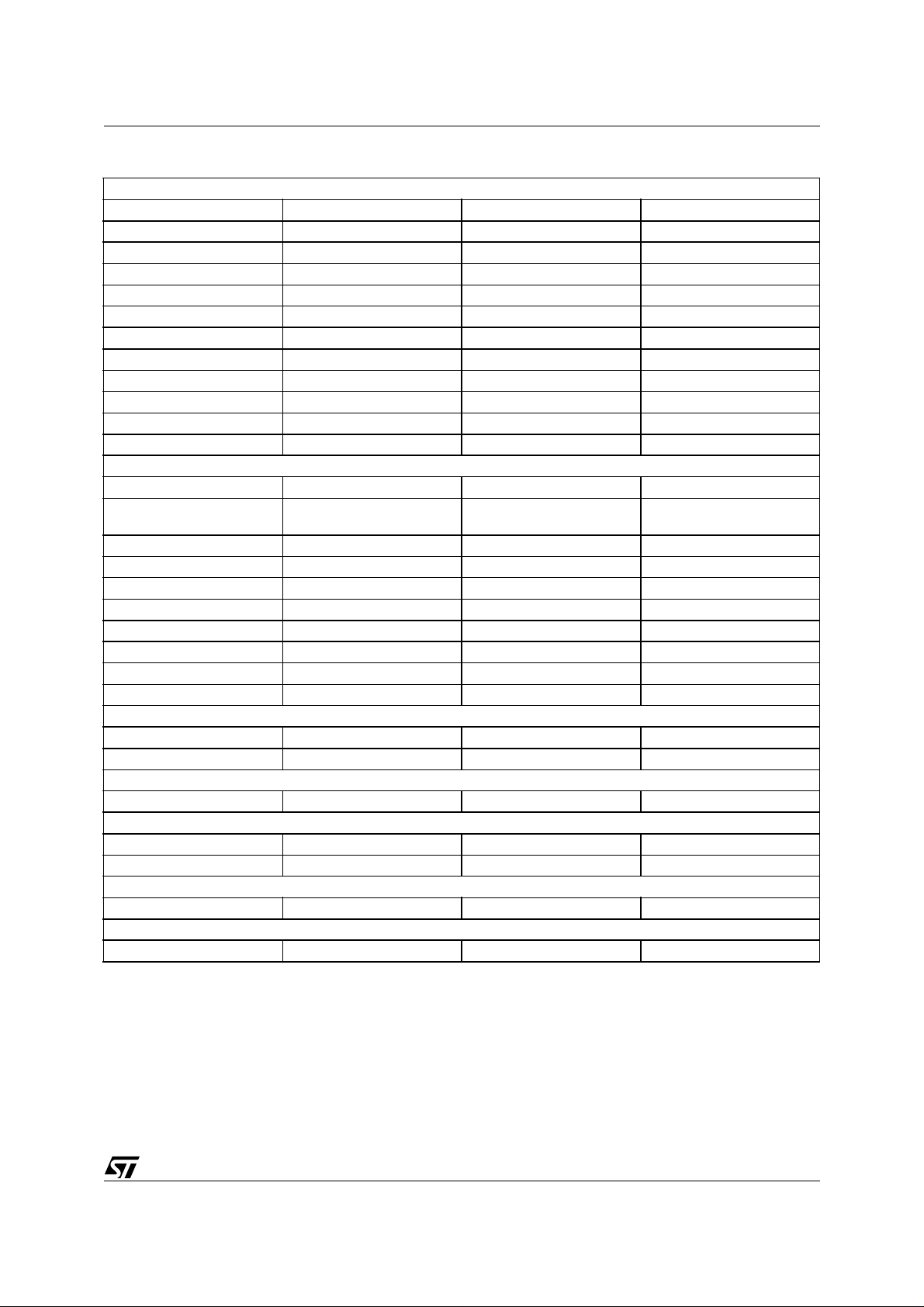
ELECTRICAL CHARACTERISTCS
(VCC = 12V, T
= 25°C unless otherwise specified)
amb
Symbol Parameter Test Condition Min. Typ. Max. Unit
V
SUPPLY CURRENT
CC
Icc Vcc Supply current UGATE and LGATE open 5 mA
POWER-ON
Turn-On Vcc threshold VOCSET=4.5V 4.6 V
Turn-Off Vcc threshold VOCSET=4.5V 3.6 V
Rising V
I
Soft start Current 10 µ
SS
threshold 1.24 V
OCSET
OSCILLATOR
Free running frequency R
Total Variation
∆
Ramp amplitude RT = OPEN 1.9 Vp-p
V
osc
= OPEN 180 200 220 KHz
T
6 KΩ < RT to GND < 200 K
Ω -15 15 %
REFERENCE AND DAC
DACOUT Voltage
Accuracy
VID0, VID1, VID2, VID3, VID4
see Table1; Tamb = 0 to 70°C
-1 1 %
VID Pull-Up voltage 4 V
ERROR AMPLIFIER
DC Gain 88 dB
GBWP Gain-Bandwidth Produ ct 10 MHz
SR Slew-Rate COMP=10pF 10
GATE DRIVERS
I
UGATE
R
UGATE
I
LGATE
High Side Source
Current
High Side Sink
Resistance
Low Side Source
- V
V
BOOT
V
V
I
- V
UGATE
BOOT-VPHASE
= 300mA
UGATE
Vcc=12V, V
PHASE
PHASE
LGATE
=12V,
= 6V
=12V,
= 6V
1 1.3 A
24Ω
0.9 1.1 A
Current
R
LGATE
Low Side Sink
Vcc=12V, I
LGATE
= 300mA
1.5 3 Ω
Resistance
Output Driver Dead Time PHASE connected to GND 120 ns
PROTECTIONS
V
Rising 117 120 %
SEN
= 4.5V 170 200 230 µ
OCSET
> OVP Trip, V
SEN
=0V 60 mA
OVP
I
OCSET
I
OVP
Over Voltage Trip
/DACOUT)
(V
SEN
OCSET Current Source V
OVP Sourcing Current V
POWER GOOD
V
Rising 110 112 114 %
SEN
V
Falling 86 88 90 %
SEN
Upper and Lower threshold 2 %
= -5mA 0.5 V
PGOOD
V
PGOOD
Upper Threshold
/DACOUT)
(V
SEN
Lower Threshold
(V
/DACOUT)
SEN
Hysteresis
(V
/DACOUT)
SEN
PGOOD Voltage Low I
A
V/µS
A
4/17

Table 1. VID Settings
VID4 VID3 VID2 VID1 VID0
11111
11110
11101
11100
11011
11010
11001
11000
10111
10110
10101
10100
10011
10010
10001
10000
Output
Voltage (V)
Output OFF
1.100
1.125
1.150
1.175
1.200
1.225
1.250
1.275
1.300
1.325
1.350
1.375
1.400
1.425
1.450
VID4 VID3 VID2 VID1 VID0
01111
01110
01101
01100
01011
01010
01001
01000
00111
00110
00101
00100
00011
00010
00001
00000
L6911D
Output Voltage
(V)
1.475
1.500
1.525
1.550
1.575
1.600
1.625
1.650
1.675
1.700
1.725
1.750
1.775
1.800
1.825
1.850
Device Description
The device is an i ntegrated circuit r ealized in BCD technol ogy. It provides c omplete control logic and protections
for a high performance step-down DC-DC converter optimized for microprocessor power supply. It is designed
to drive N-Channel Mosfets in a synchronous-rectified buck topology. The device works properly with Vcc ranging from 5V to 12V and regulates the output voltage starting from a 1.26V power stage s upply voltage (Vin). The
output voltage of the converter can be precisely regulated, programming the VID pins, from 1.100V to 1.850V
with 25mV binary steps, with a maximum tolerance of ±1% over temperature and line voltage variations. The
device provides voltage-mode control with fast transient response. It includes a 200kHz free-running oscillator
that is adjustable from 50kHz to 1MHz.
The error amplifi er features a 15MHz gain-bandwid th product and 10V /
µ
s slew rate which permits high converter bandwidth for fast transient performanc e. The resul ting PWM duty cyc le ranges from 0% to 100%. The devi ce
protects against over-current conditions entering in HICCUP mode. The device monitors the current by using
the r
of the upper MOSFET which eliminates the need for a current sensing resistor.
DS(ON)
The device is available in SO20 package
Oscillator
The switching frequency is internally fixed to 200kHz. The internal oscillator generates the triangular waveform
for the PWM charging and discharging with a constant c urrent an internal capacit or. The current deliver ed to the
oscillator is ty pically 50
µ
A (Fsw=200KHz) and may be varied using an external resistor (RT) connected between
RT pin and GND or VCC. Since the RT pin is maintained at fixed voltage (typ. 1.235V), the frequency is varied
proportionally to the current sunk (forced) from (into) the pin.
In particular connecting it to GND the frequency is increased (current is sunk from the pin), according to the
following relationship:
6
⋅
4.94 10
f
S
200kHz
-------------------------+=
Ω()
R
k
T
Connecting RT to VCC=12V or to VCC=5V the frequency is reduced (current is forced into the pin), according
to the following relationships:
5/17

L6911D
f
S
f
200kHz
S
200kHz
⋅
4.306 10
---------------------------- -+=
R
k
T
⋅
15 10
--------------------+=
R
T
Ω()
Ω()
k
7
V
7
V
CC
CC
= 12V
= 5V
Switching frequency variations vs. R
µ
Note that forcing a 50
A current into this pin, the device stops switching because no current is delivered to the
are reported in Fig.1.
T
oscillator.
Figure 1.
10000
1000
100
Resistance [kOhm]
10
10 100 1000
RT to GN D
RT to VCC =12 V
RT to VCC =5V
Frequency [kHz]
Digital to Analog Converter
The built-in digital to analog converter allows the adjustment of the output voltage from 1.30V to 2.05V with
50mV binary steps and from 2.10V to 3.50V with 100mV binary steps as shown in the previous table 1. The
internal reference is trimmed to ensure the precision of 1%.
The internal reference voltage for the regulation is programmed by the voltage identification (VID) pins. These
are TTL compatible inputs of an internal DAC that is realized by means of a series of resistors providing a partition of the internal voltage reference. The VID code drives a multiplexer that selects a voltage on a precise
point of the divider. The DAC output is delivered to an amplifier obtaining the V
set-point of the error amplifier). Internal pull-ups are provided (realized with a 5
voltage reference (i.e. the
PROG
µ
A current generator); in this
way, to program a logic "1" it is enough to leave the pin floating, while to program a logic "0" it is enough to short
the pin to GND.
The voltage identification (VID) pin configuration also sets the power-good thresholds (PGOOD) and the overvoltage protection (OVP) thresholds.
The VID code "11111" disable the device (as a short on the SS pin) and no output voltage is regulated.
Soft Start and Inhibit
At start-up a ramp is generated charging the external capacitor CSS by means of a 10µA constant current, as
shown in figure 1.
When the voltage across the soft start capacitor (V
6/17
) reaches 0.5V the lower power MOS is turned on to dis-
SS

L6911D
charge the output capacitor. As VSS reaches 1V (i.e. the oscillator triangular wave inferior limit) also the upper
MOS begins to switch and the output voltage starts to increase.
The V
creases, as shown in figure 2. In this phase the system works in open loop. When V
clamp on the output of the error amplifi er is released. In any case another cla mp on the input of the err or amplifier remains active, allowing to V
In this second phase the system works in closed loop with a growing reference. As the output voltage reaches
the desired value V
increases until a maximum value of about 4V.
The Soft-Start will not take place, and the relative pin is internally shorted to GND, if both VCC and OCSET pins
are not above their own turn-on thresholds . During normal operation, if any under -voltage is detected on one of
the two supplies, the SS pin is internally shorted to GND and so the SS capacitor is rapidly discharged.
The device goes in INHIBIT state forcing SS pin below 0.4V. In this conditi on both external MOSFETS are kept
off.
Figure 2. Soft Start
growing voltage initially clamps the output of the error amplifier, and consequently V
SS
to grow with a lower slope (i.e. the slope of the VSS voltage, see figure 2).
OUT
, also the clamp on the error amplifier input is removed, and the soft start finishes. Vss
PROG
is equal to V
SS
linearly in-
OUT
COMP
the
Vcc
Vin
Vss
LGATE
Vout
to GND
Vcc Tu rn-on thresh o l d
Vin Turn-on threshold
1V
0.5V
Timing Diagram
Aquisition: CH1 = PHASE; CH2 = V
CH3 = PGOOD; CH4 = V
SS
OUT
;
Driver Section
The driver capability on the high and low side drivers allows using different types of power MOS (also multiple
MOS to reduce the R
), maintaining fast switching transition.
DSON
The low-side mos driver is supplied directly by Vcc while the high-side driver is supplied by the BOOT pin.
Adaptative dead time control i s implemented to pr event cross-c onduction and allow to use several kinds o f mos-
fets. The upper mos turn-on is avoided if the lower gate is over about 200mV while the lower mos turn-on is
avoided if the PHASE pin is over about 500mV. The upper mos is in any case turned-on after 200nS from the
low side turn-off.
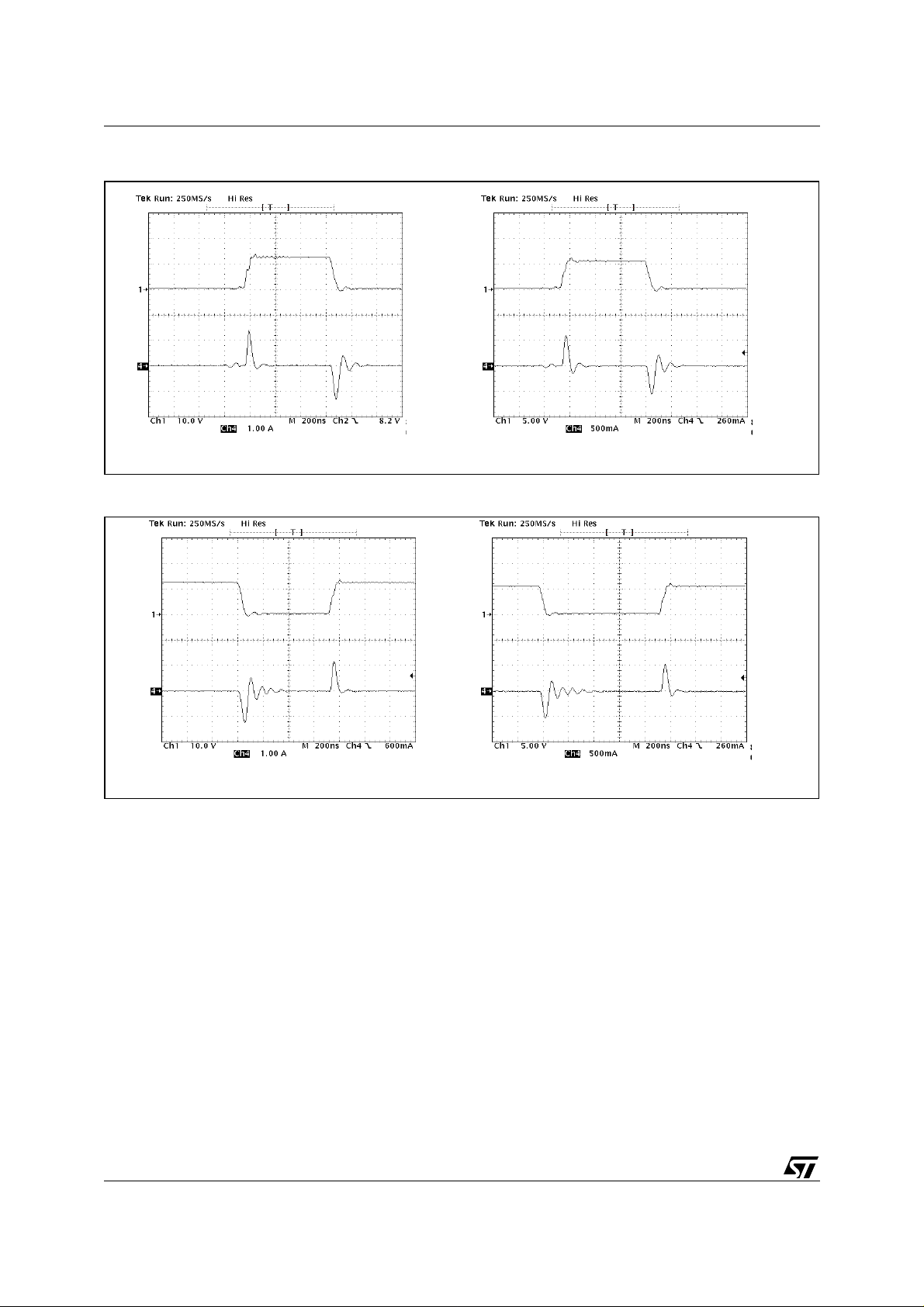
The peak current is shown for both the upper ( fig. 3) and the lower (f ig. 4) driver at 5V and 12V. A 4nF capacitive
load has been used in these measurements.
For the lower driver, the source peak current is 1.1A @ Vcc=12V and 500mA @ Vcc=5V, and the sink peak
current is 1.3A @ Vcc=12V and 500mA @ Vcc=5V.
Similarly, for the upper driver, the source peak current is 1.3A @ Vboot-Vphase=12V and 600mA @ VbootVphase =5V, and the sink peak current is 1.3A @ Vboot-Vphase =12V and 550mA @ Vboot-Vphase = 5V.
7/17
L6911D
Figure 3. High Side driver peak current. Vboot-Vphase=12V (left) Vboot-Vphase=5V (right)
CH1 = High Side Gate CH4 = Gate Current
Figure 4. Low Side driver peak current. Vcc=12V (left) Vcc=5V (right)
CH1 = Low Side Gate CH4 = Gate Current
Monitoring and Protections
The output voltage is monitored by means of pin 1 (VSEN). If it is not w ithin ±12% (typ.) of the programm ed
value, the powergood output is forced low.
The device provi des ov ervoltage pr otection, when the output voltage reache s a value 17% (typ.) gr ater than the
nominal one. If the output voltage exceeds this threshol d, the OVP pin is fo rced high, triggerin g an external SCR
to shuts the supply (VIN) down, and also the lower driver is turned on as long as the over-voltage is detected.
To perform the overcurrent protection the device compares the drop across the high side MOS, due to the
RDSON, with the voltage across the external resistor (ROCS) connected between the OCSET pin and drain of
the upper MOS. Thus the overcurrent threshold (I
Where the typical value of I
R
(also the variation with temperature) and the minimum value of I
DSON
8/17
is 200µA. To calculate the ROCS value it must be considered the maximum
OCS
) can be calculated with the following relationship:
P
⋅
I
OCSROCS
-------------------------------- -=
I
P
R
DSON
. To avoid undesirable trigger of
OCS

L6911D
overcurrent protection this relationship must be satisfied:
∆
l
---- -+≥
=
IPI
OUTMAX
∆
Where
I is the inductance ripple current and I
OUTMAX
is the maximum output current.
In case of output short circuit the soft start capacitor is discharged with constant current (10
the SS pin reaches 0.5V the soft start phase is restarted. During the soft start the over-current protection is always active and if such kind of event occurs, the device turns off both mosfets, and the SS capacitor is discharged again (after reaching the upper threshold of about 4V). The system is now working in HICCUP mode,
as shown in figure 5a. After removing the c ause of the over-current, the device restart w orking normal ly w ithout
power supplies turn off and on.
Figure 5.
I
PEAK
2
µ
A typ.) and when
a: Hiccup Mode
9
8
7
6
5
4
3
2
Inductor Ripple [A]
1
0
0.5 1.5 2.5 3.5
Output Voltage [V ]
b: Indu ctor Ripple Current vs. Vout
L=1.5µH, Vin=12V
L=3µH, Vin=5V
L=2µH,
Vin=12V
L=3µH,
Vin=12V
L=1.5µH,
Vin=5V
L=2µH,
Vin=5V
Inductor design
The inductance value is defined by a compromise between the transient response time, the efficiency, the cost
and the size. The inductor has to be calculated to sustain the output and the input voltage variation to maintain
the ripple current
culated with this relationship:
Where f
SW
the ripple current vs. the output voltage for different values of the inductor, with V
∆
IL between 20% and 30% of the maximum output current. The inductance value can be cal-
–
L
V
INVOUT
------------------------------
∆
⋅
f
S
V
OUT
-------------- -
⋅=
I
V
L
IN
is the switching frequency, VIN is the input voltage and V
is the output voltage. Figure 5b shows
OUT
= 5V and VIN = 12V.
IN
Increasing the value of the inductance reduces the ripple current but, at the same time, reduces the converter
response time to a load transient. If the compensation network is well designed, the device is able to open or
close the duty cycle up to 100% or down to 0%. The response time is now the time required by the inductor to
change its current from initial to final value. Since the ind uctor has not fini shed its char ging tim e, the output current is supplied by the output capacitors. Minimizing the response time can minimize the output capacitance
required.
The response time to a load transient is different for the application or the removal of the load: if during the application of the loa d the inductor is c harged by a voltage equal to the difference between the input and the output
voltage, during the removal it is discharged only by the output voltage. The following expressions give approximate response time for
∆
I load transient in case of enough fast compensation network response:
9/17

L6911D
t
applicatio n
⋅
L∆I
----------------------------- -=
–
V
INVOUT
t
removal
⋅
L∆I
-------------- -=
V
OUT
The worst condition depends on the input voltage available and the output voltage selected. Anyway the worst
case is the response ti me after r emoval o f the load with the minimum output voltage programmed and the maximum input voltage available.
Output Capacitor
Since the microprocessors require a current variation beyond 10A doing load transients, with a slope in the
range of tenth A/
µ
sec, the output capacitor is a basic component for the fast response of the power supply. In
fact for first few microseconds they supply the current to the load. The controller recognizes immediately the
load transient and sets the duty cycle at 100%, but the current slope is limited by the inductor value.
The output voltage has a first drop due to the current variation inside the capacitor (neglecting the effect of the
ESL):
∆
V
OUT
= ∆I
OUT
· ESR
A minimum capacitor value is required to sustain the current during the load transient without discharge it. The
voltage drop due to the output capacitor discharge is given by the following equation:
2
∆
I
L
OUT
–⋅()⋅⋅
Where D
∆
V
OUT
is the maximum duty cycle value that is 100%. The lower is the ESR, the lower is the output drop
MAX
---------------------------------------------------------------------------------------------=
2C
OUTVINMINDMAXVOUT
during load transient and the lower is the output voltage static ripple.
Input Capacitor
The input capacitor has to sustain the ripple current produced during the on time of the upper MOS, so it must
have a low ESR to minimize the losses. The rms value of this ripple is:
I
rmsIOUT
–()⋅=
D1D
Where D is the duty cycle. The equation reaches its maximum value with D=0.5. The losses in worst case are:
2
P ESR I
⋅=
rms
Compensation network design
The control loop is a voltage mode (figure 7) that uses a droop function to satisfy the requirements for a VRM
module, reducing the size and the cost of the output capacitor.
This method "recovers" part of the drop due to the output capacitor ESR in the load transient, introducing a dependence of the output voltage on the load current: at light load the output voltage will be higher than the nominal level, while at high load the output voltage will be lower than the nominal value.
10/17
L6911D
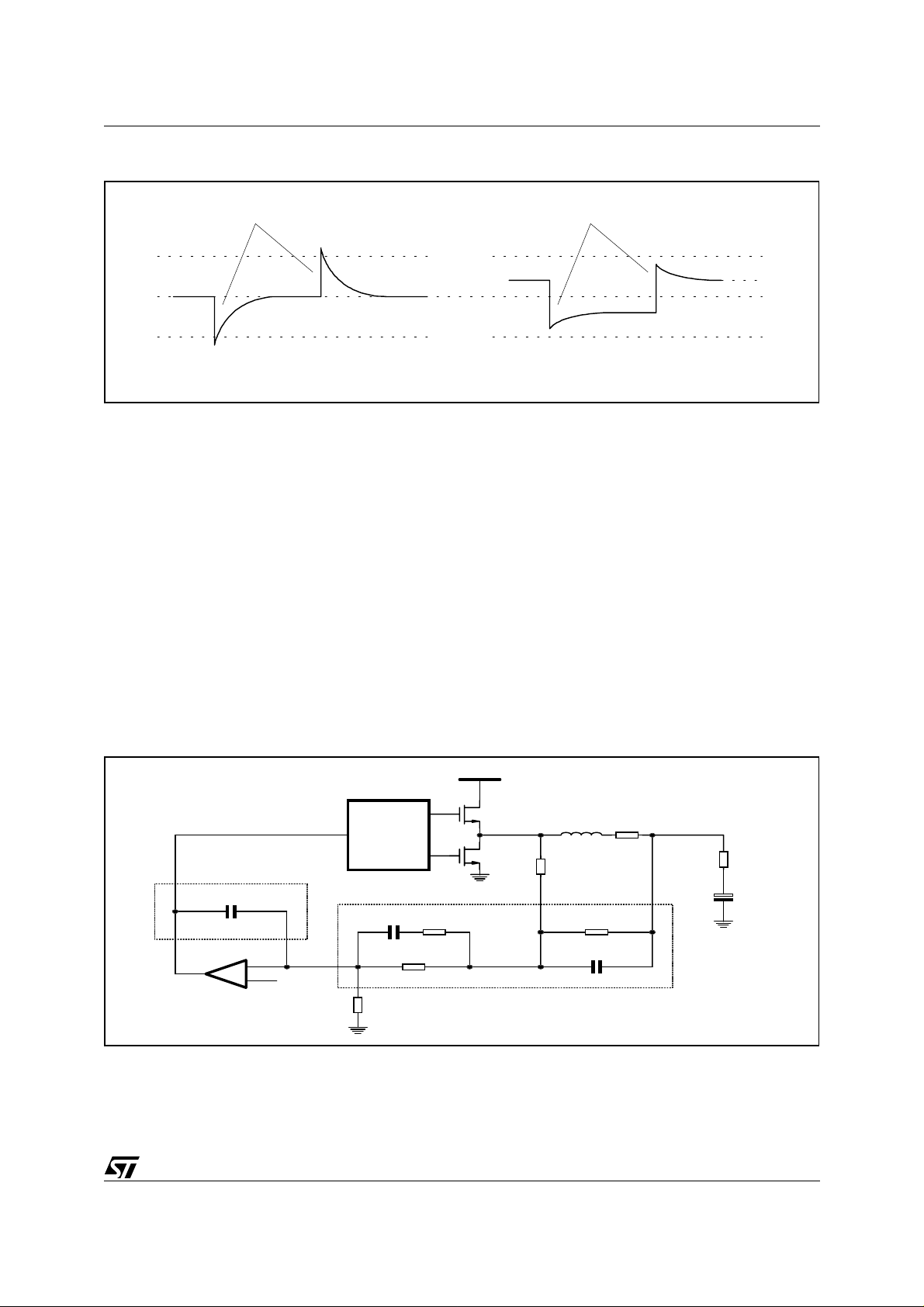
Figure 6. Output transient response without (a) and with (b) the droop function
ESR DROP ESR DROP
V
MAX
V
V
NOM
V
MIN
(a) (b)
As shown in figure 6, the ESR drop is pr esent in any c ase, but using the droop func tion the total deviation of the
output voltage is minimized. In practice the droop function introduces a static error (Vdroop in figure 6) proportional to the output current. Since a sense resistor is not present, the output DC current is measured by using
the intrinsic resistance of the inductance (a few m
Ω
). So the low-pass filtered inductor voltage (that is the inductor current) is added to the feedback signal, implementing the droop function in a simple way. Referring to the
schematic in figure 7, the static characteristic of the closed loop system is:
⋅
R 8 // R9
V
OUT
V
PROGVPROG
+
R3 R8 // R9
-------------------------------------
R2
R
L
---------------------------------- -
R8
⋅–⋅+=
I
OUT
DROOP
Where V
resistance. The second term of the equation allows a positive offset at zero load (
the droop effect (
is the output voltage of the di gital to ana log conv erter (i .e. the set po int) and RL is the inductance
PROG
∆
V
). Note that the droop effect is equal the ESR drop if:
DROOP
⋅
R8 // R9
R
L
---------------------------------- -
R8
=
ESR
∆
V+); the third term introduces
Figure 7. Compensatio n ne tw o rk
V
IN
V
COMP
C18
R9
C25
R
L
V
PWM
Z
F
C20 R4
R3
PROG
V
R2
PHASE
Z
I
L2
R8
V
OUT
ESR
C6-15
Considering the previous relationships R2, R3, R8 and R9 may be determined in order to obtain the desired
droop effect as follow:
■
Choose a value for R2 in the range of hundreds of KΩ to obtain realistic values for the other
components.
11/17

L6911D
■
From the above equations, it results:
R8
=
R9 R8
+
∆
⋅
V
R2
-----------------------
V
PROG
∆
V
DROOP
-------------------------- -
⋅⋅
⋅
R
LIMAX
⋅
R
LIMAX
-------------------------- -
⋅=
∆
V
DROOP
1
------------------------------------ -
∆
V
DROOP
-------------------------- -+
1
⋅
R
LIMAX
;
;
Where I
■
The component R3 must be chosen in order to obtain R3<<R8//R9 to permit these and successive
is the maximum output current.
MAX
simplifications.
Therefore, with the droop function the output voltage decreases as the load current increases, so the DC output
impedance is equal to a resistance R
. It is easy to verify that the output voltage deviation under load tran-
OUT
sient is minimum when the output impedance is constant with frequency.
To choose the other components of the compensation network, the transfer function of the voltage loop is con-
sidered. To simplify the analysis is supposed that R3 << Rd, where Rd = (R8//R9).
Figure 8. Compensatio n ne tw o rk def i ni t io n
|Av |
2
|R|
R
|Gloop |
G
f
LC
0
D
f
0
2
f
f
CE
1
f
f
ECfCC
3
f
f
f
fc
f
⋅⋅=
π
CRfingularityonNetworkSCompensati
2/1
⋅=
π
fingularityConverterS
LC
f
CE
f
EC
f
CC
⋅⋅=
π
CESR
2/1
π
2/1
π
2/1
OUT
⋅⋅=
⋅⋅=
doublepoleLC
ESRzero
1
byIntroducedCceramicESR
acitorCeramicCapCceramicRceramic
2
3
f
d
2042/1
π
π
π
⋅+⋅=
CRRf
20)43(2/1
⋅⋅=
CRf
2532/1
⋅⋅=
CRd
252/1
The transfer function may be evaluated neglecting the connection of R8 to PHASE because, as will see later,
this connection is important only at low frequencies. So R4 is considered connected to VOUT. Under this assumption, the voltage loop has the following transfer function:
12/17

Gloop s()Av s()Rs
()⋅
()
Av s
()
Zf s
------------- -
⋅==
()
Zi s
Where
()
Av s
Vin
--------------- -
∆
V
osc
()
s
Z
C
------------------------------------ -
⋅=
s()ZLs
Z
C
L6911D
()+
Where Z
The expression of Z
Where:
(s) and ZL(s) are the output capacitor and inductor impedance respectively.
C
(s) may be simplified as follow:
I
==
()
s
Z
I
τ
= R4×C20,
1
1
-- -
⋅⋅
Rd
--------------------------------- -
Rd
C25
s
1
-- -+
⋅
C25
s
τ
= (R4+R3)×C20 and
2
1
-- -
R4
----------------------------------------------------- -+
R4
⋅+
s
1
-- -
⋅+
s
=
Rd
⋅
C20
C20
-------------------------------------------------------------------- -
R3
+
R3
------- - τ
1s
R
1s
τ
= Rd×C25.
d
R3
⋅+
d
⋅+()
τ
2
Rd 1 s
-------------------------------------------------------------------------------------------------- -
⋅+()⋅
1s
d
τ
⋅+()⋅
1s
τ
1τd
1s
τ
1
d
+()
⋅+()
τ
2
2
R3
------- -
⋅⋅⋅+⋅+
s
1s
τ
1τd
R
d
τd⋅+()⋅
=
The regulator transfer function became now:
()
Rs
------------------------------------------------------------------------------------------------------- -
≈
sC18R
1s
2
R3
------- -
1s
d
R
⋅+()
τ
Figure 8 shows a method to select the regul ator components (pleas e note that the fr equencies f
1s
⋅+
τ
d
d
⋅+()⋅
τ
d
⋅+()⋅⋅⋅ ⋅
1s
τ
1
and fCC cor-
EC
responds to the singularities introduced by additional ceramic capacitors in parallel to the output main electrolytic capacitor).
■
To obtain a flat frequency response of the output impedance, the droop time constant
τ
has to be equal
d
to the inductor time constant (see the note at the end of the section):
L
τ
d
■
To obtain a constant -20dB/dec Gloop(s) shape the singularity f1 and f2 are placed in proximity of fCE
and f
respectively. This implies that:
LC
⋅
RdC25
f
2
----
f
1
f1 f
■
To obtain a Gloop bandwidth of fC, results:
G0f
⋅ 1f
LC
=== ==
⇒⋅ A
C
G
⋅
0
0R0
------ - τ
R
L
f
LC
-------- -
R4⇒R3
f
CE
C20
CE
C20 // C25
VIN
⋅
----------------- -
Vosc∆
-----------------------------
L
C18
⇒
C25
f
LC
-------- -1–
⋅==
f
CE
1
-- - π
R4 f
2
f
C
C18⇒
------- -
f
LC
L
-----------------------=== =
⋅()
R
LRd
⋅⋅⋅=⇒=
CE
----------------- -
Vosc∆
-----------------------------
C20 C25
+
C20 C25⋅
VIN
⋅⋅
f
------- -
f
LC
C
Note.
To understand the reason of the previous assumption, the scheme in figure 9 must be considered.
In this scheme, the inducto r current has been subs tituted by the l oad current, becaus e in the fr equenci es range
of interest for the Droop function these current are substantially the same and it was supposed that the droop
network don't represent a charge for the inductor.
13/17

L6911D
Figure 9. Voltage regulation with droop function block scheme
LOOP
VoutVcomp
1
R
⋅
OUT
1
R
OUT
s
τ
⋅+
L
s
τ
⋅+
d
⋅== =
+
τ
1s
-----------------+
τ
1s
Iout
L
d
It results:
Z
OUT
V
o
--------------- -
I
LOAD
Av(s)
R(s)
+
τ
1s
L
------------------
⋅⋅
R
d
+
τ
1s
d
G
LOOP
---------------------------- +
1G
Because in the interested range |Gloop|>>1.
To obtain a flat shape, the relationship considered will naturally follow.
Application Idea: 1.100V to 1.850V / 25A
Figure 10 shows an application schematic for a 1.100V to 1.850V conversion with 25A of current capability.
Since the device's high gate drive, more than one mosfet for both high side and low side can be used: three
STS11NF30L (30V, 9mW typ @ Vgs=10V) mosfet are suggested for high side while four of them are suggested
as low side switch.
Figure 10. Schematic Circuit
L1
+5 VIN
F1
+12Vcc
VID0
VID1
VID2
VID3
VID25mV
D1
R10
C17
VCC
GND
VID0
VID1
VID2
VID3
VID4
OSC
R1
SS
C16
COMP
18
11
4
5
6
7
8
20
3
BOOT
15
9
U1
L6911D
C18
C19
R5
OVP
C24
19
OCSET
2
UGATE
14
PHASE
13
LGATE
17
PGND
16
PGOOD
12
VSEN
1
10
VFB
R2
R3
C20
R4
C23
R7
R13
Q1,Q2, Q3
R14
Q4,Q5,Q6
C1-3
L2
D2
R8
R9
C17
C4-9
C21-22
VOUTCORE
R6
R15
Vss
PWRGD
14/17
Part List
Resistor
R1 Not Mounted SMD 0805
R2 470 1% SMD 0805
R3 1k SMD 0805
R4 82 SMD 0805
R5 Not Mounted SMD 0805
R6 1k SMD 0805
R7 1k SMD 0805
R8 13k SMD 0805
R9 100k SMD 0805
R10 Not Mounted SMD 0805
R12 20k SMD 0805
R13, R14 Short Circuit SMD 0805
Capacitor
C1-C3 680µF - 6.3V OSCON 6SP680M Radial 10x10.5
C4-C9 820µF - 4V
680µF - 6.3V
C16 100n SMD 0805
C17 100n SMD 0805
C18 2.2n SMD 0805
C19 Not Mounted SMD 0805
C20 100n SMD 0805
C23 1n SMD 0805
C24 100n SMD 0805
C25 47n SMD 0805
Magnetics
L1
L2 1.8µH T50-52B Core, 7T-16AWG
Transistors
Q1-Q5 STS12NF30L STMicroelectronics SO8
Diodes
D1 1N4148 STMicroelectronics SOT23
D2 STPS3L25U STMicroelectronics SMB
Ics
U1 L6911D STMicroelectronics SO20
Fuse
F1 251015A-15A Littlefuse AXIAL
µH T44-52 Core, 7T-18AWG
1.5
OSCON 6SP680M
OSCON 4SP820M
Radial 10x10.5
Radial 10x10.5
L6911D
15/17

L6911D
DIM.
MIN. TYP. MAX. MIN. TYP. MAX.
A 2.35 2.65 0.093 0.104
A1 0.1 0.3 0.004 0.012
B 0.33 0.51 0.013 0.020
C 0.23 0.32 0.009 0.013
D 12.6 13 0.496 0.512
E 7.4 7.6 0.291 0.299
e 1.27 0.050
H 10 10.65 0.394 0.419
h 0.25 0 .75 0.010 0.030
L 0.4 1.27 0.016 0.050
K 0˚ (min.)8˚ (max.)
mm inch
OUTLINE AND
MECHANICAL DATA
SO20
B
e
D
1120
110
L
h x 45˚
A
K
A1
C
H
E
SO20MEC
16/17

L6911D
Information furnished is believed to be accurate and reliable. However, STMicroelectronics assumes no responsibility for the consequences
of use of such information nor for any infringement of patents or other rights of third parties which may result from its use. No license is granted
by implic ation or otherwise under any patent or p at ent rights of STMicroelectronics. Spec i fications mentioned i n this publication are subject
to change without notice. This publication supersedes and replaces all information previously supplied. STMicroelectronics products are not
authorized for use as cri t i cal compone nts in life support device s or systems without express written approval of STMicroel ectronics.
The ST logo is a registered trademark of STMicroelectronics
2001 STMi croelectronics - All Ri ghts Rese rved
Australi a - Brazil - Chin a - Finland - Franc e - Germany - Hong Kong - India - Ita l y - Japan - Malaysi a - Malta - Morocco - Singapore - Spain
STMicroelectronics GROUP OF COMPANIES
- Sweden - Sw itzerlan d - United Kin gdom - U.S.A.
http://www.s t. com
17/17
 Loading...
Loading...