How it Works
Log In / Sign Up
Buy Points
How it Works
FAQ
Contact Us
Questions and Suggestions
Users
ST
Loading...
A
AN3270
AN3273
AN3275
AN3276
AN3277
AN3279
AN3280
AN3287
AN3288
AN3290
AN3298
AN3299
AN3300
AN3301
AN3302
AN3303
AN3306
AN3307
AN3309
AN3310
AN3311
AN3316
AN3317
AN3319
AN3320
AN3321
AN3324
AN3327
AN3329
AN3332
AN3334
AN3339
AN3340
AN3342
AN3352
AN3353
AN3354
AN3355
AN3357
AN3358
AN3359
AN3360
AN3361
AN3362
AN3364
AN3365
AN3371
AN3383
AN3390
AN3392
AN3393
AN3394
AN3395
AN3398
AN3399
AN3400
AN3404
AN3406
AN3407
AN3408
AN3410
AN3411
AN3413
AN3422
AN3424
AN3427
AN3429
AN3430
AN3433
AN392
AN394
AN3954
AN3955
AN3959
AN3960
AN3961
AN3964
AN3966
AN3967
AN3968
AN3969
AN3970
AN3972
AN3973
AN3980
AN3981
AN3983
AN3984
AN3985
AN3988
AN3990
AN3991
AN3992
AN3994
AN3995
AN3996
AN3997
AN3998
AN4006
AN4007
Loading...
Loading...
Nothing found
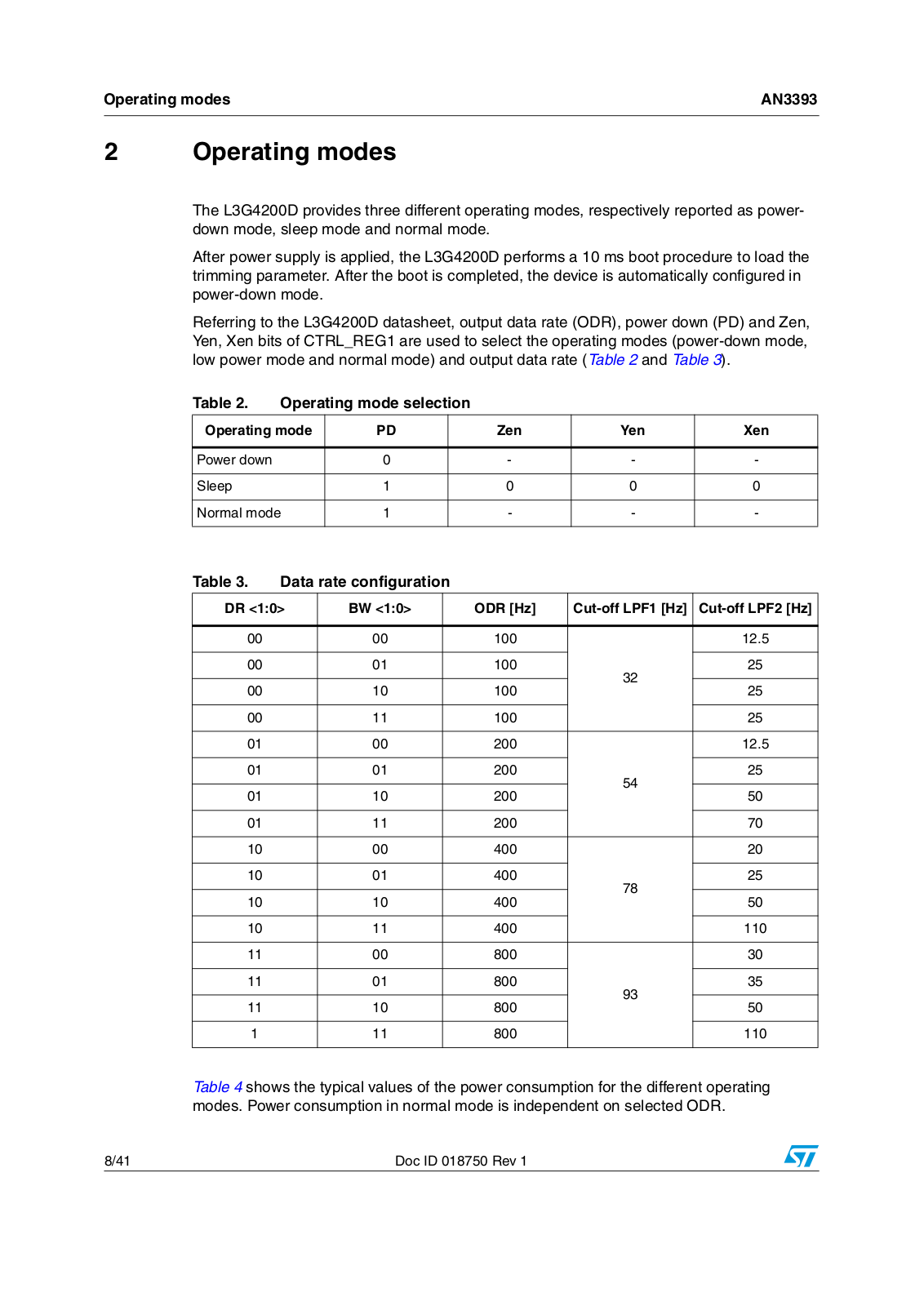
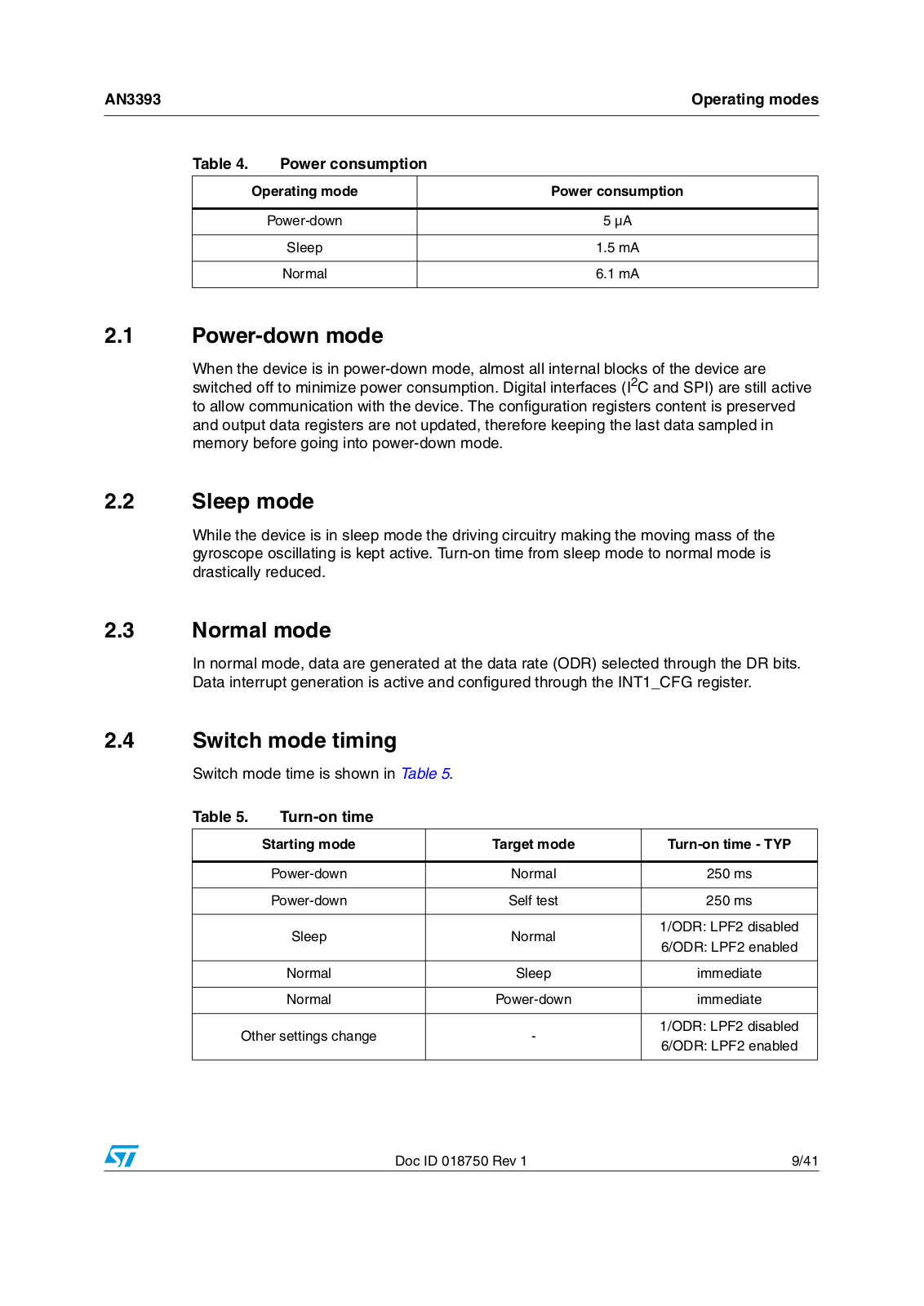
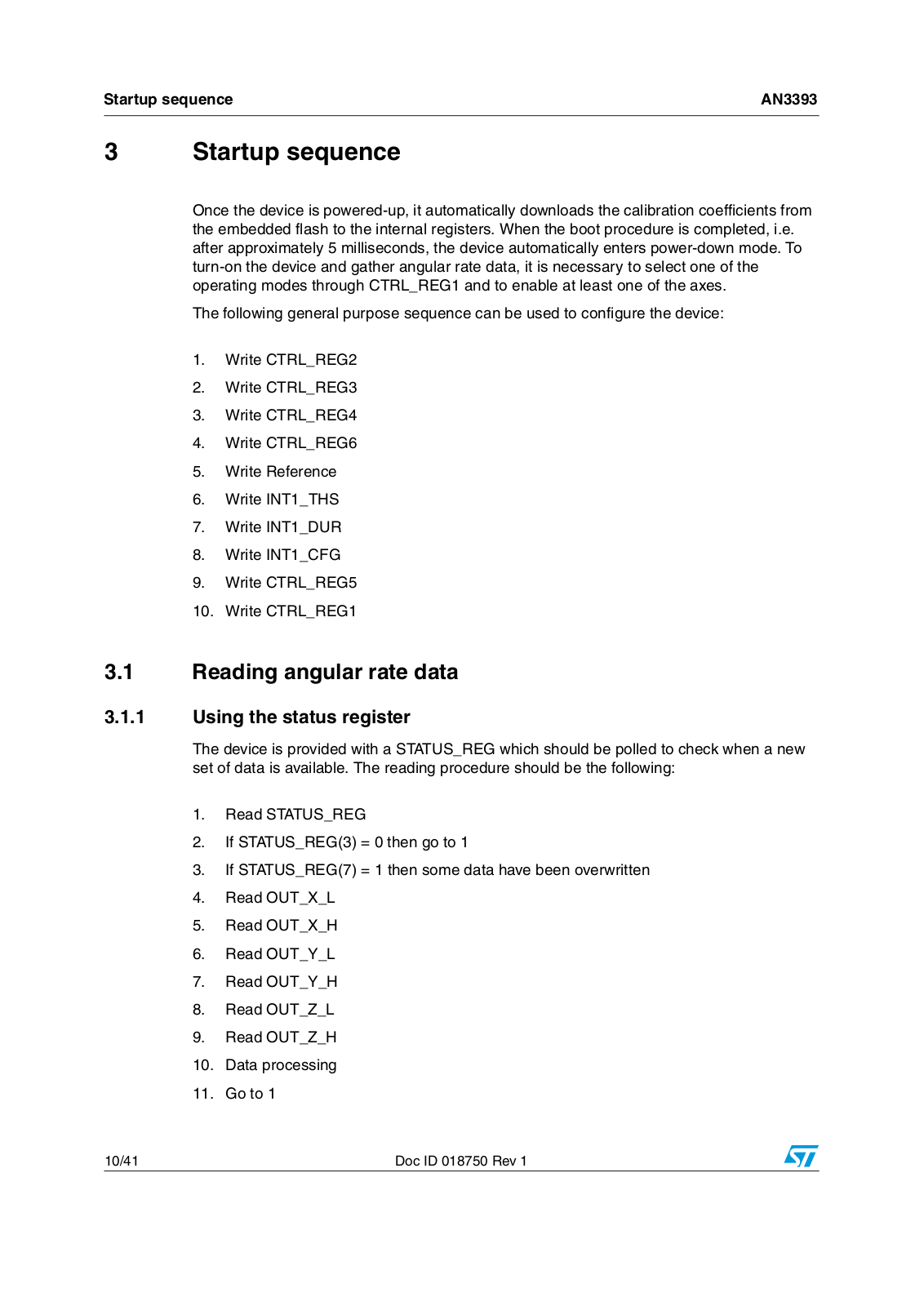
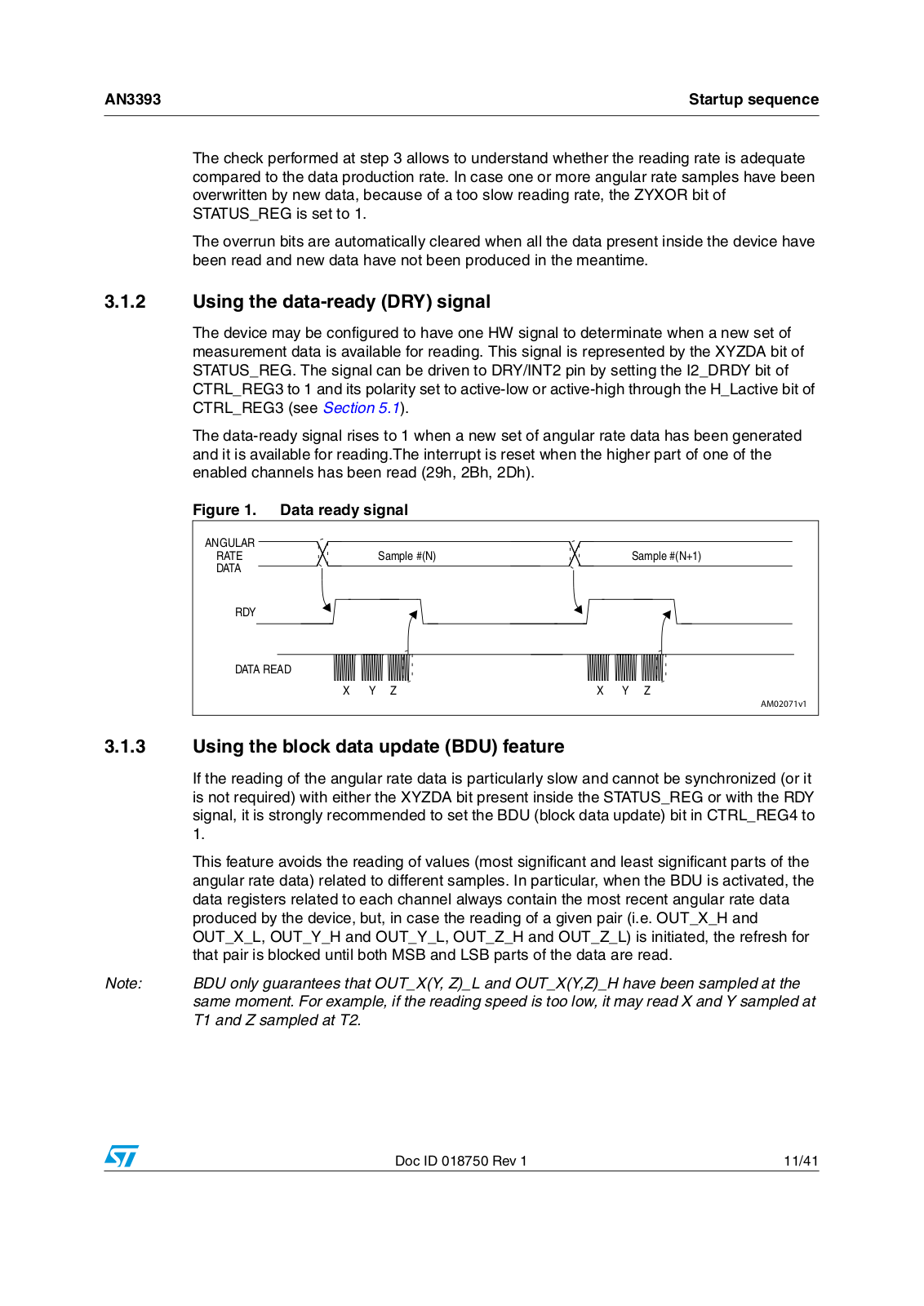
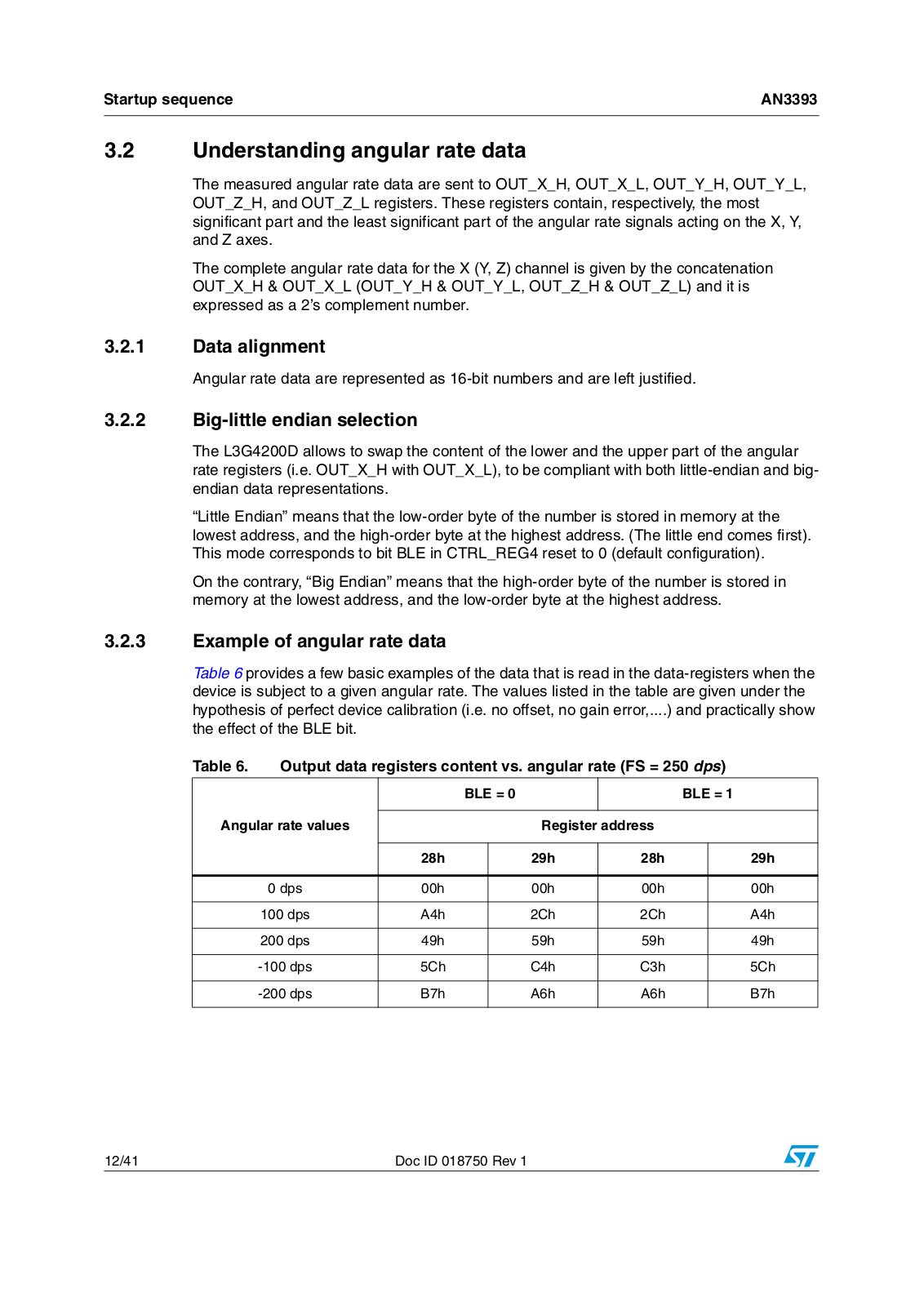
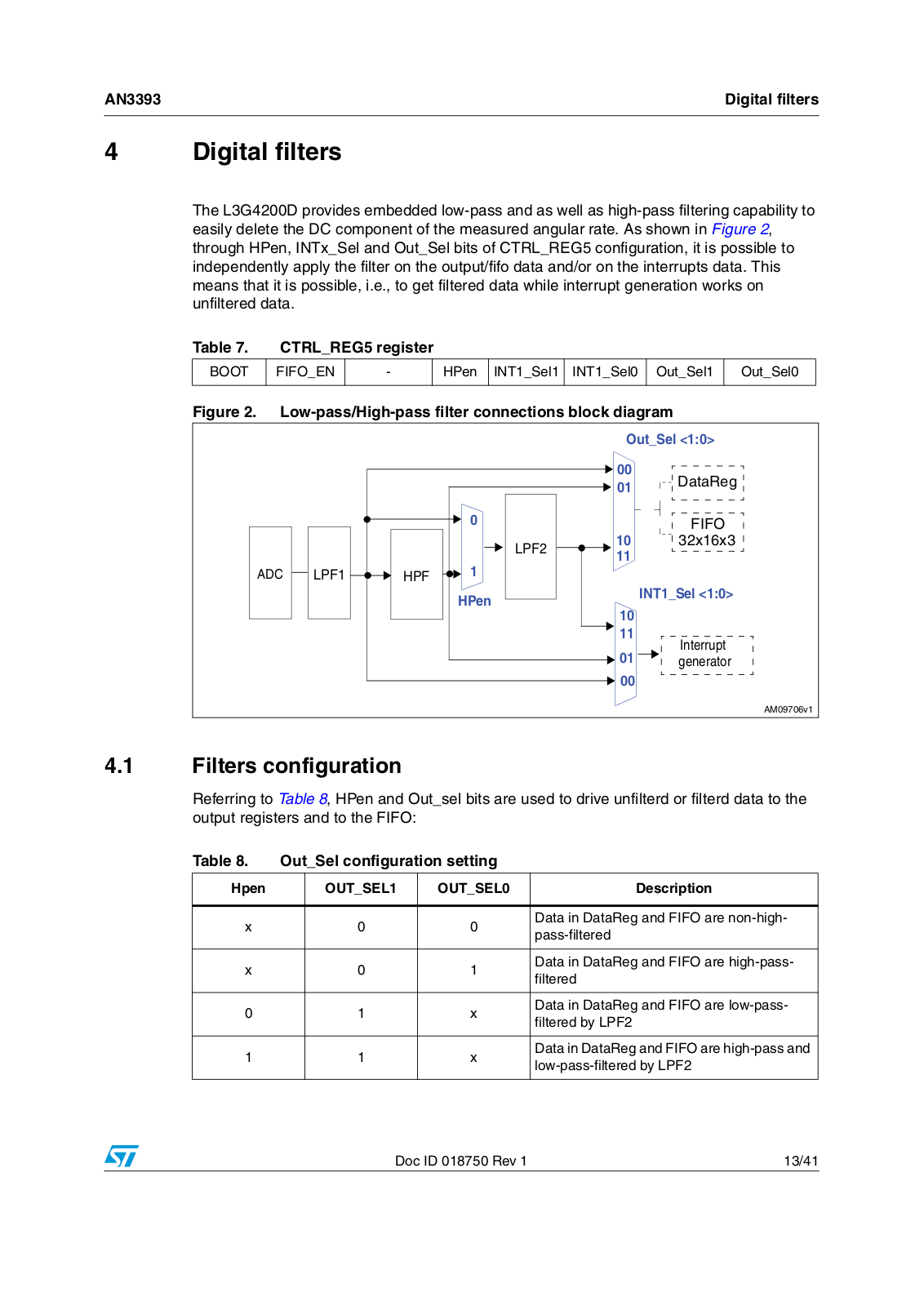
AN3393
APPLICATION NOTE
41 pgs
1.05 Mb
0
Table of contents
Loading...
ST AN3393 APPLICATION NOTE
...
ST APPLICATION NOTE
Download
Specifications and Main Features
Frequently Asked Questions
User Manual
Download
Loading...
+
hidden pages
Unhide
You need points to download manuals.
1 point = 1 manual.
You can buy points or you can get point for every manual you upload.
Buy points
Upload your manuals
 Loading...
Loading...