

Page 1

Operator manual
Simrad SH80
High frequency fishery sonar
www.simrad.com
M A X I M I Z I N G Y O U R P E R F O R M A N C E A T S E A
Page 2

Page 3
850-164385 / Rev.C
High frequency fishery sonar
SH80
Operator manual
WARNING
The sonar must never be powered up when the ship is
in dry dock. The transducer will be damaged if it
transmits in open air. To prevent inadvertent use of the
sonar, pull out the mains plug on the Sonar Processor
Unit whenever the vessel is in dry dock.
Page 4
About this document
Rev Date Written by Checked by Approved by
Rev.C
1 1.02.05 RBr SØJ OBG
Updated for software version 1.2.X
© 2005 Simrad AS
ISBN 82-8066-007-0
All rights reserved. No part of this work covered by the copyright hereon may be
reproduced or otherwise copied without prior permission from Simrad AS.
The information contained in this document is subject to change without prior notice.
Simrad AS shall not be liable for errors contained herein, or for incidental or
consequential damages in connection with the furnishing, performance, or use of this
document.
Simrad AS
Strandpromenaden 50
Box 111
N-3191 Horten
Telephone: +47 33 03 40 00
Facsimile: +47 33 04 29 87
M A X I M I Z I N G Y O U R P E R F O R M A N C E A T S E A
Page 5
Sections
1. System description
This chapter provides a brief introduction to the SH80, and defines the main
units. Refer to page 1.
2. Display modes
This chapter defines the available operational display modes. Refer to page
13.
3. Sonar Operating Panel
The main functions of the SH80 is controlled by a dedicated keyboard; the
operating panel. The controls and functions of this unit is described. Refer
to page 23.
4. Operation
This chapter provides the basic knowledge on how to operate the SH80
sonar. Refer to page 36.
Operator manual
5. Menu description
Operation of the SH80 sonar is also menu based. and the menus will
automatically adjust to your current operational modes. This chapter
explains all the menus, and referes directly to the relevant parameters. Refer
to page 56.
6. Parameters
All the operational functions of the SH80 sonar are controlled by the
parameters accessed from the menu system. In this chapter, all the
parameters are described and explaind. They are listed in alphabetical
order. Refer to page 83.
7. Maintenance
This chapter explains how to perform the on-board maintenance on the
SH80 sonar. Refer to page 150.
850-164385 / Rev.C
I
Page 6

Simrad SH80
SYSTEM DESCRIPTION 1......................................
Introduction 1..................................................
System overview 2..............................................
Main units 2..............................................
Wheelhouse units 2........................................
Sonar room units 3.........................................
System diagram 4...............................................
Options 6......................................................
General 6................................................
Multiple-frequency 6.......................................
Scientific output 6.........................................
Functional description 7..........................................
Introduction 7.............................................
Functional principles 7......................................
Stabilization system 9......................................
Reception 9...............................................
Transmission 10............................................
Peripheral equipment 12...........................................
DISPLAY MODES 13.............................................
Introduction 13..................................................
Bow Up 14......................................................
North Up 15.....................................................
True Motion 16..................................................
180°/Audio 17...................................................
270°/Vertical 18..................................................
Bow Up / Vertical 19..............................................
True Motion/Vertical 20...........................................
Dual 1 21.......................................................
Dual 2 22.......................................................
SONAR OPERATING PANEL 23..................................
Introduction 23.............................................
Main switch 24.............................................
Symbol 25................................................
Mode 27..................................................
Gain 28...................................................
Range 29..................................................
Cursor 30.................................................
Train 32..................................................
II
850-164385 / Rev.C
Page 7

Operator manual
Tilt 34....................................................
Various 35.................................................
OPERATION 36..................................................
Introduction 36..................................................
Maintaining the sonar 37...........................................
Maintenance procedures 37...................................
Important when docking the vessel 37...........................
Start and stop procedures 38........................................
Start procedure 38..........................................
Stop procedure 39...........................................
Dry-docking safety measures 40...............................
Menu operation 41................................................
Introduction 41.............................................
Screen presentations 42......................................
Menu structure 44..........................................
Menu buttons 45............................................
Selecting a new parameter value 46.............................
Stored parameters 48........................................
Visual aids 49...................................................
Common information on the display 49.........................
Moving the boundary lines 49.................................
Cosmetics 50....................................................
Installation of options 53...........................................
On-line help 55..................................................
MENU DESCRIPTIONS 56.......................................
Introduction 56..................................................
Active menus 57.................................................
Overview 57...............................................
Horizontal 58..............................................
Vertical 59................................................
Display 60................................................
Setup 61..................................................
Objects 62.................................................
Temporary menus 63..............................................
Cosmetics 64..............................................
Store/Recall 65.............................................
System test 66.............................................
Sort Modes 68.............................................
850-164385 / Rev.C
III
Page 8

Simrad SH80
Pop-up menus 69.................................................
View pop-up 70............................................
Object pop-up 72...........................................
View menus 74..................................................
GeoView 75...............................................
VerticalView 76............................................
CatchView 77..............................................
Messages 78.....................................................
Message categories 78.......................................
Warnings 79...............................................
Operator alarms 80..........................................
System alarms 81...........................................
Errors 82..................................................
PARAMETERS 83.................................................
About parameter dialogues and help 83...............................
Alphabetical list 84...............................................
About 85..................................................
Beam 86..................................................
Bearing (Horizontal) 88......................................
Bearing (Display) 90........................................
Bearing (Vertical) 91........................................
Colour Threshold 92........................................
Colours 93................................................
Data Source 94.............................................
Dead Reckoning 95.........................................
Default Setting 96..........................................
Direction Indicator 97.......................................
Edit Gear (Purse) 98.........................................
Edit Gear (Trawl) 99........................................
Edit School 101.............................................
External Synchronization 102..................................
Fish Alarm 103..............................................
Frequency 104..............................................
Gain 105...................................................
Gear 106...................................................
Heading 107................................................
Inspect Object 108...........................................
Language 109...............................................
Menu 110..................................................
IV
850-164385 / Rev.C
Page 9

Operator manual
Message Bar 111............................................
Mode 112..................................................
Mode Buttons 113...........................................
Movements 114.............................................
Noise Level 115.............................................
Palette 116.................................................
Panel Backlight 117..........................................
PP Filter 118...............................................
Pulse Form 119.............................................
Range 121..................................................
Range (Catch View) 122......................................
RCG (Reverberation Controlled Gain) 123........................
Recall 124..................................................
Recall Mode 124............................................
Ruler 125..................................................
Scale 126..................................................
School 127.................................................
Scientific Output (Option) 128.................................
Search Sector 129............................................
Search Step 130.............................................
Slant Range/True Range 131...................................
Speed 132..................................................
Stabilizer 133...............................................
Status 134..................................................
Store 135..................................................
Store Mode 135.............................................
Target Track 136.............................................
Tilt 137....................................................
Time and Date 138...........................................
Track History 139............................................
Track Window 140...........................................
Transducer 141..............................................
TVG (Time Variable Gain) 142.................................
Tx Power 143...............................................
Units 144..................................................
User Setting 145.............................................
Wind Direction 146..........................................
Wind Speed 147.............................................
Zoom 148..................................................
Zoom Scale 149.............................................
850-164385 / Rev.C
V
Page 10

Simrad SH80
ON-BOARD MAINTENANCE 150..................................
Introduction 150..................................................
Preventive maintenance schedule 151..................................
Wheelhouse units 152..............................................
Cleaning 152...............................................
Dust filter 152..............................................
Transceiver Unit 154...............................................
Dust filter 154..............................................
Replacing fuses 154..........................................
Hull unit 156.....................................................
General 156................................................
Hull unit familiarization 157...................................
Docking the vessel 158.......................................
Cleaning the transducer 160....................................
Hoist motor overload protection 161.............................
Emergency hoisting and lowering 162............................
Lubrication of the Hull Unit 163................................
VI
850-164385 / Rev.C
Page 11

SYSTEM DESCRIPTION
Introduction
The Simrad SH80 sonar is an omnidirectional high frequency
sonar, designed for all sized fishing vessels, both purse seiners
and trawlers. T he standard frequency is 116 kHz (multiple
frequencies as option), and the beam can be electronically tilted
from +10 to –60 degrees.
Great emphasis has been placed on giving the best possible
presentations on a high resolution colour display. The processor
unit is controlled by Microsoft’s Windows XP operating
system, which result in a flexible choice of display modes for a
large range of user applications.
The signal processing and beamforming is performed in a fast
digital signal processing system using the full dynamic range of
the signals. In addition to the traditional single frequency
transceiver system, the SH80 sonar contains an advanced
frequency modulated filter system (FM).
System description
The cylindrical multi-element transducer allows the
omni-directional sonar beam to be tilted electronically down to
-60 degrees. This allows you to automatically track schools of
fish, and to observe the whole water volume around the vessel.
A stabilization system is included for electronic pitch and roll
compensation.
Topics
System overview, page 2
System diagram, page 4
Options, page 6
Functional description, page 7
Peripheral equipment, page 12
Important notice
Windows, Windows NT and Windows XP are either registered
trademarks or trademarks of Microsoft Corporation in the
United States and/or other countries.
850-164385 / Rev.C
1
Page 12

Simrad SH80
System overview
Main units
The Simrad SH80 sonar consists of the following units:
Wheelhouse units:
- Display monitor
- Sonar Operating Panel
- Sonar Processor Unit
- Sonar Interface Unit
Sonar room units:
- Transceiver Unit
- Hull Unit
Wheelhouse units
The Display Monitor is a high-resolution colour LCD (Liquid
Crystal Display). In addition to the sonar picture, the monitor
can also display the user menu for the interactive operation. In
order to ease the situation comprehension, certain colours have
been chosen to better the distinction between the various
elements in the scene.
The Operating Panel contains all necessary control functions
for operating the sonar. The controls are arranged in function
groups, which gives a clear and easy operation. Note that all
sonar operation also may be made from the trackball, or from an
optional standard mouse.
The Sonar Processor Unit contains a ruggedized computer,
which runs the Microsoft Windows XP operating system.
The software has been modified by Simrad to suit the SH80
sonar requirements. The unit holds a CD R/WR unit to be used
for future software upgrades.
The Sonar Interface Unit provides interface for all auxiliary
equipment; log, gyro, GPS, echo sounder, trawl systems, purse
seine systems etc. One signal cable is used for the
communication with the Transceiver Unit in the sonar room.
Note that SH80 sonars shipped before August 2003 use a
different Sonar Processor Unit; the APC10. These sonars do not
have the Sonar Interface Unit fitted. All interfaces to peripheral
equipment are then handled by the APC10.
2
850-164385 / Rev.C
Page 13
System description
Sonar room units
The Transceiver Unit is located in the sonar room, close to the
Hull Unit. One signal cable is used for communication with the
Sonar Interface Unit in the wheelhouse. The transceiver
performs the signal processing and the digital beamforming of
the 240 transmitters and 480 receiver channels, which are
located on the eight identical transceiver boards.
The Hull Unit is designed to be lowered 1.0 meters below the
ship’s hull. The transducer can also be lowered to any selectable
middle position. Note that in case of voltage failure, the Hull
Unit can be manually raised or lowered by means of a hand
crank.
The cylindrical 480-elements transducer allows the sonar beam
to give full 360 degrees coverage of the water volume down to
-60 degrees.
The sensor for the electronic stabilization of the sonar beams is
housed in the Motor Control Unit, which is mounted on the Hull
Unit.
Warning: If the transducer hits larger objects or bottom,
the transducer shaft may be bent, or in worst
caseitcanbebrokenoff.Abrokentransducer
shaft will cause water leakage in the top of the
shaft. To prevent larger leakages in such a case,
do not
position. To prevent serious damages it is
therefore of great importance to have a good
pump and warning system in the sonar room.
Related topics
System diagram, page 4
raise the transducer shaft to the upper
850-164385 / Rev.C
3
Page 14

Simrad SH80
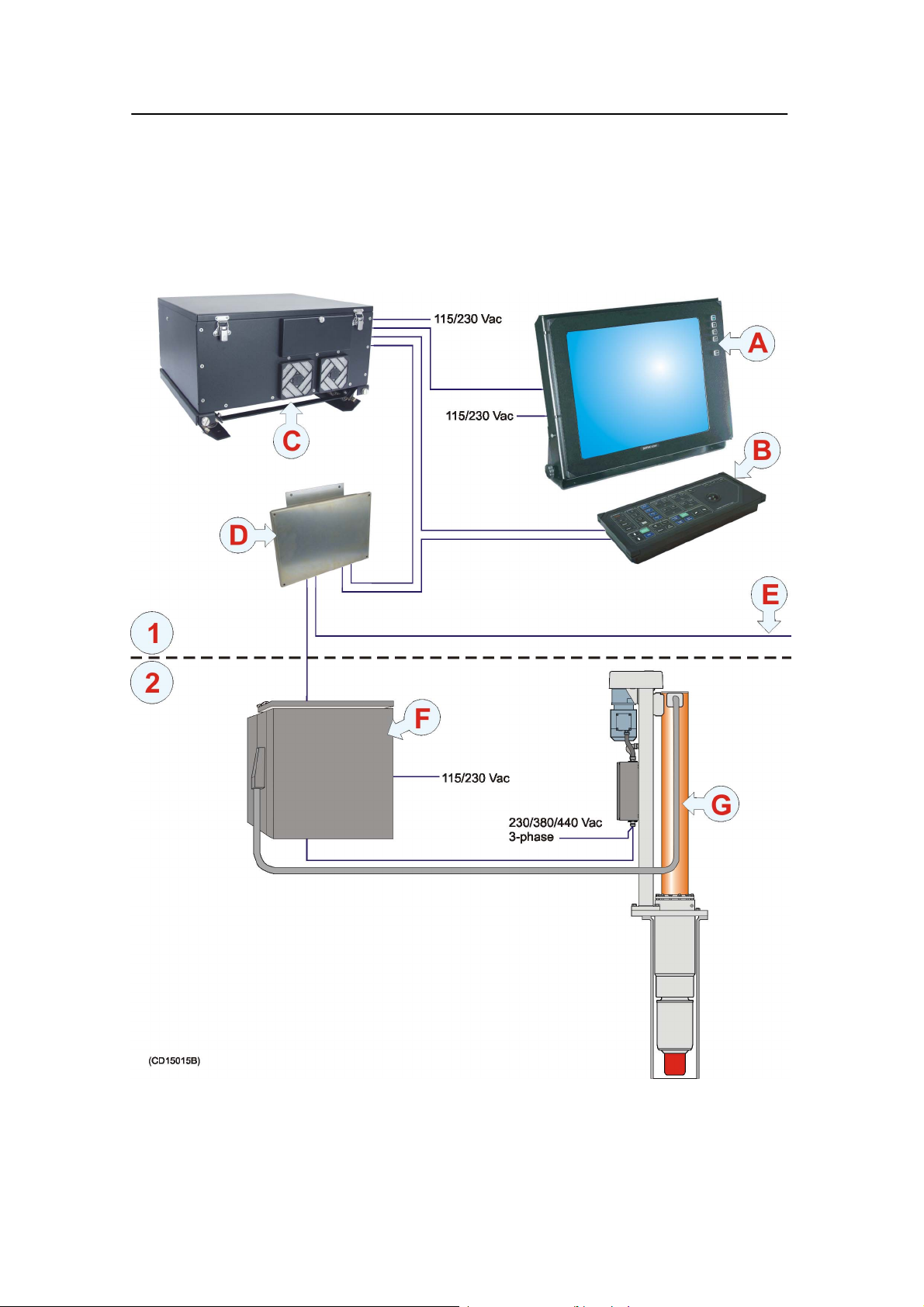
System diagram
A simplified SH80 system diagram is shown.
(A) = Colour display
(B) = Operating Panel
(C) = Sonar Processor Unit
(D) = Sonar Interface Unit
(E) = Multiple interface lines to peripheral equipment
(F) = Transceiver Unit
(G) = Hull Unit
(1) = Wheelhouse
(2) = Sonar room
4
850-164385 / Rev.C
Page 15
System description
850-164385 / Rev.C
5
Page 16

Simrad SH80
Options
General
The standard SH80 sonar is a single 116 kHz version with beam
stabilization.
The beam stabilization was an optional function until 1 January
2003. After that date, the function was included with the
standard sonar delivery.
The options described below are pre-programmed into the
standard software version, and a code word is required to make
the actual option available. Simrad offers a 1 month free test
period for certain options. Note that the Scientific Output
function is not available for such a test period.
For a permanent installation of a chosen option, a new code
word will be released from Simrad when the option is ordered.
Multiple-frequency
In addition to the standard 116 kHz frequency, a multiple
frequency option is available. In this multiple frequency version
you can select between 13 frequencies from 110 to 122 kHz in 1
kHz steps.
Scientific output
The Scientific Output is designed for research purposes. When
activated, the following data are available on an Ethernet (LAN)
output:
Beam data
Target data
Own ship data
Gear data
The scientific output option may also include software for a
Scientific Data Logger.
Note that this option is not available for a free test period.
Related topics
Code words, procedure, page 53
6
850-164385 / Rev.C
Page 17

Functional description
Introduction
The basic principles of the SH80 sonar are unique because of
the 240 transmitter and 480 receiver channels with their
transducer elements spread around on the cylindrical transducer
array.
The transmission, reception and data processing are under
computer control, and the powerful capabilities of the sonar are
the results of sophisticated digital signal processing software
and state of the art hardware.
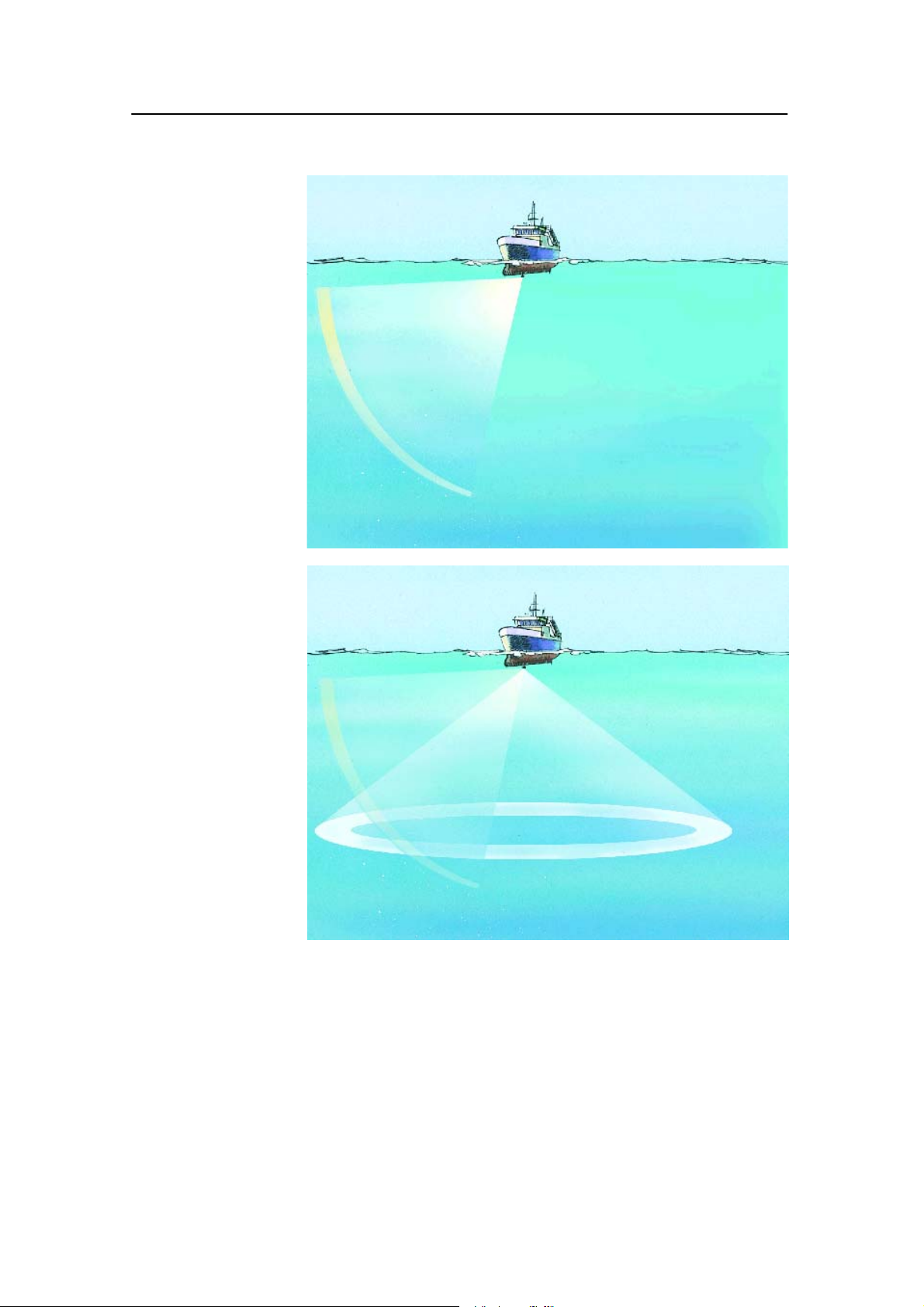
Functional principles
When the Omni beam is tilted, the total beam picture can be
compared with folding an umbrella, which means that all beams
in 360 degrees around the vessel have the same tilt angle.
System description
Omni beam
principle
The beam can be tilted from +10 up to -60 degrees down.
In addition to seeing the target from above, it is also possible to
see the target from the side, by using the vertical slice
presentation. In this case the beam covers a continuous vertical
beam from 0 to -60 degrees in one transmission.
850-164385 / Rev.C
This vertical slice, which is presented by the white audio line in
the horizontal picture, can be selected to any bearing by the
manual training control. The combination of the Omni mode
and the vertical slice will give an optimal visualization of the
catch situation.
7
Page 18
Simrad SH80
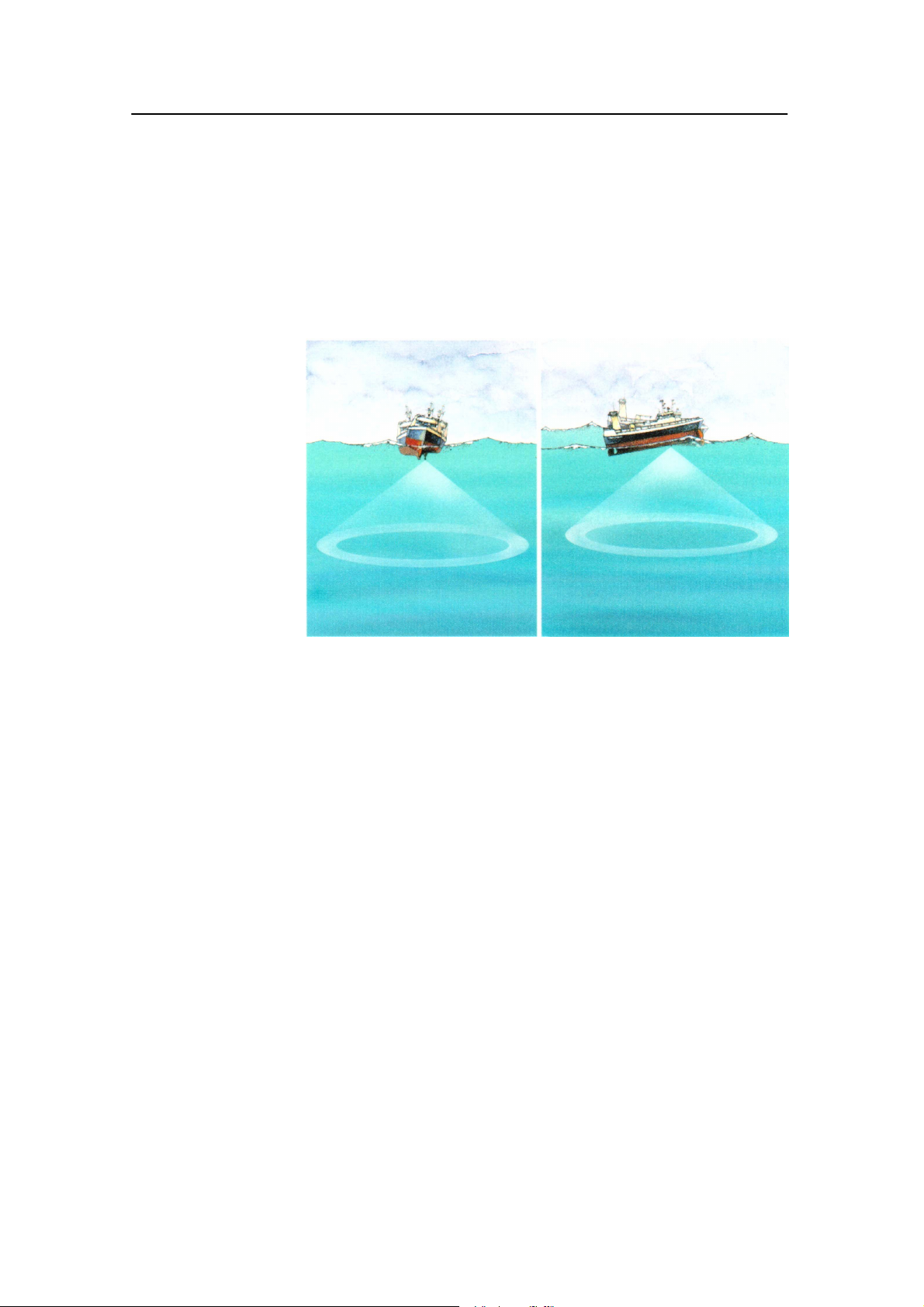
60 degrees vertical
slice
Omni/Vertical
combination
In addition to the Omni picture, the vertical slice is especially
useful for visualizing the vertical distribution of a school of fish.
In that way, it is not necessary to go over the target to see the
distribution on the echo sounder, which often results in a
spreading of the school.
8
850-164385 / Rev.C
Page 19
Stabilization
system
System description
Stabilization system
When the beam stabilizer is activated, both horizontal and
vertical beams will be stabilized electronically for roll and pitch
movements up to 20 degrees. The beam direction will then
change continuously according to the vessel’s movements, and
secure an optimal contact with the targets even in rough seas.
Reception
A great effort has been made to reduce unwanted noise to get a
clean and stable echo presentation. To achieve this goal the
sonar receiver has the following filtering possibilities:
FM Correlation filter
In addition to the traditional single frequency transmitting
method, the SH80 sonar is equipped with an FM correlation
mode.
In FM mode each transmission pulse contains up to four
different frequencies, and the receiver makes a spectrum
analysis and compares the received echoes with the transmitted
frequency code. This provides a filtering effect, which
efficiently reduces interference, noise and reverberation. In
addition to giving a clean and stable echo presentation, this will
normally also increases the sonar’s detection range
Frequency selection (Option)
The optional multiple frequency selection can be used for
suppression of interference from other sonars.
850-164385 / Rev.C
9
Page 20

Simrad SH80
However, the sound absorption in salt water increases with the
frequency, thus giving the lower frequencies a longer detection
range.
RCG (Reverberation Controlled Gain)
The RCG filter senses the noise level (reverberation, propeller
noise, etc.), and adjusts the gain individually for each of the 64
receiver beams in order to eliminate noise on the display. The
strength of the filter can be selected in the menu. With
maximum strenght is selected, the RCG will effectively reduce
the bottom in shallow water, while variations on the bottom will
be displayed.
Note that scattered fish can be perceived as reverberation. The
RCG filter must therefore be used with care if scattered schools
are to be detected.
PP Filter
The SH80 sonar is equipped with a ping-to-ping filter to give a
clean and steady presentation by reducing the interference and
noise. This filter compares the echoes from a selected amount of
transmissions (pings), and an echo has to be present in the
selected amount of pings in order to be presented on the display.
Note that in rough seas, when the beam easily can miss the
target in several pings, the PP filter must be used with care.
TVG (Time Variable Gain)
The TVG function controls the gain of the receiver so that a
school with a given size and density is presented with
approximately the same strength on the display, inside the
regulated TVG range. This can also be seen as a filter, because it
reduces the noise close to the vessel.
The regulated strength of the TVG can be selected in the menu.
Transmission
10
The transmitting is controlled by the signal processor in the
Transceiver Unit. The parameters you have chosen are used.
There are 240 separate transmitters in the unit distributed on
eight transceiver circuit boards. Each transmitter is individually
addressed and controlled from the signal processor. The
controlled parameters include power output and time delay for
each transducer element in order to form a beam with the
selected tilt angle.
850-164385 / Rev.C
Page 21
System description
When the stabilisation system is active, the tilt angle for each
beam will automatically be corrected relative to the vessel’s
pitch and roll movements.
Related topics
→ Frequency options, page 6
850-164385 / Rev.C
11
Page 22

Simrad SH80
Peripheral equipment
The SH80 sonar requires connection to a speed log and a course
gyro. An inaccurate log or gyro input will cause inaccurate
indication of the vessel and target movements.
In addition to log and gyro, the following peripheral equipment
can be connected to the sonar.
A (D)GPS may be connected to the SH80 sonar to establish
the vessels position and provide cursor and marker latitude
and longitude.
Simrad echo sounders (EQ, ES and EK Series) provides a
bottom plot on the catch data page.
Simrad PI32 and PI44 Catch Monitoring systems provide the
net depth in digits and bars on the catch data presentation.
Simrad trawl instrumentation; FS 900, FS 3300 or ITI
- FS 900 and FS 3300: The trawl will be displayed in
correct depth.
- ITI: The trawl will be displayed in correct size, depth,
distance and bearing.
A Current meter system will indicate the current speed and
direction for up to three different depths in the sonar picture.
A radio buoy system (GPS type) will provide the
geographical position of the buoy(s) in the sonar picture.
For connection of any of this peripheral equipment, contact your
local dealer.
12
850-164385 / Rev.C
Page 23

DISPLAY MODES
Introduction
This chapter describes the SH80 display modes. The various
modes represent the graphical presentation of sonar data.
Several display modes are available to present the best possible
presentations as well as flexible choices for a large range of user
applications.
Topics
Bow Up, page 14
North Up, page 15
True Motion, page 16
180
/ Audio, page 17
Display modes
270
Bow Up / Vertical, page 19
True Motion / Vertical, page 20
Dual 1, page 21
Dual 2, page 22
/ Vertical, page 18
Display mode selection is made on the second menu button in
the main menu. The four first display modes shown can also
easily be selected with the four Mode buttons on the Sonar
Operating Panel.
Note that the descriptive order of the display modes in this
chapter has been chosen only to simplify the descriptions. In
operational conditions, the order of the display modes depends
on the selected gear (seine net, bottom trawl or pelagic trawl)
This is because different initial display modes are used for easy
selection by the four Mode buttons on the Sonar Operating
Panel. The order of these display modes can easily be changed
in the Sort Mode menu.
All the display modes in the following chapters are shown
without echoes.
850-164385 / Rev.C
Related topics
Mode buttons, page 27
Sort Modes, page 68
13
Page 24
Simrad SH80
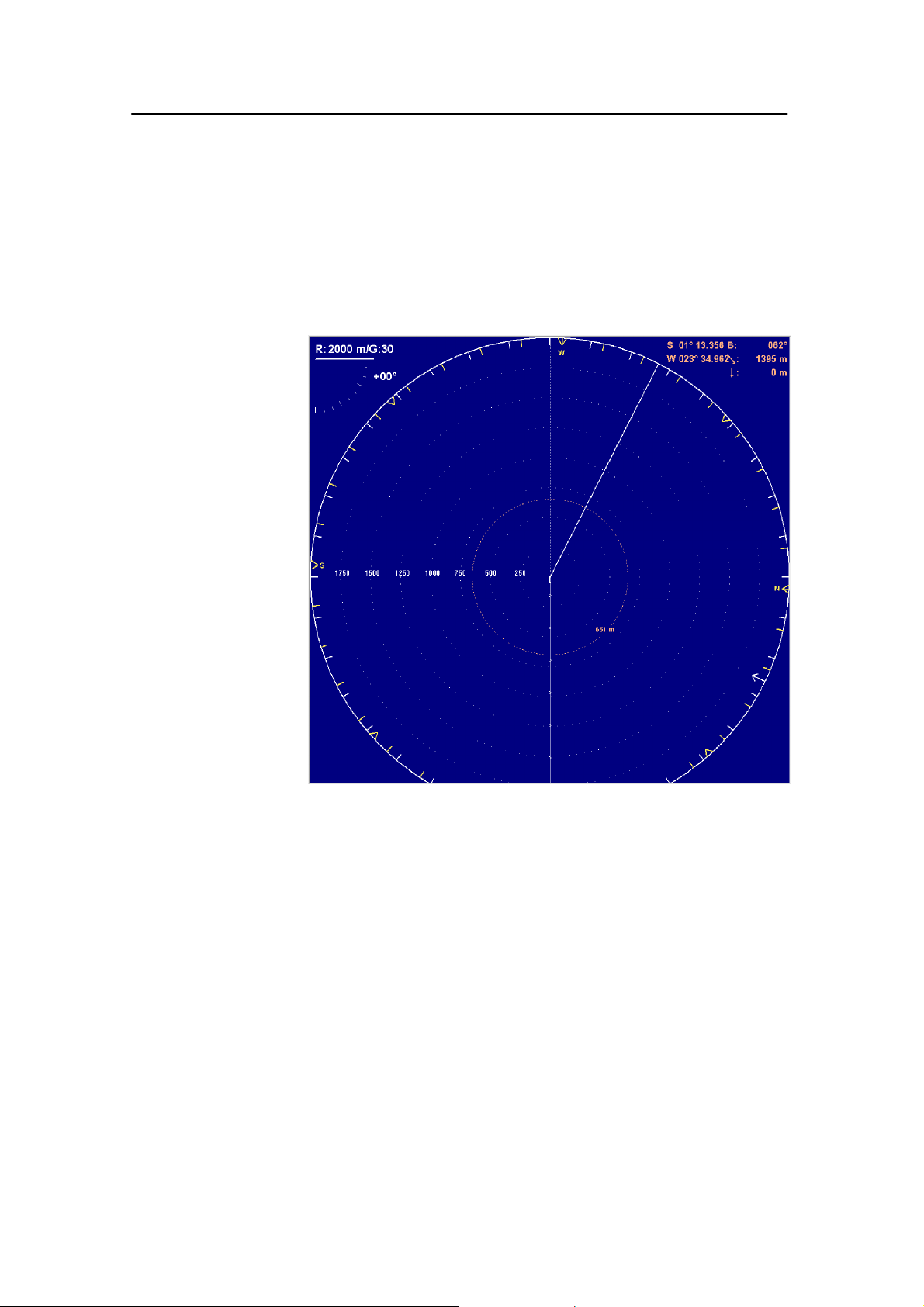
Bow Up
When Bow Up mode is selected, the vessel symbol is stationary
on the screen with the bow pointing upwards. The echo
presentation covers 360 degrees around the vessel, and all
echoes are updated for every ping. The distance from the vessel
symbol to the outer echo ring is equal to the selected range.
14
The movement of the echoes across the screen are controlled by
a combination of the vessel’s course and speed and the target’s
own movements.
Related topics
Cosmetics, page 50
850-164385 / Rev.C
Page 25
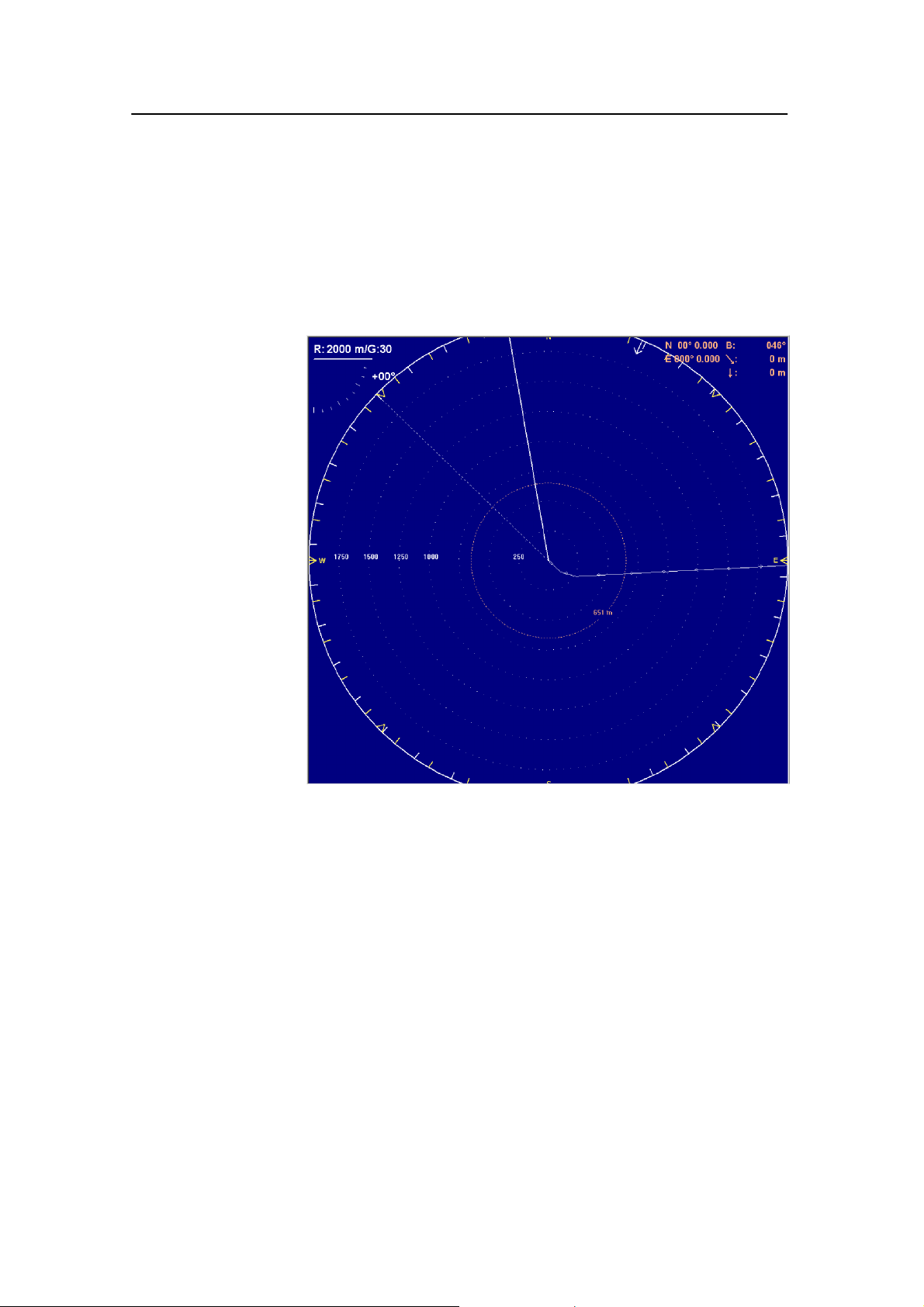
North Up
Display modes
When the North Up mode is selected, true north is always up
on the screen. The vessel symbol is stationary with the bow
pointing in the vessle’s course direction. The movement of the
echoes across the screen are controlled by a combination of the
vessel’s course and speed and the target’s own movements.
850-164385 / Rev.C
Related topics
Cosmetics, page 50
15
Page 26
Simrad SH80
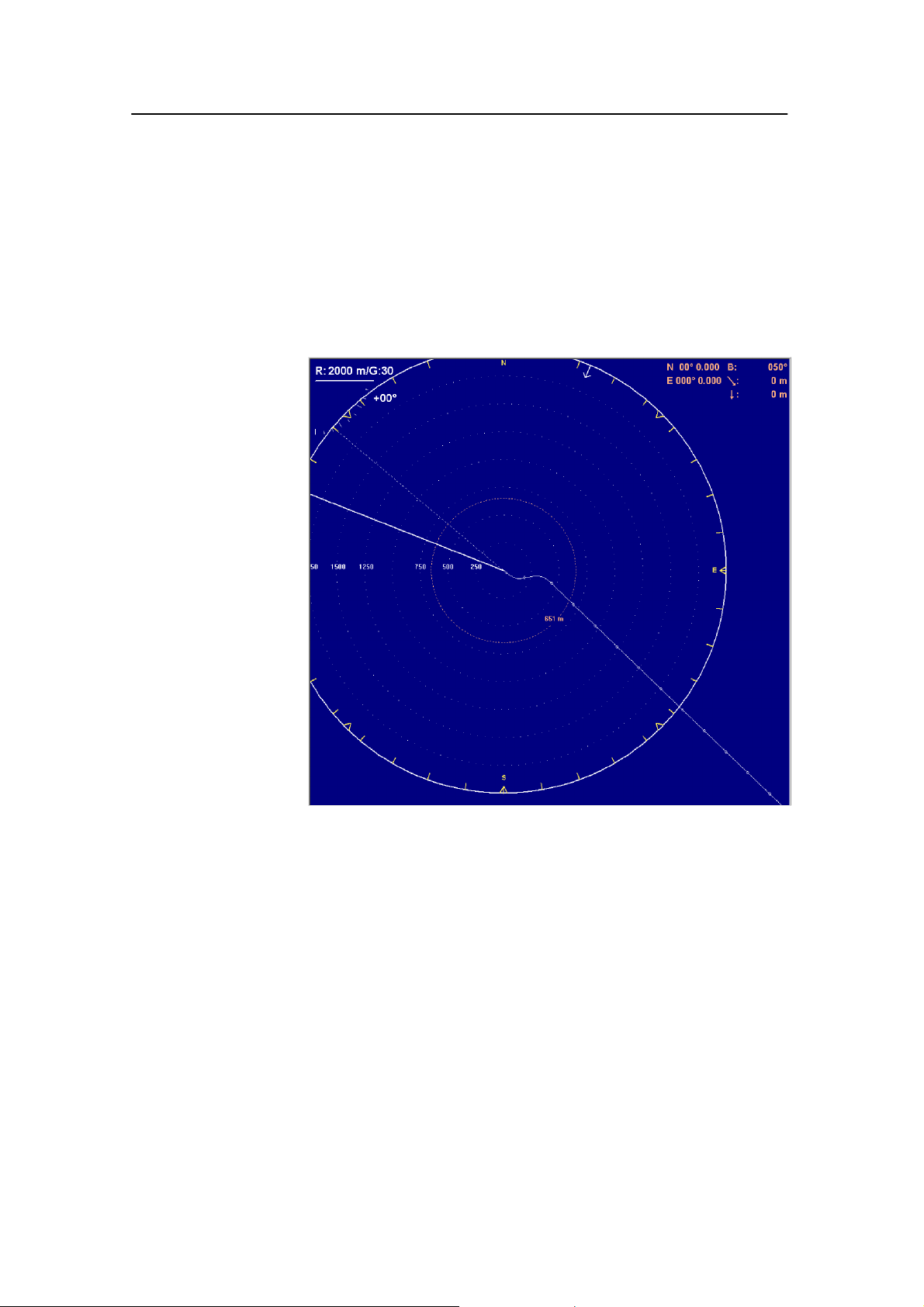
True Motion
When the True Motion mode is selected, the picture is locked
to a geographical position, where the vessel moves around the
screen according to its present course and speed. All echoes are
always presented in their correct position relative to the vessel,
and their movements on the screen will be a true representation
of the movements of the targets through the water.
16
When the vessel symbol reaches the edge of the screen, it will
automatically be moved back to the centre, or to a position
determined by the Off Centre button. This position is reset to
the screen centre whenever the mode is changed. When you
select Target Track, the target will automatically be moved to
the screen centre.
Related topics
Cosmetics, page 50
850-164385 / Rev.C
Page 27
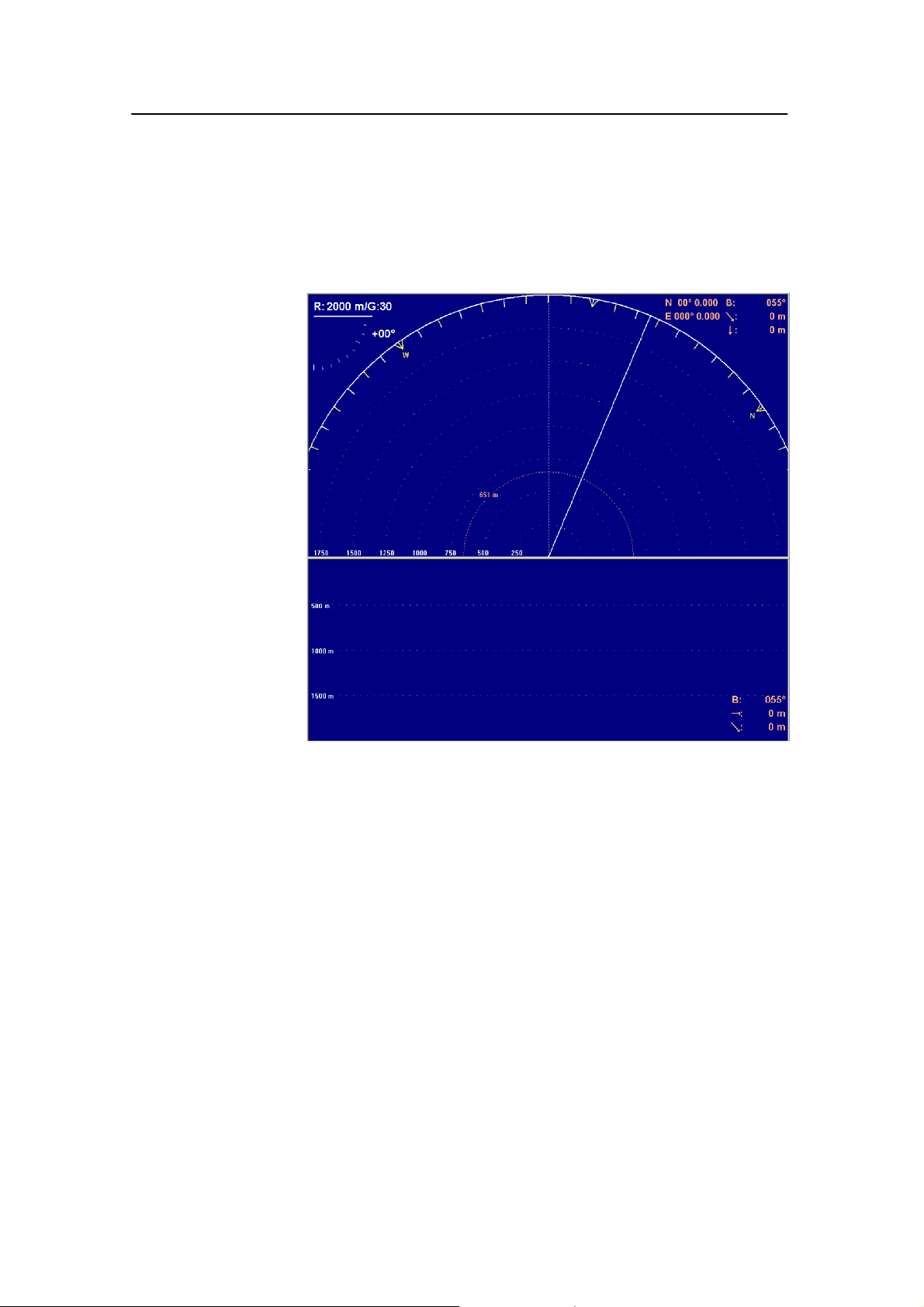
180°/Audio
Display modes
When the 180°/Audio mode is selected, the upper half of the
screen shows a 180 degrees bow-up presentation, while the
lower part is used for a recording of the audio channel.
The audio channel is shown with a continuous white line in the
horizontal picture, and it can be trained in any direction. The
recorded echoes are a direct replica of the echoes under the
white audio line. As the audio channel is recorded over a period
of time, this mode is especially useful for detection of weak
echoes mixed with reverberation or noise.
The information recorded by the audio channel is always stored
in the computer, even if another mode is selected. That means
that this recording will always be presented when selecting the
180°/Audio mode. Note that the vessel symbol can be moved to
any position in the horizontal view with the cursor and Off
Centre button.
Related topics
Cosmetics, page 50
850-164385 / Rev.C
17
Page 28
Simrad SH80
270°/Vertical
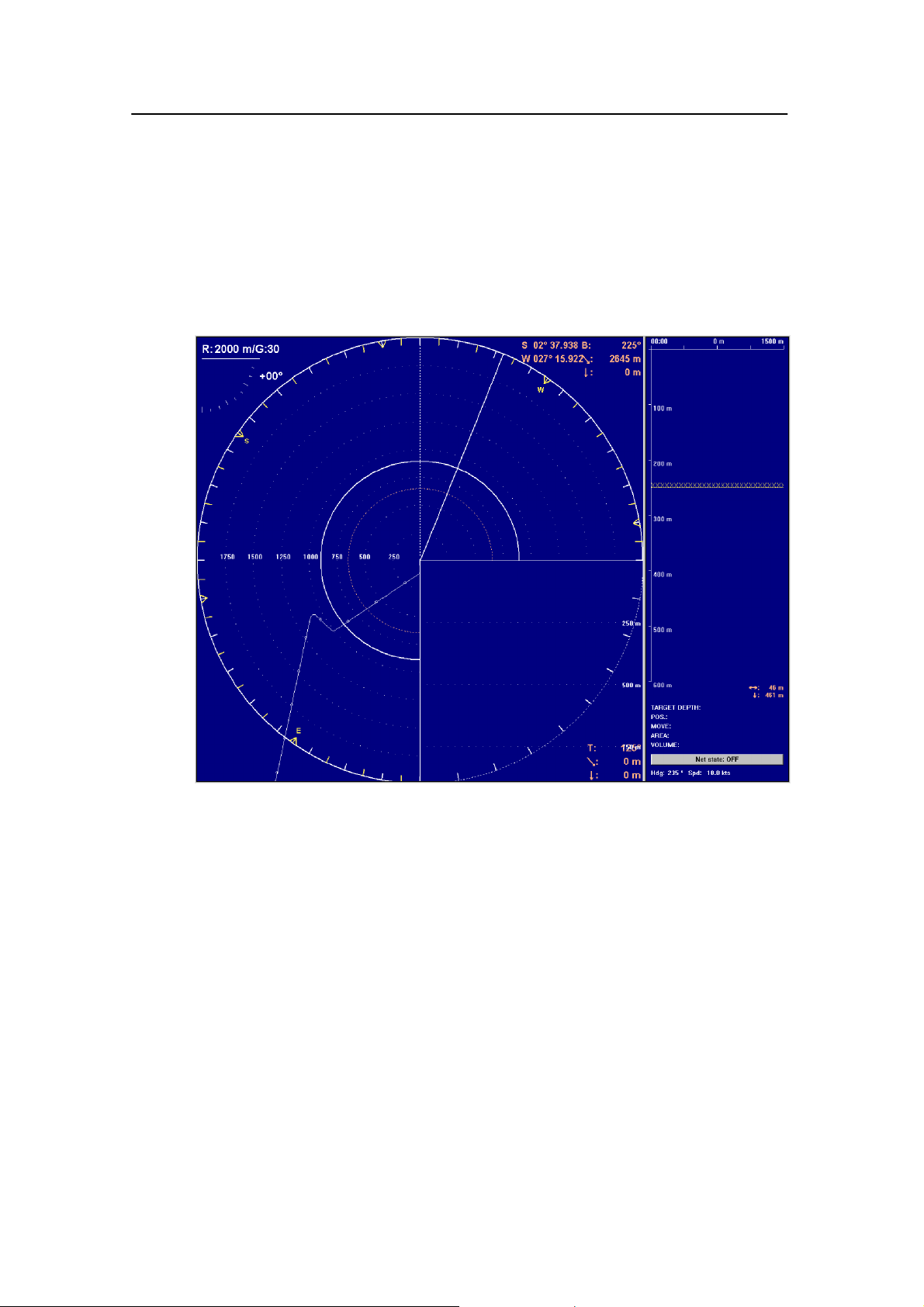
The 270°/Vertical mode is specially designed for purse seining.
The vertical half slice is displayed in the lower left corner for
normal setting with the net on the starboard side. If the net is set
on the port side, the 60 degrees vertical slice will be displayed
in the lower right hand corner.
18
With this presentation, it is easy to keep the best contact with a
school in both the vertical and horizontal presentation, and to
determine its size distribution. The position of the school
relative to the bottom is another important information provided
by this presentation. The Catch data presentation for purse
seining is shown on the right hand side. It shows all the net data
relative to the target and the bottom, as well as all available
target data.
Related topics
Cosmetics, page 50
850-164385 / Rev.C
Page 29
Bow Up / Vertical
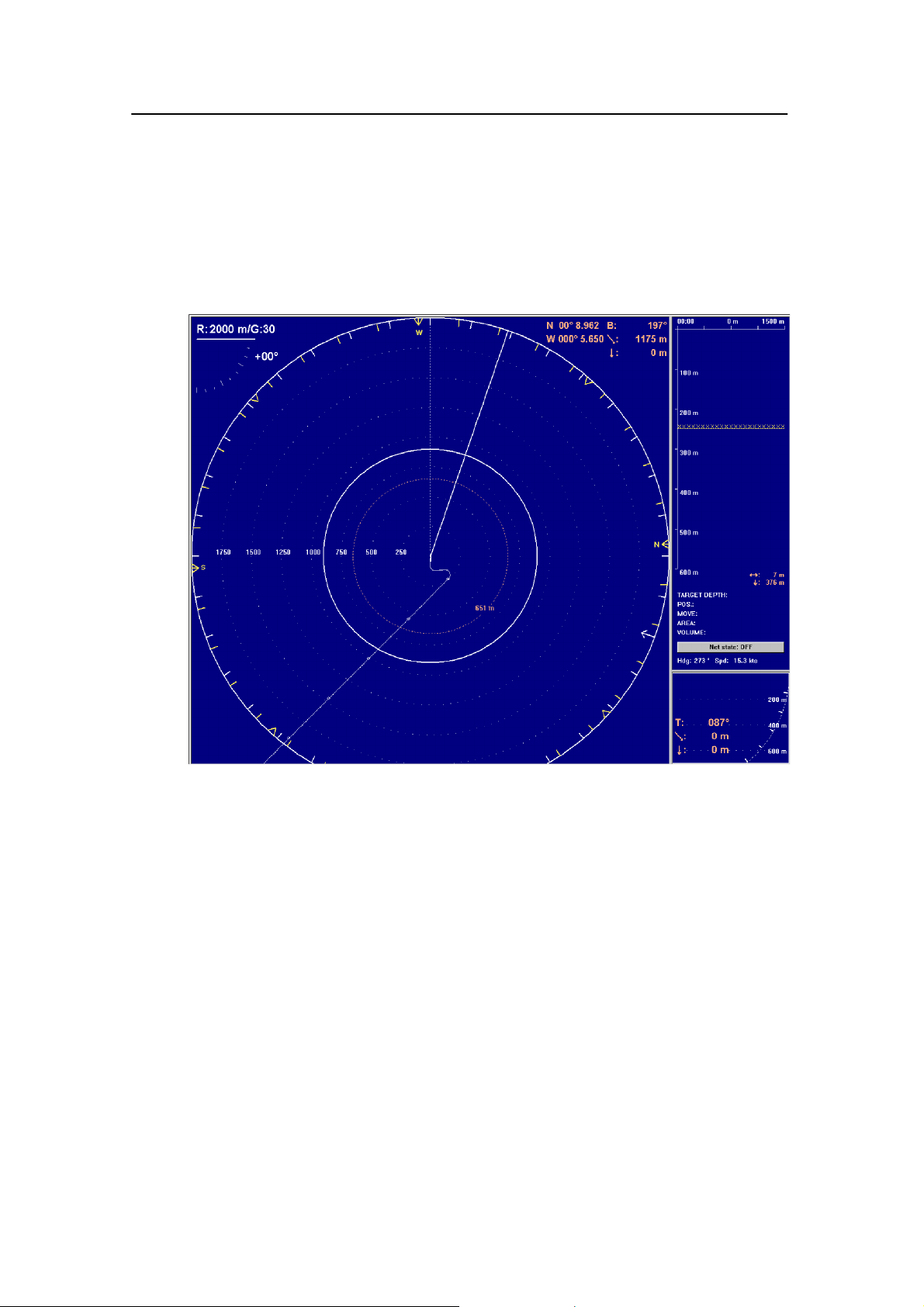
When the Bow Up / Vertical mode is selected, the picture is
divided into three sections; where the left side is a bow-up
presentation similar to the bow-up presentation previously
described.
Display modes
850-164385 / Rev.C
The upper part on the right hand side is a catch data
presentation, while the lower part is a 60 degree vertical slice
presentation.
Related topics
Cosmetics, page 50
19
Page 30
Simrad SH80
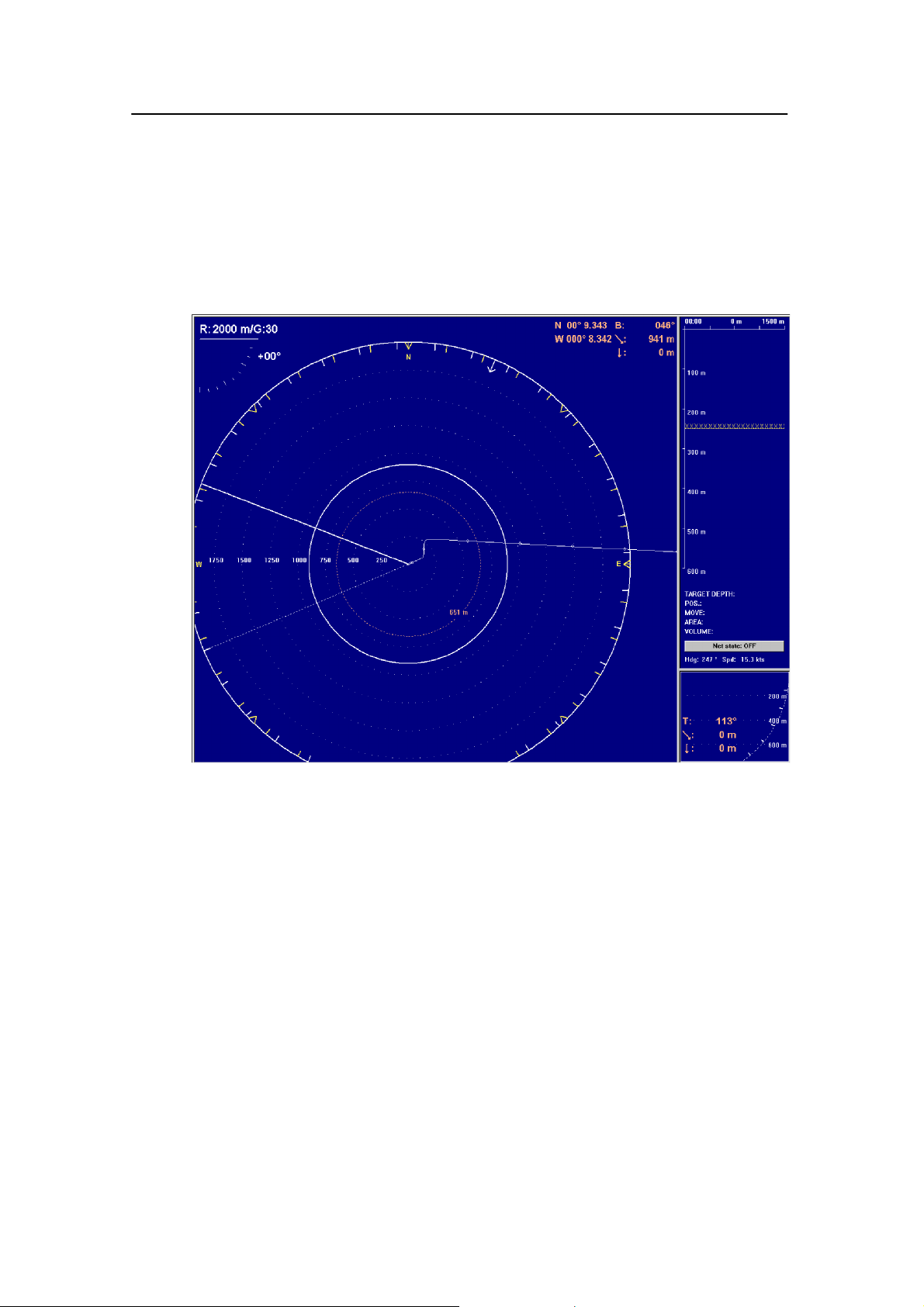
True Motion/Vertical
When the True Motion/Vertical mode is selected, the picture is
divided into three sections; where the left side is a True motion
presentation similar to the true motion presentation previously
described.
20
The upper part on the right-hand side is a Catch data
presentation, while the lower part is a 60 degrees Vertical slice
presentation.
Related topics
Cosmetics, page 50
850-164385 / Rev.C
Page 31

Dual 1
Display modes
The Dual 1 mode is a kind of “two sonars in one” operation,
where each presentation is updated for every second
transmission. All settings can be set individually for each of the
two presentations. This makes the dual mode especially useful
for optimizing settings by directly comparing the two
presentations.
850-164385 / Rev.C
To optimize the horizontal settings, use the Horizontal menu to
try different settings in the upper picture. These settings are
automatically transferred to the other modes.
The dual operation may also be used for other user applications,
where different range, tilt, frequency and other parameters can
be selected.
Related topics
Cosmetics, page 50
21
Page 32

Simrad SH80
Dual 2
The Dual 2 mode is very similar to the Dual 1 mode previously
described, but the “two sonars” are presented next to each other.
All settings can still be set individually for each of the two
presentations.
22
Related topics
Cosmetics, page 50
850-164385 / Rev.C
Page 33

SONAR OPERATING PANEL
Introduction
You may enter operational commands directly on the Sonar
Operating Panel. Sonar functions may also be accessed and
activated using the menu field on the display and the trackball
on the operating panel.
Frequently used functions are directly accessed by the
designated control buttons. These are grouped according to their
purpose.
SIMRAD
MAIN SW.
POWER
Up
Middle
Down
SYMBOL
TILT
Manual
Auto
Record
MODE
VARIOUS
Mode
Mode
Mode
Mode
1
2
3
4
Zoom
Off
Centre
Gain
H -
Gain
V -
Position
Track
Target
Track
GAIN
Gain
H +
Gain
V +
Manual
Auto
Search
RANGE CURSOR
Range
Range
H +
H -
Range
Range
V +
V -
TRAIN
Sonar Operating Panel
SelectMenu
SONAR OPERATING PANEL
View
Object
(CD5377B)
Sonar Operating Panel
A thorough understanding of system functions and controls is
necessary to optimize overall performance. Sonar conditions
vary, sometimes drastically, and it is not possible to identify
settings that will provide the best data at all times. Careful study
of the information in this manual is highly recommended,
preferably while exploring the sonar’s various functions. System
operation is a dynamic activity requiring regular adjustments
and fine tuning to achieve the best possible results under varying
environmental conditions.
850-164385 / Rev.C
23
Page 34

Simrad SH80
Main switch
Main switch functions control power to the sonar, hoisting and
lowering of the transducer and indicates the transducer’s current
position.
Power
Pressing Power for approximately two seconds powers up the
sonar. The adjacent green LED blinks while the Sonar Control
Unit boots up, and remains illuminated once the system is
operational.
Before the sonar can be powered down, the transducer must be
in the Up position. Pressing the Power button for approximately
two seconds secures power to the unit which is confirmed by the
adjacent green LED being extinguished.
Up
Raises the transducer to its upper position. The adjacent green
LED blinks while the transducer is raised and remains
illuminated once it is housed safely inside the hull of the vessel.
The green blinking LED will also be accompanied by an audible
signal.
Middle
Raises or lowers the transducer to its middle position.
The physical location of the middle position can be defined in
the Transducer parameter dialogue.
Down
Lowers the transducer to its lower position. The adjacent green
LED blinks while the transducer is lowered and remains
illuminated when lower position is reached. The green blinking
LED will also be accompanied by an audible signal.
Related topics
Transducer, page 141
24
850-164385 / Rev.C
Page 35

Sonar Operating Panel
Symbol
The Symbol functions provide on-screen graphic references for
targets, own ship and fishing gear.
(A) Target marker
To mark a target, move the cursor over it and press
the button. A triangular symbol with a
corresponding number will appear on the screen
over the target.
Position data for the defined markers are displayed
in the Objects menu.
Note that the system continues to track the markers
even when outside the sonar range.
The Target marker function can also be used for
manual target tracking as the system is designed to
calculate the speed (S), course (C) and distance (D)
between the last two chosen targets.
The Target marker data is displayed in white
figures for three minutes in the lower right hand
corner of the horizontal presentation. This function
is also an effective method for determining the
distance between two selected points on the screen.
(B) Own ship marker
The “own ship” button produces a square symbol on the screen
at the vessel’s current location when the button is pressed. The
own ship marker’s position data is displayed in the Objects
menu.
(C) Circle marker
This marker may be used to estimate the size of a school of fish
or as an indication of the size of the purse seine. To activate the
function, move the cursor to the desired position and press the
button. A circular symbol will appear on the screen at the
chosen location. The size of the symbol is equal to that of the
purse seine selected.
850-164385 / Rev.C
(D) Gear symbol
The gear symbol may be either a purse seine circle or a trawl
symbol depending on the parameter chosen by the Gear button
in the Setup menu. The selected gear symbol will be displayed
in yellow.
25
Page 36

Simrad SH80
Seine circle
This is a useful aid in planning the shooting of the purse seine. It
is used as follows:
1. Press the Gear button.
- The purse seine circle will appear on the forward end of
the ship symbol on the corresponding side of the vessel
selected in the Setup menu. The circle will follow the
vessel’s movements.
2. At the moment the seine is shot, press the Gear button
again.
- The purse seine circle will remain stationary and
indicate the ideal path for setting the seine. Three
square symbols on the ship’s course line indicate the:
shooting, one half, and the end of the seine positions.
Three different nets can be pre-programmed in the
Gear menu.
3. Press the Gear buttontodeletethePurse Seine circle.
Trawl symbol
This is a useful aid in providing an overview of the trawl
operation.
Trawl data can be set manually using the menu or automatically
by interfacing the Simrad FS trawl sonar or ITI trawl
monitoring system with the sonar.
In the manual mode the trawl symbol will be displayed with
the selected size, depth and distance.
When the FS900 or FS3000 trawl sonar is connected, the
trawl symbol will automatically be displayed with the correct
depth in the vertical modes.
When the ITI trawl system is connected, the trawl symbol
will be displayed with the correct distance, bearing and
depth. If required, the trawl opening, ambient water
temperature, and trawl-filling indicator may also be
displayed.
26
850-164385 / Rev.C
Page 37

Sonar Operating Panel
Mode
The four Mode buttons can be used to select either the four
favourite display modes or user settings. The set up the buttons
to choose modes or settings, select Mode Buttons in the
Display menu.
Depending on the selection you make in the Mode Buttons
menu, you have two options:
To select a mode, use the Mode buttononthetopofthe
menu, or press one of the four Mode buttons. Frequently
used operational modes that are task specific to particular
phases of the fishing operation can be pre-defined in the Sort
modes menu. For example, Mode 1 maybeusedforthe
search phase, Mode 2 for the evaluation phase, Mode 3 for
the catch phase, and Mode 4 for dual operation.
To select a user setting, you can select User Settings on the
the Setup menu, or you can use one of the four Mode
buttons. The different user settings are created and
maintained in the User Setting parameter dialogue. To
choose user setting assignment to the four buttons, sort the
list of users alphabetically.
Related topics
Sort Modes, page 68
Display Modes, page 13
User Settings, page 145
Mode Buttons, page 113
850-164385 / Rev.C
27
Page 38

Simrad SH80
Gain
Gain controls are specified as either horizontal or vertical.
Horizontal gain
The two upper buttons control receiver gain
effecting the horizontal presentation of the sonar.
The level of gain selected is display in the
Horizontal menu and on top of the tilt indicator in
the upper left-hand side of the display. It has 51
selectable values numbered from 0 to 50 and may be
changed in steps of 1 dB.
Vertical gain
The two lower buttons control receiver gain
effecting the vertical presentation of the sonar. The
level of gain selected is display in the Vertical
menu. It has 51 selectable values numbered from 0
to 50 and may be changed in steps of 1 dB.
28
850-164385 / Rev.C
Page 39

Sonar Operating Panel
Range
Range controls are specified as either horizontal or vertical.
Horizontal range
The two upper buttons control the horizontal range.
The range selected is displayed in the Horizontal
menu, and on top of the tilt indicator in the upper
left corner of the display.
Vertical range
The two lower buttons control the vertical range.
The range selected is displayed in the Vertical
menu.
850-164385 / Rev.C
29
Page 40

Simrad SH80
Cursor
The cursor is used for on-screen cursor orientation and menu
operation.
Menu
The Menu buttonisusedfor
selection between Menu or Full
Screen presentations. When the
main menu is displayed, the echo
presentation will be reduced
correspondingly. In full screen
presentation, the full dimension of
the screen is used for the echo
presentation.
When the full screen echo
presentation is displayed, the
cursor may be used to activate the
menu field by moving it to the left
or right extremes of the screen.
Moving the cursor outside the
menu field will hide the menu.
Select
The Select button is used to execute a selection. This
corresponds to the left button on a standard mouse.
View
The View button activates the View pop-up menu for the
selected display window. This button corresponds to the middle
button on a standard mouse.
Object
The Object button activates the Object pop-up menu for the
selected display window. This button corresponds to the right
button on a standard mouse.
30
850-164385 / Rev.C
Page 41

Sonar Operating Panel
Trackball
The trackball controls the cursor. The cursor changes
appearance in relation to its location on the screen:
An Orange cursor in the echo field.
An arrow in the menu field.
A negative or positive sign at each end of the menu buttons.
The negative or positive sign indicates the direction in which
the corresponding parameter values will be changed when the
Select button is pressed.
Related topics
Menu and full screen presentations, page 41
View pop-up menu, page 70
Object pop-up menu, page 72
Menu buttons, page 45
850-164385 / Rev.C
31
Page 42

Simrad SH80
Train
The audio channel is displayed as a continuous white line. It can
be trained either manually or automatically. The bearing angle is
displayed in the upper right-hand corner of the display, indicated
relative to the bow.
Manual
In the Manual mode the train left (arrow) or train right (arrow)
buttons are used to direct the audio line to the desired bearing.
Auto search
In the Auto Search mode the sonar will automatically search
within pre-set sector limits with the selected audio line
designating the centre of the search. The search sector is
displayed on the bearing card with two white angular symbols.
The search sector is adjusted by pressing and holding the
Auto Search button and simultaneously pressing the train
left (arrow) or train right (arrow) buttons .
The Automatic Search function is overridden when either
the train left (arrow) or train right (arrow) buttons are pressed
and will continue once released. The present bearing at the
moment either button is released will become the centre of
the search.
Position track
The Position Track function is only available when both a
course gyro and a speed log are interfaced with the sonar
system.
32
To track a fixed position, place the cursor over the desired
location and press the Position Track button. A geographically
fixed circle will appear on the display, and its position will
automatically be tracked by the system with respect to the
bearing and tilt angle.
850-164385 / Rev.C
Page 43

Sonar Operating Panel
When the Auto Tilt function is activated in the Position Track
mode the tilt search centre is automatically adjusted with regard
to the distance to the tracked position.
Target track
To track a target, place the cursor over the desired location and
press the Target Track button. A circle will appear on the
display and its position automatically tracked by the system
using the strongest echo centred in the ”window” represented by
two lines on the audio line. The “window’s” size may be
selected by the Track Window buttonintheSetup menu.
The vector originating from the target’s centre indicates its
course and speed. The length of the vector increases relative to
the target’s speed. One knot is represented by a small mark on
the vector. A course line can also be displayed showing the
target’s track.
Target tracking symbols and data are displayed with a light
violet colour. In addition to the information on the Catch data
page, the speed, course and distance for some modes are found
in the lower left hand corner of the screen.
In Manual tilt mode, the tilt angle will automatically be
adjusted with respect to the distance to the tracked target.
When the Auto Tilt function is activated in the Target Track
mode, the tilt search centre is automatically adjusted with regard
to the distance to the tracked position.
Note: Manual training overrides the Target Tracking function.
850-164385 / Rev.C
33
Page 44

Simrad SH80
Tilt
Manual tilt
In Manual mode the transducer may be tilted within the
systems limits by pressing the Tilt up (arrow) or Tilt down
(arrow) buttons. Pressing either button once changes the tilt
angle in steps of 1 degree. Pressing and holding either button
continuously changes the tilt angle until pressure is removed.
In the Position and Target Tracking modes, the tilt angle will
automatically be adjusted to compensate for the distance to the
tracked position.
Auto tilt
In the Auto Tilt mode the selected tilt angle forms
the centre of the tilt search. The selected tilt limits
are displayed on the tilt indicator by yellow lines
and corresponding numerical values for both the
upper and lower limits.
The centre of the tilt search sector is adjusted by
pressing the Tilt up (arrow) or Tilt down (arrow)
buttons. Sector limits are adjusted by pressing and
holding the Auto button and simultaneously
pressing the Tilt up (arrow) or Tilt down (arrow)
buttons.
Tilt search sector limits can be incremented in steps of 1 degree
to 10 degrees according to the value selected in the in the Tilt
menu.
The Auto Tilt function responds differently with regard to the
training mode selected as follows:
Manual training mode: The transducer automatically
changes the tilt angle after each transmission in steps within
the selected limits.
Auto search training mode: The transducer automatically
changes the tilt angle after each complete search is
performed.
Position and Target Tracking modes: The tilt angle’s search
centre will automatically be adjusted with regard to the
distance to the position being tracked. The transducer will tilt
automatically in steps after each transmission.
Note: If the stabilization system is activated, the beamformer will
automatically adjust the tilt angle with regard to the vessel’s
motion (even if manual tilt is selected). The change in the tilt
angle for the beamformer will not be shown on the tilt indicator.
34
850-164385 / Rev.C
Page 45

Sonar Operating Panel
Various
The buttons grouped under various are Zoom, Record, Mute
and Off Centre.
Mute
The Mute button is not used on the SH80 sonar.
Record
The record function is used for storing either a
sequence or single display picture. Sequential or
single storage options are preset in the Store/Recall
menu (available from the Setup menu).
If sequential store mode is selected, Record is used for starting
and stopping the storage. If single shot storage is selected a new
picture is storage each time the button is pressed.
Zoom
The zoom function magnifies an area of the display by
positioning the cursor in its centre and pressing the Zoom
button. The Zoom button works as a toggle switch for on/off of
the zoom function.
Off centre
The Off Centre function moves the Own vessel symbol to the
cursor’s position on the display. This adjusts the presentation to
fill the screen accordingly.
Related topics
Store/Recall menu, page 65
850-164385 / Rev.C
35
Page 46

Simrad SH80
OPERATION
Introduction
All operation of the sonar is normally made from the Sonar
Operating Panel. Optionally, a standard mouse or trackball may
be connected, and the sonar can then be operated by means of
the menu system alone.
This section contains a detailed description of the start and stop
procedures, the principles of the menu operation, and other
operational procedures for the daily use of the SH80. In order to
obtain the necessary understanding of the sonar design, refer to
the System description chapter. The various presentation formats
are described in the Display mode chapter.
Topics
Maintaining the sonar, page 37
Start and stop procedure, page 38
Menu operation, page 41
Visual aids, page 49
Cosmetics, page 50
Installation of options, page 53
On-line help, page 55
Note: Remember that the SH80 transducer in its lower position
reaches 1,0 meter below the vessel’s hull. Maximum vessel
speed in that position is 20 knots!
Related topics
System description, page 1
Display modes, page 13
Sonar Operating Panel, page 23
36
850-164385 / Rev.C
Page 47

Operation
Maintaining the sonar
Maintenance procedures
To ensure the best possible reliability of the SH80 sonar, it is
important to follow the maintenance procedures described in the
Maintenance chapter.
A preventive maintenance schedule is provided. It is very
important that you follow this schedule, and that you log the
actions thoroughly. Refer to the information in the Maintenance
chapter.
Important when docking the vessel
Caution: When docking the vessel, disconnect the mains plug on
the Sonar Processor Unit to prevent inadvertent use of
the sonar. The transducer can be damaged if allowed to
transmit in air.
Note: Refer to the information in the Maintenance chapter!
Related topics
Maintenance, page 150
Preventive maintenance schedule, page 151
Dry-docking safety measures, page 40
850-164385 / Rev.C
37
Page 48

Simrad SH80
Start and stop procedures
Note: Before you start the sonar, check that the water depth is
sufficient, and that the vessel’s speed is within the maximum
speed specified with the transducer lowered.
Start procedure
MAIN SW.
Up
Middle
Down
Observe the following procedure to power up the sonar.
1. Press the Power button on the monitor to power up the
display monitor.
2. Press and hold the red Power button on the Sonar
Operating Panel for approximately two seconds to start the
sonar.
- The green LED next to the button indicates that the
sonar starts loading the program. After approximately
one and a half minutes the sonar picture will be
displayed.
3. Press the Down button to move the transducer to the lower
position.
- The green LED next to the button will flash, and an
audible signal indicates that the transducer moves
downwards.
- Observe that the TX Power: Off buttoninthe
Horizontal menu starts to flash. In order to prevent
inadvertent start of the transmitter, the t ransmit power
is automatically switched off when you power up the
sonar.
- When the bottom position has been reached, the LED
will illuminate continuously, the audible signal stops,
andthetopbuttonintheStatus parameter dialogue
shows: Transducer: DOWN.
38
4. Set TX Power to On in the Horizontal menu.
This completes the normal start-up procedure.
850-164385 / Rev.C
Page 49

Disconnected mains
In case of power failure, or if the mains plug on the Sonar
Processor Unit has been disconnected, the sonar must be started
by pressing the start switch S101. This switch is located behind
the small front panel on the Sonar Processor Unit.
The location of the S101
switch on the front of the
Sonar Processor Unit.
Design change
On sonars shipped from Simrad before August 2003, the
APC10 Sonar Processor Unit is used. This unit is also equipped
with an “on/off” switch behind a front panel. It has also an
additional “master on/off” switch on its rear panel. Instead of
disconnecting the mains plug, this switch can be set to “off”.
Operation
S101
(CD15006)
Stop procedure
1. Press the Up button on the Sonar Operating Panel to hoist
the transducer to the upper position.
- The green LED next to the button will flash, and an
audible signal indicates that the transducer is hoisted.
When the upper position has been reached, the LED
will illuminate continuously, the audible signal stops,
and the upper button in the Status menu shows:
Transducer: UP.
2. Press and hold the Power button approximately two
seconds to switch off the sonar.
3. Check that the green LED next to the On/off button
extinguishes.
4. Press the Power button on the display monitor to switch it
off.
Warning: If the sonar is switched off uncontrolled with the
transducer lowered, the transducer must be
raised by means of the hoist/lower switch in the
Motor Control Unit, or with the hand crank.
850-164385 / Rev.C
39
Page 50

Simrad SH80
Procedures for emergency hoisting are provided in the
Maintenance chapter.
Dry-docking safety measures
To prevent inadvertent use of the sonar when dry-docking etc.,
disconnect the mains plug for the Sonar Processor Unit.
Warning: Transmitting in air will damage the transducer!
Related topics
Sonar Operating Panel, Main switch. page 24
Manual hoisting and lowering, page 162
Status, page 134
40
850-164385 / Rev.C
Page 51

Menu operation
Introduction
The menu system on the SH80 sonar is designed to allow for
easy and fast access to the parameters.
The menu can be removed from the screen.
Some of the parameters (for example Range, Gain and Tilt)
can be controlled both from the button on the menu and from
buttons on the Sonar Operating Panel. The parameter values
shown on the menu buttons will then change according to the
setting made on the panel.
It is also possible to operate the sonar with a standard computer
mouse.
Operation
850-164385 / Rev.C
41
Page 52

Simrad SH80
Typical screen
presentation with
themenuonthe
right hand side
Screen presentations
The menu can be set up for permanent display, or available only
when required for parameter alterations. The Menu button on
the Sonar Operating Panel is used to select Menu or Full
Screen presentation.
Menu presentation
In Menu presentation, the menu is always shown on the right
hand side of the display, and the size of the echo area will be
reduced.
42
(CD15008A)
Full screen
When Full Screen is selected, the echo presentation is extended
to cover the entire display.
Once the menu has been disabled, observe the following
procedure to recall it for temporary use.
1. Use the trackball, and move the cursor to the outmost left-
or right hand side on the display.
2. Observe the menu appear on top of the echo area, and that
the remaining echo area is not
re-scaled.
3. Move the cursor outside the menu, and observe that it
disappears.
850-164385 / Rev.C
Page 53

Full screen
presentation with
the menu hidden
from view
Operation
Full screen
presentation with
temporary menu
(CD15008B)
(CD15008C)
850-164385 / Rev.C
43
Page 54

Simrad SH80
Menu structure
The menu field on the sonar display contains several different
buttons, tabs and parameter dialogues.
A
B
C
D
E
(A) Sonar type: The upper “button”
indicates the sonar in operation. You can
not press this button.
(B) Mode selection: The second button is
used to display the current mode. You can
press this button to select a different mode.
(C) Tabs: These selections on the right
hand side of the menu allows you to choose
between the menus applicable for the
current operational mode. The menu field
will provide different tabs for each display
mode. In order to select a new menu, move
the cursor to the tab, and press Select.
(D) Active menu: The next field contains
the main menu. Depending on operational
mode and the menu properties, this menu
can contain a number of buttons or other
information.
(E) Menu button: Each menu button
allows you to define the parameters for the
specific function.
(F) Parameter dialogue: When a menu
button is pushed, the applicable dialogue
with a selection of parameters appears at
the bottom of the menu.
F
(CD15009B)
All the tabs, menus and submenus are
explained in chapter Menu.
Related topics
Menu buttons, page 45
Menus overview, page 56
44
850-164385 / Rev.C
Page 55

Operation
Menu buttons
Each menu contains several buttons. Each button shows both
the function and the current parameter. The majority of the
buttons in each menu field have three functions.
Y ou can select a lower parameter value.
Y ou can select a higher parameter value.
You can open the applicable dialogue.
-
C
+
BA
(C )D15010
(A) Decrease: Position the cursor on
the left side the button. Observe the
arrow symbol change to a minus
sign: Decrease the parameter by
pressing the Select button.
(B) Increase: Position the cursor on
the right side the button. Observe the
arrow symbol change to a plus sign:
Increase the parameter by pressing
the Select button.
(C) Dialogue: Position the cursor on
the centre of the menu button.
Observe the arrow symbol change to
a menu symbol. Open the parameter
dialogue by pressing the Select
button. The dialogue appears in the
lower part of the menu field,
providing an overview of the
available options.
850-164385 / Rev.C
45
Page 56

Simrad SH80
Selecting a new parameter value
The menu system is operated by the trackball and the Select
button on the Sonar Operating Panel.
CURSOR
Menu Select View
A
SONAR OPERATING P ANEL
D150
C
(
Second method:
1. Use t he trackball to move the cursor to the middle of the
Object
When you have gained more experience, and
have become more familiar with the available
options, you will select the parameters directly
from the “smart” buttons. Use the trackball to
move the cursor, and position it over the
button.
First method:
1. Use the trackball to move the cursor to
the right or left side of the button.
1)
1
Observe that the cursor symbol changes.
2. Increase or decrease the option by
pressing the Select button (A).
button (B). Observe that the cursor symbol changes to a
small menu icon.
2. Click the Select button (A) on the Sonar Operating Panel.
Observe the parameter dialogue appearing at the bottom of
the menu (C).
3. Use the trackball to move the cursor, and press the Select
button on the Sonar Operating Panel to choose the new
setting (D).
4. Press Close (E) to close the parameter dialogue.
C
B
D
(C )D15012B
E
46
850-164385 / Rev.C
Page 57

Operation
The parameter value shown in the button is operational even
without closing the parameter dialogue. This makes it easy to
test the effect of each parameter setting. Note that the
transceiver related parameters will first be in operation in the
next ping.
850-164385 / Rev.C
47
Page 58

Simrad SH80
Stored parameters
Default settings
The parameter settings identified with an asterisk (*), indicates
the normal setting known to perform well under normal
conditions. If you get “lost“ in the parameter settings, the
Default settings function will bring up these normal
parameters.
The Default setting function is available on the Setup menu,
and a dedicated parameter dialogue is used.
User settings
The User setting function allows you to store chosen parameter
settings for various types of fisheries, or your favourite
individual settings. The saved settings can easily be retrieved
into the operational sonar.
The User setting function is available on the Setup menu, and a
dedicated parameter dialogue is used.
Parameter memory
The SH80 sonar is equipped with a battery powered memory.
This function will cause the sonar to remember all the selected
parameter settings, even when the sonar is switched off.
Related topics
Default Settings, page 96
User Settings, page 145
48
850-164385 / Rev.C
Page 59

Visual aids
Operation
Common information on the display
In nearly all display modes, the following information is
provided.
The Tilt indicator is displayed in the upper left corner. The
selected range and gain is shown on top of this indicator.
The orange text in the upper right hand corner of the echo
area shows the bearing, distance and depth of the cursor.
If a GPS is connected to the sonar, the geographical latitude
and longitude for the cursor location will also be displayed.
A
C
(A) Tilt indicator
(B) Selected range and gain, and current user setting (if used)
(C) Geographical position
(D) Bearing, distance and depth of the cursor
DB
(CD15013)
Moving the boundary lines
In most display modes with multiple views, the size of each
view can easily be modified by moving the boundary line
between the views.
850-164385 / Rev.C
Locate the cursor on the boundary line, press and hold Select
and move the cursor with the Select button depressed. When the
button is released, the boundary line will be located at the new
cursor position.
49
Page 60

Simrad SH80
Cosmetics
Sonar display with
Bearing Card (A)
Wind Marker (B)
and Distance Rings
(C) enabled
The choices in the Cosmetics menu allows you to enable or
disable a range of visual aids in the sonar picture.
B
E
N
400
100
200300
C
S
W
A
(CD15014A)
(A) The Bearing Card shows the current bearing relative to the
vessel. The markers are shown as short white lines for every
10th degree along the outer circle of the sonar view.
(B) The Wind Marker is shown as an arrow drawn from the
Compass Card pointing towards the centre of the display. If a
wind sensor is connected to the sonar, it will automatically show
the current wind direction. Otherwise, the wind direction may
be entered manually. The arrow has a fixed length, it is not
scaled according to the current wind speed.
50
(C) The Distance Rings are shown as dotted rings, each with a
range readout on the left hand side of the display centre.
850-164385 / Rev.C
Page 61

Sonar display with
Variable Range
Marker (D), Compass
Card (E) and Vertical
Ring (F) enabled.
The Vertical Ring
reflects the vertical
range setting.
Operation
E
E
N
F
E
100 m
D
200 m
1123 m
300 m
W
400 m
S
(CD15014B)
(D) The VRM (Variable Range Marker) consists of an
adjustable range ring with range readout. It can be used for any
type of distance marking r elative to the vessel. To adjust the
marker, locate the cursor on the marker ring, press
Select and
move the cursor with the Select button depressed. When the
button is released, the variable range marker radius will be
moved to the new cursor position.
(E) The Compass Card is shown as short yellow lines for every
10th degree along the outermost circle of the sonar view. A
triangle symbol indicates each 45th degree. It has labels
indicating North, East, South and West. It is updated when the
heading of own ship has changed more than 1 degree, if the
display mode is Bow up.
850-164385 / Rev.C
(F) The Vertical Ring shows the selected range of the vertical
slice as a full circle in the horizontal presentation. This is an
indication of which distance a target should be presented in the
vertical view. The Vertical Ring will only be visible in those
modes that support a vertical slice. In other modes, the button
will give no response.
51
Page 62

Simrad SH80
Sonar display with
Vertical Depth
dividers (G), Track
history with Minute
Markers (H) and
Bow Marker (I)
enabled.
I
E
N
G
100 m
200 m
300 m
W
400 m
(G) The Depth dividers are horizontal dotted lines used to
visualize the depth steps in the vertical slices.
(H) The Minute markers are shown as small circles on the
track history of the ship.
(I) The Bow Marker is heading marker. It is a dotted line drawn
from the bow of your own ship in the same direction as the
vessel’s current heading.
Related topics
Track History, page 139
H
S
(CD15014C)
52
Wind Direction, page 146
Cosmetics, page 64
850-164385 / Rev.C
Page 63

Installation of options
The following options can be installed on the SH80 sonar:
Triple- or multiple-frequency
Scientific output
Note that all options are pre-programmed into the standard
sonar version, and that Simrad offer a 1 month free test period
for certain options. When ordering a permanent option
installation, a code word will be released from Simrad.
For a free test, or permanent option installation, use the
following procedure:
1. Select the Setup menu.
2. Press the Test button to activate the System test menu.
3. Press the Installation Menu button.
4. Observe that the installation menu bar is shown on the top
of the screen.
Operation
5. Press Options on the menu bar.
6. Select Install Options to activate the Install options
parameter dialogue.
The following parameters are available in the Install options
dialogue.
HWID - This field displays the unique 12-character Hardware
Identification code. This code is different for each SH80 sonar.
Simrad uses this code to generate the 32-characters code word
used for a permanent option installation.
850-164385 / Rev.C
Try - A number of buttons, where each will start the 1 month
free test period for the chosen option.
53
Page 64

Simrad SH80
Note: If any time or date adjustments are made during the test period,
the option will be closed.
Add License String - This button is used for permanent
installation of the chosen option. When you press the button,
this will activate the On-Screen Keyboard used to type the
required 32-character code word.
Procedure:
1. Press Add License string.
2. Place the cursor in the text field.
3. Type the code word.
4. Check that the 32 characters is entered correctly into the
text field
5. Press the Apply License String button.
6. Restart the sonar.
7. Check if the actual option is opened and operable.
Related topics
System description, Options, page 6.
54
850-164385 / Rev.C
Page 65

On-line help
Operation
The SH80 sonar is equipped with a c omprehensive on-line help
system. It is available from all the parameter dialogues and
menus by pressing the Help button.
Help is provided in two levels: On-line and Free.
Once pressed, the first Help text will appear in the bottom of the
menu. This is the On -line text. It is short, context sensitive, and
designed not to interrupt the operation of the sonar. To close the
Help dialogue, press the Close button.
To access more detailed information, press the Free button. This
will open the complete interactive manual. It contains the same
information as the printed Operator manual, but the information
is accessed using the menu on the left hand side and interactive
links throughout the document.
Press Free in the bottom left corner to return to the small
On-line dialogue, or Close to exit the interactive manual.
Note that if you press Close, the large interactive manual will
automatically reappear the next time you press a Help button.
850-164385 / Rev.C
55
Page 66

Simrad SH80
MENU DESCRIPTIONS
Introduction
This section provides a detailed description of the complete
menu system for the SH80 sonar, and contains the chapters
listed below. For an explanation of how to operate the menu
system, refer to the section Menu operation.
The SH80 comprises a large number of different menus on
several levels. Menus are selected by pressing their respective
tabs on the right side, and the appearance of menus and tabs
depends on the chosen operation mode and the current settings.
The menu types are organised as follows:
Active menus - relevant for each of the display modes,
available at all times selectable by the appropriate tab.
Temporary menus - “sub-menus” activated by a button in
one of the Active menus.
Pop-up menus - activated by the View and Object buttons
on the Sonar Operating Panel, or the middle and right mouse
button (provided a mouse is installed).
View menus - activated in the View pop-up menu.
Messages - presents system messages.
Topics
Active menus, page 57
Temporary menus, page 63
Pop-up menus, page 69
View menus, page 74
Messages, page 78
The chapter Menu structure gives a description of the menu
system configuration with references to more detailed
descriptions of all the menu. Any selections you do in the menus
will bring up the parameters available for the chosen setting.
The Alphabetical list of parameters is a useful aid to find a
description of a particular parameter of all available parameters
incorporated in the SH80 sonar system.
56
Related topics
Menu operation, page 41
Menu structure, page 44
Alphabetical list of parameters, page 84
850-164385 / Rev.C
Page 67

Active menus
Menu descriptions
Overview
The Active menus are those relevant for the different
operational modes. The menus are shown with vertical selector
tabs on the right hand side, and each menu can easily be selected
using the trackball and the Select button on the Sonar Operating
Panel. All menus have access to on-line help through a Help
button.
Topics
Horizontal, page 58
Vertical, page 59
Display, page 60
Setup, page 61
Objects, page 62
850-164385 / Rev.C
57
Page 68

Simrad SH80
Horizontal
The Horizontal menu is used to control the horizontal
presentations. The parameters chosen are present in all display
modes. When a horizontal parameter setting is selected and
defined in one mode, the chosen settings will automatically be
applied to all modes.
Parameters
Range, page 121
Tilt, page 137
Bearing, page 88
Gain, page 105
Pulse Form, page 119
Tx Power, page 143
Beam, page 86
Frequency, page 104
TVG (Time Variable Gain), page 142
RCG (Reverberation Controlled Gain), page 123
PP Filter, page 118
Noise Level, page 115
The Help button opens the on-line help.
The Horizontal 2 menu is identical to the Horizontal menu. It
is used during Dual mode operations.
58
850-164385 / Rev.C
Page 69

Menu descriptions
Vertical
The Vertical menu is only shown in modes with a vertical slice
function. All relevant settings, except the TX Power, can be
selected separately for the vertical modes independent of the
horizontal settings. When any vertical setting is selected and
defined in one mode, the setting will be applied to all vertical
modes.
Parameters
Range, page 121
Bearing (Vertical), page 91
Gain, page 105
Pulse Form, page 119
Tx Power, page 143
Frequency, page 104
TVG (Time Variable Gain), page 142
RCG (Reverberation Controlled Gain), page 123
PP Filter, page 118
The Help button opens the on-line help.
850-164385 / Rev.C
59
Page 70

Simrad SH80
Display
The Display menu is shown in all display modes, and provides
access to parameters controlling the visual presentation of the
sonar views. Some of the choices on the menu are simple on/off
buttons.
Parameters
Full Screen - Replica of the Menu button on the Sonar
Operating Panel.
Audio Mute - Replica of the Mute button on the Sonar
Operating Panel.
Resolution - Select 16 or 64 colours in the display presentation.
The chosen resolution is shown in the colour bar below the
button.
→ Palette, page 116
→ Colour Threshold, page 92
→ Colours, page 93
→ Panel backlight, page 117
→ Mode buttons, page 113
→ Language, page 109
→ Units, page 144
→ Cosmetics, page 64
→ Bearing, page 90
→ Menu, page 110
The Help button opens the on-line help.
60
850-164385 / Rev.C
Page 71

Menu descriptions
Setup
The Setup menu is shown in all display modes, and gives access
to parameters controlling the processing and algorithms in the
sonar system. It also provides access tospecific system parameters
and functions such as Test and Store/Recall.
Parameters
Store/Recall, page 65
Test, page 66
Gear, page 106
School, page 127
Dead reckoning, page 95
Stabilizer, page 133
Movements, page 114
Track Window, page 140
Wind direction, page 146
Wind speed, page 147
Sort Modes, page 68
External Sync, page 102
Scientific Output, page 128
Fish Alarm, page 103
User Setting, page 145
Default Setting, page 96
The Help button opens the on-line help.
Note that the Wind speed button will disappear from this menu
if the Scientific Output option is installed.
850-164385 / Rev.C
61
Page 72

Simrad SH80
Objects
TheObjects menu is shown in all display modes, and displays the
range (R), bearing (B) and depth (D) to all selected objects.
The identification (ID) abbreviations for the different objects are:
AT - Automatic Tar get Track Marker
Ci - Circle Marker
M - Target Marker
OS - Own Ship Marker
PT - Position Track Marker
F-Radio buoy marker (if a GPS buoy system is connected)
The number behind the ID abbreviation refers to the same
number on the object in the sonar presentation. The P after the
Automatic Target Track Marker indicates the priority level
where the audio channel is locked to the target.
When selecting an object in the list, a list with all the available
object data will be shown below the Objects menu.
When selecting a Target Marker, Automatic Target Track
Marker or a Radio Buoy Marker in the list, a dotted bearing
line from the vessel to the marker will be presented.
To delete an object, select the relevant marker in the list, and
press the Delete button in the lower part of the menu. Pressing
the Delete All button will delete all objects.
The parameters for each marker are shown in the Inspect
Object parameter dialogue.
Related topics
Inspect Object, page 108
62
850-164385 / Rev.C
Page 73

Temporary menus
The Temporary menus are those selected from the active
menus. They are also shown with vertical tabs on the right side
of the menu, and can easily be selected by the trackball and the
Select button. The Temporary menus must however be
removed manually using the Close button in the bottom of
menu. All Temporary menus have access to on-line help
through a Help button.
Topics
Cosmetics, page 64
Store/Recall, page 65
Test, page 66
Sort Modes, page 68
Menu descriptions
850-164385 / Rev.C
63
Page 74

Simrad SH80
Cosmetics
The Cosmetics menu is activated by pressing the Cosmetics
buttonintheDisplay menu. It provides access to various
parameterscontrolling the appearanceof the sonarpicture. All the
functions - except Track history - are on/off buttons.
Parameters
Slant Range / True Range, page 131
Bearing Card, page 50
Compass Card, page 51
Distance Rings, page 50
VRM (Variable Range Marker), page 51
Bow Marker, page 52
Track History, page 139
Minute Marker, page 52
Wind Marker, page 50
Vertical Ring, page 51
Depth dividers, page 52
The Close button closes this menu. The Help button opens the
on-line help.
64
850-164385 / Rev.C
Page 75

Menu descriptions
Store/Recall
The Store/Recall menu is activated by the Store/Recall button
in the Setup menu.
The Store/Recall menu is used to store single display pictures or
a sequence or pictures. The stored pictures can easily be recalled
for evaluation or comparing schools.
Parameters
Store - This is the “record” button to start the storage sequence.
Delete - Deletes the highlighted display picture.
Rename - Provides an on-screen keyboard to rename the stored
picture.
Print - Allows you to print the stored picture to the default printer
(if any).
The following other parameters are available:
Store, page 135
Store Mode, page 135
Recall, page 124
Recall Mode, page 124
The Close button closes this menu. The Help button opens the
on-line help.
850-164385 / Rev.C
65
Page 76

Simrad SH80
System test
The System test menu is activated by the Test buttoninthe
Setup menu.
The System test menu provides several test routines available to
perform operational and functional tests. These tests are designed
only to be carried out by qualified service engineers.
Parameters
Test Configuration - This function is only to be activated by
qualified service engineers.
Test Function - This function is only to be activated by
qualified service engineers.
Toggle TxPower - This function is only to be activated by
qualified service engineers.
Test Beam - This function is only to be activated by qualified
service engineers.
Echo Level - This button provides a readout of the current noise
in the waters surrounding the vessel. This noise is caused by air
bubbles, water flow and mechanical disturbances from hull and
engine. In order to obtain the best possible sonar result, the
noise level readout should be as close to 0.0 dB as possible.
Roll - This is not a button, it is a readout from the sensor of the
actual roll value at the time of the last transmission.
Pitch - This is not a button, it is a readout from t he sensor of the
actual pitch value at the time of the l ast transmission.
TRU Temp- This button provides a readout of the current
temperature inside the Transceiver Unit. If the temperature rises
to an unacceptable level, an alarm will be given.
Interpolation - This is a built-in software function that may
give a more realistic presentation of the echos.
Message bar - This button opens the Message bar parameter
dialogue, which allows you to monitor operational messages
from the sonar.
66
Installation menu - This button opens the Installation menu
on the top of the display. This menu is used during installtion of
the sonar, and information about this is provided in the
Installation manual.
850-164385 / Rev.C
Page 77

Menu descriptions
About - This button provides access to a small information
dialogue providing the current software version.
The Close button closes this menu. The Help button opens the
on-line help.
Related topics
Message bar, page 111
About, page 85
850-164385 / Rev.C
67
Page 78

Simrad SH80
Sort Modes
The Sort Modes menu is activated by the Sort Modes button in
the Setup menu.
The Sort Modes menu is used to select the display modes to be
activated by the four Mode buttons on the Sonar Operating Panel.
The four upper display modes in this menu will always be the four
modes selectable by the four Mode buttons in the order they are
sorted.
In order to sort the modes, select the actual mode and use the
Move Up and Move Down buttons to place it in the wanted
position.
When the modes are organized in the requested order, press the
Apply button to store the information.
Related topics
Mode buttons, Operator Panel, page 27
Mode buttons, page 113
68
850-164385 / Rev.C
Page 79

Pop-up menus
Menu descriptions
The pop-up menus are accessed using the View and Object
buttons on the Sonar Operating Panel, or the middle and right
mouse buttons if an optional mouse is installed. Each button
will present a small menu, and it appears at the cursor’s current
location. To make a selection, use the trackball and the Select
button, or the mouse.
Topics
View, page 70
Object, page 72
Related topics
View and Object buttons, page 30
850-164385 / Rev.C
69
Page 80

Simrad SH80
View pop-up
The View pop-up menu is accessed using the View button over
the trackball on the Sonar Operating Panel or the middle mouse
button if an optional mouse is installed.
When activating the pop-up menu in the Catch Data view, it
will display the following reduced menu.
Parameters
Set New Display Centre - When this function is selected, the
new display centre is moved to the cursor’s position where the
View menu was activated.
Ship To Centre - When this function is selected, the own ship
symbol is moved to the centre of the view.
Zoom - The zoom function magnifies an area of the display by
positioning the cursor in its centre and pressing the Zoom
button. The zoom button works as a toggle switch for on/off of
the zoom function.
Erase Echoes - When this function is selected, all echoes
displayed on the sonar view will be deleted.
Synchronize - This function is not operational on the SH80
sonar. For synchronization to external equipment, refer to the
Setup menu.
Make Same Size - When this function is selected, window areas
tiled vertically will acquire the same width.
70
850-164385 / Rev.C
Page 81

Menu descriptions
Grey scale data - This command changes the display from a
colour presentation to a black-and-white. The number of shades
of grey and the number of different colours used will be the
same. The Grey scale data command can be selected for
singular sonar views independent of each other.
View Menu - When this function is selected menus will be
displayed according to the view in which the cursor is situated.
Several different View menus are available.
Related topics
View menus, page 74
Setup menu, page 61
View button, page 30
850-164385 / Rev.C
71
Page 82

Simrad SH80
Object pop-up
The Object pop-up menu is accessed using the Object button
over the trackball on the Sonar Operating Panel, or the right
mouse button if an optional mouse is installed.
This pop-up menu is mainly used when you operate the sonar
from an optional mouse, as most of the functions on it can be
selected directly on the Sonar Operating Panel. Note that the
cursor related selections in the Object pop-upmenuusethe
cursor position where the pop-up menu was activated.
Activating the Object pop-up menu whilst positioning the
cursor over a defined object on the display, it will display the
following additional parameters.
Inspect <object>
Delete <object>
Make <object> priority target
72
850-164385 / Rev.C
Page 83

Menu descriptions
Parameters
Basic functions - These choices provide the same functions as
their respective buttons on the Sonar Operating Panel.
- Target Track
- Position Track
- Set Marker
- New Own Ship Marker
- Circle Marker
- Gear Symbol
New ruler - When this function is selected, a straight line is
drawn from the current cursor position (where the Object
pop-up menu was selected) to another selectable position. The
ruler will display range and bearing between the two points. To
remove the ruler, click on it with the right mouse button, and
select Remove ruler from the Object pop-up menu.
Inspect ruler - If you click on an existing ruler, the Ruler
parameter dialogue will appear under the menu. This dialogue
will povide information about the selected ruler, and it allows
you to remove the ruler with a Delete button.
Inspect <object> - When this function is selected, the object
parameters are displayed at the bottom of the menu in the
Inspect Object parameter dialogue.
Delete <object> - When this function is selected, the object will
be removed. This is the same function as provided by the
Objects menu.
Make <object> Priority Target - This function can be used to
give priority to an “old” target tracking symbol, which locks the
audio channel on the target.
Related topics
Ruler, page 125
Inspect Object, page 108
Object button, page 30
850-164385 / Rev.C
73
Page 84

Simrad SH80
View menus
The View menus are activated from the View pop-up menu,
which again is accessed using the View button on the Sonar
Operating Panel or the middle mouse button. The View menus
are shown with vertical tabs on the right hand side, and the
menus can easily be closed using the Close button in the lower
part of each menu. All menus have access to on-line help
through a Help button.
Topics
Geo View, page 75
Vertical View, page 76
Catch View, page 77
Related topics
View pop-up menu, page 70
View button, page 30
74
850-164385 / Rev.C
Page 85

Menu descriptions
GeoView
The GeoView menu is activated by pressing the View button on
the Sonar Operating Panel or the middle mouse button in any
horizontal view, and then selecting View menu in the View
pop-up.
The GeoView menu provides control of selected parameters
related to the current data displayed in the horizontal view; Scale
and Target track. It also provides you with a button to reposition
the vessel symbol.
Parameters
Ship to centre - Moves the ship symbol to the centre of the
view.
Scale, page 126
Target Track, page 136
The Close button closes this menu. The Help button opens the
on-line help.
The GeoView2 menu is also available. This is identical to the
GeoView menu, and used during dual mode operations.
Related topics
View pop-up menu, page 70
View button, page 30
850-164385 / Rev.C
75
Page 86

Simrad SH80
VerticalView
The VerticalView menu is activated by pressing the View
button on the Sonar Operating Panel or the middle mouse button
while positioning the cursor in any of the vertical views, and
then selecting View menu in the View pop-up.
The VerticalView menu provides control of selected parameters
related to the current data displayed in the vertical view; Zoom,
Zoom Scale and Data Source.
Parameters
Zoom, page 148
Zoom Scale, page 149
Data Source, page 94
Direction Indicator, 97
Note that Direction Indicator is only available when Indicator
is selected in the Data Source menu.
The Close button closes this menu. The Help button opens the
on-line help.
Related topics
View pop-up menu, page 70
View button, page 30
76
850-164385 / Rev.C
Page 87

Menu descriptions
CatchView
The CatchView menu is activated by pressing the View button
on the Sonar Operating Panel or the middle mouse button while
the cursor is located in the Catch view, and then selecting View
menu in the View pop-up.
The Catch view is only available in the 270º/Vertical, True
Motion/Vertical and Bow up/Vertical display modes, and you
may need to hide the menu to see it.
The CatchView menu provides control of selected parameters
related to the current data displayed in the Catch view.
Parameters
Range, page 122
The Close button closes this menu. The Help button opens the
on-line help.
Related topics
View pop-up menu, page 70
View button, page 30
850-164385 / Rev.C
77
Page 88

Simrad SH80
Messages
Message categories
When necessary, the sonar will provide you (or your service
engineer) with operational and technical messages. These
messages are sorted into four categories; Warnings, Operator
alarms, System alarms and Errors.
In order to access the messages, the Message bar must be
enabled. This function can be set to activate itself when
necessary. The Message Bar is located at the bottom of the
display, and it contains four buttons, one for each category of
messages. These buttons give an overview of the number of
unread messages currently in the system. E ach of the four
buttons gives access to a dialogue where each message can be
read, acknowledged and deleted. When no messages are
present, the four buttons are grey.
messages exists, the Warning and Operational Alarm buttons
are yellow, while the System Alarm and Error buttons are red.
When one or more unread
Topics
Warnings, page 79
Operator alarms, page 80
System alarms, page 81
Errors, page 82
Related topics
Message Bar, page 111
78
850-164385 / Rev.C
Page 89

Menu descriptions
Warnings
The Warnings menu is activated from the Warnings button in
the Message bar.
TheWarnings menu displays the warning messages issued by the
sonar. Each warning is identified with time of issue and a heading.
Additional information is found in the small text field below the
message list. The top of the message list with the most recent
messages is always displayed when the dialogue is opened.
Acknowledged messages are displayed in grey.
Use the trackball and select individual messages with the Select
button on the Sonar Operating Panel.
Parameters
Ack(knowledge) - Press this button to acknowledge the selected
message.
Delete - Press this button to delete the selected message.
The Close button closes the menu. The Help button opens the
on-line help.
Related topics
Message Bar, page 111
Trackball and Select button, page 30
850-164385 / Rev.C
79
Page 90

Simrad SH80
Operator alarms
The Operator alarms dialogue is activated from the
Op.Alarms buttonintheMessage bar.
The Operator alarms menu displays the alarms issued by the
sonar. Each alarm message is identified with time of issue and a
heading. Additional information is found in the small text field
below the message list. The top of the message list with the most
recent messages is always displayed when the menu is opened.
Acknowledged messages are displayed in grey.
Use the trackball and select individual messages with the Select
button on the Sonar Operating Panel.
Operator Alarm parameters
Ack(knowledge) - Press this button to acknowledge the selected
message.
Delete - Press this button to delete the selected message.
The Close button closes the dialogue. The Help button opens
the on-line help.
Related topics
Message Bar, page 111
Trackball and Select button, page 30
80
850-164385 / Rev.C
Page 91

Menu descriptions
System alarms
The System alarms dialogue is activated from the Sys.Alarms
buttonintheMessage bar.
The System alarms dialogue displays the alarms issued by the
sonar. Each alarm message is identified with time of issue and a
heading. Additional information is found in the small text field
below the message list. The top of the message list with the most
recent messages is always displayed when the dialogue is opened.
Acknowledged messages are displayed in grey.
Use the trackball and select individual messages with the Select
button on the Sonar Operating Panel.
Parameters
Ack(knowledge) - Press this button to acknowledge the selected
message.
Delete - Press this button to delete the selected message.
The Close button closes the dialogue. The Help button opens
the on-line help.
Related topics
Message Bar, page 111
Trackball and Select button, page 30
850-164385 / Rev.C
81
Page 92

Simrad SH80
Errors
The Errors dialogue is activated from the Errors buttoninthe
Message bar.
The Errors menu displays the alarms issued by the sonar. Each
error message is identified with time of issue and a heading.
Additional information is found in the small text field below the
message list. The top of the message list with the most recent
messages is always displayed when the menu is opened.
Acknowledged messages are displayed in grey.
Use the trackball and select individual messages with the Select
button on the Sonar Operating Panel.
Parameters
Ack(knowledge) - Press this button to acknowledge the selected
message.
Delete - Press this button to delete the selected message.
The Close button closes the dialogue. The Help button opens
the on-line help.
Related topics
Message Bar, page 111
Trackball and Select button, page 30
82
850-164385 / Rev.C
Page 93

PARAMETERS
About parameter dialogues and help
This chapter describes all the parameter dialogues accessed from
the menu system.
When a parameter is selected, the available choices are shown in
the dialogue below the menu. The setting is then made using the
available buttons or lists. Several levels are frequently used to
select the parameters.
Note that:
1. In many cases you will not need to open the parameter
dialogue, as you can control the settings directly on the
menu button.
2. The parameter is selected and activated by the sonar once
it is highlighted in the dialogue. The operational changes
can thus be investigated from within the dialogue without
closing it.
Parameters
3. The Close button will always close the dialogue.
4. The Help button will always provide short-form context
sensitive help. This help text will appear on top of the
parameter dialogue, and you need to press Close to return.
In the Help window, you can also press Free to access to
full interactive manual. This may not be available in all
modes, as it will block the view of the sonar echoes.
Once the interactive manual has been accessed, you need
to press Free to reduce the large help window back to
short-form presentation. If you press Close in the
interactive manual, the manual will automatically appear
next time you press Help in a parameter dialogue.
The menu settings marked with an asterisk, indicate the normal
setting which perform well under normal conditions. If one got
lost in the menu settings, a Default Settings function will bring
up these normal settings.
After experience, when the contents of the menus are better
known, the increase/decrease function on the actual menu button
can be used directly without selecting the submenu.
850-164385 / Rev.C
83
Page 94

Simrad SH80
Alphabetical list
The following is an overview of available parameters incorporated in the SH80 sonar
system.
About, page 85
Beam, page 86
Bearing, page 88
Bearing (Display), page 90
Bearing (Vertical), page 91
Colour Threshold, page 92
Colours, page 93
Data Source, page 94
Date and time, page 138
Dead Reckoning, page 95
Default setting, page 96
Direction Indicator, page 97
Edit gear (Purse), page 98
Edit gear (Trawl), page 99
Edit school, page 101
External synchronisation, page 102
Fish alarm, page 103
Frequency, page 104
Gain, page 105
Gear, page 106
Heading, page 107
Inspect object, page 108
Language, page 109
Menu, page 110
Message Bar, page 111
Mode, page 112
Mode buttons, page 113
Movements, page 114
Noise Level, page 115
Palette, page 116
Panel backlight, page 117
PP Filter, page 118
Pulse Form, page 119
Range, page 121
Range (CatchView), page 122
RCG, page 123
Recall, page 124
Recall Mode, page 124
Ruler, page 125
Scale, page 126
School Data, page 127
Scientific Output, page 128
Search Sector, page 129
Search Step, page 130
Slant Range, page 131
Speed, page 132
Stabilizer, page 133
Status, page 134
Store, page 135
Store Mode, page 135
Target Track, page 136
Tilt, page 137
Time and date, page 138
Track History, page 139
Track Window, page 140
Transducer, page 141
True range, page 131
TVG, page 142
Tx Power, page 143
Units, page 144
User Setting, page 145
Wind Direction, page 146
Wind Speed, page 147
Zoom, page 148
Zoom Scale, page 149
84
850-164385 / Rev.C
Page 95

Parameters
About
The About parameter dialogue is accessed from the System test
menu.
TheAbout dialogue is only used to provide information about the
current software version. In addition, the Versions button opens a
small text document with detailed version information. This
information is not intended for operational use.
850-164385 / Rev.C
85
Page 96

Simrad SH80
Beam
The Beam parameters are accessed from the Horizontal menu.
TheBeamcommand enables you to select the vertical beam width
in the horizontal presentation. The beam selection can be made
manually , or controlled automatically by the selected range.
The Wide beam is designed to be used with shorter ranges in
order to obtain a larger vertical coverage. This makes the sonar
less “tilt dependent” in the catching phase.
The Normal beam is designed to be used for the medium
ranges.
The Narrow beam is provided for the longer ranges. The
focused narrow beam has the highest source level, which
increases the detection range.
86
(A) = Wide (B) = Normal (C) = Narrow
In the Auto mode, the beam will change automatically defined
by the range selections made by the Wide and Normal buttons.
850-164385 / Rev.C
Page 97

Parameters
The following buttons can be used.
Wide - This button is used to select the upper range for the wide
beam width in Auto mode. For ranges higher than this selection,
the beam will automatically switch to Normal or Narrow,
depending on the current selection for the Normal button.
Normal – This button is used to select the upper range for the
normal beam width in Auto mode. For ranges higher than this
selection, the beam will automatically switch to Narrow,which
is indicated by a grey and unoperable Narrow button.
850-164385 / Rev.C
87
Page 98

Simrad SH80
Bearing (Horizontal)
The Bearing parameters are accessed from the Horizontal
menu.
The Bearing of the audio channel is normally controlled from the
Sonar Operating Panel. The selected bearing is shown with a
continuous white line pointing out from the transducer position.
This line can be trained manuallyor automatically in any position.
The angle readout onthe bearing button can be selected to be180
degrees relative to the bow, or absolute (relative north).
Left/Right arrow
Click to train the audio channel one degree. The current bearing
is shown above. Click Absolute or Relative to set the readout to
show an absolute value (relative to north) or show the bearing
180 degrees relative to the bow.
Search Step
This button opens a new parameter dialogue, which allows you
to select the search step angle. This value defines how many
degrees the search beam shall move for each transmission in the
Auto Search mode.
Search Sector
88
This button opens a new parameter dialogue to select the active
audio search sector. This sector can be adjusted between 22 and
360 degrees directly with the increase/decrease button function,
or by the two buttons in the Search Sector dialogue. The search
sector limits are shown on the outer part of the echo circle with
two white angular symbols.
850-164385 / Rev.C
Page 99

Parameters
Absolute/Relative
Click Absolute to set bearing of the audio channel to be relative
to true north. Click Relative to set the bearing to be relative to
the vessel’s bow.
Manual/Auto
In Manual mode, the audio channel can be trained continuously
in either direction by pressing the two arrow buttons in the
Train field on the Sonar Operating Panel. In Auto mode, the
sonar will automatically perform search within the selected
Search Sector using the steps defined.
More information about the Auto Search program are provided
in the Sonar Operating Panel description.
Related topics
Auto Search, page 32
Search Step, page 130
Search Sector, page 129
850-164385 / Rev.C
89
Page 100

Simrad SH80
Bearing (Display)
The Bearing button is located in the Display menu.
This is simply a selector switch. Click on the button to select True
north or Relative ship. Certain bearing data will change their
values accordingly.
The following bearing data will change when you switch
between the two settings:
Cursor bearing
Markers bearing in the Objects menu
Target positions in the catch data views
Note that there are no indication on any of these readouts to
identify them as relative or true.
All other bearing data remain permanent, and will not change
when you select relative or true bearing.
Wind direction - always relative to true north
Audio line - always relative to the ship’s heading
Ship’s current heading - always relative to true north
Target’s current heading - always relative to true north
90
850-164385 / Rev.C
 Loading...
Loading...