

Page 1
A
A
B
(CD11203A)
GUÍA RÁPIDA DE REFERENCIA
C
(CD11203B)
E
F
)
)
A
A
B
C
B
D
(CD11201H)
Sensor PI de Temperatura
Concepto
El sensor PI de Temperatura
monitoriza la temperatura actual del agua
en el punto elegido de la red de cerco o de
arrastre.
Operativa diaria
Una vez instalado y preparado
para usarlo, el sensor se pone en
funcionamiento, automáticamente, al
activar -on- el interruptor de contacto
con el agua. Después del periodo de
inicialización, el sensor comienza
a transmitir la temperatura actual.
Mientras no se esté usando el sensor,
vaya comprobando que el indicador (D)
no parpadea, de vez en cuando, ya que
sí es así ello indica que el sensor está
encendido y, por lo tanto, las baterías se
están descargando.
Sí está trabajando con la velocidad
de actualización ajustada a Rápida,
deberá cargar el sensor cada 24 horas,
aproximadamente. Si operamos con las
velocidades de actualización Normal o
Lenta, la autonomía de las baterías es
de 75 o 150 horas, respectivamente. La
temperatura de carga óptima, oscila entre
los +10 y los +25°C.
Tenga presente que los sensores
en estado de carga, a temperaturas
bajo cero, pueden generar gases
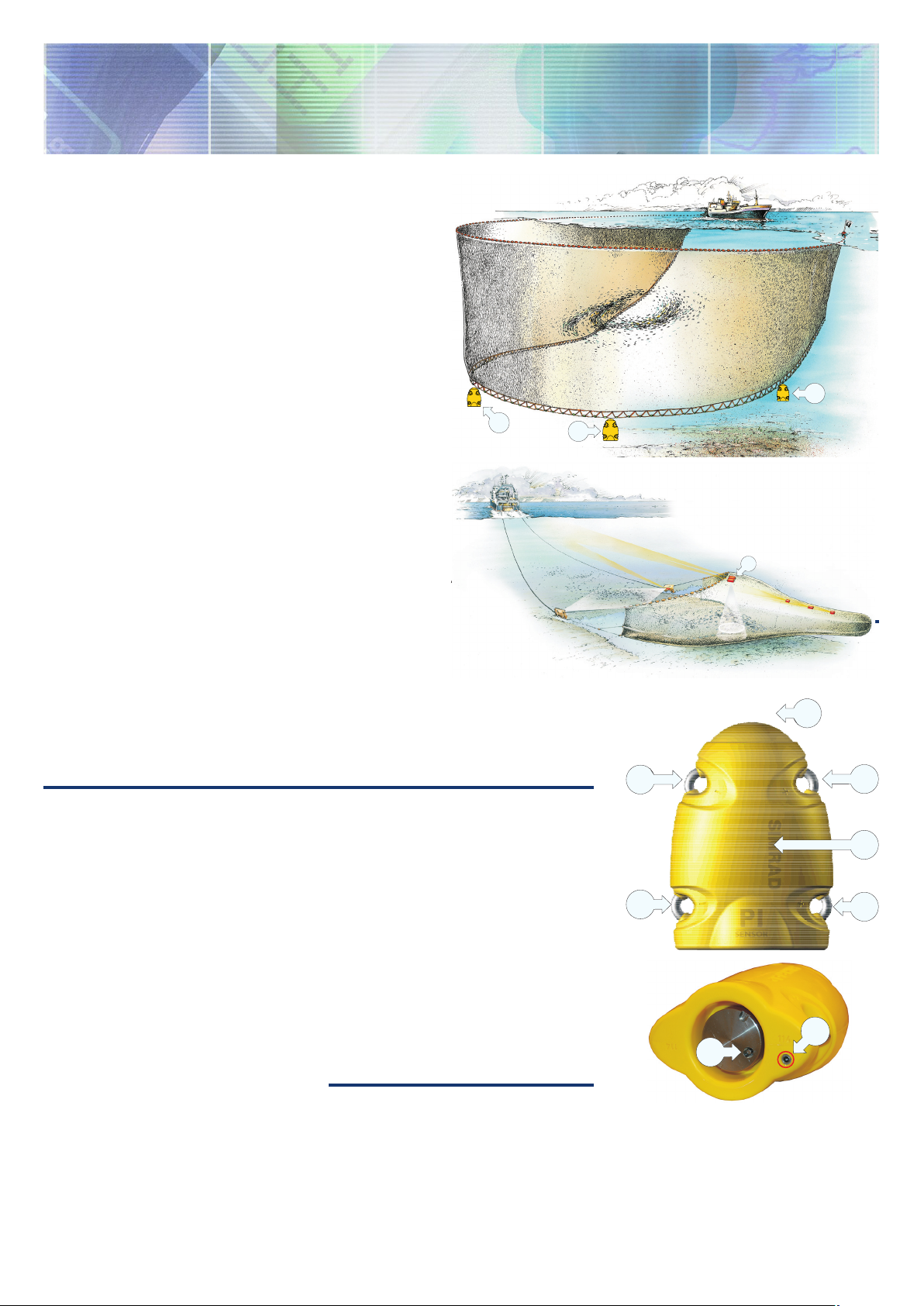
(A) = La velocidad
de descenso de la
red se monitoriza
gracias a los
dos sensores de
Profundidad.
(B) = Un sensor
de Temperatura,
montado en la
relinga de plomos,
permite monitorizar
la localización de la
termoclina.
(C) = Un sensor
de Temperatura,
montado en la
relinga superior,
para poder
monitorizar sí la
temperatura del
agua es favorable a
las especies de peces
que buscamos.
explosivos. Simrad AS no asume ninguna
responsabilidad en caso de no seguir
las instrucciones pertinentes y proceder
de forma inadecuada con el proceso de
carga. Consulte la documentación relativa
a Directrices de seguridad y carga.
Configuración del Sensor
Cuando se suministran, todos
los sensores de profundidad están
configurados para trabajar con el Canal
8 y a velocidad de actualización Rápida.
Si usted va a utilizar más de un sensor,
deberá ajustarlos para que trabajen en
diferentes canales.
Nota: El sensor y el sistema PI deben
configurarse para que se correspondan,
en caso contrario no funcionará el enlace
de comunicaciones.
Para cambiar la configuración del sensor
(selección de canal), use la utilidad
Configurador de PI.
La velocidad de actualización del sensor
controla cada cuánto deben realizarse
las lecturas e informar de las mismas,
al barco. Disponemos de tres ajustes
diferentes. Recuerde que cuanto más
rápida es la velocidad de actualización,
más baterías consumimos.
Rápida (~4,5 seg): Recomendada
para pesca al cerco y al arrastre, ya que
permite actualizaciones inmediatas de los
cambios de temperatura del agua.
Normal (~14 seg): Recomendada para
arrastreros y otros tipos normales de
pesca, en los que las temperaturas del agua
permanecen prácticamente sin cambios.
Lento (~34 seg): Es la recomendada
cuando usted está habituado a
temperaturas prácticamente constantes o
cuando desea que el período entre cargas
sea el máximo. En este caso el sistema es
más sensible a las malas comunicaciones,
ya que la velocidad de actualización es
lenta.
Configuración del Sistema
Configuración del sistema: El sensor
debe configurarse usando un único
número. Seleccione el número de canal
de acuerdo con la configuración del
sensor. Escriba dicha configuración como
referencia para posteriores usos.
►►►
Partes básicas
(A) = Carga negativa y anilla de sujeción
(B) = Carga positiva y anilla de sujeción
(C) = Enlace de comunicaciones
(D) = Situación del indicador de sensor
(E) = Interruptor de contacto con el agua
(F) = Sensor de Temperatura (sin
etiqueta)
857-165123 / Rev.A / March 2005
Page 2
M A X I M I Z I N G Y O U R P E R F O R M A N C E A T S E A
www.simrad.com
(CD11201A)
(CD11201B)
(CD11201I)
A A
C
B
(CD11009C)
A
D
E
G
B
C
F
Estatus & Receptor: Debe mantenerse
activado el filtro anti Interferencias. Sí
tiene problemas de ruido generados por
otros sistemas hidroacústicos, ajuste el
nivel del filtro a 9. Recuerde que cuando
este filtro está ajustado a -on-, influye en
el espectro de señal que se visualiza en la
pantalla de Estatus.
Filtro de Sensor: Ajuste este filtro a
Suave. Sólo debe ajustarlo a Fuerte si
tiene experiencia en el tema de ruidos. En
posición Off obtendrá datos sin procesar
y a la mayor velocidad de actualización
posible.
Montaje
Presentación de los Datos de Temperatura►►►
En el monitor del
PI, la temperatura
se visualiza en la
pantalla numérica.
Sí la temperatura
sube o baja, se
indica mediante
una flecha. Cuando
las lecturas son
estables, los dígitos aparecen en color
Negro, pero si los valores tienen carácter
estimativo, los dígitos se ven en color
gris. Sí se produce pérdida de contacto
con el fondo, los caracteres *.* * se
visualizan en gris.
(A) = Sensor configurado como sensor
nº.2.
(B) = Temperatura actual
(C) = Denominación (Celcius o
Fahrenheit)
(D) = Cambio de temperatura. Esta
flecha indica que la temperatura está
subiendo.
(E) = Alarma gráfica
(F) = Indicador, que se ilumina cada vez
que es interrogado.
(G) = Símbolo de interferencia.
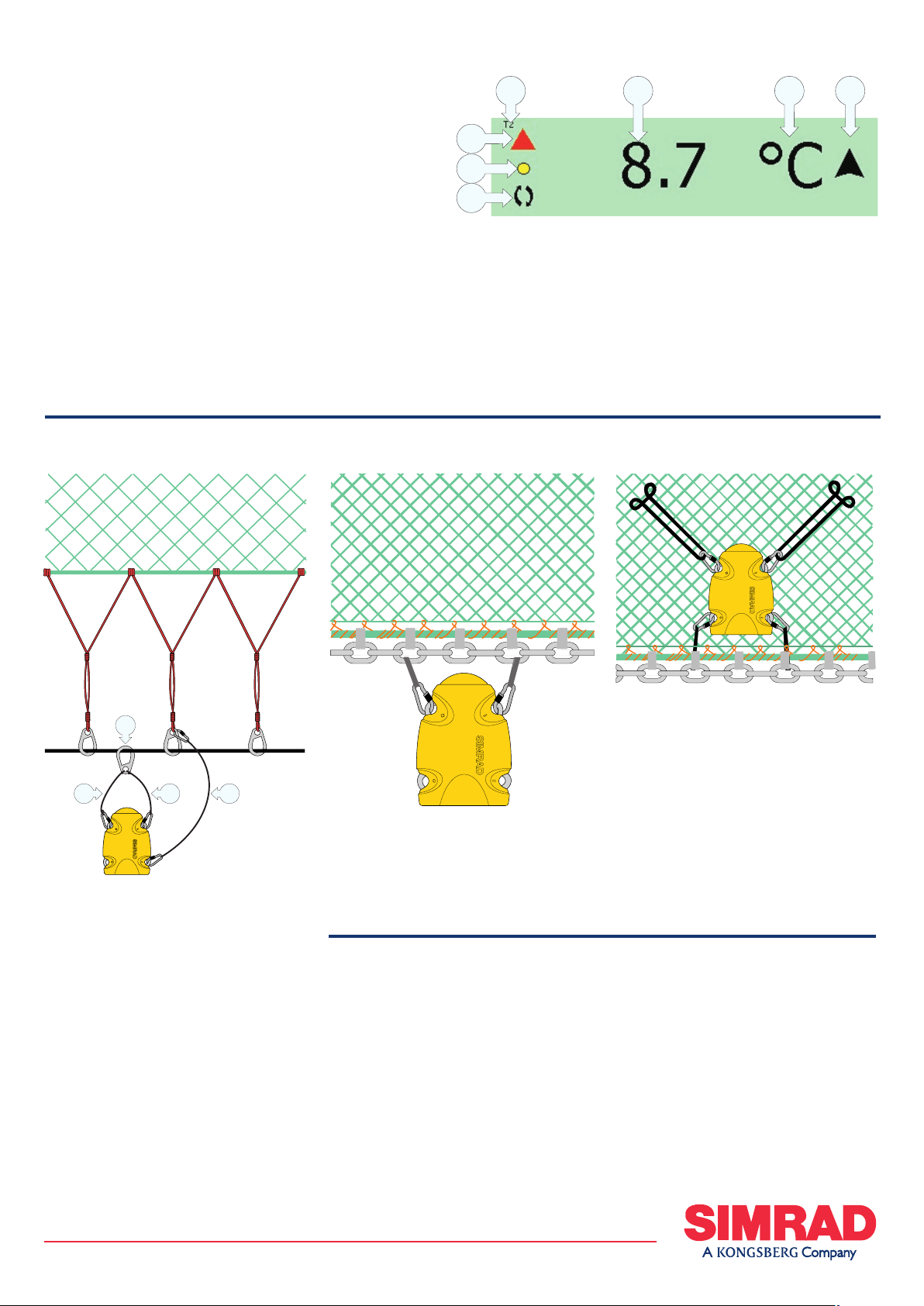
Arte de cerco: A fin de asegurar
comunicaciones estables con el hidrófono
del barco, es muy importante que el
sensor pueda asirse, libremente y sin
dificultad durante el lance y el cerco y con
el extremo del mismo apuntando hacia la
superficie.
Fije el sensor a una de las anillas
estándar del cerco, mediante dos cables
independientes (A). Sujete cada uno de
los extremos de los cables a un mosquetón
común (B), y sitúe otro mosquetón en el
otro extremo del cable para pasarlo por el
sensor.
Monte una línea de seguridad (C) entre
el sensor y el cable de retención /anilla
Cerco para atunes: El sensor no debe
quedar amarrado a la relinga de plomos
pero si a la cadena de la relinga. Utilice
un cable de seguridad adicional, por si el
sensor se soltase de la red.
del cerco. Asegúrese que esta línea de
seguridad no impide que el sensor pueda
cogerse libremente y con facilidad.
Retire el sensor del arte de cerco antes
de que éste pase por la maquinilla.
No debe haber ningún tipo de dispositivo
de sujeción “permanente” amarrado a
las anillas de carga del sensor, ya que
ésto podría ocasionar conexión eléctrica
entre ambas anillas, provocando un
cortocircuito.
Arrastre o Cerco Danés: El sensor de
profundidad queda fijado, normalmente,
a la relinga superior. Para asegurar dicha
sujeción y una posición estable del sensor
apuntando hacia el barco, realice una
pequeña anudada en el centro de la relinga
superior. Sitúe dos mosquetones a una
distancia, aproximada, de 10 - 15 cm de
la relinga superior, a modo de retención,
y mantenga el sensor fijado mediante dos
tirantes de goma sujetos a las anillas de
sujeción de popa.
(A) = Dos cables con uno de los extremos
en un mosquetón y los otros dos extremos
fijados de forma permanente a (B).
(B) = Mosquetón grande
(C) = El cable de seguridad con
mosquetones en cada uno de sus
extremos. Observe que el extremo
superior NO está sujeto al cable del arte
de cerco.
 Loading...
Loading...