

Page 1
Quick reference guide
A
A
B
B
C
D
E
F
G
H
(CD012205E)
A
B
(CD012205A)
Simrad PI SeineSounder for trawlers
Purpose
The Simrad PI SeineSonder does
two jobs at the same time. From
its position on the trawl’s headrope
it will measure the depth from the
sea surface and the height over the
seabed.
Daily operation
Once installed and put to use, the
sensor will automatically be switched
on once the waterswitch (the SHORT
bolt) is activated. After an initial
startup, the sensor starts transmission
of the current depth and height.
When the sensor is not in use, check
that the lamp (D) is not flashing, as
this indicates that the sensor is active
and discharging its batteries. In this
case, wash the sensor in fresh water.
If you operate with Fast update rate,
the sensors must be charged approx.
every 24 hours. Used with Normal or
Slow update rates, the operational life
is approx. 60 or 80 hours respectively.
Optimal sensor charging temperature
is from +10 to +25° C.
Note: Charging sensors at sub-zero
temperatures can create explosive
gasses. Simrad assumes no liability
for improper charging of sensors,
or the use of chargers not specified
in Simrad’s sensor or charger
documentation.
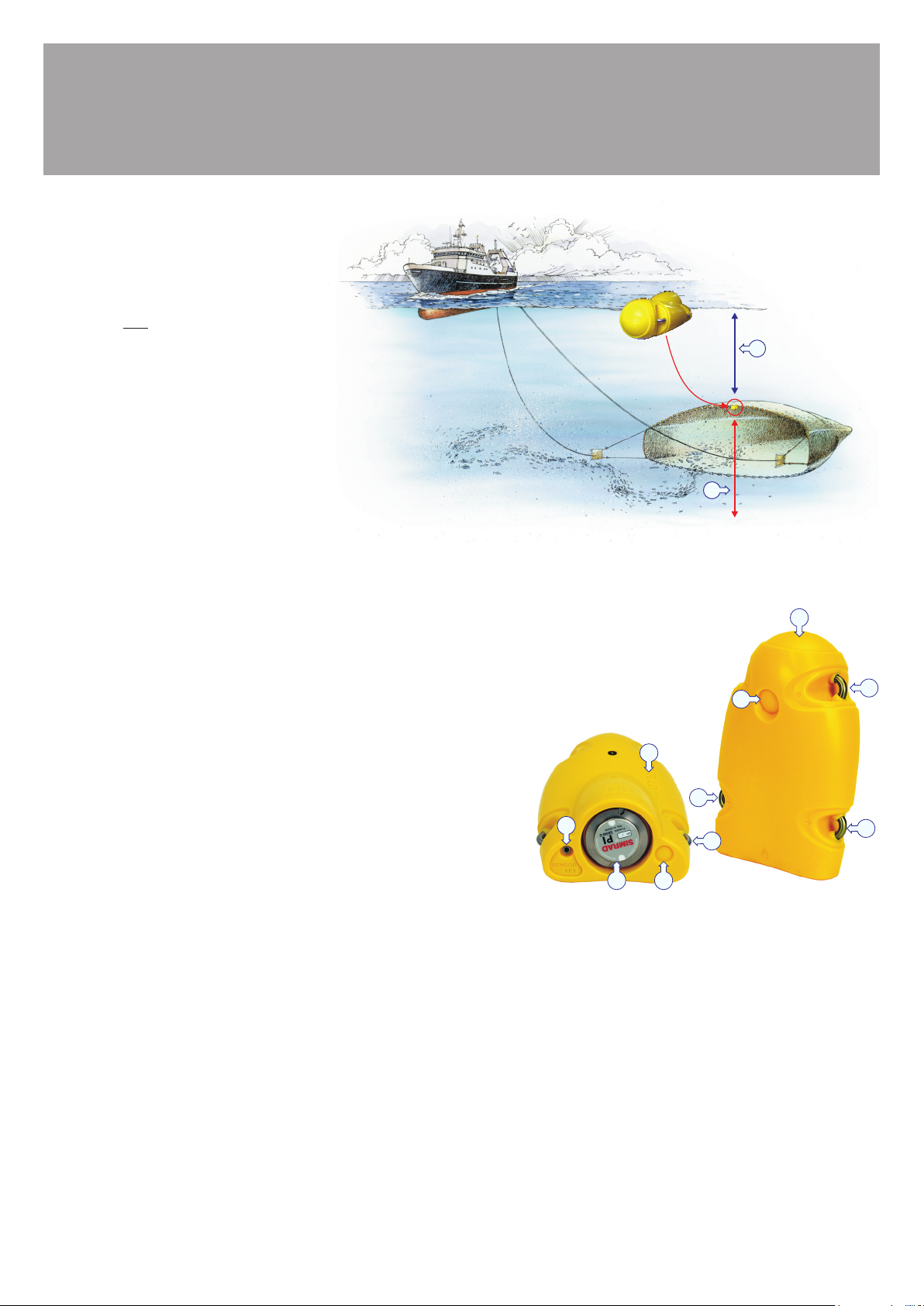
The Simrad PI SeineSounder is located on the headrope, and measures both the
depth (A) and the height above the bottom (B).
Main parts
(A) Negative charging and fastening lug
(B) Positive charging and fastening lug
(C) Communication link
(D) Location of sensor lamp
(E) Sensor “key” and water
switch sensor
(F) Echo sounder
transducer for trawl
(G) Echo sounder
transducer for purse seine
(H) Depth sensor
Sensor conguration
On delivery, all SeineSounders are
set up to channel 14 (Height) and
channels 5 (depth 300 m), 9 (600 m)
or 1 (1000 m), and with Fast update
rate.
Note: The sensor and the PI system
setup must correspond, otherwise the
communication will not work.
To change the sensor setup (channel
selection), use the PI Configurator
utility.
The sensor update rate controls how
often the sensor reads and reports the
height. Three settings are available.
Note that a faster update rate will
decrease the battery life.
Fast: Recommended for new
equipment, or if you are not familiar
with the bottom conditions.
Normal: Provided for normal use.
Slow: Recommended for long
operational time. The system will be
less sensitive due to the slow data
update.
to unique sensor numbers. Select the
same update rate for both, and use
channel numbers according to the
sensor’s configuration. Write down
this configuration for future reference.
On the receiver, the Interference
filter must be switched on. Set it to
Level 9 if you have noise problems
from other hydroacoustic sources.
Note that this filters will influence the
signal spectrum shown in the Status
display.
System conguration
The sensor must be configured with
We recommend that you set the
sensor filter to Light.
Page 2
6
D1 [m]
43.5
1
H1 [m]
21.8
(CD012205D)
A
B
C
I
J
K
E
D
F
H
G
B
B
A A
(CD012207C)
30
cm
C
D
E
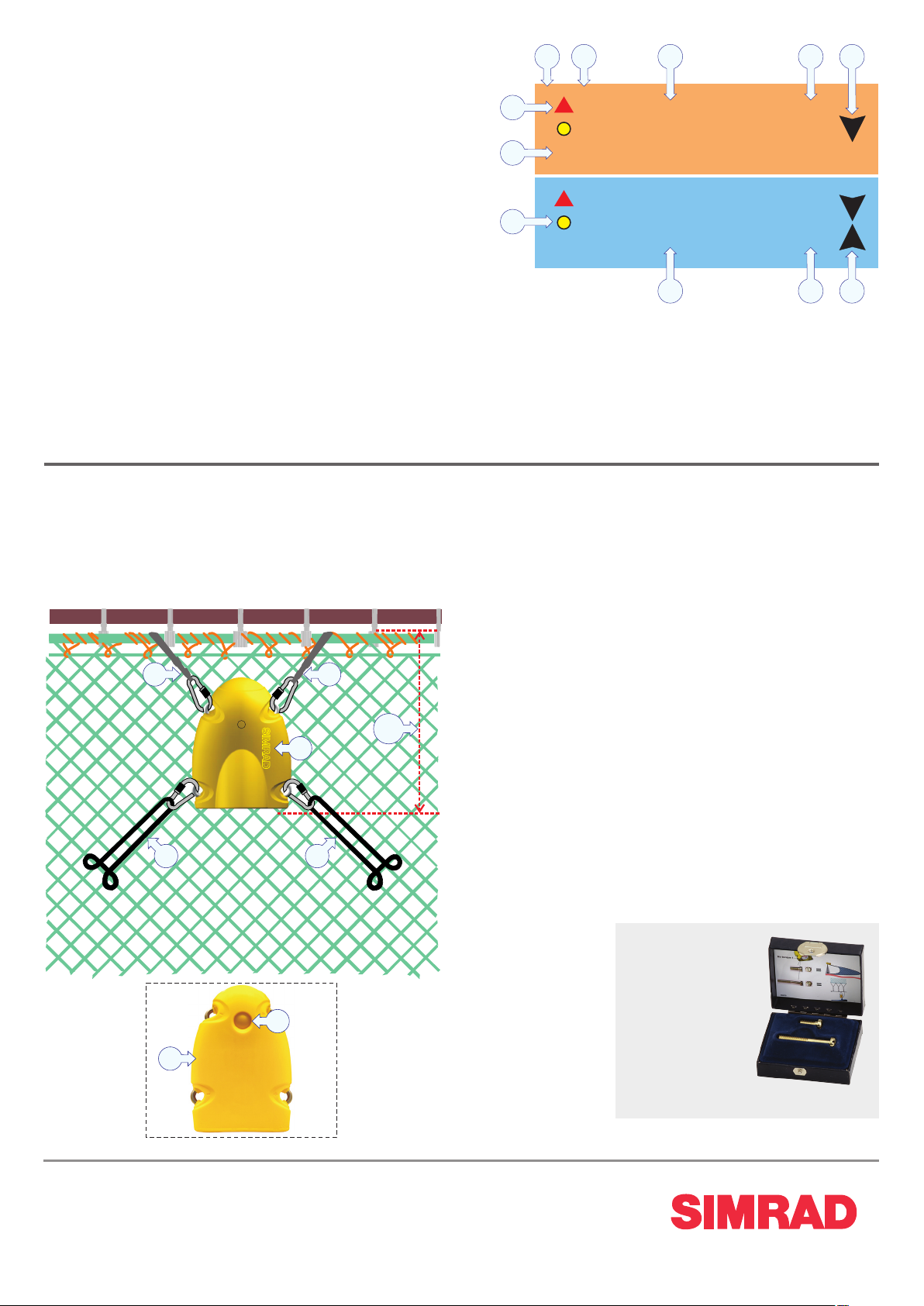
Numerical presentation
Kongsberg Maritime AS
Strandpromenaden 50
P.O.Box 111
N-3191 Horten, Norway
Sim rad
Telephone: +47 33 03 40 00
Telefax: +47 33 04 29 87
simrad.sales@simrad.com
www .si mra d.c om
On the PI display, you must use two
channels to receive the information
from the SeineSounder. The depth
and height values are then shown in
the numeric display. If the height or
depth is increasing or decreasing, this
is shown with two arrows and the
variation in meters per minute.
You can also see the depth and
height changes as a function of time in
a graphical presentation.
When the readings are stable, the
digits are shown in black colour. If the
contact is lost, the characters *** are
shown in grey. If the height is out of
range, the displays shows ???.
(A) Sensor identification
(B) Unit of measurement
(C) Depth
(D) Depth change/
minute
(E) Arrow indicates that
the depth is increasing
(F) Visual alarm
(G) Sensor transmission
indicator
(H) Interference
warning
(I) Height
(J) Height change/minute
(K) Arrows pointing “out” means
that the depth is increasing, arrows
pointing “in” means that height is
decreasing
Mounting
Location: Place the sensor where
you wish to monitor the height. This
is normally aft of the headrope at the
center of the net.
Ensure that you mount the sensor
with the reverse side (D) and the
echo sounder transducer (E) pointing
towards the bottom! The SIMRAD
print on the sensor (C) must point up
(A) Rope and snap
hooks
(B) Rubber bands
and snap hooks
(C) SIMRAD
imprint on the
sensor must point
up!
(D) Reverse side of
sensor
(E) Echo sounder
transducer must
point towards the
bottom!
towards the water surface!
Mounting: Secure the two forward
fastening lugs (A) using two snap
hooks and rope. Then, secure the
two aft fastening lugs (B) using snap
hooks and strong rubber bands. This
mounting places the sensor in a cradle
supported on all four sides.
In order to secure the sensor in place,
we recommend that you assemble a
bag of finemeshed net, and ties this
to the trawl close to the middle of the
headrope. Then, mount the sensor
inside this bag. The sensor must be
properly secured to prevent it from
moving sideways or rotate during use.
Make sure that you have best possible
free view between the sensor and the
bottom, and between the sensor and
the vessel.
NOTE!
For bottom and
pelagic trawl
applications, use
the SHORT key
bolt!
313699 / Rev.B / October 2007
 Loading...
Loading...