

Page 1
Instruction manual
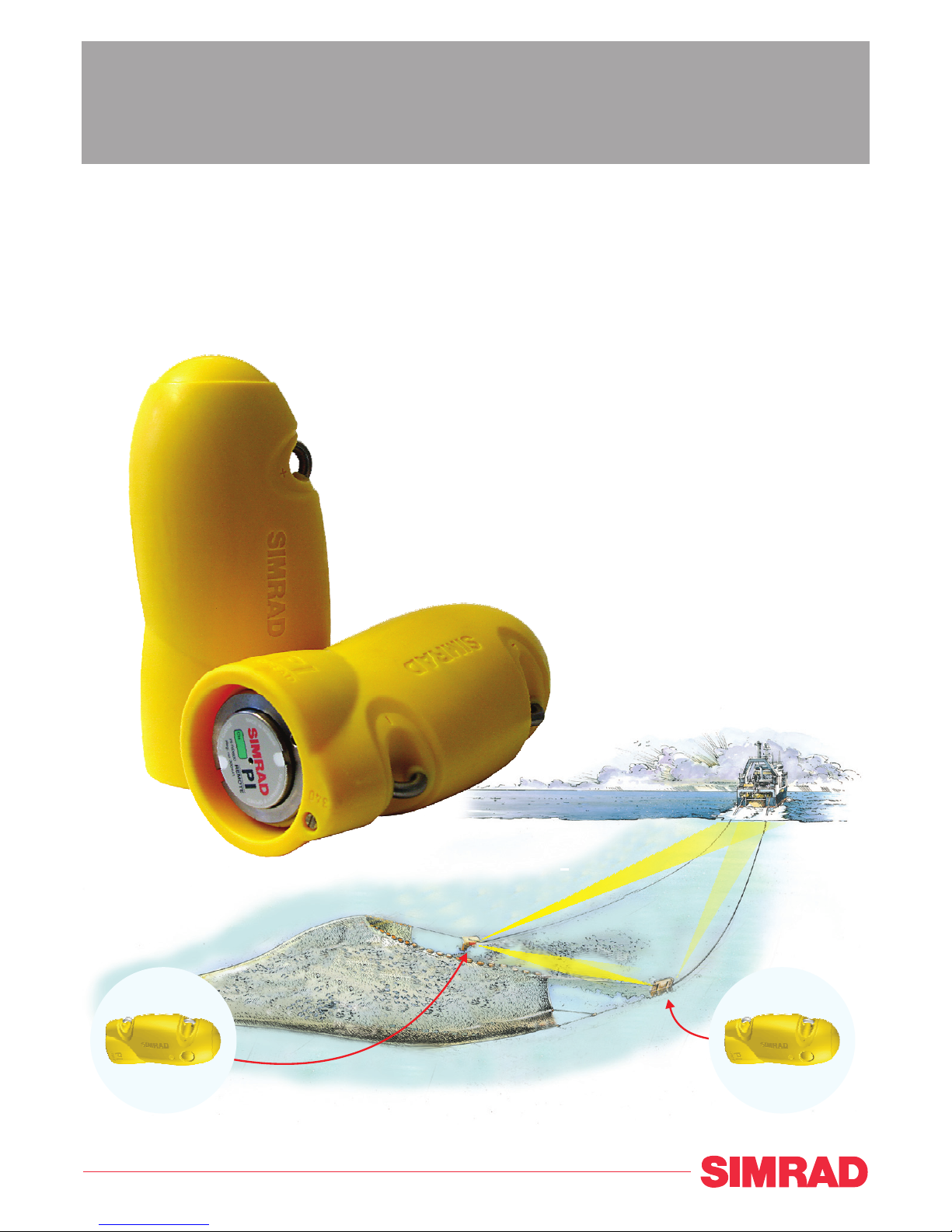
Simrad PI Remote/Depth
Sensor for depth and spread measurements
TE CH NO LO GY FO R SUS TA IN AB LE FI SH ER IE S
www.simrad.com
(CD012201F)
Page 2

Page 3
Simrad PI Remote/Depth
Instruction manual
This document gives you the necessary information for
mounting, charging and maintaining the PI Remote/Depth
sensor. It also explains how to set up the PI44 andPI54ca
tch
monitoring systems to receive and display the information
provided by the sensor.
316870/A
19 November 2007
Page 4
Document history
Document number: 316870 / ISBN-10: 82-8066-096-8 / ISBN-13: 978-82-8066-096-1
Rev.A
19 November 2007 First release.
Copyright
©2007 Kongsberg Maritime AS
The information contained in this document remains the sole property of Kongsberg Maritime AS. No part
of this document may be copied or reproduced in any form or by any means, and the info r mation contained
within it is not to be communicated to a third party, without the prior written consent of Kongsberg
Maritime AS. The document, or any part of it, may not be translated to any other language without the
written approval from Kongsberg M aritime AS.
Disclaimer
Kongsberg Maritime AS endeavours to ensure that all information in this docum ent is correct and fairly
stated, but does not accept liability for any errors or omissions.
Warning
The equipment to which this manual applies must only be used for the purpose for which it wa
s
designed. Improper use or maintena nce may cause damage to the equipment and/or injury to personnel.
The user mu st be familiar with the contents of the appropriate manuals before attempting to install,
operate or work on the equipment.
Kongsberg Maritime AS disclaims any responsibility for damage or injury caused by improper
installation, use or maintenance of the equipment.
Support
If you require maintenance on your Simrad equipment, contact your local dealer. You can also contact
Simrad using the following address:s
imrad.support@simrad.com.Ifyo
u need other information about
this product, or any other Simrad products, visit w
ww.simrad.com. On our web site you will also find
a list of our dealers and distributors.
Kongsberg Maritime AS
Strandpromenaden 50
P. O. Bo x 1 11
N-3191 Horten, Norway
Simrad
Telephone:+4733034000
Telefax:+4733042987
simrad.sales@simrad.com
www.simrad.com
Page 5

Instruction manual
Table of contents
INTRODUCTION ................................................................ 5
Purpose and applications..........................................................................................5
Main parts identification...........................................................................................6
Information on the sensor label................................................................................7
INSTALLATION ................................................................. 8
Sensor installation ....................................................................................................8
Adapter installation ..................................................................................................8
Installation principles ...............................................................................................9
CONFIGURATION ............................................................ 10
Basic configuration.................................................................................................10
Configuration of the PI32.......................................................................................10
Configuration of the PI44 and PI54........................................................................11
Adding a Spread/Depth sensor ...............................................................................13
About sensor configuration ....................................................................................14
Default communication channelsand updaterates.........................................14
Changing a communication channel ............................................................. 15
Changing the update rate ............................................................................. 15
PI Configurator ........................................................................................... 16
DISPLAY PRESENTATIONS.............................................. 17
Numerical presentation...........................................................................................17
Graphical presentation on PI32 ..............................................................................17
Graphical presentation on PI44 and PI54...............................................................19
Depth marker line.......................................................................................20
Spread marker line ...................................................................................... 21
CHARGING AND MAINTENANCE ...................................... 23
PI Remote/Depth maintenance...............................................................................23
PI Remote/Depth charging .....................................................................................24
How to use the Simrad PI Charger.........................................................................25
Daily operation........................................................................................... 25
Indicators................................................................................................... 26
Automatic configuration.............................................................................. 27
How to use the Simrad PI MaxiCharger.................................................................28
Daily operation........................................................................................... 28
Indicators................................................................................................... 29
316870/A 3
Page 6

Simrad PI Remote/Depth
4
316870/A
Page 7
Introduction
INTRODUCTION
Efficient fishery with trawl and purse seine assumes professional
and adequate instrumentation on the gear. Simrad has provided
professional instruments for fish finding for more than sixty years.
This user manual described installation, use and maintenance of
the PI Remote/Depth sensor when put to use with the PI catch
monitoring systems.
Purpose and applications
The purpose of the PI Remote/Depth sensor is to achieve accurate
measurements of both the water depth and the distance between
the two trawl doors. In order to measure the distance, it must be
installed in a pair with a PI Spread or PI Spread/Depth sensor.
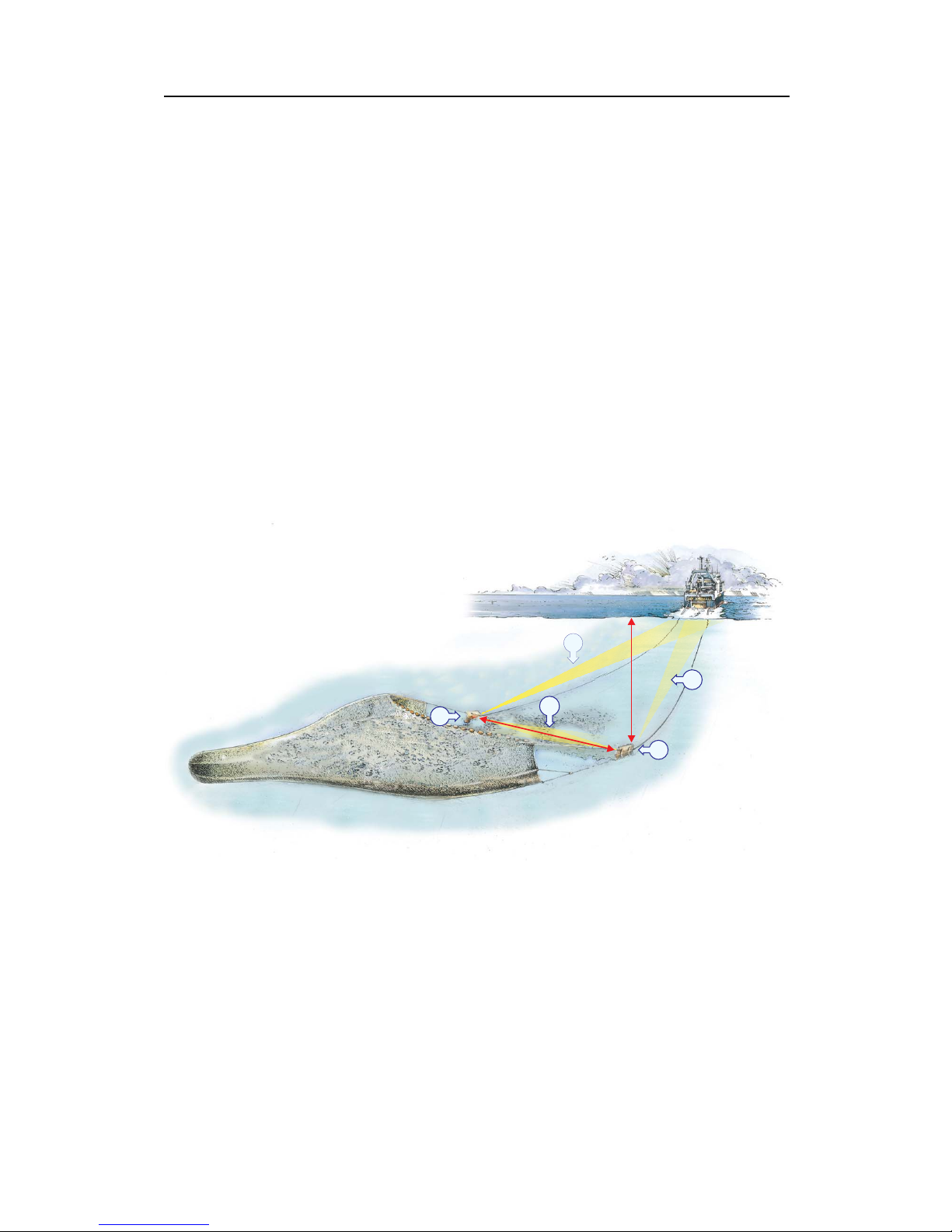
Figure 1 The PI Remote/Depth sensor application
C
(CD012201B)
A
B
D
E
(A) The Spread sensor is mou
nted in a special adapter on the
port trawl door.
(B) The Remote/Depth se
nsor is mounted in a special adapter on
the starboard trawl do
or.
(C) The Spread sensor c
ommunicates the distance between the
trawl doors to the PI s
ystem on the vessel.
(D) The Remote/Dep
th sensor communicates the current depth of
the trawl door to t
he PI system on the vessel.
(E) Using the tran
sverse communication link, the two sensors
measure the phys
ical distance between the trawl doors.
316870/A 5
Page 8
Simrad PI Remote/Depth
The PI Remote/Depth thus contains both a pressure sensor to
measure the water depth, and a transducer to communicate with
the PI Spread sensor. The sensor in the PI Spread sensor will then
measure the distance between the trawl doors. The results from
these measurements are transmitted by acoustic signals to the PI
catch monitoring system mounted on the vessel.
Note
Each Spread sensor can be configured to communicate with one
of two Remote/Depth sensors; Remote 1 or Remote 2. Label the
Spread sensor accordingly, and ensure that you only use the
sensors in the correct pairs.
The PI Remote/Depth has been developed to be used on both
bottom and pelagic trawls. The sensor is installed on the
starboard trawl door using an adapter.
Main parts identification
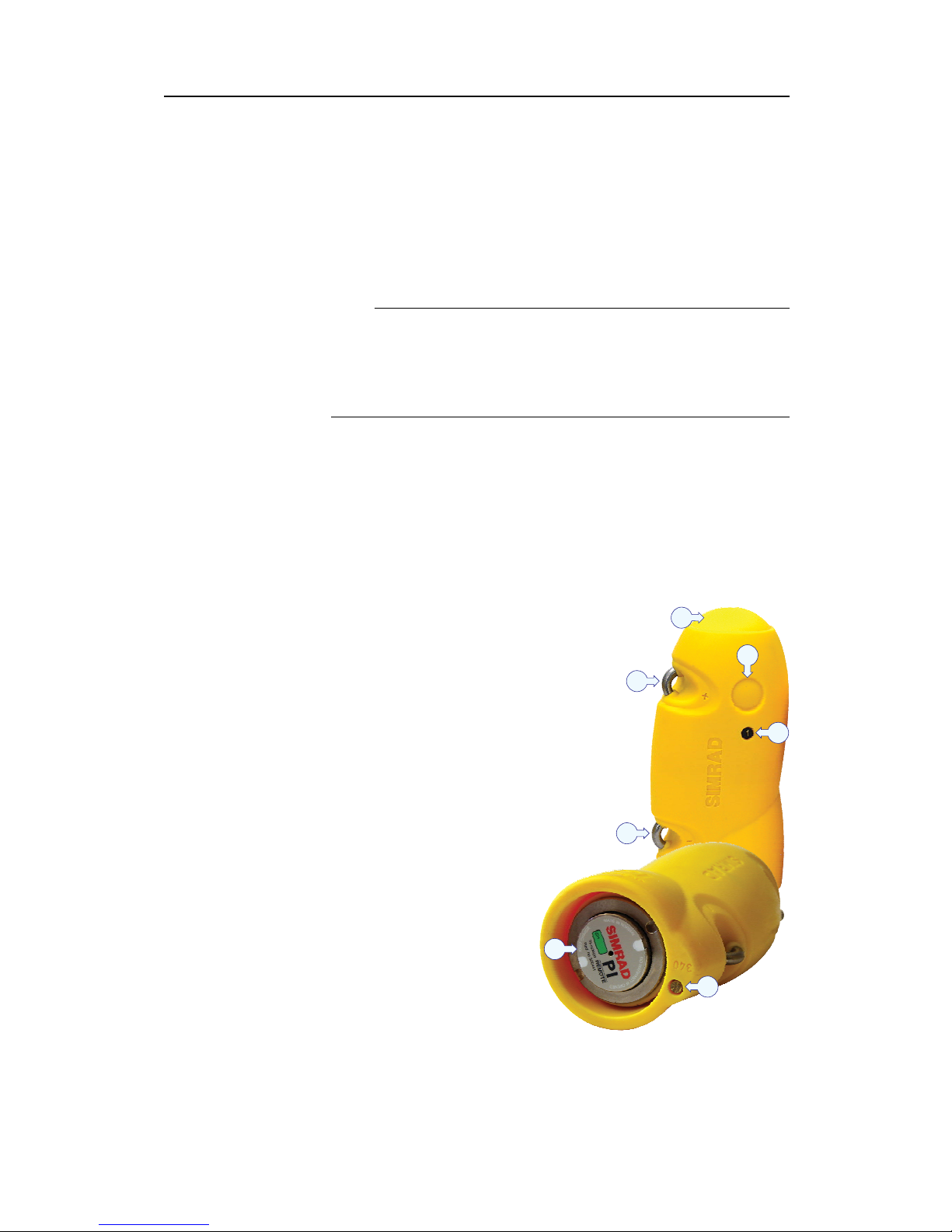
Figure 2 PI Remote/Depth sensor
(A) Negative charging and fastening lug
(B) Positive charging and fastening lug
(C) Communication link to the vessel
(D) Transverse communication link
(E) Spread and Remote set identification
(F) Water switch with sacrificial bolt
(G) Sensor identification label
B
C
E
D
F
G
A
(CD012201A)
6 316870/A
Page 9

Introduction
Information on the sensor label
The sensor label provides the following information.
Figure 3 The PI Remote/Depth sensor label
B
D
(CD012201D)
A
C
E
F
(A) Channel identification. You must write down the channel
currently used by the sensor to communicate with the PI system.
The green background colour on the label is chosen to remind
you that the sensor is mounted on the starboard trawl door.
(B) This information identifies the sensor type. Three types are
available:
• PI-RD300: PI Remote/Depth for maximum depth 300 m
• PI-RD600: PI Remote/Depth for maximum depth 600 m
• PI-RD1000: PI Remote/Depth for maximum depth 1000 m
(C) Order number.
(D) Opening for the water to access the pressure sensor.
(E) Water switch. This is a sacrificial bolt. Check it from time to
time to make sure that it has not worn out.
(F) The sensor’s serial number.
316870/A 7
Page 10
Simrad PI Remote/Depth
INSTALLATION
The PI Remote/Depth sensor is mounted on the starboard
trawl door using a special adapter. From this position, it will
communicate with a Spread or a Spread/Depth sensor on the port
trawl door, and with the hydrophone beneath the vessel.
Sensor installation
The PI Remote/Depth sensor and the Spread or Spread/Depth
sensors must be mounted in dedicated adapters on each trawl
door. These adapters must be installed beforehand. Detailed
information on how to install the adapters are provided with the
installation kit.
The PI Remote/Depth sensor is mounted on the s
tarboard door,
while the PI Spread (or PI Spread/Depth) sensor is mounted on
the p
ort door.
Note
It is essential that there is a clear line of sight between the two
transverse communication “eyes” (one on each sensor). It is
also important that both the PI Spread ( or Spread/Depth) and
the PI Remote/Depth sensors have a clear line of sight to the
hydrophone on the vessel.
The two rubber inserts provided at the bottom of each sensor
adapter must not be replaced with any other types or designs.
It is essential that these inserts provide a secure cradle for the
sensors, but they must also allow for free water circulation to
allow the sensor’s water switch to engage. Also, the design of
the inserts allows sand and mud to flow out when the trawl doors
are pulled up from the water.
Adapter installation
The installation of the sensor adapter is described in the dedicated
instruction manual provided with the adapter. The document can
also be downloaded from w
ww.simrad.com.
Note
The adapter used to install the PI Remote/Depth sensor is not the
same as the adapter used for the standard PI Remote sensor.
The PI Remote/Depth sensor uses the same physical housing
as the PI Spread and PI Spread/Depth sensors, but it must be
mounted “upside down” to establish free view between the two
transducers used for the transverse communication.
8 316870/A
Page 11
Installation
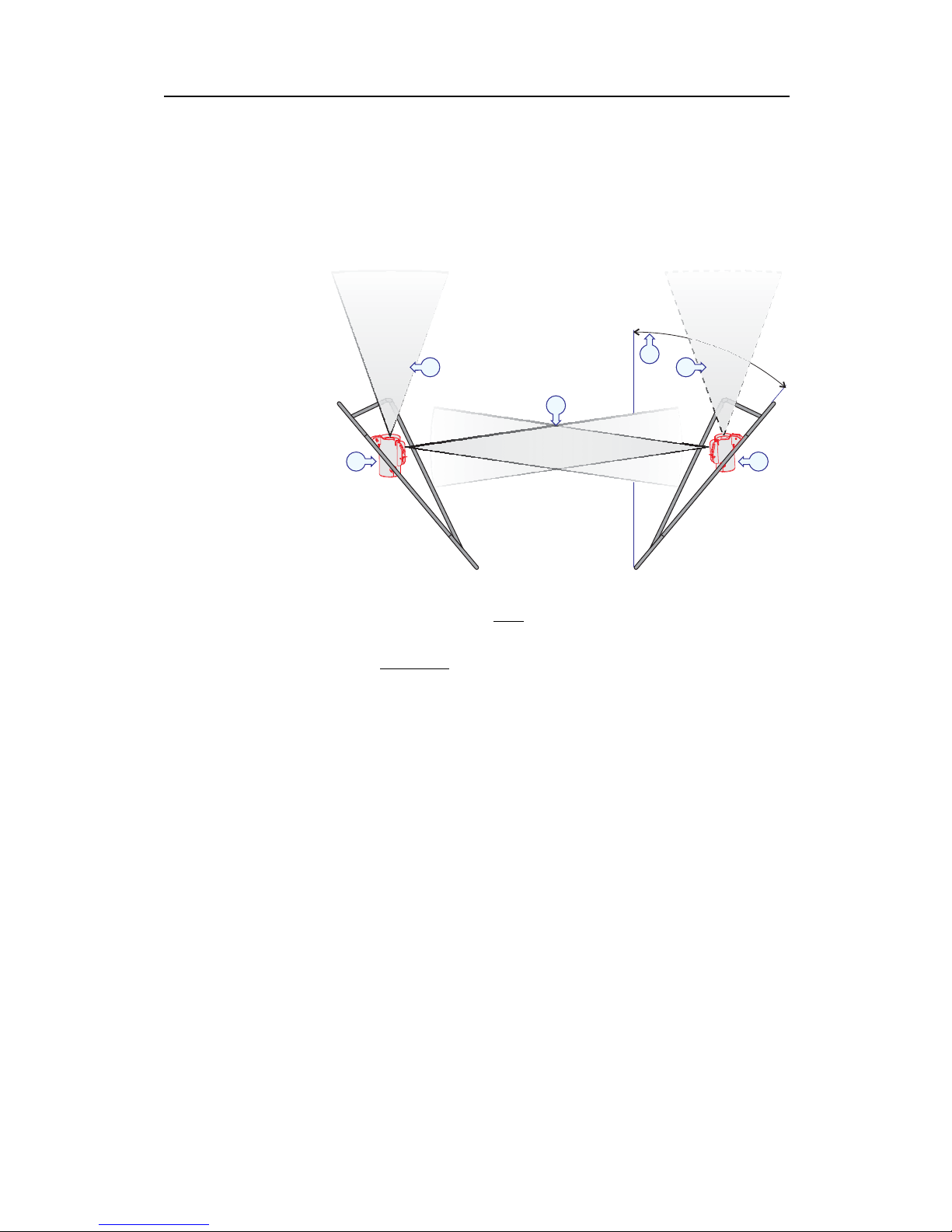
Installation principles
Observe the installation principles in the illustration.
Figure 4 Installation principles
(CD012200K)
A
B
C
E
F
D
(A) The PI Spread (or Spread/Depth) sensor is mounted in a
special adapter on the p
ort door.
(B) The PI Remote/Depth sensor is mounted in a special adapter
on the s
tarboard door.
(C) Communication link between the PI Spread (or Spread/Depth)
sensor and the PI hydrophone.
(D) Communication link between the PI Remote/Depth sensor
and the PI hydrophone.
(E) Communication link between the two sensors.
(F) Angle of attack.
316870/A 9
Page 12

Simrad PI Remote/Depth
CONFIGURATION
In order to allow the information from the PI Remote/Depth
sensor to be accepted and understood by the PI catch monitoring
system, the PI receiver must be set up correctly. This means that
you must tell the receiver that the sensor exists by entering the
sensor type, communication channels and update rate.
Upon delivery, all PI Remote/Depth sensors are set up with
factory default channels and update rates. Refer to the table in
section About sensor configuration on page 14.
Note
The sensor and the PI system setup must correspond, otherwise
the communication will not work. To change the sensor setup
(channel selection and update rate), use the PI Configurator
utility. See PI Configurator on page 16.
Basic configuration
Observe the following basic configuration settings:
• When you put the PI Remote/Depth to use, you must set it
up with a unique sensor number. Select the update rate, and
use a channel number according to the sensor’s configuration.
Write down this configuration for future reference. For
default settings, refer to the table in section About sensor
configuration on page 14.
• On the receiver, the Interference filter must be switched
on.SetittoLevel9 if you have noise problems from other
hydroacoustic sources. Note that this filters will influence the
signal spectrum shown in the
Status display.
• We recommend that you set the sensor filter to Light.
Configuration of the PI32
This procedure explains how to set up the PI32 catch
monitoring system to access the information provided by the PI
Remote/Depth sensor. For more detailed information about the
PI32 settings and parameters, refer to the PI32 Operator manual.
Note
In order to set up the PI system you must know what kind of
sensors you have, which communication channels they use, and
how often they communicate (the update rate). You need this
information b
efore you start the configuration.
Do not carry out sensor configuration unless absolutely
necessary.
10 316870/A
Page 13

Configuration
We recommend that you use the form at the beginning of the
PI32 Operator manual to write down the sensors you have and
their respective communication channels and update rates.
Figure 5 PI Remote/Depth configuration example, PI32
2
11
FAST
FAST
Sensor 1:
SINGLE - Update:
SINGLE Update:-
NONE - Update:
Measure 1:
Measure 2:
Sensor 2:
Sensor 3:
Sensor setup:
(CD012103A04)
SPREAD - Channel:
DEPTH 300M - Channel:
This example shows how the PI32 is set up to receive information
from a PI Spreadsensor and a PI Remote/Depth sensor. Standard
communication channels and update rates are used.
To access the
Sensor Setup menu:
1 Press the
MENU button to open the main menu.
2 On the
Setup menu, select Sensor setup.
3 Press the
ENT button to allow for changes, and then the
same button one more time to accept the warning.
• You must now use the circular navigation button to
move the cursor between the parameters, and the + and
- buttons to select values.
To set up the depth readings from the PI Remote/Depth sensor:
1 Choose an available sensor; 1, 2 or 3.
2 Define the sensor type (by default None)toSingle.
3 Set
Update to the correct update rate.
4 Set
Measure to the chosen sensor type Depth 300M, Depth
600M or Depth 1000M depending on the depth rating on
your PI Remote/Depth sensor.
5 Set the communication
Channel to its correct value.
All sensors are provided with default communication channels
and update rates. Refer to the table in section About sensor
configuration on page 14.
Configuration of the PI44 and PI54
This procedure explains how to set up the PI44 and PI54 catch
monitoring systems to access the information provided by the PI
Remote/Depth sensor. For more detailed information about the
settings and parameters, refer to the relevant Operator manuals.
We recommend that you use the form at the beginning of the PI44
or PI54 Operator manual to write down the sensors you have and
their respective communication channels and update rates.
316870/A
11
Page 14

Simrad PI Remote/Depth
Note
In order to set up the PI system you must know what kind of
sensors you have, which communication channels they use, and
how often they communicate (the update rate). You need this
information b
efore you start the configuration.
Do not carry out sensor configuration unless absolutely
necessary.
Figure 6 PI Remote/Depth configuration example
Sensor 1:
Demo mode:
Measure 1:
- Update:
- Update:
SINGLE
SINGLE
NONE
NONE
NONE
NONE
- Channel:
- Channel:
SPREAD
DEPTH 300M
FAST
OFF
02
Sensor 2:
Measure 2:
FAST
11
Sensor 3:
Sensor 4:
Sensor 5:
Sensor 6:
Sensor setup
Accept ENT
MENU Exit
GAIN- GAIN+
(CD012105D01)
This example shows how the PI44 (or PI54) is set up t o
receive information from a standard PI Spread sensor and a PI
Remote/Depth sensor. Standard communication channels and
update rates are used.
To access the
Sensor Setup menu:
1 Press the
MENU button to open the main menu.
2 On the
Setup menu, select Sensor setup.
3 Press the
ENT button to allow for changes, and then the
same button one more time to accept the warning.
To set up the depth readings from the PI Remote/Depth sensor:
1 Choose an available sensor; 1 to 6.
2 Define the sensor type (by default None)toSingle.
3 Set
Update to the correct update rate.
4 Set
Measure x1 to the chosen sensor type Depth 300M,
Depth 600M or Depth 1000M depending on the depth rating
on your PI Remote/Depth sensor.
5 Set the communication
Channel to its correct value.
6 Press the
ENT button to save the changes and exit.
12
316870/A
Page 15

Configuration
All sensors are provided with default communication channels
and update rates. Refer to the table in section About sensor
configuration on page 14.
Adding a Spread/Depth sensor
In order to achieve full control of the trawl, you may wish to
add a Spread/Depth sensor on the port trawl door. This sensor
will communicate with the Remote/Depth sensor to establish the
distance between the trawl doors, and it will provide you with the
accurate depth of the port trawl door. The Spread/Depth sensor
will occupy one additional channel on your PI system.
Note
You will not be able to add a PI Spread/Depth sensor on a PI32
system.
Figure 7 PI44 Spread/Depth and Remote/Depth configuration
example
Sensor 1:
Demo mode:
Measure 1:
Measure 3:
- Update:
- Update:
DUAL
NONE
SINGLE
NONE
NONE
NONE
- Channel:
- Channel:
- Channel:
SPREAD
DEPTH 300M
DEPTH 300M
FAST
FAST
OFF
02
Sensor 2:
Measure 2: 16
17
Sensor 3:
Sensor 4:
Sensor 5:
Sensor 6:
Sensor setup
Accept ENT
MENU Exit
GAIN- GAIN+
(CD012105C02)
This example shows how the PI44 (or PI54) is set up to receive
information from a PI Spread/Depth sensor (using two channels)
and a PI Remote/Depth sensor (using a single channel). Standard
communication channels and update rates are used.
To access the
Sensor Setup menu:
1 Press the
MENU button to open the main menu.
2 On the
Setup menu, select Sensor setup.
3 Press the
ENT button to allow for changes, and then the
same button one more time to accept the warning.
To set up the depth and distance (spread) readings from the PI
Spread/Depth sensor:
316870/A 13
Page 16

Simrad PI Remote/Depth
1 To reset the unit, set all six sensors to default sensor type
None.
2 Choose the sensor you wish to use for the PI Spread/Depth
sensor; 1 to 6.
3 Define the sensor type (by default None)toDual.
4 Set
Update to the correct update rate.
5 Set
Measure 1 to the chosen sensor type Spread.
6 Set the communication
Channel to its correct value.
7 Set
Measure 2 to the chosen sensor type Depth 300M, Depth
600M or Depth 1000M depending on the depth rating on
your PI Remote/Depth sensor.
8 Set the communication
Channel to its correct value.
9 Press the
ENT button to save the changes and exit.
All sensors are provided with default communication channels
and update rates. Refer to the table in section About sensor
configuration on page 14.
About sensor configuration
All sensors are provided from Simrad with predefined
communication channels and update rates.
Default communication channels and
update rates
See the table below for the initial values for the communication
channels and update rates for the various sensors.
Table 1 Default communication channels and update rates
Sensor Com.channel(s)
Update rate
PI Bottom Contact
6Normal
PI Catch
4Normal
PIDepth(300m)
16 Fast
PIDepth(600m)
12 Fast
PI Depth (1000 m )
10 Fast
PI Height 14 Fast
PI Remote/Depth
Depth 300M: 11
Depth 600M: 15
Depth 1000M: 13
Fast
PI Spread
2Fast
PI Spread/Depth
Depth 300M: 16
Depth 600M: 12
Depth 1000M: 10
Spread: 2
Fast
PI Twin Spread
2 and 7 Fast
14
316870/A
Page 17

Configuration
Table 1 Default communication channels and update rates (cont’d.)
Sensor Com.channel(s)
Update rate
PI Temperature 8 Fast
PI SeineSounder
Depth 300M: 5
Depth 600M: 9
Depth 1000M: 1
Height: 14
Fast
Changing a communication channel
It may be required to change one or more communication
channels, and there may be many reasons for this.
• You have more than one of each sensor. For example, if you
have three temperature sensors, they MUST communicate
on three different channels.
• Other vessels near your use the same PI catch monitoring
system (or a similar), and they have one or more of their
sensors set up to the same communication channels as you
have. This will create interference, as you will "read" each
others sensors.
• If your sensors are set up to use communication channels too
close to each other (for example, you have chosen channels 4,
5 and 6), this will limit the vessel’s speed. The reason for this
is the Doppler effect. If the speed is too high, the Doppler will
cause the transmission frequencies to change so much that
they overlap, and this will create interference. The PI catch
monitoring system will provide a warning if this is about to
happen! You must then either change to other communication
channels further apart, or reduce the maximum shooting speed.
• If you operate at the maximum range of the sensors, you
may be able to increase this range slightly if you use
lower communication channels. This is because the lower
communication channels user lower transmission frequencies.
Changing the update rate
It may be required to c hange the update rate on a sensor, that is
how often it sends information back to the PI catch monitoring
system. A high update rate will give frequent information
updates, but the sensor will use more battery power. If you need
your batteries to last as long as possible, you must consider
lowering the update rate.
• A low update rate will provide you with fewer information
updates, but the battery will last very long.
• A high update rate will give you frequent information updates,
but the battery will run out faster.
316870/A 15
Page 18

Simrad PI Remote/Depth
All sensors are provided from Simrad with a default update rate
setting. In some cases you may find that this update rate does not
suit your operational needs. This is a decision you have to make
depending on the local fishing conditions.
PI Configurator
Simrad has developed a dedicated computer utility to change
the sensor configurations. By means of an ordinary desktop
computer and a few special cables you can do this job yourself. If
you do not require frequent configurations, you can also contact
you local dealer for assistance. Contact the dealer for more
information.
16
316870/A
Page 19

Display presentations
DISPLAY PRESENTATIONS
The information provided by the PI Remote/Depth sensor is
shown on the PI catch monitoring system’s colour display. Two
presentations are available:
• Numerical presentation
• Graphical presentation with or without echogram
Numerical presentation
The numerical presentation of the PI Remote/Depth data is
automatically shown in the relevant display modes. It is identical
to the presentation provided by the PI Depth sensor.
Figure 8 Numerical presentation, example
18
D1 [m]
25.6
q
(CD012206G)
A
B
C
E
D
F
G
H
(A) Sensor identification
(B) Unit of measurement
(C) Depth
(D) Depth change per minute
(E) Arrow pointing “down” means that the depth i
s increasing,
arrow pointing “up” means that depth is de
creasing.
(F) Visual alarm
(G) Interference warning
(H) Sensor transmission indicator
When the readings are stable, the digi
tsareshowninblack
colour. If the contact is lost, the ch
aracters *** are shown in grey.
If the depth is out of range, the disp
lays shows ???.
Graphical presentation on PI32
This section contains a proced
ure to explain how you can set
up the PI32 to show you a graphi
cal presentation of the PI
Remote/Depth data providin
gdepthmarkers.
316870/A 17
Page 20

Simrad PI Remote/Depth
Figure 9 Graphical presentation on PI32
C3
45.9
D1m
S2m
0
25
50
75
100
10
15
5
(CD012102D)
25.6
This example shows how the trawl door is located at 45.9 m
depth, and that the distance between the trawl doors is 25.6
meters. You can also see how these values have changed during
the last 20 minutes.
The purpose of the depth- and distance markers on the graphical
presentation is to keep an eye on how deep and how far apart the
trawl doors are situated. The depth sensor in the PI Remote/Depth
measures the distance from the sea surface and down. The PI
Spread sensor communicates with the PI Remote/Depth sensor to
measure the distance between the trawl doors.
1 Identify the sensor you wish to use, and make sure that the
sensor is connected to the PI32 with correct communication
channels and update rates.
2 Ensure that you have a graphical presentation active on your
PI unit.
3 Press the
ENT button to open the Graphic setup menu.
•The
Marker line parameter allows you to switch the
marker lines on or off for sensors S1, S2 and S3.
4 Use the
Marker line parameter to switch the requested
marker line(s) On.
5 Enter the requested values for the marker line
Marker line
thickness
and Marker line delay.
•
Marker line thickness: Use this parameter to control the
thickness (in pixels) of the marker line(s).
18
316870/A
Page 21

Display presentations
• Marker line delay: The echo sounder information is
provided by the transducer located below the vessel’s
hull. The sensor is however located on the gear, and may
be position several hundred meters behind the vessel. In
order to compensate for this physical distance you can
add the
Marker line delay. You must calculate this delay
based on the vessel’s speed, the distance from the aft
stern to the gear, and the current depth of the gear.
6 Press the
ENT button to s ave the chosen parameters and
return to the graphical presentation.
The depth- and spread marker lines are shown in the graphical
presentation using solid lines and the same colours as the
background in the numerical presentation. In order to read the
accurate depth you can observe the depth scale on the right hand
side, or read the value in the numerical presentation.
Graphical presentation on PI44 and PI54
This section contains a procedure to explain how you can set up
the PI44 and PI54 to show you a graphical presentation of the PI
Remote/Depth data providing depth markers. It also explains
how you can set up a spread marker line using the information
from a PI Spread sensor.
The purpose of the depth- and distance markers on the graphical
presentation is to keep an eye on how deep the trawl doors are
situated, and how far apart they are. The depth sensor in the PI
Remote/Depth sensor measures the distance from the sea surface
and down to the sensor, while the PI Spread sensor communicates
with the PI Remote/Depth sensor to measure the distance.
316870/A 19
Page 22

Simrad PI Remote/Depth
Figure 10 Graphical presentation on PI44/PI54
17.5 12.5
10
7.5
5
2.5
15
min
38kHz 1000W MEDIUM
T 22.5 C
o
S 7.2kn DK 1050 m
(CD012106F)
D1[m]
167
5
0
50
100
150
200
250
S2[m]
5
49.5
This illustration shows that the trawl doors are presently situated
at 167 meters below the surface, and they are ascending with 5
meters per minute. The distanc e between the two trawl doors
is 49.5 meter, and this distance is increasing with 5 meters per
second.
Depth marker line
1 Identify the sensor you wish to use, and make sure that
the sensor is connected to the PI system with correct
communication channels and update rates.
2 Ensure that you have a graphical presentation active on your
PI system.
3 Press the
ADJ button to open the Graphic setup menu.
4 Press the
GAIN+ button repeatedly to reach the Marker line
dialogue.
5 Observe the list of sensors that appear. Only those sensors
that can provide a marker line are listed.
6 Set
Auto to On.
• This allows the PI unit to use the Trawl Calculator to
estimate the correct time delay. (This is not applicable
for purse seiners.)
• If you wish to calculate the delay yourself, set
Auto to
Off. You must then enter the calculated value into the
Delay column.
7 Enter requested value for
Width.
20 316870/A
Page 23

Display presentations
• Use this parameter to control the thickness (in pixels)
of the marker line(s).
8 For every marker line, set
Show to On.
9 If you wish to see the marker lines in the expanded views
(bottom expansion, zoom and phased range), set
Sensor
marker in expansion
to On.
10 If you wish the PI system to draw a thin white line over and
under the marker lines, sett
Marker white zone to On.
11 If you wish to see the height marker only in expanded views,
set
Height marker in main echogram to Off..
12 Select requested
Height reference.
• The height sensor measures the distance from the
headrope to the bottom. If you use the echo sounder in the
PI system, set
Height reference to Bottom, and the height
marker will follow the bottom contour. With correct time
delay you will then see the trawl i n “true motion”.
• If you can not use the PI echo sounder, set
Heightreference
to Surface. The height is now shown using 0 m depth as
reference. The distance from the 0 meter line and down
to the marker line is then the current height of the gear.
13 Press the
ENT button to s ave the chosen parameters and
return to the graphical presentation.
Spread marker line
1 Identify the sensor you wish to use, and make sure that
the sensor is connected to the PI system with correct
communication channels and update rates.
2 Ensure that you have a graphical presentation active on your
PI system.
3 Press the
ADJ button to open the Graphic setup menu.
4 Press the
GAIN+ button repeatedly to reach the Marker line
dialogue.
5 Observe the list of sensors that appear. Only those sensors
that can provide a marker line are listed.
6 Locate the Spread sensor, and set
Show to On.
7 Enter the preferred settings for
Marker line thickness and
Marker line delay.
8 Press the
ENT button to s ave the chosen parameters and
return to the graphical presentation.
The Spread marker line is presented on the graphic display
with a continuous line. The colour of the line is the same as
the background colour in the numeric presentation. To read the
distance between the trawl doors, consult the depth range on the
316870/A
21
Page 24

Simrad PI Remote/Depth
right side of the display, or the read-out in the numeric display. If
the trawl door distance is reduced or increased, this will be easily
detected as the marker line moves up or down. Note that you do
not monitor the depth of the trawl doors even though you use the
depth scale, the scale is used as a range scale.
22
316870/A
Page 25

Charging and maintenance
CHARGING AND MAINTENANCE
This chapter explains how you shall recharge the battery in the
PI Remote/Depth sensor, and how you shall best maintain the
sensor.
PI Remote/Depth maintenance
Once installed and put to use, the sensor will automatically be
switched on once the water switch is activated. After an initial
start-up, the sensor starts transmission of the current depth and
distance.
When the sensor is not in use, check that the sensor lamp is not
flashing, as this indicates that the sensor is active and discharging
its batteries. In this case, wash the sensor in fresh water.
All sensors are equipped with a water switch, and two different
types are used. If your sensor is equipped with a brass screw,
observe the following procedure for replacement.
1 Turn the sensor upside down, and locate the brass screw.
2 Inspect the screw for wear and tear.
3 If replacement is required, locate a new screw.
Before a new screw is inserted,
Aqua Shield (or a similar
underwater lubricant) must be applied. Due to the size of
the tube, we recommend that the grease is applied from
a syringe.
4 Apply
Aqua Shield to the screw threads.
5 Insert the screw, mount firmly, but not too hard. Use
maximum torque 1.5 NM
A pack with ten screws and a tube of
Aqua Shield can be
ordered from Simrad as a spare parts kit.
Aqua Shield is manufactured by D.A.Stuart, Warrenville,
Illinois, USA.
Visit w
ww.d-a-stuart.com.
No other maintenance of the sensor is required.
Note
You must never attempt to open the sensor. There are no user
serviceable parts inside, and you may easily cause a leak.
316870/A 23
Page 26

Simrad PI Remote/Depth
PI Remote/Depth charging
The PI Remote/Depth sensor must be charged between operation.
The battery lifetime depends on the update rate you have chosen.
Note
To charge the PI Remote/Depth sensor, use the Simrad PI
Charger or the Simrad PI MaxiCharger.
Table 2 Battery lifetime for the PI Remote/Depth sensor
Update rate
Approximate lifetime between
charging
Fast 40 hours
Normal 80 hours
Slow
110 hours
Optimal sensor charging temperature is from +10 to +25° C.
Note
Charging sensors at sub zero temperatures can create explosive
gasses. Simrad assumes no liability for improper charging of
sensors, or the use of chargers not specified in our sensor or
charger documentation.
24
316870/A
Page 27

Charging and maintenance
How to use the Simrad PI Charger
The Simrad PI Charger is an intelligent battery charger for
fast and secure charging of the PI sensors. The charger will
automatically set up the correct charging current depending on
the sensor type and the battery temperature. A “fuel meter”
shows the status of the battery during the charge.
Figure 11 The PI Charger set up to charge a PI sensor
Even though the PI Charger is designed for fast charging of the
PI sensors, it can also charge the PS sensors, but only at normal
charge rate.
Daily operation
Observe the following pr
ocedure for daily operation.
1 Attach the charging clam
ps to the sensor as follows:
• Red clamp: Positive (+)f
astening lug
• Black clamp: Negative (–
) fastening lug
• On every sensor the pola
rity of the fastening lugs are
engraved on the sensor
body using + and – characters.
2 Ensure that mounting m
aterials do not short circuit the
charging lugs.
316870/A 25
Page 28

Simrad PI Remote/Depth
• This may be ropes, wires, chains or other items that
obstruct or short circuit the electrical connections.
3 When the charger is connected to the sensor, check the
charger lamps.
• Once connected, the charger will identify whether the
sensor connected can be fast charged or not. This is
shown by the yellow lamps. If the top lamp flashes
rapidly, the sensor is fast charged.
• If your sensor can be fast charged, the charger will
also check the internal temperature of the sensor. The
temperature is shown on the “thermometer” on the
charger’s front panel. If you charge a sensor that can not
be fast charged, this “thermometer” does not work.
4 Observe the charge times and temperature limitations!
• Fast charge: The PI Charger will first recharge the
sensor battery for approximately one hour to reach 70%
battery capacity, then approximately three hours to reach
100% capacity. Once fully charged, a constant trickle
charge will compensate for self discharging.
Note
Fast charging only applies to PI s ensors!
• Normal charge: The PI Charger will first recharge the
sensor battery for 16 hours for full battery capacity. This
mode applies for charging PI sensors outside specified
temperature range, and for all PS sensors.
• Charging must only take place within the specified
temperature range. For best results, keep the ambient
temperature between +10 and +25°C.
Note
Do not charge sensors in temperatures above +50°C or
below 0°C!
Indicators
(A) 12 to 32 Vdc connected
(B) “Fuel meter”, the number of LEDs illuminated shows the
current charging status. A complete charging cycle is indicated
with all “full” battery. Charging is indicated as follows:
•Fastflashing: Fast charging in progress
•Slowflashing: Normal charging in progress
• On/off every four seconds: Trickle charging in progress
26
316870/A
Page 29

Charging and maintenance
A
B
C
(C) Battery temperature indicators during fast charging of PI
sensors:
• Green: Battery temperature between +5 and +40°C. Fast
charge is enabled.
• Green and Blue: Battery temperature between 0 and +5°C.
Fast charge is disabled, normal charge is used.
• Green and Red: Battery temperature between +40 and +50°C.
Fast charge disabled, normal charge is used.
• Blue: Battery temperature is below 0°C. No charging takes
place.
• Red: Battery temperature is above +50°C. No charging takes
place.
WARNING
Charging a sensor at sub zero temperature might
develop explosive gases representing a potential
danger. Simrad assumes no liability for improper
charging, or the use of other chargers than those
approved by us.
Automatic configuration
The charger communicates with the sensor at regular intervals.
The fast c harge cycle is controlled by data exchanged between
the PI sensor and the charger, and a series of safety mechanisms
controls the termination of the fast charging current.
The PS sensors do not communicate with the charger. A constant
charge current of 58 m A is then set up by the charger regardless
of the battery temperature.
316870/A 27
Page 30

Simrad PI Remote/Depth
HowtousetheSimradPIMaxiCharger
The Simrad PI MaxiCharger is a plain battery charger to be used
with large PI sensors.
Figure 12 Simrad PI MaxiCharger
Caution
The Simrad PI MaxiCharger must only be used to charge
the l
arge PI sensors: PI Spread, PI Spread/Depth, PI
Remote/Depth, PI Height and PI SeineSounder. You
must NOT use this charger to recharge the “small” PI
sensors and the PS sensors, as the high charging current
may cause damage to the batteries in these sensors.
The Simrad PI MaxiCharger is provided with a small booklet
from the manufacturer (Mascot). Read this booklet before you
put the charger to work!
Daily operation
Observe the following procedure for daily operation.
1 Connect the charger to 230 Vac, and check that the charger
lamp is lit in yellow.
2 Ensure that mounting materials do not short circuit the
charging lugs.
• This may be ropes, wires, chains or other items that
obstruct or short circuit the electrical connections.
3 Attach the charging clamps to the sensor as follows:
• Red clamp: Positive (+) f astening lug
• Black clamp: Negative (–) fastening lug
• On every sensor the polarity of the fastening lugs are
engraved on the sensor body using + and – characters.
28
316870/A
Page 31

Charging and maintenance
4 When the charger is connected to the sensor, check the
charger lamps.
• After a few seconds, the lamp on the charger will change
from yellow to orange/red. This means that fast charging
is in progress.
• When the battery in the sensor has reached 90% capacity
the lamp will change from orange/red to green with
short yellow flashes. This means that top charging is in
progress.
• When the battery is fully charged, the lamp turns green.
Trickle charging is now active. You can safely allow
trickle charging for long periods of time.
Indicators
The Simrad PI MaxiCharger is only equipped with a single
indicator lamp, this lamp will however change colour to show the
status of the charging process.
• Yellow: The charger is connected to 230 Vac, it has not been
connected to the sensor, and it is ready for use.
• Orange/Red: The charger is connected to a sensor, and fast
charging is in progress.
• Green with short yellow flashes: Top charging is in progress.
• Green: Trickle charging is in progress.
316870/A 29
Page 32

Simrad PI Remote/Depth
A
Applications, 5
C
Charging, 23–24
Communication
channel
default values, 14
why change?, 15
Configuration, 10
PI32, 10
PI44, 11
PI54, 11
Remote/Depth, 13
sensor, 14
D
Default
communication
channels, 14
update rate, 14
Depth
marker line, 20
Display presentation
graphical
PI32, 17
PI44/PI54, 19
numerical, 17
Display presentations, 17
G
Graphical
display presen tation
PI32, 17
PI44/PI54, 19
H
How to
set up a depth marker
line, 20
set up a spread marker
line, 21
I
Identification
main parts, 6
Installation, 8
Introduction, 5
M
Main parts
identification, 6
Maintenance, 23
Marker line
depth, 20
spread, 21
N
Numerical
presentation, 17
P
Parts
identification, 6
PI Charger
use, 25
PI MaxiCharger
use, 28
PI32
configuration, 10
PI44
configuration, 11
PI54
configuration, 11
Presentations, 17
Procedure
configuration
PI32, 10
PI44, 11
PI54, 11
Remote/Depth, 13
set up a d epth marker
line, 20
set up a spread marker
line, 21
Purpose, 5
R
Remote/Depth
configuration, 13
S
Sensor
configuration, 14
Spread
marker line, 21
U
Update rate
default values, 14
why change?, 15
30 316870/A
Page 33

Page 34

Page 35

Page 36

ISBN-10: 82-8066-096-8
ISBN-13: 978-82-8066-096-1
©
2007 Kongsberg Maritime AS
Kongsberg Maritime AS
Strandpromenaden 50
P. O. Bo x 1 11
N-3191 Horten, Norway
Simrad
Telephone:+4733034000
Telefax:+4733042987
simrad.sales@simrad.com
www.simrad.com
 Loading...
Loading...