

Simrad PI DEPTH DATASHEET [it]
GUIDA VELOCE DI RIFERIMENTO
A
A
B
(CD11201F)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
A
A
B
C
B
D
E
F
(CD11201H)
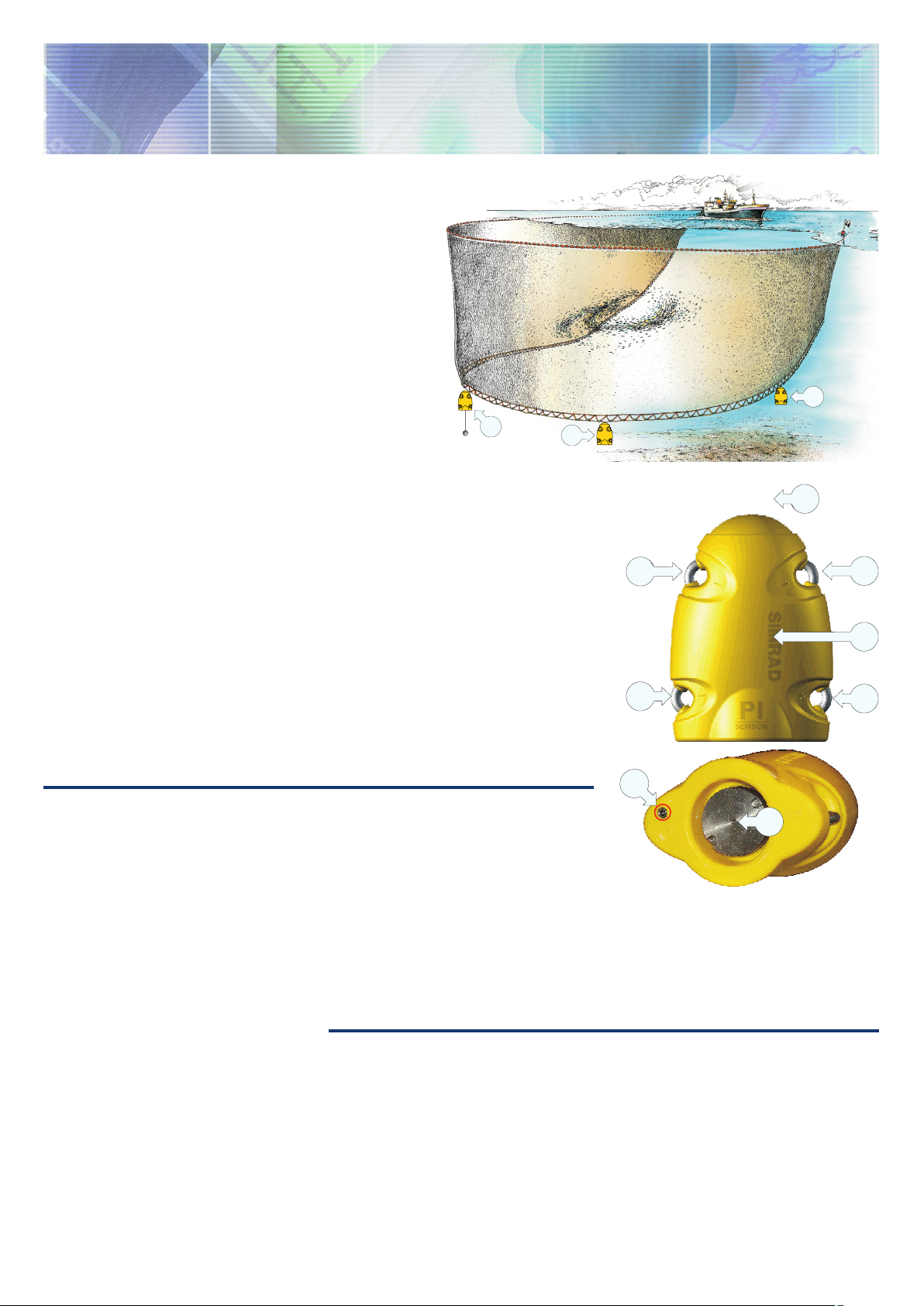
Sensore PI Profonditá
Scopo
Il sensore PI di Profondità rileva
l’attuale profondità della rete ed anche
la velocità di una qualsiasi variazione di
profondità. Tutte le misure sono relative
alla superficie.
Funzionamento giornaliero
Una volta installato e messo in uso, il
sensore verrà attivato automaticamente
dal sensore di presenza acqua quando
viene calato in mare. Dopo un
avviamento iniziale, il sensore inizia a
trasmettere l’attuale profondità quando
essa supera un valore predefinito che
avete impostato. Quando il sensore non
è in uso, controllate che la lampada
sensore (D) non sia lampeggiante di volta
in volta, in quanto ciò significa che il
sensore è attivo e si stanno scaricando le
batterie.
Se state operando nel modo di
aggiornamento Veloce, il sensore dovrà
essere ricaricato circa ogni 24 ore.
Usato con l’aggiornamento Normal o
Lento, la vita di funzionamento sarà
rispettivamente di 75 o 150 ore. La
temperatura ottimale di ricarica varia da
+10 a +25°C.
Notate che la ricarica a temperature
sotto zero potrebbe creare dei gas
esplosivi. La Simrad AS non si assume
(A) = Due
sensori di
Profondità sono
montati sul
cavo di fondo
per rilevare la
profondità.
B) = Un sensore
di Contatto
Fondale è
montato sul cavo
di fondo per
rilevare se la rete
viene in contatto
con il fondale.
Parti principali
(A) = Negativo di carica / occhiello di
fissaggio
(B) = Positivo di carica / occhiello di
fissaggio
(C) = Direzione della comunicazione
(D) = Posizione della lampada sensore
(E) = Sensore presenza acqua
(F) = Sensore di Pressione (etichetta è
rimossa)
alcuna responsabilità per una ricarica
non corretta dei sensori o per un
uso dei caricatori non indicato nella
documentazione Simrad per la ricarica dei
sensori.
Configurazione sensore
Al momento della consegna, tutti i
sensori sono impostati sul Canale 16 (300
m), Canale 12 (600 m) o Canale 10 (1000
m) e con una velocità di aggiornamento
Veloce. Se usate più di un sensore,
dovrete impostarli per funzionare su
canali diversi.
Notate: Le configurazioni del sensore e
del sistema PI devono corrispondere in
quanto altrimenti la comunicazione non
funzionerà.
Per cambiare l’impostazione del sensore
(scelta canale), usate la funzione PI
Configurator.
La velocità di aggiornamento del
sensore determina quanto spesso
il sensore rileva e riporta l’attuale
profondità. Sono disponibili tre
impostazioni. Notate che un’alta velocità
di aggiornamento riduce la durata della
batteria.
Veloce (~4,5 sec): Raccomandata per
reti a circuizione o strascico, garantisce
un aggiornamento immediato delle
informazioni sulle profondità critiche, ed
aiuta ad evitare danni alla rete.
Normal (~14 sec): Raccomandata per
strascico e pesca normale.
Lenta (~34 sec): Raccomandata se si
richiede la massima durata possibile alla
vita della batteria prima della ricarica. Il
sistema sarà più soggetto a condizioni di
cattiva comunicazione a causa della lenta
velocità di aggiornamento.
Configurazione Sistema
Configurazione Sistema: Il sensore
deve essere configurato con un unico
numero di identificazione. Selezionate
il numero del canale in accordo alla
configurazione dei sensori. Annotate
questa configurazione per riferimenti
futuri.
Stato & Ricevitore: Il filtro Interferenze
deve essere impostato su on. Impostatelo
al livello 9 se avete problemi di
interferenze da altre sorgenti idro
acustiche. Notate che con il filtro inserito,
verrà influenzato lo spettro del segnale
indicato nel Display di Stato.
Filtro Sensore: Portate questo filtro su
Leggero. Impostatelo su Forte solo se
rilevate eccessivi disturbi. La posizione
di Off fornirà dati grezzi non trattati e la
risposta più veloce possibile.
857-165128 / Rev.A / February 2005
M A X I M I Z I N G Y O U R P E R F O R M A N C E A T S E A
www.simrad.com
(CD11009C)
A
D
D
E
F
G
H
B
B
C
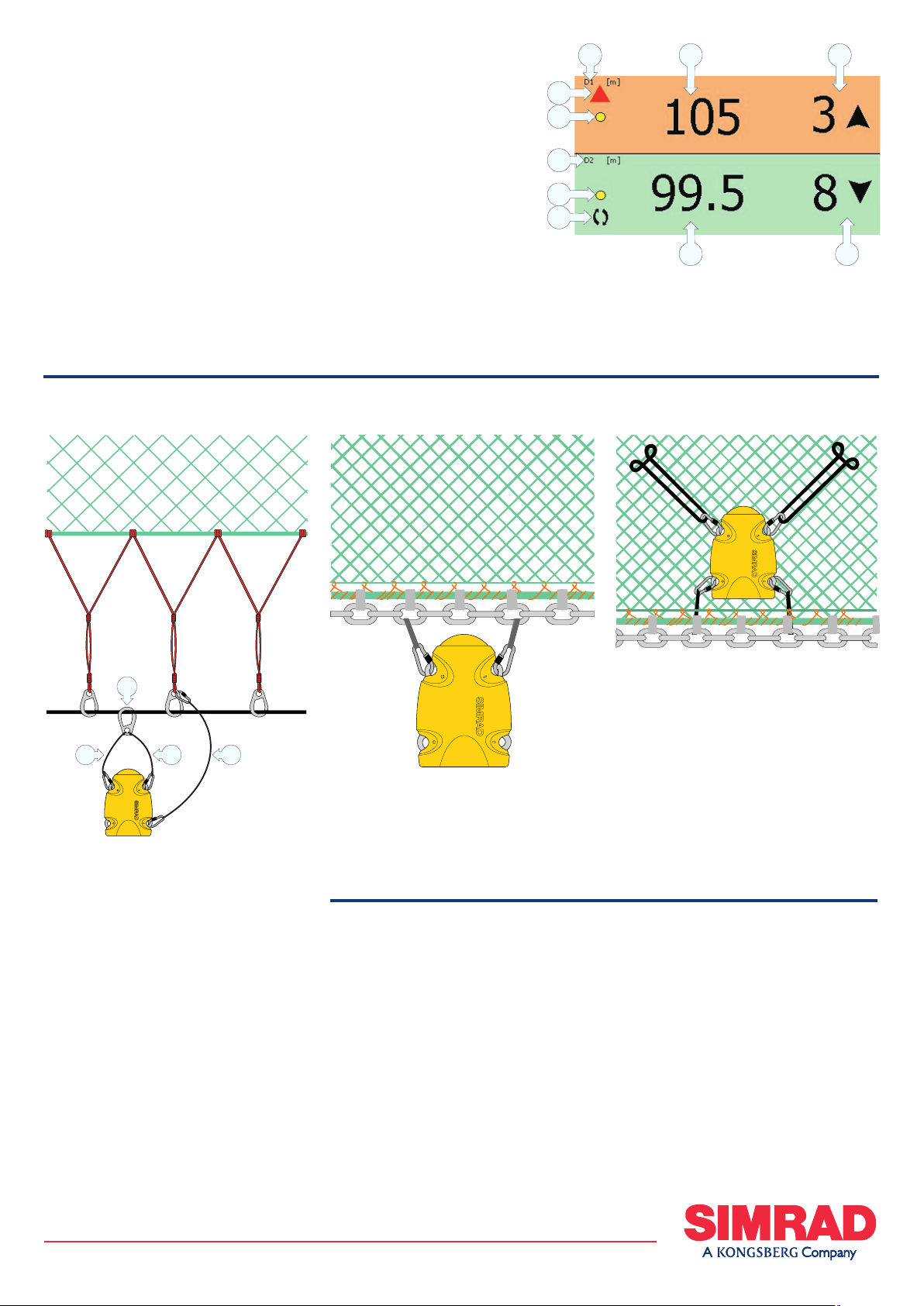
Presentazione Profondità
(CD11201A)
(CD11201B)
(CD11201I)
A A
C
B
Sul display PI, la profondità viene
indicata nella parte numerica. La velocità
di discesa o di ascesa viene indicata
in unità al minuto supportate da una
freccia che indica la direzione. Per poter
visualizzare le variazioni della profondità
in funzione del tempo, la profondità viene
indicata anche nel display grafico che
indica sia il valore numerico sia una linea
di riferimento per ogni sensore. Quando
le letture sono stabili, le cifre vengono
indicate in colore nero. Quando i valori
sono quelli predetti, le cifre sono grigie,
mentre se viene perso il contatto con il
sensore, vengono mostrati i caratteri *.*
* in grigio.
Montaggio
(A) = Sensore impostato come
sensore no.1.
(B) = Attuale Profondità.
(C) = Attuale velocità della
variazione di profondità. La
freccia indica che la profondità è
in diminuzione.
(D) = Indicatore, si illumina per
ogni interrogazione del sensore.
(E) = Allarme Grafico
(F) = Sensore impostato come
sensore no.2.
(G) = Simbolo Interferenze.
(H) = Attuale velocità della variazione di profondità. La freccia indica che la profondità
è in aumento.
Rete a circuizione:
Per garantire una
comunicazione stabile con l’idrofono
dell’imbarcazione, è molto importante
che il sensore sia libero di penzolare con
la parte alta rivolta verso la superficie
durante le fasi di cattura e circuizione.
Collegate il sensore sul fondo della
rete a circuizione usando due cavetti
separati (A). Collegate una estremità di
ogni cavetto ad un moschettone comune
(B), e montate altri due moschettoni
alle estremità libere dei due cavetti per
l’aggancio al sensore.
Montate un cavetto di sicurezza (C) tra
il sensore l’anello più vicino della rete
a circuizione. Accertatevi che questa
sicurezza non impedisca al sensore di
Circuizione per tonni: Il sensore non
deve essere collegato al cavo inferiore,
ma alla catena inferiore. Usate un cavetto
di sicurezza in più nel caso che il sensore
venga strappato via dalla rete.
muoversi liberamente!
Rimuovete il sensore dalle rete a
circuizione prima che essa passi sul rullo.
Qualsiasi materiale collegato
“permanentemente” agli occhielli di
carica del sensore, non deve formare un
collegamento elettrico tra i due occhielli
cortocircuitando la corrente di carica.
Strascico o Circuizione Danese: Il
sensore di profondità viene normalmente
collegato alla cima portante. Per un sicuro
fissaggio ed uno stabile posizionamento
del sensore puntato verso l’imbarcazione,
create una sottile borsa di rete posizionata
a metà della cima portante. Create due
cimette con moschettone lunghe circa 10
- 15 cm collegate alla cima portante che
formino una briglia, e tenete il sensore in
tensione tramite due elastici collegati agli
occhielli posteriori.
(A) = Due cavetti con un piccolo
moschettone ad una estremità e l’altra
estremità collegata in maniera fissa a (B).
(B) =Moschettone più grosso.
(C) = Cavetto di sicurezza con
moschettoni ad ogni estremità. Notate
che la parte superiore NON è collegata al
cavo della rete a circuizione.
 Loading...
Loading...