

(CD11021C)
Guía rápida de referencia
A
A
B
C
B
D
F
(CD11021D)
E
)
)
Sensor PI de Captura
Utilidades
El sensor PI de Captura detecta cuándo
está llena de peces la red. Este sensor
monitoriza la apertura de las mallas en
el copo de la red y se activa una vez el
volumen de captura es tal que tira de los
cables de detección.
Operativa diaria
Para monitorizar la proporción de llenado
recomendamos que se utilice, un mínimo,
de dos sensores. El primer sensor se sitúa
en el extremo final del copo para que nos
indique si la red está pescando, mientras
que el segundo sensor nos indica cuándo
levar. Como los peces cuando están en
el copo se mueven hacia atrás y con
movimientos bruscos, normalmente el
sensor va cambiando de estatus (on/off) a
lo largo del proceso, hasta que el volumen
de la captura es capaz de mantener estable
la apertura de las mallas.
Una vez instalado y en uso, el sensor
se activa de forma automática una
vez excitado el interruptor de contacto
con el agua. Transcurrido el período
de inicialización, el sensor comienza a
transmitir el estatus de los cables de
detección (F). Cuando el sensor no se
está utilizando, debemos comprobar que
el indicador luminoso (D) no parpadee de
vez en cuando, ya que esto nos indicaría
que está activado y que, por tanto, se
están descargando las baterías. Si ocurre
ésto, limpiar el sensor con agua dulce para
eliminar restos de sal y suciedad.
Sí está trabajando con velocidad de
actualización Rápida, deberá cargar el
sensor, aproximadamente, cada 35 horas.
Usando las velocidades de actualización
Normal o Lenta, la autonomía de las
baterías está en torno a las 150 o 300
horas, respectivamente. La temperatura
óptima para cargar los sensores está entre
los +10 y los +25°C.
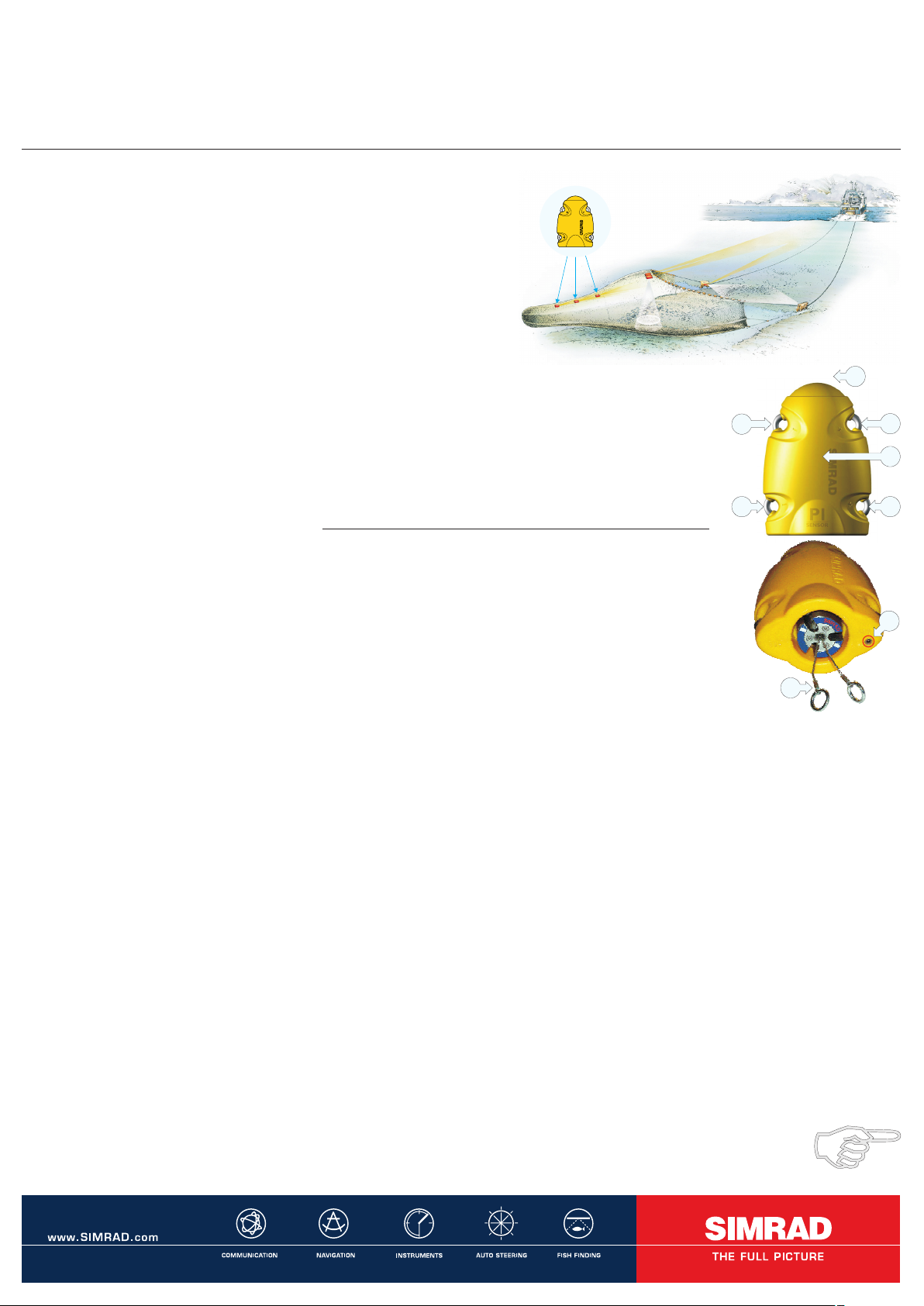
Principio del sensor de
Captura: Tres sensores
montados en el copo de la red
que detectan la cantidad de
peces capturados.
Partes básicas
(A) = Anilla de carga negativa / sujeción
(B) = Anilla de carga positiva / sujeción
(C) = Enlace de comunicación
(D) = Indicador luminoso del sensor
(E) = Interruptor contacto con el agua
(F) = Cables de detección
Nota: Recuerde que cargar los sensores
a temperatura ambiente bajo cero puede
generar gases explosivos. Simrad AS no
asume ninguna responsabilidad derivada de
un proceso de carga inadecuado o por un
uso indebido de los cargadores, que no se
ajuste a la correspondiente documentación.
Configuración del Sensor
Cuando se suministran todos los sensores
de Captura se entregan configurados en el
Canal 4 y con velocidad de actualización
Normal. Si va a utilizar más de un sensor
de Captura, asegúrese de configurarlos
para que operen en distintos canales y
asignándoles números diferentes.
Nota: La configuración del sensor y la del
sistema PI debe coincidir, en caso contrario
no es viable la comunicación entre ambos.
Para modificar la configuración del
sensor (seleccionar canal, velocidad
de actualización, etc), use la utilidad
Configurador de PI.
El sensor de Captura puede configurarse
(usando el software Configurador de PI)
para que trabaje como un sensor de captura
modelo FA701. Ésto permitirá utilizar el
sensor con un sistema de sónar de red
Simrad FS. Debemos configurar el canal de
comunicacióm
del sonar FS
para que se
corresponda
con el número
de sensor
equivalente (1,
2 3 o 4).
La velocidad de actualización del sensor
controla cada cuánto debe medirse y
comunicarse al barco, la cantidad de peces
capturados. Disponemos de tres ajustes.
Recuerde que cuanto más rápida es la
velocidad de actualización, menor es la
autonomía de las baterías.
Rápida (aproximadamente cada 5,3
segundos): Recomendada para áreas
de pesca en las que la red se llena
rápidamente. Utilice este ajuste para evitar
que la captura sea excesiva.
Normal (aproximadamente cada 33
segundos): Recomendada para faenas
normales.
Lenta (aproximadamente cada 125
segundos): Recomendada cuando
necesitamos que la autonomía de las
baterías, entre carga y carga,
sea máxima. El sistema es
más sensible a las malas
condiciones de comunicación a causa de la
(CD11009B)
A
D
E
F
D
G
H
B
C
(CD11021B)
C
C
A
B
B
F
E
D
baja velocidad de actualización.
Cuando el sensor de Captura está
configurado como un sensor FA701, tendrá
una velocidad de actualización constante
de, aproximadamente, 80 segundos. Esta
proporción no debe modificarse.
Configuración del Sistema
Configuración del sensor: El sensor
debe configurarse asignándole un único
número de sensor. Seleccione la velocidad
de actualización y el número de canal de
acuerdo con la configuración del sensor.
Anote dicha configuración para posteriores
aplicaciones.
Estatus y Receptor: El filtro de
interferencias debe ajustarse a ON. Si tiene
problemas de ruido generados por otros
equipos hidroacústicos, regule el nivel a
9. Recuerde que si el filtro está habilitado,
ésto influenciará al espectro de señal de la
Pantalla de Estatus.
Filtro de sensor de Captura /de Fondo:
Ajuste este filtro a OFF. Si experimenta
ruidos excesivos regúlelo a Ligero o Intenso.
Montaje
Localización: Fije el sensor en el extremo
del copo de la red, justo en el punto en el
que desee que se monitorice el estado de
la captura. A medida que se va llenando el
copo, las mallas de la red se van abriendo
y tirando de los cables de detección, hasta
que al final se activa el sensor.
Fijación: La orientación del sensor de
Captura mirando hacia el barco se mantiene
gracias a las anillas de fijación, de acero
y de nylon. Debemos intentar reducir al
máximo el número de mallas que quedan
entre las anillas de fijación a fin de evitar
tensiones innecesarias en las anillas de
carga de los sensores, cuando el copo de
la red está totalmente lleno. Es necesario
utilizar tanto anillas de nylon como de
acero a fin de asegurar las anillas de los
sensores cuando la fuerza que se les aplica
es máxima. Las anillas de nylon pueden
dilatarse o romperse, pero las de acero
evitarán que perdamos el sensor. Observe
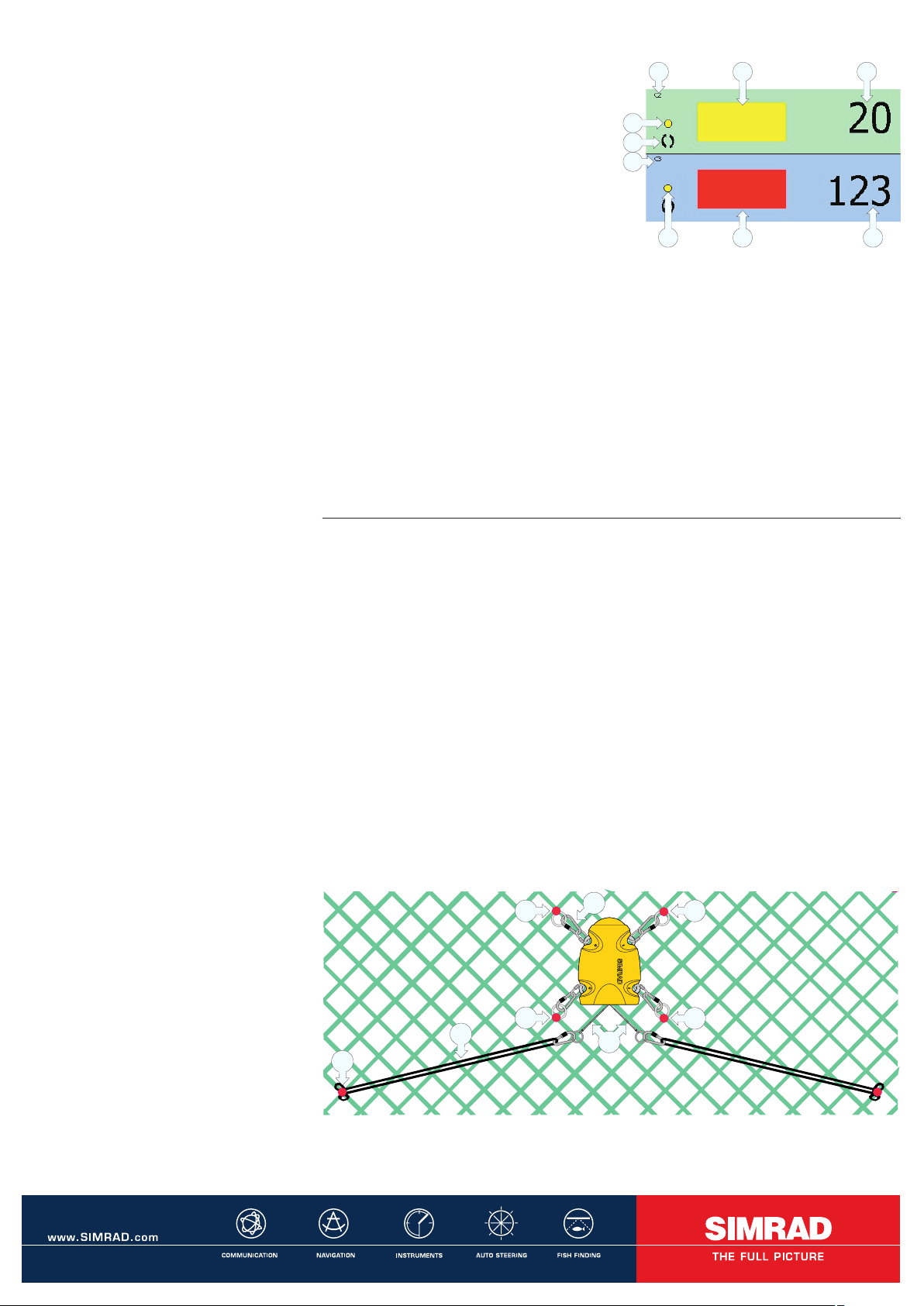
Presentación de los datos de
Captura
En la pantalla del PI, visualizamos el
estatus del sensor de Captura mediante
símbolos gráficos. Los temporizadores
contabilizan el número total de minutos
que el sensor ha permanecido (rectángulo
rojo). Si únicamente disponemos de valores
estimativos, los caracteres del temporizador
aparecen en gris. Si se ha producido
pérdida de comunicación, los símbolos
gráficos quedan reemplazados por la serie
***.* (en gris).
(A) = Sensor configurado como sensor
número.2.
(B) = Sensor en espera. El temporizador
se ha detenido
(C) = El temporizador contabiliza cuántos
minutos ha permanecido activado el sensor
durante este arrastre. Debe reinicializarse
que dos anillas de acero deben montarse en
el mismo lado.
Sensibilidad: La sensibilidad del sensor
de Captura viene determinada por el
número de mallas que quedan entre los
tirantes de goma. Podemos simular el
efecto, estirando las mallas de la red hasta
una apertura aproximada o estimada de
las mismas que genere la activación el
sensor. Marca la ubicación (con una hebra
coloreada) para futuras referencias.
Tirantes de goma: Inspeccione
regularmente los tirantes de goma, sobre
todo antes de los lances. Reemplácelos si
detecta signos visibles de deterioro o daños.
manualmente.
(D) = Indicador que se ilumina cada vez
que el sensor es interrogado.
(E) = Símbolo de interferencias.
(F) = Sensor configurado como sensor
número 3.
(G) = El sensor se ha activado. El
temporizador comienza a contar. Se activa
una alarma acústica.
(H) = El temporizador muestra cuántos
minutos ha permanecido activado el sensor.
Figura: Sensor fijado a una red con un
tamaño de malla, de aproximadamente,
140 mm. La distancia entre los puntos
de anclaje de las anillas de fijación y de
los tirantes de goma deberá ajustarse de
acuerdo con el tamaño de las mallas y de la
sensibilidad requerida.
(A) = Mosquetón y tornillo de enlace
(B) = Anillas de acero para fijación
enganchadas a la red
(C) = Anilla de nylon enganchadas a la red
(D) = Cables de detección
(E) = Tirantes de goma
(F) = Punto de fijación
857-165124 / Rev.A / August 2005
 Loading...
Loading...