


(CD11021C)
GUIDA VELOCE DI RIFERIMENTO
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
A
A
B
C
B
D
F
(CD11021D)
E
Sensore PI Cattura
Scopo
Il sensore PI Cattura rileva quando la
rete è stata riempita di pesce. Il sensore
rileva l’apertura delle maglie nel sacco
finale, e sarà attivato quando il volume di
cattura è grande abbastanza per tirare il
cavetto di rilevamento.
Funzionamento giornaliero
Per rilevare la velocità di riempimento,
raccomandiamo di usare al minimo due
sensori. Il primo sensore è localizzato
all’estremità finale del sacco ad indicare
che la rete sta pescando, mentre il
secondo vi indica quando è il momento
di recuperare la rete piena. A causa degli
spostamenti in avanti ed indietro del
pesce nel sacco finale, il sensore cambierà
normalmente stato (on/off) diverse
volte sino a quando il volume catturato
determinerà l’allargamento stabile delle
maglie.
Una volta installato e messo in uso, il
sensore verrà attivato automaticamente
dal sensore di presenza acqua quando
viene calato in mare. Dopo un avviamento
iniziale, il sensore inizia a trasmettere
lo stato dei cavi di rilevamento (F) (in
o out). Quando il sensore non è in uso,
controllate che la lampada sensore (D)
non sia lampeggiante di volta in volta,
in quanto ciò significa che il sensore è
attivo e si stanno scaricando le batterie.
In questo caso, lavare il sensore in acqua
fresca per rimuovere sale e sporcizia.
Se state operando nel modo di
aggiornamento Veloce, il sensore dovrà
Principio
sensore di
cattura: Tre
sensori sono
montati sul
sacco finale
della rete
per rilevare
l’ammontare del
pesce catturato.
Parti principali
(A) = Negativo di carica / occhiello di fissaggio
(B) = Positivo di carica / occhiello di fissaggio
(C) = Direzione della comunicazione
(D) = Posizione della lampada sensore
(E) = Sensore presenza acqua
(F) = Cavetti di Rilevamento
essere ricaricato circa ogni 35 ore.
Usato con l’aggiornamento Normal o
Lento, la vita di funzionamento sarà
rispettivamente di 150 o 300 ore. Quando
il sensore è configurato come un FA701,
il tempo operativo è di circa 250 ore. La
temperatura ottimale di ricarica varia da
+10 a +25°C.
Notate che la ricarica a temperature
sotto zero potrebbe creare dei gas
esplosivi. La Simrad AS non si assume
alcuna responsabilità per una ricarica
non corretta dei sensori o per un
uso dei caricatori non indicato nella
documentazione Simrad per la ricarica
dei sensori.
Configurazione Sensore
Al momento della consegna, tutti
i sensori di Cattura sono impostati
sul Canale 4 e con una velocità di
aggiornamento Normal. Se usate più di
un sensore di Cattura, accertatevi di averli
impostati per il funzionamento su canali
diversi e con numeri diversi!
Notate: Le configurazioni del sensore e
del sistema PI devono corrispondere in
quanto altrimenti la comunicazione non
funzionerà.
Per cambiare l’impostazione del sensore
(scelta canale, velocità di aggiornamento
etc), usate la funzione PI Configurator.
Il sensore Cattura può essere configurato
(usando il software PI Configurator) per
funzionare come un sensore di cattura
. Ciò consentirà al sensore di
FA701
essere utilizzato insieme ad un sonar
per strascico Simrad FS. Il canale di
comunicazione sul sonar FS deve essere
impostato in modo da corrispondere
all’equivalente numero del sensore (1, 2
3 o 4).
La velocità di aggiornamento del sensore
determina quanto spesso il sensore rileva
e riporta all’imbarcazione il volume
del pesce catturato. Sono disponibili tre
impostazioni. Notate che un’alta velocità
di aggiornamento riduce la durata della
batteria.
Veloce (~5,3 sec): Raccomandata per
reti a strascico in zone dove la velocità di
riempimento è molto alta. Usate questa
impostazione per evitare danni allo
strascico o catture eccessive.
Normal (~33 sec): Raccomandato per la
normale pesca.
Lenta (~125 sec): Raccomandata se si
richiede la massima durata possibile alla
vita della batteria prima della ricarica. Il
sistema sarà più soggetto a condizioni di
cattiva comunicazione a causa della lenta
velocità di aggiornamento.
Quando il sensore Cattura è configurato
come sensore FA701, esso avrà una
velocità di aggiornamento costante di
circa 80 secondi non modificabili.
857-165130 / Rev.B / June 2005
M A X I M I Z I N G Y O U R P E R F O R M A N C E A T S E A
www.simrad.com
Configurazione Sistema
(CD11009B)
A
D
E
F
D
G
H
B
C
(CD11021B)
C
C
A
B
B
F
E
D
Configurazione Sistema: Il sensore
deve essere configurato con un unico
numero di identificazione. Selezionate la
velocità di aggiornamento ed il numero
del canale in accordo alla configurazione
dei sensori. Annotate questa
configurazione per riferimenti futuri.
Stato & Ricevitore: Il filtro Interferenze
deve essere impostato su on. Impostatelo
al livello 9 se avete problemi di
interferenze da altre sorgenti idro
acustiche. Notate che con il filtro inserito,
verrà influenzato lo spettro del segnale
indicato nel Display di Stato.
Filtro Sensore Cattura/Fondale:
Portate questo filtro su off. Impostatelo su
Leggero o Forte solo se rilevate eccessivi
disturbi.
Presentazione Cattura
Sul display PI, lo stato del sensore
di Cattura è indicato con simboli
grafici. Il contatore indica il numero
totale di minuti nei quali il sensore
è stato attivato (rettangolo rosso).
Se esistono soltanto valori di
temporizzatore predetti, i caratteri
vengono indicati in grigio. Se
viene persa la comunicazione con
il sensore, il simbolo grafico viene
sostituito dai caratteri ***.* (in
grigio).
(A) = Sensore impostato come sensore
no.2.
(B) = Sensore in standby. Il contatore è
stato fermato.
(C) = Il contatore indica per quanti
minuti il sensore è stato attivato durante
una traina. Deve essere azzerato
manualmente.
(D) = = Indicatore, si illumina per ogni
interrogazione del sensore.
(E) = Simbolo interferenze.
(F) = Sensore impostato come sensore
no.3.
(G) = Il sensore è stato attivato. Il
contatore parte. Può essere abilitato un
allarme acustico.
(H) = Il contatore indica per quanti
minuti il sensore è stato attivato.
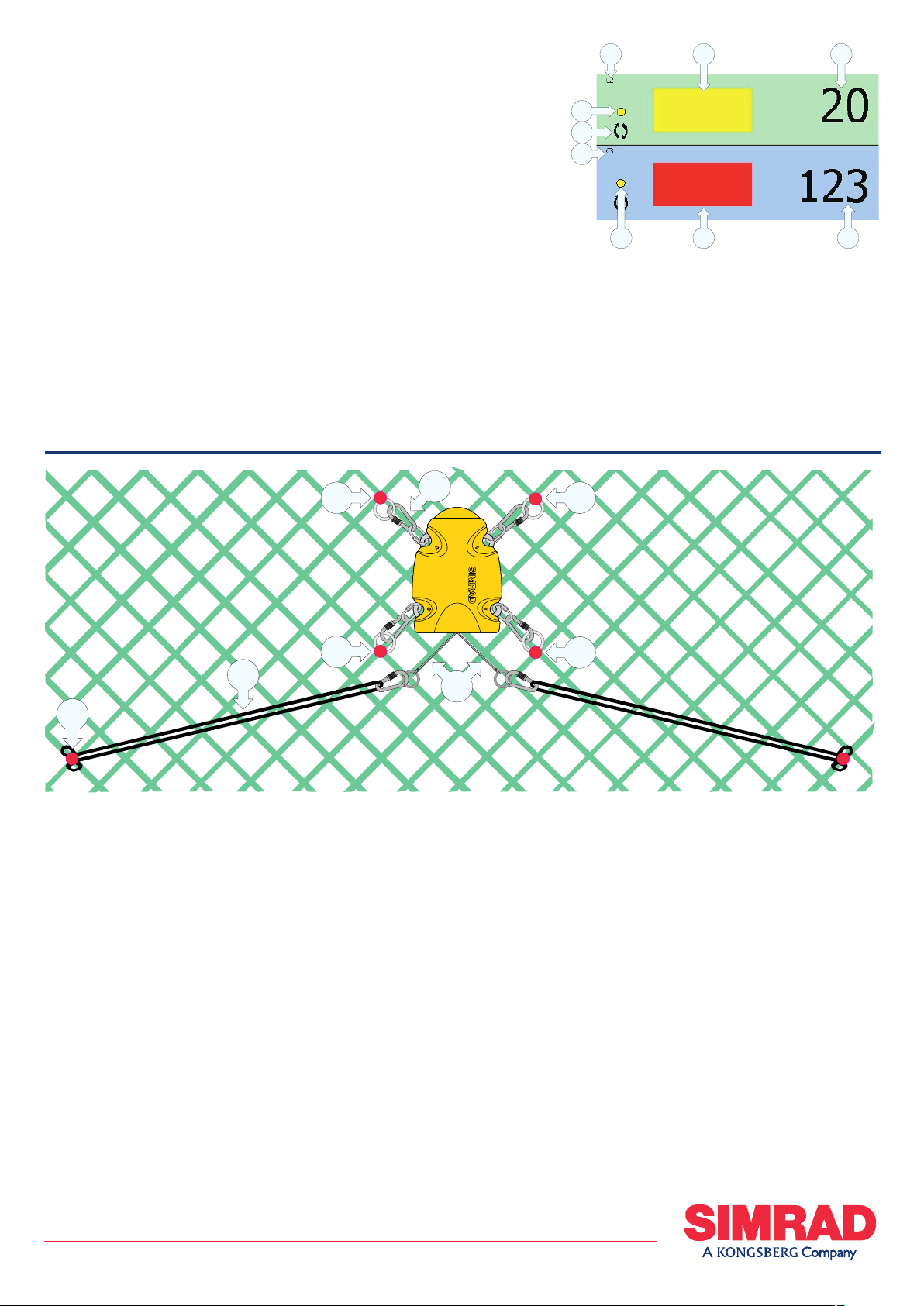
Montaggio
Posizione: Montate il sensore in cima
al sacco finale dove deve essere rilevata
la quantità della cattura. Quando il sacco
finale sarà pieno, le maglie della rete si
allargheranno tirando i fili di rilevamento
ed attivando conseguentemente il sensore.
Collegamento: L’orientamento del
sensore di Cattura verso l’imbarcazione
è mantenuto dagli anelli di collegamento
di acciaio e di nylon. Il numero di maglie
situato tra gli anelli di fissaggio deve
essere calcolato con cura per evitare
sollecitazioni meccaniche sugli occhielli
di fissaggio del sensore quando il sacco
finale si riempie al massimo. L’uso degli
anelli di nylon e di acciaio è necessario
per salvaguardare gli occhielli del sensore
quando vengono sollecitati da eccessiva
trazione. Gli anelli di nylon si apriranno,
ma gli anelli di acciaio eviteranno la
perdita del sensore. Notate che i due anelli
di acciaio devono essere montati dallo
stesso lato.
Sensibilità: La sensibilità del sensore
di cattura è determinata dal numero di
maglie che separano il punto di aggancio
dei due elastici. Potete simulare ciò
allargando le maglie della rete alla misura
stimata necessaria per azionare il sensore.
Segnate la posizione dei punti di aggancio
con dei segni colorati per riferimenti
futuri.
Elastici: Ispezionate gli elastici con
regolarità e sempre prima di ogni calata.
Procedete alla sostituzione quando rilevate
segni visibili di deterioramento.
Collegamento del Sensore ad una rete con
dimensione delle maglie di circa 140 mm.
La distanza tra i punti di ancoraggio per
gli anelli di fissaggio e gli elastici varierà
in accordo alla misura delle maglie ed
alla sensibilità richiesta.
(A) = Moschettone e collegamento a vite
(B) = Anelli di collegamento di acciaio
fissati alla rete
(C) = Anelli di collegamento di Nylon
fissati alla rete
(D) = Cavi di rilevamento
(E) = Elastici
(F) = Punto di collegamento
 Loading...
Loading...