

Page 1
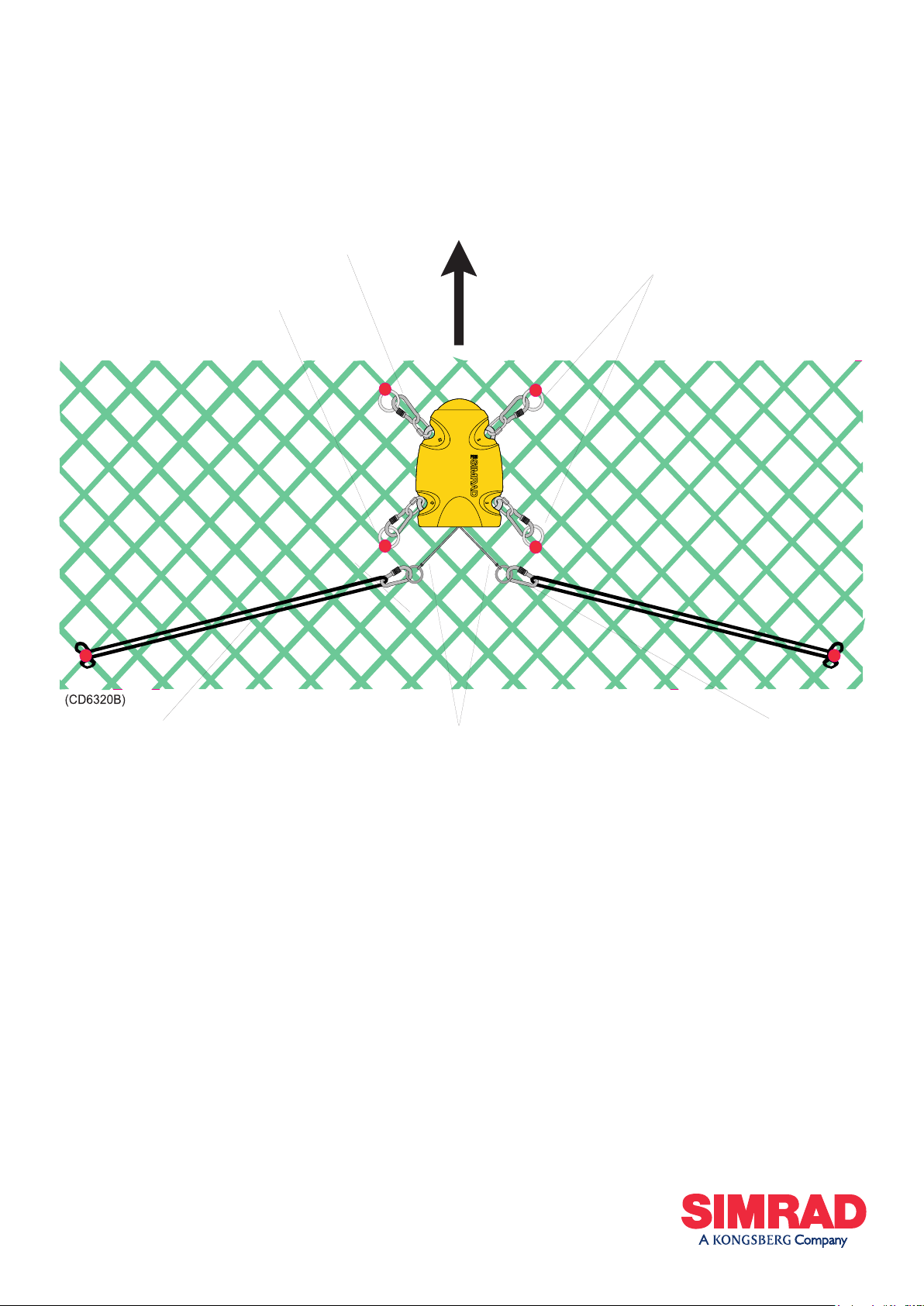
PI32 Catch sensor attachment
Sensor attachment - to a net with an approximate mesh size of 140 mm is illustrated below. The
distance between the anchor points for the attachment rings and rubber strops will vary according
to mesh size and sensitivity required.
Vessel
Karibiner and screw link
Nylon attachment rings,
bent to the netting
Steel attachment rings,
bent to the netting
Rubber strop KarabinerFeeler strap, double
Location - attach the sensor at the top of the cod-end, closest to where the catch is to be monitored.
As the cod-end fills the net’s mesh will become taught and activate the catch sensor.
Attachment - the catch sensor ’s orientation toward the mother vessel is maintained by the
steel/nylon attachment rings, strops and karabiners bent to the net. The number of mesh squares
the sensor is supported between must be restricted to avaoid unnecessary stress on the gear
when the net is filled to maximum capacity. Note that both steel attachment rings must be located
on the same side of the sensor.
Sensitivity - is determined by the number of mesh squares separating the two rubber strops (a larger
number increases sensitivity, a smaller reduces it). Simulate sensor activation by stretching the net’s
mesh to approximate the load generated by a full catch. Experiment accordingly to determine the
correct attachment points and then permanently mark their locations for future reference.
Rubber strops - are subject to heavy loading/wear; they should be changed at regular intervals
and checked before shooting. Strops with cracks or visible signs of damage should be changed
immediately.
(851-164643A)
 Loading...
Loading...