

Page 1
PI32 Quick reference guide
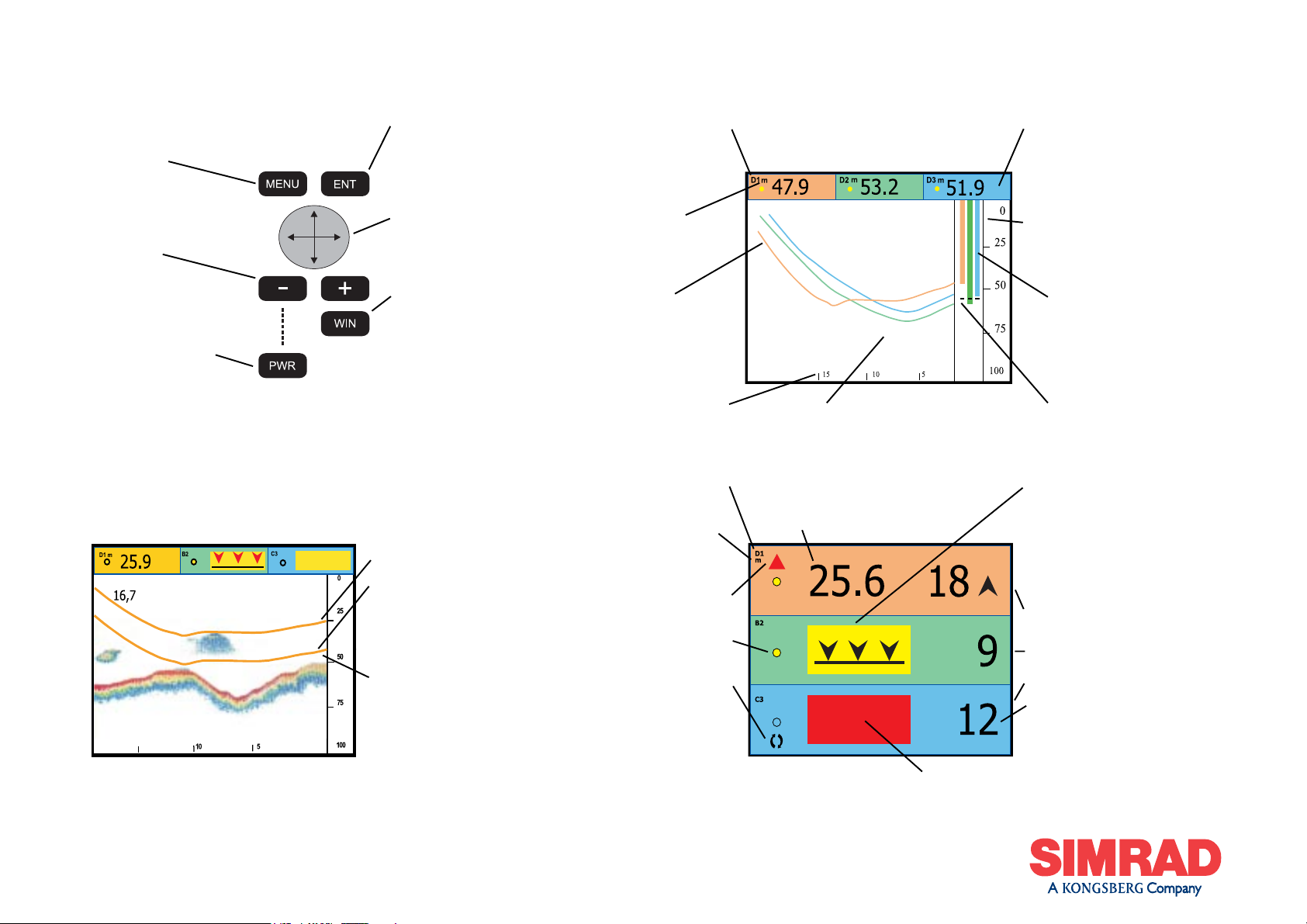
Keypad buttons
MENU - turns the menu on and
off. Press to hide the displayed
menu without making a selection.
Minus (-) Plus (+) - selects
available values, scales and
ranges.
PWR - turns on the unit, press
until the display is visible. Adjusts LCD brightness, contrast,
display colour and keypad illumination. Press twice to turn
off the unit.
Refer to the PI30 Instruction manual for more information
concerning echo sounder and navigation keypad functions.
Graphic display, pelagic trawl Numeric display
A complete view of the fishing operation with pelagic or semipelagic trawling is provided by a depth sensor attached to the
headrope, a bottom sensor to the footrope and a catch sensor to
the cod end. The echogram shows the relative positions of the
trawl, fish and bottom using an optional echo sounder transducer.
Bottom sensor ñ shows no bottom contact graphically represented by the red, downward pointing arrows not being in contact with the horizontal line. Upon bottom contact, the arrows
will touch the horizontal line and change colour from red to black.
Bottom sensor measurement range is adjusted as needed.
(857-164526A)
ENT - turns the cursor on and
off, opens parameters for the insertion and confirms data. Select setup directly from the chosen display.
Multi-direction button - controls the cursorís location in
activated menus and displays,
moves the VRM.
WIN - changes between one of
the four selected windows.
Press when the desired window is displayed to select.
Press and hold for more than
two seconds to actuate automatic window rotation, press
again to return to normal operation.
Graphic setup ñ choose the setup by
pressing ENT in graphic display:
• Remove depth bar graph.
• Show echogram if an optional echo
sounder transducer is installed.
• Head/footrope sensor ñ choose the
depth sensor that is attached to the head/
footrope.
• Trawl opening mode information:
-Manual: a fixed user input value.
-Auto: actual value from sensors.
-ON/OFF: shows numerical value.
• Manual trawl marker, ON only in the
manual mode, otherwise OFF.
Alarm ñ choose the clearing pre-alarm,
min. or max. value from the Alarm &
calibration setup menu. If the footrope
marker comes closer or farther away
than the chosen minimum and maximum
values with regard to the bottom, the
alarm can be activated. Adjust the trawl
until the point is passed.
Bottom / catch sensor alarm ñ change
of status for the bottom / catch sensor
can be indicated with an alarm. This is
selected from the Setup Alarm &
calibration menu.
Graphic display, purse seine
D1 to D3 - identifies which sensor
corresponds to the data window
(background colour) and subsequent bar and line graph information.
m - indicates that sensor depth is
shown in meters or the sinkrate is in
m/min.
Line graph - provides a depth and
sink-rate profile for the net. Line
thickness is selected in the Graphic
setup.
Time scale - is selected in Graphic
setup.
D=depth, B=bottom, C=catch, adjacent numbers correspond to the data
window.
m - indicates that the depth is shown
in meters.
Graphic alarm - the arrowsí direction indicates if the net depth should
be increased or decreased with regard to the selected alarm limits.
Graphic alarms may be accompanied with audible alarms.
Yellow pulse lamp - blinks each time
a signal is received from the respective sensor.
Interference signal - interference
from nearby vessel(s) operating on
the same channel or with similar
hydroacoustic equipment. Contact
your Simrad dealer to select a different frequency should this problem
persist (see MP filter on side two).
Surface temperature ñ when an echo sounder transducer with a temperature
sensor is installed, the ambient surface temperature is shown with large numbers
together with the temperature vs time in a separate display (not shown here).
Input is achieved using Surface temperature setup and Sensor alarm & calibration. If a temperature sensor is not available, *.* is displayed.
An echogram may be superimposed on the Graphic display when an echo sounder transducer is installed.
Sensor depth - is rounded to the nearest meter
for depths over 100 m, otherwise it is displayed
to one decimal place. Maximum depth is 290 or
580 meters.
Sensor information - illustrated here
with data from three depth sensors. Bot-
Data window 3Data window 1 Data window 2
Catch sensor ñ represents the quantity of fish presently in the cod end. A
yellow rectangle indicates that the sensor has not been activated (no fish
caught). When the rectangle becomes red, accompanied by a peeping tone,
the sensor has been activated. Bottom and catch alarms are chosen from
Setup, sensor alarm and calibration.
tom sensors can also be used for pursing
close to the bottom.
Depth scale - can be decreased or increased using the respective - or + buttons on the keypad.
Bar graph - displays a ìside viewî of the
netís depth.
Alarm limits - both the upper and lower
limits are displayed.
Bottom sensor ñ black arrows indicate bottom contact. Should the footrope lose physical contact with the bottom, the black arrows
will separate from the horizontal line and
change colour to red.
Rise/sink rate - is displayed in the selected units per minute. V alues near 0 indicate that the net has stopped sinking.
Data window 1
Data window 2
Data window 3
Timer ñ displays how many minutes have
elapsed since the footrope lost contact with
the bottom or how long a catch sensor has
been activated. This timer is reset in the numerical display setup.
Page 2
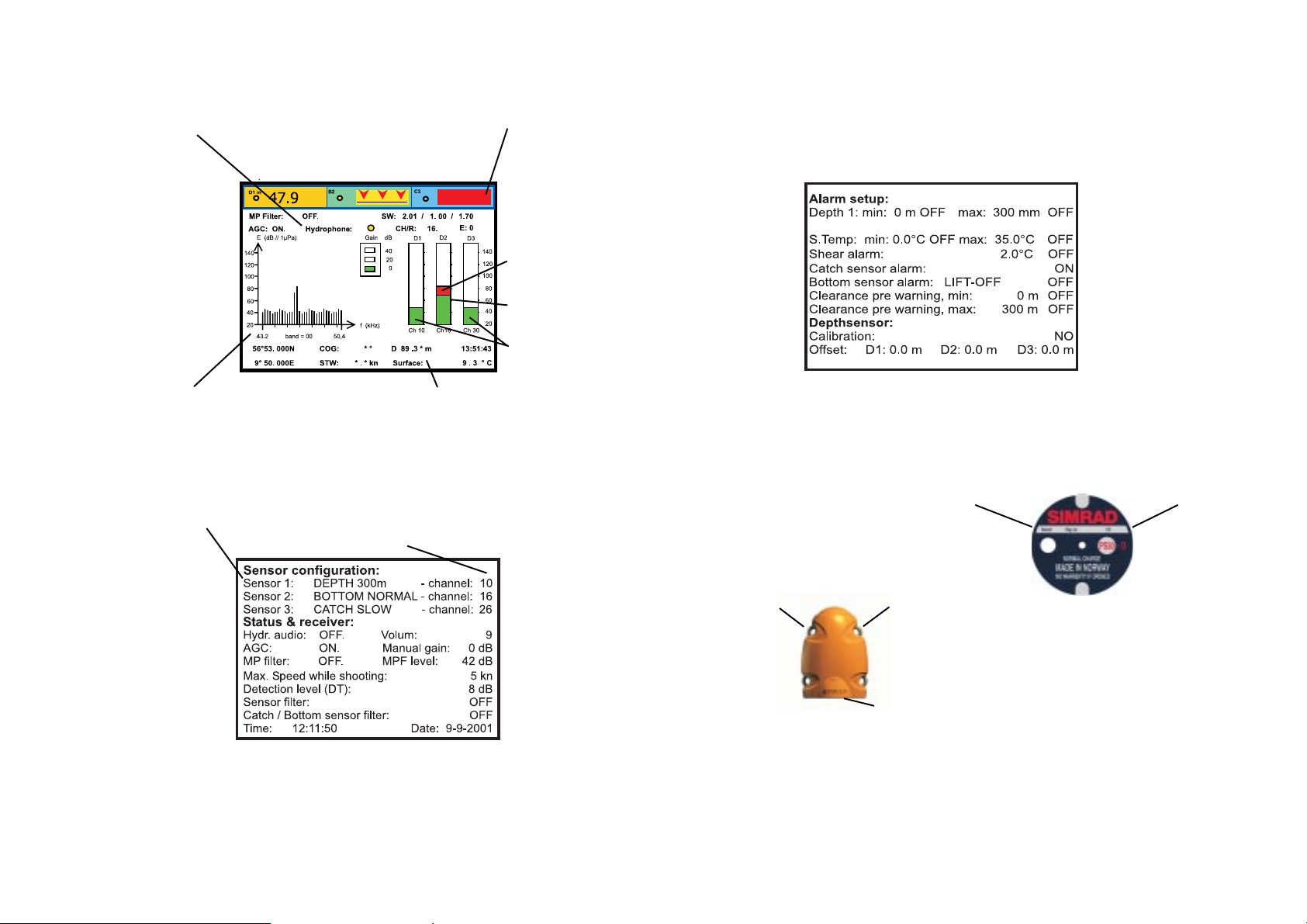
Status display
Hydrophone cable information:
- Black = break
- Red = short circuit
- Yellow = OK
The Status display shows
sensor data, signal thresholds
and background noise levels
providing an overview of
present hydro-acoustical conditions and the margin for
reliable signal detection.
Other information displayed
includes cable status, program version, and echo
sounder / position information if the necessary equipment is connected.
Frequency spectrum - for frequencies on the 00 - 15 band.
Select the desired band by pressing the respective - or +
buttons on the keypad (wait for the unit to update the display). The graph represents background noise and signal
strength of the frequency band selected.
Data window 3Data window 1 Data window 2
Information from an interfaced GPS or integrated echo sounder if
the unit is connected to
a transducer.
Data window information:
-Sensor depth
-Sensor identification
-Units of depth
-Pulse lamp condition
SW - software version
E - error message
CH/R - channel number of
the last received sensor.
The red field shows the sig-
nal level that is over the detection threshold, DT.
The green field over the noise
reference level shows the detection threshold, DT.
Average noise reference levels. Signal to noise ratio level difference between red
area in the ìbarî for the channel and the average level in
the frequency spectrum.
Installation / Configuration / Receiver parameters
Defines sensors 1 to 3
and keeps track of their
attachment locations to
the net.
AGC - recommended to be
ON. Under favorable noise
conditions manual gain adjustment may provide increased range.
MP filter - reduces excessive
echo return or interference
from other hydro-acoustic
equipment operating on the
configured channel where the
sensor is not in use.
Max shooting speed - compensation for doppler shift
when shooting the net. Maximum speed may be limited
by channel separation, effective only when the vessel is
in motion. A low value will
provide a narrower bandwidth which is advantageous
under high noise contitions.
Select the channel shown on the sensorsí labels and/or the
visual LED identification signal displayed when turned on.
Note the sensor configuration for later reference. Trawling: lower sensor channel numbers provide greater range.
The PI30 must receive at least four pings when
first powered up to display data. Should one or
two pings be missing, the predicted value will
be displayed in grey. If the signal is lost, *.* is
displayed.
MPF level - is activated when
the MP Filter is ON. Reduce
the MPF level value in small
steps to increase the filterís
effectiveness. A void reducing
the level so low that the sensorsí signals are also blocked.
Detection threshold - increases the DT if false signals
are detected on a channel
where a sensor is in use. A
high DT indicates that only
the strongest signals will be
received. A low DT may pr ovide a longer range under favorable conditions.
Sensor filter:
- OFF = no effect (fastest
update of data).
- Light = average of the
last four pings.
- Heavy = average of the
last eight pings.
Sensor maintenance, programming and calibration
Maintenance - sensors are activated when they come into contact with seawater by the electrical connection created
between the saltwater detector and the charging/fastening lug. Rinse sensors with freshwater to avoid leaving a
saltwater film on their exteriors. Such a film can also complete the circuit inadvertently activating a sensor and
depleting its battery when stowed.
Other depths - if the sensor
Programming - of sensors is
accomplished using a PC
connected to their charging/
fastening lugs. To pr ogram a
sensor both the software,
Simrad number: 889-24037
and a special cable number:
380-204728 are required. The
dealer is normally responsible for programming the
various channel selections
and other functions.
Calibration - is performed on board the vessel to set the sensorsí reference levels to one meter as follows: Suspend the
sensors over the side of the vessel individually or together at a depth of one meter, the draft plus one meter or the
reference level that is to be defined as one meter . Once the sensorsí depth r eadings have stabilised, set the Calibration
parameter to YES. Sensor calibration takes one minute and the data will be temporarily displayed as grey during this
time. Once the process is complete, the data will again be displayed in black with updated offset values and a depth
of one meter. Note: Sensors not submerged in saltwater will not be calibrated.
is programmed to start at a
depth of 2 m, it should be
suspended at 3 m during the
calibration procedure. Calibrate the sensor as described
and note the offset values.
Reduce the offset values by
2 m after calibration.
Configure sensors with several channel intervals to
avoid interference from
strong signals.
Charging and testing
A fully depleted sensor must be charged for at least 16
hours to restore its battery to full capacity . Optimal charging temperature is from +10∫C to 25∫C. Never charge sensors at temperatures below freezing.
Warning! The use of chargers not specified by Simrad
may lead to personal injury and/or material damage.
(+) charging/
fastening lug
Battery capacity -
Depth: ~30 hours
Bottom normal: ~ 60 hours
Catch slow: ~ 2 to 3 weeks
Charging - connect the red and black alligator clamps
to the ì+î and ì-î fastening lugs respectively . Check that
the charging lamp on the charger is illuminated and that
the sensor being charged blinks every four seconds. If it
does not blink (indicating charging mode), the battery
will not be fully charged. Note: Never charge a sensor
with wet rope or chain/wire in contact with the fastening lugs as the resulting electrolysis will quickly destroy the lugs and the sensor will not be charged.
(-) charging/
fastening lug
Sea water
detector
Sensor 1, 2 or 3 Channel 1 to 30
Testing - touch the sea water detector (serial no below
300: touch the cover) and a fastening lug at the same
time. This will cause the sensor to switch ON and
identify the channel it transmits on with a series of blinks
(see the Instruction manual) and begin sending data if it
is not programmed differently.
ï If the sensor does not blink when switched ON, it
indicates a depleted battery and should be charged for a
few minutes and tested again. If it blinks and begins to
send data, it should be charged for at least 16 hours.
ï If the sensor continues to just blink when switched ON
it indicates a close to empty battery. Charge the sensor
for 10 minutes and test. If it resume normal operation,
charge for ~ 16 hours.
ï If th e s en so r repeats the start up blinking sequence
with a four seconds interval, it indicates fault with the
depth cover. Contact your nearest Simrad dealer.
 Loading...
Loading...