

Page 1
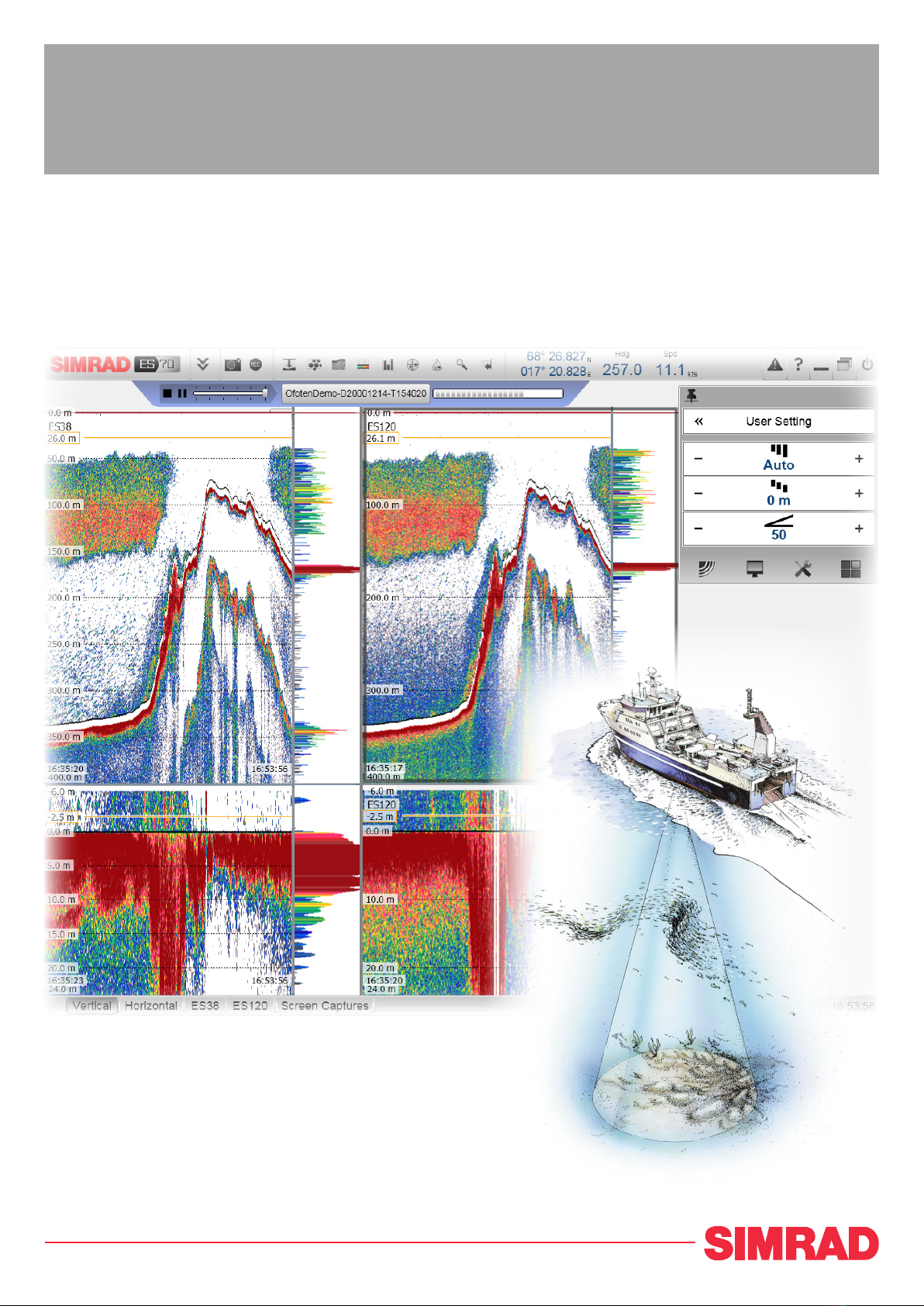
Reference manual
TECHNOLOGY FOR SUSTAINABLE FISHERIES
www.simrad.com
Simrad ES70
Fish nding echo sounder
Page 2

Page 3

Fishndingechosounder
Thismanualprovidesyouwithreferenceinformation
requiredtooperateandfullyunderstandthecommands,
menus,operationalmodes,optionsandinterfacesprovided
bytheSimradES70Fishndingechosounder.The
contentsofthisreferencemanualisalsoavailableascontext
sensitiveon-linehelpontheechosoundersystem.Foruser
informationinbrief,refertotheSimradES70Operator
manual.
SimradES70
Referencemanual
Release1.0.0
3February2010
338106/A
©
KongsbergMaritimeAS
Page 4
Revisionstatus
Documentno:338106/ISBN-13:978-82-8066-116-6/Revision:A
Rev.A03.02.2010
Firstversion.
Licenseinformation
WhenyouhaveobtainedthenecessarylicensestooperatetheES70,westronglyadvicethatyouwrite
downthehardwareIDandthelicensecodesonthispage.
Function
HardwareID:N/A
Licensecode
Licensecode
Licensecode
Copyright
©2010KongsbergMaritimeAS
TheinformationcontainedinthisdocumentremainsthesolepropertyofKongsbergMaritimeAS.Nopart
ofthisdocumentmaybecopiedorreproducedinanyformorbyanymeans,andtheinformationcontained
withinitisnottobecommunicatedtoathirdparty,withoutthepriorwrittenconsentofKongsberg
MaritimeAS.Thedocument,oranypartofit,maynotbetranslatedtoanyotherlanguagewithoutthe
writtenapprovalfromKongsbergMaritimeAS.
Purpose
Code
Disclaimer
KongsbergMaritimeASendeavourstoensurethatallinformationinthisdocumentiscorrectandfairly
stated,butdoesnotacceptliabilityforanyerrorsoromissions.
Warning
Theequipmenttowhichthismanualappliesmustonlybeusedforthepurposeforwhichit
wasdesigned.Improperuseormaintenancemaycausedamagetotheequipmentand/orinjury
topersonnel.Theusermustbefamiliarwiththecontentsoftheappropriatemanualsbefore
attemptingtoinstall,operateorworkontheequipment.
KongsbergMaritimeASdisclaimsanyresponsibilityfordamageorinjurycausedbyimproper
installation,useormaintenanceoftheequipment.
Supportinformation
Ifyourequiremaintenanceorrepair,contactyourlocaldealer.Youcanalsocontactususingthefollowing
address:contact@simrad.com.Ifyouneedinformationaboutourotherproducts,visitourwebsite.On
thewebsiteyouwillalsondalistofourdealersanddistributors.
KongsbergMaritimeAS
www.kongsberg.com
Page 5

Referencemanual
Tableofcontents
ABOUTTHISMANUAL.......................................................9
SIMRADES70.................................................................10
Important................................................................................................................10
Systemoverview....................................................................................................11
Keyfacts....................................................................................................11
Mainunits..................................................................................................11
Simpliedsystemdiagrams.........................................................................13
Wavepropagation...................................................................................................14
Bottomecho...........................................................................................................15
Split-beamoperation..............................................................................................16
Observationrange...................................................................................................17
GETTINGSTARTED..........................................................19
PowerOn/Offprocedures.......................................................................................19
Usingthetrackball..................................................................................................21
Startingnormaloperation.......................................................................................21
Howtochooseoperationalmode.................................................................22
Howtocheckthetransceiverandtransducersettings.....................................22
Howtocheckthebottomdetectorsettings....................................................23
Howtocheckthecolourscalesettings.........................................................24
Howtocheckthesizedistributionandshpositionsettings..........................24
Howtochecktheechogramsettings.............................................................25
Howtochecktherangesettings...................................................................27
Echosounderpresentations....................................................................................28
TitleBar..................................................................................................................30
Taskbar...................................................................................................................31
Themenusystem....................................................................................................31
Menuhierarchy..........................................................................................31
Menubuttons..............................................................................................32
DISPLAYVIEWS..............................................................34
Displayorganisation...............................................................................................34
TitleBar..................................................................................................................36
Logoandproductname...............................................................................37
Operationbuttons.......................................................................................37
Informationpaneicons................................................................................38
Navigationalinformation.............................................................................40
Functionbuttons.........................................................................................42
Replaybar...............................................................................................................43
Mainmenu..............................................................................................................43
338106/A
3
Page 6

SimradES70
Echograms..............................................................................................................44
Surfaceechogram.......................................................................................44
Bottomechogram.......................................................................................45
Pelagicechogram........................................................................................46
Trawlechogram..........................................................................................46
Lines,markersandannotationsintheechograms..........................................47
Informationpanes...................................................................................................50
Aboutinformationpanes.............................................................................50
Depthinformationpane...............................................................................51
Biomassinformationpane...........................................................................51
BottomHardnessinformationpane..............................................................52
ColourScaleinformationpane.....................................................................53
SizeDistributioninformationpane...............................................................54
FishPositioninformationpane....................................................................55
EchoPositioninformationpane...................................................................56
Zoominformationpane...............................................................................57
Historyinformationpane.............................................................................58
Taskbar...................................................................................................................58
Screencaptures.......................................................................................................59
OPERATIONALPROCEDURES..........................................61
Operation................................................................................................................63
Howtochangethepingrate........................................................................63
Howtosaveanechogram............................................................................64
Howtosaverawechogramdata...................................................................66
Howtoplaybackechogramsequences.........................................................67
Views......................................................................................................................68
Howtochangethesizeofthepresentationelds...........................................68
Howtoselectpresentationlayout.................................................................69
Howtochangethecolourscaleandpresentationpalette................................69
Howtochangethenumberofcoloursintheechogram..................................70
Echogram................................................................................................................70
Howtoselectechogrampresentation...........................................................70
Howtoestablishhorizontalmarkers.............................................................71
Howtoestablishverticalmarkers.................................................................72
HowtoselectTVGgain..............................................................................73
Howtoremoveinterferenceandvessel’sownnoisefromthe
echograms..................................................................................................74
Howtoeasieridentifythebottom................................................................74
Ranges....................................................................................................................74
Howtochoosetheverticalrange.................................................................75
Howtochoosethestartrange......................................................................75
Bottomdetection....................................................................................................76
4
338106/A
Page 7

Referencemanual
Howtodenemaximumandminimumdepth...............................................76
Sizedistribution,biomassandshdensity............................................................77
Howtomonitortheshsizedistribution......................................................77
Howtoadjusttheshlengthforcorrectcalculations.....................................78
Howtomonitorthecurrentbiomass.............................................................78
Gain........................................................................................................................79
Howtoadjustthesignalgain.......................................................................79
HowtoadjusttheTVGgain........................................................................80
Powerandpulseduration.......................................................................................81
Howtochoosepassivemode.......................................................................81
Howtochangetheoutputpower..................................................................81
Howtoadjustthepulseduration..................................................................82
Installation..............................................................................................................82
Howtoinstallafrequencychannel...............................................................82
Howtodisconnectafrequencychannel........................................................83
HowtomodifyanIPaddress.......................................................................84
Howtoinstallandupgradethesoftware.......................................................85
Externalinterfaces..................................................................................................87
HowtosetuptheEthernetoutputinterface...................................................88
HowtosetuptheSimradITITrawlsysteminterface....................................89
HowtosetuptheSimradPICatchmonitoringsysteminterface.....................90
Howtosetupthesonarsysteminterface......................................................91
Howtosetupthenavigationsysteminterface...............................................92
Howtosetupthemotionsensorinterface.....................................................94
Howtosetupthedepthoutput.....................................................................95
Howtosetuptheannotationinterface..........................................................96
Testandmaintenance.............................................................................................97
Receivertest...............................................................................................97
GPTpowerrecycle.....................................................................................98
Accesstologles.......................................................................................99
Rulesfortransducerhandling......................................................................99
Rulesfortransducermaintenance...............................................................100
Approvedanti-foulingpaintsfortransducers..............................................101
THEMENUSYSTEM.......................................................102
Aboutmenusandbuttons.....................................................................................102
Buttontypes..........................................................................................................103
Mainmenu............................................................................................................105
Operationmenu....................................................................................................106
Displaymenu........................................................................................................107
Setupmenu...........................................................................................................108
Activemenu.........................................................................................................109
FUNCTIONSANDDIALOGS...........................................110
338106/A
5
Page 8

SimradES70
Mainmenu;functionsanddialogs.......................................................................111
UserSettings.............................................................................................111
Range.......................................................................................................113
StartRange................................................................................................114
Gain..........................................................................................................115
Operationmenu;functionsanddialogs................................................................117
Operation..................................................................................................117
Ping..........................................................................................................118
PingMode.................................................................................................119
PingInterval.............................................................................................120
NormalOperation.....................................................................................121
Record.....................................................................................................123
Displaymenu;functionsanddialogs...................................................................125
ColourSetup............................................................................................125
ScreenBrightness.....................................................................................127
Units........................................................................................................128
Transparency............................................................................................129
Language.................................................................................................129
Layout.....................................................................................................130
DisplayOptions........................................................................................130
About.......................................................................................................133
Setupmenu;functionsanddialogs.......................................................................135
Synchronization........................................................................................136
Annotations..............................................................................................137
FishSelect................................................................................................139
Navigation...............................................................................................140
Trawl.......................................................................................................145
EthernetOutput........................................................................................146
DepthOutput............................................................................................147
Installation...............................................................................................149
Environment.............................................................................................149
I/OSetup..................................................................................................150
TransceiverInstallation.............................................................................153
SoftwareLicense......................................................................................156
Activemenu;functionsanddialogs.....................................................................158
Echogram.................................................................................................158
TVG........................................................................................................164
Ping-PingFilter........................................................................................165
BottomGain.............................................................................................165
SizeDistribution.......................................................................................166
BottomDetector.......................................................................................167
Otherdialogsandfunctions..................................................................................169
LANPortSetup........................................................................................169
6
338106/A
Page 9
Referencemanual
SerialPortSetup.......................................................................................170
AddSerialPort.........................................................................................171
PortMonitor.............................................................................................171
SelectInputs.............................................................................................172
SelectOutputs..........................................................................................175
Messages..................................................................................................176
ReplayFile...............................................................................................177
FileOutput...............................................................................................178
EK500Datagram......................................................................................181
BottomRange...........................................................................................183
SurfaceRange..........................................................................................184
SingleTargetDetection.............................................................................185
PIDataOutput..........................................................................................186
TELEGRAMFORMATS....................................................188
NMEAtelegrams..................................................................................................188
AbouttheNMEAtelegramformat.............................................................189
DBSDepthbelowsurface.........................................................................190
DBTDepthbelowtransducer.....................................................................190
DPTDepth...............................................................................................190
GGAGlobalpositioningsystemxdata.....................................................191
GLLGeographicalpositionlatitude/longitude............................................191
HDGHeading,deviationandvariation.......................................................192
HDMHeading,magnetic...........................................................................192
HDTHeading,true...................................................................................193
RMCRecommendedminimumspecicGNSSdata....................................193
VHWW aterspeedandheading.................................................................194
VLWDualground/waterdistance..............................................................194
VTGCourseoverground&groundspeed..................................................194
Proprietarytelegramsandformats.......................................................................195
SimradEK500Depth................................................................................195
SimradEMAttitude1000..........................................................................196
SimradEMAttitude3000..........................................................................197
DBSDepthoftrawlbelowsurface.............................................................198
HFBTrawlheadropetofootropeandbottom..............................................199
PSIMP.DPISensordata............................................................................199
PSIMDHBBottomhardnessandbiomass...................................................200
Sounder/TSS1Motionprotocol..................................................................201
SimradA TSAnnotation............................................................................202
Proprietarythirdpartytelegramsandformats......................................................203
Atlasdepthtelegram.................................................................................203
ECHOSOUNDERTHEORY...............................................204
Aboutbiomass......................................................................................................204
338106/A
7
Page 10
SimradES70
AboutTVGgain...................................................................................................205
Aboutdynamicrangeanddisplaypresentation...................................................206
Aboutoutputpower..............................................................................................207
Aboutpulseduration............................................................................................207
Aboutbottomslopes.............................................................................................209
Aboutrangeselection...........................................................................................210
Upperechogram:Surface..........................................................................210
Lowerechogram:Bottomexpansion..........................................................210
Aboutbottomlines...............................................................................................211
Bottomline...............................................................................................211
Whiteline................................................................................................212
Hardnessline............................................................................................212
8
338106/A
Page 11
Aboutthismanual
Aboutthismanual
Thepurposeofthismanual
Thepurposeofthismanualistoprovidethedescriptions,proceduresanddetailed
parameterexplanationsrequiredtoallowforsafeandefcientuseoftheSimradES70
Fishndingechosoundersystem,aswellasathoroughunderstandingofthesystem
parametersandadjustments.
Click“Help”!
InstalledonyourSimradES70Fishndingechosounderyouwillndacomprehensive
on-linehelpsystem.Y oumaynotnditinyourlanguage,buteverythingyoucanread
intheES70Referencemanualcanalsobefoundinthecontextsensitiveon-linehelp.To
accessthisinformationclick[?]ontheTitleBar,orthe[?]buttoninoneofthedialogs.
Notethatwhenyouopenthehelpsystemitwillplaceitselfonthetopoftheechogram!
Softwareversion
Thismanualcompliestoechosoundersoftwareversion1.0.0.
Note
WindowsNT,Windows2000,WindowsXP ,WindowsVista,Windows7andWindowsare
eitherregisteredtrademarksortrademarksofMicrosoftCorporationintheUnitedStates
and/orothercountries.
References
ThefollowingusermanualshavebeenprovidedfortheSimradES70Fishndingecho
sounder.EnglishmanualsareprovidedwiththeES70whenitisshipped.Manualsin
otherlanguagesmaybedownloadedfromw
w w . s i m r a d . c o m .
•SimradES70Referencemanual[338106]
•SimradES70Operatormanual[343522]
•SimradES70Installationmanual[343539]
338106/A
9
Page 12
SimradES70
SimradES70
ThepurposeofthischapteristoprovideanoveralldescriptionoftheES70Fishnding
echosoundersystemanditsmainfeatures.
Topics
•Importantonpage10
•Systemoverviewonpage11
•Wavepropagationonpage14
•Bottomechoonpage15
•Split-beamoperationonpage16
•Observationrangeonpage17
Important
Aswithallotheradvancedinstruments,thereareafewimportantthingsthatyoumustbe
awareof.
Whentheechosounderisnotused
WhenyoudonotusetheES70,switchoffthedisplayandthecomputer.Youmayswitch
ofthetransceivertoo.
Whendockingyourvessel
ItisveryimportantthatnoonetriestousetheES70whenthevesselisindrydock.If
thetransducerisactivatedwhenoutofwateritmaybedamagedbeyondrepair.To
ensurethatthiscannothappen,removethepowersupplytotheeitherthecomputeror
thetransceiver-orboth!Youmayalsoremovecircuitbreakers.Dothisb
vesselisplacedinthedrydock!
e f o r e the
Ifsomethingbreaksdown
Ifyoubelievethatsomethinghasbrokendown,contactyourlocaldealer.Hewillbe
abletoassist.
10
338106/A
Page 13

SimradES70
Whenyouswitchofftheechosounder
YoumustNEVERswitchofftheechosounderbymeansoftheon/offswitchonthe
computer.Y oumustALW AYSexittheES70applicationbyclickingtheExitbuttonon
theTitleBar.Ifyoupowerdownthesounderbymeansofthecomputerswitchyoumay
damagetheES70applicationandtheelectronicinterfaceparametersfortheexternal
devices.
Systemoverview
ThissectionprovidesthekeyfactsabouttheES70Fishndingechosoundersystem,as
wellasabriefintroductiontothemainunits.
Keyfacts
TheSimradES70Fishndingechosounderisdesignedfortheprofessionalshery
communityimplementingthelatestinnovations.Echosoundersrangingfromrelatively
low-costsinglebeamtolargemulti-frequencysystemscontainingseveralsplit-beam
channelscanberealised.
•TheSimradES70Fishndingechosoundersystemisexibleandeasytosetup
duetoitsmodulardesign.
•Menusanddialogsareoperatedusingastandardcomputermouseoratrackball.
•Additionaluserinputcanbefacilitatedusingastandardcomputerkeyboard.
•TheES70supportslargecolourdisplaymonitors.
•TheES70usestheMicrosoftWindows®operatingsystem.ItcompliestoWindows
XP®andWindows7®.
•TheES70providesyouwithanawardwinninguserinterface.Menusystem,dialogs
andstructurehavebeencreatedusinginnovativedesign,andinclosecooperation
withcustomers.
•Astore/replayfunctionreducestheneedforechogramprintoutonpaper.The
unprocessedtransducersignalisrecordedontheinternalharddisk.Duringreplay,
thissignalisinjectedintotheES70processingsoftwareasifitarriveddirectlyfrom
thetransceiver.
Mainunits
ThebasicES70Fishndingechosounderconsistsof:
•Display
•Computer(TheES70MarineComputermaybeprovided)
•OneormoreGeneralPurposeTransceiver(GPT)units
•Oneormorestandardsinglebeamtransducers
•Oneormoresplit-beamtransducers
338106/A
11
Page 14

SimradES70
Colourdisplay
Astandardcommercialcolourdisplayisused.Thedisplayunitisnormallynotprovided
bySimrad.Severalcommercialtypesandsizesareavailable.
ES70MarineComputer
SimradcansupplytheES70MarineComputerfortheES70Fishndingechosounder
system.
Figure1ES70MarineComputer
Acommercialcomputermayalsobeused.Itmustcomplytotherequirement
specicationslaidoutbyMicrosoftfortheiroperatingsystems.Itmustalsoprovidethe
necessaryinterfacefacilities(seriallinesandEthernetconnections)thatyoursystemwill
needtocommunicatewithexternalsensors(measuringdevices)andperipheralsystems.
GeneralPurposeTransceiver(GPT)
TheGeneralPurposeTransceiver(GPT)containstransmitterandreceiverelectronics.
Thereceiversaredesignedforlownoise,andtheycanhandleinputsignalsspanninga
verylargeinstantaneousdynamicamplituderangeof150dB.Alltargetsarecorrectly
measuredanddisplayed.
Figure2GeneralPurposeTransceiver(GPT)
AtwistedpairEthernetcableconnectstheGeneralPurposeTransceiver(GPT)tothe
computer.ThedistancebetweenthecomputerandtheGeneralPurposeTransceivercan
beextendeduptomaximum100meters.
Ifmorethanonetransceiverisused,asmallEthernetswitchisrequiredtoconnectthe
GeneralPurposeTransceiverstothecomputer.
12
338106/A
Page 15
SimradES70
A
B
C
D
PWR
MENU
Transducer
+5V
+12V
-12V
HV1
HV2
TX
RX
Fuse10A
115-230VAC
Fuse2A
S1
S2
12VDC
Auxiliary
Ethernet
GeneralPurpose Transceiver
DSP-6X IO
POWER
Ethernet
Standardsinglebeamtransducer
TheES70mustbeconnectedtooneormoretransducers.
Awiderangeofoperationalfrequenciesareavailable.
FormoreinformationaboutthesinglebeamtransducersprovidedbySimrad,consult
w
w w . s i m r a d . c o m .
Split–beamtransducer
TheES70canbeusedwithSimrad’sadvancedsplit-beamtransducers.Thesetransducers
areavailableatfrequenciesrangingfrom18to200kHz.
Formoreinformationaboutthesplit–beamtransducersprovidedbySimrad,consult
w w . s i m r a d . c o m .
w
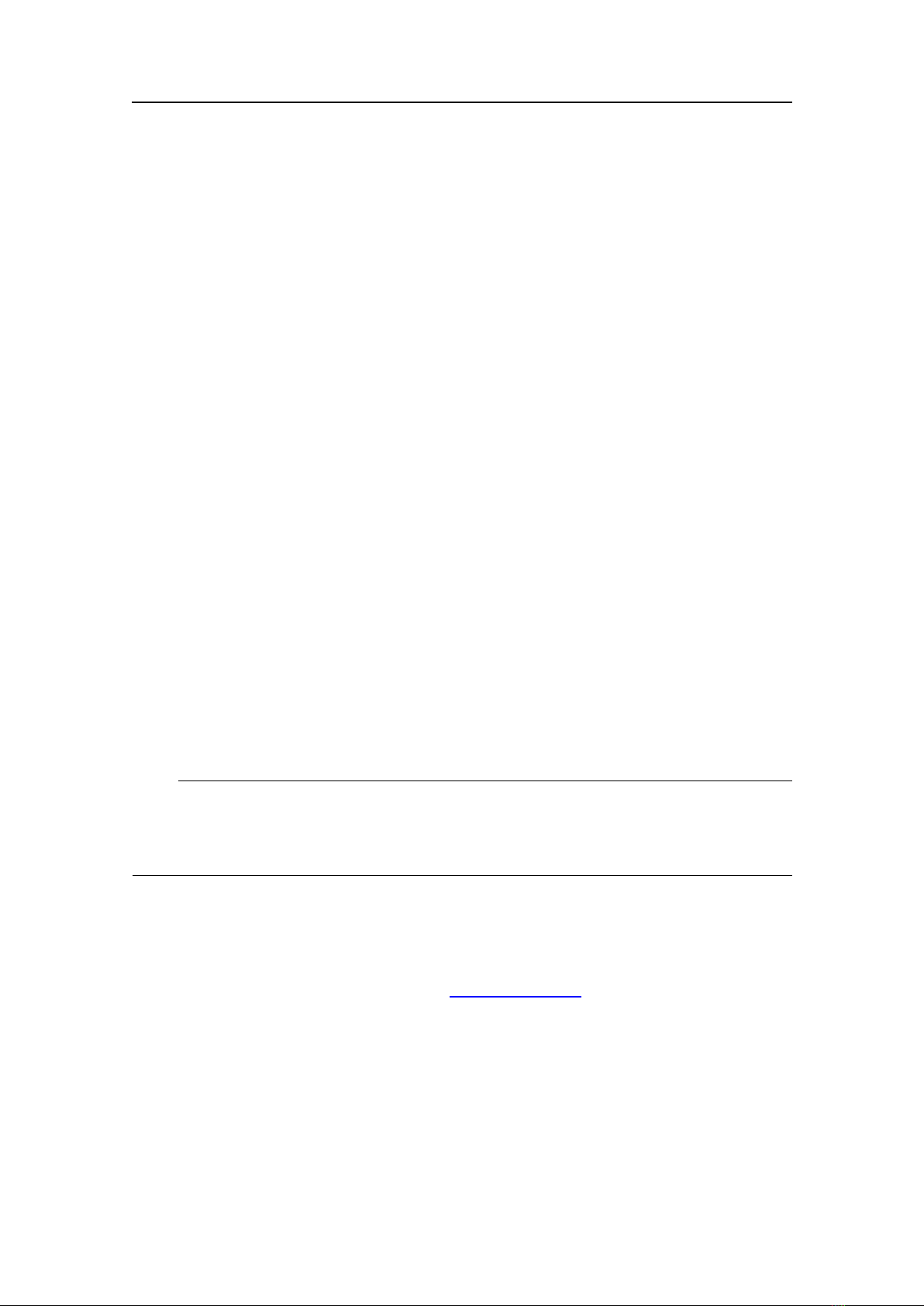
Simpliedsystemdiagrams
Thesystemdiagramsprovidedshowe x a m p l e s onhowaES70systemmaybesetup.
Figure3SystemdiagramwithasingleGeneralPurposeTransceiver
ADisplayUnit
BProcessorUnit(computer)
CGeneralPurposeTransceiver(GPT)
DTransducer(s)
338106/A
13
Page 16
SimradES70
A
B
C
D
PWR
MENU
Transducer
+5V
+12V
-12V
HV1
HV2
TX
RX
Fuse10A
115-230VAC
Fuse2A
S1
S2
12VDC
Auxiliary
Ethernet
GeneralPurpose Transceiver
DSP-6X IO
POWER
Ethernet
Transducer
+5V
+12V
-12V
HV1
HV2
TX
RX
Fuse10A
115-230VAC
Fuse2A
S1
S2
12VDC
Auxiliary
Ethernet
GeneralPurpose Transceiver
DSP-6X IO
POWER
Ethernet
E
(CD024216-002)
(CD010217C)
(CD010217G)
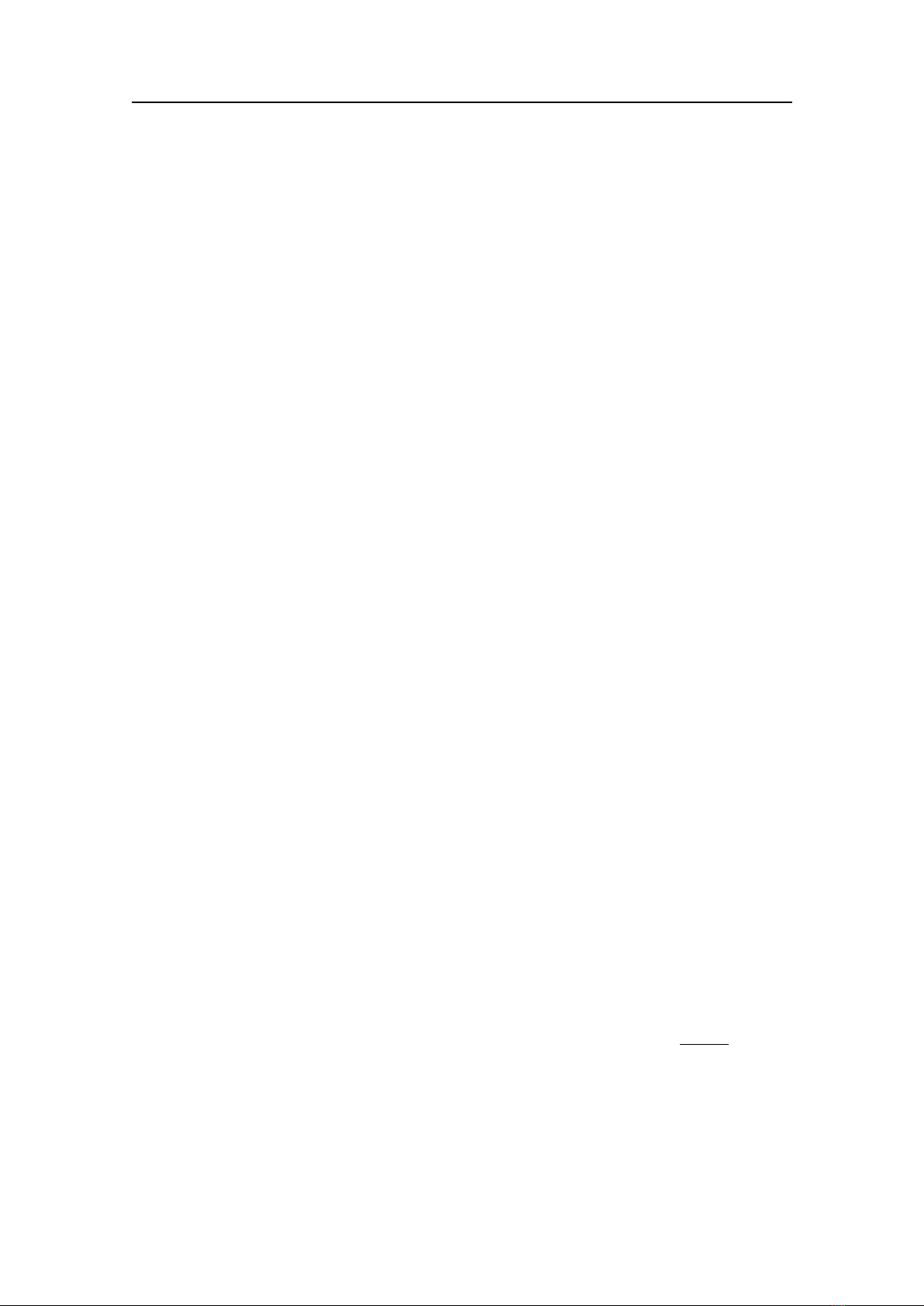
Figure4SystemdiagramwithtwoGeneralPurposeTransceivers
ADisplayUnit
BProcessorUnit(computer)
CGeneralPurposeTransceiver
(GPT)
DTransducer(s)
EEthernetswitch
Wavepropagation
Thevelocityofsoundwavepropagationintheseavariesslightlywithtemperature,
salinityandpressure.Thevelocityvariesbetween1440and1520m/sinshallowsea
water,whileavelocityaround1480m/scanbeexpectedat1000mdepth.Inshallow
freshwaterthevelocityisapproximately1430m/s.
AgoodaveragevaluetobeusedintheEnvironmentdialogis1470m/s.
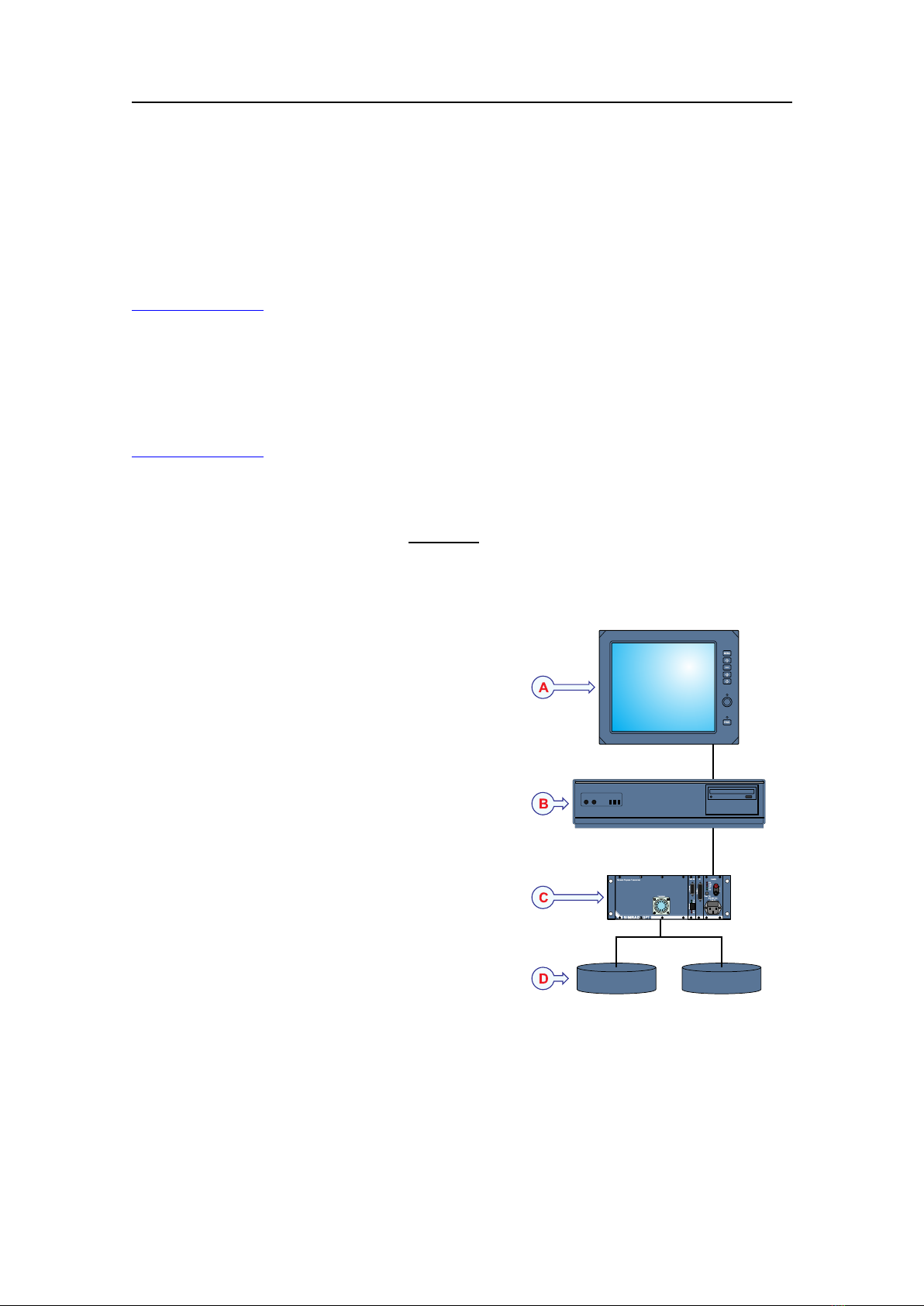
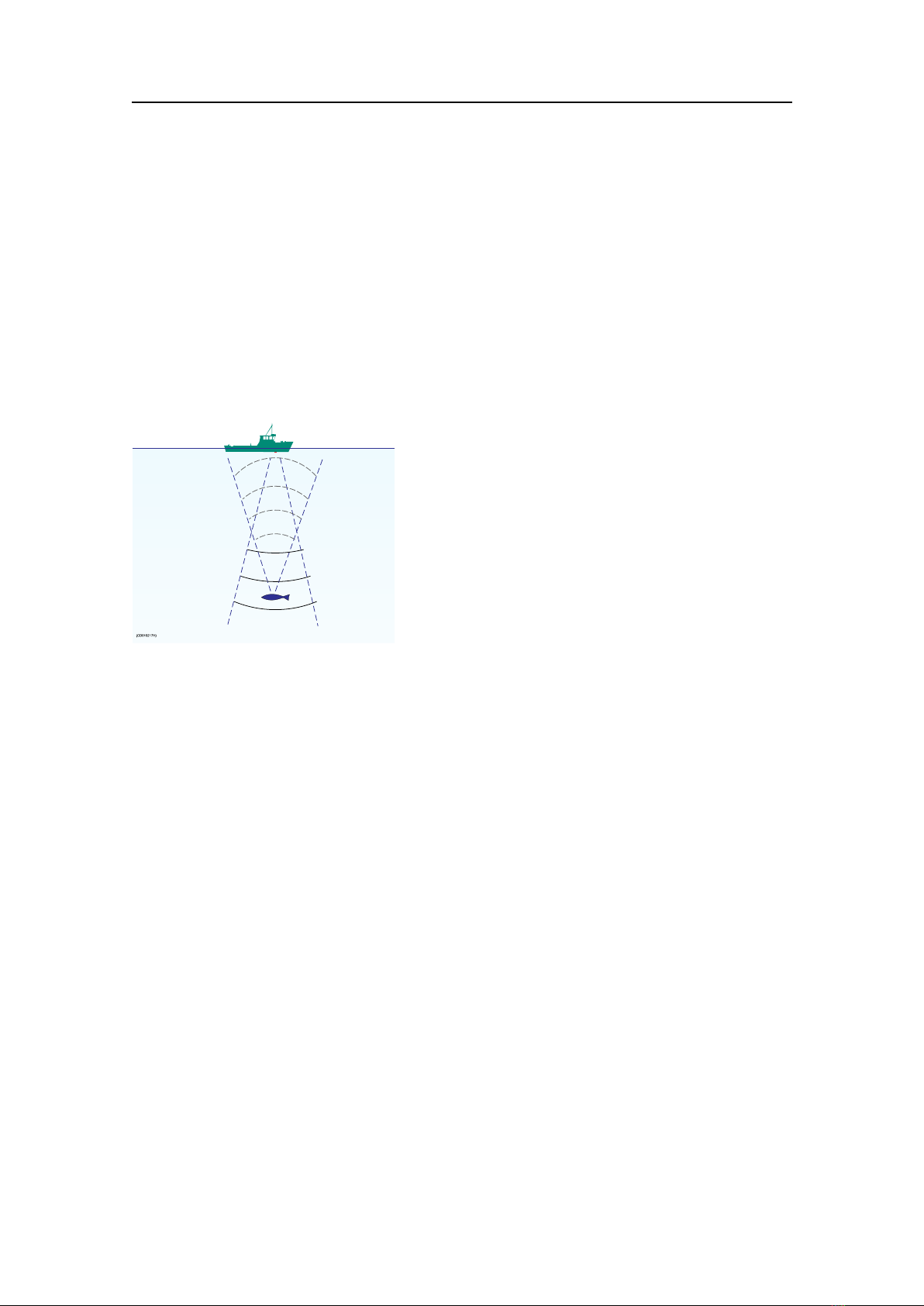
Figure5W avepropagationfromaatbottom
TheES70transmitshighenergysoundwave
pulsesintothesea.Aatbottomreectsthe
transmittedwaveasifitwereamirror.The
propagatingenergyisspreadoveralargerand
largerareaasittravelsdowntothebottomand
upagain.Theenergyisspreadoverafourtimes
largerareaeverytimethetraveldistancedoubles.
Alargeschoolofshreectssoundwavessimilarly.Thistypeofspreadingisreferredto
assquare-lawor20logTVG(TimeV aryingGain)spreading.
14
338106/A
Page 17
SimradES70
(CD010217H)
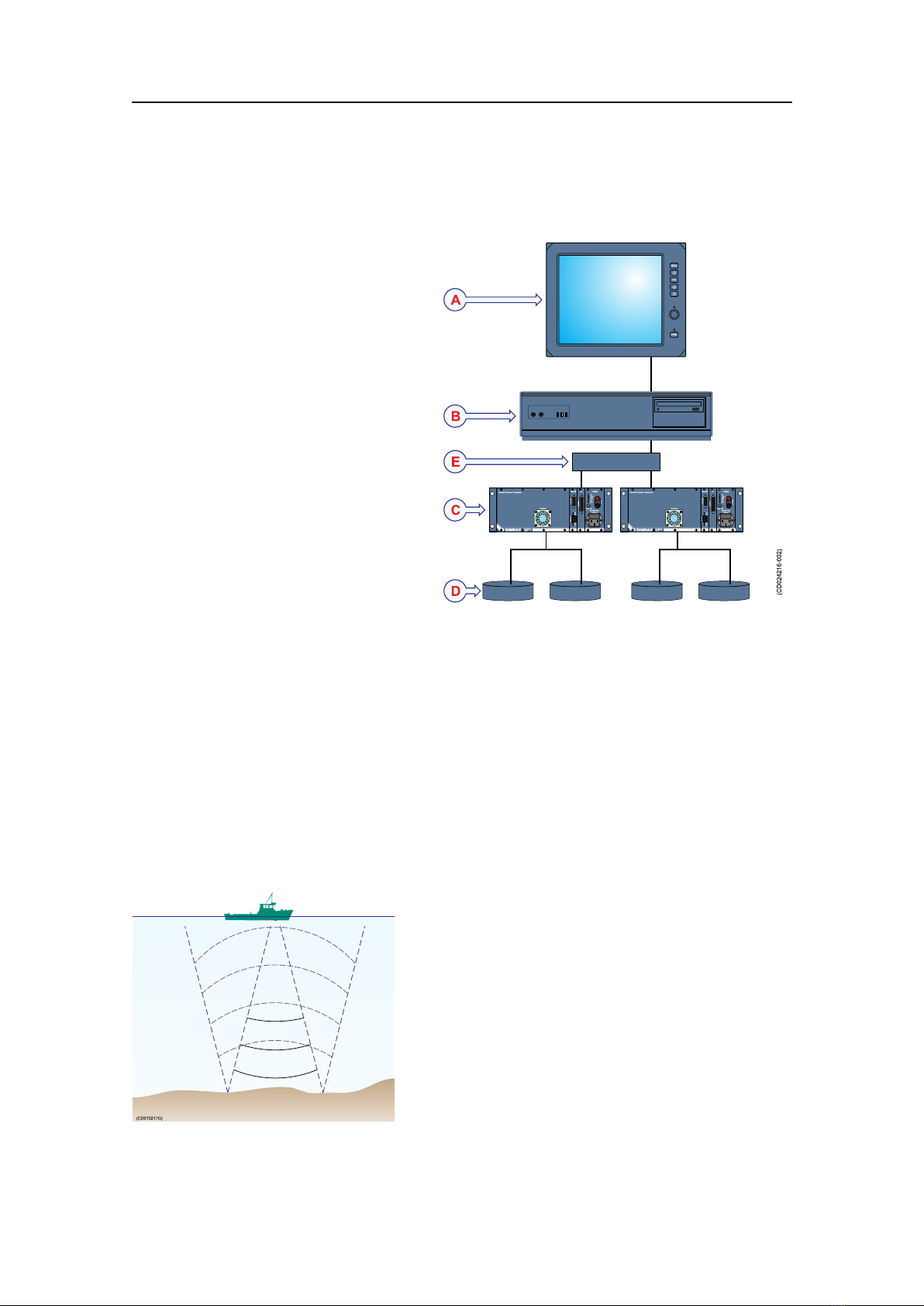
Thesituationisslightlydifferentwhenobservingtheechoesfromindividualsh.The
transmittedwaveundergoessquare-lawspreadingwhentravellingfromthesurfaceand
downtothesh.Theswimbladderoftheshscattersasmallfractionofthearriving
energyinalldirections.Travellingfromtheshandbacktowardsthesurfacethe
scatteredwaveundergoesanothersquare-lawspreading.Thecombinedeffectisreferred
toasquad-lawor40logTVGspreading.
Intheechosounder’sEchogramdialog20logTVGspreadingiscalledSchoolGainand
BottomGain,while40logTVGspreadingiscalledFishGain.
Figure6W avepropagationfromash
Propagationlossesduetoabsorptionaremuch
higherinseawaterthaninfreshwater.Absorption
alsoincreaseswithfrequency.At38kHzthe
absorptionis0.5dB/kminfreshwaterand10
dB/kminseawater.At200kHztheabsorption
is10dB/kminfreshwaterand50dB/kminsalt
water.Theechosoundermustknowwhichwater
typeispresentinordertocompensateforthese
lossescorrectly.
ThedB(decibel)unithaslongtraditionsinunderwateracousticsandothereldsin
physics.Itisalogarithmicmeasurefortheratiobetweentwoquantities.
Relatedtopics
•AboutTVGgainonpage205
•Echogramonpage158
•Environmentonpage149
Bottomecho
Ahardatbottomreectsthetransmittedsignalasifitwereamirror.Thetransmitted
pulsehitstheilluminatedbottomareaatnearlythesameinstant,andtheechofrom
differentpartsofthisareaarrivebackatthesurfacealsoatnearlythesameinstant.
338106/A
15
Page 18
SimradES70
(CD010217I)
A
B
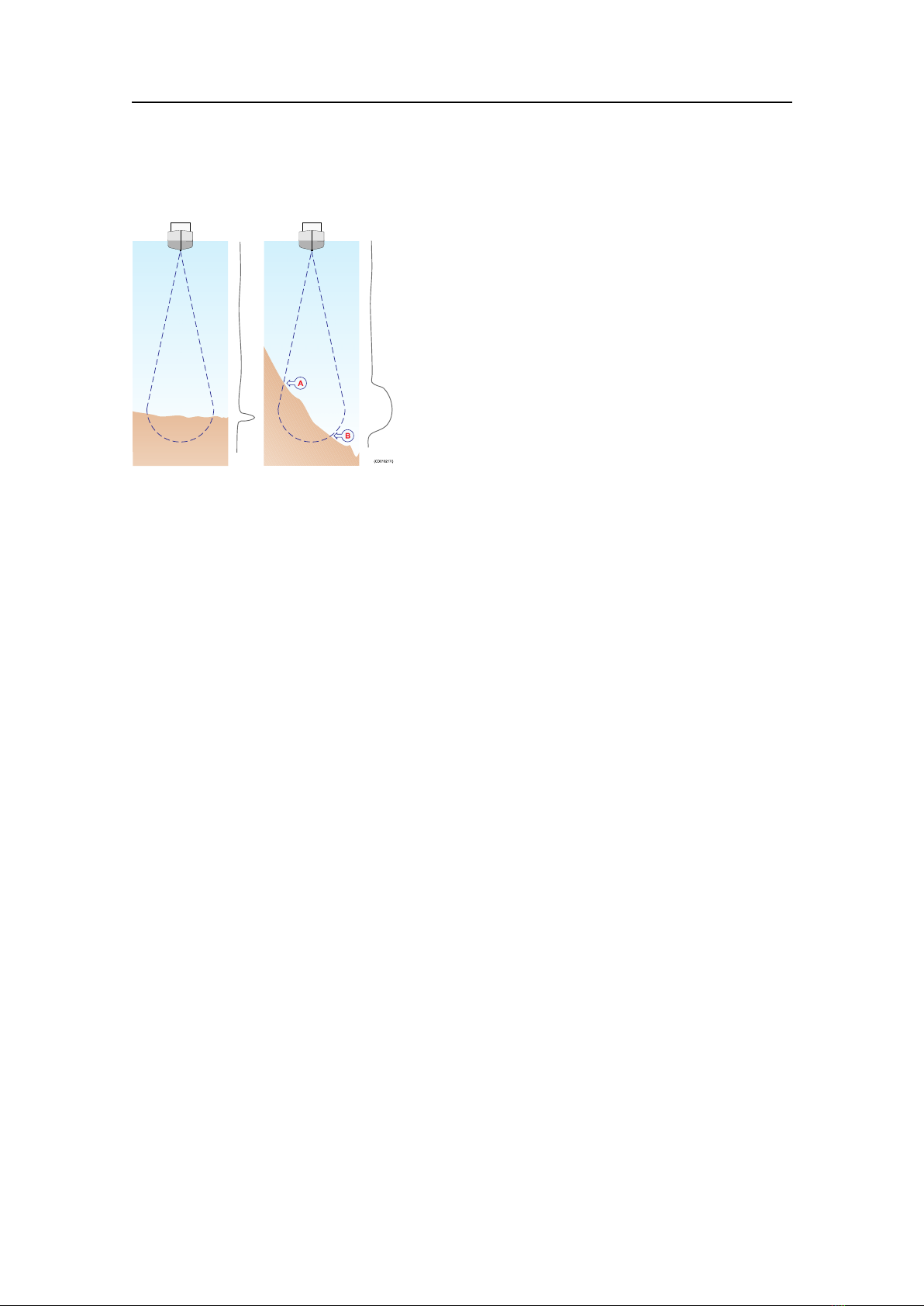
Figure7Bottomechoprinciples
Thereceivedechosignalisbasicallyanattenuated
copyoftheshorttransmitpulse.Theechosignal
fromaslopedbottomischaracterisedbyhaving
alongerdurationandaslowerriseandfalltime.
Thetransmittedpulsersthitstheslopeatpoint
(A),andastimeelapsesthereectionpointtravels
alongtheslopetowardspoint(B).Manylocations
donothaveasolidhardbottom.Frequently,the
bottomiscomposedoflayersofmud,clayand
sandwhichcanbeobservedascolouredbandson
theechosounderdisplay.
Thebottomdetectionalgorithmisimplementedsolelyinsoftware,andseparate
algorithmsarerunforeachfrequencychannel.Thealgorithmisdesignedwithemphasis
onreliabilityinthesensethaterroneousdepthdetectionsareneveroutput.Wheneverthe
qualityofadetectionisquestionablethealgorithmoutputsadepthof0.00toindicatethat
noreliabledetectionwasobtained.TheES70algorithmisdesignedtohandleanumber
ofdifcultsituations.Thealgorithmmaintainsbottomlockforadiscontinuousjumpin
bottomdepth.Itavoidsfalsebottomdetectionsonadenseschoolofsh.Thealgorithm
choosestheupperboundaryoftherstlayerwhenthebottomconsistsoflayers.
Thebottomdetectionalgorithmlockstotherstgoodbottomreturn.Thedepthatpoint
Aratherthanthedepthalongthetransduceraxiswillbeoutputforaslopedbottom.The
detecteddepthvalueisalwayssmallerthanthedepthalongthetransduceraxisimplying
thatasafetymarginisautomaticallyincluded.
Split-beamoperation
TheES70usesthesplit-beamtechniqueforassessmentofthesizedistributionof
individualsh.Asplit-beamtransduceriselectricallydividedintofourquadrants.All
fourquadrantsareexcitedinparallelduringtransmission.However,thereceivedsignal
fromeachquadrantisseparatelyampliedinafour-channelmatchedreceiverallowing
thedirectionofarrivalofanechotobedetermined.
16
338106/A
Page 19
SimradES70
(CD010217K)
A B
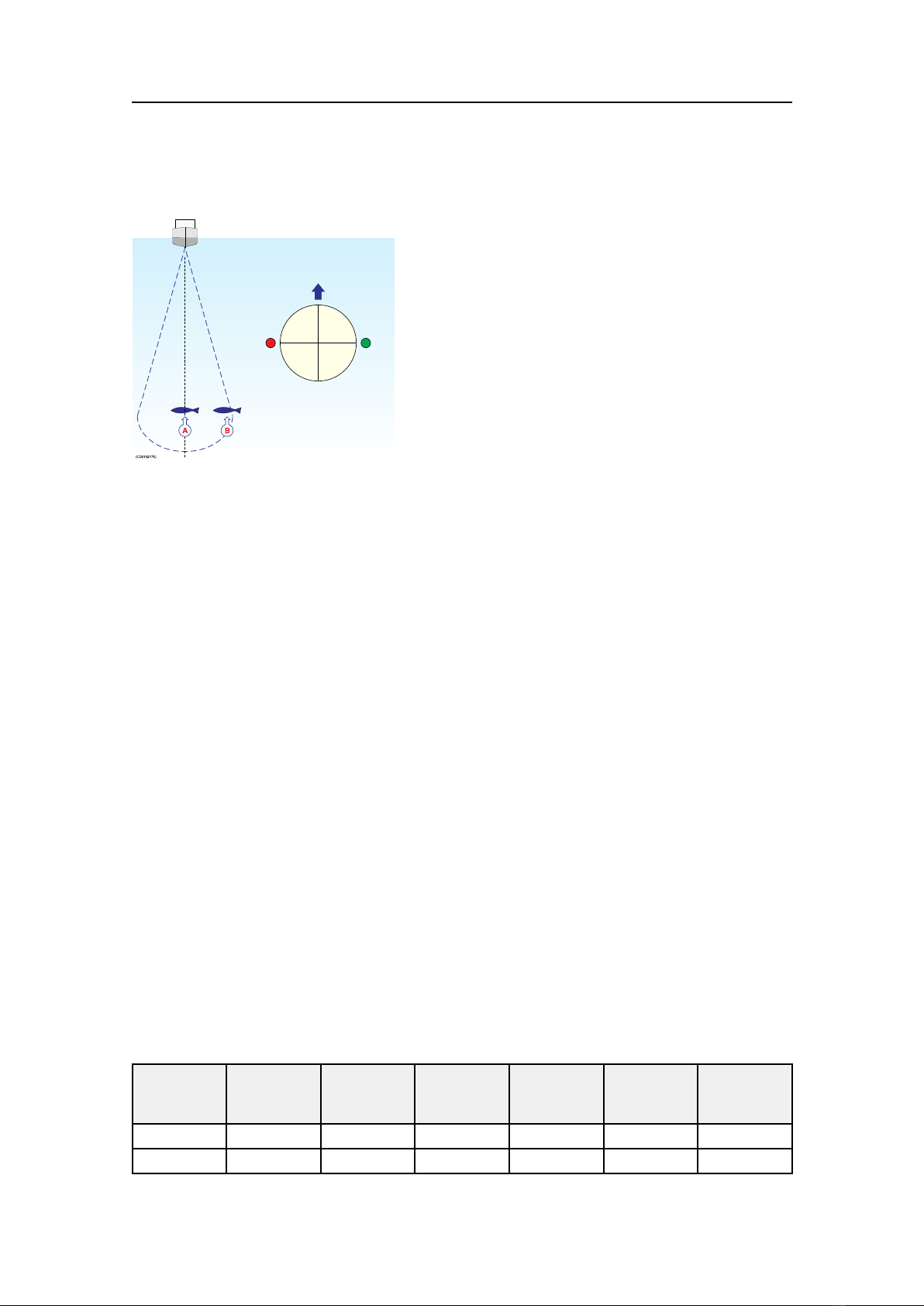
Figure8Splitbeamprinciples
Anacousticwavefrontpropagatingtowardsthe
transducerarrivesatthefourquadrantsatdifferent
timescausingthephaseangleoftheelectrical
outputsignalfromthequadrantstodiffer.The
fore-and-aftangleisdeterminedfromtheelectrical
phasedifferencebetweentheforeandtheaft
transducerhalves,andtheathwartshipsangleis
determinedfromthestarboardandportsignals.
FishAispositionedalongthetransduceraxiswherethetransducerhasitsmaximum
sensitivity,whileFishBispositionedtowardstheedgeofthebeamwherethesensitivity
islower.Evidently,theechosignalfromFishAwillbestrongerthanthesignalfrom
FishBeventhoughtheyareofthesamesizeandatthesamedepth.Hence,determining
shsizefromthereceivedechostrengthalonewillnotbetoosuccessful.Asplit-beam
echosoundermeasuresthepositionoftheshwithinthebeam.Thesoundercorrectsfor
thedifferenceintransducersensitivityandcomputesthetruesizeofthesh.
Thesplit-beammeasurementtechniqueonlyworksforechoesoriginatingfromone
singleshsincetheelectricalphasewillberandomifechoesfrommultipleindividuals
atdifferentpositionsinthebeamarereceivedsimultaneously.
Consequently,measurementofshsizeinsideaschoolofshtendstobeunreliable.
Observationrange
Absorptionincreasesdramaticallywithfrequencyinsaltwater.Formaximum
observationrangeyoushouldselectalowoperatingfrequency,alargetransducerandthe
maximumtransmitpower.
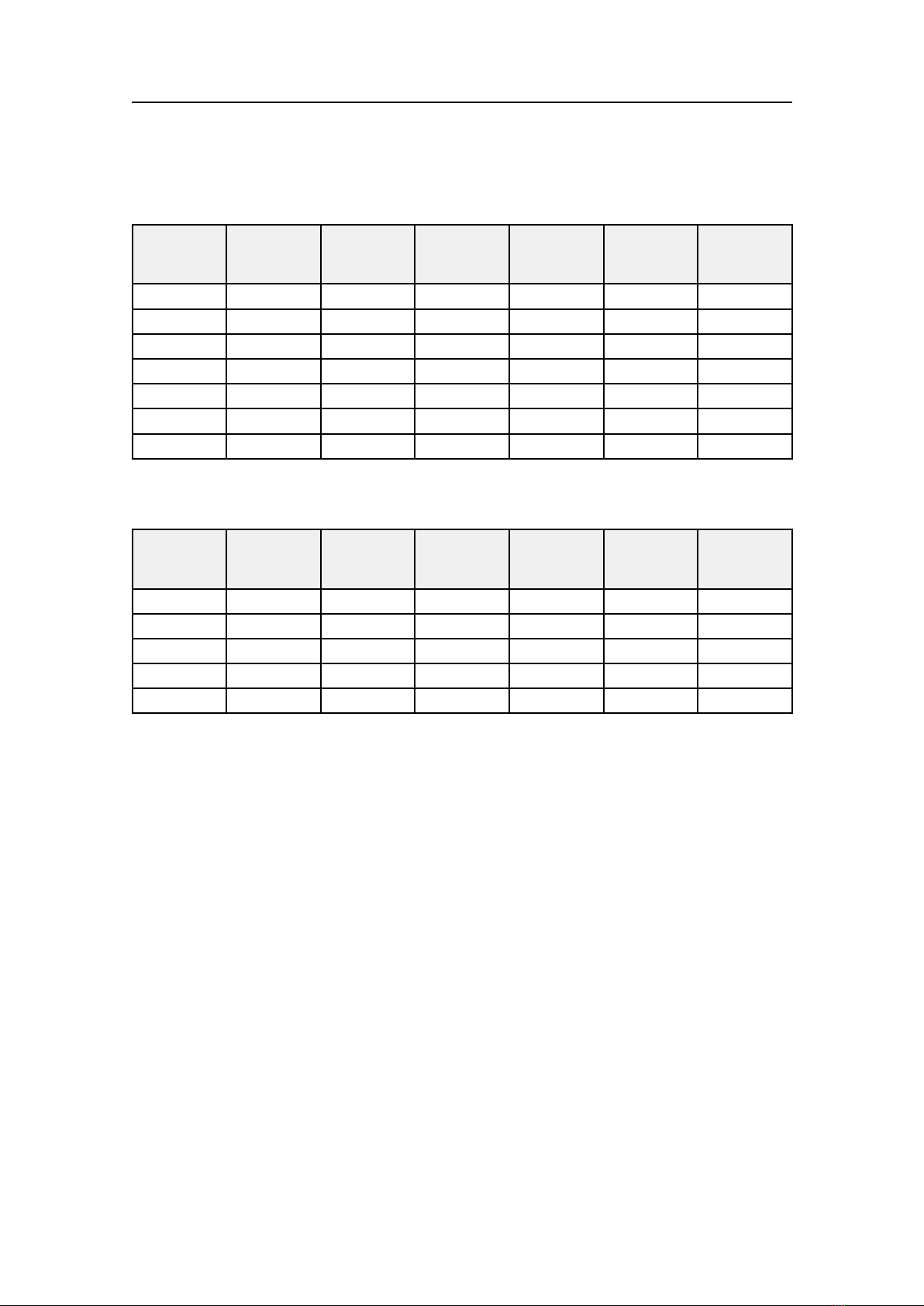
Typicalobservationrangesareshowninthetable.UsingtheSimradES38Btransducer
(38kHz,7x7degrees,2000W)youcanobservea60centimetrecoddownto950meters,
andbottomdetectionworksdownto2800meters.However,withtheSimradES200–7C
transducer(200kHz,7x7degrees,1000W)youcanonlyobservethatsamecoddownto
270meters,andbottomdetectionbecomesunreliablebelow500meters.
Table1Maximumdetectiondepth,singlebeamtransducers
TransducerFrequency
(kHz)
12–161216,4193200085010000
27–26278,18387300011004400
Pulse
duration
(ms)
Bandwidth
(hz)
Txpower
(W)
Rangesh
(m)
Range
bottom(m)
338106/A
17
Page 20
SimradES70
Table1Maximumdetectiondepth,singlebeamtransducers(cont’d.)
TransducerFrequency
(kHz)
Pulse
duration
Bandwidth
(hz)
Txpower
(W)
Rangesh
(m)
(ms)
38/200D
38–9384,0976615008002600
38–7384,0976620009502800
50/200D
50–7502,05149320007001900
120–251201,0230261000390800
50/200D
384,0976610005002100
502,05149310005001500
2001,0230881000280550
Table2Maximumdetectiondepth,splitbeamtransducers
TransducerFrequency
(kHz)
ES18–11188,21382200011007000
ES38B384,0976620009502800
ES70–11702,0515268004501100
ES120–7C1201,0230261000440850
ES200–7C2001,0230881000270550
Pulse
duration
Bandwidth
(hz)
Txpower
(W)
Rangesh
(m)
(ms)
Range
bottom(m)
Range
bottom(m)
Theserangecalculationsassumeanormalseawatersalinity(3.5ppt)andtemperature
(+10degreesCelcius),anaveragebottom(surfacebackscatteringstrength=-20dB)and
anoiseleveltypicalforamovingvessel.
18
338106/A
Page 21
Gettingstarted
ThischapterdescribeshowtogetstartedwiththebasicoperationoftheES70Fish
ndingechosounder.
Note
ThischapterassumesthattheES70Fishndingechosounderhasatleastonefrequency
channel(transceiverandtransducer)readilyconnected.Ifthisisnotthecase,observe
theprocedure.
Gettingstarted
→Howtoinstallafrequencychannelonpage82
Topics
•PowerOn/Offproceduresonpage19
•Usingthetrackballonpage21
•Startingnormaloperationonpage21
•Echosounderpresentationsonpage28
•TitleBaronpage30
•Taskbaronpage31
•Themenusystemonpage31
PowerOn/Offprocedures
Note
Makesurethatyouhavesufcientwaterbelowthehullb e f o r e youpoweruptheecho
sounder.Ifyoustarttheechosounderwiththetransducerinair ,youmaydamageit
beyondrepair!
HowtopoweruptheES70echosounder
1PoweruptheGeneralPurposeTransceiver(GPT)unit.
2Powerupthecomputerandthedisplay.
3WaituntiltheES70programstartsonthecomputer.
338106/A
19
Page 22
SimradES70
WhentheES70starts,youmayseeadialogrequestingpermissiontoupgradethe
rmwareonthetransceiver.Thishappensifthermwareonthetransceiverisolder
thanthermwareprovidedasapartoftheES70software.Sincefunctionality
ontheES70maydependonthermwareinthetransceiver,clickYestoupgrade
thetransceiver.
Duringtheprograminitialisation,adialogappearstoletyouchoosefromthecurrent
usersettingsavailableontheES70.Thedialogisonlyvisibleafewseconds.You
donotneedtomakeachoicehere.Y oucanselectusersettingatanytimebymeans
oftheUserSettingdialogontheMainmenu.
4Chooseoperationalmode:
aObservetheMainmenuontherighthandsideoftheES70presentation.
bClicktheOperationmenuicontoopentheOperationmenu.
cClicktheOperationbutton,andselectNormal.
5OnthePingbutton,clickthesymbolontherighthandsidetostartpinging.
6ObservethattheES70starts.
•TheES70startsupusingthesameoperationalparametersasthelasttimeyou
usedit.Iftheseparametersareacceptable,continueoperation.Ifyouwishtoalter
basicoperationalparameters,seesectionStartingnormaloperationonpage21.
•WhentheES70starts,itisveryimportantthatitdetectsthebottomcorrectly.
Inmostcasesthiswilltakeplaceautomatically.However,wehaveexperienced
thatlargeschoolsofshordifcultbottomconditionshavedeceivedtheES70to
displaythewrongdepth.Inthesecasesthesoundermaydisplaythebottomat
0,0meters,orwithanyotherabnormalvalue.InordertoaidtheES70tolocate
thecorrectdepth,observethededicatedprocedure.SeeHowtodenemaximum
andminimumdepthonpage76.
HowtopowerofftheES70echosounder
Note
YoumustNEVERswitchofftheechosounderonlybymeansoftheon/offswitchon
thecomputer.Thismaydamagethesoftwareortheinterfaceparametersforexternal
devices.Y oumustALWAYSusethisprocedure.
1ClicktheExitbuttonontheTitleBarinthetoprightcorneroftheES70presentation.
2ObservethattheES70applicationclosesdown.
20
338106/A
Page 23
Gettingstarted
C
D
A
B
(CD010216A)
3Ifthecomputerdoesnotswitchitselfoffautomatically,usethefunctionality
providedbytheoperatingsystemtoswitchitoffmanually.
4Switchoffthepowertothedisplayandtothetransceiver(s).
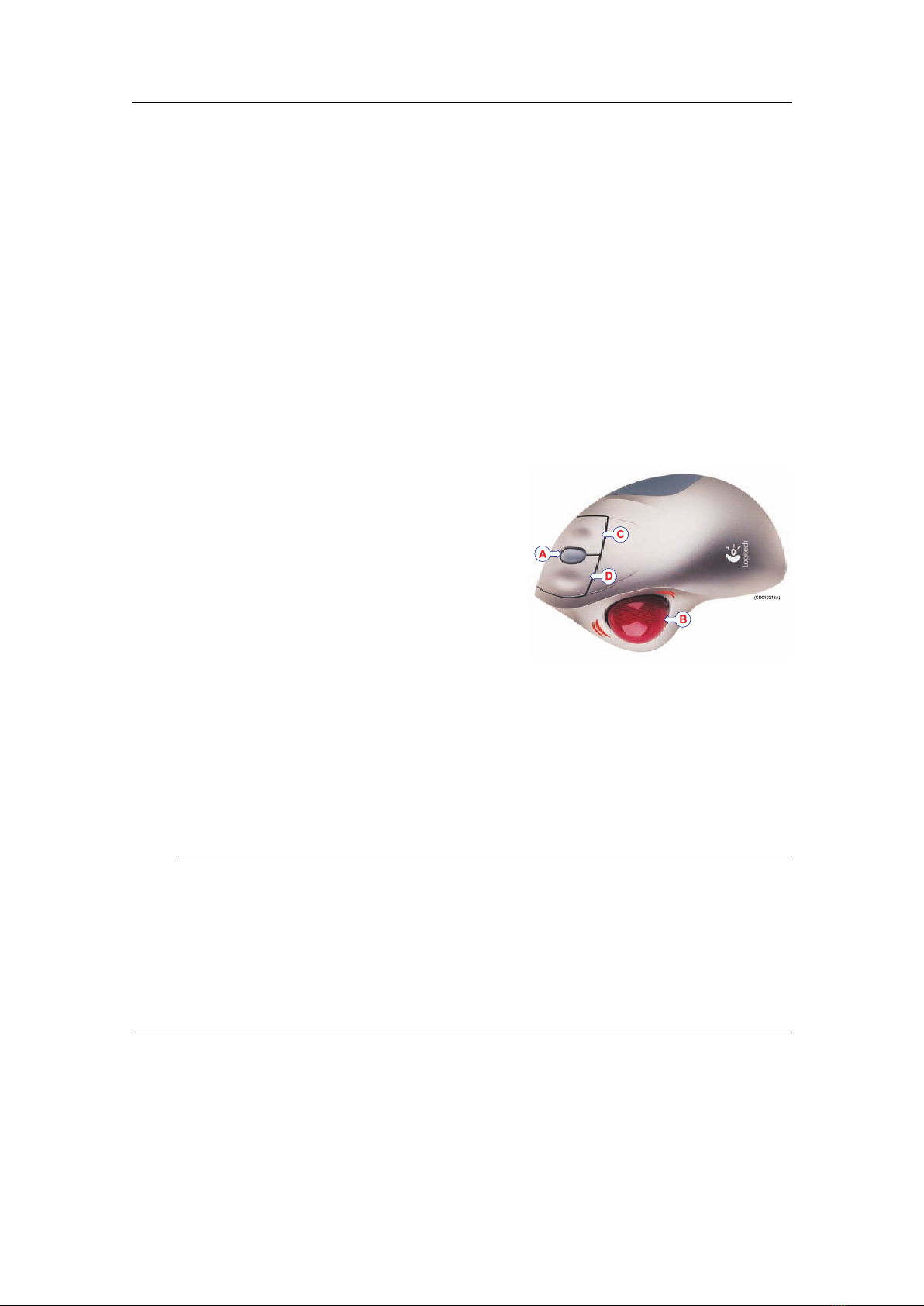
Usingthetrackball
AllES70functionsarecontrolledwiththetrackball.Thistrackballisconnectedtothe
computer,andbymeansofthebuttonsandthewheelyoucancontrolallthedialogsand
parametersettings.Astandardcomputermousecanalsobeused.Ifyouwishtousea
mouse,werecommendthatyoundoneequippedwithacontrolwheel.
AControlwheel
BTrackball
CRightmousebutton
DLeftmousebutton
Startingnormaloperation
OnceyouhavepowereduptheES70andthedisplay ,youarereadytostarttheactual
operation.Whenyouhavechosenoperationalmode,theechosounderstartsusingits
previoussetupparameters.
Note
Iftheseparametersareacceptableyoudonotneedtocarryouttheremainingprocedures
inthissection.
TheseprocedurebelowassumesthattheES70Fishndingechosounderhasatleast
onefrequencychannel(transceiverandtransducer)readilyconnected.Ifthisisnot
thecase,observetheprocedure.
→Howtoinstallafrequencychannelonpage82
1Chooseoperationalmode
2Checkthetransceiverandtransducersettings
3Checkthebottomdetectorsettings
4Checkthecolourscalesettings
5Checkthesizedistributionandshpositionsettings
338106/A
21
Page 24

SimradES70
6Checktheechogramsettings
7Checktherangesettings
Howtochooseoperationalmode
1ObservetheMainmenuontherighthandsideoftheES70presentation.
2ClicktheOperationmenuicontoopentheOperationmenu.
3ClicktheOperationbutton,andselectNormal.
Howtocheckthetransceiverandtransducersettings
1Observethatthecurrentlyconnectedtransducer(s)areshownastabsontheT askbar.
Eachtransducernamealsoidentiestheoperationalfrequency.
2ClicktheSetupicontoopentheSetupmenu.
→Setupmenuonpage108
3OntheSetupmenu,clickInstallation,andthenTransceiverInstallation.
ObservethattheT ransceiverInstallationdialogopens.Thisdialogisusedto
controlthecommunicationbetweentheES70computerandthetransceiver(s)and
transducer(s).
→TransceiverInstallationonpage153
4Checkthatallapplicabletransceiversandtransducersareconnectedandoperational.
Foreachtransceiver,thisisindicatedbythegreenlabelwithtext“Installed”.
5ClickOKtosavethesettingsandclosethedialog.
6ClicktheOperationicontoopentheOperationmenu.
→Operationmenuonpage106
7OntheOperationmenu,clickNormalOperation.
22
338106/A
Page 25

ObservethattheNormalOperationdialogopens.Thisdialogisusedtodene
variousparametersassociatedwiththetransceiver.Thesesettingsinclude
transceivermode,thedepthofthetransducersurface,thetransmitpower,andthe
pulseduration.NotethatthisdialogisnotavailableinReplaymode.
→NormalOperationonpage121
8Foreachchannel(transceiver/transducercombination):
aSetModetoActive.
bSetPulseLengthtoAuto.
TheES70willautomaticallychoosethebestpulsedurationtottheoperational
frequency,modeandcurrentdepth.Thepulsedurationdenestheresolution.
→Aboutpulsedurationonpage207
cSetPowertomaximum.
dCheckthattheDepthvalueissetcorrectly.
Thisisthedepthofthetransducerfacerelativetothewatersurface.Apositive
valueofforexample5metersmeansthatthetransducerislocated5meters
belowtheseasurface.Foraccuratedepthreadings,thisDepthvaluemustbe
setupcorrectly.
Gettingstarted
9ClickOKtosavethesettingsandclosethedialog.
Howtocheckthebottomdetectorsettings
1ClicktheActiveicontoopentheActivemenu.
→Activemenuonpage109
2OntheActivemenu,clickBottomDetector.
ObservethattheBottomDetectordialogopens.Thisdialogisusedtodenevarious
parametersassociatedwiththebottomdetection.Theseincludethedepthrange,
wheretheES70searchesforthebottom.
→BottomDetectoronpage167
3SetMinimumDepthandMaximumDepthtovaluestforthedepthatyourcurrent
location.
Note
SettingbothMinimumDepthandMaximumDepthto0mwillturnoffbottom
detection.
4ClickOKtosavethesettingsandclosethedialog.
338106/A
23
Page 26
SimradES70
Howtocheckthecolourscalesettings
1ClicktheColourScaleiconontheTitleBartoopentheColourScaleinformation
pane.
→ColourScaleinformationpaneonpage53
2Observethatthecurrentcolourscaleisshown.
Youcanlterouttheweakestechoesbymanuallymodifyingthecolourthreshold.
aClicktheColourScaleiconontheTitleBartoopentheColourScaleinformation
pane.
bMovethecursortotheleftsideofthecolourscale.
Observethatthecursorchangesshapetoadualarrowline.
cClickontheleftedgeofthecolourscale,anddragtheedgetowardsright.
dObservethattheweakestcoloursareremovedfromthecolourscale,andthus
alsotheweakestechoesfromtheechogrampresentation.
3ClicktheDisplayicontoopentheDisplaymenu.
→Displaymenuonpage107
4OntheDisplaymenu,clickColourSetup.
ObservethattheColourSetupdialogopens.Thisdialogisusedtodenewhich
colourscaletouseontheES70presentations.Y oucantesttheoptionsbymaking
aselection,andclickingApply.Theresultingcolourscaleisimmediatelyshown
intheColourScaleinformationpane.
Whenthecolourscaleuses12colours,eachcolouralwaysrepresentsa3dBvalue
range.Using12coloursthusenablesmappingofa36dBvaluerangetocolours.
→ColourSetuponpage125
5ClickOKtoacceptthedefaultsettingsandclosethedialog.
Howtocheckthesizedistributionandshpositionsettings
Note
Sizedistributionandshpositioninformationpanesareonlyavailableifyouusea
splitbeamechosoundersystem!
1ClicktheSizeDistributioniconontheTitleBartoopentheSizeDistribution
informationpane.
24
338106/A
Page 27
Gettingstarted
TheSizeDistributioninformationpaneshowsahistogramofthesingleshechoes
detectedintheechogram.Foranaccuratex-axisvalue,placethecursoronavertical
barinthehistogram,andreadthevaluefromthelabel.TheabbreviationTSis
commonlyused.Itmeans“TargetStrength”,andthisisameasureofhowstrong
echotheindividualshesinthecurrentechogramgenerate.Theechostrength
indicatesthesizeoftheshes.TheSizeDistributioninformationpanethusprovides
amathematicalestimateofthesizesofallthechosenshspeciesintheechogram.
→SizeDistributioninformationpaneonpage54
Tochangetheshspecies,usetheFishSelectdialogopenedontheSetupmenu.
→FishSelectonpage139
2IntheSizeDistributioninformationpane,clicktheSetupiconinthetoprightcorner
toopentheSizeDistributiondialog.
TheSizeDistributiondialogallowsyoutoshapethesizedistributionhistogram
toyourownrequirements.Y oucansetupthemode,theupperandlowerlimits,
theaccuracy,andtheverticalresolution.
→SizeDistributiononpage166
3ClickOKtosavethesettingsandclosethedialog.
4ClicktheFishPositioniconontheTitleBartoopentheFishPositioninformation
pane.
TheFishPositioninformationpaneshowsthepositionwithinthebeamofthe
detectedsingleechoesforthecurrentping(largestcircles)andthethreeprevious
ping(smallercircles).Thecoloursindicatetheechostrength.
→FishPositioninformationpaneonpage55
Howtochecktheechogramsettings
1ObservetheES70echogram.
Ifyouhavetwoormorechannels(transducers/frequencies),observethetabson
theT askbar.
→Displayorganisationonpage34
2Clickoneofthetransducertabs.Observethatonlytheechogramfromtheselected
frequencychannelisshown.
Bydefault,twoechogramsareshownforeachfrequencychannel.Thetop
echogramissurfacerelated,whilethebottomechogramisbottomrelated.Several
echogramtypesareprovided.
338106/A
25
Page 28

SimradES70
•Surface:Theechogramisrelatedtotheseasurface.Startdepth(upperechogram
boundary)andverticalrange(acrossechogram)aremanuallyselectedbythe
StartDepthandRangebuttonsontheMainmenu.
→StartRangeonpage114
→Rangeonpage113
•Bottom:Theechogramisrelatedtothedetectedbottom.Stopdepth(lower
echogramboundary)andverticalrangearemanuallyselectedbytheStartDepth
andRangebuttonsontheMainmenu.Theechogramisonlydrawnforpings
havingasuccessfulbottomdetection.
•Pelagic:ThisechogramisnearlyidenticaltotheSurfaceechogram.However,
thebiomasscalculationsarenotrestrictedbythebottomdetection.Thismeans
thatthebottomechowillbeincludedincalculationsifitappearswithinthe
chosenrange.
Example:Ifyouareinvestigatingalargeschoolofpelagicsh,settheStart
RangeandRangetoenclosetheschool.Iftheschoolislargeenough,aSurface
echogrammaymistakeitforbottom,andthebiomassreadingswillbewrong.
ThePelagicechogramwillhoweverdisregardthebottomdetection,andgivea
correctestimateofthebiomass.
•Trawl:Trawlsensorsystemscommunicateheadropedepthand
headrope-to-footropedistancetotheES70atregularintervals.Theechogram
coverstheverticalopeningofthetrawlincludingasmallmarginateachside.
Theheadropeandfootropemarginsareidentical.Thebiomasscalculationsare
notrestrictedbythebottomdetection.
TheirsizeisselectedintheTrawldialog.Theheadrope-to-footropedistancecan
bemanuallysetintheTrawldialogfortrawlsensorsystemsnotmeasuringthe
trawlopening,orwhenthemeasuredheadrope-to-footropedistanceisunreliable.
Theechogramisonlydrawnwhentrawlpositioninformationisavailable.
→Trawlonpage145
3Movethecursorovertheechogram.
Observethatarectangular“tooltip”labelisshown.Itprovidesinformationabout
theechoesatthecursor’spresentposition.Whichinformationtoincludeinthelabel
isdenedintheDisplayOptionsdialog.
→DisplayOptionsonpage130
4ClicktheHorizontaltab.Observethattheechogramchannelsareshownhorizontally.
5ClicktheV erticaltab.Observethattheechogramchannelsareshownvertically.
6Clickononeoftheechograms.
Observethattheechogramthenappearswithathickborderline.Theechogramyou
haveselectedisnowthe“active”echogram.AnychangesmadeintheEchogram
dialogwillbydefaultonlyapplytothisechogram.
→Echogramsonpage44
7OntheActivemenu,clickEchogram.
26
338106/A
Page 29
Gettingstarted
ObservethattheEchogramdialogopens.Thisdialogisusedtocontrolthe
appearanceoftheactiveechogram.
→Echogramonpage158
8IntheEchogramdialog,checkthattheLinestabisshown.
TheLinestabintheEchogramdialogallowsyoutochangetheappearanceofthe
bottomline.Y oucanaddanextrabottomline,andinadditiontothisyoucanenable
eitherawhitelineorahardnessindicatorline.Thetaboffersseveralhorizontal
informationlines,andyoucanchoosetheverticalscaleoftheechogram.Finally,
theLinestabofferstimeordistancemarkers,andyoucanenableannotations.
9ClickBottomlineandWhitelinetoenablethese.Observethechangesonthe
echogram.
10ClicktheEchogramtab.
TheEchogramtabintheEchogramdialogallowsyoutoselectwhichTVGcurveto
usefortheechogram.Y oucanchoosefromseveralstandardcurves,ormakeyour
own.Thetabalsoallowsyoutochoosewhichtypeofechogramyouwishtodisplay.
→AboutTVGgainonpage205
11ChangetheEchogramT ypetoseethevariations.
12ClicktheHorizontalAxistab.
TheHorizontalAxistabintheEchogramdialogallowsyoutochoosethehorizontal
scaleoftheechogram.Thiscontrolshow“fast”theechogrammovesfromright
towardsleftacrossthedisplay.
13Trythevariousoptionstoseethevariationsontheechogram.
14ClickOKtosavethecurrentsettingsandclosethedialog.
Howtochecktherangesettings
1Observetheverticalrangeoftheechograms.
Notethattheverticalrangeissetupdifferentlydependingontheechogramtype.
2Clickinasurfacerelatedechogramtomakeit“active”.
3ObservetheRangebuttonontheMainmenu.
TheRangefunctionallowsyoutospecifytheverticalrangeofthewatercolumn
coveredbytheechogram.Therangeisdenedfromaselectedstartrange,and
downtoavaluebeneaththecurrentbottomdepth.Thevalueshownandselectedis
bydefaultappliedonlytothecurrentlyselectedechogram.
4ObservetheStartRangebuttonontheMainmenu.
338106/A
27
Page 30

SimradES70
StartRangeallowsyoutospecifythestartdepthoftheechogram,thatisfrom
whichdepthinthewatercolumnthepresentationshallstart.Thevalueshownand
selectedisappliedtothecurrentlyselectedechogramtype.
Example:Inasurfaceechogram,settheStartRangevalueto0meters.Thiswill
maketheechogramstartfromtheseasurface(providedthatthetransduceroffset
hasbeendened).SetRangetothecurrentdepthplus20meters.Theechogramwill
nowshowtheareafromtheseasurfaceanddownto20meters“below”thebottom.
Thebottomcontouriseasilydetectedwhenthedepthchanges.
Example:Inasurfaceechogram,settheStartRangevalueto10meters.Thiswill
maketheechogramstartfrom10metersbelowtheseasurface(providedthatthe
transduceroffsethasbeendened).SetRangetothecurrentdepthplus20meters.
Theechogramwillnowshowtheareafrom10metersbelowtheseasurface,and
downto10meters“below”thebottom.Thebottomcontouriseasilydetected
whenthedepthchanges.
5SetRangetoAuto,andsetStartRangeto0.
Observethechangesmadetothesurfacerelatedechogram.
6Clickinabottomrelatedechogramtomakeit“active”.
7ObservetheRangeandStartRangebuttonsontheMainmenu.
Example:Inabottomechogram,settheStartRangevalueto–5meters.This
willmaketheechogramstartfrom5metersabovethebottom.SetRangetothe5
metersplus10=15meters.Theechogramwillnowshowtheareafrom5meters
abovethedepth,anddownto10meters“below”thebottom.Thebottomcontour
willappearasaatline.
8SetRangeto15,andsetStartRangeto5.
Observethechangesmadetothebottomrelatedechogram.
Echosounderpresentations
ThissectiondescribestheoveralllayoutofthepresentationprovidedbytheES70echo
sounder.
28
338106/A
Page 31

Gettingstarted
Theexampleshowsadualfrequencyechosounderusingtwosplit-beamtransducers(38
and120kHz).ThescreencapturehasbeenmadewhileinReplaymode.
ATitleBar
TheTitleBarcontainsiconstoopenthevariousinformationpanes,aswellas
buttonstoinitiatespecicfunctions.
BEchogram(s)
OneormoreEchogramisdisplayedusingthelargestportionofthescreen.The
presentationlayoutiscontrolledbythefunctionbuttonsontheStatusbar.Youcan
displayindividualechogramsforeachfrequencyinuse,oryoucanlayoutthe
presentationofallfrequencieseitherhorizontallyorvertically.
AdditionalinformationpanesmaybeselectedontheTitleBarusingtherelevant
icons.
CMainmenu
Themenusystemisbydefaultlocatedattherightsideofthedisplaypresentation.
Themainmenuisalwaysvisible,butmaybehiddenfromview.Toopena
sub-menu,clickoneoftheiconsatthebottomofthemainmenu.
DT askbar
338106/A
29
Page 32

SimradES70
TheT askbarstretchesacrosstheentirepresentationwidthatthebottomofthe
display.Ontheleftside,dedicatedfunctionbuttonsallowsyoutocontrolthe
presentationlayout.
EReplaybar
TheReplaybarcontrolstheplaybackwheninReplaymode.Itisonlyvisible
inthismode.
Foramoredetaileddescriptionoftheechogrampresentationsandthedisplayviews,
seeDisplayviewsonpage34.
TitleBar
TheES70TitleBarislocatedonthetopofthedisplaypresentation,anditisstretched
fromthefarlefttothefarrightside.
ABrandandproductnameidentication
BOperationbutton;Menu
COperationbuttons;ScreencaptureandRecord
DIconstoopeninformationpanes
ENavigationalinformation
FFunctionbuttons(Messages,Helpandoperatingsystemfunctions)
TitleBarelements
•Brandandproductname:Thiselementidentiesthemanufacturerandtheproduct.
→Logoandproductnameonpage37
•Operation:Thesebuttonsareusedtocontrolbasicoperationalfunctions.
→Operationbuttonsonpage37
•Informationpanes:Theiconsareusedtoopenandclosededicatedinformationpanes.
→Informationpaneiconsonpage38
•Navigation:Thesearenotbuttons,butinformationeldsprovidingcurrentdata
relatedtothevesselmovements.
→Navigationalinformationonpage40
•Function:Thesebuttonsareusedtocontrolbasicfunctionssuchasscreencaptures,
help,menuappearance
→Functionbuttonsonpage42
FormoredetailedinformationabouttheTitleBar,seeTitleBaronpage36.
30
338106/A
Page 33

Taskbar
TheT askbarislocatedatthebottomofthedisplay.TheT askbarcontainstabstocontrol
theechogrampresentations,aswellastimeanddateinformation.
AEchogrambrowser
BPresentationformat
CTransducer/echogrampresentation
DDate
ETime
Formoreinformation,seeTaskbaronpage58.
Gettingstarted
Themenusystem
Thissectionprovidesashortintroductiontothemenusystem,andexplainsthebasic
useoftheES70menubuttons.
Formoreinformationaboutthemenusystem,seeThemenusystemonpage102.
Menuhierarchy
ThemenusystemontheES70isbydefaultplacedontherighthandsideofthedisplay
presentation.Y oucanhowevereasilymovethemenutotheleftsideusingtheDisplay
Optionsdialog,orhideitfromviewwiththeMenubuttonontheTitleBar.Themain
menuisshort,andthefoursub-menusareopenedbyclickingonthefouricons.
Themainmenuprovidesalimitednumberofkey
functions,whilethesub-menusofferawiderrangeof
parameters.
Menuhierarchy
1TheMainmenuprovidestheparametersmostfrequentlyusedduringnormal
operation.
2TheOperationmenucontrolsthemainoperationalparameters.
338106/A
31
Page 34

SimradES70
3TheDisplaymenucontrolsthevisualaspectsofthesystem,suchasparameters
relatedtothedisplaypresentation.
4TheSetupmenuallowsyoutocontrolthecongurationofthesignalprocessing,as
wellassysteminstallationandmaintenance,andtheinterfacestoperipheraldevices.
5TheActivemenuhasitscontentlinkedtothecurrentactiveitem(vieworobject).
Useittoaccessspecialfeaturesavailablefortheselecteditem.
Menubuttons
Eachmenucontainsseveralcommandbuttons.Eachbuttonshowsthefunctionofthe
button,someofthemalsodisplaysthecurrentparametersetting.Themajorityofthe
buttonsineachmenueldhavethesefunctions:
•Youcanincreaseanddecreaseparametervaluesbyclickingthebutton.
•Youcanchangeparametervaluesbymovingthecursorsideways.
•Youcanchangeparametervaluesbymeansofthescrollwheelonthemouseor
trackball.
•Youcanenterparametervaluesfromthekeyboard(ifyouhaveone).
•Youcanselectparametervaluefromthebutton’ssub-menu.
•Youcanopenadedicateddialog.
Howtoselectanumericalparameterusingthe+/-buttons
1Movethecursortoeithersideofthebutton,andobservethatthebackgroundcolour
changes.
aClickonthel
bClickonther
e f t sideofthebuttontodecreasethenumericalvalue.
i g h t sideofthebuttontoincreasethenumericalvalue.
Howtoselectanumericalparameterbymovingthecursorhorizontally
1Placethecursoronthemiddleofthebutton.
2Clickandholdtheleftmousebuttondepressed.
3Movethecursorhorizontally:lefttodecreasetheparametervalue,orrightto
increaseit.
4Releasethemousebuttonwhentherequestedvalueisshown.
Howtoselectanumericalparameterbymeansofthescrollwheel
1Placethecursoronthemiddleofthebutton.
32
338106/A
Page 35

Gettingstarted
2Spinthescrollwheelineitherdirectiontoincreaseordecreasetheparametervalue.
3Releasethescrollwheelwhentherequestedvalueisshown.
Howtoselectanumericalparameterusingthekeyboard
1Clickthemiddlesectionofthebuttontoopenatexteld.
2Enterthenumericalvalueintothetexteld.
Ifthenumericalvalueexceedsthepermittedrangefortheparameter,theframein
thetexteldwillbered.Youwillthennotbeabletoenterthevalue.
3PresstheEnterkey.
Howtoselectaparameterusingasub-menu
1Clickthemiddlesectionofthebuttontoopenasub-menu,thenclicktherequested
parametervalue.
Thechosenvalueisapplied,andthesub-menuisautomaticallyclosed.
2Wheneverapplicable,youcanalsoaccessthesub-menubyclickingtheleftand
rightsideofthebutton,butthismethodwillnotshowyouthemenuchoices.
aClickonthel
bClickonther
e f t sideofthebuttontoselectalowersub-menuchoice.
i g h t sideofthebuttontoselectahighersub-menuchoice.
Howtoselectparametersusingadialog
1Clickanywhereonthebuttontoopenaseparatedialog.
338106/A
33
Page 36

SimradES70
Displayviews
ThischapterprovidesabriefoverviewoftheinformationdisplayedbytheES70Fish
ndingechosounder,andhowitisorganised.
Topics
•Displayorganisationonpage34
•TitleBaronpage36
•Replaybaronpage43
•Mainmenuonpage43
•Echogramsonpage44
•Informationpanesonpage50
•Taskbaronpage58
•Screencapturesonpage59
Displayorganisation
AtypicalES70Fishndingechosounderdisplaypresentationisshown.
ATitleBar
TheTitleBaridentiesthelogo,andprovidesseveralconsandbuttons.Theseare
usedtohideorretrievethemenusystemandtheinformationpanes,andtoenable
basicsystemfunctions.
→TitleBaronpage36
→Informationpanesonpage50
BEchogram(/s)
TheEchogram(s)takesupthelargestpartoftheechosounderwindow.
Bydefault,youwillhavetwoechogramsforeachfrequencychannel(transducer).
Thesecanbepresentedhorizontallywithoneovertheother,ornexttoeachother,
bymeansofthetabsontheT askbar(D).
→T askbaronpage58
Youcanmodifythesizeoftheechogramsbymovingtheboundarylinesbetween
theechograms.Clickonaboundaryline,holdthebuttondepressed,andmovethe
linehorizontallyorvertically.
34
338106/A
Page 37

Ifyouclickinanechogram,theechogramisselectedtobe“active”.The“active”
echogramisidentiedwithathickborder.Ifyouchangeparametersrelatedtothe
echogram,thesearebydefaultonlyappliedtothe“active”echogram.
CMainmenu
TheMainmenuisbydefaultlocatedontherighthandsideoftheechosounder
presentation.Toopenanyofthesub-menus,clicktheicons.Tohideorretrievethe
Mainmenu,clicktheMenubuttonontheTitleBar.
→Mainmenuonpage43
Displayviews
DT askbar
TheTaskbarislocatedatthebottomoftheechosounderpresentation.
→T askbaronpage58
EReplaybar
DuringreplayadedicatedReplaybarisshownbelowtheTitleBar.TheReplaybar
allowsyoutoretrievesavedles,andtocontroltheplayback.
→Replaybaronpage43.
338106/A
35
Page 38

SimradES70
FSub-menus
Foursub-menusmaybeopenedfromthefouriconsinthebottomoftheMainmenu.
→Mainmenuonpage43
GInformationpanes
YoucanchoosefromseveralInformationpanestoprovideyouwithadditionaldata.
ThesepanesareselectedfromthebuttonsontheTitleBar.Thepanescanbemoved
aroundontheechogrampresentation,andyoucanchangetheirsizes.Thepanesare
transparent,soechograminformationdisplayedbehindthemarenotlost.
→Informationpanesonpage50
TitleBar
TheES70TitleBarislocatedonthetopofthedisplaypresentation,anditisstretched
fromthefarlefttothefarrightside.
ABrandandproductnameidentication
BOperationbutton;Menu
COperationbuttons;ScreencaptureandRecord
DIconstoopeninformationpanes
ENavigationalinformation
FFunctionbuttons(Messages,Helpandoperatingsystemfunctions)
TitleBarelements
•Brandandproductname:Thiselementidentiesthemanufacturerandtheproduct.
→Logoandproductnameonpage37
•Operation:Thesebuttonsareusedtocontrolbasicoperationalfunctions.
→Operationbuttonsonpage37
•Informationpanes:Theiconsareusedtoopenandclosededicatedinformationpanes.
→Informationpaneiconsonpage38
•Navigation:Thesearenotbuttons,butinformationeldsprovidingcurrentdata
relatedtothevesselmovements.
→Navigationalinformationonpage40
36
338106/A
Page 39

•Function:Thesebuttonsareusedtocontrolbasicfunctionssuchasscreencaptures,
help,menuappearance
→Functionbuttonsonpage42
Logoandproductname
TheSimradlogoandtheproductname(ES70)isshown.
Double-clicktheSimradlogotoreducethesizeoftheES70presentation.Double-click
onemoretimetorestoretheoriginalsize.
Operationbuttons
Displayviews
Menubutton
ClickonceontheMenubuttontohidethemenu,andonemoretimetobringitback
again.Whenthemenuishidden,itwilltemporarilybeshownontheleftandrighthand
sideofthedisplayifyoumovethecursortothatposition.
→Mainmenuonpage43
→Themenusystemonpage102
Screencapturebutton
Clickthisbuttononcetocreateascreencaptureofthecurrentechogrampresentation.To
viewtherecordedimage,clickScreenCaptureontheTaskbartoopentheimagebrowser.
→Howtosaveanechogramonpage64
→Screencapturesonpage59
Recordbutton
Clickthisbuttontostartandstoprecording.
338106/A
37
Page 40

SimradES70
TherecordingfunctionissetupusingtheparametersavailableontheRecordbutton
ontheOperationmenu.
→Howtosaverawechogramdataonpage66
→Recordonpage123
Informationpaneicons
TheSimradES70offersseverali
n f o r m a t i o n p a n e s toprovideadditionalanddetailed
datafromtheechogram.Thepanesareopenedandclosedusingthepanebuttonson
theTitleBar.
Inordertoopenaninformationpane,youmustrstclickinanechogrampresentationto
makeit“active”.Bydoingthisyouselectfrequencychannel(transducer).Inmostcases,
thedataintheinformationpaneyouopenwillonlybevalidfortheselectedechogram.
Note
Someoftheinformationpanesareoptional.Theyarethusnotavailableforuseunlessa
licencecodeisavailable.Inordertoobtainalicence,consultyourlocaldealer .
Depth
ClickthisbuttontoopenandclosetheDepthinformationpane.Thispaneprovidesthe
currentdepthasmeasuredbytheselectedtransducer.
→Depthinformationpaneonpage51
Biomass
ClickthisbuttontoopenandclosetheBiomassinformationpane.Thispaneprovidesthe
currentbiomassascalculatedbytheechosounderbasedonthecurrentechogram.
[1]
→Biomassinformationpaneonpage51
BottomHardness
1.Biomassisanoptionalfunction.InordertoactivatetheBiomassinformationpane,youmustobtaina
licence.
38
338106/A
Page 41

Displayviews
ClickthisbuttontoopenandclosetheBottomHardnessinformationpane.Thispane
providesthebottomhardnessinthecurrentechogram.
[2]
→BottomHardnessinformationpaneonpage52
ColourScale
ClickthisbuttontoopenandclosetheColourScaleinformationpane.Thispaneshows
youthecoloursyouarepresentlyusinginyourechogrampresentation.Y oucanalso
manuallymodifythecolourscaletolteroutweakechoes.
→ColourScaleinformationpaneonpage53
SizeDistribution
ClickthisbuttontoopenandclosetheSizeDistributioninformationpane.Thispane
showsyouthecoloursyouarepresentlyusinginyourechogrampresentation.
→SizeDistributioninformationpaneonpage54.
FishPosition
ClickthisbuttontoopenandclosetheFishPositioninformationpane.Thispaneshows
youthepositionwithinthebeamofthedetectedsingleechoes.
[4]
→FishPositioninformationpaneonpage55
EchoPosition
[3]
2.Bottomhardnessisanoptionalfunction.InordertoactivatetheBottomHardnessinformationpane,
youmustobtainalicence.
3.TheSizeDistributioninformationpaneisonlyavailableifyourES70isequippedwithoneormore
splitbeamtransceivers.
4.TheFishPositioninformationpaneisonlyavailableifyourES70isequippedwithoneormoresplit
beamtransceivers.
338106/A
39
Page 42

SimradES70
ClickthisbuttontoopenandclosetheEchoPositioninformationpane.Thispaneshows
youthepositionwithinthebeamofthedetectedsingleechoes.
[5]
→EchoPositioninformationpaneonpage56
Zoom
ClickthisbuttontoopenandclosetheZoominformationpane.Thispaneallowsyou
tozoominonaselectedareaofthecurrentechogram.
→Zoominformationpaneonpage57
History
ClickthisbuttontoopenandclosetheHistorypane.Thispaneallowsyoutoviewthe
previouslysavedechogramsforthecurrentlyactiveechogram.
→Historyinformationpaneonpage58
Navigationalinformation
Thesearenotbuttons,buteldsprovidingusefulinformationrelatedtothevessel
movements.Y oucanchoosewhichinformationtobedisplayedifyouopentheDisplay
OptionsdialogfromtheDisplaysub-menu.
Note
ThisnavigationalinformationontheTitleBarmustnotbeusedfornavigation!
→DisplayOptionsonpage130
Geographicallocation
ProvidedthataGPSsystemisconnectedtotheES70,thiseldontheTitleBarwill
displaythevessel’sgeographicalpositioninlongitudeandlatitude.
5.TheEchoPositioninformationpaneisonlyavailableifyourES70isequippedwithoneormoresplit
beamtransceivers.
40
338106/A
Page 43

Displayviews
ThecommunicationwiththeexternalGPSsystemissetupusingtheNavigationbutton
ontheSetupmenu.
→Navigation;Positiontabonpage141
Vesselheading
ProvidedthataGPSorcompasssystemisconnectedtotheES70,thiseldontheTitle
Barwilldisplaythevessel’scurrentheading.
ThecommunicationwiththeexternalGPSsystem,headingsensororgyrocompassisset
upusingtheNavigationbuttonontheSetupmenu.
→Navigation;Headingtabonpage144
Vesselspeed
ProvidedthataGPSorspeedlogsystemisconnectedtotheES70,thiseldontheTitle
Barwilldisplaythevessel’scurrentspeed.
ThecommunicationwiththeexternalGPSsystemorspeedsensorissetupusingthe
NavigationbuttonontheSetupmenu.
→Navigation;Speedtabonpage142
Watertemperature
ProvidedthatatemperaturesensorisconnectedtotheES70,thiseldontheTitleBar
willdisplaythewatertemperature.
Note
ThisfunctionalityisnotimplementedinSWversion1.0.0.
Depth
ThecurrentdepthforeachofthetransducersconnectedtotheES70canbeshown.
338106/A
41
Page 44

SimradES70
Functionbuttons
ThevefunctionbuttonsarelocatedonthefarrightsideoftheTitleBar.
Messagebutton
ThisMessagebuttonwillindicatewhentheES70systemhasissuedamessage.Clickthe
buttontoopentheMessagedialog.Ifyouholdthemousecursoroverthebutton,atooltip
rectanglewillprovidealistofthemessagesthatyouhavenotacknowledged.
→Messagesonpage176
Helpbutton
ClickthisbuttontoopentheES70contextsensitiveon-linehelp.Thebuttonopens
thehelpsystemonitsstartpage.
Minimizebutton
ClickthisbuttontominimizetheES70displaypresentation.Thisisanoperatingsystem
function.
Resizebutton
ClickthisbuttontochangethesizeoftheES70displaypresentation.Thisisanoperating
systemfunction.
Exitbutton
ClickthisbuttontoclosetheES70program.
→PowerOn/Offproceduresonpage19
42
338106/A
Page 45

Displayviews
Replaybar
TheReplayBarisautomaticallyactivatedonceyouselectReplaymode.Thebaris
positioneddirectlybelowtheTitleBar.
AStop:Clickthisbuttontostoptheplayback.
BPlay/Pause:Clickthisbuttontostarttheplayback,ortopauseit.
CReplayspeed:Clickthisslidertoadjustthereplayspeed.
DFileselect:Thisbuttonshowswhichleyouarecurrentlyplaying,Clickthebutton
toopentheReplaydialog.
→ReplayFileonpage177
EProgress:Thisbarshowsyouthereplayprogressofthecurrentle.Ifyouhave
chosentoloopthereplayle(s),thegreenindicatorswillstartfromlefteverytime
thestartoftheleappears.
Mainmenu
Themainmenuisbydefaultlocatedontherighthandsideoftheechosounder
presentation.
Themainmenuprovidesalimitednumberofkey
functions,whilethesub-menusofferawiderrangeof
parameters.
YoucanhidethemenubyclickingtheMenubuttonon
theTitleBar.
YoucanplacethemenuontheleftsideoftheES70presentationbymeansoftheMenu
ontherightsideoptionintheDisplayOptionsdialog.
→DisplayOptionsonpage130
Menuhierarchy
1TheMainmenuprovidestheparametersmostfrequentlyusedduringnormal
operation.
2TheOperationmenucontrolsthemainoperationalparameters.
338106/A
43
Page 46

SimradES70
3TheDisplaymenucontrolsthevisualaspectsofthesystem,suchasparameters
relatedtothedisplaypresentation.
4TheSetupmenuallowsyoutocontrolthecongurationofthesignalprocessing,as
wellassysteminstallationandmaintenance,andtheinterfacestoperipheraldevices.
5TheActivemenuhasitscontentlinkedtothecurrentactiveitem(vieworobject).
Useittoaccessspecialfeaturesavailablefortheselecteditem.
Formoreinformationaboutthemenusystem,seeThemenusystemonpage102.
Echograms
Surfaceechogram
Thisechogramisrelatedtotheseasurface.Startdepth(upperechogramboundary)and
verticalrange(acrossechogram)aremanuallyselectedbytheStartDepthandRange
buttonsontheMainmenu.
AThisisthestartdepthoftheechogram.
Inasurfaceechogramitisnormallysetup
withStartRange=0,ortoasmallvalueto
starttheechogramimmediatelyunderthe
keel.
BThisisthebottom.
Thetotalechogramrange(A)to(F)isdened
withtheRangebuttonontheMainmenu.
Unlessspecicconditionsapply,oryouwish
tocontroltherangemanually,useRange=
Auto.
Example:Inasurfaceechogram,settheStart
Rangevalueto0meters.Thiswillmakethe
echogramstartfromtheseasurface(provided
thatthetransduceroffsethasbeendened).
SetRangetothecurrentdepthplus20meters.
Theechogramwillnowshowtheareafrom
theseasurfaceanddownto20meters
“below”thebottom.Thebottomcontouris
easilydetectedwhenthedepthchanges.
CThistextidentiesthetransducerusedtocreatetheechogram.
DThisisthescopeview.
Thisviewpresentsindividualcolourlines.Thecolourandlengthofeachline
reectsthereceivedechoamplitude.
44
338106/A
Page 47

Displayviews
EBydefault,the“pingtime”andthedepthrangeisshowninthebottomleftsideof
theechogram.Inthebottomrightcorner,the“pingtime”isthesameascurrent.
ThisinformationcanbechangedusingtheoptionsontheHorizontalAxistabinthe
Echogramdialog.
FThisisthelowerendofthedepthrange.Itisnormallyafewmetersbelowthe
bottomcontour,dependingonthechosenrange.
Relatedtopics
•StartRangeonpage114
•Rangeonpage113
•Echogramonpage158
Bottomechogram
Thisechogramisrelatedtothedetectedbottom.Stopdepth(lowerechogramboundary)
andverticalrangearemanuallyselectedbytheStartDepthandRangebuttonsonthe
Mainmenu.Theechogramisonlydrawnforpingshavingasuccessfulbottomdetection.
AThisisthestartdepthoftheechogram.
Inabottomechogramitisnormallyitisset
upwithStartRangesettoarelativesmall
negativevalue.Thevaluedeneshowmany
meterabovethebottomtheechogramwill
start.
BThisisthebottom.
Sincetheechogramisrelatedtothisbottom,itappearstobeat.Fishescloseto
thebottomistheneasytosee.
Therangefromthestartdepthabovethebottomanddowntosomedistancebelow
theactualbottomisdenedwiththeRangebuttonontheMainmenu.
Example:Inabottomechogram,settheStartRangevalueto–5meters.This
willmaketheechogramstartfrom5metersabovethebottom.SetRangetothe5
metersplus10=15meters.Theechogramwillnowshowtheareafrom5meters
abovethedepth,anddownto10meters“below”thebottom.Thebottomcontour
willappearasaatline.
CThistextidentiesthetransducerusedtocreatetheechogram.
DThisisthescopeview.
Thisviewpresentsindividualcolourlines.Thecolourandlengthofeachline
reectsthereceivedechoamplitude.
338106/A
45
Page 48

SimradES70
EBydefault,the“pingtime”andthedepthrangeisshowninthebottomleftsideof
theechogram.Inthebottomrightcorner,the“pingtime”isthesameascurrent.
ThisinformationcanbechangedusingtheoptionsontheHorizontalAxistabinthe
Echogramdialog.
FThisisthelowerendofthedepthrange.Itisnormallyafewmetersbelowthe
bottomcontour,dependingonthechosenrange.
Relatedtopics
•StartRangeonpage114
•Rangeonpage113
•Echogramonpage158
Pelagicechogram
Thepelagicechogramappearsverysimilartothesurfaceechogram.However,the
biomasscalculationsarenotlimitedbythebottomdetection.
Example:Inapelagicechogram,settheStartRangevalueto20meters.Thiswillmake
theechogramstartfrom20metersbelowtheseasurface(providedthatthetransducer
offsethasbeendened).SetRangeto40meters.Theechogramwillnowshowthearea
from20metersbelowtheseasurface,anddownto60metersbelowthetransducer.
Providedthatthedepthislargerthan60meters,thebottomcontourisnotshown.
Relatedtopics
•StartRangeonpage114
•Rangeonpage113
•Echogramonpage158
Trawlechogram
Trawlsensorsystemscommunicateheadropedepthandheadrope-to-footropedistance
totheES70atregularintervals.Theechogramcoverstheverticalopeningofthe
trawlincludingasmallmarginateachside.Theheadropeandfootropemarginsare
identical.TheirsizeisselectedintheT rawldialog.Theheadrope-to-footropedistance
canbemanuallysetintheT rawldialogfortrawlsensorsystemsnotmeasuringthe
trawlopening,orwhenthemeasuredheadrope-to-footropedistanceisunreliable.The
echogramisonlydrawnwhentrawlpositioninformationisavailable.Thebiomass
calculationsarenotlimitedbythebottomdetection.
Relatedtopics
•StartRangeonpage114
•Rangeonpage113
•Echogramonpage158
46
338106/A
Page 49

Displayviews
Lines,markersandannotationsintheechograms
TheechogramsprovidedbytheES70maycontainadditionalinformation.
Bottomline
Thebottomcontourmaybeenhancedbyaddingabottomline.Thisisdoneinthe
EchogramdialogontheActivemenu.
→Howtoestablishhorizontalmarkersonpage71
→Bottomlineonpage211
→Echogram;Linestabonpage159
Whiteline
Thebottomcontourmayalsobeenhancedbyaddingawhiteline.
Thewhitelineisanextrathickwhitelinethatis
addedtojustbelowthebottom.Thewhiteline
willnotremoveinformation,itwillsimply“push”
theinformationfurtherdowninordertomakethe
bottomeasiertosee.
ThewhitelineisenabledintheEchogramdialogontheActivemenu.Itcannotbe
usedsimultaneouslywiththehardnessline.
→Howtoestablishhorizontalmarkersonpage71
→Whitelineonpage212
→Echogram;Linestabonpage159
Hardnessline
Thebottomhardnessmaybemonitoredusingthehardnessline.
338106/A
47
Page 50

SimradES70
Thehardnesslineisanextrathickcolourcoded
linethatisaddedtojustbelowthebottom.The
linewillnotremoveinformation,itwillsimply
“push”theinformationfurtherdowninorderto
makethebottomeasiertosee.Thecolourcoding
containsthehardnessinformation.
Thehardnesslinecannotbeusedsimultaneously
withthewhiteline.
ThehardnesslineisenabledintheEchogramdialog.
→BottomHardnessinformationpaneonpage52
→Howtoestablishhorizontalmarkersonpage71
→Hardnesslineonpage212
→Echogram;Linestabonpage159
Trawlline
Wheneveravailableandconnected,trawlsystems(PIandITI)communicateheadrope
depthand/orheadrope-to-footropedistancetotheES70atregularintervals.The
informationfromthesesensorsaredrawnashorizontallinesontheES70echogram.
ThetrawllineisenabledintheEchogramdialogontheActivemenu.
→Howtoestablishhorizontalmarkersonpage71
→Echogram;Linestabonpage159
VariableDepthline
Whenenabledahorizontaldepthlineisplacedwhereveryouclickintheechogram.This
istypicallyusedtomeasurethewaterdepth,thedepthofaschool,orevensinglesh.
Youcanclickontheline,andthendragitupor
down.
ThevariabledepthlineisenabledintheEchogram
dialogontheActivemenu.
48
338106/A
Page 51

→Howtoestablishhorizontalmarkersonpage71
→Echogram;Linestabonpage159
RangeOtherlines
ThisfeatureisusedwhenyousetupyourES70withbothasurfacerelatedandbottom
relatedechogramshownsimultaneously.
Whenenabled,twohorizontallinesinthesurface
echogramindicatetherangeselectedinthebottom
echogram.
Therangeotherlinesfunctionisenabledinthe
EchogramdialogontheActivemenu.
Displayviews
→Howtoestablishhorizontalmarkersonpage71
→Echogram;Linestabonpage159
Biomassline
Thebiomassmaybemonitoredusingthebiomassline.
Thebiomasslineisanextrathickbrightly
colouredlinethatisaddedtotheechogram.The
linewillidentifythevariationsinbiomass.To
adjusttheview,usethescale.
ThebiomasslineisenabledintheEchogram
dialog.
→Biomassinformationpaneonpage51
→Howtoestablishhorizontalmarkersonpage71
→Echogram;Linestabonpage159
Rangescales
RangescalesintheechogramcanbeenabledintheEchogramdialog.
338106/A
49
Page 52

SimradES70
→Howtoestablishhorizontalmarkersonpage71
→Echogram;Linestabonpage159
Verticalticks
WhenenabledintheEchogramdialog,thisfunctionplacesverticalmarkersonthe
echogram.
•Time:Thisoptionplacesashortverticallineisdrawnintheupperpartofthe
echogramonceeveryspeciednumberofminutes.
•Distance:Thisoptioninsertsashortverticallineisdrawnintheupperpartofthe
echogramonceeveryspeciednumberofnauticalmiles.
→Echogram;Linestabonpage159
Annotations
Annotationsmaybeaddedtotheechogramtopinpointspecialechoes,specialevents,
etc.AnnotationcanbeenteredmanuallyusingtheAnnotationdialog,ortheycanbe
importedfromperipheraldevices.
Inordertoseetheannotationsontheechogram,theymustbeenabledintheEchogram
dialog.
→Annotationsonpage137
→Echogram;Linestabonpage159
Informationpanes
TheSimradES70offersseverali
datafromtheechogram.Thepanesareopenedandclosedusingthepanebuttonson
theTitleBar.
Note
Someoftheinformationpanesareoptional.Theyarethusnotavailableforuseunlessa
licencecodeisavailable.Inordertoobtainalicence,consultyourlocaldealer .
n f o r m a t i o n p a n e s toprovideadditionalanddetailed
Aboutinformationpanes
Inordertoopenaninformationpane,youmustrstclickinanechogrampresentationto
makeit“active”.Bydoingthisyouselectfrequencychannel(transducer).Inmostcases,
thedataintheinformationpaneyouopenwillonlybevalidfortheselectedechogram.
50
338106/A
Page 53

Displayviews
Youcanchangethesizeoftheinformationpanetosuityourpreferences,andyoucan
moveitwithintheechogrampresentationitisvalidfor.Tochangeitssize,clickonthe
shadedareainthebottomrightcorner,holdthemousebuttondepressed,anddragto
requestedsize.T omoveaninformationpane,justclickinsideit,holdthemousebutton
depressed,andmoveittorequestedposition.
Theinformationpanesaretransparent,soyoucansafelyplaceapaneontopofthe
echogramwithoutlosingtheinformationbehindit.Thedegreeoftransparencyis
controlledbytheT ransparencybuttonontheDisplaymenu.
Allinformationpanesareprovidedwithsmallbuttonsinthetoprightcorner.
•Thetoprightbuttonclosestheinformationpane.Notethatyoucanalsoclosethe
paneifyouclickonemoretimeonitsbuttonontheTitleBar.
•Theotherbuttonwillrestoretheinformationpanetoitsoriginalsizeandlocation.
•Someoftheinformationpanesareprovidedwitha“tool”button.Thisbuttonsopens
adialogrelevanttotheinformationshowninthepane.
Depthinformationpane
TheDepthinformationpanedisplaysthecurrentdepthforthechosentransducerand
frequency.
TheT oolintheinformationpanebuttonopensthe
BottomDetectordialog.Thisdialogisalsoavailable
fromtheActivemenu.
→BottomDetectoronpage167
Toopenthisinformationpane,clicktheDepthiconontheTitleBar.
Biomassinformationpane
TheBiomassinformationpanedisplaysthecurrentbiomasscalculatedforthecurrentset
ofechogram.Onlythebiomasscalculatedforthecurrenttransducerfrequencyisshown.
338106/A
51
Page 54

SimradES70
Note
Biomassisanoptionalfunction.InordertoactivatetheBiomassinformationpane,
youmustobtainalicence.
Echogram:Youcanseebiomassfromthreedifferent
sources.
•UpperEchogram:Thisbiomassvalueiscalculated
fromtheshechoesfromthetopechogramfor
thechosenchannel.Bydefault,thisisasurface
echogram.
•LowerEchogram:Thisbiomassvalueiscalculated
fromtheshechoesfromthebottomechogramfor
thechosenchannel.Bydefault,thisisabottom
echogram.
•Zoom:Thisbiomassvalueiscalculatedfromthesh
echoesfromthecurrentlyzoomedarea.
Toopenthisinformationpane,clicktheBiomassiconontheTitleBar.
Relatedtopics
•Biomasslineonpage49
•Howtomonitorthecurrentbiomassonpage78
•Aboutbiomassonpage204
BottomHardnessinformationpane
TheBottomHardnessinformationpanedisplaysthecurrentbottomhardnesscalculated
usingthebottomechostrengthinthecurrentechogram.
Note
Bottomhardnessisanoptionalfunction.InordertoactivatetheBottomHardness
informationpane,youmustobtainalicence.
Theverticallineinthehardnesscolourscalepositions
thecurrentping.Thehardnessofthecurrentpingisalso
shownwiththenumericalvalue.
Thebottomhardnesscanalsobeindicatedbyenabling
thebottomhardnesslineintheEchogramdialog.
52
338106/A
Page 55

Displayviews
Thislineusesthesamecolourcodingastheinformationpane,butplacesthisasathick
lineimmediatelyunderthebottomlineintheechogram.
→Hardnesslineonpage212
→Echogram;Linestabonpage159
Toopenthisinformationpane,clicktheBottomHardnessiconontheTitleBar.
ColourScaleinformationpane
TheColourScalepanedisplaysthecurrentcolourscaleyouareusingfortheechogram
presentation.
Tochangethecolourscale,clickColourSetuponthe
Displaymenu.
Toopenthisinformationpane,clicktheColourScaleiconontheTitleBar.
Youcanlterouttheweakestechoesbymanuallymodifyingthecolourthreshold.
1ClicktheColourScaleiconontheTitleBartoopentheColourScaleinformation
pane.
2Movethecursortotheleftsideofthecolourscale.
Observethatthecursorchangesshapetoadualarrowline.
3Clickontheleftedgeofthecolourscale,anddragtheedgetowardsright.
4Observethattheweakestcoloursareremovedfromthecolourscale,andthusalso
theweakestechoesfromtheechogrampresentation.
Figure9Colourscalesusing12and64colours
12colours
64colours,Echosounder
64colours,Sonar
338106/A
53
Page 56

SimradES70
64colours,Greyscale
64colours,BI500colours
Relatedtopics
•Howtochangethecolourscaleandpresentationpaletteonpage69
•Howtochangethenumberofcoloursintheechogramonpage70
•ColourSetuponpage125
SizeDistributioninformationpane
TheSizeDistributionpaneprovidesavisualindicationonhowlargetheshesinthe
echogramare.Onlytheshesdetectedbythecurrenttransducerfrequencyareshown.
Note
TheSizeDistributioninformationpaneisonlyavailableifyourES70isequippedwith
oneormoresplitbeamtransceivers.
Toopenthisinformationpane,clicktheSizeDistribution
iconontheTitleBar.
TheSizeDistributioninformationpaneshowsa
histogramofthesingleshechoesdetectedinthe
echogram.Foranaccuratex-axisvalue,placethecursor
onaverticalbarinthehistogram,andreadthevalue
fromthelabel.TheabbreviationTSiscommonlyused.
Itmeans“TargetStrength”,andthisisameasureof
howstrongechotheindividualshesinthecurrent
echogramgenerate.Theechostrengthindicatesthesize
oftheshes.TheSizeDistributioninformationpanethus
providesamathematicalestimateofthesizesofallthe
chosenshspeciesintheechogram.
→SizeDistributioninformationpaneonpage54
Tochangetheshspecies,usetheFishSelectdialog
openedontheSetupmenu.
ThefollowinginformationisprovidedintheSizeDistributioninformationpane.
54
338106/A
Page 57

•Fishspecies:Thecurrentshspecies,asselectedintheFishSelectdialog,isshown.
→FishSelectonpage139
•Echogram:Y oucanseesizedistributionhistogramsfromthreedifferentsources.
–UpperEchogram:Thishistogramiscreatedbasedonshechoesfromthetop
echogramforthechosenchannel.
Bydefault,thisisasurfaceechogram.
–LowerEchogram:Thishistogramiscreatedbasedonshechoesfromthebottom
echogramforthechosenchannel.
Bydefault,thisisabottomechogram.
Ifyouhaveselectedonlyasmallverticalrangeclosetobottom,thehistogram
maybeempty.Thisbecausetheshvolumeissmallduetothelimitedrange
selected,andbecausethetargetstrengthalgorithmmusttakeintoconsideration
otherbottomechoesthansh.
–ZoomEchogram:Thishistogramiscreatedbasedonshechoesfromthecurrently
zoomedarea.
Displayviews
•Meanvalue:Thelargenumberaboveeachhistogramisthemeanvaluefromthe
tallestbar.TheunitreectsthemodechosenintheSizeDistributiondialog.
→SizeDistributiononpage166
Tochangethesettingsinthehistogram,clickSizeDistributionontheActivemenu.
Relatedtopics
•Howtomonitortheshsizedistributiononpage77
•SizeDistributiononpage166
•FishSelectonpage139
FishPositioninformationpane
TheFishPositioninformationpaneshowsthepositionwithinthebeamofthedetected
singleechoesforthecurrentping(largestcircles)andthethreepreviousping(smaller
circles).Thecoloursindicatetheechostrength.
338106/A
55
Page 58

SimradES70
Note
TheFishPositioninformationpaneisonlyavailable
ifyourES70isequippedwithoneormoresplitbeam
transceivers.
Source:Thisisthesourceoftheshposition
information.Intheexample,thesurfaceechogramis
usedtodeterminethelatestshpositions.
Toopenthisinformationpane,clicktheFishPositioniconontheTitleBar.
EchoPositioninformationpane
TheEchoPositionpaneshowsthepositionwithinthebeamofthedetectedsingleechoes
forthecurrentping(largestcircles)andthethreepreviousping(smallercircles).
Note
TheEchoPositioninformationpaneisonlyavailable
ifyourES70isequippedwithoneormoresplitbeam
transceivers.
Toopenthisinformationpane,clicktheEchoPosition
iconontheTitleBar.
ThisisbasicallythesameviewastheFishPosition.
howevertheechoesarehereviewedfromthesideand
notfromabove.
Source:Thisisthesourceoftheechoposition
information.Intheexample,thesurfaceechogramis
usedtodeterminethelatestechopositions.
56
338106/A
Page 59

Zoominformationpane
TheZoominformationpaneallowsyoutozoominonachosenareaonthecurrent
echogram.
OncetheZoominformationpaneisopened,the
zoomedareaisvisibleasadottedrectangleonthe
echogram.Y oucanchangethiszoomedareatoany
sizeandshape,theechoesinsidethezoomedareawill
alwaysbeshownintheZoominformationpane.
AreaFixedToV essel:Whentherectangularzoomed
areaisestablished,itcaneitherfollowtheechogram
whileitmovestowardstheleft,oritcanstayput.
WhenAreaFixedT oV esselisactive,thezoomedarea
willbepermanentlypositionedontheechogram.The
echoeswillthenrunthroughthearea,andthusalso
throughtheZoominformationpane.
Displayviews
Toopenthisinformationpane,clicktheZoomiconontheTitleBar.
Figure10Zoomexample
AZoominformationpane
BZoomedarearectangle
Inthisexample,thezoomedarearectangle
ispositioneddirectlyabovetheZoom
informationpane.Ifyouclickonanyofthe
fourcornersoftherectangle,youcandragit
toanysizeandshape.
338106/A
57
Page 60

SimradES70
Historyinformationpane
TheHistoryinformationpanedoesnotusethesamepresentationmethodastheother
panes.Thefunctionallowsyoutoviewpreviouslyrecordedechogramsequences.In
ordertodothis,thecurrent“active”echogramissplitintwo,andtheleftsideisused
todisplaytherecordedhistory.
ClicktheHistoryiconontheTitleBartoenablethisfunction.
Thisfunctionisusedtostoreechogramsonbitmapformat.TheES70willcontinuously
saveechogrampicturestoitsinternalharddisk.Thesecanberecalledonthedisplay.
TheinformationintheHistorypresentationisthesameasontheoriginalechogram
presentation.
Thenumberofhistorylesislimited.Afterreachingthemaximumnumberofles,the
newestechogrampictureoverwritestheoldestone.Thehistoryfunctionstillallowsyou
toquicklylookthroughechogrampicturescoveringseveralhours.
Figure11Historypresentation
ATheoriginal“active”echogram
presentation
BTheoriginalscopeviewpresentation
CTheHistorypresentation
DClickthisbuttonanddragsidewaysto
scrollthroughtherecordedimages
Thehorizontalwidthofthehistorypresentationcanbeadjustedbyclickingtheright
border,anddraggingitsideways.
Taskbar
TheT askbarislocatedatthebottomofthedisplay.TheT askbarcontainstabstocontrol
theechogrampresentations,aswellastimeanddateinformation.
TheT askbarcontainsthefollowinginformation:
58
338106/A
Page 61

Displayviews
AScreenCaptures:Thistabhidesthecurrent“live”echogramsfromview,andallows
youtoseetheechogramimagesyouhavepreviouslysavedusingtheScreenCapture
buttonontheTitleBar.Theechogramsarepresentedinagraphicbrowser.Y oucan
openanyoftheimagesforacloserstudy,oryoucanaccessthelesdirectlyby
clickingtheOpenImageFolderbutton.
→Operationbuttonsonpage37
→Screencapturesonpage59
BPresentationformatIfonlyoneactivefrequencychannelisinuse,youwillhave
onlyoneechogram.Thesetabsarethennotshown.
•V ertical:Thistabplacesyourcurrentechogramsnexttoeachotherinavertical
presentation.
•Horizontal:Thistabplacesyourcurrentechogramsontopofeachotherina
horizontalpresentation.
CTransducerpresentationThesetabswillreecttheactualtransducersusedbythe
echosounder.Thetwotransducersshownherearejustanexample.Ifonlyone
transducerisinuse,youwillhaveonlyoneechogram.Thesetabsarethennot
shown.
•ES38:Thistaballocatestheechosounderpresentationtoonlyshowthe
echogramfromthistransducer.
•ES120:Thistaballocatestheechosounderpresentationtoonlyshowthe
echogramfromthistransducer.
DDate:Thiseldonthestatusbarpresentsthecurrentdate.Notethatduringreplay,
thedateofthereplayleisshown.An“R”isdisplayedinfrontofthedateto
identifythis.
ETime:Thiseldonthestatusbarpresentsthecurrenttime.Notethatduringreplay,
thetimesinthereplayleisshown.
Relatedtopics
•Howtoselectpresentationlayoutonpage69
Screencaptures
TheES70providesabuilt-inscreencapturefunction,andabrowsertoviewthesaved
images.
338106/A
59
Page 62

SimradES70
Figure12Screencapturebrowser
Tosaveanechogram,clicktheScreenCapturebuttonontheTitleBar.
Toviewtherecordedimage,clickScreenCaptureontheTaskbartoopentheimage
browser.
ClickOpenImageFoldertoopentheoperatingsystemfoldercontainingtheles.This
folderoffersoperatingsystemfunctionalitytoproviderenaming,copying,printing
anddeletingles.
60
338106/A
Page 63

Operationalprocedures
Operationalprocedures
Thischaptercontainsseveraloperationalproceduresexplaininghowyoucanputyour
ES70Fishndingechosoundertouse.
Note
TheseproceduresassumethatyouarefairlyfamiliarwiththeMicrosoftWindows
operatingsystem.PhrasesandterminologyareconsistentwiththeMicrosoftstyleguide.
Theproceduresalsoassumethatyouoperatetheechosounderwithamouseortrackball.
Topics
•Gettingstarted
–PowerOn/Offproceduresonpage19
–Howtochooseoperationalmodeonpage22
–Howtocheckthetransceiverandtransducersettingsonpage22
–Howtocheckthebottomdetectorsettingsonpage23
–Howtocheckthecolourscalesettingsonpage24
–Howtocheckthesizedistributionandshpositionsettingsonpage24
–Howtochecktheechogramsettingsonpage25
–Howtochecktherangesettingsonpage27
•Operation
–Howtochangethepingrateonpage63
–Howtosaveanechogramonpage64
–Howtosaverawechogramdataonpage66
–Howtoplaybackechogramsequencesonpage67
•Views
–Howtochangethesizeofthepresentationeldsonpage68
–Howtoselectpresentationlayoutonpage69
–Howtochangethecolourscaleandpresentationpaletteonpage69
–Howtochangethenumberofcoloursintheechogramonpage70
338106/A
61
Page 64

SimradES70
•Echograms
–Howtoselectechogrampresentationonpage70
–Howtoestablishhorizontalmarkersonpage71
–Howtoestablishverticalmarkersonpage72
–HowtoselectTVGgainonpage73
–Howtoremoveinterferenceandvessel’ sownnoisefromtheechogramsonpage74
–Howtoeasieridentifythebottomonpage74
•Range
–Howtochoosetheverticalrangeonpage75
–Howtochoosethestartrangeonpage75
•Bottomdetection
–Howtodenemaximumandminimumdepthonpage76
•Sizedistribution,biomassandshdensity
–Howtomonitortheshsizedistributiononpage77
–Howtoadjusttheshlengthforcorrectcalculationsonpage78
–Howtomonitorthecurrentbiomassonpage78
•Gain
–Howtoadjustthesignalgainonpage79
–HowtoadjusttheTVGgainonpage80
•Powerandpulseduration
–Howtochoosepassivemodeonpage81
–Howtochangetheoutputpoweronpage81
–Howtoadjustthepulsedurationonpage82
•Installation
–Howtoinstallafrequencychannelonpage82
–Howtodisconnectafrequencychannelonpage83
–HowtomodifyanIPaddressonpage84
–Howtoinstallandupgradethesoftwareonpage85
•Externalinterfaces
–HowtosetuptheEthernetoutputinterfaceonpage88
–HowtosetuptheSimradITITrawlsysteminterfaceonpage89
–HowtosetuptheSimradPICatchmonitoringsysteminterfaceonpage90
–Howtosetupthesonarsysteminterfaceonpage91
–Howtosetupthenavigationsysteminterfaceonpage92
–Howtosetupthemotionsensorinterfaceonpage94
–Howtosetupthedepthoutputonpage95
–Howtosetuptheannotationinterfaceonpage96
62
338106/A
Page 65

Operationalprocedures
•Testandmaintenance
–Receivertestonpage97
–GPTpowerrecycleonpage98
–Accesstologlesonpage99
–Rulesfortransducerhandlingonpage99
–Rulesfortransducermaintenanceonpage100
–Approvedanti-foulingpaintsfortransducersonpage101
Arethereanyproceduresmissing?Areyouperforminganoperationthatwehavenot
explained?Writeane-mailtos
includetheprocedureinthenextversionofthismanual.
i m r a d . s u p p o r t @ s i m r a d . c o m andask.Wemaythen
Operation
Theseproceduresarerelatedtothebasicuseoftheechosounder.
Howtochangethepingrate
ThePingrateistheparameterthatcontrolshowoftentheechosoundershalltransmit
acousticenergy(a“ping”)intothewater.
Ifyouobserveapelagicechoonthesounder,anditseemstofollowthebottomcontour,
itmayinfactbeafalseechofromtheprevioustransmission(“ping”).Theonlyway
toremovethisfalseechoistoreducethepingrate.Ifyoudothis,alltheechoesfrom
thepreviouspingwillhavedisappearedbeforeyoutransmitthenext.Onoldpaper
basedechosoundersthepenspentalongtimeontherearsideofthepapertray,andthat
reducedthepingrate.TheES70isal
theenergyfromthepreviouspinghasdisappeared.
1ClicktheOperationiconundertheMainmenutoopentheOperationsub-menu.
2ClickPing,andselectOn.
o t faster,andyoumaysendoutapingevenbefore
Thetwoiconsprovidedbythisbuttoncanalsobeusedtoenableordisable
transmission.
•Thelefticon(darkrectangle)is“Off”.
•Therighticonis“On”.ItisalsousedtoinitiatesinglepingswhenSingleStep
modeisselected.
→Pingonpage118
3Howtochoosemaximumpingrate:
338106/A
63
Page 66

SimradES70
aClickPingMode,andselectMaximum.
ThiswillmaketheES70pingwithmaximumspeed.Thetimebetweeneach
pingisautomaticallydeterminedbythecurrentdepthandpulseduration.
→PingModeonpage119
4Howtodeneapinginterval:
aClickPingMode,andselectInterval.
bClickPingInterval,andselectthetime(inmilliseconds)betweeneachping.
→PingIntervalonpage120
5Howtotransmitsinglepings:
aClickPingMode,andselectSingleStep.
bToinitiateasingleping,clickonceontherighthandicononthePingbutton.
Howtosaveanechogram
Twowaystosaveechograms
•YoucanusetheScreenCapturebuttonontheTitleBar.Everytimeyouclickthis
buttonthecurrentechogramissavedasaJPGle.
Theadvantagewiththismethodisthatthelesaresmallindividualimagesandeasy
toscrollthrough.However,theimagesarexed,whatwasrecordedintherstplace
cannotbealtered.
•YoucanusetheRecordbuttonontheTitleBar,orontheDisplaymenu,tosaveraw
datasequences.
Everytimeyouinitiatethisfunctionyoustartarecordingprocesswhichsavesthe
sequenceofrawdatafromthetransceiver.Thissequencecanbereplayedlater.
Theadvantagewiththisfunction–savingrawdatasequences–isthatallthe
informationpresentedduringtherecordingaresaved.Thismeansthatyoucanchange
parameterslikeTVG,range,etc.duringtheplayback.However,thelesarelarge,
andplaybackmaybeatimeconsumingtask.
→Howtosaverawechogramdataonpage66
Howtosavesingleechograms
1ClicktheScreenCapturebuttonontheTitleBartosavethecurrentechogram.
64
338106/A
Page 67

Howtoretrieveasavedechogram
1OntheTaskbar,clickScreenCaptures.
Observethatthebuilt-inimagebrowserstarts.Allthecurrentlysavedechogram
imagesareshownasminiatures.
→Operationbuttonsonpage37
2Double-clickontheminiatureyouwishtosee.
3ClickReturnT oBrowsertoclosetheimage.
Howtocopyanddeleteechogramles
Operationalprocedures
1OntheTaskbar,clickScreenCaptures.
Observethatthebuilt-inimagebrowserstarts.Allthecurrentlysavedechogram
imagesareshownasminiatures.
→Operationbuttonsonpage37
2Intheimagebrowser,clickOpenImageFolder.
3Tocopyale:
aConnectaUSBmemorydevicetooneofthecomputer’sUSBsockets.
bSelectthele.
cRight-clicktoopentheshort-cutmenu.
dClickSendtoandselectthememorydevice.
4Todeleteale:
aSelectthele.
bRight-clicktoopentheshort-cutmenu.
cClickDelete.
5Toprintale:
aSelectthele.
bRight-clicktoopentheshort-cutmenu.
cClickPrint.
Notethatthisfunctionwillsendtheimagetothedefaultprinterusingdefaultprint
parameters.Ifyouwishtoapplymorecontroltotheprintingprocess,youmustcopy
theechogramimagetoanothercomputer,andopenitwithasuitableeditor.
338106/A
65
Page 68

SimradES70
Howtosaverawechogramdata
Twowaystosaveechograms
•YoucanusetheScreenCapturebuttonontheTitleBar.Everytimeyouclickthis
buttonthecurrentechogramissavedasaJPGle.
Theadvantagewiththismethodisthatthelesaresmallindividualimagesandeasy
toscrollthrough.However,theimagesarexed,whatwasrecordedintherstplace
cannotbealtered.
•YoucanusetheRecordbuttonontheTitleBar,orontheDisplaymenu,tosaveraw
datasequences.
Everytimeyouinitiatethisfunctionyoustartarecordingprocesswhichsavesthe
sequenceofrawdatafromthetransceiver.Thissequencecanbereplayedlater.
Theadvantagewiththisfunction–savingrawdatasequences–isthatallthe
informationpresentedduringtherecordingaresaved.Thismeansthatyoucanchange
parameterslikeTVG,range,etc.duringtheplayback.However,thelesarelarge,
andplaybackmaybeatimeconsumingtask.
→Howtosaverawechogramdataonpage66
Thisprocedureexplainshowtostorerawechogramdata.Eachsequenceofrawdata
–oftenregardedasa“line”duringasurvey–containsasetofechogramdatasaved
ondigitalformat.Oncesaved,youcanplaybackthisdatajustasifitwas“normal”
echogramdata.
Procedure
Note
Rawdatalesareverylarge.Ifyouwishtorecordlargeamountsofechogramrawdata,
makesurethatyouhaveenoughspaceonyouharddisk.
1ClicktheOperationiconundertheMainmenutoopentheOperationsub-menu.
2ClickRecordtoopenthesub-menu.
→Recordonpage123
3ClickFileOutputtoopentheFileOutputdialog.
4IntheFileOutputdialog;
66
338106/A
Page 69

aOntheDirectorytab,denetheleoutputdirectory.
bOntheRawDatatab,clickSaveRawDatatoenablethisexport.
Rawdataaretheechodatareceiveddirectlyfromtheoutputofthetransceiver.
ThedatacanlaterbereplayedontheES70.Thedatacontainsampledata,echo
soundercongurationdata,navigationdata(NMEAformat)andannotations
(ifany).
cDeneanyotherparameterstotyourrequirements.
→FileOutputonpage178
5ClickOKtosavethecurrentsettingsandclosethedialog.
6Tostartrecording,youhavetwochoices:
aIntheRecordbutton,selectOn.
bOntheTitleBar,clicktheRecordbutton.
Operationalprocedures
Whenactivated,theRecordbuttonisred.
→Operationbuttonsonpage37
7Tostoprecording,youhavetwochoices:
aIntheRecordbutton,selectOff.
bOntheTitleBar,clicktheRecordbutton.
Whennotactivated,theRecordbuttonisblack.
→Operationbuttonsonpage37
Howtoplaybackechogramsequences
Youcansaveechogramsitwoways.Bitmapimagesaresavedcontinuously,andthese
canberecalledbymeansoftheScreenCapturebuttonontheTaskbar.Echogram
sequencesarerecordedusingtheRecordfunctionontheOperationmenu.These
sequencesareplayedbackbyplacingtheES70inReplaymode.
1ClicktheOperationiconundertheMainmenutoopentheOperationsub-menu.
2ClicktheOperationbuttontoopenitssub-menu.
338106/A
67
Page 70

SimradES70
→Operationonpage117
3ClickReplayFiletoopentheReplayFiledialog.
TheReplaydialogisusedtondthelestobereplayed.Thelenamesare
generatedautomatically,andeachleisidentiedwiththetimeanddateitwas
made.
Ifyouwishtorunthereplaycontinuously,clickLoopintheReplayFiledialog.
→ReplayFileonpage177
4IntheOperationsub-menu,clickReplaytoselectthefunction.
ObservethattheReplaybaropens.
→Replaybaronpage43
5ClickthestartbuttonintheReplaybartostarttheplayback.
6Tostoptheplayback,clickthestopbuttonintheReplaybar,orgobacktoNormal
mode.
Views
Theseproceduresexplainhowtocontrolthepresentationsonthedisplay.
Relatedtopics
•Aboutrangeselectiononpage210
•Aboutdynamicrangeanddisplaypresentationonpage206
Howtochangethesizeofthepresentationelds
Youcanmodifythesizeofeachindividualeldintheechosounderpresentation.The
contentinaeldthatchangessizewillautomaticallyadjusttotakefulladvantageof
thespaceavailable.Bymeansofthisfunctionalityyoucanforexampleincreasethe
charactersizeofthedepthvalue.
1Movethecursortotheborderlinebetweentwoelds.Observethatthemarker
changesform;itwillappearastwoparallellineswitharrowspointingout.
2Clickontheleftmousebutton,andkeepitdepressed.
3Movethemouse–orrollthecontrolwheel–andobservethattheborderlinemoves.
68
338106/A
Page 71

Operationalprocedures
4Releasethemousebutton.
Howtoselectpresentationlayout
Youechosoundermaybesetupwithoneormorefrequencies(channels).TheLayout
dialogandtheT askbarallowsyoutocontrolwhichchannelsyoucanseeonthedisplay,
andhowtheyarepresented.
1ClicktheDisplayiconundertheMainmenutoopentheDisplaysub-menu.
2ClickLayouttoopentheLayoutdialog.
TheLayoutdialoglistsallyouractivechannels,Y oucanenableordisablethe
presentationofindividualchannels.
→Layoutonpage130
3Inordertocontrolthehorizontalorverticalpresentationwhenyouhavetwoor
moreechograms,usethebuttonsontheTaskbar.
•Horizontalforahorizontalpresentation
•Verticalforaverticalpresentation
•[Transducername]toseeonlytheechogramforthechosentransducer
→T askbaronpage58
Howtochangethecolourscaleandpresentationpalette
Bydefaultyouhave64or12coloursavailabletopresenttheechograms,andaselection
ofpalettes.ThecolourscalecanberetrievedanytimebyclickingtheColourScale
iconontheTitleBar.
WhichcolourscaletouseisdenedintheColourSetupdialogontheDisplaysub-menu.
→TitleBaronpage36
→ColourScaleinformationpaneonpage53
→ColourSetuponpage125
1ClicktheDisplayiconundertheMainmenutoopentheDisplaysub-menu.
2ClickColourSetuptoopentheColourSetupdialog.
3Selectpaletteandechogramcolourstosuityourrequirements
4ClickOKtosavethecurrentsettingsandclosethedialog.
338106/A
69
Page 72

SimradES70
Howtochangethenumberofcoloursintheechogram
Bydefaultyouhave64or12coloursavailabletopresenttheechograms,andaselection
ofpalettes.ThecolourscalecanberetrievedanytimebyclickingtheColourScale
iconontheTitleBar.
WhichcolourscaletouseisdenedintheColourSetupdialogontheDisplaysub-menu.
→TitleBaronpage36
→ColourScaleinformationpaneonpage53
→ColourSetuponpage125
Youcanlterouttheweakestechoesbymanuallymodifyingthecolourthreshold.
1ClicktheColourScaleiconontheTitleBartoopentheColourScaleinformation
pane.
2Movethecursortotheleftsideofthecolourscale.
Observethatthecursorchangesshapetoadualarrowline.
3Clickontheleftedgeofthecolourscale,anddragtheedgetowardsright.
4Observethattheweakestcoloursareremovedfromthecolourscale,andthusalso
theweakestechoesfromtheechogrampresentation.
Echogram
Theseproceduresexplainthevariousparameterscontrollingtheechogram.
Relatedtopics
•Aboutrangeselectiononpage210
•Aboutdynamicrangeanddisplaypresentationonpage206
•Aboutbottomslopesonpage209
•AboutTVGgainonpage205
•Aboutbottomlinesonpage211
Howtoselectechogrampresentation
OntheES70youcanchoosefromseveralechogrampresentations.
1ClicktheActiveiconundertheMainmenutoopentheActivesub-menu.
2ClickEchogramtoopentheEchogramdialog.
→Echogramonpage158
70
338106/A
Page 73

Operationalprocedures
3OntheEchogramtab,chooseEchogramT ype.
Thefollowingechogramtypesareavailable:
•Surface:Theechogramisrelatedtotheseasurface.Startdepth(upperechogram
boundary)andverticalrange(acrossechogram)aremanuallyselectedbythe
StartDepthandRangebuttonsontheMainmenu.
→StartRangeonpage114
→Rangeonpage113
•Bottom:Theechogramisrelatedtothedetectedbottom.Stopdepth(lower
echogramboundary)andverticalrangearemanuallyselectedbytheStartDepth
andRangebuttonsontheMainmenu.Theechogramisonlydrawnforpings
havingasuccessfulbottomdetection.
•Pelagic:ThisechogramisnearlyidenticaltotheSurfaceechogram.However,
thebiomasscalculationsarenotrestrictedbythebottomdetection.Thismeans
thatthebottomechowillbeincludedincalculationsifitappearswithinthe
chosenrange.
Example:Ifyouareinvestigatingalargeschoolofpelagicsh,settheStart
RangeandRangetoenclosetheschool.Iftheschoolislargeenough,aSurface
echogrammaymistakeitforbottom,andthebiomassreadingswillbewrong.
ThePelagicechogramwillhoweverdisregardthebottomdetection,andgivea
correctestimateofthebiomass.
•T rawl:Trawlsensorsystemscommunicateheadropedepthand
headrope-to-footropedistancetotheES70atregularintervals.Theechogram
coverstheverticalopeningofthetrawlincludingasmallmarginateachside.
Theheadropeandfootropemarginsareidentical.Thebiomasscalculationsare
notrestrictedbythebottomdetection.
TheirsizeisselectedintheTrawldialog.Theheadrope-to-footropedistancecan
bemanuallysetintheTrawldialogfortrawlsensorsystemsnotmeasuringthe
trawlopening,orwhenthemeasuredheadrope-to-footropedistanceisunreliable.
Theechogramisonlydrawnwhentrawlpositioninformationisavailable.
→Trawlonpage145
Note
Thechosenechogramtypewillonlyapplytothecurrentlyselected“active”
echogram.Ifyouwishthechangestoapplytoallsimilarechograms,clickApply
ToAll.
4ClickOKtosavethecurrentsettingsandclosethedialog.
Howtoestablishhorizontalmarkers
Arangeofhorizontalmarkerscanbeenabledordisabled.
1ClicktheActiveiconundertheMainmenutoopentheActivesub-menu.
338106/A
71
Page 74

SimradES70
2ClickEchogramtoopentheEchogramdialog.
→Echogramonpage158
3OntheLinestab,observethevariousmarkersthatcanbeenabled.
•BottomLine
•WhiteLine
•HardnessLine
•TrawlLines
•VariableDepthline
•RangeOtherlines
•Biomassline
•Scalelines
→Lines,markersandannotationsintheechogramsonpage47
→Echogram;Linestabonpage159
4Enablethelinesyouwishtosee.
NotethattheWhiteLineandtheHardnessLinecannotbeusedsimultaneously.
5ClickOKtosavethecurrentsettingsandclosethedialog.
Howtoestablishverticalmarkers
Arangeofverticalmarkerscanbeenabledordisabled.
1ClicktheActiveiconundertheMainmenutoopentheActivesub-menu.
2ClickEchogramtoopentheEchogramdialog.
→Echogramonpage158
3OntheLinestab,observethevariousverticalmarkersthatcanbeenabled.
•Time
•Distance
•Annotations
TheannotationsarecontrolledontheAnnotationdialog,buttoplacethe
annotationsontheechogram,youmustenablethemintheEchogramdialog.
→Lines,markersandannotationsintheechogramsonpage47
→Echogram;Linestabonpage159
→Annotationsonpage137
4Enabletheverticalmarkersyouwishtosee.
5ClickOKtosavethecurrentsettingsandclosethedialog.
72
338106/A
Page 75

Operationalprocedures
HowtoselectTVGgain
IntheEchogramdialogyoucanchoosewhichTVGgainyouwishtouse.
TheTVGcanbechosenusingtheEchogramdialog(describedhere),orwiththeTVG
buttonontheActivesub-menu.
→HowtoadjusttheTVGgainonpage80.
1ClicktheActiveiconundertheMainmenutoopentheActivesub-menu.
2ClickEchogramtoopentheEchogramdialog.
→Echogramonpage158
3OntheEchogramtab,observethevariousTVGsettingsthatcanbeapplied.
•Power(NoTVG):TVGgainisnotimplemented.Thissettingishardlyeverused.
•School(20logTVG):Thisgainsettingprovidesthelargestamplicationcloseto
thebottom.Ithasbeendesignedtoprovidethebestechoesfromschools.
•Fish(40logTVG):Thisgainsettingprovidesloweramplicationclosetothe
bottom.Ithasbeendesignedtoprovidethebestechoesfromsinglesh.
•T argets(40logTVG):Basically,thissettingusesthesameTVGamplicationas
Fish,butadditionallteringisimplemented.Onlyechoesdetectedandinterpreted
assingleshareshown.Theechoesarecompensatedfortheirphysicalposition
inthebeam(beamcompensation).Thismeansthatshintheouterregionofthe
beamareadjustedtocorrectsizeeventhoughtheirechoesareweaker.
•T argetMix(40logTVG):Basically,thissettingusesthesameTVGamplication
asFish,butadditionalbeamcompensationisimplemented.Echoesdetected
andinterpretedassingleshareadjustedtotheircorrectsizeaccordingtotheir
physicalpositioninthebeam.
[7]
•User(V ariableTVG):ThissettingallowsyoutodeneyourownTVGsetting.
→AboutTVGgainonpage205
→Echogram;Echogramtabonpage161
4ChooseyourTVGsetting.
Notethatthechangesmadeinthistabwillbedefaultonlybeappliedtothe
currentlyselected“active”echogram(identiedwithathickborder).Ifyouwish
toapplythechangestoalltheotherechogramsofthesametype(forexampleall
bottomrelatedechograms,clickApplyT oAll.
[6]
5ClickOKtosavethecurrentsettingsandclosethedialog.
6.NotethatthisT argets(40logTVG)settingisonlyfunctionalwithsplitbeamtransducers.
7.NotethatthisT argetMix(40logTVG)settingisonlyfunctionalwithsplitbeamtransducers.
338106/A
73
Page 76

SimradES70
Howtoremoveinterferenceandvessel’sownnoisefrom
theechograms
TheActivesub–menuoffersadedicatedltertoremoveinterferenceandnoisefrom
yourownvessel.Thislterhasbeendevelopedforoursonars,andhasprovento
beveryuseful.
1ClicktheActiveiconundertheMainmenutoopentheActivesub-menu.
2ClickPing-PingFilter,andmaketheadjustmentstotyourrequirements.
•Off:Noltering
•2of3:Forthecurrentechopixeltobeshown,theechopixelfromatleastoneof
thetwopreviouspingsmusthaveacolourvaluedifferentfromthebackground.
•2of2:Forthecurrentechopixeltobeshown,theechopixelfromtheprevious
pingmusthaveacolourvaluedifferentfromthebackgroundtobeshown.
•3of3:Forthecurrentechopixeltobeshown,theechopixelfromthetwo
previouspingsmusthaveacolourvaluedifferentfromthebackgroundtobe
shown.
→Ping-PingFilteronpage165
Howtoeasieridentifythebottom
TheEchogramdialogallowsyoutoenablebottomlineorwhitelinetoeasieridentify
thebottom.
1ClicktheActiveiconundertheMainmenutoopentheActivesub-menu.
2ClickEchogramtoopentheEchogramdialog.
→Echogramonpage158
3OntheLinestab,observethevariouslinesthatcanbeapplied.
→Aboutbottomlinesonpage211
→Echogram;Linestabonpage159
4ClickOKtosavethecurrentsettingsandclosethedialog.
Ranges
Theseproceduresexplainhowtochangetheverticalrange,thatishowtocontrolthe
depthtobeshownbytheechogram.
74
338106/A
Page 77

Relatedtopics
•Aboutrangeselectiononpage210
•Aboutbottomslopesonpage209
•Aboutbottomlinesonpage211
Howtochoosetheverticalrange
TheverticalrangeiscontrolledbytheRangebuttonontheMainmenu.
→Rangeonpage113
Forexamplesettings,seeHowtochoosethestartrangeonpage75.
1Method1:
Operationalprocedures
aClick[+]or[-]toadjusttherangemanually.
2Method2:
aClickthemiddleofthebuttontoopenit.
bClickanyrangevalue(includingAutowhenavailable)toselectit.
Howtochoosethestartrange
TheverticalstartrangeiscontrolledbytheStartRangebuttonontheMainmenu.
→StartRangeonpage114
1Method1:
aClick[+]or[-]toadjustthestartrangemanually.
2Method2:
aClickthemiddleofthebutton,holdthemousebuttondepressed,anddrag
sideways.
3Method3canonlybeusedifyouhaveakeyboard:
aClickthemiddleofthebuttontoopenit.
338106/A
75
Page 78

SimradES70
bEnteranyvaluefromthekeyboard.
Bottomdetection
Theseproceduresexplainhowyoucancontrolthebottomdetection.
Relatedtopics
•Aboutrangeselectiononpage210
•Aboutbottomslopesonpage209
Howtodenemaximumandminimumdepth
WhenyouusetheES70itisveryimportantthattheechosounderdetectsand“locks”on
thecorrectdepth.Normallythiswillhappenautomatically,butcertainseaorbottom
conditions,ortheappearanceoflargeschoolsofsh,may“fool”thesounder.Whenthe
bottomisundetectedyouwillread0.00metersdepth,oranyothererroneousvalue.In
ordertoguidetheES70tolocatethecorrectdepth,youmaysometimesndituseful
tofollowthisprocedure.
1ClicktheActiveiconundertheMainmenutoopentheActivesub-menu.
2ClickBottomDetectortoopentheBottomDetectordialog.
→BottomDetectoronpage167
3EnteraMinimumDepth.
Thissettingeliminatesallunwantedbottomdetectionsfromthetransducersurface
anddowntothedeneddepth.Afalsebottomdetectionwithinthisareawould
causeerroneousdepthread-outandincorrectbottomexpansion.
4EnteraMaximumDepth.
Setthisdepthtoapproximately50%morethantheexpecteddepth.Iftheecho
soundershouldloosebottomdetectionduetoairorotherdisturbances,itwilltryto
relocatethedepthwithintheminimumandmaximumdepthsyouhavedened.Do
notexaggerate.Ifyouforexampleenter5000metersandthebottomtrackislost,
theechosounderwillsearchtheentiredepthfornewbottomlock.Thiswilltakea
lotoftime,andalotofinformationwillbelostduringthesearch,especiallyduring
roughseaconditionswithairbeingforcedunderthehull.
76
338106/A
Page 79

Operationalprocedures
5ClickOKtosavethecurrentsettingsandclosethedialog.
Ifyousetmaximumdepthtoavalueidenticalorsmallerthantheminimumvalue,the
bottomdetectionalgorithmwillbedisabled.Theechosounderwillthennotbeableto
detectthebottomatall,andthedisplayeddepthwillbe0.00m
Sizedistribution,biomassandshdensity
Ifyouusea“splitbeam”transduceronyourES70theechosounderwillyouprovideyou
withinformationaboutthesizedistributionanddensityoftheshbeneaththehull.
Relatedtopics
•Aboutbiomassonpage204
Howtomonitortheshsizedistribution
ThesizedistributionispresentedusingtheSizeDistributioninformationpane.
→SizeDistributioninformationpaneonpage54
1ClicktheSizeDistributioniconontheTitleBartoopentheinformationbar.
2Tochangethesizeoftheinformationpane,clickinthebottomrightcorner,hold
themousebuttondepressed,anddrag.
3Clickonthehistogramtitlestoseetherelevantpresentations.
4Tochangethepresentationparameters:
aClickthetoolbuttoninthetoprightcorneroftheinformationpanetoopen
theSizeDistributiondialog.
ThedialogcanalsobeopenedfromtheActivesub-menu.
→SizeDistributiononpage166
bMakethenecessaryadjustments.
cClickOKtosavethecurrentsettingsandclosethedialog.
5Tochangetheshspecies:
aClicktheSetupiconundertheMainmenutoopentheSetupsub-menu.
bClickFishSelecttoopentheFishSelectdialog.
→FishSelectonpage139
338106/A
77
Page 80

SimradES70
cMakethenecessaryadjustments.
dClickOKtosavethecurrentsettingsandclosethedialog.
Howtoadjusttheshlengthforcorrectcalculations
TheES70measuresandrecordsthetargetstrength(TS).Theresearchersatthe
NorwegianInstituteforFisheryResearchhavecompiledasetofalgorithmsbasedon
extensivetestingwiththevariousspecies,andtheseareusedbytheES70tocalculatethe
lengthoftheshbasedonitstargetstrength.However,thetargetstrengthdiffersbetween
thevariousspecies.Ifyoundoutthatthelengthoftheshyouhavecaughtdiffers
fromtheinitialpresentation,youcanadjustthealgorithmsusedtocalculatethelength.
1ClicktheSetupiconundertheMainmenutoopentheSetupsub-menu.
2ClickFishSelecttoopentheFishSelectdialog.
→FishSelectonpage139
3Makethenecessaryadjustments.
4ClickOKtosavethecurrentsettingsandclosethedialog.
Note
Payspecialattentiontomackerel,asthisshhasaverylowtargetstrength.Mackerel
canoftenbemistakenforsmallbait.Ifyoushformackerel,werecommendthatyou
use120kHzor200kHzechosounderfrequencies,asthemackerelshowslargestecho
strengthforthesefrequencies.
Howtomonitorthecurrentbiomass
ThebiomassispresentedusingtheSizeDistributioninformationpane,and/orenabling
thebiomasslineintheechogrampresentation.
→Biomasslineonpage49
→Biomassinformationpaneonpage51
Informationpane
1ClicktheSizeDistributioniconontheTitleBartoopentheinformationbar.
2Tochangethesizeoftheinformationpane,clickinthebottomrightcorner,hold
themousebuttondepressed,anddrag.
3Clickonthehistogramtitlestoseetherelevantpresentations.
78
338106/A
Page 81

Operationalprocedures
Biomassline
1ClicktheActiveiconundertheMainmenutoopentheActivesub-menu.
2ClickEchogramtoopentheEchogramdialog.
→Echogramonpage158
3OntheLinestab,observethatthebiomasscanbeenabledordisabled,andthatyou
candeneascaleforit.
4Makethenecessaryadjustments.
5ClickOKtosavethecurrentsettingsandclosethedialog.
Gain
Theseproceduresexplainhowyoucanadjustthegainintheechosounder.Thiscontrols
how“powerful”theechoesareshownintheechogram.TheES70usestwoprinciples
forgain;signalamplicationandtimevariedgain(TVG).
•Howtoadjustthesignalgainonpage79
•HowtoadjusttheTVGgainonpage80
Relatedtopics
•AboutTVGgainonpage205
•Aboutdynamicrangeanddisplaypresentationonpage206
Howtoadjustthesignalgain
1ObservetheGainbuttonontheMainmenu.
→Gainonpage115
2Method1:
aClick[+]or[-]tochoosegain.
3Method2:
aClickthemiddleoftheGainbutton,holdthemousebuttondepressed.
bdragthecursorleftorrighttoincreaseordecreasethegain.
4Method3canonlybeusedifyouhaveakeyboard:
aClickthemiddleoftheGainbuttontoopenthesub-menu.
338106/A
79
Page 82

SimradES70
bEntertherequestedgainvaluebetween20and120.
HowtoadjusttheTVGgain
TVGmeansTimeV ariedGain.ThewholeideawithTVGisthatechoesfromshshall
havethesameecholevel(colour)independentoftheirdepths.TheES70hasaTVG
rangedownto15000meters,whichforallpracticalpurposesisunlimited.TheES70
doesnothaveaTVGcompensatedreceiverlikemostotherechosounders.Inthe
ES70theTVGisimplementedinsoftwareaftertheechoesfromthereceiver(s)have
beenconvertedtodigitalformat.Inordertomakethisworkthereceivermusthave
verylargedynamicrange.
TheTVGcanbechosenusingtheEchogramdialog,orwiththeTVGbuttononthe
Activesub-menu(describedhere).
→HowtoselectTVGgainonpage73
1ClicktheActiveiconundertheMainmenutoopentheActivesub-menu.
2LocatetheTVGbutton.
3Method1:
aClick[+]or[-]tochooseTVGsetting.
4Method2:
aClickthemiddleoftheTVGbuttontoopenthesub-menu.
bClickonanyTVGsettingtoselectit.
80
338106/A
Page 83

Operationalprocedures
Powerandpulseduration
Theseproceduresexplainhowtocontroltheechosounder’soutputpowerand
transmissionpulseduration.
Relatedtopics
•Aboutoutputpoweronpage207
•Aboutpulsedurationonpage207
Howtochoosepassivemode
Inordertocheckhowmuchnoisetheechosounderisreceiving,setittopassivemode.
Thismeansthattheechosounderisnottransmittingsoundpulsesintothewater,it
isonly“listening”.
1ClicktheOperationiconundertheMainmenutoopentheOperationsub-menu.
2ClickNormalOperationtoopentheNormalOperationdialog.
→NormalOperationonpage121
3Fortherelevanttransducerchannel,setModetoPassive.
4ClickOKtosavethecurrentsettingsandclosethedialog.
Note
TheTestmodeisonlyprovidedfortroubleshootingandtestpurposes.
Howtochangetheoutputpower
Fromtimetotimeitmaybeusefultoreducetheechosounder’soutputpower.Areduced
poweroutputmayprovebenecialifyouarelookingforsingleshesorschoolsnearthe
surface,ifyouworkinveryshallowwaters,ifyouarebotheredwithfalseechoesdueto
reverberation,orifyousimplyfeelthattheechoesaretoostrong.
1ClicktheOperationiconundertheMainmenutoopentheOperationsub-menu.
2ClickNormalOperationtoopentheNormalOperationdialog.
→NormalOperationonpage121
338106/A
81
Page 84

SimradES70
3Fortherelevanttransducerchannel,setPower[W]torequestedvalue.
→Aboutoutputpoweronpage207
4ClickOKtosavethecurrentsettingsandclosethedialog.
Note
Ifyouincreasetheoutputpower ,makesurethatyoudonotchoosemorepowerthanyour
transducercanhandle.Withacorrectsetupwiththetransducerregisteredintheecho
soundersoftwareyouaresafeguardedagainstthis.However ,ifyouuseathirdparty
transducerthatisnotknownbytheechosoundersoftware,youmayinictpermanent
damageifyouincreasetheoutputtobeyondthetransducer’ scapabilities.
Howtoadjustthepulseduration
Thelengthofyourtransmittedpulseisveryimportanttohowyoucandetectsh.A
shortpulsedurationgivesyouaveryneverticalresolution.Thisallowsyoutodetect
scatteredsh,andyoucanndthosethatmovenearthebottom.Alongpulseduration
throwsalotmoreenergyintothewater,andthedigitalltersusedbythereceiverare
narrower.TheselterswillreducetheES70’ssensitivityfornoise,butthelengthofthe
transmittedpulsewillgiveyoustrongerechoes.Withthelters,alongerpulseduration
willprovidelongerrange,butreducedverticalresolution.
1ClicktheOperationiconundertheMainmenutoopentheOperationsub-menu.
2ClickNormalOperationtoopentheNormalOperationdialog.
→NormalOperationonpage121
3Fortherelevanttransducerchannel,setPulseLengthtorequestedvalue.
Forgeneraluse,werecommendthatthepulsedurationissettoAuto.
→Aboutpulsedurationonpage207
4ClickOKtosavethecurrentsettingsandclosethedialog.
Installation
Theseproceduresexplainhowtoinstalltransceiverunitandnewsoftwareversions.It
alsoexplainshowtosetuptheexternalmotionsensor.
Howtoinstallafrequencychannel
1ClicktheSetupiconundertheMainmenutoopentheSetupsub-menu.
82
338106/A
Page 85

2ClickInstallationtoopentheInstallationsub-menu.
Onthesub-menu,clickTransceiverInstallationtoopentheTransceiverInstallation
dialog.
→TransceiverInstallationonpage153
3IntheTransceiverInstallationdialog,clickBrowse.
TheES70willautomaticallysearchthenetworkforavailabletransceivers.
4Observethatavailablefrequencychannelsarelistedinthedialog.
Operationalprocedures
Eachtransceivercontainsoneormoref
r e q u e n c y c h a n n e l s .Thephraseisusedto
identifythecombinationofatransceiver,transducersandthefrequenciesoffered.
Splitbeamtransceiverscontainonlyonechanneleach.Theupperpartofthe
TransceiverInstallationdialogdisplaysalistoffrequencychannelswhicheitherare,
orhavebeen,installedontheES70.Foreachchannel,astatuslabelisprovided.
•Busy:Thefrequencychannelisalreadyinuse,probablybyanotherechosounder
onthesamenetwork.Youcannotconnecttothischannel.
•Installed:ThisfrequencychannelisconnectedtoyouES70system.
•Lost:Thisfrequencychannelcannotbeused.
5Selectafrequencychannelthatisavailable,andchoosethecorrecttransducerin
thespinbox.
Note
Thisisacriticaltask.Y oumustensurethatthecorrecttransducerisselected.If
youconnectthetransceivertoatransducerthatcannothandlethepowerrating,it
maybedamagedbeyondrepair .
6ObservethatthestatusfortherelevantfrequencychannelschangestoInstalled.
7ClickOKtosavethecurrentsettingsandclosethedialog.
Howtodisconnectafrequencychannel
1ClicktheSetupiconundertheMainmenutoopentheSetupsub-menu.
2ClickInstallationtoopentheInstallationsub-menu.
338106/A
83
Page 86

SimradES70
Onthesub-menu,clickTransceiverInstallationtoopentheTransceiverInstallation
dialog.
→TransceiverInstallationonpage153
3Observethatcurrentfrequencychannelsarelistedinthedialog.
Eachtransceivercontainsoneormoref
r e q u e n c y c h a n n e l s .Thephraseisusedto
identifythecombinationofatransceiver,transducersandthefrequenciesoffered.
Splitbeamtransceiverscontainonlyonechanneleach.Theupperpartofthe
TransceiverInstallationdialogdisplaysalistoffrequencychannelswhicheitherare,
orhavebeen,installedontheES70.Foreachchannel,astatuslabelisprovided.
•Busy:Thefrequencychannelisalreadyinuse,probablybyanotherechosounder
onthesamenetwork.Youcannotconnecttothischannel.
•Installed:ThisfrequencychannelisconnectedtoyouES70system.
•Lost:Thisfrequencychannelcannotbeused.
4Onthefrequencychannelyouwishtodisconnect,setthetransducertypetoNone.
5ObservethatthestatusfortherelevantfrequencychannelschangestoAvailable.
6ClickOKtosavethecurrentsettingsandclosethedialog.
HowtomodifyanIPaddress
ThetransceiversareprovidedbySimradreadilysetupwithaxedEthernetaddressand
anIPaddress.IfyourES70usestwotransceiverswithidenticalfrequencies,thesewill
bydefaulthavedifferentEthernetaddresses,butidenticalIPaddresses.Inorderforyour
systemtowork,alltransceiversmusthaveuniqueIPaddresses.
1ClicktheSetupiconundertheMainmenutoopentheSetupsub-menu.
2ClickInstallationtoopentheInstallationsub-menu.
Onthesub-menu,clickTransceiverInstallationtoopentheTransceiverInstallation
dialog.
→TransceiverInstallationonpage153
3Observethatthecurrentfrequencychannelsarelistedinthedialog.
4Clickonceonthefrequencychannelyouwishtomodify.
5ObservethattherelevanttransceiverparametersareshownintheTransceiver
Informationeld
84
338106/A
Page 87

Operationalprocedures
6Settthetransducer(s)toNone,andclickApply.
7ClickChangeIPAddresstoopentheIPAddressdialog.
Note
IfyouhavetwoEthernetcablesconnectedtoyourcomputer ,youmayneedto
disconnecttheEthernetcabletotheship’ snetworkbeforetheChangeIPAddress
isavailable.
8EnteranewIPaddress
Tip
ChangeonlythelastdigitintheIPaddress.
IfyoudohaveakeyboardconnectedtoyourES70system,clicktheKeyboard
buttonatthebottomofthedialogtoopenanon-screenkeyboard.
9ClickOKtosavethecurrentsettingsandclosethedialog.
10IntheTransceiverInstallationdialog,observethattheIPaddressforthechosen
transceiverhaschanged.
11InstallthetransducersforthechannelwiththenewIPaddress.
Note
Makesurethatyouchoosethecorrecttransducer(s)!
12ClickOKtosavethecurrentsettingsandclosethedialog.
Howtoinstallandupgradethesoftware
TheES70isinitiallydeliveredwithallnecessarysoftwareinstalledandcongured.
SoftwareupgradesareusefulifyourES70fails,andyoususpectasoftwareerror.An
upgradeisalsorequiredwhenevertheES70softwareismodied.
Tocheckwhichsoftwareversionyouhave,observetheAboutdialogopenedfromthe
Displaymenu.
→Aboutonpage133
ThecomputerwillautomaticallydetecttheinsertionoftheCD-ROMandopenthe
installationprogram’sstart-updialog.Ifthisisnotthecase,youmustmanuallyrunthe
Setup.exeprogramontheCD-ROM’srootdirectory.
WhentheES70softwareisupgraded,thesoftwarewillautomaticallydetectthepresence
oftransceiver(s),butyouwillneedtocheckthatthecorrecttransducer(s)areenabled.
Whenevernewsoftwareisinstalled,youwillalsoneedtoredeneallseriallines,
transducer(s)andtransceiver(s).
338106/A
85
Page 88

SimradES70
Note
Ifyouexperienceproblemsduringasoftwareupgrade,writedowntheechosounder’ s
installationparameters(transducers,portsettingsetc.).Removetheechosounder
softwareentirely,thenreinstallfromscratch.
HowtoinstalltheES70software
Usethisprocedureifyouneedtoinstallthesoftwareonanewcomputer.Notethat
minimumhardwareandsoftwarerequirementsmustbemetbythecomputer.
1Powerupthecomputer.
2InserttheES70CD-ROM.
3Observethattheinstallationprogramopens.
Iftheinstallationprogramdoesnotstartautomatically,usealemanagertoaccess
theCDfolder.Double-clickontheSetup.exeletostarttheinstallation.
4AllowtheES70installationtorun.Followtheinstructionsprovided.
5Oncetheinstallationhasbeencompleted,double-clicktheES70icononthedesktop
tostarttheapplication.
WhentheES70starts,youmayseeadialogrequestingpermissiontoupgradethe
rmwareonthetransceiver.Thishappensifthermwareonthetransceiverisolder
thanthermwareprovidedasapartoftheES70software.Sincefunctionality
ontheES70maydependonthermwareinthetransceiver,clickYestoupgrade
thetransceiver.
6IfyouuseWindows7operatingsystem:
aObservethatWindows7Firewallwillopenadialogrequestinginformation
aboutthenetwork.
bSelectPublic,andclickAllowaccess.
7Observethestart-upprocedureintheGettingstartedchapter.
→PowerOn/Offproceduresonpage19
HowtoobtaintheES70license
TheES70requiresavalidlicensetooperate.Withoutalicenseyouwillnotbeableto
communicatewiththetransceiver.
Note
Ifyoureplaceyourcomputer ,orifyoureplacemajorcomponentsinsideyourcomputer ,
youwillneedanewlicensecode.
1Double-clicktheES70icononthedesktoptostarttheapplication.
2ClicktheSetupiconundertheMainmenutoopentheSetupsub-menu.
3ClickInstallationtoopentheInstallationsub-menu.
86
338106/A
Page 89

Onthesub-menu,clickSoftwareLicensetoopentheSoftwareLicensedialog.
→SoftwareLicenseonpage156
4WritedowntheHardwareIDprovidedbytheSoftwareLicensedialog.
5Contactyourdealertoorderthesoftwarelicense.
Yourdealerwillneedthefollowinginformationfromyoutoplacetheorder:
•Vesselnameandcallsign
•Vesseltype(trawler,purseseiner,etc.)
•Vesselowner’sname,addressandcontactinformation
•Serialnumberonalltransceivers
Operationalprocedures
•HardwareID
6Whenthesoftwarelicenseisreturned,starttheES70,opentheSoftwareLicense
dialog,andclickEnterLicenceString.
7Writedownthecode,andclickOk.
8ClickOKtosavethecurrentsettingsandclosethedialog.
HowtoupgradetheES70software
Usethisprocedureifyouwishtoreinstallthesoftware,orreceiveanewCD-ROM
withasoftwareupgrade.
1Observetheprocedureforsoftwareinstallation.
Unlessyouhavemadeanyhardwarechangesonyourcomputer,theexisting
softwarelicensewillbeused.
HowtoremovetheES70software
UsethisprocedureifyouneedtoremovealltheES70softwarefromthecomputer.Note
thatalldataintheES70directorywillbeerased.
1Observetheoperatingsystem’sfunctionalityforsoftwareremoval.
Externalinterfaces
Thefollowinginterfacesaresetuptotransmitand/orreceiveinformationbymeans
ofEthernetand/orseriallines.
338106/A
87
Page 90

SimradES70
HowtosetuptheEthernetoutputinterface
TheES70cancommunicatewithanexternaldevicesthatcanbenetfromtheprocessed
data.SuchdevicesincludetheOlexchartplottersystem.Thiscommunicationis
controlledbytheEthernetOutputdialog.
Thefollowingtelegramsmaybeexported:
•Parameter
•Vessellog
•Navigation
•Motionsensor
•Depth
•Echogram
•Echotrace
TheinterfacewillrequiretheabsoluteidentityoftheremoteUDPportandtheremoteIP
address.
ThesettingsrequiredfortheOlexsystemarespeciedintheEK500Datagramdialog
description.
→EK500Datagramonpage181
Wiringprocedure
1LocatetheEthernetportyouwishtouse.
2IfnoEthernetportisavailable,anEthernetswitchmaybeinsertedbetweenthe
computerandthetransceiver.
3IfyouconnectanEthernetcabledirectlybetweentheES70computerandaremote
computer,youmustuseaEthernetcable.Ifyouconnecttheothercomputerby
meansofanEthernetswitch,youmustuse“straight”Ethernetcables.
Setupprocedure
1ClicktheSetupiconundertheMainmenutoopentheSetupsub-menu.
2ClickEthernetOutputtoopentheEthernetOutputdialog.
3DenetheRemotePort.
4DenetheRemoteIPAddressforthecomputeryouwishtoexporttheinformationto.
5SetCommunicationModetoBroadcast.
6IntheEthernetOutputdialog,clickEK500DatagramtoopentheEK500Datagram
dialog.
7OntheDatagramtab,denewhichdatagramsyouwishtoexport.
88
338106/A
Page 91

Operationalprocedures
8ClickOKtosavethecurrentsettingsandclosethedialog.
HowtosetuptheSimradITIT rawlsysteminterface
CommunicationwiththeSimradITI(IntegratedTrawlInstrumentation)isbasedon
NMEAandproprietarytelegrams.
Supportedtelegramformats
•DBSDepthbelowsurfaceonpage190
•DBSDepthoftrawlbelowsurfaceonpage198
•HFBTrawlheadropetofootropeandbottomonpage199
Wiringprocedureforserialcommunication
1LocateafreeRS-232serialportthatcanbeusedtoconnecttheITIsystem.
2OntheES70computer,connectthereceivesignalRxonpin2,thetransmitsignal
Txonpin3,andgroundonpin5.
3OntheITItransceiver,useconnectorSerialA.ConnectthereceivesignalRxonpin
2,thetransmitsignalTxonpin3,andgroundonpin5.
4Ensurethatthelengthofthecabledoesnotexceedapproximately50meters.Ifa
longercableisrequired,youmayneedtousebufferampliersontheserialline.
Setupprocedure
ThisprocedureexplainshowtheES70canbesetuptoreceiveITIinformationona
serialport.
1ClicktheSetupiconundertheMainmenutoopentheSetupsub-menu.
2ClickInstallationtoopentheInstallationsub-menu.
Onthesub-menuI/OSetuptoopentheI/OSetupdialog.
→I/OSetuponpage150
3IntheI/OSetupdialog,selectwhichseriallinetousetoacceptITIinformation.
4Clickonthechosenporttoselectit,thenclicktheInputbuttontoopentheSelect
Inputsdialog.
5IntheSelectInputsdialog,locatetheITIontheleftside,andclickthe[>]button
toconnectit.
338106/A
89
Page 92

SimradES70
•ITI:ThissettingallowsyoutocommunicatewiththeSimradITIsystem.
ValuesfortrawlopeninganddistancemustbeenteredmanuallyintheTrawl
dialog.
→Trawlonpage145
Thefollowingproprietarytelegramformatsaresupported:
–DBSDepthbelowsurfaceonpage190
–DBSDepthoftrawlbelowsurfaceonpage198
–HFBTrawlheadropetofootropeandbottomonpage199
6ClickOKtosavethecurrentsettingsandclosethedialog.
7IntheI/OSetupdialog,clickonthechosenporttoselectit,thenclicktheSetup
buttontoopentheSerialSetupdialog.
8IntheSerialSetupdialog,entertherelevantparameterstosetuptheport.
9ClickOKtosavethecurrentsettingsandclosethedialog.
10IntheI/OSetupdialog,clickonthechosenporttoselectit,thenclicktheMonitor
buttontoopenthePortMonitordialog.
Inordertomonitorthedataow,theITIsystemmustbeactiveandtransmitting
informationtotheES70.
11Ifthedataowisoperational,closealldialogs.
HowtosetuptheSimradPICatchmonitoringsystem interface
CommunicationwiththeSimradPIFamilycatchmonitoringsystemsisbasedonNMEA
andproprietarytelegrams.
Supportedtelegramformats
•DBSDepthbelowsurfaceonpage190
•PSIMP .DPISensordataonpage199
Wiringprocedureforserialcommunication
1LocateafreeRS-232serialportthatcanbeusedtoconnectthePIsystem.
2OntheES70computer,connectthereceivesignalRxonpin2,thetransmitsignal
Txonpin3,andgroundonpin5.
3OnPI44andPI54,useeitherconnectorNMEA1orNMEA2.Connectthereceive
signalRxonpin8,thetransmitsignalTxonpin6,andgroundonpins7and9.
4OnPI30andPI32,useconnectorNMEA.ConnectthereceivesignalRxonpin3,the
transmitsignalTxonpin1,andgroundonpins2and4.
5Ensurethatthelengthofthecabledoesnotexceedapproximately50meters.Ifa
longercableisrequired,youmayneedtousebufferampliersontheserialline.
90
338106/A
Page 93

Operationalprocedures
Setupprocedure
ThisprocedureexplainshowtheES70canbesetuptoreceivePIinformationona
serialport.
1ClicktheSetupiconundertheMainmenutoopentheSetupsub-menu.
2ClickInstallationtoopentheInstallationsub-menu.
Onthesub-menuI/OSetuptoopentheI/OSetupdialog.
→I/OSetuponpage150
3IntheI/OSetupdialog,selectwhichseriallinetousetoacceptPIinformation.
4Clickonthechosenporttoselectit,thenclicktheInputbuttontoopentheSelect
Inputsdialog.
5IntheSelectInputsdialog,locatethePI50ontheleftside,andclickthe[>]button
toconnectit.
•PI:ThissettingallowsyoutocommunicatewithoneoftheSimradPIsystems.
Valuesfortrawlopeninganddistanceareprovidedbythesystem.Thefollowing
proprietarytelegramformatsaresupported:
–DBSDepthbelowsurfaceonpage190
–PSIMP .DPISensordataonpage199
6ClickOKtosavethecurrentsettingsandclosethedialog.
7IntheI/OSetupdialog,clickonthechosenporttoselectit,thenclicktheSetup
buttontoopentheSerialSetupdialog.
8IntheSerialSetupdialog,entertherelevantparameterstosetuptheport.
9ClickOKtosavethecurrentsettingsandclosethedialog.
10IntheI/OSetupdialog,clickonthechosenporttoselectit,thenclicktheMonitor
buttontoopenthePortMonitordialog.
Inordertomonitorthedataow,thePIsystemmustbeactiveandtransmitting
informationtotheES70.
11Ifthedataowisoperational,closealldialogs.
Howtosetupthesonarsysteminterface
Thecurrentdepthfromadenedtransceiverchannelcanbesentoutonaseriallineto
asonarsystem.Y oucanonlyusetheseriallinesalreadysetuptoacceptinputfrom
otherperipherals.
338106/A
91
Page 94

SimradES70
Notethatthedepthinformationisnormallyalsoprovidedontheduplexinterfacesto
trawlinstrumentationandcatchmonitoringsystems.
Wiringprocedure
1LocatetheRS-232serialportthatcanbeusedtoconnectthesonarsystem.
2OntheES70computer,connectthetransmitsignalTxonpin3,andgroundonpin5.
3Sonar:
•InterfaceUnit:UseoneoftheseriallineconnectorsTB1throughTB7.Connect
thetransmittedsignalTxfromES70topin1,andgroundonpin5.
•ProcessorUnit:ConnectthetransmittedsignalTxfromES70topin2,and
groundonpin5.
4Ensurethatthelengthofthecabledoesnotexceedapproximately50meters.Ifa
longercableisrequired,youmayneedtousebufferampliersontheserialline.
Setupprocedure
1ClicktheSetupiconundertheMainmenutoopentheSetupsub-menu.
2ClickDepthOutputtoopentheDepthOutputdialog.
3Selectwhichporttouse.
4Fortheselectedport,clickSetuptodenethecommunicationparameters.
5Selectwhichtelegramtosend.
6Ifapplicable,denetheTalkerID.
7Selectwhichtransceiverandfrequencyyouwishtoexportthedepthinformation
from.
Inmostcases,thelowestfrequencyisused.
8ClickOKtosavethecurrentsettingsandclosethedialog.
Howtosetupthenavigationsysteminterface
MostGlobalPositioningSystem(GPS)receiversprovideNMEA0183telegrams
containingspeed,headingandsaileddistanceaswellasgeographicallatitudeand
longitude.
Supportedtelegramformatsforheading:
•HDGHeading,deviationandvariationonpage192
•HDTHeading,trueonpage193
•HDMHeading,magneticonpage192
•VHWWaterspeedandheadingonpage194
92
338106/A
Page 95

Supportedtelegramformatsfordistance
•RMCRecommendedminimumspecicGNSSdataonpage193
•VHWWaterspeedandheadingonpage194
•VTGCourseoverground&groundspeedonpage194
Supportedtelegramformatsforpositioning
•GLLGeographicalpositionlatitude/longitudeonpage191
•GGAGlobalpositioningsystemxdataonpage191
•RMCRecommendedminimumspecicGNSSdataonpage193
Supportedtelegramformatsforspeed
•RMCRecommendedminimumspecicGNSSdataonpage193
•VHWWaterspeedandheadingonpage194
•VTGCourseoverground&groundspeedonpage194
Operationalprocedures
Wiringprocedureforserialcommunication
1LocateafreeRS-232serialportthatcanbeusedtoconnectthenavigationreceiver.
2OntheES70computer,connectthereceivesignalRxonpin2,andgroundonpin5.
3OntheGPSsystem,wireasdescribedintherelevantdocumentation.
4Ensurethatthelengthofthecabledoesnotexceedapproximately50meters.Ifa
longercableisrequired,youmayneedtousebufferampliersontheserialline.
Setupprocedure
1ClicktheSetupiconundertheMainmenutoopentheSetupsub-menu.
2ClickNavigationtoopentheNavigationdialog.
3Foreachtab:
aSelectwhichporttouse.
bClickSetupfortheselectedporttodenethecommunicationparameters.
cSelectwhichNMEASentencetouse.
IfyouchooseAuto,theES70willautomaticallychooseamongtheincoming
informationaccordingtoapredenedprioritylist.
dIfapplicable,denetheT alkerID.
4ClickOKtosavethecurrentsettingsandclosethedialog.
338106/A
93
Page 96

SimradES70
Howtosetupthemotionsensorinterface
TheES70Fishndingechosoundercanacceptinputsfrombothanalogueanddigital
heavesensors.AsensorwithananalogueoutputisconnecteddirectlytotheAuxiliary
connectorontheGeneralPurposeTransceiver,whileadigitalsensorisconnectedtoone
oftheserialinputsusingRS-232.
Ifmorethanonetransceiverisusedbytheechosoundersystem,theanaloguesensoris
connectedtoonlyoneofthem.
Supportedtelegramformats
•Sounder/TSS1Motionprotocolonpage201
•SimradEMAttitude1000onpage196
•SimradEMAttitude3000onpage197
Wiringprocedure
1LocateafreeRS-232serialportthatcanbeusedtoconnectthesensor.
2OntheES70computer,connectthereceivesignalRxonpin2,andgroundonpin5.
3Onthemotionsensor,wireasdescribedintherelevantdocumentation.
Setupprocedure
ThisprocedureexplainshowtheES70canbesetuptoreceivemotionsensorinformation
onaserialport.
1ClicktheSetupiconundertheMainmenutoopentheSetupsub-menu.
2ClickInstallationtoopentheInstallationsub-menu.
Onthesub-menuI/OSetuptoopentheI/OSetupdialog.
→I/OSetuponpage150
3IntheI/OSetupdialog,selectwhichseriallinetousetoacceptmotionsensor
information.
4Clickonthechosenporttoselectit,thenclicktheInputbuttontoopentheSelect
Inputsdialog.
5IntheSelectInputsdialog,locatetheAMLontheleftside,andclickthe[>]button
toconnectit.
Thissettingallowsyoutocommunicatewiththemotionsensorsystem.
Thefollowingproprietarytelegramformatsaresupported:
•Sounder/TSS1Motionprotocolonpage201
94
338106/A
Page 97

Operationalprocedures
•SimradEMAttitude1000onpage196
•SimradEMAttitude3000onpage197
6ClickOKtosavethecurrentsettingsandclosethedialog.
7IntheI/OSetupdialog,clickonthechosenporttoselectit,thenclicktheSetup
buttontoopentheSerialSetupdialog.
8IntheSerialSetupdialog,entertherelevantparameterstosetuptheport.
9ClickOKtosavethecurrentsettingsandclosethedialog.
10IntheI/OSetupdialog,clickonthechosenporttoselectit,thenclicktheMonitor
buttontoopenthePortMonitordialog.
Inordertomonitorthedataow,themotionsensorsystemmustbeactiveand
transmittinginformationtotheES70.
11Ifthedataowisoperational,closealldialogs.
Howtosetupthedepthoutput
TheES70Fishndingechosounderwilloutputdepthinformationonseveraldifferent
formats.
Supportedtelegramformats
•DBSDepthbelowsurfaceonpage190
•DBTDepthbelowtransduceronpage190
•DPTDepthonpage190
•SimradEK500Depthonpage195
•Atlasdepthtelegramonpage203
•PSIMDHBBottomhardnessandbiomassonpage200
Wiringprocedureforserialcommunication
1LocatewhichRS-232portyouwishtouse.
2TheES70Fishndingechosounder,connectthetransmitsignalTxonpin3,and
groundonpin5.
3Ontheremotesystem,wireasdescribedintherelevantdocumentation.
4Ensurethatthelengthofthecabledoesnotexceedapproximately50meters.Ifa
longercableisrequired,youmayneedtousebufferampliersontheserialline.
Setupprocedure
1ClicktheSetupiconundertheMainmenutoopentheSetupsub-menu.
2ClickDepthOutputtoopentheDepthOutputdialog.
338106/A
95
Page 98

SimradES70
3Selectwhichporttouse.
4Fortheselectedport,clickSetuptodenethecommunicationparameters.
5Selectwhichtelegramtosend.
6Ifapplicable,denetheTalkerID.
7Selectwhichtransceiverandfrequencyyouwishtoexportthedepthinformation
from.
Inmostcases,thelowestfrequencyisused.
8ClickOKtosavethecurrentsettingsandclosethedialog.
Howtosetuptheannotationinterface
TheES70Fishndingechosoundercanacceptannotation(text)inputfromanexternal
system.
Supportedtelegramformats
•SimradATSAnnotationonpage202
Wiringprocedureforserialcommunication
Note
TheASCIIdatagramwiththeexternalannotationmustbeconnectedtothesameserial
lineasthenavigationsystem.
1LocateafreeRS-232serialportthatcanbeusedtoconnecttheexternalsystem.
2OntheES70computer,connectthereceivesignalRxonpin2,andgroundonpin5.
3Ontheexternalsystem,wireasdescribedintherelevantdocumentation.
4Ensurethatthelengthofthecabledoesnotexceedapproximately50meters.Ifa
longercableisrequired,youmayneedtousebufferampliersontheserialline.
Setupprocedure
1ClicktheSetupiconundertheMainmenutoopentheSetupsub-menu.
2ClickAnnotationstoopentheAnnotationsdialog.
3ClickPortsoselectcommunicationport.
4ClickSetupsodenethecommunicationparameters.
5ClickOKtosavethecurrentsettingsandclosethedialog.
96
338106/A
Page 99

Operationalprocedures
Testandmaintenance
TheseproceduresareprovidedfortestandmaintenanceoftheSimradES70Fishnding
echosounder.
Note
Neitherthecomputernorthetransceiver(s)containanyuserreplaceableparts.Ifyou
suspectthatyoursystemisnotworkingproperly,contactyourdealerforassistance.
Receivertest
TheES70transceiverprovidesabuilt-intestsignal.Thissignalcanbeusedtocheckthat
thereceiversystemisoperational.
1ClicktheDisplayiconundertheMainmenutoopentheDisplaysub-menu.
2ClickDisplayOptionstoopentheDisplayOptionsdialog.
→DisplayOptionsonpage130
3OntheT ooltiptab,verifythatScatterV alueisenabled.
4ClickOKtosavethecurrentsettingsandclosethedialog.
5ClicktheActiveiconundertheMainmenutoopentheActivesub-menu.
6ClickEchogramtoopentheEchogramdialog.
→Echogramonpage158
7OntheEchogramtab:
aSetTVGtoPower(NoTVG)
bSetEchogramT ypetoSurface
8ClickOKtosavethecurrentsettingsandclosethedialog.
9ClicktheOperationiconundertheMainmenutoopentheOperationsub-menu.
10ClickNormalOperationtoopentheNormalOperationdialog.
→NormalOperationonpage121
338106/A
97
Page 100

SimradES70
11IntheNormalOperationdialog,setModetoTest.
12ClickOKtosavethecurrentsettingsandclosethedialog.
13OntheMainmenu:
aSetRangeto100m
bSetGainto130
14Movethecursorovertheechointheechogram,andobservethetooltipinformation.
Foroperationalfrequenciesb
e l o w 120kHz,verifythefollowingresults:
•Split-beamGPTwithmorethan1kWoutput:–64dB±1dB
•SinglebeamGPTwith1kWoutputorless:–67dB±1dB
Foroperationalfrequenciesa
b o v e 120kHz,verifythefollowingresults:
•Split-beamGPTwithmorethan1kWoutput:–120dB±1dB
•SinglebeamGPTwith1kWoutputorless:–130dB±1dB
15Reversethisproceduretorestorenormaloperation,orselectfactorysettingsin
theUserSettingdialog.
Relatedtopics
•DisplayOptionsonpage130
•Echogramonpage158
•NormalOperationonpage121
GPTpowerrecycle
TheES70computermaybesubjectedtosuddenandunfortunateincidentsduring
operation.Typicalincidentsincludepowerloss,softwarecrash,oroperatingsystem
instability.Theseincidentsmaycausethecommunicationwiththetransceiverto
malfunction.
1ClicktheSetupiconundertheMainmenutoopentheSetupsub-menu.
2ClickInstallationtoopentheInstallationsub-menu.
Onthesub-menu,clickTransceiverInstallationtoopentheTransceiverInstallation
dialog.
→TransceiverInstallationonpage153
3IntheTransceiverInstallationdialog,clickBrowseinanattempttoreconnectto
thetransceiver.
98
338106/A
 Loading...
Loading...