

Siemens SIMATIC S7-1500, SIMATIC S7-1500 Motion Control V13 Function Manual
S7-1500 Motion Control V13 Update 3
___________________
___________________
___________________
___________________
___________________
___________________
___________________
___________________
___________________
___________________
___________________
___________________
___________________
SIMATIC
S7-1500
S7-1500 Motion Control V13
Update 3
Function Manual
07/2014
A5E03879256
Preface
Guide to documentation
S7-1500 / ET 200MP
1
Introduction
2
Basics
3
Guidelines
4
Using versions
5
Configuring
6
Programming
7
Downloading to CPU
8
Commissioning
9
Diagnostics
10
Instructions
11
Appendix
A
-AC
Siemens AG
Industry Sector
Postfach 48 48
90026 NÜRNBERG
GERMANY
A5E03879256-AC
Ⓟ
Copyright © Siemens AG 2013 - 2014.
All rights reserved
Legal information
Warning notice system
DANGER
indicates that death or severe personal injury will result if proper precautions are not taken.
WARNING
indicates that death or severe personal injury may result if proper precautions are not taken.
CAUTION
indicates that minor personal injury can result if proper precautions are not taken.
NOTICE
indicates that property damage can result if proper precautions are not taken.
Qualified Personnel
personnel qualified
Proper use of Siemens products
WARNING
Siemens products may only be used for the applications described in the catalog and in the relevant technical
Trademarks
Disclaimer of Liability
This manual contains notices you have to observe in order to ensure your personal safety, as well as to prevent
damage to property. The notices referring to your personal safety are highlighted in the manual by a safety alert
symbol, notices referring only to property damage have no safety alert symbol. These notices shown below are
graded according to the degree of danger.
If more than one degree of danger is present, the warning notice representing the highest degree of danger will
be used. A notice warning of injury to persons with a safety alert symbol may also include a warning relating to
property damage.
The product/system described in this documentation may be operated only by
task in accordance with the relevant documentation, in particular its warning notices and safety instructions.
Qualified personnel are those who, based on their training and experience, are capable of identifying risks and
avoiding potential hazards when working with these products/systems.
for the specific
Note the following:
documentation. If products and components from other manufacturers are used, these must be recommended
or approved by Siemens. Proper transport, storage, installation, assembly, commissioning, operation and
maintenance are required to ensure that the products operate safely and without any problems. The permissible
ambient conditions must be complied with. The information in the relevant documentation must be observed.
All names identified by ® are registered trademarks of Siemens AG. The remaining trademarks in this publication
may be trademarks whose use by third parties for their own purposes could violate the rights of the owner.
We have reviewed the contents of this publication to ensure consistency with the hardware and software
described. Since variance cannot be precluded entirely, we cannot guarantee full consistency. However, the
information in this publication is reviewed regularly and any necessary corrections are included in subsequent
editions.
07/2014 Subject to change
Preface
Purpose of the documentation
Required basic knowledge
Validity of the documentation
Conventions
Note
A note contains important information about the product described in the documentation,
about the handling of the product, and about sections in this documentation demanding your
particular
Further support
This documentation provides important information that you need to configure and
commission the integrated Motion Control functionality of the S7-1500 Automation systems.
In order to understand this documentation, the following knowledge is required:
● General knowledge in the field of automation
● General knowledge in the field of drive engineering and motion control
This documentation is valid for the S7-1500 product range.
● For the path settings in the project navigation it is presumed that the "Technology objects"
object is opened in the CPU subtree. The "Technology object" placeholder represents the
name of the technology object.
Example: "Technology object > Configuration > Basic parameters".
● The <TO> placeholder represents the name set in tags for the respective technology
object.
Example: <TO>.Actor.Type
● This documentation contains pictures of the devices described. The pictures may differ in
minor details from the devices supplied.
You should also observe the notes that are marked as follows:
attention.
● The range of technical documentation for the individual SIMATIC products and systems is
available on the Internet (http://www.siemens.com/simatic-tech-doku-portal).
● The online catalog and the online ordering system is available on the Internet
(http://mall.automation.siemens.com).
S7-1500 Motion Control V13 Update 3
Function Manual, 07/2014, A5E03879256-AC
3

Preface
Security information
Siemens provides products and solutions with industrial security functions that support the
secure operation of plants, solutions, machines, equipment and/or networks. They are
important components in a holistic industrial security concept. With this in mind, Siemens’
products and solutions undergo continuous development. Siemens recommends strongly
that you regularly check for product updates.
For the secure operation of Siemens products and solutions, it is necessary to take suitable
preventive action (e.g. cell protection concept) and integrate each component into a holistic,
state-of-the-art industrial security concept. Third-party products that may be in use should
also be considered. You can find more information about industrial security on the Internet
(http://www.siemens.com/industrialsecurity).
To stay informed about product updates as they occur, sign up for a product-specific
newsletter. You can find more information on the Internet
(http://support.automation.siemens.com).
S7-1500 Motion Control V13 Update 3
4 Function Manual, 07/2014, A5E03879256-AC
Table of contents
Preface ...................................................................................................................................................... 3
1 Guide to documentation S7-1500 / ET 200MP......................................................................................... 13
2 Introduction .............................................................................................................................................. 15
3 Basics ...................................................................................................................................................... 20
2.1 Integrated Motion Control Functionality of the CPU S7-1500 ................................................ 15
2.2 Principle of operation of S7-1500 Motion Control ................................................................... 16
3.1 Functions ................................................................................................................................ 20
3.2 Scale ....................................................................................................................................... 21
3.3 Speed-controlled axis technology object ................................................................................ 21
3.4 Positioning axis technology object .......................................................................................... 22
3.5 Synchronous axis technology object ...................................................................................... 23
3.6 External encoder technology object ........................................................................................ 25
3.7 Axis types ................................................................................................................................ 26
3.8 Modulo setting ......................................................................................................................... 26
3.9 Units of measure ..................................................................................................................... 27
3.10 Drive and encoder connection ................................................................................................ 28
3.10.1 Brief description ...................................................................................................................... 28
3.10.2 Frames .................................................................................................................................... 29
3.10.3 Setting reference values ......................................................................................................... 31
3.10.4 Tags ........................................................................................................................................ 32
3.11 Safety functions in the drive .................................................................................................... 33
3.11.1 Brief description ...................................................................................................................... 33
3.11.2 Safe Torque Off (STO) ........................................................................................................... 33
3.11.3 Safe Stop 1 (SS1) ................................................................................................................... 34
3.11.4 Safe Stop 2 (SS2) ................................................................................................................... 34
3.12 Actual values ........................................................................................................................... 35
3.12.1 Brief description ...................................................................................................................... 35
3.12.2 Incremental actual value ......................................................................................................... 35
3.12.3 Absolute actual value .............................................................................................................. 35
3.12.4 Tags ........................................................................................................................................ 36
3.13 Mechanics ............................................................................................................................... 37
3.13.1 Brief description ...................................................................................................................... 37
3.13.2 Tags ........................................................................................................................................ 38
3.14 Homing .................................................................................................................................... 39
3.14.1 Brief description ...................................................................................................................... 39
3.14.2 Terms ...................................................................................................................................... 40
3.14.3 Homing mode .......................................................................................................................... 41
S7-1500 Motion Control V13 Update 3
Function Manual, 07/2014, A5E03879256-AC
5

Table of contents
4 Guidelines ................................................................................................................................................ 85
5 Using versions ......................................................................................................................................... 86
3.14.4 Active homing with zero mark and proximity switch .............................................................. 43
3.14.5 Active homing with zero mark ................................................................................................ 46
3.14.6 Active homing with digital input .............................................................................................. 48
3.14.7 Passive homing with zero mark and proximity switch ............................................................ 50
3.14.8 Passive homing with zero mark ............................................................................................. 52
3.14.9 Passive homing with digital input ........................................................................................... 54
3.14.10 Direction reversal at the hardware limit switch (reversing cam) ............................................ 55
3.14.11 Direct homing ......................................................................................................................... 56
3.14.12 Absolute value adjustment ..................................................................................................... 56
3.14.13 Resetting the "Homed" status ................................................................................................ 57
3.14.14 Tags ....................................................................................................................................... 58
3.15 Control .................................................................................................................................... 59
3.15.1 Brief description ..................................................................................................................... 59
3.15.2 Control structure..................................................................................................................... 60
3.15.3 Tags ....................................................................................................................................... 61
3.16 Position-related monitoring .................................................................................................... 61
3.16.1 Brief description ..................................................................................................................... 61
3.16.2 Positioning monitoring ............................................................................................................ 62
3.16.3 Following error monitoring ..................................................................................................... 63
3.16.4 Tags ....................................................................................................................................... 64
3.17 Traversing range limitation ..................................................................................................... 65
3.17.1 Brief description ..................................................................................................................... 65
3.17.2 Hardware limit switches ......................................................................................................... 65
3.17.3 Software limit switch .............................................................................................................. 67
3.17.4 Tags ....................................................................................................................................... 68
3.18 Motion control and limits for dynamics ................................................................................... 69
3.18.1 Brief description ..................................................................................................................... 69
3.18.2 Velocity profile ........................................................................................................................ 70
3.18.3 Emergency stop deceleration ................................................................................................ 71
3.18.4 Tags ....................................................................................................................................... 72
3.19 Synchronous operation .......................................................................................................... 73
3.19.1 Brief description ..................................................................................................................... 73
3.19.2 Relative gearing ..................................................................................................................... 74
3.19.3 Master value coupling ............................................................................................................ 76
3.19.4 Tags ....................................................................................................................................... 77
3.20 O
perational sequence ............................................................................................................ 78
3.20.1 Organization Blocks for Motion Control ................................................................................. 78
3.20.2 Process image partition "OB Servo PIP" ............................................................................... 80
3.20.3 Operational Sequence and Timeouts .................................................................................... 80
3.20.4 Operating modes ................................................................................................................... 83
4.1 Guidelines on use of motion control....................................................................................... 85
5.1 Overview of versions .............................................................................................................. 86
5.2 Changing a technology version .............................................................................................. 89
S7-1500 Motion Control V13 Update 3
6 Function Manual, 07/2014, A5E03879256-AC

Table of contents
6 Configuring .............................................................................................................................................. 91
6.1 Adding and configuring drives in the device configuration ..................................................... 91
6.1.1 Add and configure PROFINET IO drives ................................................................................ 91
6.1.2 Add and configure PROFIBUS DP drives............................................................................... 94
6.1.3 Adding and configuring drives with analog connections ......................................................... 96
6.2 Add technology object ............................................................................................................ 99
6.3 Working with the configuration editor .................................................................................... 100
6.4 Compare values .................................................................................................................... 101
6.5 Configuring the Speed-Control Axis technology object ........................................................ 102
6.5.1 Configuration - Basic Parameters ......................................................................................... 102
6.5.2 Hardware interface ................................................................................................................ 102
6.5.2.1 Configuration - Drive ............................................................................................................. 102
6.5.2.2 Configuration - Data exchange ............................................................................................. 104
6.5.3 Extended Parameters ........................................................................................................... 105
6.5.3.1 Configuration - Mechanics .................................................................................................... 105
6.5.3.2 Configuration - Dynamic limits .............................................................................................. 105
6.5.3.3 Configuration - Dynamic Defaults ......................................................................................... 107
6.5.3.4 Configuration - Emergency stop ........................................................................................... 109
6.6 Configuring the positioning axis/synchronous axis technology object .................................. 110
6.6.1 Configuration - Basic Parameters ......................................................................................... 110
6.6.2 Hardware interface ................................................................................................................ 111
6.6.2.1 Configuration - Drive ............................................................................................................. 111
6.6.2.2 Configuration - Encoder ........................................................................................................ 113
6.6.2.3 Configuration - Data exchange ............................................................................................. 114
6.6.3 Configuration - master value interconnections (synchronous axis only) .............................. 124
6.6.4 Extended Parameters ........................................................................................................... 125
6.6.4.1 Configuration - Mechanics .................................................................................................... 125
6.6.4.2 Configuration - Position monitoring ....................................................................................... 129
6.6.4.3 Configuration - Dynamic limits .............................................................................................. 130
6.6.4.4 Configuration - Dynamic Defaults ......................................................................................... 132
6.6.4.5 Configuration - Emergency stop ........................................................................................... 134
6.6.4.6 Homing .................................................................................................................................. 135
6.6.4.7 Position monitoring ............................................................................................................... 144
6.6.4.8 Configuration - Control loop .................................................................................................. 146
6.7 Configuring the External Encoder technology object
.7.1 Configuration - Basic Parameters ......................................................................................... 147
6
............................................................ 147
6.7.2 Hardware interface ................................................................................................................ 148
6.7.2.1 Configuration - Encoder ........................................................................................................ 148
6.7.2.2 Configuration - Data exchange ............................................................................................. 149
6.7.3 Extended Parameters ........................................................................................................... 153
6.7.3.1 Configuration - Mechanics .................................................................................................... 153
6.7.3.2 Homing .................................................................................................................................. 155
6.8 Parameter view ..................................................................................................................... 159
6.8.1 Introduction to the parameter view ....................................................................................... 159
6.8.2 Structure of the parameter view ............................................................................................ 161
6.8.2.1 Toolbar .................................................................................................................................. 161
6.8.2.2 Navigation ............................................................................................................................. 161
6.8.2.3 Parameter table .................................................................................................................... 162
S7-1500 Motion Control V13 Update 3
Function Manual, 07/2014, A5E03879256-AC
7

Table of contents
7 Programming ......................................................................................................................................... 172
8 Downloading to CPU ............................................................................................................................. 198
9 Commissioning ...................................................................................................................................... 199
6.8.3 Opening the parameter view ................................................................................................ 163
6.8.4 Working with the parameter view ......................................................................................... 164
6.8.4.1 Overview .............................................................................................................................. 164
6.8.4.2 Filtering the parameter table ................................................................................................ 164
6.8.4.3 Sorting the parameter table ................................................................................................. 165
6.8.4.4 Transferring parameter data to other editors ....................................................................... 165
6.8.4.5 Indicating errors ................................................................................................................... 166
6.8.4.6 Editing start values in the project ......................................................................................... 166
6.8.4.7 Monitoring values online in the parameter view ................................................................... 168
6.8.4.8 Modifying values .................................................................................................................. 169
6.8.4.9 Comparing values ................................................................................................................ 170
7.1 Introduction .......................................................................................................................... 172
7.2 Technology data block ......................................................................................................... 172
7.2.1 Introduction .......................................................................................................................... 172
7.2.2 Evaluating the technology data block .................................................................................. 173
7.2.3 Evaluate StatusWord, ErrorWord and WarningWord .......................................................... 175
7.2.4 Change restart-relevant data ............................................................................................... 177
7.3 Motion Control instructions .................................................................................................. 178
7.3.1 Motion Control instruction parameters ................................................................................. 178
7.3.2 Add Motion Control instructions ........................................................................................... 181
7.4 Starting Motion Control jobs ................................................................................................. 183
7.5 Tracking active jobs ............................................................................................................. 184
7.5.1 Introduction .......................................................................................................................... 184
7.5.2 Motion Control instructions with "Done" parameter ............................................................. 185
7.5.3 Motion Control instructions without "Done" parameter ........................................................ 189
7.5.4 Motion Control instruction "MC_MoveJog" .......................................................................... 193
7.6 Ending Motion Control jobs .................................................................................................. 196
7.7 Restart of technology objects ............................................................................................... 197
9.1 Introduction .......................................................................................................................... 199
9.2 Commissioning guidelines ................................................................................................... 199
9.3 Axis control panel ................................................................................................................. 202
9.3.1 Function and structure of the axis control panel .................................................................. 202
9.3.2 Using the axis control panel ................................................................................................. 206
9.4 Optimization ......................................................................................................................... 207
9.4.1 Function and structure of the optimization ........................................................................... 207
9.4.2 Optimize position controller .................................................................................................. 210
9.5 Simulation mode .................................................................................................................. 213
S7-1500 Motion Control V13 Update 3
8 Function Manual, 07/2014, A5E03879256-AC

Table of contents
10 Diagnostics ............................................................................................................................................ 214
11 Instructions ............................................................................................................................................ 234
10.1 Introduction ........................................................................................................................... 214
10.2 Diagnostic concept ................................................................................................................ 214
10.3 Technology alarms ................................................................................................................ 215
10.4 Errors in Motion Control instructions ..................................................................................... 219
10.5 Speed-controlled axis technology object .............................................................................. 220
10.5.1 Status and error bits .............................................................................................................. 220
10.5.2 Motion status ......................................................................................................................... 223
10.5.3 PROFIdrive frame ................................................................................................................. 224
10.6 Positioning axis/synchronous axis technology object ........................................................... 225
10.6.1 Status and error bits .............................................................................................................. 225
10.6.2 Motion status ......................................................................................................................... 229
10.6.3 PROFIdrive frame ................................................................................................................. 230
10.7 External encoder technology object ...................................................................................... 231
10.7.1 Status and error bits .............................................................................................................. 231
10.7.2 Motion status ......................................................................................................................... 232
10.7.3 PROFIdrive frame ................................................................................................................. 233
11.1 S7-1500 Motion Control V2 .................................................................................................. 234
11.1.1 MC_Power ............................................................................................................................ 234
11.1.1.1 MC_Power: Enable, disable technology objects V2 ............................................................. 234
11.1.1.2 MC_Power: Function chart V2 .............................................................................................. 238
11.1.2 MC_Home ............................................................................................................................. 239
11.1.2.1 MC_Home: Home technology objects, set home position V2 .............................................. 239
11.1.3 MC_MoveJog ........................................................................................................................ 244
11.1.3.1 MC_MoveJog: Move axes in jog mode V2 ........................................................................... 244
11.1.3.2 MC_MoveJog: Function chart V2 .......................................................................................... 248
11.1.4 MC_MoveVelocity ................................................................................................................. 249
11.1.4.1 MC_MoveVelocity: Move axes at predefined velocity V2 ..................................................... 249
11.1.4.2 MC_MoveVelocity: Function chart V2 ................................................................................... 254
11.1.5 MC_MoveRelative ................................................................................................................. 255
11.1.5.1 MC_MoveRelative: Relative positioning of axes V2 ............................................................. 255
11.1.5.2 MC_MoveRelative: Function chart V2 .................................................................................. 259
11.1.6 MC_MoveAbsolute ................................................................................................................ 260
11.1.6.1 MC_MoveAbsolute: Absolute positioning of axes V2 ........................................................... 260
11.1.6.2 MC_MoveAbsolute: Function chart V2 ................................................................................. 264
11.1.7 MC_MoveSuperimposed ...................................................................................................... 265
11.1.7.1 MC_MoveSuperimposed: Superimposed positioning of axes V2 ......................................... 265
11.1.7.2 MC_MoveSuperimposed: Function chart V2 ........................................................................ 269
11.1.8 MC_GearIn ............................................................................................................................ 270
11.1.8.1 MC_GearIn: Start gearing V2 ............................................................................................... 270
11.1.8.2 MC_GearIn: Function chart V2 ............................................................................................. 274
11.1.9 MC_Halt ................................................................................................................................ 275
11.1.9.1 MC_Halt: Stop axes V2 ......................................................................................................... 275
11.1.9.2 MC_Halt: Function chart V2 .................................................................................................. 278
11.1.10 MC_Reset ............................................................................................................................. 279
11.1.10.1 MC_Reset: Acknowledge alarms, restart technology objects V2 ......................................... 279
S7-1500 Motion Control V13 Update 3
Function Manual, 07/2014, A5E03879256-AC
9

Table of contents
A Appendix ................................................................................................................................................ 321
11.2 S7-1500 Motion Control V1 .................................................................................................. 282
11.2.1 MC_Power ............................................................................................................................ 282
11.2.1.1 MC_Power: Enable, disable technology objects V1 ............................................................ 282
11.2.1.2 MC_Power: Function chart V1 ............................................................................................. 286
11.2.2 MC_Home ............................................................................................................................ 287
11.2.2.1 MC_Home: Home technology objects, set home position V1 .............................................. 287
11.2.3 MC_MoveJog ....................................................................................................................... 292
11.2.3.1 MC_MoveJog: Move axes in jog mode V1 .......................................................................... 292
11.2.3.2 MC_MoveJog: Function chart V1 ......................................................................................... 296
11.2.4 MC_MoveVelocity ................................................................................................................ 297
11.2.4.1 MC_MoveVelocity: Move axes at predefined specified velocity V1 ..................................... 297
11.2.4.2 MC_MoveVelocity: Function chart V1 .................................................................................. 302
11.2.5 MC_MoveRelative ................................................................................................................ 303
11.2.5.1 MC_MoveRelative: Relative positioning of axes V1 ............................................................ 303
11.2.5.2 MC_MoveRelative: Function chart V1 ................................................................................. 307
11.2.6 MC_MoveAbsolute ............................................................................................................... 308
11.2.6.1 MC_MoveAbsolute: Absolute positioning of axes V1 .......................................................... 308
11.2.6.2 MC_MoveAbsolute: Function chart V1 ................................................................................ 312
11.2.7 MC_Halt ............................................................................................................................... 313
11.2.7.1 MC_Halt: Stop axes V1 ........................................................................................................ 313
11.2.7.2 MC_Halt: Function chart V1 ................................................................................................. 317
11.2.8 MC_Reset ............................................................................................................................ 318
11.2.8.1 MC_Reset: Acknowledge alarms, restart technology objects V1 ........................................ 318
A.1 Tags of the technology object SpeedAxis ............................................................................ 321
A.1.1 Legend ................................................................................................................................. 321
A.1.2 Actual values and setpoints (speed axis) ............................................................................ 321
A.1.3 Variable simulation (speed axis) .......................................................................................... 322
A.1.4 Actor tags (speed axis) ........................................................................................................ 322
A.1.5 LoadGear tags (speed axis) ................................................................................................. 323
A.1.6 DynamicLimits tags (speed axis) ......................................................................................... 324
A.1.7 DynamicDefaults tags (speed axis) ..................................................................................... 324
A.1.8 Override tags (speed axis) ................................................................................................... 325
A.1.9 StatusDrive tags (speed axis) .............................................................................................. 325
A.1.10 StatusWord tag (speed axis) ................................................................................................ 326
A.1.11 ErrorWord tag (speed axis) .................................................................................................. 328
A.1.12 ErrorDetail tags (speed axis) ............................................................................................... 329
A.1.13 WarningWord tag (speed axis) ............................................................................................ 330
A.1.14 ControlPanel tags (speed axis) ............................................................................................ 331
A.1.15 InternalToTrace tags (speed axis) ....................................................................................... 332
A.2 Tags of the positioning axis/synchronous axis technology object ....................................... 332
A.2.1 Legend ................................................................................................................................. 332
A.2.2 Actual values and setpoints (positioning axis/synchronous axis) ........................................ 333
A.2.3 Simulation tag (positioning axis / synchronous axis) ........................................................... 333
A.2.4 Actor tags (positioning axis/synchronous axis) .................................................................... 334
A.2.5 Sensor[n] tags (positioning axis/synchronous axis) ............................................................. 336
A.2.6 LoadGear tags (positioning axis/synchronous axis) ............................................................ 338
A.2.7 Mechanics tags (positioning axis/synchronous axis) ........................................................... 338
A.2.8 Properties tags (positioning axis/synchronous axis) ............................................................ 338
A.2.9 Modulo tags (positioning axis/synchronous axis) ................................................................ 339
A.2.10 DynamicLimits tags (positioning axis/synchronous axis) ..................................................... 339
S7-1500 Motion Control V13 Update 3
10 Function Manual, 07/2014, A5E03879256-AC

Table of contents
A.2.11 DynamicDefaults tags (positioning axis/synchronous axis) .................................................. 340
A.2.12 PositionLimits_SW tags (positioning axis/synchronous axis) ............................................... 340
A.2.13 PositionLimits_HW tags (positioning axis/synchronous axis) ............................................... 341
A.2.14 Homing tags (positioning axis/synchronous axis) ................................................................. 342
A.2.15 Override tags (positioning axis/synchronous axis) ............................................................... 343
A.2.16 PositionControl tags (positioning axis/synchronous axis) ..................................................... 344
A.2.17 FollowingError tags (positioning axis/synchronous axis) ...................................................... 345
A.2.18 PositionMonitoring tags (positioning axis/synchronous axis) ............................................... 346
A.2.19 StandstillSignal tags (positioning axis/synchronous axis) .................................................... 347
A.2.20 StatusPositioning tags (positioning axis/synchronous axis) ................................................. 347
A.2.21 StatusDrive tags (positioning axis/synchronous axis) .......................................................... 348
A.2.22 StatusSensor[n] tags (positioning axis/synchronous axis) ................................................... 349
A.2.23 StatusSynchronizedMotion tags (synchronous axis) ............................................................ 350
A.2.24 StatusWord tag (positioning axis/synchronous axis) ............................................................ 351
A.2.25 ErrorWord tag (positioning axis/synchronous axis) .............................................................. 353
A.2.26 ErrorDetail tags (positioning axis/synchronous axis) ............................................................ 355
A.2.27 WarningWord tag (positioning axis/synchronous axis) ......................................................... 356
A.2.28 ControlPanel tags (positioning axis/synchronous axis) ........................................................ 357
A.2.29 InternalToTrace tags (positioning axis/synchronous axis) .................................................... 358
A.3 Tags of the technology object external encoder ................................................................... 358
A.3.1 Legend .................................................................................................................................. 358
A.3.2 Actual values and setpoints (external encoder) .................................................................... 359
A.3.3 Sensor tags (external encoder) ............................................................................................ 359
A.3.4 Mechanics tags (external encoder) ....................................................................................... 361
A.3.5 LoadGear tags (external encoder) ........................................................................................ 361
A.3.6 Properties tags (external encoder) ....................................................................................... 361
A.3.7 Modulo tags (external encoder) ............................................................................................ 362
A.3.8 Homing tags (external encoder) ........................................................................................... 362
A.3.9 StatusSensor tags (external encoder) .................................................................................. 363
A.3.10 StatusWord tag (external encoder) ....................................................................................... 364
A.3.11 ErrorWord tag (external encoder) ......................................................................................... 365
A.3.12 ErrorDetail tags (external encoder) ....................................................................................... 366
A.3.13 WarningWord tag (external encoder) .................................................................................... 367
A.3.14 InternalToTrace tags (external encoder) .............................................................................. 367
A.4 Technology alarms ................................................................................................................ 368
A.4.1 Overview ............................................................................................................................... 368
A.4.2 Technology alarms 101-110 ................................................................................................. 371
A.4.3 Technology alarms 201-204 ................................................................................................. 375
A.4.4 Technology alarms 304-
342 .................................................................................................
A.4.5 Technology alarms 401-431 ................................................................................................. 379
A.4.6 Technology alarms 501-550 ................................................................................................. 381
A.4.7 Technology alarm 601 .......................................................................................................... 385
A.5 Error ID ................................................................................................................................. 386
A.6 MC_Power function chart ...................................................................................................... 388
A.6.1 Drive connection via PROFIdrive .......................................................................................... 388
A.6.1.1 StopMode 0 ........................................................................................................................... 388
A.6.1.2 StopMode 1 ........................................................................................................................... 389
A.6.1.3 Alarm response "Stop with maximum dynamic values" ........................................................ 390
A.6.1.4 Alarm response "Remove enable" ........................................................................................ 391
S7-1500 Motion Control V13 Update 3
Function Manual, 07/2014, A5E03879256-AC
376
11

Table of contents
Glossary ................................................................................................................................................ 397
Index ...................................................................................................................................................... 400
A.6.2 Analog drive connection ....................................................................................................... 392
A.6.2.1 StopMode 0 .......................................................................................................................... 392
A.6.2.2 StopMode 1 .......................................................................................................................... 393
A.6.2.3 Alarm response "Stop with maximum dynamic values" ....................................................... 394
A.6.2.4 Alarm response "Remove enable" ....................................................................................... 395
A.7 SINAMICS drives ................................................................................................................. 396
A.7.1 Homing SINAMICS drives with external zero marks ........................................................... 396
S7-1500 Motion Control V13 Update 3
12 Function Manual, 07/2014, A5E03879256-AC
1
Basic information
Device information
General information
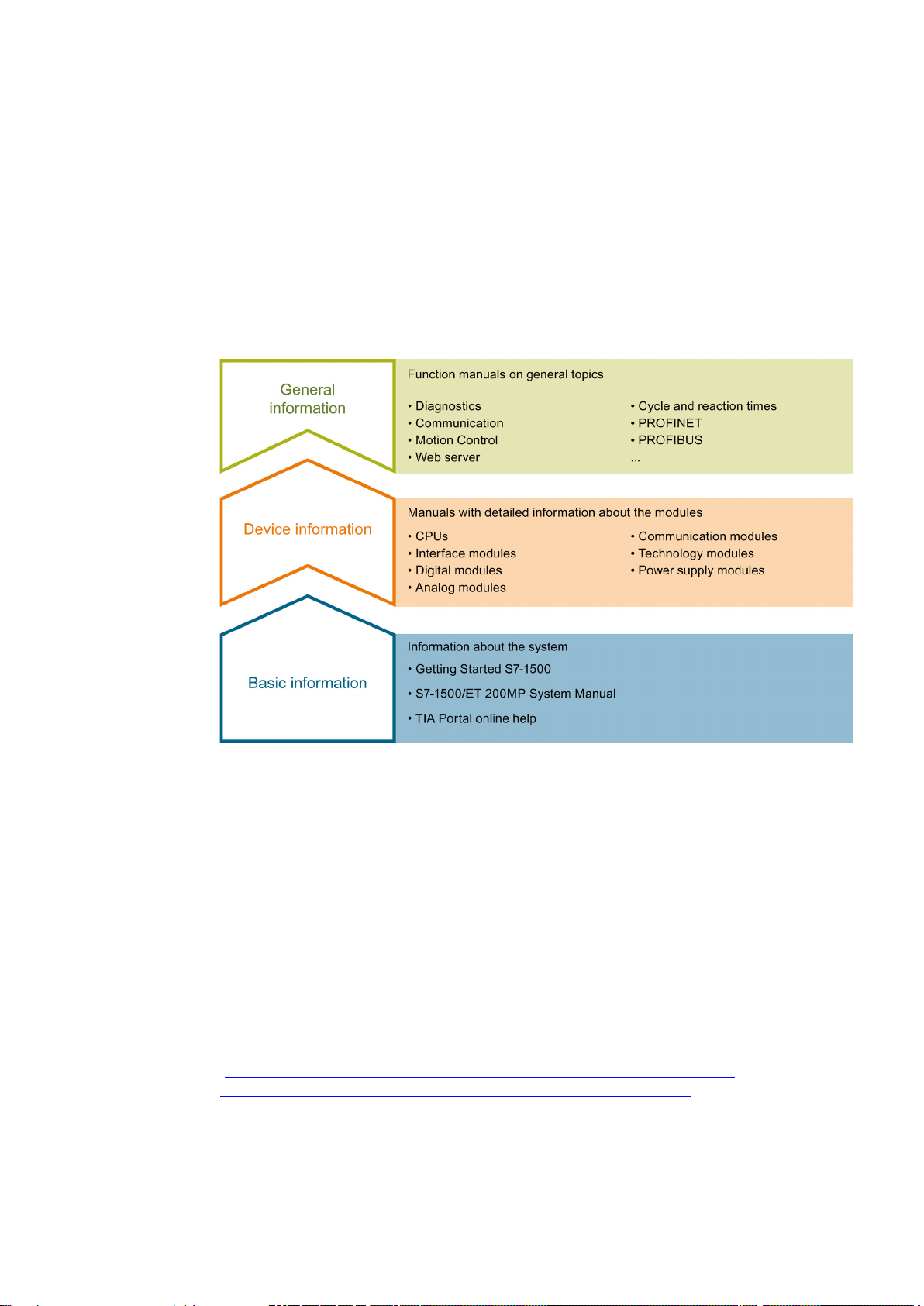
The documentation for the SIMATIC S7-1500 automation system and the SIMATIC
ET 200MP distributed I/O system is arranged into three areas.
This arrangement enables you to access the specific content you require.
System Manual and Getting Started describe in detail the configuration, installation, wiring
and commissioning of the SIMATIC S7-1500 and ET 200MP systems. The STEP 7 online
help supports you in the configuration and programming.
Manuals contain a compact description of the module-specific information, such as
properties, terminal diagrams, characteristics, technical specifications.
The function manuals contain detailed descriptions on general topics regarding the SIMATIC
S7-1500 and ET 200MP systems, e.g. diagnostics, communication, Motion Control, Web
server.
You can download the documentation free of charge from the Internet
(http://www.automation.siemens.com/mcms/industrial-automation-systems-
simatic/en/manual-overview/tech-doc-controllers/Pages/Default.aspx).
Changes and supplements to the manuals are documented in a Product Information.
S7-1500 Motion Control V13 Update 3
Function Manual, 07/2014, A5E03879256-AC
13
Guide to documentation S7-1500 / ET 200MP
Manual Collection S7-1500 / ET 200MP
My Documentation Manager
Applications & Tools
CAx Download Manager
The Manual Collection contains the complete documentation on the SIMATIC S7-1500
automation system and the ET 200MP distributed I/O system gathered together in one file.
You can find the Manual Collection on the Internet
(http://support.automation.siemens.com/WW/view/en/86140384).
The My Documentation Manager is used to combine entire manuals or only parts of these to
your own manual.
You can export the manual as PDF file or in a format that can be edited later.
You can find the My Documentation Manager on the Internet
(http://support.automation.siemens.com/WW/view/en/38715968).
Applications & Tools supports you with various tools and examples for solving your
automation tasks. Solutions are shown in interplay with multiple components in the system separated from the focus in individual products.
You can find Applications & Tools on the Internet
(http://support.automation.siemens.com/WW/view/en/20208582).
The CAx Download Manager is used to access the current product data for your CAx or CAe
systems.
You configure your own download package with a few clicks.
In doing so you can select:
● Product images, 2D dimension drawings, 3D models, internal circuit diagrams, EPLAN
macro files
● Manuals, characteristics, operating manuals, certificates
● Product master data
You can find the CAx Download Manager on the Internet
(http://support.automation.siemens.com/WW/view/en/42455541).
S7-1500 Motion Control V13 Update 3
14 Function Manual, 07/2014, A5E03879256-AC

2
2.1
Integrated Motion Control Functionality of the CPU S7-1500
S7-1500 Motion Control supports controlled positioning and moving of axes and is an
integral part of every CPU S7-1500 as well as every CPU S7-1500SP. The Motion Control
functionality supports the technology objects rotation axis, positioning axis, synchronous axis
and external encoders.
Drives with PROFIdrive capability and drives with analog setpoint interface are controlled by
means of standardized Motion Control instructions according to PLCopen.
The axis control panel and comprehensive online and diagnostic functions support easy
commissioning and optimization of drives.
S7-1500 Motion Control is constantly integrated into the CPU S7-1500 system diagnostics.
S7-1500 Motion Control V13 Update 3
Function Manual, 07/2014, A5E03879256-AC
15
Introduction
2.2
Principle of operation of S7-1500 Motion Control
Overview
2.2 Principle of operation of S7-1500 Motion Control
You create a project, configure technology objects, and load the configuration into the CPU
using the TIA Portal. The Motion Control functionality is processed in the CPU.
You control the technology objects with the Motion Control instructions in your user program.
The TIA Portal provides additional functions for commissioning, optimization (Page 199) and
diagnostics (Page 214).
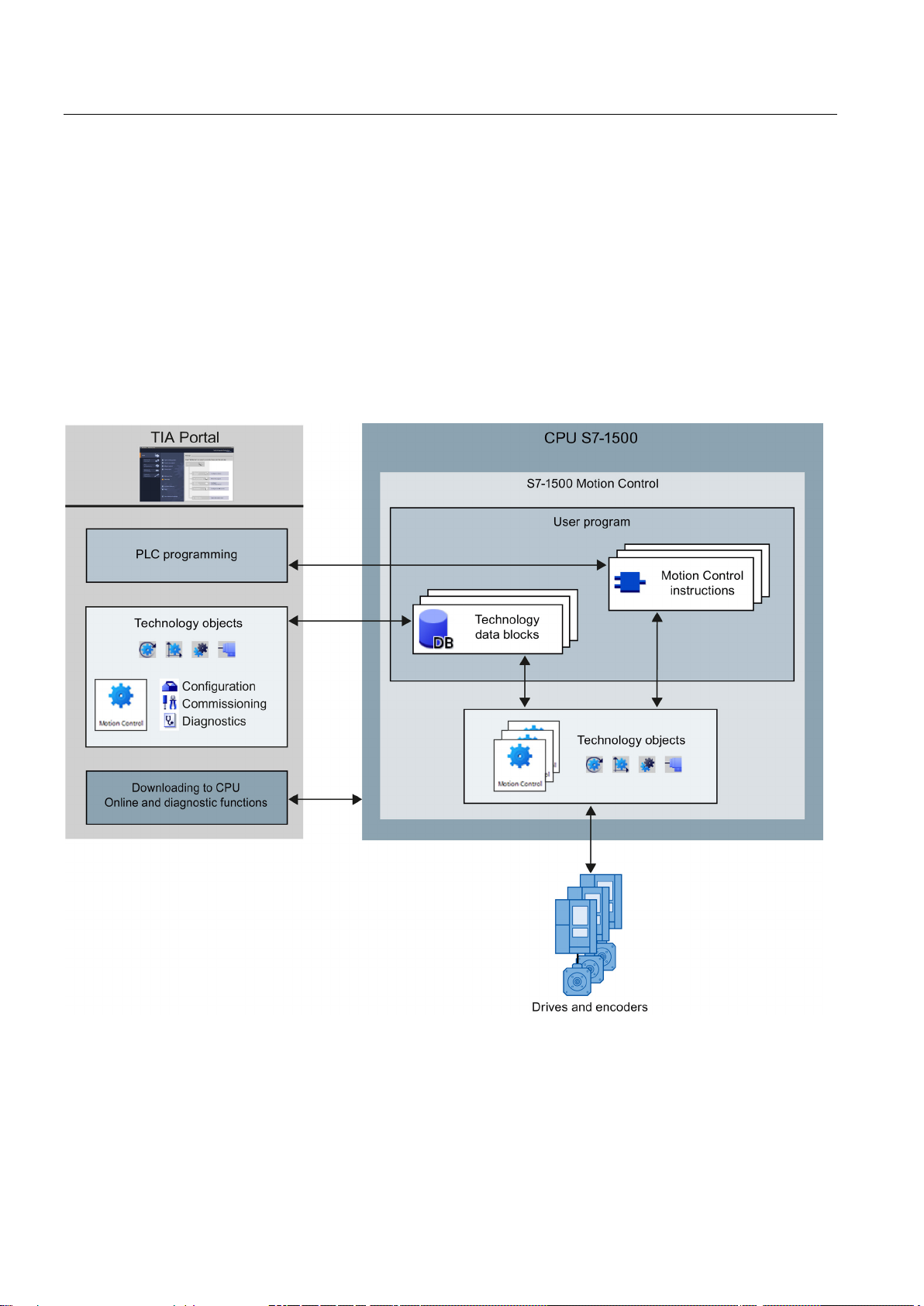
The following figure shows schematically the user interfaces and the integration of Motion
Control into the CPU S7-1500. The concepts are then briefly explained:
S7-1500 Motion Control V13 Update 3
16 Function Manual, 07/2014, A5E03879256-AC
Introduction
TIA Portal
Technology objects
Speed axis technology object
Positioning axis technology object
2.2 Principle of operation of S7-1500 Motion Control
The TIA Portal supports you in the planning and commissioning of Motion Control
functionality:
● Integrating and configuring hardware
● Creating and configuring technology objects
● Creating the user program
● Downloading to CPU
● Commissioning of axes
● Optimization of drives
● Diagnostics
You use the TIA Portal to configure the hardware, the technology objects as well as your
user program. You download the program you created to the CPU. You test your user
program and diagnose the hardware with the online and diagnostic functions of the
TIA Portal.
Technology objects represent real objects (e.g., a drive) in the controller. You can call the
functions of the technology objects by means of Motion Control instructions in your user
program. The technology objects provide open- and closed-loop control of the movement of
the real objects, and report status information (e.g. the current position).
The configuration of the technology objects represents the properties of the real object. The
configuration data are stored in a technology data block.
The following technology objects are available for Motion Control:
●
●
The speed axis technology object ("TO_SpeedAxis") permits the specification of the
speed for a drive. You program the movement of the axis with Motion Control
instructions.
The positioning axis technology object ("TO_PositioningAxis") permits the positioncontrolled positioning of a drive. You assign positioning jobs to the axis with Motion
Control instructions in your user program.
S7-1500 Motion Control V13 Update 3
Function Manual, 07/2014, A5E03879256-AC
17
Introduction
Synchronous axis technology object
External encoder technology object
Technology data block
Motion Control instructions
User program
2.2 Principle of operation of S7-1500 Motion Control
●
The synchronous axis technology object ("TO_SynchronousAxis") includes all functions of
the positioning axis technology object. You can also interconnect the axis with a master
value so that the axis follows the position change of a leading axis in synchronous
operation.
●
The external encoder technology object ("TO_ExternalEncoder") detects a position, and
makes it available to the controller. The detected position can be evaluated in the user
program.
The properties of real objects are configured by means of the technology objects and saved
in a technology data block. The technology data block contains all configuration data,
setpoint and actual values, and status information of the technology object. The TIA Portal
automatically creates the technology data block when the technology object is created. You
access the data of the technology data block with your user program.
With the Motion Control instructions you perform the desired functionality in the technology
objects. The Motion Control instructions are available in the TIA Portal under "Instructions >
Technology > Motion Control > S7-1500 Motion Control".
The Motion Control instructions conform to PLCopen (version 2.0).
The Motion Control instructions and the technology data block represent the programming
interfaces for the technology objects. Use the Motion Control instructions to start Motion
Control jobs at technology objects in your user program. You track the status of running jobs
with the output parameters of the Motion Control instructions. You access status information
of the technology object with the technology data block and change specific configuration
parameters during runtime.
S7-1500 Motion Control V13 Update 3
18 Function Manual, 07/2014, A5E03879256-AC
Introduction
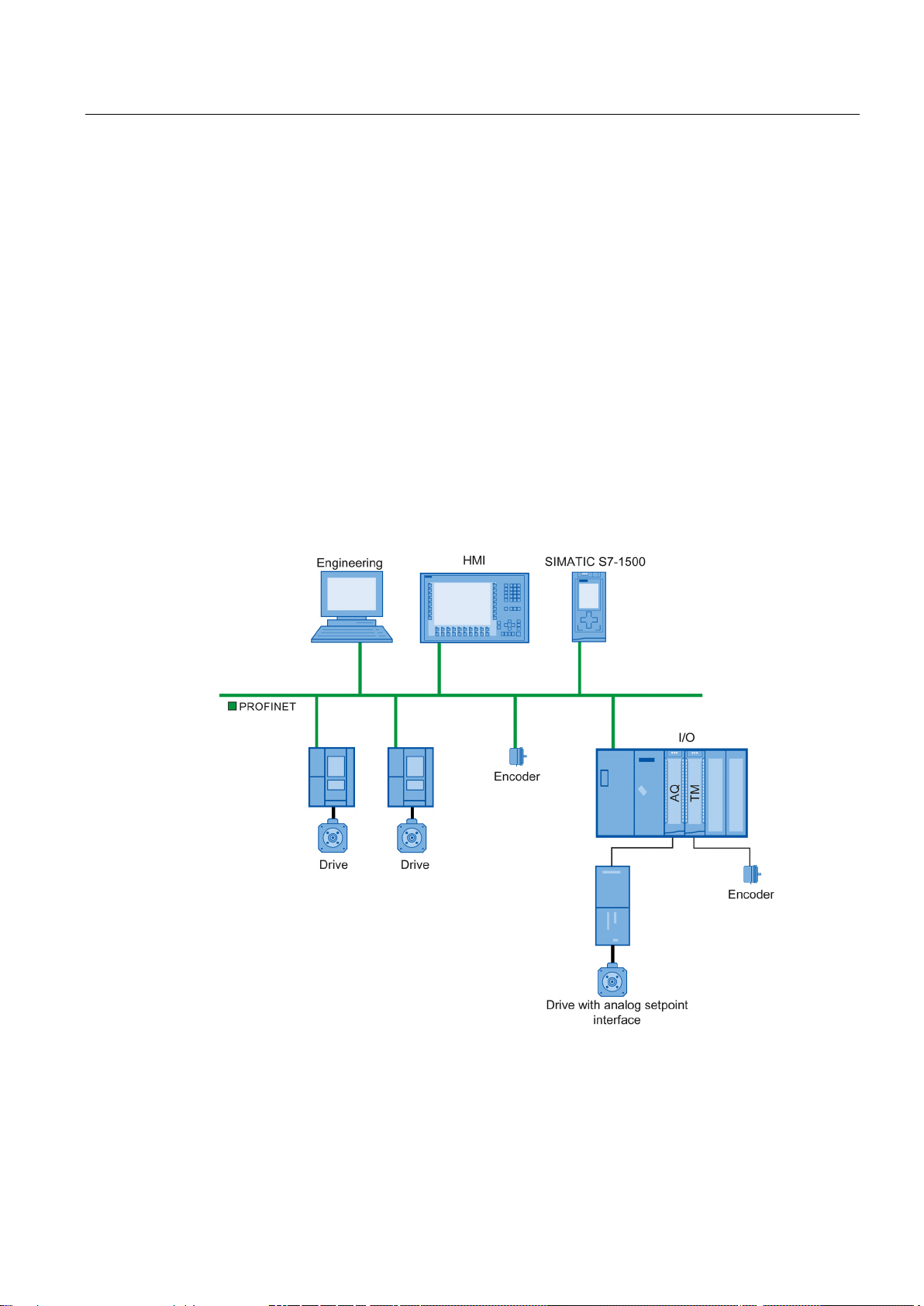
Drives and encoders
2.2 Principle of operation of S7-1500 Motion Control
Drives permit the movement of the axis. They are integrated into the hardware configuration.
When you perform a Motion Control job in your user program, the technology object takes
over the control of the drive and the reading in of values from position encoders.
Drives and encoders with PROFIdrive capability are connected by means of PROFIdrive
frames. The following connections are possible:
● PROFINET IO
● PROFIBUS DP
● Technology module (TM)
Drives with analog setpoint interfaces are connected using an analog output (AQ) and an
optional enable signal. Analog inputs and outputs are made available by means of
corresponding IO modules.
A drive is also called an actuator, and an encoder is also called a sensor.
The figure below shows an example configuration in which all components are connected to
the CPU by means of PROFINET IO:
S7-1500 Motion Control V13 Update 3
Function Manual, 07/2014, A5E03879256-AC
19
3
3.1
Functions
Function
Speed axis
Positioning axis
Synchronous axis
External encoder
Motion Control instructions (user program)
Enable, disable technology objects
home position
Moving axes in jog mode
Moving axes with the specified speed
Position axis relatively
Position axis absolutely
Start gearing
technology objects
TIA Portal
TIA Portal
("Kv" factor)
You can perform the Motion Control function by means of Motion Control instructions in your
user program or the TIA Portal (under Commissioning).
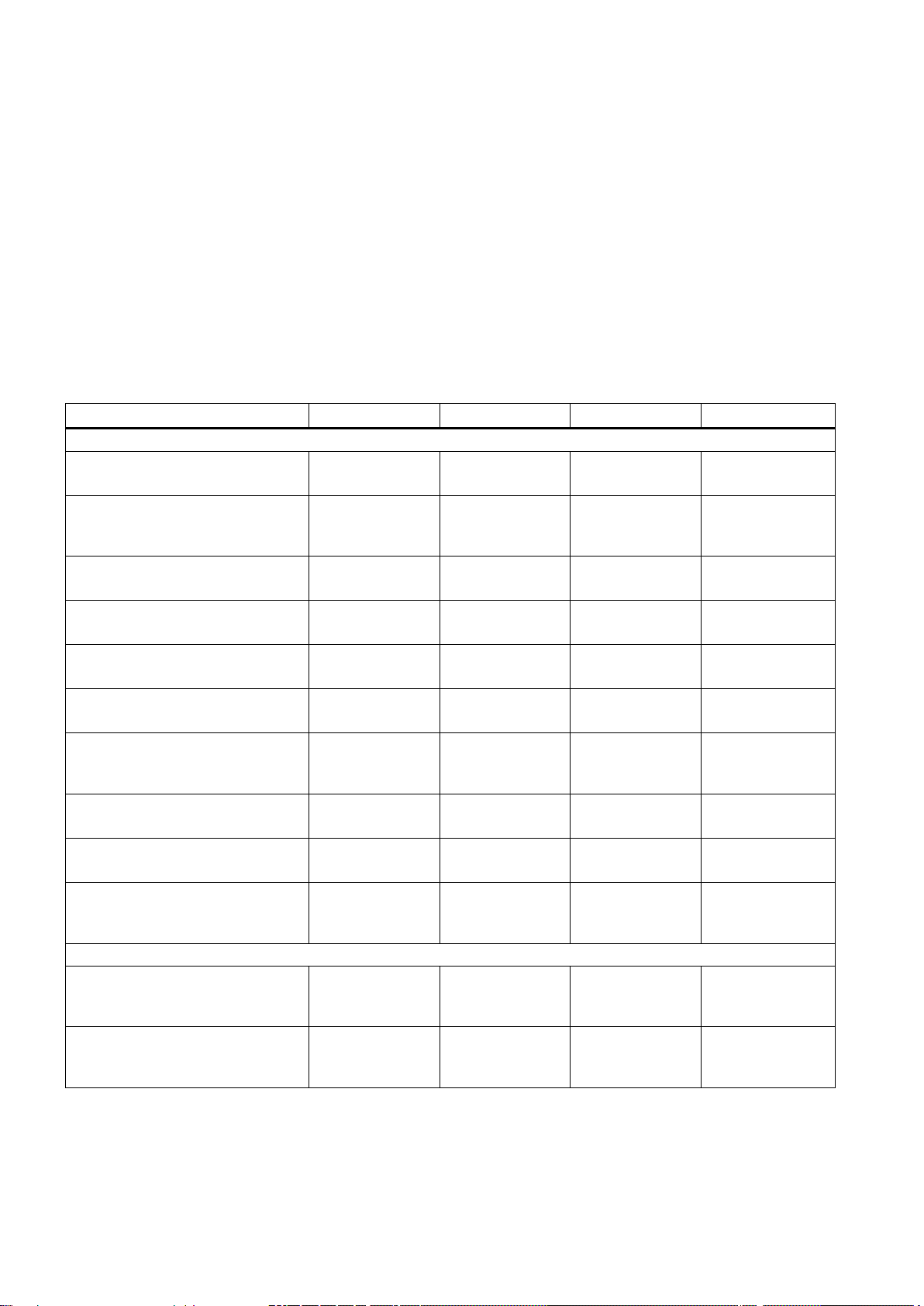
The following table shows the functions that are supported by technology objects:
"MC_Power (Page 234)"
"MC_Home (Page 239)"
Homing technology objects, setting
"MC_MoveJog (Page 244)"
"MC_MoveVelocity (Page 249)"
"MC_MoveRelative (Page 255)"
"MC_MoveAbsolute (Page 260)"
"MC_MoveSuperimposed
(Page 265)"
Superimposed positioning of axes
"MC_GearIn (Page 270)"
"MC_Halt (Page 275)"
Stop axis
"MC_Reset (Page 279)"
Acknowledging alarms, restarting
X X X X
- X X X
X X X -
X X X -
- X X -
- X X -
- X X -
- - X -
X X X -
X X X X
"Axis control panel (Page 202)"
Moving and homing axes using the
"Optimization (Page 207)"
Optimization of position control
S7-1500 Motion Control V13 Update 3
20 Function Manual, 07/2014, A5E03879256-AC
X X X -
- X X -
Basics
3.2
Scale
3.3
Speed-controlled axis technology object
3.2 Scale
For information on the number of technology objects that may be used, refer to the technical
specifications of the utilized CPU.
A synchronous axis requires twice as many resources as a speed-controlled axis or
positioning axis. You can configure two fewer speed or positioning axes for every
synchronous axis you use.
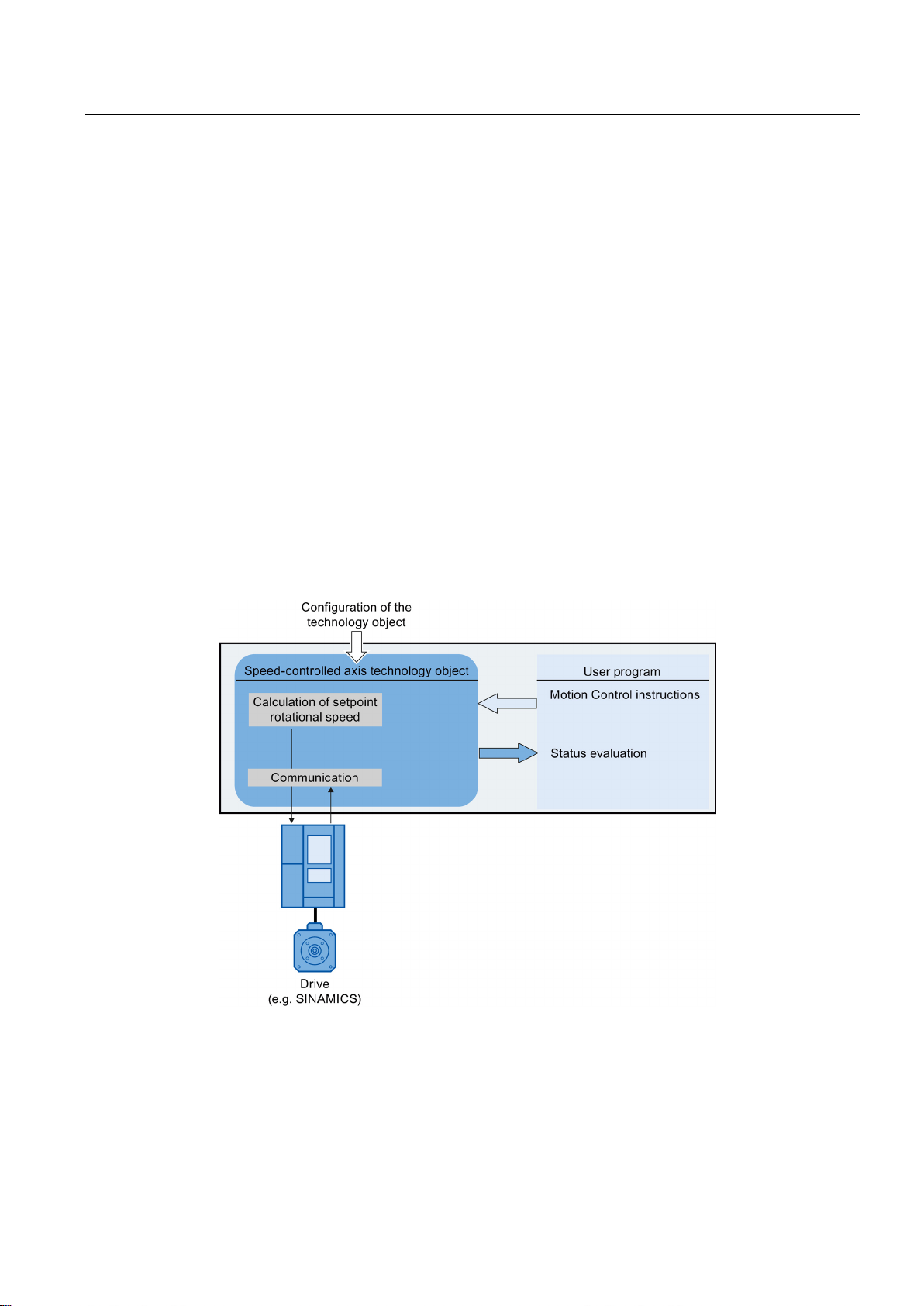
The speed axis technology object calculates speed setpoints, taking account of the specified
dynamics, and outputs them to the drive. All movements of the speed axis occur under
speed control. The system takes account of an existing load gear.
A drive is assigned to each speed axis by means of a PROFIdrive frame, or by means of an
analog setpoint interface.
The speed is specified in revolutions per unit of time.
The following figure shows the basic principle of operation of the speed axis technology
object:
S7-1500 Motion Control V13 Update 3
Function Manual, 07/2014, A5E03879256-AC
21
Basics
3.4
Positioning axis technology object
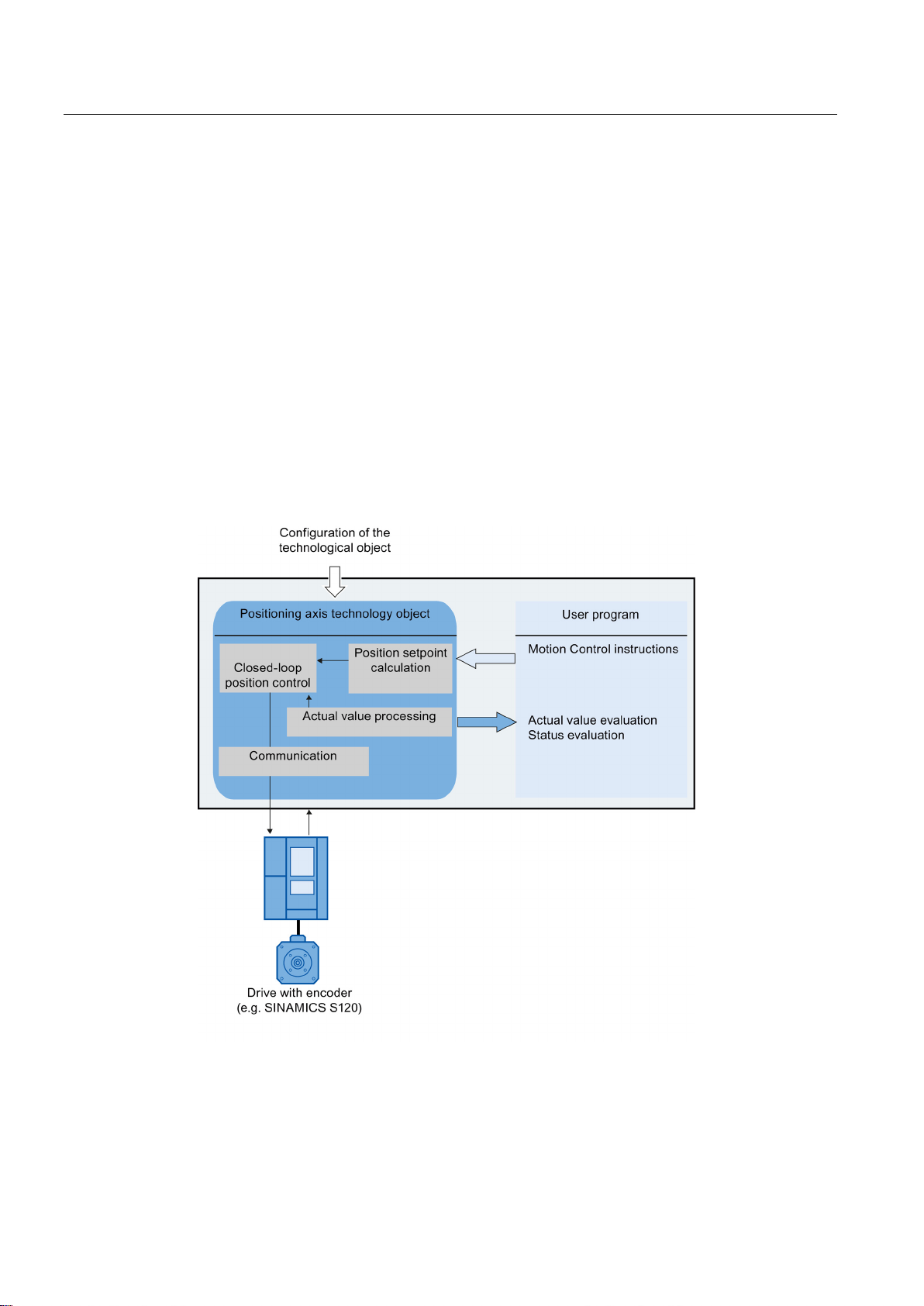
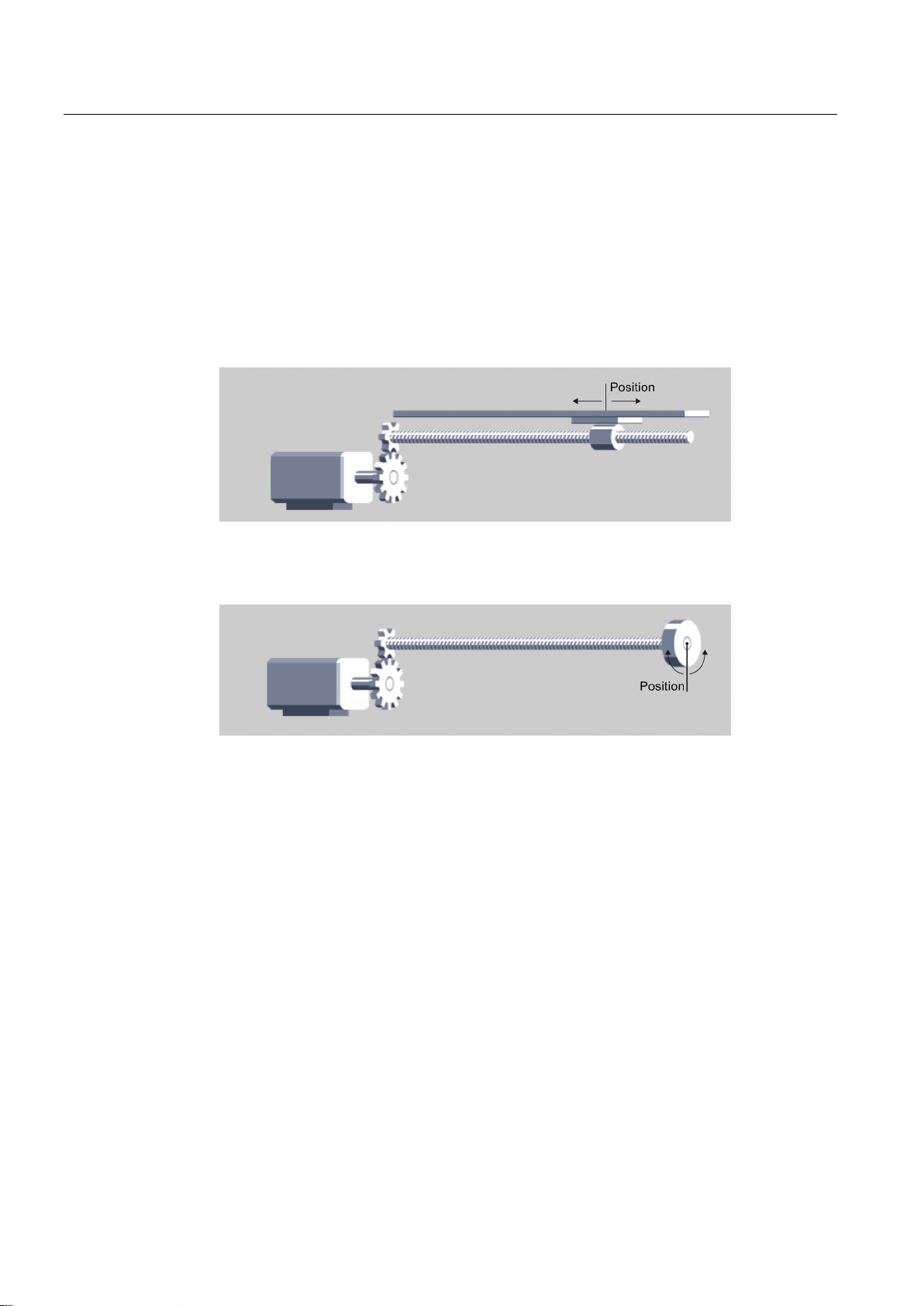
3.4 Positioning axis technology object
The positioning axis technology object calculates position setpoints, taking account of the
specified dynamics, and outputs corresponding speed control setpoints to the drive. All
movements of the positioning axis occur under position control. For absolute positioning, the
physical position must be known to the positioning axis technology object.
Each positioning axis is assigned a drive by means of a PROFIdrive frame or by means of
an analog setpoint interface, and an encoder by means of a PROFIdrive frame.
The relationship between the encoder values and a defined position is created by assigning
parameters to the mechanical properties and the encoder settings, as well as to a homing
process. The technology object can also perform movements without a position relationship,
and relative position movements, even without being in a homed status.
Depending on the execution of the mechanics, a positioning axis is implemented as linear
axis or rotary axis (Page 26).
The figure below shows the basic principle of operation of the positioning axis technology
object:
S7-1500 Motion Control V13 Update 3
22 Function Manual, 07/2014, A5E03879256-AC
Basics
3.5
Synchronous axis technology object
Relative position relationship
Synchronization
Travel synchronous
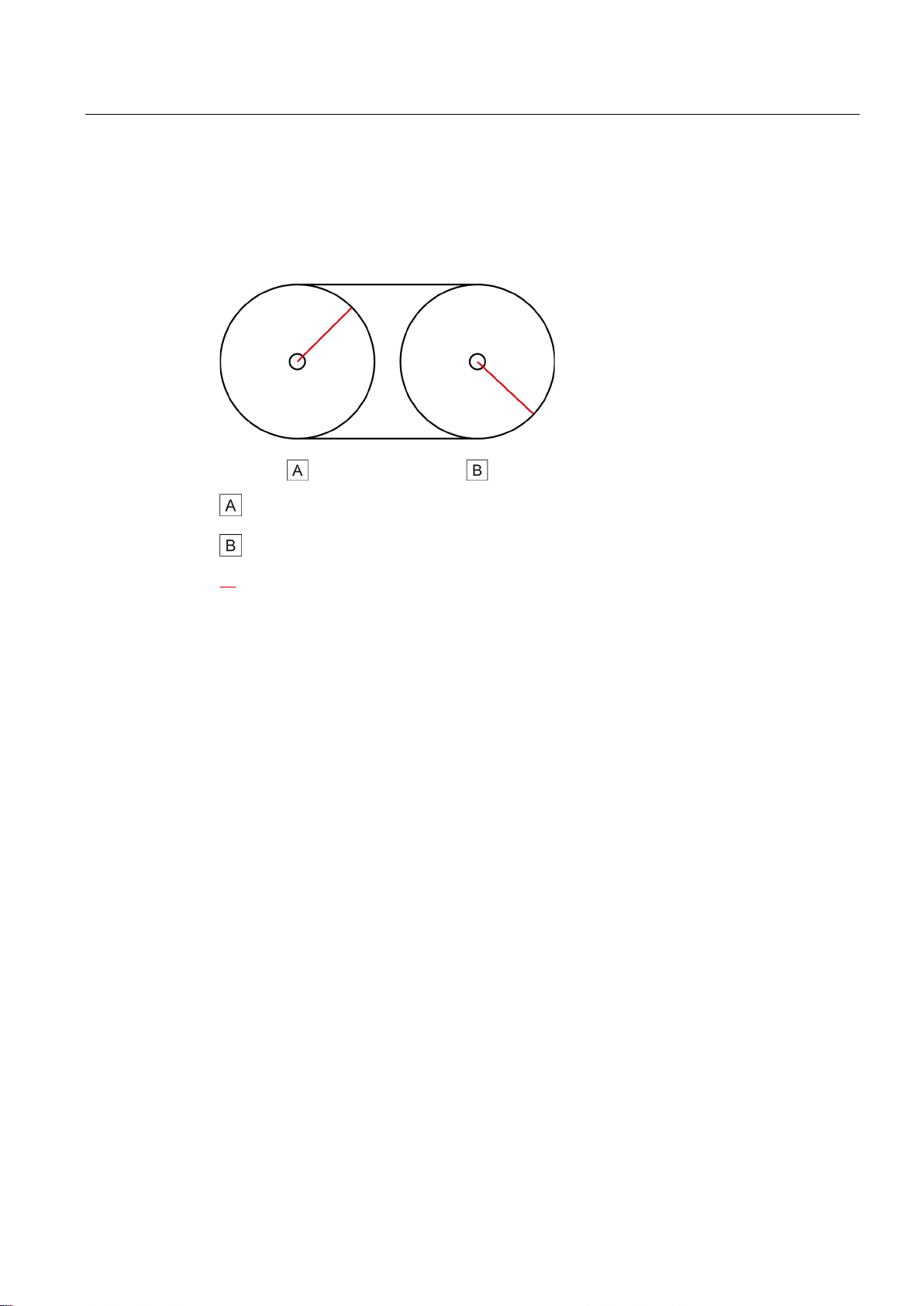
3.5 Synchronous axis technology object
The synchronous axis technology object follows the position change of a leading axis in
relative synchronous operation. A relative gearing exists, for example, when two
mechanically coupled rollers are driven by the same motor:
Leading axis (driven axis)
Following axis
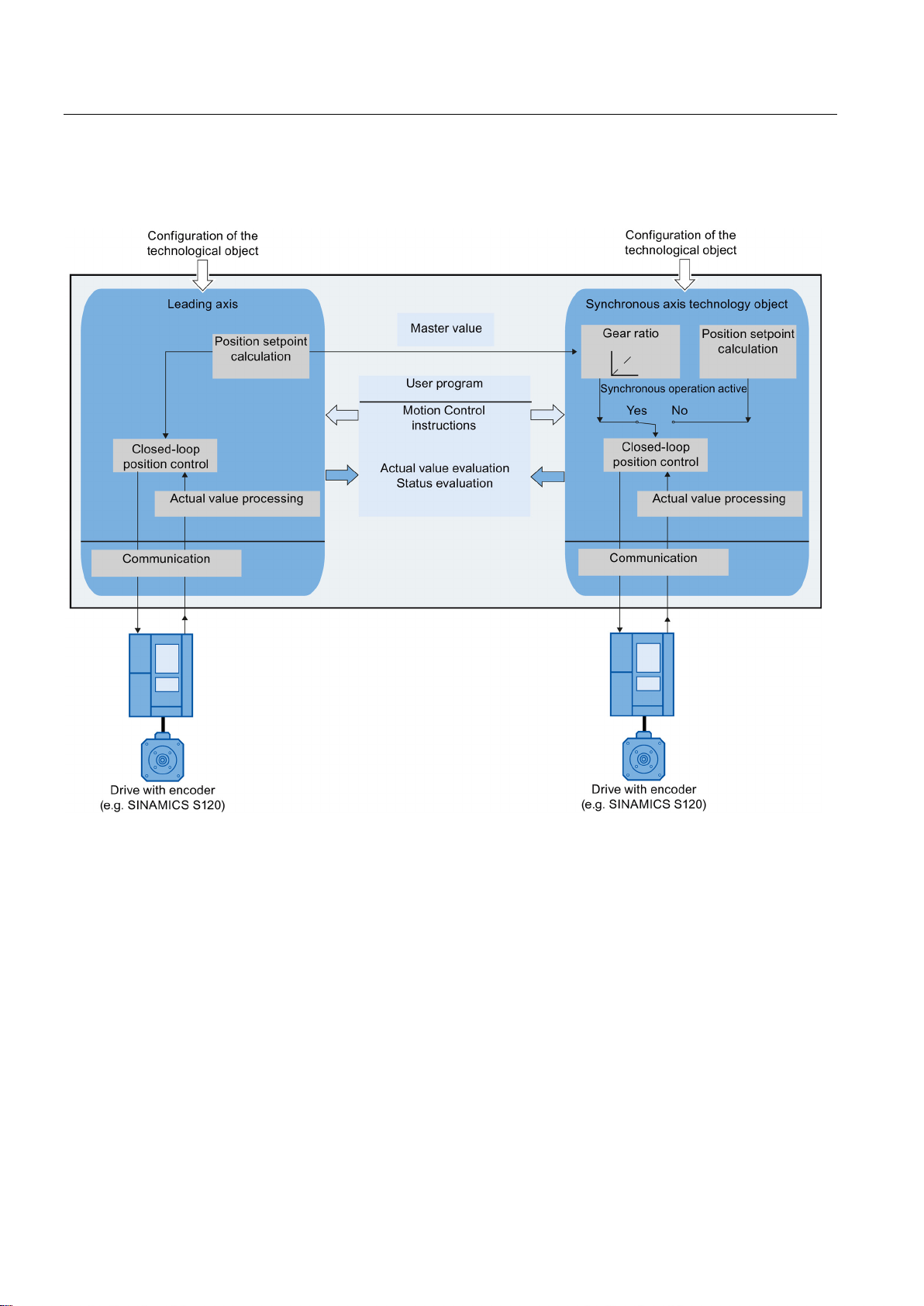
The change of the leading axis position setpoint is multiplied by a specified gear ratio and
passed on to the following axis as setpoint. The synchronous axis technology object outputs
this setpoint as speed setpoint to the drive limited to the maximum speed of the drive
(<TO>.Actor.DriveParameter.MaxSpeed).
The synchronous axis technology object includes all functions of the positioning axis
technology object. All movements of the synchronous axis occur under position control.
If the synchronous axis is operated without synchronous operation, the dynamic limits
configured at the technology object apply.
If the synchronous axis is operated as following axis in synchronous operation, the following
dynamic limits apply depending on the status of the synchronous operation.
●
During synchronization, dynamic limits configured at the technology object apply to the
lead axis and the following axis respectively.
●
If the synchronous axis is operated as following axis, the dynamic limits of the leading
axis are multiplied by the gear ratio apply. The configured dynamic limits of the following
axis are ignored. The dynamic of the following axis is limited to the maximum speed of
the drive.
The following hardware components are assigned to each synchronous axis:
● A drive by means of a PROFIdrive frame or by means of an analog setpoint interface
("MC_GearIn.InGear" = TRUE)
S7-1500 Motion Control V13 Update 3
Function Manual, 07/2014, A5E03879256-AC
● An encoder by means of a PROFIdrive frame
Depending on the execution of the mechanics, a synchronous axis is implemented as linear
axis or rotary axis (Page 26).
23
Basics
3.5 Synchronous axis technology object
The figure below shows the basic principle of operation of the synchronous axis technology
object:
S7-1500 Motion Control V13 Update 3
24 Function Manual, 07/2014, A5E03879256-AC
Basics
3.6
External encoder technology object
Linear system of units
Rotary system of units
Note
The positioning axis/synchronous axis technology objects and external encoder are
independent of each other, and cannot be coupled to each other. The actual position of an
external encoder cannot be used for position control of a
axis.
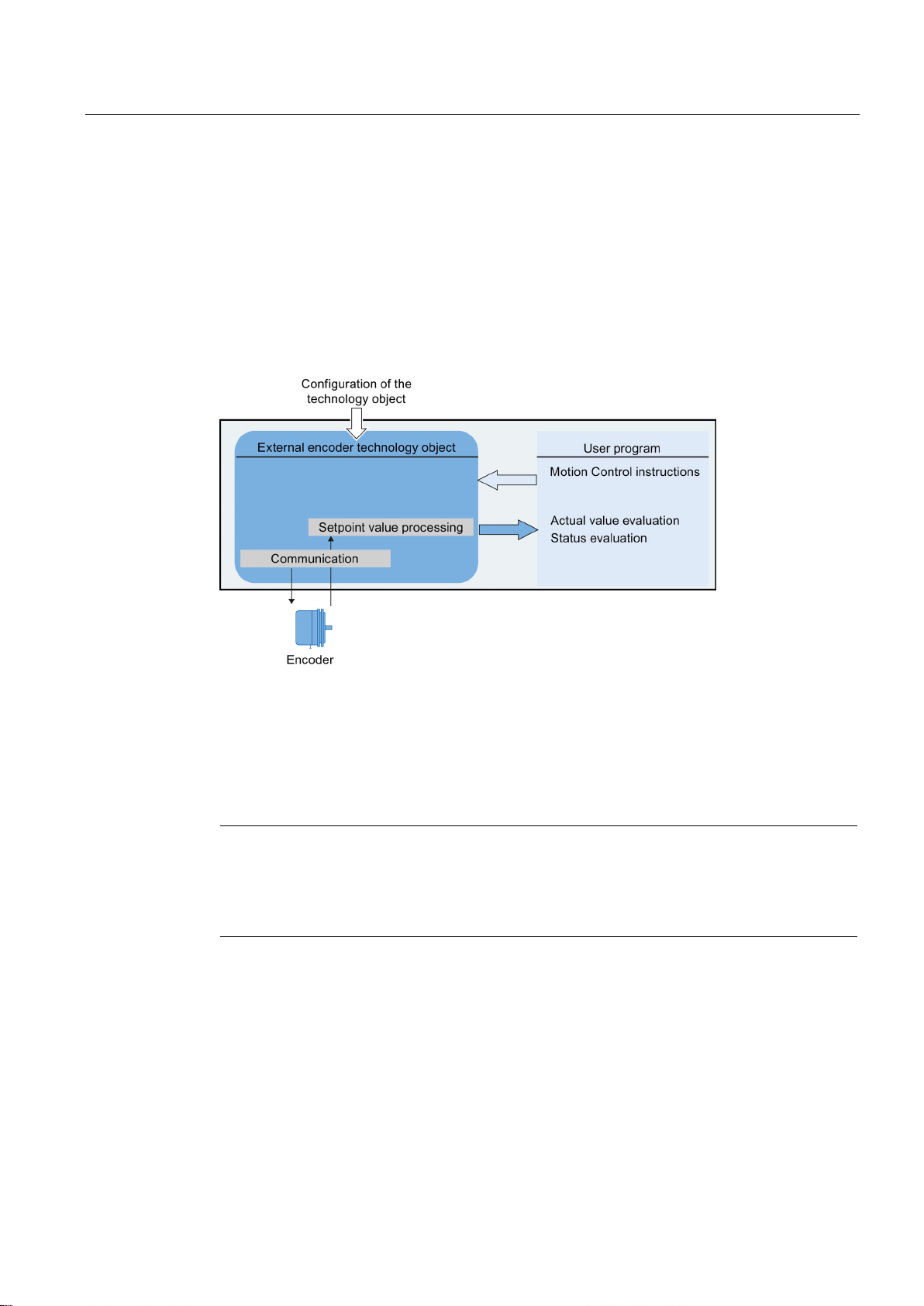
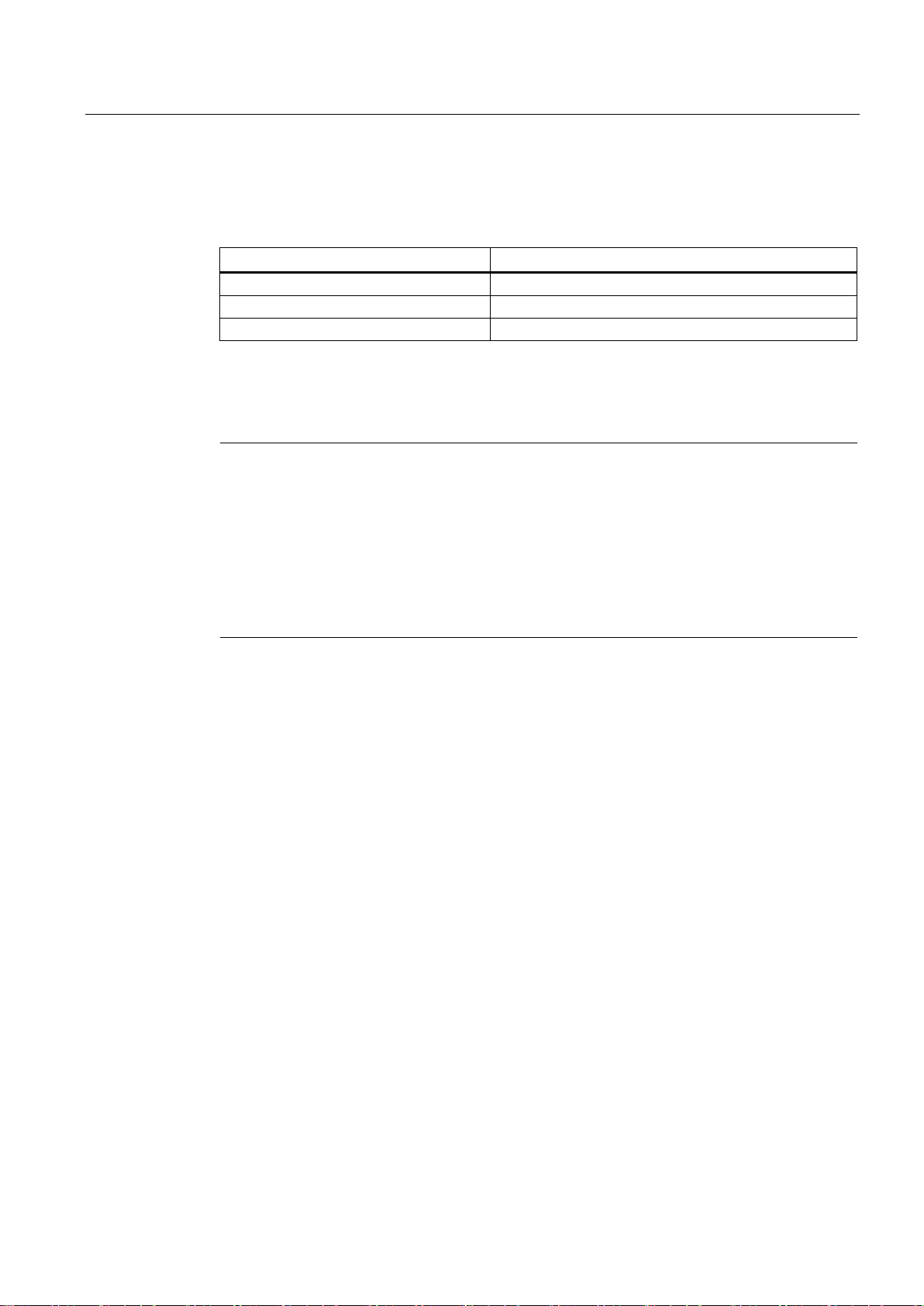
3.6 External encoder technology object
The external encoder technology object detects a position, and makes it available to the
controller.
The relationship between the encoder values and a defined position is created by assigning
parameters to the mechanical properties and the encoder settings, as well as to a homing
process.
The following figure shows the basic principle of operation of the external encoder
technology object:
Specification of the position occurs according to the selected system of units:
●
The position is specified as a linear measure, e.g. millimeters (mm).
●
The position is specified as an angular measure, e.g. degrees (°).
positioning axis or synchronous
S7-1500 Motion Control V13 Update 3
Function Manual, 07/2014, A5E03879256-AC
25
Basics
3.7
Axis types
Linear axis
Rotary axis
3.8
Modulo setting
3.7 Axis types
Axes can be configured with different axis types:
● Positioning and synchronous axes can be configured as rotary or linear axis.
● Speed axes are always rotary axes.
Depending on the execution of the mechanics, an axis is implemented as a linear axis or
rotary axis:
●
For linear axes, the position of the axis is specified as a linear measure,
e.g. millimeters (mm).
●
For rotary axes, the position of the axis is specified as an angular measure,
e.g. degrees (°).
The positioning axis, synchronous axis and external encoder technology objects can be
enabled with the "Modulo" setting.
If an axis is moved in only one direction, the position value continually increases. To limit the
position value to a recurring reference system, you can enable the "Modulo" setting.
When "modulo" is enabled, the position value of the technology object is represented by
means of a recurring modulo range. The modulo range is defined by the start value and the
length.
For example, to limit the position value of a rotary axis to a full rotation, the modulo range
can be defined with start value = 0° and length = 360°. With an encoder resolution of
0.1°/encoder step, the position value is represented in the modulo range 0° to 359.9°.
S7-1500 Motion Control V13 Update 3
26 Function Manual, 07/2014, A5E03879256-AC
Basics
3.9
Units of measure
Position
Velocity
nm, μm, mm, m, km
mm/s, mm/min, mm/h, m/s, m/min, m/h, km/min, km/h
in, ft, mi
in/s, in/min, ft/s, ft/min, mi/h
°, rad
°/s, °/min, rad/s, rad/min
Note
When setting or changing the units of measurement, note the effect on the depiction and the
user program:
•
•
•
•
All information and displays are output in the selected unit of measure.
3.9 Units of measure
The table below shows the supported units of measure for position and velocity:
The acceleration is configured accordingly as unit of measure of the position/s².
The jerk is configured accordingly as unit of measure of the position/s³.
The speed is configured as revolutions per unit of time: 1/s, 1/min, 1/h
Depiction in the technology data block
Supply to the parameters in the user program
Input and display of the position and speed in the TIA Portal
Setpoint settings by leading axes in synchronous operation
S7-1500 Motion Control V13 Update 3
Function Manual, 07/2014, A5E03879256-AC
27

Basics
3.10
Drive and encoder connection
3.10.1
Brief description
PROFIdrive
3.10 Drive and encoder connection
A speed axis is assigned a drive.
A positioning axis/synchronous axis is assigned a drive and an encoder.
An external encoder is assigned an encoder.
The setpoint value at the drive is specified either with PROFIdrive message frames, or with
an analog output.
The following connection options are available for an encoder:
● Encoder to drive
● Encoder on technology module
● PROFIdrive encoder directly to PROFIBUS DP / PROFINET IO
The encoder value is transmitted exclusively via PROFIdrive message frames.
PROFIdrive is the standardized standard profile for drive technology in the connection of
drives and encoders via PROFIBUS DP and PROFINET IO.
Drives that support the PROFIdrive profile are connected according to the PROFIdrive
standard.
Communication between controller and drive/encoder is by means of various PROFIdrive
message frames. Each of the message frames has a standardized structure. Depending on
the application, you can select the applicable message frame. Control words and status
words as well as setpoints and actual values are transmitted in the PROFIdrive message
frames.
The PROFIdrive profile likewise supports the "Dynamic Servo Control" (DSC) control
concept. DSC uses rapid position control in the drive. This can be used to solve highly
dynamic positioning jobs.
S7-1500 Motion Control V13 Update 3
28 Function Manual, 07/2014, A5E03879256-AC
Basics
3.10.2
Frames
3.10 Drive and encoder connection
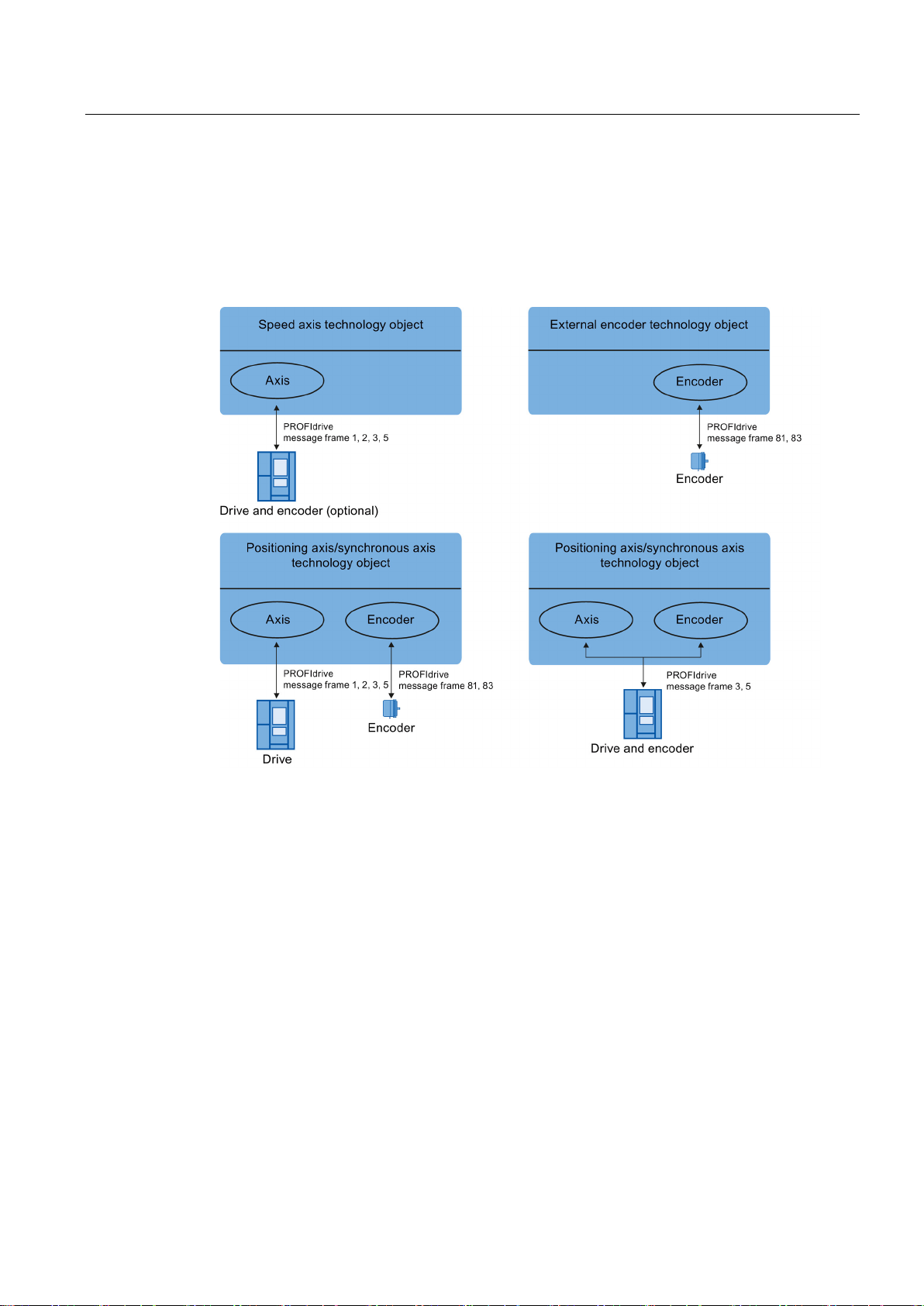
The transmission of the encoder value occurs either in a frame together with the setpoint
(frame 3 or frame 5), or in a separate encoder frame (frame 81 or frame 83).
The following figure represents the relationship between the technology objects and the
drives / encoders:
Explanation of the figure:
● The setpoint of a speed axis is transmitted to a drive via PROFIdrive frame 1, 2, 3 or 5.
● The encoder value of an external encoder is transmitted via PROFIdrive frame 81 or 83.
● The setpoint of a positioning axis/synchronous axis is transmitted to a drive via
PROFIdrive frame 1, 2, 3 or 5
● Encoder value of the positioning axis/synchronous axis
The encoder value can be transmitted in the following PROFIdrive frames:
– Transmission in the same PROFIdrive frame, in which the setpoint is also transmitted.
For example, with PROFIdrive frame 3 or 5
– Transmission in PROFIdrive frame 81 or 83.
S7-1500 Motion Control V13 Update 3
Function Manual, 07/2014, A5E03879256-AC
29
Basics
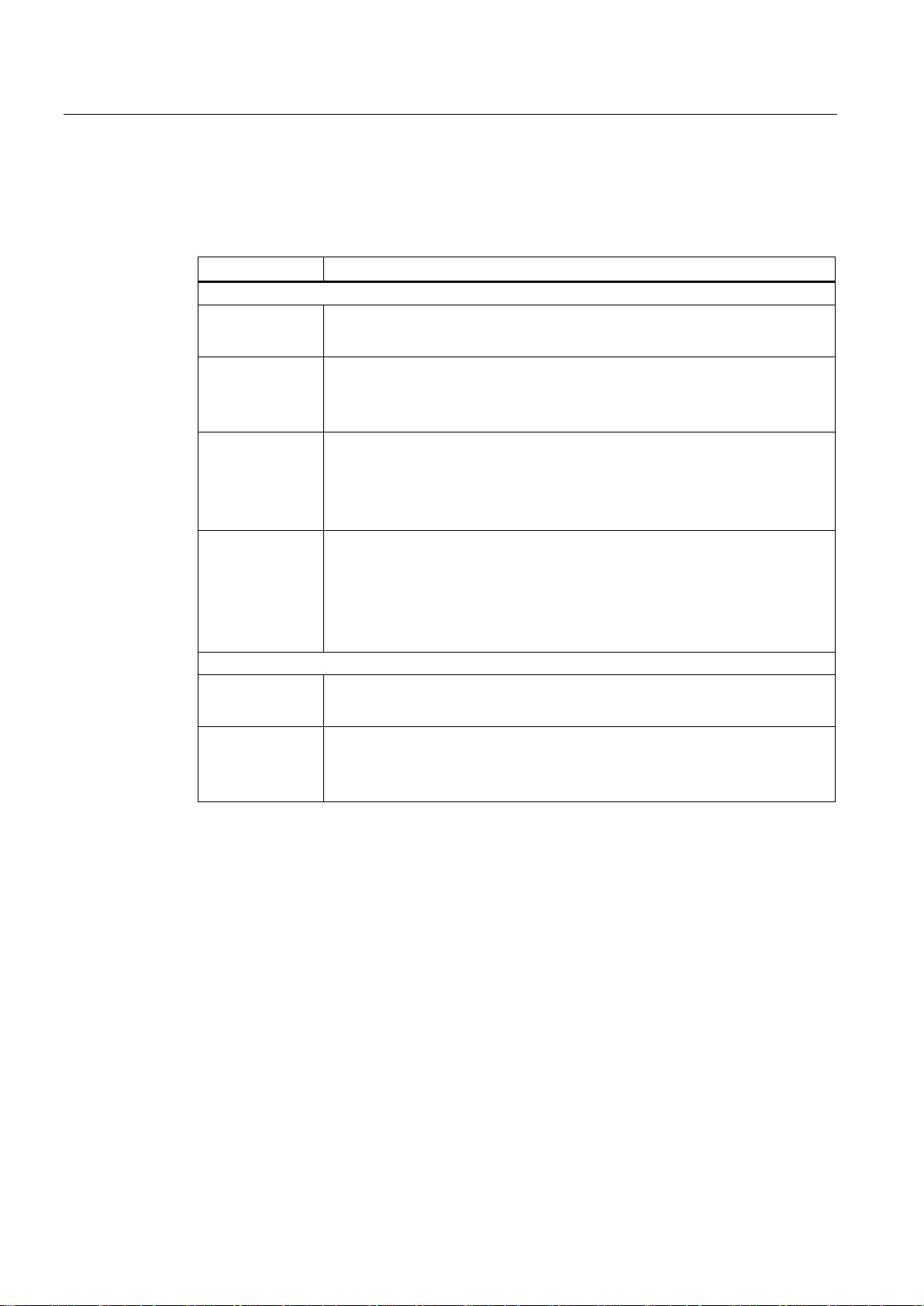
Frame types
Frame
Brief description
Standard frames
Standard frames encoder
3.10 Drive and encoder connection
The following table shows the supported PROFIdrive frame types for the assignment of
drives and encoders:
1
2
3
5
81
83
• 16 bit speed setpoint (NSET)
• 16 bit actual speed value (NACT),
• 32 bit speed setpoint (NSET)
• 32 bit actual speed (NACT)
• Signs of life
• 32 bit speed setpoint (NSET)
• 32 bit actual speed (NACT)
• Encoder actual value
• Signs of life
• 32 bit speed setpoint (NSET)
• 32 bit actual speed (NACT)
• Dynamic Servo Control (DSC)
• Encoder actual value
• Signs of life
• Encoder actual value
• Signs of life
• 32 bit actual speed (NACT)
• Encoder actual value
• Signs of life
When connecting by means of a PROFIdrive frame, the drives and encoders are handled
and switched on in accordance with the PROFIdrive profile.
S7-1500 Motion Control V13 Update 3
30 Function Manual, 07/2014, A5E03879256-AC
 Loading...
Loading...