

Siemens SIMATIC S7-1200, SIMATIC S7-1500 Function Manual

___________________
___________________
___________________
___________________
___________________
___________________
___________________
___________________
___________________
___________________
___________________
SIMATIC
S7-1200, S7-1500 PID control
Function Manual
03/2017
A5E35300227
Preface
Documentation guide
1
Principles for control
2
Configuring a software
controller
3
Using PID_Compact
4
Using PID_3Step
5
Using PID_Temp
6
Using PID basic functions
7
Auxiliary functions
8
Instructions
9
Service & Support
A
-AC
Siemens AG
Division Digital Factory
Postfach 48 48
90026 NÜRNBERG
GERMANY
A5E35300227-AC
Ⓟ
Copyright © Siemens AG 2017.
All rights reserved
Legal information
Warning notice system
DANGER
indicates that death or severe personal injury will result if proper precautions are not taken.
WARNING
indicates that death or severe personal injury may result if proper precautions are not taken.
CAUTION
indicates that minor personal injury can result if proper precautions are not taken.
NOTICE
indicates that property damage can result if proper precautions are not taken.
Qualified Personnel
personnel qualified
Proper use of Siemens products
WARNING
Siemens products may only be used for the applications described in the catalog and in the relevant technical
maintenance are required to ensure that the products operate safely and without any problems. The permissible
ambient conditions must be complied with. The information in the relevant documentation must be observed.
Trademarks
Disclaimer of Liability
This manual contains notices you have to observe in order to ensure your personal safety, as well as to prevent
damage to property. The notices referring to your personal safety are highlighted in the manual by a safety alert
symbol, notices referring only to property damage have no safety alert symbol. These notices shown below are
graded according to the degree of danger.
If more than one degree of danger is present, the warning notice representing the highest degree of danger will
be used. A notice warning of injury to persons with a safety alert symbol may also include a warning relating to
property damage.
The product/system described in this documentation may be operated only by
task in accordance with the relevant documentation, in particular its warning notices and safety instructions.
Qualified personnel are those who, based on their training and experience, are capable of identifying risks and
avoiding potential hazards when working with these products/systems.
Note the following:
documentation. If products and components from other manufacturers are used, these must be recommended
or approved by Siemens. Proper transport, storage, installation, assembly, commissioning, operation and
All names identified by ® are registered trademarks of Siemens AG. The remaining trademarks in this publication
may be trademarks whose use by third parties for their own purposes could violate the rights of the owner.
We have reviewed the contents of this publication to ensure consistency with the hardware and software
described. Since variance cannot be precluded entirely, we cannot guarantee full consistency. However, the
information in this publication is reviewed regularly and any necessary corrections are included in subsequent
editions.
for the specific
03/2017 Subject to change
Preface
Purpose of the documentation
Basic knowledge required
Validity of the documentation
Conventions
Note
The notes contain important information on the product described in the d
the handling of the product or on part of the documentation to which particular attention
should be paid.
Additional assistance
This documentation will support you in configuring and programming control tasks with the
S7-1200 and S7-1500 automation systems.
The following knowledge is required in order to understand the documentation:
● General knowledge of automation technology
● Knowledge of the industrial automation system SIMATIC
● Experience of working with STEP 7 (TIA Portal)
This documentation applies to the use of SW controllers on the CPUs of automation systems
S7-1200 and S7-1500 together with STEP 7 (TIA Portal). Additional SW controllers that are
not covered in this documentation are available for the use of S7-300 and S7-400 with
STEP 7 (TIA Portal). Section Overview of software controller (Page 38) gives a complete
overview of all SW controllers in STEP 7 (TIA Portal) and their possible applications.
Please observe notes marked as follows:
● Information on the offers of our Technical Support are available in the appendix Service &
Support (Page 523).
● The range of technical documentation for the individual SIMATIC products and
automation systems is available on the Internet
(http://www.siemens.com/simatic-tech-doku-portal).
ocumentation, on
● The online catalog and the ordering system are available on the Internet
(http://mall.automation.siemens.com).
PID control
4 Function Manual, 03/2017, A5E35300227-AC

Table of contents
Preface ................................................................................................................................................... 4
1 Documentation guide ............................................................................................................................ 12
2 Principles for control.............................................................................................................................. 16
3 Configuring a software controller ........................................................................................................... 38
2.1 Controlled system and actuators ............................................................................................ 16
2.2 Controlled systems ................................................................................................................. 18
2.3 Characteristic values of the control section ............................................................................ 20
2.4 Pulse controller ....................................................................................................................... 23
2.5 Response to setpoint changes and disturbances ................................................................... 27
2.6 Control Response at Different Feedback Structures .............................................................. 28
2.7 Selection of the controller structure for specified controlled systems ..................................... 36
2.8 PID parameter settings ........................................................................................................... 37
3.1 Overview of software controller .............................................................................................. 38
3.2 Steps for the configuration of a software controller ................................................................ 40
3.3 Add technology objects ........................................................................................................... 40
3.4 Configure technology objects ................................................................................................. 42
3.5 Call instruction in the user program ........................................................................................ 43
3.6 Downloading technology objects to device ............................................................................. 44
3.7 Commissioning software controller ......................................................................................... 45
3.8 Save optimized PID parameter in the project ......................................................................... 45
3.9 Comparing values ................................................................................................................... 46
3.9.1 Comparison display and boundary conditions ........................................................................ 46
3.9.2 Comparing values ................................................................................................................... 47
3.10 Parameter view ....................................................................................................................... 49
3.10.1 Introduction to the parameter view ......................................................................................... 49
3.10.2 Structure of the parameter view .............................................................................................. 51
3.10.2.1 Toolbar .................................................................................................................................... 51
3.10.2.2 Navigation ............................................................................................................................... 52
3.10.2.3 Parameter table ...................................................................................................................... 52
3.10.3 Opening the parameter view ................................................................................................... 54
3.10.4 Default setting of the parameter view ..................................................................................... 55
3.10.5 Working with the parameter view ............................................................................................ 57
3.10.5.1 Overview ................................................................................................................................. 57
3.10.5.2 Filtering the parameter table ................................................................................................... 58
3.10.5.3 Sorting the parameter table .................................................................................................... 59
3.10.5.4 Transferring parameter data to other editors .......................................................................... 59
PID control
Function Manual, 03/2017, A5E35300227-AC
5

Table of contents
4 Using PID_Compact .............................................................................................................................. 72
5 Using PID_3Step ................................................................................................................................. 115
3.10.5.5 Indicating errors ..................................................................................................................... 60
3.10.5.6 Editing start values in the project ........................................................................................... 60
3.10.5.7 Status of configuration (offline) .............................................................................................. 62
3.10.5.8 Monitoring values online in the parameter view ..................................................................... 63
3.10.5.9 Change display format of value ............................................................................................. 64
3.10.5.10 Create snapshot of monitor values ........................................................................................ 65
3.10.5.11 Modifying values .................................................................................................................... 65
3.10.5.12 Comparing values .................................................................................................................. 67
3.10.5.13 Applying values from the online program as start values ...................................................... 68
3.10.5.14 Initializing setpoints in the online program ............................................................................. 70
3.11 Display instance DB of a technology object. .......................................................................... 71
4.1 Technology object PID_Compact........................................................................................... 72
4.2 PID_Compact V2.................................................................................................................... 73
4.2.1 Configuring PID_Compact V2 ................................................................................................ 73
4.2.1.1 Basic settings V2.................................................................................................................... 73
4.2.1.2 Process value settings V2 ...................................................................................................... 77
4.2.1.3 Advanced settings V2 ............................................................................................................ 78
4.2.2 Commissioning PID_Compact V2 .......................................................................................... 86
4.2.2.1 Pretuning V2 .......................................................................................................................... 86
4.2.2.2 Fine tuning V2 ........................................................................................................................ 88
4.2.2.3 "Manual" mode V1 ................................................................................................................. 90
4.2.3 Override control with PID_Compact V2 ................................................................................. 91
4.2.4 Simulating PID_Compact V2 with PLCSIM ............................................................................ 95
4.3 PID_Compact V1.................................................................................................................... 96
4.3.1 Configuring PID_Compact V1 ................................................................................................ 96
4.3.1.1 Basic settings V1.................................................................................................................... 96
4.3.1.2 Process value settings V1 .................................................................................................... 100
4.3.1.3 Advanced settings V1 .......................................................................................................... 101
4.3.2 Commissioning PID_Compact V1 ........................................................................................ 108
4.3.2.1 Commissioning V1 ............................................................................................................... 108
4.3.2.2 Pretuning V1 ........................................................................................................................ 109
4.3.2.3 Fine tuning V1 ...................................................................................................................... 111
4.3.2.4 "Manual" mode V1 ............................................................................................................... 113
4.3.3 Simulating PID_Compact V1 with PLCSIM .......................................................................... 114
5.1 Technology object PID_3Step .............................................................................................. 115
5.2 PID_3Step V2 ....................................................................................................................... 116
5.2.1 Configuring PID_3Step V2 ................................................................................................... 116
5.2.1.1 Basic settings V2.................................................................................................................. 116
5.2.1.2 Process value settings V2 .................................................................................................... 121
5.2.1.3 Final controlling element settings V2 ................................................................................... 122
5.2.1.4 Advanced settings V2 .......................................................................................................... 125
5.2.2 Commissioning PID_3Step V2 ............................................................................................. 129
5.2.2.1 Pretuning V2 ........................................................................................................................ 129
5.2.2.2 Fine tuning V2 ...................................................................................................................... 131
5.2.2.3 Commissioning with manual PID parameters V2 ................................................................ 133
5.2.2.4 Measuring the motor transition time V2 ............................................................................... 134
PID control
6 Function Manual, 03/2017, A5E35300227-AC

Table of contents
6 Using PID_Temp ................................................................................................................................. 157
5.2.3 Simulating PID_3Step V2 with PLCSIM ................................................................................ 137
5.3 PID_3Step V1 ....................................................................................................................... 138
5.3.1 Configuring PID_3Step V1 .................................................................................................... 138
5.3.1.1 Basic settings V1 .................................................................................................................. 138
5.3.1.2 Process value settings V1 .................................................................................................... 143
5.3.1.3 V1 final controlling element setting ....................................................................................... 144
5.3.1.4 Advanced settings V1 ........................................................................................................... 147
5.3.2 Commissioning PID_3Step V1 .............................................................................................. 150
5.3.2.1 Commissioning V1 ................................................................................................................ 150
5.3.2.2 Pretuning V1 ......................................................................................................................... 151
5.3.2.3 Fine tuning V1 ....................................................................................................................... 152
5.3.2.4 Commissioning with manual PID parameters V1 ................................................................. 153
5.3.2.5 Measuring the motor transition time V1 ................................................................................ 154
5.3.3 Simulating PID_3Step V1 with PLCSIM ................................................................................ 156
6.1 Technology object PID_Temp ............................................................................................... 157
6.2 Configuring PID_Temp.......................................................................................................... 158
6.2.1 Basic settings ........................................................................................................................ 158
6.2.1.1 Introduction ........................................................................................................................... 158
6.2.1.2 Controller type ....................................................................................................................... 159
6.2.1.3 Setpoint ................................................................................................................................. 159
6.2.1.4 Process value ....................................................................................................................... 160
6.2.1.5 Heating and cooling output value ......................................................................................... 160
6.2.1.6 Cascade ................................................................................................................................ 162
6.2.2 Process value settings .......................................................................................................... 163
6.2.2.1 Process value limits .............................................................................................................. 163
6.2.2.2 Process value scaling ........................................................................................................... 163
6.2.3 Output settings ...................................................................................................................... 164
6.2.3.1 Basic settings of output ......................................................................................................... 164
6.2.3.2 Output value limits and scaling ............................................................................................. 167
6.2.4 Advanced settings ................................................................................................................. 170
6.2.4.1 Process value monitoring ..................................................................................................... 170
6.2.4.2 PWM limits ............................................................................................................................ 171
6.2.4.3 PID parameters ..................................................................................................................... 174
6.3 Commissioning PID_Temp ................................................................................................... 181
6.3.1 Commissioning ..................................................................................................................... 181
6.3.2 Pretuning ............................................................................................................................... 182
6.3.3 Fine tuning ............................................................................................................................ 185
6.3.4 "Manual" mode ...................................................................................................................... 189
6.3.5 Substitute setpoint ................................................................................................................ 190
6.3.6 Cascade commissioning ....................................................................................................... 190
6.4 Cascade control with PID_Temp .......................................................................................... 191
6.4.1 Introduction ........................................................................................................................... 191
6.4.2 Program creation .................................................................................................................. 193
6.4.3 Configuration ......................................................................................................................... 195
6.4.4 Commissioning ..................................................................................................................... 197
6.4.5 Substitute setpoint ................................................................................................................ 198
6.4.6 Operating modes and fault response .................................................................................... 198
PID control
Function Manual, 03/2017, A5E35300227-AC
7

Table of contents
7 Using PID basic functions .................................................................................................................... 207
6.5 Multi-zone controlling with PID_Temp ................................................................................. 199
6.6 Override control with PID_Temp .......................................................................................... 202
6.7 Simulating PID_Temp with PLCSIM .................................................................................... 206
7.1 CONT_C ............................................................................................................................... 207
7.1.1 Technology object CONT_C ................................................................................................ 207
7.1.2 Configure controller difference CONT_C ............................................................................. 208
7.1.3 Configure the controller algorithm CONT_C ........................................................................ 209
7.1.4 Configure the output value CONT_C ................................................................................... 210
7.1.5 Programming a pulse controller ........................................................................................... 211
7.1.6 Commissioning CONT_C ..................................................................................................... 212
7.2 CONT_S ............................................................................................................................... 213
7.2.1 Technology object CONT_S ................................................................................................ 213
7.2.2 Configure controller difference CONT_S ............................................................................. 214
7.2.3 Configuring control algorithm CONT_S ............................................................................... 214
7.2.4 Configure manipulated value CONT_S ................................................................................ 215
7.2.5 Commissioning CONT_S ..................................................................................................... 215
7.3 TCONT_CP .......................................................................................................................... 216
7.3.1 Technology object TCONT_CP ............................................................................................ 216
7.3.2 Configure TCONT_CP ......................................................................................................... 217
7.3.2.1 Controller difference ............................................................................................................. 217
7.3.2.2 Controlling algorithm ............................................................................................................ 218
7.3.2.3 Manipulated value continual controller ................................................................................ 219
7.3.2.4 Manipulated value pulse controller ...................................................................................... 220
7.3.3 Commissioning TCONT_CP ................................................................................................ 222
7.3.3.1 Optimization of TCONT_CP ................................................................................................. 222
7.3.3.2 Requirements for an optimization ........................................................................................ 224
7.3.3.3 Possibilities for optimization ................................................................................................. 226
7.3.3.4 Tuning result ........................................................................................................................ 229
7.3.3.5 Parallel tuning of controller channels ................................................................................... 230
7.3.3.6 Fault descriptions and corrective measures ........................................................................ 231
7.3.3.7 Performing pretuning ........................................................................................................... 234
7.3.3.8 Performing fine tuning .......................................................................................................... 234
7.3.3.9 Cancelling pretuning or fine tuning ...................................................................................... 235
7.3.3.10 Manual fine-tuning in control mode ...................................................................................... 235
7.3.3.11 Performing fine tuning manually .......................................................................................... 236
7.4 TCONT_S ............................................................................................................................. 237
7.4.1 Technology object TCONT_S .............................................................................................. 237
7.4.2 Configure controller difference TCONT_S ........................................................................... 237
7.4.3 Configure controller algorithm TCONT_S ............................................................................ 238
7.4.4 Configure manipulated value TCONT_S ............................................................................. 239
7.4.5 Commissioning TCONT_S ................................................................................................... 239
PID control
8 Function Manual, 03/2017, A5E35300227-AC

Table of contents
8 Auxiliary functions ............................................................................................................................... 240
9 Instructions ......................................................................................................................................... 241
8.1 Polyline ................................................................................................................................. 240
9.1 PID_Compact ........................................................................................................................ 241
9.1.1 New features of PID_Compact ............................................................................................. 241
9.1.2 Compatibility with CPU and FW ............................................................................................ 244
9.1.3 CPU processing time and memory requirement PID_Compact V2.x ................................... 245
9.1.4 PID_Compact V2 .................................................................................................................. 246
9.1.4.1 Description of PID_Compact V2 ........................................................................................... 246
9.1.4.2 Mode of operation of PID_Compact V2 ................................................................................ 249
9.1.4.3 Input parameters of PID_Compact V2 .................................................................................. 251
9.1.4.4 Output parameters of PID_Compact V2 ............................................................................... 253
9.1.4.5 In/out parameters of PID_Compact V2 ................................................................................. 254
9.1.4.6 Static tags of PID_Compact V2 ............................................................................................ 255
9.1.4.7 Changing the PID_Compact V2 interface ............................................................................. 263
9.1.4.8 Parameters State and Mode V2 ........................................................................................... 265
9.1.4.9 Parameter ErrorBits V2 ......................................................................................................... 269
9.1.4.10 Tag ActivateRecoverMode V2 .............................................................................................. 271
9.1.4.11 Tag Warning V2 .................................................................................................................... 273
9.1.4.12 IntegralResetMode V2 tag .................................................................................................... 274
9.1.4.13 Sample program for PID_Compact ....................................................................................... 276
9.1.5 PID_Compact V1 .................................................................................................................. 283
9.1.5.1 Description of PID_Compact V1 ........................................................................................... 283
9.1.5.2 Input parameters of PID_Compact V1 .................................................................................. 286
9.1.5.3 Output parameters of PID_Compact V1 ............................................................................... 287
9.1.5.4 Static tags of PID_Compact V1 ............................................................................................ 288
9.1.5.5 Parameters State and sRet.i_Mode V1 ................................................................................ 293
9.1.5.6 Parameter Error V1 ............................................................................................................... 297
9.1.5.7 Parameter Reset V1 ............................................................................................................. 298
9.1.5.8 Tag sd_warning V1 ............................................................................................................... 300
9.1.5.9 Tag i_Event_SUT V1 ............................................................................................................. 300
9.1.5.10 Tag i_Event_TIR V1 .............................................................................................................. 301
9.2 PID_3Step ............................................................................................................................. 302
9.2.1 New features of PID_3Step .................................................................................................. 302
9.2.2 Compatibility with CPU and FW ............................................................................................ 304
9.2.3 CPU processing time and memory requirement PID_3Step V2.x ........................................ 305
9.2.4 PID_3Step V2 ....................................................................................................................... 306
9.2.4.1 Description of PID_3Step V2 ................................................................................................ 306
9.2.4.2 Mode of operation of PID_3Step V2 ..................................................................................... 312
9.2.4.3 Changing the PID_3Step V2 interface .................................................................................. 315
9.2.4.4 Input parameters of PID_3Step V2 ....................................................................................... 316
9.2.4.5 Output parameters of PID_3Step V2
....................................................................................
9.2.4.6 In/out parameters of PID-3Step V2 ....................................................................................... 320
9.2.4.7 Static tags of PID_3Step V2 ................................................................................................. 321
9.2.4.8 Parameters State and Mode V2 ........................................................................................... 330
9.2.4.9 Parameter ErrorBits V2 ......................................................................................................... 335
9.2.4.10 Tag ActivateRecoverMode V2 .............................................................................................. 338
9.2.4.11 Tag Warning V2 .................................................................................................................... 340
PID control
Function Manual, 03/2017, A5E35300227-AC
318
9

Table of contents
9.2.5 PID_3Step V1 ....................................................................................................................... 341
9.2.5.1 Description PID_3Step V1 ................................................................................................... 341
9.2.5.2 Operating principle PID_3Step V1 ....................................................................................... 347
9.2.5.3 PID_3Step V1 input parameters .......................................................................................... 350
9.2.5.4 PID_3Step V1 output parameters ........................................................................................ 352
9.2.5.5 PID_3Step V1 static tags ..................................................................................................... 354
9.2.5.6 Parameter State and Retain.Mode V1 ................................................................................. 361
9.2.5.7 Parameter ErrorBits V1 ........................................................................................................ 369
9.2.5.8 Parameter Reset V1 ............................................................................................................ 371
9.2.5.9 Tag ActivateRecoverMode V1 ............................................................................................. 372
9.2.5.10 Tag Warning V1 ................................................................................................................... 374
9.2.5.11 Tag SUT.State V1 ................................................................................................................ 375
9.2.5.12 Tag TIR.State V1 ................................................................................................................. 375
9.3 PID_Temp ............................................................................................................................ 376
9.3.1 New features of PID_Temp .................................................................................................. 376
9.3.2 Compatibility with CPU and FW ........................................................................................... 376
9.3.3 CPU processing time and memory requirement PID_Temp V1 .......................................... 377
9.3.4 PID_Temp ............................................................................................................................ 378
9.3.4.1 Description of PID_Temp ..................................................................................................... 378
9.3.4.2 Mode of operation of PID_Temp .......................................................................................... 383
9.3.4.3 Input parameters of PID_Temp ............................................................................................ 389
9.3.4.4 Output parameters of PID_Temp ......................................................................................... 391
9.3.4.5 In/out parameters of PID_Temp V2 ..................................................................................... 393
9.3.4.6 PID_Temp static tags ........................................................................................................... 395
9.3.4.7 PID_Temp state and mode parameters ............................................................................... 430
9.3.4.8 PID_Temp ErrorBits parameter ............................................................................................ 439
9.3.4.9 PID_Temp ActivateRecoverMode tag .................................................................................. 442
9.3.4.10 PID_Temp Warning tag ........................................................................................................ 444
9.3.4.11 PwmPeriode tag ................................................................................................................... 445
9.3.4.12 IntegralResetMode tag ......................................................................................................... 447
9.4 PID basic functions .............................................................................................................. 449
9.4.1 CONT_C ............................................................................................................................... 449
9.4.1.1 Description CONT_C ........................................................................................................... 449
9.4.1.2 How CONT_C works ............................................................................................................ 450
9.4.1.3 CONT_C block diagram ....................................................................................................... 452
9.4.1.4 Input parameter CONT_C .................................................................................................... 453
9.4.1.5 Out
put parameters CONT_C ............................................................................................... 454
9.4.2 CONT_S ............................................................................................................................... 455
9.4.2.1 Description CONT_S ............................................................................................................ 455
9.4.2.2 Mode of operation CONT_S ................................................................................................. 456
9.4.2.3 Block diagram CONT_S ....................................................................................................... 457
9.4.2.4 Input parameters CONT_S .................................................................................................. 458
9.4.2.5 Output parameters CONT_S ................................................................................................ 459
9.4.3 PULSEGEN .......................................................................................................................... 460
9.4.3.1 Description PULSEGEN ...................................................................................................... 460
9.4.3.2 Mode of operation PULSEGEN ........................................................................................... 461
9.4.3.3 Mode of operation PULSEGEN ........................................................................................... 464
9.4.3.4 Three-step control ................................................................................................................ 465
9.4.3.5 Two-step control................................................................................................................... 468
9.4.3.6 Input parameters PULSEGEN ............................................................................................. 469
9.4.3.7 Output parameter PULSEGEN ............................................................................................ 470
PID control
10 Function Manual, 03/2017, A5E35300227-AC
Table of contents
A Service & Support ............................................................................................................................... 523
Index................................................................................................................................................... 526
9.4.4 TCONT_CP ........................................................................................................................... 471
9.4.4.1 Description TCONT_CP ........................................................................................................ 471
9.4.4.2 Mode of operation TCONT_CP ............................................................................................. 472
9.4.4.3 Operating principle of the pulse generator ........................................................................... 481
9.4.4.4 Block diagram TCONT_CP ................................................................................................... 484
9.4.4.5 Input parameters TCONT_CP .............................................................................................. 486
9.4.4.6 Output parameters TCONT_CP ............................................................................................ 487
9.4.4.7 In/out parameters TCONT_CP ............................................................................................. 488
9.4.4.8 Static variables TCONT_CP ................................................................................................. 489
9.4.4.9 Parameter STATUS_H.......................................................................................................... 494
9.4.4.10 Parameters STATUS_D ........................................................................................................ 495
9.4.5 TCONT_S ............................................................................................................................. 496
9.4.5.1 Description TCONT_S .......................................................................................................... 496
9.4.5.2 Mode of operation TCONT_S ............................................................................................... 497
9.4.5.3 Block diagram TCONT_S...................................................................................................... 501
9.4.5.4 Input paramters TCONT_S ................................................................................................... 503
9.4.5.5 Output parameters TCONT_S .............................................................................................. 504
9.4.5.6 In/out parameters TCONT_S ................................................................................................ 504
9.4.5.7 Static variables TCONT_S .................................................................................................... 505
9.4.6 Integrated system functions .................................................................................................. 506
9.4.6.1 CONT_C_SF ......................................................................................................................... 506
9.4.6.2 CONT_S_SF ......................................................................................................................... 506
9.4.6.3 PULSEGEN_SF .................................................................................................................... 507
9.5 Polyline ................................................................................................................................. 508
9.5.1 Compatibility with CPU and FW ............................................................................................ 508
9.5.2 Description Polyline .............................................................................................................. 508
9.5.3 Operating principle Polyline .................................................................................................. 512
9.5.4 Input parameters of Polyline ................................................................................................. 516
9.5.5 Output parameters of Polyline .............................................................................................. 516
9.5.6 Static tags of Polyline............................................................................................................ 517
9.5.7 ErrorBits parameter ............................................................................................................... 518
PID control
Function Manual, 03/2017, A5E35300227-AC
11
1
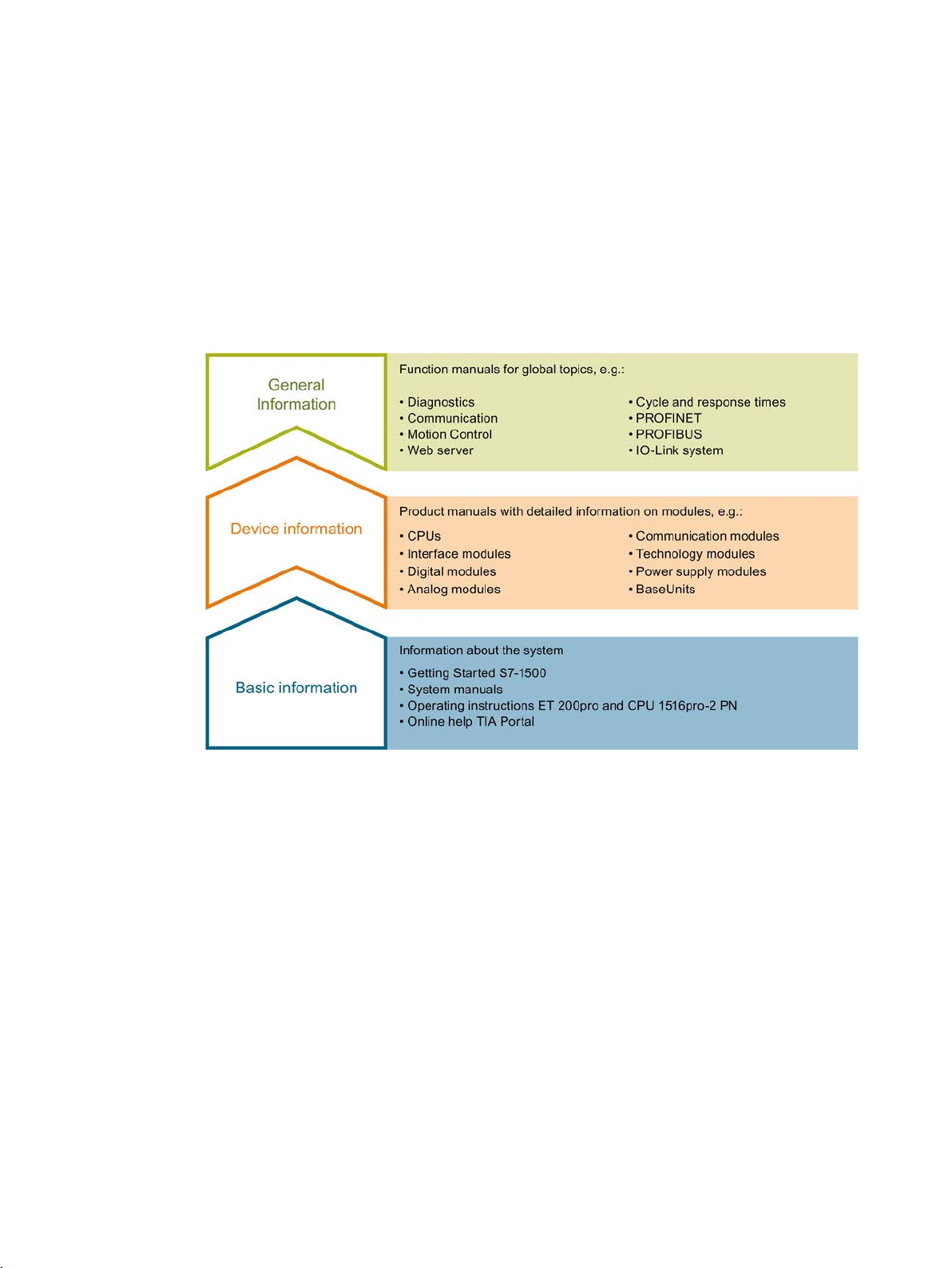
Basic information
Device information
The documentation for the SIMATIC S7-1500 automation system, for CPU 1516pro-2 PN
based on SIMATIC S7-1500, and for the distributed I/O systems SIMATIC ET 200MP,
ET 200SP and ET 200AL is divided into three areas.
This division allows you easier access to the specific information you require.
System manuals and Getting Started manuals describe in detail the configuration,
installation, wiring and commissioning of the SIMATIC S7-1500, ET 200MP, ET 200SP and
ET 200AL systems; use the corresponding operating instructions for CPU 1516pro-2 PN.
The STEP 7 online help supports you in configuration and programming.
Product manuals contain a compact description of the module-specific information, such as
properties, terminal diagrams, characteristics and technical specifications.
PID control
12 Function Manual, 03/2017, A5E35300227-AC
Documentation guide
General information
Manual Collections
"mySupport"
"mySupport" - Documentation
The function manuals contain detailed descriptions on general topics such as diagnostics,
communication, Motion Control, Web server, OPC UA.
You can download the documentation free of charge from the Internet
(http://w3.siemens.com/mcms/industrial-automation-systems-simatic/en/manual-
overview/Pages/Default.aspx).
Changes and additions to the manuals are documented in product information sheets.
You will find the product information on the Internet:
● S7-1500/ET 200MP (https://support.industry.siemens.com/cs/us/en/view/68052815)
● ET 200SP (https://support.industry.siemens.com/cs/us/en/view/73021864)
● ET 200AL (https://support.industry.siemens.com/cs/us/en/view/99494757)
The Manual Collections contain the complete documentation of the systems put together in
one file.
You will find the Manual Collections on the Internet:
● S7-1500/ET 200MP (https://support.industry.siemens.com/cs/ww/en/view/86140384)
● ET 200SP (https://support.industry.siemens.com/cs/ww/en/view/84133942)
● ET 200AL (https://support.industry.siemens.com/cs/ww/en/view/95242965)
With "mySupport", your personal workspace, you make the best out of your Industry Online
Support.
In "mySupport", you can save filters, favorites and tags, request CAx data and compile your
personal library in the Documentation area. In addition, your data is already filled out in
support requests and you can get an overview of your current requests at any time.
You must register once to use the full functionality of "mySupport".
You can find "mySupport" on the Internet (https://support.industry.siemens.com/My/ww/en).
In the Documentation area in "mySupport" you can combine entire manuals or only parts of
these to your own manual.
You can export the manual as PDF file or in a format that can be edited later.
You can find "mySupport" - Documentation on the Internet
(http://support.industry.siemens.com/My/ww/en/documentation).
PID control
Function Manual, 03/2017, A5E35300227-AC
13
Documentation guide
"mySupport" - CAx data
Application examples
TIA Selection Tool
SIMATIC Automation Tool
In the CAx data area in "mySupport", you can access the current product data for your CAx
or CAe system.
You configure your own download package with a few clicks.
In doing so you can select:
● Product images, 2D dimension drawings, 3D models, internal circuit diagrams, EPLAN
macro files
● Manuals, characteristics, operating manuals, certificates
● Product master data
You can find "mySupport" - CAx data on the Internet
(http://support.industry.siemens.com/my/ww/en/CAxOnline).
The application examples support you with various tools and examples for solving your
automation tasks. Solutions are shown in interplay with multiple components in the system separated from the focus on individual products.
You will find the application examples on the Internet
(https://support.industry.siemens.com/sc/ww/en/sc/2054).
With the TIA Selection Tool, you can select, configure and order devices for Totally
Integrated Automation (TIA).
This tool is the successor of the SIMATIC Selection Tool and combines the known
configurators for automation technology into one tool.
With the TIA Selection Tool, you can generate a complete order list from your product
selection or product configuration.
You can find the TIA Selection Tool on the Internet
(http://w3.siemens.com/mcms/topics/en/simatic/tia-selection-tool).
You can use the SIMATIC Automation Tool to run commissioning and maintenance activities
simultaneously on different SIMATIC S7 stations as a bulk operation, independently of the
TIA Portal.
The SIMATIC automation tool provides a variety of functions:
● Scanning of a PROFINET/Ethernet plant network and identification of all connected CPUs
● Address assignment (IP, subnet, gateway) and station name (PROFINET device) to a
CPU
● Transfer of the date and programming device/PC time converted to UTC time to the
module
● Program download to CPU
PID control
14 Function Manual, 03/2017, A5E35300227-AC
Documentation guide
PRONETA
● Operating mode switchover RUN/STOP
● CPU localization by means of LED flashing
● Reading out CPU error information
● Reading of CPU diagnostic buffer
● Reset to factory settings
● Updating the firmware of the CPU and connected modules
You can find the SIMATIC Automation Tool on the Internet
(https://support.industry.siemens.com/cs/ww/en/view/98161300).
With SIEMENS PRONETA (PROFINET network analysis), you analyze the plant network
during commissioning. PRONETA features two core functions:
● The topology overview independently scans PROFINET and all connected components.
● The IO check is a fast test of the wiring and the module configuration of a plant.
You can find SIEMENS PRONETA on the Internet
(https://support.industry.siemens.com/cs/ww/en/view/67460624).
PID control
Function Manual, 03/2017, A5E35300227-AC
15
2
2.1
Controlled system and actuators
Controlled system
Actuators
Application
Actuator
Liquid and gaseous mass flow
Valve, shutter, gate valve
Solid mass flow, e.g., bulk material
Articulated baffle, conveyor, vibrator channel
Switching contact, contactor, relay, thyristor
Variable resistor, variable transformer, transistor
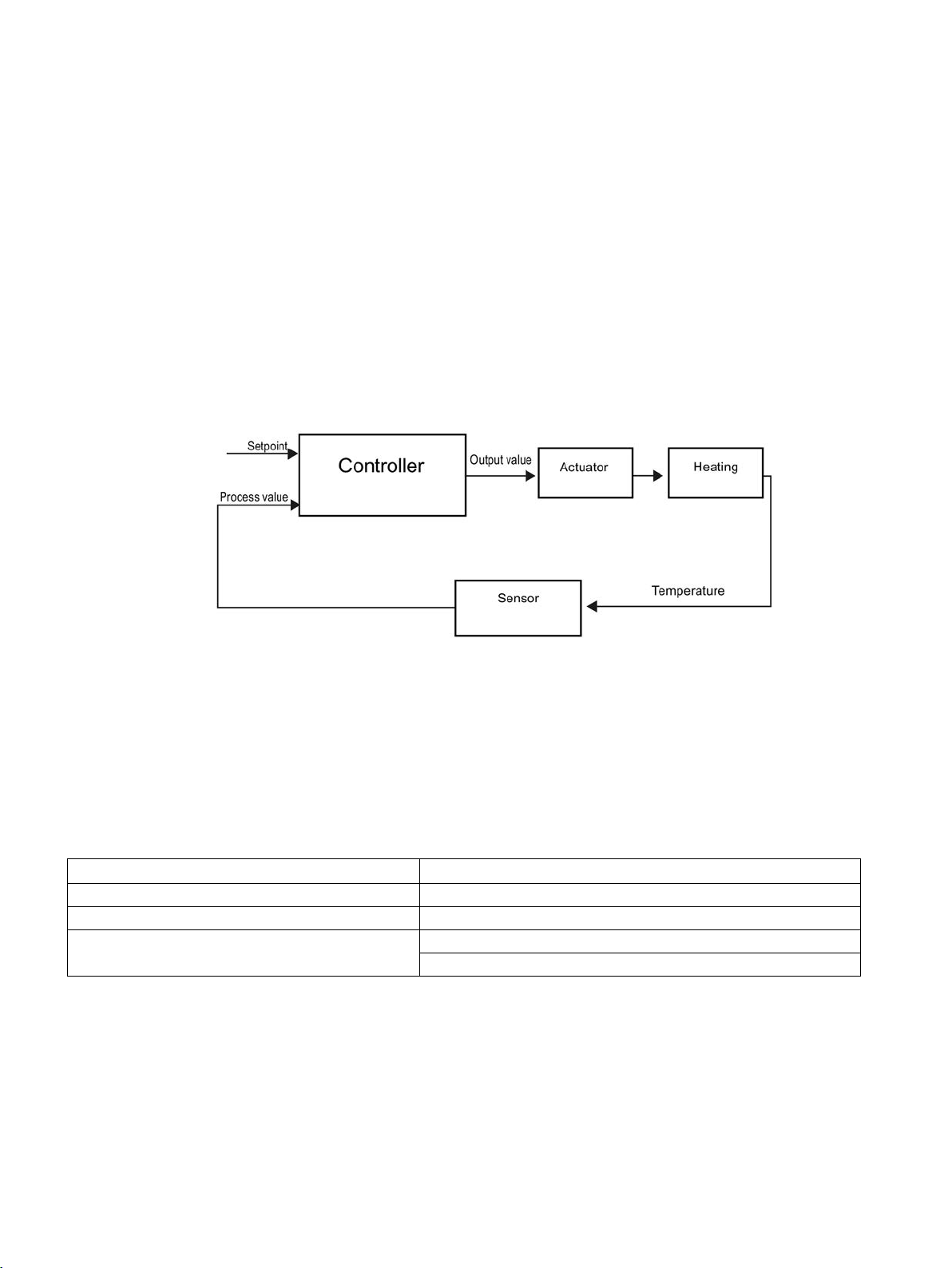
Room temperature control by means of a heating system is a simple example of a controlled
system. A sensor measures the room temperature and transfers the value to a controller.
The controller compares the current room temperature with a setpoint and calculates an
output value (manipulated variable) for heating control.
A properly set PID controller reaches this setpoint as quickly as possible and then holds it a
constant value. After a change in the output value, the process value often changes only with
a time delay. The controller has to compensate for this response.
The actuator is an element of the controlled system and is influenced by the controller. Its
function modifies mass and energy flows.
The table below provides an overview of actuator applications.
Flow of electrical power
PID control
16 Function Manual, 03/2017, A5E35300227-AC

Principles for control
2.1 Controlled system and actuators
Actuators are distinguished as follows:
● Proportional actuators with constant actuating signal
These elements set degrees of opening, angular positions or positions in proportion to
the output value. The output value has an analog effect on the process within the control
range.
Actuators in this group include spring-loaded pneumatic drives, as well as motorized
drives with position feedback for which a position control system is formed.
An continuous controller, such as PID_Compact, generates the output value.
● Proportional actuators with pulse-width modulated signal
These actuators are used to generate the output of pulses with a length proportional to
the output value within the sampling time intervals. The actuator - e.g. a heating resistor
or cooling apparatus - is switched on in isochronous mode for durations that differ
depending on the output value.
The actuating signal can assume unipolar "On" or "Off" states, or represent bipolar states
such as "open/close", "forward/backward", "accelerate/brake".
The output value is generated by a two-step controller such as PID_Compact with pulsewidth modulation.
● Actuators with integral action and three-step actuating signal
Actuators are frequently operated by motors with an on period that is proportional to the
actuator travel of the choke element. This includes elements such as valves, shutters,
and gate valves. In spite of their different design, all of these actuators follow the effect of
an integral action at the input of the controlled system.
A step controller, such as PID_3Step. generates the output value.
PID control
Function Manual, 03/2017, A5E35300227-AC
17

Principles for control
2.2
Controlled systems
Controlled system types
Self-regulating controlled systems
Proportional-action controlled systems
PT1 controlled systems
2.2 Controlled systems
The properties of a controlled system can hardly be influenced as these are determined by
the technical requirements of the process and machinery. Acceptable control results can
only be achieved by selecting a suitable controller type for the specific controlled system and
adapting the controller to the time response of the controlled system. Therefore, it is is
indispensable for the configuration of the proportional, integral and derivative actions of the
controller to have precise knowledge of the type and parameters of the controlled system.
Controlled systems are classified based on their time response to step changes of the output
value.
We distinguish between the following controlled systems:
● Self-regulating controlled systems
– Proportional-action controlled systems
– PT1 controlled systems
– PT2 controlled systems
● Non-self-regulating controlled systems
● Controlled systems with and without dead time
In proportional-action controlled systems, the process value follows the output value almost
immediately. The ratio between the process value and output value is defined by the
proportional Gain of the controlled system.
Examples:
● Gate valve in a piping system
● Voltage dividers
● Step-down function in hydraulic systems
In a PT1 controlled system, the process value initially changes in proportion to the change of
the output value. The rate of change of the process value is reduced as a function of the time
until the end value is reached, i.e., it is delayed.
Examples:
● Spring damping system
● Charge of RC elements
● Water container that is heated with steam.
The time constants are often identical for heating and cooling processes, or for charging and
discharge characteristics. With different time constants, controlling is clearly more complex.
PID control
18 Function Manual, 03/2017, A5E35300227-AC

Principles for control
PT2 controlled systems
Non-self-regulating controlled systems
Controlled systems with dead time
2.2 Controlled systems
In a PT2 controlled system, the process value does not immediately follow a step change of
the output value, i.e., it increases in proportion to the positive rate of rise and then
approaches the setpoint at a decreasing rate of rise. The controlled system shows a
proportional response characteristic with second order delay element.
Examples:
● Pressure control
● Flow rate control
● Temperature control
Non-self-regulating controlled systems have an integral response. The process value
approaches an infinite maximum value.
Example:
● Liquid flow into a container
A dead time always represents the runtime or transport time that has to expire before a
change to the system input can be measured at the system output.
In controlled systems with dead time, the process value change is delayed by the amount of
the dead time.
Example:
Conveyor
PID control
Function Manual, 03/2017, A5E35300227-AC
19
Principles for control
2.3
Characteristic values of the control section
Determining the time response from the step response
2.3 Characteristic values of the control section
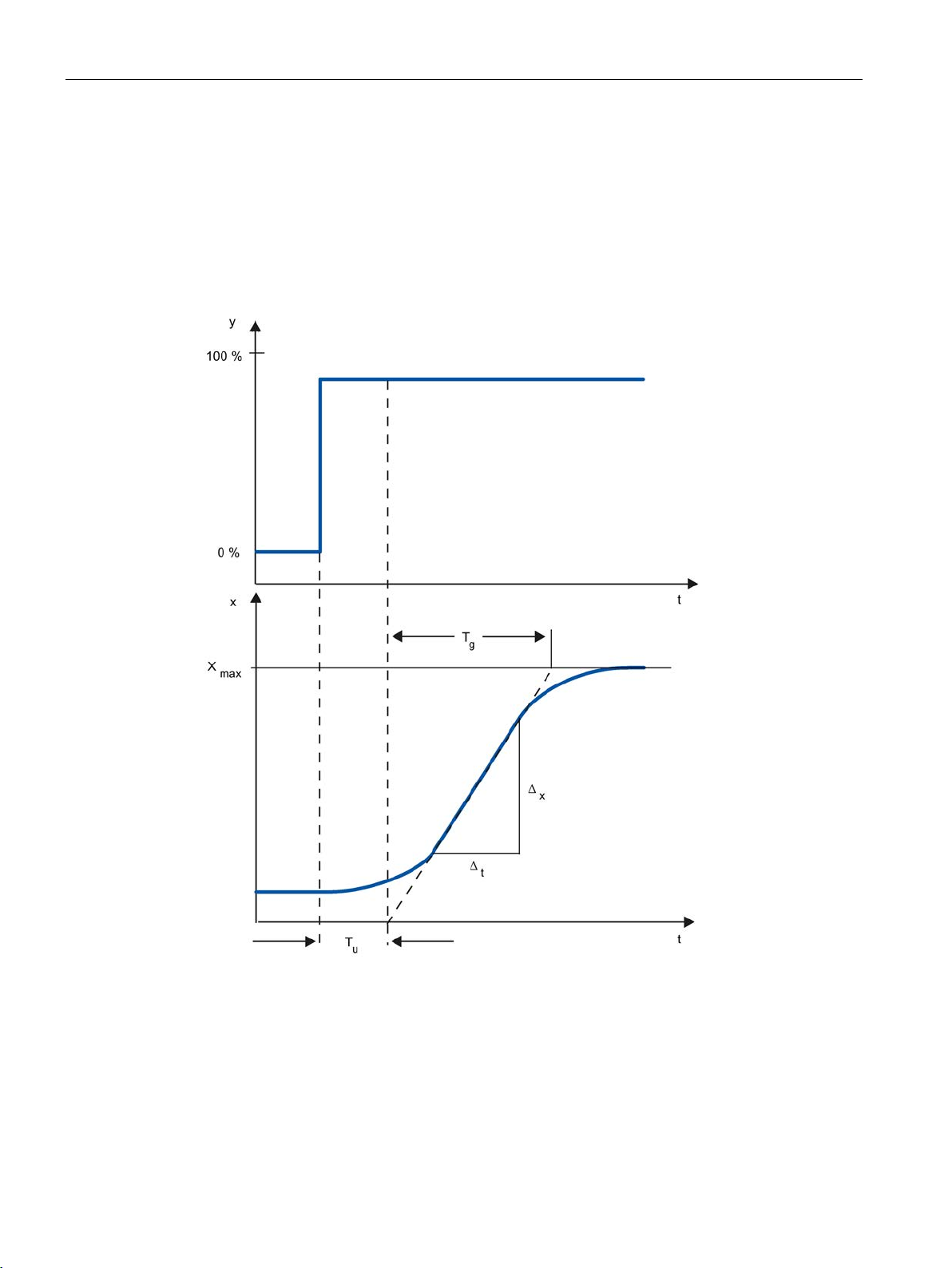
Time response of the controlled system can be determined based on the time characteristic
of process value x following a step change of output value y. Most controlled systems are
self-regulating controlled systems.
The time response can be determined by approximation using the variables Delay time Tu,
Recovery time T
and Maximum value X
g
. The variables are determined by applying
max
tangents to the maximum value and the inflection point of the step response. In many
situations, it is not possible to record the response characteristic up to the maximum value
because the process value cannot exceed specific values. In this case, the rate of rise v
used to identify the controlled system (v
PID control
= Δx/Δt).
max
max
is
20 Function Manual, 03/2017, A5E35300227-AC
Principles for control
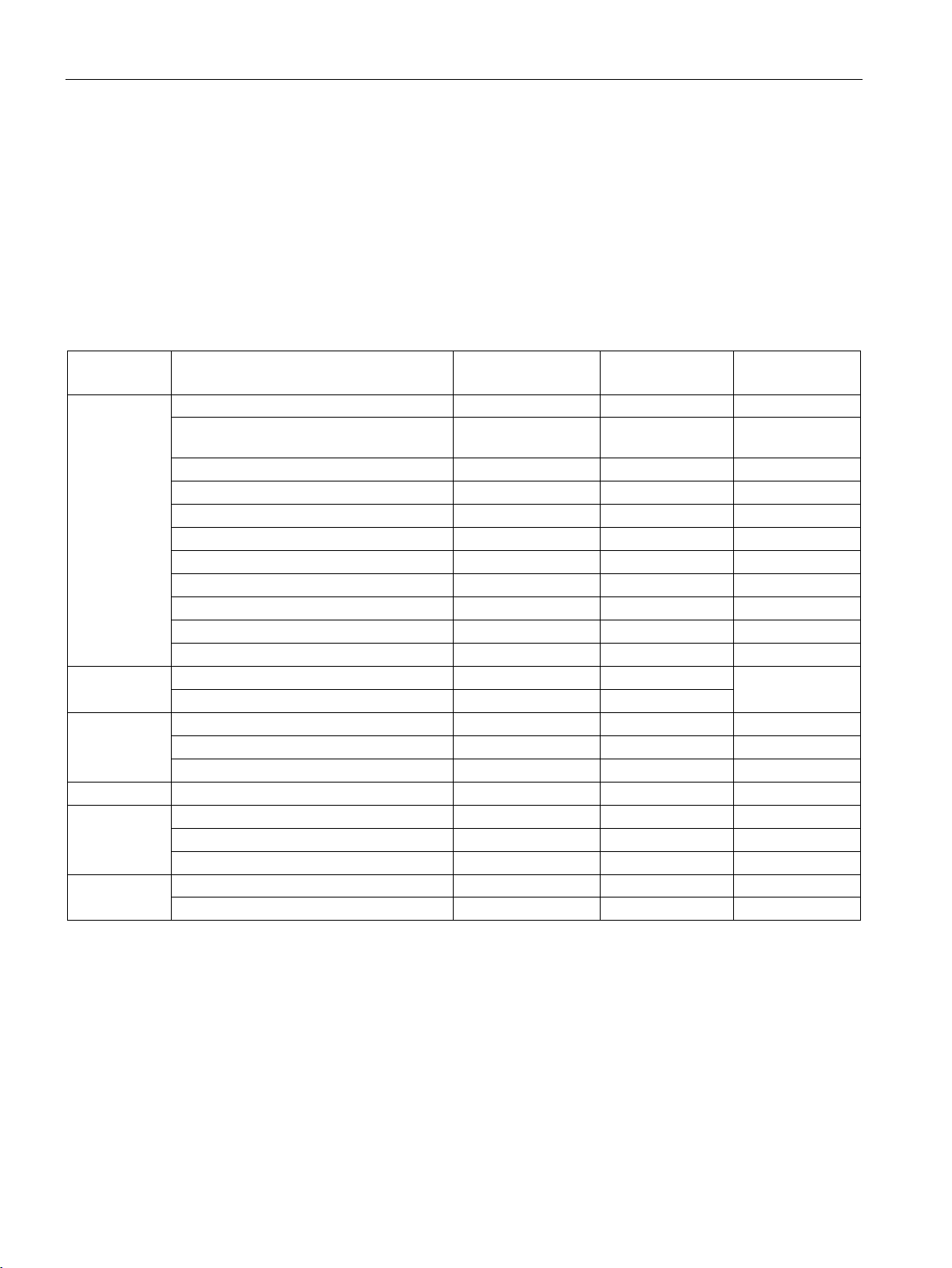
Process type
Tu / Tg
Suitability of the controlled system for controlling
I
< 0,1
can be controlled well
III
> 0,3
difficult to control
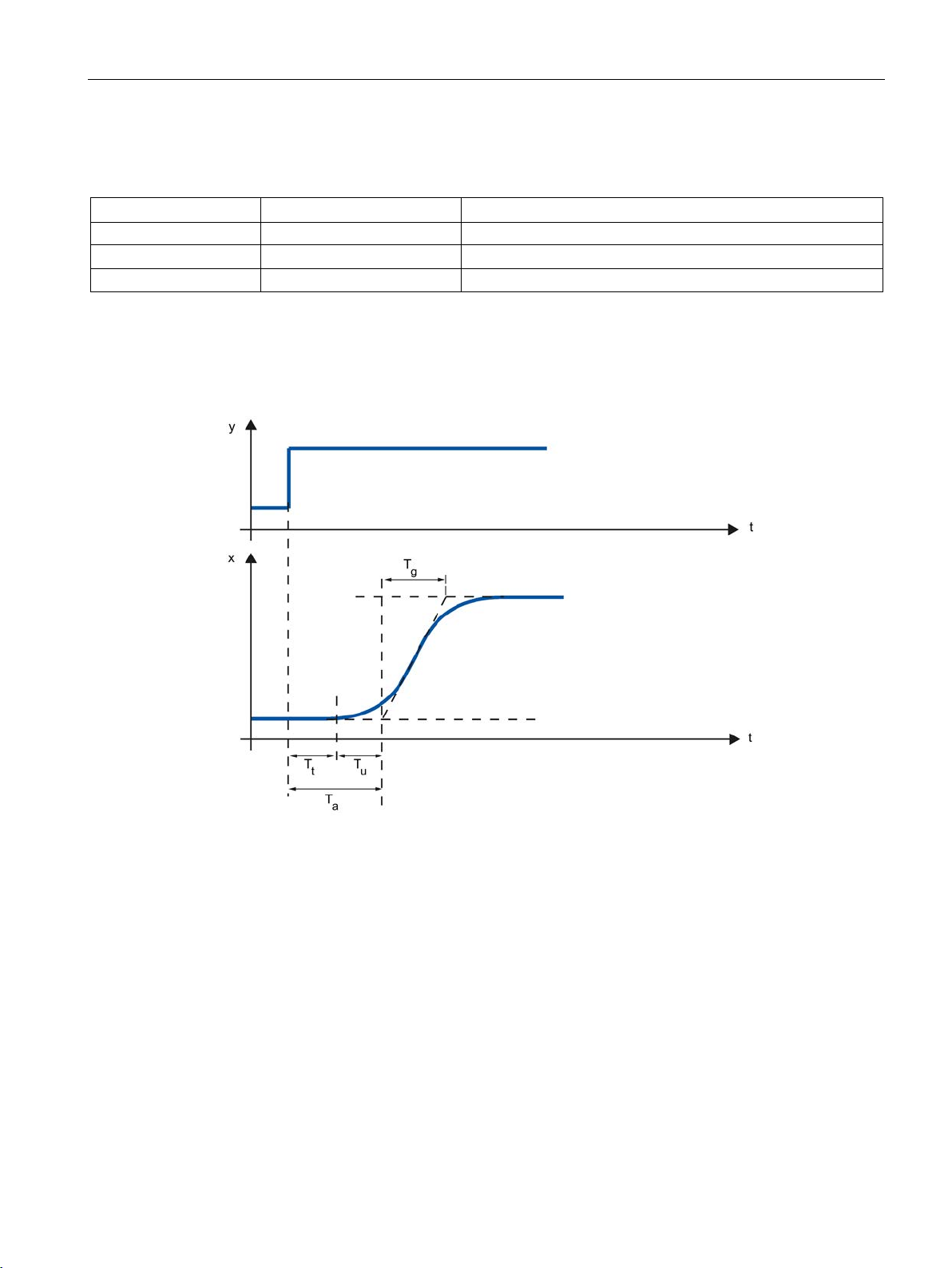
Influence of the dead time on the controllability of a controlled system
Tt
Dead time
Tu
Delay time
Tg
Recovery time
y
Output value
x
Process value
2.3 Characteristic values of the control section
The controllability of the controlled system can be estimated based on the ratio Tu/Tg, or Tu ×
v
max/Xmax
II 0.1 to 0.3 can still be controlled
. Rule:
A controlled system with dead time and recovery reacts as follows to a jump of the output
value.
The controllability of a self-regulating controlled system with dead time is determined by the
ratio of T
T
t/Tg
PID control
Function Manual, 03/2017, A5E35300227-AC
to Tg. Tt must be small compared to Tg. Rule:
t
≤ 1
21
Principles for control
Response rate of controlled systems
Parameters of certain controlled systems
Physical
quantity
Controlled system
Delay time Tu
Recovery time Tg
Rate of rise v
max
Small electrically heated furnace
0.5 to 1 min
5 to 15 min
Up to 60 K/min.
Large gas-heated annealing furnace
0.2 to 5 min
3 to 60 min
1 to 30 K/min
Autoclaves (2.5 m3)
0.5 to 0.7 min
10 to 20 min
Not specified
High-pressure autoclaves
12 to 15 min
200 to 300 min
Not specified
Steam superheater
30 s to 2.5 min
1 to 4 min
2°C/s
Injection molding machines
0.5 to 3 min
3 to 30 min
5 to 20 K/min
Extruders
1 to 6 min
5 to 60 min
Packaging machines
0.5 to 4 min
3 to 40 min
2 to 35 K/min
Room heating
1 to 5 min
10 to 60 min
1° C/min
Pipeline with gas
0 to 5 s
0.2 to 10 s
Pipeline with liquid
None
None
Gas pipeline
None
0.1 s
Not relevant
Drum boiler with gas or oil firing
None
150 s
Not relevant
Drum boiler with impact grinding mills
1 to 2 min
2 to 5 min
Not relevant
Vessel level
Drum boiler
0.6 to 1 min
Not specified
0.1 to 0.3 cm/s
Small electric drive
None
0.2 to 10 s
Not relevant
Large electric drive
None
5 to 40 s
Not relevant
Steam turbine
None
Not specified
50 min–1
Small generators
None
1 to 5 s
Not relevant
Large generators
None
5 to 10 s
Not relevant
2.3 Characteristic values of the control section
Controlled systems can be judged on the basis of the following values:
T
< 0.5 min, Tg < 5 min = fast controlled system
u
T
> 0.5 min, Tg > 5 min = slow controlled system
u
Temperature
Large electrically heated annealing furnace
Distillation tower 1 to 7 min 40 to 60 min 0.1 to 0.5° C/s
1 to 5 min 10 to 20 min Up to 20 K/min.
Flow rate
Pressure
Speed
Voltage
Not relevant
PID control
22 Function Manual, 03/2017, A5E35300227-AC
Principles for control
2.4
Pulse controller
Two-step controllers without feedback
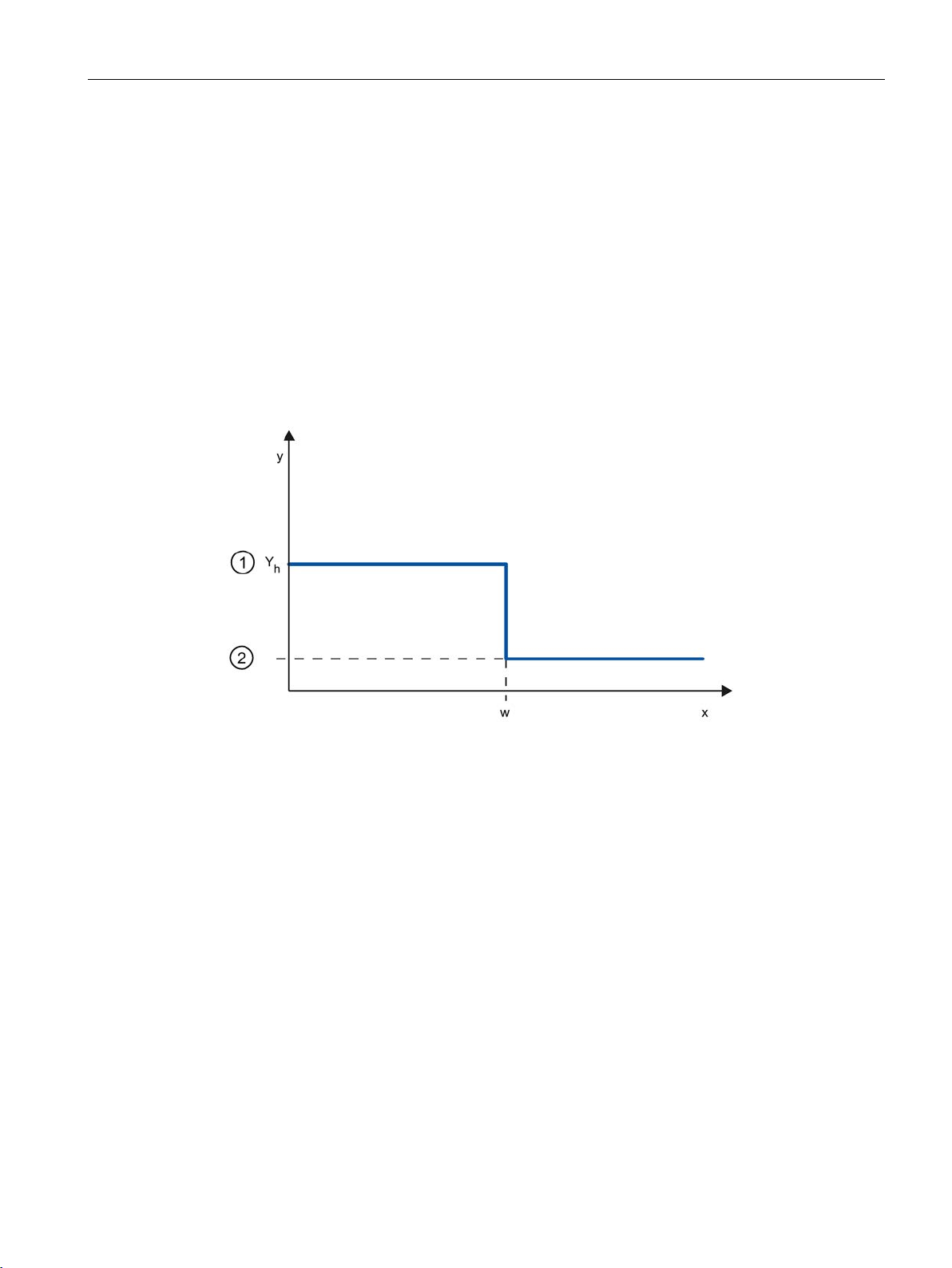
①
ON
②
OFF
Yh
Control range
w
Setpoint
2.4 Pulse controller
Two-step controllers have the state "ON" and "OFF" as the switching function. This
corresponds to 100% or 0% output. This behavior generates a sustained oscillation of
process value x around setpoint w.
The amplitude and duration of the oscillation increase in proportion to the ratio between the
delay time T
mainly for simple temperature control systems (such as electrically directly heated furnaces)
or as limit-value signaling units.
The following diagram shows the characteristic of a two-step controller
and recovery time Tg of the controlled system. These controllers are used
u
PID control
Function Manual, 03/2017, A5E35300227-AC
23
Principles for control
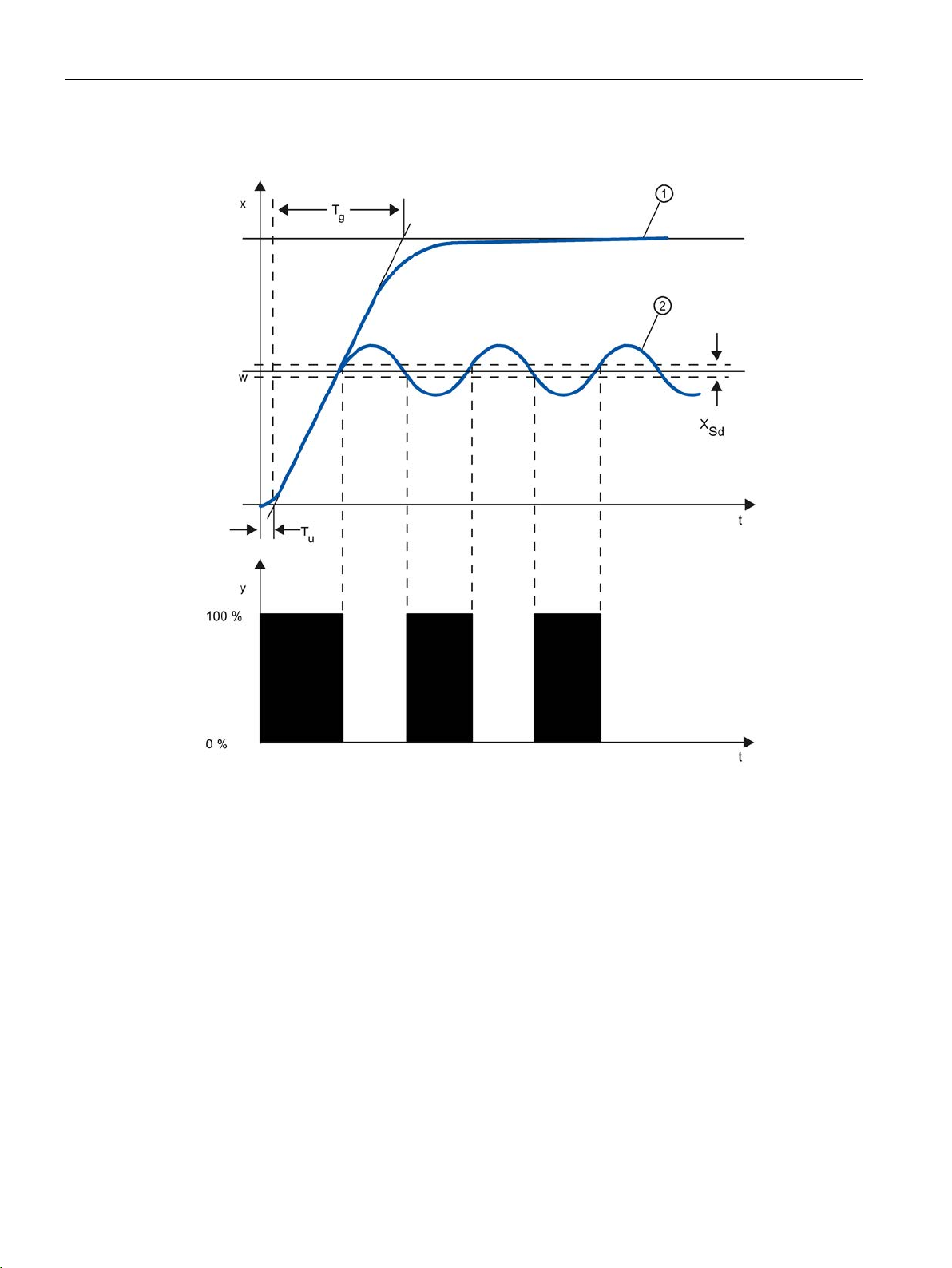
①
Response characteristic without controller
②
Response characteristic with two-step controller
Tu
Delay time
Tg
Recovery time
XSd
Switching difference
2.4 Pulse controller
The following diagram shows the control function of a two-step controller
PID control
24 Function Manual, 03/2017, A5E35300227-AC

Principles for control
Two-step controllers with feedback
2.4 Pulse controller
The behavior of two-step controllers in the case of controlled systems with larger delay
times, such as furnaces where the functional space is separated from the heating, can be
improved by the use of electronic feedback.
The feedback is used to increase the switching frequency of the controller, which reduces
the amplitude of the process value. In addition, the control-action results can be improved
substantially in dynamic operation. The limit for the switching frequency is set by the output
level. It should not exceed 1 to 5 switches per minute at mechanical actuators, such as
relays and contactors. In the case of voltage and current outputs with downstream thyristor
or Triac controllers high switching frequencies can be selected that exceed the limit
frequency of the controlled system by far.
Since the switching pulses can no longer be determined at the output of the controlled
system, results comparable with those of continuous controllers are obtained.
The output value is generated by pulse-width modulation of the output value of a continuous
controller.
Two-step controllers with feedback are used for temperature control in furnaces, at
processing machines in the plastics, textile, paper, rubber and foodstuff industries as well as
for heating and cooling devices.
PID control
Function Manual, 03/2017, A5E35300227-AC
25
Principles for control
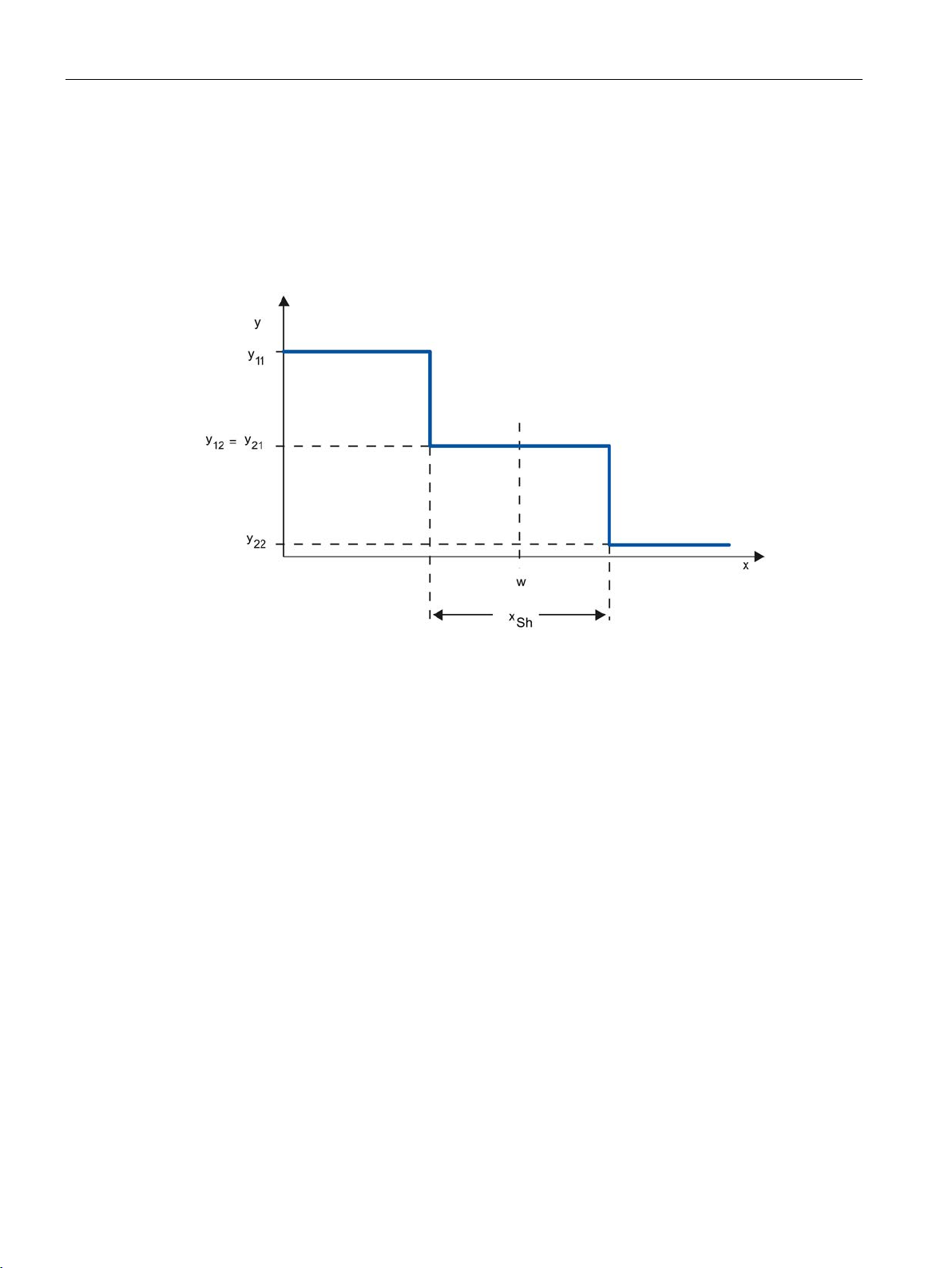
Three-step controllers
y22 = 100% cooling
x
Physical quantity of the process value, e.g., temperature in° C
w
Setpoint
xSh
Distance between Switching Point 1 and Switching Point 2
2.4 Pulse controller
Three-step controllers are used for heating / cooling. These controllers have two switching
points as their output. The control-action results are optimized through electronic feedback
structures. Fields of applications for such controllers are heating, low-temperature, climatic
chambers and tool heating units for plastic-processing machines.
The following diagram shows the characteristic of a three-step controller
y Output value, e.g.
y11 = 100% heating
y12 = 0% heating
y21 = 0% cooling
PID control
26 Function Manual, 03/2017, A5E35300227-AC

Principles for control
2.5
Response to setpoint changes and disturbances
Response to setpoint changes
x
Process value
w
Setpoint
2.5 Response to setpoint changes and disturbances
The process value should follow a setpoint change as quickly as possible. The response to
setpoint changes is improved by minimizing fluctuation of the process value and the time
required to reach the new setpoint.
PID control
Function Manual, 03/2017, A5E35300227-AC
27
Principles for control
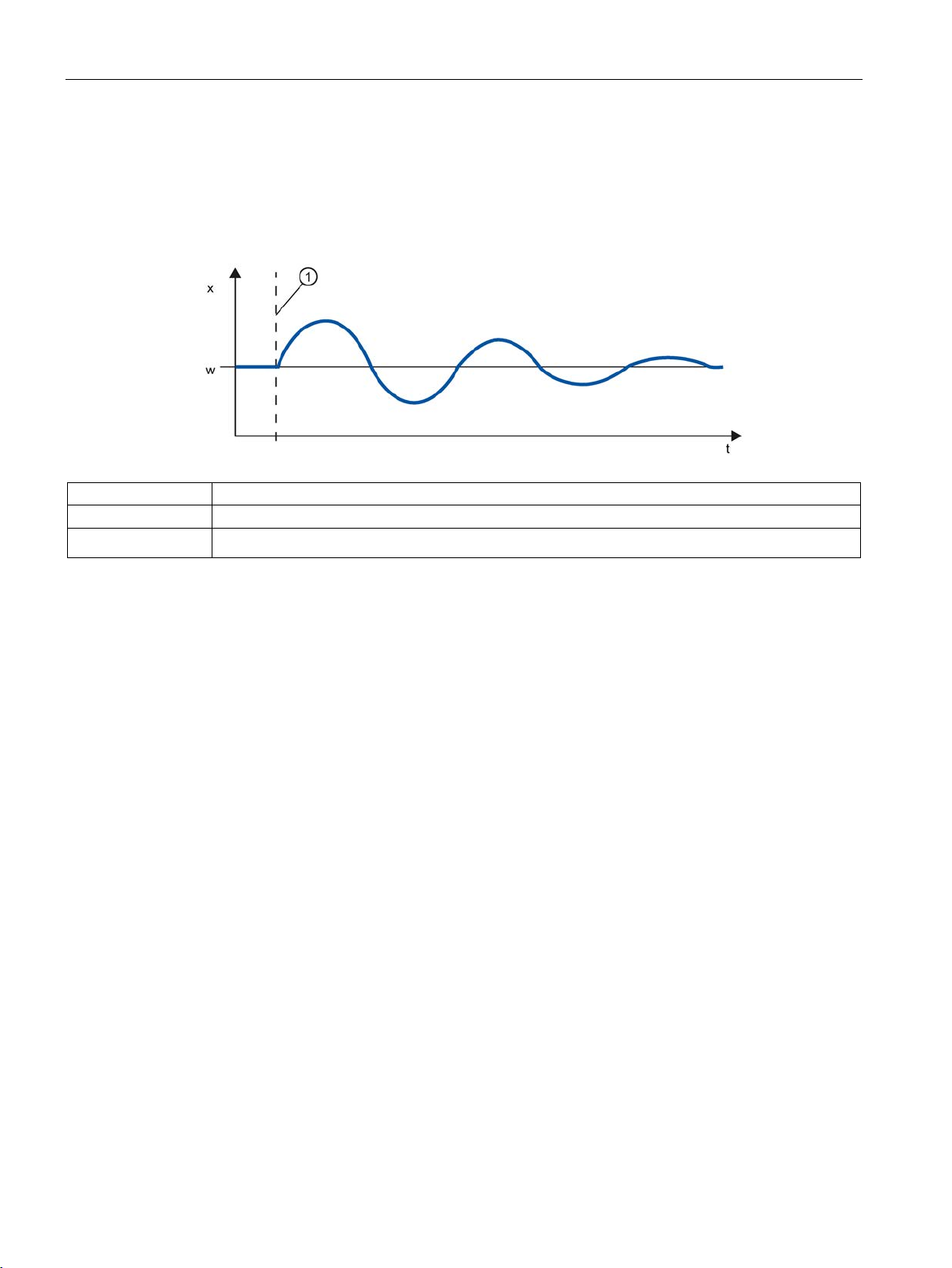
Response to disturbances
x
Process value
①
2.6
Control Response at Different Feedback Structures
Control behavior of controllers
2.6 Control Response at Different Feedback Structures
The setpoint is influenced by disturbance variables. The controller has to eliminate the
resulting control deviations in the shortest time possible. The response to disturbances is
improved by minimizing fluctuation of the process value and the time required to reach the
new setpoint.
w Setpoint
Influencing a disturbance variable
Disturbance variables are corrected by a controller with integral action. A persistent
disturbance variable does not reduce control quality because the control deviation is
relatively constant. Dynamic disturbance variables have a more significant impact on control
quality because of control deviation fluctuation. The control deviation is eliminated again only
by means of the slow acting integral action.
A measurable disturbance variable can be included in the controlled system. This inclusion
would significantly accelerated the response of the controller.
A precise adaptation of the controller to the time response of the controlled system is
decisive for the controller's precise settling to the setpoint and optimum response to
disturbance variables.
The feedback circuit can have a proportional action (P), proportional-derivative action (PD),
proportional-integral action (PI), or proportional-integral-derivative action (PID).
If step functions are to be triggered by control deviations, the step responses of the
controllers differ depending on their type.
PID control
28 Function Manual, 03/2017, A5E35300227-AC
Principles for control
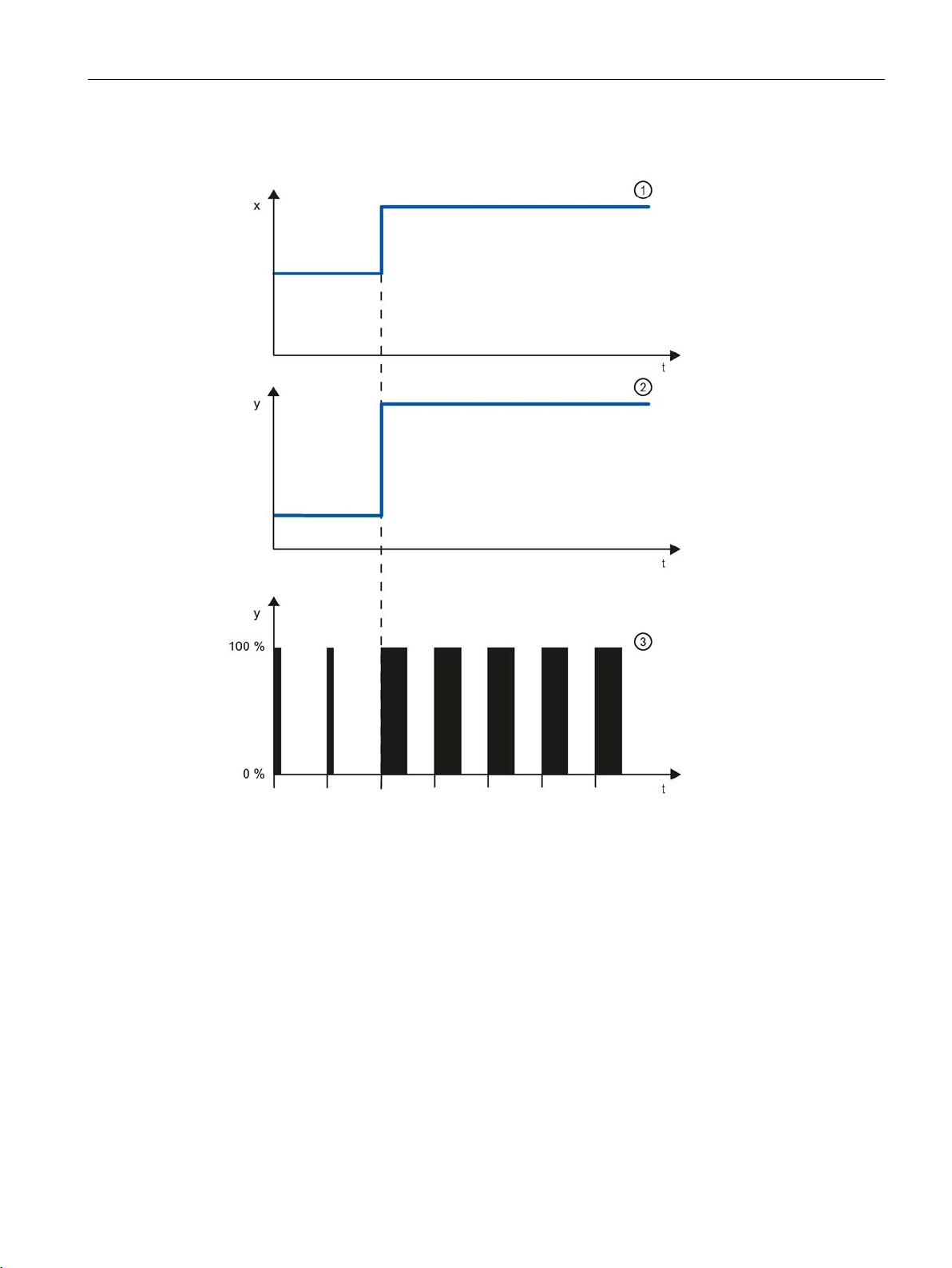
Step response of a proportional action controller
①
Control deviation
②
Output value of a continuous controller
③
Output value of a pulse controller
Equation for proportional action controller
2.6 Control Response at Different Feedback Structures
Output value and control deviation are directly proportional, meaning:
Output value = proportional gain × control deviation
y = GAIN × x
PID control
Function Manual, 03/2017, A5E35300227-AC
29
Principles for control
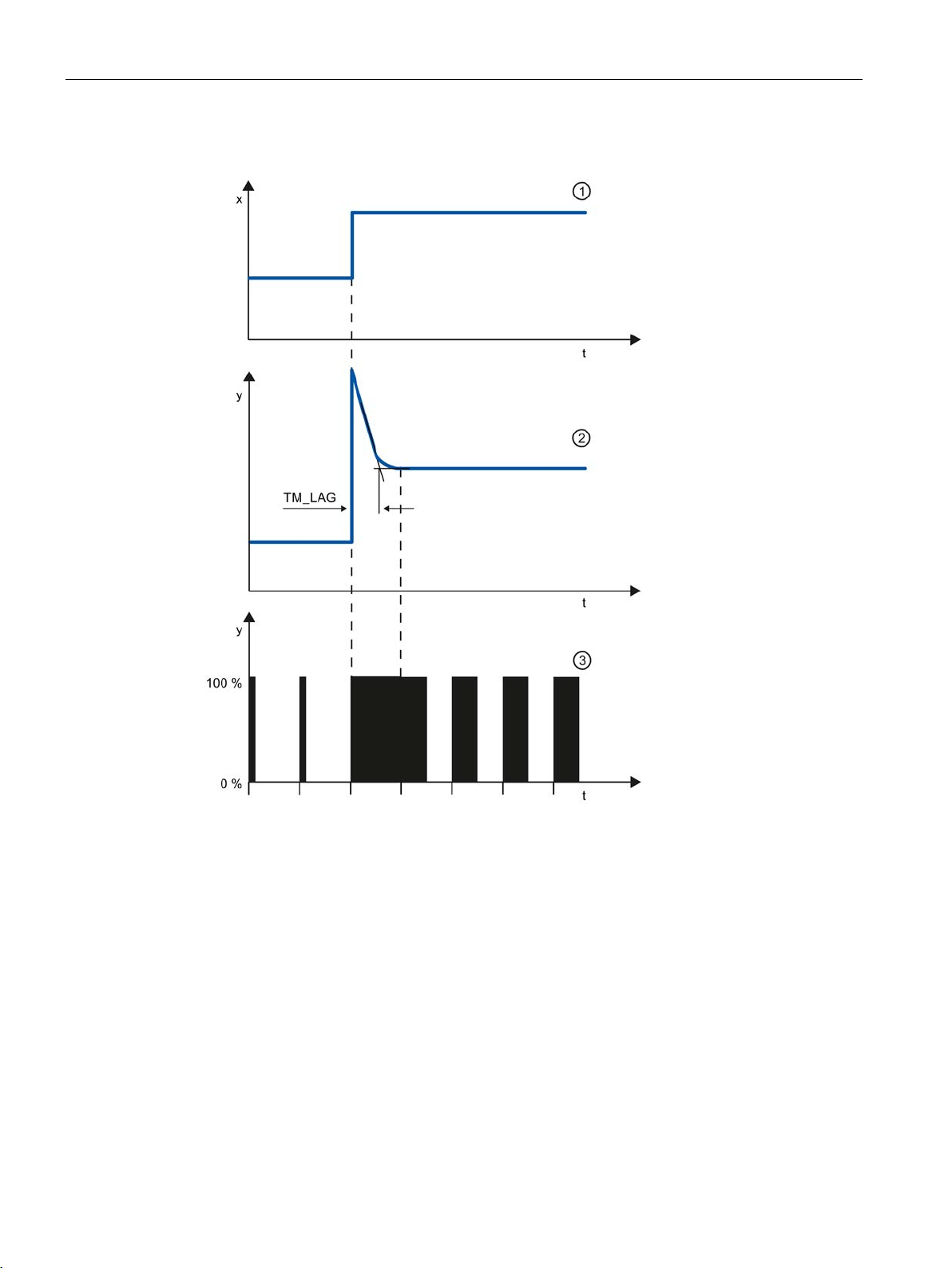
Step response of a PD-action controller
①
Control deviation
②
Output value of a continuous controller
③
Output value of a pulse controller
TM_LAG
Delay of the Derivative action
2.6 Control Response at Different Feedback Structures
PID control
30 Function Manual, 03/2017, A5E35300227-AC
 Loading...
Loading...