


S7-200 Smart to
Stepper Drive
Communication
S7-200 SMART V2.4/ TIA V15.1
https://new.siemens.com/in/en/products/automation/systems/ind
ustrial/plc/simatic-s7-200-smart.html
Siemens
Industry
Online
Support
Legal information
Legal information
Use of application examples
Application examples illustrate the solution of automation tasks through an interaction of several
components in the form of text, graphics and/or software modules. The application examples are
a free service by Siemens AG and/or a subsidiary of Siemens AG ("Siemens"). They are
non-binding and make no claim to completeness or functionality regarding configuration and
equipment. The application examples merely offer help with typical tasks; they do not constitute
customer-specific solutions. You yourself are responsible for the proper and safe operation of the
products in accordance with applicable regulations and must also check the function of the
respective application example and customize it for your system.
Siemens grants you the non-exclusive, non-sub licensable and non-transferable right to have the
application examples used by technically trained personnel. Any change to the application
examples is your responsibility. Sharing the application examples with third parties or copying the
application examples or excerpts thereof is permitted only in combination with your own products.
The application examples are not required to undergo the customary tests and quality inspections
of a chargeable product; they may have functional and performance defects as well as errors. It is
your responsibility to use them in such a manner that any malfunctions that may occur do not
result in property damage or injury to persons.
ã Siemens AG 2020 All rights reserved
Disclaimer of liability
Siemens shall not assume any liability, for any legal reason whatsoever, including, without
limitation, liability for the usability, availability, completeness and freedom from defects of the
application examples as well as for related information, configuration and performance data and
any damage caused thereby. This shall not apply in cases of mandatory liability, for example
under the German Product Liability Act, or in cases of intent, gross negligence, or culpable loss of
life, bodily injury or damage to health, non-compliance with a guarantee, fraudulent
non-disclosure of a defect, or culpable breach of material contractual obligations. Claims for
damages arising from a breach of material contractual obligations shall however be limited to the
foreseeable damage typical of the type of agreement, unless liability arises from intent or gross
negligence or is based on loss of life, bodily injury or damage to health. The foregoing provisions
do not imply any change in the burden of proof to your detriment. You shall indemnify Siemens
against existing or future claims of third parties in this connection except where Siemens is
mandatorily liable.
By using the application examples, you acknowledge that Siemens cannot be held liable for any
damage beyond the liability provisions described.
Other information
Siemens reserves the right to make changes to the application examples at any time without
notice. In case of discrepancies between the suggestions in the application examples and other
Siemens publications such as catalogs, the content of the other documentation shall have
precedence.
The Siemens terms of use (https://support.industry.siemens.com) shall also apply.
Security information
Siemens provides products and solutions with Industrial Security functions that support the secure
operation of plants, systems, machines and networks.
In order to protect plants, systems, machines and networks against cyber threats, it is necessary
to implement – and continuously maintain – a holistic, state-of-the-art industrial security concept.
Siemens’ products and solutions constitute one element of such a concept.
Customers are responsible for preventing unauthorized access to their plants, systems, machines
and networks. Such systems, machines and components should only be connected to an
enterprise network or the Internet if and to the extent such a connection is necessary and only
when appropriate security measures (e.g. firewalls and/or network segmentation) are in place.
For additional information on industrial security measures that may be implemented, please visit
https://www.siemens.com/industrialsecurity.
Siemens’ products and solutions undergo continuous development to make them more secure.
Siemens strongly recommends that product updates are applied as soon as they are available
and that the latest product versions are used. Use of product versions that are no longer
supported, and failure to apply the latest updates may increase customer’s exposure to cyber
threats.
To stay informed about product updates, subscribe to the Siemens Industrial Security RSS Feed
at: https://www.siemens.com/industrialsecurity.
S7 –200 Smart to Stepper Drive Communication
Entry-ID: 6, V0.0, 01/2020
2

Table of contents
Table of contents
Legal information ..................................................................................................... 2
1 Task ................................................................................................................. 4
1.1
Overview of the automation task ........................................................ 4
2 Automation solution ....................................................................................... 5
2.1 Hardware and software components used ......................................... 5
2.2 Setup................................................................................................. 6
3 Functional mechanisms ................................................................................. 7
3.1 Axis Control ....................................................................................... 7
3.2 Control program ................................................................................. 7
4 Commissioning ............................................................................................ 12
4.1
4.2
Setting Motion Control Wizard.......................................................... 12
Downloading the SIMATIC program ................................................. 18
5 Operation ...................................................................................................... 20
5.1 Positioning ....................................................................................... 20
5.2
Profiling ........................................................................................... 22
6 Appendix ....................................................................................................... 23
6.1 Service and support ......................................................................... 23
6.2 Application support .......................................................................... 24
6.3 Links and literature .......................................................................... 24
ã Siemens AG 2020 All rights reserved
6.4 Change documentation .................................................................... 24
S7 –200 Smart to Stepper Drive Communication
Entry-ID: 6, V0.0, 01/2020
3
1 Task
1 Task
Communication between Stepper Drive and a PLC is often required in a diversity of general
“Cutting-to-Lenght“ applications. Taking reciprocating controlled positioning of an axis for
example, communication between a controller (S7-200 Smart)and a Stepper Drive RHINO
MOTION CONTROLS RMCS-1106.
ã Siemens AG 2020 All rights reserved
1.1
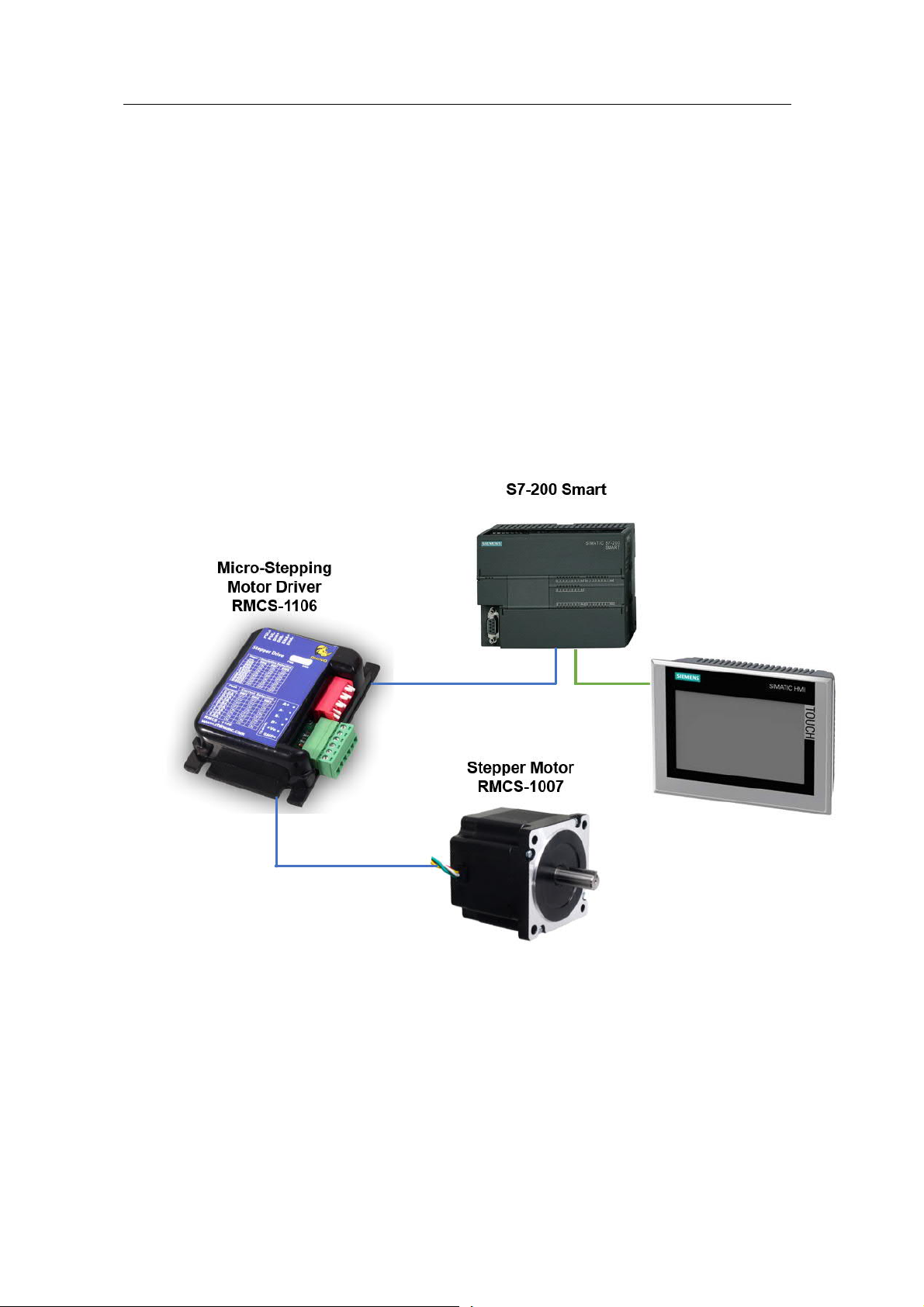
In the application, RMCS-1106 Stepper Drive controls a RMCS-1107 Stepper Motor using
motion control wizard.
The following figure provides an overview of the automation task:
Overview of the automation task
S7 –200 Smart to Stepper Drive Communication
Entry-ID: 6, V0.0, 01/2020
4
2 Automation solution
2 Automation solution
2.1 Hardware and software components used
2.1.1 Hardware components
No. Component Order number Quantity
1 SIMATIC S7-200 Smart ST30 6ES72881ST300AA0 1
2 Micro-Stepping Motor Driver
(Max. 40Vdc and 2A per phase)
3 Stepper Motor 3.75° Step Angle 0.65 Kgcm Torque
4 Comfort Panel TP 700
4 Ethernet Cable 1
2.1.2 Software components
User can order these CDs that contain the following software tools:
RMCS-1106 1
RMCS-1007
6AV2124-0GC01-0AX0
1
1
ã Siemens AG 2020 All rights reserved
No. Component Order number Quantity
1 STEP7 Micro/WIN SMART 2.4 6ES7288-SW01-0AA0 1
Most of the hardware components shown in the table are commercially
available in the global market. If unavailable in your country (or region), find an
Note
appropriate substitute at your own discretion.
The table lists key hardware components required for this
project. Other accessories such as cables and wires, supports, terminal strips,
and so on can be purchased separately.
S7 –200 Smart to Stepper Drive Communication
Entry-ID: 6, V0.0, 01/2020
5
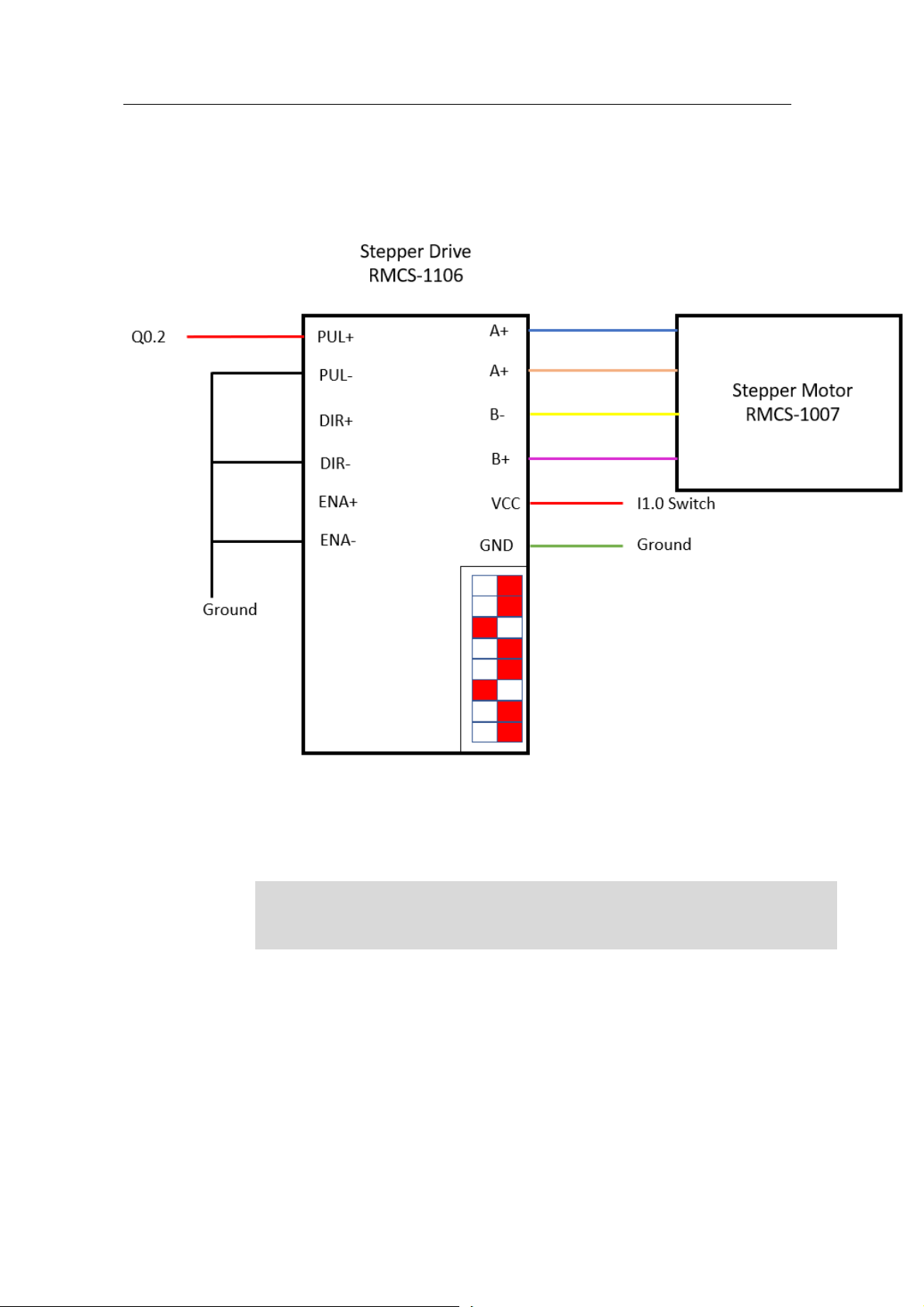
2.2 Setup
2 Automation solution
ã Siemens AG 2020 All rights reserved
Note
2.2.1 Figure 2-1 Stepper Motor connection
For more detail please refer operating manual of Stepper Drive RMCS-1106 and
Stepper Motor RMCS-1007
S7 –200 Smart to Stepper Drive Communication
Entry-ID: 6, V0.0, 01/2020
6
3 Functional mechanisms
LAD / FBD
STL
Description
3.1 Axis Control
The Axis of Motion provides a single pulse train output with integrated direction control
and disable outputs. It also includes programmable inputs which allow the CPU to be
configured for several modes of operation, including automatic reference point seek. The
Axis of Motion provides a unified solution for open loop control of the speed and position
for either stepper motors or servo motors.
To simplify the use of motion control in your application, STEP 7-Micro/WIN SMART
provides a Motion wizard to configure Axis of Motion and a PWM wizard to configure
PWM. The wizards generate motion instructions that you can use to provide dynamic
control of speed and motion in your application. For the Axis of Motion, STEP 7Micro/WIN SMART also provides a control panel that allows you to control, monitor, and
test your motion operations.
The motion control built into the CPU uses an Axis of Motion to control both the speed
and motion of a stepper motor or a servo motor. Using the Axis of Motion requires
expertise in the field of motion control. This chapter is not meant to educate the novice in
this subject. However, it provides fundamental information that will help as you use the
Motion wizard to configure the Axis of Motion for your application.
3 Functional mechanisms
ã Siemens AG 2020 All rights reserved
For more details refer operating manual section 12.2 Using Motion Control
3.2 Control program
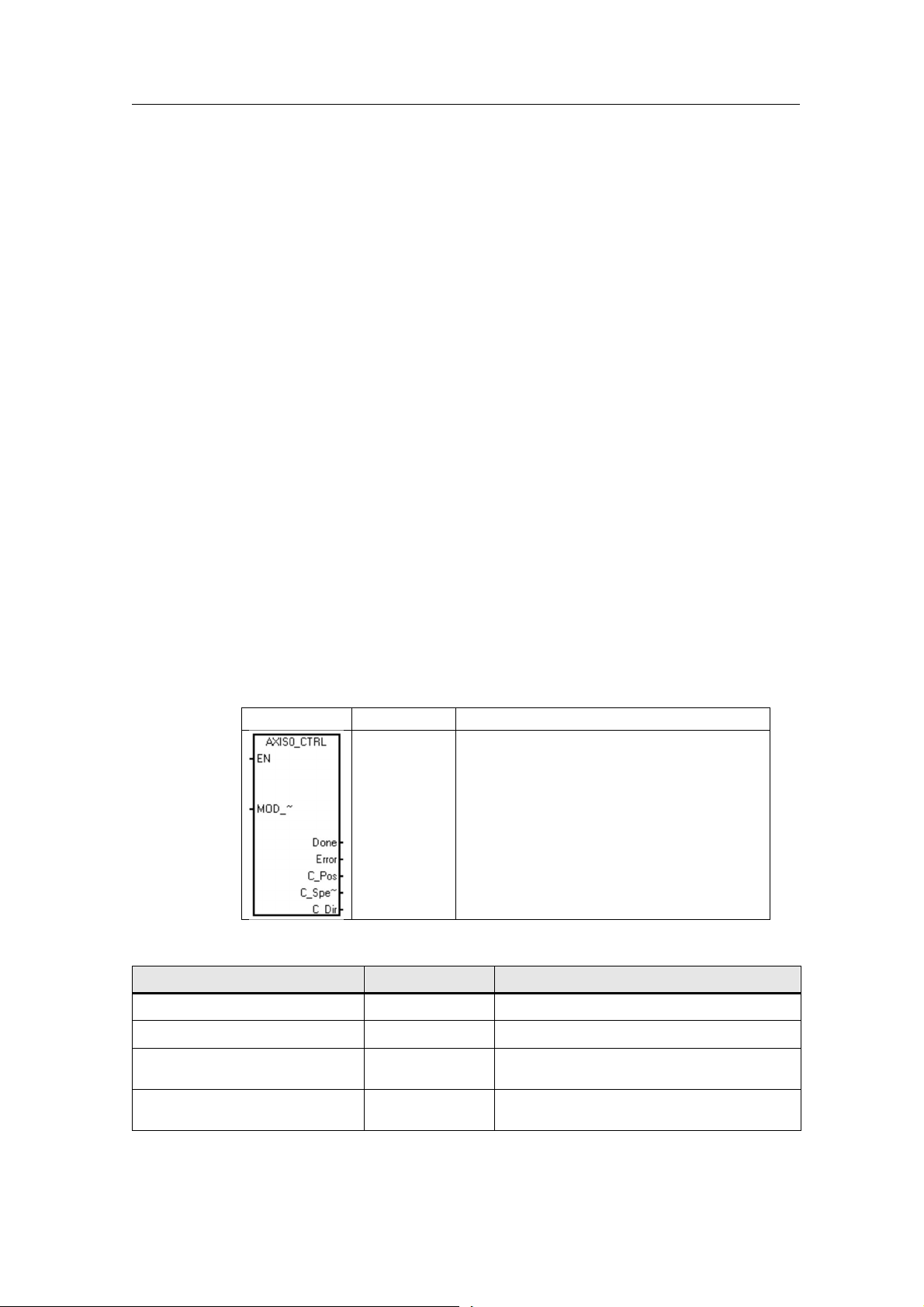
3.2.1 AXISx_CTRL subroutine
CALL
AXISx_CTRL,
MOD_EN,
Done, Error,
C_Pos,
C_Speed,
C_Dir
3.2.1.1 Figure 3-1
Input/output Date Type Value
MOD_EN BOOL I, Q, V, M, SM, S, T, C, L, Power Flow
Done, C_Dir BOOL I, Q, V, M, SM, S, T, C, L
The AXISx_CTRL subroutine (Control) enables
and initializes the Axis of Motion by
automatically commanding the Axis of Motion to
load the configuration/profile table each time the
CPU changes to RUN mode.
Use this subroutine only once in your project
per motion axis, and ensure
that your program calls this subroutine every
scan. Use SM0.0
(Always On) as the input for the EN parameter.
Error BYTE IB, QB, VB, MB, SMB, SB, LB, AC, *VD,
C_Pos, C_Speed DINT, REAL ID, QD, VD, MD, SMD, SD, LD, AC, *VD,
S7 –200 Smart to Stepper Drive Communication
Entry-ID: 6, V0.0, 01/2020
*AC, *LD
*AC, *LD
7
3 Functional mechanisms
LAD / FBD
STL
Description
The MOD_EN parameter must be on to enable the other motion subroutines to send
commands to the Axis of Motion. If the MOD_EN parameter turns off, then the Axis of
Motion aborts any command that is in progress and performs a decelerated stop.
The output parameters of the AXISx_CTRL subroutine provide the current status of the
Axis of Motion.
The Done parameter turns on when the Axis of Motion completes any subroutine.
The C_Pos parameter is the current position of the Axis of Motion. Based upon the units
of measurement, the value is either a number of pulses (DINT) or the number of
engineering units (REAL).
The C_Speed parameter provides the current speed of the Axis of Motion. If you
configured the measurement system for the Axis of Motion for pulses, C_Speed is a DINT
value containing the number of pulses/second. If you configured the measurement
system for engineering units, C_Speed is a REAL value containing the selected
engineering units/second (REAL).
· Signal state of 0 = positive
· Signal state of 1 = negative
ã Siemens AG 2020 All rights reserved
Note
The Axis of Motion reads the configuration/profile table only at power-up or when
commanded to load the configuration.
• If you use the Motion wizard to modify the configuration, then the AXISx_CTRL
subroutine automatically commands the Axis of Motion to load the
configuration/profile table every time the CPU changes to RUN mode.
• If you use the Motion control panel to modify the configuration, clicking the
Update Configuration button commands the Axis of Motion to load the new
configuration/profile table.
• If you use another method to modify the configuration, then you must also issue
an AXISx_CFG command to the Axis of Motion to load the configuration/profile
table. Otherwise, the Axis of Motion continues to use the old configuration/profile
table.
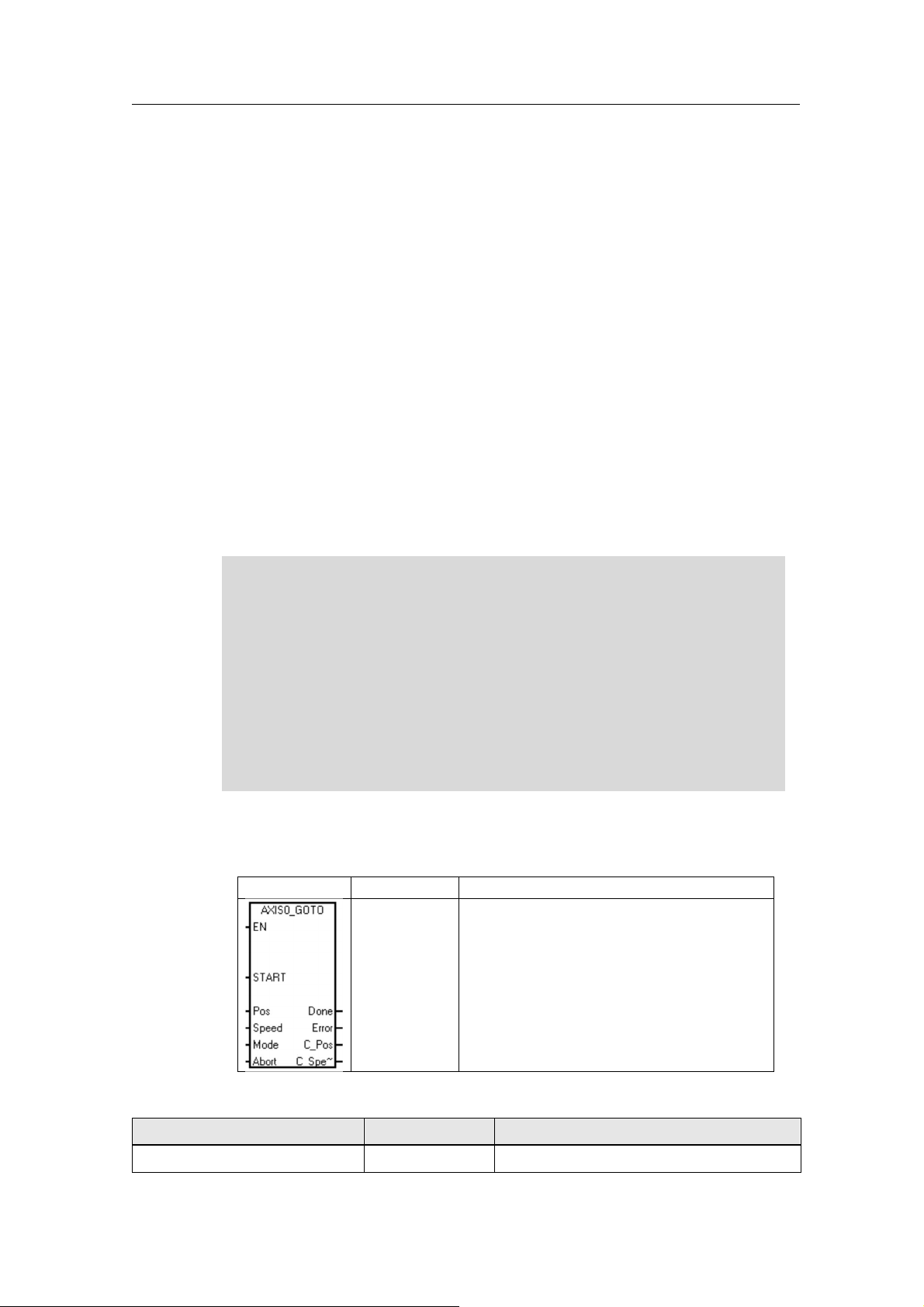
3.2.2 AXISx_GOTO subroutine
CALL
AXISx_GOTO,
START, Pos,
Speed,
Mode, Abort,
Done,
Error, C_Pos,
C_Speed
The AXISx_GOTO subroutine commands the
Axis of Motion to go to a
desired location.
Input/output Date Type Value
START BOOL
S7 –200 Smart to Stepper Drive Communication
Entry-ID: 6, V0.0, 01/2020
3.2.2.1 Figure 3-2
I, Q, V, M, SM, S, T, C, L, Power Flow
8
 Loading...
Loading...