

Page 1

MICROMASTER 420
g
Ausg
Betriebsanleitun
abe A1
Anwenderdokumentation
Page 2
IMPORTANT NOTICE
Not all converters currently have UL approval.
UL listing can be determined by examining the
converter's Rating Label.
For UL listed products the following UL mark is used:
Page 3
r
A
Übersicht
1
MICROMASTER 420
Betriebsanleitung
Anwenderdokumentation
Installation
Inbetriebnahme
Einsatz des
MICROMASTER 420
Systemparameter
Störungsbehebung
Technische Daten des
MICROMASTER 420
2
3
4
5
6
7
Gültig fü
Umrichtertyp Regelungsausführung
MICROMASTER 420 September 2000
usgabe A1
Zusatzinformationen
Anhänge
Index
8
A
B
C
D
E
F
G
H
Ausgabe A1
Page 4
Weitere Informationen sind im Internet erhältlich unter:
http://www.siemens.de/micromaster
Die approbierte Siemens-Qualität für Software und Schulung
entspricht DIN ISO 9001, Reg.- Nr. 2160-01
Die Vervielfältigung, Weitergabe oder Benutzung dieser Unterlage oder ihres Inhalts ist nur mit schriftlicher Genehmigung
zulässig. Zuwiderhandlungen werden wegen Schadensersatz
belangt. Alle Rechte vorbehalten, einschließlich solcher, die
durch Patenterteilung oder Eintragung eines Gebrauchsmusters oder der Konstruktion entstehen.
© Siemens AG 2000. Alle Rechte vorbehalten.
MICROMASTER® ist eine eingetragene Handelsmarke der
Firma Siemens.
Bestellnummer: 6SE6400-5AA00-0AP0
Gedruckt in Großbritannien
Gegebenenfalls stehen andere Funktionen zur Verfügung, die
nicht in diesem Dokument beschrieben sind. Diese Tatsache
stellt jedoch nicht die Verpflichtung dar, solche Funktionen mit
einer neuen Steuerung oder bei der Wartung zur Verfügung
zu stellen.
Die Übereinstimmung dieses Unterlageninhalts mit der beschriebenen Hardware und Software wurde geprüft. Dennoch
können Abweichungen vorliegen; für eine vollständige Übereinstimmung wird keine Gewähr übernommen. Die in diesen
Unterlagen enthaltenen Informationen werden regelmäßig
einem Review unterzogen, und gegebenenfalls erforderliche
Änderungen werden in die nächste Ausgabe aufgenommen.
Verbesserungsvorschläge sind willkommen.
Siemensunterlagen werden auf chlorfreiem Papier gedruckt,
das aus verwalteten, nachgeforsteten Waldbeständen
stammt. Für den Druck- oder Bindevorgang wurden keine
Lösungsmittel verwendet.
Die Unterlage kann ohne vorherige Ankündigung geändert
werden.
Siemens-Aktiengesellschaft.
MICROMASTER 420 Betriebsanleitung
4 6SE6400-5AA00-0AP0
Page 5
VORWORT Deutsch
Vorwort
Anwenderdokumentation
Warnung
!
Vor der Installation und der Inbetriebnahme müssen sämtliche
Sicherheitsvermerke und Warnungen und alle am Gerät angebrachten
Warnschilder sorgfältig gelesen werden. Darauf achten, dass die Warnschilder in
einem leserlichen Zustand gehalten und fehlende oder beschädigte Schilder
ersetzt werden.
Die MICROMASTER-Dokumentation ist in drei getrennte Ebenen aufgegliedert:
Kurzanweisung
Die Kurzanweisung ist so aufgebaut, dass sie dem Benutzer schnellen Zugriff auf alle
Basisinformationen liefert, die für das Installieren und Einrichten des
MICROMASTER 420 für den Betrieb erforderlich sind.
Betriebsanleitung
Die Betriebsanleitung liefert Einzelinformationen für die Installation und den Betrieb
des MICROMASTER 420. Die Betriebsanleitung liefert auch Einzelbeschreibungen
der Parameter, die für das anwendungsspezifische Einstellen der Funktionen des
MICROMASTER 420 zur Verfügung stehen.
Handbuch
Das Handbuch enthält eingehende Informationen über alle technischen Themen im
Zusammenhang mit dem MICROMASTER 420-Umrichter.
Bezüglich weiterer Einzelinformationen zu Veröffentlichungen über den
MICROMASTER 420 und Informationen über sonstige Veröffentlichungen im
MICROMASTER-Bereich bitte mit dem nächsten Siemens-Büro Verbindung aufnehmen
oder unsere Website: http://www.siemens.de/micromaster aufrufen.
MICROMASTER 420 Betriebsanleitung
6SE6400-5AA00-0AP00
5
Page 6
Deutsch VORWORT
Begriffsbestimmungen und Warnungen
Gefahr
!
!
!
Für die Zwecke dieser Unterlage und der Warnschilder am Produkt bedeutet
"Gefahr", dass bei Unterlassung geeigneter Vorsichtsmaßnahmen Tod, schwere
Körperverletzung oder erheblicher Sachschaden die Folge sind.
Warnung
Für die Zwecke dieser Unterlage und der Warnschilder am Produkt bedeutet
"Warnung", dass bei Unterlassung geeigneter Vorsichtsmaßnahmen Tod,
schwere Körperverletzung oder erheblicher Sachschaden die Folge sein können.
Vorsicht
Für die Zwecke dieser Unterlage und der Warnschilder am Produkt bedeutet
"Vorsicht", dass bei Unterlassung geeigneter Vorsichtsmaßnahmen leichte
Körperverletzung oder geringer Sachschaden die Folge sein können.
Hinweis:
Für die Zwecke dieser Unterlage bedeutet "Hinweis" eine wichtige Information im
Zusammenhang mit dem Produkt oder das Hervorheben eines
Dokumentationsteils zwecks besonderer Aufmerksamkeit.
Qualifiziertes Personal
Für die Zwecke dieser Betriebsanleitung und der Schilder am Produkt bezeichnet
"qualifizierte Person" eine Person, die mit der Installation, Montage, Inbetriebnahme und Bedienung des Gerätes und den vorliegenden Gefahren vertraut ist.
Diese Person muss folgende Qualifikationen aufweisen:
1. Sie muss geschult und berechtigt sein, Stromkreise und Geräte einzuschalten, auszuschalten, freizuschalten, zu erden und mit Warnschildern zu
versehen entsprechend den festgelegten Sicherheitsanweisungen.
2. Sie muss in der ordnungsgemäßen Pflege und Anwendung von Schutzeinrichtungen entsprechend den eingeführten Sicherheitsvorschriften geschult
sein.
3. Sie muss geschult sein, Erste Hilfe zu leisten.
Verwendung ausschließlich für den bestimmungsgemäßen Gebrauch
Die Geräte dürfen nur für die in der Anleitung genannten Anwendungen eingesetzt
werden, und nur in Verbindung mit Geräten und Komponenten, die von Siemens
empfohlen und zugelassen sind.
Kontaktanschrift
Falls beim Lesen dieser Anleitung Fragen oder Schwierigkeiten entstehen, dann bitte
unter Verwendung des am Ende dieser Anleitung befindlichen Formulars Verbindung mit
dem zuständigen Siemens-Büro aufnehmen.
MICROMASTER 420 Betriebsanleitung
6 6SE6400-5AA00-0AP0
Page 7
VORWORT Deutsch
Sicherheitsanweisungen
Die nachstehenden Warnungen, Vorsichts-Hinweise und Hinweise sind für die Sicherheit
des Benutzers vorgesehen, sowie als Hilfsmittel, um Schaden an dem Erzeugnis oder an
Teilen der angeschlossenen Maschinen zu verhindern. In diesem Abschnitt sind
Warnungen, Vorsichts-Hinweise und Hinweise zusammengestellt, die bei der Arbeit mit
MICROMASTER 420-Umrichtern allgemein gelten. Sie sind eingeteilt in Allgemeines,
Transport & Lagerung, Inbetriebnahme, Betrieb, Reparatur und Demontage &
Entsorgung.
Spezifische Warnungen, Vorsichts-Hinweise und Hinweise, die für bestimmte
Tätigkeiten gelten, sind am Anfang des jeweiligen Kapitels zusammengestellt, und sie
sind innerhalb dieser Kapitel an kritischen Punkten wiederholt oder ergänzt.
Bitte diese Informationen sorgfältig lesen, da sie für Ihre persönliche Sicherheit
bestimmt sind und auch eine längere Lebensdauer des MICROMASTER 420Umrichters und der daran angeschlossenen Geräte unterstützen.
Allgemeines
!
!
Warnungen
Das vorliegende Gerät führt gefährliche Spannungen und steuert umlaufende
mechanische Teile, die gegebenenfalls gefährlich sind. Die Missachtung der
Warnungen oder das Nichtbefolgen der in dieser Anleitung enthaltenen
Anweisungen kann Lebensgefahr, schwere Körperverletzung oder schwerwiegenden Sachschaden bewirken.
An diesen Geräten darf nur geeignetes qualifiziertes Personal arbeiten, und nur,
nachdem es sich mit allen Sicherheitshinweisen, Installations-, Betriebs- und
Wartungsanweisungen, die in dieser Anleitung enthalten sind, vertraut gemacht
hat. Der erfolgreiche und gefahrlose Betrieb des Gerätes hängt von seiner
ordnungsgemäßen Handhabung, Installation, Bedienung und Wartung ab.
Gefährdung durch elektrische Spannung. Die Kondensatoren des Gleichstrom-
zwischenkreises bleiben nach dem Abschalten der Versorgungsspannung
5 Minuten lang geladen. Das Öffnen des Gerätes vor dem Ablauf von
5 Minuten nach dem Abschalten der Versorgungsspannung ist unzulässig.
Vorsicht
Es muss verhindert werden, dass Kinder und allgemeines Publikum zu dem
Gerät oder in seine Nähe gelangen!
Das Gerät darf nur für die vom Hersteller angegebenen Zwecke verwendet
werden. Unzulässige Änderungen und die Verwendung von Ersatzteilen und
Zubehör, die nicht vom Hersteller des Gerätes vertrieben, oder empfohlen
werden, können Brände, elektrische Stromschläge und Verletzungen
verursachen.
Hinweise:
Diese Bedienungsanleitung muss in der Nähe des Gerätes gut zugänglich
aufbewahrt und allen Benutzern zur Verfügung gestellt werden.
Wenn Messungen oder Prüfungen am spannungsführenden Gerät vorge-
nommen werden müssen, dann sind die Bestimmungen des Safety Code VBG
4.0 zu beachten, insbesondere § 8 "Zulässige Abweichungen bei Arbeiten an
spannungsführenden Teilen". Es sind geeignete elektronische Hilfsmittel zu
verwenden.
Vor der Installation und Inbetriebnahme diese Sicherheitsanweisungen und
Warnungen bitte sorgfältig lesen, ebenso alle am Gerät angebrachten Warnschilder. Darauf achten, dass Warnschilder in leserlichem Zustand gehalten
werden und fehlende oder beschädigte Schilder gegebenenfalls auswechseln.
MICROMASTER 420 Betriebsanleitung
6SE6400-5AA00-0AP00
7
Page 8
Deutsch VORWORT
Transport & Lagerung
!
!
Inbetriebnahme
!
Warnungen
Für den ordnungsgemäßen und gefahrlosen Betrieb des Gerätes sind
Vorsicht
Der Umrichter muss bei Transport und Lagerung gegen mechanische Stöße
Warnungen
Von unqualifiziertem Personal vorgenommene Arbeiten am Gerät/an der
Es sind nur festverdrahtete Netzanschlüsse zulässig. Das Gerät muss
Falls eine Fehlerstromschutzeinrichtung (FSI) verwendet werden soll, muss
Maschinen mit Dreiphasen-Stromversorgung, die mit EMV-Filtern
Folgende Klemmen können gefährliche Spannungen führen, auch wenn der
ordnungsgemäßer Transport, richtige Lagerung, Montage und Befestigung
sowie sorgfältige Bedienung und Wartung ausschlaggebend.
und Schwingungen geschützt werden. Auch der Schutz gegen Wasser
(Regen) und unzulässige Temperaturen (siehe Tabelle auf Seite 95) ist
unverzichtbar.
Anlage oder das Nichteinhalten von Warnungen können zu schwerer
Körperverletzung oder schwerem Sachschaden führen. Arbeiten an dem
Gerät/an der Anlage dürfen nur von geeignetem qualifiziertem Personal
vorgenommen werden, das hinsichtlich des Einrichtens, der Installation,
Inbetriebnahme und Bedienung des Erzeugnisses geschult ist.
geerdet werden (IEC 536, Klasse 1, NEC und sonstige, einschlägige
Normen).
sie den Typ B aufweisen.
ausgestattet sind, dürfen nicht über einen Erdschluss-Schutzschalter an das
Netz angeschlossen werden (siehe DIN VDE 0160, Abschnitt 6.5).
Umrichter nicht arbeitet:
- die Netzklemmen L/L1, N/L2, L3,
- die Motorklemmen U, V, W, DC+, DC-.
!
8 6SE6400-5AA00-0AP0
Vorsicht
Der Anschluss der Netz-, Motor- und Steuerleitungen an den Umrichter muss so
vorgenommen werden, wie in Bild 2-4 auf Seite 25 dargestellt, um zu verhindern,
dass induktive und kapazitive Störungen die ordnungsgemäße Funktion des
Umrichters beeinflussen.
MICROMASTER 420 Betriebsanleitung
Page 9
VORWORT Deutsch
Betrieb
!
Warnungen
MICROMASTER-Umrichter arbeiten mit hohen Spannungen.
Im Betrieb elektrischer Geräte ist es unvermeidlich, dass an bestimmten
Geräteteilen gefährliche Spannungen anstehen.
Nothalt-Einrichtungen nach EN 60204 IEC 204 (VDE 0113) müssen in allen
Betriebszuständen des Steuergerätes funktionsfähig bleiben. Ein Rückstellen
der Nothalt-Einrichtung darf nicht zu unkontrolliertem oder undefiniertem
Wiederanlauf führen.
In Fällen, in denen Kurzschlüsse in dem Steuergerät zu erheblichen Sach-
schaden oder sogar schweren Körperverletzungen führen können
(d. h. potenziell gefährliche Kurzschlüsse), müssen zusätzliche äußere
Maßnahmen oder Einrichtungen vorgesehen werden, um gefahrlosen Betrieb
zu gewährleisten oder zu erzwingen, selbst wenn ein Kurzschluss auftritt
(z. B. unabhängige Endschalter, mechanische Verriegelungen, etc.).
Bestimmte Parametereinstellungen können bewirken, dass der Umrichter
nach einem Ausfall der Versorgungsspannung automatisch wieder anläuft.
Das Gerät ist in der Lage, internen Motorüberlastschutz nach UL508C,
Abschnitt 42, herzustellen. Siehe P0610 (ebene 3) und P0335.
Motorüberlastschutz kann auch mittels eines externen PTC (Kaltleiter) über
einen Digitaleingang hergestellt werden.
Das Gerät ist für Einsatz an einem Stromkreis geeignet, der einen symmetri-
schen Strom von bis zu 10.000 Ampere (eff), bei einer Maximalspannung
von 230/460 V liefern kann, wenn es durch eine träge Schmelzsicherung
geschützt wird (siehe Tabelle auf Seite 93).
Das Gerät darf nicht als 'Nothalt-Einrichtung' verwendet werden (siehe
EN 60204, 9.2.5.4)
Reparatur
!
Warnungen
Reparaturen an dem Gerät dürfen nur vom Siemens-Service, von Repara-
turwerkstätten, die von Siemens zugelassen sind oder von qualifiziertem
Personal vorgenommen werden, das mit allen Warnungen und Bedienungsverfahren aus diesem Handbuch gründlich vertraut ist.
Gegebenenfalls schadhafte Teile oder Bauelemente müssen durch Teile aus
der zugehörigen Ersatzteilliste ersetzt werden.
Vor dem Öffnen des Gerätes die Stromversorgung abtrennen.
Demontage & Entsorgung
Hinweise:
Die Verpackung des Umrichters ist wiederverwendbar. Bitte die Verpackung
für spätere Verwendung oder für Rücksendung an den Hersteller
aufbewahren.
Leicht lösbare Schraub- und Schnappverbindungen ermöglichen das
Zerlegen des Gerätes in seine Einzelteile. Diese Einzelteil können dem
Recycling zugeführt werden. Bitte entsprechend den örtlichen
Bestimmungen entsorgen oder an den Hersteller zurücksenden.
MICROMASTER 420 Betriebsanleitung
6SE6400-5AA00-0AP00
9
Page 10

Deutsch VORWORT
MICROMASTER 420 Betriebsanleitung
10 6SE6400-5AA00-0AP0
Page 11

INHALTSVERZEICHNIS Deutsch
Inhaltsverzeichnis
1 Übersicht ........................................................................................................................... 15
1.1 Der MICROMASTER 420..................................................................................................... 16
1.2 Merkmale ............................................................................................................................. 16
2 Installation ......................................................................................................................... 17
2.1 Allgemeines ......................................................................................................................... 18
2.2 Umgebungsbedingungen im Betrieb .................................................................................... 19
2.3 Mechanischer Einbau........................................................................................................... 20
2.4 Elektrische Installation ......................................................................................................... 21
3 Inbetriebnahme .................................................................................................................27
3.1 Frontplatten für den MICROMASTER 420 ........................................................................... 29
3.2 Allgemeine Bedienung .........................................................................................................34
4 Anwendung des MICROMASTER 420 ............................................................................. 37
4.1 Frequenzsollwert.................................................................................................................. 38
4.2 Befehlsquellen (P0700)........................................................................................................ 38
4.3 AUS- und Bremsfunktionen.................................................................................................. 39
4.4 Regelungs-Betriebsarten (P1300)........................................................................................ 40
4.5 Störungen und Warnungen.................................................................................................. 40
5 Systemparameter .............................................................................................................. 41
5.1 Übersicht der MICROMASTER-Systemparameter............................................................... 42
5.2 Einführung in die MICROMASTER-Systemparameter......................................................... 43
5.3 Systemparameter und ihre Definitionen............................................................................... 48
6 Störungsbehebung ............................................................................................................ 91
6.1 Störungsbehebung mit dem Zustands-Anzeigefeld.............................................................. 92
6.2 Störungsbehebung mit dem Basis-Bedienfeld ..................................................................... 93
6.3 Fehlerschlüssel des MICROMASTER 420........................................................................... 94
7 MICROMASTER 420 Technische Daten .......................................................................... 99
8 Zusatzinformationen ........................................................................................................ 103
8.1 Lieferbare Optionen ........................................................................................................... 104
8.2 Elektromagnetische Verträglichkeit (EMV)......................................................................... 104
MICROMASTER 420 Betriebsanleitung
6SE6400-5AA00-0AP00
11
Page 12

Deutsch INHALTSVERZEICHNIS
A – Austausch des Bedienfeldes........................................................................................... 109
B – Abnehmen der Abdeckungen bei Gehäusegröße A ....................................................... 111
C – Abnehmen der Abdeckungen bei Gehäusegrößen B und C........................................... 113
D – Abnehmen der 'Y'-Kappe, Gehäusegröße A................................................................... 115
E – Abnehmen der 'Y'-Kappe, Gehäusegrößen B und C ...................................................... 117
F – Einstellungen der Benutzerparameter............................................................................. 119
G – Anwendbare Normen ...................................................................................................... 121
H – Abkürzungsliste ............................................................................................................... 123
Index................................................................................................................................ 125
MICROMASTER 420 Betriebsanleitung
12 6SE6400-5AA00-0AP0
Page 13

INHALTSVERZEICHNIS Deutsch
Abbildungsverzeichnis
Bild 2-1 Bohrmuster für MICROMASTER 420 ...............................................................................20
Bild 2-2 Anschlussklemmen des MICROMASTER 420 ................................................................. 23
Bild 2-3 Motor- und Netzanschlüsse...............................................................................................23
Bild 2-4 Verdrahtungsanleitung zur Minimierung von EMI-Effekten............................................... 25
Bild 3-1 Für den Umrichter MICROMASTER 420 lieferbare Frontplatten...................................... 29
Bild 3-2 Basisbedienung mit dem SDP........................................................................................... 30
Bild 3-3 Tasten auf dem Basis-Bedienfeld .....................................................................................31
Bild 3-4 Ändern von Parametern über das BOP ............................................................................32
Bild 3-5 Beispiel eines typischen Motor-Typenschildes ................................................................. 33
Bild 3-6 Blockschaltplan des Umrichters ........................................................................................ 36
Tabellenverzeichnis
Tabelle 3-1 Voreinstellungen für den Betrieb mit Zustands-Anzeigefeld ............................................. 29
Tabelle 3-3 Voreinstellungen für Bedienung über das BOP ................................................................30
Tabelle 6-1 Von den LEDs auf dem SDP angezeigte Zustände des Umrichters ................................ 92
Tabelle 6-2 Fehlerschlüssel des MICROMASTER 420 ....................................................................... 94
Tabelle 6-3 Warnungsschlüssel des MICROMASTER 420 ................................................................. 96
Tabelle 7-1 MICROMASTER 420 – Technische Daten ....................................................................... 99
Tabelle 7-2 MICROMASTER-Leistungsdaten.................................................................................... 101
Tabelle 8-1 Klasse 1 – Allgemeiner Industrieeinsatz .........................................................................105
Tabelle 8-2 Klasse 2 – Industrieeinsatz mit Filter .............................................................................. 105
Tabelle 8-3 Klasse 3 – Gefiltert für Wohngebiete, kommerziellen Einsatz und leichte Industrie....... 106
Tabelle 8-4 Tabelle der Einhaltung .................................................................................................... 107
Tabelle F-1 Parametereinstellungen des Benutzers ..........................................................................119
MICROMASTER 420 Betriebsanleitung
6SE6400-5AA00-0AP00
13
Page 14

Deutsch INHALTSVERZEICHNIS
MICROMASTER 420 Betriebsanleitung
14 6SE6400-5AA00-0AP0
Page 15

1. ÜBERSICHT Deutsch
1 Übersicht
Dieses Kapitel enthält:
Eine Zusammenfassung der wichtigsten Merkmale der Serie MICROMASTER 420.
1.1 Der MICROMASTER 420..................................................................................................... 16
1.2 Merkmale ............................................................................................................................. 16
MICROMASTER 420 Betriebsanleitung
6SE6400-5AA00-0AP00
15
Page 16

Deutsch 1. ÜBERSICHT
1.1 Der MICROMASTER 420
Die MICROMASTER 420-Umrichter sind eine Umrichterserie für das Regeln der Drehzahl von Drehstrommotoren. Die einzelnen, lieferbaren Modelle haben einen Bereich von
120 W bei einphasigem Eingang bis 11 kW, dreiphasiger Eingang.
Die Umrichter sind mit Mikroprozessorsteuerung ausgestattet und weisen modernste
Technologie mit IGBT auf (Insulated Gate Bipolar Transistor = Bipolartransistor mit
isoliertem Gatter). Dadurch sind sie zuverlässig und vielseitig. Ein besonderes Verfahren
der Pulsbreitenmodulation mit wählbarer Schaltfrequenz ermöglicht einen geräuscharmen Motorbetrieb. Umfangreiche Schutzfunktionen ergeben einen hervorragenden
Schutz des Umrichters und des Motors.
Der MICROMASTER 420 mit seinen werksseitigen Voreinstellungen ist für einen weiten
Bereich einfacher Anwendungen der Motorregelung ideal. Der MICROMASTER 420 kann
auch mit Hilfe seiner umfassenden Parameterliste für anspruchsvollere Anwendungen
der Motorregelung verwendet werden.
Der MICROMASTER 420 kann sowohl in 'stand-alone'-Anwendungen eingesetzt als auch
in 'Automatisierungsanlagen' integriert werden.
1.2 Merkmale
Haupteigenschaften
Leicht zu installieren, zu parametrieren und in Betrieb zu nehmen
Kurze und wiederholbare Ansprechzeit auf Steuersignale
Umfangreiches Angebot an Parametern, die das Konfigurieren für den breitesten
Anwendungsbereich ermöglichen
Einfacher Leitungsanschluss
Modularer Aufbau für äußerst flexible Konfiguration
Hohe Schaltfrequenzen für geräuscharmen Motorbetrieb
Externe Optionen für PC-Datenaustausch, Basisbedienfeld (BOP), Advanced
Operator Panel (AOP) und Profibus-Datenübertragungsbaugruppe
Funktionsmerkmale
Feldstromregelung (FCC) für verbessertes dynamisches Verhalten und verbesserte
Motorregelung
Schnelle Strombegrenzung (FCL) für Betrieb mit abschaltfreier Mechanik
Eingebaute Gleichstrom-Einspeisungsbremse
Verbundbremsung für verbesserte Bremsleistung
Beschleunigungs-/Verzögerungszeiten mit programmierbarer Glättung
Regelung mit Proportional-Integral-Reglerfunktion (PI)
Schutzmerkmale
Vollkommener Schutz für Motor und Umrichter
Überspannungs-/Unterspannungsschutz
Übertemperaturschutz des Umrichters
Erdschluss-Schutz
Kurzschluss-Schutz
2
t-Motorerüberwärmungsschutz
I
MICROMASTER 420 Betriebsanleitung
16 6SE6400-5AA00-0AP0
Page 17

2. INSTALLATION Deutsch
2 Installation
Dieses Kapitel enthält:
Allgemeine Daten zur Installation
Abmessungen des Umrichters
Verdrahtungsrichtlinien zur Minimierung der elektromagnetischen Störbeeinflussung
Einzelheiten zur elektrischen Installation
2.1 Allgemeines ......................................................................................................................... 18
2.2 Umgebungsbedingungen für den Einsatz ............................................................................ 19
2.3 Mechanischer Einbau........................................................................................................... 20
2.4 Elektrische Installation ......................................................................................................... 21
MICROMASTER 420 Betriebsanleitung
6SE6400-5AA00-0AP00
17
Page 18
Deutsch 2. INSTALLATION
!
!
Warnungen
Von unqualifiziertem Personal durchgeführte Arbeiten am Gerät/an der Anlage
oder das Missachten der Warnungen können zu schweren Körperverletzungen oder
erheblichen Sachschäden führen. Arbeiten an dem Gerät/an der Anlage dürfen nur
von geeignet qualifiziertem Personal, das im Einrichten, Installieren, in der
Inbetriebnahme und Bedienung des Erzeugnisses geschult ist.
Es sind nur festangeschlossene Versorgungsleitungen zulässig. Das Gerät muss
geerdet werden (IEC 536, Klasse 1, NEC und sonstige einschlägige Normen).
Soll eine Fehlerstromschutzvorrichtung (FSI) verwendet werden, dann muss sie den
Typ B aufweisen.
Maschinen mit dreiphasiger Stromversorgung, die mit EMV-Filtern ausgestattet
sind, dürfen nicht über einen Erdschluss-Schutzschalter (EN 50178, Abschnitt
5.2.11.1) an das Netz angeschlossen werden.
Folgende Klemmen können auch bei nicht arbeitendem Umrichter gefährliche
Spannungen führen:
- die Netzanschlussklemmen L/L1, N/L2, L3,
- die Motorklemmen U, V, W, DC+, DC-.
Nach dem Abschalten des Gerätes grundsätzlich 5 Minuten für das Entladen
abwarten, bevor mit Installationsarbeiten begonnen wird.
Vorsicht
Der Anschluss der Netz-, Motor- und Steuerleitungen an den Umrichter muss so
ausgeführt werden, wie in Bild 2-4 auf Seite 25 dargestellt, um zu verhindern, dass
induktive und kapazitive Störungen die ordnungsgemäße Funktion des Umrichters
beeinträchtigen.
2.1 Allgemeines
Installation nach längerer Lagerungszeit
Nach einer längeren Lagerungszeit müssen die Kondensatoren des Umrichters neu
formiert werden. Die Anforderungen sind nachstehend aufgelistet.
Lagerungsdauer Erforderliche Maßnahme Vorbereitungszeit
1 Jahr oder weniger kein Formieren erforderlich keine Vorbereitung
1 bis 2 Jahre den Umrichter vor der Eingabe des Startbefehls eine
Stunde lang an Spannung legen
2 bis 3 Jahre
einstellbare Wechselspannungsquelle verwenden
30 Minuten lang 25 % der Eingangsspannung
anlegen
weitere 30 Minuten die Spannung auf 50 % erhöhen
weitere 30 Minuten die Spannung auf 75 % erhöhen
weitere 30 Minuten die Spannung auf 100 %
erhöhen
Umrichter für Startsignal bereit
3 Jahre und mehr
einstellbare Wechselspannungsquelle verwenden
2 Stunden lang 25 % der Eingangsspannung
anlegen
2 Stunden lang 50 % der Eingangsspannung
anlegen
2 Stunden lang 75 % der Eingangsspannung
anlegen
2 Stunden lang 100 % der Eingangsspannung
anlegen
Umrichter für Startsignal bereit
1 Stunde
2 Stunden
8 Stunden
MICROMASTER 420 Betriebsanleitung
18 6SE6400-5AA00-0AP0
Page 19

2. INSTALLATION Deutsch
2.2 Umgebungsbedingungen im Betrieb
Temperatur
Min. Betriebstemperatur = -10C
Max. Betriebstemperatur = 50C
Feuchtigkeitsbereich
95 %, ohne Kondensation
Höhe
Soll der Umrichter in einer Höhe von > 1.000 m installiert werden, dann ist eine
Leistungsreduzierung erforderlich.
(siehe MM420-Handbuch)
Stoß
Der Umrichter darf nicht fallen gelassen oder plötzlichen Stößen ausgesetzt werden.
Schwingungen
Den Umrichter nicht in einem Bereich installieren, wo er ständigen Schwingungen
ausgesetzt sein könnte.
Elektromagnetische Strahlung
Den Umrichter nicht in der Nähe von elektromagnetischen Strahlungsquellen installieren.
Luftverschmutzung
Den Umrichter nicht in einer Umgebung installieren, die Luftverschmutzungen, wie Staub,
korrosive Gase, etc. enthält.
Wasser
Darauf achten, dass der Umrichter abseits von möglicher Gefährdung durch Wasser angeordnet wird. Z. B. den Umrichter nicht unter Rohren installieren, an denen Kondensation auftreten kann. Den Umrichter nicht an Stellen installieren, an denen übermäßige
Feuchtigkeit und Kondensation auftreten können. Geräte mit Schutzart IP54 und IP56
weisen einen zusätzlichen Schutz auf.
Übererwärmung
Den Umrichter senkrecht montieren, um optimale Kühlung zu gewährleisten. Bei waagerechter Montage kann zusätzliche Belüftung erforderlich sein.
Sicherstellen, dass die Luftöffnungen des Umrichters nicht behindert werden. Über und
unter dem Umrichter 100 mm Abstand einhalten.
MICROMASTER 420 Betriebsanleitung
6SE6400-5AA00-0AP00
19
Page 20
Deutsch 2. INSTALLATION
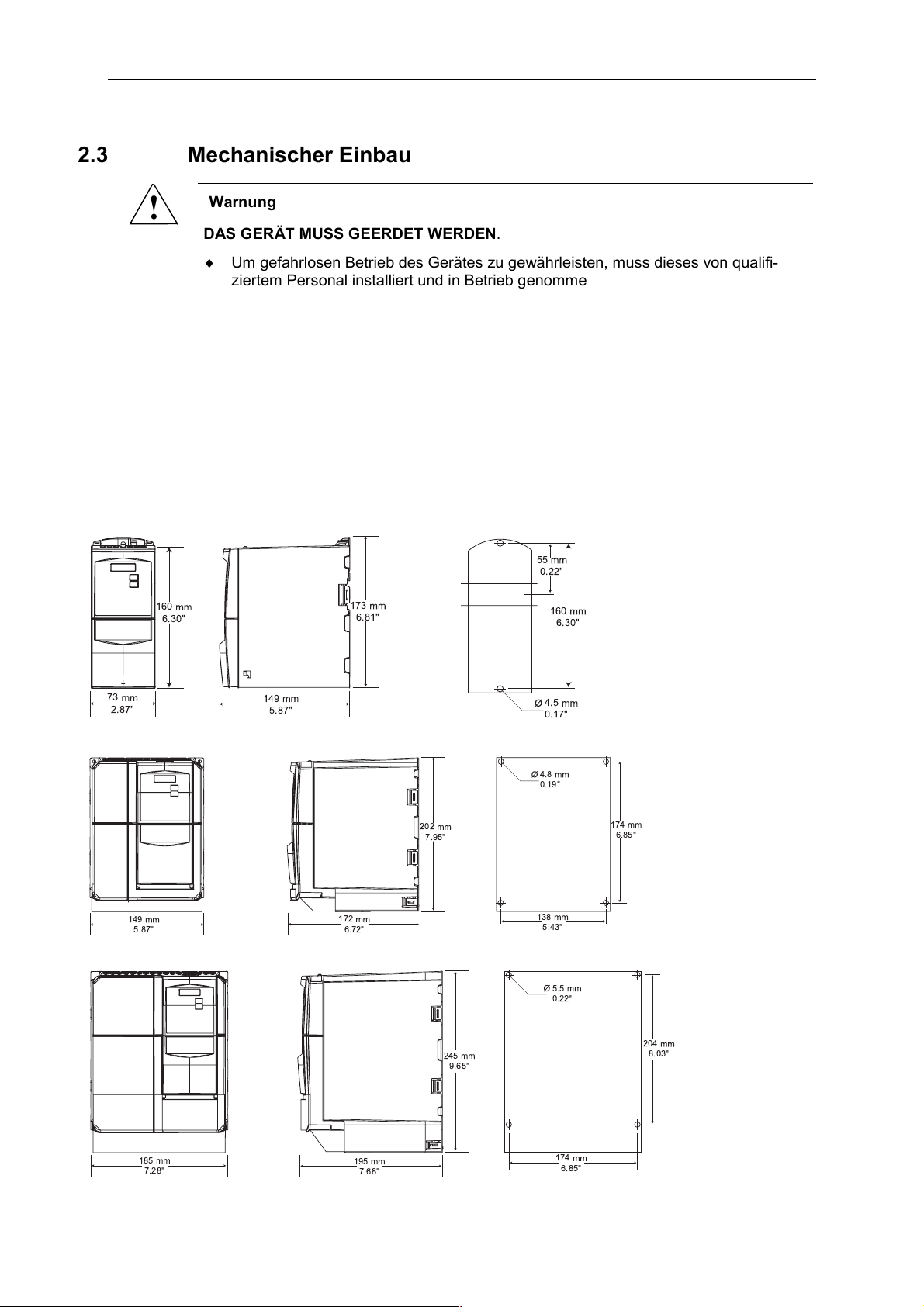
2.3 Mechanischer Einbau
!
Warnung
DAS GERÄT MUSS GEERDET WERDEN.
Um gefahrlosen Betrieb des Gerätes zu gewährleisten, muss dieses von qualifi-
Die allgemeinen und regionalen Installations- und Sicherheitsrichtlinien bezüglich
Die Netzeingangsklemmen, die Gleichspannungs- und Motorklemmen können auch
4
Gehäusegröße A:
160 mm
6.30"
ziertem Personal installiert und in Betrieb genommen werden, unter vollständiger
Beachtung der in dieser Betriebsanleitung festgelegten Warnungen.
Arbeiten an Anlagen mit gefährlichen Spannungen (z. B. EN 50178) müssen
besonders beachtet werden, ebenso die einschlägigen Bestimmungen bezüglich
der ordnungsgemäßen Verwendung von Werkzeugen und Personen-Schutzeinrichtungen.
bei nicht arbeitendem Umrichter gefährliche Spannungen führen; vor dem Durchführen von Installationsarbeiten nach dem Abschalten des Gerätes 5 Minuten für
das Entladen abwarten.
Befestigung mit
2 Schrauben M4
2 Muttern M4
2 Unterlegscheiben M4
Anzugsdrehmoment (Gerät
gegenüber Schrank) mit eingesetzten Unterlegscheiben: 2,5 Nm
173 mm
6.81"
55 mm
0.22"
160 mm
6.30"
73 mm
2.87"
Gehäusegröße B:
149 mm
5.87"
Gehäusegröße C:
149 mm
5.87"
172 mm
6.72"
202 mm
7.95"
245 mm
9.65"
Ø 4.5 mm
0.17"
Ø 4.8 mm
0.19"
138 mm
5.43"
Ø 5.5 mm
0.22"
174 mm
6.85"
Anschluss an DIN-Schiene
Befestigung mit
4 Schrauben M4
4 Muttern M4
4 Unterlegscheiben M4
Anzugsdrehmoment (Gerät
gegenüber Schrank) mit eingesetzten Unterlegscheiben: 2,5 Nm
Befestigung mit
4 Schrauben M5
4 Muttern M5
204 mm
4 Unterlegescheiben M5
8.03"
Anzugsdrehmoment
(Gerät gegenüber
Schrank) mit eingesetzten
Unterlegscheiben: 3 Nm
185 mm
7.28"
195 mm
7.68"
174 mm
6.85"
Bild 2-1 Bohrmuster für MICROMASTER 420
MICROMASTER 420 Betriebsanleitung
20 6SE6400-5AA00-0AP0
Page 21
2. INSTALLATION Deutsch
2.4 Elektrische Installation
!
Warnung
DAS GERÄT MUSS GEERDET WERDEN.
Um gefahrlosen Betrieb des Gerätes zu gewährleisten, muss dieses von qualifi-
ziertem Personal installiert und in Betrieb genommen werden, unter vollständiger
Beachtung der in dieser Betriebsanleitung festgelegten Warnungen.
Die allgemeinen und regionalen Installations- und Sicherheitsrichtlinien bezüglich
Arbeiten an Anlagen mit gefährlichen Spannungen (z. B. EN 50178) müssen
besonders beachtet werden, ebenso die einschlägigen Bestimmungen bezüglich
der ordnungsgemäßen Verwendung von Werkzeugen und PersonenSchutzeinrichtungen.
Die Netzeingangsklemmen, die Gleichspannungs- und Motorklemmen können auch
bei nicht arbeitendem Umrichter gefährliche Spannungen führen; vor dem Durchführen von Installationsarbeiten nach dem Abschalten des Gerätes 5 Minuten für
das Entladen abwarten.
Die Umrichter können nebeneinander installiert werden. Bei Installation überein-
ander muss jedoch ein Abstand von 100 mm (3,94 Zoll) eingehalten werden.
2.4.1 Allgemeines
!
Warnung
Der Umrichter muss immer geerdet sein. Ist der Umrichter nicht ordnungsgemäß
geerdet, dann können äußerst gefährliche Zustände innerhalb des Umrichters
entstehen, die sich gegebenenfalls als verhängnisvoll erweisen könnten.
Betrieb an ungeerdeten Netzen (IT)
Der MICROMASTER arbeitet an ungeerdeten Netzen und bleibt funktionsfähig, wenn
eine Eingangsphase mit Erde verbunden wird. Hat eine Ausgangsphase Erdschluss,
dann schaltet sich der MICROMASTER aus und zeigt die Meldung F0001.
Bei ungeerdeten Netzen muss der 'Y'-Kondensator im Geräteinneren entfernt werden.
Die Vorgehensweise für den Ausbau dieses Kondensators ist in den Anlagen E
und F beschrieben.
Betrieb mit Fehlerstromschutzvorrichtung
Ist eine Fehlerstromschutzvorrichtung eingebaut (auch als SFI, ELCB oder RCCB
bezeichnet), dann arbeiten die Umrichter unter folgenden Voraussetzungen ohne
unerwünschte Abschaltung:
Es wird ein SFI vom Typ B verwendet.
Der Ansprechstrom des SFI beträgt 300 mA.
Der Netz-Mittelpunktsleiter ist geerdet.
Jeder SFI speist nur einen Umrichter.
Die Ausgangskabel sind kürzer als 50 m (geschirmt) bzw. 100 m (ungeschirmt).
MICROMASTER 420 Betriebsanleitung
6SE6400-5AA00-0AP00
21
Page 22
Deutsch 2. INSTALLATION
Betrieb mit langen Leitungen
!
Vorsicht
Die Steuer-, Netz- und Motorleitungen müssen getrennt verlegt werden. Sie dürfen
nicht in demselben Leitungsrohr/Leitungskanal verlegt sein. An Leitungen, die an den
Umrichter angeschlossen sind, darf niemals eine Isolationsprüfung mit hoher Spannung
vorgenommen werden.
Alle Umrichter arbeiten bei voller Einhaltung ihrer Daten mit Leitungslängen bis 50 m
geschirmt oder 100 m ungeschirmt.
2.4.2 Netz- und Motoranschlüsse
!
!
Warnung
Vor dem Herstellen oder Ändern der Anschlüsse am Gerät die elektrische Strom-
versorgung abtrennen.
Überprüfen, ob der Motor für die richtige Netzspannung konfiguriert ist: einphasige/
dreiphasige MICROMASTER-Geräte für 230 V dürfen nicht an ein 400 V-Drehstromnetz angeschlossen werden.
Werden Synchronmaschinen angeschlossen oder mehrere Motoren parallel ge-
schaltet, dann muss der Umrichter mit Spannungs-/Frequenz-Steuerkennlinie
betrieben werden (P1300 = 0, 2 oder 3).
Vorsicht
Nach dem Anschließen der Netz- und Motorleitungen an die geeigneten Klemmen überprüfen, ob die Abdeckungen ordnungsgemäß wieder aufgesetzt worden sind. Erst dann
die Versorgungsspannung des Gerätes zuschalten!
Hinweis:
Überprüfen, ob zwischen dem Netz und dem Umrichter geeignete Schutzschalter/
Schmelzsicherungen angeschlossen sind (siehe Tabelle auf Seite 93).
Nur Kupferleitung, Klasse 1 60/75
drehmoment der Netzklemmen beträgt 1,1 Nm.
Zum Anziehen der Netzklemmen-Schrauben einen Kreuzschlitzschraubendreher
von 4 - 5 mm verwenden.
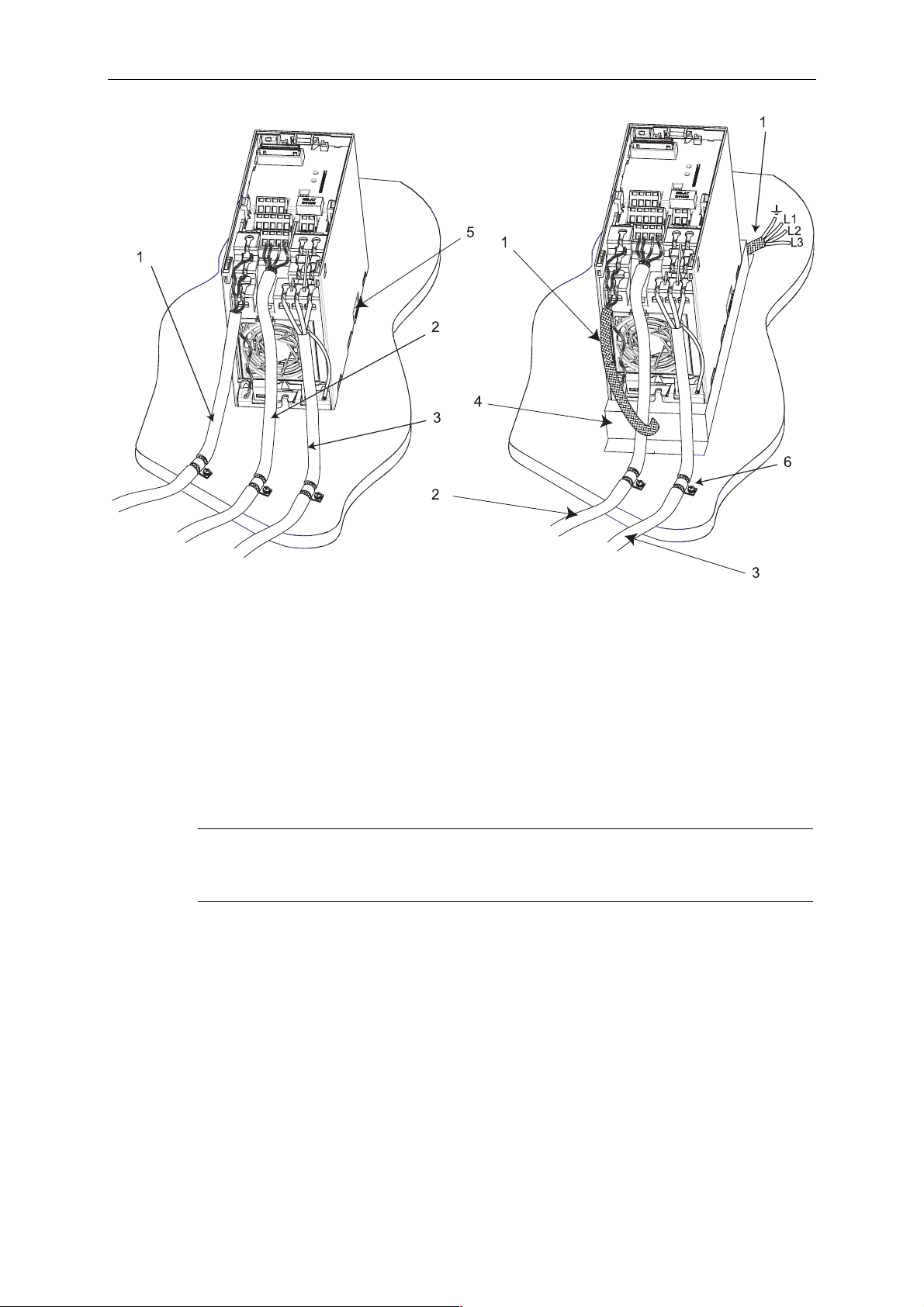
Zugang zu den Netz- und Motorklemmen
Die Vorgehensweise für den Zugang zu den Netz- und Motorklemmen des Umrichters
MICROMASTER 420 ist in den Anlagen B und C abgebildet. Bitte auch die Lichtbilder auf
der hinteren Umschlagsseite dieses Handbuchs beachten, die die Anschlüsse der Netzklemmen und der Steuerklemmen zeigen.
Nachdem die Abdeckungen entfernt und die Klemmen freigelegt sind, sind die Netz- und
Motorleitungen so anzuschließen, wie auf der nächsten Seite dargestellt.
o
C verwenden (um UL einzuhalten). Das Anzugs-
MICROMASTER 420 Betriebsanleitung
22 6SE6400-5AA00-0AP0
Page 23
2. INSTALLATION Deutsch
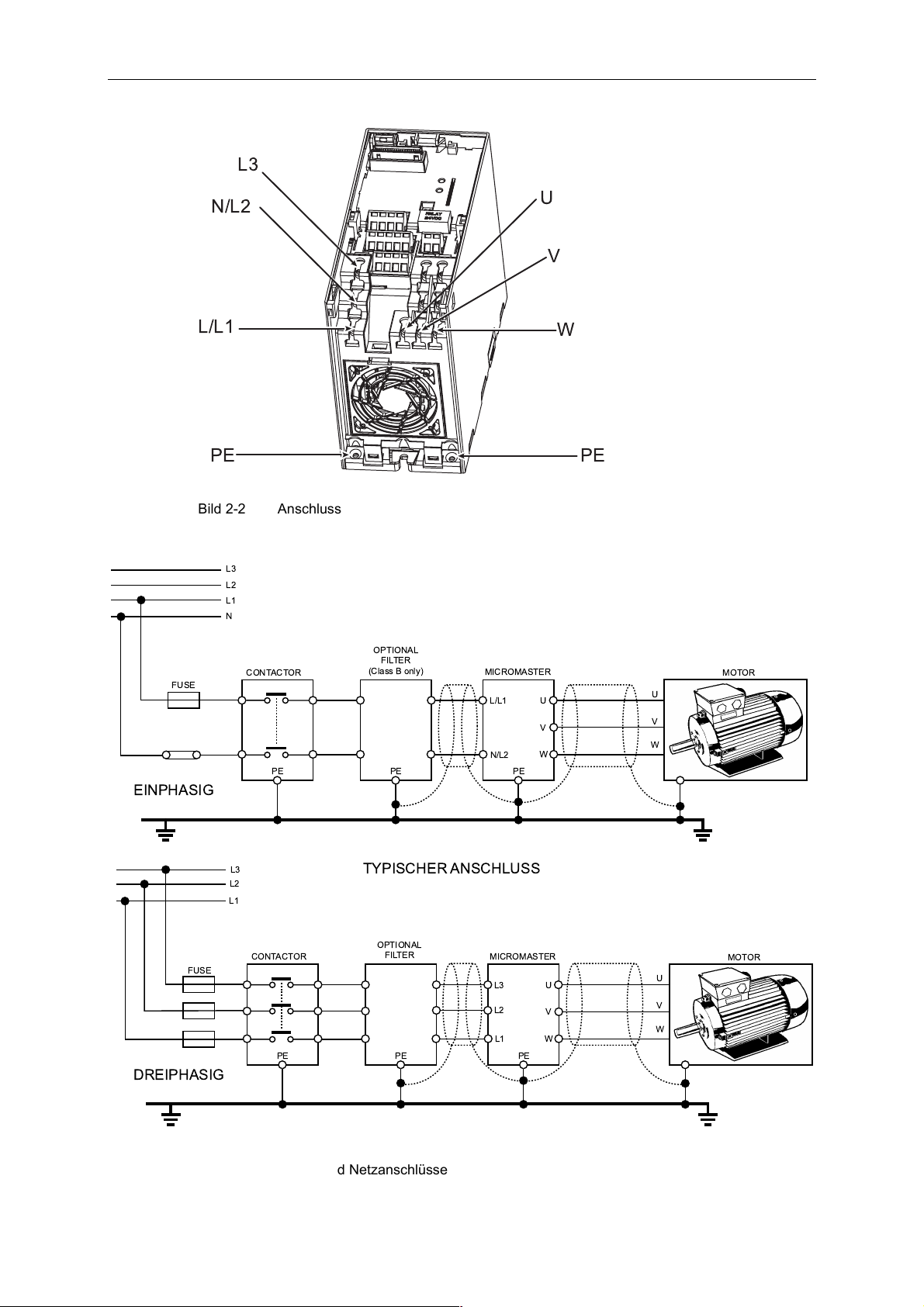
L3
L/L1
Bild 2-2 Anschlussklemmen des MICROMASTER 420
FUSE
EINPHASIG
N/L2
PE
L3
L2
L1
N
CONTACTOR
OPTIONAL
FILTER
(Class B only)
PEPE
MICROMASTER
L/L1
N/L2
PE
U
U
V
W
V
W
PE
MOTOR
U
V
W
L3
L2
L1
CONTACTOR
FUSE
DREIPHASIG
Bild 2-3 Motor- und Netzanschlüsse
MICROMASTER 420 Betriebsanleitung
6SE6400-5AA00-0AP00
TYPISCHER ANSCHLUSS
OPTIONAL
FILTER
PEPE
MICROMASTER
L3
L2
L1
PE
MOTOR
U
V
W
U
V
W
23
Page 24
Deutsch 2. INSTALLATION
2.4.3 Vermeiden elektromagnetischer Störbeeinflussungen (EMI)
Die Umrichter sind für den Betrieb in Industrieumgebung ausgelegt, wo hohe Werte der
EMI zu erwarten sind. Im Allgemeinen gewährleistet eine gute Installation den gefahrlosen und störungsfreien Betrieb. Bei auftretenden Schwierigkeiten bitte die nachstehenden Hinweise befolgen.
Zu treffende Maßnahmen
Sicherstellen, dass alle Geräte im Schrank über kurze Erdungsleitungen mit großem
Querschnitt gut geerdet sind, die an einen gemeinsamen Sternpunkt oder eine
Sammelschiene angeschlossen sind.
Sicherstellen, dass alle an den Umrichter angeschlossenen Steuereinrichtungen
(z. B. PLC) über eine kurze Leitung mit großem Querschnitt an denselben Erdungsoder Sternpunkt angeschlossen sind, wie der Umrichter.
Den Rückleiter der von den Umrichtern gesteuerten Motoren direkt an den Erdungs-
anschluss (PE) des zugehörigen Umrichters anschließen.
Flache Leitungen werden bevorzugt, da sie bei höheren Frequenzen eine geringere
Impedanz aufweisen.
Die Leitungsenden sauber anschließen und darauf achten, dass ungeschirmte
Leitungen möglichst kurz sind.
Die Steuerleitungen von den Lastleitungen möglichst gut trennen und getrennte
Kabelkanäle verwenden, erforderlichenfalls mit Kreuzungswinkeln von 90°.
Nach Möglichkeit für die Verbindungen zu Steuerschaltungen geschirmte Leitungen
verwenden.
Sicherstellen, dass die Schütze im Schrank entstört sind, entweder mit R-C-Beschalt-
ungen bei Wechselstromschützen oder mit 'Freilauf'-Dioden bei Gleichstromschützen,
die an die Spulen angeschlossen sind. Varistor-Überspannungsableiter sind gleichfalls
wirksam. Dieser Umstand ist wichtig, wenn die Schütze vom Relais des Umrichters
gesteuert werden.
Für den Motoranschluss geschirmte oder bewehrte Leitungen verwenden und den
Schirm an beiden Enden mit Kabelschellen erden.
!
Warnung
Sicherheitsbestimmungen dürfen bei der Installation von Umrichtern nicht beeinträchtigt
werden!
MICROMASTER 420 Betriebsanleitung
24 6SE6400-5AA00-0AP0
Page 25
2. INSTALLATION Deutsch
1
L1
5
1
L2
L3
1
2
4
3
6
2
3
Bild 2-4 Verdrahtungsanleitung zur Minimierung von EMI-Effekten
Kennzahl Bedeutung in obigen Abbildungen
1 Netzzuleitung
2 Steuerleitung
3 Motorleitung
4 Unterbaufilter
5 Metall-Rückwand
6 für die zuverlässige Befestigung der Abschirmungen von Motor- und
Steuerleitung an der Metall-Rückwand geeignete Schellen verwenden
Hinweis:
Zur Verbesserung der Abschirmung von Motor- und Steuerleitung kann die als Option
lieferbare Durchführungsplatte verwendet werden (in Bild 2-4 nicht dargestellt).
MICROMASTER 420 Betriebsanleitung
6SE6400-5AA00-0AP00
25
Page 26

Deutsch 2. INSTALLATION
MICROMASTER 420 Betriebsanleitung
26 6SE6400-5AA00-0AP0
Page 27

3. INBETRIEBNAHME Deutsch
3 Inbetriebnahme
Dieses Kapitel enthält:
Eine Beschreibung der Frontplatten-Bedienelemente
Eine Kurzbeschreibung der als Optionen lieferbaren Frontplatten und eine
Funktionsbeschreibung des Basis-Bedienfeldes (Basic Operator Panel, BOP)
Eine in acht Schritte gegliederte Anleitung am Ende des Kapitels, die eine einfache
Vorgehensweise für das Ändern von Parametern liefert
3.1 Frontplatten für den MICROMASTER 420 ........................................................................... 29
3.2 Allgemeine Bedienung .........................................................................................................34
MICROMASTER 420 Betriebsanleitung
6SE6400-5AA00-0AP00
27
Page 28
Deutsch 3. INBETRIEBNAHME
!
Warnung
MICROMASTER-Geräte arbeiten mit hohen Spannungen.
Bei dem Betrieb elektrischer Geräte ist es nicht möglich, das Anlegen gefährlicher
Spannungen an bestimmte Geräteteile zu vermeiden.
Nothalt-Einrichtungen nach EN 60204 IEC 204 (VDE 0113) müssen in allen
Betriebszuständen der Steuereinrichtung funktionsfähig bleiben. Ein Rücksetzen
der Nothalt-Einrichtung darf nicht zu einem unkontrollierten oder undefinierten
Wiederanlauf führen.
Wenn in der Steuereinrichtung auftretende Störungen zu erheblichen Sachschäden
oder sogar schwerwiegender Körperverletzung führen können (d. h. gegebenenfalls
gefährliche Störungen), dann müssen zusätzliche externe Maßnahmen getroffen
oder Einrichtungen vorgesehen werden, die einen gefahrlosen Betrieb gewährleisten oder erzwingen, auch wenn eine Störung auftritt (z. B. unabhängige
Endschalter, mechanische Verriegelungen, etc.).
Bestimmte Parametereinstellungen können bewirken, dass der Umrichter nach
einem Netzausfall automatisch wieder anläuft.
Das vorliegende Gerät ist in der Lage, internen Motorüberlastungsschutz
entsprechend UL508C, Abschnitt 42, herzustellen. Siehe P0610 (ebene 3) und
P0335. Motorüberlastungsschutz kann auch durch Verwendung eines externen
PTC (Kaltleiters) über einen Digitaleingang hergestellt werden.
Dieses Gerät ist für Einsatz in einem Stromkreis geeignet, der einen symmetrischen
Kurzschlussstrom von bis zu 10.000 Ampere (Effektivwert) bei einer maximalen
Spannung von 230/460 V liefern kann, wenn es durch eine träge Sicherung
geschützt wird (siehe Tabelle auf Seite 93).
Das Gerät darf nicht als 'Notaus-Mechanismus' verwendet werden (siehe
EN 60204, 9.2.5.4).
!
Vorsicht
Die Eingaben an den Bedienfeldern dürfen nur von qualifiziertem Personal vorgenommen werden. Den Sicherheitsmaßnahmen und Warnungen muss jederzeit
besondere Aufmerksamkeit gewidmet werden.
Der MICROMASTER 420 wird mit einem Zustands-Anzeigefeld (Status Display Panel,
SDP) und mit Parametereinstellungen geliefert, die folgende Anforderungen abdecken:
Die Motornenndaten, Spannung, Strom und Frequenz sind sämtlich mit den Daten
des Umrichters kompatibel, (es wird ein Siemens-Normmotor empfohlen).
Lineare V/f-Motordrehzahl, durch ein analoges Potentiometer gesteuert.
-1
Höchstdrehzahl 3.000 min
die Analogeingänge des Umrichters angeschlossenes Potentiometer.
Rampenhochlaufzeit/Rampenauslaufzeit = 10 s
Werden Einstellungen für kompliziertere Anwendungen benötigt, dann bitte nach der
Parameterliste in dieser Betriebsanleitung vorgehen.
Für das Ändern von Parametern wird eine der Optionsbaugruppen "Basis-Bedienfeld"
(BOP) oder das "Advanced Operator Panel" (AOP), wie unten beschrieben benötigt.
Darüber hinaus können die Parameter über die Datenübertragungs-Optionen verändert
werden (siehe Handbuch).
Anleitung für das Auswechseln/Ersetzen der Bedienfelder, siehe Anhang A.
Hinweis:
bei 50 Hz (3.600 min
-1
bei 60 Hz), steuerbar über ein an
Für jeden MICROMASTER 420 kann dasselbe BOP/AOP verwendet werden.
Nach dem Wechseln der Parameter ist das BOP/AOP durch das SDP zu ersetzen.
Die Klemmenanordnung für den Anschluss der Last- und Steuerleitungen ist auf
dem Lichtbild an der hinteren Umschlagsseite dieser Anleitung dargestellt.
MICROMASTER 420 Betriebsanleitung
28 6SE6400-5AA00-0AP0
Page 29
3. INBETRIEBNAHME Deutsch
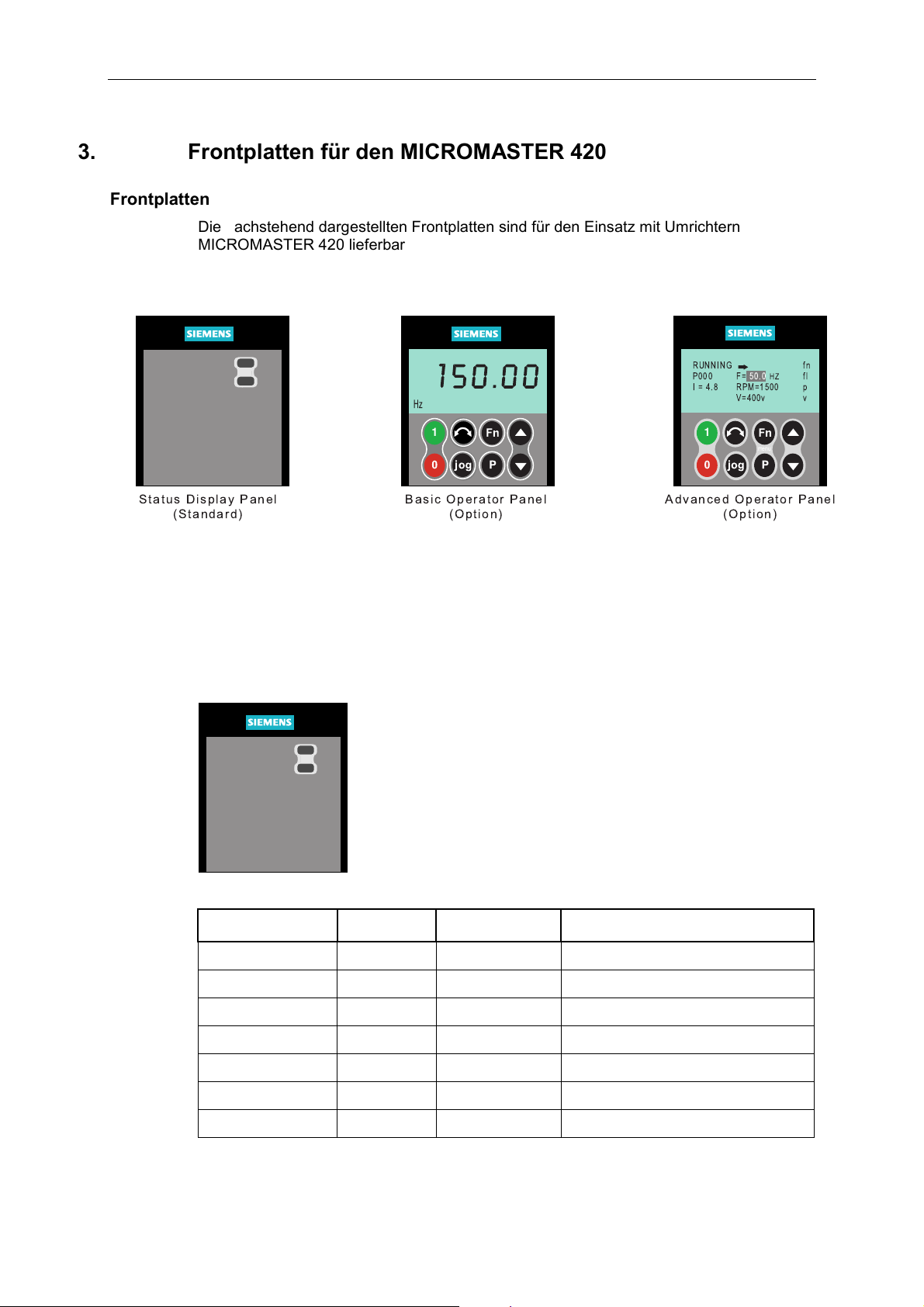
3.1 Frontplatten für den MICROMASTER 420
Frontplatten
Die nachstehend dargestellten Frontplatten sind für den Einsatz mit Umrichtern
MICROMASTER 420 lieferbar. Die linke Tafel wird standardmäßig mit dem Umrichter
geliefert und als Statusanzeigefeld (SDP) bezeichnet. Das Basis-Bedienfeld (BOP) und
das 'Advanced Operator Panel' (AOP) sind als Optionen lieferbar.
150.00
Hz
Hz
1
0
Status Display Panel
(Standard)
Basic Operator Panel
Bild 3-1 Für den Umrichter MICROMASTER 420 lieferbare Frontplatten
Auswechseln der Frontplatte
Die Vorgehensweise für das Entfernen des SDP und Einsetzen eines BOP oder AOP, die
als Optionen lieferbar sind, ist im Anhang A beschrieben.
3.1.1 Inbetriebnahme mit dem Zustands-Anzeigefeld (SDP)
Das SDP wird mit jedem MICROMASTER 420-Umrichter standardmäßig geliefert. Das Feld hat vorne zwei LEDs, die den
Betriebszustand des Umrichters anzeigen.
Mit dem SDP kann der Umrichter mit seinen Voreinstellungen
eingesetzt werden, die eine Vielzahl der Anwendungen abdecken. Die Voreinstellungen sind in Tabelle 3.1 angegeben.
Fn
P
jog
(Option)
RUNNING
P000
F= 50.0
RPM=1500
I = 4.8
V=400v
1
0
jog
Advanced Operator Panel
(Option)
Fn
menu
P
HZ
fn
fl
p
v
Tabelle 3-13-1 Voreinstellungen für den Betrieb mit Zustands-Anzeigefeld
Digitaleingang 1 5 P0701 = '1' EIN, rechts
Digitaleingang 2 6 P0702 = '12' Gegenrichtung
Digitaleingang 3 7 P0703 = '9' Störungsrücksetzung
Ausgangsrelais 10/11 P0731 = '52.3' Störungsanzeige
Analogausgang 12/13 P0771 = 21 Ausgangsfrequenz
Analogeingang 3/4 P0700 = 0 Frequenzsollwert
MICROMASTER 420 Betriebsanleitung
6SE6400-5AA00-0AP00
Die Klemmenanordnung ist in dem Lichtbild der Steuerklemmenanschlüsse auf der hinteren Umschlagsseite dieser
Anleitung innen dargestellt.
Klemmen Parameter Funktion laut Voreinstellung
1/2 Stromversorgung Analogeingang
29
Page 30
Deutsch 3. INBETRIEBNAHME
A
Warnungen und Störungszustände des Zustands-Anzeigefeldes
Die beiden LEDs auf dem Zustands-Anzeigefeld zeigen den Betriebszustand des
Umrichters an. Diese LEDs zeigen auch verschiedene Warnungen oder Störungszustände. Im Abschnitt 6.2 werden die Zustände des Umrichters und ihre Anzeige
durch die beiden LEDs erläutert.
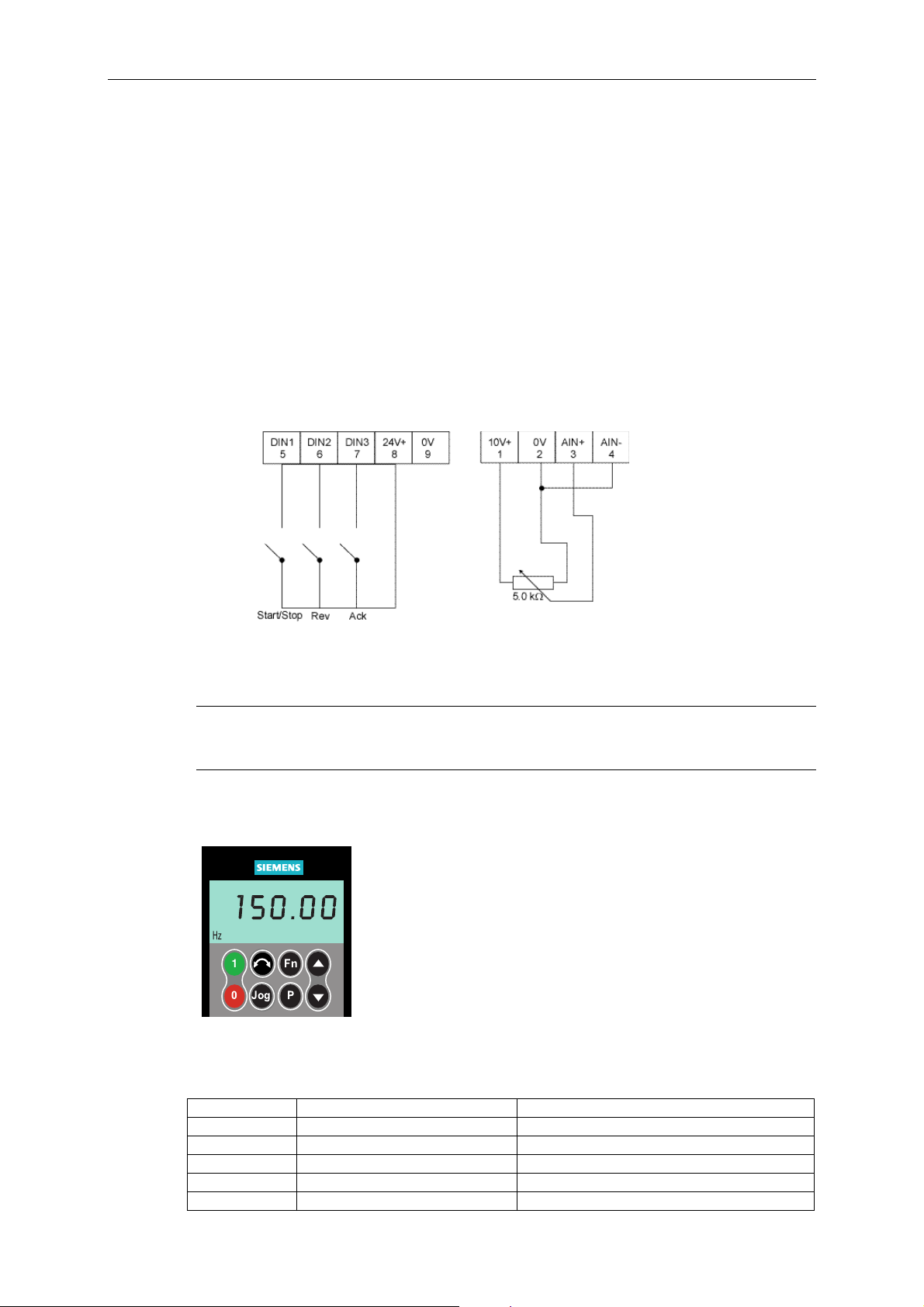
3.1.2 Grundbedienung mit dem SDP
Mit eingesetztem SDP ist Folgendes möglich:
Starten und Stillsetzen des Motors
Richtungsumkehr des Motors
Fehlerrücksetzung
Steuern der Motordrehzahl
Die Klemmen gemäß nachstehender Abbildung beschalten.
nalogeingängeDigitaleingänge
Bild 3-2 Basisbedienung mit dem SDP
Hinweis:
Die Klemmenanordnung für den Anschluss der Last- und Steuerleitungen ist in den
Lichtbildern auf der hinteren Umschlagsseite dieser Anleitung innen dargestellt.
3.1.3 Inbetriebnahme mit dem Basis-Bedienfeld (BOP)
Das als Option lieferbare Basis-Bedienfeld (BOP) ermöglicht den
Zugang zu den Parametern des Umrichters und gestattet eine
anwendungsspezifische Einstellung des MICROMASTER 420.
150.00
Hz
1
0
Jog
Fn
P
Das BOP kann für das Konfigurieren mehrerer
MICROMASTER 420-Umrichter verwendet werden. Es ist nicht
nötig, für jeden Umrichter ein eigenes BOP zu kaufen.
Es ist zu beachten, dass das BOP durch Voreinstellung passiviert ist. Zum Steuern des Motors über das BOP muss der
Parameter P0700 auf 1 gesetzt werden.
Tabelle 3-2 zeigt die werksseitigen Voreinstellungen für
Bedienung über das Basis-Bedienfeld.
Tabelle 3-2 Voreinstellungen für Bedienung über das BOP
Parameter Bedeutung Voreinstellung Europa (Nordamerika)
P0100 Betriebsart Europa/US 50 Hz, kW (60 Hz, hp)
P0307 Leistung (Motornennleistung) kW (Hp)
P0310 Motornennfrequenz 50 Hz (60 Hz)
P0311 Motornenndrehzahl 1395 (1680) rpm [abhängig von Variante]
P1082 Max. Motorfrequenz 50 Hz (60 Hz)
MICROMASTER 420 Betriebsanleitung
30 6SE6400-5AA00-0AP0
Page 31

3. INBETRIEBNAHME Deutsch
Tasten auf dem Basis-Bedienfeld
Feld/Taste Funktion Auswirkungen
P(1)
r0000
Hz
Zustandsanzeige
Die LCD zeigt die Einstellung, mit der der
Umrichter gerade arbeitet.
Umrichter Start
Umrichter Halt
Richtungswechsel
Motor Tipp-Betrieb
Durch Drücken der Taste wird der Umrichter gestartet. Diese Taste ist durch Vorbelegung passiviert.
Zum Aktivieren der Taste P0700 = 1 setzen.
AUS1 Das Drücken der Taste bewirkt, dass der Um-
richter mit der gewählten Rampenauslaufgeschwindigkeit zum Stillstand kommt. Durch
Vorbelegung passiviert, zum Aktivieren
P0700 = 1 setzen.
AUS2 Das zweimalige Drücken (oder einmaliges
langes Drücken) bewirkt das freie Auslaufen
des Motors zum Stillstand.
Das Drücken dieser Taste bewirkt die Drehrichtungsumkehr des Motors. Die Gegenrichtung wird
durch ein Minuszeichen (-) oder durch den blinkenden Dezimalpunkt angezeigt. Durch Vorbelegung
passiviert, zum Aktivieren P0700 = 1 setzen.
Das Drücken dieser Taste, während der Umrichter
keine Ausgangsspannung liefert, bewirkt, dass der
Motor anläuft und mit der voreingestellten JOGFrequenz arbeitet. Nach dem Loslassen der Taste
hält der Umrichter an. Das Drücken der Taste bei
laufendem Umrichter/Motor ist wirkungslos.
Diese Taste kann zur Darstellung zusätzlicher
Informationen benutzt werden. Siehe auch
Abschnitt 5.1.2 auf Seite 44.
Funktionen
Parameterzugriff
Wert erhöhen
Wert verringern
Bild 3-3 Tasten auf dem Basis-Bedienfeld
MICROMASTER 420 Betriebsanleitung
6SE6400-5AA00-0AP00
Die Taste muss gedrückt und festgehalten werden.
Sie zeigt, ausgehend von jeden beliebigen
Parameter im Betrieb, Folgendes:
1. Spannung des Gleichstromzwischenkreises
(gekennzeichnet durch d)
2. Ausgangsstrom (A)
3. Ausgangsfrequenz (Hz)
4. Ausgangsspannung (o)
5. den Wert (gewählt in P0005)
Das Drücken dieser Taste ermöglicht den Zugriff
auf die Parameter.
Das Drücken dieser Taste erhöht den angezeigten
Wert. Zum Ändern des Frequenzsollwertes über
das BOP ist P1000 = 1 einzustellen.
Das Drücken dieser Taste verringert den angezeigten Wert. Zum Ändern des Frequenzsollwertes über
das BOP ist P1000 = 1 einzustellen.
31
Page 32

Deutsch 3. INBETRIEBNAHME
Ändern von Parametern mit dem BOP
Die nachstehende Beschreibung zeigt, wie der Parameter P1082 zu verändern ist. Diese
Beschreibung kann als Anleitung für das Einstellen jedes beliebigen Parameters über das
'BOP' verwendet werden.
Schritt Ergebnis auf Anzeige
drücken, um auf Parameter
1
zuzugreifen
drücken, bis P0010 angezeigt wird
2
drücken, um auf die Parameter-
3
werteebene von P0010 zu gelangen
drücken, um P0010 = 1 einzustellen
4
drücken, um Parameter zu spei-
5
chern und die Parameterwerteebene zu
verlassen
drücken, bis P1082 angezeigt wird
6
drücken, um die Parameterwerte-
7
ebene von P1082 zu erreichen
drücken, um gewünschte Höchst-
8
frequenz zu wählen
drücken, um Parameter zu spei-
9
chern und die Parameterwerteebene zu
verlassen
drücken, um zu P0010 zurückzu-
10
kehren
drücken, um zur Parameterwerte-
11
ebene P0010 zu gelangen
drücken, um den Wert auf
12
P0010 = 0 zurückzubringen
drücken, um Parameter zu spei-
13
chern und die Parameterwerteebene zu
verlassen
drücken, um zu r0000 zurückzu-
14
kehren
drücken, um die Parametrierung zu
15
verlassen
Die LCD wechselt zwischen der
Istfrequenz und dem gewünschten
Frequenzsollwert
Bild 3-4 Ändern von Parametern über das BOP
P(1)
r0000
Hz
P(1)
P0010
Hz
P(1)
Hz
P(1)
Hz
P(1)
P0010
Hz
P(1)
P1082
Hz
P(1)
50.00
Hz
P(1)
35.00
Hz
P(1)
P1082
Hz
P(1)
P0010
Hz
P(1)
Hz
P(1)
Hz
P(1)
P0010
Hz
P(1)
r0000
Hz
P(1)
35.00
Hz
P(1)
00
.00
Hz
0
1
1
0
Die gewünschte Höchstfrequenz ist nunmehr gespeichert. Den Umrichter durch Drücken
der Taste 'RUN' starten. Er läuft rampenförmig bis zu der in Parameter P1082 eingestellten
Frequenz hoch. Zum Anhalten des Umrichters die Taste 'STOP' drücken.
Hinweis – Verlorene Meldung
In manchen Fällen zeigt – beim Ändern der Parameterwerte – die Anzeige des BOP
" - - - -" an. Das bedeutet, dass der Umrichter mit Aufgaben höherer Priorität beschäftigt ist.
MICROMASTER 420 Betriebsanleitung
32 6SE6400-5AA00-0AP0
Page 33

3. INBETRIEBNAHME Deutsch
Motordaten für die Parametrierung
P0308 P0310 P0304
3_Mot
IEC 56
IM B3
50 Hz
Cosj0.81
95.75%
P0309 P0305 P0311 P0307
230-400V
0.61 0.35A
0.12kW
2800 / min
Bild 3-5 Beispiel eines typischen Motor-Typenschildes
Hinweis:
Das Ändern von Motorparametern ist nur bei P0010 = 3 möglich.
Sicherstellen, dass der Umrichter ordnungsgemäß für den Motor konfiguriert ist. Im
obigen Beispiel liegt der Klemmenanschluss für Dreieckschaltung bei 230 V vor.
Externer Motor-Übertemperaturschutz
8
Motor
PTC
5, 6
or 7
τ
1 k
9
Bild 3-6 Schaltung für Motor-Übertemperaturschutz mit PTC
Inverte r C ontrol
Terminals
Nr. ED510 3053
IP54 Rot KL 16
60 Hz 440V Y
0.34A
0.14 kW
Cosj0.81
3310 /min
S.F. -- 1.15
12.022
I.CI.F
Bei Betrieb unterhalb der Nenndrehzahl ist die Kühlwirkung der an
die Motorwelle angebauten Lüfter
verringert. Folglich ist bei den
meisten Motoren für den Dauerbetrieb bei tiefen Frequenzen eine
Leistungsreduzierung erforderlich.
Um sicherzustellen, dass die
Motoren unter solchen Bedingungen gegen Übererwärmung
geschützt sind, muss am Motor ein
PTC-Temperaturgeber angebaut
und an die Steuerklemmen des
Umrichters angeschlossen werden,
wie in Bild 3-6 dargestellt.
Hinweis:
Zum Aktivieren der Abschaltfunktion sind die Parameter P0701, P0702 oder P0703 =
29 einzustellen.
MICROMASTER 420 Betriebsanleitung
6SE6400-5AA00-0AP00
33
Page 34

Deutsch 3. INBETRIEBNAHME
3.1.4 Inbetriebnahme mit dem 'Advanced Operator Panel' (AOP)
Das Advanced Operator Panel (AOP) ist als Option lieferbar.
Zu seinen erweiterten Funktionen gehören:
RUNNING
P000
I = 4.8
F= 50.0
RPM=1500
V=400v
HZ
fn
fl
Mehrsprachige Klartextanzeige
p
Laden/Speichern mehrerer Parametersätze
v
Programmierbar über PC
1
0
Jog
Fn
menu
P
Multidrop-Fähigkeit zum Steuern von bis zu
30 MICROMASTER-Umrichtern
Einzelheiten entnehmen Sie bitte dem AOP-Handbuch oder
fordern Sie Unterstützung bei Ihrem nächsten SiemensVertriebsbüro an.
3.2 Allgemeine Bedienung
Bezüglich einer vollständigen Beschreibung der Standardparameter und der erweiterten
Parameter siehe Abschnitt 6.
3.2.1 Allgemeines
1. Der Umrichter besitzt keinen Netz-Hauptschalter und führt Spannung, sobald die
Netzspannung angeschlossen ist. Er wartet bei gesperrtem Ausgang bis zum
Drücken der Taste RUN oder bis zum Erscheinen eines digitalen EIN-Signals an
Klemme 5 (Laufrichtung rechts).
2. Ist ein BOP oder ein AOP eingesetzt und die Ausgangsfrequenz für die Anzeige
gewählt (P0005=21), dann wird der entsprechende Sollwert in Abständen von etwa
1,0 Sekunden bei stillstehendem Umrichter angezeigt.
3. Der Umrichter wird im Werk für Standardanwendungen mit 4-poligen SiemensNormmotoren programmiert, die die gleiche Nennleistung haben, wie der Umrichter.
Bei Verwendung anderer Motoren müssen deren Daten vom Motortypenschild
eingegeben werden. Bezüglich des Lesens von Motordaten siehe Bild 3-5.
Hinweise:
Das Ändern von Motorparametern ist nur bei P0010 = 1 möglich.
Um den Motor anlaufen zu lassen, muss P0010 zurück auf 0 eingestellt werden.
3.2.2 Grundbedienung mit SDP
Voraussetzungen
Die Klemmen sind so beschaltet, wie in Bild 3-2 gezeigt.
Den Motor über einen Schalter zwischen den Klemmen 5 und 8 starten und anhalten.
Den Motor über einen Schalter zwischen den Klemmen 6 und 8 reversieren.
Die Motordrehzahl über ein Potentiometer steuern, das an die Klemmen 1 bis 4
angeschlossen ist.
MICROMASTER 420 Betriebsanleitung
34 6SE6400-5AA00-0AP0
Page 35

3. INBETRIEBNAHME Deutsch
3.2.3 Basisbetrieb mit dem BOP
Voraussetzungen
P0010 = 0 (um den Befehl RUN ordnungsgemäß zu initialisieren)
P0700 = 1 (aktiviert Start-/Stop-Taste auf dem BOP)
P1000 = 1 (gibt die Motorpotentiometer-Sollwerte frei)
1. Die grüne Taste ('RUN') drücken, um den Motor zu starten.
2. Bei laufendem Motor die Taste 'UP' drücken. Die Motordrehzahl nimmt bis 50 Hz zu.
3. Wenn der Umrichter 50 Hz erreicht, die Taste 'DOWN' drücken. Die Motordrehzahl
und der angezeigte Wert nehmen ab.
4. Die Drehrichtung mit der Taste 'FORWARD/REVERSE' ändern.
5. Mit der roten Taste wird der Motor angehalten ('STOP').
MICROMASTER 420 Betriebsanleitung
6SE6400-5AA00-0AP00
35
Page 36

Deutsch 3. INBETRIEBNAHME
Blockschaltplan
1/3 AC 200 - 240V
3 AC 380V - 480V
Analogeingang Quelle
Eingangsspannung:010V
(Überwachung möglich, P0758)
Eingangsstrom:04mA
externer Widerstand, 500
>5.0k
W
+
24V
–
externe Strom
-versorgung
Ausgangsrelais (RL 1)
(250VAC, 2A (induktive Last)
30VDC, 5A (induktionsfreie Last)
Analogausgang
0-20mA
über
Optokoppler
isoliert
W
AIN +
AIN -
DIN1
DIN2
DIN3
RL1B
RL1C
AOUT +
AOUT -
1
+10V
2
0V
3
4
A/D
5
6
7
8
+24V(100mA max)
9
0V(Isolated)
RL1
10
11
12
13
D/A
CPU
PE
Optional - Operator Panel
Hz Min-1 V A kWh
Fn
l
Jog
O
P
FS1
PE
L, N (L1,L2)
or
L1, L2,L3
~
3
~
P+
N-
Der Analogeingangskreis kann wahlweise so konfiguriert werden, dass er einen
zusätzlichen Digitaleingang (DIN 4) ergibt, wie dargestellt.
serielle
14
Schnitt-
stelle
15
(RS485)
DIN4
+
24V
–
Bild 3-6 Blockschaltplan des Umrichters
2
3
4
9
PE
M
0V
0V (Isolated)
MICROMASTER 420 Betriebsanleitung
36 6SE6400-5AA00-0AP0
Page 37

4. ANWENDUNG DES MICROMASTER 420 Deutsch
4 Anwendung des MICROMASTER 420
Dieses Kapitel enthält:
Eine Erläuterung der verschiedenen Verfahren zum Steuern des Umrichters
4.1 Frequenzsollwert.................................................................................................................. 38
4.2 Befehlsquellen (P0700)........................................................................................................ 38
4.3 AUS und Bremsfunktionen................................................................................................... 39
4.4 Steuerungsarten (P1300)..................................................................................................... 40
4.5 Störungen und Warnungen.................................................................................................. 40
MICROMASTER 420 Betriebsanleitung
6SE6400-5AA00-0AP00
37
Page 38

Deutsch 4. ANWENDUNG DES MICROMASTER 420
!
Warnungen
Bei dem Betrieb elektrischer Geräte ist es nicht möglich, das Anlegen gefährlicher
Spannungen an bestimmte Geräteteile zu vermeiden.
Nothalt-Einrichtungen nach EN 60204 IEC 204 (VDE 0113) müssen in allen
Betriebszuständen des Steuergerätes funktionsfähig bleiben. Ein Rückstellen der
Nothalt-Einrichtung darf nicht zu unkontrolliertem oder undefiniertem Wiederanlauf
führen.
In Fällen, in denen Kurzschlüsse im Steuergerät zu erheblichem Sachschaden oder
sogar schweren Körperverletzungen führen können (d. h. potenziell gefährliche
Störungen), müssen zusätzliche äußere Maßnahmen oder Einrichtungen vorgesehen werden, um gefahrlosen Betrieb zu gewährleisten oder zu erzwingen, selbst
wenn ein Kurzschluss auftritt (z. B. unabhängige Endschalter, mechanische
Verriegelungen, etc.).
MICROMASTER-Umrichter arbeiten mit hohen Spannungen.
Bestimmte Parametereinstellungen können bewirken, dass der Umrichter nach
einem Ausfall der Versorgungsspannung automatisch wieder anläuft.
Das Gerät ist in der Lage, internen Motorüberlastschutz nach UL508C, Abschnitt
42, herzustellen. Siehe P0610 (ebene 3) und P0335. Motorüberlastschutz kann
auch mittels eines externen PTC (Kaltleiters) über einen Digitaleingang hergestellt
werden.
Das Gerät ist für Einsatz an einem Stromkreis geeignet, der einen symmetrischen
Strom von bis zu 10.000 Ampere (eff), bei einer Maximalspannung von 230/460 V
liefern kann, wenn es durch eine träge Schmelzsicherung geschützt wird (siehe
Tabelle auf Seite 93)
Das Gerät darf nicht als 'Nothalt-Einrichtung' verwendet werden (siehe EN 60204,
9.2.5.4)
4.1 Frequenzsollwert
Standard: Klemme 3/4 (AIN+/AIN-)
Optionen: siehe P1000
Hinweise:
Bezüglich USS siehe Handbuch, bezüglich PROFIBUS siehe Handbuch und ProfibusAnweisungen.
4.2 Befehlsquellen (P0700)
Hinweise:
Die Funktionen Rampenzeiten und Rampenglättung wirken sich auch auf den Anlauf
und Auslauf des Motors aus. Bezüglich Einzelheiten dieser Funktionen siehe die
Parameter P1120, P1121, P1130 bis P1134 unter den Systemparametern auf Seite 43.
Anlassen des Motors
Standard: Klemme 5 (DIN 1)
Optionen: siehe P0701 bis P0704
Anhalten des Motors
Für das Anhalten des Motors gibt es mehrere Möglichkeiten:
Standard:
AUS1 Klemme 5 (DIN 1)
AUS2 AUS-Taste auf dem BOP/AOP, einmaliges langes Drücken der
AUS-Taste (2 Sekunden) oder zweimaliges Drücken (bei
Voreinstellungen nicht ohne BOP/AOP möglich)
AUS3 keine Standardeinstellung
MICROMASTER 420 Betriebsanleitung
38 6SE6400-5AA00-0AP0
Page 39

4. ANWENDUNG DES MICROMASTER 420 Deutsch
Optionen: siehe P0701 bis P0704
Reversieren des Motors
Standard: Klemme 6 (DIN 2)
Optionen: siehe P0701 bis P0704
4.3 AUS- und Bremsfunktionen
4.3.1 AUS1
Dieser (durch das Aufheben des EIN-Befehls entstehende) Befehl bewirkt das Auslaufen
des Umrichters zum Stillstand entsprechend der gewählten Rampenauslaufgeschwindigkeit.
Parameter zum Ändern der Rampenzeit siehe P1121
Hinweise:
Der EIN-Befehl und der folgende AUS1-Befehl müssen die gleiche Quelle haben.
Ist der EIN-/AUS1-Befehl für mehr als einen Digitaleingang eingestellt, dann ist nur
die zuletzt eingestellte Nummer des Digitaleingangs aktiv, z. B. DIN3.
AUS1 kann mit der Gleichstrom- oder der Verbundbremsung kombiniert werden.
4.3.2 AUS2
Dieser Befehl bewirkt das freie Auslaufen des Motors bis zum Stillstand.
Hinweis:
Der AUS2-Befehl kann eine oder mehrere Quellen haben. Durch Voreinstellung ist der
AUS2-Befehl auf BOP/AOP eingestellt. Diese Quelle bleibt auch dann bestehen, wenn
durch einen der Parameter P0701, P0702, P0703 und P0704 andere Quellen definiert
werden.
4.3.3 AUS3
Ein AUS3-Befehl bewirkt das schnelle Abbremsen des Motors.
Für das Anlassen des Motors bei gesetztem AUS3 muss der Binäreingang geschlossen
(high) sein. Ist AUS3 high, dann kann der Motor über AUS1 oder AUS2 angelassen
werden.
Im low-Zustand von AUS3 ist ein Anlassen des Motors nicht möglich.
Rampenauslaufzeit: siehe P1135
Hinweis:
AUS3 kann mit Gleichstrombremsung oder Verbundbremsung kombiniert werden.
4.3.4 Gleichstrombremsung
Gleichstrombremsung ist zusammen mit AUS1 und AUS3 möglich. Es wird Gleichstrom
eingespeist, der den Motor schnell abbremst und die Welle bis zum Ende der Bremszeit
festhält.
Gleichstrombremse einstellen: siehe P0701 bis P0704
Bremsdauer einstellen: siehe P1233
Bremsstrom einstellen: siehe P1232
MICROMASTER 420 Betriebsanleitung
6SE6400-5AA00-0AP00
39
Page 40

Deutsch 4. ANWENDUNG DES MICROMASTER 420
Hinweis:
Ist kein Digitaleingang für Gleichstrombremsung gesetzt und ist P1233 0, dann wird die
Gleichstrombremsung nach jedem AUS1-Befehl wirksam.
4.3.5 Verbundbremsung
Verbundbremsung ist sowohl mit AUS1 als auch mit AUS3 möglich. Für die Verbundbremsung wird dem Drehstrom eine Gleichstromkomponente überlagert.
Bremsstrom einstellen: siehe P1236
4.4 Regelungs-Betriebsarten (P1300)
Die verschiedenen Betriebsarten des MICROMASTER 420 bestimmen das Verhältnis
zwischen der Motordrehzahl und der vom Umrichter gelieferten Spannung. Es sind vier
Betriebsarten möglich:
Lineare V/f-Regelung
Kann für Anwendungen mit veränderbarem und konstantem Drehmoment verwendet
werden, wie Förderbänder und Pumpen.
Feldstromregelung (FCC)
Diese Regelungsart kann verwendet werden, um den Wirkungsgrad und das
dynamische Verhalten des Motors zu verbessern.
Quadratische V/f-Regelung
Diese Betriebsart kann für Lasten mit veränderlichem Drehmoment eingesetzt
werden, wie Gebläse und Pumpen.
Mehrpunkt-V/f-Regelung
Informationen zu dieser Betriebsart befinden sich im MM420-Handbuch.
4.5 Störungen und Warnungen
SDP eingebaut
Ist ein SDP eingebaut, dann werden die Fehlerzustände und Warnungen durch die zwei
LEDs an der Frontplatte angezeigt. Weitere Informationen: siehe Abschnitt 6.1.
BOP eingebaut
Ist ein BOP eingebaut, dann werden die Störungszustände und Warnungen gemäß
Abschnitt 6.3 angezeigt. Dieser Abschnitt enthält auch weitere Informationen.
MICROMASTER 420 Betriebsanleitung
40 6SE6400-5AA00-0AP0
Page 41

5. SYSTEMPARAMETER Deutsch
5 Systemparameter
Dieses Kapitel enthält:
Eine Funktionsübersicht der für die kundenspezifische Gestaltung Ihres Umrichters
MICROMASTER MM420 zur Verfügung stehenden Parameter.
Eine detaillierte Auflistung der verwendeten Parameter
(einschließlich der Wertebereiche und der Voreinstellungen).
Eine vertiefte Beschreibung der eigentlichen Funktionsweise des Parameters.
5.1 Übersicht der MICROMASTER-Systemparameter............................................................... 42
5.2 Einführung in die MICROMASTER-Systemparameter......................................................... 43
5.3 Systemparameter und ihre Definitionen............................................................................... 48
MICROMASTER 420 Betriebsanleitung
6SE6400-5AA00-0AP00
41
Page 42

Deutsch 5. SYSTEMPARAMETER
5.1 Übersicht der MICROMASTER-Systemparameter
5.1.1 Voreinstellung
Der MM420 wird mit einem Zustands-Anzeigefeld (Status Display Panel, SDP) geliefert.
Zum Ändern der Parameter muss ein Basic Operator Panel (BOP), ein Advanced
Operator Panel (AOP) oder eine externe serielle Schnittstelle benutzt werden. Der
MM420 wird deshalb mit folgenden Voreinstellungen geliefert:
Motorparameter geeignet für einen 4poligen Siemensmotor, angepasst an die
Antriebsleistung und -spannung.
Sollwerteinstellung vom Analogeingang; 0 – 10 V entsprechen 0 bis 50 Hz oder
0 bis 60 Hz (Nordamerika).
Digitaleingänge:
DIN 1 Rechtslauf
DIN 2 Rücklauf
DIN 3 Fehlerrücksetzung
DIP-Schalter 2
Aus-Stellung: europäische Voreinstellungen (50 Hz, kW etc.)
Ein-Stellung: nordamerikanische Voreinstellungen (60 Hz, hp etc.). Weitere
Einzelheiten: Siehe P0100.
Der DIP-Schalter 1 ist nicht für Benutzung durch den Kunden vorgesehen.
Relais – Störungsbedingungen.
Analogausgang – Ausgangsfrequenz
5.1.2 Funktionstaste (Fn) auf dem Basis-Bedienfeld
Verwendung der Funktionstaste.
Die Funktionstaste wird zur Darstellung zusätzlicher Informationen verwendet. Um
zusätzliche Informationen darzustellen, müssen folgende Handlungen vorgenommen
werden:
Ausgehend von jedem beliebigen Parameter die Funktionstaste drücken und während
der Bedienung festhalten.
1. Die Anzeige ändert sich und zeigt die Spannung des Gleichspannungszwischenkreises (gekennzeichnet durch d).
2. Die Funktionstaste erneut drücken, um den Ausgangsstrom (A) darzustellen.
3. Die Funktionstaste erneut drücken, um die Ausgangsfrequenz (Hz) darzustellen.
4. Die Funktionstaste erneut drücken, um die Ausgangsspannung darzustellen
(gekennzeichnet durch o).
5. Die Funktionstaste erneut drücken, um die für die Darstellung gewählte Funktion
(unter Verwendung von P0005) anzuzeigen. (Falls P0005 für das Anzeigen einer der
vorstehenden Größen (3, 4, oder 5) eingestellt ist, dann wird diese nicht erneut
angezeigt.)
Hinweis:
Durch weiteres Drücken werden die obigen Anzeigen nacheinander durchlaufen.
Die Funktionstaste an einem beliebigen Punkt des Ablaufs drücken und festhalten, um an
diesem Punkt innerhalb des Ablaufs Folgendes darzustellen: die Parameternummer, von
der ausgegangen wurde (z. B. r0000); nach dem Loslassen erfolgt Rückkehr zu dieser
Anzeige.
MICROMASTER 420 Betriebsanleitung
42 6SE6400-5AA00-0AP0
Page 43

5. SYSTEMPARAMETER Deutsch
Rollfunktion
Wenn der Benutzer den Betrag eines Parameters ändern muss, dann werden die
Pfeiltasten
benutzt.
Ändern einzelner Stellen der Parameterwerte
Für schnelles Ändern des Parameterbetrags können die einzelnen Stellen der Anzeige
wie folgt verstellt werden:
Vergewissern Sie sich, dass Sie sich auf der Parameter-Änderungsebene befinden
(siehe "Ändern der Parameter mit BOP").
1. Die (Funktionstaste)
2. Den Betrag dieser Zahl durch Drücken von
3. Erneutes Drücken der (Funktionstaste)
4. Die Schritte 2 bis 4 wiederholen, bis der gewünschte Wert angezeigt wird.
5. Zum Verlassen der Parameterwert-Änderungsebene die Taste
Hinweis:
Die Funktionstaste kann auch für das Quittieren einer Fehlermeldung verwendet werden.
und auf dem BOP für das Erhöhen bzw. Verringern des Betrags
drücken. Bewirkt das Blinken der rechten Zahl.
/ verändern.
bewirkt das Blinken der nächsten Stelle.
drücken.
Sprungfunktion
Von jedem Parameter (rXXXX oder PXXXX) ausgehend bewirkt ein kurzes Drücken der
Taste Fn den direkten Sprung zu r0000. Darauf hin kann bei Bedarf ein anderer
Parameter verändert werden. Nach der Rückkehr zu r0000 bewirkt das Drücken der
Taste Fn die Rückkehr zum Ausgangspunkt.
5.2 Einführung in die MICROMASTER-Systemparameter
Die Parameter können nur durch Verwendung des Basic Operator Panel (BOP), des
Advanced Operator Panel (AOP) oder der seriellen Schnittstelle verändert werden.
Mit Hilfe des BOP können die Parameter geändert und eingestellt werden, um die
gewünschten Eigenschaften des Umrichters einzustellen, wie Rampenzeiten, Mindestund Höchstfrequenz etc. Die gewählten Parameternummern und die Beträge der
Parameterwerte werden auf der als Option lieferbaren 5-stelligen LCD-Anzeige
dargestellt.
Hinweise:
Bei kurzzeitigem Drücken der Taste α oder ändern sich die Werte schrittweise.
Werden die Tasten länger gedrückt, dann laufen die Werte schnell durch.
In den Parametertabellen:
'' Die Parameter können nur bei der Schnellinbetriebnahme geändert werden,
z. B., wenn P0010 0 ist.
'' Zeigt an, dass die Parameter im Betrieb geändert werden können.
***' Zeigt an, dass der Betrag dieser werksseitigen Einstellung von den
'
Nenndaten des Umrichters abhängt.
Alle übrigen Parameter können nur bei ausgeschaltetem Umrichter verändert
werden.
Nur-Lese-Parameter werden durch r anstelle P gekennzeichnet.
P0010 leitet die "Schnellinbetriebnahme" ein.
Der Umrichter läuft nur an, wenn P0010 nach seinem Aufruf auf 0 gesetzt wurde.
Diese Funktion läuft automatisch ab, wenn P3900 > 0 ist.
P0004 wirkt als Filter und gestattet den Zugriff auf die Parameter entsprechend ihrer
Funktionalität.
Bei dem Versuch, einen Parameter zu ändern, der in dem vorliegenden Zustand nicht
geändert werden kann, da er z. B. nicht im Betrieb oder nur bei der Schnellinbetriebnahme geändert werden kann, wird
angezeigt.
MICROMASTER 420 Betriebsanleitung
6SE6400-5AA00-0AP00
43
Page 44

Deutsch 5. SYSTEMPARAMETER
Verlorene Meldung
In manchen Fällen gibt die Anzeige auf dem BOP beim Ändern von Parameterwerten
für max. 5 Sekunden
höherer Priorität beschäftigt ist.
aus. Das bedeutet, dass der Umrichter mit Aufgaben
5.2.1 Zugriffsebenen
Für den Zugriff durch den Benutzer sind vier Ebenen vorhanden: Standard, Extended,
Expert und Service. Sie sind über den Parameter P0003 wählbar. Für die meisten
Anwendungen reichen die beiden Parameter Standard und Extended aus.
Die Anzahl der Parameter, die innerhalb jeder Funktionsgruppe erscheinen, hängt von
der im Parameter P0003 eingestellten Zugriffsebene ab. Das vorliegende Dokument
beschreibt die Zugriffsebenen 1 und 2 (Standard und Extended); sonstige Einstellungen
sind im Handbuch (Reference Manual) beschrieben.
5.2.2 Schnelle Inbetriebnahme (P0010=1)
Es ist wichtig, für die Inbetriebnahme den Parameter P0010 zu verwenden und P0003
für die Wahl der Anzahl zugänglicher Parameter. Dieser Parameter ermöglicht das
Auswählen einer Gruppe von Parametern, die eine schnelle Inbetriebnahme ermöglichen.
Dazu gehören Parameter wie Motoreinstellungen und Rampeneinstellungen.
Am Ende des Ablaufs einer schnellen Inbetriebnahme soll P3900 gewählt werden. Dieser
Parameter führt, wenn er auf 1 eingestellt wird, die erforderlichen Motorberechnungen
durch und setzt alle übrigen Parameter (die nicht in P0010 = 1 enthalten sind) auf die
Voreinstellwerte. Dies erfolgt nur in der Betriebsart der schnellen Inbetriebnahme.
5.2.3 Rücksetzen auf werksseitige Voreinstellungen
Um alle Parameter auf die werksseitigen Voreinstellungen zurückzusetzen, müssen die
nachstehenden Parameter wie folgt eingestellt werden:
1. P0010 = 30 einstellen.
2. P0970 = 1 einstellen.
Hinweis:
Der Vorgang des Rücksetzens nimmt etwa 10 Sekunden in Anspruch.
MICROMASTER 420 Betriebsanleitung
44 6SE6400-5AA00-0AP0
Page 45

5. SYSTEMPARAMETER Deutsch
5.2.4 Parameterübersicht, Ebenen 1 und 2
Es folgt eine Übersicht der Parameter der Ebenen 1 und 2. Eine vollständige Übersicht
sämtlicher Parameter der Ebenen 1 und 2 befindet sich im Abschnitt 5.3.
Schnelle Inbetriebnahme, P0010=1 Umrichtereinheit P0004=2
P 0100 Europa/Nordamerika P 0003 BOP/AOP-Zugangsebene Lesen
P 0300 Motortyp wählen P 0010 Antriebs-Inbetriebnahme
P 0304 Motornennspannung r 0018 Firmware-Version
P 0305 Motornennstrom r 0026 Istwert der Zwischenkreisgleichspannung
P 0307 Motornennleistung r 0039 Energieverbrauch [kWh]
P 0308 Nenn-Motorleistungsfaktor P 0040 Energieverbrauch rücksetzen
P 0309 Motornennwirkungsgrad r 0206 Nennleistung des Antriebs
P 0310 Motornennfrequenz r 0207 Nennstrom des Antriebs
P 0311 Motornenndrehzahl r 0208 Nennspannung des Antriebs
P 0335 Motorkühlung P 1800 Schaltfrequenz
P 0640 Max. Ausgangsstrom P 1820 Ausgangs-Phasenfolge umkehren
P 0700 Befehl PZD über
P 1000 Wahl des Frequenzsollwertes
P 1080 Min. Frequenz
P 1082 Max. Frequenz
P 1120 Rampenanstiegszeit
P 1121 Rampenabfallzeit
P 1300 Steuerbetrieb
P 3900 Schnell-Parametrierung
Motordaten P0004=3 Befehle und digitale E/A P0004=7
P 0003 BOP/AOP-Zugangsebene Lesen r 0002 Zustand des Antriebs
P 0010 Inbetriebnahme des Antriebs P 0003 BOP/AOP-Zugangsebene Lesen
r 0034 Motorauslastung P 0010 Inbetriebnahme des Antriebs
P 0300 Motortyp wählen r 0052 Statuswort 1
P 0304 Motornennspannung r 0053 Statuswort 2
P 0305 Motornennstrom P 0700 Befehl PZD über
P 0307 Motornennleistung (kW oder hp)
P 0701 Auswahl Digitaleingang 1
P 0308 Motor-Nennleistungsfaktor P 0702 Auswahl Digitaleingang 2
P 0309 Motornennwirkungsgrad P 0703 Auswahl Digitaleingang 3
P 0310 Motornennfrequenz P 0704 Auswahl Digitaleingang 4
P 0311 Motornenndrehzahl r 0722 Binäre Eingangswerte
P 0335 Motorkühlung P 0731 Binärausgang
P 0340
P 0350 Ständerwiderstand Phase-Phase
P 0611 Motor-Zeitkonstante I
P 0614 Motor-Überlastwarnstufe I
Motorabbild und Steuerung berechnen
2
t
2
t
P 0640 Max.-Ausgangsstrom
P 1910 Motordaten-Kennzeichnung wählen
r 1912 Ermittelter Ständerwiderstand
MICROMASTER 420 Betriebsanleitung
6SE6400-5AA00-0AP00
45
Page 46

Deutsch 5. SYSTEMPARAMETER
Analog E/A P0004=8 Sollwertkanal & Rampengenerator P0004=10
P 0003 BOP/AOP-Zugangsebene Lesen P 0003 BOP/AOP-Zugangsebene Lesen
P 0010 Inbetriebnahme des Antriebs P 0010 Inbetriebnahme des Antriebs
r 0752 Analogeingang in V P 1000 Wahl des Frequenzsollwertes
r 0754 Analogausgang in % P 1001 Festfrequenz 1
r 0755 ADU-Istwert normiert (4000 h) P 1002 Festfrequenz 2
P 0756 ADU-Typ P 1003 Festfrequenz 3
P 0757 Wert x1 der ADU-Kennlinie P 1004 Festfrequenz 4
P 0758 Wert y1 der ADU-Kennlinie P 1005 Festfrequenz 5
P 0759 Wert x2 der ADU-Kennlinie P 1006 Festfrequenz 6
P 0760 Wert y2 der ADU-Kennlinie P 1007 Festfrequenz 7
P 0761 Breite des Unempfindlichkeitsbereiches P 1031 Sollwertspeicher des MOP
P 0771 DAU P 1040 Sollwert des MOP
r 0774 Analog-Ausgangswert P 1058 JOG Frequenz rechts
P 0777 Wert x1 der DAU-Kennlinie P 1059 JOG Frequenz links
P 0778 Wert y1 der DAU-Kennlinie P 1060 JOG-Rampenanstiegszeit
P 0779 Wert x2 der DAU-Kennlinie P 1061 JOG-Rampenabfallzeit
P 0780 Wert y2 der DAU-Kennlinie P 1080 Min. Frequenz
P 0781 Unempfindlichkeitsbereich des
P 1082 Max. Frequenz
Analogausgangs
P 1120 Rampenanstiegszeit
P 1121 Rampenabfallzeit
P 1130 Anfangs-Verrundungszeit für
Rampenanstieg
P 1131 End-Verrundungszeit für
Rampenanstieg
P 1132 Anfangs-Verrundungszeit für
Rampenabfall
P 1133 End-Verrundungszeit für Rampenabfall
P 1134 Verrundungstyp
Merkmale des Antriebs P0004=12 Motorsteuerung P0004=13
P 0003 BOP/AOP-Zugangsebene Lesen P 0003 BOP/AOP-Zugangsebene Lesen
P 0004 Parameter für Anzeige r0000 P 0010 Inbetriebnahme des Antriebs
P 0010 Inbetriebnahme des Antriebs r 0021 Frequenz Istwert
P 1200 Fangschaltung r 0025 Istwert der Ausgangsspannung
P 1210 Automatischer Wiederanlauf r 0027 Istwert des Ausgangsstroms
P 1215 Betriebsart des MHB r 0056 Statuswort 1 für V/f und VC
P 1216 Öffnungszeit des MHB P 1300 Steuerungsart
P 1217 Schließungszeit des MHB P 1310 Dauer-Spannungsanhebung
P 1232 Brems-Gleichstrom P 1311
Beschleunigungs-Spannungsanhebung
P 1233 Dauer der Gleichstrombremsung P 1312 Anlauf-Spannungsanhebung
P 1236 Verbund-Bremsstrom P 1333 Anfangsfrequenz für FCC
P 1335 Verstärkung der Schlupfkompensation
P 1336 Schlupf-Grenzwert
Alarmmeldungen, Warnungen &
Kommunikation P0010=20
Überwachung P0010=21
P 0003 BOP/AOP-Zugangsebene Lesen P 0003 BOP/AOP-Zugangsebene Lesen
P 0010 Inbetriebnahme des Antriebs P 0010 Inbetriebnahme des Antriebs
P 0918 CB-Bus-Adresse r 0947 Fehlernummer
P 0927 Parameter änderbar über r 2110 Nummer der Warnung
P 2000 Bezugsfrequenz r 2197 Statuswort 1 des Monitors
P 2010 USS-Baudrate
P 2011 USS-Adresse
MICROMASTER 420 Betriebsanleitung
46 6SE6400-5AA00-0AP0
Page 47

5. SYSTEMPARAMETER Deutsch
PI-Regler P0004=22 Werkseinstellungen P0010=30
P 0003 BOP/AOP-Zugangsebene Lesen P 0003 BOP/AOP-Zugangsebene Lesen
P 0010 Inbetriebnahme des Antriebs P 0010 Inbetriebnahme des Antriebs
P 2200 Freigabe PI-Regler P 0970 Werkseinstellungen
P 2201 Fest-Sollwert 1
P 2202 Fest-Sollwert 2
P 2203 Fest-Sollwert 3
P 2204 Fest-Sollwert 4
P 2205 Fest-Sollwert 5
P 2206 Fest-Sollwert 6
P 2207 Fest-Sollwert 7
r 2224 Stecker: fester PI-Sollwert
P 2231 Sollwertspeicher des MOP
P 2232
Sperre Tastatursollwert Gegenrichtung
P 2240 Sollwert des MOP
r 2250 Aktiver digitaler PI-Ausgangssollwert
P 2253 Quelle: PI-Sollwert
P 2257 Beschleunigungszeit für den PI-Sollwert
P 2258 Verzögerungszeit für den PI-Sollwert
r 2260 PI-Sollwert
P 2264 PI-Rückführung
P 2265 Filterzeitkonstante der PI-Rückführung
r 2266 PI-Rückführung
P 2271 PI-Gebertyp
P 2272
Stecker: skaliertes PI-Rückführsignal
r 2273 PI-Fehler
P 2280 PI-Proportionalverstärkung
P 2285 PI-Integrationszeit
P 2291 PI, obere Begrenzung
P 2292 PI, untere Begrenzung
r 2294 PI-Ausgang
MICROMASTER 420 Betriebsanleitung
6SE6400-5AA00-0AP00
47
Page 48

Deutsch 5. SYSTEMPARAMETER
5.3 Systemparameter und ihre Definitionen
Parameter-
nummer
Antriebsanzeiger0000
Zeigt den vom Benutzer gewählten Ausgang an, wie in P0005 definiert.
Hinweis:
Das Drücken der Taste "Fn" für 2 Sekunden ermöglicht dem Benutzer das Betrachten der
Werte der Zwischenkreisgleichspannung, des Ausgangsstroms, der Ausgangsfrequenz,
Ausgangsspannung und der gewählten r0000-Einstellung (definiert in P0005).
Parameterbezeichnung
Min.
Max.
[Vorein-
stellung]
Einheiten
-
-
[-]
-
P0003
BenutzerZugangsebene
P0004
Einstellung
Zustand
änderbar
1
7
Antriebsstatusr0002
Zeigt den derzeitigen Zustand des Antriebs an.
Mögliche Werte:
0 "Inbetriebnahme-Modus – (P0010 0)"
1 "Betriebsbereit"
2 "Störung"
3 "Anlauf – Vorladen des Gleichstromzwischenkreises"
4 "Betrieb"
5 "Auslauf – (Rampenablauf)"
Hinweis:
Der Zustand 3 ist nur während des Gleichstromzwischenkreis-Vorladens sichtbar und nur,
wenn eine Datenübertragung der Baugruppe mit externer Stromversorgung eingebaut ist.
Benutzer-ZugangsebeneP0003
Legt die Zugangsebene zu den Parametersätzen fest. Für die meisten einfachen
Anwendungen ist die (Standard-Voreinstellung) ausreichend.
Mögliche Einstellungen:
0 "Benutzerdefinierte Parameterliste – Einzelheiten der Verwendung: siehe P0013
(Ebene 3)"
1 "Standard": ermöglicht Zugriff auf die am häufigsten verwendeten Parameter
2 "Extended": ermöglicht erweiterten Zugriff auf E/A-Funktionen des Umrichters
3 "Expert": nur für Benutzung durch Fachleute
4 "Service": nur für Benutzung durch bevollmächtigtes Wartungspersonal –
durch Passwort geschützt.
[-]
[1]
0
5
-
0
4
-
2
7
1
Alle
''
MICROMASTER 420 Betriebsanleitung
48 6SE6400-5AA00-0AP0
Page 49

Parameter-
nummer
P0004
5. SYSTEMPARAMETER Deutsch
P0003
BenutzerZugangsebene
P0004
Einstellung
Zustand
änderbar
1
Alle
''
Parameterbezeichnung
Parameterfilter
Filtert die verfügbaren Parameter nach Funktionalität, so dass eine konzetriertere
Inbetriebnahme möglich ist. Bei P0004=22 sind z. B nur die PI-Parameter sichtbar.
Mögliche Einstellungen:
0 "Alle Parameter"
2"Umrichter"
3"Motor"
7 "Befehle & digitale E/A"
8 "Analog-E/A"
10 "Sollwertkanal & Rampengenerator"
12 "Merkmale des Antriebs"
13 "Motorsteuerung"
20 "Datenübertragung"
21 "Alarme, Warnungen & Überwachung"
22 "PI-Regler"
Hinweis:
Der Umrichter kann bei jeder Einstellung von P0004 gestartet werden.
Manche Parameter sind "nur für die Inbetriebnahme" vorgesehen und können im Rahmen
dieses "Filter"-Parameters betrachtet werden. Ihre Einstellung ist jedoch nur mit Hilfe von
P0010=1 (Schnellinbetriebnahme) möglich. Diese Parameter sind in der rechten Spalte
durch das Schlüsselsymbol '
' gekennzeichnet.
Min.
Max.
[Vorein-
stellung]
Einheiten
0
22
[0]
-
Wahl der AnzeigeP0005
Wählt die Anzeige für den Parameter r0000 aus.
Gebräuchlichste Einstellungen:
21 Ist-Frequenz
25 Ausgangsspannung
26 Gleichstromzwischenkreisspannung
27 Ausgangsstrom
Hinweis:
Die vorstehenden Einstellungen beziehen sich auf Nummern von Nur-Lese-Parametern.
Weitere Einzelheiten: siehe die entsprechenden Beschreibungen der "rXXXX"-Parameter.
Parametergruppen für die InbetriebnahmeP0010
Diese Einstellung ermöglicht das Filtern der Parameter derart, dass nur solche Parameter
gewählt werden, die mit einer Gruppe von Funktionen zusammenhängen. Siehe nachstehende Tabelle.
Mögliche Einstellungen:
0 Betriebsbereit
1 Schnelle Inbetriebnahme
30 Werkseinstellungen
Hinweise:
1 Dieser Parameter muss auf 0 rückgesetzt werden, da der Umrichter andernfalls
nicht arbeitet (automatisch, wenn P3900 ≠ 0 ist (Voreinstellung)).
2 Die zugänglichen Parameter werden auch von dem Parameter (P0003),
Benutzer-Zugangsebene (User Access Level) beeinflusst.
0
4000
[0]
-
0
30
[0]
-
2
12
''
1
Alle
MICROMASTER 420 Betriebsanleitung
6SE6400-5AA00-0AP00
49
Page 50

Parameter-
nummer
r0018
Deutsch 5. SYSTEMPARAMETER
P0003
BenutzerZugangsebene
P0004
Einstellung
Zustand
änderbar
1
2
2
13
2
13
2
2
C
2
13
2
3
Parameterbezeichnung
Firmwareversion
Zeigt die Versionsnummer der installierten Firmware an.
Umrichterausgangsfrequenz (ohne Schlupfkompensation)r0021
Umrichterausgangsspannungr0025
Zeigt den Effektivwert der an den Motor angelegten Spannung an.
Zwischenkreis-Gleichspannungr0026
Motorstromr0027
Zeigt den Effektivwert des Motorstroms (A) an.
Motor- Übertemperaturschutz (I2t)r0034
Zeigt die berechnete Motortemperatur als Prozentanteil des höchstzulässigen Wertes an.
Hinweis:
Der Wert 100 % bedeutet, dass der Motor seine höchstzulässige Betriebstemperatur
erreicht hat. In einem solchen Fall versucht der Umrichter, die Motorbelastung zu
verringern, wie durch den Parameter P0610 (Ebene 3) definiert.
Min.
Max.
[Vorein-
stellung]
Einheiten
-
-
[0]
-
-
-
[-]
Hz
-
-
[-]
V
0
-
[0]
V
-
-
[-]
A
-
[-]
%
Energieverbrauchszähler [kWh]r0039
Zeigt die elektrische Energie an, die der Antrieb seit dem letzten Rücksetzen verbraucht hat
(siehe P0040).
Hinweis:
Der Wert wird bei P3900=1 rückgesetzt (bei der schnellen Inbetriebnahme) oder bei
P0970 = 1 (Werks-Rückstellung) oder durch Verwendung von P0040.
Energieverbrauchszähler [kWh] rücksetzenP0040
Setzt die Energieverbrauchsanzeige auf 0 zurück.
Mögliche Einstellungen:
0 = Kein Rücksetzen
1 = r0039 auf 0 Rücksetzen
Hinweis:
Das Rücksetzen tritt beim Drücken von "P" ein.
0
-
[0]
kWh
0
1
[0]
-
2
2
2
2
MICROMASTER 420 Betriebsanleitung
50 6SE6400-5AA00-0AP0
Page 51

Parameter-
nummer
r0052
5. SYSTEMPARAMETER Deutsch
P0003
BenutzerZugangsebene
P0004
Einstellung
Zustand
änderbar
2
7
Parameterbezeichnung
Statuswort 1
Dieser Parameter zeigt das erste aktive Statuswort des Umrichters (im Bit-Format) an und
kann für die Diagnose des Umrichterzustands verwendet werden. Eine Beschreibung der
Zustandswort-Anzeigesegmente befindet sich in der Einleitung zu den Parametern und
kann wie folgt interpretiert werden.
Mögliche Werte:
Min.
Max.
[Vorein-
stellung]
Einheiten
-
-
[-]
-
Bit 00 Antrieb bereit 0 NEIN
Bit 01 Antrieb betriebsbereit 0 NEIN
Bit 02 Antrieb läuft 0 NEIN
Bit 03 Antriebsstörung aktiv 0 JA
Bit 04 AUS2 aktiv 0 JA
Bit 05 AUS3 aktiv 0 JA
Bit 06 Einschaltsperre aktiv 0 NEIN
Bit 07 Antriebs-Warnung aktiv 0 NEIN
Bit 08 Abweichung Sollwert/Istwert 0 JA
Bit 09 PZD-Steuerung (Prozessdatensteuerung) 0 NEIN
Bit 10 Höchstfrequenz erreicht 0 NEIN
Bit 11 Warnung: Motorstrom-Grenzwert 0 JA
Bit 12 Motorhaltebremse aktiv 0 JA
Bit 13 Motorüberlastung 0 JA
Bit 14 Motorlaufrichtung rechts 0 NEIN
Bit 15 Umrichterüberlastung 0 JA
1JA
1JA
1JA
1NEIN
1NEIN
1NEIN
1JA
1JA
1NEIN
1JA
1JA
1NEIN
1NEIN
1NEIN
1JA
1NEIN
MICROMASTER 420 Betriebsanleitung
6SE6400-5AA00-0AP00
51
Page 52

Parameter-
nummer
r0053
Deutsch 5. SYSTEMPARAMETER
P0003
BenutzerZugangsebene
P0004
Einstellung
Zustand
änderbar
2
7
Parameterbezeichnung
Statuswort 2
Dieser Parameter zeigt das zweite Statuswort des Umrichters (im Bit-Format) an. Er kann
für die Zustandsdiagnose des Umrichters an Hand der in der Einleitung enthaltenen
Angaben benutzt werden.
Mögliche Werte:
Bit 00 Gleichstrombremse aktiv 0 NEIN
1JA
Bit 01 Umrichterfrequenz Ψ Abschaltgrenzwert 0 JA
1NEIN
Bit 02 Umrichterfrequenz Ψ Mindestfrequenz 0 JA
1NEIN
Bit 03 Strom ∫ Grenzwert 0 NEIN
1JA
Bit 04 Ist-Frequenz [ Soll-Frequenz 0 NEIN
1JA
Bit 05 Ist-Frequenz Ψ Soll-Frequenz 0 NEIN
1JA
Bit 06 Ist-Frequenz ∫ Sollwert 0 NEIN
1JA
Bit 07 Spannung Ψ Grenzwert 0 NEIN
1JA
Bit 08 Spannung [ Grenzwert 0 NEIN
1JA
Bit 09 Reserve 0 NEIN
1JA
Bit 10 PI-Frequenz Ψ Grenzwert 0 NEIN
1JA
Bit 11 PI-Sättigung 0 NEIN
1JA
Min.
Max.
[Vorein-
stellung]
Einheiten
-
-
[-]
-
Statuswort 1 für V/fr0056
Zeigt das Statuswort (V/f) im Bit-Format, das für die Diagnose des Umrichterzustandes
verwendet werden kann. Bezüglich der Anzeige siehe Diagramm in r0052.
Mögliche Werte:
Bit 00 Initialisierungskontrolle beendet 0 NEIN
1JA
Bit 01 Motorentmagnetisierung beendet 0 NEIN
1JA
Bit 02 Impulse freigegeben 0 NEIN
1JA
Bit 03 Spannung Sanftanlauf wählen 0 NEIN
1JA
Bit 04 Motorerregung beendet 0 NEIN
1JA
Bit 05 Anlauf-Spannungsanhebung aktiv 0 NEIN
1JA
Bit 06 Beschleunigungs-Spannungsanhebung aktiv 0 NEIN
1JA
Bit 07 Frequenz negativ 0 NEIN
1JA
Bit 08 Feldschwächung aktiv 0 NEIN
1JA
Bit 09 Spannungssollwert begrenzt 0 NEIN
1JA
Bit 10 Schlupffrequenz begrenzt 0 NEIN
1JA
Bit 11 I-max.-Regler aktiv 0 NEIN
1JA
Bit 12 Vdc-max.-Regler aktiv 0 NEIN
1JA
Bit 15 Vdc-min.-Regler aktiv 0 NEIN
1JA
-
-
[-]
-
2
13
MICROMASTER 420 Betriebsanleitung
52 6SE6400-5AA00-0AP0
Page 53

Parameter-
nummer
P0100
5. SYSTEMPARAMETER Deutsch
P0003
BenutzerZugangsebene
P0004
Einstellung
Zustand
änderbar
1
1
'
'
Parameterbezeichnung
Betrieb für Europa/Nordamerika
Bestimmt, ob die Leistungseinstellungen (z. B. Typenschild-Nennleistung – P0307) in kW
oder hp ausgedrückt werden. Die Voreinstellungen für die Typenschild-Nennfrequenz
(P0310) und maximale Motorfrequenz (P1082) werden ebenfalls an dieser Stelle
automatisch eingestellt, zusätzlich zur Sollfrequenz (P2000).
Mögliche Einstellungen:
0 = Leistungseinstellungen in kW; Frequenzvoreinstellung 50 Hz
(DIP-Schalter 2 verwenden)
1 = Leistungseinstellungen in hp; Frequenzvoreinstellung 60 Hz
(DIP-Schalter 2 verwenden)
2 = Leistungseinstellungen in kW; Frequenzvoreinstellung 60 Hz
Warnung:
DIE EINSTELLUNG DES kW-/hp-DIP-SCHALTERS UNTER DEM BEDIENFELD
ÜBERSCHREIBT DIE EINSTELLUNGEN 0 ODER 1 BEIM EINSCHALTEN.
Einstellung 2 wird nicht überschrieben.
Hinweis:
Dieser Parameter kann nur bei P0010=1 (Inbetriebnahmemodus) geändert werden.
Min.
Max.
[Vorein-
stellung]
Einheiten
0
2
[0]
-
Umrichternennleistungr0206
Zeigt die Motornennleistung an, die vom Umrichter geliefert werden kann.
Hinweis:
Die Anzeige erfolgt abhängig von P0100 in kW oder hp.
Umrichternennstromr0207
Zeigt den maximalen Dauerausgangsstrom des Umrichters an.
Umrichter-Nenneingangsspannungr0208
Zeigt die Versorgungs-Nennwechselspannung des Umrichters an.
Mögliche Werte:
230 = 200 - 240 V 10 %
400 = 400 - 480 V 10 %
Motortyp wählenP0300
Wählt den Motortyp.
Mögliche Einstellungen:
1 = Asynchronmotor.
2 = Synchronmotor.
Hinweis 1:
Dieser Parameter kann nur bei P0010=1 oder 3 geändert werden.
Dieser Parameter wird während der Inbetriebnahme zur Auswahl des Motortyps und zur
Optimierung des Umrichter-Betriebsverhaltens benötigt. Die meisten Motoren sind
Asynchronmotoren; im Zweifelsfall nachstehende Formel verwenden.
(P0310 x 60)/P0311
Ist das Ergebnis eine ganze Zahl, dann handelt es sich um einen Synchronmotor.
Hinweis 2:
Wird der Synchronmotor gewählt, dann stehen folgende Funktionen nicht zur Verfügung:
Leistungsfaktor (P0308), Motorwirkungsgrad (P0309), Magnetisierungszeit (P0346),
Entmagnetisierungszeit (P0347), Fangschaltung (P1200, P1202, P1203), DC-Bremsung
(P1230, P1232, P1233), Schlupfkompensation (P1335), Schlupfgrenzwert (P1336).
[-]
[-]
[-]
[1]
-
-
-
-
-
A
-
-
V
1
2
-
'
2
2
2
2
2
2
2
3
'
MICROMASTER 420 Betriebsanleitung
6SE6400-5AA00-0AP00
53
Page 54

Parameter-
nummer
P0304
Deutsch 5. SYSTEMPARAMETER
P0003
BenutzerZugangsebene
P0004
Einstellung
Zustand
änderbar
1
3
'
'
Parameterbezeichnung
Motornennspannung
Motornennspannung (V) aus dem Typenschild
Nachstehendes Diagramm zeigt, wo die Daten Ihres Motors zu finden sind.
Min.
Max.
[Vorein-
stellung]
Einheiten
10
2000
[
***]
V
P0304P0305
230-400 V
1455/min
P0311
3~Mot
1LA7130-4AA10
60 Hz
6.5kW
Cos ♥=
♥=0.82
♥=♥=
ρ=
ρ=440-480
ρ=ρ=
11.1-11.3 A
EN 60034
460 V
10.9 A
1755/min
95.75%
45kg
P0309
P0307
P0310
No UD 0013509-0090-0031 TICI F 1325 IP 55 IM B3
50 Hz
5.5kW 19.7/11.A
Cos ♥=
♥=0.81
♥=♥=
==αΛρ=
==αΛρ=220-240/380-420 V
==αΛρ===αΛρ=
19.7-20.6/11.4-11.9 A
P0308
Hinweis:
Dieser Parameter kann nur bei P0010=1 oder 3 geändert werden.
MotornennstromP0305
Motornennstrom (A) aus dem Typenschild – siehe Diagramm P0304
Hinweis:
Dieser Parameter kann nur bei P0010 = 1 geändert werden.
Der Maximalwert ist definiert als 2 * Umrichternennstrom (P0207).
MotornennleistungP0307
Motornennleistung (kW) aus dem Typenschild. Bei P0100 = 1 sind die Werte in hp
angegeben – siehe Diagramm P0304
P0344
0.12
10000
***]
[
A
0.01
2000
***]
[
-
'
'
1
3
'
1
3
'
Hinweis:
Dieser Parameter kann nur bei P0010 = 1 geändert werden.
P0308
Motor-Nennleistungsfaktor (cos ∞Φ
∞Φ
∞Φ∞Φ
0
1
Motor-Nennleistungsfaktor (cos ∞) aus dem Typenschild – siehe Diagramm P0304
[0]
-
Hinweis:
Dieser Parameter kann nur bei P0010 = 1 geändert werden.
Dieser Parameter ist nur bei P0100 = 0 oder 2 sichtbar, d. h. wenn die Motorleistung in kW
eingegeben wird.
Hinweis:
Die Einstellung auf 0 bewirkt, dass der Wert intern berechnet wird.
MICROMASTER 420 Betriebsanleitung
54 6SE6400-5AA00-0AP0
'
2
3
'
Page 55

Parameter-
nummer
P0309
5. SYSTEMPARAMETER Deutsch
P0003
BenutzerZugangsebene
P0004
Einstellung
Zustand
änderbar
2
3
'
'
Parameterbezeichnung
Motor-Nennwirkungsgrad
Nennwirkungsgrad des Motors (%) aus dem Typenschild – siehe Diagramm P0304
Hinweis:
Dieser Parameter kann nur bei P0010 = 1 geändert werden.
Dieser Parameter ist nur bei P0100 = 1 sichtbar, d. h. wenn die Motorleistung in hp
eingegeben wird.
Hinweis:
Die Einstellung auf 0 bewirkt, dass der Wert intern berechnet wird.
Min.
Max.
[Vorein-
stellung]
Einheiten
0
100
[0]
%
MotornennfrequenzP0310
Nennfrequenz des Motors (Hz) aus dem Typenschild – siehe Diagramm P0304
P0311 Motornenndrehzahl
Hinweis 1:
Dieser Parameter kann nur bei P0010 = 1 oder 3 geändert werden.
Nenndrehzahl des Motors (U/min) aus dem Typenschild – siehe Diagramm P0304
Hinweis 2:
Dieser Parameter kann nur bei P0010=1 oder 3 geändert werden.
Hinweis 3:
Dieser Parameter muss korrekt sein, damit die Schlupfkompensation ordnungsgemäß
arbeiten kann.
Hinweis 4:
Die Einstellung auf 0 bewirkt, dass der Wert aus P0340=1 oder 2 oder aus P3900=1 oder 2
berechnet wird.
MotorkühlungP0335
Gibt die verwendete Kühlungsart des Motors an.
Mögliche Einstellungen:
0 Eigenkühlung – mittels des an der Motorwelle angebrachten Lüfterrades
1 Zwangskühlung – mittels eines Kühlgebläses mit eigenem Antrieb
12
650
[50]
Hz
0
40000
***]
[
1/min
0
1
[0]
-
'
'
1
3
'
1
3
'
2
3
Berechnung von MotorparameternP0340
Mögliche Einstellungen:
0 "keine Berechnung"
1 "Berechnung der Motorparameter aus den eingegebenen Typenschilddaten"
Berechnet eine Vielzahl von Motorparametern, wie P0344 (Motorgewicht), P0350
(Ständerwiderstand), P0346 (Magnetisierungszeit) und P0347 (Entmagnetisierungszeit),
P2000 (Nennfrequenz), P2001 (Nennspannung), P2002 (Nennstrom).
Hinweis:
Dieser Parameter wird bei der Inbetriebnahme für das Optimieren des UmrichterBetriebsverhaltens benötigt.
MICROMASTER 420 Betriebsanleitung
6SE6400-5AA00-0AP00
[0]
0
4
-
2
3
55
Page 56

Parameter-
nummer
P0350
Deutsch 5. SYSTEMPARAMETER
P0003
BenutzerZugangsebene
P0004
Einstellung
Zustand
änderbar
2
3
''
Parameterbezeichnung
Ständerwiderstand Phase gegen Phase
Betrag des Ständerwiderstandes in Ohm für den angeschlossenen Motor.
Für das Bestimmen des Wertes dieses Parameters gibt es drei Möglichkeiten:
1. der Wert kann mit Hilfe von P0340 = 1 berechnet werden,
2. der Wert kann mit Hilfe von P1910 = 1 gemessen werden,
3. manuelles Messen mit einem Ohmmeter.
Hinweis
Der in P0350 eingegebene Wert ist der nach dem letzten Verfahren ermittelte Wert.
Min.
Max.
[Vorein-
stellung]
Einheiten
0
300
[***]
Ohm
Motor I2t-ZeitkonstanteP0611
Bestimmt die thermische Zeitkonstante des Motors und wird automatisch aus den
Motordaten (P0340) berechnet.
Hinweis:
Eine größere Zahl verlängert die für die Änderung der berechneten Motortemperatur
benötigte Zeit.
I2t-Überlast-Warngrenzwert des MotorsP0614
2
Die I
t-Berechnung des Motors schätzt die Dauer ab, über welche der Motor ohne
Übererwärmung überlastet werden kann. Wurde die höchst zulässige Zeitspanne erreicht,
dann beträgt die I
bestimmt den rechnerischen I
2
t-Berechnung für den Motor 100 % (siehe r0034). Dieser Parameter
2
t-Wert in %, bei dem eine Warnung (A0511) ausgegeben
wird.
Hinweis:
Die Motor-Übertemperaturabschaltung (F0011) wird bei 110 % dieses Wertes angestoßen.
Motorüberlastfaktor (%)P0640
Bestimmt den Augenblicksgrenzwert des Motorstromes als % des Motornennstroms.
Dieser Wert ist auf 150 % des Umrichternennstroms (r0207) begrenzt oder auf 400 % des
Motorstromes (je nach dem, welcher Wert kleiner ist).
Wahl der BefehlsquelleP0700
Parameter für die Wahl der digitalen Befehlsquelle. Wird der Parameter geändert, dann
werden alle digitalen Eingangsparameter auf zweckmäßige Werte eingestellt.
Mögliche Einstellungen:
0 "Werks-Voreinstellung"
1 "Tastatur"
2 "Terminal"
4 "USS1 auf der BOP-Leitung"
5 "USS2 auf der Comm-Leitung"
6 "PROFIBUS/Fieldbus auf Comm-Leitung"
Hinweis:
Das Ändern dieses Parameters setzt die Einstellungen auf die Voreinstellwerte bei dem
gewählten Teil ein. Beispiel: Bei Änderung von Einstellung 1 auf Einstellung 2 weisen alle
Digitaleingänge nunmehr die Voreinstellwerte auf.
0
16000
[***]
s
0
400
[100]
%
0
400
[150]
%
0
6
[0]
-
2
3
2
3
''
2
3
''
1
7
MICROMASTER 420 Betriebsanleitung
56 6SE6400-5AA00-0AP0
Page 57

Parameter-
nummer
P0701
5. SYSTEMPARAMETER Deutsch
P0003
BenutzerZugangsebene
P0004
Einstellung
Zustand
änderbar
2
7
Parameterbezeichnung
Funktion des Digitaleingangs 1
Wählt die Funktion des Digitaleingangs 1 aus
0 Digitaleingang gesperrt
1 EIN rechts
2 EIN links (EIN + Richtungsumkehr)
3 AUS2 – freier Auslauf zum Stillstand
4 AUS3 – schneller Rampenauslauf (P1135 legt die Rampenabfallzeit fest)
9 Fehlerquittierung
10 JOG rechts
11 JOG links
12 Richtungsumkehr
13 Frequenz erhöhen (Haupt-/Zusatzsollwert = Tastatur (P1000))
14 Frequenz verringern (Haupt- oder Zusatzsollwert = Tastatur )
15 Festfrequenz 1 (siehe P1001)
16 Festfrequenz 1 + EIN (siehe P1001)
17 Festfrequenzen 1 bis 7 (binär codiert) (siehe P1001)
25 Freigabe DC-Bremse (siehe P1230 bis P1233)
29 Externe Abschaltung
33 Zusatzsollwert sperren (definiert in P1000)
99 BICO-Parametrierung freigeben – nur für Verwendung durch Experten
Nur rücksetzbar über P0700 oder P3900 = 1, 2 oder Werksvoreinstellung P0970=1
Min.
Max.
[Vorein-
stellung]
Einheiten
0
99
[1]
-
Funktion des Digitaleingangs 2P0702
Wählt die Funktion am Digitaleingang 2 aus.
0 Digitaleingang gesperrt
1 EIN rechts
2 EIN links (EIN + Richtungsumkehr)
3 AUS2 – freier Auslauf zum Stillstand
4 AUS3 – schneller Rampenauslauf (P1135 legt die Rampenabfallzeit fest)
9 Fehlerquittierung
10 JOG rechts
11 JOG links
12 Richtungsumkehr
13 Frequenz erhöhen (Haupt-/Zusatzsollwert = Tastatur (P1000))
14 Frequenz verringern (Haupt- oder Zusatzsollwert = Tastatur)
15 Festfrequenz 2 (siehe P1002)
16 Festfrequenz 2 + EIN (siehe P1002)
17 Festfrequenzen 1 bis 7 (binär codiert) (siehe P1002)
25 Freigabe DC-Bremse (siehe P1230 bis P1233)
29 Externe Abschaltung
33 Zusatzsollwert sperren (definiert in P1000)
99 BICO-Parametrierung freigeben – nur für Verwendung durch Experten.
Nur rücksetzbar über P0700 oder P3900 = 1, 2 oder Werksvoreinstellung P0970=1
0
99
[12]
2
7
-
MICROMASTER 420 Betriebsanleitung
6SE6400-5AA00-0AP00
57
Page 58

Parameter-
nummer
P0703
Deutsch 5. SYSTEMPARAMETER
P0003
BenutzerZugangsebene
P0004
Einstellung
Zustand
änderbar
2
7
Parameterbezeichnung
Funktion des Digitaleingangs 3
Wählt die Funktion am Digitaleingang 3 aus.
0 Digitaleingang gesperrt
1 EIN rechts
2 EIN links (EIN + Richtungsumkehr)
3 AUS2 – freier Auslauf zum Stillstand
4 AUS3 – schneller Rampenauslauf (P1135 legt die Rampenabfallzeit fest)
9 Fehlerquittierung
10 JOG rechts
11 JOG links
12 Richtungsumkehr
13 Frequenz erhöhen (Haupt-/Zusatzsollwert = Tastatur (P1000))
14 Frequenz verringern (Haupt- oder Zusatzsollwert = Tastatur)
15 Festfrequenz 3 (siehe P1003)
16 Festfrequenz 3 + EIN (siehe P1003)
17 Festfrequenzen 1 bis 7 (binär codiert) (siehe P1003)
25 Freigabe DC-Bremse (siehe P1230 bis P1233)
29 Externe Abschaltung
33 Zusatzsollwert sperren (definiert in P1000)
99 BICO-Parametrierung freigeben – nur für Verwendung durch Experten.
Nur rücksetzbar über P0700 oder P3900 = 1, 2 oder Werksvoreinstellung P0970=1
Min.
Max.
[Vorein-
stellung]
Einheiten
0
99
[9]
-
Funktion des Digitaleingangs 4 – über AnalogeingangP0704
Wählt die Funktion am Digitaleingang 4 (über den Analogeingang) aus
0 "Analogeingang nicht als Digitaleingang verwendet"
1 "EIN/AUS1"
2 "EIN/AUS1 + Richtungsumkehr"
3 "AUS2"
4 "AUS3"
9 "Fehlerquittierung"
10 "JOG rechts"
11 "JOG links"
12 "Richtungsumkehr"
13 "Frequenz erhöhen"
14 "Frequenz verringern"
15 "Festfrequenz?"
16 "Festfrequenz? + EIN"
17 "Festfrequenzen? bis ?" (binär codiert), siehe P1001
25 "Freigabe DC-Bremse"
29 "Externe Abschaltung"
33 "Zusatzsollwert sperren"
99 "BICO-Parametrierung freigeben – nur für Verwendung durch Experten"
Hinweis:
Signale über XXXXV sind aktiv, Signale unter XXXXV sind inaktiv.
Anzahl der Digitaleingänger0720
Zeigt die Anzahl der Digitaleingänge an.
99
[0]
0
-
-
-
[-]
-
2
7
2
7
MICROMASTER 420 Betriebsanleitung
58 6SE6400-5AA00-0AP0
Page 59

Parameter-
nummer
r0722
5. SYSTEMPARAMETER Deutsch
P0003
BenutzerZugangsebene
P0004
Einstellung
Zustand
änderbar
2
7
Parameterbezeichnung
Werte der Digitaleingänge
Bit-Anzeige des Zustands von Digitaleingängen.
Mögliche Werte:
Bit 00 "Digitaleingang 1" 0 AUS
1 aktiv
Bit 01 "Digitaleingang 2" 0 AUS
1 aktiv
Bit 02 "Digitaleingang 3" 0 AUS
1 aktiv
Bit 03 "Digitaleingang 4 (über AIN)" 0 AUS
1 aktiv
Hinweis:
Wenn das Signal aktiv ist, dann leuchtet das Segment.
Min.
Max.
[Vorein-
stellung]
Einheiten
-
-
[-]
-
High-aktive/low-aktive Digitaleingänge (PNP/NPN-Eingänge)P0725
Schaltet zwischen high-aktiv (PNP) und low-aktiv (NPN) um.
Mögliche Einstellungen:
0= low-aktiv (NPN)
1 = high-aktiv (PNP)
[1]
0
1
-
2
7
MICROMASTER 420 Betriebsanleitung
6SE6400-5AA00-0AP00
59
Page 60

Parameter-
nummer
P0731
Deutsch 5. SYSTEMPARAMETER
P0003
BenutzerZugangsebene
P0004
Einstellung
Zustand
änderbar
2
7
''
Parameterbezeichnung
Digitale Ausgabefunktion (Relais)
52.0 Umrichter bereit 0 geschlossen
1offen
52.1 Umrichteranlauf bereit 0 geschlossen
1offen
52.2 Umrichter arbeitet 0 geschlossen
1offen
52.3 Umrichterstörung aktiv 0 geschlossen
1offen
52.4 AUS2 aktiv 0 offen
1 geschlossen
52.5 AUS3 aktiv 0 offen
1 geschlossen
52.6 Einschaltsperre aktiv 0 geschlossen
1offen
52.7 Umrichterwarnung aktiv 0 geschlossen
1offen
52.8 Abweichung Sollwert/Istwert 0 offen
1 geschlossen
52.9 PZD-Steuerung (Prozessdatensteuerung) 0 geschlossen
1offen
52.A Höchstfrequenz erreicht 0 geschlossen
1offen
52.b Warnung: Motorstromgrenzwert 0 offen
1 geschlossen
52.C Motorhaltebremse aktiv 0 offen
1 geschlossen
52.d Motorüberlastung 0 offen
1 geschlossen
52.E Motorlaufrichtung rechts 0 geschlossen
1offen
52.F Umrichterüberlastung 0 offen
1 geschlossen
53.0 DC-Bremse aktiv 0 geschlossen
1offen
53.1 Umrichterfrequenz kleiner Ausschaltgrenzwert 0 geschlossen
1offen
53.2 Umrichterfrequenz kleiner Mindestfrequenz 0 geschlossen
1offen
53.3 Strom höher oder gleich Grenzwert 0 geschlossen
1offen
53.4 Istfrequenz höher Vergleichsfrequenz 0 geschlossen
1offen
53.5 Istfrequenz kleiner Vergleichsfrequenz 0 geschlossen
1offen
53.6 Istfrequenz größer/gleich Sollwert 0 geschlossen
1offen
53.7 Spannung kleiner als Grenzwert 0 geschlossen
1offen
53.8 Spannung höher als Grenzwert 0 geschlossen
1offen
53.9 Reserve 0 geschlossen
1offen
53.A Reglerausgang am unteren Grenzwert (P2292) 0 geschlossen
1offen
53.b Reglerausgang am unteren Grenzwert (P2291) 0 geschlossen
1offen
Hinweis:
Min.
Max.
[Vorein-
stellung]
Einheiten
0
2197.F
[52.3]-
Es handelt sich um die gebräuchlichsten Einstellungen. Weitere Einstellungen sind
im Expertenmodus möglich.
Analoge Eingangsspannungr0752
Zeigt den geglätteten Analogeingangswert in Volt vor dem Datenblock an.
MICROMASTER 420 Betriebsanleitung
10
0
[-]
V
2
8
60 6SE6400-5AA00-0AP0
Page 61

Parameter-
nummer
r0754
5. SYSTEMPARAMETER Deutsch
P0003
BenutzerZugangsebene
P0004
Einstellung
Zustand
änderbar
2
8
Parameterbezeichnung
Betrag der geglätteten Analogeingangsspannung
Zeigt den geglätteten Wert des Analogeingangs in % nach dem Datenblock an.
Hinweis:
100 % = 10 V.
Min.
Max.
[Vorein-
stellung]
Einheiten
0
100
[-]
%
Analogeingangswert normiert auf 16384 (4000 Hexadezimal)r0755
Zeigt die Analogeingangsspannung, skaliert mit Hilfe von ASPmin und ASPmax.
Analogsollwert von Analogskalierungsfunktion (siehe Parameter P0757 bis P0760); kann
sich von ASPmin bis ASPmax ändern, wie im zugehörigen Diagramm gezeigt.
Der größte Betrag (Wert ohne Vorzeichen) von ASPmin und ASPmax legt die Skalierung
von 16384 fest.
Beispiele:
ASPmin = 300 %, ASPmax = 100 %; in diesem Fall stellt 16384 300 % dar. Dieser
Parameter ändert sich von 5461 bis 16384.
ASPmin = -200 %, ASPmax = 100 %; in diesem Fall stellt 16384 200 % dar. Dieser
Parameter ändert sich von -16384 bis +8192.
Hinweis:
Dieser Wert wird als Eingangswert für die analogen BICO-Stecker verwendet.
Überwachung des AnalogeingangsP0756
Aktiviert die Überwachung des Analogeingangs.
Mögliche Einstellungen:
0 = Überwachung gesperrt
1 = Überwachung aktiviert
Ist die Überwachung aktiviert und ein Unempfindlichkeitsbereich festgelegt (P0761), dann
wird ein Fehlerzustand generiert (F0080), wenn die analoge Eingangsspannung unter 50 %
der Unempfindlichkeitsbereichs-Spannung absinkt.
-16384
16384
[-]
-
0
1
[0]
-
2
8
2
8
Hinweis:
Diese Funktion ist gesperrt, wenn der Analogskalierungsblock (siehe P0757 – P0760) für
die Ausgabe negativer Sollwerte programmiert ist.
MICROMASTER 420 Betriebsanleitung
6SE6400-5AA00-0AP00
61
Page 62

Parameter-
nummer
P0757
Deutsch 5. SYSTEMPARAMETER
P0003
BenutzerZugangsebene
P0004
Einstellung
Zustand
änderbar
2
8
''
Parameterbezeichnung
Wert X1 der Analogeingangsskalierung
Für das Konfigurieren der Analogeingangsskalierung werden die Parameter P0757 –
P0760 wie folgt verwendet:
Sollwert (%)
ASPmax
Min.
Max.
[Vorein-
stellung]
Einheiten
0
10
[0]
-
(%) P0760 Y2
0V
(%) P0758 Y1
ASPmin
(V) P0757 X1
P1
P0759 X2
P2
Analogeingang (V)
10V
Alternativmöglichkeiten sind durch nachstehende Diagramme dargestellt.
ASPmax
ASPmin
P2
0V
P1
10V
ASPmax
ASPmin
P1
0V
10V
P2
Hinweise:
Analogsollwerte stellen einen Prozentanteil (%) der normierten Frequenz in P2000 dar.
Analogsollwerte können größer sein als 100 %.
ASPmax stellt den höchsten Analogsollwert dar (kann bei 0 V liegen).
ASPmin stellt den niedrigsten Analogsollwert dar (kann bei 10 V liegen).
Standardvoreinstellungen ergeben eine Skalierung von 0 V = 0 % und 10 V = 100 %.
Wert Y1 der AnalogeingangsskalierungP0758
Stellt den Wert von y1 ein, wie in P0757 beschrieben.
Wert X2 der AnalogeingangsskalierungP0759
Stellt den Wert von x2 ein, wie in P0757 beschrieben.
Wert Y2 der AnalogeingangsskalierungP0760
Stellt den Wert von y2 ein, wie in P0757 beschrieben.
-99999
99999
[0]
%
-10
20
[10]
V
-99999
99999
[100]
%
2
8
''
2
8
''
2
8
''
MICROMASTER 420 Betriebsanleitung
62 6SE6400-5AA00-0AP0
Page 63

Parameter-
nummer
P0761
5. SYSTEMPARAMETER Deutsch
P0003
BenutzerZugangsebene
P0004
Einstellung
Zustand
änderbar
2
8
Parameterbezeichnung
Breite des Unempfindlichkeitsbereichs
Bestimmt die Breite des Unempfindlichkeitsbereichs am Analogeingang.
Zur Erläuterung der Verwendung siehe nachstehende Diagramme;
Beispiel 1 – 2 bis 10 V = 0 bis 50 Hz
Sollwert (%)
P0760 Y2 (100%)
ASPmax
P0758 Y1 (0%)
ASPmin
P0761
(2V)
P0757 X1 (2V)
P0759 X2 (10V)
Min.
Max.
[Vorein-
stellung]
Einheiten
0
10
[0]
V
Analogeingang (V)
Das vorstehende Beispiel ergibt eine Analogeingangsspannung 2 bis 10 V, 0 bis 50 Hz.
P0757 = 2 V
P0761 = 2 V
P2000 = 50 Hz
Beispiel 2 – Nullpunkt in der Mitte (0 bis 10 V = -50 bis +50 Hz)
Sollwert (%)
ASPmax
P0760 Y2 (100%)
Analogeingang (V)
0V
P0761 (0.1s)
ASPmin
P0758 Y1 (-100%)
P0757 X1 (100%)
P0759 X2 (10V)
Das vorstehende Beispiel ergibt 0 bis 10 V, -50 Hz bis +50 Hz mit Nullpunkt in der Mitte und
einem "Haltepunkt” von 0,2 V Breite.
P0758 = -100 %
P0761 = 0,1 (0,1 V zu beiden Seiten der Mitte)
P2000 = 50 Hz
Hinweis:
Bei Verwendung der Einstellung mit Nullpunkt in der Mitte sollte Fmin (P1080) Null sein.
MICROMASTER 420 Betriebsanleitung
6SE6400-5AA00-0AP00
63
Page 64

Parameter-
nummer
P0771
Deutsch 5. SYSTEMPARAMETER
P0003
BenutzerZugangsebene
P0004
Einstellung
Zustand
änderbar
2
8
''
Parameterbezeichnung
Analogausgangsfunktion
Legt die Funktion des Analogausgangs 0 – 20 mA fest.
Mögliche Einstellungen:
Nachstehend sind die gebräuchlichsten Werte angegeben:
21 Istfrequenz (skaliert auf P2000)
24 Ausgangsfrequenz (skaliert auf P2000)
25 Ausgangsspannung (skaliert auf P2001, 1000 V)
26 Zwischenkreis-Gleichspannung (skaliert auf P2001, 1000 V)
27 Ausgangsstrom (skaliert nach P2002, Ebene 3)
Sonstige Werte: siehe Beschreibungen der einzelnen Parameter
Min.
Max.
[Vorein-
stellung]
Einheiten
0
2248.0
[21]
-
Analoger Ausgangswertr0774
Zeigt den Wert des Analogeingangs in mA an.
Wert X1 der AnalogausgangskennlinieP0777
Bestimmt die Ausgangskennlinie x1.
Die Parameter P0777 – P0780 arbeiten wie folgt:
Ausgangssignal (mA)
20
P0780 Y2
P0778 Y1
0
P0777
X1
P0779
X2
Die Punkte (x1, y1), (x2, y2) können frei gewählt werden.
Wert Y1 der AnalogausgangskennlinieP0778
Bestimmt y1 der Ausgangskennlinie.
-
-
2
8
[-]
%
-99999
99999
[0]
2
8
''
%
20 mA
100%(-100%)
0
4
[0]
2
8
''
-
Wert X2 der AnalogausgangskennlinieP0779
Bestimmt x2 der Ausgangskennlinie.
Wert Y2 der AnalogausgangskennlinieP0780
Bestimmt y2 der Ausgangskennlinie.
Unempfindlichkeitsbereich des AnalogausgangsP0781
Stellt die Breite eines Unempfindlichkeitsbereiches für den Analogausgang in mA ein.
-99999
99999
[100]
%
0
20
[20]
-
0
20
[0]
-
2
8
''
2
8
''
2
8
''
MICROMASTER 420 Betriebsanleitung
64 6SE6400-5AA00-0AP0
Page 65

Parameter-
nummer
P0918
5. SYSTEMPARAMETER Deutsch
P0003
BenutzerZugangsebene
P0004
Einstellung
Zustand
änderbar
2
20
''
Parameterbezeichnung
PROFIBUS-Adresse
Bestimmt die PROFIBUS-Adresse oder die Adresse der Ergänzungsbaugruppen. Es
stehen zwei Verfahren zur Verfügung:
1 über die DIP-Schalter auf der PROFIBUS-Baugruppe
2 über einen vom Benutzer eingegebenen Wert
Mögliche PROFIBUS-Einstellungen:
1 ... 125
0, 126, 127 sind unzulässig.
Min.
Max.
[Vorein-
stellung]
Einheiten
0
127
[3]
-
Parameter änderbar überP0927
Legt fest, auf welche Weise der Benutzer die Parameter ändern kann.
Mögliche Einstellungen:
Einstellung RS485 USS RS232 USS BOP COMMS Modul
00 000
10 001
20 010
30 011
40 100
50 101
60 110
70 111
81 000
91 001
10 1 0 1 0
11 1 0 1 1
12 1 1 0 0
13 1 1 0 1
14 1 1 1 0
15 1 1 1 1
0
15
[15]
-
2
20
MICROMASTER 420 Betriebsanleitung
6SE6400-5AA00-0AP00
65
Page 66

Parameter-
nummer
r0947
Deutsch 5. SYSTEMPARAMETER
P0003
BenutzerZugangsebene
P0004
Einstellung
Zustand
änderbar
2
21
Parameterbezeichnung
Letzter Fehlerschlüssel
Zeigt die Vorgeschichte eines Fehlers an.
Im nachstehenden Diagramm:
Min.
Max.
[Vorein-
stellung]
Einheiten
-
-
[-]
-
F1
F1e
F1e
1
NEUESTER
FEHLER-
2
3
4
5
6
F2
F1e
F1e
SCHLÜSSEL
NEUESTER
FEHLERSCHLÜSSEL - 1
NEUESTER
FEHLERSCHLÜSSEL - 2
F1e
F1e
"F1" ist der 1. Fehler nach einer Fehlerquittierung oder einem Einschaltereignis.
"F2" ist der 2. Fehler nach einer Fehlerquittierung oder einem Einschaltereignis.
"F1e" ist das Auftreten von F1, d. h. wenn F1 auftritt.
7
NEUESTER
8
FEHLERSCHLÜSSEL - 3
Die neuesten Fehlerereignisse werden in den Indizes 0 und 1 gespeichert.
Beispiel:
Wenn der Wechselrichter wegen Unterspannung abschaltet und danach einen externen
Ausschaltbefehl erhält, bevor die Unterspannung quittiert wird, erhält man:
Index 0 = 3 Unterspannung
Index 1 = 85 externe Abschaltung
Immer, wenn eine Störung in den Index 1 eingegeben wird (F1e), wird die vorhandene
Störungsvorgeschichte verschoben, wie im Diagramm gezeigt.
Hinweis:
Siehe Liste der Fehlerschlüssel im Abschnitt 6.
Index 2 wird nur benutzt, wenn ein zweiter Fehler auftritt, bevor der erste quittiert
wurde.
Voreinstellungen ab WerkP0970
Stellt alle Parameter auf ihre Voreinstellwerte ein. Zu diesem Zweck muss P0010=30
eingestellt werden, danach P0970=1.
P0100 wird entsprechend der Stellung des DIP-Schalters eingestellt.
MICROMASTER 420 Betriebsanleitung
[0]
0
1
-
1
30
C
66 6SE6400-5AA00-0AP0
Page 67

Parameter-
nummer
P1000
5. SYSTEMPARAMETER Deutsch
P0003
BenutzerZugangsebene
P0004
Einstellung
Zustand
änderbar
1
10
Parameterbezeichnung
Auswahl des Frequenzsollwerts
Wählt die Quelle für den Frequenzsollwert aus. In der nachstehenden Tabelle der
möglichen Einstellungen wird der Hauptsollwert aus der letzten signifikanten Stelle gewählt,
d. h. 0 bis 6, und gegebenenfalls ein Zusatzsollwert aus der höchst signifikanten Stelle,
d. h. x0 bis x6. Zum Beispiel wird bei der Einstellung 12 der Hauptsollwert (2) vom
Analogeingang abgeleitet, wobei der Zusatzsollwert (1) von der Tastatur kommt.
Einstellige Zahlen sind nur Hauptsollwerte ohne Zusatzsollwert.
Zusatzsollwert
Min.
Max.
[Vorein-
stellung]
Einheiten
0
66
[2]
-
Kein Zusatzsollwert
Tastatursollwert
Analogeingang
Festfrequenz
USS über RS232
USS über RS485
Hauptsollwert
Option Datenübertragungsbaugruppe
Kein Hauptsollwert 0 10 20 30 40 50 60
Tastatursollwert 1 11 21 31 41 51 61
Analogeingang 2 12 22 32 42 52 62
Festfrequenz 3 13 23 33 43 53 63
USS über RS232 4 14 24 34 44 54 64
USS über RS485 5 15 25 35 45 55 65
Option Datenübertragungsbaugruppe 6 16 26 36 46 56 66
Die gebräuchlichsten Einstellungen sind:
1 Tastatursollwert (Motorpotentiometer)
2 Analogeingang
3 Festfrequenzsollwert
4 USS über RS232
5 USS über RS485-Anschlüsse
6 Option Datenübertragungsbaugruppe
Andere Einstellungen einschließlich eines Zusatzsollwertes können mit Hilfe der
obigen Tabelle ausgewählt werden.
MICROMASTER 420 Betriebsanleitung
6SE6400-5AA00-0AP00
67
Page 68

Parameter-
nummer
P1001
Deutsch 5. SYSTEMPARAMETER
P0003
BenutzerZugangsebene
P0004
Einstellung
Zustand
änderbar
2
10
'
'
Parameterbezeichnung
Festfrequenz 1
Legt den Sollwert für die Festfrequenz 1 fest.
Verwendung von Festfrequenzen:
Um mit Festfrequenzen zu arbeiten, muss mit Hilfe von P1000 der Festfrequenzbetrieb
gewählt werden.
Festfrequenzen können mit Hilfe der Digitaleingänge gewählt und können auch mit einem
EIN-Befehl kombiniert werden.
Es gibt drei Arten von Festfrequenzen.
1) Direktwahl
2) Direktwahl + EIN-Befehl
3) Binär codierte Wahl + EIN-Befehl
1. Direktwahl (P0701 – P0703 = 15)
In dieser Betriebsart wählt EIN (1) Digitaleingang eine (1) Festfrequenz. Sind mehrere
Eingänge gleichzeitig aktiv, dann werden die gewählten Frequenzen addiert.
Z. B. (FF1 + FF2 + FF3).
Min.
Max.
[Vorein-
stellung]
Einheiten
-650
650
[0]
Hz
Hinweis:
Zum Anlassen des Umrichters wird außerdem ein EIN-Befehl benötigt, z. B. von der
Tastatur oder der seriellen Schnittstelle, etc.
2. Direktwahl + EIN-Befehl (P0701 – P0703 = 16)
Bei dieser Festfrequenzwahl werden die Festfrequenzen mit einem EIN-Befehl kombiniert.
In dieser Betriebsart wählt EIN (1) Digitaleingang eine (1) Festfrequenz. Sind mehrere
Eingänge gleichzeitig aktiv, dann werden die gewählten Frequenzen addiert.
Z. B. (FF1 + FF2 + FF3).
3. Binär codierte Wahl + EIN-Befehl (P0701 – P0703 = 17)
Mit Hilfe dieses Verfahrens können bis zu 7 Festfrequenzen gewählt werden. Die
Festfrequenzen werden entsprechend nachstehender Tabelle gewählt:
DIN3 DIN2 DIN1
OFF Inaktiv Inaktiv Inaktiv
P1001 FF1 Inaktiv Inaktiv
P1002 FF2 Inaktiv
P1003 FF3 Inaktiv
P1004 FF4
P1005 FF5
P1005 FF6
P1007 FF7
Festfrequenz 2P1002
Bestimmt den Sollwert für die Festfrequenz 2.
Siehe Beschreibung für P1001.
Aktiv
Aktiv
Aktiv Aktiv
Aktiv Aktiv Aktiv
Aktiv
Aktiv Aktiv
Inaktiv Inaktiv
Inaktiv
Aktiv
Inaktiv
Aktiv
Inaktiv
-650
650
[5]
Hz
10
2
'
'
Festfrequenz 3P1003
Bestimmt den Sollwert für die Festfrequenz 3.
Siehe Beschreibung für P1001.
-650
650
[10]
Hz
MICROMASTER 420 Betriebsanleitung
10
2
'
'
68 6SE6400-5AA00-0AP0
Page 69

Parameter-
nummer
P1004
5. SYSTEMPARAMETER Deutsch
P0003
BenutzerZugangsebene
P0004
Einstellung
Zustand
änderbar
2
10
''
Parameterbezeichnung
Festfrequenz 4
Bestimmt den Sollwert für die Festfrequenz 4.
Siehe Beschreibung für P1001.
Min.
Max.
[Vorein-
stellung]
Einheiten
-650
650
[15]
Hz
Festfrequenz 5P1005
Bestimmt den Sollwert für die Festfrequenz 5.
Siehe Beschreibung für P1001.
Festfrequenz 6P1006
Bestimmt den Sollwert für die Festfrequenz 6.
Siehe Beschreibung für P1001.
Festfrequenz 7P1007
Bestimmt den Sollwert für die Festfrequenz 7.
Siehe Beschreibung für P1001.
Sollwertspeicher der Tastatur (des Motorpotentiometers)P1031
Speichert den letzten Tastatur-(Motorpotentiometer-)-Sollwert, der vor dem AUS-Befehl
oder dem Ausschalten aktiv war.
Mögliche Einstellungen:
0 0= nicht gespeichert
1 = gespeichert (P1040 wird aktualisiert).
Hinweis:
Bei dem nächsten EIN-Befehl ist der Tastatur-(Motorpotentiometer-)-Sollwert der in P1040
gespeicherte Wert.
-650
650
[20]
Hz
-650
650
[25]
Hz
-650
650
[30]
Hz
0
1
[0]
-
2
10
''
2
10
''
2
10
''
2
10
''
Gegenrichtung der Tastatur (des Motorpotentiometers) sperrenP1032
Sperrt die Sollwertwahl für Gegenrichtung, wenn die Tastatur (das Motorpotentiometer)
(über P1000) entweder als Hauptsollwert oder als Zusatzsollwert gewählt wurde.
Mögliche Einstellungen:
0 Gegenrichtung ist zugelassen – es ist möglich, den Drehsinn des Motors über den
Tastatur-(Motorpotentiometer-)-Sollwert zu ändern (Erhöhen/Verringern der Frequenz
entweder durch Verwendung der Digitaleingänge oder der Auf-/Abtasten der
Tastatur).
1 Gegenrichtung gesperrt
Sollwert der Tastatur (des Motorpotentiometers)P1040
Bestimmt den Sollwert für die Tastatur-(Motorpotentiometer-)-Steuerung (P1000=1).
Hinweis:
Wenn der Tastatur-(Motorpotentiometer-)-Sollwert entweder als Haupt- oder als Zusatz-
sollwert gewählt wurde, dann wird die Gegenrichtung standardmäßig durch Verwendung
von P1032 gesperrt. Soll die Gegenrichtung wieder freigegeben werden, dann ist P1032 =
1 einzustellen.
MICROMASTER 420 Betriebsanleitung
6SE6400-5AA00-0AP00
0
1
[1]
-
-650
650
[5]
Hz
2
10
2
10
''
69
Page 70

Parameter-
nummer
P1058
Deutsch 5. SYSTEMPARAMETER
P0003
BenutzerZugangsebene
P0004
Einstellung
Zustand
änderbar
2
10
''
Parameterbezeichnung
Tippfrequenz (JOG) rechts
Der Tippbetrieb wird verwendet, um den Motor in kleinen Schritten drehen zu lassen. Der
Tippbetrieb wird über die JOG-Taste gesteuert, oder durch Verwendung eines nicht
einrastenden Schalters an einem der Digitaleingänge.
Ist JOG rechts gewählt, dann bestimmt dieser Parameter die Frequenz, mit der der
Umrichter arbeitet. Die für den Tippbetrieb verwendeten Beschleunigungs- und
Verzögerungsrampenzeiten werden in P1060 bzw. P1061 eingestellt.
Min.
Max.
[Vorein-
stellung]
Einheiten
0
650
[5]
Hz
Tippbetrieb (JOG) linksP1059
Ist JOG links gewählt, dann bestimmt dieser Parameter die Frequenz, mit der der Umrichter
arbeitet.
JOG-RampenhochlaufzeitP1060
Stellt die Rampenhochlaufzeit ein. Es ist die Zeit, die im Tippbetrieb verwendet wird, oder
dann, wenn die Funktion "use jog ramp times" (JOG-Rampenzeiten verwenden) aktiv ist.
f (Hz)
f max
(P1082)
0
Jog Rampenhochlaufzeit (P1060)
Zeit (s)
JOG-RampenauslaufzeitP1061
Stellt die Rampenauslaufzeit (s) ein. Es ist die Zeit, die im Tippbetrieb verwendet wird, oder
dann wenn die Funktion "use jog ramp times" (JOG-Rampenzeiten verwenden) aktiv ist.
0
650
[5]
Hz
0
650
[10]
s
0
650
[10]
s
2
10
''
2
10
''
2
10
''
f (Hz)
f max
(P1082)
0
Jog Rampenauslaufzeit P1061
time (s)
MICROMASTER 420 Betriebsanleitung
70 6SE6400-5AA00-0AP0
Page 71

Parameter-
nummer
P1080
5. SYSTEMPARAMETER Deutsch
P0003
BenutzerZugangsebene
P0004
Einstellung
Zustand
änderbar
1
10
''
Parameterbezeichnung
Min. Frequenz
Stellt die kleinste Motorfrequenz (Hz) ein, mit der der Motor unabhängig vom
Frequenzsollwert arbeitet.
Der hier eingestellte Wert ist für beide Drehrichtungen gültig.
Hinweis:
Unter bestimmten Umständen (z. B. Rampenablauf, Strombegrenzung) kann der Umrichter
unter der Mindestfrequenz arbeiten.
Min.
Max.
[Vorein-
stellung]
Einheiten
0
650
[0]
Hz
Max. FrequenzP1082
Stellt die höchste Motorfrequenz (Hz) ein, mit der der Motor unabhängig vom
Frequenzsollwert arbeitet.
Der hier eingestellte Wert ist für beide Drehrichtungen gültig.
Hinweise:
Für die höchste Drehzahl, mit der ein Motor arbeiten kann, gibt es mechanische
Einschränkungen. Im Allgemeinen soll die höchste Motorfrequenz nicht das Dreifache der
Motornennfrequenz laut Typenschild übersteigen.
Die Höchstfrequenz kann überschritten werden, wenn eine der folgenden Gegebenheiten
aktiv ist:
Schlupfkompensation (f
max
+ f
slip comp max
)
oder
Fangschaltung (f
max
+ f
slip nom
)
RampenhochlaufzeitP1120
Die Zeit, die der Motor zum Beschleunigen vom Stillstand bis zur höchsten Motorfrequenz
(P1082) benötigt, wenn keine Verrundung verwendet wird.
f (Hz)
f max
(P1082)
0
650
[50]
Hz
0
650
[10]
s
1
10
1
10
''
0
Ramp up time
time (s)
Das Einstellen einer zu kurzen Rampenhochlaufzeit kann zum Abschalten des Umrichters
führen (Überstrom).
Hinweise:
Bei Verwendung eines externen Frequenzsollwertes, bei dem bereits Rampenzeiten
eingestellt sind (z. B. von einer SPS), dann wird ein optimales Betriebsverhalten des
Antriebs am Besten erzielt, wenn die Rampenzeiten in P1120 und P1121 etwas kürzer
eingestellt werden, als die der SPS.
Änderungen der Rampenhochlauf- oder Rampenauslaufzeit werden erst aktiv, wenn sie
durch Drücken der Taste P bestätigt wurden.
MICROMASTER 420 Betriebsanleitung
6SE6400-5AA00-0AP00
71
Page 72

Parameter-
nummer
P1121
Deutsch 5. SYSTEMPARAMETER
P0003
BenutzerZugangsebene
P0004
Einstellung
Zustand
änderbar
1
10
''
Parameterbezeichnung
Rampenauslaufzeit
Die Zeit, die der Motor für das Verzögern von maximaler Motorfrequenz (P1082) bis zum
Stillstand benötigt, wenn keine Verrundung verwendet wird.
f (Hz)
f max
(P1082)
Min.
Max.
[Vorein-
stellung]
Einheiten
0
650
[10]
s
0
P1121
time (s)
Hinweis:
Das Einstellen einer zu kurzen Rampenauslaufzeit kann zum Abschalten des Umrichters
führen (Überspannung (F0002)/Überstrom (F0001)).
Änderungen der Rampenhochlauf- oder Rampenauslaufzeit werden erst aktiv, wenn sie
durch Drücken der Taste P bestätigt wurden.
Anfangsverrundung der RampenhochlaufzeitP1130
Bestimmt die Anfangs-Glättungszeit in Sekunden, wie im nachstehenden Diagramm
gezeigt.
40
[0]
0
2
10
''
s
P1133P1130 P1132P1131
darin sind
gesamt = ½ P1130 + X * P1120 + ½ P1131
T
up
T
gesamt = ½ P1132 + X * P1121 + ½ P1133
down
X ist definiert als αf= x*F
Endverrundungszeit für den RampenhochlaufP1131
Bestimmt die Glättungszeit am Ende des Rampenhochlaufs, wie in P1130 dargestellt.
max
40
[0]
0
2
10
''
s
MICROMASTER 420 Betriebsanleitung
72 6SE6400-5AA00-0AP0
Page 73

Parameter-
nummer
P1132
5. SYSTEMPARAMETER Deutsch
P0003
BenutzerZugangsebene
P0004
Einstellung
Zustand
änderbar
2
10
''
Parameterbezeichnung
Anfangsverrundungszeit für Rampenauslauf
Bestimmt die Glättungszeit am Anfang des Rampenauslaufs, wie in P1130 gezeigt.
Min.
Max.
[Vorein-
stellung]
Einheiten
0
40
[0]
s
Endverrundungszeit für RampenauslaufP1133
Bestimmt die Glättungszeit am Ende des Rampenauslaufs, wie in P1130 gezeigt.
VerrundungstypP1134
Bestimmt das kontinuierliche Glätten (Voreinstellung) oder das diskontinuierliche Glätten
als Reaktion auf AUS-Befehle oder eine Sollwertverringerung.
Die Gesamt-Glättungszeit muss auf > 0 s eingestellt werden; anderenfalls hat dieser
Parameter keine Wirkung.
Mögliche Einstellungen:
0 = Kontinuierlich
1 = Diskontinuierlich
req
kontinuierlich
40
[0]
[0]
0
2
10
''
s
0
1
2
10
''
-
Diskontinuierlich
0
ZeitStop
MICROMASTER 420 Betriebsanleitung
6SE6400-5AA00-0AP00
73
Page 74

Parameter-
nummer
P1200
Deutsch 5. SYSTEMPARAMETER
P0003
BenutzerZugangsebene
P0004
Einstellung
Zustand
änderbar
2
12
''
Parameterbezeichnung
Fangschaltung
Schaltet den Umrichter auf einen drehenden Motor zu.
Wenn z. B. nach einer kurzen Netzunterbrechung der Motor noch drehen kann, oder von
der Last angetrieben werden kann, dann muss die Fangschaltung verwendet werden, da
anderenfalls Abschaltung wegen Überstrom erfolgt.
Diese Funktion ist insbesondere bei Motoren zweckmäßig, deren Last ein hohes
Trägheitsmoment aufweist.
Mögliche Einstellungen:
0 "Fangschaltung inaktiv", läuft in Sollwertrichtung an
1 "Fangschaltung immer aktiv", läuft in Sollwertrichtung an
2 "Fangschaltung bei Netzzuschaltung, Störung, AUS2", läuft in Sollwertrichtung an
3 "Fangschaltung bei Störung, AUS2"
4 "Fangschaltung immer aktiv. AUSSCHLIESSLICH in Sollwertrichtung suchen."
5 "Fangschaltung bei Netzzuschaltung, Störung, AUS2. AUSSCHLIESSLICH in
Sollwertrichtung suchen."
6 "Fangschaltung bei Störung, AUS2. AUSSCHLIESSLICH in Sollwertrichtung suchen."
+ 2
(F
max
Nennschlupf
)
''Läuft an normaler Rampe
zum Sollwert hoch''
Geschwindigkeit gesetzt
durch P1203
Min.
Max.
[Vorein-
stellung]
Einheiten
0
6
[0]
-
F Ausgang
P1202
I Ausgang
I Eingang
Zeit
Die Funktion verändert schnell die Ausgangsfrequenz des Umrichters solange, bis die
Istdrehzahl des Motors gefunden ist. Danach läuft der Motor mit der normalen Rampenzeit
zu seinem Sollwert hoch.
Hinweis:
Bei den Einstellungen 1 bis 3 erfolgt die Suche in beiden Richtungen. Soll nur in
Richtung des Sollwertes gesucht werden, dann muss gemäß 4 bis 6 eingestellt
werden.
MICROMASTER 420 Betriebsanleitung
74 6SE6400-5AA00-0AP0
Page 75

Parameter-
nummer
P1210
5. SYSTEMPARAMETER Deutsch
P0003
BenutzerZugangsebene
P0004
Einstellung
Zustand
änderbar
2
12
''
Parameterbezeichnung
Automatischer Wiederanlauf
Ermöglicht den Wiederanlauf nach einer Netzunterbrechung oder einer Störung.
Mögliche Einstellungen:
0 = Gesperrt
1 = Quittiert Störungen nach dem Einschalten – der Umrichter läuft nicht an. Zum
Anlassen des Umrichters muss der EIN-Befehl aus- und eingeschaltet werden.
2 = Nach (totalem) Netzausfall/Wiederzuschaltung
3 = Wiederanlauf nach Störung/Netzeinbruch (total/teilweise)
4 = Wiederanlauf nach Netzausfall (total/teilweise)
5 = Wiederanlauf nach Netzausfall/Störung, ohne Rücksicht auf Vorgeschichte
Warnung:
Die Einstellungen 2 bis 5 können ein unerwartetes Wiederanlaufen des Motors bewirken.
Hinweis:
Der automatische Wiederanlauf arbeitet nur, wenn der EIN-Befehl ständig aktiviert ist, z. B.
über eine digitale Eingangsleitung.
Falls der Motor noch drehen sollte oder gegebenenfalls von der Last weitergedreht
wird, dann muss auch die Fangschaltung (P1200) freigegeben werden.
Min.
Max.
[Vorein-
stellung]
Einheiten
0
5
[1]
-
Freigabe HaltebremsenprofilP1215
Aktiviert/passiviert die Haltebremsenfunktion.
Diese Funktion kann verwendet werden, um zu erreichen, dass der Umrichter dem
nachstehenden Profil folgt. Es ist auch möglich, an den Punkten 1 und 2 ein Relais schalten
zu lassen, um eine Bremse zu steuern, wenn in P0731 = 52.C programmiert ist.
Punkt 1 Punkt 2
f min
(P1080)
P1217P1216
Mögliche Einstellungen:
0 = Passiviert
1=Aktiviert
Hinweis:
Das Bremsrelais öffnet am Punkt 1, wenn über P0731 aktiviert. Das Bremsrelais schießt am
Punkt 2.
[0]
0
1
2
12
-
MICROMASTER 420 Betriebsanleitung
6SE6400-5AA00-0AP00
75
Page 76

Parameter-
nummer
P1216
Deutsch 5. SYSTEMPARAMETER
P0003
BenutzerZugangsebene
P0004
Einstellung
Zustand
änderbar
2
12
Parameterbezeichnung
Ausschaltverzögerung der Haltebremse
Bestimmt die Zeit, während der der Umrichter mit f
arbeitet, bevor er am Punkt 1
min
rampenförmig hochläuft (wie im Diagramm P1215 gezeigt).
Hinweis:
Der Umrichter läuft bei diesem Profil mit f
an, d. h. ohne Rampe.
min
Falls diese Funktion verwendet wird, um den Motor mit einer bestimmten Frequenz gegen
eine mechanische Bremse arbeiten zu lassen (d. h. wenn zur Steuerung einer
mechanischen Bremse ein Relais benutzt wird), dann ist es wichtig, f
< 5 Hz zu wählen;
min
anderenfalls kann die Stromaufnahme zu hoch sein, und das Relais kann nicht öffnen,
während der Umrichter sich in Strombegrenzung befindet.
Ein typischer Wert von f
für Anwendungen dieser Art ist die Schlupffrequenz des Motors.
min
Die Nenn-Schlupffrequenz kann nach folgender Formel berechnet werden:
n
– n
syn
Nenn
__________________
n
syn
x f
Nenn
Min.
Max.
[Vorein-
stellung]
Einheiten
0
20
[1]
s
Haltezeit nach RampenauslaufP1217
Bestimmt die Zeit, während der der Umrichter nach dem Rampenauslauf in Punkt 2 (wie in
Diagramm P1215 gezeigt) mit f
arbeitet.
min
Brems-GleichstromP1232
Bestimmt den Betrag des Gleichstroms als Prozentanteil des Motornennstroms (P0305).
Dauer der Gleichstrombremsung nach AUS1P1233
Bestimmt die Zeit, während der die Bremsung mit Gleichstromeinspeisung nach einem
AUS1-Befehl aktiv bleiben soll.
Mögliche Einstellungen:
0 = nach AUS1 nicht aktiv
1 – 250 = aktiv für die vorgegebene Zeit
Hinweis:
Die Funktion Gleichstrombremsung bewirkt ein schnelles Anhalten des Motors durch
Einspeisen von Bremsgleichstrom (der eingespeiste Strom hält auch die Welle fest). Wird
das Gleichstrombremssignal angelegt, dann werden die Ausgangsimpulse des Umrichters
gesperrt, und der Gleichstromwert erst angelegt, nachdem der Motor ausreichend
entmagnetisiert ist (Die Entmagnetisierungszeit wird aus den Motordaten automatisch
berechnet).
Warnung:
Häufiger Einsatz langer Gleichstrom-Bremszeiten kann zur Übererwärmung des Motors
führen.
0
20
[1]
s
0
250
[100]
%
0
250
[0]
s
2
12
2
12
''
2
12
''
Verbund-BremsstromP1236
Bestimmt den Betrag des Gleichstroms, der der Wechselstromkurve überlagert wird. Diese
Art des Bremsens wird nach einem AUS1-/AUS3-Befehl aktiv.
0
250
[0]
%
2
12
''
Das Erhöhen des Wertes verbessert im Allgemeinen die Bremswirkung; wird der Wert
jedoch zu hoch eingestellt, dann kann eine Abschaltung wegen Überspannung erfolgen.
Mögliche Einstellungen:
0 = Verbundbremsung gesperrt
1 – 250 = Betrag des Bremsgleichstroms definiert als Prozentanteil des
Motornennstroms (P0305)
MICROMASTER 420 Betriebsanleitung
76 6SE6400-5AA00-0AP0
Page 77

Parameter-
nummer
P1300
5. SYSTEMPARAMETER Deutsch
P0003
BenutzerZugangsebene
P0004
Einstellung
Zustand
änderbar
2
13
Parameterbezeichnung
V/f- & FCC-Steuerbetrieb
Steuert das Verhältnis zwischen Motordrehzahl und der vom Umrichter gelieferten
Spannung.
Mögliche Werte:
0 = Linear V/f (Voreinstellung)
1 = FCC (Feldstromregelung) – regelt den Motorfeldstrom im Sinne einer
Wirkungsgradverbesserung
2 = Quadratisch V/f – geeignet für Querstromlüfter/Pumpen
3 = Polygon V/f (programmierbar – nur im Expertenmodus)
Min.
Max.
[Vorein-
stellung]
Einheiten
0
3
[1]
-
MICROMASTER 420 Betriebsanleitung
6SE6400-5AA00-0AP00
77
Page 78

Parameter-
nummer
P1310
Deutsch 5. SYSTEMPARAMETER
P0003
BenutzerZugangsebene
P0004
Einstellung
Zustand
änderbar
2
13
''
Parameterbezeichnung
Kontinuierliche Anhebung
Bestimmt den Betrag der Anhebung, die bei sowohl linearen als auch quadratischen
V/f-Kurven entsprechend nachstehendem Diagramm anzuwenden ist.
Linear V/f
V
V Nom
(P0304)
100%
50%
f
/
V
)
l
0
a
=
m
r
0
o
0
N
3
1
P
(
V Max
Min.
Max.
[Vorein-
stellung]
Einheiten
0
250
[50]
%
Quadratisch
V
V Max
V Nom
(P0304)
Boost,100
V
50%
0 V
0
0
BOOST,100
F Boost Min
(P1316)
Normal quadratisch
F Boost Min
(P1316, Level 3)
F Nom
(P0310)
(P1300 = 2)
F Nom
(P0310)
= durch Motornennstrom (P0305) vorgegebene Spannung
F Max
(P1082)
V Max
F Max
(P1082)
1 * Ständerwiderstand (P0350)
Hinweise:
Bei Verwendung der kontinuierlichen Anhebung P1310 zusammen mit anderen
Anhebungsparametern (Beschleunigungsanhebung P1311 & Anlaufanhebung
P1312), werden die Beträge der Anhebung addiert. Den zugehörigen Parametern
werden allerdings Prioritäten zugewiesen, wie folgt:
P1310 > P1311>P1312
Der erreichbare Betrag der Anhebung ist durch die Einstellung in P0640 begrenzt.
Erhöhte Anhebungswerte verstärken die Motorerwärmung, insbesondere im
Stillstand.
ππππ Boosts < 300/I
mot
* R
S
MICROMASTER 420 Betriebsanleitung
78 6SE6400-5AA00-0AP0
Page 79

Parameter-
nummer
P1311
5. SYSTEMPARAMETER Deutsch
P0003
BenutzerZugangsebene
P0004
Einstellung
Zustand
änderbar
2
13
''
Parameterbezeichnung
Beschleunigungsanhebung
Schaltet nach einer positiven Sollwertänderung die Anhebung zu und fällt nach dem
Erreichen des Sollwertes zurück. Kann zur Verbesserung der Reaktion auf kleine positive
Sollwertänderungen zweckmäßig sein.
V
V Max
V Nom
(P0304)
V Max
Min.
Max.
[Vorein-
stellung]
Einheiten
0
250
[0]
%
100%
50%
F boost min
(P1305 - expert)
f
/
V
l
a
m
r
o
N
F Nom
(P0310)
F Max
(P1082)
Hinweis:
Das Erhöhen der Anhebungsbeträge erhöht die Motorerwärmung.
Bezüglich der Prioritäten der Anhebungen siehe Hinweis in P1310.
Der erzielbare Betrag der Anhebung ist durch die Einstellung in P0640 begrenzt.
π Boosts < 300/I
mot
* R
S
MICROMASTER 420 Betriebsanleitung
6SE6400-5AA00-0AP00
79
Page 80

Parameter-
nummer
P1312
Deutsch 5. SYSTEMPARAMETER
P0003
BenutzerZugangsebene
P0004
Einstellung
Zustand
änderbar
2
13
''
Parameterbezeichnung
Anlaufanhebung
Versieht die aktive V/f-Kurve (linear oder quadratisch) nach einem EIN-Befehl mit einem
konstanten linearen Offset und bleibt aktiv, bis der Sollwert erstmalig erreicht wird.
Zweckmäßig für das Anlassen von Lasten mit hohem Trägheitsmoment.
V
V Max
V Nom
(P0304)
Normal V/f
P1312
V Max
Min.
Max.
[Vorein-
stellung]
Einheiten
0
250
[0]
%
0
F Nom
(P0310)
F Max
(P1082)
Hinweise:
Das Einstellen einer zu hohen Anlaufanhebung bewirkt, dass der Umrichter in
Strombegrenzung geht, wodurch wiederum die Ausgangsfrequenz auf einen Wert unterhalb
der Sollfrequenz begrenzt wird.
Das Erhöhen der Anhebungsbeträge erhöht die Motorerwärmung.
Bezüglich der Prioritäten der Anhebungen siehe Hinweis in P1310.
Der erzielbare Betrag der Anhebung ist durch die Einstellung in P0640 begrenzt.
π Boosts < 300/I
mot
* R
S
SchlupfkompensationP1335
Passt die Ausgangsfrequenz des Umrichters dynamisch so an, dass die Motordrehzahl
unabhängig von der Motorbelastung konstant gehalten wird.
0 % = Schlupfkompensation gesperrt
100 % = Die Motordaten und das Motorabbild werden so verwendet, dass die
Nenn-Schlupffrequenz bei Nenndrehzahl und Nennstrom des Motors
addiert wird.
Hinweis:
Der Betrag der Verstärkung kann bei Bedarf eingestellt werden, um einen Feinabgleich der
Motoristdrehzahl zu erreichen.
SchlupfbegrenzungP1336
Begrenzt den Betrag, der zum Frequenzsollwert addierten Schlupfkompensation, wenn die
Schlupfkompensation aktiv ist.
0
600
[0]
%
0
600
[250]
%
2
13
''
2
13
''
MICROMASTER 420 Betriebsanleitung
80 6SE6400-5AA00-0AP0
Page 81

Parameter-
nummer
P1800
5. SYSTEMPARAMETER Deutsch
P0003
BenutzerZugangsebene
P0004
Einstellung
Zustand
änderbar
2
2
''
Parameterbezeichnung
Impulsfrequenz
Stellt die Impulsfrequenz der Last-Schaltelemente im Umrichter ein. Die Frequenz kann in
Stufen von 2 kHz verändert werden.
Ist ein geräuscharmer Betrieb nicht unbedingt erforderlich, dann können die Verluste und
die abgestrahlten Hochfrequenzstörungen des Umrichters durch Wahl kleinerer
Impulsfrequenzen verringert werden.
Werden bei Geräten für 380 - 480 V Impulsfrequenzen [ 4 kHz gewählt, dann verringert
sich der maximale Motordauerstrom. Die erforderliche Leistungsreduzierung geht aus
nachstehender Tabelle hervor.
Höchster Motordauerstrom (A) bei 380 V- bis 480 V-Geräten
Min.
Max.
[Vorein-
stellung]
Einheiten
2
16
[4]
kHz
Umrichter-
leistung
0,37 1,2 1,2 1,2 1,2 1,2 1,2 1,1
0,55 1,6 1,6 1,6 1,6 1,6 1,6 1,1
0,75 2,1 2,1 2,1 2,1 1,6 1,6 1,1
1,1 3,0 3,0 2,7 2,7 1,6 1,6 1,1
1,5 4,0 4,0 2,7 2,7 1,6 1,6 1,1
2,2 5,9 5,9 5,1 5,1 3,6 3,6 2,6
3 7,7 7,7 5,1 5,1 3,6 3,6 2,6
4 10,2 10,2 6,7 6,7 4,8 4,8 3,6
5,5 13,2 13,2 13,2 13,2 9,6 9,6 7,5
7,5 18,4 18,4 13,2 13,2 9,6 9,6 7,5
11 26,0 26,0 17,9 17,9 13,5 13,5 10,4
Hinweis
Unter bestimmten Umständen kann der Umrichter die Schaltfrequenz verringern, um
Übererwärmungsschutz zu bewirken (siehe P0290, Ebene 3).
Die kleinste Impulsfrequenz hängt von P1082, max. Frequenz, und von P0310,
Motornennfrequenz ab.
Ausgangs-Phasenfolge umkehrenP1820
Ändert die Motordrehrichtung ohne Polaritätsumkehr des Sollwerts.
Mögliche Werte:
0=Normal
1 = Umgekehrte Phasenfolge
Nicht im Betrieb änderbar.
4 kHz 6 kHz 8 kHz 10 kHz 12 kHz 14 kHz 16 kHz
:
[0]
0
1
-
2
2
MICROMASTER 420 Betriebsanleitung
6SE6400-5AA00-0AP00
81
Page 82

Parameter-
nummer
P1910
Deutsch 5. SYSTEMPARAMETER
P0003
BenutzerZugangsebene
P0004
Einstellung
Zustand
änderbar
2
3
Parameterbezeichnung
Motordatenerfassung wählen
Nimmt die Messung des Ständerwiderstandes vor.
Mögliche Werte:
0 = keine Messung – (es wird der Einstellwert von P0350 verwendet)
1 = Messung des Ständerwiderstandes – (die Einstellung von P0350 wird
überschrieben)
2 = Messung des Ständerwiderstandes. Der bereits berechnete Wert wird nicht
überschrieben – (es wird die ursprüngliche Einstellung von P0350 verwendet).
Hinweise:
Vor dem Anstoßen der Ständerwiderstandsmessung müssen die Motordaten richtig
eingegeben werden.
Nach der Aktivierung (P1910 = 1) wird die Warnung A0541 generiert, die anzeigt, dass bei
dem nächsten EIN-Befehl eine Messung des Ständerwiderstandes vorgenommen wird.
Wird die Einstellung 1 gewählt, dann wird der manuell eingegebene/berechnete Wert des
Ständerwiderstandes (siehe P0350) überschrieben.
Bei Wahl von 2 werden die bereits berechneten Werte nicht überschrieben.
Min.
Max.
[Vorein-
stellung]
Einheiten
0
2
[0]
-
Ermittelter Ständerwiderstandr1912
Zeigt den gemessenen Ständerwiderstand (Phase gegen Phase) in Ohm an (gemessen mit
Hilfe von P1910 = 1 oder 2).
BezugsfrequenzP2000
Vollbereich-Einstellwert für serielle Schnittstelle, Analog-E/A. Entspricht 4000 H.
USS-BaudrateP2010
Bestimmt die für die USS-Datenübertragung zu verwendende Baudrate.
Index
0 = USS2 = Datenleitung (RS485) (Endgeräte)
1 = USS1 = Tastatur (RS232)
Mögliche Einstellungen:
3 = 1200 Baud
4 = 2400 Baud
5 = 4800 Baud
6 = 9600 Baud
7 = 19200 Baud
8 = 38400 Baud
9 = 57600 Baud
USS-AdresseP2011
Stellt eine eindeutige Adresse des Umrichters ein.
Bis zu 31 Umrichter können über eine serielle Leitung miteinander verbunden und mit Hilfe
des USS seriellen Busprotokolls gesteuert werden. Dieser Parameter stellt für den
Umrichter eine eindeutige Adresse ein.
Index
0 = USS2 = Datenleitung (RS485)
1 = USS1 = Tastatur (RS232)
-
-
[-]
Ohm
1
650
[***]
Hz
3
9
[6]
-
0
31
[0]
-
2
3
2
20
2
20
''
2
20
''
MICROMASTER 420 Betriebsanleitung
82 6SE6400-5AA00-0AP0
Page 83

Parameter-
nummer
r2024
5. SYSTEMPARAMETER Deutsch
P0003
BenutzerZugangsebene
P0004
Einstellung
Zustand
änderbar
2
20
2
21
Parameterbezeichnung
Fehlerfreie Telegramme
Zeigt die Anzahl der fehlerfreien USS-Telegramme an.
Index
0 = USS2 = Datenleitung (RS485)
1 = USS1 = Tastatur (RS232)
Warnungs-Vorgeschichter2110
Zeigt Warnungsinformationen an.
Es ist möglich, bis zu zwei aktive Warnungen darzustellen (Indizes 0 und 1), sowie zwei
frühere Warnungen (Indizes 2 und 3).
Hinweis:
Ist eine Warnung aktiv, dann blinkt die Tastatur: die LEDs zeigen den Status der Warnung
an. Ist ein AOP im Einsatz, dann stellt die Anzeige die Nummer und den Text der aktiven
Warnung dar.
Die Indizes 0 und 1 werden nicht gespeichert.
Min.
Max.
[Vorein-
stellung]
Einheiten
0
65535
[-]
-
-
-
[-]
-
Stecker: Zustandswort 1 des Monitorsr2197
Zeigt das erste aktive Zustandswort der Überwachungsfunktionen an.
[Lesen der Bitwerte auf der Anzeige]
Bit01 "| n,gefiltert| < n,2" 0 NEIN
1JA
Bit02 "| n,gefiltert| > n,2" 0 NEIN
1JA
Bit03 "| n,gefiltert| < n,3" 0 NEIN
1JA
Bit04 "| n,gefiltert| > n,3" 0 NEIN
1JA
Bit05 "| n,gesetzt| < n,min" 0 NEIN
1JA
Bit06 "n,gesetzt > 0" 0 NEIN
1JA
Bit07 "Motor blockiert" 0 NEIN
1JA
Bit08 "Motor gekippt" 0 NEIN
1JA
Bit09 "| I,act | < I,Schwelle" 0 NEIN
1JA
Bit10 "| T,actNoAcc | > T,Schwelle" 0 NEIN
1JA
Bit11 "| T,act | > T,Schwelle" 0 NEIN
1JA
-
-
[-]
-
2
21
MICROMASTER 420 Betriebsanleitung
6SE6400-5AA00-0AP00
83
Page 84

Parameter-
nummer
P2200
Deutsch 5. SYSTEMPARAMETER
P0003
BenutzerZugangsebene
P0004
Einstellung
Zustand
änderbar
2
22
''
Parameterbezeichnung
Quelle: PI-Regler freigeben
PI-Betrieb
Ermöglicht dem Benutzer das Freigeben/Sperren des PI-Reglers
Mögliche Einstellungen:
0 = Gesperrt
1 = Freigegeben
Hinweis 1:
Der PI-Regler kann mittels dieser Funktion durch Einstellen auf 1 freigegeben werden.
Sobald der PI-Regler freigegeben ist, werden die normalen Rampenzeiten, wie in P1120
und P1121 eingestellt, automatisch gesperrt, ebenso die normalen Frequenzsollwerte.
Nach einem Befehl AUS1 oder AUS3 wird jedoch die Ausgangsfrequenz des Umrichters
unter Verwendung der in P1121 eingestellten Rampenzeit (bei AUS3: P1135)
rampenförmig auf Null abgesenkt.
Hinweis 2:
Die Quelle für den PI-Sollwert wird mittels P2253 gewählt. Der PI-Sollwert und das PIRückführungssignal werden als Prozentwerte interpretiert (nicht als Frequenzwerte). Das
Ausgangssignal des PI-Reglers wird als Prozentwert angezeigt und anschließend durch
P2000 in Hz normiert, wenn PI freigegeben ist.
Min.
Max.
[Vorein-
stellung]
Einheiten
0
2197.F
[0]
-
Hinweis 3:
Die tiefste und die höchste Motorfrequenz (P1080 und P1082) sowie die auszublendenden
Frequenzen (P1091 bis P1094) sind an dem Umrichterausgang nach wie vor aktiv. Das
Aktivieren von auszublendenden Frequenzen bei PI-Regelung kann allerdings zu
Instabilitäten führen.
Hinweis 4:
Die Quellenfreigabe für den PI-Regler kann auch von den Digitaleingängen in den
Einstellungen 722.0 bis 722.2 für DIN1 – DIN3 oder von einer sonstigen BICO-Quelle
in Ebene 3 kommen.
MICROMASTER 420 Betriebsanleitung
84 6SE6400-5AA00-0AP0
Page 85

Parameter-
nummer
P2201
5. SYSTEMPARAMETER Deutsch
P0003
BenutzerZugangsebene
P0004
Einstellung
Zustand
änderbar
2
22
Parameterbezeichnung
Fester PI-Sollwert 1
Bestimmt den festen PI-Sollwert 1.
In der Benutzer-Zugangsebene 2 ist es erforderlich, P2200 einzustellen, um die
Sollwertquelle zu aktivieren. Zusätzlich kann über die Digitaleingänge (P0701 – P0703.)
jeder der Digitaleingangsparameter auf einen festen PI-Sollwert eingestellt werden.
Für die Wahl des festen PI-Sollwerts gibt es drei Möglichkeiten.
1 Direktwahl (P0701 = 15 oder P0702 = 15, etc.)
In dieser Betriebsart wählt EIN (1) Digitaleingang einen (1) festen PI-Sollwert.
Sind mehrere Eingänge für feste PI-Sollwerte programmiert und werden sie gemeinsam
gewählt, dann werden die gewählten Sollwerte addiert.
Zum Anlassen des Motors (Freigabe der Impulse) ist in dieser Betriebsart ein EIN-Befehl
entweder von der Tastatur oder von den Digitaleingängen oder von USS erforderlich.
2 Direktwahl mit EIN-Befehl (P0701 = 16 oder P0702 = 16, etc.)
Beschreibung wie bei 1), jedoch wird bei der Wahl dieser Art gleichzeitig mit der Wahl eines
Sollwertes ein EIN-Befehl ausgegeben.
Hinweis:
Es können verschiedene Arten von Festfrequenzen gemischt werden; aber bitte beachten,
dass sie bei gleichzeitiger Wahl addiert werden.
3 Wahl mit binär codierter Dezimalzahl P0701 – P0703 = 17
Bei Verwendung dieses Auswahlverfahrens für den PI-Festsollwert ist es möglich, bis zu
7 verschiedene PI-Sollwerte zu wählen. Die Sollwerte werden entsprechend nachstehender
Tabelle ausgewählt:
Min.
Max.
[Vorein-
stellung]
Einheiten
-130
130
[0]
%
DIN3 DIN2 DIN1
OFF Inaktiv Inaktiv Inaktiv
P2201 FS. 1 Inaktiv Inaktiv Aktiv
P2202 FS. 2 Inaktiv Aktiv Inaktiv
P2203 FS. 3 Inaktiv Aktiv Aktiv
P2204 FS. 4 Aktiv Inaktiv Inaktiv
P2205 FS. 5 Aktiv Inaktiv Aktiv
P2205 FS. 6 Aktiv Aktiv Inaktiv
P2207 FS. 7 Aktiv Aktiv Aktiv
Festsollwert 2P2202
Siehe Beschreibung in P2201 für Festsollwert 1.
Festsollwert 3P2203
Siehe Beschreibung in P2201 für Festsollwert 1.
Festsollwert 4P2204
Siehe Beschreibung in P2201 für Festsollwert 1.
Festsollwert 5P2205
Siehe Beschreibung in P2201 für Festsollwert 1.
-130
130
[10]
%
-130
130
[20]
%
-130
130
[30]
%
-130
130
[40]
%
-
2
22
2
22
2
22
2
22
MICROMASTER 420 Betriebsanleitung
6SE6400-5AA00-0AP00
85
Page 86

Parameter-
nummer
P2206
Deutsch 5. SYSTEMPARAMETER
P0003
BenutzerZugangsebene
P0004
Einstellung
Zustand
änderbar
2
22
2
22
2
22
2
22
Parameterbezeichnung
Festsollwert 6
Siehe Beschreibung in P2201 für Festsollwert 1.
Festsollwert 7P2207
Siehe Beschreibung in P2201 für Festsollwert 1.
Stecker: PI-Festsollwertr2224
Zeigt die Gesamtausgangsgröße der PI-Sollwertauswahl an.
Sollwertspeicher des Motorpotentiometers (Tastatursollwert)P2231
0 = Sollwertspeicher gesperrt
1 = Sollwertspeicher freigegeben
Bei Wahl von 0 kehrt der Sollwert nach einem AUS-Befehl zu dem in P2240 eingestellten
Wert zurück. Ist 1 gewählt, dann wird der aktive Sollwert in P2240 gespeichert und
entsprechend dem Momentanwert aktualisiert. Siehe P2240.
Min.
Max.
[Vorein-
stellung]
Einheiten
-130
130
[50]
%
-
-130
130
[60]
%
-
-130
130
[60]
%
-
0
1
[0]
-
Gegenrichtung bei Tastatursollwert sperrenP2232
Sperrt die Sollwertwahl für die Gegenrichtung, wenn die Tastatur (mittels P1000) als
Hauptsollwert oder als Zusatzsollwert gewählt wurde.
Mögliche Einstellungen:
0 Gegenrichtung zugelassen – mit Hilfe des Tastatursollwerts kann die Motordrehrichtung
verändert werden (Erhöhen/Verringern der Frequenz entweder über die Digitaleingänge
oder die Auf-/Abtasten der Tastatur).
1 Gegenrichtung gesperrt
DigitalsollwertP2240
Ermöglicht dem Benutzer das Einstellen eines digitalen PI-Sollwertes in %. Der Sollwert kann
entweder mit Hilfe der Tasten
14 verändert werden.
Aktiver digitaler PI-Ausgangssollwertr2250
Zeigt den aktiven digitalen PI-Sollwert in % an.
∆ auf am BOP oder durch Einstellen von DIN3 auf 13 und
0
1
[1]
-
-130
130
[10.00]
%
-130
130
[10.00]
%
2
10
2
22
''
2
22
''
MICROMASTER 420 Betriebsanleitung
86 6SE6400-5AA00-0AP0
Page 87

5. SYSTEMPARAMETER Deutsch
g
Parameter-
nummer
P2253 Quelle: PI-Sollwert
Rampenhochlaufzeit
+
für Sollwert
P2257
P2258
Sollwertquel le
P2253
KK
Rampenauslaufzeit für Sollwert
Parameterbezeichnung
Sollwert
P2260
Min.
Max.
[Vorein-
stellung]
Einheiten
0
2248.0
[0]
-
P0003
BenutzerZugangsebene
P0004
Einstellung
Zustand
änderbar
2
22
''
Rückführsignal-Quelle
P2264
KK
Obere
Rückführungsbegrenzung
P2267
Untere
Rückführungsbegrenzung
P2268
Gebertyp
y
x
P2271
+
-
PID-Ausgang oberer Grenzwert
P2291
unterer Grenzwert
Beschleunigungs-/Ve rzögerungszeit der PID -Grenzwerte
P2293
Fehler
P2273
PID-Ausgang
P2292
P-Ver-
stärkung
P2280
I-Ver-
stärkung
P2285
Kp T n
PID an obere m/unteren Grenzwert
P53.10/P53.11
y
PID Ausgan
x
r2294
Der Parameter P2253 ermöglicht dem Benutzer die Wahl der PI-Sollwertquelle. Im Allgemeinen wird ein digitaler PI-Sollwert entweder mit Hilfe
eines festen PI-Sollwerts oder eines aktiven Sollwerts gewählt. Die gebräuchlichsten Einstellungen sind wie folgt:
755 = Analogeingang 1
2224 = PI-Festsollwert (siehe P2201 bis P2207)
2250 = Aktiver PI-Sollwert (siehe P2240)
Rampenhochlaufzeit für den PI-SollwertP2257
Stellt die Rampenhochlaufzeit für den PI-Sollwert ein.
PI Sollwert (%)
100 %
0
650
[1]
s
2
22
''
0
Rampenhochlaufzeit
(P2257)
Zeit (s)
Das Einstellen einer zu kurzen Rampenhochlaufzeit kann zum Abschalten des Umrichters
führen, z. B. wegen Überstrom.
Hinweis:
Ist die PI-Regelung freigegeben, dann ist die normale Rampenhochlaufzeit (P1120)
gesperrt.
Die PI-Rampenzeit wirkt sich nur auf den PI-Sollwert aus und ist nur aktiv, wenn der PISollwert geändert wird oder ein RUN-Befehl gegeben wird (wenn der PI-Regler diese
Rampen zum Erreichen seines Wertes von 0 % aus benutzt).
MICROMASTER 420 Betriebsanleitung
6SE6400-5AA00-0AP00
87
Page 88

Parameter-
nummer
P2258
Deutsch 5. SYSTEMPARAMETER
P0003
BenutzerZugangsebene
P0004
Einstellung
Zustand
änderbar
2
22
''
Parameterbezeichnung
Rampenauslaufzeit für den PI-Sollwert
Stellt die Rampenauslaufzeit für den PI-Sollwert ein.
Sollwert (%)
100 %
Min.
Max.
[Vorein-
stellung]
Einheiten
0
650
[1]
s
0
Rampenauslaufzeit
(P1121)
Zeit (s)
Das Einstellen einer zu kurzen Rampenauslaufzeit kann zum Abschalten des Umrichters
führen (wegen Überspannung (F0002)/Überstrom (F0001)).
Hinweis:
Ist die PI-Regelung freigegeben, dann ist die normale Rampenauslaufzeit (P1121)
gesperrt.
Die PI-Sollwertrampe ist nur bei Änderungen des PI-Sollwertes freigegeben und
wirksam. Die nach AUS1 & AUS3 verwendeten Rampenzeiten sind in P1121 bzw.
P1135 definiert.
Stecker: PI-Sollwertr2260
Zeigt den gesamten, aktiven PI-Sollwert in % an.
Quelle: PI-RückführungP2264
Wählt die Quelle des PI-Rückführsignals aus. Die herkömmlichsten Einstellungen sind:
755 = Analogeingang 1
Hinweis 1:
Wird der Analogeingang gewählt, dann können der Offset und die Verstärkung mit Hilfe der
Parameter P756 – P760 eingestellt werden.
Hinweis 2:
Bezüglich weiterer Einzelheiten über andere Einstellungen siehe Beschreibung
"Verwendung von BICO".
-
[-]
%
0
2294.0
[755]
-
2
22
2
22
''
Zeitkonstante des PI-RückführungsfiltersP2265
Bestimmt die Zeitkonstante des PI-Rückführungsfilters.
Stecker: PI-Rückführungr2266
Zeigt das PI-Rückführungssignal an.
60
[0]
[-]
%
0
2
22
''
s
-
-
2
22
MICROMASTER 420 Betriebsanleitung
88 6SE6400-5AA00-0AP0
Page 89

Parameter-
nummer
P2271
5. SYSTEMPARAMETER Deutsch
P0003
BenutzerZugangsebene
P0004
Einstellung
Zustand
änderbar
2
22
''
Parameterbezeichnung
PI-Gebertyp
Ermöglicht dem Benutzer die Wahl des Gebertyps für das PI-Rückführungssignal.
0: = [Voreinstellung] wenn das Rückführsignal kleiner ist als der PI-Sollwert, dann erhöht
der PI-Regler die Motordrehzahl, um diesen Zustand zu beheben.
1: = ist das Rückführsignal kleiner als der PI-Sollwert, dann verringert der PI-Regler die
Motordrehzahl, um diesen Zustand zu beseitigen
Hinweis:
Die richtige Auswahl des Gebertyps ist äußerst wichtig. Bei Unsicherheit bezüglich der
Eingabe von 0 oder 1 kann der vorliegende Typ wie folgt festgestellt werden:
Die Funktion PI sperren (P2200 = 0). Die Motorfrequenz erhöhen und dabei das
Rückführungssignal messen. Steigt das Rückführungssignal bei zunehmender
Motorfrequenz, dann muss der Gebertyp 0 sein.
Nimmt das Signal bei zunehmender Motorfrequenz ab, dann muss der Gebertyp auf
1 eingestellt werden.
Min.
Max.
[Vorein-
stellung]
Einheiten
0
1
[0]
-
Stecker: Skaliertes PI-Rückführungssignalr2272
Stecker: PI-Fehlerr2273
Zeigt das PI-Fehlersignal (Regelabweichung) zwischen Sollwert und Rückführsignal in %
an.
PI-ProportionalverstärkungP2280
Ermöglicht dem Benutzer das Einstellen der Proportionalverstärkung für den PI-Regler.
Der PI-Regler auf dem MM420 ist unter Verwendung des Standardmodels ausgeführt:
Fehler
P
+
+
Ausgang
I
Die besten Ergebnisse werden gewöhnlich erzielt, wenn sowohl der P- als auch der
I-Anteil freigegeben sind. Unterliegt das System plötzlichen, sprungförmigen Änderungen
des Rückführungssignals, dann muss der P-Anteil gewöhnlich auf einen kleinen Wert
eingestellt werden (L 0,5), bei schnellerem I-Anteil zwecks optimaler Funktion.
Wird der P-Anteil auf 0 eingestellt, dann reagiert der I-Anteil auf das Quadrat des
Fehlersignals.
-
[-]
%
-
[-]
%
0
125
[3]
-
2
22
2
22
2
22
''
PI-IntegrationszeitP2285
Ermöglicht dem Benutzer das Einstellen der Integrationszeitkonstante für den PI-Regler.
Einzelheiten: siehe oben unter P2280.
MICROMASTER 420 Betriebsanleitung
6SE6400-5AA00-0AP00
0
100
[0]
s
2
22
''
89
Page 90

Parameter-
nummer
P2291
Deutsch 5. SYSTEMPARAMETER
P0003
BenutzerZugangsebene
P0004
Einstellung
Zustand
änderbar
2
22
''
Parameterbezeichnung
Obere PI-Begrenzung
Stellt den oberen Grenzwert für den Ausgang des PI-Reglers ein.
Hinweis:
Der voreingestellte Wert von 100 % ist durch P2000 definiert. Wenn Fmax (P1082)
größer ist als P2000, dann muss entweder P2000 oder P2291 geändert werden, um
Fmax zu erreichen.
Min.
Max.
[Vorein-
stellung]
Einheiten
0
200
[100]
%
Unterer Grenzwert des PI-AusgangsP2292
Ermöglicht dem Anwender das Einstellen des unteren Grenzwerts für den PI-Reglerausgang. Ein negativer Wert ermöglicht die bipolare Arbeitsweise des PI-Reglers.
Stecker: PI-Ausgangr2294
Zeigt das Ausgangssignal des PI-Reglers in % an.
Ende SchnellinbetriebnahmeP3900
Nimmt die für optimalen Motorbetrieb erforderlichen Berechnungen vor.
Mögliche Einstellungen:
0 keine Berechnung – der Benutzer MUSS P0010=0 von Hand einstellen
1 Ende Schnellinbetriebnahme – mit werkseitigem Rücksetzen der Parameter und
E/A-Einstellungen, die sich nicht in der Schnellinbetriebnahme-Gruppe (P0010=1)
befinden – siehe Hinweis 1
2 Ende Schnellinbetriebnahme mit Rücksetzen nur der E/A-Einstellungen – siehe
nachstehende Hinweis 2
3 Ende Schnellinbetriebnahme, nur Durchführung der Motorberechnungen
Nach Beendigung der Berechnungen wird auch P3900 auf seinen Ursprungswert 0
rückgesetzt.
Hinweis 1:
Ist die Einstellung 1 gewählt, dann bewirkt sie den Verlust aller übrigen Parameteränderungen mit Ausnahme der Parameter aus dem Inbetriebnahme-Menü "Schnellinbetriebnahme"
-200
200
[0]
%
-250
250
[-]
%
[0]
2
22
''
2
22
0
2
-
1
1
Hinweis 2:
Ist die Einstellung 2 gewählt, dann werden nur solche Parameter berechnet, die von den
Parametern im Inbetriebnahmemenü "Schnellinbetriebnahme" (P0010=1) abhängig sind.
Hinweis 3:
Wird Einstellung 3 gewählt, dann wird nur die Berechnung der Motorparameter
vorgenommen, wie in Hinweis 5 angegeben.
Hinweis 4:
Dieser Parameter kann nur bei P0010=1 verändert werden.
Hinweis 5:
Berechnet eine Anzahl von Motorparametern – dabei werden frühere Werte überschrieben, einschließlich P0344 (Motorgewicht), P0350 (Ebene 3, Ständerwiderstand),
P0346 (Ebene3, Magnetisierungszeit) und P0347 (Ebene 3, Entmagnetisierungszeit),
P2000 (Bezugsfrequenz), P2002 (Bezugsstrom).
MICROMASTER 420 Betriebsanleitung
90 6SE6400-5AA00-0AP0
Page 91

6. STÖRUNGSBEHEBUNG Deutsch
6 Störungsbehebung
Das vorliegende Kapitel enthält:
Eine Übersicht der Umrichterzustände, die von den LEDs auf dem Zustands-
anzeigefeld angezeigt werden, das standardmäßig mit dem Umrichter geliefert wird.
Einige allgemeine Informationen über verschiedene Maßnahmen der Fehlerbehebung.
Eine Liste der Fehlerschlüssel, die auf der Anzeige des BOP erscheinen können. Für
jeden angegebenen Fehlerschlüssel sind die Ursache und die empfohlene Abhilfemaßnahme angegeben.
6.1 Störungsbehebung mit dem Zustandsanzeigefeld ............................................................. 100
6.2 Störungsbehebung mit dem Basis-Bedienfeld ................................................................... 100
6.3 Fehlerschlüssel des MICROMASTER 420......................................................................... 102
MICROMASTER 420 Betriebsanleitung
6SE6400-5AA00-0AP00
91
Page 92

Deutsch 6. STÖRUNGSBEHEBUNG
!
Warnungen
Reparaturen dürfen nur von Siemens Kundendienst, von Siemens Reparatur-
zentren, die von Siemens bevollmächtigt sind oder von qualifiziertem Personal
vorgenommen werden, das mit sämtlichen Warnungen und
Bedienungsvorgehensweisen aus diesem Handbuch gründlich vertraut sind.
Schadhafte Teile oder Bauelemente müssen durch Teile ersetzt werden, die in der
einschlägigen Ersatzteilliste enthalten sind.
Vor dem Öffnen des Gerätes zwecks Arbeiten im Inneren die Stromversorgung
abtrennen.
6.1 Störungsbehebung mit dem Zustands-Anzeigefeld
In Tabelle 6-1 sind die Bedeutungen der verschiedenen Zustände der LEDs auf dem
Zustands-Anzeigefeld (SDP) erläutert.
Tabelle 6-1 Von den LEDs auf dem SDP angezeigte Zustände des Umrichters
LEDs
grün gelb
AUS AUS 1 keine Netzspannung
AUS EIN 8 andere Umrichterstörung als unten
Prioritäts-
anzeige
Beschreibung des
Umrichterzustands
aufgezählt
EIN AUS 13 Umrichter arbeitet
EIN EIN 14 Betriebsbereit – Bereitschaft
AUS blinkend – R1 4 Störung – Überstrom
blinkend – R1 AUS 5 Störung – Überspannung
blinkend – R1 EIN 7 Störung – Motorübertemperatur
EIN blinkend – R1 8 Störung – Umrichterübertemperatur
blinkend – R1 blinkend – R1 9 Strom-Warngrenzwert (beide LEDs
blinken gleichzeitig)
blinkend – R1 blinkend – R1 11 sonstige Warnung (beide LEDs
blinken abwechselnd)
blinkend – R1 blinkend – R2 6/10 Unterspannungsabschaltung/Unter-
spannungswarnung
blinkend – R2 blinkend – R1 12 Umrichter nicht bereit – Anzeige > 0
blinkend – R2 blinkend – R2 2 RAM-Störung (beide LEDs blinken
gleichzeitig)
blinkend – R2 blinkend – R2 3 RAM-Störung (beide LEDs blinken
abwechselnd)
R1 – Einschaltdauer 900 ms R2 – Einschaltdauer 300 ms
MICROMASTER 420 Betriebsanleitung
92 6SE6400-5AA00-0AP0
Page 93

6. STÖRUNGSBEHEBUNG Deutsch
6.2 Störungsbehebung mit dem Basis-Bedienfeld
Zeigt die Anzeige einen Störungs- oder Warnschlüssel, dann wird auf Abschnitt 6.3 und
die nachstehenden Fehlerschlüssel des MM420 verwiesen.
Falls der Motor nach erteiltem EIN-Befehl nicht anläuft:
Kontrollieren, ob P0010 = 0 ist.
Kontrollieren, ob ein gültiges EIN-Signal vorhanden ist.
Kontrollieren, ob P0700 = 2 (bei digitaler Eingabesteuerung) oder
P0700 = 1 (bei BOP-Steuerung) ist.
Kontrollieren ob der Sollwert vorhanden ist (0 bis 10 V an Anschluss 3) oder ob der
Sollwert in den richtigen Parameter eingegeben wurde, abhängig von der
Sollwertquelle (P1000). Siehe Abschnitt 5.3 auf Seite 66.
Läuft der Motor nach dem Ändern der Parameter nicht an, dann P0010 = 30, danach
P0970 = 1 einstellen und P drücken, um den Umrichter auf die werksseitigen Parametervoreinstellwerte rückzusetzen.
Nunmehr einen Schalter zwischen den Klemmen 5 und 8 auf dem Bedienfeld verwenden.
Der Antrieb müsste nunmehr entsprechend dem am Analogeingang vorgegebenen
Sollwert laufen.
MICROMASTER 420 Betriebsanleitung
6SE6400-5AA00-0AP00
93
Page 94

Deutsch 6. STÖRUNGSBEHEBUNG
6.3 Fehlerschlüssel des MICROMASTER 420
Bei Auftreten einer Störung schaltet der Umrichter ab, und auf der Anzeige erscheint ein
Fehlerschlüssel.
Tabelle 6-2 Fehlerschlüssel des MICROMASTER 420
Fehler-
schlüssel
F0001 Überstrom 1. Motorleistung entspricht
F0002 Überspannung Versorgungsspannung außerhalb
F0003 Unterspannung Netzspannung bei laufendem
F0004 Umrichterüber-
F0005 Umrichter I2t Umrichter ist überlastet.
Beschreibung Mögliche Ursachen Diagnose + Abhilfe
nicht der Umrichterleistung.
2. Kurzschluss in Motorleitung
3. Erdschluss
Toleranz
Generatorbetrieb der Last
Umrichter abgeschaltet.
temperatur
Umgebungstemperatur außerhalb
der Grenzwerte,
Lüfterausfall
1. Kontrollieren, ob die Motorleistung
mit der Umrichterleistung überein stimmt.
2. Kontrollieren, ob die Grenzwerte
der Leitungslänge nicht über schritten wurden.
3. Motorkabel und Motor auf Kurz schlüsse und Erdschlüsse prüfen.
4. Kontrollieren, ob die Motorpara meter mit dem verwendeten Motor
übereinstimmen.
5. Den Ständerwiderstand (P0350)
kontrollieren.
6. Die Rampenhochlaufzeit (P1120)
verlängern.
7. Die in (P1310), (P1311) und
(P1312) eingestellte Anhebung
verringern.
8. Kontrollieren, ob der Motor
behindert oder überlastet ist.
1. Kontrollieren, ob die Versorgungs spannung in den Grenzen gemäß
Typenschild liegt.
2. Kontrollieren, ob der Regler für die
Zwischenkreisgleichspannung
(P1240) freigegeben und richtig
parametriert ist.
3. Die Rampenauslaufzeit (P1121)
verlängern.
1. Kontrollieren, ob die Versorgungs spannung in den Grenzen gemäß
Typenschild liegt.
2. Kontrollieren, ob das Netz nicht
vorübergehende Spannungsaus fälle oder Spannungseinbrüche
aufweist.
1. Kontrollieren, ob der eingebaute
Lüfter bei arbeitendem Antrieb
läuft.
2. Kontrollieren, ob die Impulsfre quenz auf den Voreinstellwert ein gestellt ist.
3. Die Umgebungstemperatur könnte
höher sein, als für den Umrichter
zugelassen.
4. Kontrollieren, ob die Luftein- und
-austrittsöffnungen nicht behindert
sind.
Kontrollieren, ob das Lastspiel in den
vorgeschriebenen Grenzen liegt.
Kontrollieren, ob die Motorleistung der
Umrichterleistung entspricht
MICROMASTER 420 Betriebsanleitung
94 6SE6400-5AA00-0AP0
Page 95

6. STÖRUNGSBEHEBUNG Deutsch
Fehler-
schlüssel
F0011 Motorübertemperatur
F0041
F0051 Störung des
F0052 Powerstack-Störung Lesen der Powerstack-Information
F0060 ASIC-Zeitüberlauf Softwarefehler Fehler quittieren
F0070
F0071 Keine Daten vom USS
F0072
F0080
F0085 Externe Störung
F0101 Kellerspeicher-Überlauf Softwarefehler oder
F0221
F0222 PI-Rückführwert über
F0450
(Nur Wartungs-
betrieb)
Beschreibung Mögliche Ursachen Diagnose + Abhilfe
2
t
I
Fehler bei Messung
des Ständerwiderstandes
Parameter-EEPROMs
Sollwertfehler der
Datenübertragungsbaugruppe
(RS23-Leitung)
während der
Telegramm-Auszeit
Keine Daten vom USS
(RS485-Leitung)
während der
Telegramm-Auszeit
Eingangssignal für
Analogeingang fehlt
PI-Rückführwert unter
Mindestwert
Höchstwert
Fehler bei BIST-Test Wert des Fehlers
1. Motor überlastet.
2. Motordaten falsch
3. Parameter für Temperaturzeit konstante des Motors
kontrollieren.
4. Parameter für Motor-I
grenzwert kontrollieren.
5. Langzeitbetrieb bei geringen
Drehzahlen
Motordatenerfassung ausgefallen Prüfen, ob der Motor an den Umrichter
Lesen oder Schreiben aus dem/in
den nicht flüchtigen Parameterspeicher fehlerhaft.
fehlerhaft oder Daten ungültig
Während der Telegramm-Auszeit
ging kein Sollwert von der
Datenübertragungsbaugruppe ein
Keine Reaktion während der
Telegramm-Auszeit
Keine Reaktion während der
Telegramm-Auszeit
Analogeingang – Eingangssignal
fehlt
Externe Störung wird über
Endgeräteeingänge angestoßen
Prozessorstörung
PI-Rückführsignal unter Mindestwert
P2268
PI-Rückführsignal über Höchstwert
P2267
1 - Einige der Tests am Lastteil
negativ
2 - Einige der Tests an der
Steuerbaugruppe negativ
4 - Einige Funktionsprüfungen
negativ
8 - Einige Tests an der
E/A-Baugruppe negativ.
Nur Vektor
16 - Störung bei Tests des
internen RAM
2
t-Warn-
Motordaten kontrollieren.
Motorbelastung kontrollieren.
Einstellungen der Anhebungen zu
hoch (P1310, P1311, P1312)
angeschlossen ist.
Prüfen, ob die Motordaten richtig
eingetragen wurden.
Rücksetzen auf Werks-Voreinstell-
werte und neu parametrieren.
Umrichter austauschen.
Umrichter austauschen.
Bei Wiederholung Umrichter
auswechseln
Verbindungen mit der
Datenübertragungsbaugruppe prüfen
Den Master prüfen
Verbindungen mit der
Datenübertragungsbaugruppe prüfen
Den Master prüfen
Verbindungen mit der
Datenübertragungsbaugruppe prüfen
Den Master prüfen
Verbindung zum Analogeingang
prüfen
Endgeräteeingang für
Fehlerauslösung sperren.
Eigentest-Routinen ablaufen lassen.
Umrichter auswechseln.
1. Wert von P2268 ändern.
2. Die Rückführungsverstärkung
anpassen.
1. Wert von P2267 ändern.
2. Die Rückführungsverstärkung
anpassen.
1. Der Umrichter läuft gegebenenfalls,
aber bestimmte Funktionen
arbeiten nicht richtig.
2. Umrichter austauschen.
MICROMASTER 420 Betriebsanleitung
6SE6400-5AA00-0AP00
95
Page 96

Deutsch 6. STÖRUNGSBEHEBUNG
Tabelle 6-3 Warnungsschlüssel des MICROMASTER 420
Warn-
schlüssel
A0501 Stromgrenzwert
A0502 Überspannungsgrenz-
A0503 Unterspannungs
A0504
A0505 Umrichter I2t Die Warngrenze überschritten,
A0506 Umrichterlastspiel
A0511 Motorübertemperatur
A0600 Überlaufwarnung des
A0700 CB-Warnung 1 –
A0701 CB-Warnung 2 –
Beschreibung Mögliche Ursachen Diagnose + Abhilfe
wert
grenzwert
Umrichterübertemperatur
2
I
t
Echtzeitbetriebssystems
Einzelheiten siehe
CB-Handbuch
Einzelheiten siehe
CB-Handbuch
Netzspannung zu hoch,
Last im Generatorbetrieb
Rampenauslaufzeit zu kurz
Netzspannung zu gering,
Kurze Netzunterbrechung
Die Warngrenze der Umrichter-
Kühlkörpertemperatur ist
überschritten, weshalb die
Impulsfrequenz und/oder die
Ausgangsfrequenz (abhängig von
der Parametrierung) verringert wird.
Strom wird verringert, falls
parametriert.
Kühlkörpertemperatur und
Sperrschicht-Temperaturmodell
liegen außerhalb des zulässigen
Bereiches
Motor überlastet. Parameter für die Temperatur-
Softwarefehler Siemens hinzuziehen
Abhängig von
Datenübertragungsbaugruppe
Abhängig von
Datenübertragungsbaugruppe
1. Kontrollieren, ob Motorleistung
mit der Umrichterleistung überein stimmt.
2. Kontrollieren, ob die Grenzwerte
der Leitungslänge nicht über schritten wurden.
3. Motorleitung und Motor auf Kurz schlüsse und Erdschlüsse über prüfen.
4. Kontrollieren, ob die Motorparame ter mit dem verwendeten Motor
übereinstimmen.
5. Den Ständerwiderstand
kontrollieren.
6. Die Rampenhochlaufzeit
verlängern.
7. Die Anhebung verringern.
8. Kontrollieren, ob der Motor
behindert oder überlastet ist.
Prüfen, ob Netzspannung im
zulässigen Bereich liegt
Rampenauslaufzeiten verlängern
Anmerkung:
Der Vdc-max-Regler ist aktiv, die
Rampenauslaufzeiten werden
automatisch verlängert
Dafür sorgen, dass die Netzspannung
im zulässigen Bereich bleibt
1. Prüfen, ob die Umgebungstempe ratur in den vorgeschriebenen
Grenzen liegt.
2. Belastungsbedingungen und
Lastspiel kontrollieren.
3. Kontrollieren, ob der Lüfter bei
arbeitendem Antrieb umläuft.
Prüfen, ob das Lastspiel in den
vorgeschriebenen Grenzen liegt.
Prüfen, ob das Arbeitsspiel in den
vorgeschriebenen Grenzen liegen.
Zeitkonstante des Motors
überprüfen.
Parameter für den Motor-I
Warngrenzwert kontrollieren.
Prüfen, ob lange Betriebszeiten mit
geringer Drehzahl vorkommen
Prüfen, ob die Einstellungen der
Anhebung nicht zu hoch sind
Siehe CB-Anwenderhandbuch
Siehe CB-Anwenderhandbuch
2
t-
MICROMASTER 420 Betriebsanleitung
96 6SE6400-5AA00-0AP0
Page 97

6. STÖRUNGSBEHEBUNG Deutsch
Warn-
schlüssel
A0702 CB-Warnung 3 –
A0703 CB-Warnung 4 –
A0704
A0705 CB-Warnung 6 –
A0706
A0707 C CB-Warnung 8 –
A0708
A0709 CB-Warnung 10 –
A0710 CB-Datenüber-
A0711 CB-Konfigurations-
A0910
A0911 Vdc-max-Regler aktiv
A0920 Analogeingangs-
A0921
A0922 Kein Verbraucher an
A0923
Beschreibung Mögliche Ursachen Diagnose + Abhilfe
Einzelheiten siehe
CB-Handbuch
Einzelheiten siehe
CB-Handbuch
CB-Warnung 5 –
Einzelheiten siehe
CB-Handbuch
Einzelheiten siehe
CB-Handbuch
CB-Warnung 7 –
Einzelheiten siehe
CB-Handbuch
Einzelheiten siehe
CB-Handbuch
CB-Warnung 9 –
Einzelheiten siehe
CB-Handbuch
Einzelheiten siehe
CB-Handbuch
tragungsfehler
fehler
Vdc-max-Regler
passiviert.
parameter sind nicht
richtig eingestellt.
Analogausgangsparameter sind nicht
richtig eingestellt.
Umrichter
angeschlossen
Signale JOG rechts
und JOG links aktiv
Abhängig von
Datenübertragungsbaugruppe
Abhängig von
Datenübertragungsbaugruppe
Abhängig von
Datenübertragungsbaugruppe
Abhängig von
Datenübertragungsbaugruppe
Abhängig von
Datenübertragungsbaugruppe
Abhängig von
Datenübertragungsbaugruppe
Abhängig von
Datenübertragungsbaugruppe
Abhängig von
Datenübertragungsbaugruppe
Datenaustausch mit CB
(Datenübertragungsbaugruppe)
ausgefallen.
CB (Datenübertragungsbaugruppe)
meldet Konfigurationsfehler.
Vdc-max-Regler wurde passiviert.
Die Rampenauslaufzeiten werden
verlängert, um Überspannungsabschaltungen zu verhindern und
die Gleichspannungszwischenkreisspannung in zulässigen
Grenzen zu halten
Falsche Parametrierung der
Analogeingangsparameter
Ausgangsstrom geringer als
erwartet.
Geringe Ausgangsspannung z.B.
wenn bei 0 Hz die Anhebung 0
verwendet wird
Signale JOG rechts und JOG links
gleichzeitig aktiv
Siehe CB-Anwenderhandbuch
Siehe CB-Anwenderhandbuch
Siehe CB-Anwenderhandbuch
Siehe CB-Anwenderhandbuch
Siehe CB-Anwenderhandbuch
Siehe CB-Anwenderhandbuch
Siehe CB-Anwenderhandbuch
Siehe CB-Anwenderhandbuch
CB-Hardware überprüfen.
CB-Parameter überprüfen.
Parameter Umrichtereingangsspannung kontrollieren.
Den Parameter Umrichtereingangsspannung prüfen
Rampenauslaufzeiten prüfen.
Analogeingangsparameter dürfen
untereinander nicht auf den gleichen
Wert eingestellt werden.
Analogausgangsparameter dürfen
untereinander nicht auf den gleichen
Wert eingestellt werden
Kontrollieren, ob die Last an den
Umrichter angeschlossen ist.
Kontrollieren, ob Motorparameter dem
angeschlossenen Motor entsprechen.
Als Folge arbeiten einige Funktionen
gegebenenfalls nicht richtig, da kein
normaler Belastungszustand vorliegt.
Dafür sorgen, dass die Signale JOG
rechts und JOG links nicht gleichzeitig
angelegt werden
MICROMASTER 420 Betriebsanleitung
6SE6400-5AA00-0AP00
97
Page 98

Deutsch 6. STÖRUNGSBEHEBUNG
MICROMASTER 420 Betriebsanleitung
98 6SE6400-5AA00-0AP0
Page 99

7. MICROMASTER 420 – TECHNISCHE DATEN Deutsch
7 MICROMASTER 420 Technische Daten
Tabelle 7-1 MICROMASTER 420 – Technische Daten
Einphasige MICROMASTER-Umrichter für 230 V (mit eingebautem Filter, Klasse A)
Bestellnummer (6SE6420-2AB) 11-2AA0 12-5AA0 13-7AA0 15-5AA0 17-5AA0 21-1BA0 21-5BA0 22-2BA0 23-0CA0
Bereich der Eingangsspannung 1 AC 200 V - 240 V +10 % -10 %
Motornennleistung, kW (hp) 0,12 (0,16) 0,25 (0,33) 0,37 (0,5) 0,55 (0,75) 0,75 (1) 1,1 (1,5) 1,5 (2) 2,2 (3) 3 (4)
Ausgangs-kVA 0,4 0,7 1 1,3 1,7 2,4 3,2 4,6 6
Max. Ausgangsstrom, A 0,9 1,7 2,3 3 3,9 5,5 7,4 10,4 13,6
Eingangsstrom A 2 4 5,5 7,5 9,9 14,4 19,6 26,4 35,5
Min. Querschnitt der Zuleitung, mm2 (awg)
Max. Querschnitt der Zuleitung, mm2 (awg) 2,5 (13) 6 (9) 10 (7)
Min. der Ausgangsleitung, mm2 (awg) 1 (17) 1,5 (15)
Max. der Ausgangsleitung, mm2 (awg) 2,5 (13) 6 (9) 10 (7)
Maße [B x H x T], mm (Zoll) 73x173x149 (2,87x6,81x5,87) 149x202x172 (5,87x7,95x6,77) 185 x 245 x 195
Gewicht, kg (lbs) 1,2 (2,6) 1,3 (2,9) 3,3 (7,3) 3,6 (7,9) 5,2 (11,4)
1 (17) 2,5 (13) 4 (11)
6 (9)
(7,28 x 9,65 x
7,68)
Dreiphasige MICROMASTER-Umrichter für 230 V (mit eingebautem Filter, Klasse A)
Bestellnummer (6SE6420-2AC) 23-0CA0 24-0CA0 25-5CA0
Bereich der Eingangsspannung 3 AC 200 V - 240 V +10 % -10 %
Motornennleistung kW (hp) 3 (4) 4 (5) 5,5 (7,5)
Ausgangs-kVA 6 7,7 9,6
Max. Ausgangsstrom, A 13,6 17,5 22
Eingangsstrom A 15,6 19,7 26,3
Min. Querschnitt der Zuleitung, mm2 (awg) 2,5 (13) 2,5 (13) 4 (11)
Max. Querschnitt der Zuleitung, mm2 (awg) 10 (7) 10 (7) 10 (7)
Min. der Ausgangsleitung, mm2 (awg) 1,5 (15) 2,5 (13) 4 (11)
Max. der Ausgangsleitung, mm2 (awg) 10 (7) 10 (7) 10 (7)
Maße [B x H x T] mm (Zoll) 185 x 245 x 195 (7,28 x 9,65 x 7,68)
Gewicht, kg (lbs) 5,2 (11,4) 5,7 (12,5) 5,7 (12,5)
Ein-/Dreiphasige MICROMASTER-Umrichter für 230 V (ohne Filter)
Bestellnummer (6SE6420-2UC)
Bereich der Eingangsspannung 1/3 AC 200 V - 240 V +10 % -10 %
Motornennleistung kW (hp) 0,12 (0,16) 0,25 (0,33) 0,37 (0,5) 0,55 (0,75) 0,75 (1) 1,1 (1,5) 1,5 (2) 2,2 (3) 3 (4)
Ausgangs-kVA 0,4 0,7 1 1,3 1,7 2,4 3,2 4,6 6
Max. Ausgangsstrom, A 0,9 1,7 2,3 3 3,9 5,5 7,4 10,4 13,6
Eingangsstrom A 0,7
Min. Querschnitt der Zuleitung, mm2 (awg) 1 (17) 2,5 (13)
Max. Querschnitt der Zuleitung, mm2 (awg) 2,5 (13) 6 (9) 10 (7)
Min. der Ausgangsleitung, mm2 (awg) 1 (17) 1,5 (15)
Max. der Ausgangsleitung, mm2 (awg) 2,5 (13) 6 (9) 10 (7)
Maße [B x H x T] mm (Zoll) 73 x 173 x 149 (2,87 x 6,81 x 5,87) 149 x 202 x 172 (5,87 x 7,95 x 6,77) 185 x 245 x 195
Gewicht, kg (lbs) 1,2 (2,6) 2,9 (6,4) 2,9 (6,4) 3,1 (6,8) 5,2 (11,4)
11-2AA0 12-5AA0 13-7AA0 15-5AA0 17-5AA0 21-1BA0 21-5BA0 22-2BA0 23-0CA0
(2 1AC)
1,7
(4 1AC)
2,4
(5,5 1AC)
3,1
(7,5 1AC)
4,3
(9,9 1AC)
6,2
(14,4 1AC)
8,3
(19,6 1AC)
11,3
(26,4 1AC)
15,6
(35,5 1AC)
(7,28 x 9,65 x
7,68)
MICROMASTER 420 Betriebsanleitung
6SE6400-5AA00-0AP00
99
Page 100

Deutsch 7. MICROMASTER 420 – TECHNISCHE DATEN
Dreiphasige MICROMASTER-Umrichter für 230 V (ohne Filter)
Bestellnummer (6SE6420-2UC)
Bereich der Eingangsspannung 3 AC 200 V - 240 V +10 % -10 %
Motornennleistung kW (hp) 4 (5) 5,5 (7,5)
Ausgangs-kVA 7,7 9,6
Max. Ausgangsstrom, A 17,5 22
Eingangsstrom A 19,7 26,3
Min. Querschnitt der Zuleitung, mm2 (awg) 2,5 (13) 4 (11)
Max. Querschnitt der Zuleitung, mm2 (awg) 10 (7) 10 (7)
Min. Querschnitt der Ausgangsleitung, mm2 (awg) 2,5 (13) 4 (11)
Max. Querschnitt der Ausgangsleitung, mm2 (awg) 10 (7) 10 (7)
Maße [B x H x T] mm (Zoll)
Gewicht, kg (lbs) 5,5 (12,1) 5,5 (12,1)
24-0CA0 25-5CA0
185 x 245 x 195
(7,28 x 9,65 x 7,68)
(7,28 x 9,65 x 7,68)
185 x 245 x 195
Dreiphasige MICROMASTER-Umricher für 400 V (mit eingebautem Filter, Klasse A)
Bestellnummer (6SE6420-2AD) 22-2BA0 23-0BA0 24-0BA0 25-5CA0 27-5CA0 31-1CA0
Bereich der Eingangsspannung 3 AC 380 V - 480 V +10 % -10 %
Motornennleistung kW (hp) 2,2 (3) 3 (4) 4 (5) 5,5 (7,5) 7,5 (10) 11 (15)
Ausgangs-kVA 4,5 5,9 7,8 10,1 14 19,8
Max. Ausgangsstrom, A 5,9 7,7 10,2 13,2 18,4 26
Eingangsstrom A 7,5 10 12,8 17,3 23,1 33,8
Min. Querschnitt der Zuleitung, mm2 (awg) 1 (17) 1 (17) 1,5 (15) 2,5 (13) 4 (11) 6 (9)
Max. Querschnitt der Zuleitung, mm2 (awg) 6 (9) 10 (7)
Min. der Ausgangsleitung, mm2 (awg) 1 (17) 1,5 (15) 2,5 (13) 4 (11)
Max. der Ausgangsleitung, mm2 (awg) 6 (9) 10 (7)
Maße [B x H x T] mm (Zoll) 149 x 202 x 172 (5,87 x 7,95 x 6,77) 185 x 245 x 195 (7,28 x 9,65 x 7,68)
Gewicht, kg (lbs) 3,1 (6,8) 3,3 (7,3) 3,3 (7,3) 5,4 (11,9) 5,7 (12,5) 5,7 (12,5)
Dreiphasige MICROMASTER-Umrichter für 400 V (ohne Filter)
Bestellnummer (6SE6420-2UD) 13-
7AA0
Bereich der Eingangsspannung 3 AC 380 V - 480 V +10 % -10 %
Motornennleistung kW (hp) 0,37
(0,5)
Ausgangs-kVA 0,9 1,2 1,6 2,3 3 4,5 5,9 7,8 10,1 14 19,8
Max. Ausgangsstrom, A 1,2 1,6 2,1 3 4 5,9 7,7 10,2 13,2 18,4 26
Eingangsstrom A 1,6 2,1 2,8 4,2 5,8 7,5 10 12,8 17,3 23,1 33,8
Min. Querschnitt der Zuleitung, mm2 (awg) 1 (17) 1,5 (15) 2,5 (13) 4 (11) 6 (9)
Max. Querschnitt der Zuleitung, mm2 (awg) 2,5 (13) 6 (9) 10 (7)
Min. der Ausgangsleitung, mm2 (awg) 1 (17) 1,5 (15) 2,5 (13) 4 (11)
Max. der Ausgangsleitung, mm2 (awg) 2,5 (13) 6 (9) 10 (7)
Maße [B x H x T] mm (Zoll)
Gewicht, kg (lbs)
Hinweise:
a) 4-poliger Siemensmotor
b) Das 3 kW-Gerät für 230 V benötigt eine externe Drosselspule (z. B. 4EM6100-3CB) und eine Netz-
sicherung für 30 A, um an einem einphasigen Netz betrieben werden zu können.
15-
5AA0
0,55
(0,75)
73 x 173 x 149 (2,87 x 6,81 x 5,87)
17-
5AA0
0,75 (1) 1,1 (1,5) 1,5 (2) 2,2 (3) 3 (4) 4 (5) 5,5 (7,5) 7,5 (10) 11 (15)
1,3 (2,9) 3,1 (6,8) 3,3 (7,3) 3,3 (7,3)
21-
1AA0
21-
5AA0
22-
2BA0
23-
0BA0
149 x 202 x 172
(5,87 x 7,95 x 6,77)
24-
0BA0
25-
5CA0
5,2
(11,4)
27-
5CA0
185 x 245 x 195
(7,28 x 9,65 x 7,68)
5,5
(12,1)
31-
1CA0
5,5
(12,1)
MICROMASTER 420 Betriebsanleitung
100 6SE6400-5AA00-0AP0
 Loading...
Loading...