

Page 1
操作手册 2007.1
sitrans
LR 460
SIEMENS
Page 2
安全指导:须注意警告提示,以确保人身安全,保护产品及相关设备不受损坏。这些警告提示均附带
警告级别说明。
资质人员:本设备/系统须根据此手册进行安装和运行。根据已有安全惯例和标准,只有具备资质的人员有
权进行安装和操作此设备。
部件换修与免责
z 用户对所有由用户或用户代理对仪表所做的改变与维修负责
z 所有新的部件由妙声力过程仪表公司提供
z 仅限制对故障部件进行维修
z 不可再使用故障部件
警告:此产品只有在正确运输、储存、安装、装配、操作及维护的情况下才能正确和安全的工作。
.
注意:请根据说明书使用本产品。
版权归西门子过程仪表有限公司所有 免责申明
我们鼓励用户购买有授权的装订手册或者查
看西门子过程仪表有限公司设计和授权的电
子版手册。西门子过程仪表有限公司对装订
手册或电子版部分或全部内容的拷贝一律不
负任何责任
MILLTRONICS®是 Siemens Milltronics Process Instruments Inc.的一个注册商标。
可通过下列地址联系 SMPI 技术出版部:
Siemens Milltronics Process Instruments Inc
1954 Technology Drive, P.O. Box 4225
Peterborough, Ontario,Canada,K9J7B1
Email: techpubs.smpi@siemens.com
虽然我们对手册内容是否与仪表描述一致进
行了核对,但仍可能存在变动。这样我们不
能确保完全一致。手册内容会被有序的核查
并纠正,勘误表登录在后续版本里。我们欢
迎用户提出各种改进建议。
技术数据可能有变动
关于 SMPI 其它操作手册,可访问我们的网站:www.siemens.com/processautomation 。
Page 3

目录
安全提示...................................................................................1
安全标志符号...........................................................................1
FCC和IC一致................................................................................2
手册.......................................................................................3
支持...................................................................................3
SITRANS LR460...........................................................................5
参数.......................................................................................6
供电...................................................................................6
性能...................................................................................6
界面...................................................................................7
手操器(红外线).......................................................................8
机械...................................................................................8
环境...................................................................................9
过程...................................................................................9
通讯...................................................................................9
认证..................................................................................10
尺寸......................................................................................11
标准配置..............................................................................11
安装.....................................................................................12
安装位置..................................................................................12
关键考虑..............................................................................13
管口设计..............................................................................13
管口位置..............................................................................13
设备位置..............................................................................13
在有障碍物容器内安装..................................................................14
快速瞄准器安装............................................................................15
空气吹扫系统(选配)......................................................................16
通用开口法兰(选配空气吹扫时用)......................................................17
选配的防尘罩..............................................................................18
接线.....................................................................................19
连接 SITRANS LR460........................................................................19
HART接线..............................................................................20
PROFIBUS接线..........................................................................21
危险场合安装..............................................................................23
产品铭牌..............................................................................23
危险场合安装指导参数..................................................................23
快速启动................................................................................26
激活 SITRANS LR460........................................................................26
RUN模式显示...........................................................................26
编辑 SITRANS LR460........................................................................27
手操器和PROGRAM模式显示...............................................................27
Page 4

通过手操器快速启动精灵................................................................28
通过SIMATIC PDM快速启动精灵............................................................30
设备描述(DD)........................................................................30
快速启动步骤..........................................................................31
物位应用举例..............................................................................34
自动虚假回波抑制..........................................................................35
通过SIMATIC PDM操作SITRANS LR460.....................................................36
SIMATIC PDM功能...........................................................................36
SIMATIC PDM Rev.6.0,SP2特点............................................................37
回波图保存与查看......................................................................37
趋势图(时变物位趋势)................................................................38
手动TVT修正...........................................................................39
PDM中的访问功能.......................................................................40
通过SIMATIC PDM修改参数设置............................................................40
配置一个新的仪表......................................................................40
通过PDM标定LR460......................................................................41
通过下拉菜单访问参数..................................................................41
重置..................................................................................41
配置标记重置(只对HART)...............................................................41
自动虚假回波抑制......................................................................41
D/A(数字/模拟)调整..................................................................42
仿真AO(模拟输出)....................................................................42
仿真..................................................................................42
参数参考................................................................................43
参数菜单..............................................................................43
通过SIMATIC PDM下拉菜单...............................................................43
快速启动精灵..............................................................................44
快速启动..................................................................................44
语言..................................................................................44
应用类型..............................................................................44
操作..................................................................................44
单位..................................................................................45
高位标定点............................................................................45
低位标定点............................................................................45
速度..................................................................................45
申请生效..............................................................................45
识别......................................................................................46
操作单位..............................................................................46
配置..................................................................................46
设备..................................................................................48
统计..................................................................................49
输入......................................................................................50
静态修订数............................................................................50
级别..................................................................................50
标准安装..............................................................................50
传感器标定............................................................................51
测量限制...........................................................
细节设定..............................................................................53
...................53
Page 5

回波信息..............................................................................61
输出......................................................................................61
AIFB1.................................................................................61
AIFB2.................................................................................65
mA输出................................................................................65
继电器配置............................................................................67
设备认证..............................................................................67
剩余设备寿命..........................................................................68
剩余传感器寿命........................................................................68
服务间隔..............................................................................68
标定间隔..............................................................................68
附录A:技术参考...........................................................................71
工作原理..................................................................................71
测量响应..................................................................................71
回波处理..................................................................................72
通过SIMATIC PDM监视回波图..............................................................72
时变阀值(TVT).........................................................................72
回波选择..............................................................................72
虚假回波..................................................................................73
自动虚假回波抑制...................................................
...................73
盲区..................................................................................74
回波置信度................................................................................74
回波丢失(LOE).........................................................................74
LOE定时器.............................................................................74
失效保护模式..............................................................................74
最大过程温度表............................................................................76
附录B:问题诊断...........................................................................77
一般错误码/PROFIBUS PA诊断.................................................................80
附录C:维护..............................................................................84
设备维修和免责声明........................................................................85
附录D:本地操作界面.......................................................................85
LCD显示...................................................................................85
RUN模式(启动显示).....................................................................85
PROGRAM模式显示.......................................................................85
手操器....................................................................................86
手操器:在RUN模式的关键功能............................................................86
通过手持编程器编辑....................................................................86
手操器:在Navigation模式的关键功能.....................................................87
手操器:在Edit模式的关键功能...........................................................87
单独参数重置..........................................................................87
附录E: HART通讯..........................................................................88
HART设备描述(DD)..........................................................................88
SIMATIC过程设备管理(PDM).............................................
....................88
SIMATIC PDM的HART Modem接口............................................................88
HART版本..............................................................................88
Page 6

突发模式..............................................................................89
HART通讯参数..............................................................................89
附录 F: HART信息结构.....................................................................90
记录和处理测量值的模块图..................................................................90
模块描述..............................................................................91
附录 G: 通过PROFIBUS PA远程操作...........................................................92
配置工具..................................................................................92
SIMATIC PDM..........................................................................92
设备描述..............................................................................92
配置..................................................................................93
GSD文件...............................................................................93
设置PROFIBUS地址......................................................................93
配置一个新的设备: 程序................................................................93
配置带有S7-300/400 PLC的PROFIBUS PA....................................................94
通过SIMATIC PDM标定....................................................................94
附录 H: 通过PROFIBUS PA通讯...............................................................95
循环VS非循环数据..........................................................................95
循环数据..............................................................................95
状态字节..................................................................................96
诊断......................................................................................97
诊断回复(只对循环控制者)..............................................................97
非循环诊断............................................................................97
非循环扩展诊断(一般错误代码)..........................................................98
非循环数据发送............................................................................98
附录 J: PROFIBUS PA结构...................................................................99
PROFIBUS物位设备设计......................................................................99
记录和处理测量值的模块图..............................................................99
模块描述.............................................................................100
物位转换模块功能组...................................................................100
模拟输入功能模块1和2.................................................................102
附录 K: 软件修订历史....................................................................105
术语表..................................................................................107
索引....................................................................................111
LCD菜单结构.............................................................................113
Page 7
安全提示
须特别注意灰框中的警告和注意内容。
警告:涉及产品警告标志,表示不注意必要的预防可能导致死亡、严重伤害及/或财产损失。
警告:表示不注意必要的预防可能导致死亡、严重伤害及/或财产损失。
注意:表示产品或操作手册部分内容的重要信息。
安全标示符号
手册中的标示 产品上的标示 描述
接地(地线)端子
保护导线端子
交流电
直流电
(在产品上的标示:黄色背
景)警告:参考手册上的细节。
Page 8
FCC 和 IC 一致
只针对在美国境内安装:警告提示必须被注意,以确保人员安全,以及保护本仪表与其所连
接设备。警告提示一般都带有一个警告级别的认证。联邦通讯委员会(FCC)准则
警告:没有经过Siemens Milltronics认可的改动或修改会使用户使用本仪表的权利失
效。
注意:
z 本设备已经经过测试可以与Class A数字设备限制兼容,依照FCC准则Part 15。这个限
制用以当设备在商业环境操作时提供充足的保护屏蔽有害的干扰。
z 本设备产生,使用和发射雷达频率能量,如果没有依照手册进行安装,可能导致对于
雷达通讯产生干扰。在居民区操作本设备也可能对雷达通讯产生干扰,这使得用户不
得不再次投资已避免干扰。
只针对在加拿大境内安装:加拿大工业(IC)准则
注意:
z 本设备应该被安装并使用在一个完整包附的容器内,以阻止RF发散,否则将会干扰航
空导航。安装应由经过培训的安装人员进行,并严格遵照工厂的安装要求。
z 本设备“不保护不干扰”原则。
-如果用户使用了采用同样频率带的高能量雷达可能会对本设备产生干扰,更严重会
损坏设备。
-如果设备对主要的被许可操作产生了干扰,用户有责任担负移走设备的费用,
Page 9
手册
注意:请遵循安装与操作程序以快捷,无误的安装 SITRANS LR460 并保证最大的测量精度
和稳定性。本手册专门且只能用于 LR460。
本手册将帮助您设置 SITRANS LR460 为最佳工作状态。我们随时欢迎您关于本手册内容,
设计或实用性的建议和意见。请把您的内容发致 techpubs.smpi@siemens.com
如欲查找 Siemens Milltronics 其他物位测量仪表手册,请登陆 www.siemens.com/level
.
.
应用举例
在本手册的图解中所应用的例子是 SITRANS LR460 的典型安装方式。一般实现一个应用有
不止一种方法,其他的配置也可以应用。如果举例不能应用于您的应用,请参考可用的选项
检查应用参数。
支持
如果您有任何问题,请登陆 24 小时热线,地址:www.siemens.com/automation/support-request
电话:+49 180 50 50 222
缩写和识别
缩写 全称 描述 单位
A/D
AIFB
CE/FM/CSA
Ci
D/A
DAC
DCS
模拟到数字
模拟输入功能模块
欧盟批准
/工厂互检批准
/加拿大标准协会批准
内部电容
数字到模拟
数字模拟转换器
分散控制系统 控制室设备
安全批准
Page 10
缩写 全称 描述 单位
FV
ESD
HART PV
HART SV
Ii
Io
IS
Li
LR
LTB
mH
绝对真空
静电释放
HART 主变量 从 AIFB1 得到的输出
HART 二级变量 从 AIFB2 得到的输出
输入电流
输出电流
本质安全 安全批准
内部感应
物位雷达
物位变送模块
毫亨(利)
μF 微法拉
μS 微秒
PA
过程自动化
mA
mA
10-3
10
10
-6
-6
亨利
法拉
秒
(PROFIBUS)
PDM
过程设备管理
(SIMATIC)
pF
ppm
psia
PV
RH
SCFM
SV1
皮(可)法拉
百万分率
磅每平方英寸
1
主值
默认测量值
相对湿度
标准立方英尺每分钟
二级值 1
1
LTB 物位输出(物位
-12
10
法拉
单位)
SV2
二级值 2
1
LTB 距离输出(传感
器单位)
TV
TVT
Ui
Uo
变送器变量
时变阀值 敏感阀值
输入电压
输出电压
V
V
1.从物位变送模块来的输出称为主变量(或二级变量)。当此值作为 AIFB 的输入,又被称
为过程变量。这与 HART PV 是不同的。
Page 11

SITRANS LR 460
SITRANS LR 460 是一种四线制24GHz频率的FMCW(调频连续波)雷达物位变送器,具有先进的信号处
理技术,量程高达100米。是应用于粉尘环境和困难应用的物位测量的理想的选择。快速瞄准器使得安装非
常便捷,并可以根据物料的角度调整天线瞄准方向。高频率信号使发射波束很窄,因而LR460对容器干扰不
敏感。
SITRANS LR460可选配空气吹扫连接来清洁天线内壁。
编程
SITRANS LR460通过设置内建的参数表可以实现物位测量功能。您可以通过Siemens Milltronics手操器,
运行SIMATIC PDM的PC或HART手持通讯器进行编程。
批准和认证
SITRANS LR460 可以应用于一般场合,或应用于含有粉尘的危险场合。更多细节请看第 10 页认证。
系统执行
SITRANS LR460 支持 HART 通讯协议,或 PROFIBUS PA(选配)和 SIMATIC PDM 软件。
Page 12
技术规格
注意:Siemens Milltronics 尽力保证这些规格的精确性,但是保留随时更改的权利。
SI
TRANS LR 46
电源
•
供电电源 100~ 230 V AC, ±15%, 50/60 Hz, 6W
•
保险丝 (AC)
•
保险丝 (DC)
性能
参考操作状态根据IEC60770-1
• 环境温度 +15到+20℃
• 湿度 45%到75% m 相对湿度
• 环境压力 860到1060mbar(12,47到15,37psi)
测量精度(根据IEC60770-1测量)
• 非线性(精度) 25mm(1”)或0.25%量程(包括滞后和非重复精度)
• 非重复精度 10mm[包括非线性参数]
• 死区(分辨率) 10mm[包括非线性参数]
• 滞后误差 0mm
模拟输出精度(根据IEC60770-1测量)
• 非线性(精度) 0,100%量程(包括滞后和重复精度)
• 非重复精度 0,030%量程[包括非线性参数]
• 死区(分辨率) 0,030%量程[包括非线性参数]
• 滞后误差 0%
频率 25GHz 正常
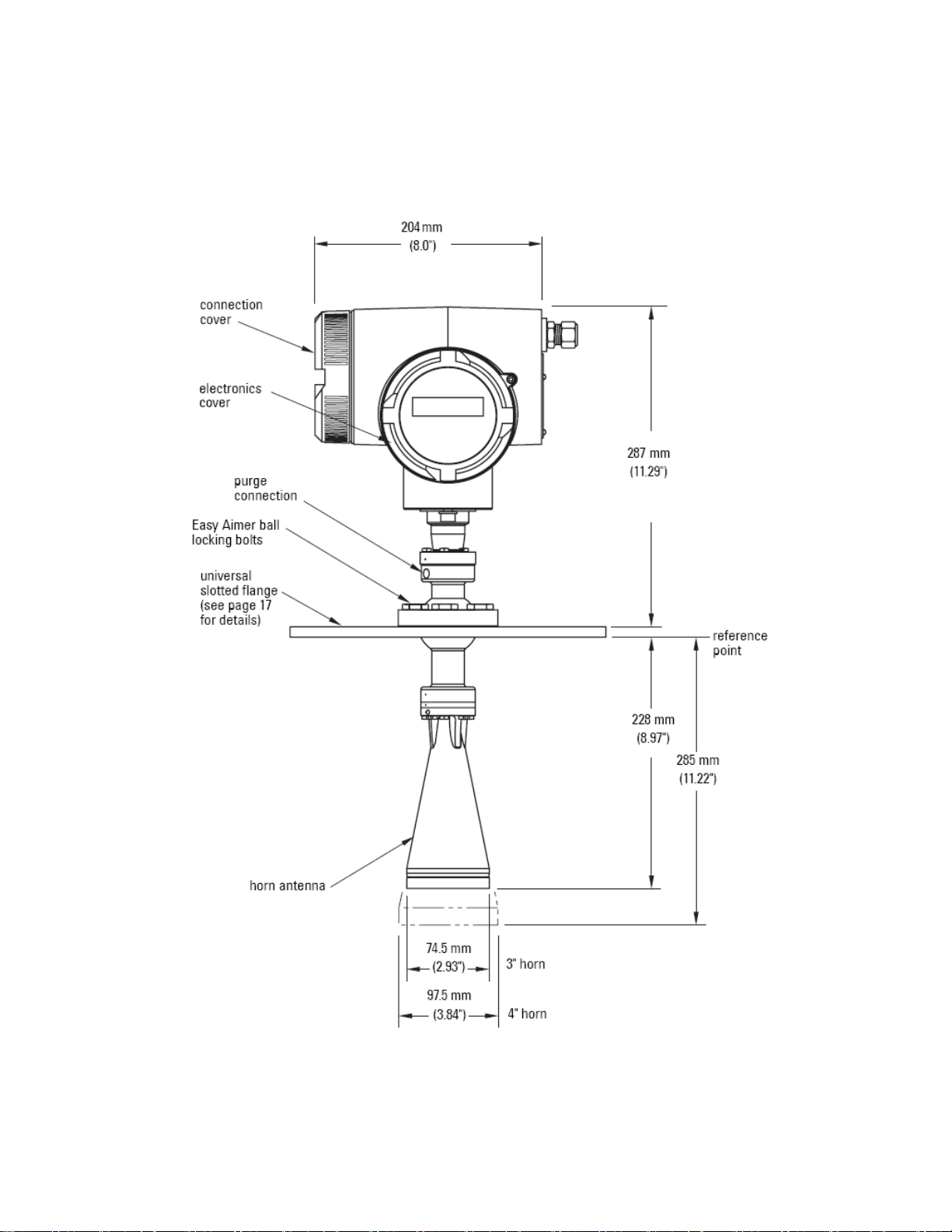
测量范围 0,35m到100m(1,15到328.08ft)
从法兰面作为参考点
0
24 V DC, +25/-20%, 6W
SI1 快速动作陶瓷, 4 x 20 mm, 1A, 250 V AC SI2 Slow-Blow, 4 x 20
mm, 0.63 A, 250 V AC
SI2 快速动作陶瓷, 4 x 20 mm, 2A, 250 V AC SI2 Slow-Blow, 4 x 20
mm, 0.63 A, 250 V AC
SI1 快速动作陶瓷, 4 x 20 mm, 1A, 250 V AC SI2 Slow-Blow, 4 x 20
mm, 0.63 A, 250 V AC
SI2 快速动作陶瓷, 4 x 20 mm, 2A, 250 V AC SI2 Slow-Blow, 4 x 20
mm, 0.63 A, 250 V AC
Page 13

长期稳定性 ≤±1mm/年
盲区 0,35m(1,15ft)
更新时间 mA输出和循环显示每秒更新一次
波束角度
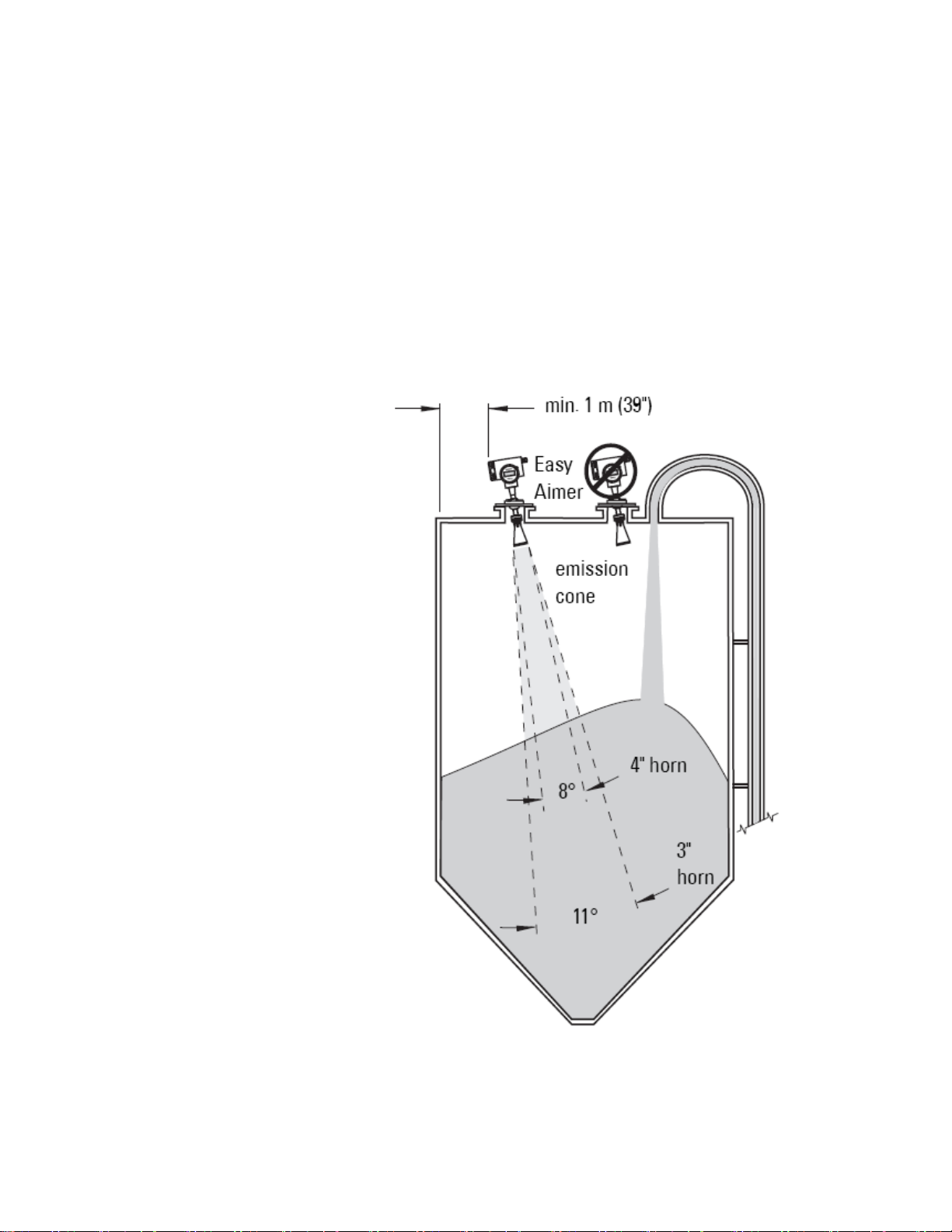
• 3”天线 11º 以3dB作为分界
• 4”天线 8º 以3dB作为分界
内存
• 非挥发性EEPROM
• 无需电池
界面
模拟输出(当输出为PROFIBUS PA时无效)
•
信号范围 4到20mA
上限可在20到23mA之间调整
•
失效信号
•
负载 最大600欧姆;HART通讯最小230欧姆
3,6mA到23mA:或最后数值
数字输出
•
功能 可以作为设备状态或限位值(物位)设置
•
信号类型
继电器,NCC或NOC可选,最大50V DC,
最大200mA, 5W
自重置熔断, Ri=9Ω
电气隔离 电气输出和电源供应隔离,相互之间隔离
显示
•
LCD, 两排,每排16字符,
可显示:
液位,波幅,数字输出,温度,置信度,信噪比,输出电流,距离
Page 14
红外线手操器
Siemens Milltronics 红外线本安 (Intrinsically Safe,本质安全) 手操器用于危险及其它场所 (专用电池
不可替代)
•
认证: ATEX II 1 G, EEx ia IIC T4, 证书 SIRA 01ATEX2147
CSA和FM Class Ⅰ,Div 1,Gr. A, B, C, D, T6@max
环境温度40℃(104℉)
•
环境温度: −20 ~ 40°C (−5 ~ 104°F)
•
接口: 所带红外脉冲信号
•
电源: 3 V 锂电池
•
重量: 150 g (0.3 lb)
•
颜色: 黑色
机械
接液部分(接触过程)
•
法兰和喇叭天线 304不锈钢(或相当的牌号)
•
发射天线 PTFE
过程连接
• 通用法兰 3”/80mm,4”/100mm,6”/150mm(请看17页的法兰尺寸)
压力(容器) 0,5bar(7.25psi)最大
喇叭天线
• 3"喇叭(74,5 mm) 直径
• 4"喇叭(97,5 mm) 直径
重量
• 仪表和法兰重量
过程连接 重量
通用, 3”/80mm法兰, 3”喇叭口天线 6,1kg(13,4lbs)
通用, 4”/100mm法兰, 4”喇叭口天线 10,6kg(23,36lbs)
通用, 6”/150mm法兰, 4”喇叭口天线 TBA
Page 15

附件
•
构造 铸铝,涂层
•
电气接口 2 x M20
或 2 x ½”NPT(可选)
•
防护等级 Type 4X/NEMA 4X, Type 6/NEMA 6, IP 67
防尘罩(选配)
•
3” PTFE,管夹连接,O.D. 95mm(3,74”)
•
4” PTFE,管夹连接,O.D. 120mm(4,72”)
空气吹扫连接
•
1/8”NPT内螺纹接头
环境条件
2
•
安装位置: 室内/室外
•
海拔
•
相对湿度 适于室外 (Type / NEMA 4X, 6/ IP67)
•
安装等级 II
•
污染等级 4
•
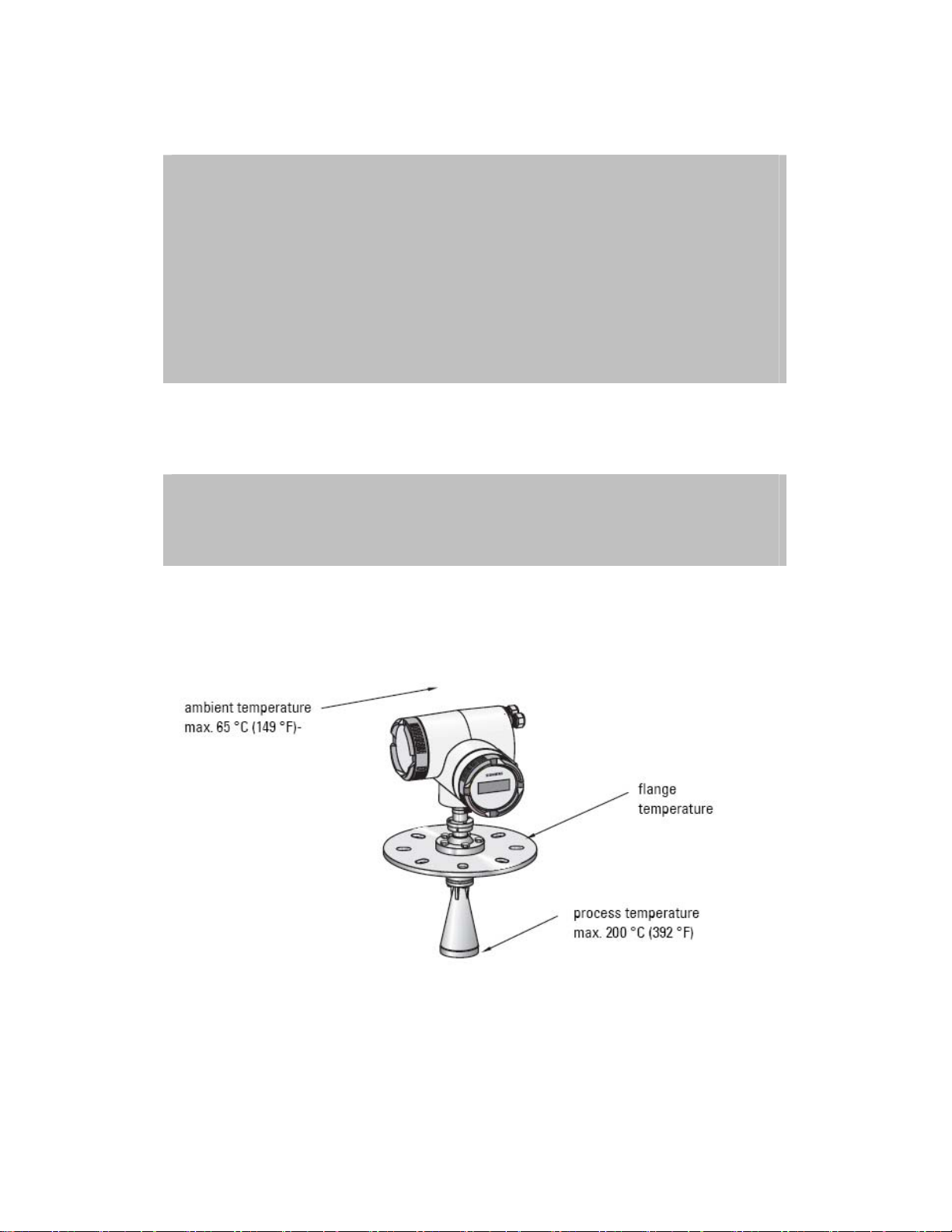
允许环境温度3 -40~65 °C (-40~149 °F) (非危险性)
LCD: -10 ~55 °C (14~131 °F)
200
0 m (6562 ft) 最大
在危险区域观察温度等级!
过程
• 过程温度 -40~200 °C (-40~392 °F)
• 压力(容器) 最大0.5 bar (7.25 psi)
通信
通信:HART
•
负载: 连接耦合模块时,230~600 Ω 230~500 Ω
•
连线: 屏蔽多线制:≤ 1.5 km(4921ft)
•
协议: HART, Version 5.1
1
Page 16

通信:PROFIBUS PA
•
协议: PROFIBUS PA,
技术: IEC 61158-2, slave-functionality
•
设备等级: B
•
设备描述: 3.01
总线电流(PROFIBUS PA):10.5mA
认证
•
危险区 FM/CSA Class II, Div. 1, Groups E,F and G, Class III
• 常规 CSAus/c, FM, CE
• 无线电 FCC, Industry Canada, European Radio (R&TTE)
ATEX II 1D; 1/2 D, 2D T85 deg C
Page 17
尺寸
标准配置
1. 在振动强烈场合使用喇叭延长段时请联系西门子工程师。
2. 通用法兰符合 EN1092-1/ASME B16,5/JIS B2238 螺栓孔分布圆。
Page 18
安装
警告:
z SITRANS LR460 需按照本手册所述方式使用,否则设备提供的保护可能被削弱。
z 安装需由有资格的人员进行,而且需符合当地政府规章。
注意:
z 欧盟及其成员国家安装,必须符合 ETSI EN302372
z 参考设备铭牌上的认证信息
z 使用匹配的穿线管和接头,保持 IP 或 NEMA 等级
z 观察最大允许环境和过程温度,看第 2 页环境/操作温度
z 美国和加拿大境内安装,看第 2 页 FCC 和 IC 一致
安装位置
注意:
z 提供便于观察显示屏和便于通过手操器操作。
z 提供的环境条件需符合外壳防护等级和材料兼容性
z 如果设备安装在阳光直照下需安装遮阳罩
Page 19
重要条件
z 管口的设计与位置对应用是否成功致关重要
z 避免罐壁以及下面所提到的罐内遮挡物的反射干扰
管口设计
z 天线底边必须伸出管口
z 管口必须保证有足够的空间允许 LR460 可以以一定的角度瞄准(看下面设备角度)
管口位置
z 天线距离罐壁至少一米
z 保持发射束不受梯子,管,
横梁,进料的干扰
设备角度
z 如果可能的话,把天线调
整到雷达波束垂直需测量
物质表面的位置。(看第
15 页的快速瞄准器安装)
z 需要补偿容器的障碍物
时,请看第 14 页的极化参
考点。
Page 20
在有障碍物的容器内安装
发射极参考点
梯子,管道或填充路径等障碍可能导致错误的反射。为了避免这些,可以使用发射极参考点
使设备适应这些干扰。
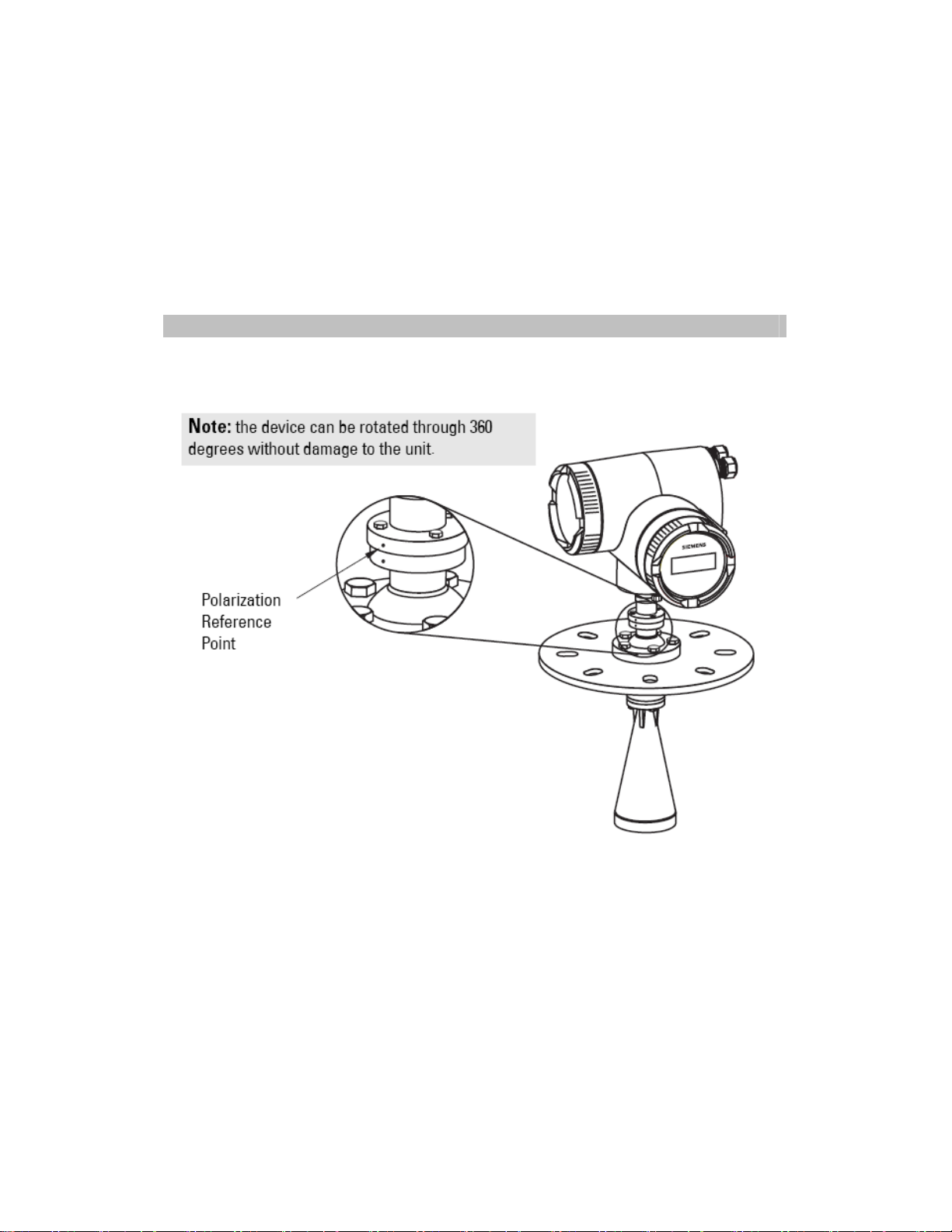
z 一个小的中心原点提供一个极化参考点
z 为了得到最好的信号,旋转设备直到发射极参考点面朝向障碍,或者背对障碍(180 度)
注意: 设备可以旋转 360 度。
Page 21
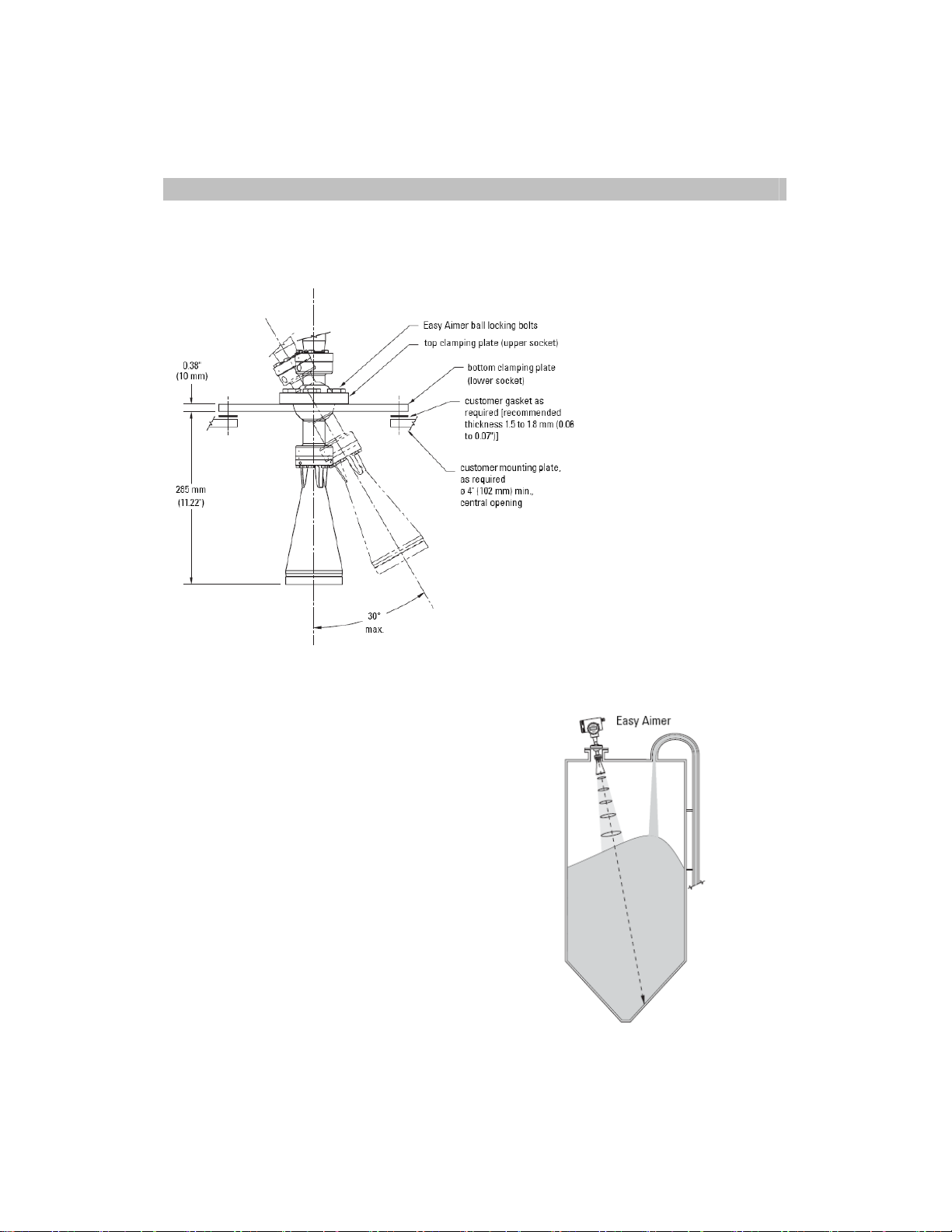
快速瞄准器安装
注意:当快速瞄准器球被固定,设备可以自由旋转 30º
1. 固定住电子部件外壳,松开快速瞄准器球
锁定螺栓然后慢慢调整外壳
2. 转动 SITRANS LR460 以便天线垂直指
向物料表面,如果可能(作为参考,瞄准
波束在大约 2/3 罐直径处)
3. 当调整到了需要的位置,上紧 5 个螺栓
到 15-23Nm(11-17 lbf-ft)
快速瞄准器琐定螺栓
顶部箝位板(上部牙槽)
底部箝位板(下部牙槽)
客户提供的垫圈(推荐厚度
1,5 到 1,8mm/ 0,06 到 0,
07”)
客户提供的安装板(推荐厚
度最小 102mm(0,4”)中
心开孔
Page 22

空气吹扫系统(选配)
为了更频繁的清洗,可以在法兰与喇叭天线间安装一个吹扫系统。系统在法兰上提供一个
1/8”内螺纹用于连接冷却气体或清洗液体穿过法兰从喇叭内排出清洁天线。用户需要手动或
自动阀系统提供吹扫介质。
选配吹扫只能配于第 17 页所示通用法兰。
注意:
z 当安装了防尘罩就不能使用吹扫系统了
z 吹扫持续时间,压力和间隔,根据应用情况而不尽相同。用户有责任根据实际情况确定
所需。
z 短时间的高压气体吹扫比持续的低压气体吹扫更为有效。
z 一些粉尘颗粒有很强的研磨性,可能在吹扫过程中被吸进喇叭内部,损坏天线内 PTFE
发射装置。您可以咨询西门子工程师咨询替代的方案。
z 用户有责任确认容器内的压力,考虑过程连接孔与 LR460 天线系统。
推荐的有效清洗 耗气量
压力:90 到 110psi
入口流量:10 SCFM
z 吹扫连接口由制造商密封,使用 1/8” 塞
子。
z 当塞子被移出,并连接上了吹扫系统,
操作者有责任确认吹扫环路符合”Ex”:
比如,配一个 NRV 阀。
(流量 VS 应用压力)
气源 近似入口流量
20 5 SCFM
40 6 SCFM
60 8 SCFM
80 9 SCFM
90 10 SCFM
Page 23
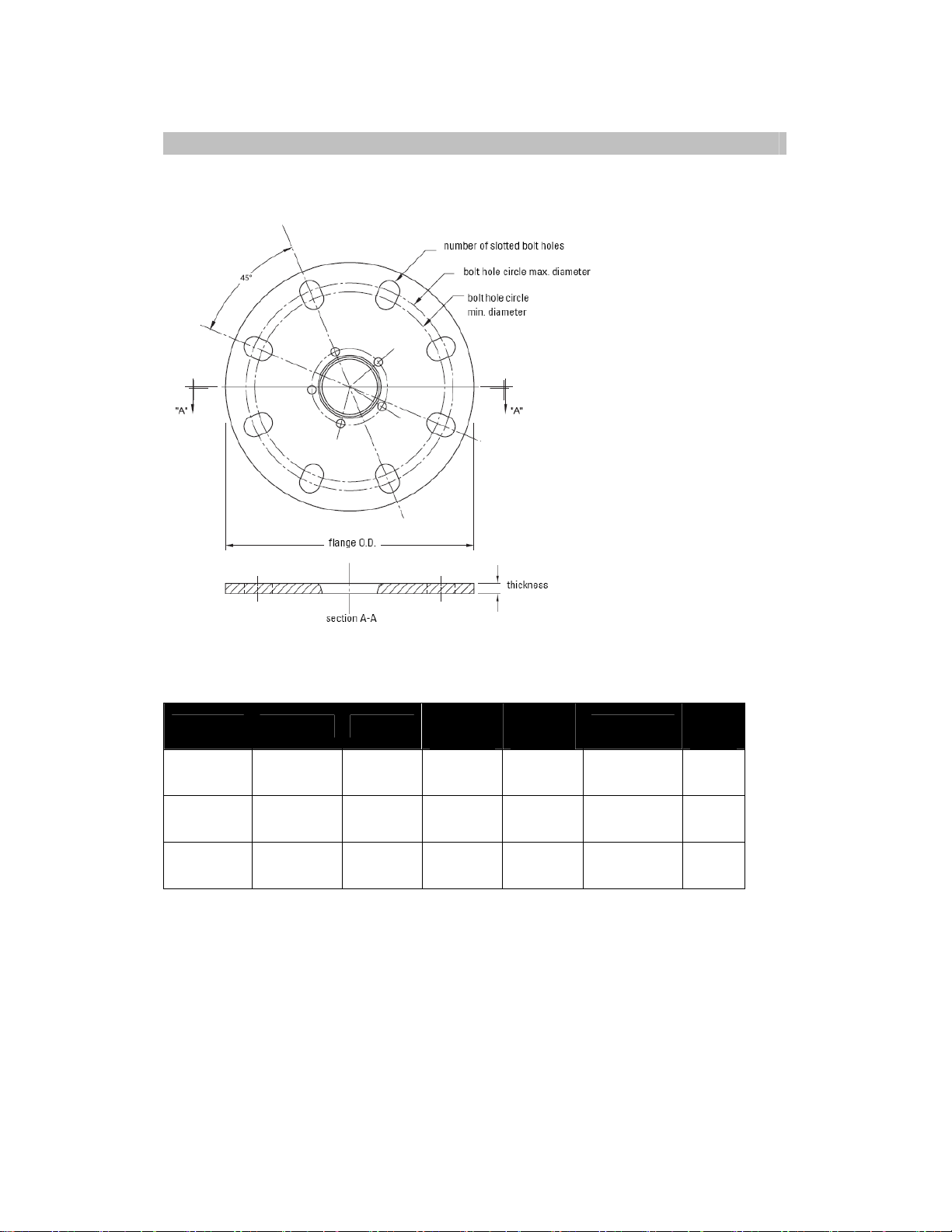
通用开口法兰(只用于选配空气吹扫时)
警告:用户有责任选择适当的螺栓与垫片材料适合服务情况与法兰限制。
螺栓孔数
螺栓孔最大中心距
螺栓孔最小中心距
法兰外径
厚度
尺寸
管尺寸 法兰外径 厚度
3”/
80mm
4”/
100mm
6”/
150mm
7,87”/
200mm
9,00”/
229mm
11,22”/
285mm
0,38”/
9,65mm
0,38”/
9,65mm
0,38”/
9.65mm
螺栓孔最
大中心距
6,30”/
160mm
7,52”/
191mm
9,53”/
242mm
螺栓孔最
小中心距
5,91”/
150mm
6,89”/
175mm
9,45”/
240mm
螺栓孔半径
0,38”/
9,5mm
0,38”/
9,5mm
0,45”/
11,5mm
螺栓孔
数量
8
8
8
Page 24

选配的防尘罩
注意: 在使用空气吹扫前必须前卸下防尘罩。(请看第 16 页空气吹扫系统)
防尘罩安装在喇叭的末端,用来防止粉尘和其他过程材料粘附在喇叭内壁。
z 一般用于高湿度或者粉料含有高水分的场合应用。
z 有两种规格分别匹配 3”和 4”喇叭。
安装
1. 彻底的清洁喇叭。如果您需要卸下喇叭来清洗,请注意不要损坏或弯曲塑料发射装置。
塑料发射电极
凹槽
2.把帽按紧直到帽上的隆起完全卡进喇叭上的凹槽。
3.用手把夹套拉紧。
4.使用螺丝刀把夹套螺丝拧紧,保证气密性。
注意:保证喇叭内没有水分是非常重要的。
隆起
防尘罩
夹套螺丝
Page 25

接线
警告:
z 在危险场合打开外壳盖时必须先关闭设备供电
z 所有 AC 型号的现场接线必须至少有满足 250V 的隔离
z DC 输入端子应该在输入与输出间提供电气隔离,已符合 IEC61010-1 安全要求
z 在建筑物内安装时设备要带有一个 16A 的熔断或短路器
z 在建筑物内安装时所使用的短路器或开关必须标示为断开开关,并且要尽可能接近设
备,方便操作员操作
z 为避免短路,不要在接线盒内连接一个带裸线的电阻。
注意:
z AC 和 DC 输入电路:最小 14AWG(2.5mm2)铜线
z 不要把供电线与通讯线放在一起
z 推荐的端子上紧扭矩是:0.5-0.6Nm(0.37-0.44 Lbf-ft)
连接 SITRANS LR460
1. 使用 3mm 内六角螺丝刀拧开盖子
2. 松开进线管,把供电线缆推进接线盒内,并足够接到接线端子
(请看第 20 页的 HART 接线或第 21 页的 PROFIBUS 接线下面的步骤)
Page 26
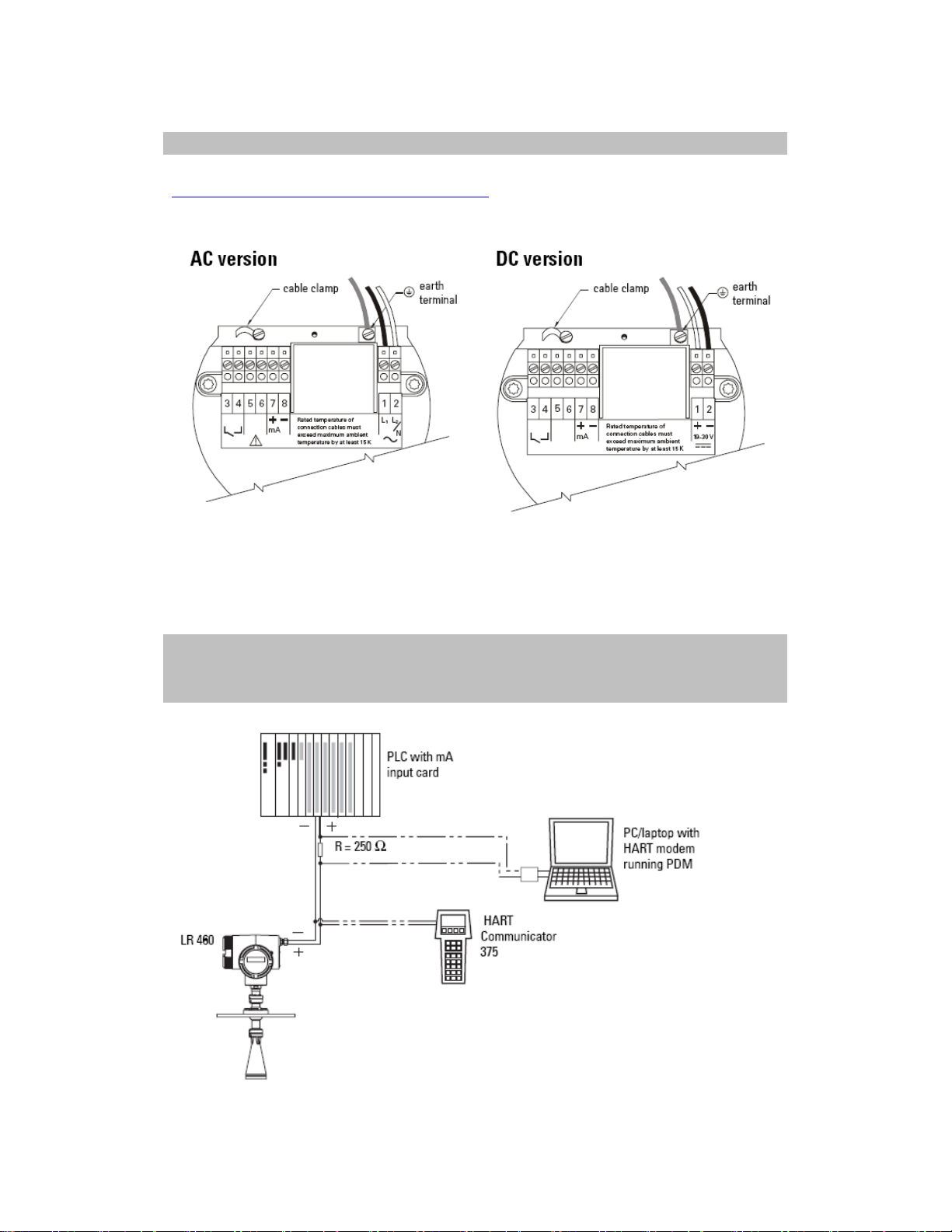
HART 接线
注意:LR460是四线制仪表,不需要 4-20mA 环路供电
安装需符合 HART 应用指南中的接线和安装(订购号 HCF-LIT-34),在以下网址:
http://www.hartcomm.org/technical/doclist.html
.
连接 HART
典型 PLC/mA 带有 HART 配置
注意:
z 为通过 HART 协议通讯无误,当环路阻抗小于 250 欧姆时请串接一个 250 欧姆的电阻
z 在环路中只能有一个 HART 通讯设备
3. 连接供电的地线到外壳内的金属架上的地线端子。调整电缆长度以便在电缆被拉动时地
线是最后被断开的
Page 27
4. 上紧电缆接头,检查出气冒口(拉和旋转)
5. 盖上外壳盖然后用手上紧,密封圈必须干净并且没有被损坏
6. 上紧盖锁螺丝
7. 连接外部地线到你的容器的接地连接上。
2
使用横截面积为 2.5mm
或更大的导线
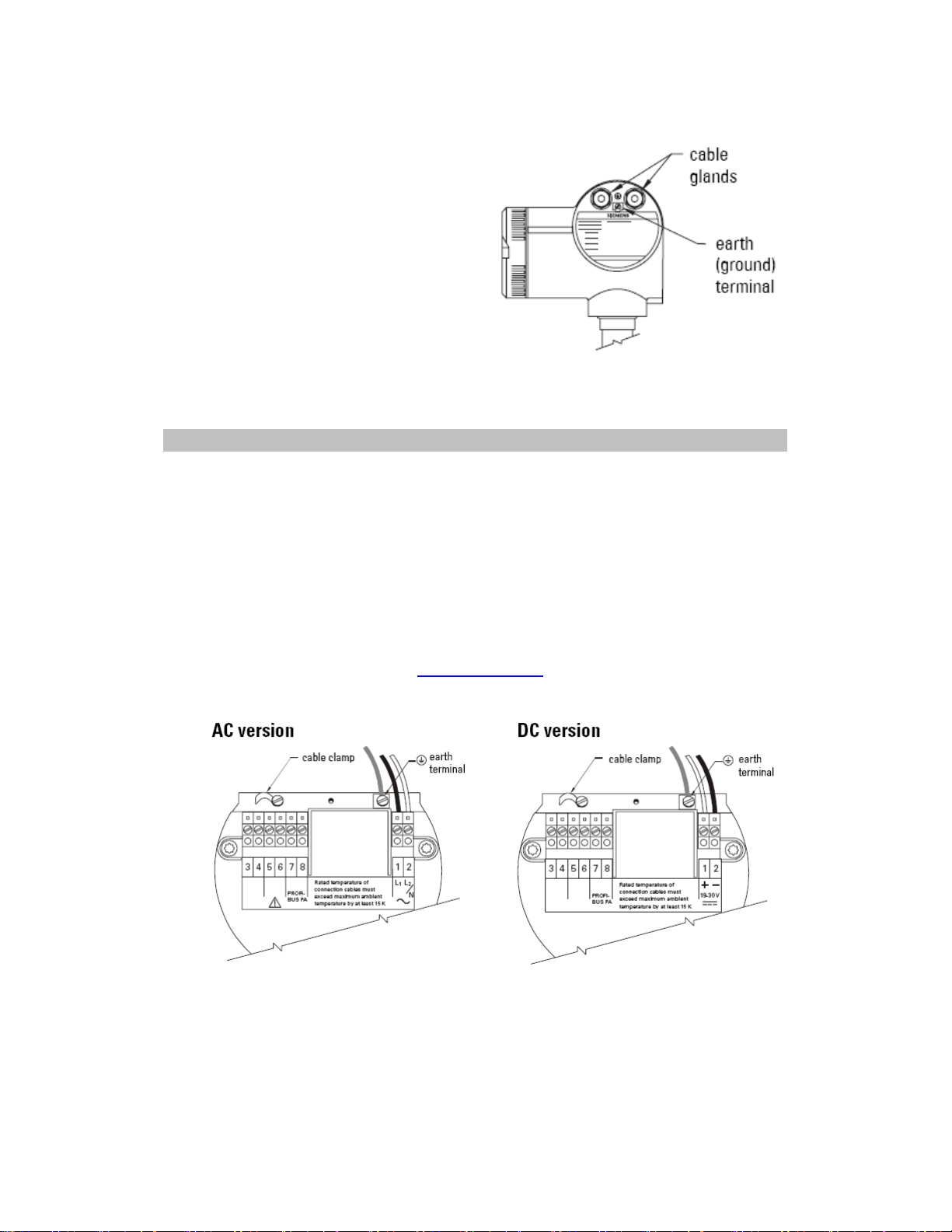
PROFIBUS 接线
注意:PROFIBUS PA 是不分极性的。
供电需要
确定在总线上将会连接多少设备,计算这些设备的总的最大电流消耗:SITRANS LR460 需要
10.5mA 电流储备。
总线端子
PROFIBUS PA 必须接到导线的末端才能正常工作。请参考 PROFIBUS PA 用户和安装指
南(订购号 2.092),在以下网址:www.profibus.com
.
Page 28

连接 PROFIBUS PA
典型 PLC/mA 带 PROFIBUS PA 配置
4. 连接供电的地线到外壳内的金属架上的地线端子。调整电缆长度以便在电缆被拉动时地
线是最后被断开的
5. 上紧电缆接头,检查出气冒口(拉和旋转)
6. 盖上外壳盖然后用手上紧,密封圈必须干
净并且没有被损坏
7. 上紧盖锁螺丝
8. 连接外部地线到你的容器的接地连接上。
使用横截面积为 2.5mm
2
或更大的导线
Page 29
危险场合安装
产品铭牌
注意: 铭牌展示的是一个典型的例子。请检查你设备上的铭牌确认设备的参数配置。
危险场合安装的指导细节
(参考 European ATEX Directive94/9/EC,Annex Ⅱ,1/0/6)
注意:
z 看前盖内部铭牌图。铭牌上是典型的例子。请检查您的设备的铭牌已确认设备参数。
z 安装需由有资格的人员进行,而且需符合当地政府规章。
下面的应用于设备的建议含盖在 Sira 06 ATEX 9218X 范围内。
1. 使用和装配,参考主指导
2. 设备被认证可用于 Category Ⅱ 1D, 1/2 D &2D. 基本的健康与安全需要已确认符合 IEC
61241-0:2004 和 IEC 61241-1:2004.
3. 设备可以在温度级别T内应用于粉尘和纤维环境。
Page 30

4. 高温数据 7ML5426 系列
设备种类 在喇叭天线处允许的环境温度 在电子模块外壳处允许的环境温度
1D, 1/2D, 2D
5. 设备不能作为安全级别仪表使用(请参考 Directive 94/9/EC Annex Ⅱ,clause 1.5)
6. 安装和检查本设备应由经过适当培训的人员进行,符合实践应用号码(EN61241-14 和
EN61241-17 欧洲)
7. 修理本设备应由经过适当培训的人员进行,符合实践应用号码
8. 组成部件或用于备件的部件应由经过适当培训的人员进行,符合工厂文件。
9. 用户有责任保证人工强制关闭设备是可实现的,此保护系统需要与偏离操作状态的自动
化过程合并,同时保证这样不会降低安全性。
10.设备标示:在产品标签上包含了设备标示。请看前盖内的产品铭牌图。
11.如果设备可能接触有伤害性的物质,用户有责任采取适当的措施方式保护不受影响,同
时确保保护级别不会降低。
z 有伤害性的物质,比如:酸液或酸性气体可能腐蚀金属,或溶液可能影响聚合物质。
z 适当的措施,比如:周期性的检查,或根据可能接触的物质选择合适的金属。
-40℃(-40℉)≤T≤+200℃(+392℉) -40℃(-40℉)≤T≤+65℃(+149℉)
安全使用的特殊状况
跟在认证数的后缀“X”关系到下面的安全使用的特殊状况。
z 线缆或接头必须符合欧洲 Directive 94/9/EC Group Ⅱ,Category 1D, 1/2D, 或 2D.并且必
须保持完整的外壳 IP 等级。
z 为了那些需要清洗的应用,用户应保证危险场合的可燃性粉尘不会进入清洗气源,保证
场合级别不会降低。
Page 31

注意
Page 32

快速启动
注意:SITRANS LR460 只支持 SIMATIC PDM 6.0 版本 SP2
SITRANS LR460 简单应用只需要设置以下:
z 选择应用类型(筒仓结构)
z 选择操作类型:物位,距离或空间
z 设置响应速度
z 设置高和低标定点
一个快速启动精灵包括了您需要的所有设置。有两种方式可以进入精灵:
z 通过手操器快速启动精灵,第 9页
z 通过 SIMATIC PDM 快速启动精灵,第 11 页
使用 SITRANS LR460
注意:
z 保持笔记本,手机,PDA 等红外设备远离 SITRANS LR460,避免无意中的操作。
z 频繁的开启和关闭设备会导致电气老化(请看 49 页 2.3.进入记录)。
仪表上电后,SITRANS LR460 自动进入运行(RUN)模式,检测传感器法兰表面到物料料
面之间的距离。LCD 显示测量值,默认单位是米。系统状态显示在 LCD 上,或在远程通讯
终端。
运行(RUN)模式显示
正常操作 LOE 状态
请看第 85 页 RUN 模式(启动显示)查找更多细节信息。
Page 33

编辑 SITRANS LR460
可以在任何时间激活 PROGRAM 模式,已改变参数值和设置操作状态。
z 参数被组织成功能组,并被分成四级菜单结构(请看第 113 页 LCD 菜单结构)。
z 设置适合您应用要求的参数。
z 如欲查看详细结构列表,请看第 43 页的参数参考。
手操器和 PROGRAM 显示
注意: 请看第 85 页的附录 D:本地操作界面以查找关于手操器和 LCD 显示的更多细节。
z 把手操器对准显示屏(最大间距 600mm),然后按模式(MODE)键激活编程(PROGRAM)
模式或回到运行(RUN)模式
z 使用箭头键来在菜单项之间切换
z 使用右箭头键打开编辑(EDIT)模式:编程图标会
闪烁
z 如果需要,改变到所要的值或选项然后按右箭头键
来确认。LCD 显示新的数值然后编程图标消失。
z 按模式来返回 RUN 模式。
Page 34

通过手操器快速启动精灵
注意:
z 精灵是一个完整的包,设置是内部关联的。
z 不要使用快速启动精灵来修改单独的参数。请看第 43 页替代参数参考。
z 申请改变只有在顺序的最后,在你选申请改变(Apply change)后。
一般激活编程(PROGRAM)模式快速启动菜单就会出现。
1.快速启动
注意:在启动快速启动序列之前不必重启。
a. 把手操器对准显示屏(最大间距 600mm),然后按模式(MODE)键激活编程
(PROGRAM)模式然后进入一级菜单。
b. 按右箭头键在菜单项 1.1 间切换
c. 按右箭头键打开编辑(Edit)模式:编程图标会闪烁
d. 改变一个设置,改变所需要的值为一新值
e. 修改数值后,按右箭头键确认。LCD 显示下个菜单项,编程图标消失,然后最
右边的数字闪烁已显示导航(Navigation)模式。
1.1 语言
选项: 英语(ENGLISH),德语(DEUTSCH),法语(FRANCAIS),西班牙语(ESPANOL)
1.2 应用类型
选项:
钢
水泥
筒仓结构
1.3 操作
物位 从零位(空罐物位)到物料表面的距离
选项:
空间 从物料表面到高标定点的距离
距离 从传感器参考点到物料表面的距离
Page 35

操作类型
1.4 单位
选择快速启动变量单位(高和低标定点,物位,距离或空间)
选项: 毫米(mm),厘米(cm),米(m),英寸(in),英尺(ft)
1.5 高标定点
高标定点与传感器参考点之间的距离:通常是过程满罐物位(看 1.3 操作图)
数值: 范围 0.0000 到 100.00 m
1.6 低标定点
低标定点与传感器参考点之间的距离:通常是过程空罐物位(看 1.3 操作图)
数值: 范围 0.0000 到 100.00 m
1.7 速度
设置目标范围内的测量值改变的反应速度。
慢速 0.1m/minute
选项:
使用比最大填充或排空速度略快的选项(取大者)。较慢的速度提供高的精度; 较快的速
度允许更严重的物位波动
中速 1.0m/minute
快速 10.0m/minute
1.8 申请改变
为了保存快速启动设置需要使用申请改变。
数值: 是(YES),否(NO)
选择是,SITRANS LR460 准备操作并返回运行(RUN)模式。
Page 36

通过 SIMATIC PDM 快速启动精灵
图象化的快速启动精灵包含了简单应用的所有所需设置,只需 4 个步骤。
为使用 HART 或 PROFIBUS PA,您需要一个 PC 设置工具:我们推荐 SIMATIC PDM。
请参考操作建议或在线帮助已得到使用 SIMATIC PDM 的细节。(使用 SIMATIC PDM 设置 SMPI
HART 和 PROFIBUS PA 仪表的应用向导请到如下地址:
www.siemens.com/processautomation
. )
设备描述(DD)
您需要针对 SIMATIC PDM SP2 版本 6.0 的 DD。您可以在设备目录里指定 DD, 在
Sensors/Level/Echo/Siemens Milltronics/SITRANS LR460.
如果您在 Siemens Milltronics 下面没有发现 SITRANS LR460,您可以在如下网址下载:
https://pia.khe.siemens.com/index.asp?Nr=14655
保存文件到您的电脑硬盘,解压缩文件。点击 SIMATIC PDM-Manager Device Catalog,选中
DD 文件。
设置一个新的设备
1. 设置地址(PROFIBUS PA 默认值 126;HART 默认值 0;)
z 把手操器对准显示屏按模式(MODE)键激活编程(PROGRAM)模式然后进入一
级菜单。
z 按下箭头键,右箭头键在菜单项间切换。(到菜单项 2.1.2)
z 按右箭头键打开编辑(Edit)模式:编程图标会闪烁
z 如果需要,键入一个新的值然后按右箭头键确认,LCD 显示新的数值然后编程
图标消失
2. 您需要最新的设备描述(DD)来使用您的仪表。点击 SIMATIC PDM-Manager Device
Catalog, 选中 DD 文件。
3. 使用 SIMATIC Manager 为 LR460 创建一个新的项目。使用 SIMATIC PDM 设置 HART
和 PROFIBUS PA 的应用指南可以在下面地址下载:
4. https://pia.khe.siemens.com/index.asp?Nr=14655
5. 打开 Menu Device-Master Reset 来执行一个工厂重置。
6. 上传参数到 PC/PG。
7. 通过快速启动精灵在标定设备。
.
Page 37

快速启动精灵步骤
注意:
z 快速启动设置不是孤立的参数。设置是内部关联的,改变只有在第 4 步骤的末尾点击
Transfer 时应用。
z 不要使用快速启动精灵修改独立的参数,请看手册中详细的建议。
打开菜单 Device-Quick Start,遵循步骤 1 到 4。
步骤 1-识别
点 NEXT 来接受默认值。(描述,信息和最后设置场合可以留空)
Page 38

步骤 2-应用类型
选择应用类型和操作类型然后点击 NEXT
步骤 3-范围设置
设置传感器单位,输入高和低标定点值,选择相应速度正好高于最大填充/排空速度,点击
NEXT
Page 39

步骤 4-概要
检查参数设置,点击 BACK 返回然后修改数值,或者点击 TRANSFERNEXT 来上传数值到
设备。
当值上传到设备后,信息 Device Configuration Complete 出现。点 OK 来更新设备值到 PC/PG,
同步设备和 PDM。
Page 40

物位应用举例
应用是一个钢制面粉筒仓,3 小时填满,21 天排空。
使用快速瞄准器,LR460 发射锥形可以达到与物料表面近似垂直。
填充率=0.09 m/minute(15.5m/180minutes).相应速度设置为慢速:0,1m/minute,比填充率稍微
快一点。
语言
应用类型
操作
单位
高标定点
低标定点
速度
申请应用
快速启动设置 描述
ENGLISH
STEEL
LEVEL
M
1.0
15.5
SLOW
YES
筒仓结构
物料从低标定点作为参考点
过程满物位
过程空物位
相应速度=0.1m/minute
保存新的设置
Page 41

通过 SIMATIC PDM 操作 SITRANS LR460
注意:
z SITRANS LR460 只支持 SIMATIC PDM version 6.0 SP2。
z 完整的参数列表,请看第 43 页参数参考。
SIMATIC PDM 是一个用来使用和维护 SITRANS LR460 和其他过程设备的软件。请参考操
作指导或在线帮助得到关于使用 SIMATIC PDM 的更多细节。
(您可以登陆 www.fielddevices.com
Device Manager.)
: Products and solutions>Products and Systems>Process
SIMATIC PDM 功能
SIMATIC PDM 监视设备的过程值,警报和状态信号。允许显示,对比,调整,确认和仿真
过程设备数据。
请看第 39 页在 PDM 中实现功能。
SIMATIC PDM Rev. 6.0, SP2 功能
SITRANS LR460 的图形界面使监视和调整非常便捷。
z 一个图形化的快速启动精灵组拥有一个简单应用的所有需要的设置,而只需要仅仅四
步。请看第 30 页通过 SIMATIC PDM 快速启动精灵。
z 请看第 37 页回波图保存和观看实现回波图的对比。
z 请看第 37 页趋势图(物位趋势图)实现物位趋势监视。
z 请看第 38 页手动 TVT 修改器。
Page 42

回波图保存和观看
注意: 双击每个轴然后记录 X 缩放和数据缩放值,所以你可以通过重新设置这些值来储存
默认视图。
z 打开菜单 View-Display,然后滚动到 Echo Profile。
z 按 Measure 来更新回波图。
z 在保存一个图后打开菜单 View-Show echo profile。
趋势图(物位随时间趋势)
注意: 双击每个轴然后记录 X 缩放和数据缩放值,所以你可以通过重新设置这些值来储存
默认视图。
打开菜单 View-Trend 观看物位随时间趋势。
Page 43

手动 TVT 修改器
注意:
z 更多详细的解释,请看第 73 页自动虚假回波抑制。
z 请看第 57 页 3.5.6TVT(自动虚假回波抑制)得到更多指导。
z 双击每个轴然后记录 X 缩放和数据缩放值,这样你可以通过重新设置这些值来储存默
认视图。
打开菜单 Device-TVE Shaper.
z 使用 Index+和 Index-改变 TVT 曲线上的X箭头位置;使用 Va l ue + 和 Va l u e - 来升高和降
低曲线。
z 还有一种选择,在对话框为每一个折点直接输入数值。
Page 44

在 PDM 中实现功能
您可以在菜单 Device 或 View 的下拉菜单中实现大部分的功能。
完整的列表,请看第 43 页通过 SIMATIC PDM 下拉菜单。
在线显示
在线显示允许您实时对比输出。打开菜单 View-Display.
Page 45

通过 SIMATIC PDM 改变参数设置
注意:完整的参数列表,请看第 43 页参数参考。
1. 启动 SIMATIC PDM,连接 SITRANS LR460,从设备下载数据。
2. 在参数值框输入参数值,然后按 Enter, 状态显示 Changed。
3. 打开设备菜单,点 Download to device,然后使用 File-Save.保存参数设置。状态框没有
显示。
配置一个新的设备
设备描述(DD)
您需要 SIMATIC PDM version 6.0 with sp2 的 DD。您可以在设备目录中定位 DD,在
Sensors/Level/Echo/Siemens Milltronics/SITRANS LR460. 如果您在 Siemens Milltronics 看
不到 SITRANS LR460,您可以从西门子网站下载,地址:
https://pia.khe.siemens.com/index.asp?Nr=14655
把文件保存到你的电脑,解压缩。然后运行 SIMATIC PDM-Manager Device Catalog,定位
DD 文件然后选择他。
1.设置地址(默认 PROFIBUS PA 是 126; HART 是 0)
z 手操器指向显示然后按模式键激活编程模式,菜单项目 1.0.
z 按下箭头键,右箭头键,右箭头键,导航到地址(菜单项 2.1.2).
z 按右箭头键打开编辑模式:编程图标会闪烁。
z 如果需要,键入一个新值,然后按右箭头键来接受他。LCD 显示新值,编程图标
消失。
, 点 Downloads.
Page 46

2. 您需要您的仪表的最新的设备描述(DD)。启动 SIMATIC PDM-Manager
Device Catalog, 定位DD 文件并选择他。
3. 启动 SIMATIC Manager 创建一个 LR460 的新项目。用 SIMATIC PDM 设置
HART 和 PROFIBUS PA 设备的应用向导,请从西门子网站下载:
https://pia.khe.siemens.com/index.asp?Nr=14655
4. 打开 Menu Device-Reset 然后点 Factory Reset.
5. 上传数据到 PC/PG.
6. 标定设备。
.
通过 PDM 标定 LR460
z 请看第 30 页通过 SIMATIC PDM 快速启动精灵,然后遵循四个步骤。
z 打开菜单 Device-Sensor Calibration 单独设置参数。
z 请看第 43 页参数参考察看完整的参数列表。
通过下拉菜单编辑参数
请看 43 页通过 SIMATIC PDM 下拉菜单,察看只能通过 SIMATIC PDM 下拉菜单进入的参
数列表。
重置
工厂默认
使用工厂默认来重置除设备地址外所有参数到默认设置。
1. 打开菜单 Device-Reset, 选择工厂默认,然后点 OK.
2. 重置后会完整参数上传到 PC/PG。
设备重置
作用与循环供电(热启动)相同。不会重置任何参数。
z 打开菜单 Device-Reset,选择 Device Reset,然后出现 MasterReset?后点 OK.
配置标记重置(HART)
把配置标记重置到零,打开菜单 Device-Configuration Flag Rese t 然后执行一个重置。
自动回波抑制
使用这个参数学习新的 TVT 曲线,避免由障碍物引起的虚假回波。请看第 73 页自动虚假回
波抑制得到更多详细解释,第 57 页 TVT(自动虚假回波抑制)设置。
Page 47

D/A(数字/模拟)修正
允许您修正 4mA 和 20mA 点来标定 mA 输出。
打开菜单 Device-D/A Trim。系统会提示您连接一个标定表,然后输入一个 4mA 和 20mA 值。
仿真 AO (模拟输出)
在您试运和维护设备过程中通过输入一个仿真值测试 mA 连接功能。
仿真一个用户定义的 mA 值:
1. 打开菜单 Device-SimulateAO.
2. 选 Other,输入一个新值,点 OK,信息‘Field Device fixed at new value’出现,点 OK.
3. 当您准备结束仿真时,选 End 后点 OK 设备返回原始输出级别。
仿真
注意:仿真参数影响控制系统的输出值。
仿真模拟输出到 AIFB1 或 AIFB2
允许您输入一个仿真值来测试模拟输入功能模块的功能。
1. 打开菜单 Device-Simulation, 选所需的功能模块。
2. 启用仿真,输入一个值,点 Transfer。
3. 当仿真结束后,禁用仿真。
仿真输入
允许您仿真一个输入到物位变换模块的传感器值。这会测试所有在物位变换模块和输出之间
的值。
1. 打开菜单 Device-Simulation,选 Simulation(输入)。
2. 启用仿真,选 Fixed 或 Ramp。如果您选择 Ramp,输入步长和步数。.
3. 输入仿真值,然后点 Transfer。
4.当仿真结束后,禁用仿真。
Page 48

参数参考
参数菜单
参数根据功能被分成若干个组。子菜单又被分成四级。
通过手操器的数字键可以进入参数。(请看第 113 页 LCD 参数结构表)。另外还可以通过
SIMATIC PDM 进入参数。
在 SIMATIC PDM 中的下拉菜单可以设置一些参数。也可以通过手操器设置参数,他们可以
在编号列表中查到,
注意:
z 参数表中的默认设置用星号(*)指示,或者看说明。
z 通过手操器快速进入参数设置,按模式键激活编程模式,然后键入一个菜单数。(请看
第 86 页通过手操器编程得到更多细节)。
z 下面表格所示值都可以通过手操器输入。
SIMATIC PDM 下拉菜单
设置菜单 页码 观看菜单 页码
通讯路径
下载到设备
上传到 PC/PG
更新诊断状态
快速启动
自动虚假回波抑制
TVT 编辑
维护
自检
重置
配置标记重置
数字/模拟修整
写保护
仿真模拟输出
HART 通讯
仿真
传感器标定
-
-
-
-
44
57
59
68
-
47
41
42
49
42
89
42
51
显示
趋势
回波图
显示回波图
状态
读模拟值
清除错误
峰值
损耗
37
37
37
-
-
-
53
49
Page 49

快速启动精灵
快速启动精灵包含了一个简单应用的所有所需设置。
z 精灵是一个完整的包,设置是内部关联的。
z 不要使用快速启动精灵来修改单独的参数。
z 您可以通过 SIMATIC PDM 或手操器进入快速启动精灵。
z 快速启动前不需要执行重置。
1. 快速启动
在 SIMATIC PDM 中,打开菜单 Device-Quick Start,然后遵循步骤 1 到 5。
如果您使用手操器,激活编程模式然后快速启动数列。
1.4 语言
选项: 英语(ENGLISH),德语(DEUTSCH),法语(FRANCAIS),西班牙语(ESPANOL)
1.5 应用类型
选项:
1.6 操作
选项:
操作类型
钢
水泥
物位 从低标定点(空罐物位)到物料表面的距离
间距 从物料表面到高标定点的距离
距离 从传感器参考点到物料表面的距离
筒仓结构
Page 50

1.4 单位
选择快速启动变量单位(高和低标定点,物位,距离或空间)
选项: 毫米(mm),厘米(cm),米(m),英寸(in),英尺(ft)
1.5 高标定点
高标定点与传感器参考点之间的距离:通常是过程满物位(看 1.3 操作图)
数值: 范围 0.0000 到 100.00 m
1.6 低标定点
低标定点与传感器参考点之间的距离:通常是过程空物位(看 1.3 操作图)
数值: 范围 0.0000 到 100.00 m
1.7 速度
设置目标范围内的测量值改变的反应速度。
慢速 0.1m/minute
选项:
中速 1.0m/minute
快速 10.0m/minute
使用比最大填充或排空速度快的选项(取大者)。慢速提供高的精度; 快速允许更多的物
位波动
1.8 申请改变
为了保存快速启动设置需要使用申请改变。
数值: 是(YES),否(NO)
Page 51

2. 识别
操作单位
标签
文本可以以任意方式使用,比如作为一个唯一的现场使用设备标志。
描述
文本应该与现场设备相关联。文本可以以任意方式使用。没有指定的使用要求。
信息
文本应该与现场设备相关联。文本可以以任意方式使用。没有指定的使用要求。
注意:
在参数表中默认设置用星号(*)表示,或者有明确说明。
2.1 配置
2.1.2 地址
设备在网络上的唯一地址(PROFIBUS 或 HART 地址)
值
通过手操器设置地址:
z 按模式键激活编程模式,菜单项目 1.0.
z 按下箭头,右箭头,右箭头导航到地址。
z 按右箭头打开编辑模式:编程图标会闪烁。
z 如果需要,键入一个新值然后按右箭头接受他。
通过 PDM 设置地址(PROFIBUS PA)
打开菜单 Device-Set Address。
2.1.3 启用远程操作(REMLOCK)
通过网络和 PDM 启用或关闭。
手操器值
PROFIBUS PA
HART
0 *
1
0-126,默认:126(我们推荐选择 0-125 范围内值)
0-15,默认:0
远程操作启用
远程操作关闭
Page 52

2.1.5 重置
注意:
z 重置工厂默认值后,需要进行完整的编程。
z 重置不会清除快速启动精灵中的值:他们可以再次使用。
z 设备重置会清除快速启动精灵中的所有值。
通过 SIMATIC PDM 有两种重置选项。选工厂默认重置后除设备地址外所有参数恢复到默认
值。设备重置(热重置)与重新上电有一样的效果。手操器只可以激活工厂默认。
HART PROFIBUS
PARA M S PAR A MS
手操器选项
WARTS TA RT
ADDRESS
NONE NONE
描述
工厂默认
设备重置:重启设备(很少使用)
重置 PROFIBUS 地址到 126。
不执行重置
通过手操器执行一次重置:
a. 按模式打开编程模式,然后键入 215 快速进入,或使用箭头键导航到重置。
b. 按右箭头打开编辑模式。
c. 按下箭头滚动到 PA RA MS,然后按右箭头选择他。当执行完重置后,显示会回到 NONE。
d. 按模式键回到测量模式。
通过 SIMATIC PDM 执行重置:
打开菜单 Device-Reset,然后选择 Factory Defaults 或 Device Reset(请看第 41 页得到更多
细节)。
重置错误
当一个错误出现然后被修正后重置错误信息。在一般错误代码列表(第 80 页),只在列出的
错误需要一个手动重置时需要。
打开菜单 View-Clear Faults。你会看到错误列表,点 Transfer。
通过手操器重置,键入一个可能的错误代码值。
Page 53

2.1.6 确认错误
一般错误代码列表(第 80 页),只在列出的错误需要一个手动重置时需要。
通过 SIMATIC PDM 确认,请看第 47 页重置错误。
通过手操器确认,键入可能的错误代码值。错误代码会消失。
2.1.7. 菜单定时器
用于确认在编程模式无任何动作状态多少时间(秒)会跳回运行模式。
2.1.7 背光
控制背光设置
手操器值
0
1
2 *
背光关闭
背光打开
背光在最后一个键动作后打开 3 分钟
2.2. 设备
制造商
查询一个指定的制造商,一般是制造这个现场设置的公司的名字。
产品诊断
制造商识别和设备类型组合为现场设备的唯一标示。这个变量不能由用户修改。
设备序列号
现场设备的唯一标示。这个变量不能由用户修改。
订货号
这个设备的订货号
出厂日期
制造的日期
2.2.1 软件版本
与植入现场设备的软件或固件版本相关。
2.2.2 硬件版本
与现场设备的电子元件相关
描述版本(只针对 PROFIBUS 设备)
PROFIBUS PA 描述这个设备所履行的标准。
静态版本号(只对 PROFIBUS PA 设备)
与物理模块结合的静态数据的版本级别。当标准描述配置参数改变时静态版本号也会更新。
Page 54

PROFIBUS 识别数(只对 PROFIBUS PA 设备)
识别在网络上的设备。识别数必须与 GSD 文件匹配(GSD 文件提供设备到主的信息)
0
值
描述-专用(使用通用设备 DD 和 Class B 设备描述 DD
1
制造商-专用(使用 Siemens Milltronics DD 和 GSD 文件,识别 LR460)
最后的配置
设备安装的日期。用户必须输入数据。
本地操作启用
启用/禁用通过手操器编辑设备。当禁用时,用户仍然可以进入模式控制两个模拟输入功能
模块。
2.2.4 写锁定
阻止通过 PDM 或手操器对参数的任何改动。
选项
解锁
锁定
*
编辑启用
编辑禁用
打开菜单 Device-Write Locking,然后选择 ON 或 OFF
2.2.5 语言
选择用户 LCD 显示的语言
*
英语
选项
德语
法语
西班牙语
2.3.统计
通过 PDM 观看统计,打开菜单 View-Wear。
2.3.1 供电时间
从制造起设备供电的时间(小时)
2.3.2 开电重置
从制造起发生的电循环数目。
Page 55

3. 输入
静态版本号
与物位转换模块相关联的静态数据的版本级别,但一个标准描述配置参数被改变时被更新。
级别
指示物位转换模块作为每个 PROFIBUS PA 指定描述。
3.2. 标准设置
3.2.1 天线
指示天线配置
值
3”喇叭
4”喇叭
LOE 定时器、
(分钟)
*
慢速
中速
快速
100 0.1m/minute 0.1m/minute
10 1m/minute 1m/minute
1 10m/minute 10m/minute
填充速度 排空速度
选项
3.2.2 响应速度
设备测量目标范围改变的反应速度。
相关参数 响应速度
注意:如果改变响应速度,将会重置下面参数:LOE 定时器,填充速度,排空速度。
使用略快于最大填充和排空速度的设置(取大者)。慢速会提供高精度和平滑的输出信号:
快速会允许更大的物位波动。
Page 56

3.3 传感器标定
通过 SIMATIC PDM 执行标定,请打开菜单 Device-Senso r Calibration.
传感
器参
考点
(法
兰
面)
高标
定点
低标
定点
3.3.1 传感器单位
传感器测量单位。
选项
3.3.2 标定类型
在干标时,用户输入所有四个标定值:高和低物位点,高和低标定点。
选项
3.3.3 低标定点(默认 30,000m)
从传感器参考到低标定点的距离(相对低物位点)。单位为传感器单位。
m, in, cm, mm, ft
默认:m
DRY CAL *
干标
LR460
配快速瞄
准器
高物位点
(100%)
低物位点
(0%)
Page 57

3.3.4 高标定点(默认 0,350m)
从传感器参考到高标定点的距离(相对高物位点)。单位为传感器单位。
3.3.5 单位(物位)
选择物位的工程单位(PV),参考低物位点(如果有的话,加上物位补偿)
%
m, in, cm, mm ,ft
选项
百分比
线性
默认:m
3.3.6 低物位点(默认:0,000)
当物料在低标定点时的物位。单位为物位单位。
3.3.7 高物位点(默认:100,000)
当物料在高标定点时的物位。单位为物位单位。
3.3.8 物位补偿(默认:0,000)
一个补偿常数加到 PV/SV!(默认物位输出)。请看 101 页的图。单位是物位单位。
3.3.9 传感器补偿(默认:0)
从传感器参考点到容器参考点的补偿。这是一个常数,被用来从传感器值中减掉。单位是传
感器单位。(请看第 100 页物位转换模块如何工作,以得到更多细节信息)
补偿,比如传感器头被改变了。
3.3.A 温度单位
选择表示温度值的工程单位
选项
℃,℉,ºR,ºK
默认:℃
Page 58

3.4 测量极限
您可以观看传感器和过程温度的最大和最小值。
在 SIMATIC PDM 中打开菜单 View-Peak Values,点适当的标记。
3.4.1 最小测量值(默认:0,000)
传感器的最小记录值,定位为传感器单位。
3.4.2 最大测量值
传感器的最大记录值,定位为传感器单位。
3.4.3 最小传感器值(默认:0,000)-PROFIBUS PA
定义测量范围的最小可用值。(传感器的物理限制)定位为传感器单位。
3.4.4 最大传感器值(默认:100,000)-PROFIBUS PA
定义测量范围的最大可用值。(传感器的物理限制)定位为传感器单位。
3.4.5 最小过程温度
内部电子元件的最小记录温度
打开菜单 View-Peak Values,然后选择温度标号。如果需要,点重置键。
3.4.6 最大过程温度
内部电子元件的最大记录温度
打开菜单 View-Peak Values,然后选择温度标号。如果需要,点重置键。
3.5 细节安装
3.5
.1 失效安全
3.5.1.1 LOE(失波)定时器
时间量,单位:分钟,在设备切换到失效安全模式前失波需要持续出现。请看失效安全模式
得到更多细节。
值
范围:0,00-720(分钟)
默认:10,000
3.5.1.2 限制 LOE(失波)
当一个 LOE 状态结束时,限制检测回波的速度,已阻止立即跳到一个新的回波。限制速度
与响应(填充/排空)速度相同。
选项
YES(ON)/NO(OFF)
默认:YES
Page 59

3.5.2 回波
3.5.2.1 回波算法
选择应用于回波图的算法已选取真实回波。
选项
TF
ALF
A
L
* F
AL
AF
LF
BLF
高于 TVT 的第一个回波被选择
面积,最大和第一个相综合
长范围面积
长范围最大
第一个大回波
面积和最大平均化
长范围面积和第一平均
长范围最大和第一平均
第一和最大的最好者
相关参数 z 3.6.2.1 回波置信度高
z 3.5.2.4 窄回波过滤器(默认 0)
z 3.5.2.5 改善回波(默认 0)
使用回波置信度来确认那种算法可以在所有的状态下给出最高的置信度。如果虚假的回波被
选择,观察回波处理画面然后选择一个替代的算法。
3.5.2.2 回波阀值长
设置一个回波必须达到的最小的回波置信度,以便可以阻止失波状态和终止 LOE 定时器。
当回波置信度超过置信度阀值,回波会被评价。
值
范围:0-99
默认:10
相关参数 LOE 定时器
当看到不正确的物料物位值时请使用这些特点
3.5.2.3 回波标记
选择的回波测量值的那一点。
Page 60

3.5.2.4 窄回波过滤器(默认 0)
过滤出一些指定宽度的回波
值
相关参数
0= OFF
更大= 更宽
z 3.6.2.1 回波置信度长器
z 3.5.2.5 改善回波
为从回波图上去掉一个虚假回波,把虚假回波的宽度以 mm 为单位乘以 0,014,输入结果。
例如,过滤一个宽度 500mm 的尖峰,输入 7(500x0,014 的结果)
当输入数值时,要输入最接近的可接受的值。
3.5.2.5 改善回波(默认 0)
在回波图上平滑化有锯齿的波。改善碎的回波为一个回波。
0= OFF
值
更大= 更宽
推荐范围:10-20:更高的值不推荐使用
z 材料
相关参数
z 3.5.2.1 回波算法
z 3.5.2.4 窄回波过滤器(默认 0)
z 3.5.2.3 回波标记
当检测固体时使用此项,如果物位反馈有微小的波动但是实际物面很平静。
输入一个需要的平滑值。当键入一个值被时,最近的可接受值被输入。
3.5.2.6 回波检测位置
所选择的回波的测量选择点的位置。
选项
*
中心
升起
3.5.3 回波采样
3.5.3.1 窗口回波采样
在回波中心有一个“距离窗口”,用来得到读数。当在窗口有一个新的测量,窗口重新被居
中,读数被计算。
当此值为 0,窗口在每个测量后自动被计算。
z 对于那些较慢测量响应的值,窗口很窄。
z 对于那些较快测量响应的值,窗口变的逐渐宽。
Page 61

3.5.3.2 使用的窗口
显示用户上个测量的窗口尺寸。
使用的窗口是最接近可用的窗口尺寸,依赖于设备测量分辨率。
比如,如果窗口=1m,使用的窗口可能是 0,96m,
3.5.3.3 发射
回波图采样的数目,平均地产生一个测量值。
3.5.4 范围
近范
围
远范
围
传感器
参考点
(法兰
面)
高标定
点
低标定
点
3.5.4.1 近范围
在设备前的范围(从法兰面作为参考),在此范围内任何回波都将被忽略。(有时称为死区或
盲区)
值
范围:0,35-100m 最大
默认:0,6m
默认的 0,6 米是为了避免由于凝固或其他物料粘附而造成的虚假回波。如果之前预计没有粘
附(比如测量干水泥),可以使用最小值 0,35m。
3.5.4.2 远范围
注意:远范围可以低于容器底部。
距离参考点的最大距离之内的回波都会被认为是有效的。
值
范围:0-100m
默认:低标定点加上 20%
Page 62

3.5.6 TVT(自动虚假回波抑制)设置
注意:如果改善的参数被使用来重新调取回波图,自动虚假回波抑制也必须被重新启用,以
便重新学习 TVT 曲线。
SITRANS LR460 先学习回波图,然后学习回波,或把他分成部分,用来屏蔽掉虚假回波。
(请看第 73 页自动虚假回波抑制得到更多解释)
通过 SIMATIC PDM 使用自动虚假回波抑制:
a. 确认范围(在此距离内学习的 TVT 会代替默认的 TVT)。测量从天线参考点到物料表面
的实际距离,使用绳子或卷尺测量,然后保证 LR460 的实际位置。从这个距离减 2m,
使用这个结果。
b. 打开菜单 Device-Auto False Echo Suppression。
c. 输入范围值,然后点 Set Range。
d. 点 Learn。开和关键消失同时新的曲线正被学习。
e. 当按键重新出现,点 Close。自动 TVT 现在启动了,然后学习的 TVT 曲线会被使用。
f. 如欲关闭或开启自动虚假回波抑制,再次打开菜单 Device-Auto TVT 然后点 On 或 Off。
通过手操器使用自动虚假回波抑制:
3.5.6.1 自动 TVT(自动虚假回波抑制)
OFF
值
ON
LEARN
启用自动虚假回波抑制
“学习”TVT 曲线
相关参数 z 3.5.2.5 改善回波(默认 0)
a. 到 3.5.6.2 范围(自动虚假回波抑制距离)步骤 a 然后输入一个值。
b. 选择学习。设备会一段时间后自动回到开启(使用学习的 TVT)。
3.5.6.2 范围(自动虚假回波抑制距离)
定义学习的 TVT 距离的结束点。
a. 确认从天线参考点到物料表面的实际距离。使用绳子或卷尺测量,然后保证 LR460 的实
际位置。从这个距离减 2m,使用这个结果。
b. 出入范围值然后按右箭头确认。
c. 在 3.5.6.1 自动 TVT(自动虚假回波抑制)步骤 b。
Page 63

自动虚假回波抑制前的显示
自动虚假回波抑制后的显示
Page 64

3.5.6.3 TVT 浮动距离
定义 TVT(时变阀值)曲线高于回波图的百分比,与最大的回波有关。
值
范围:0-100%
默认:40%
3.5.6.4 手动 TVT 修改模式
启用 TVT 曲线以便在指定范围自动调整。
值
开
*
关
3.5.7 手动 TVT 修改
您可以手动输入一个最大 120 转折点的值来调整 TVT 曲线。
值
范围:-50-50
预设:0
相关 z 3.5.6.4 手动 TVT 修改模式
使用这个功能去修正 TVT 曲线的形状来避免选择固定干扰物的虚假回波。
每一个折点都被标准化到值 0。改变数值就可以调整曲线。为了避免多重虚假回波,塑形可
以被用于不同的曲线点上。塑形应该保守一些已免丢失了真实的回波。
手动 TVT 修改允许您在观看回波图的同时调整 TVT 曲线。
通过 PDM 改动一个折点:
a. 确定修改模式被选中。
b. 打开菜单 Device-TVT Shaper,之后可以手动调整或者在需要的折点输入值(请看第 38
页手动 TVT 修改器)
通过手操器改动一个转折点:
a. 确认修改模式被选中。
b. 进入折点数目的子菜单,然后输入值。
3.5.7.1 修改器 A(1 - 9)
3.5.7.2 修改器 B(10 - 18)
3.5.7.3 修改器 C(19 - 27)
Page 65

3.5.7.4 修改器 D(28 - 36)
3.5.7.5 修改器 E(37 - 45)
3.5.7.6 修改器 F(46 - 54)
3.5.7.7 修改器 G(55 - 63)
3.5.7.8 修改器 H(64 - 72)
3.5.7.9 修改器 I(73- 81)
3.5.7.A 修改器 J(82 - 90)
3.5.7.B 修改器 K(
91 - 99)
3.5.7.C 修改器 L(100 - 108)
3.5.7.D 修改器 M(109 - 118)
3.5.7.E 修改器 N(119 - 120)
3.5.8 速度
3.5.8.1 填充速度
值
范围:0,0000- 99999 m/min
预设:10,000
替代 相应速度
相关
单位(物位)
高物位点
输入一个比最大容器填充率略大的值,每分钟的速度,以传感器单位。
3.5.8.2 排空速度
值
范围:0,0000- 99999 m/min
预设:10,000
替代 相应速度
相关
单位(物位)
高物位点
输入一个比最大容器排空率略大的值,每分钟的速度,以传感器单位。
Page 66

3.6 回波信息
3.6.1 物位转换模块(LTB)值(诊断目的)
物位转换模块输出被称为主值(或二级值)。当他 变 为 AIFB 的输入时,又被称为过程变量。
3.6.1.1 主值(PV)
物位默认值(物位单位)
打开菜单 View-Display,选 Measured Value(二级值)。
3.6.1.2 二级值 1(SV1)
PV 的相等值(物位)
3.6.1.3 二级值 2(SV2)
距离值(传感器单位)
打开菜单 View-Display,然后选择测量值(二级值)请看传感器值。
3.6.2 回波质量
3.6.2.1 回波置信度长
测量回波可靠性。显示最后一次射击的测量回波的置信度。置信度阀值定义了回波置信度的
最小标准。
值
(只读)
相关参数 置信度阀值
打开菜单 View-Echo Profile。
3.6.2.2 回波强度
显示作为测量回波的绝对强度。
值(不可写)
0- 99
---- 没有发射
-20-99
4. 输出
4.1 AIFB1
静态版本号
与模拟输入功能模块 1 相关联的静态数据的版本级别。每次标准描述配置参数被改变时同时
更新静态版本号。
Page 67

4.1.1 目标模式(PROFIBUS P A)
用来从功能模块请求一个操作模式
128
值
16
8 *
不在服务(O/S)
手动模式(MAN)
自动模式(AUTO)
4.1.2 单位
输出值的显示工程单位
%
文本
m, cm, mm, ft, in
选项
百分比
用户定义
线性
默认:m 文本
4.1.3 过滤器时间常数
阻尼过滤器的时间常数,工程单位是秒。(这是一个指数过滤器:当输入改变发生时,输出
值每一个时间常数会有 63.2%的改动,5 个时间常数后会完全改变)。
4.1.4 功能
用来在不同物位模块输出间选择:物位或距离(请看第 100 页的图 物位转换模块功能组)。
PV/主值 物位
选项
SV1/二级值 1 物位
SV2/二级值 2 距离(传感器单位)
4.1.5 批量信息(PROFIBUS P A)
这 4 个参数用于批量应用,并遵从 IEC61512 Part 1(ISA S88)。其他应用不需要这些值,只
是储存在功能模块中。
4.1.5.1 批量 ID。识别一个特定批量来允许设备信息配置(比如错误,报警)进行批量。
4.1.5.2 批量单位
识别活动的控制方法单位程序或相关单位(比如反应器,离心机,干燥机)
4.1.5.3 批量操作
识别主动控制方法操作。
4.1.5.4 批量相位
识别主动控制方法相位。
Page 68

4.1.6 过程值比例
4.1.6.1 低值。定义了输入值的能使用的低值(过程值缩放),以工程单位。过程值缩放
规格化输入值到客户定义范围。
4.1.6.2 高值。定义了输入值的能使用的高值(过程值缩放),以工程单位。过程值缩放
规格化输入值到客户定义范围。
4.1.7 输出缩放
缩放过程变量。功能模块参数 OUT SCALE 包含了低限和高限有效范围的值。
4.1.7.1 低值。定义了输入值的能使用的低值(过程值比例),以工程单位。
4.1.7.1 高值。定义了输入值的能使用的高值(过程值比例),以工程单位。
4.1.8 输出限制
4.1.8.1 低限报警,低限报警的设置,工程单位。
4.1.8.2 低限警告,低限警告的设置,工程单位。
4.1.8.3 高限报警,高限报警的设置,工程单位。
4.1.8.4 高限警告,高限警告的设置,工程单位。
Page 69

4.1.8.5 限制滞后
滞后用来调整触发报警信息的敏感度。当过程变量围绕某值波动时可用来补偿作为一个限
制。当一个值超过了一个上限,会发生一个高位报警。报警状态直到值下降到限值减去报警
滞后后才消失。方向与下限方向相反。
在此处输入一个滞后值,用于所有报警和警告。单位与输出值缩放相同。
4.1.8.6 最小输出
AIFB 输出值的最小峰值指示器。
4.1.8.7 最大输出
AIFB 输出值的最大峰值指示器。
4.1.9 失效安全模式(PROFIBUS PA)
4.1.9.1 失效安全模式
当输入值是坏的会出现失效安全模式,亦或设备使用仿真进入失效安全模式。三种选项可以
在 LOE 定时器结束后被选用。
手操器选项
FS VALUE
LAST VAL *
USE BAD
被报告的物料物位。
默认值作为输出值。
储存最后一个有效输出值。
计算出的输出值是错误的。
4.1.9.2 失效安全值
(只有在失效安全模式选 FS VALUE 后才能通过 PDM 进入)
如果检测到传感器或传感器电子部件错误,用户定义的输出值。单位与输出值单位一致。
范围:
值
默认:0,000
4.1.A 用户界面
4.1.A.1 小数点
在小数点后显示的数字的位数。(LCD 被限制只能显示三个小数点位置)
输出单位文本
如果代码列表中没有包含输出参数的所需单位,(请看一般要求)您可以用这个参数写详尽
的文本。
Page 70

4.2 AIFB2
(看 AIFB1:AIFB2 的参数是相同的)
4.3 mA 输出
mA 输出由模拟输入功能模块 2(AIFB2)提供。您可以输入一个用户定义 mA 值,或一个
仿真值,或执行一个 mA 修正。
如欲通过 PDM 设置这些参数,请看第 42 页仿真 AO(模拟输出)或 D/A(数字/模拟)修
正。
4.3.1 功能
允许你在三种选项中设置 mA 输出,包括用户定义值。
AUTO
手操器值
通过 PDM 设置 mA 输出,打开菜单 Device-Simulate AO.
4.3.2 输出值
通过在低值和高值范围内的电流级别得到一个 mA 值。
FIXED
MANUAL
使用测量值电流
只能通过 HART 主设置电流
HART 默认是 4mA。
使用在 4.3.3 操纵值输入的用户定义值
4.3.3 自定义值
用户定义的一个 mA 值,可以用来仿真或做数字/模拟修正。
值 范围:3,8-20,5mA
通过 PDM 设置一个 mA 输出,打开菜单 Device-Simulate AO 选择一个选项。
Page 71

4.3.4 最小限
mA 值根据 4.1.7.1 低值。
值
范围:
默认:3,8mA
4.3.5 最大限
mA 值根据 4.1.7.2 高值。
值
范围:
默认:20,5mA
4.3.6 FS 模式
在发生错误或故障时的输出 mA 值。
值
mA HOLD *
mA SET
mA HIGH
mA LOW
物位保持最后一个读数
用户在 4.3.7FS 值中的定义值
把最大限制作为物料物位
把最小限制作为物料物位
4.3.7 FS 值
在失效安全定时器已经结束时输出的用户定义的 mA 值。
值
范围:3,5-20,5mA
默认:3,5mA
4.3.8 4mA 修正
标定 4mA 输出
值 范围:2,0-6,0mA
相关参数 4.3.1 功能
通过在低值和高值范围内的电流级别得到一个 mA 值。
a. 设置 4.3.1 功能为手动模式
b. 设置 4.3.3 操作值为 4mA
c. 使用标定表检查端子输出。记录 mA 远程读数。
d. 输入在 4.3.8.4mA 修正的记录值
e. 回复 4.3.1 功能到之前的设置
f. 确认 mA 输出是就是所需的
Page 72

4.3.9 20mA 修正
标定 20mA 输出
值 范围:18- 24mA
相关参数 4.3.1 功能
通过在低值和高值范围内的电流级别得到一个 mA 值。
a. 设置 4.3.1 功能为手动模式
b. 设置 4.3.3 操作值为 20mA
c. 使用标定表检查端子输出。记录 mA 远程读数。
d. 输入在 4.3.8.4mA 修正的记录值
e. 回复 4.3.1 功能到之前的设置
f. 确认 mA 输出是就是所需的
4.4 继电器配置
4.4.1 AIFB
选择 AIFB1 或 AIFB2
4.4.2 功能
DISABLED *
MANUAL
手操器
4.4.3 NC/NO
手操器选项
4.4.4;状态
手操器选项
LO ALM
HI ALM
ANY ALM
FAIL-SAFE
NO *
NC
OFF *
ON
常开
常闭
继电器没有被激励
继电器被激励
认证和批准
设备认证
Page 73

6. 维护设置
使用这些参数设置标定和维护的时间表。设备会根据操作小时来记录自己,而不是根据日历,
这会监视他的预测寿命。
通过状态或缩写状态字节维护警告和报警会与使用者联系。这信息可以被整合进任何资产管
理系统。为最佳使用,我们推荐您使用 SIMATIC PDM 联合 SIMATIC PCS7 资产管理系统软
件。
6.1 剩余设备寿命
设备会尝试预测他所有寿命。用户可以重置工厂默认值。
6.1.1 总设备操作时间
6.1.2 剩余设备寿命
6.1.3 需要维护限制
6.1.4 请求维护限制
6.1.5 维护报警激活
6.1.6 总期望设备寿命
6.1.7 维护状态
6.1.8 确认状态
6.1.9 确认
6.2 剩余传感器寿命
设备会尝试预测传感器的寿命(元件暴露在容器环境)。用户可以重置工厂默认值。
6.2.1 总设备操作时间
6.2.2 剩余设备寿命
6.2.3 需要维护限制
6.2.4 请求维护限制
6.2.5 维护报警激活
Page 74

6.2.6 总期望设备寿命
6.2.7 维护状态
6.2.8 确认状态
6.2.9 确认
6.3 服务间隔
设备检测的时间,当需要其他的服务时,用户可以重置工厂默认值。
6.3.1 从最后一次服务的时间消耗
6.3.2 需要维护限制
6.3.3 请求维护限制
6.3.4 维护报警激活
6.3.5 总服务间隔
6.3.6 维护状态
6.3.7 确认状态
6.3.8 确认
6.4 标定间隔
设备检测在从最后一次标定后时间,当需要其他的标定时,用户可以重置工厂默认值。
6.4.1 从最后一次标定的时间消耗
6.4.2 需要维护限制
6.4.3 求维护限制
6.4.4 维护报警激活
6.4.5 总标定间隔
6.4.6 维护状态
6.4.7 确认状态
6.4.8 确认
Page 75

注意
Page 76

附录 A: 技术参考
工作原理
SITRANS LR460 是一种长量程 FMCW(调频连续波)雷达物位变送器。雷达物位测量使用
传播时间原理来确定到物料表面的距离。
FMCW 雷达发射一个连续波。波的频率会一直增长:这称为伸展。当第一部分的波从目标
反射回设备时,另一部分的波刚刚以一高频率发射。发射与接受的信号的频率差与传播时间
成一定比例。
电磁波的传播不受温度或压力的变化的影响,也不受容器内蒸汽和粉尘层变化的影响。
SITRANS LR460 由一个电子模块连结到一个天线和过程连接组成。电子模块产生电磁信号,
频率范围 24,2GHz 到 25,2GHz,沿天线发射。
信号从天线发射,然后反射回波被数字转换成一个回波图。回波图被分析用以确认从物料表
面到仪表参考点的距离。这个距离作为物料物位与输出显示的基础。
测量响应
测量响应(响应速度)限制了显示与输出响应的最大改变速度。一旦实际的过程填充/排空
速度(m/s)确定了,响应速度的选择以略高于实际速度的速度为准。响应速度自动调整过
滤器并会对输出响应速度产生影响。
这有三档可选速度:慢速,中速,快速
有关
参数
值:
如果上面三挡选择没有很合适的,过滤器可以独立调整。
响应速度 LOE 定时器(分) 填充速度 排空速度
1
2 中速 10 1.0m/minute 1,0m/minute
3 快速 1 10.0m/minute 10,0m/minute
慢速 100
0.1m/minute 0,1m/minute
Page 77

回波处理
通过 SIMATIC PDM 监视回波图
打开菜单 View-Profile 观看回波图
您可以看到回波图,时间变化阈值(TVT),垂直线指示传感器到所选择回波的距离。
回波强度在图上以纵坐标(dB)显示。在横坐标上显示传感器到目标的距离。
时间变化阈值(TVT)
TVT 是一种阈值曲线,用来去除对实际回波有影响的回波的出现。请看自动虚假回波抑制得
到更多细节。
回波选择
设备会把所有高于 TVT 的峰值作为可能的有效回波。
每一个峰值根据强度,面积,高于 TVT 的高度和其他参数得到一个等级。实际回波根据回
波算法选择。
Page 78

虚假回波
虚假回波会在接受循环过程中出现。他们可能是由于发射束的干扰,或内部障碍物比如梯子
的干扰造成,经常会指示一个高物位读数。
-3dB 波束角
保证波束传播不受干扰
极化参考点
您可以旋转设备来最小化虚假回波。看第 14 页的极化参考点得到更多信息。
自动虚假回波抑制
注意: 如果可能,先旋转设备,尽可能的降低虚假回波的幅值后再使用自动回波抑制。
TVT 调整参数允许您操作 TVT,以便 LR460 忽略虚假回波。
默认的 TVT 是在回波曲线的上方的,可以有效的屏蔽小的虚假回波。但如果容器内结构导致
在实际物料回波前一个大的回波,这个回波将高于默认的 TVT。
1. 设置自动回波抑制去学习(Learn).仪表学习当时的回波图,新的 TVT 跟随此回波图,
此时没有任何高于 TVT 的峰值。
2. 设置自动回波抑制距离以便 TVT 使用在虚假回波区域,此区域没有高于 TVT 的峰值。从
那点开始仪表继续使用默认的 TVT。物料物位回波高于 TVT 的,则会被认为是真实回波。
请看 58 页在使用自动虚假回波抑制前后的回波图。
Page 79

盲区
注意: 自动回波抑制推荐先于盲区使用。
盲区允许您在天线前设置一段距离,在此距离类任何回波都将被忽略。
回波置信度
回波置信度是内部产生的一个数字等级,由回波强度,面积和高度决定。
回波丢失(LOE)
当回波置信度下降到置信度阀值以下时,LOE 会出现。LOE 定时期开始运行,如果 LOE 状态
持续超过 10 分钟(通过 LOE 定时器设置),不可靠的回波指示会代替可靠回波指示出现在屏
幕上。
当 LOE 在定时器时间内的时候 X 闪烁,代替两个横条。当 LOE 超过定时器时间,X 一直显示,
不再闪烁,同时辅助显示出现错误码:S:0
直到接受到可靠的回波,回波丢失状态才停止,可靠回波指示出现,读数重新回到当前物位。
LOE 定时器
LOE 定时器确定在最后一个有效读数后直到失效模式激活出现间的时间(单位:分钟)。
当 LOE 定时器时间结束,物料物位将会默认为失效模式设置值。
失效安全模式
失效安全模式定义检测到失效状态时设备的反应,过程会在失效或失败时已安全状态继续进
行。根据每一个应用的实际情况决定是高物位还是低物位作为安全输出。
Page 80

失效安全状态可能由失波,错误的设置,或特定设备错误引起。你可以从以下 3 种可能的值
来输出。
z 用户定义的值作为输出
z 最后一个有效值最为输出
z 适当的值作为错误输出
失效安全值
用户定义失效安全值允许输入一个针对应用的最安全的输出值。
Page 81

最大过程温度表
警告:内部温度不能超过 85℃(185℉)
注意: 下面的图表只作为指导
可以通过 SIMATIC PDM 查看最大和最小温度记录,打开菜单 View-Peak Values,点击温度
标号。
z 如果内部温度超过了允许的最大温度,可能就需要一个遮阳罩或更长的径。
通过手操器检查温度峰值,按(#6)在 LCD 辅助显示上观看内部温度。
z 上边表格只作为参考用。
z 上表没有列出所有可能的过程连接组合
z 上表没有考虑暴露在阳光下的温升。
不能应用上表的情况,请根据您自己的判断来使用 SITRANS LR460。
Page 82

附录 B:问题诊断
1. 检查以下:
z 仪表有供电
z LCD 显示相关数据
z 检查是否有错误码出现(看一般错误码/PROFIBUS PA 诊断)
z 设备可以通过手操器编程
2. 确认接线是正确的
3. 检查 HART(或 PROFIBUS)地址,确认所有设备有唯一的 HART(或 PROFIBUS)地
址。
4. 如果还是有问题,请到我们的网站 www.siemens.com/processautomation
LR460 的 FAQ,或联系西门子工程师。
现象 可能的原因 措施
把 LR 460 移动到更好的位置
旋转 LR 460 已改变极场
在天线附近存在虚假回波
把管口短径去短,使天线伸进容器
LR460 连续
调整 LR 460 瞄准方向远离障碍物
读数在 100%
清洁天线
, 查找 SITRANS
读数不变化
天线上有挂料
天线上有挂料
低介电常数和低密度材料 降低回波置信度阀值
安装 PTFE 防尘罩
使用空气吹扫
清洁天线
安装 PTFE 防尘罩
使用空气吹扫
Page 83

现象 可能的原因 措施
在容器底部附近手动增加 TVT
非空罐时显示
穿过低介电常数的罐底回
把低物位标定点设置为一个高于罐底的值
空罐
波被识别为有效回波
降低 TVT
减小响应速度。
由固料的倾斜表面引起,小
读数摆动
降低填充/排空参数值。
的摆动是正常的。
在 AIFB 增加过滤器时间常数
回波有双峰/被
增加回波矫正(Echo Reform)
分离
增加响应速度。
读数太慢
关闭窗口跟踪(Window tracking)。
延迟慢于实际
改变填充/排空速度参数值
物位改变
在 AIFB 增加过滤器时间常数
确定本地操作是可用的。
设备不能通过
看允许本地操作,49 页
手操器编程
确定写保护锁是关闭的。参考写保护,49 页
不能通过远程
通讯器修改参
数
确定远程操作是可用的。
看允许远程操作(REMLOCK),46 页
确定写保护锁是关闭的。看写保护,49 页
Page 84

现象 可能的原因 措施
PLC 值与本地
显示值相等,
但是和实际物
位不符
PLC 值与本地
显示值不等
AIFB1 中缩放比例是错误
的
高标定点不正确。
选择的错误的回波
您在 PLC 可能查看的不是
本仪表
你可能在 PLC 上编辑了缩
放比例,但是 LR 460 并没
有被编辑
PLC 与 LR 460 没有建立通
讯
在 A IFB1 中调整缩放比例
更正高标定点
检查网络确认通讯正常
Page 85

一般错误代码/PROFIBUS PA 扩展诊断
注意:一些错误导致设备进入实效安全模式。这些可能的错误被用星号(*)指示。
LCD 显示 含义 纠错措施 字节 位
失波(LOE)状态:设备
在实效安全定时器时
间内无法得到一个测
S:0 *
量值。可能的原因:
错误的安装,物料粘
附和/或泡沫的出现。
S:2 *
S:3
S:4
内部电子元件故障
根据在维护请求限制
中的设置,设备接近
寿命限制。
根据在维护需求限制
中的设置,设备接近
寿命限制。
根据在维护请求限制
确保安装的所有细节都是正确
的。确保没有物料粘附。调整过
程状态最小化泡沫。如果问题还
是出现,请联系西门子工程师。
重新上电。如果还是出现,请联
系西门子工程师。
推荐更换设备。
推荐更换设备。
0
2
3
0
4
S:6
S:7
中的设置,设备接近
寿命限制。
根据在维护需求限制
中的设置,设备接近
寿命限制。
推荐更换设备。
推荐更换设备。
6
7
Page 86

LCD 显示 含义 纠错措施 字节 位
定义的维护请求限制
S:8
S:9
S:10
S:11
S:12 *
S:14 *
作为服务间隔期满
请进行服务
了。
定义的维护需求限制
作为服务间隔期满
请进行服务
了。
输入的高标定点和低
标定点相同。
检查设备的标定设置。保证高标
定点和低标定点是不同的。
内部温度传感器故障 设备送修。
设备内部温度超过了
参数值。在温度范围
外工作。
降低环境温度以冷却设备。
错误代码在使用 PDM 或 LCD
界面手动重置后才会消失。
AIFB1 的高和低输入
检查 AIFB1 配置。保证高和低
值(过程值缩放)相
输入值(过程范围值)不同。
同。
0
1
3
4
1
5
6
S:15
AIFB2 的高和低输入
值(过程值缩放)相
同。
检查 AIFB2 配置,保证高和低
7
输入值(过程范围值)不同。
Page 87

LCD 显示 含义 纠错措施 字节 位
定义的维护请求限制
S:17
作为标定间隔期满
了。
定义的维护需求限制
S:18
作为标定间隔期满
了。
有内存错误导致的内
S:28
部设备故障
S:29
S:30 *
S:31 *
EEPROM 损坏 需要维修:联系西门子工程师。
EEPROM 误用
Flash 错误 需要维修:联系西门子工程师。
用于通讯的识别数,
S:32
由识别数选择器选的
数不符合要求。
请进行服务
请进行服务
需要维修:联系西门子工程师。
重新供电。如果错误仍然出现。
请联系西门子工程师。
保证识别数选择器的值对于网
络配置是正确的。如果不正确,
设备需要由 PLC 重新设参数。
1
2
2
4
5
3
6
7
0
4
内部温度传感器工厂
S:33
标定值丢失。
需要维修:联系西门子工程师。
1
Page 88

LCD 显示 含义 纠错措施 字节 位
设备的工厂标定值丢
S:34 *
需要维修:联系西门子工程师。
2
失。
设备的工厂标定值丢
S:35 *
需要维修:联系西门子工程师。
3
失。
S:36 *
S:37 *
无法启动微波模块
无法收集图形 需要维修:联系西门子工程师。
微波模块硬件故障:
S:38 *
无法计算测量距离。
无法从 EEPROM 取得
S:51
mA 标定值,或被占
用。
重新上电。如果问题仍然出现,
请联系西门子工程师。
需要维修:联系西门子工程师。
执行电流修正来标定 4mA 和
20mA 点。
4
4
5
6
14 3
Page 89

附录 C:维护
SITRANS LR460 在正常操作状态下不需维护或清洁。
在恶劣操作状态下,天线可能需要定期的清洁。如果清洁成为必须:
z 我们推荐使用高压空气清洁天线
z 喇叭内壁可能会产生擦痕,但是一定要小心不要损坏喇叭内的 PTFE 发射装置。
元件修理和免责声明
所有改动和维修必须由有资质的人员进行,必须遵循相应的安全规则。请注意以下:
z 用户对所有用于设备的改动和维修都是有责任的。
z 所有的新的元件必须由 Siemens Milltronics Process Istruments Inc.提供。
z 只维修出现问题的元件。
z 不要再次使用那些出现问题的元件。
Page 90

附录 D:本地操作界面
LCD 显示
注意: SITRANS LR460 即使在 PROGRAM 模式也在连续监测输入和输出值。
RUN 模式(启动显示)
正常操作 LOE状态
1- 主显示:物位,空间或距离
2- 单位:主显示的单位(m,cm,mm,ft,in 或百分比)
3- 回波状态指示:
可靠的回波: 在正常操作时可见
不可靠的回波:如果 LOE 在正在判断过程 X 闪烁,替代两个水平线。
当 LOE 已被确认,X 不再闪烁,而是一直出现。辅助显示出现错误编
码:S:0
4- 心跳:一个小的心形图表每秒闪烁一次。
5- 辅助显示:距离,mA 值(HART 输出),置信度或温度。
PROGRAM 模式显示
1- 菜单级
2- 参数名
3- 编辑模式指示/PROGRAM 图标
4- 当前参数值
Page 91

手操器
注意:
z 本地编程必须启动,允许改动(请看第 49 页本地操作启动)
z 清除可以用来清除画面
z 按右箭头打开编程模式:PROGRAM 图标闪烁。
z 再次按右箭头接受一个值并停止编辑模式:菜单数的最后数字闪烁(编辑模式图标消
失)。
z 按模式键可以激活 PROGRAM 模式,从而快速编辑参数,接着按主页键进入菜单数(请
看第 113 页 LCD 菜单结构)
键 功能
更新 mA 值(HART 版本)
更新内部温度值并在 LCD 辅助区域显示
更新回波置信度值在 LCD 辅助区域显示
更新测量值在 LCD 辅助区域显示
通过手操器编程
把手操器对准显示屏(最大间距 600mm),然后按模式(MODE)键激活编程(PROGRAM)模
式。
Page 92

z 在导航模式,菜单数的最右边一位闪烁,PROGRAM 图标不可见。
z 在编辑模式 PROGRAM 图标出现并闪烁:按一个数字键进入参数数据。
手持编程器:在导航模式的关键功能
键 名称 当显示时: 导航模式
上/下箭头 菜单或项目 显示上一个或下一个菜单或项目
右箭头
左箭头 菜单或项目 显示上一级菜单
模式键 菜单或项目 恢复到 RUN 模式
主页键 菜单或项目 显示顶级菜单的第一个项目(菜单 1,项目 1)
菜单 显示所选菜单的第一个项目,或下一个菜单
项目 恢复到编辑模式
菜单或项目 选择适当的菜单或项目
手持编程器:在编辑模式的关键功能
键 编辑模式
右箭头:接受数据(写参数)和从编辑改动到导航模式。
左箭头:取消编辑模式,并不改动参数。
擦除最近改过的字符。如果在刚进入编辑模式时按,作用则是擦除显示。
加入小数点
改变输入值的符号
加入相应字符。
单独参数重置
1- 按右箭头,然后按清除,最后再次按右箭头。
2- 回到工厂设置的默认值。
Page 93

附录 E: HART 通讯
High Addressable Remote Transducer, HART, 是一个叠加在 4-20mA 信号上的工业协议。他是
一个开放标准,完整的 HART 信息请登陆 HART 通讯基金会:www.hartcomm.org
SITRANS LR460 可以使用 Fisher-Rosemount 的 HART 通讯器 275 或其他软件包。目前有很
多不同的软件包。我们推荐用户使用西门子自己的 SIMATIC 过程设备管理(PDM)软件包。
.
HART 设备描述(DD)
SITRANS LR460 不能使用一般的 DD。配置软件需要专用于 SITRANS LR460 的 HART 设备
描述。
您可以从我们的网站下载 SITRANS LR460 的 HART 设备描述,地址:
http://pia.khe.siemens.com/index.asp?Nr=14655
旧版本的库需要进行更新来使用 SITRANS LR460 的所有功能。
.
SIMATIC 过程设备管理(PDM)
软件包设计成允许便捷的设置和问题诊断 HART 设备。SITRANS LR460 的 HART DD 为
SIMATIC PDM 优先使用而编写, 进行了缜密的测试。
请看第 92 页 SIMATIC PDM 查找更多信息。
SIMATIC PDM 的 HART 调制解调界面
您需要一个 HART 调制解调器。有两种型号可选。
HART 调制解调器型号 零件号码
HART 调制解调器/RS-232(PC 与 SIMATIC PDM)
HART 调制解调器/USB(PC 与 SIMATIC PDM)
7MF4997-1DA
7MF4997-1DB
Page 94

HART 版本
SITRANS LR460 遵从 HART rev.5.1.
脉冲模式
SITRANS LR460 不支持脉冲模式
HART 通讯参数
警告:不正确的使用这个参数会导致所有的通讯失效。
打开 Device-Hart Communication 设置序请求数。
Page 95

附录 F: HART 信息结构
SITRANS LR460 通过传感器检测物料物位,然后处理信息提供一个测量值。测量值作为数
字信号传递。
LR460 设备设计可以提供两路不同输出:
z 4-20mA 通道
z 数字通道
记录和处理测量值的模块模型
LR460 遵循类似 PROFIBUS 3.01,Class B, PA 设备的图表模块模型。设备的功能被分割成几
块。
传感器记录信息,然后经过物位转换模块到两个独立的模拟输入功能模块(AIFB1 和
AIFB2)。
用来配置功能模块参数的是标准图表参数,遵循与 PROFIBUS PA 图表结构类似的惯例。他
们可以通过 PDM 中的 HART 通讯修改。
物位转换模块(LTB)
物位变送模块(LTB)把调整带到传感器,比如物位标定,他提供给两个 AIFB 的输出使用
(主值/PV,或二级值 1/SV!或或二级值 2/SV!)
Page 96

模拟输入功能模块 AIFB1 和 AIFB2
两个 AIFB 是完全独立的。他们使用来自 TB 的输出。
应用任何所需质量的检查,测量和失效安全操作选择。
AIFB1
模拟输入模块 1 的输出提供测量值和关联的状态信息作为两个通讯通道的数字信号:
z 通过 mA 输出模块到 4-20mA 通道
z 到 HART 数字通道,作为 HART 主变量。这只有通过 HART 数字通道可以看到。
AIFB2
模拟输入模块 2 的输出提供测量值和关联的状态信息到 HART 数字通讯通道,作为 HART
二级变量。这只有通过 HART 数字通道可以看到。
模块描述
如欲查看物位转换模块和模拟输入功能模块是如何处理信息的,请看第 100 页的模块描述。
Page 97

附录 G: 通过 PROFIBUS PA 远程操作
注意:
z 请看附录 H:通过 PROFIBUS PA 通讯,在第 95 页。
z 只有在完整的 PROFIBUS PA 网络才能使用 SITRANS LR460 的所有功能。
PROFIBUS PA 是一个开放的工业标准。完整的信息可以从下面网址查看:
www.profibus.com
.
设置工具
为使用 PROFIBUS PA,您需要一个 PC 配置工具:我们推荐 SIMATIC PDM。请参考操作指
导或在线帮助得到更多关于如何使用 SIMATIC PDM 的信息。(您可以在
www.fielddevices.com
找到更多信息,路径 products and solutions>products and systems>communications and
software>process device manager.)
SIMATIC PDM
SIMATIC PDM 是一个用于调试和维护 SITRANS LR460 和其他过程设备的软件包。
SIMATIC PDM 监视设备的过程值,警报和状态信号。允许您显示,调整,检验和仿真,处
理设备数据。
查找通过 SIMATIC PDM 可以实现的特殊功能,请看第 36 页通过 SIMATIC PDM 操作
SITRANS LR460。
设备描述
SITRANS LR460 的设备描述已包含在新版本的 SIMATIC PDM 中。
您可以在设备目录内定位设备描述,Sensors/ Level/ Echo/ Siemens Milltronics。如果在
Siemens Milltronics 下找不到 SITRANS LR460,您可以从网上下载,地址:
https://pia.khe.siemens.com/index.asp?Nr=14655
下载 DD 文件后,先解压缩,运行 SIMATIC PDM-Manager Device Catalog,找到解压缩后的
DD 文件并选中他。
.
Page 98

配置
您需要一个 GSD 文件来配置 PROFIBUS PA Class1 Master(比如,一个 PLC)。
GSD 文件
GSD 文件 SIEM8132.gsd 可以从网站下载,地址:
https://pia.khe.siemens.com/index.asp?Nr=14655
然后从您的电脑运行。这将会安装 GSD 文件到您的系统(在使用 SIMATIC 软件的时候)。
注意:如果您不使用 SIMATIC 软件,你可以单独下载 GSD 文件,然后导入您所用的软件。
,页面打开后点 Downloads,下载设备安装,
设置 PROFIBUS 地址
当您的仪表被装货时,PROFIBUS 地址设置为 126。你可以本地设置他(看下面)或通过总
线远程设置,使用诸如 SIMATIC PDM 之类的参数化工具。(请看 46 页地址)
值
z 把手操器指向显示屏,按模式激活编辑模式,菜单项 1.0.
z 按下箭头,右箭头,右箭头导航到地址(菜单项 2.1.2)
z 按右箭头打开编辑模式:编辑图标 将闪烁
z 如果需要,键入一个新的值然后按右箭头确认。LCD 显示新值然后编辑图标消失
范围:0 到 126(我们推荐设置为 0 到 125)
预设:126
配置一个新的设备:程序
1. 您需要仪表最新的设备描述(DD),运行 SIMATIC PDM-Manager Device Catalog,
找到 DD 文件并选择他。
2. 运行 SIMATIC Manager 创建一个 LR460 的新项目。设置 SIMATIC PDM 中的 HART
和 PROFIBUS PA 设备的应用指导,可以从网站下载,地址:
https://pia.khe.siemens.com/index.asp?Nr=14655
3. 打开 Menu Devic-Reset 点击 Factory Reset。
4. 上传参数到 PC/PG。
5. 标定设备。请看第 30 页的通过 SIMATIC PDM 快速启动精灵。
Page 99

用 S7-300/400 PLC 配置 PROFIBUS PA
1. 如果 SITRANS LR460 没有在 STEP 7 设备目录中列出,您可以从西门子网站下载并运
行安装。登陆 https://pia.khe.siemens.com/index.asp?Nr=14655
2. 把 SITRANS LR460“上架”,从硬件目录点并拖 SITRANS LR460。
3. 用需要的模块填充架子,把他们从硬件目录中拖并放下。
4. 当步骤 2 和步骤 3 运行完毕后,下载到 PLC。
5. 在 PLC 程序中加入编码,使用 SFC14 读取数据。
点击 Downloads.
通过 SIMATIC PDM 标定
1. 打开 Device- Sensor Calibration 菜单,选 Dry Calibration 键。
2. 输入低标定点的新值(默认单位米),点 OK。
3. 输入相应的低标定点的百分比值(默认 0),点 OK。
4. 输入高标定点的新值(默认单位米),点 OK。
5. 输入相应的高标定点的百分比值(默认 100),点 OK。
6. 信息“Sensor Trim Successful”出现,点 OK。
7. SITRANS LR460 现在准备工作。
完整参数列表,请看 43 页参数参考。
Page 100

附录 H: 通过 PROFIBUS PA 通讯
SITRANS LR460 是一种 Class B,版本 3.01 的 PA 设备。他为循环和非循环数据交换提供
Class 1 Master,和为非循环服务提供 Class 2。完整的 SITRANS LR460 功能需要完整的
PROFIBUS PA 网络。
PROFIBUS PA 是开放的工业协议,您可以登陆 www.profibus.com
得到完整的信息。
循环对比非循环数据
当您通过 PROFIBUS PA 请求数据时,您有两个选择。循环数据在每个总线扫描提供:非循
环数据请求和提供作为需要。
循环数据
当您在 PROFIBUS PA 总线配置 SITRANS LR460 时,有两个模块槽可用。
注意:每个位置需要一个模块定义。
槽 0 一直是传递 AIFB1 信息;槽 1 默认是自由空间,但可以更改为 AIFB2 信息。如果你不
希望数据传递,你必须在槽中使用空白的模块。
每一个模拟输入功能模块可以设置为物位,或距离。在这些功能模块中,值根据用户要求被
比例调整(请看第 102 页的模拟输入功能模块 1 和 2)
 Loading...
Loading...