

Page 1
Version: 05/2012
Getting Started
SINAMICS V60
Controlled Power Module (CPM60.1)
Page 2

Table of contents
General information
1.1 System overview ..........................................................
1.2 Safety notes..................................................................
1.3 Identification..................................................................
1.4 Technical data..............................................................
Installation
2.1 Mechanical installation..................................................
Commissioning
3.1.1 Main menu...................................................................
3.1.2 Function menu.............................................................
3.1.3 Setpoints from NC.......................................................
3.1.4 First commissioning.....................................................
3.1.5 System commissioning................................................
3.1 Commissioning............................................................
3.2 Parameter list................................................................
Troubleshooting
EN-3
EN-4
EN-6
EN-8
2.1.1 Mounting the drive.......................................................
2.1.2 Mounting the motor......................................................
2.2 Electrical installation.....................................................
2.3 Interface definition.........................................................
4.1 LED status indicators.....................................................
4.2 Alarms...........................................................................
4.3 Errors during drive self-test...........................................
4.4 Other faults....................................................................
1-NEdetratS gnitteG )1.06MPC( eludoM rewoP dellortnoC 06V SCIMANIS
EN-10
EN-19
EN-25
EN-19
EN-20
EN-22
EN-23
EN-24
EN-10
EN-12
EN-12
EN-16
2.4 Signal sequence example.............................................
EN-18
EN-29
EN-29
EN-32
EN-32
中文版请见第 CHS-1 至 CHS-34 页。
For the Chinese version, see pages CHS-1 to CHS-34.
CPM 的固件(软件)已更新为 V1.7。当前驱动器在缺省状态下较旧版具有更强的动
态性。如需回到旧版工作状态,可将当前缺省值重设为第二缺省值(见 3.1.2 节)。
The firmware (software) in the CPM is already updated to V1.7. Now the performance of the drive in the default status is more dynamic than that of the old version.
If you want the drive to work in the old status, you can change the current default
value to the second default value (see section 3.1.2).
Page 3

EN-2 SINAMICS V60 Controlled Power Module (CPM60.1) Getting Started
Page 4

The SINAMICS V60 servo drive system is a new drive system developed by Siemens. It's designed for
use with a Siemens SINUMERIK 801 or SINUMERIK 802S base line numerical controller to control the
operation of a CNC turning or milling machine, and it can also be connected with a Siemens SIMATIC
PLC. Siemens delivers to each customer the whole drive system instead of only one drive device, which
includes: a drive module (CPM60.1, available in 4 A, 6 A, 7 A or 10 A version), an AC servo motor (type
1FL5, with or without a built-in brake and with or without a key ) and all necessary cables (for power,
encoder and brake, with a length of 5m or 10m).
The following picture illustrates possible system configuration
General Information
1.1 System Overview
3-NEdetratS gnitteG )1.06MPC( eludoM rewoP dellortnoC 06V SCIMANIS
or
or
or
Motor with brake Motor without brake
Brake cable
Motor cable
Encoder cable
Setpoint cable
SINUMERIK 801
SINUMERIK 802S base line
4 A/6 A/7 A
10 A
Page 5
1.2 Safety Notes
EN-4 SINAMICS V60 Controlled Power Module (CPM60.1) Getting Started
Only qualified personnel should be allowed to work on this drive system, and only after
becoming acquainted with all the safety notices regarding installing, connecting,
commissioning, operation and maintenance as set out in this manual. Failure to observe
these notices contained in this manual can result in death, severe personal injury or
considerable damage to property. Without prior authorization, you are not allowed to
perform any modification on the drive.
Deliverables received must be complete and intact. Exercise caution to ensure that you do
not put a damaged device into service. Make sure that the drive, the motor and the cables
received correspond with the specific drive package you ordered from Siemens.
Transport and storage must meet specified environmental conditions.
Do not handle the motor by gripping the connecting cable (motor cable, brake cable or
encoder cable) or the motor shaft.
Risk of fire or electric shock. Use caution to ensure that you do not install the drive and the
motor in an area which is subject to inflammables or combustibles, water or corrosion
hazards.
Do install the drive in a distribution cabinet with an adequate protection level.
Do not install the drive and the motor in a location where it is likely to be exposed to constant
vibrations or physical shocks.
Risk of fire. Make sure that no any foreign body (such as chips of wood or metal, dust, paper
scraps, etc.) falls into the drive or lies on its heatsink.
Keep sufficient clearance between drives, one drive and another device/inner wall of the
cabinet.
Siemens recommends that you tighten the screw on the terminal door of the drive, after you
have completed the installation work.
General
Identification
Transport & Storage
Mechanical installation
WARNING
WARNING
WARNING
CAUTION
CAUTION
NOTICE
Page 6
SINAMICS V60 Controlled Power Module (CPM60.1) Getting Started EN-5
The drive must have been disconnected from the power supply for at least five minutes
before you perform any wiring to it.
Make sure that all connections are correct and reliable, and the drive and motor are always
properly grounded.
Do suppress radio interference according to EN61800, category C3 (for industrial
environment only).
SINAMICS V60 is an open-loop drive system, so it has no protection against wire breaks.
The drive must connect to the motor directly with no capacitor, inductor or filter, etc.
installed between them.
The mains supply voltage must fall in the range of voltage limits.
It is strictly prohibited to wire the mains input cable to motor terminals U, V, W or to wire a
motor cable to the line input terminals L1, L2, L3.
It is strictly prohibited to wire motor terminals U, V.W on the drive in an incorrect phase
sequence.
If the whole system has to be qualified with CE mark, please use shielded cables for motor
cable, mains input cable and brake cable.
Always install a 380 V three-phase AC isolating transformer at a mains supply network for
protective separation.
Route signal cables separately from power cables and lay them in different cable conduits.
Keep the signal cables a minimum of 10 cm away from the power cables.
Keep cables already connected away from rotating mechanical parts.
Before switching the power on, make sure that the drive system has been reliably installed
and connected, and the mains voltage falls in the permitted voltage limits.
Do not touch the motor shaft when the motor is running. Failure to comply may cause
personal injury.
Ensure that all connections to the SINAMICS V60 drive module have been disconnected
before you perform any voltage test (according to EN60201-1 (VDE0112-1), Article 20.4) for
an electrical device on the machine tool. The drive had passed the insulation test before its
delivery to the customer and doesn't require a second test (for avoiding additional voltage
stress).
The motor brake is only used for brake control over motor start/stop. Unless absolutely
necessary, do not apply it as an emergency stop mechanism.
Only after you have successfully carried out commissioning of the drive system while the
motor operates under dry-run conditions, can you perform commissioning of the drive
system while the motor operates under loaded conditions.
Do not touch the heatsink of the drive, the motor or other high-temperature parts during
equipment running or within a certain period since power disconnection. Failure to comply
may cause personal injury.
Ensure that you do not switch on/off the power frequently. This may cause damage to the
drive system.
The motor rotation direction is determined according to your view from the motor shaft end.
Viewing from the motor shaft end, counterclosewise (CCW) rotation is defined as forward
rotation while clockwise (CW) rotation is defined as reverse rotation.
Electrical installation
Commissioning/Operation
WARNING
WARNING
CAUTION
CAUTION
Page 7
1.3 Identification
EN-6 SINAMICS V60 Controlled Power Module (CPM60.1) Getting Started
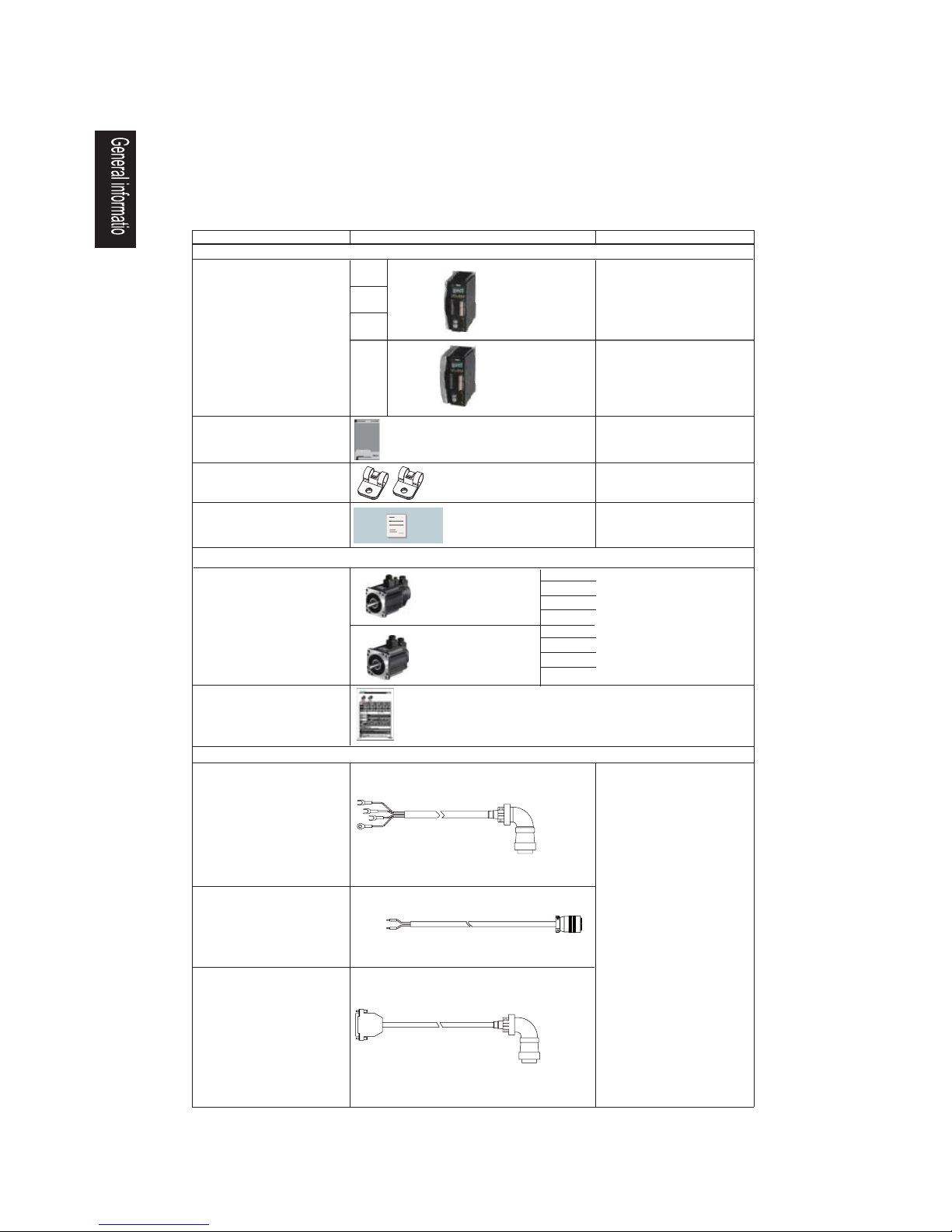
The drive will be always delivered with a complete axis package, including one drive unit
CPM60.1, one motor unit 1FL5. and some necessary cables.
Scope of delivery
Encoder cable (shielded)
Motor cable (unshielded)
Brake cable (unshielded)
Drive side
(to encoder interface X7)
Motor side
(to encoder socket)
4 Nm
4 A
6 A
7 A
10 A
10 Nm
6 Nm
7.7 Nm
4 Nm
10 Nm
6 Nm
7.7 Nm
Refer to the rating plate on
the motor housing for
motor-specific electrical data
Getting started
Warranty card
Cable clamps (2 pieces)
Controlled Power
Module CPM60.1
1FL5 motor
With the brake
Without the brake
Datasheet for 1FL5
motor
For each cable, two lengths
are available for your
selection:
- 5 m
- 10 m
Cables individually packaged
Drive side
(to motor interface U, V, W)
Motor side
(to motor socket)
Drive side
(to motor brake interface X3)
Motor side
(to motor brake socket)
Component Illustration
Remark
--
--
--
Components included in the drive unit package
Components included in the motor unit package
Dimension (W x H x D; in mm):
106 x 226 x 200
Dimension (W x H x D; in mm):
123 x 226 x 200
1FL5 motors have two main
types - with key and without
key. Each type involves motors
with brakes and without brakes.
Applicable to both shielded
and non-shielded cables
Page 8
SINAMICS V60 Controlled Power Module (CPM60.1) Getting Started EN-7
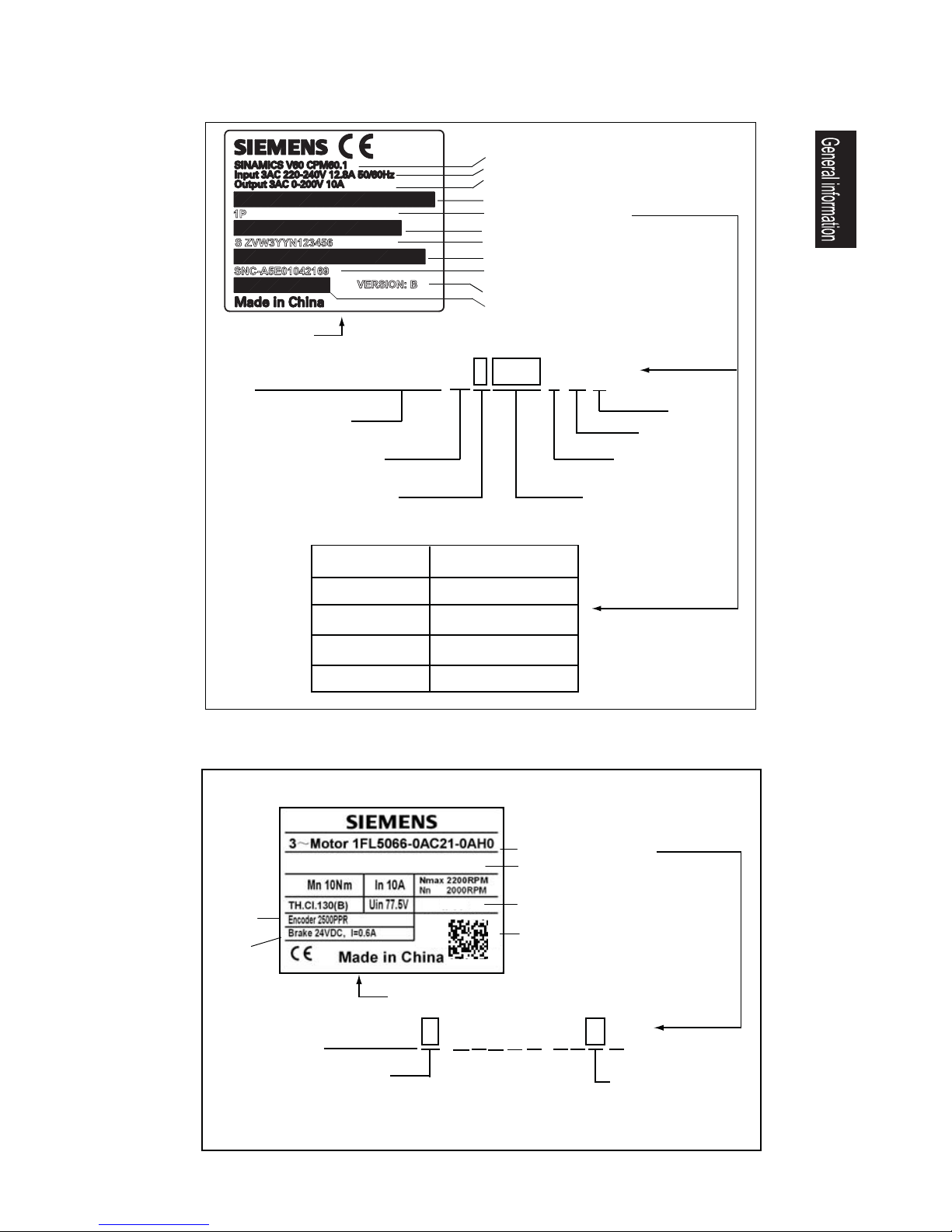
Product name
MLFB (order number)
Product serial number
Siemens part number
Rated input voltage, current and frequency
Rated output voltage & current
Hardware version
Bar code
Bar code
Bar code
Bar code
6 S L 3 2 1 0 - 5 C C 2 1 - 0 U A 0
SINAMICS AC Drive,
blocksize, with internal
air cooling
3 AC 220 ... 240 V rated
Multiplier for output current:
1: x 0.1
2: x 1
Rated output current:
4 - 0: 4 A
6 - 0: 6 A
7 - 0: 7 A
1 - 0: 10 A
Unfiltered
Standard
Version
Drive variant/
Rated output current
Order number
4 A
6 A
6SL3210-5CC14-0UA0
6SL3210-5CC16-0UA0
6SL3210-5CC21-0UA0
Drive rating plate
6SL3210-5CC21-0UA0
10 A
6SL3210-5CC17-0UA0
7 A
MLFB (order number)
2D-code
(for MLFB and
serial number)
Product serial number
Protection class
Rated
resolution
1 F L 5 0 6 0 - 0 A C 2 1 - 0 A H 0
Rated torque:
0: 4.0 Nm
2: 6.0 Nm
4: 7.7 Nm
6: 10.0 Nm
G: Without key, without brake
H: Without key, with brake
A: With key, without brake
B: With key, with brake
Motor (with brake)
rating plate
Brake
requirements
IPxx
Drive rating plate (example)
Motor rating plate (example)
VERSION: B
S ZVW3YYN123456
SNC-A5E01042169
1P
S 10025AA13LFBZ0001
Page 9
1.4 Technical data
For technical data of the motor, please refer to the Motor Specification delivered with the motor.
EN-8 SINAMICS V60 Controlled Power Module (CPM60.1) Getting Started
Vibration resistance
Relative humidity
Ambient temperature
< 95%
Operation
Transportation
Storage
-40°C to 70°C
-25°C to 55°C
Operation
Transport &
storage
< 1,000 m above sea level: without power derating;
1,000 to 2,000 m: with power derating (derated to 80%)
Installation altitude
Outline dimensions (W x H x D)
Protection class
Mechanical design
NOTICE
IP20
0 to 45 °C: without power derating (100% load);
45 to 55°C: with power derating (by 0% at 45°C
up to 30% at 55°C ).
Rated voltage: 3 AC 220 V to 240 V
Tolerance: - 15 % ~ + 10 %
50/60 Hz, unregulated DC-Link
Mains supply voltage
Protection functions
Input pulse frequency
Control mode
2. JOG mode
Drive output
Drive input
Encoder
Overcurrent, overvoltage, undervoltage, overload, IGBT overtemperature,
overspeed, encoder abnormal protections, I
2
t detection
TTL encoder 2,500p/r with U, V, W rotor position signal; one zero mark
1. Brake output 2. Servo alarm 3. Servo ready 4. Zero mark
Environmental conditions
Control performance
General performance
Order No.: 6SL3210- 5CC14-0UA0 5CC16-0UA0 5CC17-0UA0 5CC21-0UA0
Applicable load inertia
Overload capability
Setpoint interface
Keys on panel
Display
Axis
Configurable controller
Application field
Rated motor torque
Rated output power
Rated input power
Max. output current
Rated output current
6 Nm
1.2 kW
1.6 kW
2.0 kW
7.7 Nm 10 Nm
4 Nm
tt
I
I
8 A
4 A
6 A
7 A
10 A
12 A
14 A
20 A
0.8 kW
1.4 kW
1.9 kW
2.3 kW
0.9 kW
Turning machines, milling machines, engraving, packaging, printing etc.
SINUMERIK 801, SINUMERIK 802s base line, SIMATIC S7-200 and
SIMATIC S7-1200
Single-axis drive
6-digit, 7-segment LED display, two LED status indicators
4 tact switch keys
Pulse interface
1. Servo enable 2. Alarm cancel
1. Position control (Input mode: pulse + direction signals)
106 x 226 x 200
mm
106 x 226 x 200
mm
106 x 226 x 200
mm
123 x 226 x 200
mm
0
20
40
60
80
100
120
0 5 10 15 20 25 30 35 40 45 50 55
Output power
Temperature ( C)
Imax
Imax = 2 x In
In
3s
10s
Imax
In
0.3s
10s
Technical data for CPM60.1 Drive Modules
Page 10
SINAMICS V60 Controlled Power Module (CPM60.1) Getting Started EN-9
Technical data for transformer
Recommended transformer type 380 V/220 V SG series 3AC isolating transformer
V022/083CA3egatlovylppuS
50/60 Hz
Connection group Y/Y-12
Impedance voltage (Uk%) 4
No-load current (%) For a transformer =< 1.0 kVA, the no-load current < 18%;
For a transformer > 1.0 kVA, the no-load current < 14%.
Possible motor combination Transformer power (apparent power)
AVk0.1mN4
AVk5.1mN6
AVk0.2mN7.7
AVk5.2mN01
AVk5.1mN4+mN4
AVk5.1mN6+mN4
AVk5.1mN7.7+mN4
AVk0.2mN01+mN4
AVk0.2mN6+mN6
AVk0.2mN7.7+mN6
AVk5.2mN01+mN6
AVk0.2mN7.7+mN7.7
AVk5.2mN01+mN7.7
AVk0.3mN01+mN01
4 Nm + 4 Nm + 4 Nm 1.5 kVA
4 Nm + 4 Nm + 6 Nm 1.5 kVA
4 Nm + 4 Nm + 7.7 Nm 2.1 kVA
4 Nm + 4 Nm + 10 Nm 2.0 kVA
4 Nm + 6 Nm + 6 Nm 2.0 kVA
4 Nm + 6 Nm + 7.7 Nm 2.0 kVA
4 Nm + 6 Nm + 10 Nm 2.5 kVA
4 Nm + 7.7 Nm + 7.7 Nm 2.5 kVA
4 Nm + 7.7 Nm + 10 Nm 2.5 kVA
4 Nm + 10 Nm + 10 Nm 3.0 kVA
6 Nm + 6 Nm + 6 Nm 2.0 kVA
6 Nm + 6 Nm + 7.7 Nm 2.0 kVA
6 Nm + 6 Nm + 10 Nm 2.5 kVA
6 Nm + 7.7 Nm + 7.7 Nm 2.5 kVA
6 Nm + 7.7 Nm + 10 Nm 2.5 kVA
7.7 Nm + 7.7 Nm + 7.7 Nm 2.5 kVA
Power selection (for standard
turning/milling machines)
7.7 Nm + 7.7 Nm + 10 Nm 3.0 kVA
6 Nm + 10 Nm + 10 Nm 3.0 kVA
7.7 Nm + 10 Nm + 10 Nm 3.0 kVA
10 Nm + 10 Nm + 10 Nm 3.5 kVA
CAUTION
To reduce the risk of electric shock, interference from power supply and electromagnetic
field, an isolating transformer is necessary for the 3AC 380V mains system.
The customer may select the right transformer with reference to the table above
(Determine the right transformer power based on desired motor combinations)
Page 11
2
2.1 Mechanical Installation
2.1.1 Mounting the drive
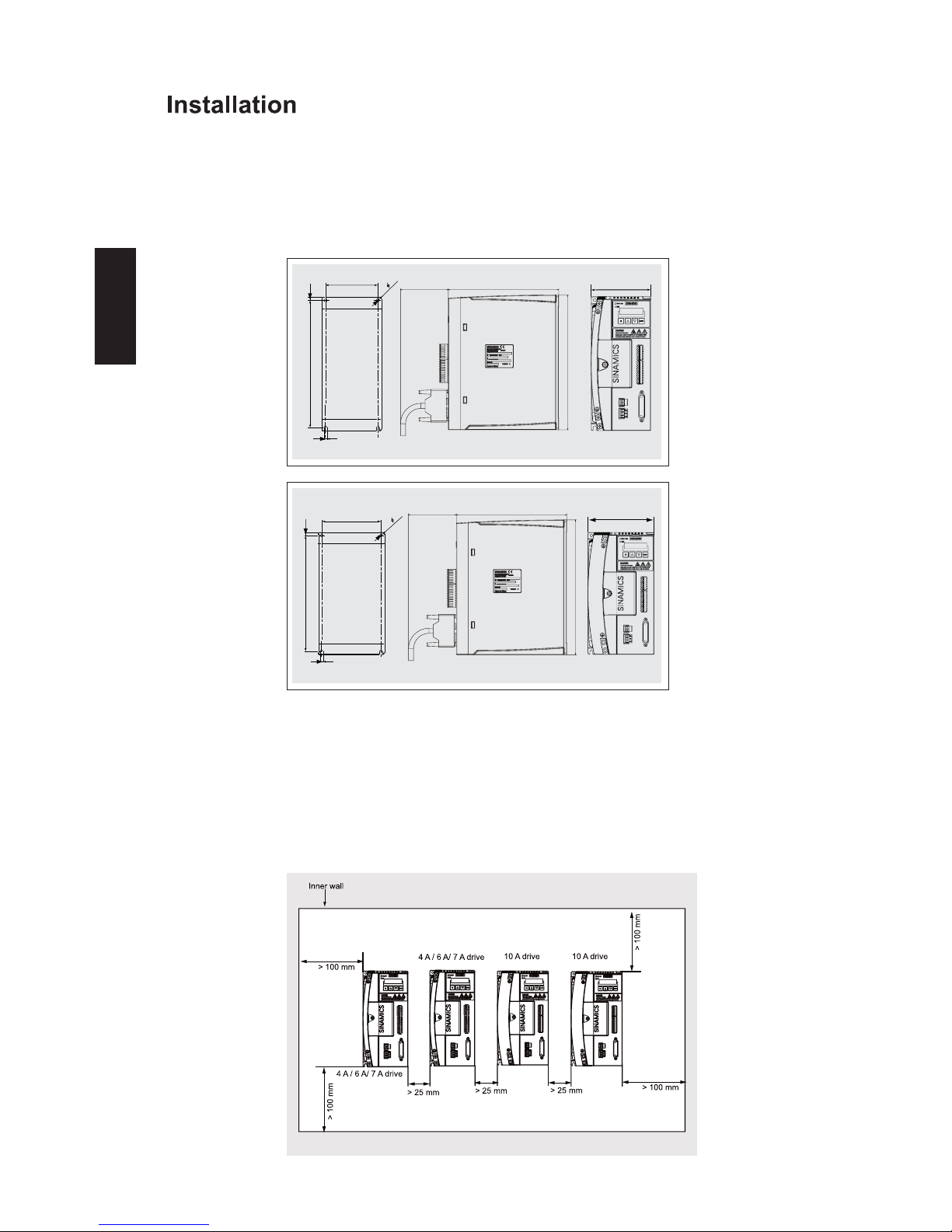
Drill pattern and outline dimensions
Mounting method
Minimum mounting clearance
EN-10 SINAMICS V60 Controlled Power Module (CPM60.1) Getting Started
Installation
You mount the drive with four M5 screws to the inner wall of the cabinet. Note that the drive
must be mounted vertically to the cabinet wall, with the ventilation openings of the drive
pointing upwards. The screw tightening torque of the drive must be no more than 2.0 Nm.
To ensure sufficient heat dissipation, please observe the requirements for minimum
clearance between drives, one drive and another device/inner wall of the cabinet, as
illustrated in the picture below:
93
215
5.5
5.5
2- 5.5
106
RDY / JOG
ERR
80
185
226
215
5.5
110
2- 5.5
5.5
123
RDY/ JOG
ERR
80
185
226
4 A/ 6 A / 7A versions
10 A version
Page 12

11-NEdetratS gnitteG )1.06MPC( eludoM rewoP dellortnoC 06V SCIMANIS
The use of supplied cable clamps
If the CE marking requirements for cables are mandatory, the mains input cable and the motor cable
used must all be shielded type of cables. In that case, you can use the cable clamps as a ground
connection between the cable shielding layer and a common ground point.
Clamps can also be helpful in better fixing cables (the unshielded motor cable and the mains input
cable) in place.
The illustration below shows you how to use the clamps to fix both cables and to make a shielding
connection with the cable.
Cable Clamp
PE
(for connection to earth
tightening torque: 2.0 Nm)
Ground wire
Ground wire
Mains input cable (shielded)
Motor cable
Caution
Note
Make sure that the clamp for fixing the shielded motor cable is in close contact
with the shielding layer of the cable.
After the installation, it is recommended that the screws on the terminal covers
should be screwed down to ensure the safety.
Installation
Siemens does not provide the shielded motor cable. Please prepare the shielded
motor cable by yourselves for CE certification.
Page 13

Page 14

When using the drive together with the SIMATIC PLC, you are recommended to use a
standard 24 V DC power supply for the SIMATIC PLC and use a Siemens cable
(6ES7298-2DS23-0XA0) to connect the two ones.
Page 15

EN-14 SINAMICS V60 Controlled Power Module (CPM60.1) Getting Started
Installation
For PNP types (example)
For NPN types (example)
(orange)
(blue)
(brown)
(white)
(yellow)
(orange)
(blue)
(brown)
(white)
(yellow)
(gray)
(purple)
(black)
(red)
(purple+white)
(red+white)
(gray)
(purple)
(red)
(black)
(purple+white)
(red+white)
PULS1 (orange)
RST (white)
M24 (black)
PULS2 (orange + white)
DIR1 (blue)
ENA1 (brown)
ALM1 (purple)
RDY1 (gray)
RDY2 (red + white)
+24V (red)
Z-M (green)
Z-M24 (green + white)
ALM1 (purple + white)
ENA2 (brown + white)
DIR2 (blue + white)
PULS2 (orange + white)
RST (white)
M24 (black)
PULS1 (orange)
DIR1 (blue + white)
ENA1 (brown + white)
ALM1 (purple)
RDY1 (gray)
RDY2 (red + white)
+24V (red)
Z-M (green)
Z-M24 (green + white)
ALM1 (purple + white)
ENA2 (brown)
DIR2 (blue)
PEPEM L+
L+MI0.0 I0.1 I0.2
1M
1M
Q0.0 Q0.1 Q0.2 Q0.31L+
CPU 224XP CN
DC / DC / DC
DC 24 V
PULS DIR ENA RST
ALM RDY Z-M P24V/M M P24V
DC 24 V
PE
PE
M
L+
L+MI0.0 I0.1 I0.2
1M
1M
Q0.0 Q0.1 Q0.2 Q0.3
PULS DIR ENA RST
M/V42PM-ZYDRMLA M P24V
CPU 224XPsi CN
DC / DC / DC
If SIMATIC PLC is S7-200 series, please see following wiring diagrams:
NOTE
As 65 signal from SINAMICS V60 drive is recommended for emergency stop, it is not used in SIMATIC
PLC/SINAMICS V60 signal cable.
For a SIMATIC PLC (S7-200 series), signal PULS can only be connected to output terminal Q0.0 or Q0.1,
and terminal Q0.2 or Q0.3 is used for direction output.
For PNP and NPN types, connectors on X5 are differently arranged. So, be sure to connect to X5
correctly according to the actual situation.
Based on contact colors, connect the contacts on the PLC (left)and those on the V60 (right)
respectively, as shown on page EN-13. The contact colors on the PLC, however, do not match those
on the V60.
Page 16

SINAMICS V60 Controlled Power Module (CPM60.1) Getting Started EN-15
Installation
SIMATIC PLC/SINAMICS V60 signal cable
It is recommended to use SIEMENS-designed SIMATIC PLC/SINAMICS V60 signal cable (length: 3m) to
connect SIMATIC PLC and SINAMICS V60. This signal cable can be ordered with MLFB of 6ES7298-2DS230XA0.
PE
PE
MM
3M3L+
L+L+ 1M I0.0
Q0.0 Q0.1 Q0.2 Q0.3 Q0.4 Q0.5 Q0.6
I0.1 I0.2
DC 24 V
PULS DIR ENA RST
CPU 1214C
DC / DC / DC
ALM RDYZ-MP24V/MMP24V
If SIMATIC PLC is S7-1200 series, please see the following wiring diagram (example):
(orange)
(blue)
(brown)
(white)
(yellow)
(gray)
(purple)
(red)
(black)
(purple+white)
(red+white)
PULS1 (orange)
RST (white)
M24 (black)
PULS2 (orange + white)
DIR1 (blue)
ENA1 (brown)
ALM1 (purple)
RDY1 (gray)
RDY2 (red + white)
+24V (red)
Z-M (green)
Z-M24 (green + white)
ALM1 (purple + white)
ENA2 (brown + white)
DIR2 (blue + white)
The CPM60.1 drive unit should be connected to an external 24 V DC power supply (rated input current 2 A),
which enables the drive to normally work under the voltage range of 24 V (- 15% to +20%). Since the excellent
quality of a DC power supply is critical to the stable operation of a drive system, Siemens recommends you to
select a SIEMENS DC 24 V stabilized power supply (order number: 6EP1333-3BA00). If there is no SIEMENS
DC 24 V power supply available, you can use a non-SIEMENS high-quality power supply instead.
External 24 V DC Power Supply
Filter
Circuit breaker
A line filter (rated current 16 A, protection level IP20) is required so that the system can pass the CE certification
(radiated emission test or conducted emission test). The filter recommended by SIEMENS has an order number
of 6SN1111-0AA01-1BA1.
You can install a mains linear breaker (rated current: 15 A for 7 A or 10 A version of the drive and 10 A for 4 A
or 6 A version of the drive; rated voltage: 250 VAC) to protect the system.
NOTE
As 65 signal from SINAMICS V60 drive is recommended for emergency stop, it is not used in SIMATIC
PLC/SINAMICS V60 signal cable.
For a SIMATIC PLC (S7-1200 series), signal PULS can only be connected to output terminal Q0.0 or
Q0.2, and terminal Q0.1 or Q0.3 is used for direction output.
Page 17

2.3 Interface Definition
Line supply connection L1, L2, L3
Motor output connection U, V, W
Motor brake connection X3
DC 24 V power supply connection X4
EN-16
SINAMICS V60 Controlled Power Module (CPM60.1) Getting Started
Installation
Setpoint interface X5
Pulse input setpoint ++PULS
-PULS
+DIR
+ENA
-ENA
-DIR
Direction of motor setpoint +
Pulse enable +
Pulse enable -
Direction of motor setpoint -
Pulse input setpoint -
1
2
3
4
5
6
I
I
I
I
I
I
Interface
Signal name
Description
Interface
Signal name
Schematic connection diagram
Description
Interface
Signal name
Schematic connection diagram
Description
Interface
Interface
Pin
Signal name
Signal
name
I/O
type
Remark
Remark
Description
Description
Voltage 24 V DC
(20.4 - 28.8 V)
Current consumption:
brake power supply
power supply
Maximum conductor cross-section: 1.5 mm
2
Maximum conductor cross-section: 1.5 mm
2
Maximum conductor cross-section: 2.5 mm
2
Maximum conductor cross-section: 2.5 mm
2
+ 24 V, motor brake
voltage positive
B+
B- 0 V, motor brake
voltage negative
B+
White
Black
Drive side
(Terminal strip)
Motor side
(Socket connector)
B-12
B-
B+
2
1
U
Drive side
(Terminal strip)
Motor side
(Socket connector)
V
W
1
Black
Yellow-Green
Black
Black
2
3
U
PE
V
W
2
1
3
4
U
V
W
Motor phase U
Motor phase V
Motor phase W
L1
L2
L3
Line phase L1
Line phase L2
Line phase L3
24 V
0 V
PE
- -
Protective earth
0 V
DC 24 V
5V differential signal
Too high input
voltage may cause
a damage to the
device.
Max. conductor cross section: 0.5 mm
If the drive is connected with a SIMATIC PLC, please make sure that the time delay between PULS and
DIR signals should be more than 16 s.
Please ensure that all the terminals of interface X5 should be firmly wired, otherwise, it is forbidden to start
the machine.
It’s recommended that the
differential drive mode is used here
so that the pulse data can be
transmitted correctly.
220
220
servo amplifier
PULS+
PULS-
SIGN+
SIGN-
2
drive side
1 2
3 4 5 6
Page 18

Digital I/O interface X6
Encoder interface X7
SINAMICS V60 Controlled Power Module (CPM60.1) Getting Started EN-17
24 A+
12 A-
TTL encoder A phase signal
Servo enable
Interface
Interface
Pin
Pin
Signal
name
Description
Description
I/O
type
Remark
Alarm cancel
Servo enable and alarm
cancel reference ground, 0 V
Alarm relay contact 1 terminal
Alarm relay contact 2 terminal
Servo ready contact 1 terminal
Servo ready contact 2 terminal
Zero mark power supply
Zero mark reference ground 0 V
Maximum conductor cross section: 1.5 mm
2
1)
To cancel an active alarm, apply a high level (+24V) at this terminal.
tuptuo kram oreZZ-M
M24
9
10
RST
M24
ALM1
RD
Y1
ALM2
RDY2
+24V8
+24 V = high active
1)
+24 V = drive enable
0 V = drive disable
I
I
I
I
I
-
-
-
-
O
1
2
3
4
5
6
7
65
23 B+
11 B-
TTL encoder B phase signal
22 Z+
10 Z-
TTL encoder Z phase signal
21 U+
9 U-
TTL encoder U phase signal
20 V+
8 V-
TTL encoder V phase signal
19 W+
7 W-
TTL encoder W phase signal
13 NC
25 NC
Not connected
(reserved)
5/6/17/18 EP5
1/2/3/4 EM
1
13
14
25
A+
Drive side
(25-pin socket connector X7)
Motor side
(15-pin socket connector)
A-
24
12
B+
B-
23
11
Z+
Z-
22
10
U+
U-
21
9
V+
V-
20
8
W+
W-
19
7
N.C.
N.C.
13
25
EP5
5/6/17/18
EM
1/2/3/4
4
7
5
8
6
9
10
13
11
14
12
15
2
A+
AB+
BZ+
ZU+
UV+
VW+
WEP5
EM
PE
3
1
Screw type: UNC 4-40 (plug-in terminal block)
Tightening torque : 0.5 - 0.6 Nm
Encoder power supply + 5 V
Signal name
Encoder power supply GND
ALM1
ALM2
RDY1
RDY2
Pulse width: 2 ~ 3 ms
H = +24 V, L = 0 V
Internal relay terminals
Relay picks up in case
of an alarm
NC can receive this
alarm from drive
Internal relay terminals
Relay picks up when
drive is ready for
operation
7
8
9
10 11 12 13 1415 16
Page 19

Power-on sequence
Power-off sequence
EN-18
SINAMICS V60 Controlled Power Module (CPM60.1) Getting Started
Installation
2.4 Signal Sequence Example
24 V
Main power
16 ms
16 ms
1.5 s
32 ms
16 ms
65 enable
RDY signal
ENA enable
DIR signal
PULS signal
......
......
......
......
......
......
......
0.5 s
......
......
Main power
24 V
Page 20

3
3.1.1 Main Menu
3.1 Commissioning
Displays and settings
The status menu items
Commissioning
Main Menu
Status
Parameter Set
Function
Data Display
M
M
M
M
ENTER
......
......
......
To cancel the alarm,
power off the drive, then
power on again
Normal
status
display
Status-1
Status-2
Status-3
Status-4
Status-RUN
Status-A01
Status-A09
......
Status-A14
Status-A21
Status-A23
Status-A41
Status-A45
...... ......
The default menu item
under current menu level
Actual menu display
Alarm
status
display
Display of the 1st detected alarm
(the alarm no. always contains
a letter “L” to indicate this is the
first alarm.)
Display of the 2nd detected alarm
Display of the 3rd detected alarm
2 sec
2 sec
2 sec
When more than one error occurs at the same
time, the rule for error display is as the following
example:
8.8.8.8.8.8.
S-RUN
Alarm status
Normal status
Menu Item
Definition
Preconditions for display of normal status
S-A01
...
SINAMICS V60 Controlled Power Module (CPM60.1) Getting Started EN-19
Page 21

3.1.2 Function Menu
NOTICE
Descriptions of main keys:
Key Definition Function
M
ENTER
Mode selection
Enter
Switch between 4 main menu items (Status, Parameter Set , Data
Display and Function) or return current display to next higher-level.
Go to next lower-level menu item or back to higher-level item, confirm
value (save modified value into RAM) or cancel an alarm.
Accessibility to "JOG" mode or 'Save user parameter" mode (see the picture above) depends on the
current display status of the drive:
when the drive is in "S-3" (waiting for 65 enable) state and P05 = 1, access to JOG mode is possible.
Please save modified parameters via the Store function in the function menu, otherwise, the parameter
changes will be lost if the drive is powered off. It must be noted that signal of servo enable (terminal
X6-"65") or signal of pulse enable (terminal X5-"+ENA"/"-ENA") should be cut off if you try to save the
EN-20 SINAMICS V60 Controlled Power Module (CPM60.1) Getting Started
Function Menu
Save user
parameter
Restore
default
ENTER
JOG
No
ENTER
or
or
ENTER
ENTER
M
or
Status
Parameter Set
Function
Data Display
M
M
M
M
M
ENTER
or
M
M
ENTER
or
M
ENTER
or
The default menu item
under current menu level
or
If the current drive operating status supports JOG
funtion, “JOG RUN”will be displayed.
Otherwise, “Forbidden” will be displayed.
Keeping Up key pressed can make the motor run
counter-clockwise.
Keeping Down key pressed can make the motor run
clockwise
Releasing the key can stop the motor.
Key release
Yes
Forbidden
Forbidden
Finish
JOG RUN
JOG RUN
JOG RUN
If the current drive operating status
supports “Save user parameter”
function, “Finish” will be displayed.
Otherwise, “Forbidden” will be
displayed.
If the current drive operating status supports
“Restore default” function, “Finish” will appear.
Otherwise, “Forbidden” will appear.
Key release
Restore
default
the second
No
ENTER
or
or
ENTER
ENTER
M
or
M
or
M
ENTER
or
Yes
Forbidden
Finish
No
ENTER
or
or
ENTER
ENTER
M
or
M
or
M
ENTER
or
Yes
Forbidden
Finish
The 2nd default values are the default values of FW V1.6 and the lower.
Page 22

P47 value (default)
Parameter Set Menu
Status
Parameter Set
Function
Data Display
M
M
M
M
M
ENTER
ENTER
ENTER
M
or
: save value to RAM and return
M
ENTER
: return without saving
Menu display change after Mode button is pressed:
The point will turn dark under the following circumstances:
- At next power-on;
- After the value has been saved to the memory using
“Save user parameter” function under “Function” main
menu item.
Point is lit
Point is lit
Increase value Decrease value
Par. No. 47
Par. No. 99
Par. No. 01
Par. No. 05
Press or for several seconds,
the value can be increased or descreased faster.
“P01” will be displayed by default at first power-on only.
The last parameter you changed before power-off will be
displayed by default at next power-on.
To change parameter settings, change the default setting of P01
first.
Figure 6-3 "Parameter Set" menu
Note
All parameter settings made in Parameter Set mode will be saved to RAM only. At next drive
power-on, the settings made will be recovered to the setting prior to the last setting
automatically. To save the setting permanently, you should use "Save user parameter" menu
entry under "Function" main menu.
Detailed description of individual parameters can be found in Section 6.2 "Parameter list
(Page 44)".
SINAMICS V60 Controlled Power Module (CPM60.1) Getting Started EN-21
Page 23

Data Display Menu
Status
Parameter Set
Function
Data Display
M
M
M
M
M
ENTER
ENTER
ENTER
M
or
D10 value
Data No. 11
Data No. 81
Data No. 82
Data No. 10
The default menu item
under current menu level
Actual menu display
Figure 6-4 "Data Display" menu
N
ote
Detailed description of individual display data can be found in Section 6.5 "Display data list
(Page 49)".
31400
31020
STEP_RESOL
ENC_RESOL PPR
IPR
X, Z (for 801)
X, Y, Z (for 802S base line)
X, Z (for 801)
X, Y, Z (for 802S base line)
10,000
10,000
Encoder revolution (2,500)
x Multiplier (4)
Steps per servo motor revolution
noitpircseDtniopteSnoitangiseDataD enihcaM Unit Axis
3.1.3 Setpoints from NC
EN-22 SINAMICS V60 Controlled Power Module (CPM60.1) Getting Started
Page 24

3.1.4 First commissioning
Start
Switch on the DC 24 V power supply
to the drive
Remove write protection (P01 = 1)
Is "S-2" displayed?
Yes
Connecting the unit
Check the connections
1)
2)
It’s necessary to connect the cables below:
(refer to Section 2.2)
- Encoder cable
- Motor cable
- Mains input cable
- DC 24 V cable
- Brake cable
Check points:
- Is the device or cable damaged?
- Do the connected cables sustain
excessive pressure, load or tension?
- Are the connected cables put on sharp
edges?
- Is the mains supply within the allowable
range?
- Are all the terminals firmly and correctly
connected?
- Are all the connected system components
well grounded?
No
Refer to Section 3.1.1 for possible causes
Refer to Section 3.1.1 for possible causes
Set JOG speed (P46)
Yes
Save settings to memory?
Pressing to return to the main
menu, and then to
No
M
Set internal JOG enable function (P05 = 1)
Enable drive terminal 65 via external DC 24 V power supply
Switch on the mains supply (3AC 220 V) to the drive
Go to "Func" main menu, select "JOG" -> "JOG RUN".
Keep Up or Down key pressed to enable motor trial run.
Adjust speed controller performance (P20 & P21) , if necessary.
No
Yes
Alternative 1:
Alternative 2:
Is “S-3 displayed”?
End
If there is need to adjust speed controller
performance (P20&P21), value of P47 should be
set to be 0 first.
3)
Prior to the adjustment of speed controller
performance, please refer to the explanation
to P47 in the parameter list and set P47=0
1
1
Follow the procedure below to complete the first commissioning of the drive and motor:
Go to "Func" main menu,select "Store" to store settings into the
memory (whether a changed drive parameter takes effect
immediately or after power-on, be sure to perform the “Store”
operation. For details, see Section 3.1.2).
SINAMICS V60 Controlled Power Module (CPM60.1) Getting Started EN-23
Page 25

3.1.5 System Commissioning
Start
Connect the drive with NC (SINUMERIK 801 or
SINUMERIK 802S base line) Connect setpoint cable and BERO signal wires
from NC to drive (Refer to Section 2.2)
Set parameters on NC
(refer to Section 3.1.3 Setpoints from NC)
Switch off the drive
Check the connections
Switch on the DC 24 V power supply
to the drive and NC
Switch on the mains supply (3AC 220 V) to the drive
Yes
Is "S-2" displayed?
No
No
Yes
Yes
Is “S-3 displayed”?
Enable drive terminal 65 via external DC 24 V power supply
No
Is “S-4 displayed”?
Refer to Section 3.1.1 for possible causes
Refer to Section 3.1.1 for possible causes
Refer to Section 3.1.1 for possible causes
Start NC operation
Yes
Adjust speed controller performance (P20 & P21) as well as
position controller performance (P30 & P31), if necessary.
Yes
Are you satisfied with
the system performance?
No
End
Is "S-RUN" displayed?
Yes
No
Yes
Turn on NC to enable terminals ENA+ and ENA- at drive interface X5
Refer to Section 3.1.1 for possible causes
Follow the procedure to complete the system commissioning:
EN-24 SINAMICS V60 Controlled Power Module (CPM60.1) Getting Started
Page 26

3.2 Parameter List
1. This parameter specifies the proportional gain of position loop.
2. The bigger the value, the higher both the gain and rigidity, and at the same pulse command frequency the
smaller the position hysteresis. However, excessively high value setting may cause system oscillation or
overshooting.
3. The setting depends on specific drive and load.
Sets the maximum possible motor speed.
This parameter specifies the integral action time (Tn, integral component) of speed control loop.
The smaller the value, the higher the gain and rigidity. The setting depends on specific drive and load.
Note:
Default value varies with software version.
Factory defaults:
This parameter specifies the proportional gain (Kp, proportional component) of speed control loop.
The bigger the value, the higher the gain and rigidity. The setting depends on specific drive and load.
Generally, the bigger the load inertia, the bigger the value is to set. If however, there is no oscillation occurred
in the system, you can set the value as big as possible.
Note:
Default value varies with software version.
Factory defaults:
Specifies the maximum motor current (2 x rated motor current) of your choice.
0: Sets all parameters other than P01 as read-only parameters.
1: Sets all parameters to be both readable and writable.
P01 automatically resets to 0 after power-on!
P05 automatically resets to 0 after power-on!
Parameter write protection
Maximum motor current
evitceffEtnemercnItluafeDegnaRemaN.oN .raP
Unit
Internal enable
0: JOG mode can be enabled externally.
1: JOG mode can be enabled internally.
P30
Position loop proportional gain
Speed loop proportional gain
Maximum motor speed
Speed loop integral time
constant
P26
P21
P20
P16
P05
P01
0.1-3.2
0-2,200
0.1-300.0
0.01-5.00
0-100
0-1
0-1
0
0
1
1
-
-
100 1 %
Depends on
drive version
Depends on
drive version
2,200 20 rpm
0.1
0.1
0.01
ms
Nm*s/rad
1,000/min Immediately
Immediately
Immediately
Immediately
Immediately
Power On
Power On
SINAMICS V60 Controlled Power Module (CPM60.1) Getting Started EN-25
4 Nm: 0.81(0.54); 6 Nm: 1.19(0.79); 7.7 Nm: 1.50(1.00); 10 Nm: 2.10(1.40)
4 Nm: 17.7(44.2); 6 Nm: 17.7(44.2); 7.7 Nm: 17.7(44.2); 10 Nm: 18.0(45.0)
3.0(2.0)
Page 27

1. This parameter specifies the feedforward gain of position loop.
2. Setting the value to 100 % means position hysteresis is always 0 at any pulse command frequency.
3. Increasing the feedforward gain of position loop improves the high-speed response characteristics of
the control system, but meanwhile causes the system's position loop unstable and liable to oscillation.
4. Unless very high response characteristics are necessary, set the feedforward gain of position loop to 0
This parameter specifies the maximum possible following error. When the actual following error is larger than
the setpoint, the drive sends an over-position alarm (A43)
When the drive is enabled, the drive brake will be opened after a delay which is set by P41.
Drive can be enabled under the following conditions:
A: When the following three conditions are all met:
1. Terminal 65 (external enable) has been enabled;
2. The drive has received an enable signal from NC;
3. No alarm is detected by the drive.
B: When the following two conditions are both met:
1. Terminal 65 (control enable) has been activated;
2. Motor operates in "JOG-RUN" mode (enabled from function menu )
C: When the following two conditions are both met:
1. P05 = 1 (The JOG mode can be enabled internally);
2. Motor operates in "JOG-RUN' mode (enabled from function menu )
When motor speed exceeds 30 rpm and the drive generates an alarm, if, within the specified brake close time
(P42),the actual motor speed becomes smaller than the P43 setpoint, brake is closed when the actual speed
reaches the speed P43 sets.
This parameter specifies the input pulse multiplier. For example, when P36 = 100, input frequency = 1 kHz,
output frequency = 1 kHz x 100 = 100 kHz.
When motor speed exceeds 30 rpm and the drive generates an alarm, if, within the specified brake close
time (P42), actual motor speed remains bigger than brake close speed setpoint (P43), brake is closed after
the specified brake close time (P42) expires.
When motor speed is lower than 30 rpm, the drive remains enabled within the time period set by P44
after brake close.
This parameter specifies the motor speed in JOG mode.
This parameter defines the time period when the motor ramps up from 0 rpm to 2,000 rpm or ramps down
from 2, 000 rpm to 0 rpm.
Reserved for Siemens internal use only
Note:
Pulse frequency setpoint = Actual pulse frequency x input pulse multiplier;
This parameter is applicable only when the software version is V01.06 or later;
When P36 = 100 or 1,000, speed stability will decrease with higher multiplication factor.
Input pulse multiplier
Maximum following error
Position loop feedforward gain
Par. No.
Name
Range
Default
Increment Unit
Effective
1, 2, 4, 5, 8,
10, 16, 20,
100, 1,000
1
-
-
Power On
P99
P47
Ramp-up/-down time constant
JOG speed
Drive enable time after
the brake close
Brake close speed while
motor operation
Brake close time while
motor operation
Brake open delay
P46
P44
P43
P42
P41
P36
P34
P31
0.0 - 10.0 4.0 0.1 s Power On
0 - 2,000 200 10 rpm Immediately
20 - 2,000 600 10 ms Power On
20 - 2,000 100 20 r/min Power On
20 - 2,000 100 10 ms Power On
20 - 2,000 100 10 ms Power On
20 - 999 500 1 100 pulses Immediately
0 - 100 85(0) 1 % Immediately
EN-26 SINAMICS V60 Controlled Power Module (CPM60.1) Getting Started
Note:
The default values in brackets are the second default values.
Page 28

Data no. Name Data format Unit Data group
mN tnioptes euqroT *01D
mN euqrot eht fo eulav lautcA *11D
D12* Actual value of the phase
current
Decimal
(See table below)
A
Current
MPR tnioptes deeps rotoM 02D
MPR deeps rotom lautcA 12D
Speed
D30 Position revolution se snoitulover rotoM tniopt
)r/00001( stnemercnI tnioptes elgna noitisoP 13D
D32 Actual position revolu snoitulover rotoM snoit
D33 Actual position ang )r/00001( stnemercnI el
D34 Position deviation angle
Integer
Increments (10000/r)
Position
xeh ni stiB langis tupni latigiD *05D
D51* Digital output signal
Bit (See table below)
Bits in hex
I/O
D80* Firmware version (See table below)
D81 Power Board rated current Integer
D82* Parameter version number (See table below)
HW, FW
* The data type of D10, D11, D12, D80, D82 is all decimal format. The display value for D50 and D51
respectively varies as the case may require.
3.3
Display data list
SINAMICS V60 Controlled Power Module (CPM60.1) Getting Started EN-27
Page 29

Dark
Pulse not enabled
Pulse enabled
Drive status displays (D50)
Drive not enabled
Drive enabled
Alarm not cancelled
Alarm cancelled
No zero mark input
Zero mark input
IGBT under-temperature
IGBT over-temperature
Drive status displays (D51)
Dark
Alarm output off
Alarm output on
Drive not ready
Drive ready
Zero mark output on
Zero mark output off
Brake open
Brake closed
Power resistor off
Power resistor on
Display data format D10, D11 and D12
(Example)
The point is lit. This point stands for
the decimal number.
In this example, the value is “1804.1”
Display data format D80
(Example)
The point is lit. This point stands for
the decimal number.
In this example, the value means that
the firmware version number is “01.01”.
Display data format D82
(Example)
The point is lit. This point stands for
the decimal number.
In this example, the value means that
the parameter version number is “01.01”.
Figure 6-11 Special data displays (D10, D11, D12, D80, D82)
EN-28 SINAMICS V60 Controlled Power Module (CPM60.1) Getting Started
Page 30

4
4.1 LED status indicators
4.2 Alarms
Descriptions of LED status indicators
H1
H2
Description
RDY/JOG
Green LED
ERR red LED
7-segment LED
display description
Overview of alarms
”nur-J“ yalpsiDedom GOJkraDFlash light with 1 Hz
A45
A44
A43
A42
A41
A23
A22
A21
A14
A09
A08
A07
A06
A05
A04
A03
A02
A01
Emergency stop
I
2
t protection
Enable signal from Terminal 65 is lost during normal drive running
Signals from encoder phases U, V, W are detected all the same (all high or all
low)
Actual motor speeds is higher than 2,300 rpm
DC link voltage is lower than 200 V
DC link voltage is higher than 405 V
Encoder TTL signals error
Encoder UVW signals error
Software failure
TTL pulse error
IGBT current exceeds the upper limit for 300 ms
Grounding short circuit occurs during drive initialization
Internal chip is detected overcurrent
IGBT is detected overcurrent
Control voltage is lower than 3.5 V
Unable to write data to memory
Parameter validation error (CRC error, encoder type or parameter header
invalid)
Unable to identify the power board
Power board ID number error
DescriptionAlarm nameAlarm code
Parameter error
Memory-write failure
Control voltage error
IGBT overcurrent
Internal chip overcurrent
Grounding short circuit
IT protection
DC link voltage undervoltage
DC link voltage overvoltage
Internal error
Overspeed
IGBT becomes overheatingIGBT overtemperature
Motor load exceeds nominal motor torque
Following error exceeds the limit
Following error too big
DarkDark
Dark
Dark
Green
Green
Dark
Red
Red
Drive ready
Drive error
Initialization Display “8.8.8.8.8.8.”
Alarm code
Dark No 24 V DC input or drive defect
Flash light with 1 Hz Drive not ready Current status
Depends on current menu operation
M
ENTER
Possible states
LED RDY / JOG (Ready / JOG mode)
Possible states
LED ERR (Error)
Dark
Flashing green
Lit green
Dark
Lit red
Flashing red
SINAMICS V60 Controlled Power Module (CPM60.1) Getting Started EN-29
Page 31

Alarm list
Press Enter key on
the operator panel
or terminal RST of
X6 interface
Free stop
Free stop
Free stop
Free stop
Free stop
Free stop
Free stop
Free stop
Free stop
Free stop
Free stop
Power on
Power on
Power on
Power on
Power on
Power on
Power on
Power on
Power on
Power on
Free stop
Press Enter key on
the operator panel
or terminal RST of
X6 interface
1. check the wiring or
whether the connection
to U, V or W is broken
2. make a correct
grounding
3. replace the motor
with a new one
4. replace the drive
with a new one
1. lower the start-stop
frequency
2. minish the limit value
of current
3. minish load inertia
4. use another drive and
motor with higher
power
The memory is damaged due to
unexpected power-off during
data saving
This alarm may
occur when the
DC link is
connected
This alarm may
occur when the
DC link is
connected
This alarm may
occur when the
24 V DC supply
is connected
There is failure at the internal
software
A short-circuit occurs to the
encoder
There is a failure at the circuit
board
This alarm may
occur when the
DC link is
connected
This alarm may
occur when the
DC link is
connected
This alarm may
occur when the
motor is running
This alarm may
occur when the
motor is running
This alarm may
occur when the
motor is running
This alarm may
occur when the
motor is running
The 24 V DC supply is abnormal
Replace the drive
with a new one
Replace the drive
with a new one
Replace the drive
with a new one
Replace the drive
with a new one
Replace the drive
with a new one
Check the wiring of
encoder
Check the power supply
Brake loop has no enough
space
The motor is mechanically
blocked
Check the mechanical
load
Overload
Reset by power-on
Restore default
parameters
The drive is defective
Check the 24 V DC
supply
Memory is damaged
Power board is broken
A01
A02
A03
A04
A06
A07
A08
A09
A14
A21
A22
A05
1. check the wiring
2. make a correct
grounding
3. replace the motor
with a new one
4. replace the drive
with a new one
1. There is a short-circuit
between terminals U, V, W
and PE on the drive
2. bad grounding
3. motor insulation is broken
4. the drive is broken
1. There is a short-circuit
between terminals U, V, W
and PE on the drive
2. bad grounding
3. motor insulation is broken
4. the drive is broken
1. IGBT module is broken
2. There is a short-circuit
between U, V or W and PE
1. replace the drive
with a new one
2. Check the wiring
1. replace the drive
with a new one
2. Check the interface
circuit of the encoder
1. check the wiring of
encoder cable
2. Check the interface
circuit of the encoder
1. UVW signals of the encoder
are bad
2. bad cable
3. bad cable shielding
4. bad wiring of the shielded
ground cable
5. there is a failure in the
interface circuit of the
encoder
1. connection failure of encoder
ABZ
2. bad cable
3. bad cable shielding
4. bad wiring of the shielded
grounded cable
5. there is a failure in the
interface circuit of the
encoder
1. the mains supply voltage is
too high
2. the waveform of mains
supply voltage is abnormal
1. disconnection of the internal
brake resistor
2. the internal brake resistor is
broken
1. lighten the load
2. use another drive
and motor with
bigger power
Alarm
code
Background
Possible Cause Remedy Result Acknowledgement
EN-30 SINAMICS V60 Controlled Power Module (CPM60.1) Getting Started
Page 32

Press Enter key on
the operator panel
or terminal RST of
X6 interface
Replace the drive with
a new one
Replace the drive with
a new one
Replace the motor with
a new one
Check the maximum
speed limitation (refer to
parameter P26)
Set a wider value range
for the detection of
following error (P34)
Use a drive and motor
with bigger power
Reduce the load
Give more gains
Check the limit value of
current (P16)
Replace the drive with
a new one
Check the ambient
temperature
Ambient temperature is too high
Check the drive load
Check the wiring
Check the wiring
Check the wiring
Replace the drive with
a new one
Check the power supply
Replace the drive with
a new one
Replace the drive with
a new one
The encoder cable is badly
connected
Replace the drive with
a new one
Circuit board fails
Circuit board fails
The drive is overloaded
Encoder fails
Replace the drive with
a new one
Check whether the
brake is open or not
Check the 65 enable
terminal
Circuit board fails
Low speed
No enough torque
The position loop gain is too
small
The maximumly-permitted
following error is too small
The rated torque is exceeded
Command pulse frequency is too
high
The brake is not open
The motor is not stable
The encoder is wrongly wired
The encoder fails
The encoder fails
Emergency
stop (the
motor will
stop with
the
maximum
energy or
torque)
Emergency
stop (the
motor will
stop with
the
maximum
energy or
torque)
Emergency
stop (the
motor will
stop with
the
maximum
energy or
torque)
Emergency
stop (the
motor will
stop with
the
maximum
energy or
torque)
Emergency
stop (the
motor will
stop with
the
maximum
energy or
torque)
Free stop
Press Enter key on
the operator panel
or terminal RST of
X6 interface
This alarm may
occur when the
24 V DC supply
is connected
This alarm may
occur when the
24 V DC supply
is connected
The motor does
not rotate or
reversely rotate
if the command
pulse is input
after DC-link and
mains line are
connected
This alarm may
occur when the
24 V DC supply
is connected
This alarm may
occur when the
DC-link is
connected
This alarm may
occur when the
motor is running
This alarm may
occur when the
motor is running
This alarm may
occur when the
motor starts
running
Press Enter key on
the operator panel
or terminal RST of
X6 interface
Press Enter key on
the operator panel
or terminal RST of
X6 interface
Press Enter key on
the operator panel
or terminal RST of
X6 interface
Press Enter key on
the operator panel
or terminal RST of
X6 interface
1. check the load
2. lower the start/Stop
frequency
3. use drive and motor
with more power
1. Lower the frequency
2. Check whether P36
has the right value
1. modify the gain value
2. lessen load inertia
by RST terminal.
The 65 enable signal is lost
when the motor is running
A23
A41
A42
A43
A44
A45
Alarm
code
Background
Possible Cause Remedy Result Acknowledgement
1. terminas U, V and W on the
motor are wrongly connected
2. encoder cable is wrongly
connected
1. terminas U, V and W on the
motor are wrongly connected
2. the encoder is wrongly wired
1. circuit board fails
2. fuse of the power is burnt out
3. rectifier is boken
1. low supply voltage
2. insufficient supply power
capacity
3. transient power failure
NOTICE
SINAMICS V60 Controlled Power Module (CPM60.1) Getting Started EN-31
Page 33

4.3 Errors during drive self-test
4.4 Other faults
1. Brake not open
2. Axis position incorrect or axis does not move
3. Axis does not move
4. Axis keeps running in a single direction
Drive error list
Drive display Description Cause Remedy
Error 1 RAM damaged
Flash damaged
Program copy error
Replace the drive
Replace the drive
Replace the drive
Error 2
Error 3
EN-32 SINAMICS V60 Controlled Power Module (CPM60.1) Getting Started
Page 34

Appendix
A.1 Order numbers
Spare parts
rebmunredrOnoitpircseD
0AU0-41CC5-0123LS6A4-1.06MPC 06VSCIMANIS
SINAMICS V60 CPM60.1 - 0AU0-61CC5-0123LS6A6
SINAMICS V60 CPM60.1 - 0AU0-71CC5-0123 LS6A7
SINAMICS V60 CPM60.1 - 10A 6SL3210-5CC21-0UA0
Servomotor 1FL5 - 4Nm - without key, without brake
Servomotor 1FL5 - 4Nm - with key, without brake
Servomotor 1FL5 - 4Nm - with key, with brake
Servomotor 1FL5 - 4Nm - without key, with brake
1FL5060-0AC21-0AH0
Servomotor 1FL5 - 6Nm - without key, without brake
Servomotor 1FL5 - 6Nm - with key, without brake
1FL5062-0AC21-0AG0
1FL5062-0AC21-0AA0
Servomotor 1FL5 - 6Nm - without key, with brake
Servomotor 1FL5 - 6Nm - with key, with brake
1FL5062-0AC21-0AH0
1FL5062-0AC21-0AB0
Servomotor 1FL5 - 7.7Nm - without key, without brake
Servomotor 1FL5 - 7.7Nm - with key, without brake
1FL5064-0AC21-0AG0
1FL5064-0AC21-0AA0
Servomotor 1FL5 - 7.7Nm - without key, with brake
Servomotor 1FL5 - 7.7Nm - with key, with brake
1FL5064-0AC21-0AH0
1FL5064-0AC21-0AB0
Servomotor 1FL5 - 10Nm - without key, without brake
Servomotor 1FL5 - 10Nm - with key, without brake
1FL5066-0AC21-0AG0
1FL5066-0AC21-0AA0
Servomotor 1FL5 - 10Nm - without key, with brake
Servomotor 1FL5 - 10Nm - with key, with brake
1FL5066-0AC21-0AH0
1FL5066-0AC21-0AB0
Encoder cable for 1FL5 Servomotors - 5m
Encoder cable for 1FL5 Servomotors - 10m
Power cable for 1FL5 Servomotors - 5m
Power cable for 1FL5 Servomotors - 10m
Brake cable for 1FL5 Servomotors - 5m
Brake cable for 1FL5 Servomotors - 10m
6FX6002-2LE00-1BA0
1FL5060-0AC21-0AG0
1FL5060-0AC21-0AA0
1FL5060-0AC21-0AA0
6FX6002-2LE00-1AF0
6FX6002-5LE00-1AF0
6FX6002-5LE00-1BA0
6FX6002-2BR00-1AF0
6FX6002-2BR00-1BA0
SINAMICS V60 Controlled Power Module (CPM60.1) Getting Started EN-33
Page 35

A.2 Technical support
If you have any question (any suggestion or amendment) about this product or this
document, please call SIEMENS technical support or visit SIEMENS internet:
For Chinese customers:
For customers outside China:
Fax
Telephone
0911 895 7222
New Support Request:
Internet:
FAQ:
0911 895 7223
http://www.siemens.com/automation/support-request
http://www.siemens.de/automation/service&support
http://www.siemens.de/automation/csi_en/product
Fax
Telephone
00 86 10 6471 9990 or 400 810 4288
400 810 4288@siemens.com
00 86 10 6471 9991
EN-34 SINAMICS V60 Controlled Power Module (CPM60.1) Getting Started
Page 36

A5E03975175
Address: IA&DT Division
SIEMENS Limited China (SLC)
NO. 7, Wangjingzhonghuannanlu Road
Chaoyang District, Beijing, China
Post: 100102
TEL: (+86) 010 - 64768888
FAX: (+86) 010 - 64764729
Subject to change without prior notice
© Siemens AG 2012
Order Number:
 Loading...
Loading...