

Page 1

This catalog is out of date, see note on page 2
Page 2

TELEPERM M
CS 275 Bus System
Catalog PLT 130 · 1994
This catalog is no longer available in printed
form. However, it can still be used to obtain
information and for ordering spare parts.
Certain products from this catalog are no
longer available. Your Siemens partner will
offer appropriate substitutes wherever
possible.
Summary
Mode of operation
Design
Modules and
ordering data
Appendix
SY--TRANS 300 CS Gateway
Documentation for
CS 275 bus system
Subject index
Conditions of sale and delivery
Page 3
Summary
This catalog is out of date, see note on page 2
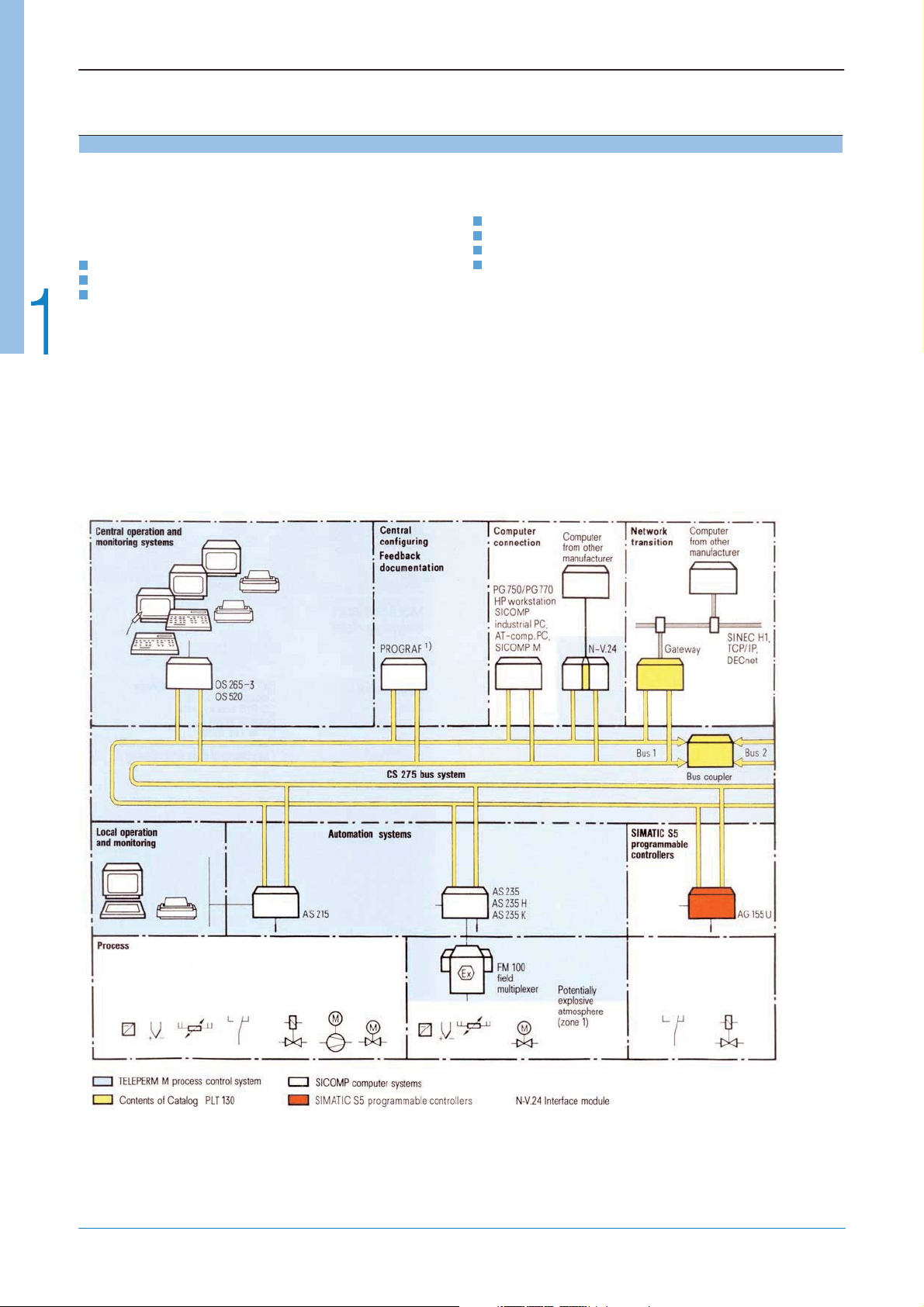
The TELEPERM M process control system consists of functionally different components which are optimized for the various
problems encountered in process automation. Because of their
modular design, these components are also referred to as systems.
The TELEPERM M process control system is divided into
AS automation systems,
OS operation and monitoring systems and
CS 275 bus system.
The CS 275 bus system is responsible for communication between all TELEPERM M components and to components of other
systems by means of serial data transmission on stranded conductors (local bus) or coaxial cables (remote bus), if applicable
also via optical fibers. Data exchange is mainly between the AS
automation systems themselves as well as between automation
systems, OS operation and monitoring systems and central
configuring console and the AS and OS systems.
In order to satisfy the high demands made on data communication in process control technology, the CS 275 bus system has
been par ticularly optimized for the following demands:
Efficient data transmission
High data reliability and availability
Uniform system time
Automatic establishment of communication.
The CS 275 bus system has exceptional real--time properties.
Every bus participant is provided with the current process data
at all times. The capacity of the bus system is large enough
such that sufficient reserve is available for transmitting messages (e. g. process alarms) even with a high cyclic loading.
Automatic test routines guarantee data reliability. The user can
configure which messages must be acknowledged by the receiver. The failure of a bus component has no influence on the
communication between the other participants.
Fig. 1/1 TELEPERM M, process control system, summary, including system-integrated links to SICOMP computer systems, SIMATIC S5 programmable
controllers and the SINEC communication network
1)
Not for AS 215 and OS 520 systems.
1/2
Siemens PLT 130.1994
Page 4
This catalog is out of date, see note on page 2
The bus system can be designed in redundant form if extremely
high demands are placed on the availability. This does not result
in additional configuring requirements.
Events are always recorded with the exact time since the individual bus participants can synchronize their clocks via the bus
system.
The simple configuring is one of the most important characteristics of the CS 275 bus system. Convenient system functions are
used to establish the connection, intervention by the operator is
not required. The parameters to be transmitted (analog/binary
values, messages etc.) are already declared when configuring
the automation systems and the operation and monitoring systems. The establishment of the connection for the operation and
monitoring systems is carried out automatically when starting
up, it is merely necessary to enter a coupling command for connections between automation systems.
Optimum utilization of the high performance of the CS 275 bus
system is only guaranteed with a large number of participants if
certain rules are observed when configuring the bus and if it is
ensured that the cyclic bus loading does not exceed 70 % of the
bus capacity. Thus 30 % are available for acyclic data transfer
(e. g. messages).
In the case of a specific configuration, the cyclic bus loading is
independent of
x
the configuration of the transmitter blocks in the automation
systems,
x
the transmission mode selected and
x
the processing cycle of the transmitter blocks.
Information on the establishment of data transfer with the coupling blocks for data exchange via the CS 275 bus system is
included in the publication ”Configuring guidelines” in the
Manual ”CS 275 bus system”. This publication describes the
determination of the cyclic bus loading using the bus loading
characteristics and lists the cyclic bus loading for a selected
configuration.
Summary
Siemens PLT 130.1994
1/3
Page 5
This catalog is out of date, see note on page 2
1/4
Siemens PLT 130.1994
Page 6
This catalog is out of date, see note on page 2
Mode of operation
Contents Page
Transfer control 2/2
Data protection 2/2
Data transfer 2/2
Addressing 2/3
Transmission modes 2/3
Redundant operation mode 2/4
Transmission reliability 2/4
Time synchronization 2/4
Configuring of communication 2/5
Siemens PLT 130.1994
2/1
Page 7
This catalog is out of date, see note on page 2
Mode of operation
Transfer control, data protection and transfer
Transfer control
Sequential data transmission systems require a transfer control
unit for organization of the data traffic on the line. This unit organizes and coordinates the data traffic so that only one subscriber transmits data on the bus at a time. This transfer control
function is decentralized in the CS 275 bus system. The availability of the data transmission system is therefore mainly determined by the line length.
Data transfer control in the CS 275 bus system operates according to the token principle, i. e. each participant (local bus interface module) accepts the transfer control function (master function) from time to time.
In a system with n participants, there is only one participant in
the master condition at any one time, all other (n--1) participants
are in the slave condition. The change of the master function
from one par ticipant to another is called master transfer. Since
every participant can assume the master function, this function
has n--times redundancy in a token system.
The ”bus protocol” also specifies how a participant becomes
master and how this status is transferred within the system. The
protocol complementar y methods for the assignment of the
master function to a participant are:
Time-out-controlled master transfer
Request-controlled master transfer
Instruction-controlled master transfer
Data protection
Data protection is achieved in the CS 275 bus system by generating line and column parities and is referred to as block parity.
The following errors are detected by the data protection:
1-bit, 2-bit and 3-bit errors,
Hamming distance d =4
Odd bit errors, 1-, 3-, 5-, 7- and 9-fold errors,
independent of location
Error bursts < 11 bit long
Error pattern (with exception of rectangular format).
--5
The bit error rate of p =10
SC-65-WG6 for process buses. According to this, an undetected transmission error in a message may occur on average
once in every 1000 years (at 250 kbit/s).
satisfies the requirements of IEC-
This presents the following advantages:
Easy configuring of communication (only the transmitter and
receiver blocks must be configured, not
for 20-m local bus)
Messages to several subscribers are simply transmitted on
the bus (several receiver blocks can access one transmitter
block)
Symbolic addressing (block name and number)
Complete documentation of all connections by self-documentation of systems
The communication procedure can be configured in a still
simpler manner in full-graphic mode on the screen by means
of the configuring tool PROGRAF and can also be documented in the same representation (see page 2/5).
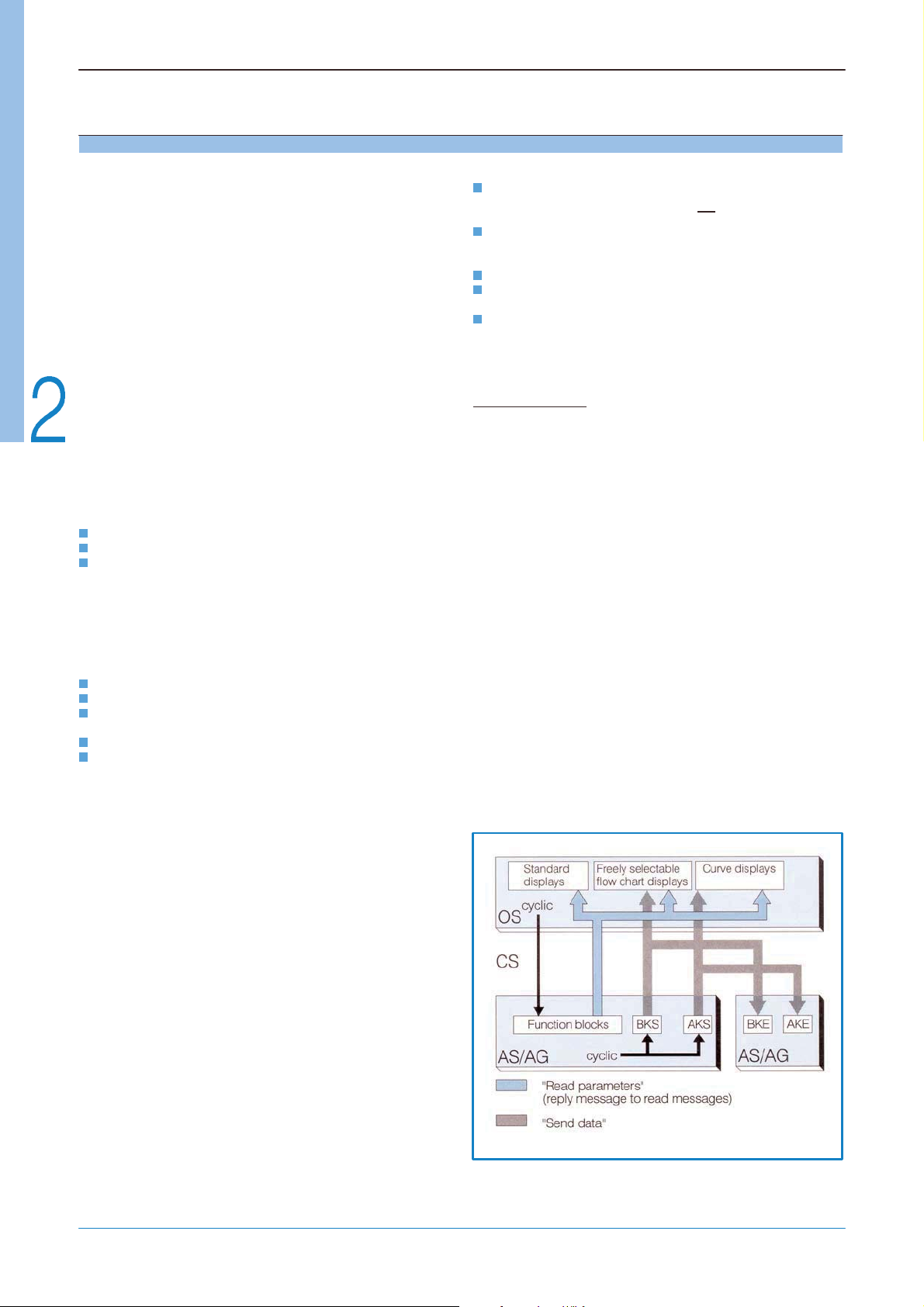
Cyclic data
Analog values are transmitted cyclically with the coupling
blocks AKS/AKE, binary values with the BKS/BKE blocks and
characters with the ZKS/ZKE blocks.
There are also further functions in addition to the cyclic data
transfer.
These functions include image updating in an OS operation and
monitoring system. The updating time is < 2 s in the TELEPERM
M process control system. In order to guarantee this value, the
bus system provides a function ”Read parameters”. This enables up to 30 different parameters per message to be read
from one AS system. The functional sequence is as follows:
The OS system sends the request to the bus system to read the
corresponding parameters from several AS systems for image
updating. The addresses of these parameters have already
been converted to on-line-accessible parameters from the symbolic addresses of the configuration during the system start-up.
Thus, the bus inter face modules can read the desired information out of the automation system memory by DMA, generate
corresponding reply messages and return these to the corresponding OS systems.
transfer
the interface modules
Data transfer
Blocks in the TELEPERM M system components are available for a
cyclic and a sporadic (acyclic) data transfer via the bus system:
Dedicated transmitter and receiver blocks handle all functions
associated with data transfer. Thus, the data transfer can be
established easily by configuring, just as the automation functions.
The user need only carry out the following to produce communication:
-- The inputs of the transmitter block must be provided with the
addresses of the data to be transmitted
-- The transmitter block must be inserted into the processing
sequence
-- The outputs of the corresponding receiver block must be
linked accordingly in another automation system
-- The receiver block must be inserted into the processing
sequence
-- The connection to the transmitter must be established using a
coupling instruction.
2/2
Fig. 2/1 Cyclic data transfer, example OS/AS and AS/AS
Siemens PLT 130.1994
Page 8
Addressing, transmission modes
This catalog is out of date, see note on page 2
Mode of operation
This method has the following important advantages:
There is far less loading on the bus system since only the
information is read from the automation system which is currently displayed on the monitor channels
Data need only be stored at one position as a result of the
distributed data base principle. Modifications are therefore
only necessary at one position
No special planning for the OS systems is required in the
automation systems (exception: curve display)
Acces to information in the automation systems by another
computer is possible without additional planning (by using the
function ”Read parameters”).
The cyclic data exchange is also used for a life test
pants connected to the CS 275 bus by an OS operation and
monitoring system. Each failure and also the return of a participant is supervised and signalled.
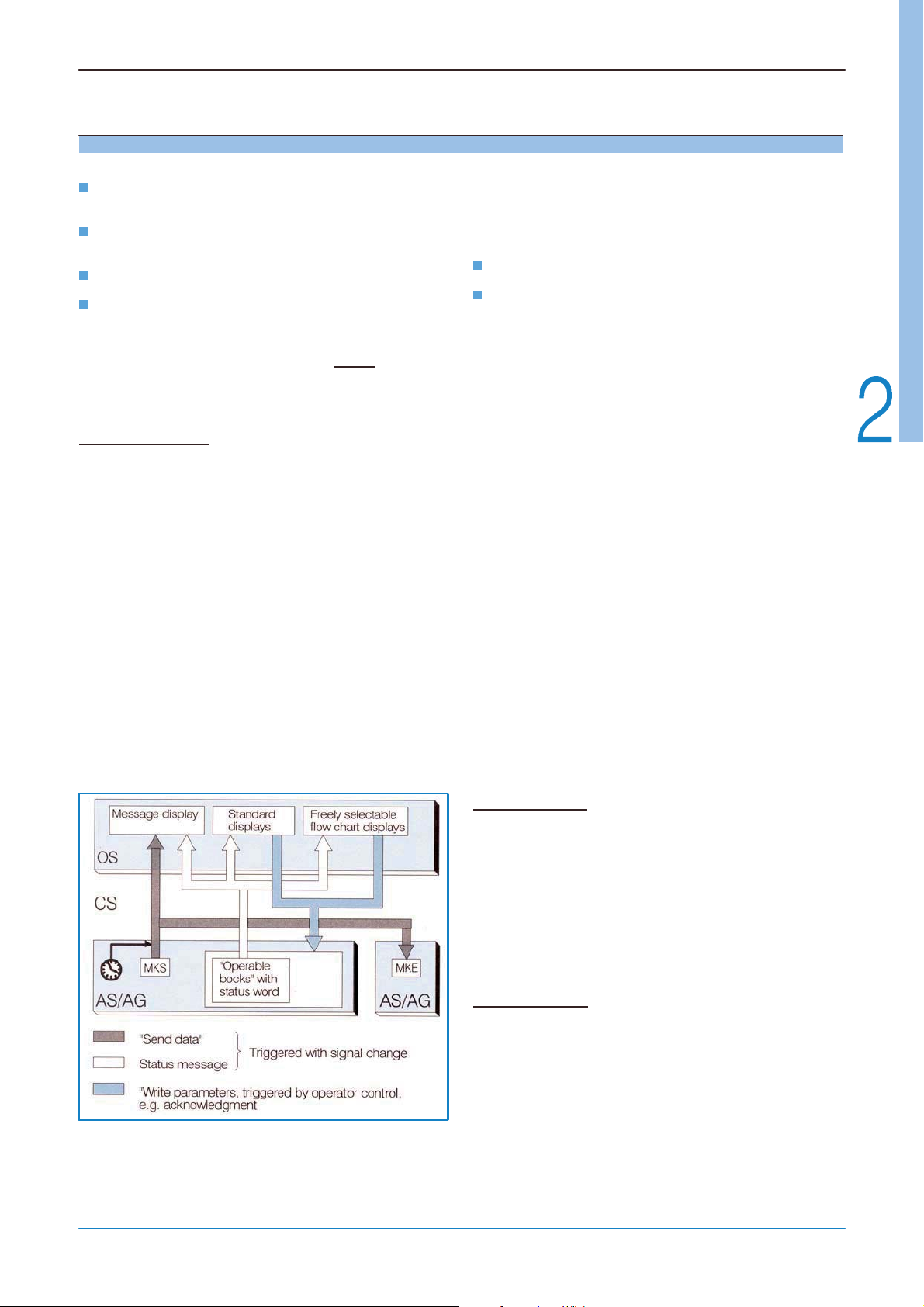
Sporadic data
Sporadic data transfer is necessary to rapidly pass on modifications in the process control system to other participants. Typical
examples are faults or changes in status (e. g. motor on/off)
which detects the automation system. Messages exchanged
between several automation systems are transmitted by means
of the coupling blocks MKS/MKE.
A status word is assigned to each function block for processing
with standardized operation and monitoring as well as to driver
blocks for I/O modules with standardized display. The changes
in signal are detected event -controlled by the status word or by
the MKS block, provided with the actual time (MKS only) and
transferred to the bus system. This then transfers MKS messages to a maximum of 6 participants (typically OS systems
and higher-level computers) which have ”registered” themselves for this information when the complete system was
started up. This presents the advantage that the automation
system need only transmit one message with one or several
destination addresses. In addition, only those stations receive
the information which actually require it.
Data transfer with OS systems and computers takes place using
the functions ”Read parameters” and ”Write parameters”.
transfer
of all partici-
Addressing
The addressing of the participants of the bus system is oriented
towards the transmission of messages between several autonomous buses and within a bus.
Each participant is identified by two addresses:
Bus address (0 to 7), i. e. 8 autonomous buses are possible.
7 bus couplers are needed in this case.
Participant address (0 to 99).
These two addresses are set on the local bus interface module
using jumpers or DIP switches.
The bus coupler behaves like a par ticipant with respect to each
bus. It has an address on each bus.
Transmission modes
A differentation is made between two transmission modes when
configuring and defining the AKS and BKS transmitter blocks:
-- Direct coupling (DI)
-- Common data (CD).
Fig. 2/2 Sporadic/acyclic data exchange, example OS/AS and AS/AS
Siemens PLT 130.1994
Direct coupling
The registered participants are directly addressed by the trans mitter blocks, i. e. each participant only receives the data which
is assigned for it. Up to 6 receivers can be registered with a
transmitter block and receive the data (analog or binary values)
pertaining to it with each transmission cycle of this block.
Any participant on the bus can be a receiver. Transmission can
also take place via bus couplers. A receiver is entered as such
in the transmitter block in the respective automation system.
The MKS block only operates in direct coupling mode.
Common-Data
The transmitter block sends the data simultaneously to all connected participants of a particular bus. Thus certain identical
data can be planned in a transmitter block for many participants
on a bus and many destination addresses can then be reached.
The CD procedure can only be used for subscribers with the
same bus address. Addressing via bus couplers is not possible.
The par ticipants on a bus connected via a bus coupler can be
addressed via their own CD procedure.
(DI)
(CD)
2/3
Page 9
This catalog is out of date, see note on page 2
Mode of operation
Redundant operation mode, transmission reliability, synchronization
Redundant operation mode
The CS 275 bus system can be redundant in order to increase
the availability. The interface modules for the local bus are already designed for a redundant local bus line. A bus converter
UI and a connector board AF are required for connection of a
redundant remote bus per remote bus cable. Different remote
bus cable lengths are permissible between bus A and the redundant bus B.
The bus system is started up on bus A. Besides this, no preference is given to either bus. The bus system carries out a cyclic
test to see whether a changeover criterion is satisfied. An automatic changeover is carried out if this is the case.
Changeover
criteria
An image of the local bus is generated through each bus line
approx. every 750 ms. If the image of the passive bus contains more entries than that of the active bus, the system
switches to the passive bus.
If the images on the two bus lines are the same, but the master detects a transfer request on the passive bus, a changeover also takes place to the passive bus. A slave sends transfer requests on the passive bus if transfers are no longer
possible for it on the active bus.
If the current master fails because of a fault, the slave with the
smallest participant address assumes the master function on
the previously passive bus (if one exists).
The bus changeover is signalled to all bus participants.
Time synchronization
The real-time clocks of the particular TELEPERM M subsystems
are synchronized by signals from an OS operation and monitoring system. This can be synchronized by a radio clock (DCF 77
radio transmitter) or a standard clock.
The subscribers on the CS 275 bus system must be synchronized with high accuracy. Because of it, the transit time of the
synchronization message is corrected within the milliseconds
range by the internal buffers of the local bus interface modules
of the automation systems and programmable controllers or by
bus couplers.
Date and time
transmission
program
Remote bus 1
Time receive
memory
Intermediate time
counter ' t(ms)
Transmission
buffer
Remote bus 2
Transmission reliability
In addition to data security of the transmission method, the following measures ensure high transmission reliability in the
physical transmission path:
Noise immunity to IEC 255-4
T riple screened cable, redundant
Coarse overvoltage protection in the building entry (option)
Fine overvoltage protection in the connector board AF (option)
Deflection of noise using braided screens and metal front
plugs
Passive line without amplifier
Non--reactive inductive coupling
Appropriate signal coding on the remote bus (bipolar current
signals)
Automatic signal equalization independent of location
Balanced (to earth) transmission
High signal voltages
Electrical isolation of par ticipants on remote bus
Distributed transfer control.
Fig. 2/3 Time generation, time synchronization
2/4
Siemens PLT 130.1994
Page 10
This catalog is out of date, see note on page 2
Configuring of communication
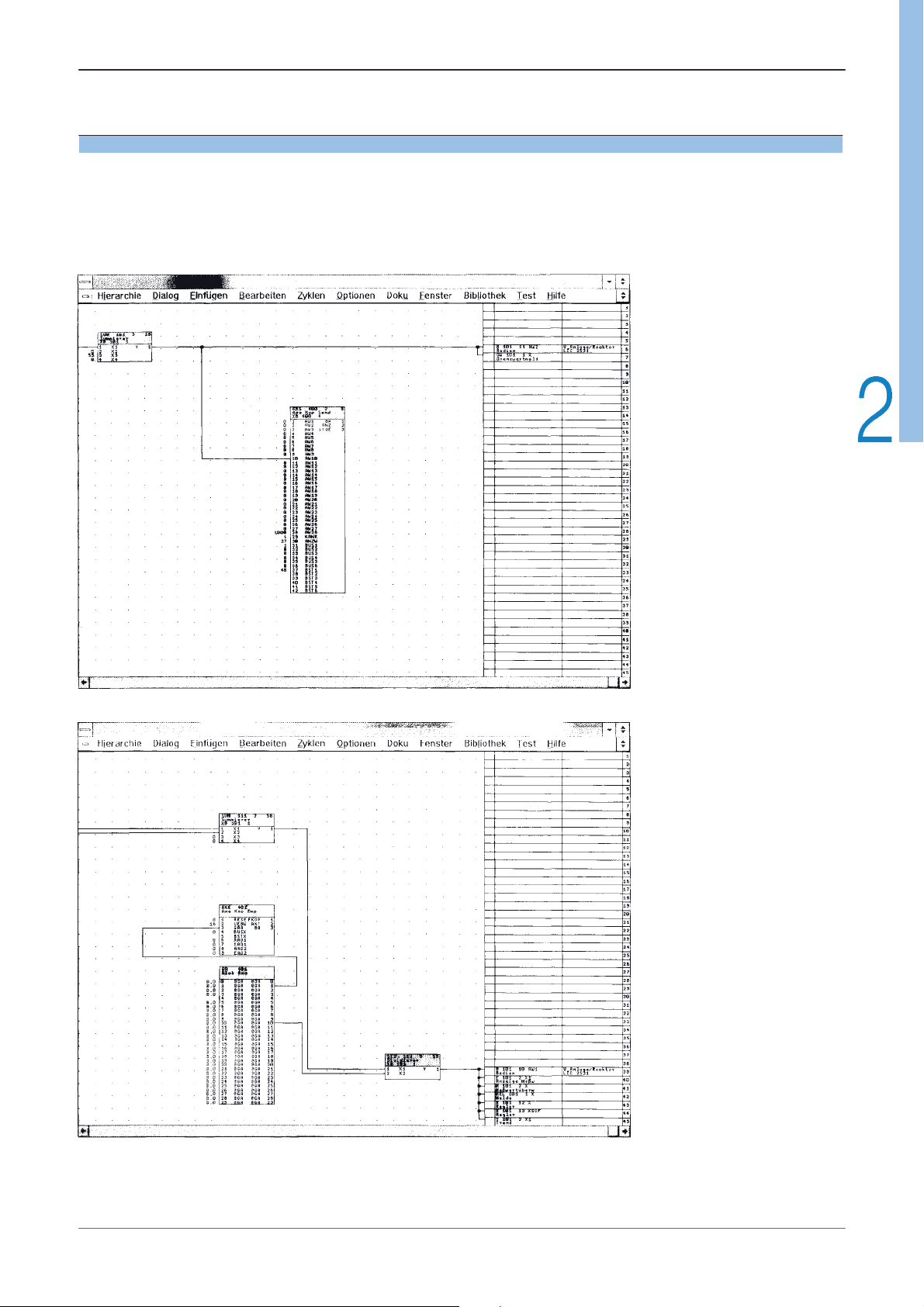
Configuring of communication
Since the communication via the CS 275 bus system is handled
like the automation functions via function blocks, they can also
be configured in full-graphic mode on the screen by means of
the configuring tools PROGRAF. Examples for AS/AS communication are shown in Figs. 2/4 and 2/5.
Mode of operation
Fig. 2/4 Connection of an analog value out of an adder block to the transmitter block AKS (e. g. as subscriber 3 on bus 1 in an automation system)
Fig. 2/5 Take-off of the transmitted analog value from the receiver module
AKE/GA (e. g. as subscriber 7 on bus 1 in an automation system) and connection to a divider block
Siemens PLT 130.1994
2/5
Page 11
This catalog is out of date, see note on page 2
2/6
Siemens PLT 130.1994
Page 12
This catalog is out of date, see note on page 2
Design
Contents Page
General notes 3/2
Local range 3/2
Remote range 3/3
Bus components 3/3
Technical data 3/5
Bus configurations 3/6
Siemens PLT 130.1994
3/1
Page 13
Design
General notes, local range
This catalog is out of date, see note on page 2
The CS 275 bus system is physically divided into
-- a local range
-- a remote range
up to 20 m (local bus) and
up to 4 km, or up to 12 km with bus couplers.
Each par ticipant requires a local bus interface module to enable
bus communication, redundant systems such as the AS 235 H
automation system require two modules. These interface modules convert the various internal system bus interfaces of the
participants into the uniform local bus interface. The transfer
control function for the complete bus is transferred from participant to participant. This function is also handled by the local
bus interface module of the respective participant which currently possesses the master function.
The design of the local bus inter face modules depends on the
participant system to be connected. Thus the modules e. g. for
connection of the automation systems are of double ”EUROPE”
format, and those for connection of SICOMP industral PCs are of
A T format. In the local range, the local bus interface modules
are connected together into a ”local bus island” using cables.
Systems not belonging to TELEPERM M require additional coupling software to match their inter nal communication interface to
that of the CS 275 bus system. This software is available,
amongst others, for the connection of personal computers with
MS-Windows or UNIX operating systems, for workstations and
for SIMATIC S5 programmable controllers.
In the remote range, individual participants or complete local
bus islands are connected to the remote bus via inductive bus
couplers UI. Different designs of coaxial cable are available for
the connection depending on the associated mechanical stress.
The local bus is always redundant, the remote bus can be either
single or redundant.
Local range
The transmission is on multi-conductor cables with a max. total
length of 20 m.
Three line signals are used. The data themselves are transmitted sequentially on one data line. A second line transmits the
clock, the third is used for synchronization.
It is necessary to differentiate between electrical participants
and (bus) participants when determining the maximum possible
number of participants. Electrical participants are the local bus
interface modules, the bus converter modules UI and connection multiplexers AV (for connection of a local bus interface
module).
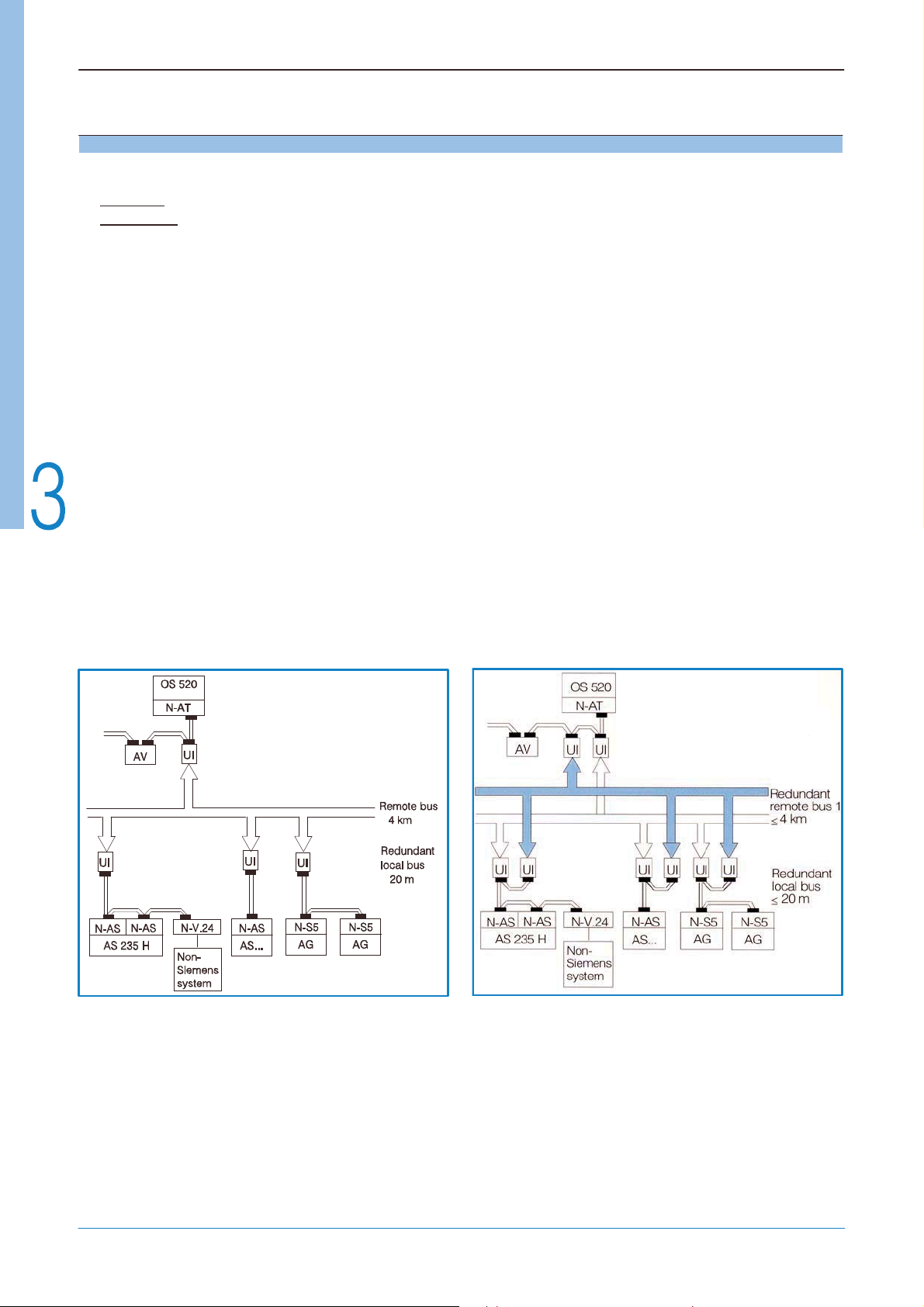
(Bus) participants are e.g . an AS 215 automation system
(1 electrical participant) or an AS 235 H automation system
(2 electrical participants). Up to 9 electrical participants are
permissible on a local bus. For example, this means $ 7bus
participants for a local bus island connected to a redundant
remote bus via two bus converters UI (cf. Figs. 3/1 and 3/2.)
Depending on their type, the local bus interface modules can be
either floating or non-floating. Certain design guidelines must be
observed when connecting into a local bus island in order to
prevent interferences (also refer to Manual ”TELEPERM M,
Information and Guidelines for Planning, Installation and Operation”, Order No. C79000-G8076-C417).
≤
≤
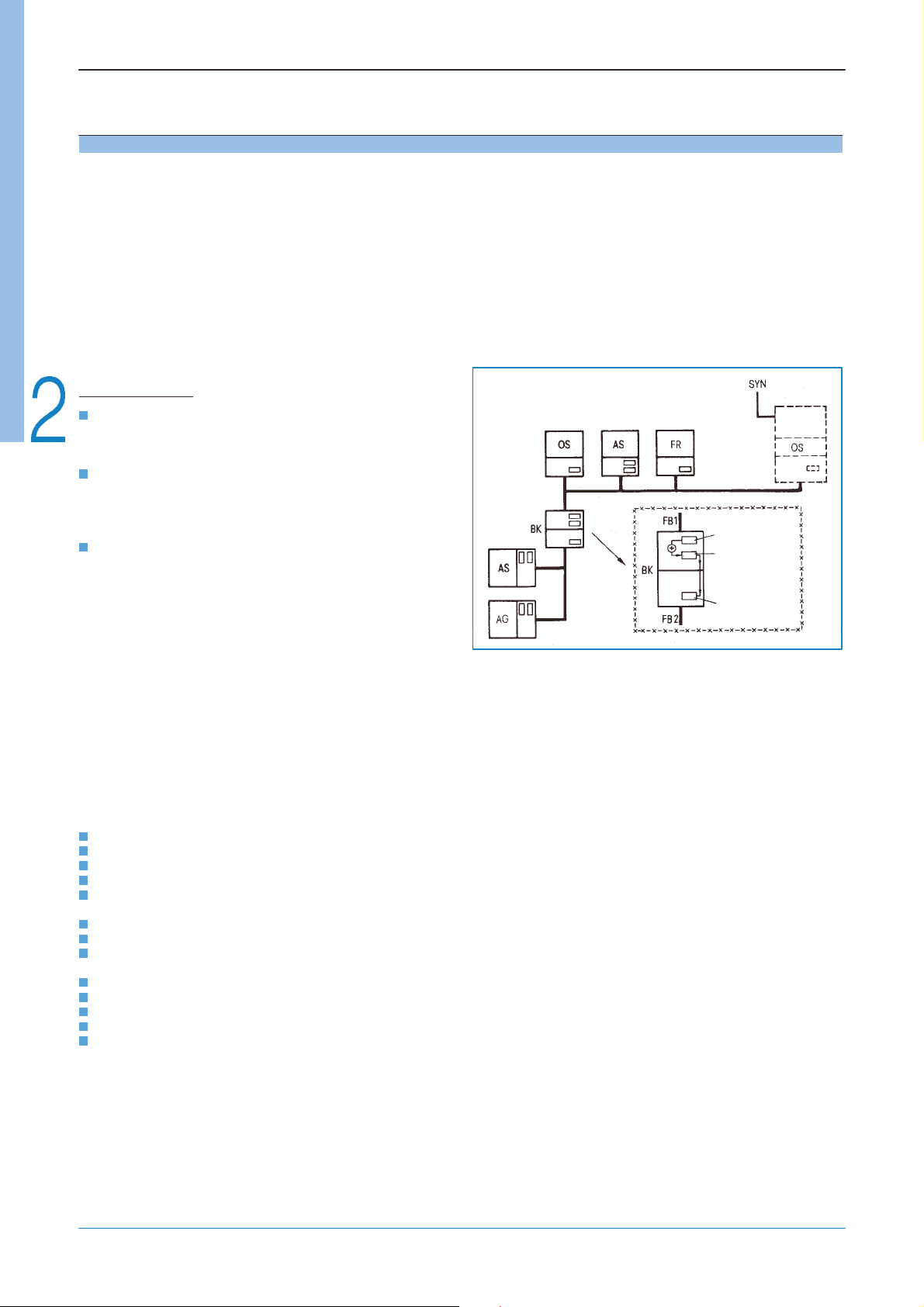
AS Automation system
AG SIMATIC S5 programmable controller
AV Connection distributor for local bus
N-AT, N- AS,
N-V.24, Interface modules for 20-m local bus
N-S5
OS Operation and monitoring system
UI Bus converter unit
Fig. 3/1 CS 275 bus system, example for interconnection of local bus and
remote bus (non-redundant remote bus); local bus island (left) with 2 communication subscribers and 4 electric participants.
}
3/2
AS Automation system
AG SIMATIC S5 programmable controller
AV Connection distributor for local bus
N-AT, N- AS,
N-V.24, Interface modules for 20-m local bus
N-S5
OS Operation and monitoring system
UI Bus converter unit
Fig. 3/2 CS 275 bus system, example for interconnection of local bus and
remote bus (redundant remote bus); local bus island (left) with 2 communication subscribers and 5 electric participants.
}
Siemens PLT 130.1994
Page 14

Remote range, bus components
This catalog is out of date, see note on page 2
Design
The following therefore applies:
In the case of electrically isolated local bus interface modules,
the ground potential of the bus interface is decoupled from the
ground potential of the subrack system. In addition, the 0-V
level of the interface logic is matched to the potential of the coupling partner via the local bus cable. This prevents equalizing
currents from flowing via the local bus cable in the event of voltage differences > 0.2 V between the grounds of the coupling
partners. These currents would interfere with the bus traffic.
In this manner, it is possible e. g. to extend a local bus island
(0-V island) consisting of basic and extension cabinets by
means of exter nal, electrically isolated local bus participants
(N-AS/N-A T). Any local bus interface modules can be linked
together within this local bus island since they are powered from
the same power distribution subrack. The following conditions
apply: max. length 20 m, max. 9 participants, where each bus
converter UI also counts as one participant.
It is not permissible to mix non-floating participants with different earthing concepts, e. g. SIMATIC S5 or SICOMP M with
OS 265-3 systems or interface module N-V.24 in the same local
bus island.
The interface modules for the local bus have a redundant local
bus interface. They are each connected to one another by only
one cable which contains the redundant local bus.
The cables are fitted at one end with a front plug for connection
to the local bus inter face modules, the other cable end is prepared for the connection and is soldered to the front plug of the
cable of the next inter face module. A single front plug is required for the n-th local bus par ticipant. This is not necessary
for standard connections, e. g. to the bus conver ter UI for the
remote bus, since prefabricated cables are available with
looped-through wiring to up to 5 plugs.
The total length of the cables must not exceed 20 m.
Bus components
Local bus interface
Interface
module for
20-m local bus
Typ e
N-AS
(-8AC)
N-AS
(-8AA)
N-BK Bus coupler x
N-AT OS 520 operation and monitoring system,
N16-M OS 265-3 operation and monitoring systems
N-V.24 SICOMP industrial PCs and non-Siemens com-
N-S5 SIMATIC S5-155U programmable controllers x
modules
Required to connect the following systems and
devices to the CS 275 bus system
AS 215, AS 235 and AS 235 K
automation system
AS 235 H automation system x
AT -compatible personal computers,
SICOMP industrial PCs and
PG 770 programmer
SICOMP M minicomputers
puters via V.24 or 20-mA current loop interface
floating
x
x
Cable connectors for local bus
To connect the interface modules for 20-m local bus to one
another and to the bus converter UI. A front plug is required for
the last participant on the local bus.
Front plug for local
bus
Metal front plug with 2 cable inlets and contact points. The
contact points must be used to connect the plug with a low
inductance to the subrack.
non-floating
x
x
Remote range
T ransmission takes place via a coaxial cable up to distances of
4 km. The signals are self-timing bipolar square-wave pulses.
The coupling to the remote bus is reaction-free.
Up to 100 bus participants can communicate with one another
via the remote bus. The remote bus and local bus are connected
together via inductive bus conver ters UI. The complete bus
system therefore has the same information.
T wo autonomous bus systems are connected together via a
coupler
so that only the information intended for the other bus is
bus
transferred. The bus coupler is counted in each of the two autonomous bus systems as one bus participant.
Connection
distributor
The connection distributor has a vacant plug connection to the
redundant 20-m local bus for the connection of configuring aids
(SICOMP industrial PC with PROGRAF program package) and
bus diagnostic aids. It must be connected to the local bus via a
separate cable connector for this purpose.
Inductive bus converter (bus converter unit
UI)
A bus converter is required to connect individual participants or
a local bus with several participants to a remote bus. It per forms continuous signal conversion between the local bus and
the remote bus or vice versa without intermediate storage. The
coupling is inductive and non-reactive.
Standard locations:
Basic cabinet of the AS 235 and AS 235 H automation system
Basic system of the AS 235 K automation system
OS 265-3 system cabinet
Remote bus connection unit
Bus coupler subrack
Remote bus connection subrack FAZ-S5.
Siemens PLT 130.1994
3/3
Page 15

Design
Bus components
This catalog is out of date, see note on page 2
Connector board
AF
The remote bus cable is connected to the bus conver ter via the
connector board AF.
The board is provided with a terminating resistor which can be
activated using a jumper. The resistor is activated in the connector board of the first and last bus participants (Fig. 3/3).
Standard locations:
Basic cabinet of the AS 235 and AS 235 H automation systems
Basic system of the AS 235 K automation system
OS 265-3 system cabinet
Remote bus connection unit.
e.g. TELEPERM M
cabinet with
AS 235 H
e.g. Remote bus
connection unit
(OS 265-3)
e.g. TELEPERM M
cabinet
Bus
coupler
Autonomous buses are connected together via a bus coupler.
Data transfer is then possible between several systems or system areas over larger distances (> 4 km) with decoupling of the
data traffic on the buses.
The intermediate connection of up to 2 bus couplers is per missible for data transfer between any two participants in the complete bus system.
T wo different structures are possible when designing a bus system with bus couplers:
Line structure
Hierarchical structure.
≤
≤
BK Bus coupler
Fig. 3/4 Bus system with linear structure
≤
4-km bus
a Terminating resistor F (activated by jumper)
AF Connector board
UI Bus converter
Fig. 3/3 Redundant remote bus with terminating resistors
Remote bus BRemote bus A
Remote bus connection unit
The remote bus connection unit is used to connect those bus
participants to the remote bus which are not installed in
TELEPERM M standard cabinets, as e. g. the OS 520 operation
and monitoring system.
The power supply module, inductive bus conver ters, connector
board for connection of one participant or of a participant group
(local bus island) are fitted ready for connection in a separate
housing which is to be placed underneath a table.
Remote bus connection
subrack
The remote bus connection subrack is used to connect those
bus participants to the remote bus which are fitted in cabinets
according to the customer requirements, e. g. SIMATIC S5-155U
programmable controllers.
The power supply module and inductive bus converters for connection of one or several participants installed in the cabinet are
accomodated in a subrack which has been prepared for installation in a cabinet.
≤
BK Bus coupler
Fig. 3/5 Bus system with hierarchical structure
In both applications, all buses or individual buses can be redundant as desired (Fig. 3/6).
BK Bus coupler
Bus 0 and bus 2 are redundant for availability reasons. To reduce cable
costs, bus 1 is not redundant and is e. g. the connection between two buildings.
Fig. 3/6 Redundant bus, example
3/4
Siemens PLT 130.1994
Page 16

Bus components, technical data
This catalog is out of date, see note on page 2
Design
Overvoltage pr
otection
The par ticipants connected to the remote bus can be extensively protected against destruction by overvoltages by means
of the coarse and fine overvoltage protection units.
The coarse protection limits high-voltage signals of high power
to the arc voltage. The coarse protection is able to handle brief
peaks in the kA range. It is installed where the remote bus cable
enters the building. The fine protection reduces the residual
voltage which passes the coarse protection down to a value
between the internal conductor and the screen of the remote
bus cable which is harmless for the amplifier of the inductive
coupler in the bus converter. The fine protection is fitted on the
connector board AF.
Remote bus
Standard coaxial cable
cable
is used as the remote bus cable. This
may be routed in potentially explosive atmospheres to
DIN 57 165/VDE 0165, Section 5.6.1. It is also suitable for burial
in the ground. The max. permissible length is 4000 m.
An in-house cable
with smaller outer diameter and smaller permissible bending radius can be used indoors. The max. permissible length is 2000 m.
An increased tensile strength up to 25 000 N is possible using a
cable with additional ar mouring
. If protection against damage
by rodents and mechanical damage is required, the cable with
additional steel-tape armouring should be used.
Connection of remote bus
cables
It may be necessar y when using remote bus cables to connect
sections together. The maximum available length of the in-house
cable is 200 m, with all other types of cable 1000 m.
The type of connection depends on the type of cable. Standard
and in-house cables are connected by splicing or by using RF
plugs. The 2 other types of cable can be connected by splicing.
To provide protection against mechanical damage, the connection should be enclosed in a metal sleeve. The cable armouring
can be electrically connected using a copper cable (e. g. as
additional overvoltage protection) and secured to prevent tension. The sleeve is filled with sealing compound following assembly. All parts required can be obtained as a parts kit for
splicing coaxial cables.
T echnical data
Number of participants
Distance without bus coupler Max. 4000 m
Data formats Va ri ab le
Bus control Distributed (token passing principle)
Data protection Block parity
Hamming distance d =4
Noise immunity IEC Recommendation 255-4
Local bus
Number of participants Max. 9
Tranmission rate 250 kbit/s
Data transfer rate Up to 2800 analog values/s or
Overall cable length between
participant interface modules
Standard cable 12x2x0.22m
Signal transmission Unbalanced
Signal level 5V
Signal form Unipolar
Coupling Open collector
Redundant local bus Standard
Remote bus
Number of converters (UI) Max. 32
Number of bus couplers Max. 7,
Transmission rate 250 kbit/s
Standard cable 2YC (mS) CY 1.6/10-75
Signal form Bipolar current signals
Coupling Inductive, non-reactive
Redundant remote bus Option
$ 100, dependent on bus loading
(bus conver ter UI counts as
participant)
The transmission rate is increased to
340 kbit/s with autonomous local buses, i. e. without remote bus coupling
up to 38400 binary values/s or
a corresponding combination
Max. 20 m
2
max. 2 between 2 communication
subscribers
(Z2/5) vs sw
Siemens PLT 130.1994
3/5
Page 17

Design
Bus configurations
This catalog is out of date, see note on page 2
Bus configuration,
20-m local bus Small plants
20-m local bus/4-km remote
bus
20-m local bus/4-km remote
bus, redundant
examples
Application Other conditions Cable connectors
Max. 9 par ticipants possible
Max. 20 m bus cable
Standard design redundant
Large plants
Max. 100 par ticipants possible
Max. 4 km remote bus cable
Large plants
Max. 100 par ticipants possible
Max. 4 km remote bus cable
Can only be used in instrumentation
rooms.
The guidelines for earthing and screening must be observed for the participants on the local bus.
Ensure in particular that the par ticipants have the same ground potential
(equipotential bonding, 0-V island).
Exceptions are valid for isolated local
bus interface modules N-AS and N-AT.
Max. 32 bus converters UI can be
used, power distribution subrack can
be used for 2 bus converters UI.
The guidelines for earthing and screening must be observed for the participants on the local bus.
Ensure in particular that the par ticipants have the same ground potential
(equipotential bonding, 0-V island).
Exceptions are valid for isolated local
bus interface modules N-AS and N-AT.
Max. 32 bus converters UI can be
used, power distribution subrack can
be used for 2 bus converters UI.
The guidelines for earthing and screening must be observed for the participants on the local bus.
Ensure in particular that the par ticipants have the same ground potential
(equipotential bonding, 0-V island).
Exceptions are valid for isolated local
bus interface modules N-AS and N-AT.
N1 to N2,
N2 to N3 etc.: 6DS8 201-8 . .
Front plug on N1: 6DS9 200-8AA
N1 to UI: 6DS8 205-8 . .
N1 to N2,
N2 to N3 etc.: 6DS8 201-8 . .
N1 to U/1 and UI2: 6DS8 204-8 . .
N1 to N2,
N2 to N3 etc.: 6DS8 201-8 . .
Individual participant on
4-km remote bus
Individual participant on
4-km remote bus, redundant
AF Connector board ”Remote bus” N Interface module for 20-m local bus
FB Remote bus UI Inductive bus conver ter
Medium-sized plants
Individual participant on remote bus
(large distances between individual
participants)
Max. peripheral configuration of
connected AS systems
Max. 32 par ticipants possible
Max. 4 km remote bus cable
Medium-size plants
Individual participant on remote bus
(large distances between individual
participants)
Max. peripheral configuration of
connected AS systems
Max. 32 par ticipants possible
Max. 4 km remote bus cable
Interface module(s) for 20-m local bus
and bus converter in same cabinet or
subrack.
Power distribution subrack can be
used for 2 bus conver ters UI per
cabinet.
Interface module(s) for 20-m local bus
and bus converter in same cabinet or
subrack.
Power distribution subrack can be
used for 2 bus conver ters UI per
cabinet.
N to UI: 6DS8 205-8 . .
N to UI1 and UI2: 6DS8 204-8 . .
3/6
Siemens PLT 130.1994
Page 18

This catalog is out of date, see note on page 2
Modules and
ordering data
Contents Page
Interface modules for 20-m local bus
N-AS 4/2
N-BK 4/3
N16-M 4/4
N-V.24 4/5
N-S5 4/7
N-AT 4/8
Bus converter UI 4/9
Connector board AF ”Remote bus” 4/10
Remote bus connection unit FAE 4/11
Remote bus connection subrack S5 4/12
Bus coupler 4/13
Front plug for 20-m local bus 4/15
Cable connectors for 20-m local bus 4/15
Overvoltage protection 4/16
Remote bus cables 4/18
Connection of remote bus cables 4/19
Siemens PLT 130.1994
4/1
Page 19

This catalog is out of date, see note on page 2
Interface modules for 20-m local bus (N-AS), 8 bit
Description and ordering data
-- The bits transmitted on the 20-m local bus are returned via the
receiver for checking. The fault signal occurs if the transmitted and received values differ (bit-by-bit comparison).
LED D (green)
The receiver control unit of the interface modules signals that
data transfer elements are on the bus. The brightness of the
display depends on the number of transfer elements received.
LED M (green)
Signals that the interface module has the master function.
LEDs A and B (green)
Indicate that the interface module is set on bus A or bus B.
Static light signals active bus.
LED T (green)
Signals that the bus processor is busy. The central processor
1 LED (yellow), signals ”maintenance protocol stored”
2 LED (red), signals faults (line protocol faulty, receiver memory overflow)
3 LEDs (green)
D signals ”Data transfer on bus”
M signals ”Interface module has master function”
T signals ”Bus processor busy”
B indicates setting of interface module on bus B
A indicates setting of interface module on bus A
4 DIP switch for function and address settings
5 DIP switch for function and address settings
6 Front plug for 20-m local bus
Fig. 4/1 Inter face module N-AS for 20-m local bus, 8 bit
generates read and write signals. The display goes out if the
central processor enters the STOP status.
Setting of addr
ess
In order to differentiate between the individual interface modules
in the autonomous bus system, each interface module must be
allocated a so-called participant address. In order to differentiate between several autonomous buses connected via bus couplers, each interface module must be allocated a bus address.
These two addresses are set via DIP switches on the front panel
of the interface module.
Application
To connect an AS 215, AS 235, AS 235 K (6DS1 223-8AC) or
AS 235 H (2 x 6DS1 223-8AA) automation system to the CS 275
bus system.
The module handles all duties specifically connected with data
transmission, including occasional control of data transfer.
Design
Compact subassembly, double height, with 2 base plugs and
one front plug.
Front panel width 30.48 mm = 2 standard slots.
The module can be selected as desired.
Mode of operation
Operational signals and fault
signals
LED W (yellow)
For maintenance staff only. It signals that diagnosis infor mations
which occured during operation are stored.
LED F (red), signals the following faults:
-- Line protocol faulty, e. g. faulty qualifier signal on the local
bus, parity error in data byte, incorrect message format
-- Receiver memory overflow, e. g. if the bus processor of the
interface module does not correctly read the receiver memory.
T echnical data
Power supply DC 5 V
Current consumption 1.4 A
Interfaces
-- B a s e p l u g
-- Front plug
Weight Approx. 0.4 kg
Central unit bus, 8 bit
Redundant 20-m local bus output,
open collector, asymmetric,
for connection of a cable connector
with metal front plug and contact points
Ordering data
Order No.
Interface module for 20-m local bus (N-AS),
8bit
¯ for AS 215, AS 235 and AS 235 K
automation systems
¯ for AS 235 H automation system 6DS1 223-8AA
Instructions
Interface module for 20-m local bus Order No.
N--AS and N--BK
German C79000-- B8000--C406
English C79000-- B8076--C406
French C79000-- B8077--C406
Spanish C79000-- B8078--C406
6DS1 223-8AC
4/2
Siemens PLT 130.1994
Page 20

This catalog is out of date, see note on page 2
Interface module for 20-m local bus (N-BK)
Description and ordering data
1 LED W (yellow), signals ”maintenance protocol stored”
2 LED F (red), signals faults (line protocol faulty, receiver memor y over flow)
3 LEDs (green)
D signals ”Data transfer on bus”
M signals ”Interface module has master function”
T signals ”Bus processor busy”
B indicates setting of interface module on bus B
A indicates setting of interface module on bus A
4 DIP switch for function and address settings
5 DIP switch for function and address settings
6 Front plug for 20-m local bus
Fig. 4/2 Inter face module for 20-m local bus (N-BK), 8 bit
LED F (red) signals the following faults:
-- Line protocol faulty, e. g. faulty qualifier signal on the local
bus, parity error in data byte, incorrect message format
-- Receiver memory overflow, e. g. if the bus processor of the
interface module does not correctly read the receiver memory
-- The bits transmitted on the 20-m local bus are returned via the
receiver for checking. The fault signal occurs if the transmitted and received values differ (bit-by-bit comparison).
LED M (green)
Signals that the interface module has the master function.
LEDs A and B (green)
Indicate that the interface module is set on bus A or B. Static
light signals active bus.
LED T (green)
Signals that the bus processor is busy. The central processor
generates read and write signals. The display goes out if the
central processor enters the STOP status.
Setting of addr
ess
In order to differentiate between the individual interface modules
in the autonomous bus system, each interface module must be
allocated a so-called participant address. In order to differentiate between several autonomous buses connected via bus couplers, each interface module must be allocated a bus address.
These two addresses are set via DIP switches on the front panel
of the interface module.
Application
The interface module N-BK is used in the remote bus/remote
bus coupler.
The module handles all duties specifically connected with data
transmission, including occasional control of data transfer.
Design
Compact subassembly, double height, with 2 base plugs and
one front plug.
Front panel width 30.48 mm = 2 standard slots.
The slot for the module in the subrack for the bus coupler is
preset.
Mode of operation
Operational signals and fault
signals
LED W (yellow)
For maintenance staff only. It signals that diagnosis infor mations
which occurred during operation are stored.
LED D (green)
The receiver control unit of the interface module signals that
data transfer elements are on the bus. The brightness of the
display depends on the number of transfer elements received.
T echnical data
Power supply DC 5 V
Current consumption 1.4 A
Interfaces
-- B a s e p l u g
-- Front plug
Weight Approx. 0.4 kg
Central unit bus, 8 bit
Redundant 20-m local bus output,
open collector, asymmetric,
for connection of a cable connector
with metal front plug
and contact points
Ordering data
Order No.
Interface module for 20-m local bus (N-BK) 6DS1 223-8AB
for bus coupler, 8 bit
Instructions
Interface module for 20-m local bus Order No.
German C79000-- B8000--C406
English C79000-- B8076--C406
French C79000-- B8077--C406
Spanish C79000-- B8078--C406
Siemens PLT 130.1994
4/3
Page 21

This catalog is out of date, see note on page 2
Interface module for 20-m local bus (N16-M), 16 bit
Description and ordering data
via the serial bus. A message can be sent to a single bus par ticipant, to several participants or to all participants.
Apart from certain cyclic messages, the receiver acknowledges
every message received.
The transmitter is immediately informed when a message has
been received without faults. In certain cases, the required data
are also transmitted immediately with this feedback, thus enabling short reaction times.
The interface module N16-M stores the messages in its transmitter and receiver buffers until they are processed and transmitted and thus dynamically decouples the OS 265-3 system or
the SICOMP M minicomputer from the data transfer on the bus
during times of peak loading. T o reduce the time required for
organizational tasks, the interface module collects several messages over a specific period and combines these into a package. This is not the case if short reaction times are required.
In addition to the data messages, the inter face module also
generates and processes organizational messages together
with the other interface modules on the CS 275 bus system.
These are required, for example, to transfer the master function,
1 LED F (red), signals faults (line protocol faulty, receiver memory overflow)
2 LEDs (green)
D signals ”Data transfer on bus”
M signals ”Interface module has master function”
T signals ”Bus processor busy”
B indicates setting of interface module on bus B
A indicates setting of interface module on bus A
3 DIP switch for setting the bus address and for selection of redundant/
non-redundant remote bus
4 DIP switch for setting the par ticipant address
5 Front plug for 20-m local bus
Fig. 4/3 Inter face module for 20-m local bus (N16-M), 16 bit
Application
To connect the OS 265-3 operation and monitoring system and
SICOMP M minicomputers to the CS 275 bus system. The
SICOMP M minicomputer must be equipped with the KSN-16M
coupling software to adapt bus communication. Local bus coupling (< 20 m) with other participants is only possible if these
have the same earth potential. Both coupling participants must
have the same earthing concept (e. g. OS 265-3 and AS 235/K/H
systems). The remote bus connection unit (cf. page 4/11 must be
used in all other cases and provides electrical isolation together
with the bus conver ters UI (page 4/9).
The module handles the following duties connected with data
transmission:
Collection of parameters and processing of input/output in-
structions on the I/O interface channel of the SICOMP M mini-
computer
Signalling of operating statuses and faults with defined dis-
plays.
Design
Plug-in module, triple height, with 1 base plug and 1 front plug.
Front panel width 15.24 mm = 1 standard slot.
Defined slot EA 01 in the SICOMP M minicomputer.
The interface processor of the modules is an SAB 80186 chip
with a 32-kbyte program memory (EPROM) and 8-kbyte data
memory (RAM).
Mode of operation
Handling of
messages
Depending on the type and parameterization of the communication instructions, the interface module N16-M transmits and receives protected messages of various lengths up to 128 byte
for routing information, redundancy tests, monitoring and signalling information.
Time synchr
onization
The interface module receives time messages and routes these
on to the OS 265-3 system or SICOMP M minicomputer. In the
opposite direction, it can also receive the time from the
OS 265-3 system or SICOMP M minicomputer and transmit it on
the bus in order to synchronize the participants.
Diagnostic
functions
The interface module detects and signals static and dynamic
faults and any states which could be critical for the bus loading.
It monitors the processes on the bus, on the interfaces to the
user system and in the interface module itself.
During operation, cyclically triggered test programs carry out an
extensive hardware test of the interface module. Faults are
therefore early detected and malfunctions and cumulative faults
are thus prevented. External bus diagnosis via the coupling
software is also possible. The interface module provides a diagnostic list with 23 positions which can be read for this purpose.
T echnical data
Power supply +5V
Current consumption
With + 5 V
With -- 12 V
Interfaces
-- B a s e p l u g
-- Front plug
Weight Approx. 0.55 kg
Ordering data
Interface module for 20-m local bus (N16-M), 6DS1 205-8AA
16 bit
Instructions
Interface module for 20-m local bus (N16-M), Order No.
German C79000-- B8000--C128
English C79000-- B8076--C128
French C79000-- B8077--C128
Spanish C79000-- B8078--C128
-- 1 2 V
2.8 A
0.05 A
SICOMP M I/O interface channel
Redundant 20-m local bus input/output,
open collector, asymmetric,
for connection of a cable connector
with metal front plug and contact points
Order No.
4/4
Siemens PLT 130.1994
Page 22

This catalog is out of date, see note on page 2
Interface module for 20-m local bus (N-V.24)
Description
1 LED F (red), signals faults (line protocol faulty, receiver memor y over flow)
2 LEDs (green)
D signals ”Data transfer on bus”
M signals ”Interface module has master function”
T signals ”Bus processor busy”
B indicates setting of interface module on bus B
A indicates setting of interface module on bus A
3 Reset key RS
4 Front plug X3 for connection of a non-Siemens computer via V.24
or 20-mA current loop interface
5 Front plug X4 for connection to the 20-m local bus
6 Jumpers for function and address settings
Fig. 4/4 Interface module for 20--m local bus (N--V .24)
voltage +5 V is loaded with 2.4 A per N-V. 24 module thereby.
The number of useable interface modules N-V.24 is therefore
restricted.
Possible plug-in slots:
Slot for I/O module
In the AS 235 automation system (max. 2 modules N-V.24 per
system (basic unit or extension unit)
In the AS 235 K automation system (max. 2 modules N-V.24
per system (basic unit)
In the AS 235 H automation system (max. 1 module N-V.24
per extension unit with 5-V module.)
Use of the N-V.24 interface module in the ES 100 K extension
system or in the AS 215 automation system is not allowed.
Interfaces for non-Siemens
computer
(alternatively at front plug X3)
V.24 interface
T x D T ransmitted data
Information is sent to the peripheral device via this line
R x D Received data
Information is transferred to the system via this line
DSR Data set ready
Input for ”data set ready” message from data circuit
terminating equipment
CTS Clear to send
Input for ”clear to send” message from data circuit terminating equipment
DTR Data terminal ready
Output for operating status message of N-V .24 module
RTS Request to send
Output signal, switches the transmitter unit of the data
circuit terminating equipment
I1,I2 Internal constant-current sources
Application
For connection of non-Siemens computers to the CS 275 bus
system via a V.24 or 20-mA current loop interface.
The external computer must have a V.24 or 20-mA current loop
interface. Coupling software is required in the external computer
to handle communication with the interface module N-V.24.
The data transmission rate can be adapted to the requirements
between 110 bit/s and 9600 bit/s; for example, 120 measured
values/s can be transmitted at a data transfer rate of 9600 bit/s
via the serial interface.
The module handles duties specifically connected with data
transmission, including occasional control of data transfer.
Design
Compact subassembly, double height, with 1 base plug and
2 front plugs
Front panel width 30.48 mm = 2 standard slots.
The N-V.24 interface module is plugged into an I/O slot. It does
not receive its supply voltage via L+ (DC 24 V) but via the supply voltage +5 V of the I/O bus for the logic. The logic supply
20-mA current loop interface
R x D Received data
+ 20 mA: input, -- 20 mA: output
T x D T ransmitted data
+ 20 mA: input, -- 20 mA: output
Mode of operation
Communication between TELEPERM M systems and
non-Siemens computers
Data transfer between TELEPERM M systems and a
non-Siemens computer via the CS 275 bus system is carried out
using the same messages which are used for communication
between TELEPERM M systems. The defined types of order
(format, coding, acknowledgement mode) and the function of
the hardware interface (N-V.24) are described in the Instructions
for the inter face module N-V.24 and in the Manual ”N-V.24, Coupling of non-Siemens computers to the CS 275 Bus System”.
Coupling software must be installed in the external computer
which matches the computer to the communication conditions of
the N-V.24 inter face.
Setting of addr
ess
In order to differentiate between the individual interface modules
in the autonomous bus system, each interface module must be
allocated a so-called participant address. In order to differentiate between several autonomous buses connected via bus couplers, each interface module must be allocated a bus address.
These two addresses are set using plug-in jumpers on the front
panel of the interface module.
Siemens PLT 130.1994
4/5
Page 23

This catalog is out of date, see note on page 2
Interface module for 20-m local bus (N-V.24)
T echnical data and ordering data
Ordering data
Interface module for 20-m local bus (N-V.24)
with V.24 or 20-mA current loop interface
¯ with parts kit for front plug and installation
instructions in Ger man
¯ Without parts kit for front plug 6DS1 202-8AB
Parts kit for front plug
for interface module 6DS1 202-8AB
with installation instructions in Ger man
KSN-PC coupling software
for SICOMP industry-standard PC or
PG 750/PG 770 programmer
Order No.
6DS1 202-1AB
C79458-L437-D1
See Catalog PLT 150
This circuit cancels the
electrical isolation of the
N.-V.24 interface
Fig. 4/5 20-mA current loop interface with internal constant-current source
for transmitter (left) and receiver (right), connection example
Fig. 4/6 20-mA current loop interface with external current loop for transmitter (left) and receiver (right), connection example
T echnical data
Power supply DC 5 V
Current consumption 2.4 A
Interfaces
-- B a s e p l u g
-- Front plug X3
-- Front plug X4
Weight Approx. 0.75 kg
5-V power supply
Serial V.24 or
20-mA current loop inter face
for distances up to 15 or 1000m
respectively, 4-wire system
Redundant 20-m local bus output, open
collector, asymmetric,
for connection of a cable connector
with metal front plug and contact parts
Instructions
Interface module for 20-m local bus, Order No.
V.24- or 20-mA current loop interface
German C79000-- B8000--C3
English C79000-- B8076--C3
French C79000-- B8077--C3
Spanish C79000-- B8078--C3
Manuals
N-V .24: Coupling of non-Siemens
computers to the CS 275 bus system
German C79000-- G8000-- C87
English C79000-- G8076-- C87
20-m local bus V.24- or 20-mA
Transmission rate 340 kbit/s (autonomous)
Data protection Horizontal parity (d =4) Longitudinal parity
Operating mode Half-duplex Half-duplex,
Character frame Bus transfer element 8bit,code-transparent
Authorization for
data transmission
250 kbit/s (remote
bus connection
via inductive conver ter)
Token passing principle DIN 66 020
interface
110 bit/s to
9600 bit/s,
can be set on module
(d =2)
contention mode
(V.24)
4/6
Siemens PLT 130.1994
Page 24

Description and ordering data
This catalog is out of date, see note on page 2
Interface module for 20-m local bus (N-S5)
Mode of operation
Data received via the CS 275 bus system pass through the line
protocol controller of the bus interface logic in bit-serial mode
and are placed into intermediate storage. The microprocessor
reads the data byte-by -byte and stores them in the buffer
memory of the module. Up to 70 complete messages can be
stored in the buffer memory.
As soon as sufficient space is available in the dual-port RAM for
a complete message, this is entered into the receiver order list
of the dual-port RAM. Transmit messages are transferred from
the function blocks of the KSN-S5E coupling software to the
dual-port RAM system interface and entered into the transmitter
order list.
1 LED F (red), signals faults (line protocol faulty,
receiver memory overflow)
2 LEDs (green)
D signals ”Data transfer on bus”
M signals ”Interface module has master function”
T signals ”Bus processor busy”
B indicates setting of interface module on bus B
A indicates setting of interface module on bus A
3 DIP switch for function and address settings
4 DIP switch for function and address settings
5 Front plug for 20-m local bus
6 Base plug for connection to SIMATIC S5 bus
Fig. 4/7 Inter face module for 20-m local bus (N-S5)
Application
The module is used to connect a SIMATIC S5-155U programmable controller (CPU 946/947 or CPU 948) to the CS 275 bus
system.
The KSN-S55 coupling software must be installed in the programmable controller. It enables the controller to be matched to
the requirements of bus communication.
The module handles duties specifically connected with data
transmission, including occasional control of data transfer.
Setting of addr
ess
In order to differentiate between the individual interface modules
in the autonomous bus system, each interface module must be
allocated a so-called participant address. In order to differentiate between several autonomous buses connected via bus couplers, each interface module must be allocated a bus address.
These two addresses are set via DIP switches on the front panel
of the interface module.
T echnical data
Power supply DC 5 V
Current consumption 1.8 A
Interfaces
-- B a s e p l u g
-- Front plug
Weight Approx. 0.5 kg
Central unit of SIMATIC S5-155U
programmable controller
Redundant 20-m local bus output,
open collector, asymmetric,
for connection of a cable connector
with metal front plug and contact points
Ordering data
Order No.
Interface module for 20-m local bus (N-S5), 6DS1 206-8AA
8bit
KSN-S55 coupling software See Catalog PLT 150
Design
Compact subassembly, double height, with 2 base plugs and 1
front plug.
Front panel width 20.32 mm = 1
1/3
standard slots.
Possible plug-in slots:
Central unit 155U (CPU 946/947), slots 35, 43, 75, 83 and 107
to 131
Central unit 155U (CPU 948), slots19, 35, 51 and 67 to 131.
Siemens PLT 130.1994
Instructions
Interface module for 20-m local bus (N-S5) Order No.
German C79000-- B8000--C181
English C79000-- B8076--C181
French C79000-- B8077--C181
Spanish C79000-- B8078--C181
4/7
Page 25

This catalog is out of date, see note on page 2
Interface module for 20-m local bus (N-AT)
Description and ordering data
T echnical data
Power supply DC5V/DC12V
Current consumption Approx. 1.8 A (DC 5 V)
Interfaces
-- A T p l u g
-- Front plug
Weight Approx. 0.7 kg
viaATbus
AT bus of respective device
Redundant 20-m local bus output,
open collector, asymmetric,
for connection of a cable connector
with metal front plug
Fig. 4/8 Inter face module for 20-m local bus (N-AT)
Application
The module is used to connect the following systems/devices to
the CS 275 bus system:
OS 520 operation and monitoring system
SICOMP industry-standard PC
HP 9000/7xx workstation
A T-compatible personal computer.
For adaptation to the bus communication, a coupling software
must be installed in these devices (except of OS 520 sys tem).The interface module N-A T handles duties specifically connected with data transmission, including occasional control of
data transfer.
Design
Plug-in card in long AT format with one plug on the front panel.
Slot: extension slot in AT format in the above-mentioned
devices.
The interface module N-AT contains:
An SAB 80 188 microprocessor for controlling and monitoring
all functions
A dual-port RAM system interface to the AT bus with asso-
ciated control logic
An interface to the 20-m local bus with bus interface logic.
Mode of operation
Data received via the CS 275 bus system pass through the line
protocol controller of the bus interface logic in bit-serial mode
and are placed into intermediate storage. The microprocessor
reads the data byte-by -byte and stores them in the buffer
memory of the module.
As soon as sufficient space is available in the dual-port RAM for
a complete message, this is entered into the receiver order list
of the dual-port RAM. Transmit messages are transferred from
the coupling software to the dual-port RAM system interface
and entered into the transmitter order list.
Ordering data
Coupling package (hardware) to couple ATcompatible personal computers to the CS 275
bus system,
comprising
-- Interface module for 20-m local bus
6DS1 222-8AB for AT-compatible personal
computers
-- Cable connector for 20-m local bus
6DS8 208-8KC with 1 ES 902 plug and 1 Cannon plug, 2.5 m long
-- Instructions for the interface module
¯ with German documentation
¯ with English documentation
Cable connectors
for bus participants with N-AT interface module
for 20-m local bus
¯ Cable connector for 20-m local bus
with 3 plugs ES 902 and 1 Cannon plug
to connect a remote bus connection unit
with 2 UI bus converters and a connection
distributor
¯ Cable connector for 20-m local bus
with 1 Cannon plug and
one free cable end
(for soldering on)
¯ Cable connector for 20-m local bus
with 3 Cannon plugs to connect a bus
participant with N-AT interface module to
another bus participant with N-AT interface
module
1.5 m EC 3m MC 4m QC
1.8 m GC 3.3 m NC 4.5 m RC
2.2 m JC 3.6 m PC 5mSC
Coupling software
¯ For PC with MS-DOS and MS-Windows:
TM
WIN
¯ For HP 9000/7xx workstation with RTAP/Plus
under UNIX: CS
275-Scantask
Order No.
6DS1 222-1AB10
6DS1 222-1AB20
6DS8 210-8
6DS8 211-8
6DS8 212-8
See Catalog PLT 150
4/8
Siemens PLT 130.1994
Page 26

Description and ordering data
This catalog is out of date, see note on page 2
Bus converter unit UI
1 LED ET (green), flashes in rhythm with the messages received
from the remote bus
2 LED F (red), signals faults (line protocol faulty, transfer element
format faulty)
3 LED B (green), indicates setting of module on bus B
4 LED A (green), indicates setting of module on bus A
5 Reset key RS
6 LED SV (green), signals the presence of all operating
voltages
7 Coding jumper
8 Power supply unit
9 Bus interface
10 Inductive coupler
Fig. 4/9 Bus converter 6DS4 400-8AB
Application
To convert signals from a 20-m local bus to a 4-km remote bus.
Signal coupling-in and coupling-out inductive and without feedback.
Design
The bus converter consists of 3 single-height modules.
Front panel width:
Power supply unit 30.48 mm = 2 standard slots
Bus interface 15.24 mm = 1 standard slot
Inductive coupler 45.72 mm = 3 standard slots
The bus interface module has a 20-m local bus interface and
constitutes the input of the bus converter. The inductive coupler
module has 2 lengths of coaxial cable fixed to the front panel.
These are screwed onto the connector board AF (page 4/10)
and form the connection to the remote bus cable.
Possible plug-in locations:
AS 235 K automation system, basic unit
AS 235 automation system, power distribution subrack in the
basic cabinet
AS 235 H automation system, power distribution subrack in
the basic cabinet
Remote bus connection unit (e. g. for OS 520 and OS 265-3
desk-top units)
Remote bus connection subrack (e. g. for SIMATIC S5-155 U,
SICOMP industry-standard PC or OS 265-3 rack-type version)
Bus coupler (BK-FF).
1)
Redundant 24 V supply only when a remote bus connection subrack
6DS4 426--8AA is used
Fig. 4/10 Bus converter, function diagram
T echnical data
Power supply DC 24 V (20 to 33 V)
Current consumption 450 mA
Module fuse 1.6 A medium-slow
Interfaces
-- Local bus
-- R e m o t e b u s
Signal coupling-in inductive, reaction-free
Weight Approx. 1.18 kg
TTL level, open collector, asymmetric,
redundant
Biphase signals
(levels approx. á 1V)
Ordering data
Order No.
Bus converter (UI), 6DS4 400-8AB
consisting of power supply unit, bus interface
and inductive coupler
Instructions
Bus converter , inductive Order No
German C79000-- B8000--C4
English C79000-- B8076--C4
French C79000-- B8077--C4
Spanish C79000-- B8078--C4
Siemens PLT 130.1994
4/9
Page 27

Connector board AF
Description and ordering data
This catalog is out of date, see note on page 2
Fig. 4/11 Connector board AF ”Remote bus” 6DS9 203-- 8DA, with
mounting plate
Application
To convert the remote bus coaxial cable to the two lengths of
coaxial cable fixed in the bus converter UI and to convert the
standard remote bus cable and the remote bus cable for special
applications to thin remote bus cable (Inhouse cable). To terminate the remote bus coaxial cable with the characteristic impedance. For uninterruptable switching on and off of remote bus
participants.
The connector board AF with mounting plate is provided for the
AS 235 and AS 235 H automation systems which are installed in
standard cabinets, the OS 265-3 operation and monitoring system (rack version), the bus coupler and the SIMATIC S5-155U
programmable controller.
The connector board AF without mounting plate is provided for
the AS 235 K automation system and for the remote bus connection unit (page 4/11).
For applications in critical environments (EMC), the connector
board AF can be retrofitted with an overvoltage fine protection
device.
Possible locations:
AS 235, AS 235 H, OS 265-3 systems and SIMATIC S5: On
the front right-hand cabinet member, up to 2 connector
boards can be mounted on 1 cabinet member
AS 235 K system: In the subrack on the left of the power supply assembly
Remote bus connection unit: In the subrack.
Fig. 4/12 Connector board AF ”Remote bus” 6DS9 203-- 8CA, without
mounting plate
4-km bus
Remote bus 1a Remote bus 1b
a Terminating resistor F (activated by jumper)
AF Connector board
UI Bus converter
Fig. 4/13 Redundant remote bus with terminating resistors
Ordering data
Order No.
Connector board AF ”Remote bus”
with terminating resistor F
¯ Without mounting plate
¯ With mounting plate, for rack-mounted
systems
Overvoltage fine protection,
can be retrofitted (see page 4/16)
6DS9 203-8CA
6DS9 203-8DA
6DS9 210-8AA
4/10
Siemens PLT 130.1994
Page 28

This catalog is out of date, see note on page 2
Remote bus connection unit FAE
1 Connection distributor for 20-m local bus, 6DS9 207-8AA;
for commissioning and servicing, can be retrofitted
2 Bus converter 6DS4 400-8AB
3 Connector board AF ”Remote bus” 6DS9 203-8CA
4 Power supply module
Fig. 4/14 Remote bus connection unit, redundant design;
front door removed
Application
The remote bus connection unit connects desk-top systems, as
e. g. the OS 265-3 operation and monitoring system or SICOMP
industry-standard PC to a redundant or non-redundant remote
bus. Electrical isolation between the local and the remote buses
is achieved at the same time. Non-redundant AC 230 V power
supply.
Design
The remote bus connection unit consists of a housing for floor or
wall mounting, 2 single-height subracks, a mounting rail, mains
filter and power supply module for AC 50 Hz 230 V.
It provides space for the 2 bus converters (cf. page 4/9) required to convert the 20-m local bus interface to the remote bus
interface. The connector boards AF for converting the cable
cross-section (cf. page 4/10) are also fitted into the remote bus
connection unit. One connector board is required for each bus
converter.
The remote bus connection unit can be fitted with a connection
distributor for 20-m local bus for commissioning and servicing.This is an open local bus interface for intermediate connection of e. g. a SICOMP industry-standard PC with PROGRAF
AS/OS program package for central configuring.
The remote bus connection unit is connected to the interface
module for 20-m local bus fitted in the system to be connected
via a cable connector.
AF Connector board ”Remote bus”for converting the cable cross-section
AV Connection dstributor for 20-m local bus
FS Front plug for 20-m local bus
SV Power supply unit of bus converter
UI Bus interface and inductive coupler of bus converter
Fig. 4/15 Remote bus connection unit, function diagram
T echnical data
Power supply AC 50/60 Hz 230 V + 6 %/-- 10 %
Power consumption Approx. 20 VA
Permissible ambient
temperature
-- Operation
-- Transport and storage
Degree of protection to
DIN 40 050
Dimensions (h x d) 500 mm x 236 mm x 313 mm
Weight Approx. 13.5 kg (without bus conver-
(with 2 bus converters UI)
0to+40qC
--40to+70qC
IP 20
ters and connector boards)
Ordering data
Order No.
Remote bus connection unit (basic unit) 6DS4 425-8AA
with slots for 2 bus conver ter units Ul
Options to be ordered in addition, twice in the
case of a redundant bus connection:
Bus converter Ul
Connector board AF ”Remote bus”
Overvoltage fine protection, can be retrofitted 6DS9 210-8AA
Connection distributor for 20-m local bus
for commissioning and servicing
Cable connector with 1 plug, 0.3 m long
for connection distributor for 20-m local bus
Instructions
Remote bus connection unit (FAE) Order No.
German C79000-- B8000--C127
English C79000-- B8076--C127
French C79000-- B8077--C127
Spanish C79000-- B8078--C127
Bus converter unit, inductive
German C79000-- B8000--C4
English C79000-- B8076--C4
French C79000-- B8077--C4
Spanish C79000-- B8078--C4
6DS4 400-8AB
6DS9 203-8CA
6DS9 207-8AA
6DS8 201-8MB
Siemens PLT 130.1994
4/11
Page 29

This catalog is out of date, see note on page 2
Remote bus connection subrack S5
Description and ordering data
1 Mains terminals AC 230 V
2 Power supply modules
3 Bus converters UI 6DS4 400-8AB
Fig. 4/16 Remote bus connection subrack S5 6DS4 426-8CA
Application
The remote bus connection subrack S5 connects rack-mounted
systems, especially SIMATIC S5-155U programmable controllers, to a redundant or non--redundant remote bus. Electrical
isolation between the local and remote buses is achieved at the
same time.
Non--redundant or redundant DC 24 V or AC 230 V power supplyispossible.
Note: The remote bus connection subrack is not used in the
basic cabinets of the AS 235 and AS 235 H automation systems
and in the OS 265-3 operation and monitoring system (rack version) for DC 24 V.
Design
Single-tier 19-inch subrack with 2 slots for bus converter units
UI, optionally with power supply module(s).
The power supply in the case of DV 24 V is from the cabinet
supply of the programmable controller, in the case of AC 230 V
via the power supply module C79451-A3276-A1 (redundant as
option).
T echnical data
Power supply
-- 6DS4 426-8AA
-- 6DS4 426-8BA and
-- 6DS4 426-8CA
Power consumption Approx. 20 VA
Permissible ambient
temperature
-- Operation
-- Transport and storage
Degree of protection
to DIN 40 050
Protection class
(6DS4 426-8BA and
6DS4 426-8CA)
Dimensions (hxwxd) 134 mm x 485 mm x 260 mm
Weight
-- Subrack (empty)
-- Power supply module
-- Bus converter unit
DC 24 V (20 to 33 V)
permissible ripple $ 15 %
AC50Hz/60Hz230V+6%/--10%
with 2 bus converter units
0to+40qC
--40to+70qC
IP 00
I
Approx. 4.5 kg
Approx. 1.5 kg
Approx. 1.2 kg
E. g. SIMATIC
S5-155U
Remote bus
connection subrack S5
Remote bus A
Remote bus B
AF Connector board ”Remote bus” for converting the cable cross-section
FS Front plug for 20-m local bus
SV Power supply unit of bus converter
UI Bus interface and inductive coupler of bus converter
Fig. 4/17 Remote bus connection subrack S5 6DS4 426-8CA,
function diagram
Ordering data
Order No.
Remote bus connection subrack S5
with slots for 2 bus conver ters UI
¯ For connection to DC 24 V,
non-redundant or redundant
¯ With 1 power supply module
for AC 230 V for non-redundant supply
to 1 or 2 bus conver ters UI
¯ With 2 power supply modules
for AC 230 V for redundant supply
to 2 bus converters UI
The following are required in addition for a
remote bus connection:
Bus converter UI 6DS4 400- -8AB
Connector board AF ”Remote bus”
with mounting plate
Overvoltage fine protection, can be retrofitted 6DS9 210-8AA
Instructions
Remote bus connection subrack S5 Order No.
German C79000-- B8000--C251
English C79000-- B8076--C251
French C79000-- B8077--C251
Spanish C79000-- B8078--C251
Bus converter , inductive
German C79000-- B8000--C4
English C79000-- B8076--C4
French C79000-- B8077--C4
Spanish C79000-- B8078--C4
6DS4 426- -8AA
6DS4 426- -8BA
6DS4 426- -8CA
6DS9 203-8DA
4/12
Siemens PLT 130.1994
Page 30

Description
This catalog is out of date, see note on page 2
Bus coupler
Fig. 4/18 Bus coupler (BK--FF), subrack configuration
Application
Bus couplers are used for data transfer between participants on
independent remote buses (BK-FF). They enable decoupling of
the data transfer on the buses as well as distances between two
participantsupto3x4km.
The bus line can be single or redundant. Bus couplers can also
be used in parallel to increase the transmission performance. A
maximum of two bus couplers may be connected in series between two participants which exchange information.
Parallel bus
couplers
If the coupling capacity of a bus coupler is not sufficient, the
transmission performance can be increased by approx. 100%
by using a second bus coupler. This parallel connection of bus
couplers leads to limitations in performance if one of them fails
(this is not a redundant connection).
Redundant bus
couplers
If the coupling capacity of a bus coupler is sufficient, a redundant system can be produced using a second bus coupler. In
this case, the second bus coupler automatically takes over the
coupling function if the first bus coupler fails.
Design
The bus coupler consists of
-- 2 interface modules for bus coupler (N-BK),
-- power supply module and
-- 2 or 4 bus conver ters UI for remote bus coupling (BK-FF)
depending on whether the remote buses are of single or
redundant design.
All these modules are fitted in a double-height subrack. This is
completely wired and equipped with all necessary plugs and
guide rails.
Mode of operation
A bus coupler acts like any other participant on the bus. It has
an address on every bus. A par ticipant on bus 1 sends a mes sage to a participant on bus 2 by first addressing the bus coupler. This stores the message briefly independent of the current
message transfer on bus 2 and acknowledges receipt to the
transmitting participant.
The bus coupler transmits the message on bus 2 if it becomes
the master on this bus. The participant to which the message is
addressed accepts the message and acknowledges receipt to
the bus coupler.
Redundant remote bus 1
e. g.
Busaddress1
Participant address 5
e. g.
Busaddress1
Participant address 5
BK Bus coupler
UI Bus converter
Fig. 4/19 Parallel bus couplers, e. g. between redundant remote buses
e. g.
Busaddress1
Participant address 6
e. g.
Busaddress2
Participant address 12
Redundant remote bus 2
Siemens PLT 130.1994
4/13
Page 31

This catalog is out of date, see note on page 2
Bus coupler
T echnical data and ordering data
AF Connector board ”Remote bus”
UI Bus converter
Fig. 4/20 Bus coupler BK-FF, function diagram
The DC 5-V supply required to operate the interface module for
bus coupler (N-BK) is obtained from the 24-V supply by a
switching controller on the power supply module 6DS1 000-8AA.
The bus coupler subracks can be fitted either in their own cabi nets or in the cabinet of an AS automation system depending on
the type of remote bus coupling.
T echnical data
Power supply module
Power supply
Current consumption
Bus converter unit UI
Power supply
Current consuption
Fuse
Interface
Remote bus Biphase signals,
DC 24 V
1A
DC 24 V
450 mA
1.6 A medium-slow
level approx. á 1V
Ordering data
Order No.
Bus coupler, consisting of
Subrack
provided for bus couplers for
remote bus coupling (BK-FF)
Power supply module
DC24V/DC5V,18A
Interface module N-BK for bus couplers,
8bit
Bus converter UI,
required for remote bus coupling
(2 off required for single remote buses, 4 off for
redundant remote buses)
Connector board AF ”Remote bus”
with terminating resistor F and
with mounting plate, for rack-mounted systems;
1 connector board is required per bus converter
unit UI if not already installed in the cabinet
Overvoltage fine protection, can be retrofitted
(see page 4/16)
Cable connector for 20-m local bus
with 3 plugs for connecting the interface
modules (N-BK) to the bus converters UI
(2 off required for BK-FF)
Cable set for power supply
to connect the bus coupler subrack to the
power distribution subrack DC 24 V mounted in
cabinet 1
¯ Bus coupler subrack in cabinet 1
Tier A (height module U 2 to 7)
Tier B (height module U 10 to 15)
Tier C (height module U 18 to 23)
Tier D (height module U 26 to 31)
¯ Bus coupler subrack in cabinet 2
Tier A (height module U 2 to 7)
Tier B (height module U 10 to 15)
Tier C (height module U 18 to 23)
Tier D (height module U 26 to 31)
Instructions
Bus coupler units
German C79000-- B8000--C5
English C79000-- B8076--C5
French C79000-- B8077--C5
Spanish C79000-- B8078--C5
6DS9 003-8CA
6DS1 000-8AA
6DS1 223-8AB
6DS4 400-8AB
6DS9 203-8DA
6DS9 210-8AA
6DS8 204-8MB
6DS9 908-8AA
6DS9 908-8AB
6DS9 908-8AC
6DS9 908-8AD
6DS9 908-8AE
6DS9 908-8AF
6DS9 908-8AG
6DS9 908-8AH
4/14
Siemens PLT 130.1994
Page 32

This catalog is out of date, see note on page 2
Description and ordering data
Fig. 4/21 Front plug 6DS9 200-8AA (ES 902 plug)
Application
To connect a cable connector to the last bus participant. The
front plug is only required for cable connectors 6DS8 201--8.. . It
is already part of the cable connectors 6DS8 204--8.. and
6DS8 205 --8.. .
Front plug for 20-m local bus
N Interface module for 20-m local bus or converter unit UI
Fig. 4/22 Local bus coupling, connection of last participant
Design
Metal front plug with 2 cable inlets and contact points. The contact points must be used to connect the plug with a low inductance to the subrack.
Ordering data
Order No.
Front plug with contact points 6DS9 200-8AA
Cable connectors for 20-m local bus
Application and ordering data
Application
To connect the interface modules for 20-m local bus to one
another and to the bus converter Ul. A front plug is required for
the last participant on the local bus when using the cable
6DS8 201-8.. .
Ordering data
Cable connector for 20-m local bus
Cable connector
From
Interface module for
20-m local bus,
nth par ticipant
0.3 m MB 1.5 m EC 2.2 m JC 3.3 m NC 4.5 m RC
0.5 m SB 1.6 m FC 3m MC 3.6 m PC 5m SC
0.63 m UB 1.8 m GC 4m QC 10 m AD
Interface module for
20-m local bus
To
Interface module
for 20-m local bus,
(n--1)th par ticipant
(n ± 9)
Bus converter UI ES 902 plug ES 902 plug — LiYCY
Plug 1 Plug 2 Plug 3 Cab le Possible
ES 902 plug End of cable
prepared for
plug
— LiYCY
12x2x0.22
VZNSi
12x2x0.22
VZNSi
1
)
1
)
cable length
0,3to15m
(over n participants ± 20 m
0.3to5m 6DS8 205-8
Order No.
6DS8 201-8
15 m ED
0.3 m MB 1.5 m EC 2m HC 2.7 m LC 3.3 m NC 5m SC
0.5 m SB 1.6 m FC 2.5 m KC 3m MC 3.6 m PC
Interface module for
20-m local bus
0.3 m MB 1.6 m EC 2.5 m KC 3m MC 3.6 m PC
1.2 m CC 2m HC 2.7 m LC 3.3 m NC 5m SC
1.5 m EC 2.2 m JC
1
) SIMATIC cable.
Siemens PLT 130.1994
Bus converters
UI1 und UI2
ES 902 plug ES 902 plug ES 902 plug LiYCY
12x2x0.22
VZNSi
0.3 m UI1--UI2
1
)
0.3to5mUI-interface module
6DS8 204-8
4/15
Page 33

This catalog is out of date, see note on page 2
Overvoltage protection
Description
Fig. 4/23 Coarse overvoltage protection 6DS9 208-8AA
Application
The coarse and fine overvoltage protection components largely
protect the participants connected to the CS 275 bus from destruction as a result of overvoltages which result from inter ferences in the remote bus cable. The division into coarse and fine
protection means that it is possible to optimally match the overvoltage protection to the respective system.
The coarse protection limits powerful, high-voltage pulses to the
arc voltage. It can briefly handle currents in the kA range.
The fine protection reduces the residual voltage between the
internal conductor and screen which passes the coarse protection to a measure which is non--hazardous for the amplifier of the
inductive coupler in the bus converter Ul.
The use of overvoltage protection components is not mandatory
for operation of the CS 275 remote bus in non-disturbed system
environments. But their use is recommended if the effect of
overvoltages onto remote bus cables cannot be excluded.
Important
The coarse and fine protection components do not replace a
lightning protection system installed according to the regulations.
In conjunction with the so-called primary lightning protection
(connection and earthing of steel armoring, equipotential bonding etc.) you can reduce the extent of damage to the bus participants as a result of a lightning stroke, but this does not provide
complete protection from the damage of lightning.
notes:
Fig. 4/24 Fine overvoltage protection 6DS9 210-8AA
Design
Coarse pr
The coarse overvoltage protection 6DS9 208-8AA is fitted in a
cast aluminum housing with degree of protection IP 54 and dimensions (l x w x h) 125 mm x 80 mm x 58 mm. It contains 2
lightning arresters.
It is connected via an M5 threaded bolt to the ear thing system.
The screens of the remote bus cables which are combined in
the housing of the coarse protection can be connected if required to the earthing system either directly or via one of the two
lightning arresters (floating design).
The coarse protection is suitable for all types of remote bus
cables.
Fine pr
The fine overvoltage protection basically consists of two Z
diodes and a terminator for the remote cable which can be connected when needed via the connecting splicing plate on the
connector board AF instead of the resistor present there. These
components are located on a miniature PCB which can be fitted
in the connector board 6DS9 203-8CA or --8DA.
The coarse and fine protection components can also be retrofitted in existing system.
For configuring notes and ordering data see page 4/17.
otection
otection
4/16
Siemens PLT 130.1994
Page 34

Configuring notes and ordering data
This catalog is out of date, see note on page 2
Overvoltage protection
AF Connector board ”Remote bus” GS Coarse overvoltage protection Cable lengths: a < 25 m
ES Grounding rail IK Inhouse cable b 25 to 50 m
FE Foundation earth PA Equipotential bonding c < 50 m
FK Standard remote bus cable T Participant
FS Fine overvoltage protection
Fig. 4/25 Application of coarse and fine overvoltage protection components with different lengths of cable
Configuring notes
The coarse overvoltage protection must be provided for all remote bus cables prior to their exit points from the building and
The cable clamps for the various types of remote bus cable are
included in the delivery of the overvoltage protection.
also in the immediate vicinity of the foundation earth connection.
The connection between the coarse protection and the foundation earth must be kept as short as possible.
The coarse protection is also recommended if the remote bus
connects cabinet groups which are positioned more than 50 m
from one another within a building. In this case the coarse
protection must be installed directly next to the last participant
before the longer inhouse cable, and connected to the potential
Ordering data
Coarse overvoltage protection
for the CS 275 bus system
Fine overvoltage protection
for the CS 275 bus system
Order No.
6DS9 208-8AA
6DS9 210-8AA
earth of the cabinet.
The fine protection must be provided for each bus participant
which is directly connected to a coarse protection component.
Fine protection is required for both par ticipants if the distance
between the bus participants is > 25 m.
For further information refer to: Order No.
”TELEPERM M, instructions and
guidelines for planning, installation and operation”
German C79000-G8000-C417
English C79000-G8076-C417
Siemens PLT 130.1994
4/17
Page 35

This catalog is out of date, see note on page 2
Remote bus cables
Standard remote bus cable Remote bus cable for special applications
Fig. 4/26 Standard remote bus cable
Application
Coaxial cable 2YC(mS) CY1.6/10-75(Z2/5) vs sw is used as
standard as the remote bus cable. The cable may be routed in
potentially explosive atmospheres to DIN 57 165/VDE 0165,
Section 5.6.1 and is also suitable for burial in the ground. Max.
permissible length 4000 m.
Coaxial cable 2YC(ms)CY 1.0/6.5--75(Z2/5)vs ws (in-house
cable) can be used indoors. Max. permissible length 2000 m.
Design
From inside to outside:
-- Cu conductor, silver-coated -- Plastic film
-- Polyethylene isolation -- Braiding of Cu wires
-- Braining of Cu wires -- PVC sheath, black, wall thicknes
-- Plastic film -- approx. 1.8 mm.
-- Winding of metal ribbon
Calculation of the max. permissible length of the remote bus
cable when using the standard and in-house cables together:
= 4000 m -- 2 L
L
F
where LiLength of in-house cable in m; max. 2000 m
Length of remote bus cable in m
L
F
i
T echnical data
External sheath UV-resistant to VDE 0207, Part 5,
Sheath color
Remote bus cable
In-house cable
Sheath thickness
Remote bus cable
In-house cable
Outer diameter
Remote bus cable
In-house cable
Perm. ambient temperature
Laying
Operation and storage
Curvature (diameter)
Single bending
Repeated bending
Tensile strength
Remote bus
In-house cable
Weight
Remote bus cable
In-house cable
oil-resistant to IPC EA--S61-- 402,
flame-retardant to VDE 0472/A
Black
white, pink longitudinal line
Approx. 1.8 mm
Approx. 0.65 mm
(16.8 ¦ 0.5) mm
(9.5 ¦ 0.3) mm
--5to+50qC
--40to+70qC
300 mm; 200 mm (In-house)
600 mm; 400 mm (In-house)
660 N
240 N
Approx. 435 kg/km
Approx. 155 kg/km
Fig. 4/27 Remote bus cable with additional ar mouring
Application
The cable 2YC(mS)CYbY1.6/10-75(Z2/5) vs (F 0.8 vzk) sw
(Order No. V45466-D21-B65) must be used if the tensile
strength of the standard remote bus cable is insufficient. This
has additional ar mouring to increase the tensile strength of the
cable to 25000 N.
If protection against damage by rodents and mechanical dam-
age is required, the cable 2YC(mS)CYbY1.6/10-75 (Z2/5) vs
(2 B 0,5 vzk) sw (Order No. V45466-D21-B55) with additional
steel-tape armouring should be used. This cable does not have
an increased tensile strength.
Design
Both cables have the same basic design as the standard re-
mote bus cable (see there) but have additional armouring.
Max. permissible length of remote bus cable: see standard
cable.
T echnical data
V45466-D21-B65
Permissible ambient
temperature
Laying
Operation and storage
Outer diameter 21.3 mm
Tensile strength 25000 N
Weight Approx. 920 kg/km
V45466-D21-B55
Permissible ambient
temperature
Laying
Operation and storage
Outer diameter 22.1 mm
Tensile strength 660 N
Weight Approx. 923 kg/km
Buried laying of the remote bus cable
The remote bus cable must be laid in sand and covered with a suitable mate-
rial, e. g. concrete or plastic slabs. The cable should be laid on a 10-cm thick
layer of sand and then covered with another 10 cm sand. A cable for poten-
tial equilization must be laid above the remote bus cable.
--5to+50qC
--40to+70qC
--5to+50qC
--40to+70qC
Ordering data
Standard remote bus cable
Specify length in plain text
(max. length available in one piece: 1000 m)
In-house cable
Specify length in plain text
(max. length available in one piece: 250 m; ring)
4/18
Order No.
V45466-D21-B35
...m
V45466-D17-B135
...m
Ordering data
Remote bus cable with additional armouring
¯ To increase the tensile strength to 25000 N
¯ To protect against mechanical damage and
damage by rodents
Specify length in plain text
(max. length available in one piece: 1000 m)
Order No
V45466-D21-B65
V45466-D21-B55
...m
Siemens PLT 130.1994
Page 36

This catalog is out of date, see note on page 2
Connection of remote bus cables
It may be necessar y when using remote bus cables to connect
sections together. The type of connection differs depending on
thetypeofcable:
Standard remote bus cable V45466-D21-B35 and
V45466-D17-B135
cable
in-house
These cables can be connected by splicing or by using RF
plugs.
Remote bus cables V45466-D21-B65 and
-B55
Only splicing is possible for connecting these cables. T o provide additional protection against mechanical damage, the connection should be enclosed in a metal sleeve. The cable armouring can be electrically connected using a copper cable
(e. g. as additional overvoltage protection) and secured to prevent tension. The sleeve is filled with s ealing compound following assembly.
All parts required for the connection, both for the cable connection itself and also the sleeve and sealing compound, can be
obtained as a parts kit for splicing coaxial cables. Instructions
are included with the kit.
Ordering data
Order No.
For remote bus cables V45466-D21-B35 and
V45466-D17-B135:
Parts kit for splicing coaxial cables
(1 kit is required per connection point)
Al-foil, 50 mm wide, 250 mm long;
package with 100 foils
(2 off required per connection point)
Cable plug 4.6-16
(2 plugs required per connection point)
Coupling SPN:683500
Heat-shrinkable sleeve, length approx. 250 mm 5GF2603
Al foil, 50 mm wide, 250 mm long;
package with 100 foils
(2 off required per connection point)
For remote bus cables V45466-D21-B65 and
V45466-D21-B55:
Parts kit for splicing coaxial cables
(1 kit is required per connection point)
Al foil, 50 mm wide, 250 mm long,
package with 100 foils
(2 off required per connection point)
S45056-M125-A1
C45197-A114-C330
SPN:684732-00
C45197-A114-C330
S45054-A271-A1
C45197-A114-C330
Siemens PLT 130.1994
4/19
Page 37

This catalog is out of date, see note on page 2
4/20
Siemens PLT 130.1994
Page 38

This catalog is out of date, see note on page 2
Appendix
Contents Page
SY-TRANS 300 CS Gateway 5/2
Documentation for CS 275 bus system 5/4
Subject index 5/5
Conditions of sale and delivery 5/6
Siemens PLT 130.1994
5/1
Page 39

This catalog is out of date, see note on page 2
SY--TRANS 300 CS gateway
Description
Bild 5/1 SY--TRANS 300 CS gateway
Application
The SY-TRANS 300 CS gateway enables bidirectional data
transfer at high rates between participants on the CS 275 bus
system and computers connected to an Ethernet bus (LAN according to IEEE 802.3). The standard network protocols which
are alternatively available are TCP/IP, DECnet or SINEC H1 (ISO
transpor t).
Design
The gateway comprises the basic hardware and a software
component which handles the communication server function in
the computers connected to the LAN.
The basic device
-- an AT-compatible basic PC module,
-- the local bus interface module N-AT as the interface to the CS
275 bus system and
-- the CP 1413 communications processor for SINEC H1
or
an interface module for the Ethernet bus.
A power supply
The system software
need not be loaded. The software is different depending on the
required network protocols.
As a result of the housing depth, the basic device can only be
installed hanging vertically with the front panel upwards in
TELEPERM M standard cabinets (also those with depth of
600 mm).
contains
unit is used for DC 24 V oder AC 115 to 230 V.
is present as firmware in EPROMs and
Connections
The CS 275 inter face
bus (cf. page 4/15). The transition to the CS 275 remote bus can
be made via the remote bus connection unit FAE (page 4/11) or
-- in the case of cabinet installation -- via the remote bus connec-
tion subrack S5 (page 4/12)
The SINEC H1 interface
according to the SINEC H1 guidelines (cf. Catalog IK 10 ”Indu-
strial Communications Networks”).
The Ethernet interface
BNC plug and also via a 15-pin AUI plug
wire cables can be used for the connection.
The thin-wire cable is connected via BNC plugs -- via a T-con-
nector when looping through -- if a BNC connection is also pre-
sent on the computer. If the computer only has an AUI connec-
tion, a transceiver is required for each transition from AUI to
thin-wire.
The software component is a communications server (client/ser -
ver architecture) with a simple communication interface to the
user: the library OPEN CS. This contains command procedures
and library routines and can be executed in the computer under
one of the following operating system platforms:
VMS, OPEN VMS, ULTRIX, OSF/1, UIX, SUN OS, SINIX, SCO
UNIX, MS-DOS, Windows NT (others on equir y).
The network protocols TCP/IP, DECnet or SINEC H1 (ISO trans-
port)canbeusedintheLAN.
User applications in the computer can be readily linked to auto-
mation systems of the TELEPERM M process control system
using simple library calls. The following AS automation systems
can be communications partners: AS 230
235, AS 235 K und AS 235 H.
Library calls are offered as standard for the following CS 275
functions:
-- Y- s t a r t u p
-- Read parameters
-- Write parameters
-- Receive AKS, BKS und MKS messages.
The library OPEN CS can also be extended by further CS 275
functions for specific projects.
Further functions have already been implemented which permit
the design of a fault-tolerant system.
1) AUI = Attachment Unit Interface.
2) These automation systems are no longer available.
is connected via a cable for 20-m local
is connected via a 15-pin sub-D plug
with TCP/IP or DECnet is available via a
1
). Thin-wire or thick-
2
), AS 230 K2), AS
5/2
Siemens PLT 130.1994
Page 40

This catalog is out of date, see note on page 2
T echnical data and Ordering data
T echnical data
Ethernet inter face IEEE 802.3 10Base2/10Base5
(thin/thick-wire) with TCP/IP oder DECnet protocol).
SINEC H1 interface with ISO-transport protocol
CS 275 local bus interface with CS 275 protocol
Transmission rate 250 kbit/s
CS 275 functions available
to the user
Maximum number n of communications par
for SY-TRANS 300
-- With TCP/IP
-- With DECnet
-- W i t h S I N E C H
Communications server Data medium TK50,
tners
CS
Reception of AKS messages
Reception of BKS messages
Reception of MKS messages
Y function
Read parameters
Write parameters
8
5
32
giga tape
SY-TRANS 300 CS gateway
General data
Power supply AC 115 V to 230 V or DC 24 V
Power consumption <50W
Dimensions (hxwxd) 178 mm x 485 mm x 429 mm
Weight Approx. 12 kg
Ordering data
The SY --TRANS 300 CS gateway is a product of Synobec
GmbH. For advice and sales, contact:
x Siemens AG
AUT 381 V1
Siemensallee 84
D--76181 Karlsruhe
Tel. (0721) 595 2843
Fax (0721) 595 6390
or
x Siemens AG
AUT38V51
Siemensallee 84
Tel. (0721) 595 6182
Fax (0721) 595 6580
The SY-TRANS 300 CS gateway can be ordered in the following
versions:
x For power supply AC 115 V to 230 V or DC 24 V
x Network protocol in LAN: TCP/IP or
SINEC H1 or DECnet
x Communications server software and test software for installa-
tion tests for the following operating systems:
VMS, OPEN VMS, Ultrix, OSF/1, UIX, SUN OS, SINIX, SCO
UNIX, MS-DOS, Windows NT.
Language versions: English or German.
Accessories:
Transceiver, including cable and terminating resistors for connec-
tion of AUI (attachment unit interfaces) to:
-- Thin-wire cable.
-- Thick-wire cable.
Documentation
Description ”SY-TRANS 300 CS converter”
German
English
Description ” VMS/UNIX user interface”
German
English
Siemens PLT 130.1994
5/3
Page 41

This catalog is out of date, see note on page 2
Appendix
Documentation for CS 275 bus system
Ordering data
Manual ”CS 275 bus system”
including the following instructions:
-- ”Interface module for 20 m local bus 6DS1 202-8AB”
-- ”Interface module for 20 m local bus 6DS1 205-8AA”
-- ”Local bus interface module N-AS 6DS1 223-8AA”
-- ”Bus conver ter 6DS4 400-8AB”
-- ”Bus couplers”
-- ”Remote bus connection unit 6DS4 425-8AB”
-- ”Interface module for SIMATIC S5-150U/155U
programmable controllers 6DS1 206-8AA”
-- ”Remote bus connection subrack S5
6DS4 426-8AA/-8BA/-8CA”
as well as
-- System overview
-- Configuring guidelines
-- Spare parts list ”CS 275 bus system”
German
English
French
Spanish
Manual ”N-V.24. coupling of non-Siemens computers to
CS 275 bus system”,
describes the user communication interface of the CS 275
bus system and the generation of the coupling software in
the non-Siemens computer
German
English
Manual ”TELEPERM M, instructions and guidelines for
planning, installation and operation”,
contains a.o. planning notes, installation instructions and guidelines for overvoltage protection of the CS 275 bus system
German
English
C79000-B80 . . -C3
C79000-B80 . . -C128
C79000-B80 . . -C406
C79000-B80 . . -C4
C79000-B80 . . -C5
C79000-B80 . . -C127
C79000-B80 . . -C181
C79000-B80 . . -C251
C79000-T80 . . -C301
C79000-T80 . . -C302
C79000-E80 . . -C2
Order No.
C79000-G8000-C6
C79000-G8076-C6
C79000-G8077-C6
C79000-G8078-C6
C79000-G8000-C87
C79000-G8076-C87
C79000-G8000-C417
C79000-G8076-C417
5/4
Siemens PLT 130.1994
Page 42

This catalog is out of date, see note on page 2
Subject index
Page
A
Addressing 2/3
B
Bus components 3/3
Bus configurations 3/6
Bus converter unit UI 3/4, 4/9
Bus coupler 3/4, 4/13
C
Cable connectors for 20-m local bus 4/15
Commondatamode 2/3
Configuring of communication 2/5
Connector board AF ”remote bus” 3/4, 4/10
D
Data protection 2/2
Data transfer 2/2
Direct coupling mode 2/3
Documentation for CS 275 bus system 5/4
Appendix
F
Front plug for 20-m local bus 3/3, 4/15
G
Gateway SY-TRANS 300 CS 5/2
I
Interface module for 20-m local bus 3/3, Section 4
N-AS 4/2
N-AT 4/8
N-BK 4/3
N-S5 4/7
N-V.24 4/5
N16-M 4/4
L
Life test 2/3
Local bus interface modules 3/3, Section 4
Local bus range 3/2
O
Overvoltage protection 3/5, 4/16
R
Redundant operation mode of CS 275 bus 2/4
Remote bus cables 3/5, 4/18
Connection of remote bus cables 3/5, 4/13
Remote bus connection subrack S5 3/4, 4/12
Remote bus connection unit FA 3/4, 4/11
Remote range 3/3
S
Summary Section 1
System data 3/5
SY - TRANS 300 CS Gateway 5/2
T
Technical data 3/5
Time synchronization 2/4
T ransfer control 2/2
T ransmission modes 2/3
Transmission reliability 2/4
Siemens PLT 130.1994
5/5
 Loading...
Loading...