

Page 1
SIMOTION
CamTool
Configuration Manual
Preface
Description
Installing the Software
Configuring
Functions
1
2
3
4
12.2004
6AU1900-1AB32-0BA0
Page 2
Safety Guidelines
This manual contains notices you have to observe in order to ensure your personal safety, as well as to prevent
damage to property. The notices referring to your personal safety are highlighted in the manual by a safety alert
symbol, notices referring to property damage only have no safety alert symbol. These notices shown below are
graded according to the degree of danger.
Danger
indicates that death or severe personal injury will result if proper precautions are not taken.
Warning
indicates that death or severe personal injury may result if proper precautions are not taken.
Caution
with a safety alert symbol, indicates that minor personal injury can result if proper precautions are not taken.
Caution
without a safety alert symbol, indicates that property damage can result if proper precautions are not taken.
Attention
indicates that an unintended result or situation can occur if the corresponding information is not taken into
account.
If more than one degree of danger is present, the warning notice representing the highest degree of danger will
be used. A notice warning of injury to persons with a safety alert symbol may also include a warning relating to
property damage.
Qualified Personnel
The device/system may only be set up and used in conjunction with this documentation. Commissioning and
operation of a device/system may only be performed by qualified personnel. Within the context of the safety notes
in this documentation qualified persons are defined as persons who are authorized to commission, ground and
label devices, systems and circuits in accordance with established safety practices and standards.
Prescribed Usage
Note the following:
Warning
This device may only be used for the applications described in the catalog or the technical description and only in
connection with devices or components from other manufacturers which have been approved or recommended
by Siemens. Correct, reliable operation of the product requires proper transport, storage, positioning and
assembly as well as careful operation and maintenance.
Trademarks
All names identified by ® are registered trademarks of the Siemens AG. The remaining trademarks in this
publication may be trademarks whose use by third parties for their own purposes could violate the rights of the
owner.
Copyright Siemens AG 2004. All rights reserved.
The distribution and duplication of this document or the utiliz ation and transmission of its
contents are not permitted without express written permission. Offenders will be liable for
damages. All rights, including rights created by patent grant or registration of a utility
model or design, are reserved.
Siemens AG
Automation and Drives
Postfach 4848, 90327 Nuremberg, Germany
Siemens Aktiengesellschaft 6AU1900-1AB32-0BA0
Disclaimer of Liability
We have reviewed the contents of this publication to ensure consistency with the
hardware and software described. Since variance cannot be precluded entirely, we cannot
guarantee full consistency. However, the information in this publication is reviewed
regularly and any necessary corrections are included in subsequent editions.
Siemens AG 2004
Technical data subject to change
Page 3

Preface
Contents of manual
The accompanying manual describes the SIMOTION CamTool option package.
The document is part of the SIMOTION Engineering System documentation package with
order number: 6AU1900-1AB32-0BA0, Edition 12.2004
Scope
The accompanying manual applies to SIMOTION SCOUT in conjunction with the
SIMOTION CamTool option package.
Standards
The SIMOTION system was developed in accordance with the ISO 9001 quality guidelines.
Information blocks:
The following is a description of the purpose and use of the product manual.
• Description chapter
• Installation chapter
• Configuration chapter
• Functions chapter
This chapter provides a short overview of the basic functions of the SIMOTION CamTool
and the inclusion in SIMOTION SCOUT.
This chapter describes how the SIMOTION CamTool is installed and which prerequisites
must be satisfied to allow the use of SIMOTION CamTool.
This chapter describes the basic functions of SIMOTION CamTool. It shows you how to
process cams with CamTool.
In this chapter you learn how to create a cam with CamTool.
CamTool
Configuration Manual, 12.2004, 6AU1900-1AB32-0BA0
iii
Page 4

Preface
SIMOTION documentation
An overview of the SIMOTION documentation is provided in a separate list of references.
The list of references is supplied on the "SIMOTION SCOUT" CD and is included in each
print copy order of the documentation package.
The list of references can be obtained separately under the following MLFB number:
Order no.: 6AU1900-1AA32-0BA0
Edition 12.2004
SIMOTION documentation consists of 10 documentation packages containing approximately
50 SIMOTION documents and documents on other products (e.g., SINAMICS).
The following documentation packages are available for SIMOTION V3.2:
• SIMOTION Engineering System
• SIMOTION System and Function Descriptions
• SIMOTION Diagnostics
• SIMOTION Programming
• SIMOTION Programming - Reference Lists
Hotline
• SIMOTION C230
• SIMOTION P350
• SIMOTION D4xx (incl. SINAMICS S120)
• SIMOTION Supplementary Documentation
• SIMOTION Function Library
If you have any questions, please contact our hotline (worldwide):
• A & D Technical Support: Phone: +49 (180) 50 50 222
• Fax: +49 (180) 50 50 223
• E-mail: ad.support@siemens.com
If you have any questions, suggestions, or corrections regarding the documentation, please
fax or e-mail them to the following:
• Fax: +49 (9131) 98 2176
• E-mail: motioncontrol.docu@erlf.siemens.de
• Fax form: refer to the reply form at the end of the document
CamTool
iv Configuration Manual, 12.2004, 6AU1900-1AB32-0BA0
Page 5

Preface
Additional support
We also offer introductory courses to help you familiarize yourself with SIMOTION.
Please contact your regional training center or our main training center at D-90027
Nuremberg/Germany, phone +49 (911) 895 3202.
Siemens Internet address
The latest information on SIMOTION products can be found on the Internet at:
General information http://www.siemens.com/simotion
Technical information http://www4.ad.siemens.de/view/cs/de/10805438
CamTool
Configuration Manual, 12.2004, 6AU1900-1AB32-0BA0
v
Page 6

Page 7

Table of contents
Preface ...................................................................................................................................................... iii
1 Description.............................................................................................................................................. 1-1
2 Installing the Software ............................................................................................................................ 2-1
2.1 Installing SIMOTION CamTool .................................................................................................. 2-1
2.2 Deinstalling SIMOTION CamTool ..............................................................................................2-2
3 Configuring ............................................................................................................................................. 3-1
3.1 Content....................................................................................................................................... 3-1
3.2 Customizing the Working Area Display ..................................................................................... 3-2
3.2.1 Changing the representation using the toolbar.......................................................................... 3-2
3.2.2 Maximizing working area ........................................................................................................... 3-4
3.3 Editing a Cam with CamTool ..................................................................................................... 3-5
3.3.1 Content....................................................................................................................................... 3-5
3.3.2 Adding a cam to a SCOUT project using CamTool ................................................................... 3-5
3.3.3 Edit cam created with CamEdit with CamTool........................................................................... 3-7
3.3.4 Import cam from text file .......................................................................................................... 3-10
3.3.5 Upload cam from SIMOTION device ....................................................................................... 3-12
3.4 Save cam ................................................................................................................................. 3-15
3.5 Customize the display of the cam ............................................................................................ 3-16
3.5.1 Display the cam ....................................................................................................................... 3-16
3.5.2 Show/hide diagram .................................................................................................................. 3-16
3.5.3 Change axis representation parameters.................................................................................. 3-17
3.5.4 Change diagram representation parameters ........................................................................... 3-20
3.5.5 Change lines and fonts representation parameters................................................................. 3-22
3.5.6 Displaying auxiliary lines in the diagram.................................................................................. 3-24
3.6 Download cam to SIMOTION device ....................................................................................... 3-26
4 Functions................................................................................................................................................ 4-1
4.1 Content....................................................................................................................................... 4-1
4.2 Structure of a cam...................................................................................................................... 4-2
4.3 Fixed point.................................................................................................................................. 4-3
4.3.1 Fixed Point Definition ................................................................................................................. 4-3
4.3.2 Insert fixed point......................................................................................................................... 4-3
4.3.3 Change fixed point position........................................................................................................ 4-5
4.3.4 Changing the velocity at the position of a fixed point: ............................................................... 4-5
4.3.5 Changing the acceleration at a fixed point position: .................................................................. 4-6
4.3.6 Delete fixed point ....................................................................................................................... 4-7
CamTool
Configuration Manual, 12.2004, 6AU1900-1AB32-0BA0
vii
Page 8

Table of contents
4.4 Straight line ................................................................................................................................ 4-7
4.4.1 Definition straight line................................................................................................................. 4-7
4.4.2 Insert straight line....................................................................................................................... 4-8
4.4.3 Change straight line position...................................................................................................... 4-9
4.4.4 Changing the velocity along a straight line .............................................................................. 4-10
4.4.5 Delete straight line ................................................................................................................... 4-11
4.5 Sine curve ................................................................................................................................ 4-11
4.5.1 Insert sine curve....................................................................................................................... 4-11
4.5.2 Change sine curve position...................................................................................................... 4-13
4.5.3 Change sine curve definition range ......................................................................................... 4-14
4.5.4 Delete sine curve ..................................................................................................................... 4-15
4.6 Arc Sine Curve ......................................................................................................................... 4-15
4.6.1 Insert arc sine curve................................................................................................................. 4-15
4.6.2 Change arc sine curve position................................................................................................ 4-17
4.6.3 Change arc sine curve definition range ................................................................................... 4-18
4.6.4 Delete arc sine curve ............................................................................................................... 4-19
4.7 Interpolation point..................................................................................................................... 4-20
4.7.1 Interpolation Point Definition .................................................................................................... 4-20
4.7.2 Insert interpolation point........................................................................................................... 4-20
4.7.3 Changing the interpolation point position................................................................................. 4-21
4.7.4 Delete interpolation point ......................................................................................................... 4-22
4.8 Optimizing a Cam..................................................................................................................... 4-23
4.8.1 Optimizing a Cam..................................................................................................................... 4-23
4.8.2 Optimize transition ................................................................................................................... 4-24
4.8.3 Interpolation Curve properties.................................................................................................. 4-26
4.9 Specify parameters for target device ....................................................................................... 4-30
4.9.1 Specify parameters for target device ....................................................................................... 4-30
4.9.2 Target device parameters ........................................................................................................ 4-31
4.10 Specify simulation settings....................................................................................................... 4-35
4.10.1 Specify simulation settings....................................................................................................... 4-35
4.10.2 Simulation settings ................................................................................................................... 4-36
4.11 Edit cam created with CamTool with CamEdit......................................................................... 4-38
4.12 Export cam as text file .............................................................................................................. 4-38
4.13 Print cam .................................................................................................................................. 4-39
Index
Tables
Table 2-1
Table 3-1 SIMOTION CamTool toolbar icons ............................................................................................ 3-2
Table 3-2 Parameters in the Master Properties or S Diagram (Slave) Properties................................... 3-18
Table 3-3 Parameters for the V, A or J Diagram Properties windows ..................................................... 3-21
SIMOTION CamTool system requirements ............................................................................... 2-1
Table 3-4 Representation parameters in the diagrams............................................................................ 3-23
Table 3-5 Parameters in the Line tab ....................................................................................................... 3-23
Table 3-6 Parameters in the Font tab....................................................................................................... 3-24
CamTool
viii Configuration Manual, 12.2004, 6AU1900-1AB32-0BA0
Page 9

Table of contents
Table 4-1 Parameters in the Type tab (Interpolation Curve Properties window) ..................................... 4-26
Table 4-2 Parameters in the Parameters tab (Interpolation Curve Properties window) .......................... 4-27
Table 4-3 Parameters in the Type tab (Interpolation Curve Properties window) ..................................... 4-28
Table 4-4 Parameters in the Coordinates tab (Target Device Parameters window) ............................... 4-31
Table 4-5 Parameters in the Interpolation tab (Target Device Parameters window) ............................... 4-32
Table 4-6 Parameters in the Scaling tab (Target Device Parameters window)....................................... 4-33
Table 4-7 Parameters in the Master tab (Simulation Settings window) ................................................... 4-36
Table 4-8 Parameters in the Slave tab (Simulation Settings window) ..................................................... 4-37
CamTool
Configuration Manual, 12.2004, 6AU1900-1AB32-0BA0
ix
Page 10

Page 11

Description
Introduction
The graphical user interface in SIMOTION CamTool allows you to create, edit and optimize
cams.
SIMOTION CamTool is fully integrated in SIMOTION SCOUT. This allows you to also use in
SIMOTION CamTool information configured in SIMOTION SCOUT (e.g. axis settings).
Basic functions
SIMOTION CamTool provides the following basic functions:
• Insert and edit cams.
• Modifying the representation of the cam in CamTool
• Converting cams from SIMOTION CamTool to SIMOTION CamEdit.
1
Cams can be added to a SCOUT project using SIMOTION CamTool. In addition, you can
edit with CamTool a cam created with CamEdit: Cams can also be imported from a text
file or uploaded from a SIMOTION device.
In SIMOTION CamTool, you can show and hide diagrams, change the representation
parameters of the axes and diagrams, and adapt the lines and fonts. You can also
represent auxiliary lines in the diagram.
To edit with SIMOTION CamEdit a cam edited in SIMOTION CamTool, the cam must be
converted.
• Exporting cams into a text file.
• Downloading cams to a SIMOTION device
• Printing a cam.
CamTool
Configuration Manual, 12.2004, 6AU1900-1AB32-0BA0
1-1
Page 12

Page 13
Installing the Software
2.1 Installing SIMOTION CamTool
Introduction
SIMOTION CamTool is an option package for SIMOTION SCOUT.
SIMOTION SCOUT must have been installed on the system on which you want to install
SIMOTION CamTool. For further information, refer to the system prerequisites.
Notice
You require administrator rights for the installation.
After the installation, every user (also those without administrator rights) can work with
SIMOTION CamTool.
2
System requirements
The following table provides a detailed overview of the system requirements for
SIMOTION CamTool.
Table 2-1 SIMOTION CamTool system requirements
Minimum requirement
Programming device or
PC
Operating system
Software required
• Processor: Intel Pentium II or compatible. 400 MHz (WIN NT 4.0, WIN
2000)
• Processor: Intel Pentium III or compatible. 500 MHz
(WIN XP Professional)
• 256 MB RAM; 512 MB recommended
• Screen resolution: 1024 x 768 pixels
• Microsoft Windows NT 4.0 ≥ Service Pack 6 or
• Microsoft Windows 2000 ≥ Service Pack 3
• Microsoft Windows XP Professional ≥ Service 1
• Microsoft Internet Explorer Version 5.0.1
• SIMATIC STEP 7 Version 5.1 ≥ Service Pack 6 or STEP 7 Version 5.2
(required for SIMOTION D435)
• SIMOTION SCOUT ≥ Version 2.1
CamTool
Configuration Manual, 12.2004, 6AU1900-1AB32-0BA0
2-1
Page 14
Installing the Software
2.2 Deinstalling SIMOTION CamTool
Installing SIMOTION CamTool
To install SIMOTION CamTool:
1. Insert the CD with installation software into the CD-ROM drive.
2. Start Windows Explorer and select the CD-ROM drive.
3. Open the CamTool\Disk1 directory.
4. Double-click on setup.exe. The installation program is started.
5. Run through the installation program. SIMOTION CamTool will be installed.
2.2 Deinstalling SIMOTION CamTool
Deinstalling SIMOTION CamTool
To deinstall SIMOTION CamTool:
1. Click Start > Settings > System Control in the Windows taskbar. The System Control
window appears.
2. Double-click Add/Remove Programs. The Software Properties window is displayed.
3. Mark the SIMOTION SCOUT CamTool entry in the Install/Deinstall tab.
4. Click Add/Remove. The deinstallation program is started.
5. Run through the deinstallation program. SIMOTION CamTool will be deinstalled.
Notice
You require administrator rights for the deinstallation.
CamTool
2-2 Configuration Manual, 12.2004, 6AU1900-1AB32-0BA0
Page 15
Configuring
3.1 Content
Overview
This chapter describes how you work with SIMOTION CamTool. You learn how
• to customize the display of the working area
• to edit a cam with CamTool
• to save a cam
• to customize the display of the cam
• to download a cam to a SIMOTION device
Note
The following operating instructions primarily describe the operation of
SIMOTION CamTool using the functions in the menu bar.
You can also execute the functions from the context menus. In this case, right-click the
element that you want to edit.
3
You can also execute the most import functions using the icons in the
SIMOTION CamTool toolbar. Pay attention to the tooltip which is displayed when you
place the mouse pointer on an icon in the toolbar.
CamTool
Configuration Manual, 12.2004, 6AU1900-1AB32-0BA0
3-1
Page 16
Configuring
3.2 Customizing the Working Area Display
3.2 Customizing the Working Area Display
3.2.1 Changing the representation using the toolbar
Introduction
You can show or hide the scaled curve, the V diagram (velocity diagram), the A diagram
(acceleration diagram) and the J diagram (jerk diagram) via icons in the toolbar. You can use
the zoom tool to increase or reduce the size of the display or use the hand tool to move the
display.
Changing the representation using the toolbar
To change the representation of the diagrams via the toolbar
Toolbar icons
1. When the mouse pointer is placed on an icon in the toolbar, a tooltip is displayed.
2. Click the icon of the function that you want to use.
The screen display can be changed using the following functions:
Table 3-1 SIMOTION CamTool toolbar icons
Symbol Explanation / instructions
With this icon, you can activate or deactivate the display of the scaled curve. If you
have not specified a scaling, the icon is shown grayed-out.
Note:
If the scaled curve is displayed, you cannot edit the original curves in the diagram
displays.
With this icon, you can show or hide the V diagram (velocity diagram).
With this icon, you can show or hide the A diagram (acceleration diagram).
With this icon, you can show or hide the J diagram (jerk diagram).
CamTool
3-2 Configuration Manual, 12.2004, 6AU1900-1AB32-0BA0
Page 17
Configuring
3.2 Customizing the Working Area Display
Symbol Explanation / instructions
With this icon, you can activate or deactivate the zoom tool. You can also deactivate
the zoom tool using the ESC key.
You can perform various functions with the activated zoom tool. The function is
dependent on whether the mouse pointer is on the diagram area or on a coordinate
axis and whether the SHIFT key is also pressed:
Zoom tool on the diagram area (zoom in all directions at the same time)
Left-click to increase the size of the display by the factor 2.
Right-click to decrease the size of the display by the factor 2.
Zoom tool on the coordinate axis (zoom in all directions at the same time)
Left-click to increase the size of the display by the factor 2 in the direction of the
coordinate axis on which you are pointing.
Right-click to decrease the size of the display by the factor 2 in the direction of the
coordinate axis on which you are pointing.
Zoom tool with pressed SHIFT key
The mouse pointer is activated as a hand tool while you keep the SHIFT key pressed.
With activated hand tool, you can move the diagram area with drag&drop. All
displayed diagrams are adjusted to the move.
With this icon, you can activate or deactivate the zoom function. You can also
deactivate the zoom function using the ESC key.
Zoom function on the diagram area
With activated zoom function, you can lasso a section of the diagram area that you
want to enlarge with the mouse button pressed.
Zoom function on the coordinate axis
With activated zoom function, you can lasso a section of a coordinate axis that you
want to enlarge with the mouse button pressed. The enlargement is in the direction in
which you lasso the section of the coordinate axis.
With this icon, you can restore the previous zoom setting.
With this icon, you can activate or deactivate the hand tool. You can also deactivate
the hand tool using the ESC key.
With activated hand tool, you can move the diagram area with drag&drop. All
displayed diagrams are adjusted to the move.
With this icon, you can restore the whole display to the normal view.
CamTool
Configuration Manual, 12.2004, 6AU1900-1AB32-0BA0
3-3
Page 18
Configuring
3.2 Customizing the Working Area Display
3.2.2 Maximizing working area
Maximizing the working area
To set the largest possible working area for SIMOTION CamTool:
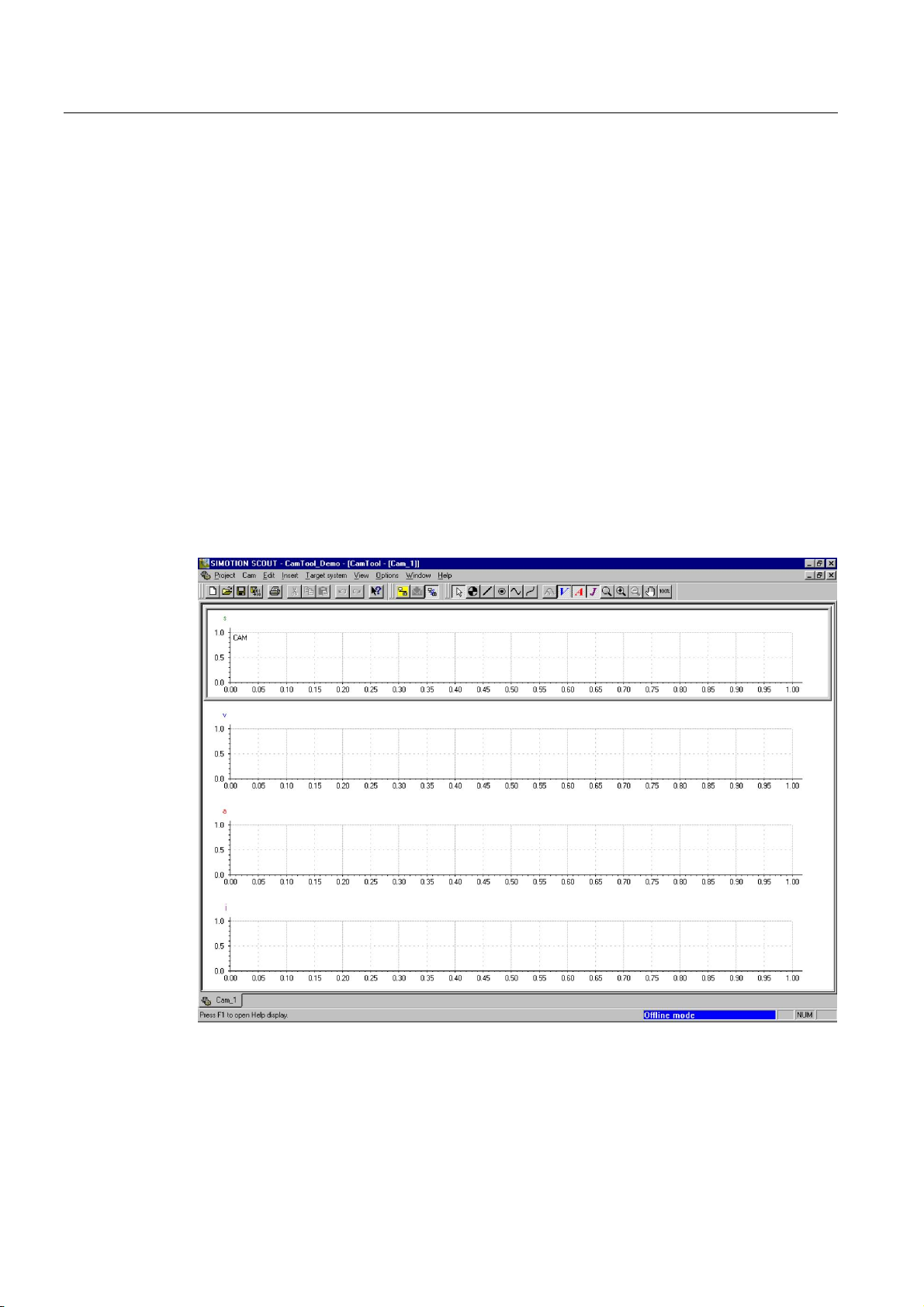
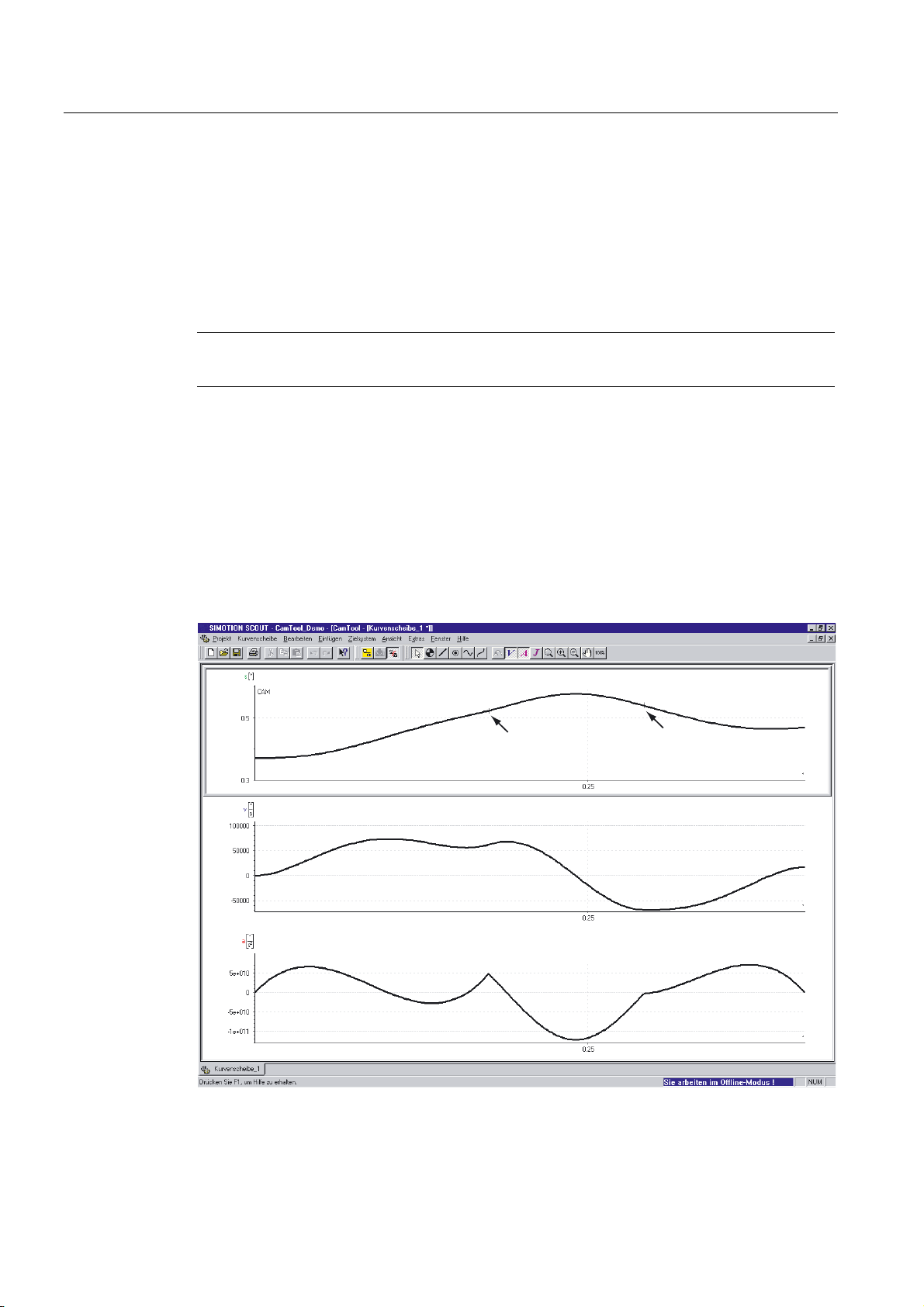
1. In the View menu, click Maximized working area. Detail view and project navigator are
closed.
2. Maximize the window with the diagrams of the cam.
or
1. Close the project navigator via the menu View > Project navigator.
2. Close the detail view via the menu View > Detail view.
3. Maximize the window with the diagrams of the cam.
Figure 3-1 Maximized cam diagrams in the SIMOTION SCOUT working area
CamTool
3-4 Configuration Manual, 12.2004, 6AU1900-1AB32-0BA0
Page 19

Configuring
3.3 Editing a Cam with CamTool
3.3 Editing a Cam with CamTool
3.3.1 Content
Overview
With SIMOTION CamTool, you can edit a cam that is inserted in a SCOUT project.
You can use the following methods to insert and edit a cam. You can
• add a cam to a SCOUT project using SIMOTION CamTool.
• edit with CamTool a cam created with CamEdit.
• import and edit a cam from a text file.
• upload and edit a cam from a SIMOTION device.
3.3.2 Adding a cam to a SCOUT project using CamTool
Requirements
SIMOTION CamTool is installed as an option package for SIMOTION SCOUT.
The project, into which you want to insert the cam, is opened in SIMOTION SCOUT. At least
one SIMOTION device is configured in this project.
CamTool
Configuration Manual, 12.2004, 6AU1900-1AB32-0BA0
3-5
Page 20
Configuring
3.3 Editing a Cam with CamTool
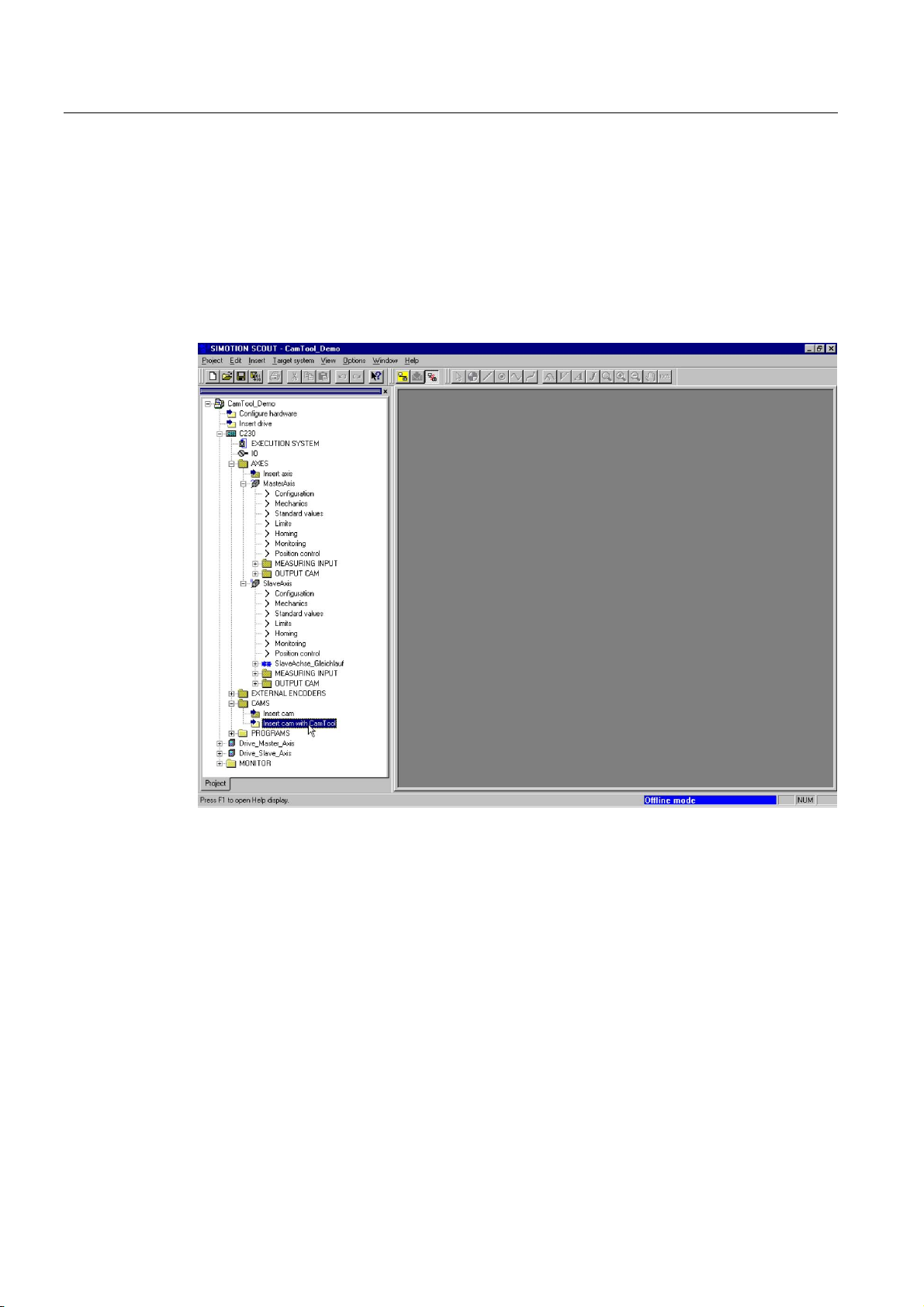
Inserting a cam in a SCOUT project
To insert a cam in a SCOUT project:
1. In the project navigator, find the SIMOTION device under which you want to insert a new
cam.
2. Open the Cams folder and double-click Insert cam with CamTool.
Figure 3-2 Inserting a cam with CamTool
CamTool
3-6 Configuration Manual, 12.2004, 6AU1900-1AB32-0BA0
Page 21
Configuring
3.3 Editing a Cam with CamTool
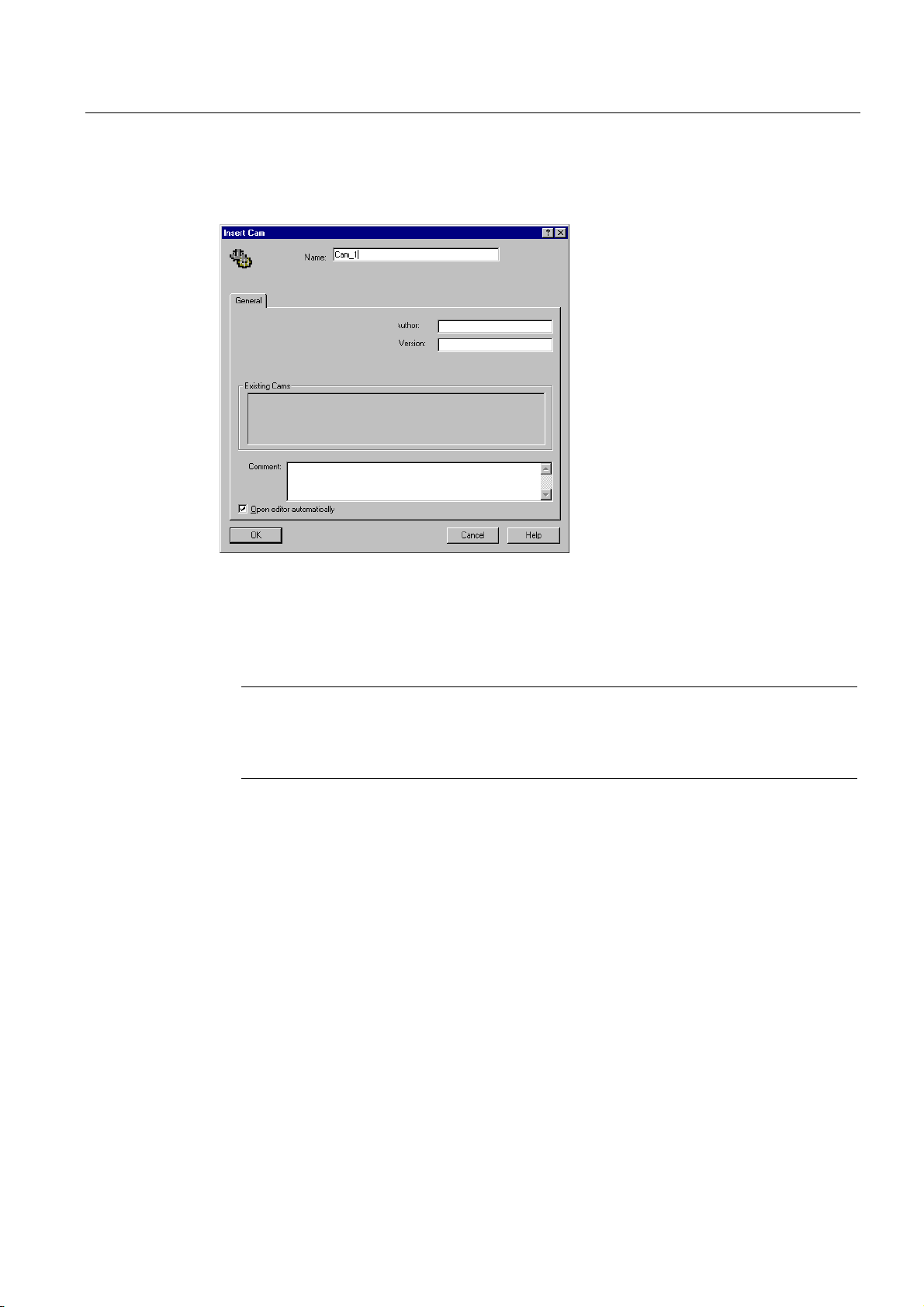
3. The Insert Cam window appears. Under Name, enter a unique name for the cam (all the
cams existing in the project are displayed under Existing cams).
Figure 3-3 Window for inserting a cam
4. Click OK. A window appears in the working area of SIMOTION SCOUT. The diagrams of
the cam depending on the settings in the menu Cam > Diagrams are displayed in this
window.
Notice
The following are represented in the cam diagrams:
• the master axis in the horizontal direction (X-axis) and
• the slave axis in the vertical direction (Y-axis).
3.3.3 Edit cam created with CamEdit with CamTool
Editing a Cam with CamTool
To edit a cam created with CamEdit with CamTool:
1. Close the cam in SIMOTION CamEdit.
2. Find the cam that you want to edit with SIMOTION CamTool in the project navigator.
3. Right-click the cam and select Convert to CamTool in the displayed context menu. The
cam is then opened the next time with SIMOTION CamTool.
CamTool
Configuration Manual, 12.2004, 6AU1900-1AB32-0BA0
3-7
Page 22
Configuring
3.3 Editing a Cam with CamTool
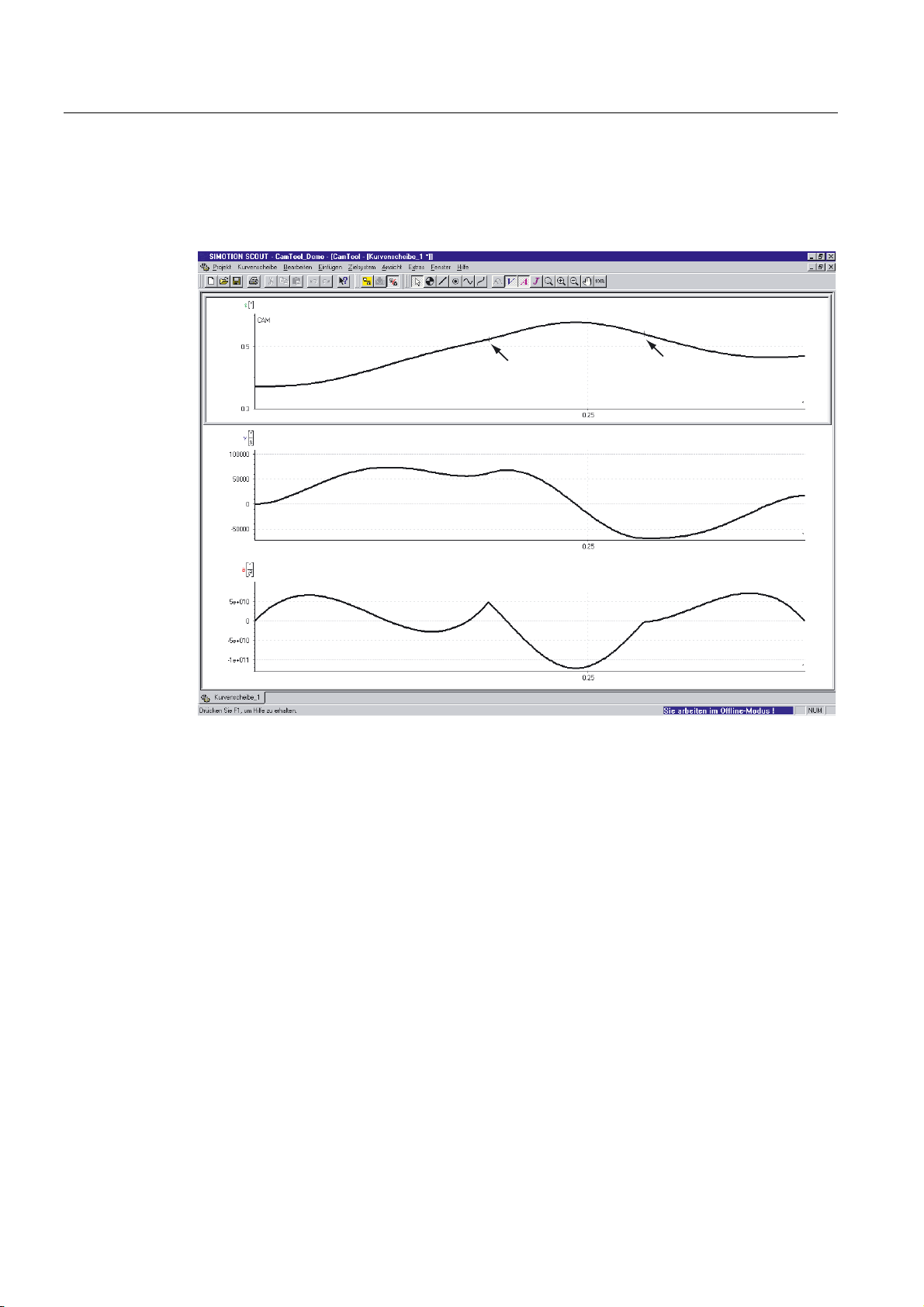
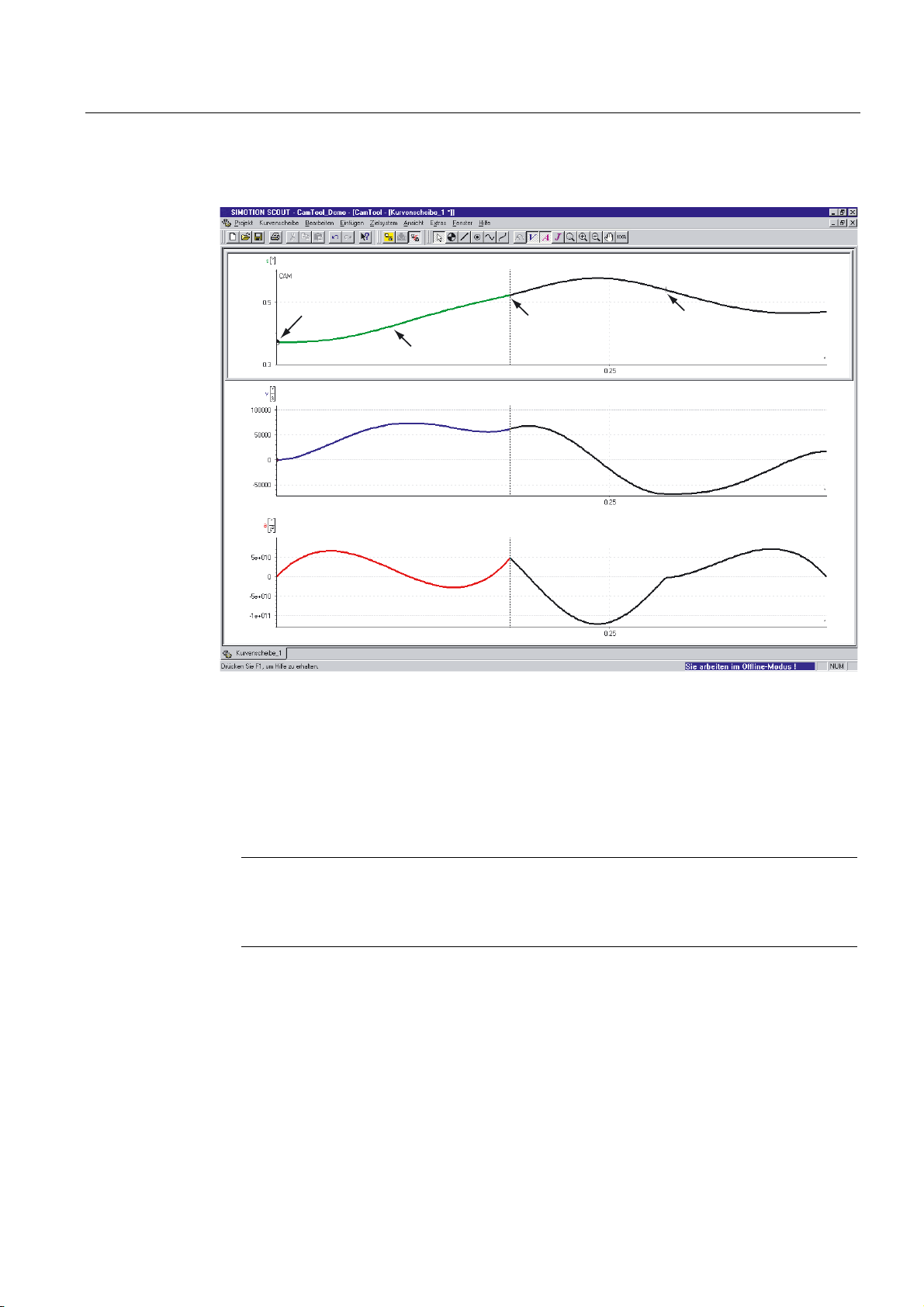
4. Double-click the cam. The cam is opened with SIMOTION CamTool and displayed.
Segment limits between individual cam segments are marked in the S diagram (distance
diagram).
6GLDJUDPGLVWDQFHGLDJUDP
6HJPHQWERXQGDU\
9GLDJUDPYHORFLW\GLDJUDP
6HJPHQWERXQGDU\
$GLDJUDPDFFHOHUDWLRQGLDJUDP
Figure 3-4 Open with CamTool a cam created with CamEdit
5. Select the cam segment that you want to edit. Note the displayed segment limits.
CamTool
3-8 Configuration Manual, 12.2004, 6AU1900-1AB32-0BA0
Page 23
Configuring
3.3 Editing a Cam with CamTool
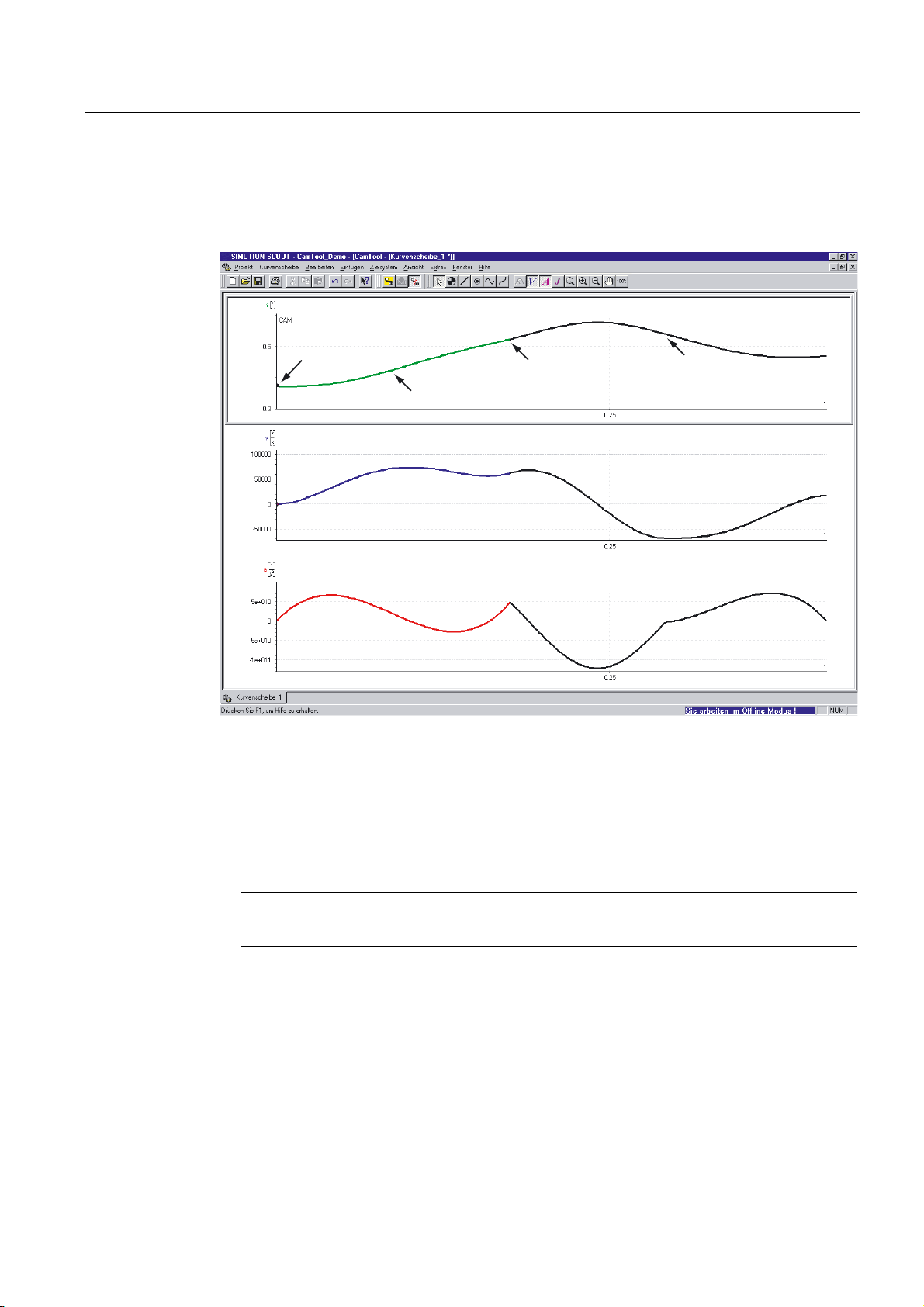
6. Delete the cam segment by pressing the DEL key. The cam segment is replaced by an
interpolation curve (transition) by SIMOTION CamTool. If required, fixed points are
inserted in the curve to maintain the corner points of the original curve.
6GLDJUDPGLVWDQFHGLDJUDP
)L[HGSRLQW
6HJPHQWERXQGDU\
,QWHUSRODWLRQFXUYHWUDQVLWLRQ
9GLDJUDPYHORFLW\GLDJUDP
$GLDJUDPDFFHOHUDWLRQGLDJUDP
Figure 3-5 Cam segment replaced by SIMOTION CamTool with fixed point and transition
(interpolation polynomial)
6HJPHQWERXQGDU\
7. The cam segment (e.g. fixed point) inserted by SIMOTION CamTool can be edited (e.g.
change position).
8. The interpolation curve (transition) inserted by SIMOTION CamTool can be optimized
(e.g. velocity).
Notice
With SIMOTION CamTool, you can edit all cams created with SIMOTION CamEdit.
CamTool
Configuration Manual, 12.2004, 6AU1900-1AB32-0BA0
3-9
Page 24
Configuring
3.3 Editing a Cam with CamTool
3.3.4 Import cam from text file
Introduction
You can re-import a cam exported as text file from SIMOTION CamTool back into CamTool
(e.g. to re-import a cam edited in an external program).
Importing a cam
Notice
The cam representation in the text file must correspond to the Microsoft Excel CSV format.
To import a cam from a text file:
1. Open with SIMOTION CamTool the cam in which you want to import the cam from the
text file.
or
Add a new cam in which you want to import the cam from the text file.
6GLDJUDPGLVWDQFHGLDJUDP
6HJPHQWERXQGDU\
6HJPHQWERXQGDU\
9GLDJUDPYHORFLW\GLDJUDP
$GLDJUDPDFFHOHUDWLRQGLDJUDP
Figure 3-6 Cam imported from a text file
CamTool
3-10 Configuration Manual, 12.2004, 6AU1900-1AB32-0BA0
Page 25
Configuring
3.3 Editing a Cam with CamTool
2. Click a diagram to show the Cam menu.
6GLDJUDPGLVWDQFHGLDJUDP
)L[HGSRLQW
6HJPHQWERXQGDU\
,QWHUSRODWLRQFXUYHWUDQVLWLRQ
9GLDJUDPYHORFLW\GLDJUDP
$GLDJUDPDFFHOHUDWLRQGLDJUDP
Figure 3-7 Cam segment replaced by SIMOTION CamTool with fixed point and transition
(interpolation polynomial)
6HJPHQWERXQGDU\
3. Click the menu Cam > Import. The file selection window is displayed.
Navigate under Find in to the text file that contains the cam and select the text file. The
name of the text file is entered under Name.
4. Click OK in the file selection window. The cam is imported.
Notice
When you import a cam from a text file and have previously changed the displayed cam,
a window appears. You can accept the changed cam into the project via the window. The
cam is then imported from the text file.
CamTool
Configuration Manual, 12.2004, 6AU1900-1AB32-0BA0
3-11
Page 26
Configuring
3.3 Editing a Cam with CamTool
Edit imported cam
To edit a cam imported into SIMOTION CamTool:
1. The cam imported from a text file is displayed in SIMOTION CamTool. Segment limits
between individual cam segments are marked in the S diagram (distance diagram).
Select the cam segment that you want to edit. Note the displayed segment limits.
2. Delete the cam segment by pressing the DEL key. The cam segment is replaced by an
interpolation curve (transition) by SIMOTION CamTool. If required, fixed points are
inserted in the curve to maintain the corner points of the original curve.
3. The cam segment (e.g. fixed point) inserted by SIMOTION CamTool can be edited (e.g.
change position).
4. The interpolation curve (transition) inserted by SIMOTION CamTool can be optimized
(e.g. velocity).
3.3.5 Upload cam from SIMOTION device
Requirements
The cam is opened with SIMOTION CamTool.
Notice
If you create a cam and the cam has never been previously downloaded to the SIMOTION
device, you must first download the entire configuration with the new cam to the SIMOTION
device.
Only then can you upload the cam currently opened with SIMOTION CamTool from the
SIMOTION device. The upload is only possible in ONLINE status.
CamTool
3-12 Configuration Manual, 12.2004, 6AU1900-1AB32-0BA0
Page 27

Configuring
3.3 Editing a Cam with CamTool
Upload cam
To upload a cam from a SIMOTION device:
1. Click the menu Project > Connect to target system. The system changes to ONLINE
status.
6GLDJUDPGLVWDQFHGLDJUDP
6HJPHQWERXQGDU\
Figure 3-8 Cam uploaded from SIMOTION device
6HJPHQWERXQGDU\
9GLDJUDPYHORFLW\GLDJUDP
$GLDJUDPDFFHOHUDWLRQGLDJUDP
CamTool
Configuration Manual, 12.2004, 6AU1900-1AB32-0BA0
3-13
Page 28

Configuring
3.3 Editing a Cam with CamTool
2. Click a diagram to show the Cam menu.
6GLDJUDPGLVWDQFHGLDJUDP
)L[HGSRLQW
6HJPHQWERXQGDU\
,QWHUSRODWLRQFXUYHWUDQVLWLRQ
9GLDJUDPYHORFLW\GLDJUDP
$GLDJUDPDFFHOHUDWLRQGLDJUDP
Figure 3-9 Cam segment replaced by SIMOTION CamTool with fixed point and transition
(interpolation polynomial)
6HJPHQWERXQGDU\
3. Click the menu Cam > Upload cam. The cam is uploaded from the SIMOTION device.
4. After the upload, you can change back to OFFLINE status. Click the menu
Project > Disconnect from target system.
Notice
When you upload a cam from the SIMOTION device and have previously changed the
displayed cam, a window appears. You can accept the changed cam into the project via
the window. The cam is then uploaded from the SIMOTION device.
CamTool
3-14 Configuration Manual, 12.2004, 6AU1900-1AB32-0BA0
Page 29

Configuring
3.4 Save cam
Edit uploaded cam
To edit a cam uploaded from a SIMOTION device:
1. The uploaded cam is displayed in SIMOTION CamTool. Segment limits between
individual cam segments are marked in the S diagram (distance diagram).
Select the cam segment that you want to edit. Note the displayed segment limits.
2. Delete the cam segment by pressing the DEL key. The cam segment is replaced by an
interpolation curve (transition) by SIMOTION CamTool. If required, fixed points are
inserted in the curve to maintain the corner points of the original curve.
3. The cam segment (e.g. fixed point) inserted by SIMOTION CamTool can be edited (e.g.
change position).
4. The interpolation curve (transition) inserted by SIMOTION CamTool can be optimized
(e.g. velocity).
3.4 Save cam
Requirements
Save cam
The cam is opened with SIMOTION CamTool.
Notice
When you exit SIMOTION CamTool and have previously changed the cam, a window
appears. You can accept the changed cam into the project via the window.
SIMOTION CamTool is then closed.
When you upload a cam from a SIMOTION device and have previously changed the
displayed cam, a window appears. You can accept the changed cam into the project via the
window. The cam is then uploaded from the SIMOTION device.
When you import a cam from a text file and have previously changed the displayed cam, a
window appears. You can accept the changed cam into the project via the window. The cam
is then imported from the text file.
To save a cam:
1. Click the menu Project > Save. The cam is transferred to the SCOUT project.
CamTool
Configuration Manual, 12.2004, 6AU1900-1AB32-0BA0
3-15
Page 30

Configuring
3.5 Customize the display of the cam
3.5 Customize the display of the cam
3.5.1 Display the cam
Diagram display
The S diagram (distance diagram) of the cam is always displayed in the SIMOTION SCOUT
working area. You can show or hide the V diagram (velocity diagram), the A diagram
(acceleration diagram) and the J diagram (jerk diagram) via icons in the toolbar.
Representation parameters
You can customize the display parameters (e.g. representation range) for the master axis,
the slave axis and the individual diagrams. This also includes the fonts and lines used for the
display.
3.5.2 Show/hide diagram
Requirements
The cam is opened with SIMOTION CamTool.
Show/hide diagram
To show/hide a diagram:
1. Click a diagram to show the Cam menu.
CamTool
3-16 Configuration Manual, 12.2004, 6AU1900-1AB32-0BA0
Page 31

Configuring
3.5 Customize the display of the cam
2. Click the diagram that you want to show or hide under menu Cam > Diagrams. The
diagram is shown or hidden.
Figure 3-10 Show/hide diagrams again
3.5.3 Change axis representation parameters
Requirements
The cam is opened with SIMOTION CamTool.
Change axis representation parameters
To change the representation parameters for the master or slave axis:
1. Click a diagram to show the Cam menu.
2. Click the axis whose representation parameters you want to change under
menu Cam > Representation parameters.
CamTool
Configuration Manual, 12.2004, 6AU1900-1AB32-0BA0
3-17
Page 32

Configuring
3.5 Customize the display of the cam
3. Either the window Master Properties (for the master axis) or the window S Diagram
Properties (Slave) (for the slave axis) is displayed.
For the master axis, change the representation parameters in the window Master Properties.
Figure 3-11 Master Properties window
For the slave axis, change the representation parameters in the window S Diagram (Slave)
Properties.
Figure 3-12 Slave Properties window
Table 3-2 Parameters in the Master Properties or S Diagram (Slave) Properties
Field/button Explanation/instructions
Master Range
(Master Properties)
Start Enter the start point of the curve, or the start of the master
End Enter the end point of the curve, or the end of the master
CamTool
You specify the master range (definition range) of the curve
via start and end points. Cam segments must lie within this
master range (see also Master range under Target device
properties in the Coordinates tab).
range of the curve here.
range of the curve here.
3-18 Configuration Manual, 12.2004, 6AU1900-1AB32-0BA0
Page 33

Configuring
3.5 Customize the display of the cam
Field/button Explanation/instructions
Representation range
Start
(Number of periods deactivated)
End
(Number of periods deactivated)
Number of periods
(cyclical absolute,
cyclical relative)
Grid lines
Set automatically If you activate Set automatically, the grid lines will be
Main line spacing You can activate the display of the grid lines for the main
Auxiliary line spacing
(Main line spacing activated)
Specify here the Start point of the representation range.
If the Number of periods option has been activated, the
system will determine the start point.
Specify here the End point of the representation range.
If the Number of periods option has been activated, the
system will determine the end point.
If under Target device parameters in the Coordinates tab,
you have specified the cyclic absolute execution type or the
cyclic relative execution type, you can select the
option Number of periods. Enter the number of periods that
you want to display.
displayed automatically with an optimum spacing.
If you deactivate Set automatically, you can use Main line
spacing or Auxiliary line spacing to specify the grid line
spacing.
line spacing here.
If you deactivate the Set automatically option, you can
specify the grid line spacing for the main line spacing.
Note:
The spacing that you specify for the grid lines in the main
line spacing must be a multiple of the spacing that you
specify for the grid lines in the auxiliary line spacing.
If the main line spacing option has been activated, you can
also activate the display of the grid lines for the auxiliary line
spacing.
If you deactivate the Set automatically option, you can
specify the grid line spacing for the auxiliary line spacing.
Note:
The spacing that you specify for the grid lines in the main
line spacing must be a multiple of the spacing that you
specify for the grid lines in the auxiliary line spacing.
CamTool
Configuration Manual, 12.2004, 6AU1900-1AB32-0BA0
3-19
Page 34

Configuring
3.5 Customize the display of the cam
3.5.4 Change diagram representation parameters
Requirements
The cam is opened with SIMOTION CamTool.
Change diagram representation parameters
To change the representation parameters for the V diagram (velocity diagram), the A
diagram (acceleration diagram) or the J diagram (jerk diagram):
1. Click a diagram to show the Cam menu.
2. Click the diagram whose representation parameters you want to change under
menu Cam > Representation parameters.
3. Either the window V Diagram Properties (for the velocity diagram), the window A Diagram
Properties (for the acceleration diagram) or the window J Diagram Properties (for the jerk
diagram) is displayed.
For the V diagram (velocity diagram), change the representation parameters in the
window V Diagram Properties.
Figure 3-13 V Diagram Properties window
For the A diagram (acceleration diagram), change the representation parameters in the
window A Diagram Properties.
Figure 3-14 A Diagram Properties window
CamTool
3-20 Configuration Manual, 12.2004, 6AU1900-1AB32-0BA0
Page 35

Configuring
3.5 Customize the display of the cam
For the J diagram (jerk diagram), change the representation parameters in the
window J Diagram Properties.
Figure 3-15 J Diagram Properties window
Table 3-3 Parameters for the V, A or J Diagram Properties windows
Field/button Explanation/instructions
Representation range
Automatically If you activate Automatically, the representation range in the
Y-direction will be automatically changed to the value range
of the displayed curve.
If you deactivate Automatically, you can use maximum
value and minimum value to specify the representation
range in the Y-direction.
Maximum value
(automatically deactivated)
Minimum value
(automatically deactivated)
Grid lines
Set automatically If you activate Set automatically, the grid lines will be
Main line spacing You can activate the display of the grid lines for the main
Specify here the maximum value of the representation
range.
If the Automatically option has been activated, the system
will determine the maximum value.
Specify here the minimum value of the representation
range.
If the Automatically option has been activated, the system
will determine the minimum value.
displayed automatically with an optimum spacing.
If you deactivate Set automatically, you can use Main line
spacing or Auxiliary line spacing to specify the grid line
spacing.
line spacing here.
If you deactivate the Set automatically option, you can
specify the grid line spacing for the main line spacing.
Note:
The spacing that you specify for the grid lines in the main
line spacing must be a multiple of the spacing that you
specify for the grid lines in the auxiliary line spacing.
CamTool
Configuration Manual, 12.2004, 6AU1900-1AB32-0BA0
3-21
Page 36

Configuring
3.5 Customize the display of the cam
Field/button Explanation/instructions
Auxiliary line spacing
(Main line spacing activated)
If the main line spacing option has been activated, you can
also activate the display of the grid lines for the auxiliary line
spacing.
If you deactivate the Set automatically option, you can
specify the grid line spacing for the auxiliary line spacing.
Note:
The spacing that you specify for the grid lines in the main
line spacing must be a multiple of the spacing that you
specify for the grid lines in the auxiliary line spacing.
3.5.5 Change lines and fonts representation parameters
For the representation of the diagrams, default parameters are used for the lines and fonts.
You can change these default settings.
/LQHIRUFDPVHJPHQWV
/LQHIRUVLPXODWHGLQWHUSRODWLRQ
<FRRUGLQDWHD[LV
;FRRUGLQDWHD[LV
$X[LOLDU\OLQH
,QWHUSRODWLRQFXUYHLQWKHGLVWDQFHGLDJUDP
$X[LOLDU\JULGOLQHV
0DLQJULGOLQH
9HORFLW\FXUYH
$X[LOLDU\OLQH
$FFHOHUDWLRQFXUYH
-HUNFXUYH
/LQHDWSK\VLFDOOLPLW
Figure 3-16 Representation parameters in the diagrams (line for the scaling not shown)
CamTool
3-22 Configuration Manual, 12.2004, 6AU1900-1AB32-0BA0
Page 37

Configuring
3.5 Customize the display of the cam
Table 3-4 Representation parameters in the diagrams
Representation parameters Note
Main grid line Type and color of the line can be changed.
Auxiliary grid lines Type and color of the line can be changed.
Auxiliary line Type, color and width of the line can be changed.
Line at physical limit Type, color and width of the line can be changed.
X-coordinate axis Color and width of the line can be changed.
Y-coordinate axis Color and width of the line can be changed.
Line for simulated interpolation Color and width of the line can be changed.
The line for simulated interpolation is used to
display a transition interpolated by the target
device.
Interpolation curve in the distance diagram Color and width of the line can be changed.
Velocity curve Color and width of the line can be changed.
Acceleration curve Color and width of the line can be changed.
Jerk curve Color and width of the line can be changed.
Line for cam segments Color and width of the line can be changed.
Line for scaling Color and width of the line can be changed.
The line for scaling is used to display a scaled
and offset curve.
Requirements
The cam is opened with SIMOTION CamTool.
Change lines and fonts representation parameters
To change the representation parameters for lines and fonts:
1. Click a diagram to show the Cam menu.
2. Click Lines and fonts under menu Cam > Representation parameters.
3. The Lines and Fonts window appears.
You can change the representation parameters for the lines in the Line tab.
Table 3-5 Parameters in the Line tab
Field/button Explanation/instructions
Line type Select the line type that you want to specify here.
Settings Note:
Type Specify the type of the line.
Under Settings, the associated parameters are displayed
and the line type shown.
Grayed-out parameters cannot be changed.
The line type is displayed in the Preview.
CamTool
Configuration Manual, 12.2004, 6AU1900-1AB32-0BA0
3-23
Page 38

Configuring
3.5 Customize the display of the cam
Field/button Explanation/instructions
Color Specify the color of the line.
The line is displayed in the Preview.
Width Specify the thickness of the line.
The line type is displayed in the Preview.
Preview Under Preview, the line type specified via type, color and
width is shown.
You can change the representation parameters for the fonts in the Font tab.
Table 3-6 Parameters in the Font tab
Field/button Explanation/instructions
Settings
Font Select the font here.
The font is displayed in the Preview.
Font style Select the font style here.
The font is displayed in the Preview.
Font size Select the font size here.
The font is displayed in the Preview.
Preview Under Preview, the font specified via font, font style and font
size is shown.
3.5.6 Displaying auxiliary lines in the diagram
You can represent horizontal and vertical auxiliary lines in the individual diagrams. You can,
for example, determine the position of individual points of the curve via auxiliary lines.
Requirements
The cam is opened with SIMOTION CamTool.
Representing a horizontal auxiliary line in a diagram
To represent a horizontal auxiliary line (in the direction of the x-coordinate) in a diagram:
1. Click in the diagram, in which you want to represent a horizontal auxiliary line, on the xcoordinate and keep the mouse button pressed. The current position of the auxiliary line
is displayed in the position window.
CamTool
3-24 Configuration Manual, 12.2004, 6AU1900-1AB32-0BA0
Page 39

Configuring
3.5 Customize the display of the cam
2. Drag the auxiliary line to the position at which you want to represent the auxiliary line and
release the mouse button. The auxiliary line and the position window with the current
position are displayed in the diagram.
Figure 3-17 Displaying a horizontal auxiliary line
Representing vertical auxiliary lines in all displayed diagrams
To represent a vertical auxiliary line (in the direction of the y-coordinate) in all displayed
diagrams:
1. Click in a diagram on the y-coordinate axis and keep the mouse button pressed. The
current position of the auxiliary line is displayed in the position window.
2. Drag the auxiliary line to the position at which you want to represent the auxiliary line and
release the mouse button. The auxiliary line and the position window with the current
position are both displayed in all the displayed diagrams.
Figure 3-18 Displaying a vertical auxiliary line
CamTool
Configuration Manual, 12.2004, 6AU1900-1AB32-0BA0
3-25
Page 40

Configuring
3.6 Download cam to SIMOTION device
Moving the position window along an auxiliary line
To move a position window with the current position of the auxiliary line along the horizontal
or vertical auxiliary line:
1. Point at the position window. The mouse pointer shows the direction in which you can
move the window. Drag the window with the current position with drag&drop to the new
position.
Figure 3-19 Moving the position window horizontally
Deleting an auxiliary line in a diagram
To delete a horizontal or vertical auxiliary line in a diagram:
1. Select the auxiliary line that you want to delete.
2. Press the DEL key. The auxiliary line is deleted.
3.6 Download cam to SIMOTION device
Requirements
The cam is opened with SIMOTION CamTool.
Notice
If you create a cam and the cam has never been previously downloaded to the SIMOTION
device, you must first download the entire configuration with the new cam to the SIMOTION
device.
Only then can you download the cam independent of the other technology objects in the
SIMOTION device. The download is only possible in ONLINE status.
CamTool
3-26 Configuration Manual, 12.2004, 6AU1900-1AB32-0BA0
Page 41

Configuring
3.6 Download cam to SIMOTION device
Download cam to SIMOTION device
To download a cam to a SIMOTION device:
1. Click the menu Project > Connect to target system. The system changes to ONLINE
status.
2. Click a diagram to show the Cam menu.
3. Click the menu Cam > Download cam. The cam is downloaded to the SIMOTION device.
4. After the download, you can change back to OFFLINE status. Click the menu
Project > Disconnect from target system.
CamTool
Configuration Manual, 12.2004, 6AU1900-1AB32-0BA0
3-27
Page 42

Page 43

Functions
4.1 Content
Overview
In this chapter you learn how you can use SIMOTION CamTool to create and optimize a
cam, and to make the simulation settings. In addition, you learn how you can use CamTool
to edit a cam created with CamEdit and how you can export a cam as a text file.
Note
The following operating instructions primarily describe the operation of SIMOTION CamTool
using the functions in the menu bar.
You can also execute the functions from the context menus. In this case, right-click the
element that you want to edit.
You can also execute the most import functions using the icons in the SIMOTION CamTool
toolbar. Pay attention to the Tooltip which is displayed when you place the mouse pointer on
an icon in the toolbar.
4
CamTool
Configuration Manual, 12.2004, 6AU1900-1AB32-0BA0
4-1
Page 44

Functions
4.2 Structure of a cam
4.2 Structure of a cam
Introduction
Create the cam in the S diagram (distance diagram). The curve represents the path-related
dependency between the master axis (X-axis in the diagram) and the slave axis (Y-axis in
the diagram).
Structure of a cam
The cam consists of individual cam segments.
Under SIMOTION CamTool, you can use fixed points, straight lines, sine curves, arc sine
curves and interpolation points as cam segments.
SIMOTION CamTool calculates interpolation curves between the individual cam segments
and displays the V diagram (velocity diagram), the A diagram (acceleration diagram) and the
J diagram (jerk diagram).
6WUDLJKWOLQH
)L[HGSRLQW
,QWHUSRODWLRQFXUYH
,QWHUSRODWLRQFXUYH
6WUDLJKWOLQH
6GLDJUDPGLVWDQFHGLDJUDP
,QWHUSRODWLRQFXUYH
Interpolation curve
9GLDJUDPYHORFLW\GLDJUDP
$GLDJUDPDFFHOHUDWLRQGLDJUDP
-GLDJUDPMHUNGLDJUDP
Figure 4-1 Example of a cam with interpolation curves
CamTool
4-2 Configuration Manual, 12.2004, 6AU1900-1AB32-0BA0
Page 45

Functions
4.3 Fixed point
4.3 Fixed point
4.3.1 Fixed Point Definition
Definition
The cam consists of individual cam segments. Under SIMOTION CamTool, you can use
fixed points, straight lines, sine curves, arc sine curves and interpolation points as cam
segments.
A fixed point is a specified position of the slave axis for a certain position of the master axis.
You can specify the velocity and acceleration at the fixed point position.
Notice
With a fixed point, you define a single fixed position. The transitions between adjacent cam
segments are optimally calculated by CamTool.
If you want to specify an arbitrary characteristic, you must use interpolation points. The
individual interpolation points are connected by CamTool with cubic splines in order to
generate a curve specified by the interpolation points which is as exact as possible.
4.3.2 Insert fixed point
Requirements
The cam is opened with SIMOTION CamTool.
Insert fixed point
To insert a fixed point:
1. Click in the S diagram (distance diagram) to activate the diagram.
2. Click under menu Cam > Insert at fixed point. The mouse pointer changes.
3. With the changed mouse pointer, click the position in the S diagram (distance diagram) at
which you want to insert the fixed point.
CamTool
Configuration Manual, 12.2004, 6AU1900-1AB32-0BA0
4-3
Page 46

Functions
4.3 Fixed point
The fixed point is displayed in the diagram. The position of the fixed point shown in the
tooltip.
Figure 4-2 Insert fixed point
Notice
Once the function Cam > Insert > Fixed point is activated, you can insert fixed points in
the S diagram (distance diagram) until
• you press the ESC key,
• you press the right mouse button (this activates the selection tool in the toolbar) or
• you activate another cam segment (straight line, sine curve, arc sine curve, interpolation point)
for insertion.
CamTool
4-4 Configuration Manual, 12.2004, 6AU1900-1AB32-0BA0
Page 47

Functions
4.3 Fixed point
4.3.3 Change fixed point position
Requirements
The cam is opened with SIMOTION CamTool.
Change fixed point position
To change the position of a fixed point:
1. Select the fixed point in the S diagram (distance diagram). The position of the fixed point
shown in the tooltip.
2. Move the fixed point with drag&drop to the new position.
or
1. Double-click the fixed point. The Fixed Point Properties window appears.
2. Enter the new x- or y-position of the fixed point in the Position tab and click OK. The
representation of the fixed point in the diagram will be updated and displayed at the new
position.
4.3.4 Changing the velocity at the position of a fixed point:
Requirements
The cam is opened with SIMOTION CamTool.
Change velocity at fixed point
To change the velocity at the fixed point position:
1. The velocity at a fixed point position is represented by a handle in the V diagram (velocity
diagram).
Select the handle. The mouse pointer shows the direction in which you can move the
handle.
2. Move the handle with drag&drop to the new position.
or
1. Double-click the fixed point. The Fixed Point Properties window appears.
2. Enter the new velocity as specified in the following table in the Dynamic response tab and
click OK. The handle in the V diagram (velocity diagram) is shown at the new position.
CamTool
Configuration Manual, 12.2004, 6AU1900-1AB32-0BA0
4-5
Page 48

Functions
4.3 Fixed point
Field/button Explanation/instructions
v = Under v =, the current velocity at the position of the fixed point is
displayed.
(see note below)
a =
(manual input activated)
Manual input If you activate Manual input, you can enter an acceleration value
Under a =, the current acceleration at the position of the fixed
point is displayed.
If Manual input is deactivated, the acceleration value is
calculated by the system. The jerk diagram (J diagram) is
smooth at the position of the fixed point.
If Manual input is activated, you can enter an acceleration value.
To change the acceleration, enter the new acceleration under a =
and click Accept or OK. The display of the fixed point in the
diagrams is refreshed.
under a =.
If you deactivate Manual input, the acceleration value is
calculated by the system. The jerk diagram (J diagram) is
smooth at the position of the fixed point.
Notice
To specify an absolute slave velocity, you must select an absolute master velocity for
calculations in the Simulation Settings window.
4.3.5 Changing the acceleration at a fixed point position:
Requirements
The cam is opened with SIMOTION CamTool.
Change acceleration at fixed point
To change the acceleration at the fixed point position:
1. Right-click the fixed point and select Direct entry for acceleration in the displayed context
menu.
2. The acceleration at a fixed point position is represented by a handle in the A diagram
(acceleration diagram).
Select the handle. The mouse pointer shows the direction in which you can move the
handle.
3. Move the handle with drag&drop to the new position.
or
CamTool
4-6 Configuration Manual, 12.2004, 6AU1900-1AB32-0BA0
Page 49

Functions
4.4 Straight line
1. Double-click the fixed point. The Fixed Point Properties window appears.
2. In the Dynamic response tab, activate the option Manual input and enter the new
acceleration.
3. Click OK. The handle in the A diagram (acceleration diagram) is shown at the new
position.
Notice
To specify an absolute slave acceleration, you must select an absolute master velocity
for calculations in the Simulation Settings window.
4.3.6 Delete fixed point
Requirements
The cam is opened with SIMOTION CamTool.
Delete fixed point
To delete a fixed point:
1. Select the fixed point that you want to delete.
2. Press the DEL key. The fixed point is deleted and the representation of the cam adjusted
in all diagrams.
4.4 Straight line
4.4.1 Definition straight line
Definition
The cam consists of individual cam segments. Under SIMOTION CamTool, you can use
fixed points, straight lines, sine curves, arc sine curves and interpolation points as cam
segments.
A straight line defines a synchronous distance in the cam. You can specify the velocity along
the straight line.
CamTool
Configuration Manual, 12.2004, 6AU1900-1AB32-0BA0
4-7
Page 50

Functions
4.4 Straight line
4.4.2 Insert straight line
Requirements
The cam is opened with SIMOTION CamTool.
Insert straight line
To insert a straight line:
1. Click in the S diagram (distance diagram) to activate the diagram.
2. Click Straight line under menu Cam > Insert. The mouse pointer changes.
With the changed mouse pointer, click the position in the S diagram (distance diagram) at
which you want to insert the straight line. The straight line is inserted with a default size.
The current position of the straight line is shown in the tooltip.
Figure 4-3 Insert straight line
CamTool
4-8 Configuration Manual, 12.2004, 6AU1900-1AB32-0BA0
Page 51

Functions
4.4 Straight line
Notice
Once the function Cam > Insert > Straight line is activated, you can insert straight lines in
the S diagram (distance diagram) until
• you press the ESC key,
• you press the right mouse button (this activates the selection tool in the toolbar) or
• you activate another cam segment (fixed point, sine curve, arc sine curve, interpolation point)
for insertion.
4.4.3 Change straight line position
Requirements
The cam is opened with SIMOTION CamTool.
Change straight line position
To change the position of a straight line:
1. Select the straight line in the S diagram (distance diagram). The position of the straight
line is shown in the tooltip.
2. The straight line is shown with handles. Move the handles of the straight line with
drag&drop to the new positions.
or
1. Select the straight line in the S diagram (distance diagram). The position of the straight
line is shown in the tooltip.
2. Move the whole straight line with drag&drop to the new position.
Figure 4-4 Change the position of all straight lines
or
1. Double-click the straight line. The Straight Line Properties window appears.
2. Enter the new positions in the Position tab (left: x1 and y1, right: x2 and y2), and click OK.
The representation of the straight lines in the diagram will be updated and displayed at
the new positions.
CamTool
Configuration Manual, 12.2004, 6AU1900-1AB32-0BA0
4-9
Page 52

Functions
4.4 Straight line
4.4.4 Changing the velocity along a straight line
Requirements
The cam is opened with SIMOTION CamTool.
Change velocity along a straight line
To change the velocity along a straight line:
1. The velocity along a straight line is represented by a line in the V diagram (velocity
diagram).
Select the line. The mouse pointer shows the direction in which you can move the line.
2. Move the line with drag&drop to the new position. The S diagram (distance diagram) is
automatically adjusted.
Figure 4-5 Changing the velocity along a straight line
or
1. Double-click the straight line. The Straight Line Properties window appears.
2. Enter the new velocity in the Dynamic response tab and click OK. The line in the V
diagram (velocity diagram) is shown at the new position. The S diagram (distance
diagram) is automatically adjusted.
Notice
To specify an absolute slave velocity, you must select an absolute master velocity for
calculations in the Simulation Settings window.
CamTool
4-10 Configuration Manual, 12.2004, 6AU1900-1AB32-0BA0
Page 53

Functions
4.5 Sine curve
4.4.5 Delete straight line
Requirements
The cam is opened with SIMOTION CamTool.
Deleting a straight line
To delete a straight line:
1. Select the straight line that you want to delete.
2. Press the DEL key. The straight line is deleted and the representation of the cam
adjusted in all diagrams.
4.5 Sine curve
4.5.1 Insert sine curve
Requirements
The cam is opened with SIMOTION CamTool.
Insert sine curve
To insert a sine curve:
1. Click in the S diagram (distance diagram) to activate the diagram.
2. Click Sine under menu Cam > Insert > Functions. The mouse pointer changes.
3. With the changed mouse pointer, click the position in the S diagram (distance diagram) at
which you want to insert the sine curve. The sine curve is inserted with a default size.
CamTool
Configuration Manual, 12.2004, 6AU1900-1AB32-0BA0
4-11
Page 54

Functions
4.5 Sine curve
The current position of the sine curve is shown in the tooltip.
Figure 4-6 Insert sine curve
Notice
Once the function Cam > Insert > Sine is activated, you can insert sine curves in the S
diagram (distance diagram) until
• you press the ESC key,
• you press the right mouse button (this activates the selection tool in the toolbar) or
• you activate another cam segment (fixed point, straight line, arc sine curve, interpolation point)
for insertion.
CamTool
4-12 Configuration Manual, 12.2004, 6AU1900-1AB32-0BA0
Page 55

Functions
4.5 Sine curve
4.5.2 Change sine curve position
Requirements
The cam is opened with SIMOTION CamTool.
Change sine curve position
To change the position of a sine curve:
1. Select the sine curve in the S diagram (distance diagram).
The current position of the sine curve is shown in the tooltip.
2. The sine curve is shown with handles. Point to a handle. The mouse pointer shows the
direction in which you can move the handle.
3. Move the handles with drag&drop to the new positions.
Figure 4-7 Change sine curve position
or
1. Select the sine curve in the S diagram (distance diagram).
The current position of the sine curve is shown in the tooltip.
2. Move the whole sine curve with drag&drop to the new position.
Figure 4-8 Changing the position of the complete sine curve
or
1. Double-click the sine curve. The Fx Sine Properties window appears.
CamTool
Configuration Manual, 12.2004, 6AU1900-1AB32-0BA0
4-13
Page 56

Functions
4.5 Sine curve
2. Enter the new position in the Position tab and click OK. The sine curve is shown at the
new position.
Figure 4-9 Position (Fx Sine Properties) tab
4.5.3 Change sine curve definition range
Requirements
The cam is opened with SIMOTION CamTool.
Change sine curve definition range
To change the definition range of a sine curve:
1. Select the sine curve in the S diagram (distance diagram).
The current position of the sine curve is shown in the tooltip.
2. The sine curve is shown with handles. The handles for the definition range are shown in
green. Point to a green handle. The mouse pointer shows the direction in which you can
move the handle.
3. Move the green handles with drag&drop to the new positions. While moving, the current
value of the respective limit of the definition range is displayed in the tooltip.
Figure 4-10 Change sine curve definition range
CamTool
4-14 Configuration Manual, 12.2004, 6AU1900-1AB32-0BA0
Page 57

Functions
4.6 Arc Sine Curve
4.5.4 Delete sine curve
Requirements
The cam is opened with SIMOTION CamTool.
Delete sine curve
To delete a sine curve:
1. Select the sine curve that you want to delete.
2. Press the DEL key. The sine curve is deleted and the representation of the cam adjusted
in all diagrams.
4.6 Arc Sine Curve
4.6.1 Insert arc sine curve
Requirements
The cam is opened with SIMOTION CamTool.
Notice
The arc sine curve is calculated as an interpolation point table. The number of interpolation
points can be specified in the Fx Arc Sine Properties window. Double-click the arc sine curve
to show the window.
Insert arc sine curve
To insert an arc sine curve:
1. Click in the S diagram (distance diagram) to activate the diagram.
2. Click Arc sine under menu Cam > Insert > Functions. The mouse pointer changes.
3. With the changed mouse pointer, click the position in the S diagram (distance diagram) at
which you want to insert the arc sine curve. The arc sine curve is inserted with a default
size.
CamTool
Configuration Manual, 12.2004, 6AU1900-1AB32-0BA0
4-15
Page 58

Functions
4.6 Arc Sine Curve
The current position of the arc sine curve is shown in the tooltip.
Figure 4-11 Insert arc sine curve
Notice
Once the function Cam > Insert > Arc sine is activated, you can insert arc sine curves in
the S diagram (distance diagram) until
• you press the ESC key,
• you press the right mouse button (this activates the selection tool in the toolbar) or
• you activate another cam segment (fixed point, straight line, sine curve, interpolation point) for
insertion.
CamTool
4-16 Configuration Manual, 12.2004, 6AU1900-1AB32-0BA0
Page 59

Functions
4.6 Arc Sine Curve
4.6.2 Change arc sine curve position
Requirements
The cam is opened with SIMOTION CamTool.
Change arc sine curve position
To change the position of an arc sine curve:
1. Select the arc sine curve in the S diagram (distance diagram).
The current position of the arc sine curve is shown in the tooltip.
2. The arc sine curve is shown with handles. Point to a handle. The mouse pointer shows
the direction in which you can move the handle.
3. Move the handles with drag&drop to the new positions.
Figure 4-12 Change arc sine curve position
or
1. Select the arc sine curve in the S diagram (distance diagram).
The current position of the arc sine curve is shown in the tooltip.
2. Move the whole arc sine curve with drag&drop to the new position.
Figure 4-13 Changing the position of the complete arc sine curve
or
1. Double-click the sine curve.
The Fx Arc Sine Properties window appears.
CamTool
Configuration Manual, 12.2004, 6AU1900-1AB32-0BA0
4-17
Page 60

Functions
4.6 Arc Sine Curve
2. Enter the new position and the number of interpolation points in the Position tab and
click OK. The arc sine curve is shown at the new positions. The arc sine curve is saved
by the system as an interpolation point table.
Figure 4-14 Position tab
4.6.3 Change arc sine curve definition range
Requirements
The cam is opened with SIMOTION CamTool.
Change arc sine curve definition range
To change the definition range of an arc sine curve:
1. Select the arc sine curve in the S diagram (distance diagram).
The current position of the arc sine curve is shown in the tooltip.
2. The arc sine curve is shown with handles. The handles for the definition range are shown
in green. Point to a green handle. The mouse pointer shows the direction in which you
can move the handle.
CamTool
4-18 Configuration Manual, 12.2004, 6AU1900-1AB32-0BA0
Page 61

Functions
4.6 Arc Sine Curve
3. Move the green handles with drag&drop to the new positions. While moving, the current
value of the respective limit of the definition range is displayed in the tooltip.
Figure 4-15 Change arc sine curve definition range
4.6.4 Delete arc sine curve
Requirements
The cam is opened with SIMOTION CamTool.
Delete arc sine curve
To delete an arc sine curve:
1. Select the arc sine curve that you want to delete.
2. Press the DEL key. The arc sine curve is deleted and the representation of the cam
adjusted in all diagrams.
CamTool
Configuration Manual, 12.2004, 6AU1900-1AB32-0BA0
4-19
Page 62

Functions
4.7 Interpolation point
4.7 Interpolation point
4.7.1 Interpolation Point Definition
Definition
The cam consists of individual cam segments. Under SIMOTION CamTool, you can use
fixed points, straight lines, sine curves, arc sine curves and interpolation points as cam
segments.
An interpolation point is a specified position in the S diagram (distance diagram).
4.7.2 Insert interpolation point
Requirements
The cam is opened with SIMOTION CamTool.
Notice
With a fixed point, you define a single fixed position. The transitions between adjacent cam
segments are optimally calculated by CamTool.
If you want to specify an arbitrary characteristic, you must use interpolation points. The
interpolation points are connected by CamTool with cubic splines in order to generate a
curve specified by the interpolation points which is as exact as possible.
Insert interpolation point
To insert an interpolation point:
1. Click in the S diagram (distance diagram) to activate the diagram.
2. Click Interpolation point under menu Cam > Insert. The mouse pointer changes.
3. With the changed mouse pointer, click the position in the S diagram (distance diagram) at
which you want to insert the interpolation point.
CamTool
4-20 Configuration Manual, 12.2004, 6AU1900-1AB32-0BA0
Page 63

Functions
4.7 Interpolation point
The interpolation point is displayed in the diagram. The position of the interpolation point
is shown in the tooltip.
Figure 4-16 Insert interpolation point
Notice
Once the function Cam > Insert > Interpolation point is activated, you can insert
interpolation points in the S diagram (distance diagram) until
• you press the ESC key,
• you press the right mouse button (this activates the selection tool in the toolbar) or
• you activate another cam segment (fixed point, straight line, sine curve, arc sine curve) for
insertion.
4.7.3 Changing the interpolation point position
Requirements
The cam is opened with SIMOTION CamTool.
CamTool
Configuration Manual, 12.2004, 6AU1900-1AB32-0BA0
4-21
Page 64

Functions
4.7 Interpolation point
Changing an Interpolation Point Position
To change the position of an interpolation point:
1. Select the interpolation point in the S diagram (distance diagram). The position of the
interpolation point is shown in the tooltip.
2. Move the interpolation point with drag&drop to the new position.
or
1. Double-click the interpolation point. The Interpolation Point Properties window appears.
2. Enter the new position in the Position tab and click OK. The interpolation point is
displayed at the new position.
Figure 4-17 Position tab
4.7.4 Delete interpolation point
Requirements
The cam is opened with SIMOTION CamTool.
Delete interpolation point
To delete an interpolation point:
1. Select the interpolation point that you want to delete.
2. Press the DEL key. The interpolation point is deleted and the representation of the cam
adjusted in all diagrams.
CamTool
4-22 Configuration Manual, 12.2004, 6AU1900-1AB32-0BA0
Page 65

Functions
4.8 Optimizing a Cam
4.8 Optimizing a Cam
4.8.1 Optimizing a Cam
Introduction
Create the cam in the S diagram (distance diagram). The curve represents the path-related
dependency between the master axis (X-axis in the diagram) and the slave axis (Y-axis in
the diagram).
Structure of a cam
The cam consists of individual cam segments.
Under SIMOTION CamTool, you can use fixed points, straight lines, sine curves, arc sine
curves and interpolation points as cam segments.
SIMOTION CamTool calculates interpolation curves between the individual cam segments
and displays the V diagram (velocity diagram), the A diagram (acceleration diagram) and the
J diagram (jerk diagram).
6WUDLJKWOLQH
)L[HGSRLQW
,QWHUSRODWLRQFXUYH
,QWHUSRODWLRQFXUYH
Figure 4-18 Example of a cam with interpolation curves
6WUDLJKWOLQH
6GLDJUDPGLVWDQFHGLDJUDP
,QWHUSRODWLRQFXUYH
Interpolation curve
9GLDJUDPYHORFLW\GLDJUDP
$GLDJUDPDFFHOHUDWLRQGLDJUDP
-GLDJUDPMHUNGLDJUDP
CamTool
Configuration Manual, 12.2004, 6AU1900-1AB32-0BA0
4-23
Page 66

Functions
4.8 Optimizing a Cam
4.8.2 Optimize transition
Requirements
The cam is opened with SIMOTION CamTool.
Optimize transition
To optimize a transition:
1. Right-click the transition that you want to optimize and select Properties in the displayed
context menu.
Figure 4-19 Selecting the transition to be optimized
2. The Interpolation Curve Properties window appears. Specify the parameters in the Type
tab.
3. Click the Parameters tab and specify the parameters.
CamTool
4-24 Configuration Manual, 12.2004, 6AU1900-1AB32-0BA0
Page 67

Functions
4.8 Optimizing a Cam
4. Click the Limits tab to display the minimum and maximum values of the interpolation
curve.
Notice
For the slave axis, you can take over the settings of an axis already existing in the project
via the menu Cam > Simulation settings and specify the limits of the axis. These
simulation settings for the slave axis are used for the calculation of the percentage values
which are displayed in the Limits tab.
or
1. Use the handles, which are dependent on the settings in the Interpolation Curve
Properties window, to optimize the cam.
2. The mouse pointer shows the direction in which you can move the handle.
3. Move the handle with drag&drop to the new position. The display of the cam is adjusted
in all diagrams.
Figure 4-20 Optimizing a cam with handle using drag&drop
CamTool
Configuration Manual, 12.2004, 6AU1900-1AB32-0BA0
4-25
Page 68

Functions
4.8 Optimizing a Cam
4.8.3 Interpolation Curve properties
Type
You can specify the type of the interpolation curve for the transition here.
You can set the following parameters:
Table 4-1 Parameters in the Type tab (Interpolation Curve Properties window)
Field/button Explanation/instructions
Transition The type of transition is displayed here.
Allow interpolation by target device If you activate this option, the system does not generate an interpolation
curve. The transition is interpolated by the target device. The
representation of the transition is refreshed in the diagrams when you
click Accept or OK.
Optimize for
(allow interpolation by target device
deactivated)
Do not optimize If you select this option, all the interpolation curves which are suitable for
Velocity If you select this option, all the interpolation curves which are suitable for
Acceleration If you select this option, all the interpolation curves which are suitable for
Jerk If you select this option, all the interpolation curves which are suitable for
Applicable motion rules
(allow interpolation by target device
deactivated)
the transition are displayed under Applicable motion rules.
the transition for the optimization of the velocity are displayed under
Applicable motion rules.
the transition for the optimization of the acceleration are displayed under
Applicable motion rules.
the transition for the optimization of the jerk are displayed under
Applicable motion rules.
The applicable motion rules are displayed here. Select the motion rule
that you want to use for the transition. The representation of the
transition is refreshed in the diagrams when you click Accept or OK.
Depending on the motion rule used, you can specify further parameters
in the Parameters tab.
CamTool
4-26 Configuration Manual, 12.2004, 6AU1900-1AB32-0BA0
Page 69

Functions
4.8 Optimizing a Cam
Parameters
You can specify the parameters of the interpolation curve for the transition here.
You can set the following parameters:
Table 4-2 Parameters in the Parameters tab (Interpolation Curve Properties window)
Field/button Explanation/instructions
Jerk at boundary point
(allow interpolation by target device
deactivated)
(for 6th degree polynomial)
Automatically If you activate Automatically, the jerk value at the boundary points is
Left
(automatically deactivated)
Right
(automatically deactivated)
(Jerk value)
(automatically deactivated)
Curve point of inflexion
(allow interpolation by target device
deactivated)
(for inclined sine curve)
(for modified sine curve)
(for modified acceleration trapezoid)
(for harmonic combination)
Valid values are between 0 and 1 You can enter the turning point of the curve here.
Optimum value If you click this button, the optimum value for the turning point of the
calculated by the system. A polynomial of the 5th degree is used for the
calculation.
Note:
You can activate this function via the context menu in the diagram
representation: Right-click the transition and select Automatic jerk
characteristic in the context menu.
If you activate Left, you can specify the jerk at the left boundary point of
the interpolation curve. Enter the jerk value in the input field.
If you activate Right, you can specify the jerk at the right boundary point
of the interpolation curve. Enter the jerk value in the input field.
If you activate the option Left or the option Right, you can enter the jerk
value here.
Note:
To specify an absolute jerk value, you must select an absolute master
velocity for calculations in the Simulation Settings window.
curve is calculated by the system and entered under Valid values are
between 0 and 1.
Note:
You can activate this function via the context menu in the diagram
representation: Right-click the transition and select Optimum value in the
context menu.
CamTool
Configuration Manual, 12.2004, 6AU1900-1AB32-0BA0
4-27
Page 70

Functions
4.8 Optimizing a Cam
Limit values
The limits of the interpolation curve for the transition are displayed here.
You can set the following parameters:
Table 4-3 Parameters in the Type tab (Interpolation Curve Properties window)
Field/button Explanation/instructions
Position
Min The minimum value is displayed here as absolute value and as
percentage value depending on the physical limit.
If the physical limit is undershot, the minimum value is displayed with a
red background.
Max The maximum value is displayed here as absolute value and as
percentage value depending on the physical limit.
If the physical limit is exceeded, the maximum value is displayed with a
red background.
Velocity
Min The minimum value is displayed here as absolute value and as
percentage value depending on the physical limit.
If the physical limit is undershot, the minimum value is displayed with a
red background.
Max The maximum value is displayed here as absolute value and as
percentage value depending on the physical limit.
If the physical limit is exceeded, the maximum value is displayed with a
red background.
Acceleration (v > 0)
Min The minimum value is displayed here as absolute value and as
percentage value depending on the physical limit.
If the physical limit is undershot, the minimum value is displayed with a
red background.
Max The maximum value is displayed here as absolute value and as
percentage value depending on the physical limit.
If the physical limit is exceeded, the maximum value is displayed with a
red background.
Acceleration (v < 0)
Min The minimum value is displayed here as absolute value and as
percentage value depending on the physical limit.
If the physical limit is undershot, the minimum value is displayed with a
red background.
Max The maximum value is displayed here as absolute value and as
percentage value depending on the physical limit.
If the physical limit is exceeded, the maximum value is displayed with a
red background.
CamTool
4-28 Configuration Manual, 12.2004, 6AU1900-1AB32-0BA0
Page 71

Functions
4.8 Optimizing a Cam
Field/button Explanation/instructions
Jerk (v > 0)
Min The minimum value is displayed here as absolute value and as
percentage value depending on the physical limit.
If the physical limit is undershot, the minimum value is displayed with a
red background.
Max The maximum value is displayed here as absolute value and as
percentage value depending on the physical limit.
If the physical limit is exceeded, the maximum value is displayed with a
red background.
Jerk (v < 0)
Min The minimum value is displayed here as absolute value and as
percentage value depending on the physical limit.
If the physical limit is undershot, the minimum value is displayed with a
red background.
Max The maximum value is displayed here as absolute value and as
percentage value depending on the physical limit.
If the physical limit is exceeded, the maximum value is displayed with a
red background.
Notice
For the slave axis, you can take over the settings of an axis already existing in the project via
the menu Cam > Simulation settings and specify the limits of the axis. These simulation
settings for the slave axis are used for the calculation of the percentage values which are
displayed in the Limits tab.
CamTool
Configuration Manual, 12.2004, 6AU1900-1AB32-0BA0
4-29
Page 72

Functions
4.9 Specify parameters for target device
4.9 Specify parameters for target device
4.9.1 Specify parameters for target device
Via the parameters for the target device, you can adjust the cam to the SIMOTION device
(e.g. scale cam).
Requirements
The cam is opened with SIMOTION CamTool.
Specify parameters for target device
To specify the parameters for the target device:
1. Click a diagram to show the Cam menu.
2. Click the menu Cam > Target device parameters. The Target Device Parameters window
appears.
Figure 4-21 Target Device Parameters window
3. Specify the parameters in the Coordinates tab.
4. Click the Interpolation tab and specify the parameters.
5. Click the Scaling tab and specify the parameters.
CamTool
4-30 Configuration Manual, 12.2004, 6AU1900-1AB32-0BA0
Page 73

Functions
4.9 Specify parameters for target device
Notice
If you specify a scaling, you can show and hide the scaled curve via the menu
Cam > Representation parameters > Display scaling.
If the scaled curve is displayed, you cannot edit the original curve in the diagram
displays.
4.9.2 Target device parameters
coordinates
Specify the coordinates for the target device here.
You can set the following parameters:
Table 4-4 Parameters in the Coordinates tab (Target Device Parameters window)
Field/button Explanation/instructions
Master Range You specify the master range (definition range) of the curve via start and
end points. Cam segments must lie within this master range (see also
Master range under S Diagram (Master) properties).
Start Enter the start point of the curve, or the start of the master range of the
curve here.
End Enter the end point of the curve, or the end of the master range of the
curve here.
Execution type The Execution type specifies the interpolation of the cam by the target
device at the boundary points of the master range.
Non-cyclic If you select the Non-cyclic execution type. The cam cycle ends when
the end value of the curve is reached. The function values of the cam
(slave position) at the start and end point of the master range are
normally different.
Note:
If you activate Non-cyclic, the master range in the horizontal direction is
displayed once.
Cyclic absolute If you select the cyclic absolute execution type, a return is made from the
end value of the slave axis to the start point of the slave axis and the
cam is repeated. The function values of the cam (slave position) at the
start and end point of the master range are identical. Possibly an
identical value (average value) is forced from the target device.
Note:
If you activate Cyclic absolute, the master range in the horizontal
direction can be displayed repeatedly.
CamTool
Configuration Manual, 12.2004, 6AU1900-1AB32-0BA0
4-31
Page 74

Functions
4.9 Specify parameters for target device
Field/button Explanation/instructions
Cyclic relative If you select the cyclic relative execution type, the cam will be repeated
starting at the end value of the slave axis. The first derivation of the cam
(velocity) in the start and end point of the master range are identical.
Possibly an identical value (average value) is forced from the target
device.
Note:
If you activate Cyclic relative, the master range in the horizontal and
vertical direction can be displayed repeatedly. You can optimize the
display via the parameters Cycle start (slave) and Cycle length (slave).
Cycle start (slave)(Cyclic relative
activated)
Cycle length (slave)(Cyclic relative
activated)
Under Cycle start (slave), enter the start point for the display in the
vertical direction.
Under Cycle length (slave), enter the length of the displayed range in the
vertical direction.
Interpolation
Specify the interpolation for the target device here.
You can set the following parameters:
Table 4-5 Parameters in the Interpolation tab (Target Device Parameters window)
Field/button Explanation/instructions
Interpolation type The curve in the master range can be made up of individual segments.
Gaps may occur between the curve segments. If the gaps are greater
than the maximum specified gap size, interpolation for the target device
is performed between the end points of the curve segments.
Under Interpolation type, specify the type of target device for which the
interpolation is to be performed between the gaps.
Linear If you select the interpolation type Linear, there is a smooth closure of
the gap through the insertion of a straight line segment between the
interpolation points.
Cubic splines If you select the interpolation type Cubic splines, there is a smooth
differentiable closure of the gap. The curve runs through the specified
interpolation points.
Bezier splines If you select the interpolation type Bezier splines, the approximation
curve runs along the specified interpolation points.
With gaps up to
Master
Leave gaps Gaps may occur between the curve segments of the master axis. Here
you can specify up to which size the gaps are maintained.
Merge points Gaps may occur between the curve segments of the master axis. Here
you can specify up to which size the gaps are closed by merging the end
points.
Slave
Leave gaps Gaps may occur between the curve segments of the slave axis. Here
you can specify up to which size the gaps are maintained.
Merge points Gaps may occur between the curve segments of the slave axis. Here
you can specify up to which size the gaps are closed by merging the end
points.
CamTool
4-32 Configuration Manual, 12.2004, 6AU1900-1AB32-0BA0
Page 75

Functions
4.9 Specify parameters for target device
Scaling
You can specify the scaling for the target device here.
Notice
To display the scaled curve, select menu Cam > Representation parameters > Display
scaling.
If the scaled curve is displayed, you cannot edit the original curve. To edit the original curve
again, reselect menu Cam > Representation parameters > Display scaling.
You can set the following parameters:
Table 4-6 Parameters in the Scaling tab (Target Device Parameters window)
Field/button Explanation/instructions
Master axis
Basic scaling Enter the basic scaling of the master axis here. The center of the scaling
is always the coordinate origin.
Note:
Do not use any scaling values which are greater than 5. Greater values
cause a roughness in the curve characteristic.
Scalings You can specify the scalings of two ranges of the master axis here. The
center of the scaling is the start point of the scaling range.
Note:
If you specify two ranges, the ranges cannot overlap.
(Range1) Under From and To, enter the range that you want to scale. Under
Factor, enter the scaling factor.
Note:
Do not use any scaling values which are greater than 5. Greater values
cause a roughness in the curve characteristic.
(Range2) Under From and To, enter the range that you want to scale. Under
Factor, enter the scaling factor.
Note:
Do not use any scaling values which are greater than 5. Greater values
cause a roughness in the curve characteristic.
Offset You can enter a factor for the offset of the master axis here. If you have
specified a scaling, the offset applies to the scaled curve. If you have not
specified a scaling, the offset applies to the unscaled curve.
CamTool
Configuration Manual, 12.2004, 6AU1900-1AB32-0BA0
4-33
Page 76

Functions
4.9 Specify parameters for target device
Field/button Explanation/instructions
Slave axis
Basic scaling Enter the basic scaling of the slave axis here. The center of the scaling is
always the coordinate origin.
Note:
Do not use any scaling values which are greater than 5. Greater values
cause a roughness in the curve characteristic.
Scalings You can specify the scalings of two ranges of the slave axis here. The
center of the scaling is the start point of the scaling range.
Note:
If you specify two ranges, the ranges cannot overlap.
(Range1) Under From and To, enter the range that you want to scale. Under
Factor, enter the scaling factor.
Note:
Do not use any scaling values which are greater than 5. Greater values
cause a roughness in the curve characteristic.
(Range2) Under From and To, enter the range that you want to scale. Under
Factor, enter the scaling factor.
Note:
Do not use any scaling values which are greater than 5. Greater values
cause a roughness in the curve characteristic.
Offset You can enter a factor for the offset of the slave axis here. If you have
specified a scaling, the offset applies to the scaled curve. If you have not
specified a scaling, the offset applies to the unscaled curve.
CamTool
4-34 Configuration Manual, 12.2004, 6AU1900-1AB32-0BA0
Page 77

Functions
4.10 Specify simulation settings
4.10 Specify simulation settings
4.10.1 Specify simulation settings
You can take over the axis settings of the master and slave axes from the axes configured in
the SCOUT project or specify them independently.
Requirements
The cam is opened with SIMOTION CamTool.
Specify simulation settings
To specify the simulation settings:
1. Click a diagram to show the Cam menu.
2. Click the menu Cam > Simulation settings. The Simulation Settings window appears.
Figure 4-22 Simulation Settings window
3. Specify the parameters in the Master tab.
4. Click the Slave tab and specify the parameters.
CamTool
Configuration Manual, 12.2004, 6AU1900-1AB32-0BA0
4-35
Page 78

Functions
4.10 Specify simulation settings
4.10.2 Simulation settings
Master tab
You specify here the simulation settings for the Master tab.
You can set the following parameters:
Table 4-7 Parameters in the Master tab (Simulation Settings window)
Field/button Explanation/instructions
Setting
Accept from axis
Properties
(Setting: None)
(Setting: Time axis)
Linear axis
(Setting: None)
Rotary axis
(Setting: None)
Modulo rotary axis
(Setting: None)
Type
(Setting: None)
Unit of measure
(Setting: None)
(Setting: Time axis)
• (Axis)
When you create the cam for an axis that already exists
in the project, you can select the axis here. The
configured values are taken over and displayed. You
can change the master velocity for calculations.
• (External encoder)
When you create the cam for an external encoder that
already exists in the project, you can select the external
encoder here. The configured values are taken over and
displayed.
• None
If you select None, you can specify all parameters.
• Time axis
If you select Time axis, you can specify the unit of
measure under Properties.
If you select this option, you simulate the master axis as a
linear axis.
If you select this option, you simulate the master axis as a
rotary axis.
If you select this option, you simulate the master axis as a
modulo rotary axis.
Here you select the axis type.
Here you specify the unit of measure for the axis. Select a
unit of measure or enter the unit of measure. The
representation of the unit of measure is refreshed in the
diagrams when you click Accept or OK.
Note:
The unit of measure is only used for the display. If the unit
of measure is changed, the represented values are not
converted.
CamTool
4-36 Configuration Manual, 12.2004, 6AU1900-1AB32-0BA0
Page 79

Functions
4.10 Specify simulation settings
Field/button Explanation/instructions
Master velocity for calculations
(Setting (axis))
(Setting: None)
Gear ratio (relative) If you activate this option, all calculations are based on
Use standard velocity
(Setting (axis))
User-defined If you activate this option, you must enter a velocity under
V Master
(User-defined activated)
relative values (values relative to the master axis).
If you activate this option, the configured standard velocity
of the axis which you specified under Accept from axis is
accepted. All calculations are based on absolute values.
V master. All calculations are based on absolute values.
If you activate user-defined, you must enter the master
velocity under V master.
Slave tab
You specify here the simulation settings for the Slave tab.
You can set the following parameters:
Table 4-8 Parameters in the Slave tab (Simulation Settings window)
Field/button Explanation/instructions
Setting
Accept from axis
Properties
(Setting: None)
Linear axis If you select this option, you simulate the slave axis as a
Rotary axis If you select this option, you simulate the slave axis as a
Modulo rotary axis If you select this option, you simulate the slave axis as a
Type Here you select the axis type.
Unit of measure Here you specify the unit of measure for the axis. Select a
• (Axis)
When you create the cam for an axis that already exists
in the project, you can select the axis here. The
configured values are taken over and displayed.
• None
If you select None, you can specify all parameters.
linear axis.
rotary axis.
modulo rotary axis.
unit of measure or enter the unit of measure. The
representation of the unit of measure is refreshed in the
diagrams when you click Accept or OK.
Note:
The unit of measure is only used for the display. If the unit
of measure is changed, the represented values are not
converted.
CamTool
Configuration Manual, 12.2004, 6AU1900-1AB32-0BA0
4-37
Page 80

Functions
4.11 Edit cam created with CamTool with CamEdit
Field/button Explanation/instructions
Limit
(Setting: None)
Minimum Enter the minimum limit of the slave axis here.
Maximum Enter the maximum limit of the slave axis here.
Modulo values
(Setting: None)
(Simulation of slave axis as modulo
rotary axis activated)
Base If the simulation of slave axis as modulo rotary axis is
Length If the simulation of slave axis as modulo rotary axis is
activated, you must enter the modulo base here.
activated, you must enter the modulo length here.
4.11 Edit cam created with CamTool with CamEdit
Convert a cam created with CamTool for CamEdit
To edit a cam created with CamTool with CamEdit:
1. Close the cam in SIMOTION CamTool.
2. Find the cam that you want to edit with SIMOTION CamEdit in the project navigator.
3. Right-click the cam and select Convert to CamEdit in the displayed context menu. The
cam is then opened the next time with SIMOTION CamEdit.
Notice
With SIMOTION CamEdit, you can edit all cams that contain only polynomials or only
interpolation points. In general, those are all the cams created with SIMOTION CamTool
that do not contain any cam segments with arc sine curves.
4.12 Export cam as text file
You can export a cam created with SIMOTION CamTool as a text file (e.g. to edit the cam in
an external program).
CamTool
4-38 Configuration Manual, 12.2004, 6AU1900-1AB32-0BA0
Notice
The cam is shown in the text file in Microsoft Excel CSV format.
Page 81

Functions
4.13 Print cam
Export cam as text file
To export a cam as text file:
1. Open the cam with SIMOTION CamTool.
2. Click a diagram to show the Cam menu.
3. Click the menu Cam > Export. The file selection window is displayed.
4. Under Save as, select the destination for the text file and enter a name for the text file
under Name.
5. Click OK in the file selection window. The cam is saved as a text file at the selected
destination under the entered name.
4.13 Print cam
Print cam
You can print a cam opened with SIMOTION CamTool via SIMOTION SCOUT. The
individual parameters and the diagrams of the cam are printed.
Notice
The diagrams of the cam are printed as they are in the screen view.
To print a cam:
1. Open the cam with SIMOTION CamTool.
2. Click a diagram to show the Cam menu.
3. Activate the diagrams that you want to display via the menu Cam > Diagrams. The
diagrams are displayed.
4. Click the menu Project > Print. The printer selection window is displayed.
5. Specify the printer, printing range and number of copies.
6. Click OK. The cam is printed.
CamTool
Configuration Manual, 12.2004, 6AU1900-1AB32-0BA0
4-39
Page 82

Page 83

Index
A
Arc Sine Curve
Changing the definition range, 4-18
Delete, 4-19
Insert, 4-15
Repositioning objects, 4-17
Auxiliary line
Deleting a horizontal auxiliary line, 3-26
C
Cam
Display horizontal auxiliary line, 3-24
Cam
Cam segments, 4-2
Upload cam from SIMOTION device;SIMOTION
device, 3-13
Change acceleration at fixed point, 4-6
Change arc sine curve definition range, 4-18
Change arc sine curve position, 4-17
Change fixed point position, 4-5
Change sine curve definition range, 4-14
Change sine curve position, 4-13
Change straight line position, 4-9
Change velocity at fixed point, 4-5
Changing the interpolation point position, 4-22
Changing the velocity along a straight line, 4-10
Creating, 4-2, 4-23
Delete arc sine curve, 4-19
Delete fixed point, 4-7
Delete interpolation point, 4-22
Delete sine curve, 4-15
Delete straight line, 4-11
Deleting a horizontal auxiliary line, 3-26
Download to SIMOTION device, 3-27
Edit uploaded cam, 3-15
Edit with SIMOTION CamEdit, 4-38
Editing an imported cam, 3-12
Export as text file, 4-39
Importing a cam from a text file, 3-10
Insert, 3-6
Insert arc sine curve, 4-15
Insert fixed point, 4-3
Insert interpolation point, 4-20
Insert sine curve, 4-11
Insert straight line, 4-8
Interpolation curves, 4-2, 4-23
Optimize transition, 4-24
Optimizing the handles, 4-25
Printing, 4-39
Save, 3-15
Specify simulation settings, 4-35
Specifying the target device parameters, 4-30
Cam segments, 4-23
Structure, 4-2
Changing the acceleration
Fixed point position, 4-6
Changing the definition range
Arc Sine Curve, 4-18
Sine curve, 4-14
Changing the representation parameters
Lines and fonts, 3-23
Diagram, 3-20
Axis, 3-17
Changing the velocity
Along a straight line, 4-10
At fixed point position, 4-5
Creating
Cam, 4-2
Creating
Cam, 4-23
D
Definition
Straight line, 4-7
Delete
Arc Sine Curve, 4-19
Fixed point, 4-7
Horizontal auxiliary line, 3-26
Interpolation point, 4-22
Sine curve, 4-15
Straight line, 4-11
Diagram
Display horizontal auxiliary line, 3-24
Zoom tool, 3-3
Diagram
CamTool
Configuration Manual, 12.2004, 6AU1900-1AB32-0BA0
Index-1
Page 84

Index
Note: master axis unit of measure, 4-36
Note: slave axis unit of measure, 4-37
Representation, 3-16
Representation parameters, 3-16
E
Edit
CamEdit cam with CamTool, 3-7
CamTool cam with CamEdit, 4-38
Exporting
Cam as text file, 4-39
F
Fixed point
Definition, 4-3
Repositioning objects, 4-5
Fixed point
Changing fixed point position acceleration, 4-6
Changing the velocity at a position, 4-5
Insert cam, 4-3
H
Hand tool
Moving the diagram area, 3-3
Horizontal auxiliary line
Moving the position window, 3-26
Representing in a diagram, 3-24
Master axis basic scaling, 4-33
Master axis scaling (Range1), 4-33
Master axis scaling (Range2), 4-33
Master axis scaling ranges, 4-33
Master axis unit of measure, 4-36
Optimize transition (absolute jerk value), 4-27
Optimize transition (curve point of inflexion), 4-27
Optimize transition (optimum value), 4-27
Print cam, 4-39
Slave axis basic scaling, 4-34
Slave axis scaling (Range1), 4-34
Slave axis scaling (Range2), 4-34
Slave axis scaling ranges, 4-34
Slave axis unit of measure, 4-37
P
Printing
Cam, 4-39
R
Repositioning objects
Arc Sine Curve, 4-17
Fixed point, 4-5
Interpolation point, 4-22
Sinuslinie, 4-13
Straight line, 4-9
Representation
Diagram show/hide, 3-16
Maximizing the working area, 3-4
I
Import
Cam from a text file, 3-10
Editing an imported cam, 3-12
Insert
Cam, 3-6
Interpolation point
Delete, 4-22
Insert, 4-20
Repositioning objects, 4-22
N
Notice
Edit CamTool cam with CamEdit, 4-38
Grid line spacing, 3-19, 3-21, 3-22
Master area, cyclic absolute execution type, 4-31
Master area, cyclic relative execution type, 4-32
Master area, non-cyclical execution type, 4-31
CamTool
Index-2 Configuration Manual, 12.2004, 6AU1900-1AB32-0BA0
S
SIMOTION CamEdit
Editing a cam created with CamTool, 4-38
SIMOTION CamTool
Basic functions, 1-1
Deinstall, 2-2
Editing a cam created in CamEdit, 3-7
Installing, 2-2
SIMOTION device
Download cam, 3-27
Sine curve
Delete, 4-15
Insert, 4-11
Sinus curve
Repositioning objects, 4-13
Specify simulation settings, 4-35
Straight line
Changing the velocity, 4-10
Definition, 4-7
Page 85

Index
Delete, 4-11
Insert, 4-8
Repositioning objects, 4-9
System requirements, 2-1
T
Target device
Specifying the target device parameters, 4-30
Text file
Importing a cam, 3-10
Toolbar
Changing the representation using the toolbar, 3-2
Transition
Note: Curve point of inflexion (optimize), 4-27
Note: Optimum value (optimize), 4-27
Optimize, 4-24
Optimizing the handles, 4-25
Warning: Absolute jerk value (optimize), 4-27
Z
Zoom
in all directions at the same time, 3-3
Zoom
Increasing the size of an area, 3-3
Restoring the normal view, 3-3
Restoring the previous zoom setting, 3-3
Zoom function on the coordinate axis, 3-3
Zoom function on the diagram area, 3-3
Zoom tool
Hand tool with the SHIFT key, 3-3
Zoom in all directions at the same time, 3-3
Zoom in the direction of the coordinate axis, 3-3
CamTool
Configuration Manual, 12.2004, 6AU1900-1AB32-0BA0
Index-3
Page 86

Index
CamTool
Index-4 Configuration Manual, 12.2004, 6AU1900-1AB32-0BA0
 Loading...
Loading...